product overview - robotics academy · teachers can find additional vex robotics resources to teach...
TRANSCRIPT

ROBOTC® VEX
® Cortex® Video Trainer
Product Overview
VEX® Cortex® Video Trainer Using ROBOTC® © 2013 Carnegie Mellon Robotics Academy
ROBOTC 2
Why Robotics/STEM EducationWe can’t predict what the hot new technology will be in five years, but we can confidently predict that it will include computer programming, electronic embedded systems, engineering design, and mathematics. If you believe these things, then you need to know that robotics has the ability to teach these concepts. At the same time, robotics teaches 21st century skill sets like time management, resource allocation, teamwork, problem solving, and communications.
Think about this...• Approximately 98% of all the 32-bit microprocessors currently in use worldwide are used in embedded systems; in other words they are being used in robotic smart technologies. • By the year 2010, it is forecasted that 90% of the overall program code developed will be for embedded computing systems; to innovate and compete globally we will need more people that know how to program. • Robotics Technology is a hundred billion dollar emerging industry that has moved from being an industry that could
potentially employ thousands of people to an integral part of all industries. Robotics will impact the economy the same way that mass production impacted the industrial revolution and the computer impacted the information age.
• Science and Engineering (S&E) occupations are projected to grow by 26% from 2010 to 2020, twice as fast as the overall job market during that period (S&EI 2008) yet we have fewer students pursuing S&E careers.
The ROBOTC VEX Cortex Curriculum
If you are reading this, then you are probably considering teaching using VEX Cortex and ROBOTC to teach robotics. I understand the dilemma that you are facing, I taught in the Pittsburgh Public School System for 27 years before coming to Carnegie Mellon. You have a limited budget, you have a thousand things to do every day that don’t involve teaching, and then you also teach five or six sections of students. (Sometimes with multiple preps!) This curriculum is designed for a teacher with no programming background that is interested in teaching programming and engineering. This curriculum also supports a teacher that knows how to program, but has students of various skill levels and wants to allow them to move at their own pace. The teaching materials that we’ve developed use a high level of multimedia and have been tested with hundreds of students; they work. ROBOTC is the best programming software available for use with Cortex Controller. You have one of the hardest jobs in the world; you teach. This training tool will make it easier.
Math, Engineering, and Computer Science are the languages of innovation
Many teachers see robotics as a way to teach STEM education. We’ve seen that robotics does provide unique opportunities for teachers to place engineering design, scientific process, technological literacy and mathematics in contexts that students find engaging and understand. Across the nation, many schools and community-based organizations are using robotics to address STEM competencies. Yet, our research is finding that many teachers miss key STEM “teaching moments” that robotics enables. Often, robotics teachers will allow students to be haphazard in their design process and avoid mathematics when possible (e.g., using guess-and-check strategies). This methodology leads to weak solutions and reduces student learning. At the Robotics Academy we believe that:• Math is the language of STEM and if you can’t do math, then you won’t be able to compete for a STEM job.• Mathematics needs to be brought to the foreground for the student. The focus of the math instruction must be
centered on addressing specific mathematics concepts (not general) and the mathematics in the lesson must be made explicit not implicit.
• Robotics is the perfect organizer to teach Design Engineering. We support all robotics competitions. We believe that these competitions provide students with fresh/difficult problems to solve each year.
• Computer Science is a new basic skill set that all kids need to understand. Robotics provides the perfect opportunity to teach kids how to program. Don’t allow one student to be “your team’s programmer”. Teach everyone to program.
• For students’ STEM understanding to move beyond parroting the teacher’s words, ideas, and solutions, and to develop deep understanding, students need the opportunity to struggle with the problem, be able to defend their decisions, and explain their answer in their own words.
Have a great year.
Robin Shoop, Director, Carnegie Mellon Robotics Academy

ROBOTC 3
© 2013 Carnegie Mellon Robotics AcademyVEX® Cortex® Video Trainer Using ROBOTC®
Teaching VEX Cortex Using ROBOTC Curriculum OutlineThis curriculum is designed to use robotics as the organizer to teach engineering design process and programming. Robotics consists of an eclectic mix of mechanics, electronics, programming, engineering, and mathematics. Each robotic teacher needs to determine what it is that they want to foreground and teach. The curriculum outline below provides a suggested set of activities for a teacher that has never taught robotics; the experienced teachers will blend these lessons into their existing lesson set. Teachers can find additional VEX robotics resources to teach robotics and engineering the Robotics Academy website and at www.vexteacher.com. The scope and sequence below is designed to help you to quickly find resources to teach your class. The number of days at the right will depend on the number of challenges and labs that your students complete and your teaching style.
Welcome to Robotics Class...........................................................................................1-2 days What are the goals of this class? - (learn engineering, programming, applied STEM). What is the definition of a robot? - SPA handout - page 18 What is the definition of engineering? - Videos and handouts - page 10 & 12 How Do Robots Think? - Videos and handouts - page 16 What is a System?
Fundamentals and Setup 10 - 15 daysClass Organization Rules...........................................................................................1-2 days Grading/Rubrics for Evaluation – page 13 & 14 Lab Procedures – pages 13 & 14 Keeping an Engineering Journal – page 10
Safety..............................................................................................1-2 days and then ongoing General Safety Handout – page 8 Safety Checklist Handout – page 9 Safety Quiz – page 9
Introduction to Project Management................................................................... 1-2 days then ongoing Project Management Resource Description pages 10 - 12 Project Planning Video - page 10 Engineering Process Video - page 10 Engineering Design Notebook - page 10 Project Planning and Introduction to Engineering Handouts and Study Guides What is Engineering Process Handout - page 11 Team Building, Brainstorming, and Understanding the Problem Handouts - page 11 What is a Design Review Handout - page 11 Planning Your Time Handout - page 11 PERT Charts and Gantt Charts - page 12 Definition of Engineering - page 12 Project Planning - Recording Progress - page 12 Preparing for a Competition - page 12 Organizational Matrix Handout - page 12
Introduction to Programming.........................................................................................1-2 days Thinking About Programming lesson video – page 15 ROBOTC Programming Rules video – page 16 Behaviors/pseudocode handout – page 15 Whitespace/Comments/ reserved words handouts – page 16 Natural Language Programming and Handouts - pages 17 - 20 ............................................................*8 - 10 days
Introduction to the VEX Cortex Hardware...............................................3-5 days then ongoing The VEX Cortex Hardware PDFs – page 21 Cortex Motors and Sensors Handouts– pages 22 - 23 Building VEX Robots - pages 24 - 25* Some teachers begin by teaching Natural Language, others begin with standard ROBOTC

VEX® Cortex® Video Trainer Using ROBOTC® © 2013 Carnegie Mellon Robotics Academy
ROBOTC 4
VEX Cortex System Configuration..............................................................2-3 days then ongoing Instructions for wireless programming – page 26 Instructions for wired programming – page 27 Instructions on how to download a sample program – page 27
ROBOTC Has Over 250 Working Sample Programs - pages 28 - 29..................................ongoing use
Getting Started Students work at different rates – page 30 Teaching Programming using Robot Virtual World Simulation Software - page 31
The Movement Unit 10 - 15 days The Labyrinth Challenge – page 33Movement/Moving Forward – pages 34 - 35.................................................................................2-3 days Moving Forward Videos - Program Dissection, Renaming Motors, Reversing Polarity - page 34 Wait State Engineering Investigation - page 35 SumoBot Challenge - page 35
Movement/Speed and Direction– page 36 - 37................................................................................3-4 days Speed and Direction Videos - Motor Power Levels, Turn and Reverse, Manual Straightening - page 36 -37 Power Level and Turning Investigations - page 37 Sentry Simulation and Drive Straight Programming Challenges - page 37
Movement/Shaft Encoders – pages 38 - 40 ...............................................................................4-5 days Shaft Encoder Videos - Shaft Encoders, Forward for Distance 1 & 2 - page 38 Boolean Logic Videos - page 39 Boolean Logic Handout - page 39 Shaft Encoder Programming Challenges - page 39 Shaft Encoder Robot Virtual World Programming Challenges - page 39
Movement/Automated Straightening – pages 40 - 41......................................................................2-3 days Automated Straightening Video Set - page 41 if-else Statement Reference Guide - page 41 Automated Straightening Programming Challenges - page 41
The Remote Control Unit 10 -13 days The Minefield Challenge – page 42
Remote Control/Joystick Mapping – pages 43 - 44..............................................................2-4 days Introduction to Remote Control Video – page 43 Joystick Mapping Video – page 43 VEX Joystick Calibration reference handout – page 43 Boolean Logic lesson videos and handouts – page 44 Mapping Values Videos– page 44 Remote Control Programming Challenges - page 44
Programming Remote Control/Timers – page 45 ............................................................2-3 days Time and Timers video – page 45. Using Timers reference guide – page 45 Using Timers video – page 45 Remote Control/Timers Programming Challenges – page 45 Robot Virtual World Programming Challenges – page 45
Teaching VEX Cortex Using ROBOTC Curriculum Outline

ROBOTC 5
© 2013 Carnegie Mellon Robotics AcademyVEX® Cortex® Video Trainer Using ROBOTC®
Programming Remote Control/Buttons – pages 46 & 47..................................................3-5 days Remote Control Buttons videos – page 46 The Remote Start video – page 46 Remote Control Buttons Engineering Lab – page 47 Controlling the Arm Videos parts 1 through 3 – page 47 Remote Control Button Programming Labs page 47
Introduction to Programming Sensors 20 - 30 daysThe Grand Challenge - pages 49 -50 ............................................................................8 - 10 days Introduction to the Grand Challenge - page 49 The Grand Challenge Design Specification – page 50 The Grand Challenge example video – page 50 Robot Virtual World Grand Challenge programming challenges – page 50
Limiting the Arm (the Limit Switch and the Potentiometer) – pages 51 - 53..............................3-5 days Limiting the Arm Lesson Set Resource Description – page 51 Configuring Sensors video - page 52 Programming Lifting the Arm parts 1 and 2 – page 52 Sensor reference guides – page 52 Servo Motors reference guide - page 52 if-else Statement and Switch Case reference guide – page 52 Touch Sensor and Potentiometer programming challenges – page 53 Robot Virtual World Robocci programming challenge - page 53
Behaviors and Functions – pages 47 - 56...........................................................................5 days Behaviors and Functions Lesson Set Resource Description – page 54 Behaviors and Functions part 1 and part 2 videos – page 55 Passing Parameters part 1 and part 2 videos – page 55 Shaft Encoders reference guide - page 55 VEX Integrated Encoders reference - page 55 Behaviors and Functions programming challenges - page 56 Robot Virtual Worlds Behaviors and Functions programming challenges - page 56
Forward Until Near (the Ultrasonic Rangefinder) - pages 57 - 59........................................3-5 days Forward Until Near Lesson Set Resource Description – page 57 The Ultrasonic Rangefinder Video – page 58 Forward Until Near Video – page 58 Straight Until Near Videos (Part 1 &2) – page 58 Ultrasonic Rangefinder Reference Guide – page 58 Thresholds Reference Guide - page 58 Ultrasonic Rangefinder Programming Challenges - page 59 Robot Virtual World Programming Challenges - page 59
Line Tracking (the Light Sensor Kit) – pages 60 - 62.............................................................3 - 5 days Line Tracking Lesson Set Resource Description – page 60 Line Tracking Sensor Video – page 61 Calculating Thresholds Video– page 61 Basic Through Optimized Line Tracking Video Set - page 61 The Line Follower Kit Reference Guide – page 61 SwerveBot Building Instructions - page 61 Variables Reference Guide - page 61 Thresholds Reference Guide - page 61 Line Tracking Robot Programming Challenges - page 62 Robot Virtual Word Line Tracking Programming Challenges - page 62
Teaching VEX Cortex Using ROBOTC Curriculum Outline

VEX® Cortex® Video Trainer Using ROBOTC® © 2013 Carnegie Mellon Robotics Academy
ROBOTC 6
The VEX Cortex Video Trainer is a comprehensive guide that teaches students how to program the VEX Cortex Hardware System as it helps students develop engineering competencies.
Teaching VEX Cortex Using ROBOTC
Teaching Engineering Process .....................................................................................Ongoing Teaching the Engineering Design Process pages 63 - 64 Planning Your Project - Technical Sketching Introduction to sketching worksheets - pages 65 - 66 Drawing Conventions/Dimensioning worksheets page 66 Pictorial Sketching worksheets - page 67 Precision Measurement worksheet - page 67
VEX Robotics Competitions.........................................................5 weeks - Semester Long Classes The REC Foundation VEX Competition - page 68 BEST Robotics - page 68 VEX In-School Design problems - pages 68 - 69 How Robotics Addresses Standards - pages 70 through 79 National Science Education Standards - pages 70 through 73 National Council of Teachers of Mathematics - pages 74 & 75 International Technology Education Association - pages 76 & 77 Reading, Writing, Listening, and Presenting - pages 78 & 79
VEXIQ pages 80-86................................................................................................................Preview
Robot Virtual Worlds 87 - 88............................................................................................................Preview
Teaching VEX Cortex Using ROBOTC Curriculum Outline

ROBOTC 7
© 2013 Carnegie Mellon Robotics AcademyVEX® Cortex® Video Trainer Using ROBOTC®
Fundamentals/Setup
The Getting Started Lessons are found in the “Fundamentals” and “Setup” sections.
The Fundamentals Unit
The Fundamentals Unit is divided into six Lesson Sets: Safety, Project Management, Assessment Rubrics, Introduction to Programming, Natural Language and VEX Hardware
The curriculum is divided into two sections: “Getting Started” and “Programming and Engineering.”
The Programming and Engineering Lessons are found in the Movement, Remote Control, Sensing, and Resources sections.

VEX® Cortex® Video Trainer Using ROBOTC® © 2013 Carnegie Mellon Robotics Academy
ROBOTC 8
Fundamentals/Safety
Safety
Any course that involves moving parts, handling and processing materials and students requires safety training. Safety begins with the development of a safe attitude. Most accidents can be avoided if a student develops a safe and conscientious attitude. The safety lesson begins by challenging a student’s general beliefs about safety and concludes with a safety inspection of the robotics lab.
Safety is an Attitude - A one page handout that defines what safety is and what safety is not, and concludes with statements that support the fact that most accidents are preventable with the development of a safe attitude.
General Lab Safety - A four page handout that spells out general safety rules, describes features of a safe classroom, safe storage, material handling, disposal of materials, tools and equipment, and ends with a list of definitions of terms that students may not know.
Safety Checklist - A three page handout that contains a safety checklist, rules to consider when you are moving things around the lab, and a one page safety poster.
Electrical Safety - A two page handout that describes safety rules when working with electricity and common causes of electrical accidents, including defective equipment, unsafe practices, and lack of electrical knowledge.
Power Tool Safety - A one page handout that sets rules and expectations for when students use power tools in the robotics lab.

ROBOTC 9
© 2013 Carnegie Mellon Robotics AcademyVEX® Cortex® Video Trainer Using ROBOTC®
Fundamentals/Safety continued
Safety Tests and Answers - Three different safety quizzes designed to check students’ understanding of the importance of safety.
Robotics Lab Safety Inspection Sheet - Helps students to understand that they need to monitor the robotics classroom for safety.

VEX® Cortex® Video Trainer Using ROBOTC® © 2013 Carnegie Mellon Robotics Academy
ROBOTC 10
Fundamentals/Project Management
Project ManagementMany schools compete in robotic competitions; other schools are using the VEX Cortex and IQ systems to teachengineering. The resources on this page provide students with materials that teach how to manage projects and solve engineering design problems.
Project Planning Video - The five minute Project Planning Video uses a combination of humor and examples to describe what a well planned project looks like. You will find this video at www.vexteacher.com
Engineering Process Video - The five minute Engineering Process Video highlights the importance of research, planning, developing prototypes, and iterative testing when solving engineering design problems. You will find this video at www.vexteacher.com.
Engineering Design Notebook - Each student is required to keep an engineering design notebook. This two page handout describes the what is kept in the notebook and what a daily log is.

ROBOTC 11
© 2013 Carnegie Mellon Robotics AcademyVEX® Cortex® Video Trainer Using ROBOTC®
Fundamentals/Project Management continued
Project Planning DocumentsEngineering Process Reference - This three page set of handouts describes steps that engineers use to solve problems, provides a set of definitions for the word “engineering”, and describes the iterative nature of design.
Team Building PDF- The Team Building Lesson Set consists of four documents that describe guidelines that teams should use for the first team meeting, general ground rules for any team meeting, things to consider when building teams, and a description of roles on a robotics team: Project Management, Programming, Engineering, Documentation and Communications.
Understanding the Problem PDF - One of the keys to solving any problem is “Understanding the Problem”. This three page set of handouts consists of: Defining the Problem, Technical Research, and Creating a Design Specification.
Brainstorming PDF - Another key problem-solving step involves meetings where people brainstorm together to develop potential solutions. This three page set of handouts is broken into: a Brainstorming Primer, Thingsto Think About, and Brainstorming Tips. Each handout can be used individually or as part of a set.
Planning Your Time PDF - Time management is a crucial skill to develop. This four page handout uses a simple activity, planning a birthday party, to describe a critical skill set that everyone should learn: how to manage time.
Design Reviews PDF - Engineers conduct design reviews on a regular basis. This two page handout describes how to conduct weekly team design reviews, as well as preliminary and detail design reviews.

VEX® Cortex® Video Trainer Using ROBOTC® © 2013 Carnegie Mellon Robotics Academy
ROBOTC 12
Organizational Matrix Ideas PDF - This three page handout graphically shows three methods of organizing projects.
Recording Progress PDF - The recording progress tools offer the project manager three solutions that can be used to help team members to document the team’s progress toward the project goals.
Gantt Chart PDF - A Gantt chart provides a graphical illustration of a schedule to help plan, coordinate, and track specific tasks in a project. This one page handout is designed to teach students how Gantt charts work.
PERT Chart PDF - A PERT chart is a tool that graphically illustrates when parts of the project become due. The advantage of the PERT chart is that it shows which things must be completed in sequence and which things need to be completed simultaneously. This one page handout is designed to teach students how PERT charts work.
Preparing for a Competition PDF- Robotic competitions offer unique opportunities to teach students about time management, resource allocation, teamwork, and problem solving, all within a context that they find challenging but fun. The Preparing for a Competition handout is designed to support robotics teams as they plan for the competition.
Fundamentals/Project Management continued
Project Planning Documents

ROBOTC 13
© 2013 Carnegie Mellon Robotics AcademyVEX® Cortex® Video Trainer Using ROBOTC®
Fundamentals/Assessment Rubrics
Assessment Rubrics
Timely assessment is paramount in today’s educational environment. A clear expectation of what is being assessed is a key to training students. Traditional assessments are provided in the curriculum; ie quizzes. The assessments found in this section are assessment rubrics for project-based learning. There are many other tools that a teacher may use, but this section provides some examples. Rubrics allow all stakeholders to see what is being measured.
Writing Criteria Rubric - Writing is a process and good writing requires several steps: brainstorming, outlining, pre-writing, and editing. This is a simple rubric that check for those steps.
Engineering Journal Rubric - Explains to students what is expected in their engineering journals.
Presentation Rubric - Helps students determine what a good presentation should include.
Request for Proposal Rubric - Helps students to determine what is being evaluated in their RFP submission.
Work Habit Evaluation - This is a great tool for students to use to develop strong work habits.
Workplace Competencies Rubric - This rubric helps students to develop the skills that are valued by industry.
Internal Design Rubric - This evaluation tool helps students understand the expectations and preparation needed for an internal design review.
External Design Review - This evaluation tool helps students understand the expectations and preparation needed for an external design review.

VEX® Cortex® Video Trainer Using ROBOTC® © 2013 Carnegie Mellon Robotics Academy
ROBOTC 14
Fundamentals/Assessment Rubrics continued

ROBOTC 15
© 2013 Carnegie Mellon Robotics AcademyVEX® Cortex® Video Trainer Using ROBOTC®
Fundamentals/Introduction to Programming
Introduction to Programming
Thinking About Programming Video Set - The “Programmer and Machine” and “Planning and Behaviors” videos explain to students the role of the programmer and the machine, and how the programmer must learn to think like a machine in order to program robots. The videos are designed to explain programming concepts to beginners.
Behaviors and Flowcharts & Pseudocode Helper Pages - These are reference PDFs that students can use as study guides. The helper pages are designed to be guides to the topics.

VEX® Cortex® Video Trainer Using ROBOTC® © 2013 Carnegie Mellon Robotics Academy
ROBOTC 16
Fundamentals/Introduction to ProgrammingThinking about Programming ROBOTC Rules Parts 1 & 2 - This video set builds the foundational knowledge that student must develop to begin to program using any syntax-based programming language. This video set introduces syntax concepts in a sequential and logical manner.
Whitespace, Comments, and Reserved Words Helper Pages - These are reference PDFs that students can use for reference or as study guides.
ROBOTC Rules and ROBOTC Error Messages - These handouts are designed to complement the ROBOTC Rules programming videos above.
How Do Robots Think and Iterative Design - These are two new videos that help students understand how to break their programs into smaller behaviors. These two videos can be found at: www.vexteacher.com

ROBOTC 17
© 2013 Carnegie Mellon Robotics AcademyVEX® Cortex® Video Trainer Using ROBOTC®
Fundamentals/Natural Language Programming
What is Natural Language?
Natural Language provides an intuitive, easy to use, English language version of ROBOTC. Natural Language is for beginner programmers and is designed as a stepping stone to full ROBOTC programming The Natural Language Library is filled with commands that are both easy to use and easy to remember. Natural Language commands encompass entire robot behaviors into a single command. The documents provided with the curriculum were current with the date the curriculum was developed. If you are looking for the latest features of ROBOTC’s Natural Language consult the ROBOTC Wiki at: http://www.robotc.net/wiki/VEX2_Natural_Language.
VEX PIC and VEX Cortex Natural Language reference guides. These two PDFs contain examples of the code and explanations of how the code works.
Note: Natural Language is a good choice if you have a very short amount of time to dedicate to teaching programming. BUT, when student begin to write complex programs Natural Language has limitations. If you are teaching a semester or a full year course it is recommended that you begin by teaching traditional ROBOTC.

VEX® Cortex® Video Trainer Using ROBOTC® © 2013 Carnegie Mellon Robotics Academy
ROBOTC 18
Fundamentals/Natural Language Programming (NL) - Additional handouts that explain ROBOTC NL programming. The handouts can be used a study guides or quick reference sheets. They are available online at www.ROBOTC.net under VEX Curriculum so that they can be used for homework.

ROBOTC 19
© 2013 Carnegie Mellon Robotics AcademyVEX® Cortex® Video Trainer Using ROBOTC®
Fundamentals/Natural Language Programming - Additional handouts that explain ROBOTC NL programming. The handouts can be used a study guides or quick reference sheets. They are available online so that they can be used for homework.

VEX® Cortex® Video Trainer Using ROBOTC® © 2013 Carnegie Mellon Robotics Academy
ROBOTC 20
Fundamentals/Natural Language Programming - Additional handouts that explain ROBOTC NL programming. The handouts can be used a study guides or quick reference sheets. They are available online so that they can be used for homework.
Natural Language Introductory Video -The Video at the left and all of the handouts that are found on pages 17 - 20 are posted for free at: www.robotc.net/NaturalLanguage/

ROBOTC 21
© 2013 Carnegie Mellon Robotics AcademyVEX® Cortex® Video Trainer Using ROBOTC®
Fundamentals/VEX Hardware
VEX Hardware
The VEX Cortex Robotics System consists of a micro controller, a set of sensors and motors, and lots of parts. The documents on the next couple of pages contains valuable information about how the system works. These documents are available online for free student access and can be used as reference documents or assigned as homework study guides.

VEX® Cortex® Video Trainer Using ROBOTC® © 2013 Carnegie Mellon Robotics Academy
ROBOTC 22
Fundamentals/VEX Hardware (continued)
http://www.education.rec.ri.cmu.edu/products/teaching_robotc_cortex/index.html

ROBOTC 23
© 2013 Carnegie Mellon Robotics AcademyVEX® Cortex® Video Trainer Using ROBOTC®
Fundamentals/VEX Hardware (continued)
In order to begin programming, you will need to build a robot, use ROBOTC to update the firmware on the VEX Cortex and VEXnet Joystick, and then make sure that it works by downloading and running a sample program. The SETUP section guides a user step-by-step through this process. This section is divided into three sections: Build, System Configuration, and Download Sample.
Setup

VEX® Cortex® Video Trainer Using ROBOTC® © 2013 Carnegie Mellon Robotics Academy
ROBOTC 24
Setup/Building VEX Cortex Robots
Robot Building instructions come in PDF format allowing you to either print them or use them directly from the screen. Additional instructions and updates will always live on the VEX Building Link at the Robotics Academy website.
RECBOT is the robot used most in the curriculum. It can be built out of the VEX Protobot kits with plus sensor kits.
Swervebot is a significantly smaller robot model that requires significant cutting to the VEX metal to create. It’s smaller form factor make it ideal for storage and for robot applications that require sharp turns such as line following.
Squarebot 4.0 is an excellent alternative to the RECBOT, and takes up a little less space. It requires very little adjustment to make it work with the videos, and is also buildable using Protobot kits plus sensor kits.

ROBOTC 25
© 2013 Carnegie Mellon Robotics AcademyVEX® Cortex® Video Trainer Using ROBOTC®
Additional Building Instructions for VEX RobotsChoosing a robot model is a big choice because you may not have the time to have kids build robots multiple times during the year.
Read all of the notes below each set of plans before you begin.
All of the Robot Plans plans are available via the VEX robotics link at the Robotics Academy website.
The Clawbot instructions are the best choice if you have the VEX Clawbot kits. Some adaptation will be needed on your part to account for the differences between it and the other builds, such as which motors are used to move the robot forward.
Tumbler and Protobot are excellent robots but are not recommended for use with the curriculum.
The Test Bed works well with Natural Language programming, and allows the system to be learned in a controlled environment.

VEX® Cortex® Video Trainer Using ROBOTC® © 2013 Carnegie Mellon Robotics Academy
ROBOTC 26
Setup/System Configuration
Instructions for Wireless Programming
Updating the Cortex Firmware Video - Teaches students about the VEX Master firmware and the ROBOTC user firmware. The video teaches students how to download the latest firmware and software before they begin programming their robots.
Updating the VEX Joystick Firmware Video - Guides students step-by-step as they update the VEXnet Joystick firmware.
Establishing a VEXnet Link, VEXnet Joystick Calibration, and VEX Programming Drivers Reference Guides - Step-by-step instructions that guide students through the VEXnet setup and configuration process.

ROBOTC 27
© 2013 Carnegie Mellon Robotics AcademyVEX® Cortex® Video Trainer Using ROBOTC®
Setup/Downloading a ROBOTC Sample Program
Instructions for Wireless Programming
Downloading a Sample Program over VEXnet Videos - Guides students step-by-step through the process of down-loading a ROBOTC program. The first video tells them how to setup their hardware. The second video shows them how to powerup their VEX Cortex and VEXnet Joystick, confirm their settings, and then download their program. Once this process is complete the Cortex remembers all of the settings and so setup only need to be done once.
USB to Serial Driver Installation and Downloading a Sample Program over USB Reference Guides - Step-by-step instructions that guide students through installing drivers.

VEX® Cortex® Video Trainer Using ROBOTC® © 2013 Carnegie Mellon Robotics Academy
ROBOTC 28
ROBOTC Has over 250 Working Sample ProgramsOften it is easier for new programmers to get a feel for programming by editing working programs. To access ROBOTC’s extensive library of examples select “File” and then “Open Sample Program”. Each folder contains examples of working code that can be loaded onto a student’s robot and tested.
1. Select “File”2. Select “Open Sample Program”3. Navigate to the folder that you want to open

ROBOTC 29
© 2013 Carnegie Mellon Robotics AcademyVEX® Cortex® Video Trainer Using ROBOTC®
ROBOTC Has over 250 Working Sample ProgramsPictured below are the types of programs that a student will find. The programs range from Basic Movement using standard ROBOTC to Basic Movement using ROBOTC’s Natural Language Library to using the VEX Gyro Sensor and everything in between.
VEX® Cortex® Video Trainer Using ROBOTC® © 2013 Carnegie Mellon Robotics Academy
ROBOTC 30
Guided Programming and Challenges
Note: Students learn at different rates and the curriculum is designed so that students are able to work indepen-dently through the lessons. The Guided Programming and Engineering section of the curriculum is divided into four instructional units. The first three units: Movement, Remote Control, and Sensing contain Lesson Sets that teach a particular programming concept and several programming and engineering challenges which are identified by a round-orange colored or in the curriculum. Each unit is organized around a “Unit Programming Challenge”. The solution for the Unit Programming Challenge is taught as students move through the individual Lesson Sets.
The fourth unit, Resources, is connected to engineering design and other ROBOTC resources that are up-dated regularly so that the curriculum doesn’t go out-of-date. This curriculum begins by teaching students how to program preparing them to compete in robotics competitions or engineering design challenges. In each lesson set students will find additional exercises designed to reinforce their programming skills or give them a deeper understanding of how to optimize the Cortex Hardware. This curriculum is designed to be implemented from left to right and top to bottom. Complete the Movement Unit and then go to the Remote Control Unit, complete Remote Control and move to Sensing...

ROBOTC 31
© 2013 Carnegie Mellon Robotics AcademyVEX® Cortex® Video Trainer Using ROBOTC®
The Curriculum Companion is designed to mirror the VEX Cortex Video Trainer using ROBOTC. The RVW software includes over 40 programming challenges that are found in the VEX Cortex Video Trainer Curriculum.
Throughout the Introduction to Programming section you will find icons that show which challenges are included.
Additionally, students can pick from five robot configurations to choose to program, they are shown at the left of this page; VEX Squarebot, VEX Clawbot, VEX Swervebot, BuggyBot, and Mammal Bot.
Teaching Programming via Robot Virtual Worlds (RVW)
Robot Virtual World Software - the Curriculum Companion
Additional VEX Robotics Virtual WorldsA ROBOTC RVW License gives you access to the Curriculum Companion, PLUS all of the RVWs below.
The current VEX Robotics Engineering Challenge. Students can begin developing code and strategies before they build their robots
The Level Builder and Model Importer allow student to build their own levels and import their own models into their new worlds. RVW is compatible with any modeling software that can generate a .STL file, including Autodesk, SolidWorks, and Google Sketchup.
The Palm Island, Operation Reset, and Atlantis Robot-To-The-Rescue programming games take kids to yet to be discovered worlds where their robots need to be programmed to solve challenges!

VEX® Cortex® Video Trainer Using ROBOTC® © 2013 Carnegie Mellon Robotics Academy
ROBOTC 32
The Movement Unit
The Movement Unit
The Movement Unit is taught using four Lesson Sets and a programming challenge. The Lesson Sets begin using sample code that is already included in ROBOTC. The first Lesson Set, Moving Forward, teaches students in a very lockstep manner what each line of code does while introducing them to moving motors for specific amounts of time. The second Lesson Set, Speed and Direction, explains motor power levels and how to reverse polarity. The second Lesson Set includes an “engineering lab” that the students will complete. The engineering labs place students in the role of engineer where they run their robots, measure results, iteratively test the results to determine reliability, and then extrapolate from their data set to predict new robot behaviors. The third Lesson Set, Shaft Encoders, begins to introduce students to Boolean Logic and While Loops. Automated Straightening introduces students to if-else Statements and Variables and teaches them to develop their own automated straightening algorithm.
The Movement Unit also includes fourteen programming challenges where students are challenged to solve simple movement programming challenges. Although some of the challenges appear to be repetitive, the extra challenges enable the teacher to differentiate instruction, it will be up to the teacher to decide which students do which challenges. The extra challenges give the teacher to differentiate the instruction based on student’s ability.
Note: It will be important to remind students that although the initial work may seam easy, that the skills that they learn in the movement unit are foundational pieces that they must understand before they move to the Remote Control and Sensing Units.

ROBOTC 33
© 2013 Carnegie Mellon Robotics AcademyVEX® Cortex® Video Trainer Using ROBOTC®
Movement/Challenge Description
Labyrinth Programming ChallengeEach Programming Unit (Movement, Remote Control, Sensing, and Resources) contains a Unit Programming challenge that is designed to place the learning into an interesting context. In the “Movement” Lesson Set the programming challenge is the “Labyrinth Challenge”.
In this challenge, students will learn:• Behavior based programming logic • How to program their robots to
accurately move forward, backward and turn
• The syntax rules related to programming using ROBOTC
The Movement Unit programming challenge comes with a PDF that explains the rules to the challenge, an example video solution.
The Labyrinth Challenge is also available in a Robot Virtual World simulation format.
Labyrinth Challenge Teacher Resources
Each of the large units, Movement; Remote Control, and Sensing, has a unit programming challenge that students will be guided step-by-step toward a solution.

VEX® Cortex® Video Trainer Using ROBOTC® © 2013 Carnegie Mellon Robotics Academy
ROBOTC 34
Movement/Moving Forward
The Moving Forward Lesson SetEach Lesson Set is designed to teach a related set of programming concepts and is designed to give students confidence opening a program and understanding what the individual lines of code mean. Every set is supported with a combination of video and print resources:
Program Dissection Video - Students are given a line by line description of the code used in the first sample program.
Reversing Polarity Video - This video shows students how to make their robot change directions and turn.
Renaming Motors Video - ROBOTC provides a very handy utility that allows the programmer to rename their motors using names that make sense to them (i.e. leftMotorArm, or RightWheel). This video shows how it works.
The Moving Forward Lesson Set is continued on the next page.

ROBOTC 35
© 2013 Carnegie Mellon Robotics AcademyVEX® Cortex® Video Trainer Using ROBOTC®
Movement/Moving Forward (continued)
The Moving Forward Lesson SetMoving Forward Timing Video - Timing is the least accurate way to control a robot, but it is also the simplest method.
Wait States Engineering Investigation - This PDF contains an Engineering Investigation that requires students to take an initial measurement and then to make predictions of how far their robot will travel based on changing the amount of time the robot is set to run.
SumoBot Challenge- At this point in a student’s programming career all they can do is move forward. This is a nice engineering challenge that allows students to focus on weight distribution, traction, and design.
Robot Virtual World SimulationsWait States Engineering Investigation - Students are required to run their robots, take measurements, and then predict and record their measurements for their next run.
Ths SumoBot Challenge - Enables students to simulate the programming challenge.

VEX® Cortex® Video Trainer Using ROBOTC® © 2013 Carnegie Mellon Robotics Academy
ROBOTC 36
Movement/Speed and Direction
In this lesson set students continue to build confidence in their ability to program simple movements. The lesson set consists of three videos, three Engineering Challenges, and two Programming Challenges.
The Speed and Direction Lesson Set
Motor Power Lesson
The Motor Power Level Video - teaches students how to change the power level on the robot. Students learn that as they change the power level, they are in effect changing the robot’s speed. They will also complete an Engineering Lab named “Power Level Investigation”. In this investigation, students program their robots at a variety of power levels and keep the amount of time the robot runs constant. In the investigation students will investigate if there is a proportional relationship between power levels and speed.
The Power Level Investigation is also available as a Robot Virtual World Simulation.

ROBOTC 37
© 2013 Carnegie Mellon Robotics AcademyVEX® Cortex® Video Trainer Using ROBOTC®
Movement/Speed and Direction (continued)
Turn and Reverse Video - teaches students how changing motor polarity enables the robot to turn and change direction.Manual Straightening Video - Challenges the student to use power levels to control the robot to go straight (students will learn a better method soon).Programming Challenge PDFs - The Power Level Investigation, Driving Straight Challenge, and Sentry Simulation provide students with opportunities to practice programming and learn about the VEX robot system.
Speed and Direction
Robot Virtual World Simulations
Motor Power Levels, Sentry Simulation, Turning, and the Driving Straight challenges are available via the ROBOTC RVW simulation software.

VEX® Cortex® Video Trainer Using ROBOTC® © 2013 Carnegie Mellon Robotics Academy
ROBOTC 38
Movement/Shaft Encoders
Shaft Encoders Lesson Set
Shaft encoders allow you to accurately control the distance your robot travels. Since the release of this curriculum VEX Robotics released smart motors where the encoder is built into the motor. You can find information about the Integrated Motor Encoders: http://www.robotc.net/wiki/Tutorials/Programming_with_the_new_VEX_Integrated_Encoder_Modules
The Shaft Encoder Video - This video teaches students how shaft encoders work and how they are used to control distance.
The Motor and Sensors Setup, Forward for Distance 1 Video - This video teaches students how to configure the shaft encoders using the Motors and Setup wizard.
The Encoder, Forward for Distance 2 Video - This video teaches students why clearing the values in the encoder is important and introduces them to how “While Loops” work.

ROBOTC 39
© 2013 Carnegie Mellon Robotics AcademyVEX® Cortex® Video Trainer Using ROBOTC®
Movement/Shaft Encoders (continued)
Boolean Logic Part 1 & Part 2 Videos - Boolean Logic enables robots to make decisions. The first video teaches stu-dents how conditional statements work. The second teaches them about logical operators. There is also a Boolean Logic 3 page PDF that complements the videos.
Boolean Logic PDF - Covers the same topics as the Boolean Logic videos, but in a print format.
Shaft Encoders PDF - Teaches students how shaft encoders work.
The While Loop Handout - Shows students the code that controls a while loop.
Additional Shaft Encoder Lesson Resources
The Sensor Debug Window Video - ROBOTC’s debug window is one of its most powerful tools. This video introduces students to how they can see all of the robot’s input and output values.
Shaft Encoders, Forward and Turning Video- Teaches students how to use encoders in path planning.
The BasketBall Challenge - A programming challenge designed to give student’s practice with the shaft encoders.
The Power Level and Turning with Encoder’s Engineering Investigations - students use feedback from the “Debug” window to gather data to complete these two Engineering Investigations.

VEX® Cortex® Video Trainer Using ROBOTC® © 2013 Carnegie Mellon Robotics Academy
ROBOTC 40
Movement/Shaft Encoders (continued)
Basketball Drills, Power Levels with Encoders, and Turning with Encoders are available as RVW Challenges.
Movement/Automated Straightening
The Automated Straightening Lesson Set
This lesson set continues to introduce students to programming concepts like if-else statements, variable types, and global variables. Students will get more practice using Boolean Logic as they create their own self-straightening algorithm.
Automated Straightening Part 1 Video - This video teaches students will learn how to use feedback from encoders and conditional statements to develop an algorithm that allows the robot to self-correct its forward movements.
Automated Straightening Part 2 Video - This video teaches students how to implement the automated straightening algorithm on their robot.
if-else Statement Handout - This handout can be used as a study guide that shows students how the if-else Statement can be used with a while loop to help a robot make a decision.
Movement/Automated Straightening resources continued next page.

ROBOTC 41
© 2013 Carnegie Mellon Robotics AcademyVEX® Cortex® Video Trainer Using ROBOTC®
Movement/The Automated Straightening (continued)
The Driving Straight Programming Challenge - This challenge requires students to write a program that controls their robot to go perfectly straight. The challenge is also available using the RVW simulation software.
Seeing the Difference Challenge - This challenge requires students to use feedback from ROBOTC’s real time debugger to track the robot’s wheel movement.
Boolean Logic Part 1 & Part 2 Videos - Boolean Logic enables robots to make decisions. The first video teaches students how conditional statements work. The second teaches them about logical operators. There is also a Boolean Logic 3 page PDF that complements the videos.
Variables and Values
Variables and Values Video Part 1 - This video introduces students to the power of variables. This lesson teaches students about how to specify variables and variable types..
Variables and Values Video Part 2 - This teaches students about variable names and types, how to initialize a variable, and how to use variables in their program.
Variable and Global Variables Reference Guide - This PDF can be used as a study guide and covers everything taught in the two variable videos.

VEX® Cortex® Video Trainer Using ROBOTC® © 2013 Carnegie Mellon Robotics Academy
ROBOTC 42
Remote Control/Challenge Description
Using Operator Input to Control Your Robot/The Minefield Challenge
A powerful feature of the VEX Cortex is its ability to be driven using the VEXnet Remote Control. This ability proves to be indispensable in the competition environment. In this unit you will learn how to optimize and program your VEX remote control. You will learn to program buttons on the Joystick controller to enable robot behaviors.
The Minefield Challenge Resources - Remote Control Video Solution, Minefield Challenge PDF that describes the rules, and a Robot Virtual World simulation environment that allows students to develop and test code.
Note: Pictured at the right is the culminating challenge for the Remote Control Unit. Begin the unit by showing students the Minefield RC challenge. Students are not expected to know how to solve the challenge until they complete the Joystick Mapping, Timers, and Buttons Lessons.
Note: the VEXnet Joystick does not communicate its values to the PC, only to a VEX Cortex, so it cannot be used to control the Virtual Robot. A USB Logitech Joystick is recommended for use with the virtual worlds. We also have resources at the ROBOTC Wiki for using any USB joystick.

ROBOTC 43
© 2013 Carnegie Mellon Robotics AcademyVEX® Cortex® Video Trainer Using ROBOTC®
Remote Control/Joystick Mapping
Introduction to Remote Control Video - Students will learn how the VEXnet Remote Control works and be able to describe the range of values that the joystick provides. Additionally, they will learn which ROBOTC commands allow them to access the Remote Control.
Real Time Control Video - Students will learn how loops work and the difference between and infinite loop and a loop controlled by a conditional statement, they will also learn new ROBOTC reserved words that allow them to control the different remote controller channels.
VEXnet Joystick Calibration Guide - Initially, calibrating the Joystick may appear complicated to students. This is a four page guide with lots of pictures that takes them step-by-step through Joystick calibration.
Joystick Mapping Resources are continued on the next page.

VEX® Cortex® Video Trainer Using ROBOTC® © 2013 Carnegie Mellon Robotics Academy
ROBOTC 44
Remote Control/Joystick Mapping (continued)
While Loops PDF - A simple example that shows how While Loops work.
Boolean Logic Part 1 & Part 2 Videos - The Boolean Logic videos are included in multiple lessons and are intended for review. These videos teach foundational principles that all programmers need to know.The first video teaches students how conditional statements work. The second teaches them about logical operators. There is also a Boolean Logic 3 page PDF that complements the videos.
Mapping Values Videos Part 1 & 2 - These videos teach students how to map motor ports to the VEX joystick. By the end of the videos students will be able to change the motor speeds assigned by the remote control and will be able to optimize the joystick values to suit their needs.
Race to the Finish and Robo-Slalom Challenges - These are two relatively simple challenges that students will have fun with. They are designed to give the student practice optimizing the value and configuration of the VEX joystick.
ROBOTC Sample Programs - ROBOTC contains three sample programs in the Remote Control Folder, 2 Joystick Drive with Thresholds, 2 Joystick Drive, and Top Hat Drive. Students are encouraged to begin by opening the sample programs and modifying them.

ROBOTC 45
© 2013 Carnegie Mellon Robotics AcademyVEX® Cortex® Video Trainer Using ROBOTC®
Time and Timers Video - In this video students will learn the difference between using the Wait1Msec command and using Timers to control behaviors, they will also learn how many Timers are available, how to reset Timers, and how to access the value of a timer programmatically.
The Using Timers Video - This video teaches students how to use the reserved words built into ROBOTC to control timers.
The Timers PDF Reference Guide - is a one page handout that can be used as a study guide for using Timers.
The Round-Up and Bull-In-The-Ring Challenges - Designed to give students the opportunity to apply Timers. Both challenges are available as Robot Virtual World Simulations.
Remote Control/Timers

VEX® Cortex® Video Trainer Using ROBOTC® © 2013 Carnegie Mellon Robotics Academy
ROBOTC 46
Buttons provide a very powerful input enabling students to control their robot’s behaviors. This unit teaches students how to develop code that uses feedback from the remote control’s buttons to control their robot’s movements.
The Remote Control Buttons Video - This video teaches students the numbering systems for buttons on the VEX remote control. It also shows them how to access the value of a button, and the values that buttons send to the controller.
The Remote Start Video - This video teaches students how to develop competition ready code and how an idle loop can be used to control the start of a program.
The Controlling the Arm Video Part 1 - This video introduces students to programming an arm for the Minefield Challenge, how to use the Motors and Sensors Setup Wizard to rename motors, and how they can use an if statements to control the up and down motion for the arm.
Controlling the Arm Video Part 2 - This video teaches students how the else branch can be used to complete their arm control algorithm.
Controlling the Arm Video Part 3 - The final video shows students how to integrate a while loop and several if-else statements to control the robot’s arm.
Additional Remote Control labs - The Remote Control Engineering Lab provides students with code and a set of activities designed to take them step-by-step through a remote control lab. Robo-Dunk, RoboWriter, and Turn Buttons are additional labs designed to provide a set of hands on activities to check a student’s understanding of programming buttons.
Remote Control/Buttons

ROBOTC 47
© 2013 Carnegie Mellon Robotics AcademyVEX® Cortex® Video Trainer Using ROBOTC®
Introduction to Remote Control Buttons
Remote Control/Buttons (continued)
Controlling the Arm - Broken into 3 videos due to the complexity and length of the topic.
Button Labs - Available in PDF format and as a Robot Virtual World programming challenge.
Note: the VEXnet Joystick does not communicate its values to the PC, only to a VEX Cortex, so it cannot be used to control the Virtual Robot. A USB Logitech Joystick is recommended for use with the virtual worlds. We also have resources at the ROBOTC Wiki for using any USB joystick.
VEX® Cortex® Video Trainer Using ROBOTC® © 2013 Carnegie Mellon Robotics Academy
ROBOTC 48
Sensing
Sensing/Additional Resources
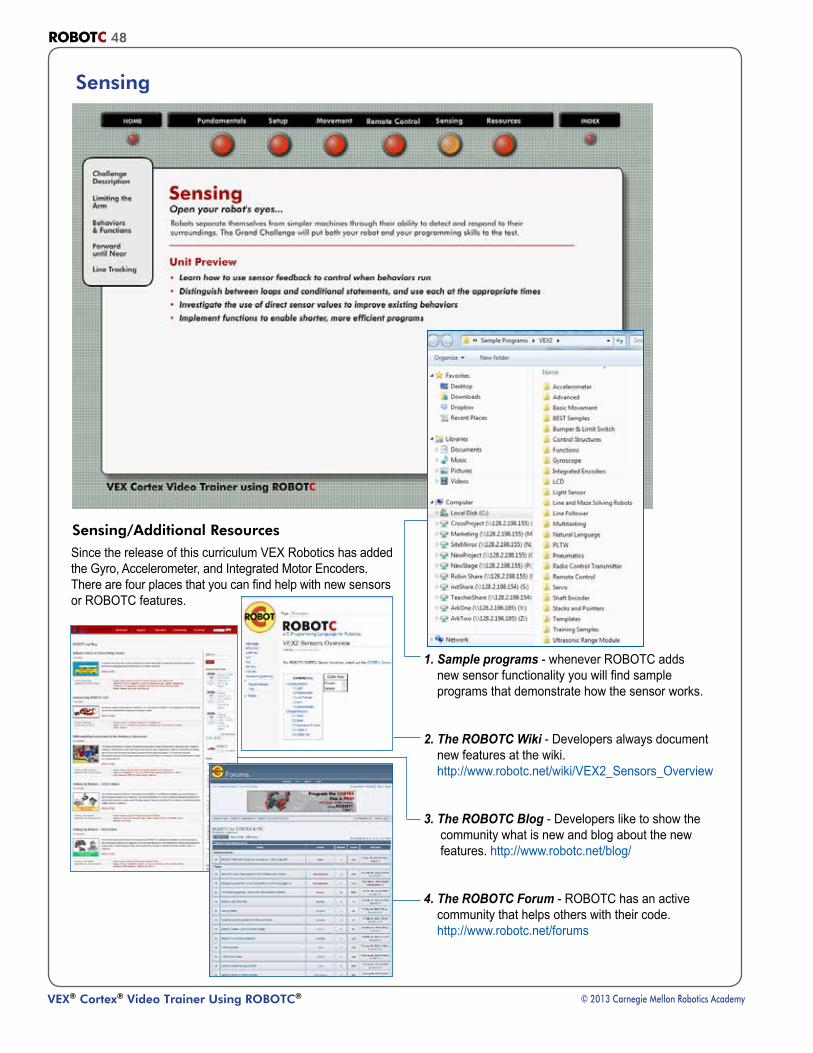
1. Sample programs - whenever ROBOTC adds new sensor functionality you will find sample programs that demonstrate how the sensor works.
2. The ROBOTC Wiki - Developers always document new features at the wiki. http://www.robotc.net/wiki/VEX2_Sensors_Overview
3. The ROBOTC Blog - Developers like to show the community what is new and blog about the new features. http://www.robotc.net/blog/
4. The ROBOTC Forum - ROBOTC has an active community that helps others with their code. http://www.robotc.net/forums
Since the release of this curriculum VEX Robotics has added the Gyro, Accelerometer, and Integrated Motor Encoders. There are four places that you can find help with new sensors or ROBOTC features.

ROBOTC 49
© 2013 Carnegie Mellon Robotics AcademyVEX® Cortex® Video Trainer Using ROBOTC®
Sensing/The Grand Challenge
The Grand ChallengeThis challenge is a teacher designed course that reinforces behavior-based programming and the engineering process. The challenge course is teacher-designed course and not revealed to students until the day of the competition.Before the competition, students are provided with a list of conditions and situations to prepare for (width of the robot’s path, 30 degree ramps, line following, obstacle detection, etc). On the day of the competition, the student’s programming knowledge and preparation are put to the test as they work to traverse the course in a limited amount of time. The robot that makes the most progress without stalling out or deviating from the course wins!
Example Robot Behaviors/Functions - The list below are example behaviors and functions that students might use to solve the Grand Challenge.
• Moving Straight using Encoders• Accurately Move a Specific Distance• Move Forward Until the Light Sensor Sees a Dark Line• Program using Remote Control• Precise Turning using Encoder Feedback• Precise Turning using Compass Sensor Feedback• Programming Remote Controller Buttons to Precise Turning using Encoder or Compass Sensor Feedback• Obstacle Detection using Feedback from Sonar or Touch Sensors (autonomous)• Track a Line• Ability to Push Object• Ability to Detect and Count Lines• Ability to Display Characters to the LCD Remote Screen
Grand Challenge resources are found on the next page.

VEX® Cortex® Video Trainer Using ROBOTC® © 2013 Carnegie Mellon Robotics Academy
ROBOTC 50
Grand Challenge Problem ResourcesPhysical Robot Resources
The Grand Challenge Design Specification - A PDF that describes the challenge.
Grand Challenge Example Solution Video - This solution video is an example of a course. The course that you use will be designed by you and your students.
Robot Virtual World Resources
The Robot Virtual World Grand Challenge Design Specification - This world is designed so that it can be solved many ways allowing the teacher to assign student challenges based on ability. Below, at the left is a picture of the home screen for the RVW Grand Challenge, it is found in the Utility Tables section, in the center is a screen shot of the RVW, and at the right is the RVW Grand Challenge programming description PDF.
The Robot Virtual World Robotics Academy Grand Challenge Design Specification - This world is also designed so that it can be solved many ways allowing the teacher to assign student challenges based on ability. This world is a little easier than the RVW Grand Challenge above. Below, at the left is a picture of the home screen for the RVW Grand Challenge, it is found in the Utility Tables section, in the center is a screen shot of the RVW, and at the right is the Robotics Academy RVW Grand Challenge program-ming description PDF.

ROBOTC 51
© 2013 Carnegie Mellon Robotics AcademyVEX® Cortex® Video Trainer Using ROBOTC®
Sensing/Limiting The Arm
Limiting the Arm Resources
The Limiting the Arm lesson set teaches students how to configure and integrate sensors into the lift-arm mechanism on the robot. The Lesson Set has the following resources:
The Configuring Sensors Video - The video explains how to configure sensors using ROBOTC’s Motors and Sensors Setup wizard and reviews the rules for naming sensors.
The Sensors Reference Guide PDF - A 12 page reference guide that describes the Analog and Digital ports found on VEX Controllers and describes how touch sensors work.
Servo Motors Reference Guide PDF - A 2 page reference guide that shows students how to control servo motors.
Limiting the Arm Part 1 Video - This video explains how the touch sensor works as a limit switch to control how far the motor can move. Students will also learn how to apply the AND Logical Operator in their conditional statement enabling them to check two conditions at the same time.
if-else Statement Reference Guide PDF - Provides students with a review of how the if-else Statement works.
Switch Cases Reference Guide PDF - Provides students with working code that shows how a Switch Case works.
Limiting the Arm Part 2 Video - This video teaches about potentiometers and how they work. Students will learn how to integrate the potentiometer into the mechanical arm mechanism using ROBOTC’s debug window.
Potentiometer Reference Guides - The reference guides are designed to be used as study guides or teaching tools and explain how the sensor works.
Lifting the Arm resources are continued on the next page.

VEX® Cortex® Video Trainer Using ROBOTC® © 2013 Carnegie Mellon Robotics Academy
ROBOTC 52
Sensing/Limiting the Arm Resources (continued)
PDF Reference Guides
Instructional Videos

ROBOTC 53
© 2013 Carnegie Mellon Robotics AcademyVEX® Cortex® Video Trainer Using ROBOTC®
Sensing/Limiting the Arm Resources (continued)
Physical Robot Programming Challenges
Robot Virtual World Programming Challenges

VEX® Cortex® Video Trainer Using ROBOTC® © 2013 Carnegie Mellon Robotics Academy
ROBOTC 54
Sensing/Behaviors and Functions
This lesson set will teach students to build their own behaviors by creating functions. They will also learn to pass parameters that make their functions more portable.
The Behaviors and Functions Part 1 Video - This video introduces students to the power of functions enabling them to make their programs shorter and easier to read.
The Behaviors and Functions Part 2 Video - In this lesson students will learn to transform their code into functions. They will learn how to declare a function and what a parameter is.
The Shaft Encoders Reference Guide - This PDF explains how Shaft Encoders work.
VEX Integrated Encoders Module - Integrated encoders were not available when this curriculum was developed. You will find everything that you need to know at the ROBOTC Wiki. http://www.robotc.net/wiki/Tutorials/Programming_with_the_new_VEX_Integrated_Encoder_Modules
Optimizing Code and Incorporating Functions Challenges - Two challenges that give students the chance to revisit old code that they wrote and make the code easier to read by incorporating functions into their code.
Passing Parameters Part 1 Video - In this video students learn how to pass parameters allowing them to write more powerful functions, they will also learn the rules to naming and specifying parameters.
Passing Parameters Part 2 Video - In this lesson students learn how to implement the parameter including the type of data the parameter will pass and the name of the parameter.
Function Challenges - The Real World Values, RoboDunk2, Seeing the Difference, and Robot Acceleration Program-ming Challenge enable students to revisit code that they’ve previously written and optimize it by incorporating functions and parameters.
Additional resources for the Sensing/Behaviors and Functions lesson set can be found on the next page.
ROBOTC 55
© 2013 Carnegie Mellon Robotics AcademyVEX® Cortex® Video Trainer Using ROBOTC®
Sensing/Behaviors and Functions Resources (Continued)
PDF Reference Guides
Instructional Videos
Integrated encoders were not available when this curriculum was developed. Click the picture above to go to the Wiki page.
Additional resources are available on the next page.
Commented Integrated Encoder sample programs are found in the current ROBOTC Software build.

VEX® Cortex® Video Trainer Using ROBOTC® © 2013 Carnegie Mellon Robotics Academy
ROBOTC 56
Sensing/Behaviors and Functions Resources (Continued)
Physical Robot Programming Challenges
Robot Virtual World Programming Challenges

ROBOTC 57
© 2013 Carnegie Mellon Robotics AcademyVEX® Cortex® Video Trainer Using ROBOTC®
Sensing/Forward Until Near
This lesson set will teach students how to program the VEX Ultrasonic Rangefinder Sensor
The Ultrasonic Rangefinder Video - This video teaches students about the Ultrasonic Rangefinder.
The Ultrasonic Rangefinder Reference Guide - This guide explains how the Ultrasonic Rangefinder works.
The Forward Until Near Video - Shows students how the code for the Forward Until Near behavior works with the ultra-sonic rangefinder including: using the Motors and Sensors wizard, the while loop, and the related code.
The Thresholds Reference Guide - A reference guide that explains what a threshold value is.
The Straight Until Near Video - This lesson combines the Forward Until Near behavior with the Automated Straightening behavior. They will also review how encoders work and why you need to clear them before use.
The Straight Until Near Fine Tuning Video - In this lesson the student will optimize their program using the debugging window so that it moves to the object and stops when it hits the object.
Forward Until Near Programming Challenges - This lesson set contains four increasingly difficult programming chal-lenges that use the Ultrasonic Rangefinder: Sentry Simulation Two, The Speed of Sound, Sentry Simulation Level Three, and the Sonic Scanner programming challenges.
Robot Virtual World Programming Challenges - The RVW simulation software has the Sentry Simulation Level Two, Sentry Simulation Level Three, Speed of Sound, and the Sonic Scanner programming challenges in simulation.
Additional resources for the Sensing/Behaviors and Functions lesson set can be found on the next page.

VEX® Cortex® Video Trainer Using ROBOTC® © 2013 Carnegie Mellon Robotics Academy
ROBOTC 58
Sensing/Forward Until Near (continued)
PDF Reference Guides
Instructional Videos
Additional resources are available on the next page.

ROBOTC 59
© 2013 Carnegie Mellon Robotics AcademyVEX® Cortex® Video Trainer Using ROBOTC®
Sensing/Forward Until Near (continued)
Physical Robot Programming Challenges
Robot Virtual World Programming Challenges

VEX® Cortex® Video Trainer Using ROBOTC® © 2013 Carnegie Mellon Robotics Academy
ROBOTC 60
Sensing/Line Tracking
This lesson set will teach students how to program the VEX Line Tracking Kit.
The Line Tracker Sensor Video - This video teaches students about the Line Tracker Sensor.
The SwerveBot Building Instructions - The Swervebot tracks lines well and can be used for this challenge.
The Line Follower Kit Reference Guide- This PDF shows students how the light sensor kit works including the values the light sensor sees and the ports that it connects to.
The Line Tracking Calculating Thresholds Video - This video teaches students how to use ROBOTC’s debugger to calculate threshold values for the light sensor.
The Thresholds Reference Guide - This reference guide explains what a threshold value is and how to calculate it.
The Variables Reference Guide - This reference guide explains what variables are and how to use them.
The Basic Line Tracking Video - This video teaches students how to build a line tracking behavior.
Line Tracking for Distance Video - This video teaches students how to use a combination of encoder values and the Line Track kit to track a line for a specific distance.
The Optimized Line Tracking Video - Line tracking can be slow, this video shows how you can modify the motor powers to significantly increase the speed your robot tracks a line.
Programming Challenges - This unit has the Forward Until Dark, TableBot, Robo500, Robo Slalom Level 2, Minefield Traversal and Robo Slalom Level three programming challenges to give students practice programming.
Additional resources for the Sensing/Behaviors and Functions lesson set can be found on the next page.

ROBOTC 61
© 2013 Carnegie Mellon Robotics AcademyVEX® Cortex® Video Trainer Using ROBOTC®
Sensing/Line Tracking (continued)
PDF Reference Guides
Instructional Videos

VEX® Cortex® Video Trainer Using ROBOTC® © 2013 Carnegie Mellon Robotics Academy
ROBOTC 62
Sensing/Line Tracking (continued)
Robot Virtual World Programming Challenges
Physical Robot Programming Challenges

ROBOTC 63
© 2013 Carnegie Mellon Robotics AcademyVEX® Cortex® Video Trainer Using ROBOTC®
Resources
Teaching The Engineering Design Process
“The Engineering Design Process is the formulation of a plan to help an engineer build a product with a specified performance goal.”
This process involves a number of steps, and parts of the process may need to be repeated many times before production of a final product can begin. Engineering design teaches problem solving, brainstorming, time and resource management, cooperation and collaboration, and the soft skills that today’s workforce demands. Robotics and robotics competitions provide a high energy organizer to teach the Engineering Design Process.
VEX Robotics Competitions - Each year the Robotics Education and Competition (REC) Foundation hosts an International VEX competition, in 2012 there were over 7,000 teams. The Competition is incredibly well run and can provide a life-changing experience for students. The Robotics Academy is a strong supporter of the formalized robotics competitions because they are well thought out, provide real deadlines, and provide students with a high energy 21st century learning experience.
School-based Competitions - Many teachers us school based competitions. They setup classroom design challenges; some of them are competitive and others are cooperative in nature. There are several examples of possible school based cooperative design problems like The Rube Goldberg Challenge, and the Hot Dog Maker and Automated Workcell examples included in this curriculum.
The next couple of pages introduce resources that are available to teach the Engineering Design Process.

VEX® Cortex® Video Trainer Using ROBOTC® © 2013 Carnegie Mellon Robotics Academy
ROBOTC 64
What is Engineering and Teaching the Engineering Design ProcessTeaching engineering is an iterative process, just like engineering. Students are not going to learn engineering process by attempting to solve one engineering problem, they need to engineer solutions for many problems before they become good at it. There are multiple ways to introduce engineering and 5th grade teachers are going to approach the topic much different than high school teachers. Start with small engineering projects that are a couple days in duration and introduce new organization concepts like brainstorming and ideation, cooperation and collaboration, Gantt and PERT Charts, and developing prototypes and Design Reviews as each project requires them. Always have students keep an Engineering Design Journal for every project. Below are some suggestions that others have used to introduce students to Engineering and Engineering Design Process. 1. Ask the class to discuss the difference between Engineering and Engineering Design Process.
Help them to develop their own internal definition of what engineering is. Introduce students to engineering by showing the Engineering Process Video found on page 10 and provide them with the Definitions of Engineering PDF from page 12. Have them write a one-page paper describing “what is engineering”.
2. Introduce students to what the engineering process looks like by providing them with the Engineering Process PDF found on page 11.
3. Teach students to keep and Engineering Design Journal and require them to document their project by keeping all notes, sketches, and code snippets. Have them keep all of their handouts in their Engineering Design Notebook. There is a PDF describing the notebook on page 10.
4. Require students to work in teams. This is a very important skill for students to develop and it takes practice. Begin by having them review and discuss the “First Team Meeting” handout found on page 11.
5. Teach students how to brainstorm without offending each other. There is a handout on page 10 called “Brainstorming”. Give students ample opportunities to solve new problems regularly.
6. Require evidence of project planning and “Time Management” by having them develop PERT and GANTT Charts for various projects. Pass the Gantt and PERT chart handouts found on page 12.
7. Discuss how to break a project into manageable parts, assigning deliverables, and self assigning due dates. Have them watch the Project Planning Video on page 10.
8. Build prototypes and conduct design reviews. Use the design review handout on page 11.
9. Invite other adults to sit in on design reviews to review student solutions.
10. Require project documentation.
11. Iteratively test solutions and have students brainstorm how to improve them.
12. Give students the opportunity to present their solution
13. Debrief, talk about what worked, what didn’t work, and how to improve the process.
14. Give students other problems to solve - The students will improve each time they participate in the engineering design process. The first project may be a disaster for some teams. The debrief session is the most important part of the above process for new learners. Students need to recognize that this process will be with them in some form for the rest of their lives and so it is important that they become good at it.

ROBOTC 65
© 2013 Carnegie Mellon Robotics AcademyVEX® Cortex® Video Trainer Using ROBOTC®
Sketching provides a quick way to share ideas; this module introduces students to technical sketching, a fundamental tool of engineers. This section is not meant to replace a formal Engineering Design CAD course, but to teach kids basic skills that enable them to share ideas. The resources are divided into the following organizers and it will be up to the teacher to determine what is appropriate for their students:1. Introduction to Technical Sketching2. Drawing Conventions/Dimensioning3. Pattern Developments4. Pictorial Sketching5. Precision Measurement6. Sketching FastenersThe Lesson section consists of a variety of hands-on technical sketching exercises of a variety of parts. It will depend on the teacher’s point of emphasis, but this section of the course could take anywhere from two days to a week. Introduce students to sketching early, challenge them with a design problem that involves building a working model. Have them plan their project before they build it. This process involves sketches, dimensioning, and design reviews. Team members share ideas, and then make improvements based on testing and feedback. Require students to keep all sketches in their engineering design journal. Introduction to Technical Sketching resources consists of a series of printable handouts that demonstrate sketching technique, a set of handouts that explains sketching technique, and multiple sketching exercises.Drawing Conventions/Dimensioning consists of two printable handouts illustrating technical sketching line conventions and general dimensioning rules and several parts to dimension.Pattern Developments is a handout that introduces the topic of pattern development and provides several examples of student-designed manipulators that use pattern developments.Pictorial Sketching consists of a series of printable handouts that reinforces “crating technique” when sketching pictorial drawings and a pictorial sketching handout. Precision Measurement consists of a couple of VEX robot parts that need to be accurately measured. The handouts are designed to give students practice measuring accurately, and a handout on units of measurement.Sketching Fasteners - fasteners are used on many robotics engineering projects. This set of exercises give students the opportunity to both perfect their sketching technic and also learn the names of the various fasteners.
Planning You Project: Technical Sketching
Introduction to Technical Sketching

VEX® Cortex® Video Trainer Using ROBOTC® © 2013 Carnegie Mellon Robotics Academy
ROBOTC 66
Introduction to Technical Sketching Continued
Drawing Conventions/Dimensioning

ROBOTC 67
© 2013 Carnegie Mellon Robotics AcademyVEX® Cortex® Video Trainer Using ROBOTC®
Pictorial Sketching
Precision Measurement Sketching Fasteners

VEX® Cortex® Video Trainer Using ROBOTC® © 2013 Carnegie Mellon Robotics Academy
ROBOTC 68
VEX Robotics Competitions
VEX Robotics Competitions - Type Robotics Competitions into a search engine and you will have millions of hits. They are incredibly popular with over 30,000 US teams. The major advantages of competing in an annual robotics competition are:• The competition game is new each year so your students won’t get bored• The rules are generally well thought out and developed by a team of experts• There are hard deadlines that students need to meet.• It is incredibly exciting for students to compete against other students from across the region and the
world.• There are multiple events that your team can compete in.• Taking your school to these types of events ads prestige to your program.
The REC Foundation - Each year the Robotics Education and Competition (REC) Foundation hosts an International VEX competition, in 2012 there were over 7,000 teams. The Competition is incredibly well run and can provide a life-changing experience for students. There are competitions run in every state and in most countries in the world. To learn more go here: http://www.roboticseducation.org/
BEST Robotics http://www.bestinc.org/ BEST stands for Boosting Engineering Science and Technology. It hosts and annual competition each year and has about 1,000 teams. To learn more go here: http://www.bestinc.org/documents/Competition%20Overview.pdf
On the next page you will find handouts that you can use to introduce these three challenges. The challenges are described below and are designed to challenge students to develop innovative solutions using the engineering design process.
Project Time Required
Experience Level
Other Requirements
Focus/Coverage
Rube Goldberg
1 - week Introductory Focus: Engineering process, teamwork, communication, systems concepts (input, output, subsystems, state), designCoverage: Non-Vex building of stationary “cells” in a system that can only perform their functions once, and do not have electronic control
Hot Dog Maker Challenge
3-5 weeks Recommended: Students must know how to program with sensors
Required:Programming kit, various additional sensors, hardware and tools
Focus: Engineering process, teamwork, communication, collaboration, systems concepts, reliabilityCoverage: Inter-team collaborative design and Vex building of subsystems that must work together reliably to accomplish a multi-step process with dissimilar functions at each step. Project management on several levels is key to successfully completing this activity.
Automated Work Cell
4-5 weeks Required: Students must know how to program with sensors
Required:Programming kit, various additional sensors, hardware and tools
Focus: Engineering process, teamwork, communication, collaboration, systems concepts, reliabilityCoverage: Inter-team collaborative design and Vex building of subsystems that must work together reliably to accomplish a multi-step process with dissimilar functions at each step. Project management on several levels is key to successfully completing this activity.
VEX In-School Design Problems

ROBOTC 69
© 2013 Carnegie Mellon Robotics AcademyVEX® Cortex® Video Trainer Using ROBOTC®
Notes on Projects:
1. Rube Goldberg Challenge – This challenge can be accomplished with or without VEX parts. Our intention with this design problem is to get the kids engineering early and have them develop an outside the box solution. We believe that the project can be done without VEX parts using all recycled parts. The project can be done at home as a homework assignment over the weekend and then brought to class. There are many examples of Rube Goldberg Machines on the Internet. There is also a handout below which uses VEX parts.
2. The Hot Dog Maker & Automated Work Cell – The nature and themes of these projects can be modified however the teacher sees fit (hot dog maker and work cell are just two ideas), and should be designed to fit available resources. The idea behind the projects is to challenge the students to develop an automated system that requires every group to be doing something different, yet integral, to the final solution. The solution to the system is up to the students.

VEX® Cortex® Video Trainer Using ROBOTC® © 2013 Carnegie Mellon Robotics Academy
ROBOTC 70
How Robotics Aligns with Standards
This section describes how robotics as a content area aligns with National Science, Mathematics, Technology, and Communications Standards. Below you will see the format that we use to show how robotics education aligns to national science, technology, engineering, and mathematics (STEM) standards.
The natural and designed world is complex; it is too large and complicated to investigate and com-prehend all at once.
A system is an organized group of related objects or components that form a whole.
The goal of this standard is to think and analyze in terms of systems.
Science assumes that the behavior of the universe is not capricious, that nature is the same every-where, and that it is understandable and predict-able.
Prediction is the use of knowledge to identify and explain observation, or changes, in advance. The use of mathematics allows for greater or lesser certainty of predictions.
Order is the behavior of units of matter, objects, organisms or events in the universe – can be described mathematically.
Types and levels of organization provide useful ways of thinking about the world
Standard
On the left is a description of the standard or particular point of the standard that is addressed through robotics.
Robotics Link
On the right is a description of how robotics in general and this curriculum in particular addresses this standard.
Science Standards AddressedFrom the National Science Education Standards (NSES)
Robots are excellent examples of systems, with many heterogeneous components interacting in organized, methodical ways to achieve results as a whole that they could not have achieved separately.
Examples include:• Navigation systems (e.g. sensor tells the robot where it is, programmable controller tells the robot how to interpret this information, motors move in order to achieve the desired result)• Sensing systems (electrical, mechanical, and programming elements of a sensor)• Power & transmission systems (motor, axle, gear, wheel)• Manipulator systems• Lifting systems, vision systems, etc.
Each system can be broken down into subsystems.
Robotics technology is built upon a series of behaviors that can be measured mathematically and are under-standable and predictable.
There are many examples that are easy for students to manipulate and understand:• Gears and mechanical advantage• Sensors and electronic control• Wheel diameter and its effect on distance traveled• Rotation sensor readings and robot path planning
Systems, Order, and Organization

ROBOTC 71
© 2013 Carnegie Mellon Robotics AcademyVEX® Cortex® Video Trainer Using ROBOTC®
Science Standards continued
From the National Science Education Standards (NSES)
Evidence consists of observations and data on which to base scientific explanations. Using evi-dence to understand interactions allows individu-als to predict changes in natural and designed systems.
Models are tentative schemes or structures that correspond to real objects, events, or classes of events that have explanatory power. Models help scientists and engineers understand how things work. Models take many forms, including physical objects, plans, mental constructs, mathematical equations and computer simulations.
Scientific explanations incorporate existing sci-entific knowledge and new evidence into logical statements. Terms like “hypothesis,” “model,” “law,” “theory,” and “paradigm” are used to de-scribe various scientific explanations.
The investigations included in this curriculum allow students to collect evidence to investigate scientific principles. Robots physically demonstrate many sci-entific concepts to make them more clear and under-standable.
Examples include:• Electronics and basic circuitry, which can be demonstrated using touch sensors and the VEX power supply• Gear trains, which demonstrate the ability to mathematically predict mechanical advantage and speed.• Light sensors, which can detect infrared as well as visible light
Evidence, Models and Explanation
Although most things are in the process of becoming different – changing – some proper-ties of objects and processes are characterized by constancy; the speed of light, the charge of an electron, the total mass plus energy of the universe.
Energy can be transmitted and matter can be changed. Nevertheless, when measured, the sum of energy and matter in the system, and, by extension, the universe, remains the same.
Mathematics is essential for accurately measuring change.
Different systems of measurement are used for different purposes.
Scale includes understanding that different characteristics, properties, or relationships with a system might change as its dimensions are increased or decreased.
Rate involves comparing one measured quantity with another measured quantity, for example, 60 meters per second.
Robots rely on the use of many innate constants in their basic operation. Ultrasonic sensors, for instance, calculate distance based around an assumed value for the speed of sound.
In calculating the distance a robot travels per spin of its motor, fundamental mathematical relationships govern the elements of change and constancy between the different factors involved. For example, the ratio between the diameter and circumference of the wheel is constant (C=πd). On the other hand, a robot doesn’t always need to use the same wheels – they can change – yet, no matter what the size of the wheel, the distance traveled per turn of the wheel remains proportional.
Measurement is fundamental to all aspects of robotics, from matching dimensions of parts to ensure that they can connect properly, to measuring how far your robot went, to measuring how well a prediction matched a result.
Constancy, Change and Measurement

VEX® Cortex® Video Trainer Using ROBOTC® © 2013 Carnegie Mellon Robotics Academy
ROBOTC 72
Science Standards continued
From the National Science Education Standards (NSES)
Evolution is a series of changes, sometimes gradual and sporadic, that accounts for the present form and function of objects, natural systems and designed systems. The general idea of evolution is that the present arises from materials and forms of the past.
Equilibrium is a physical state in which forces and changes occur in opposite and off-setting directions. For example, opposite forces are of the same magnitude, or off-setting changes occur at equal rates.
Every robot design has a story. As they build and modify their robot designs, students can trace the evolution of their creation as they adapt it in different ways that allow it to complete different tasks, building upon lessons learned from their previous designs.
Equilibrium appears in many different forms as a design factor that students will encounter in designing their robots. For example, a robot’s top speed is an equilibrium point between the physical force of friction and the force generated by the motor.
Evolution and Equilibrium
Form and function are complementary aspects of objects, organisms, and systems in the natural and designed world.
When designing robots, form always follows function.
Whether the design decision involves using large ver-sus small wheels, making the motor power high versus low, or selecting the sensing device the robot will use, all decisions are based on what the robot is expected to do: its function. All of these decisions will affect the final shape of the robot: its form.
Form and Function
As a result of activities in all grades, all students should develop:
• Abilities necessary to do scientific inquiry• Understanding about scientific inquiry
Students should be engaged in activities that:
• Begin with a question• Allow them to perform an investigation• Gather evidence• Formulate an answer to the original question• Communicate the investigative process and results
The guided investigations in Robotics Engineering are targeted at specific relevant questions about robotics technologies and concepts that lead to rich exploratory experiences.
Some investigations focus on specific portions of the inquiry process, such as evidence-gathering or hypoth-esis evaluation. Others begin with a question and seek an answer using general inquiry processes.
Explanation and evaluation are primary abilities ap-plied in answering questions, not simply calculations or summarization.
Science as Inquiry – Content Standard “A”

ROBOTC 73
© 2013 Carnegie Mellon Robotics AcademyVEX® Cortex® Video Trainer Using ROBOTC®
Science Standards continued
From the National Science Education Standards (NSES)
As a result of activities in all grades, all students should develop an understanding of:
• Properties and changes of properties in matter• Motions and forces• Transfer of energy
By using simple objects, such as rolling balls and mechanical toys, students can move from qualita-tive to quantitative descriptions of moving objects and begin to describe the forces acting on the objects.
Understanding of energy will include light, heat, sound, electricity, magnetism, and the motion of objects.
Robotics is able to demonstrate many applied physical concepts. Here are a few examples:
• Mechanical advantage (gears)• Basic circuitry (sensor operation)• Digital and analog electronics (sensors)• Light (lamp, light sensor)• Sound (ultrasonic, sound sensors)• Speed (motors)• Friction (robot movement)
Quantitative measurement is a staple of all investigations.
Physical Science – Content Standard “B”
As a result of activities in all grades, all students should develop:• Abilities in technological design• Understandings about science and technology
Students should begin to differentiate between science and technology.
In the middle school years, scientific investigations can be completed by activities in which the purpose is to meet a human need, solve a problem, or develop a product rather than explore ideas about the natural world.
Robotics is the premier example of the marriage of science and technology, especially as related to the solving of problems or human needs.
Every investigation students conduct with the robot is motivated by the need to advance the performance of the robot in order to meet performance criteria, connecting the “need to know” with the “ability to do”.
Science and Technology – Content Standard “E”

VEX® Cortex® Video Trainer Using ROBOTC® © 2013 Carnegie Mellon Robotics Academy
ROBOTC 74
• Understand numbers, ways of representing number, relationships among numbers and number systems.• Understand meaning of operations and how they relate to one another.• Compute fluently and make reasonable estimates.
Mathematics Standards AddressedFrom the National Council of Teachers of Mathematics (NCTM)
Robotics uses numbers and operations in nearly all lessons, for example:
• Calculating distance with rotational sensors (equations, equalities)• Gears, gear ratios and speed (ratios and proportions)• Light sensors and threshold (inequalities)• Wheel circumference, radius and diameter (geometric relationships)
Numbers and Operations
• Represent and analyze mathematical situations and structures using algebraic symbols.• Use mathematical models to represent and understand qualitative relationships.• Analyze change in various contexts.
Robotics lessons that involve algebra include the fol-lowing:
• Conditional statements (inequalities)• Programming sensors and thresholds (inequalities)• Measuring turns (equalities, solving equations)• Gears and speed (ratios, direct and indirect proportionality)• Passing parameters in functions
Algebra
• Precisely describe, classify, and understand relationships among types of two and three- dimensional objects using their defining properties.
• Specify location and describe spatial relation ships using coordinate geometry and other representational systems.
Robotics situations involving geometry include:
• Wheel rotations and circumference (diameter, circumference)• Identifying locations in order to program a robot to move from point to point (connected path segments)• Interlocking gears and gear ratios (discrete combinations of radii)
Geometry
• Understand measurable attributes of objects and the units, systems, and processes of measurement.• Apply appropriate techniques, tools and formulas to determine measurements.
Understanding the significance and meaning of mea-surements are central to the understanding of robotics:• Distance the robot travels (linear measurement, meter stick)• Amount a motor turns (angular measurement)• Directional change of the robot (angular measurement, protractor)• Speed of the robot (rate measurement, meter stick, built-in timer)• Physical quantities measured by sensors (touch, sound, light, distance)• Detectable region of a sensor (ultrasonic sensor, meter stick, 2D graph paper)
Measurement
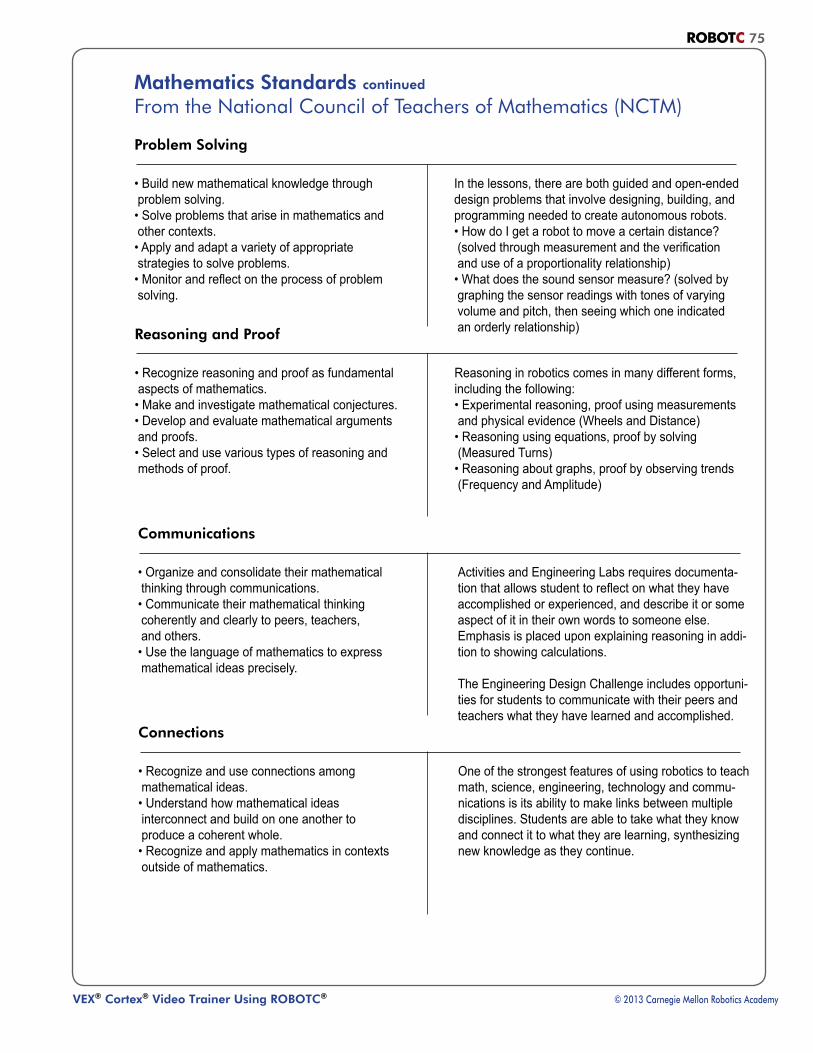
ROBOTC 75
© 2013 Carnegie Mellon Robotics AcademyVEX® Cortex® Video Trainer Using ROBOTC®
• Build new mathematical knowledge through problem solving.• Solve problems that arise in mathematics and other contexts.• Apply and adapt a variety of appropriate strategies to solve problems.• Monitor and reflect on the process of problem solving.
Mathematics Standards continued
From the National Council of Teachers of Mathematics (NCTM)
In the lessons, there are both guided and open-ended design problems that involve designing, building, and programming needed to create autonomous robots. • How do I get a robot to move a certain distance? (solved through measurement and the verification and use of a proportionality relationship)• What does the sound sensor measure? (solved by graphing the sensor readings with tones of varying volume and pitch, then seeing which one indicated an orderly relationship)
Problem Solving
• Recognize reasoning and proof as fundamental aspects of mathematics.• Make and investigate mathematical conjectures.• Develop and evaluate mathematical arguments and proofs.• Select and use various types of reasoning and methods of proof.
Reasoning in robotics comes in many different forms, including the following:• Experimental reasoning, proof using measurements and physical evidence (Wheels and Distance)• Reasoning using equations, proof by solving (Measured Turns)• Reasoning about graphs, proof by observing trends (Frequency and Amplitude)
Reasoning and Proof
• Organize and consolidate their mathematical thinking through communications.• Communicate their mathematical thinking coherently and clearly to peers, teachers, and others.• Use the language of mathematics to express mathematical ideas precisely.
Activities and Engineering Labs requires documenta-tion that allows student to reflect on what they have accomplished or experienced, and describe it or some aspect of it in their own words to someone else. Emphasis is placed upon explaining reasoning in addi-tion to showing calculations.
The Engineering Design Challenge includes opportuni-ties for students to communicate with their peers and teachers what they have learned and accomplished.
Communications
• Recognize and use connections among mathematical ideas.• Understand how mathematical ideas interconnect and build on one another to produce a coherent whole.• Recognize and apply mathematics in contexts outside of mathematics.
One of the strongest features of using robotics to teach math, science, engineering, technology and commu-nications is its ability to make links between multiple disciplines. Students are able to take what they know and connect it to what they are learning, synthesizing new knowledge as they continue.
Connections

VEX® Cortex® Video Trainer Using ROBOTC® © 2013 Carnegie Mellon Robotics Academy
ROBOTC 76
1. Students will develop an understanding of the characteristics and scope of technology.2. Students will develop an understanding of the core concepts of technology.3. Students will develop and understanding of the relationships among technologies and the connections between technology and other fields of study.
Technology Standards AddressedFrom the International Technology Education Association (ITEA)
All robotics activities provide excellent hands-on expo-sure to technology in use and development.• Robotics activities feature linkages to advanced technologies that allow students to connect their designs to real-world needs and solutions• Successful robot operation revolves around the application of systems concepts to make sensors, actuators, and other components work together• Design processes take into account goals, resources, and trade-off factors to achieve optimal results• Technology exists in proper context alongside applications in science, math, and engineering• Several different technologies (e.g. desktop computer, USB/Bluetooth peripheral interface, mobile robotics controller, electromechanical sensors and actuators) are routinely used together in the operation of the VEX robot system, and all are necessary for it to work
The Nature of Technology
6. Students will develop an understanding of the role of society in the development and use of technology.
Robotics Engineering Design Challenges are linked to real world problems that use similar technologies to accomplish tasks that fulfill a social and/or economic need in the real world. For example:• For instance the robot mining project that is part of this curriculum addresses a real problem that mining industries face daily.Some robot activities focus specifically on Human-Ro-bot Interaction (HRI), an emerging field dealing specifi-cally with psychological and design issues relating to the use of robots in human environments.
Technology and Society
8. Students will develop an understanding of the attributes of design9. Students will develop and understanding of engineering design10. Students will develop an understanding of the role of troubleshooting, research and development, invention and innovation, and experimentation in problem-solving.
Students gain first-hand experience with developing a functional robotic system in many activities, including:• The Warehouse Programming Challenge• The Robot Mining Challenge• Teacher assigned robot problems
Design

ROBOTC 77
© 2013 Carnegie Mellon Robotics AcademyVEX® Cortex® Video Trainer Using ROBOTC®
11. Students will develop the ability to apply the design process12. Students will develop the ability to use and maintain technological products and systems
Technology Standards continued
From the International Technology Education Association (ITEA)
Students will apply design processes continually while working with and developing the robot. Here are some basic examples:• Solving engineering design problems• Robotics Competitions
In the course of working with the robot, students will be responsible for the maintenance of their robots:• Mechanical soundness (the robot needs to be kept in good enough condition to perform its tasks daily)• Organizing information (students must keep good records to know how to use systems they initially designed days or weeks earlier)• Troubleshooting (robots have problems–often–and students must be able to identify and solve these issues as they arise)
Students will work with many important technologies as part of the operation of the VEX system:• Electronic microcontrollers (VEX)• Desktop/laptop computer and software (VEX Programming Software, word processor for write ups, spreadsheets for data graphs)• Peripheral interfaces (USB or Bluetooth wireless)• Electromechanical systems (touch, light, rotation, sound, ultrasonic sensors)• Electromechanical actuators (Interactive Servo Motors)
Abilities for a Technological World
16. Students will develop an understanding of and be able to select and use energy and power technologies17. Students will develop an understanding of and be able to select and use information and communications technologies18. Students will develop an understanding of and be able to select and use transportation technologies19. Students will develop an understanding of and be able to select and use manufacturing technologies
The Cortex robot is an excellent example and integrator of many different designed technologies working together as a coordinated system.• Power sources (battery technologies – rechargeable Lithium-Ion vs. disposable alkaline)• Vehicle systems (all the robot’s systems must work together in order to make it mobile, a viable platform for transportation of goods or as a platform to perform other work)• Manufacturing and prototyping (robot must be built and modified using appropriate materials, plans and tools)• Structural soundness and stability concepts are integral to the design of the robot’s physical form.• Communication between system components (desktop to VEX, sensors to VEX, VEX to motors)• Communication technologies (USB vs. Bluetooth)
The Designed World

VEX® Cortex® Video Trainer Using ROBOTC® © 2013 Carnegie Mellon Robotics Academy
ROBOTC 78
Reading, Writing, Listening, and PresentingCommunications skills developed through robotics
Communications skills applied when working with Robots
Situation or Activity Communications Concepts AppliedMaintain Engineering Design Notebook Organization of informationReach consensus on which of several student-pro-posed designs the team will build
Teamwork and group communication skills• Running and participating in meetings• Building consensus
Compose a compelling proposal to convince a (virtual) sponsor that their robot’s development is worth funding
Formal persuasive compositionIntegrate self-conducted research into a piece that is not purely expositoryTechnical writing• Explaining technical decisions and implementations to an audience that is not necessarily technically inclined
Document the team’s progress and accomplishments daily
Documentation and accounting for time, resources, and progress
Undergo review and integrate feedback from experts Review and feedback processesLearning to accept and respond to criticism
Choose from a variety of representations to best illus-trate and communicate a point
Use many different formats of both technical and non-technical information, across different media:• Graphs• Charts• Tables/Matrices• Photographs• Sketches• Timelines• PERT and Gantt Charts• Multimedia presentation• Text
Use Wireless to communicate between two Cortex Controllers
Electronic communication paradigms (as opposed to human)Networking and connected devices
Establish a standard “language” for communicating between two VEX Robots
Electronic communicationBasic principles of communication• Necessity of shared language• Encoding and interpretation
Programming the robot Communicate instructions explicitly to a robot using a “foreign” language
Engineering does not exist in a vacuum; it is highly interdisciplinary and highly social. Teamwork is a central foundation of Engineering, and communication is essential to smooth functioning of any engineering team. Students will find that highly developed communication skills are an absolute necessity for success.
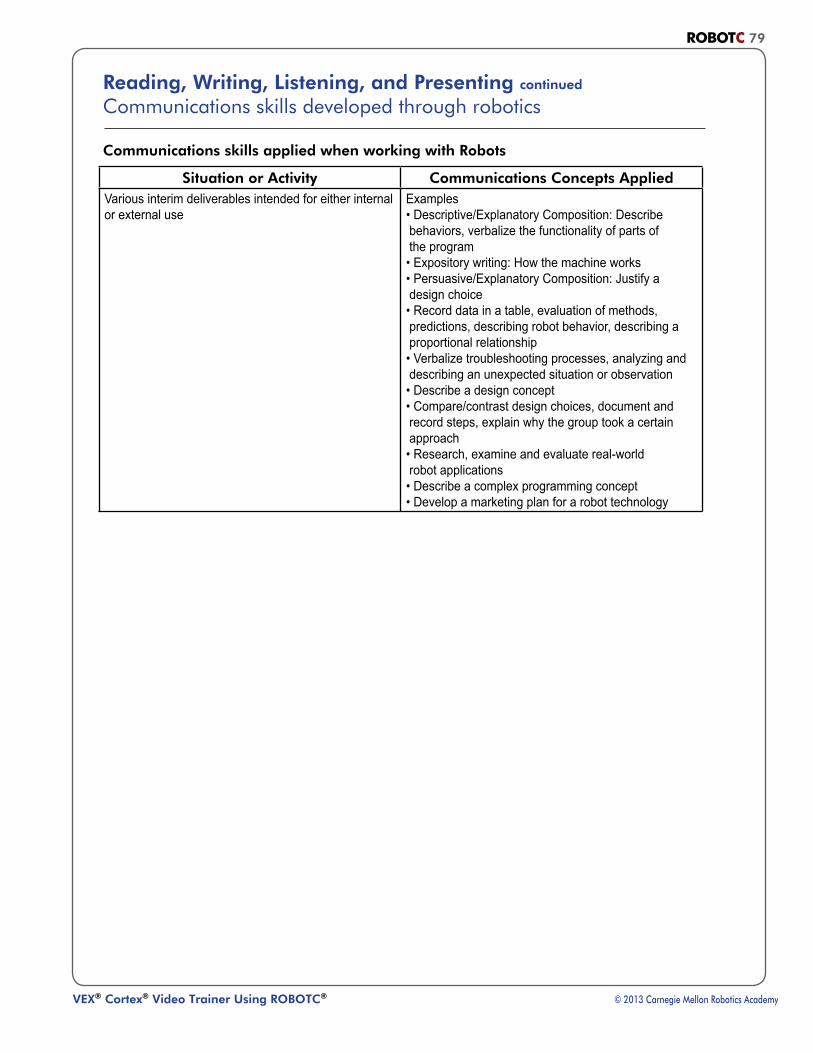
ROBOTC 79
© 2013 Carnegie Mellon Robotics AcademyVEX® Cortex® Video Trainer Using ROBOTC®
Reading, Writing, Listening, and Presenting continued
Communications skills developed through robotics
Communications skills applied when working with Robots
Situation or Activity Communications Concepts AppliedVarious interim deliverables intended for either internal or external use
Examples• Descriptive/Explanatory Composition: Describe behaviors, verbalize the functionality of parts of the program • Expository writing: How the machine works • Persuasive/Explanatory Composition: Justify a design choice• Record data in a table, evaluation of methods, predictions, describing robot behavior, describing a proportional relationship • Verbalize troubleshooting processes, analyzing and describing an unexpected situation or observation• Describe a design concept• Compare/contrast design choices, document and record steps, explain why the group took a certain approach• Research, examine and evaluate real-world robot applications • Describe a complex programming concept• Develop a marketing plan for a robot technology

VEX® Cortex® Video Trainer Using ROBOTC® © 2013 Carnegie Mellon Robotics Academy
ROBOTC 80

ROBOTC 81
© 2013 Carnegie Mellon Robotics AcademyVEX® Cortex® Video Trainer Using ROBOTC®

ROBOTC 82
Developed by Carnegie Mellon Robotics Academy, the VEX IQ Curriculum will include videos, animations, and step-by-step lessons designed to help beginners learn behavior-based programming using the VEX IQ hardware and ROBOTC 4.0 for VEX Robotics.
Designed to encourage independent learning and problem solving. All lessons are self-contained, require a minimum of instructor supervision, and include many built-in opportunities to self-assess progress. Prior robotics experience not required or assumed!
VEX IQ® CURRICULUM BUNDLEROBOTC VideO TRaineR
eXPediTiOn aTLanTiSenGineeRinG MOdULeS
DESIGNED TO TEACH PROGRAMMING, GRADE
LEVEL MATHEMATICS, AND ENGINEERING
$349.95
VeX iQ is a robotics platform designed
to transform STeM learning for young
students and their teachers. Students
as young as 8 can jump right in and snap robots together using this intuitive, tool-less
platform. The VeX iQ system was designed to be simple and easy for students to use.
Structural pieces snap together and come apart without tools, allowing for quick build
times and easy modifications. a variety of gears, wheels and other accessories allows
for complete customization of VeX iQ projects and mobile robots. Robomatter is an
official reseller of all VeX products.
MS CURRICULUM<< ROBOTiCS
Call customer service for additional help 412-963-7310

ROBOTC 83
VEX IQROBOT STaRTeR KiTS >>
if you are just getting started and want to sample the VeX iQ
robot kit this is the place to start. The Starter Kit with Controller
is designed to use remote control and costs $249.99. The
Starter Kit with Sensors is designed to be programmed and
costs $249.99. The best value is the Super Kit which is picture
below. The Super Kit contains both the sensors and the remote
control allowing students to begin building and programming
immediately (ROBOTC is not included with the Starter Kits).
The Super Kit is picture above, It includes the color sensor, gyroscope, potentiometer, touch sensors, smart motors, a storage kit and over 650 structural parts.
$299.99 eaCh
inCLUdeS ReMOTe COnTROL PLUS
SenSORS! BeST VaLUe
$249.99 eaCh
STaRTeR KiT wiTh COnTROLLeRS OR
SenSORS

ROBOTC 84
VeX iQ Classroom Bundles are designed to equip a teacher with everything that
they need to run a robotics class, or compete in a competition - Curriculum, Training,
ROBOTC Software, additional motors, batteries, cables, a VeX iQ Challenge Field
(a must have for the classroom teacher), the Chain and Sprocket add-on Kit, the Tank
Tread & intake Kit, Omni wheels, the VeX iQ Foundation Kit, and individual storage
solutions. Bundled pricing includes significant discounts and prepare you to teach
with the VeX iQ robots!
Each Classroom Bundle includes a VEX Super Kit, and extra Robot Battery, VEX IQ Curriculum, ROBOTC4.0 Programming Language, an either a Full or a Half VEX IQ Challenge Field; everything that a teacher needs to begin teaching with the VEX IQ robot training tool.
VEX IQCLaSSROOM BUndLe
$348.99
The base VEX IQ Super Kit comes with 4 motors, but our Super Bundle will add two (2) additional motors to help your most creative designs get up and moving. We've also added a pack of six (6) smart cables to help connect your extra motors and sensors to your VEX IQ robot brain. Also includes ROBOTC Software and Curriculum to program smart!
VEX IQSUPeR BUndLe
$559.87
There are additional Bundle Configurations at the Robomatter Store www.robomatter.com
VEX IQ<<CLaSSROOM Ready
Call customer service for additional help 412-963-7310
VEX IQ Official Challenge Table
VEX IQ Curriculum and Software
VEX IQ Starter Kit (on left) plus lots of additional hardware on right
SiGniFiCanT diSCOUnT
PRiCinG On MULTiPLe BUndLeS!
SiGniFiCanT diSCOUnT
PRiCinG On MULTiPLe BUndLeS!

ROBOTC 85
Online Training
VEX IQCOMPeTiTiOn Ready>>
The Half Field Comes with the 4 Pack
An Extra Rechargeable Battery with Every Bundle
Plus all of these additional
parts prepare you to be
classroom or competition
ready!
One VEX IQ Super Kit Included with Each Super Bundle
2 Additional Motors Included with every
Super Bundle

NO ROBOT? NO PROBLEM!ROBOT VIRTUAL WORLDS
Robot Virtual Worlds (RVW) is a high-end simulation environment that enables students, without robots to use the same code that they use on their physical robots to program their simulation robots. Research has shown that learning to program in the RVW is more efficient than learning to program using physical robots. RVW simulates popular real world VEX®, LEGO®, and TETRIX® robots in 3D curriculum, gaming, and competition environments. The RVW environment is perfect for home, classroom, and competition learning!Pages 13 & 14 preview simulated environments for the annual VEX programming competition and the curriculum companion.
Above: VEX Toss Up Virtual World
Above: Virtual Worlds Programmable Robot Examples
To learn more about our research study click this link www.cs2n.org/teachers/research

ROBOTC 87
Toss Up!VEX Robot Virtual World
Toss Up is the 2013-2014 Official game for VEX Robotics.
Supporting the VEX Robotics Competition Community!
The VEX Toss Up Challenge is the official VEX Challenge for 2013-14 season. Each year Robomatter designs the RVW simulation of the VEX Challenge. Winners of the VEX RVW Competition qualify to go to the National Championship!
Above: Grip or Scoop up Balls.
Below: Score with Buckeyballs and Large Balls.
<<<<<<<<<<<
Above: Practice Hanging from the Rack!
The VEX Toss Up RVW Competition is an Offical Competition for the 2013-14 Season