problemas y ejercicios de mecanica ii´ - upm...problemas y ejercicios de mecanica ii´ propuestos...
TRANSCRIPT

Problemas y ejercicios de Mecanica II
Propuestos por los profesores de la asignatura en examenes
Compilados y resueltos por Manuel Ruiz Delgado
Escuela Tecnica Superior de Ingenieros Aeronauticos
Universidad Politecnica de Madrid
16 de junio de 2010
II
Indice general
1. Movimiento rectil ıneo 11.1. CasoF(x) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2. CasoF(x) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.3. Oscilador armonico . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . 10
2. Movimiento del punto libre 192.1. Partıcula libre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . 192.2. Movimientos centrales . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . 302.3. Dinamica orbital . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . 39
3. Punto sometido a ligaduras 493.1. Punto sobre superficie . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . 493.2. Punto sobre curva . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. 65
4. Dinamica relativa 81
5. Examenes: Dinamica del Punto 955.1. Examenes recientes . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . 955.2. Examenes mas antiguos . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . 105
6. Dinamica analıtica: sistemas holonomos 115
7. Dinamica analıtica: Sistemas no holonomos 145
8. Percusiones 155
9. Dinamica del solido 181
10. Examenes: Dinamica de Sistemas 23310.1. Problemas resueltos . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . 23310.2. Enunciados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .265
III

IV
Capıtulo 1
Movimiento rectil ıneo
1.1. CasoF(x)
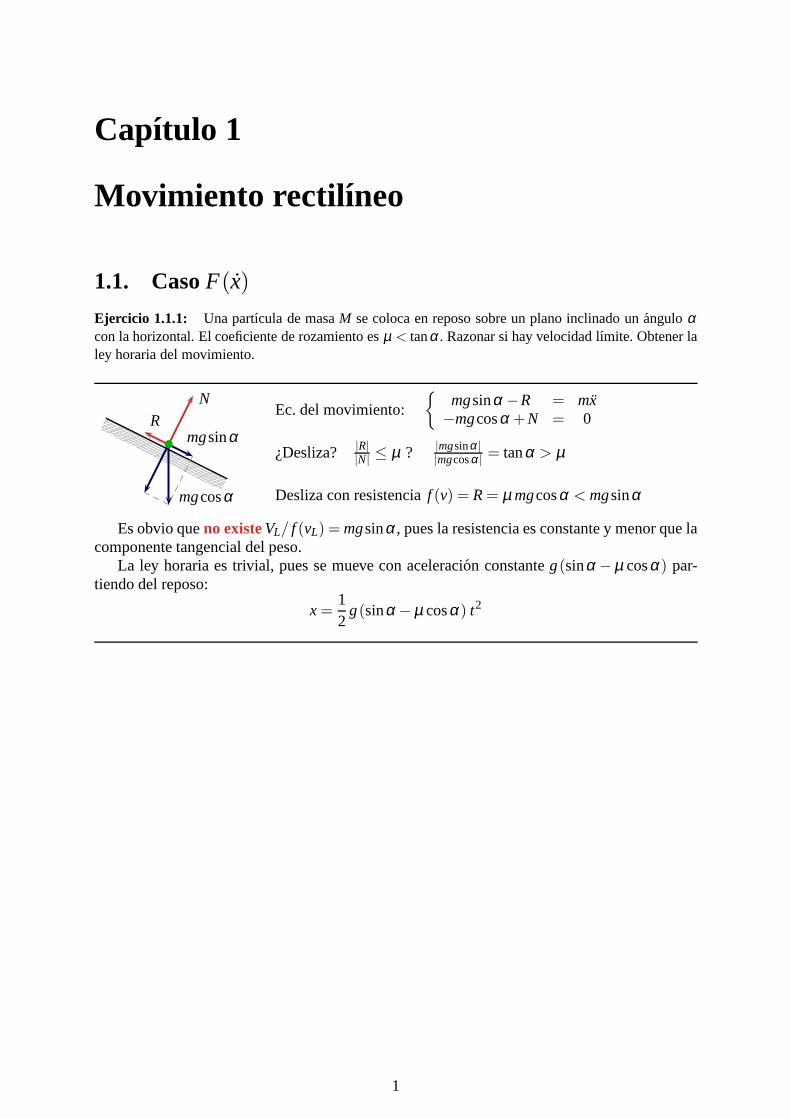
Ejercicio 1.1.1: Una partıcula de masaM se coloca en reposo sobre un plano inclinado un anguloαcon la horizontal. El coeficiente de rozamiento esµ < tanα . Razonar si hay velocidad lımite. Obtener laley horaria del movimiento.
N
Rmgsinα
mgcosα
Ec. del movimiento:
mgsinα −R = mx
−mgcosα +N = 0
¿Desliza? |R||N| ≤ µ ? |mgsinα|
|mgcosα| = tanα > µ
Desliza con resistenciaf (v) = R= µ mgcosα < mgsinα
Es obvio queno existeVL/ f (vL) = mgsinα, pues la resistencia es constante y menor que lacomponente tangencial del peso.
La ley horaria es trivial, pues se mueve con aceleracion constanteg(sinα −µ cosα) par-tiendo del reposo:
x =12
g(sinα −µ cosα) t2
1
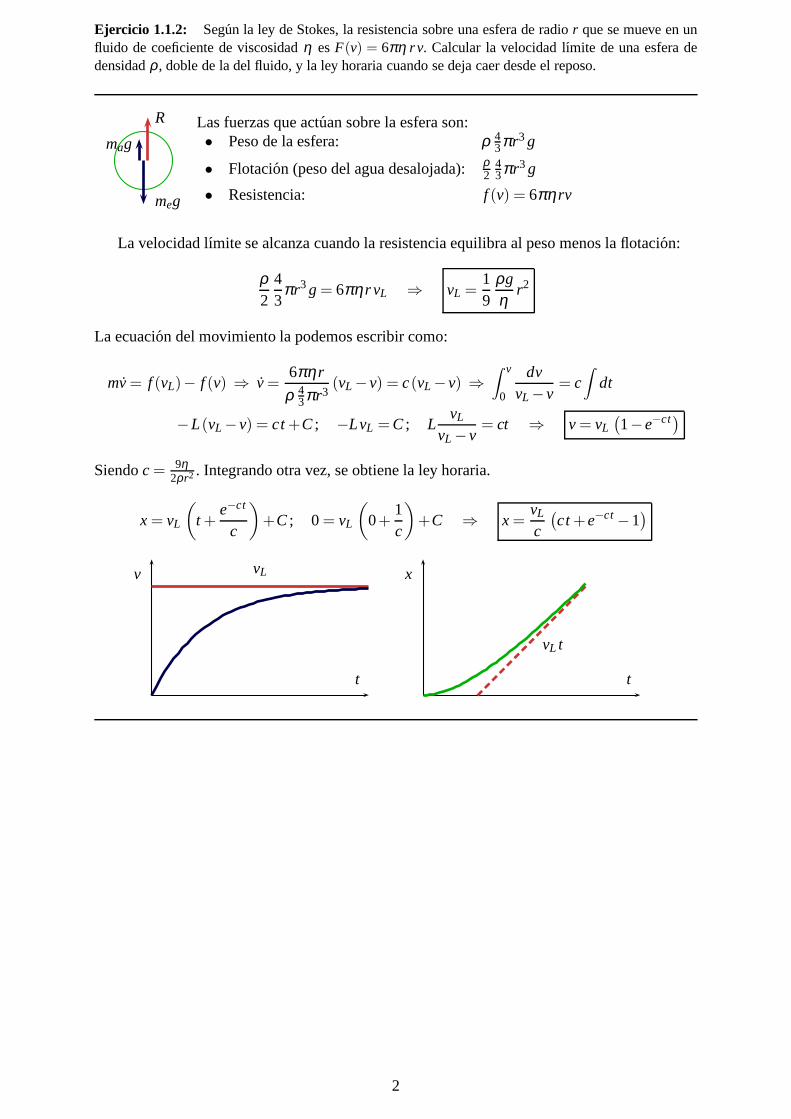
Ejercicio 1.1.2: Segun la ley de Stokes, la resistencia sobre una esfera de radio r que se mueve en unfluido de coeficiente de viscosidadη esF(v) = 6πη r v. Calcular la velocidad lımite de una esfera dedensidadρ , doble de la del fluido, y la ley horaria cuando se deja caer desde el reposo.
R
mag
meg
Las fuerzas que actuan sobre la esfera son:• Peso de la esfera: ρ 4
3πr3g
• Flotacion (peso del agua desalojada):ρ2
43πr3g
• Resistencia: f (v) = 6πηrv
La velocidad lımite se alcanza cuando la resistencia equilibra al peso menos la flotacion:
ρ2
43
πr3g = 6πηr vL ⇒ vL =19
ρgη
r2
La ecuacion del movimiento la podemos escribir como:
mv = f (vL)− f (v) ⇒ v =6πηr
ρ 43πr3
(vL −v) = c(vL −v) ⇒∫ v
0
dvvL −v
= c∫
dt
−L(vL −v) = ct+C; −LvL = C; LvL
vL −v= ct ⇒ v = vL
(1−e−ct)
Siendoc = 9η2ρr2 . Integrando otra vez, se obtiene la ley horaria.
x = vL
(
t +e−ct
c
)
+C; 0 = vL
(
0+1c
)
+C ⇒ x =vL
c
(ct+e−ct −1
)
vLv
t
vL t
x
t
2
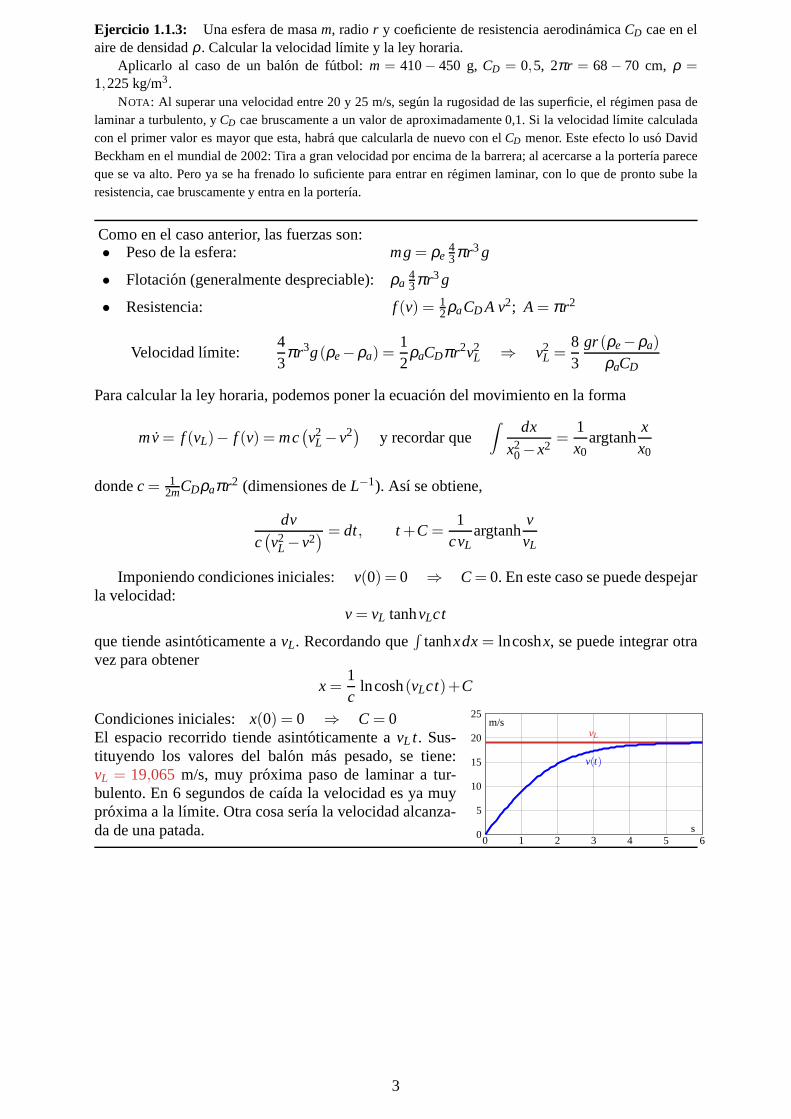
Ejercicio 1.1.3: Una esfera de masam, radior y coeficiente de resistencia aerodinamicaCD cae en elaire de densidadρ . Calcular la velocidad lımite y la ley horaria.
Aplicarlo al caso de un balon de futbol:m = 410− 450 g,CD = 0,5, 2πr = 68− 70 cm, ρ =1,225 kg/m3.
NOTA: Al superar una velocidad entre 20 y 25 m/s, segun la rugosidad de las superficie, el regimen pasa delaminar a turbulento, yCD cae bruscamente a un valor de aproximadamente 0,1. Si la velocidad lımite calculadacon el primer valor es mayor que esta, habra que calcularla de nuevo con elCD menor. Este efecto lo uso DavidBeckham en el mundial de 2002: Tira a gran velocidad por encima de la barrera; al acercarse a la porterıa pareceque se va alto. Pero ya se ha frenado lo suficiente para entrar en regimen laminar, con lo que de pronto sube laresistencia, cae bruscamente y entra en la porterıa.
Como en el caso anterior, las fuerzas son:• Peso de la esfera: mg= ρe
43πr3g
• Flotacion (generalmente despreciable):ρa43πr3g
• Resistencia: f (v) = 12ρaCD A v2; A = πr2
Velocidad lımite:43
πr3g(ρe−ρa) =12
ρaCDπr2v2L ⇒ v2
L =83
gr (ρe−ρa)
ρaCD
Para calcular la ley horaria, podemos poner la ecuacion delmovimiento en la forma
mv = f (vL)− f (v) = mc(v2
L −v2) y recordar que∫
dx
x20−x2
=1x0
argtanhxx0
dondec = 12mCDρaπr2 (dimensiones deL−1). Ası se obtiene,
dv
c(v2
L −v2) = dt, t +C =
1cvL
argtanhvvL
Imponiendo condiciones iniciales:v(0) = 0 ⇒ C= 0. En este caso se puede despejarla velocidad:
v = vL tanhvLct
que tiende asintoticamente avL. Recordando que∫
tanhxdx= lncoshx, se puede integrar otravez para obtener
x =1c
lncosh(vLct)+C
Condiciones iniciales: x(0) = 0 ⇒ C = 0El espacio recorrido tiende asintoticamente avL t. Sus-tituyendo los valores del balon mas pesado, se tiene:vL = 19,065 m/s, muy proxima paso de laminar a tur-bulento. En 6 segundos de caıda la velocidad es ya muyproxima a la lımite. Otra cosa serıa la velocidad alcanza-da de una patada. 0
5
10
15
20
25
0 1 2 3 4 5 6
m/s
s
vL
v(t)
3

1.2. CasoF(x)
Ejercicio 1.2.1: Un punto material de masamse mueve sobre una rectaOx, sometido a un campo cuyopotencial esV(x) = mgx[(x/a)2 −3]. Determinar su ley horaria, cuando se lanza desdex0 = a con unavelocidadv0 =
√8ga.
Conviene hacer primero un analisis cualitativo,para ver que tipo de movimiento vamos a tener,que signo hay que tomar en las cuadraturas, y sihay puntos de parada, en que habra que parar laintegracion y hacer una nueva cuadratura.El potencial tiene ceros en±a
√3 y en 0. Se va a
+∞ por la derecha y a−∞ por la izquierda. Conesos datos, podemos dibujarlo aproximadamen-te.
Interesa conocer el valor en el maximo y mınimo, para compararlo con laE que se obtienede las condiciones iniciales, que vale:
E =12
mv20 +V(a) = 2mga
Los extremos del potencial estan en:
V ′/mg=(x
a
)2−3+2x
(xa
)
/a = 3(x
a
)2−3 = 0 ⇒ x = ±a
El maximo del potencial es
V(−a) = 2mga
con lo que las condiciones iniciales dadas correspon-den exactamente al movimiento asintotico. Primero seira hasta la derecha hasta el punto de parada y retroceso,y luego volvera hacia la izquierda, llegando en tiempo in-finito ax=−a. Por tanto, la cuadratura habra que hacerlaen dos fases. El punto de corte por la derecha esta en:
V(x) = 2mga ⇒ x = +2a
La raız se obtiene con facilidad porque ya conocemosotra, la del maximo, y se puede reducir el orden del poli-nomio.
La primera cuadratura sera con signo +, pues se lanza con velocidad positiva:
t =
∫ x
a
+dx√
2m [E−V(x)]
=
∫ x
a
+d xa
√2ga
√
2− xa
[( xa
)2−3]
xa=z=
∫ z
1
+dz√
2ga
√
2−z[z2−3]
Factorizando el polinomio se obtiene una expresion cuya integral se encuentra en tablas:
√
2ga
t =∫ z
1
dz
(z+1)√
2−z= − 2√
3argth
√2−z√
3+C
Imponiendo las condiciones iniciales,z(0) = 1 ⇒ 0 = − 2√3argth 1√
3+C, se llega a
xa
= 2−3tanh2[
argth1√3−√
3g2a
t
]
4

Llegara al punto de corte,x = 2a, en un tiempot1 que se puede calcular con facilidad. Allı separa, y comienza a retroceder. Hay que plantear de nuevo la cuadratura con el signo - y lasnuevas condiciones iniciales. La integral, logicamente,es la misma cambiada de signo:
√
2ga
(t − t1) =
∫ z
2
−dz
(z+1)√
2−z= +
2√3
argth
√2−z√
3+C
Imponiendo quex(t1) = 2a, se tieneC = 0. La ley horaria queda:
xa
= 2−3tanh2[√
3g2a
(t − t1)
]
Observese que, con esta ley horaria, parat →∞, x→−a. Llega al maximo en un tiempo infinito,con un movimiento asintotico.
5

Ejercicio 1.2.2: Un punto de masam realiza un movimiento unidimensional a lo largo del ejeOxsometido solo a la accion de la fuerzaF = mKxex/a i, dondeK y a son constantes conocidas. Inicialmenteel punto se situa en la posicionx = a y se le comunica una velocidadv0 segun el sentido negativo del ejeOx. Estudiar en funcion dev0 el tipo de movimiento que sigue el punto.
16 de Septiembre de 1991
Para hacer el analisis cualitativo, primero obtenemos el potencial:
V(x) = −∫
F(x)dx= −∫
mK xexa dx= −mKa(x−a) e
xa +C
⇒a
La x del maximo es obvia, pues la fuerza es nula enx = 0. El valor del potencial en elmaximo esV(0) = mKa2 = Easint. Como se lanza desdex = a hacia la izquierda, el tipo demovimiento dependera de si la energıa total es mayor, menor, o igual que la asintotica:
E = T +V =12
mv20 +V(a) ⇒ 1
2mv2
0 ⋚ Easint = mKa2
Los casos posibles son:v2
0 < 2Ka2 : Se mueve hacia el punto de parada yretrocede hacia+∞v2
0 = 2Ka2 : Movimiento asintotico. Se mueve ha-ciax = 0, y tarda un tiempo infinito en llegar.
v20 > 2Ka2 : Se mueve hacia la izquierda; pasa por
0 con velocidad mınima, pero sin detenerse, y con-tinua hacia−∞, donde llegarıa al cabo de un tiem-po infinito con la misma velocidad inicial.
a
No es necesario estudiar la convergencia de la integral en elmovimiento asintotico: como lafuncion potencial admite desarrollo en serie enx = 0, ya sabemos queα va a ser 1 y el tiempoinfinito.
6

Ejercicio 1.2.3: Un punto material de masam, realiza un movimiento unidimensional, a lo largo delejeOx, sometido a una fuerza que deriva del potencialV(x) =−(mg/a2)x2(x−a). Inicialmente, el puntoesta en el origen y tiene una velocidadv0, segun el sentido negativo del ejeOx. Estudiar cualitativamenteel movimiento del punto, segun sea el valor dev0.
4 de Abril de 1991
Descomponiendo el potencial en una recta y una parabola, sepuede dibujar directamente lacurva y saber que va a tener ceros enx = 0 y x = a, y el signo de las ramas infinitas. Tambiense puede ver que en 0 tendra un mınimo, al ser positiva a ambos lados del cero, y que habra unmaximo entre 0 ya.
⊕ ⊕ ⊖⇒
a
Hay que determinar la posicion del maximo, y el valor del potencial, que determinara laenergıa necesaria para el movimiento asintotico:
V ′ = 0 ⇒ 3x2−2ax= 0, ⇒
x1 = 0, V(0) = 0
x2 = 2a3 , V(x2) = 4
27mga
La energıa inicial vale
E =12
mv20 +V(0) ⇒ 1
2mv2
0 ⋚ Easint =427
mga
Los movimientos posibles son:
v20 < 8
27ga : Oscilaciones acotadas asimetri-
cas alrededor del origen, sin llegar ax = 2a/3
v20 = 8
27ga : Movimiento asintotico. Se muevehacia la izquierda, se para, y vuelve haciax =2a/3 con un movimiento asintotico.
v20 > 8
27ga : Como el anterior, pero en el re-
troceso llega en tiempo finito ax = 2a/3, nose para, y sigue hacia+∞.
a
7

Ejercicio 1.2.4: Un punto material de masam realiza un movimiento unidimensional segun el ejeOxsometido a una fuerza que deriva del potencialV(x) = −mgxe−x/a. Inicialmente se situa enx = a y se lecomunica una velocidadv0 hacia la izquierda. Estudiar el movimiento del punto segunel valor dev0.
11 de Septiembre de 1990
El potencial se puede dibujar aproximadamente:
⊕ ⊖ ⇒a
El potencial es muy similar a otro que acabamos de hacer. Primero veremos donde esta elmınimo:
V ′ = 0 ⇒ −e− x
a +xa
e− x
a = 0 ⇒ x = a, V(a) = −mga/e
El mınimo es el mismo punto de lanzamiento. Hay una rama infinita paraE = 0. A la vista dela figura, tendremos tres tipos de movimiento (o cuatro, si secuenta el reposo):
v20 = 0 : Equilibrio estable enx = a
v20 < 2ga/e : Oscilaciones acotadas asimetricas al-
rededor dex = a
v20 = 2ga/e : Movimiento asintotico. Se mueve ha-
cia la izquierda, se para en el origen, y vuelve haciaatras. Llegarıa a+∞ con velocidad nula.
v20 > 2ga/e : Como el anterior, pero en el retroceso
llegarıa a+∞ con velocidad no nula.
8

Ejercicio 1.2.5: Un punto material de masamse mueve sobre una rectaOxsometido a una fuerza quederiva del potencialV(x) = −(mg/a3)x2(x2−a2). Inicialmente se situa en el origen y se lanza con unavelocidadv0. ¿Cual es el mınimo valor dev0 necesario para que el punto llegue al infinito?
29 de Junio de 1988
Descomponiendo el potencial en el producto de dos parabolas, se puede dibujar directamentela curva: va a tener ceros enx = 0 y x = ±a; las ramas infinitas van hacia abajo; en 0 tendra unmınimo, al ser positiva a ambos lados del cero, y habra maximos entre 0 y±a.
⊕ ⊕⊖⊖ ⇒
Hay que determinar la posicion de los maximos, y el valor del potencial, que determinara laenergıa necesaria para el movimiento asintotico:
V ′ = 0 ⇒ −2x(x2−a2)−3x3 = 2x
(2a2−x2)= 0, ⇒
x1 = 0, V(0) = 0
x2 = ± a√2, V(x2) = mga
4
La energıa inicial vale
E =12
mv20 +V(0) ⇒ 1
2mv2
0 ⋚ Easint =mga
4
Aunque no se pida, es facil hacer un analisis cualitativo de los movimientos posibles:
v20 < ga/2 : Oscilaciones acotadas simetricas alrededor del origen.
v20 = ga/2 : Movimiento asintotico haciax = ±a/
√2, segun el signo dev0. Tarda un
tiempo infinito.
v20 > ga/2 : Llega en tiempo finito al maximox= ±a/
√2, no se para, y sigue hacia±∞,
en la direccion de la velocidad inicial.
Es obvio que, para que llegue a∞, la velocidad ha de ser superior a la asintotica,√
ga/2.
9

1.3. Oscilador armonico
Ejercicio 1.3.1: Un cubo de aristaa y densidad la mitad de la del agua esta flotando con la cara superiorhorizontal. Se empuja un poco hacia abajo, sin hundirlo del todo, y se suelta sin girarlo, de modo que semueve siempre con la misma orientacion. Calcular la frecuencia de las oscilaciones.
Naturalmente, para poder tratar el problema como unidimensional, hay que suponer que un ejedel cubo se mantiene siempre vertical. Seaz la altura del CDM del cubo sobre el agua.Las fuerzas que actuan sobre el cubo son:
Peso:P = −mgkFlotacion, o peso del agua desalojada:F = +m′gk
La masa desalojada dependera de la alturaz: m′ = ρaa/2−z
a a3
z P
F
La ecuacion del movimiento sera:
mz= −mg+m′g =12
ρaa3 z= g
(
−12
ρaa3+
ρaa3
2−ρaa2z
)
= −12
ρaa2gz
que se reduce al oscilador armonico
z+2ga
z= 0 ⇒ ω =
√
2ga
10

Ejercicio 1.3.2: Una partıcula pesada de masam se mueve por una recta horizontal rugosa, de coe-ficiente de rozamientof . Esta unida a un puntoO de la recta por un muelle de constantek y longitudnatural cero. Integrar la ecuacion del movimiento, razonando como se han de tratar los cambios de signoen la fuerza de rozamiento. Inicialmente se lanza desdeO con velocidadv0.
Septiembre de 1996
1 Cantidad de Movimiento. Si inicialmente estuviera en reposo, lo primero serıa plantear unproblema de estatica, para ver si se mueve o no. Como se lanzacon velocidadv0 6= 0, ya sabemosque hay que tomar la expresion del rozamiento con deslizamiento del modelo de Coulomb:
R = − f |N| vv
= − f |N|sign(x) i
La recta es horizontal, la reaccion normal es igual al peso.La ecuacion del movimiento sera:
mx = −kx− f mgsign(x) → x+ω2x = − f gsign(x)
El termino independiente cambia de signo al variar el sentido de la velocidad. Inicialmente,comov0 > 0, tomamos el signo−. Cuando se pare, hay que resolver el problema de estaticapara ver si retrocede o se queda parada. Si retrocede, se resuelve de nuevo la ecuacion, perocambiando el signo del rozamiento, y ası sucesivamente.
1. Primera fase: ¨x+ω2x = − f g. La solucion es trivial, tanto la homogenea como la parti-cular:
xh = Acosω t +Bsinω t xp = − f gω2
Imponemos condiciones iniciales:
x(0) = A− f gω2 = 0 x(0) = Bω = v0 → x =
f gω2 (cosω t −1)+
v0
ωsinω t
2. La partıcula se para en el instanteτ tal que
x = − f gω
sinω τ +v0cosω τ = 0 ⇒ tanωτ =v0ωf g
Conocido el tiempo de parada, se calcula la distanciax(τ) . Se podrıa hacer explıcitamentecon las expresiones del seno y el coseno en funcion de la tangente, pero no merece la pena.En un caso real se calcularıa el valor numerico y luego se sustituye en lax. Ademas, acontinuacion se calculara de modo mas directo.Se plantea la ecuacion de equilibrio para ver si el rozamiento puede aguantar la fuerza delmuelle a esa distancia:
0 = −kx(τ)+R; R≤ f mg ⇒ |x| ≤ f mgk
Si la partıcula se ha parado dentro del intervalo[
− f mgk , f mg
k
]
, la fuerza del muelle es me-
nor que el rozamiento maximo; la partıcula se queda en equilibrio y el problema esta aca-bado. Si no, empieza a moverse hacia el origen, y pasamos a la tercera fase.
3. Planteamos de nuevo la ecuacion del movimiento, ahora con velocidad negativa y roza-miento positivo:
x+ω2x = + f g → x = Acosω t +Bsinω t +f gω2
Se imponen ahora como condiciones inicialest0 = τ , x0 = x(τ) , x0 = 0. Cuando vuelvaa pararse, se comprueba de nuevo el equilibrio, para ver si lax de parada cae en la franjade equilibrio± f mg
k . Si esta dentro, se acaba; si esta fuera, se repite el punto(1) con lasnuevas condiciones iniciales; y ası sucesivamente.
11

2 Analisis cualitativo. Este problema permite hacer un analisis cualitativo, tratando separa-damente cada tramo. La ecuacion del movimiento se puede integrar una vez, multiplicando porx, para obtener la ecuacion de la energıa:
12
mx2 +12
kx2 = - f mgx+E1 ; E1 =12
mv20
Se obtiene la energıa cinetica, el potencial del peso y eltrabajodel rozamiento. Aunque se hayaintegrado, no es el potencial del rozamiento,que no tiene potencialporque es disipativo. Esel trabajo del rozamiento cuando se mueve hacia la derecha. Si se mueve hacia la izquierda, secambia el signo: no puede tener potencial porque si vuelve almismo sitio el trabajo no es nulo,sino siempre negativo.
Resolviendo la ecuacion de la energıa con ˙x = 0, se obtiene facilmente el punto de parada:
x(τ) =− f mg±
√
f 2m2g2+kv20
k
Solo nos interesa el positivo; el otro corresponde a un tiempo negativo, antes de cruzar el origen.En la vuelta hacia la izquierda tendrıamos:
12
mx2 +12
kx2 = + f mgx+E2 ; E2 =12
kx(τ)2− f mgx(τ)
El trabajo del rozamiento parece ahora una funcion positiva dex, pero en realidad es negativo:f mg[x−x(τ)]. Lax comienza enx(τ) y va disminuyendo, luego el trabajo sera siempre negativo.
Con las expresiones para la ecuacion de la energıa en cada tramo, se puedehacer un analisis cualitativo del movimiento, dibujando el potencial del mue-lle y la energıa decreciente. Primero va hacia la derecha, perdiendo energıalinealmente hasta pararse enx(τ). Luego va hacia la izquierda, perdiendosiempre energıa. Si el punto de parada esta fuera de la zonade equilibrio,empieza a moverse hacia la derecha, y ası hasta que se pare enun punto deequilibrio, donde se queda en reposo (aunque no sea el origen). x(τ)
E1 Vm
Tambien podemos dibujar el mapa de fases[x, x]: Laecuacion de la energıa del primer tramo es una circunfe-rencia en el plano de fases (o elipse, segun la escalaOy),con centro enx =− f mg
k (media de los puntos de parada).La segunda rama es otra circunferencia, esta vez con cen-tro enx= f mg
k , y ası sucesivamente alternando centros demodo que cada elongacion es mas corta, hasta que se paredentro de la zona de equilibrio y ya no se mueva mas.
bb bx
x
x(τ)
v0
12

Problema 1.3.1: El sistema de la figura es un modelo muy simplificado que se usa para estudiar lasuspension de los vehıculos. Consta de una masaM (masa suspendida) y una rueda de masam (masa nosuspendida) unidas por un amortiguador viscoso de constantec y un muelle de constantek y longitudnaturalL0+Mg/k, de modo que la altura deM sobre la rueda en equilibrio esL0. El sistema se desplazacon una velocidad horizontal constantev sobre un suelo ondulado sinusoidalmente, de longitud de ondaL y amplitud 2H. Se supone que la rueda es lo suficientemente pequena para que el punto de contactoeste en la vertical deM y que, en principio, no se separa del suelo. Se tomara, para simplificar, Ω =2πv/L. Se pide:
Plantear las ecuaciones del movimiento deM
Hallar la velocidad a la que se produce la resonancia
Sabiendo que el amortiguamiento es menor que el crıtico, obtener la respuesta transitoria y esta-cionaria para las condiciones inicialest = 0, x = 0, z= 0, z= 0.
Obtener la reaccion del suelo sobre la rueda
M
ck
m
M
v
z
L0
x
z
O
L
2H
1 En un caso real, la rueda tendrıa un radio no despreciable, yhabrıa que cal-cular el punto de contacto segun la pendiente, y a partir de ahı la altura verticalsobre el suelo. Despreciando el radio se simplifica el calculo, de modo que laaltura deM sobre el suelo es
b
h(x,z) = L0+z−H
(
1−cos2πxL
)
En reposo, se equilibran el peso suspendido y la fuerza del muelle, que es proporcional a ladiferencia entre la longitud natural y la actual:
M g = k(hn−h) = k
[
L0 +
Mg
k−h(x,z)
]
Podemos pues olvidarnos del peso y de la longitudkMgk , y dejar la longitud natural del muelle
reducida aL0. Con esto, la fuerza que el muelle ejerce sobre la masa se reduce a:
Fm = k (L0−h) = k
[
L0−L0−z+H
(
1−cos2πxL
)]
= k
[
−z+H
(
1−cos2πxL
)]
Al moverse el sistema con velocidad constante, se tienex = vt, con lo que el argumento delcoseno se puede reducir a2πx
L = 2πvtL = Ω t.
La fuerza viscosa depende de la velocidad vertical relativaentre la masa suspendidaM y laruedam pegada al suelo:
h = z−HΩsinΩ t
13

por tanto, las fuerzas sobreM son:
Fm = k[−z+H (1−cosΩ t)] Fa = −c(z−HΩsinΩ t)
La ecuacion del movimiento vertical deM sera:
M z= k[−z+H (1−cosΩ t)]−c(z−HΩsinΩ t)
M z+cz+kz= kH−kHcosΩ t +cHΩsinΩ t
que se simplifica introduciendo la notacion usualkM = ω2
n , cM = 2ωnζ :
z+2ωnζ z+ω2n z= ω2
nH −ω2nH cosΩ t +2ωnζ ΩH sinΩ t
2 Sin amortiguamiento, hay resonancia cuan-do la frecuencia de forzamiento es igual a la na-tural del sistema:
√
kM
=2πvL
⇒ v =L
2π
√
kM
y la amplitud crece hasta infinito. Con amor-tiguamiento, la respuesta esta acotada. Paraamortiguamiento supercrıtico (ζ > 1), la am-plitud maxima se da paraΩ = 0 (deformacionestatica). Si es subcrıtico (ζ < 1) y menor que1√2, aparece un maximo en la amplitud, que
tiende a∞ cuandoΩ → ωn.0 1 2 3
0
1
2
3
4
Ω/ωn
µζ = 0
0,15
0,2
0,3
0,4
0,5
0,75
1
∞
ζ = ∞
Para obtener la frecuencia a la que se produce, derivaremos la parte de la amplitud quedepende de la excitacion, elfactor de amplificacion:
µ =1
√
4ζ 2Ω2
ω2n
+(
1− Ω2
ω2n
)2=
1√∆
Para obtener el maximo, basta derivar el radicando:
d∆dΩ
=8ζ 2Ω
ω2n
− 4Ωω2
n
(
1− Ω2
ω2n
)
= 0 ⇒
Ωr = 0Ωr = ±ωn
√
1−2ζ 2
La solucion nula corresponde al reposo, que en este caso es un mınimo. Como la frecuencia esesencialmente positiva, tomamos
Ωr = +ωn
√
1−2ζ 2 =2πvL
→ vr =L
2π
√
kM
√
1− c2
2kM
Haciendoc = 0 se reduce a la vista antes para amortiguamiento nulo. En la figura, la lınea detrazos muestra los maximos de amplitud en funcion deζ y deΩ. Es obvio que solo hay maximoparaζ < 1√
2.
3 Para obtener las respuestas transitoria y estacionaria, separamos la ecuacion diferencial enla pare homogenea
z+2ωnζ z+ω2n z= 0
y termino independiente
FM
= ω2nH −ω2
nH cosΩ t +2ωnζ ΩH sinΩ t
14

Si el amortiguamiento es subcrıtico, la transitoria se escribe directamente:
zH = e−ζωn t[
Acos
(
ωn
√
1−ζ 2 t
)
+Bsin
(
ωn
√
1−ζ 2 t
)]
Para la estacionaria, podemos obtener soluciones particulares para cada sumando del terminoindependiente. La constante es trivial:
zP1 = H
Para el seno, podemos aplicar directamente la expresion vista en teorıa:
zPs =cHΩ/k
√
4ζ 2Ω2
ω2n
+(
1− Ω2
ω2n
)2sin
Ω t − tan−12ζ Ω
ωn
1− Ω2
ω2n
Para el coseno, no es necesario realizar todas las operaciones: basta con expresarlo como cost =sin( t + π
2) = sinτ. Ası se puede aplicar la misma expresion del seno,
zPc =H
√
4ζ 2Ω2
ω2n
+(
1− Ω2
ω2n
)2sin
Ω t +π2− tan−1
2ζ Ωωn
1− Ω2
ω2n
sin necesidad de ensayar senos y cosenos y calcular los coeficientes.Tambien se puede buscar directamente la particular en la formazP =CcosΩ t +DsinΩ t, en
vez de laAsin(Ω t −φ) usada en teorıa. Sustituyendo en la EDO (menos el termino constante,que ya se ha calculado):
−Ω2(CcosΩ t +DsinΩ t)+2ζ ωnΩ(−CsinΩ t +DcosΩ t)+
+ω2n (CcosΩ t +DsinΩ t) = −ω2
nH cosΩ t +2ωnζ ΩH sinΩ t
Obtenemos los coeficientes, que tienen que ser ambos nulos:
sinΩ t
=0︷ ︸︸ ︷(ω2
nD−Ω2D−2ζ ωnΩC−2ζ ωnΩD)+
+cosΩ t(ω2
nC−Ω2C+2ζ ωnΩD+ω2nH)
︸ ︷︷ ︸
=0
= 0
y resolvemos el sistema:
C = −Ω2ω2
n
(
4ζ 2−1+ω2
nΩ2
)
H
(ω2n −Ω2)2+4ζ 2ω2
nΩ2D = − 2Ω3ωnζH
(ω2n −Ω2)2+4ζ 2ω2
nΩ2
La solucion completa, con la homogenea y los tres terminos de la particular, sera:
z= e−ζωn t[
Acos
(
ωn
√
1−ζ 2 t
)
+Bsin
(
ωn
√
1−ζ 2 t
)]
+
+H −Ω2ω2
n
(
4ζ 2−1+ω2
nΩ2
)
H
(ω2n −Ω2)
2+4ζ 2ω2
nΩ2cosΩ t − 2Ω3ωnζH
(ω2n −Ω2)
2+4ζ 2ω2
nΩ2sinΩ t
Para determinar las constantesA y B imponemos condiciones iniciales. Ent = 0, la altura vale
z(0) = 0 = A+H −Ω2ω2
n
(
4ζ 2−1+ω2
nΩ2
)
H
(ω2n −Ω2)
2+4ζ 2ω2
nΩ2
15

En un instante generico, la velocidad vale
z= −ζ ωne−ζωn t[
Acos
(
ωn
√
1−ζ 2 t
)
+Bsin
(
ωn
√
1−ζ 2 t
)]
+
+e−ζωn tωn
√
1−ζ 2
[
−Asin
(
ωn
√
1−ζ 2 t
)
+Bcos
(
ωn
√
1−ζ 2 t
)]
+
+ΩΩ2ω2
n
(
4ζ 2−1+ω2
nΩ2
)
H
(ω2n −Ω2)
2+4ζ 2ω2
nΩ2sinΩ t −Ω
2Ω3ωnζH
(ω2n −Ω2)
2+4ζ 2ω2
nΩ2cosΩ t
y en el instante inicial,
z(0) = 0 = −ζ ωnA+Bωn
√
1−ζ 2− 2Ω4ωnζH
(ω2n −Ω2)
2+4ζ 2ω2
nΩ2
Se resuelve el sistema de ecuaciones para obtener
A =Ω2(ω2
n −Ω2)
H
(ω2n −Ω2)
2+4ζ 2ω2
nΩ2B =
ζ Ω2(ω2
n +Ω2)
H√
1−ζ 2[
(ω2n −Ω2)
2+4ζ 2ω2
nΩ2]
Con esto quedan perfectamente determinadas la transitoriay la estacionaria.
4 Para obtener la reaccion del suelo, podemos: a) aplicar la ecuacion de cantidad de movimien-to al sistema completo, con lo que el muelle-amortiguador desaparece por ser fuerzas interiores;b) aislar la rueda y aplicarle la ECM, considerando las fuerzas del muelle como exteriores. Enambos casos basta con la componente vertical.
El movimiento de la masa no suspendida, la rueda, se conoce porque siempre esta en con-tacto con el suelo (y de modo razonablemente simple, graciasa que se supone contacto en elpunto mas bajo). La altura del centro de la rueda es la del suelo (mas el radio constante, que nointerviene):
zr = r +H
(
1−cos2πxL
)
= r +H (1−cosΩ t) zr = HΩ2cosΩ t
Aplicando la ecuacion de la cantidad de movimiento al sistema,
M z+mzr = −Mg−mg+N
dondezr se conoce ya como funcion del tiempo yz se puede obtener derivando. No hay masque sustituir y hallarN.
Aplicando la cantidad de movimiento a la rueda sola, hay que anadir las fuerzas que ejercenel muelle y amortiguador, que son las mismas que sobre la masasuspendida cambiadas de signo:
mzr = −Fm−Fa−mg+N
La fuerza del muelle depende dez, y la del amortiguador dez; ambas son conocidas.Es obvio que las dos ecuaciones estan relacionadas mediante la de la masa suspendida,
mz= +Fm+Fa−Mg
En cuanto a que camino es el mas corto, depende de como se opere en uno u otro caso.Si usamos la ecuacion para la rueda sola,z ya se ha integrado en el apartado anterior, y se
derivo para obtenerz e imponer condiciones iniciales. Por lo tanto ambas son conocidas y nohay mas que sustituir.
Si se quiere usar la ecuacion para todo el sistema, necesitamosz. Se puede derivar otra vezuna expresion ya larga y tediosa, que antes se ha integrado (¡mas trabajo!). O se puede despejarde la ecuacion del movimiento, con lo que volvemos a la ecuacion de la rueda sola. Los dos
16

caminos son realmente el mismo, siempre que no se derive de nuevoz.
No vamos a sustituir las expresiones: saldrıa una expresi´on muy larga, que no aporta nadanuevo. Es obvio que en este tipo de problemas los calculos secomplican en cuanto se abandonael caso trivial. Lo mas adecuado es usar un programa de calculo simbolico, comoMaple oMathematica. En la pagina WWW de la asignatura se encuentra este problema resuelto conMaple, y se pueden apreciar los valores de la reaccion normal para distintas velocidades.
Al estar apoyado sobre el suelo,N tiene que ser positiva o nula. Si se hace negativa, es queel movil se ha levantado del suelo y las ecuaciones ya no valen.
Intuitivamente se ve que, al subir la rampa, el movil coge una velocidad de subida que crececon la velocidad horizontal. Al pasar la cresta y empezar la bajada, si se lleva mucha velocidadpodrıa levantarse y salir volando, hasta caer de nuevo y chocar con el suelo mas adelante.
Al hacerse cero la normal, el sistema se levanta del suelo y laligadura ya no actua. Habrıaque plantear las ecuaciones del movimiento libre, hasta quevuelva a hacer contacto. Entoncesse plantean de nuevo las ecuaciones con ligadura, se sigue hasta que se levante, y ası sucesiva-mente.
17

18
Capıtulo 2
Movimiento del punto libre
2.1. Partıcula libre
Ejercicio 2.1.1: Un punto materialM se desplaza en el espacio sometido a una fuerza que simultanea-mente es paralela a un plano fijoP y normal a la velocidad deM. Sabiendo que la magnitud de estafuerza es proporcional a la velocidad deM y que en el instante inicialM esta dotado de una velocidadv0
que forma un anguloα con el planoP, se pide:
1. Determinar el movimiento deM especificando su trayectoria y su ley horaria.
2. Indicar como serıa el movimiento del punto en el caso de que la fuerza indicada fuese proporcionalal cubo de la velocidad deM.
Mayo de 1968
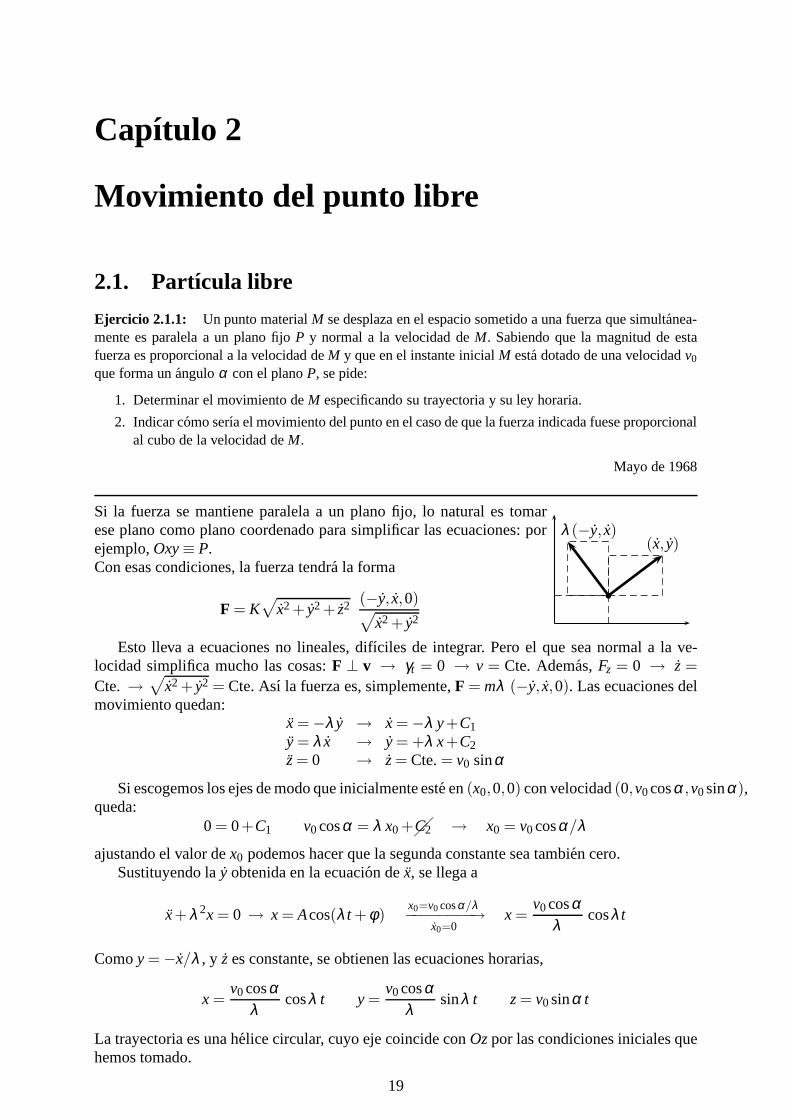
Si la fuerza se mantiene paralela a un plano fijo, lo natural estomarese plano como plano coordenado para simplificar las ecuaciones: porejemplo,Oxy≡ P.Con esas condiciones, la fuerza tendra la forma
F = K√
x2 + y2 + z2 (−y, x,0)√
x2+ y2
(x, y)λ (−y, x)
Esto lleva a ecuaciones no lineales, difıciles de integrar. Pero el que sea normal a la ve-locidad simplifica mucho las cosas:F ⊥ v → γt = 0 → v = Cte. Ademas,Fz = 0 → z =
Cte. →√
x2 + y2 = Cte. Ası la fuerza es, simplemente,F = mλ (−y, x,0). Las ecuaciones delmovimiento quedan:
x = −λ y → x = −λ y+C1y = λ x → y = +λ x+C2z= 0 → z= Cte.= v0 sinα
Si escogemos los ejes de modo que inicialmente este en(x0,0,0) con velocidad(0,v0cosα,v0sinα),queda:
0 = 0+C1 v0cosα = λ x0+C2 → x0 = v0cosα/λ
ajustando el valor dex0 podemos hacer que la segunda constante sea tambien cero.Sustituyendo la ˙y obtenida en la ecuacion de ¨x, se llega a
x+λ 2x = 0 → x = Acos(λ t +φ)x0=v0 cosα/λ−−−−−−−−→
x0=0x =
v0cosαλ
cosλ t
Comoy = −x/λ , y z es constante, se obtienen las ecuaciones horarias,
x =v0cosα
λcosλ t y =
v0cosαλ
sinλ t z= v0sinα t
La trayectoria es una helice circular, cuyo eje coincide con Ozpor las condiciones iniciales quehemos tomado.
19

La velocidad es constante (pues la fuerza es siempre normal), de modo que la ley horaria ess= v0 t.
Si la fuerza fuera proporcional al cubo, lo unico que variarıa es el valor deλ . Al seguirsiendo la fuerza normal a la velocidad, esta es constante enmodulo; seguirıamos teniendo un
problema lineal, pero con otra constante. Aquı se ha tomadomλ = K√
x2+y2+z2√x2+y2
= K v0v0 cosα ,
mientras que en el otro caso serıamλ = K(x2+y2+z2)
3/2
√x2+y2
. La trayectoria seguirıa siendo una
helice, pero de distinto radio.
20

Ejercicio 2.1.2: Una partıcula de masam se mueve bajo la accion de una fuerza~F = m~v∧~B siendo~v la velocidad de la partıcula, y~B un vector de modulo y direccion constantes. Describir el tipo demovimiento que sigue la partıcula en funcion del valor inicial de~u, componente de velocidad paralela a~B. Obtener el radio de curvatura de la trayectoria cuandou = 0.
Septiembre de 1991
Descompondremos la velocidad en sus componentes paralela ynormal a~B, ~v =~u+~v⊥ . Comose trata de una direccion fija, sus derivadas seran las componentes de la aceleracion paralela yperpendicular a~B, respectivamente:
~γ = ~u+~v⊥ = (~u+~v⊥)∧~B =~u∧~B+~v⊥∧~B ⇒
⇒
~u = ~Cte.
~v⊥ =~v⊥∧~B →
γt = 0 → v⊥ = Cte.γn = Bv⊥ = Cte → ρ⊥ = Cte
El movimiento paralelo a~B se realiza con velocidad constante. En el movimiento proyecta-do sobre el plano ortogonal, la aceleracion es normal a la velocidad: su modulo se mantieneconstante. Por tanto, la aceleracion normal es tambien constante, y el radio de curvaturade latrayectoria proyectadaes constante, es decir, describe una circunferencia en el plano normal (elradio de curvatura de la trayectoria tridimensional dependera de~u). La trayectoria tridimensio-nal es una helice circular.
Si inicialmente~u =~0, el movimiento se desarrolla en el plano normal, y el radio constantede la trayectoria proyectada es el de la trayectoria real:
γn =v2⊥ρ
= v⊥B → ρ = v⊥B
21

Problema 2.1.1: Una partıculaM de masam y desprovista de peso se mueve sin rozamiento sobre unplano referido a un par de ejes ortogonalesOxy, sometida a un campoF tal que si la partıcula se lanzacon una velocidadv0 desde el punto(x0,y0) la velocidadv que lleva cuando llega a un punto generico(x,y) verifica que
v2 = v20 +2ω2(xy−x0y0)
Se pide:
a) Determinar del campoF que actua sobre la partıcula.
b) Plantear e integrar completamente las ecuaciones del movimiento de la partıcula.
c) Si la partıcula se lanza desde un punto cuyo vector de posicion esr0 con una velocidadv0,¿Que condicion deben verificarr0 y v0 para que la partıcula no se marche al infinito?.
d) ¿Cual serıa el movimiento limite de la partıcula si se cumple la condicion anterior?
e) Para una velocidad inicialv0 de modulo dado, ¿desde que region del plano podrıa lanzarse lapartıcula para que no se marche al infinito?.
f) Determinar completamente las constantes de integracion y hacer un dibujo aproximado de la tra-
yectoria si se lanza la partıcula desde(0,a) con una velocidadv0 = −a2
ω(i + j).
Febrero de 1990
1 La ecuacionv2 = v20 +2ω2(xy−x0y0) es obviamente la integral de la energıa; sola no per-
mitirıa resolver el problema, pues podrıa haber fuerzas giroscopicas que, al dar trabajo nulo, noaparecen en esta ecuacion. Pero, si la fuerza deriva de un campo, es que es potencial. Poniendola integral en la forma
T +V =12
mv2−mω2xy=12
mv20−mω2x0y0 = E
se obtiene directamente
V(r) = −mω2 xy ⇒ F = −∇V = mω2(yi +xj)
2 Las ecuaciones del movimiento son
mx = mω2ymy = mω2x
....y = ω2 x = ω4y; r4−ω4 = 0 → r = ±ω,±iω →
→ y = Ae+ωt +Be−ωt +Ce+iωt +De−iωt = Ae+ωt +Be−ωt +C′ cosωt +D′ sinωt ;
x =y
ω2 = Ae+ωt +Be−ωt −C′ cosωt −D′ sinωt ;
3 Todos los terminos de la solucion se mantienen acotados menosAe+ωt . Para que no se vayaa ∞ las condiciones iniciales han de ser tales queA = 0.
x0y0
=
A+B−C′
A+B+C′
x0y0
= ω
A−B−D′
A−B+D′
x0+y0 = 2(A+B) x0 + y0 = 2ω(A−B)
x0 +y0 +x0 + y0
ω= 4A ⇒ x0 +y0 +
x0 + y0
ω= 0 (1)
4 ConA = 0, el vector posicion sera
r = B
11
e−ωt +
−1+1
(C′ cosωt +D′ sinωt
)
Tendremos un movimiento asintotico al origen en la direccion (1,1), y unaoscilacion armonica en la direccion (-1,1).
22

5 Entenderemos mejor el movimiento viendo que la fuerza se puede des-componer en una atraccion de la rectay = x (muelle) y una repulsion de larectay=−x (fuerza centrıfuga). El movimiento en la direccion del muelle noimporta, porque esta acotado. El movimiento en la direcci´on de la repulsion(normal ay=−x) se ira siempre a∞, a menos que le demos exactamente lascondiciones del movimiento asintotico al maximo, lanzando hacia el eje.
Notese que la condicion (1) del movimiento acotado es precisamente de movimiento asintoti-co en la direcciony = x. Si llamamosξ a la distancia al ejey = −x, la ecuacion de la energıapara la repulsion es12mξ 2− 1
2mω2ξ 2 = Er . Para el movimiento asintotico,Er = 0, es decir,ξ 2
0 −ω2ξ 20 = 0; y como hay que lanzar hacia el origen,ξ0 y ξ0 tienen signos opuestos, de mo-
do que se llega aξ0 + ωξ0 = 0. Esta es la misma condicion (1), puesξ0 = r0 · (1,1)/√
2 =
(x0+y0)/√
2, mientras queξ0 = r0 · (1,1)/√
2 = (x0+ y0)/√
2.Por lo tanto, cuando se lanza con una velocidad de modulo dado v, no se vaa infinito si la componente de la velocidad en la direcciony = x vale exacta-
menteω(x0 +y0)/√
2. Lo mas lejos que se puede ir esω|x0 +y0| ≤ v√
2 ,que es una zona limitada por dos rectas. Si se lanza desde el l´ımite de la zo-na, la velocidad ha de ser paralela a la direcciony = x; si se lanza desde unpunto(x,y) interior, la velocidad debe dirigirse de modo que la componenteen direcciony = x sea exactamente−ω(x+y)/
√2.
Hemos podido aislar la repulsion porque la fuerza es linealy sus efectos estan desacoplados.Podemos plantear igualmente la ecuacion de la energıa para la atraccion, llamandoη = (−x+y)/
√2 = r · (−1,1)/
√2 a la distancia a la rectay = x. Se obrendrıa12mη2 + 1
2mω2η2 = Ea. Elpotencial ahora es el de un muelle, mientras que antes era el de una repulsion. Si sumamos losdos terminos, tenemos el potencial completo del movimiento:
V = Vr +Va =12
mω2(−ξ 2+η2)=12
mω[
−(x+y)2+(−x+y)2]
=12
mω2xy
5 Las condiciones iniciales cumplen los requisitos de movimiento acotado:
r0 = (0,a) v0 = −a2
ω (i + j) (0+a)ω −ω(a
2+
a2
)
= 0
0a
= B
11
+C′−1+1
B−C′ = 0B+C′ = a
B = a/2C′ = a/2
−a2
ω
11
= −Bω
11
−D′ω−1+1
−B+D′ = −a/2−B−D′ = −a/2
D′ = 0B = a/2
Las ecuaciones horarias quedan
r =a2
11
e−ωt +a2
−1+1
cosωt
23

Problema 2.1.2: Una partıcula material pesadaM, de masam, y cuya carga electrica esq, esta obligadaa moverse sin rozamiento por un plano horizontalOXY. La partıculam esta unida al puntoO medianteun muelleOM, cuya longitud sin deformar, y constante elastica son respectivamentea y mω2, de formaque la fuerza que el muelle ejerce sobre el puntoM sera:
F = −mω2(r −a) ur
en donder representa la distanciaOM y ur es el versor de la direccion y sentido deOM.Se considera finalmente un campo magnetico definido por:
B =mωq
k
siendok el versor de la vertical ascendente.La posicion de la partıculaM en el plano quedara determinada indistintamente por sus coordenadas
cartesianas(x,y) y por sus coordenadas polares(r,θ). Se pide:
1. Determinar, en funcion dex, y, y sus derivadas, las componentes segun los ejesOX y OY de lasfuerzas que actuan sobreM.
2. Plantear, utilizando las coordenadasx, y, las ecuaciones de movimiento deM.
3. Plantear, utilizando las coordenadasr, θ , las ecuaciones de energıa cinetica y de momento cineticorespecto aO.
4. Reducir la cuadraturas las ecuaciones determinadas en elapartado anterior con objeto de determi-nar la trayectoria y la ley horaria deM.
5. Suponiendo queM se encuentra inicialmente a una distanciaa de O, ¿en que direccion se de-bera lanzar y cual debe ser el valor de la velocidad deM, con objeto de que el movimiento dedicho punto sea uniforme?
6. Suponiendo que el punto se encuentra inicialmente a una distanciaa de O y que se lanza endireccion radial, ¿cual sera el valor mınimo de la velocidad inicial con objeto de queM llegue auna distancia 2a deO?
E.T.S.I. Aeronauticos
1 En la fuerza del muelle aparece la dificultad de expresarur en car-tesianas:
Fm = −mω2 (r −a) ur = −mω2
xy0
+mω2 a
√
x2 +y2
xy0
v
FB
bM
La fuerza de Lorenz es mas sencilla
FB = qv∧B = qmωq
∣∣∣∣∣∣
i j kx y 00 0 1
∣∣∣∣∣∣
= mω
y−x0
2 La ecuacion de cantidad de movimiento, en cartesianas:
m
xy0
= −mω2
xy0
+mω2 a
√
x2 +y2
xy0
+mω
y−x0
3 Para la ecuacion de la energıa, observamos que la fuerza del muelle es conservativa:
Fm = f (r)ur → Vm = −∫
f (r)dr =mω2
2(r −a)2
Tambien se podrıa haber escrito como(r2−2ar
), pero da lo mismo porque la diferencia es una
constante. La fuerza electromagnetica es giroscopica: siempre normal al desplazamiento, por loque su trabajo es nulo:
dWB = FB ·vdt = qv∧B ·vdt = 0
24

La ecuacion de la energıa queda
dT = −dVm+dWB → T +Vm = E =12
m(r2 + r2θ2)+
mω2
2(r −a)2 = E
La ecuacion del momento cinetico en cilındricas es conocida; solo hay que calcular el mo-mento de las fuerzas,
dHO
dt= m
ddt
00
r2θ
= MO =r ∧Fm+mω
∣∣∣∣∣∣
ur uθ uzr 0 0
r θ −r 0
∣∣∣∣∣∣
→ ddt
(r2θ)
= −ωr r
4 De las dos ecuaciones anteriores, la segunda es obviamente una diferencial exacta:
ddt
(r2θ)
= −ωr r = −ωddt
(r2
2
)
⇒ r2θ = C− ωr2
2
Esto permite eliminarθ de la de la energıa y llegar a una cuadratura enr
12
m
[
r2 + r2(
Cr2 −
ω2
)2]
+mω2
2(r −a)2 = E
r2 =2Em
−ω2 (r −a)2− r2(
Cr2 −
ω2
)2
= f (r) ⇒∫
d t =∫ ±d r√
f (r)
y de la ecuacion del momento cinetico sale otra
dθdt
=Cr2 −
ω2
⇒∫
dθ = ±∫ (
Cr2 −
ω2
)d r
√
f (r)
5 Obviamente, lo de “uniforme” hay que entenderlo como “circularuniforme”, pues con estas fuerzas el rectilıneo no es posible. Si se lanzasegunuθ , obligando a quer sea constante:
m(r − r θ2)= m
(0− r θ2)= −mω2 (r −a)+mωr θ
r θ2 +ωr θ −ω2 (r −a) = 0 → θ = −ω2
(
1±√
5−4ar
)
v FBb
M
Para cada valor der mayor que 4a/5, hay dos valores deθ que producenmovimiento circular uniforme, unos positivos y otros negativos. Parar = a, se tiene
θ1 = −ω θ2 = 0
Una solucion es el reposo, porquea es la longitud natural del muelle.En la otra, girando en el sentido de las agujas del reloj, la fuerza deLorenz sola produce la aceleracion centrıpeta. Por tanto, hay que darlas siguientes condiciones iniciales:
r0 = aur v0 = −aω uθ
vFBb
M
6 Para la distancia radial maxima, se puede usar el analisiscua-litativo del movimiento radial por el potencial eficaz, comoen losmovimientos centrales. Aunque este no lo es, la ecuacion del mo-mento cinetico da otra integral primera analoga a la ley deareas.De la ecuacion de la energıa,
r2 =2m
[E−Ve f(r)
]
2m
Ve f = ω2 (r −a)2 + C2
r2 + r2ω2
4 −Cω a
Ve f
25

Los distintos terminos del potencial eficaz, dos parabolas y una inversa, se suman para daruna curva con un mınimo. El movimiento se desarrollara oscilando entre dos valores del radior1 y r2, con ˙r = 0 en ambos extremos. Por cierto que, al contrario que en los centrales, eneste movimiento sı puede cambiar el sentido de giro. La integral del momento cineticor2θ =C−ωr2/2 permite el cambio de signo, mientras que la ley de areasr2θ = C no.
Si se lanza desder = a con velocidad radialv0 (y por tantoθ = 0), y se quiere que llegue ar = 2a, basta con calcular las constantes iniciales y obligar a quer = 0 enr = 2a. En el instanteinicial,
r20θ0 = C− ω r2
0
2= 0; C =
ωa2
2
r20 = E′−Ve f(r0) ; v2
0 = E′−ω2(a−a)2−a2
(ωa2
2a2 − ω2
)2
→ E′ = v20
Obligamos ahora a que ˙r se anule en 2a,
0 = v20−ω2(2a−a)2−4a2
(ωa2
8a2 − ω2
)2
= v20−
2516
ω2a2
v0 =54
ωa
Aunque no se pida, se puede resolver el mismo problema lanzando normal al radio. Entoncessera ˙r = 0 y estamos en uno de los extremos. Basta con obligar a que el segundo extremo sear2 = 2a. En el instante inicial,
r2θ = C− ω r2
2; av0 = C− ωa2
2→ C = av0 +
ωa2
2
Si oscila entrea y 2a,
r2 = E−Ve f(a) = 0; r2 = E−Ve f(2a) = 0 ⇒ Ve f(a) = Ve f(2a)
ω2(a−a)2+a2
(
av0+ ωa2
2
a2 − ω2
)2
= ω2(2a−a)2+4a2
(
av0 + ωa2
2
4a2 − ω2
)2
34
v20+
34
ωav0−2516
ω2a2 = 0 → v0 = aω
(
−12±
√213
)
26

Problema 2.1.3: Un punto materialM, de masam, se mueve sin rozamiento sobre un plano, atraıdoproporcionalmente a su masa y a la distancia por dos puntos deese plano, el unoO fijo y otro Sque girauniformemente alrededor deO.
La constante de proporcionalidad de las fuerzas atractivasesk.La velocidad angular de la rectaOSse representa porω y la distanciaOSse tomara igual aa. Se
pide:
Calcular la trayectoria deM con relacion a la recta movilOS.
Estudiar el movimiento en el caso particulark = ω2/2 suponiendo que en el instante inicial elpuntoM se encuentra enO y no tiene velocidad.
Calcular el valor maximo de la velocidad relativa deM en el caso particular definido en el apartado2).
Nota: La ecuacion de la trayectoria pedida en el apartado 2 debe contener cuatro constantes indeter-minadas.
E.T.S.I.A., marzo de 1966
1 Para calcular la trayectoria, tenemos dos posibilidades:
Plantear las ecuaciones en ejes moviles, con las fuerzas deinercia.
Plantearlas en ejes fijos, y luego hacer un cambio de ejes
Por el primer camino, llamamosS0 a la recta. La posicion deM en ejes0 sera(x,y,0). Habra que tener en cuenta las fuerzas de los dos muelles,la de inercia de arrastre, y la de Coriolis:
ω t
b
b
b
S
M
x
y
m
xy0
= −km
xy0
−km
x−ay0
+mω2
xy0
−2mω
−yx0
LlamandoΩ2 = 2k, se tiene
x−2ω y+(Ω2−ω2)x =
Ω2a2
y+2ω x+(Ω2−ω2)y = 0
Este sistema se puede resolver por varios caminos; por ejemplo, introduciendo la variable com-pleja z= x+ i y,
z+2ω i z+(Ω2−ω2)z=
Ω2a2
La particular es obviamente una constante. Para la homogenea, el polinomio caracterıstico es
r2+2ω i r +Ω2−ω2 = 0 →
r1 = −i (Ω+ω)r2 = +i (Ω−ω)
La solucion completa sera
z= Ae−i (Ω+ω) t +Be+i (Ω−ω) t +Ω2a
2(Ω2−ω2)
Esta solucion no vale para el caso particularΩ = ω , en que se anula el termino lineal (lafuerza centrıfuga iguala a la del muelle). Como a partir delapartado 2 se trata ese caso, hay queconsiderarlo:
z+2ω i z=ω2 a
2→ z= A+Be−2i ω t − i ω a
4t
27
Las constantes son complejas,A = A1 + i A2 , B = B1 + i B2 . Separando las partes real eimaginaria, se obtiene la trayectoria:
x = A1 cos(Ω+ω) t +A1 sin(Ω+ω) t+
+B1 cos(Ω−ω) t −B2 sin(Ω−ω) t +Ω2a
2(Ω2−ω2)
y = A2 cos(Ω+ω) t −A1 sin(Ω+ω) t+
+B2 cos(Ω−ω) t +B1 sin(Ω−ω) t
y para el caso singular,
x = A1+B1 cos2ω t +B2 sin2ω t
y = A2+B2 cos2ω t −B1 sin2ω t − ω a4
t
Notese que lo que hemos calculado son, en sentido estricto,las ecuaciones horarias. De todosmodos, tambien son las ecuaciones parametricas de la trayectoria.
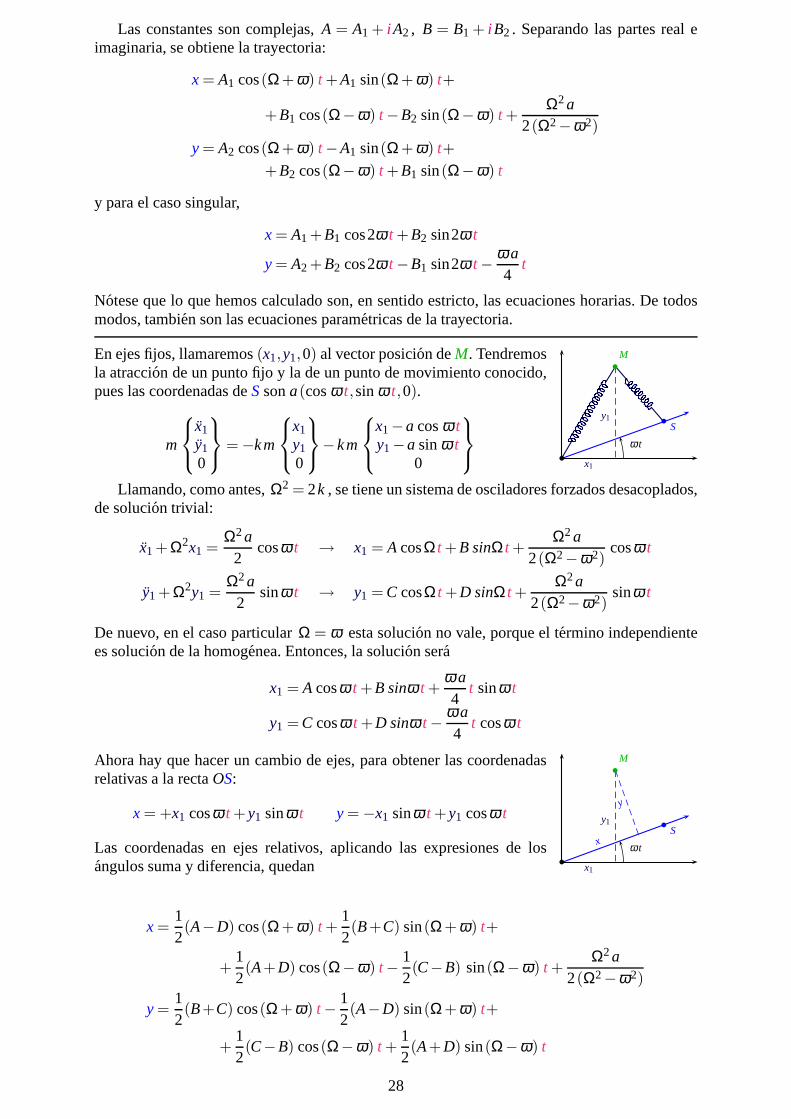
En ejes fijos, llamaremos(x1,y1,0) al vector posicion deM. Tendremosla atraccion de un punto fijo y la de un punto de movimiento conocido,pues las coordenadas deSsona(cosω t,sinω t,0).
m
x1y10
= −km
x1y10
−km
x1−a cosω ty1−a sinω t
0
ω t
b
b
b
S
M
x1
y1
Llamando, como antes,Ω2 = 2k , se tiene un sistema de osciladores forzados desacoplados,de solucion trivial:
x1 +Ω2x1 =Ω2a
2cosω t → x1 = A cosΩ t +B sinΩ t +
Ω2a2(Ω2−ω2)
cosω t
y1 +Ω2y1 =Ω2a
2sinω t → y1 = C cosΩ t +D sinΩ t +
Ω2a2(Ω2−ω2)
sinω t
De nuevo, en el caso particularΩ = ω esta solucion no vale, porque el termino independientees solucion de la homogenea. Entonces, la solucion sera
x1 = A cosω t +B sinω t +ω a4
t sinω t
y1 = C cosω t +D sinω t − ω a4
t cosω t
Ahora hay que hacer un cambio de ejes, para obtener las coordenadasrelativas a la rectaOS:
x = +x1 cosω t +y1 sinω t y = −x1 sinω t +y1 cosω t
Las coordenadas en ejes relativos, aplicando las expresiones de losangulos suma y diferencia, quedan
ω t
b
b
b
S
M
x
y
x1
y1
x =12(A−D) cos(Ω+ω) t +
12(B+C) sin(Ω+ω) t+
+12(A+D) cos(Ω−ω) t− 1
2(C−B) sin(Ω−ω) t +
Ω2a2(Ω2−ω2)
y =12(B+C) cos(Ω+ω) t − 1
2(A−D) sin(Ω+ω) t+
+12(C−B) cos(Ω−ω) t +
12(A+D) sin(Ω−ω) t
28
que es la misma solucion que por el otro camino, escogiendo de otro modo las constantes. Lomismo ocurre con el caso singular, que no repetiremos.
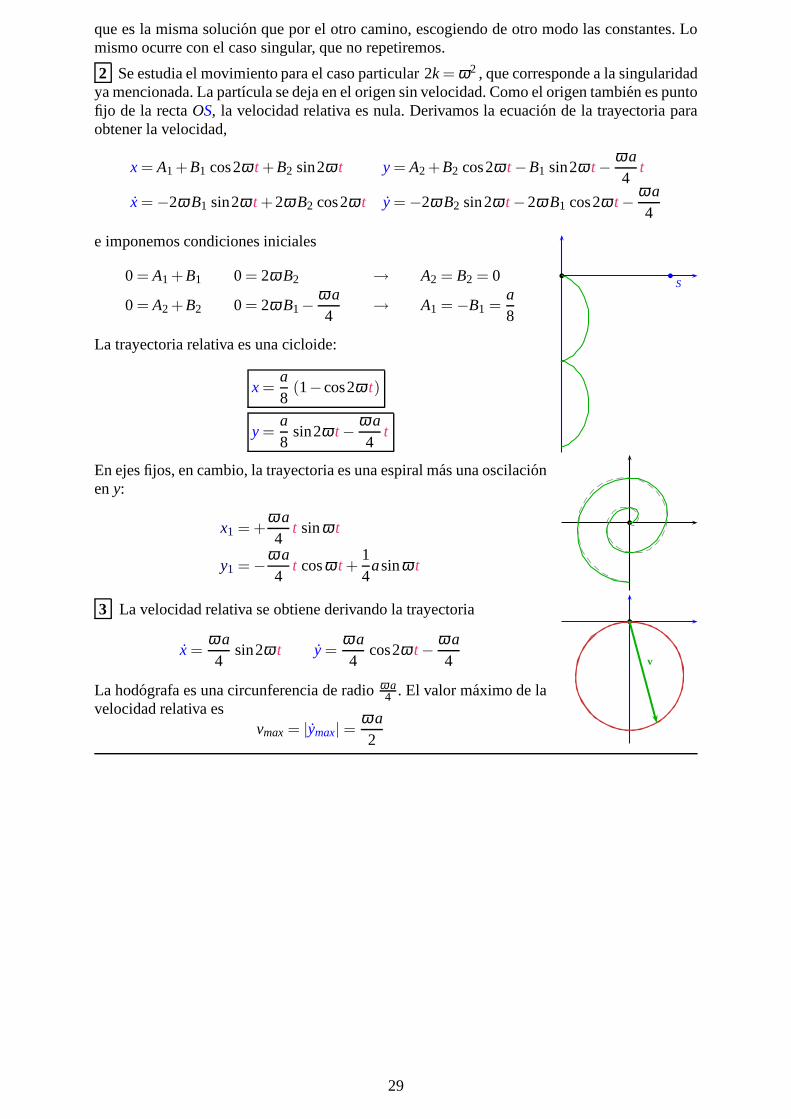
2 Se estudia el movimiento para el caso particular 2k= ω2 , que corresponde a la singularidadya mencionada. La partıcula se deja en el origen sin velocidad. Como el origen tambien es puntofijo de la rectaOS, la velocidad relativa es nula. Derivamos la ecuacion de latrayectoria paraobtener la velocidad,
x = A1+B1 cos2ω t +B2 sin2ω t y = A2+B2 cos2ω t −B1 sin2ω t − ω a4
t
x = −2ω B1 sin2ω t +2ω B2 cos2ω t y = −2ω B2 sin2ω t −2ω B1 cos2ω t − ω a4
e imponemos condiciones iniciales
0 = A1 +B1 0 = 2ω B2 → A2 = B2 = 0
0 = A2 +B2 0 = 2ω B1−ω a4
→ A1 = −B1 =a8
La trayectoria relativa es una cicloide:
x =a8
(1−cos2ω t)
y =a8
sin2ω t − ω a4
t
bb
S
En ejes fijos, en cambio, la trayectoria es una espiral mas una oscilacioneny:
x1 = +ω a4
t sinω t
y1 = −ω a4
t cosω t +14
asinω t
b
3 La velocidad relativa se obtiene derivando la trayectoria
x =ω a4
sin2ω t y =ω a4
cos2ω t − ω a4
La hodografa es una circunferencia de radioω a4 . El valor maximo de la
velocidad relativa esvmax= |ymax| =
ω a2
b
v
29

2.2. Movimientos centrales
Ejercicio 2.2.1: Una partıcula de masamesta sometida a una fuerza central respecto al punto fijoO devalor: F = Km
(r2−3ar +2a2
)ur dondeK y a son constantes positivas. Estudiar para que valores del
radio son posibles orbitas circulares de centroO, y determinar la velocidad en funcion del radio.Septiembre de 1994
Con fuerzas centralesF(r), para que haya orbitas circulares hacen falta doscondiciones:
que la fuerza sea atractiva:F(r) < 0
que la velocidad sea la justa para que la fuerza proporcione la acelera-cion centrıpeta del movimiento circular:F(r) = mv2
r
F
v
Habra orbitas circulares a cualquier distancia a la que lafuerza sea negativa, solo hay quedarle la velocidad adecuada para ese radio.
Otra manera de verlo es plantear el equilibrio relativo en ejes rotatorios: hay que lanzarlacon la velocidad justa para que la fuerza centrıfugamv2/r (repulsiva) equilibre a la central(atractiva).Esto puede parecer sorprendente. En el movimiento rectilıneo, hay puntos deequilibrio donde se anule la derivada del potencial: son siempre valores fijosdex. En el analisis cualitativo del movimiento central, puedehaber puntosde equilibrio del movimiento radial (orbitas circulares)en cualquierr en quela fuerza sea negativa (V(r) de pendiente positiva). Y se cumple queV ′
e f = 0.
Vcent V(r)
Ve f
Lo que ocurre es que el termino centrıfugo varıa conr a traves deC que, en el movimientocircular, valerv. Al variar lar, si se escoge lav adecuada, el potencial centrıfugo es el necesariopara que haya un mınimo en eser. Podemos resolver el ejercicio por varios caminos:
1 Aceleracion centrıpeta (o fuerza centrıfuga). La fuerza atractiva debe ser igual a la acelera-cion centrıpeta del movimiento circular:
F(r) = Km(r2−3ar +2a2)= −mv2
r⇒ v2
c = −Krc(r2c −3arc+2a2)≥ 0
Solo existiran movimientos circulares donde lav2c ≥ 0 (o lo que es lo mismo, la fuerza sea
negativa).F(r) es una parabola con la concavidad hacia arriba, por lo que sera negativa en elintervalo entre las dos raıces:
r2−3ar +2a2 → r =3a±
√9a2−8a2
2=
3a±a2
→ r = a,2a
Por tanto, habra orbitas circulares en las siguientes condiciones:
rc ∈ [a,2a] v2c = −Krc
(r2c −3arc +2a2)
2 Puntos estacionarios del potencial eficazLa fuerza deriva del potencial
V(r) = −∫
f (r)dr = −Km
(r3
3− 3ar2
2+2a2r
)
Y el potencial eficaz es:
F(r)
a 2a
V(r)
Ve f
Vcent
Ve f = V(r)+Vcent = −Km
(r3
3− 3ar2
2+2a2r
)
+mC2
2r2
Los maximos y mınimos se obtendrıan de
dVe f
dr= −Km
(r2−3ar +2a2)− mC2
r3 = 0; r > 0 ⇒ r5−3ar4+2a2r3 +C2
K= 0
30

Que obviamente no se puede resolver (mas que de modo numerico, dando un valor aC). Y si sepudiera, no servirıa de mucho. Para tener orbita circularen los maximos y mınimos obtenidos,habrıa que lanzar con laE correspondiente,sin tocar la C. Y solo por casualidad lanzandodesde eserM, con velocidad ortogonalC/rM, la E resultarıa ser la del maximo. Es decir, losmaximos y mınimos obtenidos para unaC generica no permanecen al dar laC correspondientea ese radio, pues varıan con la propiaC.
Lo que se puede hacer es sustituir directamenteC = rv en la expresionV ′e f = 0; lo que queda
es una relacion entrev y r:v2 = −Kr
(r2−3ar +2a2)≥ 0
Para que exista solucion,v2 ≥ 0. Dentro del intervalo en que se cumple esta condicion, paracada valor der se tendra una velocidad para que haya orbita circular. Ahora se ve con masfacilidad que, como es natural, la solucion es la misma que por el otro procedimiento.
De hecho, al derivarV hemos obtenido la fuerza, y al hacerC = rv hemos calculado lafuerza centrıfuga a ese radio. Es decir, la misma ecuacionque en el primer metodo.
31
Ejercicio 2.2.2: Una partıcula de masam esta sometida a la fuerza centralF = −kmr3 ur , dondek es
una constante positiva yr es la distancia al polo de atraccion. SeaC la constante de areas yE la energıamecanica total de la partıcula. Determinar, segun sea(C2−k) > / = / < 0 y E > / = / < 0, si la partıculapuede irse al infinito y en caso de que ası sea, si lo hace con rama asintotica, parabolica o espiral.
Septiembre de 1993
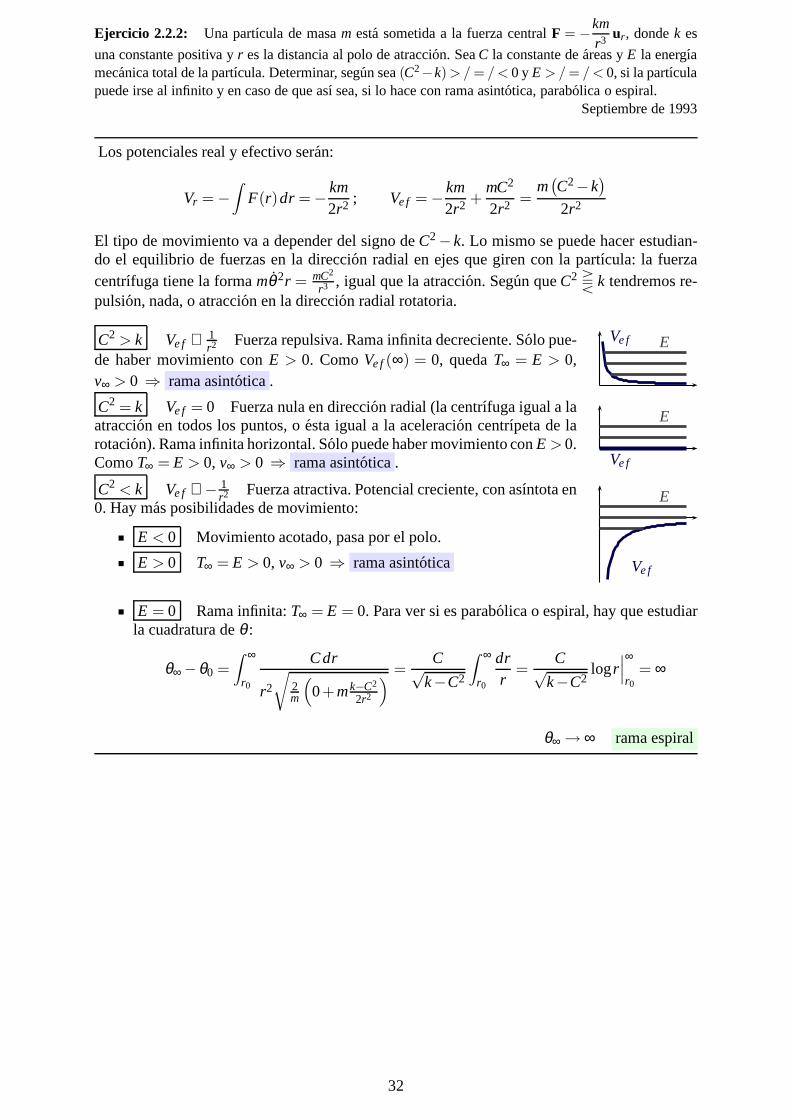
Los potenciales real y efectivo seran:
Vr = −∫
F(r)dr = − km2r2 ; Ve f = − km
2r2 +mC2
2r2 =m(C2−k
)
2r2
El tipo de movimiento va a depender del signo deC2−k. Lo mismo se puede hacer estudian-do el equilibrio de fuerzas en la direccion radial en ejes que giren con la partıcula: la fuerzacentrıfuga tiene la formamθ2r = mC2
r3 , igual que la atraccion. Segun queC2 T k tendremos re-pulsion, nada, o atraccion en la direccion radial rotatoria.
C2 > k Ve f ∝ 1r2 Fuerza repulsiva. Rama infinita decreciente. Solo pue-
de haber movimiento conE > 0. ComoVe f(∞) = 0, quedaT∞ = E > 0,v∞ > 0 ⇒ rama asintotica .
EVe f
C2 = k Ve f = 0 Fuerza nula en direccion radial (la centrıfuga igual a laatraccion en todos los puntos, o esta igual a la aceleraci´on centrıpeta de larotacion). Rama infinita horizontal. Solo puede haber movimiento conE > 0.ComoT∞ = E > 0, v∞ > 0 ⇒ rama asintotica .
E
Ve f
C2 < k Ve f ∝ − 1r2 Fuerza atractiva. Potencial creciente, con asıntota en
0. Hay mas posibilidades de movimiento:
E < 0 Movimiento acotado, pasa por el polo.
E > 0 T∞ = E > 0, v∞ > 0 ⇒ rama asintotica
E
Ve f
E = 0 Rama infinita:T∞ = E = 0. Para ver si es parabolica o espiral, hay que estudiarla cuadratura deθ :
θ∞ −θ0 =∫ ∞
r0
Cdr
r2
√
2m
(
0+mk−C2
2r2
) =C√
k−C2
∫ ∞
r0
drr
=C√
k−C2logr
∣∣∣
∞
r0
= ∞
θ∞ → ∞ rama espiral
32

Ejercicio 2.2.3: Una partıcula describe una orbita circular de radioa bajo la accion de una fuerzacentral que solo depende de la distanciar al polo O. Sabiendo quedicho polo se encuentra sobre laorbita de la partıcula,obtener la ecuacion de la trayectoria respecto a un sistem de referencia con origenenO y la forma de la fuerza.
Septiembre de 1996
La primera parte es trivial, un simple ejercicio de geometr´ıa. Hay que tomaruna direccion como eje polar, que puede ser el diametro o latangente porO.Tomando el primero, la trayectoria es obviamente
r = 2a cosθ
con el segundo se tendrıa un seno en vez del coseno.
a
r
b
2θθO
La forma de la fuerza se puede obtener por varios caminos:
1 Se aplica la 2a formula de Binet:
Fm
= γ = −C2
r2
[d2
dθ2
(1r
)
+1r
]1r
=1
2acosθ
Derivamos: (1r
)′=
sinθ2acos2 θ
;
(1r
)′′=
cosθ2acos2 θ
+sin2θ cosθ
acos4 θsustituimos en la formula de Binet:
− C2
r2
[cosθ
2acos2θ+
sin2 θ cosθacos4θ
+1
2acosθ
]
= −C2
r2
[cos3 θ +2sin2 θ cosθ +cos3 θ
2acos4θ
]
=
=C2
r2
[2
2acos3θ
]
= −C2
r2
[23a2
r3
]
⇒ F = −23a2C2m
r5
2 Se deriva respecto al tiempo con ayuda de la ley de areas:
γ = γr = r − r θ2 r = 2acosθ θ =Cr2
r = −2asinθ θ =−2asinθC4a2cos2 θ
r = − C2a
Cr2
[cosθcos2θ
− sinθ(−2cosθ sinθ)
cos4θ
]
= − C2
2ar2
cos2 θ +2sin2 θcos3 θ
r − r θ2 = r −C2
r3 = − C2
2ar2
[cos2θ +2sin2θ
cos3θ+
cos2 θcos3 θ
]
= − C2
2ar2
2cos3θ
= − C2
2ar2
24a3
r3
con lo que se llega a la misma expresion de antes.
33

Problema 2.2.1: Una partıcula de masam se mueve sin rozamiento sobre un planoOxysometida a lafuerza central
F = −mω2a3
r2 (1−2λ cosθ)ur
dondeλ es un parametro positivo.Inicialmente la partıcula se encuentra en(a,0) con una velocidadωa dirigida segun la parte positiva
deOy. Se pide:
1. Establecer la ecuacion diferencial de la trayectoria dela partıcula, integrarla y particularizarla paralas condiciones iniciales dadas.
A continuacion vamos a ir resolviendo una serie de cuestiones que tienen por finalidad el analisis delmovimiento y de la trayectoria.
2. Dibujar en un diagrama cartesiano el valor dea/r en funcion deθ y observar la influencia quetiene el parametroλ en la curva obtenida.
3. Razonar a la vista de las curvas anteriores que para valores pequenos deλ existen dos puntos delplano por los que pasa varias veces la trayectoria antes de marcharse al infinito. SeanM y M′ estosdos puntos. Situarlos exactamente en el plano.
4. La velocidad de la partıcula va pasando alternativamente por unos valores maximos y mınimos.Seanθi los valores deθ en los puntos correspondientes. Obtener una ecuacion trascendente quenos de los valoresθi buscados.
5. Hallar el valor que la velocidad va tomando en funcion deθ y en particular calcular sus maximosy mınimos en funcion de losθi anteriores.
6. Establecer la ecuacion que nos da el valorθ∞ para el que la trayectoria se marcha al infinito.
7. Obtener el mınimo valor deλ para el cual la partıcula se marcha al infinito sin que su velocidadhaya crecido en ningun momento. Seaλm este valor.
8. Estudiar si la marcha al infinito se hace con rama asintotica o parabolica considerando especial-mente el caso en queλ = λm.
9. Hacer un dibujo aproximado de la trayectoria en el caso en queλ = 1/10.
Septiembre de 1985
1 Una fuerza central que depende solo der y θ se presta a usar la segunda formula de Binet:
γ = −C2
r2
[d2(1/r)
dθ2 +1r
]
= −ω2a3
r2 (1−2λ cosθ)
Con las condiciones inicialesr0 = aur y v0 = aω uθ , podemos calcular la constante de areasC = |r0∧v0| = a2ω. Llamando1
r = u, se llega a:
u′′+u =1−2λ cosθ
a
uh = Acosθ +Bsinθup = 1
a + f (θ)
Como el termino independiente es solucion de la homogenea, ensayamos soluciones de la forma
up = Cθ sinθ +Dθ cosθ + 1a
u′p = Csinθ +Dcosθ +Cθ cosθ −Dθ sinθu′′p = 2Ccosθ −2Dsinθ −Cθ sinθ −Dθ cosθ
2Ccosθ −2Dsinθ + 1a = 1
a + 2λa cosθ
D = 0 : C = −λa
up = 1a − λ
a θ sinθ
La solucion completa es
1r
= u = Acosθ +Bsinθ +1a− λ
aθ sinθ
Hay que imponer condiciones iniciales (naturalmente, a la completa)
θ0 = 0, r0 = a ⇒ 1a
= A+1a
⇒ A = 0
34

Para la velocidad hay que tener en cuenta que conocemos ˙r0, pero la solucion es funcion deθ :
drdt
= 0 =drdθ
6=0︷︸︸︷
dθdt
→ drdθ
= r ′ = 0 → u′ = − 1r2 r ′ = 0
u′ = Bcosθ − λa
sinθ − λa
θ sinθ → u′(0) = B = 01r
=1a− λ
aθ sinθ
2 Es facil representaru y r, tomando 1/a o a como unidad, y dando valores aλ :
(a,0)
(a,π)
1
u
θ
λ
λ
θ∞
(a,0)(−a,0)
∞
3 Se ve con claridad que la curva deu pasa por los puntos(a,2nπ) y (a,(2n+1)π), que alrepresentar la trayectoria en cartesianas corresponden a dos puntos:(a,0) y (−a,0). Tambien seve que el factorθ hace que la amplitud de la oscilacion deu crezca continuamente. Llegara unmomento en queu = 0, y por tantor → ∞. Cuanto mayor seaλ , antes se llega a este punto.4 Para obtener los maximos dev, convendra trabajar con expresiones que contengan el modulo
de la velocidad: la ecuacion de la energıa, o la primera formula de Binet. Como variable paraderivar, se puede usarθ en vez det porque los dos son crecientes y positivos: el giro no se parapor la ley de areas.
dT = F ·dr = −mω2a3
r2 (1−2λ cosθ)dr = mω2a3(1−2λ cosθ)d(1/r)
dTdθ
= 0 ⇒ (1−2λ cosθ)u′ = 0
u′ = 01−2λ cosθ = 0 [λ ≥ 0,5]
Por otro camino:
v2 = C2[
u′2+u2]
2vv′ = 2C2[u′u′′+uu′]= 2C2u′
[u′′+u
]=
= 2C2u′[
1−2λ cosθa
]
= 0 ⇒
u′ = 01−2λ cosθ = 0 [λ ≥ 0,5]
Derivando lau(θ), se tienen las ecuaciones transcendentes para lasθi de los maximos dev:
u′ = −λa (sinθ +θ cosθ) ⇒ θ = − tanθ
cosθ =1
2λ[λ ≥ 0,5]
5. . . El resto de los apartados tiene que resolverse numericamente; es mejor hacerlo conun programa de calculo como Maple. Se puede consultar la solucion completa en la seccionProblemasde la pagina WWW de la asignatura.
35

Problema 2.2.2: Una partıcula material de masames atraıda por un punto fijoO de un planoOxyconuna fuerza
F = −3kmr4
(
1+2ar
)
donder es la distancia que la separa deO.En el momento inicial la partıcula se encuentra en(3a,0) con una velocidadv0 j . Se pide:
1. Plantear las ecuaciones del movimiento de la partıcula,dejando la integracion pendiente de unacuadratura del tipo
t =
∫r2dr√
ϕ(r)
2. Obtener completamente integrada la trayectoria para el caso en quev0 es tal queϕ(r) quedareducida a un polinomio de 2o grado. Dibujar dicha trayectoria.
3. Determinar en este caso el tiempo que la partıcula tarda en llegar aO ignorando la singularidadfısica que presenta este punto.
4. Determinar que rango de velocidades hacen que la partıcula se marche al infinito.
5. Estudiar la existencia de asıntota en este caso.
6. Estudiar la existencia y estabilidad de movimientos circulares estacionarios.
1 Fuerza conservativa:
F = −3kmr4
(
1+2ar
)
→ V(r) = −kmr3
(
1+3a2r
)
E = T0 +V0 =12
mv20−
km27a3
(
1+3a6a
)
=mv2
0
2− km
18a3 C = 3av0
La cuadratura der se obtiene directamente
(drdt
)2
=2m
(
E−V(r)− mC2
2r2
)
=2m
[mv2
0
2− km
18a3 +kmr3
(
1+3a2r
)
− m9a2v20
2r2
]
Separando variables, se llega a la cuadratura
t− t0 =
∫
dt =
∫ r
3a
±dr√
v20− k
9a3 + 2kr3
(1+ 3a
2r
)− 9a2v2
0r2
=
=
∫ r
3a
±r2dr√(
v20− k
9a3
)
r4+2kr +3ka−9a2v20r2
=
∫ r
3a
±r2dr√
ϕ(r)
La cuadratura deθ se obtiene mediante la ley de areas:
dθ =Cr2dt → θ =
∫
dθ =∫ t
0
Cdtr2 =
∫ r
3a
±Cr2dr
r2√
ϕ(r)=∫ r
3a
±3av0dr√
ϕ(r)
El signo sera el de ˙r en el instante inicial. En este caso, comor0 ⊥ v0, r0 = 0; hay que recurrira r. ComoFr = m
(r − r θ2
)y θ se saca de la ley de areas, se tiene:
r0 = F(0)/m− r0θ20 = − 3k
81a3
(
1+2a3a
)
+v2
0
3a
Como depende del valor dev0, no se puede afirmar nada de momento.
36

2 Se tiene un polinomio de grado 2 haciendo cero el coeficiente de r4:
v20−
k9a3 = 0 ⇒ v0 =
13
√
ka3 ⇒ r < 0 → ⊖
ϕ(r) = 2kr +3ka−9a2(
k9a3
)
r2 = k
(
2r +3a− r2
a
)
La trayectoria se obtiene de la cuadraturaθ(r):
θ =∫ r
3a
⊖3a13
√ka3 dr
√ka
√2ar +3a2− r2
=∫ r
3a
−dr√2ar +3a2− r2
= arcsina− r2a
∣∣∣∣
r
3a=
π2−arcsin
r −a2a
Se puede despejar lar para obtener explıcitamente la trayectoria en polares, que resulta ser uncaracol de Pascal:
sin(
θ − π2
)
=a− r2a
⇒ ra
= 1+2cosθ
Paraθ = 2π/3 (120o), la curva pasa por el origen yr pasa de + a -. Esto nopuede ser, porque en polares lar esta definida como positiva, y si se hace 0la θ tiene una singularidad. Ademas, en funciones impares las atracciones seconvertirıan en repulsiones.Lo que se hace es parar la integracion, pasar deθ a θ +π (esto explica queθ se haga infinita al sufrir un salto en tiempo cero), y volver a plantear lacuadratura con ˙r > 0
2π/3
5π/3 r
θ − 5π3
=∫ r
0
⊕dr√−r2+2ar +3a2
=π6
+arcsinr −a2a
θ − 11π6
arcsinr −a2a
⇒ r = a
[
1+2sin
(
θ − 11π6
)]
Esta rama valdra hasta el proximo paso por el centro, en quehabra que repetir el proceso.
3 Al hacer el analisis cualitativo se vera que la partıculapasa por el centro con velocidadinfinita. Ignorando esta singularidad, podemos integrar lacuadratura del tiempo:
t =∫ 0
3a
−r2dr√−r2 +2ar +3a2
=
√ak
[
r2
√
−r2 +2ar +3a2+3a2
√
−r2 +2ar +3a2−
−3a2arcsinr −a2a
]0
3a
=
√ak
[
2aπ +32
√3a2]
; t = a2√
ak
[
2π +3√
32
]
4 Lo primero es representar el potencial, para ver las ramas infini-tas. Se puede hacer facilmente, tomandoa como unidad de distancia, yhaciendo 1 las otras constantes. Los dos terminos son potencias de ex-ponente negativo.V(r) tiene el exponente de orden mayor, y predominacerca del origen;Vcent tiene el exponente menor, y predomina al tendera ∞. Esto quiere decir queVe f se aproxima aV(r) cerca der = 0 y aVcent hacia∞; en algun punto intermedio corta el eje y se hace positivo.Necesariamente ha de tener un maximo en la zona positiva, pues acabatendiendo a 0+ cuandor → ∞.
V(r)
Vcent
Ve f
37

Ve f E
r0rM
A la vista del potencial eficaz, parece que el criterio para que se vaya a∞es queE > VMax. Pero esto no es posible, porque lanzamos conv ⊥ r , y portantoE = Ve f(r0): se lanza desde un punto de corte. Tampoco nos vale queE = VMax, es decir, que lancemos exactamente en el maximo: tendrıamos unmovimiento circular, aunque inestable, y no se irıa a∞ (a menos que se leperturbe, que no se contempla en el enunciado). Al final, el unico criterio quenos vale es quer0 > rMax. ComoVe f depende de las condiciones iniciales atraves deC, rMax va a ser una funcion dev0.
dVe f
dr= 0 =
3kmr4
(
1+3a2r
)
− kmr3
(−3a2r2
)
− 3a2v20
r3 =3m
r5
(kr +2ak−3a2v2
0 r2)= 0
3a2v20 r2−kr−2ak= 0 → rMax =
k⊕√
k2+24a3kv20
6a2v20
< 3a
Hay que tomar el signo +, pues la otra raız es negativa. De esta expresion podemos sacar lacondicion parav0, pero es pesado. Es mas sencillo calcularla para quer0 = rMax:
3a2v20 r2−kr−2ak= 0
r=3a−−−→ 27a4v20−3ak−2ak= 0 → v2
0 =5k
27a3
Este valor no nos vale, pues hace falta quer0 sea mayor. Es facil ver que, comov0 esta en elcoeficiente der2, al crecerv0 la parabola se cierra yrMax disminuye. Es logico que, con masenergıa, pueda llegar a∞. Por tanto, la condicion es
v20 >
5k27a3
5 ComoVe f(∞) = 0, T∞ = E > 0. Tendremosv∞ > 0 y por tanto asıntota.
6 Ve f solo tiene un punto de tangente horizontal finito, y es un maximo. Parece pues que hayun solo movimiento circular estacionario, y que es inestable.
Sin embargo, hay que tener en cuenta queVe f varıa con las condiciones iniciales, que cam-bian laC. Notese que la condicionV ′
e f = 0 es una ecuacion enr y v0: para cada valor der, existeunav0 que hace que el movimiento sea circular uniforme (lanzando perpendicularmente).
Hay infinitos movimientos circulares estacionarios inestables, siempre que las condicionesiniciales cumplan
3a2v20 r2
0−kr0−2ak= 0
38

2.3. Dinamica orbital
Ejercicio 2.3.1: Un satelite de masam, sigue una orbita circular de radioa alrededor de la Tierra; enun instante dado se ponen en funcionamiento sus cohetes, durante un tiempo muy corto frente al perıodoorbital, que incrementan su velocidad en∆v, en la direccion tangente a la orbita. Discutir el tipo de ´orbitaen funcion de∆v. En caso de orbita cerrada, ¿En que punto alcanza la distancia maxima a la Tierra?
Junio de 1992
La velocidad de la orbita circular se obtiene facilmente planteando la ecuacion de la cantidad demovimiento en la direccion radial, y obligando a que la atraccion sea la aceleracion centrıpetadel movimiento circular de radioa:
−µma2 = m
(r − r θ2)= 0−m
v2c
a⇒ vc =
õa
La energıa inicial es negativa, como corresponde a un movimiento acotado:
Em
=v2
c
2− µ
a=
µ2a
− µa
= − µ2a
Al darle un incremento en la direccion tangente, la nueva velocidad seravc +∆v, y la energıa
E′
m=
(vc +∆v)2
2− µ
a=
µ2a
+∆v
õa
+∆v2
2− µ
a=
∆v2
2+∆v
√µa− µ
2a⋚ 0
El tipo de orbita va a depender del signo deE′, y para obtenerlo calcularemos las raıces en∆v
∆v2+2∆v
√µa− µ
a= 0; ∆v = −
√µa±√
µa
+µa
=
õa
(
−1±√
2)
Las dos raıces corresponden a la∆v que hay que darle para que la orbita sea parabolica (E′ = 0).La positiva corresponde a una orbita parabolica en el mismo sentido que la circular, y es lamas economica: solo hay que darle la diferencia de velocidad entre circular y parabolica. Lanegativa corresponde a una orbita en sentido opuesto, y es mucho mas costosa: el impulso tieneque absorber toda la velocidad circular, y darle toda la parabolica en sentido opuesto. No tendrıamucho sentido practico.
Cinendonos a la solucion positiva, las orbitas posibles son:
∆v < µa
(
−1+√
2)
orbita acotada elıptica; de mayor periodo si es positiva (acelera), de
menor si es negativa (frena)
∆v = µa
(
−1+√
2)
orbita parabolica
∆v > µa
(
−1+√
2)
orbita hiperbolica
Un analisis similar se podrıa hacer para la otra raız, conorbitas en sentido opuesto, aunque notiene mucho sentido practico.Para la orbita acotada, el periodo va a depender de si acelera o frena:
∆v > 0 orbita de mayor energıa, masa, y mayor periodo; el puntoinicial es obviamente el pericentro, y el mas alejado serael diametral-mente opuesto o apocentro
∆v < 0 orbita de menor energıa,a y periodo; el punto inicial es el masalto (apocentro) y el diametralmente opuesto el mas cercano (pericen-tro)
39

Ejercicio 2.3.2: Una nave espacial describe una orbita circular de radioR con velocidadvc alrededorde la Tierra, supuesta perfectamente esferica. Desde la nave se lanza una partıcula, de masa despreciablefrente a la de la nave, con velocidadv0 = εvc relativa a la nave, en una direccion que forma un anguloϕ0 con el radio vector. SeanT y T0 los perıodos de las orbitas de nave y partıcula, respectivamente.Determinar el cocienteT/T0 en terminos deε y deϕ0; hallar la relacionf (ε ,ϕ0) necesaria para que losperıodos coincidan, y explicarla mediante un adecuado diagrama de velocidades.
Febrero de 1993
La velocidad de la nave se obtiene facilmente planteando laecuacion de la cantidad demovimiento en la direccion radial, y obligando a que la atraccion sea la aceleracion centrıpetadel movimiento circular de radioR:
−µmR2 = m
(r − r θ2)= 0−m
v2c
R⇒ vc =
õR
La velocidad de la partıcula sera
v = vc j + ε vcu = εvccosϕ0 i +vc (1+ ε sinϕ0) j
y su energıa
ϕ0
x
y
E′
m= v2
cε2cosϕ2
0 + ε2sinϕ20 +2ε sinϕ0 +1
2− µ
R=
=µ2R
(1+ ε2+2ε sinϕ0
)− µ
R= − µ
2R
(1− ε2−2ε sinϕ0
)= − µ
2a
Los periodos seran:
T = 2π
√
R3
µ; T0 = 2π
√
a3
µ= 2π
√
R3
µ (1− ε2−2ε sinϕ0)3 ;
TT0
=(1− ε2−2ε sinϕ0
) 32
Si queremos que los periodos sean iguales,
1− ε2−2ε sinϕ0 = 1 ⇒ ε (ε +2sinϕ0) = 0
ε = 0ε = −2sinϕ0
La primera solucion equivale a no lanzar la partıcula. La segunda supone que la velocidad de lapartıcula tras el lanzamiento sea igual en modulo a la de lanave: ası tienen la misma energıa ypor tanto el mismo periodo.
ϕ0
vc ϕ0
vc
Habra dos soluciones: una lanzando hacia arriba y atras, yotra hacia abajo y atras. En lasfiguras puede apreciarse queεvc es la base del triangulo isosceles que forman las velocidades,cuyo angulo es 2ϕ0, y por tanto vale 2vcsin(2ϕ0/2).
40

Ejercicio 2.3.3: Dos satelites 1 y 2, siguen la misma orbita circular, de radio r0, alrededor de la Tierra,de forma que sus radios vectores estan separados un anguloα ; en un puntoP dado el satelite 1 enciendesus motores, lo que le comunica subitamente un incremento de velocidad∆v (tangente a la orbita).Determinar el valor de∆v, necesario para que los dos satelites se encuentren la proxima vez que pasenporP.
Septiembre de 1993
Habrıa que distinguir dos casos:
Si el 2 va delante, el 1 debe fre-nar, entrar en una orbita mas ba-ja y mas rapida, y adelantarlepor debajo.
Si el 2 va detras, el 1 debe acele-rar, pasar a una orbita mas alta ylenta, y dejar que el otro le ade-lante por debajo.
❶
❷
2π −α
α
❶
❷
2π +α
α
Supongamos que el 2 esta un anguloα por detras del 1. Mientras que 1 recorre 2π en sunueva orbita mas lenta, el 2 debe recorrer 2π +α por la orbita circular. Si esT1 el periodo de laorbita elıptica de 1, yT0 el de la circular de 2, la condicion de encuentro es
T1 = T0
(
1+α2π
)
Este mismo enfoque sirve para el otro caso, tomandoα negativo. Para el satelite en orbitacircular se cumple:
v20 =
µr0
Em
=µ
2r0− µ
r0= − µ
2r0T0 = 2π
√
r30
µ
Cuando el satelite 1 enciende los motores, su nueva velocidad esv1 = v0+∆v. Para simplificarlos calculos, podemos ponerlo comov0(1+ ε):
E1
m=
v20(1+ ε)2
2− µ
r0=
µ2r0
(1+2ε + ε2−2) = − µ2r0
(1−2ε − ε2) = − µ2a
T1 = 2π
√
a3
µ= 2π
√
r30
µ(1−2ε − ε2)3
Se impone la condicion de encuentro:
2π
√
r30
µ(1−2ε − ε2)3 = 2π
√
r30
µ
(
1+α2π
)
→
→ 1−2ε − ε2 =(
1+α2π
)− 32
; ε2+2ε −1+(
1+α2π
)− 32= 0
ε = −1±
√
2−(
1+α2π
)− 32
︸ ︷︷ ︸
<1
ε>0, ⊕−−−−→∆v=εv0
∆v =
õr0
−1+
√
2−(
1+α2π
)− 32
La solucion conε < 0 tambien es posible: corresponde a una orbita retrograda, el gasto decombustible es muy alto (hay que absorber completamente la velocidad y darle otra en sentidocontrario), y los satelites se encontrarıan de frente.
Tomandoα < 0, tenemos el primer caso, con 2 por delante. Saleε < 0, con lo que 1 se frenay entra en una orbita mas baja y rapida para adelantar a 2.
41

Aunque el enunciado no lo contempla (“la proxima vez”), si no hay urgencia existen solucio-nes mas economicas en∆v, pero mas lentas: consiste en dar varias vueltas antes del encuentro.La condicion de encuentro serıa entonces:
T1 ·2nπ = T0 (2nπ +α) → T1 = T0
(
1+α
2nπ
)
Cuanto mayor sean, menor sera el∆v necesario.
42
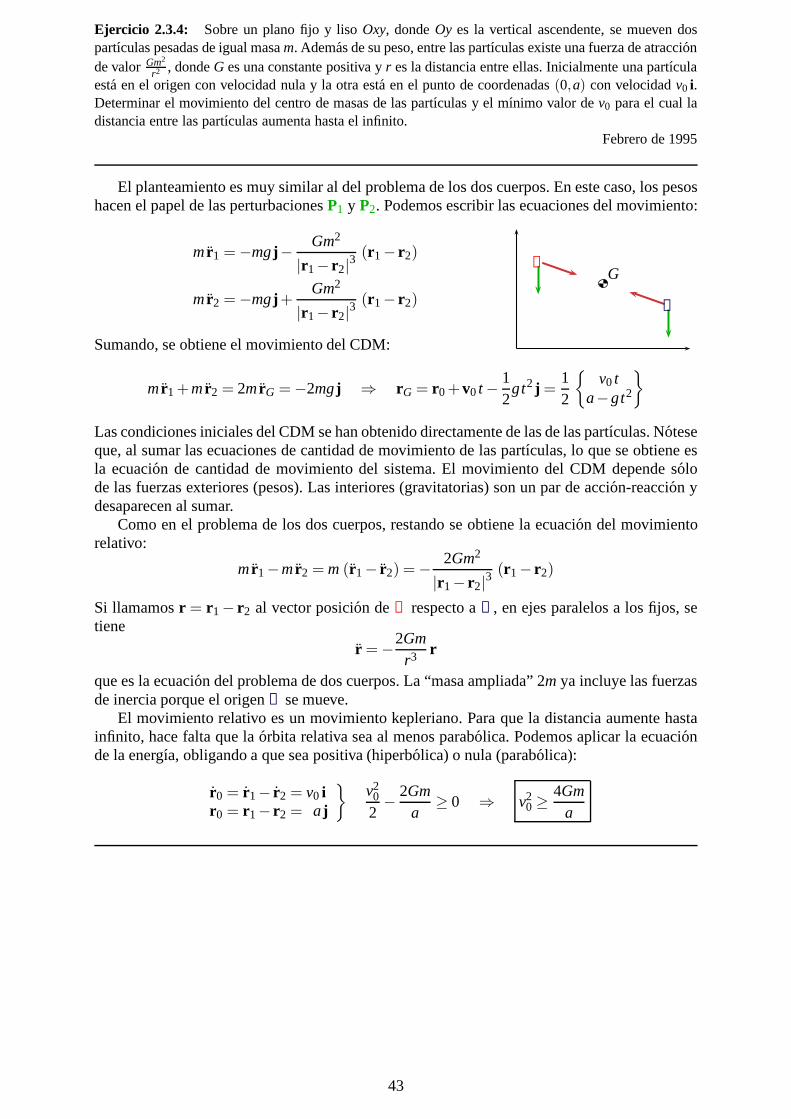
Ejercicio 2.3.4: Sobre un plano fijo y lisoOxy, dondeOy es la vertical ascendente, se mueven dospartıculas pesadas de igual masam. Ademas de su peso, entre las partıculas existe una fuerzade atraccionde valorGm2
r2 , dondeG es una constante positiva yr es la distancia entre ellas. Inicialmente una partıculaesta en el origen con velocidad nula y la otra esta en el punto de coordenadas(0,a) con velocidadv0 i.Determinar el movimiento del centro de masas de las partıculas y el mınimo valor dev0 para el cual ladistancia entre las partıculas aumenta hasta el infinito.
Febrero de 1995
El planteamiento es muy similar al del problema de los dos cuerpos. En este caso, los pesoshacen el papel de las perturbacionesP1 y P2. Podemos escribir las ecuaciones del movimiento:
mr1 = −mgj − Gm2
|r1− r2|3(r1− r2)
mr2 = −mgj +Gm2
|r1− r2|3(r1− r2)
Sumando, se obtiene el movimiento del CDM:
❷
❶G
mr1 +mr2 = 2mrG = −2mgj ⇒ rG = r0+v0 t − 12
gt2 j =12
v0 t
a−gt2
Las condiciones iniciales del CDM se han obtenido directamente de las de las partıculas. Noteseque, al sumar las ecuaciones de cantidad de movimiento de laspartıculas, lo que se obtiene esla ecuacion de cantidad de movimiento del sistema. El movimiento del CDM depende solode las fuerzas exteriores (pesos). Las interiores (gravitatorias) son un par de accion-reaccion ydesaparecen al sumar.
Como en el problema de los dos cuerpos, restando se obtiene laecuacion del movimientorelativo:
mr1−mr2 = m(r1− r2) = − 2Gm2
|r1− r2|3(r1− r2)
Si llamamosr = r1− r2 al vector posicion de❶ respecto a❷, en ejes paralelos a los fijos, setiene
r = −2Gmr3 r
que es la ecuacion del problema de dos cuerpos. La “masa ampliada” 2mya incluye las fuerzasde inercia porque el origen❷ se mueve.
El movimiento relativo es un movimiento kepleriano. Para que la distancia aumente hastainfinito, hace falta que la orbita relativa sea al menos parabolica. Podemos aplicar la ecuacionde la energıa, obligando a que sea positiva (hiperbolica)o nula (parabolica):
r0 = r1− r2 = v0 ir0 = r1− r2 = aj
v2
0
2− 2Gm
a≥ 0 ⇒ v2
0 ≥4Gm
a
43

Ejercicio 2.3.5: Considerese una Tierra perfectamente esferica que atraea una partıcula de masamcon una fuerzaF = −mµ
r3 r , siendor el vector posicion con origen en el centroO de la Tierra. Una naveespacial de masam se encuentra en orbita circular de radioa alrededor de la Tierra. En un instante dado(t = 0) se encienden los motores que proporcionan un empuje constante en la direccion radial de valorF1 = ε mµ
a2 ur . Mostrar que existe un valor crıtico del parametroε , por encima del cual la nave escapa delcampo gravitatorio terrestre. Determinar dicho valor crıtico.
Junio de 1999
F
vcAntes de encender los motores, se tiene una orbita circu-lar de radioa:
Ve f = −µmr
+mC2
2r2 vc =
õa
C =√
µa
Como ˙r = r = 0, E = min(Ve f) = Ve f(a)
V(r)
Vcent
Ve f
a
E
Al encender los motores, se aplica una fuerza radial de modulo constante, que es tambienpotencial:
F1 = εmµa2 ur → V1(r) = −ε
mµa2 r
F
vc La fuerza atractiva disminuye, la partıcula se aleja, y elpotencial eficaz baja al sumarle un termino negativo li-neal; aparece tambien un maximo:
Ve f = −µmr
− εmµa2 r +
mC2
2r2
Ve f
Las condiciones inicialesa y vc no varıan, ni tampocoC = avc. E sı varıa por el nuevotermino en el potencial. Como la velocidad inicial es normal al radio, ˙r = 0 y partimos de uncorte con el potencial, aunque no sera el mınimo.
Podra haber tres casos:
1. E < Vmax Tres cortes. La trayectoria esta acotada
2. E = Vmax Dos cortes. Movimiento asintotico; acotada.
3. E > Vmax Un corte. La partıcula se va a∞ 123
El corte en el mınimoE = Vmin no es posible con estas condiciones iniciales. Se parte de laorbita circular conF. Al reducirse la fuerza, esa velocidad ya no corresponde a laorbita circularcon radioa.
Para que pueda irse a infinito, la energıa inicial tiene que ser mayor que la del maximo, esdecir, tiene que haber solo una raız para el valor deE inicial. El valor crıtico corresponde puesal movimiento asintotico, con dos cortes.
La ecuacion que tenemos que resolver es:
r = 0 ⇒ E−Ve f(r) = E +µmr
+ εmµa2 r − mC2
2r2 = 0 ⇒ r i
donde
E = Ve f(a) = −mµa
− εmµa2 a+
mµa2a2 = −mµ
2a(1+2ε)
Ordenando y simplificando se llega a un polinomio de grado 3:
2ε r3−a(1+2ε) r2+2a2 r −a3 = 0
Ya conocemos una raız, porque en el instante inicialr ⊥ v y r = 0. Eso permite aplicar Ruffinicon r = a y reducir el orden:
44

2ε r3 −a(1+2ε) r2 +2a2 r −a3 r −a−2ε r3 +a2ε r2 2ε r2−ar +a2
– −ar2
ar2 −a2 r– a2 r +a3
– –
Queda una ecuacion de segundo grado. El caso crıtico corresponde a la raız doble:
2ε r2−ar +a2 = 0 → r =a±
√a2−8εa2
2ε
Raız doble: ∆ = a2−8εa2 = 0 ⇒ ε∗ =18
El maximo en el caso asintotico corresponde ar = 4a. El punto de lanzamiento es, como cabıaesperar, el radio mınimo.
Por tanto, cuandoε > 18 aparecen soluciones imaginarias, y solo tenemos un corte. Esta-
mos en el caso 3) y la partıcula se va a∞.
45

Problema 2.3.1: SeaM una partıcula material de masam, que se mueve en un planoP, atraıda por unpuntoA del planoP, con una fuerza de intensidad
mµ|AM|2
.
SeaOx1y1 una referencia galileana, rectangular, ligada al planoP; el centro atractivoA, es movil, ydescribe la rectay1 = L, con velocidad constante de valor−U i. En el instante considerado como inicial,el puntoA atraviesa el ejeOy1, y la partıcula material se lanza, desde el origenO, con una velocidad,respecto a la referenciaOx1y1, de valorv0 = v0 j1. Se pide:
a) Determinar la trayectoria seguida porM en una referenciaAxy, con origen enA y ejes paralelos alos de la referenciaOx1y1.
b) ¿Cual es la mınima velocidadv0, con que debe lanzarse la partıcula para que no quede atrapadapor el centro atractivoA?.
c) Determinar, para la trayectoria obtenida en el apartado a), las asıntotas, en el supuesto en que lavelocidadv0 sea superior al valor calculado en el apartado b). ¿Cual es la mınima distancia deMal centro atractivo?.
d) Determinar el valor de la velocidadv0 con la que es necesario lanzar la partıculaM, para que seescape con una asıntota paralela aAx.
e) Supongase que se cumplen las condiciones del apartado anterior. Un observador ligado aOx1y1, siespera un tiempo suficientemente largo, detecta un incremento de la energıa total de la partıcula.Calcular ese incremento y explicar su origen.
Febrero de 1991
a. Los ejesAx0y0 (S0) son inercia-les, pues su origen se mueve con ve-locidad constante(−U,0), y no giran.Por composicion de movimientos, de-terminamos la posicion y velocidadiniciales deM respecto a los ejesS0
r0 = (0,−L)
vM20 = vM
21−vM01 = (U,v0)
Ax0
y0
U
Mx1
y1
v0
Ax0
y0
M
vM20
Con estos valores iniciales, podemos calcular las constantes vectoriales de la orbita respectoaA:
h = r0∧vM0 = ULk0 → p =
h2
µ=
U2L2
µ
e= −rr− h∧v
µ=
010
− 1
µ
∣∣∣∣∣∣
i0 j0 k00 0 ULU v0 0
∣∣∣∣∣∣
=
010
− 1
µ
−v0ULU2L
0
=
v0ULµ
1− U2Lµ
0
y las escalares:
e2 = e·e=v2
0U2L2
µ2 +1− 2U2Lµ
+U4L2
µ2 = 1− 2U2Lµ
+U2L2
µ2
(U2+v2
0
)
Em
=v2
2− µ
r=
v20 +U2
2− µ
L
46

Es facil comprobar que se cumpleE = (e2− 1)mµ2
2h2 . Tambien sepuede ver que la excentricidad tiene una componentex siemprepositiva, mientras que lay sera positiva o negativa segun las condi-ciones iniciales. Con estos datos se puede escribir ya la trayectoria:
r =U2L2/µ
1+ecos(θ −α)
αe
Ax0
y0
MvM
20
Dondeα es el angulo del eje de la conica con el ejeAx0: α = cos−1 e·ie o mejor, sin am-
biguedad de signo,α = sin−1 e·je . Si U2L
µ > 1, seraα > 0, y si no,< 0.
b. El tipo de trayectoria deM viene dado por el signo deE. Si es negativo, la orbita es acotaday la partıcula queda atrapada porA. Para que no quede atrapada, debe ser:
Em
=v2
0+U2
2− µ
L≥ 0 ⇒ v2
0 ≥2µL
−U2
c. Suponiendo que se cumplee> 1, v20 > 2µ
L −U2, la orbita sera hiperbolica y habra asıntotasque pasan por el centro de la conica. Habra que calcular la distancia focalc = aeo el semiejeaque, para la hiperbola,
rp =p
1+e=
U2L2/µ1+e
= a(e−1) ⇒ a =p
e2−1=
U2L2/µe2−1
El anguloγ de la asıntota con el eje de la conica se puede calcular hallando primero el semiejemenor,b =
√ap, y luego la tangente tanγ = b
a. Tambien se puede sacar directamente de latrayectoria:
r =p
1+ecos(π − γ)→ ∞ ⇒ cosγ = +
1e
Dondeγ no es el angulo polar de la asıntota, sino su complemen-tario (referido al eje de la conica). Notese que esta ecuacion tienedos soluciones, simetricas respecto al eje. Ası, las ecuaciones delas asıntotas serıan
ras = ae+λ
cos(α ±cos−11/e)sin(α ±cos−11/e)
0
αe
γ
Ax0
y0
d. Para que la asıntota sea paralela aA0, los dos angulos han deser iguales,α = γ:
e· ie
=1e
→ e· i = 1 → v0ULµ
= 1 ⇒ v0 =µ
UL
Ademas, debe cumplirse queα > 0, es decir, 1− LU2
µ > 0; si no, laasıntota paralela serıa la de llegada.
αe
γ
Ax0
y0
d. Si se espera un tiempo suficientemente largo,M se aleja una distancia muy grande deAsiguiendo la asıntota. Aplicando la ecuacion de la energ´ıa al movimiento relativo, y teniendo encuenta que para este casoµ
L = v0U , se obtiene la velocidad asintotica 20:
Em
∣∣∣∣20
=v2
0 +U2
2− µ
L=
v2∞2
−µ∞
v2∞ = v2
0 +U2−2v0U = (U −v0)2
47

AdemasµL = v0U <U2, como se vio en el apartado anterior, de modo quev∞ =U −v0. Y como
se marcha hacia la izquierda,v∞20 = −(U −v0) j0. En ejes inerciales,
v∞21 = v∞
20+vA01 = (−2U +v0) j1
En estos ejes, las energıas deM inicial y final van a ser distintas:
Ei
m=
v20
2− µ
L=
v20
2−Uv0
Ef
m=
v2∞2
−0 =(−2U +v0)
2
2
El incremento de energıa es
∆Em
= 2U2+v2
0
2−2Uv0−
v20
2+Uv0 = 2U2−Uv0 = U(2U −v0)
Se debe a la atraccion gravitatoria deA, que acelera aM. A la vez,M frena aA, que pierde lamisma cantidad de energıa. En este modelo no se nota la perdida, porque la velocidad deA esconstante: una fuerza de ligadura debe encargarse de mantenerla constante, y proporcionar eltrabajo comunicado aM.
En casos reales, suele ocurrir queA es un planeta, y tiene una masa mucho mayor que la dela astronaveM. Ası la energıa recibida supone un aumento significativo de la velocidad deM,mientras que la perdida porA no influye apreciablemente en su velocidad. Con maniobras deeste tipo (flybyu honda gravitatoria) se pueden realizar misiones a gran distancia con muy pocaenergıa inicial; al pasar cerca de un planeta, con una trayectoria cuidadosamente estudiada, serecibe un impulso para llegar al siguiente planeta, y ası sucesivamente.
48
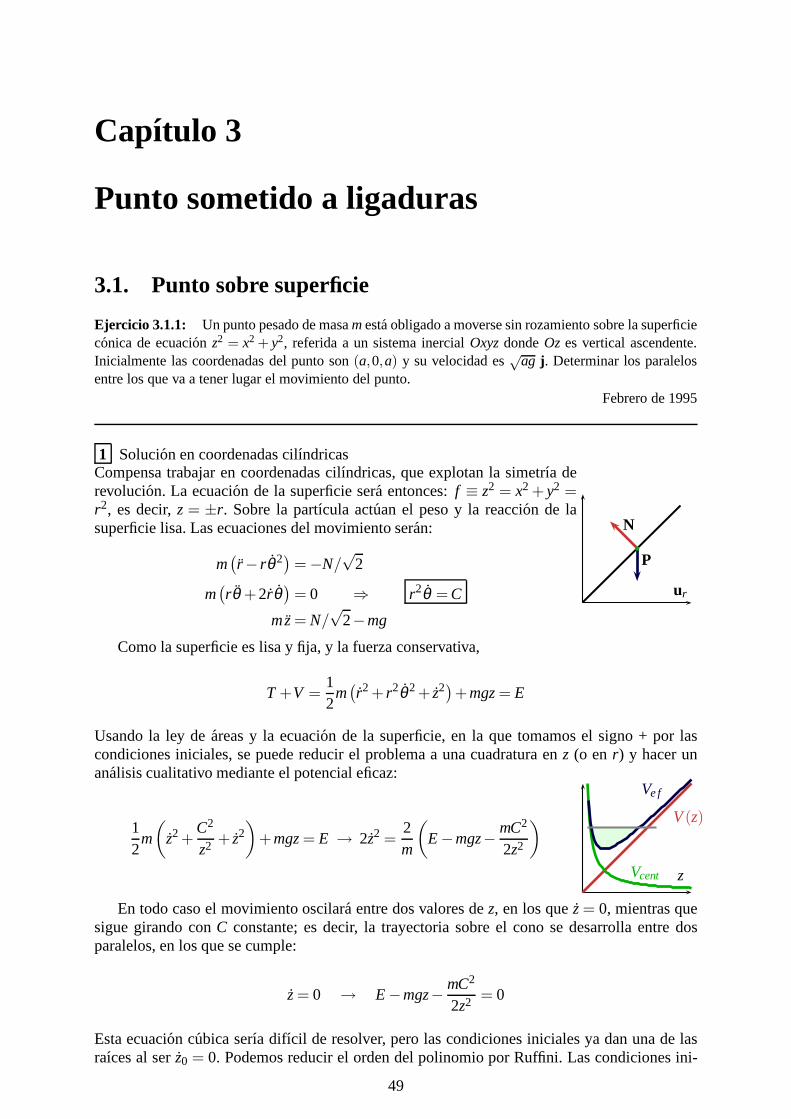
Capıtulo 3
Punto sometido a ligaduras
3.1. Punto sobre superficie
Ejercicio 3.1.1: Un punto pesado de masamesta obligado a moverse sin rozamiento sobre la superficieconica de ecuacionz2 = x2 + y2, referida a un sistema inercialOxyzdondeOz es vertical ascendente.Inicialmente las coordenadas del punto son(a,0,a) y su velocidad es
√ag j . Determinar los paralelos
entre los que va a tener lugar el movimiento del punto.Febrero de 1995
1 Solucion en coordenadas cilındricasCompensa trabajar en coordenadas cilındricas, que explotan la simetrıa derevolucion. La ecuacion de la superficie sera entonces:f ≡ z2 = x2 + y2 =r2, es decir,z = ±r. Sobre la partıcula actuan el peso y la reaccion de lasuperficie lisa. Las ecuaciones del movimiento seran:
m(r − r θ2)= −N/
√2
m(r θ +2r θ
)= 0 ⇒ r2θ = C
mz= N/√
2−mg
N
P
ur
Como la superficie es lisa y fija, y la fuerza conservativa,
T +V =12
m(r2 + r2θ2+ z2)+mgz= E
Usando la ley de areas y la ecuacion de la superficie, en la que tomamos el signo + por lascondiciones iniciales, se puede reducir el problema a una cuadratura enz (o enr) y hacer unanalisis cualitativo mediante el potencial eficaz:
12
m
(
z2 +C2
z2 + z2)
+mgz= E → 2z2 =2m
(
E−mgz− mC2
2z2
) V(z)
zVcent
Ve f
En todo caso el movimiento oscilara entre dos valores dez, en los que ˙z= 0, mientras quesigue girando conC constante; es decir, la trayectoria sobre el cono se desarrolla entre dosparalelos, en los que se cumple:
z= 0 → E−mgz− mC2
2z2 = 0
Esta ecuacion cubica serıa difıcil de resolver, pero las condiciones iniciales ya dan una de lasraıces al ser ˙z0 = 0. Podemos reducir el orden del polinomio por Ruffini. Las condiciones ini-
49

ciales permiten calcularE = 3mga/2 y C = a√
ag, con lo que la ecuacion queda:
2z3−3az2+a3 = 0z1=a−−−→ (z−a)
(z2−az−a2) →
z2 = a
z3 = −a2
Como a la parte negativa no se puede llegar (por el potencial centrıfugo), solo la raız doblez= ase alcanza. Resulta que se ha lanzado en un mınimo, por lo queel movimiento se desarrolla enun paraleloz= r = a. Podemos comprobar que es un mınimo:
V ′e f(z) = mg− mC2
z3 = mg− ma3gz3 V ′
e f(a) = 0
2 Solucion en coordenadas esfericasSi se trabaja en coordenadasesfericas, la ecuacion de la ligadura se simplifica aun mas:
θ = π/4. Sin embargo, la aceleracion en cilındricas es mucho mas complicada de escribir:
ρ −ρ θ 2−ρ cos2 θ ϕ2
ρ cosθ ϕ +2ρ ϕ cosθ −2ρθ ϕ sinθ
2ρ θ +ρ θ +ρ cosθ sinθ ϕ2
=
−mg/√
2
0
N−mg/√
2
ϕ
θ
N
P
u ρ
Al sustituir la ecuacion de la ligadura, las ecuaciones se simplifican notablemente. Ademas,la de la direccion radial queda libre de fuerzas de ligadura. La segunda nos da la ley de areas,
ρ2 ϕ = C
Notese que ahora se llamaθ a la latitud (constante), yϕ a la longitud, que es la que apareceen la ley de areas. Sustituyendo esta ecuacion en la deuρ , se tiene
ρ − C2
2ρ3 = − g√2
Multiplicando ambos terminos porρ , esta ecuacion se puede integrar para dar una expresion enρ y ρ de la que se obtiene una cuadratura.
A esta misma expresion se llegarıa por la ecuacion de la energıa, de la que se eliminaϕmediante la ley de areas:
m2
(
ρ2 +ρ2ϕ2
2
)
=mgρ√
2=
m2
(
ρ2+C2
2ρ2
)
Esta expresion es la misma que se obtuvo antes usando coordenadas cilındricas, como era deesperar, pues sobre el cono se cumplez= ρ/
√2. A partir de aquı, se procederıa exactamente
igual que por cilındricas: analisis cualitativo en la variableρ , obtencion de las raıces, etc.
50

Ejercicio 3.1.2: Una partıcula pesada de masam se mueve sin rozamiento en el paraboloideaz= r2,(a≡Cte. positiva), siendo el ejeOzla vertical ascendente. Si inicialmenter = a y se lanza con velocidadv0 tangente al paralelo local, dejar el calculo del movimiento reducido a cuadraturas. Determinar losvalores maximo y mınimo que alcanzar a lo largo del movimiento.
Abril de 1996
Por ser una superficie de revolucion, compensa trabajar en coordenadascilındricas. Sobre la partıcula actuan el peso y la reaccion de la superficielisa. Podemos determinar directamente dos integrales primeras:
Por la simetrıa de revolucion, la reaccion normal y el peso estan conte-nidos en el plano meridiano: no dan momento segunOzy se conservael momento cinetico en esa direccion:r2θ = C.
La superficie es lisa y fija, la fuerza potencial:T +V = E
N
Pur
La ecuacion de la superficie permite despejar una de las variables,r oz: az= r2 → az= 2r r.La ley de areas del movimiento proyectado permite eliminarla θ . Las condiciones inicialespermiten calcularC = av0 y E = mga+mv2
0/2. La ecuacion de la energıa queda:
12
m
(
r2+a2v2
0
r2 +4r2r2
a2
)
+mgr2
a= mga+
mv20
2→ r2 =
v20 +2ga− 2g
a r2− a2v20
r2
1+ 4r2
a2
De donde se obtienen las cuadraturas
dt =±dr
√
1+ 4r2
a2√
v20 +2ga− 2g
a r2− a2v20
r2
dθ =±dr av0
√
1+ 4r2
a2
r2√
v20 +2ga− 2g
a r2− a2v20
r2
El analisis cualitativo muestra que el movimiento va a desarrollarse siempreentre dos paralelos, en que ˙r = 0. Como el denominador es> 0, tiene queanularse el numerador
v20+2ga− 2g
ar2− a2v2
0
r2 = 0 → 2ga
r4−(v2
0+2ga)
r2+a2v20 = 0
r2 =v2
0 +2ga±√(v2
0 +2ga)2−8gav20
4g/a=
v20 +2ga±
(v2
0−2ga)
4g/a
V(r)
rVcent
Ve f
Las soluciones son pues
r1 = a r2 = v0
√a2g
La primera ya sabıamos que tenıa que salir, pues inicialmente se lanza con ˙r = 0; la segundaestara por encima o por debajo segun el valor dev0. Parav2
0 = 2ga se tiene una raız doble, y latrayectoria es un paralelo.
51

Ejercicio 3.1.3: Una partıcula pesada de masam, se mueve por una superficie lisa esferica, estandoatraıda por el punto mas alto de la misma y el modulo de la atraccion es 2mg. En un instante dado elpunto se encuentra en el ecuador con velocidad de modulov0 tangente al mismo. Calcular el radio decurvatura de la trayectoria en dicho punto.
Septiembre de 1994
Para una partıcula libre, el radio de curvatura de la trayectoria se obtiene trivialmente de laaceleracion normal. Expresando la aceleracion en intrınsecas:
~γ =~γt +~γn = (~γ · t) t +(~γ ·n)n = vt +v2
ρn =
ΣFm
Si se conocen los vectores aceleracion y velocidad en ese momento, se tiene todo lo necesariopara despejarρ .
Si la partıcula se mueve sobre una superficie, no se conoce directamente la aceleracionporque aparece la fuerza de ligadura normal. Entonces hay que despejarla usando la ecuacionde la superficie. No se conoce la normal principal de la trayectoria n, pues esta sera una de lasinfinitas curvas que pasan por ese punto de la superficie: solo se conoce la normal a la superficieuN. Pero no importa, porque conociendo~γ y t, que es la direccion de la velocidad,~γn se obtienetrivialmente.
Se pueden seguir varios caminos:
Cartesianas
−2mg 1√2−N = mx
0 = my2mg 1√
2−mg = mz
∣∣∣∣∣
x2 +y2 +z2 = R2
r0 = (R,0,0)v0 = (0,v0,0)
Por laN no podemos obtener directamente ¨x. Derivando la ecuacion dela ligadura obtenemos una relacion para las aceleraciones:
y
z
x v0
N
x2 +y2 +z2 = R2 xx+yy+zz= 0 xx+ x2 +yy+ y2 +zz+ z2 = 0
R2 +0+0 = R2 0+0+0 = 0 Rx0 +0+0+v20+0+0 = 0 → x0 = −v2
0R
Ası obtenemos el vector aceleracion, que al ser normal at es toda aceleracion normal:
~γ = (x, y, z) =
[
−v20
R,0,g
(√2−1
)]
=⊥
γt (0,1,0)+~γn ≡~γn =v2
0
ρn
Con lo que se obtiene directamente el radio de curvatura inicial,
ρ =v2
0
|~γ| =v2
0R√
v40+R2g2
(√2−1
)2
Esfericas
La ligadura se puede incorporar directamente en las ecuaciones tomando coordenadas esfericas:r = R= Cte., que se sustituye en la velocidad y aceleracion.
v =
rr cosϕθ
rϕ
~γ =
r − r cos2ϕθ2− rϕ2
r θ cosϕ +2r θ cosϕ −2r θ ϕ sinϕrϕ + r θ2sinϕ cosϕ +2rϕ
52

En nuestro caso,r = R y r = r = 0 por la ligadura;θ = ϕ = 0 en el instante inicial, con lo queel triedro a derechas (ur ,uθ ,uϕ ) coincide con el cartesiano. Sustituyendo estos valores y lascondiciones iniciales, se tiene
0Rθ0Rϕ0
=
0v00
→ m~γ = m
0−Rθ20 −0
Rθ0 +0−0Rϕ0 +0+0
=
−2mg 1√2−N
02mg 1√
2−mg
Se obtiene directamente el vector aceleracion
~γ =
[
−v20
R,0,g
(√2−1
)]
y a partir de aquı operarıamos como en el caso anterior paraobtenerρ .
Intrınsecas
El problema que se encuentra para calcular directamenteρ es que no se conoce la normalprincipal de la trayectoria,n. Pero se conoce la tangente,t, y la normal a la superficieuN.Podemos entonces aplicar el teorema de Meusnier, y descomponer el vector curvatura en cur-vatura normal y curvatura geodesica. Tomamos sobre la superficie el triedro(t,ug,uN), dondeug completa un triedro a derechas (triedro de Darboux-Ribancour):
Frenet Geodesico
Ft = mvFn +Ncosθ = v2 κFb +Nsinθ = 0
Ft = mvFg = mv2 κg
FN +N = mv2 κN
θ
v0
~κ~κN
~κg
Para la esfera,KN = 1/R para todas las direcciones, por lo que no hacefalta calcular laN. El triedro de Darboux en este caso es(j ,−k,−i).Solo hay que proyectar segunug:
−2mg1√2
+mg= mv2kg ⇒ kg = −g(√
2−1)
v20
y
z
x v0
N
Con esto podemos ya calcular la curvatura:
k2 =1
ρ2 = k2N +k2
g =1R2 +
g2(√
2−1)2
v40
⇒ ρ =Rv2
0√
v40 +R2g2
(√2−1
)2
53

Problema 3.1.1: Un punto materialM, de masam, esta obligado a moverse por el interior de un cilin-dro recto cuya seccion es una circunferencia de radioR. Se representa porf el coeficiente de rozamientoentre el punto y el cilindro.
En el instante inicial el puntoM se encuentra en una determinada posicion del cilindro y se le lanzacon una velocidadv0 que forma un anguloα0 con la correspondiente generatriz.
Se pide:
1. Determinar en el instante inicial las componentes tangencial y normal de la aceleracion, ası comoel correspondiente radio de curvatura de la trayectoria.
2. Plantear las ecuaciones de movimiento del punto utilizando como parametros las coordenadascilındricas deM.
3. Determinar en un instante arbitrario la reaccion normalN del cilindro en funcion de la velocidadv deM y el anguloα que dicha velocidad forma con la generatriz.
4. Estudiar el movimiento deM determinando su trayectoria y ley horaria.
5. Calcular en funcion del tiempo la reaccion normalN del cilindro.
NOTA.- Se supondra nulo el peso del punto materialM.Febrero de 1969
1. Trabajando en coordenadas cilındricas, como pide la geometrıa delproblema, se tiene:
v =
0Rθz
~γ =
−Rθ2
Rθz
N = −Nur
R = − f |N| vv y
z
N v0
R
x θComo la velocidad esta contenida en el plano tangente, es perpendicular a la reaccion nor-
mal; la resistencia, en cambio, tiene la direccion de la velocidad. Las dos componentes de laaceleracion son pues inmediatas:
m~γ = m~γt +m~γn = −‖v
︷ ︸︸ ︷
f |N| vv +
⊥v︷︸︸︷
N
Otra propiedad que se deduce directamente es que, comom~γn =−Nur , en todo momento esn≡−ur ; la normal principal de la trayectoria coincide con la normal a la superficie. La trayectoriaes una geodesica del cilindro,una helice.
Para calcular los valores de las aceleraciones, planteamos:
v0 =(0,Rθ0, z0
)= (0,v0 sinα0,v0 cosα0) → θ0 =
v0 sinα0
R
m~γ0 = m
−Rθ20
Rθ0z0
=
−N− f |N|v0 sinα0
v0
− f |N|v0 cosα0v0
→
γn =v2
0 sin2α0R =
v20
ρ → ρ = Rsin2α0
γt = fv2
0 sin2α0R
El valor deρ se podrıa haber calculado directamente sabiendo que la trayectoria es una helicede pendienteπ/2−α0.
2. Planteamos las ecuaciones como en el caso anterior, pero en un momentogenerico:
m~γ = m
−Rθ2
Rθz
=
−N− f |N| sinα− f |N| cosα
donde cotα =
z
Rθ
v
α
R
3. La N se puede obtener por diversos caminos:
54

Lo mas sencillo es proyectar en intrınsecas, sabiendo quen = −ur y que la trayectoria esuna helice:
N = mv2
ρ= m
v2sin2αR
Se puede obtener directamente de las ecuaciones:
N = mRθ2 ; v = (0,Rθ , z) = v(0,sinα,cosα) ; → N = mv2sin2 α
R
4. Aunque ya lo sabemos por consideraciones geometricas, de las ecuaciones del movimientotambien se deduce que la trayectoria es una helice, yα =Cte. Dividiendo las ecuaciones deθ yz:
Rθz
= tanα =Rθz
;dθθ
=dzz
; lnK + ln θ = ln z;
z= Kθ v0,θ0−−−→ z= cotα0Rθ → z−z0 = cotα0R(θ −θ0)
Para la ley horaria, podemos proyectar segun la tangente:
mv = − f |N| = − f mv2sin2 α0
R;
dvv2 = − f sin2 α0
Rdt − 1
v+
1v0
= − f sin2α0
Rt →
→ v =dsdt
=v0R
R+v0 f sin2 α0 t⇒ s=
R
f sin2 α0ln(R+v0 f sin2α0 t
)+C
Para obtener las ecuaciones horarias, de la geometrıa de lahelice se obtiene:
Rθ = ssinα0+C1 z= scosα0+C2
4. ConociendoN(v) y v(t), no hay mas que sustituir:
N =mv2
0Rsin2α0(R+v0 f sin2 α0 t
)2
55

Problema 3.1.2: Un punto material de masamsin peso, se mueve sin rozamiento sobre un cono de ejeOzy verticeO fijos, y cuyo semiangulo en el verticeα es tal que
tg α =1At
siendoA una constante positiva conocida yt el tiempo.
En el instante inicial(t = 0) se situa el punto a una distancial del verticeO y esta dotado de unavelocidad, relativa al cono,λ perpendicular a la generatriz correspondiente.
Sobre el punto actua una fuerza de valor:
F = −ml2λ 2
Ar3tk
siendor la distancia entre el punto y el ejeOzy k el versor del ejeOz. Se pide:
1. Ecuaciones del movimiento absoluto del punto en coordenadas cilındricas.
2. Trayectoria absoluta del punto en coordenadas cilındricas.
3. Reaccion que el cono ejerce sobre el punto en funcion deltiempo.
4. Trabajo realizado porF en el movimiento absoluto del punto en el intervalot = 1 at = 2.
5. Trabajo realizado por la reaccion en el movimiento absoluto del punto en el intervalot = 1 at = 2.
Abril de 1972
1. La ecuacion de la superficie y sus derivadas son:
rz
= tanα =1At
∣∣∣∣∣
z= At rz= Ar +At rz= 2Ar +At r
Tomando laN positiva hacia el exterior del cono, las ecuaciones quedan:N
α α
ur
m(r − r θ2
)= Ncosα
m(r θ +2r θ
)= 0
mz = −Nsinα − ml2λ 2
Ar3t
∣∣∣∣∣∣∣∣∣
→ Ncosα = m(
r − l2λ 2
r3
)
↑→ r2θ = C = lλ→ −Nsinα = mz+ ml2λ 2
Ar3t
− tanα =z+ l2λ 2
Atr3
r − l2λ 2
r3
Las condiciones iniciales necesarias para integrar este sistema se dan relativas al cono movil:
r0 = (l ,0,0) = (r0,0,z0) v20∣∣0= (0,λ ,0) t = 0 ⇒ α =
π2
Para obtener la velocidad de arrastre, necesitamos parametros que identifiquen un punto deter-minado de la superficie. La deformacion consiste en que las generatrices van girando un anguloα hacia el vertice, sin variar laθ de cada una, ni la distancia de sus puntos al origenρ . Conestos parametros, la velocidad de un punto del cono serıa,en cilındricas
vM01
∣∣0 = ρα(−cosα,0,sinα)
∣∣0 = ρα
∣∣0(0,0,1) = (r,0, z)0 → r0 = 0
No es necesario calcularα : de la ecuacion de la superficie se obtiene ˙z
z= Ar +At r → z0 = Al +0
Y con esto ya podemos escribir las condiciones iniciales respecto a los ejes fijos:
r0 = l ; θ0 arbitrario ;z0 = 0; r0 = 0; θ0 = λ/l ; z0 = Al
2. Como el tiempo aparece explıcitamente, no va a ser facil eliminarlo. Buscaremos las ecua-ciones horarias que, al fin y al cabo, son tambien las parametricas de la trayectoria cont como
56

parametro. EliminandoN entre las ecuaciones de ¨r y z, y usando la ecuacion de la superficiepara eliminar ¨z, se llega a
−r +
l2λ 2
r3 = At
(
z+l2λ 2
Atr3
)
= At
(
2Ar +Atr +
l2λ 2
Atr3
)
→(A2t2+1
)r +2A2t r = 0
La ecuacion que resulta es una diferencial exacta:
(A2t2+1
)r +2A2t r =
ddt
[(A2t2+1
)r]= 0 →
(A2t2+1
)r = Cte
r0=0−−−→ r = 0, r = l
De la ligadura se obtienez= Al t , y de la ley de areasθ = λ/l → θ =λl
t +θ0 .
La trayectoria es una helice circular.Si uno no se da cuenta de que es una diferencial exacta, se puede integrar laecuacion diferencial, que es de variables separadas:
rr
= − 2A2tA2t2+1
; ln r = lnK− ln(1+A2t2) ;
r =K
1+A2t2r0=0−−−→ K = 0 → r = 0
Con lo que se obtiene el mismo resultado que antes.x y
z
b
3. De las ecuaciones del movimiento
Ncosα = −mrθ2 ; N = −mrθ 2
cosαcosα = 1√
1+tan2α= At√
1+A2t2
N = −mλ 2
lAt
√
1+A2t2
4. Trabajo deF entret = 1 y t = 2,
δWF = F ·dr = F dz= −ml2λ 2
Al3tAl dt = −mλ 2dt
t
WF12 =
∫ 2
1δW = −mλ
∫ 2
1
dtt
= −mλ ln t∣∣21 = WF
12 = −mλ ln2
5. El trabajo deN entret = 1 y t = 2 se puede calcular por varios caminos:
Ecuacion de la energıa: conocido ya el trabajo deF, podemos aplicar la ecuacion de laenergıa, sabiendo que el modulo de la velocidad es constante:
WF12+WN
12 = T2−T1 = 0 ⇒ WN12 = mλ ln2
Integracion directa: ConocidaN(t), se puede calcular directamente el trabajo:
δWN = N ·dr = N (cosα dr−sinα dz)sinα= 1√
1+A2t2−−−−−−−−−→dz=Al dt
→ −mλ 2
lAt
√
1+A2t2 −1√1+A2t2
Al dt = +mλ 2dtt
WN12 =
∫ 2
1δW = mλ
∫ 2
1
dtt
= mλ lnt∣∣21 = WN
12 = mλ ln2
57

Problema 3.1.3: Un punto materialM de masam, no pesado, se mueve sin rozamiento, con ligadurabilateral, sobre un helicoide de ecuaciones
x = r cosθ , y = r sinθ , z= kθ
referidas a un sistema de ejesOXYZfijos. El punto es atraıdo por el ejeOZ con una fuerza de valor:F = mk4ω2
r3 , siendok y ω constantes conocidas.En el instante inicial se lanza el punto con las siguientes condiciones iniciales:
r0 = k,
(drdt
)
0=
kω√2,
(dθdt
)
0=
ω2
Se pide:
1. Determinar completamente el movimiento del punto, es decir, determinarr(t), θ(t).
2. Determinar la reaccion de la superficie sobre el punto, enfuncion del tiempo.
Septiembre de 1981
1. Las ecuaciones del movimiento sobre la superficie seran
F+N = mx ; N = Nn ; n =xr ∧xθ|xr ∧xθ |
Las derivadas parciales de la ecuacion parametrica de la superficiex(r,θ) forman una base del plano tangente, y permiten calcularel vector normal a la superficie. Para resolverlas hay que tener encuenta: x y
z
bFxr
xθN
Podemos proyectar sobre el plano tangente, y obtener dos ecuaciones enr,θ en las queno aparece la reaccion normal
Se conserva la energıa, pues la fuerza es potencial, y la superficie fija y lisa.
No se conserva el momento cinetico respecto al ejeOzpor laN.
Los parametrosr y θ de la superficie son tambien coordenadas cilındricas del punto, loque facilita escribir la aceleracion.
a) Proyeccion sobre el plano tangente
Calculamos primero las derivadas parciales:
xr = (cosθ ,sinθ ,0) = ur xθ = (−r sinθ , r cosθ ,k) = r uθ +kuz
Si hiciera falta, se podrıa calcularn mediante el producto vectorial. Observese quexr es unitarioy tiene la direccion de la fuerza de atraccionF, y de la radial de las coordenadas cilındricas.
(F+⊥N = mx) ·xr → −mk4ω2
r3 = m(r − r θ2)
La otra direccion es normal a la fuerza y a la reaccion:
(⊥F+
⊥N = mx
)·xθ →
(r θ +2r θ
)r + z k= 0
z=kθ−−−→(r θ +2r θ
)r + θ k2 = 0
(r θ +2r θ
)r + θ k2 =
ddt
(r2θ +k2θ
)= 0 ⇒
(r2+k2) θ = Cte.= (k2+k2)
ω2
= k2ω
58

Esta integral primera permite eliminarθ en la primera ecuacion, que se podrıa integrar dosveces para obtenerr(t). Como la primera integracion va a dar precisamente la integral de laenergıa, tambien podemos plantear esta directamente, y eliminar θ del mismo modo.
− mk4ω2
r3 = m
[
r − rk4ω2
(r2+k2)2
]
; r = k4ω2
[
r
(r2+k2)2 −
1r3
]
r r = k4ω2
[
r
(r2+k2)2 −
1r3
]
r → r2
2= k4ω2
[ −12(r2+k2)
− 12r2
]
+C
t = 0,k2ω2
2= k4ω2
[−14k2 +
12k2
]
+C → r2 =k6ω2
(r2+k2) r2
La expresion de ˙r lleva a una cuadratura, que se integra completamente, e incluso puede despe-jarser. En la raız se toma el signo + porque ˙r0 es positivo:
+r√
r2 +k2dr = k3ω dt → 13
(r2+k2)3/2
+C = k3ω tr=k−−→t=0
C = −k323/2
3
De aquı se puede despejarr:
r2 = k2(
3ωt +23/2)2/3
−k2
Con este valor vamos a la otra integral primera, que permite obtenerθ(t):
dθ =k2ω
r2+k2 dt =k2ω
r2 +k2
r√
r2 +k2
k3ωdr ; kdθ =
r√r2+k2
dr
kθ =√
r2+k2−k√
2 ⇒ kθ = k(
3ωt +23/2)1/3
−k√
2
2. Para obtenerN, proyectamos sobre la normal. La fuerza no interviene, porque tiene ladireccion dexr ; solo la aceleracion va a producirN.
Primero calculamos el vector normal:
xr ∧xθ =
∣∣∣∣∣∣
ur uθ uz1 0 00 r k
∣∣∣∣∣∣
=
0kr
n =
(0,k, r)√k2 + r2
Y se proyecta la ecuacion del movimiento en esa direccion
(⊥F+N = mx
)·n → N =
(r θ +2r θ
)k+ z r√
k2 + r2= k
(2r θ +2r θ
)
√k2 + r2
No hace falta derivar para hallarθ , pues antes se obtuvo
θ(r2+k2)+2r r θ = 0 ⇒ N = k
k2− r2
(r2 +k2)3/2
2r θ
θ y r se han obtenido antes como funciones der, y r a su vez como funcion det, con lo quesustituyendo se tieneN(t).
59

Problema 3.1.4: SeaO1x1y1z1 un sistema de referencia galileano, triortogonal y orientado a derechas,en el queO1z1 es la vertical ascendente; considerese la esferaE de centroO1 y radio a y seaC1 lacircunferencia horizontal deE, situada en el plano de ecuacionz1 = a/2.
Sobre un planoπ, en el que se considera un sistema de referencia ortogonalOxy, se traza la circun-ferenciaC, de centroO y radioa
√3.
El planoπ se mueve permaneciendo en contacto con la esferaE, de forma que la circunferenciaCde π, rueda sin deslizar sobre la circunferenciaC1 de E; el movimiento se realiza de forma tal, que elpunto geometrico de contacto entre ambas circunferencias, describe la circunferenciaC1 con velocidadconstante de valor(aω
√3). (En la figura se esquematizan los elementos geometricos que intervienen, en
un instante generico).
Dos puntos materialesP y Q, de igual masam, estan unidos por un hilo flexible inextensible, delongitud l y sin masa, y se mueven sometidos a las siguientes condiciones:
El punto P, se mueve con ligadura bilateral y sin rozamiento, sobre el plano π, sometido a laaccion de las siguientes fuerzas directamente aplicadas:i) el peso,mg, ii) una repulsion del puntoO1 proporcional a la masa y la distancia, siendog/(2a) la constante de proporcionalidad, yiii) unaatraccion del diametroOM deC, proporcional a la masa y la distancia, siendo(3ω2) la constantede proporcionalidad.
El hilo que une ambos puntos, pasa por un orificio del planoπ practicado en el puntoO; de suotro extremo pende el puntoQ, que se mueve en la verticalOO1, y sobre el actuan, como fuerzasdirectamente aplicadas, unicamente el peso.
Se pide:
a) Determinar las fuerzas de inercia que han de tenerse en cuenta al analizar el movimiento relativodel puntoP respecto del planoπ. Determinar la componente paralela al plano y analizar si secompensa, o no, con alguna de las fuerzas directamente aplicadas que actuan sobre el punto.
b) Comprobar que el movimiento del puntoP, respecto del planoπ, es central; plantear las ecua-ciones que gobiernan dicho movimiento; suponga que el hilo se mantiene tenso durante todo elmovimiento (“a posteriori”, una vez determinado el movimiento, puede comprobarse la veracidadde esta hipotesis).
c) Reducir a cuadraturas las ecuaciones planteadas en b). Determinar los movimientos estacionariosdel puntoP y analizar cuales son estables y cuales no.
d) Determinar, en un movimiento estacionario generico, lareaccion normal del planoπ sobre elpuntoP.
Junio de 1988
a Para resolver el problema se usaran los siguientes sistemas de referencia:
S1: Ejes fijosO1x1y1z1
S0: EjesOxyzligados al planoπ
60

S2: Solido al que pertenece la partıculaP.
S3: Sistema auxiliarMuvwde la figura, que acompana al punto de contacto.
Para calcular las fuerzas de inercia, necesitamos la aceleracion deO, la ve-locidad angularωωω01, y la aceleracion angular.
De la geometrıa del problema se deduce que el puntoO esta fijo sobreel ejeO1z1: el plano es siempre tangente a la esfera; las dos circun-ferencias son tangentes; a la altura de la circunferenciaC1, el planotangente a la esfera forma 30o con la vertical; los radios de las circun-ferencias forman un triangulo rectangulo con el ejeO1z1: por tanto,O
esta siempre fijo en(0,0,2a). Por tanto, γγγO01 = 0 .
Del movimiento del plano tenemos ya un punto fijo,O. Como la circunfe-renciaC rueda sin deslizar sobre laC1, el punto de contactoM consideradocomo parte deS0 tiene velocidad nula (es el punto deS0 que en cada mo-mento coincide conM deS3).
a √3
a√
3/2
O
M
30o
Por tanto, el eje instantaneo de rotacion esOM. Es obvio que la axoide movil es el propioplanoπ y la fija un cono de verticeO que se apoya sobreC1. Ademas,ωωω01 solo tiene compo-nente de rodadura.
bb
b
b
bO
x
y
M
u
v
w
P
Q
Aunque conozcamos el EIR y por lo tanto la di-reccion deωωω01, para calcularla va a ser mas facilusar la composicion de movimientos0/1=0/3+3/1.Notese que el unico dato que tenemos para calcu-lar su modulo es la velocidad deM, que es un puntogeometrico independiente al que hemos asociado elsistemaS3.
El movimiento 3/1 es un giro alrededor deO1z1, con O ≡ O como punto fijo: el planoMvw esta fijo al plano meridiano deM. Co-mo este recorreC1 con velocidadaω
√3u, se
tiene:
ω31k1∧OM = ω31a
√3
2u =
= vM31 = aω
√3u → ω31 = 2ω
El movimiento 0/3 es un giro alrededor deOz‖ Mw. La velocidad angular se puede cal-cular de varios modos:
1. ComoC rueda sin deslizar sobreC1, vM01 = 0 y por tanto
vM01 = vM
03 +vM31 = ωωω03∧OM +aω
√3u =
(
ω03a√
3 +aω√
3)
u → ωωω03 = −ω w
2. Una circunferencia rueda sin deslizar sobre la otra; el punto de contactoM, consideradocomo independiente, recorre las dos circunferencias con lamisma velocidad:
vM30 = vM
31 = ω30w∧OM = aω√
3u → ωωω30 = ω w
Con esto podemos hallar la velocidad angular de arrastre:
ωωω01 = ωωω03 +ωωω31 = −ω w+2ω k1 = −ω w+2ω
(√3
2v+
12
w
)
= ωωω01 = ω√
3v
61

Y la aceleracion angular:
ωωω01∣∣1 =ωωω01
∣∣3 +ωωω31∧ωωω01 = 2ω ·ω
√3
∣∣∣∣∣∣
u v w0
√3/2 1/2
0 1 0
∣∣∣∣∣∣
= ωωω01 = −ω2√
3u
Con esto podemos ya calcular las fuerzas de inercia. Solo quedapasar a ejesOxy, y antes hay que situar el sistemaS3 enS0. Comoωωω30 = ω k, la rectaOM ha girado un anguloω t respecto a unareferencia arbitraria, que podemos tomar comoOx. Ası,
ωωω01 = ω√
3v = −ω√
3 (cosωt i +sinωt j)
ωωω01 = −ω2√
3u = −ω2√
3 (−sinωt i +cosωt j)
OP = (x,y,0) vP20 = (x, y,0)
M
v
u P
P′
ωt
O x
y
La fuerza de inercia de Coriolis va a ser normal al plano
FIC = −2mωωω01 ∧ vP20 = +2mω
√3
∣∣∣∣∣∣
i j kcosωt sinωt 0
x y 0
∣∣∣∣∣∣
= 2mω√
3(ycosωt − xsinωt) k
En la de arrastre va a haber terminos paralelos al plano (centrıfuga) y normales (azimutal)
FIA = −mωωω01∧ (ωωω01∧OP)−mωωω01∧OP
Como la velocidad angular tiene la direccion deOM, ωωω01 = ω√
3v, la fuerza centrıfuga tienela direccion de la normal a este eje,P′P:
−mωωω01∧ (ωωω01∧OP) = 3mω2P′P
Obviamente, esta repulsion se compensa con la atraccion del ejeOM, que vale
Fa = m3ω2PP′
El otro termino de la fuerza de arrastre es
−mωωω01∧OP = +mω2√
3
∣∣∣∣∣∣
i j k−sinωt cosωt 0
x y z
∣∣∣∣∣∣
= −mω2√
3 (ysinω t +xcosω t) k
b Las fuerzas que actuan sobre la partıculaP son:
FIA =3mω2P′P−mω2
√3 (ysinω t +xcosω t) k
FIC = 2mω√
3(ycosωt − xsinωt) k
Fa =m3ω2PP′
Fr = mg2a
O1P =mg2a
(O1O+OP) =mg2a
(2ak1+xi +yj)
P =−mgk1
N = Nk ; T = −TOP|OP|
Hay dos fuerzas de ligadura: la reaccion del planoN y la tension del hiloT. Se observa que partede la repulsion se anula con el peso, ademas de la centrıfuga con la atraccion deOM. De estemodo, las unicas fuerzas que quedan en el plano son parte de la repulsion, de direccionOP, y latension del hilo. Las dos son centrales. El movimiento relativo va a ser central. Convendra tomarcoordenadas polares enS0.
62

Con estas simplificaciones podemos plantear las ecuacionesdel movimientode las dos partıculas:
Pmgr2a −T = m
(r − r θ2
)
0 = m(r θ +2r θ
)
Lig. l = r +(2a−z) → r = z
Q T −mg= mz
P
Fr
T
rθ
O x
y
Q
P
T
c La segunda ecuacion deP es la ley de areas:r2θ = C . Con la ecuacion de la ligadura(longitud del hilo) se elimina ¨zde la ecuacion deQ; se despejaT y se sustituye en la radial deP
z= r → T = mg+mr → mgr2a
−m(g+ r) = m(r − r θ2)
θ =Cr2 → 2r =
gr2a
−g+C2
r3
Esta ecuacion se puede integrar una vez, multiplicando ambos terminos por ˙r:
2r r =
(gr2a
−g+C2
r3
)
r → r2 = A+gr2
4a−gr− C2
2r2 =g4a
(
h+ r2−4ar− αr2
)
Dondeα = 2C2ag . De aquı se obtiene una cuadratura parar y, con la ley de areas, otra paraθ :
√g4a
∫
dt =∫ ±dr√
h+ r2−4ar− αr2
√g4a
∫
dθ =∫ ±Cdr
r2√
h+ r2−4ar− αr2
Para estudiar los movimientos estacionarios, podemos obligar a que ¨r = 0 o hacer unanalisis cualitativo de ˙r2. Los dos caminos llevan a la misma ecuacion. Hacer ˙r = 0 no sirve denada, pues se cumple tambien en los puntos de parada y retroceso; ademas, si ¨r = 0, para que elmovimiento sea estacionario hay que lanzar ortogonalmente, es decir, con ˙r = 0.
La expresion de ˙r2 se puede poner como
r2 =g4a
(
h+ r2−4ar− αr2
)
=g4a
(h−Ve f
); Ve f = −r2 +4ar +
αr2
dondeVe f es una funcion analoga al potencial eficaz, pero sin dimensionesde potencial. Los movimientos estacionarios son los puntosestacionarios delpotencial, es decir,V ′
e f = 0. El potencial se puede representar facilmente: unaparabola invertida, una recta de pendiente positiva, y el termino centrıfugo;este depende de las condiciones iniciales a traves deC.El potencial eficaz se aproxima al centrıfugo parar → 0 y a la parabola parar → ∞. Entre medias, para valores deC pequenos se puede aproximar a larecta: entonces, habrıa dos movimientos estacionarios. CuandoC crece, lasdos raıces se convierten en una (punto de inflexion) y luegodesaparecen. Lasraıces se obtienen de
V ′e f = −2r +4a− 2α
r3 = 0 → r4−2ar3+α = 0
Esta expresion es la misma que se obtiene de ¨r = 0. Obviamente, esta ecuacion no tiene solu-cion facil. Pero, tomando variables adimensionalesu = r/a (es decir, tomandoa como unidadde longitud) se puede comprobar que hay dos raıces positivas, para valores suficientementepequenos deα:
63

a4u4−2a4u3+α = 0 ; u4−2u3 = − αa4 = −b ; u3(u−2) = −b
Dondeb tiene que ser positiva porqueα = 2C2a/g. Si fuera negativa, saldrıala velocidad imaginaria. Se puede obtener el valor maximo deb (y por tantodeC) calculando el mınimo de la funcion:
4u3−6u2 = 0 → um = 3/2 ; bM = −278
(32−2
)
=2716
f (u)
−b
3/2
Por tanto, segun la velocidad inicial, tendremos:
b =2C2
ga3
> 2716 ∄ rest −
= 2716 ∃1rest = 3a/2 inestable (pto. inflexion)
< 2716 ∃2rest 1 estable (min)< 1 inestable (max)
Tambien es obvio —se ve en la curva— que los radios∈ [0,3a/2] son movimientos estaciona-rios estables (mınimos), y los radios∈ [3a/2,2a] son inestables (maximos).
No tiene sentido hallar los valores der para movimiento estacionario: aparte de la dificultadde hallar analıticamente las raıces de una ecuacion de cuarto grado, es quetodos los valores der entre 0 y 2a corresponden a un movimiento estacionario. Solo hay que lanzarlo perpendicu-larmente al radio con la velocidad adecuada. Esta velocidadse calcula facilmente de
r ⊥ v0 → C = rv0 → r4−2ar3+2r2v2
0a
g= 0 → v2
0 =g2a
(2ar− r2)
Parar > 2a, la velocidad saldrıa imaginaria: no hay movimientos estacionarios. Una vez llega-dos a esta expresion, tambien se puede calcular el radio del movimiento estacionario para unav0 dada: es resolver una ecuacion de segundo grado:
rest = a±√
a2−2av20/g
c En un movimiento estacionario, la partıcula recorre una circunferencia de radior ≤ 2a convelocidad uniformev2
0 = g2a
(2ar− r2
). El equilibrio de fuerzas segunk muestra queN ha de
equilibrar a la fuerza de inercia de Coriolis y a la azimutal
N−mω2√
3 (ysinω t +xcosω t)+2mω√
3(ycosωt − xsinωt) = 0
La posicion y velocidad deP en el movimiento estacionario son
(x,y) = r(
cosv0
rt,sin
v0
rt)
(x, y) = v0
(
−sinv0
rt,cos
v0
rt)
La reaccion quedara
N = mω2√
3r(
sinv0
rt sinω t +cos
v0
rt cosω t
)
−
−2mω√
3v0
(
cosv0
rt cosωt +sin
v0
rt sinωt
)
=
= N = 2mω√
3(ωr −2v0) cos[(v0
r−ω
)
t]
La reaccion va a ser nula parav0 = ωr/2, y constante parav0 = ωr. Comov0 en el movimientoestacionario es funcion der (o al reves), esto corresponde respectivamente a los radios
r =4ga
ω2a+2gr =
2ga2ω2a+g
64

3.2. Punto sobre curva
Ejercicio 3.2.1: Una partıcula pesada se mueve por una circunferencia lisa de radioR y centroO fijo,que gira alrededor de un diametro vertical con velocidad angular constanteω . Se estudia el movimientorelativo a la circunferencia mediante el anguloθ que forma la partıcula con el punto mas bajo de lacircunferencia. (a) Obtener la integral de la energıa parael movimiento relativo. (b) Calcular en funcionde la posicionθ la reaccion de la curva en la direccion normal a su plano.
Septiembre de 2001
Mθ
x0
z1 ≡ z0
ω
O
La ley de Newton para el movimiento relativo a unos ejes ligados a la cir-cunferencia se puede escribir:
−mg~k0 +~N+~FIa +~FIcor = m~γM20
La ecuacion de la energıa en el movimiento relativo es:dW20 = dT20, inclu-yendo el trabajo de las fuerzas de inercia. De las fuerzas queactuan:
El peso deriva del potencialVp = mgz= −mgRcosθ
La reaccion normal no trabaja en el movimiento relativo, por ser la curva lisa (sı trabajarıaen el movimiento absoluto, por ser una curva movil).
Al estar el centro fijo y ser constante la velocidad de giro, lafuerza de inercia de arrastrese reduce a la centrıfuga, que deriva de un potencial:
~FIa = −m[
~γO01+
~ω01∧OM +~ω01∧ (~ω01∧OM)]
= mω2x~i0 →
→ Vc = −mω2x2
2= −mω2R2sin2 θ
2
La fuerza de inercia de Coriolis no trabaja por ser perpendicular a la velocidad relativa.
Queda pues−dVp−dVc = dT20, que da lugar a la integral primeraT20+Vp +Vc = E = Cte.Sustituyendo sus valores en funcion de la variable y sus derivadas queda:
12
mR2θ2−mgRcosθ −mω2R2sin2θ2
= E (6 pt.)
En la direccion normal al plano de la circunferencia, solo estan la fuerza de inercia de Corio-lis y una de las componentes de la reaccion normal. La aceleracion, el peso, la otra componentede la reaccion normal y la fuerza centrıfuga estan el el plano. Queda pues:
N2~j0−2m~ω01∧~vM20 =~0 = N2~j0−2mRθω cosθ ~j0
ya que~vM20 = Rθ(cosθ ,0,sinθ). De la integral de la energıa se despeja:
Rθ = ±√
2E/m+2gRcosθ +ω2R2sin2θ
El signo es el deθ en cada momento. Se llega finalmente a:
N2 = ±2mω cosθ√
2E/m+2gRcosθ +ω2R2sin2θ (4 pt.)
65
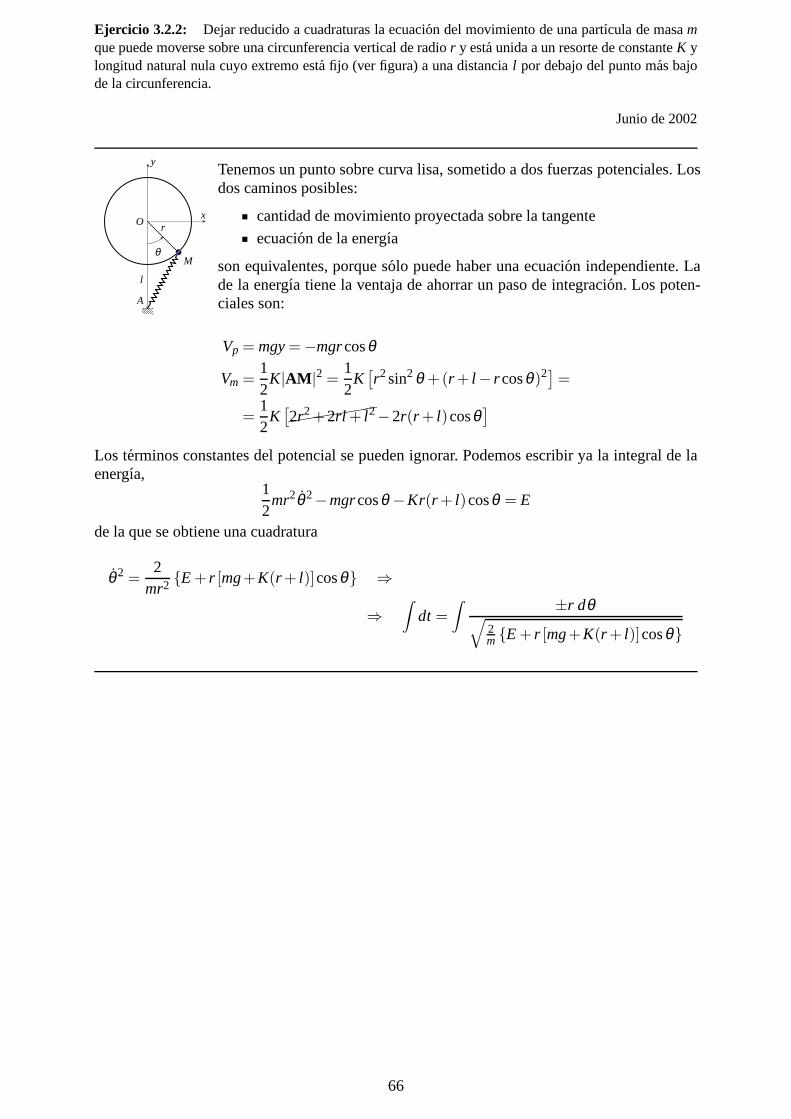
Ejercicio 3.2.2: Dejar reducido a cuadraturas la ecuacion del movimiento deuna partıcula de masamque puede moverse sobre una circunferencia vertical de radio r y esta unida a un resorte de constanteK ylongitud natural nula cuyo extremo esta fijo (ver figura) a una distancial por debajo del punto mas bajode la circunferencia.
Junio de 2002
Mθ
x
y
rO
l
A
Tenemos un punto sobre curva lisa, sometido a dos fuerzas potenciales. Losdos caminos posibles:
cantidad de movimiento proyectada sobre la tangente
ecuacion de la energıa
son equivalentes, porque solo puede haber una ecuacion independiente. Lade la energıa tiene la ventaja de ahorrar un paso de integracion. Los poten-ciales son:
Vp = mgy= −mgrcosθ
Vm =12
K|AM |2 =12
K[r2sin2θ +(r + l − r cosθ)2]=
=12
K[
(((((((2r2+2rl + l2−2r(r + l)cosθ
]
Los terminos constantes del potencial se pueden ignorar. Podemos escribir ya la integral de laenergıa,
12
mr2θ2−mgrcosθ −Kr(r + l)cosθ = E
de la que se obtiene una cuadratura
θ2 =2
mr2E + r [mg+K(r + l)]cosθ ⇒
⇒∫
dt =
∫ ±r dθ√
2mE + r [mg+K(r + l)]cosθ
66

Ejercicio 3.2.3: Una partıcula materialM no pesada, de masam, esta obligada a moverse sobre un arocircular de radioa situado en un plano vertical y con centro en el origenO. SobreM actua una fuerzarepulsiva e inversamente proporcional a la distancia al punto A = (0,−a) con constante de proporciona-lidad K = +2a2m.
a) Plantear las ecuaciones del movimiento. (2 puntos)
b) Si parat = 0, θ = θ0, θ = θ0 siendoθ el angulo entre~OA y ~OM, hallar la reaccion en funcion deθ . (2 puntos)
c) Dejar reducido a una cuadratura la ecuacion del movimiento. (1 punto)
Junio de 2003
En primer lugar hay que observar que debe de haber una errata en el enunciado: conK =2a2m, la fuerza no tiene las dimensiones adecuadas. Usaremos 2ma2ω2, donde laω tiene di-mensiones de velocidad angular. Seguramente se aclaro de palabra en el examen.
FrN
Mπ2−θ
2θ
O
A
a Para expresar la fuerza de repulsion, es conveniente observar queOAMes un triangulo isosceles, por lo que la distanciaAM se puede escribir como2asinθ
2 . Ademas, el angulo deAM con el radio vector esπ2 − θ2 ; este es el
mismo angulo que forma la fuerza conur . Aunque parece mas sencillo usarel angulo que forma conuθ , que esθ
2 .Por tanto, las ecuaciones quedan:
maθ =2ma2ω2
2asinθ2
cosθ2
−maθ2 = −N+2ma2ω2
2asinθ2
sinθ2
= −N+maω2
b Para expresarN en funcion deθ , hay que obtener una integral primera que deθ en funciondel angulo. Se puede integrar la ecuacion de la cantidad demovimiento en la direccion tangentemultiplicando ambos terminos porθ :
θdθ = ω2cosθ2
sinθ2
dθ → 12
(θ2− θ2
0
)= 2ω2 lnsin
θ2−2ω2 lnsin
θ0
2
Al mismo resultado se llegarıa usando la ecuacion de la energıa. Se trata de una curva lisa y unafuerza potencial, por lo que se conserva la energıa. El potencial vale
Fr =Kρ
uρ → Vr = −K lnρ = −2ma2ω2 ln
(
2asinθ2
)
La integral de la energıa se escribe directamente,
12
ma2 θ2−2ma2ω2 ln
(
2asinθ2
)
= E =12
ma2 θ20 −2ma2ω2 ln
(
2asinθ0
2
)
En este caso, la ecuacion de la energıa no tiene grades ventajas frente a las de cantidad demovimiento. Ahorra una integracion, pero hay que integrarel potencial que es casi igual decomplicado. Y de todos modos hay que plantear las de cantidadde movimiento, o al menossegun la normal, porque se pide la reaccion. En cualquier caso, se llega a
θ2 = θ20 +4ω2 ln
(
sinθ2/sin
θ0
2
)
La singularidad paraθ = 0 es natural, porque la fuerza se hace infinita enA. Sustituyendo en laecuacion del movimiento segunur ,
N = ma(ω2 + θ2)= ma
[
ω2 + θ20 +4ω2 ln
(
sinθ2
/sinθ0
2
)]
c Conocidaθ , la cuadratura es inmediata:
±dθ√
θ20 +4ω2 ln
(
sinθ2/sinθ0
2
) = dt
67

Ejercicio 3.2.4: Una partıcula de masam se mueve con ligadura unilateral por el interior de una cir-cunferencia vertical, rugosa, de radioR (el coeficiente de rozamiento entre la partıcula y la circunferenciaesµ). En el instante inicial se lanza desde el punto mas bajo de la circunferencia, con una velocidadv0
suficientemente grande para que la partıcula alcance el punto superior. ¿Con que velocidad llega al puntomas alto?
θ
Sugerencias:θ = ddθ(
12θ2)
∫ θ
0(sinθ + µ cosθ)e2µθ =
−11+ µ2
eµθ (cosθ −2µ sinθ −µ2cosθ)+ µ2−1
Junio de 1994
En el pendulo simple, como la curva es lisa, basta con plantear la ecuacion de la cantidad demovimiento en la direccion de la tangente —la direccion del grado de libertad— o plantear laecuacion de la energıa, que en ese caso es equivalente. Cuando hay rozamiento, la ecuacion dela energıa es igual de complicada que la cantidad de movimiento: no da integral primera direc-tamente. Y no se puede ignorar la direccion normal, que est´a acoplada con la de la tangente atraves de la reaccion normal.
mg θ
N
R
θ
Proyectamos las ecuaciones del movimiento segun la tangente y la normal:
mRθ = −mgsinθ −R; R= µ|N|−mRθ2 = mgcosθ −N
Como hay movimiento, se aplica el modelo de Coulomb con deslizamiento.La partıcula se mueve por el interior, por lo queN ≥ 0.
Si se dice que llega hasta el punto mas alto, es que no hay desprendimiento y laN es siemprepositiva: no hay que preocuparse de modulos y cambios de signo. Podemos despejar y sustituirdirectamente:
mRθ = −mgsinθ −µ(mgcosθ +mRθ2) →
→ θ = −gR
sinθ −µgR
cosθ −µθ2 =d
dθ
(12
θ2)
Usando esta ultima relacion, se obtiene una ecuacion diferenciallineal en la variableu = θ2 :
u′+2µu = −2gR
sinθ −2µgR
cosθ →
uhup
La homogenea es inmediata:
u′h+2µuh = 0 ⇒ uh = Ae−2µθ
Para la particular, se puede usar el metodo de variacion delas constantes. Llamandob(θ) altermino independiente, una solucion particular serıa
up(θ) = uh(θ)
∫ θ
0
b(x)uh(x)
dx
Aparece la integral que se da como sugerencia. Se puede escribir sin mas y pasar a imponercondiciones iniciales.
Pero la EDO es muy simple. Las funciones del termino independiente no son solucion de la
68

homogenea. . . puede ser mas sencillo ensayar funciones del mismo tipo:
up = Bsinθ +Ccosθ u′p = Bcosθ −Csinθ
Bcosθ −Csinθ +2µ(Bsinθ +Ccosθ) = −2gR
sinθ −2µgR
cosθ
B+2µC = −2µgR
−C+2µB = −2gR
B = −2gR
3µ1+4µ2 C =
2gR
1−2µ2
1+4µ2
La solucion completa queda:
u = θ2 = Ae−2µθ − 2gR
3µ1+4µ2 sinθ +
2gR
1−2µ2
1+4µ2 cosθ
Es facil comprobar que se obtiene lo mismo por variacion delas constantes. Podemos ya impo-ner condiciones iniciales, y calcular la velocidad final:
θ = 0 : θ20 =
v20
R2 = A+2gR
1−2µ2
1+4µ2
θ = π : θ2f =
v2f
R2 = Ae−2µπ − 2gR
1−2µ2
1+4µ2
despejando y sustituyendo la constante de integracion,
v2f = R2
[(v2
0
R2 −2gR
1−2µ2
1+4µ2
)
e−2µπ − 2gR
1−2µ2
1+4µ2
]
69

Problema 3.2.1: Se dispone de un alambre elasticoABsin masa, de longitudπa el cual se empotra enuna pared por su extremoA.
Se flexa el alambre sujetandolo por su extremoB, de manera que adopte la forma de una semicircun-ferencia, y en esta posicion, se coloca un punto materialM, no pesado, de masamsobre el mismo.
En el instante inicial se suelta el extremoB del alambre y debido a su elasticidad, trata de recuperarsu forma rectilınea, arrastrando al puntoM.
Se sabe que la curva que adopta el alambre en cada instante, esun arco de circunferencia, con centrovariableC sobre el ejeAY y cuyo radio varıa segun la ley conocida
CA= R(t)
Se tomara como parametro para definir la posicion del punto, el anguloϕ de la figura adjunta.Sabiendo que no existe rozamiento, se pide:
1. Expresion de la posicion, velocidad y aceleracion absoluta del punto, en funcion det, ϕ y susderivadas.
2. Ecuacion diferencial del movimiento [ecuacion que determinaϕ(t)].
Suponiendo el caso particular en queCA = R(t) = v0t + a, y que se lance el punto en el instanteinicial desdeϕ0 = π/2, con una velocidad absoluta, de valorv0 i +v0 j . Se pide:
3. Integrar completamente la ecuacion del movimiento.
4. Determinar la fuerza que el alambre ejerce sobre el punto en cada instante.
5. Trayectoria absoluta descrita por el punto.
6. Determinar el instante y la posicion absoluta del punto,cuando este abandona el alambre.
7. Trayectoria descrita por el punto, a partir del instante en que abandona el alambre.
Julio de 1974
1. El vector posicion del punto y sus derivadas seran:
r = R(t)
sinϕ
1−cosϕ
v = R
sinϕ
1−cosϕ
+Rϕ
cosϕsinϕ
tnϕ
R(t)C
~γ = R
sinϕ
1−cosϕ
+2Rϕ
cosϕsinϕ
+Rϕ2−sinϕcosϕ
+Rϕ
cosϕsinϕ
2. La unica fuerza que actua es la reaccion normal
N = N (−sinϕ,cosϕ) = m~γ
Proyectando sobre la tangentet = (cosϕ,sinϕ) queda una ecuacion diferencial que determinael movimiento, suponiendo cocidaR(t):
0 = R(sinϕ cosϕ +sinϕ −sinϕ cosϕ)+2Rϕ(1)+Rϕ2(0)+Rϕ(1)
Rsinϕ +2Rϕ +Rϕ = 0
70

3. Las condiciones iniciales son
R= v0 t +a R= v0 R= 0
v0
11
= v0
11
+aϕ0
01
⇒
ϕ0 = 0
ϕ0 = π/2
v0
v0ϕ0
R0C
La ecuacion diferencial queda
(a+v0 t) ϕ +2v0 ϕ = 0
Es de variables separadas, y se puede integrar
ϕϕ
=−2v0
a+v0 t;
dϕϕ
=−2v0dta+v0 t
→ ln ϕ = −2ln(a+v0 t)+ lnK
ϕ =K
(a+v0 t)2 ; dϕ =K dt
(a+v0 t)2 → ϕ =K
v0(a+v0 t)+C
Hay que imponer las condiciones iniciales
ϕ0 = K(a+0)2 = 0 K = 0 ϕ = 0
ϕ0 = −Kv0(a+0) +C = π
2 C = π2 ϕ =
π2
4. La reaccion del alambre sale de la ley de Newton
N = m~γ = 0 ·
11
+2v0 ·0 ·
01
+a ·0 ·−10
+a ·0 ·
01
=
00
5. La trayectoria sale sustituyendoR(t) y ϕ(t) en la expresion der :
r = (a+v0 t)
sinϕ
1−cosϕ
= (a+v0 t)
11
Es una recta a 45o.
6. Saldra del alambre cuando la longitud de arco desde el origen hasta la partıcula sea igual ala longitud del alambre.
s= Rϕ =(a+v0 t f
) π2
= πa ⇒ t f =v0
ar f = 2a
11
7. Obviamente, si no actua ninguna fuerza, seguira un movimiento uniforme y rectilıneo.Sera la prolongacion de la trayectoria sobre el alambre, pues este tampoco ejercıa fuerza al-guna.
71

Problema 3.2.2: Un punto material pesadoM de masam, se mueve sobre una helice situada en uncilindro recto cuya seccion es una circunferencia de radioRy cuyo eje es vertical. Se representara porαel angulo que la helice forma con el plano horizontal y porf el coeficiente de rozamiento existente entreel puntoM y la helice.
En el instante inicial se situa el punto en una determinada posicion de la helice y se le abandona sincomunicarle velocidad.
Sabiendo que el coeficiente de rozamientof cumple la condicionf < tg α , se pide:
1. Calcular en el instante inicial las componentes tangencial y normal de la aceleracion deM.
2. Plantear las ecuaciones que proporcionan el movimiento deM.
3. Demostrar que la velocidad del puntoM tiende a un valor finito cuando el tiempo tiende a infinito.
4. Calcular la velocidad lımite deM y determinar los valores lımites de las componentes tangencial,normal y binormal de la reaccion que la helice ejerce sobreel punto.
5. Estudiar el movimiento deM en el caso de que el anguloα de la helice valga 45o, que el coeficiente
de rozamiento seaf =
√3
3y que inicialmente se lance el punto hacia abajo con una velocidad
v0 =√
2·g·R.
Febrero de 1969
1. Para obtener las componentes intrınsecas de la aceleraci´on, lomejor es trabajar en ejes intrınsecos. En el caso de la helice no hayproblema, porque su triedro de Frenet es muy conocido. Supondre-mos que el sentido positivo es hacia arriba, independientemente dela partıcula vaya en un sentido u otro. Los vectores unitarios seran:
t =(−sinθ ,cosθ , tanα)√
1+ tan2αn = − (cosθ ,sinθ ,0)
b = t∧b = (sinα sinθ ,−sinα cosθ ,cosα)x y
z
bNn
P
RNb
Ft = mv Fn+Nn = mv2
ρFb+Nb = 0
Antes de proyectar las fuerzas, hay que estudiar el sentido del rozamiento.Se deja la partıcula en reposo: hay que ver si se mueve o no. Enel instanteinicial no hayNn, puesFn es siempre nula, yv0 = 0. Planteando el equilibriode fuerzas, suponiendo que hay equilibrio:
−mgsinα +R= 0 −mgcosα +Nb = 0
αR
P
Nb
Se ve claramente que, como|R| ≤ f |N| = f mgcosα, y f < tanα, la fuerza tangencial es−mgsinα + f mgcosα = mgcosα ( f − tanα) < 0. Podemos pues afirmar,
γt∣∣0 = gcosα ( f − tanα) < 0 γn
∣∣0 =
v20
ρ0= 0
2. En un instante generico, lav no sera 0, y laNn tampoco; suponemos que ha empezado amoverse hacia abajo, con lo que ˙v < 0 y para laR se toma el signo +.
−mgsinα + f√
N2n +N2
b = mv
0+Nn = mv2
ρ−mgcosα +Nb = 0
siendoρ = R/cos2α
72

3. Despejando las componentes deN y sustituyendo se llega a
v = −gsinα ± f
√
g2cos2α +cos4 α
R2 v4
En este caso se toma el signo + para laR, tal como se ha visto enel primer apartado; en un caso mas general, en que se pueda lanzarhacia arriba o hacia abajo, habrıa que tomar el signo opuesto al dela velocidad.
vL
v
v
−gsinα
R
R tiene un valor mınimo (debido aNb, constante) y crece con|v| (debido a laNn). Como elsigno es el opuesto a la velocidad, no es continua: da un saltoen el origen. Hay que sumarle lacomponente tangencial del peso, negativa y mayor que el mınimo deR. Ası queda la aceleraciontal como se ve en la figura.
Si se lanza con velocidad positiva,R y el peso son negativas y la frenan hasta que se pare; sise deja en reposo, empieza a caer con una aceleracion que es la diferencia de los dos terminos; sise lanza con velocidad negativa, el peso acelera yR frena. Al principio se acelera hacia abajo,pero como la resistencia crece con la velocidad, llega un momento en que equilibra al peso:tenemos una velocidad lımite. Si se lanza hacia abajo con una velocidad mayor que la lımite,el rozamiento es mayor que el peso y frena a la partıcula hasta que llega asintoticamente a lavelocidad lımite. Para ver si llega en un tiempo finito a estavelocidad, podemos estudiar laconvergencia de la cuadratura dev:
lımv→vL
(vL −v)α
gsinα − f cosαR
√g2R2
cos2 α +v4= lım
v→vL
α (vL −v)α−1
− f cos2α2R
4v3√
g2R2
cos2 α+v4
=
=αR√
v4L + g2R2
cos2 α (vL −v)α−1
2 f cosα v3L
α=1−−→ K ⇒ α = 1 ⇒ tL → ∞
Por tanto, la velocidad tiende asintoticamente a un valorvL, y tardaun tiempo infinito en alcanzarlo.Notese que el comportamiento serıa muy distinto sif > tanα; en-tonces el mınimo del rozamiento serıa mayor que la componentetangencial del peso. Si la partıcula se deja quieta, no se mueve, y sise lanza la velocidad tiende siempre a cero, quedandose parada.
v
v
−gsinα
R
4. La velocidad lımite se obtiene haciendo ˙v = 0
vL =
√
gRcosα
(tan2 α
f 2 −1
)1/4
Vuelve a quedar de manifiesto que, sif > tanα, no habrıa velocidad lımite (o serıa cero). Encuanto a reacciones,Nb es constante y las otras dos se hallan sustituyendovL:
Nb = mgcosα Nn =mv2
L cos2αR
= mgcosα
√
tan2 αf 2 −1
R= f√
N2n +N2
b = f
√
m2g2cos2 α +m2g2cos2 α
(tan2 α
f 2 − 1
)
= mgsinα
Como es logico, en el lımite la resistencia equilibra a la componente tangencial del peso.
5. En este caso particular, se sigue cumpliendo quef =√
33 < tanα = 1. Lo primero es calcular
la velocidad lımite:
vL =
√
gR2√2
(1
1/3−1
)1/4
=√
2gR= v0
73

Se lanza exactamente con la velocidad lımite, de modo que ˙v = 0; el movimiento se realizahacia abajo con velocidad constante.
74

Problema 3.2.3: Sea el sistema inercialOx1y1z1, conOz1 vertical ascendente. Alrededor del ejeOz1
gira con velocidad angular constanteω el sistemaOxyz, Oz coincidiendo conOz1. Una partıcula pe-sada de masam se mueve sobre la curva lisa del sistemaOxyzde ecuaciony = 0, z = x3
a2 − x, dondea = g/ω2. Dejar reducido a cuadratura el movimiento de la partıculasobre la curva. Si inicialmente lapartıcula esta en el origen y se lanza con una velocidad respecto al sistemaOxyzde valorv0, estudiarcualitativamente el movimiento del punto segun sea el valor dev0.
Septiembre de 1994
1. Este problema (o mas bien ejercicio) se puede resolver en ejes fijos tomando
r = (xcosω t,xsinω t,z)
calculando la aceleracion como funcion det, x, z y sus derivadas, y proyectando segun la tan-gente la ecuacion de la cantidad de movimiento. Mediante laecuacion de la curva, quedarıa unaecuacion diferencial ent, x y sus derivadas (oz, si se prefiere). La velocidad y la aceleracion secalculan mas facilmente por composicion de movimientos. Con un poco de esfuerzo, se puedereducir a una cuadratura.
Pero las operaciones son laboriosas.Parece mas sencillo estudiar el mo-vimiento relativo a los ejes movilesOxyz. Hay que considerar solo la fuer-za centrıfuga, pues la de Coriolis esnormal al planoOxzy la anula la reac-cion normal. Esto tiene la ventaja deque, como la fuerza centrıfuga es po-tencial, se puede hacer un analisis cua-litativo.
x1 y1
z1 ≡ z
ω tx
P mω2x
P = −mgk → Vp = mgz Fc = mω2xi → Vc = −12
mω2x2
En el movimiento relativo se conserva la energıa: curva lisa y fija (en ejesOxyz), la fuerza deinercia de Coriolis no trabaja, el peso y la centrıfuga son potenciales.
12
m(x2 + z2)+mgz− 1
2mω2x2 = E =
12
mv20+0−0
Con la ecuacion de la curva podemos eliminar una de las coordenadas; parece algo mas facilsustituir laz; ademas, la curva es uniforme enx y no enz:
z=x3
a2 −x; z=
(3x2
a2 −1
)
x; ω2 =ga
12
mx2
[
1+
(3x2
a2 −1
)2]
+mg
(x3
a2 −x
)
− 12
mga
x2 =12
mv20
x2
[
1+
(3x2
a2 −1
)2]
= v20−2g
(x3
a2 −x2
2a−x
)
⇒ dt =±√
1+(
3x2
a2 −1)2
dx√
v20−2g
(x3
a2 − x2
2a −x)
2. Para el analisis cualitativo podemos observar que el coeficiente de ˙x es siempre positivo, demodo que solo hay que estudiar el comportamiento del segundo miembro
x2[
1+
(3x2
a2 −1
)2
︸ ︷︷ ︸
>0
]
= v20−2g
(x3
a2 −x2
2a−x
)
=2m
[E−V(x)]
75

El potencial tendra una forma similar a la de la curva. El potencialcentrıfugo es una parabola invertida, que mueve hacia la derecha elmaximo y el mınimo de la curva, pero sin alterar su forma general.Veamos los ceros y maximos y mınimos:
V(x) = 0 → x
(x2
a2 −x
2a−1
)
= 0 → x = 0, a(
1±√
17)
/4
V ′ = 0 → 3x2
a2 − 2x2a
−1 = 0 → x = a(
1±√
13)
/6
Viendo la forma de la curva, y lanzando desde el origen, la energıaque determina el tipo de movimiento es el potencial del maximo:
2m
V[
a(
1−√
13)
/6]
= 2ga−19+13
√13
108T v2
0
Si v20 es menor que ese valor, la partıcula oscila asimetricamente
alrededor del origen; si es igual, tiende asintoticamenteal maximo;si es menor, pasa el maximo y se va a−∞.
76
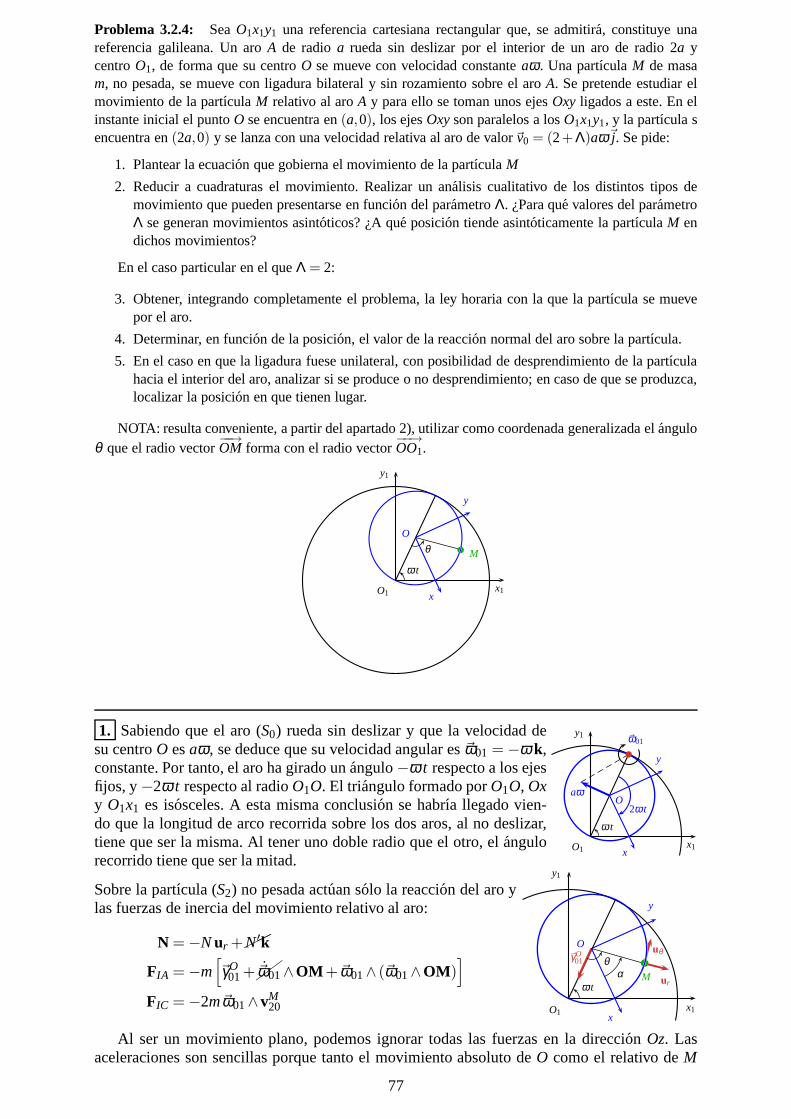
Problema 3.2.4: SeaO1x1y1 una referencia cartesiana rectangular que, se admitira, constituye unareferencia galileana. Un aroA de radioa rueda sin deslizar por el interior de un aro de radio 2a ycentroO1, de forma que su centroO se mueve con velocidad constanteaω . Una partıculaM de masam, no pesada, se mueve con ligadura bilateral y sin rozamientosobre el aroA. Se pretende estudiar elmovimiento de la partıculaM relativo al aroA y para ello se toman unos ejesOxy ligados a este. En elinstante inicial el puntoO se encuentra en(a,0), los ejesOxyson paralelos a losO1x1y1, y la partıcula sencuentra en(2a,0) y se lanza con una velocidad relativa al aro de valor~v0 = (2+ Λ)aω~j. Se pide:
1. Plantear la ecuacion que gobierna el movimiento de la partıculaM
2. Reducir a cuadraturas el movimiento. Realizar un analisis cualitativo de los distintos tipos demovimiento que pueden presentarse en funcion del parametro Λ. ¿Para que valores del parametroΛ se generan movimientos asintoticos? ¿A que posicion tiende asintoticamente la partıculaM endichos movimientos?
En el caso particular en el queΛ = 2:
3. Obtener, integrando completamente el problema, la ley horaria con la que la partıcula se muevepor el aro.
4. Determinar, en funcion de la posicion, el valor de la reaccion normal del aro sobre la partıcula.
5. En el caso en que la ligadura fuese unilateral, con posibilidad de desprendimiento de la partıculahacia el interior del aro, analizar si se produce o no desprendimiento; en caso de que se produzca,localizar la posicion en que tienen lugar.
NOTA: resulta conveniente, a partir del apartado 2), utilizar como coordenada generalizada el anguloθ que el radio vector
−−→OM forma con el radio vector
−−→OO1.
ω t
O1 x1
y1
x
y
MθO
1. Sabiendo que el aro (S0) rueda sin deslizar y que la velocidad desu centroO esaω, se deduce que su velocidad angular es~ω01 = −ω k,constante. Por tanto, el aro ha girado un angulo−ω t respecto a los ejesfijos, y−2ω t respecto al radioO1O. El triangulo formado porO1O, Oxy O1x1 es isosceles. A esta misma conclusion se habrıa llegado vien-do que la longitud de arco recorrida sobre los dos aros, al no deslizar,tiene que ser la misma. Al tener uno doble radio que el otro, elangulorecorrido tiene que ser la mitad.
ω t
O1 x1
y1
aω2ω t
~ω01
x
y
O
Sobre la partıcula (S2) no pesada actuan solo la reaccion del aro ylas fuerzas de inercia del movimiento relativo al aro:
N = −Nur +N′k
FIA = −m[
~γO01+
~ω01∧OM +~ω01∧ (~ω01∧OM)]
FIC = −2m~ω01∧vM20
ω t
O1 x1
y1
~γO01
α
x
y
M ur
uθθ
O
Al ser un movimiento plano, podemos ignorar todas las fuerzas en la direccionOz. Lasaceleraciones son sencillas porque tanto el movimiento absoluto deO como el relativo deM
77

son circulares. Parece conveniente proyectar en los ejes delas coordenadas polares deM enS0. El angulo polar esα, que esta relacionado conθ a traves del triangulo isosceles antesmencionado:
θ = α +π −2ω t θ = α −2ω θ = αEn estos ejes las aceleraciones seran mas sencillas
~γO01 = mω2 OO1 = mω2a (cosθ ur −sinθ uθ )
~ω01∧ (~ω01∧OM) = −ω2aur
FIA = −mω2a
cosθ −1−sinθ
0
FIC = −2m
∣∣∣∣∣∣
ur uθ uz0 0 −ω0 aα 0
∣∣∣∣∣∣
= −2maωα ur
La ecuacion de la cantidad de movimiento de la partıcula
−
N00
+mω2a
1−cosθsinθ
0
+2maωα
−100
= m
−aα2
aα0
proyectada segun la tangente al arouθ da
maω2 sinθ = maα ⇒ θ = ω2 sinθ
que es la ecuacion del pendulo simple, pero tomando origende angulos en el punto inestable.La fuerza centrıfuga hace el efecto del peso. Notese queθ no es propiamente el movimientorespecto al aro, sino respecto al radio vectorO1O.
2. La ecuacion diferencial es la del pendulo, luego el movimiento es tambien el del pendulo:libracion, movimiento asintotico, y rotacion. La ecuacion del movimiento se puede integrar,llegando a la integral de la energıa:
θ θ = ω2sinθθ ;θ2
2= C−ω2cosθ ;
12
maθ2 = E−maω2cosθ = E−V(θ)
Aquı la energıa es la del movimiento respecto al radio vector giratorioO1O. Para calcular laenergıa del movimiento asintotico, necesitamos las condiciones iniciales referidas a esta recta,pero la velocidad inicial se da respecto al aro:
θ0 = π α0 = 0
vM20 = aα0uθ = a(2+Λ)ω uθ
θ0 = α0−2ω = Λω
En el movimiento asintotico, se llega al punto inestable,θ = 0, convelocidad nula:
E∗ = mgω2 =12
maΛ2ω2−mgω2 ⇒ Λ∗ = 2
1
−1
π2 π 3π
2 2π
Segun que el parametroΛ sea mayor o menor que esteΛ∗ tendremos rotaciones o libracionesalrededor del punto mas alejado; si es exactamente igual, tendremos un movimiento asintoticoal origen.
3. El valor deΛ es precisamente el del movimiento asintotico; si fuera otro, no se podrıaintegrar la ley horaria mediante funciones elementales. Eneste caso la integral de la energıa sereduce a
θ2 = E∗−2ω2cosθ = 2ω2(1−cosθ) ;+dθ√
1−cosθ=
√2ω dt
78

Compensa hacer un cambio de variable, de modo que midamos losangulos desde el punto deequilibrio estable, como se hace en el pendulo simple:φ = π − θ , cosφ = −cosθ . De estemodo se llega a una integral que se encuentra en tablas:
∫+dφ√
1+cosφ=√
2 argth[
csc(x
2
)]
+C =√
2ω t
Si no se dispone de tablas, se puede hacer a mano con el cambio
sinφ2
= u; cosφ2
dφ2
= du; dφ =2du√1−u2
; cosφ = 1−2sin2 φ2
= 1−2u2
∫2du√
1−u2√
2(1−u2)=∫ √
2du1−u2 =
√2argthu+C =
√2ω t
φ0 = 0 → C = 0; sinφ2
= tanhω t → φ = π −θ = 2arcsin tanhω t
α = θ −π +2ω t ; α = 2arcsin tanhω t +2ω t
4. De la ecuacion de la cantidad de movimiento, proyectando segunur , se obtiene:
−N+mω2a (1−cosθ)−2maω α = −maα2
N = ma(ω2−2ωα + α2)−mω2acosθ = ma(α −ω)2mω2acosθ
α = θ +2ω ⇒ N = ma(θ +ω
)2−mω2acosθ
De la integral de la energıa se obtuvo
θ2 = 2ω2(1−cosθ)
con lo que podemos poner laN en funcion deθ , teniendo cuidado con el signo deθ :
N = ma(
±ω√
2(1−cosθ)+ω)2
−mω2acosθ =
maω2[
2(1−cosθ)+1±2√
2(1−cosθ)−cosθ]
N = mω2a[
3(1−cosθ)±2√
2(1−cosθ)]
En el caso del pendulo simple, la reaccion era simetrica.Aquı varıa segun el signo deθ . Estose debe a que la fuerza que empuja hacia el exterior del aro es basicamente la centrıfuga, quedepende de la velocidad en ejes inerciales. Y esta es mucho menor cuando oscila en sentidocontrario al del movimiento deO. La de Coriolis tambien cambia de sentido y afecta a laN.
5. El desprendimiento se producira a partir del momento en queN cambie de signo. Noteseque 1− cosθ ≥ 0 siempre. Por lo tanto, laN solo puede anularse en la oscilacion de vuelta,cuandoθ = −ω
√
2(1−cosθ):
N = 0 → 3(1−cosθ)−2√
2(1−cosθ) = 0
9(1−cosθ)2 = 8(1−cosθ) 6= 0; 1−cosθ =89
⇒ θd = arccos19
(θ < 0)
79

80

Capıtulo 4
Dinamica relativa
Ejercicio 4.1.1: Una partıcula pesada de masam se encuentra sobre una referencia plana movilOxy,que gira con velocidad constante de moduloω alrededor de su eje fijoOy (vertical ascendente). Lapartıcula esta unida al origen del sistema mediante un muelle de longitud natural nula y constante derigidez k. Inicialmente se encuentra en reposo en una posicion dada por sus coordenadasx0,y0. Se pi-de calcular las trayectorias que puede seguir la misma en funcion de los valores que pueda tomar elparametro adimensionalλ = mω2/k.
Febrero de 1995
SeaS0 el plano movil yS2 el solido del que forma parte el punto. Las fuerzas son:
F = −kr −mgj N = Nk
FIA = −m[
γγγO01+ωωω01∧ r +ωωω01(ωωω01∧ r)
]
= mω2xi
FIC = −2mωωω01∧vM20 // k
La ecuacion del movimiento sera:
m
xy0
= −k
xy0
−mg
010
+mω2
x00
+
00N
+
00
FIC
La ecuacion paray corresponde a un oscilador armonico:
my = −ky−mg ⇒ y = −mgk
+Acos
√
km
t +Bsin
√
km
t
La ecuacion dex es tambien lineal de coeficientes constantes,
mx = −kx+mω2x → x+km
(1−λ ) x = 0
pero la solucion va a depender del valor deλ :
λ < 1 → x = C cos√
km (1−λ )t +D sin
√km (1−λ ) t
λ = 1 → x = x0+ x0 t
λ > 1 → x = Ce
√km(λ−1) t
+D e−√
km(λ−1)t
Imponiendo las condiciones iniciales se llega a:
y = −mgk +
(y0+ mg
k
)cos√
km t
λ < 1 → x = x0 cos√
km (1−λ ) t
λ = 1 → x = x0
λ > 1 → x = x02 e
√km(λ−1)t
+ x02 e−
√km(λ−1) t
81

Ejercicio 4.1.2: Un plano liso gira con velocidad angular constante~ω constante alrededor de un ejehorizontalOx contenido en el plano. Una partıcula pesada de masam se mueve sobre dicho plano conun movimiento de leyes conocidasx(t), y(t) respecto a un sistema de referencia ligado al mismo. Si enel momento inicialt = 0 el plano esta horizontal, se pide obtener la reaccion normal que ejerce sobre lapartıcula.
Abril de 1995
Las ecuaciones del movimiento son
m
xy0
= −mg
0sinω tcosω t
+
00N
+mω2
0y0
−2m
∣∣∣∣∣∣
i j kω 0 0x y 0
∣∣∣∣∣∣
yz
⊙ ω t y1
z1
Donde la fuerza de inercia de arrastre se reduce a la centrıfuga, que es simple y se puedeescribir directamente. Proyectando en la direccion normal al plano tenemos:
N = m(gcosω t +2ω y) k
Se ha supuesto que la unica fuerza directamente aplicada esel peso. Si hubiera ademas unafuerza arbitrariaF = (Fx,Fy,Fz), habrıa que anadir su proyeccion segunOzcambiada de signo,
−F ·k = Fxsinω t −Fzcosω t
82

Ejercicio 4.1.3: Una partıculaM esta obligada a moverse por un plano lisoOxy, que a su vez semueve respecto a un sistema inercial del siguiente modo: la direccionOy permanece siempre paralela ası misma; el plano gira con velocidad angular constanteω ; O se desplaza con aceleracion constanteg poruna recta fija del sistema inercial, ortogonal aOy. Plantear las ecuaciones del movimiento deM relativoal plano, cuando no actuan mas fuerzas que las de ligadura.
Septiembre de 1996
Para simplificar, tomaremos los ejes fijosO1y1z1 de modoque en el instante inicial coincidan con losOxyz, y que larecta por la que se mueveO seaO1x1.Los vectores del movimiento de arrastre en ejesS0 son:
γγγO01 = g[cosω t,0,sinω t] ωωω01 = ω [0,1,0] ααα01 = 0
Las ecuaciones del movimiento relativo son:
x1
y1
z1
O1
x
y
z
by
x
M
N
ω t
Og
ωωω
mγγγM20 = N+FI
A +FIC
donde solo intervienen las fuerzas de inercia y la reacciondel plano liso. Las fuerzas de inerciase calculan sin dificultad:
FIA = −m[
γγγO01+ααα01∧ r +ωωω01(ωωω01∧ r)
]
= −mg
cosω t0
sinω t
+mω2
x00
FIC = −2mωωω01∧vM20 = −2m
∣∣∣∣∣∣
i j k0 ω 0x y 0
∣∣∣∣∣∣
= 2mω
00x
Sustituyendo en la ecuacion del movimiento,
m
xy0
=
00N
−mg
cosω t0
sinω t
+mω2
x00
+2mω
00x
Aunque solo se pida plantearlas, observando las ecuacionesse intuye el movimiento:
En la direccionOx, la fuerza centrıfuga se lleva la partıcula a±∞ exponencialmente, conuna oscilacion armonica superpuesta.
En la direccionOy se conserva la cantidad de movimiento, por lo que la velocidadsera constante.
No hay movimiento en la direccionOzpor la ligadura, pero la ecuacion correspondienteda el valor de la reaccion normal en cada momento, una vez resuelta la ecuacion parax.
83

Ejercicio 4.1.4: SeaOx1y1z1 un sistema de referencia inercial tal queOz1 es la vertical ascendente.SeaOx0y0z0 un sistema giratorio respecto al anterior tal queOz0 siempre coincide conOz1 y ~ω01 = ω~k1
(ω =cte.). Una partıculaP de masamse mueve sin rozamiento por una recta del sistema 0 de ecuacionesparametricas:
x0 = ξ , y0 = 0 , z0 = κ ·ξ (κ = cte.)
Sabiendo que el peso es la unica fuerza directamente aplicada que actua sobre la partıcula se pide:
a) Dejar reducido a una cuadratura la determinacion deξ (t).
b) A partir de la cuadratura anterior, hacer un estudio cualitativo del movimiento de la partıcula segunsean las condiciones iniciales.
Septiembre de 2007
a La partıcula se mueve por una recta fija en un sistema giratorio. Obviamente, hay que
estudiar el movimiento relativo, en el que las fuerzas normales no trabajan. Intentar estudiarloen ejes fijos serıa muy complicado. Y para el movimiento relativo tenemos dos opciones:
Plantear la ecuacion de cantidad de movimiento y proyectarla segun la tangente.
Plantear directamente la ecuacion de la energıa.
El segundo camino parece mas directo, pues no hay que preocuparse de la reaccion normal(la curva es lisa y fijaen el movimiento relativo) ni de la de Coriolis, que es normal al des-plazamiento relativo. (Por el primer camino, tampoco harıa falta si uno se da cuenta de queson normales a la direccion en que se va a proyectar). Tanto el peso como la fuerza de inerciade arrastre son potenciales. Si se pidiera la reaccion normal, o hubiera rozamiento, habrıa queplantear la ecuacion de cantidad de movimiento en todas suscomponentes.
La energıa cinetica, sobre la recta, vale:
T =12
m(x2
0 +0+ z20
)=
12
m(1+κ2) ξ 2
El potencial del peso, sobre la recta, es:
Vp = mgz0 = mgκ ξ
La fuerza de inercia de arrastre se reduce a la centrıfuga,
FIA = −m[
γγγO01+ωωω01∧ r +ωωω01(ωωω01∧ r)
]
= mω2x0 i0 = mω2ξ i0
y deriva del potencial
Vc = −12
mω2ξ 2
Escribimos la integral de la energıa,
12
m(1+κ2) ξ 2+mgκ ξ − 1
2mω2ξ 2 = E
y obtenemos la cuadratura:
∫ ±√
1+κ2dξ√
2Em −2gκξ +ω2ξ 2
=∫
dt
b Para el analisis cualitativo, derivamos el potencial: hayun solo punto de
equilibrio en:
V ′ = mgκ −mω2ξ = 0 → ξe =gκω2 ; Ve =
mg2κ2
2ω2
Suponiendo que se lanza desde el origen, tenemos:
84

Si se lanza hacia la izquierda, se va a−∞ (baja por la recta).
Si se lanza hacia la derecha, el movimiento depende de la velocidad:
• v0 < gκω : punto de parada antes del maximo; retrocede hacia−∞
• v0 = gκω : movimiento asintotico hacia el maximo enξe
• v0 > gκω : va hacia el maximo, lo pasa, y sigue hacia+∞
85

Ejercicio 4.1.5: En un planeta de radioR y masaM, los cuerpos pesan en los polos el doble que en elecuador. Determinar la duracion del dıa.
En los polos, el peso es solo la atraccion gravitatoria:Pp = GMmR2
En el ecuador, el peso incluye la fuerza centrıfuga:Pe = GMmR2 −mΩ2R
Si uno es el doble del otro, se puede obtener la velocidad angular:
GMmR2 = 2
(GMm
R2 −mΩ2R
)
→ Ω2 =GM2R3
El dia (sidereo) es el periodo de rotacion:D = 2π√
2R3
GM . Para calcular el dıa solar, hace faltasaber tambien el periodo de la orbita.
86

Ejercicio 4.1.6: Una partıcula pesada se mueve sin rozamiento sobre la parabola de ecuaciony= 0,z=
b(
xa
)2, cuyo ejeOzes vertical. La parabola gira con velocidad angular constanteω = Λ
a
√2gb alrededor
deOz. Determinar, en funcion deΛ, las posiciones de equilibrio relativo de la partıcula. Enel caso enqueΛ = 1, determinar el movimiento y la reaccion normal cuando la partıcula se lanza desde el verticeO con una velocidadv0 relativa a la parabola.
Junio de 2000
1 Se trata de calcular primero el equilibrio y despues el movimiento respec-to a unos ejes moviles. Para calcular el equilibrio de un punto sobre curva,tenemos distintos caminos.
a Obviamente el mas complicado es plantear las ecuaciones generales:
mγγγM20 = 0 = P+FI
A +FIC +λ ∇ f1+ µ ∇ f2
f1 = 0
f2 = 0
mω2x
mg
N
DondeγγγM20 = (x, y, z) , generico, sin sustituir las ligaduras. Se han planteado las ecuaciones
del movimiento, porque seran utiles mas adelante. Para el equilibrio se anula la aceleracion y lafuerza de Coriolis, que depende de la velocidad.
Las fuerzas directamente aplicadas y de inercia valdran
P = −mgk
FIA = −m[
γγγO01+ωωω01∧ r +ωωω01(ωωω01∧ r)
]
= mω2xi
FIC = −2mωωω01∧vM20 = −2mω(−y, x,0)
Las ecuaciones de ligadura son
f1 ≡ z− ba2x2 = 0 f2 ≡ y = 0
y por tanto la fuerza de ligadura es
N = λ(
−2bxa2 ,0,1
)
+ µ (0,1,0)
Sustituyendo todo en las ecuaciones generales, con velocidad y aceleracion nulas, se tiene unsistema de cinco ecuaciones algebraicas no lineales, cuya solucion dara las posiciones de equili-brio y las fuerzas de ligadura en esas posiciones,xe,ye,ze; λ e,µe. Exploraremos otros caminos.
b En un problema de punto sobre curva, suele ser mas facil tomar un parametro y
proyectar sobre la tangente. Ademas, es un movimiento plano y podemos ignorar la direccionOy. Como parametro se puede tomar lax, que es regular (laz es singular en el vertice).
r =
(
x,0,ba2x2
)
rx =
(
1,0,2ba2 x
)
r =
[
x,0,2ba2
(x2+xx
)]
Proyectamos las ecuaciones de equilibrio sobre el vector tangenterx, con lo que la reaccionnormal desaparece:
m(−gk +ω2 xi +N
)·(
1,0,2ba2 x
)
= xm
(
ω2− 2gba2
)
= 0 ⇒
x = 0ω2 = 2gb
a2 ∀x
Por tanto, hay equilibrio siempre en el vertice, y para un valor determinado deω (correspon-diente aΛ = 1), todas las posiciones son de equilibrio.
c El peso es potencial; la fuerza de arrastre tambien; la de Coriolis no interviene en el
87

equilibrio y la curva es lisa. Por tanto, se puede calcular elpotencial sobre la curva y derivarlopara hallar el equilibrio. Tomandox como parametro,
V = VP +Vc = mgz− 12
mω2x2 = mgba2x2− 1
2mω2x2 =
m2
(2gba2 −ω2
)
x2
dVdx
= m
(2gba2 −ω2
)
x = 0 ⇒
x = 0ω2 = 2gb
a2 ∀x
Se obtienen, naturalmente, las mismas soluciones, pero conmenos trabajo.
2 Hay que estudiar ahora el movimiento para el casoΛ = 1 en el que, como hemos visto,todos los puntos son de equilibrio. Esto quiere decir queΣF ⊥ t en toda la curva. Aquı tambienhay varios caminos, pero esta vez empezaremos por el mas simple.
a En el movimiento sobre una curva lisa, lo mas directo suele ser proyectar sobre la
tangente, en coordenadas intrınsecas si es posible:
ΣF · t = Ft = mγt = ms= 0 → s= Cte.= v0 → s=s0+v0 t
La aceleracion tangencial es nula, por lo que elmodulo de la velocidad es constante; pero nola aceleracion normal, que hace variar su direccion. Igualmente, se conserva el modulo de lacantidad de movimiento, pero no la direccion.
La velocidad de lanzamiento es relativa a la parabola, que es precisamente el movimientoque estamos estudiando. Queda relacionar el parametro naturalscon el que tomamos antes parala curva,x:
ds2 = dx2+dz2 = dx2
[
1+
(2ba2
)2
x2
]
ds= +dx
√
1+
(2ba2
)2
x2
s=s0 +∫ x
0
√
1+
(2ba2
)2
ξ 2dξ =x2
√
1+
(2ba2
)2
x2+a2
bargsinh
2ba2 x = v0 t
Tenemos ası la ley horaria en forma implıcita. Viendo estasolucion, en la que no se puededespejarx(t), se da uno cuenta de que la ecuacion diferencial del movimiento en la variablexno va a ser facil de integrar.
b La ecuacion de la energıa tambien da una solucion directa. Para este valor de laω, el
potencial se anula (± una constante arbitraria):
V =m2
(2gba2 −ω2
)
x2ω2= 2gb
a2−−−−→ V = 0
con lo que llegamos a la misma solucion.
T =12
mv2+0 = E = Cte. → v = v0
c Si se quieren usar las cinco ecuaciones generales, la cosa secomplica. Sabemos que
hay solucion, pero no esta claro que por este camino vayamos a obtenerla.
Hay que sustituir las ecuaciones de las ligaduras en la del movimiento
y = y = y = 0
r =
(
x,0,ba2x2
)
r =
(
x,0,2ba2 xx
)
r =
[
x,0,2ba2
(x2 +xx
)]
La ecuacion segunOy da, una vez resuelto el movimiento, una de las componentes delanormal.
88

En las ecuaciones segunOx y Ozaparece la otra reaccion normal; se despeja de una y sesustituye en la otra para obtener una ecuacion diferencialen x y sus derivadas. Vista laforma de la ley horaria obtenida antes, no va a ser facil de integrar.
Otra forma de obtener la ecuacion diferencial del movimiento es proyectar sobre la tan-genterx.
En cualquier caso, se obtiene una ecuacion diferencial no lineal enx:
(a4+4b2x2) x+4b2xx2 = 0 → x
x= − 4b2xx
a4 +4b2x2
Es de variables separadas, y se puede integrar para obtenerx(x) , de donde se sacarıa una cua-dratura que, integrada, darıat(x) ; la ley horaria implıcita que se obtuvo mas arriba.
3 Conocido el movimiento, obtener la reaccion normal es un problema algebraico.a Una posibilidad es seguir trabajando en ecuaciones intrınsecas, pero habrıa que calcu-
lar el radio de curvatura que aparece en la reaccion normal.No parece el camino mas sencillo.b Se conoce el vector unitario tangente y, como la curva es plana, el binormal; la
normal principal se obtiene simplemente girando la tangente. Proyectamos las ecuaciones delmovimiento en esas direcciones. La componentey se obtiene facilmente:
µ −2mω x = 0
Del vector tangenterx derivado mas arriba, se obtiene directamente uno normal:
rx =
(
1,0,2ba2 x
)
→ rn =
(
−2ba2 x,0,1
)
rn ·(γγγM
20−P−FIA−FI
C−N1−Ny)
= 0 = 2ma2bx2+(a2+4b2x2) (mg−λ )
Con lo que quedan determinadasλ y µ. No se pueden expresar en funcion det porque noconocemos explıcitamentex(t), sinot(x). Pero con la ley horaria implıcita se puede poner todoen funcion dex:
f (x) = v0 t → f ′(x) x = v0 → x =v0
f ′(x)
operando y sustituyendo en las expresiones anteriores, se llegarıa aλ (x) y µ(x). Recuerdese queλ no es el modulo de la reaccion normal en el plano, porque el vector∇ f1 que da la direccionno es unitario;µ sı es el modulo de la fuerza normal al plano, porque∇ f2 = j .
89

Problema 4.1.1: Una estacion espacialO, se encuentra en orbita circularalrededor de la Tierra siendoR el radio de su orbita. Se pretende, analizar el movimiento,respecto de la estacion espacialO, de unanaveM que desea atracar en ella.
x1
y1
z1
C
x
y
z
bM
R
O
ρρρ
Para la descripcion analıtica del problema se consideraran los siguientessistemas de referencia:i) Cx1y1z1, con origen en el centro de la TierraC, el planoCx1y1 coincidiendo con el plano de la orbita circular seguidapor la estacion, y el ejeCz1 perpendicular al mismo,ii) Oxyz, con origenen la estacion espacial, el ejeOx segun la vertical ascendente, el ejeOytangente a la orbita y el ejeOznormal al plano orbital. En la resolucion delproblema se tendran en cuenta las siguientes hipotesis simplificatorias:a)el sistema de referenciaCx1y1z1 se considerara inercial y,b) la Tierra esperfectamente esferica y atrae a cualquier partıcula material M de masam con una fuerza igual a
F = − mµ|CM |3CM .
Se pide:
a) Determinar las fuerzas de inercia, de arrastre y de Coriolis, que es preciso tener en cuenta paraanalizar el movimiento de una partıculaM de masam, respecto de la referenciaOxyz. La posicionde la partıculaM se fijara mediante el radio vectorOM = ρρρ = xi +yj +zk.
b) Suponiendo que|ρρρ | ≪ |CM | obtener un desarrollo en serie de potencias del parametro pequeno|ρρρ |/R de la fuerza gravitatoria terrestre que actua sobreM.
c) Se denominagradiente de gravedada la suma de la fuerza de inercia de arrastre y la atracciongravitatoria terrestre. Obtengase una expresion aproximada del gradiente de gravedad, usando,para la atraccion gravitatoria terrestre, los dos primeros terminos del desarrollo obtenido en b).
d) Planteense las ecuaciones que gobiernan el movimiento libre de una partıculaM de masam,respecto de la estacion espacialOxyz; obtengase una version aproximada de las ecuaciones, usan-do, para el gradiente de gravedad, la expresion aproximadadeterminada en el apartado anterior.(Ecuaciones de Hill).
e) Integrense las ecuaciones de Hill a partir de unas condiciones iniciales arbitrarias
en t = 0 : x = x0, y = y0, z= z0, x = x0, y = y0, z= z0 (1)
Si la partıculaM representa una nave espacial que evoluciona en las proximidades de la estacion, lasolucion obtenida en e) permite resolver, en principio, elproblema de atraque de la nave en la estacion,mediante una maniobra de dos impulsos:
f) Si en el instantet = 0 la nave se encuentra con el estado dinamico definido en (1),averiguarel impulso que es necesario dar a la nave para que en el instante final t = τ , se encuentre en laestacion espacial (origenO : x = y = z= 0).
g) Averiguar el impulso que es necesario darle a la nave, en elinstante finalt = τ , para dejarla enreposo en el origenO.
Abril de 1994
90

a Si la orbita es circular, la estacionO se mueve con velocidad uniforme conocida√
µR, que
determina tambien la velocidad angular de los ejesOxyzque la acompanan. Si uno no recordarael valor, se deduce facilmente igualando la atraccion gravitatoria a la aceleracion centrıpeta delmovimiento circular:
x1
y1
z1
C
ωωω01
x
y
z
v
R
O
µR2 =
v2
R= Rθ2 ⇒ v =
õR
ωωω01 = θ k =
õR3 k
γγγO01 = −Rθ2ur = −Rω2 i = − µ
R2 i γγγC01 = 0
Conocido el movimiento de arrastre (circular uniforme), sepue-den calcular las fuerzas de inercia. Se simplifican los calculos si seobserva queC es un punto fijo del sistemaS0:
γM01 = ωωω01∧ (ωωω01∧CM) = −ω2
R+xy0
⇒ FI
A =mµR3
R+xy0
FIC = −2ωωω01∧vM
20 = −2m
∣∣∣∣∣∣
i j k0 0 ωx y z
∣∣∣∣∣∣
⇒ FIC = −2m
√mµR3
−yx
0
b La atraccion gravitatoria sobre la naveM es:
F = − mµ|CM |3 CM , dondeCM = (R+x,y,z)
Vamos a tener ecuaciones no lineales en las coordenadas. Se pueden linealizar aprovechandoque la distancia de la nave a la estacion es mucho mas peque˜na que la distancia de ambas alcentro de la Tierra:
|ρρρ| ≪ |CM | ⇒ |x|, |y|, |z| ≪ R
El modulo se puede expresar como
|CM | =(R2+2Rx+x2 +y2 +z2)− 1
2 = R−3[
1+
(
ε≪1︷ ︸︸ ︷
2xR
+x2+y2+z2
R2
)]− 12
lo que permite usar el desarrollo
(1+ ε)n = 1+nε +12
n(n−1)ε2+o(ε2)
para obtener|CM |. Pero lo que nos interesa no es el modulo, sino el cubo, que eslo que apareceen las ecuaciones:
|CM |3 = R3
[
1− 32
(
2xR
+x2 +y2+z2
R2
)
+ . . .
]
del que solo conservamos el primer termino, y aun este lo truncamos porque los terminoscuadraticos son mucho mas pequenos que los lineales.
c La atraccion gravitatoria, conservando solo los terminos lineales, queda
F = −mµR3
(
1− 3xR
)
R+xyz
+ · · · ≃ −mµ
R3
R−2x+ 3x2
R
y−3xyR
z−3xzR
91

y al sumar la fuerza de inercia de arrastre, se obtiene elgradiente de gravedad:
Fg = F+FIA ≃−mµ
R3
R−2xyz
+
mµR3
R+xy0
≃ Fg =
mµR3
3x0−z
Esta fuerza la experimenta un cuerpo en el movimiento relativo a otro objeto en orbita circular(hay una expresion analoga para orbitas elıpticas). Resulta que el plano orbital (osculador) esatractivo, mientras que el horizontal local (rectificante)es repulsor.
d Si planteamos las ecuaciones del movimiento relativo con las fuerzas linealizadas,
Fg+FIC = mγγγM
20 =
= mω2
3x0−z
−2mω
−yx0
= m
xyz
⇒
x = 3 ω2x +2ω yy = −2ω xz= −ω2z
se obtienen lasecuaciones de Hill: ecuaciones linealizadas del movimiento relativo a un cuerpoen orbita circular.
e Las ecuaciones de Hill son lineales de coeficientes constantes; se pueden integrar por varioscaminos. La tercera esta desacoplada, es un oscilador arm´onico, y se integra directamente:
z= z0 cosω t +z0
ωsinω t
La segunda se puede integrar una vez,
y = −2ω x → y = −2ω x+D ; D = y0+2ω x0
y sustituir el resultado en la primera, que tambien resultaun oscilador, pero forzado:
x = −ω2x+2ωD →
xh = Acosω t +Bsinω txp = 2D
ω
Esto se lleva a la ecuacion dey, que ya puede integrarse,
y = −2ω (xh +xp)+D → y = E−3Dt −2(Asinω t −Bcosω t)
Imponemos condiciones iniciales a lax,
x = −(
3x0 +2y0
ω
)
cosω t +x0
ωsinω t +4x0 +
2y0
ω
tambien a lay:
y = y0−2x0
ω−3(2ω x0 + y0) t +2
[(
3x0 +2y0
ω
)
sinω t +x0
ωcosω t
]
En conjunto,
x = −(
3x0 + 2y0ω
)
cosω t + x0ω sinω t +4x0 + 2y0
ω
y = 2x0ω cosω t +2
(
3x0 + 2y0ω
)
sinω t −3(2ω x0+ y0) t +y0− 2x0ω
z= z0 cosω t + z0ω sinω t
Notese que, aunque el plano horizontal local sea repulsor,la x no crece indefinidamente; lafuerza de Coriolis se encarga de curvar la trayectoria; donde sı hay un termino que crece indefi-nidamente es en la direcciony: el plano normalOxzno ejerce fuerza ninguna, y una velocidadinicial hace que se aleje indefinidamente la en esa direccion.
92

f La nave se encuentra ent = 0 en un estado arbitrariox0,y0,z0, xa0, y
a0, z
a0 antesde la percusion.
Se le aplica una percusion, con lo que el estado cinematicopasa a serx0,y0,z0, xd0, y
d0, z
d0 inme-
diatamentedespues. Se busca el valor de la percusion para que al cabo de un tiempo τ llegue aO. El problema es analogo a preguntar que velocidad inicialhace falta, porque la percusion loque hace es cambiar la velocidad sin alterar la posicion:
P = m(
vd0−va
0
)
⇒ vd0 = va
0+Pm
A la configuracion despues de la percusion se le puede aplicar la misma ecuacion general, paraun t arbitrario:
x = −(
3x0 +2yd
0ω
)
cosω t +xd
0ω sinω t +4x0 +
2yd0
ω
y = 2xd
0ω cosω t +2
(
3x0 +2yd
0ω
)
sinω t −3(2ω x0+ yd
0
)t +y0− 2xd
0ω
z= z0 cosω t +zd0
ω sinω t
Obligando a que ent = τ llegue al origen de coordenadas,
0 = −(
3x0+2yd
0ω
)
cosω τ +xd
0ω sinω τ +4x0 +
2yd0
ω
0 = 2xd
0ω cosω τ +2
(
3x0+2yd
0ω
)
sinω τ −3(2ω x0 + yd
0
)τ +y0− 2xd
0ω
0 = z0 cosω τ +zd0
ω sinω τ
se obtiene un sistema lineal del que podemos despejar las velocidades despues de la percusion:
sinω τω
2ω (1−cosω τ) 0
− 2ω (1−cosω τ) −3τ + 4
ω sinω τ 00 0 1
ω sinω τ
xd0
yd0
zd0
=
3x0cosω τ −4x06x0(ω τ −sinω τ)−y0
−z0cosω τ
Luego la percusion vale
Pm
=
sinω τω
2ω (1−cosω τ) 0
2ω (cosω τ −1) −3τ + 4
ω sinω τ 00 0 1
ω sinω τ
−1
3x0cosω τ −4x06x0(ω τ −sinω τ)−y0
−z0cosω τ
−
xa0
ya0
za0
g La velocidad con que llega al origen se obtiene derivando lasecuaciones horarias, y susti-tuyendo el tiempo de llegada:
xf =(3x0ω +2yd
0
)sinω τ +xd
0 cosω τyf = −2xd
0 sinω τ +2(3x0ω +2yd
0
)cosω τ −3
(2ω x0 + yd
0
)
zf = −z0ω sinω τ +zd0 cosω τ
que se puede expresar como
v f =
cosω τ 2sinω τ 0−2sinω τ 4cosω τ −3 0
0 0 cosω τ
xd0
yd0
zd0
+
3x0ω sinω τ6x0ω (cosω τ −1)
−z0ω sinω τ
El impulso final tiene que quitarle toda la cantidad de movimiento,
Pf = −mv f
donde todos los terminos dev f y devd0 se han calculado ya y son conocidos.
93
94
Capıtulo 5
Examenes: Dinamica del Punto
No debe pensarse, por el tıtulo de esta parte, que haya un tipo de problemas para los exame-nes, y otro para explicar en clase: la mayor parte de los problemas de los capıtulos anterioresse han propuesto en examenes. Y los ejercicios cortos proceden de las preguntas de teorıa. Sesuele indicar la fecha al pie del enunciado.
Para cada capıtulo se han seleccionado problemas que traten sobre ese tema concreto, yque no requieran conocimientos aun por explicar. Aquı se incluyen problemas cuya solucionrequiere herramientas de varios capıtulos, y que por tantosolo pueden resolverse al final decada parte. Ademas, en la pagina WWW de la asignatura se encuentran las soluciones de losultimos examenes.
5.1. Examenes recientes
95

Problema 5.1.1: SeaO1x1y1z1 un sistema de referencia inercial tal que el ejeO1z1 es vertical ascen-dente. El sistemaOx0y0z0 de la figura se mueve respecto al sistema 1 de tal modo que:i) ~ω01 es constantesiendo su valorω~k1 = ω~k0; ii) el planoOx0z0 rueda sin deslizar sobre el cilindro circular del sistema 1de ejeO1z1 y radioR; iii) zO
1 = R en todo instante. SeaA el punto interseccion, en un instante generico,entre el ejeOy0 y la generatriz del cilindro que esta en contacto con el plano Ox0z0. Seaα el angulo entreO1x1 y Ox0 y η la coordenaday0 del puntoA.
Una partıcula pesadaM, de masam, esta obligada a moverse sin rozamiento por la circunferenciadel sistema 0 que esta contenida en el planoOx0z0, tiene radioRy centro en el puntoO. Seaθ el angulo,en un instante generico, entreOM y la parte negativa del ejeOz0.
Se pide:
a) Determinarα y η en funcion del tiempo sabiendo que inicialmente sus valores son nulos.
b) Determinar, en funcion deθ y sus derivadas respecto al tiempo, las expresiones de las fuerzas deinercia que intervienen en el estudio del movimiento de la partıcula respecto al sistema 0.
c) A partir de las ecuaciones del movimiento respecto al sistema 0, dejar el calculo deθ(t) reducidoa una cuadratura.
d) Estudiar cualitativamente que tipo de movimientos puede tener la partıcula, indicando en particu-lar si existen posiciones de equilibrio o siθ puede realizar movimientos asintoticos hacia ciertosvalores.
e) Determinar la reaccion de la curva sobre la partıcula.
Junio de 2002
96
a Es obvio queα es el angulo girado por el sistema 0 respecto a un eje vertical:
~ω01 = ω k = α k → α = ω t +α0 → α = ω t
El planoOy0z0, y el ejeOy0 contenido en el, ruedan sin deslizarsobre el cilindro. Las longitudes recorridas porA por el eje y por lacircunferencia de contacto con el cilindro son iguales:
η = α R= Rω t α
O
x0
y0
Aωt
x1
y1
b Las expresiones de las fuerzas de inercia son
FIA = −m[
~γO01+
~ω01∧OM +~ω01∧ (~ω01∧OM)]
FIC = −2m~ω01∧vM20
~ω01 es conocida y constante. La posicion y velocidad relativasdeM son triviales
OM = R(sinθ ,0,−cosθ) vM20 = Rθ (cosθ ,0,sinθ)
La velocidad y aceleracion deO son mas complicadas.
No hay ningun punto de movimiento conocido simple en el que apoyarse
Al rodar sin deslizar,A de 0 tiene velocidad nula, pero no es siempre el mismo punto de0, por lo que no podemos derivar para hallar la aceleracion
El movimiento es plano, podrıan usarse las tecnicas del movimiento plano para calcularla aceleracion del CIRA y luego por campo de aceleraciones la deO
Finalmente, va a ser mas sencillo calcularla derivando el vector posicion. Por supuesto,lo haremos en ejes moviles para evitar los errores al hacer ydeshacer cambios de ejes.
O1O = Ri0−η j0 +Rk0 = (R,−η,R)
vO01 =
˙−−→O1O
∣∣1 =
˙−−→O1O
∣∣0 +~ω01∧
−−→O1O = (0,−η,0)+
∣∣∣∣∣∣
i j k0 0 ωR −η R
∣∣∣∣∣∣
=
ω ηω R− η
0
~γO01 = vO
01
∣∣1 =
ω η−η0
+
∣∣∣∣∣∣
i j k0 0 ω
ω η ω R− η 0
∣∣∣∣∣∣
=
Rω2 +ω η −ω2Rω2η
0
=
ω2Rω2Rω t
0
Con esto se pueden ya calcular las fuerzas de inercia:
FIA = −mω2 R
1−sinθω t0
FIC = −2mω
0Rθ cosθ
0
c Para plantear las ecuaciones del movimiento, solo faltan el peso, que es trivial, y las fuerzasde ligadura. Al ser una curva lisa, habra dos componentes defuerza de ligadura, contenidas enel plano normal; las proyectaremos segunur de las polares asociadas a la circunferencia y aθ ,y la normalj .
−mg
001
0
−mω2R
1−sinθω t0
0
−2mω
0Rθ cosθ
0
0
+Ny
010
0
+Nr ur =
= mRθ uθ −mRθ2ur
97

Para obtener la ecuacion del movimiento, proyectamos sobre el vector unitario tangente a lacurvauθ = (cosθ ,0,sinθ):
−mgsinθ −mω2R(1−sinθ)cosθ +Nr
(
(((((((((((((−sinθ cosθ +cosθ sinθ
)
= mRθ cosθ
θ = −ω2 (1−sinθ)cosθ − gR
sinθ
Esta ecuacion se puede integrar multiplicando ambos miembros porθ
θ θ = θ[
−ω2 (1−sinθ)cosθ − gR
sinθ]
θ2
2= C−ω2sinθ +ω2sinθ2
2+
gR
cosθ
Y se obtiene directamente la cuadratura√
2∫
d t =
∫ ±dθ√
C−ω2 sinθ +ω2 sinθ 2
2 + gR cosθ
d La integral permite hacer un analisis cualitativo en funcion deθ :
θ2
2= E−Ve f(θ) → Ve f(θ) = ω2
(
sinθ − sin2 θ2
)
− gR
cosθ
Aunque haya dos curvas con dos coeficientes distintos, no es difıcil dibujar el potencial efi-caz. Por la forma de las curvas que se suman, vemos que no van a aparecer o desaparecer puntosestacionarios al variar el parametrogω2R
. En θ = π , se suma al coseno una curva de pendientenegativa, por lo que el maximo se desplaza hacia la izquierda. Enθ = 0, se suma al coseno unacurva de pendiente positiva, por lo que el mınimo se desplaza tambien a la izquierda. Lo quehace la curva de los senos, independientemente del valor relativo de los coeficientes, es bajarla curva del coseno para angulos negativos y subirla para los positivos: tanto maximos comomınimos se desplazan a la izquierda. El valor de este desplazamiento sı depende degω2R
.
Los puntos de equilibrio son los estacionarios del potencial:
V ′ = ω2(cosθ +sinθ coscosθ)+gR
sinθ = 0
ω2cosθ (1−sinθ)+gR
sinθ = 0
tanθ =Rω2
g(sinθ −1)
π2− π
2
Esta ecuacion transcendente tiene dos soluciones: un maximo θM ∈ [π/2,π] y un mınimoθM ∈ [−π/2,0]. Los movimientos seran los del pendulo: equilibrio estable, libracion, movi-miento asintotico, equilibrio inestable, rotacion. La diferencia esta en que los puntos de equili-brio se desplazan en el sentido del reloj un angulo que depende de la relacionRω2
g .
e Las componentes de la reaccion normal se determinan proyectando la ecuacion del movi-miento segun sus direcciones:
N = Nr ur +Ny j
CM · j → −mω2Rω t −2mωRθ cosθ +Ny = 0
CM ·ur → mgcosθ −mω2Rsinθ (1−sinθ)+Nr = −mRθ2
98
99
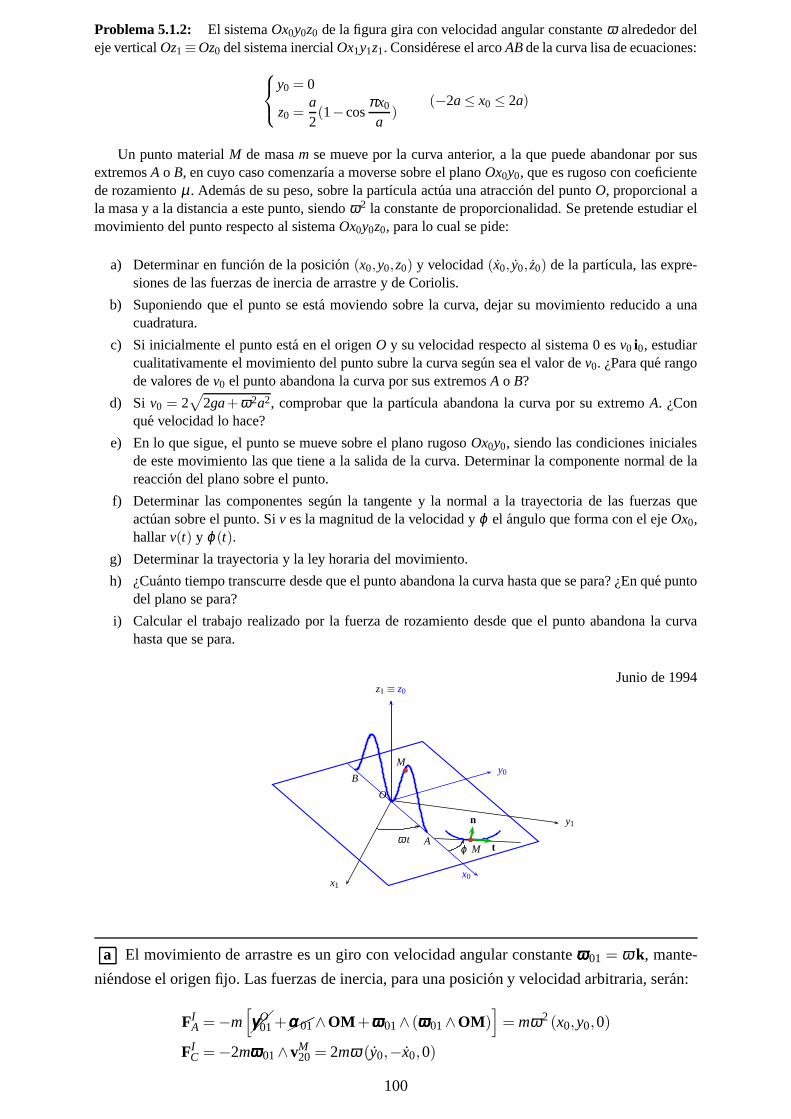
Problema 5.1.2: El sistemaOx0y0z0 de la figura gira con velocidad angular constanteω alrededor deleje verticalOz1 ≡Oz0 del sistema inercialOx1y1z1. Considerese el arcoABde la curva lisa de ecuaciones:
y0 = 0
z0 =a2(1−cos
πx0
a)
(−2a≤ x0 ≤ 2a)
Un punto materialM de masam se mueve por la curva anterior, a la que puede abandonar por susextremosA o B, en cuyo caso comenzarıa a moverse sobre el planoOx0y0, que es rugoso con coeficientede rozamientoµ . Ademas de su peso, sobre la partıcula actua una atracci´on del puntoO, proporcional ala masa y a la distancia a este punto, siendoω2 la constante de proporcionalidad. Se pretende estudiar elmovimiento del punto respecto al sistemaOx0y0z0, para lo cual se pide:
a) Determinar en funcion de la posicion(x0,y0,z0) y velocidad(x0, y0, z0) de la partıcula, las expre-siones de las fuerzas de inercia de arrastre y de Coriolis.
b) Suponiendo que el punto se esta moviendo sobre la curva, dejar su movimiento reducido a unacuadratura.
c) Si inicialmente el punto esta en el origenO y su velocidad respecto al sistema 0 esv0 i0, estudiarcualitativamente el movimiento del punto subre la curva segun sea el valor dev0. ¿Para que rangode valores dev0 el punto abandona la curva por sus extremosA o B?
d) Si v0 = 2√
2ga+ ω2a2, comprobar que la partıcula abandona la curva por su extremo A. ¿Conque velocidad lo hace?
e) En lo que sigue, el punto se mueve sobre el plano rugosoOx0y0, siendo las condiciones inicialesde este movimiento las que tiene a la salida de la curva. Determinar la componente normal de lareaccion del plano sobre el punto.
f) Determinar las componentes segun la tangente y la normala la trayectoria de las fuerzas queactuan sobre el punto. Siv es la magnitud de la velocidad yϕ el angulo que forma con el ejeOx0,hallarv(t) y ϕ(t).
g) Determinar la trayectoria y la ley horaria del movimiento.
h) ¿Cuanto tiempo transcurre desde que el punto abandona lacurva hasta que se para? ¿En que puntodel plano se para?
i) Calcular el trabajo realizado por la fuerza de rozamientodesde que el punto abandona la curvahasta que se para.
Junio de 1994
x1
y1
O
x0
y0
z1 ≡ z0
A
Bb
M
b
Mϕ t
n
ω t
a El movimiento de arrastre es un giro con velocidad angular constanteωωω01 = ω k, mante-
niendose el origen fijo. Las fuerzas de inercia, para una posicion y velocidad arbitraria, seran:
FIA = −m
[
γγγO01+ααα01∧OM +ωωω01∧ (ωωω01∧OM)
]
= mω2(x0,y0,0)
FIC = −2mωωω01∧vM
20 = 2mω (y0,−x0,0)
100

Si la partıcula se mueve sobre la curva, hay que sustituir suecuacion en la posicion, velocidad,aceleracion y fuerzas de inercia:
y0 = y0 = y0 = 0
z0 =a2
(
1−cosπx0
a
)
; z0 = z′0x0 =π x0
2sin
πx0
a;
z0 = z′0x0 +z′′0x20 =
π x0
2sin
πx0
a+
π2x20
2acos
πx0
a
donde ˙( ) es la derivada respecto al tiempo, y( )′ respecto ax0.
b Hay varios caminos para obtener la ecuacion del movimientode una partıcula sobre curva.1 El mas obvio, pero tambien mas complejo, es plantear las ecuaciones generales de un
sistema con ligaduras. La curva se puede expresar como interseccion de dos superficies
f1 ≡ z0−a2
(
1−cosπx0
a
)
= 0 f2 ≡ y0 = 0
y la reaccion normal tendra componentes segun las normales
N = λ1∇ f1 +λ2∇ f2 = λ1(−z′0,0,1)+λ2(0,1,0)
Las ecuaciones del movimiento seran:
m
x0y0z0
=
00
−mg
−mω2
x0
y0z0
+mω2
x0
y00
+2mω
y0−x0
0
+λ1∇ f1 +λ2∇ f2
f1 = 0 f2 = 0
Es un sistema algebraico-diferencial: tres ecuaciones diferenciales y dos algebraicas; con cin-co incognitas: las coordenadasx0,y0,z0 y las fuerzas de ligaduraλ1 y λ2. Para resolverlo, sederivan las ecuaciones de la ligadura, para sustituir en lasde cantidad de movimiento dos coor-denadas y sus derivadas; luego con estas tres se eliminan lasincognitas de ligadura, para dejaruna ecuacion diferencial en una coordenada, que se integra(o, en este caso, se reduce a cuadra-turas). No seguiremos ese camino, porque hay otros mas simples.
2 Tratandose de una curva lisa, es mas directo proyectar la ecuacion de la cantidad
de movimiento sobre la tangente a la curva. Es mejor tomarx0 como parametro: no tiene sin-gularidades (z0 las tiene en todos los maximos y mınimos), y ya aparece en laecuacion de lacurva:
r = [x0,0,z0(x0)] t ‖ rx0 = (1,0,z′0) =(
1,0,π2
sinπx0
a
)
La ecuacion que hay que proyectar sobre la tangente es
m
x00
z′0x0 +z′′0x20
=
00
−mg
−mω2
00z0
+2mω
0−x0
0
+N
Proyectamos segun la direccion tangenterx0 , con lo que la reaccion normal desaparece:
x0 +z′0(z′0x0 +z′′0x2
0) = x0
[
1+(z′0)2]
+z′0z′′0x20 = z′0[−g−ω2z0(x0)]
Comoz0 es una funcion dex0, queda una ecuacion no lineal enx0 y sus derivadas temporales.En esta forma, la ecuacion no parece muy amigable. Perotiene que poderse integrar una vez,para luego reducirla a cuadraturas. Ademas, como el sistema es conservativo, tiene la integralde la energıa, que en curvas lisas sabemos que es equivalente a la de cantidad de movimientosegun la tangente. Si se se multiplican ambos terminos porx0, queda una diferencial exacta:
x0 x0
[
1+(z′0)2]
+z′0z′′0 x30 =
ddt
12
[
1+(z′0)2]
x20
[−g−ω2z0(x0)]z′0 x0 =
ddt
(
−gz0−12
ω2 z20
)
101

con lo que se llega a la ecuacion de la energıa, y de esta a unacuadratura:
12
[
1+(z′0)2]
x20 = E−gz0−
12
ω2z20 ⇒
∫
dt = ±∫
√√√√ 1+
(z′0)2
2(E−gz0− 1
2ω2z20
) dx0
donde, naturalmente,z0 y su derivada son las funciones dex0 que se calcularon mas arriba.3 Finalmente, tenemos el camino mas directo: la ecuacion dela energıa. En el mo-
vimiento relativo, la fuerza de Coriolis no trabaja porque es normal al desplazamiento. La dearrastre es potencial, el peso y la del muelle tambien. No hay rozamiento y, aunque la curva noesta en reposo en el movimiento absoluto, sı lo esta en el relativo. Por tanto, la fuerza normalno trabaja. La ecuacion de la energıa queda:
dT = −dV → T +V = E =12
m(x2
0 + z20
)+mgz0+
12
mω2z20 = E
Sustituyendo la ligadura ˙z0 = z′0 x0 , se llega a la misma ecuacion que antes, y por tanto a lamisma cuadratura. Aunque, obviamente, con mucho menos trabajo. Y sin tener que reconoceruna diferencial exacta poco evidente.
c Con la ecuacion de la energıa en la variablex0, se puede hacer un analisis cualitativo:
12
[
1+(z′0)2]
x20 = E−V(x0) = E−
(
mgz0+12
mω2z20
)
El coeficiente de ˙x20 es siempre positivo, por lo que los puntos de parada y movimientos asintoti-
cos dependeran solo del potencial. Sustituyendo la ecuacion de la curva se tiene:
Vm
=ag2
(
1−cosπx0
a
)
+ω2a2
8
(
1−cosπx0
a
)2=
=ag2
+ω2a2
8− 2ga+a2ω2
4cos
πx0
a+
ω2a2
8cos2
πx0
a=
= A+ω2a2
8
[
−2(1+ ε)cosπx0a + cos2 πx0
a
]
dondeε =2g
aω2 > 0
El parametroε determina la relacion entre la gravedad y la atraccion delorigen. Los puntos deequilibrio son:
V ′ ∝ 2(1+ ε)sinπx0
a−2cos
πx0
asin
πx0
a= 2sin
πx0
a
[
1+ ε −cosπx0
a
]
= 0 → x0 = na
El termino entre corchetes nunca se anula, porqueε > 0. Por lo tanto, los puntos estacionariosson los ceros del seno. Es obvio quea = 0,2a seran mınimos yx = a maximo, pero podemoscomprobarlo dibujando el potencial. Aunque no sepamos el valor deε, con saber que es positivose puede dibujar aproximadamente:
2
-2
a2a
2
1
-2
a2a
2
-2
a2a
Queda claro que hay mınimos ena y 2a, y un maximo ena. Para que llegue al extremoA(x0 = 2a), la energıa inicial debe ser mayor que la potencial del maximo, de modo que pase sinpararse y siga hacia el extremo. Cuando salga porA llevara la misma energıa que al principio,
102

porque los potenciales son iguales. Para hacer los calculos es mas simple poner el potencial enfuncion dez0:
T(0)+V(0) ≥ 0+V(a);12
mv20+0≥ mgz0(a)+
12
mω2z0(a)2 = mga+12
mω2a2
⇒ v20 ≥ 2ga+ω2a2
d Si la partıcula se lanza desde el origen con velocidadv0 = 2√
2ga+ω2a2, se cumple lacondicion de paso:
v20 = 4(2ga+ω2a2) > 2ga+ω2a2
Llega con la misma velocidad, porque el potencial es el mismo:
T(0)+V(0) = T(2a)+V(2a) ⇒ v(2a) = v0
y la direccion es la misma, dada por la tangente de la curva.
e Cuando la partıcula abandona la curva porA, se mueve sobre un plano rugoso. La ligadurapasa a serz0 = 0. Al ser rugoso, la reaccion del plano tendra una componente normalN y unacontenida en el plano, el rozamientoR . Las ecuaciones del movimiento son ahora:
00N
+
RxRy0
−
00
mg
−mω2
x0y00
+mω2
x0y00
+2mω
y0−x0
0
= m
x0y00
Obviamente,N = mgk
f Si el punto desliza sobre el plano, se aplica el modelo de Coulomb con deslizamiento:
x0
y0
ϕ
t
R−2mωωω ∧vt
N = mgk → R = −µ mgvv
= −µ mgt
Sobre el plano, solo actuan dos fuerzas: el rozamiento seg´un la tan-gente y la fuerza de Coriolis segun la normal a la trayectoria. El pe-so y la normal se anulan, ası como el muelle y la fuerza centr´ıfuga.Como la velocidad tiene la direccion de la tangente y la velocidadangular la dek, la fuerza de Coriolis tuerce la trayectoria siemprehacia la derecha. Proyectando segun la tangente,
−µmg= mγt = mv ⇒ v = v0−µ gt = 2√
2ga+ω2a2−µ gt
Proyectando segun la normal principal,
2mω v = mv2
ρ; 2ω =
vρ
=ds/dt
−ds/dϕ= −dϕ
dt⇒ ϕ = ϕ0−2ω t = −2ω t
donde se ha tenido en cuenta que, por curvarse hacia la derecha, al aumentarsdisminuyeϕ.
g Pasamos de intrınsecas a cartesianas proyectando el elementods:
dx= dscosϕ = vdt cosϕ = (v0−µgt)cos(−2ω t)dt
dx= dssinϕ = vdt sinϕ = (v0−µgt)sin(−2ω t)dt
Se integran estas ecuaciones con las condiciones inicialesx(0) = 2a, y(0) = 0, para dar
x = v02ω
[
sin2ω t − µg2ωv0
(cos2ω t +2ω t sin2ω t −1)]
+2a
y = v02ω
[
cos2ω t + µg2ωv0
(sin2ω t −2ω t cos2ω t)−1]
103
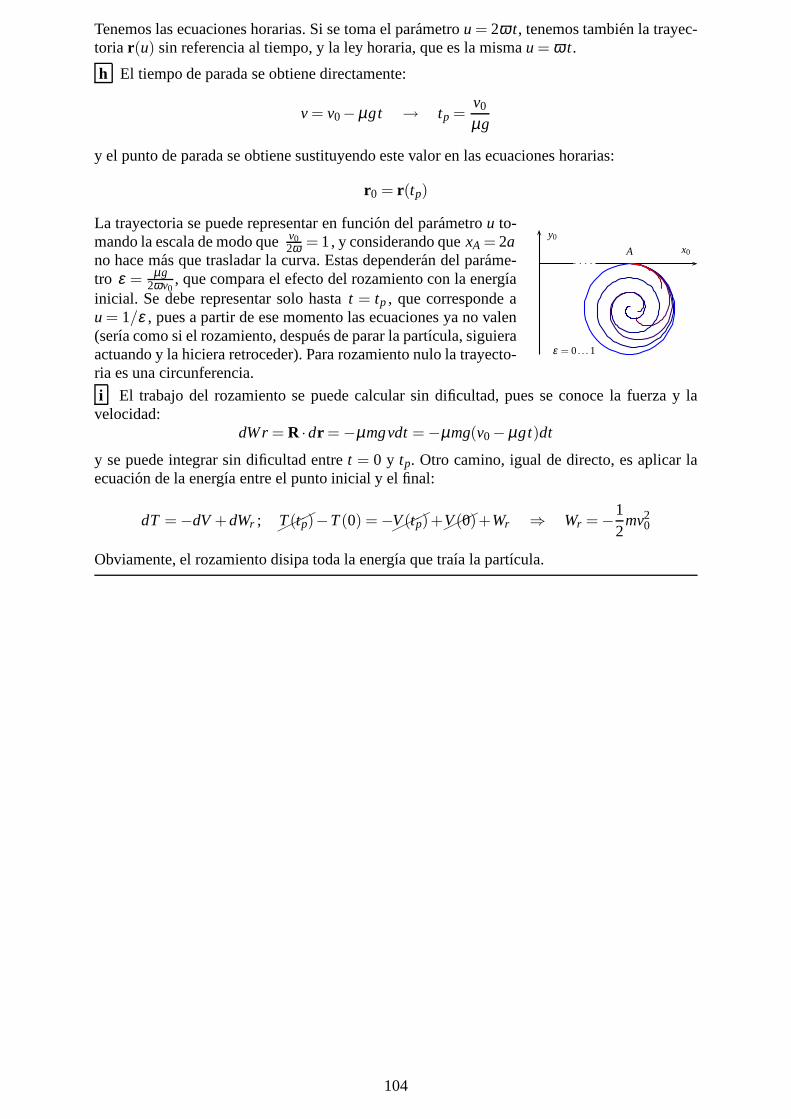
Tenemos las ecuaciones horarias. Si se toma el parametrou = 2ω t, tenemos tambien la trayec-toria r(u) sin referencia al tiempo, y la ley horaria, que es la mismau = ω t.
h El tiempo de parada se obtiene directamente:
v = v0−µgt → tp =v0
µg
y el punto de parada se obtiene sustituyendo este valor en lasecuaciones horarias:
r0 = r(tp)
La trayectoria se puede representar en funcion del parametro u to-mando la escala de modo quev0
2ω = 1, y considerando quexA = 2ano hace mas que trasladar la curva. Estas dependeran del parame-tro ε = µg
2ωv0, que compara el efecto del rozamiento con la energıa
inicial. Se debe representar solo hastat = tp , que corresponde au = 1/ε , pues a partir de ese momento las ecuaciones ya no valen(serıa como si el rozamiento, despues de parar la partıcula, siguieraactuando y la hiciera retroceder). Para rozamiento nulo la trayecto-ria es una circunferencia.
x0
y0
A
ε = 0. . .1
i El trabajo del rozamiento se puede calcular sin dificultad, pues se conoce la fuerza y lavelocidad:
dWr= R ·dr = −µmgvdt= −µmg(v0−µgt)dt
y se puede integrar sin dificultad entret = 0 y tp. Otro camino, igual de directo, es aplicar laecuacion de la energıa entre el punto inicial y el final:
dT = −dV +dWr ; T(tp)−T(0) = −V(tp)+V(0)+Wr ⇒ Wr = −12
mv20
Obviamente, el rozamiento disipa toda la energıa que traıa la partıcula.
104

5.2. Examenes mas antiguos
En esta seccion se incluyen problemas de examenes anteriores al plan de estudios 2000.Esto presenta dificultades, porque la asignatura Mecanicadel plan 1974 tenıa un programa masamplio que la Mecanica I y la II del plan 2000; de hecho inclu´ıa temas de Mecanica Analıtica,de Mecanica Orbital y Dinamica de la Actitud, y hasta de Vibraciones: teorıa del potencial, for-mulacion hamiltoniana, linealizacion (pequenos movimientos), modos de vibracion. Por tanto,algunas preguntas no podran resolverse con los conocimientos correspondientes a esta asigna-tura. Pero no por eso vamos a dejar de lado otros temas que sı pueden tratarse y tienen un interesnotable.
En las secciones anteriores tambien hay problemas anteriores a 2000, pero todo lo que sepregunta se puede resolver con los conocimientos de Mecanica II. Se dejan para esta parte losque tengan alguna cuestion que ya no se incluye.
Problema 5.2.1: Un punto materialA de masa 3m, se mueve, sin rozamiento, por una circunferenciade centroO y radio a contenida en un plano vertical, en el que se elige un sistema de referenciaOxyzcuyo ejeOy coincide con la vertical ascendente que pasa porO. Un puntoB de masam se mueve, enel planoOxy, unido con el puntoA mediante un muelle de longitud natural nula y constante de rigidezK = (mg)/a. Para determinar la configuracion del sistema se utilizar´an, como coordenadas generalizadas,el anguloϕ que el radio vectorOA forma con el ejeOy, y las coordenadas(x,y) del puntoB. Se pide:
1. Determınese la energıa potencial del sistema en funci´on de las coordenadas generalizadas. Hallarlas posiciones de equilibrio, especificando cuales son estables y cuales inestables.
2. Determınese la energıa cinetica del sistema en funci´on de las coordenadas y velocidades genera-lizadas.
3. Linealıcese la energıa cinetica y la energıa potencial del sistema, alrededor de la posicion deequilibrio estable determinada en 1.
4. Planteense las ecuaciones de Lagrange que gobiernan lospequenos movimientos del sistema al-rededor de la posicion de equilibrio estable anteriormente mencionada.
5. Obtenganse las frecuencias naturales de vibracion delsistema y las formas modales asociadasa cada uno de los modos propios de oscilacion. Determınense unas coordenadas normales delsistema.
7 de Junio de 1986
Aϕ
x
y
O
B
1 Tendremos que calcular los potenciales del peso deA y B, y el potencial del muelle:
VA = −3mgacosϕ VB = mgy
Vm =mg2a
[
(x−asinϕ)2+(y+acosϕ)2]
105

Los puntos de equilibrio son los puntos estacionarios del potencial. Como se trata de una funcionde tres variables, hay que anular las derivadas parciales respecto a todas las variables:
V(ϕ,x,y)
∂Vdϕ = mg(3asinϕ −ysinϕ −xcosϕ) = 0
∂Vdx = mg
a (x−asinϕ) = 0
∂Vdy = mg
a (a+y+acosϕ) = 0
De la segunda se despejax = asinϕ y de la terceray = −a(1+ cosϕ) .Sustituyendo en la primera, se llega a las siguientes soluciones:
sinϕ = 0 →
ϕ = 0 x = 0 y = −2a
ϕ = π x = 0 y = 0
que corresponden a los puntos de equilibrio del pendulo, para A, y a colgarverticalmente donde el peso equilibra al muelle, paraB.
x
y
B
A
B
A
2 Las velocidades de los puntos son:
vA = aϕ uϕ vB = xi + yj
La energıa cinetica es:
T =12
3ma2ϕ2+12
m(x2 + y2)
3 Formaremos el vector de coordenadas generalizadasq = (ϕ,x,y) , y el de velocidades ge-neralizadasq = (ϕ, x, y) . La energıa cinetica es una forma cuadratica
T =12
qTMMM(q) q =
12⌊ϕ, x, y⌋
3ma2 0 00 m 00 0 m
ϕxy
En este caso, la matriz de masasMMM es ya una constante, por que no hay que linealizar nada.En cuanto al potencialV(q) , tenemos una posicion de equilibrio estableqe, en la que∂V
∂q = 0.Para pequenos movimientos alrededor de la posicion de equilibrio, q = qe+∆q , se puede hacerun desarrollo en serie:
q = qe+∆q = (0,0,−2a)+(φ ,ξ ,η)
V(q) = V(qe)+
∂V
∂q
∣∣∣∣qe
∆q+12
∆qT
[∂ 2V∂q2
]
qe
∆q+ . . .
V = −9mga2
+0+12⌊φ ,ξ ,η⌋
5mga −mg4 0
−mg4
mga 0
0 0 mga
φξη
+ . . .
El primer termino se puede ignorar porque es una constante.El segundo es nulo, porque esta par-ticularizado en una posicion de equilibrio. Conservamos el segundo, que es una forma cuadrati-
ca. La matriz de coeficientesKKK =[
∂ 2V∂q2
]
qese denomina matriz de rigidez. Si la posicion de
equilibrio es estable, el potencial tiene un mınimo. La matriz de rigidez sera definida positiva.
4 Para pequenos movimientos alrededor de la posicion de equilibrio estable, podemos formarla lagrangiana aproximada
L =12
qMMM q− 12
qKKKq
en la que los dos terminos son formas cuadraticas definidaspositivas: se trata de un sistemaarmonico. Se derivan los terminos de las ecuaciones de Lagrange,
∂L
∂ q= MMM q
ddt
∂L
∂ q= MMM q+MMM q
∂L
∂q= KKKq
106

Quedan las ecuaciones, en forma vectorial,
MMM q+KKKq = 0
5 Es un sistema de ecuaciones lineales de coeficientes constantes. Buscamos soluciones de laforma
q = Cueiλ t →(−λ 2
MMM+KKK)
u = 0
Para que haya soluciones distintas de la trivial, la matriz de coeficientes tiene que ser singular;tenemos un problema de autovalores y autovectores:
∣∣KKK−λ 2
MMM∣∣=
∣∣∣∣∣∣
5mga−λ 23ma2 −mg4 0
−mg4
mga −λ 2m 0
0 0 mga −λ 2m
∣∣∣∣∣∣
= 0
En este caso la solucion es mas simple, porque la tercera oscilacion, la dey,esta desacoplada:
λ3 =
√ga
u3 = (0,0,1)u3
x
y
B
A
B
A
Para las otras dos oscilaciones, que estan acopladas, hallamos las raıces delpolinomio caracterıstico de la submatriz restante,
λ1 =12
√g3a
(
16+√
19)
λ2 =12
√g3a
(
16−√
19)
Los autovectores asociados son
u1 =
(
−4+√
193
,a,0
)
u2 =
(
−4−√
193
,a,0
)
u1
u2
En el modou2, las dos partıculas oscilan horizontalmente con la frecuenciaλ2 en la mismafase. En el modou1, oscilan horizontalmente en contrafase con la frecuenciaλ1. En el modou3, la partıculaB oscila verticalmente con la frecuenciaλ3.
Las frecuenciasλi se llaman frecuencias modales, y los autovectoresui vectores modales.Las constantesCi son complejas, por el exponente complejoi λi t. Al imponer condiciones ini-ciales, se elimina la parte imaginaria y las soluciones quedan:
Cueiλi t = ui (Ci cosλi t +Di sinλi t)
La solucion general se puede escribir matricialmente
q(t) =3
∑i=1
ui (Ci cosλi t +Di sinλi t) = [u1|u2|u3]
C1cosλ1 t +D1sinλ1 tC2cosλ2 t +D2sinλ2 tC3cosλ3 t +D3sinλ3 t
= UUUz(t)
Las columnas de la matrizUUU son los vectores modales, que son independientes (tienen laspropiedades de los autovectores). Por tanto, la matriz es regular y define un cambio de variables.Las coordenadas
zi(t) = Ci cosλi t +Di sinλi t
son unas coordenadas normales. Es facil comprobar que, coneste cambio de variables, el pro-blema se reduce a tres oscilaciones desacopladas.
107

Problema 5.2.2: Se tiene un sistema galileanoOx1y1z1, cuyo ejeOz1 coincide con la vertical ascen-dente. Otro sistemaOxyz, tal queOzcoincide conOz1, gira con velocidad angular constanteω = ω k1
respecto al primero. Solidario aOxyzhay un cilindro circular, de radioR, cuyo eje esOx. Sobre el cilin-dro se mueve una partıculaP de masamy carga electricaq, con ligadura bilateral sin rozamiento. Sobrela partıcula actuan las siguientes fuerzas.a) el peso;b) Fuerza de LorentzF = qv21∧B, dondeB = Bk1.
1. Plantear las ecuaciones del movimiento de la partıcula respecto al sistema movilOxyz, calculandotodas las fuerzas que intervienen.
2. Calcular en funcion deω el valor deB necesario para que desaparezcan las fuerzas dependientesde la velocidad.
3. Para este valor deB, comprobar que el movimiento segunOx queda desacoplado, e integrarlocompletamente.
4. Para este mismo valor, reducir a cuadraturas el movimiento eny y z. Hacer un estudio cualitativo,indicando los distintos tipos de movimiento en funcion delparametroλ = 2g
Rω2 y las posicionesde equilibrio estables o inestables. (Para este analisis puede ser mas comodo usar la variableθindicada en la figura).
5. Linealizar este movimiento para valores pequenos deθ . Determinar el perıodo.
6. Para estos pequenos movimientos en las proximidades deθ = 0, determinar los valores deω quedan lugar a trayectorias cerradas sobre el cilindro.
7. Para condiciones indicadas en los numeros 3 y 4, calcularel valor de la reaccion normal en funcionde la posicion.
Marzo de 1993
x1
y1
O
x
y
z1 ≡ z
bP
ω t
P
θ
y
z
O
1 Para el movimiento relativo a una superficie lisa movil hay que tener en cuenta:
Fuerzas directamente aplicadas:−mgk , qvP21∧B .
Fuerza de ligadura,N = Nur .
Fuerzas de inercia:FIA , FI
C .
El peso es trivial. Para la fuerza de Lorentz, tendremos que aplicar la composicion de movi-mientos:
vP21 = ωωω01∧ rP +vP
20 = ω
−yx0
+
xyz
FL = qω
∣∣∣∣∣∣
i j k−y x 00 0 B
∣∣∣∣∣∣
+q
∣∣∣∣∣∣
i j kx y z0 0 B
∣∣∣∣∣∣
= qωB
xy0
+qB
y−x0
De la fuerza de inercia de arrastre, solo queda el termino centrıfugo,
FIA = −m
[
γγγO01+ααα01∧ rP +ωωω01∧
(ωωω01∧ rP)
]
= mω2
xy0
108

La fuerza de Coriolis va a tener una forma semejante a la segunda parte de la de Lorentz, porquela velocidad angular es paralela al campo magnetico:
FIC = −2mωωω01∧vP
20 = −2m
∣∣∣∣∣∣
i j k0 0 ωx y z
∣∣∣∣∣∣
= 2mω
y−x0
Podemos ya escribir la ecuacion de la cantidad de movimiento para la partıcula:
m
xyz
= N
0sinθ
−cosθ
−
00
mg
+qωB
xy0
+qB
y−x0
+mω2
xy0
+2mω
y−x0
donde tanθ = y−z .
2 Dependen de la velocidad la fuerza de Coriolis y la segunda parte de la de Lorentz. Noteseque en el movimiento relativo solo se puede llamar velocidad a la relativa. La de arrastre esciertamente una velocidad, pero no en el movimiento relativo: aquı aparece solo como un campodependiente de la posicion:
qB
y−x0
+2mω
y−x0
=
000
→ B = −2mω
q
3 Sustituyendo este valor deB, las ecuaciones quedan:
m
xyz
= N
0sinθ
−cosθ
−mg
001
−mω2
xy0
La fuerza de Coriolis se compensa con uno de los terminos de la de Lorentz, mientras que lacentrıfuga se anula con la mitad de la otra parte: en vez de una repulsion del eje de giro, quedauna atraccion.
Se observa que la ecuacion parax queda desacoplada. Se trata de un oscilador armonico,que se integra directamente:
x+ω2x = 0 ⇒ x = x0cosω t +x0
ωsinω t
4 Las ecuaciones paray, z corresponden las de un pendulo con peso y atraccion del ejeOz.Hay varios caminos:
Trabajar en cartesianas por el metodo general. Aunque sea una superficie, al eliminar laxlas ecuaciones se reducen a las de una curva plana,y2 +z2 = R2 . De todos modos, es elcamino mas complejo, y no lo abordaremos.
Introducir la variableθ de las cilındricas (y = Rsinθ , x = −Rcosθ ), y proyectar sobrela tangente para eliminarN como se hace en el pendulo simple.
Como las fuerzas que quedan son potenciales y la superficie eslisa, se puede planteardirectamente la integral de la energıa.
La aceleracion segunuθ seraRθ . La distanciay es Rsinθ . Proyectandolas fuerzas segun la tangente, tenemos
mRθ = −mgsinθ −mω2Rsinθ cosθ
Esta ecuacion se integra multiplicando ambos miembros porθ :
Rθ2
2=
C2
+gcosθ +12
ω2Rcos2θ
Pθ
y
z
O
109
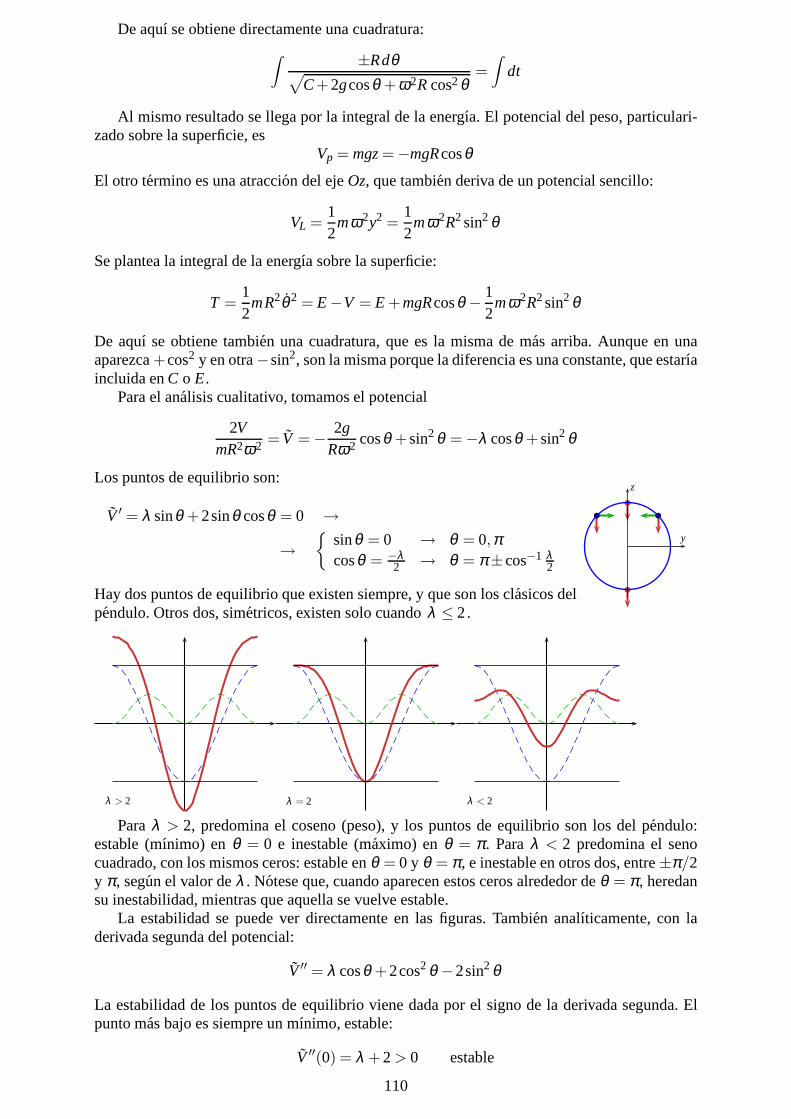
De aquı se obtiene directamente una cuadratura:∫ ±Rdθ√
C+2gcosθ +ω2Rcos2θ=
∫
dt
Al mismo resultado se llega por la integral de la energıa. Elpotencial del peso, particulari-zado sobre la superficie, es
Vp = mgz= −mgRcosθ
El otro termino es una atraccion del ejeOz, que tambien deriva de un potencial sencillo:
VL =12
mω2y2 =12
mω2R2sin2 θ
Se plantea la integral de la energıa sobre la superficie:
T =12
mR2θ2 = E−V = E +mgRcosθ − 12
mω2R2sin2θ
De aquı se obtiene tambien una cuadratura, que es la misma de mas arriba. Aunque en unaaparezca+cos2 y en otra−sin2, son la misma porque la diferencia es una constante, que estarıaincluida enC o E.
Para el analisis cualitativo, tomamos el potencial
2VmR2ω2 = V = − 2g
Rω2 cosθ +sin2θ = −λ cosθ +sin2 θ
Los puntos de equilibrio son:
V ′ = λ sinθ +2sinθ cosθ = 0 →
→
sinθ = 0 → θ = 0,πcosθ = −λ
2 → θ = π ±cos−1 λ2
Hay dos puntos de equilibrio que existen siempre, y que son los clasicos delpendulo. Otros dos, simetricos, existen solo cuandoλ ≤ 2.
y
z
λ > 2 λ = 2 λ < 2
Paraλ > 2, predomina el coseno (peso), y los puntos de equilibrio sonlos del pendulo:estable (mınimo) enθ = 0 e inestable (maximo) enθ = π . Paraλ < 2 predomina el senocuadrado, con los mismos ceros: estable enθ = 0 y θ = π , e inestable en otros dos, entre±π/2y π , segun el valor deλ . Notese que, cuando aparecen estos ceros alrededor deθ = π , heredansu inestabilidad, mientras que aquella se vuelve estable.
La estabilidad se puede ver directamente en las figuras. Tambien analıticamente, con laderivada segunda del potencial:
V ′′ = λ cosθ +2cos2 θ −2sin2 θ
La estabilidad de los puntos de equilibrio viene dada por el signo de la derivada segunda. Elpunto mas bajo es siempre un mınimo, estable:
V ′′(0) = λ +2 > 0 estable
110

El punto mas alto es estable o inestable segun el valor deλ :
V ′′(π) = 2−λ
λ < 2 V ′′ > 0 estableλ > 2 V ′′ < 0 inestable
Los puntos simetricos, cuando existen, son maximos (inestables)
V ′′(
cos−1 λ2
)
= −2+λ 2
2> 0 inestable (λ < 2)
En el casoλ > 2, el analisis cualitativo es el mismo que en el pendulo simple. Si se lanza desdeel punto mas bajo, la velocidad necesaria para el movimiento asintotico es
12
mR2θ2c = V(π)−V(0) = λmω2R2
y los movimientos posibles son:
θ0 < θc Libracion alrededor del punto mas bajo
θ0 = θc Movimiento asintotico aθ = πθ0 > θc Rotacion periodica
Para el casoλ < 2, los maximos estan en otro sitio. Lanzando desde el puntomas bajo, lavelocidad para llegar asintoticamente al maximo es:
12
mR2θ2c = V
(
cos−1 −λ2
)
−V(0) =12
mω2R2(
1+λ +λ 2
4
)
mientras que si se lanza desde el otro mınimo,θ = π ,
12
mR2θ2c = V
(
cos−1 −λ2
)
−V(π) =12
mω2R2(
1−λ +λ 2
4
)
Los movimientos posibles son los mismos que para el casoλ > 2, pero ahora con esta ultimavelocidad si se lanza desdeπ , o con la anterior si se lanza desde 0.
5 La ecuacion del movimiento en este plano es
θ = −gR
sinθ −ω2sinθ cosθ
Para pequenos desplazamientos, sinθ ≃ θ , cosθ ≃ 1,
θ = −gR
θ −ω2θ → θ +(g
R+ω2
)
θ = 0
Queda un oscilador armonico. La frecuencia esΩ =√
gR +ω2 , y el periodoT = 2π√
gR+ω2
.
6 El movimiento segunx es una oscilacion armonica de frecuenciaω, ysegunθ otro de frecuenciaΩ (en pequenos movimientos). Para que la tra-yectoria sea una curva cerrada, es necesario que al cabo de untiempo deter-minado hayan pasado numeros enteros de periodos en ambos movimientos,es decir, que el cociente de frecuencias sea un numero racional:
ω√ gR +ω2
=1
√λ2 +1
=nm
; n,m∈ N
7 Proyectamos las ecuaciones con la variableθ en la direccion radial,
−mRθ2 = N+mgcosθ −mω2Rsin2 θ
111

De la integral de la energıa obtenemosθ2:
12
mR2θ2 = E +mω2R2
2
(λ cosθ +cos2θ
)
y podemos poner la reaccion en funcion de la posicion:
N = −[E +mω2R
(λ cosθ +cos2θ
)]−mgcosθ +mω2Rsin2 θ =
= mω2R(sin2 θ −cos2 θ
)−3mgcosθ − E
112

Problema 5.2.3: Considerese la referencia galileana trirectangularOx1y1z1, cuyo ejeOz1 coincide conuna vertical ascendente. SeaOxyzuna referencia trirectangular, que gira con velocidad angular constante,−ω j , alrededor del ejeOy1, cuyo ejeOycoincide conOy1 y cuyo planoOxzcoincide con el planoOx1z1
de la referencia galileana; inicialmente, ambas referencias coinciden.SeaM, una partıcula material, pesada, de masam, sometida a una atraccion del punto de coordenadas
x1 = y1 = 0, z1 = a, proporcional a la masa y la distancia, siendok = (g/a) la constante de proporciona-lidad (g≡ aceleracion de la gravedad). Se pide:
Determinar los campos de fuerzas de inercia, de arrastre y deCoriolis, que debe considerar unobservador unido a la referenciaOxyz, que pretenda analizar el movimiento de la partıculaM.El puntoM, es obligado a moverse sin rozamiento y con ligadura bilateral, sobre la circunferenciaC de ecuaciones:
x = 0, y2 + z2 = a2.
Dejar reducido a cuadraturas, el movimiento del puntoM.
Realizar un analisis cualitativo del movimiento del punto; mostrar que existe cuatro posiciones deequilibrio relativo aC, e indicar cuales son estables.
Determinar el periodo de los pequenos movimientos del punto M alrededor de una de las posicio-nes de equilibrio estable.
Obtener la reaccion que la circunferencia ejerce sobre el punto.Supongase al punto situado inicialmente enx = y = 0, z= A; se lanza con una velocidad, relativaaC, de valorv0 = aω .
Determinar el tiempo que tarda el punto en alcanzar el equilibrio relativo aC.
Trabajo que la reaccion normal realiza, en el movimiento del punto, respecto a la referenciaOx1y1z1, desde el instante inicial, hasta que alcanza el equilibriorelativo aC.
Abril de 1989
Problema 5.2.4: SeaOx1y1z1 un sistema de referencia galileano triortogonal y orientado a derechas;su origen coincide con el centroO de un aro de masaM y radio a contenido en el planoOx1y1. Sean(r,θ ,ϕ) las coordenadas esfericas, asociadas a la referenciaOx1y1z1, de un punto genericoP del espacio,y seaV(r,θ ,ϕ) el potencial gravitatorio generado por la masa del aro en el puntoP. Se pide:
a) Obtener una expresion que proporcione, mediante una unica cuadratura, el potencial gravitatorioV(r,θ ,ϕ).
b) Obtengase un desarrollo asintotico deV(r,θ ,ϕ), en potencias del parametro pequeno(r/a) ≪ 1,que proporcione expresiones aproximadas para el potencialen las proximidades del centroO delaro.
c) Compruebe que, si se aproxima el potencial, en las cercanias del origenO, por los tres primerosterminos del desarrollo asintotico obtenido en b), adopta la forma
V ≃ µ4a3 (2z2
1−x21−y2
1)
conµ = GM (G es la constante de gravitacion universal).
Se pretende analizar el movimiento de una partıcula material de masam respecto de la helice de repre-sentacion parametrica
(x,y,z) = b(senψ ,1−cosψ ,ψ);
dicha helice se encuentra rıgidamente unida a una referencia Oxyz, cuyo ejeOz coincide con el ejeOz1 de la referencia galileana, alrededor del cual gira con velocidad angular constanteω . Se admitiranlas siguientes hipotesis:i) la helice es lisa,ii) el cociente(b/a ≪ 1, y en consecuencia el potencialgravitatorio puede aproximarse por la expresion recogidaen el apartado c). Se pide:
d) Reducir a cuadraturas el movimiento de la partıcula respecto de la helice.
e) Analizar las posibles posiciones de equilibrio en funci´on del parametro,Λ = µ(2a3ω2). ¿Paraque valor deΛ se presenta una posicion de equilibrio relativo enψ =30o?
f) Realizar un analisis cualitativo del movimiento de la partıcula.
g) Determinar la reaccion de la helice sobre la partıcula, si esta se encuentra en equilibrio relativo enla posicionψ = 30o.
113

Abril de 1992
Problema 5.2.5: Hay en el sistema solar dos grupos de asteroides, los Troyanos, que acompanan aJupiter en su orbita alrededor del Sol. Cada grupo se situa en el vertice de un triangulo equilatero conte-nido en el plano de la orbita, con Jupiter y el Sol en los otros dos vertices. Un grupo va por delante deJupiter, y otro por detras.
Para estudiar este movimiento estacionario —que es una solucion particular del problema de lostres cuerpos— se consideraran tres masas aisladas del resto del universo,m1, m2 y m3. Sus vectoresposicion respecto de un sistema inercial son~r1,~r2 y~r3. Para facilitar los calculos se usaran las magnitudesM = m1 +m2+m3,~u =~r1−~r3 y~v =~r2−~r3.
1. Plantear las ecuaciones del movimiento de las tres masas respecto del sistema inercial. Sera con-veniente expresar las fuerzas en funcion de~u y~v.
2. Plantear las ecuaciones del movimiento dem1 y m2 respecto de un sistema con origen enm3 y ejesparalelos a los inerciales.
3. Dejar estas ecuaciones en la forma~u = −GM|~u|3~u+ f (~u,~v), y analogamente para~v.
4. Comprobar que un movimiento tal que las tres masas forman un triangulo equilatero (|~u| = |~v| =|~u−~v|) es solucion de las ecuaciones (si se obtiene la misma ecuacion para~u y~v, y las condicionesiniciales son las adecuadas, tendremos la misma orbita giradaπ/3 ).
5. Si inicialmente~u= R~i y~v= R(
12~i +
√3
2~j)
, calcular los vectores velocidad que deben tener en ese
momentom1 y m2 en los ejes no inerciales, para que se produzca este movimiento estacionario,con orbitas circulares alrededor dem3.
6. Comprobar que tambien es posible una solucion en la que las tres masas estan siempre alineadas(~u = λ~v), pero solo para determinados valores deλ . Obtener la ecuacion escalar de la que seobtienen estos valores (sin perdida de generalidad, se puede considerarλ > 1).
Enero de 1998
114

Capıtulo 6
Dinamica analıtica: sistemas holonomos
Ejercicio 6.1.1: Obtener las ecuaciones de Lagrange para una partıcula libre pesada.
Una partıcula libre no tiene ligaduras, y por tanto tampococinematicas no integrables: es unsistema holonomo. La Lagrangiana se escribe directamente:
L = T −V =12
m(x2 + y2 + z2)−mgz
Derivamos la Lagrangiana respecto a cada velocidad, coordenada, y tiempo:
Lx = mx Lx = mx Lx = 0Ly = my Ly = my Ly = 0Lz = mz Lz = mz Lz = −mg
y escribimos directamente las ecuaciones de Lagrange:
mx = 0
my = 0
mz+mg= 0
Como es natural, coinciden con las de Newton.
115

Ejercicio 6.1.2: Obtener, por los metodos de la mecanica analıtica, las ecuaciones del movimientode una partıcula pesada que se mueve por un plano vertical liso. El plano gira con velocidad angularconstanteω alrededor del eje verticalOz1.
Hay una ligadura ideal finita no estacionaria (plano liso movil). El sistema es holonomoreonomo. La ecuacion de la ligadura, en ejesS0 serıa f ≡ y = 0, y al introducir como coor-denadas generalizadasq1 = x y q2 = z, se obtendrıarP(q j , t) = xi0 +zk0 . A primera vista, eltiempo no aparece explıcitamente. Aparece cuando se expresa la ligadura en ejes fijos:
f ≡−x1 sinω t +y1cosω t = 0 rP = x1 i1+x1 tanω t j1 +z1k1
Por tanto, el tiempo sı estaba explıcitamente: eni0(t) , que es un vector con un movimiento de-terminado por la ligadura. Notese que las coordenadas generalizadasx, z tambien son funcionesdel tiempo, pero no estan determinadasdesde el principiopor la ligadura: se sabran cuando seapliquen fuerzas, se den condiciones iniciales, y se resuelva el problema.
Movimiento absoluto
y1
z1
x1ωt
ω
P z
x
x
zωx
mg
Para estudiar por mecanica analıtica el movimiento absoluto, bastacon escribir la energıa cinetica con las velocidades del movimientoabsoluto,aunque sea en coordenadas relativas a un sistema movil.Consideramos el sistemaS0, plano giratorio, y las coordenadas car-tesianas(x,z) en ese plano. La ecuacion de la ligadura en estos ejeses muy simple:f1 ≡ y = 0. La velocidad 2/1 de la partıcula es larelativa mas la de arrastre:
vP21 = (x,ωx, z)
La Lagrangiana del movimiento 2/1 es:
L =12
m(x2 +ω2x2+ z2)−mgz
Podemos ir derivando,
Lx = mx Lx = mx Lx = mω2xLz = mz Lz = mz Lz = −mg
y formar las ecuaciones de Lagrange:
mx−mω2x = 0
mz+mg= 0
En la direccion radial la fuerza centrıfuga se lleva la partıcula a∞ (a menos que se lance haciael centro con la velocidad del movimiento asintotico), y enla vertical tenemos una caıda libre.
Movimiento relativo
mω2x
mg
P
z
x
x
z
Para estudiar el movimiento relativo, escribimos la energ´ıa cineticade ese movimiento, y tenemos en cuenta las fuerzas de inercia.
T20 =12
m(x2 + z2)
De la fuerza de inercia de arrastre, solo queda la centrıfuga:
FIA = −m
[
γγγO01+ωωω01∧OP+ωωω01∧ (ωωω01∧OP)
]
= mω2xi0
Esta fuerza deriva del potencialmω2x2/2 y podemos incluirla en la lagrangiana,
L =12
m(x2+ z2)−mgz+
12
mω2x2
116

La fuerza de inercia de Coriolis sera
FIC = −2mωωω01∧vP
20 = −2mω xj0
No deriva de un potencial ordinario (sı deriva de uno generalizado, pero no se van a estudiar),por lo que tendremos que calcular sus fuerzas generalizadas:
δWC = FIC ·δ rP = (0,−2mω x,0) · (δx,0,δz) = 0
Donde los desplazamientos virtuales compatibles con las ligaduras se calculan como
rP = (x,0,z) δ rP = ∑ ∂ rP
∂q jδq j = (δx,0,δz)
con las coordenadas generalizadasq1 = x, q2 = z. La fuerza de Coriolis no va a intervenir enlas ecuaciones, porque es normal a la velocidad y no trabaja en ningun DVCL. Sı afecta a lafuerza de ligadura, pero esta no aparece en mecanica analıtica.
Notese que la Lagrangiana es la misma que para el movimientoabsoluto. El termino12mω2x2 ,que allı era parte de la energıa cinetica, aquı aparece como aportacion del potencial. Y quedaigual, por el doble cambio de signo. Las ecuaciones seran, naturalmente, las mismas. Y es que elmismo sistema, con las mismas variables, tiene que estar gobernado por las mismas ecuaciones(o por combinaciones lineales de estas).
Movimiento absoluto en coordenadas absolutas
Para estudiar el movimiento absoluto, se han tomado coordenadas en el plano movil. Setrata de introducir un conjunto de coordenadas generalizadas que simplifique el problema. Si sehubieran usado las coordenadas respecto al plano fijo,
rP = (x1,y1,z1)
la ecuacion de la ligadurafinita no estacionariaserıa mas complicada:
f1 ≡y1
x1= tanω t
Las coordenadas, velocidades y aceleraciones serıan mascomplejas, y con singularidades:
rP = (x1,x1 tanω t,z1)
vP21 =
[x1, x1 tanω t +x1ω
(1+ tan2ω t
), z1]
γγγP21 = . . .
Es obvio quex1 , z1 no son unas coordenadas generalizadas convenientes para este problema.
117

Ejercicio 6.1.3: Una partıcula se mueve sobre un plano horizontal lisoOxy, que gira con velocidadangular constanteω respecto a un eje vertical fijoOz≡ Oz1. Plantear las ecuaciones del movimiento,usando las coordenadas en el plano movil, por los metodos de la mecanica analıtica.
Movimiento absoluto
Planteamos las ecuaciones del movimiento absoluto, aun-que se usen las coordenadas en ejes moviles:
vM21 = vM
20+vM21 = (x−ω y, y+ω x,0)
Como el movimiento es horizontal, el peso no trabaja ypodemos ignorarlo. Podemos escribir directamente la La-grangiana,
x1
y1
O1
x
y
z≡ z1
b
y
x
M
ω t
ωωω
L =12
m[x2 + y2 +2ω (xy−yx)+ω2(x2 +y2)]= T2+T1 +T0
Derivamos,Lx = mx−mωy Lx = mx−mω y Lx = mω y+mω2xLy = my+mωx Ly = my+mω x Ly = −mω x+mω2y
y formamos las ecuaciones de Lagrange:
x−2ω y−ω2x = 0
y+2ω x−ω2y = 0
Movimiento relativo
La energıa cinetica es trivial,
T =12
m(x2 + y2)
La fuerza de inercia de arrastre se reduce a la centrıfuga, que deriva de un potencial
FIA = mω2(x,y,0) → VA = −1
2mω2(x2 +y2)
Con la fuerza de inercia de Coriolis, tenemos que calcular las fuerzas generalizadas:
FIC = −2mωωω01∧vM
20 = 2mω (y,−x,0) δ rM = (δx,δy,0)
δWC = FIC ·δ rM = 2mω (yδx− xδy) = Qxδx+ Qyδy
Podemos ya derivar la Lagrangiana,
Lx = mx Lx = mx Lx = mω2xLy = my Ly = my Ly = mω2y
y plantear las ecuaciones de LagrangeLq j −Lq j = Q j ,
mx−mω2x = 2mω y
my−mω2y = −2mω x
que son, naturalmente, las mismas. Los terminos deT2 son ahora los de laT unica; los terminosde T1 en el movimiento absoluto aparecen ahora como fuerzas generalizadas de Coriolis; losterminos deT0 aparecen como contribucion del potencial centrıfugo.
En este caso sı aparece la fuerza de Coriolis. Aunque lasQ j no sean nulas, la potencia totalque desarrolla sı es cero:
WC = ∑Q j q j = Qxx+ Qyy = 2mω (yx− xy) = 0
Esto no es intuitivo. Por la forma de la fuerza de Coriolis, parece que su trabajo deberıa sersiemprecero, para cualquier desplazamiento, y por tanto puede creerse que lasQ j deberıan sertodas nulas. La explicacion esta en la naturaleza de los DVCL y en como separamos los trabajosde cada desplazamiento:
118
Se toma el sistema en una configuracion genericaq j y con unas velocidades genericasq j , que en principio cumplen las ligaduras.
Para esa posicion y velocidades (que seran unas del conjunto de las posibles), se calculanlas fuerzas. Las fuerzas dependeran en general de lasq j , de las ˙q j y del tiempo.
Ahora se congelan las ligaduras, se obtiene los DVCL, y se calcula el trabajo virtual encadaδq j , pero manteniendo la fuerza de un desplazamiento genericoFI
C(q1, . . . , qn) .
El trabajo virtual de las fuerzas de Coriolis,−2mωωω01∧ vM21 es nulo en todo desplazamiento
vM20dt, el mismo que aparece en la fuerza. Pero su trabajo virtual puede ser no nulo: se han calcu-
lado para unos desplazamientos posibles ˙q j dt, y se obtiene su trabajo en unos desplazamientosdistintos δq j , pero manteniendo las mismas fuerzasFI
C(q j). Esto explicarıa la diferencia cuan-do hay ligaduras no estacionarias en el movimiento relativo, que hace que los desplazamientosposibles y los DVCL sean distintos.
Ademas, en el movimiento real los desplazamientos se dan todos juntos, y el trabajo de lafuerza es el global, la suma de lasQ j dqj . En las ecuaciones de Lagrange se separa el trabajoQ j encadadesplazamientoδq j y se lleva a su ecuacion correspondiente. Aunque la suma seacero, cada termino por separado puede ser no nulo.
Finalmente, y considerando ahora el enfoque general, esto no es mas que un ejercicio paraexplorar las propiedades del movimiento relativo y del absoluto. Si realmente interesara la so-lucion, lo mas sencillo es resolverla en ejes fijos —queda un movimiento rectilıneo uniforme—y las coordenadas en ejes moviles se obtendrıan por cambiode ejes.
119

Ejercicio 6.1.4: Obtener las ecuaciones de Lagrange del movimiento de un cilindro homogeneo queapoya una generatriz sobre un plano horizontal liso.
La condicion de que una generatriz apoye sobre el planose traduce en dos ligaduras finitas:
f1 ≡ ζ = R f2 ≡ θ =π2
Usaremos como coordenadas generalizadas las dos coor-denadas del centro en ejes fijo,ξ , η, y los angulos de Eu-ler de precesionψ y rotacion propiaϕ. La tercera coor-denada y el angulo de nutacion estan determinados porlas ligaduras.
x1
y1
z1
G
ψ
x
y
z
ϕ
ψ
La velocidad del centro y la velocidad angular, cada una en sus ejes, son
vG21 = xi1+ yj1 ωωω21 = ϕ i0+ ψ k0
La energıa cinetica se calcula por el teorema de Koenig, porque el solido no tiene punto fijo.Para el primer termino, usamos los ejes fijosS1. Para la rotacion, habrıa que usar unos ejesligados al solidoS2, de modo que el tensor sea constante. Pero el cilindro tiene simetrıa derevolucion alrededor de su eje. Por tanto, podemos usar losejesS0, en los que el tensor estambien constante, y nos ahorramos el giroϕ:
T =12
m(vG21)
2+12
ωωω21IIIGωωω21 =12
m(x2+ y2)+12⌊ϕ,0, ψ⌋
A 0 00 C 00 0 C
ϕ0ψ
donde A = mR2/2 y C = mR2/4+ mH2/12. Como el peso no actua, porque el centrosiempre se mantiene a altura constante, la Lagrangiana es
L = T =12
m(x2 + y2)+12
(Aϕ2 +Cψ2)
Notese que ninguna de las coordenadas aparece (son todascıclicas), sino solo las derivadas. Portanto, todas lasLq j son nulas, y las ecuaciones de Lagrange se reducen a
ddt
∂L
∂ q j= 0 ⇒ ∂L
∂ q j= Cte.
es decir,x = x0 y = y0 ψ = ψ0 ϕ = ϕ0
Todas las velocidades generalizadas se conservan.
120
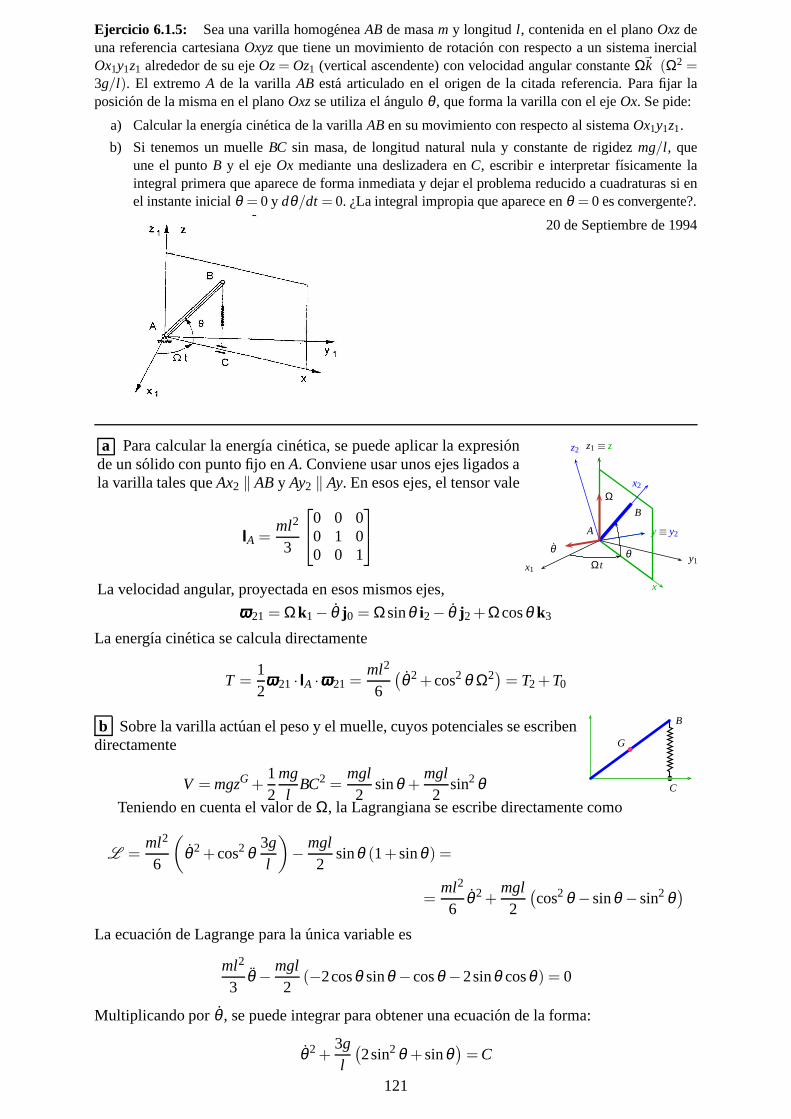
Ejercicio 6.1.5: Sea una varilla homogeneaAB de masam y longitud l , contenida en el planoOxzdeuna referencia cartesianaOxyzque tiene un movimiento de rotacion con respecto a un sistema inercialOx1y1z1 alrededor de su ejeOz= Oz1 (vertical ascendente) con velocidad angular constanteΩ~k (Ω2 =3g/l). El extremoA de la varillaAB esta articulado en el origen de la citada referencia. Para fijar laposicion de la misma en el planoOxzse utiliza el anguloθ , que forma la varilla con el ejeOx. Se pide:
a) Calcular la energıa cinetica de la varillaABen su movimiento con respecto al sistemaOx1y1z1.
b) Si tenemos un muelleBC sin masa, de longitud natural nula y constante de rigidezmg/l , queune el puntoB y el ejeOx mediante una deslizadera enC, escribir e interpretar fısicamente laintegral primera que aparece de forma inmediata y dejar el problema reducido a cuadraturas si enel instante inicialθ = 0 y dθ/dt = 0. ¿La integral impropia que aparece enθ = 0 es convergente?.
20 de Septiembre de 1994
a Para calcular la energıa cinetica, se puede aplicar la expresionde un solido con punto fijo enA. Conviene usar unos ejes ligados ala varilla tales queAx2 ‖ ABy Ay2 ‖ Ay. En esos ejes, el tensor vale
IIIA =ml2
3
0 0 00 1 00 0 1
La velocidad angular, proyectada en esos mismos ejes,
x1y1
A
Ωt
x
y≡ y2
z1 ≡ z
x2
z2
B
θθ
Ω
ωωω21 = Ωk1− θ j0 = Ωsinθ i2− θ j2+Ωcosθ k3
La energıa cinetica se calcula directamente
T =12
ωωω21 · IIIA ·ωωω21 =ml2
6
(θ2+cos2 θ Ω2)= T2+T0
b Sobre la varilla actuan el peso y el muelle, cuyos potenciales se escribendirectamente
V = mgzG +12
mgl
BC2 =mgl2
sinθ +mgl2
sin2θ
bG
B
C
Teniendo en cuenta el valor deΩ, la Lagrangiana se escribe directamente como
L =ml2
6
(
θ2 +cos2θ3gl
)
− mgl2
sinθ (1+sinθ) =
=ml2
6θ2+
mgl2
(cos2 θ −sinθ −sin2 θ
)
La ecuacion de Lagrange para la unica variable es
ml2
3θ − mgl
2(−2cosθ sinθ −cosθ −2sinθ cosθ) = 0
Multiplicando porθ , se puede integrar para obtener una ecuacion de la forma:
θ2 +3gl
(2sin2θ +sinθ
)= C
121

que se puede reducir a cuadraturas:
∫ θ
θ0
±dθ√
C− 3gl
(2sin2θ +sinθ
)=∫
dt
Esta integral primeraNO es la integral de la energıa, porque el sistemano esconservativo.La ligadura es no estacionaria, y las fuerzas de ligadura (normales al plano) trabajan en los des-plazamientosposibles(al girar el plano). Si planteamos la ecuacion de la energıa para sistemasholonomos,
ddt
(T2−T0 +V) = ∑Q j q j −
∂T
∂ t+
∂V
∂ t= 0
vemos que no hay fuerzas no potenciales, y la energıa cinetica y el potencial no dependenexplıcitamentedel tiempo. Se conserva la integral de Painleve, cuyo valorcoincide con el Ha-miltoniano, aunque este expresado en otras variables:
ml2
6θ2− mgl
2cos2θ +
mgl2
(sinθ +sin2 θ
)= h = Cte
Es la misma integral que se obtuvo mas arriba. El sistema no es conservativo, pero sıconserva-tivo generalizado.
En el instante inicial son nulos el angulo y la velocidad,
θ2+3gl
(2sin2θ +sinθ
)= C = 0
por lo que la cuadratura tiene una singularidad ent = 0:
∫ θ
0
±dθ√
−sin2 θ −sinθ=
√
3gl
∫
dt
El signo no importa porque la barra horizontal empieza a caery θ se hace negativa. Para ver laconvergencia, hallamos el valor deα que hace que el lımite siguiente sea una constante:
lımθ→0
(−θ)α√
−sin2 θ −sinθ= Cte
Si usamos el desarrollo del seno,√
−sin2 θ −sinθ ≃√
−θ2−θ =√−θ
√1+θ
con lo que el lımite queda
lımθ→0
(−θ)α
(−θ)12√
1+θ= Cte ⇒ α =
12
< 1
Por tanto, la integral impropia converge.
122

Ejercicio 6.1.6: SeaOx1y1z1 un sistema de referencia inercial siendoOz1 vertical ascendente. SeaOx0y0z0 un sistema tal queOz0 siempre coincide conOz1 y ~ω01 = ω~k1 dondeω es una constante. Undisco homogeneo de masam y radio R (solido 2) esta articulado en su centroC mediante un cojineteideal al ejeOx0 de modo que el plano del disco siempre el perpendicular a dicho eje pudiendo el centroC deslizar a lo largo del mismo. Seaθ el angulo que un radio del disco forma con la direccion deOz1 yξ la coordenadax0 del puntoC. El peso es la unica fuerza directamente aplicada sobre el disco. Para elestudio del movimiento del disco respecto al sistema 1 se pide:
a) Determinar en funcion de las coordenadas generalizadasy sus derivadas la expresion de la energıacineticaT.
b) Indicar que componentes no nulas pueden tener la resultante y el momento respecto al puntoCdel sistema de reacciones que el ejeOx0 ejerce sobre el disco.
c) Contestar razonadamente si el trabajo del anterior sistema de reacciones es nulo en los despla-zamientos posibles del sistema (sugerencia: utilizar la expresion de la potencia de un sistema defuerzas actuando sobre un solido teniendo en cuenta las componentes no nulas del apartado ante-rior) y si T +VPESOse mantiene constante a lo largo del movimiento.
d) Contestar razonadamente como son en este caso los desplazamientos virtuales compatibles conlas ligaduras. En particular ¿en que se diferencian los desplazamientos posibles del puntoC de susdesplazamientos virtuales compatibles con las ligaduras?
e) Contestar razonadamente si el trabajo virtual de las reacciones del apartado b) en nulo para cual-quier desplazamiento virtual compatible con las ligaduras.
f) Plantear la ecuacion de Lagrange para la coordenadaθ .
g) La ecuacion general de la energıa para un sistema holonomo es:
ddt
(T2−T0+V) =n
∑l=1
QNoPotl ql −
∂T∂ t
+∂V∂ t
Estudiar razonadamente si su aplicacion en este caso proporciona una integral primera del movi-miento.
Septiembre de 2004
a El disco no tiene punto fijo, luego se aplica el teorema de Koenig:
T =12
m(vC21)
2+12
ωωω21IIICωωω21
La velocidad deC, la velocidad angular y el tensor en C son inmediatos
vC21 = vC
20+vC01 = ξ i0+ωξ j0
ωωω21 = ωωω20+ωωω01 = θ i0+ω k0IIIC =
mR2
4
2 0 00 1 00 0 1
La energıa cinetica queda
T =12
m(
ξ 2+ω2ξ 2)
+mR2
8
(2θ2 +ω2)= T2+T0
123

b El modo mas directo esanalizar los desplazamientos permitidos y losimpedidos. La junta permite dos grados de libertad:
Desplazamiento libreξ segunOx0.
Giro libreθ alrededor del mismoOx0.
Por tanto, habra componentes de fuerza o momento de ligadura respectiva-mente en todas las direcciones de desplazamiento o giro prohibidas:
Fuerzas de ligadura segunOy0 y Oz0: FL = Fy j0+Fzk0
Momentos de ligadura segunOy0 y Oz0: MLC = My j0+Mzk0
x0
y0
z0
C
Fy
FzMy
Mz
θξ
Otra manera de verlo:analizar el sistema de fuerzas distribuidas. El coji-nete se puede construir mediante el contacto entre dos superficies cilındricaslisas de ejeOx0. Las fuerzas de contacto forman un sistema de fuerzas distri-buidas que, en cada punto, son normales al plano tangente comun, es decir,tienen la direccion radial perpendicular al ejei0 en cada punto.La resultante puede tener cualquier direccion en en plano(j0,k0), pero nuncatendra componente seguni0: son todas normales a esa direccion. Cuando secalcule el momento enC de la distribucion, tendra cualquier direccion menosla i0, porque todas las fuerzas elementales cortan a este eje. x0
y0
z0
C
δN
c Los desplazamientos de un solido consisten en un desplazamiento delpunto de referencia,δ rC y un giro elementaldΘ = ωωω21dt. En losdesplaza-mientos posibles, se tiene en cuenta la dependencia deltiempo .
rC(q j , t) = ξ i0 t esta explıcitamente eni0, que es movil.
drC = vC21dt =
(
vC20+ωωω01∧ rC
)
dt =
= dξ i0+ ωξ dt j0 =∂ rC
∂ξdξ +
∂ rC
∂ tdt
El giro seradΘ = ωωω21dt = dθ i0+ ω dtk0
x0
y0
z0ωdt
ωξ dtFz
θξ
El trabajo virtual de las fuerzas y momentos de ligadura en los desplazamientos posibles,aplicando la expresion del trabajo sobre un solido, sera:
dWL = FL ·drC +MLC ·dΘ =
= (0,Fy,Fz) · (dξ ,ωξ dt,0)+(0,My,Mz) · (dθ ,0,ω dt) = Fyωξ dt+Mzω dt
La ecuacion de la energıa para los desplazamientos posibles sera
d(T +V) = dWL 6= 0 → T +V 6= Cte
d Los desplazamientos virtuales compatibles con las ligaduras son los posibles con las liga-duras congeladas:t =cte., dt = 0 .
δ rCVCL = δξ i0 + ωξ δ t j0 δΘVCL = δθ i0 + ω δ t k0
Al girar el plano durante un tiempoδ t, el puntoC se mueveωξ δ t j0, mientras que el discogiraωδ t k0. Estos desplazamientos, debidos al movimiento de la ligadura —arrastre— duranteel tiempoδ t, desaparecen cuando labloqueamos, es decir, paramos el plano. Quedan solo losdesplazamientos asociados a los grados de libertad de la ligadura bloqueada,δξ y δθ .
e En un desplazamiento virtual compatible con las ligaduras arbitrario, (δξ ,δθ), el trabajovirtual de las fuerzas y momentos de ligadura es
δWL = (0,Fy,Fz) · (δξ ,0,0)+(0,My,Mz) · (δθ ,0,0) = 0
124

f La unica fuerza directamente aplicada es el peso, que no trabaja porque el centro de masasse mueve a altura constante. La Lagrangiana se reduce a la energıa cinetica
L = T =12
m(
ξ 2+ω2ξ 2)
+mR2
8
(2θ2 +ω2)= T2 +T0
La θ es cıclica, y por tanto se conserva su momento conjugado:
Lθ = 0 ⇒ ddt
Lθ =ddt
mR2
2θ = 0 ⇒ θ = Cte
f En este caso, no hay fuerzas directamente aplicadas no potenciales, la energıa cinetica nodepende explıcitamente del tiempo, y el potencial tampoco. La ecuacion general de la energıaproporciona una integral primera
ddt
(T2−T0 +V) =n
∑l=1
QNoPotl ql −
∂T
∂ t+
∂V
∂ t= 0 ⇒
⇒ T2−T0 =12
mξ 2+mR2
4θ2− 1
2mω2ξ 2− mR2
8ω2 = h
que es la integral de Painleve: se trata de un sistema conservativo generalizado.
125

Problema 6.1.1: Se dispone de un alambre elasticoABsin masa, de longitudπa el cual se empotra enuna pared por su extremoA.
Se flexa el alambre sujetandolo por su extremoB, de manera que adopte la forma de una semicircun-ferencia, y en esta posicion, se coloca un punto materialM, no pesado, de masamsobre el mismo.
En el instante inicial se suelta el extremoB del alambre y debido a su elasticidad, trata de recuperarsu forma rectilınea, arrastrando al puntoM.
Se sabe que la curva que adopta el alambre en cada instante, esun arco de circunferencia, con centrovariableC sobre el ejeAY y cuyo radio varıa segun la ley conocida
CA= R(t)
Se tomara como parametro para definir la posicion del punto, el anguloϕ de la figura adjunta.Sabiendo que no existe rozamiento, se pide:
1. Expresion de la posicion, velocidad y aceleracion absoluta del punto, en funcion det, ϕ y susderivadas.
2. Ecuacion diferencial del movimiento [ecuacion que determinaϕ(t)].
Suponiendo el caso particular en queCA = R(t) = v0t + a, y que se lance el punto en el instanteinicial desdeϕ0 = π/2, con una velocidad absoluta, de valorv0 i +v0 j . Se pide:
3. Integrar completamente la ecuacion del movimiento.
4. Determinar la fuerza que el alambre ejerce sobre el punto en cada instante.
5. Trayectoria absoluta descrita por el punto.
6. Determinar el instante y la posicion absoluta del punto,cuando este abandona el alambre.
7. Trayectoria descrita por el punto, a partir del instante en que abandona el alambre.
Julio de 1974
Solucion por mecanica analıtica
1. El punto se mueve sobre una curva movil. En el espacio, esto su-pone dos ligaduras. En el plano, se reduce a una. Como la curvaes unacircunferencia de centroC y radioR(t),
f (r , t)≡ x2 +[R(t)−y]2−R(t)2 = 0
El enunciado ya especifica la coordenada generalizada que hay que in-troducir:
r(ϕ, t) = R(t)
sinϕ
1−cosϕ
Derivando se obtienen la velocidad y la aceleracion:
v =∂ r∂ϕ
ϕ +∂ r∂ t
= Rϕ
cosϕsinϕ
+ R
sinϕ
1−cosϕ
tnϕ
R(t)C
126

~γ = Rϕ2−sinϕcosϕ
+Rϕ
cosϕsinϕ
+ R
sinϕ
1−cosϕ
+2Rϕ
cosϕsinϕ
2. No actua mas fuerza que la de ligadura: no hayV ni Q j . Solo es necesario calcular la energıacinetica:
T =m2
[R2ϕ2 +2RRϕ sinϕ + R2(2−2cosϕ)
]= T2+T1+T0
Se ve que, en el caso general, no se conserva la energıa mecanica (hayT1 y T0) ni la integral deJacobi (T depende explıcitamente det, a traves deR(t)).
Solo hay una coordenada generalizada. Las derivadas de la energıa cinetica son
∂T∂ϕ
= mR2ϕ +mRRsinϕ
ddt
∂T∂ϕ
= mR2ϕ +2mRRϕ +mR2sinϕ +mRRsinϕ +mRRϕ cosϕ
∂T∂ϕ
= mR2sinϕ +mRRϕ cosϕ
La unica ecuacion de Lagrange es
mR2ϕ +2mRRϕ +mR2sinϕ +mRRsinϕ +
mRRϕ cosϕ −mR2sinϕ −
mRRϕ cosϕ = 0
Simplificando,
Rsinϕ +2Rϕ +Rϕ = 0
Es la misma ecuacion que se obtenıa por mecanica newtoniana. Aunque es laborioso, se puedecomprobar que la ecuacion general de la energıa para sistemas holonomos conduce a la mismaecuacion (como es logico, porque solo hay un grado de libertad).
A partir de aquı, la solucion es la misma que se vio en el cap´ıtulo 3.3. Las condiciones iniciales son
R= v0 t +a R= v0 R= 0
v0
11
= v0
11
+aϕ0
01
⇒
ϕ0 = 0
ϕ0 = π/2
v0
v0ϕ0
R0C
La ecuacion diferencial queda
(a+v0 t) ϕ +2v0 ϕ = 0
Es de variables separadas, y se puede integrar
ϕϕ
=−2v0
a+v0 t;
dϕϕ
=−2v0dta+v0 t
→ ln ϕ = −2ln(a+v0 t)+ lnK
ϕ =K
(a+v0 t)2 ; dϕ =K dt
(a+v0 t)2 → ϕ =K
v0(a+v0 t)+C
Hay que imponer las condiciones iniciales
ϕ0 = K(a+0)2 = 0 K = 0 ϕ = 0
ϕ0 = −Kv0(a+0) +C = π
2 C = π2 ϕ =
π2
Si se sustituye la solucion en la energıa cinetica, quedauna constante. Aunque en el caso generalno se conserve la energıa, se han dado las condiciones iniciales justas para un movimientoestacionario.
127

4. La reaccion del alambre sale de la ley de Newton
N = m~γ = 0 ·
11
+2v0 ·0 ·
01
+a ·0 ·−10
+a ·0 ·
01
=
00
5. La trayectoria sale sustituyendoR(t) y ϕ(t) en la expresion der :
r = (a+v0 t)
sinϕ
1−cosϕ
= (a+v0 t)
11
Es una recta a 45o.
6. Saldra del alambre cuando la longitud de arco desde el origen hasta la partıcula sea igual ala longitud del alambre.
s= Rϕ =(a+v0 t f
) π2
= πa ⇒ t f =v0
ar f = 2a
11
7. Obviamente, si no actua ninguna fuerza, seguira un movimiento uniforme y rectilıneo.Sera la prolongacion de la trayectoria sobre el alambre, pues este tampoco ejercıa fuerza al-guna.
128

Problema 6.1.2: El sistema material indicado en la figura esta formado por una horquilla que puedegirar alrededor de un eje horizontalAB y un disco que gira alrededor del ejeCD montado sobre lahorquilla perpendicularmente alAB y de forma que el plano del disco contiene en todo momento a lahorizontalAB
Se supondran los siguientes triedros de referencia, todosellos triortogonales y a derechas:
El O1x1y1z1 fijo (sistema 1) tal queO1y1 coincidecon el eje de giroABy O1z1 es vertical descenden-te.
El Ox2y2z2 ligado a la horquilla (sistema 2) tal queOx2 coincide con el eje de giroCD y Oy2 es para-lelo alOy1.
El Ox0y0z0 ligado al disco (sistema 0) tal queOx0
coincide conOx2.
La posicion del sistema quedara determinada mediante elanguloθ que la horquilla forma con la vertical descen-dente y el anguloϕ de giro del disco con respecto a lahorquilla.
Se representara porM la masa de la horquilla, pora la distancia del centro de masasG de la misma alejeAB, porρ su radio de giro con respecto al ejeAB, porm la masa del disco, porb la mınima distanciaentre los ejesABy CD y porR el radio del disco.
Suponiendo que el espesor del disco es despreciable, se pide:
1. Calcular la energıa cinetica del sistema constituıdopor la varilla y el disco.
2. Calcular el momento cinetico del disco respecto a su centro de masasO expresado mediante suscomponentes en el triedroOx2y2z2.
3. Calcular el momento cinetico del conjunto horquilla-disco respecto al puntoO1, expresado me-diante sus componentes en el triedroOx1y1z1.
4. Plantear las ecuaciones del movimiento del sistema y reducirlas a cuadraturas.
5. Determinar los componentes segun el triedroOx2y2z2 de la resultante y momento resultante res-pecto aO de las fuerzas que el ejeCD ejerce sobre el disco.
Julio de 1968
Al resolver el problema pormecanica analıtica, resultan irrelevantes las preguntas 2 y 3, salvocomo paso intermedio para calcular la energıa cinetica. La pregunta 5 no se puede contestar,porque en mecanica analıtica no aparecen las fuerzas de ligadura (excepto en las no integrablesde los sistemas no holonomos, si se resuelve por multiplicadores). Habrıa que plantear las ecua-ciones de Newton-Euler —ya con el movimiento conocido— y despejar las fuerzas y momentosbuscados.
Tenemos un sistemas formado por dos solidos: horquillaS2 y discoS2, moviendose res-pecto a unos ejes fijosS1.
Las ligaduras son finitas, estacionarias e ideales: cojinetes lisos con restriccion axial, quesolo dejan un grado de libertad a cada solido:q1 = θ a la horquilla yq2 = ϕ al disco.
La unica fuerza directamente aplicada, el peso, es potencial.
Por tanto, el sistema es holonomo y se puede resolver por mecanica analıtica.
1 Calcularemos la energıa cinetica y el potencial del sistema, para aplicar las ecuaciones deLagrange.
La horquilla es un solido con punto fijo. No tenemos el tensorde inercia enO1, pero sı el
129

momento de inercia respecto aAB= O1y1 ‖ Oy2 , dado mediante el radio de giroρ :
Iy1 = Mρ2 → IhO1
=
? 0 00 Mρ2 00 0 ?
Los productos de inercia los suponemos nulos, pues la figura parece indicar que la varilla tienedos planos coordenados de simetrıa, por lo que los ejesS2 son principales. Los momentosde inercia respecto a los otros dos ejes no se necesitan, puesla velocidad angular solo tienecomponenteO1y1. La energıa cinetica, como solido con punto fijo, sera
Th =12⌊0, θ ,0⌋
? 0 00 Mρ2 00 0 ?
0θ0
=
12
Mρ2θ2
El disco no tiene ningun punto fijo, y su energıa se calcula por el teorema de Koenig:
Td =12
m(vO01)
2+12
ωωω01IIIdOωωω01 =
12
mb2θ2+12⌊ϕ , θ ,0⌋mR2
4
2 0 00 1 00 0 1
ϕθ0
Sumando las dos, tenemos la energıa cinetica del sistema:
T =
[12
Mρ2+m
(12
b2 +18
R2)]
θ2 +14
mR2ϕ2
ComoO1z1 es la verticaldescendente, el potencial del sistema es
V = −MgzhG−mgzdG = −gcosθ (Ma+mb)
Calculamos la LagrangianaL = T −V , la derivamos
Lθ =
[
Mρ2+m
(
b2 +14
R2)]
θ Lθ = −gsinθ (Ma+mb)
Lϕ =12
mR2ϕ Lϕ = 0
y formamos las dos ecuaciones de Lagrange:[
Mρ2+m
(
b2+14
R2)]
θ +g(Ma+mb)sinθ = 0
12
mR2ϕ = 0
La primera es la ecuacion del pendulo. Corresponde, en mecanica de Newton-Euler, a la demomento cinetico del sistema segunO1y1. Se puede integrar una vez y reducir a cuadraturas:
θ = − g(Ma+mb)
Mρ2+m(b2+ 1
4R2) sinθ = −ω2 sinθ
θ θ = −ω2sinθθ → θ2
2=
C2
+ω2cosθ∫ ±dθ√
C+2ω2 cosθ=∫
dt
La segunda es la de momento cinetico del disco respecto a su eje de giro. Se puede integrarcompletamente:
ϕ = 0 → ϕ = ϕ0 t +ϕ0
130

Como el sistema es conservativo, una —obviamente la primera, mas complicada— se podrıasustituir por la de la energıa
ddt
(T2−T0+V) =∑ Q j q j −
∂T
∂ t+
∂V
∂ t→ T +V = E
Se llega a la misma cuadratura enθ , porque la contribucion deϕ2, constante, se incluye en laconstante de integracion.
Si por capricho se prefiere sustituir la segunda, quedarıanla de Lagrange paraθ y la integralde la energıa. Al integrar una vez la primera y sustituir en la de la energıa, se recuperaϕ = Cte.
131

Problema 6.1.3: El sistema material de la figura se compone de dos varillas sinmasa,OA y AG, delongitudes 2a y a, respectivamente, y un disco de centroG, radio 2a y masam. El disco se mantieneconstantemente perpendicular a la varillaAG, alrededor de la cual puede girar libremente; la varillaOApuede girar libremente alrededor de la vertical que pasa porsu extremoO, de forma que el extremoAdescribe una circunferencia horizontal de centroO y radio 2a; las dos varillas se unen por el extremoA mediante una articulacion que unicamente permite el girorelativo de las dos varillas alrededor de latangente enA a la circunferencia descrita por este extremo.
Se considerara el movimiento del sistema respecto de lareferencia triortogonal y orientada a derechas,Oxyz, conorigen enO, y cuyo ejeOzcoincide con la vertical ascen-dente; si se estima conveniente, puede usarse la referenciaG; u1,u2,u3 que acompana al disco en su movimiento,y que tiene origen en su centroG, con los vectores unita-riosu3 dirigido segun la prolongacion de la varillaAG, u2
perpendicular al anterior y contenido en el plano verticaldefinido por la varillaAG, y u1 perpendicular a los dosanteriores.
Para el analisis del sistema se tomaran las siguientes coordenadas generalizadas:i) ϕ , angulo que~OAforma con la direccion del ejeOx, ii) θ , angulo que la varillaAG forma con el plano horizontalOxy, yiii) ψ , angulo que un radio fijo al disco forma con el plano verticalque contiene a la varilla. Se pide:
a) Determinar, en funcion de las coordenadas y velocidadesgeneralizadas:i) la energıa cinetica delsistema,ii) momento cinetico del sistema respecto del centro de masasG, y, iii) momento cineticodel sistema respecto del origenO.
b) Plantear, aislando el disco, la ecuacion de momento cin´etico respecto del centro de masas; deduciruna integral primera y las componentes del momento que la varilla AG transmite al disco.
c) Plantear, para todo el sistema, la ecuacion de momento cinetico en el puntoO; deducir una integralprimera.
d) Deducir otra integral primera independiente de las anteriores y reducir el problema a cuadraturas.
e) Plantear, aislando el disco, la ecuacion de cantidad de movimiento; deducir las componentes de lareaccion que la varillaAG transmite al disco.
f) Determinar el sistema de fuerzas que se transmite de una a otra varilla a traves de la union deA.
g) Hallar la lagrangiana del sistema y deducir las ecuaciones de Lagrange para las coordenadas cıcli-cas.
Septiembre de 1992
Solucion por mecanica analıtica
En la solucion por mecanica analıtica, no tienen sentidolas preguntas b) a f). Solo hay que
Comprobar que se puede aplicar la mecanica analıtica: si las ligaduras son ideales.
Analizar el sistema: holonomo/no holonomo; escleronomo/reonomo; fuerzas potencia-les/giroscopicas/disipativas
Calcular la energıa cinetica y el potencial
Obtener las ecuaciones de Lagrange y resolverlas (si se puede)
En este caso, las ligaduras son todas ideales: cojinetes lisos. Tambien son estacionarias. Estoes sorprendente: dos de los cojinetes estan en un plano giratorio. Pero no gira de una maneraprescrita (funcion conocida del tiempo, p.e.,ω t), sino que el giro es debido a una coordenadageneralizada. En las ecuaciones de las ligaduras aparecer´an senos y cosenos deϕ o deθ , no deω t. Por tanto, no aparece el tiempoexplıcitamente, sino solo las coordenadas.
El sistema es por tanto holonomo escleronomo. La unica fuerza directamente aplicada, elpeso, es potencial.
132
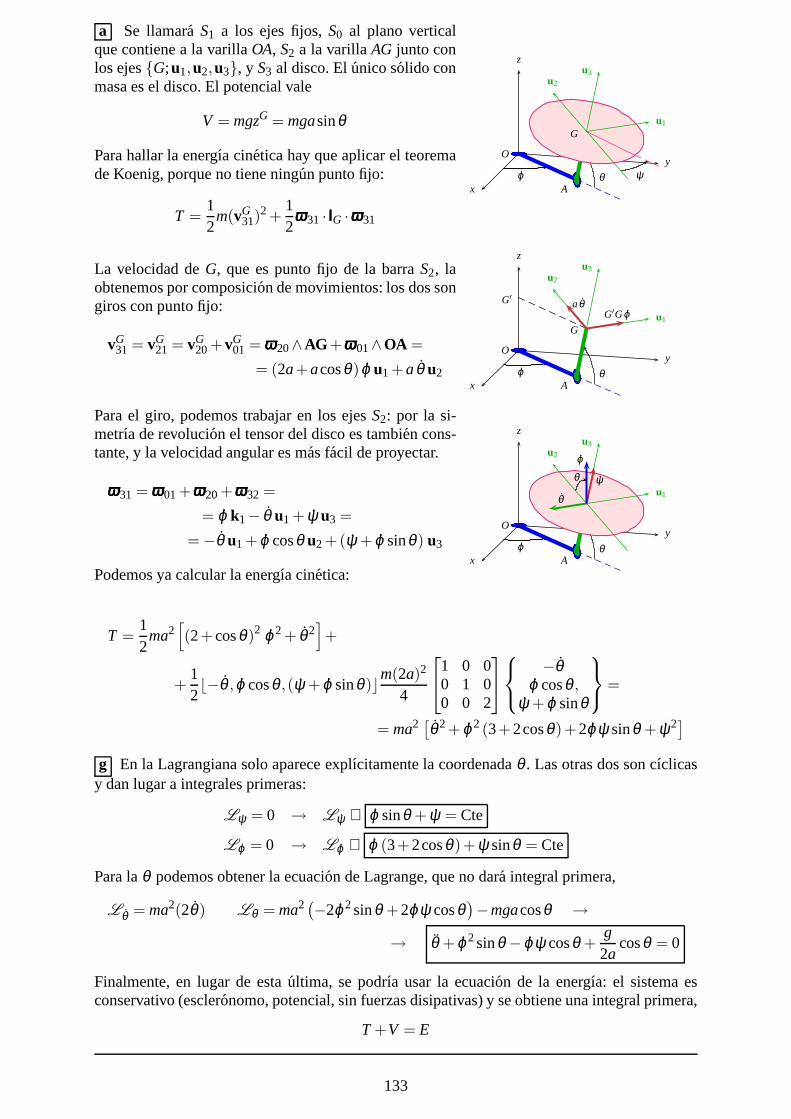
a Se llamaraS1 a los ejes fijos,S0 al plano verticalque contiene a la varillaOA, S2 a la varillaAG junto conlos ejesG;u1,u2,u3, y S3 al disco. El unico solido conmasa es el disco. El potencial vale
V = mgzG = mgasinθ
Para hallar la energıa cinetica hay que aplicar el teoremade Koenig, porque no tiene ningun punto fijo:
T =12
m(vG31)
2+12
ωωω31 · IIIG ·ωωω31
x
y
z
O
ϕA
θ ψ
G
u3
u1
u2
La velocidad deG, que es punto fijo de la barraS2, laobtenemos por composicion de movimientos: los dos songiros con punto fijo:
vG31 = vG
21 = vG20+vG
01 = ωωω20∧AG +ωωω01∧OA =
= (2a+acosθ) ϕ u1 +aθ u2x
y
z
O
ϕA
θ
G′
G
u3
u1
u2
G′Gϕaθ
Para el giro, podemos trabajar en los ejesS2: por la si-metrıa de revolucion el tensor del disco es tambien cons-tante, y la velocidad angular es mas facil de proyectar.
ωωω31 = ωωω01+ωωω20+ωωω32 =
= ϕ k1− θ u1 + ψ u3 =
= −θ u1 + ϕ cosθ u2 +(ψ + ϕ sinθ) u3
Podemos ya calcular la energıa cinetica:x
y
z
O
ϕA
θ
u3
u1
u2
θ
θ
ψ
ϕ
T =12
ma2[
(2+cosθ)2 ϕ2 + θ2]
+
+12⌊−θ , ϕ cosθ ,(ψ + ϕ sinθ)⌋m(2a)2
4
1 0 00 1 00 0 2
−θϕ cosθ ,
ψ + ϕ sinθ
=
= ma2 [θ2+ ϕ2(3+2cosθ)+2ϕψ sinθ + ψ2]
g En la Lagrangiana solo aparece explıcitamente la coordenadaθ . Las otras dos son cıclicasy dan lugar a integrales primeras:
Lψ = 0 → Lψ ∝ ϕ sinθ + ψ = Cte
Lϕ = 0 → Lϕ ∝ ϕ (3+2cosθ)+ ψ sinθ = Cte
Para laθ podemos obtener la ecuacion de Lagrange, que no dara integral primera,
Lθ = ma2(2θ) Lθ = ma2(−2ϕ2sinθ +2ϕψ cosθ)−mgacosθ →
→ θ + ϕ2sinθ − ϕψ cosθ +g2a
cosθ = 0
Finalmente, en lugar de esta ultima, se podrıa usar la ecuacion de la energıa: el sistema esconservativo (escleronomo, potencial, sin fuerzas disipativas) y se obtiene una integral primera,
T +V = E
133

Problema 6.1.4: Consideremos un disco pesado, homogeneo de masamy radioR. En el centroM deldisco hay unida rıgidamente y perpendicular a el una varilla MN sin masa y de longitud 2R.
El solido ası formado se pone en movimiento de modo que el extremoN se apoye sobre un planofijo, horizontalOx1y1 y sin rozamiento.
Para el estudio del movimiento se consideran los tres sistemas de ejes siguientes:
Ox1y1z1: Sistema ortogonal que se considera fijo y a susversores llamaremosi, j , k.
Mx2y2z2: Sistema movil de ejes paralelos aOx1y1z1 y deorigenM.
Mx3y3z3: Sistema movil ligado al solido y de origen enM. El ejeMz3 es la prolongacion deNM y losMx3,My3 dos diametros ortogonales.
Inicialmente el puntoN se encuentra enO(0,0,0), el M en(√
3R,0,R) y Mx3 esta en el planoOx1z1.
La velocidad inicial deM vale ωRj y la velocidad de rotacion, tambien en el instante inicial, es lasuma de las dos siguientes:
ω1 = ω k sobreOz1 (6.1)
ω2 =16g−ω2R
8ωR(√
3i + k) sobreMz3 (6.2)
Se elegiran como parametros para fijar la posicion del solido las coordenadas(ξ ,η) de la proyecciondeM sobreOx1y1 y los angulos de Euler(ψ ,θ ,ϕ) del sistemaMx3y3z3 respecto alMx2y2z2. Se pide:
1o.- Energıa cinetica del solido en funcion de los parametros que fijan su posicion y de sus derivadasrespecto al tiempo.
2o.- Funcion de fuerzas de la que derivan las fuerzas activas.
3o.- Ecuaciones generales del movimiento.
4o.- Movimiento de M.
5o.- Integrar completamente las ecuaciones del movimiento para las condiciones iniciales dadas.
ETSIA, Marzo de 1973
1 El sistema es holonomo, con una sola ligadura finita: el contacto del extremoN con elplano liso. La altura deM pasa a serζ = 2Rcosθ , y quedan 5 coordenadas generalizadas:ξ ,η,ψ,θ ,ϕ, una por grado de libertad.
La energıa cinetica se calcula facilmente por Koenig:
T =12
mv2M +
12
ωωω32 · IIIM ·ωωω32
La velocidad deM se calcula directamente, pues tenemos sus coordenadas en ejes fijos:
134

OM = (ξ ,η,2Rcosθ) vM31 =
(
ξ , η,−2Rsinθ θ)
Para hallar laωωω32 ≡ ωωω31, conviene introducir unos ejesintermediosMx0y0z0 (ejes de Resal), que acompanan alsolido en la precesion y la nutacion, pero no en la rota-cion propia, de modo queMx0 es el eje de nodos. Porla simetrıa de rotacion, son tambien principales para eldisco, y la velocidad angular queda mas simple:
ωωω32 = ψ k1 + θ i0+ ϕ k0 =
θψ sinθ
ϕ + ψ cosθ
0
θϕ
θ
ϕ
ψ
x0
y0
x3
z0 ≡ z3z1
M
N
El tensor del disco, en ejes 0 o 3,IIIM = mR2
4
1 0 00 1 00 0 2
. Se puede ya calcular la energıa
cinetica,
T =12
m(
ξ 2+ η2 +4R2sin2θ θ2)
+18
mR2[
θ2 + ψ2sin2θ +2(ϕ + ψ cosθ)2]
=
= T =m2
(
ξ 2+ η2)
+mR2
8
[
ψ2sin2θ + θ2(1+16sin2 θ)+2(ϕ + ψ cosθ)2
]
2 La funcion de fuerzas es inmediata, pues solo actua el peso:
U = −V = −mgzM = −2mgRcosθ
3 Las ecuaciones del movimiento se obtienen de la Lagrangiana
L = T −V = T +U =m2
(
ξ 2+ η2)
+
+mR2
8
[
ψ2sin2 θ + θ2(1+16sin2 θ)+2(ϕ + ψ cosθ)2
]
−2mgRcosθ
Solo aparece explıcitamente laθ ; las otras cuatro son cıclicas y dan integrales primeras:
∂L
∂ ξ= mξ → ξ = C1
∂L
∂η= mη → η = C2
∂L
∂ϕ=
mR2
2(ϕ + ψ cosθ) → ϕ + ψ cosθ = C3
∂L
∂ψ=
mR2
4
[ψ sin2θ +2(ϕ + ψ cosθ)cosθ
]→ ψ sin2θ +2(ϕ + ψ cosθ)cosθ = C4
La quinta es mas complicada y no da integral primera:
∂L
∂ θ=
mR2
4θ(1+16sin2 θ
)
ddt
∂L
∂ θ=
mR2
4
[θ(1+16sin2θ
)+32θ2sinθ cosθ
]
∂L
∂θ=
mR2
8
[(2ψ2 +32θ2)sinθ cosθ −4(ϕ + ψ cosθ) ψ sinθ
]+2mgRsinθ
135

finalmente,
mR2
4
[
θ(1+16sin2θ
)+
1632(((((((
θ2sinθ cosθ]
−
− mR2
8
[(
2ψ2 +32θ2
)
sinθ cosθ −4(ϕ + ψ cosθ) ψ sinθ]
−2mgRsinθ = 0
Se trata de un sistema conservativo: fuerzas potenciales, ligaduras ideales. En vez de estaquinta ecuacion, mas complicada, se puede usar laintegral de la energıa:
m2
(
ξ 2+ η2)
+mR2
8
[
ψ2 sin2θ + θ2(1+16sin2 θ)+2(ϕ + ψ cosθ)2
]
+
+2mgRcosθ = E
4 Para determinar el movimiento deM, tendremos que integrar o dejar reducidas a cuadraturassus coordenadas,ξ ,η,ζ (θ). Las dos primeras son inmediatas:
ξ = C1 t +ξ0 ; η = C2 t +η0
Como inicialmenterM = (√
3R,0,R) y vM = (0,ωR,0), se tiene
ξ =√
3R ; η = ωRt
De las condiciones iniciales tambien deducimos queθ0 = π/3 y θ0 = 0. Para hallarθ(t)podemos usar cuatro integrales primeras para dejar la de la energıa solo como una funcion deθy θ . Antes, la tercera se sustituye en la cuarta de modo que podemos despejar
ψ sin2 θ = C4−2C3cosθ
con lo que se llega a
m2
(C2
1 +C22
)+
mR2
8
[(C4−2C3cosθ
sinθ
)2
+ θ2(1+16sin2 θ)+2C2
3
]
+2mgRcosθ = E
Agrupando las constantes, se obtiene una cuadratura:
θ2(1+16sin2 θ)
= E′− 16gR
cosθ −(
C4−2C3cosθsinθ
)2
→
→ ±dθ
√√√√
1+16sin2 θ
E′− 16gR cosθ − (C4−2C3 cosθ )2
sin2θ
= dt
La ecuacion deθ es exactamente la misma que la del solido de Lagrange. Se puede hacer unanalisis cualitativo mediante el potencial efectivoV(θ). Como se ve en teorıa, el caso generales una oscilacion entre dos valoresθ1,θ2, mientras continuan la precesion y la nutacion.
Las condiciones iniciales implicanθ0 = 0; esto significa que estamos en uno de los extremosde la oscilacion, o bien en un movimiento estacionario (θ1 = θ2); este ultimo caso se identificafacilmente porqueθ = 0.
5 El enunciado pide integrar completamente el movimiento, pero hemos visto que las ecuacio-nes son las del solido de Lagrange, queno se pueden integrarmediante funciones elementales.Esto solo puede significar una cosa: estamos en el caso integrable del solido de Lagrange: elmovimiento estacionario.
Para determinarlo, veremos siθ = 0. Iremos calculando las constantes, y sustituyendo enla quinta ecuacion de Lagrange. Sustituir en la de la energ´ıa no sirve de nada: ya sabemos queθ = 0 en el instante inicial. Se podrıa derivar, eliminarθ (pues la ecuacion vale para todot, no
136

solo el inicial) y comprobar el valor deθ . Pero es mas corto hacerlo con la quinta de Lagrange:se ahorra derivar.
ζ0 = R= 2Rcosθ0 → θ0 = π/3; ζ0 = 0 = −2r sinθ0θ0 = 0 → θ0 = 0
En cuanto a la velocidad angular, notese que las dos componentesω1 y ω2 estan dirigidas,respectivamente, segunk1 y k0 ≡ k3; es decir, corresponden a la precesion y la rotacion propia.La nutacion, como se dedujo de la velocidad deM, es nula:
ωωω32 = ψ0k1 +θ0 i0+ ϕ0k0 = ω k1 +16g−ω2R
8ωR2k3 →
ψ0 = ωϕ0 = 16g−ω2R
4ωR
donde el 2 se debe a que el vector direccion√
3i1+k1 = 2k3 no es unitario.
mR2
4
[
θ(1+16sin2 θ
)+16θ2sinθ cosθ
]
−
− mR2
8
[2ψ2sinθ cosθ −4(ϕ + ψ cosθ) ψ sinθ
]−2mgRsinθ = 0
θ0 (. . .) =[2ψ2
0 sinθ0cosθ0−4(ϕ0 + ψ0cosθ0) ψ0sinθ0]+
16gR
sinθ0
θ0 (. . .) =
[
2ω2
√3
4−4
(16g−ω2R
4ωR+ω
12
)
ω√
32
]
+16gR
√3
2= 0
Por tanto, estamos en el movimiento estacionario. Las coordenadas generalizadas valen:
ξ =√
3R η = ωRt θ =π3
ψ = ω t +π2
ϕ =16g−ω2R
4ωRt +ϕ0
El valor inicial deψ se obtiene observando la configuracion del sistema en el instante inicial.El deϕ es arbitrario, porque no se ha dado ningun dato.
137
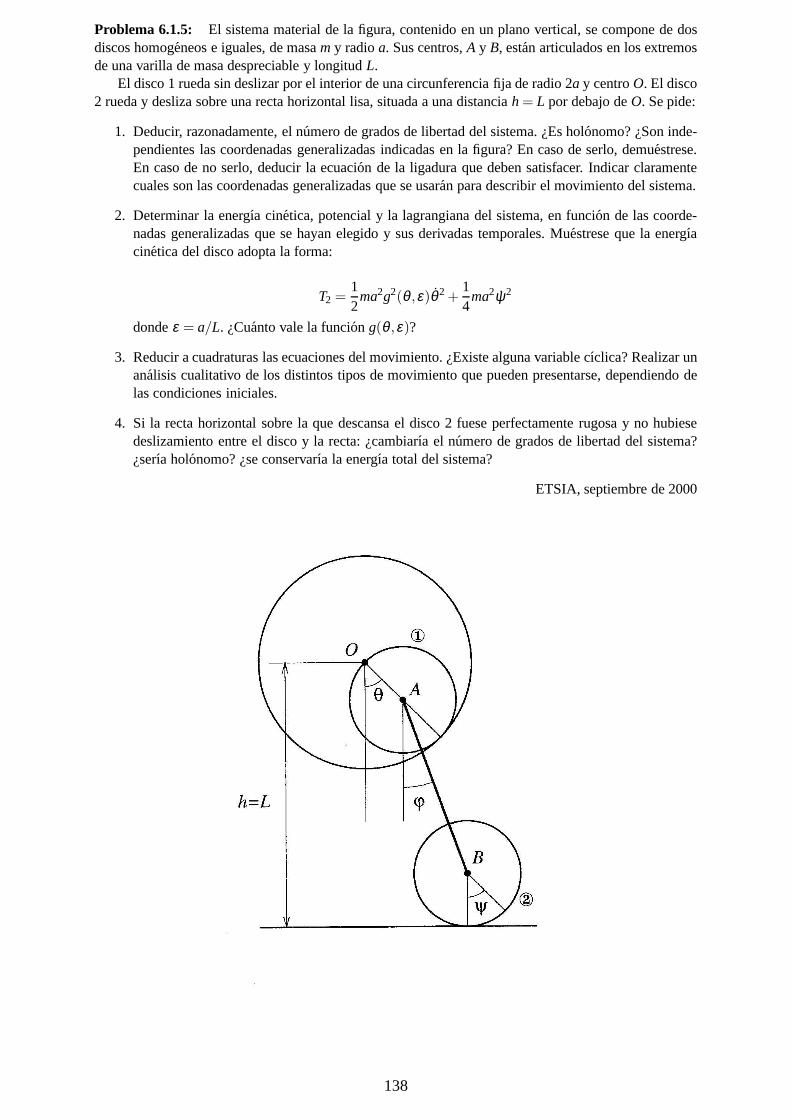
Problema 6.1.5: El sistema material de la figura, contenido en un plano vertical, se compone de dosdiscos homogeneos e iguales, de masamy radioa. Sus centros,A y B, estan articulados en los extremosde una varilla de masa despreciable y longitudL.
El disco 1 rueda sin deslizar por el interior de una circunferencia fija de radio 2a y centroO. El disco2 rueda y desliza sobre una recta horizontal lisa, situada a una distanciah = L por debajo deO. Se pide:
1. Deducir, razonadamente, el numero de grados de libertaddel sistema. ¿Es holonomo? ¿Son inde-pendientes las coordenadas generalizadas indicadas en la figura? En caso de serlo, demuestrese.En caso de no serlo, deducir la ecuacion de la ligadura que deben satisfacer. Indicar claramentecuales son las coordenadas generalizadas que se usaran para describir el movimiento del sistema.
2. Determinar la energıa cinetica, potencial y la lagrangiana del sistema, en funcion de las coorde-nadas generalizadas que se hayan elegido y sus derivadas temporales. Muestrese que la energıacinetica del disco adopta la forma:
T2 =12
ma2g2(θ ,ε)θ2 +14
ma2ψ2
dondeε = a/L. ¿Cuanto vale la funciong(θ ,ε)?
3. Reducir a cuadraturas las ecuaciones del movimiento. ¿Existe alguna variable cıclica? Realizar unanalisis cualitativo de los distintos tipos de movimientoque pueden presentarse, dependiendo delas condiciones iniciales.
4. Si la recta horizontal sobre la que descansa el disco 2 fuese perfectamente rugosa y no hubiesedeslizamiento entre el disco y la recta: ¿cambiarıa el numero de grados de libertad del sistema?¿serıa holonomo? ¿se conservarıa la energıa total del sistema?
ETSIA, septiembre de 2000
138

1 Tenemos 3 solidos planos; si estuvieran libres tendrıamos 9 grados de libertad. Las ligadurasson:
2 cinematicas de la rodadura sin deslizamiento del discoA sobre el fijo. Las dos son integra-bles. En direccion radial, se tiene que la distancia entre los dos centros esa: solo hace falta elanguloθ para situar el centroA. En la direccion tangencial, el angulo girado se obtiene en fun-cion deθ igualando las longitudes de arco rodado sin deslizar se obtienen los angulos giradoso integrando la ligadura cinematica.
2 finitas de la articulacion enA: xAv = xA
1 , zAv = zA
1. Para situar la varilla solo hace falta elanguloϕ.
2 finitas de la articulacion enB: xBv = xB
2 , zBv = zB
2. Para situar el disco solo se necesita elanguloψ.
1 finita del contacto liso del disco B:zB = L−a. Esto hace queϕ ya no sea independiente.Quedan pues 9-7=2 grados de libertad. De las tres coordenadas generalizadas de la figura,
solo 2 son independientes. De la geometrıa del problema sededuce directamente:
acosθ +Lcosϕ +a = L → ε(cosθ +1) = 1−cosϕ → −ε sinθθ = sinϕϕ
De estas dos, tomaremosθ como independiente. La otra independiente es laψ, que no esta su-jeta a ninguna condicion porque puede deslizar libremente.
2 Para la energıa potencial, solo hay que tener en cuenta el disco A, pues el de B es constante.Tomando la horizontal comoOx y la vertical comoOz,
V = mgzA = −mgacosθ
Para la energıa cinetica, hay que calcular las velocidades de los centros de los discos y suvelocidad angular:
T =12
mv2A +
14
ma2ω2A +
12
mv2B +
14
ma2ω2B
La velocidad angular de A se obtiene trivialmente obligandoa que el punto A tenga la mismavelocidad como parte del disco y como parte del radio vector desdeO.
vA = aθ uθ ωωωA = θ j
Para B, la velocidad angular es trivial, y la velocidad hay que calcularla
ωωωB = −ψ j xB = asinθ +Lsinϕ → vB = (acosθθ +Lcosϕϕ) i
Hay que dejarla en funcion de las coordenadas independientes,θ y ψ y sus derivadas. De laecuacion de la ligadura finita se despeja cosϕ = 1− ε(cosθ +1), y de su derivada saleϕ :
cosϕϕ = −cosϕεsinθθsinϕ
= −ε sinθ1− ε(cosθ +1)
√
1− [1− ε(cosθ +1)]2θ
de ese modo, la velocidad deB queda
vB = a(
cosθθ +cosϕ
εϕ)
i = a
cosθ − sinθ [1− ε(cosθ +1)]√
1− [1− ε(cosθ +1)]2
θ i = ag(θ ,ε)θ i
La energıa cinetica del sistema queda
T =12
ma2θ2 +14
ma2θ2 +12
ma2g2(θ ,ε) θ2+14
ma2ψ2 =
= T =14
ma2(3+2g2(θ ,ε)]
θ2+ ψ2
139

Se puede observar que, efectivamente,T2 tiene la forma indicada en el enunciado, siendo
g(θ ,ε) =
cosθ − sinθ [1− ε(cosθ +1)]√
1− [1− ε(cosθ +1)]2
Esta expresion puede adoptar formas distintas segun se simplifiquen o no las expresiones, seintroduzcan relaciones trigonometricas como el arco mitad, etc.
ConocidasT y V, la Lagrangiana es
L =14
ma2[3+2g2(θ ,ε)]
θ2 + ψ2+mgacosθ
3 En la Lagrangiana se observa que laψ es cıclica, con lo que se obtiene la integral primeraque se puede integrar completamente
Lψ =12
ma2ψ ; Lψ = 0 → ψ = ψ0 → ψ = ψ0 t +ψ0
La θ no es cıclica, puesLθ 6= 0; su ecuacion de Lagrange sera diferencial de segundo orden ybastante complicada por lag(θ ,ε) y sus derivadas.
El sistema es holonomo (ligaduras finitas sin rozamiento),escleronomo (las fuerzas de li-gadura no trabajan en los desplazamientos posibles) y las fuerzas potenciales, por lo queseconserva la energıa. Ası obtenemos una ecuacion mas simple que la deθ , y que ademas es unaintegral primera:
T +V =14
ma2[3+2g2(θ ,ε)]
θ2 + ψ2−mgacosθ = E
Sustituyendo el valor deψ en la integral de la energıa y combinando las constantes, sellega auna cuadratura paraθ :
[3+2g2(θ ,ε)
]θ2− 4g
acosθ = E′ → ±dθ
√
3+2g2(θ ,ε)
E′+ 4ga cosθ
= d t
El giro del disco 2 es completamente independiente del restodel movimiento: tiene veloci-dad angular constante. En cuanto a laθ (y la ϕ que depende de ella), se puede hacer un analisiscualitativo. Notese que el coeficiente 3+2g2(θ ,ε) es siempre positivo, por lo que el valor deθ2
y sus ceros van a depender unicamente deE′ + 4ga cosθ . Podemos estudiar cualitativamente el
movimiento con el “potencial eficaz”Ve f = −4ga cosθ (que no tiene dimensiones de potencial).
El potencial eficaz es el del pendulo simple, por lo que los movi-mientos van a ser los mismos:
Equilibrio estable E′ = −4ga
Libracion 4ga < E′ < −4g
aAsintotico E′ = 4g
aRotacion E′ > 4g
a
Pero no esta claro que todos esos movimientos sean posibles, porque laθ , aunque se hayatomado como independiente, tiene que cumplir las condiciones de existencia de la ligadura
ε(cosθ +1) = 1−cosϕ → cosθ =1−cosϕ
ε−1
140
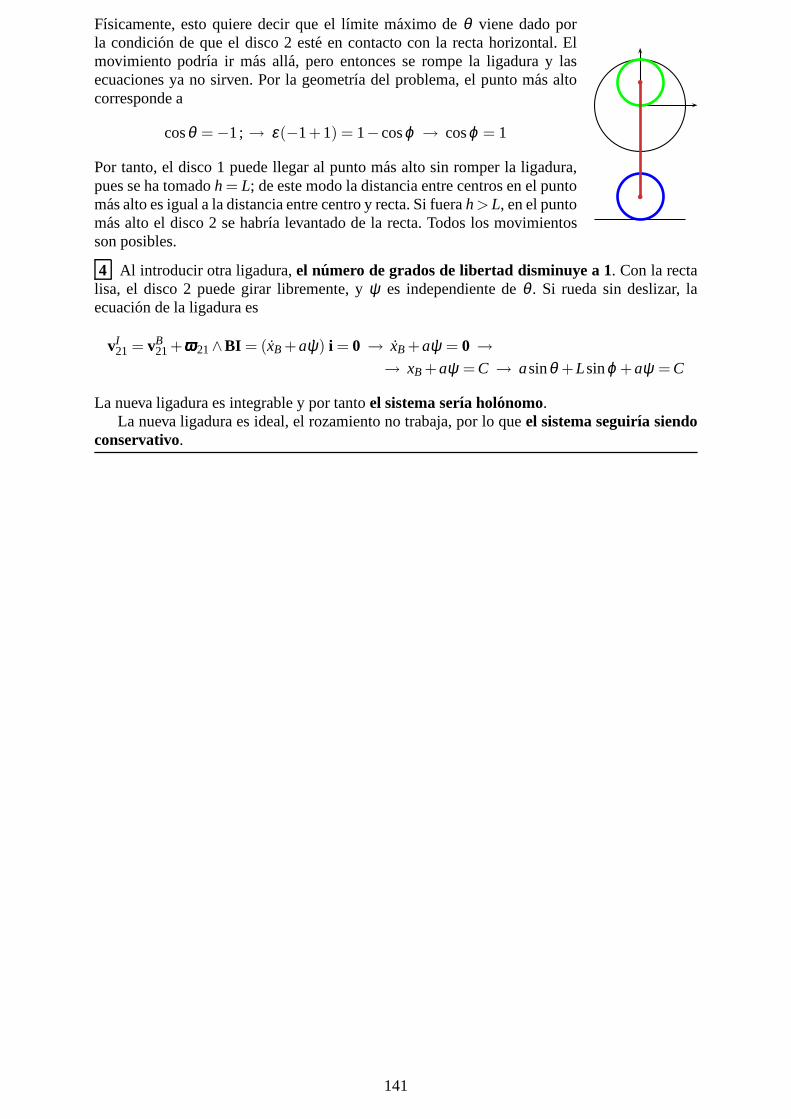
Fısicamente, esto quiere decir que el lımite maximo deθ viene dado porla condicion de que el disco 2 este en contacto con la recta horizontal. Elmovimiento podrıa ir mas alla, pero entonces se rompe la ligadura y lasecuaciones ya no sirven. Por la geometrıa del problema, el punto mas altocorresponde a
cosθ = −1; → ε(−1+1) = 1−cosϕ → cosϕ = 1
Por tanto, el disco 1 puede llegar al punto mas alto sin romper la ligadura,pues se ha tomadoh= L; de este modo la distancia entre centros en el puntomas alto es igual a la distancia entre centro y recta. Si fuerah> L, en el puntomas alto el disco 2 se habrıa levantado de la recta. Todos los movimientosson posibles.
4 Al introducir otra ligadura,el numero de grados de libertad disminuye a 1. Con la rectalisa, el disco 2 puede girar libremente, yψ es independiente deθ . Si rueda sin deslizar, laecuacion de la ligadura es
vI21 = vB
21+ωωω21∧BI = (xB +aψ) i = 0 → xB +aψ = 0 →→ xB +aψ = C → asinθ +Lsinϕ +aψ = C
La nueva ligadura es integrable y por tantoel sistema serıa holonomo.La nueva ligadura es ideal, el rozamiento no trabaja, por lo queel sistema seguirıa siendo
conservativo.
141

ESCUELA TECNICA SUPERIOR DE INGENIEROS AERONAUTICOS
Apellidos, Nombre: Grupo:
Ejecicio 5: Mecanica II Curso: 02/03 Fecha: 02.06.2003
Problema 6.1.6: Un sistema material plano esta formado por una varilla sin masa de longitud 2R,contenida en un plano verticalOxz, y con su centro articulado en el origenO. En uno de sus extremos,B, hay una masa puntualM. En el otro extremo,A, esta articulado un disco de masaM/2 y radioR/2,que rueda sin deslizar por el interior de una circunferenciafija con centro en el origen. Se toman comocoordenadas generalizadas el anguloθ que forma la varillaBA con la verticalOz, y el anguloϕ queforma un radio fijo del disco con la vertical, en el sentido quese indica en la figura. En el instante inicialambos son cero, estando la masaM por debajo. Se pide:
1. Comprobar que el sistema es holonomo, e integrar laecuacion de la ligadura cinematica.
2. Calcular la Lagrangiana para el sistema holonomo, to-mandoθ como coordenada generalizada.
3. Plantear la ecuacion de Lagrange para el sistemaholonomo. Comprobar que se obtiene la ecuacion delpendulo simple, y calcular el periodo de las pequenasoscilaciones.
4. Considerando ahora el problema como no holonomo,plantear las ecuaciones del movimiento por el metodode los multiplicadores, comprobando que se llega a lamisma ecuacion del pendulo para la coordenadaθ .
ϕ
O
θM
M2
SOLUCION
1.
2Rθ
Rϕ
A
I
La ligadura cinematica se puede obtener de muchos modos. Uno esconsiderar la velocidad deA: como parte del disco que rueda, tienela velocidad−Rϕuθ . Como parte de la varilla, tiene−2Rθuθ .
vA21 = Rϕ uθ = vA
01 = 2Rθ uθ ⇒ 2θ − ϕ = 0 ⇒ ϕ = 2θ
Notese queϕ es la velocidad angularabsolutadel disco. Si en vezde tomar el angulo que forma un radiocon la verticalse hubiera to-mado el que forma conla varilla, tendrıamos la velocidad angularrelativa a la varilla, que valdrıa en este casoψ = 3θ .
2. La varilla no tiene masa, por lo que no tiene energıa cinetica ni potencial. Las de la partıculaB se calculan directamente:
TB =12
MR2θ2 VB = −MgRcosθ
La energıa cinetica del disco se calcula mediante el teorema de Konig, mientras que su poten-cial es inmediato:
TD =12
M2
R2θ2 +12
MR2
16
(2θ)2
VD =M2
gRcosθ
Sumando para todo el sistema se obtiene la Lagrangiana:
L = T −V =78
MR2θ2 +12
MgRcosθ
142

3.En la lagrangiana aparece una sola coordenada, que no es cıclica.
∂L
∂ θ=
74
MR2θ
ddt
(∂L
∂ θ
)
=74
MR2θ
∂L
∂θ= −1
2MgRsinθ
⇒ 7MR2 θ +2MgRsinθ = 0
La ecuacion anterior es obviamente la de un pendulo simple:
θ +2g7R
sinθ = 0
Para pequenas oscilaciones,θ +2g7R
θ = 0, cuyo periodo esT = 2π
√
7R2g
4.
Si no se integra la ligadura, hay que dejar laϕ como coordenada generalizada en la lagran-giana:
L =34
MR2θ2 +132
MR2ϕ2+12
MgRcosθ ; con la ligadura ϕ −2θ = 0
ası el sistema tendrıa dos coordenadas generalizadas, pero solo un grado de libertad.La ecuacion de la ligadura se puede escribir de muchos modos:
(vA
21−vA01
)· uθ = 0, que
indicarıa que el centro del disco debe estar unido al extremo de la varilla; las fuerzas deligadura serıanµ uθ , actuando sobre el disco, y−µ uθ sobre la varilla, de modo que no seseparen. Otra forma serıavI
21·uθ = 0, convI21 = vA
21+ωωω01∧AI =(2Rθ −Rϕ
)uθ , que expresa
que el disco rueda sin deslizar; la fuerzaµ uθ se aplicarıa al punto de contactoI para que tengavelocidad nula. El que la velocidad deI sea tambien cero en la direccion radialuρ serıa otraligadura distinta, integrable, y ya incluida en la eleccion de las coordenadas generalizadas. Enambos casos, la expresion final es la misma del apartado1.Los coeficientes del multiplicador de Lagrangeµ serıanc1ϕ = 1; c1θ = −2. Si se quiere queµ tenga dimensiones de fuerza, se pueden multiplicar porR.Las ecuaciones del movimiento serıan:
ϕ)116
MR2ϕ = µ
θ)32
MR2θ +M2
gRsinθ = −2µ
L) ϕ −2θ = 0
Se derivaL) para obtenerϕ = 2θ , que se sustituye enϕ) dandoMR2θ/8 = µ ; este valor deµ se sustituye enθ). Ası se obtiene la ecuacion del pendulo del apartado anterior:
32
MR2θ +M2
gRsinθ = −2
(MR2θ
8
)
⇒ 148
MR2θ +M2
gRsinθ = 0
Este camino es mas largo, pero tiene una ventaja: una vez integrada la ecuacion deθ para ob-tenerθ(t) —en este caso habrıa que hacerlo numericamente, o mediante funciones elıpticas—se conoce tambien el valor de la fuerza de ligadura mediantela µ . Aun sin integrarlo, se obtie-ne el valor de la fuerza de ligadura para cada posicion, puesµ(θ ) se puede poner en funciondeθ mediante la ecuacion del pendulo.
143

144
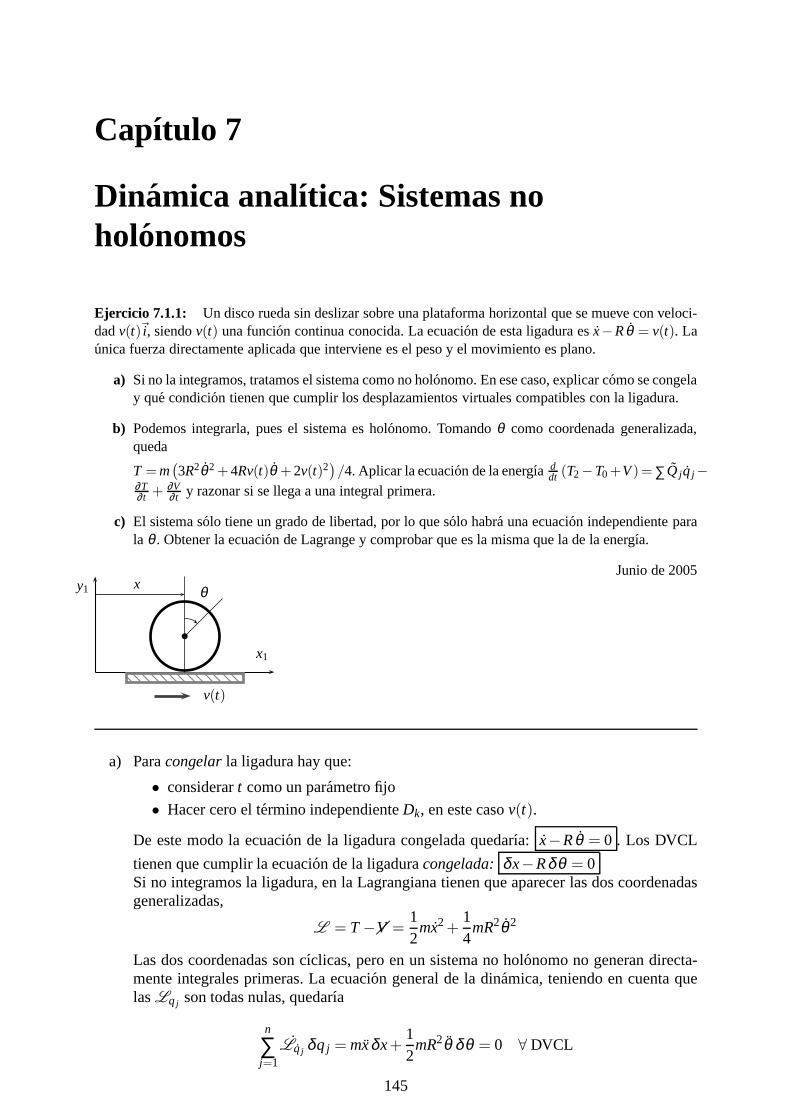
Capıtulo 7
Dinamica analıtica: Sistemas noholonomos
Ejercicio 7.1.1: Un disco rueda sin deslizar sobre una plataforma horizontalque se mueve con veloci-dadv(t)~i, siendov(t) una funcion continua conocida. La ecuacion de esta ligadura es ˙x−Rθ = v(t). Launica fuerza directamente aplicada que interviene es el peso y el movimiento es plano.
a) Si no la integramos, tratamos el sistema como no holonomo. En ese caso, explicar como se congelay que condicion tienen que cumplir los desplazamientos virtuales compatibles con la ligadura.
b) Podemos integrarla, pues el sistema es holonomo. Tomandoθ como coordenada generalizada,queda
T = m(3R2θ2 +4Rv(t)θ +2v(t)2
)/4. Aplicar la ecuacion de la energıaddt (T2−T0+V)= ∑Q j q j −
∂T∂ t + ∂V
∂ t y razonar si se llega a una integral primera.
c) El sistema solo tiene un grado de libertad, por lo que solo habra una ecuacion independiente parala θ . Obtener la ecuacion de Lagrange y comprobar que es la mismaque la de la energıa.
Junio de 2005
θ
v(t)
x
x1
y1
a) Paracongelarla ligadura hay que:
• considerart como un parametro fijo
• Hacer cero el termino independienteDk, en este casov(t).
De este modo la ecuacion de la ligadura congelada quedarıa: x−Rθ = 0 . Los DVCL
tienen que cumplir la ecuacion de la ligaduracongelada:δx−Rδθ = 0Si no integramos la ligadura, en la Lagrangiana tienen que aparecer las dos coordenadasgeneralizadas,
L = T −V =12
mx2+14
mR2θ2
Las dos coordenadas son cıclicas, pero en un sistema no hol´onomo no generan directa-mente integrales primeras. La ecuacion general de la dinamica, teniendo en cuenta quelasLq j son todas nulas, quedarıa
n
∑j=1
Lq j δq j = mxδx+12
mR2θ δθ = 0 ∀ DVCL
145

Si en la ecuacion de la ligadura congelada despejamosδx = Rδθ comodependiente, ysustituimos, (
mRx+12
mR2θ)
δθ = 0 ∀ δθ
Ahora δθ es independiente, y el coeficiente tiene que ser nulo. Junto con la ligadura (estavez sin congelar, porque se aplica al movimiento real, no al virtual), tenemos un sistemacerrado de dos ecuaciones con dos incognitas:
mRx+12
mR2θ = 0
x−Rθ = v(t)
Derivando la ligadura y sustituyendo ¨x se llega a la misma ecuacion del sistema holono-mo.
b) Lo estudiamos ahora como sistema holonomo, con una sola variable. El potencial esconstante,V = mgyG = mgRNo hay fuerzas no potenciales:Q j = 0.
La estructura de la energıa cinetica es:T = m4
[
T2︷ ︸︸ ︷
3R2θ2 +
T1︷ ︸︸ ︷
4Rv(t)θ +
T0︷ ︸︸ ︷
2v(t)2]. Aplicandodirectamente la ecuacion de la energıa, se obtiene:
ddt
(T2−T0 +V) =∑Q j q j −∂T∂ t
+
∂V
∂ t;
m4
[6Rθ θ −4v(t)v(t)
]= −m
4
[4Rv(t)θ +4v(t)v(t)
];
6Rθ θ +4v(t)θ = 0
c) Observando la lagrangianaL = T −V, se observa queθ es cıclica: no aparece explıcita-mente. Se obtiene una integral primera:
ddt
(∂L
∂ θ
)
−
∂L
∂θ= 0 ⇒ ∂L
∂ θ=
m4
[6R2θ +4Rv(t)
]= Cte.
Derivando esta expresion se obtiene 6R2θ + 4Rv(t) , que es proporcional a la de laenergıa.
146
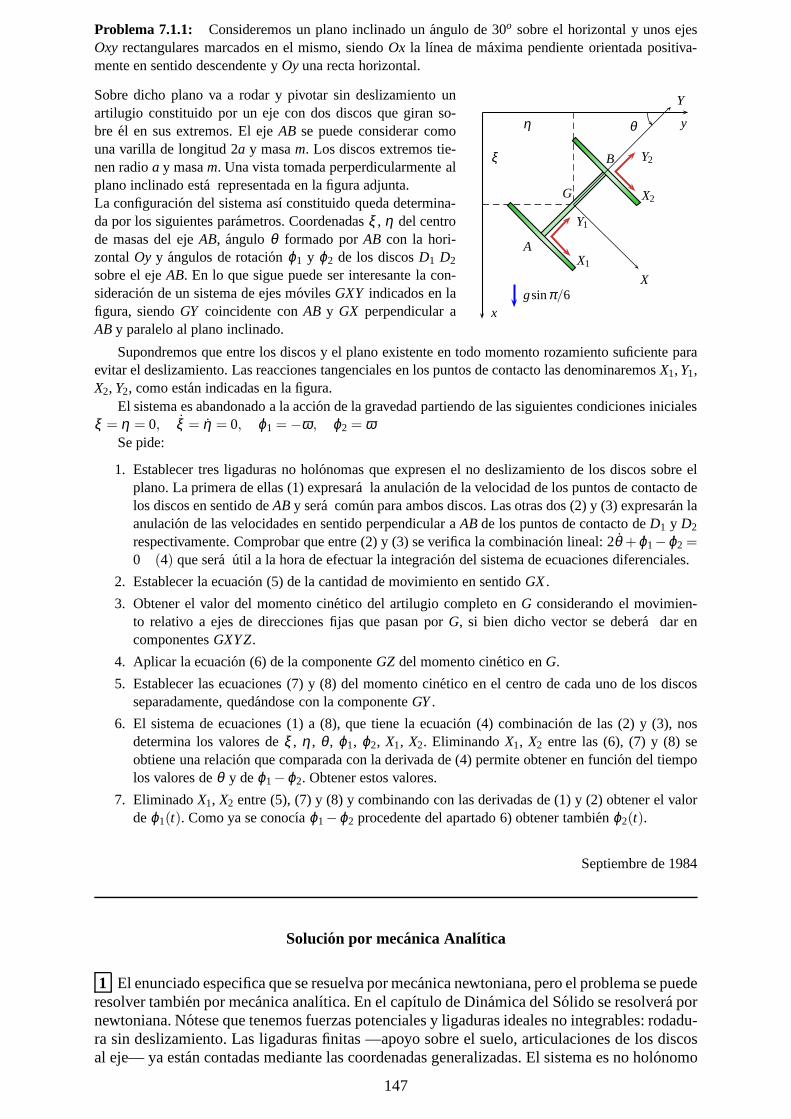
Problema 7.1.1: Consideremos un plano inclinado un angulo de 30o sobre el horizontal y unos ejesOxy rectangulares marcados en el mismo, siendoOx la lınea de maxima pendiente orientada positiva-mente en sentido descendente yOyuna recta horizontal.
Sobre dicho plano va a rodar y pivotar sin deslizamiento unartilugio constituido por un eje con dos discos que giran so-bre el en sus extremos. El ejeAB se puede considerar comouna varilla de longitud 2a y masam. Los discos extremos tie-nen radioa y masam. Una vista tomada perperdicularmente alplano inclinado esta representada en la figura adjunta.La configuracion del sistema ası constituido queda determina-da por los siguientes parametros. Coordenadasξ , η del centrode masas del ejeAB, anguloθ formado porAB con la hori-zontalOy y angulos de rotacionϕ1 y ϕ2 de los discosD1 D2
sobre el ejeAB. En lo que sigue puede ser interesante la con-sideracion de un sistema de ejes movilesGXY indicados en lafigura, siendoGY coincidente conAB y GX perpendicular aABy paralelo al plano inclinado.
y
x
ξ
η
gsinπ/6
θ
Y
X
G
B
AX1
Y1
X2
Y2
Supondremos que entre los discos y el plano existente en todomomento rozamiento suficiente paraevitar el deslizamiento. Las reacciones tangenciales en los puntos de contacto las denominaremosX1, Y1,X2, Y2, como estan indicadas en la figura.
El sistema es abandonado a la accion de la gravedad partiendo de las siguientes condiciones inicialesξ = η = 0, ξ = η = 0, ϕ1 = −ω , ϕ2 = ω
Se pide:
1. Establecer tres ligaduras no holonomas que expresen el no deslizamiento de los discos sobre elplano. La primera de ellas (1) expresara la anulacion de lavelocidad de los puntos de contacto delos discos en sentido deABy sera comun para ambos discos. Las otras dos (2) y (3) expresaran laanulacion de las velocidades en sentido perpendicular aABde los puntos de contacto deD1 y D2
respectivamente. Comprobar que entre (2) y (3) se verifica lacombinacion lineal: 2θ + ϕ1− ϕ2 =0 (4) que sera util a la hora de efectuar la integracion del sistema de ecuaciones diferenciales.
2. Establecer la ecuacion (5) de la cantidad de movimiento en sentidoGX.
3. Obtener el valor del momento cinetico del artilugio completo enG considerando el movimien-to relativo a ejes de direcciones fijas que pasan porG, si bien dicho vector se debera dar encomponentesGXYZ.
4. Aplicar la ecuacion (6) de la componenteGZ del momento cinetico enG.
5. Establecer las ecuaciones (7) y (8) del momento cineticoen el centro de cada uno de los discosseparadamente, quedandose con la componenteGY.
6. El sistema de ecuaciones (1) a (8), que tiene la ecuacion (4) combinacion de las (2) y (3), nosdetermina los valores deξ , η , θ , ϕ1, ϕ2, X1, X2. EliminandoX1, X2 entre las (6), (7) y (8) seobtiene una relacion que comparada con la derivada de (4) permite obtener en funcion del tiempolos valores deθ y deϕ1−ϕ2. Obtener estos valores.
7. EliminadoX1, X2 entre (5), (7) y (8) y combinando con las derivadas de (1) y (2)obtener el valordeϕ1(t). Como ya se conocıaϕ1−ϕ2 procedente del apartado 6) obtener tambienϕ2(t).
Septiembre de 1984
Solucion por mecanica Analıtica
1 El enunciado especifica que se resuelva por mecanica newtoniana, pero el problema se puederesolver tambien por mecanica analıtica. En el capıtulo de Dinamica del Solido se resolvera pornewtoniana. Notese que tenemos fuerzas potenciales y ligaduras ideales no integrables: rodadu-ra sin deslizamiento. Las ligaduras finitas —apoyo sobre el suelo, articulaciones de los discosal eje— ya estan contadas mediante las coordenadas generalizadas. El sistema es no holonomo
147

escleronomo.
LlamaremosS1 a los ejes fijosOxyz, S0 a los intermediosGXY, S2 al discoD1 enA, y S3al discoD2 enB. Los discos ruedan y pivotan sin deslizar. Por tanto, si llamamosI1 e I2 a lospuntos de los discos que en cada momento esten en contacto con el plano, las ecuaciones de lasligaduras son:
vI121 = 0 vI2
31 = 0
Como los puntos de contacto van cambiando, hay que calcular las velocidades mediante elcampo de velocidades del solido, basandose en un punto quesea siempre el mismo; por ejemplo,G, que es punto fijo de cada uno de los discos.
vI121= vG
21+ωωω21∧GI1 =
ξη0
1
+
∣∣∣∣∣∣
i0 j0 k0
0 ϕ1 θ0 −a −a
∣∣∣∣∣∣
=
=
ξ cosθ + η sinθ +a(θ − ϕ1
)
−ξ sinθ + η cosθ0
=
000
vI231 = vG
31+ωωω31∧GI2 =
ξη0
1
+
∣∣∣∣∣∣
i0 j0 k0
0 ϕ2 θ0 a −a
∣∣∣∣∣∣
=
=
ξ cosθ + η sinθ −a(θ + ϕ2
)
−ξ sinθ + η cosθ0
=
000
x1
y1
z1
θb
θ
A
I1
B
I2
G
ϕ2
ϕ1
X
Y
Z
Las ecuaciones en la direccionGY son naturalmente las mismas, porque los discos estanunidos por una barra rıgida en esa direccion, y las velocidades de los puntos deben ser iguales.Aunque solo contemos una, tenemos dos ligaduras redundantes. El rozamiento del suelo sobreun disco, en esa direccion, hace lo mismo que el rozamiento sobre el otro mas la barra. Es sis-tema va a ser hiperestatico, y no podremos calcular las fuerzas de ligaduraY1 eY2 por separado,sino solo la suma.
Las componentes en la direccionGZ no aparecen porque, al ser integrables, ya se han tenidoen cuenta al no introducir las coordenadas generalizadas correspondientes (que podrıan ser, porejemplo,ζ1 y ζ2 para las alturas de los puntosA y B). Quedan tres ecuaciones independientes,
−ξ sinθ + η cosθ = 0 (1)
ξ cosθ + η sinθ +a(θ − ϕ1
)= 0 (2)
ξ cosθ + η sinθ −a(θ + ϕ2
)= 0 (3)
Son ligaduras no integrables, y por tanto el sistema es no holonomo. Sin embargo, restando lasdos ultimas se obtiene
2θ − ϕ1 + ϕ2 = 0 (4)
cuyo sentido es simple: si el aparato pivota en conjunto, unade las ruedas tiene que rodar haciadelante y la otra hacia atras (quiza sobrepuesto a una rodadura conjunta).
Esta ultima es integrable. Como es combinacion lineal de dos anteriores, puede sustituira cualquiera de ellas. Podrıamos integrarla y eliminar unode los angulos, dejando solo dosligaduras no integrables, y cuatro coordenadas generalizadas. O bien dejarlas como estan, yseguir con las tres no integrables y cinco coordenadas.
2 A partir de este punto, dejaremos el orden de las preguntas del enunciado, para seguir pormecanica analıtica. Ya que tenemos las ecuaciones de las ligaduras y las coordenadas generali-zadas, hay que calcular la energıa cinetica y el potencial, para obtener la Lagrangiana y derivarlas ecuaciones de Lagrange.
148

El potencial se halla trivialmente:
Fg = 3mgsinπ6
i ⇒ V = −3mgsinπ6
ξ = −32
mgξ
donde se ha ignorado la componente normal al plano, queno trabaja. Al mismo resultado se habrıa llegado con laforma usualmgz, tomando laz segun la vertical ascen-dente, y sustituyendoz= z0− 1
2ξ de nuestros ejes.Para calcular la energıa cinetica, hay que aplicar el teore-ma de Koenig. Se puede hacer primero a todo el sistema yluego a cada solido, o directamente a cada solido. El mo-vimiento relativo al centro de masas se entiende respectoa unos ejesS4 con origen enG y paralelos a los fijosS1.Tendremos,
y
x
ξ
η
gsinπ/6
θ
Y
X
G
B
A
x4
y4
T =12
3m(vG01)
2+TG =3m2
(ξ 2+η2)+TV
G +TD1G +TD2
G
Los terminos relativos aG son
TVG = 0+
12⌊0,0, θ⌋ m(2a)2
12
1 0 00 0 00 0 1
00θ
TD1G =
m2
(vA24)
2+TD1A =
12
m(aθ ,0,0)2+12⌊0, ϕ1, θ⌋
ma2
4
1 0 00 2 00 0 1
0ϕ1
θ
TD2G =
m2
(vB34)
2+TD2B =
12
m(−aθ ,0,0)2+12⌊0, ϕ2, θ⌋
ma2
4
1 0 00 2 00 0 1
0ϕ2
θ
Por el segundo camino, se aplica Koenig a cada solido por separado:
TV =12
m(vG01)
2+12
ωωω01IIIVGωωω01
TD1 =12
m(vA21)
2+12
ωωω21IIID1A ωωω21
TD2 =12
m(vB31)
2+12
ωωω31IIID2B ωωω31
Uno de los terminos es mas laborioso: las velocidades absolutas de los centros de los discos secalculan como
vA21 = vA
01 = vG01+ωωω01∧GA
El primer sumando esta en ejesS1 y el segundo en ejesS0. Habrıa que cambiar de ejes, sumar,y elevar al cuadrado; lo mismo paraB. Pero se puede tener en cuenta queGA = −GB, y porlo tanto los dobles productos se cancelan al sumar para ambosdiscos. No hay que hallar lavelocidad completa, sino elevar al cuadrado cada sumando (sin cambiarlo de ejes) y sumarlotodo:
(vG01+ωωω01∧GA)2+(vG
01+ωωω01∧GB)2 =
= g2(vG01)
2+((((((((2vG
01 ·ωωω01∧GA +((((((((2vG
01 ·ωωω01∧GB+2(ωωω01∧GA)2
Operando y sumando,
T =3m2
(
ξ 2+ η2)
+17ma2
12θ2 +
ma2
4
(ϕ2
1 + ϕ22
)
La Lagrangiana sera
L =3m2
(
ξ 2+ η2)
+17ma2
12θ2 +
ma2
4
(ϕ2
1 + ϕ22
)+
32
mgξ
149

Metodo de los multiplicadores de Lagrange
3 Las ecuaciones del movimiento, por el metodo de los multiplicadores, son
ddt
∂L
∂ q j− ∂L
∂q j=
h
∑k=1
µkCk j
Lasq j son las coordenadas generalizadasξ , η, θ , ϕ1 y ϕ2. LosCk j son los coeficientes de lasvelocidades generalizadas ˙q j en la ecuacion de la ligadura cinematicak:
1) −ξ sinθ + η cosθ = 02) ξ cosθ + η sinθ +a
(θ − ϕ1
)= 0
3) ξ cosθ + η sinθ −a(θ + ϕ2
)= 0
[Ck j]=
−sinθ cosθ 0 0 0cosθ sinθ a −a 0cosθ sinθ −a 0 −a
Calculamos las derivadas de la Lagrangiana,
q j Lq j Lq j Lq j
ξ 3mξ 3mξ 32mg
η 3mη 3mη 0
θ 17ma2
6 θ 17ma2
6 θ 0
ϕ1ma2
2 ϕ1ma2
2 ϕ1 0
ϕ2ma2
2 ϕ2ma2
2 ϕ2 0
Ya podemos escribir las ecuaciones:
3mξ −32
mg =−sinθ µ1+cosθ µ2+cosθ µ3 (5)
3mη −0 = cosθ µ1 +sinθ µ2 +sinθ µ3 (6)
17ma2
6θ −0 = 0·µ1 +aµ2 −aµ3 (7)
ma2
2ϕ1 −0 = 0·µ1 −aµ2 +0·µ3 (8)
ma2
2ϕ2 −0 = 0·µ1 +0·µ2 −aµ3 (9)
Junto con las tres ecuaciones de ligadura tenemos un sistemaalgebraico-diferencial cerradode ocho ecuaciones con ocho incognitas (cinco coordenadasgeneralizadasq j y tres fuerzas deligaduraµk).
Notese que la ligadura (1) indica que la velocidad deambospuntos de contacto es nula enla direccionGY. Como es redundante, la fuerza de ligaduraFL
1 = µ1 j0 representa la suma delas que actuan sobreA y B en esa direccion. No podemos saber que parte actua sobre cadadisco, porque el sistema es hiperestatico. Solo podemos saber la suma (con la terminologıa elenunciado,Y1 +Y2).
4 Para integrar analıticamente el sistema hay que:
Eliminar los multiplicadores en las ecuaciones de Lagrange, con lo que tenemos dosecuaciones diferenciales libres de fuerzas de ligadura.
Derivar las tres ecuaciones de las ligaduras, para tener un sistema de cinco ecuacionesdiferenciales con cinco incognitas.
150

Cuando se integra numericamente, se sigue el mismo procedimiento en cada paso de integra-cion.
De (8) y (9) despejamosµ2 y µ3, y se sustituyen en (7),
173
θ = −ϕ1 + ϕ2 (10)
Entre (5) y (6) se eliminaµ1 y luego se sustituyen lasµ2 y µ3 obtenidas de las ultimas:
3m(
ξ cosθ + η sinθ)
− 32
mgcosθ = −ma2
ϕ1−ma2
ϕ2 (11)
Con las derivadas de las ligaduras ya tendrıamos un sistemade cinco ecuaciones diferenciales desegundo orden de la formaAAA · q = f(q, q) , que se puede integrar numericamente sin problemas.Para la integracion analıtica, podemos combinar la segunda y tercera ligaduras en la ecuacion(4), y derivarla:
2θ − ϕ1 + ϕ2 = 0 → 2θ − ϕ1+ ϕ2 = 0 (12)
Notese que (10) y (12) forman un sistema homogeneo incompatible, por lo que la unica soluciones la trivial, que se integra con las condiciones iniciales del enunciado. Los valores iniciales delos angulos se pueden hacer cero.
θ = 0 → θ =θ0−ω t
ϕ2− ϕ1 = 0 → ϕ2−ϕ1 = 2ω t +ϕ20 −ϕ10
Sumando (2) y (3) y derivando, se obtiene
2(ξ cosθ + η sinθ)−a(ϕ1+ ϕ2) = 0 →
→ 2(ξ cosθ + η sinθ)+2:0(
−ξ sinθ + η cosθ)
θ −a(ϕ1+ ϕ2) = 0
Se sustituye en (11)
3a2
(ϕ1+ ϕ2)−32
gcosθ = −a2
(ϕ2 + ϕ1)ϕ2=ϕ1−−−−→
→ ϕ1 = ϕ2 =3g8a
cosθ =3g8a
cosω t
Estas ecuaciones se integran sin dificultad:
ϕ1 =3g
8aω2(1−cosω t)−ω t ϕ2 =3g
8aω2(1−cosω t)+ω t
De las ecuaciones de las ligaduras, por ejemplo, (1) y (2), sedespeja
ξ = acosθ(ϕ1− θ
)=
3g8ω
cosω t sinω t
η = asinθ(ϕ1− θ
)=
3g8ω(cos2ω t −1
)
y se integra directamente,
ξ =3g
32ω2 (1−cos2ω t) η =3g
32ω2 (sin2ω t −2ω t)
La trayectoria es una cicloide que no avanza en la direccionde maxima pendiente, sino en lahorizontal:
151

x
y
g
5 Sustituyendo las coordenadas en las ecuaciones de Lagrange, se obtienen las fuerzas deligadura:
FL1 = (Y1+Y2)j0 = µ1 j0 = −21mg
8sinω t j0
FL2 = X1i0 = µ2 i0 = −3mg
16cosω t i0
FL3 = X2i0 = µ3 i0 = −3mg
16cosω t i0
Metodo de los desplazamientos independientes
3 En un sistema potencial como este, la ecuacion general de ladinamica, en coordenadasgeneralizadas, queda
n
∑j=1
(ddt
∂L
∂ q j− ∂L
∂q j
)
δq j = 0 ∀DVCL
No podemos obtener directamente las ecuaciones de Lagrangeporque, en un sistema no holono-mo, un conjunto arbitrario deδq j serıa compatible con las ligaduras finitas —que se cumplenautomaticamente al introducir lasq j — pero no con las cinematicas no integrables. Los DVCLtienen que cumplir las ecuaciones (1) a (3)congeladas.En este caso no hay que hacer nada,porque son estacionarias:
1) −δξ sinθ +δη cosθ = 02) δξ cosθ +δη sinθ +a(δθ −δϕ1) = 03) δξ cosθ +δη sinθ −a(δθ +δϕ2) = 0
[Ck j]
δq j
=
−sinθ cosθ 0 0 0cosθ sinθ a −a 0cosθ sinθ −a 0 −a
δξδηδθδϕ1δϕ2
=
000
Con estas ecuaciones, podemos escoger dos desplazamientoscomo independientes y expresarlos otros tres en funcion de ellos. Basta con escoger, entrelas columnas de
[Ck j], una matriz
regular. Es decir, escoger tres que se puedan despejar en funcion de los dos independientes. Estose facilita sustituyendo una de las dos ultimas ligaduras por su diferencia. Aparece una matrizregular.
−sinθ cosθ 0 0 0cosθ sinθ a −a 0
0 0 2a −a a
δξδηδθδϕ1δϕ2
=
000
Podemos separarlas
−sinθ cosθ 0cosθ sinθ a
0 0 2a
δξδηδθ
=
0 0a 0a −a
δϕ1δϕ2
152

Se despejan invirtiendo la matriz,
δξδηδθ
=
−sinθ cosθ −12 cosθ
cosθ sinθ −12 sinθ
0 0 12a
0 0a 0a −a
δϕ1δϕ2
=
a2 cosθ a
2 cosθa2 sinθ a
2 sinθ12 −1
2
δϕ1δϕ2
Tambien se pueden despejar directamente. La tercera ya esta despejada:
δθ =12(δϕ1−δϕ2)
Las dos primeras, sustituyendo esta, quedan
−sinθ δξ +cosθ δη = 0
cosθ δξ +sinθ δη =12(δϕ1 +δϕ2)
y se despejan trivialmenteδξ y δη. De este modo, la ecuacion general de la dinamica queda:
5
∑j=1
L j δq j = Lξa2
cosθ(δϕ1 +δϕ2)+Lηa2
sinθ(δϕ1 +δϕ2)+
+Lθ12(δϕ1−δϕ2)+Lϕ1δϕ1 +Lϕ2δϕ2 =
=12
(Lξ acosθ +Lηasinθ +Lθ +2Lϕ1
)δϕ1+
+12
(Lξ acosθ +Lη asinθ −Lθ +2Lϕ2
)δϕ2 = 0 ∀δϕ1,δϕ2
Como ahora los desplazamientos sı son arbitrarios, podemos obligar a que se anulen sus coefi-cientes. Sustituyendo las derivadas de la LagrangianaL j = Lq j −Lq j que se calcularon por elotro procedimiento, se tienen dos ecuaciones:
32
ma(
cosθ ξ +sinθ η)
+1712
ma2θ +12
ma2ϕ1 =34
mgacosθ
32
ma(
cosθ ξ +sinθ η)
− 1712
ma2θ +12
ma2ϕ2 =34
mgacosθ
Junto con las tres ecuaciones de ligadura, forman un sistemacerrado de cinco ecuaciones concinco incognitas.
4 Para resolverlo, podemos restar las dos ecuaciones de Lagrange,
176
ma2θ +12
ma2ϕ1−12
ma2ϕ2 = 0
y tambien las dos ultimas ecuaciones de ligadura,
2θ − ϕ1 + ϕ2 = 0 → 2θ − ϕ1+ ϕ2 = 0
Queda un sistema homogeneo incompatible, y por tanto
θ = 0 → θ = −ω t
ϕ2− ϕ1 = 0 → ϕ2−ϕ1 = 2ω t
Si sumamos las dos ecuaciones de Lagrange, teniendo en cuenta estos resultados,
3ma(
cosθ ξ +sinθ η)
+ma2ϕ1 =32
mgacosω t
153

Se deriva una de las ecuaciones de ligadura:
ξ cosθ + η sinθ −aϕ1 = 0 →
→ ξ cosθ + η sinθ +:0(
−ξ sinθ + η cosθ)
θ −aϕ1 = 0
Sustituyendo en la anterior, se tiene
3ma2ϕ1+ma2ϕ1 =32
mgacosω t → ϕ1 =3g8a
cosω t
Se llega a la misma ecuacion que por multiplicadores. A partir de aquı, la solucion serıa lamisma que antes: integrarϕ1 y obtener directamenteϕ2. De las dos primeras ecuaciones deligadura se despejanξ y η , que se integran tambien.
Por este procedimiento no se obtienen las fuerzas de ligadura. Si se necesitan, habrıa queplantear las ecuaciones de cantidad de movimiento y de momento cinetico global segunGZ:queda un problema algebraico en las fuerzas de ligadura, porque lasq j(t) se conocen.
Solucion reduciendo el orden del problema
Notese que combinando dos de las ecuaciones de ligadura cinematicas se obtiene una inte-grable:
2θ + ϕ1− ϕ2 = 0
Se puede integrar, y eliminar una de las coordenadas generalizadas. Quizas no convenga elimi-nar laθ porque no es cıclica y aparece como argumento de senos y cosenos. Se podrıa eliminar,por ejemplo, laϕ2. Ası la Lagrangiana quedarıa
L =3m2
(
ξ 2+ η2)
+17ma2
12θ2+
ma2
4
[
ϕ21 +(2θ + ϕ1
)2]
+32
mgξ
Conservamos las dos primeras ecuaciones de ligadura. Tenemos entonces un sistema con cuatrocoordenadas generalizadas y dos ligaduras cinematicas nointegrables. Se resolverıa, como elanterior, por multiplicadores o por desplazamientos independientes.
154
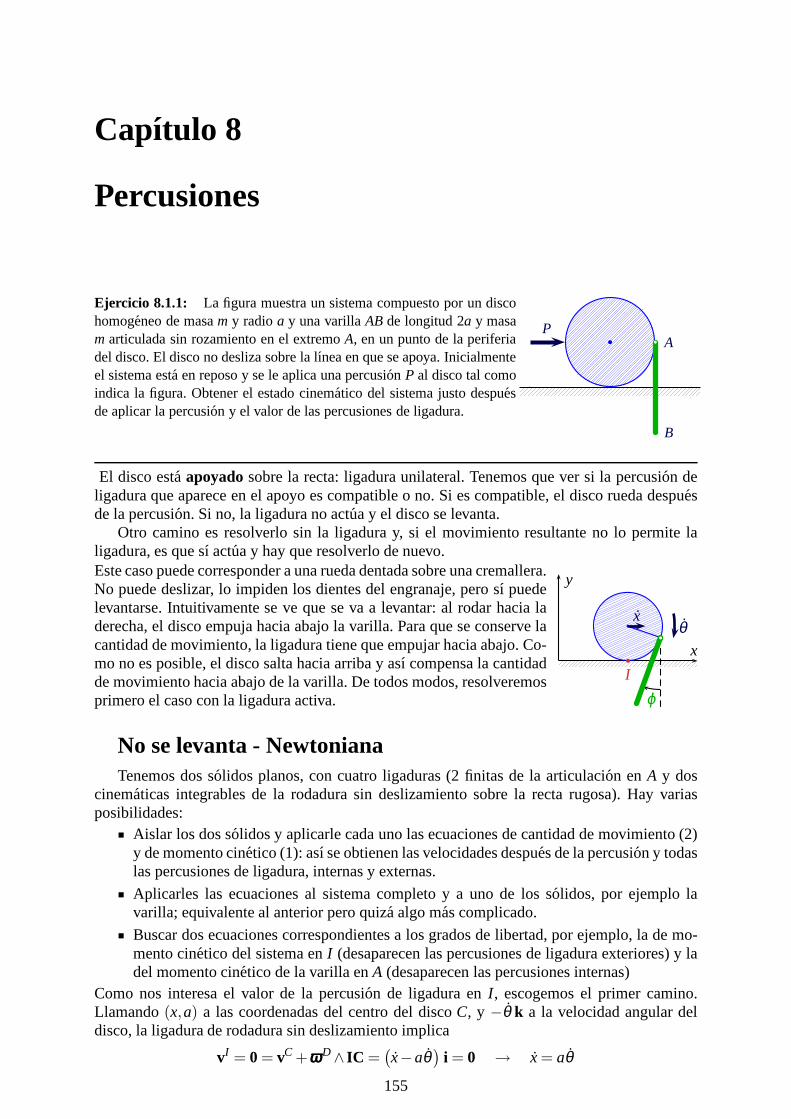
Capıtulo 8
Percusiones
Ejercicio 8.1.1: La figura muestra un sistema compuesto por un discohomogeneo de masam y radioa y una varillaAB de longitud 2a y masam articulada sin rozamiento en el extremoA, en un punto de la periferiadel disco. El disco no desliza sobre la lınea en que se apoya.Inicialmenteel sistema esta en reposo y se le aplica una percusionP al disco tal comoindica la figura. Obtener el estado cinematico del sistema justo despuesde aplicar la percusion y el valor de las percusiones de ligadura.
PA
B
El disco estaapoyadosobre la recta: ligadura unilateral. Tenemos que ver si la percusion deligadura que aparece en el apoyo es compatible o no. Si es compatible, el disco rueda despuesde la percusion. Si no, la ligadura no actua y el disco se levanta.
Otro camino es resolverlo sin la ligadura y, si el movimientoresultante no lo permite laligadura, es que sı actua y hay que resolverlo de nuevo.Este caso puede corresponder a una rueda dentada sobre una cremallera.No puede deslizar, lo impiden los dientes del engranaje, pero sı puedelevantarse. Intuitivamente se ve que se va a levantar: al rodar hacia laderecha, el disco empuja hacia abajo la varilla. Para que se conserve lacantidad de movimiento, la ligadura tiene que empujar haciaabajo. Co-mo no es posible, el disco salta hacia arriba y ası compensa la cantidadde movimiento hacia abajo de la varilla. De todos modos, resolveremosprimero el caso con la ligadura activa. ϕ
θx
x
y
I
No se levanta - NewtonianaTenemos dos solidos planos, con cuatro ligaduras (2 finitasde la articulacion enA y dos
cinematicas integrables de la rodadura sin deslizamientosobre la recta rugosa). Hay variasposibilidades:
Aislar los dos solidos y aplicarle cada uno las ecuaciones de cantidad de movimiento (2)y de momento cinetico (1): ası se obtienen las velocidadesdespues de la percusion y todaslas percusiones de ligadura, internas y externas.
Aplicarles las ecuaciones al sistema completo y a uno de los solidos, por ejemplo lavarilla; equivalente al anterior pero quiza algo mas complicado.
Buscar dos ecuaciones correspondientes a los grados de libertad, por ejemplo, la de mo-mento cinetico del sistema enI (desaparecen las percusiones de ligadura exteriores) y ladel momento cinetico de la varilla enA (desaparecen las percusiones internas)
Como nos interesa el valor de la percusion de ligadura enI , escogemos el primer camino.Llamando(x,a) a las coordenadas del centro del discoC, y −θ k a la velocidad angular deldisco, la ligadura de rodadura sin deslizamiento implica
vI = 0 = vC +ωωωD ∧ IC =(x−aθ
)i = 0 → x = aθ
155

Para aplicar la ecuacion de la cantidad de movimiento a la varilla tenemos que calcular lavelocidad deA y la deG. Llamando−ϕ k a la velocidad angular de la varilla:
vA = vC +ωωωD ∧CA = aθ i −aθ j vG = vA+ωωωV ∧AG =(aθ −aϕ
)i −aθ j
Apareceran dos percusiones de ligadura exteriores enI (una por cada direccion de movimientoimpedida) y dos interiores, de accion reaccion, en la articulacionA. La cantidad de movimientoy el momento cineticoantesde la percusion son nulos, porque el sistema esta en reposo. Lasecuaciones a aplicar son:
FL +P = mvdG−mva
G MLO +MP
O = HdO−Ha
O
que en este caso adoptan la forma:
P+Qx−Rx = maθd Rx = ma(
θd− ϕd)
Qy−Ry = 0 Ry = −maθd
a(Ry−Qx) =12
ma2θd Rxa =112
m4a2 ϕd
θ x Rx
Ry
QxQy
P
ϕ
RxRy
Todas las ecuaciones estan aplicadas en la posicion inicial, sin mover las coordenadas. Por laligadura unilateral, tendra que serQy ≥ 0: el suelo solo puede dar percusiones hacia arriba.Entre la segunda y la quinta se obtieneQy = Ry = −maθd , que es obvio que va a ser negativa.
Entre la cuarta y la sexta sale 3θd = 4ϕd ; sustituyendoRx y Qy en la primera, se obtieneP = 11
4 maθd > 0, con lo que, efectivamente,Qy < 0. Esto no es posible: el disco se levanta.Hay que repetir el problema sin la ligadura.
Se levanta - NewtonianaSi el disco puede levantarse, hay que liberar la ligadura vertical (quitar la percusion de
ligadura y devolver el grado de libertad), y modificar las velocidades:
vC = aθ i + yj vG =(aθ −aϕ
)i +(y−aθ
)j
Las nuevas ecuaciones seran:
P+Qx−Rx = maθd Rx = ma(
θd− ϕd)
−Ry = myd Ry = m(
yd−aθd)
a(Ry−Qx) =12
ma2θd aRx =112
m4a2 ϕd
θ
xy
Rx
Ry
Qx
P
ϕ
RxRy
Entre la 4 y la 6,13
maϕd = ma(
θd− ϕd)
→ ϕd =34
θd
Entre la 2 y la 5,
−yd = m(
yd−aθd)
→ yd =a2
θd → Ry = −ma2
θd
Con esto, de la 3a se obtieneQx = −amθd ; sustituyendo esto y laRx en la 1a,
P−maθd− 14
maθd = maθd → θd =4P
9maϕd =
P3ma
yd =2P9m
Las percusiones de ligadura seran,
Qx = −4P9
Rx =P9
Ry = −2P9m
156

Se levanta - Analıtica - holonomoEste ejercicio se puede resolver por mecanica analıtica,considerando el sistema como holono-
mo. La ligadura se integra, de modo que las coordenadas independientes serany, θ y ϕ. Ladificultad esta en que por ese camino no apareceran las percusiones de ligadura, ni la exterioresQx ni las interioresRx, Ry.
Primero calcularemos la energıa cinetica. El potencial no es necesario, porque las fuerzasacotadas no intervienen:
TD =12
m(a2θ2 + y2)+
12
12
ma2θ2
TV =12
m[(
aθ −aϕ)2
+(y−aθ
)2]
+12
112
m4a2ϕ2
T =13
ma2ϕ2−ma2ϕθ +my2−mayθ +74
ma2θ2
Tambien hay que calcular las fuerzas generalizadas de la percusion. El punto de aplicacion,F,tiene una velocidad:
vF = vc +ωωωD ∧CG = aθ i +(y+aθ) j → δ rF = (ai +aj)δθ + j δy
δW = P ·δ rF = Paδθ → QPθ = aP; QP
ϕ = QPy = 0
Las ecuaciones de Lagrange impulsivas para un sistema holonomo son
∂T∂ q j
∣∣∣∣
d
− ∂T∂ q j
∣∣∣∣
a
= QPj
El termino que se evalua antes de la percusion va a ser nulo, porque el siste-ma esta inicialmente en reposo. Las ecuaciones van a ser:
y) 2myd−maθd −0 = 0
θ) −ma2ϕd −mayd +72
ma2θd −0 = aP
ϕ)43
ma2ϕd−ma2θd −0 = 0
θ
aθy
PF
ϕ
El sistema se resuelve trivialmente: de la primera se despeja yd, de la terceraϕd, se sus-tituyen en la segunda, y se calculaθd. Las soluciones, naturalmente, son las mismas que pornewtoniana:
θd =4P
9maϕd =
P3ma
yd =2P9m
Las percusiones de ligadura no se pueden obtener por este camino. Habrıa que liberartodaslasligaduras en la energıa cinetica e introducirlas como cinematicas no integrables; ası se puedencalcular lasµk.
Se levanta - Analıtica - multiplicadoresConsideraremos el sistema formado por dos solidos libres,con tres fuerzas aplicadas en vez
de las ligaduras. Como coordenadas generalizadas se tomar´an lax,y,θ del disco, las coordena-dasξ ,η del puntoA de la varilla, y el anguloϕ. Ası, las velocidades de los puntos afectadospor las ligaduras son:
vID = (x−aθ) i vA
D = xi +(y−aθ) j vAV = ξ i + η j
157

Se podrıan haber tomado las coordenadas del centro de masas, con lo que laT quedarıa massimple, pero ası se ve mejor el sentido de la ecuacion de ligadura y de las fuerzas de ligadura.
La energıa cinetica del sistema sera:
TD =12
m(x2 + y2]+
12
12
ma2 θ2
TV =12
m
[(
ξ −aϕ)2
+ η2]
+12
112
m4a2 ϕ2
T =mx2
2+
my2
2+
ma2θ2
4+
mξ 2
2+
mη2
2−maξ ϕ +
2ma2ϕ2
3
θ
xy
F2DL
F3DL
F1DL
P
ϕ
ξηF2V
L
F3VL
Las ligaduras finitas se derivan para dejarlas como cinematicas. La velocidad horizontal deI es cero, y la velocidad deA del disco es la misma que la deA de la varilla:
g1 ≡ i ·vI = x−aθ = 0 → F1DL = µ1 i
g2 ≡ i ·vAV − i ·vA
D = ξ − x = 0 → F2VL = µ2 i ; F2D
L = −µ2 i
g3 ≡ j ·vAV − j ·vA
D = η − y+aθ = 0 → F3VL = µ3 j ; F3D
L = −µ3 j
Notese que tanto la energıa cinetica como las ligaduras se han calculadoen la posicion inicialθ = ϕ = 0, y no en una generica, que serıa mucho mas complejo. Estono va a afectar a lasderivadas parciales de las ecuaciones de Lagrange, pues solo derivamos respecto a las veloci-dades generalizadas (que sı aparecen todas),y no respecto a las coordenadas. Como al final seva a particularizar para el instante inicial, podemos calcularlo todo desde el principio con esosvalores de las coordenadas.
Las fuerzas generalizadas de la percusion se calculan comoen el caso holonomo, pero conlos nuevos grados de libertad:
vF = vc +ωωωD ∧CG = xi +(y+aθ ) j → δ rF = i δx+ j δy+aj δθδW = P ·δ rF = Pδx → QP
x = P;QPy = QP
θ = · · · = 0
Las ecuaciones de movimientos impulsivos por multiplicadores de Lagrange seran
∂T∂ q j
∣∣∣∣
d
− ∂T∂ q j
∣∣∣∣
a
= QPj +
g
∑k=1
µkCk j
En este caso,
x) mxd −0 = P +µ1 −µ2 +0
y) myd −0 = 0 +0 +0 −µ3
θ)ma2θd
2−0 = 0 −aµ1 +0 +aµ3
ξ ) mξ 2−maϕd −0 = 0 +0 +µ2 +0
η) mηd −0 = 0 +0 +0 +µ3
ϕ) −maξ d +4ma2ϕd
3−0 = 0 +0 +0 +0
junto con las ecuaciones de las ligaduras, que tambien tienen que cumplirse en el movimientoinmediatamente despues de la percusion:
xd −aθd = 0
ξ d− xd = 0
ηd − yd +aθd = 0
158

Si se sustituyen las ligaduras en las ecuaciones de Lagrange, dejando soloy,θ y ϕ como inde-pendientes, se llega a
maθd = P+ µ1−µ2 +0 maθ2−maϕd = µ2
myd = −µ3 myd−maθ = µ3
ma2θd
2= −aµ1 +aµ3 −ma2θd +
4ma2ϕd
3= 0
Son exactamente las mismas que por newtoniana, donde se llamo Qx, Rx y Ry a las percusionesde ligadura que aquı aparecen comoµ1, µ2 y µ3.
159

Ejercicio 8.1.2: Un disco que se mantiene siempre en un plano verticalva rodando y deslizando sobre una recta horizontal lisa la cual a partir deuna posicion se vuelve rugosa tal como muestra la figura.Discutir, segun que el coeficiente de rozamiento sea finito oinfinito ysegun los valores deω y V, si aparecen percusiones en el instante en queel disco llegue a la parte rugosa.
v
ω
RugosoLiso
1 Rozamiento finitof 6= ∞: al empezar a rodar por la zona rugosa aparece una fuerza derozamiento que valdra
No desliza: |R| ≤ f |N| ; Desliza: R = − f |N|VI
vI
Obviamente es una fuerza acotada, del mismo orden que las fuerzas caracterısticas del movi-miento (peso,N), que actua si hay deslizamiento y lo va frenando hasta que desaparezca;noaparece percusion (fuerza muy grande que actua durante un tiempo muy corto, encomparacioncon los valores caracterısticos del movimiento).
2 Rozamiento infinitof = ∞ : propiamente, no puede haber roza-miento infinito. Es una manera de decir que no hay deslizamiento.Sobre la zona rugosa, el disco rodarıasin deslizar. Esto pasa, porejemplo, cuando un pinon rueda sobre una superficie lisa y de pron-to engrana en una cremallera. Se introduce bruscamente la ligadurade rodadura sin deslizamiento. El primer choque entre los dientesdel engranaje frena bruscamente la velocidad de deslizamiento.
y
v
ω
Llamandox a la coordenada en la direccion dev y θ al angulo girado por el disco en ladireccion deω de la figura, la ecuacion de la ligadura brusca de no deslizamiento sera
vI = (x−Rθ) i = 0 → x = Rθ
En el punto de contactoI aparecera una percusion de ligaduraPx i al empezar a rodar por lazona rugosa (o en el diente primero que engrane). En ese puntoya hay una fuerza normal deligadura, que equilibra al peso. Supondremos que da percusion tambien,Py j , aunque ya veremosque va ser nula, porque el disco sigue rodando sobre la recta (hacemos esta hipotesis para que elejercicio no se complique: en realidad, habrıa salto o percusion vertical si el plano de contactoentre los dos primeros dientes no es exactamente vertical).Las ecuaciones impulsivas para eldisco seran:
CM:
mxd −mv= Px0−0 = Py
MC: − 12
mR2θd +12
mR2ω = PxR
De este sistema se obtiene
xd = Rθd =2v+ωR
3Px = m
ωR−v3
Py = 0
Observese que, en el momento del choque, el punto de contacto tiene una velocidadv−ωR.La percusion en la ligadura tiene el signo opuesto: frenar bruscamente esa velocidad de desli-zamiento. Tendremos tres casos segun los valores relativos dev y ω:
v
Rω < v
Px
v
Rω = v
Px = 0
v
Rω > v
Px
160

3 Solucion por mecanica analıticaLa ligadura que aparece, aunque sea integrable, la dejamos como cinematica:
g1 ≡ A1I ·vI = i ·vI = x−Rθ = 0 → PIL = µ1 i ; C1x = 1 C1θ = −R
La energıa cinetica del disco es
T =12
mx2 +14
mR2 θ2
Las ecuaciones de movimientos impulsivos por multiplicadores de Lagrange seran
∂T∂ q j
∣∣∣∣
d
− ∂T∂ q j
∣∣∣∣
a
= QPj +
g
∑k=1
µkCk j
En este caso hay dos coordenadas generalizadas, no hay percusiones aplicadas y se introduceuna ligadura,
x) mxd −mv = 0 +µ1
θ)mR2
2θd −mR2
2ω = 0 −Rµ1
xd −Rθd = 0
Son las mismas ecuaciones que por newtoniana, salvo que la percusion de ligadura aquı se hallamadoµ1 en vez dePx. La solucion, naturalmente, es la misma.
161
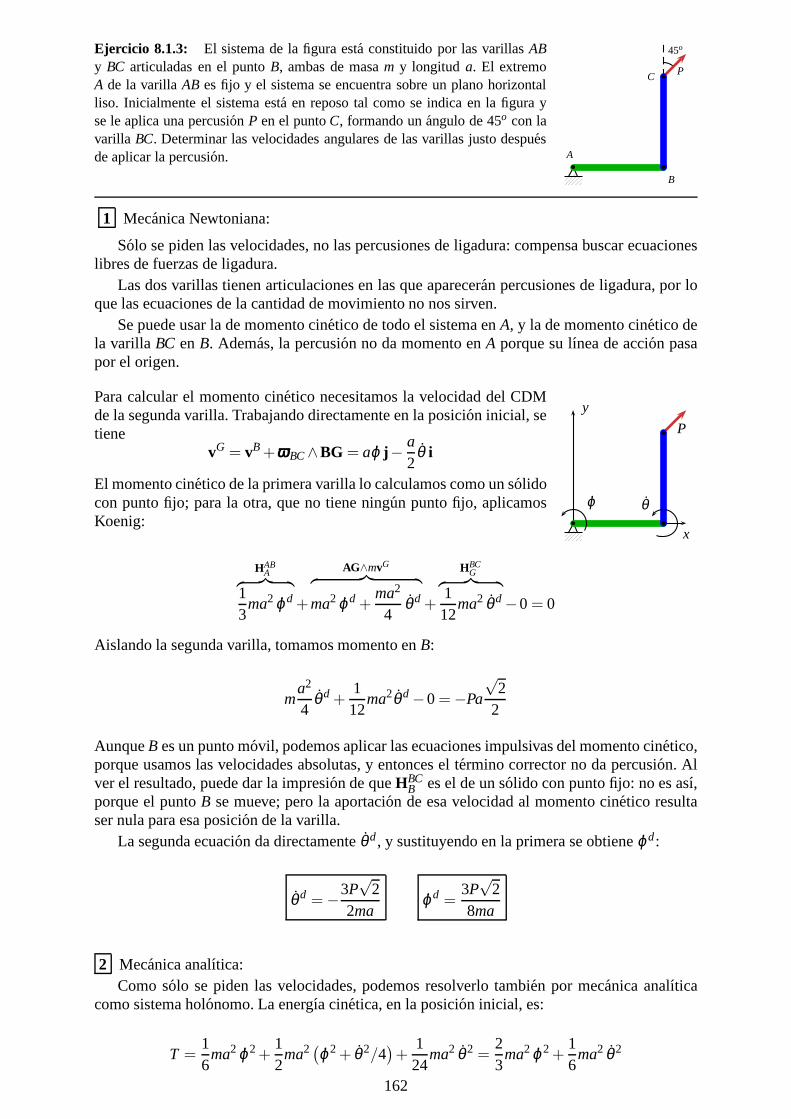
Ejercicio 8.1.3: El sistema de la figura esta constituido por las varillasABy BC articuladas en el puntoB, ambas de masam y longitud a. El extremoA de la varillaAB es fijo y el sistema se encuentra sobre un plano horizontalliso. Inicialmente el sistema esta en reposo tal como se indica en la figura yse le aplica una percusionP en el puntoC, formando un angulo de 45o con lavarilla BC. Determinar las velocidades angulares de las varillas justo despuesde aplicar la percusion. A
B
C P
45o
1 Mecanica Newtoniana:
Solo se piden las velocidades, no las percusiones de ligadura: compensa buscar ecuacioneslibres de fuerzas de ligadura.
Las dos varillas tienen articulaciones en las que aparecer´an percusiones de ligadura, por loque las ecuaciones de la cantidad de movimiento no nos sirven.
Se puede usar la de momento cinetico de todo el sistema enA, y la de momento cinetico dela varilla BC enB. Ademas, la percusion no da momento enA porque su lınea de accion pasapor el origen.
Para calcular el momento cinetico necesitamos la velocidad del CDMde la segunda varilla. Trabajando directamente en la posicion inicial, setiene
vG = vB+ωωωBC∧BG = aϕ j − a2
θ i
El momento cinetico de la primera varilla lo calculamos como un solidocon punto fijo; para la otra, que no tiene ningun punto fijo, aplicamosKoenig:
ϕ θ
P
x
y
HABA
︷ ︸︸ ︷
13
ma2 ϕd +
AG∧mvG
︷ ︸︸ ︷
ma2 ϕd +ma2
4θd +
HBCG
︷ ︸︸ ︷
112
ma2 θd−0 = 0
Aislando la segunda varilla, tomamos momento enB:
ma2
4θd +
112
ma2θd −0 = −Pa
√2
2
AunqueB es un punto movil, podemos aplicar las ecuaciones impulsivas del momento cinetico,porque usamos las velocidades absolutas, y entonces el termino corrector no da percusion. Alver el resultado, puede dar la impresion de queHBC
B es el de un solido con punto fijo: no es ası,porque el puntoB se mueve; pero la aportacion de esa velocidad al momento cinetico resultaser nula para esa posicion de la varilla.
La segunda ecuacion da directamenteθd, y sustituyendo en la primera se obtieneϕd:
θd = −3P√
22ma
ϕd =3P
√2
8ma
2 Mecanica analıtica:Como solo se piden las velocidades, podemos resolverlo tambien por mecanica analıtica
como sistema holonomo. La energıa cinetica, en la posicion inicial, es:
T =16
ma2 ϕ2+12
ma2(ϕ2 + θ2/4)+
124
ma2 θ2 =23
ma2 ϕ2 +16
ma2 θ2
162

Para calcular las fuerzas generalizadas de la per-cusion, tenemos que hallarδ rC. Con un pocode experiencia, se puede ver directamente que,al dar un DVCLδϕ, C se mueveaδϕ j ; al darun DVCL δθ , C se mueve−aδθ i. Con esto sepueden ya calcular laQP
ϕ y QPθ . δϕ
aδϕ P
x
y
δθ
aδθP
x
y
Si se quiere hacer con detalle, hay que calcularrC en una posicion generica, y diferenciarlo:
rC(ϕ,θ) = a
cosϕsinϕ
+a
−sinθcosθ
→ δ rc =n
∑j=1
∂ rC
∂q jδq j
δ rC = a
−sinϕcosϕ
δϕ +a
−cosθ−sinθ
δθ → δ rC = a
01
δϕ +a
−10
δθ
Sustituyendo la posicion inicial,ϕ = θ = 0, se obtiene el valor que se adelanto mas arriba,δ rC = aδϕ j −aδθ i. Las fuerzas generalizadas son:
QPϕ = P · ∂ rC
∂ϕ= Pa
√2
2QP
θ = P · ∂ rC
∂θ= −Pa
√2
2
Podemos ya plantear las ecuaciones de percusion por analıtica
43
ma2ϕd−0 = Pa
√2
226
ma2θd−0 = −Pa
√2
2
Los resultados son, naturalmente, los mismos que por newtoniana.
163

Ejercicio 8.1.4: Sea un proyectilM con movimiento horizontal rectilıneo y uniforme que tieneunacantidad de movimiento de valorpi. Sea una barra homogenea de masam y longitudL0 que esta articu-lada en un puntoO y que inicialmente esta en reposo verticalmente.
El proyectil choca con la barra a una distanciaL de la articulacionO y sequeda incrustado en ella. Calcular, suponiendo despreciable la masa delproyectil frente a la de la barra:i) incremento de cantidad de movimientodel sistema y valor de la percusion de ligadura enO; ii) la velocidad an-gular que adquiere la barra despues del impacto.iii) el angulo de maximadesviacion de la barra respecto de la vertical, en el movimiento que sigueal impacto, si solo actua el peso en direccion−j . p
ML
L0
x
y
O
ETSIA, febrero de 1994
1 Los apartados i) e ii) se obtienen de las ecuaciones impulsivas por newtoniana. Tenemos tres
ecuaciones: una de momento cinetico y dos de cantidad de movimiento. Hay tres incognitas:dos percusiones de ligadura en la articulacion,Qx y Qy, y la velocidad angular inmediatamentedespues de la percusion. A la varilla se le pueden aplicar las expresiones del solido con puntofijo. Tomando como coordenada el anguloθ de la figura, se tiene:
13
mL20 θd −0 = pL → θd =
3pL
mL20
mL0
2θd −0 = p+Qx → Qx = p
3L−2L0
2L0
0−0 = 0+Qy → Qy = 0
p
Qx
Qy
x
y
θ
La cantidad de movimiento inicial es solo la del proyectil;despues, solo la barra. El incre-mento es:
∆C = Cd−Ca = mL0
2θd − p = p+Qx− p = Qx
2 Despues de la percusion, el movimiento del sistema es el deuna varilla articulada sometidaa su peso. Podemos aplicar la ecuacion de la energıa,
T +V =16
mL20 θ2−mg
L0
2cosθ = E
entre el momento inicial (inmediatamente despues de la percusion, varilla vertical) y el final(cuando llega al punto mas alto con velocidad nula):
E =16
mL20
(
θd)2
−mgL0
2= 0−mg
L0
2cosθM → cosθM = 1− L0
3g
(3pL
mL20
)2
Si p es suficientemente grande, no hay solucion. Esto significa que la varilla llegarıa al puntomas alto sin pararse: un pendulo en regimen de rotacion.
Este aparato se denominapendulo balıstico. Permite determinar la cantidad de movimientode un proyectil mediante el desplazamiento de un pendulo demasa mucho mayor.
Otro aspecto interesante es elcentro de percusion: punto en que tiene que dar el proyectilpara que no aparezcan percusiones de ligadura en la articulacion. Se obtiene haciendoQx =0 → L = Lcp = 2L0/3.
164

Ejercicio 8.1.5: El sistema de la figura consta de una varilla pesada de lon-gitud 2a y masam que se encuentra inicialmente en reposo sobre el ejeOy deun sistema de referenciaOxy, dondeOy lleva la direccion de la vertical ascen-dente. En contacto unilateral con la varilla se encuentra, tambien en reposo,un disco de masam y radioa. El extremo inferior de la varilla puede deslizarlibremente sobre la rectaOx sin separarse de ella y tiene contacto liso con eldisco. El disco esta obligado a rodar sin deslizar sobreOx. En el momento ini-cial se aplica un percusionPi en el extremo superior de la varilla. Calculese elestado cinematico a la salida de la percusion y las percusiones de reaccion delsistema.
Febrero de 1995
P
x
y
Este problema no se puede resolver mediante la mecanica cl´asica. En el contacto entre varillay solido aparece una percusion de ligadura, que determinaque parte deP transmite la varilla aldisco. Segun las propiedades elasticas de una y otro, y losintervalos de tiempo de las dos percu-siones, la varilla podrıa rebotar hacia la izquierda, empujando al disco hacia la derecha; podrıaquedarse quieta, solo girando (como las esferas de Newton), mientras casi toda la percusion setransmite al disco; o podrıan salir los dos hacia la derechacon velocidades del mismo orden.Y si supieramos el coeficiente de restitucion entre los solidos, tampoco servirıa de nada, puesno es realmente un choque, sino la transmision de una percusion a traves de otro solido. Comola diferencia de velocidades inicial es nula, en el denominador del coeficiente de restitucionaparece un cero que lo hace inutil.
Lo unico que nos permitirıa resolverlo es suponer que entre los solidos hay un pequeno hue-co, de modo queprimero se produce la percusion sobre la varilla y,despueschocan la varillay el disco. Para esto necesitarıamos el coeficiente de restitucion, pues se trata propiamente deun choque.
Tambien se podrıa resolver si el enunciado dijera algo sobre el contacto, por ejemplo, quesalen con la misma velocidad, porque la ligadura de contactoesta activa durante la percusion.Es decir, que el choque esmucho mas rapido que la percusion, y que mientras dura la percu-sion la varilla esta continuamente empujando al disco, demodo que al acabar tienen la mismavelocidad.
Son los dos extremos: choque completamente anterior a la percusion, o percusion comple-tamente anterior.
1 Comprobaremos que el problema, en su forma actual, es in-soluble. La varilla tiene dos grados de libertad, ˙x y ϕ . El disco,por rodar sin deslizar, solo uno,θ . Aparecera una percusion de li-gadura verticalRy por deslizar el extremos de la varilla por el ejehorizontal, dos en el punto de contacto del disco,Qy, Qy, y un parde percusiones de accion reaccion±Rx en el contacto entre los dossolidos. En total, siete incognitas, para seis ecuaciones:
aθθP
x
ϕ
Rx
Ry
QxQy
P−Rx = mxd Rx +Qx = maθd
0+Ry = 0 0+Qy = 0
−Pa= − 112
m4a2ϕd aQx = −12
ma2 θd
Esta determinada la velocidad angular de la varilla despu´es de la percusion. Para las velocidades,eliminando laQx y la Rx entre la primera, la cuarta y la sexta, se llega a:
P = mxd +32
maθd
Podemos obtener la cantidad de movimiento del sistema mas el momento cinetico del disco,pero no hay modo de saber como se reparte entre los dos solidos. Harıan falta hipotesis adicio-nales.
2 Una posibilidad es que los dos solidos se mantengan en contacto durante toda la percusiona la varilla, con lo que a la salida tendrıan la misma velocidad,
xd = aθd
165

Con esto el problema estarıa resuelto. Equivale a decir quela ligadura es persistente, por lomenos hasta afectar a las velocidades de salida de la percusion. O bien, que el choque es tanrapido, que continuamente la varilla esta transmitiendoal disco la cantidad de movimiento querecibe de la percusion, mediante choques diferenciales, llevando los dos la misma velocidad.
3 Supongamos que hay una pequena separacion entre los dos s´olidos, de modo que primerotiene lugar la percusion, y luego el choque. Para resolver el choque necesitamos el coeficientede restitucion. Supongamos que es 1, choque elastico. Lasecuaciones de la varilla seran lasmismas, excepto que no hayRx porque no esta en contacto con el disco:
P = mx1 Ry = 0 Pa=13
ma2ϕ1
A continuacion la varilla, con las velocidades de salida dela percusion (1), choca con el discoy saldran con velocidades (2)
−Rx = mx2−mx1 Rx +Qx = maθ2−0
+Ry = 0 0+Qy = 0
0 =13
maϕ2−13
maϕ1 aQx = −12
ma2 θ2−0
El coeficiente de restitucion proporciona otra ecuacion:las velocidades de los puntos que cho-can deben cumplir,
1 = − i · (vV2 −vD
2 )
i · (vV1 −vD
1 )= − x2−aθ2
x1−0→ −x1 = x2−aθ2
De estas ecuaciones se obtiene
ϕ2 =3Pma
x2 = − P5m
θ2 =4P
5am
La varilla rebota hacia la izquierda con una velocidad que esla quinta parte de la que lleva eldisco hacia la derecha; no se conserva la cantidad de movimiento en el choque por la percusionde ligadura exteriorQx, que transforma parte de la cantidad de movimiento inicial en momentocinetico del disco. La energıa se conserva.
En un caso real, el resultado serıa algo intermedio entre las dos hipotesis extremas queaquı se han considerado, de modo que, aunque uno sea anterior al otro, habrıa un cierto solapeentre la percusion y el choque.
166

Problema 8.1.1: Sea un disco homogeneo de masamy radioRque se mueve en un plano vertical. SeaOxyuna referencia cartesiana rectangular de este plano en la queOyes la vertical ascendente y el ejeOxes un suelo rugoso con coeficiente de rozamiento al deslizamiento del discof . El disco se mueve sobreel suelo sin poderse despegar.
Para fijar la posicion del disco se utilizan las siguientes coordenadas generalizadas: i) la coordenadacartesianax de su centro de masas, ii) el anguloϕ que forma el radio que inicialmente esta en contactocon el suelo con la vertical descendente (VER FIGURA 1).
Inicialmente el disco se encuentra en reposo en la posicionx= 0, ϕ = 0 y se aplica sobre el punto decoordenadax mas negativa del mismo una percusion de valorP (cosα~i−sinα~j ) (VER FIGURA 2).
A) Supongamos que en la etapa de percusion el discono puede deslizar;se pide:
1) Expresar la condicion matematica de no deslizamiento.
2) Calcular el estado cinematico a la salida de la percusion.
3) Hallar las percusiones sobre el disco en el punto de contacto.
4) Comprobar cuando es valida la hipotesis de no deslizamiento y expresar la misma medianteuna relacion del tipof ≥ Φ(α)
5) Plantear y resolver las ecuaciones del movimiento posterior a la percusion.
B) Supongamos que en la etapa de percusionhay deslizamiento( f < Φ(α)); se pide:
1) Calcular el estado cinematico a la salida de la percusion: x0( f ,α), ϕ0( f ,α).
2) Calcular la velocidad de deslizamiento del disco a la salida de la percusion y comprobar sucompatibilidad con el resultado de A-4.
3) Plantear y resolver las ecuaciones del movimiento posterior a la percusion
4) Determinar el instante (t∗) en que termina el deslizamiento.
5) Plantear y resolver las ecuaciones del movimiento parat > t∗.
ETSIA, septiembre de 1995
ϕ
x
y
FIGURA 1
αP
y
FIGURA 2
x
167
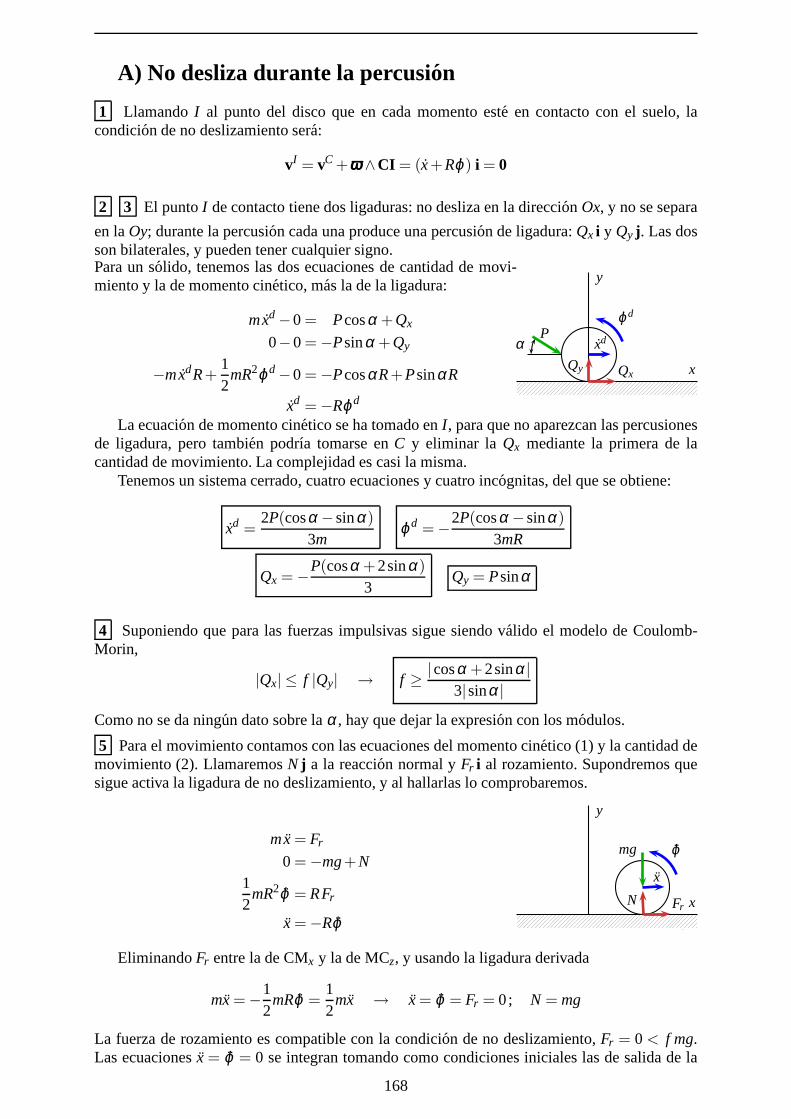
A) No desliza durante la percusion
1 LlamandoI al punto del disco que en cada momento este en contacto con elsuelo, lacondicion de no deslizamiento sera:
vI = vC +ωωω ∧CI = (x+Rϕ) i = 0
2 3 El puntoI de contacto tiene dos ligaduras: no desliza en la direccionOx, y no se separa
en laOy; durante la percusion cada una produce una percusion de ligadura:Qx i y Qy j . Las dosson bilaterales, y pueden tener cualquier signo.Para un solido, tenemos las dos ecuaciones de cantidad de movi-miento y la de momento cinetico, mas la de la ligadura:
mxd −0 = Pcosα +Qx
0−0 = −Psinα +Qy
−mxdR+12
mR2ϕd−0 = −PcosαR+PsinαR
xd = −Rϕd
αP
xd
ϕd
QxQy
y
x
La ecuacion de momento cinetico se ha tomado enI , para que no aparezcan las percusionesde ligadura, pero tambien podrıa tomarse enC y eliminar la Qx mediante la primera de lacantidad de movimiento. La complejidad es casi la misma.
Tenemos un sistema cerrado, cuatro ecuaciones y cuatro inc´ognitas, del que se obtiene:
xd =2P(cosα −sinα)
3mϕd = −2P(cosα −sinα)
3mR
Qx = −P(cosα +2sinα)
3Qy = Psinα
4 Suponiendo que para las fuerzas impulsivas sigue siendo valido el modelo de Coulomb-Morin,
|Qx| ≤ f |Qy| → f ≥ |cosα +2sinα|3|sinα|
Como no se da ningun dato sobre laα, hay que dejar la expresion con los modulos.
5 Para el movimiento contamos con las ecuaciones del momento cinetico (1) y la cantidad demovimiento (2). LlamaremosN j a la reaccion normal yFr i al rozamiento. Supondremos quesigue activa la ligadura de no deslizamiento, y al hallarlaslo comprobaremos.
mx = Fr
0 = −mg+N12
mR2ϕ = RFr
x = −Rϕ
mg
x
ϕ
FrN x
y
EliminandoFr entre la de CMx y la de MCz, y usando la ligadura derivada
mx = −12
mRϕ =12
mx → x = ϕ = Fr = 0; N = mg
La fuerza de rozamiento es compatible con la condicion de nodeslizamiento,Fr = 0 < f mg.Las ecuaciones ¨x = ϕ = 0 se integran tomando como condiciones iniciales las de salida de la
168

percusion, ˙xd, ϕd y x0 = ϕ0 = 0:
x =2P(cosα −sinα)
3mt ϕ = −2P(cosα −sinα)
3mRt
Esta parte se podrıa haber hecho por mecanica analıtica,porque al no deslizar la ligaduraes ideal; pero tratandolo como sistema holonomo solo se habrıan obtenido las velocidades. Laspercusiones de ligadura no aparecerıan, y no se podrıa comprobar la validez de la hipotesis deno deslizamiento.
Si se liberan las dos ligaduras, se podrıa obtener tambienQx y Qy por multiplicadores deLagrange; pero entonces nos queda un solido libre, y para s´olidos y partıculas libres las ecua-ciones por analıtica son las mismas que las de Newton-Euler. No se ganarıa nada, y en generalel calculo de las fuerzas generalizadas y multiplicadoreses mas laborioso.
B) Hay deslizamiento durante la percusion
1 Ademas de la condicion del enunciado, hay que suponer que en todo momento se cumpleel modelo de Coulomb con deslizamiento entre las componentes horizontal y vertical de lapercusion de ligadura. Llamaremos, como antes,Qx y Qy a las percusiones de ligadura.
Las ecuaciones de conservacion de movimiento y momento cineti-co daran
mxd−0 = Pcosα +Qx
0−0 = −Psinα +Qy
12
mR2ϕd−0 = PsinαR+QxR
αP
xd
ϕd
QxQy
y
x
En vez de la condicion cinematica de no deslizamiento, tenemos la ley de Coulomb condeslizamiento:
Qx i = − f |Qy|vI
|vI |Para resolver estas ecuaciones, hay que hacer algunas hipotesis sobre los signos. Supongamosqueα ∈]0,π/2[ y quevI > 0, es decir, que el disco empieza a deslizar hacia la derecha,con loqueQx sera negativa. La segunda hipotesis la comprobaremos al final, la primera depende delos datos. La solucion del sistema sera pues
mxd = Pcosα − f Psinα → xd =P(cosα − f sinα)
m
12
mR2ϕd−0 = PsinαR− f PsinαR → ϕd =2Psinα(1− f )
mR
2 Para comprobar la validez de esta solucion, hay que calcular la velocidad de deslizamiento,
vI = (x+Rϕ) i =Pm
[cosα +sinα(2−3 f )] i
Para que la partıcula deslice, y los signos tomados en las ecuaciones sean correctos,
cosα +sinα(2−3 f ) > 0 → f <cosα +2sinα
3sinα
que es el opuesto de la condicion de no deslizamiento que se calculo en A). Ahora no aparecenmodulos, porque se supuso queα ∈]0,π/2[, es decir, el seno y el coseno son positivos y distintosde cero. Por tanto, las hipotesis que se hicieron eran correctas.
169

Podrıamos repetir los calculos suponiendo que el punto decontactoI desliza hacia la iz-quierda. Resulta que ese movimiento solo es posible con unα negativo, es decir, cuando segolpea de abajo hacia arriba. Se deja como ejercicio rehacerlas ecuaciones con esa hipotesis.
3 Para el movimiento contamos con las ecuaciones del momento cinetico (1) y la cantidadde movimiento (2). LlamaremosN j a la reaccion normal yFr i al rozamiento. Ahora no hayecuacion de ligadura, pero tenemos la inecuacion de Coulomb mientras dure el deslizamiento.
Siguiendo con la hipotesis de que desliza hacia la derecha,
mx = Fr
0 = −mg+N12
mR2ϕ = RFr
Fr = − f |N| = − f mg
mg
x
ϕ
FrN x
y
Quedan ecuaciones lineales
mx = − f mg → x = xd − f gt ; x = xd t − 12
f gt2
12
mR2ϕ = −R f mg → ϕ = ϕd− 2 f gR
t ; ϕ = ϕd t − f gR
t2
4 Estas ecuaciones valen mientras haya deslizamiento, y la velocidad sea positiva. La veloci-dad de deslizamiento valevI (t) = x+Rϕ y se anulara cuando
vI (t∗) = x+ Rϕ = xd − f gt + Rϕd −R2 f gR
t = 0 → t∗ =P[cosα +sinα(2−3 f )]
3 f gm
5 En el momento en que no hay deslizamiento, la fuerza de rozamiento sera la necesaria paraque no deslice, es decir, ninguna porque ya rueda sin deslizar. Por tanto, el sistema se siguemoviendo con velocidad y velocidad angular constantes:
x = x(t∗)+ x(t∗) t ϕ = ϕ(t∗)+ ϕ(t∗) t
170

ESCUELA TECNICA SUPERIOR DE INGENIEROS AERONAUTICOS
Apellidos, Nombre: Grupo:
Mecanica II - Problema de Dinamica de Sistemas Curso: 01/02 Fecha: 22.06.2002
Problema 8.1.2: Un sistema material esta formado por dos discos pesados iguales, de masam y radior, que se pueden considerar como infinitamente delgados. El disco 1 esta horizontal y fijo en el origende coordenadasO, de manera que solo puede girar libremente alrededor del eje verticalOz. Un radiofijo de este disco forma conOx un anguloψ1. El disco 2 esta articulado con una rotula lisa en el puntoO′(0,0, r) mediante una varilla sin masa, ortogonal al disco y de longitud r. Esta apoyado sobre el otrodisco, yrueda sin deslizarsobre el. Se situara mediante el sistemaOx0y0z0, de modo queOz0 coincidecon Ozy Ox0 pasa por el punto de apoyo sobre el disco 1.Ox0 forma un anguloψ2 con el eje fijo delprimer disco, de modo que el angulo de precesion del segundo esψ1 +ψ2. El angulo girado por el discovertical alrededor de su propio eje (la varilla) esϕ .
En el instante inicial el sistema esta en reposo y todos los ´angulos son cero. Se aplica una percusionPj en el punto(r,0,0) del disco horizontal. Suponiendo que el disco verticalno se levanta,y siguerodando sin deslizar sobre el horizontal, calcular:
1. Momento cinetico de cada uno de los discos respecto aO′ en un momento arbitrario, en funcionde las coordenadas y sus derivadas, proyectados enOx0y0z0. (0,5 puntos)
2. Ecuacion de la ligadura cinematica. (0,5 puntos)
3. Analizar las percusiones y momentos de percusion que actuan sobre cada uno de los discos alaplicarP (1,5 puntos)
4. Valor de las velocidades angulares inmediatamente despues de la percusion. Solo sera necesarioplantear las ecuaciones que determinen el movimiento (4,5 puntos).
5. Despues de la percusion, el sistema tendra un movimiento estacionario con las velocidades angu-lares resultantes. Calcular la reaccion normal entre los discos (1,5 puntos)
6. Como la ligadura es unilateral, solo actua mientras la reaccion normal sobre el disco vertical seapositiva. Calcular el valor maximo deP para que el segundo disco no se levante en el movimientoposterior (1,5 puntos).
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
x
y
z
ϕ
ψψ
.
12
O
O'
x0
171

1. Momentos cineticos: 1 punto
Disco 1: H1O′ =
12mr2
−−
1
00
ψ1
=
12
mr2
00
ψ1
Para el disco 2, hay que aplicar Koenig:IO′z = IGz+mr2 = 14mr2+mr2 = 5
4mr2.
Disco 2: H2O′ =
14mr2
2−
5
ϕ0
ψ1 + ψ2
=
14
mr2
2ϕ0
5(ψ1 + ψ2)
2. Ligadura cinematica: 1 punto
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
x
y
z
ψψ
.
12
CO'
x0
O
M
ϕ rr ψ.2
El centro del disco 2,C, esta siempre en el planoOx0z0, por loque tiene respecto al disco 1 la misma velocidad que el punto decontacto como punto independiente,M, que esta en el ejeOx0:
vC21 = vM
01; −ϕr j0 = ψ2r j0 ⇒ −ϕ = ψ2
3. Reacciones: 1,5 puntos
x
y
z
O
x0-Q
R
M
M1
x
y xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
x
y
z
O
O'
x0Q
R2
El disco 1 es un solido con eje fijo. Se puede fijar de varios modos, con lo que se tendrıandiversos sistemas de fuerzas y momentos de ligadura. En cualquier caso, el sistema sepuede reducir aO, con lo que se obtiene una reaccionR1 con tres componentes (el centroesta fijo y no puede moverse en ninguna direccion) y un momento con componentesMxy My (no hay componente segunOzporque puede girar libremente alrededor de este eje).Ademas, sufre la percusion directamente aplicadaPj0.
El disco 2 es un solido con punto fijo, por lo que esta sometido a una reaccionR2 enO′
con tres componentes.
La rodadura sin deslizamiento entre los dos discos supone que el punto de contacto tienevelocidad relativa nula, por lo que habra una reaccionQ con tres componentes de 1 a 2 (y−Q de 2 a 1).
Notese que el sistema eshiperestatico, puesQx y R2x0
sobre el disco 2 son redundantes,igual que−Qx y R1
x0sobre el disco 1. Si no hubiera reaccion radial entre los dos, Qx = 0,
y el sistema serıa isostatico.
172

4. Estado cinematico despues de la percusion: 4,5 puntos
Solo hay que plantear las ecuaciones que determinan el movimiento: las asociadas a losgrados de libertad de cada solido.
No interesa plantear las del momento cinetico para todo el sistema, pues hay percusionesde ligadura enO y enO′: aunque se tomen momentos en uno de esos puntos, quedaranlas ligaduras del otro.
M1z (P−Qy) r =
14
mr2 ψ1−0
M2z Qyr =
54
mr2(ψ1 + ψ2)−0
M2x Qyr =
12
mr2ϕ −0
Junto con la ligadura,−ϕ = ψ2, forman un sistema decuatro ecuacionesconcuatro incogni-tas. Se puede sustituir la ligadura en la tercera, obteniendoQy en funcion deψ2; se despejaψ1de la primera, y se sustituyen ambas en la segunda; ası se obtieneψ2, y de esta las demas:
ψ2 = −56
Pmr
ψ1 =76
Pmr
ϕ =56
Pmr
5. Reaccion normal: 1,5 puntos
Aunque no sea necesario, porque ya lo dice el enunciado, es f´acil comprobar que el movi-miento resultante es estacionario. Planteando la ecuacion del momento cinetico segunOzparacada uno de los discos y para el sistema, mas la ligadura, se tiene un sistema incompatible enlas derivadas segundas, cuya unica solucion es que sean todas cero, ası comoQy (las reaccionesno son ya las de percusion, sino las del movimiento ordinario). Por lo tanto, el sistema mantieneel estado cinematico resultante de la percusion.
Para hallar la reaccion normalQz hay que plantear la ecuacion del momento cinetico deldisco 2 segunOy0, teniendo en cuenta que son ejes moviles:
dH2O′
dt=
14
mr2
2ϕ0
5(ψ1 + ψ2)
+
14
mr2
∣∣∣∣∣∣
i0 j0 k00 0 ψ1+ ψ2
2ϕ 0 5(ψ1 + ψ2)
∣∣∣∣∣∣
=12
mr2
0ϕ (ψ1 + ψ2)
0
El momento de las fuerzas enO′ sera:(mg−Qz−Qx) r j0. Si no hay reaccion radial,Qx = 0, elproblema es isostatico, y se puede determinar la reaccionnormal:
(mg−Qz) r =12
mr2ϕ (ψ1 + ψ2) =536
P2
mr⇒ Qz = mg− 5
36P2
mr
6. Percusion maxima: 0,5 puntos
Si la ligadura es unilateral,Qz = mg− 536
P2
mr≥ 0, por lo que el valor maximo de la percusion
corresponde aQx = 0. Si fuera mayor, harıa falta tirar del disco 2 hacia abajo,y esto no esposible porque esta simplemente apoyado: se levantarıa.Por tanto,
Pmax= 6m
√gr5
173
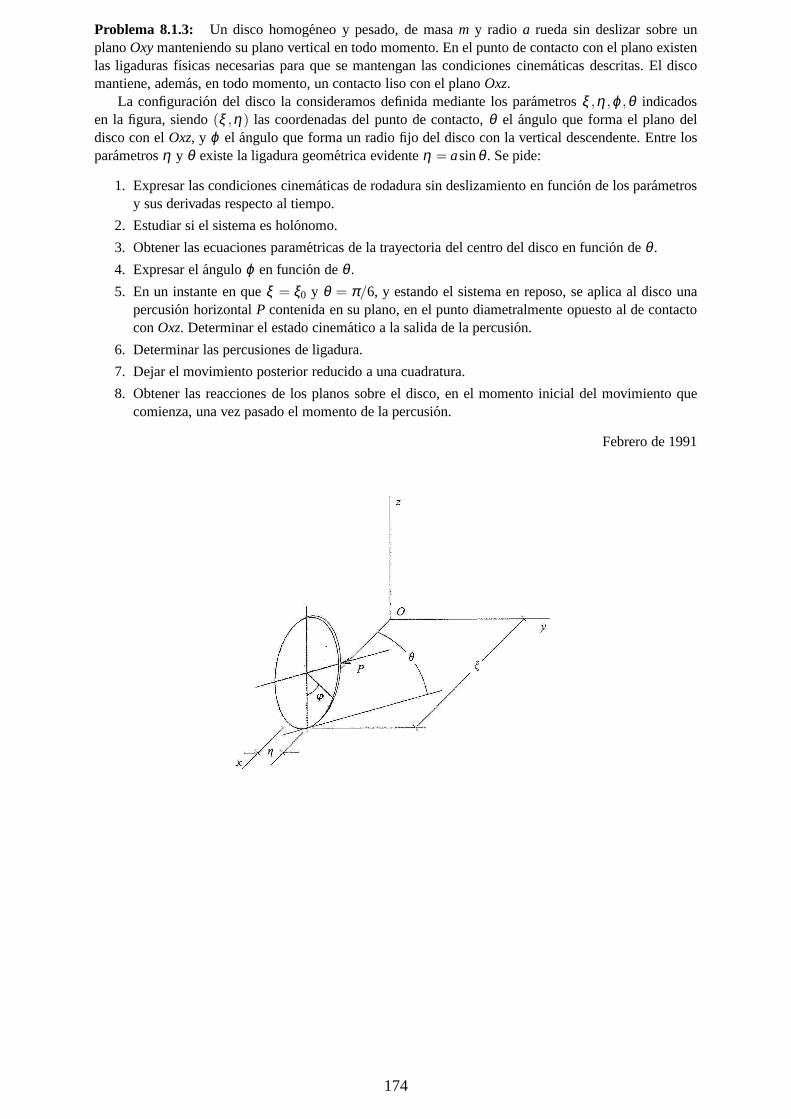
Problema 8.1.3: Un disco homogeneo y pesado, de masam y radio a rueda sin deslizar sobre unplanoOxymanteniendo su plano vertical en todo momento. En el punto decontacto con el plano existenlas ligaduras fısicas necesarias para que se mantengan lascondiciones cinematicas descritas. El discomantiene, ademas, en todo momento, un contacto liso con el planoOxz.
La configuracion del disco la consideramos definida mediante los parametrosξ ,η ,ϕ ,θ indicadosen la figura, siendo(ξ ,η) las coordenadas del punto de contacto,θ el angulo que forma el plano deldisco con elOxz, y ϕ el angulo que forma un radio fijo del disco con la vertical descendente. Entre losparametrosη y θ existe la ligadura geometrica evidenteη = asinθ . Se pide:
1. Expresar las condiciones cinematicas de rodadura sin deslizamiento en funcion de los parametrosy sus derivadas respecto al tiempo.
2. Estudiar si el sistema es holonomo.
3. Obtener las ecuaciones parametricas de la trayectoria del centro del disco en funcion deθ .
4. Expresar el anguloϕ en funcion deθ .
5. En un instante en queξ = ξ0 y θ = π/6, y estando el sistema en reposo, se aplica al disco unapercusion horizontalP contenida en su plano, en el punto diametralmente opuesto alde contactoconOxz. Determinar el estado cinematico a la salida de la percusi´on.
6. Determinar las percusiones de ligadura.
7. Dejar el movimiento posterior reducido a una cuadratura.
8. Obtener las reacciones de los planos sobre el disco, en el momento inicial del movimiento quecomienza, una vez pasado el momento de la percusion.
Febrero de 1991
174

Problema 8.1.4: Una placaOABCcuadrada, homogenea y pesada de ladoa y masam, se encuentra enreposo apoyada sobre un planoO1x1y1 perfectamente liso y perteneciente a un sistema galileanoO1x1y1z1
en el queO1z1 va dirigido segun la vertical ascendente. El plano de la placa coincide inicialmente con elplano coordenado, como se indica en la figura.
En esta situacion se aplica una percusion P paralela aO1y1 en el punto de coordenadas(x1,y1,z1) =(α ,0,β ). La placa comienza el movimiento que le permite la ligadura de que su ladoOA pertenezca entodo momento al planoO1x1y1. Durante esta fase del movimiento, su configuracion se supondra fijadapor las coordenadas(ξ ,η) de la proyeccion de su centro de masasG sobreO1x1y1, el anguloϕ que elladoOA forma conO1x1 y por el anguloθ que la placa forma conO1z1.
Finalmente, cuando se alcanza el valorθ = π/2 la placa choca contra el planoO1x1y1 manteniendosesobre el, el resto del movimiento. El choque se efectua sinrozamiento y, en la ultima fase del movimiento,la posicion de la placa se supondra determinada con las coordenadas(ξ ,η) y el anguloϕ manteniedoseθ con el valorπ/2 en todo momento.
Se pide:
1. Valores iniciales deξ0,η0,ϕ0,θ0 inmediatamente despues de la percusion.
2. Ecuaciones generales del movimiento de la placa en su primera fase, dejandolo reducido a unacuadratura.
3. Analizar la percusion que aparece cuando la placa llega al plano horizontal, determinando el mo-vimiento posterior a la percusion y reduciendo las percusiones de ligadura procedentes del plano,a una unica percusion cuyo valor y situacion se determinaran.
4. ¿Donde hay que aplicar la percusionP para que en la ultima fase del movimiento los verticesOABCdescriban cicloides perfectas?
5. ¿Donde hay que aplicar la percusionP para que el primer eje instantaneo de la placa pase porC?
Junio de 1986
Solucion por mecanica newtoniana
1 Este problema se puede resolver con las tecnicas de la mecanica newtoniana o con las dela analıtica. Solo el apartado (3) hace mas recomendablela newtoniana, porque se pide unapercusion de ligadura. Se resolvera primero por newtoniana.
Para resolver la percusion hay que:
Analizar los grados de libertad, coordenadas generalizadas y sistema de fuerzas de liga-dura. En todas las ligaduras pueden aparecer percusiones.
Calcular la cantidad de movimiento y el momento cinetico
175

Estos dos pueden calcularse solo para la configuracion de la percusion, mucho mas simpleque en el caso general. Pero como luego se estudiara el movimiento, compensa calcularlos parauna configuracion arbitraria. Se llamara solidoS2 a la placa, yS0 a los ejes intermedios de lafigura, de modo queOz‖ O1z1 y Oy‖ OA.
El contacto de un lado con el plano es una ligaduraque determina la altura del centro de la placaG enfuncion del angulo de nutacionθ . Ası la posicion yvelocidad del centro deG seran
O1G =(
ξ ,η,a2
cosθ)
1
vG21 =
(
ξ , η,−a2
sinθ θ)
1
La velocidad angular tendra solo componentes deprecesion y nutacion; la rotacion propia esta impe-dida por el contacto con el plano:
x1
y1
z1
ϕ
x
y
z
θO
Ax2
y2
z2
G
ωωω21 = ϕ k1 + θ j0 = ϕ (cosθ i2+sinθ i2)+ θ j2
HG = IIIG ·ωωω21 =112
ma2
1 0 00 1 00 0 2
·
ϕ cosθθ
ϕ sinθ
=
112
ma2
ϕ cosθθ
2ϕ sinθ
Como el contacto entre la placa y el suelo no es en unpunto, sino a lo largo de una recta, en vez de fuerzanormal de ligadura tenemos un sistema distribuido alo largo del lado. No podemos conocer la distribu-cion, pero sı podemos reducirlo a un sistema equiva-lente que se puede calcular: dos fuerzasN1 y N2 enlos extremos, una resultanteN en el centro del ladoy un momento resultanteMy, o una normalN apli-cada a una distanciad del lado; el momento en esteultimo caso serıad N.
x
y
z
N(y)
x
y
z
N1
N2
x
y
z
N
Mx
Las dos resultantes o la resultante aplicada en un punto inc´ognita son utiles con ligadu-ra unilateral para ver si se separa. Como en este caso la ligadura es bilateral, podemos usarla resultante y momento. Naturalmente, cuando hay percusiones, todas las fuerzas de ligadurapueden en principio dar percusion, por lo que se tomanN y Mx como percusiones de ligadura.Tenemos pues seis incognitas para el solido: cuatro coordenadas generalizadas y dos incognitasde ligadura.
En el momento de la percusion, tenemosϕ = θ = η = 0,ξ = a/2, y todas las velocidades nulas. Las magnitudes cineti-casantesson nulas. Las ecuaciones impulsivas de cantidad demovimiento, en ejes 1, son:
0P0
+
00N
= m
ξ d
ηd
0 · θd
−0 →
ξ d = 0
ηd = Pm
N = 0
x1
y1
z1
x
y
z
O
A
x2
y2
z2Gb
P
N
M
La percusion se aplica en(α,0,β ), por lo que habra que calcular su momento enG. Porotra parte, el momento cinetico se ha calculado en ejesS2. En el momento de la percusionestan paralelos aotrosfijos: Gy2 ‖ O1x1 y Gx2 ‖ O1z1. Para no tener que cambiar componentes,
176

trabajaremos en ejesS2.
P(α − a
2
)
−P(β − a
2
)
0
+
00M
=
112
ma2
1 · ϕd
θd
0 · ϕd
−0 ⇒
ϕd = 12(α − a
2
)P
ma2
θd = −12(β − a
2
) Pma2
M = 0
2 Para estudiar el movimiento de la placa conta-mos con tres ecuaciones de cantidad de movimien-to y tres de momento cinetico, para seis incognitas.Tambien tenemos la de la energıa, que es combina-cion de las anteriores. La unica fuerza dada es el pe-so, y tenemos el sistema de fuerzas de ligadura. Lade cantidad de movimiento en ejesS1 es:
00
N−mg
= m
ddt
ξη
−a2 sinθ θ
→
ξ = C1
η = C2
N(θ , θ )
x1
y1
z1
ϕ
x
y
z
θ
O
A
x2
y2
z2
G
Mx
Nmg
La de momento cinetico enG nos da:
MxNasinθ
0
0
=
MxsinθNasinθ−Mxcosθ
2
=
=112
ma2 ddt
ϕ cosθθ
2ϕ sinθ
2
+112
ma2
∣∣∣∣∣∣
i2 j2 k2
ϕ cosθ θ ϕ sinθϕ cosθ θ 2ϕ sinθ
∣∣∣∣∣∣
Entre la primera y la tercera se eliminaMx, y queda una ecuacion diferencial en los angulos ysus derivadas; en la segunda se sustituyeN de la tercera de cantidad de movimiento, y quedaotra ecuacion diferencial limpia. Entre las dos se podrıa
obtener dos integrales primeras;
eliminar uno de los angulos para llegar a una cuadratura.
Pero es ciertamente laborioso, e incierto el que se atine a integrarlas. Es mas facil buscar direc-tamente integrales primeras:
Ni el peso ni las fuerzas de ligadura dan momento segunOz, que es una direccion fija,por lo que se conserva el momento cinetico en esa direccion:
MEG ·k0 =
ddt
HG ·k0 =ddt
(HG ·k0) = 0 → HG ·k0 = Cte
El vectork0 en ejesS2 vale
k0 = (sinθ ,0,cosθ) ⇒ ϕ(1+sin2θ
)= C3
Las ligaduras son ideales y estacionarias, y el peso es potencial, por lo que se conserva laenergıa:
V = mgzG =mga
2cosθ T =
12
mvG21
2+
12
HG ·ωωω21 =
=12
m
(
ξ 2+ η2 +a2
4sin2θ θ2
)
+124
ma2(ϕ2sin2θ + θ2 +2ϕ2cos2 θ)
=
=12
m(
ξ 2 + η2)
+124
ma2 [θ2 (1+3sin2θ)+ ϕ2 (1+sin2 θ
)]
T +V = E
177

El valor de las constantesC1, C2, C3 y E se obtiene de las condiciones iniciales del movimiento,que son las de salida de la percusion:
C1 = ξ0 = 0 C2 = η0 =Pm
C3 = ϕ0(1+sin2 θ0
)=(
α − a2
) 12Pma2
La cuadratura se obtiene sustituyendo las integrales primeras en la ecuacion de la energıa
E =12
m(C2
1 +C22
)+
124
ma2 [θ2 (1+3sin2 θ)+C2
3
]+
mga2
cosθ
θ2 =1
1+3sin2 θ
24
ma2
[
E− mga2
cosθ − m2
(C2
1 +C22
)]
−C23
= f (θ)
∫
dt =∫ ±dθ√
f (θ)ϕ(1+sin2θ
)= C3 →
∫
dϕ =∫ ±C3dθ(1+sin2θ
)√
f (θ)
3 La placa sigue el movimiento gobernado por las ecuaciones anteriores hasta que choca conel suelo. Entonces se introduce bruscamente la ligaduraθ = π
2 , que espersistente: se mantienedespues del choque. Hace falta:
Determinar el estado cinematicoantesdel choque, con las ecuaciones del apartado (2).
Determinar el estado cinematicodespuesdel choque, al aplicar la ligadura.
Analizar el sistema de percusiones de ligadura al chocar conel suelo.
Calcularlas.
Las velocidades angulares inicialesϕ y θ cambian de signo segun queα ≷ a2 y β ≷ a
2. Noes necesario saberlo para laϕ, que queda perfectamente determinada por su integral primera;pero laθ esta pendiente del doble signo de una raız, que hay que escoger segun el valor inicial.
P θ β < a2 θ0 = −12P
m
(β − a
2
)> 0 θ = +
√. . .
P θ β > a2 θ0 = −12P
m
(β − a
2
)< 0 θ = −√
. . .
El enunciado indica que se cumple la primera condicion, pues llega al suelo conθ = π2 , por
lo que tomaremos el signo +. La figura lo corrobora. En el caso contrario, el procedimiento serıaanalogo, pero tomando el signo -, y llegarıa al suelo conθ = −π
2 .
a) Estado cinematicoantesdel choque: valor de las velocidades paraθ = π2
ξ a = ξ0 = 0 ηa = η0 =Pm
ϕa =ϕ0
1+sin2 π2
=6Pm
(
α − a2
)
Para laθ , hay que tener cuidado de aplicar la ecuacion de la energıaentre el instantedespuesde la percusion y el choque con el suelo; noantesde la percusion. En la percusionno se conserva la energıa, en el movimiento posterior sı. Inmediatamente despues de laprimera percusion, conθ = 0,
E =12
m(0+C2
2
)+
124
ma2
[
−12(
β − a2
) Pma2
]2
(1+3 ·0)+C23
+mga
2·1
mientras que all llegar al suelo, conθ = π2 ,
E =12
m(0+C2
2
)+
124
ma2[
θa]2 (1+3 ·1)+C23
+mga
2·0
Igualando los dos valores se obtiene
θa = +
√
9(2α −a)P2
m2a4 +3ga
178

b) En el choque se introduce la ligaduraθ = π2 , por lo que las velocidadesdespuesseran:
ξ d = ξ a ηd = ηa ϕa = ϕd θd = 0
c) Se ha introducido una nueva ligadura que impide el giro alrededor del ejeOy, por lo queaparecera un momento de percusion de ligaduraMy. Las otras dos ligaduras continuan:giro impedido segunOxy altura deG ligada a la nutacion,ζ G = ζ (θ). En estas ligadurastambien pueden aparecer percusiones:Mx y N. Para las ecuaciones de momento cinetico,convine tomar momentos enG. Y se puede trabajar indistintamente en ejesS0 o S2 porqueestan paralelos.Tenemos un sistema distribuido de percusiones verticales,de resultanteNk2 y momentoresultanteMx i2 +My j2. Se puede sustituir por un sistema equivalente; por ejemplo, trespercusiones en tres vertices de la placa, o una sola percusion en un punto de la placa(x,y)a determinar.
x
y
z
x2
y2
z2
G
N(x,y)
x
y
z
x2
y2
z2
G
NMx
My
x
y
z
x2
y2
z2
G
N y
x
Las ecuaciones impulsivas de cantidad de movimiento dan
00N
= m
0ηa
0
−m
0ηa
−a2θa
⇒ ma
2θa = N =
ma2
√
9(2α −a)P2
m2a4 +3ga
Y las de momento cinetico
N y−N x
0
=
ma2
12
00
2ϕa
− ma2
12
0θa
2ϕa
⇒
y = 0
x =a6
4 En la ultima fase la placa se mueve sobre el plano con velocidad deG constanteη0 j1 yvelocidad angular constanteϕ0k1. G describe una recta paralela aO1y1. Los puntos de la placaque esten a una distanciad = η0/|ϕ0| deG describiran cicloides; los que esten a mas distanciacicloides alargadas, y los que esten a menos cicloides acortadas. Y esto independientemente dequeϕ sea positiva o negativa. La base sera una recta y la ruleta una circunferencia de radiod.
2α > a ϕ > 0
b
b
2α < a ϕ < 0
b
b
Para que sean los vertices los que describen cicloides, en el caso 2α > a hace falta que
d =η0
|ϕ0|= a
√2 → P
m= a
√2
12Pma2
(
α − a2
)
⇒ α = a6√
2+1
12√
2
179

Si estamos en el caso 2α < a, hay que cambiar el signo de laϕ :
d =η0
−ϕ0= a
√2 → P
m= −a
√2
12Pma2
(
α − a2
)
⇒ α = a6√
2−1
12√
2
5 Conocemos el estado cinematico de la placa inmediata-mente despues de la primera percusion. En general, para queel eje instantaneo pase porC hay que obligar a que su veloci-dad sea paralela a la velocidad angular. En este caso, se ve quela velocidad de mınimo deslizamiento va a ser cero, porquela velocidad deG es normal a la velocidad angular. Podemosobligar a que la velocidad deC sea nula.
vG21 = η k2 ωωω21 = ϕ i2+ θ j2
vC21 = vG
21+ωωω21∧GC = 0 x1
y1
z1
x2
y2
z2G η
ϕ
θ
C
00
η0
+
∣∣∣∣∣∣
i2 j2 k2
ϕ0 θ0 0a2 −a
2 0
∣∣∣∣∣∣
=
00
η0− a2
(ϕ0+ θ0
)
=
000
P2
=a2
[12Pma2
(
α − a2
)
− 12Pma2
(
β − a2
)]
⇒
⇒ a = 6α −6β
La percusion ha de aplicarse sobre una recta a 45o, que pasa aa6 por debajo y por la izquierda deG, como se ve en la figura.
x1
y1
z1
x2
y2
z2G
C
180
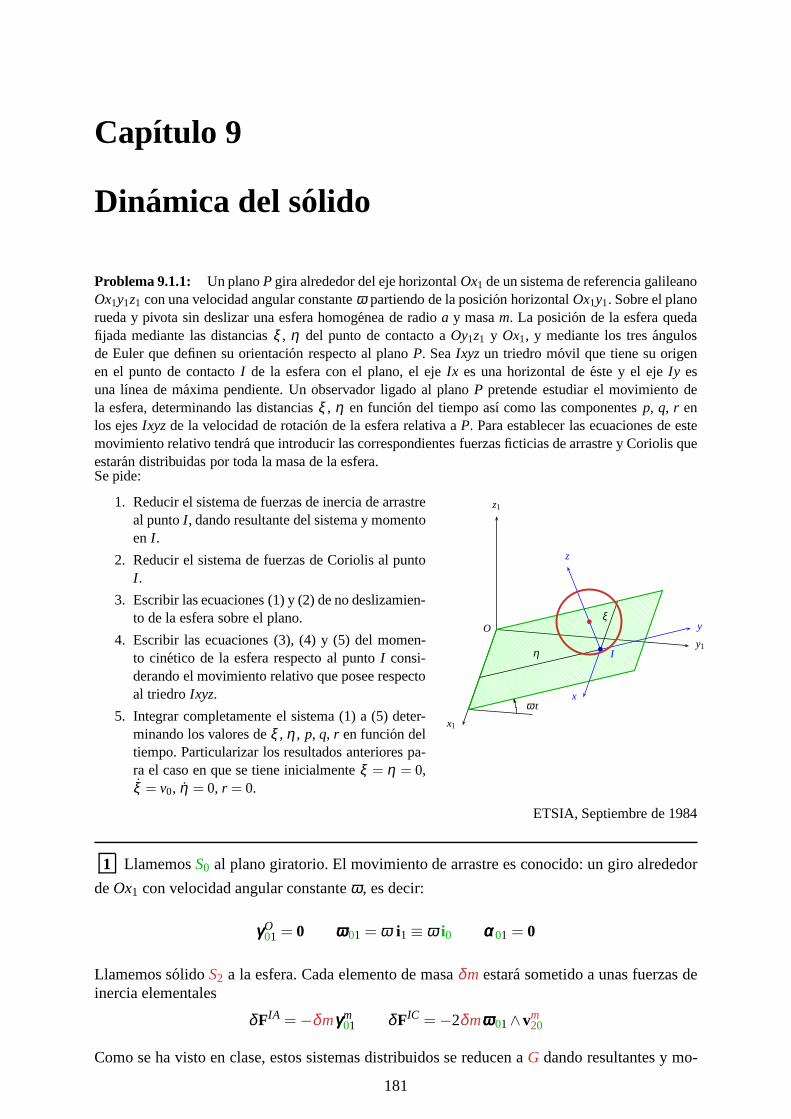
Capıtulo 9
Dinamica del solido
Problema 9.1.1: Un planoP gira alrededor del eje horizontalOx1 de un sistema de referencia galileanoOx1y1z1 con una velocidad angular constanteω partiendo de la posicion horizontalOx1y1. Sobre el planorueda y pivota sin deslizar una esfera homogenea de radioa y masam. La posicion de la esfera quedafijada mediante las distanciasξ , η del punto de contacto aOy1z1 y Ox1, y mediante los tres angulosde Euler que definen su orientacion respecto al planoP. SeaIxyz un triedro movil que tiene su origenen el punto de contactoI de la esfera con el plano, el ejeIx es una horizontal de este y el ejeIy esuna lınea de maxima pendiente. Un observador ligado al plano P pretende estudiar el movimiento dela esfera, determinando las distanciasξ , η en funcion del tiempo ası como las componentesp, q, r enlos ejesIxyzde la velocidad de rotacion de la esfera relativa aP. Para establecer las ecuaciones de estemovimiento relativo tendra que introducir las correspondientes fuerzas ficticias de arrastre y Coriolis queestaran distribuidas por toda la masa de la esfera.Se pide:
1. Reducir el sistema de fuerzas de inercia de arrastreal puntoI , dando resultante del sistema y momentoen I .
2. Reducir el sistema de fuerzas de Coriolis al puntoI .
3. Escribir las ecuaciones (1) y (2) de no deslizamien-to de la esfera sobre el plano.
4. Escribir las ecuaciones (3), (4) y (5) del momen-to cinetico de la esfera respecto al puntoI consi-derando el movimiento relativo que posee respectoal triedroIxyz.
5. Integrar completamente el sistema (1) a (5) deter-minando los valores deξ , η , p, q, r en funcion deltiempo. Particularizar los resultados anteriores pa-ra el caso en que se tiene inicialmenteξ = η = 0,ξ = v0, η = 0, r = 0.
x1
y1
z1
ω t
O
x
y
z
b
bη
ξ
I
ETSIA, Septiembre de 1984
1 LlamemosS0 al plano giratorio. El movimiento de arrastre es conocido: un giro alrededor
deOx1 con velocidad angular constanteω, es decir:
γγγO01 = 0 ωωω01 = ω i1 ≡ ω i0 ααα01 = 0
Llamemos solidoS2 a la esfera. Cada elemento de masaδm estara sometido a unas fuerzas deinercia elementales
δFIA = −δmγγγm01 δFIC = −2δmωωω01∧vm
20
Como se ha visto en clase, estos sistemas distribuidos se reducen aG dando resultantes y mo-
181

mentos:
RIA = −mγγγG01 M IA
G = −IIIG ·ωωω01−ωωω01∧ IIIG ·ωωω01
RIC = −2mωωω01∧vG20 M IC
G = 2ωωω20∧PPPG ·ωωω01
Para la esfera, independientemente de los ejes en que se trabaje,
IIIG =25
ma2UUU PPPG = IGUUU− IIIG =
35
ma2UUU− IIIG =
15
ma2UUU
Del enunciado,ωωω20 = (p,q, r) vG
20 = (ξ , η,0)
Estan proyectados en ejesIxyz(solidoS3), que son paralelos a losS0. Las dos estan relacionadaspor la condicion de no deslizamiento, pero eso se vera en elapartado 3. La resultante de lasfuerzas de arrastre sera,
RIA = −mγγγG01 = −m [0+0+ωωω01∧ (ωωω01∧OG)] = mω2 (0,η,a)
y el momento enG,
M IAG = −IIIG ·ωωω01−ωωω01∧ IIIG ·ωωω01 = −2
5ma2
(((((((ωωω01∧UUU ·ωωω01 = 0 (‖)
Reduciendolo aI , se tiene:
RIA = mω2 (0,η,a) M IAI = IG∧RIA = M IA
I = −mω2 aη i3
2 Aplicando las expresiones de las fuerzas y momentos de Coriolis,
RIC = −2mωωω01∧vG20 = −2m
∣∣∣∣∣∣
i3 j3 k3ω 0 0ξ η 0
∣∣∣∣∣∣
= RIC = −2mω η k3
M ICG = 2ωωω20∧PPPG ·ωωω01 = 2
15
ma2ωωω20∧ωωω01 =25
ma2
∣∣∣∣∣∣
i3 j3 k3p q rω 0 0
∣∣∣∣∣∣
=25
ma2ω (0, r,−q)
M ICI =
IG∧RIC +M ICG = M IC
I =25
ma2ω (0, r,−q)
3 Como la esfera rueda y pivota sin deslizar,
vI20 =
000
= vG
20+ωωω20∧GI =
ξη0
+
∣∣∣∣∣∣
i3 j3 k3p q r0 0 −a
∣∣∣∣∣∣
→ξ = aq (1)
η = −ap (2)
4 Hay que escribir las ecuaciones del momentocinetico enI para el movimiento relativo a los ejesS3. Pero las fuerzas de inercia y sus momentos se hancalculado para el movimiento relativo aS0. No hacefalta calcularlos de nuevo. En Mecanica I, al plantearlas ecuaciones del momento cinetico respecto a unpunto movil, se vieron dos formas:
MEI = HI +mvI
30∧vG20
MEI = hI +mIG∧γγγ I
30x1
y1
z1
ω t
O
x
y
z
bη
ξ
I
b
Ambas suponen que los ejes inerciales son los0; en la primera el momento cineticoHI esel de las velocidades respecto a estos ejes0; en la segundahI se calcula con las velocidades
182

respecto a unos ejes paralelos a los0, con origen enI , es decir, precisamente lo que pide elenunciado. No importa que de hecho los ejes0 no sean inerciales, porque vamos a incluir losmomentos de las fuerzas de inercia. La unica fuerza directamente aplicada es el peso, que enejesS0 se ve girar como
P = mg(0,−sinω t,−cosω t)
Las fuerzas de ligadura enI , naturalmente, no dan momento.
MEI = M IA
I +M ICI + IG∧P = −mω2aη
100
+
25
ma2ω
0r−q
+mgasinω t
100
Para el momento cinetico relativo, hay que tener en cuenta queG es un punto fijo de los ejesS3;ademas, estos ejes son ya “inerciales”:
hI = hG +mIG∧vG23 = IIIG ·ωωω23 =
25
ma2
pqr
→ hI =
25
ma2
pqr
Para el termino complementario,
γγγ I30 =
ξη0
mIG∧γγγ I
30 = ma
−ηξ0
Finalmente, las ecuaciones quedan,
mgasinω t −maω2 η =25
ma2 p−maη (3)
25
ma2ω r =25
ma2 q+maξ (4)
−25
ma2ω q =25
ma2 r (5)
5 Estas ecuaciones debe integrarse junto con las de ligadura.Derivando estas,
ξ = aq η = −a p
se pueden eliminarξ y η de (3) y (4). En la primera,
mgasinω t −maω2 η =25
ma2 p−maη =75
ma2 p
derivando: mgaω cosω t −maω2 η =75
ma2 p
y eliminandoη con (2): p− 57
ω2 p =5gω7a
cosω t
El termino independiente no es solucion de la homogenea;se puede escribir directamente:
p = phom+ ppart = Ae
√57ω t
+Be−√
57ω colorbluet
+C cosω t
para C: −Cω2− 57
ω2C =5gω7a
→ C = − 5g12ω a
En la segunda,
25
ma2ω r =25
ma2 q+maξ =25
ma2 q+ma2 q =75
ma2 q
183

Esta acoplada con la (5). Derivando y sustituyendo esta, se eliminar
2ω r = 7q → 2ω r = 7q → 7q+2ω2 q = 0↑
−ω q = r
que se integra trivialmente,
q = D cos
√
27
ω t +E sin
√
27
ω t
Para obtenerr, se puede sustituir este valor deq en (5) e integrar; pero es mas sencillo sacarladirectamente de (4), simplemente derivando laq:
r =7
2ωq =
√
72
(
−D sin
√
27
ω t +E cos
√
27
ω t
)
Con estos valores se pueden integrar las ecuaciones de la ligadura para obtenerξ y η
ξ = aq → ξ =
√
72
aω
(
D sin
√
27
ω t −E cos
√
27
ω t
)
+F
η = −ap → η =
√
75
aω
(
−Ae
√57ω t
+Be−√
57ω t)
+5g
12ω2 sinω t +G
Las constantesA, B y G no son independientes, puesη y p estan relacionadas tambien por laecuacion (3), que al eliminarη queda
ω2η = g sinω t − 75
a p
Sustituyendop(t) se llega al mismo valor que antes, pero conG = 0.Estas expresiones generales se particularizan para el casoξ = η = r = η = 0, ξ = v0.
ξ (0) = −√
72
aω
E +F = 0
η(0) =
√
75
aω
(−A+B) = 0
r(0) =
√
72
E = 0
ξ (0) = aq(0) = aD = v0
η(0) = −ap(0) = −a
(
A+B− 5g12ωa
)
= 0
Con lo que se obtiene
E = F = 0 D =v0
aA = B =
5g24ω a
Y las soluciones son
p =5g
24ω a
(
e
√57ω t
+e−√
57ω t −2cosω t
)
q =v0
acos
√
27
ω t
r = − v0
2asin
√
27
ω t
ξ =
√
27
v0
ωsin
√
27
ω t
η =5g
24ω2
(
−√
75
e
√57ω t
+
√
75
e−√
57ω t
+2sinω t
)
En la solucion se aprecia:
184

El termino sinusoidal de laη , debido al peso: al girar el plano el peso oscila en uno y otrosentido del ejey
La oscilacion sinusoidal segunx debido a que el peso desvıa la velocidad inicial, y encuanto hay velocidad seguny el momento de Coriolis induce un movimiento segunx
El termino exponencial seguny, debido a la fuerza centrıfuga, que enseguida ahoga a losotros dos.
Tambien se aprecia el factor 7/5, propio de la rodadura de una esfera: 2/5 del momento deinercia en el centro, que al tomar momentos en el punto de contacto se convierte en 7/5.
Curiosamente, la velocidad angular de pivotamiento, que noinfluye en la velocidad deG,tambien se acelera: se debe al momento de las fuerzas de Coriolis.
Ademas, para que este analisis fuera valido, la esfera nodeberıa caerse cuando el planoeste hacia arriba. Harıa falta que la ligadura fuera bilateral, o comprobar el signo de lareaccion normal.
Dando valores unitarios aω, v0 y a, y para valores diversos deg, la trayectoria sera:
x0
y0
185

Problema 9.1.2: Consideremos un disco pesado, homogeneo de masamy radioR. En el centroM deldisco hay unida rıgidamente y perpendicular a el una varilla MN sin masa y de longitud 2R.
El solido ası formado se pone en movimiento de modo que el extremoN se apoye sobre un planofijo, horizontalOx1y1 y sin rozamiento.
Para el estudio del movimiento se consideran los tres sistemas de ejes siguientes:
Ox1y1z1: Sistema ortogonal que se considera fijo y a susversores llamaremosi, j , k.
Mx2y2z2: Sistema movil de ejes paralelos aOx1y1z1 y deorigenM.
Mx3y3z3: Sistema movil ligado al solido y de origen enM. El ejeMz3 es la prolongacion deNM y losMx3,My3 dos diametros ortogonales.
Inicialmente el puntoN se encuentra enO(0,0,0), el M en(√
3R,0,R) y Mx3 esta en el planoOx1z1.La velocidad inicial deM vale ωRj y la velocidad de rotacion, tambien en el instante inicial, es la
suma de las dos siguientes:
ω1 = ω k sobreOz1 (9.1)
ω2 =16g−ω2R
8ωR(√
3i + k) sobreMz3 (9.2)
Se elegiran como parametros para fijar la posicion del solido las coordenadas(ξ ,η) de la proyecciondeM sobreOx1y1 y los angulos de Euler(ψ ,θ ,ϕ) del sistemaMx3y3z3 respecto alMx2y2z2. Se pide:
1o.- Energıa cinetica del solido en funcion de los parametros que fijan su posicion y de sus derivadasrespecto al tiempo.
2o.- Funcion de fuerzas de la que derivan las fuerzas activas.
3o.- Ecuaciones generales del movimiento.
4o.- Movimiento de M.
5o.- Integrar completamente las ecuaciones del movimiento para las condiciones iniciales dadas.
ETSIA, Marzo de 1973
186

1 Este mismo problema se ha resuelto ya por mecanica analıtica, como sistema holonomo.Ahora se va a resolver usando la mecanica de Newton-Euler. Los dos primeros apartados sonnaturalemente iguales.
El sistema tiene una ligadura finita: el contacto del extremoN con el plano liso. La altura deM pasa a serζ = 2Rcosθ , y quedan 5 coordenadas generalizadas:ξ ,η,ψ,θ ,ϕ, una por gradode libertad. La reaccion del plano sera una fuerza vertical en el extremoN, FL = Nk.
La energıa cinetica se calcula facilmente por Koenig:
T =12
mv2M +
12
ωωω32 · IIIM ·ωωω32
La velocidad deM se calcula directamente, pues tenemos sus coordenadas en ejes fijos:
OM = (ξ ,η,2Rcosθ) vM31 =
(
ξ , η,−2Rsinθ θ)
Para hallar laωωω32 ≡ ωωω31, conviene introducir unos ejesintermediosMx0y0z0 (ejes de Resal), que acompanan alsolido en la precesion y la nutacion, pero no en la rota-cion propia, de modo queMx0 es el eje de nodos. Porla simetrıa de rotacion, son tambien principales para eldisco, y la velocidad angular queda mas simple:
ωωω32 = ψ k1 + θ i0+ ϕ k0 =
θψ sinθ
ϕ + ψ cosθ
0
θϕ
θ
ϕ
ψ
x0
y0
x3
z0 ≡ z3z1
M
N
El tensor del disco, en ejes 0 o 3,IIIM = mR2
4
1 0 00 1 00 0 2
. Se puede ya calcular la energıa
cinetica,
T =12
m(
ξ 2+ η2 +4R2sin2θ θ2)
+18
mR2[
θ2 + ψ2sin2θ +2(ϕ + ψ cosθ)2]
=
= T =m2
(
ξ 2+ η2)
+mR2
8
[
ψ2sin2θ + θ2(1+16sin2 θ)+2(ϕ + ψ cosθ)2
]
2 La funcion de fuerzas es inmediata, pues solo actua el peso:
U = −V = −mgzM = −2mgRcosθ
3 Para el solido contamos con seis ecuaciones independientes:Tres de cantidad de movimiento.
Tres de momento cinetico. Se puede tomar momentos enG o enN; en este caso hay queanadir el termino corrector.
Tambien se pueden buscar directamente integrales primeras, razonando que magnitudesse conservan.
Para la ecuacion de la cantidad de movimiento, en la aceleracionse sustituye la ligadura,ζ = 2Rcosθ
00
N−mg
= m
ξη
−2R(sinθ θ +cosθ θ2)
Salen dos integrales primeras,ξ = C1 y η = C2.
Nθ
mg
187

Para la ecuacion del momento cinetico, tenemos dos opciones:
Tomar momentos enG, pero aparece el momento deNTomarlos enN, con lo que la fuerza de ligadura no aparece, pero hay que anadir el terminocorrector por ser punto movil.
ComoN se obtiene facilmente de la tercera de cantidad de movimiento, podemos tomar mo-mentos enG. Se puede plantear la otra como ejercicio, y comprobar que sellega exactamente alas mismas ecuaciones, como es natural.
Hay que escoger los ejes para proyectar. El momento cinetico es mas simple en ejes deResal,S0, que en los fijos o en ejes solido; el momento deN es tambien mas simple en esosejes. Ası se obtiene:
MN ∧Nk1 =dHM
dt
∣∣∣∣1= IIIM ·ωωω31+ωωω01∧ IIIM ·ωωω31
La velocidad angular de los ejesS0 es la misma del solido, menos la rotacion propiaϕ. Todo seconoce en estos ejes, puesMN = −2Rk0, y k1 = sinθ j0 +cosθ k0. Si quisieramos desarrollary usar esta ecuacion, se tendrıa,
2RNsinθ00
=
mR2
4ddt
θψ sinθ
2(ϕ + ψ cosθ)
+
mR2
4
∣∣∣∣∣∣
i0 j0 k0
θ ψ sinθ ψ cosθθ ψ sinθ 2(ϕ + ψ cosθ)
∣∣∣∣∣∣
De esta ecuacion se obtiene directamente una integral primera,pues el termino corrector no tiene componentez0, de modo quese conservaϕ + ψ cosθ .Podrıamos seguir y desarrollar las otras dos ecuaciones diferencia-les, que por el aspecto van a ser bastante complicadas, y muchomas cuando se sustituya laN. Esas ecuaciones se podran integrar,pues en el sistema se conservan varias magnitudes, pero ser´a unproceso costoso. Es mas sencillo buscar directamente las integra-les primeras:
Nθ
mg
El sistema es conservativo: la unica fuerza es el peso, y la ligadura es lisa y estacionaria,con lo que no trabaja. Podemos plantear la integral de la energıa, cuyos terminos yaconocemos:
T +V =m2
(
ξ 2+ η2)
+
+mR2
8
[
ψ2sin2 θ + θ2(1+16sin2θ)+2(ϕ + ψ cosθ)2
]
+2mgRcosθ = E
Las dos fuerzas exteriores, peso y reaccion normal, son verticales: no dan momento segunk1 y por tanto se conserva el momento cinetico en esa direccion:
(MN ∧Nk1) ·k1 = 0 ⇒ HM ·k1 = Hz1 = Cte.
mR2
4
θψ sinθ
2(ϕ + ψ cosθ)
·
0sinθcosθ
⇒ ψ sin2 θ +2(ϕ + ψ cosθ)cosθ = C3
Las fuerzas exteriores cortan al ejeMz0, que es de revolucion: la tercera ecuacion de Eulerda una integral primera:
Cr + pq(A−A) = 0 ⇒ r = Cte ⇒ ϕ + ψ cosθ = C4
De estas integrales primeras, solo la ultima sale directamente de la ecuacion del momento cineti-co. Las otras se podrıan haber obtenido, pero laboriosamente.
Observese que las integrales primeras asociadas al giro son las mismas que en el solido deLagrange. El problema es distinto, pues aquı no hay punto fijo, pero la rotacion tiene las mismasecuaciones e integrales primeras que en aquel caso.
188

Tambien se puede observar que las integrales primeras son las mismas que se obtenıandirectamente por analıtica, mediante las coordenadas cıclicas. Aquı hemos tenido que buscarlasuna a una razonando que magnitudes se conservan. No salen automaticamente, pero se ve conmas facilidad cual es su sentido fısico.
4 A partir de este momento, habiendo llegado a las mismas ecuaciones, se sigue igual quepor mecanica analıtica. Para determinar el movimiento deM, tendremos que integrar o dejarreducidas a cuadraturas sus coordenadas,ξ ,η,ζ (θ). Las dos primeras son inmediatas:
ξ = C1 t +ξ0 ; η = C2 t +η0
Como inicialmenterM = (√
3R,0,R) y vM = (0,ωR,0), se tiene
ξ =√
3R ; η = ωRt
De las condiciones iniciales tambien deducimos queθ0 = π/3 y θ0 = 0. Para hallarθ(t)podemos usar cuatro integrales primeras para dejar la de la energıa solo como una funcion deθy θ . Antes, la tercera se sustituye en la cuarta de modo que podemos despejar
ψ sin2 θ = 2C4cosθ +C3
con lo que se llega a
m2
(C2
1 +C22
)+
mR2
8
[(2C4cosθ +C3
sinθ
)2
+ θ2(1+16sin2 θ)+2C2
3
]
+2mgRcosθ = E
Agrupando las constantes, se obtiene una cuadratura:
θ2(1+16sin2 θ)
= E′− 16gR
cosθ −(
2C4cosθ +C3
sinθ
)2
→
→ ±dθ
√√√√
1+16sin2 θ
E′− 16gR cosθ − (2C4 cosθ+C3)
2
sin2θ
= dt
La ecuacion deθ es exactamente la misma que la del solido de Lagrange. Se puede hacer unanalisis cualitativo mediante el potencial efectivoV(θ). Como se ve en teorıa, el caso generales una oscilacion entre dos valoresθ1,θ2, mientras continuan la precesion y la rotacion propia.
Las condiciones iniciales implicanθ0 = 0; esto significa que estamos en uno de los extremosde la oscilacion, o bien en un movimiento estacionario (θ1 = θ2); este ultimo caso se identificafacilmente porqueθ = 0.
5 El enunciado pide integrar completamente el movimiento, pero hemos visto que las ecuacio-nes son las del solido de Lagrange, queno se pueden integrarmediante funciones elementales.Esto solo puede significar una cosa: estamos en el caso integrable del solido de Lagrange: elmovimiento estacionario.
Para determinarlo, veremos siθ = 0. Iremos calculando las constantes, y sustituyendo enla quinta ecuacion de Lagrange. Sustituir en la de la energ´ıa no sirve de nada: ya sabemos queθ = 0 en el instante inicial. Se podrıa derivar, eliminarθ (pues la ecuacion vale para todot, nosolo el inicial) y comprobar el valor deθ . Pero es mas corto hacerlo con la quinta de Lagrange:se ahorra derivar.
ζ0 = R= 2Rcosθ0 → θ0 = π/3; ζ0 = 0 = −2r sinθ0θ0 = 0 → θ0 = 0
En cuanto a la velocidad angular, notese que las dos componentesω1 y ω2 estan dirigidas,respectivamente, segunk1 y k0 ≡ k3; es decir, corresponden a la precesion y la rotacion propia.La nutacion, como se dedujo de la velocidad deM, es nula:
ωωω32 = ψ0k1 +θ0 i0+ ϕ0k0 = ω k1 +16g−ω2R
8ωR2k3 →
ψ0 = ωϕ0 = 16g−ω2R
4ωR
189

donde el 2 se debe a que el vector direccion√
3i1+k1 = 2k3 no es unitario.
mR2
4
[
θ(1+16sin2 θ
)+16θ2sinθ cosθ
]
−
− mR2
8
[2ψ2sinθ cosθ −4(ϕ + ψ cosθ) ψ sinθ
]−2mgRsinθ = 0
θ0 (. . .) =[2ψ2
0 sinθ0cosθ0−4(ϕ0 + ψ0cosθ0) ψ0sinθ0]+
16gR
sinθ0
θ0 (. . .) =
[
2ω2
√3
4−4
(16g−ω2R
4ωR+ω
12
)
ω√
32
]
+16gR
√3
2= 0
Por tanto, estamos en el movimiento estacionario. Las coordenadas generalizadas valen:
ξ =√
3R η = ωRt θ =π3
ψ = ω t +π2
ϕ =16g−ω2R
4ωRt +ϕ0
El valor inicial deψ se obtiene observando la configuracion del sistema en el instante inicial.El deϕ es arbitrario, porque no se ha dado ningun dato.
190

Problema 9.1.3: Consideremos el sistema formado por dos varillasAB y CD homogeneas, pesadas,iguales de masam y longitud a. El extremoA de la varillaAB desliza sin rozamiento sobre un planohorizontalOxycon ligadura bilateral. El otro extremoB se articula mediante una rotula al centro de lavarilla CD que solamente posee esta ligadura.
La posicion del sistema queda definida mediante seis parametros que son coordenadas(ξ ,η) de laproyeccion del centro de masas sobreOxy, los angulosϕ1,ϕ2 que ambas varillas forman conOxyy losangulosθ1,θ2 que sus proyecciones forman conOx. Se pide:
1o) Energıa cinetica del sistema completo en funcion de losparametros que fijan su posicion y susderivadas respecto al tiempo.
2o) Suponiendo condiciones iniciales arbitrarias dejar el problema reducido a cuadraturas. Se de-bera estudiar en primer lugar el movimiento deCD tiene respecto a unos ejes de direccionesfijas que pasan por su centro de masas. de dicho movimiento se describira cualitativamente enque consiste y a ello se puede llegar sin necesidad de plantear matematicamente las ecuaciones.Los parametrosϕ2,θ2 se supondra que varıan con el tiempo en la forma necesaria para conse-guir el movimiento antes descrito. Se estudiaran, a continuacion, las dependencias deξ ,η con eltiempo y se terminara planteando un sistema que deje el calculo deϕ1,θ1 reducido a cuadraturas.
3o) Llevemos el sistema al reposo en la configuracion inicial definida por
x = 0,η = 3a/4,ϕ1 = 0,ϕ2 = π/2,θ1 = π/2.
Apliquemos al extremo superior de la varillaCDun percusion de componentes(O,Pcosα ,−Psenα).Determinar el valor deα para el cual el campo de velocidades del sistema en el instante inicial delmovimiento que nace, es el campo de velocidades de un solido.
4o) Discutir los tipos de movimiento que pueden aparecer segun el valor deP.
NOTA: Se supone que el planoOxy no presenta en ningun momento impedimento fısico al mo-vimiento de ambas varillas salvo la ligadura que ejerce sobre el extremoA. Cada varilla se consideratransparente al movimiento de la otra.
ETSIA, 22 de Marzo de 1986
191

Solucion por mecanica de Newton-Euler
1 LlamaremosS2 a la varilla AB y S3 a la CD.La manera mas simple de calcularT es aplicar elteorema de Konig a cada una de las varillas:
T =12
mv2G2
+TG2 +12
mv2G3
+TG3
Tambien se puede aplicar a todo el sistema, pero tie-ne mas pasos: para calcularTG de cada varilla, hayque obtener tambienvGi respecto aG, que es igualde complicado que hallar lavGi absoluta. x
y
z
b
b
b
G
G2
G3 ≡ B
θ1
θ2
ϕ1
ϕ2A
D
C
(ξ ,η)
Para calcular la energıa cinetica del movimiento relativo al centrode masas, conviene tomar ejes ligados a cada varilla, de modoqueel tensor de inercia sea constante. Los ejesGiyi tendran la direc-cion de cada varilla y losGixi seran horizontales, de modo que seobtienen de los fijos dando los giros de precesionθi y nutacionϕi .Las velocidades angulares seran,
ωωω21 = (ϕ1, θ1sinϕ1, θ1cosϕ1)2 ωωω31 = (ϕ2, θ2sinϕ2, θ2cosϕ2)3 x
y
z
b
b
b
G
G2
G3
θ1
θ1
ϕ1
ϕ1
ϕ1
x2
y2
z2
Para cada varilla en sus ejes, el tensor de inercia sera
IIIG2 =ma2
12
1 0 00 0 00 0 1
2
IIIG3 =ma2
12
1 0 00 0 00 0 1
3
Las velocidades de los centros de las varillas se obtienen a partir de la del centro de masas delsistema. Esta se obtiene directamente en ejes fijos.G esta en la varillaAB, entreG2 (centro dela varilla) y G3 (extremoB, donde esta fijado el centro de la varillaCD), es decir, a 3/4 de lavarilla:
rG =
(
ξ ,η,34
asinϕ1
)
1⇒ vG =
(
ξ , η,34
acosϕ1 ϕ1
)
1
Como los tres centros estan a lo largo de la varillaAB, se puedeaplicar el campo de velocidades de la varilla, en ejesS2:
vG2 = vG +ωωω21∧GG2 = vG+a4
(θ1cosϕ1,0,−ϕ1
)
2
vG3 = vG +ωωω21∧GG3 = vG+a4
(−θ1cosϕ1,0, ϕ1
)
2
Hay una dificultad: el primer sumando esta proyectado en ejes S1,y el segundo en ejesS2. x
y
z
b
b
b
G
G2
G3
θ1ϕ1 x2
y2
z2
a4 ϕ1
a4 ϕ1
a4 θ1 cosϕ1
a4 θ1 cosϕ1
Si se tienen ganas de operar y tiempo abundante, se puede cambiar de ejes uno de los termi-nos, sumar, y elevar al cuadrado. Da lo mismo que se pase a ejesS1 o S2: la complicacion es lamisma, y al final vamos a obtener un escalar.
Antes de meterse en calculos largos, con muchas posibilidades de equivocarse, compensabuscar caminos mas simples. Uno serıa aplicar Konig a todo el sistema:
T =12(m+m)v2
G+T2G +T3
G =
=12(m+m)v2
G+12
mv2G2G +
12
ωωω21 · IIIG2 ·ωωω21+12
mv2G3G +
12
ωωω31 · IIIG3 ·ωωω31
192

donde lasvGiG, velocidades deGi respecto a unos ejes paralelos a los fijos con origen enG,son precisamente lasωωω21∧GGi que se acaban de calcular. No es necesario cambiar de ejes ysumar: cada termino puede elevarse al cuadrado en sus propios ejes.
Esto puede parecer sorprendente: los dobles productos no son nulos, pero se llega al mismoresultado omitiendolos. Lo que ocurre es que se anulan al sumar para las dos varillas, pues soniguales y de sentido contrario:GG2 = −GG3
v2G2
= v2G+(ωωω21∧GG2)
2+2vG · (ωωω21∧GG2)
v2G3
= v2G+(ωωω21∧GG3)
2+2vG · (ωωω21∧GG3)
vG · (ωωω21∧GG2) = −vG · (ωωω21∧GG3)
Ya podemos calcular la energıa cinetica; por un camino o por otro, el resultado es el mismo:
T =12
2m
(
ξ 2+ η2 +916
a2 cos2ϕ1 ϕ21
)
+12
ma2
16
(ϕ2
1 +cos2ϕ1 θ21
)+
+ma2
24
(ϕ2
1 +cos2 ϕ1θ21
)+
12
ma2
16
(ϕ2
1 +cos2ϕ1 θ21
)+
ma2
24
(ϕ2
2 +cos2 ϕ2θ22
)
T = m
ξ 2+ η2 +a2
48
[(27cos2ϕ1 +5
)ϕ2
1 +2ϕ22 +5cos2ϕ1θ2
1 +2cos2ϕ2θ22
]
2 Para estudiar el sistema se tienen las siguientes ecuaciones:5 de la varillaAB (3 CM, 2 MC, + 1 EN dependiente de las anteriores)
5 de la varillaCD (3 CM, 2 MC, + 1 EN dependiente de las anteriores)
7 para todo el sistema (3 CM, 3 MC, 1 EN), que son combinacion de las 10 anteriores.Cada varilla (solido degenerado) tiene 5 GDL si esta libre. Se pierde 1 por el apoyo liso enA y3 por la articulacion enB. Quedan 6 GDL, que corresponden a las 6 coordenadas generalizadasdel enunciado.
Como no se piden las fuerzas de ligadura, compensa buscar lasecuaciones asociadas a cadagrado de libertad, que es precisamente lo que va pidiendo el enunciado.
a) Respecto a lavarilla CD, esta claro que las ecuaciones de CM no dicen nada: su centroG3esta unido al extremo deAB, y habra tres fuerzas de ligadura, las necesarias para que se muevaconB. En cambio, las ecuaciones de MC enG3 van a dar el giro de la varilla, y por tanto losangulosϕ2 y θ2:
MEG3
= 0 =dHG3
dt⇒ HG3 = Cte.
El movimiento relativo al centro de masas es el de unsolido de Poinsot, aunqueG3 no este fijosino que se mueve conB. Y se simplifica mucho porque es el caso simetrico, y el ser degeneradole hace perder un grado de libertad.
Los valores deϕ2 y θ2 se pueden obtener de las ecuaciones de Euler:
ma2
12
1 0 00 0 00 0 1
· ddt
ϕ2
θ2sinϕ2
θ2cosϕ2
+
ma2
12
∣∣∣∣∣∣
i3 j3 k3
ϕ2 θ2sinϕ2 θ2cosϕ2
ϕ2 0 θ2cosϕ2
∣∣∣∣∣∣
La ecuacion segunj3, naturalmente, no dice nada, 0=0; las otras dos determinanϕ2 y θ2. Noteseque las ecuaciones son complicadas. Las variables no son lasmas adecuadas para el solido dePoinsot: habrıa que tomar como ejez la direccion del vector momento cinetico constante.
Una manera de obtener integrales primeras es calcular el momento cinetico en ejesS3, yproyectarlo en ejesS1, en los que es un vector constante. Solo tiene dos componentes inde-pendientes, pues el momento cinetico es nulo en la direcci´on de la varilla:(Ap,0,Ar). Paraobtener integrales primeras, habrıa que proyectarlo seg´un direcciones fijas. Lo mas simple esproyectarlo segunk1, que se expresa facilmente en ejesS3:
k1 = sinϕ2 j3+cosϕ2k3 HG3 =ma2
12
ϕ20
θ2cosϕ2
⇒ θ2cos2ϕ2 = C1
193

Se podrıa proyectar segun otra direccion fija,i1 o j1, pero no merece la pena porque va a salirmuy complicado, y hay otro camino mas simple.
Como el momento cinetico no tiene componente segun la propia varilla (por ser cero elmomento de inercia), el eje de giro es principal y por tanto siempre el mismo. La varilla giracon velocidad angular constante alrededor de una normal porG3. Aunque la velocidad angulartenga una componente segunj3, esto se debe solo a la composicion de movimientos precesion+ nutacion; la varilla en sı no gira en esa direccion por ser infinitamente delgada.
Otra integral primera se obtiene aplicando la ecuacion de la energıa al movimiento respectoal centro de masas: como no hay momento, se conserva la energ´ıa cinetica relativa:
TG3 =ma2
24
(ϕ2
2 + θ22 cos2ϕ2
)= C2
Con estas dos integrales se pueden reducir a cuadraturas losdos angulos: se despejaθ2 de ladel momento cinetico, y se sustituye en la de la energıa, que da una cuadraturadt = f (ϕ2)dϕ2;estadt se sustituye en la primera para dardθ2 = g(ϕ2)dϕ2. De todos modos, no se pide tanto:se supone queθ2(t) y ϕ2(t) son las corresponden al movimiento de Poinsot con las condicionesiniciales adecuadas.
b) Para estudiarξ y η, lo mejor es plantear la ecuacion de la can-tidad de movimiento para todo el sistema. Las fuerzas exteriores(pesos, reaccion enA) son verticales: se conserva la cantidad demovimiento en las dos direcciones horizontales:
00
N−2mg
= m
ξηζ
⇒ ξ = ξ0 t +ξ0⇒ η = η0 t +η0⇒ N = N(ϕ1, ϕ1,ϕ1)
N
ϕ1mg
mg G2
G3
c) Para obtenerϕ1 y θ1 podemos seguir dos caminos:
Aislar la varillaAB. La fuerza de ligadura enB, FLB, que se anula para todo el sistema por
ser un par de accion reaccion, ahora aparece como fuerza exterior. La podemos obtenerde la ecuacion de cantidad de movimiento de la varillaCD,
−FLB−mgk1 = mrB
Al sustituir esta fuerza en las ecuaciones deAB, estamos metiendo el peso y la aceleraciondeG3. Esto equivale a poner una partıcula de masam en el extremoB de la varilla.
Otra opcion es usar las ecuaciones del momento cinetico y de la energıa para todo elsistema, teniendo en cuenta las magnitudes que ya se ha vistoque son constantes.
Los dos caminos son equivalentes. Al poner una masa en el extremo de la varilla, estamosincorporando la varillaCD reducida a un punto: ignoramos su momento cinetico y su energıade giro respecto al centro de masas, que ya sabemos que son constantes.
Cuando planteamos las ecuaciones del momento cinetico y dela energıa para todo el siste-ma, y luego sustituimos por constantes el momento cineticoy la energıa cinetica deCD respectoa su centro de masas, estamos haciendo exactamente lo mismo.
Como solo necesitamos dos ecuaciones mas, lo mas sencillo es buscar integrales primeras.Hay dos obvias:
Las fuerzas sobre el sistema son verticales: se conserva el momento cinetico en la direc-cion vertical:HG ·k1 = Cte.
Las fuerzas son potenciales, la ligadura lisa y estacionaria: se conserva la energıa.
Para la ecuacion de la energıa, solo falta el potencial: toda la masa enG
V = (m+m)gζG = 2mg34
asinϕ1
194

Ademas, de la energıa cinetica podemos eliminar todos los terminos que ya sabemos que sonconstantes:
m
ξ 2+
η2 +a2
48
[(27cos2ϕ1 +5
)ϕ2
1 +5cos2ϕ1θ21 +(((((((((
2ϕ22 +2cos2 ϕ2θ2
2
]
+32
mgasinϕ1 = E′
El momento cinetico del sistema enG sera
HG = GG2∧m(ωωω21∧GG2)+ IIIG2 ·ωωω21+GG3∧m(ωωω21∧GG3)+Cte.
IIIG3 ·ωωω31
Como solo nos interesa la componente segunk1, que es la constante, procuraremos simplificarel calculo: los terminos que van a salir horizontales no los calcularemos.
GG2∧m(ωωω21∧GG2) = −a4
j2∧ma4
(θ1cosϕ1 i2−⊥k1
ϕ1k2)
Ası que la parte que nos interesa sera
HG =ma2
16
. . .0
θ1cosϕ1
+
ma2
12
. . .0
θ1cosϕ1
+
ma2
16
. . .0
θ1cosϕ1
+Cte
El momento cinetico segunj2 es nulo; seguni2 es horizontal; solo nos interesa la componentesegunk2. Proyectandok1 en ejesS2 se tiene
k1 = sinϕ1 j2 +cosϕ1k2
Por tanto, la magnitud que se conserva es
HG ·k1 = Hz2 cosϕ1 ⇒ θ1cos2 ϕ1 = C3
Para reducir el problema a cuadraturas, se sustituyeθ1 en la ecuacion de la energıa simplificada
m
a2
48
[(27cos2ϕ1 +5
)ϕ2
1 +5cos2ϕ1C2
3
cos4ϕ1
]
+32
mgasinϕ1 = E′ =ma2
48C4
ϕ2 =C4− 5C2
3cos2ϕ1
− 72gsinϕ1a
5+27cos2ϕ1⇒
∫
dt = ±∫√√√√
5+27cos2 ϕ1
C4− 5C23
cos2 ϕ1− 72gsinϕ1
a
dϕ1
y volviendo a la del momento cinetico, se tiene
∫
dθ1 = ±∫
C3
cos2 ϕ1
√√√√
5+27cos2 ϕ1
C4− 5C23
cos2 ϕ1− 72gsinϕ1
a
dϕ1
3 Llevamos el sistema a la posicion indicada (AB seguny1, CDvertical) y aplicamos la percusionP. EnA aparecera una percusionde ligadura, y un par de percusiones de accion reaccion enB. Estasse anulan para todo el sistema. Las ecuaciones que tenemos son:
Cantidad de movimiento para todo el sistema
Momento cinetico para todo el sistema
Momento cinetico de la varillaCD enB
z1
y1
α
PC
D
A
N
No se pide el problema completo, sino solo el valor deP para que empiece a moverse comoun solido, es decir,ϕ1 = ϕ2, θ1 = θ2 = 0. Para esto bastarıa con las componentesx de las
195

ecuaciones del momento cinetico del sistema y de la varillaCD. De todos modos, podemosirlas planteando todas, pues no son complicadas:
0Pcosα
N−Psinα
= mvd
G−mvaG = m
ξ d
ηd
34aϕd
1
−m
000
Para la del momento cinetico de la varillaCD en su centro de ma-sas, hay que tener en cuenta que, en esa posicion,j3 = k1; las otrasdirecciones no estan definidas al no estarloθ2. Esto es un proble-ma serio, pues estamos en la posicion singular de los angulos deEuler: θ2 no influye para nada en el movimiento; solo influyeϕ2.Por tanto, la varilla solo puede moverse dentro del planoG3y3z3.Si empezara a moverse en otra direccion, para expresarlo con es-tas variables habrıa que girar instantaneamente los ejespara quela velocidad deC estuviera contenida enG3y3z3 (velocidad infini-ta, desplazamiento finito). La unica salida es saber de antemano enque direccion va a moverse, y poner el ejeG3x3 normal.
x
y
z
b
x3
y3
z3
P
ϕd2
θd2
En este caso es sencillo, pues se ve claramente la direcciondel movimiento:θ2 = −π/2,con i3 = i1 y k3 = −j1.
−Pcosα a2
00
= Hd
G3−Ha
G3=
ma2
12
ϕd2
00
− ma2
12
000
→ ϕd2 = −6Pcosα
ma
→ θd2 =?
Para el sistema completo, tomaremos momento enA, de modo quela percusion de ligadura no aparezca. Notese que todas lasmagnitu-des se calculan en la posicion inicial, en la que los ejesS2 coincidencon los fijos.
AC∧P = AG2∧mvdG2
+HdG2
+AG3∧mvdG3
+HdG3
θ d1
ϕd1 ϕd
2G2 G3
G
z1
y1
α
PC
D
A
N
Para los centros,
vdG2
= vdG +ωωωd
21∧−ak
j1 =
0ξ d
34aϕd
1
+
a4
θd10
−ϕd1
vdG3
= vdG +ωωωd
21∧ak
j1 =
0ξ d
34aϕd
1
+
a4
−θd1
0ϕd
1
x
y
z
b bb
x2
z2
y2
G
ϕd1
θd1
Sustituyendo,
Pa
−12 cosα −sinα
00
= ma2
ϕd1/40
−θd1 /8
+
ma2
12
ϕd1
0θd
1
+ma2
ϕd1
0θd
1 /4
+
ma2
12
ϕd2
00
De esta ecuacion, teniendo en cuenta el valor deϕd2 , se obtiene
θd1 = 0 −Pasinα =
43
ma2ϕd1 ⇒ ϕd
1 = −3Psinα4ma
Para que el sistema salga de la percusion con el campo de velocidades de un solido,
ϕd1 = ϕd
2 − 3Psinα4ma
= −6Pcosαma
⇒ tanα = 8
196

Lo de moverse como solido vale solo en el instante de salidade la percusion; a partir de ese mo-mento cada varilla se mueve segun las ecuaciones antes deducidas, y las velocidades angularesevolucionan por separado.
4 En el movimiento posterior a la percusion:
La varilla CD se mueve como solido de Poinsot simetrico girando alrededor de un ejeprincipal: velocidad angular constanteϕd
2 , eje de giro constante de direccioni1.
El centro de masas se mueve con cantidad de movimiento constante en el plano horizontal;su altura dependera del anguloϕ1 de la varillaAB.
La varillaAB se mueve segun las cuadraturas del apartado 2, tomando comocondicionesiniciales las de salida de la percusion. Es facil ver que elmovimiento de giro va a seranalogo al de un pendulo plano.
La varilla sale de la percusion conθd1 = 0 y ϕd
1 = −3Psinα4ma . Sustituyendo en las cuadraturas se
obtienen las constantes
θd1 cos2 ϕd
1 = 0 ·1 = C3 = 0 ⇒ θ1 = 0
m
a2
48
[(27cos2 ϕ1+5
)ϕ2
1 +0]
+32
mgasinϕ1 = E′ =ma2
48C4 =
= m
a2
48
[
(27+5)9P2sin2 α16m2a2 +0
]
+0
(27cos2 ϕ1+5
)ϕ2
1 =18P2sin2α
m2a2 − 72a
gsinϕ1
El coeficiente deϕ21 no se anula nunca, y el potencial es el del peso: el movimientodebido aϕ1
es analogo al del pendulo simple. Tendremos tres posiblesmovimientos:
Libraciones
Movimiento asintotico a la vertical
Rotaciones
El movimiento asintotico es la separacion entre las libraciones y las rotaciones. Corresponde alcaso en que llega a la vertical con velocidad angular nula, esdecir,
0 =18P2sin2 α
m2a2 − 72a
g ·1 ⇒ P2 ⋚ 4m2agsinα
ParaP menores habra oscilaciones acotadas dentro del planoOy1z1; paraP mayores, rotacionesdentro del mismo plano. Mientras tanto, el sistema se desplaza horizontalmente con velocidadconstanteηd, y la varillaCD gira en el mismo plano con velocidad angular constanteϕd
2 .
197

Solucion por mecanica analıtica
1 El primer apartado, el calculo de la energıa cinetica, sehace exactamente igual que pornewtoniana. Se llegarıa al mismo resultado.
2 El sistema es holonomo (ligadura integrable), escleronomo (el suelo no se mueve, la rotulaune siempre los mismos puntos) y potencial: es conservativoy tiene lagrangiana. LaT ya latenemos, y el potencial tambien se calculo antes por newtoniana. Podemos escribirla directa-mente:
L = m
ξ 2+ η2 +a2
48
[(27cos2ϕ1 +5
)ϕ2
1 +2ϕ22 +5cos2ϕ1θ2
1 +2cos2ϕ2θ22
]
−mg32
asinϕ1
De las seis coordenadas generalizadas, cuatro son cıclicas o ignorables, pues solo aparecenexplıcitamenteϕ1 y ϕ2. Tendremos pues cuatro integrales primeras, mas la de la energıa por serconservativo. Veamos primero las cıclicas:
q j Lq j Lq j L j
ξ 2mξ 0 ξ = C1
η 2mη 0 η = C2
θ1524ma2cos2ϕ1θ1 0 cos2 ϕ1θ1 = C3
θ2ma2
12 cos2ϕ2θ2 0 cos2 ϕ2θ2 = C4
Cada integral primera representa la conservacion de la magnitud cinetica asociada a esa coor-denada. Paraξ y η, coordenadas del centro de masas del sistema, la cantidad demovimientodel sistema en esa direccion. Paraθ1 y θ2, angulos de precesion de cada varilla, la componentedel momento cinetico de esa varilla en la direccion del giro de precesion.
La ecuacion deϕ1 es mas compleja:
Lϕ1 =ma2
24
(27cos2 ϕ1+5
)ϕ1
Lϕ1 = ma2
48
[−52cosϕ1sinϕ1 ϕ2
1 −10cosϕ1sinϕ1θ21
]− 3
2mgacosϕ1
ma2
24ddt
[(27cos2 ϕ1+5
)ϕ1]+
ma2
48cosϕ1sinϕ1
(52ϕ2
1 +10θ21
)+
32
mgacosϕ1 = 0
La deϕ2 algo menos, pues solo aparece en un termino:
Lϕ2 =ma2
12ϕ2
Lϕ2 = −ma2
12cosϕ2sinϕ2 θ2
2
ma2
12ϕ2+
ma2
12cosϕ2sinϕ2 θ2
2 = 0
Las dos ultimas se pueden integrar una vez, pues ya vimos al resolverlo por newtoniana quese puede reducir a cuadraturas. Es necesario sustituir en ellas las otras integrales, de modo quequeden las dos como funciones deϕi y sus derivadas. En la segunda es muy facil:
cos2 ϕ2θ2 = C4 → θ2 =C4
cos2 ϕ2
ma2
12ϕ2+
ma2
12cosϕ2sinϕ2
(C4
cos2ϕ2
)2
= 0 → ϕ2 = −sinϕ2C24
cos3ϕ2
multiplicando porϕ2 : ϕ2 ϕ2 = −sinϕ2C24
cos3ϕ2ϕ2 → ϕ2
2 = − C24
cos2 ϕ2+C5
198

A esta expresion se llegaba por newtoniana sustituyendo laintegral del momento cinetico ver-tical en la de la energıa relativa al centro de masas. Allı las constantes se numeraron de otromodo pues aparecieron en orden distinto.
En la primera probablemente no compense hacerlo, pues saldrıa muy complicado, y aunnos queda otra integral primera: la de la energıa. Con ella,sustituyendo las otras integrales,llegamos al mismo resultado que integrando la de laϕ1, y sin necesidad de integrar:
m
ξ 2+
η2 +a2
48
[(27cos2ϕ1 +5
)ϕ2
1 +2ϕ22 +5cos2ϕ1θ2
1 +2cos2 ϕ2θ2
2
]
+mg32
asinϕ1 = E
ma2
48
[
(27cos2ϕ1 +5
)ϕ2
1 +5cos2 ϕ1
(C3
cos2 ϕ1
)2]
+mg32
asinϕ1 = E′
(27cos2 ϕ1+5
)ϕ2
1 = C6−72a
mgsinϕ1−5C2
3
cos2 ϕ1
De aquı se obtiene una cuadratura de la forma±√
f (ϕ1)dϕ1 = dt ; sustituyendo estadt enla cuadratura deθ1 se obtienedθ1 = ±g(ϕ1)dϕ1, tal como se hizo por newtoniana. De modoanalogo se obtienen cuadraturas paraϕ2 y θ2.
3 Para tratar la percusion por mecanica analıtica aplicaremos
∂L
∂ q j
∣∣∣∣
d
− ∂L
∂ q j
∣∣∣∣
a
= QPj
Para las derivadas parciales, usamos la lagrangiana particularizada en la posicion inicial (comoderivamos solo respecto a las velocidades, da lo mismo sustituir los valores de las coordenadasantes o despues de derivar; hacerlo antes ahorra trabajo).
L =m
ξ 2+ η2 +a2
48
[(27cos2 ϕ1+5
)ϕ2
1 +2ϕ22 +5cos2 ϕ1θ2
1 +2cos2 ϕ2θ22
]
−mg32
asinϕ1
La =m
ξ 2+ η2 +a2
48
[
32ϕ21 +2ϕ2
2 +5θ21 + 0 · θ2
2
]
−0
El coeficiente deθ2 es cero. Se debe a que, con la varilla vertical,cualquier giroθ2 es un giro de la varilla alrededor de su eje, queno tiene sentido dinamico por ser infinitamente delgada. Estamosen el punto singular de los angulos de Euler, como se coment´o enla solucion por newtoniana. Tambien veremos que la solucion delproblema en este caso singular depende de como tomemosθ2, queno esta definida. x
y
z
b
x3
y3
z3
P
ϕd2
θd2
Para obtener lasQPj , tenemos que poner el punto de
aplicacionC en un punto generico y derivar respectoa las coordenadas:
QPj =
N
∑i=1
Pi ·∂ r i
∂q j= P · ∂ rC
∂q j
Como solo hay una percusion, se calcula solamenteel desplazamiento del punto de aplicacionδ rC.Aquı no se pueden sustituir las coordenadas por suvalor antes y durante la percusion, porque vamosa derivar precisamente respecto a las coordenadas.Despues de derivar se sustituira.
x
y
z
b
b
b
G
G2
G3 ≡ B
θ1
θ2
ϕ1
ϕ2A
D
C
(ξ ,η)
La posicion generica deC sera:
rC = rG +GG3+G3C =
ξη
34asinϕ1
+
a4
cosϕ1cosθ1cosϕ1sinθ1
sinϕ1
+
a2
−cosϕ2cosθ2−cosϕ2sinθ2
sinϕ2
199

Ni siquiera se puede simplificar dejando cada vector en sus ejes mas simples, y sumando des-pues de derivar y particularizar: hay desplazamientos queconsisten precisamente en una varia-cion de esos ejes. Los DVCL seran:
δ rC =
100
δξ +
010
δη +
a4
−sinϕ1cosθ1−sinϕ1sinθ1
4cosϕ1
δϕ1 +
a4
−cosϕ1sinθ1cosϕ1cosθ1
0
δθ1+
+a2
sinϕ2cosθ2sinϕ2sinθ2
cosϕ2
δϕ2 +
a2
cosϕ2sinθ2−cosϕ2cosθ2
0
δθ2
Ahora sı podemos sustituir los valores de las coordenadas durante la percusion,θ1 = π/2,ϕ1 = 0, ϕ2 = π/2. θ2 no esta definida pero, para poder resolver el problema, hay que tomarlacomo−π/2, de modo que la velocidad angular de la varilla despues de la percusion coincidacon la unica posible,ϕ2. Es decir, hay que intuir la solucion para plantear correctamente elproblema.
δ rC =
100
δξ +
010
δη +
00a
δϕ1+
+a4
−100
δθ1 +
a2
0−10
δϕ2+
a2
000
δθ2
Sobre la figura se puede comprobar que los DVCL sonefectivamente estos.θ2 no interviene.
x
y
z
b bb
x2
z2
y2
G
ϕd1
θd1
b
x3
y3
z3
P
ϕd2
θd2
Hay otro camino para calcular las∂ r i∂q j
: calcular la velocidad del punto por el camino massencillo, e igualar con
vi =n
∑j=1
∂ r i
∂q jq j +
∂ r i
∂ t
Los coeficientes de cada ˙q j seran los vectores buscados. Tiene la ventaja de que podemos cal-cular la velocidad ya particularizada para la percusion, que suele ser mas simple:
vC31 = vG3
31 +ωωω31∧G3C = vG21+ωωω21∧GG3+ωωω31∧G3C =
=
ξη
34aϕ1
+
a4
−θ10
ϕ1
+
a2
0−ϕ2
0
El resultado es obviamente el mismo que por el otro camino, pero mucho mas rapido: se hapodido escribir directamente, casi sin operaciones.
Multiplicando escalarmenteP= P(0,cosα,−sinα) por cada una de las derivadas parcialesse obtienen lasQP
j :
QPη = 0 QP
ξ = Pcosα QPϕ1
= −Pasinα QPθ1
= 0 QPϕ2
= −Pa2
cosα QPθ2
= 0
200

Podemos ya plantear las ecuaciones impulsivas:
ξ ) 2mξ d − 0 = 0 → ξ d = 0
η) 2mηd − 0 = Pcosα → ηd =Pcosα
2m
ϕ1)4ma2
3 ϕd1 − 0 = −Pasinα → ϕd
1 = −3Psinα4ma
θ1)5ma2
24 θd1 − 0 = 0 → θd
1 = 0
ϕ2)ma2
12 ϕd2 − 0 = −Pa
2 cosα → ϕd2 = −6Pcosα
maθ2) 0 − 0 = 0 → θd
2 = ?
Para que inmediatamente despues de la percusion el movimiento sea el de un solido, lasvelocidades angulares de las varillas deben ser iguales, demodo que
ϕd1 = −3Psinα
4ma= ϕd
2 = −6Pcosαma
⇒ tanα = 8
4 Habiendo obtenido las mismas ecuaciones del movimiento, y las mismas condiciones inicia-les (los valores de salida de la percusion), el analisis cualitativo se hace como por newtoniana.Puede haber algo de dificultad en identificar el movimiento deCD como un solido de Poinsot,pues han salido de la Lagrangiana directamente sin ver la conservacion del momento vectorcinetico. Habrıa que trabajar algo mas para dejarlas de lado en el analisis cualitativo.Nota: En la solucion por newtoniana se llego a estas integrales primeras del movimiento de lavarillaCD:
θ2cos2 ϕ2 = C1ma2
24
(ϕ2
2 + θ22 cos2ϕ2
)= C1
que corresponden a la conservacion de la componente vertical deHG3 y a la energıa cinetica delmovimiento relativo al centro de masas.
Por mecanica analıtica se ha llegado a las mismas ecuaciones, teniendo que integrar unaecuacion de Lagrange para llegar a la segunda.
Ya se ha visto que estas ecuaciones pueden reducirse a cuadraturast(ϕ2) y θ2(ϕ2). Ademas,las cuadraturas pueden integrarse analıticamente (por ejemplo, con Maple). Mas difıcil es des-pejarlas para obtener las ecuaciones horarias explıcitamente.
Sin embargo, el movimiento en sı es muy sencillo: caso de Poinsot simetrico, que para unavarilla es todavıa mas simple. Equivale a un giro con velocidad angular constante alrededorde un eje principal, constante en ejes fijos y en ejes solido.Al ser nulo el momento de inerciasegunAB, el momento cinetico es normal a la varilla:(Ap,0,Ar). Como todos los ejes normalesa la varilla porG3 son principales, la velocidad angular tiene la misma direccion que el vectormomento cinetico, y es tambien constante.
La dificultad esta en que, para el movimiento de Poin-sot, los ejes adecuados estan ligados a la direccion delvector momento cinetico, no a la vertical. Matematica-mente, hay que encontrar un cambio de variables que de-je las ecuaciones en forma sencilla. Fısicamente, se tratade hacer un cambio de ejes conveniente. Lo mas sencilloes tomar la direccion del momento cinetico como ejez4;dentro del plano normal, la direccion horizontal serax4 yla de maxima pendientey4. x
y
z
b
z4 ω
ω t x4
y4
HG3
Seanθ y φ los angulos en esfericas de la recta soporte del vector momento cinetico, yω lavelocidad angular de la varilla, todos constantes. Entonces, los versores del sistemaS4 seran
i4 = (−sinθ ,cosθ ,0)
j4 = (−sinφ cosθ ,−sinφ sinθ ,cosφ)
k4 = (cosφ cosθ ,cosφ sinθ ,sinφ)
201
La varilla habra girado un anguloω t respecto al ejeG3x4, por lo que un vector unitario en ladireccion de la varilla tendra las componentes
u = cosω t i4+sinω t j4 =
= (−sinθ cosω t −sinφ cosθ sinω t,cosθ cosω t −sinφ sinθ sinω t,cosφ sinω t)
De aquı se obtienen las coordenadas de la varilla.ϕ2 es el angulo de nutacion, el que forma lavarilla con el plano horizontal:
sinϕ2 = uz = cosφ sinω t
El angulo de precesionθ2 se obtiene de la proyeccion horizontal de la varilla
tanθ2 =uy
ux=
cosθ cosω t −sinφ sinθ sinω t−sinθ cosω t −sinφ cosθ sinω t
Trabajando directamente con las integrales primeras, no esprobable que se acierte a encontrarel cambio de variables que lleva a esta solucion explıcita. Lo que tenemos es un problema muysencillo, proyectado en unos ejes poco adecuados.
202
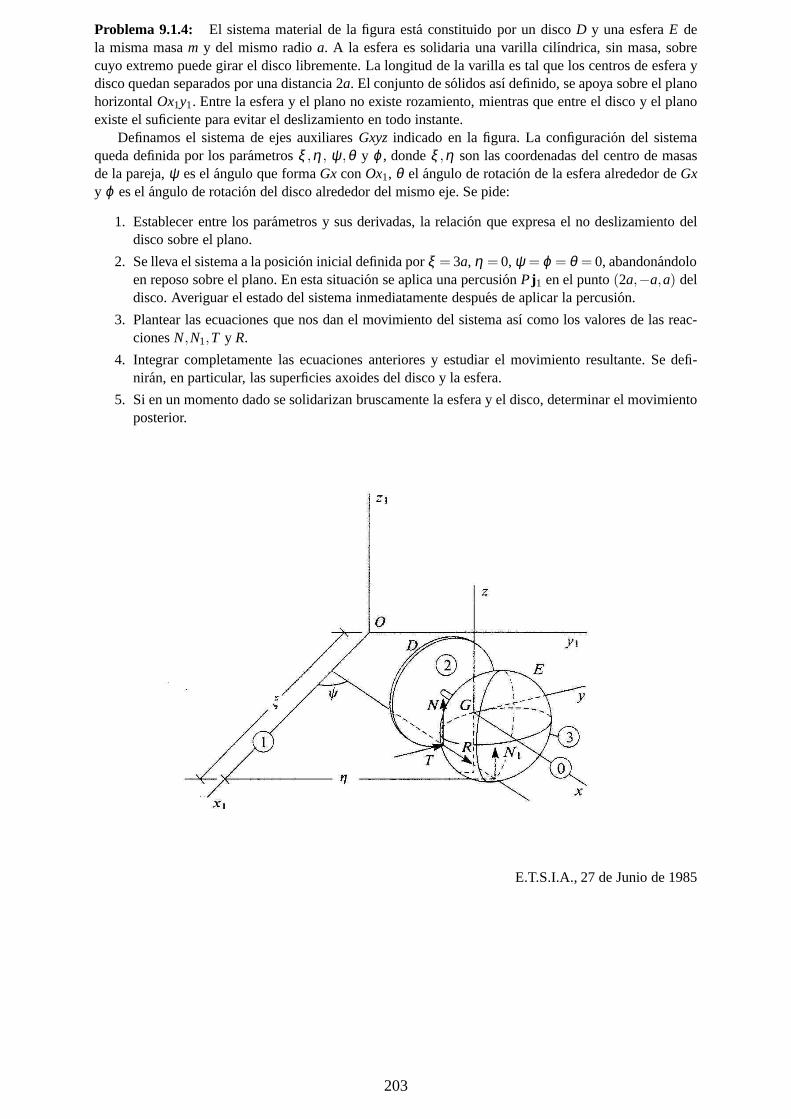
Problema 9.1.4: El sistema material de la figura esta constituido por un disco D y una esferaE dela misma masam y del mismo radioa. A la esfera es solidaria una varilla cilındrica, sin masa,sobrecuyo extremo puede girar el disco libremente. La longitud dela varilla es tal que los centros de esfera ydisco quedan separados por una distancia 2a. El conjunto de solidos ası definido, se apoya sobre el planohorizontalOx1y1. Entre la esfera y el plano no existe rozamiento, mientras que entre el disco y el planoexiste el suficiente para evitar el deslizamiento en todo instante.
Definamos el sistema de ejes auxiliaresGxyz indicado en la figura. La configuracion del sistemaqueda definida por los parametrosξ ,η , ψ ,θ y ϕ , dondeξ ,η son las coordenadas del centro de masasde la pareja,ψ es el angulo que formaGx conOx1, θ el angulo de rotacion de la esfera alrededor deGxy ϕ es el angulo de rotacion del disco alrededor del mismo eje.Se pide:
1. Establecer entre los parametros y sus derivadas, la relacion que expresa el no deslizamiento deldisco sobre el plano.
2. Se lleva el sistema a la posicion inicial definida porξ = 3a, η = 0,ψ = ϕ = θ = 0, abandonandoloen reposo sobre el plano. En esta situacion se aplica una percusionPj1 en el punto(2a,−a,a) deldisco. Averiguar el estado del sistema inmediatamente despues de aplicar la percusion.
3. Plantear las ecuaciones que nos dan el movimiento del sistema ası como los valores de las reac-cionesN,N1,T y R.
4. Integrar completamente las ecuaciones anteriores y estudiar el movimiento resultante. Se defi-niran, en particular, las superficies axoides del disco y laesfera.
5. Si en un momento dado se solidarizan bruscamente la esferay el disco, determinar el movimientoposterior.
E.T.S.I.A., 27 de Junio de 1985
203
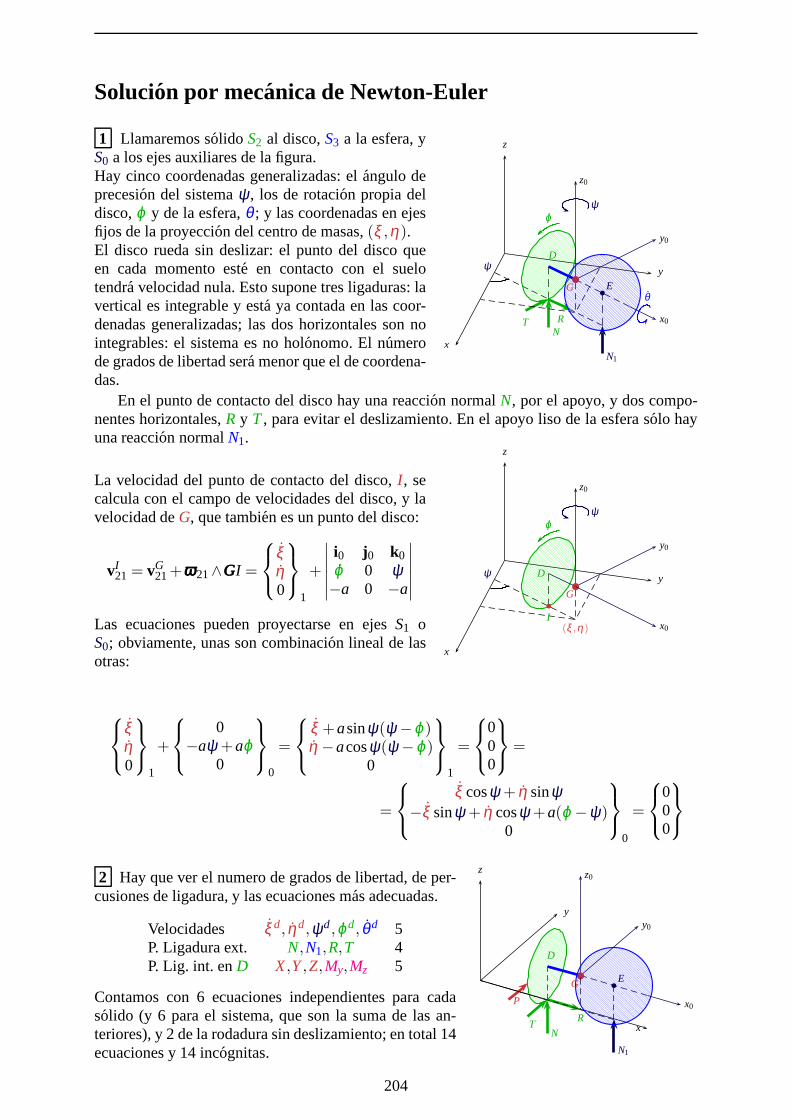
Solucion por mecanica de Newton-Euler
1 Llamaremos solidoS2 al disco,S3 a la esfera, yS0 a los ejes auxiliares de la figura.Hay cinco coordenadas generalizadas: el angulo deprecesion del sistemaψ, los de rotacion propia deldisco,ϕ y de la esfera,θ ; y las coordenadas en ejesfijos de la proyeccion del centro de masas,(ξ ,η).El disco rueda sin deslizar: el punto del disco queen cada momento este en contacto con el suelotendra velocidad nula. Esto supone tres ligaduras: lavertical es integrable y esta ya contada en las coor-denadas generalizadas; las dos horizontales son nointegrables: el sistema es no holonomo. El numerode grados de libertad sera menor que el de coordena-das.
x
y
z
b
b
x0
y0
z0
G
D
E
ϕψ
θ
ψ
N1
NT R
En el punto de contacto del disco hay una reaccion normalN, por el apoyo, y dos compo-nentes horizontales,R y T, para evitar el deslizamiento. En el apoyo liso de la esfera solo hayuna reaccion normalN1.
La velocidad del punto de contacto del disco,I , secalcula con el campo de velocidades del disco, y lavelocidad deG, que tambien es un punto del disco:
vI21 = vG
21+ωωω21∧GGGI =
ξη0
1
+
∣∣∣∣∣∣
i0 j0 k0ϕ 0 ψ−a 0 −a
∣∣∣∣∣∣
Las ecuaciones pueden proyectarse en ejesS1 oS0; obviamente, unas son combinacion lineal de lasotras:
x
y
z
b
b
x0
y0
z0
G
(ξ ,η)
D
I
ϕψ
ψ
ξη0
1
+
0−aψ +aϕ
0
0
=
ξ +asinψ(ψ − ϕ)η −acosψ(ψ − ϕ)
0
1
=
000
=
=
ξ cosψ + η sinψ−ξ sinψ + η cosψ +a(ϕ − ψ)
0
0
=
000
2 Hay que ver el numero de grados de libertad, de per-cusiones de ligadura, y las ecuaciones mas adecuadas.
Velocidades ξ d, ηd, ψd, ϕd, θd 5P. Ligadura ext. N,N1,R,T 4P. Lig. int. enD X,Y,Z,My,Mz 5
Contamos con 6 ecuaciones independientes para cadasolido (y 6 para el sistema, que son la suma de las an-teriores), y 2 de la rodadura sin deslizamiento; en total 14ecuaciones y 14 incognitas.
x
y
z
bb
x0
y0
z0
G
D
E
N1
NT
R
P
204

Como no se piden las percusiones de ligadura, interesarıa buscar las ecuaciones asociadasa cada grado de libertad. En este caso no va a ser posible, porque las percusiones de ligaduraexteriores van a intervenir en las del sistema: en total tendremos 9 incognitas. Y procuraremosno dividirlo, para que no aparezcan las 5 percusiones de ligadura interiores de la union entredisco y esfera. Lo mas conveniente parece ser aplicar las ecuaciones de CM y MC al sistema (6),las de rodadura (2), y aislar la esfera tomando solo la ecuacion asociada a su grado de libertad,el giro θ (1).
Proyectaremos en ejesS0, que en la posicion inicial coinciden con los fijos. Las ecuacionesimpulsivas de cantidad de movimiento del sistema son triviales:
RP+TN+N1
= m
ξ d
ηd
0
−m
000
Tomaremos momentos enG, que simplifica los calculos cineticos. Solo intervienen las ve-locidades relativas a unos ejes con origen enG paralelos a los fijos:
hG = GD∧m(ωωω01∧GD)+ IIID ·ωωω21+GE∧m(ωωω01∧GE)+ IIIE ·ωωω31
Las velocidades angulares son, obviamente,ωωω21= (ϕ,0, ψ) y ωωω31 =(θ ,0, ψ). El tensor de iner-cia de la esfera es, naturalmente, esferico, con todos los momentos2
5ma2; el del disco sera14ma2
respecto a los diametros y12ma2 respecto al eje de giro. Las velocidades de los centrosD y Erespecto al centro de masas se deben solo al giro de precesi´on ψ .
hG =
00
ma2ψ
+
ma2
4
2ϕ0ψ
+
00
ma2ψ
+
2ma2
5
θ0ψ
La ecuacion del momento cinetico para percusiones sera
Ta(N−N1−R)a−(P+T)a
= ma2
12ϕd + 2
5θd
05320ψd
−
000
Si aislamos la esfera, podemos tomar la unica ecuacionen la que no aparecen percusiones de ligadura: la de mo-mento cinetico segun el eje de giro:
0 =25
ma2θd−0
x
y
z
bb
x0
y0
z0
G
D
E
N1
NT
R
P
Contamos tambien con las ecuaciones de la rodadura sin deslizamiento, particularizadaspara la configuracion del momento de la percusion
ξ d = 0 ηd +a(ϕd− ψd) = 0
Algunos resultados son inmediatos:
ξ d = θd = R= N = N1 = 0
Las ecuaciones restantes se simplifican,
T −2mηd = −P T − ma2
ϕd = 0
−T − 5320
maψd = P ηd +aϕd −aψd = 0
y proporcionan el resto de las incognitas
T = − 93305
P ηd =106305
Pm
ϕd = −186305
Pma
ψd = −1661
Pma
205

3 Para el movimiento posterior, podemos aplicarlas mismas ecuaciones que en la percusion, peroahora seran diferenciales; las condiciones inicialesseran las de salida de la percusion. Se puede susti-tuir alguna por la de la energıa, pues el sistema esobviamente conservativo. Para no tener que calcu-lar la energıa cinetica, seguiremos con las mismasecuaciones. Para la ecuacion de la cantidad de movi-miento del sistema (CM), se tiene:
Rcosψ −T sinψRsinψ +T cosψ
N+N1−2mg
= 2m
ξη0
x
y
z
b
b
x0
y0
z0
G
D
E
ψ
N1
NT R
Para despejar las fuerzas de ligadura, es mas conveniente proyectarla en ejesS0:
RT
N+N1−2mg
= 2m
ξ cosψ + η sinψ−ξ sinψ + η cosψ
0
En el movimiento posterior, los ejesS0 ya no coinciden con los fijos. La ecuacion de lacantidad de movimiento se ha proyectado en ejes fijos, pero ladel momento cinetico convienedejarla en los moviles:
hG∣∣1 =
ddt
ma2
12ϕ + 2
5θ0
5320ψ
+ma2
∣∣∣∣∣∣
i0 j0 k00 0 ψ
12ϕ + 2
5θ 0 5320ψ
∣∣∣∣∣∣
La ecuacion (MC) queda
Ta(N−N1−R)a
−Ta
= ma2
12ϕ + 2
5θψ(1
2ϕ + 25θ)
5320ψ
Para la esfera tenemos la ecuacion del momentocinetico segunGx0, que es en realidad la primera deEuler (MCEsf):
Ap+qr(C−B) =Mx ⇒ 0 =25
ma2θ
Ni la reaccion del suelo ni las fuerzas y momentosde ligadura en la union con el disco dan momentosegun ese eje.
bb
Z
Mz
YMyX
D
x0y0
z0
G
E
N1
Finalmente, tenemos las ecuaciones de la ligadura de rodar sin deslizar, proyectados en unosejes u otros:
ξ +asinψ(ψ − ϕ) = 0η −acosψ(ψ − ϕ) = 0
ξ cosψ + η sinψ = 0−ξ sinψ + η cosψ +a(ϕ − ψ) = 0
4 El sistema de ecuaciones diferenciales, algunas no lineales, puede parecer formidable. Peroel sistema en sı es sencillo: se conserva la energıa, el peso no hace mas que pegarlo contra el sue-lo, las ligaduras no trabajan. . . lo natural es que salga un movimiento estacionario. La ecuaciondel giro de la esfera es trivial; las condiciones iniciales son las de salida de la percusion.
θ = 0 → θ = θ0 = 0 → θ = θ0
206

De MC1 y MC3 se obtiene
Ta = 12ma2ϕ
−Ta = 5320ma2ψ
12
ϕ +5320
ψ = 0 (9.3)
Proyectando las ecuaciones de cantidad de movimiento en ejes S0, seguny0:
T = 2m(−ξ sinψ + η cosψ)
Derivando las ecuaciones de la ligadura cinematica, proyectadas enS0
R/2m︷ ︸︸ ︷
ξ cosψ + η sinψ + ψ(
−a(ϕ−ψ)︷ ︸︸ ︷
−ξ sinψ + η cosψ)
= 0
−ξ sinψ + η cosψ︸ ︷︷ ︸
T/2m
+ ψ(−ξ cosψ − η sinψ︸ ︷︷ ︸
0
+a(ϕ − ψ) = 0 → −T = 2ma(ϕ − ψ)
Con esta ultima y MC3 se puede eliminarT:
−T = ma5320
ψ → 0 = ma
(
ϕ − 9320
ψ)
(9.4)
Como (9.3) y (9.4) son incompatibles, las dos derivadas tienen que ser nulas
ϕ = ψ = 0 ⇒ ϕ = −186305
Pma
t +ϕ0 ψ = −1661
Pma
t +ψ0 T = 0
Sustituyendo estos valores en las ecuaciones de las ligaduras, proyectadas ahora en ejes fijos
ξ = −a(ψ0− ϕ0)sinψ0 t = −106305
Pm sin
(−16
61Ptma
)
η = a(ψ0− ϕ0)cosψ0 t = 106305
Pm cos
(−16
61Ptma
)
se integran directamente, con las condiciones inicialesξ0 = 3a, η0 = 0,
ξ = −10680
a cos 16P61mat +
34680
a η =10680
a sin 16P61mat
De la ecuacion de la cantidad de movimiento segunGy0 se obtiene
R= 2m(
ξ cosψ + η sinψ)
= 2maψ(ϕ − ψ) ⇒ R= −(
106305
)2 P2
ma
Finalmente, para las normales contamos con CMz y MCy:
N+N1 = 2mg
N−N1 = R+maψϕ2
= ma12323721
P2
m2a2
N = mg+6163721
P2
maN1 = mg− 616
3721P2
ma
Notese que, siN1 se hace negativo, la esfera se levanta del suelo.Axoides: El sistema precesa con velocidad angular constanteψ0. El centro de masas des-
cribe una circunferencia de centro(34680 a,0). Hay por tanto un punto del eje,F , situado a una
distancia10680 a deG, que no se mueve.
207

G F
O1
y1
x1 G F
Iψ
ϕ
ω21
EIR21
z1
x1
E F
EIR31
ψ
z1
x1
Disco: Hay dos puntos de velocidad nula: el de contactoI y el puntoF del eje, que tambienes parte del disco. ElEIR21 pasara por esos dos puntos.F esta fijo en el espacio, y en el ejedel disco. El punto del discoI es siempre es uno de la periferia; en ejes fijos, recorre unacircunferencia sobre el plano horizontal. Las axoides son conos de verticeF, la fija se apoya enla circunferencia trayectoria deI , y la movil en la periferia del disco.
Al mismo resultado se llega sin necesidad de conocer la trayectoria deG. Se sabe queI tienevelocidad nula y se conoce la velocidad angularωωω21 = ϕ i0 + ψ k0: esto determina elEIR21, yde su movimiento se obtienen las axoides.
Esfera: solo tiene precesionωωω31 = ψ k0. F es siempre el mismo punto de la esfera, comotodos los del ejey0. El EIR31 y las dos axoides son la recta vertical fija que pasa porF.
5 Si se solidifican de pronto la esfera y el disco, se introduce bruscamente la ligadura
ϕ = θ → ±Mx0
Aparece un momento de percusion interno en la union: pone agirar a la esfera, y frena eldisco, para que ambos tengan la misma velocidad angular. Al ser un par de accion-reaccion, elmomento resultante es nulo para todo el sistema. Pero eso no quiere decir que no tenga efectoglobal: al variarϕ , a traves de las ligaduras varıan la precesion y la velocidad del centro demasas, lo que puede producir percusiones en todas las ligaduras exteriores.
Ahora se toman como valores iniciales los del movimiento, que coinciden con los de salidade la primera percusion. El movimiento es una precesion y rotacion uniforme, y el centro demasas recorre una circunferencia con velocidad constante en modulo. Las velocidades tienenpues simetrıa de revolucion, y podemos simplificar el problema: en vez de coger un anguloarbitrario ψ0 t, podemos dar la percusion en el momento en que coinciden losejesS1 y S0.Luego, para llevarlo a la posicion que sea, no hay mas que rotar las velocidades que se obtengan.
Las ecuaciones seran ahora:
Cantidad de movimiento del sistema:
R = 2m(
ξ d−0)
T = 2m(ηd− 106
305Pm
)
N+N1 = 0 (≥ 0) x
y
z
−Mx0
+Mx0b
b
x0
y0
z0
G
D
E
N1
NT
R
Momento cinetico del sistema:
Ta = ma2(
ϕd
2 + 2θ d
5 + 186610
Pma−0
)
(N−N1−R)a = ma2(0−0)
−Ta = ma2(53
20ψd + 5320
1661
Pma
)
Momento cinetico de la esfera segunGx0:
Mx0 =25
ma2θd −0
208

Ligaduras cinematicas, las de rodadura y la nueva:
ξ d = 0
ηd = −a(ϕd − ψd)
ϕd = θd
Del sistema se obtiene directamente
ξ d = R= N = N1 = 0
El resto del sistema es mas complicado:
Entre las ecuaciones MC1 y MC2 se eliminaT, y teniendo en cuenta la nueva ligaduraϕd = θd, se llega a
910
ϕd +5320
ψd +P
ma= 0
Entre las ecuaciones CM2 y MC3 se elimina tambienT, y sustituyendoηd de la segundaecuacion de ligadura, se obtiene
−2ϕd +9320
ψd = 0
De estas dos ecuaciones se obtiene
ϕd = θd = − 9301897
Pma
ψd = − 4001897
Pma
Y sustituyendo estos valores en cualquiera de las otras utilizadas,
ηd =5301897
Pm
T = − 78864578585
P Mx0 = − 3721897
aP
Todos los valores que se han calculado son constantes en ejesS0. Si la percusion se diera enalguna posicion distinta, habrıa que proyectar el valor de ηd, que esta dirigido segunj0, en losejes fijos.
209

Solucion por mecanica analıtica
1 La condicion cinematica se resuelve igual quepor newtoniana. Llamaremos solidoS2 al disco,S3 ala esfera, yS0 a los ejes auxiliares de la figura.Hay cinco coordenadas generalizadas: el angulo deprecesion del sistemaψ, los de rotacion propia deldisco,ϕ y de la esfera,θ ; y las coordenadas en ejesfijos de la proyeccion del centro de masas,(ξ ,η).El disco rueda sin deslizar: el punto del disco queen cada momento este en contacto con el suelotendra velocidad nula. Esto supone tres ligaduras: lavertical es integrable y esta ya contada en las coor-denadas generalizadas; las dos horizontales son nointegrables: el sistema es no holonomo. El numerode grados de libertad sera menor que el de coordena-das.
x
y
z
b
b
x0
y0
z0
G
D
E
ϕψ
θ
ψ
N1
NT R
En el punto de contacto del disco hay una reaccion normalN, por el apoyo, y dos compo-nentes horizontales,R y T, para evitar el deslizamiento. En el apoyo liso de la esfera solo hayuna reaccion normalN1.
La velocidad del punto de contacto del disco,I , secalcula con el campo de velocidades del disco, y lavelocidad deG, que tambien es un punto del disco:
vI21 = vG
21+ωωω21∧GGGI =
ξη0
1
+
∣∣∣∣∣∣
i0 j0 k0ϕ 0 ψ−a 0 −a
∣∣∣∣∣∣
Las ecuaciones pueden proyectarse en ejesS1 oS0; obviamente, unas son combinacion lineal de lasotras:
x
y
z
b
b
x0
y0
z0
G
(ξ ,η)
D
I
ϕψ
ψ
ξη0
1
+
0−aψ +aϕ
0
0
=
ξ +asinψ(ψ − ϕ)η −acosψ(ψ − ϕ)
0
1
=
000
=
=
ξ cosψ + η sinψ−ξ sinψ + η cosψ +a(ϕ − ψ)
0
0
=
000
2 Las ecuaciones de la rodadura sin deslizamiento no son integrables: el sistema esno holono-mo. Las incognitas son:
Velocidades ξ d, ηd, ψd, ϕd, θd 5P. Ligadura ext. N,N1,R,T 4P. Ligadura int. X,Y,Z,My,Mz 5
Como hay dos ecuaciones cinematicas no integrables, el numero de grados de libertad esn−h= 5−2= 3. Las ecuaciones de la mecanica analıtica para sistemas no holonomos permitenobtener las cinco velocidades y, si se usa el metodo de los multiplicadores de Lagrange, tambienRy T.
Como estas percusiones estan proyectadas en ejes moviles, tendremos que usar las ecuacio-nes de las ligaduras proyectadas en esos mismos ejes; de ese modo losµ1 y µ2 corresponderana las percusiones que se buscan. Si se usan las ligaduras en ejes fijos, losµi corresponderıan alas proyecciones de la fuerza de ligadura en esos ejes.
210

Las percusiones asociadas a las ligaduras finitas,N y N1, no se pueden obtener por estemetodo. Pero, una vez resuelto el problema, se obtienen facilmente planteando las ecuacionesCMz y MCy0, que son muy simples. En este caso, aunque se pidan percusiones o fuerzas deligadura, se puede resolver por mecanica analıtica sin demasiados problemas.
Las ecuaciones que vamos a aplicar son
∂L
∂ q j
∣∣∣∣
d
− ∂L
∂ q j
∣∣∣∣
a
= QPj +
g
∑k=1
µkCk j
Necesitaremos:
La lagrangiana. Compensa calcularla en un instan-te generico, para usarla tambien en el movimientoposterior.
Las fuerzas impulsivas generalizadas
Los coeficientesCk j los conocemos ya, pues las li-gaduras estan en funcion de las coordenadas gene-ralizadas.
x
y
z
bb
x0
y0
z0
G
D
E
ϕψ
θ
ψ
N1
Nµ2
µ1
Para la lagrangiana solo necesitamos la energıa cinetica, pues el potencial es constante mien-tras no se levante del suelo. La energıa cinetica la podemos calcular aplicando el teorema deKoenig en dos fases, primero a todo el sistema, y luego a cada solido para el movimiento relativoal centro de masas del sistema:
T =12
2mvG01
2+TD
G +TEG = mvG
012+
12
m(ωωω01∧GD)2+12
ωωω21 · IIID ·ωωω21+
+12
m(ωωω01∧GE)2 +12
ωωω31 · IIIE ·ωωω31
Tambien se podrıa haber calculado por separado para cada solido, aplicando Koenig directa-mente a cada uno:
T =12
mvD21
2+
12
ωωω21 · IIID ·ωωω21+12
mvE31
2+
12
ωωω31 · IIIE ·ωωωE1
Por este segundo camino hay que sumarvG01 y ωωω01∧GD para obtenervD
21, lo que implica cam-biar de ejes y sumar los vectores, y luego elevar al cuadrado.Por el primer metodo se elevanal cuadrado cada uno y se suman. El doble producto desapareceal contar los dos solidos, puesGD = −GE.
Los elementos deT son todos conocidos, y se pueden escribir directamente,
vG01 =
ξη0
1
ωωω01∧GD = −ωωω01∧GE =
−aψ00
0
IIID =ma2
4
2 0 00 1 00 0 1
0
ωωω21 = (ϕ,0, ψ) ωωω31 = (θ ,0, ψ) IE =25
ma2UUU
La energıa cinetica y la lagrangiana quedan
L = T = m(
ξ 2+ η2)
+ma2(
ϕ2
4+
θ2
5+
5340
ψ2)
211

LlamemosA al punto de aplicacion de la percusion. Te-nemos que calcular
n
∑j=1
QPj δq j =
n
∑j=1
P · ∂ rA
∂q jδq j
Para calcular las∂ rA
∂q jhabrıa que situarA en una posicion
arbitraria, derivar respecto a cada coordenada . . . Es muycomplejo, y no nos va a servir para los otros apartados.Compensa hacerlo calculando su velocidad ya en la posi-cion de la percusion:
x
y
z
bb
x0
y0
z0
G
D
E
N1
Nµ2
µ1
A
P
vA21 = vG +ωωω21∧GA =
ξη0
+
00−a
ϕ +
a−a0
ψ =
n
∑j=1
∂ rA
∂q jq j
No hay que preocuparse de cambios de ejes, porque al dar la percusion los dos coinciden.Multiplicando escalarmentePj por el coeficiente de cada ˙q j , se obtiene
QPξ = 0 QP
η = P QPϕ = 0 QP
θ = 0 QPψ = −aP
LosCk j se obtienen de las ecuaciones de la rodadura sin deslizamiento, particularizadas para laconfiguracion del momento de la percusion
LIG1 ≡ 1 · ξ d = 0 =5
∑j=1
C1 j q j → PL1 = µ1 i0 = R
LIG2 ≡ 1 · ηd + a · ϕd −a · ψd = 0 =5
∑j=1
C2 j q j → PL2 = µ2 j0 = T
Ya tenemos todos los elementos para plantear las ecuacionesimpulsivas de Lagrange
∂L
∂ q j
∣∣d − ∂L
∂ q j
∣∣a = QP
j + C1 j µ1 + C2 j µ2
2mξ d − 0 = 0 + µ1 + 0
2mηd − 0 = P + 0 + µ2
12ma2ϕd − 0 = 0 + 0 + aµ2
25ma2θd − 0 = 0 + 0 + 0
5320ma2ψd − 0 = −aP + 0 − aµ2
junto con las ecuaciones de las ligaduras: 7 ecuaciones con 7incognitas.Algunos resultados son inmediatos:
ξ d = θd = µ1 = 0
Entre LAG3 y LAG5 se eliminaµ2 y se llega a
5320
ψd +12
ϕd = − Pma
Entre LAG2 y LAG5 se eliminaµ2 y se sustituyeηd en LIG2:
−9340
ψd + ϕd = 0
con lo que se obtiene el resto de las incognitas
µ2 = − 93305
P ηd =106305
Pm
ϕd = −186305
Pma
ψd = −1661
Pma
212

3 Para el movimiento posterior, aplicaremos lasecuaciones de Lagrange por el metodo de los mul-tiplicadores; las ecuaciones de las ligaduras corres-ponderan a una posicion generica, y no aparecen per-cusiones sino fuerzas; la lagrangiana no varıa porqueno aparece ninguna coordenada; las condiciones ini-ciales seran las de salida de la percusion. Se puedesustituir alguna por la de la energıa, pues el sistemaes obviamente conservativo.
ddt
∂L
∂ q j− ∂L
∂q j= C1 j µ1 +C2 j µ2
x
y
z
b
b
x0
y0
z0
G
D
E
ψ
N1
Nµ2
µ1
Las ecuaciones de las ligaduras, en un instante arbitrario,son
LIG1 ≡ cosψ · ξ d + sinψ · ηd = 0 =5
∑j=1
C1 j q j → FL1 = µ1 i0 = R
LIG2 ≡ −sinψ · ξ d + cosψ · ηd + a · ϕd −a · ψd = 0 =5
∑j=1
C2 j q j → FL2 = µ2 j0 = T
Y las ecuaciones del movimiento
ddt
∂L
∂ q j− ∂L
∂ q j= + C1 j µ1 + C2 j µ2
2mξ − 0 = + cosψµ1 − sinψµ2
2mη − 0 = + sinψµ1 + cosψµ2
12ma2ϕ − 0 = + 0 + aµ2
25ma2θ − 0 = + 0 + 0
5320ma2ψ − 0 = + 0 − aµ2
Integrando estas ecuaciones se obtienen las cinco coordenadas generalizadas y las dos fuer-zas de la ligadura cinematica. Para las reacciones del suelo podemos plantear primero la ecua-cion de la cantidad de movimiento del sistema en la direcci´on vertical; suponiendo que no selevanta,
N+N1−2mg= 0
Para escribir la ecuacion del momento cinetico segunGy0, trataremos de economizar esfuerzosal maximo. De la ecuacion
MEG =
ddt
HG∣∣1 =
ddt
HG∣∣1+ ψ k1∧HG
recordamos queHG no tiene componentey0, y que en esa direccion el termino corrector delteorema de Coriolis se reduce aψHGx, es decir,
(N−N1−µ1)a = ψ(
12
ma2 ϕ +25
ma2 θ)
HGx se ha calculado como la del disco y la esfera girando alrededor de su eje comun. Una vezobtenidas las leyes horarias, de estas ecuaciones se obtiene la reaccion normal.
4 Si se comparan las ecuaciones del movimiento con las obtenidas por newtoniana, se ve quesonexactamente las mismas.El unico cambio es que aquı se ha llamadoµ1 y µ2 a lo que allı sellamoRy T. El proceso de integracion sera identico. Las condiciones iniciales son las de salidade la percusion.
213

La ecuacion deθ es inmediata:
θ = 0 → θ = θ0 = 0 → θ = θ0
De LAG3 y LAG5 se obtiene
µ2a = 12ma2ϕ
−µ2a = 5320ma2ψ
12
ϕ +5320
ψ = 0 (9.5)
Entre LAG1 y LAG2 se eliminaµ1 (lo que equivale a proyectar la ecuacion de la cantidad demovimiento segunGx0):
µ2 = 2m(−ξ sinψ + η cosψ)
Derivando las ecuaciones de la ligadura cinematica, proyectadas enS0
µ1/2m︷ ︸︸ ︷
ξ cosψ + η sinψ + ψ(
−a(ϕ−ψ)︷ ︸︸ ︷
−ξ sinψ + η cosψ)
= 0
−ξ sinψ + η cosψ︸ ︷︷ ︸
µ2/2m
+ ψ(−ξ cosψ − η sinψ︸ ︷︷ ︸
0
+a(ϕ − ψ) = 0 → −µ2 = 2ma(ϕ − ψ)
Con esta ultima y LAG5 se puede eliminarµ2:
−µ2 = ma5320
ψ → 0 = ma
(
ϕ − 9320
ψ)
(9.6)
Como (9.5) y (9.6) son incompatibles, las dos derivadas tienen que ser nulas
ϕ = ψ = 0 ⇒ ϕ = −186305
Pma
t +ϕ0 ψ = −1661
Pma
t +ψ0 µ2 = 0
Sustituyendo estos valores en las ecuaciones de las ligaduras, proyectadas ahora en ejes fijos
ξ = −a(ψ0− ϕ0)sinψ0 t = −106305
Pm sin
(−16
61Ptma
)
η = a(ψ0− ϕ0)cosψ0 t = 106305
Pm cos
(−16
61Ptma
)
se integran directamente, con las condiciones inicialesξ0 = 3a, η0 = 0,
ξ = −10680
a cos 16P61mat +
34680
a η =10680
a sin 16P61mat
Entre LAG1 y LAG2 se elimina ahoraµ2 (lo que equivale a la ecuacion de la cantidad demovimiento segunGy0)
µ1 = 2m(
ξ cosψ + η sinψ)
= 2maψ(ϕ − ψ) ⇒ µ1 = −(
106305
)2 P2
ma
Finalmente, vamos a las ecuaciones para las normales, CMz y MCy, y sustituimos:
N+N1 = 2mg
N−N1 = µ1 +maψϕ2
= ma12323721
P2
m2a2
N = mg+6163721
P2
maN1 = mg− 616
3721P2
ma
Notese que, siN1 se hace negativo, la esfera se levanta del suelo.Axoides: El sistema precesa con velocidad angular constanteψ0. El centro de masas des-
cribe una circunferencia de centro(34680 a,0). Hay por tanto un punto del eje,F , situado a una
distancia10680 a deG, que no se mueve.
214

G F
O1
y1
x1 G F
Iψ
ϕ
ω21
EIR21
z1
x1
E F
EIR31
ψ
z1
x1
Disco: Hay dos puntos de velocidad nula: el de contactoI y el puntoF del eje, que tambienes parte del disco. ElEIR21 pasara por esos dos puntos.F esta fijo en el espacio, y en el ejedel disco. El punto del discoI es siempre es uno de la periferia; en ejes fijos, recorre unacircunferencia sobre el plano horizontal. Las axoides son conos de verticeF, la fija se apoya enla circunferencia trayectoria deI , y la movil en la periferia del disco.
Al mismo resultado se llega sin necesidad de conocer la trayectoria deG. Se sabe queI tienevelocidad nula y se conoce la velocidad angularωωω21 = ϕ i0 + ψ k0: esto determina elEIR21, yde su movimiento se obtienen las axoides.
Esfera: solo tiene precesionωωω31 = ψ k0. F es siempre el mismo punto de la esfera, comotodos los del ejey0. El EIR31 y las dos axoides son la recta vertical fija que pasa porF.
5 Si se solidifican de pronto la esfera y el disco, se introduce bruscamente la ligadura
ϕ = θ → ±Mx0
Aparece un momento de percusion interno en la unionD: pone a girar a la esfera, y frena eldisco, para que ambos tengan la misma velocidad angular. Al ser un par de accion-reaccion, elmomento resultante es nulo para todo el sistema. Pero eso no quiere decir que no tenga efectoglobal: al variarϕ , a traves de las ligaduras varıan la precesion y la velocidad del centro demasas, lo que puede producir percusiones en todas las ligaduras exteriores.
Ahora se toman como valores iniciales los del movimien-to, que coinciden con los de salida de la primera per-cusion. El movimiento es una precesion y rotacion uni-forme, y el centro de masas recorre una circunferenciacon velocidad constante en modulo. Las velocidades tie-nen pues simetrıa de revolucion, y podemos simplificar elproblema: en vez de coger un angulo arbitrarioψ0 t, po-demos dar la percusion en el momento en que coincidenlos ejesS1 y S0. Luego, para llevarlo a la posicion que sea,no hay mas que rotar las velocidades que se obtengan.
x
y
z
−Mx0
b+Mx0
b
x0
y0
z0
G
D
E
N1
NT
R
Las ecuaciones seran como en la primera percusion, pero sin QP y con una ligadura mas:
LIG1 ≡ 1 · ξ d = 0 =5
∑j=1
C1 j q j → PL1 = µ1 i0 = R
LIG2 ≡ 1 · ηd + a · ϕd −a · ψd = 0 =5
∑j=1
C2 j q j → PL2 = µ2 j0 = T
LIG3 ≡ -1 · ϕd +1 · θd = 0 =5
∑j=1
C2 j q j → ML2 = µ3 j0 = Mx
En las ecuaciones impulsivas de Lagrange, los valores iniciales no son el reposo, sino el estado
215

previo al bloqueo, es decir, el de salida de la primera percusion:
∂L
∂ q j
∣∣d − ∂L
∂ q j
∣∣a = C1 j µ1 + C2 j µ2 + C3 j µ3
2mξ d − 0 = µ1 + 0 + 0
2mηd − 2m106305
Pm = 0 + µ2 + 0
12ma2ϕd + 1
2ma2 186305
Pma = 0 + aµ2 − µ3
25ma2θd − 0 = 0 + 0 + µ3
5320ma2ψd + 53
20ma2 1661
Pma = 0 − aµ2 + 0
Del sistema se obtiene directamente
ξ d = µ1 = 0
El resto del sistema es mas complicado:
Entre las LAG3 y LAG4, teniendo en cuenta la nueva ligadura, se eliminaµ3, y con LAG5se eliminaµ2:
910
ϕd +5320
ψd +P
ma= 0
Entre las ecuaciones LAG2 y LAG5 se elimina tambienµ2, y sustituyendoηd de lasegunda ecuacion de ligadura, se obtiene
−2ϕd +9320
ψd = 0
De estas dos ecuaciones se obtiene
ϕd = θd = − 9301897
Pma
ψd = − 4001897
Pma
Y sustituyendo estos valores en cualquiera de las otras utilizadas,
ηd =5301897
Pm
µ2 = − 78864578585
P µ3 = − 3721897
aP
Las percusiones del suelo se calculan, como en el movimiento, con las ecuaciones de canti-dad de movimiento vertical y momento cinetico segunGy0, pero ahora para percusiones:
N+N1 = 0 (N−N1−µ1)a = 0 ⇒ N = N1 = 0
En la de la cantidad de movimiento no aparece el peso porque esuna fuerza acotada, y en ladel momento cinetico no aparece el termino de Coriolis porque tambien esta acotado (no hayaceleraciones angulares).
Todos los valores que se han calculado son constantes en ejesS0. Si la percusion se diera enalguna posicion distinta, habrıa que proyectar el valor de ηd, que esta dirigido segunj0, en losejes fijos:
ξ d = − 5301897
Pm
sinψ ηd =5301897
Pm
cosψ
216

Problema 9.1.5: Consideremos un plano inclinado un angulo de 30o sobre el horizontal y unos ejesOxy rectangulares marcados en el mismo, siendoOx la lınea de maxima pendiente orientada positiva-mente en sentido descendente yOyuna recta horizontal.
Sobre dicho plano va a rodar y pivotar sin deslizamiento unartilugio constituido por un eje con dos discos que giran so-bre el en sus extremos. El ejeAB se puede considerar comouna varilla de longitud 2a y masam. Los discos extremos tie-nen radioa y masam. Una vista tomada perperdicularmente alplano inclinado esta representada en la figura adjunta.La configuracion del sistema ası constituido queda determina-da por los siguientes parametros. Coordenadasξ , η del centrode masas del ejeAB, anguloθ formado porAB con la hori-zontalOy y angulos de rotacionϕ1 y ϕ2 de los discosD1 D2
sobre el ejeAB. En lo que sigue puede ser interesante la con-sideracion de un sistema de ejes movilesGXY indicados en lafigura, siendoGY coincidente conAB y GX perpendicular aABy paralelo al plano inclinado.
y
x
ξ
η
gsinπ/6
θ
Y
X
G
B
AX1
Y1
X2
Y2
Supondremos que entre los discos y el plano existente en todomomento rozamiento suficiente paraevitar el deslizamiento. Las reacciones tangenciales en los puntos de contacto las denominaremosX1, Y1,X2, Y2, como estan indicadas en la figura.
El sistema es abandonado a la accion de la gravedad partiendo de las siguientes condiciones inicialesξ = η = 0, ξ = η = 0, ϕ1 = −ω , ϕ2 = ωSe pide:
1. Establecer tres ligaduras no holonomas que expresen el no deslizamiento de los discos sobre elplano. La primera de ellas (1) expresara la anulacion de lavelocidad de los puntos de contacto delos discos en sentido deABy sera comun para ambos discos. Las otras dos (2) y (3) expresaran laanulacion de las velocidades en sentido perpendicular aABde los puntos de contacto deD1 y D2
respectivamente. Comprobar que entre (2) y (3) se verifica lacombinacion lineal: 2θ + ϕ1− ϕ2 =0 (4) que sera util a la hora de efectuar la integracion del sistema de ecuaciones diferenciales.
2. Establecer la ecuacion (5) de la cantidad de movimiento en sentidoGX.
3. Obtener el valor del momento cinetico del artilugio completo enG considerando el movimien-to relativo a ejes de direcciones fijas que pasan porG, si bien dicho vector se debera dar encomponentesGXYZ.
4. Aplicar la ecuacion (6) de la componenteGZ del momento cinetico enG.
5. Establecer las ecuaciones (7) y (8) del momento cineticoen el centro de cada uno de los discosseparadamente, quedandose con la componenteGY.
6. El sistema de ecuaciones (1) a (8), que tiene la ecuacion (4) combinacion de las (2) y (3), nosdetermina los valores deξ , η , θ , ϕ1, ϕ2, X1, X2. EliminandoX1, X2 entre las (6), (7) y (8) seobtiene una relacion que comparada con la derivada de (4) permite obtener en funcion del tiempolos valores deθ y deϕ1−ϕ2. Obtener estos valores.
7. EliminadoX1, X2 entre (5), (7) y (8) y combinando con las derivadas de (1) y (2)obtener el valordeϕ1(t). Como ya se conocıaϕ1−ϕ2 procedente del apartado 6) obtener tambienϕ2(t).
Septiembre de 1984
1 Se resolvera aquı por mecanica newtoniana —como pide el enunciado— un problema ya
resuelto antes por analıtica.
LlamaremosS1 a los ejes fijosOxyz, S0 a los intermediosGXY, S2 al discoD1 enA, y S3al discoD2 enB. Los discos ruedan y pivotan sin deslizar. Por tanto, si llamamosI1 e I2 a lospuntos de los discos que en cada momento esten en contacto con el plano, las ecuaciones de lasligaduras son:
vI121 = 0 vI2
31 = 0
217

Como los puntos de contacto van cambiando, hay que calcular las velocidades mediante elcampo de velocidades del solido, basandose en un punto quesea siempre el mismo; por ejemplo,G, que es punto fijo de cada uno de los discos.
vI121 = vG
21+ωωω21∧GI1 =
ξη0
1
+
∣∣∣∣∣∣
i0 j0 k0
0 ϕ1 θ0 −a −a
∣∣∣∣∣∣
=
ξ cosθ + η sinθ +a(θ − ϕ1
)
−ξ sinθ + η cosθ0
=
000
vI231 = vG
31+ωωω31∧GI2 =
ξη0
1
+
∣∣∣∣∣∣
i0 j0 k0
0 ϕ2 θ0 a −a
∣∣∣∣∣∣
=
ξ cosθ + η sinθ −a(θ + ϕ2
)
−ξ sinθ + η cosθ0
=
000
Las ecuaciones en la direccionGY son naturalmente las mismas, porque los discos estan unidospor una barra rıgida en esa direccion, y las velocidades delos puntos deben ser iguales. Aunquesolo contemos una, tenemos dos ligaduras redundantes. El rozamiento del suelo sobre un disco,en esa direccion, hace lo mismo que el rozamiento sobre el otro mas la barra. Es sistema va aser hiperestatico, y no podremos calcular las fuerzas de ligaduraY1 eY2 por separado, sino solola suma.
Las componentes en la direccionGZ no aparecen porque, al ser integrables, ya se han tenidoen cuenta al no introducir las coordenadas generalizadas correspondientes (que podrıan ser, porejemplo,ζ1 y ζ2 para las alturas de los puntosA y B). Quedan tres ecuaciones independientes,
−ξ sinθ + η cosθ = 0 (1)
ξ cosθ + η sinθ +a(θ − ϕ1
)= 0 (2)
ξ cosθ + η sinθ −a(θ + ϕ2
)= 0 (3)
Restando las dos ultimas se obtiene
2θ − ϕ1 + ϕ2 = 0 (4)
cuyo sentido es simple: si el aparato pivota en conjunto, unade las ruedas tiene que rodar haciadelante y la otra hacia atras (quiza sobrepuesto a una rodadura conjunta).
2 La ecuacion de la cantidad de movimiento del sistema se escribe
3m
ξη0
= 3mg
sinπ/60
−cosπ/6
+
X1Y1Z1
0
+
X2Y2Z2
0
donde las fuerzas de ligadura estan en ejesGXY y el resto en ejesS1. Proyectando el peso y laaceleracion en la direccionGx, tenemos
3m(
ξ cosθ + η sinθ)
=3mg
2cosθ +X1+X2 (5)
3 Para calcular el momento cinetico del sistema respecto a unos ejesS4 paralelos a los fijos(ωωω24 = ωωω21) con origen enG, podemos:
Aplicar el teorema de Konig a cada disco
Aprovechar queG se puede considerar como parte de cada disco, y aplicar las expresionesdel solido con punto fijo. En vez de Konig, se aplica Steiner
En este movimiento, la varilla es un solido con punto fijo.
218
Por el primer camino,
H2G = GA ∧mvA
24+ III2 ·ωωω24 = m
∣∣∣∣∣∣
i0 j0 k00 −a 0
aθ 0 0
∣∣∣∣∣∣
+ma2
4
1 0 00 2 00 0 1
·
0ϕ1
θ
=
ma2
4
02ϕ1
5θ
H3G = GB∧mvB
34+ III3 ·ωωω34 = m
∣∣∣∣∣∣
i0 j0 k00 a 0
−aθ 0 0
∣∣∣∣∣∣
+ma2
4
1 0 00 2 00 0 1
·
0ϕ2
θ
=
ma2
4
02ϕ2
5θ
H3G = IIIAB ·ωωω04 =
m(2a)2
12
1 0 00 0 00 0 1
00θ
=
ma2
3
00θ
El momento de todo el sistema es la suma de los tres,
HG =ma2
6
03(ϕ1+ ϕ2)
17θ
4 La ecuacion del momento cinetico del sistema es
dHG
dt
∣∣∣∣1=
dHG
dt
∣∣∣∣0+ωωω01∧HG = GI1∧R1 +GI2∧R2
Proyectando en la direccionGZ, tenemos
17ma2
6θ = a(X1−X2) (6)
5 Separando los discos, nos quedaremos con la ecuacion correspondiente a su grado de li-bertad, la de momento segun su eje de giro. La articulacionde los discos deja libre solo el girosegunGY. En todos los movimientos impedidos aparecen fuerzas o momentos de ligadura: EnA, RA = (XA,YA,ZA) y MA = (MA
X,0,MAZ), y las equivalentes enB. Para el discoA, la ecuacion
de momento cinetico en su centro es
dHA
dt
∣∣∣∣1=
dHA
dt
∣∣∣∣0+ωωω01∧HA = MA+AI 1∧R1
Podemos trabajar en ejesS0 porque el disco tiene simetrıa de revolucion, y el tensor es constantetambien en esos ejes. Las ecuaciones quedan
ma2
4
1 0 00 2 00 0 1
0ϕ1
θ
+
ma2
4
∣∣∣∣∣∣
i0 j0 k0
0 0 θ0 2ϕ1 θ
∣∣∣∣∣∣
=
MAX
0MA
Z
+
aY1−aX1
0
Tomando la componenteGY,ma2
2ϕ1 = −aX1 (7)
Para el otro disco, la ecuacion es analoga,
ma2
2ϕ2 = −aX2 (8)
6 Se han obtenido las ecuaciones (6), (7) y (8) de momento cinetico:
17ma2
6θ = a(X1−X2)
ma2
2ϕ1 = −aX1
ma2
2ϕ2 = −aX2
219

Eliminando las fuerzas de ligadura se llega a
17ma2
6θ =
ma2
2(ϕ2− ϕ1)
Por otra parte, derivando la ligadura (4) se obtiene
2θ − ϕ1 + ϕ2 = 0
Se trata de un sistema homogeneo incompatible, por lo que launica solucion es la trivial,
θ = 0 ϕ2− ϕ1 = 0 (9)
Estas ecuaciones se integran, con las condiciones iniciales del enunciado, y suponiendo parasimplificar queθ0 = 0 y ϕ1
∣∣0 = ϕ2
∣∣0 = 0, para dar
θ = −ω t ϕ1−ϕ2 = −2ω t
7 Se sustituyen (7) y (8) en (5),
3m(
ξ cosθ + η sinθ)
=3mg
2cosθ − ma
2ϕ1−
ma2
ϕ2
Teniendo en cuenta (9),
3m(
ξ cosθ + η sinθ)
=3mg
2cosθ −maϕ1
Derivando (2) se tiene
ξ cosθ + η sinθ +(
−ξ sinθ + η cosθ)
θ +a(
θ − ϕ1
)
= 0
El termino entre parentesis es precisamente la ligadura (1). Sustituyendo en la ecuacion anterior,se llega a
3maϕ1 =3mg
2cosθ −maϕ1 →
→ ϕ1 =3g8a
cosω tϕ1|0=−ω−−−−−→ ϕ1 =
3g8aω2 (1−cosω t)−ω t
y por lo tanto,
ϕ2 =3g
8aω2 (1−cos2ω t)+ω t
Aunque no se pida, es facil sustituir en las ecuaciones de laligadura y obtener las coordenadasdel centro:
ξ =3g
32ω2 (1−cos2ω t)
η =3g
32ω2 (sin2ω t −2ω t)
La trayectoria —como en otros ejercicios similares que ya sehan hecho— es una cicloide que,curiosamente, no se desplaza hacia abajo sino en horizontal.
x
y
220
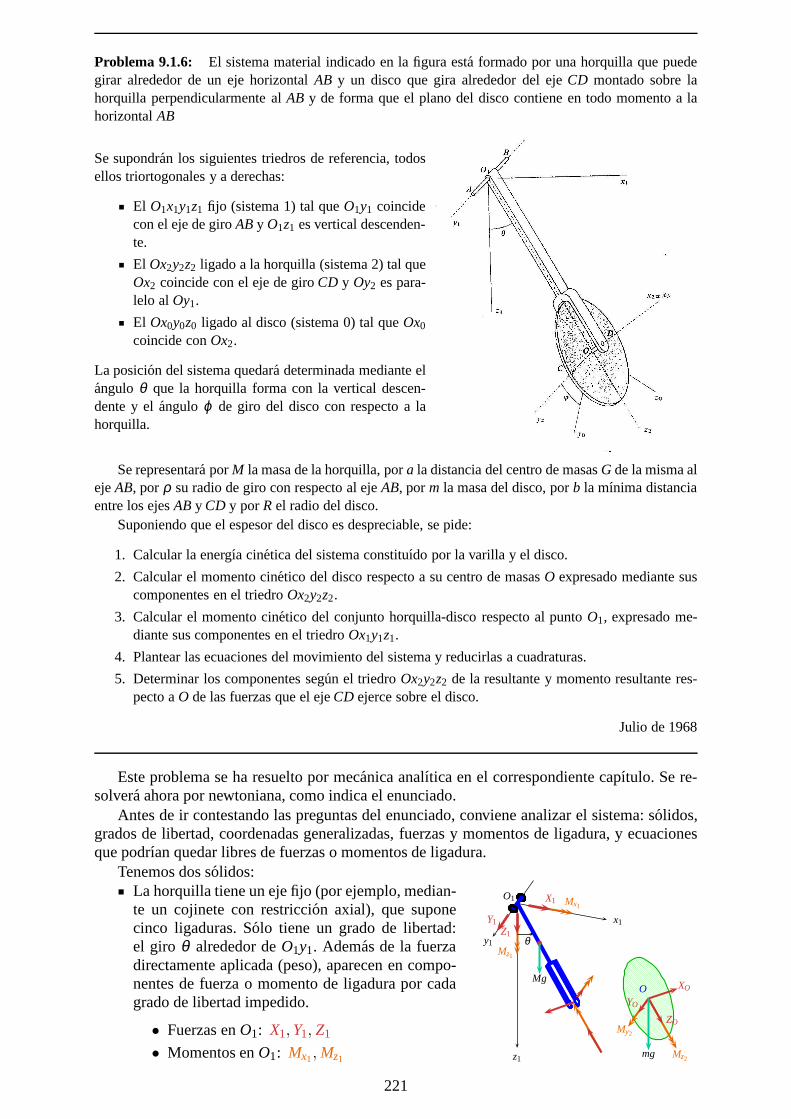
Problema 9.1.6: El sistema material indicado en la figura esta formado por una horquilla que puedegirar alrededor de un eje horizontalAB y un disco que gira alrededor del ejeCD montado sobre lahorquilla perpendicularmente alAB y de forma que el plano del disco contiene en todo momento a lahorizontalAB
Se supondran los siguientes triedros de referencia, todosellos triortogonales y a derechas:
El O1x1y1z1 fijo (sistema 1) tal queO1y1 coincidecon el eje de giroABy O1z1 es vertical descenden-te.
El Ox2y2z2 ligado a la horquilla (sistema 2) tal queOx2 coincide con el eje de giroCD y Oy2 es para-lelo alOy1.
El Ox0y0z0 ligado al disco (sistema 0) tal queOx0
coincide conOx2.
La posicion del sistema quedara determinada mediante elanguloθ que la horquilla forma con la vertical descen-dente y el anguloϕ de giro del disco con respecto a lahorquilla.
Se representara porM la masa de la horquilla, pora la distancia del centro de masasG de la misma alejeAB, porρ su radio de giro con respecto al ejeAB, porm la masa del disco, porb la mınima distanciaentre los ejesABy CD y porR el radio del disco.
Suponiendo que el espesor del disco es despreciable, se pide:
1. Calcular la energıa cinetica del sistema constituıdopor la varilla y el disco.
2. Calcular el momento cinetico del disco respecto a su centro de masasO expresado mediante suscomponentes en el triedroOx2y2z2.
3. Calcular el momento cinetico del conjunto horquilla-disco respecto al puntoO1, expresado me-diante sus componentes en el triedroOx1y1z1.
4. Plantear las ecuaciones del movimiento del sistema y reducirlas a cuadraturas.
5. Determinar los componentes segun el triedroOx2y2z2 de la resultante y momento resultante res-pecto aO de las fuerzas que el ejeCD ejerce sobre el disco.
Julio de 1968
Este problema se ha resuelto por mecanica analıtica en el correspondiente capıtulo. Se re-solvera ahora por newtoniana, como indica el enunciado.
Antes de ir contestando las preguntas del enunciado, conviene analizar el sistema: solidos,grados de libertad, coordenadas generalizadas, fuerzas y momentos de ligadura, y ecuacionesque podrıan quedar libres de fuerzas o momentos de ligadura.
Tenemos dos solidos:La horquilla tiene un eje fijo (por ejemplo, median-te un cojinete con restriccion axial), que suponecinco ligaduras. Solo tiene un grado de libertad:el giro θ alrededor deO1y1. Ademas de la fuerzadirectamente aplicada (peso), aparecen en compo-nentes de fuerza o momento de ligadura por cadagrado de libertad impedido.
• Fuerzas enO1: X1, Y1, Z1
• Momentos enO1: Mx1, Mz1
θ b
Mg
y1
z1
x1
O1
Y1
X1 Mx1
Z1
Mz1
mg Mz2
My2
XO
YO
ZO
O
221
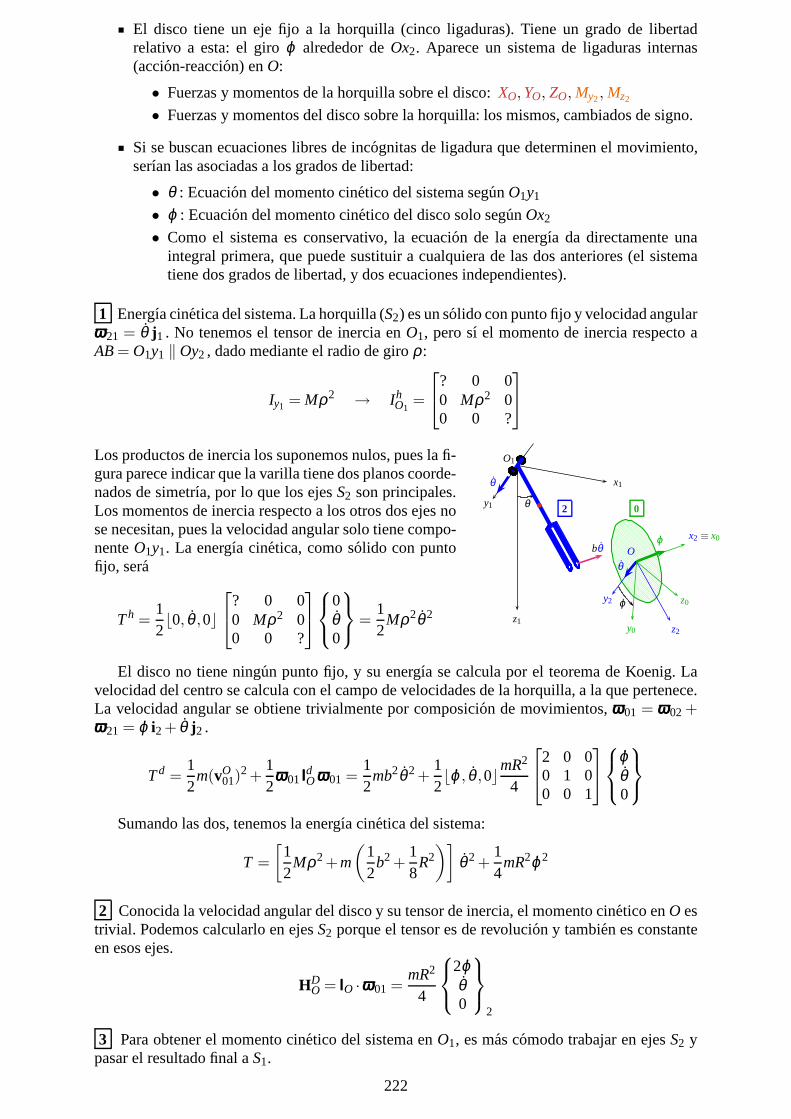
El disco tiene un eje fijo a la horquilla (cinco ligaduras). Tiene un grado de libertadrelativo a esta: el giroϕ alrededor deOx2. Aparece un sistema de ligaduras internas(accion-reaccion) enO:
• Fuerzas y momentos de la horquilla sobre el disco:XO, YO, ZO, My2, Mz2
• Fuerzas y momentos del disco sobre la horquilla: los mismos,cambiados de signo.
Si se buscan ecuaciones libres de incognitas de ligadura que determinen el movimiento,serıan las asociadas a los grados de libertad:
• θ : Ecuacion del momento cinetico del sistema segunO1y1
• ϕ : Ecuacion del momento cinetico del disco solo segunOx2
• Como el sistema es conservativo, la ecuacion de la energıada directamente unaintegral primera, que puede sustituir a cualquiera de las dos anteriores (el sistematiene dos grados de libertad, y dos ecuaciones independientes).
1 Energıa cinetica del sistema. La horquilla (S2) es un solido con punto fijo y velocidad angularωωω21 = θ j1 . No tenemos el tensor de inercia enO1, pero sı el momento de inercia respecto aAB= O1y1 ‖ Oy2 , dado mediante el radio de giroρ :
Iy1 = Mρ2 → IhO1
=
? 0 00 Mρ2 00 0 ?
Los productos de inercia los suponemos nulos, pues la fi-gura parece indicar que la varilla tiene dos planos coorde-nados de simetrıa, por lo que los ejesS2 son principales.Los momentos de inercia respecto a los otros dos ejes nose necesitan, pues la velocidad angular solo tiene compo-nenteO1y1. La energıa cinetica, como solido con puntofijo, sera
Th =12⌊0, θ ,0⌋
? 0 00 Mρ2 00 0 ?
0θ0
=
12
Mρ2θ2
θ
bθ
b2
θ
y1
z1
x1
O1
0
O
ϕ
θ
ϕ
y2
x2 ≡ x0
z2y0
z0
El disco no tiene ningun punto fijo, y su energıa se calcula por el teorema de Koenig. Lavelocidad del centro se calcula con el campo de velocidades de la horquilla, a la que pertenece.La velocidad angular se obtiene trivialmente por composicion de movimientos,ωωω01 = ωωω02+ωωω21 = ϕ i2+ θ j2 .
Td =12
m(vO01)
2+12
ωωω01IIIdOωωω01 =
12
mb2θ2+12⌊ϕ , θ ,0⌋mR2
4
2 0 00 1 00 0 1
ϕθ0
Sumando las dos, tenemos la energıa cinetica del sistema:
T =
[12
Mρ2+m
(12
b2 +18
R2)]
θ2 +14
mR2ϕ2
2 Conocida la velocidad angular del disco y su tensor de inercia, el momento cinetico enO estrivial. Podemos calcularlo en ejesS2 porque el tensor es de revolucion y tambien es constanteen esos ejes.
HDO = IIIO ·ωωω01 =
mR2
4
2ϕθ0
2
3 Para obtener el momento cinetico del sistema enO1, es mas comodo trabajar en ejesS2 ypasar el resultado final aS1.
222

El momento cinetico de la horquilla enO1 se calcula como solido con punto fijo. Sin lahipotesis de que los productos de inercia sean nulos (que eleje O1yY1 sea principal deinercia), no se podrıa calcular el momento cinetico. Parala energıa cinetica no hacıa faltaporque se multiplica de nuevo porωωω21.
HhO1
= IIIhO1
·ωωω21 =
? ? ?? Mρ2 ?? ? ?
0θ0
=
?Mρ2θ
?
2
Esta proyectado en ejesS2, pero no es necesario cambiar nada porqueO1y1 ≡ O1y2.
Para el disco, hay que aplicar el teorema de Koenig porque no tiene punto fijo:
HDO1
= O1O∧mvO01+HD
O =
∣∣∣∣∣∣
i2 j2 k20 0 b
bθ 0 0
∣∣∣∣∣∣
+HDO =
mR2
2 ϕ(
mb2+ mR2
4
)
θ0
2
Sumamos los dos terminos, y pasamos a ejesS1:
HO1 =
mR2
2 ϕ(
Mρ2+mb2 + mR2
4
)
θ0
2
=
mR2
2 ϕ cosθ(
Mρ2 +mb2+ mR2
4
)
θ
−mR2
2 ϕ sinθ
1
4 Podemos plantear las ecuaciones correspondientes a los grados de libertad.
Para el disco, la ecuacion de Euler segunOx2 da una integral primera, porque es simetricoy no hay momento exterior en esa direccion
Ap+(C−B)qr = Mx → Ap+(C−C)qr = 0 ⇒ p = ϕ = Cte
Para el sistema completo, la ecuacion de momento cineticoen la direccionO1y1 da unaecuacion libre de ligaduras. Notese queO1z1 es la verticaldescendente.
MPO1
= O1G∧Mgk1 +O1O∧mgk1 = −(Ma+mb)gsinθ j1
Mx1
−(Ma+mb)gsinθMz1
=
ddt
mR2
2 ϕ cosθ(
Mρ2+mb2 + mR2
4
)
θ
−mR2
2 ϕ sinθ
−(Ma+mb)gsinθ =
(
Mρ2+mb2 +mR2
4
)
θ
Es obvio que se conserva la energıa: ligaduras ideales y estacionarias, fuerzas potenciales.Podemos escribir directamente la integral de la energıa, yusarla en lugar de una de lasanteriores. Hay que tener cuidado con los signos en los potenciales.
V = −MgzG−mgzO = −(Ma+mb)gcosθT +V = E = Cte
Comoϕ es constante, solo hay que reducir a cuadraturas laθ . Se puede integrar la ecuacionde momentos segunO1y1:
θ =−(Ma+mb)g
Mρ2+mb2+ mR2
4
sinθ = −Ω2sinθ
223

Se puede integrar una vez multiplicando ambos terminos porθ :
θ2
2=
C2
+Ω2cosθ ⇒∫ ±dθ√
C+2Ω2cosθ=∫
dt
Si se sustituye el valor constante deϕ en la integral de la energıa,
[12
Mρ2+m
(12
b2 +18
R2)]
θ2 +14
mR2ϕ20 − (Ma+mb)gcosθ = E
θ2− 2(Ma+mb)g
Mρ2 +mb2+ mR2
4
cosθ = θ2−2Ω2cosθ = E− 14
mR2ϕ20 = C
se obtiene directamente la misma cuadratura que por el otro camino.
5 Para calcular las reacciones de la horquillaS2 sobre el discoS0, lo aisla-mos y planteamos las ecuaciones de cantidad de movimiento y de momentocinetico enO:
mgk1+RO = mγγγO01 = mγγγO
21 MLO = HD
O
La ecuacion de cantidad de movimiento es la del absoluto, 0/1, aunquesea mas comodoproyectarlaen ejes movilesS2.
mg Mz2
My2
XO
YO
ZO
O
El puntoO del disco esta fijo en la horquilla, por lo que su aceleracionse calcula con el campo de aceleraciones de esta: movimientocircular.
γγγO21 = aθ i2−aθ2k2
No hace falta derivar nada, ya esta proyectada en ejesS2.
mg
−sinθ0
cosθ
+
XOYOZO
= ma
θ0
−θ2
x1
z1
aθ
−aθ 2
El momento cinetico del disco enO se ha conoce ya, proyectado en ejesS2; como estamosestudiando el movimiento absoluto, hay que derivarlo por elteorema de Coriolis.
0My2
Mz2
= III
DO ·ωωω01+ωωω21∧ III
DO ·ωωω01 =
mR2
4
2ϕθ0
+
mR2
4
∣∣∣∣∣∣
i2 j2 k2
0 θ 02ϕ θ 0
∣∣∣∣∣∣
0My2
Mz2
=
mR2
4
2ϕθ
−2ϕθ
Tenemos la reaccion y el momento de ligadura enO en funcion de las coordenadas y sus deri-vadas. Si se hubiera integrado completamente el movimiento, se conocerıan en funcion det. Alhaberlo reducido a cuadraturas, sabemos que:
ϕ = 0 ϕ = ϕ0
θ = −Ω2sinθ θ = ±√
C+2Ω2cosθ
224

donde el doble signo se determina con el valor inicialθ0. Las incognitas pueden quedar enfuncion deθ y de las condiciones iniciales:
XOYOZO
= mg
sinθ0
−cosθ
+ma
−Ω2sinθ0
−C−2Ω2cosθ
0My2
Mz2
=
mR2
4
0−Ω2sinθ
−2ϕ0(C+2Ω2cosθ
)
225

Problema 9.1.7: El sistema material de la figura se compone de dos varillas sinmasa,OA y AG, delongitudes 2a y a, respectivamente, y un disco de centroG, radio 2a y masam. El disco se mantieneconstantemente perpendicular a la varillaAG, alrededor de la cual puede girar libremente; la varillaOApuede girar libremente alrededor de la vertical que pasa porsu extremoO, de forma que el extremoAdescribe una circunferencia horizontal de centroO y radio 2a; las dos varillas se unen por el extremoA mediante una articulacion que unicamente permite el girorelativo de las dos varillas alrededor de latangente enA a la circunferencia descrita por este extremo.
Se considerara el movimiento del sistema respecto de lareferencia triortogonal y orientada a derechas,Oxyz, conorigen enO, y cuyo ejeOzcoincide con la vertical ascen-dente; si se estima conveniente, puede usarse la referenciaG; u1,u2,u3 que acompana al disco en su movimiento,y que tiene origen en su centroG, con los vectores unita-riosu3 dirigido segun la prolongacion de la varillaAG, u2
perpendicular al anterior y contenido en el plano verticaldefinido por la varillaAG, y u1 perpendicular a los dosanteriores.
Para el analisis del sistema se tomaran las siguientes coordenadas generalizadas:i) ϕ , angulo que~OAforma con la direccion del ejeOx, ii) θ , angulo que la varillaAG forma con el plano horizontalOxy, yiii) ψ , angulo que un radio fijo al disco forma con el plano verticalque contiene a la varilla. Se pide:
a) Determinar, en funcion de las coordenadas y velocidadesgeneralizadas:i) la energıa cinetica delsistema,ii) momento cinetico del sistema respecto del centro de masasG, y, iii) momento cineticodel sistema respecto del origenO.
b) Plantear, aislando el disco, la ecuacion de momento cin´etico respecto del centro de masas; deduciruna integral primera y las componentes del momento que la varilla AG transmite al disco.
c) Plantear, para todo el sistema, la ecuacion de momento cinetico en el puntoO; deducir una integralprimera.
d) Deducir otra integral primera independiente de las anteriores y reducir el problema a cuadraturas.
e) Plantear, aislando el disco, la ecuacion de cantidad de movimiento; deducir las componentes de lareaccion que la varillaAG transmite al disco.
f) Determinar el sistema de fuerzas que se transmite de una a otra varilla a traves de la union deA.
g) Hallar la lagrangiana del sistema y deducir las ecuaciones de Lagrange para las coordenadas cıcli-cas.
Septiembre de 1992
Solucion por mecanica newtoniana
Este mismo problema se resolvio por mecanica analıtica en el capıtulo correspondiente. Seresolvera ahora por mecanica newtoniana, como pide el enunciado.
Los distintos apartados especifican que ecuaciones plantear. Si no lo hicieran, la inspec-cion del sistema muestra que ecuaciones van a determinar el movimiento sin que aparezcanincognitas de ligadura:
La ecuacion correspondiente al giroϕ (precesion) es la de momento cinetico del sistemasegun el ejeOz. Dara lugar a una integral primera, pues se trata de una direccion fija enla que no hay momento de las fuerzas exteriores.
La asociada al giroψ (rotacion propia del disco) es la de momento cinetico del disco solosegun su eje de giro. Por tener el tensor de revolucion y no haber momento, la ecuacionde Euler segunu3 da tambien una integral primera.
La ecuacion asociada al giroθ es la del momento cinetico del disco enA, segun el ejenormal al plano meridianoOAG. No va a dar integral primera por el momento del peso.
Finalmente, por ser el sistema conservativo, existe la integral de la energıa, que puedesustituir a cualquiera de las 3 anteriores.
226

No se usa la notacion de clase para los angulos de Euler: precesion y rotacion propia estanintercambiados (como en los libros anglosajones), y la nutacion corresponderıa aθ −π/2 delproblema. Por tanto, no se pueden copiar directamente formulas.
Si se quiere analizar completamente el problema:
Tenemos 3 solidos→ 18 parametros y ecuaciones independientes.
En O, A y G hay cojinetes con restriccion axial: 5x3=15 ligaduras finitas.
Quedan 18-15=3 grados de libertad, uno por cada cojinete, que corresponden a los tresangulos de la figura.
Dos solidos son varillas sin masa (y por tanto sin dinamicapropia), pero transmiten todaslas fuerzas y momentos de las ligaduras, por eso no se reduce ningun parametro.
a Se llamaraS1 a los ejes fijos,S0 al plano verticalque contiene a la varillaOA, S2 a la varillaAG junto conlos ejesG;u1,u2,u3, y S3 al disco. El unico solido conmasa es el disco. El potencial vale
V = mgzG = mgasinθ
i) Se halla la energıa cinetica por el teorema de Koe-nig, porque el disco no tiene ningun punto fijo:
T =12
m(vG31)
2+12
ωωω31 · IIIG ·ωωω31
x
y
z
O
ϕA
θ ψ
G
u3
u1
u2
La velocidad deG, que es punto fijo de la barraS2, laobtenemos por composicion de movimientos: los dos songiros con punto fijo:
vG31 = vG
21 = vG20+vG
01 = ωωω20∧AG +ωωω01∧OG =
= (2a+acosθ) ϕ u1 +aθ u2x
y
z
O
ϕA
θ
G′
G
u3
u1
u2
G′Gϕaθ
Para el giro, podemos trabajar en los ejesS2: por la si-metrıa de revolucion el tensor del disco es tambien cons-tante, y la velocidad angular es mas facil de proyectar.
ωωω31 = ωωω01+ωωω20+ωωω32 =
= ϕ k1− θ u1 + ψ u3 =
= −θ u1 + ϕ cosθ u2 +(ψ + ϕ sinθ) u3
Podemos ya calcular la energıa cinetica:x
y
z
O
ϕA
θ
u3
u1
u2
θ
θ
ψ
ϕ
T =12
ma2[
(2+cosθ)2 ϕ2 + θ2]
+
+12⌊−θ , ϕ cosθ ,(ψ + ϕ sinθ)⌋m(2a)2
4
1 0 00 1 00 0 2
−θϕ cosθ ,
ψ + ϕ sinθ
=
= ma2 [θ2+ ϕ2(3+2cosθ)+2ϕψ sinθ + ψ2]
ii) El momento cinetico del solido respecto al centro de masas (respecto a unos ejes para-lelos a los fijos con origen en el centro de masas) se calcula con el tensor de inercia del
227

disco y su velocidad angular absoluta, que se han calculado ya:
HG = IIIG ·ωωω31 = ma2
−θϕ cosθ
2(ψ + ϕ sinθ)
Esta proyectado en ejesS2 (Resal): por la simetrıa de revolucion, el tensor es tambien cons-tante en esos ejes en que la velocidad angular es mas sencilla; nos ahorramos el giroψ.
iii) Para calcular el momento cinetico enO, se aplica el teorema de Koenig, pues no es unpunto fijo del solido, ni el centro de masas:
HO = OG∧mvG31+HG
Todos los terminos se conocen ya en ejesS2, salvoOG:
HO = m
∣∣∣∣∣∣
u1 u2 u30 −2asinθ 2acosθ +a
a(2+cosθ) ϕ aθ 0
∣∣∣∣∣∣
+HG = 2ma2
−θ (1+cosθ)ϕ(1+cos2 θ +3cosθ
)
ϕ sinθ (3+cosθ)+ ψ
b El disco puede girar libremente alrededor deu3; habra fuerzas ymomentos de ligadura en todas las direcciones impedidas de giro ydesplazamiento:(RG
1 ,RG2 ,RG
3 ) y (MG1 ,MG
2 ,0). La ecuacion del momentocinetico se escribe:
MLG = HG
∣∣1 = HG
∣∣2 +ωωω21∧HG
Desarrollando los terminos,
u3
u1
u2
MG1
MG2
RG2
RG1
RG3
MG1
MG2
0
= ma2 d
dt
−θϕ cosθ
2(ψ + ϕ sinθ)
+ma2
∣∣∣∣∣∣
u1 u2 u3
−θ ϕ cosθ ϕ sinθ−θ ϕ cosθ 2(ψ + ϕ sinθ)
∣∣∣∣∣∣
=
ma2 ddt
−θϕ cosθ
2(ψ + ϕ sinθ)
+ma2
ϕ cosθ (2ψ + ϕ sinθ)θ (2ψ + ϕ sinθ)
0
La tercera da una integral primera:
ddt
(ψ + ϕ sinθ) = 0 ⇒ ψ + ϕ sinθ = C1
Esta corresponde a la tercera ecuacion de Euler,
Cr +(A−B)pq= M3 = 0 ⇒ r = r0
que da integral primera porque el tensor es simetrico respecto al ejeu3 y no hay momento enesa direccion. Es la misma, porquer = ψ + ϕ sinθ .
Las otras dos determinan las componentes del momento de ligadura enG:
MG1 = ma2[−θ + ϕ cosθ (2ψ + ϕ sinθ)
]
MG2 = ma2[ϕ cosθ −ϕθ sinθ + θ (2ψ +ϕ sinθ)
]
228

c Para plantear la ecuacion del momento cinetico enO,hay que analizar los momentos exteriores en ese punto.Convendra trabajar en los ejesS0 ligados al plano meri-dianoOAG.
Como el sistema puede girar libremente alrededorde Oz, en las otras direcciones el cojinete ejer-cera momentos de ligadura que impidan el giro:(Mx0,My0,0) . En ejesS1 tendrıamos otros dos, queserıan las proyecciones de estos en dichos ejes.
La reaccion no cuenta porque esta aplicada en elmismo puntoO
El peso del disco da momentoMp segun el ejeOy0.
x0
y0
x
y
z≡ z0
O
Mx0
My0Mp
ϕ
A
G
u3
u1
u2
θmg
Mx0
My0
0
+
0mga(2+cosθ)
0
= HO
∣∣1 ⇒ HO ·k1 = Cte
ComoHO lo tenemos en ejesS2, es mas sencillo pasark1 a esos ejes:
k1 = (0,cosθ ,sinθ)2
HO ·k1 = 2ma20+cosθϕ(1+cos2θ +3cosθ
)+sinθ [ϕ sinθ (3+cosθ)+ ψ ]
=
= 2ma2(3ϕ +2ϕ cosθ + ψ sinθ) ⇒ ϕ (3+2cosθ)+ ψ sinθ = C2
d Las ligaduras son ideales y estacionarias; la fuerza directamente aplicada es potencial: seconserva la energıa. La cinetica la conocemos, y el potencial se escribe directamente:
T +V = ma2 [θ2+ ϕ2(3+2cosθ)+2ϕψ sinθ + ψ2]+mgasinθ = E
Para reducir el problema a cuadraturas, se opera como en el s´olido de Lagrange, pues lasintegrales primeras que hemos obtenido son las mismas.
Con las dos integrales primeras de momento cinetico se despejanϕ y ψ como funcionesdeθ :
ψ + ϕ sinθ = C1 ϕ (3+2cosθ)+ ψ sinθ = C2
ψ = C1− ϕ sinθ → ϕ (3+2cosθ)+(C1− ϕ sinθ)sinθ = C2
ϕ =C2−C1sinθ
3+2cosθ −sin2 θψ =
C1(3+2cosθ)−C2sinθ3+2cosθ −sin2 θ
Se sustituye en la ecuacion de la energıa,
ma2[
θ2 +C2
1 (3+2cosθ)+c22−2C1C2sinθ
2+2cosθ +cos2 θ
]
+mgasinθ = E
y se obtiene una cuadratura:
θ2 = C3− f (θ) → dt =±dθ
√
C3− f (θ)
Con estadt, los otros angulos se reducen tambien a cuadraturas,
dϕ =C2−C1sinθ
3+2cosθ −sin2θ· ±dθ√
C3− f (θ)
dψ =C1(3+2cosθ)−C2sinθ
3+2cosθ −sin2 θ· ±dθ√
C3− f (θ)
229

Un camino alternativo —y mucho mas laborioso— para obtenerla tercera integral es plan-tear la ecuacion correspondiente al grado de libertadθ : la del momento cinetico enA, tomandola componente segunOy0. Se obtendrıa una ecuacion diferencial de segundo orden en θ , sinincognitas de ligadura. No da directamente una integral primera por el momento del peso, yporque aparecen las otras velocidades generalizadas al derivar en ejes moviles. ComoA es unpunto movil, hay que anadir el termino corrector. Usandoel momento cinetico de las velocida-des absolutas,
MEA = HA+vA
01∧mvG31
Como ejercicio, se puede plantear la ecuacion del momento cinetico con las velocidades relati-vas aA (a unos ejes paralelos a los fijos con origen en A). Se debe llegar a la misma ecuacion.
Es mas comodo trabajar en ejesS2. El momento cinetico es similar al que se calculo paraO,quitando el vectorOA del producto vectorial:
HA = AG∧mvG31+HG = m
∣∣∣∣∣∣
u1 u2 u30 0 a
a(2+cosθ) ϕ aθ 0
∣∣∣∣∣∣
+
+ma2
−θϕ cosθ
2(ψ + ϕ sinθ)
= 2ma2
−θϕ (1+cosθ)ϕ sinθ + ψ
En A da momento el peso, y hay momentos de ligaduraen las direccionesu2 y u3 de giro impedido.
MEA =
0MA
2MA
3
+
mgacosθ00
Si se trabajara en ejesS0, el momento de ligadura tendrıacomponentes segunOx0 y Oz0.Finalmente, el termino complementario vale,
x0
y0
x
y
z≡ z0
OM2 M3 Mpϕ
A
G
u3
u1
u2
mg
vA01∧mvG
31 = m
∣∣∣∣∣∣
u1 u2 u32aϕ 0 0
(2+cosθ)aϕ aθ 0
∣∣∣∣∣∣
= ma2
00
2ϕθ
Planteamos la ecuacion,
mgacosθMA
2MA
3
= 2ma2
ddt
−θϕ (1+cosθ)ϕ sinθ + ψ
+
∣∣∣∣∣∣
u1 u2 u3
−θ ϕ cosθ ϕ sinθ−θ ϕ (1+cosθ) ϕ sinθ + ψ
∣∣∣∣∣∣
+
00
ϕθ
Separamos la componenteu1,
mgacosθ = 2ma2 [−θ + ϕ (ψ cosθ − ϕ sinθ)]
Es la misma que se obtiene por mecanica analıtica para la coordenadaθ . Para obtener unaintegral primera, se eliminanψ y ϕ con las dos integrales anteriores, llegando a una expresionde la formaθ = f (θ) , que se integra multiplicando ambos terminos porθ . Una vez en la formaθ2 = g(θ), se procede como antes.
e Sobre el disco actuan la reaccion de la varilla enG (3 componentes)y el peso. La aceleracion de G (solidario con la varilla) se puede calcularpor varios caminos:
DerivandovG21, ya conocida, en ejes moviles.
Por la composicion de movimientos 2/0+0/1. θmg
u3
u1
u2RG
2
RG1
RG3
230

Por el primer camino, trabajando en ejesS2.
vG31 = vG
21 =[(2+cosθ)aϕ,aθ ,0
]
γγγG21 = a
(2+cosθ) ϕ −sinθϕθθ0
+
∣∣∣∣∣∣
u1 u2 u3
−θ ϕ cosθ ϕ sinθ(2+cosθ)aϕ aθ 0
∣∣∣∣∣∣
Por el segundo camino, tendrıamos
γγγG21 = γγγG
20+γγγG01+2ωωω01∧vG
20
La velocidad y la aceleracion relativas son las de un giro planoθ alrededor deAy0: aθ u2 yaθ u2−aθ2 u3. La aceleracion de arrastre es la de un giroϕ alrededor deOz: a(2+cosθ)ϕ u1−a(2+cosθ)ϕ2 i0 . La velocidad angular de arrastre es la de este ultimo giro,ϕ k0. Proyectandolotodo en ejesS2 y operando se obtiene el mismo resultado que por el otro camino.
Planteamos la ecuacion de la cantidad de movimiento:
RG1
RG2
RG3
−mg
0cosθsinθ
= ma
(2+cosθ) ϕ −2sinθϕθθ +(2+cosθ)sinθ ϕ2
θ2+(2+cosθ)cosθ ϕ2
que determina la reaccion una vez conocido el movimiento.
f Se han calculado antes la reaccionRG y el momentoMG que la varillaAG transmite al disco enG. Por accion-reaccion, el disco transmite a la varilla los mismos consigno opuesto. EnA, la varillaOA transmite a laAG unareaccionRA con tres componentes, y un momentoMA
con componentes segunu2 y u3, las direcciones de giroimpedido. Como la varilla no tiene masa, las ecuacionesdel movimiento se reducen a las de equilibrio de fuerzasy momentos en algun punto, por ejemplo enA.
x
y
z
O
ϕ
A
θMA
2MA
3
RA
G
u3
u1
u2
−RG
−MG1
−MG2
RA−RG = 0 ⇒ RA = RG
MA−MG +AG∧(
−RG)
= 0 ⇒ MA = MG +AG∧RG
La varilla no tiene masa y lo unico que hace es transmitir el sistema de fuerzas y momentos deun extremo a otro. Salvo las direcciones en que hay giro libre, en que el momento transmitidoes nulo:
0MA
2MA
3
=
MG1
MG2
0
+
∣∣∣∣∣∣
u1 u2 u30 0 a
RG1 RG
2 RG3
∣∣∣∣∣∣
=
MG1 −aRG
2MG
2 +aRG1
0
Podemos ahora analizar la varillaOA, y ver que ligaduras se transmiten al sistema fijo.OAsolotransmite aAGel momentoMA
1 , los demas son nulos. Y recibe de esta su opuesto. Para analizarla varillaOA conviene usar los ejesS0.
RO−RG = 0
El peso y la inercia del disco se transmiten ıntegros a los ejes fijos.
MOx0
MOy0
0
=
−MA2 sinθ0
MA2 cosθ
+
∣∣∣∣∣∣
u1 u2 u32a 0 0RG
x0RG
y0RG
z0
∣∣∣∣∣∣
=
−MA2 sinθ
−2aRGz0
MA2 cosθ +2aRG
y0
g En la Lagrangiana solo aparece explıcitamente la coordenadaθ . Las otras dos son cıclicasy dan lugar a integrales primeras:
Lψ = 0 → Lψ ∝ ϕ sinθ + ψ = Cte
Lϕ = 0 → Lϕ ∝ ϕ (3+2cosθ)+ ψ sinθ = Cte
231

Para laθ podemos obtener la ecuacion de Lagrange, que no dara integral primera,
Lθ = ma2(2θ) Lθ = ma2(−2ϕ2sinθ +2ϕψ cosθ)−mgacosθ →
→ θ + ϕ2sinθ − ϕψ cosθ +g2a
cosθ = 0
Se trata de la ecuacion de momento cinetico correspondiente a θ : momento cinetico enA,proyectada en la direccionu1, como se vio mas arriba.
Finalmente, en lugar de esta ultima, se podrıa usar la ecuacion de la energıa: el sistema esconservativo (escleronomo, potencial, sin fuerzas disipativas) y se obtiene una integral primera,
T +V = E
232

Capıtulo 10
Examenes: Dinamica de Sistemas
10.1. Problemas resueltos
233
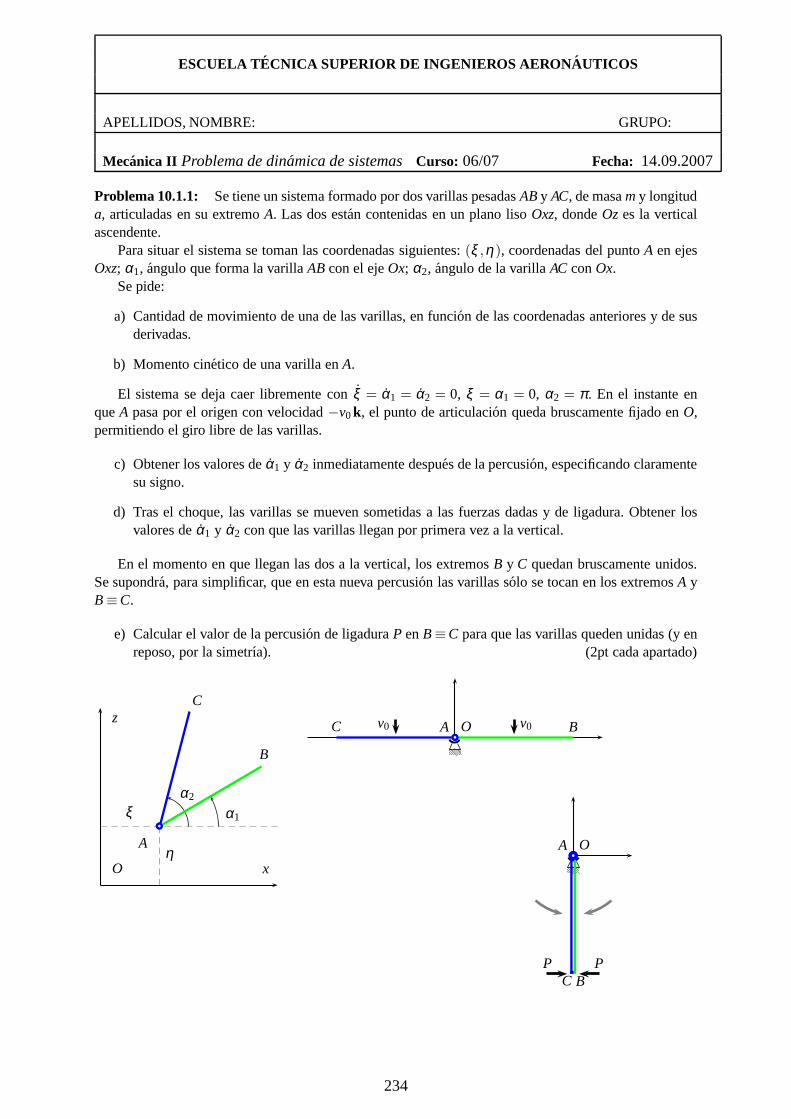
ESCUELA TECNICA SUPERIOR DE INGENIEROS AERON AUTICOS
APELLIDOS, NOMBRE: GRUPO:
Mecanica II Problema de dinamica de sistemasCurso: 06/07 Fecha: 14.09.2007
Problema 10.1.1: Se tiene un sistema formado por dos varillas pesadasABy AC, de masamy longituda, articuladas en su extremoA. Las dos estan contenidas en un plano lisoOxz, dondeOzes la verticalascendente.
Para situar el sistema se toman las coordenadas siguientes:(ξ ,η), coordenadas del puntoA en ejesOxz; α1, angulo que forma la varillaABcon el ejeOx; α2, angulo de la varillaAC conOx.
Se pide:
a) Cantidad de movimiento de una de las varillas, en funcionde las coordenadas anteriores y de susderivadas.
b) Momento cinetico de una varilla enA.
El sistema se deja caer libremente conξ = α1 = α2 = 0, ξ = α1 = 0, α2 = π. En el instante enqueA pasa por el origen con velocidad−v0k, el punto de articulacion queda bruscamente fijado enO,permitiendo el giro libre de las varillas.
c) Obtener los valores deα1 y α2 inmediatamente despues de la percusion, especificando claramentesu signo.
d) Tras el choque, las varillas se mueven sometidas a las fuerzas dadas y de ligadura. Obtener losvalores deα1 y α2 con que las varillas llegan por primera vez a la vertical.
En el momento en que llegan las dos a la vertical, los extremosB y C quedan bruscamente unidos.Se supondra, para simplificar, que en esta nueva percusionlas varillas solo se tocan en los extremosA yB≡C.
e) Calcular el valor de la percusion de ligaduraP enB≡C para que las varillas queden unidas (y enreposo, por la simetrıa). (2pt cada apartado)
B
α1
C
α2
O x
z
A
ξ
η
BC v0v0 A O
BC
A O
PP
234

a Podemos calcular la cantidad de movimiento de una varilla devarios modos. Derivandodirectamente el vector posicion,
rGi = rA +AG i =
ξ0η
+
a2
cosαi0
sinαi
⇒ mvGi = m
ξ0η
+
maαi
2
−sinαi0
cosαi
o por el campo de velocidades del solido,mvGi = m(vA +ωωω i ∧AG i
), que da el mismo resulta-
do.
b Para el momento cinetico enA, hay que tener en cuenta que ese punto no esta fijo ni es elcentro de masas, por lo que hay que aplicar el teorema de Koenig:
H iA = AG i ∧mvGi + IIIGi ·ωωω i
Para proyectarIIIGi conviene usar unos ejesGix0y0z0 ligados a la varilla:Gix0 segun la varilla yGiy0 ‖ Oy (normal al plano). Son los mas comodos y no hay que hacer cambio ninguno, porqueel momento cinetico va a tener la direccion del eje comun.Notese que, por el sentido en quecrecen los angulos,ωωω i = (0,−αi,0).
H iA =
ma2
∣∣∣∣∣∣
i j kcosαi 0 sinαi
ξ 0 η
∣∣∣∣∣∣
+ma2αi
4
∣∣∣∣∣∣
i j kcosαi 0 sinαi−sinαi 0 cosαi
∣∣∣∣∣∣
+ma2
12
0 0 00 1 00 0 1
0
·
0−αi
0
0
=
=ma2
0ξ sinαi − η cosαi
0
+
ma2αi
4
0−10
+
ma2αi
12
0−10
=
=ma2
0ξ sinαi − η cosαi
0
1
+ma2αi
3
0−10
0
Los dos terminos enαi se pueden sumar sin necesidad de cambio de ejes.
c Al bloquear la articulacion en el origen, se introduce bruscamente una ligadura. Como espersistente (se mantiene despues de la percusion), tenemos un sistema cerrado. El proceso es:
Antes ξ = α1 = α2 = 0, η = −v0; ξ = η = α1 = 0, α2 = πPercusion Percusion de ligadura enADespues: ξ = η = ξ = η = 0 (ligadura persistente);α1 = 0, α2 = π
Al bloquearA aparecen percusiones de ligadura en la articulacion. No podemos distinguirque parte es percusion externa sobre el sistema y que parte es interna de una varilla sobre otra,porque el problema es hiperestatico en este sentido. Y ademas no se pide.
Como solo interesa el estado cinematico despues,α1 y α2, es obvio que hay que aplicar laecuacion impulsiva del momento cinetico enA, para cada varilla por separado; la del sistemacompleto solo confirma la simetrıa. La de cantidad de movimiento no dice nada por la percusionde ligadura.
MPA = Hd
A−HaA
0 = ma2
000
+
ma2αd1
3
0−10
− ma
2
00+v0
0
−0
0−10
→ αd
1 = −3v02a
0 = ma2
000
+
ma2αd2
3
0−10
− ma
2
00−v0
0
−0
0−10
→ αd
2 = +3v02a
Comoωωω i = (0,−αi,0), α1 < 0 significa que la varillaAB gira en el sentido de las agujas delreloj, y α2 > 0 que laAC gira en el sentido contrario, como era de esperar.
235

d Tras la primera percusion, las varillas se mueven sometidas a las fuerzas directamenteaplicadas y de ligadura. Como el peso es potencial y la articulacion es una ligadura ideal, seconserva la energıa. Podemos aplicar la ecuacion
T +V = Cte=16
ma2α2i +mg
a2
sinαi
dondeT es la de un solido con punto fijo, yV corresponde a la altura del centro de masas.Aplicandolo entre la horizontal y la primera vertical (αi = −π/2), se tiene:
16
ma2(
3v0
2a
)2
+0 =16
ma2α2i
∣∣v−mg
a2
⇒ αi∣∣v = ±
√
9v20+12ga
2a
La de la varilla 1 es negativa, como al salir de la percusion,y la de la 2 positiva.
e Al llegar a la vertical, las dos varillas chocan por los extremos libres, y quedan unidas y(como se puede ver por la simetrıa) en reposo. Aparecera una percusion interna, de accion-reaccion, en los extremosC y D. Obviamente, tambien apareceran percusiones de ligadura en elextremoA, que no nos interesan. Por eso, lo mejor es aplicar de nuevo laecuacion del momentocinetico enA. Podemos hacerlo con cualquiera de ellas. LlamandoPi a la percusion de la varilla2 sobre la 1,
MPA = Hd
A−HaA →
0−aP
0
=
000
− ma2
3
−
√
9v20 +12ga
2a
0−10
⇒ P = m
√
9v20+12ga
6
Obviamente, la 1 ejerce−Pi sobre la 2.
236

ESCUELA TECNICA SUPERIOR DE INGENIEROS AERONAUTICOS
Apellidos, Nombre: Grupo:
Mecanica II - Problema de Sistemas Curso: 99/00 Fecha: 06.2000
Problema 10.1.2: Un sistema material esta formado por una varilla sin masa delongitud 3Rarticuladaen O, y que puede girar libremente dentro del plano fijoOxz, siendoOz la vertical ascendente. A unadistanciaR del extremoO tiene ensartado un disco pesadoA de masam y radio R, que se mantieneperpendicular a la varilla y puede girar libremente alrededor de ella. En el otro extremo esta fijado por sucentro otro disco pesadoB, identico alA, que puede girar libremente alrededor de un eje paralelo aOy.Este disco rueda sin deslizar por una circunferencia fija de centroO y radio 4R, contenida tambien en elplanoOxz. Se llamaraϕ al angulo girado por el discoA y θ al angulo que forma la varilla con la verticaldescendente. Se pide:
1. Integrar la ligadura cinematica, y comprobar que basta con las coordenadas generalizadasθ y ϕpara determinar la configuracion del sistema. (0 puntos)
2. Calcular la Lagrangiana del sistema en funcion de las coordenadas generalizadasθ y ϕ y susderivadas. (6 puntos: 4 desarrollo, 2 resultado correcto)
3. El sistema se lanza desde la posicion mas baja,θ = 0. Calcular las velocidades inicialesϕ0 y θ0
necesarias para que llegue aθ = π con θ = 0. (4 puntos: 3 desarrollo, 1 resultado correcto )1
x y
z
O
ϕ
θ
A
B
1Si se hace uso de integrales primeras, habra que justificar que existen.
237

Solucion por mecanica de Newton-EulerEste problema esta planteado para hacerlo por Mecanica Lagrangiana, aunque tambien se
puede resolver mediante las Ecuaciones Generales de la Mec´anica de Newton-Euler.El sistema esta formado por tres solidos con eje fijo, por loque su configuracion viene
dada por tres angulos: el anguloθ que forma la varilla (llamemosla solido 2) con la vertical,el anguloϕ girado por el disco ortogonal (solido 3), y el angulo girado por la rueda (solido4). Este ultimo se puede medir respecto a una referencia fija(anguloψ) o relativo a la varilla(anguloβ ). Sin embargo, el numero de grados de libertad es solo dos,por la ligadura adicionalde rodar sin deslizar. Esto deberıa permitir eliminarψ o β , dejando solo dos coordenadas. Peroesta ligadura es distinta de las otras: afecta a las velocidades, no a las coordenadas; por tanto,para poder usarla y eliminar la tercera coordenada hay que integrarla.
ψ
B
I
vB
3Rθ
Rψ
O
θ
β
B
I4Rθ
Rβ
O
θ
LigaduraLa ligadura de rodar sin deslizar im-plica quevI
41 = 0, siendoI el puntode contacto. Esta ecuacion hay que ex-presarla en funcion de las coordenadasdel problema. Esto no se puede hacerdirectamente porqueI no es siempreel mismo punto, y no tiene sus propiascoordenadas. Habra que usar compo-sicion de movimientos o campo de ve-locidades, apoyandose en puntos quesı sean siempre el mismo.Si usamos el anguloψ que forma larueda con la vertical, que es una di-reccion fija, su derivada da directa-mente la velocidad angular absoluta:ωωω41 = −ψ j1.
Podemos tomar el puntoB, que es el mismo para los solidos 2 y 4, y aplicarle el campode velocidades de cada uno de ellos, teniendo en cuenta que ambos tienen puntos de velocidadnula,O e I respectivamente:
vB21≡ vB
41 ⇒ vO21+ωωω21∧OB =
vI41+ωωω41∧IB ⇒ 3Rθ = Rψ ⇒ ψ = 3θ ⇒ ψ = 3θ +C
Tambien se puede usar el puntoB, de velocidad conocida porque se mueve con el solido 2, paraaplicar el campo de velocidades del solido 4 e imponer que lavelocidad deI sea nula:
0 = vI41 = vB
41+ωωω41∧BI = 3Rθ uθ −Rψ uθ = 0
que da el mismo resultado que antes.Si usamos el anguloβ relativo a la varilla, su derivada nos dara la velocidad relativaωωω42.
Podemos entonces aplicar la composicion de movimientos para calcular la velocidad deI :
0 = vI41 = vI
42+vI21 = ωωω42∧BI +ωωω21∧OI = −Rβ uθ +4Rθ uθ ⇒ β = 4θ +C
Si vamos a calcular momentos y energıas cineticas absolutas, es mas comodo usar el primero.
Analisis del sistema y obtencion de ecuacionesEl sistema esta formado por tres solidos, pero tiene solodos grados de libertad, por lo que
basta con dos ecuaciones independientes para determinar sumovimiento. Si se tiene experien-cia, se ve inmediatamente cuales son:
Momento cinetico del disco 3 en la direccion de su giro: al tener simetrıa de revolucion ygirar sin rozamiento, nos dara directamente una integral primera para laϕ.
238
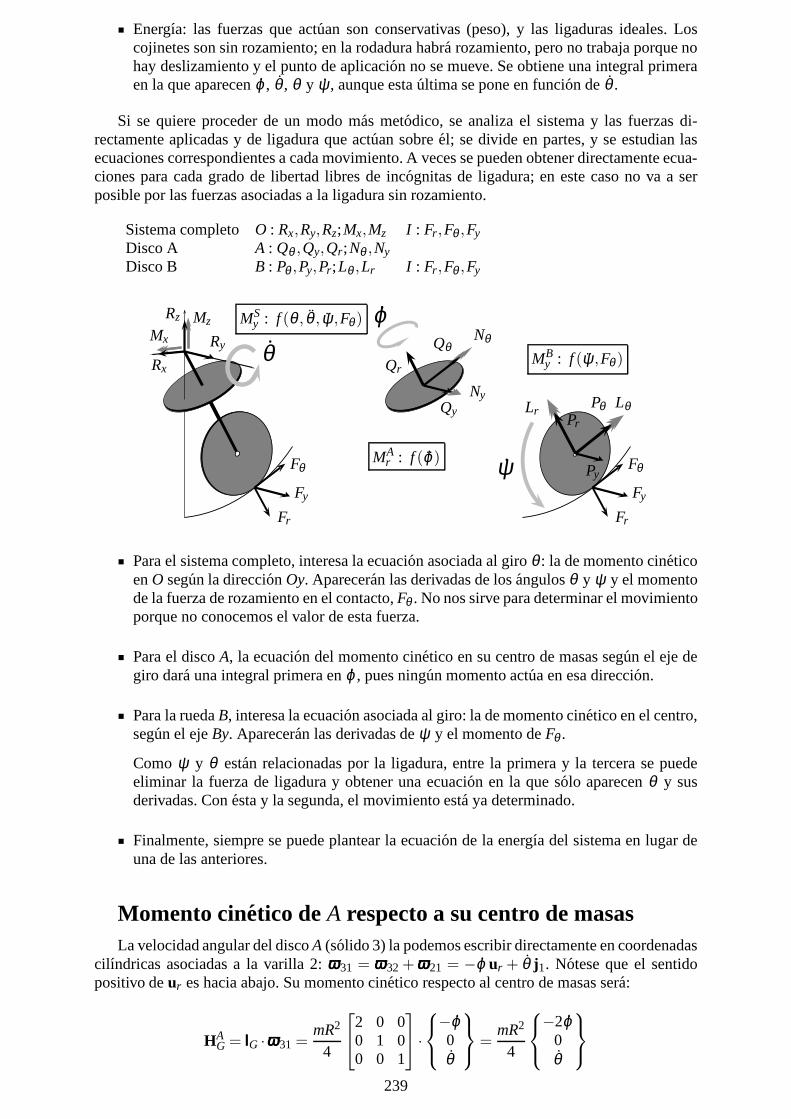
Energıa: las fuerzas que actuan son conservativas (peso), y las ligaduras ideales. Loscojinetes son sin rozamiento; en la rodadura habra rozamiento, pero no trabaja porque nohay deslizamiento y el punto de aplicacion no se mueve. Se obtiene una integral primeraen la que aparecenϕ, θ , θ y ψ , aunque esta ultima se pone en funcion deθ .
Si se quiere proceder de un modo mas metodico, se analiza elsistema y las fuerzas di-rectamente aplicadas y de ligadura que actuan sobre el; sedivide en partes, y se estudian lasecuaciones correspondientes a cada movimiento. A veces se pueden obtener directamente ecua-ciones para cada grado de libertad libres de incognitas de ligadura; en este caso no va a serposible por las fuerzas asociadas a la ligadura sin rozamiento.
Sistema completo O : Rx,Ry,Rz;Mx,Mz I : Fr ,Fθ ,FyDisco A A : Qθ ,Qy,Qr ;Nθ ,NyDisco B B : Pθ ,Py,Pr ;Lθ ,Lr I : Fr ,Fθ ,Fy
Rx
Rz
RyMx
Mz
Fr
Fθ
Fy
θMS
y : f (θ , θ , ψ,Fθ )
QθQr
Qy
Nθ
Ny
ϕ
MAr : f (ϕ)
PθPr
Py
LθLr
Fr
Fθ
Fy
ψ
MBy : f (ψ,Fθ )
Para el sistema completo, interesa la ecuacion asociada algiro θ : la de momento cineticoenO segun la direccionOy. Apareceran las derivadas de los angulosθ y ψ y el momentode la fuerza de rozamiento en el contacto,Fθ . No nos sirve para determinar el movimientoporque no conocemos el valor de esta fuerza.
Para el discoA, la ecuacion del momento cinetico en su centro de masas segun el eje degiro dara una integral primera enϕ , pues ningun momento actua en esa direccion.
Para la ruedaB, interesa la ecuacion asociada al giro: la de momento cinetico en el centro,segun el ejeBy. Apareceran las derivadas deψ y el momento deFθ .
Comoψ y θ estan relacionadas por la ligadura, entre la primera y la tercera se puedeeliminar la fuerza de ligadura y obtener una ecuacion en la que solo aparecenθ y susderivadas. Con esta y la segunda, el movimiento esta ya determinado.
Finalmente, siempre se puede plantear la ecuacion de la energıa del sistema en lugar deuna de las anteriores.
Momento cinetico deA respecto a su centro de masasLa velocidad angular del discoA (solido 3) la podemos escribir directamente en coordenadas
cilındricas asociadas a la varilla 2:ωωω31 = ωωω32 +ωωω21 = −ϕ ur + θ j1. Notese que el sentidopositivo deur es hacia abajo. Su momento cinetico respecto al centro de masas sera:
HAG = IIIG ·ωωω31 =
mR2
4
2 0 00 1 00 0 1
·
−ϕ0θ
=
mR2
4
−2ϕ0θ
239

La ecuacion del momento cinetico respecto a su centro de masas nos dara:
0NθNy
=
dHAG
dt
∣∣∣∣1=
dHAG
dt
∣∣∣∣2+ωωω21∧HA
G =mR2
4
−2ϕ0θ
+
mR2
4
∣∣∣∣∣∣
ur uθ j1
0 0 θ−2ϕ 0 θ
∣∣∣∣∣∣
=
=mR2
4
−2ϕ−2ϕ θ
θ
⇒ ϕ = 0 ⇒ ϕ = Cte.
Esto ocurre siempre con los cuerpos que pueden girar libremente alrededor de un eje principal,si los otros dos momentos principales son iguales. Por tanto, cuando se ve uno de estos casos nohace falta plantear las ecuaciones: ya se puede afirmar que lacomponente de velocidad angularsegun el eje se mantiene constante.
Aquı, como en el apartado siguiente,G es el centro de masas del disco, no el del sistema.
Momento cinetico deB respecto a su centro de masasPara la ruedaB tenemos:ωωω41 =−ψ j1 =−3θ j1, con lo queHB
G = IIIBG ·ωωω41 =−3mR2
2 θ j1. Laecuacion del momento enB da:
LrLθ −RFy
RFθ
=
ddt
HBG = −3mR2
2
00θ
→ Fθ = −3mRθ/2
La derivada es simple porque el ejej1 tiene direccion constante. La presencia deFθ , desco-nocida, impide integrar esta ecuacion. Como no se piden lasfuerzas y momentos de ligadura,dejamos las otras componentes y nos quedamos solo con la tercera.
Momento cinetico del sistema enOComo la varilla no tiene masa, solo tenemos que calcular el momento cinetico de los discos.
El puntoO no es el centro de masas, ası que habra que aplicar el teorema de Koenig2:
HSO = HA
O +HBO = OA ∧mvA
31+HAG +OB∧mvB
41+HBG
Los momentos respecto a los centros de masas ya los hemos calculado. Solo hay que calcular losproductos vectoriales. Las velocidades de los centros se obtienen directamente, pues se muevencon la varilla:vA
31 = Rθ uθ y vB41 = 3Rθ uθ . Sustituyendo,
HSO = m
00
R2θ
+
mR2
4
−2ϕ0θ
+m
00
9R2θ
− 3mR2
2
00θ
=
mR2
4
−2ϕ0
35θ
Notese que laψ que aparecerıa en el momento deBya esta sustituida porθ mediante la ecuacionde la ligadura. La ecuacion del momento cinetico sera:
. . .
. . .4RFθ −4Rmgsinθ
=
ddt
HSO =
mR2
4
. . .
. . .35θ
No hemos calculado los momentos ni las derivadas en el plano del movimiento, porque solo nosinteresa la direccionOy1: como es fija, la derivada es inmediata. Esta ecuacion no la podemosintegrar porque la fuerza de ligadura es desconocida. Pero si sustituimos el valor deFθ obtenidoen el discoB se llega a:
4RFθ −4mgsinθ =354
mR2θ ⇒ 594
mR2θ +4mgRsinθ = 0
2El discoA tiene la varilla como eje, por lo que el origen es un punto fijo:se podrıa calcular su tensor enO porSteiner y aplicar las expresiones del solido con punto fijo.Pero como ya se ha calculado su momento cinetico enG, seguiremos el primer camino. En cambio, para el discoB el origen no es punto fijo.
240

que si la multiplicamos porθ es una diferencial exacta:
594
mR2θ θ +4mgRsinθ θ = 0 ⇒ 598
mR2 θ2−4mgRcosθ = Cte.
Ecuacion de la energıaEl sistema es conservativo: las fuerzas directamente aplicadas son potenciales, y las ligadu-
ras son lisas (cojinetes) o, si tienen rozamiento, este no trabaja (rodadura sin deslizamiento). Elpotencial es inmediato:
V = mgzA+mgzB = −mgRcosθ −mg3Rcosθ = −4mgRcosθ
La energıa cinetica se calcula por el teorema de Koenig. Todos los terminos son ya conocidos:
T = TA +TB =12
mvA31
2+
12
ωωω31 ·HAG+
12
mvB41
2+
12
ωωω41 ·HBG =
=12
mR2θ2+18
mR2(2ϕ2 + θ2)+92
mR2θ2 +94
mR2θ2 =18
mR2(59θ2 +2ϕ2)
Sumando:18
mR2(59θ2 +2ϕ2)−4mgRcosθ = E
Notese que esta ecuacion es combinacion lineal de las dosanteriores. No podıa ser de otromodo, porque el sistema tiene dos grados de libertad, y solopuede haber dos ecuaciones inde-pendientes.
241

Mecanica analıtica: sistema holonomoLigadura
La ecuacion de la ligadura se puede obtener de muchos modos.Uno es expresar la velocidad del centro del discoB como parte dela varilla y del disco:
vB = 3Rθ = Rψ ⇒ ψ = 3θ ⇒ ωB = −ψ j = −3θ j
Si se llamaψ al angulo girado por el discoB respecto a la vertical,la ecuacion anterior se integra directamente:ψ −ψ0 = 3θ −3θ0 .Tambien se podrıa medir el angulo respecto a la varilla, yse ob-tendrıaα = 4θ ; o igualar los arcos rodados, para obtener direc-tamenteα −α0 = 4(θ −θ0); o usar el campo de velocidades delsolidoB para imponer que la velocidad del punto de contacto seacero . . .
ψ
B
I
vB
3RθRψ
O
θ
LagrangianaPotencial:V = VA +VB = −mgRcosθ −mg3RcosθEnergıa cinetica, por Konig:
T =12
mv2GA+
12
ωA · IA ·ωA+12
mv2GB+
12
ωB · IB ·ωB
siendo, en ejes ligados a la varillaur ,uθ , j :
vGA = Rθuθ ωA = −ϕur + θ j vGB = 3Rθuθ ωB = −3θ j
IA =mR2
4
2 0 00 1 00 0 1
IB =mR2
4
1 0 00 1 00 0 2
Operando:
L = T −V = mR2(
598
θ2+14
ϕ2)
+4mgRcosθ
Velocidades inicialesCalculamos los terminos de las ecuaciones de Lagrange:
q Lq Lq Lq Lq = Pq−Qq
ϕ 12mR2ϕ 1
2mR2ϕ 0 12mR2ϕ
θ 594 mR2θ 59
4 mR2θ −4mgRsinθ 594 mR2θ +4mgRsinθ
Se observa queϕ es cıclica, y se conserva su momento generalizado:ϕ = ϕ0. La ecuacionde Lagrange paraθ da:
594
mR2θ +4mgRsinθ = 0
que es la ecuacion del pendulo y se integra sin dificultad:
598
mR2θ2−4mgRcosθ = C
242

A este mismo resultado se llegarıa usando la ecuacion de laenergıa, ya que el sistema esconservativo, yϕ es constante. Aplicando esta ecuacion a los instantes inicial y final:
θ = 0 : 598 mR2θ2
0 −4mgR= Cθ = π : 0+4mgR= C
⇒ θ0 =
√
64g59R
Mientras queϕ0 es arbitrarioal estar las ecuaciones desacopladas.
243

No holonomo - desplazamientos indepen-dientes
Ligadura
Para obtener la ecuacion de la ligadura, se puede aplicar elcampode velocidades del disco B (S4):
vI41 = vB
41+ωωω41∧BI =(3Rθ −Rψ
)uθ = 0
La condicion de no deslizamiento incluye tres ligaduras, pero dosestan ya contadas entre las finitas mediante las coordenadas gene-ralizadas. La que nos interesa es:
g1 ≡ uθ ·vI41 = 3Rθ −Rψ = 0
No hace falta congelarla para los DVCL, porque es estacionaria:
ψ
B
I
vB
3Rθ
Rψ
O
θ
C1θ δθ +C1ψδψ +C1ϕ δϕ = 3R·δθ −R·δψ +0 ·δϕ = 0
La ligadura es integrable pero, si no la integramos, el sistema sera no holonomo.
LagrangianaSi no integramos la ligadura, hay que mantenerψ como coordenada generalizada; ahora
habra tres:Potencial:V = VA +VB = −mgRcosθ −mg3RcosθEnergıa cinetica, por Konig:
T =12
mv2GA+
12
ωA · IA ·ωA+12
mv2GB+
12
ωB · IB ·ωB
siendo, en ejes ligados a la varilla:
vGA = Rθuθ ωA = −ϕur + θ j vGB = 3Rθuθ ωB = −ψ j
IA =mR2
4
2 0 00 1 00 0 1
IB =mR2
4
1 0 00 1 00 0 2
Operando:
T =12
mR2θ2 +18
mR2(2ϕ2 + θ2)+12
m9R2θ2 +28
mR2ψ2
L = T −V = mR2(
418
θ2 +14
ϕ2 +14
ψ2)
+4mgRcosθ
Velocidades inicialesLa ecuacion general de la dinamica da:
Lθ δθ +Lψδψ +Lϕ δϕ = 0 ∀ DVCL
Para hallar los desplazamientos independientes, usamos laecuacion de la ligadura,
δψ = 3δθ →(Lθ +3Lψ
)δθ +Lϕ δϕ = 0 ∀ δθ ,δϕ
Ahora los desplazamientos son independientes, y podemos imponer que los coeficientes seancero.
244

q Lq Lq Lq Lq = Pq−Qq
ϕ 12mR2ϕ 1
2mR2ϕ 0 12mR2ϕ
ψ 12mR2ψ 1
2mR2ψ 0 12mR2ψ
θ 414 mR2θ 41
4 mR2θ −4mgRsinθ 414 mR2θ +4mgRsinθ
Obtenemos dos ecuaciones de la Lagrangiana, una de ellas unaintegral primera (laϕ siguesiendo cıclica e independiente: su ecuacion no varıa); la tercera es la ecuacion de la ligadura:
ϕ = 0 → ϕ = Cte.
414
mR2θ +4mgRsinθ +32
mR2ψ = 0
3θ − ψ = 0
Si derivamos la ligadura 3θ = ψ y eliminamosψ en la segunda, se llega a:
594
mR2θ +4mgRsinθ = 0 (10.1)
que es la ecuacion deθ en el sistema holonomo. Naturalmente, con las mismas coordenadas yel mismo sistema, se llega a las mismas ecuaciones. A partir de aquı el problema se resuelvecomo en el caso anterior.
Si no se desea integrar esta ecuacion, puede observarse queel sistema es conservativo:ligaduras estacionarias e ideales, fuerzas potenciales. La ligadura no integrable (o mejor, nointegrada) es estacionaria tambien. Se conserva la energ´ıa mecanica:
T +V = mR2(
418
θ2 +14
ϕ2+14
ψ2)
−4mgRcosθ = E = Cte.
Sustituyendo laψ mediante la ecuacion de la ligadura, se llega a la misma expresion que el elsistema holonomo:
418
θ2 +14
ψ2 =418
θ2 +94
θ2 =598
θ2
245

No holonomo - Multiplicadores de Lagran-ge
Ligadura
Para obtener la ecuacion de la ligadura, se puede aplicar elcampode velocidades del disco B (S4):
vI41 = vB
41+ωωω41∧BI =(3Rθ −Rψ
)uθ = 0
La condicion de no deslizamiento incluye tres ligaduras, pero dosestan ya contadas entre las finitas mediante las coordenadas gene-ralizadas. La que nos interesa es:
g1 ≡ uθ ·vI41 = 3Rθ −Rψ = 0 ; FL = µ1uθ
No hace falta congelarla para los DVCL, porque es estacionaria:
ψ
B
I
vB
3Rθ
Rψ
O
θ
C1θ δθ +C1ψδψ +C1ϕ δϕ = 3R·δθ −R·δψ +0 ·δϕ = 0
La ligadura es integrable pero, si no la integramos, el sistema sera no holonomo.
LagrangianaSi no integramos la ligadura, hay que mantenerψ como coordenada generalizada; ahora
habra tres:Potencial:V = VA +VB = −mgRcosθ −mg3RcosθEnergıa cinetica, por Konig:
T =12
mv2GA+
12
ωA · IA ·ωA+12
mv2GB+
12
ωB · IB ·ωB
siendo, en ejes ligados a la varilla:
vGA = Rθuθ ωA = −ϕur + θ j vGB = 3Rθuθ ωB = −ψ j
IA =mR2
4
2 0 00 1 00 0 1
IB =mR2
4
1 0 00 1 00 0 2
Operando:
T =12
mR2θ2 +18
mR2(2ϕ2 + θ2)+12
m9R2θ2 +28
mR2ψ2
L = T −V = mR2(
418
θ2 +14
ϕ2 +14
ψ2)
+4mgRcosθ
Ecuaciones del movimientoSe plantean las ecuaciones de Lagrange con las tres coordenadas generalizadas, pero inclu-
yendo el trabajo virtual de las fuerzas de ligadura:QL1 j = µ1C1 j
q Lq Lq Lq Lq = Pq−Qq QLj
ϕ 12mR2ϕ 1
2mR2ϕ 0 12mR2ϕ 0
ψ 12mR2ψ 1
2mR2ψ 0 12mR2ψ −µ1 R
θ 414 mR2θ 41
4 mR2θ −4mgRsinθ 414 mR2θ +4mgRsinθ µ13R
246

Las ecuaciones de Lagrange seran ahora:
ϕ = 0 → ϕ = Cte.
414
mR2θ +4mgRsinθ = µ13R
12
mR2ψ −0 = −µ1R
mas la ecuacion de la ligadura,3θ − ψ = 0
Eliminandoµ1 entre las dos ecuaciones en que aparece, se llega a
414
mR2θ +4mgRsinθ +12
mR2ψ = 0
que es la misma ecuacion que se obtuvo por desplazamientos independientes. A partir de aquı,se procede como en el caso anterior: se deriva la ecuacion dela ligadura, se eliminaψ , y yatenemos la ecuacion del sistema holonomo paraθ .
A continuacion se integra esa ecuacion, o se plantea la integral de la energıa, como en loscasos anteriores.
247

Problema 10.1.3: Deslizamiento de una moneda sobre una mesa
Un disco pesado, homogeneo, de masam y radioa se mueve sobre el plano horizontalOxy, liso, deun sistema de referencia galileano. El disco esta obligadoa mantenerse siempre en contacto con el plano.Su posicion en un momento cualquiera viene dada por: las coordenadas(ξ ,η) de la proyeccion de sucentro de masas sobre el planoOxy; el anguloθ que forma el plano del disco con el eje verticalOz; elanguloϕ que forman la tangente al disco —en el punto de contacto con elplano— y el ejeOx; el anguloϕ que ha girado el disco en torno a un eje perpendicular a el y que pasa por su centro de masas.
Se pide:
i) Obtenga la funcion lagrangiana del sistema.
ii) Plantee las ecuaciones del movimiento y obtenga cinco integrales primeras.
iii) ¿Cual es el significado de las integrales primeras obtenidas en el apartado anterior?
iv) En el momento inicial, el disco se encuentra en reposo, contenido en el planoOxzcon su centrode masas sobre el ejeOz. Se aplica una percusion~P = m
2√
ga~j en el puntoB de la periferia deldisco dado por~rB = a√
2(1,0,1+
√2). Calculese el estado cinematico a la salida de la percusi´on.
v) A partir de la ecuacion de la energıa, y en el movimiento posterior a la percusion, se llega a unaecuacion diferencial del estilo ˙u = f (u)/(5− u2) , mediante el cambio de variableu = 2cosθ .Representesef (u) y realıcese un analisis cualitativo del movimiento para la variableθ . ¿Comoevolucionan las restantes variables angulares?
15 de febrero de 1993
i La unica fuerza directamente aplicada es el peso, que deriva del potencialV = mgzZ . Laaltura del centro de masas se obtiene trivialmente de la ligadura:
zZ = acosθ → V = mgacosθ
La energıa cinetica del disco, que no tiene punto fijo, se obtiene por el teorema de Koenig:
T =12
m(vC21)
2+12
ωωω21IIICωωω21
La velocidad del centro se obtiene directamente, en ejes fijos:
rC = (ξ ,η,acosθ) → vC21 = (ξ , η,−asinθ θ)
Para calcular la energıa cinetica del giro necesitamosunos ejes en que el tensor sea constante y la velocidadangular lo mas simple posible. Podemos tomar los ejesauxiliaresS3, con origen en el punto de contactoI , queacompanan al disco en los girosϕ y θ , pero no en elψ.En estos ultimos ejes, el tensor es tambien constante porla simetrıa de revolucion. Notese que los angulos de Eulerclasicos serıan el complementario deθ para la nutaciony el opuesto deψ para la rotacion propia. En esos ejes lavelocidad angular es
ωωω21 = ϕ k1− θ i0+ ψ j3 = (−θ , ψ − ϕ sinθ , ϕ cosθ)
x1
y1
z1
I
ϕ
ϕψ
C
ψ
y3
z3
θ
θ
x≡ x3
y
z
θ
Podemos ya calcular la energıa cinetica,
T =12
m(
ξ 2+ η2 +a2sin2θθ2)
+
+12⌊−θ , ψ − ϕ sinθ , ϕ cosθ⌋ma2
4
1 0 00 2 00 0 1
−θψ − ϕ sinθ
ϕ cosθ
=
=m8
4ξ 2+4η2 +a2[(1+4sin2θ)
θ2 +2ψ2 +(1+sin2 θ
)ϕ2−4sinθϕψ
]
248

La Lagrangiana se obtiene trivialmente comoL = T −V .
ii En la Lagrangiana solo aparece explıcitamente laθ . Las otras cuatro son cıclicas y danlugar a integrales primeras de la formaLq j =Cte.:
ξ ) ξ = C1
η) η = C2
ϕ)(1+sin2θ
)ϕ −2sinθψ = C3
ψ) ψ −sinθϕ = C4
La coordenadaθ aparece en la energıa cinetica y el potencial. Su ecuacion de Lagrange serıacomplicada. Como el sistema es conservativo (ligadura ideal y estacionaria, fuerzas potencia-les), podemos usar la integral de la energıa en su lugar:
T +V = E
iii Las dos correspondientes a las coordenadas cartesianasξ y η son sus momentos conjuga-dos: las componentes de momento lineal (cantidad de movimiento) en la direccion correspon-diente:
pξ = mξ pη = mηLas dos correspondientes a angulos de giro alrededor de un eje son tambien sus momentosconjugados: las componentes de momento cinetico segun ese eje:
pϕ = Hz1 =ma2
4
[(1+sin2θ
)ϕ −2sinθψ
]
pψ = Hy3 =ma2
2(ψ −sinθϕ)
La quinta es simplemente la energıa mecanica.
x1y1
z1
P
iv Las ecuaciones de Lagrange impulsivas para un sistema holonomo son
Ldq j−L
aq j
= QPj j = 1. . .n
Al estar inicialmente en reposo, lasLq j antes de la percusion son todas nulas(porque solo hayT2, si hubieraT1 no; compruebese). Hay que calcular lasfuerzas de percusion generalizadas:
∑QPj δq j = P ·δ rB = P ·vB
21δ t∣∣0
En vez de calcularlas para una posicion generica y luego particularizar, pueden calcularse parala posicion de la percusion. Esto facilita mucho los calculos: Los ejes 1 y los 3, por ejemplo,coinciden, y no es necesario hacer cambios de ejes:
vB21
∣∣0 = vC
21+ωωω21∧CB =
ξη0
+
∣∣∣∣∣∣
i1 j1 k1
−θ ψ ϕa/
√2 0 a/
√2
∣∣∣∣∣∣
=
ξ +aψ/√
2η +a/
√2(ϕ + θ )
−ψa/√
2
No hay nada que congelar, porque la ligadura es estacionaria. Los DVCL seran
δ rB =
δξ +aδψ/√
2δη +a/
√2(δϕ +δθ)
−δψa/√
2
Calculamos las fuerzas de percusion generalizadas
P ·δ rB =m√
ga
2(0,1,0) ·
δξ +aδψ/√
2δη +a/
√2(δϕ +δθ)
−δψa/√
2
=
m√
ga
2
[
δη +a/√
2(δϕ +δθ)]
Qξ = 0 Qη =m√
ga
2Qϕ =
ma√
ga
2√
2Qθ =
ma√
ga
2√
2Qψ = 0
249

Planteamos las ecuaciones de Lagrange impulsivas, particularizando para la posicionθ = 0,
mξ d−0 = 0
mηd −0 =m√
ga
2ma2
4
[
(1+sin2 θ) ϕd −2sinθψd]
−0 =ma
√ga
2√
2ma2
2
[
2(1+sin2 θ) θd]
−0 =ma
√ga
2√
2ma2
2
(
ψd −sinθϕd)
−0 = 0
y se obtienen directamente las velocidades generalizadas ala salida de la percusion
ξ d = ψd = 0; ηd =12√
ga; ϕd = θd =
√
2ga
v En el movimiento posterior a la percusion se aplican todas las integrales primeras del apar-tadoii) . Se sustituyen antes las condiciones iniciales:
ψ −sinθϕ = C4 = 0 → ψ = ϕsinθ(1+sin2 θ
)ϕ −2sinθψ = C3 =
√
2ga
Y sustituyendoϕ de la primera en la segunda,
(1+sin2 θ
)ϕ −2sin2 θϕ = C3 = cos2 θ ϕ → ϕ =
C3
cos2 θ
Todo esto se sustituye en la integral de la energıa:
m8
47
0ξ 2+4
ηd
η2 +a2[(1+4sin2θ)
θ2 +2ψ2 +(1+sin2 θ
)ϕ2−4sinθϕψ
]
+
+mgacosθ =m8
ga+a2[(1+4sin2 θ
)θ2 +
2ψ C4=0︷ ︸︸ ︷
2ψ2−2sinθϕψ+
+
ϕ C3=C23/cos2θ
︷ ︸︸ ︷(1+sin2θ
)ϕ2−2sinθϕψ
]
+mgacosθ = E = 2mga
Finalmente, simplificando
4ga+a2[(1+4sin2 θ
)θ2+
2g/acos2 θ
]
+8gacosθ = 16ga
(1+4sin2 θ
)θ2 =
4ga
(
3−2cosθ − 24cos2 θ
)
Introduciendo el cambiou = 2cosθ ,
(5−u2) θ2 =4ga
(
3−u− 2u2
)
= g(u)
El coeficiente deθ2 no se anula nunca, porqueu2 ≤ 4. Por eso, para estudiar el comportamientode θ2 basta con ver la formag(u). El enunciado pide que se estudie ˙u2, pero es una malaeleccion:
2cosθ = u −2sinθ θ = u
250
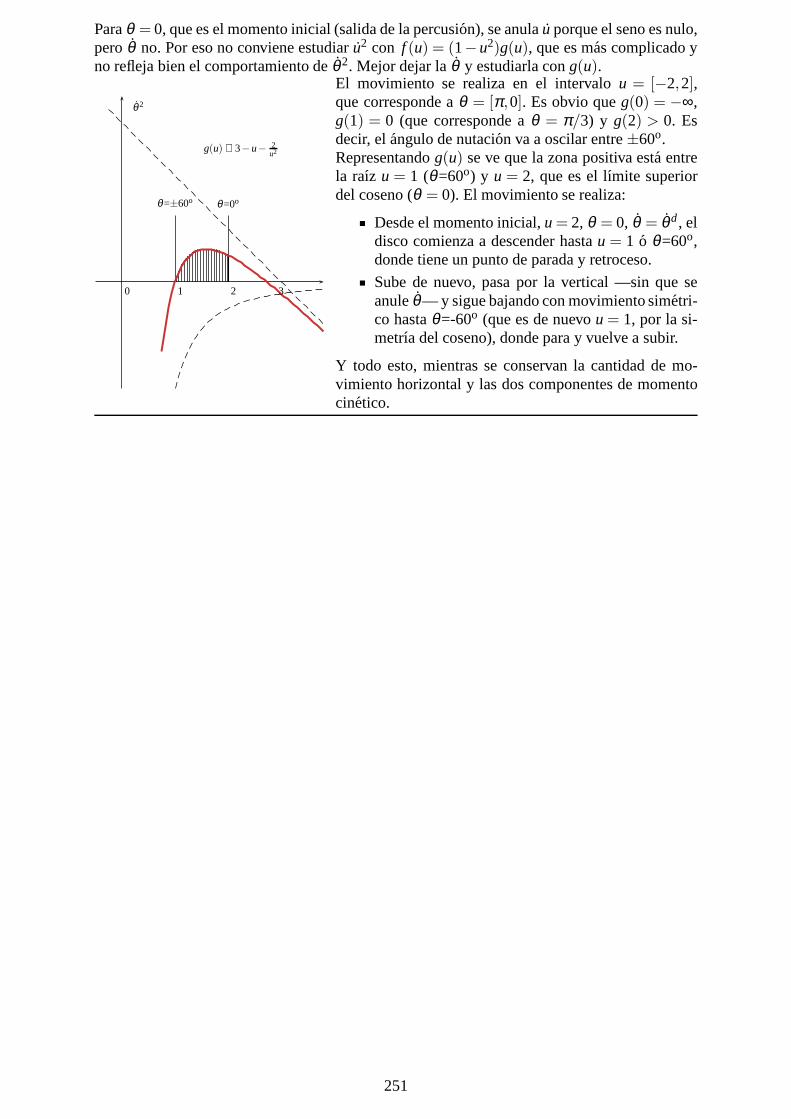
Paraθ = 0, que es el momento inicial (salida de la percusion), se anula u porque el seno es nulo,peroθ no. Por eso no conviene estudiar ˙u2 con f (u) = (1−u2)g(u), que es mas complicado yno refleja bien el comportamiento deθ2. Mejor dejar laθ y estudiarla cong(u).
θ 2
θ=±60o θ=0o
g(u) ∝ 3−u− 2u2
0 1 2 3
El movimiento se realiza en el intervalou = [−2,2],que corresponde aθ = [π,0]. Es obvio queg(0) = −∞,g(1) = 0 (que corresponde aθ = π/3) y g(2) > 0. Esdecir, el angulo de nutacion va a oscilar entre±60o.Representandog(u) se ve que la zona positiva esta entrela raızu = 1 (θ=60o) y u = 2, que es el lımite superiordel coseno (θ = 0). El movimiento se realiza:
Desde el momento inicial,u = 2, θ = 0, θ = θd, eldisco comienza a descender hastau = 1 o θ=60o,donde tiene un punto de parada y retroceso.
Sube de nuevo, pasa por la vertical —sin que seanuleθ— y sigue bajando con movimiento simetri-co hastaθ=-60o (que es de nuevou = 1, por la si-metrıa del coseno), donde para y vuelve a subir.
Y todo esto, mientras se conservan la cantidad de mo-vimiento horizontal y las dos componentes de momentocinetico.
251

Problema 10.1.4: SeaO1x1y1z1 un sistema de referencia inercial dondeO1z1 es vertical ascendente.Respecto a la anterior referencia se va a estudiar el movimiento del sistema material de la figura queesta formado por el disco 2 de centroG2, radioR y masam al que esta unido rıgidamente su ejeAG2G3
que no tiene masa(|AG2| = R, |G2G3| = 2R), y por el disco 3 de radioR y masam, cuyo centroG3 semantiene fijo en el ejeAG2G3, estando el plano del disco siempre perpendicular a dicho eje y pudiendogirar libremente alrededor del mismo. El extremoA del ejeAG2G3 se apoya sin rozamiento sobre elplanoO1x1y1; el disco 2 se apoya igualmente sobre dicho plano y no puede deslizar sobre el mismo.Ambos contactos son con ligadura bilateral.
Para fijar la posicion del sistema se utilizaran las siguientes coordenadas generalizadas:i) ξ y η :coordenadas en el planoO1x1y1 del punto de contacto del disco 2 con dicho plano;ii) θ : angulo que laproyeccion del ejeAG2G3 sobre el planoO1x1y1 forma con el ejeO1x1; iii) ϕ y ψ : angulos que unosradios fijos a los discos 2 y 3, respectivamente, forman con elplano vertical que contiene al ejeAG2G3.
Sabiendo que la unica fuerza directamente aplicada que actua sobre el sistema es el peso, se pide:
a) Hallar en funcion de las coordenadas generalizadas y susderivadas la condicion de no desliza-miento del disco 2 sobre el planoO1x1y1.
b) Determinar en funcion de las coordenadas generalizadasy sus derivadas las expresiones de laenergıa cinetica y del momento cinetico respecto al centro de masas del sistema.
c) Deducir razonadamente, a partir de las ecuaciones de Newton de la dinamica, tres integrales pri-meras del movimiento.
d) Determinar, para unas condiciones iniciales arbitrarias, las coordenadas generalizadas en funciondel tiempo.
e) Hallar las reacciones que el planoO1x1y1 ejerce sobre el extremoA del ejeAG2G3 y sobre el disco2.
f) Hallar la resultante y el momento respecto aG3 del sistema de reacciones que el ejeAG2G3 ejercesobre el disco 3.
g) Plantear las ecuaciones de Lagrange para el sistema y resolverlas.
Septiembre de 1994
252

Comenzamos por analizar el sistema:
Dos solidos libres (la varilla no tiene masa y no cuenta) necesi-tarıan doce parametros para describirlos.
Fijar un solido a otro mediante un cojinete con restriccion axialson cinco ligaduras finitas: desaparecen cinco grados de libertad.Solo le queda al segundo, respecto al primero, el giro alrededordel eje.
MG3y
MG3x
XG3
YG3
ZG3
G3
Apoyar un extremo de la varilla supone una ligadura finita:zA = 0.
Apoyar el borde del disco supone fijar el angulo de nutacionenπ/2: otra ligadura finita.
La rodadura sin deslizamiento supone dos ligaduras cinematicasno integrables, que no permiten reducir coordenadas (la terceraes la velocidad vertical deI , que ya esta contada como finita alapoyar el borde del disco).
Por tanto, los grados de libertad son 12-5-1-1-2=3
Pero como dos ligaduras son no integrables, necesitamos masparametros: 12-5-1-1=5
El sistema es no holonomo escleronomo.
NA NI
X
Y
2mg
x0
y0
z0
G
I
a La ecuacion de la ligadura se obtiene con mas facilidad en losejesS0: origen enI , girados el angulo de precesionθ respecto a losfijos. Notese que los tres centros pueden considerarse comopuntosfijos de los ejesS0, S2 y S3. El no deslizamiento deI se puedeescribir como
vI21 = 0 = vG
21+ωωω21∧GI =
=
ξη0
1
+
∣∣∣∣∣∣
i0 j0 k0
ϕ 1√2
0 θ + ϕ 1√2
0 0 −R√
2
∣∣∣∣∣∣
=
=
ξ − ϕRsinθη + ϕRcosθ
0
1
=
ξ cosθ + η sinθ−ξ sinθ + η cosθ + ϕR
0
0
=
000
ϕ
G2
x0
z0
I
G
θ
b Calcularemos primero el momento cinetico respecto al centro de masas: el de cada discorespecto a unos ejesS4 paralelos a los fijos con origen enG. Por tanto, las velocidades angularesseran las absolutas; el movimiento deG2 y G3 respecto aG es un giro en el que solo hace faltacontar la precesionθ (las rotaciones propias son paralelas a los vectoresGG2 y GG3). Se puedenseguir dos caminos:
Considerar que los centros se mueven respecto aG y aplicar Koenig a cada disco.
Considerar queG es tambien un punto fijo del disco en el movimiento 2/4, calcular eltensor de inercia del disco enG por el teorema de Steiner, y aplicar las expresiones delsolido con punto fijo.
Por el primer metodo:
hG = h2G +h3
G = GG2∧mvG224 + IIIG2 ·ωωω21+GG3∧mvG3
34 + IIIG3 ·ωωω31
Todos los vectores se calculan con facilidad en ejesS0, pero los tensores deben calcularse enejes principales del disco. Un compromiso es girar los ejesS0 45o alrededor deIy0: en estosnuevos ejesS5 los vectores son igual de simples, y son principales para losdiscos:Iz5 es ladireccion de sus ejes de revolucion:
253

GG2 = −Rk5 GG3 = +Rk5
vG224 = ωωω01∧GG2 = θ k0∧GG2 = − R√
2θ j5
vG334 = ωωω01∧GG3 = θ k0∧GG3 = +
R√2
θ j5
IIIG2 = IIIG3 =mR2
4
1 0 00 1 00 0 2
5
ωωω21 = − θ√2
i5+
(
ϕ +θ√2
)
k5
ωωω31 = − θ√2
i5+
(
ψ +θ√2
)
k5
x5
z5
ψ
ϕ
G2
G3
x0
z0
I
G
θ
De este modo, los momentos cineticos de cada disco respectoa su centro de masa son
hG2 = IIIG2 ·ωωω21 =mR2
4
− θ√2
0
2(
ϕ + θ√2
)
5
=mR2
4
θ2 + ϕ
√2
03θ2 + ϕ
√2
0
hG3 es identica, pero conψ en vez deϕ. Para el momento del sistema, sustituyendo y operando,se llega a
hG =mR2
4
−5√
2θ0
2(√
2θ + ϕ + ψ)
5
=mR2
4
(ϕ + ψ)√
2−3θ0
(ϕ + ψ)√
2+7θ
0
Por el otro metodo, habrıa que calcular primero el tensor en G, por el teorema de Koenig:
IIID2G = III
D3G = IIIG2 +m
(GG2
2UUU− [GG2,GG2]
)=
=mR2
4
1 0 00 1 00 0 2
+m
R2
1 0 00 1 00 0 1
−m
0 0 00 0 00 0 R2
=mR2
4
5 0 00 5 00 0 2
A este mismo resultado se llegarıa a mano: el momentoIz es igual, porque es el mismo eje.Los momentosIx e Iy se hallan por el teorema de Koenig para ejes paralelos:IG
x = IG2x +mR2 .
Y los productos son nulos porque los planos coordenados enG tambien son de simetrıa paralos discos. Esto es mucho mas corto, pero hay que tener cuidado de aplicarlo solo cuando seeste seguro de que los nuevos ejes son tambien principales.
Ahora se aplicarıa el momento cinetico del solido con punto fijo,
hG = IIID2G ·ωωω21+ III
D3G ·ωωω31
y se llega al mismo resultado.Para la energıa cinetica, tambien hay dos caminos:
Calcular la de cada solido por separado, aplicandole el teorema de Koenig:
T = T2+T3 =12
m(
vG221
)2+
12
ωωω21 · IIIG2 ·ωωω21+12
m(
vG331
)2+
12
ωωω31 · IIIG3 ·ωωω31 =
=12
m(
vG01+ωωω01∧GG2
)2+
12
ωωω21 · IIIG2 ·ωωω21+
+12
m(
vG01+ωωω01∧GG3
)2+
12
ωωω31 · IIIG3 ·ωωω31
donde las velocidades de los centrosG2 y G3 se calculan por el campo de velocidades deS0, del que son puntos fijos.
254

Aplicar el teorema de Koenig a todo el sistema, y luego otra vez a cada disco para laenergıa del movimiento relativo a G:
T =12(2m)
(
vG01
)2+TD2
G +TD3G =
= m(
vG01
)2+
12
m(ωωω01∧GG2)2 +
12
ωωω21 · IIIG2 ·ωωω21+
+12
m(ωωω01∧GG3)2 +
12
ωωω31 · IIIG3 ·ωωω31
Los dos dan necesariamente el mismo resultado. Pero el primero es mas largo de operar: laclave esta en la velocidad del centro de cada disco,
(
vG01+ωωω01∧GG2
)2
El primer termino esta proyectado en ejesS1 y el segundo en ejesS0 o S5. Para sumarlos hayque cambiar de ejes, y luego elevar al cuadrado. Por el segundo camino, este paso se simplifica:se elevan al cuadrado cada sumando por su cuenta (mas simples), sin necesidad de cambiar deejes. Y desaparece el doble producto al sumar para los dos discos:
2vG01 ·ωωω01∧GG3 = 2vG
01 ·ωωω01∧ (−GG2)
Por el segundo camino, y aprovechando los calculos realizados para el momento cinetico, seobtiene:
T =12(2m)
(
ξ 2+ η2)
+12
mR2θ2
2+
12
hG2 ·ωωω21+12
mR2θ2
2+
12
hG3 ·ωωω31 =
= T = m(
ξ 2+ η2)
+78
mR2θ2+14
mR2(ϕ2 + ψ2)+
√2
4mR2θ (ϕ + ψ)
c Es obvio que se conserva la energıa mecanica:
Las fuerzas directamente aplicadas (peso) son potenciales(yademas no trabajan porque la altura es constante).
Las ligaduras finitas —apoyo liso, cojinetes— son ideales y esta-cionarias.
La ligadura cinematica es ideal y estacionaria: aunque haya roza-miento, no trabaja porque no desliza.
Por tantoT +V = E (1)
NA NI
X
Y
2mg
x0
y0
z0
G
I
Si se toman momentos enI , se anulan los de las reacciones en ese punto, y el del peso.El de NA , que es vertical, no tiene componente segunk0 : ME
I · k0 = 0. De aquı no se puedededucir directamente que se conserve esa componente de momento cinetico, porqueI es unpunto movil, y la ecuacion del momento cinetico es mas complicada:
MEI = HI +mvI
01∧vG21
Ahora bien,G esta siempre encima deI , a altura constante, por lo que sus velocidades soniguales (ambos son puntos fijos del sistemaS0), y el termino corrector se anula. Por tanto, seconserva la componente del momento cinetico del sistema enI segunIz0:
MEI ·k0 = 0, vI
01 ‖ vG21 ≡ vG
01 ⇒ HI ·k0 ∝ 7θ +√
2(ϕ + ψ) = Cte (2)
Finalmente, aislando el discoS3 se tiene otra integral: no hay momento exterior segun el ejedegiro, y el tensor es de revolucion respecto a este eje:
Cr +(B−A) pq= 0 ⇒ r = ωωω31 ·k5 = ψ +θ√2
= Cte (3)
255

d Tenemos cinco ecuaciones diferenciales de primer orden: tres integrales del movimiento, ydos ligaduras cinematicas:
(1) m(
ξ 2+ η2)
+78
mR2θ2+14
mR2(ϕ2 + ψ2)+
√2
4mR2θ (ϕ + ψ) = C1
(2) 7θ +√
2(ϕ + ψ) = C2
(3) ψ +θ√2
= C3
(4) ξ −Rϕ sinθ = 0
(5) η +Rϕ cosθ = 0
Con (2)-(4) despejamos cuatro derivadas en funcion deθ ,
ξ 2+ η2 = R2 ϕ2
ψ = C3− θ√2
; ϕ = C2√2−C3−3
√2θ
y sustituimos en (1)
mR2(
C2√2−C3−3
√2θ)2
+78
mR2θ2 +14
mR2[(
C2√2−C3−3
√2θ)2
+(
C3− θ√2
)2]
+
+
√2
4mR2θ
(C2−7θ√
2
)
= C1 ⇒ Aθ2+Bθ +C = 0 ⇒ θ = θ0
Se obtiene una ecuacion de segundo grado paraθ , cuya solucion es una constante. De (2) y (3)se deduce que las otras velocidades angulares son constantes,
ψ = ψ0 ϕ = ϕ0
Las ecuaciones de la ligadura se integran directamente, y seobtiene que la trayectoria deG esuna circunferencia:
ξ = ξ0 +Rϕ0
θ0
[cosθ0−cos
(θ0 t +θ0
)]
η = η0 +Rϕ0
θ0
[sinθ0−sin
(θ0 t +θ0
)]
e Necesitamos cuatro ecuaciones. La cantidad de movimiento del sis-tema da tres, en las que intervienen las cuatro fuerzas de ligadura quese buscan:
XY
NA+NI −2mg
0
= 2mγγγG01
La cuarta puede ser la de momento cinetico enI segunIy0, en la queaparece soloNA:
MEI = HI +mvI
01∧vG21 =
0NAR
√2
0
NA NI
X
Y
2mg
x0
y0
z0
G
I
Tambien se podrıan tomar momentos enG: el momento cinetico es mas simple, pero hayque contar el momento de la reaccionX, con lo que la complicacion total viene a ser la misma.El momento cinetico enI vale
HI = hG + IG ∧vG01
256

La velocidad del centro de masas es por definicion(ξ , η,0)1, pero resulta mas comodo expre-sarla en funcion de la velocidad angular mediante la ecuacion de la ligadura:
vG01 = vG
21 = ωωω21∧ IG = −Rϕ j0
De este modo, el momento cinetico vale
HI =mR2
4
(ϕ + ψ)√
2−3θ0
(ϕ + ψ)√
2+7θ
0
+mR2
√2ϕ00
0
=mR2
4
(5ϕ + ψ)√
2−3θ0
(ϕ + ψ)√
2+7θ
0
Como todas las derivadas son constantes, es un vector constante en ejesS0: su derivada es soloel termino corrector de Coriolis:
HI∣∣1 =
HI∣∣0+ωωω01∧HI =
∣∣∣∣∣∣
i0 j0 k0
0 0 θHx 0 Hz
∣∣∣∣∣∣
= θHx j0
Por tanto, la componentey0 de la ecuacion es
mR2
4
[
(5ϕ0 + ψ0)√
2−3θ0
]
θ0 = NAR√
2
De aquı se obtieneNA. Para la cantidad de movimiento, necesitamos la aceleraci´on deG. Suvelocidad es constante en ejesS0, por lo que la aceleracion es debida solo al termino de Coriolisde derivacion en ejes moviles:
γγγG01 =
dvG01
dt
∣∣∣∣1= 0+ωωω01∧vG
01 = Rθ0ϕ0 i0
Notese que podemos calcular la aceleracion derivando la velocidad porqueG es siempre el mis-mo punto; paraI , por ejemplo, habrıamos tenido que usar otro metodo (campo de aceleraciones,composicion de movimientos).
Una vez conocidaNA de la del momento cinetico, la ecuacion de cantidad de movimientodetermina las otras fuerzas de ligadura:
XY
NA +NI −2mg
0
= 2m
Rθ0ϕ000
f Las fuerzas y momentos de ligadura sobre el disco 3 se obtienen aislandolo y planteando lasecuaciones del movimiento:
RG3 −mgk0 = mγγγG331 = mγγγG3
01 MG3 =ddt
hG3
La aceleracion deG3 se obtiene con facilidad del campo de velocidades y aceleraciones deS0,en el que es un punto fijo:
vG301 = vG
01+ωωω01∧GG3 = vG01+
∣∣∣∣∣∣
i0 j0 k0
0 0 θ0R√2
0 R√2
∣∣∣∣∣∣
= R
0
−ϕ0 + θ0√2
0
Podemos derivar la velocidad para obtener la aceleracion,porque es siempre el mismo punto.Es un vector constante en ejesS0, por tanto la aceleracion se debe solo a la derivacion ene ejesmoviles:
γγγG301 =
ddt
vG301 = 0+ωωω01∧vG3
01 = Rθ0
(
ϕ0−θ0√
2
)
i0
257
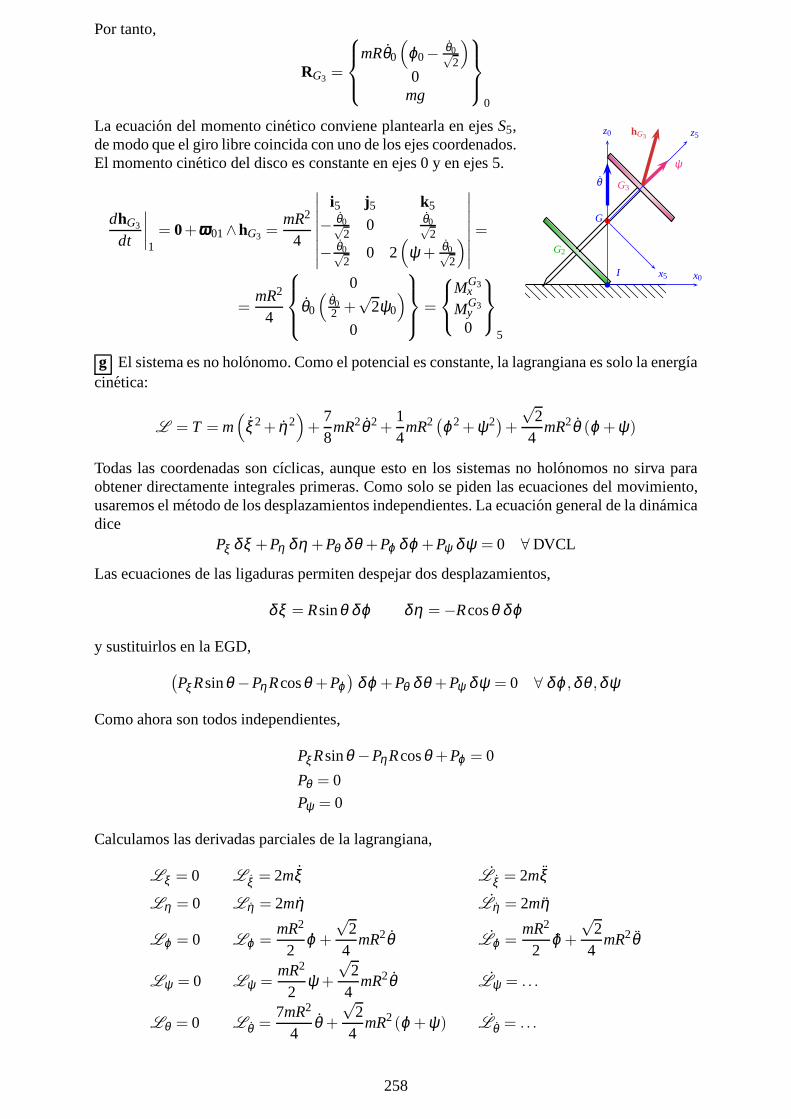
Por tanto,
RG3 =
mRθ0
(
ϕ0− θ0√2
)
0mg
0
La ecuacion del momento cinetico conviene plantearla en ejesS5,de modo que el giro libre coincida con uno de los ejes coordenados.El momento cinetico del disco es constante en ejes 0 y en ejes5.
dhG3
dt
∣∣∣∣1= 0+ωωω01∧hG3 =
mR2
4
∣∣∣∣∣∣∣∣
i5 j5 k5
− θ0√2
0 θ0√2
− θ0√2
0 2(
ψ + θ0√2
)
∣∣∣∣∣∣∣∣
=
=mR2
4
0
θ0
(θ02 +
√2ψ0
)
0
=
MG3x
MG3y0
5
x5
z5
ψ
hG3
G2
G3
x0
z0
I
G
θ
g El sistema es no holonomo. Como el potencial es constante, la lagrangiana es solo la energıacinetica:
L = T = m(
ξ 2+ η2)
+78
mR2θ2 +14
mR2(ϕ2 + ψ2)+
√2
4mR2θ (ϕ + ψ)
Todas las coordenadas son cıclicas, aunque esto en los sistemas no holonomos no sirva paraobtener directamente integrales primeras. Como solo se piden las ecuaciones del movimiento,usaremos el metodo de los desplazamientos independientes. La ecuacion general de la dinamicadice
Pξ δξ +Pη δη +Pθ δθ +Pϕ δϕ +Pψ δψ = 0 ∀ DVCL
Las ecuaciones de las ligaduras permiten despejar dos desplazamientos,
δξ = Rsinθ δϕ δη = −Rcosθ δϕ
y sustituirlos en la EGD,
(Pξ Rsinθ −PηRcosθ +Pϕ
)δϕ +Pθ δθ +Pψ δψ = 0 ∀ δϕ,δθ ,δψ
Como ahora son todos independientes,
Pξ Rsinθ −PηRcosθ +Pϕ = 0
Pθ = 0
Pψ = 0
Calculamos las derivadas parciales de la lagrangiana,
Lξ = 0 Lξ = 2mξ Lξ = 2mξ
Lη = 0 Lη = 2mη Lη = 2mη
Lϕ = 0 Lϕ =mR2
2ϕ +
√2
4mR2θ Lϕ =
mR2
2ϕ +
√2
4mR2θ
Lψ = 0 Lψ =mR2
2ψ +
√2
4mR2θ Lψ = . . .
Lθ = 0 Lθ =7mR2
4θ +
√2
4mR2(ϕ + ψ) Lθ = . . .
258

Por tanto, las tres ecuaciones de Lagrange son
2mR(
ξ sinθ − η cosθ)
+mR2
2ϕ +
√2
4mR2θ = 0
ddt
(
mR2
2ψ +
√2
4mR2θ
)
= 0
ddt
[
7mR2
4θ +
√2
4mR2(ϕ + ψ)
]
= 0
La primera no da directamente integral primera. Las dos ultimas son las integrales primerasque se obtuvieron para el momento cinetico del disco tres segun su eje (3), y del sistema segunla vertical (2). Una tercera integral primera se obtiene de la energıa, que se conserva comose razono mas arriba (1). Para cerrar el sistema, tenemos las dos ecuaciones de las ligadurascinematicas, que son diferenciales de primer orden. Por tanto, tenemos el mismo sistema que seintegro en el apartadod , y que no vamos a repetir.
Un camino alternativo serıa integrar el presente sistema,sin recurrir a la integral de laenergıa: derivando las ecuaciones de las ligaduras se obtiene,
ξ = Rϕ sinθ +Rϕ θ cosθ η = −Rϕ cosθ +Rϕθ sinθ
Sustituyendo en la primera de Lagrange,
2mR2ϕ +mR2
2ϕ +
√2
4mR2θ = 0
queda una diferencial exacta. Se integra, y junto con las otras dos de Lagrange, se llega a unsistema lineal no homogeneo en las derivadas de los angulos,
52
ϕ +
√2
4θ = C1
12
ψ +
√2
4θ = C3
74
θ +
√2
4(ϕ + ψ) = C2
cuya solucion es que los tres son constantes. Entonces las de las ligaduras se integran directa-mente, como se hizo antes.
259

Ejercicio 10.1.1: Sobre la periferia de un disco de masam y radio R se enrolla un hilo, flexible,inextensible y sin masa, de longitudL (yo-yo); con el hilo totalmente enrollado se sujeta un extremo A,se coloca el disco vertical, y se abandona a la accion de la gravedad. Averiguar la velocidad de rotacionque tiene el disco cuando se ha desenrollado todo el hilo, y eltiempo que tarda en hacerlo.
Septiembre de 1994
Lo primero es la ecuacion de la ligadura: el centro baja la longitud de hilodesenrollado, y el disco gira el arco de la misma longitud:
Rθ = z → Rθ = z
La velocidad final se puede obtener facilmente de la integral de la energıa(que obviamente se conserva). Pero para hallar el tiempo hayque obtener laley horaria: sera mejor plantear directamente las ecuaciones del movimiento,que integrar la cuadratura de la energıa suele ser mas complicado.
T
zθ
SeaT la tension del hilo; las ecuaciones de la cantidad de movimiento son
mg−T = mz 0 = mx
La ecuacion del momento cinetico en el centro del disco nosda
TR=mR2
2θ =
mR2
z
Sustituyendo estaT en la de cantidad de movimiento,
mg− mz2
= mz → z=23
g → z=23
gt z=13
gt2
Cuando se desenrolla todo el hilo,
L =13
gt2f → t f =
√
3Lg
→ vf = 2
√
Lg3
Tambien se puede aplicar la ecuacion de la energıa (hay que tener en cuenta que se tomazpositivo hacia abajo),
T +V =12
mz2 +14
mR2 θ2−mgz=34
mz2−mgz= 0
Cuando se desenrolla el hilo,z= L , y la velocidad vale
vf =
√
4gL3
El tiempo, en cambio, es algo mas difıcil de obtener: la integral de la energıa se puede ponercomo ecuacion diferencial de variables separadas,
dzdt
=
√
4gz3
;dz√
z=
√
4g3
dt ; 2√
z=
√
4g3
t +C; z=13
gt2
260

Ejercicio 10.1.2: Una placa cuadrada, homogenea de masam y lado a tiene uno de sus verticesOsujeto mediante una rotula; con la placa en reposo, se aplica una percusionP = 7
12maω , perpendicular ala placa en el puntoM de la figura definido por las coordenadas(ξ ,η). Averiguar el estado cinematicode la placa despues de aplicar la percusion, y la percusion de ligadura que aparece enO, en funcion de(ξ ,η).
Septiembre de 1994
SeaR la percusion de ligadura enO, y ωωω la velocidad angular inmediatamente despues de lapercusion. Se pueden seguir varios caminos:
Tomar momentos enO, calcular laωωω , y luego con la cantidad de movimiento la percusionde ligadura. El momento cinetico enO se puede calcular:
• Por Koenig, sabiendo quevG = ωωω ∧OG• Calcular en tensor enO por Steiner y aplicar la expresion del solido con punto fijo
Tomar momentos enG, eliminarR con la ecuacion de cantidad de movimiento, obtenerωωω , y luegoR.
Por el primer camino, la ecuacion impulsiva de momento cin´etico enO es
OM ∧P = HdO−
HaO = IIIG ·ωωω +OG∧m(ωωω ∧OG)
Pη−Pξ
0
=
ma2
12
1 0 00 1 00 0 2
·
ωxωyωz
+
ma2
4
ωx−ωyωy−ωx
2ωz
=
ma2
12
4ωx−3ωy−3ωx +4ωy
8ωz
dondeOG = (a/2,a/2,0). De aquı se obtiene la velocidad angular,
ωωω =12P7ma2
4η −3ξ3η −4ξ
0
La percusion de ligadura se obtiene de la ecuacion impulsiva de cantidad de movimiento:
00P
+
RxRyRz
= mvG−0 = mωωω ∧OG =
6P7ma
00
ξ +η
Si se prefiere calcular el tensor de la placa enO, hay que aplicar Steiner:
IIIO = IIIG +m(OG2
UUU− [OG,OG])
= IIIG +m
a2
2
1 0 00 1 00 0 1
− a2
4
1 1 01 1 00 0 0
=
=ma2
12
1 0 00 1 00 0 2
+ma2
4
1 −1 0−1 1 00 0 2
=ma2
12
4 −3 0−3 4 00 0 8
Notese que en este caso hay que aplicar la expresion tensorial, porque los nuevos ejes no sontodos principales. Usando el teorema de Steiner para ejes paralelos se podrıan obtener los termi-nos de la diagonal principal (momentos de inercia respecto alos ejes coordinados), pero no losproductosPxy, que no son nulos.
261

Ahora aplicamos la ecuacion impulsiva del momento cinetico enO, usando la expresion delsolido con punto fijo:
Pη−Pξ
0
=
ma2
12
4 −3 0−3 4 00 0 8
·
ωxωyωz
=
ma2
12
4ωx−3ωy−3ωx +4ωy
8ωz
Se llega, naturalmente, a la misma ecuacion. A partir de aquı se sigue como antes.Tambien se puede plantear la ecuacion del momento cinetico enG, pero entonces la percu-
sion de ligadura da momento:
GM ∧P+GO∧R = IIIG ·ωωω =
P(η − a
2
)− aRz
2−P(ξ − a
2
)+ aRz
2
2 (Rx−Ry)
=
ma2
12
ωxωy2ωz
La ecuacion impulsiva de cantidad de movimiento es la mismade antes (sin sustituir la veloci-dad angular, que aun no se conoce por este camino):
00P
+
RxRyRz
= mωωω ∧OG =
a2
−ωzωz
ωx−ωy
Tenemos un sistema lineal de seis ecuaciones con seis incognitas, que determinaωωω y R. Elplanteamiento es mas sencillo, pero la resolucion es maslaboriosa.
262

Ejercicio 10.1.3: El sistema material de la figura consta de un disco de masamy radioa, y una varillaPG, sin masa de longitudl , rıgidamente unidos. La varilla se articula en el puntoP(0,0,a) y se une aldisco en su centroG (es perpendicular a el). El disco rueda sin deslizar sobre el plano horizontalOxyque gira con velocidad angularω alrededor de la verticalOz. Contestar, razonadamente, las siguientespreguntas: ¿Es holonomo el sistema? ¿Es escleronomo? ¿Cuantos grados de libertad tiene? ¿Se conservala energıa totalT +V?
Septiembre de 1994
a Para situar el disco tomaremos los angulos analogos a la precesionψy rotacion propiaϕ medidos respecto al plano movilS0. Para el analisisde las ligaduras conviene considerar la varillaPG como parte del dis-co S2. A los 6 GDL del disco libre se le quitan tantos como ligadurasindependientes:
Fijar el puntoP supone tres ligaduras finitas (xP,yP,zP conoci-das).
La rodadura sin deslizamiento supone otras tres ligaduras ci-nematicas:vI
20 = 0.
x
y
z
ψ
b
b
G
ϕ
I
P
x3
y3
Con estas ultimas, conviene trabajar en los ejesS3 de la figura para analizarlas con masfacilidad:
La de direccion vertical,vI20·k0 = 0, es integrable: supone fijar la altura deG y, junto con
la dezP, determina el angulo de nutacion. Ya esta contada al poner la varilla horizontal.
La de direccion radial,vI20 · i3 = 0, es redundante: impide el movimiento en la direccion
radial x3, que ya esta impedida por la rotula enP. Tambien esta contada al ponerG adistancia fija deP. El sistema es hiperestatico y no podemos obtener todas lasfuerzas deligadura en esa direccion.
La de direcciony3 va a ser integrable, porque el plano del disco esta determinado. Lacalculamos para comprobarlo:
vI20 = ωωω20∧PI =
∣∣∣∣∣∣
i3 j3 k3−ϕ 0 ψ
l 0 −a
∣∣∣∣∣∣
=
0l ψ −aϕ
0
=
000
Es obviamente integrable,l ψ −aϕ = C. Las otras dos direcciones no dan nada, porqueson finitas y se cumplen automaticamente con las coordenadas generalizadas que se hanescogido.
Por tanto, el sistema esholonomo; tiene un grado de libertad, y seis ligaduras finitas o cinem´ati-cas integrables, de las que solo cinco son independientes.
b Es obvio que el sistema es reonomo: rodadura sin deslizamiento sobre un plano movil. Paraverlo con facilidad, expresamos la ligadura en el movimiento absoluto:
vI21 = vI
01 = l ω j3
Comoj3 es un vector movil, de componentes[−sin(ψ +ω t),cos(ψ +ω t),0] en ejes fijos, seve que el tiempo aparece explıcitamente en la ecuacion de ligadura a traves de este vector.
263

En la ecuacion de la ligadura cinematical ψ−aϕ = 0 no se ve porque laprecesion se ha tomado relativa a los ejes moviles; si se toma el angulorespecto a los ejes fijos,ψ1 = ψ +ω t, la ligadura queda
l ψ1−aϕ − l ω = 0x1
ω tx
y
z
ψ x3
que es obviamente no estacionaria porque tiene termino independientelω no nulo. Y se vetodavıa mas claro si se integra:
f5(ψ1,ϕ, t)≡ l ψ1−aϕ − lω t −C1 = 0
c Como el sistema es reonomo, en principio no se conserva la energıa. Para comprobarlo,calculamos la energıa cinetica del movimiento absoluto.El potencial no interviene porque esconstante, y las ligaduras son ideales.
T =12
m(
vG21
)2+
12
ωωω21 · IIIG ·ωωω21 =
=12
ml2(ψ +ω)2 +ma2
8⌊− l
aψ ,0, ψ +ω⌋
2 0 00 1 00 0 1
− laψ0
ψ +ω
=
=m(8l2+a2)
8
(ω2 +2ωψ
)+
m(10l2+a2)
8ψ2 = T0+T1+T2
La energıa cinetica no depende explıcitamente del tiempo, el potencial tampoco y no hay fuerzasaplicadas no potenciales, luego se conserva la integral de Painleve,
T2−T0 = h = Cte 6= E
y no se conserva la energıa mecanicaE.Si se tomara como variable la precesion respecto a ejes fijos, ψ1 = ψ +ω t, tambien apare-
cerıan los tres terminos en la energıa cinetica. La ligadura que determinaϕ serıa
ϕ =la
ψ =la
(ψ1−ω)
con lo que, al elevar al cuadrado, aparecerıan terminos enψ21 , enψ1ω y enω2.
264

10.2. Enunciados
Problema 10.2.1: Consideremos un sistema material formado por un disco homogeneo de masa 4m/3y radioa, una varillaAB homogenea de longituda y masaλm y otra varillaCD tambien homogenea delongitud 2
√6a y masam. Todos los solidos son pesados.
La varilla AB se articula al disco en un puntoA de la periferia de este y la varillaCD rueda sindeslizar sobre el. El disco rueda sin deslizar a su vez sobreuna horizontal.
La configuracion del sistema puede definirse por los siguientes parametros:Anguloθ que el disco hagirado a partir de la posicion mas baja deA. Angulo ϕ queCD ha rodado respecto al disco suponiendoque en la posicionθ = 0 esϕ = 0, coincidiendo entonces el punto medio deCD con el diametralmenteopuesto deA. Angulo ψ queAB forma con la vertical. Se pide:
1. Energıa potencial del sistema completo.
2. ¿A partir de que valores deλ puede asegurarse que la posicionθ = ϕ = ψ = 0 es estable?
3. Energıa cinetica del sistema.
4. Suponiendoλ = 4, hallar los pequenos movimientos del sistema en torno a laposicionθ = ϕ =ψ = 0.
Junio 1991
Problema 10.2.2: SeaOx1y1z1 un sistema de referencia inercial (dondeO1z1 es la vertical ascendente)respecto al que se va a estudiar el movimiento del sistema material de la figura, compuesto por dos discoshomogeneos de masamy radioa (solidos 2 y 3), y un chasis sin masa (solido 4), cuya longitud ABes 4a.El disco 3, perpendicular en todo instante al ejeABpuede girar sin rozamiento alrededor del mismo, y sucentroG3 esta fijo en el punto medio deAB. Asimismo, el disco 2 puede girar sin rozamiento alrededordel eje de la horquilla situada en el extremoB del chasis. El extremoA tiene una articulacion ideal quepermite aAB un giro alrededor de un eje vertical, ası como el deslizamiento a lo largo de la recta fijaRde ecuacion:x1 = 0, z1 = 2a. (La articulacion enA obliga a que en todo momento el plano del disco 2permanezca vertical pues impide el giro alrededor deAB). El disco 2 se apoya sobre el plano horizontalO1x1y1 y no puede deslizarsobre el mismo; ademas, sobre su centroG2 actua en todo instante una fuerzaconstante de valormgi1.
Las coordenadas generalizadas que fijan la posicion del sistema son:i) η , coordenadax1 del puntoA; ii) θ , angulo que la direccionAB forma con la direccionO1x1; iii) ϕ , angulo que un radio fijo deldisco 3 forma con la direccion vertical;iv) ψ , angulo que un radio fijo del disco 2 forma con la direccionvertical.
Se pide:
a) Expresar, en funcion de las coordenadas generalizadas ysus derivadas, la condicion de no desli-zamiento del disco 2 sobre el plano horizontal.
b) Obtener, en funcion de las coordenadas y sus derivadas, la expresion de la energıa cinetica delsistema.
c) Hallar la diferencial del trabajo de la fuerza constante que actua en el centroG2 del disco 2.Demostrar que esta fuerza deriva de un potencial.
d) Utilizando los metodos de la mecanica newtoniana plantear dos ecuaciones que, junto con lasrelaciones obtenidas en a), permitan determinar el movimiento del sistema.
e) Reducir el movimiento a cuadraturas, obteniendo en particular una ecuacion paraθ de la forma:θ2 = f (θ , cond. inic.)/g(θ), donde el denominadorg(θ) es una funcion acotada que no se anulapara ningun valor deθ .
f) A partir de la anterior ecuacion paraθ , demostrar que si, por ejemplo, inicialmenteθ = 0 entoncesel valor absoluto deθ nunca va a ser superior aπ/2, sean cuales sean el resto de las condicionesiniciales. ¿Que ocurre si inicialmenteθ = π/2?.
g) Obtener, en funcion de las coordenadas generalizadas y sus derivadas, la resultante y el momentorespecto aG3 del sistema de reacciones que el ejeABejerce sobre el disco 3.
h) De las expresiones del apartado a) obtenerψ y η en funcion deθ y θ . ¿Es holonomo el sistema?
265

i) Utilizando los metodos de la mecanica analıtica plantear las ecuaciones del movimiento del siste-ma. Comparar con lo obtenido anteriormente.
Junio de 1993
Problema 10.2.3: Una varilla homogenea y pesada, de masamy longitud 2a, se mueve sobre un planoOxzque a su vez esta obligado a girar alrededor de la verticalOz1 con una velocidad angular constanteω . El extremoA de la varilla esta obligado a deslizar sobreOzy el B sobreOx. Se utilizaran a lo largodel problema los siguientes sistemas de ejes:
Sistema de referenciaO1x1y1z1 que se considerara galileano.
SistemaOxyzque gira con la varilla alrededor e la vertical, siendoOx la proyeccion de la varillasobreO1x1y1.
SistemaGx2y2z2 ligado a la varilla, en el queGx2 va dirigido a lo largo de ella yGy2 el paralelo aOy.
La posicion de la varilla sobreOxzse considerara determinada por el anguloϕ indicado en la figura.Las reacciones que la varilla recibe en sus extremos se consideraran descompuestas en las fuerzas
N1,N2, N3,N4 dirigidas en las direcciones de los ejesOxyze indicadas en la figura. Se pide:
1. Momento cinetico de la varilla en su centro de gravedadG, considerando el movimiento de lamisma respecto a unos ejes de direcciones fijas que pasan porG. Calcular tambien la derivada delvector momento cinetico obtenido anteriormente en los ejesO1x1y1z1. Ambos vectores se deberandar por sus componentes en los ejes movilesOxyz, habiendo utilizado, si se precisan, losGx2y2z2
como ejes auxiliares de calculo, pero nunca los ejes fijosO1x1y1z1.
2. Obtener la ecuacion diferencial que nos daϕ(t) utilizando las ecuaciones de la cantidad de movi-miento y de momento cinetico respecto aG. Obtener una integral primera (1) que deje el movi-miento reducido a una cuadratura.
3. Calcular la energıa cinetica de la varilla respecto a unos ejes galileanos. ¿Es constante en este casola suma de las energıas cinetica y potencial de la varilla?. ¿Por que? Obtener una integral primeradel movimiento a la vista de la expresion que tiene la energ´ıa cinetica, comprobando que coincidecon (1).
4. Obtener la misma ecuacion del movimiento aplicando las ecuaciones de Lagrange.
Consideremos ahora un observador subido a los ejesOxyzque pretende estudiar el movimiento de lavarilla mediante el mismo anguloϕ(t).
5. Calcular las fuerzas de inercia de arrastre y comprobar que derivan de una funcion de fuerzas,cuyo valor se pide.
6. Obtener la energıa cinetica de este movimiento relativo y aplicar al mismo la ecuacion de laenergıa, comprobando que tiene una integral primera que coincide con (1).
7. Aplicar la ecuacion de Lagrange al movimiento relativo que estamos considerando, evaluandopara ello, si fuera preciso, el trabajo virtual de la fuerzasde inercia de Coriolis. Comprobar que laecuacion del movimiento obtenida coincide con la de los apartados anteriores.
8. Supongamos que el observador anterior quiere calcular elmovimiento plano que el observa ala varilla, aplicando la ecuacion del momento cinetico enel puntoI de interseccion de las rectassoporte deN1 conN3. Aplicar esta ecuacion analizando muy particularmente eltermino correctivo.Comprobar que el resultado nos conduce de nuevo a (1).
30 de junio de 1984
Problema 10.2.4: Consideremos un sistema material formado por un disco homogeneo de masa 4m/3y radioa, una varillaAB homogenea de longituda y masaλm y otra varillaCD tambien homogenea delongitud 2
√6a y masam. Todos los solidos son pesados.
La varilla AB se articula al disco en un puntoA de la periferia de este y la varillaCD rueda sindeslizar sobre el. El disco rueda sin deslizar a su vez sobreuna horizontal.
La configuracion del sistema puede definirse por los siguientes parametros: a)Angulo θ que eldisco ha girado a partir de la posicion mas baja deA. b) Angulo ϕ queCD ha rodado respecto al discosuponiendo que en la posicionθ = 0 esϕ = 0, coincidiendo entonces el punto medio deCD con eldiametralmente opuesto deA. c) Angulo ψ queAB forma con la vertical. Se pide:
266

1. Energıa potencial del sistema completo.
2. ¿A partir de que valores deλ puede asegurarse que la posicionθ = ϕ = ψ = 0 es estable?
3. Energıa cinetica del sistema.
4. Suponiendoλ = 4, hallar los pequenos movimientos del sistema en torno a laposicionθ = ϕ =ψ = 0. sistema.
E.T.S.I.A., Junio 1991
Problema 10.2.5: SeaOx1y1z1 un sistema de referencia inercial (dondeO1z1 es la vertical ascendente)respecto al que se va a estudiar el movimiento del sistema material de la figura, compuesto por dos discoshomogeneos de masamy radioa (solidos 2 y 3), y un chasis sin masa (solido 4), cuya longitud ABes 4a.El disco 3, perpendicular en todo instante al ejeABpuede girar sin rozamiento alrededor del mismo, y sucentroG3 esta fijo en el punto medio deAB. Asimismo, el disco 2 puede girar sin rozamiento alrededordel eje de la horquilla situada en el extremoB del chasis. El extremoA tiene una articulacion ideal quepermite aAB un giro alrededor de un eje vertical, ası como el deslizamiento a lo largo de la recta fijaRde ecuacion:x1 = 0, z1 = 2a. (La articulacion enA obliga a que en todo momento el plano del disco 2permanezca vertical pues impide el giro alrededor deAB). El disco 2 se apoya sobre el plano horizontalO1x1y1 y no puede deslizarsobre el mismo; ademas, sobre su centroG2 actua en todo instante unafuerza constante de valormgi1.
Las coordenadas generalizadas que fijan la posicion del sistema son:i) η , coordenadax1 del puntoA; ii) θ , angulo que la direccionAB forma con la direccionO1x1; iii) ϕ , angulo que un radio fijo deldisco 3 forma con la direccion vertical;iv) ψ , angulo que un radio fijo del disco 2 forma con la direccionvertical.
Se pide:
1. Expresar, en funcion de las coordenadas generalizadas ysus derivadas, la condicion de no desli-zamiento del disco 2 sobre el plano horizontal.
2. Obtener, en funcion de las coordenadas y sus derivadas, la expresion de la energıa cinetica delsistema.
3. Hallar la diferencial del trabajo de la fuerza constante que actua en el centroG2 del disco 2.Demostrar que esta fuerza deriva de un potencial.
4. Utilizando los metodos de la mecanica newtoniana plantear dos ecuaciones que, junto con lasrelaciones obtenidas en a), permitan determinar el movimiento del sistema.
5. Reducir el movimiento a cuadraturas, obteniendo en particular una ecuacion paraθ de la forma:θ2 = f (θ , cond. inic.)/g(θ), donde el denominadorg(θ) es una funcion acotada que no se anulapara ningun valor deθ .
6. A partir de la anterior ecuacion paraθ , demostrar que si, por ejemplo, inicialmenteθ = 0 entoncesel valor absoluto deθ nunca va a ser superior aπ/2, sean cuales sean el resto de las condicionesiniciales. ¿Que ocurre si inicialmenteθ = π/2?
7. Obtener, en funcion de las coordenadas generalizadas y sus derivadas, la resultante y el momentorespecto aG3 del sistema de reacciones que el ejeABejerce sobre el disco 3.
8. De las expresiones del apartado a) obtenerψ y η en funcion deθ y θ . ¿Es holonomo el sistema?
9. Utilizando los metodos de la mecanica analıtica plantear las ecuaciones del movimiento del siste-ma. Comparar con lo obtenido anteriormente.
E.T.S.I.A., Junio de 1993
Problema 10.2.6: Una varilla homogenea y pesada, de masamy longitud 2a, se mueve sobre un planoOxzque a su vez esta obligado a girar alrededor de la verticalOz1 con una velocidad angular constanteω . El extremoA de la varilla esta obligado a deslizar sobreOzy el B sobreOx. Se utilizaran a lo largodel problema los siguientes sistemas de ejes:
Sistema de referenciaO1x1y1z1 que se considerara galileano.
SistemaOxyzque gira con la varilla alrededor e la vertical, siendoOx la proyeccion de la varillasobreO1x1y1.
SistemaGx2y2z2 ligado a la varilla, en el queGx2 va dirigido a lo largo de ella yGy2 el paralelo aOy.
267
La posicion de la varilla sobreOxzse considerara determinada por el anguloϕ indicado en la figura.Las reacciones que la varilla recibe en sus extremos se consideraran descompuestas en las fuerzasN1,N2,N3,N4 dirigidas en las direcciones de los ejesOxyze indicadas en la figura. Se pide:
1. Momento cinetico de la varilla en su centro de gravedadG, considerando el movimiento de lamisma respecto a unos ejes de direcciones fijas que pasan porG. Calcular tambien la derivada delvector momento cinetico obtenido anteriormente en los ejesO1x1y1z1. Ambos vectores se deberandar por sus componentes en los ejes movilesOxyz, habiendo utilizado, si se precisan, losGx2y2z2
como ejes auxiliares de calculo, pero nunca los ejes fijosO1x1y1z1.
2. Obtener la ecuacion diferencial que nos daϕ(t) utilizando las ecuaciones de la cantidad de movi-miento y de momento cinetico respecto aG. Obtener una integral primera (1) que deje el movi-miento reducido a una cuadratura.
3. Calcular la energıa cinetica de la varilla respecto a unos ejes galileanos. ¿Es constante en este casola suma de las energıas cinetica y potencial de la varilla?¿Por que? Obtener una integral primeradel movimiento a la vista de la expresion que tiene la energ´ıa cinetica, comprobando que coincidecon (1).
4. Obtener la misma ecuacion del movimiento aplicando las ecuaciones de Lagrange.Consideremos ahora un observador subido a los ejesOxyzque pretende estudiar el movimiento dela varilla mediante el mismo anguloϕ(t).
5. Calcular las fuerzas de inercia de arrastre y comprobar que derivan de una funcion de fuerzas,cuyo valor se pide.
6. Obtener la energıa cinetica de este movimiento relativo y aplicar al mismo la ecuacion de laenergıa, comprobando que tiene una integral primera que coincide con (1).
7. Aplicar la ecuacion de Lagrange al movimiento relativo que estamos considerando, evaluandopara ello, si fuera preciso, el trabajo virtual de la fuerzasde inercia de Coriolis. Comprobar que laecuacion del movimiento obtenida coincide con la de los apartados anteriores.
8. Supongamos que el observador anterior quiere calcular elmovimiento plano que el observa ala varilla, aplicando la ecuacion del momento cinetico enel puntoI de interseccion de las rectassoporte deN1 conN3. Aplicar esta ecuacion analizando muy particularmente eltermino correctivo.Comprobar que el resultado nos conduce de nuevo a (1).
Problema 10.2.7: SeaE una esfera hueca, de masam y radio 2a, y AA′ un diametro de la misma; enel interior, y concentrica con ella, se encuentra otra esfera huecae de masa 4m y radio a, obligada agirar alrededor deAA′ (la union entre las esferas se realiza con una rotula enA y un pasador enA′); laesferaE rueda y desliza sobre un plano horizontal, perfectamente liso,Oxy, de una referencia galileanatrirectangularOxyz.
Para el estudio del sistema, se tomaran las siguientes coordenadas generalizadas: i)(ξ ,η) coordena-das sobre el planoOxydel punto de contacto de la esferaE y el plano, ii)θ , angulo que el plano verticalque contiene al diametroAA′ forma con el planoOxz, iii) ϕ , angulo que el diametroAA′ forma con elplanoOxy, iv) ψ , angulo de rotacion propia de la esferaE alrededor deAA′, y v) γ , angulo de rotacionpropia de la esferaealrededor deAA′.
En el instante inicial el centro deE esta situado en el punto de coordenadas(2a,0,2a), el diametroAA′ es paralelo aOx, la esferaE esta en reposo y la esferae gira con velocidad angularΩi, siendoΩ unvalor constante conocido; en este estado cinematico, se aplica una percusion a la esferaE, en el punto(0,0,2a), de valor−Pj , siendoP = (4/3)maΩε funcion del parametroε . Se pide:
1. Calcular la energıa cinetica y el momento cinetico, respecto del centro de masas, del sistema, enfuncion de las coordenadas y velocidades generalizadas.
2. Determinar, en funcion del parametroε , el estado cinematico del sistema en el instante posteriora la percusion.
3. Plantear la ecuacion de cantidad de movimiento para el sistema.
4. Plantear la ecuacion de momento cinetico, respecto delcentro de masas:
a) para el sistema completo
b) para cada una de las esferasE y e.
5. Dejar reducido a cuadraturas la determinacion del movimiento del sistema.
268
6. Plantear las ecuaciones de Lagrange para el sistema. Analizar las posibles coincidencias con lasecuaciones planteadas en 3 y 4.
19 de Septiembre de 1989
Problema 10.2.8: Se tienen dos varillas identicasAB y BC, de masam y longitud a, articuladas ensu extremoB, contenidas en un plano vertical, y que pueden cruzarse libremente. Sobre el sistema soloactua el peso. La configuracion del sistema viene dada por las coordenadas(ξ ,η) de su centro de masas,el anguloθ que forma la bisectriz de las varillas con el eje horizontalOx, y el anguloα que forma cadauna de las varillas con la bisectriz. Se pide:
1. Obtener las ecuaciones que gobiernan el movimiento del sistema:
a) por metodos de mecanica Newtoniana;
b) por metodos de mecanica analıtica.
2. Dejar el problema reducido a cuadraturas para las condiciones inicialesξ = η = θ = 0, α = α0,ξ = η = α = 0, θ = ω .
3. Hagase un analisis cualitativo de la evolucion temporal deα basado en el signo de(1+3cos2α)α2.Compruebese los resultados viendo el signo deα enα = α0 y α = π −α0.
4. A la vista del comportamiento deα , dese una interpretacion fısica de las variaciones deθ conα , explicando que magnitudes cineticas se conservan. Se deja caer el sistema desde una alturah,de manera que llega al origen de coordenadas con el siguienteestado:ξ = η = 0; α = θ = π
2 ;ξ = η = θ = 0; η = −√
2gh. En ese momento se aplica una ligadura persistente, de manera queel verticeB queda fijado en el origen, pudiendo las varillas girar libremente.
5. Determinar el estado cinematico del sistema inmediatamente despues y las percusiones que apa-recen en la ligadura.
Febrero 1994
Problema 10.2.9: Considerese un cono circular homogeneo, de verticeV, masam, alturah y radio dela baseR cuyo tensor central de inercia es esferico; el cono se muevesobre un planoπ —inclinado unanguloα respecto de la horizontal— manteniendo el contacto —unilateral— con el planoπ, a traves deuna generatriz. Se tomara un sistema de referenciaO1x1y1z1, cuyo planoO1x1y1 coincide conπ y el ejeO1z1 normal a el; el ejeO1y1 es horizontal yO1x1 coincide con una lınea de maxima pendiente del planoπ orientada en sentido descendente. Para describir el movimiento del cono se tomaran las siguientescoordenadas generalizadas:i) (ξ ,η) coordenadas de la proyeccion ortogonal, sobreπ, del centro demasasG del cono,ii) θ , angulo que la generatriz de contacto forma con el ejeO1x1, y iii) ϕ , angulo queun radio de la base del cono forma con el radio determinado porla generatriz de contacto.
Se pide:
1. Determinar la relacionF(h,R) = 0 necesaria para que el tensor de inercia del cono en su centrode masasG sea esferico; hallar el momento de inercia del cono respecto de una recta tangente a lacircunferencia de su base.
2. Determinar la energıa cinetica del cono en funcion de las coordenadas y velocidades generaliza-das. En lo que sigue se supondra que el planoπ es perfectamente rugoso, y el cono se abandona,en reposo, con su verticeV sobre el origen y de forma que seanθ = ϕ = 0.
3. ¿Cuales son las ligaduras cinematicas que actuan sobre el sistema?. Expresarlas en terminos delas velocidades y coordenadas generalizadas, y describir las fuerzas de ligadura asociadas.
4. Se le aplica al cono una percusion de valorPi1 en el punto mas alto de su base; analizar, razona-damente, si el cono se levanta o no.
5. Se le aplica al cono una percusion de valorPj1 en el punto mas alto de su base; obtener, razona-damente, el estado cinematico del cono a la salida de la percusion.
6. Plantear las ecuaciones de Lagrange que gobiernan el movimiento posterior del cono.
7. Reducir el problema a cuadraturas; analıcese cualitativamente el movimiento que toma el cono.
8. Determınense los multiplicadores de Lagrange; ¿Cual es su significado fısico?
9. Repıtanse las preguntas c) f) y g) tomando como coordenadas generalizadas, en lugar de(ξ ,η),las coordenadas(x,y) del verticeV del cono.
269

Febrero de 1995
Problema 10.2.10: 83.-El sistema material de la figura esta constituido por dossuperficies conicasrectas de masam, radio de la baseR y altura R, soldadas por las bases con el eje de simetrıa comun(solido 2), y dos discos iguales, de masamy radioR, con sus centros de masaG3 y G4 en los vertices delos conos, situados perpendicularmente al eje de los mismos, alrededor del cual pueden girar libremente(solidos 3 y 4). El sistema se coloca sobre un plano horizontal Ox1y1, de una referencia cartesiana inercialOx1y1z1 (solido 1), en la que el ejeOz1 coincide con la vertical ascendente. El solido 2 rueda sin deslizarsobre dicho plano mientras que los discos pueden deslizar sobre el mismo.
Para definir la posicion del sistema se utilizan las coordenadas generalizadas siguientes:i) ξ y η ,coordenadas de la proyeccion del centro de masasG sobre el planoOx1y1, ii) θ , angulo que el planoGxzforma con el planoOx1z1, iii) ψ , angulo que un radio fijo de las bases conicas forma con la vertical, iv)ϕ , angulo que un radio fijo del solido 3 forma con la vertical,v) χ , angulo que un radio fijo del solido 4forma con la vertical.
Si se estima conveniente, podra usarse la referencia auxiliar Gxyz(solido 0), dondeG es el centro demasas del sistema completo,Gx el eje de simetrıa de revolucion del sistema que apunta hacia el solido3, Gzun eje vertical ascendente yGyel adecuado para definir un triedro a derechas.
Se pide:
1. Calcular el tensor de inercia del solido 2 en el centro de masasG (ver nota).
2. Calcular las ligaduras cinematicas que impone la condicion de no deslizamiento del solido 2.
3. Calcular la energıa cinetica del sistema completo en sumovimiento con respecto al solido 1,ası como el momento cinetico del sistema completo en su movimiento respecto al centro de masasG.
4. Inicialmente el sistema se encuentra en reposo en la posicion indicada por:ξ = η = 0, θ = ψ =ϕ = χ = 0. Se aplica una percusion de valorPj sobre el punto del disco 3 de coordenadas(x1 = R,y1 = −R, z1 = R); calcular las velocidades generalizadas a la salida de la percusion utilizando lasecuaciones de Lagrange para percusiones.
5. Hallar cuatro integrales primeras, independientes, utilizando ecuaciones de mecanica newtonia-na. Obtener un sistema de seis ecuaciones independientes permita determinar el movimiento delsistema.
6. Plantear las ecuaciones de Lagrange del sistema.
7. Describir claramente el movimiento del centro de masas del sistema. Demostrar que el movimien-to del sistema es periodico y calcular el periodo del mismo.
8. Cuando el sistema vuelve a pasar por la posicion que ocupaba inicialmente se agarrotan ambosdiscos al cono. ¿Como influye sobre el movimiento del sistema?
NOTA: Los momentos principales de inercia de una superficie conica de radio de la baseR y alturah ensu vertice son:
12
mR2 : segun el eje de simetrıa,12
mh2 : segun un diametro de la base
Junio 94
Problema 10.2.11: 84.-Consideremos un plano inclinado un angulo de 30o sobre el horizontal y unosejesOxyrectangulares marcados en el mismo, siendoOx la lınea de maxima pendiente orientada positi-vamente en sentido descendente yOyuna recta horizontal.
Sobre dicho plano va a rodar y pivotar sin deslizamiento un artilugio constituido por un eje con dosdiscos que giran sobre el en sus extremos. El ejeABse puede considerar como una varilla de longitud 2ay masam. Los discos extremos tienen radioa y masam. Una vista tomada perpendicularmente al planoinclinado esta representada en la figura adjunta.
La configuracion del sistema ası constituido queda determinada por los siguientes parametros. Coor-denadasξ , η del centro de masas del ejeAB, anguloθ formado porAB con la horizontalOy y angulosde rotacionϕ1 y ϕ2 de los discosD1 D2 sobre el ejeAB. En lo que sigue puede ser interesante la consi-deracion de un sistema de ejes movilesGXY indicados en la figura, siendoGY coincidente conABy GXperpendicular aABy paralelo al plano inclinado.
Supondremos que entre los discos y el plano existente en todomomento rozamiento suficiente paraevitar el deslizamiento. Las reacciones tangenciales en los puntos de contacto las denominaremosX1, Y1,X2, Y2, como estan indicadas en la figura.
270

El sistema es abandonado a la accion de la gravedad partiendo de las siguientes condiciones inicialesξ = η = 0, ξ = η = 0, ϕ1 = −ω , ϕ2 = ωSe pide:
1. Establecer tres ligaduras no holonomas que expresen el no deslizamiento de los discos sobre elplano. La primera de ellas (1) expresara la anulacion de lavelocidad de los puntos de contacto delos discos en sentido deABy sera comun para ambos discos. Las otras dos (2) y (3) expresaran laanulacion de las velocidades en sentido perpendicular aABde los puntos de contacto deD1 my D2
respectivamente. Comprobar que entre (2) y (3) se verifica lacombinacion lineal: 2θ + ϕ1− ϕ2 =0 (4) que sera util a la hora de efectuar la integracion del sistema de ecuaciones diferenciales.
2. Establecer la ecuacion (5) de la cantidad de movimiento en sentidoGX.
3. Obtener el valor del momento cinetico del artilugio completo enG considerando el movimientorelativo a ejes de direcciones fijas que pasan porG, si bien dicho vector se debera dar en compo-nentesGXYZ.
4. Aplicar la ecuacion (6) de la componenteGZ del momento cinetico enG.
5. Establecer las ecuaciones (7) y (8) del momento cineticoen el centro de cada uno de los discosseparadamente, quedandose con la componenteGY.
6. El sistema de ecuaciones (1) a (8), que tiene la ecuacion (4) combinacion de las (2) y (3), nosdetermina los valores deξ , η , θ , ϕ1, ϕ2, χ1, χ2. Eliminandoχ1, χ2 entre las (6), (7) y (8) seobtiene una relacion que comparada con la derivada de (4) permite obtener en funcion del tiempolos valores deθ y deϕ1−ϕ2. Obtener estos valores.
7. Eliminadoχ1, χ2 entre (5), (7) y (8) y combinando con las derivadas de (1) y (2)obtener el valordeϕ1(t). Como ya se conocıaϕ1−ϕ2 procedente del apartado 6) obtener tambienϕ2(t).
Septiembre de 1984
Problema 10.2.12: 110.-Una esfera homogenea y pesada, con centro enO, masam y radio a, sedesplaza con respecto a un sistema galileanoO1x1y1z1 (O1z1 es vertical y ascendente) de forma quese apoya sobre el plano horizontalO1x1y1, mientras que un diametroOz de dicha esfera esta obligadomediante una ligadura sin rozamiento, a permanecer en un plano verticalP que pasa porO1z1. EsteplanoP esta animado de un movimiento de rotacion uniforme alrededor deO1z1 con velocidad angularconstanteω . Se representa porO1w1 la recta de interseccion de los planosP y O1x1y1 y se recomiendaintroducir los triedros trirrectangulos a derechas siguientes:
El O1u1w1z1 de forma que el angulox1O1u1 sea igual aωt.
El Ouwz1 con ejes paralelos a los del triedro anterior y con origen enO.
El Ouvzdeducido del anterior por giroθ alrededor deOu y en el sentido positivo definido pordicho eje.
Se representa finalmente porϕ el angulo de rotacion propia de la esfera alrededor del di´ametroOzypor ρ la distancia deO al ejeO1z1. La reacciones que el plano verticalO1w1z1 ejerce sobre el diametroOzson normales a dicho plano y se representara porU la componente segunOude la resultante y porMv
la componente sobre el ejeOv del momento respecto aO de dichas reacciones. Las componentes segunlos ejesOu, Ow y Oz1 de la reaccion que el planoO1x1y1 ejerce sobre la esfera se representaran porRu,Rw y N respectivamente. Suponiendo que el coeficiente de rozamiento entre esfera y planoO1x1y1 seainfinito, es decir que la esfera ruede y pivote sin deslizamiento sobre el plano indicado, se pide:
a) Plantear las relaciones que deben existir entre los parametrosρ , θ , ϕ y sus derivadas, al imponerla condicion de que la esfera ruede y pivote sin deslizar sobre el planoO1x1y1.
b) Calcular la energıa cinetica de la esfera en su movimiento respecto al triedroO1x1y1z1.
c) Calcular el momento cinetico de la esfera respecto a su centro de masas correspondiente al movi-miento relativo al mismo.
d) Plantear las ecuaciones del movimiento de la esfera respecto al triedroO1x1y1z1.
e) Integrar las ecuaciones del movimiento suponiendo que enel instante inicial se verifique:
θ0 = 30o, ρ0 = 2a, ϕ0 = 0, θ0 = 2ω
Suponiendo ahora que la esfera desliza sin rozamiento sobreel planoO1x1y1 se pide:
271

f) Plantear los teoremas del movimiento del centro de masas de la esfera y del momento cinetico enel movimiento relativo al centro de masasO.
g) Integrar las ecuaciones del movimiento absoluto de la esfera suponiendo que las condiciones ini-ciales son:
ρ0 = 4a, ρ0 = 2ωa (10.2)
ϕ0 = 0, ϕ0 = −ω/2 (10.3)
θ0 = 60o, θ0 = 3ω/2 (10.4)
Febrero de 1968
Problema 10.2.13: 71.-Un planoΠ horizontal, perfectamente rugoso, que coincide con el plano Oxyde una referencia cartesiana rectangularOxyz, gira con velocidad angular constanteω , alrededor deOz (vertical ascendente). Una esferaE, maciza, homogenea, de masam, radioa, y centroG, rueda sindeslizar sobre el planoΠ, sometida a fuerzas directamente aplicadas que equivalen auna resultanteF y unmomentoM situado en el centro de masasG. SeanN y R las componentes, normal y paralela al plano,respectivamente, de la reaccion que el planoΠ ejerce sobre la esfera, en el puntoA de contacto entreambos. Se pretende estudiar el movimiento del centro de masas G de la esfera respecto de la referenciaOxyz, que se considerara inercial. Se pide:
Plantear las ecuaciones vectoriales de cantidad de movimiento, y momento cinetico respecto delcentro de masas. Expresar, vectorialmente, la condicion de no deslizamiento de la esfera sobre elplanoΠ.
Obtener, razonadamente, las ecuaciones:
dvG
dt=
2ω7
(k ∧vG)− 57ma
(k ∧M)+5
7mF−k(F ·k) (1)
I · dΩΩΩdt
=5ω I7a
vG +27
M +57
k(M ·k)+2a7
(k ∧F) (2)
que gobiernan la evolucion temporal de la velocidadvG del centro de masasG y la velocidadangularΩΩΩ de la esfera (I = 2
5ma2 es el momento de inercia de la esfera respecto de un diametro).
En el caso en que las unicas fuerzas directamente aplicadassean las gravitatorias, determinar latrayectoria seguida por el centro de masas, y la velocidad angular de la esfera, a partir de unascondiciones iniciales arbitrarias. Determinar tambien,las componentesN y R de la reaccion queel planoΠ ejerce sobre la esfera. (Los calculos se aligeran si se toman las siguientes variables adi-mensionales: tiempo:τ = 2ωt
7 , posicion del centro de masas:OG = a(ξ ,η ,1), velocidad angular:ΩΩΩ = 5ω
7 ωωω).
En lo que sigue se usaran los resultados obtenidos en los apartados anteriores para resolver el siguienteproblema: supongase, a continuacion, que el planoΠ sobre el que rueda la esfera esta dividido en dospartes por la circunferenciaC de ecuacionesz= 0, x2 + y2 = L2; la parte exterior, en reposo respectodeOxyz, y la interior a la circunferencia, que gira con velocidad angular constanteω alrededor deOz. Laesfera, en el instante inicial, se situa sobre el punto(Lsinα ,−3L,0), y su estado cinematico esta definidopor: vG = 2ωLb
7 j , ΩΩΩ = −2ωLb7a i siendob un parametro adimensional conocido.
Calcular la trayectoria seguida por el centro de masas de la esfera, el tiempo que tarda en alcanzarla circunferenciaC, el punto en el que la alcanza, y el estado cinematico (vG, ΩΩΩ) en ese instante.
Cuando la esfera alcanza la circunferencia sufre una percusion; determinar su valor, y el estadocinematico justo despues de la percusion. ¿Que ocurrirıa si el planoΠ no fuese perfectamenterugoso?
Determinar la trayectoria seguida por el centro de masas en el interior de la circunferenciaC,comprobando que es simetrica respecto del ejeOx. Determinar el punto de la circunferenciaC pordonde la abandona, el tiempo que tarda en alcanzar ese punto,y el estado cinematico con que lohace.
Cuando la esfera sale de la circunferenciaC sufre otra percusion; determinar su valor, y el estadocinematico justo despues de la percusion.
Determinar la trayectoria posterior del centro de masas.
272

Septiembre de 1993
Problema 10.2.14: 103.-El sistema material representado en la figura 1, consta de un disco D, ho-mogeneo, pesado de masam y radio R, y una varillaOC, de masa despreciable frente a la del disco,longitud l > R, unida rıgidamente al disco en su centroC, y perpendicular al plano del mismo. El extre-mo O de la varilla se articula en una rotula situada en un punto fijo del espacio, y se toma como origende una referencia triortogonal y orientada a derechasOx1y1z1, en el queOz1 es la vertical ascendente.Ligado al solido se toma un sistema de referencia triortogonal Oxyz, en el queOzcoincide con la varillaOC.
Para determinar la posicion del solido en el espacio respecto deOx1y1z1, se utilizaran los angulos deEuler(ψ ,θ ,ϕ) del triedroOxyzindicados en la figura 1.
En el instante inicial el sistema esta en reposo, en la posicion indicada en la figura 2(ψ = ϕ =0,θ = π/2), y en el punto mas bajo del disco se aplica una percusion de valor Pi,siendoi el versor de ladireccion deOx.
Se pide:
Determinar el campo de velocidades del solido, en el instante inmediato posterior a la percusion.
Analizar cualitativamente el movimiento posterior del solido, discutiendo los resultados en fun-cion de la intensidadP de la percusion. Integrar las ecuaciones en el caso particular de que
Calcular la reaccion que la rotula ejerce sobre el extremoO de la varilla.
20 de Septiembre de 1986
273
Problema 10.2.15: 87.-Sobre un plano inclinado 30o sobre la horizontal se mueve un artilugio pesadoque esta compuesto por los siguientes solidos.
Una horquillaABque se puede asimilar a una varilla homogenea de masamy longitud 2a.
Un discoD1 de radioa y masamque gira enB dentro de la horquilla.
Un discoD2 de radioa y masamque gira enA ortogonalmente a la varilla.
Ambos discos ruedan sin deslizar sobre el planoP en el que hemos definido un sistema coordenadoformado por una lınea de maxima pendiente descendenteOxy una horizontalOy.
El sistema mecanico ası constituido necesita para fijar suconfiguracion, los parametrosξ .η ,θ indi-cados en la figura y los angulos de rotacionϕ1, ϕ2 de los dos discosD1 y D2 respecto a la horquilla.
Si inicialmente se dan las siguientes condiciones:
ξ = η = 0, θ = ϕ1 = ϕ2 = 0, ξ = η = 0, ϕ1 = 0, θ = ϕ2 = ω
se pide:
1. Plantear las ecuaciones del movimiento del sistema dejando el problema reducido a una cuadratu-ra.
2. Discutir los distintos tipos de movimientos que pueden presentarse.
Septiembre de 1984
274