predicting tractor perf
DESCRIPTION
vnbvnbvbnvnTRANSCRIPT

Computers and Electronics in Agriculture
31 (2001) 137–149
A program for predicting tractor performancein Visual C++
S.A. Al-Hamed *, A.A. Al-JanobiAgricultural Engineering Department, King Saud Uni6ersity,
P.O. Box 2460, Riyadh, 11451, Saudi Arabia
Received 6 May 2000; received in revised form 26 September 2000; accepted 2 October 2000
Abstract
A tractor performance program that predicts the performance of two-wheel-drive (2WD)and four-wheel-drive/mechanical-front-wheel-drive (4WD/MFWD) tractors on agriculturalsoils for both bias-ply and radial tires was developed to meet the user requirements for botheducational and research programs. The program was written in Visual C++ programminglanguage as a new method of predicting 2WD and 4WD/MFWD tractor performance. Theprogram provides an intuitive user interface by linking databases such as tractor specifica-tions, tire data (front, bias-ply, and radial), and traction equation coefficients to predict theperformance of a selected tractor and model. The program has been proven to be userfriendly and efficient. © 2001 Elsevier Science B.V. All rights reserved.
Keywords: Tractor performance; Traction equation coefficients; Simulation; Visual programming
www.elsevier.com/locate/compag
1. Introduction
Computer models and simulation programs for predicting tractor performancehelp researchers to determine the relative importance of many factors affecting fieldperformance of tractors without conducting expensive, as well as time consuming,field tests. They also help researchers and manufacturers to improve the tractorperformance by comparing and analyzing various parameters that influence tractorperformance. The rapid progress in developing new software and the trend in
* Corresponding author. Fax: +9661-4678502.E-mail address: [email protected] (S.A. Al-Hamed).
0168-1699/01/$ - see front matter © 2001 Elsevier Science B.V. All rights reserved.
PII: S0168 -1699 (00 )00177 -0
S.A. Al-Hamed, A.A. Al-Janobi / Computers and Electronics in Agriculture 31 (2001) 137–149138
enhancing the existing application software and programming languages alwaystend to facilitate the interaction between users and computers. As a result, manycomputer modeling and simulation programs have been developed. Considerableresearch has been conducted in developing computer based models and simulationprograms to service the educational and research needs in the farm machinery areaof agricultural engineering.
Zoz (1970) presented a graphical method for predicting tractor field performance.The method was useful for predicting drawbar pull, drawbar power, travel speed,and travel reduction of 2WD tractors under various soil conditions. Wismer andLuth (1972) outlined a set of empirical equations for the tractive performance oftires on agricultural (cohesive-frictional) soils. These equations described tractivecharacteristics of both towed and driven tires and these were used later by manyresearchers to develop tractive performance models for tractors. Clark (1985)proposed generalized forms of the Wismer and Luth model for a wider range ofactual field conditions. Brixius (1987) presented equations to predict the tractiveperformance of bias-ply tires operating on agricultural soils as revisions of equa-tions introduced by Wismer and Luth (1972). The new equations improved theprediction of tractive performance and extended the range of applications. Theseequations can be applied to wheeled vehicles ranging from lawn and garden tractorsto earthmovers as long as the set of variables are within the applicable limits. Theset of variables includes width-to-diameter ratio, deflection ratio, weight divided bywidth and diameter, and cone index. The applicable limits include all conditionstypically encountered by agricultural tractor tires, except radial tires. Wheel torque,motion resistance, net traction and tractive efficiency were predicted as a functionof soil strength, wheel load, slip, tire size, and tire deflection for both dual andsingle wheels. The equations can be used for radial tires by adjusting the equationscoefficients as recommended by Brixius (1987).
Zoz (1987) developed Lotus templates for predicting 2WD and 4WD/MFWDtractor performance for bias-ply tires on agricultural soils using the tractionequations by Brixius (1987) and on concrete using the equations presented by Zozand Brixius (1979). Evans et al. (1989) developed a traction prediction and ballastselection model based on the traction equations proposed by Brixius (1987) usingthe equation solving software TK Solver. The traction model developed for aspecific small front wheel assist tractor operating on grass surface was demonstratedby adjusting the coefficients of traction equations.
Grisso et al. (1992) demonstrated the flexibility of templates introduced by Zoz(1987) as an educational tool by comparing bias-ply versus radial tires, dual versussingle tires, and the influence of travel speed, tire size, ballast distribution, and soilcondition for 2WD and 4WD/MFWD tractors. An alternative calculation modecan be used to determine the required ballast weight to obtain a desired perfor-mance. This mode with an optimizing ballast scheme was used to predict theoptimum wheel slip and maximum tractive efficiency for each comparison. Al-Hamed et al. (1994) revised the Lotus compatible templates from the Zoz (1987)spreadsheets. These revised templates were capable of predicting 2WD and 4WD/MFWD tractor performance on agricultural soils for both bias-ply and radial
S.A. Al-Hamed, A.A. Al-Janobi / Computers and Electronics in Agriculture 31 (2001) 137–149 139
tractor tires. Comparison between the predicted and experimental results of a givennumber of tractors for the performance variables (wheel slip, drawbar pull, andtractive efficiency) showed that the templates’ performance was fair and acceptable.
Computer models and simulation programs for predicting tractor performancewere developed by many researchers using various programming tools. With thefast development in computer software and hardware, it is necessary to takeadvantage of the recently introduced programming tools such as Visual Basic andVisual C++ to develop software for the needs of educational and researchprograms in farm machinery. The availability of visual languages made program-ming easier for programmers and the programs written in visual programmingenvironment are easily accessible to the users of them. Visual programmingprovides a set of screens, object buttons, scroll bars, and menus. The objects can bepositioned on a form, and their behaviors are described through the use of ascripting language associated with each one. Visual programming is used forapplications development, systems design, and simulations. They let users put moreeffort into solving their particular problem rather than learning about a program-ming language. As it seems to be an excellent tool for developing flexible and userfriendly software for various applications, it is considered as a new approach todevelop a program for predicting tractor performance.
The objective of this research was to develop a tractor performance program inVisual C+ + as a new method to predict performance of 2WD and 4WD/MFWDtractors for both bias-ply and radial tires. Specifically, the program has to predictthe performance parameters for a given tractor by accessing databases concerningtractor specification, tire information, and traction equation coefficients.
2. Tractor performance model equations
The traction prediction equations of Brixius (1987) have been used in thedevelopment of the computer program for predicting tractor performance. In thisresearch, the following traction equations are considered and it will be shown thatthe program developed in Visual C++ programming language becomes rathereasy for the user to predict the performance of a selected tractor and model
Gross Traction, GT=Tr
(1)
where T, torque applied to the wheel, and r, rolling radius of the tire.Part of the GT is required to overcome the motion resistance (MR) and the
remainder is the net traction (NT). Therefore,
Gross Traction, GT=MR+NT (1a)
From the experimental data, the gross traction ratio is expressed as:
GTW
=A1(1−e−A2Bn)(1−e−A3s)+A4 (2)

S.A. Al-Hamed, A.A. Al-Janobi / Computers and Electronics in Agriculture 31 (2001) 137–149140
where A1, A2, A3, and A4, traction coefficients based on tire type (Table 1), W,dynamic wheel load, s, wheel slip and Bn, mobility number.
The mobility number (Bn), combining the wheel numeric (Cn=CIbd/W), thedeflection ratio (d/h), and the section width-to-diameter ratio (b/d) is expressed as:
Bn=�CI b d
W��1+A5d/h
1+A6b/d�
(3)
where A5 and A6, traction equation coefficients based on tire type (Table 1).The motion resistance ratio is defined as:
MRW
=A7
Bn
+A4+0.5 s
Bn
(4)
where A7, traction equation coefficient based on tire type (Table 1).The motion resistance ratio of an unpowered wheel can be predicted with Eq. (4)
by setting the slip dependent term (0.5 s/Bn) equal to zero.Net tractive ratio is defined as:
NTW
=A1(1−e−A2Bn)(1−e−A3s)−A7
Bn
−0.5 s
Bn
. (5)
The net traction is a force in direction of travel developed by the traction deviceand transferred to the vehicle. The net traction includes the force produced at thedrawbar and the motion resistance of any unpowered wheels. Thus
P=NT−MRUP (6)
where P, drawbar pull, and MRUP, motion resistance of unpowered wheels.Dynamic wheel load can be calculated in terms of static load, drawbar pull and
dynamic weight transfer.Wheel slip (s) is expressed as:
Table 1Traction equation coefficients for bias-ply and radial tires
Bias-plya RadialTraction coefficient
Mean valueRecommended rangea
0.88A1 0.880.880.1A2 0.1 0.19.5A3 7.5 8.50–10.500.0320.03–0.035A4 0.045A5 5 5
33A6 30.90.91A7
a From Brixius (1987).
S.A. Al-Hamed, A.A. Al-Janobi / Computers and Electronics in Agriculture 31 (2001) 137–149 141
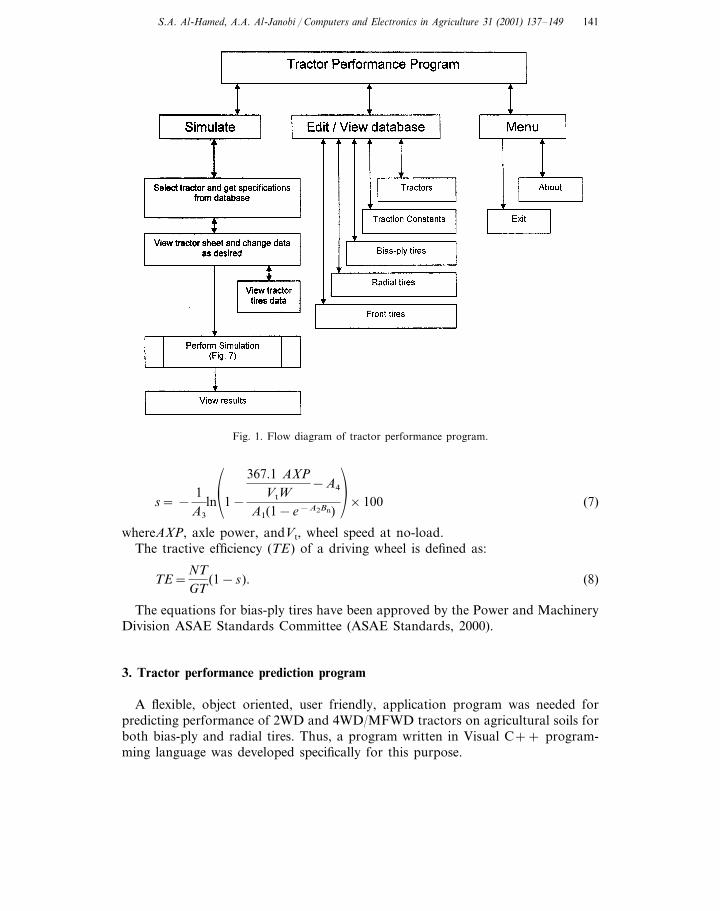
Fig. 1. Flow diagram of tractor performance program.
s= −1
A3
ln
:1−
367.1 AXPVtW
−A4
A1(1−e−A2Bn)
;×100 (7)
whereAXP, axle power, andVt, wheel speed at no-load.The tractive efficiency (TE) of a driving wheel is defined as:
TE=NTGT
(1−s). (8)
The equations for bias-ply tires have been approved by the Power and MachineryDivision ASAE Standards Committee (ASAE Standards, 2000).
3. Tractor performance prediction program
A flexible, object oriented, user friendly, application program was needed forpredicting performance of 2WD and 4WD/MFWD tractors on agricultural soils forboth bias-ply and radial tires. Thus, a program written in Visual C++ program-ming language was developed specifically for this purpose.
S.A. Al-Hamed, A.A. Al-Janobi / Computers and Electronics in Agriculture 31 (2001) 137–149142
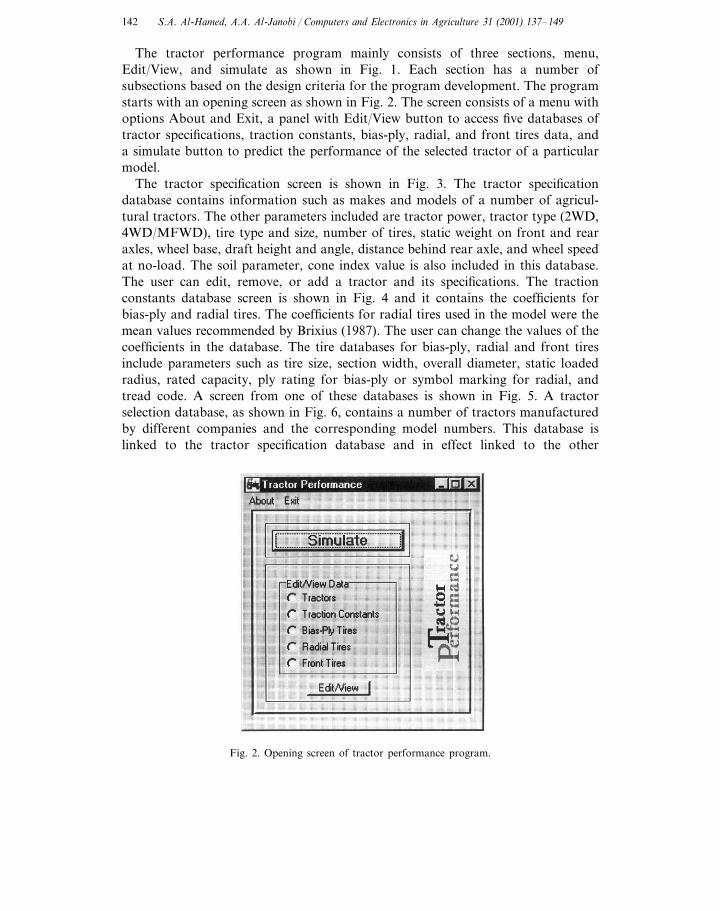
The tractor performance program mainly consists of three sections, menu,Edit/View, and simulate as shown in Fig. 1. Each section has a number ofsubsections based on the design criteria for the program development. The programstarts with an opening screen as shown in Fig. 2. The screen consists of a menu withoptions About and Exit, a panel with Edit/View button to access five databases oftractor specifications, traction constants, bias-ply, radial, and front tires data, anda simulate button to predict the performance of the selected tractor of a particularmodel.
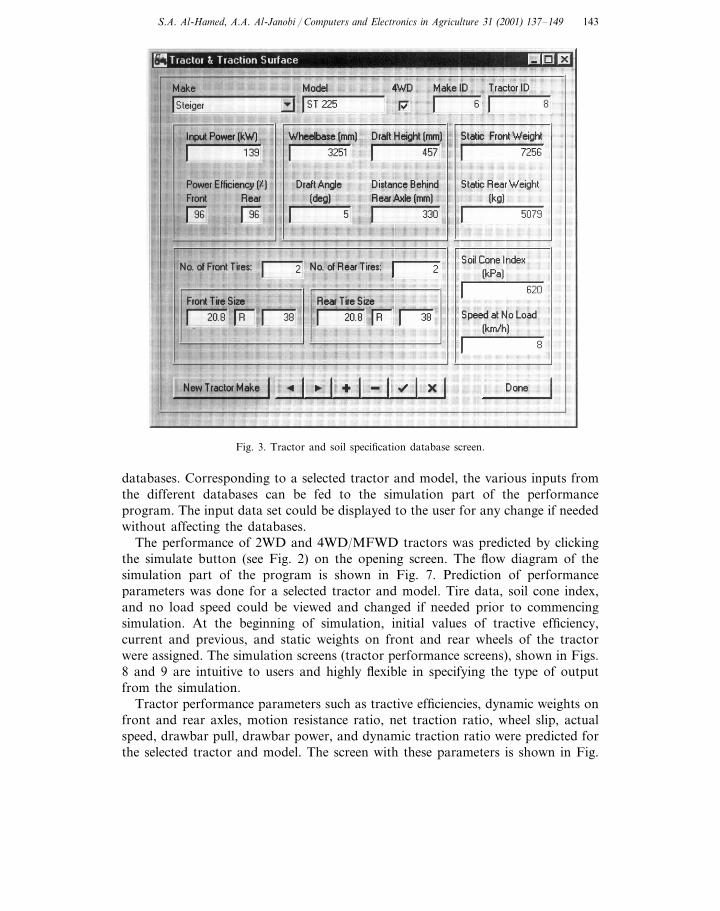
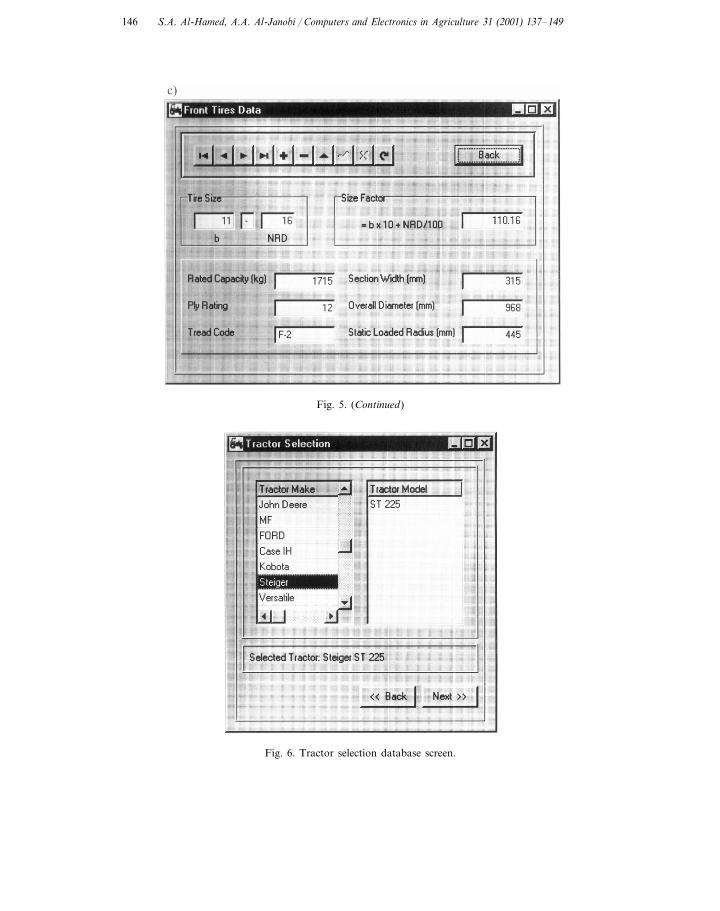
The tractor specification screen is shown in Fig. 3. The tractor specificationdatabase contains information such as makes and models of a number of agricul-tural tractors. The other parameters included are tractor power, tractor type (2WD,4WD/MFWD), tire type and size, number of tires, static weight on front and rearaxles, wheel base, draft height and angle, distance behind rear axle, and wheel speedat no-load. The soil parameter, cone index value is also included in this database.The user can edit, remove, or add a tractor and its specifications. The tractionconstants database screen is shown in Fig. 4 and it contains the coefficients forbias-ply and radial tires. The coefficients for radial tires used in the model were themean values recommended by Brixius (1987). The user can change the values of thecoefficients in the database. The tire databases for bias-ply, radial and front tiresinclude parameters such as tire size, section width, overall diameter, static loadedradius, rated capacity, ply rating for bias-ply or symbol marking for radial, andtread code. A screen from one of these databases is shown in Fig. 5. A tractorselection database, as shown in Fig. 6, contains a number of tractors manufacturedby different companies and the corresponding model numbers. This database islinked to the tractor specification database and in effect linked to the other
Fig. 2. Opening screen of tractor performance program.
S.A. Al-Hamed, A.A. Al-Janobi / Computers and Electronics in Agriculture 31 (2001) 137–149 143
Fig. 3. Tractor and soil specification database screen.
databases. Corresponding to a selected tractor and model, the various inputs fromthe different databases can be fed to the simulation part of the performanceprogram. The input data set could be displayed to the user for any change if neededwithout affecting the databases.
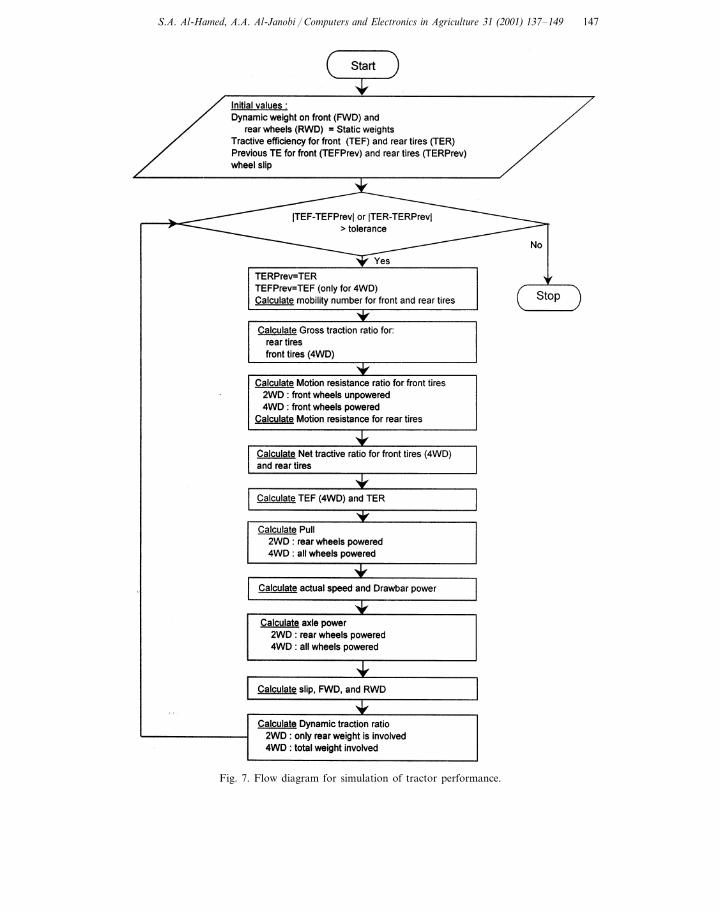
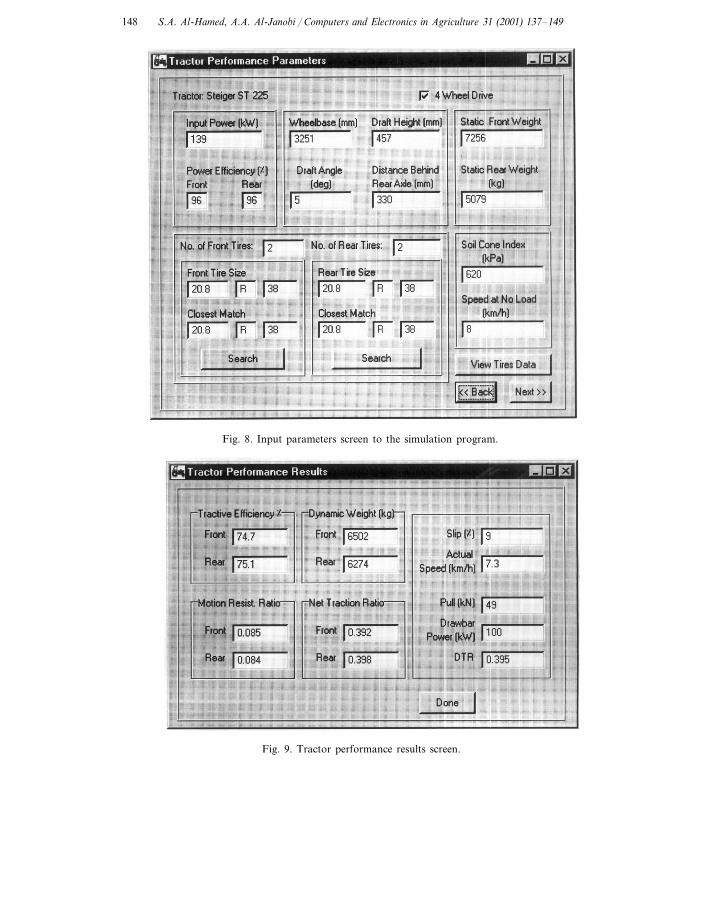
The performance of 2WD and 4WD/MFWD tractors was predicted by clickingthe simulate button (see Fig. 2) on the opening screen. The flow diagram of thesimulation part of the program is shown in Fig. 7. Prediction of performanceparameters was done for a selected tractor and model. Tire data, soil cone index,and no load speed could be viewed and changed if needed prior to commencingsimulation. At the beginning of simulation, initial values of tractive efficiency,current and previous, and static weights on front and rear wheels of the tractorwere assigned. The simulation screens (tractor performance screens), shown in Figs.8 and 9 are intuitive to users and highly flexible in specifying the type of outputfrom the simulation.
Tractor performance parameters such as tractive efficiencies, dynamic weights onfront and rear axles, motion resistance ratio, net traction ratio, wheel slip, actualspeed, drawbar pull, drawbar power, and dynamic traction ratio were predicted forthe selected tractor and model. The screen with these parameters is shown in Fig.

S.A. Al-Hamed, A.A. Al-Janobi / Computers and Electronics in Agriculture 31 (2001) 137–149144
9. The simulation continued until a convergence occurred in which the difference oftwo successive values of tractive efficiency was less than a tolerance of 0.001%.
4. Validation of the model
The traction prediction equations of Brixius (1987) were used in the developmentof the computer model for predicting tractor performance. Al-Hamed et al. (1994)templates, a revision of Zoz (1987) templates were the basis for developing thesimulation program written in Visual C++ programming language. Thus, tovalidate the model, predicted performance variables were compared with the resultsof Al-Hamed et al. (1994) spreadsheets for bias-ply and radial tires. The samenumerical values up to two decimal digits of precision were obtained for theperformance variables. The tractor performance program developed in visualprogramming environment was also illustrated by selecting an example Steiger ST225 tractor from the tractor specification database. The results of the various stagesof predicting tractor performance parameters are shown in Figs. 2–6 and 8, and 9.
5. Conclusion
A computer based model and simulation program for predicting 2WD and4WD/MFWD tractors performance on agricultural soil was developed in a VisualC++ programming environment for use in educational and research needs. The
Fig. 4. Traction constants database screen.

S.A. Al-Hamed, A.A. Al-Janobi / Computers and Electronics in Agriculture 31 (2001) 137–149 145
Fig. 5. Tire specification database screens: (a) bias-ply tire; (b) radial tire; (c) front tire.
S.A. Al-Hamed, A.A. Al-Janobi / Computers and Electronics in Agriculture 31 (2001) 137–149146
Fig. 5. (Continued)
Fig. 6. Tractor selection database screen.
S.A. Al-Hamed, A.A. Al-Janobi / Computers and Electronics in Agriculture 31 (2001) 137–149 147
Fig. 7. Flow diagram for simulation of tractor performance.
S.A. Al-Hamed, A.A. Al-Janobi / Computers and Electronics in Agriculture 31 (2001) 137–149148
Fig. 8. Input parameters screen to the simulation program.
Fig. 9. Tractor performance results screen.
S.A. Al-Hamed, A.A. Al-Janobi / Computers and Electronics in Agriculture 31 (2001) 137–149 149
menus and object driven windows were vital in making the program relatively easyto learn and operate compared to the programs developed using any software toolavailable prior to the visual programming tools. The intuitive user interface to themodel is a visual object-oriented window, which allows the selection of the tractor,making changes to soil–tractor–tire factors, and initiates the simulation. The usercan also access other windows to edit or expand available databases. These featuresprovided by the facilities of visual programming make the program highly flexibleand interactive to the users in both research and education in farm machinery area.
References
Al-Hamed, S.A., Grisso, R.D., Zoz, F.M., Von Bargen, K., 1994. Tractor performance spreadsheet forradial tires. Comput. Electron. Agric. 10, 45–62.
ASAE Standards, 2000. ASAE D497.4 Agricultural machinery management data. ASAE, St. Joseph,MI.
Brixius, W.W., 1987. Traction prediction equations for bias ply tires. ASAE Paper 87-1622, 8 pp.Clark, R.L., 1985. Tractive modeling with the modified Wismer-Luth model. ASAE Paper 85-1049.Evans, M.D., Clark, R.L,. Manor, G., 1989. A traction prediction and ballast selection model. ASAE
Paper 89-1054, 14 pp.Grisso, R.D., Al-Hamed, S.A., Taylor, R.K., Zoz, F.M., 1992. Demonstrating tractor performance
trends using Lotus templates. Appl. Eng. Agric. 8 (6), 733–738.Wismer, R.D., Luth, H.J., 1972. Off-road traction prediction for wheeled vehicles. ASAE Paper 72-619,
16 pp.Zoz, F.M., 1970. Predicting tractor field performance. ASAE Paper 70-118, 12 pp.Zoz, F.M., 1987. Predicting tractor field performance (updated). ASAE Paper 87-1623, 12 pp.Zoz, F.M., Brixius, W.W., 1979. Traction prediction for agricultural tires on concrete. ASAE Paper
79-1046, 5 pp..