podstawy modelowania i syntezy mechanizmów...
TRANSCRIPT

Podstawy modelowania i syntezy mechanizmów. Charakterystyki kinematyczne mechanizmów. Podstawy syntezy geometrycznej mechanizmów płaskich.
Opracował J. Felis str. 1
CZ. 2. PODSTAWY SYNTEZY GEOMETRYCZNEJ MECHANIZMÓW PŁASKICH
Po ustaleniu struktury mechanizmu, kolejnym etapem projektowania jest synteza geome-tryczna. Synteza geometryczna to dobór wymiarów członów mechanizmu w celu uzyskania parametrów ruchu odpowiadających ich funkcji i przeznaczeniu.
Zwykle celem syntezy geometrycznej jest uzyskanie określonych położeń wybra-
nych członów lub torów punktów wybranych członów odpowiadających położeniom członu lub członów napędzających.
Podejście do syntezy geometrycznej wynika ze złożoności przyjętej struktury mechanizmu oraz faktycznych ruchów będą wykonywać człony(płaski, obrotowy, postępowy, postępowy prostoliniowy prostoliniowy).
Metody syntezy opierają się mi. na teorii geometrii kinematycznej której podstawy opraco-wał Ludwig Burmester (1840–1927). W zagadnieniach geometrii kinematycznej ruch figury na płaszczyźnie rozpatrywany jako niezależny od czasu. W ramach tej geometrii rozpatry-wane są następujące zagadnienia: dwa położenia figury płaskie, trzy położenia figury płaskiej, cztery położenia figury płaskiej, pięć położeń figury płaskiej. Pozwala to rozwiązywać niektóre zadania syntezy geometrycznej mechanizmów dźwigniowych.
Syntezę przeprowadza się metodami analitycznymi, wykreślnymi i poprzez wykorzystanie programów komputerowych. Wykreślne zadania syntezy należy rozwiązywać przy pomocy programów typu CAD.
Podstawy modelowania i syntezy mechanizmów. Charakterystyki kinematyczne mechanizmów. Podstawy syntezy geometrycznej mechanizmów płaskich.
Opracował J. Felis str. 2
n
1ii 0l
ks2n2p
OGÓLNE ZASADY SYNTEZY GEOMETRYCZNEJ MECHANIZMÓW DŹWIGNIOWYCH Twierdzenie: Jeżeli mechanizm płaski można opisać zamkniętym wielobokiem wektorowym:
to liczbę niezależnych parametrów geometrycznych, które mechanizm posiada można wyliczyć z równania: gdzie: n – liczba wektorów (każdy wektor posiada 2 parametry, długość i kąt), 2 – liczba warunków zamykania wieloboku (suma rzutów na dwie osie), s – liczba współrzędnych opisujących ruch członu napędzającego (liczba stopni swobody mechanizmu), k – liczba znanych kątów określających położenie nieruchomych wektorów podstawy.

Podstawy modelowania i syntezy mechanizmów. Charakterystyki kinematyczne mechanizmów. Podstawy syntezy geometrycznej mechanizmów płaskich.
Opracował J. Felis str. 3
SYNTEZA CZWOROBOKU PRZEGUBOWEGO. METODA ANALITYCZNA Przykład 1. Wyznaczyć długości członów mechanizmu czworoboku przegubowego dla zada-nych wzajemnych położeń kątowych członu napędzającego 1 i napędzanego 3. Rozwiązanie Liczba wektorów n=4, liczba współrzędnych opisujących ruch członu napędzającego s=1(człon 1), liczba znanych kątów k=1 ( 4=-180o), liczba niezależnych parametrów wynosi p=2 4-2-1-1=4 Zmiennymi parametrami mechanizmu są długości członów: 4321 llll ,,, Jeżeli wszystkie narzucone warunki dotyczą położeń kątowych liczba parametrów ulega zmniejszeniu o 1 tzn. p=3, ponieważ można np. przyjąć l1=1, a pozostałe boki czworoboku wyrazić w formie bezwymiarowej.
Rys. 1. Schemat kinematyczny czworoboku przegubowego w zadanych położeniach kątowych członów 1 i 3
Podstawy modelowania i syntezy mechanizmów. Charakterystyki kinematyczne mechanizmów. Podstawy syntezy geometrycznej mechanizmów płaskich.
Opracował J. Felis str. 4
Człony mechanizmu traktujemy jako wektory i rzutujemy na osie x,y
0lll0llll
332211
4332211
sinsinsincoscoscos
(1)
Dzielimy stronami równania przez 1l i podstawiamy:
1
44
1
33
1
22 l
lrllr
llr ;;
Przekształcamy następnie do postaci
0rr0rrr
13322
133422
sinsinsincoscoscos
(2)
(2) podnosimy do kwadratu i dodajemy stronami:
3131
23
223313143431
23
223
24
22
r2
rr2r2rr2rrr
sinsinsin
sincoscoscoscoscoscos
Po przekształceniach otrzymamy:
0r2
r1rrrrr
r2r2rr2r2r1rr
14
22
23
24
134
333
41434313322
22
24
cos)cos(cos
/coscos)cos(
(3)

Podstawy modelowania i syntezy mechanizmów. Charakterystyki kinematyczne mechanizmów. Podstawy syntezy geometrycznej mechanizmów płaskich.
Opracował J. Felis str. 5
Podstawimy:
4
22
23
24
4
33 r2
r1rrrrrqrp ;;
i otrzymamy: 0rqp 1133 cos)cos(cos (4)
Równanie (4) piszemy dla trzech położeń mechanizmu: 332313
322212
312211
,,,,,,
Ostatecznie:
0rqp0rqp0rqp
13133333
12123232
11113131
cos)cos(coscos)cos(coscos)cos(cos
(5)
Podstawy modelowania i syntezy mechanizmów. Charakterystyki kinematyczne mechanizmów. Podstawy syntezy geometrycznej mechanizmów płaskich.
Opracował J. Felis str. 6
4
22
23
24
4
3
3
r2r1rr41340r
rr41340q
r38601p
.
;.
;,
Zadanie syntezy zostało rozwiązane dla danych
130150
9090
6045
3313
3212
3111
,
,
,
0150r150130q130p
090r9090q90p
045r4560q60p
cos)cos(cos
cos)cos(cos
cos)cos(cos
086600rq93970p642800rq
070710rq96590p50
...
..,
Do obliczeń wykorzystano
program WolframAlpha
Po zaokrągleniu jest:

Podstawy modelowania i syntezy mechanizmów. Charakterystyki kinematyczne mechanizmów. Podstawy syntezy geometrycznej mechanizmów płaskich.
Opracował J. Felis str. 7
Przyjęto długość członu napędzającego: mm100l1 Obliczono: 35273r38601r37483r 432 ,;;,;,
Ponieważ 100lr
100lr
100lr 4
43
32
2 ;; to 27335l60138l48337l 432 ,;,;,
Rys. 2. Schemat kinematyczny czworoboku przegubowego z wyznaczonymi długościami członów
dla zadanych położeń kątowych członów 1 i 3
Podstawy modelowania i syntezy mechanizmów. Charakterystyki kinematyczne mechanizmów. Podstawy syntezy geometrycznej mechanizmów płaskich.
Opracował J. Felis str. 8
Rys. 3. Model i charakterystyki kinema-tyczne czworoboku w programie SAM realizujący zadanie syntezy postawione w przykładzie 1. Czworobok jest w tym przypadku me-chanizmem korbowo-wahaczowym. Człon 1 może wykonać ruch obrotowy w zakresie kąta pełnego Liniami przerywanymi zaznaczono za-kres kąta obrotu członu 1 zgodny z za-danym w trakcie syntezy Prędkość kątowa członu członu 1
srad21 /

Podstawy modelowania i syntezy mechanizmów. Charakterystyki kinematyczne mechanizmów. Podstawy syntezy geometrycznej mechanizmów płaskich.
Opracował J. Felis str. 9
Synteza geometryczna mechanizmów dźwigniowych. Metoda wykreślna W celu syntezy mechanizmu czworoboku: 1) przyjmujemy położenie łącznika BC czworoboku względem przemieszczanej figury płaskiej (L) i jego długość, 2) wyznaczamy dwa położenia łącznika (B1C1,B2C2) zgodne z kolejnymi położeniami figury płaskiej (L), 3) rysujemy symetralne odcinków B1B2 i odpowiednio C1C2 i znajdujemy w ten sposób proste na któ-rych leżą środki A i D okręgów, które są zarazem środkami obrotu członów AB i CD, 4) dobieramy dowolnie promienie i rysujemy okręgi przechodzące odpowiednio przez dwa punkty B1,B2 i C1,C2, promienie tych okręgów wyznaczają długości członów zewnętrznych czworoboku.
Rys. 4. Synteza geometryczna czworoboku przegubowego dla dwóch zadanych położeń płaszczyzny łącznikowej
Podstawy modelowania i syntezy mechanizmów. Charakterystyki kinematyczne mechanizmów. Podstawy syntezy geometrycznej mechanizmów płaskich.
Opracował J. Felis str. 10
W celu syntezy mechanizmu czworoboku: 1) przyjmujemy położenie łącznika BC czworoboku względem przemieszczanej figury płaskiej (L) i jego długość, 2) wyznaczamy trzy położenia łącznika (B1C1,B2C2,B3C3) zgodne z kolejnymi położeniami figury płaskiej , 3) wykorzystując punkty przecięcia odpowiednich symetralnych, wyznaczamy środki A i D okręgów prze-chodzących przez trzy punkty, odpowiednio B1,B2,B3 i C1,C2,C3, 4) promienie tych okręgów AB i CD wyznaczają długości członów zewnętrznych czworoboku.
Rys. 5. Synteza geometryczna czworoboku przegubowego dla trzech zadanych położeń płaszczyzny łącznikowej

Podstawy modelowania i syntezy mechanizmów. Charakterystyki kinematyczne mechanizmów. Podstawy syntezy geometrycznej mechanizmów płaskich.
Opracował J. Felis str. 11
a) b)
Rys. 6. Synteza geometryczna czworoboku przegubowego dla czterech zadanych położeń punktu płaszczyzny łącznikowej: a) wyznaczenie wymiarów czworoboku metodą graficzną przybliżoną (opis
metody [7]), b) model w programie SAM wykonany na podstawie przeprowadzonej syntezy
Podstawy modelowania i syntezy mechanizmów. Charakterystyki kinematyczne mechanizmów. Podstawy syntezy geometrycznej mechanizmów płaskich.
Opracował J. Felis str. 12
)POO()POO(
P 0'3'21
032110
Synteza geometryczna mechanizmu suwakowego o zadanej strukturze i dwóch skrajnych położeniach członów
Rys. 7. Synteza geometryczna mechanizmu chwytaka o równoległym ruchu szczęk

Podstawy modelowania i syntezy mechanizmów. Charakterystyki kinematyczne mechanizmów. Podstawy syntezy geometrycznej mechanizmów płaskich.
Opracował J. Felis str. 13
0
5
10
15
20
25
30
35
40
45
50
55
25 27,5 30 32,5 35 37,5 40 42,5 45 47,5 50
Przemieszczenie suwaka x [mm]
Prze
mie
szcz
enie
koń
ców
ki c
hwyt
nej y
(x) [
mm
0,5
0,6
0,7
0,8
0,9
1,0
1,1
1,2
1,3
1,4
1,5
25 27,5 30 32,5 35 37,5 40 42,5 45 47,5 50
Przemieszczenie suwaka x [mm]
Char
akte
ryst
yka
pręd
kośc
iow
ako
ńców
ki c
hwyt
nej f v
(x)
1txxll
xlxyxf
24
22
4v
)(18ymm90lmm80lmm50xmm25x
42 min
maxmin
,,,
Dobór długości i położenia początkowego członów na podstawie charakterystyk: przemieszczeniowej i prędkościowej
Rys. 8. Charakterystyki kinematyczne mechanizmu chwytaka: a) przemieszczeniowa, b) prędkościowa
minyxlly 24
22
Podstawy modelowania i syntezy mechanizmów. Charakterystyki kinematyczne mechanizmów. Podstawy syntezy geometrycznej mechanizmów płaskich.
Opracował J. Felis str. 14
Rys. 9. Model chwytaka i charakterystyki kinematyczne chwytaka w programie SAM

Podstawy modelowania i syntezy mechanizmów. Charakterystyki kinematyczne mechanizmów. Podstawy syntezy geometrycznej mechanizmów płaskich.
Opracował J. Felis str. 15
Rys. 10. Charakterystyki kinematyczne wykreślone za pomocą programu WolframAlpha
Podstawy modelowania i syntezy mechanizmów. Charakterystyki kinematyczne mechanizmów. Podstawy syntezy geometrycznej mechanizmów płaskich.
Opracował J. Felis str. 16
KRZYWE ŁĄCZNIKOWE MECHANIZMÓW DŹWIGNIOWYCH Krzywe łącznikowe są to tory (trajektorie) punktów należących tzw. płaszczyzny łącznikowej czyli
pewnej powierzchni płaskiej, której ruch jest związany z członami mechanizmów dźwigniowych zwanych łącznikami. Są to człony stanowiące połączenie pomiędzy członami mechanizmu a w szczególności pomiędzy członem napędzającym i napędzanym. Człony te zwykle wykonują ruch płaski. Krzywe łącznikowe możemy wykorzystać podczas syntezy tzw. mechanizmów kierujących, czyli mechanizmów w których wybrane punkty członów poruszają się po zadanych torach np. pro-stoliniowych.
Rys. 11. Krzywe łącznikowe asymetryczne mechanizmu czworoboku przegubowego

Podstawy modelowania i syntezy mechanizmów. Charakterystyki kinematyczne mechanizmów. Podstawy syntezy geometrycznej mechanizmów płaskich.
Opracował J. Felis str. 17
Krzywe łącznikowe symetryczne. a) b)
Rys. 12. Krzywe łącznikowe symetryczne mechanizmów: a) korbowo-suwakowego, b) jarzmowego
Odcinek toru zbliżony do prostej
Odcinki torów zbliżone do okręgów
Podstawy modelowania i syntezy mechanizmów. Charakterystyki kinematyczne mechanizmów. Podstawy syntezy geometrycznej mechanizmów płaskich.
Opracował J. Felis str. 18
Synteza mechanizmu dźwigniowego z okresowym postojem suwaka Wykorzystamy właściwości toru punktu płaszczyzny łącznikowej 1 - Przyjmujemy wymiary mechanizmu korbowo-suwakowego złożonego z członów 1,2,3 2 - Wykreślamy tor punktu B mechanizmu (korzystamy w AutoCAD z funkcji splain), 3 – Wybieramy fragment toru zbliżony do okręgu, 4 – Rysujemy okrąg przez trzy punkty wybranego fragmentu toru, 5 – Sprawdzamy za pomocą punktów pomocniczych Bn i Bk przybliżenie toru okręgiem, 3 – Przyjmujemy długość łącznika 4 dołączonej grupy strukturalnej (4,5) równy promieniowi wyznaczonego okręgu, 4 – Suwak 5 mechanizmu będzie wykonywał ruch z postojami
Czas postoju suwaka 5:
constdla2T
T360
t
11
c
cp
,
Rys. 13. Synteza mechanizmu dźwigniowego z okresowym postojem suwaka (AutoCAD)

Podstawy modelowania i syntezy mechanizmów. Charakterystyki kinematyczne mechanizmów. Podstawy syntezy geometrycznej mechanizmów płaskich.
Opracował J. Felis str. 19
Rys. 14. Model mechanizmu dźwigniowego z okresowym postojem suwaka (SAM)
Podstawy modelowania i syntezy mechanizmów. Charakterystyki kinematyczne mechanizmów. Podstawy syntezy geometrycznej mechanizmów płaskich.
Opracował J. Felis str. 20
Mechanizm maltański (Maltese cross) (Geneva drive – "napęd genewski") Mechanizm maltański – mechanizm zamieniający ciągły ruch obrotowy członu napędzające-
go w ruch obrotowy przerywany członu napędzanego. Sworzeń, (palec) koła napędzającego wchodzi kolejno w wycięcia krzyża powodując jego okresowy obrót o pewien kąt. Krzyż ten po-siada także wycięcie blokujące człon napędzany pomiędzy kolejnymi obrotami.
Mechanizm taki nazywany jest maltańskim, ponieważ jeden z jego elementów (człon napę-dzany, napędzany) przypomina krzyż maltański
Istnieje wiele odmian tych mechanizmów, różniących się m.in. kształtem i liczbą zazębień, np. mechanizm mal-tański z zazębieniem wewnętrznym, który ma bardziej zwartą budowę, a jego człony obracają się w tym samym kierunku. Mechanizm maltański znalazł szerokie zastosowanie najpierw w zegarach mechanicznych, potem w projektorach i kamerach filmowych
Grecja, Rodos , Klasztor zakonu Joanitów zwanych zakonem rodyjskim i maltańskim
Rys.15. Model mechanizmu maltańskiego (Working Model)
Podstawy modelowania i syntezy mechanizmów. Charakterystyki kinematyczne mechanizmów. Podstawy syntezy geometrycznej mechanizmów płaskich.
Opracował J. Felis str. 21
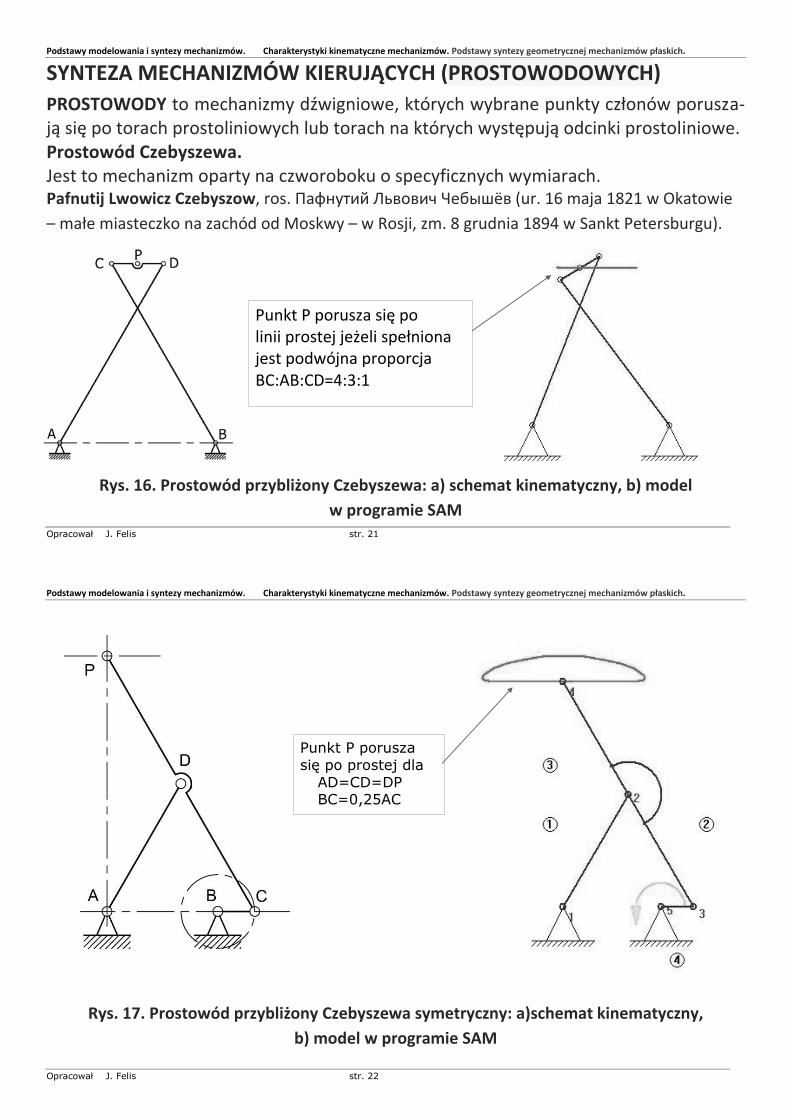
SYNTEZA MECHANIZMÓW KIERUJĄCYCH (PROSTOWODOWYCH) PROSTOWODY to mechanizmy dźwigniowe, których wybrane punkty członów porusza-ją się po torach prostoliniowych lub torach na których występują odcinki prostoliniowe. Prostowód Czebyszewa. Jest to mechanizm oparty na czworoboku o specyficznych wymiarach. Pafnutij Lwowicz Czebyszow, ros. Пафнутий Львович Чебышёв (ur. 16 maja 1821 w Okatowie – małe miasteczko na zachód od Moskwy – w Rosji, zm. 8 grudnia 1894 w Sankt Petersburgu).
Rys. 16. Prostowód przybliżony Czebyszewa: a) schemat kinematyczny, b) model
w programie SAM
Punkt P porusza się po linii prostej jeżeli spełniona jest podwójna proporcja BC:AB:CD=4:3:1
Podstawy modelowania i syntezy mechanizmów. Charakterystyki kinematyczne mechanizmów. Podstawy syntezy geometrycznej mechanizmów płaskich.
Opracował J. Felis str. 22
Rys. 17. Prostowód przybliżony Czebyszewa symetryczny: a)schemat kinematyczny, b) model w programie SAM
Punkt P porusza się po prostej dla
AD=CD=DP BC=0,25AC

Podstawy modelowania i syntezy mechanizmów. Charakterystyki kinematyczne mechanizmów. Podstawy syntezy geometrycznej mechanizmów płaskich.
Opracował J. Felis str. 23
Prostowód Peaucelliera-Lipkina, w którym AB=BC, CD=DP=PE=CE=c. Punkt P porusza się po prostej. Jeżeli AB jest mniejsze od BC to punkt P porusza się po okręgu o promieniu
22
22
P abcdbR )(
Prostowód Peaucelliera-Lipkina (Charles-Nicolas Peaucellier (1832 – 1913) francuski inżynier), Lipman Lipkin – student Czebyszewa (1846-1876)
Rys. 18. Prostowód dokładny Peaucelliera-Lipkina: a) schemat kinematyczny
b) modele w programie SAM
Podstawy modelowania i syntezy mechanizmów. Charakterystyki kinematyczne mechanizmów. Podstawy syntezy geometrycznej mechanizmów płaskich.
Opracował J. Felis str. 24
Rys. 19. Prostowód dokładny Cardana
Rys. 20. Prostowód przybliżony powstały po modyfikacji (zamiana pary postępowej poprzez parę obrotową)

Podstawy modelowania i syntezy mechanizmów. Charakterystyki kinematyczne mechanizmów. Podstawy syntezy geometrycznej mechanizmów płaskich.
Opracował J. Felis str. 25
Prostowód przybliżony Watta. Przy wymiarach BC=0,6h i AB=BCD=1,5h punkt S poru-sza się po torze mało odbiegającym od prostej a) b) Rys. 21. Prostowód przybliżony Watta: a) schemat kinematyczny, b) model w programie SAM
Podstawy modelowania i syntezy mechanizmów. Charakterystyki kinematyczne mechanizmów. Podstawy syntezy geometrycznej mechanizmów płaskich.
Opracował J. Felis str. 26
INNE PROSTOWODY H-długość odcinka toru o założonym prostoliniowym ruchu punktu S Tor punktu s na odcinku S1S3 równym w przybliżeniu H mało odbiega od prostej
Rys. 22. Prostowód przybliżony: a) schemat kinematyczny, b) model w programie SAM

Podstawy modelowania i syntezy mechanizmów. Charakterystyki kinematyczne mechanizmów. Podstawy syntezy geometrycznej mechanizmów płaskich.
Opracował J. Felis str. 27
a) b)
Rys. 23. Przykład wykorzystania prostowodu jako mechanizmu dźwigu: a) model ForceEffect Motion, b) model SAM
Podstawy modelowania i syntezy mechanizmów. Charakterystyki kinematyczne mechanizmów. Podstawy syntezy geometrycznej mechanizmów płaskich.
Opracował J. Felis str. 28
PANTOGRAFY Rys. 24. Modele mechanizmu Pantografu (SAM)

Podstawy modelowania i syntezy mechanizmów. Charakterystyki kinematyczne mechanizmów. Podstawy syntezy geometrycznej mechanizmów płaskich.
Opracował J. Felis str. 29
Rys. 25. Mechanizm podwójne-
go równoległoboku znany jako mechanizm kreślarski Umożliwia równoległe prowa-dzenie zestawu linijek. W razie potrzeby zestaw linijek można obracać. (SAM)
Podstawy modelowania i syntezy mechanizmów. Charakterystyki kinematyczne mechanizmów. Podstawy syntezy geometrycznej mechanizmów płaskich.
Opracował J. Felis str. 30
Rys. 26. Mechanizmy dźwigniowe, które można wykorzystać jako prostowody, mechanizmy pantografów lub podnośników (SAM)

Podstawy modelowania i syntezy mechanizmów. Charakterystyki kinematyczne mechanizmów. Podstawy syntezy geometrycznej mechanizmów płaskich.
Opracował J. Felis str. 31
SYNTEZA GEOMETRYCZNA MECHANIZMÓW Z PARAMI KINEMATYCZNYMI WYŻSZYMI SYNTEZA GEOMETRYCZNA MECHANIZMÓW KRZYWKOWYCH. Mechanizmy krzywkowe występują w praktyce m.i. jako: 1) mechanizmy sterujące np. mechanizmy rozrządu silników spalinowych, 2) mechanizmy wykonawcze np. mechanizmy pras krzywkowych, plombownic, 3) mechanizmy ustalające, blokujące, zaciskowe, np. samozaciskowe mechani-zmy chwytaków, klucze samozaciskowe, samohamowne blokady okienne. Istotą syntezy mechanizmu krzywkowego jest dobór zarysu krzywki tak aby krzywka spełniała zadane funkcje kinematyczne z uwzględnieniem układu sił przyłożonych do członów.
Podstawy modelowania i syntezy mechanizmów. Charakterystyki kinematyczne mechanizmów. Podstawy syntezy geometrycznej mechanizmów płaskich.
Opracował J. Felis str. 32
Rys. 27. Wybrane przykłady wykorzystania mechanizmów krzywkowych: a) klucz samozaci-skowy, b) zacisk mimośrodowy, chwytak samozaciskowy

Podstawy modelowania i syntezy mechanizmów. Charakterystyki kinematyczne mechanizmów. Podstawy syntezy geometrycznej mechanizmów płaskich.
Opracował J. Felis str. 33
Warianty mechanizmów krzywkowych Mechanizmy krzywkowe: płaskie, przestrzenne Mechanizmy krzywkowe przedstawione na rys. 28 posiadają tzw. zamknięcie siłowe (docisk popychacza do krzywki uzyskany jest przy pomocy sprężyny) a) b) c) d)
Rys. 28. Schematy kinematyczne mechanizmów krzywkowych płaskich z krzywką obrotową i popycha-czem o ruchu liniowym: a) z popychaczem ostrzowym, b) z popychaczem zaokrąglonym, c) z popycha-
czem zakończonym krążkiem, d) z popychaczem talerzowym, s-sprężyna, k-krążek
Podstawy modelowania i syntezy mechanizmów. Charakterystyki kinematyczne mechanizmów. Podstawy syntezy geometrycznej mechanizmów płaskich.
Opracował J. Felis str. 34
a) b)
Rys. 29. Schematy kinematyczne mechanizmów krzywkowych płaskich z krzywką obrotową i popychaczem o ruchu wahliwym: a) z popychaczem płaskim, b) z popychaczem zakończonym krążkiem, zamkniecie mechani-zmów siłowe (za pomocą sprężyny), s-sprężyna, k-krążek
Rys. 30. Schemat kinematyczny mechanizmu krzywkowego z krzywką o ruchu obrotowym i popychaczem o ruchu linowym z tzw. zamknięciem kinematycznym (na popychacz nałożono więzy geometryczne dwustronne w postaci rowka utrzymującego krążek popychacza w kontakcie z krzywką niezależnie od układu sił przyłożonych do popychacza )

Podstawy modelowania i syntezy mechanizmów. Charakterystyki kinematyczne mechanizmów. Podstawy syntezy geometrycznej mechanizmów płaskich.
Opracował J. Felis str. 35
Wykreślanie zarysu krzywki Wykreślanie przeprowadza się w oparciu o przyjęte prawo ruchu popychacza )(s lub )(
Rys. 31. Wykreślanie zarysu krzywki w oparciu o zadane prawo ruchu popychacza: krzywka wykonuje pełny ruch obrotowy, popychacz ostrzowy wykonuje ruch liniowy.
1) Przyjmujemy prawo ruchu popychacza, 2) przyjmujemy minimalny promień krzywki (promień koła podstawowego), 3) oznaczamy punkty na wykresie prawa ruchu, 4) poprzez przecięcie odpowiednich od-noszących wychodzących z punktów leżą-cych na wykresie prawa ruchu i promieni określających odpowiedni obrót krzywki wyznaczamy punkty zarysu krzywki, 5) wykreślamy zarys jako krzywą gładką, 6) ponieważ okresy podnoszenia i opusz-czania są takie same, krzywka będzie sy-metryczna. Uwaga: liniowe prawo ruchu popychacza jest stosowane tylko w szczególnych przypadkach wolnobieżnych mechani-zmów krzywkowych, ze względu na zjawi-sko udarów w położeniach, w których na-stępuje skokowa zmiana prędkości.
Podstawy modelowania i syntezy mechanizmów. Charakterystyki kinematyczne mechanizmów. Podstawy syntezy geometrycznej mechanizmów płaskich.
Opracował J. Felis str. 36
Rys. 32. Synteza zarysu krzywki mechanizmu z popychaczem o ruchu postępowym zakończonym krążkiem
Postój
Podnoszenie
Postój Opuszczanie

Podstawy modelowania i syntezy mechanizmów. Charakterystyki kinematyczne mechanizmów. Podstawy syntezy geometrycznej mechanizmów płaskich.
Opracował J. Felis str. 37
Rys. 33. Synteza zarysu krzywki mechanizmu z popychaczem wahliwym zakończonym krążkiem
Minimalny promień krzywki. Okres postoju popychacza
Maksymalny promień Krzywki stały dla obrotu krzywki o kąt III . Okres postoju popychacza
Podstawy modelowania i syntezy mechanizmów. Charakterystyki kinematyczne mechanizmów. Podstawy syntezy geometrycznej mechanizmów płaskich.
Opracował J. Felis str. 38
Rys. 34. Model mechanizmu krzywkowego w programie Working Model, Tc-okres cyklu ruchu krzywki
Tc

Podstawy modelowania i syntezy mechanizmów. Charakterystyki kinematyczne mechanizmów. Podstawy syntezy geometrycznej mechanizmów płaskich.
Opracował J. Felis str. 39
Mechanizmy w internecie www.mekanizmalar.com Literatura:
1.Felis J., Jaworowski., Cieślik J.: Teoria Mechanizmów i Maszyn. Część 1. Analiza Mechanizmów. AGH, Uczelniane Wydawnictwa Naukowo-Dydaktyczne, Kraków 2008. 2.Felis J., Jaworowski H.: Teoria Mechanizmów i Maszyn. Część 2. Przykłady i zadania. AGH, Uczelniane Wydawnictwa Naukowo-Dydaktyczne, Kraków 2011. 4. Gronowicz A., Miller S.: Mechanizmy, Metody tworzenia zbiorów rozwiązań alternatywnych, Katalog schematów strukturalnych i kinematycznych, Oficyna Wydawnicza Politechniki Wrocławskiej, Wrocław 1997. 6.Morecki A., Oderfeld J.: Teoria maszyn i mechanizmów. PWN, Warszawa 1987. 7.Miller S.: Układy kinematyczne, Podstawy projektowania, WNT, Warszawa 1988. 8.Olędzki A.: Podstawy Teorii Maszyn i Mechanizmów. WNT, Warszawa 1987. 9.SAM (Simulation and Analysis of Mechanisms), opis programu. 10.Working Model, opis programu.