perancangan dan realisasi sistem kendali kontinyu dan digital pada plant debit air dengan metode...
TRANSCRIPT
PERANCANGAN DAN REALISASI SISTEM
KENDALI KONTINYU DAN DIGITAL PADA PLANT
DEBIT AIR DENGAN METODE ZIEGLER NICHOLS
DAN COHEN COON MENGGUNAKAN
MATLAB & ARDUINO
Laporan ini disusun untuk memenuhi salah satu tugas
Mata kuliah
“Sistem Kendali Digital”
Oleh
Diaz Zulkipli
131311042
POLITEKNIK NEGERI BANDUNG
2015

i
ABSTRAK
Suatu sistem yang dirancang tidak selalu menghasilkan respon yang sesuai
dengan perancangan. Dibutuhkan suatu pengendali untuk mengurangi error yang
didapat agar sistem bekerja stabil. Sistem kendali PID merupakan salah satu sistem
pengendali tersebut. Untuk membuat sistem yang stabil diperlukan perhitungan
yang tepat dan akurat, melalui beberapa metod. Metoda Ziegler Nichols dan Cohen
Coon salah satunya yang dapat digunakan untuk mendesain sistem kendali dengan
menggunakan tiga parameter yaitu Propotional - Intergative - Derivative (PID).
Ketika sudah mendapat ketiga parameter PID, suatu sistem dapat dikendalikan
responnya (Process Value) yang sesuai dengan Set Point yang diterapkan. Misalnya
mengendalikan Debit Air, yang dapat dikendalikan adalah berupa sirkulasi
kecepatan air yang masuk dan air yang keluar agar debit air sesuai dengan set point.
Kendali debit air dapat diaplikasikan pada industri-industri seperti tangki pengisian
minyak bumi, sirkulasi bendungan dan sebagainya.
Kata Kunci : Sistem Kendali, Error, Ziegler Nichols, Cohen Coon, Parameter
PID, Debit Air.

ii
ABSTRACT
A system that was designed does not always produce a response in
accordance with the design. We need a controller to reduce the error obtained for
the system to work stable. PID control system is one of the control system. To create
a stable system required precise and accurate calculation, through some metod.
Ziegler Nichols and Cohen Coon method that can be used to design the control
system using three parameters : the proportional - Intergative - Derivative (PID).
When it gets three PID parameters, can be controlled response system (Process
Value) in accordance with the Set Point is applied. For example, controlling the
discharge water, which can be controlled is the velocity of circulation of water in
the form of incoming and outgoing water so that the water flow in accordance with
the set point. Control the flow of water can be applied to industries such as
petroleum tank charging, the circulation of the dam and so on.
Keywords : Full System, Error, Ziegler Nichols, Cohen Coon, PID parameters,
Debit Water.

iii
KATA PENGANTAR
Puji dan syukur kehadirat Allah SWT yang telah memberikan karuni-Nya
kepada penulis sehingga dapat menyesaikan makalah yang berjudul “Perancangan
dan Realisasi Sistem Kendali Kontinyu dan Digital pada Plant Debit Air
dengan metode Ziegler Nichols dan Cohen Coon menggunakan Matlab &
Arduino” dapat diselesaikan. Laporan ini dibuat untuk mata kuliah Sistem Kendali
Digital, Program Studi D3 Teknik Elektronika, Jurusan Teknik Elektro Politeknik
Negeri Bandung.
Dalam pelaksanaan pembuatan laporan, penulis banyak mendapatkan
bantuan dan bimbingan dari berbagai pihak. Oleh karena itu penulis mengucapkan
banyak terimakasih kepada pihak-pihak berikut :
1. Orang tua dan keluarga yang telah memberikan dukungan moril maupun
materil.
2. Bapak Feriyonika, S.T., M.Sc. Eng. Selaku dosen pembimbing yang
memberikan bimbingan dan nasihat yang bermanfaat kepada penulis dalam
menyelesaikan laporan akhir ini.
3. Ibu Iom, Bapak Tete. Selaku teknisi laboraturium elektronika yang membantu
dalam menyediakan peralatan-peralatan yang penulis butuhkan pada saat
praktikum.
4. Dina Maylina. Selaku partner kelompok praktikum sistem kendali digital yang
telah bersedia membantu dalam bentuk pemikiran atau pun materi dalam
berjalannya praktikum.
5. Semua pihak yang membantu dan mendukung yang tidak dapat penulis
sebutkan satu persatu.
Dalam penyusunan laporan ini masih belum dari kata sempurna, masih
banyak kekurangan yang didasari keterbatasan penulis sendiri, oleh karena itu kritik
atau saran sangat diharapkan untuk mendukung penulisan laporan yang lebih baik.
Akhir kata penulis berharap laporan ini dapat memberikan manfaat
khususnya untuk penulis sendiri dan umumnya untuk pembaca guna dapat
membuat tulisan yang lebih baik lagi.

iv
Bandung, Juli 2015
Penulis

v
DAFTAR ISI
ABSTRAK .............................................................................................................. i
ABSTRACT ............................................................................................................ ii
KATA PENGANTAR .......................................................................................... iii
DAFTAR ISI .......................................................................................................... v
DAFTAR TABEL ............................................................................................... vii
DAFTAR GAMBAR .......................................................................................... viii
DAFTAR LAMPIRAN ......................................................................................... x
BAB I PENDAHULUAN ..................................................................................... 1
BAB II LANDASAN TEORI .............................................................................. 3
2.1 PID (Proportional-Integrative-Derivative) .............................................. 3
2.1.1 Kontrol Proporsional ......................................................................... 4
2.1.2 Kontrol Integratif .............................................................................. 4
2.1.3 Kontrol Derivatif ............................................................................... 5
2.2 Manual Tuning PID .................................................................................. 5
2.3 Metoda Ziegler Nichols ............................................................................ 6
2.3.1 Metoda Ziegler Nichols Tipe-1 ......................................................... 6
2.3.2 Metoda Ziegler Nichols Tipe-2 ......................................................... 7
2.4 Metoda Cohen Coon ................................................................................. 8
2.5 Plant Sistem Kendali ................................................................................ 9
2.5.1 Modul Power Supply ........................................................................ 9
2.5.2 Modul Setpoint ................................................................................ 10
2.5.3 Modul PID ....................................................................................... 11
2.5.4 Modul Penguat Daya ....................................................................... 11
2.5.5 Modul Debit Air .............................................................................. 12
2.6 Arduino UNO ......................................................................................... 13
2.7 Matlab 2013 ............................................................................................ 13
BAB III PERANCANGAN ............................................................................... 15
3.1 Desain Kendali dengan Metoda Ziegler Nichols Tipe-1 ........................ 15
3.2 Desain Kendali dengan Metoda Ziegler Nichols Type-2 ....................... 18
3.3 Desain Kendali dengan Metoda Cohen Coon ........................................ 21
vi
3.4 Desain Kendali PID dengan Script Matlab ............................................ 23
3.5 Desain Kendali PID dengan Arduino (Stand Alone Control) ................ 26
BAB IV HASIL DAN PEMBAHASAN ........................................................... 32
4.1 Desain Kendali dengan Metoda Ziegler Nichols Tipe-1 ........................ 32
4.2 Desain Kendali dengan Metoda Ziegler Nichols Tipe-2 ........................ 33
4.3 Desain Kendali PID dengan Script Matlab ............................................ 34
4.4 Desain Kendali PID dengan Arduino (Stand Alone Control) ................ 35
BAB V KESIMPULAN DAN SARAN ............................................................. 37
5.1 Kesimpulan ............................................................................................. 37
5.2 Saran ....................................................................................................... 37
DAFTAR PUSTAKA .......................................................................................... 38

vii
DAFTAR TABEL
Tabel II.1 Parameter Ziegler Nichols tipe-1 .......................................................... 6
Tabel II.2 Parameter mengubah nilai Kp, Ki dan Kd ............................................ 7
Tabel II.3 Parameter Ziegler Nichols tipe-2 .......................................................... 7
Tabel II.4 Parameter Cohen Coon.......................................................................... 9
Tabel IV.1 Parameter Perhitungan dengan ZN-1 ................................................. 32
Tabel IV.2 Parameter Perhitungan ZN-2 ............................................................. 33
Tabel IV.3 Data nilai Kp, Ki dan Kd (pada praktikum ZN-1) ............................. 34

viii
DAFTAR GAMBAR
Gambar II.1 Blok diagram PID ............................................................................. 3
Gambar II.2 Sinyal respon sistem ......................................................................... 6
Gambar II. 3 Karakteristik respon dengan menambahkan nilai Kp ...................... 7
Gambar II.4 Sistem kendali pada metode Cohen Coon ........................................ 8
Gambar II.5 Grafik nilai gp, tau dan td ................................................................. 8
Gambar II.6 Modul power supply ....................................................................... 10
Gambar II.7 Modul setpoint ................................................................................ 10
Gambar II.8 Modul PID ...................................................................................... 11
Gambar II.9 Modul penguat daya ....................................................................... 12
Gambar II.10 Modul kendali debit air dan modul TFTM ................................... 12
Gambar II.11 Konfigurasi Arduino UNO [6] ....................................................... 13
Gambar II.12 Matlab versi R2013a [8] ................................................................ 14
Gambar III.1 Rangkaian untuk sistem kendali debit air dengan ZN-1 ............... 15
Gambar III.2 Realisasi Modul-modul setelah dihubungkan ............................... 16
Gambar III.3 Skematik rangkaian pembagi tegangan......................................... 16
Gambar III.4 Grafik ZN-1 pada Scope ............................................................... 17
Gambar III.5 Grafik setelah dibuat garis potong ................................................ 17
Gambar III.6 Realisasi modul awal yang telah ditambahkan modul PID........... 18
Gambar III.7 Rangkaian untuk sistem kendali debit air ..................................... 18
Gambar III.8 Realisasi modul-modul setelah dihubungkan ............................... 19
Gambar III.9 Modul kendali debit air dihubungan dengan arduino dan PC ....... 19
Gambar III.10 Grafik ZN-2 pada scope .............................................................. 20
Gambar III.11 Grafik setelah dibuat garis potong .............................................. 20
Gambar III.12 Rangkaian untuk sistem kendali debit air ................................... 21
Gambar III.13 Realisasi modul-modul setelah dihubungkan ............................. 21
Gambar III.14 Modul kendali debit air dihubungan dengan arduino dan PC ..... 22
Gambar III.15 Gelombang CC pada scope ......................................................... 22
Gambar III.16 Grafik setelah diberi garis potong ............................................... 23
Gambar III.17 Realisasi modul-modul yang dihubungkan ................................. 23
ix
Gambar III.18 Script deklarasi pin I/O pada arduino dan parameter PID .......... 24
Gambar III.19 Script menentukan PV dan perhitungan Error ............................ 24
Gambar III.20 Script menentukan nilai PID ....................................................... 25
Gambar III.21 Script membaca PID, Respon dan Setopint pada Arduino ......... 25
Gambar III.22 Realisasi modul-modul yang telah dihubungkan ........................ 26
Gambar III.23 Script deklarasi pin I/O dan parameter PID pada Arduino ......... 27
Gambar III.24 Sistem kenali debit air dihubungkan degan arduino dan laptop . 29
Gambar III.25 Script Embedded System pada Arduino ..................................... 30
Gambar III.26 Hasil setpoint dan feedback sistem kendali debit air pada LCD. 31
Gambar III.27 Kendali PID Debit Air Stand Alone Controller .......................... 31
Gambar IV.1 Gelombang ZN-1 pada scope ........................................................ 32
Gambar IV.2 Gelombang ZN-2 pada scope-kondisi normal .............................. 33
Gambar IV.3 Gelombang ZN-2 pada scope-tunning manual.............................. 33
Gambar IV.4 Gelombang PID dengan script-kondisi rise time .......................... 34
Gambar IV.5 Gelombang PID dengan script-kondisi normal ............................. 34
Gambar IV.6 Gelombang PID dengan script-manual tunning ............................ 35
Gambar IV.7 Data nilai setpoint dan feedback dari “Serial Monitor” ................ 35
Gambar IV.8 Data nilai setpoint dan feedback dari tampilan “LCD”................. 36
x
DAFTAR LAMPIRAN

1
BAB I
PENDAHULUAN
Perkembangan teknologi yang semakin pesat telah membawa banyak pengaruh
dalam berbagai aspek kehidupan terutama dibidang industri. Di dalam industri,
sangat dibutuhkan sistem kendali yang baik agar dapat menunjang dan
meningkatkan efisiensi dalam proses produksi. Sebagai contoh, otomatisasi baik
dalam segi proses maupun peralatan yang digunakan dibidang industri seperti
dalam proses pengisian dan pembuangan cairan dalam tangki penampungan.
Masalah yang muncul ketika level ketinggian cairan dalam tangki penampung tidak
diketahui, sehingga dimungkinkan terjadi keadaan tangki yang meluap atau kosong
dikarenakan kurangnya pengawasan terhadap tangki penampung. Pada industri
kimia terdapat proses pemisahan cairan (destilasi) yang membutuhkan pengaturan
level ketinggian cairan, apabila ada perubahan (deviasi) laju aliran masukan yang
disebabkan perubahan tekanan aliran masukan atau juga disebabkan timbulnya
gaya gesek pada pipa saluran, maka akan mengakibatkan perubahan debit masukan
yang membuat level cairan berubah-ubah [1]. Proses pengendalian yang digunakan
oleh kebanyakan industri yaitu kendali konvensional seperti PID karena
kesederhanaan struktur serta kemudahan dalam melakukan tuning parameter
kontrolnya. Penentuan parameter yang sesuai agar mendapatkan keluaran sistem
yang stabil dapat dilakukan dengan metode tuning PID [2]. Perancangan yang
dilakukan untuk melakukan proses manual tunning dilakukan menggunakan
software Matlab. Matlab dapat digunakan untuk simulasi sebagai alat untuk
mempelajari dasar-dasar kendali PID sebelum dihubungkan langsung pada plant.
Matlab yang dilengkapi Control Toolbox, membantu perancang untuk melihat
respon berbagai kombinasi konstanta dengan variasi input yang berbeda.
Penggunaan Matlab ini sangat membantu perancang dalam menentukan kombinasi
diantara P, I, dan D Controller untuk menghasilkan sistem pengaturan yang baik
dan sederhana. [3]

2
Pada laporan akhir ini penulis melakukan eksperimen mengenai sistem kendali
PID dengan melakukan suatu perancangan manual tunning pada modul sistem
kendali debit air. Manual tunning dilakukan untuk menemukan algoritma PID.
Metode yang digunakan untuk mendapatkan parameter PID yaitu dengan
menggunakan metode Ziegler Nichols tipe-1, tipe-2 dan Cohen Coon. Setelah
parameter-parameter PID (Kp, Ti, Td) didapat, selanjutnya nilai dari parameter
tersebut digunakan ke modul PID. Respon sistem akan dianalisis dan akan
diperbaiki dengan teknik manual tunning.
3
BAB II
LANDASAN TEORI
2.1 PID (Proportional-Integrative-Derivative)
Dalam dunia perindutrian, untuk melakukan proses produksi sudah tidak
dilakukan secara manual oleh operator akan tetapi semua proses telah
dilakukan secara otomatis dengan menggunakan sistem kendali. Hal ini dapat
mempercepat dan mempermudah proses produksi dari awal hingga akhir.
Dalam sistem kendali terdapat salah satu jenis kendali yaitu kendali PID
(Proportional-Integrative-Derivative). Sistem kendali ini memperhatikan
kepresisian dan akurasi dari sistem yang dikendalikan. Sistem kendali ini
banyak diterapkan pada beberapa sistem atau plant. Karena sistem kendali ini
sangat cocok untuk beberapa kasus.
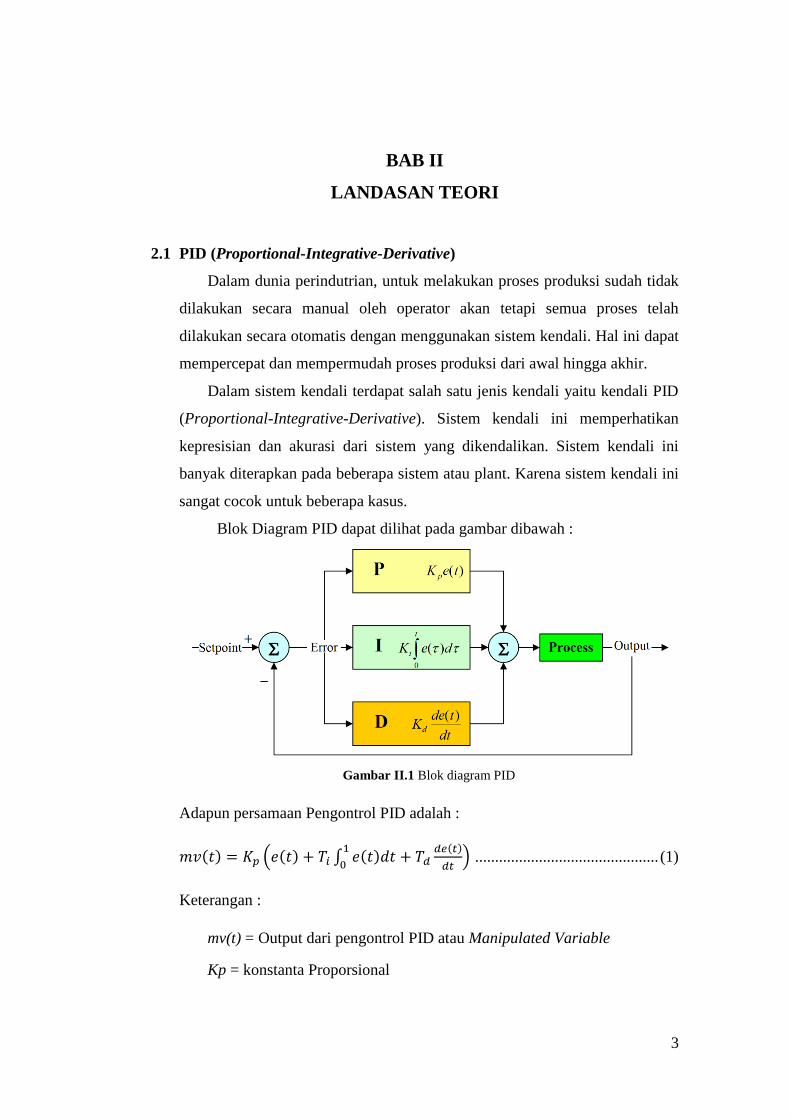
Blok Diagram PID dapat dilihat pada gambar dibawah :
Gambar II.1 Blok diagram PID
Adapun persamaan Pengontrol PID adalah :
𝑚𝑣(𝑡) = 𝐾𝑝 (𝑒(𝑡) + 𝑇𝑖 ∫ 𝑒(𝑡)𝑑𝑡 + 𝑇𝑑𝑑𝑒(𝑡)
𝑑𝑡
1
0) .............................................. (1)
Keterangan :
mv(t) = Output dari pengontrol PID atau Manipulated Variable
Kp = konstanta Proporsional
4
Ti = konstanta Integral
Td = konstanta Detivatif
e(t) = error (selisih antara setpoint dengan level aktual)
Persamaan Pengontrol PID diatas dapat juga dituliskan sebagai berikut :
𝑚𝑣(𝑡) = 𝐾𝑝𝑒(𝑡) + 𝐾𝑖 ∫ 𝑒(𝑡)𝑑𝑡1
0+ 𝐾𝑑
𝑑𝑒(𝑡)
𝑑𝑡 ................................................. (2)
𝐾𝑖 = 𝐾𝑝 ×1
𝑇𝑖 dan 𝐾𝑑 = 𝐾𝑝 × 𝑇𝑑 ................................................................... (3)
Seperti dalam penjelasan kontrol PID terbagi atas 3 komponen utama yaitu
Proportional, Integrative dan Deritative.
2.1.1 Kontrol Proporsional
Kontrol P jika G(s) = kp, dengan k adalah konstanta. Jika u = G(s).e maka
u = Kp.e dengan Kp adalah Konstanta Proporsional. Kp berlaku sebagai Gain
(penguat) saja tanpa memberikan efek dinamik kepada kinerja kontroler.
Penggunaan kontrol P memiliki berbagai keterbatasan karena sifat kontrol
yang tidak dinamik ini. Walaupun demikian dalam aplikasi-aplikasi dasar
yang sederhana kontrol P ini cukup mampu untuk memperbaiki respon
transien khususnya rise time dan settling time. [4]
2.1.2 Kontrol Integratif
Jika G(s) adalah kontrol I maka u dapat dinyatakan sebagai u(t) = Ki ∫
e(t) dt dengan Ki adalah konstanta Integral, dan dari persamaan di atas, G(s)
dapat dinyatakan sebagai u(t) = Kd de(t)/dt Jika e(T) mendekati konstan
(bukan nol) maka u(t) akan menjadi sangat besar sehingga diharapkan dapat
memperbaiki error. Jika e(T) mendekati nol maka efek kontrol I ini semakin
kecil. Kontrol I dapat memperbaiki sekaligus menghilangkan respon steady-
state, namun pemilihan Ki yang tidak tepat dapat menyebabkan respon
transien yang tinggi sehingga dapat menyebabkan ketidakstabilan sistem.
Pemilihan Ki yang sangat tinggi justru dapat menyebabkan output berosilasi
karena menambah orde system. [4]

5
2.1.3 Kontrol Derivatif
Sinyal kontrol u yang dihasilkan oleh kontrol D dapat dinyatakan sebagai
G(s) = s.Kd dari persamaan di atas, nampak bahwa sifat dari kontrol D ini
dalam konteks "kecepatan" atau rate dari error. Dengan sifat ini ia dapat
digunakan untuk memperbaiki respon transien dengan memprediksi error
yang akan terjadi. Kontrol Derivative hanya berubah saat ada perubahan error
sehingga saat error statis kontrol ini tidak akan bereaksi, hal ini pula yang
menyebabkan kontroler Derivative tidak dapat dipakai sendiri. [4]
2.2 Manual Tuning PID
Dalam kontrol PID terdapat beberapa jenis error bila nilai Kp, Ki dan Kd
tidak sesuai. Error yang dapat terjadi antara lain :
1. Rise time, waktu yang diperlukan untuk mencapai steady state.
2. Overshoot, merupakan sinyal pada respon yang harganya melebihi harga
ketika steady state. Overshoot terjadi ketika sinyal belum mencapai steady
state.
3. Settling Time, merupakan keadaan dimana sinyal akan mencapai atau
mendekati steady state.
4. Error Steady State, merupakan keadaan ketika kondisi sinyal respon atau
sistem sudah atau belum mencapai steady state, namun terdapat error
(kesalahan sinyal respon) sehingga kondisi steady state yang seharusnya
stabil atau konstan, terdapat perubahan sinyal atau tidak sesuai dengan
steady state.
Untuk menghilangkannya dibutuhkan metoda Ziegler Nichols dan Cohen
Coon, Ziegler Nichols memiliki 2 tipe yaitu Ziegler Nichols tipe-1 (Open
Loop) dan tipe-2 (Closed Loop).

6
2.3 Metoda Ziegler Nichols
Metode Ziegler Nichols merupakan pengembangan dari metoda trial and
error. Metode ini digunakan sebagai point awal untuk memulai manual
tunning. Ziegler Nichols ini akan menentukan parameter-parameter PID yang
akan digunakan untuk mendapatkan respon yang baik.
Metoda ini merupakan metoda tuning PID controller untuk menentukan
nilai proportional gain Kp, integral time Ti, dan derivative time Td
berdasarkan karakteristik respon transient dari sebuah plant atau sistem [5].
2.3.1 Metoda Ziegler Nichols Tipe-1
Metode ke-1 didasarkan pada respon plant. Plant yang tidak mempunyai
integrator, menghasilkan kurva seperti kurva huruf S pada Gambar 2. Kurva
tanggapan plant digunakan untuk mencari waktu tunda L dan konstanta waktu
T.
Gambar II.2 Sinyal respon sistem
Parameter-parameter yang didapat dari kurva reaksi digunakan untuk
menentukan parameter-parameter pengendali PID berdasarkan tetapan
empiris Zielger Nichols. Rumus-rumus untuk parameter pengendali
menggunakan metode kurva reaksi ditabelkan pada tabel berikut ini.
Tabel II.1 Parameter Ziegler Nichols tipe-1
Pengendali Kp Ti Td
P 1/a - -
PI 0,9/a 3L -
PID 1,2/a 2L L/2

7
Untuk mendapatkan sinyal respon yang tidak memiliki error, maka dapat
di manual tunning dengan parameter seperti gambar dibawah ini. Parameter
dapat digunakan pada Ziegler Nichols tipe-1 atau tipe-2.
Tabel II.2 Parameter mengubah nilai Kp, Ki dan Kd
Parameter Rise Time Overshoot Settling Time S-S Error
Kp Berkurang Bertambah Perubahan Sedikit Berkurang
Ki Berkurang Bertambah Bertambah Menghilangkan
Kd Perubahan Sedikit Berkurang Berkurang Perubahan Sedikit
2.3.2 Metoda Ziegler Nichols Tipe-2
Pada metode ke-2, pengendali pada metode ini hanya pengendali
proporsional. Kp, dinaikkan dari 0 hingga nilai kritis Kp, sehingga diperoleh
keluaran yang terus-menerus berosilasi dengan amplitudo yang sama. Nilai
kritis Kp ini disebut sebagai ultimated gain. Tanggapan keluaran yang
dihasilkan pada 3 kondisi penguatan proporsional ditunjukkan pada Gambar
ke 3. Sistem dapat berosilasi dengan stabil pada saat Kp = Kcr.
Gambar II. 3 Karakteristik respon dengan menambahkan nilai Kp
Nilai Kcr, Pcr, diperoleh setelah keluaran sistem mencapai kondisi yang
terus menerus berosilasi. Nilai Kcr dan Pcr digunakan untuk menentukan
konstanta-konstanta pengendali sesuai dengan tetapan empiris Ziegler
Nichols pada tabel berikut ini.
Tabel II.3 Parameter Ziegler Nichols tipe-2
Pengendali Kp Ti Td
P 0,5 Kcr ∞ 0
PI 0,45 Kcr (1/1,2)*Pcr 0
PID 0,6 Kcr 0,5 Pcr 0,125 Pcr

8
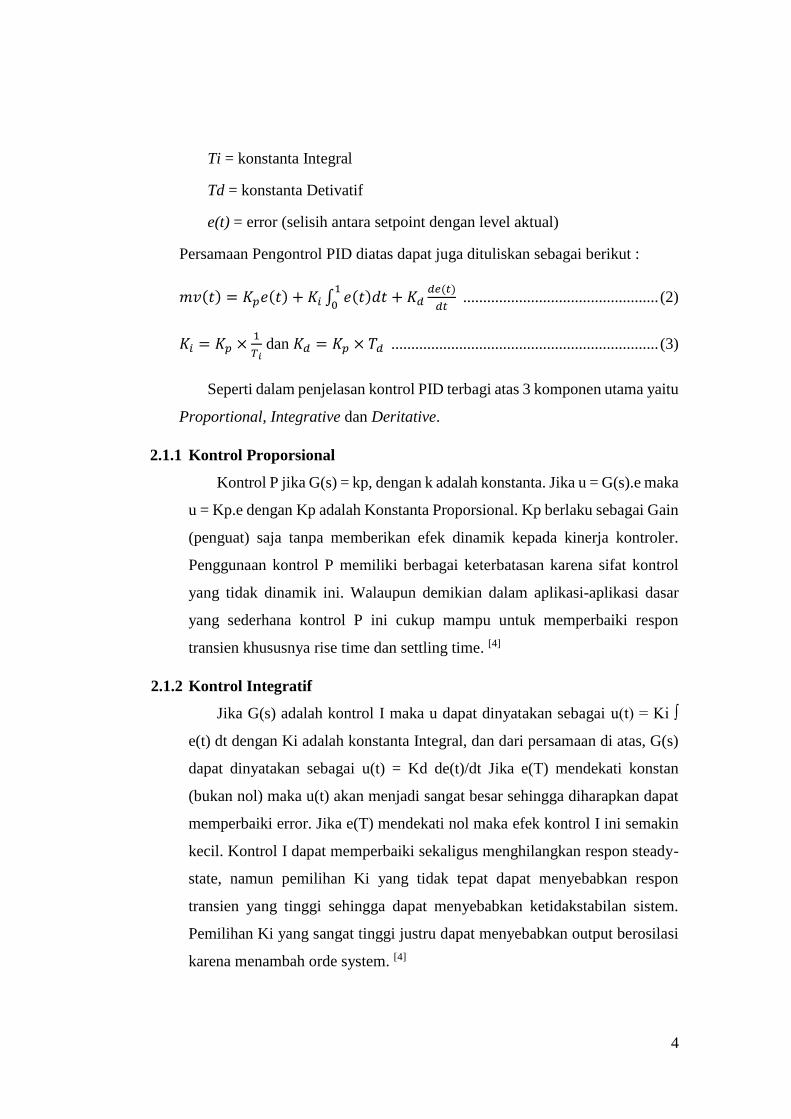
2.4 Metoda Cohen Coon
Cohen Coon untuk mendesain suatu sistem kendali plant yang memiliki
deadtime yang besar atau time delay yang lama. dengan menggunakan metode
ini suatu sistem bisa diset menggunakan rumus Cohen Coon, cara nya yaitu
dengan mencari nilai gain, t dan td lalu kita dapat mengetahui nilai Kc, Ki dan
Kd.
Sistem kendali Cohen Coon yaitu menambahkan 1 gelombang agar
menjadi 2 tingkatan. Agar mudah untuk menentukan titik-titik gp, tau dan td.
Gambar II.4 Sistem kendali pada metode Cohen Coon
Untuk menghitung nilai gp, tau dan td, dapat dilihat pada gambar berikut.
Gambar II.5 Grafik nilai gp, tau dan td
Setelah mendapat nilai gt, tau dan td, lalu dihitung dengan menggunakan
metoda Cohen Coon, seperti pada tabel berikut ini.
9
Tabel II.4 Parameter Cohen Coon
2.5 Plant Sistem Kendali
Untuk membuat kendali debit air dibutuhkan modul-modul pendukung
untuk memberikan supply dan input untuk sistem. Modul yang dibutuhkan
yaitu modul power supply, modul setpoint, modul PID, modul penguat daya
dan modul debit air.
2.5.1 Modul Power Supply
Prinsip kerja modul ini yaitu akan menguluarkan output tegangan DC -
15V sampai +15V, dengan menyalakan modul pada tombol on/off maka
modul akan menyala. Pada modul terdapat potensiometer, fungsi dari
potensio berguna untuk mengatur besar keluaran dari -15 VDC hingga 0 VDC
ataupun mengatur dari 0 VDC hingga +15VDC. Namun modul ini terdapat
keluaran tegangan tetap dengan nilai, yaitu +5VDC, 6VDC, 12VDC dan
24VDC. Modul power supply ini menghasilkan arus sebesar 1 Ampere (1A).
Modul ini berfungsi untuk memberikan tegangan pada modul lainnya
agar dapat digunakan. Keluaran yang dibutuhkan yaitu +15 VDC, 0 VDC, -
15 VDC dan +5 VDC.
Gambar berikut ini merupakan modul power supply yang digunakan
dalam praktikum sistem kendali digital.

10
Gambar II.6 Modul power supply
2.5.2 Modul Setpoint
Modul ini dapat diatur menjadi 2 jenis, antara lain 0 sampai 10V atau -
10V sampai +10V. Modul ini merupakan modul untuk mengatur refrensi atau
keadaan yang diinginkan, refrensi ini akan dijadikan setpoint untuk sistem
yang akan dikendalikan. Modul ini bekerja bila diberi tegangan +/- 15Vdc
dan ground.
Gambar berikut ini merupakan modul setpoint yang digunakan dalam
praktikum sistem kendali digital.
Gambar II.7 Modul setpoint
11
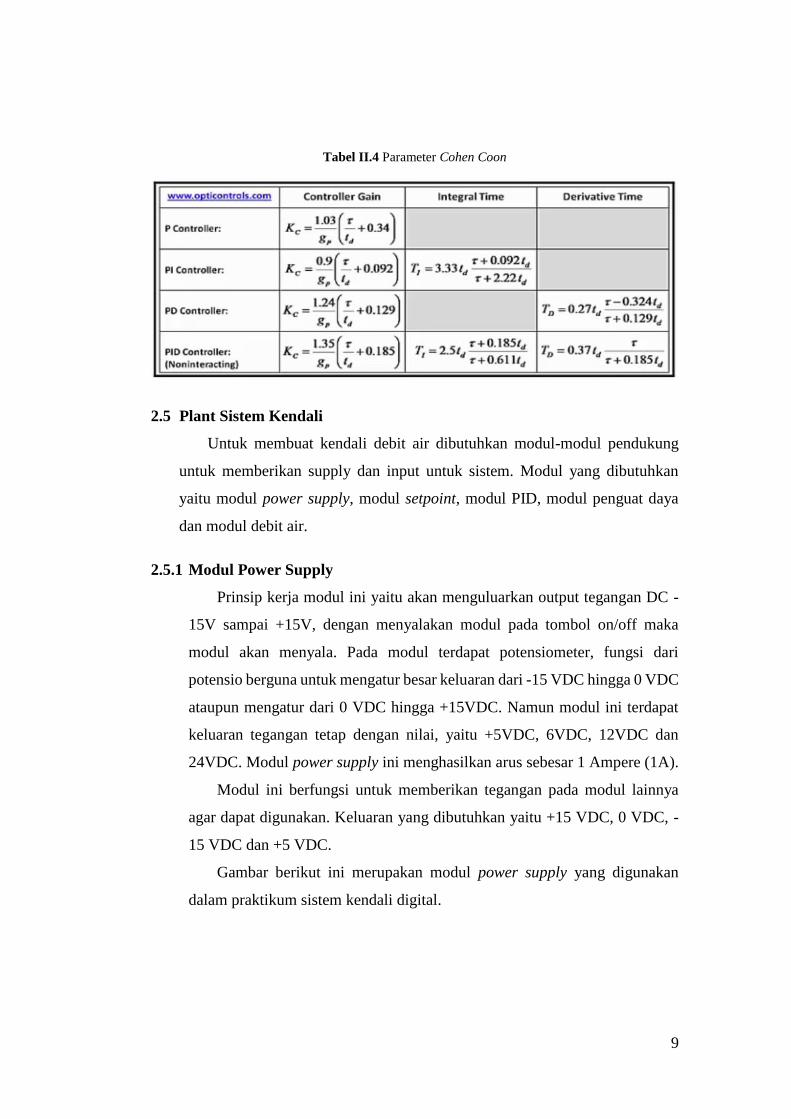
2.5.3 Modul PID
Modul ini bekerja bila diberi tegangan +/- 15Vdc dan dihubungkan pada
ground. Modul ini akan menjumlahkan ataupun mengurangi dari beberapa
nilai yang dimasukan. Hal itu dilakukan pada blok sum, setelah melewati blok
sum, maka akan melewati blok PID. Pada blok tersebut akan terdapat nilai
Kp, Ki dan Kd yang dapat diatur. Blok ini berfungsi sebagai sistem kendali,
dengan memberi nilai setpoint dan umpan balik dari output sistem. Maka
nilai-nilai tersebut akan dijadikan masukan pada modul ini.
Gambar berikut ini merupakan modul PID yang digunakan dalam
praktikum sistem kendali digital.
Gambar II.8 Modul PID
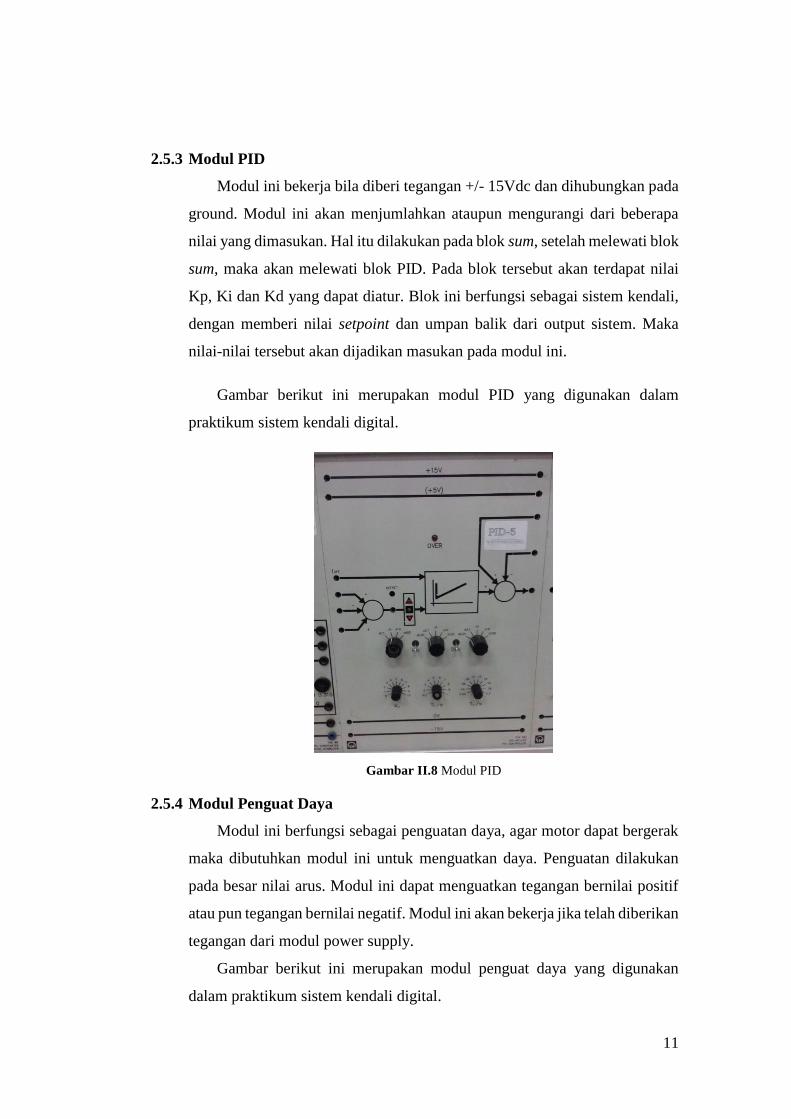
2.5.4 Modul Penguat Daya
Modul ini berfungsi sebagai penguatan daya, agar motor dapat bergerak
maka dibutuhkan modul ini untuk menguatkan daya. Penguatan dilakukan
pada besar nilai arus. Modul ini dapat menguatkan tegangan bernilai positif
atau pun tegangan bernilai negatif. Modul ini akan bekerja jika telah diberikan
tegangan dari modul power supply.
Gambar berikut ini merupakan modul penguat daya yang digunakan
dalam praktikum sistem kendali digital.
12
Gambar II.9 Modul penguat daya
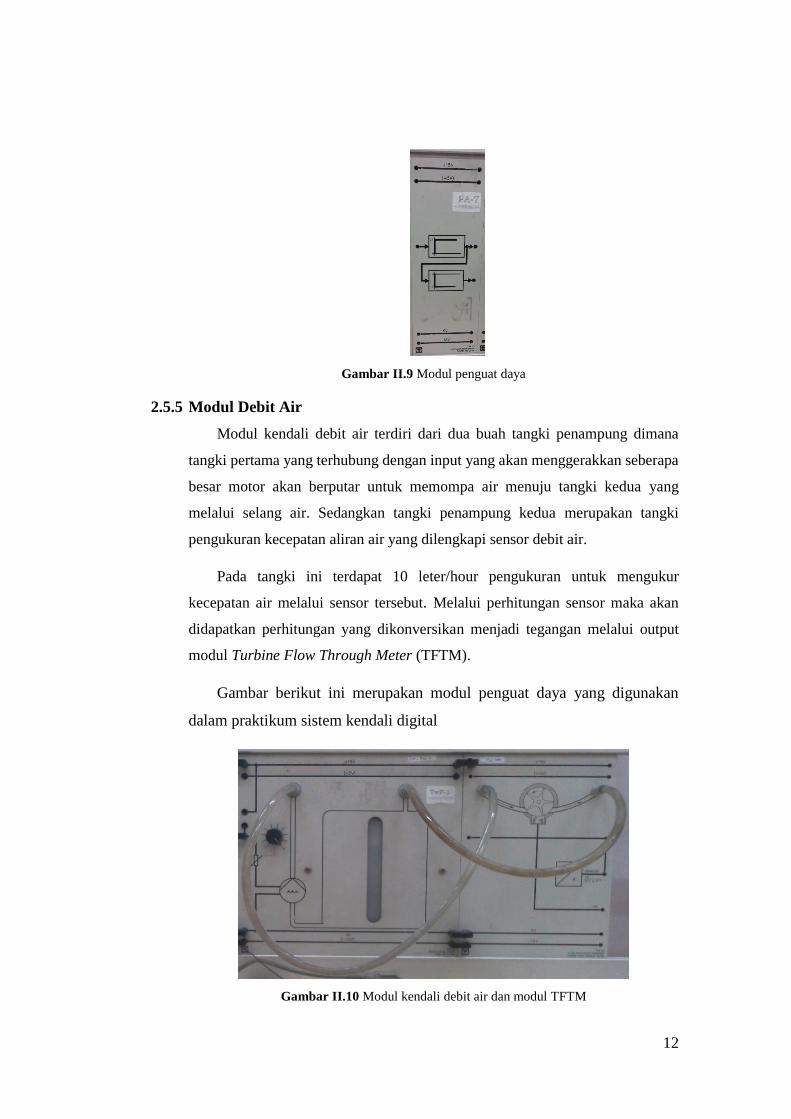
2.5.5 Modul Debit Air
Modul kendali debit air terdiri dari dua buah tangki penampung dimana
tangki pertama yang terhubung dengan input yang akan menggerakkan seberapa
besar motor akan berputar untuk memompa air menuju tangki kedua yang
melalui selang air. Sedangkan tangki penampung kedua merupakan tangki
pengukuran kecepatan aliran air yang dilengkapi sensor debit air.
Pada tangki ini terdapat 10 leter/hour pengukuran untuk mengukur
kecepatan air melalui sensor tersebut. Melalui perhitungan sensor maka akan
didapatkan perhitungan yang dikonversikan menjadi tegangan melalui output
modul Turbine Flow Through Meter (TFTM).
Gambar berikut ini merupakan modul penguat daya yang digunakan
dalam praktikum sistem kendali digital
Gambar II.10 Modul kendali debit air dan modul TFTM

13
2.6 Arduino UNO
Gambar II.11 Konfigurasi Arduino UNO [6]
Arduino sebuah alat pengembangan yang merupakan kombinasi dari
hardware, bahasa pemrograman dan Integrated Development Environment (IDE)
yang canggih. IDE adalah sebuah software yang sangat berperan untuk menulis
program, meng-compile menjadi kode biner dan mengupload ke dalam memory
microcontroller. Ada banyak projek dan alat-alat dikembangkan oleh akademisi
dan profesional dengan menggunakan Arduino, selain itu juga ada banyak modul-
modul pendukung (sensor, tampilan, penggerak dan sebagainya) yang dibuat oleh
pihak lain untuk bisa disambungkan dengan Arduino. Arduino berevolusi menjadi
sebuah platform karena ia menjadi pilihan dan acuan bagi banyak praktisi. [7]
2.7 Matlab 2013
MATLAB (Matrix Laboratory) adalah sebuah program untuk analisis dan
komputasi numerik dan merupakan suatu bahasa pemrograman matematika
lanjutan yang dibentuk dengan dasar pemikiran menggunkan sifat dan bentuk
matriks. Pada awalnya, program ini merupakan interface untuk koleksi rutin-rutin
9 numeric dari proyek LINPACK dan EISPACK, dan dikembangkan menggunkan
bahasa FORTRAN namun sekarang merupakan produk komersial dari perusahaan
Mathworks, Inc yang dalam perkembangan selanjutnya dikembangkan
menggunakan bahasa C++ dan assembler (utamanya untuk fungsi-fungsi dasar
MATLAB).

14
Gambar II.12 Matlab versi R2013a [8]
MATLAB telah berkembang menjadi sebuah environment pemrograman
yang canggih yang berisi fungsi-fungsi built-in untuk melakukan tugas
pengolahan sinyal, aljabar linier, dan kalkulasi matematis lainnya. MATLAB
juga berisi toolbox yang berisi fungsi-fungsi tambahan untuk aplikasi khusus.
MATLAB bersifat extensible, dalam arti bahwa seorang pengguna dapat
menulis fungsi baru untuk ditambahkan pada library ketika fungsi-fungsi built-
in yang tersedia tidak dapat melakukan tugas tertentu. Kemampuan
pemrograman yang dibutuhkan tidak terlalu sulit bila Anda telah memiliki
pengalaman dalam pemrograman bahasa lain seperti C, PASCAL, atau
FORTRAN. [9]
15
BAB III
PERANCANGAN
3.1 Desain Kendali dengan Metoda Ziegler Nichols Tipe-1
Langkah-langkah dalam mendesain kendali dengan menggunakan metode
Ziegler Nichols tipe-1 yaitu, sebagai berikut :
1. Mengkoneksikan Arduino UNO dan Laptop juga telah terhubung dengan
Matlab.
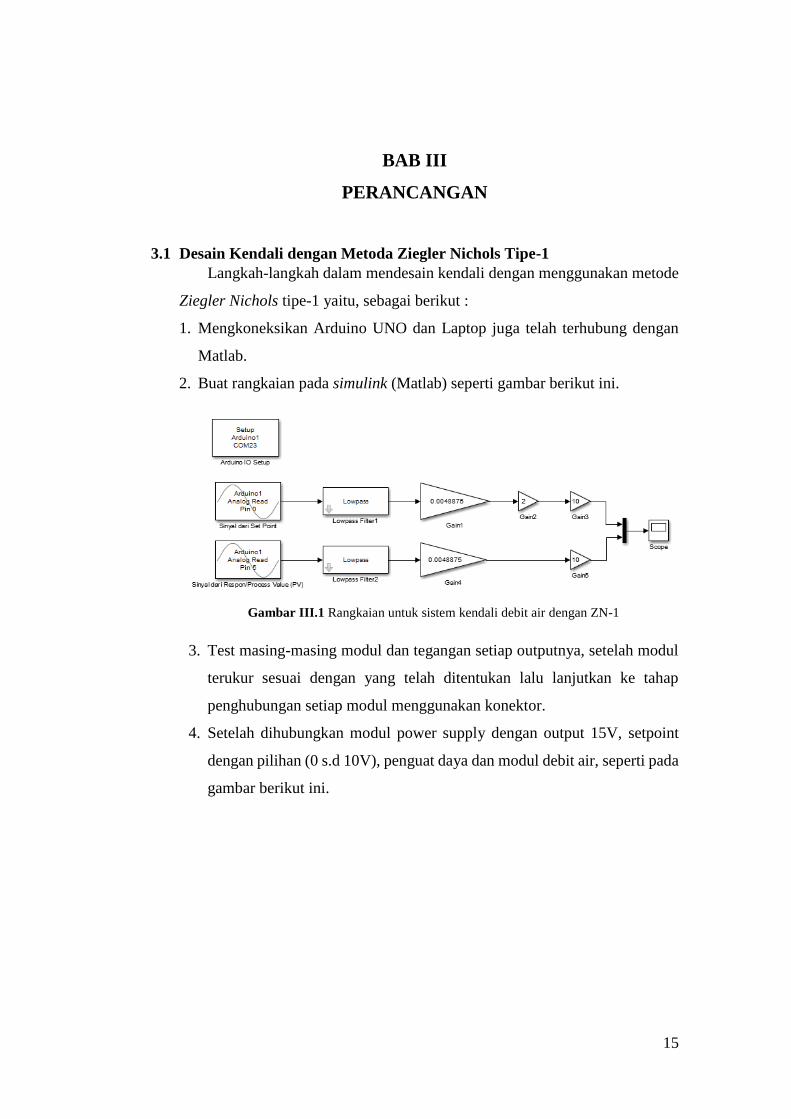
2. Buat rangkaian pada simulink (Matlab) seperti gambar berikut ini.
Gambar III.1 Rangkaian untuk sistem kendali debit air dengan ZN-1
3. Test masing-masing modul dan tegangan setiap outputnya, setelah modul
terukur sesuai dengan yang telah ditentukan lalu lanjutkan ke tahap
penghubungan setiap modul menggunakan konektor.
4. Setelah dihubungkan modul power supply dengan output 15V, setpoint
dengan pilihan (0 s.d 10V), penguat daya dan modul debit air, seperti pada
gambar berikut ini.

16
Gambar III.2 Realisasi Modul-modul setelah dihubungkan
5. Hubungkan modul yang telah tersambung semuanya dengan arduino,
karena arduino mampu menerima tegangan maksimal 5V. maka dibuatlah
rangkaian pembagi tegangan agar keluaran dari arduino tetap sama
tegangannya dengan keluaran PID. Rangkaian pembagi tegangan seperti
gambar berikut ini.
Gambar III.3 Skematik rangkaian pembagi tegangan
6. Setelah terhubung dengan arduino dan rangkaian pembagi tegangan
nyalakan power supply tetapi jangan menyalakan switch pada modul PID.
7. Hubungakan arduino dengan laptop lalu jalankan (play) simulinknya.
Dengan siapkan stopwatch untuk mengukur waktu detik (asli).
8. Setelah dijalankan, lalu on kan switch pada modul PID dan akan terlihat
gelombang pada scope setelah gelombang stabil lalu stop pada simulink
17
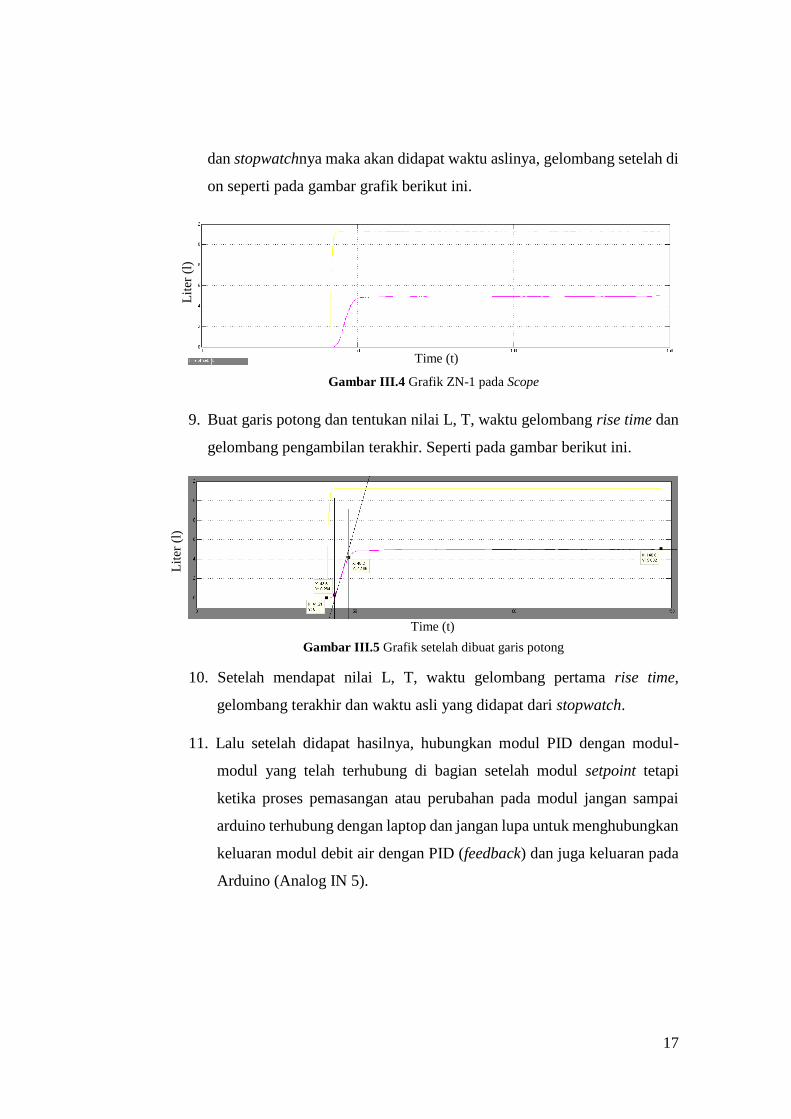
dan stopwatchnya maka akan didapat waktu aslinya, gelombang setelah di
on seperti pada gambar grafik berikut ini.
Gambar III.4 Grafik ZN-1 pada Scope
9. Buat garis potong dan tentukan nilai L, T, waktu gelombang rise time dan
gelombang pengambilan terakhir. Seperti pada gambar berikut ini.
Gambar III.5 Grafik setelah dibuat garis potong
10. Setelah mendapat nilai L, T, waktu gelombang pertama rise time,
gelombang terakhir dan waktu asli yang didapat dari stopwatch.
11. Lalu setelah didapat hasilnya, hubungkan modul PID dengan modul-
modul yang telah terhubung di bagian setelah modul setpoint tetapi
ketika proses pemasangan atau perubahan pada modul jangan sampai
arduino terhubung dengan laptop dan jangan lupa untuk menghubungkan
keluaran modul debit air dengan PID (feedback) dan juga keluaran pada
Arduino (Analog IN 5).
Lit
er (
l)
Lit
er (
l)
Time (t)
Time (t)

18
Gambar III.6 Realisasi modul awal yang telah ditambahkan modul PID
12. Kemudian hubungkan lagi arduino dengan laptop, dan play simulinknya,
maka setelah di play akan menghasilkan gelombang respon dari plant
debit air.
3.2 Desain Kendali dengan Metoda Ziegler Nichols Type-2
Langkah-langkah dalam mendesain kendali dengan menggunakan metode
Ziegler Nichols tipe-2 yaitu, sebagai berikut :
1. Mengkoneksikan Arduino UNO dan Laptop juga telah terhubung dengan
Matlab.
2. Buat rangkaian pada simulink (Matlab) seperti gambar berikut ini.
Gambar III.7 Rangkaian untuk sistem kendali debit air
3. Test masing-masing modul dan tegangan setiap outputnya, setelah modul
terukur sesuai dengan yang telah ditentukan lalu lanjutkan ke tahap
penghubungan setiap modul menggunakan konektor.

19
4. Setelah dihubungkan modul power supply dengan output 15V, setpoint
dengan pilihan (0 s.d 10V), penguat daya dan modul debit air, seperti pada
gambar berikut ini.
Gambar III.8 Realisasi modul-modul setelah dihubungkan
5. Atur gain pada PID agar sinyal berosilasi secara konstan didapat untuk gain
pada modul debit air yaitu sebesar 1 (x100), saklar pada Ti dan Td nya
dimatikankan.
6. Hubungkan modul yang telah tersambung semuanya dengan arduino seperti
gambar berikut ini.
Gambar III.9 Modul kendali debit air dihubungan dengan arduino dan PC
Keterangan I/O pada Arduino :
Setup Arduino1 (COM17) = PORT Arduino pada Komputer
Analog Read (PIN 0) = Dihubungkan ke Setpoint
Analog Read (PIN 5) = Dihubungkan pada Output Plant
Dan jangan lupa menghubungkan arduino pada Ground
20
7. Setelah terhubung dengan arduino nyalakan power supply tetapi jangan dulu
menyalakan switch setpoint.
8. Hubungakan arduino dengan laptop lalu jalankan (play) simulinknya.
Dengan menyalakan saklar pada setpoint dan menyiapkan stopwatch untuk
mengukur waktu detik (asli).
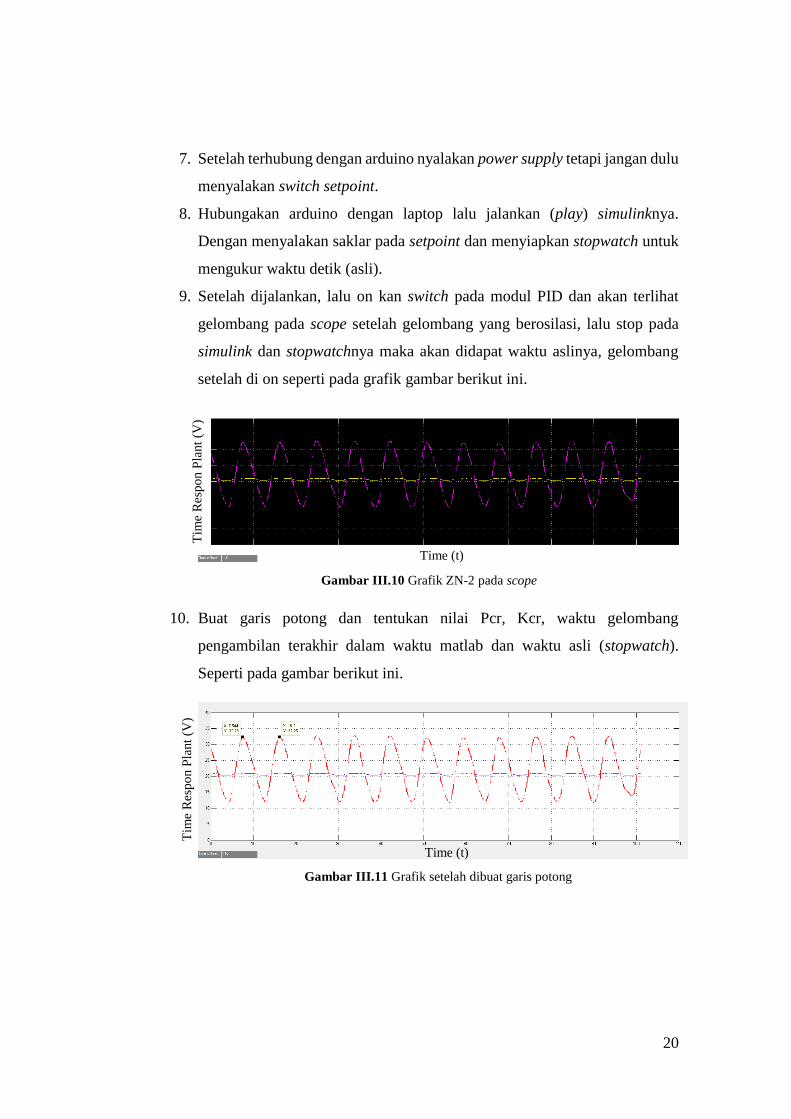
9. Setelah dijalankan, lalu on kan switch pada modul PID dan akan terlihat
gelombang pada scope setelah gelombang yang berosilasi, lalu stop pada
simulink dan stopwatchnya maka akan didapat waktu aslinya, gelombang
setelah di on seperti pada grafik gambar berikut ini.
Gambar III.10 Grafik ZN-2 pada scope
10. Buat garis potong dan tentukan nilai Pcr, Kcr, waktu gelombang
pengambilan terakhir dalam waktu matlab dan waktu asli (stopwatch).
Seperti pada gambar berikut ini.
Gambar III.11 Grafik setelah dibuat garis potong
Tim
e R
esp
on P
lant
(V)
Time (t)
Tim
e R
esp
on P
lant
(V)
Time (t)
21
3.3 Desain Kendali dengan Metoda Cohen Coon
Langkah-langkah dalam mendesain kendali dengan menggunakan metode
Cohen Coon yaitu, sebagai berikut :
1. Mengkoneksikan Arduino UNO dan Laptop juga telah terhubung dengan
Matlab.
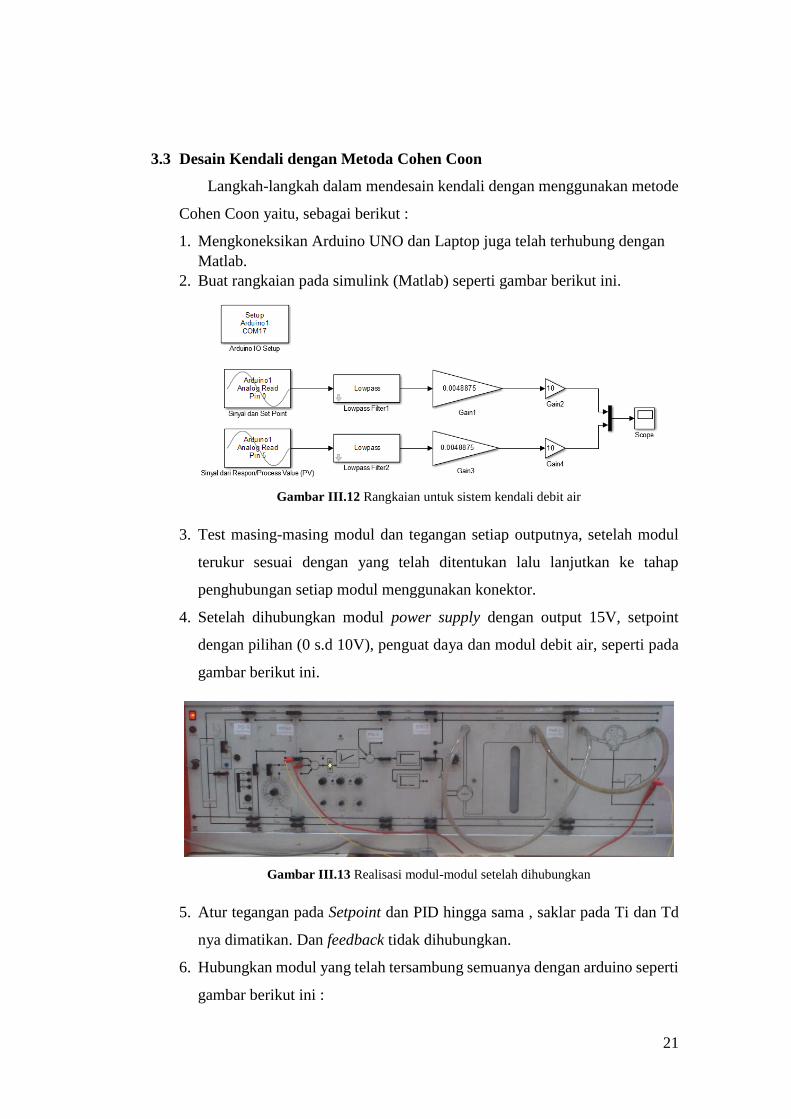
2. Buat rangkaian pada simulink (Matlab) seperti gambar berikut ini.
Gambar III.12 Rangkaian untuk sistem kendali debit air
3. Test masing-masing modul dan tegangan setiap outputnya, setelah modul
terukur sesuai dengan yang telah ditentukan lalu lanjutkan ke tahap
penghubungan setiap modul menggunakan konektor.
4. Setelah dihubungkan modul power supply dengan output 15V, setpoint
dengan pilihan (0 s.d 10V), penguat daya dan modul debit air, seperti pada
gambar berikut ini.
Gambar III.13 Realisasi modul-modul setelah dihubungkan
5. Atur tegangan pada Setpoint dan PID hingga sama , saklar pada Ti dan Td
nya dimatikan. Dan feedback tidak dihubungkan.
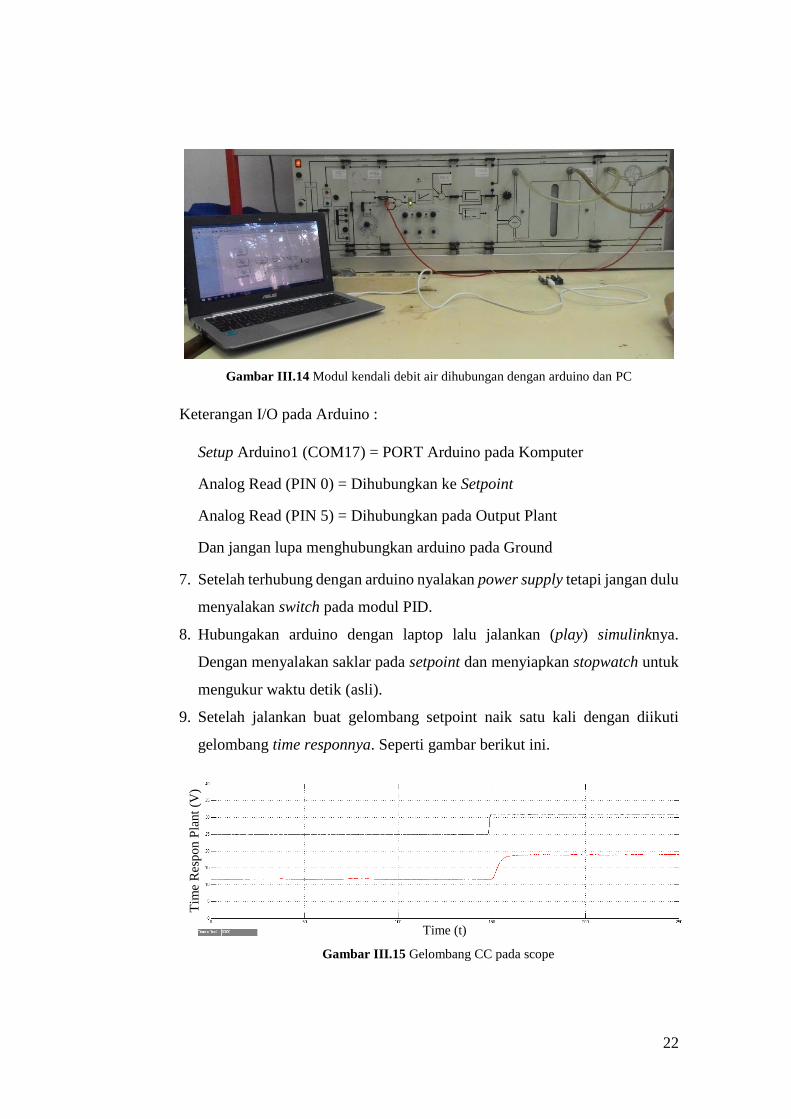
6. Hubungkan modul yang telah tersambung semuanya dengan arduino seperti
gambar berikut ini :
22
Gambar III.14 Modul kendali debit air dihubungan dengan arduino dan PC
Keterangan I/O pada Arduino :
Setup Arduino1 (COM17) = PORT Arduino pada Komputer
Analog Read (PIN 0) = Dihubungkan ke Setpoint
Analog Read (PIN 5) = Dihubungkan pada Output Plant
Dan jangan lupa menghubungkan arduino pada Ground
7. Setelah terhubung dengan arduino nyalakan power supply tetapi jangan dulu
menyalakan switch pada modul PID.
8. Hubungakan arduino dengan laptop lalu jalankan (play) simulinknya.
Dengan menyalakan saklar pada setpoint dan menyiapkan stopwatch untuk
mengukur waktu detik (asli).
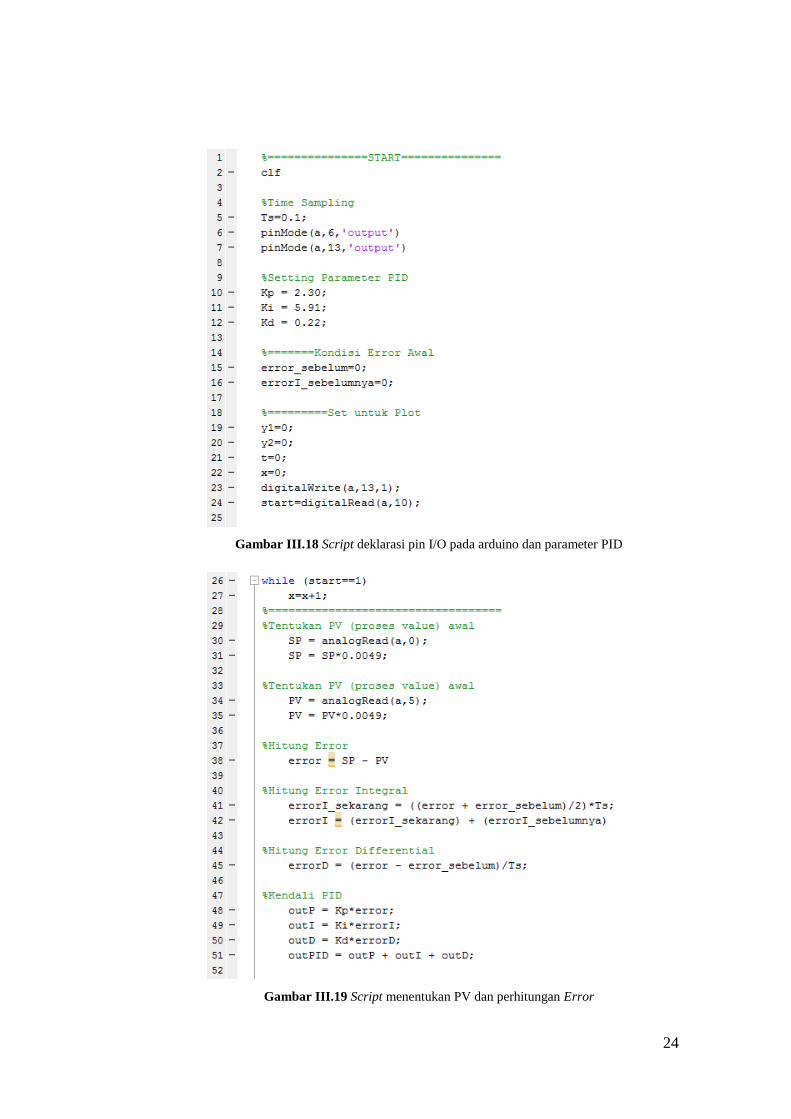
9. Setelah jalankan buat gelombang setpoint naik satu kali dengan diikuti
gelombang time responnya. Seperti gambar berikut ini.
Gambar III.15 Gelombang CC pada scope
Tim
e R
esp
on P
lant
(V)
Time (t)

23
10. Buat garis potong dan tentukan nilai Kc, Ti dan Td. seperti dambar berikut
ini.
Gambar III.16 Grafik setelah diberi garis potong
11. Setelah itu lakukan perhitungan dan hasil perhitungan diatur pada PID dan
apabila hasil gelombang bagus maka kita telah mendesain suatu sistem
dengan baik menggunakan metoda Cohen Coon.
3.4 Desain Kendali PID dengan Script Matlab
Langkah-langkah dalam mendesain kendali PID dengan Script Matlab
yaitu, sebagai berikut :
1. Mencek kondisi masing-masing modul, agar berjalan dengan baik.
2. Menghubungkan modul Power Supply, PID (Kp on, Ti dan Td off), penguat
dan kendali debit air. Seperti gambar berikut ini.
Gambar III.17 Realisasi modul-modul yang dihubungkan
3. Mengkoneksikan Arduino UNO dan Laptop juga telah terhubung dengan
Matlab.
4. Membuat script di Matlab, seperti gambar berikut ini.
Tim
e R
esp
on P
lant
(V)
Time (t)
24
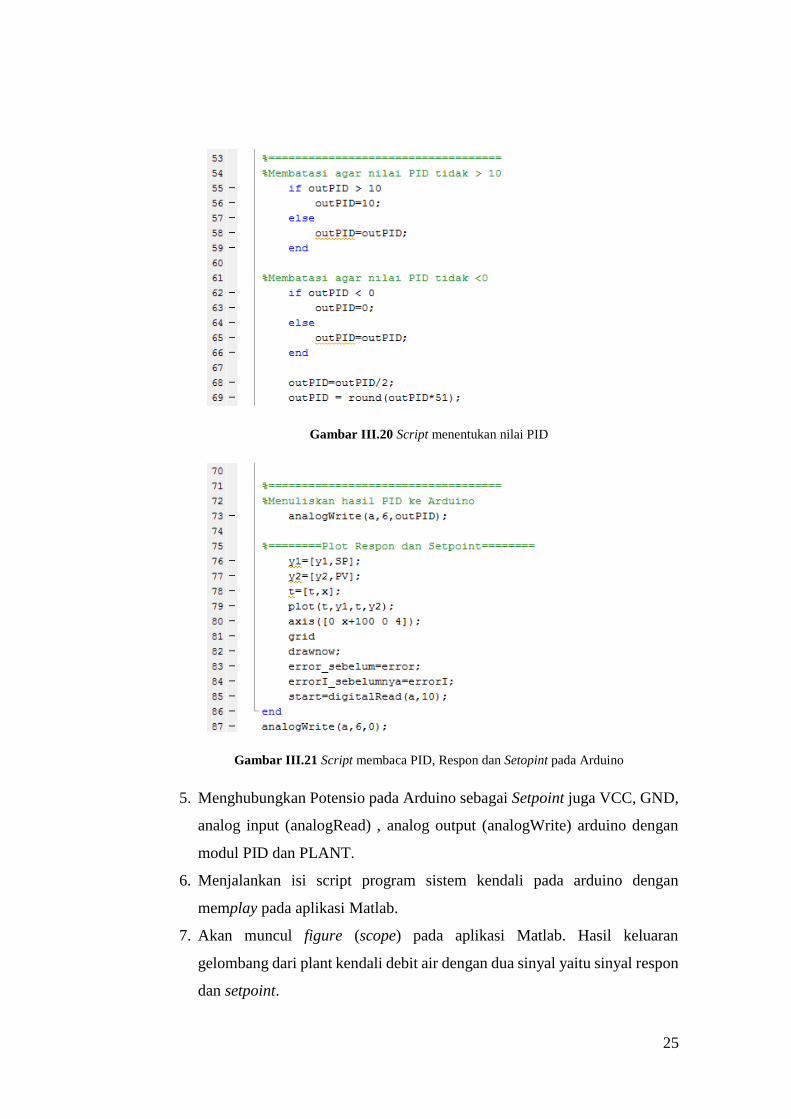
Gambar III.18 Script deklarasi pin I/O pada arduino dan parameter PID
Gambar III.19 Script menentukan PV dan perhitungan Error
25
Gambar III.20 Script menentukan nilai PID
Gambar III.21 Script membaca PID, Respon dan Setopint pada Arduino
5. Menghubungkan Potensio pada Arduino sebagai Setpoint juga VCC, GND,
analog input (analogRead) , analog output (analogWrite) arduino dengan
modul PID dan PLANT.
6. Menjalankan isi script program sistem kendali pada arduino dengan
memplay pada aplikasi Matlab.
7. Akan muncul figure (scope) pada aplikasi Matlab. Hasil keluaran
gelombang dari plant kendali debit air dengan dua sinyal yaitu sinyal respon
dan setpoint.
26
3.5 Desain Kendali PID dengan Arduino (Stand Alone Control)
Langkah-langkah dalam mendesain kendali PID dengan Arduino yaitu,
sebagai berikut :
1. Mencek kondisi masing-masing modul, agar berjalan dengan baik.
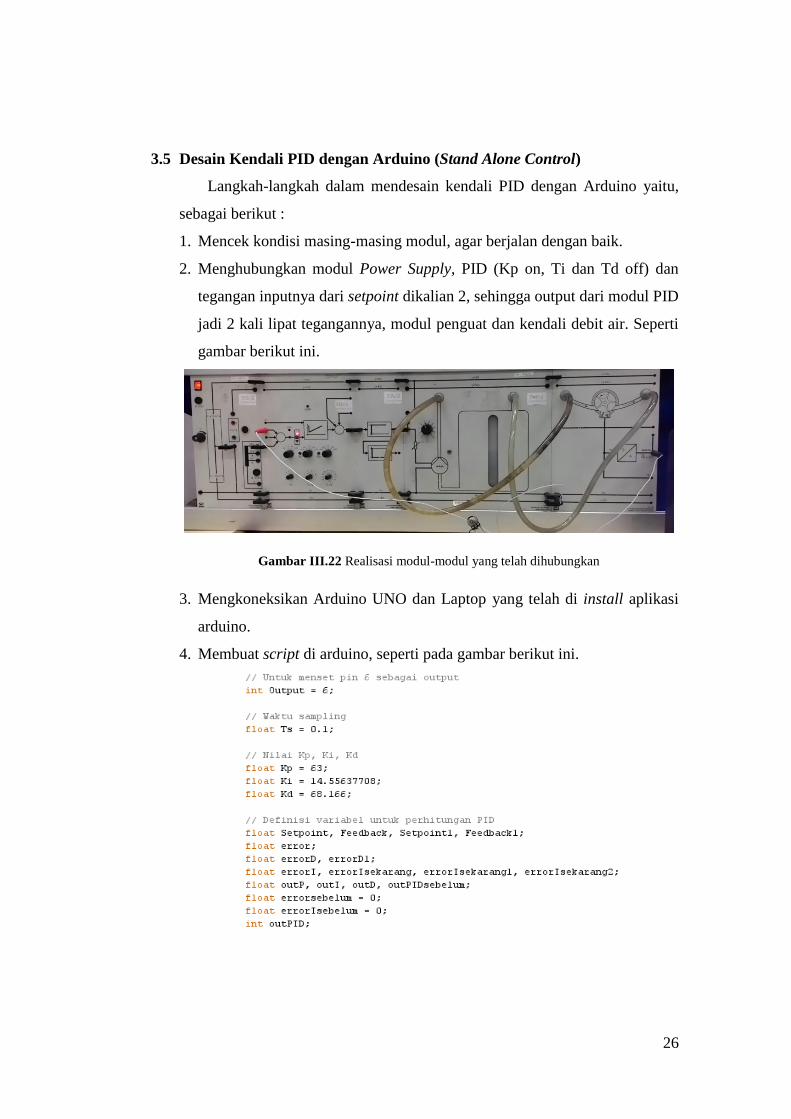
2. Menghubungkan modul Power Supply, PID (Kp on, Ti dan Td off) dan
tegangan inputnya dari setpoint dikalian 2, sehingga output dari modul PID
jadi 2 kali lipat tegangannya, modul penguat dan kendali debit air. Seperti
gambar berikut ini.
Gambar III.22 Realisasi modul-modul yang telah dihubungkan
3. Mengkoneksikan Arduino UNO dan Laptop yang telah di install aplikasi
arduino.
4. Membuat script di arduino, seperti pada gambar berikut ini.

27
Gambar III.23 Script deklarasi pin I/O dan parameter PID pada Arduino

28
5. Menghubungkan Potensio pada Arduino sebagai Setpoint. VCC, GND,
analog input (analogRead) , analog output (analogWrite) arduino dengan
modul PID dan PLANT.
6. Cek script dengan cara mengklik button “Verify” pada aplikasi arduino
bagian atas, ketika sudah “Done Compiling” lakukan upload script tersebut
dengan mengklik button “Upload” pada aplikasi arduino bagian atas.
7. Tunggu hinggal proses Upload selesai, jangan melakukan perubahan
rangkaian ataupun mencabut arduino dari Laptop ketika proses Upload,
karena dapat membuat gagal upload juga dapat membuat rusak arduino.
8. Ketika script telah selesai di upload, lihat pada tools “Serial Monitor” pada
aplikasi arduino, yang akan menampilkan proses keadaan setpoint (SP) dan
feedback (PV) dan Sistem Kendali pun telah bekerja, dan lakukan perubahan
setpoint dengan memutar potensio, nilai feedback akan mengikuti setpoint.
9. Ketika proses kendali menggunakan arduino menggunakan tampilan Serial
Monitor pada aplikasi arduino telah dilakukan, maka tahap selanjutnya kita
aplikasikan secara terpisah dengan laptop yaitu dengan menggunakan
Shield arduino dan LCD (Liquid Crystal Display).
10. Shiels arduino yang telah terpasang dengan LCD ditumpukkan diatas
arduino yang telah disusun kaki-kaki shield pada arduino.
11. Lakukan test dengan menampilkan tulisan pada LCD, dengan memilih
script yang telah ada pada example script “Hello World!” di aplikasi
arduino.
12. Setelah muncul tulisan di LCD, brarti Shield dan arduino bekerja dengan
baik.
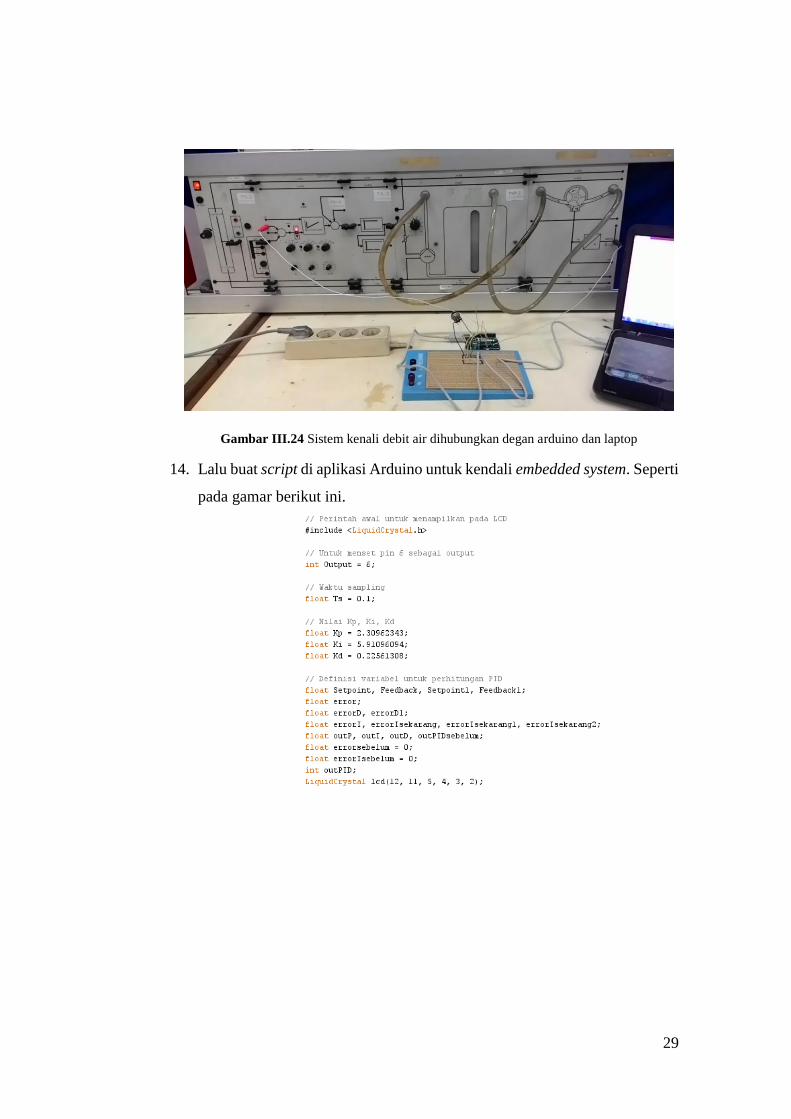
13. Hubungkan modul-modul sistem kendai dengan arduino yang telah
dipasang shield dan LCD, potensio juga dihubungkan dengan laptop terlebih
dahulu, untuk diprogram arduino nya.. Seperti gambar berikut ini.
29
Gambar III.24 Sistem kenali debit air dihubungkan degan arduino dan laptop
14. Lalu buat script di aplikasi Arduino untuk kendali embedded system. Seperti
pada gamar berikut ini.

30
Gambar III.25 Script Embedded System pada Arduino

31
15. Cek script dengan cara mengklik button “Verify” pada aplikasi arduino
bagian atas, ketika sudah “Done Compiling” lakukan upload script tersebut
dengan mengklik button “Upload” pada aplikasi arduino bagian atas.
16. Tunggu hinggal proses Upload selesai, jangan melakukan perubahan
rangkaian ataupun mencabut arduino dari Laptop ketika proses Upload,
karena dapat membuat gagal upload juga dapat membuat rusak arduino.
17. Ketika script telah selesai di upload, lihat keadaan plant kendali debit air,
apakah bekerja sesuai dan lihat nilai setpoint dan feedback pada LCD.
Seperti gambar berikut ini.
Gambar III.26 Hasil setpoint dan feedback sistem kendali debit air pada LCD
18. Ketika sistem kendali bekerja dengan baik, nilai feedback mengikuti setpoint
yang dirubah-rubah oleh potensio. Setelah itu kita dapat melepaskan arduino
dari laptop lalu menghubungkannya dengan charger hp-usb, dan sistem
kendali debit air pun dapat dikendalikan hanya dengan menggunakan
arduino (stand alone). Seperti pada gambar berikut ini.
Gambar III.27 Kendali PID Debit Air Stand Alone Controller
32
BAB IV
HASIL DAN PEMBAHASAN
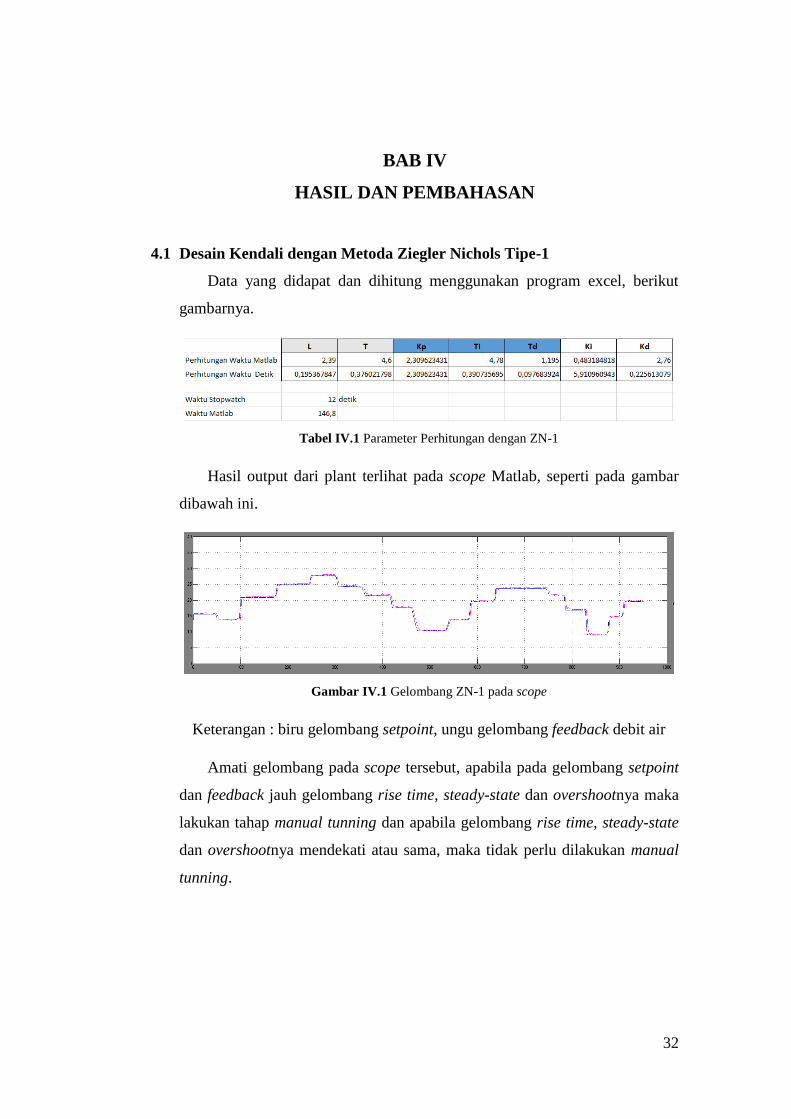
4.1 Desain Kendali dengan Metoda Ziegler Nichols Tipe-1
Data yang didapat dan dihitung menggunakan program excel, berikut
gambarnya.
Tabel IV.1 Parameter Perhitungan dengan ZN-1
Hasil output dari plant terlihat pada scope Matlab, seperti pada gambar
dibawah ini.
Gambar IV.1 Gelombang ZN-1 pada scope
Keterangan : biru gelombang setpoint, ungu gelombang feedback debit air
Amati gelombang pada scope tersebut, apabila pada gelombang setpoint
dan feedback jauh gelombang rise time, steady-state dan overshootnya maka
lakukan tahap manual tunning dan apabila gelombang rise time, steady-state
dan overshootnya mendekati atau sama, maka tidak perlu dilakukan manual
tunning.

33
4.2 Desain Kendali dengan Metoda Ziegler Nichols Tipe-2
Data yang didapat dan dihitung menggunakan program excel, berikut
gambarnya.
Tabel IV.2 Parameter Perhitungan ZN-2
Hasil output dari plant terlihat pada Scope Matlab, seperti pada gambar
dibawah ini.
Gambar IV.2 Gelombang ZN-2 pada scope-kondisi normal
Gambar IV.3 Gelombang ZN-2 pada scope-tunning manual
Keterangan : Ungu gelombang setpoint, Merah gelombang feedback
Tim
e R
esp
on P
lant
(V)
Time (t)
Tim
e R
esp
on P
lant
(V)
Time (t)
34
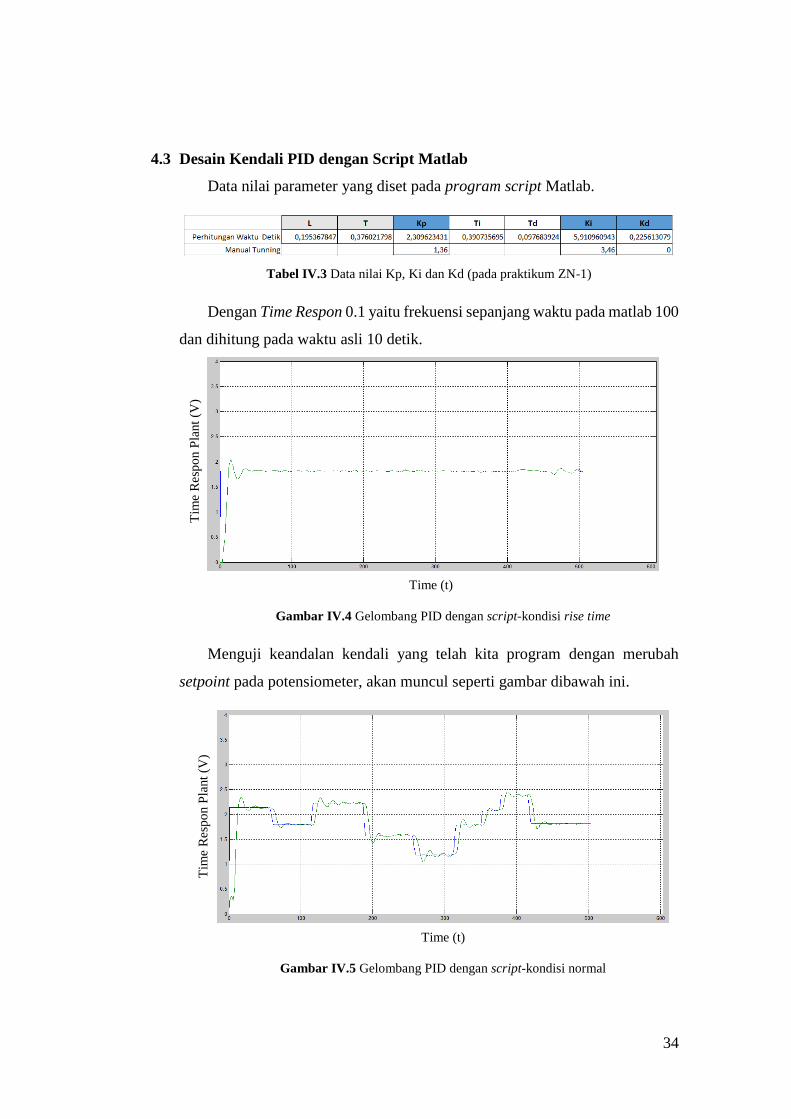
4.3 Desain Kendali PID dengan Script Matlab
Data nilai parameter yang diset pada program script Matlab.
Tabel IV.3 Data nilai Kp, Ki dan Kd (pada praktikum ZN-1)
Dengan Time Respon 0.1 yaitu frekuensi sepanjang waktu pada matlab 100
dan dihitung pada waktu asli 10 detik.
Gambar IV.4 Gelombang PID dengan script-kondisi rise time
Menguji keandalan kendali yang telah kita program dengan merubah
setpoint pada potensiometer, akan muncul seperti gambar dibawah ini.
Gambar IV.5 Gelombang PID dengan script-kondisi normal
Tim
e R
esp
on P
lant
(V)
Time (t)
Tim
e R
esp
on P
lant
(V)
Time (t)

35
Gambar IV.6 Gelombang PID dengan script-manual tunning
4.4 Desain Kendali PID dengan Arduino (Stand Alone Control)
Data pertama yang didapat yaitu, nilai setpoint dan feedback menggunakan
“serial monitor” pada aplikasi arduino.
Gambar IV.7 Data nilai setpoint dan feedback dari “Serial Monitor”
Hasil dari nilai diatas dikalikan 10, karena output dari Sistem Kendali
Debit Air 1𝑉
10𝑙𝑖𝑡𝑒𝑟 𝑥 ℎ−1
Tim
e R
esp
on P
lant
(V)
Time (t)

36
Data yang didapat yaitu, nilai setpoint dan feedback yang diambil oleh
camera dengan beberapa kali foto dari setiap perubahan pada LCD.
(a) (b)
(c) (d)
(e)
Gambar IV.8 Data nilai setpoint dan feedback dari tampilan “LCD”
Keterangan :
(a) Data ke-1, (b) Data ke-2, (c) Data ke-3, (d) Data Ke-4 dan (e) Data Ke-5.

37
BAB V
KESIMPULAN DAN SARAN
5.1 Kesimpulan
Dari hasil pengujian, pengambilan data dan analisa percobaan yang telah
dilakukan pada lab kendali teknik elektronika, dapat disimpulkan.
1. Sistem Kendali Debit Air dapat menggunakan sistem kendali PID Dengan
Metode Ziegler Nichols 1, 2 atau Cohen Coon. Akan tetapi terdapat kelebihan
dan kekurangannya.
2. Apabila Sistem Kendali Debit Air menggunakan metode tipe 1 hasil dari
respon akan lebih stabil dibandingkan dengan tipe 2 tetapi proses
pengambilan data untuk mencari parameter Kp, Ki dan Kd membutuhkan
waktu yang lebih lama dibanding tipe 2.
3. Hasil respon setelah di tunning menggunakan parameter PID yang dihasilkan
dari metode Ziegler Nichols tipe 2 kurang baik karena osilasi yang dihasilkan
tercampur dengan noise dari gelombang aliran air yang tidak tenang.
4. Dalam modul kendali plant debit air ini, tegangan output tidak stabil apabila
diatas 3,5V karena kecepatan aliran yang dapat membuat gelombang output
tidak bagus.
5.2 Saran
Untuk penyempurnaan dan pengembangan praktikum lebih lanjut, maka
diberikan saran-saran sebagai berikut untuk penyempurnaan :
1. Melakukan praktikum sesuai jadwal dan prosedur dengan langkah-langkah
yang benar.
2. Lebih teliti dan jeli dalam melakukan pemotongan garis dari gelombang
pertama dan dalam melakukan tunning manual, karena akan
mempengaruhi hasil desain kendali tersebut.
3. Pada setiap praktikum untuk memeriksa kabel jumper atau penghubung.
38
DAFTAR PUSTAKA
[1]. Wahyudi, Bakhtiar Indra K, dan Iwan Setiawan, “Perancangan Sistem
Pengendalian Debit Aliran Masukan pada Tandon Air dengan Menggunakan
Mikrokontroler ATmega8535”, Jurnal, Universitas Diponegoro Semarang, 2008.
[2]. Maharani. Aldea Steffie, Setiono. Budi, dan Sumardi, “Aplikasi Kontrol Pid Untuk
Pengendalian Ketinggian Level Cairan Dengan Menggunakan TCP/IP”, Skripsi,
Universitas Diponegoro, 2007.
[3]. Ferdinando. Hany, “Desain PID Controller dengan Software Matlab”, Jurnal,
Universitas Kristen Petra, 2007.
[4] “PID Controller”
en.wikipedia.org/wiki/PID_controller
Diakses 5 Juli 2015
[5]. “Metoda Tunning Ziegler Nichols”,
http://instrumentationsystem.blogspot.com/2011/05/metoda-tuning-ziegler-
nichols.html.
Diakses 5 Juli 2015.
[6]. “Matlab R2013a”,
http://www.behdadsoft.com/Matlab-R2013a.html.
Diakses 5 Juli 2015.
[7]. “Pengantar untuk Pemrograman Matlab”,
https://inaseptiana.files.wordpress.com/2014/11/modul-pengantar-pemrograman-
matlab.pdf.
Diakses 5 Juli 2015.
[8] “Arduino Arts”,
http://arduinoarts.com/wp-content/uploads/2011/08/Arduino-callouts1.jpg.
Diakses 6 Juli 2015.
[9]. “Pengenalan Arduino”
http://www.tobuku.com/docs/Arduino-Pengenalan.pdf.
Diakses 6 Juli 2015.