pcsi les ulis cours systèmes linéaires continus … · système combinatoire système séquentiel...
TRANSCRIPT
PCSI Les Ulis COURS Systèmes Linéaires Continus Invariants
Sciences Industrielles pour l’Ingénieur Page 1
Modélisation des Systèmes Linéaires Continus Invari ants SOMMAIRE
1 INTRODUCTION A L’AUTOMATISME ET AUX SYSTEMES ASSERVIS 2
1.1 INTRODUCTION A L’AUTOMATISME 2 1.2 NOTION DE COMMANDE 2 1.3 SYSTEME ASSERVI 2 1.4 PERFORMANCES D’UN SYSTEME ASSERVI 3
2 PRESENTATION SLCI : 5
2.1 SYSTEMES LINEAIRES : 5 2.2 SYSTEME CONTINU : 5 2.3 SYSTEME INVARIANT : 6 2.4 SYSTEMES NON LINEAIRES: 6
3 REPRESENTATION DES SLCI: 6
4 ENTREES TYPES 7
5 TRANSFORMATION DE LAPLACE: 7
5.1 TRANSFORMEE DE LAPLACE : A QUOI ÇA SERT ? 7 5.2 DEFINITION: 8 5.3 PROPRIETES DE LA TRANSFORMEE DE LAPLACE: 8 5.4 TRANSFORMEES DE FONCTIONS COURANTES: 9
6 FONCTION DE TRANSFERT D'UN SYSTEME: 11
6.1 GENERALITES 11 6.2 INTERET ERREUR !
SIGNET NON DEFINI. 6.3 FONCTION DE TRANSFERT EN BOUCLE FERMEE D'UN SYSTEME ASSERVI: 12 6.4 FONCTION DE TRANSFERT EN BOUCLE OUVERTE: 12
7 OPERATIONS SUR LES SCHEMAS BLOCS: 13
7.1 ÉLEMENTS DE BASE 13 7.2 FONCTION DE TRANSFERT EN SERIE: 13 7.3 FONCTION DE TRANSFERT EN PARALLELE: 14 7.4 DEPLACEMENT D'UNE JONCTION: 14 7.5 DEPLACEMENT D'UN SOMMATEUR: 14 7.6 CAS DES SYSTEMES PERTURBES 14
8 SYSTEMES LINEAIRES FONDAMENTAUX: 15
8.1 FONCTION DE TRANSFERT 15 8.2 REPONSE A UN ECHELON 15 8.3 REPONSE A UNE IMPULSION 20 8.4 .REPONSE A UNE RAMPE 21
9 IDENTIFICATION D’UN MODELE DE COMPORTEMENT A PARTIR D’UNE REPONSE A UN ECHELON 23
9.1 PRINCIPE 23 9.2 IDENTIFICATION D’UN PREMIER ORDRE NON RETARDE 23 9.3 IDENTIFICATION D’UN PREMIER ORDRE RETARDE 24 9.4 IDENTIFICATION PAR UN 2
EME ORDRE APERIODIQUE 25
9.5 IDENTIFICATION PAR UN 2EME
ORDRE PSEUDOPERIODIQUE 26
10 ANALYSE HARMONIQUE 27
10.1 PPRINCIPES 27 10.2 LIEUX DE TRANSFERT 28 10.3 PREMIER ORDRE 31 10.4 IDENTIFICATION D’UN MODELE DU PREMIER ORDRE A PARTIR DE LA REPONSE HARMONIQUE 32 10.5 REPONSE HARMONIQUE D’UN MODELE DU DEUXIEME ORDRE 33 10.6 IDENTIFICATION D’UN MODELE DU DEUXIEME ORDRE A PARTIR DE LA REPONSE HARMONIQUE 36

PCSI Les Ulis COURS Systèmes Linéaires Continus Invariants
Sciences Industrielles pour l’Ingénieur Page 2
1 Introduction à l’automatisme et aux systèmes asservis 1.1 Introduction à l’automatisme Différents types d’automatismes : Systèmes binaires, systèmes continus
Dans le cadre du programme, deux principales sources d’informations conduisant à des parties commandes différentes et donc des modélisations différentes seront étudiées :
Entrées - Sorties Logique (0 ou 1) Analogique
Système combinatoire Système séquentiel Système asservi
Relation entrées sorties A une combinaison de l’état des entrées correspond une unique combinaison de l’état des sorties (indépendamment du temps)
A une combinaison de l’état des entrées correspond plusieurs combinaisons de l’état des sorties (indépendamment du temps)
La sortie du système évolue de façon continue en fonction du niveau de la grandeur d’entrée
1.2 Notion de commande Système de commande en chaîne directe :
Un système fonctionne en chaîne directe s’il n’y a pas de contrôle sur la manière dont la consigne a été exécutée. Perturbation :
Une perturbation est une autre cause agissant sur le système. C’est une grandeur d’entrée qui n’est pas contrôlée. Système de commande en chaîne fermée :
Un système fonctionne en boucle fermée si une mesure de la sortie est réalisée afin de la comparer à la consigne et d’agir en conséquence.
1.3 Système asservi
Définition d’un système asservi
Un système asservi est un système bouclé dans lequel la grandeur de retour est comparée à la grandeur d’entrée par
élaboration d’un signal, appelé écart. Ce signal écart est adapté et amplifié afin de commander la partie opérative. Un système asservi peut être défini en trois points :
• C’est un système à retour : L’évolution de la grandeur de sortie est surveillée au moyen d’un capteur qui la transforme en une grandeur image appelée retour. Cette grandeur image doit être de la même nature que la grandeur d’entrée.
• C’est un système générateur d’écart : La grandeur de retour, image de la sortie, est comparée à la grandeur d’entrée par élaboration de la différence ou écart.
• C’est un système amplificateur : L’écart est une grandeur d’autant plus faible que la sortie est proche de l’entrée et devient alors insuffisant pour maintenir un signal de commande en sortie. L’écart est donc, dans la plupart des cas, amplifié et adapté.
Structure d’un système asservi
Un système asservi peut être modélisé par le schéma–bloc suivant :
Figure 1 : Schéma bloc d'un système asservi
Ecart ε Consigne Correcteur
Capteur
Actionneur
Effecteur
+
-
mesure
Sortie

PCSI Les Ulis COURS Systèmes Linéaires Continus Invariants
Sciences Industrielles pour l’Ingénieur Page 3
Régulateur ou système suiveur
Une REGULATION est un système asservi destiné à maintenir en sortie une grandeur constante pour une consigne constante (régulation en température d’une enceinte, régulation en vitesse d’un moteur).
Un Système SUIVEUR, est un système asservi dont la consigne varie dans le temps. L’objectif de ce système est
d’ajuster en permanence le signal de sortie au signal d’entrée. (radar de poursuite, fusée,…).
1.4 Performances d’un système asservi En fonction du régime du système (transitoire ou permanent), il est possible de définir quatre critères permettant de mesurer les performances d’un système asservi suivant le point de vue de l’utilisateur. Précision
La précision qualifie l’aptitude du système à atteindre la valeur visée. Elle est caractérisée par l’écart entre la valeur visée et la valeur effectivement atteinte par la grandeur de sortie. L’écart éventuel s’exprime dans la même unité que la grandeur de sortie.
Ecart statique εεεεs
O
t
eoécarte(t)
s(t)
εεεεs
Le système est en mode régulation (entrée fixe). On
définit alors l'écart statique εεεεs comme l'écart entre la
consigne fixe e0 et la réponse s(t) en régime permanent.
Ecart dynamique εεεεv
t
O
εεεεv Ecart
e(t)s(t)
Encore appelé écart de traînage ou écart de poursuite, il représente la différence entre la consigne variable et la réponse en régime permanent.
Rapidité
La rapidité est caractérisée par le temps que met le système à réagir à une variation brusque de la grandeur d’entrée. Cependant la valeur finale étant le plus souvent atteinte de manière asymptotique on retient alors comme principal critère d’évaluation de la rapidité d’un système, le temps de réponse à n% (en pratique le temps de réponse à 5%). C’est le temps mis par le système pour atteindre sa
valeur de régime permanent à ±5% près et y rester.
t
s
t n%O
1
1+
1-
n%
n%

PCSI Les Ulis COURS Systèmes Linéaires Continus Invariants
Sciences Industrielles pour l’Ingénieur Page 4
Stabilité
Un système est instable si la grandeur de sortie ne converge pas vers une valeur constante pour une consigne constante et en absence de toute perturbation.
Oscillant non amorti - Comportement INSTABLE
Non oscillant – Comportement INSTABLE
bien amorti ; stable
Amortissement
L’amortissement est caractérisé par le rapport entre les amplitudes successives des oscillations de la sortie. Plus ces oscillations s’atténuent rapidement, plus le système est amorti.
système peu amorti
système fortement amorti
système bien amorti
Pour caractériser la qualité de l’amortissement on peut retenir deux critères :
• le taux de dépassement, qui caractérise l’amplitude maximale des oscillations,
• le temps de réponse à 5 % qui correspond au temps de stabilisation du système.
Il est à noter que pour certaines applications (l’usinage par exemple) un comportement oscillant n’est pas autorisé et tout dépassement est inacceptable.
Comportement d’un système asservi
Ces différents aspects, précision, rapidité, stabilité et amortissement, sont étroitement liés. En fait, la rapidité d’un processus est limitée par l’inertie propre du système. On ne peut donc espérer rendre plus rapide le processus qu’en agissant sur la loi de commande.
Par exemple, si la loi de commande est de la forme u = K.ε, en prenant K très grand la réaction sera très rapide, mais peut-être disproportionnée, d’où un risque d’instabilité du système. C’est ce qui peut se passer lorsque l’on donne des coups de volants trop brusques pour rectifier la trajectoire d’un véhicule subissant des rafales de vent latéral. On s’aperçoit également que la précision est liée à l’intensité de la commande. En supposant le système stable, si la commande est trop molle (K petit), l’écart a tendance à s’accroître (le véhicule a tendance à s’éloigner de la trajectoire désirée), par contre si la commande est plus ferme (K grand), l’écart diminue (les perturbations dues au vent sont "gommées"). Il faudra chercher un bon compromis puisque la boucle de retour du système asservi permet d’améliorer la précision et la
rapidité mais peut nuire à la stabilité. Ceci nécessitera l’introduction dans la chaîne d’éléments « correcteurs » pour obtenir les performances souhaitées
t
s
t 5%O
1
D
0.951.05

PCSI Les Ulis COURS Systèmes Linéaires Continus Invariants
Sciences Industrielles pour l’Ingénieur Page 5
2 Présentation SLCI : Un système linéaire est représenté sous la forme de schémas-blocs, les entrées (Causes) étant situées généralement à gauche et les sorties (Effets) à droite. L’intérieur du bloc contient une description du système étudié (Fonction de transfert).
Remarque : Dans les cas réels, k ≤ n, on parle alors de système causal: la cause e(t) précède l'effet s(t).
2.1 Systèmes linéaires :
Un système est dit linéaire si la fonction qui le décrit est elle-même linéaire. Cette dernière vérifie alors le principe de proportionnalité et de superposition:
-Proportionnalité :
Si s(t) est la réponse à l’entrée e(t) alors λs(t) est la réponse à λe(t).
-Superposition :
2.2 Système continu : Un système est continu, par opposition à un système discret, lorsque les variations des grandeurs physiques le caractérisant sont des fonctions à temps continu et que l’on peut donc définir ces grandeurs à tout instant. On parle aussi dans ce cas de système analogique. La plupart des systèmes physiques, du point de vue macroscopique, sont continus. Un système informatique par contre a besoin d’un temps non nul pour réaliser un traitement de l’information. On ne peut donc pas le qualifier de système continu, il ne peut que traiter des échantillons des signaux continus qui lui sont soumis, on parle dans ce cas de système échantillonné.
)(1 te
)(ten )(tsk
)(1 ts
SYSTEME LINEAIRE
Cause Effet Fonction de transfert
e(t) s(t) Système linéaire
λ.e(t) λ.s(t) Système linéaire
e1(t)
e2(t) s2(t) e1(t) + e2(t) s1(t) + s2(t)
Système linéaire
Système linéaire s1(t)
Système linéaire
PCSI Les Ulis COURS Systèmes Linéaires Continus Invariants
Sciences Industrielles pour l’Ingénieur Page 6
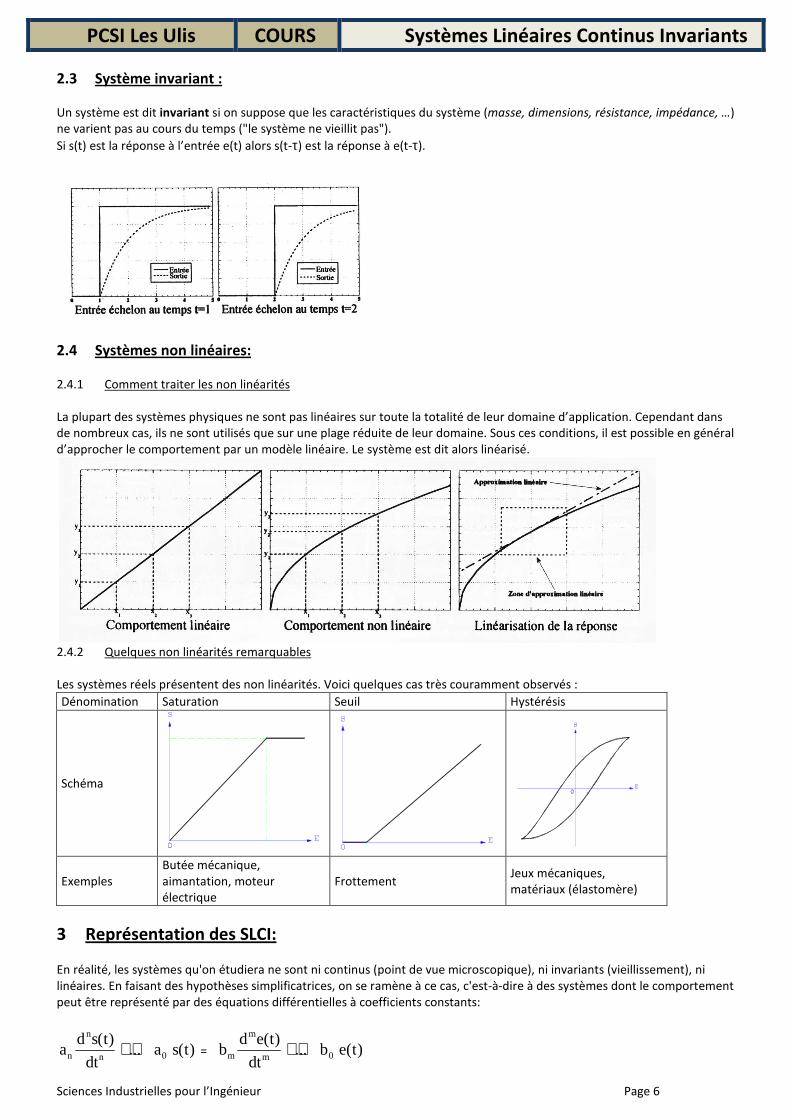
2.3 Système invariant : Un système est dit invariant si on suppose que les caractéristiques du système (masse, dimensions, résistance, impédance, …) ne varient pas au cours du temps ("le système ne vieillit pas").
Si s(t) est la réponse à l’entrée e(t) alors s(t-τ) est la réponse à e(t-τ).
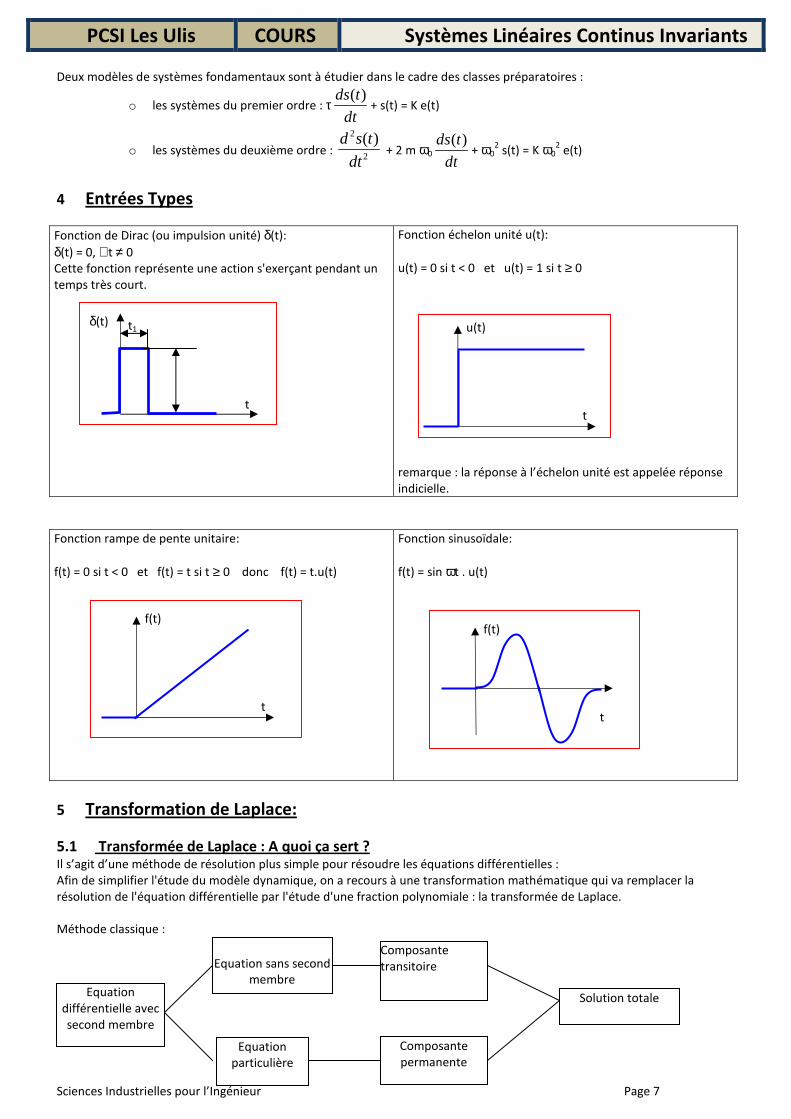
2.4 Systèmes non linéaires: 2.4.1 Comment traiter les non linéarités La plupart des systèmes physiques ne sont pas linéaires sur toute la totalité de leur domaine d’application. Cependant dans de nombreux cas, ils ne sont utilisés que sur une plage réduite de leur domaine. Sous ces conditions, il est possible en général d’approcher le comportement par un modèle linéaire. Le système est dit alors linéarisé.
2.4.2 Quelques non linéarités remarquables Les systèmes réels présentent des non linéarités. Voici quelques cas très couramment observés :
Dénomination Saturation Seuil Hystérésis
Schéma
Exemples Butée mécanique, aimantation, moteur électrique
Frottement Jeux mécaniques, matériaux (élastomère)
3 Représentation des SLCI: En réalité, les systèmes qu'on étudiera ne sont ni continus (point de vue microscopique), ni invariants (vieillissement), ni linéaires. En faisant des hypothèses simplificatrices, on se ramène à ce cas, c'est-à-dire à des systèmes dont le comportement peut être représenté par des équations différentielles à coefficients constants:
ad s t
dta s tn
n
n
( )... ( )+ + 0 = b
d e t
dtb e tm
m
m
( )... ( )+ + 0
PCSI Les Ulis COURS Systèmes Linéaires Continus Invariants
Sciences Industrielles pour l’Ingénieur Page 7
Deux modèles de systèmes fondamentaux sont à étudier dans le cadre des classes préparatoires :
o les systèmes du premier ordre : τ( )ds t
dt+ s(t) = K e(t)
o les systèmes du deuxième ordre :
2
2
( )d s t
dt + 2 m ω0
( )ds t
dt+ ω0
2 s(t) = K ω0
2 e(t)
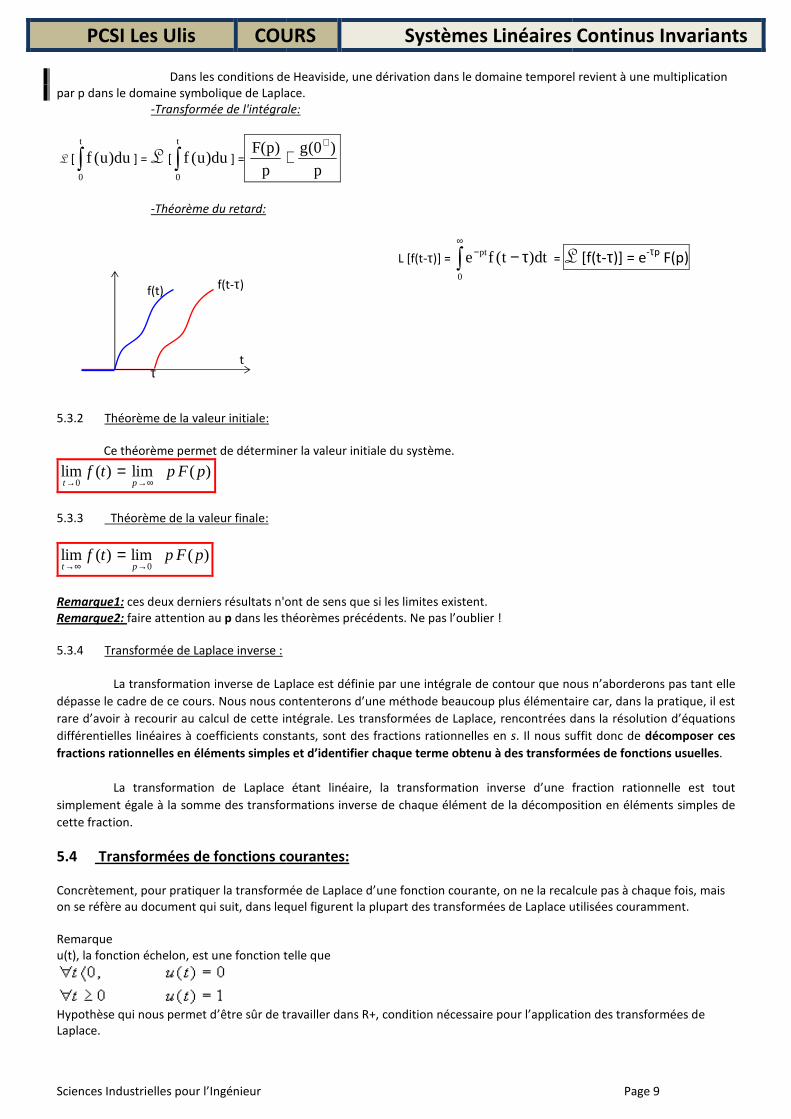
4 Entrées Types
Fonction de Dirac (ou impulsion unité) δ(t):
δ(t) = 0, ∀t ≠ 0 Cette fonction représente une action s'exerçant pendant un temps très court.
Fonction échelon unité u(t):
u(t) = 0 si t < 0 et u(t) = 1 si t ≥ 0
remarque : la réponse à l’échelon unité est appelée réponse indicielle.
Fonction rampe de pente unitaire:
f(t) = 0 si t < 0 et f(t) = t si t ≥ 0 donc f(t) = t.u(t)
Fonction sinusoïdale:
f(t) = sin ωt . u(t)
5 Transformation de Laplace:
5.1 Transformée de Laplace : A quoi ça sert ? Il s’agit d’une méthode de résolution plus simple pour résoudre les équations différentielles : Afin de simplifier l'étude du modèle dynamique, on a recours à une transformation mathématique qui va remplacer la résolution de l'équation différentielle par l'étude d'une fraction polynomiale : la transformée de Laplace. Méthode classique :
t
f(t)
t
f(t)
t
u(t)
t
δ(t) t1
Equation différentielle avec second membre
Equation sans second
membre
Composante transitoire
Equation particulière
Composante permanente
Solution totale

PCSI Les Ulis COURS Systèmes Linéaires Continus Invariants
Sciences Industrielles pour l’Ingénieur Page 8
Méthode par les transformées de Laplace :
Cette transformation va permettre de simplifier l’équation différentielle qui régit le système. Remarque : Dans la pratique, on ne calcule que les transformées de Laplace de fonctions causales c'est-à-dire telles que f(t) = 0 pour t < 0. Ces fonctions f représentent des grandeurs physiques: intensité, température, effort, vitesse,…
5.2 Définition: La transformée de Laplace de la fonction f(t) est notée F(p) = L [f(t)]. Avec :
• p est une variable complexe. p=a+jb
• f(t) est intégrable
• f(t) croit mois vite q’une exponentielle Conditions de Heaviside :
On dit qu’une fonction du temps f(t) vérifie les conditions de Heaviside si elle vérifie :
'
''
(0 ) 0
(0 ) 0
(0 ) 0,....
f
f
f
+
+
+
=
= =
, c’est à dire si les conditions initiales sont nulles
5.3 Propriétés de la transformée de Laplace: 5.3.1 Propriétés générales : - Unicité: à f(t) correspond F(p) unique, à F(p) correspond f(t) unique. - Linéarité: L [f1(t) + f2(t)] = L [f1(t)] + L [f2(t)] = F1(p) + F2(p)
L [λ f(t)] = λ L [f(t)] = λ F(p)
-Transformée de la dérivée:
Pour cela, intégrons par partie :
[ ]
' ' '
00 0
0
( ) ( ) ( ) ( ) ( )
( ) (0 ) ( ) (0 )
pt pt pt
pt
L f t e f t dt e f t e f t dt
p e f t dt f pL f t f
∞ ∞∞− − −
∞ − + +
= = −
= − = −
∫ ∫
∫
Car la fonction f(t) est intégrable. Ainsi, nous avons de même, avec la même démarche :
[ ][ ]
'
'' 2 '
( ) ( ) (0 )
( ) ( ) (0 ) (0 )
L f t pL f t f
L f t p L f t pf f
+
+ +
= −
= − −
f(t) L→ F(p) =
0
( )pte f t dt∞
−∫
Equation différentielle avec second membre
Equation algébrique
Ecriture sous format
type Solution totale
Transformation de Laplace
Conditions initiales
Décomposition en formes « type »
Transformation de Laplace inverse
PCSI Les Ulis COURS
Sciences Industrielles pour l’Ingénieur
Dans les conditions de Heaviside, une dérivation dans le domaine temporel revient à une multiplication par p dans le domaine symbolique de Laplace. -Transformée de l'intégrale:
L [ ∫t
0
du)u(f ] = L [ ∫t
0
du)u(f ] = p
)p(F +
-Théorème du retard:
5.3.2 Théorème de la valeur initiale: Ce théorème permet de déterminer la valeur initiale du système.
0lim ( ) lim ( )t p
f t p F p→ →∞
=
5.3.3 Théorème de la valeur finale:
0lim ( ) lim ( )t p
f t p F p→∞ →
=
Remarque1: ces deux derniers résultats n'ont de sens que si les limites existent.Remarque2: faire attention au p dans les théorèmes précédents. Ne pas l’oublier 5.3.4 Transformée de Laplace inverse :
La transformation inverse de Laplace est définie par une intégrale de contour que nous n’aborderons pas tant elle
dépasse le cadre de ce cours. Nous nous contenterons d’une méthode beaucoup plus élémentaire car, dans la pratique, il est
rare d’avoir à recourir au calcul de cette intégrale. Les transformées de Laplace, rencontrées dans la résolution d’équations
différentielles linéaires à coefficients constants, sont des fractions rationnelles en
fractions rationnelles en éléments simples et d’identifier chaque terme obtenu à des transformées de fonctions usuelles
La transformation de Laplace étant linéaire, la transformation inverse d’une fraction rationnelle est tout
simplement égale à la somme des transformations inverse de chaque élément de la décomposition en éléments simples de
cette fraction.
5.4 Transformées de fonctions courantes: Concrètement, pour pratiquer la transformée de Laplace d’une fonction courante, on ne la recalcule pas à chaque fois, maon se réfère au document qui suit, dans lequel figurent la plupart des transformées de Laplace utilisées couramment. Remarque u(t), la fonction échelon, est une fonction telle que
Hypothèse qui nous permet d’être sûr de travailler dans R+, conditionLaplace.
t
f(t) f(t-τ)
τ
COURS Systèmes Linéaires Continus Invariants
Dans les conditions de Heaviside, une dérivation dans le domaine temporel revient à une multiplication par p dans le domaine symbolique de Laplace.
Transformée de l'intégrale:
p
)0(g +
+
L [f(t-τ)] = ∫∞
− τ−0
pt dt)t(fe = L
Ce théorème permet de déterminer la valeur initiale du système.
ces deux derniers résultats n'ont de sens que si les limites existent. dans les théorèmes précédents. Ne pas l’oublier !
La transformation inverse de Laplace est définie par une intégrale de contour que nous n’aborderons pas tant elle
dépasse le cadre de ce cours. Nous nous contenterons d’une méthode beaucoup plus élémentaire car, dans la pratique, il est
voir à recourir au calcul de cette intégrale. Les transformées de Laplace, rencontrées dans la résolution d’équations
différentielles linéaires à coefficients constants, sont des fractions rationnelles en s. Il nous suffit donc de
rationnelles en éléments simples et d’identifier chaque terme obtenu à des transformées de fonctions usuelles
La transformation de Laplace étant linéaire, la transformation inverse d’une fraction rationnelle est tout
formations inverse de chaque élément de la décomposition en éléments simples de
Transformées de fonctions courantes:
Concrètement, pour pratiquer la transformée de Laplace d’une fonction courante, on ne la recalcule pas à chaque fois, maon se réfère au document qui suit, dans lequel figurent la plupart des transformées de Laplace utilisées couramment.
u(t), la fonction échelon, est une fonction telle que
Hypothèse qui nous permet d’être sûr de travailler dans R+, condition nécessaire pour l’application des transformées de
Systèmes Linéaires Continus Invariants
Page 9
Dans les conditions de Heaviside, une dérivation dans le domaine temporel revient à une multiplication
L [f(t-τ)] = e-τp F(p)
La transformation inverse de Laplace est définie par une intégrale de contour que nous n’aborderons pas tant elle
dépasse le cadre de ce cours. Nous nous contenterons d’une méthode beaucoup plus élémentaire car, dans la pratique, il est
voir à recourir au calcul de cette intégrale. Les transformées de Laplace, rencontrées dans la résolution d’équations
. Il nous suffit donc de décomposer ces
rationnelles en éléments simples et d’identifier chaque terme obtenu à des transformées de fonctions usuelles.
La transformation de Laplace étant linéaire, la transformation inverse d’une fraction rationnelle est tout
formations inverse de chaque élément de la décomposition en éléments simples de
Concrètement, pour pratiquer la transformée de Laplace d’une fonction courante, on ne la recalcule pas à chaque fois, mais on se réfère au document qui suit, dans lequel figurent la plupart des transformées de Laplace utilisées couramment.
nécessaire pour l’application des transformées de

PCSI Les Ulis COURS Systèmes Linéaires Continus Invariants
Sciences Industrielles pour l’Ingénieur Page 10
Tableau des transformées de Laplace usuelles f(t)u(t) F(p) f(t)u(t) F(p)
K K
p
cos( )tω 2 2
p
p + ω
Kt
2
K
p
( )sh tω 2 2p
ω− ω
ate− 1
p a+
( )ch tω 2 2
p
p − ω
nt 1
!n
n
p + sin( )ate t− ω
2 2( )p a
ω+ + ω
1t
e τ−
− 1
(1 )p p+ τ
cos( )ate t− ω 2 2( )
p a
p a
++ + ω
at ne t 1
!
( )n
n
p a +−
( )tδ 1
sin( )tω 2 2p
ω+ ω
5.4.1 Fonction de Dirac (ou impulsion unité) δ(t):
par définition δ(t) = 0, ∀t ≠ 0 Cette fonction représente une action s'exerçant pendant un temps très court.
d'où L [δ(t)] = [ ] dttet
pt∫∞
=− ⋅
00
)(δ =1
5.4.2 Fonction échelon unité u(t):
u(t) = 0 si t < 0 et u(t) = 1 si t ≥ 0
L [u(t)] = ∫∞
−
0
pt dt)t(ue = ∫∞
−
0
ptdte =
∞−
−
0
ptep
1 ⇒
5.4.3 Fonction rampe de pente unitaire:
f(t) = 0 si t < 0 et f(t) = t si t ≥ 0 donc f(t) = t.u(t)
dt
df = u(t) ⇒ L [t.u(t)] =
p
)0(f
p
)p(U + ⇒
5.4.4 Fonction sinusoïdale: f(t) = sin ωt . u(t)
F(p) = ∫∞
− ω0
pt dttsine qu'on intègre par parties en posant du = sin ωt dt et v = e-pt
5.4.5 Fonction exponentielle: f(t) = e
-at . u(t
L [δ (t)] = 1
L [u (t)] = p
1
L [t.u(t)] = 2p
1
L [sin ωt.u(t)] = 22p ω+
ω
L [e-at
.u(t)] = ap
1
+
PCSI Les Ulis COURS Systèmes Linéaires Continus Invariants
Sciences Industrielles pour l’Ingénieur Page 11
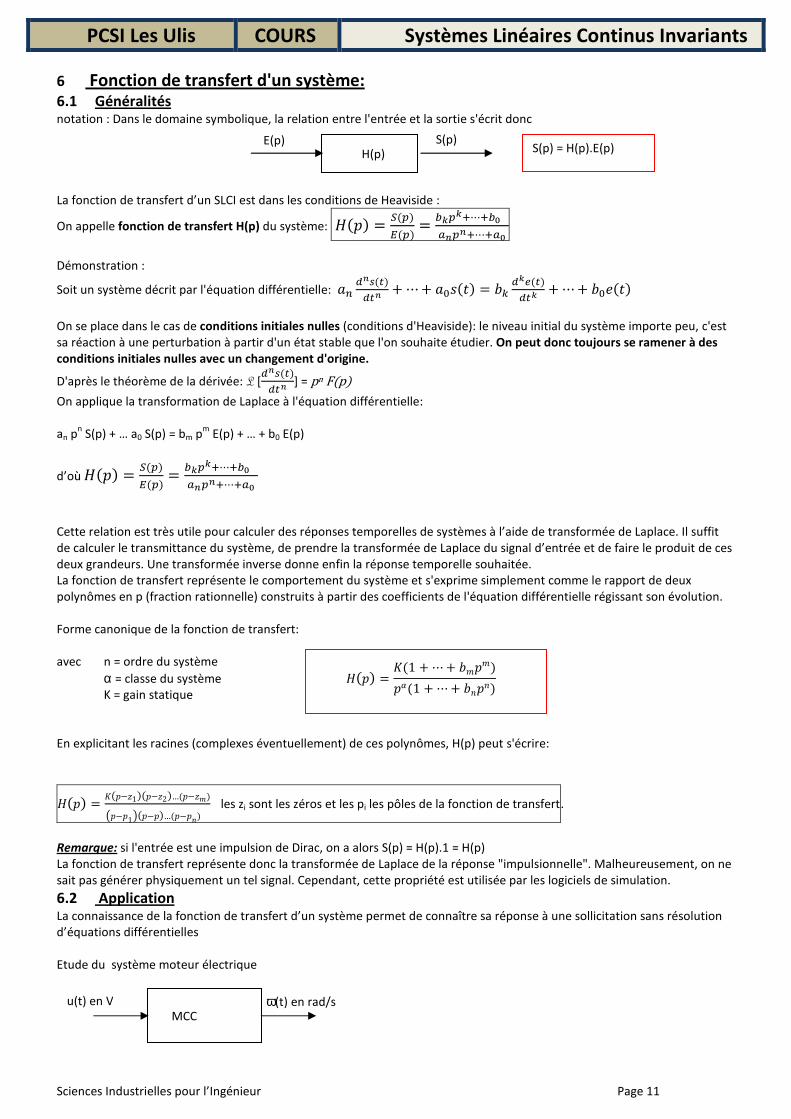
6 Fonction de transfert d'un système: 6.1 Généralités notation : Dans le domaine symbolique, la relation entre l'entrée et la sortie s'écrit donc La fonction de transfert d’un SLCI est dans les conditions de Heaviside :
On appelle fonction de transfert H(p) du système: ���� = ����
���= ����⋯��
�����⋯���
Démonstration :
Soit un système décrit par l'équation différentielle: �����������
+⋯+ ������ = �����������
+⋯+ ������ On se place dans le cas de conditions initiales nulles (conditions d'Heaviside): le niveau initial du système importe peu, c'est sa réaction à une perturbation à partir d'un état stable que l'on souhaite étudier. On peut donc toujours se ramener à des
conditions initiales nulles avec un changement d'origine.
D'après le théorème de la dérivée: L [���������
] = pnF�p� On applique la transformation de Laplace à l'équation différentielle: an p
n S(p) + … a0 S(p) = bm p
m E(p) + … + b0 E(p)
d’où ���� = ����
���= ����⋯��
�����⋯���
Cette relation est très utile pour calculer des réponses temporelles de systèmes à l’aide de transformée de Laplace. Il suffit de calculer le transmittance du système, de prendre la transformée de Laplace du signal d’entrée et de faire le produit de ces deux grandeurs. Une transformée inverse donne enfin la réponse temporelle souhaitée. La fonction de transfert représente le comportement du système et s'exprime simplement comme le rapport de deux polynômes en p (fraction rationnelle) construits à partir des coefficients de l'équation différentielle régissant son évolution. Forme canonique de la fonction de transfert: avec n = ordre du système
α = classe du système K = gain statique En explicitant les racines (complexes éventuellement) de ces polynômes, H(p) peut s'écrire:
���� = !��−#1���−#2�…��−#'�
(�−�1)��−��…��−�*�les zi sont les zéros et les pi les pôles de la fonction de transfert.
Remarque: si l'entrée est une impulsion de Dirac, on a alors S(p) = H(p).1 = H(p) La fonction de transfert représente donc la transformée de Laplace de la réponse "impulsionnelle". Malheureusement, on ne sait pas générer physiquement un tel signal. Cependant, cette propriété est utilisée par les logiciels de simulation.
6.2 Application La connaissance de la fonction de transfert d’un système permet de connaître sa réponse à une sollicitation sans résolution d’équations différentielles Etude du système moteur électrique
MCC u(t) en V ω(t) en rad/s
���� =!�1 + ⋯+ �'�
'�
�+�1 + ⋯+ �*�*�
S(p) = H(p).E(p) H(p) E(p) S(p)

PCSI Les Ulis COURS Systèmes Linéaires Continus Invariants
Sciences Industrielles pour l’Ingénieur Page 12
6.3 Fonction de transfert en boucle fermée d'un système asservi:
H(p) = )p(B).p(A1
)p(A
+
On peut toujours se ramener à un système à retour unitaire:
)p(B
1.
)p(B).p(A1
)p(B).p(A)p(H
+=
Système réduit de fonction de transfert Hr = )p(B).p(A1
)p(B).p(A
+
On note FTBO la fonction de transfert en boucle ouverte du système soit FTBO = A.B et on étudie la fonction de transfert du système réduit soit
FTBO
FTBOFTBF
+=
1
Si on connaît la FTBO (en général simple à calculer), la FTBF se trouve en réalisant la transformation ci-dessus.
6.4 Fonction de transfert en boucle ouverte: La fonction de transfert en boucle ouverte est définie comme la fonction de transfert du système lorsque le retour sur le sommateur est coupé. Elle comprend la chaîne d'action et la chaîne de mesure.
Figure 2 : Système en boucle ouverte
La fonction de transfert en boucle ouverte s’écrit :
M(p)FTBO= =H(p).K(p)
E(p)
S(p) A(p)
B(p)
E(p)
S(p) A(p) B(p)
E(p) 1/B(p)
H(p)
G(p)
+ -
E(p) S(p) ε(p)
M(p)
FTBO E(p) S(p)