oryx delivery robot
TRANSCRIPT

Oryx Delivery Robot
Product Manual V 1.1.0
BOOCAX
400 -161- 8661
Better Robot, Better Life

Oryx Robot_Product Manual
BooCax 1 / 23 boocax.com
Safety and Precautions
The use of this robot should follow the specifications of this product, and use out of range is
strictly forbidden! BooCax will not assume any responsibilities for the losses caused by improper
operation.
Symbols:
○! This symbol indicates danger, warning and attention.
○\ This sign indicates prohibited behavior.
⚠ PROHIBITIONS ○\ THE ROBOT IS NOT EQUIPPED WITH EXPLOSION-PROOF STRUCTURE AND SHALL NOT BE USED IN
FLAMMABLE ENVIRONMENT;
○\ DO NOT STAND IN FRONT OF A RUNNING ROBOT;
○\ DO NOT TOUCH THE DRIVING DEVICE UNDER OPERATION, WHICH MAY CAUSE INJURY AFTER BEING
ENTANGLED;
○\ WHEN THE BATTERY IS CHARGED, DO NOT TOUCH THE COMPONENTS IN THE CONTROL BOARD
(EXCEPT THE CIRCUIT PROTECTOR) AND THE WIRE TERMINALS, OTHERWISE, SHORT CIRCUIT,
LEAKAGE AND ELECTRIC SHOCK MAY OCCUR, CAUSING MACHINE DAMAGE, INJURY AND FIRE;
○\ DO NOT STAND IN THE FORWARD DIRECTION OF THE ROBOT FOR OPERATION, IN CASE THAT
SUDDEN START CAUSES AN ACCIDENT.
⚠ ATTENTIONS ○! BEFORE STARTING THE ROBOT, PLEASE CHECK WHETHER THE SAFETY COMPONENTS (SENSOR,
EMERGENCY STOP SWITCH, ETC.) ARE IN NORMAL CONDITIONS;
○! THE DRIVING WHEEL MAY SLIP ON WATERLOGGED OR GREASY FLOOR. PLEASE CLEAN THE FLOOR
PROMPTLY;
○! SMALL OBJECTS SUCH AS SCREW OR SOLID WASTE ON THE PATH MAY BE ENGAGED IN THE
UNIVERSAL WHEEL AND DRIVING WHEEL, MAKING THE ROBOT DEVIATE FROM THE ROUTE.
○! ROUGH PAVEMENT SUCH AS CONCRETE AND ASPHALT WILL ACCELERATE WEARING OF WHEELS,
SO PLEASE KEEP THE PAVEMENT SMOOTH AS MUCH AS POSSIBLE;
○! WHEN REMOVING ANY COMPONENT, PLEASE REMOVE THE CONNECTING LINE WITH THE MAIN
BODY FIRST, AND THEN OPERATE AFTER POWER OFF;
○! PLEASE FIRMLY INSTALL THE TERMINAL COVER OF THE BATTERY, OR IT MAY CAUSE SHORT
CIRCUIT, MACHINE DAMAGE AND FIRE IF THE COVER CURLS UP OR FALLS OFF;
○! WHEN CHARGING, PLEASE READ THE INSTRUCTIONS OF THE CHARGING PILE BEFORE OPERATION;
○! THE ROBOT BODY MUST BE MAINTAINED BY A TRAINED PROFESSIONAL.

Oryx Robot_Product Manual
BooCax 2 / 23 boocax.com
Contents
1. PRODUCT PROFILE ........................................................................................................................................... 3
2. SPECIFICATIONS ................................................................................................................................................ 4
3. EXTERNAL DIMENSIONS ................................................................................................................................ 5
4. FUNCTIONAL COMPONENTS ........................................................................................................................ 6
5. PRODUCT STRUCTURES ................................................................................................................................. 7
6. OPERATING INSTRUCTIONS FOR CONTROL PANEL ........................................................................... 8
6.1 FUNCTION DESCRIPTION OF CONTROL PANEL ............................................................................................................ 8
6.2 OPERATING INSTRUCTIONS FOR CONTROL PANEL ..................................................................................................... 9
7. PREPARATION BEFORE USE ....................................................................................................................... 11
7.1 INSTALL THE CHARGING PILE ..................................................................................................................................... 11
7.2 QR CODE DEPLOYMENT .............................................................................................................................................. 12
7.3 CLEAN UP BARRIERS .................................................................................................................................................... 13
7.4 DOWNLOAD APP ........................................................................................................................................................... 14
7.5 TURN ON AND CONNECT THE ROBOT ........................................................................................................................ 14
7.6 BUILD SCENE MAP ........................................................................................................................................................ 16
7.7 SET PATH POINTS AND TASK POINTS .......................................................................................................................... 17
8. START TO WORK ............................................................................................................................................. 21

Oryx Robot_Product Manual
BooCax 3 / 23 boocax.com
1. Product Profile
PRODUCT FEATURES
Easy to use—use robot like elevator
Mobile App operation; route deployment by pushing the robot, offline operation without reliance on 4G
network;
The target task is issued by clicking the button on control panel. The user can learn to operate instantly
without training.
Excellent distribution ability—optimized process and efficient delivery
The delivery workflow is greatly optimized, and the high-performance chassis is equipped with a smart
navigation engine to efficiently realize the high-frequency delivery between two points.
Accurate positioning and safe use—multiple operation tips
Centimeter-level precision ensures accurate positioning; driving light in combination with voice prompt
guarantees safe operation.
One-button return to charge—automatic charging
With one click, the robot will return to autocharge, eliminating the trouble of wire charging. It is easy to
manage, convenient, and can improve work efficiency.
BooCax "Oryx” delivery robot is used indoors, such as
factories, laboratory buildings, hospitals, e-commerce
warehouses, etc., to realize two-point delivery and cargo
handling.
The robot is light and small, and easy to use. It can issue
instructions through its own control panel, which allows the
robot to move and handle according to the actual needs,
greatly optimizing the field operation process, reducing
operating costs and improving the intelligent management of
enterprises.

Oryx Robot_Product Manual
BooCax 4 / 23 boocax.com
2. Specifications
Type Oryx Delivery Robot
Model Name LY-55
Function Indoor delivery and handling
Basic
parameters
Body weight 47.4 kg
External dimensions 530mm (diameter) * 397mm (chassis height) (shelf
height is adjustable)
Rated load 50 kg
Positioning/navigation
mode Laser SLAM
Communication mode WiFi
Man-machine interaction Physical button control panel, mobile App
Drive mode Two-wheel differential drive
Rotating diameter 610 mm
Operating
parameters
Running speed 0.8 m/s
Positioning accuracy ±20 mm
Navigation accuracy Startup ±25 mm; smooth running ±10 mm
Gradeability ≤8°
Obstacle crossing ability Vertical obstacle crossing height: 10mm
Width of driving channel ≥750 mm
Noise ≤[email protected]/s
Battery
Rated voltage/capacity 24V / 28Ah
Battery life Full load 10 ~ 12
Charging time 3 h (0-80%)
Charging mode Autocharge
Charging current 8A fast charge +1A slow charge
Safety
performance
Obstacle avoidance Laser+collision sensor
Emergency stop button Control panel
Driving safety Voice prompt,driving indicator
Working
environment
Indoor Concrete pavement, wood floor
Working temperature -5°C ~ +50°C

Oryx Robot_Product Manual
BooCax 5 / 23 boocax.com
3. External dimensions
Oryx Robot Basic
530 mm
397 mm

Oryx Robot_Product Manual
BooCax 6 / 23 boocax.com
4. Functional components
Description of front functional components
Description of back functional components
Laser radar
Charging connector
Expandab
le loading
platform
Vision sensor
Driving wheel
Expandable
loading platform
Power switch
Running light
Control
panel
Nameplate
Universal wheel
Collision sensor

Oryx Robot_Product Manual
BooCax 7 / 23 boocax.com
5. Product structures
Structure 1: Oryx suitable for handling Structure 2: Oryx suitable for delivery in
commercial buildings

Oryx Robot_Product Manual
BooCax 8 / 23 boocax.com
6. Operating instructions for control panel
6.1 Function description of control panel
Description of corresponding functions of buttons:
Task buttons
• 1-10 task buttons correspond to 10 target
location points;
• At present, only 10 target points can be set;
• Only one target point can be clicked once,
triggering one navigation task.
Return-to-charge
button
• By clicking the “Charge" button, the robot will
automatically return to the charging pile for
charging;
• The robot will keep charging at the pile until a new
task instruction is received.
Emergency stop
button
• By pressing the "Emergency Stop" button, the
robot will immediately stop the executing
task;
• By releasing the "Emergency Stop” button,
the robot will be in a stop status, at the same
time, the executing task will be cancelled, and
the target point button corresponding to the
task will keep flashing.
Low battery
alarm lamp
• When the battery is less than 15%, the alarm
lamp will flash continuously to give a
charging warning;
• When the battery is more than 15%, the alarm
lamp will stop flashing.
Return-to-charge
button
Task buttons
Low battery alarm lamp
Emergency stop button
Battery display

Oryx Robot_Product Manual
BooCax 9 / 23 boocax.com
6.2 Operating instructions for control panel
① Assign tasks
② Emergency stop
③ Cancel the task
Press the "Task 1" button,
the light is on, and the
robot will go to the target
position 1.
Press the "Emergency Stop"
button
Press the "Task 1" button, the
light keeps on, and the robot
will stop.
Release the "Emergency Stop"
button (rotate right)
The "Task 1" button light flashes,
the robot stops, and the ongoing
task is cancelled.

Oryx Robot_Product Manual
BooCax 10 / 23 boocax.com
④ Continue the task
Other wrong operations
Release the "Emergency Stop" button
(rotate right)
Press the "Task 1" button, the light keeps
on, and the robot will go to the target
position 1.
Click "Task 10", and the "Task 1”
button light turns off.
The "Task 10" button light keeps on,
and the robot will go to the target
position 10.
⑤ Modifying task
When "emergency stop button" is not released, there is no reaction by clicking any
button

Oryx Robot_Product Manual
BooCax 11 / 23 boocax.com
7. Preparation before use
7.1 Install the charging pile
The charging pile of the robot should be placed in a safe and tidy place. It should be on the horizontal
ground with its back against the flat wall, as shown in the following figure:
① Place the back of the charging pile against the wall, and then turn the foot pads at the bottom
to adjust the charging pile;
② Plug the 3-pin female socket end of the three-plug power cord into the 3-pin male end of the
adapter, and connect the other end (i.e., power plug) to a 110V/220V AC socket to complete
the power-on preparation.

Oryx Robot_Product Manual
BooCax 12 / 23 boocax.com
7.2 QR code deployment
In order to enhance the positioning accuracy of the robot, QR codes are provided so that the long-
term running is more stable.
Usage scenario of QR codes:
①Right above the charging pile;
②The QR codes are generally used to
assist positioning where the robot
positioning is prone to deviation, for
example, in a long corridor, a QR code can
be pasted at a distance of 15 m.
1) QR code pasting
• Avoid deploying at a place with strong light, so as not to affect the camera to capture the QR
code image;
• The QR code should be pasted at the same level as the camera;
• Paste the QR code as the arrow points;
• A QR code damaged shall be replaced in time.
2) The example is shown below:
3) Precautions
• No same QR codes can appear in the same environment;
• When mapping, the robot stops at the QR code board for 1-2 seconds to ensure that the QR
code is saved(Voice prompt will be given for successful identification);
• The QR code of the charging pile should be identified by the camera in front of the robot, and
the QR code of a corridor is identified by the cameras on two sides;
• When incrementally mapping, it is necessary to ensure that the robot's positioning is accurate
before identifying and saving the QR code.
Same level Parallel to
the ground

Oryx Robot_Product Manual
BooCax 13 / 23 boocax.com
7.3 Clean up barriers
1) Before using the robot, remove the barriers in the aisle to avoid affecting the working and
charging;
Narrowest walking width: 750 mm
2) Make sure that there is no vertical step over 10mm, and no objects (books, boards, stones, etc.)
over 10mm in height on the working path;
The obstacle crossing height of the robot is 10 mm
3) Make sure that there is no steep slope on site:
Maximum gradeability: 8°

Oryx Robot_Product Manual
BooCax 14 / 23 boocax.com
7.4 Download App
Android 8.0 and above mobile phone scan the QR code below to download the App and install it:
Scan by WeChat or mobile browser to download App
7.5 Turn on and connect the robot
1) When starting up for the first time, turn the power key switch to "on" position to connect the
power;
2) Turn on the phone wifi, search the wifi network beginning with "LY-****", and enter the
assigned initial password “robot123” to connect the robot;
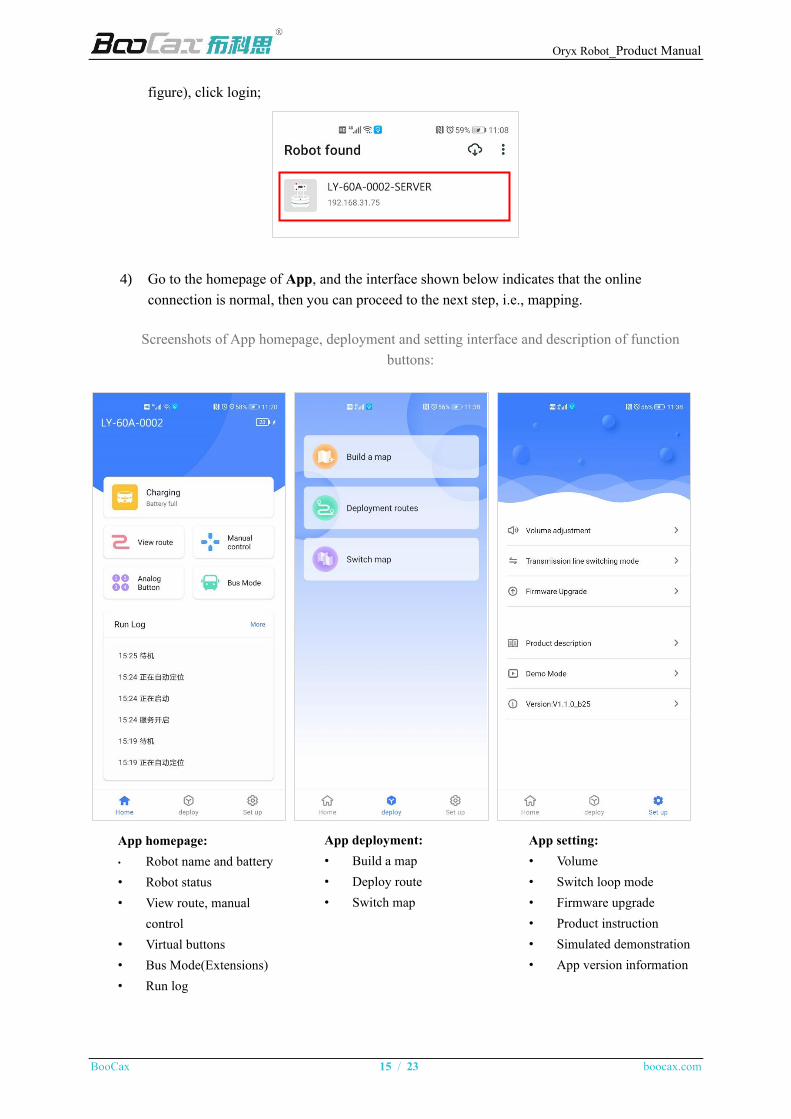
3) Open the App, you will find the robot beginning with "LY-****" (as shown in the following
Oryx Robot_Product Manual
BooCax 15 / 23 boocax.com
figure), click login;
4) Go to the homepage of App, and the interface shown below indicates that the online
connection is normal, then you can proceed to the next step, i.e., mapping.
Screenshots of App homepage, deployment and setting interface and description of function
buttons:
App homepage:
• Robot name and battery
• Robot status
• View route, manual
control
• Virtual buttons
• Bus Mode(Extensions)
• Run log
•
App setting:
• Volume
• Switch loop mode
• Firmware upgrade
• Product instruction
• Simulated demonstration
• App version information
App deployment:
• Build a map
• Deploy route
• Switch map

Oryx Robot_Product Manual
BooCax 16 / 23 boocax.com
7.6 Build scene map
1) PREPARATION
Push the robot at 0.5-1m away from the charging pile.
Robot battery>50%
2) BEGIN TO BUILD MAP
Click Deployment-Build Map on App, and you will see the "Build Map" interface (shown in the
middle figure below). Click "Start to map" to build a 2D map of the working scene (push the robot by
hand to build the map).
White radius—the range scanned by the laser;
Black thick line—the scanned obstacles (special objects such as transparent glass may not be
identified);
Gray area—Area that has not been scanned.
The robot can accurately execute the assigned tasks in the new scene only after the mapping is
completed.
⚠ Attentions:
① When mapping by hand, push the robot forward slowly in the scene from the charging pile as
the starting point, and finally return to the charging pile to form a large circle;
② When mapping, don't be too close to the wall and keep a distance of at least 0.5 m;
③ The operator must stand behind the robot to avoid leaving noise on the map;
④ When turning, walk slowly so that the robot can collect as much characteristic point data as
possible;

Oryx Robot_Product Manual
BooCax 17 / 23 boocax.com
⑤ As laser radar does not recognize accurately in abnormal environment (glass, mirror, pure
black object, grid, etc.), it is suggested to carry out appropriate treatment, such as pasting
frosted sticker, gray adhesive tape, reflector, etc.;
⑥ If the working scene is too large, you can use "incremental mapping" for local repair and
area expansion;
⑦ When passing the QR code, stay in front for more than 1 second, and there will be a voice
prompt when it is successfully scanned.
7.7 Set path points and task points
The walking path consists of charging points, path points and task points, in which N path points
(setting points while walking) and 10 task points are allowed.
When deploying, you can: push the robot by hand to set points while walking; or drag the map to on
the App interface.
The detailed steps are shown in the following figure ("Rapid Deployment" is the initial path
setting, "Free Edit" is to edit the existing path):
➢ Rapid deployment
① Set the charging position:
Click "Rapid Deployment" to enter the route setting mode; push the robot to the charging pile
for docking as guided, and click Next to complete the setting when the green symbol shows.
The task points
correspond to the 10
task buttons on the
panel.

Oryx Robot_Product Manual
BooCax 18 / 23 boocax.com
② Set path points and task points:
• Path points and task points are also set on the above interface, which can be realized by
pushing robot by hand/dragging map;
• Path points have to be set where the robot has to pass through, such as turning and gate
(as shown in Figure 3 below: gray points are path points);
• The target location points are the task points, which correspond to the 10 task buttons on
the panel (as shown in Figure 2 below: the purple symbol is the task point, and the task
point can be set with a parking direction of 180 degrees).

Oryx Robot_Product Manual
BooCax 19 / 23 boocax.com
➢ Free editing—adjust path
• If the route by rapid deployment is not applicable, click "Free Edit" to adjust the route.
The robot supports adding/deleting/moving points, changing running route, changing
disinfection points, etc.

Oryx Robot_Product Manual
BooCax 20 / 23 boocax.com
⚠Attention: Don’t pass through walls.
When mapping, the turning should be deployed with path points which cannot pass through the wall,
as shown in the figure below:
As shown in the figure above, when the robot has to move from A to C, but is obstructed by a wall
or an unmovable obstacle inbetween, the correct path deployment should be A-B-C. B must be set as it is
the key node of the turning.
The figure on the right shows the wrong deployment, in which the path will go through the wall
directly, causing the robot unable to walk.

Oryx Robot_Product Manual
BooCax 21 / 23 boocax.com
8. Start to work
① After the route has been deployed, push the robot to the charging pile or in front of the QR code;
② Ensure that the robot is on the route and ready to accept the task instruction;
③ Press the "Return-to-charge" button or the "Task Point" button on the control panel to
automatically navigate to complete the assigned task.

Oryx Robot_Product Manual
BooCax 22 / 23 boocax.com
www.boocax.com
Business cooperation / after-sales: 0086-400-161-8661
Beijing Headquarter: Shenzhen Branch: Shandong Branch:
Room 606, Jianjin Center,
Yongtaiyuan A No.1, Qinghe,
Haidian District, Beijing
3F, Building 10, COFCO
Fu’an Robotics Industrial
Park, Fuyong Street, Baoan
District, Shenzhen
No.269 Hengfeng Road,
Zoucheng Central
Electromechanical Industrial
Park, Ji’ning, Shandong