ΡΟΜΠΟΤΙΚΗ ΣΤΗΝ ΥΓΕΙΑ · 2012-12-03 · ΡΟΜΠΟΤΙΚΗ ΓΙΑ ΕΡΕΥΝΑ...
TRANSCRIPT
Τμήμα Ηλεκτρολόγων Μηχανικών & Τεχνολογίας Υπολογιστών
Εισαγωγή
Τα ρομπότ καλούνται να διευκολύνουν τον ανθρώπινο παράγοντα σε σημεία
που η παρουσία του καθίσταται αδύνατη.
Τέτοια σημεία είναι:
Η επέμβαση σε απρόσιτα σημεία σε περιπτώσεις φυσικών καταστροφών Η υποβοήθηση του ανθρώπου σε κλάδους της υγείας που η φυσική του παρουσία και
προσπάθεια δεν μπορεί να εγγυηθεί με ασφάλεια το αποτέλεσμα
Η ερευνητική ομάδα ANeμMoS αποτελείται από ερευνητές που υπό την καθοδήγηση του καθηγητή Αντωνίου Τζέ προσπαθεί να αξιοποιήσει την αιχμή της τεχνολογίας για να δημιουργήσει καινοτόμα ρομπότ που θα μπορέσουν να υποβοηθήσουν τον άνθρωπο σε περιπτώσεις:
Έρευνας και διάσωσης σε περιπτώσεις φυσικών καταστροφών (search and rescue)
Χειρουργικών επεμβάσεων (surgical robotics)
Αποκατάστασης ανθρωπίνων άκρων με προσθετικά μέλη (rehabilitation)
Τζές Αντώνιος Καθηγητής & Επιστημονικός Υπεύθυνος
Ανδριανέσης Κωνσταντίνος Υποψήφιος Διδάκτωρ
Παπαχρήστος Χρήστος Υποψήφιος Διδάκτωρ
Αρβανιτάκης Ιωάννης Υποψήφιος Διδάκτωρ
Ευαγγελίου Νικόλαος Υποψήφιος Διδάκτωρ
Θάνου Μιχαήλ Υποψήφιος Διδάκτωρ
Κελασίδη Ελένη Υποψήφια Διδάκτωρ
ΡΟΜΠΟΤΙΚΗ ΣΤΗΝ ΥΓΕΙΑ
ΡΟΜΠΟΤΙΚΗ ΧΕΙΡΟΥΡΓΙΚΗ
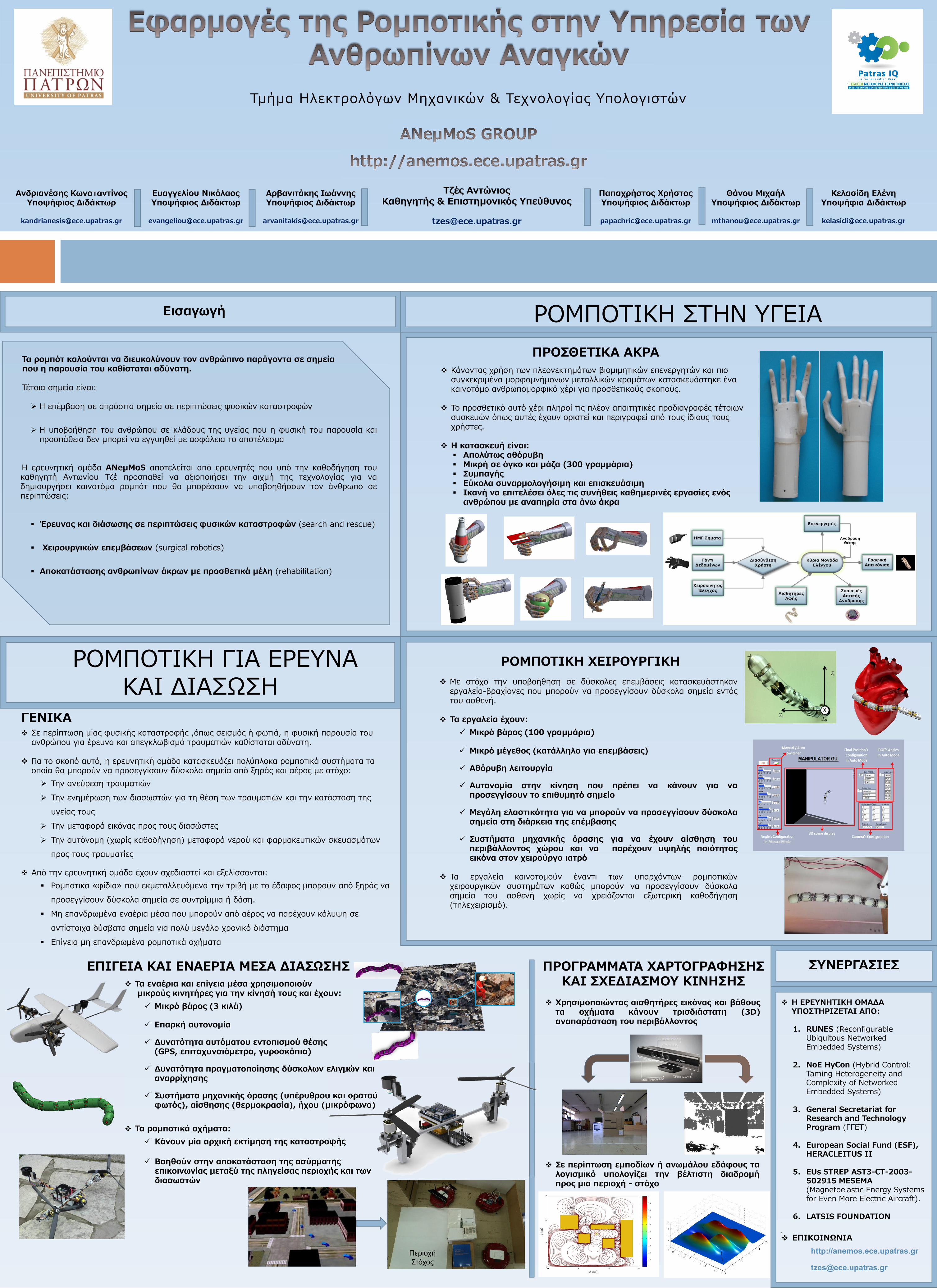
ΠΡΟΣΘΕΤΙΚΑ ΑΚΡΑ Κάνοντας χρήση των πλεονεκτημάτων βιομιμητικών επενεργητών και πιο
συγκεκριμένα μορφομνήμονων μεταλλικών κραμάτων κατασκευάστηκε ένα καινοτόμο ανθρωπομορφικό χέρι για προσθετικούς σκοπούς.
Το προσθετικό αυτό χέρι πληροί τις πλέον απαιτητικές προδιαγραφές τέτοιων συσκευών όπως αυτές έχουν οριστεί και περιγραφεί από τους ίδιους τους χρήστες.
Η κατασκευή είναι: Απολύτως αθόρυβη Μικρή σε όγκο και μάζα (300 γραμμάρια) Συμπαγής Εύκολα συναρμολογήσιμη και επισκευάσιμη Ικανή να επιτελέσει όλες τις συνήθεις καθημερινές εργασίες ενός
ανθρώπου με αναπηρία στα άνω άκρα
Με στόχο την υποβοήθηση σε δύσκολες επεμβάσεις κατασκευάστηκαν εργαλεία-βραχίονες που μπορούν να προσεγγίσουν δύσκολα σημεία εντός του ασθενή.
Τα εργαλεία έχουν:
Μικρό βάρος (100 γραμμάρια)
Μικρό μέγεθος (κατάλληλο για επεμβάσεις)
Αθόρυβη λειτουργία
Αυτονομία στην κίνηση που πρέπει να κάνουν για να προσεγγίσουν το επιθυμητό σημείο
Μεγάλη ελαστικότητα για να μπορούν να προσεγγίσουν δύσκολα σημεία στη διάρκεια της επέμβασης
Συστήματα μηχανικής όρασης για να έχουν αίσθηση του περιβάλλοντος χώρου και να παρέχουν υψηλής ποιότητας εικόνα στον χειρούργο ιατρό
Τα εργαλεία καινοτομούν έναντι των υπαρχόντων ρομποτικών
χειρουργικών συστημάτων καθώς μπορούν να προσεγγίσουν δύσκολα σημεία του ασθενή χωρίς να χρειάζονται εξωτερική καθοδήγηση (τηλεχειρισμό).
ΡΟΜΠΟΤΙΚΗ ΓΙΑ ΕΡΕΥΝΑ ΚΑΙ ΔΙΑΣΩΣΗ
Σε περίπτωση μίας φυσικής καταστροφής ,όπως σεισμός ή φωτιά, η φυσική παρουσία του ανθρώπου για έρευνα και απεγκλωβισμό τραυματιών καθίσταται αδύνατη.
Για το σκοπό αυτό, η ερευνητική ομάδα κατασκευάζει πολύπλοκα ρομποτικά συστήματα τα οποία θα μπορούν να προσεγγίσουν δύσκολα σημεία από ξηράς και αέρος με στόχο: Την ανεύρεση τραυματιών Την ενημέρωση των διασωστών για τη θέση των τραυματιών και την κατάσταση της
υγείας τους Την μεταφορά εικόνας προς τους διασώστες Την αυτόνομη (χωρίς καθοδήγηση) μεταφορά νερού και φαρμακευτικών σκευασμάτων
προς τους τραυματίες
Από την ερευνητική ομάδα έχουν σχεδιαστεί και εξελίσσονται: Ρομποτικά «φίδια» που εκμεταλλευόμενα την τριβή με το έδαφος μπορούν από ξηράς να
προσεγγίσουν δύσκολα σημεία σε συντρίμμια ή δάση. Μη επανδρωμένα εναέρια μέσα που μπορούν από αέρος να παρέχουν κάλυψη σε
αντίστοιχα δύσβατα σημεία για πολύ μεγάλο χρονικό διάστημα Επίγεια μη επανδρωμένα ρομποτικά οχήματα
Τα εναέρια και επίγεια μέσα χρησιμοποιούν μικρούς κινητήρες για την κίνησή τους και έχουν:
Μικρό βάρος (3 κιλά)
Επαρκή αυτονομία
Δυνατότητα αυτόματου εντοπισμού θέσης (GPS, επιταχυνσιόμετρα, γυροσκόπια) Δυνατότητα πραγματοποίησης δύσκολων ελιγμών και
αναρρίχησης
Συστήματα μηχανικής όρασης (υπέρυθρου και ορατού φωτός), αίσθησης (θερμοκρασία), ήχου (μικρόφωνο)
Τα ρομποτικά οχήματα:
Κάνουν μία αρχική εκτίμηση της καταστροφής
Βοηθούν στην αποκατάσταση της ασύρματης επικοινωνίας μεταξύ της πληγείσας περιοχής και των διασωστών
Σε περίπτωση εμποδίων ή ανωμάλου εδάφους τα λογισμικό υπολογίζει την βέλτιστη διαδρομή προς μια περιοχή - στόχο
ΓΕΝΙΚΑ
ΕΠΙΓΕΙΑ ΚΑΙ ΕΝΑΕΡΙΑ ΜΕΣΑ ΔΙΑΣΩΣΗΣ ΠΡΟΓΡΑΜΜΑΤΑ ΧΑΡΤΟΓΡΑΦΗΣΗΣ ΚΑΙ ΣΧΕΔΙΑΣΜΟΥ ΚΙΝΗΣΗΣ
Περιοχή Στόχος
Χρησιμοποιώντας αισθητήρες εικόνας και βάθους τα οχήματα κάνουν τρισδιάστατη (3D) αναπαράσταση του περιβάλλοντος
ΣΥΝΕΡΓΑΣΙΕΣ
Η ΕΡΕΥΝΗΤΙΚΗ ΟΜΑΔΑ ΥΠΟΣΤΗΡΙΖΕΤΑΙ ΑΠΟ:
1. RUNES (Reconfigurable
Ubiquitous Networked Embedded Systems)
2. NoE HyCon (Hybrid Control: Taming Heterogeneity and Complexity of Networked Embedded Systems)
3. General Secretariat for Research and Technology Program (ΓΓΕΤ)
4. European Social Fund (ESF), HERACLEITUS II
5. EUs STREP AST3-CT-2003-502915 MESEMA (Magnetoelastic Energy Systems for Even More Electric Aircraft).
6. LATSIS FOUNDATION ,
ΕΠΙΚΟΙΝΩΝΙΑ http://anemos.ece.upatras.gr