object-oriented bond-graph modeling of a gyroscopically stabilized camera platform robert t....
Post on 20-Dec-2015
215 views
TRANSCRIPT

ICBGM'03
Object-Oriented Bond-Graph Modeling of a Gyroscopically
Stabilized Camera Platform
Robert T. McBride Dr. François Cellier
Raytheon Missile Systems University of Arizona
ICBGM'03
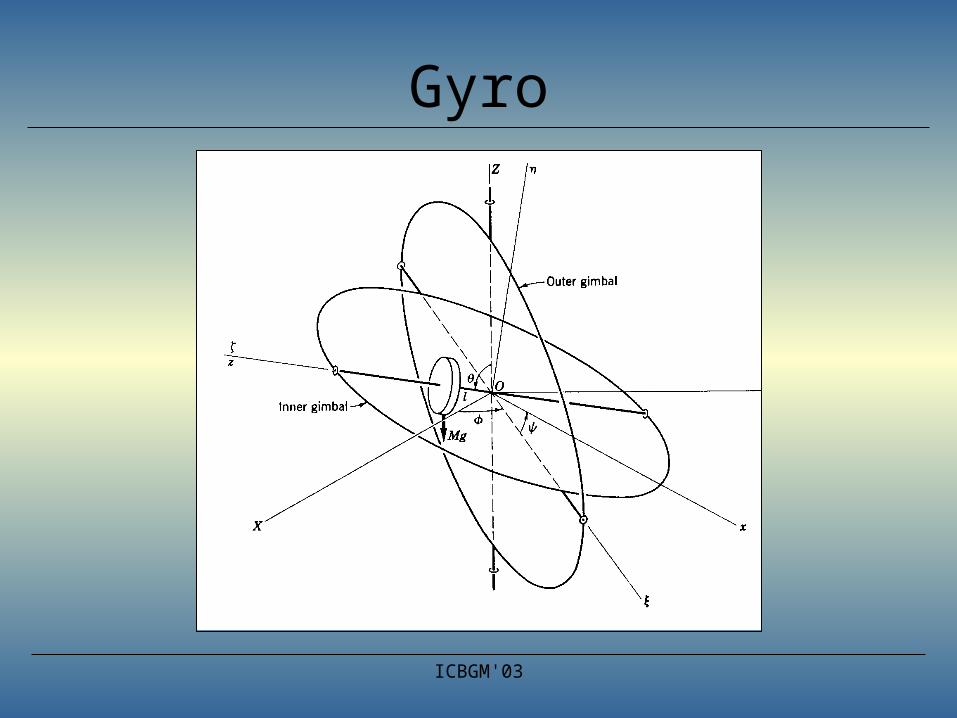
Gyro

ICBGM'03
Gyro Bond Graph
ICBGM'03
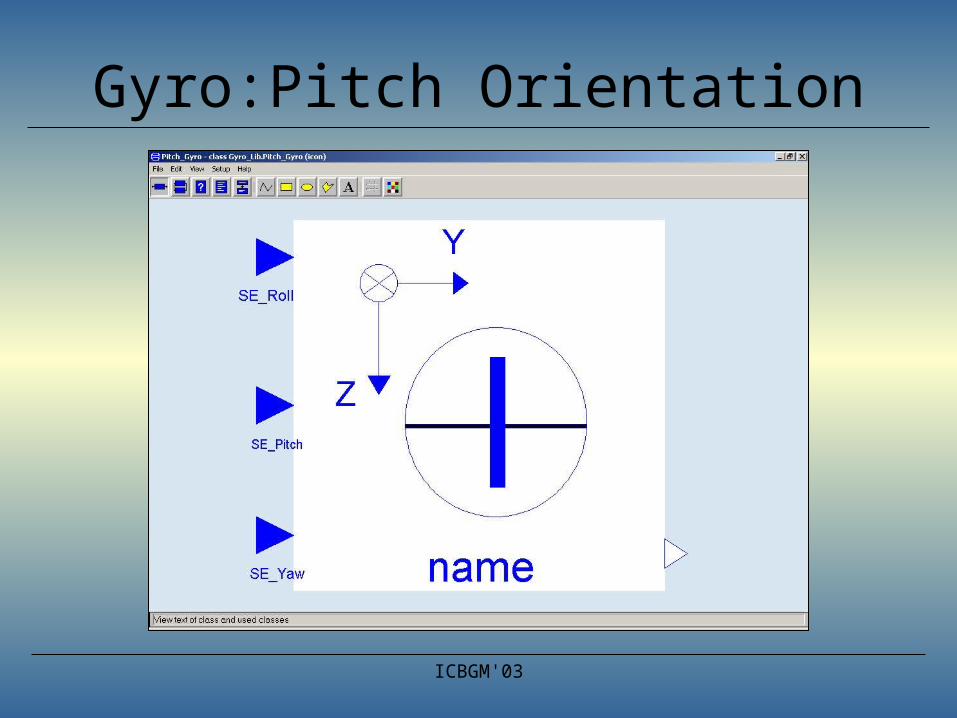
Gyro:Pitch Orientation

ICBGM'03
Gyro:Yaw Orientation

ICBGM'03
Gyro:Roll Orientation
ICBGM'03
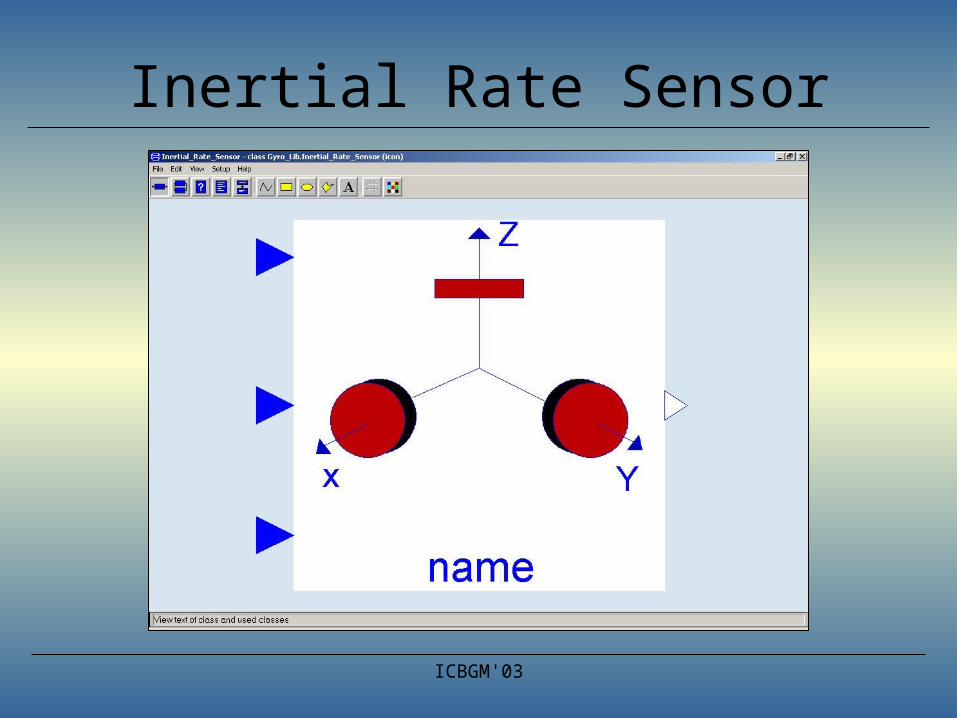
Inertial Rate Sensor

ICBGM'03
Camera Model

ICBGM'03
Simple Platform Inertia

ICBGM'03
Simple Platform Inertia: 3 Channels

ICBGM'03
Stabilized Platform

ICBGM'03
Stabilized Platform and Camera

ICBGM'03
Platform and Camera Test Scenario

ICBGM'03
0 5 10 15-15
-10
-5
0
5
10
15A
ngle
(de
g.)
Time (sec.)
Platform Commanded Angular Pos.
RollPitchYaw
Platform Commanded Angular Positions

ICBGM'03
0 5 10 15-10
-5
0
5
10P
itch
Ang
le (
deg.
)
Platform: Pitch
Gyro-SensedCommanded
0 5 10 15-1.5
-1
-0.5
0
0.5
1
Pitc
h A
ngle
Err
or (
deg.
)
Time
Gyro-Sensed - Commanded
Pitch Achieved Position

ICBGM'03
Roll Achieved Position
0 5 10 15-20
-10
0
10
20R
oll A
ngle
(de
g.)
Platform: Roll
Gyro-SensedCommanded
0 5 10 15-10
-5
0
5
10
Rol
l Ang
le E
rror
(de
g.)
Time
Gyro-Sensed - Commanded

ICBGM'03
Yaw Achieved Position
0 5 10 15-20
-10
0
10
20Y
aw A
ngle
(de
g.)
Platform: Yaw
Gyro-SensedCommanded
0 5 10 15-4
-2
0
2
4
Yaw
Ang
le E
rror
(de
g.)
Time
Gyro-Sensed - Commanded

ICBGM'03
Camera: Pitch Achieved Position
0 5 10 15-20
0
20
40
60
80P
itch
Ang
le (
deg.
)
Camera: Pitch
Camera Body Pos.CommandedPlatform Body Motion
0 5 10 15-20
0
20
40
60
Pitc
h: C
amer
a In
ertia
l Err
or (
deg.
)
Time
Camera Cmnd. - Camera Pos. - Body Mtn.

ICBGM'03
0 5 10 15-20
0
20
40
60
80R
oll A
ngle
(de
g.)
Camera: Roll
Camera Body Pos.CommandedPlatform Body Motion
0 5 10 15-20
0
20
40
60
Rol
l: C
amer
a In
ertia
l Err
or (
deg.
)
Time
Camera Cmnd. - Camera Pos. - Body Mtn.
Camera: Roll Achieved Position

ICBGM'03
0 5 10 15-20
0
20
40
60
80
Yaw
Ang
le (d
eg.)
Camera: Yaw
Camera Body Pos.CommandedPlatform Body Motion
0 5 10 15-20
0
20
40
60
Yaw
: Cam
era
Iner
tial E
rror (
deg.
)
Time
Camera Cmnd. - Camera Pos. - Body Mtn.
Camera: Yaw Achieved Position

ICBGM'03
• The paper has demonstrated how bond-graph models of physical devices can be embedded in an overall control architecture in an object-oriented fashion.
• The Dymola modeling framework enables the modeler to convert hierarchical bond-graph models into software objects that can be integrated into larger entities, and that can be used in simulation experiments.
• A gyroscopically stabilized platform was used in this paper to demonstrate the generality of the approach to object-oriented bond-graph modeling of physical systems, and to show that the tools available to this end are powerful enough to deal with complex industrial processes.
Conclusions