note de curs fundamente de inginerie mecanicĂ · note de curs fundamente de inginerie mecanicĂ...
TRANSCRIPT

NOTE DE CURS
FUNDAMENTE DE INGINERIE MECANICĂ
Dorin SIMOIU Alexandru PERESCU
2017

2
NOŢIUNI DE CALCUL VECTORIAL
Există două categorii de mărimi fizice: mărimi scalare şi mărimi vectoriale. Mărimile
vectoriale sunt mărimi caracterizate de patru elemente:
1. Punct de aplicaţie (punctul în care acţionează)
2. Direcţia (suportul pe care acţionează)
3. Sensul (arată orientarea)
4. Valoarea (modulul/mărimea)
Valoarea F sau |F|
Operaţii cu mărimi vectoriale
Pentru că mărimile vectoriale au o prelucrare grafică dar în acelaşi timp au şi o valoare
numerică, operaţiile se pot face: grafic şi analitic.
Adunarea a doi vectori grafic
a,b
Grafic doi vectori se adună pe baza regulii paralelogramului
c=a+b
c2=a2+b2+2ab cos α
Teorema lui Pitagora generalizată în ∆OBC:
c2=a2+b2-2ab cos(π-α)⇒c2=a2+b
2+2ab cos α
Operaţia inversă este descompunerea unui vector după o direcţie.

3
Pentru determinarea valorii celor două componente se foloseşte teorema sinusurilor.
Într-un triunghi o latura supra sinusului unghiului opus este egală cu cealaltă latură supra
sinusul unghiului opus.
∆OAC: F2
sin α1
=F1
sin α2
=F
sin[π-(α1+α2)]
Aplicaţie:
O lampă având 5 kg este susţinută deasupra unei străzi printr-un fir. Să se determine forţele
care solicită cele două capete ale firului.
m=5 kg, α= 30°, β= 40°, F1=?, F2=?

4
F1
sin (π2
-α)=
F2
sin (π2
-β)=
G
sin(α+β)
F1=G
sin(α+β)∙ cos α
F2=-G∙ cos β
sin (α+β)
G=m∙g=5∙10=50N
Proiecţia unui vector pe o direcţie.
cos α=OA''
OA→pr
∆F=F∙ cos α
Proiecţia unui vector pe o dreaptă (pe o direcţie) este o mărime scalară.
Fx=F∙ cos α
Fy=F∙ cos (π
2-α) ⇒ Fy=F∙ sin α
Cum se scrie forţa dacă se cunosc proiecţiile?
Axele au o orientare, iar această orientare este dată de vectorii universali (versori).
F=Fxi+Fyj reprezentare analitică

5
F=Fxi+Fyj+Fzk
Forţa în cazul nostru este diagonala unui paralelipiped care are relaţia:
F2=Fx2+Fy
2+Fz2
F=√Fx2+Fy
2+Fz2
cos α=Fx
F=
Fx
√Fx2+Fy
2+Fz2
cos β=Fy
F=
Fy
√Fx2+Fy
2+Fz2
cos γ=Fz
F=
Fz
√Fx2+Fy
2+Fz2
Operaţii analitice
1. Adunarea a doi vectori
Fie a=axi+ayj+azk ; b=bxi+byj+bzk
a+b=c ⇒ c=(ax+bx)i+(ay+by)j+(az+bz)k

6
→{
cx=ax+bx
cy=ay+by
cz=az+bz
2. Produsul scalar a doi vectori este o mărime scalară
a∙b=ab cos(a,b)
a=axi+ayj+azk
b=bxi+byj+bzk
Calculul analitic al produsului scalar a doi vectori
a∙b=axbx+ayby+azbz
cos(a,b) =a∙b
a∙b
cos(a,b) =axbx+ayby+azbz
a∙b
cos(a,b) =axbx+ayby+azbz
√ax2+ay
2+az2∙√bx
2+by
2+bz
2
Aplicaţie.
Să se calculeze produsul scalar dintre vectorii:
a=3i-7j+k
b=2i+j+k
a∙b=ab cos(a,b)
a∙b=6-7+1=0 ⇒a⊥b
3. Produsul vectorial
Prin această operaţie se obţine tot un vector care va avea cele patru elemente:
- Punctul de aplicaţie (originea)
- Direcţia este perpendiculară pe planul dat de cei doi vectori
- Sensul este dat de regula burghiului drept
- Mărimea c=ab sin(a,b) unde c=a×b (produsul vectorial nu este comutativ)

7
Presupunem că:
a=ax∙i+ay∙j+az ∙ k
b=bx∙i+by∙j+b𝑧 ∙ k
c=(ax∙i+ay∙j+az ∙ k) x (bx∙i+by∙j+b𝑧 ∙ k)
c=ax∙bx∙0+bx∙ay(-k)+azbx∙j+axby∙k+0+azby(-i)+axbz(-j)+aybzi+0
c= |
i j kax ay az
bx by bz
| = (ay∙bz-azby)i+(azbx-axbz)j+(axby-aybx)k
Indicii au o permutare circulară:
4. Produsul mixt
Se referă la produsul a trei vectori, pentru doi se face produsul vectorial şi apoi produsul
scalar cu al treilea.
a∙(b×c)
a=ax∙i+ay∙j+az ∙ k
b=bx∙i+by∙j+bz ∙ k
c=cx∙i+cy∙j+cz ∙ k
a∙(b×c)= |
ax ay az
bx by bz
cx cy cz
|
Dacă doi vectori sunt coliniari produsul mixt este nul.
5. Produsul dublu vectorial
d=a×(b×c)
d= | b c
a∙b a∙c|=(a∙c)∙b-(a∙b)∙c

8
STATICA
DEFINITIE: Statica este partea mecanicii care se ocupă în principal cu următoarele aspecte:
1. Reducerea sistemului de forţe, care constă în găsirea celui mai simplu sistem de forţe
echivalent cu sistemul dat.
2. Echilibrul sistemelor de forţe care urmăreşte condiţiile în care diferite sisteme de forţe
îşi fac echilibrul.
In statică corpurile materiale se modelează astfel:
1) Modelul unui punct material, atunci când corpul are dimensiuni mici şi în consecinţă
se poate considera că întreaga masă este concentrată într-un punct.
2) Modelul corpului rigid. Când corpul are dimensiuni mari, prin urmare este important
să ţinem cont de punctele de aplicaţie ale forţelor. În acest model corpul se consideră
nedeformabil.
Statica punctului material
Echilibrul unui punct material liber
Un punct material este liber dacă poate ocupa orice poziţie în spaţiu. Poziţia lui este
determinată prin trei parametrii geometrici (distanţe sau unghiuri).
Se spune că un punct material are trei grade de libertate (q1, q2, q3 parametrii geometrici)
Forţele care acţionează asupra unui punct material sunt forţe concurente, prin urmare
considerăm una dintre forţe Fi pe care o putem scrie analitic astfel:
Fi=Fixi+Fiyj+Fizk
i=1,2,….n

9
Dacă adunăm aceste forţe vom obţine o rezultantă:
R=∑Fi
n
i=1
R=(∑Fix
n
i=1
) i+(∑Fiy
n
i=1
) j+(∑Fiz
n
i=1
) k⇒ R=Rxi+Ryj+Rzk
Comparând ultimele două relaţii rezultă:
{
Rx=∑ Fix
n
i=1
Ry=∑ Fiy
n
i=1
Rz=∑ Fiz
n
i=1
Pentru echilibrul punctului efectul rezultantei trebuie să fie nul, prin urmare rezultanta trebuie
să fie nulă.
{
Rx=0
Ry=0
Rz=0
Rezultanta este nulă dacă toate componentele sunt nule.
{
∑Fix=0
n
i=1
∑ Fiy
n
i=1
=0
∑Fiz
n
i=1
=0

10
Din aceste trei ecuaţii se poate determina poziţia de echilibru a punctului.
În aşa numita problemă directă se cunosc forţele care acţionează asupra punctului şi se
determină poziţia de echilibru.
În general această problemă este unic determinată, adică are o soluţie unică.
Se poate pune şi problema inversă, adică vrem o anumită poziţie de echilibru şi se cere să se
determine forţele care asigură această poziţie de echilibru. Aceasta nu are soluţie unică.
Aplicaţie:
Un punct este atras de 3 puncte fixe, ale unui triunghi cu forţe proporţionale cu distanţele, de
masă neglijabilă. Să se determine poziţia de echilibru.
Condiţia de echilibru R=F1+F2
+F3=0
F1=k1MA
F2=k2MB
F3=k3MC
MA =(x1-x)i+(y1-y)j+(z1-z)k
MB =(x2-x)i+(y2-y)j+(z2-z)k
MC =(x3-x)i+(y3-y)j+(z3-z)k
Condiţia:

11
{
∑Fix=0
n
i=1
∑Fiy
n
i=1
=0
∑Fiz
n
i=1
=0
⇒{
k1(x1-x)+k2(x2-x)+k3(x3-x)=0
k1(y1-y)+k2(y2
-y)+k3(y3-y)=0
k1(z1-z)+k2(z2-z)+k3(z3-z)=0
{
x=
k1x1+k2x2+k3x3
k1+k2+k3
y=k1y
1+k2y
2+k3y
3
k1+k2+k3
z=k1z1+k2z2+k3z3
k1+k2+k3
Dacă: k1=k2=k3=k
{
x=
x1+x2+x3
3
y=y
1+y
2+y
3
3
z=z1+z2+z3
3
Echilibrul unui punct material supus la legături
Un punct material este supus la legături când nu poate ocupa orice poziţie în spaţiu, adică este
supus unor restricţii geometrice. Restricţiile geometrice reduc numărul gradelor de libertate.
Se pot întâlni două situaţii posibile:
- Numărul gradelor de libertate este 2, prin urmare punctul material trebuie să verifice
şi o ecuaţie de forma f(q1,q
2,q
3)=0.
În acest caz punctul este supus la o legătură pe o suprafaţă.
- Numărul gradelor de libertate este 1, prin urmare punctul material trebuie să verifice o
ecuaţie de forma:
{f1(q1
,q2,q
3)=0
f2(q1,q
2,q
3)=0
În acest caz punctul este supus la o legătură pe o curbă.

12
Axioma legăturilor
Orice legătură poate fi înlocuită cu o forţă sau cu un sistem de forţe care să aibă acelaşi
efect ca şi legătura. Prin urmare asupra punctului supus la legături vor acţiona două
categorii de forţe:
- O categorie de forţe exterioare sau date
- O categorie de forţe introduse de legături, numite forţe de legătură.
Fid - forţe date, R
d=∑ Fi
dni=1 - rezultanta forţelor date, Fi
l - forţe de legătură, R
l=∑ Fi
lni=1 -
rezultanta forţelor de legătură, Rd+R
l=0 - condiţia de echilibru.
Pentru că forţele care acţionează asupra punctului sunt concurente ele se pot proiecta pe cele
trei axe de coordonate Oxyz: {
Rxd+Rx
l=0
Ryd+Ry
l=0
Rzd+Rz
l=0
Din aceste ecuaţii se pot determina parametrii care dau poziţia de echilibru şi forţa de
legătură.
Echilibrul unui punct pe o suprafaţă ideală
Asupra punctului acţionează mai multe forţe din exterior, care dau o rezultantă Rd.

13
Presupunem că prin P se duce un plan tangent la suprafaţa. Atunci prin punctul P ducem
direcţia normală n. Planul determinat de (n, Rd) se intersectează cu planul tangent şi rezultă o
dreapta care trece prin punct.
Rd=Rn
d+Rt
d
N - normala
Observaţie:
Rnd - vrea să introducă punctul în suprafaţă
Rtd - vrea să deplaseze punctul pe suprafaţă
Pentru că suprafaţa este ideală (fără frecare) componenta Rtd ar deplasa punctul pe suprafaţă.
Pentru echilibru Rtd=0. Prin urmare, forţele care acţionează asupra punctului vor avea o
direcţie după normală. Ca atare componenta normală nu poate avea nici un efect, componenta
v-a fi înlocuită de o forţă.
Rd+N=0
Observaţie: Forţa de legătură introdusă de o suprafaţă fără frecare are întotdeauna direcţia
normală la suprafaţă în acel punct. Prin urmare, această legătură introduce o singură
necunoscută şi anume valoarea reacţiunii normale, care se obţine din ecuaţia de echilibru.
Rd+N=0
Echilibrul punctului material pe o suprafaţă reală
O suprafaţă reală presupune existenţa unei frecări pe suprafaţă.

14
Conform axiomei legăturii suprafaţa poate fi înlocuită de o forţă care să aibă acelaşi efect
Rd+R
l=0
După direcţia normalei: Rnd+N=0
R𝑡d în cazul unei suprafeţe reale i se opune o forţă de frecare.
0≤Ff≤Ffmax
Valoarea forţei de frecare maxime depinde, conform legilor lui Coulomb de: valoarea forţei
după direcţia normalei şi natura suprafeţelor de contact.
Forţa de frecare: Ffmax=μ∙N
{Rn
d+N=0
Rtl+Rt
d=0
Dacă ţinem cont de desen ⇒{Rn
d-N=0⇒N=R
d
-Ff+Rtd=0
Legătura cu fir
Dacă un punct material este legat cu un fir, acesta îl obligă pe punct să rămână pe suprafaţă.
Reacţiunea normală va fi după direcţia firului. Prin urmare forţa de legătură introdusă de fir
se va numi tensiune sau efort (T).

15
Pe un plan înclinat cu unghiul α se sprijină un punct material care are greutatea G.
Să se determine reacţiunea planului înclinat şi efortul de fir.
Pentru rezolvarea problemei vom folosi calculul analitic, trei forte nu-şi fac echilibru decât
dacă sunt într-un plan, în cazul nostru forţele determină un triunghi, rezultă cele trei forţe sunt
într-un plan.
Cum proiectăm aceste trei forțe?
Cât mai multe forţe să fie după direcţiile axelor.
{∑Fx=0
∑ Fy =0⇒
Ox :T cos(β-α)-G sin α=0
Oy :N+T sin(β-α) -G cos α =0
⇒T=Gsin α
cos(β-α)
⇒N=G cos α -Gsin α sin(β-α)
cos(β-α)
N=Gcos(α+β-α)
cos(β-α)=G
cos β
cos(β-α)

16
Problemă:
Pe un plan înclinat de unghi α un punct material este ţinut în echilibru de o forţă F. Ştiind că
coeficientul de frecare este μ să se determine valoarea forţei F pentru a rămâne în echilibru.
ECHILIBRUL CORPULUI RIGID
Momentul unei forţe în raport cu un punct
Măsoară o tendinţă de rotaţie a corpului.

17
Prin definiţie momentul unei forţe faţă de un punct este produsul vectorial dintre vectorul de
poziţie al punctului de aplicaţie al forţei şi forţă.
MO =OA ×F
Punctul de aplicaţie este punctul faţă de care se calculează. Direcţia este perpendiculară pe
planul care determină cei doi vectori. Sensul este dat de regula burghiului drept.
Valoarea este Mo=F∙r∙ sin(r,F)=F∙r∙ sin α=F∙d
r∙ sin α=d, d este distanţa de la punctul de aplicaţie la suportul forţei – braţul forţei.
MO=r ×F
OA=r
Se pot constata următoarele proprietăţi:
1. Momentul depinde de punctul în raport cu care se calculează (este un vector legat de
punct).
MO'=O'A ×F
MO=OA ×F
În triunghiul ∆OO'A se poate scrie OO
' +O
'A
=OA , înlocuind mai sus obţinem:
MO= (OO' +O
'A) ×F=OO
' ×F+O'A ×F
MO=MO'+OO' ×F
Dacă schimb punctul se schimbă şi momentul.
2. Nu depinde de caracterul de vector alunecător al forţei.
Dacă se mută forţa din A în B,
MO=OB ×F
∆OBA:OB +BA =OA ⇒ MO(FB)=(OA -BA )×F=OA ×F-BA ×F
⇒ MO(FB)=MO (FA)
3. Momentul unei forţe în raport cu un punct este nul dacă suportul forţei trece prin
punctul respectiv.
Dacă forţa se raportează la un sistem triortogonal Oxyz
OA =r=xi+yj+zk
F=Fxi+Fyj+Fzk

18
MO= |i j k
x y z
Fx Fy Fz
| = (y∙Fz-z∙Fy)i+(z∙Fx-x∙Fz)j+(x∙Fy-y∙Fx)k
⇒ 𝑝𝑟𝑜𝑖𝑒𝑐ţ𝑖𝑙𝑒 𝑚𝑜𝑚𝑒𝑛𝑡𝑢𝑙𝑢𝑖 𝑝𝑒 𝑐𝑒𝑙𝑒 𝑡𝑟𝑒𝑖 𝑎𝑥𝑒 𝑠𝑢𝑛𝑡:
{
Mox=yFz-zFy
Moy=zFx-xFz
Moz=xFy-yFx
Momentul unei forţe în raport cu o axă
Momentul unei forţe în raport cu o axă este o mărime scalară egală cu proiecţia momentului
forţei în raport cu un punct de pe axă, pe acea axă.
M∆- proiecţia momentului M pe ∆
Având în vedere că proiectăm pe axă, se ia un vector al axei pe care îl notez cu u.
Dacă se aleg axele x,y,z atunci:
MO=MOxi+MOyj+MOzk
Dacă vectorul u face unghiurile α,β,γ cu cele trei axe:
u= cos α i+ cos β j+ cos γ k
M∆=MO∙u=(MO∙1∙ cos(u,MO))=pr∆MO
M∆=Mox∙ cos α +Moy∙ cos β +Moz∙ cos γ
Avem produsul scalar dintre un vector şi un produs vectorial rezulta un produs mixt.
M∆=(r×F)∙u=u(r×F)

19
M∆= |
cos α cos β cos γ
x y z
Fx Fy Fz
|
Obs. Proprietăţile momentului unei forţe în raport cu o axa.
1. Nu depinde de punctul în raport cu care se calculează.
2. Nu depinde de caracterul de vector alunecător al forţei.
3. Momentul unei forţe în raport cu o axă este 0, dacă forţa intersectează axa, dar şi dacă
forţa este într-un plan determinat de punctul de aplicaţie şi axa ∆.
Cuplul de forţe
Două forţe egale şi de sensuri contrare, având suporturile paralele formează un cuplu de forţe.
F1=F2=F
F1+F2=0
MO=MO(F1)+MO(F2)
MO=OA ×F1+OB ×F2
∆OAB: OA +AB =OB
⇒ MO=OA ×F1+(OA +AB )×F2=OA ×F1+OA ×F2+AB ×F2=OA ×(F1+F2)+AB ×F2=AB ×F2=BA ×F1
Observaţii
1. Momentul unui cuplu nu depinde de punctul în raport cu care se calculează, rezultă că
momentul este un vector liber.
2. Momentul unui cuplu este egal cu momentul unei forţe în raport cu punctul de
aplicaţie al celeilalte.
3. MO=AB∙F∙ sin(AB ,F)
sin α =d
AB ⇒MO=F∙d

20
Momentul unui cuplu are valoarea egală cu produsul dintre valoarea unei forţe şi braţul
cuplului.
Reducerea unei forţe în raport cu un punct
Presupunem că o forţă acţionează asupra unui corp rigid. Problema care se pune este ce efect
are această forţă în raport cu un alt punct al corpului rigid.
Cele două forţe sunt egale şi de sens contrar, dar au acelaşi suport.
Conceptul de corp rigid presupune faptul că sub acţiunea celor două forţe distanţa dintre
punctele AB nu se modifică.
F1+F2=0
Presupunem că în punctul A acţionează o forţă F. În punctul B introducem un sistem nul.
F+(-F)=0
F(A)+F(B)=F+(-F)=0
Forţa a alunecat pe suportul ei, rezultă că forţa care acţionează asupra unui rigid are caracter
de vector alunecător.

21
Presupunem că în A acţionăm cu o forţă F. Ce efect are această forţă faţă de un punct arbitrar
O?
F(A); -F(O) constituie un cuplu cu rezultanta 0.
F+(-F)=0
MO - moment al cuplului.
Prin reducerea forţei F care acţionează în punctul A, într-un punct O s-a obţinut aceeaşi forţă
F şi în plus un moment egal cu momentul forţei în raport cu punctul de reducere.
Reducerea unui sistem de forţe în raport cu un punct
Presupunem că asupra unui corp acţionează un sistem de forţe F1,F2….Fn se pune problema
reducerii acestui sistem de forţe în punctul O.
Prin reducerea unui sistem de forţe în punctul O s-a obţinut două sisteme de vectori
concurenţi.

22
Primul sistem este al forţelor F1,F2….Fn care va da o rezultantă, iar al doilea sistem este al
vectorilor moment M1,M2….Mn care va da un moment rezultant faţă de O.
R=∑ Fi
n
i=1
MO=∑ Mi=∑ ri×Fi
n
i=1
n
i=1
Cele două elemente de reducere R, MO formează aşa numitul TORSOR DE REDUCERE
τ(R, MO). Presupunem că sistemul de forţe este raportat la un sistem de referinţă Oxyz faţă
de care avem:
- O forţă oarecare F i=Fixi+Fiyj+Fizk, unde Fix, Fiy, Fiz sunt proiecţiile forţei Fi pe cele
trei axe.
- Poziţia punctelor de aplicaţie OA i=ri=xii+yij+zik, unde xi,yi
,zi sunt coordonatele
punctelor Ai.
Cu aceste notaţii putem calcula expresiile analitice ale elementelor torsorului.
R=∑ Fi
R=√Rx2+Ry
2+Rz2
Înlocuind în expresiile de mai sus vom obţine:
R= (∑ Fix) i+ (∑Fiy) j+ (∑Fiz) k
⇒R=Rxi+Ryj+Rzk unde
{
Rx=∑ Fix
Ry=∑ Fiy
Rz=∑ Fiz
Momentul rezultant
MO=∑ ri
n
i=1
×Fi=∑OA i
n
i=1
×Fi
⇒ MO=∑|
i j k
xi yi
zi
Fix Fiy Fiz
|
n
i=1
MO=√MOx2 +MOy
2 +MOz2

23
Dezvoltăm pe rând după versori şi vom obţine:
MO=∑(yiFiz-ziFiy)
n
i=1
i+∑(ziFix-xiFiz)
n
i=1
j+∑(xiFiy-yiFix)
n
i=1
k
⇒ MO=Moxi+Moyj+Mozk
Proiecţiile momentului pe cele trei axe
{
MOx=∑ y
iFiz-ziFiy
n
i=1
MOy=∑ ziFix-xiFiz
n
i=1
MOz=∑ xiFiy-yiFix
n
i=1
Invarianţii torsorului de reducere
Considerăm un corp rigid asupra căruia acţionează un sistem de forţe F1,F2….Fn. Dacă se
reduce sistemul în punctul O se obţine un torsor format din rezultantă şi momentul în raport
cu punctul O: τ(R, MO).
Ce se întâmplă dacă schimbăm punctul de reducere?
Introducem în punctul O1 un sistem echivalent cu O (format din două forţe egale şi de sens
contrar care acţionează în acelaşi punct).
Momentul unei forţe în raport cu punctul de aplicaţie al celeilalte.
M'=O1O ×R
MO- momentul unor cupluri (un vector liber, indiferent în ce punct îl calculez el este acelaşi).

24
În O1 avem o rezultantă şi un moment rezultant, rezultă că torsorul din O1 este τO1(R1,MO1)
MO1=MO+M'=MO+O1O ×R=MO-OO1
×R
Concluzii:
1. În urma schimbării punctului de reducere din O în O1 se obţine un torsor în care
rezultanta este aceeaşi iar momentul se schimbă după formula de mai sus. Deci
rezultanta este un invariant.
2. Proiecţia momentului rezultant pe rezultantă în orice punct de reducere este un
invariant
PrRMO −proiecţia pe rezultantă a momentului MO
MO1=MO-OO1
×R | ∙R
⇒MO1R=MOR-(OO1 ×R)∙R,
(OO1 ×R)∙R=0 deoarece este produs mixt cu doi vectori coliniari.
⇒MO1R=MOR
⇒ MO1∙R∙ cos(MO1
,R)=MO∙R∙ cos(MO,R)
⇒MO1∙ cos(MO1
,R)=MO∙ cos(MO,R)
⇒PrRMO1=PrRMO=MR moment minimal
Indiferent care ar fi punctul O1 proiecţia este un scalar notat cu MR. Rezultă că proiecţia
momentului rezultant pe rezultantă în orice punct de reducere este un invariant
MO1R=MOR
MO1∙R∙ cos(MO1
,R)=MO∙R
MO1 ∙ cos(MO1,R)=MR
MR∙R=MO∙R

25
MR=MO∙R
R
Dar R=Rxi+Ryj+Rzk
MO=MOxi+MOyj+MOzk
MR=RxMOx+RyMOy+RzMOz
√Rx2+Ry
2+Rz
2, expresia analitică a momentului minimal
Axa centrală a unui sistem de forţe
S-a observat că odată cu schimbarea punctului de reducere se schimbă doar momentul,
rezultanta fiind un invariant. Se pune problema determinării punctelor în care, făcându-se
reducerea, se obţine un torsor a cărui componente sunt rezultanta şi un moment(momentul
minim).
τmin(R,MR) – torsor minimal
Presupunem că punctul B este un astfel de punct de reducere:
MB=MR
R
R
R
R- versorul rezultantei
MB=MO-OB ×R
Înmulţim această relaţie cu rezultanta şi vom obţine:
R×MB=R×MO-R×(OB ×R)
R×(OB ×R)= | OB R
R∙OB R2|=R2OB -(R∙OB )R
⇒0=R×MO-R2∙OB+(R∙OB )R
Notăm OB=r ⇒R2r=R×MO+(R∙r)R
OB=r =RxMO
R2+(
R∙r
R2) R

26
RMO
R2 , vectorul de poziţie al unui punct.
Ecuaţia axei centrale sub formă vectorială:
r=RxMO
R2+λR
Ecuaţia unei drepte care trece printr-un punt determinat de primul termen din dreapta şi are
direcţia rezultantei.
Pentru determinarea ecuaţiei axei centrale sub formă analitică se pleacă de la observaţia
făcută anterior, că momentul minimal pe axa centrală este coliniar cu rezultanta ��.
MB=MO-OB ×R
OB =r=xi+yj+zk
(MB=λR)
⇒ λR=MO-r×R
Pentru rezultantă:
R=Rxi+Ryj+Rzk
MO=MOxi+MOyj+MOzk
Înlocuim expresiile analitice în ecuaţia vectorială
⇒ λ(Rxi+Ryj+Rzk)=MOxi+MOyj+MOzk- |i j k
x y z
Rx Ry Rz
| în această ecuaţie se identifică
termenii după versorii i, j, k
{
λRx=MOx-(yRz-zRy)
λRy=MOy-(zRx-xRz)
λRz=MOz-(xRy-yRx)
⇒Ecuaţia parametrică a unei drepte: {
x=x(λ)
y=y(λ)
z=z(λ)
⇒MOx-(yRz-zRy)
Rx
=MOy-(zRx-xRz)
Ry
=MOz-(xRy-yRx)
Rz
Ecuaţia analitică a axei centrale:
{A1x+B1y+C1z+D1=0
A2x+B2y+C2z+D2=0

27
Cazurile de reducere ale unui sistem de forţe oarecare
În urma reducerii unui sistem de forţe oarecare se obţine un torsor de reducere.
În funcţie de elementele torsorului de reducere şi elementele torsorului minimal se pot obţine
mai multe situaţii de reducere.
Cazul I de reducere
�� ≠ 0; ��𝑂 ≠ 0; 𝑑𝑎𝑟 ş𝑖 �� ∙ ��𝑂 ≠ 0 ⇒ 𝑀𝑅 ≠ 0
În acest caz sistemul de forţe este echivalent întotdeauna cu un torsor minimal situat pe axa
centrală.
Cazul II de reducere:
�� ≠ 0; ��𝑂 ≠ 0; 𝑑𝑎𝑟 �� ∙ ��𝑂 = 0; (�� ⊥ ��𝑂) ⇒ 𝑀𝑅 = 0
��𝐵 = ��𝑂 − 𝑂𝐵 × ��
B este un punct pe axa centrală
⇒ 𝑂 = ��𝑂 − 𝑂𝐵 × ��
𝑂𝐵 = ��
⇒ ��𝑂 = �� × ��
Teorema Varignon: Momentul rezultant este egal cu momentul rezultantei.
Cazul III de reducere:
�� = 0; ��𝑂 ≠ 0
Sistemul de forţe este echivalent cu un cuplu (toate forţele vor imprima corpului o mişcare de
rotaţie).
Cazul IV de reducere:
�� = 0; ��𝑂 = 0, ecuaţii vectoriale de echilibru
Rezultă sistemul de forţe este în echilibru.
Dar analitic toate componentele (proiecţiile) trebuie să fie 0.

28
{
𝑅𝑥 =∑𝐹𝑖𝑥
𝑛
𝑖=1
= 0
𝑅𝑦 =∑𝐹𝑖𝑦
𝑛
𝑖=1
= 0
𝑅𝑧 =∑𝐹𝑖𝑧
𝑛
𝑖=1
= 0
{
𝑀𝑂𝑥 =∑(𝑦𝑖𝐹𝑖𝑧 − 𝑧𝑖𝐹𝑖𝑦) = 0
𝑛
𝑖=1
𝑀𝑂𝑦 =∑(𝑧𝑖𝐹𝑖𝑥 − 𝑥𝑖𝐹𝑖𝑧)
𝑛
𝑖=1
= 0
𝑀𝑂𝑧 =∑(𝑥𝑖𝐹𝑖𝑦 − 𝑦𝑖𝐹𝑖𝑥)
𝑛
𝑖=1
= 0
Pentru echilibrul unui corp se pot scrie 6 ecuaţii scalare.
Reducerea unui sistem de forţe coplanare
Un sistem de forţe care are punctele de aplicaţie şi suporturile situate în acelaşi plan se
numeşte sistem de forţe coplanare.
Dacă vreau să le reduc în raport cu punctul O:
𝜏𝑂(��, ��𝑂)

29
{
�� =∑��𝑖
𝑛
𝑖=1
��𝑂 =∑𝑂𝐴i x��𝑖
𝑛
𝑖=1
Oxy în planul forţelor ⇒ 𝐴𝑖(𝑥𝑖, 𝑦𝑖,0)
vectorul 𝑂𝐴i = ��𝑖 = 𝑥𝑖𝑖 + 𝑦𝑖𝑗 + 0 ∙ ��
��𝑖 = 𝐹𝑖𝑥𝑖 + 𝐹𝑖𝑦𝑗 + 0
�� = ∑��𝑖
𝑛
𝑖=1
⇒ �� = (∑ 𝐹𝑖𝑥𝑛𝑖=1 )𝑖 + (∑ 𝐹𝑖𝑦
𝑛𝑖=1 )𝑗 ⇒ �� ∈ 𝑝𝑙𝑎𝑛𝑢𝑙𝑢𝑖
��𝑂 =∑��𝑖 × ��𝑖
𝑛
𝑖=1
=∑|𝑖 𝑗 ��𝑥𝑖 𝑦𝑖 0𝐹𝑖𝑥 𝐹𝑖𝑦 0
|
𝑛
𝑖=1
=∑(𝑥𝑖𝐹𝑖𝑦 − 𝑦𝑖𝐹𝑖𝑥)
𝑛
𝑖=1
⇒ ��𝑂 ⊥ 𝑝𝑙𝑎𝑛 (𝑂𝑥𝑦)
��𝑂 ⊥ �� ⇒ ��𝑅 = 𝑀𝑅
��
𝑅
𝑀𝑅 =��𝑂 ∙ ��
𝑅= 0
În cazul reducerii unui sistem de forţe coplanare primul caz de reducere de la sistemul de
forţe oarecare nu există.
Cazul II: �� ≠ 0; ��𝑂 ≠ 0; 𝑀𝑅 = 0
Teorema lui Varignon ��𝑂 = �� × 𝑅, de aici se poate deduce ecuaţia axei centrale.
⇒ ��𝑂𝑧 = |𝑖 𝑗 ��𝑥 𝑦 𝑧𝑅𝑥 𝑅𝑦 0
|
După i: 𝑧𝑅𝑦 = 0 ⇒ 𝑧 = 0
După j: 𝑧𝑅𝑥 = 0 ⇒ 𝑧 = 0
După k: ��𝑂𝑧 = 𝑥𝑅𝑦 − 𝑦𝑅𝑥 ⇒ 𝑎𝑥𝑎 𝑐𝑒𝑛𝑡𝑟𝑎𝑙ă 𝑒𝑠𝑡𝑒 î𝑛 𝑝𝑙𝑎𝑛𝑢𝑙 𝑓𝑜𝑟ţ𝑒𝑙𝑜𝑟
Cazul III: �� = 0; ��𝑂 ≠ 0, sistemul de forţe se reduce la un cuplu
Cazul IV: �� = 0; ��𝑂 = 0
{
𝑅𝑥 =∑𝐹𝑖𝑥
𝑛
𝑖=1
= 0
𝑅𝑦 =∑𝐹𝑖𝑦
𝑛
𝑖=1
= 0

30
𝑀𝑂𝑧 =∑(𝑥𝑖𝐹𝑖𝑦 − 𝑦𝑖𝐹𝑖𝑥)
𝑛
𝑖=1
= 0
Forţele în acest caz îşi fac echilibru. Pin urmare pentru echilibrul unui sistem de forţe situat în
acest plan, se pot scrie trei ecuaţii scalare de echilibru.
Reducerea unui sistem de forţe paralele
Considerăm un corp asupra căruia acţionează un sistem de forţe care au direcţiile paralele.
Dacă se alege un sistem de referinţă Oxyz atunci una dintre axe poate fi considerată ca având
direcţia forţelor. În cazul considerat axa Oy are direcţia forţelor: dacă se reduce sistemul în
punctul O
𝐹𝑖 = 𝐹𝑖𝑗
Atunci
�� = (∑𝐹𝑖
𝑛
𝑖=1
) 𝑗
⇒ �� = 𝑅𝑦𝑗
⇒
{
��𝑥 = 0
��𝑦 =∑𝐹𝑖
𝑛
𝑖=1
��𝑧 = 0

31
Rezultanta va avea direcţia comună a forţelor.
În O obţinem şi un moment (cele două elemente ale torsorului) 𝜏(��, ��𝑂)
��𝑂 =∑��𝑖 × ��𝑖
𝑛
𝑖=1
=∑𝑂𝐴𝑖 × ��𝑖 =∑|𝑖 𝑗 ��𝑥𝑖 𝑦𝑖 𝑧𝑖0 𝐹𝑖 0
|
𝑛
𝑖=1
𝑛
𝑖=1
��𝑖 = 𝑥𝑖𝑖 + 𝑦𝑖𝑗 + 𝑧𝑖��
Dezvoltând vom obţine:
��𝑂 = (−∑𝑧𝑖𝐹𝑖
𝑛
𝑖=1
) 𝑖 + (∑𝑥𝑖𝐹𝑖
𝑛
𝑖=1
) �� = 𝑀𝑂𝑥𝑖 + 𝑀𝑂𝑧��
⇒
{
𝑀𝑂𝑥 = −∑𝑧𝑖𝐹𝑖
𝑛
𝑖=1
𝑀𝑂𝑦 = 0
𝑀𝑂𝑧 =∑𝐹𝑖
𝑛
𝑖=1
𝑥𝑖
Concluzie:vectorul moment rezultant ��𝑂 ∈ (𝑥𝑂𝑧)
Se constată că rezultanta �� ⊥ ��𝑂
Cazuri de reducere: I Primul caz de reducere de la un sistem oarecare nu se va întâlni în
cazul sistemelor de forţe paralele �� ⋅ ��𝑂 = 0 ⇒ 𝑀𝑅 = 0
II. �� ⋅ ��𝑂 = 0 ⇒ 𝑀𝑅 = 0,
𝑅 ≠ 0
Prin urmare sistemul este echivalent cu o rezultantă unică situată pe axa centrală.
Tot din această condiţie, în acest caz este valabilă Teorema lui Varignion: momentul
rezultantei este egal cu ��𝑂 = �� × �� această ecuaţie poate fi folosită pentru deducerea axei
centrale deoarece rezultanta �� are direcţia cunoscută (direcţia comună a forţelor).
Pentru obţinerea ecuaţiei axei centrale ar trebui cunoscută poziţia unui punct.
Fie C punctul prin care trece axa centrală.
Prin urmare �� = 𝑂𝐶 ⇒ 𝐶(𝑥𝑐, 𝑦𝑐, 𝑧𝑐) (nu se cunosc)
Din ��𝑂 = �� × ��, înlociund vom obţine
∑��𝑖
𝑛
𝑖=1
× ��𝑖 = 𝑂𝐶 ×∑��𝑖
𝑛
𝑖=1
⇒ ∑ ��𝑖 × ��𝑖
𝑛
𝑖=1
𝑗 = ��𝑐 × (∑��𝑖
𝑛
𝑖=1
) 𝑗
Ţinând cont de faptul că 𝐹𝑖 este o mărime scalară relaţia se poate scrie:

32
(∑𝐹𝑖 ∙ ��𝑖
𝑛
𝑖=1
) × 𝑗 = (∑𝐹𝑖 ∙ ��𝑐
𝑛
𝑖=1
) × 𝑗
⇒∑𝐹𝑖 ∙ ��𝑖
𝑛
𝑖=1
= (∑𝐹𝑖
𝑛
𝑖=1
) ∙ ��𝑐
𝑟 =
n
1i
i
n
1i
ii
F
rF
(*)
Această relaţie ne spune că dacă cunoaştem forţele care acţionează asupra unui corp ştim că
va exista un punct prin care va trece axa centrală.
C este punctul prin care trece axa centrală, centrul forţelor paralele
Dacă se scrie analitic
��𝑐 = 𝑥𝑐𝑖 + 𝑦𝑐𝑗 + 𝑧𝑐��
��𝑖 = 𝑥𝑖𝑖 + 𝑦𝑖𝑗 + 𝑧𝑖��
Atunci după identificarea cu versori făcută în relaţia (*) se obţin coordonatele centrului
forţelor paralele.
𝑥𝑐 =
n
1i
i
n
1i
ii
F
xF
; 𝑦𝑐 =
n
1i
i
n
1i
ii
F
yF
; 𝑧𝑐 =
n
1i
i
n
1i
ii
F
zF
Proprietăţi:
1. Dacă toate forţele se multiplică de un anumit număr de ori rezultă că centrul forţelor nu
se schimbă.
2. Dacă toate forţele au punctul de aplicaţie într-un plan atunci centrul forţelor paralele se
află în acel plan.
Dacă 𝐴𝑖 ∈ (𝑥𝑂𝑦), atunci 𝐴𝑖(𝑥𝑖, 𝑦𝑖, 0) ⇒ 𝑧𝑐 = 0 ⇒ 𝐶 𝑒𝑠𝑡𝑒 î𝑛 𝑝𝑙𝑎𝑛𝑢𝑙 𝑓𝑜𝑟ţ𝑒𝑙𝑜𝑟
3. Dacă toate forţele au punctele de aplicaţie pe o dreaptă atunci centrul forţelor de
aplicaţie este pe acea axă.
III . �� = 0��𝑂 ≠ 0
} ⇒ sistemul de forţe paralele este echivalent cu un cuplu de forţe (forţele care
acţionează asupra corpului îl vor rotii).
IV. �� = 0��𝑂 = 0
} ⇒ sistemul de forţe este în echilibru

33
⇒
{
𝑅𝑦 =∑𝐹𝑖 = 0
𝑛
𝑖=1
𝑀𝑂𝑥 =∑𝐹𝑖𝑧𝑖 = 0
𝑛
𝑖=1
𝑀𝑂𝑧 =∑𝐹𝑖𝑥𝑖 = 0
𝑛
𝑖=1
Pentru echilibrul unui sistem de forţe paralele se pot scrie trei ecuaţii scalare.
CENTRE DE GREUTATE
Greutăţile sunt forţe de atracţie pe care le exercită pământul asupra corpurilor aflate în sfera
sa de atracţie. Ele sunt, de fapt, forţe particulare ce rezultă din legea atracţiei universale:
„două corpuri se atrag cu o forţă proporţională cu masele lor şi invers proporţională cu
distanţa”.
𝐹 = 𝑘 ∙𝑚1 ∙ 𝑚2
𝑟2
La suprafaţa pământului, greutăţile corpului sunt
��𝑖 = 𝑚𝑖��
�� - este acceleraţia gravitaţională.
Totuşi, ţinând cont că raza pământului e mare ( 64000 km), la suprafaţa pământului aceste
forţe pot să fie considerate paralele.
Dacă considerăm un sistem material format din puncte.

34
Centrul acestor forţe paralele se numeşte centru de greutate.
��𝑖 ⟶ 𝐺𝑖 ⟹ ��𝑐 =
n
1i
i
n
1i
ii
G
rG
Unde 𝑚𝑖 - masa punctului considerat
Înlocuind în formula centrului de greutate şi simplificând cu g se obţine:
��𝑖 =
n
1i
i
n
1i
ii
m
rm
, formula de determinare a centrului de masă
Observaţie : Între centrul de masă şi centrul de greutate nu este nici-o deosebire, atâta timp
cât punctele materiale se găsesc la suprafaţa pământului.
Coordonatele centrului de masă vor fi :

35
{
𝑥𝑐 =
n
1i
i
n
1i
ii
m
xm
,
𝑦𝑐 =
n
1i
i
n
1i
ii
m
ym
𝑧𝑐 =
n
1i
i
n
1i
ii
m
zm
Centrul de masă (centrul de greutate) se bucură de aceleaşi proprietăţi ca şi centrul forţelor
paralele.
1. Dacă masele se găsesc într-un plan, atunci centrul de masă se găseşte în acelaşi plan
2. Dacă punctele se găsesc pe o dreaptă, atunci centrul de masă/greutate se va găsi pe
aceeaşi dreaptă.
Centrul de masă/greutate al unui sistem continuu
Un sistem continuu de puncte materiale, în primul rând ocupă un domeniu (D) şi se bucură de
câteva proprietăţii.
Cele mai importante proprietăţi :
1. În vecinătatea unui punct se găsesc o infinitate de puncte.
2. Oricare două puncte ale sistemului se pot unii printr-o curbă constituită din puncte ale
sistemului.
3. Dacă un corp are un plan de simetrie sau o axă de simetrie atunci centrul de greutate
(masă) se află în acel plan sau pe aceea axă.

36
Dacă se raportează la un sistem de referinţă Oxyz şi presupunem că este împărţit într-o
infinitate de elemente infinitezimale care ocupă un volum dv şi au o masa dm.
Poziţia unui punct oarecare este notat cu A(x,y,z), prin urmare ��𝑖 → ��, unde
�� = 𝑥𝑖 + 𝑦𝑗 + 𝑧��, un vector curent (un vector care descrie tot domeniul).
∑𝑚𝑖��𝑖 → 𝑙𝑖𝑚∑𝑚𝑖��𝑖 = lim𝑣𝑖→0
∑𝜌𝑉𝑖 ∙ ��𝑖
∞
𝑖=1
- Limita acestei sume ∑𝜌𝑉𝑖 ∙ ��𝑖, se numeşte integrală în sens Riemann
𝑙𝑖𝑚∑𝑚𝑖 ∙ ��𝑖
∞
𝑖=1
→ ∫ �� ∙ 𝑑𝑚
În cazul unui corp continu:
��𝑐 =∫ 𝑑𝑚 ∙ ��𝐷
∫ 𝑑𝑚𝐷
{
𝑥𝑐 =
∫ 𝑥𝑑𝑚𝐷
∫ 𝑑𝑚𝐷
𝑦𝑐 =∫ 𝑦𝑑𝑚𝐷
∫ 𝑑𝑚𝐷
𝑧𝑐 =∫ 𝑧𝑑𝑚𝐷
∫ 𝑑𝑚𝐷
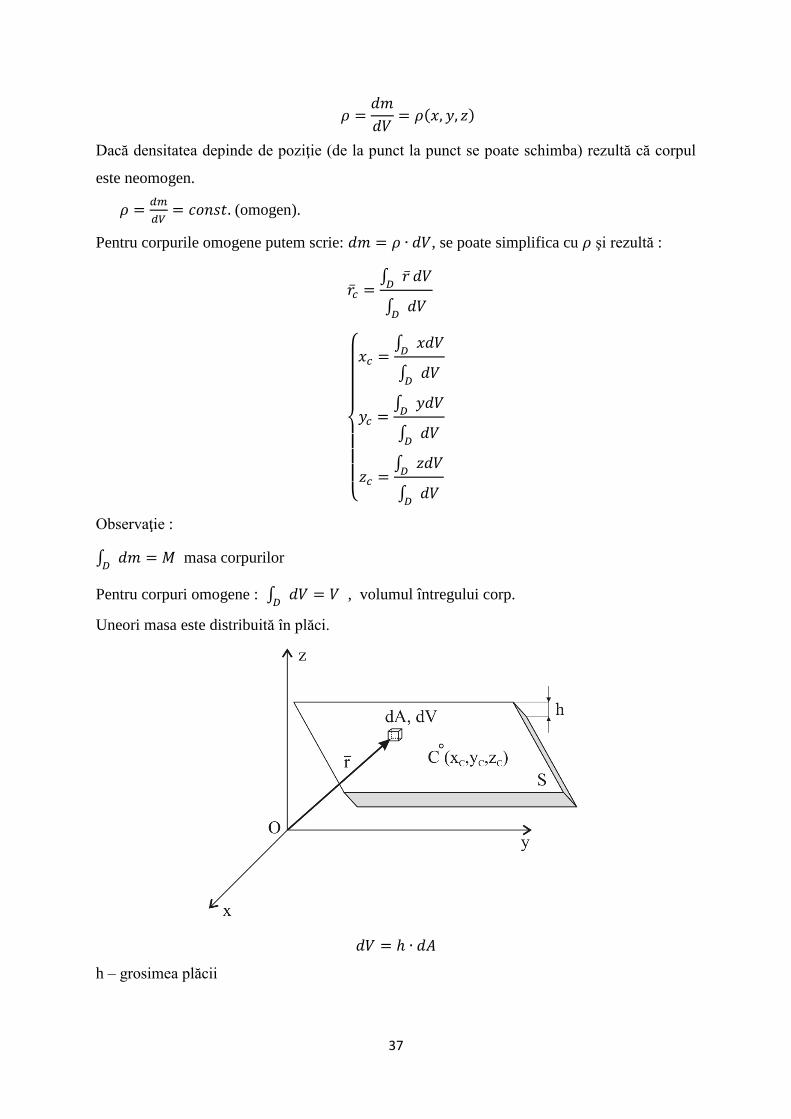
Masa unităţii de volum, egală cu densitatea, poate depinde de poziţie.
37
𝜌 =𝑑𝑚
𝑑𝑉= 𝜌(𝑥, 𝑦, 𝑧)
Dacă densitatea depinde de poziţie (de la punct la punct se poate schimba) rezultă că corpul
este neomogen.
𝜌 =𝑑𝑚
𝑑𝑉= 𝑐𝑜𝑛𝑠𝑡. (omogen).
Pentru corpurile omogene putem scrie: 𝑑𝑚 = 𝜌 ∙ 𝑑𝑉, se poate simplifica cu 𝜌 şi rezultă :
��𝑐 =∫ ��𝐷
𝑑𝑉
∫ 𝑑𝑉𝐷
{
𝑥𝑐 =
∫ 𝑥𝑑𝑉𝐷
∫ 𝑑𝑉𝐷
𝑦𝑐 =∫ 𝑦𝑑𝑉𝐷
∫ 𝑑𝑉𝐷
𝑧𝑐 =∫ 𝑧𝑑𝑉𝐷
∫ 𝑑𝑉𝐷
Observaţie :
∫ 𝑑𝑚𝐷
= 𝑀 masa corpurilor
Pentru corpuri omogene : ∫ 𝑑𝑉𝐷
= 𝑉 , volumul întregului corp.
Uneori masa este distribuită în plăci.
𝑑𝑉 = ℎ ∙ 𝑑𝐴
h – grosimea plăcii

38
Dacă se înlocuieşte elementul de volum în relaţiile precedente se poate simplifica cu h şi
obţinem:
��𝑐 =∫ ��𝑆
𝑑𝐴
∫ 𝑑𝐴𝑆
{
𝑥𝑐 =
∫ 𝑥𝑑𝐴𝑆
∫ 𝑑𝐴𝑆
𝑦𝑐 =∫ 𝑦𝑑𝐴𝑆
∫ 𝑑𝐴𝑆
𝑧𝑐 =∫ 𝑧𝑑𝐴𝑆
∫ 𝑑𝐴𝑆
Observaţie. Sunt cazuri în care masa este distribuită în corpuri sub formă de bare.
𝑑𝑚 = 𝜌𝑙 ∙ 𝑑𝑙
𝜌𝑙 – densitatea/masa unităţii de lungime
Înlocuind masa elementului în formulele precedente se obţine:
��𝑐 =∫ �� ∙ 𝑑𝑙(𝐶)
∫ 𝑑𝑙(𝐶)
C – centru de masă.

39
{
𝑥𝑐 =
∫ 𝑥𝑑𝑙(𝐶)
∫ 𝑑𝑙(𝐶)
𝑦𝑐 =∫ 𝑦𝑑𝑙(𝐶)
∫ 𝑑𝑙(𝐶)
𝑧𝑐 =∫ 𝑧𝑑𝑙(𝐶)
∫ 𝑑𝑙(𝑐)
Centrul de greutate al unui corp format din mai multe subsisteme
Corpul este format din mai multe componente (subsisteme).
Fiecare subsistem are centrul de greutate cunoscut.
Centrul de greutate a componentei (a subsistemului) Sj
��𝑐𝑗 =∫ ��𝑑𝑚Sj
∫ 𝑑𝑚Sj
Dacă se cunosc centrele de masă ale tuturor componentelor sistemelor, cum se poate
determina poziţia centrului de masă a ansamblului?
��𝑐 =?

40
��𝑐 =∫ ��𝑑𝑚𝐷
∫ 𝑑𝑚𝐷
Domeniul D este format din :
𝐷 = 𝑆1 + 𝑆2 +⋯… . . +𝑆𝑝
Dar 𝑅𝑐𝑗 se mai poate scrie ;
𝑅𝑐𝑗 =∫ ��𝑑𝑚Sj
𝑀𝑗
𝑀𝑗 - masa subsistemului 𝑆𝑗
Revenind anterior vom obţine:
��𝐶 =∫ ��𝑑𝑚 + ∫ ��𝑑𝑚 +
𝑆2………+ ∫ ��𝑑𝑚 +
𝑆𝑗… . . + ∫ ��𝑑𝑚
𝑆𝑝𝑆1
∫ 𝑑𝑚 + ∫ 𝑑𝑚 +𝑆2
…… .+𝑆1
∫ 𝑑𝑚 +𝑆𝑗
… .+∫ 𝑑𝑚𝑆𝑝
Dar ∫ 𝑑𝑚 = 𝑀𝑗𝑆𝑗; 𝑗 = 1,2, … . . 𝑝
∫ ��𝑆𝑗
𝑑𝑚 = 𝑅𝑐𝑗 ∙ 𝑀𝑗 ; 𝑗 = 1,2, … . . 𝑝
Înlocuind în formula de mai sus:
��𝑐 =��1��𝐶1 + ��2��𝐶2 +⋯ .+��𝑗��𝐶𝑗 +⋯ . .+��𝑝��𝐶𝑝
𝑀1 +𝑀2 +⋯…+𝑀𝑝
��𝐶 =
p
j
j
p
j
Cj
M
RMj
1
1
Formula care dă poziţia centrului de greutate a unui corp format din mai multe componente.
Observaţii :
1 -Prin urmare aceste formule ne dau posibilitatea să determinăm centrul de greutate al unui
corp când cunoaştem poziţiile centrelor de masă (greutate) ale componentelor.
2- Formulele se pot aplica şi dacă corpul are goluri. În acest caz golurile sunt ‘umplute’ şi
atunci în formulă la masele corespunzătoare se va lua semnul minus.

41
Centre de masă particulare
1. Bară rectilinie
Dacă un corp are centru de simetrie atunci acesta va fi centrul de greutate. Mijlocul barei este
centrul de simetrie, deci el este centrul de greutate.
2. Bară sub formă de arc de cerc.
𝑑𝐿 = 𝑅 ∙ 𝑑𝜃
𝐿𝑐𝑒𝑟𝑐 = 2𝜋 ∙ 𝑅
𝐿𝑎𝑟𝑐 = 𝜃 ∙ 𝑅
𝑥𝑐 =∫𝑥𝑑𝑙
∫𝑑𝑙=∫𝑥𝑅𝑑𝜃
∫𝑅𝑑𝜃
𝑥𝑐 =∫ 𝑅𝑥𝑑𝜃𝛼
−𝛼
∫ 𝑅𝑑𝜃𝛼
−𝛼
, 𝑑𝑎𝑟 𝑥 = 𝑅𝑐𝑜𝑠𝜃
⟹ 𝑥𝑐 =∫ 𝑅2𝑐𝑜𝑠𝜃𝑑𝜃𝛼
−𝛼
∫ 𝑅 𝑑𝜃𝛼
−𝛼

42
𝑥𝑐 =𝑅𝑠𝑖𝑛𝜃|−𝛼
𝛼
𝜃|−𝛼𝛼 =
𝑅2𝑠𝑖𝑛𝛼
2𝛼=𝑅𝑠𝑖𝑛𝛼
𝛼
3. Placă dreptungiulară
4. Placă patrată
5. Placă triunghiulară
6. Sectorul de cerc
Centrul este pe axa Ox.
43
𝑑𝐴 =𝑅𝑑𝜃𝑅
2=𝑅2𝑑𝜃
2
𝑂𝐶 = 𝑥𝑐 =∫𝑥𝑑𝐴
∫𝑑𝐴=∫
23𝑅𝑐𝑜𝑠𝜃 ∙
𝑅2𝑑𝜃2
𝛼
−𝛼
∫𝑅2
2𝛼
−𝛼𝑑𝜃
=
𝑅3
3 ∫ 𝑐𝑜𝑠𝜃𝑑𝜃𝛼
−𝛼
𝑅2
2 ∫ 𝑑𝜃𝛼
−𝛼
=2
3𝑅𝑠𝑖𝑛𝛼
𝛼
MOMENTE DE INERȚIE MECANICE
Definiţii şi relaţii
La fel ca şi centrele de greutate, momentele de inerţie caracterizează distribuţia de masă într-
un sistem de puncte materiale sau într-un corp.
Problema momentelor de inerție se pune în mişcarea de rotaţie.
Momentele de inerţie mecanice sunt mărimi fizice care caracterizează modul în care este
distribuită masa într-un corp (sistem de puncte) faţă de diferite elemente geometrice de
referinţă (punct, dreaptă, plan).
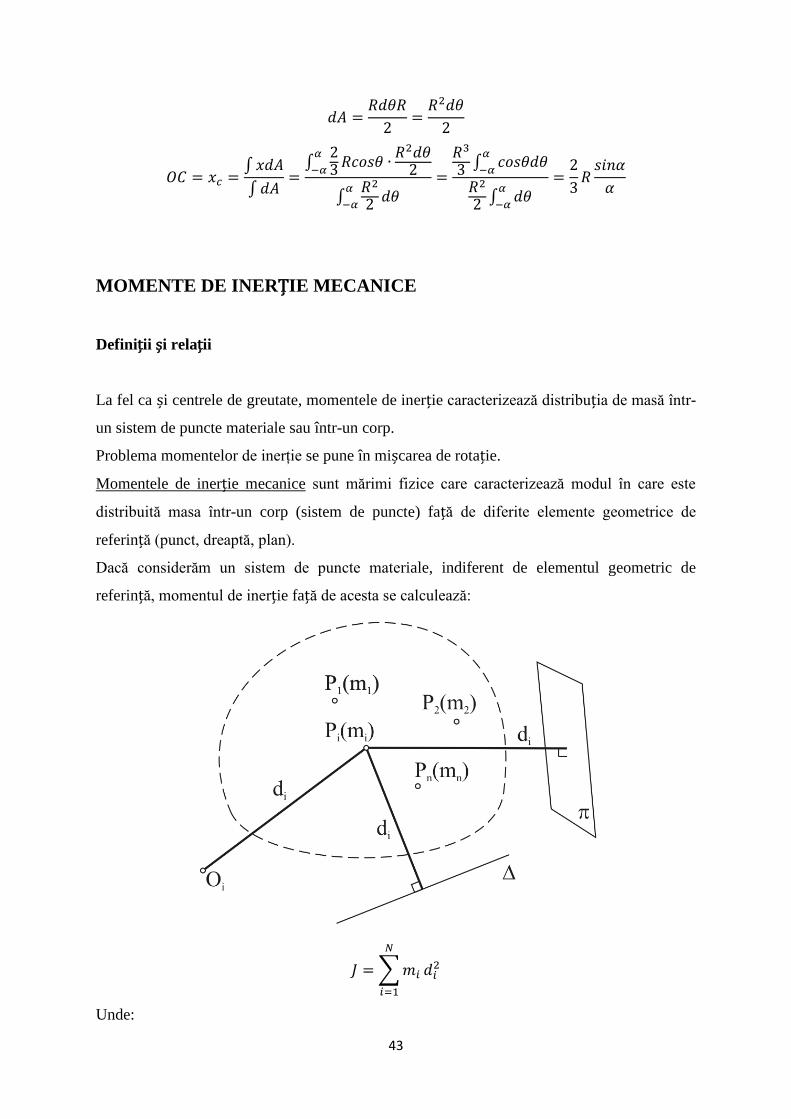
Dacă considerăm un sistem de puncte materiale, indiferent de elementul geometric de
referinţă, momentul de inerţie faţă de acesta se calculează:
𝐽 =∑𝑚𝑖
𝑁
𝑖=1
𝑑𝑖2
Unde:

44
𝑚𝑖 - masa unui punct oarecare
𝑑𝑖 - distanţa de la punct la elementul geometric considerat
𝑛 - numărul de puncte ale sistemului
Exemplu:
- Punctul ●
- Dreapta ∆
- Planul π
[𝐽]𝑆𝐼 = 𝑘𝑔𝑚2
Considerăm sistemul material raportat la un sistem de referinţă Oxyz.
În acest sistem de referinţă avem următoarele elemente geometrice importante:
- punctul (𝑂)
- dreapta (𝑂𝑥, 𝑂𝑦, 𝑂𝑧)
- planul (𝑂𝑥𝑦, 𝑂𝑥𝑧, 𝑂𝑦𝑧)
Prin urmare se pot defini următoarele momente de inerţie mecanice:
1. MOMENTUL DE INERȚIE POLAR
𝐽𝑜 =∑𝑚𝑖𝑑𝑖2
𝑁
𝑖=1
𝑥𝑖 , 𝑦𝑖, 𝑧𝑖 - muchiile paralelipipedului
𝑑𝑖 – diagonala paralelipipedului

45
𝑑𝑖 = √𝑥𝑖2 + 𝑦𝑖
2 + 𝑧𝑖2 ⇒ 𝐽𝑜 =∑𝑚𝑖(𝑥𝑖
2 + 𝑦𝑖2 + 𝑧𝑖
2)
𝑁
𝑖=1
2. MOMENTE DE INERȚIE AXIALE
𝐽𝑥 =∑𝑚𝑖𝑑𝑖𝑥2
𝑁
𝑖=1
=∑𝑚𝑖(𝑦𝑖2 + 𝑧𝑖
2)
𝑁
𝑖=1
𝐽𝑦 =∑𝑚𝑖𝑑𝑖𝑦2
𝑁
𝑖=1
=∑𝑚𝑖(𝑧𝑖2 + 𝑥𝑖
2)
𝑁
𝑖=1
𝐽𝑧 =∑𝑚𝑖𝑑𝑖𝑧2
𝑁
𝑖=1
=∑𝑚𝑖(𝑥𝑖2 + 𝑦𝑖
2)
𝑁
𝑖=1
3. MOMENTE DE INERȚIE PLANARE
𝐽𝑥𝑂𝑦 =∑𝑚𝑖𝑑𝑖𝑥𝑜𝑦2
𝑁
𝑖=1
=∑𝑚𝑖𝑧𝑖2
𝑁
𝑖=1
𝐽𝑦𝑂𝑧 =∑𝑚𝑖𝑑𝑖𝑦𝑜𝑧2
𝑁
𝑖=1
=∑𝑚𝑖𝑥𝑖2
𝑁
𝑖=1
𝐽𝑧𝑂𝑥 =∑𝑚𝑖𝑑𝑖𝑧𝑜𝑥2
𝑁
𝑖=1
=∑𝑚𝑖𝑦𝑖2
𝑁
𝑖=1
Avem definite 7 momente de inerţie = momente de inerţie mecanice obişnuite.
Pe lângă aceste momente se mai definesc 3 momente de inerţie centrifugale:
𝐽𝑥𝑦 =∑𝑚𝑖𝑥𝑖𝑦𝑖
𝑁
𝑖=1
𝐽𝑦𝑧 =∑𝑚𝑖𝑦𝑖𝑧𝑖
𝑁
𝑖=1
𝐽𝑧𝑥 =∑𝑚𝑖𝑧𝑖𝑥𝑖
𝑁
𝑖=1
Acestea nu caracterizează modul de distribuţie a maselor faţă de elementele geometrice.
Observaţia 1: Momentele de inerţie polare și axiale sunt pozitive.
Obesrvaţia 2: Momentele de inerţie centrifugale pot fi pozitive, nule sau chiar negative.
Ce relaţii se pot stabili între ele?

46
- Dacă adunăm axialele 𝐽𝑥 + 𝐽𝑦 + 𝐽𝑧 = 2𝐽𝑜
- Dacă adunăm un axial cu un planar {
𝐽𝑥 + 𝐽𝑦𝑜𝑧 = 𝐽𝑜𝐽𝑦 + 𝐽𝑧𝑜𝑥 = 𝐽𝑜𝐽𝑧 + 𝐽𝑥0𝑦 = 𝐽𝑜
- Dacă adunăm cele 3 planare 𝐽𝑥𝑜𝑦 + 𝐽𝑦𝑜𝑧 + 𝐽𝑧𝑜𝑥 = 𝐽𝑜
- Dacă adunăm 2 planare {
𝐽𝑥𝑜𝑦 + 𝐽𝑦𝑜𝑧 = 𝐽𝑦𝐽𝑦𝑜𝑧 + 𝐽𝑥𝑜𝑦 = 𝐽𝑧𝐽𝑧𝑜𝑥 + 𝐽𝑦𝑜𝑧 = 𝐽𝑥
Între cele 7 momente de inerţie s-au obţinut 8 relaţii de legătură ceea ce înseamnă că
relaţiile nu sunt independente. Totuşi relaţiile sunt utile în cazul în care se calculează 2 dintre
ele şi se pot obţine celelalte.
Momente de inerţie pentru corpuri continue
Un corp continuu ocupă un domeniu D.
dV - element de volum
dm – masă elementară
Prin raportarea elementului de volum 𝑑𝑉 la sistemul de referinţă 𝑂𝑥𝑦𝑧 se vor defini cele 7
momente de inerţie obişnuite, dar în loc de sumele finite vom avea sume Riemann (sume
integrale).
∑⟶∫
Masa unităţii de volum = DENSITATE 𝑑𝑚
𝑑𝑉= 𝜌(𝑥, 𝑦, 𝑧) , [𝜌]𝑆𝐼 =
𝑘𝑔
𝑚3

47
- Dacă densitatea este diferită de la punct la punct atunci corpul este neomogen.
- Dacă densitatea este aceeaşi în toate punctele corpului 𝜌(𝑥, 𝑦, 𝑧) sunt constante – corpul
este omogen.
Cele 7 momente obişnuite
𝐽 = ∫ 𝑑2𝑑𝑚 - integrală variabilă pe toate elementele geometrice de referinţă.
1. Momentul de inerţie polar
𝐽𝑜 = ∫ 𝑑2
𝐷
𝑑𝑚
𝐽𝑜 = ∫ (𝑥2 + 𝑦2 + 𝑧2)𝐷
𝑑𝑚
Dacă corpul este omogen: 𝑑𝑚 = 𝜌𝑑𝑉
𝐽𝑜 = 𝜌∫ (𝑥2 + 𝑦2 + 𝑧2)𝐷
d𝑉
dV - un volum elementar corespunzător masei
2. Momentele de inerţie axiale.
𝐽𝑥 = ∫ (𝑦2 + 𝑧2)𝐷
𝑑𝑚
Omogen:
𝐽𝑥 = 𝜌∫ (𝑦2 + 𝑧2)𝐷
𝑑𝑉
𝐽𝑦 = ∫ (𝑧2 + 𝑥2)𝐷
𝑑𝑚
Omogen:
𝐽𝑦 = 𝜌∫ (𝑧2 + 𝑥2)𝐷
𝑑𝑉
𝐽𝑧 = ∫ (𝑥2 + 𝑦2)𝐷
𝑑𝑚
Omogen:
𝐽𝑧 = 𝜌∫ (𝑥2 + 𝑦2)𝐷
𝑑𝑉

48
3. Momente de inerţie planare
𝐽𝑥𝑜𝑦 = ∫ 𝑧2
𝐷
𝑑𝑚
Omogen:
𝐽𝑥𝑜𝑦 = 𝜌∫ 𝑧2
𝐷
𝑑𝑉
𝐽𝑦𝑜𝑧 = ∫ 𝑥2
𝐷
𝑑𝑚
Omogen:
𝐽𝑦𝑜𝑧 = 𝜌∫ 𝑥2
𝐷
𝑑𝑉
𝐽𝑧𝑜𝑥 = ∫ 𝑦2
𝐷
𝑑𝑚
Omogen:
𝐽𝑧𝑜𝑥 = 𝜌∫ 𝑦2
𝐷
𝑑𝑉
4. Momentele de inerție centrifugale:
𝐽𝑥𝑦 = ∫ 𝑥𝑦𝐷
𝑑𝑚
𝐽𝑦𝑧 = ∫ 𝑦𝑧𝐷
𝑑𝑚
𝐽𝑧𝑥 = ∫ 𝑧𝑥𝐷
𝑑𝑚
Observaţia 1: În cazul corpurilor omogene, densitatea iese de sub semnul integralei, fiind o
constantă, iar sub semnul integralei sunt numai mărimi geometrice (mărimi care nu depind de
natura materială a corpului).
Se poate scrie o relaţie generală între momentele de inerţie mecanice şi momentele de inerţie
geometrice astfel:
𝐽 = 𝜌𝐼
𝐼 - momentul de inerţie geometric care poate fi la rândul lui calculat pentru elementele
geometrice amintite la momentele mecanice:

49
{− 𝑚𝑜𝑚𝑒𝑛𝑡 𝑝𝑜𝑙𝑎𝑟− 𝑚𝑜𝑚𝑒𝑛𝑡 𝑎𝑥𝑖𝑎𝑙− 𝑚𝑜𝑚𝑒𝑛𝑡 𝑝𝑙𝑎𝑛𝑎𝑟
Observaţia 2: Corpul material poate avea masa continuu distribuită pe o curbă (bare), pe o
suprafaţă (plăci) şi respectiv pe volume.
În aceste cazuri domeniul pe care se face integrarea se schimbă, evident şi elementul de masă
se schimbă şi, în consecinţă, se vor obţine integrale curbilinii (în cazul barelor), integrale
duble – de suprafaţă (în cazul plăcilor) sau integrale triple – de volum (în cazul corpurilor
volumetrice).
Observaţia 3: Dacă domeniile sunt suprafeţe, în cazul corpurilor omogene, se calculează
momente de inerţie geometrice care vor fi utilizate la disciplina REZISTENȚA
MATERIALELOR.
Aplicație.
Presupunem că avem o placă dreptunghiulară de grosime constantă, ℎ.
𝑑𝐴 - element de arie
𝑑𝑉 - element de volum
𝑑𝑉 = 𝑑𝐴 ℎ
𝑑𝐴 = 𝑑𝑥 𝑑𝑦
𝐽𝑥 = ∫𝑦2 𝜌𝑑𝑉 = 𝜌∫𝑦2 ℎ𝑑𝐴 = 𝜌ℎ∫𝑦2 𝑑𝐴

50
𝐽𝑥 = 𝜌ℎ∬𝑦2 𝑑𝑥𝑑𝑦 = 𝜌ℎ∫ 𝑑𝑥𝑎
0
∫ 𝑦2𝑏
0
𝑑𝑦 = 𝜌ℎ𝑥|0𝑎𝑦3
3|0
𝑏
= 𝜌ℎ𝑎𝑏3
3= 𝜌ℎ
𝑎𝑏3
3
𝜌ℎ𝑎𝑏 = 𝑚; 𝑚 −𝑚𝑎𝑠𝑎 𝑝𝑙ă𝑐𝑖𝑖
𝐽𝑥 = 𝑚𝑏2
3
În mod analog
𝐽𝑦 = 𝑚𝑎2
3
Variaţia momentelor de inerţie faţă de axe paralele (Formulele lui Steiner)
Avem un corp omogen care are centru de greutate 𝐶, cunoscut. În centrul 𝐶 se alege un
sistem de referinţă 𝐶𝑥𝑦𝑧. Se consideră un alt sistem 𝑂1𝑥1𝑦1𝑧1 având axele paralele:
{𝑂1𝑥1 ∥ 𝐶𝑥𝑂1𝑦1 ∥ 𝐶𝑦𝑂1𝑧1 ∥ 𝐶𝑧
Dacă se cunosc momentele de inerţie faţă de elementele geometrice ale sistemului 𝐶𝑥𝑦𝑧 şi
poziţia celor două sisteme de referinţă, să se determine momentele de inerţie faţă de
elementele geometrice ale sistemului 𝑂1𝑥1𝑦1𝑧1.
��1 = ��1𝑐 + �� (1)

51
��𝑐 =∫ ��𝐷 𝑑𝑚
∫ 𝑑𝑚𝐷
= 0 (2)
Din (1) şi (2) ⇒
{
𝑥𝑐 =
∫ 𝑥𝑑𝑚𝐷
∫ 𝑑𝑚𝐷
= 0
𝑦𝑐 =∫ 𝑦𝑑𝑚𝐷
∫ 𝑑𝑚𝐷
= 0
𝑧𝑐 =∫ 𝑧𝑑𝑚𝐷
∫ 𝑑𝑚𝐷
= 0
Din ��1 = ��1𝑐 + �� ⇒ 𝑥1𝑖1 + 𝑦1𝑗1 + 𝑧1��1 = 𝑥1𝑐𝑖1 + 𝑦1𝑐𝑗1 + 𝑧1𝑐��1 + 𝑥𝑖 + 𝑦𝑗 + 𝑧��
{
𝑥1 = 𝑥1𝑐 + 𝑥𝑦1 = 𝑦1𝑐 + 𝑦𝑧1 = 𝑧1𝑐 + 𝑧
Vrem să determinăm 𝐽 faţă de 𝑥1:
𝐽𝑥1 = ∫ (𝑦12 + 𝑧1
2)𝑑𝑚𝐷
𝐽𝑥1 = ∫ [(𝑦1𝑐 + 𝑦)2 + (𝑧1𝑐 + 𝑧)
2]𝑑𝑚𝐷
𝑦1𝑐, 𝑧1𝑐 - coordonatele centrului de masă sunt cunoscute şi ies în afara integralelor.
⇒ 𝐽𝑥1 = ∫ (𝑦2 + 𝑧2)𝑑𝑚𝐷
+ 2𝑦1𝑐∫ 𝑦𝑑𝑚𝐷
+ 2𝑧1𝑐∫ 𝑧𝑑𝑚𝐷
+ (𝑦1𝑐2 + 𝑧1𝑐
2 )∫ 𝑑𝑚𝐷
Mai sus s-a demonstrat că
{
∫ 𝑦𝑑𝑚
𝐷
= 0
∫ 𝑧𝑑𝑚𝐷
= 0
⇒ ∫ 𝑑𝑚𝐷
= 𝑚 - masa corpului
𝑦1𝑐2 + 𝑧1𝑐
2 = 𝑑2𝑥1𝑥
𝑑𝑥1𝑥 – distanța dintre axele O1x1 și Cx
Formula lui Steiner: 𝐽𝑥1 = 𝐽𝑥 +𝑚𝑑2𝑥1𝑥
Această formulă spune că: Momentul de inerție în raport cu o axă paralelă cu altă axă ce trece
prin centrul de greutate este egal cu momentul de inerție în raport cu axa ce trece prin centru
de greutate, la care se adaugă produsul dintre masa corpului şi pătratul distanţei dintre cele
două axe.”

52
Observaţie: În cazul plăcilor (suprafeţelor) folosite la rezistenţă, această formulă este valabilă
şi pentru momentele de inerţie geometrice (în loc de masă va fi aria).
𝐼𝑥1 = 𝐼𝑥 + 𝐴𝑑2𝑥1𝑥
Pentru celelalte două axe se scrie similar:
𝐽𝑦1 = ∫ (𝑧12 + 𝑥1
2)𝑑𝑚𝐷
𝐽𝑦1 = ∫ [(𝑧 + 𝑧1𝑐)2 + (𝑥 + 𝑥1𝑐)
2]𝑑𝑚𝐷
𝐽𝑦1 = 𝐽𝑦 +𝑚𝑑2𝑦1𝑦
𝐼𝑦1 = 𝐼𝑦 + 𝐴𝑑2𝑦1𝑦
𝐽𝑧1 = ∫ (𝑥12 + 𝑦1
2)𝑑𝑚𝐷
𝐽𝑧1 = ∫ [(𝑥 + 𝑥1𝑐)2 + (𝑦 + 𝑦1𝑐)
2]𝑑𝑚𝐷
𝐽𝑧1 = 𝐽𝑧 +𝑚𝑑2𝑧1𝑧
𝐼𝑧1 = 𝐼𝑧 + 𝐴𝑑2𝑧1𝑧
şi pentru cele planare se poate scrie la fel:
𝐽𝑥1𝑜1𝑦1 = ∫ 𝑧12𝑑𝑚
𝐷
= ∫ (𝑧 + 𝑧1𝑐)2𝑑𝑚
𝐷
= 𝐽𝑥𝐶𝑦 +𝑚𝑧1𝑐2
𝐽𝑦1𝑜1𝑧1 = ∫ 𝑥12𝑑𝑚
𝐷
= ∫ (𝑥 + 𝑥1𝑐)2𝑑𝑚
𝐷
= 𝐽𝑦𝐶𝑧 +𝑚𝑥1𝑐2
𝐽𝑧1𝑜1𝑥1 = ∫ 𝑦12𝑑𝑚
𝐷
= ∫ (𝑦 + 𝑦1𝑐)2𝑑𝑚
𝐷
= 𝐽𝑧𝐶𝑥 +𝑚𝑦1𝑐2
Formulele lui STEINER pentru momentele centrifugale:
𝐽𝑥1𝑦1 = ∫ 𝑥1𝑦1𝑑𝑚𝐷
= ∫ (𝑥 + 𝑥1𝑐)(𝑦 + 𝑦1𝑐)𝑑𝑚𝐷
= ∫ 𝑥𝑦𝑑𝑚 +𝐷
𝑥1𝑐∫ 𝑦𝑑𝑚 +𝐷
𝑦1𝑐∫ 𝑥𝑑𝑚 +𝐷
𝑥1𝑐𝑦1𝑐∫ 𝑑𝑚𝐷
⇒ {
𝐽𝑥1𝑦1 = 𝐽𝑥𝑦 +𝑚𝑥1𝑐𝑦1𝑐𝐽𝑦1𝑧1 = 𝐽𝑦𝑧 +𝑚𝑦1𝑐𝑧1𝑐𝐽𝑧1𝑥1 = 𝐽𝑧𝑥 +𝑚𝑧1𝑐𝑥1𝑐

53
Echilibrul corpului și sistemelor de corpuri
Echilibrul corpului liber
Un corp este liber dacă poate să ocupe orice poziţie în spaţiu fără nici o constrângere
geometrică.
Dacă vrem să cunoaştem poziţia lui, presupunem că într-un corp liber cunoaştem
poziţia unui punct ceea ce implică cunoaşterea a trei parametrii geometrici care determină
poziţia acelui corp.
Poziţia corpului nu este determinată de poziţia acestui punct pentru că prin acel punct
presupunem că ducem trei axe, ceea ce înseamnă că el se poate roti faţă de toate cele trei axe
(pentru fiecare axă am o rotaţie).
Prin urmare, cunoaşterea poziţiei corpului necesită încă trei unghiuri (rotaţii faţă de
cele trei axe).
Concluzie: Se spune că un corp liber are şase grade de libertate, adică şase parametrii
geometrici determină poziţia lui.
Presupunem că asupra acestui corp acţionează nişte forţe exterioare de la 𝐹1, 𝐹2, … 𝐹��.
Forţele sunt cunoscute, adică sunt date şi punctele lor de aplicaţie sunt cunoscute. Dacă se
reduce sistemul de forţe în punctul 𝑂 rezultă torsorul 𝜏(��𝑑 ��𝑂𝑑) ⇒ �� = ∑ ��𝑖
𝑛𝑖=1 dar dacă
𝐹𝑖 = 𝐹𝑖𝑥𝑖 + 𝐹𝑖𝑦𝑗 + 𝐹𝑖𝑧��
⇒ �� =∑��𝑖
𝑛
𝑖=1
= (∑𝐹𝑖𝑥) 𝑖 + (∑𝐹𝑖𝑦) 𝑗 + (∑𝐹𝑖𝑧) �� = 𝑅𝑥𝑑𝑖 + 𝑅𝑦
𝑑𝑗 + 𝑅𝑧𝑑��

54
��𝑂 =∑��𝑖 × ��𝑖
𝑛
𝑖=1
=∑|𝑖 𝑗 ��𝑥𝑖 𝑦𝑖 𝑧𝑖𝐹𝑖𝑥 𝐹𝑖𝑦 𝐹𝑖𝑧
|
𝑛
𝑖=1
=
=∑(𝑦𝑖𝐹𝑖𝑧 − 𝑧𝑖𝐹𝑖𝑦) 𝑖 +∑(𝑧𝑖𝐹𝑖𝑥 − 𝑥𝑖𝐹𝑖𝑧) 𝑗 +∑(𝑥𝑖𝐹𝑖𝑦 − 𝑦𝑖𝐹𝑖𝑥) ��
Pentru echilibrul corpului este necesar ca sistemul de forţe să se situeze în cazul IV de
reducere:
{��𝑑 = 0��𝑂𝑑 = 0
- condiţii vectoriale
Rezultanta are 3 componente pe x, y, z; Momentul are 3 componente pe x, y, z; Astfel pentru
ca rezultanta să fie nulă, toate cele trei componente trebuie să fie nule.
{��𝑑 = 0��𝑂𝑑 = 0
⇒{
𝑅𝑥
𝑑 =∑𝐹𝑖𝑥
𝑛
𝑖=1
= 0
𝑅𝑦𝑑 =∑𝐹𝑖𝑦
𝑛
𝑖=1
= 0
𝑅𝑧𝑑 =∑𝐹𝑖𝑧
𝑛
𝑖=1
= 0
{
𝑀𝑂𝑥
𝑑 =∑(𝑦𝑖𝐹𝑖𝑧 − 𝑧𝑖𝐹𝑖𝑦)
𝑛
𝑖=1
= 0
𝑀𝑂𝑦𝑑 =∑(𝑧𝑖𝐹𝑖𝑥 − 𝑥𝑖𝐹𝑖𝑧)
𝑛
𝑖=1
= 0
𝑀𝑂𝑧𝑑 =∑(𝑥𝑖𝐹𝑖𝑦 − 𝑦𝑖𝐹𝑖𝑥)
𝑛
𝑖=1
= 0
Astfel s-au obţinut şase ecuații scalare de unde se pot determina cei şase parametrii
geometrici care determină poziţia de echilibru a corpului.
Echilibrul corpului supus la legături
Un corp este supus la legături dacă ocuparea unei poziţii în spaţiu este restricţionată de
anumite constrângeri geometrice.
Conform axiomei legăturilor, orice legătură poate fi ”înlăturată” cu condiţia ca în locul ei să
se introducă o forţă sau un sistem de forţe care să aibă acelaşi efect ca şi legătura.

55
Prin urmare, după eliberarea corpului de legături, acesta devine cu corp liber sub acţiunea
unui sistem de forţe exterioare sau date, notate: ��𝑖𝑑; 𝑖 = 1,2, … , 𝑛 respectiv unui sistem de
forţe de legătură ��𝑖𝑙; 𝑖 = 1,2, … , 𝑝.
Se reduc cele două sisteme de forţe în punctul O şi se va obţine un torsor format din:
- rezultanta forţelor date şi de legătură
- momentul forţelor date şi de legătură
𝜏0 = (��𝑑 + ��𝑙; ��𝑂𝑑 + ��𝑂
𝑙 )
{
��𝑑 =∑��𝑖
𝑑
𝑛
𝑖=1
= (∑𝐹𝑖𝑥𝑑
𝑛
𝑖=1
) 𝑖 + (∑𝐹𝑖𝑦𝑑
𝑛
𝑖=1
) 𝑗 + (∑𝐹𝑖𝑧𝑑
𝑛
𝑖=1
) ��
��𝑙 =∑��𝑖𝑙
𝑝
𝑖=1
= (∑𝐹𝑖𝑥𝑙
𝑝
𝑖=1
) 𝑖 + (∑𝐹𝑖𝑦𝑙
𝑝
𝑖=1
) 𝑗 + (∑𝐹𝑖𝑧𝑙
𝑝
𝑖=1
) ��
{
��𝑂𝑑 =∑��𝑖
𝑛
𝑖=1
× ��𝑖𝑑 =∑|
𝑖 𝑗 ��𝑥𝑖 𝑦𝑖 𝑧𝑖𝐹𝑖𝑥𝑑 𝐹𝑖𝑦
𝑑 𝐹𝑖𝑧𝑑|
𝑛
𝑖=1
��𝑂𝑙 =∑��𝑖
𝑝
𝑖=1
× ��𝑖𝑙 =∑|
𝑖 𝑗 ��𝑥𝑖 𝑦𝑖 𝑧𝑖𝐹𝑖𝑥𝑙 𝐹𝑖𝑦
𝑙 𝐹𝑖𝑧𝑙|
𝑝
𝑖=1
Pentru echilibrul corpului, sistemul forţelor date împreună cu sistemul forţelor de legătură
trebuie să aibă torsorul nul, 𝜏 = 0.
⇒ {��𝑑 + ��𝑙 = 0��𝑂𝑑 + ��𝑂
𝑙 = 0 - cazul IV de reducere
Cele două ecuaţii vectoriale se proiectează pe cele trei axe, obţinându-se şase ecuaţii scalare:
{
��𝑥𝑑 + ��𝑥
𝑙 = 0
��𝑦𝑑 + ��𝑦
𝑙 = 0
��𝑧𝑑 + ��𝑧
𝑙 = 0
{
��𝑂𝑥𝑑 + ��𝑂𝑥
𝑙 = 0
��𝑂𝑦𝑑 + ��𝑂𝑦
𝑙 = 0
��𝑂𝑧𝑑 + ��𝑂𝑧
𝑙 = 0
Astfel, s-au obţinut şase ecuații scalare din care se pot determina şase necunoscute.
Deoarece corpul este supus la legături, numărul gradelor de libertate se reduce. Prin urmare,
din cele şase ecuaţii se pot deduce parametrii geometrici care determină poziţia de echilibru
şi forţele introduse de legătură care se mai numesc şi reacţiuni.

56
Legăturile la care este supus un corp rigid
Rezemarea
Se spune că un corp se reazemă pe un alt corp numit legătură deoarece au un punct comun.
Corpul (C) se reazemă pe corpul (L), numit legătură. Corpul de legătură are o suprafaţă S.
Prin punctul de contact ducem un plan tangent la suprafaţa S. Asupra corpului C acţionează
un sistem de forţe exterioare sau date. Dacă se reduce sistemul de forţe în punctul O se
obţine torsorul forţelor date: 𝜏𝑜(��𝑑, ��𝑂
𝑑).
Forţele de legătură, reduse tot în punctul O, vor da un torsor al forţelor de legătură. Pentru
echilibrul corpului este necesar ca rezultanta celor două forţe şi momentul să fie egale cu 0.
În punctul O se ridică o perpendiculară pe planul tangent care este normala la suprafaţă în
acel punct. Rezultanta forţelor date împreună cu normala determină un plan care intersectat
cu planul P dă tangenta t: (��𝑑, 𝑛)⋂𝑃𝑡 = 𝑡.
Descompunem pe ��𝑑 după cele două drepte şi vom obţine ��𝑛𝑑 şi ��𝑡
𝑑.
��𝑑 = ��𝑛𝑑 + ��𝑡
𝑑
��𝑙 = ��𝑛𝑙 + ��𝑡
𝑙
Componenta normală a rezultantei forţelor date caută să introducă corpul C în corpul de
legătură L, ceea ce este imposibil deoarece corpurile sunt rigide. Prin urmare, din partea
legaturii L apare o componentă ��𝑛𝑙 care se opune. Această componentă se numeşte reacţiune
normală (��).

57
⇒ ��𝑛𝑑 + �� = 0
Cele două componente îşi fac echilibrul.
Componenta tangenţială a forţelor date caută să deplaseze corpul C peste legătura L.
Putem considera două cazuri:
Cazul 1: Dacă legătura este ideală (fără frecare) atunci pentru echilibru ��𝑡𝑑 = 0. Prin urmare,
în acest caz, rezultanta forţelor direct aplicate trebuie să aibă direcţia normală la suprafaţă.
Cazul 2: Dacă legătura nu este ideală (are frecare) atunci tendinţei de deplasare date de ��𝑡𝑑 i
se opune o componentă de legătură numită şi forţă de frecare ��𝑡𝑑 = ��𝑓. În acest caz, pentru
echilibru, ��𝑡𝑑 + ��𝑓 = 0.
În mod asemănător ca şi la punctul material se demonstrează că 0 ≤ ��𝑓 ≤ ��𝑓𝑚𝑎𝑥, iar conform
legilor lui Columb: 𝐹𝑓𝑚𝑎𝑥 = 𝜇𝑁.
Momentul forţelor date împreună cu normala determină un plan care intersectat cu planul
tangent dă o dreaptă (��𝑜𝑑 , ��)⋂𝑃𝑡 = 𝑡
′).
Componenta normală a momentului forţelor date caută să rotească corpul C în jurul normalei
n. Dacă legătura este ideală, adică suprafaţa este lucie, atunci pentru echilibru ��𝑡𝑑 = 0 - acest
moment se mai numeşte şi momentul frecării de pivotare.
Dacă suprafaţa este cu frecare atunci aceasta introduce un moment de legătură numit moment
de frecare de pivotare.
��𝑛𝑑 + ��𝑛
𝑙 = 0 - pentru echilibru
0 ≤ ��𝑓𝑝 ≤ ��𝑝 𝑚𝑎𝑥

58
Componenta tangentă a momentului forţelor date caută să rostogolească corpul C peste
legătura L. Dacă legătura este ideală, pentru echilibru trebuie să fie 0 (��𝑙𝑑 = 0).
Dacă legătura nu este ideală, atunci aceasta se opune cu un moment ��𝑡𝑙 numit şi moment de
frecare de rostogolire.
Pentru echilibru: ��𝑡𝑑 + ��𝑓𝑟 = 0
Momentul de frecare de rostogolire maxim se demonstrează experimental.
𝑀𝑓 𝑚𝑎𝑥 = 𝑠𝑁
s - coeficient de frecare de rostogolire şi are dimensiunea de lungime.
Simbolizarea rezemării este prezentată în figură.
Articulaţia
Se spune că două corpuri sunt articulate dacă ele au tot timpul un punct comun (acelaşi
punct).
Se spune că articulaţia este sferică când sistemul de forţe care acţionează este în spaţiu. Prin
urmare sunt împiedicate deplasările după trei direcţii. În schimb sunt permise rotaţiile. Se
mai poate spune că articulaţia sferică reduce numărul gradelor de libertate de la şase la trei.
Când forţele sunt într-un plan – articulaţia este cilindrică.
Deplasarea este împiedicată după două direcţii.
Simbolul articulaţiei plane:

59
Sistemul de forţe ��i; i=1, 𝑛 ; se reduce în punctul de articulaţie O, la bine cunoscutul torsor
𝜏(��,��0) unde {��𝑑 = ∑ 𝐹��
𝑛𝑖=1
��0𝑑 = ∑ 𝑟𝑖 × ��𝑖 = ∑ 𝑂𝐴 𝑖 × 𝐹��
𝑛𝑖=1 𝑛
𝑖=1
Dacă frecările din articulaţie se neglijează, acest moment trebuie să fie nul ��𝑂𝑑 = 0, altfel
corpul nu stă în echilibru.
Rezultanta forţelor direct aplicate încearcă să scoată corpul C din legătura L, dar datorită
faptului că există o articulaţie acest lucru este imposibil, ceea ce înseamnă că legătura se
opune cu o forţă egală şi de semn contrar.
Deci, pentru echilibru, rezultanta dintre forţele direct aplicate şi de legătură trebuie să fie 0.
��𝑑 + ��𝑙 = 0
În cazul unei articulaţii sferice forţa de legătura va avea trei componente:
��𝑙 = ��𝑥𝑙 𝑖 + ��𝑦
𝑙 𝑗 + ��𝑧𝑙 ��
rezultă că articulaţia sferică introduce trei necunoscute.
În cazul unei articulaţii plane, rezultanta forţelor date este într-un plan, astfel că rezultanta
forţelor de legătură va fi în acelaşi plan, ceea ce înseamnă că va avea două componente, altfel
spus articulaţia plană introduce două necunoscute:
��𝑙 = ��𝑥𝑙 𝑖 + ��𝑦
𝑙 𝑗
De obicei se notează cu V şi H cele două necunoscute.

60
Dacă nu se neglijează frecările din articulaţie (articulaţia este cu frecare) atunci legătura se
opune tendinţei unei mişcări de rotaţie printr-un moment de legătură.
Pentru echilibru: ��𝑜𝑑 + ��𝑜
𝑙 = 0, unde ��𝑜𝑙 este momentul de frecare din articulaţie 𝑀𝑓𝑎.
𝑀𝑓𝑎 = 𝜇𝑟𝑅𝑙, unde 𝜇 este coeficientul de frecare din articulaţie şi 𝑟 este raza fusului
articulaţiei.
Încastrarea
Încastrarea este o legătură care împiedică orice tip de deplasare dintre corpul C şi corpul de
legătură L. Cele două corpuri au în comun cel puţin trei puncte necoliniare.
Presupunem că asupra corpului C acţionează un sistem de forţe din exterior. Reducând
sistemul de forţe într-un punct O obţinem torsorul forţelor direct aplicate 𝜏(��𝑑, ��𝑜𝑑).
Rezultanta forţelor ��𝑑 caută să-l scoată pe C din legătură. Momentul forţelor date ��𝑜𝑑 caută
să rotească corpul C în raport cu legătura L, deplasare imposibilă, rezultă că legătura
introduce un mement al forţelor de legătură.
În acest caz, condiţia de echilibru se scrie:

61
{��𝑑 + ��𝑙 = 0��𝑜𝑑 + ��𝑜
𝑙 = 0 (*)
Cele două componente introduse de legătură ��𝑙, ��𝑜𝑙 vor avea câte trei componente:
{��𝑙 = 𝑅𝑥
𝑙 𝑖 + ��𝑦𝑙 𝑗 + ��𝑧
𝑙 ��
��𝑜𝑙 = 𝑀𝑥
𝑙 𝑖 + 𝑀𝑦𝑙 𝑗 + 𝑀𝑧
𝑙 ��
ceea ce înseamnă că o încastrare introduce şase necunoscute.
Ecuaţiile vectoriale (*) se proiectează pe cele trei axe şi prin urmare se obţin şase ecuaţii
scalare. Din acestea se obţin cele şase necunoscute ale încastrării.
Dacă forţele care reacţionează asupra corpului C sunt într-un plan, avem de-a face cu
reducerea sistemului de forţe plane.
Acestea se reduc la o rezultantă situată în acel plan şi un moment perpendicular pe planul
forţelor, prin urmare, şi rezultanta forţelor de legătură va fi în acel plan, respectiv momentul
forţelor de legătură (moment de încastrare) va fi perpendicular pe acel plan (în cazul nostru
Oxy).
{��𝑙 = 𝑅𝑥
𝑙 𝑖 + 𝑅𝑦𝑙 𝑗
��𝑜𝑙 = 𝑀𝑧
𝑙 ��
Rezultă că în plan încastrarea introduce trei necunoscute.

62
Legătura cu fir
Legătura cu fir este un caz particular de rezemare, practic firul obligând un corp să stea pe o
suprafaţă sferică. Prin urmare, firul se înlocuiește cu o forță de legătură, numită şi efort sau
tensiune. Rezultă că legătura cu fir introduce o singură necunoscută.
Echilibrul sistemelor de corpuri
Două sau mai multe corpuri aflate în legătură constituie un sistem de corpuri. Pentru
rezolvarea problemei de echilibru sistemului de corpuri se aplică următoarele metode:
Metoda separării (izolării) corpurilor
Această metodă se bazează pe următorul considerent: dacă un sistem de corpuri este
în echilibru sub acţiunea forţelor date din exterior, forţele de legătură interioare (dintre
corpuri) şi forţele de legătură cu exteriorul, atunci fiecare corp în parte este în echilibru sub
acţiunea forţelor date care acţionează asupra lui (a corpului) şi a forţelor de legătură pe care
acesta le are cu alte corpuri sau cu exteriorul.

63
În punctele 𝑂1, 𝑂2, ..., 𝑂𝑛 sunt legături. 𝑂1 şi 𝑂𝑛 sunt legături exterioare şi 𝑂2, 𝑂3, ..., 𝑂𝑛−1
legături interioare (dintre corpuri).
Asupra corpului acţionează forţe exterioare: ��1, ��2, ..., ��𝑛,. Fiecare corp in parte, se separă.
Se pun forţele exterioare care acţionează asupra corpurilor.
Se înlocuiesc legăturile exterioare cu forţele de legătură corespunzătoare. În cazul în care
legăturile sunt complexe se introduce torsorul forţelor de legătură. Se înlocuiesc legăturile
dintre corpuri (legături interioare) cu forţe de legătură corespunzătoare, conform principiului
acţiunii şi reacţiunii.
Astfel rezultă că dacă asupra unui corp este acţiune, asupra celuilalt se va introduce o
legătură egală şi de sens contrar.

64
Pentru fiecare corp se scriu condiţiile de echilibru. De exemplu pentru corpul k:
{��𝑘𝑑 + ��𝑙
𝑙 = 0
��𝑜𝑘𝑑 + ��𝑜𝑘
𝑙 = 0
𝑘 = 1,2, … , 𝑛
Aceste două ecuaţii vectoriale prin proiecţii pe cele trei axe ale unui sistem Oxyz se
transformă în şase ecuaţii scalare. Dacă sunt 𝑛 corpuri, atunci se obţin 6𝑛 ecuaţii scalare. Din
acest sistem de ecuaţii rezultă 6𝑛 necunoscute.
OBS: Dacă forţele sunt într-un plan, atunci pentru fiecare corp se scriu trei ecuaţii de
echilibru, rezultă în total 3𝑛 ecuaţii de echilibru (printre necunoscute, în general sunt forţele
de legătură şi uneori parametrii geometrici ce determină poziţia de echilibru).
Metoda solidificării (rigidizării) corpurilor
Această metodă se bazează pe următorul considerent: dacă un sistem de corpuri legate între
ele prin diferite tipuri de legături sunt în echilibru sub acţiunea unui sistem de forţe date din
exterior, atunci acest sistem de corpuri poate fi considerat ca un singur corp rigid ce se află în
echilibru sub acţiunea forţelor date din exterior şi a forţelor de legătură cu exteriorul.

65
În exemplul considerat, legăturile 𝑂1 şi 𝑂𝑛 sunt legături exterioare şi celelalte, 𝑂2, 𝑂3, ...,
𝑂𝑛−1 sunt legături interioare. Prin aplicarea metodei rigidizării (solidificării), întreg sistemul
de corpuri se consideră ca fiind un singur corp rigid. Prin urmare nu se desfac legăturile
interioare.
Corpul va fi în echilibru sub acţiunea forţelor date din exterior şi a forţelor de legătură cu
exteriorul. Prin urmare fiind un singur corp se scriu următoarele ecuaţii vectoriale de
echilibru.
{��𝑑 + ��𝑙𝑒𝑥𝑡 = 0��𝑜𝑑 + ��𝑜
𝑙𝑒𝑥𝑡 = 0
Cele două ecuaţii vectoriale se proiectează pe cele trei axe obţinându-se şase ecuaţii scalare,
rezultă şase necunoscute.
OBS: Dacă forţele sunt într-un plan, atunci ecuaţiile scalare vor fi trei.
Astfel rezultă că metoda este recomandată atunci când numărul necunoscutelor introduse de
legăturile exterioare şi de poziţia de echilibru, şase în cazul forţelor în spaţiu, respectiv trei în
cazul forţelor plane.
Metoda mixă
Sunt situaţii în care se poate aplica o combinaţie dintre cele două metode:
- să se facă solidificarea pentru 𝑛 − 1 corpuri şi izolarea pentru unul singur, astfel rezultă
metoda mixtă.

66
CINEMATICA
Cinematica punctului material
Elemente cinematice ale mişcării unui punct
Se spune că mişcarea unui punct este cunoscută dacă în fiecare moment al mişcării poziţia lui
este bine precizată faţă de un reper.
Dacă reperul este fix atunci mişcarea se numeşte mişcare absolută, iar dacă reperul este
mobil, mişcare se numeşte relativă.
Poziţia unui punct la un moment dat este precizată prin vectorul de poziţie.
Legea vectorială a mişcării: 𝑟 = 𝑟(𝑡)
Un alt mod pentru precizarea mişcării este cunoaşterea celor trei parametrii geometrici
corespunzători celor trei grade de libertate:
{
𝑞1 = 𝑞1(𝑡)
𝑞2 = 𝑞2(𝑡)𝑞3 = 𝑞3(𝑡)
Cele trei funcţii scalare de timp reprezintă legea mişcării sub formă parametrică, parametrul
fiind timpul (t)
Locul geometric descris de punct în mişcare se numeşte traiectorie.
Prin eliminarea timpului între cele trei funcţii scalare se obţin două funcţii scalare:
{𝑓1(𝑞1, 𝑞2, 𝑞3) = 0
𝑓2(𝑞1, 𝑞2, 𝑞3) = 0

67
Ecuaţiile a două suprafeţe în sistemul de coordonate ales.
Intersecţia acestor două suprafeţe dă curba pe care se mişcă punctul material. Este bine de
precizat că această curbă pe care se mişcă punctul nu este întotdeauna traiectoria (traiectoria
este o parte din această curbă).
Pendulul se mişcă pe un cerc.
Cunoaşterea traiectoriei nu implică descrierea completă a mişcării pentru că această mişcare
poate să aibă loc într-un timp mai lung sau mai scurt, din acest motiv se definesc alte
elemente cinematice ale mişcării:
Viteza
Considerăm punctul 𝑃1 la momentul 𝑡, după un interval de timp (∆𝑡) punctul se va găsi în 𝑃2.
Din punct de vedere geometric între poziţia lor există o diferenţă vectorială ∆��
∆�� = 𝑟(𝑡 + ∆𝑡) − 𝑟(𝑡)
Se defineşte viteza medie ca fiind raportul ∆𝑟/∆𝑡.

68
𝑣𝑚 =∆𝑟
∆𝑡=𝑟(𝑡 + ∆𝑡) − 𝑟(𝑡)
∆𝑡
[𝑣]𝑆𝐼 = 𝑚/𝑠
Intervalul ∆𝑡 poate fi mai mare sau mai mic. 𝑣𝑚 este viteza medie pe acest interval de timp.
Dacă presupunem că ∆𝑡 se micşorează atunci poziţia lui 𝑃2 este tot mai aproape de 𝑃1.
Rezultă că la un moment dat putem considera că ∆𝑡 → 0.
Se defineşte viteza instantanee (momentană):
𝑣 = lim∆𝑡→0
∆𝑟
∆𝑡= lim
∆𝑡→0
𝑟(𝑡 + ∆𝑡) − 𝑟(𝑡)
∆𝑡⇒ 𝑣 = ��(𝑡)
OBS: În mecanică se foloseşte pentru simbolul derivatei în raport cu timpul punctul pentru a
se deosebi de derivatele în raport cu alte variabile.
Acceleraţia
Pentru a descrie modul în care are loc modificarea vitezei se introduce noţiunea de
acceleraţie. Notăm cu 𝑣1 viteza punctului în poziția 𝑃1 şi cu 𝑣2 viteza punctului în poziția 𝑃2.
∆�� = 𝑣(𝑡 + ∆𝑡) − 𝑣(𝑡)
[𝑎]𝑆𝐼 = 𝑚/𝑠2
Se defineşte acceleraţia medie ca fiind raportul ∆𝑣/∆𝑡.
𝑎𝑚 =∆𝑣
∆𝑡=𝑣(𝑡 + ∆𝑡) − 𝑣(𝑡)
∆𝑡
69
Se constată că acceleraţia este un vector îndreptat spre interiorul curbei pe care se deplasează
punctul. Dacă intervalul de timp ∆𝑡 se micşorează, atunci punctul 𝑃2 aproape se suprapune cu
𝑃1. Rezultă că la un moment dat putem considera că ∆𝑡 → 0.
𝑎 = lim∆𝑡→0
∆𝑣
∆𝑡= lim
∆𝑡→0
𝑣(𝑡 + ∆𝑡) − 𝑣(𝑡)
∆𝑡⇒ 𝑎 = ��(𝑡)
Dacă ţinem cont că viteza este derivata vectorului de poziţie, rezultă: 𝑎 = �� = ��
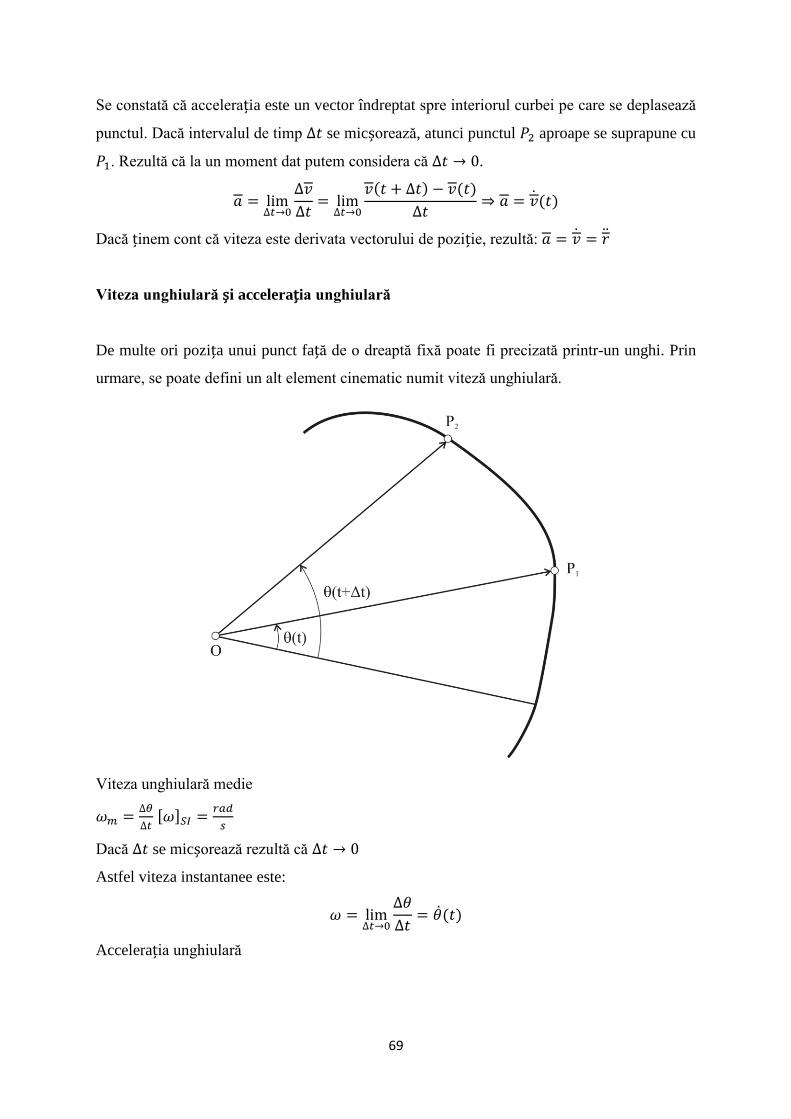
Viteza unghiulară şi acceleraţia unghiulară
De multe ori poziţa unui punct faţă de o dreaptă fixă poate fi precizată printr-un unghi. Prin
urmare, se poate defini un alt element cinematic numit viteză unghiulară.
Viteza unghiulară medie
𝜔𝑚 =∆𝜃
∆𝑡 [𝜔]𝑆𝐼 =
𝑟𝑎𝑑
𝑠
Dacă ∆𝑡 se micşorează rezultă că ∆𝑡 → 0
Astfel viteza instantanee este:
𝜔 = lim∆𝑡→0
∆𝜃
∆𝑡= ��(𝑡)
Acceleraţia unghiulară

70
Dacă punctul are la momentul 𝑡 viteza unghiulară ��(𝑡), după un timp ∆𝑡 viteza unghiulară va
fi ��(𝑡 + ∆𝑡). Prin urmare, are loc o variaţie a vitezei unghiulare în intervalul ∆𝑡 deci se poate
introduce acceleraţia unghiulară medie:
𝜀𝑚 =∆𝜔
∆𝑡
Dacă ∆𝑡 se micşorează, cele două puncte se apropie şi ∆𝑡 → 0
Astfel acceleraţia instantanee este:
𝜀 = lim∆𝑡→0
∆𝜔
∆𝑡= ��(𝑡) = ��(𝑡); [𝜀]𝑆𝐼 =
𝑟𝑎𝑑
𝑠2
Viteza areolară şi acceleraţia areolară
Viteza areolară
De multe ori se urmăreşte, în mişcarea unui punct material, cum se modifică aria descrisă de
vectorul de poziţie al punctului într-un interval de timp.
Vectorul de poziţie a descris o arie ∆𝐴, astfel se poate descrie o viteză areolară medie.
Ω𝑚 =∆𝐴
∆𝑡
Mărime scalară ∆𝐴 =1
2∆𝑟 ∙ 𝑟
Mărime vectorială ∆𝐴 =1
2𝑟 × ∆𝑟
[Ω]𝑆𝐼 =𝑚2
𝑠
Când ∆𝑡 → 0 rezultă viteza areolară instantanee
Ω = lim∆𝑡→0
∆𝐴
∆𝑡

71
Ω = lim∆𝑡→0
1
2
𝑟 × ∆𝑟
∆𝑡= lim
∆𝑡→0(1
2�� ×
∆𝑟
∆𝑡) =
1
2�� × lim
∆𝑡→0
∆𝑟
∆𝑡=1
2𝑟 × 𝑣
Ω =1
2�� × ��
Acceleraţia areolară
Acceleraţia areolară medie:
Γ𝑚 =∆Ω
∆𝑡
Acceleraţia areolară instantanee:
∆𝑡 → 0 rezultă Γ = lim∆𝑡→0
∆Ω
∆𝑡= Ω
Γ =1
2�� × 𝑣 +
1
2𝑟 × �� =
1
2𝑣 × 𝑣 +
1
2𝑟 × 𝑎 =
1
2𝑟 × 𝑎
1
2𝑣 × 𝑣 = 0
Γ =1
2𝑟 × 𝑎
[Γ]𝑆𝐼 =𝑚2
𝑠2
Studiul mişcării unui punct material în coordonate carteziene
Se presupune cunoaşterea mişcării unui punct, cunoscută faţă de un triedru de referinţă Oxyz.
Prin urmare în orice moment al mişcării se cunosc cele trei coordonate ale sale ca funcţie de
timp, ceea ce reprezintă legea mişcării sub formă parametrică.

72
{
𝑥 = 𝑥(𝑡)𝑦 = 𝑦(𝑡)𝑧 = 𝑧(𝑡)
⇒ {𝑓1(𝑥, 𝑦, 𝑧) = 0
𝑓2(𝑥, 𝑦, 𝑧) = 0
Din intersecția celor două suprafețe date de ecuațiile 𝑓1 ş𝑖 𝑓2 rezultă curba pe care se
deplasează punctul material.
Legea vectorială se poate exprima în coordonate carteziene sub forma:
𝑟 = 𝑥𝑖 + 𝑦𝑗 + 𝑧𝑘
Viteza mişcării unui punct în coordonate carteziene:
𝑣 = �� = ��𝑖 + 𝑥𝑖 + ��𝑗 + 𝑦𝑗 + ��𝑘 + 𝑧𝑘
Deoarece versorii 𝑖, 𝑗, 𝑘 sunt vectori de modul constant |𝑖| = |𝑗| = |𝑘| = 0 şi de direcţie şi
sens cunoscute, putem trage concluzia că nu variază în timp, rezultă că derivata lor în raport
cu timpul este zero.
𝑣 = �� = ��𝑖 + ��𝑗 + ��𝑘
Astfel se poate trage concluzia că proiecţiile vitezei pe cele trei axe sunt:
{
𝑣𝑥 = ��𝑣𝑦 = ��
𝑣𝑧 = ��
Modulul vitezei:
𝑣 = √𝑣𝑥2 + 𝑣𝑦2 + 𝑣𝑧2 ⟺ 𝑣 = √��2 + ��2 + ��2
Acceleraţia mişcării unui punct în coordonate carteziene:
𝑎 = �� = �� = ��𝑖 + ��𝑗 + ��𝑘
Rezultă următoarele proiecţii ale acceleraţiei în coordonate carteziene:
{
𝑎𝑥 = ��𝑎𝑦 = ��
𝑎𝑧 = ��
Modulul acceleraţiei:
𝑎 = √𝑎𝑥2 + 𝑎𝑦2 + 𝑎𝑧2 ⟺ 𝑎 = √��2 + ��2 + ��2

73
Studiul mişcării unui punct material în coordonate intrinseci (Frenet)
Dacă se cunoaşte traiectoria pe care are loc mişcarea unui punct atunci poziţia punctului la un
moment dat poate fi precizată şi prin lungimea arcului 𝑠 = 𝑠(𝑡). Pentru că măsurarea arcului
se face în sens orar, acesta se mai numeşte şi legea orară a mişcării.
Pentru studiul mişcării se foloseşte un triedru numit triedrul lui Frenet format din tangenta la
curbă în punctul considerat, normala principală şi binormala, care trebuie să satisfacă relaţia:
𝑏 = 𝜏 × 𝑛 ⇔ 𝑘 = 𝑖 × 𝑗
Triedrul lui Frenet este legat de punct (merge odată cu punctul).
Pentru viteză, conform definiţiei, vom avea: 𝑣 =𝑑𝑟
𝑑𝑡
Fiind dată traiectoria şi cunoscându-se legea orară a mişcării, legea vectorială este dată
implicit:
𝑟 = 𝑟(𝑠)
�� =𝑑𝑟
𝑑𝑡=𝑑𝑟
𝑑𝑠∙𝑑𝑠
𝑑𝑡= 𝑠𝜏
𝑑𝑟
𝑑𝑠→ 𝜏 când ∆𝑡 → 0 ⇒
𝑑𝑟
𝑑𝑠= 𝜏
Concluzie: Viteza are o singură componentă pe tangentă sau viteza este întotdeauna tangentă
la traiectorie.
{𝑣𝜏 = ��𝑣𝑛 = 0𝑣𝑏 = 0

74
Pentru acceleraţie:
𝑎 =𝑑𝑣
𝑑𝑡=𝑑��
𝑑𝑡𝜏 + ��
𝑑𝜏
𝑑𝑡
𝑑𝜏
𝑑𝑡=𝑑𝜏
𝑑𝑠∙𝑑𝑠
𝑑𝑡= ��
𝑑𝜏
𝑑𝑠
Folosind formula lui Frenet vom obţine:
𝑑𝜏
𝑑𝑠=
1
𝜌𝑛, unde 𝜌 este raza de curbură şi 𝑛 este versorul normalei
Revenind la formula acceleraţiei: 𝑎 = ��𝜏 +��2
𝜌𝑛
Prin urmare acceleraţia are următoarele componente:
{
𝑎𝜏 = �� = ��
𝑎𝑛 =��2
𝜌=𝑣2
𝜌𝑎𝑏 = 0
⇒ 𝑎 = √𝑎𝜏2 + 𝑎𝑛2 = √��2 +𝑣2
𝜌2
Concluzii:
1. Acceleraţia este în planul format de tangentă şi normala principală.
2. Chiar dacă mișcarea este cu viteză constantă, atunci când acceleraţia tangenţială este zero,
există acceleraţie normală.
3. Se pune problema cum este mişcarea în care nu există acceleraţie: 𝑎𝑛 → 0, 𝜌 → ∞ rezultă
punctul material trebuie să se deplaseze pe o dreaptă cu viteză constantă.
Mişcarea unui punct în coordonate polare
Dacă mişcarea unui punct are loc într-un plan, poziţia acestuia la un moment dat este perfect
determinată prin distanţa de la un reper fix 𝑂 la punct, notată cu 𝜌, numită rază polară,
respectiv printr-un unghi 𝜃 măsurat faţă de o dreaptă orizontală până la raza polară.

75
Legea de mişcare a unui punct în coordonate polare:
{𝜌 = 𝜌(𝑡)𝜃 = 𝜃(𝑡)
Relațile de mai sus reprezintă totodată şi ecuaţiile traiectoriei sub formă parametrică.
Se alege un sistem de versori 𝑖��- în lungul razei polare şi 𝑖�� - în sensul creșterii al lui 𝜃 şi
perpendicular pe 𝑖��.
Aceşti doi versori au poziţia variabilă în timp. Pentru a cunoaşte derivatele acestora în raport
cu timpul va trebui să explicităm în raport cu versorii unui sistem de referinţă fix, din plan.
Se alege axa 𝑂𝑥 dreapta orizontală şi 𝑂𝑦 perpendiculară pe aceasta.
{𝑖�� = 𝑐𝑜𝑠𝜃𝑖 + 𝑠𝑖𝑛𝜃𝑗
𝑖�� = −𝑐𝑜𝑠 (𝜋
2− 𝜃) 𝑖 + 𝑠𝑖𝑛 (
𝜋
2− 𝜃) 𝑗
⇒ {𝑖�� = 𝑐𝑜𝑠𝜃𝑖 + 𝑠𝑖𝑛𝜃𝑗
𝑖�� = −𝑠𝑖𝑛𝜃𝑖 + 𝑐𝑜𝑠𝜃𝑗
Legea mişcării sub formă vectorială:
𝑟 = 𝑂𝑃 = 𝜌𝑖𝜌
𝑣 = �� =𝑑𝑟
𝑑𝑡
Reguli de derivare ale versorilor:
{i𝜌 = −��𝑠𝑖𝑛𝜃i + ��𝑐𝑜𝑠𝜃j = ��i𝜃
i𝜃 = −��𝑐𝑜𝑠𝜃i − ��𝑠𝑖𝑛𝜃j = −��i𝜌
Ținând cont de formulele scrise anterior, viteza va fi:
𝑣 = ��i𝜌 + 𝜌i𝜌 = ��i𝜌 + 𝜌��i𝜃

76
Modulul vitezei:
𝑣 = √𝑣𝜌2 + 𝑣𝜃2 = √��2 + 𝜌2��2
Acceleraţia în coordonate polare:
𝑎 = �� = ��i𝜌 + ��i𝜌 + ����i𝜃 + 𝜌��i𝜃 + 𝜌��i
𝜃
⇒ 𝑎 = ��𝑖𝜌 + ����𝑖𝜃 + ����𝑖𝜃 + 𝜌��𝑖𝜃 − 𝜌��2𝑖𝜌
Componentele acceleraţiei în coordonate polare:
{𝑎𝜌 = �� − 𝜌��2
𝑎𝜃 = 2���� + 𝜌��
𝑎 = √𝑎𝜌2 + 𝑎𝜃2 = √(�� − 𝜌��2)
2+ (2���� + 𝜌��)
2
Studiul mişcării unui punct în coordonate cilindrice
În spaţiu, poziţia unui punct poate fi precizată prin cele două coordonate din plan, 𝜌 şi 𝜃, iar
a treiacoordonată este cota 𝑧 la care se află punctul.
Legile de mişcare ale unui punct în coordonate cilindrice:
{
𝜌 = 𝜌(𝑡)
𝜃 = 𝜃(𝑡)
𝑧 = 𝑧(𝑡)
𝑟 = 𝑂𝑃′ + 𝑃′𝑃 = 𝜌𝑖𝜌 + 𝑧𝑘

77
𝑣 = �� = ��𝑖𝜌 + 𝜌𝑖𝜌 + ��𝑘 = ��𝑖𝜌 + 𝜌��𝑖𝜃 + ��𝑘
⇒ {
𝑣𝜌 = ��
𝑣𝜃 = 𝜌��𝑣𝑧 = ��
𝑣 = √𝑣𝜌2 + 𝑣𝜃2 + 𝑣𝑧2 = √(��)2 + (𝜌��)
2+ 𝑧2
Componentele acceleraţiei în coordonate cilindrice:
𝑎 = �� = ��𝑖𝜌 + ��𝑖𝜌 + ����𝜃 + ����𝑖𝜃 + 𝜌��𝑖𝜃 + ��𝑘
Înlocuim ��𝜌 şi ��𝜃 şi vom obţine:
𝑎 = ��𝑖𝜌 + ����𝑖𝜃 + ����𝑖𝜃 − 𝜌��2𝑖𝜌 + ��𝑘
⇒ {
𝑎𝜌 = �� − 𝜌��2
𝑎𝜃 = 2���� + 𝜌��𝑎𝑧 = ��
⇒ 𝑎 = √𝑎𝜌2 + 𝑎𝜃2 + 𝑎𝑧2 = √(�� − 𝜌��2)
2+ (2���� + 𝜌��)
2+ ��2
Cinematica corpului rigid
Legile de mişcare ale unui punct material
Se spune că mişcarea unui corp rigid este cunoscută dacă în orice moment al mişcării sale se
cunosc poziţia, viteza şi acceleraţia oricărui punct din corp.
Prin urmare, de la început se constată că trebuie găsite relaţii general valabile pentru toate
punctele din corp pentru că fiecare nu poate fi analizat, corpul având o infinitate de puncte.
Un corp după cum se ştie are şase grade de libertate. În mişcarea lui, şase funcţii scalare o
determină complet. Vom arăta că cele şase funcţii scalare sunt determinate de coordonatele
unui punct oarecare din corp şi de cosinusurile directoare ale unui sistem de axe 𝑂𝑥𝑦𝑧 legat
de corp faţă de axele unui sistem de referinţă fix 𝑂1𝑥1𝑦1𝑧1.

78
𝑖1, 𝑗1, 𝑘1 – versori fixi, atât ca mărime, cât şi ca direcţie ai sistemului 𝑂𝑥1𝑦1𝑧1
𝑖, 𝑗, 𝑘 - versori (cu modulul 1) ai sistemului 𝑂𝑥𝑦𝑧 care se mişcă odată cu corpul, rezultă că au
direcţia variabilă
Fiecare din aceşti versori 𝑖, 𝑗, 𝑘 este determinat prin cosinusurile unghiurilor pe care aceştia
le fac cu versorii 𝑖1, 𝑗1, 𝑘1 ai sistemului fix şi se numesc cosinusuri directoare. Se notează cu
𝛼𝑖𝑗, 𝑖 = 1,2,3 corespunzător pe rând versorului 𝑖, 𝑗, 𝑘, respectiv 𝑗 = 1,2,3 corespunzător pe
rând 𝑖1, 𝑗1, 𝑘1.
𝛼11 = cos ( 𝑖, 𝑖1) 𝛼21 = cos ( 𝑗, 𝑖1) 𝛼31 = cos ( 𝑘, 𝑖1
)
𝛼12 = cos ( 𝑖, 𝑗1
) 𝛼22 = cos ( 𝑗, 𝑗1
) 𝛼32 = cos ( 𝑘, 𝑗1
)
𝛼13 = cos ( 𝑖, 𝑘1
) 𝛼23 = cos ( 𝑗, 𝑘1
) 𝛼33 = cos ( 𝑘, 𝑘1
)
Au rezultat nouă cosinuşi directori
⇒
{
𝑖 = 𝛼11𝑖1 + 𝛼12𝑗1 + 𝛼13𝑘1
𝑗 = 𝛼21𝑖1 + 𝛼22𝑗1 + 𝛼23𝑘1
𝑘 = 𝛼31𝑖1 + 𝛼32𝑗1 + 𝛼33𝑘1
Cele nouă cosinusuri directoare nu sunt independente pentru că sunt următoarele relaţii de
legătură:

79
{
𝑖2= 1
𝑗2= 1
𝑘2= 1
⇒ {
𝛼112 + 𝛼12
2 + 𝛼132 = 1
𝛼212 + 𝛼22
2 + 𝛼232 = 1
𝛼312 + 𝛼32
2 + 𝛼332 = 1
Cei trei versori sunt perpendiculari unul pe celălalt:
{
𝑖 𝑗 = 0
𝑗 𝑘 = 0
𝑘 𝑖 = 0
⇒ {
𝛼11𝛼21 + 𝛼12𝛼22 + 𝛼13𝛼23 = 0𝛼21𝛼31 + 𝛼22𝛼32 + 𝛼23𝛼33 = 0𝛼31𝛼11 + 𝛼32𝛼12 + 𝛼33𝛼13 = 0
Legile de mişcare
Fie P un punct oarecare din corp bine precizat prin coordonatele lui faţă de sistemul 𝑂𝑥𝑦𝑧 şi
cu coordonatele 𝑥1, 𝑦1, 𝑧1 faţă de sistemul fix 𝑂𝑥1𝑦1𝑧1.
Notăm cu 𝑟1vectorul 𝑂1𝑃: {
𝑟1 = 𝑂1𝑃
𝑟1𝑂 = 𝑂1𝑂
𝑟 = 𝑂𝑃
⇒ 𝑟1 = 𝑟1𝑂 + 𝑟
𝑟1 este precizat faţă de sistemul fix
𝑟1 = 𝑥1𝑖1 + 𝑦1𝑗1 + 𝑧1𝑘1
𝑟1𝑂 este precizat faţă de sistemul fix
𝑟1𝑂 = 𝑥1𝑂𝑖1 + 𝑦1𝑂𝑗1 + 𝑧1𝑂𝑘1
𝑟 este precizat faţă de sistemul fix
𝑟 = 𝑥𝑖 + 𝑦𝑗 + 𝑧𝑘
Legile de mişcare ale punctului P vor fi:
{
𝑥1 = 𝑥1(𝑡)𝑦1 = 𝑦1(𝑡)𝑧1 = 𝑧1(𝑡)
Din relaţiile de mai sus rezultă
𝑥1𝑖1 + 𝑦1𝑗1 + 𝑧1𝑘1 = 𝑥1𝑂𝑖1 + 𝑦1𝑂𝑗1 + 𝑧1𝑂𝑘1 + 𝑥𝑖 + 𝑦𝑗 + 𝑧𝑘
Pentru determinarea 𝑥1, 𝑦1, 𝑧1 se face identificarea din relaţia de anterioară:
Legile de mişcare ale unui punct oarecare în mişcarea generală a unui corp
{
𝑥1 = 𝑥1𝑂 + 𝛼11𝑥 + 𝛼21𝑦 + 𝛼31𝑧𝑦1 = 𝑦1𝑂 + 𝛼12𝑥 + 𝛼22𝑦 + 𝛼32𝑧𝑧1 = 𝑧1𝑂 + 𝛼13𝑥 + 𝛼23𝑦 + 𝛼33𝑧
Dacă se fac următoarele notaţii matriciale:
{𝑟1} = {
𝑥1𝑦1𝑧11
}, {𝑟} = {
𝑥𝑦𝑧1
} şi [𝐺] = [
𝛼11 𝛼21𝛼12 𝛼22
𝛼31 𝑥1𝑂𝛼32 𝑦1𝑂
𝛼13 𝛼230 0
𝛼33 𝑧1𝑂0 1
]

80
Atunci legile de mişcare se pot scrie matricial:
{𝑟1} = [𝐺]{𝑟}
Distribuţia de viteze în mişcarea generală a corpului rigid
Legile de mişcare a unui punct oarecare 𝑃:
{
𝑥1 = 𝑥1(𝑡)𝑦1 = 𝑦1(𝑡)𝑧1 = 𝑧1(𝑡)
𝑂𝑥𝑦𝑧 – sistem legat de corp (se mişcă odată cu corpul).
Cele două origini 𝑂1 şi 𝑂 sunt legate prin vectorul 𝑟10
𝑟1 - vectorul de poziţie al unui punct care se mişcă faţă de sistemul fix.
𝑂, 𝑃 - puncte din corp, rezultă distanţa 𝑟 nu se schimbă
𝑟1 = 𝑟10 + 𝑟
Punctul 𝑂 fiind precizat faţă de un sistem fix, vectorul lui de poziţie este: 𝑟10 = 𝑥10𝑖1 +
𝑦10𝑗1+ 𝑧10𝑘1

81
{
𝑥10 = 𝑥10(𝑡)𝑦10 = 𝑦10(𝑡)𝑧10 = 𝑧10(𝑡)
sunt cunoscute
𝑣𝑃 = ��1 =𝑑𝑟1𝑑𝑡
⇒ 𝑣𝑃 = ��10 + ��
��10 = 𝑣𝑂 = ��10𝑖1 + ��10𝑗1 + ��10𝑘1
𝑟 = 𝑂𝑃 = 𝑥𝑖 + 𝑦𝑗 + 𝑧𝑘
�� = ��𝑖 + 𝑥�� + ��𝑗 + 𝑦�� + ��𝑘 + 𝑧𝑘
Deoarece corpul este rigid, distanţa dintre 𝑃 şi 𝑂 nu se modifică ⇒
{��𝑖 = 0
��𝑗 = 0
��𝑘 = 0
⇒ 𝑥, 𝑦, 𝑧 rămân constante
Vectorul viteză unghiulară de rotație a sistemului mobil față de sistemul fix:
𝜔 = 𝜔𝑥𝑖 + 𝜔𝑦𝑗 + 𝜔𝑧𝑘
Se poate demonstra că:
{
𝜔𝑥 = �� 𝑘
𝜔𝑦 = 𝑘 𝑖
𝜔𝑧 = �� 𝑗
⇒ {
�� = 𝜔 × 𝑖
�� = 𝜔 × 𝑗
𝑘= 𝜔 × 𝑘
formulele lui Poisson
Ținând cont de aceste relaţii rezultă vectorul
�� = 𝑥(𝜔 × 𝑖) + 𝑦(𝜔 × 𝑗) + 𝑧(𝜔 × 𝑘)
⇒ �� = 𝜔 × (𝑥𝑖 + 𝑦𝑗 + 𝑧𝑘) ⇒ �� = 𝜔 × 𝑟
Revenind la viteză şi înlocuind �� rezulta formula de distribuţie a vitezelor în mişcarea
generală:
𝑣𝑃 = 𝑣𝑂 + 𝜔 × 𝑟
Distribuţia de viteze în mişcarea generală are câteva proprietăţi:
1) Viteza unghiulară este aceeaşi pentru toate punctele din corp
2) Proiecţiile vitezelor punctelor din corp, pe viteza unghiulară, sunt egale
𝑣𝑃 = 𝑣𝑂 + 𝜔 × 𝑂𝑃 | ⋅ 𝜔 ⇔ 𝑣𝑃 ⋅ 𝜔 = 𝑣𝑂 ⋅ 𝜔 + (𝜔 × 𝑂𝑃) ⋅ 𝜔
(𝜔 × 𝑂𝑃) ⋅ 𝜔 = 0 deoarece avem doi vectori coliniari
⇒ 𝜔 ⋅ 𝑣𝑃 = 𝜔 ⋅ 𝑣𝑂
⇒ 𝜔𝑝𝑟��𝑣𝑃 = 𝜔𝑝𝑟��𝑣𝑂 ⇒ 𝑝𝑟��𝑣𝑃 = 𝑝𝑟��𝑣𝑂
3) Proiecţiile vitezelor a două puncte pe dreapta ce le uneşte sunt egale.

82
𝑣𝐵 = 𝑣𝐴 + 𝜔 × 𝐴𝐵 | ⋅ 𝐴𝐵 ⇔ 𝑣𝐵 ⋅ 𝐴𝐵 = 𝑣𝐴 ⋅ 𝐴𝐵 ⇔ 𝑝𝑟𝐴𝐵 𝑣𝐵 = 𝑝𝑟𝐴𝐵 𝑣𝐴
Distribuţia de acceleraţii în mişcarea generală a corpului rigid
Pornind de la faptul că acceleraţia este derivata vitezei: 𝑣𝑃 = 𝑣𝑂 + 𝜔 × 𝑟 ; 𝑎𝑃 =𝑑𝑣𝑃
𝑑𝑡= ��𝑃
𝑎𝑃 = ��𝑂 + �� × 𝑟 + 𝜔 × ��
𝑎𝑂 = ��𝑂
�� = 𝜔 × 𝑟
𝜔 = 𝜔𝑥𝑖 + 𝜔𝑦𝑗 + 𝜔𝑧𝑘
�� = ��𝑥𝑖 + 𝜔𝑥 �� + ��𝑦𝑗 + 𝜔𝑦 �� + ��𝑧𝑘 + 𝜔𝑧𝑘
Se cunosc ��, �� şi 𝑘 ⇒
�� = ��𝑥𝑖 + ��𝑦𝑗 + ��𝑧𝑘 + 𝜔𝑥(𝜔 × 𝑖) + 𝜔𝑦(𝜔 × 𝑗) + 𝜔𝑧(𝜔 × 𝑘)
⇔ �� = ��𝑥𝑖 + ��𝑦𝑗 + ��𝑧𝑘 + 𝜔 × (𝜔𝑥𝑖 + 𝜔𝑦𝑗 + 𝜔𝑧𝑘)
𝜔 × 𝜔 = 0 ⇒ 𝜀 = �� = ��𝑥𝑖 + ��𝑦𝑗 + ��𝑧𝑘 - acceleraţia unghiulară
⇒ 𝜀 = 𝜀𝑥𝑖 + 𝜀𝑦𝑗 + 𝜀𝑧𝑘
{
𝜀𝑥 = ��𝑥𝜀𝑦 = ��𝑦𝜀𝑧 = ��𝑧
Revenind la formula de calcul a acceleraţiei, se obţine:
𝑎𝑃 = 𝑎𝑂 + 𝜀 × 𝑟 + 𝜔 × (𝜔 × 𝑟)
Formula de mai sus reprezinta distribuţia acceleraţiilor în mişcarea generală

83
Mişcarea de translaţie
Un corp are o mişcare de translaţie dacă orice dreaptă din acesta rămâne tot timpul mişcării
paralelă cu o direcţie fixă. Dacă orice dreaptă rămâne paralelă cu o direcţie fixă în spaţiu,
atunci putem considera cele trei axe 𝑂𝑥, 𝑂𝑦 şi 𝑂𝑧 ca fiind drepte care au această proprietate.
Dacă avem mişcare de translaţie:
{𝑂𝑥 ∥ 𝑂1𝑥1𝑂𝑦 ∥ 𝑂1𝑦1𝑂𝑧 ∥ 𝑂1𝑧1
Axele sunt tot timpul paralele, prin urmare, poziţia sistemului, legat de corp, 𝑂𝑥𝑦𝑧 este
cunoscută. Pentru a cunoaşte poziţia corpului mai trebuie cunoscută doar poziţia punctului 𝑂.
În consecinţă un corp în mişcarea de translaţie are trei grade de libertate.
{
𝑥10 = 𝑥10(𝑡)𝑦10 = 𝑦10(𝑡)𝑧10 = 𝑧10(𝑡)
Legile de mişcare ale unui punct 𝑃 se obţin din relaţia matricială dedusă la mişcarea
generală:
{𝑟1} = [𝐺]{𝑟}
{𝑟1} = {
𝑥1𝑦1𝑧11
}, {𝑟} = {
𝑥𝑦𝑧1
} şi [𝐺] = [
𝛼11 𝛼21𝛼12 𝛼22
𝛼31 𝑥1𝑂𝛼32 𝑦1𝑂
𝛼13 𝛼230 0
𝛼33 𝑧1𝑂0 1
]

84
𝛼11, 𝛼12, … - cosinuşii unghiurilor dintre axe (cosinușii directori)
𝛼𝑖𝑗 = 0, 𝑖 ≠ 𝑗
𝛼𝑖𝑗 = 1, 𝑖 = 𝑗} ⇒ [𝑇] = [
1 00 1
0 𝑥1𝑂0 𝑦1𝑂
0 00 0
1 𝑧1𝑂0 1
]
[𝑇] - matrice de translaţie
Înlocuind, vom obţine legile de mişcare:
{
𝑥1𝑦1𝑧11
} = [
1 00 1
0 𝑥1𝑂0 𝑦1𝑂
0 00 0
1 𝑧1𝑂0 1
]{
𝑥𝑦𝑧1
}
Rezultă legile de mişcare ale unui punct în mişcarea de translaţie:
{
𝑥1 = 𝑥1𝑂 + 𝑥𝑦1 = 𝑦1𝑂 + 𝑦𝑧1 = 𝑧1𝑂 + 𝑧
Exemple ale mișcării de translație:

85
Distribuţia de viteze în mişcarea de translaţie
1.)
�� = 𝜔 × 𝑖 = 0
�� = 𝜔 × 𝑗 = 0
𝑘= 𝜔 × 𝑘 = 0
} ⇒ 𝜔 = 0
2.)
𝜔𝑥 = �� 𝑘 = 0
𝜔𝑦 = 𝑘 𝑖 = 0
𝜔𝑧 = �� 𝑗 = 0
} ⇒ 𝜔 = 0
Rezultă vectorul viteză unghiulară este nul în mişcarea de translaţie.
𝑟1 = 𝑟10 + 𝑟
𝑣𝑃 = ��1 = ��10 + �� = 𝑣𝑂 + 𝜔 × 𝑟
𝜔 = 0
𝑣𝑃 = 𝑣𝑂
Rezultă în mişcarea de translaţie la un moment dat, toate punctele au aceeaşi viteză.
Distribuţia de acceleraţii în mişcarea de translaţie
𝜀 = �� = 0
Din formula generală
𝑎𝑃 = ��𝑃 = 𝑎𝑂 + 𝜀 × 𝑟 + 𝜔 × (𝜔 × 𝑟)
𝜔 = 0𝜀 = 0
} ⇒ 𝑎𝑃 = 𝑎𝑂
Proprietate: La un moment dat, în mişcarea de translaţie toate punctele din corp au aceeaşi
acceleraţie.

86
Mişcarea de rotaţie cu axă fixă
Un corp are o mişcare de rotaţie cu axă fixă dacă în tot decursul mişcării două puncte ale sale
rămân fixe. Dacă două puncte rămân fixe, o dreaptă rămâne fixă, pentru că două puncte
determină o dreaptă.
Presupunem 𝑂1 şi 𝑂2 două puncte fixe:
Originea sistemului 𝑂𝑥𝑦𝑧 fiind aleasă în punctul fix 𝑂1, coordonatele lui rămân tot timpul
nule:
{
𝑥1𝑂 = 0𝑦1𝑂 = 0𝑧1𝑂 = 0
Deoarece axa 𝑂1𝑧1 ≡ 𝑂𝑧 ⇒ că direcţia axei este bine precizată.
Prin urmare, poziţia axelor Ox şi Oy faţă de 𝑂1𝑥1 şi 𝑂1𝑦1 va determina numărul gradelor de
libertate.
Cum axele sunt perpendiculare două câte două, înseamnă că este suficient să cunoaştem un
singur unghi pentru a determina poziţia versorilor 𝑖 şi 𝑗 faţă de 𝑖1 şi 𝑗1, deci un corp în

87
mişcare de rotaţie are un singur grad de libertate. Parametrul cu care se studiază mișcarea
este 𝜃(𝑡).
{𝑖 = 𝑐𝑜𝑠𝜃𝑖1 + 𝑠𝑖𝑛𝜃𝑗1
𝑗 = −𝑠𝑖𝑛𝜃𝑖1 + 𝑐𝑜𝑠𝜃𝑗1
Legile de mişcare ale unui punct în mişcarea de rotaţie
Legea de mişcare sub formă matricială
{𝑟1} = [𝑅]{𝑟}
[𝑅] - Matricea de rotaţie
𝑟1 = 𝑟10 + 𝑟
𝑟10 = 𝑂𝑂 1
{
𝑥1𝑦1𝑧11
} = [
cos𝜃 −sin𝜃sin𝜃 cos𝜃
0 00 0
0 00 0
1 00 1
] {
xyz1
}
Rezultă legile de mişcare ale unui punct:
𝑥1 = 𝑥𝑐𝑜𝑠𝜃 − 𝑠𝑖𝑛𝜃𝑦
𝑦1 = 𝑥𝑠𝑖𝑛𝜃 + 𝑐𝑜𝑠𝜃𝑦
𝑧1 = 𝑧
Determinarea traiectoriei punctului:
{𝑥12 + 𝑦1
2 = 𝑥2(𝑠𝑖𝑛2𝜃 + 𝑐𝑜𝑠2𝜃) + 𝑦2(𝑠𝑖𝑛2𝜃 + 𝑐𝑜𝑠2𝜃)𝑧1 = 𝑧
𝑠𝑖𝑛2𝜃 + 𝑐𝑜𝑠2𝜃 = 1
⇒ {𝑥12 + 𝑦1
2 = 𝑥2 + 𝑦2 = 𝑅2
𝑧1 = 𝑧
Concluzie:
Traiectoria unui punct în mişcarea de rotaţie este un cerc.

88
Distribuţia de viteze în mişcarea de rotaţie
Calculul vitezei unghiulare:
{
𝜔𝑥 = �� ∙ 𝑘
𝜔𝑦 = 𝑘∙ 𝑖
𝜔𝑧 = i ∙ 𝑗
𝑘 = 𝑘1
𝑖 = 𝑐𝑜𝑠𝜃𝑖1 + 𝑠𝑖𝑛𝜃𝑗1
𝑗 = −𝑠𝑖𝑛𝜃𝑖1 + 𝑐𝑜𝑠𝜃𝑗1
𝑘= 𝑘
1 = 0
�� = −��𝑠𝑖𝑛𝜃𝑖1 + ��𝑐𝑜𝑠𝜃𝑗1 = ��𝑗
�� = −��𝑐𝑜𝑠𝜃𝑖1 − ��𝑠𝑖𝑛𝜃𝑗1 = −��𝑖
Înlocuind mai sus obţinem:
{
𝜔𝑥 = −��𝑖 ∙ 𝑘 = 0
𝜔𝑦 = 0 ∙ 𝑖 = 0
𝜔𝑧 = ��𝑗 ∙ 𝑗 = ��
⇒ �� = �� ∙ 𝑘 = �� ∙ 𝑘1 - viteza unghiulară
Viteza unghiulară este dirijată după axa de rotaţie.
Pentru a exprima viteza unui punct din corp folosim formula generală de distribuţie a
vitezelor.
𝑣𝑃 = 𝑣𝑂 + 𝜔 × 𝑟
Pentru că 𝑂 este un punct fix: 𝑣𝑂 = 𝑣𝑂1 = 0 rezultă că viteza: 𝑣𝑃 = 𝜔 × 𝑟
Formula vectorială a distribuţiei de viteze în mişcarea de rotaţie.
𝑣𝑃 = 𝑣𝑃𝑥𝑖 + 𝑣𝑃𝑦𝑗 + 𝑣𝑃𝑧𝑘
𝑣𝑃 = |𝑖 𝑗 𝑘
0 0 ��𝑥 𝑦 𝑧
| = −��𝑦𝑖 + ��𝑥𝑗 + 0𝑘
Rezultă proiecţiile vitezei pe sistemul legat de corp:
{
𝑣𝑥 = −��𝑦
𝑣𝑦 = ��𝑥
𝑣𝑧 = 0

89
Proprietăţi ale distribuţiei de viteze
1. Vitezele tuturor punctelor de pe axa de rotaţie sunt nule: 𝑥 = 𝑦 = 0 şi 𝑣𝑧 = 0 rezultă că şi
𝑣𝑥 = 0 şi 𝑣𝑦 = 0.
Dacă toate proiecţiile sunt nule rezultă că viteza este nulă:
𝑣 = √𝑣𝑥2 + 𝑣𝑦2 + 𝑣𝑧2
2. Toate vitezele punctelor se află în plane perpendiculare pe axa de rotaţie.
Din moment ce 𝑣𝑧 = 0 rezultă că viteza are componente pe Ox şi Oy, adică în plan
perpendicular pe Oz.
3. Vitezele punctelor aflate pe o dreaptă paralelă cu axa de rotaţie sunt egale.
{𝑣𝐴 = 𝜔 × 𝑂𝐴 ; (𝑟 = 𝑂𝐴) (1)
𝑣𝐵 = 𝜔 × 𝑂𝐵 ; (𝑟 = 𝑂𝐵) (2)
𝑂𝐴 + 𝐴𝐵 = 𝑂𝐵
Înlocuind în relaţia (2) rezultă:
𝑣𝐵 = 𝜔 × (𝑂𝐴 + 𝐴𝐵) = 𝜔 × 𝑂𝐴 + 𝜔 × 𝐴𝐵 = 𝜔 × 𝑂𝐴 = 𝑣𝐴
Deoarece 𝜔 × 𝐴𝐵 = 0.

90
4. Pe o dreaptă perpendiculară pe axa de rotaţie, vitezele cresc liniar cu depărtarea faţă de
axă.
∆⊥ 𝑂1𝑧1 ⇒ {𝑣𝐶 = 𝜔 × 𝑂𝐶 ⇒ 𝑣𝐶 = 𝜔 ∙ 𝑂𝐶 ∙ sin
𝜋
2= 𝜔 ∙ 𝑂𝐶
𝑣𝐷 = 𝜔 × 𝑂𝐷 ⇒ 𝑣𝐷 = 𝜔 ∙ 𝑂𝐷 ∙ sin𝜋
2= 𝜔 ∙ 𝑂𝐷
tan𝛼 =𝑣𝐶𝑂𝐶
=𝑣𝐷𝑂𝐷
= 𝜔
Vitezele se văd sub același unghi.
Distribuţia de acceleraţii în mişcarea de rotaţie
Calculul acceleraţiei unghiulare
𝜀 = ��
𝜔 = ��𝑘1 = ��𝑘
𝜀 = ��𝑘1 = ��𝑘
⇒ {
𝜀𝑥 = 0𝜀𝑦 = 0
𝜀𝑧 = ��
Rezultă acceleraţia unghiulară este dirijată după axa de rotaţie.
Calculul acceleraţiei unui punct
Pentru a determina acceleraţia unui punct pornim de la formula de distribuţie a acceleraţiilor
în mişcarea generală.
𝑎𝑝 = 𝑎𝑜 + 𝜀 × 𝑟 + 𝜔 × (𝜔 × 𝑟)
𝑎𝑜 = 0
𝑟 = 𝑟𝑝} ⇒ 𝑎𝜏 = 𝜀 × 𝑟 - acceleraţie tangenţială
𝑎𝑛 = 𝜔 × (𝜔 × 𝑟) - acceleraţie normală
𝑎𝜏 = |𝑖 𝑗 𝑘
0 0 ��𝑥 𝑦 𝑧
| = −��𝑦𝑖 + ��𝑥𝑗 + 0𝑘
𝑣𝑝 = 𝜔 × 𝑟 ⇒ 𝑎𝑛 = 𝜔 × 𝑣𝑝 = |𝑖 𝑗 𝑘
0 0 ��−��𝑦 ��𝑥 0
| = −��2𝑥𝑖 − ��2𝑦𝑗 + 0𝑘
𝑎 = 𝑎𝜏 + 𝑎𝑛 = (−��𝑦 − ��2𝑥)𝑖 + (��𝑥 − ��2𝑦)𝑗 + 0𝑘

91
{
𝑎𝑥 = −��𝑦 − ��2𝑥
𝑎𝑦 = ��𝑥 − ��2𝑦
𝑎𝑧 = 0
Proprietăţi ale distribuţiei de acceleraţie
1. Punctele de pe axa de rotaţie au acceleraţia nulă:
𝑥 = 0𝑦 = 0
} ⇒ 𝑎𝑥 = 0, 𝑎𝑦 = 0
2. Acceleraţiile punctelor din corp sunt situate în planuri perpendiculare pe axa de rotaţie.
𝑎𝑧 = 0
𝑎𝑥, 𝑎𝑦 𝜖 𝑂𝑥𝑦 ⇒ 𝑎 𝜖 𝑂𝑥𝑦, 𝑂𝑧 ⊥ 𝑂𝑥𝑦 ⇒ 𝑎 ⊥ 𝑂𝑧
3. Acceleraţile punctelor situate pe o dreaptă paralelă cu axa de rotaţie sunt egale
{𝑎𝐴 = 𝜀 × 𝑟𝐴 + 𝜔 × 𝑣𝐴𝑎𝐵 = 𝜀 × 𝑟𝐵 + 𝜔 × 𝑣𝐵
𝑎𝐵 = 𝜀 × (𝑟𝐵 + 𝐴𝐵) + 𝜔 × 𝑣𝐵
𝑟𝐵 = 𝑟𝐴 + 𝐴𝐵

92
⇒ 𝑎𝐵 = 𝜀 × 𝑟𝐴 + 𝜀 × 𝐴𝐵 + 𝜔 × 𝑣𝐵
⇒ 𝑎𝐵 = 𝜀 × 𝑟𝐴 + 𝜔 × 𝑣𝐵 = 𝑎𝐴
Pentru că 𝜀 × 𝐴𝐵 = 0, iar de la proprietatea vitezelor: 𝑣𝐴 = 𝑣𝐵
4. Pe o dreaptă perpendiculară pe axa de rotaţie acceleraţiile cresc proporţional cu distanţa.
Fie A şi B două puncte pe o dreaptă perpendiculară pe axa de rotaţie:
𝑎𝐴 = (−��𝑦𝐴 − ��2𝑥𝐴)𝑖 + (��𝑥𝐴 − ��
2𝑦𝐴)𝑗
𝑎𝐵 = (−��𝑦𝐵 − ��2𝑥𝐵)𝑖 + (��𝑥𝐵 − ��
2𝑦𝐵)𝑗
{𝜔 = ��𝑘 = 𝜔𝑘
𝜀 = ��𝑘 = 𝜀𝑘
Înlocuind mai sus obţinem:
{
𝑎𝐴 = √𝑎𝐴𝑥
2 + 𝑎𝐴𝑦2 = √𝜀2 + 𝜔4√𝑥𝐴
2 + 𝑦𝐴2
𝑎𝐵 = √𝑎𝐵𝑥2 + 𝑎𝐵𝑦
2 = √𝜀2 + 𝜔4√𝑥𝐵2 + 𝑦𝐵
2
{𝑎𝐴 = √𝜀2 + 𝜔4 𝑑𝐴𝑧
𝑎𝐵 = √𝜀2 + 𝜔4 𝑑𝐵𝑧

93
DINAMICA
Principiile dinamicii
1. Principiul I al dinamicii (Principiul inerţiei)
Enunţ: Un punct îşi păstrează starea de repaus sau starea de mişcare rectilinie uniformă faţă
de un sistem fix sau faţă de un sistem inerţial dacă asupra lui nu acţionează o altă forţă care
să-i schimbe această stare.
Un sistem inerţial este un sistem de referinţă care se află în mişcare rectilinie uniformă.
2. Principiul al II-lea al dinamicii (Legea fundamentală a dinamicii) – fundamentat de
Newton
Enunţ: Dacă asupra unui punct material acţionează o forţă, aceasta îi imprimă punctului o
acceleraţie având aceeaşi direcţie şi modulul egal cu raportul dintre forță și masa punctului
material.
Legea fundamentală: 𝐹 = 𝑚𝑎
3. Principiul al III-lea al dinamicii (Principiul acţiunii şi reacţiunii)
Enunţ: Dacă un punct acţionează asupra altui punct cu o forţă, acesta acţionează cu o forţă
egală şi de sens contrar. Prima se numeşte acţiune, iar cea de-a doua reacţiune.
𝐹𝐴𝐵 + 𝐹𝐵𝐴 = 0
Studiul vectorial al mişcării unui punct cu ajutorul legii fundamentale
𝑚𝑎 = 𝐹
Prin 𝐹 se va înţelege forţa rezultantă care acţionează asupra unui punct.

94
𝑎 = ��
Forţa rezultantă este o mărime vectorială care poate depinde de viteză, poziţie sau timp.
𝐹 = 𝐹(��, 𝑟, 𝑡)
Prin urmare, legea lui Newton se transformă într-o ecuaţie diferenţială de ordinul II.
Se pot pune două probleme:
1. Cunoscându-se forţa rezultantă, să se determine legea de mişcare
2. Cunoscându-se legea de mişcare, să se determine forţa care o determină
Pentru determinarea legii de mişcare se integrează ecuaţia diferenţială şi rezultă două
constante de integrare.
𝑟 = 𝑟(𝐶1, 𝐶2, 𝑡)
Determinarea celor două constante se face pe baza condiţiilor iniţiale:
𝑡 = 0 ⇒ {��0 = 𝑟(𝐶1, 𝐶2, 0)
𝑣0 = ��(𝐶1, 𝐶2, 0)
Studiul dinamicii punctului în coordonate carteziene
Pornind tot de la legea lui Newton:
𝑚𝑎 = 𝐹(��, 𝑟, 𝑡)
𝐹 = 𝐹𝑥𝑖 + 𝐹𝑦𝑗 + 𝐹𝑧𝑘
𝑎 = �� = ��𝑖 + ��𝑗 + ��𝑘
Se proiectează legea lui Newton pe cele trei axe.
{
𝑂𝑥: 𝑚�� = 𝐹𝑥(��, ��, ��, 𝑥, 𝑦, 𝑧, 𝑡)
𝑂𝑦: 𝑚�� = 𝐹𝑦(��, ��, ��, 𝑥, 𝑦, 𝑧, 𝑡)
𝑂𝑧: 𝑚�� = 𝐹𝑧(��, ��, ��, 𝑥, 𝑦, 𝑧, 𝑡)
S-au obţinut trei ecuaţii scalare de ordinul II care se integrează.
{
𝑥 = 𝑥(𝐶1, 𝐶2, 𝐶3, 𝐶4, 𝐶5, 𝐶6, 𝑡)
𝑦 = 𝑦(𝐶1, 𝐶2, 𝐶3, 𝐶4, 𝐶5, 𝐶6, 𝑡)
𝑧 = 𝑧(𝐶1, 𝐶2, 𝐶3, 𝐶4, 𝐶5, 𝐶6, 𝑡)
Cele şase constante de integrare se determină din condiţiile iniţiale:
- poziţia iniţială
{
𝑥(0) = 𝑥0𝑦(0) = 𝑦0𝑧(0) = 𝑧0
- viteza iniţială

95
{
��(0) = 𝑣𝑜𝑥��(0) = 𝑣𝑜𝑦��(0) = 𝑣𝑜𝑧
⇒
𝑥0 = 𝑥(𝐶1, 𝐶2, 𝐶3, 𝐶4, 𝐶5, 𝐶6, 0)
𝑦0 = 𝑦(𝐶1, 𝐶2, 𝐶3, 𝐶4, 𝐶5, 𝐶6, 0)
𝑧0 = 𝑧(𝐶1, 𝐶2, 𝐶3, 𝐶4, 𝐶5, 𝐶6, 0)
𝑣𝑜𝑥 = ��(𝐶1, 𝐶2, 𝐶3, 𝐶4, 𝐶5, 𝐶6, 0)
𝑣𝑜𝑦 = ��(𝐶1, 𝐶2, 𝐶3, 𝐶4, 𝐶5, 𝐶6, 0)
𝑣𝑜𝑧 = ��(𝐶1, 𝐶2, 𝐶3, 𝐶4, 𝐶5, 𝐶6, 0)}
Din cele şase ecuaţii se determină cele şase constante: 𝐶1, 𝐶2, 𝐶3, 𝐶4, 𝐶5, 𝐶6
Mişcarea unui punct sub acţiunea greutăţii
Pentru un punct care se mişcă în vid (frecările sunt neglijabile) legea a doua se scrie:
𝑚𝑎 = 𝐹
𝑚�� = 𝑚𝑔
�� = 𝑔 ⇒ �� = 𝑔𝑡 + 𝐶1 (1)
⇒ 𝑟 =𝑔𝑡2
2+ 𝐶1𝑡 + 𝐶2 (2)
𝐶1, 𝐶2 se determină din condiţiile iniţiale
𝑡 = 0: 𝑟(0) = 𝑟0 ; ��(0) = 𝑣0
(1) ⇒ 𝐶1 = 𝑣0
(2) ⇒ 𝐶2 = 𝑟0
Legea de mişcare:

96
𝑟 = 𝑟0 + 𝑣0𝑡 +𝑔𝑡2
2
𝑟 − 𝑟0 = 𝑣0𝑡 +𝑔𝑡2
2
Concluzie: Mişcarea este în planul determinat de viteza iniţială şi acceleraţia gravitaţională.
Aruncarea verticală a unui punct material
O vom studia cu legea fundamentală a lui Newton
𝑚𝑎 = 𝐹
Se proiectează pe cele trei axe:
Din 𝑚𝑎 = 𝐹 ⇒ 𝑚�� = −𝑚𝑔
�� = −𝑔
𝑣 = �� = −𝑔𝑡 + 𝐶1
𝑦 = −𝑔𝑡2
2+ 𝐶1𝑡 + 𝐶2
Cele două constante de integrare se determină din condiţiile iniţiale
𝑦(0) = 0 ⇒ 0 = 𝐶2
��(0) = 𝑣0 ⇒ 𝑣0 = 𝐶1
⇒ {
𝑣 = 𝑣0 − 𝑔𝑡
𝑦 = −𝑔𝑡2
2+ 𝑣0𝑡
Se pune problema până când urcă punctul.
Punctul urcă atât timp cât are viteză.
𝑣 = 0
0 = 𝑣0 − 𝑡𝑢𝑔

97
𝑡𝑢 =𝑣0
𝑔 - timp de urcare
𝑦(𝑡𝑢) = ℎ𝑚𝑎𝑥 = −𝑔𝑡𝑢
2
2+ 𝑣0𝑡𝑢 = −
𝑔𝑣02
𝑔2
2+𝑣0𝑣0
𝑔=
𝑣02
2𝑔 - înălţimea maximă
Aruncarea orizontală
Se foloseşte legea a II-a a lui Newton
𝑚𝑎 = 𝐹
𝑚𝑎 = 𝑚𝑔
În acest caz mişcarea este într-un plan, se proiectează ecuația vectorială, de mai sus, pe
ambele axe:
𝑚�� = 0 ⇒ �� = 0𝑚�� = 𝑚𝑔 ⇒ �� = 𝑔
} ⇒
�� = 𝐶1 ⇒ 𝑥 = 𝐶1𝑡 + 𝐶2
�� = 𝑔𝑡 + 𝐶3 ⇒ 𝑦 =𝑔𝑡2
2+ 𝐶3𝑡 + 𝐶4
Cele patru constante de integrare se determină din condiţiile iniţiale:
𝑡 = 0 ⇒ {𝑥(0) = 0; 𝑦(0) = 0
��(0) = 𝑣0; ��(0) = 0
0 = 𝐶2; 0 = 𝐶4
𝑣0 = 𝐶1; 0 = 𝐶3
Legea de mişcare a punctului material este:
{
𝑥 = 𝑣0𝑡
𝑦 =𝑔𝑡2
2

98
Pentru a determina traiectoria se elimină timpul din cele doua ecuații de mai sus:
𝑦 =𝑔
2∙𝑥2
𝑣02
Timpul de coborâre se determină astfel:
ℎ =𝑔𝑡𝑐
2
2⇒ 𝑡𝑐 = √
2ℎ
𝑔
𝑡𝑐 - timp de coborâre
𝑥(𝑡𝑐) = 𝑥𝑚𝑎𝑥 = 𝑣0√2ℎ
𝑔
Aruncarea oblică
Este aruncarea de la suprafaţa pământului sub un unghi.
Aplicăm legea lui Newton
𝑚𝑎 = 𝐹
𝑚𝑎 = 𝑚𝑔
Se proiectează pe cele două axe:
𝑚�� = 0 ⇒ �� = 0𝑚�� = −𝑚𝑔 ⇒ �� = −𝑔
} ⇒ {
�� = 0 ⇒ �� = 𝐶1 ⇒ 𝑥 = 𝐶1𝑡 + 𝐶2
�� = −𝑔 ⇒ �� = −𝑔𝑡 + 𝐶3 ⇒ 𝑦 = −𝑔𝑡2
2+ 𝐶3𝑡 + 𝐶4
Cele patru constante de integrare se determină din condiţiile iniţiale
𝑡 = 0 ⇒ {𝑥(0) = 0; 𝑦(0) = 0
��(0) = 𝑣0𝑥 = 𝑣0 cos 𝛼 ; ��(0) = 𝑣0𝑦 = 𝑣0 sin 𝛼

99
Înlocuim în 𝑥 ⇒ 0 = 𝐶2
Înlocuim în 𝑦 ⇒ 0 = 𝐶4
Înlocuim în �� ⇒ 𝑣0 cos 𝛼 = 𝐶1
Înlocuim în �� ⇒ 𝑣0 sin 𝛼 = 𝐶3
⇒
{
𝑥 = 𝑣0𝑡 cos 𝛼
𝑦 = −𝑔𝑡2
2+ 𝑣0𝑡 sin 𝛼
𝑣𝑥 = �� = 𝑣0 cos 𝛼𝑣𝑦 = �� = −𝑔𝑡 + 𝑣0 sin 𝛼
Dacă eliminăm timpul vom obţine traiectoria:
𝑦0 = −𝑔𝑥2
2𝑣02𝑐𝑜𝑠2𝛼
+ 𝑥sin 𝛼
cos𝛼
Traiectoria este o parabolă.
Pentru determinarea timpului de urcare:
𝑣𝑦 = 0
−𝑔𝑡𝑢 + 𝑣0 sin 𝛼 = 0 ⇒ 𝑡𝑢 =𝑣0 sin 𝛼
𝑔
Înălțimea maximă:
𝑦(𝑡𝑢) = ℎ𝑚𝑎𝑥 =𝑣02𝑠𝑖𝑛2𝛼
2𝑔
Teoreme fundamentale din dinamică
Impulsul şi teorema impulsului
Impulsul unui punct material este o mărime vectorială.

100
ℎ = 𝑚𝑣
[ℎ]𝑆𝐼 = 𝑘𝑔𝑚
𝑠
Impulsul este colinar cu viteza.
Teorema impulsului
ℎ= 𝑚�� = 𝑚𝑎
𝑚𝑎 = 𝐹} ⇒ ℎ
= 𝐹
Dacă punctul este supus la legături atunci forţa rezultantă va cuprinde atât forţele de legătură
cât şi forţele date.
Teorema impulsului
ℎ= 𝐹
𝑑+ 𝐹
𝑙
Impulsul derivat în raport cu timpul este egal cu rezultanta forţelor date și de legătură care
acţionează asupra punctului material.
Observaţie: Dacă punctul este izolat (nu acţionează nicio forţă asupra lui) sau rezultanta
forţelor date şi de legătură este nulă, atunci din teorema impulsului se obţine:
ℎ= 0 ⇒ ℎ = 𝑐 , rezultă impulsul se conservă.
Teorema momentului cinetic
Momentul cinetic al unui punct în raport cu un punct se defineşte ca fiind momentul
impulsului.
𝑘𝑂 = 𝑟 × ℎ = 𝑟 × 𝑚𝑣

101
O - punct de aplicaţie
Direcţia perpendiculară pe planul (𝑟, ℎ)
Sensul – regula burghiului drept
Mărimea: 𝑘𝑂 = 𝑟𝑚𝑣 sin 𝛼 = 𝑟𝑚𝑣 sin(𝑟, ℎ)
Derivăm în raport cu timpul momentul cinetic:
𝑘𝑂 = �� × 𝑚𝑣 + 𝑟 × 𝑚�� = 𝑣 × 𝑚𝑣 + 𝑟 × 𝑚𝑎
Ținem cont de legea a II-a a lui Newton rezultă:
𝑘𝑂 = 𝑟 × 𝐹 = 𝑀𝑂
Teorema momentului cinetic:
𝑘𝑂 = 𝑀𝑂
Derivata în raport cu timpul a momentului cinetic, calculat în raport cu un punct fix O, este
egală cu momentul forţelor ce acţionează asupra lui, calculat în raport cu acelaşi punct.
Dacă punctul este supus la legături atunci momentul rezultat al forţelor va fi dat atât de
forţele cunoscute (sau date), cât şi de forţele de legătură.
Lucrul mecanic al unor forţe constante
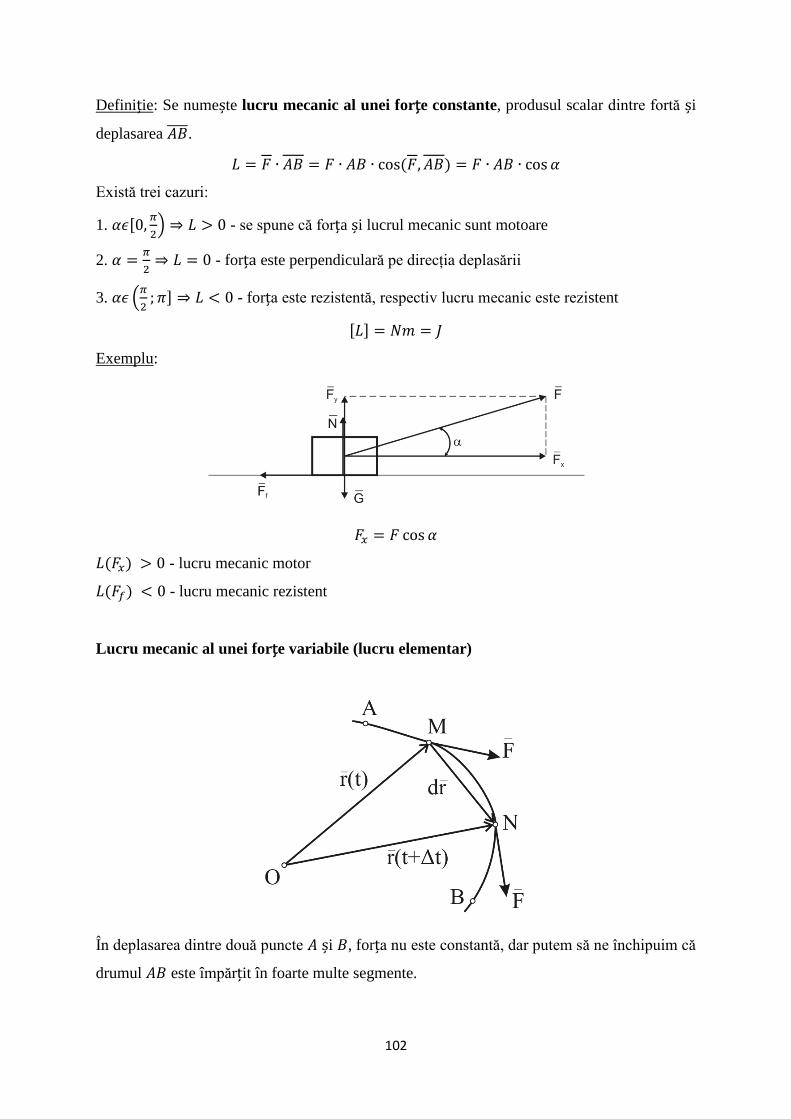
102
Definiţie: Se numeşte lucru mecanic al unei forţe constante, produsul scalar dintre fortă şi
deplasarea 𝐴𝐵 .
𝐿 = 𝐹 ∙ 𝐴𝐵 = 𝐹 ∙ 𝐴𝐵 ∙ cos(𝐹, 𝐴𝐵) = 𝐹 ∙ 𝐴𝐵 ∙ cos 𝛼
Există trei cazuri:
1. 𝛼𝜖[0,𝜋
2) ⇒ 𝐿 > 0 - se spune că forţa şi lucrul mecanic sunt motoare
2. 𝛼 =𝜋
2⇒ 𝐿 = 0 - forţa este perpendiculară pe direcția deplasării
3. 𝛼𝜖 (𝜋
2; 𝜋] ⇒ 𝐿 < 0 - forţa este rezistentă, respectiv lucru mecanic este rezistent
[𝐿] = 𝑁𝑚 = 𝐽
Exemplu:
𝐹𝑥 = 𝐹 cos 𝛼
𝐿(𝐹𝑥) > 0 - lucru mecanic motor
𝐿(𝐹𝑓) < 0 - lucru mecanic rezistent
Lucru mecanic al unei forţe variabile (lucru elementar)
În deplasarea dintre două puncte 𝐴 şi 𝐵, forţa nu este constantă, dar putem să ne închipuim că
drumul 𝐴𝐵 este împărţit în foarte multe segmente.

103
Un astfel de segment este 𝑀𝑁. Între cele două puncte 𝑀 şi 𝑁 distanţa este foarte mică şi
forţa este constantă.
Pe porţiunea 𝑀𝑁 se defineşte lucru mecanic elementar:
𝑑𝐿 = 𝐹𝑑𝑟
𝐹 = 𝐹𝑥𝑖 + 𝐹𝑦𝑗 + 𝐹𝑧𝑘
𝑑𝑟 = 𝑑𝑥 𝑖 + 𝑑𝑦 𝑗 + 𝑑𝑧 𝑘} ⇒ 𝑑𝐿 = 𝐹𝑑𝑟 = 𝐹𝑥 𝑑𝑥 + 𝐹𝑦 𝑑𝑦 + 𝐹𝑧 𝑑𝑧
𝐿𝐴→𝐵 = ∫(𝐹𝑥 𝑑𝑥 + 𝐹𝑦 𝑑𝑦 + 𝐹𝑧 𝑑𝑧)
𝐵
𝐴
Există forţe care provin din funcţii de forță notate cu 𝑈.
𝑈(𝑥, 𝑦, 𝑧) =
{
𝐹𝑥 =
𝜕𝑈
𝜕𝑥
𝐹𝑦 =𝜕𝑈
𝜕𝑦
𝐹𝑧 =𝜕𝑈
𝜕𝑧
⇒ 𝐿𝐴→𝐵 = ∫ (𝜕𝑈
𝜕𝑥𝑑𝑥 +
𝜕𝑈
𝜕𝑦𝑑𝑦 +
𝜕𝑈
𝜕𝑧𝑑𝑧)
𝐵
𝐴
= ∫𝑑𝑈
𝐵
𝐴
= 𝑈 |𝐵𝐴= 𝑈(𝑥𝐵, 𝑦𝐵, 𝑧𝐵) − 𝑈(𝑥𝐴, 𝑦𝐴, 𝑧𝐴)
Pentru aceste forţe, lucru mecanic nu depinde de drumul parcurs de punctul de aplicație al
forței.
Aceste forţe se numesc conservative.
Energia cinetică şi energia potenţială
Energia cinetică
𝐸𝑐 =1
2𝑚𝑣2
[𝐸𝑐]𝑆𝐼 = 𝐽
Energia potenţială – este o energie care este legată de forţele conservative şi anume energia
potenţială este lucru mecanic al forţelor conservative, luat cu semn schimbat.
𝐸𝑝 = −𝐿 = −𝑈
𝐸𝑐 + 𝐸𝑝 = 𝐸𝑚 - energia mecanică

104
Teorema de variaţie a energiei cinetice
Pentru a enunţa teorema de variaţie a energiei cinetice se pleacă de la legea lui Newton:
𝑚𝑎 = 𝐹
𝐹 = 𝐹𝑑+ 𝐹
𝑙
Dacă înlocuim acceleraţia cu derivata vitezei, obţinem:
𝑚𝑑𝑣
𝑑𝑡= 𝐹
𝑑+ 𝐹
𝑙 | ⋅ 𝑑𝑟
𝑚𝑑𝑟
𝑑𝑡𝑑𝑣 = (𝐹
𝑑+ 𝐹
𝑙) 𝑑𝑟
𝑚𝑑𝑟
𝑑𝑡𝑑𝑣 = 𝐹
𝑑𝑑𝑟 + 𝐹
𝑙𝑑𝑟
𝑑𝑟
𝑑𝑡𝑑𝑣 = 𝑣𝑑𝑣 = 𝑑 (
𝑣2
2)
Teorema energiei cinetice sub formă diferenţială:
𝑑 (𝑚𝑣2
2) = 𝑑𝐿𝑑 + 𝑑𝐿𝑙
Diferenţiala energiei cinetice este egală cu suma lucrurilor mecanice elementare date şi de
legătură.
Dacă se integrează pe întreg drumul 𝐴 → 𝐵 se obţine teorema energiei cinetice sub formă
integrală.
𝐸𝑐𝐵 − 𝐸𝑐𝐴 = 𝐿𝐴→𝐵𝑑 + 𝐿𝐴→𝐵
𝑙
Variaţia energiei cinetice între două puncte 𝐴 şi 𝐵 este egală cu lucrul mecanic efectuat de
forţe între aceste două puncte.
Dacă forţele sunt conservative, atunci lucru mecanic elementar este: 𝑑𝐿 = 𝑑𝑈.
Din teorema energiei cinetice sub formă diferenţială se obţine:
𝑑𝐸𝑐 = 𝑑𝑈
𝑑(𝐸𝑐 − 𝑈) = 0
𝑑(𝐸𝑐 + 𝐸𝑝) = 0
Rezultă teorema de conservare a energiei mecanice:
𝐸𝑐 + 𝐸𝑝 = 𝑐𝑜𝑛𝑠𝑡𝑎𝑛𝑡ă ⇒ 𝐸𝑚 = 𝑐𝑜𝑛𝑠𝑡𝑎𝑛𝑡ă
𝐸𝑐𝐴 + 𝐸𝑝𝐴 = 𝐸𝑐𝐵 + 𝐸𝑝𝐵