nclassifle fg 1/ n - defense technical information center report docmentation page read instructions...
TRANSCRIPT
AD-14 84 OT~rFI DIITL CNTOL F BAK-O-TRNMISILE(U) 1/2I NAVAL POSTGRADUATE SCHOOL MONTEREY CA C A YELLOSOI lMAR 84
NCLASSIFlE D FG 1/ N
"7,
1.0 !,,lia 1.
5WA
.W52
M R (3 c P ' f R E s O L U T O N T E S T C H A R T
.
Of
5-.
-:.-.5-?
, '.J .. o
1111 10 i•,
76
NAVAL POSTGRADUATE SCHOOLMonterey, California
DTICE ECT~f
SAUG 7 134THESISD
CFTIh!AL DIG3ITAL CCNW\7.OLCF
A BAUK-T-Th-UP MISSILE
by
Carlos A. L. 'ielloso
March 1984
Thqesis Advisor: Daniel j. Collins
Approved for public release; distribution unlimited
18 4 '0O3 06 'O3T
UnclassifiedSECURITY CLASSIFICATION OF THIS PAGE ffteft Datal eIMo_0
REPORT DOCMENTATION PAGE READ INSTRUCTIONSDEFORE COMPLETING FORM
1. REPORT NUMBER 2. GOVT ACCESSION NO. 3. RECIPIENT'S CATALOG NUMBER
I ,.4) - // - u""# __ _ _ _ _ _ _ __ _ _ _ _ _ _
4. TITLE (and SubAtle) S. TYPE Of REPORT & PERIOD COVERED
Optimal Digital Control of a Bank-to-Turn Missile Master ThesisMarch 1984
41. PERFORMING ORG. REPORT NUMBER
7. ATHOR(J8 . CONTRACT OR GRANT NUMBER(s)
Carlos Augusto Lea. Velloso
S. PERFORMING ORGANIZATION NAME AND AODRESS 10. PROGRAM ELEMENT. PROJECT. TASKII OTOLNAREA WORK UNIT NUMBERS
,.-...Naval Postgraduate School
Monterey, California 93940It. CONTIIOILZING OFIClE NAMEl AND ADDRES|S 12. REPORT DATE
':i"Navl Potgrduat ScoolMarch 1984Naa Potraut Scoo1. NUMBER OF
r PAGES
Monterey, California 93940 154
14. MONITORING AGENCY NAME 4 AOORESS(I diferent Item Controlitfln Office) IS. SECURITY CLASS. (of thle report)
UnclassifiedISO. DECLASSIFICATIONi DOWNGRAOING
SCHEDULE
IS. OISTRIBUTION STATEMENT (o,' thl Reort)
Approved for public release; distribution unlimited
17. DISTRIBUTION STATEMENT (of the abstract ntierd In Block 30. II dliferent tram Report)
IS. SUPPLEMENTARY NOTES
Ig. KEY WORDS (Caeti.. an rower.. old& it 0W nasmE n idetify by block numnber)
1Guidance -and ControlOptimal Digital ControlTerr~unal Guidance Lawank-to-Turn Missile
30. ABSTRACT (Coinuteu o reverse ide ti necesary ad Identify by block nutber)
.his work adresses the application of digital optimum control theory toa bank-to-turn missile.
A oDtimal guidance law has been developed and tested in several scenariosusing a 2-D model. Effects of sample rate, pitch angle, gravity and approxima-tions for small and large roil excursions are discussed.,
FORM% Do JAN71 1473 aoi OL TJnclassifiedO S/N 0102- LF. 014- 6601 SECURITY CLASSIFICATION OF THIS PAGE (Whe, Date E ntoeres
1%
Approved f-.r public :-%tease; distribution unlimi-sed.
optimal Digital Controlof
a Dank-to-Turn Mi3sile
by
Carlos A.L. VellosoMajor,Brazi4.an Air Fo)rce
B.S., Insti.tuto Tecnolog-lco da Aercnauti caBzas"l, 1976
Submilttad *in partial fuilf-UIten't of the
reaui-rements for the3 dagree of
dAsrE3 OF SCIZNCE IN ENGINEERING SCIENCZ
fromt the
NAVAL POSI!GRADUATE SC3OOL4arch 198~4
Autho r: - -
Approved by:--
rhessis Advisor
S ecord R a .1 rAccession For
NTIS GRAMI - ~DTIC TAB
&Z Unannounced C hairman, Dzepa3:tner- of Aeron~autics
B----------* Diibu~ni - -De-an if Sciancs ari i
*Ava I)t: I i*<i C
Dis -Ca
& BSTRACT
This work adresses the application of 1igi-al optimum
control theory to a bank-to-turn missile.
A optimal guidance law has beea developed and tested in
ssv-ral scenarios, using a 2-D m.d-l. Effects cf samplg?
rate, pitch angle, gravity and appr3ximations fo: small and
large roll excursions are discussed.
1
3"
.........
. . . . . . . . . . . . . . . .. . .*. . . . . . . . .. . . . . - .
- -•
b'.
I. INTRODUCTION ................ 11
Ii. AODEL OF THE SYSTEM .. . .. .. .. .. .. . 3
A. INTRODUCTION . ......... ... .13
"
3. ASS U KPlIO0NS . . . . . . . . . . . . . . . . . 13
C-THE CONTINUOUS MODEL T13
D. THE DISCRETE MODEL .............. 17
1. Introductioa . . . . . . . . . . . . . . . 17
*2. Calculation of the Matrices & (k) ,B (k)
-..
. .:~an 1. (k) . .TO .O .. . . . . . ... ... 19
III. THE OPTIMAL CCSTROLLE . . . . . . . . . . . . . . 29A. DERIVXTION OF TE OPTIMAL CONTROLLE.... 29
B. EXTENTION OF THE MODEL F)R LARGE ROLL
ANGLES . .. .o i . . 36.......... .....*13
1 . Effacts on-, the liss Di ces as of hs
Extantion of -.ha cI.. . . . . . . . . . . . 42
C. SIMUA T IO0 N . . . . .. .. . . . . . .. .. 49
D . COMMENT!S AND CONCLUSIONS . . . . . . . . . . . '4 5
-~~~ 1. Rsl' SS U 1 .t S . 45
IV. ANAL-SYS OF GAINS, SAMPLE E~r AND ?ITCH ANGL E .. 82
"-9"7A. ANALISYS OF THE GAINS . . . . . . . . . . . . 82B. EFFECT OF THE SAMPLE RATE OL94
C. EFFECT OF THE INITIAL PI... ANGLE . . . . . . 850. EFFECT OF TIME TO0 INTERCET . . . . . . . . . 88
V. FINAL CONCLUSIONS AND COMNENTS . . . . . . . . . 130
,.'%*
'4
% - . - LS OF T G'*.S ............. 82
.pEDXl O. N PROG-................... . . .
LIST OF REFERENCES . .. . . . ... . .. . ..... 15
15
LIS.. . .
'.,
**m
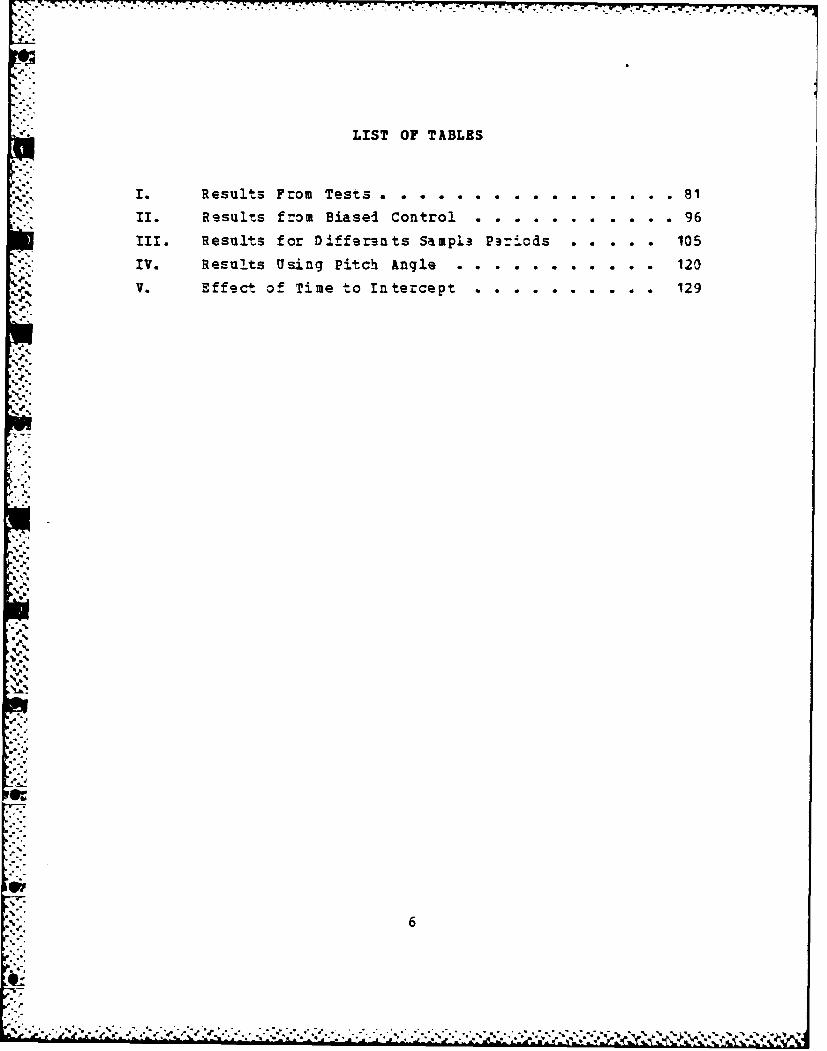
"* LIST OF TABLES
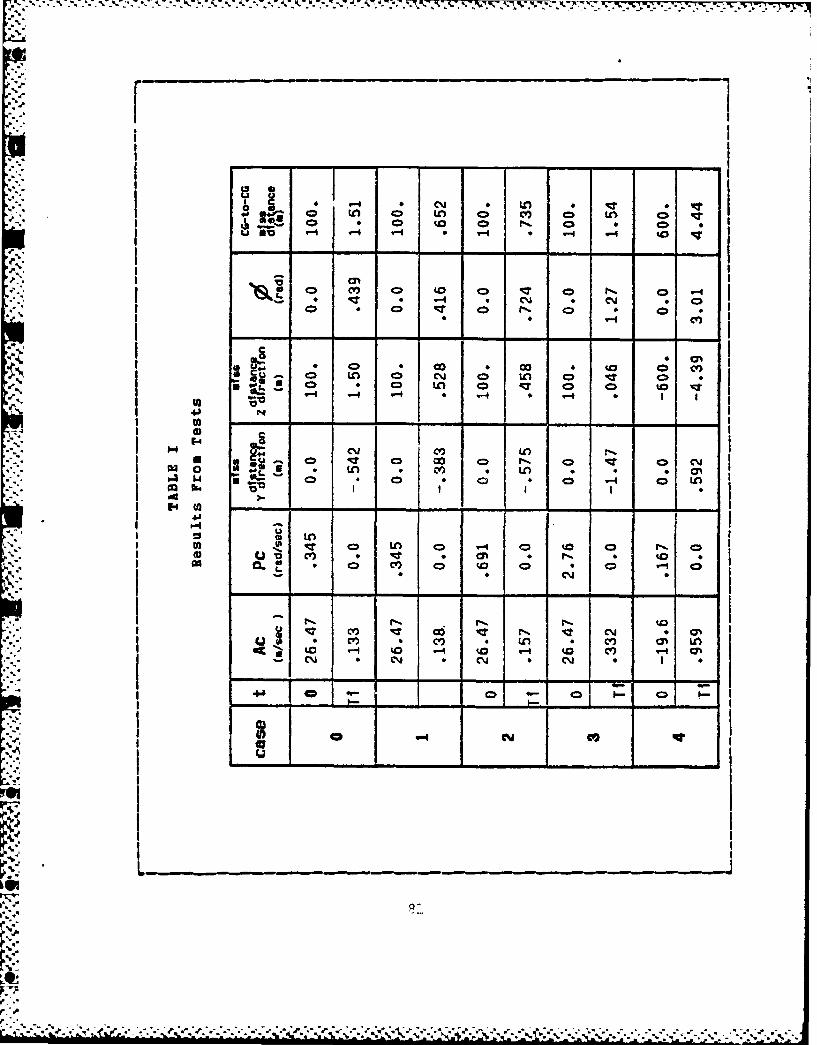
I. Results From Tests ................ 81SII. Results from Biased Control ........... 96
III. Results for Differents Sampi3 Paicds ..... 105
IV. Results Using Pitch Angle ........... 120
V. Effect of Time to Intercept .......... 129
.J..
* *.--. .;.. .<.b
-'--77 .'-a -
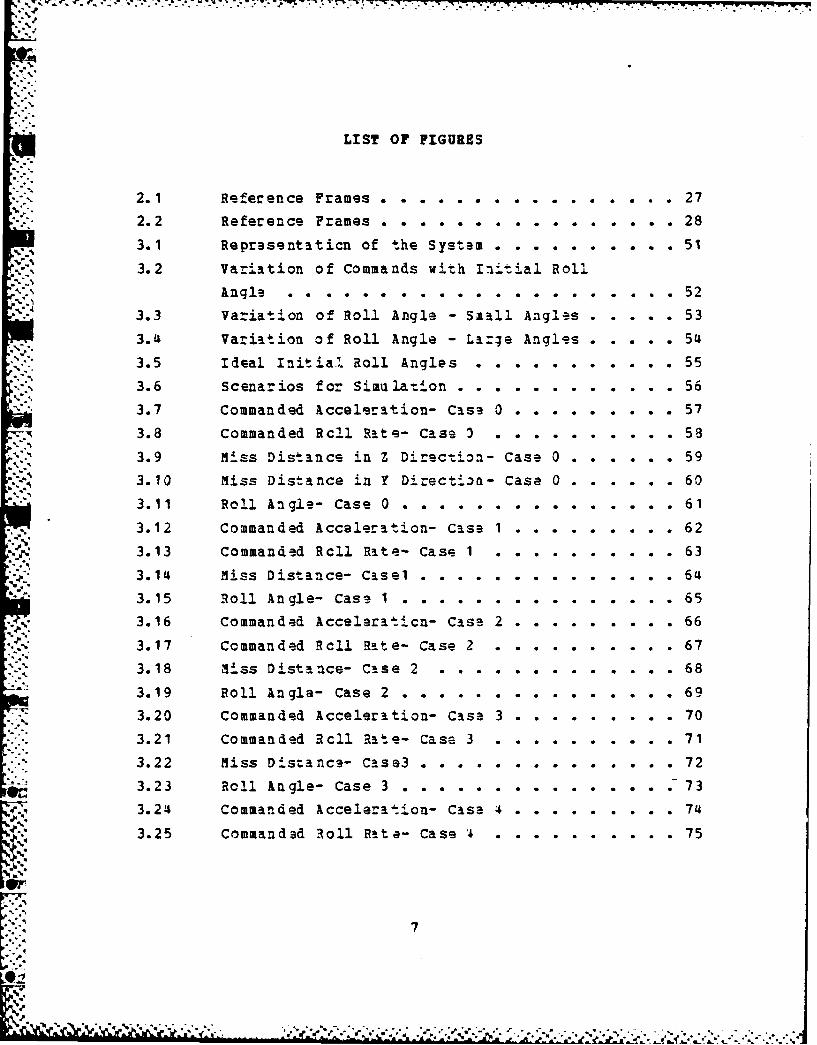
LIST OF FIGURES
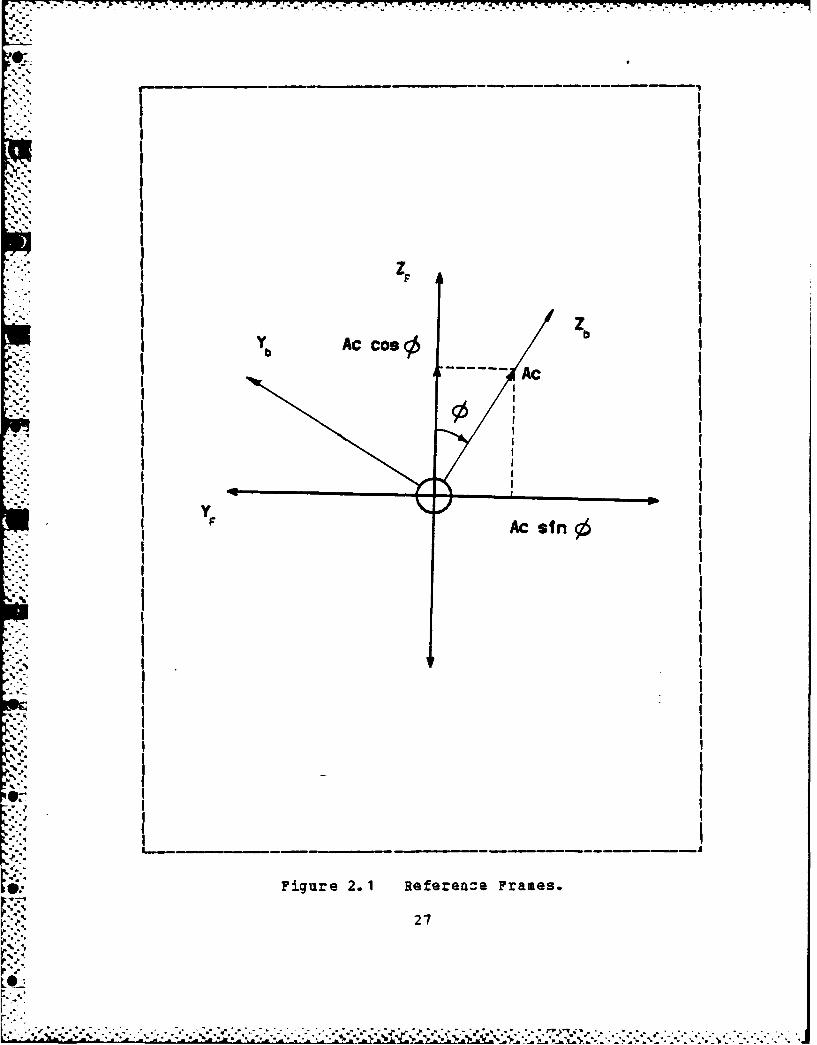
2.1 Refeence Frames..... . o...... 27
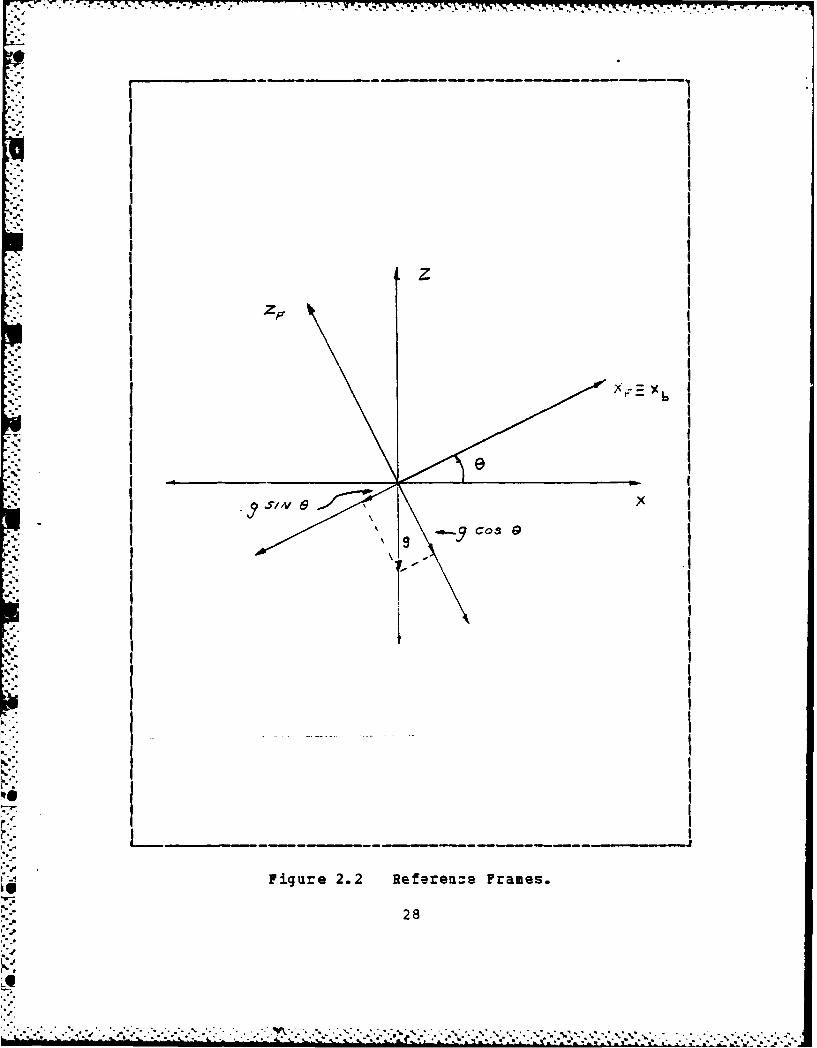
2.2 Reference Frames . . . . . . . . . . . . . . . . 28
3.1 Reprasentaticn of the System . . . . . . . . . . 51
- 3.2 Variation of Commands with Iaitial Roll: Angle ... . . . . . . . .. 52
3.3 Variation of Roll Angle - Small Angles . . . . . 53
3.4 Variation of Roll Angle - L.rge Angles . . o . . 54
3.5 Ideal Initial Roll Angles . . . . . . . . . . . 55
3.6 Scenarios for Simulation ............ 56
3.7 Commanded Acceleration- Casa 0 . . . . . . . . . 57
.[ 3.8 Commanded Rcll Rate- Case 3 . . . . . . . . . . 58
' 3.9 Miss Distance in Z Direction- Case 0 . . . . . . 59
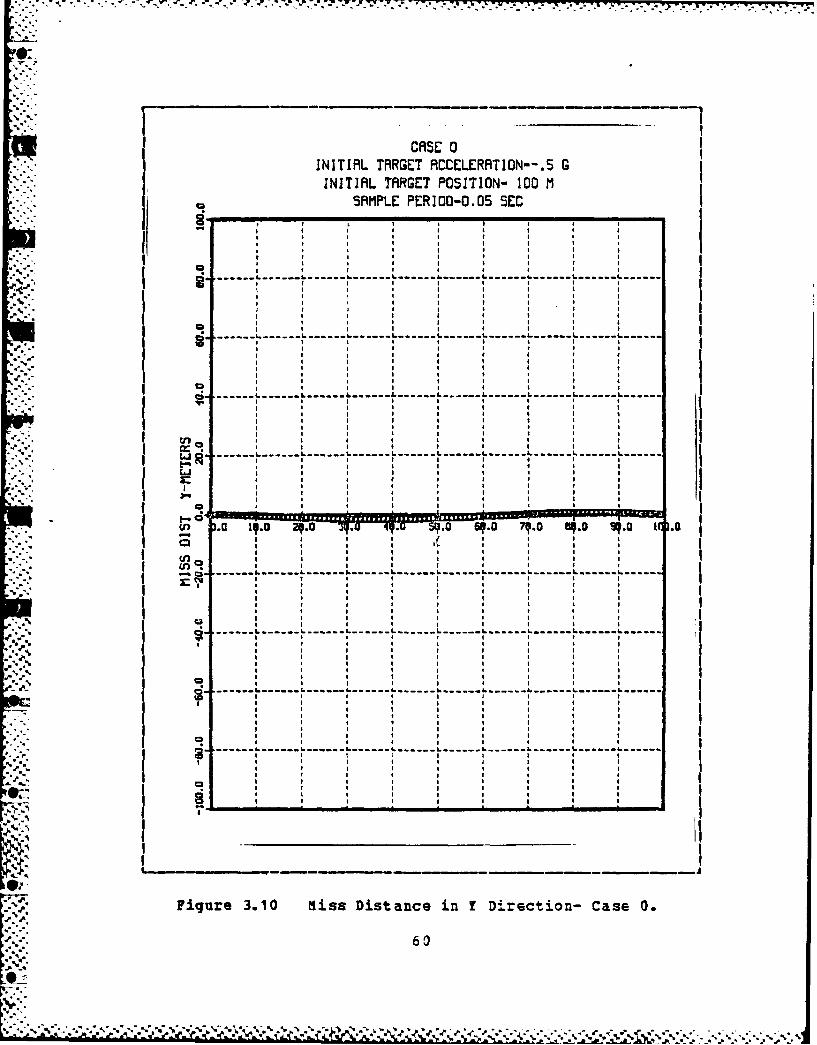
3.10 Miss Distance in Y Direction- Case 0 . . . . . . 60
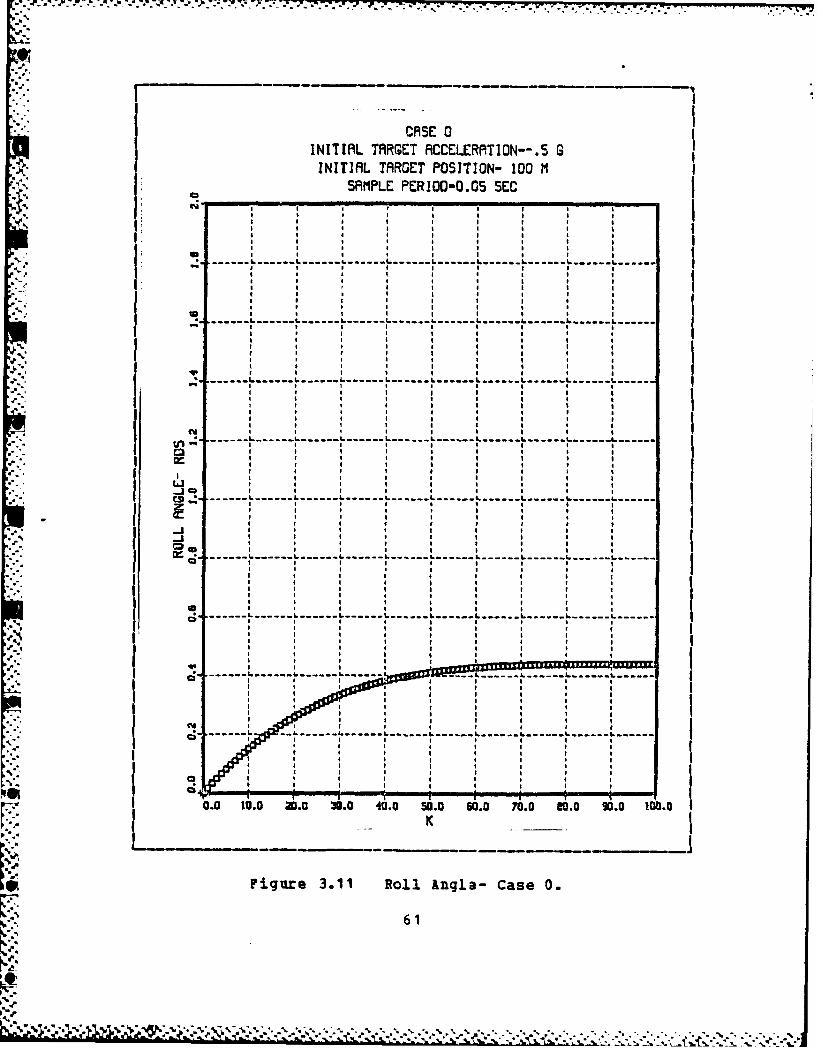
3.11 Roll Angle- Case 0 . . . . . . . . . . . . . . . 61
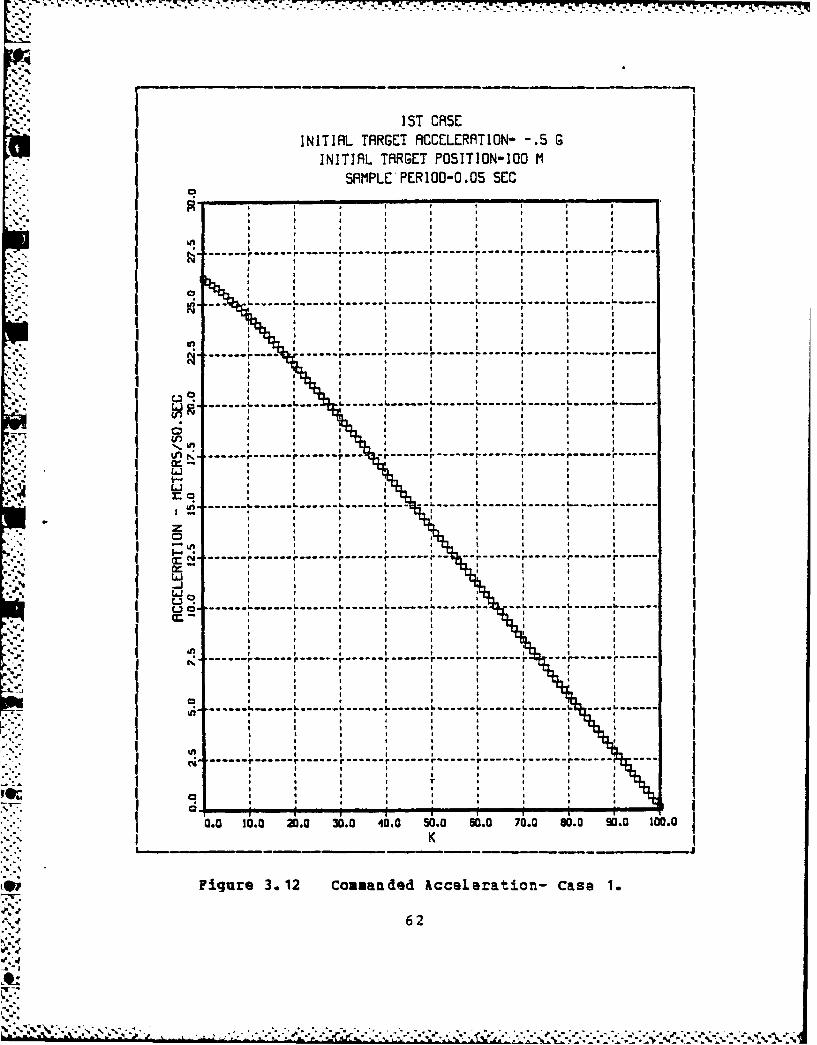
3.12 Commanded Acceleration- Case 1 ......... 62
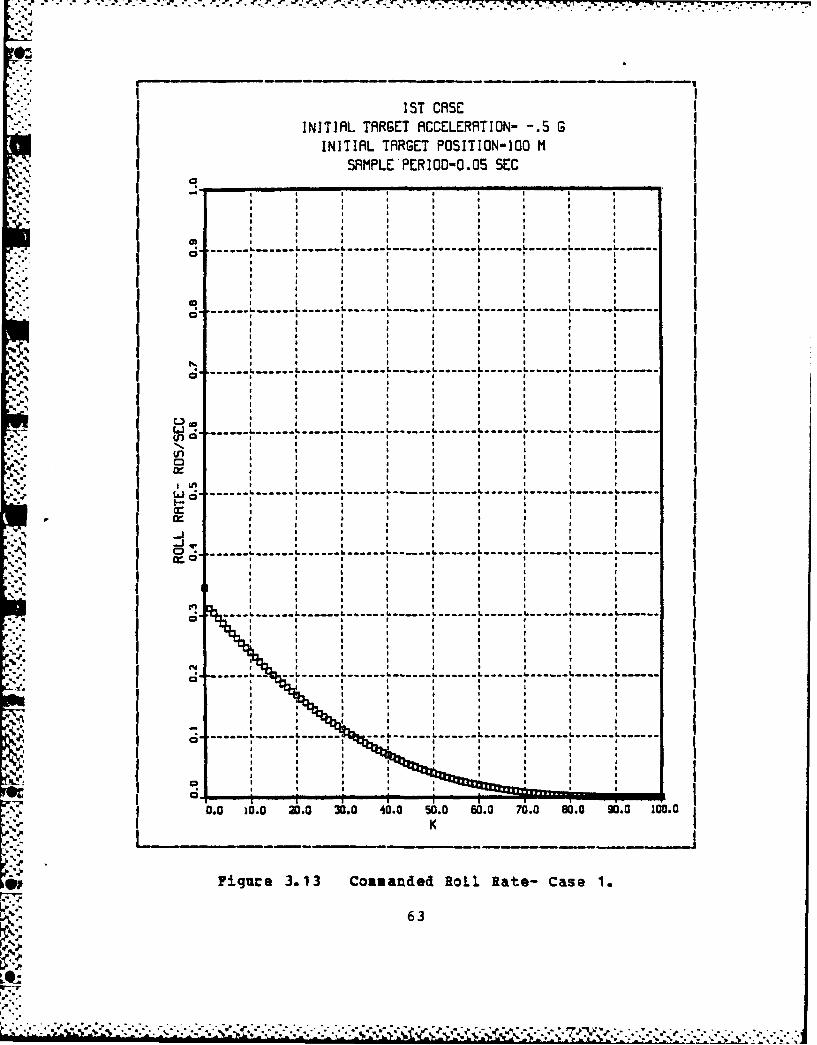
3.13 Commanded Roll Rita- Case 1 . ...... 63
"-U 3.14 Miss Distance- Casel . . . . . . . . . . . . . . 64
3.15 Roll Angle- Case 1 . . . . . . . . . . . . . . . 65
3.16 Commanded Acceleraticn- Case 2 . . . . . . . . . 66
3.17 Commanded Roll Rate- Case 2 .......... 67
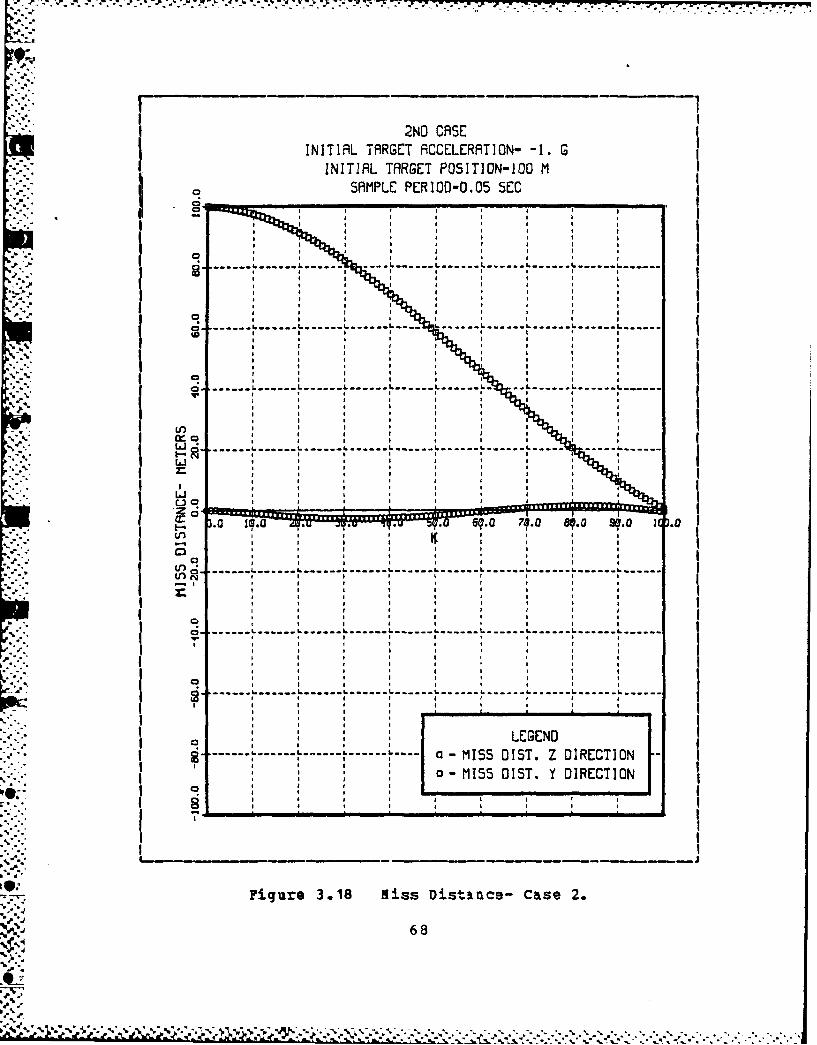
3.18 Miss Distance- Case 2 . . . . . . . . . . . . . 68
3.19 Roll Angle- Case 2 ............... 69
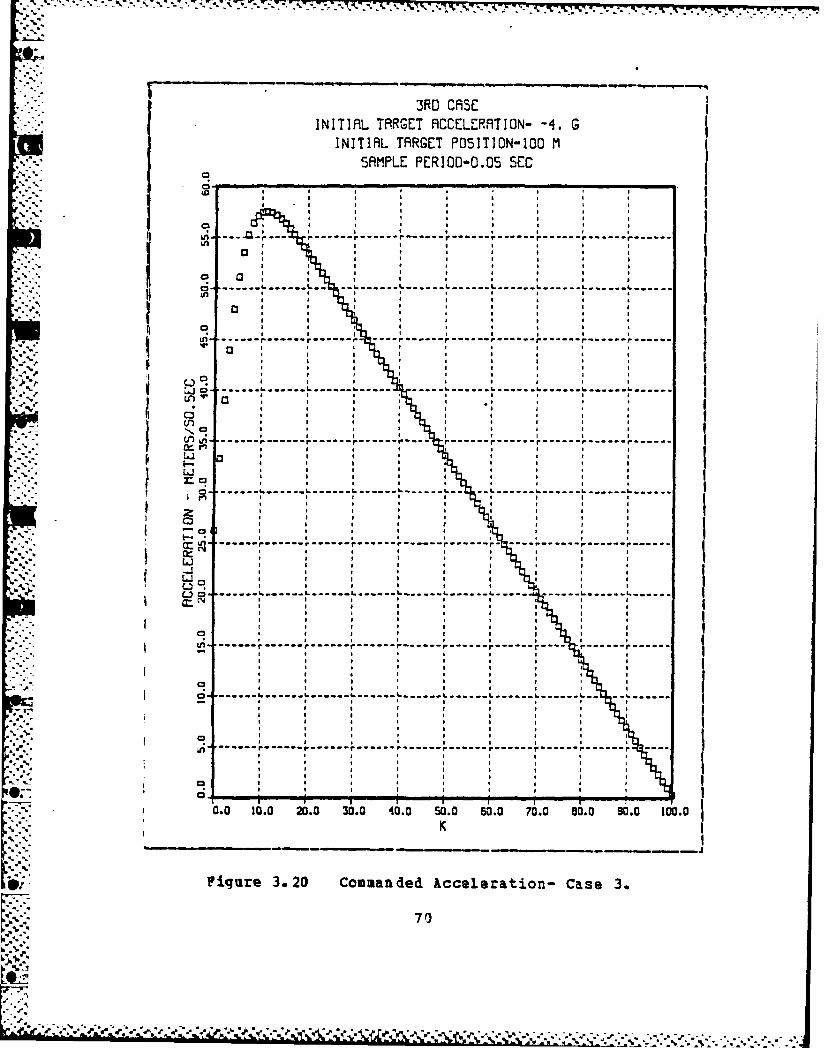
3.20 Commanded Acceleration- Casa 3 . . . . . . . . . 70
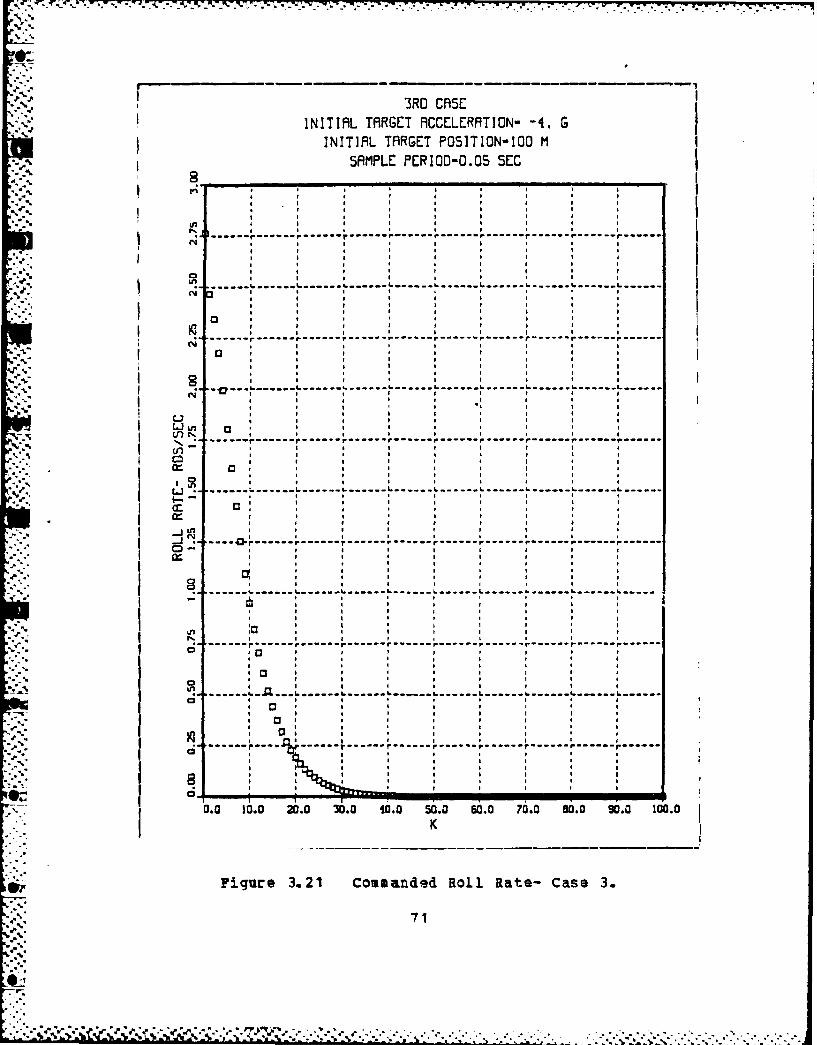
3.21 Commanded Roll Rate- Case 3 . . . . . . . . . . 71
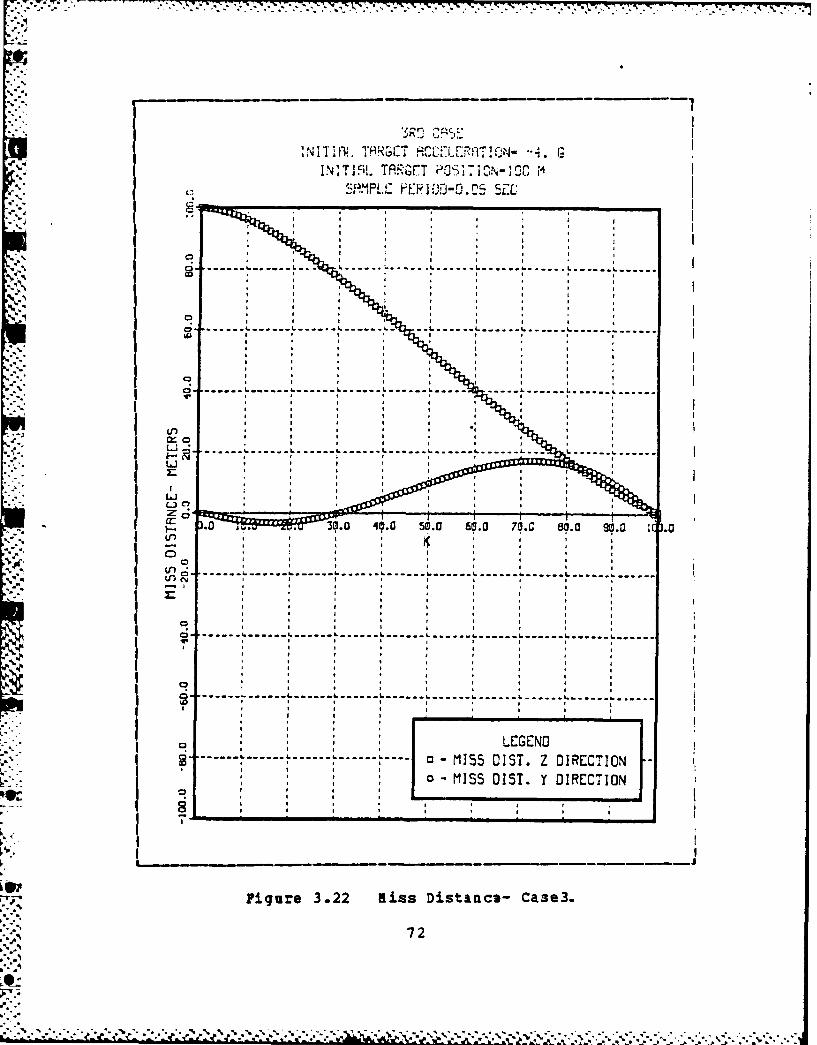
3.22 Miss Distance- Case3 . . . . . . . . . . . . . . 72
3.23 Roll Angle- Case 3 . . . . . . . . . . . .73
3.24 Commanded Acceleration- Casa 4 . . . . . . . . . 74
3.25 Commanded Roll Rate- Case 4 ...... . .. 75
%°°
-%."* ~ ; N' % . **~*
7.p ~ 1 * *
. . . .. . . . . - . - o .- -. ° - o . . . . ° . _
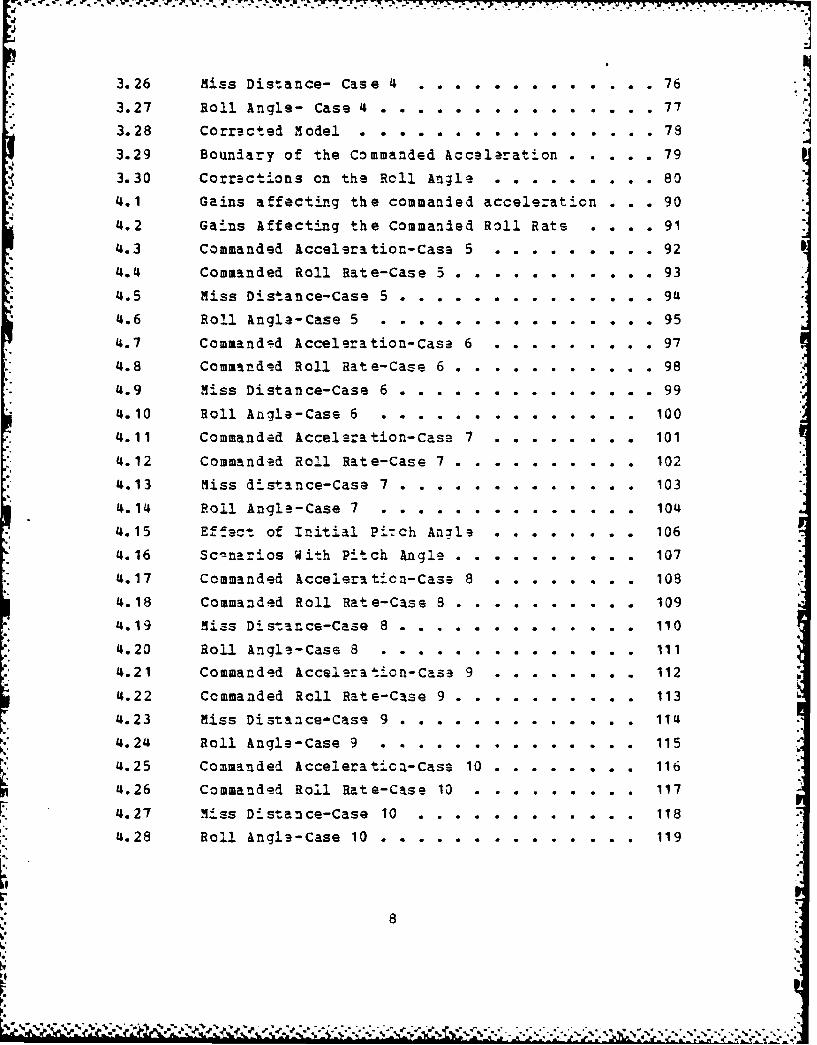
*- 3.26 Miss Distance- Case 4 76
3.27 Roll Angle- Case 4 . . . . . . . . . . . . . . . 77
3.28 Corr-cted Model 78 j3.29 Boundary of the Commanded Acceleration 79
3.30 Corrections on the Roll Anle. . . . . . . . 80
4.1 Gains affecting the commanded accelerat-on . . . 90
4.2 Gains Affecting the Commanded Roll Rate . . . 91
4.3 Commanded Acceleration-Case 5 . . . . . . . . . 92
4.4 Commanded Roll Rate-Case 5 ........ 93
4.5 Miss Distance-Case 5 . . . . . . . . . . . . . . 9-
4.6 Roll Angle-Case 5 ............ 95
4.7 Commanded Acceleration-Cas_ 6 . . . . . . . . . 97
4.8 Commanded Roll Rate-Case 6 . . . . . . . . . . . 98
4.9 Miss Distance-Case 6 . . . . . . . . . . . .. . 99
4.10 Roll Angle-Case 6 . . . . . . . . . . . . . . 100
4 4.11 Commanded Acceleration-Cass 7 . . . . . . . . 101
4.12 Commanded Roll Rate-Case 7 .......... 102
4 4.13 Miss distance-Case 7 . . . . . . . . . . . . . 103
4.14 Roll Angle-Case 7 . . . . . . . . . . . . . . 104
4.15 Ef -fct of Initial Pi"ch An7le . . . . . . . . 106
4.16 Sc-narios With Pitch Angle . . . . . . o . . . 107
4.17 Commanded Acceleraticn-Case 8 . . . . . . . . 108
4.18 Commanded Roll Rate-Case 8 . . . . . . . . . . 109
4.19 Miss Distance-Case 8 . . . . . . . . . .... 110
4.20 Roll Angla-Case 8 . . . . . . . . . . . . . . 111
4.21 Commanded Acceleration-Case 9 . . . . . . . . 112
4.22 Commanded Roll Rate-Case 9 . . . . . . . . . . 113
4.23 Miss Distance-Case 9 . . . . . . . . . . . . . 114
4.24 Roll Angle-Case 9 . . . . . . . . . . . . . . 115
4.25 Commanded Acceleratica-Cass 10 . . . . . . . . 116
4.26 Commanded Roll Rate-Case 10 ......... 117
4.27 Miss Distance-Case 10 . . . . . . . . . . . . 118
4.28 Roll Angl.-Case 10 . . . . . . . . . . . . . . 119
8,
* • . . . . .. .. _~W ~ . . . .. T . • 2.- . o° -° .- ° j
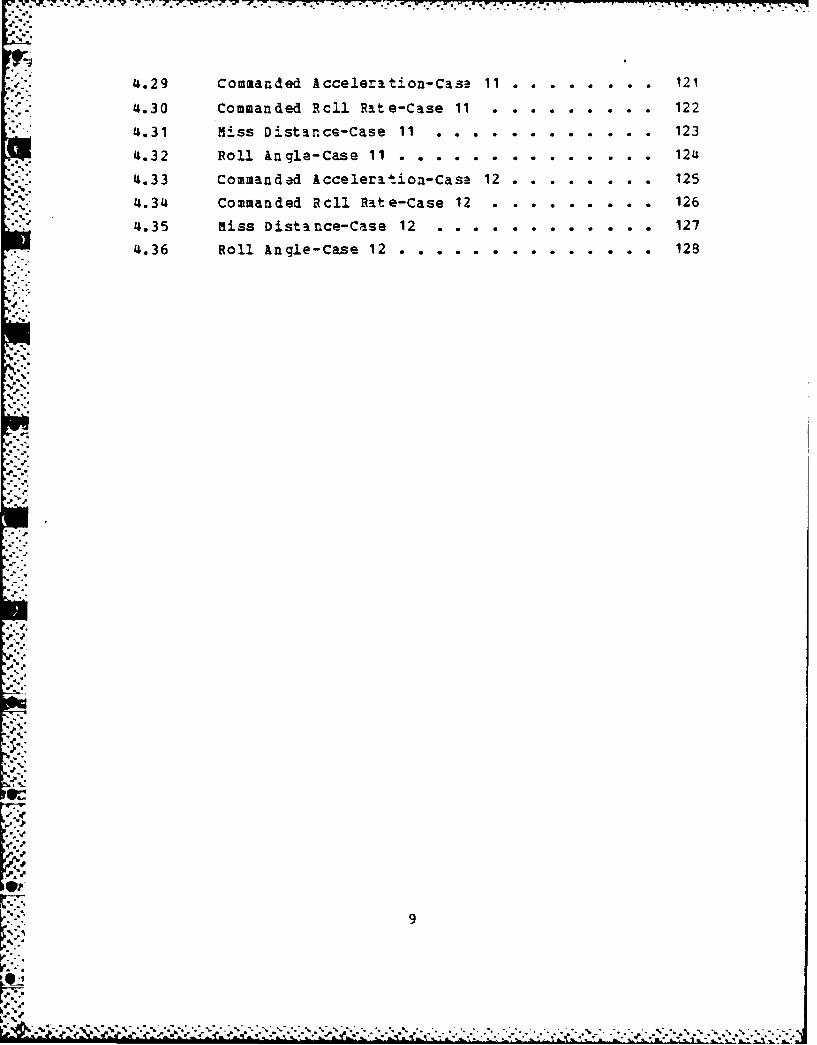
4.29 Commanded Acceleration-Cas3 11 . . . . . . . . 121
4.30 Commanded Rcl Rate-Case 11 .. ....... 122
4.31 Miss Distance-Case 11 . . . . . ..... 123
4.32 Roll Angle-Case 11 . . . . . . . . . . . . . . 124
4o33 Commandad Accelerition-Cass 12 ........ 125
4.34 Commanded Rcll Rate-Case 12 ......... 126
4o35 Miss Distance-Case 12 . . . . . . . . . . . 127
4.36 Roll Angle-Case 12 . . . . . . . . . . . .. 128
. -.%
.°s"....
.'..
I%9
_________ -_____________._,__.__ . -.. . .. . . ,... . .. . : . . , . . ...
ACKNOILEDGEEI
*,. To my wife, Rosy, for her constanr encouragment, suppor-
and love.
To my children, Ana, Antonio, Chica, Joao and Rita, for
yours smiles and love.
* .*i Without you this work would be iupossible.
4.-.1
9.,
..
'4.
". . * . q *4* --. *.***
1. INTRODUCTI39
Because of threats from highly mansuvarabnle high
performance aircrafts and the need for Increase standof f
ranges, major improvements are a9919d in 4u"dancs an dcontrol capabilities of missiles.
The high maneuverability of targets, has la-1 to defense
missiles capable of develop higher lift acceleratiors and to
more complex control laws, able to improve P'4rformance over:
well know laws as proportional navegani -on.
VIn order to accomplish these new zequirezmsr.nts with largs
*standoff ranges, propulsi-on systems asing airbreathing
engines has been studied and developai in recent years.
The advent of air-breathi.ng engines leadS natzural to a
con siderati.6on of bank-to-turn. missiles in orde-r to min-m-z
the angle of -attack of the inlets.
The necassity of more complex cntr ol laws, laads In a
genaral way, to the application or -modern control and zszi-mation theory, since more complmte informations cf the
*statses of missile and target arq nazassazy than thl-ose s-tates
informed by sensors commonly In use --a mlssilss today. This
leads to the use of a airborne computear.
The present work adreasss the dasign and evalua-ion of a
cp-' mal digital cont rcl for application to terminal guidance
ia hank-tc-turn missiles.
one ccntiauous two dimensional nodal was adopted, in the
following form:
X (t)= A (t) x (t)+ B (t) u (t)4 E g(1)
-- N
where the effect of gravity appears explicitly in the th r-
term on the righ hand side of axpression 1.1.
After the development of a equivalent discret s model,
the optimal control problem has been solved,using a mod.ified
Ricatti equation due to the existence of the third term
representing to the gravity effect.
Next, several analysis has been made in o:der to check
the effects of small and large roll excursions, the effect
of the sample rate on the system, and the .ffect of the
initial pitch angle, in order to check the validity of such
two dimensional model, when applied in some scenarios of
in te r st.
12
II. MODEL OF THE SYSTEM
A. INTRODUCTION
In -he present work the problem of terminal guidance for
long range, bank-to-turn missiles irith ramjet engines,using
a digitalized system has been investigated.
The modsl developed in reference 1 is used as the base
for this work. After the digitalization of that model, aa
optimal control law was developed.
B. ASSURPTIONS
Keeping the same assumptions as in ref.1,on= has:
The missil is limited to -2g's and +15 g's of ccmmanded
acceleration in the pitch plane,with ziro lag.Also its yaw
auto pilot has zero lag, yaw ra-ulator maintains zero
siieslip.
Missile thrust exactly cancels Irag.
The angle of attack is assumed to be very small,which
leads to the ccmmanded 3cel!:ration acting normal tc the
velocity vector.
The missile w'il not have -o roll through a large
angle. (Furthet consid.ra-i3ns will ive -o this at the end
of the? derivation of the control lawl
C. THE CONTINUOUS MODEL
Using the same refe-en-e frames is in ref.1,one assumes:
-Bcdy frame with xb axis parallel tc --he longitudinal
missile axis, positive Yb axis out of the le-ft wing ,andpositive Zb axis upward. (see fig.2.1)
13
• ° " " "i"°s". "•° •
° . . . . " - -. "
" b - %
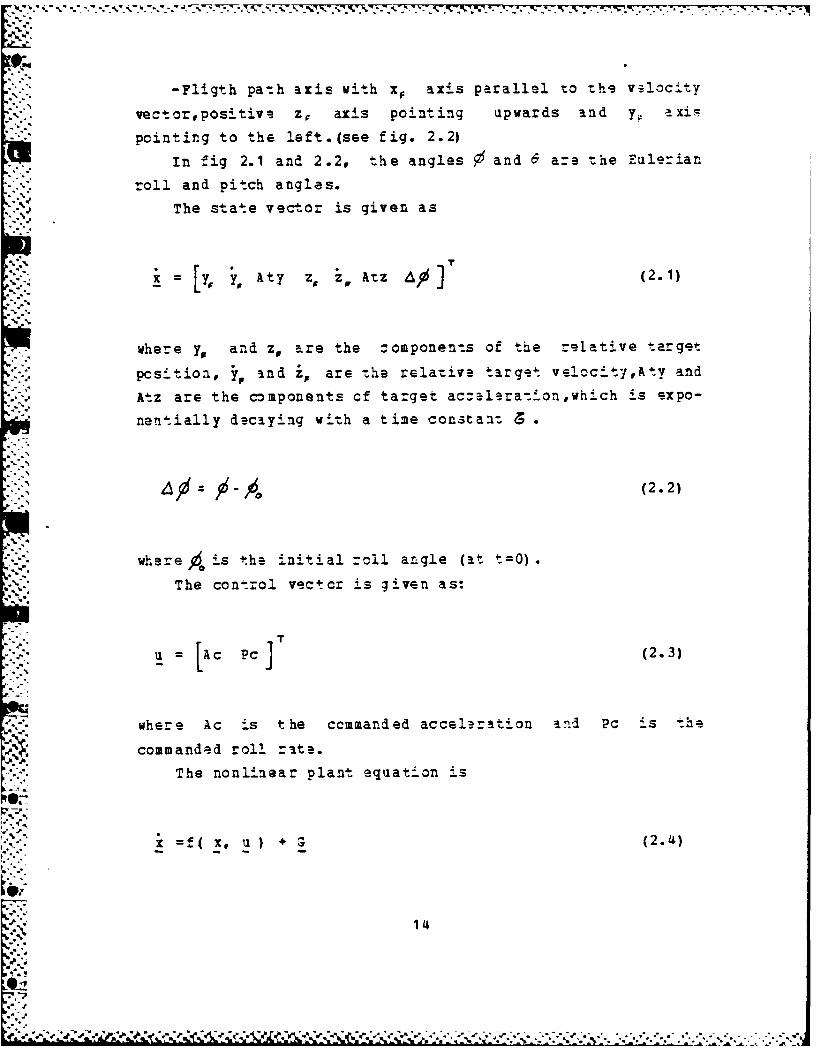
-Fligth path axis with xF axis parallel to the velocity
- vector,positive z, axis pointing upwards and y, a xiF
pointing to the left.(see fig. 2.21
In fig 2.1 and 2.2, the angles and 6 are the Eulerian
roll and pitch angles.
The state vector is given as
[, &ty zi, -. At z A~ (2.1)
where y, and z, are the zomponents of the relative target
p..' position, y, and i, are the relativ- target veloc'ty,Rty and
Atz are the components of target aczelera-ion,which is expo-
nentially decaying with a time constan: .
-(2.2)
where is thz- initial roll angle (at t=0).
The control vector is given as:
.Ac Pc (2.3)
where Ac is the commanded acceleration an'd Pc is the
commanded roll rate.
The nonlinear plant equation is
" '" f ( X , u ) ,(2 .4 )
14
F.'
-7'" '; M , a .g.,,,2. e' g"'. c.j. -2'oj'. "-Jd'€-. ""'¢.."•.. "-.."..- .-. '
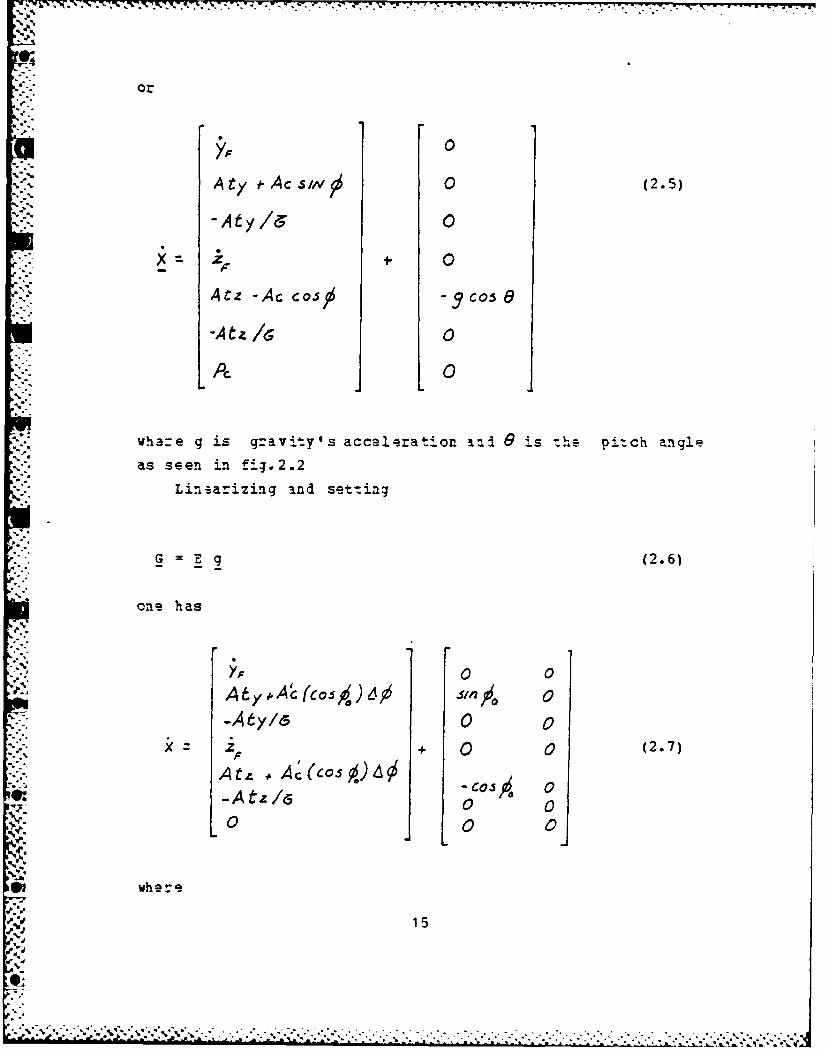
or
0
A ty i- Ac,51 0 (2.5)
-Aty1 -A
0
-A 0
wha~e g is gzavity's accal1-rati'on i 46is : pitch angleas seen in fig.2.2
Linsarizing and setting
G E g (2.6)
one has
0 0
-Ayls0 0X: *+ 0 (2.7)
0 0
L0 0 0
0 where
15
t.
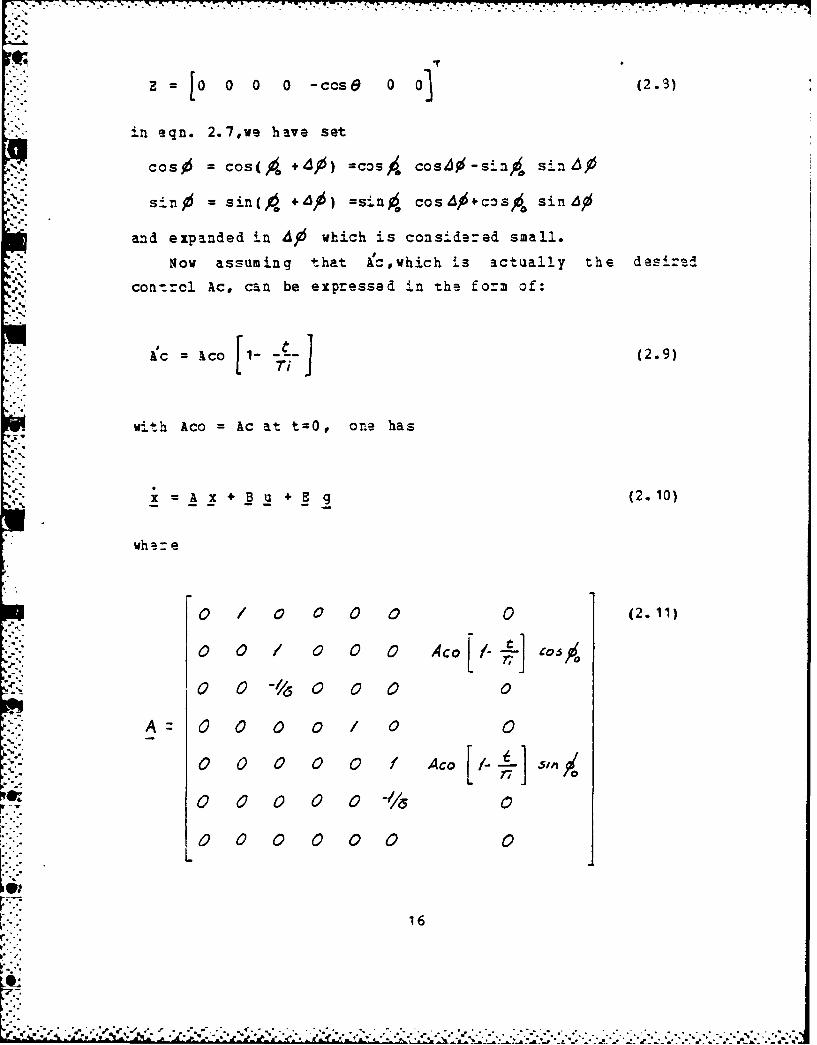
E 0 0 0 0 -ccs 9 0 0 (2.3)
in eqn. 2.7,we have set
CosJ = cos(,o +4,) =c3$A cos46-s nA sin A6
s -;n )6 = s in(~ +,) =si-n j6 co s A co sj6 s in d#
and expanded in A6 which is considered small.Now assuming that A,which is actually the desirsd
con-tel Ac, can be expressed in the form of:
.°
= .co 1- (2.9)
with Aco = Ac at t=O, one has
A B u E g (2.10)
whire
0 / 0 0 0 0 0 (2. 11)
0 0 / 0 0 Aco 1-lco./
4-0 0'/ 0 0 0 0
A= 0 0 0 o / 0 0
0 0 0 0 0 / Aco[I" ]'%0o
000 0 / 0
0 0 0 0 0
16
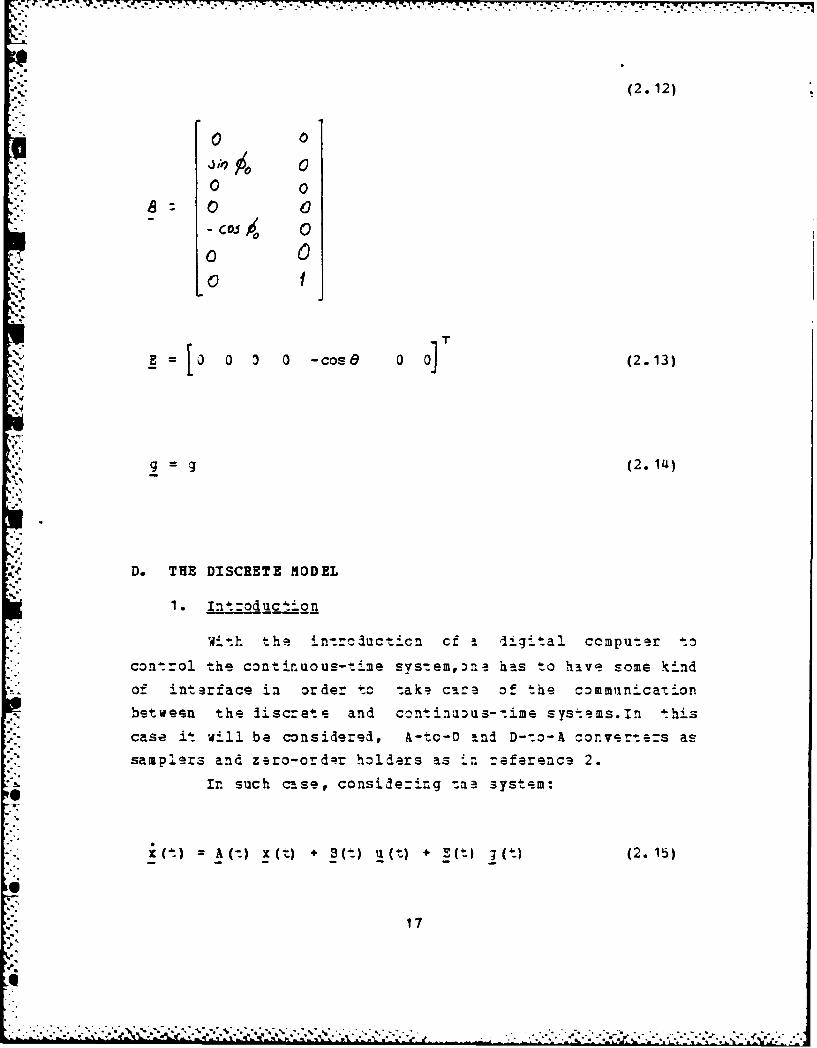
(2.12)
' o O
o oJ: 4 0o 0
00
E=J0 , 0 -cos.8 0 O(2.13)
g =g (2. 1)
A D. THE DISCRETE MODEL
1 . Introduction
Wi- the in-rc ducticn cf . digital computer to
control the continuous-time system,:).a. has to have some kind
of interface in order to takei ca:r of the communication
between the discrete and ccntinai)us--ime systems.In this
case it will ba considered, A-to-D and D-:o-A convsrt&s as
samplers and zz.ro-ordqr holders as in referenc_ 2.
In such case, considering -a. syst.m:
(it) A(t) x(t) + B(t(t) t) + E(t ; (t) (2. 15)
* 174.t
Qi
4 4 t- . ,* .'- * N .4 - - - -~ .

one can write the state of the system it -z mp (k+1) a
x ,(t Vt, 't xlt )+ (t., d ul(% (2.16)
10 I k I t
tee
where (t,to) is the transiction matrix of the systam repre-
sented by eqn. 2.13.
Furthermore, we will considered that -he sampling
instants are equally spaced, or:
- t = (2.17)
=kT r (2. 18)
so one can replacet = kT
thus,
x(kT+T)= 6(kT+r) x(kT) (2.19)
ITsr,?
+ (k+T, 1 ) (I dj a(kr)
A7
&7#r
+ ,7)IrT I)E I d g(-
or in a simplified no-azion:
18
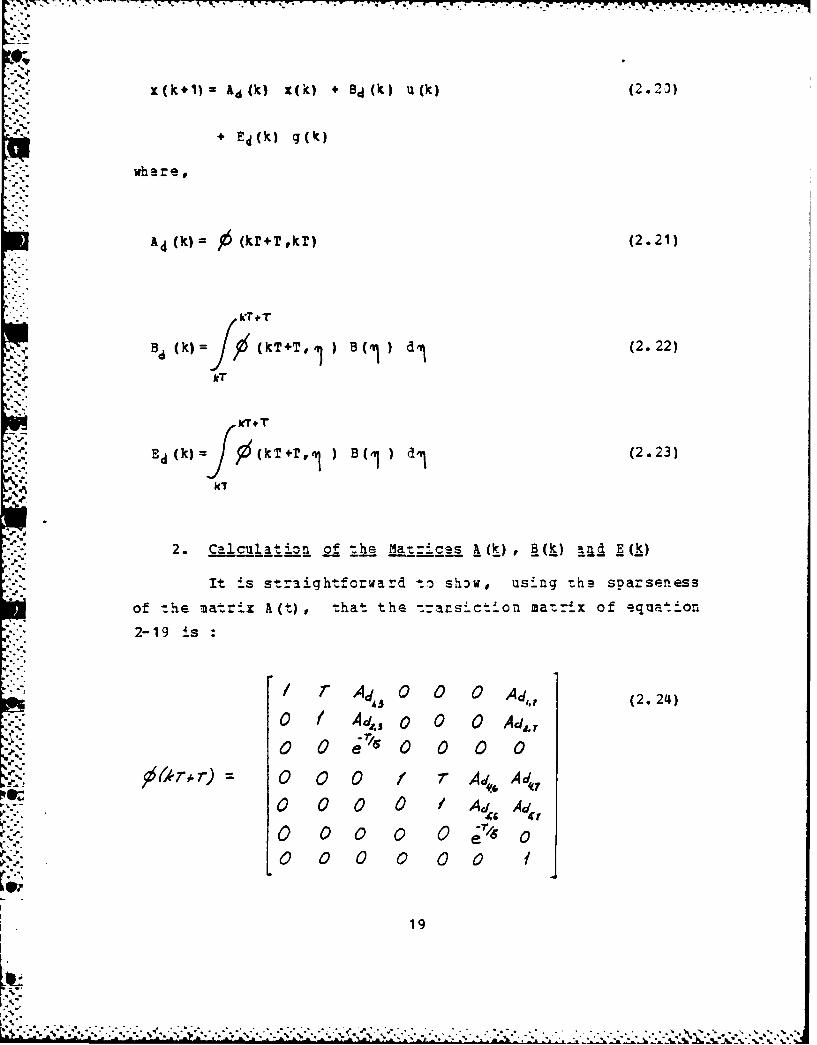
x(k+1): Ad(k) x k) * Ba(k) u(k) (2 2)
+ Ed(k) g(k)
• .- [-.-where,
A4 (k) (kr+T,kT) (2.21)
B4 (k)= (kT+T,q) B(I ) dl (2. 22)
kT
, .:" ... ''."Ed (k)~ lkT+I!,l B(i] di (2.23)2'..
2. Calculation of the Mazrices A(k), B((t) nd E(k)
It is straightforward to show, using the sparseness
of -he matrix A(t), that the -_-ansiction ma:rix of equation
2-19 is :
r T A., 0 0 0 Ad,, (2. 24)0 Ad,., A d 0 Ad,.,
0 0e 0 000,zkr ") = 0 0 0 r " A. A4 7
0 0 0 0 / A As,
0 0 0 /o0 0 0 0 0
19
-...-
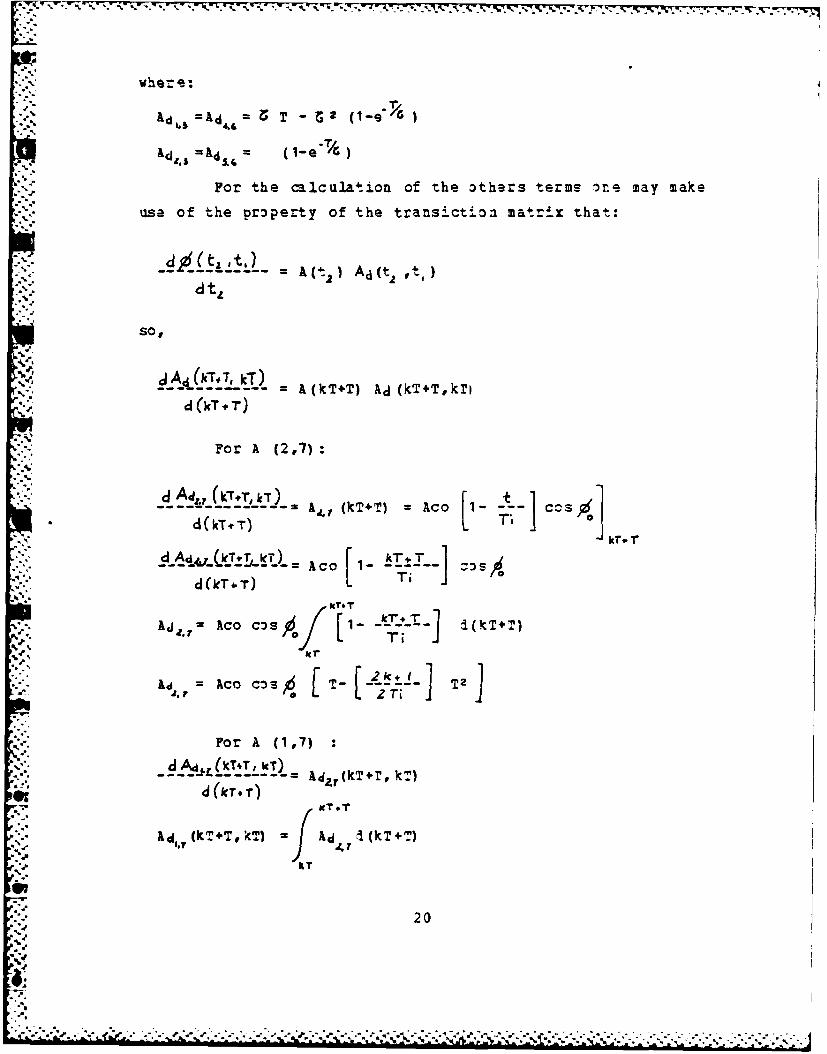
Where4:
Ad =Ad = T - 2 (-"
Ad Ad e (14
V For the calculation of the others terms )re may make
use of the property of the transiction matrix that:
it) A(t ) Ad(t 2 ,dtl2
so,
dAd (kT#T, ti) = A (kT.T) Ad (kT+T, k31
d (kT + T)
For A (2,7):
d Ai,.,(kTrTk-T) =A,,., (kT+T) =Aco 1is- cs'
kr4.r
d (kT4. T) T
Aj Aco c~s 1 [i + .7T.-j d(kT+T)
L .r Ao cs L T- 17 7J- Tz
For A (1,7)
dA, Ad~r (kTT,)T
d(lcT-T)
Ad (kT.T, kT) EfAd I (kT+T")
20
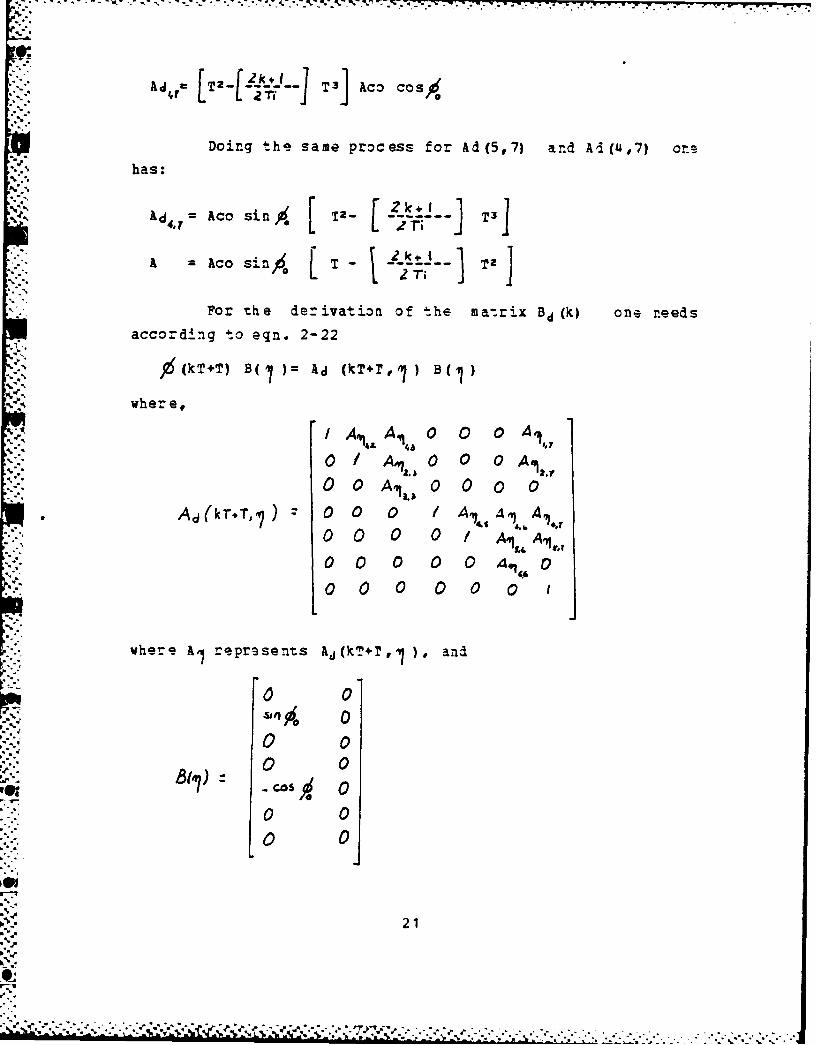
Ad T2[ 2[Ti T3 cC
Doing the same process for Ad(5,7) and Ai(U,7) onsS',has:
"~Ad< = Aco sin T2- TJ A34.7 r 2r; I 21
iAos iT-i -iTT
A ~ ~ =LcinT-I A "1 T J
For the derivation of the ma-.rix Bd (k) one needs
according to eqn. 2-22
.(kT+T) B A (kT+r, B
where,
IA 44,A 9 00 0 A
0/ A,, 0 0 O Al.0 0 Aqa 0 0 0 0
Ad (kT.T, 1 ) 0 0 0 / A,4,1 A0 0 0 0 A I= Aq.,000 0 / 4
0 0 0 0 0 0
where A, repr.sents Aj(kT+.,i ), and
" o 0o 0o 0
0 0
O0
21
4.: : " < ,: " " " " " , " , -',-< -: ,-7 , -,- : .. , , : v : .. ..,- ,, ,: - : - , ... -..... . ... .,,,,, , ,,, ..
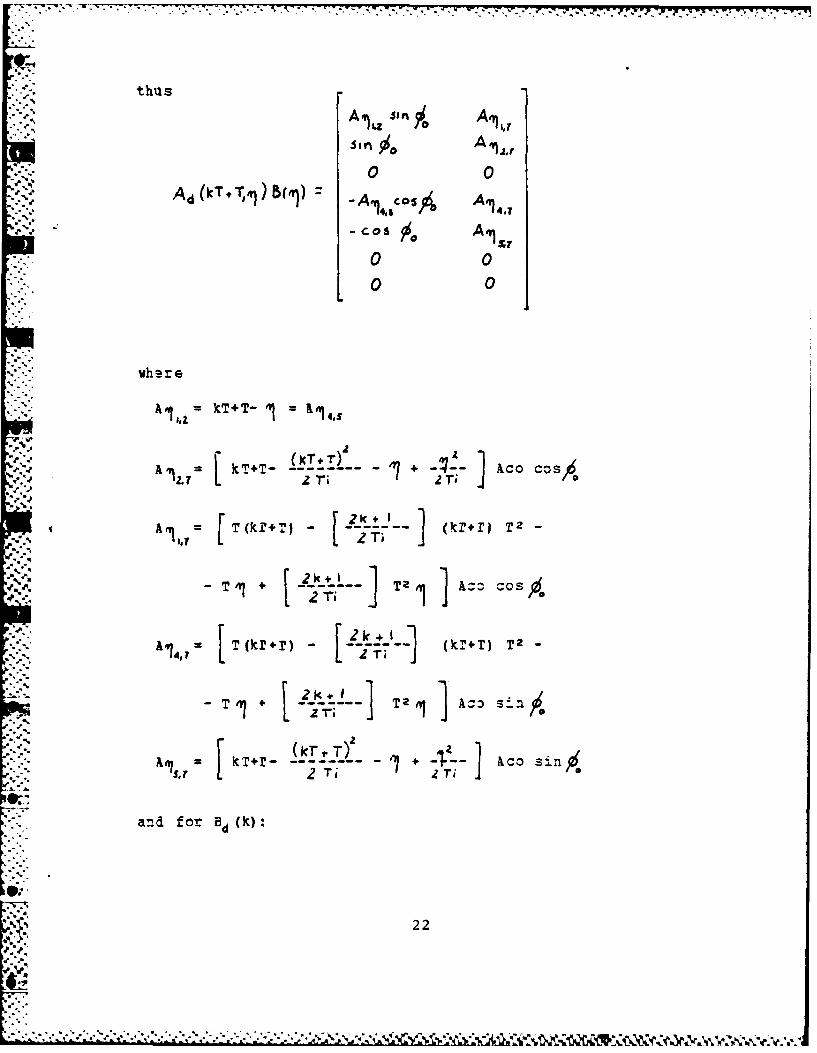
thu s
" ,, Si # 0 F", ~~si A~ 'T' (,
0 0"..A / . 4, A 4 A 4.1
"Cos A
o 0.o 0
wh e r e
kT+T- = 1
-~ 2
., ~= *- -- + Ti Aco cos.0"-' 2. T
-- :,'-Alloyr IT (kZ+T) - T; ] ( kr +r ' V" -r*i, .~
T Al+ T2 Az cos
A,:[7 T(k ] r) (k T) T2 -
-- ] j Az snZ Ti
'-'--... = (r, T)'_tAnj,= kT+r- (A 1 co sin
SE..:.[_2 7i 2 Ti
K- and for Bd (k)
% 22*o i " **
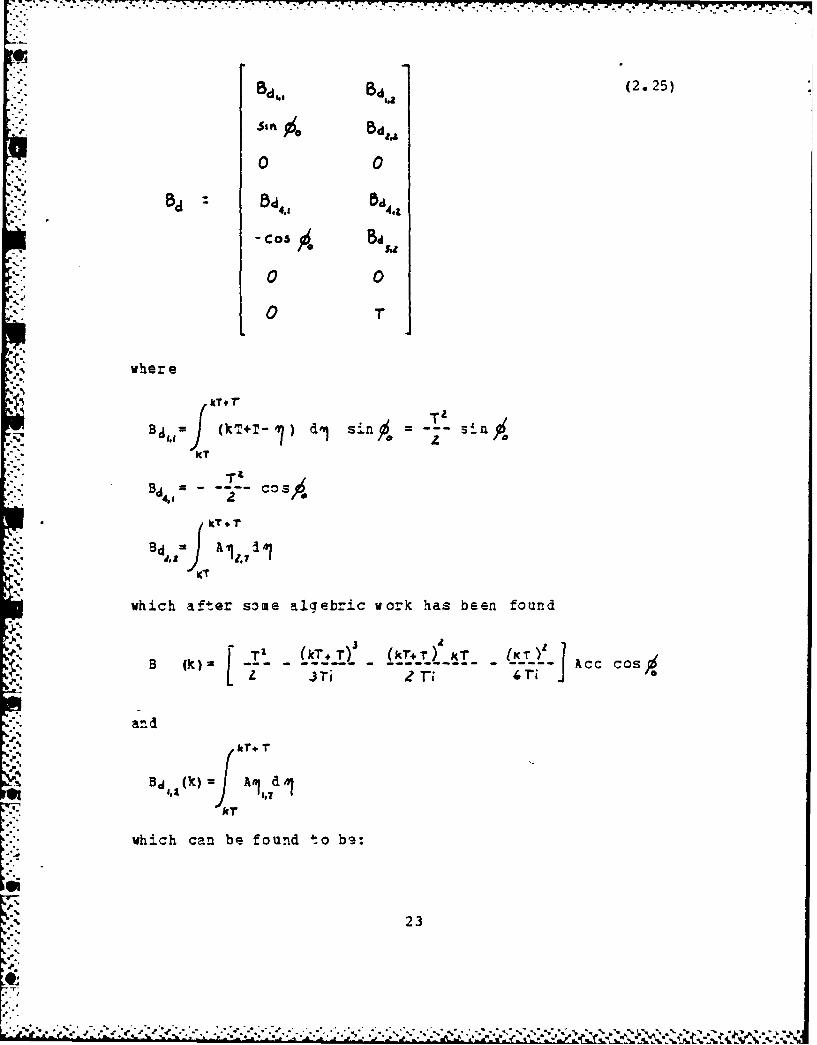
8 d~a Bd(2. 25)
o 0
B'a b4.1
o0
where
Bd =I(k'~T-l!7) dl~ sIn# s:.na
kTT
3d ).R A 147' d
'iCs
which after same algebric work has been found
F T' (kr) (IC.T TrB (k) [ ~ JiimACC. Co
* and
%I (k) Al t di
whi ch can be found 'to ba:
23
4.~ 4;.Z*-
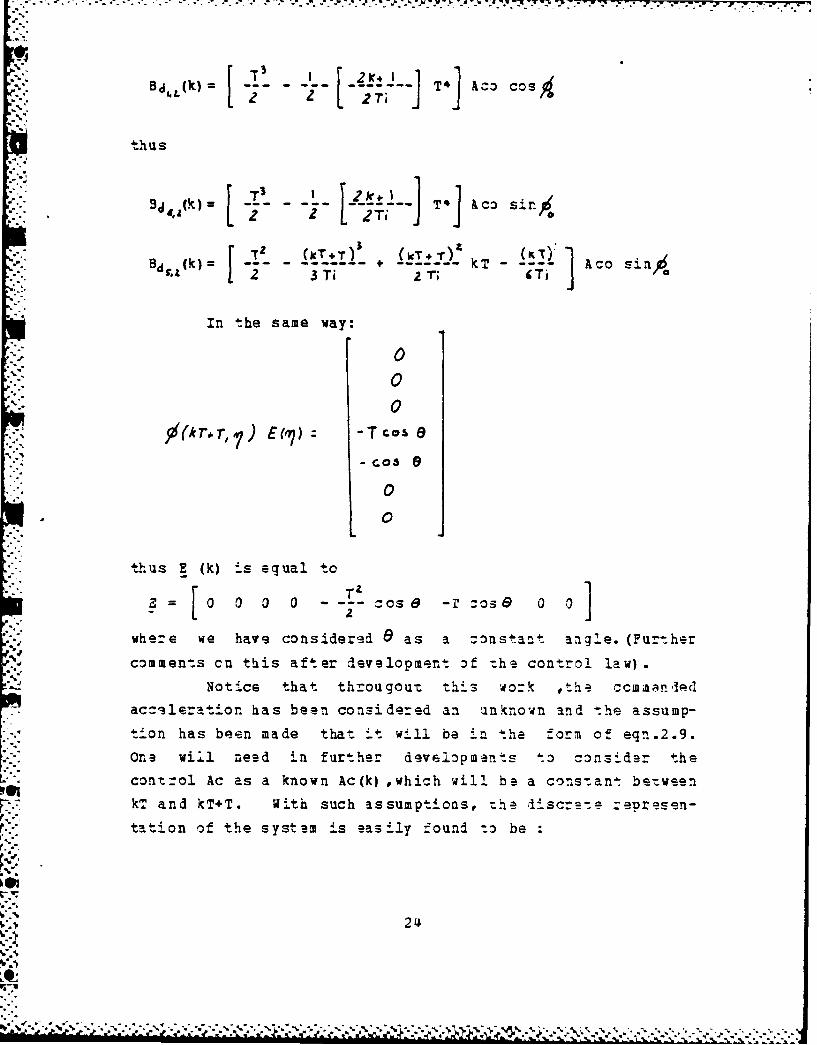
B j (k)1 T41 Aco cos
thus
Bd (k)= T 2Tco si
r T2 (cT T) 3 (ICTT) (K- k kT Aco sin
B 2. 3T 2.; T A
In the same way:
000
P(Ykr,y) E&t7)) -Tcas 8
00
thus E (k) i-s egual to
E [0 0 3 0 -- o -r =03 0 3]- L 2
whe~e we have considered e9 as a zonstaat aagle. (Further
commen-ts cn this after development of :ha control law).
*NotiAce that througout thi4s wo=.k ,th ccm&a nidacciler-at-or. has been considered an anknown and the assump-
tion has been made that it ; wil be in the ' ormu of eqn.2.9.
One- will need in further developments t-: considar theconzrol Ac as a known Ac(k) ,which will be a cons-an- be-cwen
kA" and kT.T. With such assumptions, th-2icee ersn
tation of the systam Is sasily found :obe
24
A-o
o5..,a .. ~ ~ a
-,. -7...
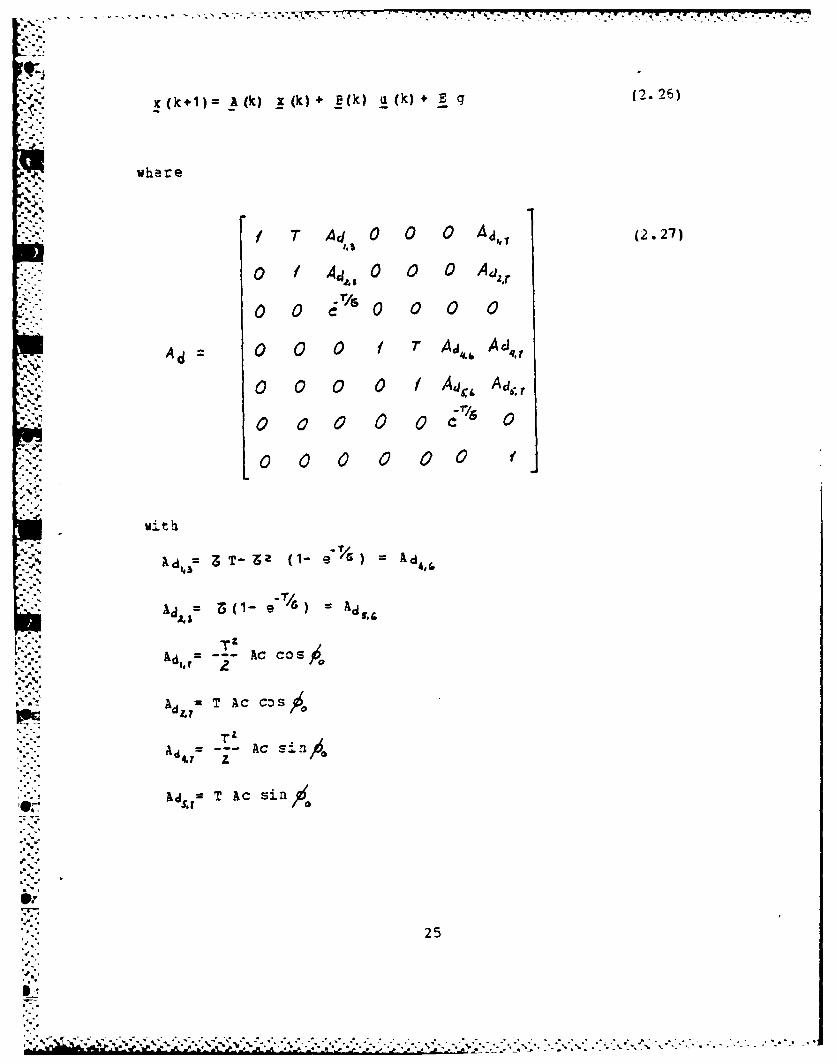
x (k+) A(k) r(k) + B(k) u(k)+ B 9 (2.26)
where
I T Ad 0 0 0 Ad1, (2.27)
o / , 5 0 0 0 Ad..r
0 0 T/G 0 0 0 0
Ad~ 0 0 0 f r Aj L&A Jq
0 0 0 o (Aa Ad,
0000 02-_ 0 0 0 0 0 c"+
000 0 0 0
."it "i
Ad Z, T- 2 (1-e Ad
Ad,= 5(- 4) = Ad
= Ac COS4
Ad - AC si.$i;."A. 8 d,= Z~ l
;z' Ad,= T Ac sin A
f.--.
".'. 25
IJ '
V- '> K\:C/--
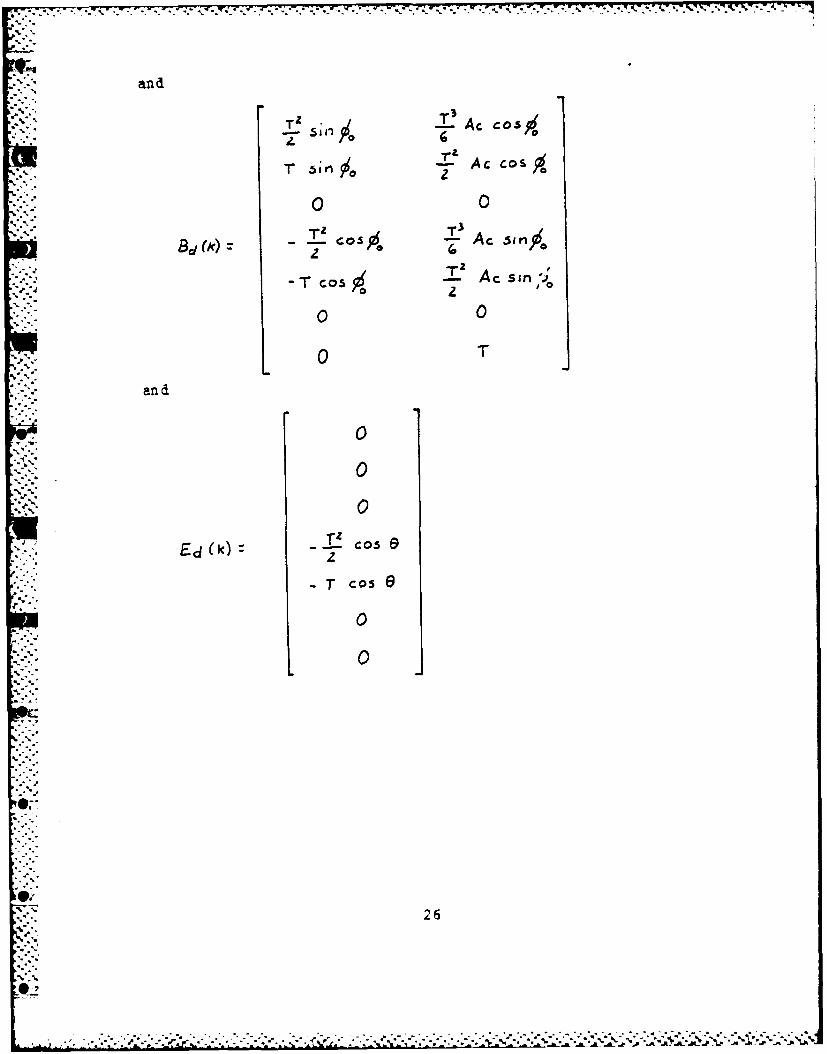
and
T3o COS
2
,'-0 0Bd(A-): _ZCS TI Ac inA
T-Cos A. sin,
.. '.' "an d
oC 0
o
0
I , T °
.0;-
0'"
* . . .-.-.-.~~**** ~ .'o *. . . . - .." o* - - ~ A
** ** * * .*-'. .. . .* .. k A -. AJ >~-
* % .
0z. . .I I
"------ Ac
I I
-" I i
I AcsAc On
- I.-
iur. 2 1I-27
I I"
IO II," II" I4
I Io°IO iurI. efrn rms
-, I2I 0°I
._ r -,- - ° , *, . ., ." :. ., % % , ' % "Ir% " - *.I .'"''. % " , '""""
*77K73
* :* I
S/ /ICos
Fiue . Re ze FrmsI 28
III. THE OPTIMAL COTROLglE
A. DERIVATION OF rHE OPTIMAL CONTROLLER
In order to have a suitable gaidaace law to .-mplementth coto omma nds, we will xiaimi.Zing the following
performance iadex:
J= x (r.) W() x(n) + ur (k) 2(k) u(k) (3.1)
*so
where x (N) is the f inal smat e at t=ri
As we want to minimize the final miss distance,t1-he
weighting matrix W(N) is taken. as
/ 0 0 0 0 0 0a (3.2)
0 00 0 00 0
0 000 / 000
0 000 0 00 0
0 000 00 0
anr.d Q(k) is a two by two positive defin-Ite symm,:t=:.=
weighti.ng matrix to be chosen.
K..In b-he decivation of the solu=:i, zefersrcs 3 has beer,
followsd kesping in mind that the stata sgua::on has nz
form:
I. z "
29
~.. .. i
x (k +1)=A(k) x (k) B (k) u (k) *E ;(3.3)
0=.
x (k+1)= f ((k).u(k) g) (3.4)
wher e -:he -third te-rm,whizh represe n-s ~h - effe ct o f the
gr a vit.y has been considered constant.
Considering that the perfcrmancB index is in. ths form:
i=d~ ()L k)x(k ,u(k g()](35
we need to find a sequence of ui(k) that minimizas J.
Adjoin tha system equat ion to J wit1-h a mu2tiplIsr \ (z)
J= (N)] j L (k) [x (k) *u(k) g] + (3.6)
+ ~(k+1) -xxk,~) ] xk1
and definIng a scalar sequancs H (k)
H(k)= L(k) x (k) u (k) ,g]+ (3.7)
r (Ik+1) fU x (k) , a( k) ,gJ
k=0, 1,2,.... n-i1
30
" . .' , ' -.'
. . '- . ' '_ ' ° . -. - , . - . - .r r r r " - -' .-" , . - . . " . .. -.. -.. - -. . "
one has:
-=xXN) (N) x (N) +* (3.8)
Ar-I
H ) (k) x (k) 3+ H (0)K1I
Considering differential changes i J:
ddx(N) + (3.9)
.(k Ix (k) +
.:. I¢= I
+ ( du(k) ko) )
• om.'-" H (o)+ du (0)
J u (0)
choosing the sultiplier X(k) so that
;(k) =0 (3. 10)
thus
:" LIc + (k+ 1)1~k
~x(1c)
31
- .. . Y2... ..... ..... , . . .

and
-0 (3. 11)
v with boundary condition
x)(3. 12)
we obtain the minimization of the parformanca in ex.
In the present case we hava:
J= x (N) W(N) x(N) + a'(k) . (K) u(k) (3. 13)
S T(k+1) A (k) x (k)+B (kjK u (k) E 3- x(k+ 1)
and H (k):
R (k) =--u (k) (k) u(k) (3. 14)
.% • (k+ 1) A(k) x(kl + 3(k) (k* E g]
then in order to minimize J:
- u (k) Q (k) + (k 1) B(k) =2 (3.15)
32•0:
. . . . . . . . . . ..........................................|........................................................
or consi dering that 0(k)=Q(k)
TQ (k) u (k) =-B (k) X(k+ 1)
to] and
(k) N)(3. 16)
(k X(k+1) A(k)
and
T TA(N) x x(N) V (N) (3. 17)
Notice thtwe are not weighti ag the states i4n thepsrfrmac~'adex, except the last state. oegnrlf~
could bea ob-lained, with ill, states beiag weigthIngi we
change -:he =.qn 3 .16 to:
X(k) )(k+l) A(k) x T(k) W1(k) (3.18)
wher a W (k) is the weightiag matrix of the states.
Wi-th equatlcns 3.15,3.16 and 3.17 one is -able to fini
the sequenca Df a(k) that will give the minima controls.
Such set 3f eqilatics can be solved by the sweep mothod
as in rcef.2
* . We will look for a solution of the form:
u (k)-F (k) x(k) -PG (k) g(k) (3. 19)
F 33
what means that the commanded acc-leration and roll z
will have a correcticn du?3 to the affac- of gravity.
Placing:
--. 4
X(k) S (k) x(k) + SG(k) g(k) (3.20)
from eqn. 3.15
T 1Q (k) u (k) =-B (k) LS(k+l) x(k+1) 3S (k 1) g(k+1)
from eqn.
3.3
44
-(k) u(k) =-B (k) S(k+1) [A(k) x(k), (3. 21)
+' (k) a (k) E g - Bk) SG(k+l) g(k+l)
so
[Q (k) + BT(k) S(k+l) B(k) u(k):'4
T T-B (k) S(k+1) A(k) x(k) - B (k) 3(k+1) E g(k)-
'4
-B (k) SG(k+1) g(k+1)
considering that g is a constant
-I
u(k) (k) B k ) S(k+1) B (k) (3.22)
34
--
[BT(k) S (k+.I A (k) 1(K).
+. B[ (k) S (k+ 1) E+B (k) Sg(k+1)] gJ
so:
u (k) =-FP(k) x (k) -FG (k)g
wha3r e
F Q (k * B (k) S (k+ 1) B.k (3. 23)
r
FG LQ(k) +B (k) S(Jc.1) B(k)j (3.2L4)
[B T(k) S (k4.1) E + BrSg (k+1)J
from eqn..3.16 an-I 3. 19
-~X(k)=AT (k) A (k+ 1=A (k) [S(k 1) x(k +1) +SG (k 1) g(k+ 1)]
=A' k S (k+ 1 A (k) x (k) + AT (k) S (k+ 1) B (k) u (k)
4Ar (k) S (k +l1 Eg + A T(k) SG(k+1) g(k+1)
from eqn. 3.19
1. 1TX(k) =A (k) S(k+l) A(k) x(k) + A (kc) S(k4.1) 3(k).
[-Fk)x(k) - FG(k) g] + A (k) S(k+l) Eg+
+A S3 (k) g (k+1)
so, as gis a constant:
-. 35
Ar. -VL
- A (k) S(k+1) E -A (k+1) 8(k) FG(k)
+ A (k) SG(k+1) g~thus
.. '
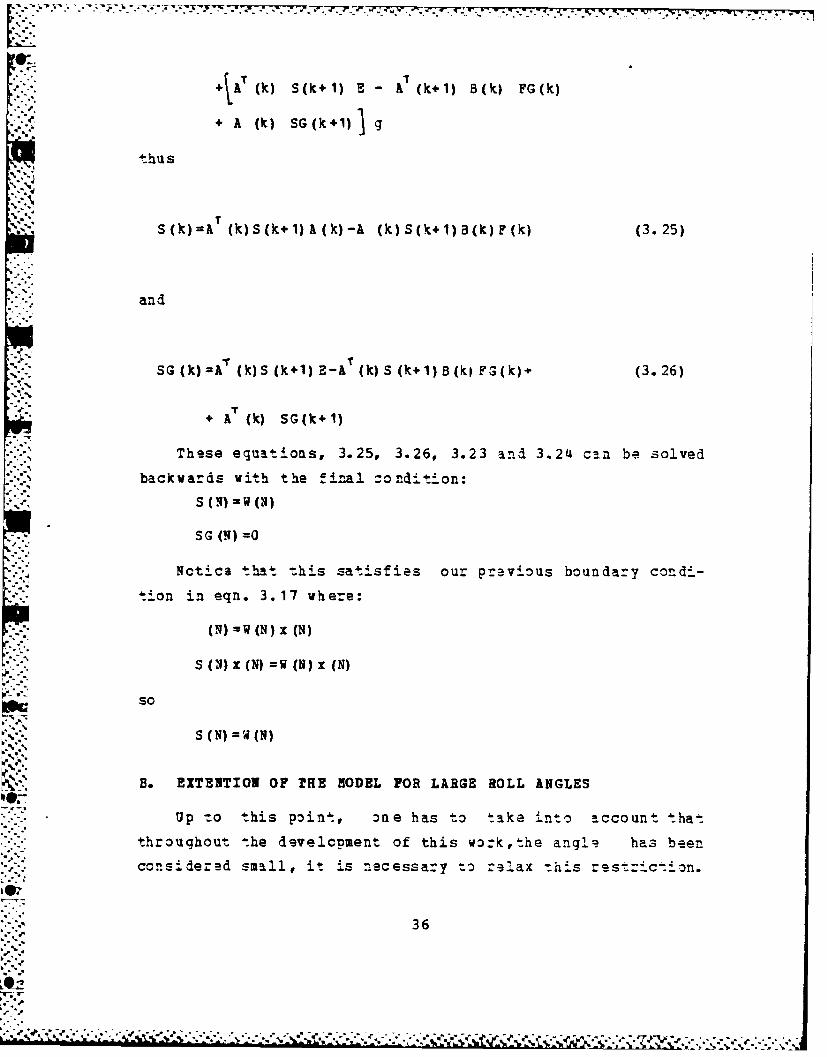
S (k)=A (k)S(k.1)k(k)-A (k)S(k+1)B(k)F(k) (3. 25)
and
SG (k)=A (k) S (k 1) E-A (k) S (k+1) B(ki F G(k) (3.26)
+ (k) SG(k 1)
These equations, 3.25, 3.26, 3.23 and 3.24 can be solved
backwards with the final condition:
S (3)-W (N)
SG (N) =0
Nctica that this satisfies our previous boundary condi-
tion in eqn. 3. 17 where:
(3) = W(N) x (N)
S (N) x (N) =W (N) x (N)
so
S (N) =W (N)
B. EXTENTION OF THE MODEL FOR LARGE ROLL ANGLES
Up -o this point, one has to take into account tha-
throughout the d.velcpment of this wozk,the angl z has beenconsidered small, it -s necessary t .)lax :his res::iction.
36
'0"
o...- , -, . .. - . ,, _ .. - .* , ,, . : . . , , , I . , . . . .
In order to do that, the system has been broker, i. two
blocks as in figure 3.1.The first block is a representation of the algorihm
which will calculate the optimal comzands. The algorithm has
contain with itself an exact model of the system or missile.The model of the missile is initialized from thp information
on the initial states, the initial input command Aco and
" initial roll angle (at t=0 ) and computes th? optimal qainsand further thq optimal commands which will be feed to the
missile1.
The method adopted in computing the optimal commands is
more easily understood if one consilers figure 3.2.
In figure 3.2, the lines numbered as 0 in the graph for
Ac and for Pc are the optimal commands for a given initial
roll angle(Ao). Lines number 1 are the commands for a second
initial roll angle( ,) larger thano, and so on. Thus in
figure 3.2 one has a family of optimal commands for any
initial roll angle.
Notice that the upper line of the graph of Ac represents
the accelerations of a missile whizh had at t=0 a correc-
initial roll angle in order to hit the target with no
comands in roll rate.
In the present method the computer performs the calcula-
tion of the commands only for the firs- step of time and
then feeds these commands to the aissile. The missile is
then driven to the next state (x(k 1I) and fed-backs to the
computer the information on the roll angle at that step. The
roll angle fed-backs from the miss le is considered by -he
algoritm as the initial roll angle at t=0 and the n ext
commands are calculated. Notice that at this second step the
algorithm will feed to the system the second command(at
t=t, ). This process is them repeated until - is equal to
the int.rcepted time.
37
AL
It is important to realize that with this methcd of
calculation, since the algorithm was developed wi-h thsassumption of small roll excursions soma error is expected
due to the fact that in oomputing the gains by solving a
Ricatti equation backwards,as has been done,it is necessary
to update the system from t=O to t=ri at Bach step, and in
this process the roll angle is not small.Notice however that
we are applying the commands only in one step,and if one
expects that the roll rate will dezrease to zero,as we are
increasing in time, the variation of the roll angle will
tend to decraase,so,we can expec-ted that the error will
decrease as the time increases.
Another important point tc be studied is how ths missile
itself (second block in fig.3.2 ) has to be implemented in
order to be valid for small and large roll excursions.
It is considered -hat one has ".he pe.rfect knowledge of
thea commands, thus the missile is modeled as a state vari-
able system as in eqn 2.26 with the initial roll angle being
update at each step. In this way th- system will -ak;: the
initial roll angle as the summatioa of all previcus initial
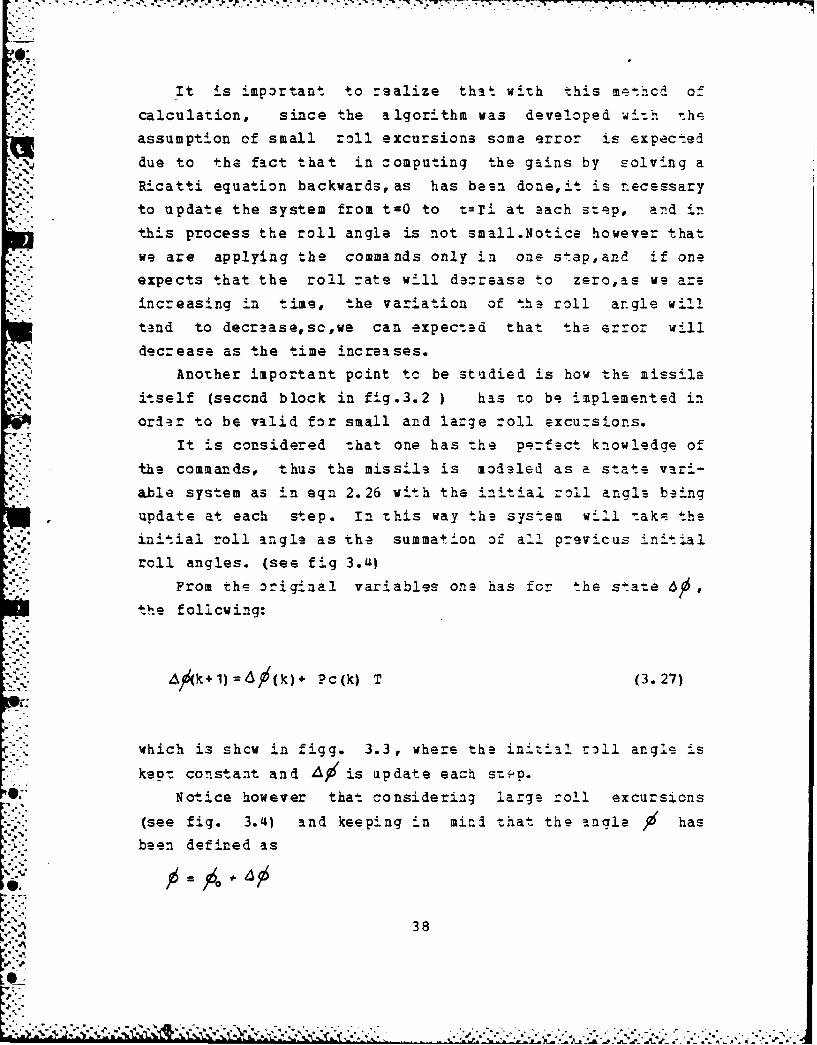
roll angles. (see fig 3.U)From the original variables one has for the state ,
the follcwing:
A )...1((k)+ Pc(k) T (3. 27)
which is shcw in figg. 3.3, where the initi2 r-311 angle is
keD constant and AO is apdate each stzp.
Notice however that considering large roll excursions
(see fig. 3.4) and keeping in mind that the angle $ hasbeen defined as
~ ~ 38ji7'4"*'. -* -. *S.. *". . . .
".7". . . S
,- -. - * * * •* *
7 -777rrJ .. *•
the expression 3.27 is not valid, since .n ,clelina :1'.=.
system it was assumed that would be samll.
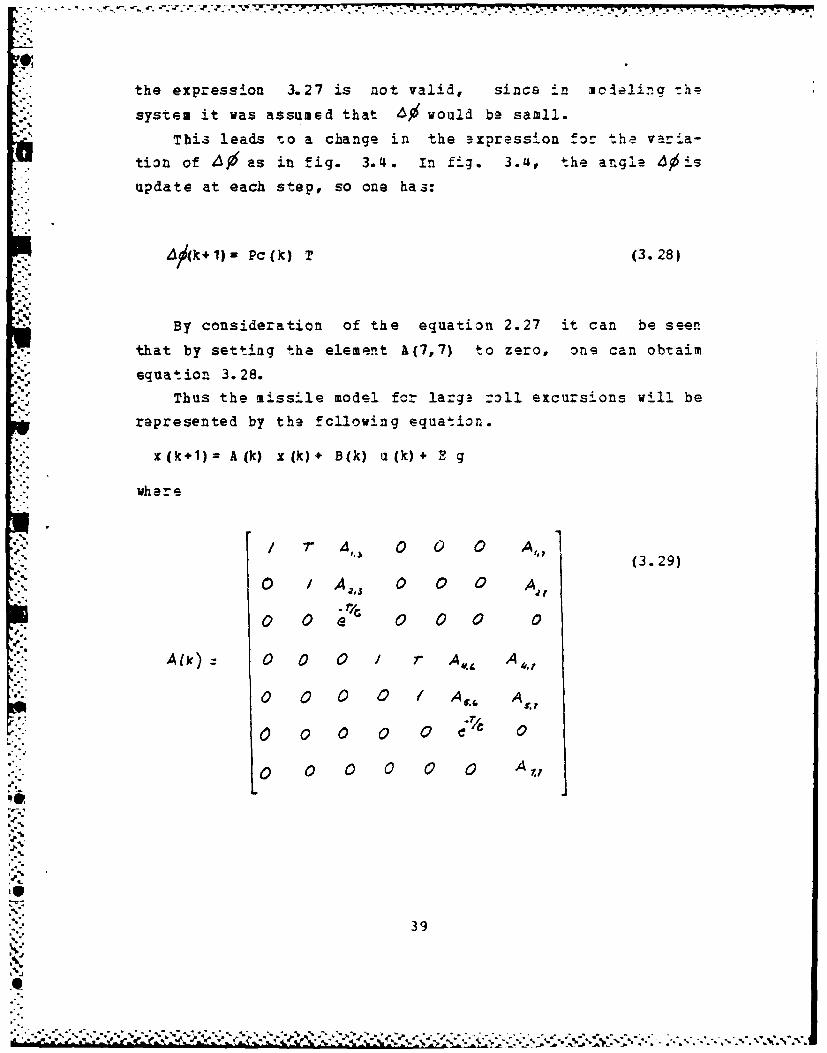
This leads to a change in the axpression foc the varia-
tion of 4 as in fig. 3.4. In fig. 3.4, the angle is
update at each step, so one has:
k+l) Pc(k) T (3.28)
By consideration of the equation 2.27 it can be seen
that by setting the element A(7,7) to zero, one can obtaim
equation 3.28.
Thus the missile mode! for lar g -3ll excursions will be
represented by the fcllowing equatior,.
x (kW)= A (k) x (k)+ B(k) u (k) + 2 g
where
.. / r A, 0 0 0 A,,, (3.29)
A-a's 0 0 0 A1,
0 0 0 0 0.1'A
Ati) = 0 0 0 / r A . A ,
0 o 0 0 A A,6 A,,
0 0 0 0 0 0 0
0 0 0 0 0 0 ,.
39
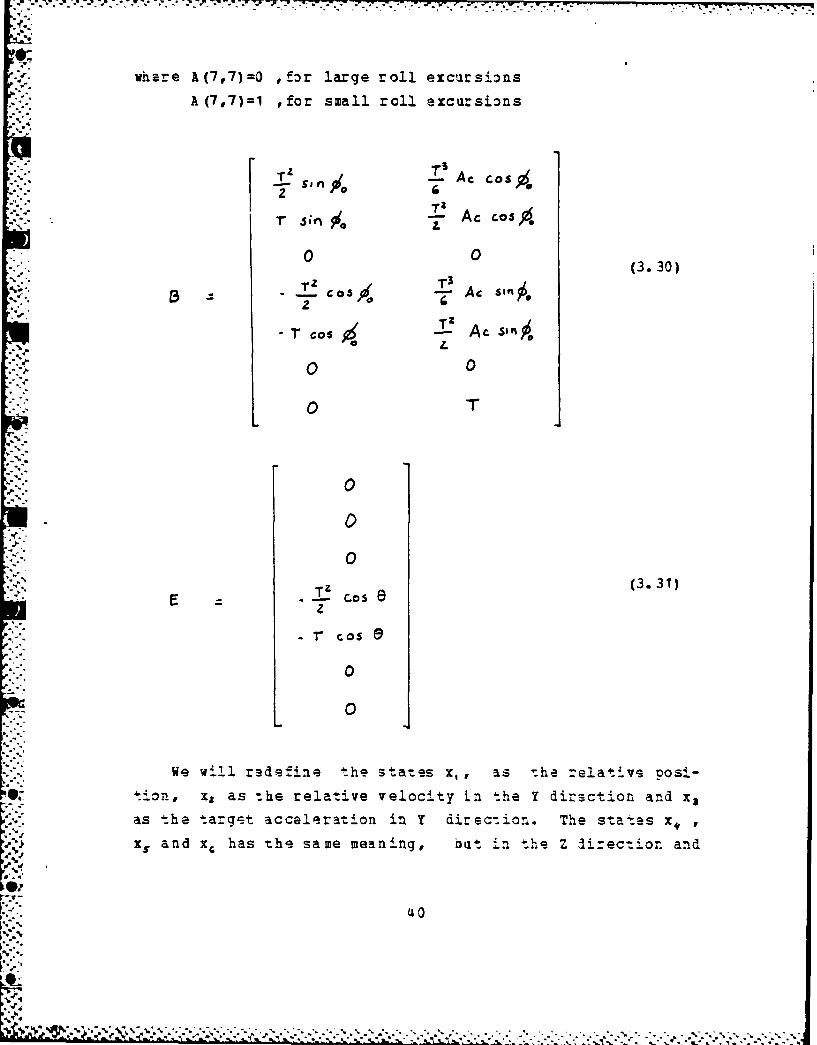
whare A( 7 ,7)=O ,for large roll excursi:ns
A (7,7)=l ,for small roll excursions
TZAc cos~~
r savn Ac cos)6
• v'..(3.30)
TZ T3A,'-.~ ~ 0 3 -co. Ac sin.
T Cos$Ja-i Ac SmA~
0 0
o -
V. 00
0
T z (3.31)
- cos 9
0
0
We will r~define the states r, , as -.he relative posi-@1tion, x, as -he relative velocity in the Y direction and x8
as the target acceleration in Y di.rec-ion. The states x4 ,
x, and x has the same meaning, b t in the Z irection and
Am.,...--..-
x, is'. In this represqntation of the system, x, (k) is
equal to the component of the miss distance along the Y
direction and:
X, (k 1}= y, k 1)= y,(k) + , (k) T + (3.32)
o2r
+ -r sinA Ac(k)+ -ar ck3 cs k
The first three terms in the RHS of eqn.3.32, a:e easily
s een as the contribuition to the miss distance of respec-
tively the previous miss distance, relative velocity and
target acceleration. The following two t.rms represents ths
* . contribui:icn, of the commanded a=r:l.ration an. -hs last
term represents the effect of couplad Ac and Pc, and tends
to be small due -to the cuba of the saaple period.
For the component of miss distance in the Z direction,
one has:
x4 (k+1)= z.(k+1)= z,(k) z (k) Ti.
+[r)T-,2(1- e Atz(k)+ -- Ac(k) sn A k)
T z T3 T19cos/ Ac(k)+ __- Ac(k1 sinio Pc(k) - ccsg
where i-s terms have the same physical meaning as in th-
ext:ession for x (k+1), with the effect of thz gravity addedto the expression.
Since one can notice that in tae representation of the
miss distance in Y direction appear two terms as a function
Cf cos A and in the representactioa of the miss dis-anc3
in Z direction appear two terms as function of sin , i s
41
interesting to verify that the fourth term in the _HS of
bcth expressions acts like a corraztion for the fif'-y term.
Refering to fig. 3.4b, one can see that at any step of zims,
the commanded acceleration is actually,
Ac ccsA0.-AAc
and considering small angles:
AAC= AC COSA Ac Cos (A +
= Ac cos4 cos 6 sinAs n -
= Ac sin~e [cstsd~snfj
The same idea can be applied to the expression for
x (k+1).
"The terms xa and x , rpresen: the relative veloci:y,
and are:
-2 (k+1)= y,(k) * G (1- ) Aty(k) + Ac(k) cosc T
+ Ac(k) sin)6 T + -- Ac(k) cosX Pc(k)2
Sx (k+1) =!i,(k) + 6 (1-/'8 ) Atz(k) 4 Ac(k) sin6 T-
., - Ac(k) ccs A T + -2- Ac(k) sinA Pc(k) - T CosB g
Where the two first terms in the RHS represents the effec-:
of the velocity and acceleration at a previous step, and thecher three terms has --he same meaning as previ-usly state!.
The terms x. and x& are the target accelerations, in
this model being expcnentially decaying.
1. Effects on the Miss Dis:anc. of the 2x_--nticn of the
model
In previous subseztior, a a-tia-nion of the model for
large roll excurssions has been performed. Notice t;-t there
are two models of the system being used. rhe first one, used
42
S-
in the algorithm is valid only for samll roll excursions,
and a second model, valid for small and large roll :xu:-
sions used as a representation of the missile.
The algorithm with the first model, as exzlained
before, is initialized at each step with the actual roll
angle of the missil, and performs the calculation of the
comands.
In order to check the effect of the extention of the
model on the miss distanc-, one cin define a ideal initial
roll anale( oIodA, ), as the roll angle at t=O in order to
have the comanded acceleration vector pointing to the
projected fiaal target's position. This means 'hat the
missile would not have to roll to hit the target (see
fig3.5 ), thus the commanded roll rate calculated by the
al;orithm will be equal to zero. This implies that from that
point ahead, the roll angle is consta- and equalto 'o,,de, , and that the time history of the control Ac will
be a straight line.
The fact that the roll angla will tend to this lim":dese.rves an investigation. Notice -ha:, as show in fig. 3.2,
at the moment the missile reachs its maximum roll angle, -h _
control Ac will be the required acceleration to hit the_~ _ /nital rol)l angle was ,,,target if the missile inia This
means that -he contrcl Ac computed would be correct nly ifthe missile would have turned immediatly to this angle.
For very small angles, the previous comment would be
acaeptable, but In a normal situation, as showed infigure3.5, the missile will only reach the idaal initial
roll angle after some time, and due :o th. vertical ccmpo-.en- of the accelration, when -his occurs th- missile would
be "n a position abcve the ideal trajectory, which means
that it would follow a coarse parallel to the ideal -rajec-
tory to intercept.
:43
o .
*.. .. ... . .. . ... ... ....... ,......-..,..-...... .... -- ', -
One can see that such problem will lead to a la:gs
miss distance, in the case that the target acceleration itis not small. Thus, some correction is necessary in order to
. imprcve the missile performance.
Figure 3.5b shows the missil at some point of its%- trajectory where it has reach Its maximum roll angle, thus
it is at a parallel course with its ideal trajectory to
intercept. &t this point, since ill the states are known,
it is possible to recompute a new . So, if at thispoint the computer is feed with with the states at this
point it will compute the commands in order to drive the
missil to the neCw O,,eI , which will introduce the desired
correction. Notice that such correction can be made during
all the flight, from t=O, to t=Ti.
In the present work this mshod has been accom-
plished by feeding-back to the computer the roll angle and
all the states of the missile. Wirh this information the
compute: is able to perform the calz-ulition of the corrected
commands at each step of time. howaveras -he states arebeing updated, it is also necessary to updats_ -he time to
intercept, which has been done --sing the time to gc to
intercept, or:
Ti(k) Ti- k T
where Ti is the nominal time to intercept.
C. SIBULATION
In order to keep the same assumptions as refsrence 1,
the matrix Q (weighting the cont:ol) has been put as
suggested in such reference or:
L44
%. . . . . .C C C V2~-
b. 0 (3.33)
with
bi =5.78 103
b,=5.0 meters
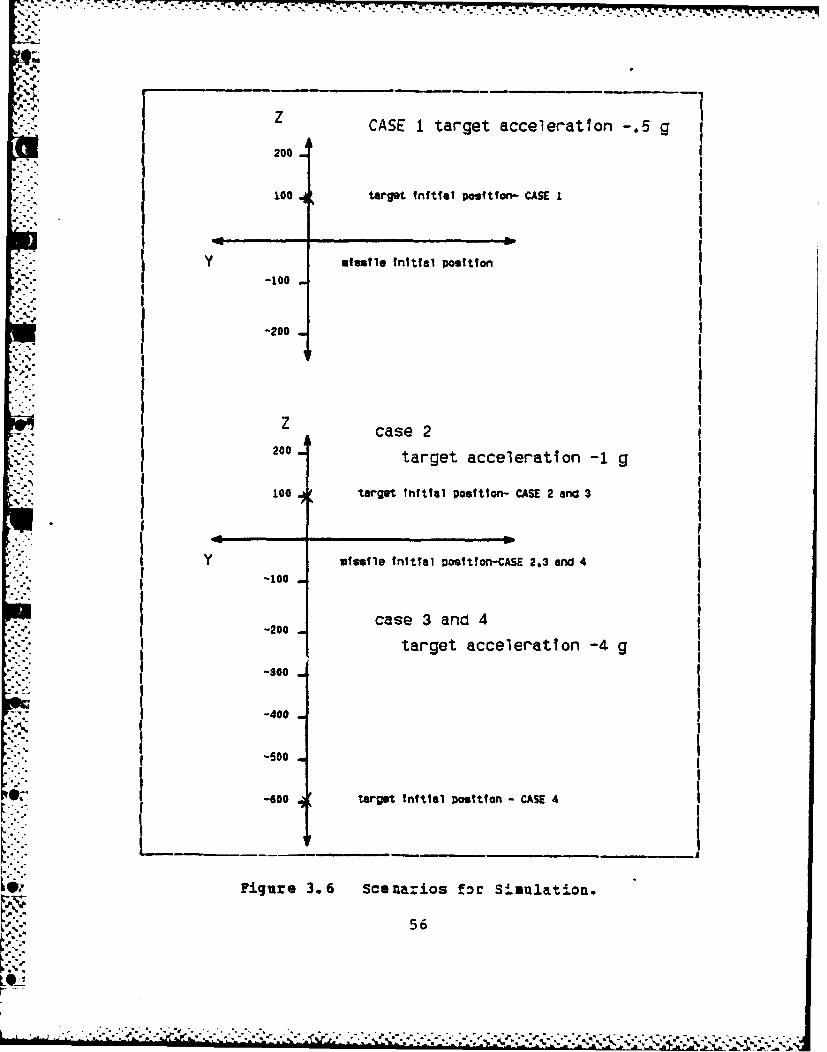
Five diffarent cases were run:
case 0, tested with one simple model valid only for
small roll angles begins with missil and target on parallel
courses to the inertial x axis, the t rge- 100 meters abovethe missile and with an evasive manoevar Bxponentially
decaying with time constant of 2) seconds. rhe inItial
acceleration 3f target was -.5 g's in y direaction, (.-ae fig.
3.6)
Case 1, with the same scenarios as case 0, but was run
using the algorithm for large roll e.cursions.
- Case 2,is the same scenario as in case 1, except that
the initial acceleration of target was -1.0 g's in -he y
direction. (Same as case 1 in ref. lo
Case 3, the same as case2,with target accel-raticn of -4
g's. ( Same as case 2 in the reference 1)
Case 4,same as case 3 but with target at initial posi-
tion 600 meters bellow the missile. (Same as case 3 in refer---- =.nce. 1.)
D. COMMENTS IND CONCLUSIONS
1. .= Sul s
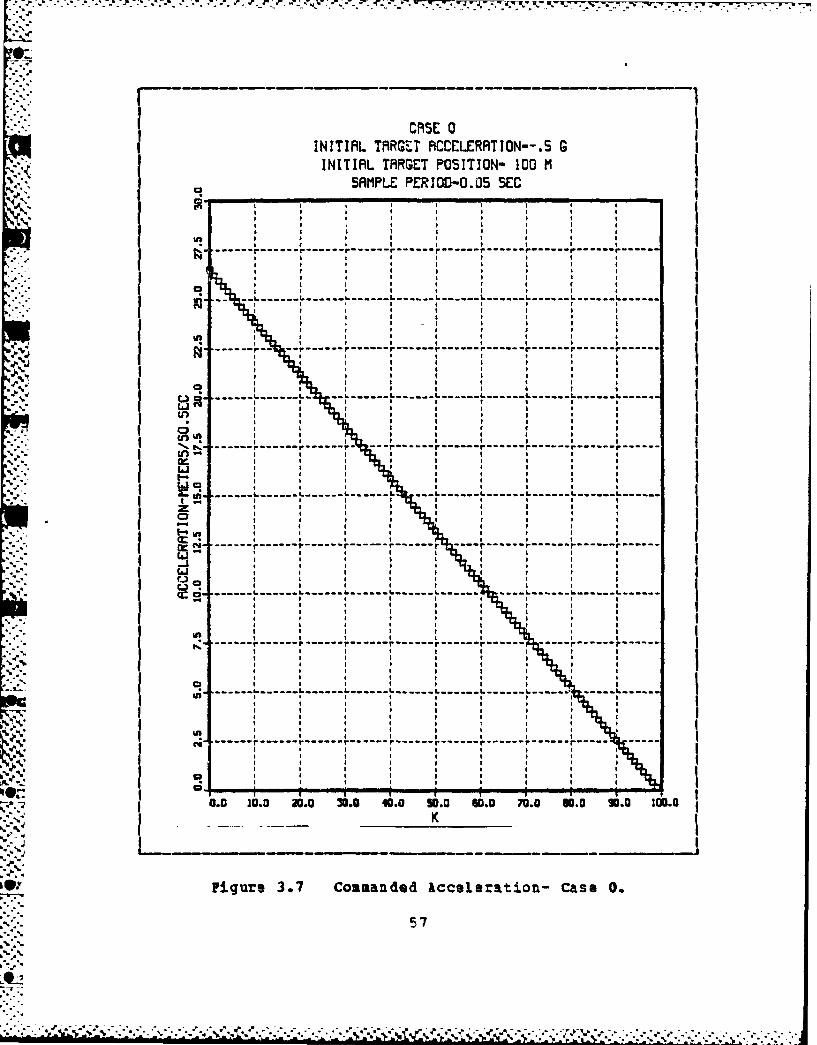
In case 0, the missile bagins its trajectory
commanding 26.5 m/sec 2 and the time history of I h control
AC follows exactly a straight line in the form suggested in
45;-.-.
% -.. . .. . . . . . . . . . . . . . . . .
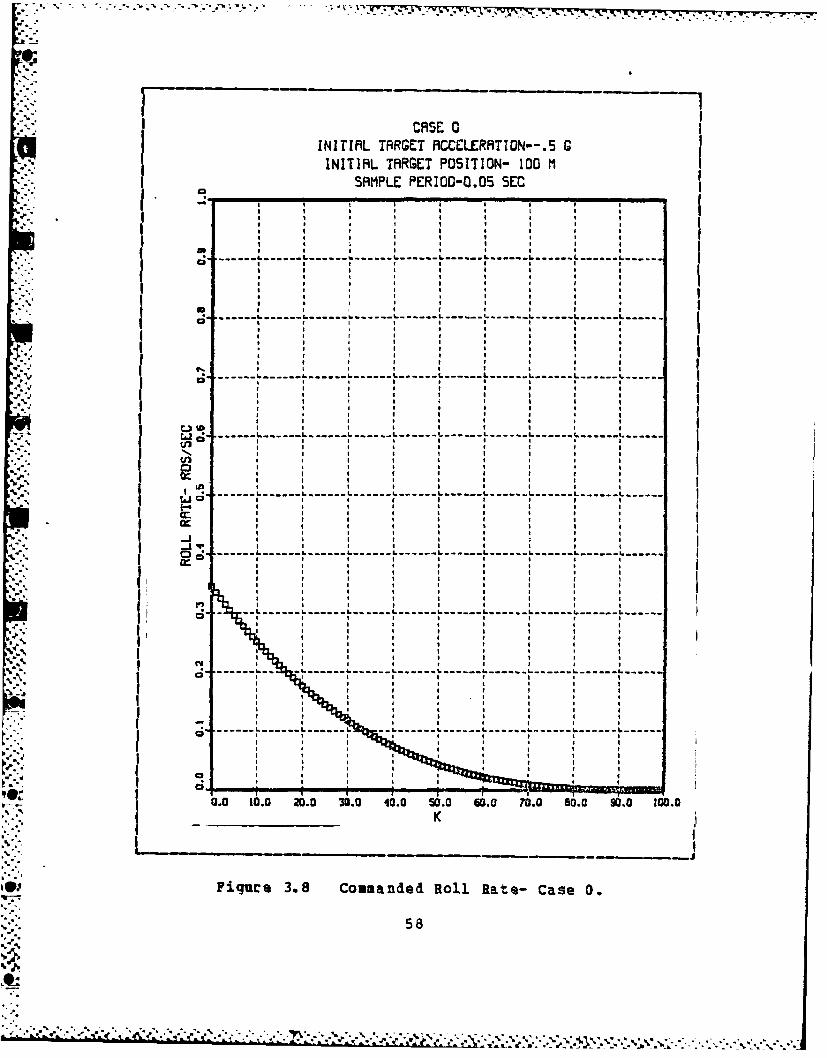
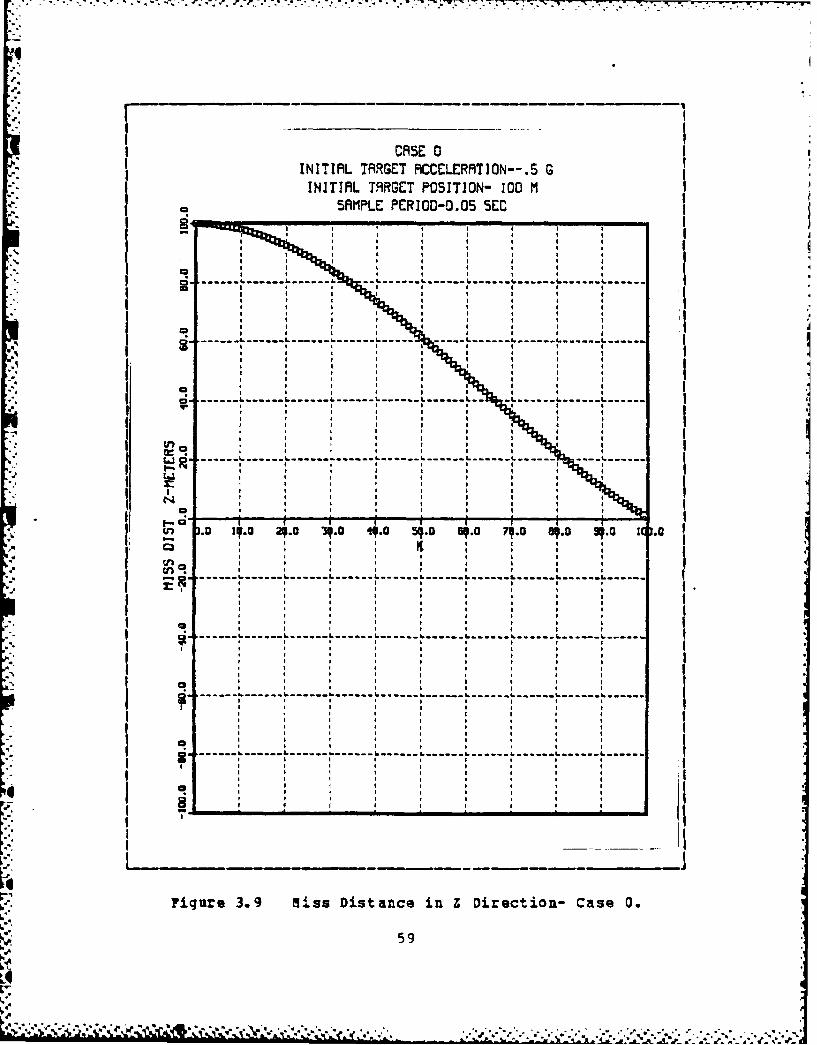
ref. 1, as seen in fig.3.7The coa.rol Pc, beginirng at .35
rad per second, is decaying and caachs zero at k=80 (see
fig.3.8). Figures 3.9 and 3.10 show the miss distance, where
one can see that the missile is crossing the target with a
CG-to-CG distance of 1.5 meters.
Pigur93. 11, shows the tiue his-ory for the roll
• angle, which as expect, reachs a constant value, with the
missile crossing target at t=Ti, with a bank of .44 radians.
In case 1,which was run with the model for large
roll excursions, the missile kept the same Aco, but there is
a very small increase in further commanded acceleration in
order to correct the effect of the roll angle on the
vertical component of the control Ac, as seen in fig.3. 12,
and table I.
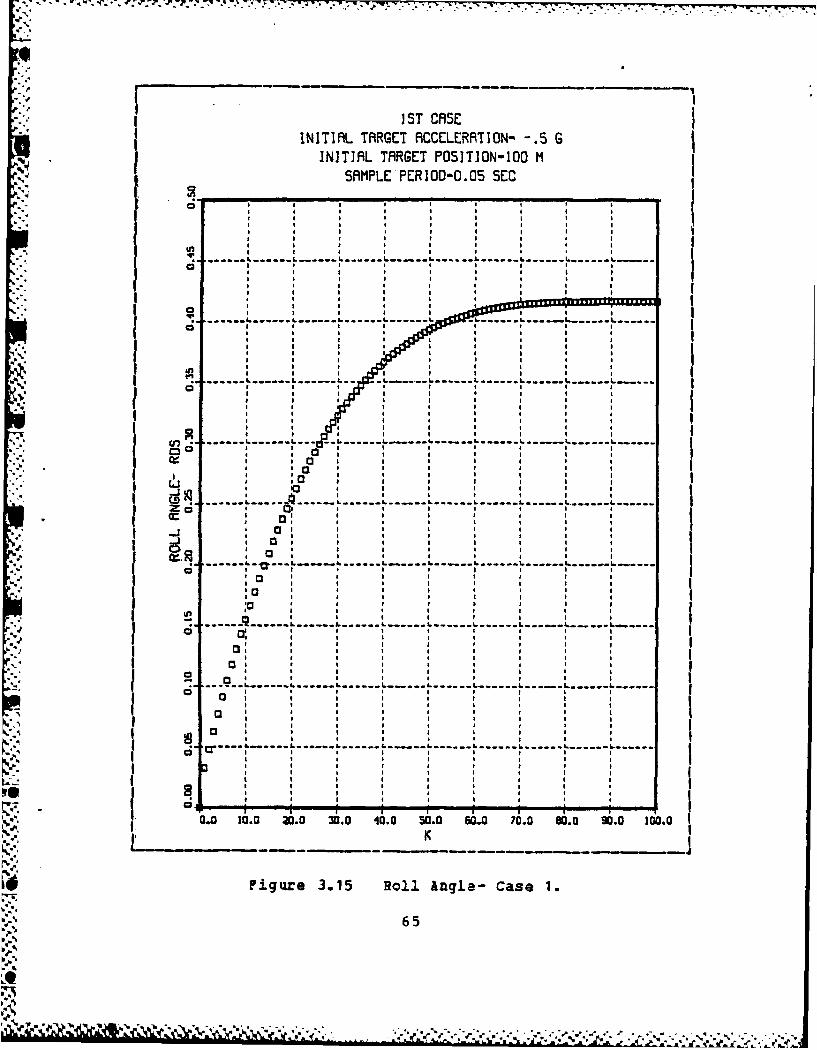
Figure 3.13 shows that ts.a roll rat. decreases
almost as before, and the final roll angle is .42 rds, as
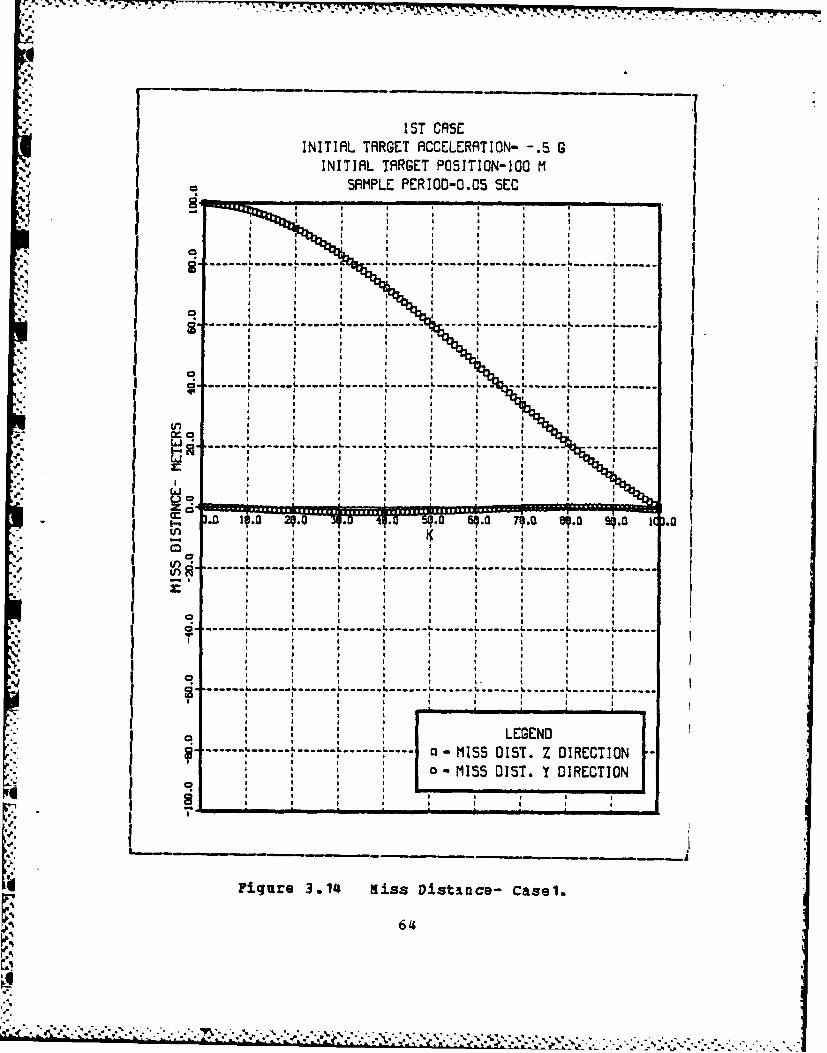
shown in fig.3.15 and table I. Refering to figure 3.14 there
is a change in the final miss distance, which is better than
case 0, due to a improvement in its Z component (see table
I) . This results in a fina2 CG-to-C: miss distance of .65
meters.
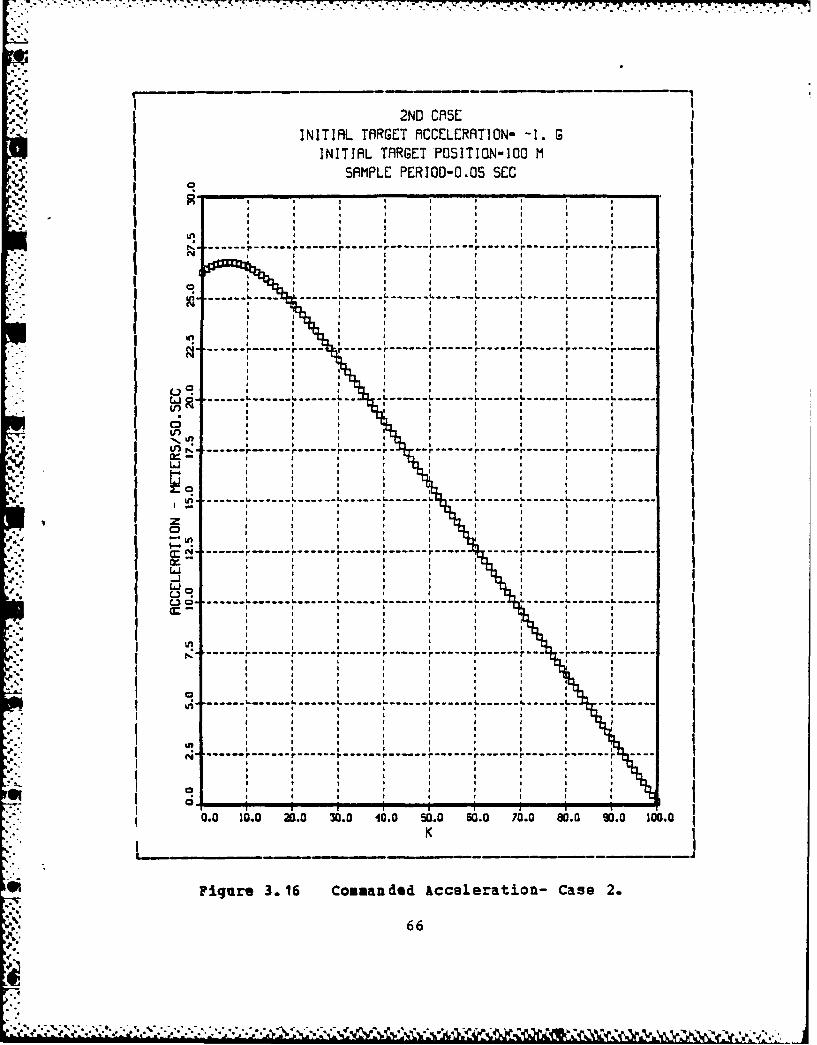
In cass 2, the missile has the same Ac at -0, but
with the correcction for roll angle being increased due to
the increase of target acceleration (see fig.3.16), thqcommandsd Ac reachs a larger peak val.
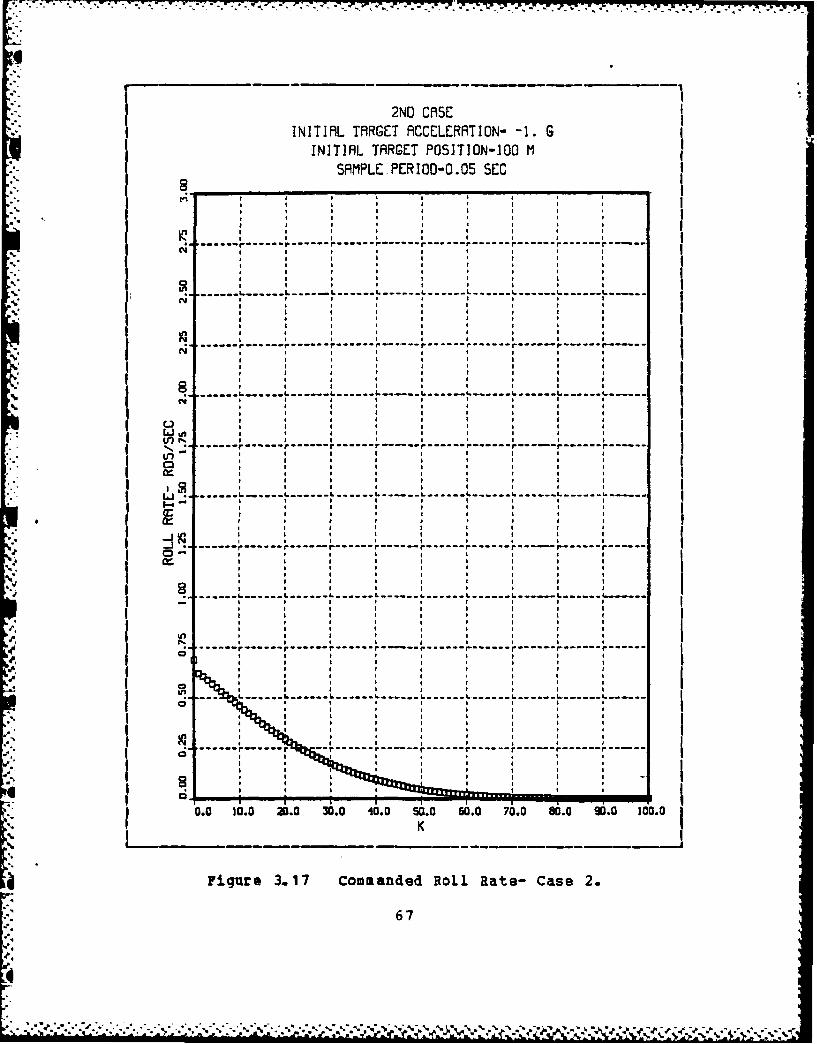
The initial value of the co)mandad roll rate is .69
radians, which is larger than case 1, due to the increase in
the target acceleration. In figure 3.18, -here is no
noticeable change in the shape of the curve for Z directicn,
and in the Y direction the final distance is about the same
as in case 1. Tne CG-to-C3 distanta at t=Ti is .73 meters.
The larger roLl rate leads to larger roll angles as seen infig. 3.19, where the final roll angle is .72 radians.
46
.,°
%. C . . o
:. :,..? ...; . ','.'. .. .... *.-. ":. .-.,.. .. .+.. _.. .. .. . ... .... . . .. -. . . .. . .- . . . .
. ." .. .
The effect of target acceleration can be easily seen
in case 3, where one can see that with the same Aco, the
accelerations are largelly increased from this point, and
-' the missil begins its trajectory with very high roll
rate(see figures 3.20 and3.21). Thera is a change in the Z
* component of the miss distance, tha- decreases its final
value to .05 meters, but now the aiss distarnce in Y direc-
tion is made worse as shown in figure 3.22, which leads to a
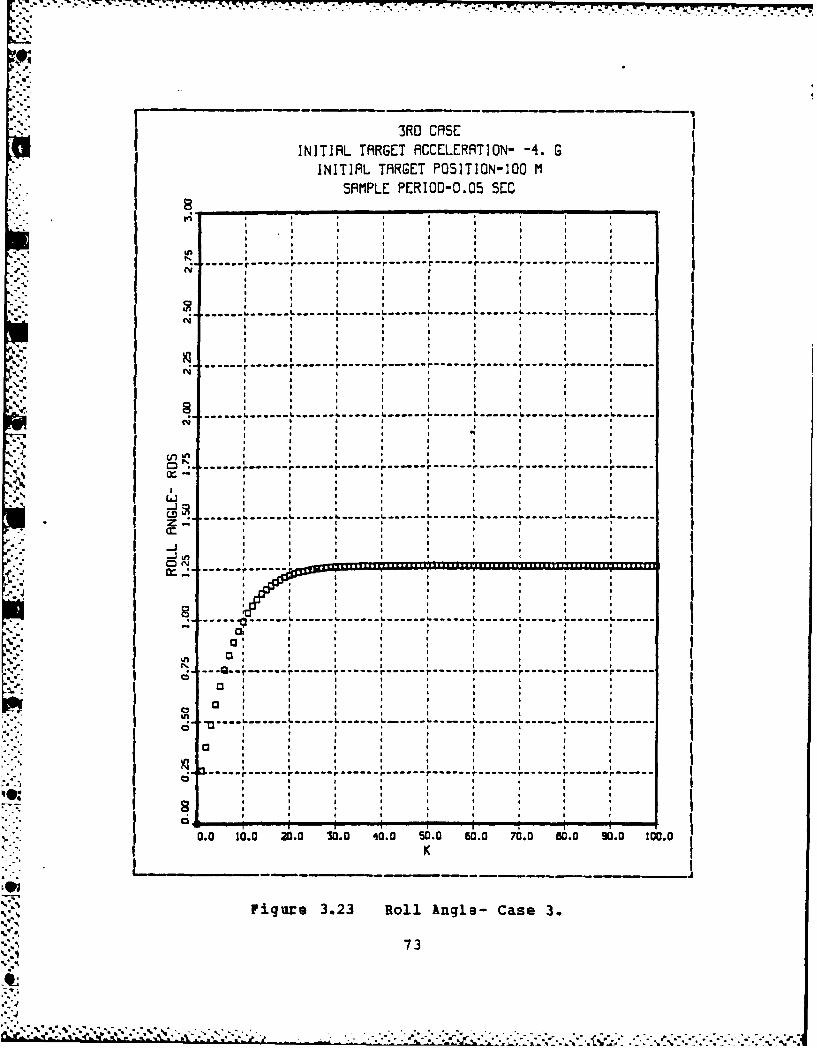
final CG-to-C3 distance of 1.5 meters. In fig.3.23 one can
see that the missile crosses the target with a bank angle of
1.26 radians.
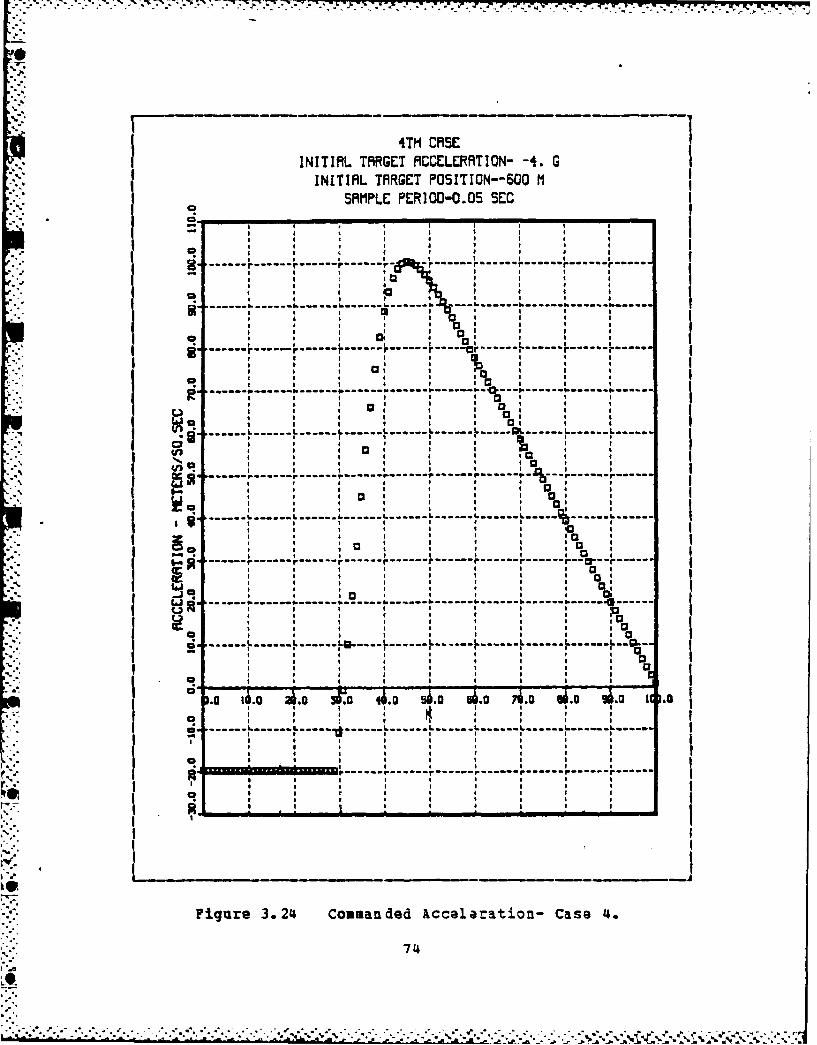
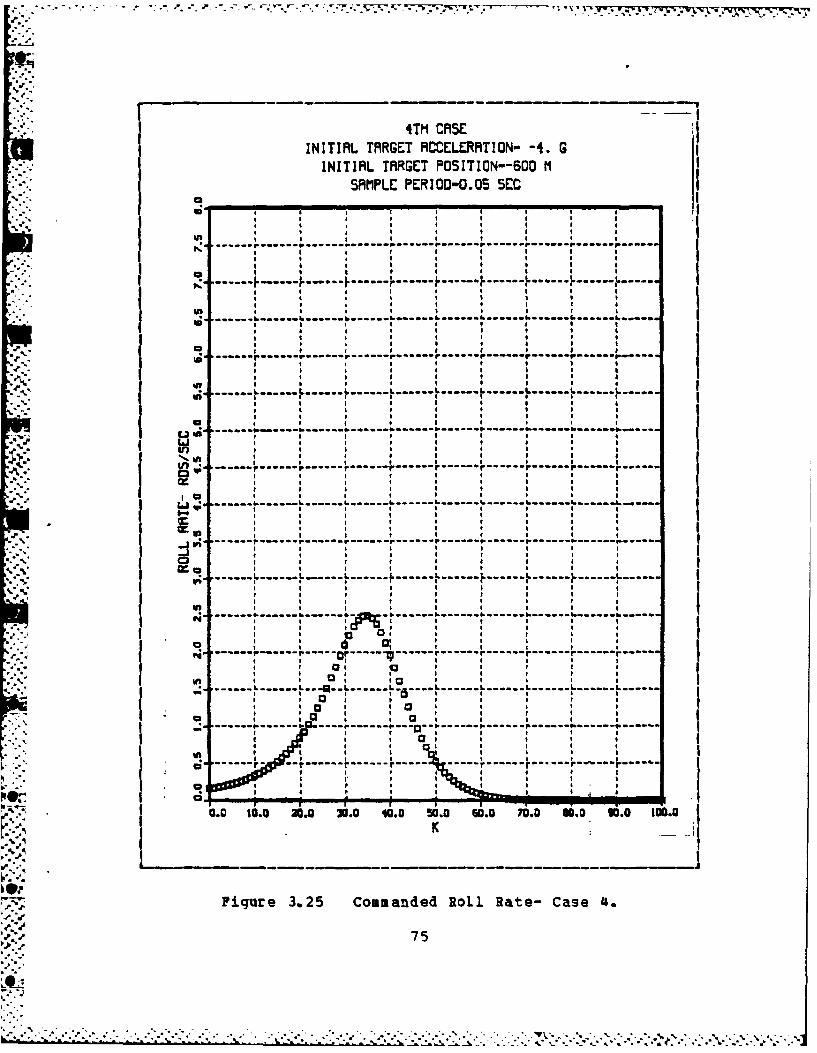
In case 4, due to the position of target 600 meters* .. "under the missile, the initial commanded acceleration is
negative and reachs the limit of -2 g's. The initial roll
rate begins at a smaller value than in case 3 but increases
during the initial part of the flight reaching its peak
value at 1.75 seconds when again is in the previous casesbegins to decay. As the missile baaks tc roll angles larger
than 90 degrees, the acceleration goes to positive values,
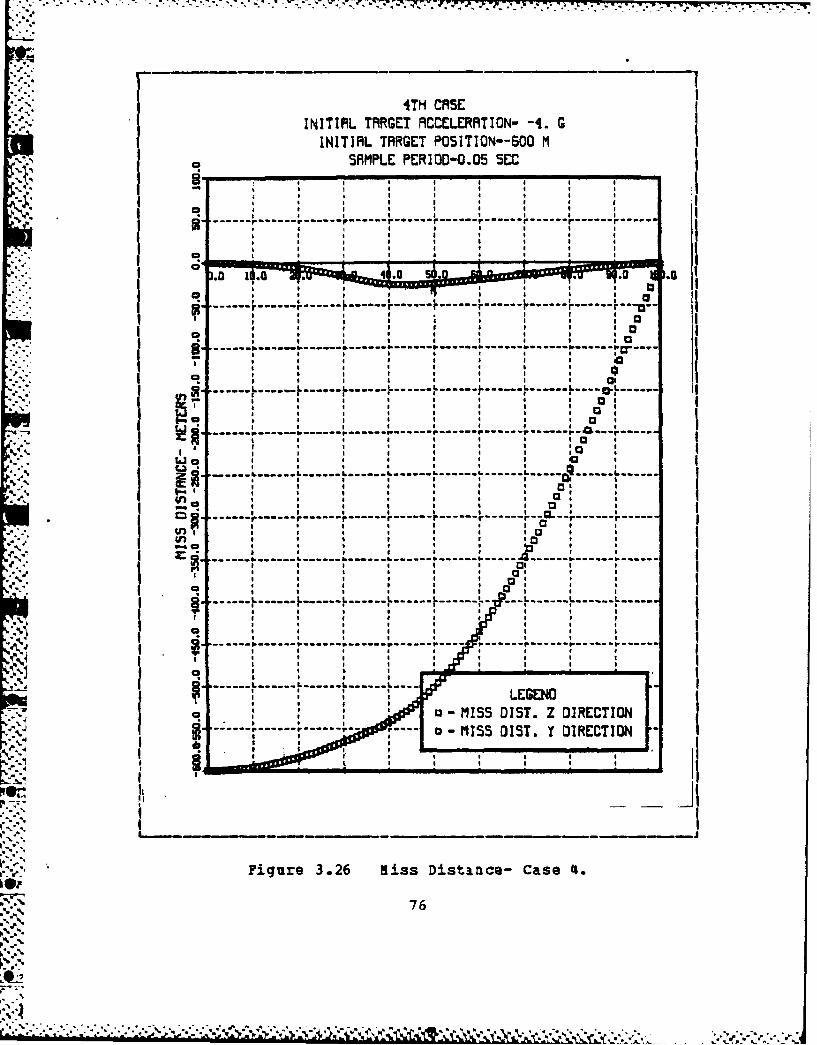
as seen in figures 3.24 and 3.25 Figure 3.26, shows the
worse case among these in respect to the miss distance,
mai nly in the Z direction, and in the final cg-to-cg
distance, which is equal to 4.43 meters. Also the final
roll angle of 3.0 radians Is the largest among all these
cases, as seen in fig. 3.27.
2. Comments
Defining the projected zaco effort miss distance
(ZEn) as the aiss distance -he missile cross the target with
no commands. It can be calculated it "=0 as the initial
distance between target and missile plus the miss distance
due to the gravity or:
4&7
e'02
. o..
- W r°-. V ' - - " . . . . . . .-. . . . • .. .° " , - - ..
Z = z (0) + "-g tz (3.34)
which is equal in all the three first cases.
In the first three cases,the initial missile's
commanded acceleraticn is the same as seen in tablz 3.1.Considering that the control Ac aacessary to correct the
initial miss distance can be calculated as:
c -- = 26.7 (3. 35)~ Til
which is close to the initial control Ac.
This suggests that the ini.ial Ac, would be that onenecessary tc correct the initial ZEM in Z direction, which
agrees with reference 1. Notice howaver that in all casesthe initial Ac is less than the :alculate9d value of Aco,which agrees with the previous statzmen -that som error was
expected in the initial part of the :omoutations.
Considering the ideal initial roll angle as defin.d
before, one has:
ideal tan-' [ - J (3.36)
From table I, and figures showing roll angles, it
can be verified that the missile is banking to rach angles
larger than Aida , in :rder to correct its trajec-ory tohit the target.
Therefors,in all cases, the missile begins itstrajectory with an Aco (discussed bef3=e), and a roll ratz
48
.
, "--.
which is proportional to the target acceleration in 4hs Y
direction. As the missile rolls it decreasing roll rates,
the ccmmanded acceleration is changed in order for tc
compensate the effect of the roll iangle on its Z direction
component.At Some time when the control Pc is zero or near
zero, the control Ac begins to follow a linear law, as
suggested in eqn. 2.7:
Ac= Aco i- JNotice however that the term Aco in th.s eqDu-:ion is no more
the actual initial ccmmanded acceleration, but that one the
missile would have if its initial roll angle was equal to
the final
Such behavior defines a boundary in the ccntrol Ac
which is clearly seen in 3.29, where the commanded accelera-
tion is bounded by the curve of th- control Ac the missilewould have if its initial was equal to o, ,1 (or, if no
commanded roll was necessary to reach the target)Althoug the missile commands roll angles larger than
the ideal initial rcll angle, it is possibl . to do a
prediction- with no no computer work- of an aproximatior. for
the maximum acceleration the missile would experiance during
its fligth, as following(see fig. 3.32):
jcZ (3. 37)
where Aw., cames from eqn.3.50, and Ac is a streiht !inq
as in fig 3.32.
Other interesting point is that the missile is
commanding -o reach roll angles about twice of , when
the target is at small aacelaratins, and when at large
49
-'-' "" " " " ." " " . * ," "- -" .".', oi ".\' ." ", .-. - . .. . . . - - - . -, -.. .. -
I ... . - -. 1 . . . . . -; -1 W -7 77 W-.. ._.. .
accelerations, the missile is making a small correc-icn on
its roll angle, as shown in table I.
One can see from the figures showing miss distance,that the relative position of missile to target Is about the
same in all three initial cases. rhus, the new 9,,I at
each point is the same. As the A idea I computed at t=O is
smaller when the target is at small accelerations, the
correction has to be larger in order -o hit --he target, as
seen in figure 3.30.
In table I, one can see the final miss distances,
the final miss distance cg to cg and the final roll angle.
Such results show that with this ligitalized nodel, good
results has been obtained.
.'
V5-
-'
50
.4
%,: '~~~~~~~~~~~~~~.-.......,'-,..--... ... . -.... .•. .-. --. € - . . . . -,
X(O) C(O)
algorlthm
Ac(k) Pc(k)
mlssileI
I ~(k)
*Fiqnre 3.1 Reproseutatioa of the System.
51
*............~ ~. xr - wr - ~ .- w~u *
rI II I1 1I I
Ac II KI II II I ki
* F ~.
~
I I I IK~K>~.
I .-. ..-. , -
I ~.N>N f~ iO '.~~.7K~N I, ~, F'
I ~ I II I I I
I I F II -'--- I
K II II I
II
4..
1 1
It I II II I
I IfI II II II I
K
1 II ~~~---~- -
I.,, Figure 3.2 Variation of Commands with Initial Roll Angle.I-..
52
-4,.
................. .* . . . .4 4 - V
, h -°,.
II
J. I IFi uI33Yraino ol nl ml nls
I 53
.'II-I- .' - . - - - - - - ° , • ° . . - o . . . . . .
4' 6
I4
I
40
I
"- -I IA
:'--II
I
54
I ,
w° • • .q ..l -• --• q .......-
,% ,,- -. . . . . . . . . . . . .- - - - - - - - t r e
"<o-'.
z I Iz.
'FTgure 3.5a
*: I 1
I targetI 'II "I I
Ia ideal trajectory.ZE10
I I
FIgure 3.5b
""I I age
.g I I
" - , I
.';"'; I 2 / i''el r~c~y* I
""I I
_, . I Ig , .s
Fe Fggeu. I e Initia olAnls
*,1. 5 5
' , ...-- ,.,.!' . ,, . . . . .{ • . , . . . . , . , . . .
-,,, , ., . , , % *'~b *. . % ., ** ,, . - . - . .- . ' . - . .-N. . . . ' . . . , • . ". .
.- ,'
< Z CASE 1 target acceleration -.5 g
200
100 target nftfel pm.ton- CASE I
,I'-1 00tealle tnittal poetton
-200
.target acceleration - g
-'100 twget tnttia1 position- CASE 2 and 3
I Y mssilo inti positton-CASE 2,3 and 4
.. -.100I'+'I-200 case 3 and 4
I..-. target acceleration -4 g
' * 1 -300
I '-400
-I -Io-600
" I -600 target Inti.al IDosttton - CASE 4
.? Figure 3.6 Scenarios for Simulation.
F" 56
L_2
CAS5E 0I INITIAL TARGET ACCELERRTION--.S GI INITIAL TARGET POSITION- 100 M
5AIIPLE PERIOD-O.UJ5 BEG
9 ~ 6 __ a -- - -L - - - - - - - - -6 - - - - - - - -
"a:" I a
-------------------------------------------------- --- -- r---r----r--- ---- ---
: - - _ IL I - L -
' I I I a a aIII a o I aaaa
" " " "" "a',' , a, a a I a a
a~ ----aa--
4r C ----.L ------ -- -- ... .--- - ------ -- -- . . . . . .. . . . . ....... ------. -- - -
I - I a
I. - .., a. , a a a aa aI a a a a a
I a a a a a
3 ":-.' -4 ------- ' .. --'- n , , .... .. - ---- r -- - - - - - r.. .,". . ., . . . - . . ., . . .,". . ..",
I 9. - .L.L 4. L - . 4. a..I-
I a a a a
* o . ,I o , a e a a a a
I. 0 I a.0 , a a , . 0 A. a, 6 /
I a• a a , a a a a a
"a.. . ... .a.a a a a
I IaaSa a
* a
Figure 3.7 Conaanded Acceleration- Case 0.
5"7
Iz-aa
"°- " : " a a a"" "- - - " " " " : "a." - , - - - a . -", " " " a a a-. a' ; . , . - ' -; ' Y ... .-' 'Z '- .. '. , " ".. ' '
• "-" CR$E 0
I .INITIML ThRBET POSITION- 100 tia SAMIPLE PERIDD-O.O5 SEC
I a a a a a a I
I a
! o I t a a
l. a. i. Ii a. I. I I
I S a I a a
a a a a a a a a II a a a a aI a a a a a
I a a a a a a a
a i a a a a a a I
I a I a a a a ag- -a a a a a a a a
I a a a a a a a
* I I I i a a a a a a-,a pw , , , a....a- 'I a, ,. ,. ,. - I. , - a, , -
I a
tiI a a a a a a a a a
I a a a a a a a a aI a a a & a a a
* a a a I t a a aI a a a a a a a aa1.
" a a a a a a a
I a. a. - a - a. - . - a. a. - a - a.
i .~ a a a a a a aa a a a a a a a aat a a a a a a a
Sa. . - a l.Il .... -------------a. a. - . - .- aI . I- ......I-- .a a a a a
a-a a a a a a aa aa a a a,a a.a a a a a a a
PI 0. !0. a0. a0. a0. a0, a0, a'. a. a,,- .. L a - . - . a. a - . - . a
• aa"aa aa aa-a aa'-a aaa aa aa
I. a a. a a aJI aa aa
a aaaa aa aa
i i ae a. ao a ane aol aas a O.
5.--------a -.a. a - . a -
-- CR5E 0 -- - .
I-.INIT[AL TARGET MCCELtRATI0N--.5 G I"- INITIAL T9RGET POSITION- 100 M• . S5t1LE PERIO -0.05 5 CI
a 4
a a 4Ia a
a a
5 a a '
a aa
aI i aI I aI I lll l i I 4. II I II i l ~ III I II l~! a
ifili aiiI I-I a I9lI ! i t I~ I Il l I 4il~ 9i~ l I 1! 4II
"I. I 9 n I I I a a: a a I a=,,
, Ia Ia
a igare 3. as D s anc n a i c on C ase
*-----a. - 9.---- 9 - . 9- - -. 9
"*-: ,a", a" a a" a a,, I,, a'.,,'"''. "-". . "."'.,, .' - - -"" ."' "" .- '..-,." - ' ..
CASE 0'. INITIAL TARGET RCCELERATION--.5 G
INITIAL TARGET POSITION- 100 I* "" I SAMPLE PERIOD-0.05 SEC
L L -
---- ---- ---- L ----- L .... ... ... L ------ L ----- L .... ... ... L ------ L ------
-- - - L I -- -- L - - -L- - - - - - -L- - - -i- - -
u--------- --- --------- u---- --- u --- L----6---
-94 -,
u 3 1 M s in f s 0$. .-. 0I 444
1 44 44- I4
I "I 4I I. . .. . .. . 4 4.. i... . 1 ... .. . _ . ,. . . , . .. , . .. L4 .
, 4 4 I- 44 .4 I 4.. .. . .. . . . .. . .. .. . . . . .. .. . .. . . . .. . .. .- . - tI 4 4 4 4 4 4 4
-. ". o"L . L 4
4 4 I I ,1
4 4 44 * I4 4
"I -"Fqre31 s isac in p~ 7Di0ectio Case O.0
" 44I
I :: 4
-," . -, °-"-'-',-; ,"", . I',. )., ' .- ','.,'.,'' ' ,,..,. - ",.-•". ,. ,.- ,-, _,- .-. -. - -• ,. .. . - ,. . . .
ICASE 0. . INIT[RL TARGET RCCELERRTION--.5 QI NITIRL TARGET POSITION- 100 H1 I
SA ' 5MPLE PERIOD-O.05 SEC I
Ia- - a
I I
a -a . aaIa aI ' a aI a
i a a I I a a aI a a a I a a II I a a I I II a a a a a a I a
I a a a I a a a
o a ' I a a a,aO. it. a9. a0. a0. a0. a. a. 0 O .
a a a aa a a
* i a e 3.1 Rol an1 Cas II -o
,,N':'.-.' .. .. I,,' .' -'-------a,' -- '.,--..-. - a.- ..- a- .- ..-..... .. ...
'*W W .
1 1ST CASE
INITIAL TARGET ACCELERATION- -.5 G
INITIAL TARGET POSITION-IO M
SPMPLE PERIOO-O.O5 SEC
1 0' 1 1
I-- - -----I--- I ------ ------ -
, .. --- L - - --,- -
. .... r -I I- -
I 5 5
I-. i I i I I S
r --------
I I I I I I I !III I I I I I
--------------,------
If II fl~ i O Ie I~ p ~ l O l I I I S p e l[i H
-I- i - 6 S . . .. ,I 1 I I I* I I I I I I
"I I I 4 I I I I I I•
i I I I I I I iI m o I
------- r - -- -r- - ----------- r ------ - -- r ---------------
.5 , , , ' , '
I I I !II I I
.. I ,.,. , , , ..... ,
I I I I I I I I I
I I
-- II.. . . .L .. .. L . . .5 . . .I . . .. .I . . . . . . L . . . . . .
0. 16. 20. 36. 4. 56. 56. 760 0.0 1 .
i .. I I.* I $ o
- i I I I
- .I I I I I I I I I
Figure 3. 12. . . . ...celrtin-Cse1
i I o S il I i I
I Sl I I I I S' I I I" S . . . . .. . . I. .. .. I . . . I . . . . . L .. S,. . . .. . . I. . . .
ii I I I I I I I I
II " I I I I I S I I S
,. 1I I I I I I I I"S , I I S I I I
I I I I I I II
-I I I I I I I ol
* I I I I I I I
I I t S I I I I
I I I ,I I I .SI
* I- - I I--- ' -- -- ' -- - ' - - -- ' ' - -- - -- -' -- - - . S. . - .I I I I i i l i I
I I I I I II" I I I I I i
II Ii I I S I S-'% .'S/ I £ I S s I I:i:0 .. .. .. _ _..._ _.. ... .. ..,". .. ._"_..._ _.. .. _.. .. _ _... .. .._
21.0 30.0~~ 400 5.o 00 7. 00 9. 0.
__.__ , ,
Figur 3.1 Comade cleraion CaI 1.
'
::--L::1ST CRSE!
m ,,,,INTIAL, TAR,,GET PosITIoN-lOoGI.,,SAIMPLE PERIlOO-O. 05 SECI
-" S
"-,." I SI
I,, .. a I
a'l I
*.-Ia I
,I I- -I. i ----------------I a I I a I
* ,I +
I I i I a a a
I a II a II a
I I i a I I a i
. * ., I a I I a I I
I I I a a a I I
- I I III II I a O a
I a - a. I. - I- - ai - I. - i I I
I a a I a I I I a
I a 1 a I I I I aiq- - a a I iS I a
a. I I0a o a a I aa a I a a I a
I I I I aI I I I
I a I i a i i a
II I a I I a a a -ga's r0.0 a0. 30. 40. a0. I00 7. 900 9. 3. I
K S. .I-. S - .0 a a aa a
* igure 3.3 mande Roa Rae as 1.I
- a a aa a a
..- / -,- , ' ',T -.- .+. .- .-..- Q "+a".' .+a.- -... - -- ,, a-,[-,,, a,,, , ,T-,,,a ,, .- a.. .'-' .. ""- . - . , ."-. - .. .". -
I ST CASEINITIAL TARGET ACCELERATION- -.5 G
INITIAL TARGET POSITION-1O0 MSAMPLE PERIOD-0.05 SEC _
I - . - .~ -.. - . a--------------- ...a---
R --------- a- & 4.-..- 4 ..- ...
S- - - . ..-.. .- I..... .....- . - -- ---
-;4 . - .-..- ----
6 - - 6 .. .. ....0 UQ -- -- 9. ----- 89. --- .0 1 -----
a a I I a a a
rIa a I |aaaI I 4 4 a
m a I i
S4". -I...-... .- I". -I'_' - . ',.aee e o ae~ o a I a l I a I
aI 4a I a*aaaaI 4 S
4 -- .---------------- S - IS- .----- ECTI -
j - --* I a I
I a I a... ..- L.... I. .. .. LE.. .,-. . .GEND. . . .. , .. .. . . .
a I
a I a
A . I _ _MISS DIST. Y DIRECTION
I Ia
Figure 3.14 Miss Distance- Casel.
464
* , * ~ * ~ ~ *~ *~. .. .
I1ST CASEI INITIAL TA~RGET RCCELERPTION- -.5 G) INITIAL TARGET POSITION-100 M
SAMPLE PERIOIJ-O.05 SEC
13 113 -
S 1 I I 1T C I 1
* INITIA TRE CLRAI N- -. I
,, INITI TREPS]OIO0 I
I I I• I I I
.. ------ L ..... 1 ...... L - ------ L -. .- . I
a I I
a ------ I
I I
, ...... ' ...... . .......
, L
I IILI I I I
S.D
. I , -II - I - II II III I
1.0 36 4.0 I I I . 0
i I 1 R A Case1.
I i 65
a I I I I I S
II a I~ S
a I
I : ::
I III I
I I I I I III
''I 0.0 10.0 ao.0 30.0 10.0 50.0 80.0 70.0 80.0 90.0 100.0
Figure 3.15 Roll Angle- Case 1.
65
.... -- .
I I
2ND CASEINITIAL TARGET ACCELERATION- -I. G
I INITIAL TARGET PQSTION-100 M"4' SAMPLE PERIO-0.05 SECV 0
cr-.I I
6... . .. .. .. . .. . L- . .. . . .. L . . . . . . .-
r I I r I I II £ I I I I i
I I I I I I I I I
I I I I I I I II I I I I I
* I I & I £ I
SI I I £ I
- -- -- - - - I* I I i I I I S
IIII I I I i I
i I i I I I I i I* I I I I I I t I
I i I I I i I I
I i I I i I I I i* I I I i I I I II I l II I ll i l I. I l I lq I I I I~l l l l . I H l
i * i II. * I I i i
-I - - - i
i I Il I
i I II I I , I I I I
I S I i I I I iI.I i i i i I i II 0 ii .I I 4 I i
I Il f! i li 1 i S! 1 l Ii !I!! 1 I I I l i i li
S . I I I I I I I Ij-I. . I I I I I I I I I I
.4 .II I I I I I I I I -
tI o ,,!
0.0- 1.--2D0--0.-60. 56-0 60. 76- - - - -01 10.
I 1I I IIj I I I I I I II I I I I I I I
I I I I I I I
I I II I I I I
II I r I
Pi. r 3. 16 Comndd. . ..rton as .
-Ii I I I I II I I I I I i |
I I i I i 4 I I* I 4 ! I I a
I 4 p I 4I
I I I i I 4
I I I I I
K ____________________ _________
.4.
o , l I" I. "I~ - -* **- 1.0. SO. S o0 . n~ . o oo 0~ a~ o~
I:i 2N0 CRSE .
INI T I L TARGE-T ACCELERATION- -..rIINIT]RL TR~GET POSITION-IO 11
SAtIPLE PERIOO0.05 SEC*I I aI L b I l
I a a a a a a
I I i a a aa i i I £ a a
I a a a a aI I i a I i a
a|I a a a a a I I
N i a a I a a I
* a a a I a I a
I a a a a a a I a
* a a S a I a I a
L I-I - . - . a I I .
I Ia I a aI a a a I a a I
N |l a I S I I a S I aI aI a i a I I a a
N I i a a I I a aa I a i I S a aI a a a a a a a a
a a a I a a a a a
5 aII V a I a
,L1a a a a a a I I a(1--i I a a I l I a a a
--------------------------------------------------------------------
I a a a a a a a a aa a a a a I I a a I
I a a a a a a aI a a a a a a a
a a a a I I
I a a a a a a a
a a a a a i a a
------------------------------- L -i a L iI a a a a a a
I a a a I a a a a
I IaI i a a a a a
I a a a a a a
I a a aa aa a a a aI
I... - - . a----------a---------a aaa-
__ ,- - - - - - - - - - -
Fiagara 3.7 Cmande aoL Ra Cas a
I a aa a aa 6
I .a- ' "-.-- - '-...-. - -' - '. ' -.-- ',a,'- - .a, - a-.., ----- -- - , ' a- a... - - a-.- -, - - - -. ,. . - . . .
;,-';'77.
.'. .° . . . . . .
2ND CASEINITIAL TARGET ACCELERATION- -1. G
INITIAL TARGET POSITION-100 Mo SAMPLE PER !0D-0.05 SEC
; -- - - -U-- - - I-- -6- - - I- - I -- - - - -- - - - I .....
W - - -
Ij --- --- I L I - L ...... I ------ I - i---- I I L - L - - -I I--- -- - ---
-- - - L -- - -6- - - I -- - -I -- - -I - - - - - -6 - - - -I - - -
I -------- ------ L ------.-------- IS- D- ST.-----------
*.* " "
I .0 I. . . 6 . 0 7. I. J.
tI
•%'%%
I" I I I
--- ---::a. I. I. - . - . - 1 - a - a
I III
I 4 "4 "
I, , . .L EGEND . I
"--..... ...-....- ...... a.. - MISS DIST. Z DIRECTION -
I4-4'4 - MISS 01ST. Y DIRECTION
II.J
%-.
• ...........................................................

' - -"a---- - -
2N0 CASEINITIAL TARGET ACCELERATION- -1. G
INITIAL TARGET POSITION-IO0 M. ISAMPLE PERIOD-O.O5 SEC
- r - - - -
Co I
4 I4 4I 4I I4
Figur4 - , 1 , , 2.
4 4 .... I I
• ""9
VV'
I="" . Io ~ 20 4. 40. 50. 4 . 4. 8o4 400 O.
"4' 'I I I
a ' ig 4 I.1 I o1 4nl -Ca e 2I .4 44.I I I I 4
S4I- - - --y.- t-_ 44 I4.
I I4r
4i° " , ! ' . ' ' , _ ' . - ' ' - ' "
" . ' -' ,. . ' - .'4 ' . . - ' . , - - ..ll ' ' f " "' '-4 i - " . "I,' " " " "I' - - , ''" . .. , ,.' -, ''' "" - . . , , , , ,- ',, '
3RD CASEINITIAL TPRGET ACCELERATION- -4. G
INITIAL TARGET POSITION-100 MSAMPLE PERIOD-Q.05 SEC
0
to.-a , . ,' !
I i i i C I i1
........--------- r ----- - --... -- F ------------- -- -...... ......
I*I S i a a I I U
* I I S I I I I I
* i S a I i i i i
6,, : . . . . . .-- -
- I a S S i S I I t
i I I S I i I I I
Si a I i i S i I I
* I "• I I I I 4I l I I
* - r - - r - - r - - - - -
----------------- -------------------........ .. ...... .- -...... .. .. .. ........ ....... -- -- ...... 6- -- -
• | i i I I I
0 i I . S i I I i
* S I I a S S I i
I I a I I I S S I".a"I " S , , , - S ,
I I U I i i I i i-- I S S I S i II
Fiur 3.2 Comne Aceaaio ae3
* I I I I I S I I
"" .' "I a a S 5 i I I I
* IIll
I 90.0i100.00.0 1.0 .0. 00 .0. . 50. '0. 8.Figure.. .20 Cmmne Aceeion CSS3"lll ° " €. I I II 70
C, "... .." ... ... ... ......... N
.. PsI U ~ .: ~ - - - -- * * *aaI * *
3RO CSEI INITIAL TARGET ACCELERATION- -4. G
INITIAL TARGET POSITION-1O0 MSAMPLE PERIOD-O.05 SEC
e> i a . .. ... ... .
- - - U ------ L
6.. .. . .. .. . .". . ............... L -- -- --- -- --- --.
a IlaI I
L)~
(n K
a|i a I a a a
a| I a a a i a a a- a Ii i a a a a I a
L:.. ------ L -- -- L --- ... L'-- -L- ---- ---L- --,_ . . . . ........... ,....... r --- ----- -- Ir ------ 1. ------ 1. ...... .-------
I'~ a r a I a I a'"I aI a a a a a i
.------------------ r,-----
aI i a a a a I a
F 3 CommndeRol Ra sa 3-N .
I -' a,,a a....a..
I ---------- a a a a i i a a
$ a a i I a I a
'. a (IIa* a a a a a a a--- --- - - - - - - - - - - - -- - - - - - - - -
- . I a a a I t a a
• *" a- a[ a i a a a a a
-. I a a a a a aJ nf , .. , a .. a.a.a.
I * a a I aj. -I, a , .. a.a a a ,
I I a a a a aI i a a a
. . a..A...K--. a ~ a - . a - . aC
a 0Fiaua 3. 1 Ciand a Ro a Ra e as a
a.I , 7 1
a= aaaa-
a.... a a:.;¢ .,;* ;.; ; :.; .; / . .. .... . ... v a. a...v a..... .-..-. a .. .a ..... .... .... ..
%°..
. - . . . - - ---- . . . . . .
'r * a.
I*f12. TH 7 I-E.11 1 ,-4. GIN TI1L TA;GITT P' 1'1CN- 'O
P,1PLC PEi.,-'I'D-[' SEl
S-. .I -.. . . '* S
* i a i ii * i i a i a
.L.
Ili Ii i
400 o raa 7. aa~
'02 5 I I I I
1... .
9------------ ---- -- ---- L - MIS DI T I E T O
* I a a I a
i , a i i a a a4 4 * I 4
JI 0 *~ .. 30. 41. 50. 680 7L 90 .I .0
i I i 4 i i
.. ~~~~~ - MIS-----LD----------.-D------C------
I II II4 iit-,-*t * r 1
0 a I I I IN !
Fiur 3.2 ---- j MISSg ZCDeCTO
C 4 II _ __ __
a a a II I a
IOU
.,l IA,- -
3RD CASEINITIAL TARGET ACCELERATION- -4. G
INITIAL TARGET POSITION-IO M-', SAMPLE PERIOD-O.05 SEC
I I SI I I 4
I :I_1 4
L-------------.----L------- -- - - - ---- .-L -- ---I 5 N 4 I
II I I I I tt
I I 4 I I 4i II I 4 4 i I I
* I I 4 I I 4
*I I 4 i I I I
• I - II " IS.-. ------------------- ---------.. -- -
: :
4
_ ...... ..... ...... ... .. ............. .... .. ... ..............
.. ...... - --- ..... 6 ...... U ----- 6 ........ ...... 6 ....... ,. ....... ...... ,- I - - r - r -
" ' I
I ..- , U 4
I I
"~~~~~~~~ ~~~~ ------ ... -- -- .. .. ------.. . .L. .. . . . . . .. . . . .. . . . .
-------------------- -r ----
cii
I a ' o
I ' :I :
Figure 3.23 Roll Angla- Case 3.
73
~ - Q * II 4 Ie
4TH CA5EINITIRL TARGET ACCELERTION- -4. G
INITIAL TARGET POSITION--600 M
SAMPLE PER]O-0.05 SEC
r - r ., . - ---- I I
* I
------ ---- ---- ..... ,
9 43
i Iii4l l I
+i" ,, ..~ .. .. ......L I q I
*l a,9 .. .. ............ a t b+ + .m .++ . -I. .-- k.+ + + . + . . +
- I III I 4 I 4I
4 I 0 o 40 * *
. ..... L ----- ----- ------a I
..... +.. .. I. ... ... .. ...... -- L ,-- - -.-.... -....
4 0 I , aFgr I C 4 IOa C 4.
-I I I 41 I O
- # I I I I I4 I I 4 I I .0
* . I 6 4 I le
I
I a A
S4 4
* 0j
* ...., ... , ... +... ... ,,*...F ...... a .... I- -
o I 4 I :_ 0 ..
. LI.L - .
a II
. . . I I I I i
I la
4ir 3.2 Co4 n d c a aton Cas 4
4 I4
* aao
4-'...-. / -..'.I..- ."." .'. ...... . .. .. " . - . -. '... .,.'. .4.+ . '. - .. - 4.- . . . .I, - , . . -I. +
-- 4TH CASEINITIAL TARGET RCCELERATION- -4. G
INITIAL TARGET POSITION--600 M". -- SAMPLE PERIOM-O.05 5EC
- -a I . - - I --a - -
Ln -- -- ....... rpo uoo ... a.... . l -- -- - --- r....*.p. r - ---- I ----- l*I m*
cr- Is
I an t:
c;- ------- -- -- 4 -- -- -
• "-
--- a.---------. - .--------- I- .a . . . .. . . a.. . . . . . a. .. . a .. . a.. . . a.. . . a, . . .,. . .
I I. .. . .p.. . . . . . . . . . a. . . . a .. . .--.. .
IIa l- - - -a a a a ,
a' " a a aI
• .- .,.. I a
• a.------------a. - a -,.I
a a,, , a ' a 'I aI I a
I -1 i a a a I aI aa I 0 a a
I a I ----------------I
I I% a aa a
a I a a a I a
j a .P a '. aI . a , a, a
1 0 ,4aDa- . I. . IOO 4. 50. aO. a0. 000 a. 0.
a a.aa1" aga-a ,a
*VI--------m--,:e to.1.Ba---ase-,
a"75a
' " . . .. , .. ' . .' .. . ' , " . . . - . . . .' ... " *.". . ...a. .0-. - a , ~. , . Q j % ", . . , . ,
:::.: 4TH CAqSE
INITI1L TARGET ACCELERATION- -4. GINITIAL TARGET POSITION-600 M
SAMPLE PERIOD-O.05 5EC
I I3
I -----
a a a *I I I
----- I --------
I a a a a a a
-a a I Q
C- ------ -- -------- --------- ----- . I -
I aa a a a !I I i I a w
". ........... .---- L ---
* I I I p
- ..... I I --- --o ! oL
MS D" Z DIET.
I-- . a .... a.. .,. .. .. ..o. ...o. .. .. .. 0. -. ... ...
- - ,a DIT .YD I
Fiur .2 • is Ditie Case 4.
I 76I
Il " * i 1 -iSp al~ dI~ l~oI~ IIIp l a a p ii ~ *!lIl i ~ ~ll
I.': a aLEGEo
i, IL .. , ......... L- - ----- - I SS..T.DRET
Ia. * I 4
I .Il I Ja
.- .J FiISr 3.6Is itne ae
- o 0156
! .::p!.%a
I 1INITIAL TARGET ACCELERATION- -4l. G
INITIAL TARGET POSITION-SOD M
-- SAMHPLE PERIOO.05 SEC
..... ... 4 ...I I
I a I
-I - - ---I~ I - .... ",.. . ... " ,*... [,..... "......", ... ,....,...., ... I
i° •I I a S 4 a a
I III4 I a 9 4 a a 4 I
- - - - I - -
L ---- L--- 1--- _
* I I I a"a a a a ' a a
,r , ---j~ --- : ---- I--,...
* a I I 4 I 4 S
.....----..-- ...... - -..
Z I. a 1 -,PM4a '
I a' a'
* a: a a
a .. . . a . ."- . . 4.- 1. .: a. . .. .. .. .. . a .. . ,.. . .- . .
0. a0. 0 a1. 400 M. 50. 7 A a00' 1. O
Fiue3.7 anle Cas a4.
. . :: o a a a a a
O a I
I ., ', a a " ,
.- a*I a , 0 4 a •
-- , II a' a' a a a a " -
a a 11 a a I . aI
"," - I-, , , a a , , ;I': a 'l'''
_a_ a a a 4 a 4
0;.- .01 .0 ,o ,o0 40.0 10.0 WaDo 70.0 Uo.o l .oa l O
.% .. ..
!ffigure 3.27 Roli AngLe- Case 4.
• ..-. 77
o-r
* *? " - .*. . . - * a
- 7- -
Ick Ac( 0)
* ~* IX() ~ ()
IFigur 3.2 Iorca Ioe
is.7.
-Av
H'' °' ' " ' ' ' , - ' .
. - . . Z -- ;.- " .-. *' -- * - - ; . *
,* I I1
I **
I I
... .............................. ,... ,....... ....... ,.......U 4 I 4 I 4 I 4
4 I I-I II I 4 I 4 4
4I4 I I I I 4
* 4 I - jO) 1 e I
I I0 g 4 4I I I 4 I
LJ--- .. . ., ....... ...... -- -- .... -- -- ...... 6 ...... 6 ------ L ------Boundary' of4 I 4 I 4 I
I 4 4 l 4 4
I I I IS !I 4 I
.| I 4 I I I
o* I" 4N , ,' --------
....... .... ... .;... ' " ... A el ratto "[...!
,-. U): I %. 4 / ; , II 4 4I
Aw ------ L ------ . ...... U ...... - - 6..... * ...... , . -.......
I I
Ion ---- - ------ -- -- ------ -- -- ------ -- -- .. .. . . . . . . ------ .. .. -- -- .. ..
,. .. ..,1: ---. ... , ,, .,,. .. I , ...*0,. ...r ...0i!, .
C!!
Figure 3.29 Boundary of the Coamanded kcceleration.
7 9 I.
I 4 4'- , b., , q. ,' ,, - - - -- - - - - - - - - - - - - --. - --"- -"- - - --"""- -"-,-".- --,-,-.-,- -.- --"" --- .'-,..''2'.-'"• .- "." ...". " "
-4 z i
correction
-INI
-y IFig. 3.30 a Large target accelerattons
p.."" I
"4 I I
"I I
zcorrection
I ",, ". Ot.1
e--y
Fig. 3.30 b Small target accelerations
Figure 3.30 Corrections on the Roll Angle.
80
%1-P
C;~i t) 0 LC) 0 CO) 0D IAf)
-4 C', 0Y CD tCN 0. * 0 1
C;. LC 0D *~ 4= Lcl 0 v% 0
I - -- --
0- IC) C#)a 0 I) 0 0o~ F* 0D IC) 0 0 0 .0paI LO- OE & 1 4 .*
nto CJ o '(D V1 0# cr% *l 6C to f * **
0 1.1 fJ3. mcr Lto tof z mO
I '-m
a cm Io
- - . , .:
- - . .- -- . = . . - . . . b . . -. , ,
IV. AN L SS OF GAINS §gSPLE Ra&TE AND PITCH ANGLE
-'0- A. ANALISYS OF THE GAINS
.21In chapter 3 has been developed a solution for -he
optimal ccntrol of a system as:
x(k+1)= A(k) x(k)+ B(k) u (k)+ E g
It would be interesting -o check if the optimal gains
reach steady state,but at the momeat that the ezrentLon for
larae roll excursions has been introduced, and the system is
being feed with optimal commands which are varying each step
of time, such idea can not be applyed. However one can do
such chsck in the model for small roll excursions, which is
acc-.ual2.y used to compute the optimal commands.
-" Doing this, one has the time hi. story of those gains as
in . and 4.2
One can n:tic in fig. 4,1 that ths gain FG(2,1) associ-a.-ed wit the effect of gravity has no effect on the
ccmanded roll rate, and that F (1,1), as shown in fig. 4.2,
has a large affect on the zommanded accelerat.ion.
- Furthermore, this gain r-achs stealy state very fast, thus
- i- can be assumed that the gain FG will be equal to ths
steady sta-te value during all time.
From eqn. 3. 19, and assuming steady state:
u(k) -F(k) x(k- FG(k) g (4.1)
and substi-utiag g:
%o
82.- °
0 °
a (k)= -F(k) x(k)- C (4.2)
where the second term in the right hand side is a constan:,
and its value is exactly equal to tie value of the commanded
acceleration necessary at t=O to correct the gravity fall ofthe missil (or to correcT the initial ZEM due t) gravity).
* - It might be supposed that one could solve the optimal
control prcblem for the system represe,,ted by eqn. 4.1, Just
o cozsidering one raduced system repr.ssated by:
x (k+1)= A (k) x (k)e B(k) u (k) (4.3)
* wth a bias in -the ccntrol as:
u(k)= -F(k) x(k)+ C (4.4)
But as shewed in the follcwing analysis, this is not
tDossi bl -.
The constant term in the right aanl side of -qn. 4. i
calculated as follows:
4,r-c eqn.:
... i n-tial ZEM due to gravity= ZEM -- g :2
-::: c -- ..-- -- .. .. .
a h2 t6r Cos
and the gains F(k) are zalculated using a Ricatti equation
as usual.
83
• • .** . " ' . " . ' ' " . """ ' o " """"" - ."
Case 5 was tested using the above consideraticns, and
r- using the same scenario of case 3.
. Figures i.3 and4.4, show the time history of the
* controls. One can see that the commanded acceleration has
begun at same values as in case 3, but the commanded accel-
eration reachs a peak considerable higher, them dcreases
does not following a linear law, with a final at 14.7 metere
per second sguare, being this tercminal value due to the
constant term representing the effect of the gravity.
* Refering to fig. 4.4, the commanded roll rate begins at
a same value as in case 3, but as the control Ac is too
high, it reachs negative values, going to zero almost at the
end of the running time. This behaviour of the control leads
to a large miss distance as seen in figure 4.5, and tableII.
Figure 4.6 shows the time history of the roll angle,
which rises to values close to 1.5 radians. As the accelera-
tion at this point is larger than the correct value, the the
corrections are excessive and the roll angledecreases at the
end of the running time to the valuB of .12 radians.
Thus, one can see that the gain due to the gravity's
acceleration can not be replacel by its steady state
value.This kind of simplification can thus not be done in
the sys-em being studied.
B. EFFECT OF THE SABPLE RATE
Thrcughcut all the simulatios a sample period of .05
seconds has been used.In this section a brief study of theeffect of the change of this sample rate 4s given.
Two- -best c.ases have been selected to ilustrate the
effect of the sample period.
The first case, case 6, has been run with a sample
period of .1 seconds and consits 3f the same scenario as
case 3.
8A
L " t ' ; " , ," - ' ' , ' ' - ' ...,,' ' '-,..- / . . .
, ', , .~- - .. . . " ." ' .. . " -. - . - ," " . , " ' ., ".
As one can see in figure-4.7 anl tiDlalIII, there is no
noticable change in the commanded acceleration, but the
commanded rcll rate begins at smallar value thin in case 3,
as is seen in fig.4.8 Thi3 initial decrease in roll ra-e,
leals to a large miss distance in y direction as shown in
fig.4.9, and to a small value of roll angle (see fig.4. 10).
The second case, case 7,has a saple period of 0.025
seconds. There is no noticeable cdange in the time historyof the control Ac as shown in faig.4.11. The commanded roll
rate begins at a higher value than in case 3 -s shows fig.4.12, which leads to a final miss distance in Y direction of
.- 2.22 meters and in Z direction smaller than case 6 (see
fig4 .13). Figure4. 14 shows that the final roll angle is
- - increased and the missile cross the target with 1.28 radians
and with a CG-to-CG distance of 2.5 meters.
In both cases, the miss distanze was increased over the
nominal value obtained with a sampling rate of 0.05 seconds.
Thus, it would appear that there is an optimal value for the
sampling rate, which may be conected with the geometry of
the scenario and with time to go.
C. EFFECT OF THE INITIAL PITCH ANGLE".
It is Important at this sTep to remenber that througout;. Uthis work has we have been discussing a dimensional model,
where there is no information on the X coordinate, so it is
-; impossible to verify the behavior of the pitch angla.In -his work, since in all the previous scenarios the
initial angle G was equal to zero, this value has been keptas a constant during all time, and considering that whimhout
any information of a thirl dimension it was not possible to
correct the time to intercept, this time was also kept
constan- and equal to the nominal value- of 5 seconds.
85
;.-....... .............- -.. .. ,...-. . .,...... .... ,-....... .. .. ,. - . - - .. . . . .- . . .
Notice that this assumption is likely to be correct if
one has the horizontal i.4.tial listance from target to
missile compared with the initial vertical distance between
target and missile large enough in order to have
small angles.
The question that rises is, how could this pitch angle
affect the system if it was nct small?
As seen in fig.4.15, the missile velocity in the X
direction would be:
VM= V, cosS + g cose sine t (4.5)
which has an effect not only from the pitch angle, repre-
sented by the cos e , but also from the gravity's accelera-tion, which will leads to a different -ime to intercept.
Conside-ing the same physical scenario as in case 4, but
changing the initial pitch angle, in order to have the" missile pointing to the target (see fig.4.16), and keeping
the missiles velocity of 1000 m/sac in the X direction, one
has a ccmpletly different geometry of the problem as seen
from the flight path reference frame.
With this new situation (see fig. 4. 16), case 8 has beenrun. Figures 4.17 and 4.18 show that- now the missile iscomanding large positive acccelerations, and the roll rate at
the begining of the flight is too high, going to zero in a
very small p-riod of time. The miss distance as se.n infig.4.19 are increased in the initial par- of the fUigth and
as the missile corrects its trejectory it is decreased to
rsach a final CG-to-CG miss distance of 2.17 m. The roll
angle, due to the large control Pc Is oscilatory In the
begining and becames constant with a value of .57 radians
(see fig.4.20 and tabl . IV)
86
LO :
- ~.lA.I .1 ~ ~.2 2 .
0%
Notice that the high values of acceleration needed are
in som - part due to a vertical component f target's
velocity, which is seen from the flight path frame as the
target was manouvering ia the Z direction with constant
- velocity. These large accelerations leads to roll rates too
[ large for the physical integrity of the missile. This means
that although althoug the good results obtained, if compared
with case 4, they are not practical.
In order to get rid of the vertical manouever of -the
target, case 9 has been run. In this case, the scenario is
the same as before with the targe- also pointing down, with
" the same pitch angle as the missil-, and has a X velocity
equal to the previous case (see fig.4.16).
From fig.4.21, one can see that the decrease in the
control Ac is substantial if compared with case 8, but the
commanded roll rate is still toc large as shows fig.4.22 The
time history of the miss listance is better, resulting in a
final CG-to-CG distance, of abcaz 50% of case 8 (see
fiq.4.23). The roll angle is not oscilatory as seen infig..2- and the missile cross the target 4ith 1.3 radians
in roll. (see tableIV).
"""" The results obtained in the two previous cases, suggests
that the algorithm developed in this work could be readly
applied to air-to-surface missiles. in the latter, the
scenario would be favorable to the missile thar. in either
previous cases, since one can consider that the target could
be essencially stationary in comparison wi-h the missile
speed.
Case 10 his been run with this issumption, aad the scen-
ario as in fig. 4. 16. The target is with zero velocity and
- acceleration, and the missile begins its flight 600 meters
_above i with the same initial pith angle as before.
Fig.L.25 shows the time history of th - commanded accel-
-ratio., where one can see that as the.re is no roll rate to
87
be commanded, the acceleration is following a straight line
with very resoanable values. The miss distance is show in
figure4.27, which shows the final ZG-to-CG distance of .31
meters.
Based in the results of these tests, one can see that
* there will be some effect of the pitch angle on the miss
distance, not only due to its effect on the time to inter-cept, but also because at the moment that there is a pitch
angle different from zero, even if the target is keeping its
flight level, in the flight path frame a component of the
target's velocity will show up lealing the missile to
command large accelerations and roll rates. Althoug this
results harm the performance in an air-to-air missile, in
the case of air-to-surface missiles, when the target has
been considered with no motion, good results has been
obtained.
D. EFFECT OF TIME TO INTERCEPT
In the simulation of case I and 2 in chapter 3,it has
been observed that when the target was at small accelera-
tions, the missile did larger corrections on its roll angle,
with respect to the ideal initial roll angle, than when the
target was with large accelerations. One can think that must
be some kind of compromise between the velocity rate of
target and missile (which will reflected on the tim to
intercept), ind the relative position between them, which
will affect the miss distance.
In order to do a brief analisys on this, case 11 and 12
has been run.In case 11, the scenario of case 2 has been kept, with
the exception that the missile's velocity was change to 2000m/sec., which aeans that Ti was changad to 2.5 seconds.
88
V
. ee.
Figure 4. 29 shows that the acleration is larg.ly
increased due to the small time required to correct the ZEM,
and the commanded rcll rate is almost twice of case 2 (see
fig. 4.30). rhe final miss distance is more than four times
the value obtained in case 2, as seen in fig. 4.31 and table
V. The final roll angle is about half as in case 2, since
the projected final position of the target in the Y direc-
tion is less than in case 2 (see fig. 4.32).
Case 12 was run with a scenario less favorable to the
missile, where all the conditions of the previous case was
kept, except the target position that has been increased to
200 meters above the missile.
Now, the commanded acceleration are much larger, with a
initial Aco of 103 m/sec2 , being almost impossible to see
the difference of the time history of the acceleration from
one straight line, as shown in fig. 4.33 The commanded roll
rate is small, about the same as in case 2 (see fig. 4.34).
The change in the miss distance is noticeable, with a final
CG-to-CG distance of 4.8 meters as in table V , and figurs
4.35. The final roll angle explain the shape of the accelezr-
aticn curve, since with the small roll angle as shown in
fig. 4.36, the system is behaving as for small roll excur-
5:ions.
Notice that from this analyzis, oae has to realize that
there is some kind of envelope ,hare the 2-D system is
valid. And in order tc determine this envalope, one has totake in acccunt not cnly the geometry of the scena::-o, but
also the time to intercept, which is determined no- only by
the relation of velocities of missile and -:argat, but thq
pitch angle too.
!.8 i 89
K' ,'.. ... ..e, ¢ j C ~ ~ V D ,.;""''' ' ' ," " , " , * U . Y ~ : - ' •", ". • -, • .. .-. . .. .. . . . .. . . ...
W.. I-
. . ....... ....... I IL -
-------------- ---- 7--- ------ ------- ----------
I I
-- --- - - --r- - - -r- -- - - - - - -
9
a ILEGEND
F (2 5 ------I I
I~ ~ ( 2,6 I
:.~~ - O F (2,7)- -~~
Fiur 4.1Gisafcin hIomne accleatin
* I I I 90
. . . .- . ... . . . . .
'Si.
".- -- -- - -- ----- ---- - .... .. ..... .. . -
11*o x
MI - I x Ia a a a Ia I a I
- o I
I + I i
------- L ------ L ------ 1-- ---- --......... -I
a' o s o r. I. es a .
:+ +
r -- -- ... -- -- ------,+ , 0 -F, -- -- r .....:
+ 1i
---------------- L------ ------------------ --- --
' ,, ...... - .,..... ,
, , a Ix + Ia I I I + aI _. a; - a
a 1X
.a.+
I'.-la ia ~xx
a ' a aND
I a a I I} . aI .+ I
, a a I
, *- - -..."... " . -.. ..... cls a.. ... .,.X. - ++.. . .. jIo F(1,6J a -'
a II 3 + I
I ----------------------- oFt1,7]----------+-
a I ~ (,4
o '(,6 a a
f17
a Ia
* 5TH CASEINITIRL T'RGET MCCELERMTION- -4. G
INITIRL TIRSET POSITION-IO0 I
SAMPLE PERIO-O.05 SEC
p.: . -- --...- - - --r . .. .. . .r - --
r pL , ...... .. ..... --- --- -
-- ---13 -- -- If - --,, - - -r, - - - , -- --
"- - - - - - - -- - -- - - - - - - - - - - - - - - -
2>o a
r a-- ---r ......r a ------r a-- ---r--- - - - - -- - -------------------- - -- ----------------------
I-I -- i II I
...- . .0....0 .0.......0 six.7
aiur 4. cmae Icclrto-ae5
N I I I I e Iz------- . - 4.-L "I
I a a a I a a a a
~~-....... ----------.... --.. ... ..... ..... ....... ....... ....... ......
a a a I I I a a
I I a g a a a
I a a . a .II a' a a a a a a a a
I I a a a a S a"
I a a aa
t *o
I.. a I a - - - - -!
I : o. L - I.-------------,L- 4 -'.I. - .a" ' i ! + a a a a. .a.a"a
a a
,.. .Figure '4.3 Commanded Acceleration-Case 5.
% %
• 'a
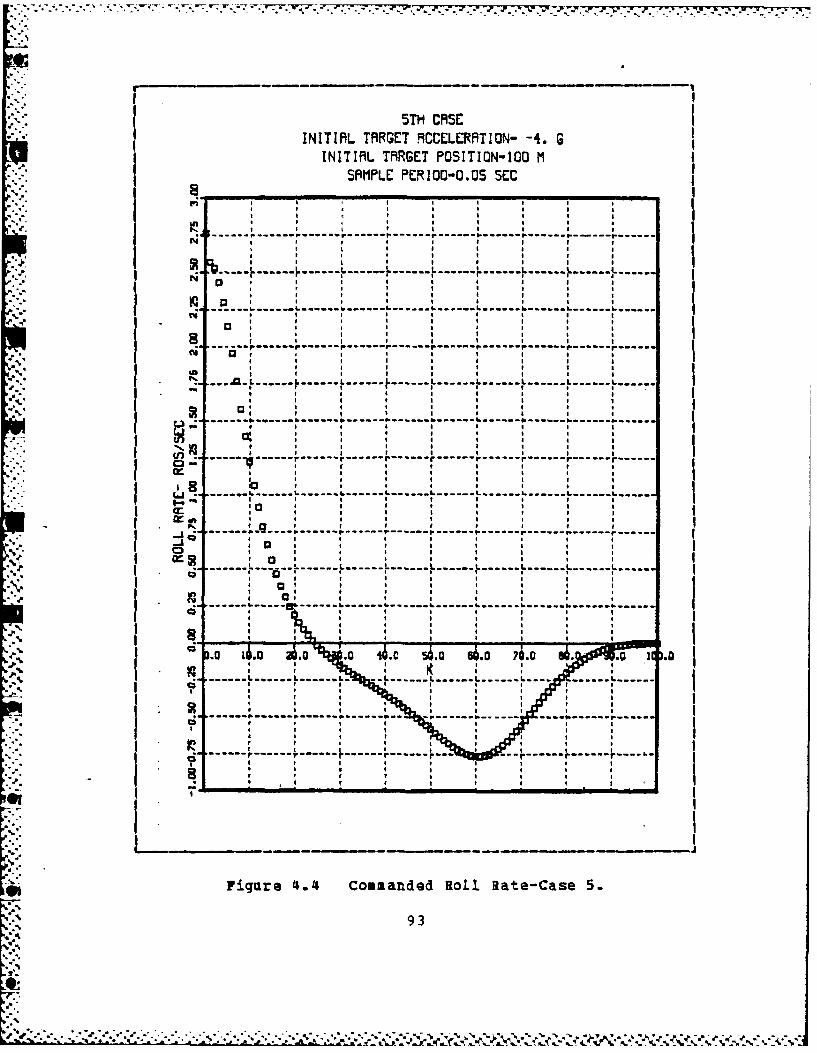
--T H C*RS E
INITIL TAtRGET 9CCELERRTION- -4. G
INITIRL TRRGET POSITION-1O0 MSHMPLE PERIOO-O.05 SEC -
t II a
-,_ , , ,
S .
I - --
a ar ---- a , ---- r ----
*------------------------- 6----L--L---.-- - a- - ---
CCa i I
- - - - -a-- --- -
--- - -L-- - -L- - - -- --...... ----- ------. II
60 2.a a 4. TO ;. A. 06 a0 1.
L - - -- - --- - - - -
N g , a aa
a4 a a- --a-aa- -a- --
a - --------- ---------------
------- ......
4~~~~~~ 4------------- ------- 4------------4
II
I LI • .al II I~ l a lI I aI aIII I aII I aI all I aII~ lIII~
FgureI . Co ma d e Bo l l RaataeaCas e a 5 .
^ N a a
, a a a
a, a aI
I a a a a
I g Ea a a aII a
a a I a a
I a a a a a
.d ........ ......--------.-. - . - . - a - a
I . I!0. 0 .
I .. L----------------------------
I '--- --- ---
I a
@1I 55
Figure ($*1 Commanded Roil late-Case 5.
.a;% g.A°. .. 1~.
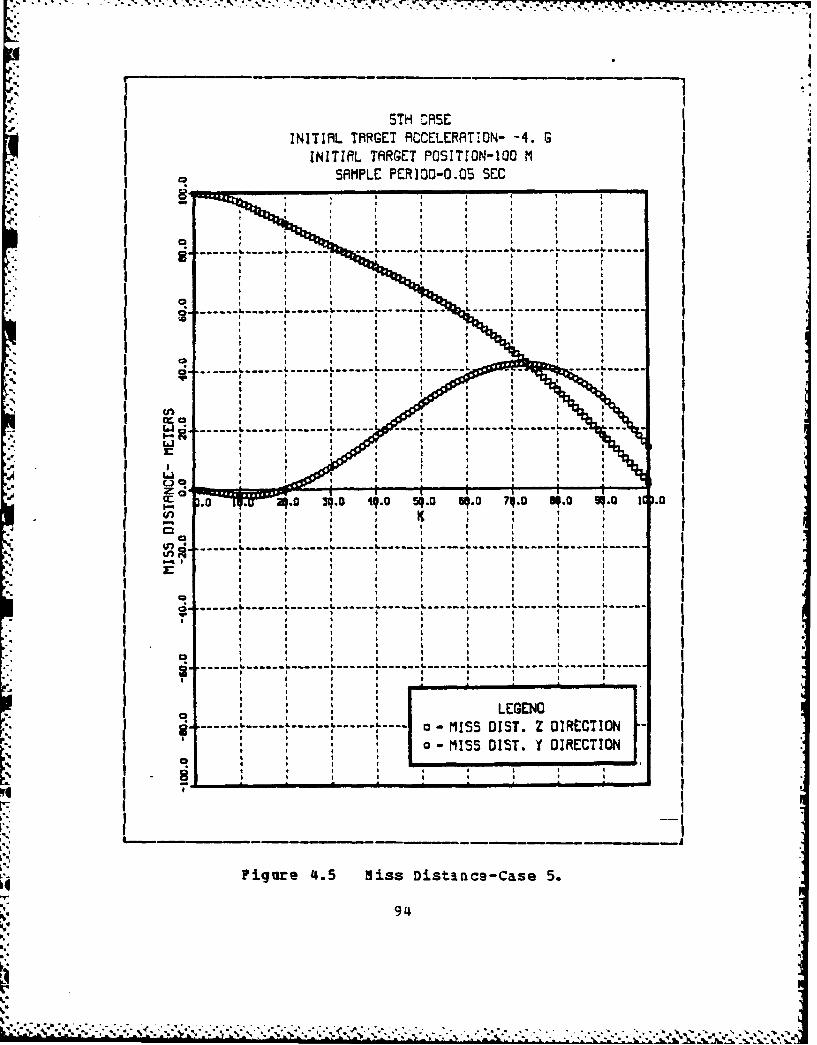
I -' . . . - . .- - .. . .i -- -•
. . . , , ' . - -...
5TH CASE
SINITIAL TARGE ACCELERATION- -4. GIN'ITIPL TAiRGET POSITION-100 M
SHM1PLE PER]3D-O.05 SEC
I 52 Il
I I S 4 I 4
1 t I a a 4
I I I Ia aI I I S a
- 0ii
r L .. L$ I l I L -- I
L ------ L I-----------------a.-- I.------ --
S- . I
I
i IiII I S I
a.L -------
I -I - -I I
r 4 4 4 I I S
o MI I IR E7: 7
-' a . 4 .i L 4 -._i, , .I a a a
a aaIaI
a I EGEN
I 4 I I ___ __ __ _ I__ ___ __ __ __ __ __
a I S _ _ _ _ _ _ _
a a i 4I,. I I I- I - -*1
igur 4. is DIstIii a 5. I
-7- ItI
* *l44 I l *t ** . .,l
.. *. . . I . i4 - . - i* -.. i2*'~.p %' 4i ..l !- .*.
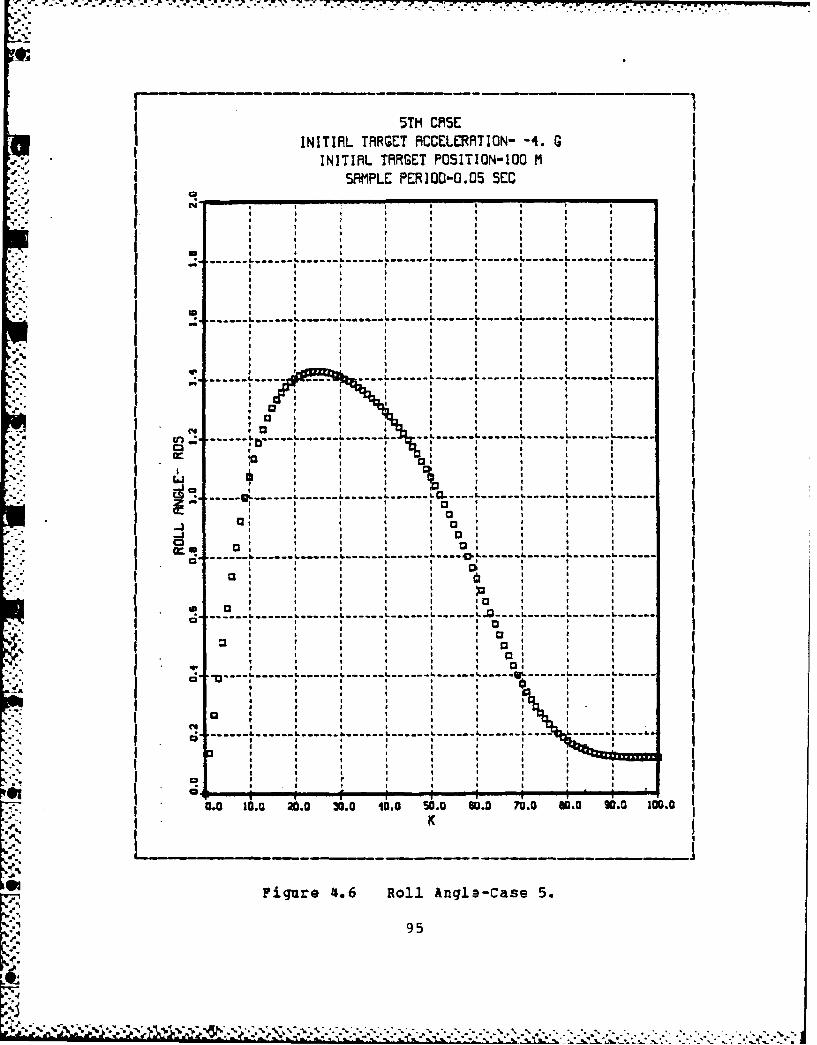
5TH CA5EIINITIAL TRGET RCCELERMT]ON- -4. GINITIAL TARGET PO5TION-O0 M
...- SAMRPLE PERIOO=O.05 SEC
__ _ _ _ _ _ _
* LL
I
I I
------
L ---- - - - -
"%- h
- - I I i I aI a as I I a I
a i I a
a a I
Im %I 5 I
, 0
i !
Fiur 45.95-I
a I I a
P I a a 5 a
I I 5 I I aa 5 I* a a I I
I i a a I a
0.0 10.0 20.0 30.0 40.0 50.0 60.0 70.0 60.0 60.0 10,O
KFigure '$.6 Roll Angl9=-Case 5.
95
AD-Ai44 043 OPTIMAL DIGITAL CONTROL OF A BANK-TO-TURN MISSILE(U) 2/2NAVAL POSTGRADUATE SCHOOL MONTEREV CA C A VELLOSO
UNCLASSIFIED A F/G 1 NL
smEEEEEEohEEEEEEEEEmhEEEEEEmEEEEEEEElhEEEmuIrIIIII
11.2
'.2.2
11111-2-...
MICROCOPY RESOLUTION TEST CHARTNATIONAL BUREAU OF STANDARDS -963-A
.° "%
I
illi i
-. I TABLE II
Results from Biased Control
t Ac PC CG-tO-C(./~c ) rad/ec)Y ift~on Z (ItrectIon
(mS(ina/ec ) (red)
0 26.37 2.76 0.0 100. 0.0 100.
TI 14.47 0.0 13.78 2.00 .119 13.93
69
.' "- - - - -- , -. . -b ," .-' . . .t I . - - - r r r . - . . . . . o -w-7 .w- "o.-- - - -
6TH CA5EI INITIAL TARGET ACCELERATION- -4. G
INITIAL TARGET POSITION-O0 MSAMPLE PERIOO-O.I0 SEC
,i, ,* - _
-8 .. .... ..
Ib I I I Ir - - - r - - -
-- -- - -- - - - --- - -- -- -- --- -- I -- - -
6 rl 6 0 '
V9 ------... ..--- --- -- 6 -----------
I I I"'0-" 6 6 6
* 666°
. . . I 6 O ,66
I I 6 0 ,
""" I 0j" " 6 6i 66
1 36
I *I i I I I
' ----- - -I I
'G0 i.x 1.0 15.0 !3.0 2i.0 MI.0 3i.0 40.0 45.0 50.06K
I - -I . ... l6 66
Figure 4 .7 Commanded &ccaleration-Case 6.
97
o°f-o o°' -I o ' ' -6° . •" .° 6° 0-6 6 6. . '6 " -" , '. " . .. - o" . " " . " z . o . . -6 " "6"" " "6" - 6"" '", -. " , 6- " 6-".' .6- '"-", ,,:'. ' ''. ,, _' . . ' ... ' " ' 'f ".,',.. ,",z. ,. ;' " . .. _.
F 6TH CASEI INITIAL TARGET ACCELERTION- -4. G
INITIAL TARGET POSITION-100 M4 I
* SAMPLE PERIO0-.0 SEC I.... . . ... r-------------r-----I
I I I I
NI I I II
I I Ii I
m a I , @
,IoI I I I I --
III I II II ' I
I III
L ---L-------'---
I, IIII II I
IIIII I I
I I
IIII I I'I
L I I I i i I I - - -j I I I I I I I
I mq.I I I I I I I I
~LM
I IiiI I I
L - -- -- I-- ---
-- --- -, .
,8 . . . .....d-- --------- ---- ----
I I I I I Ir
[] I I I I I I I I IN I
' I
0.0 5.0 10. ii.0 -2-o.a--- 2s.-h-b - .o--4.a--- = -b. I
I !
Fiue . Comne Rol Rt-Cae6
Si I i i I I i I
* I I o I I I I I
I r I I I I,! I
I ... . rI
_ _ _ _ _ _
98
17. L L
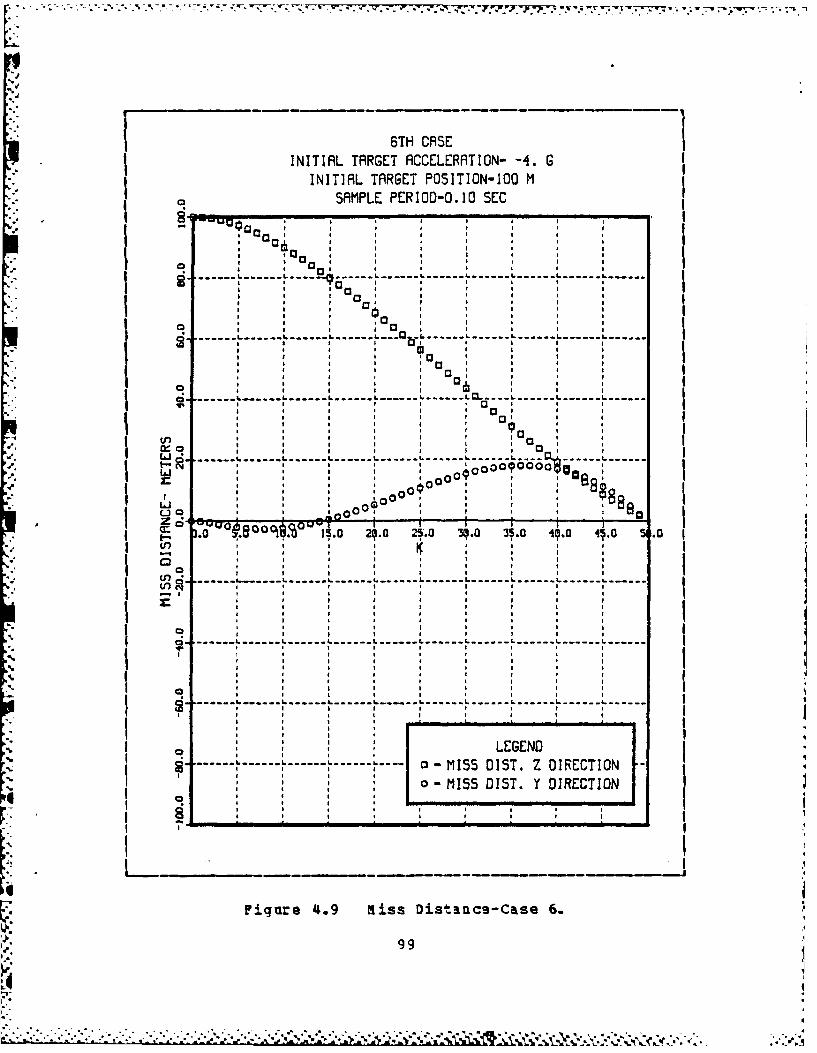
6TH CASEINITIAL TARGET ACCELERATION- -4. G
I INITIAL TARGET POSITION-10 M___ __ SAMPLE PERIOD-O.1 SECI It
0 1212
- a0 13
----- ------- - L _ ---- - L L ------ L ------ I -------
EI - - -- - -- - - L - - - - - - - - - - I -- - - - - - - - - -L - - -
, , :0,.0 0,
II I.,0
s
LL]O , o 0 0 0, ,
a aa- b aa
3.0 I 0 W
I L a -
a a I
- - - -- I - - a
L -- -- L - --- L..-....- - 0...... MS DS.-Z IRECTIO-
"I aQ I
a I., 0Ia
I I al~~ il a li I l II iN c!;.I 0O I4--------------------II .iII Iaa ia I a a
o- MISS DIST. Y DIRECTION
I a
Figure 4.9 Miss Disl*ancs-Case 6.
99
O'*
_. . ,. o-l°, .. . . . . ..fl4..0..
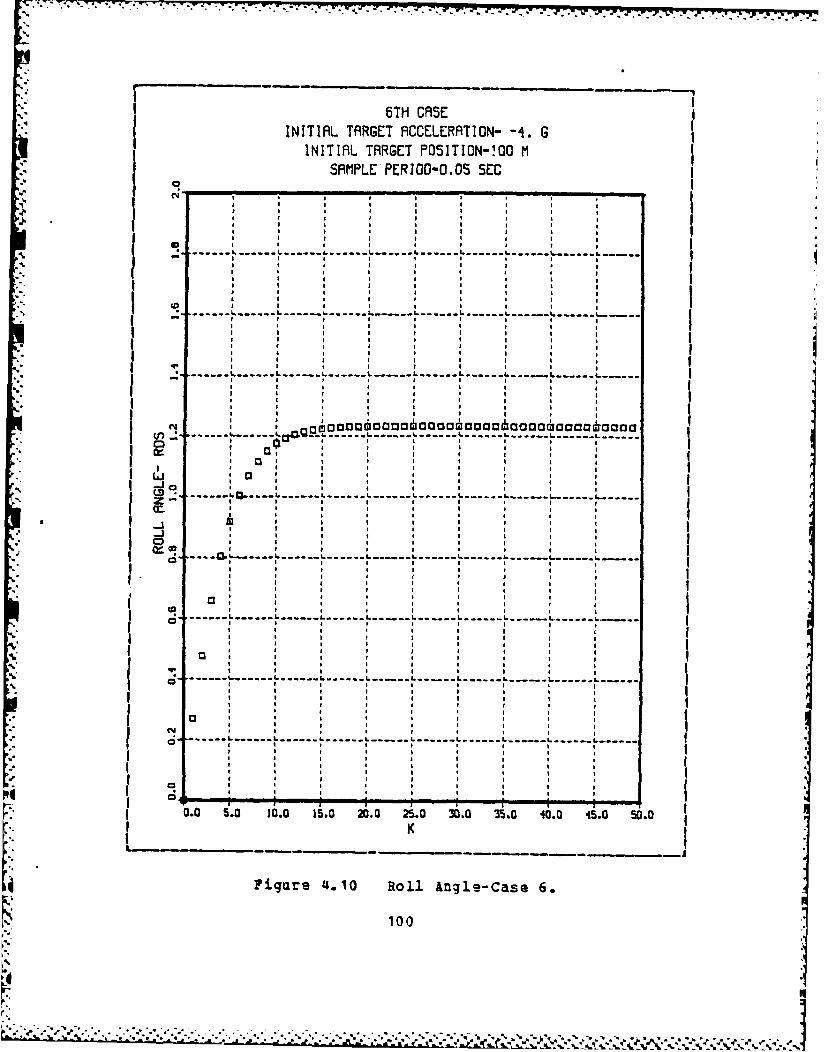
- - - - - - - ----
I. 6Th CASEINITIAl TARGET ACCELERAT'ION- -1I. 6
iNITIAL TARGET POSITION-!.00 (f SAMPLEI PERIOO"O.05 SEC
aaii I i Iii i i II ll
- aaa
I
I .a a aa
I a a a* a...., .. ... .. a . - . . . . .. .. ......---------... .... ..-. - ..
a a
L -. I. a- a I I. I I- af-
I a°
*
I , aa II
a iga a.! oi ne-a . j
a a,.f0OOO ~ IOad wwu w C CW O O O O
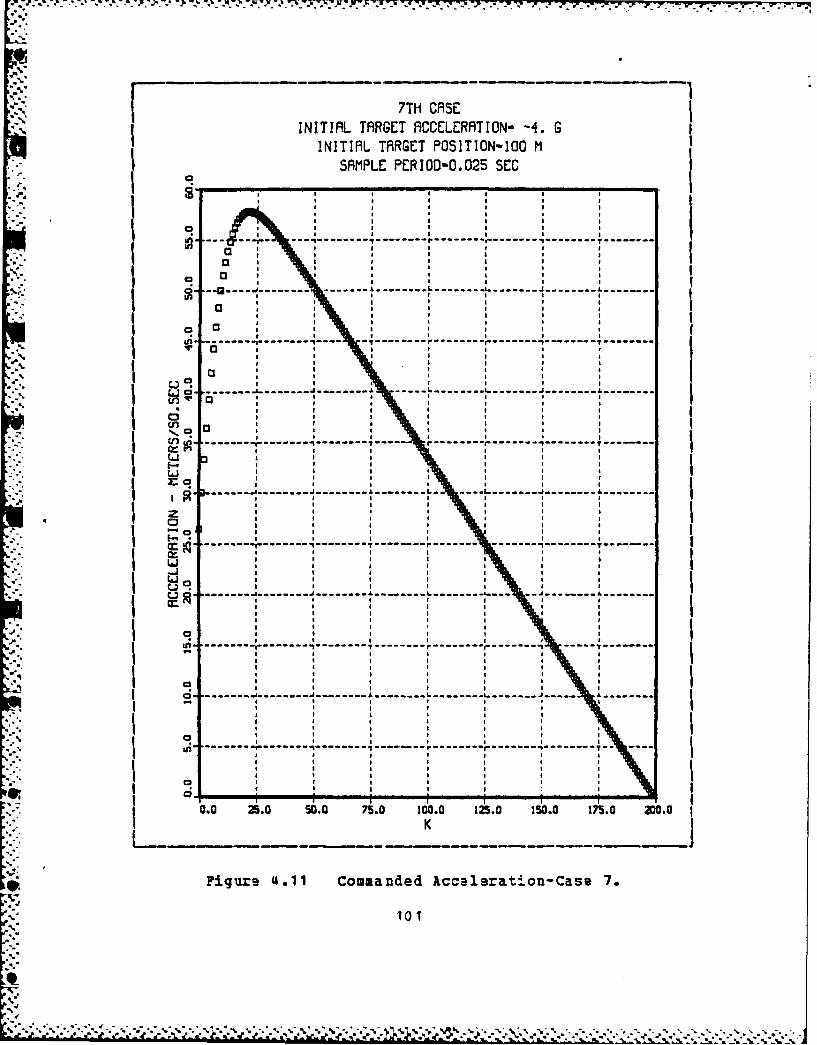
7TH CASE II INITIAL TARGET HCCELERATION- -4. G
INITIAL TARGET POSITION-IOO M I51PMPLE PERIOD-O.025 SEC
- ,-,.""." ------. --- ". ,,---- I
..---..-- ---- - ---- --- L ........ "' -------- J - -- -I It
III I II
I I S I
o - - - -- - 4 -- - - - - - - - - - - r - - - - - - - - - --, -- - -
U 13
I a I I I I
,.',.I -,I" 5 " "", "I aJ' a 'IIIIII I IF" I I . , ,a
I-;I I I I Ir ------ ----- --- - - - -- ----- --- -
--:I * ...
I I SI° I--------- L-----i - - - - - -
--- -- -- - -------
igurI . C I 7I ' ' I I I I .. .1
"" . .0 5. . ,O. ,I. ,I. 1I0 20.
"1 oa - ,I II
U igur .1 Comne Aceeion s I7
- I - - 101
-*'';,'t'';S.5..,; a'. I''" .I-;'' ',I . --"", " ! l- , v,. . ."& -, .- -.,. . -. - . -, , . - -. S. . ' 'I I I
-'- I "i'I
". 4. #, , '_' - ' , r .. ., . , : ,, .. - . . . ", 2. . . . . . . . . . ' .
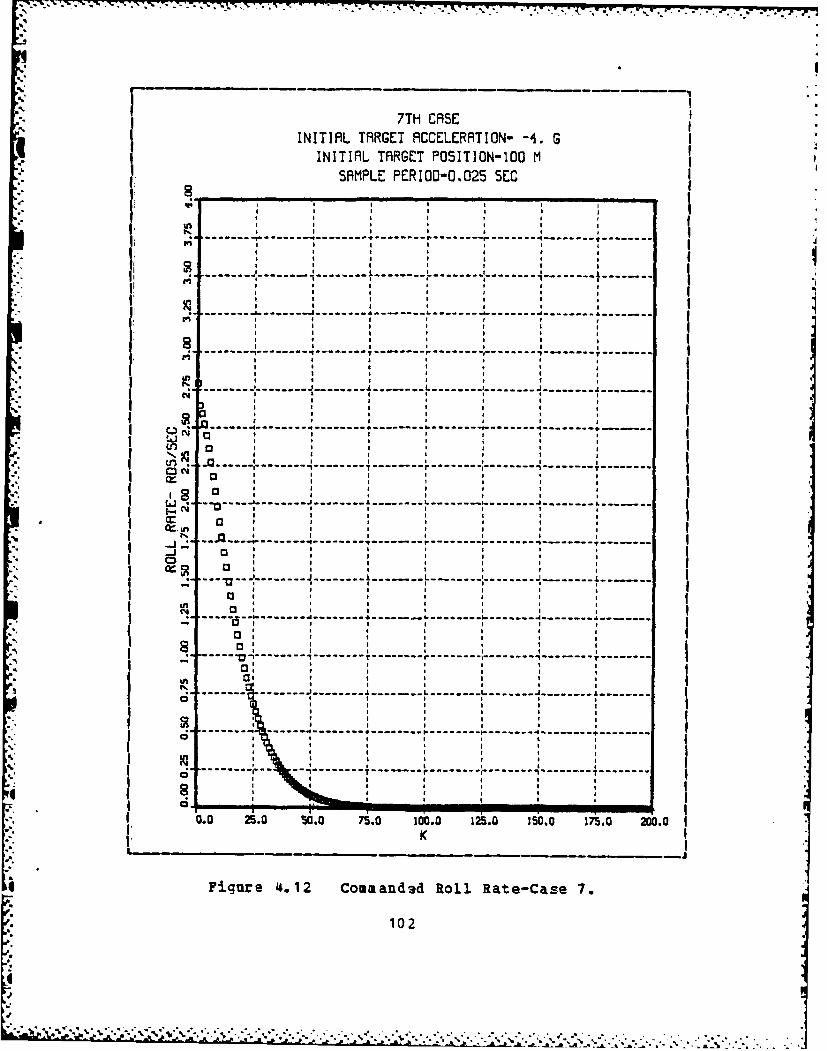
, .-.- - .. .-, . , ... .. ,,
7TH CASEINITIAL TARGET ACCELERATION- -4. G
INITIAL TARGET POSITION-10 MSAMPLE PERIOD-O.025 SEC
tA.
., ..................- --- --- --
* I
ixf----- I!
I;---------------------------- ------- -------- -------- -------- --------
I aa --... .,
------------- ------ -------- -------- -------- -------- ------- --- --------
a~---------------~~---& - - -a---------------------
0 a Id a I
IIa I I I
, I I I II I I I II I I i I I I I a I I a Ii II l ~ l
KI
aiu a 4.1 omn-dRl ate-as 7.
,102
aI I
I' K
• " "-3 . .. . . . . . ....... " " .... ......-': - .. '.,.4- --... ,,''.,-'"" ",-'..'. -
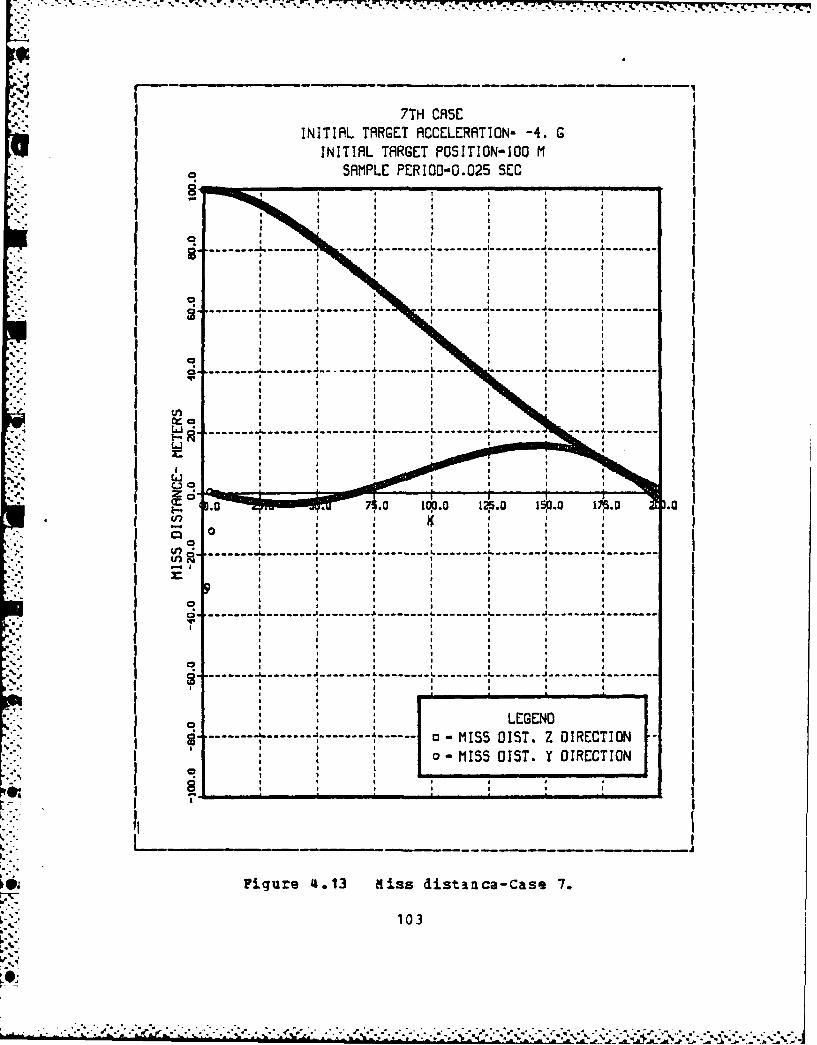
'.' Ip.C %
7TH CASEINITIAL TARGET ACCELERATION- -4. G
INITIAL TARGET POSITION-I0O MSAMPLE PERIOO-O.025 SEC
a I- .. i - i- -------- -
--------------- j---~-------- -- L ------ I-------- ------------------
L I - - - -
S.- -J- £- I- -------- ..----
a' . a a I I I*l a a I S I a
S.0 0 I 1 7 6 I
a 4 I I ai I a a I I I
L ------- --- ------ -------- -----. - - - - - --
a a I I a I
a I a a I
I a I I I a Ia a" i a a I Ia I a I I I I
.------ - - - - ------ M IS
ao a -------- -
a LEEN
MISS DIST. Y DIRECTION
t I
a' I __________ _______ ____
Figure 4.13 Miss distiaca-Case 7.
103
-Lt"" . . " 'w " " "- " * " " , " % " ,% " .° _ ' ." ' 9" ' "% '
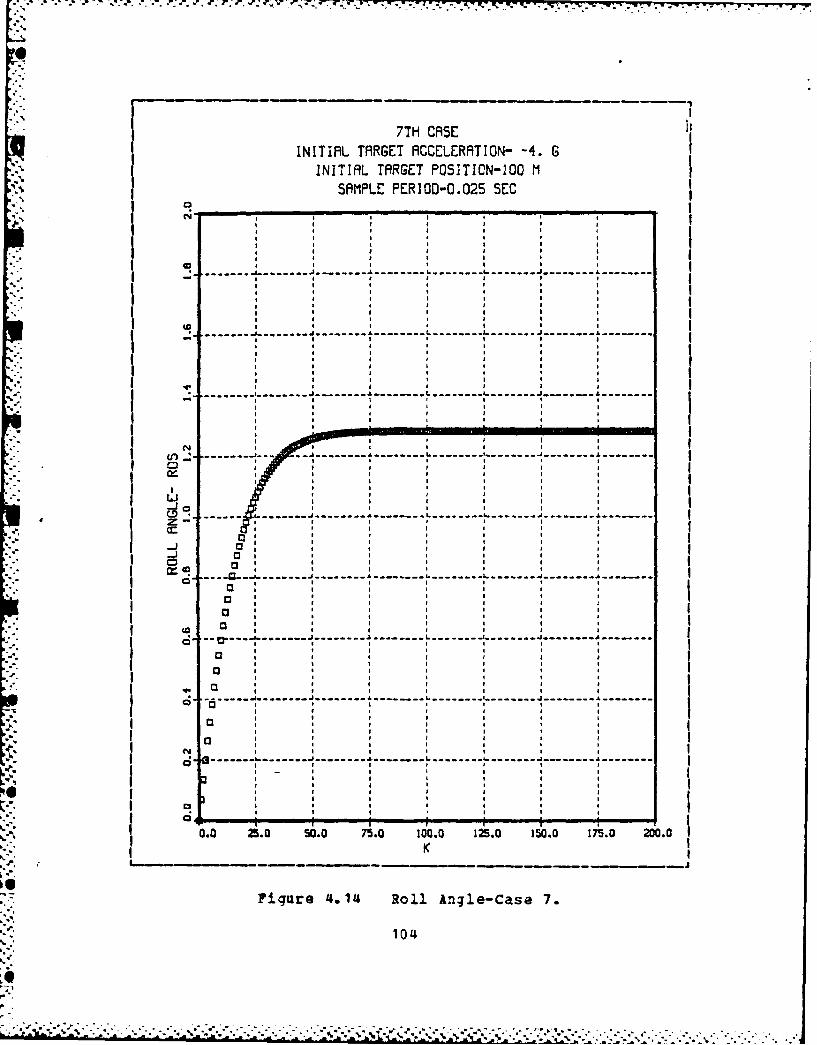
0!
77]H CASE I
INITIL TARGET ACCELERATION- -4. G
,I INITIAL TARGET POSTION-I00 MSAMPLE PERIOD-O.025 SEC
- - - - - ------ - - 6 - I
_6 0 ------- ~------------------ -
a aCDa
ci
0.0 25. 50. 7 Q 10. 1.0 ,50. 17. 0.
a i I * I
1
I=,. a-a I I S
- . w I I i a l i I ~ i I -I a a ii l l i - a I I a a- l l l - I - i
C I--------------------....---..... .......--.-. .------- --
5 a a aa a r
-- I. .. " " . .. . "a.. . . . .. . . a a.. .. .. . ." . . .. . . . . .
a
I I
'." . 0 5.0 a5. aO . a2 . a5 . a7 . 0
.*........... ...... a.-----.- - - a ----- a.----------.... .,. - , "0" a " - -. " -.• .. - a' a- a.- . - - .,I a'- ' ' . - ' , , . - " ." , -. - .• -- - , . . .• . , • - . . . .
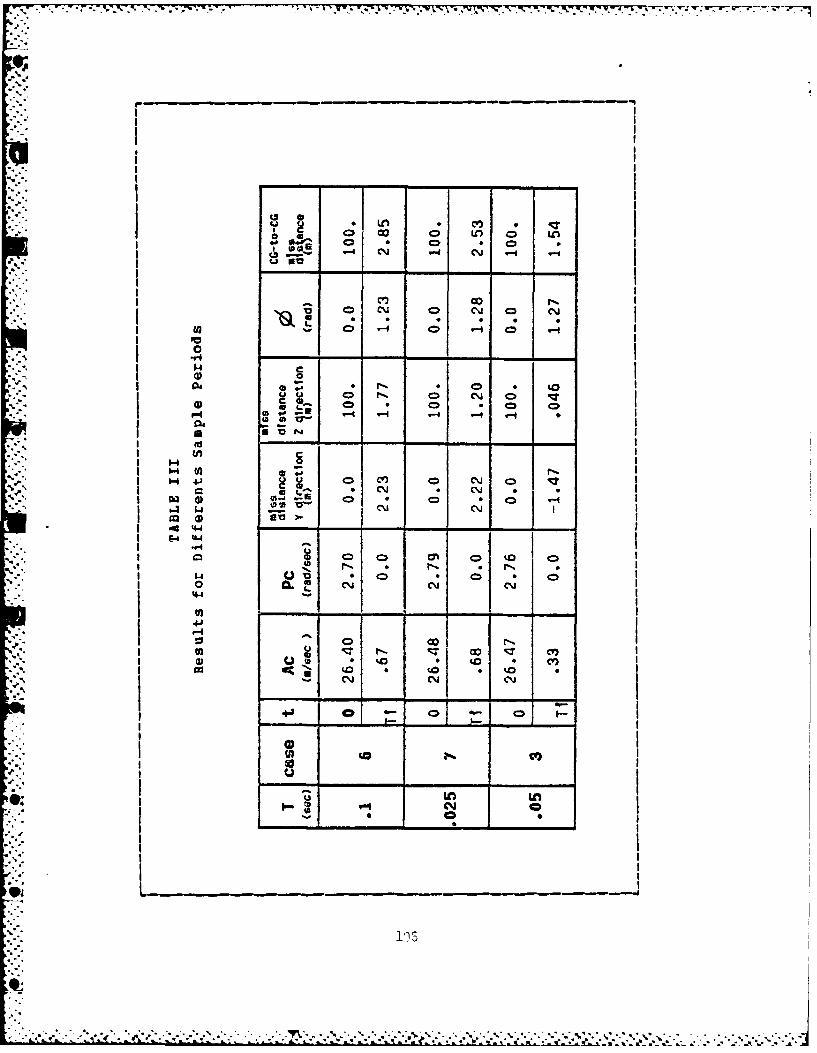
*22-4 ---W4----.-4
w C
C> (% C C'.4 C>
cv, 1-
1.4 0 c 0 C0
I .-w- I~
I) si > - - a -
c'JIC coCVI 0 * ~0
-. I 0 c' II
.41.4 D
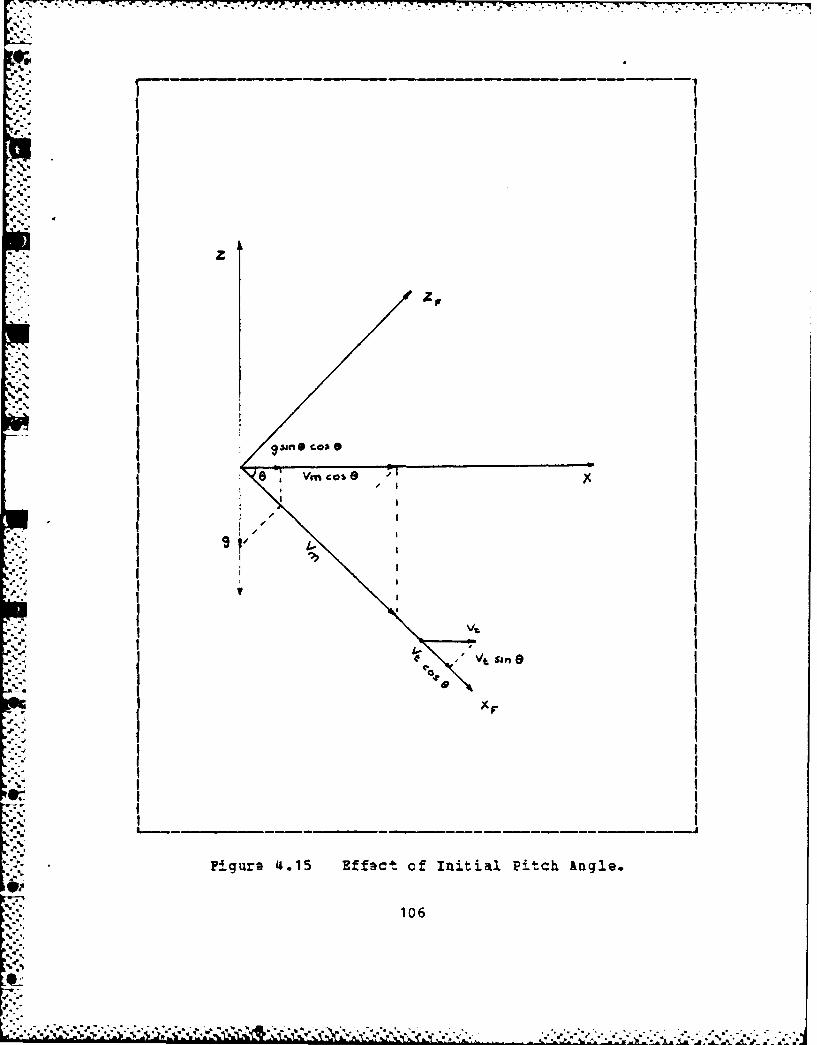
i'l.
I Im
I " I
z
I S
.-.. '. I .
I IF
Figure 4 .15 Effect of Initial Pitch Angle.
106

7 177_ _.
-600 ------ _ ---- itarget
500 M/9
Figure 4.16a Case 81
I tage-6 0 .... . .
-6 0 -- -- - - - --.ti
Fiur 4.16c__Case_10
Fiur 4.6 SeaisWihPthIg
I107
Lai-y
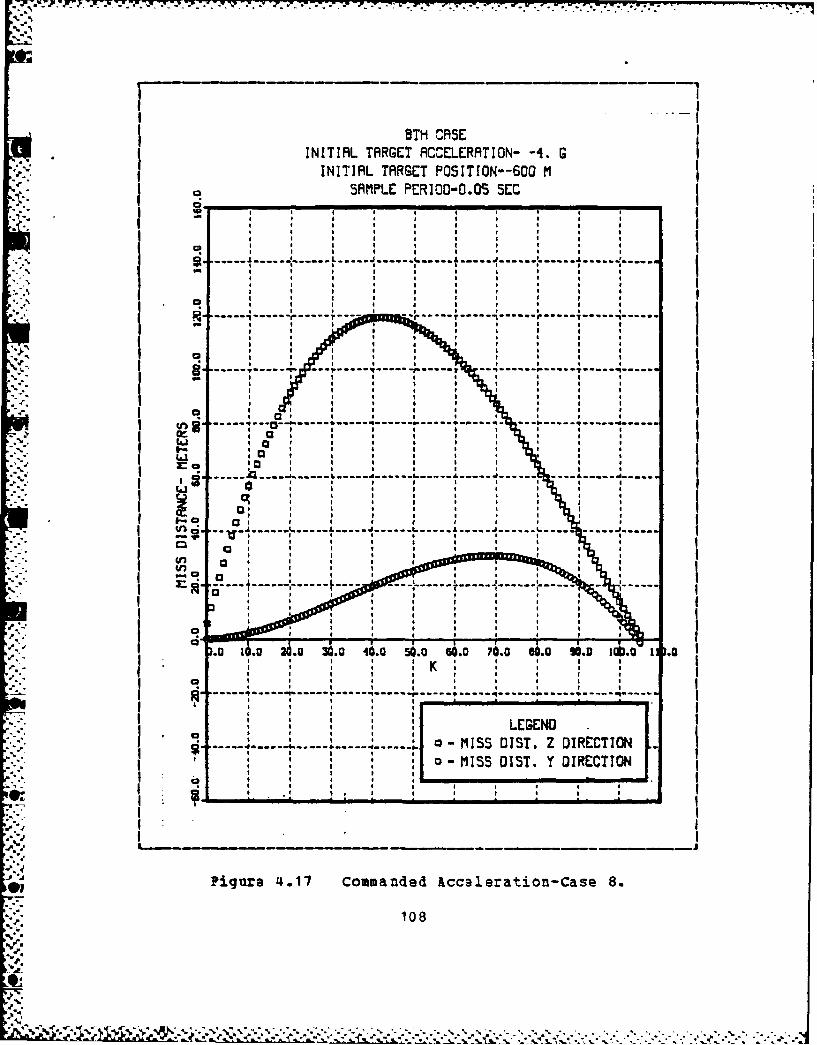
~-7 7-
OTH kroASEINITIAL TARGET ACCELERATION- -4. GINITIAL TARGET POSITION-GOG M
R ---- .. ------ I ... I - .I .......
3. -------------- A E PR O---------- --- ---
I a--------- -- ------ - - - --- -- - ---
I S I I4 . 76. e6. SO S~ .
1. 16. 26. 3. 4. a00(.
MIS DIT Y IETO
91 j Figure .17- - mman edL- - - -e at-- --- £ - 8
I -- ~~ - - - - - - - - - - - - - - - - - - -
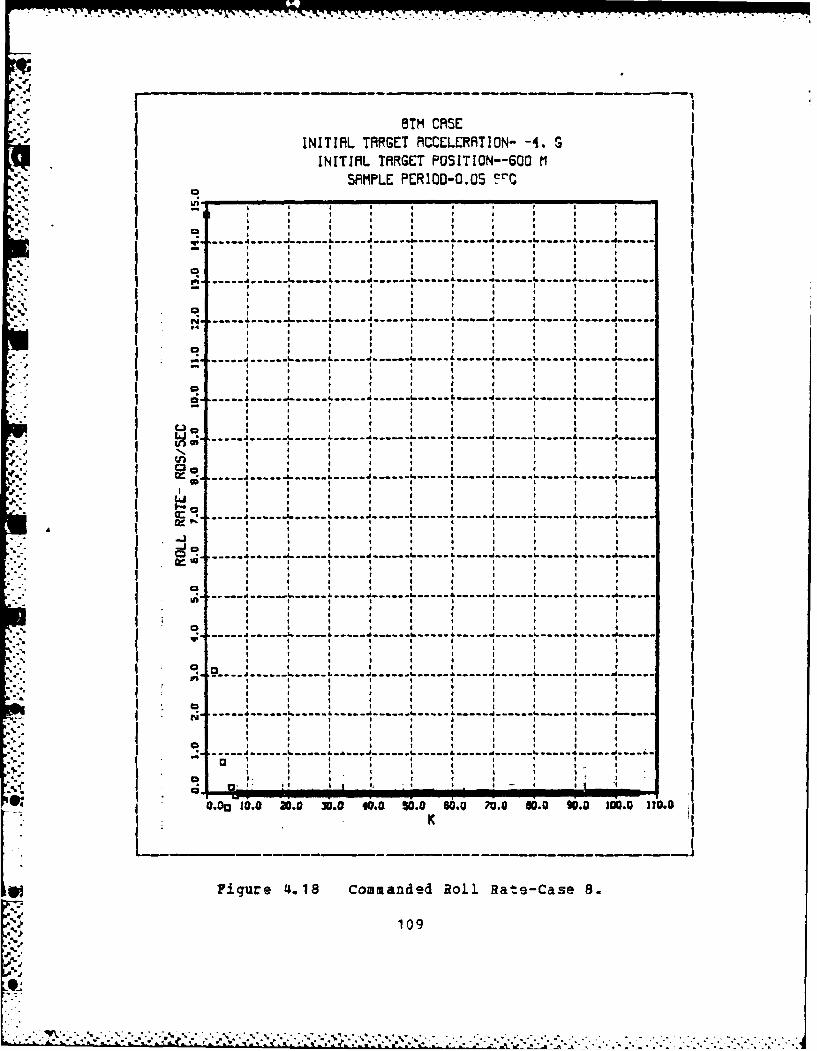
. T IIE
"" INITIRL TPIRGET PICCELEIRFTI0N- -4.I INITIML TARGET POSITION--600 M
"" SAMPLE PERIOD-O.05 .e'!,
I - a
a I a a aa I a I
I = =" "I a i a a a
I a-I I a a
I a a aa
a a i I! I a
aI a a
a----------------------------------.... -. ...-... &.....d - .... -.. I .. ...
a a a a
- I a
I a
I a a a a
,,------..- .. .. 8 .,. .... .. .a.... -. ... •..... ... , .. . -,. . . . ...,.. .
a I
a I a a a a aI I - j . - a.. . . . .,. . ... . . .. .,. . ...... A -....... . 8..... .
I a iI a a
S.- - - .8 a- £.,a - a--------
I -- a, . a, . a +aa a a, - -o~ a+ . ao~ ao~ a a. a~ a. a. I6. ,a~ to-a. a a a a a
C a a S a a a a a
I I.-------- a.1 A -.an8 -oI +.-----------8 -
a a aaa, a a a a a0 a a9* ,a -a a,
" I." + " ' .'a. '. - , .a' + ,a"- . - .' a' a' 'a' a-' ', .' +. . . ,,- , . . - - , • + . . .. . - .. . - .-a• - . , ..a. .a a a a a I ,a,+- a a p • , ,+ ,: + ; . .. , .p ,, , ,. , . +, . _ . . . . . + . . .. .. ' .' . . . . . . . . . - , ' . ,
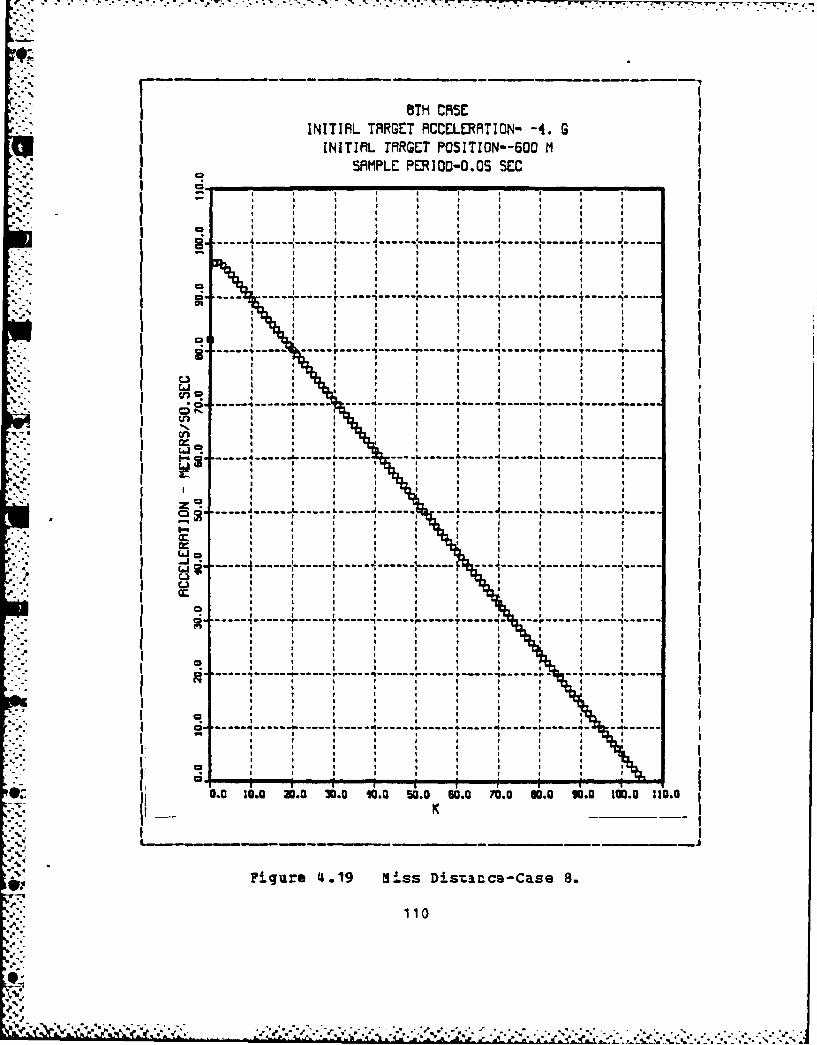
-a °
"TH CASE
IINITIAL TARGET ACCELERATION- -4. GINITIAL TARGET POSITION--60O M
SAMPLE PERIOD-O.05 SEC
-. -. - -,------ ..... .
...... i ..... . ...... ..... v ------- ,, ------... 4 . . . . .
I U -
a a a I a aI II aI aIII al I I I IU------------------------------~---- .. ---- ---------
-'2 - -- ---
I -- - - - T a- -- o a a a
------ -- - ---- 4- .----------------------------- --------------
'~~ .- . . .. .. . . .. . - . .. -I . . . .. - - - - - - - - - - - - - - ..... --......
. a aII . a aI I a I I I a a aI a I I.
- ,* aI a a a
a a , , t a aW0------------ .....;-.a aur, a a ... -, 8.
,a a • a a a aa1 1
a, aaaaI
. - . - J----------'----------.---------.......
I I • a a a
,.a I a a a a a a aIa0 l . aO. 20. a0. aI. a00 Ii. a. aI. a1. 10 |.a a a a _ a a
L---------------4..------------ - Cas 8.-'
a a. a a 0
a aa a aa aa
a a a aa aa
a aaa_ aaaa a aa
IW+ ,V '" , ,,.,,,, . . , .' ' " " "" a a ... a" "a," " .a". . .. a . .. a.- . .
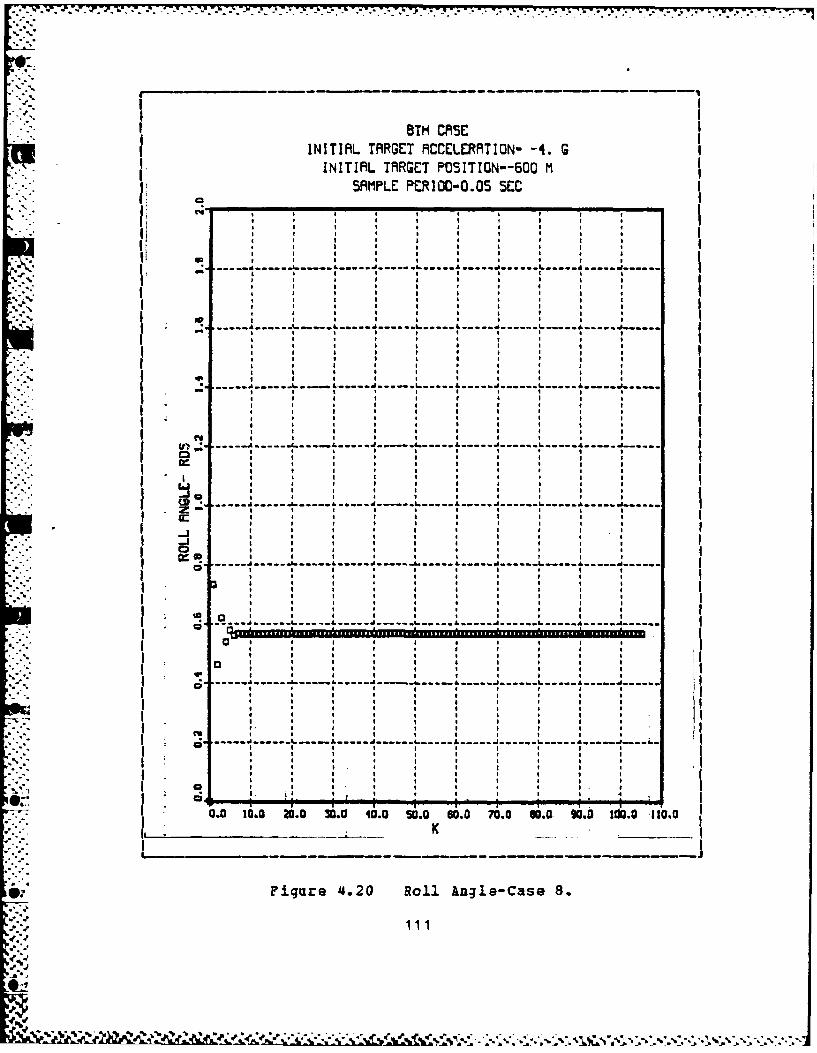
8TH CASE
I ~INITIAL. TARGET ACCELERATION- -4. GIINITIAL TARGET POSITION--500 M
n SAMPLE PERIO0O.05 7C
I I
--------------------- ------------------. d
S ------ - ------
I I I II I
•_ - -- -- - -......
0. IQ, 20. M. 5j. OQ6. Q0WQ Q1 I. IQ
• , a I
I" ' I I I I S I I I I
0 I I I S i I I I S
-I I S II I I I I i I
i gure I l I I I
I "I.-C I S I I S ! I I
-. . .I , , , , , I , ,
..-. I I-I .,.
-O" I' , I I I I I Ii , I
-I-- !11I
: I'.
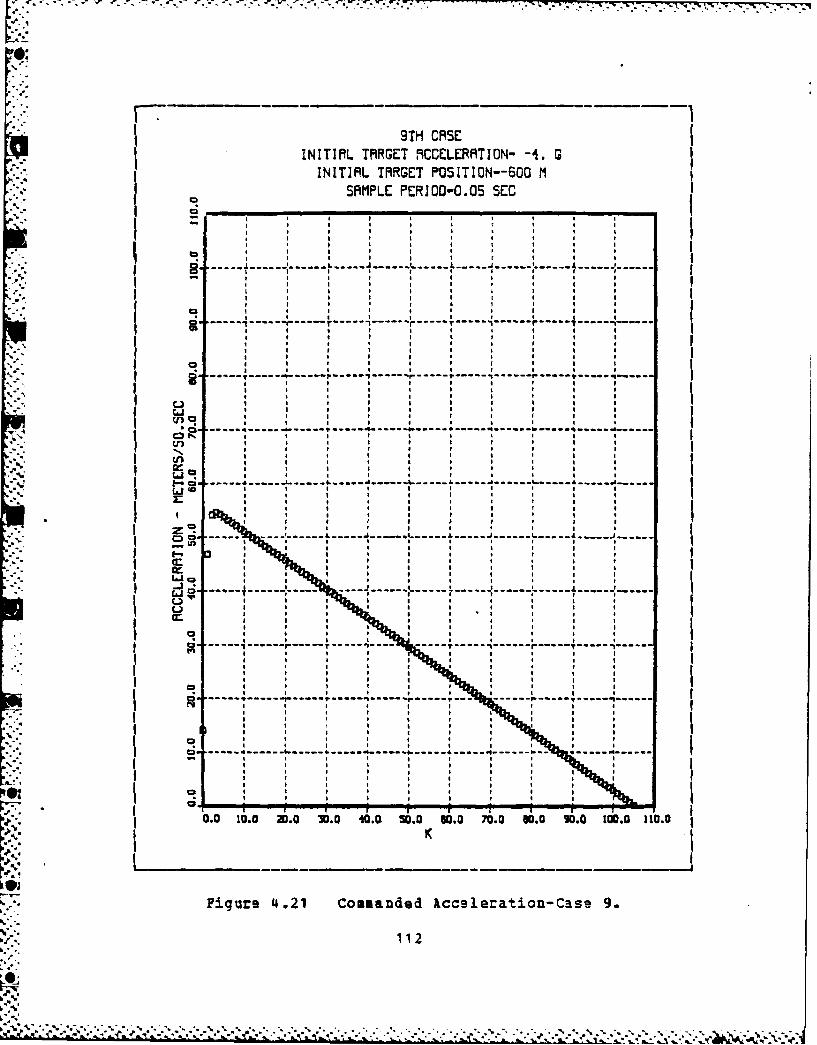
[.
9TH CMSEINITIRL TMRET RCCELERATION- -4. G
INITIRL TRRGET POSITION--600 M". I SOMPLE PERIOO-O.05 SEC
9
-4in M. L_____________I
-I Ca I a' iI a a
I I I I I I CI a a r
Im a a a a a a a aII a a a I S 1 4 a a
I a a a a S I a a
- -I -I - I --
a a a I a aI! a a
a 4 a a a I a a a a. a a I a aa1 - I I S a I a a 4 4
a a t I £ 4 C 4 4 a*I a t I a S Ia
a a a I a a a I a aa a a a a a a I a a
---------- I - r --
-4- - t.---4- - - ---- - - - - - - -
a a a al a a I I II a I a 4 a a a I I
I a I a it a Ia a a ta
I *'I-- - a.------------------ . - - - -
Fgr .2 Comne kc ,--aio--.5. 9
11 2
I - - -I- - - - - - - -|
• .'-,... .. ,,.-...-... ah ..... .... .,... . L .. .. ... ... •. ....- i
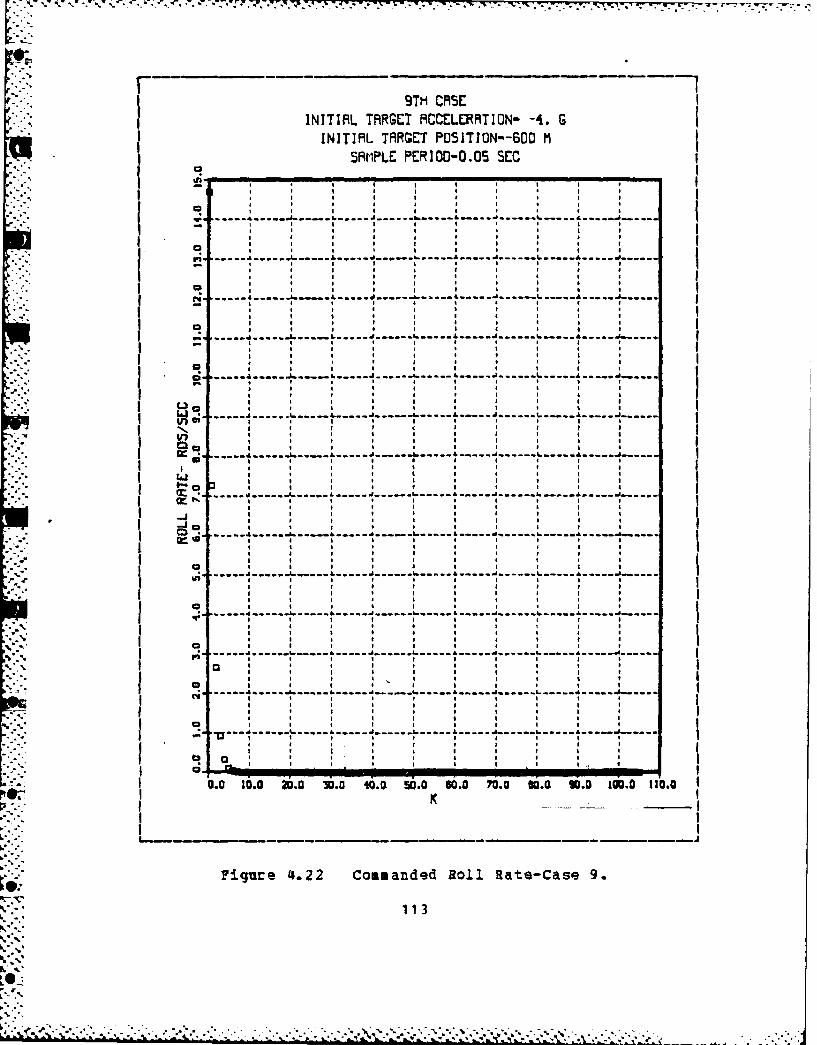
"--" 9Th CAfSEI" ' INITJRL TRRG[T ACCELERRT ION- -4. G
~INIT]AL TRRGET POSIDIN--600 M
5Ir1PLC PERIOD-O,05 SEC
I a
a a
a a
a i
I aa a a a I a,. a.a-
C ',
I I
a a
a e
"a a II * a""-a a : a
a a I aJ a I
"a'" d' & - a -at ' ' i ]*, 9 . a a . a .
a a a I a a a
I i ae .2 Cm ae Rol aae- a a
r ~ a a a a a a1a3
* a aa. a aa"[- ," :-."-". " '- .a2 , ' .. . ,.. ' , a . ak ,. a-------------- .,,,"-, .,_,,"," -a a., a' -,- .,-,., . ,-. . ."
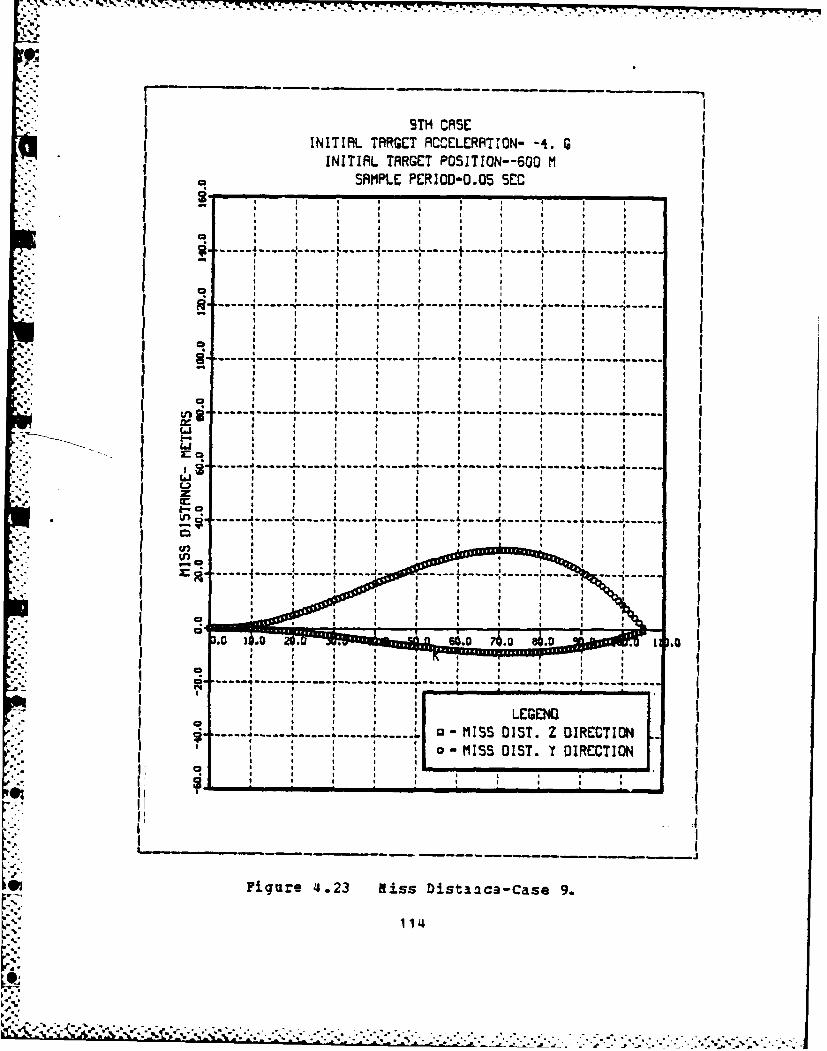
STH CASEINITIAL TARGET ACrELERATION- -4. I9
INITIAL TARGET POSITION--600 M
SA PL PE I D 0 0 SEC9
9
* c I *a- - -- - - - - - - - - - - - - - - - - - - - - - - - - - - -
- - - - - - - - -
--------- i ------- -- ---- - -- --- - - - - -I.. . .
* 2 0I II
I I3I
I I I I l
; -- -- .. . .. . . -- - -- -- -- - -- - - -- -- I
M I a IS IST I RETO I
a a2a
Fiur 4.2 Mis I isiaca- I I9
S-r------------------4
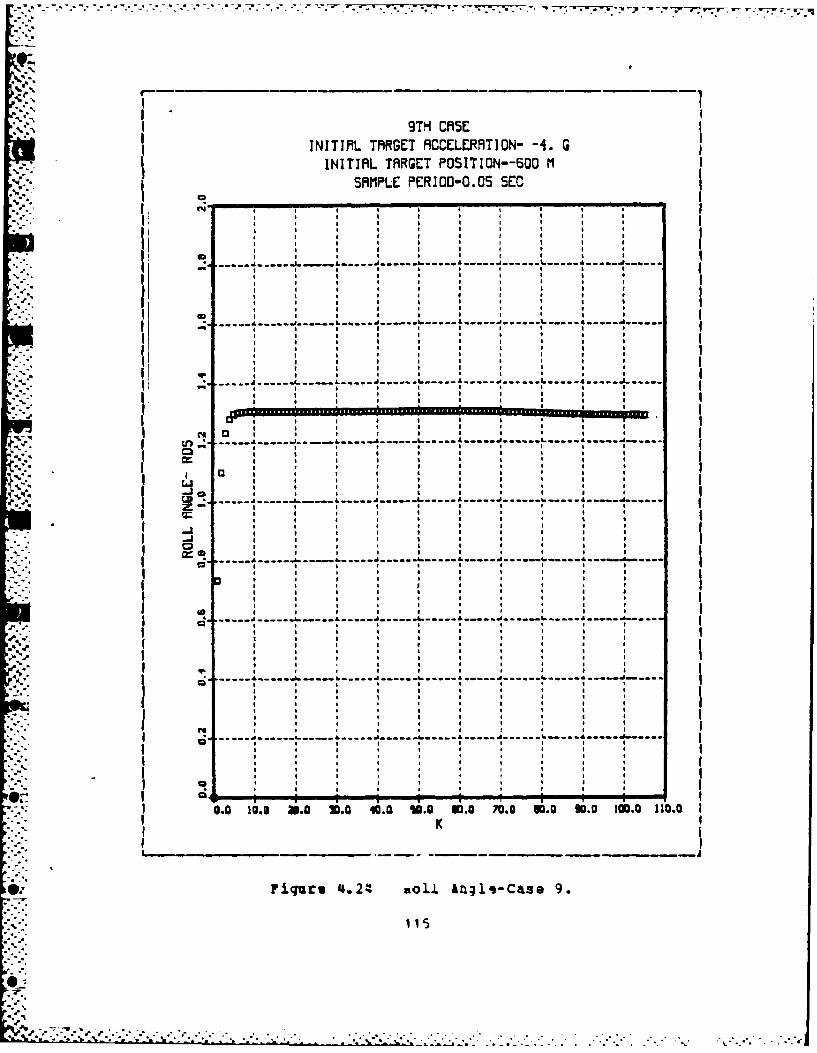
"I 9Th CASEI INITIAL TARGET RCCELERMT]ON- -4. G
-"I INITIAL TARGET POSITION--600 M-SAM.I 5PLPER7 00-0.05 SEC
-- - -- - - - - - - -I -- -- A-- -
"% W° -
.°. I, II a a
I : :ia a ""oaI I
L ". a I
------------------- -- --- -# - - -- - -
. . i 9 I
6 ...,. ........ ..... ------. A.... ..... 4........ ......... ...
S i I I I I I
g"ug 0 a a Ang l - a 9I -- -- - - - ----- ~
I : :
115
la: :.
I° ° I I I II
- a a .- IaIa
I aI -I a,I a a.a a;.a aa,--.>.,.;a a
*. . . . . I . . .I-- .. . a . . I . . a . . .. . a.. . . . . a ...
I a ! I I I Ir I I Il I "
-.- - I. 10. a~ a. aOO 'l I. al. I. ali I 0 . l.
° I
O; i 2 oi iI I-asa 9.aI I.aa -a".. • 1------
I. ;.
:..'.
- 9I aI
.- " I 9"-' a" - ,- ,I ., .- -a• • . - . . .-. , .. . . . ,, . . , . . , . . • . - .. . . . ., . . ... , . . . . . •: , . . " .' -' . - .- ..
y-:C:; 3otH CASE~~INITIAL TARGET ACCELE;RATION- -4. G.1 liINITIAL TARGET POSITION--600 M'
SAMPLE PER ]OO-O.05 SEC. a
____ ___I a a aI
. _ aa aa
a a a a a I
".-.'., a a a a
I . , , Ia aI a..:( . ... .,. ,. ... . a a. . .. . a .. a. . .. .. a .. ..a
.-.----. I. - 4 .4 t - - 4.
. . .a a, a a
•- a a0qa a a aa a
i. I a:t - a= a aI aa a a a a aa ... . a0.. .=. . . . .. . . . . . . .. ' I . . . .
0-a a a a aj0 , a 0 a a t a a a - a a
""! . 5...0.O l.--------.0 .0 = . . 4.- s -O =0 .- - - ':I _* c a
- a : a a aa9 aiur a.2 a o a anda a a e a ~ o - a a0a a 0 a a
a % - .. - . -,-. -. ,...I .-,-,.''. -... a .--... .-. -...-.-. .. -. ..- • a.. ..S: - '- . ., ,: '- a. a " " a a'" - a.-" -' . .; a a'- L-9..".''''',% .., '.:..
IO1TH CASIEt t ]NITIRL TRRGET ACCEL.ERRTION- -i. G
tNITIRL TRRGET PQSITrnN--S00 N
SA5MPLE PERO.05 EC - - -
a i
I I a
* I P 1I
I a
aII a I I
I ,, I
I : 17
-. -. -. " - .a. 'a.,, a a + .a-.- . - ,I , -+ . + , . - , . .. , .'.+ '. -,+..a-,' .. .. .. '. -.. . . , , a ," . • ; '. ., . ." .-. ." . .. . '. . .. . +. . . . . . .
- SA-7L. PIOO-O0S SC
I a I* a a Ia
I a a I
!I -a a a a a
Ia Ia a a
| ; .. .. . . . .. . . ..a.-, . . . , , . . , . . .. .. a - a. . a .. .- ,. . .'-- J -- -
I aj a* a. .a. .a. a
a ig a arae a.7 is is nc - ae a0 a
O a a a S a a I11 8
-='-a ,.-, .-.-..-.- . . . -. -. , a- a.. a a a a ,aa a,' aN;,- -'..j .. '.-,% ".,. . =... ..- a,,. -'a ',-.'a . .-. 'a . .,,,-. .,.a _ . ...a. ._... .
10TH CRSE --
IINITIAL TARGET ACCELE.RATION- -4. GINITIAL TRG ET PO5ITION"-500 M
:.: . SAMPLE PE.RIOD-aOSO SEC
.-. a a a
I .- - - - -
* B B
I It I
I !
* I U
I a B I a a
I t
I I
1igu s .2 Rol n~-ase0
a - °I " 119a* I B BB
. * . -aaa.
,-. - . -a.' : ,- .,._." ..... '.... ....- ,-. . .:.
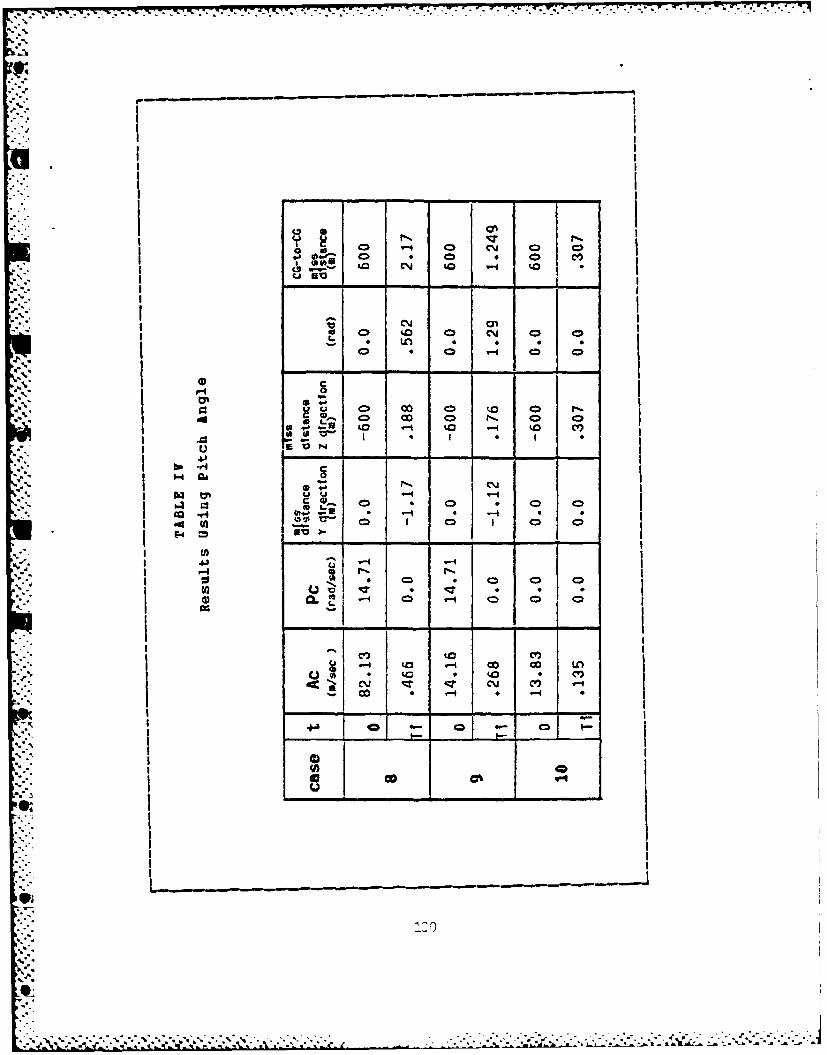
IF. 10
Si a V
9: ~ .. u o c-t to t-to
. IF V UN
p-aa3 S a
I n -94s 4 in- -
.4 - 4 co c LLn
c o cmo * v
-e-eV ', '-
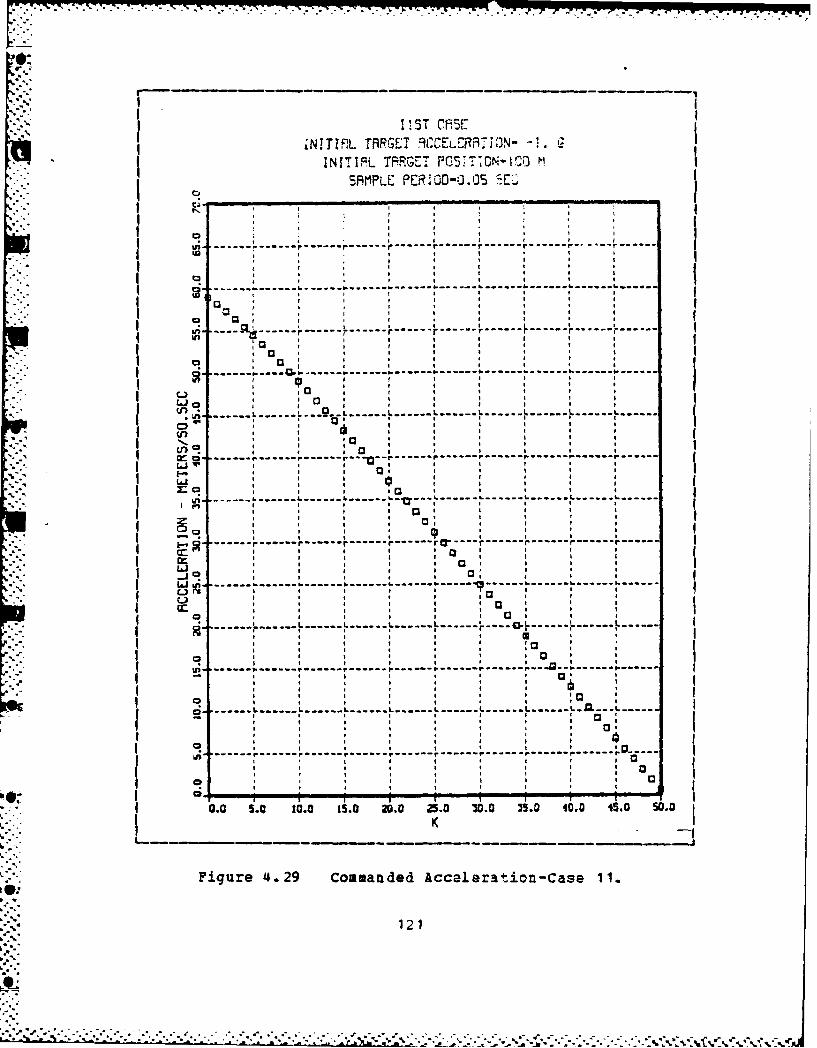
-. . . .. . . , w " "- - "-
S:3T CH5 E
.iN IT .L T W C.OT E L . i ,T3N - .
['--.SRI PLE P'Ei iOO- O.Q 5 E
a,. H Ii
6 A.
",-- I ' a-- - -- - - --- - - - -r -- -- 1 -- -- , -- ---- - - - - - - - - - - ----
4 ----- r- -------.. ..-- a.. . . . . .. . . -. . .a -.. .. • .. .,-. . . -. . . -. . .
-1 , ,
,
"-"tc; l ''
A.-" - - , ,
a I
r"- ------ r -- -- rarr- - - - -- - - - ,- - -
.~- -- - LI -- - - r ----. -- - - ------ F . . .t,. . . . . . . . . . . . .......
Ifl --a-------
a- -a
I t a" I I II 0
I a a
a a I 4
, , 1212 1
, -, a am a
L a
--------------------------------------------------------------------------------------------------------------------
, a a ,, ,
C. a a a a -!C , ai a a a a
a a a a
I a
a a I I aai a i aa, a , a a , a0. a. I . aS. a0, a5. a. a3 . a0, a5 00 a a aa a aK
o--------------L- I ded-Ac-L- ti-n-as.1.A...a
a a a aa a1a
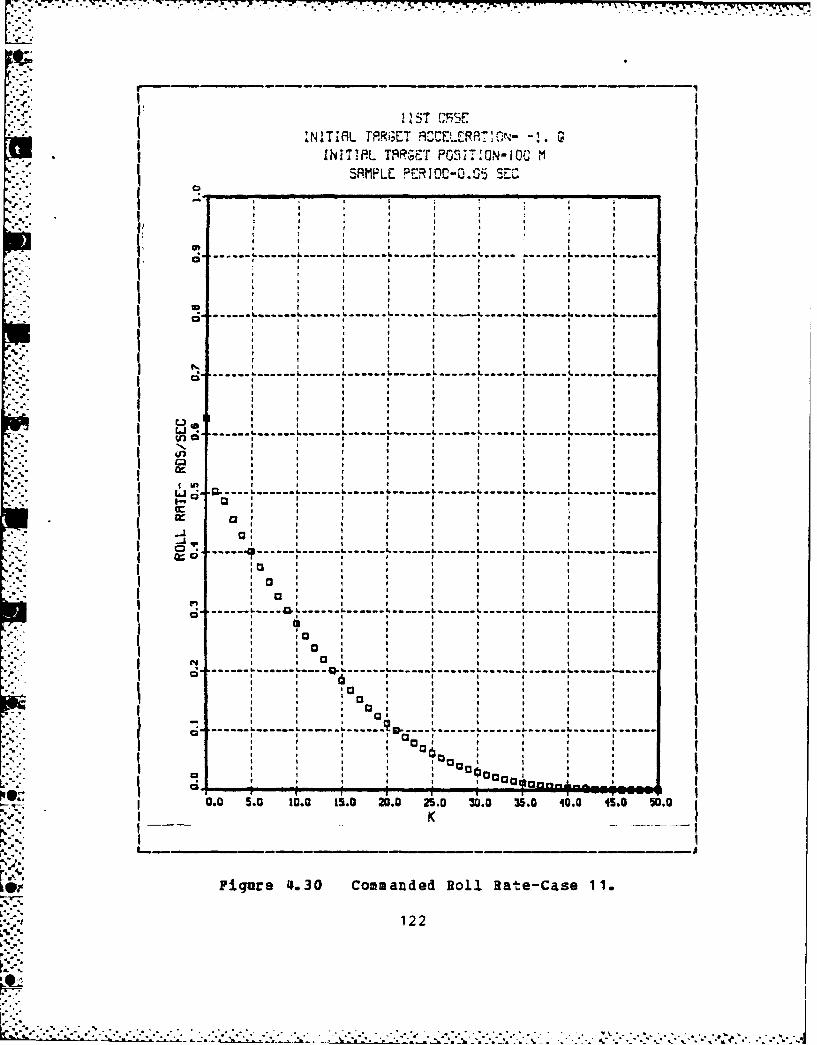
-------.. . .............. . . . L. . .... .L
I --- -
.-:' :I ! l T UF,$E
N!TU3L T. RG T .... : - - . ...... I LNi7!f.PL TPR$,f:' -O¢"7- IQ- "
------ P.ML PE --O--O.5 5..
-- - -. .. L .. -
,L.: -- -- , .. .. "I -- -- - ....
I F
0.0 i.0 IL 50 2. 51 . 4.
K
'.*."~~ ~ ~ ~~~~~~~~~~~~~~~~~ - - - -G ... -- --..' ... ... .... -.... ' ... ' ... ' ... ' ..
"":FI F"
I I" FF FF-JII-------------... , ... ..... ,....., ... . ... ..... , ...
•I F , , , Fl i F F F
_ * I Li----------------I. - - F - F - F- F - ,-T-. .
-- I F FK
-. F - ,1 2 2
I FFF
F a a-FF F" FF
F° F F * *F.% ., . , o, , . - . -. . . -- F --o a s F F F FI - I II
I .1 I I • l . ' " , " IIlt " i . " I I "I "@ " , -
, ' ' 1 , i . l
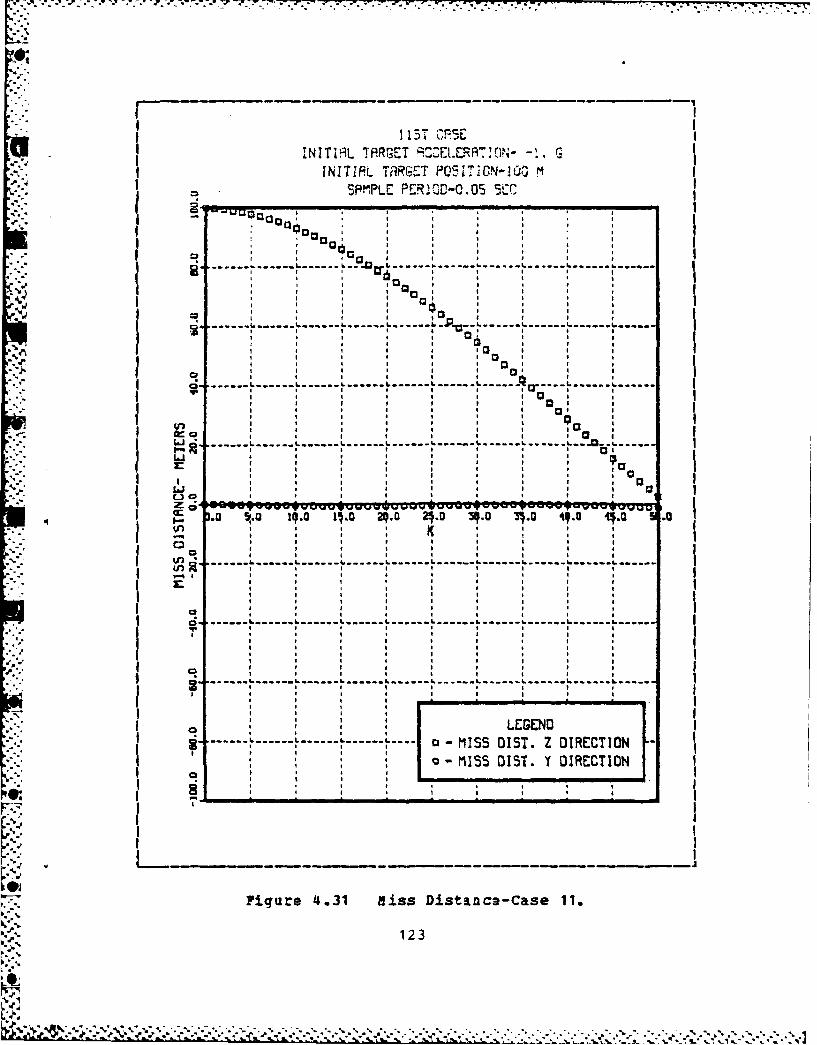
i*" " . . • . . . . . ,-- - ° .° . . .. . o . °
,--NIT.L T.R°T CE1X : N- -INITIPL TRRGET ?OS1i10N-!"0 M
=SPPLE PRIO -C.05 5cg.I I6 Ii
I 6 =° ° i: i'I 6 6II
i i II
I-6 I 13
i . I.- ......
I 6 i I i I6 I 6 6 I 6 6 6 66 6 6 = ~ I I
6
0
.......~~ ~~ -- -- .. .. L . . . . . . . . ., . . . .. . ..... ...... ......aa
I !6 6I I',SI 6 6 I
6 I 6 qI 6 i 6
6 I0 I
o --------- - I--------- ---- 100
I 6 I I
6 e *I 8I 4I 6 0Il l l l l I l ~ l I I I
IK
LEEN I
I I
II6I 6I,-66I 6I l 6lII 6l~
I I I~ l l I ~l II I l I I~ i
- --- -6---- - ----- ..----------- DI TI I E T O
- - f I ~ I II I I I I 6I 6I I f . I i I. I i i I I I i
* *,II6 6 I I
I666I _ " I 6
SSS DIST. Y DIRECTION3 6 6 , I , , ,I I... ... ' -" '_ I
I
Figure 4.31 Miss Distanca-Case 11.
123
I'" ' , -'""'% '' ;'"'"" -,."""-" " "- "- " "-I , ". . . . . . . . - . . - .- . -
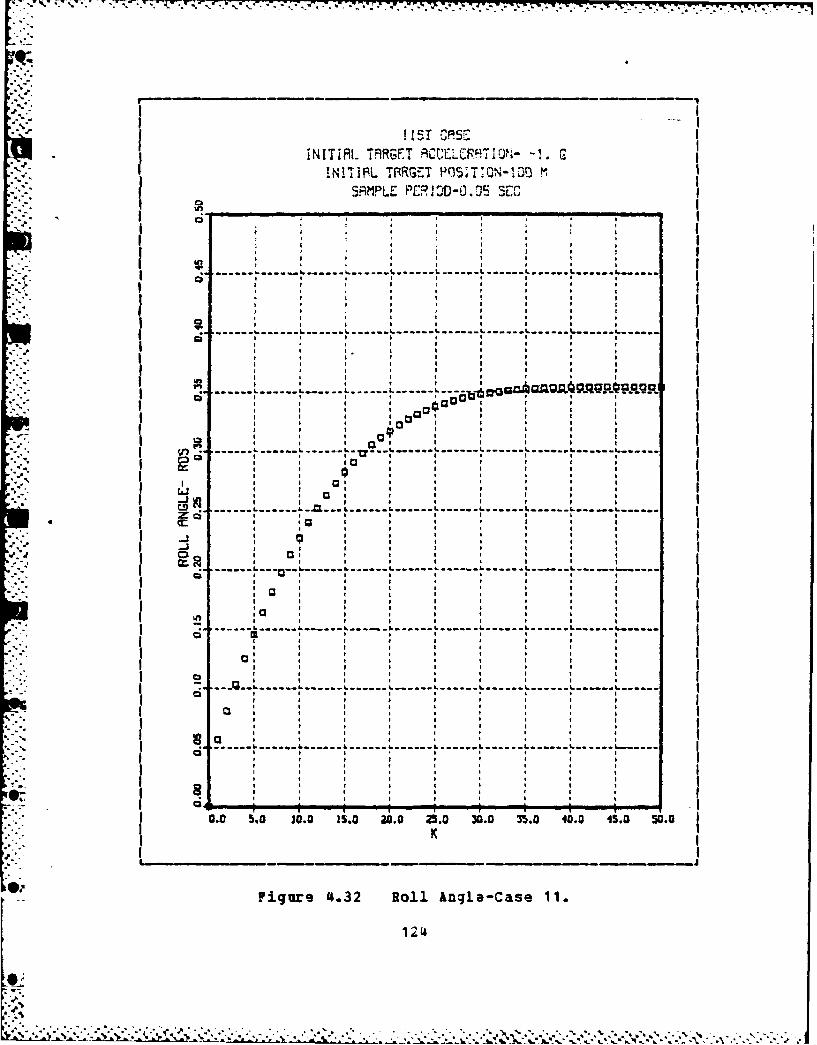
. i S C I
1NITIRL TflRC.T q,'(' 4- , II i t. I
INILTPRGrT P054"T:QN-1130 M-.- S.MPLE PCP?1,O-O,.05 SEC
-- -- -- - -- - 6 -- -- i .. . . I -- - - U I-- I -- - - U -- -- I --- -- I - - -
I r l i I
- I|,I Ii
*" * . a
inC
T I III
....... L ---- ----- ,bc~r ~ S~ ,L ,
I ----- --- --------- --- .... ------a a
M ------ --... ..--- ' ' -- -- ------ -- -- ------ -- -- ... ......
z a; I
* i ,l l t i . i 1 i l l t l I I - II i i I I! 1 I ! 1i! I l Il ll
. . . .. . .....
I" I
a- a
0.* .0 30.0 15.0 20.0 2i.0 .0 3.0 4i.0 I ,0 5I.0
Figure 4.32 Roll Angla-Case 11.
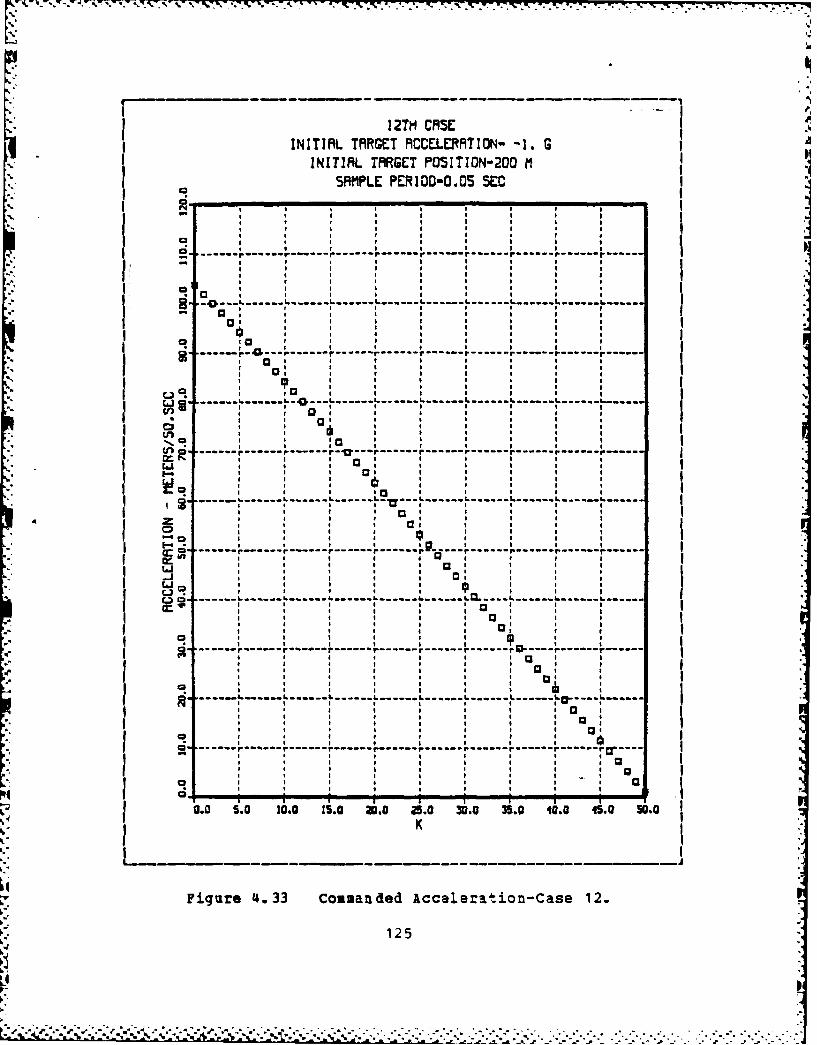
7 -7.0; 1
I 2TH CASEI" INITIAL TMRGET MCCELE£1RTION- -1. G,. INITIAL TARGET POSITION-200 M
- I SRMPLE PERWOD-Q.05 SEC
L - - -U- -- -L- ---- -
;C3
ir. - - - -. .... --- "r -- -- - r"". . ..... . r .. .. . .. ... r .... .. . . r - - - -- - !" .. .
...... '-: ...... ," ------ " ------ LE ..... L ------ -- -- .. .. -- - - ------...,. .. .---- ap w---- I ---- --- ..
------- 6-----------------L------ ------ ... ------..
.6 .... or-
z a a a a
I I ---4 .. .. I .. . a.. . . . .I
l ,l_2
• a a I a , ,
Ri
.I I a aa a a ,. .I- I
Fiur 4. 33,naddAclaiinCs 2
I 12
m a ,"" *I I -I SI
• I I 0 I I 4 9 II .3 . I0, I.O IO. 25. I0, 3 40. a5 0 5 ,
aI
Fig r a.3 o aae Ica ~oasa 12
125
% "" " " " " " " - g " . . . • - - . . . . ..LaJ *:." +'-",, ,' :','. I. 'I, "- I ,.-"'S -----. I.-- . ---.-.- I. -.-,I- .- "... '-'-..? .. ?. -5."-'. .'-"
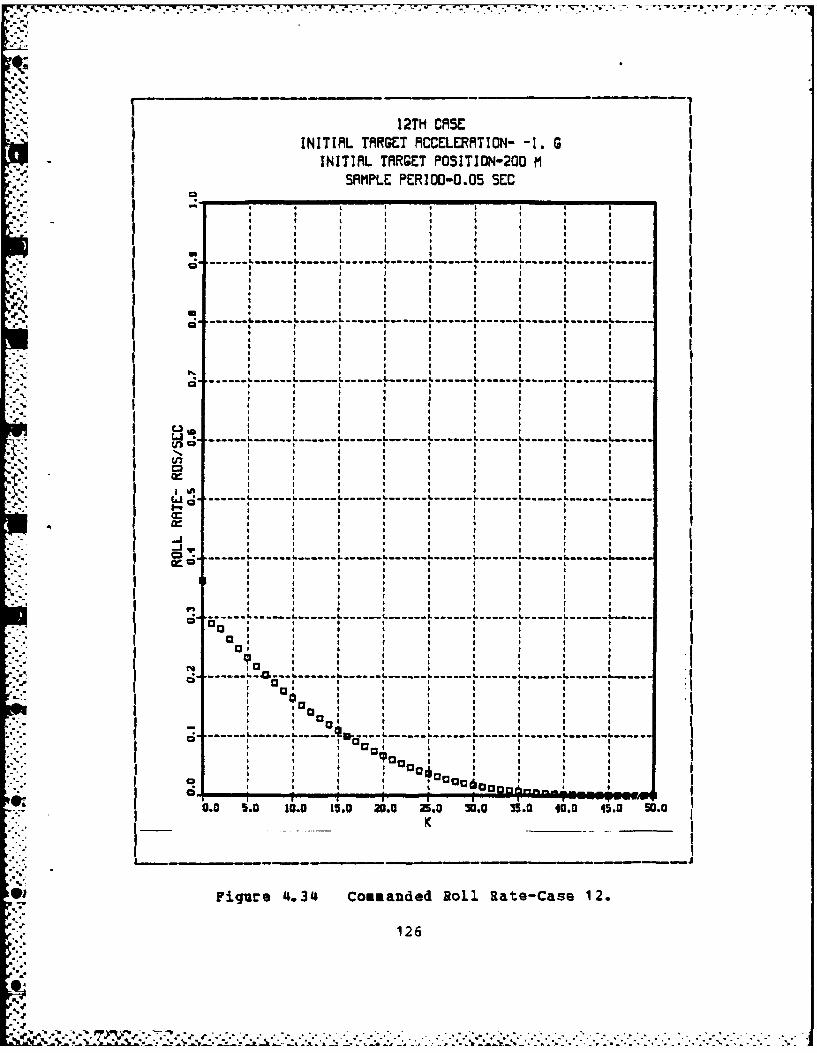
IINITIRL T~iRGIT ACCELEMiITION-, -1.G
::: t =SRlIPLE PERIOO-O.O5 SEC
A "-I "_
__a
am_ .... 6 . ... L a. .. ... L ... .. ... . . L a . ... --..I "I a
I ,a a
* a a a
I a aaaaI a , a aa
Sa ... . .- L' ... ... .. ......--- . - .- . - a . -.". .. .- ..
I I I a aM a a a a aa a a a a S I a a
I a a o a a a ,s I a a a
Sa. L...... L - a. - a.-----------I a a a a a a a-- - - =
" . . .I K
I -aaa
aigaro Cian e aol Ra - as 1 a
j a aa a aa 2
"-. .I.. a.". . . " .. - ' .- .- " . - .- . -. . -. . . . . . .
,ra a" a I I' a r .- . " -a - -. . - -"" " " - - " -"" - - ".a "- - - " """a " . .- - " " "'a a " ,a -- a--, " - " ,, " , " ' a
•" _ " ,a" - - 'a"' , a' " , , , b , " " ., ' ' .., ' - , ., " . ' , . . 3 .- ' . ...
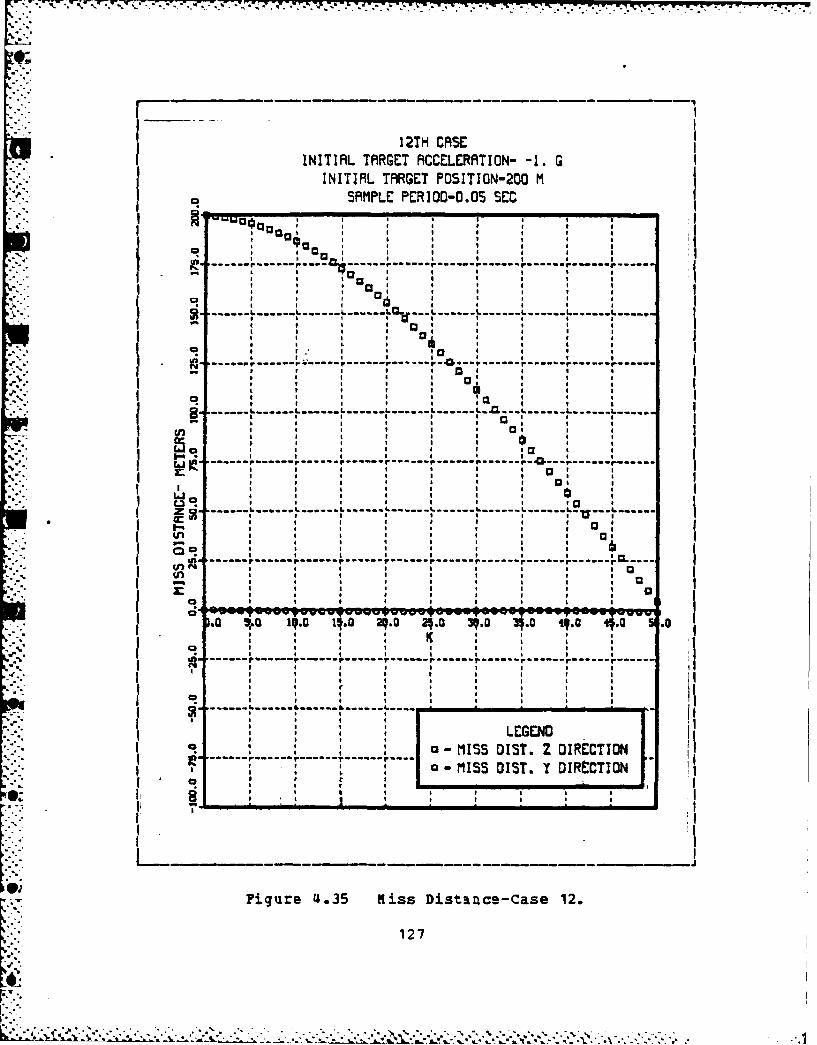
12TH CASE
I INITIAL TARGET ACCELERATION- -1. G-.1 INITIRL TARGET POSITION-200 M
SPMPLE PER]OD-O.05 SEC6 - 7'' Il
C30g0I I I ! 64" Im I 6 ! I 6
I 0 4I 6i
L ------6,,-. ..... r -- -- ------o
~-~------------------------ ..". .'- .~~ ~ ~~ ------------ ,.... .... .... . .., ..,...... ---- ------ L ------ ,L....
I 6 6 0 ,
C!!J------------------0----- ------ r------------ r
I ~- -.. . . . . ' . . . . . ." . . . . . ." . . . . a----- -- ------ ,- - . . . ..e10
-. M D Z DIRECTION
......iL .... 6.. . ....... U 6 6 I
--------- OI T DIRECTION
I I6 6 6 6 I n 6 6
I6
Figure 4.35 Miss Distice-Case 12.
127
. I66 66.I-' + ' " + ; ' ' " . . '- " ; , -. . . + '- -- - .- -, . , ' , ..- 6,, . . . . . . . ." , . , ,6' , . + . ' . ' ' r
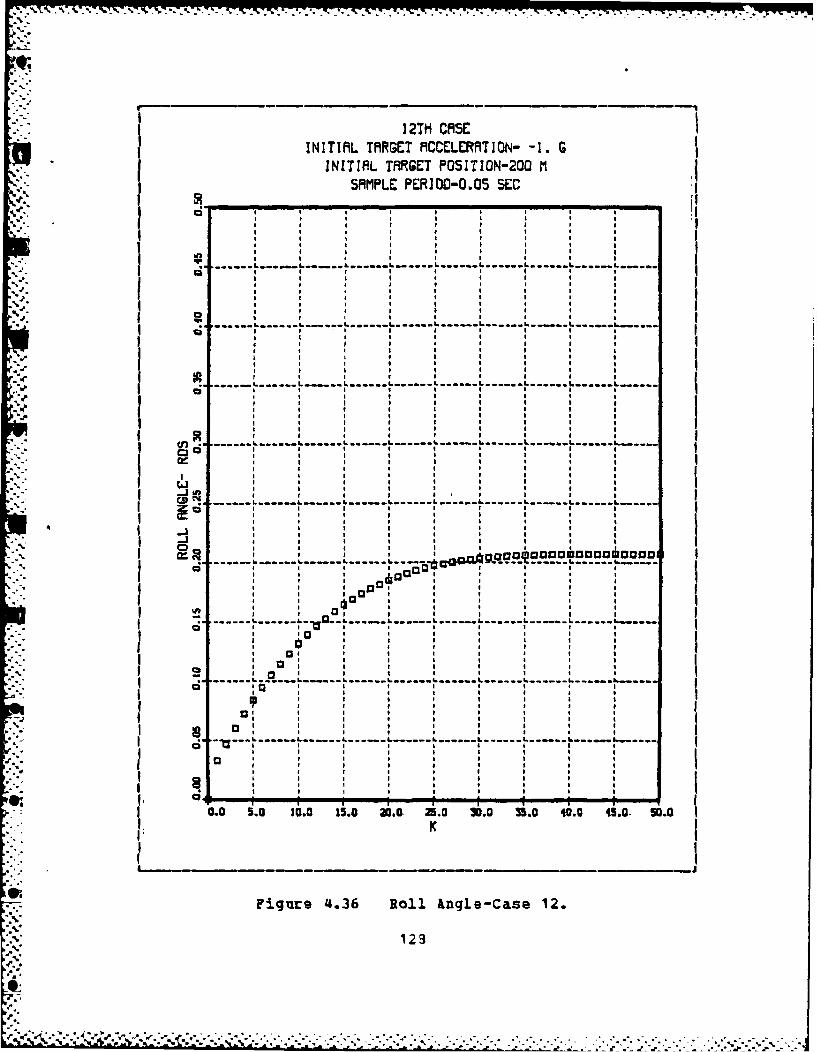
12T CSE
INITIAL TARGET ACCELERATION- -1. Gj!INITIRL TRRGET POSITION-200 5MPrPR0-00
IC!
51a
laa
Z a
L ------- L--- --- ------L
0. 5. 10. Ii. 2O 2i. 3i0 U0 4.
1 12-
I I=.
. . . . . . .. . . L . . . . .I I . . . . . .
a . . .I . . . . .
a Ia
I I
-a
a aO
I
I aii ! i a a a
"I
I S i *. o a a I a a
0,0 *
l l I
I
-I a a a a
a: , , a I I
I' aI
Jaaa
-----------------------------------------------------------
ag a a. ao l & n l - a 1 2 .
I I a a a a.. . . . . . . . . . . . . .
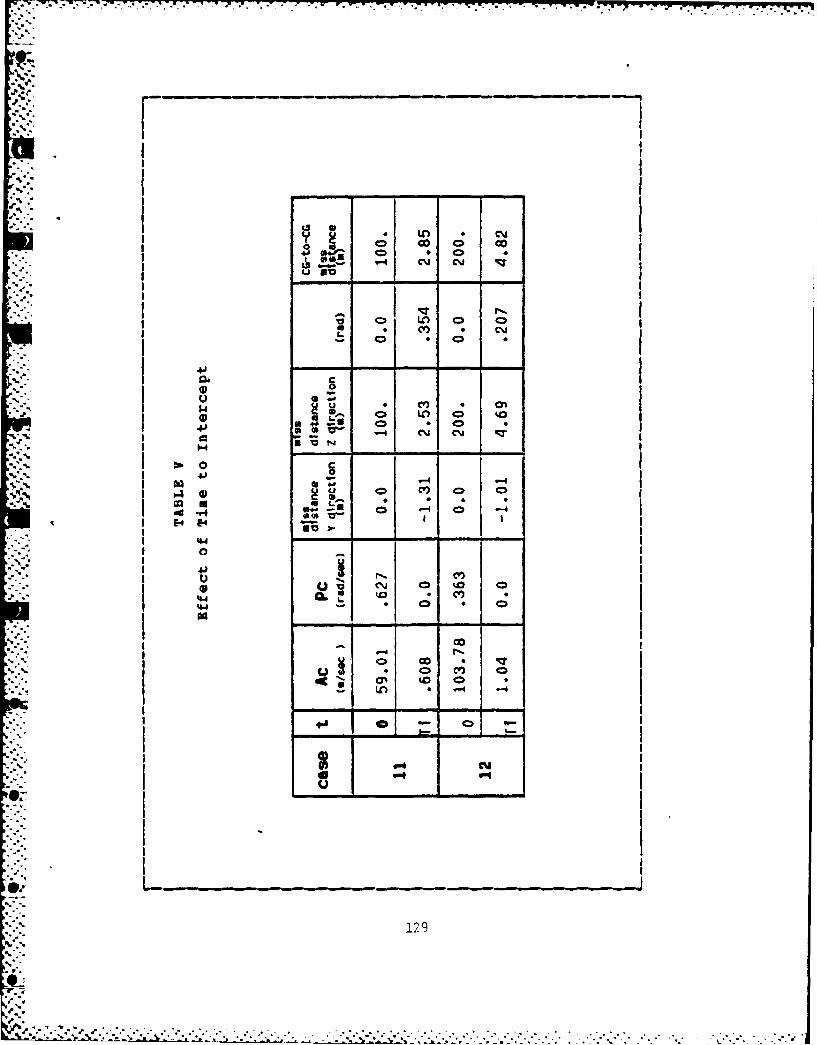
j~CVj
40 0 40 0o
IBID
m Cn4I (% C' * Cj
io-
0.
I cv,.oC>
04 - --4
IC 1.~0 4 0 4S 44 181; C 4=
I Ibi - - -9 0,
(J~ (% 0 '0
hV
V. ~__S _;sLI2__ ID CORMEITS
The scope of the present work was the development of anoptimal digital control to be applied on a bank-to turn
missile.
A two dimensional model, as sug.stad in reference 1, wasadopted. After the digitalization of the continuous model itwas necessary to solve a modified Ricatti equation since in
the state equation there was a third term representing thegravity's effect. The approach that has been adopted is new,
and although good results were obtained for the scenariosconsidered in this work, is necessary that the algorithm be
further tes:ed and evaluated in similar problems due to its
-0 novelty.
The optimal was solved with ia initial restriction to
small angles. This condition was late: relaxed so that largs
roll angles could be analyzed.It is dificult to compare the pr-sent work with previous
rsults since Stallard has indicated a mistake in his orig-inal paper, and further works in this area was act found.
However some comparison with Stallard work is possible.
The commanded acceleration of the missile are such as to
correct the ZEM at each point, this agrees with that refer-
ence. There is a proporti onal rsl a-ionship between the
commanded roll rate and the command.ed acceleration , and thecommanded rcll rate is proportional to the defined $,a, / at
each point, which again agrees with reference 1.
The algorithm d.velopel in this work requires ex-ensive
computa-tion at each step, and is clear :hat some softwara
opt'imization will be needed.The motivation for cons"ieringth- constant steady-statea gain due to gravity was to
decrease this computational burden. rhis approach however'esulted in unacceptable miss distance.
""i
130
Another point of investigation that could reflect or. ths
* period available to the computer to perform its calculations
was a change in the sample rate. rio different sample rates
were investigated, both lead to larger errors than the
nominal period of .05 seconds. A detailed study cn this
issue is left as sugestion for future works, since some
optimal value of the sampling rate is clearly indicated.It is important to keep in mind that the model adopted
is two dimentinal, while the actual problem is thre;, diman-sional, thus some brief studies were conducted in order tc
check the region of validity of the 2-0.
In the analysis of the pitch angle, one car see that is
necessary to have small variations in pitch in order toaDproximate i as a constant. However, at the moment that
s angle is different from zero, as explained in chapter
., it is possible to have in the flight path refen a
a target manouver In the Z direction that will lead to large
acceleration commands, leading the missile to larqe miss
distancss, when considering a movable target. When thepresent system was tested tested against fixed targets, the
results were guite good, this suggests the application of
the model in air-to-surface m.ssiles.
Further investigation were made on the effect of time-*.. to-go. As expected, decreased ti me to go, results in
increased miss distance. A de-ilzd analysis of more
complex scenarios is needed in order to properly define the
effect of time to go.Also, it would be interesting to extend -he model to
-h=e dimensions and include the affects of lags on thesystem in future works. Finally, in appendix A, the
compute: model used in this work is enzlosed. So me improve.-ments in this program can be done, mainly in the data intro-duation, and in some optimization of the running time.
131
° ." r °" ° °e .- "" -e . ' ' "
"" " ° "
°" ' .- "- - ". ." " * . . . . . .
FORTRAN PROGRAM
These appendix provides a listing of the computer
program used in the present study.
Since the routines used are non-IMSL, and a 3mall change
to double-pracision vas necessary, they are also being
providedl.
132
000000 NN NNNm m*-?--)
-J~ ~ -4 - r Z 4J--- 6.DV) N- . -
0.-40.m- r- o- 00- C)
ft. $L->Nr -44.L Q r -N V -
LU .c I--40- U '. LL Z 6-= N L
-I-->~- Ar t OK.-0 -)- '. .- - 0 . 4LCafM r- Nf'D-OOZ-4n-4 -41 - 0 -
J ft -4 6. '.0.0- o 00 Z -
LUu.- U. - O '. -or- Nr N - C%J
.- -OLLO(. (- U- LL Q O- N N -L
ftl.(') -- '.0.'-4u4 -* C.)V (41 V) - OONN . -4'. -I-.- U. N - -40 NAU '- 0
0C-f- NN '.-4 N -40f -0 -4.4 -4- (4rI-(3 O<CNU. ftO W . Z '-Z
'.4/) ~ ~ ~ Nr -'. -4-4 .. N O *.- ' -)'o0 /-Nvl->. -.. ' - '- .4mm - 6. -40 N N. 0 a U.. )
v4-crCfl-. .- 0 . U4..4 06 ft.t - N6. U
V) '..k-o '.-Z '0->ON - O- 0 00 f 6J.N-A- (-- 00e.' L.-N. LL NNJ I- -. 4 -a
- .cj -D44C. ft- '-- ZO 00(L --
.44J -f - ~ -N '.-N *-- WO f- 00 ON3' -- 0L 9 - 9.N6 0-4.-ENr- N N14N -id=f--4 -4-4 NN U
Lfl.r (r-4CN "Nc- 4 ~ --- -- LZ U '.00 00 - jtL M "VOW)'-0 SK.. 40-i w. -" -.Of L '- nN -7 0~-4044 00 - d.- C.r o
LU <Mo MLi- '.-9.- >.-.I~ X< -LL < 'J <L L L -4.4 N4 N J LL U' q
<<< 4c ~ <<(/ '.Q. << -42 <.~4~~j U .~~J (J~ .4 U fL-..N N %L~' NNJ -- 0W --J W0 '0 L JLJ6 A L WLJ U ULJ Z LJJL U LLSA
LLJJ
LOUU
0o , :67"
WWWWWWWWWWWWWWWWWWWWWWLLUULUJLJLLLUJLJJWWUJWWWWWJUUJAJJULLJWWWWLUJ LWULJWUJUJWL
It0
11 0 000
*~I j u A. -'- ~j*.~ I I I *
Wl W1 in- 1 I 0 0 0 0 * 000 * I I 1 -I- '* 11i0 0-454 'J04 *i~ *I 0t 0 *OoIat-400 000)(>.-. 0 I 0
I- 4 .d -4b.UJ-st-l % - * OOC4O-40 If 11 I [I i 11 - - It 11 if =Z - .1 to Z 3 -- If ",VAI-0 O 11 It It 1I 11 If 0Jci~cic2.0 '- x -4 if if 1I 0000c.
0 4 Z~-e.- ZZ 000(O-Z-1- 1 i11000 (>rV .jJ
tj0I. (L I-XZmLnAa) J1-.- >--)()(r-JI-J :-l >-(NJ>>> q4440
p11. ZU. 11 e- 0 W 0 c
11 M -U
LJ (.J..134
Z*
000000000000000000000000000000000000000000000000LULWUJUjuuj JLUJLUUUJULUwa
XO 4 - N0 0% - N
00 0 0 00NAJN N \ N ~ 4 ?~N
00 4- iL.--. -U ~- . ~. ~ . ~-44.44. -- 4.4 ~ ~ - .4.4.d.4.4-
I.-oo~ oo~o0oooooooooooo0o
WW W WLW W W W W WWIW W W W W W WW W W.LJW W W.
*DL000 - "4-JIf+ *-11*0 -.
4%r- V ZQ x- nL*i U11 11 _j if 11 11 if it 11 it * . . I*0 1 1 1 1 If 1J.- 0 = 0 Y P- fnpo CW=* -I w -4-w L u 11 4 -- UJ~f-NOU 004t4"(6 f ft3 11 z t v~p-j11- 0i *p
*f1 -,"t'wo xxx xx "Xi- m0 0
z 3-* - w i 1Q i i
* J a c
W(.ti -WQ tj w -J Q
13
l~**L
U.5WWWWWWLUWWWW WWUWWLUWWWWWLU.ULJLIWL.
* -j JJ-L-
-LJ w +*J
NN -1_ j_ - N 4
-ww -1% N- N-*.5
I-i,- C%4C7
0 0-4
wj N0w 4%x -. j Z*Nm 'L-
w. (x a. NiL 13 - 0 LL 1
0 --N ft " I-* Z C C
* U .. j....lJ lt -L -4/ +% (.n NIt -Lj
o.- .. J 0U -0i 00.1 -i -(ix 44JLJ 4. LU"iat.
a- 0 -. .jjt *' - -
*%* *z I. !n 4 O*-.5O Q
Z 0. N NJ N N M~ Mt.0 -tL n ' -
WUJC <q Z .4 04 - -4 iOZ -1-94 0U Q- Wo 0.0.0.0 Coc co -MDOCC -0.'-Q.m O0
J ** 0 -'- a I NOZ-
0@ -~flVZ.~- h ~* * .. )V1JQJ a
*' -1 S0O'' ' 4 I-N N ~0fl136-
I I .LJL~)V It- 4 *- % 0-~c-.) /)*fl I*-%
fir.- - ' -
o)000000(t~ )000000knl)000000fj4000000V) 00000000000I0V( 000Af 00000(4 000 V)AV))V
@ 000 O 0 O 0000-N N N N N N N NNULuLLUUjLLIUJUUULIULL LL ULLULULUJAJJ -JLILLLJLJ JL .t LUI
NNNN NNCJNN NNNN NNN NNN
00 ~0000000 00O 00O0O O O O 00O 00O O0
*L *L y 3
co x - _j T I* * I.M-- <- W * m:r- JjL A -0*<i-C r- 0, .4 L a 0** 0 allM 4-4 " - 4 I I11 0 0a * VW'
=)x c = - an1 * 1I L o .* *-)N - J a kZ 4 UJ-44Z r-4 (3 0 * -- ~
Ln - 0 r- )(6- 00 L P )( a**" 4 (l 1 U * 01 n I- U_. 0- .4 0-0 1- 0 N ft 0 . "I - ' *-.* I *--j * z Z- Z- -*4.N <'. zz _j- m
Z< 04 OZ- I 0 44o -4 --4 *I-* -o s-uti II1U a~~. 4WQ acaI l-J-4 0 *M*O N 0 -
0 ~ B.0 - J-J 1 *tJ* zt~*-~~~~~L WZ Nlu tZ r-. .w LA Ii- ** r
-~~~L Wo - t.n 04 *I* X.4cIZ u4 w- -- I - I J** . . * 'J 4
WI-Il~ ~~~~~~~~~~ C%4 U ~ l~II*W *~.~ tt~ U* ~ U
0~'- 00 00- .- '-0-- II I IIIg W -~ * * * W '-
Z'~D 0 -) 0 jZ4 Z-44Z4 -4 .Z *137-~
CNNNNNNN C'JN JN N NNNNN NN J~NNNCJ NNNNCJ
ft~' ft Q* XNMLUN -~ ~ 4Z<. A.r--
*--D* 1-*rU * .o L
x~~~~~~ *-A L 4 -)-(D)A 4-4-4A~ Co. L) -L
*--d(L)P-C* -*t. - (1 c~ ,
MMM NMM - MM M * -W< <
NC - ** N * *--. -
r-NNI-WUV M N -* *- m~m mw
-Z oooo Noo (.Do 0 -4 U * - ..*000 0.(D -*~ ~ 7, 0. - * NJ NUJu. DC
Z -v) U.S '-4-J )JJJ-- *J C-4* MC(W(.
- z ZZJJJJ---- _J- _j. 'A* S-t--*(DW..Sii -j u.L
--m <<f.(~'C0 <0 oaI * q<<*) I4..t<S <M40-Nom Q fI/NaJ~ ul')uQ uu QO -o aI * uu *(.QQgUlV) Q cm
.Wk.
- ~ l) U).00.d'~ 02 ~ - 1 -~.4LA .138. a.P-ISI- N S'4 * - -- ) Sf
N 10 % 4 *~4*~4~ ~-~~~~~~~ N.~I~ -4 ~ '
oooWoooooooW.ooooo oooooooooooo
LMV* 'OQQ'Q'Q'O' %00000000004 ~ijjuiLU-44.d. 4.4 4. 4CU~u j( CjC ULLUiCjC JCJCJJ CY JLm(JI1
oooooo000000000000000000000+0000.00+*~~~~~N /1 li1dVClV~f
*
-- : -
+Z *'
+*4' aC~-4- ie 1 1 1 1 90 1L
uj AL - - :3 o
+4 *N N44 -- f - r 7
xN z .')--
*Z *
*N - I-Ilr-CL
Q1 -.JJJ L ki LA - - 4.
** -zN-4
J07;-
ooooooooooooooooooooooooooooooooooooX
~L~>
ftw u. -w* I-*"LUU.<-()W~uj * Jj*c L6V
U. 4ZCQX* c- * iU.CULL. -- * *ju t
LU 40 t 4acn*X -- *-1 : 4j~ ~ ~ *z 0iff
*- *- )i .0.4 ~ ~ ~ ^zj*zu~c 0 - - - xr-~~ ~ *LJXXJX w rd- U>-4-OJULzu.1 ~ ~ *6)LLLq2 W fL -4r P
if 0- *-.J <111 IJ
N .. j ww LU
QUO'- -.JUW4.Ii-
*LI~ *- 40-
AlnU. ~ *I *i -*I.
g00000000 000000 l0000000000000KIM000000
.J.
-JJ Jj - .1 -1 -
- L Cli S Q
000 NNO -0 N 0 NoM - WP40 M* *%. -4 *. 5% .. $10-
-q * MX * = '* 6. * =* * w
-4 w IZ - 0.L..~ <M.J4 0.-*-J
-1 WOOO- loO *0 0 .0 0-0--C=-O-O0N;-- u < 0.* Q- Ow -(A5* 0cr-j -uj--.x
*0 000 W 0 00 Zo (mZ*0.t-* 0* *- 0I-. - ZM X -4--OD +
r" W".0 *LZL *Z SL...L *J - f f
I~~C 0. N ~ 0-. - z4. 0 0Sg n zz -o pN - m'. XZ 4tLnZ I-Pf g - --- JJ x I;
0 00 I- 0 ~f0 Q. 0.- 0 m~ iwLelz4 0LICI *( ~ o--~-
bl.(l00 Z - 0 ) - w ~ w 4- -
-* -41 *** Z* -* 0* -141 - - Z .( -. ( 4
PJ-~ %00 0.J JO O -5 * II f 0 0 0 -
J.-
00000000000000000000000000000000000000or-000000
WV)
aa
ftz ZOOe
4. 0 10
-Z <<C 01 .. 1
P- ~ ~~~ *4 P1100V~fjG~l j ocww - -J
.. zaUM * -zo
*t ( OX4=XXZW-a 6* -"o LU'@ of f
*>N -- 0 WW * L)..g-z r-Qtjaxmm a
-L6*u J/Ifov z~~~S., m mn m* 1J---BOCO 0JJ--Ji-
ais '0 J44.
4-n' tn Z. 9p
142-. .I.~I
* .~0 I OW%
* .............................................................................................
* ~WwLwwWWWWJWWWWWWWWWWuWWWWWWWWWWwwwwwwwwwwWUwwWwWwW
*0 I c; 4I 0c0
w 0,0..4V -10C
0 (- t --
0 X00 <'40z U ~ LU W -J S
-- - - i 'I.Ln~ (A - '? *
SOJ~ r - O -,: 0 L u30
LUL 0 ZOO -44 ZOO aZM0 ou.Ir o C4 0..-
*0 ~I U0 I ~ 0 mo-- - r 3 .J -40
(A '044 cc-04 w4 0-4L U -1
00~~~~- -f~I./ (A -416i--)
I-I- -L S4U)U~ Q J( WA 4 Q J- (LJ (1 I *J0 *LU.j00~ -0 -ZV-
*W- -0 0 ".a 0 (
Q0fi LI b - 0 WLUO 4_0qb~ _oju ** 'XOW-4 '%J).0.4-4- Z '0.4 0i'~- 0-
--- -e WAJ-"-! Q. 1 Ln -w ..z QC ) *-JWE-
S0Af4* 4 >0- QJ-ZZ< V/) - < >0-o 0l-Z < (A a- -a >0. 01--Z(AV -~ O 0*-.--) (A -03 0 $40---( - VA -0a 0 04 C t-
WfltfZj w vo-f^ww<<U<<.wWw(.4-440WW wJVIOWW4
>W ~ LUW 0W004O 00>Z0O OO( U->~0W.1430
~ZZ.5cfl-fl%
k.-0 -4fnt~c 0-4eq m.tul %Qr-cog%0 -C%nm..t ~. .0
L.0
LU
00 -* - L*
-- t L* c% Sd
* *
)- i CL CC 0.* z a~ "0j
-r. 0 (Y L%.<C 00 *i ..
=CL LL'. -_t~ 0 CL mI- w LLL
*0 AC X
* 4-0( 4 a- I f i 0 -4< W<
* X-~ (x 4. "~ - m x Q W0=J~5 (DXJU * QC - I- Ca*A z -.JCI x (An
*0Cw40UO 0 1 00.W- =% :) CA
46 7* *.G 04. La-k I.--_74_ jU.4 ""A *UL CA L PZ0-1 " CUL 0
I.Wo~i -An 04 U% 0 MA * SLU *
-A - *~.J ?~* 144
%W L ' * * 3* 0..
tnntot~~nn~tnnnt~hnuu . n ini . n UNN., %.% 4jo.Q0%'''''00%'' 00%
k .. )
o0000000000000000000000.000~c O'O C..CJ)fs~Q 'r-(' ~NL -rJ
OOOOO~oOO00000000000000000000000W
0x-- 0U0>
X04 *4 *0 0)JU c
cc' z 14%M LL.
< ~ cc ZZM <Co ~ rL 0j
x w .I-- LU at- co atZ'4 ZU 00 :D 0.
3<(U Z.I z
- 0 a 0
W 4 44 co zUPCW .j4p3 =A -L O.. .. j.- *
*U U 04.4.. .-- 4 LL i% -0 n
*X X I.- Ix* 2U X 4l 1u -
42W 4- 0
Ln Z=-ECJJ 11L 'J 5 U - L
=(AoL +.i +-I it +W * c cwJJ. (J.iL~ CO -*o.ar I-4 * * J ..U0
U.U.~W~ W4L0) 2 od d03 cj.) 1 .. 1J *1 11 11 it
UJW 145.(* -
l'- - . * - t-f
r(ooooooooooooooooooooooooooooooooooooo
w 0 0 5
* (A Z (A
Lu J Cf. z
(4 LU Q
Luj cr w LU
iJX (A cc 0cr .
c0 0 <
o < 0 4b
1-4 ft x
w lq oA0 (A SW Uft J4 -1 (A 0A - W S iJ
(A.)(~JL x a aj w S% 9
X.Z4Z(A L Z -u 0 CD z
0 -3 0 0 ...J ixx cV)Z LU LI(A Coc I A 01 0 0-- Zu *X u2I-zxx..J I Li ( 0 x-
~ '~.w~ U- Li * . .i
4I - LJL. V) IL Lux * -0 Lu < .J0 L Lu
% .9 U.14C ix 4- 00 *3 - M (Z IfZaqx Li) x *0 1- Z3L wj x O0Z 0 rt0 L L L M -o~ * :) 0 11 n 0 z( 3 tA
:D 3 cc44 0I C4 ii 0 O Q~ Lu ) 0 (A CS (~~i M.h4 q.J I .40- &*~~~~-- a_ O....a 0.v ew ~ u 4 L e*,
4Lu4t =L a1
for,4WC~C~ WWW 0 0UWLi I-WW* Q0 UWQ(
4 A Z ~ I- * ~()UJ.Z146
(A L Lu Lu * 0~J4 * 0OI~ * ~ %
LiA
ooo AtooooooooooooooeMooo ooooox L I- X V
z ui *
*j L.V).
4..4 c ) M.I
4Qf 14 ZIC
1.<c. LU *- I
xU u.(3 J S V)I
LU 0 Zlc
'. z .: I- 7* I,- cO- CO * ft-,4 x c1-4 X 0 L3 0 Z-Io V U
4,noo.0 0 -u . 0 2:( 14 Cf .Ln U..ft( ft Q, Iu~v V)~ a
tx~4 4-4/ WU 03 -W I. C0. UJ(A WL4J .
U. -,-4 .U. LU *L w: LU (4 4c ~
ZL)LI,:DC Un LU Z c I < Z0. A. oc1..V(.J.LI 6. t S X.4v 0 LUIz V) L2
I- J.. e-) z *& 4.-44 X. I- (x ac I tCL.U.. (n Z.U a, U -- At I. I 4) I-cc::) Z. -0
V) W~ i' c I .- & 4-eV~ - <Z 1 0 OZ= W,4 0'-
L4 Zi w~ * O - At z 1 I w M -4 ou QL.
'.Jwwma Q~ Z .1. .4 =4 4.4 C4 /~'
LU" xU W-- f~ *O .. J4 ELu I --- DjQ
1474
"N N NN4 MMM IIMmB rt-~-utl~~~~tn 0041 O
-j-
-- (.1I- CI
LW- *-LflC.4 L- Z 1~l
Ix -_ L,,-z I
1-a -J(LV O/C IWU ae~ '-WI- I
-;c ILZ . .CIL. La Z LL 4z I
Q Q.)= I4xz wx(3 I
0- _jz I(JX.o( w ; mu Imzz M-W 0 I -
(A O.JU 1~l 0.DZZ M-: Ozz I Ln
4- O C.D 4 I>.4 ZLLZ WZZ~ I C;
1-Z c>v1 " r.I-l I Inz-. (A' J .1 1 -- 0
=00 4 0z0 I3 Z 00
CA cjc-eoI*c La.ouw I 0 .
f.WWc CC .- W q-Oct I ft) -
Owi WZZZL -- so I n -- X4* )0c<11 '-tA I ~'Z Z
01-I-Wi IIjc <J4 I 4)( ZZ - ) n* W 0.wu. Iwj Z Z--" IZ O~ wZ -4 I I
<V (D < : QWn I Z- -411 111 Q3I i g -- LU , 4*
W4C-UQW L 44- I 0*Z - n-e *J Z*I< tuj - O I M~ W~I ft ft ."0~(JI ~ c W.Z....Z"Z
MLUMa=j < I V Q- II JJ-.) 11IZI~II II 1b-41-8 0-4-40Z~a<x1 0 O.Zr2-<Z0OO -< -c= I - z u CC 01 a l- - u I -.J
26J M -t q I + q -7 --4JLs -" q ~~ I l Y.d.XV)f
11 114 CC jC X z * I>.GZ* I
U. I Z M .St C 406 4 Z
-tinr.. '.r--o ()% -41M-rc,
lot-............................................00.000.0
'4---f-rPrr ----- 00 DC DU 0CC 00 OOC DOO
ooooooooo~oooooooooooooo MUooo)o~O ~ ~ C.l~lsCL' UjL
* Ww W*~L oU -i-
0* Ix *)
z Z: x
* at <(-3 10J L^ .!t/5o - 0 z zcrc- OC 0 CCC ?+ -4<.w LUW 0< *
*W I-U" LU tC.D* LU )U.
x ft C(AP".<Q~r cu -j q S) 0 -L
P" z -r 2-XJJ01 0 z-ac 1- . Dv 0 *
* zzU.1LI<00J 0. .. 4v)
4 )- 1 4.4- LLfl Z--i Qz cna 4wU < 0
_r 4jd- oz3( W( <0 w C 0 -)t=*447 - C Ac7Q W< Z Z <Z =Z 0-
OLN + If(A W WZ *a cc- O:CL:D V) -L L DD SU OZ
*~ (n. 2:U CU'ICA... 4 -Jil 11 11 0- 11 (A Z *-
* 0 4 (Z!-WLU 4 l--.* . S4'Cs .l.I 4 /I S 3.
* - Z ~49c . D.
OOOOOOOOOOOOOOOOLJUJLILUUUJUoOUJLI UOOOO J OJ OQOOJUUJ ooooOO~lU.JLoOOOUUJ tLUwOOOj
U.0a~
* I-.
LU
p NO
* J Ln
*z
* . -.)W 0) A4o-
ac CIO'%4oc
at CZ LD
*eI I# LU cc f Z)
0 d LU -, zQ - Z 4 I11 --I e + 1 >
lo p- o-o if1 l.I.-O X i a 11
*1 U') L. 2: 4
1.44 CV
WQQ .Jj W%.) CJjt
* I LU * 150
*777 . I~C. L
eM - ~ 4LL
0o0O0O0O OODOo0 OOOOO DOOCVO OCOO OCOO DoOOOC 00O OO000%(000(C%07%00000%
;.5
cr z
Co.
LI x
b- %% - co r- ). 0. 3
Ir in Li% LI- na . W-M r- IIn. .
0- oN- 04f M3 u- 0
ft ON 0 0-) 1- W. ft.. t !4 WQ1'O'O 4 w LLI LJO- d Q 0
-~ "WU ow ~ -4 m <, +0 I -* 4 o
'Do ~+I z 03 -4 Z+ l *I isz > z +NdIiz 0o 0. i z z0-o ng -- If 1~i itn-21 I,- LM- 1 w6- CC L.4 0
ell- e'w-.- ad .. i mg--Y.gzL
U. to LWLU.X-,- Q..j-)~u -)JW IL - 11 -Wi. is 1 LA. 1g
X0-4LI C2 -m x pLb
151
N WW WW WW5.JWW WW W
- a0
I.., * nC.) of4 x 1 -
9 -+ O 4 +I - zo < i
3.1
.- 4CJ (% ('1 LA 3 152
1 LIST OF REFERENCES
1. Stallarl, D. V.,"An Ap~roa c2 tD optimal -ui Jarce for*a Bank-to-Turn isji. e, Prozaadings of AINA Guijdance
and Control Conference, Danvars, Mass., August 1980.
2. Kwakernaa k. H. and Sivan, R. Linear Optimal Cont~oayJ~s Wley-Interscience, 1977-.-
-~~~ 3. Bry son. A. E. and Ho, Y. C.&A jdOpia Cp1
* Haisted Press, 1975.-
.15
Y- %,.l
- * * '* . . . . - * - . 1 . - . .. . .. . . . . o* . . , . . - .. . . . . . . . . , . . ° .
* ..
° INITIAL DISTRIBUT1I3 LIST
No. Copies1. Defense Techtical Information :entar 2
Cameron $tat1(nAlexandria, Virginia 22314
2. LibrirY, Code 0142 2Naval Post gradua t e School3 onterey, California 9393
Department of Aeronautical EngineeringNaval Postgraduate SchoolMonterey, California 93943
4. Professor D.J. Collins, Code 67Co 3Department of Aeronautical EngineeringNaval Postgraduate SchoolMonterey, California 93943
5. Professor f. A. Titus, Code 62rs gDepartment of Electrical EngineeringNaval Postgraduate SchoolMonterey, California 93943
6. Office of The Air Attache 3
Brazilian Embassy3006 ['assachus sets Av NWWashington DC 20008
7. Centro Tqcnico Aeroespacial1%Rua Parabuna SIN imo".'12200 Sao Jose ds Campos - S?
Sao Paulo, BRAZIL
8. Centro Tecnico Aeroespacial 2Institut? de Atividades EspaciaisRua Parai-buna S/N12200 Sao Jose dos Campos - SPSao Paulo, BRAZIL
9. Centro Tacnico Aeroespacial 2I;stituto de Atividales EspaciaisDivisao le Si4stemas BelicogRua Paraibuna S/N12200 Sa5 Jose dos Campos - SPSao Paulo, BRAZIL
10. MAJ Carlos A. L. Velloso 3Centro Tacnico AeroespacialInstituto de Atividades EspaciaisRua Paraibuna S/N12200 Sa, Jose dos Campos- SPSao Paulo, BRAZIL
1514
"- ".-,!-
*'w, .. . .-. . -. -. .. • -. ,*..
-. .
L
Vt - .. - *~*~;
'4 ..-
~.4
1vt~. ~'.
ItS [
* -~~A' ' ~
d..
. ~ 4~
4,.
4~.4
- 4-.
-4 .~*'. ~
.4.. ~ ~
~ .- ± ~ -- 7 ~ ~ ;*
tbraha..atrvr* * 4~~4 .;~ ~ ~4' 4
4-' 4
4 ~.4
~. .' 4
-' -
~ I
14.~ ,4.
~J~--;*2 ~ ~
-J
k
~*
4%4% . ~ .4* 4 - *. * ~ ~- *~.*~j*