moteurs à supraconducteur
DESCRIPTION
Les supraconducteurs ont annoncé de nouvelles possibilités dans l'utilisation de l'énergie électrique mais les contraintes d'utilisation n’autorisent pas encore leur intégration à grande échelle.TRANSCRIPT

Que peuvent apporter les supraconducteurs aux moteurs électriques, les structures conventionnelle s
sont-elles toujours adaptées ?
OLIVIER BARRE(1), BELLEMAIN NAPAME(2) , KEVIN SCHMITT(3) (1)Lycée G.EIFFEL , France, (2) JSPM - AREVA, France, (3)Ingénieur ENSEM, France Email : [email protected].
1. Introduction.
Imaginer qu’un matériau mis à une température proche du zéro absolu soit capable de conduire le courant électrique sans présenter la moindre résistance, est une hypothèse physique qu’aucune loi ne peut introduire. C’est pour cette raison que ce phénomène ne sera découvert que durant une expérimentation ou le protocole d’essai ne fut pas respecté. Heike Kamerlingh Onnes et Gilles Holst observe la supraconduction dans le mercure à 4° K en 1911. L’histoire des sciences et techniques est constellée de découvertes accidentelles [1]. Les produits ainsi obtenus sont parfois utilisés quotidiennement sans que leurs utilisateurs se posent la moindre question sur leurs origines. C’est le cas pour le polycarbonate ou le Téflon. D’autres composants, comme le nylon, ont suivi une voie plus conventionnelle et ont demandé près de 8 années de travail à leur inventeur avant d’arriver dans notre vie quotidienne. Les problèmes d’industrialisation restent néanmoins des problèmes d’actualité pour toute innovation. Il faut se souvenir que la synthèse du polyéthylène ne fut possible qu’après la seconde guerre mondiale, dès que les réacteurs furent capables de travailler à hautes pressions et à hautes températures. Dans le cas des
supraconducteurs, les basses températures requises (<23°K) ne furent relevées qu’en 1986, quand deux chercheurs du laboratoire IBM de Zurich découvrirent que les cuprates, comme l’oxyde de baryum-lanthane-cuivre, étaient encore supraconducteurs à la température de 35°K [2]. Les premières applications électriques liées aux supraconducteurs se sont orientées vers le transport ou le stockage de l’énergie et les limiteurs de courants [3] [4] [5] [6]. Les moteurs électriques furent abordés mais restent encore des objets de laboratoire [7] [8] [9] [10]. Par exemple, un taxi à propulsion électrique, utilisant un moteur à supraconducteur, est présenté par Sumitomo Electric cette année au G8 d’Hokkaido. Bien que cette application soit représentative des efforts en cours, Sumitomo Electric estime qu’il faudra attendre au moins 10 ans pour rencontrer régulièrement de tels moteurs. Ce seront les équipements lourds comme les trains ou les bateaux qui en seront les premiers bénéficiaires [11] [12] [13]. Dans cet article, l’aspect comportemental des supraconducteurs sera abordé en premier. Puis, le principe de Nicolas Tesla : le champ tournant, sera confronté au supraconducteur. Un exemple intermédiaire : le palier magnétique servira de support pour montrer la remise en cause des démarches de conception. Finalement, il apparaitra au travers de
Résumé : Le brevet lié à la machine asynchrone est déposé par le physicien serbe Nikola Tesla en 1887. Cela fait plus d’un siècle que son architecture est établie et semble immuable. En 1889, Michail Ossipowitsch Doliwo-Dobrolski, électricien d'origine russe, invente le moteur asynchrone triphasé à rotor à cage d’écureuil. Celui-ci sera finalement construit industriellement à partir de 1891. Une vingtaine d’années plus tard, le phénomène de supraconduction fut découvert fortuitement en 1911 par un étudiant en physique, Gilles Holst sous la direction du physicien néerlandais Kamerlingh Onnes. Ces deux découvertes sont centenaires et cependant, l’utilisation des supraconducteurs en suppléance des conducteurs en cuivre dans les moteurs électriques n’est qu’exceptionnelle. Les basses températures requises pour rendre la supraconduction possible ne sont que des éléments qui pénalisent leur utilisation. De plus, la réalisation de conducteurs utilisables dans les machines n’est guère aisée. Les matériaux sont nouveaux et pour certains équipements d’âge respectable, comme les moteurs asynchrones, l’utilisation exclusive de supraconducteurs parfaits conduirait à détruire les effets physiques qui sont responsables de leurs rotations. La présentation qui va suivre est basée sur l’analyse des documents relatifs à la supraconduction, les plus anciens ont quinze ans et les plus récents datent de 2008. L’objectif est de revenir sur les principes physiques mis en œuvre dans les machines électriques et d’introduire pas à pas la problématique liée à l’utilisation des supraconducteurs.

quelques réalisations, qu’il est illusoire de penser remplacer le cuivre par des supraconducteurs pour améliorer les performances [14].
2. Supraconducteurs de type I et de type II.
L’absence de résistance électrique est le principal intérêt de ces éléments, cela permet d’envisager le transport de l’énergie électrique sans la moindre perte. Les basses températures requises pour l’obtention de cet état sont les éléments les plus pénalisants [15]. Par exemple, les plus basses températures sont obtenues avec de l’hélium liquide (4,2°K à 1 atm.), mais pour obtenir et conserver cet hélium liquide quelques précautions doivent être prises. Il ne faut pas oublier la superfluidité associée à ce liquide. L’hydrogène liquide (20,2°K à 1 atm) est lent à produire à cause de la transformation d’ortho-hydrogène en para-hydrogène qui assure sa stabilité [16]. Finalement, le gaz liquéfié le plus intéressant économiquement est l’azote liquide (77°K à 1 atm). Dans les basses températures, comme hélium liquide, les supraconducteurs sont du type I alors que pour des températures un peu plus élevées les supraconducteurs sont du type II [17]. La température de changement d’état n’est toutefois pas le seul critère, à 27 °K le néon est 40 fois plus réfrigérant que l’hélium et 3 fois plus réfrigérant que l’hydrogène.
La supraconductivité ne s’obtient que dans un
domaine défini par trois paramètres : la température, la densité de courant et le champ magnétique (Fig.1). Pour que le matériau reste dans un état supraconducteur, les paramètres doivent être inférieurs aux paramètres critiques : Tc (température critique), Jc (densité de courant critique) et Hc (champ critique). Dans cette situation, une propriété nouvelle apparait : l’effet Meissner ou le diamagnétisme parfait. Ce dernier permet de conduire des expériences de lévitation. Il suffit de regarder les vidéos du train magnétique du département de physique de l'Université de Sherbrooke (http://www.tp.physique.usherbrooke.ca). A
partir du moment où la température est maintenue basse et que le champ magnétique engendré par les aimants reste en dessous de Hc, ce train peut continuer à exécuter ses tours de circuit sans le moindre ralentissement. C’est ce comportement diamagnétique qui va permettre de classer les supraconducteurs en supraconducteur de type I ou de type II (Fig.2 et 3) [18] [19]. Dans tous les cas, il faudra placer le supraconducteur à une température bien plus faible car il devra transporter un courant et sera soumis à un champ magnétique. Ainsi, si certains supraconducteurs ont une température critique Tc de plus de 77°K, ils devront être utilisés à une température bien inférieure quand ils seront en situation.
Figure-2 : Pour un supraconducteur de type I, le retour de l’état
supraconducteur diamagnétique à l’état normal se fait brutalement, dès
que le champ extérieur imposé dépasse Hc.
Figure-1 : Représentation tridimensionnelle du domaine de validité de
l’état supraconducteur du câble Ag-Bi.
Figure-3 : Pour un supraconducteur de type II, le retour de l’état
supraconducteur diamagnétique à l’état normal se fait par l’intermédiaire
d’un état mixte dès que le champ extérieur imposé dépasse Hc1 et est
inférieur à Hc2.

Un supraconducteur de type I voit son diamagnétisme disparaitre dès que le champ magnétique imposé dépasse la valeur Hc. Par contre, un supraconducteur de type II possède un état intermédiaire, dit état mixte, où la perméabilité magnétique augmente régulièrement avec l’intensité du champ. C’est pour cette raison qu’un supraconducteur de type II sera caractérisé par deux valeurs de Hc (Hc1 et Hc2, Fig. 3). Ce nouveau domaine induit dans le matériau des pertes d’origine magnétique [20] [21] [22]. Finalement, ces deux types de supraconducteurs ont des propriétés et des comportements différents et seul le type II conduit à des réalisations industrielles avec comme désagrément de présenter des pertes par hystérèse dans le cas du transport des courants alternatifs. Une telle situation se retrouvera dans les machines à courants alternatifs.
3. Stator et génération du champ magnétique.
Les équations de type bilan de puissances, associées aux moteurs, permettent de calculer rapidement les courants absorbés en fonction des caractéristiques mécaniques de la charge. Ces équations sont jumelées au schéma équivalent pour une phase qui permet d’explorer avec une certaine justesse le domaine de fonctionnement de la machine. Toutefois, comme l’approche retenue est une approche magnétique, la présentation qui va suivre reposera en particulier sur les interactions magnétiques entre le stator et le rotor.
Le premier élément important pour toute machine
fonctionnant sur un réseau polyphasé est le moyen retenu pour engendrer le champ magnétique dans le stator. Bien que le premier moteur conçu par Nicolas Tesla utilise une source diphasée (Fig. 4) [23], il fixa la structure de ce type de machine [24]. Dans le cas d’une source triphasée, trois bobines placées à 120 ° l’une de l’autre peuvent engendrer un champ tournant si elles sont alimentées par trois courants sinusoïdaux déphasés de 120 °. L’intérêt de cette structure est de conserver le module du champ tournant constant. L’utilisation des supraconducteurs, pour assurer le transport du courant dans les bobines, ne changera rien au principe retenu. Toutefois, le remplacement des conducteurs en cuivre par des supraconducteurs n’est pas aussi aisé. Avant l’arrivée des oxydes de cuivre en 1986, supraconducteur haute température (HTS) [25], le choix était limité au Niobium-Titane (NbTi) [26] et aux éléments du groupe A15 (Nb3Sn,…) [27]. Les bonnes caractéristiques de ces supraconducteurs permettaient d’en faire des filaments extrêmement fins qui, une fois assemblés, pouvaient supporter des courants de plusieurs milliers d’ampères. Les températures
critiques de ces anciens éléments (LTS, Low Temperature Superconductors) sont de l’ordre de 10-20° K et les champs critiques B0 dépassent les 30 Teslas. L’utilisation des oxydes de cuivre, aussi dénommés YBCO ou BSCCO, est effective dans le transport de l’énergie électrique mais posent encore des problèmes pour les machines [28] [29]. Par exemple, pour le transport : la société AMSC (American Superconductor) a fabriqué un câble YBCO de 100 m en 2006 et a installé le plus long câble BSCCO près de new-york en 2008 [30]. Ces deux réalisations utilisent l’azote liquide comme réfrigérant.
Dans le cas des moteurs électriques, les conducteurs
ne sont pas seuls, la plus grande partie de la masse vient des parties ferromagnétiques. La disparition des pertes ohmiques ne cache pas les pertes par hystérésis associées aux matériaux composant le stator. Ces matériaux avaient leur justification dès lors que les conducteurs en cuivre limitaient la densité de courant dans les bobines. L’augmentation de l’induction est assurée simplement par la grande perméabilité relative des matériaux ferromagnétiques. L’imperfection de ces matériaux, saturation et cycle d’hystérésis, sont des obstacles à l’amélioration du rendement du système. La recherche d’un excellent rendement conduit à chasser les éléments qui produisent des pertes. Finalement, il serait intéressant de faire disparaitre les matériaux ferromagnétiques. Un brevet américain proposait d’ailleurs de remplacer ce stator rigide par un fluide ayant des propriétés magnétiques. Ce fluide servant aussi de réfrigérant pour les supraconducteurs [31]. La suppression pure et simple de cet élément n’est pas exclue puisqu’un moteur utilisant un stator à air fut construit et testé en 2002 [32]. Toutefois, en l’absence de circuit magnétique, le champ ne sera plus circonscrit
Figure-4 : Image issue d’une émission canadienne, « Les Archives
Oubliées », ou Nicolas Tesla présente le principe de son moteur à
induction. Deux bobines, puis trois par la suite, seront associées à
une source de courant triphasé pour engendrer un « champ
tournant ». (Vidéo complète disponible sur :
http://www.dailymotion.com)

au moteur et un rayonnement indésirable se fera sentir à proximité.
4. L’exemple du palier magnétique.
Un exemple simple va permettre de mieux mettre en évidence le problème posé. Un palier magnétique conventionnel est utilisé comme support pour cette analyse (Fig. 5) [33]. L’objectif est de maintenir en position, sans le moindre contact, un arbre tournant à grande vitesse (Repère 1, Fig 5.) en utilisant les effets attractifs d’électroaimants fixes situés en périphérie (Repère 2, Fig 5.). Bien que les champs générés soient fixes, l’exemple sera suffisant pour arriver à la conclusion recherchée, c'est-à-dire une remise en cause des choix techniques réalisés.
Dans la figure 5, la répartition spatiale du champ est
donnée par simulation [34]. Il apparait qu’un niveau correspondant à la saturation est atteint dans le stator (1,5 Tesla). Cela veut dire qu’il est inutile d’augmenter les courants dans les enroulements pour augmenter l’attraction sur la partie mobile du palier, la valeur de l’induction étant limitée, la valeur de la force associée l’est aussi. Pour éviter cette limitation liée à la matière, il suffit de la retirer ! Il ne reste plus que de l’air et plus aucune limitation. Hélas, pour retrouver le même niveau d’attraction, Il faut augmenter le courant qui va circuler dans les bobines de maintien. Un courant 40 fois plus intense est requis pour retrouver les mêmes niveaux d’attraction. Cette solution ne sera envisageable que si les bobines sont réalisées en supraconducteurs. Dans la solution ainsi obtenue, le principe d’attraction est conservé et la partie mobile est inchangée. Cette solution est à éviter. Il restera une
saturation au niveau de la partie mobile (Fig 6.).
Pour obtenir une solution acceptable, il faut revenir sur le choix initial ayant induit cette solution. Puisqu’un supraconducteur est aussi un diamagnétique parfait, il est possible d’utiliser la répulsion magnétique plutôt que l’attraction. Il suffit de remplacer la partie mobile de ce palier par un corps supraconducteur. Cette structure présente un nouvel intérêt, car la position désirée est naturellement obtenue. Les bobines supraconductrices repoussent systématiquement cette partie mobile au centre du dispositif. En examinant la distribution de champ (Fig.7), il apparait que cette fois le rotor ne pouvant accepter le moindre flux magnétique, il est automatiquement centré par la
Figure-5 : Représentation des lignes de flux associées à un palier
magnétique conventionnel. Dans cette représentation, la partie mobile
du palier (1) est attirée par la partie fixe (2) contenant les bobinages de
génération des champs magnétiques. (Simulation réalisée au moyen de
FEMM 4 .2)
Figure-6 : Représentation des lignes de flux associées à un palier
magnétique n’ayant plus de noyau fixe ferromagnétique. Pour obtenir le
même niveau d’effort, le courant a été multiplié par 40. Des fuites
magnétiques de plusieurs dizaines de milli-tesla vont se rencontrer dans
des zones ou il n’y avait auparavant aucun champ parasite. Comme la
partie tournante est inchangée (1), une saturation magnétique peut toujours
apparaitre. (Simulation réalisée sous FEMM 4.2)
Figure-7 : Dans cette simulation, le rotor amagnétique est maintenu
au centre du dispositif par le simple fait qu’il n’accepte pas d’être
traversé par le moindre champ magnétique. Il se centre de lui-même
dans le dispositif. (Simulation réalisée sous FEMM 4.2)

répulsion engendrée par les bobines périphériques. Les simulations précédentes montrent qu’une autre
méthode conduit à un résultat tout à fait acceptable. Cette remise en cause du concept initial va continuer car il ne sera finalement pas possible d’utiliser des supraconducteurs au stator du palier. Les champs magnétiques vont atteindre très vite des valeurs qui vont faire sortir les matériaux de leur état supraconducteur. Enfin, le phénomène de répulsion qui repose sur l’utilisation des supraconducteurs massifs aussi bien pour le stator que le rotor est le principe retenu par la société NEXANS pour fournir, depuis quelques années, un palier supraconducteur sans contact pour les applications industrielles [35]. Une partie fixe cryogénique permet de garder la partie mobile constituée de 270 plaquettes de supraconducteur (YBCO) au centre du système (Fig.8).
Cet exemple est une bonne illustration des remises
en cause des conceptions issues de l’utilisation des conducteurs en cuivre. Si les supraconducteurs sont considérés comme des conducteurs sans perte, des augmentations considérables de courant sont autorisées. Il n’est pas toujours pertinent d’utiliser les matériaux magnétiques classiques pour guider le flux magnétique. Ceux-ci vont limiter l’induction à leurs niveaux de saturation. Les stators à air apparaissent naturellement avec comme principal aspect positif une réduction immédiate de poids. Il est clair que les machines à supraconducteur auront les meilleures
puissances massiques du marché. Cette caractéristique peut expliquer le développement des éoliennes utilisant des générateurs à supraconducteurs [49]. Malheureusement, l’absence de matériau magnétique fait que des niveaux d’inductions élevées risquent de faire transiter les supra-conducteurs. Cet aspect négatif, est très pénalisant pour l’utilisation des supraconducteurs dans les stators à air.
5. Le rotor et l’utilisation du champ statorique
Quittons cet exemple et revenons sur le principe de Nicolas Tesla. En présence de ce « champ tournant », la création d’un couple mécanique s’obtient très facilement en insérant une seconde source de champ magnétique dans le stator. Cette source peut être un aimant ou un électro-aimant et aussi un circuit fermé qui va voir se développer un courant qui servira à créer cette autre source de champ magnétique [36].
La solution à aimant permanent ou à électroaimant,
cela conduit à la machine synchrone, la seconde solution, se dirige naturellement vers la machine asynchrone. Les récentes réalisations s’orientent plutôt vers des machines de type synchrone et les applications envisagées sont d’ordres maritimes ou aéronautiques. Cette orientation est compréhensible quand l’aspect puissance massique revient à l’esprit. Les architectures sont globalement conservées, les machines peuvent être à flux axial ou radial. De plus, le matériau supraconducteur peut aussi remplacer l’aimant permanent. Il peut être magnétisé tout comme les aimants permanents [37] [38] [39]. Cette propriété physique est mise en œuvre dans la prochaine réalisation abordée : un moteur synchrone réalisé au Japon [Fig 9.].
Dans le domaine maritime, les laboratoires japonais
(a)
(b)
Figure-8 : Palier industriel de la société NEXANS, le stator (a)
cryogénique impose au rotor passif (b), constitué de pastilles
supraconductrices (b), de rester au centre du dispositif.
Figure-9 : Moteur synchrone expérimental construit par les laboratoires
japonais dans le but de fournir des moyens de propulsion pour les navires
de surface.
ont étudié un moteur comportant des aimants supraconducteurs au rotor et des enroulements supraconducteurs au stator [40]. Cette machine à flux axial, sans aucun circuit magnétique métallique, est destinée à la propulsion des navires. Le principal critère est la fourniture d’un fort couple mécanique à très faible vitesse de rotation. Une puissance de 36,5 MW à 120 trs/min est tout à fait envisageable. En 2006, un article scientifique donne les spécifications de ce moteur et, en particulier, le moyen utilisé pour aimanter les supraconducteurs massifs insérés dans le rotor. La machine ainsi testée, dont l’aspect général est donné dans la figure 9, est prévue pour délivrer une puissance de 30 kW à 720 trs/min dans le cas ou un rotor simple est utilisé et une puissance de 60 kW à 720 trs/min dans le cas ou un double-rotor est monté, (Fig.10a et 10b). Ces chiffres ne sont pas encore obtenus, les différences proviennent des aimants supraconducteurs qui n’ont pas encore atteint leur magnétisation nominale de 2 teslas. Il demeure que les avantages inhérents à la structure ainsi choisie persistent. Les moteurs à flux axiaux sont généralement plus compacts et il est aisé d’augmenter le couple en multipliant le nombre de plateaux magnétiques au rotor. De plus, le choix d’aimants supraconducteurs conduit immédiatement à l’absence de contacts glissants annulaires nécessaires à l’excitation des pôles magnétiques d’un rotor à électroaimant. Toutefois, la magnétisation des aimants supraconducteurs (Gd-Ba-Cu-O) ne peut pas être obtenue par un courant circulant dans les enroulements supraconducteurs (Bi-2223, Bi2Sr2Ca2Cu3O10), la densité de courant demandée excède le courant critique associé à ces matériaux, pourtant prometteur dans les applications à forts champs et à forts courants. En conséquence, ce sont d’autres enroulements, en cuivre, qui vont prendre en charge cette fonction [41].
6. Les structures mixtes.
Dans le domaine aéronautique, en 2002, une coopération entre la Russie et l’Allemagne a conduit ces deux pays vers des travaux similaires [42]. Les
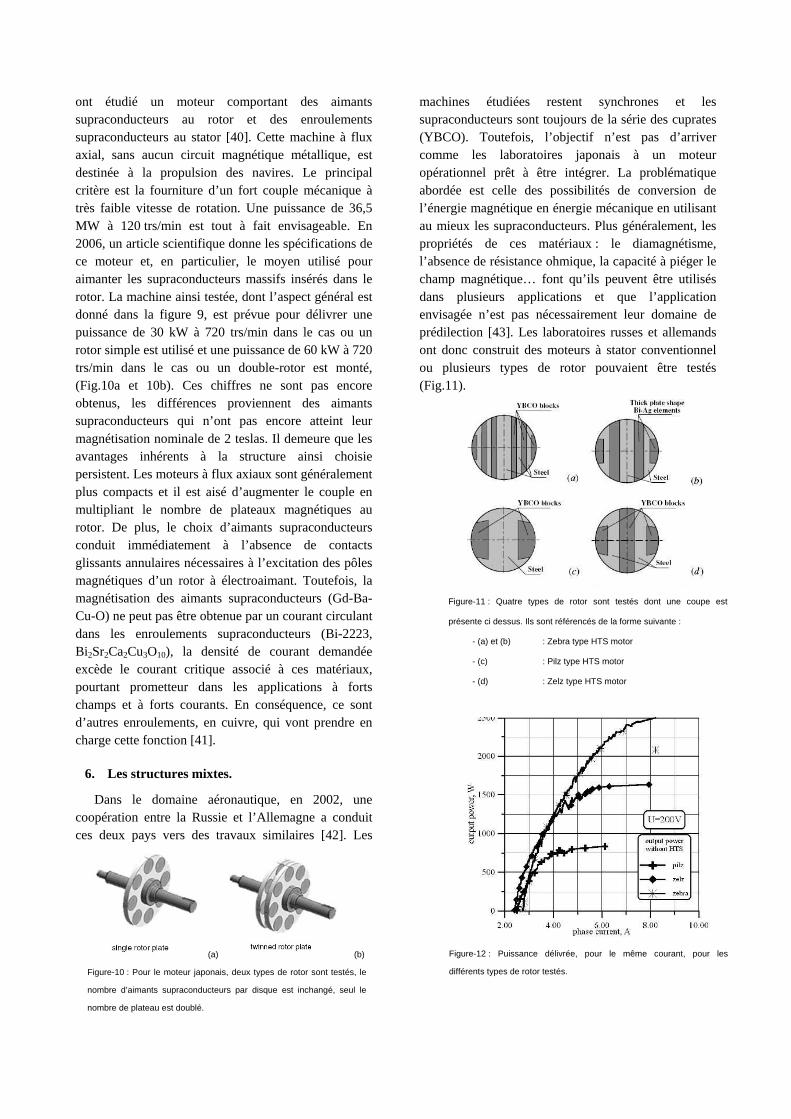
machines étudiées restent synchrones et les supraconducteurs sont toujours de la série des cuprates (YBCO). Toutefois, l’objectif n’est pas d’arriver comme les laboratoires japonais à un moteur opérationnel prêt à être intégrer. La problématique abordée est celle des possibilités de conversion de l’énergie magnétique en énergie mécanique en utilisant au mieux les supraconducteurs. Plus généralement, les propriétés de ces matériaux : le diamagnétisme, l’absence de résistance ohmique, la capacité à piéger le champ magnétique… font qu’ils peuvent être utilisés dans plusieurs applications et que l’application envisagée n’est pas nécessairement leur domaine de prédilection [43]. Les laboratoires russes et allemands ont donc construit des moteurs à stator conventionnel ou plusieurs types de rotor pouvaient être testés (Fig.11).
Figure-11 : Quatre types de rotor sont testés dont une coupe est
présente ci dessus. Ils sont référencés de la forme suivante :
- (a) et (b) : Zebra type HTS motor
- (c) : Pilz type HTS motor
- (d) : Zelz type HTS motor
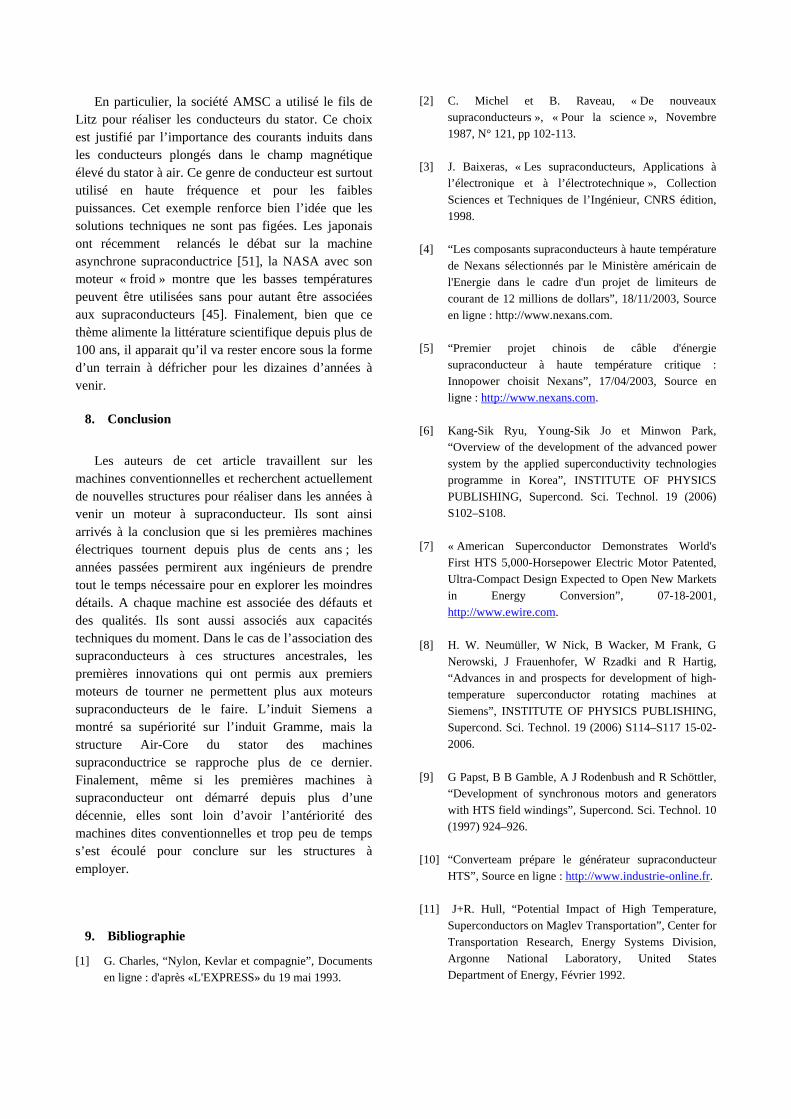
Figure-12 : Puissance délivrée, pour le même courant, pour les
différents types de rotor testés.
(a) (b)
Figure-10 : Pour le moteur japonais, deux types de rotor sont testés, le
nombre d’aimants supraconducteurs par disque est inchangé, seul le
nombre de plateau est doublé.

Le résultat est une machine synchrone à réluctance dont les principaux paramètres qui vont être observés sont : la puissance délivrée, le rendement et le facteur de puissance. Il apparait finalement que pour une liberté d’action réduite, le seul élément libre de conception étant le rotor, il est possible d’avoir des caractéristiques très différentes. Par rapport à un rotor conventionnel, le gain en puissance est significatif (Fig 12). L’introduction des aimants supraconducteurs YCBO double la puissance délivrée. Cela s’explique en parti par la structure retenue. Les éléments supraconducteurs interdisent le passage du flux et renforcent l’effet de réluctance du rotor. Il est à noter que le rendement reste dans des valeurs honorables, de l’ordre de 90%. Pour mettre en avant les phénomènes rencontrés qui peuvent justifier cette augmentation de puissance, il n’est pas utile de reprendre l’architecture de la machine car seul le rotor est spécifique. Les meilleures performances furent obtenues au moyen d’un rotor feuilleté (Sandwich Supra-Acier). Des différents types de rotor présentés à la figure 11, il apparait que les rotors de type Zebra feuilletés sont capables de développer le plus de puissance pour un même courant (Fig. 12). Les bons résultats obtenus par les structures Zebra ont conduits ces laboratoires à lancer un projet de moteur de 100 kW en continuant à utiliser la structure feuilletée au rotor (Fig. 13). L’ajout du supraconducteur renforce le flux dans les parties ferromagnétiques et oblige celui-ci à rester dans l’acier du rotor. Il quitte finalement le rotor à la position la plus éloigné de l’axe de rotation et ce phénomène peut expliquer l’accroissement de puissance ainsi obtenu.
Il est intéressant de constater que cette approche, ou la liberté de conception est limitée, permet de mettre en évidence l’aspect positif du diamagnétisme qui se rencontre dans les supraconducteurs. Toutefois, comme
la structure reste majoritairement conventionnelle, il faut quantifier les pertes thermiques pour pouvoir dimensionner le système de cryogénie. L’étude russo-germanique a mis en évidence que celles-ci se situent principalement au niveau de l’acier sous forme de perte par hystérèse. Comme le supraconducteur est un élément adjacent à ce matériau, les équipes de recherche ont très vite remédié à ce problème en utilisant des matériaux amorphes.
Figure-14 : Un stator conventionnel est associé à un rotor constitué
d’un sandwich d’acier magnétique et de supraconducteur. Le
supraconducteur est considéré comme diamagnétique.
Figure-15 : Simulation avec un rotor à air. La position du rotor est
décalée de 10° par rapport au champ tournant.
Figure-16 : Simulation avec un rotor à supraconducteur. La position du
rotor est décalée de 10° par rapport au champ tourn ant.
Figure-13 : Prototype d’un moteur de 100 kW et coupe de son rotor
constitué d’un sandwich d’acier amorphe et de supraconducteur YBCO.

Pour mieux mettre en évidence l’effet positif des supraconducteurs dans les rotors feuilletés, des simulations numériques sont réalisées en utilisant le logiciel FEMM dans sa version 4.2 (Fig.14, 15 et 16). L’apport du supraconducteur est quantifié en comparant le couple produit par un rotor de géométrie similaire ou le supraconducteur est remplacé par de l’air. De telles conditions mettent en avant que le matériau supraconducteur est bien un nouveau degré de liberté pour la conception des machines électriques. La figure 14 précédente montre la structure qui servira à conduire l’analyse proposée. Les figures 15 et 16 montrent la répartition du flux dans les deux types de rotor quand un décalage de 10° est imposé. Il apparait dans la figure 16 que le flux évite de circuler dans le supraconducteur, milieux peu favorable, alors qu’il arrive à s’insérer dans les zones d’air du précédent rotor, figure 15. Les simulations associées à ces deux représentations permettent de calculer l’effet du supraconducteur sur le couple mécanique produit. Pour calculer le couple mécanique que peut délivrer chaque machine, il suffit de calculer l’énergie magnétique pour deux positions voisines du rotor et d’interpréter la variation d’énergie comme étant le travail du couple associé à cette variation de position angulaire. Cette méthode est bien sûr employée régulièrement pour déterminer le couple mécanique des moteurs conventionnels. Si on considère le couple délivré par le rotor à lames d’air comme le couple de référence, Il apparait que le couple délivré par le rotor comportant des supraconducteurs est supérieur de 140% !
La technique mise en œuvre par ces chercheurs russes est très intéressante car elle montre que le concept est à la base de la réalisation technique. Les simulations qui sont présentées n’utilisent pas les données issues des machines russes mais sont en fait de simples interprétations personnelles associant un stator conventionnel à un rotor feuilleté. Comme le concept initial est conservé, il est remarquable de constater que les résultats sont similaires. Il est clair que le système n’est pas optimisé, mais les bases sont acquises et cette optimisation n’est plus qu’un travail qui peut être réalisé à postériori quand tous les paramètres seront bien identifiés. Il apparait que les structures des machines synchrones intégrant des éléments supraconducteurs ne sont pas aussi figées que les structures des machines conventionnelles. Le supraconducteur apporte un degré de liberté supplémentaire qu’il convient de prendre en compte. Un rapport de synthèse mandaté par le ministère de l’énergie américain rappelait ce dernier point. Les machines à supraconducteur ayant une structure AIR-
CORE ont certes un très bon rendement mais sont aussi couteuses [44]. En particulier en utilisant un critère de coût de possession réparti sur deux ans (Two Year Cost of Ownership Benefit – TYCOB), les meilleurs résultats étaient obtenus par des machines mixtes IRON-CORE-HTS.
7. Les machines asynchrones.
Les machines les plus répandues, ne sont pas les machines synchrones. La simplicité de la machine asynchrone ainsi que sa fiabilité en font le premier convertisseur d’énergie électrique en énergie mécanique dans l’industrie. Il est intéressant de regarder cette machine sous un aspect supraconducteur. Elle a été rapidement classée comme inutilisable pour des applications utilisant des supraconducteurs [44]. Des recherches récentes, conduites au japon, peuvent peut-être remettre en cause ce choix. La machine asynchrone est une machine qui ne peut donner du couple que si le rotor se comporte comme un élément résistif. Cette propriété est requise pour que le champ magnétique engendré par les courants induits dans le rotor soit déphasé de 90° par rapport au champ tournant. Le résultat immédiat est que cette situation est la plus favorable au niveau magnétique car le couple ainsi obtenu est maximum. Dans les machines synchrones, cette situation ne peut pas être envisagée car le moindre accroissement de couple ne peut pas être toujours compensé par un accroissement du déphasage. Un accroissement du déphasage de plus de 90° se traduit par une désynchronisation catastrophique de la machine. Ce résultat de fonctionnement est un point intéressant car il n’existe pas un tel décrochage sur une machine asynchrone.
Il est aisé de trouver dans la littérature ou les sites web spécialisés des informations sur la création des champs tournants. Par contre, l’exploitation du champ magnétique ainsi produit dans le rotor n’est pas aussi bien documentée. Les lignes suivantes vont permettre de mieux mettre en évidence les phénomènes associés. En préambule, une spire est placée dans un champ magnétique de module constant mais de direction variable, il semble «tourner » dans le sens trigonométrique (Fig. 17.a). Le résultat est qu’une force électromotrice apparait aux bornes de cette spire ouverte. Si cette spire est une spire fermée résistive, un courant induit va apparaitre et il sera déphasé de 90° par rapport à la phase de B (Fig. 17.b). Ce courant, circulant dans une spire engendrera un champ magnétique (Fig. 18.a) dont l’amplitude est proportionnelle à la variation de flux par rapport au

temps. Si une deuxième spire, légèrement décalée de la première, est ajoutée à cette structure, un deuxième champ magnétique va être produit. En multipliant le nombre de spires, on arrive à une structure de rotor à « cage d’écureuil ». La particularité de cette structure est que si l’on regarde la direction du champ magnétique engendré par les courants au rotor, on remarque qu’il est en quadrature par rapport au champ magnétique initial du stator. (Fig. 18). C'est-à-dire, que l’on obtient l’écart angulaire qui produit naturellement le maximum de couple. De plus, cet écart est indépendant du couple demandé. L’adaptation à ce couple mécanique passera par une augmentation ou une diminution du champ Br, c'est-à-dire une augmentation ou une diminution des courants rotoriques. Cette adéquation se traduira finalement par une modification des forces électromotrices via le glissement. Cette adaptation se faisant naturellement. Il serait dommage qu’une si belle succession de phénomènes physiques ne puissent pas se marier avec les supraconducteurs.
Avant de regarder plus en détail les possibilités offertes, il convient de reprendre les arguments qui furent utilisés pour condamner l’association de cette
machine avec les supraconducteurs. Le rapport du département de l’énergie américain comprend un chapitre sur ce sujet. Le moteur à induction, aussi appelé Superconducting Induction Motor (SCIM) est comparé au moteur synchrone, High Temperature Superconducting / Permament Magnet motor (HTS/PM). Il apparait, bien sûr, que tout rotor dans une machine asysnchrone doit se comporter comme un
(a)
(b)
Figure-17 : Un champ tournant, figure 17.a, engendre une force
électromotrice. Si la spire se comporte comme une résistance, figure
17.b, le courant engendré sera en phase avec la force électromotrice
produite dans la spire.
(a)
(b)
(c)
Figure-18 : Le courant rotorique, figure 18.a, engendre un champ magnétique.
Pour une deuxième spire décalée angulairement, figure 18.b, le même
phénomène se retrouve avec la génération d’un champ B1. Finalement, pour
un nombre important de spire, la somme des champs produits par les
différentes spires, Br, est un champ en quadrature avec le champ tournant, Bs
(figure 18.c).

élément résistif pour autoriser le démarrage de cette machine. Les courants importants qui vont en résulter sont dommageables pour le bon comportement des supraconducteurs. Les intensités des courants ou des champs magnétiques résultants de ces courants risquent d’excéder les paramètres critiques associés aux matériaux supraconducteurs. Même si ces limitations ne sont pas atteintes, il faut garder à l’esprit qu’un supraconducteur réel se comporte néanmoins comme une résistance très faible. En face de courant important, des pertes vont apparaitre. Ces pertes doivent être compensées par le système de cryogénie. Comme les contraintes thermiques sont sévères, les rapporteurs conclurent finalement sur l’absence d’urgence à poursuivre les investigations sur les SCIM. Conclusion qui semblait ne pas être remise en cause jusqu’aux dernières publications japonaises [51].
Envisager la fabrication d’un moteur cryogénique présentant des pertes joules n’est pas une hérésie… La NASA le montre dans l’une de ses réalisations [45]. L’objectif était de réaliser le moteur assurant la propulsion d’un avion n’utilisant que l’énergie électrique. Le moteur est réalisé à partir de matériaux conventionnels. En particulier, les matériaux conducteurs peuvent être du cuivre ou de l’aluminium. Comme ces deux matériaux seront utilisés à basses températures, leur résistivité va chuter d’un facteur 100. Les pertes Joules à évacuer sont d’office minorées. Dans de telles conditions, la NASA a proposé un moteur de 10,6 kW et assurant un couple de
sortie de 21 Nm. Les essais à température ambiante ont montré qu’un courant moteur produisant une densité de courant de 11 A/mm² ne pouvait être dépassé alors qu’en condition cryogénique, cette même densité atteint sans aucun problème 30 A/mm².
Les pertes thermiques existent et il faut les prendre en considération… Pour répondre à cette question, les chercheurs de la NASA ont tenu compte de l’environnement du moteur. C’est un moteur qui équipera un équipement mobile, il doit être autonome, il ne peut pas compter sur une source d’énergie extérieure à l’avion. Or la source d’énergie est l’énergie produite par des piles à combustible et le combustible est de l’hydrogène liquide à 20,2°K. Pourquoi ne pas demander à ce combustible de réfrigérer le moteur avant d’aller alimenter la pile (Figure 19). La solution prise par les ingénieurs de la NASA est particulièrement judicieuse. Le moteur, utilisant des conducteurs classiques, peut fonctionner à température ambiante et ainsi assurer une propulsion minimale. Pour un avion, c’est primordial. L’hydrogène présent dans l’avion étant avant tout un combustible, il pouvait être utilisé comme réfrigérant sans pénaliser le fonctionnement des piles. Il est remarquable de constater que cette solution, apparue au début de la conquête spatiale, est toujours utilisée par les ingénieurs concevant les tuyères des moteurs principaux des fusées. Les tuyères des moteurs Vulcain sont refroidies par l’hydrogène issu des réservoirs avant d’être envoyé dans la chambre de combustion.
La majorité des moteurs présentés sont des moteurs destinés à des applications mobiles. La source d’énergie principale est bien sur l’énergie électrique et la production de cette énergie électrique est très souvent confiée à des piles à combustible.
Figure-20 : Illustration d’un rotor à cage d’écureuil qui met en avant la
simplicité du réseau de conducteur ayant pour objectif de générer un
champ magnétique en interaction avec le champ magnétique issu du
stator. (Source : http://fr.wikipedia.org)
Figure-19 : Sur cette photo du moteur de la NASA, on peut voir le rotor
submergé par de l’hydrogène liquide qui assure son maintien à basse
température.

Est-il toujours d’actualité de retenir le critère thermique pour définir les structures des futures machines si les sources froides sont effectivement à proximité ?
En conséquence, il est possible de revenir sur la machine asynchrone qui était écartée jusqu’à présent des applications des supraconducteurs. Avoir un stator AIR-CORE ne remet pas en cause le principe du champ tournant, seul le rotor va demander une attention particulière (Fig. 20). Il doit avoir un comportement majoritairement résistif et ne pas perturber le fonctionnement du stator dont les conducteurs, qui seront peut-être à l’avenir des supraconducteurs, nécessiteront une température basse. Le rapport américain sur les machines à supraconducteur prévoyait un rotor purement supraconducteur. Cette solution avait été écartée par rapport aux trop forts courants associés au démarrage. Les convertisseurs de fréquence peuvent supprimer ce problème et donner de nouvelles perspectives au moteur asynchrone supraconducteur. De plus, il faut que le rotor se comporte comme un élément résistif et non inductif. C’est ce qui se passera si le glissement est très faible et si les matériaux employés sont des supraconducteurs de type II.
Si le courant est contrôlé et que des supraconducteurs de type II sont utilisés, leur faible niveau de perte en alternatif permet au rotor d’être assimilé à un élément résistif. L’étude japonaise va encore bien plus loin dans ce sens car elle montre
qu’une telle machine peut se comporter comme une machine synchrone. En effet, un très faible glissement provoque une très faible tension induite dans la cage du rotor. Cette cage ayant une résistance très faible, les courants qui y prennent naissance sont suffisants pour produire le couple mécanique demandé. Comme le glissement est très faible, il n’y a quasiment pas d’effet inductif au rotor. Si le courant qui s’établi au rotor à une fréquence négligeable, la machine asynchrone devient quasi-synchrone. Il reste encore le problème du circuit magnétique au rotor, car il est conservé (Fig. 21), il ne produira aucune perte par hystérésis mais limitera les niveaux d’induction et ne supprimera pas les pertes de surface.
Les métallurgistes montrent que si l’on accepte un rotor contenant des matériaux magnétiques, ils finiront toujours par limiter les inductions au niveau de saturation. Les faibles températures ainsi que le besoin d’isoler thermiquement les parties froides fait que les matériaux composites sont utilisés en suppléance de l’acier pour la transmission de la puissance mécanique. Les moteurs actuellement opérationnels restent finalement d’un aspect conventionnel. Si des personnalités historiques comme Michail Ossipowitsch Doliwo-Dobrowolski, inventeur du moteur asynchrone à cage d’écureuil ou Nicolas Tesla reconnaitraient sans difficulté les divers éléments d’un tel moteur, il serait assez surpris de voir dans quels matériaux ils sont réalisés, figures 22a et 22b [46] [47] [48].
(a)
(b)
Figure-22 : (a), Vue en coupe d’un moteur à supraconducteur de 5
MW de la société AMSC. L’absence de circuit magnétique fait que la
rigidité du stator doit être obtenue au niveau des bobinages (b). Le
stator ne contient pas aujourd’hui de supraconducteur et sa structure
reste encore proche des moteurs conventionnels.
Figure-21 : Synoptique d’un rotor à cage d’écureuil pour machine
asynchrone :
1) arbre primaire de transmission.
2) Anneau de court-circuit pour les barres conductrices
3) Matériau magnétique feuilleté : tôles isolées
4) Cannelures assurant la liaison mécanique entre l’arbre
primaire et les tôles magnétiques.
En particulier, la société AMSC a utilisé le fils de Litz pour réaliser les conducteurs du stator. Ce choix est justifié par l’importance des courants induits dans les conducteurs plongés dans le champ magnétique élevé du stator à air. Ce genre de conducteur est surtout utilisé en haute fréquence et pour les faibles puissances. Cet exemple renforce bien l’idée que les solutions techniques ne sont pas figées. Les japonais ont récemment relancés le débat sur la machine asynchrone supraconductrice [51], la NASA avec son moteur « froid » montre que les basses températures peuvent être utilisées sans pour autant être associées aux supraconducteurs [45]. Finalement, bien que ce thème alimente la littérature scientifique depuis plus de 100 ans, il apparait qu’il va rester encore sous la forme d’un terrain à défricher pour les dizaines d’années à venir.
8. Conclusion
Les auteurs de cet article travaillent sur les machines conventionnelles et recherchent actuellement de nouvelles structures pour réaliser dans les années à venir un moteur à supraconducteur. Ils sont ainsi arrivés à la conclusion que si les premières machines électriques tournent depuis plus de cents ans ; les années passées permirent aux ingénieurs de prendre tout le temps nécessaire pour en explorer les moindres détails. A chaque machine est associée des défauts et des qualités. Ils sont aussi associés aux capacités techniques du moment. Dans le cas de l’association des supraconducteurs à ces structures ancestrales, les premières innovations qui ont permis aux premiers moteurs de tourner ne permettent plus aux moteurs supraconducteurs de le faire. L’induit Siemens a montré sa supériorité sur l’induit Gramme, mais la structure Air-Core du stator des machines supraconductrice se rapproche plus de ce dernier. Finalement, même si les premières machines à supraconducteur ont démarré depuis plus d’une décennie, elles sont loin d’avoir l’antériorité des machines dites conventionnelles et trop peu de temps s’est écoulé pour conclure sur les structures à employer.
9. Bibliographie
[1] G. Charles, “Nylon, Kevlar et compagnie”, Documents en ligne : d'après «L'EXPRESS» du 19 mai 1993.
[2] C. Michel et B. Raveau, « De nouveaux supraconducteurs », « Pour la science », Novembre 1987, N° 121, pp 102-113.
[3] J. Baixeras, « Les supraconducteurs, Applications à
l’électronique et à l’électrotechnique », Collection Sciences et Techniques de l’Ingénieur, CNRS édition, 1998.
[4] “Les composants supraconducteurs à haute température
de Nexans sélectionnés par le Ministère américain de l'Energie dans le cadre d'un projet de limiteurs de courant de 12 millions de dollars”, 18/11/2003, Source en ligne : http://www.nexans.com.
[5] “Premier projet chinois de câble d'énergie
supraconducteur à haute température critique : Innopower choisit Nexans”, 17/04/2003, Source en ligne : http://www.nexans.com.
[6] Kang-Sik Ryu, Young-Sik Jo et Minwon Park,
“Overview of the development of the advanced power system by the applied superconductivity technologies programme in Korea”, INSTITUTE OF PHYSICS PUBLISHING, Supercond. Sci. Technol. 19 (2006) S102–S108.
[7] « American Superconductor Demonstrates World's
First HTS 5,000-Horsepower Electric Motor Patented, Ultra-Compact Design Expected to Open New Markets in Energy Conversion”, 07-18-2001, http://www.ewire.com.
[8] H. W. Neumüller, W Nick, B Wacker, M Frank, G
Nerowski, J Frauenhofer, W Rzadki and R Hartig, “Advances in and prospects for development of high-temperature superconductor rotating machines at Siemens”, INSTITUTE OF PHYSICS PUBLISHING, Supercond. Sci. Technol. 19 (2006) S114–S117 15-02-2006.
[9] G Papst, B B Gamble, A J Rodenbush and R Schöttler,
“Development of synchronous motors and generators with HTS field windings”, Supercond. Sci. Technol. 10 (1997) 924–926.
[10] “Converteam prépare le générateur supraconducteur
HTS”, Source en ligne : http://www.industrie-online.fr. [11] J+R. Hull, “Potential Impact of High Temperature,
Superconductors on Maglev Transportation”, Center for Transportation Research, Energy Systems Division, Argonne National Laboratory, United States Department of Energy, Février 1992.

[12] “Des supraconducteurs à haute température pour les moteurs et générateurs de demain”, Documents en ligne : http://www.technicites.fr, 17/07/2008.
[13] BBC, “Les supraconducteurs annoncent une ère
nouvelle”, Informations en ligne, http://www.bbc.co. [14] “Mécanique – Energétique, Physique : moteur linéaire
moins cher sans supraconducteur”, Documents en ligne : http://www.bulletins-electroniques.com , Partenariat ADIT - Ministère des affaires étrangères et Européennes.
[15] L. Landau et E. Lifchitz, « Physique Statistique, Tome
5 », Editions MIR., Moscou, 1967. [16] B. Dutoit, “Eléments de cryogénie”, Ecole
polytechnique fédérale de Lausanne, Juin 2007, Faculté STI Sciences et Techniques de l'ingénieur, cours en ligne.
[17] N. Wiest-Million Nicolas, J. Lemoine, E. Solt, “Les
matériaux supraconducteurs Rapport d’Epistemologie”, 22/07/2002, Document en ligne.
[18] B. Dutoit, “Supraconductivité de type I & II”, Cours
Supraconductivité, Juin 2007, Ecole polytechnique fédérale de Lausanne, Faculté STI Sciences et Techniques de l'ingénieur, Cours en ligne.
[19] B. Dutoit, “Matériaux supraconducteurs ”, Cours
Supraconductivité, Juin 2007, Ecole polytechnique fédérale de Lausanne, Faculté STI Sciences et Techniques de l'ingénieur, Cours en ligne.
[20] S.P. Chapman, « A hierarchy of models for type II
superconductors », SIAM review, 2000, vol. 42, no4, pp. 555-598.
[21] J.S. Hurley, U. Rao, « Alternating current losses in Ag-
Sheathed BSCCO (2212 &2223) tapes wires and YBCO (123) coated conductors », U.S Department of Energy, Federal Energy Technology Center.
[22] J. S. Hurley, “FINAL REPORT, Alternating Current
Losses in Ag-Sheathed BSCCO (2212 & 2223) Tapes and Wires and YBCO (123) Coated Conductors!” U.S. Department of Energy, Federal Energy Technology Center.
[23]http://www.dailymotion.com/al-fred/video/xsd71_nikola-
tesla-les-archives-oubliees
[24] POUR LA SCIENCE N° 330, Avril 2005 [25] B. Dutoit, “HTSC Tapes”, Cours Supraconductivité,
Juin 2007, Ecole polytechnique fédérale de Lausanne,
Faculté STI Sciences et Techniques de l'ingénieur, Cours en ligne.
[26] E. B. Forsyth, “Intermetallic Superconductors - the
State of Development in 1991”, Maglev Transportation Systems, May 23-24, 1991.
[27] F. Sirois, “ELE4453, Matériaux de l’électrotechnique,
Matériaux supraconducteur“, 21-05-2007, Ecole polytechnique de Montréal, Présentation en ligne.
[28] R. A. Hawsey, “Progress in development of high
temperature superconducting wire for electric power applications”, Document soumis au 29ème congrès International Energy Conversion Engineering, Montrey, CA, 7-12 / 8 / 1994.
[29] G. A. Levin and P. N. Barnes, “The Integration of
YBCO Coated Conductors into Magnets and Rotating Machinery”, Presented at 2005 Cryogenic Engineering Conference and International Cryogenic Materials Conference, Keystone, CO (August 29-September 2, 2005).
[30] D. Selse, “Nouveau record pour les supraconducteurs
!”, 15-09-2006, http://www.futura-sciences.com/fr/. [31] Brevet USA: stator of a cryogenic electric machine -
Patent 4398108, publié le 08/09/1983, http://www.freepatentsonline.com/4398108.html
[32] Zhang, B.; Driscoll, D.; Dombrovski, V, « Construction
and testing of a 1000 hp high-temperature superconducting motor», Petroleum and Chemical Industry Conference, 2002. Industry Applications Society 49th Annual, pp 223- 228.
[33] J. Sapin et A. Schouleur, “ Etude et contrôle d'un palier
magnétique pour volant d'inertie”, CEREM Centre de Recheche en mécatronique, Présentation en ligne : http://www.grepes.be/content/documents/presentations/present_2007_02_23/.
[34] http://femm.foster-miller.net/wiki/HomePage [35] “Nexans fournit le premier palier supraconducteur sans
contact pour une application industrielle”, 21/09/2005, Source en ligne : http://www.nexans.com.
[36]http://www.physclips.unsw.edu.au/jw/electricmotors.htm [37] M Izumi, C Xu, A Hu, M Ichihara, Y Xu, E Morita, Y
Kimura, M Murakami, N Sakai, I Hirabayashi, H Sugimoto et M Miki, “ Materials Processing, Pulsed Field Magnetization and Field-Pole Application to Propulsion Motors on Gd123 Bulk Superconductors”, 8th European Conference on Applied

Superconductivity (EUCAS 2007), Journal of Physics: Conference Series 97 (2008).
[38] E Morita, H Matsuzaki, YKimura, IOhtani, H Ogata, M
Izumi, Y Nonaka, MMurakami, T Ida, H Sugimoto, M Miki et M Kitano, “Study of single pulsed-field magnetization of Gd–Ba–Cu–O bulk high-temperature superconductor with a split type of armature coil for rotating machinery”, INSTITUTE OF PHYSICS PUBLISHING, Supercond. Sci. Technol. 19 (2006) S486–S490.
[39] J. R. Hull, S. SenGupta et J. R. Gaines, “Trapped-Flux
internal dipole superconducting motor / generator”, Work supported by the U.S. Department of Energy, Submitted to 1998 Applied Superconductivity Conference, Sept. 13-18, 1998, PalmDesert, CA.
[40] M. Kiki, S. Tokura, H. Hayakawa, H. Inami, M.
Kitano, H. Matsuzaki, Y. Kimura, I. Ohtani, E. Morita, H. Ogata, M. Izumi, H. Sugimoto and T. Ida, « Development of a synchronous motor with Gd-Ba-Cu-O bulk superconductors as pole-field magnets for propulsion system», INSTITUTE OF PHYSICS PUBLISHING, Supercond. Sci. Technol., N°19, 2006, pp S494-499.
[41] P Vanderbemden, Z Hong, T A Coombs, M Ausloos, N
Hari Babu, D A Cardwell et A M Campbell, “Remagnetization of bulk high-temperature superconductors subjected to crossed and rotating magnetic fields”,
[42] L.K. Kovalev, K.V. Ilushin, V.T. Penkin, K.E.
Kovalev, A.E. Larionoff, S.M-A. Koncev, K.A. Modestov, S.A. Larionoff, V.N. Poltavets, I.I. Akimov, V.V. Alexandrov, W. Gawalek, B. Oswald et G. Krabbes. « High output power reluctance electric motors with bulk high-temperature superconductor elements », INSTITUTE OF PHYSICS PUBLISHING, Supercond. Sci. Technol. N° 15, 2002, pp 817-822.
[43] P. Chu, « Les supraconducteurs dans l’industrie »,
« Pour la science», Novembre 1995, N°217, pp 128- 132.
[44] RELIANCE ELECTRIC COMPAGNY,
« Development of Ultra-Efficient electric motors », Final technical report, covering work from April 2002 through September 2007, Published May 2008. United State Department of Energy.
[45] Dr. Gerald V. Brown, “Cryogenic Electric Motor
Tested”, NASA, Propulsion and Power, VSP, RAC, Rapport d’essais en ligne. http://www.grc.nasa.gov/
[46] American Superconductor (A.M.S.C.), “Marine
Propulsion DataSheet”, http://www.amsc.com.
[47] American Superconductor (AMSC), “High
Temperature Superconductor (HTS) Electric Propulsion Motors”, 2006, http://www.amsc.com.
[48] American Superconductor (AMSC), “Development
Status of Superconducting Rotating Machines”, IEEE PES Meeting, New York, 27-31 January 2002
[49] American Superconductor (AMSC), “American
superconductor developing 10 MW wind generators”, 11 octobre 2007, http://www.amsc.com.
[50] H. Walter, J.Bock, Ch. Frohne, K. Schippl, H. May,
W.R. Canders, P. Kummeth, W. Nick et H.-W. Neumueller. American Superconductor (AMSC), « First Heavy Load Bearing for Industrial Application with Shaft Loads up to 10 KN », Journal of Physics; Conference Series 43 (2006) pp 995-998.
[51] G Morita, T Nakamura1, and I Muta., « Theoretical
analysis of a YBCO squirrel-cage type induction motor based on an equivalent circuit », INSTITUTE OF PHYSICS PUBLISHING SUPERCONDUCTOR SCIENCE AND TECHNOLOGY Supercond. Sci. Technol. 19 (2006) 473–478.