modelos estatísticos para predição da trajetória de ... · modelos estatísticos para...
TRANSCRIPT

Modelos estatísticos para predição da trajetória deaeronaves comerciais
Juliana João Ferreira dos Ramos
Dissertação para a obtenção de Grau de Mestre em
Engenharia Aeroespacial
Orientadores: Prof. Rodrigo Martins de Matos VenturaProf. Miguel José Simões Barão
Júri
Presidente: Prof. João Manuel Lage de Miranda LemosOrientador: Prof. Rodrigo Martins de Matos VenturaVogais: Américo Gomes Dias de Melo
Prof. Pedro da Graça Tavares Alvares Serrão
Junho 2014

ii

Agradecimentos
Agradeco a todos os professores que fizeram parte da minha formacao e com os quais aprendi muito.
Dirijo um agradecimento especial ao meu orientador, Rodrigo Ventura, pela oportunidade dada de
poder trabalhar com ele e por todos os valiosos contributos dados nas nossas reunioes, pela paciencia
e disponibilidade demonstradas. Ao meu co-orientador, Miguel Barao, agradeco igualmente a sua
colaboracao e contributos para o desenvolvimento da presente tese. Gostaria ainda de destacar o
Miguel Branco, membro fundador do Portugal vACC, pela base de dados de aeronaves comerciais
disponibilizada, foi gracas a esta que tive a possibilidade de desenvolver esta tese.
Por fim, aos meus pais, irmao, avos, Ligia e a todos os meus colegas que sempre me acompanharam,
apoiaram e incentivaram.
iii

iv

Resumo
Os algoritmos de predicao de trajetorias sao uma componente crıtica e fundamental numa ferramenta de
suporte a decisao (DST - Decision Support Tool) na gestao de trafego aereo. Alem disso, relativamente
aos restringimentos de seguranca, e mais sensato prever intervalos possıveis da posicao das aeronaves
em vez de posicoes precisas. Devido a presenca de incertezas nos modelos de predicao de trajetorias
e de modo a ter uma predicao de trajetoria com significado, e necessario um modelo estatıstico de
modo a estimar essas incertezas. Obter dados estatısticos representativos destas incertezas e um
processo intensivo que requer a recolha de dados de trafego aereo e analise de um grande numero de
trajetorias. Foi utilizado um modelo cinematico estocastico que a partir de um modelo de performance
probabilıstico consegue captar a variabilidade associada a execucao de uma fase de voo. As fases de
voo foram identificadas a partir do algoritmo Viterbi. Em conjunto com o Metodo de Monte Carlo foi
possıvel reproduzir a trajetoria duma aeronave com varias possibilidades e combinacoes pelo tempo
desejado. O modelo de performance estatıstico foi desenvolvido a partir dos dados reais de aeronaves,
obtidos a partir de recetores ADS-B, e esta dependente do modelo e fase de voo da aeronave. Os
resultados obtidos foram promissores, a maior parte das trajetorias foram previstas com sucesso.
Palavras-chave: Predicao da trajetoria, DST, Metodo de Monte Carlo, Algoritmo Viterbi, ADS-B
v

vi

Abstract
Ground-based aircraft trajectory prediction is a critical and fundamental issue for air traffic management
decison support tool (DST). Moreover, regarding the safety constraints, it could be more reasonable to
predict intervals rather than precise aircraft positions. With the presence of uncertainties in the trajectory
prediction models and in order to have a meaningful trajectory prediction, a statistical model, to estimate
these uncertainties, is required. Obtain representative statistical measures of these uncertainties is an
intensive process that requires data collection and analysis of a large number of aircraft trajectories.
A kinematic stochastic model was used, associated with a probabilistic performance model it captures
the variability associated with the execution of a flight phase. Flight phases were identified using the
Viterbi algorithm. Together with the Monte Carlo method it was possible to reproduce the trajectory of
an aircraft with multiple possibilities and combinations for the desired time. The statistical performance
model was developed from real aircraft data, obtained from ADS-B receptors, and it is dependent on the
type and flight phase of the aircraft. The results were promising, the most part of the trajectories were
successfully predicted.
Keywords: Trajectory prediction, DST, Monte Carlo Method, Viterbi Algorithm, ADS-B
vii

viii

Conteudo
Agradecimentos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . iii
Resumo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . v
Abstract . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . vii
Conteudo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ix
Lista de Figuras . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xi
Lista de Tabelas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xiii
Lista de Sımbolos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xvii
Lista de Acronimos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xix
1 Introducao 1
1.1 Objetivos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.2 Visao Geral do Modelo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.3 Estado da Arte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.4 Contribuicoes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.5 Estrutura . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2 Base de Dados 7
2.1 Obtencao de dados aeronauticos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.1.1 Radar Primario . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.1.2 Radar Secundario . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.1.3 Automatic Dependent Surveillance (ADS) . . . . . . . . . . . . . . . . . . . . . . . 9
2.2 Informacoes sobre a base de dados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.2.1 Dados disponıveis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.2.2 Dados adicionais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.2.3 Informacoes de interesse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
3 Identificacao de fases de voo 17
3.1 Hidden Markov Model (HMM) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3.2 Algoritmo Viterbi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
3.3 Resultados do Algoritmo Viterbi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
ix

4 Modelo estatıstico de predicao de trajetorias 27
4.1 Metodo de Monte Carlo (MMC) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
4.2 Modelo cinematico e de performance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
4.3 Resultados dos Modelos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
4.3.1 Resultados A320 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
4.3.2 Resultados B738 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
5 Conclusoes 41
5.1 Trabalho futuro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
A Modelo de performance BADA - A320 45
Referencias 48
x

Lista de Figuras
1.1 Esquema do modelo de performance. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.1 Exemplo de 9 conjuntos de dados obtidos pelos recetores ADS-B. . . . . . . . . . . . . . 11
2.2 Referencial ECEF e ENU para representar as posicoes cartesianas das aeronaves. . . . 12
2.3 Numero total de medidas por ficheiro de dados disponibilizados pelos recetores ADS-B. . 14
2.4 Numero total de voos por ficheiro de dados disponibilizados pelos recetores ADS-B. . . . 15
2.5 Numero total de modelos de aeronaves e companhias aereas identificados para cada
ficheiro da base de dados. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.6 Area geografica abrangida pelos recetores ADS-B. . . . . . . . . . . . . . . . . . . . . . . 16
3.1 Efeito da variacao da largura de banda do KDE para uma amostra de dados de 15 aeron-
aves para a fase de subida. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
3.2 Funcao KDE e distribuicao gaussiana para a identificacao da fase de subida e descida. . 22
3.3 Funcao KDE e distribuicao gaussiana para a identificacao da fase de cruzeiro. . . . . . . 22
3.4 Identificacao das fases de voo pelo Viterbi para uma porcao do voo da TAP Portugal 213
e modelo de aeronave A320. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3.5 Identificacao das fases de voo pelo Viterbi para o voo da Ryanair 2011 e modelo de
aeronave B738. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
3.6 Identificacao das fases de voo pelo Viterbi para o voo da Monarc Airlines 286 e modelo
de aeronave A321. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
3.7 Identificacao das fases de voo pelo Viterbi para uma porcao do voo da TAP Portugal 572
e modelo de aeronave A319. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
3.8 Grafico ROC mostrando 4 classificacoes possıveis. . . . . . . . . . . . . . . . . . . . . . 26
4.1 Altitudes reais medidas e extremos de predicao para 500 partıculas. . . . . . . . . . . . . 31
4.2 Normalizacao da altitude da aeronave para predicao com 500 partıculas. . . . . . . . . . 31
4.3 Altitudes reais medidas e extremos de predicao para a fase de descida do A320 utilizando
500 partıculas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
4.4 Distancia percorrida real medida e extremos de predicao para a fase de descida do A320
utilizando 500 partıculas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
4.5 Altitudes reais medidas e extremos de predicao para a fase de subida do A320 utilizando
500 partıculas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
xi

4.6 Distancia percorrida real medida e extremos de predicao para a fase de subida do A320
utilizando 500 partıculas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
4.7 Altitudes reais medidas para uma trajetoria fora do padrao normal e predicao com 500
partıculas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
4.8 Distancia percorrida real medida para uma trajetoria fora do padrao normal e predicao
com 500 partıculas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
4.9 Altitudes reais medidas pouco coerentes e predicao com 500 partıculas. . . . . . . . . . . 35
4.10 Distancias reais medidas pouco coerentes e predicao com 500 partıculas. . . . . . . . . . 35
4.11 Distancia entre extremos de predicao da altitude para a fase de descida do A320 para
500 partıculas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
4.12 Distancia entre extremos de predicao da distancia percorrida para a fase de descida do
A320 para 500 partıculas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
4.13 Distancia entre extremos de predicao da altitude para a fase de subida do A320 para 500
partıculas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
4.14 Distancia entre extremos de predicao da distancia percorrida para a fase de subida do
A320 para 500 partıculas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
4.15 Altitudes reais medidas e extremos de predicao para a fase de descida do B738 utilizando
500 partıculas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
4.16 Distancia percorrida real medida e extremos de predicao para a fase de descida do B738
utilizando 500 partıculas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
4.17 Altitudes reais medidas e extremos de predicao para a fase de subida do B738 utilizando
500 partıculas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
4.18 Distancia percorrida real medida e extremos de predicao para a fase de subida do B738
utilizando 500 partıculas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
A.1 Modelo de performance do BADA para o A320 e para FL entre 0 e 40. . . . . . . . . . . . 45
A.2 Modelo de performance do BADA para o A320 e para FL entre 60 e 410. . . . . . . . . . 46
xii

Lista de Tabelas
2.1 Especificacao dos campos obtidos pelos recetores ADS-B e sua descricao. . . . . . . . . 11
2.2 Os dez modelos de aeronaves mais frequentes e respectivo numero de voos identificados. 16
2.3 As dez companhias de aereas mais frequentes e respectivo numero de voos identificados. 16
2.4 Intervalo de medidas, tempo de seguimento e numero de medidas por aeronave medio e
respectivo desvio padrao. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3.1 Resultados possıveis da classificacao binaria. . . . . . . . . . . . . . . . . . . . . . . . . 23
3.2 Resultados de TVP e TFP para as tres fases de voo. . . . . . . . . . . . . . . . . . . . . . 25
4.1 Percentagem de medidas fora do intervalo de predicao para a fase de descida do A320
utilizando 500 e 300 partıculas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
4.2 Percentagem de medidas fora do intervalo de predicao para a fase de subida do A320
utilizando 500 e 300 partıculas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
4.3 Percentagem de medidas fora do intervalo de predicao para a fase de descida do B738
utilizando 500 e 300 partıculas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
4.4 Percentagem de medidas fora do intervalo de predicao para a fase de subida do B738
utilizando 500 e 300 partıculas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
xiii

xiv

Lista de Sımbolos
Sımbolos gregos
δh Ruıdo da medida de altitude.
δs Ruıdo da medida de distancia percorrida.
δt(i) Maior probabilidade ao longo de um unico caminho ate o instante t e para o estado i.
λ Longitude.
λ0ENULongitude da origem do referencial ENU.
λHMM Conjunto de parametros HMM.
µ Media da distribuicao gaussiana.
φ Latitude.
φ0ENULatitude da origem do referencial ENU.
π Matriz da probabilidade inicial dos estados.
ψt(i) Sequencia de estado otima de acordo com δt(i).
σ Desvio padrao da distribuicao gaussiana.
Sımbolos romanos
A Matriz de transicao.
ae Semi-eixo maior do elipsoide terrestre.
B Matriz de observacao.
bw Largura de banda.
f Funcao de densidade kernel estimada.
ft Achatamento terrestre.
FN Numero de falsos negativos.
FP Numero de falsos positivos.
xv

G Velociadade solo.
h Altitude no referencial ENU.
Kh Funcao kernel escalado.
M Numero de sımbolos por estado do HMM.
N Numero de estados ocultos do HMM.
Ne Distancia que uma linha perpendicular ao elipsoide interseta o eixo polar.
Np Numero de partıculas.
Nt Numero de instantes de tempo.
ny Valor normalizado da variavel y.
O Sequencia de observacoes.
Q Sequencia de estados otima.
q Estado atual.
Rotx(γ) Matriz de rotacao em torno do eixo x.
Rotz(γ) Matriz de rotacao em torno do eixo z.
S Estados possıveis.
s Distancia percorrida.
T Intervalo de tempo.
TFP Taxa de falsos positivos.
TV P Taxa de verdadeiros positivos.
V Velocidade vertical.
vk Sımbolo observavel do HMM.
V N Numero de verdadeiros negativos.
V P Numero de verdadeiros positivos.
X Coordenada cartesiana da posicao no referencial ECEF.
xp Coordenada cartesiana da posicao no referencial ENU.
Y Coordenada cartesiana da posicao no referencial ECEF.
yp Coordenada cartesiana da posicao no referencial ENU.
Z Coordenada cartesiana da posicao no referencial ECEF.
xvi

Subscritos
ECEF Referente ao referencial ECEF.
ENU Referente ao referencial ENU.
k Instante de tempo discreto.
max Maximo valor.
mix Mınimo valor.
xvii

xviii

Lista de Acronimos
4D Quatro Dimensoes
ADS-B Automatic Dependent Surveillance-Broadcast
ADS-C Automatic Dependent Surveillance-Contract
BADA Base of Aircraft Data
DME Distance Measuring Equipment
DST Decision Support Tool
ECEF Earth Centered Earth Fixed
ENU East North Up
FANS Future Air Navigation System
FDP Funcao Densidade de Probabilidade
FL Flight Level
FMS Flight Management System
GPS Global Positioning System
GTA Gestao de Trafego Aereo
HMM Hidden Markov Model
ICAO International Civil Aviation Organization
IFR Instrument Flight Rules
ILS Instrument Landing System
KDE Kernel Density Function
MMC Metodo de Monte Carlo
NDB Non Directional Beacon
PSR Primary Survaillance Radar
PT Predicao de trajetoria
ROC Receiver Operating Characteristic
SSR Secondary Survaillance Radar
VOR VHF Ominidirectional Equipment
xix

xx

Capıtulo 1
Introducao
Apesar dos avancos tecnologicos na navegacao, comunicacao, computacao e controlo, a Gestao de
Trafego Aereo (GTA) e ainda, na sua maioria, assente em torno de um espaco aereo rigidamente es-
truturado e num sistema centralizado, principalmente operado pelos controladores aereos. O aumento
do trafego aereo leva as atuais praticas de GTA ao limite. O aumento da carga de trabalho dos con-
troladores aereos pode causar degradacao na sua performance e na seguranca do trafego aereo num
futuro proximo. Cre-se que com o aumento do nıvel de automacao, a eficiencia na GTA pode ser mel-
horada e as tarefas do controlador podem ser simplificadas. Isto permitira ao controlador aereo lidar
com o aumento do trafego de maneira mais segura, aumentando o nıvel de seguranca do sistema atual
[1].
O principal objectivo do controlador de trafego aereo e manter um fluxo ordenado seguro e expedito
do mesmo, assegurando-se de que as aeronaves estao sempre separadas horizontal e verticalmente
umas das outras, mantendo contudo um padrao de rotas que garanta uma gestao eficaz do espaco
aereo, tendo em consideracao as necessidades comerciais, de exploracao e do tempo de voo. Neste
contexto, as principais tarefas de analise de seguranca do controlador e a detecao de conflitos e a
resolucao dos mesmos, ou seja, estimar a criticidade de uma situacao, prevenir e resolver situacoes
crıticas.
Para desenvolver uma ferramenta de apoio a decisao (DST - Decison Support Tool) que produz instrucoes
de forma a cumprir os dois objectivos do controlo de trafego aereo: (1) seguranca e (2) fluidez de trafego,
sao necessarios algoritmos para predicao de trajetorias de aeronaves. E neste contexto em que se in-
sere esta tese, ou seja, na criacao de um algoritmo de predicao de trajectorias.
Algoritmos de predicao de trajetorias (PT) sao uma componente crıtica e fundamental numa DST, para
detecao de conflitos e outras aplicacoes de automacao de GTA, uma predicao segura e eficiente e um
dos pre-requisito. Alem disso, relativamente aos restringimentos de seguranca, e mais sensato pre-
ver intervalos possıveis da posicao das aeronaves em vez de posicoes precisas. A predicao a quatro
1

dimensoes (4D) da trajetoria contem dados especificando a posicao vertical e horizontal da aeronave
para um determinado instante de tempo, ou seja, especıfica as coordenadas cartesianas (xp, yp e h)
ou geodesicas (φ, λ e h) e o respectivo instante de tempo. A habilidade do algoritmo de PT, prever com
precisao as trajetorias 4D para um numero elevado de aeronaves e para diferentes condicoes de voo e
um dos factores mais importantes na determinacao da precisao e eficacia duma DST.
A incerteza da PT aumenta com o intervalo de tempo de predicao, ou seja, no inıcio da trajetoria
(quando sao recebidos novos dados aeronauticos) a incerteza e menor comparada com o fim da
mesma. A PT e realizada com base nas informacoes do estado e accoes da aeronave. Devido as
influencias do ambiente de trafego aereo, nao e de esperar que aeronave se mantenha no mesmo
estado ao longo de todo o intervalo de predicao. A informacao de alteracao do mesmo, ou seja, a
realizacao de uma accao por parte desta, faz com que a PT nos instantes futuros seja invalida. So-
mente os dados relativamente aos instantes de tempo anteriores a informacao de tomada de accao da
aeronave seriam validas. Accoes por parte da aeronave ocorrem de forma imprevisıvel no trafego aereo
real e escondera a verdadeira precisao do algoritmo de PT se nao for tido em conta.
Uma PT consiste tıpicamente num conjunto de fases de voo com subidas, descidas e cruzeiros. A PT
para a subida e descida tem inevitavelmente uma variabilidade maior comparativamente com o cruzeiro,
e entre si tem variabiliadades diferentes originadas pela performance da aeronave para cada fase de
voo, configuravel pela companhia aerea e pelo piloto, como tambem pelas escolhas dos pilotos, por
exemplo a taxa de descida ou subida. Por isso, a variabilidade da PT tem que ser determinada sepa-
radamente para cada fase de voo. O algoritmo de PT tambem necessita de ter em conta o modelo da
aeronave, pois a performance de uma aeronave depende do mesmo.
A precisao da PT e afectada por varias incertezas. A bordo da aeronave o FMS (Flight Management
System) preve a trajetoria da aeronave com base num modelo ponto-massa com as forcas a serem
aplicadas no centro de gravidade. Este modelo e formulado como um conjunto de equacoes algebricas
diferenciais que sao integradas para um certo intervalo de tempo de modo a prever as sucessivas
posicoes da aeronave para este intervalo [2]. O modelo ponto-massa requer o conhecimento do estado
da aeronave (massa, forca de impulso, coeficiente de sustentacao, entre outros parametros), condicoes
atmosfericas (como vento e temperatura), e accoes da aeronave (velocidade ou altitude a atingir, por ex-
emplo). Muitas destas informacoes nao estao disponıveis numa DST no solo, e a informacao disponıvel
nao e conhecida com grande precisao. A massa da aeronave, por exemplo, nao e atualmente trans-
mitida para as estacoes no solo e por isso tem que ser estimada. As condicoes atmosfericas sao
estimadas com recurso a modelos meteorologicos. E por fim, as actuais predicoes da trajetoria sao
realizadas atraves de assumpcoes basicas relativamente as accoes da aeronave. Muitos dos modelos
de performance utilizados atualmente, como os que estao presentes no BADA (Base of Aircraft Data)
desenvolvido pela EUROCONTROL para predicao de trajetorias [3] (exempificado no Anexo A para o
A320), podem nao refletir a realidade, onde as velocidades sao escolhidas pelos pilotos de acordo com
2

o cost index que e a razao entre o custo de operacao e o custo do combustıvel. Estes custos sao
especıficos de cada companhia aerea, e nao estao disponıveis ao publico em geral.
Como consequencia, a PT numa DST e atualmente relativamente imprecisa, comparada com a predicao
feita a bordo. Existe a necessidade de prever as trajetorias numa DST, para todo o trafego num determi-
nado espaco aereo, com velocidade e precisao suficiente de modo a permitir uma detecao e resolucao
de conflitos das trajetorias 4D. Com a presenca de tais incertezas, e de modo a ter uma PT com signifi-
cado, e necessario um modelo estatıstico de modo a estimar essas incertezas. Obter dados estatısticos
representativos destas incertezas nas medidas e um processo intensivo que requer a recolha de dados
de trafego aereo e analise de um grande numero de trajetorias.
1.1 Objetivos
As ferramentas de apoio a decisao de GTA realizam a predicao de trajetorias com base nas accoes
da aeronave, no modelo de performance e numa estimativa das condicoes meteorologicas. A estas
predicoes estao associadas incertezas que provem dos dados utilizados, das accoes do piloto e dos
controloladores aereos.
Pretende-se desenvolver um metodo que para alem de prever a trajetoria da aeronave determina a vari-
abilidade associada a mesma em funcao da fase de voo e modelo da aeronave. Para tal, sera definido
um modelo cinematico estocastico, que representa o comportamento da aeronave. Sera realizada uma
analise de dados de trajetorias reais, de aeronaves comerciais, a partir dos quais sera criado um mod-
elo de performance, a ser utilizado no modelo estocastico. Em conjunto com um sistema gerador de
numeros aleatorios, o Metodo de Monte Carlo, pretende-se estudar as possıveis trajetorias e daı inferir
a variabilidade associada a predicao.
1.2 Visao Geral do Modelo
O modelo da cinematica desenvolvido e estocastico. Os simuladores estocasticos sao capacitados a
modelar a aleatoriedade do sistema real atraves de distribuicoes probabilısticas, as quais representam
matematicamente as possibilidades de ocorrencia de todos os valores possıveis para um determinado
processo do sistema. As distribuicoes probabilısticas sao obtidas a partir do modelo de performance
desenvolvido. Em conjunto com um sistema gerador de numeros aleatorios como o Metodo de Monte
Carlo (MMC), os simuladores estocasticos permitem reproduzir o comportamento do sistema com to-
das as possibilidades e combinacoes, e sem limite no perıodo de tempo desejado pelo usuario.
Para a predicao da trajetoria e necessario definir o modelo da cinematica da aeronave. No plano vertical
e horizontal sao definidas duas equacoes diferenciais, uma correspondente a predicao da altitude (h)
da aeronave e outra a distancia percorrida (s)
3
hk = hk−1 + T (Vk + δhk) (1.1)
sk = sk−1 + T (Gk + δsk) (1.2)
onde T , representa o intervalo de tempo entre medicoes, V a velocidade vertical, G a velocidade solo,
δh e δs que correspondem as perturbacoes da velocidade vertical e de solo, respectivamente.
Como se pode constatar pelo modelo da cinematica das Eqs. (1.1) e (1.2), a PT foi simplificada para os
casos em que a aeronave apenas navega em segmentos de reta, ou seja, os segmentos no plano de
voo onde sao executadas curvas estao excluıdos do ambito da tese. Para realizar a PT de aeronaves
nestas condicoes, sabendo o rumo e a posicao inicial de predicao e possıvel obter as posicoes futuras
da aeronave no plano horizontal.
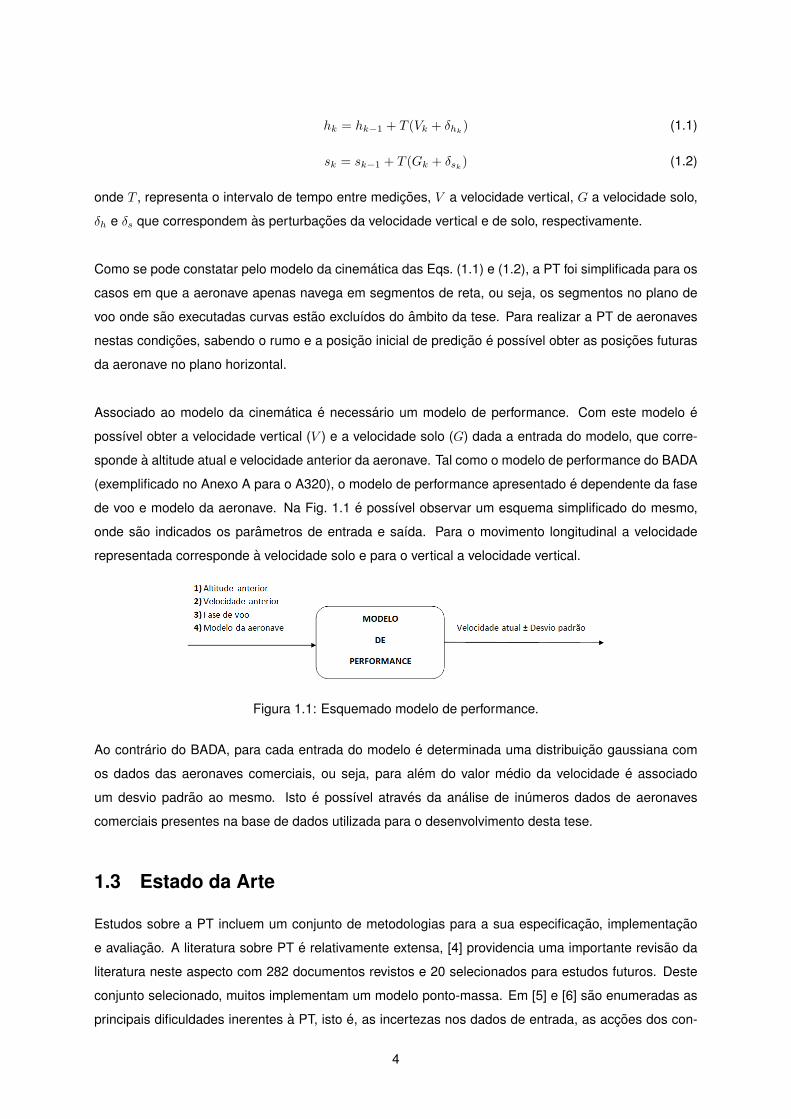
Associado ao modelo da cinematica e necessario um modelo de performance. Com este modelo e
possıvel obter a velocidade vertical (V ) e a velocidade solo (G) dada a entrada do modelo, que corre-
sponde a altitude atual e velocidade anterior da aeronave. Tal como o modelo de performance do BADA
(exemplificado no Anexo A para o A320), o modelo de performance apresentado e dependente da fase
de voo e modelo da aeronave. Na Fig. 1.1 e possıvel observar um esquema simplificado do mesmo,
onde sao indicados os parametros de entrada e saıda. Para o movimento longitudinal a velocidade
representada corresponde a velocidade solo e para o vertical a velocidade vertical.
Figura 1.1: Esquemado modelo de performance.
Ao contrario do BADA, para cada entrada do modelo e determinada uma distribuicao gaussiana com
os dados das aeronaves comerciais, ou seja, para alem do valor medio da velocidade e associado
um desvio padrao ao mesmo. Isto e possıvel atraves da analise de inumeros dados de aeronaves
comerciais presentes na base de dados utilizada para o desenvolvimento desta tese.
1.3 Estado da Arte
Estudos sobre a PT incluem um conjunto de metodologias para a sua especificacao, implementacao
e avaliacao. A literatura sobre PT e relativamente extensa, [4] providencia uma importante revisao da
literatura neste aspecto com 282 documentos revistos e 20 selecionados para estudos futuros. Deste
conjunto selecionado, muitos implementam um modelo ponto-massa. Em [5] e [6] sao enumeradas as
principais dificuldades inerentes a PT, isto e, as incertezas nos dados de entrada, as accoes dos con-
4

troladores aereos e pilotos, e quantificam os erros de acordo com as mesmas. Os dados de entrada
referem-se principalmente a caracterısticas das aeronaves.
Os modelos estatısticos existem porque e normalmente impossıvel obter todos os dados sobre uma
populacao de interesse. A solucao consiste em recolher dados de um subconjunto (amostra) da
populacao. Quantidades como medias, desvios padroes, entre outros, sao importantes e sao desig-
nados por parametros da amostra, visto que normalmente nao e possıvel obte-los para a populacao. A
estatıstica tem como finalidade estimar estes mesmos parametros. Em termos estatısticos um modelo
pode ser classificado como parametrico ou nao parametrico. De uma maneira geral, os processos es-
tatısticos parametricos dependem de pressupostos sobre a forma da distribuicao (sendo a mais comum
a distribuicao normal) da populacao subjacente e sobre os parametros (medias e desvios padroes, por
exemplo) da distribuicao assumida. Os modelos nao parametricos contam com nenhuma ou poucas
suposicoes sobre a forma ou parametros da distribuicao da populacao da qual a amostra foi recolhida.
No contexto da PT para aeronaves comerciais, uma abordagem parametrica refere-se a um modelo
baseado nas equacoes da dinamica e caracterısticas da aeronave, como e o caso do modelo ponto-
massa do BADA. Um defeito comum nas abordagens parametricas esta relacionado com os valores
nominais usados para cada parametro que podem diferir da situacao real [7]. Como exemplo, tem-se
um dos parametros definidos pelo BADA, o angulo de pranchamento (bank angle) nominal e maximo
de acordo com a fase de voo para a aeronave. Para todas as fases de voo de uma aeronave civil, com
excepcao da descolagem e aterragem, foi definido um valor nominal de 35◦ e um valor maximo de 45◦.
Com os dados das trajetorias de aeronaves comerciais utilizados para o desenvolvimento desta tese
foi possıvel verificar que estes valores nao estao de acordo com os obtidos, que foram 15◦ para o valor
nominal e 30◦ para o valor maximo. Outro parametro, que pode muito facilmente nao corresponder a
realidade e a massa da aeronave. No BADA sao definidas as massas mınimas, nominais e maximas
que podem diferir em dezenas de toneladas levando a PT completamente distintas, em [7] e possıvel
ver a importancia do ajuste da mesma. Para os modelos ponto-massa os parametros definidos sao
determinantes para realizar a PT. Alem disso, estes nao disponibilizam a incerteza associada a PT, de-
vido a escolha dos parametros, apenas identificam o valor nominal da predicao. De modo a ultrapassar
estas dificuldades inerentes, uma abordagem nao parametrica permite obter a partir de um historial de
trajetorias um modelo de PT.
Uma abordagem nao parametrica para o problema da PT traz vantagens, como o facto de nao ser
necessario definir valores nominais para os parametros do modelo e permite obter um modelo mais
informativo, isto e, sao disponibilizadas mais informacoes, como e o caso da variabilidade da predicao.
A principal desvantagem dos modelos nao parametricos e que requerem uma grande quantidade de
dados e como o modelo e criado a partir de contextos especıficos pode existir problemas de overfitting,
ou seja, na sua generalizacao, devido as restricoes do espaco aereo, como por exemplo a aeronave
executar um procedimento standard de descolagem. Deste modo, e necessario realizar testes para
5

outros contextos de modo a validar a sua generalizacao.
O modelo proposto na presente tese segue uma abordagem nao parametrica. Do melhor conhecimento
obtido, nenhum trabalho realizou uma abordagem segundo o metodo proposto.
1.4 Contribuicoes
Esta tese contribui para a area de GTA, mais concretamente insere-se no contexto de PT necessarias
para as ferramentas de apoio a decisao. E apresentado um metodo de PT, as quais e associada uma
variabilidade, inferida a partir de dados de varias trajetorias reais de aeronaves comerciais, que nao
esta presente nos modelos ponto-massa comumente usados. O metodo nao parametrico proposto ul-
trapassa as dificuldades das abordagens parametricas, nos quais e necessario conhecer os parametros
de performance das aeronaves. A presente tese tambem contribui com resultados experimentais que
ilustram o modelo proposto. Os resultados foram satisfatorios, uma vez que as trajetorias testadas foram
em grande parte previstas com sucesso, validando a sua relevancia no contexto em que se insere.
1.5 Estrutura
Os restantes quatro capıtulos da tese estao organizados da seguinte forma:
Capıtulo 2 Pretende-se dar a conhecer a base de dados de aeronaves comerciais utilizada para a
realizacao dos modelos de performance probabilısticos. Comeca-se por realizar uma breve introducao
acerca dos sistemas de vigilancia que permitem obter dados de navegacao aeronauticos na seccao
2.1. E igualmente explorado o sistema Automatic Dependent Survaillance-Broadcast (ADS-B), utilizado
para obtencao dos dados utilizados. De seguida e dado a conhecer os parametros presentes na base
de dados obtidos pelos recetores ADS-B, outros que foram necessarios estimar, bem como outras
informacoes de interesse relativamente a mesma na seccao 2.2.
Capıtulo 3 E dado a conhecer o processo de identificacao das fases de voo das aeronaves, necessario
para a criacao do modelo de performance. Comeca-se por apresentar o Hidden Markov Model (HMM)
e de seguida apresenta-se o algoritmo Viterbi para identificar as fases de voo, nas seccoes 3.1 e 3.2,
respectivamente. Por fim, mostram-se os resultados da aplicacao do mesmo na seccao 3.3.
Capıtulo 4 E realizada uma breve introducao acerca do Metodo de Monte Carlo (MMC) na seccao 4.1.
E apresentado o modelo da cinematica e o modelo de performance das aeronaves que permitem prever
as trajetorias das aeronaves na seccao 4.2. E por fim mostram-se os resultados obtidos dos modelos
propostos combinados com o MMC para prever as trajetorias na seccao 4.3.
Capıtulo 5 Apresentam-se as conclusoes da tese e sugerem-se trabalhos futuros.
6

Capıtulo 2
Base de Dados
Os modelos de performance probabilısticos, que apresentam distribuicoes de probabilidade gaussianas
para a velocidade da aeronave, foram criados a partir de uma base de dados que contem dados iner-
entes a varias aeronaves comerciais. Os modelos probabilısticos desenvolvidos para a execucao de
fases de voo necessitam de dados reais para um numero elevado de aeronaves comerciais. Como a
execucao de fases de voo tem uma variabilidade associada, e importante que os dados sejam o mais
rigorosos possıveis e em grande quantidade, deste modo os modelos conseguem traduzir o comporta-
mento real das aeronaves. Os dados foram obtidos a partir de recetores ADS-B amadores fornecidos
por um dos membros fundadores do Portugal vACC, Miguel Branco. Considera-se que a informacao
obtida a partir dos mesmos e suficientemente fiavel para o proposito desta tese.
Dada a conhecer a importancia da base dados utilizada e importante saber como foram obtidos esses
dados. Para tal, na seccao 2.1, e dado a conhecer alguns dos sistemas de vigilancia que permitem obter
dados aeronauticos, incluindo o sistema que permitiu a recolha dos dados. De seguida, na seccao 2.2,
da-se a conhecer os dados existentes na base de dados, bem como outras informacoes relevantes
sobre a mesma.
2.1 Obtencao de dados aeronauticos
Existem diferentes tipos de sistemas de apoio a gestao do trafego aereo: sistemas de comunicacao,
sistemas de navegacao e sistemas de vigilancia. Os sistemas de comunicacao incluem por exemplo
as mesas de controlo nas torres, feixes hertzianos, emissores VHF/UHF e gravadores de voz e dados.
Fazem parte dos sistemas de navegacao o ILS (Instrument Landing System), VOR (VHF Omnidirec-
tional Range), DME (Distance Measuring Equipment) e NDB (Non Directional Beacon). Por ultimo,
destacam-se dos sistemas de vigilancia os radares primarios e secundarios, bem como o sistema ADS-
B/C (Automatic Dependent Surveillance-Broadcast/Contract). A base de dados foi criada a partir de
informacoes disponibilizadas pelo sistema de vigilancia ADS, daı nas subseccoes 2.1.1, 2.1.2 e 2.1.3
da-se a conhecer os tres sistemas de vigilancia referidos.
7

2.1.1 Radar Primario
O radar primario (PSR - Primary Surveillance Radar ) emite um pulso de energia radio, no qual ape-
nas uma pequena parte e reflectida pela estrutura da aeronave e e recebida pelo recetor do radar. O
azimute da antena do radar permite obter a direcao da aeronave relativamente a estacao no solo, e o
tempo que o pulso demora a atingir o alvo e a retornar permite obter a distancia. A direcao e a distancia
do alvo pode ser convertida numa posicao no solo para ser disponibilizada ao controlador de trafego
aereo. A altitude nao e medida pelos radares primarios. A vantagem do radar primario e que este opera
totalmente independente da aeronave, ou seja, nao e necessario nenhuma accao por parte da mesma
para haver um retorno do sinal, permitindo a deteccao de alvos nao cooperativos [8].
As desvantagens do PSR sao, primeiro, a grande quantidade de potencia necessaria para assegurar o
retorno do sinal refletido pelo alvo. Quanto mais distante estiver o alvo maior tera que ser a potencia.
Segundo, devido a pequena quantidade retornada ao recetor, o sinal pode ser facilmente interrompido
devido a fatores como mudancas de atitude do alvo ou atenuacao do sinal devido a chuva forte. Isto
pode fazer com que o alvo nao seja detetado. Terceiro, associado ao sinal recebido e necessario
um processo de identificacao do alvo. Quando o PSR era o unico tipo de radar disponıvel, isto era
tipicamente possıvel quando o controlador dava uma instrucao de mudanca de rumo e observava a
accao no display de controlo.
2.1.2 Radar Secundario
O sistema do radar secundario (SSR - Secondary Surveillance Radar ) e composto por dois elementos:
uma estacao radar no solo interrogadora e um transponder embarcado na aeronave. Um transponder
e um recetor e transmissor radio operando nas frequencias do radar (interrogacoes a 1030MHz e re-
spostas a 1090MHz). O transponder da aeronave alvo responde a uma interrogacao da estacao no solo
atraves da transmissao de um sinal codificado.
As grandes vantagens do SSR sao tres: primeiro, como o sinal e transmitido pela aeronave e muito
mais forte quando recebido na estacao no solo, sendo possıvel um maior alcance e a reducao de prob-
lemas relativamente a atenuacao do sinal; de modo semelhante, como a potencia da estacao de solo e
reduzida para um determinado alcance, e possıvel reduzir os custos; e em terceiro, como os sinais em
todas as direccoes sao electronicamente codificados e possıvel trasmitir informacoes adicionais relati-
vamente ao estado da aeronave.
A desvantagem do SSR e a necessidade da aeronave alvo possuir um transponder operacional. Deste
modo, o SSR e um sistema de vigilancia dependente. Por esta razao, o SSR funciona em conjunto com
o PSR em certas areas, de modo a que alvos nao cooperativos, como aeronaves de pequeno porte,
sejam detetadas.
8

O SSR desenvolveu-se com a utilizacao do Modo A/C seguidamente do Modo S para a aviacao civil.
No Modo A o transponder transmite a identificacao da aeronave atraves de um codigo de quatro dıgitos
para a estacao, denominado por Squawk atribuıdo pelo controlador aereo. O sistema do codigo e
octal, ou seja, os dıgitos podem ser quaisquer numeros entre 0-7. Deste modo existem 4096 possıveis
codigos de quatro dıgitos (exemplo: 3472). No Modo C, a altitude pressao da aeronave, providenciada
por equipamentos a bordo, e transmitida para a estacao conjuntamente com a identificacao. O Modo
S, de seletivo, e uma melhoria do Modo A/C. Este permite enviar mais informacao, como o callsign,
codigo squawk, posicao, velocidade, rumo, entre outros. No modo S, as interrogacoes podem ser
direccionadas a uma determinada aeronave que contenha o endereco especificado na interrogacao.
Uma aeronave com um Transponder Modo S tem um unico e permanente endereco de 24 bits. Este
endereco sera incluıdo em todas as interrogacoes a essa aeronave e em todas as respostas modo S
que provierem da mesma [9].
2.1.3 Automatic Dependent Surveillance (ADS)
Originalmente conhecido pelo acronimo FANS (Future Air Navigation System), e actualmente con-
hecido como Automatic Dependant Surveillance (ADS). E automatico porque nao necessita do piloto
e parametros de input para funcionar, e dependente porque necessita de equipamento embarcado
operando, um transponder (tal como o SSR).
O sistema ADS permite transmitir dados a partir da aeronave, como altitude, posicao , entre outros para
a estacao de radar no solo. Neste sentido, e um sistema analogo ao SSR.
O sistema original ADS e actualmente conhecido como ADS-C, ou ADS-Contract, porque os dados sao
reportados de acordo com um “contrato” estabelecido com a estacao. Por exemplo, a estacao pode
pedir os dados quando a aeronave atinge a altitude de cruzeiro, em pontos especıficos ou outros way-
points de navegacao, ou ainda em intervalos de tempo especıficos. Os dados basicamente substituem
os dados verbais do piloto e facilitam a aplicacao da separacao mınima entre aeronaves [10].
Tambem existe uma outra aplicacao da ideia do ADS, conhecida como ADS-Broadcast (ADS-B). Neste
sistema, como o proprio nome indica, a transmissao da informacao relativa a navegacao nao e di-
rigida especıficamente a uma estacao ou estacoes, esta pode ser recebida quer por recetores no solo,
para fins de GTA ou outros, ou por outras aeronaves. O ADS-B e uma grande mudanca na filosofia
de vigilancia, em vez de radares no solo que interrogam e determinam a posicao da aeronave, cada
aeronave ira usar o seu GPS para determinar a sua posicao e automaticamente reporta-la [11].
Existe tres benefıcios que advem da transicao para o ADS-B. Primeiro, as posicoes GPS obtidas sao
mais precisas que as posicoes obtidas por radar e sao mais consistentes. Isto significa que num espaco
IFR (Instrument Flight Rules) a navegacao pode ser realizada com espacos mais reduzidos, providen-
9

ciando melhorias na capacidade do espaco aereo. Em segundo, e mais facil de instalar e e menos
dispendioso do que os radares no solo. E por fim, como o ADS-B e um servico broadcast, e possıvel
obter informacao precisa e nao dispendiosa acerca de outras aeronaves nas imediacoes.
E certo que so existem benefıcios no ADS-B se existir uma quantidade substancial de aeronaves que
participam. A reducao do espaco entre aeronaves so e possıvel se todas as aeronaves tiverem mel-
horias na determinacao da sua posicao. E importante referir que para usufruir destes benefıcios, uma
aeronave apenas precisa de um ADS-B ”Out”. Ou seja, a aeronave necessita de reportar informacoes
de posicao para a estacao e outras aeronaves. Nao existe o requisito para ADS-B ”In” - sera sempre
uma opcao. Uma aeronave com ADS-B ”In” e capaz de obter as posicoes de outras aeronaves nas
redondezas. Para suportar um ADS-B ”In” e necessario um recetor de dados, para alem do transmissor
ADS-B ”Out”.
De modo a suportar ADS-B ”Out”, a aeronave tem de possuir um recetor GPS como mecanismo para
determinar a posicao, e um transmissor de dados ADS-B. O transmissor que a maior parte das aeron-
aves utiliza e um transponder Modo S, usando a opcao Extended Squitter. A opcao Extended Squitter
refere-se a transmissao de informacao periodicamente sem que seja realizada uma interrogacao pelo
radar. O Modo S com Extended Squitter e o standard internacional para o ADS-B output [12].
Os dados obtidos foram obtidos a partir de aeronaves que estao incorporadas com um transponder
Modo S com Extended Squitter, deste modo recetores Modo S/ADS-B no solo puderam recolher os
mesmos.
2.2 Informacoes sobre a base de dados
Depois de compreender como foram obtidos os dados de navegacao presentes na base de dados, na
presente seccao pretende-se dar a conhecer os dados disponıveis na mesma, na subseccao 2.2.1.
Para alem dos dados disponibilizados pelos recetores ADS-B foi necessario obter dados adicionais,
estes serao abordados na subseccao 2.2.2. Informacoes de interesse relativamente a base de dados
serao indicadas na subseccao 2.2.3.
2.2.1 Dados disponıveis
Os dados das trajetorias das aeronaves comerciais utilizados na tese foram obtidos por recetores ADS-
B da Kinetic Avionics Limited. Estes recetores sao uma combinacao de hardware e software que per-
mitem a entusiastas da navegacao aerea monitorizar o trafego aereo em tempo real nos seus computa-
dores, de aeronaves equipadas com transponders Modo S e sistema ADS-B.
Os dados obtidos estao em ficheiros do tipo ‘.bst’ e tem o formato mostrado na Fig. 2.1, onde estao
10

ilustrados nove conjuntos de dados, um por linha do ficheiro. Cada dado e apresentado entre aspas e
sao separados por vırgulas. Cada linha no ficheiro, representa um novo conjunto de dados recebido
pelos recetores.
Figura 2.1: Exemplo de 9 conjuntos de dados obtidos pelos recetores ADS-B.
Sao disponibilizados dezassete campos no total. Pela ordem apresentada tem-se o respectivo parametro
e descricao na Tab. 2.1.
Parametro DescricaoData Data de recepcao dos dados marcada pelo PC. [aaaa/mm/dd]Tempo Hora de recepcao dos dados. [hh:mm:ss.sss]Endereco Modo S1 Endereco ICAO 24bits da aeronave em formato decimal.
Endereco Modo S2 Endereco ICAO 24bits da aeronave em formato hexadecimal.
Identificacao dovoo Identificacao da companhia aerea e numero de voo.
Registo da aeron-ave Codigo alfa-numerico unico para cada aeronave.
Flag IsOnGround Flag que indica se a aeronave encontra-se no solo. Toma o valor ”-1” severdadeiro e ”0” caso contrario.
Altitude Altitude Modo C/pressao, relativa a 1013.2mb (como o Flight Level). [ft]
Display altitude E sempre igual a ”Altitude” e esta a alocar espaco para uma futura variavel,que pode advir duma nova versao do receptor.
Latitude Positiva no hemisferio norte e negativa no sul. [graus]Longitude Positiva a Este do meridiano de Greenwich e negativa a Oeste. [graus]Velocidade vertical Velocidade de subida ou descida da aeronave.[ft/min]Velocidade verticalcalculada
Velocidade de subida ou descida calculada pelo recetor, caso esta informacaonao seja disponibilizada pelo transponder. [ft/min]
Velocidade solo Velocidade da aeronave relativamente ao solo. [kts]
Rumo Angulo da trajetoria da aeronave, projetada no solo, com o norte magnetico.Pode tomar valores entre 0-359. [graus]
Flag codigosquawk
Flag que indica se o codigo squawk se alterou. Toma o valor ”-1” se verdadeiroe ”0” caso contrario.
Codigo squawk Codigo squawk Modo A/C em formato octal.
Tabela 2.1: Especificacao dos campos obtidos pelos recetores ADS-B e sua descricao.
E tambem de notar a resolucao de algumas medidas. Para o parametro de altitude e velocidade vertical
tem-se uma resolucao de 100ft e 100ft/min, respectivamente. Para a velocidade solo tem-se 1kt
e para o rumo 1◦. A latitude e longitude apresentam sempre um valor com seis ou sete algarismos
significativos. O tempo de recepcao dos dados tem uma precisao ate a milesima de segundo.
11

2.2.2 Dados adicionais
Para alem dos dados disponibilizados pelos recetores ADS-B, para os modelos estatısticos foi necessario
estimar com base na latitude, longitude e altitude as coordenadas cartesianas das aeronaves para a
equacao da cinematica da distancia. Para alem disso, os modelos dependem do modelo da aeronave
e por isso foi necessario definir um processo que permitisse identificar o mesmo, uma vez que este nao
e disponibilizado pelos recetores ADS-B. Em 2.2.2.1 e 2.2.2.2 e descrito o processo para obtencao dos
mesmos, respectivamente.
2.2.2.1 Coordenadas cartesianas
Para converter as coordenadas geodesicas para cartesianas e necessario definir o sistema de eixos
utilizado. O sistema de eixos ENU (East North Up) tem origem num plano tangente a superfıcie da
Terra num ponto com latitude e longitude correspondente a primeira posicao da aeronave. O eixo YENU
aponta para o Norte e o eixo XENU aponta para Este. O terceiro eixo aponta para fora da superfıcie
terrestre formando um referencial ortogonal, Fig. 2.2.
Figura 2.2: Referencial ECEF e ENU para representar as posicoes cartesianas das aeronaves. Fonte:http://en.wikipedia.org/
A conversao de latitude e longitude para coordenadas cartesianas xp, yp da posicao da aeronave con-
siste muito resumidamente no seguinte processo [13]: com a latitude, longitude e altitude (coordenadas
geodesicas) da aeronave no referencial ECEF - Earth-Centered, Earth-Fixed e possıvel obter as coor-
denadas ECEF cartesianas (X,Y, Z), cujo sistema de eixos esta centrado no centro da Terra Fig. 2.2.
12

XECEF
YECEF
ZECEF
=
(Ne + h)cosφcosλ
(Ne + h)cosφsinλ
((1− ft)2Ne + h)sinφ
(2.1)
Ne =ae√
(1− ft(2− ft))sin2φ(2.2)
Onde λ corresponde a longitude, φ a latitude e h a altitude da aeronave. O parametro ae corresponde
ao semi-eixo maior do elipsoide terrestre, ft ao achatamento terrestre e Ne corresponde a distancia que
uma linha perpendicular ao elipsoide, para uma dada latitude, intersecta o eixo polar.
Apos a obtencao das coordenadas ECEF cartesianas e possıvel obter as coordenadas ENU atraves do
seguinte calculo [14]:
[xpyph]ENU = [XY Z]ECEF .Rotz(λ0ENU+ π/2).Rotx(π/2− φ0ENU
) (2.3)
Onde λ0ENUe φ0ENU
correspondem a longitude e latitude da origem do referencial ENU, respectiva-
mente, que por sua vez corresponde a primeira posicao da aeronave. As matrizes de rotacao sao
dadas por:
Rotz(γ) =
cos(γ) −sin(γ) 0
sin(γ) cos(γ) 0
0 0 1
(2.4)
Rotx(γ) =
1 0 0
0 cos(γ) −sin(γ)
0 sin(γ) cos(γ)
(2.5)
2.2.2.2 Modelos das aeronaves
Para obter o modelo de cada aeronave presente na base de dados, foi necessario desenvolver uma
aplicacao de software concebida para automatizar acessos a web, conhecido como Bot. Foram en-
contrados dois sites que disponibilizam a informacao desejada com base no endereco ICAO 24bits
(ou endereco Modo S), que corresponde a identificacao unica de uma aeronave. O primeiro e o
http://www.airframes.org/, contudo este nao permite o uso de bots, ou seja, a busca de informacao
e limitada a um determinado numero de aeronaves. O segundo, http://www.libhomeradar.org/, permite
o uso de bots e foi a partir deste que foi retirada a informacao desejada.
2.2.3 Informacoes de interesse
Nesta subseccao pretende-se dar a conhecer informacoes adicionais acerca da base de dados que se
consideram importantes.
13

A base de dados e contituıda por 28 ficheiros do tipo ‘.bst’. Cada ficheiro contem todos os dados capta-
dos pelos recetores ADS-B para um determinado dia, mes e ano. Do total, 27 correspondem a dias do
mes de Janeiro de 2012 (estao excluıdos os dias 6, 24,25 e 30 de Janeiro simplesmente pelo facto de
nao terem sido disponibilizados) e o restante ao dia 31 de Marco de 2012. Para a criacao dos modelos
os dados das aeronaves referentes ao mes de Janeiro serao utilizados para criar o modelo de perfor-
mance, e as aeronaves do dia 31 de Marco serao usadas para validar o modelo.
Para se ter uma nocao da dimensao da base de dados e dado a conhecer na Fig. 2.3 o numero total de
medidas por cada ficheiro.
Figura 2.3: Numero total de medidas por ficheiro de dados disponibilizados pelos recetores ADS-B.
Uma informacao relavante consiste em saber quantos voos foram detetados para cada um dos dias
representado na Fig. 2.4, ou seja, uma aeronave com numeros de voo distintos mas igual registo e
contabilizada de acordo com os numeros de voo.
O numero de modelos de aeronaves e companhias aereas distintas identificados por dia tambem e
ilustrado na Fig. 2.5.
Considerando todos os 28 ficheiros de dados, tem-se os dez modelos de aeronaves e companhias
aereas mais frequentes identificadas nas Tabs. 2.2 e 2.3, respectivamente, onde e apresentado o
numero total de voos distintos identificados. Para cada um dos ficheiros de dados, o B738 e a TAP
foram o modelo e a companhia aerea mais frequentes. Pode-se constatar que embora o modelo da
aeronave mais frequente seja um Boeing, a Airbus apresenta um numero maior de voos no espaco
aereo considerado, 14.989 contra 10.465 da Boeing.
Uma outra curiosidade consiste em saber o intervalo de tempo entre medidas, o tempo de seguimento
e o numero de medidas mınimo e maximo por voo identificado e respectiva mediana, Tab. 2.4.
14

Figura 2.4: Numero total de voos por ficheiro de dados disponibilizados pelos recetores ADS-B.
Figura 2.5: Numero total de modelos de aeronaves e companhias aereas identificados para cadaficheiro da base de dados.
Por fim, uma informacao relevante consiste em saber qual a area geografica abrangida pelos radares,
atraves da identificacao das latitudes e longitudes maximas e mınimas. Foi determinado um centroide
destas medidas, Fig. 2.6. Os pontos ilustrados tem as seguintes coordenadas geodesicas no plano
horizontal: A=(28,0001◦;-19,2752◦), B=(43,7999◦;-19,2752◦), C=(43,7999◦;-0,1593◦), D=(28,0001◦;-
0,1593◦) e O=(36,7375;-9,6300).
15

Modelo da aeronave B738 A320 A319 A321 A332 B752 B737 F100 A343 A346No de voos 8729 5673 4690 2224 1333 884 852 684 551 518
Tabela 2.2: Os dez modelos de aeronaves mais frequentes e respectivo numero de voos identificados.
Companhia TAP RYR IBE EZY RAM AEA BER AFR TOM CFGNo de voos 6162 4366 2158 2050 1812 1286 1140 1039 947 791
Tabela 2.3: As dez companhias de aereas mais frequentes e respectivo numero de voos identificados.TAP - TAP Portugal, RYR - Ryanair, IBE - Iberia, EZY - EasyJet, RAM - Royal Air Maroc, AEA - AirEuropa, BER - Air Berlin, AFR - Air France, TOM - Thomson Airways, CFG - Condor Flugdienst.
Figura 2.6: Area geografica abrangida pelos recetores ADS-B. Amarelo: centroide. Vermelho: extremosde latitude e longitude.
Valor mınimo Valor maximo MedianaTempo entre medidas [s] 0,003 3596,70 1,312Tempo de seguimento [min] 2,290 287,751 42,006No de medidas por aeronave 101 7145 1322,5
Tabela 2.4: Intervalo de medidas, tempo de seguimento e numero de medidas por aeronave medio erespectivo desvio padrao.
16
Capıtulo 3
Identificacao de fases de voo
Para criar um modelo capaz de prever a trajetoria de uma aeronave e necessario saber o estado em que
esta se encontra, pois o modelo probabilıstico de performance para a velocidade depende do mesmo.
Como ja tinha sido referido, a variabiliadade de uma trajetoria e diferente para as tres fases de voo
(subida, descida e cruzeiro), e por esta razao e necessario criar um modelo de performance de acordo
com as mesmas.
A solucao adotada para determinar as diferentes fases de voo consiste na utilizacao de Hidden Markov
Models (HMMs) e do algoritmo Viterbi que se insere no contexto de HMMs. No subcapıtulo 3.1 define-se
o conceito e a utilidade de HMMs na presente tese. No subcapıtulo 3.2 apresenta-se o algoritmo usado
para determinar a sequencia de estados otima duma aeronave dada uma sequencia de observacoes,
designado por Viterbi e no subcapıtulo 3.3 apresentam-se os resultados da aplicacao do Viterbi aos
dados observados.
3.1 Hidden Markov Model (HMM)
Um Hidden Markov Model (HMM) e um modelo estatıstico em que o sistema modelado e assumido
como um processo de Markov com parametros desconhecidos, e o desafio consiste em determinar os
parametros ocultos a partir dos parametros observaveis.
O objectivo da utilizacao de uma HMM nesta tese e o de determinar se a aeronave se encontra num es-
tado de subida, cruzeiro ou descida. Os estados ocultos sao estes tres mencionados. As observacoes
tem de algum modo estar relacionadas com os estados do sistema, ou seja, para o estado vertical a
velocidade vertical sera a observacao utilizada. Para caracterizar uma HMM e necessario definir [15]:
1. N, numero de estados ocultos no modelo.
2. M, numero de sımbolos/observacoes distintas observaveis por estado.
17

3. A matriz de probabilidade de transicao de estado A = aij , onde aij corresponde a probabilidade
de transitar do estado i para o estado j, ou seja:
aij = P [qt = Sj |qt−1 = Si], 1 ≤ i, j ≤ N (3.1)
onde q representa o estado actual e S os estados possıveis.
4. A matriz de probabilidade de observacao de um determinado sımbolo no estado j, B = bj(vk),
onde bj(vk) corresponde a probabilidade de observar o sımbolo vk no estado j, ou seja:
bj(vk) = P [vk em t|qt = Sj ], 1 ≤ j ≤ N 1 ≤ k ≤M (3.2)
onde vk representa os sımbolos possıveis.
5. As probabilidades iniciais dos estados π = πi:
πi = P [q1 = Si] 1 ≤ i ≤ N (3.3)
O numero de estados, N , sao tres. O numero de sımbolos possıveis, M , depende do conjunto de
observacoes, se existirem M observacoes distintas entao tem-se M sımbolos. Resta definir π, A e B
que correspondem aos parametros do modelo HMM, λHMM = (π,A,B).
A probabilidade inicial dos estados, π, e igual para todos porque nao se sabe inicialmente em qual
estado a aeronave se encontra, pelo que πi e igual a um terco.
A matriz de transicao, A, foi definida de forma intuitiva. Na seccao 3.3 valida-se a sua escolha pois
os resultados nao foram afectados. Sendo i e j o indicador de linha e coluna, respectivamente, para
i = j = 1 corresponde ao estado de subida, i = j = 2 ao cruzeiro e i = j = 3 a descida. Como e
possıvel observar pela Eq. (3.4), a maior probabilidade corresponde a estar num determinado estado e
mante-lo, por sua vez, foi atribuıda uma probabilidade muito pequena (0.001) a transicao do estado de
subida para descida e vice-versa porque e muito raro encontrar este tipo de situacao, embora nao seja
impossıvel e por essa razao nao foi atribuıdo um valor nulo.
A =
0.899 0.1 0.001
0.1 0.8 0.1
0.001 0.1 0.899
(3.4)
A escolha da matriz de observacao, B, nao e intutiva como a matriz A. Para saber que observacoes
tem maior probabilidade de se observar num determinado estado recorreu-se a uma funcao de den-
sidade de probabilidade de Kernel estimada ou mais conhecida por KDE (Kernel Density Estimation).
Em estatıstica o KDE e uma forma nao parametrica de estimar a funcao de densidade de probabilidade
de uma variavel aleatoria, ou seja, de estimar a forma dessa funcao sobre a qual nao existe nenhum
18

conhecimento [16].
Seja (x1, x2, . . . , xn) uma amostra de densidade f desconhecida. Pretende-se estimar o formato da
funcao f. O estimador para a densidade de kernel e dado por
f(x) =1
n
n∑i=1
Kbw(x− xi) =1
n.bw
n∑i=1
K(x− xibw
) (3.5)
onde K e o kernel e bw a largura de banda. O Kbw e o kernel escalado e e definido por Kbw(x) = 1/bw∗
K(x/bw). Existem varias funcoes kernel que sao geralmente usadas: uniforme, triangular, normal, entre
outras. Foram testados varios kernels. A escolha do kernel nao afecta significativamente o resultado
final, pelo que optou-se pelo gaussiano. Para alem do kernel tambem e necessario definir a largura de
banda, bw. Este parametro afecta significativamente o resultado final, consoante o seu valor a funcao
tem uma distribuicao suave ou mais oscilatoria. Na Fig. 3.1 mostra-se o efeito da variacao da largura
de banda para uma amostra de velocidades verticais positivas obtida a partir de quinze aeronaves da
base de dados.
Figura 3.1: Efeito da variacao da largura de banda do KDE para uma amostra de dados de 15 aeronavespara a fase de subida.
Para estimar a densidade f desconhecida foi utilizado um conjunto de observacoes de aeronaves do
mesmo modelo. E necessario definir f para cada um dos estados existentes. As observacoes de ve-
locidade vertical sao as amostras. A partir do conjunto de amostras, definido o kernel e bw obtem-se
uma distribuicao de densidade de probabilidade que representa a probabilidade de encontrar uma de-
terminada observacao para um dado estado.
19

3.2 Algoritmo Viterbi
Definidos os parametros do modelo HMM, λHMM = (π,A,B), e possıvel determinar a sequencia de
estados otima, Q = q1q2 . . . qT , com base nas observacoes O = O1O2 . . . OT . Uma das solucoes para
este problema consiste na utilizacao do algoritmo Viterbi [17].
O algoritmo Viterbi pode ser resumido em quatro passos. Para tal e necessario definir a quantidade
δt(i) = maxq1,q2,...,qt−1
P [q1q2 . . . qt−1 = i, O1O2 . . . Ot|λ] (3.6)
isto e, δt(i) e a maior probabilidade ao longo de um unico caminho, no instante t, tendo em conta todas
as observacoes ate t terminando no estado Si. Por inducao tem-se
δt+1(j) = [maxiδt(i)aij ]bj(Ot+1) (3.7)
Para obter a sequencia de estados e necessario ter em conta qual o argumento que maximiza (3.7),
para cada t e j. Isso e concretizado atraves do vector ψt(j).
O processo para a determinacao da sequencia otima e o seguinte:
1. Inicializacao:
δ1(i) = πibi(O1), 1 ≤ i ≤ N (3.8)
ψ1(i) = 0 (3.9)
2. Recursao:
δt(j) = max1≤i≤N
[δt−1(i)aij ]bj(Ot), 2 ≤ t ≤ T, 1 ≤ j ≤ N (3.10)
ψt(j) = argmax1≤i≤N
[δt−1(i)aij ], 2 ≤ t ≤ T, 1 ≤ j ≤ N (3.11)
3. Terminacao:
p∗ = max1≤i≤N
[δT (i)] (3.12)
q∗T = argmax1≤i≤N
[δT (i)] (3.13)
4. Backtracking do caminho (sequencia de estados):
q∗t = ψt+1(q∗t+1), t = T − 1, T − 2, . . . , 1. (3.14)
Como se pode constatar o Viterbi usa todo o contexto das observacoes para tomar decisoes providen-
ciando uma boa analise de ruıdo e identificacao de outliers.
20

3.3 Resultados do Algoritmo Viterbi
O processo para determinar os estados da aeronave acabou de ser descrito e nesta seccao analisa-se
os resultados obtidos. Em primeiro lugar, apresenta-se as funcoes KDE utilizadas, que sao equiva-
lentes a matriz de observacao do HMM, B, para cada estado da aeronave. Em segundo lugar sao
ilustrados alguns dos resultados obtidos para a determinacao da sequencia de estados otima. E em
terceiro e ultimo lugar e realizada uma analise quantitativa da qualidade da classificacao dos estados,
pelo Viterbi, conhecido como grafico ROC (Receiver Operating Characteristic) onde foram selecionadas
de forma aleatoria 20 aeronaves comerciais da base de dados.
Para estimar a funcao de densidade f desconhecida foi utilizado um conjunto de aeronaves do mesmo
modelo (210 voos do modelo A319). E necessario definir f para cada um dos estados existentes.
As observacoes de velocidade vertical sao as amostras. A partir do conjunto de amostras, definido o
kernel e bw obtem-se uma distribuicao de densidade de probabilidade que representa a probabilidade
de encontrar uma determinada observacao para um dado estado. E de notar que uma vez definida a
funcao f esta manteve-se para qualquer modelo de aeronave, porque a alteracao desta nao apresenta
alteracoes significativas nos resultados se for adaptada de acordo com o modelo da aeronave como se
contatara mais a frente.
Para gerar a funcao KDE para o cruzeiro e necessario definir um conjunto de dados que naturalmente
consiste em velocidades verticais nulas. Contudo, devido a erros inerentes aos dados do radar, acon-
tece que a aeronave embora estando em cruzeiro apresente velocidades verticais nao nulas por breves
instantes. O Viterbi tem a capacidade de detetar estes erros desde que os parametros do algoritmo
sejam bem definidos. Para que esses erros sejam detetados por este, a probabilidade de observar
uma velocidade vertical nao nula em cruzeiro nao pode ser nula. Por essa razao a amostra de dados
de velocidade vertical em cruzeiro foram introduzidos um conjunto de dados nao nulos de velocidade
vertical para gerar a funcao KDE.
Posteriormente, foi realizada uma substituicao da funcao KDE por uma distribuicao gaussiana de modo
a estudar os efeitos desta mudanca. Os resultados da determinacao do estado vertical da aeronave
nao foram afectados, pois as medias das distribuicoes para as tres fases de voo encontram-se suficien-
temente afastadas. Caso contrario, haveria a possibilidade de haver sobreposicoes indesejadas das
distribuicoes que levariam a probabilidades e resultados nao realistas.
Na Fig. 3.2 e ilustrada a funcao KDE e a distribuicao gaussiana para o conjunto de observacoes de
velocidade vertical para as fases de subida e descida. Da mesma forma na Fig. 3.3 para o cruzeiro. O
kernel escolhido foi o gaussiano e a largura de banda, que tem uma maior influencia na determinacao
da funcao, foi calculada de forma automatica atraves da regra de Scott, permitindo obter uma largura
de banda otima para o conjunto de dados.
21

Figura 3.2: Funcao KDE e distribuicao gaussiana para a identificacao da fase de subida e descida.
Figura 3.3: Funcao KDE e distribuicao gaussiana para a identificacao da fase de cruzeiro.
22

Os resultados obtidos para a detecao das fases de voo sao satisfatorios, observa-se nas Figs. 3.4 –
3.7 a detecao dos erros nas medidas do radar quando e mantido o estado embora a medida recebida
pareca indicar o contrario. Aos estados identificados foram associados uma cor e foram utilizados
modelos de aeronaves diferentes.
Figura 3.4: Identificacao das fases de voo pelo Viterbi para uma porcao do voo da TAP Portugal 213 emodelo de aeronave A320.
De modo a ter uma melhor percepcao da performance do algoritmo Viterbi, realizou-se uma grafico
ROC (Receiver Operating Characteristic). Um grafico ROC permite analisar os dados que foram cor-
rectamente classificados e os que nao foram. O primeiro passo consiste em definir as classes exis-
tentes, que neste caso sao duas, a positiva e a negativa {P,N}. Ao conjunto de dados a ser analisado e
atribuıdo uma das duas classes. O algoritmo de predicao, Viterbi, classifica os dados segundo uma das
duas classes, verdadeiro ou falso {V,F}. Dado um conjunto de dados e um classificador existem quatro
possıveis resultados. Se o dado e positivo e e classificado como positivo diz-se que e um verdadeiro
positivo (V P ); se e classificado como negativo diz-se um falso negativo (FN ). Se o dado e negativo e e
classificado como negativo diz-se um verdadeiro negativo (V N ); se e classificado como positivo diz-se
um falso positivo (FP ). Estes resultados sao apresentados de forma sucinta na Tab. 3.1.
Classe real P Classe real NClassificado como P V P FPClassificado como N FN V N
Tabela 3.1: Resultados possıveis da classificacao binaria.
23

Figura 3.5: Identificacao das fases de voo pelo Viterbi para o voo da Ryanair 2011 e modelo de aeronaveB738.
A taxa de verdadeiros positivos (TV P ) e de falsos positivos (TFP ) permite obter o grafico ROC, onde
TV P e representada no eixo Y e TFP no eixo X, e sao calculadas da seguinte forma, respectivamente
TV P =Positivos identificados corretamente
Total positivos=
V P
V P + FN(3.15)
TFP =Negativos identificados incorretamente
Total negativos=
FP
FP + V N(3.16)
Como se pode constatar pelas Eqs. (3.15) e (3.16), a TV P e a TFP podem tomar valores entre [0, 1].
Alguns pontos num grafico ROC, Fig. 3.8, sao importantes referir. O ponto A = (0, 0) indica que nao
foi obtida nenhuma classificacao positiva; o classificador nao comete erros na determinacao de falsos
positivos mas nao detecta verdadeiros positivos. De modo semelhante tem-se o ponto B = (1, 1), onde
sao detetados todos os V P mas nao deteta os V N . O ponto C = (0, 1) apresenta uma classificacao
perfeita. O ponto D = (0.5, 0.5) encontra-se sobre a linha diagonal y = x, e representa a determinacao
da classe dos dados de forma aleatoria, ou seja, se o classificador deteta 50% da classe dos posi-
tivos e de esperar que se identifique metade dos positivos e metade dos negativos corretamente. Este
raciocınio e valido para qualquer ponto sobre esta linha, para um classificador aleatorio o ponto ira
deslizar sobre a mesma dependendo da frequencia que e detetada a classe positiva [18].
Foram selecionadas de forma aleatoria dez aeronaves A320 e dez B738. Classificou-se manualmente
24

Figura 3.6: Identificacao das fases de voo pelo Viterbi para o voo da Monarc Airlines 286 e modelo deaeronave A321.
os estados e observou-se os resultados obtidos pelo Viterbi. Calculou-se, entao, o valor de TV P e
de TFP para cada estado e cada aeronave. Os resultados obtidos para cada estado e representado
na Tab. 3.2, onde e apresentado o valor medio do conjunto das 20 aeronaves. Como e possıvel con-
statar os valores obtidos estao muito proximos de uma classificacao perfeita, pelo que se considera os
resultados a partir do algoritmo Viterbi satisfatorios, para os parametros HMM (λHMM ) definidos.
Estado Subida Cruzeiro DescidaTVP 0,999 0,998 0,998TFP 0,003 0,001 0
Tabela 3.2: Resultados de TVP e TFP para as tres fases de voo.
25

Figura 3.7: Identificacao das fases de voo pelo Viterbi para uma porcao do voo da TAP Portugal 572 emodelo de aeronave A319.
Figura 3.8: Grafico ROC mostrando 4 classificacoes possıveis.
26

Capıtulo 4
Modelo estatıstico de predicao de
trajetorias
O modelo da cinematica desenvolvido e estocastico. Os simuladores estocasticos sao capacitados a
modelar a aleatoriedade do sistema real atraves de distribuicoes probabilısticas, as quais representam
matematicamente as chances de ocorrencia de todos os valores possıveis para um determinado pro-
cesso do sistema. Estas distribuicoes estatısticas sao obtidas a partir do modelo de performance. Em
conjunto com um sistema gerador de numeros aleatorios como o denominado Metodo de Monte Carlo
(MMC), os simuladores estocasticos permitem reproduzir o comportamento do sistema com todas as
possibilidades e combinacoes, e sem limite no perıodo de tempo desejado pelo usuario.
O presente capıtulo encontra-se dividido em tres subcapıtulos. No primeiro, 4.1, e apresentado o
Metodo de Monte Carlo. No segundo, 4.2, e apresentado o modelo da cinematica e o modelo de per-
formance estatıstico que permite prever as trajetorias das aeronaves. Por ultimo, 4.3, sao apresentados
os resultados obtidos.
4.1 Metodo de Monte Carlo (MMC)
O Metodo de Monte Carlo pode ser descrito como um metodo estatıstico, no qual se utiliza uma
sequencia de numeros aleatorios para a realizacao de uma simulacao [19]. Em termos de previsao
da posicao da aeronave, atraves do calculo da sua altitude (h) e distancia percorrida (s), o processo
estocastico pode ser visto como uma famılia de partıculas cujas coordenadas individuais mudam aleato-
riamente em cada iteracao.
A essencia do MMC aplicado a determinacao da posicao de aeronaves consiste em estimar determi-
nadas quantidades (h e s), observando-se o comportamento de um grande numero de eventos individ-
uais.
27

O conjunto de eventos que ocorre com uma determinada partıcula, desde o seu “nascimento”, ou seja,
a partir do momento em que se inicia a predicao da trajetoria, ate o momento em que ela “morre”, ou
seja, quando a informacao da posicao da aeronave e atualizada com medidas de radar, e denominado
de historia da partıcula. Essas historias sao geradas por meio de amostragens de Funcoes de Den-
sidade de Probabilidade (FDP). Em outras palavras, solucionar um problema com o Metodo de Monte
Carlo consiste em realizar uma simulacao matematica do fenomeno fısico de interesse ao inves de
solucionar a equacao ou conjunto de equacoes que o regem. Assim, qualquer calculo de Monte Carlo
e iniciado com a criacao de um modelo que representa o sistema real de interesse, neste caso a aeron-
ave. A partir de entao, simulam-se as posicoes da aeronave com este modelo por meio de amostragens
aleatorias das FDP que caracterizam esse processo fısico. A medida que o numero de historias das
partıculas simuladas aumenta, melhora-se a qualidade do comportamento medio do sistema, caracter-
izado pela diminuicao das incertezas estatısticas das grandezas de interesse. Entretanto, este metodo
e qualificado pela impraticabilidade em se obter a solucao exata do problema, mas o que se espera
e uma boa estimativa do valor exato a medida que um numero suficientemente grande de amostras e
processado.
4.2 Modelo cinematico e de performance
Como qualquer calculo de Monte Carlo e iniciado com a criacao de um modelo que representa o sistema
real, a aeronave, define-se neste subcapıtulo o modelo da cinematica vertical e horizontal da aeronave.
Do ponto de vista de GTA interessa a monitorizacao das aeronaves no espaco, ou seja, saber a sua
posicao geografica em termos de altitude, h e posicao no plano horizontal xp e yp (ou latitude e longi-
tude). Para o modelo horizontal assume-se que a aeronave nao executa curvas, mantendo sempre o
seu rumo. Admitindo que e conhecido a priori o rumo da aeronave, sabendo a distancia percorrida, s,
pela aeronave ao executar um segmento reto de navegacao tem-se a posicao da aeronave no referen-
cial cartesiano ao longo do tempo.
Para fazer a predicao da altitude e da distancia as equacoes da cinematica discretizadas foram apre-
sentadas, na seccao 1.2, as Eq. (1.1) e Eq. (1.2). Tem-se novamente,
hk = hk−1 + T (Vk + δhk) (1.1)
sk = sk−1 + T (Gk + δsk) (1.2)
As variaveis associadas ao modelo vertical, Eq. (1.1), da aeronave sao a altitude, h, a velocidade verti-
cal, V , e a perturbacao da velocidade vertical, δh. As variaveis correspondentes ao modelo horizontal,
Eq. (1.2), sao a distancia percorrida, s, a velocidade solo, G, e a perturbacao da velocidade solo δs.
Quando o piloto executa uma descida ou subida este pode executa-la de diferentes formas. Interessa-
nos estudar essa variabilidade de modo a que com h, s, V e G inicial da aeronave seja possıvel prever
o seu comportamento.
28

Para o modelo da cinematica vertical e horizontal da aeronave e necessario criar modelos proba-
bilısticos para as variaveis V , δh, G e δs.
A criacao dos modelos probabilisticos de δh e δs baseou-se num metodo simples. Com todas as aeron-
aves presentes na base de dados procedeu-se ao calculo de δh e δs conforme as Eqs. (1.1) e (1.2),
respectivamente. Optou-se por utilizar uma distribuicao de probabilidade comumente usada a Gaus-
siana. Obteve-se uma media aproximadamente nula e um desvio medio de cerca de 5m/s para δh e de
50m/s para δs.
E de notar que a medida de distancia percorrida pela aeronave (s), nao esta presente na base de
dados, pelo que e necessario estimar a partir dos parametros presentes na mesma. Assim, a partir das
coordenadas cartesianas xp e yp obtem-se s atraves de
s =√(XB −XA)2 + (YB − YA)2 (4.1)
Para a criacao dos modelos probabilisticos de V eG, aos quais designa-se de modelos de performance,
e necessario:
1. Separar os dados presentes na base de dados consoante o modelo da aeronave.
2. Identificar o estado da aeronave, ou seja, se esta em subida, descida ou cruzeiro. A identificacao
do estado da mesma e realizada com recurso ao algoritmo Viterbi que se insere no contexto de
Hidden Markov Models (HMMs). Este processo e descrito no Capıtulo 3.
As entradas do modelo de performance serao a altitude e a velocidade anterior da aeronave. A
distribuicao utilizada sera Gaussiana, ou seja, para o modelo vertical
Vk|hk−1, Vk−1 ∼ N(µ(hk−1, Vk−1), σ(hk−1, Vk−1)) (4.2)
e para o modelo horizontal
Gk|hk−1, Gk−1 ∼ N(µ(hk−1, Gk−1), σ(hk−1, Gk−1)) (4.3)
Para todas as entradas (hk−1, Vk−1), do modelo vertical, e para todas as entradas (hk−1, Gk−1), do
modelo horizontal, de acordo com o modelo da aeronave e fase de voo da mesma e estimado um valor
medio e o seu correspondente desvio padrao. Estas distribuicoes gaussianas, do modelo de perfor-
mance, foram obtidas a partir dos dados presentes na base de dados.
Na simulacao dos modelos da cinematica por vezes e necessario estimar um valor de velocidade para
uma entrada do modelo de performance nao existente, quer dentro ou fora do intervalo dos valores
conhecidos. Neste caso e realizada uma interpolacao linear ou extrapolacao da media e do desvio
29

padrao, caso a entrada esteja dentro ou fora do intervalo de dados, respectivamente. A extrapolacao
e constante, ou seja, uma entrada fora do intervalo de valores conhecidos tem uma media e desvio
padrao igual ao extremo mais proximo.
Resumindo, para cada partıcula e iteracao e utilizado um valor aleatorio da FDP de V e δh, para o
modelo vertical, e de G e δs, para o modelo horizontal, deste modo e possıvel obter uma estimativa
do comportamento medio do sistema e variabilidade associada. O aumento do numero de partıculas
traz um aumento nos requisitos sobre o hardware usado na simulacao e no tempo necessario para se
dispor do resultado. Para definir o numero de simulacoes, deve-se fazer um balanco entre a qualidade
dos resultados desejada e as disponibilidades de hardware e de tempo, que sera realizado de seguida
na seccao 4.3.
4.3 Resultados dos Modelos
Nesta seccao apresentam-se os resultados finais dos modelos estatısticos propostos, para a predicao
de trajetorias. Os resultados aqui apresentados sao referentes aos dois modelos de aeronaves mais
frequentes presentes na base de dados, ou seja, o A320 e o B738(B737− 800), nas subseccoes 4.3.1
e 4.3.2, respectivamente.
Para a criacao do modelo estatıstico da predicao de trajetorias, o modelo de performance e uma compo-
nente crıtica, ou seja, as distribuicoes de probabilidade gaussianas sao a base da predicao afectando o
comportamento do sistema. A escolha de distribuicoes gaussianas para o modelo de performance e jus-
tificada por uma aproximacao razoavel dos dados aos parametros caracterısticos de uma distribuicao
gaussiana. Esta distribuicao e caracterizada pela media e desvio padrao sendo a mediana, a obliq-
uidade e a curtose igual a media, nula e igual a tres, respectivamente. A obliquidade serve como o
indicador de assimetria da distribuicao da curva de densidade e a curtose caracteriza o pico da curva
da funcao de distribuicao de probabilidade. Para os dados do modelo de performance verifica-se con-
stantemente que a media e mediana encontram-se muito proximas. Tanto a obliquidade como a curtose
apresentam oscilacoes, tanto apresentam valores semelhantes, menores como maiores relativamente
aos standards da funcao de distribuicao gaussiana. Apesar destes ultimos factos considera-se que
a utilizacao de uma distribuicao alternativa, nao traria vantagens, apenas maior complexidade. Uma
alternativa seria a utilizacao de uma forma nao parametrica para estimar a funcao de densidade de
probabilidade, como por exemplo a utilizacao do KDE (Kernel Density Estimation) ja referido no sub-
capıtulo 3.1.
Para a predicao da trajetoria de uma aeronave o algoritmo necessita da altitude, velocidade solo e
vertical inicial da aeronave, bem como o seu modelo e fase de voo. De modo a quantificar as predicoes
de trajetorias realizadas com sucesso, independentemente da altitude e velocidades iniciais normalizou-
30

se os resultados obtidos para a altitude e distancia percorrida pelas aeronaves segundo a equacao
ny = 2y − ymin
ymax − ymin− 1 (4.4)
sendo ny o valor normalizado da medida da altitude ou distancia percorrida pela aeronave. O valor
ymax e ymin coincidem com os extremos da predicao para um dado instante de tempo e y o valor real
da medida. Se a medida y coincidir com o extremo superior da predicao, ymax, o valor normalizado
da medida e ‘+1’, se coincidir com o extremo inferior, ymin, o valor normalizado e ‘-1’. Um exemplo e
ilustrado nas Fig. 4.1 e 4.2, onde a medida e a altitude da aeronave e foram utilizadas 500 partıculas
para a predicao.
Figura 4.1: Altitudes reais medidas e extremosde predicao para 500 partıculas.
Figura 4.2: Normalizacao da altitude da aeron-ave para predicao com 500 partıculas.
Como e de esperar, o numero de partıculas utilizado no metodo de Monte Carlo influencia significativa-
mente os resultados obtidos. De seguida sao apresentados os resultados quando sao utilizadas 500 e
300 partıculas.
Para analisar os resultados obtidos foram selecionadas de forma aleatoria 100 trajetorias de aeronaves
de treino (correspondentes ao mes de Janeiro de 2012) e as disponıveis de teste (para o mes de Marco
de 2012), para as fases de voo de descida e subida correspondentes a instantes depois da descolagem
e aterragem, permitindo um perıodo de predicao maior a ser comparado com as medidas reais.
4.3.1 Resultados A320
Para a fase de descida do A320 e ilustrado na Fig. 4.3 a normalizacao das medidas de altitude das
aeronaves, de acordo com os extremos de predicao, quando sao utilizadas 500 partıculas. E de notar
nesta figura uma trajetoria totalmente distinta, onde o valor de altitude normalizado ultrapassa o valor
dez. A representacao da altitude ao longo do tempo para esta trajetoria e ilustrada mais a frente na
Fig. 4.7. Na Fig. 4.4 de forma semelhante para a normalizacao da distancia percorrida pelas aeron-
aves. Para a fase de subida do A320 os resultados sao apresentados nas Fig. 4.5 e 4.6, para a altitude
31

e distancia percorrida, respectivamente.
Figura 4.3: Altitudes reais medidas e extremos de predicao para a fase de descida do A320 utilizando500 partıculas.
A ilustracao dos resultados referentes a utilizacao de 300 partıculas sao semelhantes com a excepcao
de existir um maior numero de medidas fora do intervalo de predicao, pelo que se optou por nao ilustrar
os resultados e apenas quantifica-los. De modo a quantificar a qualidade da predicao calculou-se
a percentagem de medidas de altitude (h) e distancia percorrida (s) fora do intervalo dos extremos
normalizados [-1,+1]. Nas Tab. 4.1 e 4.2 mostram-se os resultados de acordo com a fase de voo e
numero de partıculas para o A320.
Descida A320 500 partıculas 300 partıculasPercentagem de medidas de h fora de [-1,+1] 1,67 2,44Percentagem de medidas de s fora de [-1,+1] 4,38 6,07
Tabela 4.1: Percentagem de medidas fora do intervalo de predicao para a fase de descida do A320utilizando 500 e 300 partıculas.
Subida A320 500 partıculas 300 partıculasPercentagem de medidas de h fora de [-1,+1] 0,67 1,22Percentagem de medidas de s fora de [-1,+1] 2,64 3,87
Tabela 4.2: Percentagem de medidas fora do intervalo de predicao para a fase de subida do A320utilizando 500 e 300 partıculas.
32

Figura 4.4: Distancia percorrida real medida e extremos de predicao para a fase de descida do A320utilizando 500 partıculas.
Figura 4.5: Altitudes reais medidas e extremos de predicao para a fase de subida do A320 utilizando500 partıculas.
33

Figura 4.6: Distancia percorrida real medida e extremos de predicao para a fase de subida do A320utilizando 500 partıculas.
Como se pode constatar a percentagem e baixa, a maior parte das medidas que se encontram fora dos
extremos resultam ou de trajetorias fora do padrao normal estimado, como exemplificado nas Fig. 4.7
para a altitude e Fig. 4.8 para a distancia percorrida, ou medidas pouco coerentes obtidas a partir dos
recetores ADS-B, exemplificadas nas Fig. 4.9 e Fig. 4.10, para a altitude e distancia percorrida, respec-
tivamente. Para o intervalo de predicao da altitude e da distancia percorrida pelas aeronaves e possıvel
observar um maior numero de medidas fora do intervalo no inıcio da predicao pois a distancia entre os
extremos do intervalo e relativamente pequena. A medida que o intervalo de tempo aumenta o intervalo
de predicao consegue captar as oscilacoes das medidas. A partir destes resultados pode-se afirmar
que com maior precisao nas medidas recebidas pelos recetores ADS-B, a percentagem de medidas
fora do intervalo causadas por erros inerentes a precisao dos dados seria muito menor. Quanto as
trajetorias que se destinguem bastante da predicao efectuada, espera-se que com o aumento da base
de dados seja possıvel ajustar o modelo de performance de modo a captar performances de aeronaves
pouco comuns.
Como e de esperar a medida que o intervalo de predicao aumenta, os extremos de predicao, ou seja, a
incerteza relativamente a posicao da aeronave aumenta. Para o A320, utilizando 500 partıculas e para
a fase de descida e possıvel constatar este facto. Como se pode observar pela Fig. 4.11 a distancia
entre os extremos de predicao, para a altitude, aumenta ate o momento em que o extremo menor atinge
a altitude zero, a partir daı a distancia entre os dois diminui. Para a distancia percorrida verifica-se de
forma semelhante o incremento do intervalo entre os extremos, na Fig. 4.12.
34

Figura 4.7: Altitudes reais medidas para umatrajetoria fora do padrao normal e predicaocom 500 partıculas.
Figura 4.8: Distancia percorrida real medidapara uma trajetoria fora do padrao normal epredicao com 500 partıculas.
Figura 4.9: Altitudes reais medidas pouco co-erentes e predicao com 500 partıculas.
Figura 4.10: Distancias reais medidas poucocoerentes e predicao com 500 partıculas.
Figura 4.11: Distancia entre extremos depredicao da altitude para a fase de descida doA320 para 500 partıculas.
Figura 4.12: Distancia entre extremos depredicao da distancia percorrida para a fase dedescida do A320 para 500 partıculas.
A distancia entre extremos de predicao para a altitude e para a distancia percorrida pela aeronave para
a fase de subida tambem aumenta como se pode observar pela Fig. 4.13 e 4.14. Verifica-se tambem
35

uma estagnacao ou diminuicao dos valores para a variavel de altitude no final da predicao, justificado
por um menor desvio padrao das entradas do modelo de performance a medida que a altitude da aeron-
ave aumenta.
Figura 4.13: Distancia entre extremos depredicao da altitude para a fase de subida doA320 para 500 partıculas.
Figura 4.14: Distancia entre extremos depredicao da distancia percorrida para a fase desubida do A320 para 500 partıculas.
Sabe-se que com um numero maior de partıculas, a quantidade de trajetorias dentro do intervalo de
predicao aumenta, contudo o tempo necessario para obtencao do mesmo tambem aumenta, ou seja,
a complexidade computacional e proporcional ao numero de partıculas utilizadas no modelo. Numa
DST os caculos de predicao da trajetoria da aeronave sao realizados em tempo real, a predicao e at-
ualizada a medida que sao recebidos novos dados de navegacao da aeronave. Com a utilizacao de
500 partıculas e para um maximo de instantes de tempo de 1500 segundos, o tempo de predicao para
as trajetorias apresentadas foi cerca de 40 minutos e para 300 partıculas 25 minutos. Para a predicao
das trajetorias foram utilizados dois ciclos “for”, um para percorrer o numero de instantes de tempo
(Nt) e outro para o numero de partıculas (Np). Representando a complexidade temporal pela notacao
“Grande-O” tem-se O(Np.Nt), ou seja, a complexidade e diretamente proporcional a Nt e Np. Para a
aplicacao do metodo proposto em tempo real, estes intervalos de tempo atuais nao sao realistas, pelo
que seria necessario melhorar a implementacao do algoritmo de PT, por exemplo com a remocao dos
ciclos “for”.
4.3.2 Resultados B738
De forma semelhante a analise realizada para o A320, ilustra-se os resultados obtidos para a predicao
do B738 para a fase de descida e subida utilizando 500 partıculas nas Figs. 4.15 – 4.18.
Na Tab. 4.3 e 4.4 observam-se as percentagens de medidas fora do intervalo de predicao de acordo
com as fases de voo e numero de partıculas utilizadas para o metodo de Monte Carlo. Tal como o A320
observa-se uma pencentagem relativamente baixa de medidas reais fora do intervalo de predicao e a
36

Figura 4.15: Altitudes reais medidas e extremos de predicao para a fase de descida do B738 utilizando500 partıculas.
Figura 4.16: Distancia percorrida real medida e extremos de predicao para a fase de descida do B738utilizando 500 partıculas.
37

Figura 4.17: Altitudes reais medidas e extremos de predicao para a fase de subida do B738 utilizando500 partıculas.
Figura 4.18: Distancia percorrida real medida e extremos de predicao para a fase de subida do B738utilizando 500 partıculas.
38

Descida B738 500 partıculas 300 partıculasPercentagem de medidas de h fora de [-1,+1] 0,91 1,69Percentagem de medidas de s fora de [-1,+1] 2,14 3,95
Tabela 4.3: Percentagem de medidas fora do intervalo de predicao para a fase de descida do B738utilizando 500 e 300 partıculas.
Subida B738 500 partıculas 300 partıculasPercentagem de medidas de h fora de [-1,+1] 0,49 0,64Percentagem de medidas de s fora de [-1,+1] 0,65 0,99
Tabela 4.4: Percentagem de medidas fora do intervalo de predicao para a fase de subida do B738utilizando 500 e 300 partıculas.
sua justificacao mantem-se.
39

40
Capıtulo 5
Conclusoes
Ferramentas de apoio a decisao (DST) na gestao de trafego aereo estao a ser desenvolvidas de modo
a auxiliar os controladores aereos na melhoria da capacidade, eficiencia e seguranca no espaco aereo.
Embora uma DST tenha varias aplicacoes, algoritmos de predicao de trajetorias estao na base da
maior parte delas. Foi apresentado um metodo baseado num modelo estocastico para a predicao de
trajetorias que depende da fase de voo e modelo da aeronave.
O metodo foi implementado em Python com o auxılio de uma base de dados, que contem um numero
elevado de dados relativos a aeronaves comercias detetadas por recetores ADS-B. No capıtulo 2 deu-
se a conhecer a base de dados, os parametros presentes e como foram obtidos, e ainda como foram
adquiridos os modelos das aeronaves necessarios para os modelos de predicao de trajetorias. No
capıtulo 3 foi apresentado o metodo utilizado para a identificacao das fases de voo da aeronave, o al-
goritmo Viterbi, necessario para a criacao do modelo de performance das aeronaves. No capıtulo 4 foi
apresentado o modelo proposto nos objetivos desta tese. A combinacao de um modelo estocastico com
o metodo de Monte Carlo permitiu prever as trajetorias possıveis das aeronaves dado o estado inicial
das mesmas, ou seja, altitude, velocidades solo e vertical, fase de voo e modelo da aeronave. A partir
destas condicoes iniciais foi possıvel fazer amostragens, das funcoes de densidade de probabilidadde
gaussianas, para cada instante de tempo de predicao. Ao conjunto destas funcoes de densidade de
probabilidade denomina-se de modelo de performance da aeronave. Este modelo contıtui a base do
modelo estocastico proposto e foi a partir dos inumeros dados de trajetorias disponıveis na base de
dodos que foi criado.
Os resultados do metodo proposto mostram que:
1. A escolha da funcao de densidade de probabilidade gaussiana, para o modelo de performance,
adequa-se ao conjunto de dados sendo validada a sua escolha.
2. A variabilidade da trajetoria aumenta com o tempo de predicao.
3. A percentagem de medidas das trajetorias fora do intervalo de predicao foi baixo. Observou-se
41

algumas trajetorias distintas que nao estao de acordo com a predicao do modelo. Para as medidas
de altitude e distancia percorrida fora do intervalo de predicao, muitas apresentam valores que
nao sao coerentes com os dados de toda a trajetoria, levando a crer que se as medidas fossem
mais precisas, ou seja, com um menor numero de erros, os resultados obtidos seriam ainda mais
satisfatorios.
4. Quanto ao numero de partıculas utilizadas no metodo de Monte Carlo, quanto maior for o seu
numero, melhores sao os resultados. Comparou-se os resultados da predicao das trajetorias ao
utilizar 300 e 500 partıculas.
5. A complexidade temporal do algoritmo de PT implementado e proporcional ao numero de partıculas
e numero de instantes utilizados na predicao (O(Np.Nt)). Do modo que o algoritmo foi implemen-
tado o tempo de predicao e demasiado elevado para aplicar em tempo real, sendo justificado pela
utilizacao de ciclos “for”. Com a remocao dos mesmos, e possıvel aumentar significativamente a
performance temporal do algoritmo.
5.1 Trabalho futuro
A qualidade dos resultados depende da quantidade de dados e da quantidade de erros existentes nas
trajetorias das aeronaves, por isso os resultados obtidos podem ser melhorados com o incremento de
dados e diminuicao dos erros nas medidas. Este aumento de precisao podera ser alcancado com a
utilizacao de dados ADS-B de estacoes de GTA, que estao preparados para filtrar “falsas” medidas,
ao inves de dados obtidos a partir de recetores ADS-B amadores que inevitavelmente estao sujeitos a
maiores erros.
Quanto ao desempenho computacional, para aplicacao do metodo em tempo real, o codigo do algo-
ritmo de predicao teria de ser modificado. Uma alternativa, como ja foi referido, seria a substituicao dos
ciclos “for”.
Um outro aspecto nao implementado, foi a predicao da trajetoria em segmentos de voo nao rectilıneos,
ou seja, quando as aeronaves executam curvas. A predicao da trajetoria nestes segmentos e natural-
mente mais complexa, pois a velocidade da aeronave depende da distancia disponıvel para a execucao
da mudanca de rumo. Alem disso, a mudanca de rumo de uma aeronave pode ser executada de difer-
entes formas, pode ser realizada de forma gradual e lenta (quando sao executadas trajetorias sobre
o cırculo maximo por exemplo) ou ainda sobre um arco de curva com um centro e raio fixo. Existem,
certamente mais aspectos a ter em conta, comparativamente aos segmentos rectilıneos para os quais
foi desenvolvido o modelo probabilıstico.
Por fim, a abordagem nao parametrica para o modelo de PT das aeronaves tem que ser validado
para outros contextos, fora da regiao de detecao de dados pelos recetores ADS-B, para confirmar a
42

existencia ou nao de overfitting, ou seja, se o modelo de performance pode ou nao ser generalizado
para outros espacos aereos.
43

44

Anexo A
Modelo de performance BADA - A320
Figura A.1: Modelo de performance do BADA para o A320 e para FL entre 0 e 40.
45

Figura A.2: Modelo de performance do BADA para o A320 e para FL entre 60 e 410.
46

Referencias
[1] John Lygeros and Maria Prandini. Aircraft and Weather Models for Probabilistic Collision Avoidance
in Air Traffic Control. In IEEE Conference on Decision and Control, Las Vegas, pages 2427–2432 ,
2002.
[2] Cary R. Spitzer, editor The Avionics Handbook. CRC Press, 2001. Chapter 15.
[3] A. Nuic. User Manual for the Base of Aircraft Data (BADA) Revision 3.10. Eurocontrol Experimental
Center, Bretigny, France, 2012.
[4] B. Musialek, C. F. Munafo, H. Ryan, and M. Paglione. Literature survey of trajectory predictor tech-
nology. Technical report DOT/FAA/TCTN11/1, Federal Aviation Administration William J. Hughes
Technical Center, Atlantic City, November 2010.
[5] R. A. Coppenbarger. Climb trajectory prediction enhancement using airline flight-planning informa-
tion. In AIAA Guidance, Navigation, and Control Conference,1999.
[6] Sip Swierstra e S.M. Green. Common Trajectory Prediction Capability for Decision Support Tools. In
5th USA/Europe Air Traffic Management Research and Development Seminar, pages 1–10, 2003.
[7] A. Hadjaz, G. Marceau Caron, P. Saveant and M. Schoenauer. Online Learning for Ground Trajectory
Prediction. In Proceedings of the SESAR Innovation Days (2012). EUROCONTROL, 2012.
[8] Air Traffic Management - A guide to global surveillance. Thales Air Systems.
[9] Introduction to RADAR - Principle of RADAR operation and interpretation of presented data. Vatsim
uk.
[10] http://www.duncanaviation.aero/videos/understanding-fans/adsc-cpdlc.php
[11] http://www.trig-avionics.com/adsb.html
[12] International Standards and Recommended Practices, Annex 10 to the Convention on International
Civil Aviation, Aeronautical Telecommunications, Volume IV Surveillance and Collision Avoidance
Systems, Chapter 5. ICAO, Fourth Edition, July 2007.
[13] Jose E. Sanguino. Navigation Systems, Part1. Instituto Superior Tecnico, Second semester
2011/2012.
47

[14] Jose E. Sanguino. Navigation Systems, Part2. Instituto Superior Tecnico, Second semester
2011/2012.
[15] Lawrence R. Rabiner. A tutorial on hidden markov models and selected applications in speech
recognition. In Proceedings of the IEEE, pages 259–261 , 1989.
[16] Emanuel Parzen. On Estimation of a Probability Density Function and Mode. In The Annals of
Mathematical Statistics , Vol. 33, No. 3 (Sep., 1962) , pp. 1065–1076.
[17] Lawrence R. Rabiner. A tutorial on hidden markov models and selected applications in speech
recognition. In Proceedings of the IEEE, pages 263–264 , 1989.
[18] Tom Fawcett. An introduction to ROC analysis. Pattern Recognition Letters In ROC Analysis in
Pattern Recognition, Vol. 27, No. 8., 2006, pp. 861–874.
[19] Samik Raychaudhuri. Introduction to Monte Carlo Simulation. In Proceedings of the 2008 Winter
Simulation Conference, pages 91–100 , 2008.
48