metody sztucznej inteligencji w identyfikacji, … · metody sztucznej inteligencji – sieci...
TRANSCRIPT
Prace Naukowe Instytutu Maszyn, Napędów i Pomiarów Elektrycznych Nr 58 Politechniki Wrocławskiej Nr 58
Studia i Materiały Nr 25 2005
__________
sieci neuronowe, algorytm genetyczne, logika rozmyta, identyfikacja, estymatory stanu, sterowanie
Teresa ORŁOWSKA-KOWALSKAF
*
METODY SZTUCZNEJ INTELIGENCJI W IDENTYFIKACJI, ESTYMACJI ZMIENNYCH STANU I STEROWANIU
NAPĘDÓW ELEKTRYCZNYCH
W artykule przedstawiono zagadnienia związane z zastosowaniem metod sztucznej inteligencji w napędzie elektrycznym, do identyfikacji parametrów modeli matematycznych, estymacji zmiennych stanu oraz sterowania prędkością silników prądu stałego i przemiennego. Po krótkim omówieniu cech i możliwości aplikacyjnych takich metod jak sztuczne sieci neuronowe, logika rozmyta oraz algoryt-my genetyczne, przedstawiono wybrane przykłady zastosowań opracowane w ośrodku wrocławskim w ostatnim dziesięcioleciu. Scharakteryzowano podstawowe problemy związane ze specyfiką stoso-wanych rozwiązań, przedstawiono wybrane wyniki badań symulacyjnych i eksperymentalnych opra-cowanych układów napędowych.
1. WPROWADZENIE
W ostatnim dziesięcioleciu pojawiła się nowa dziedzina wiedzy, zwana inteligencją obliczeniową, która znalazła zastosowanie m.in. w: automatyce i robotyce, sterowaniu procesami przemysłowymi, diagnostyce układów napędowych, telekomunikacji, sys-temach wojskowych, interpretacji badań biologicznych i medycznych, kryminalistyce. Inteligencja obliczeniowa obejmuje i łączy ze sobą takie metody i techniki, jak: sieci neuronowe, logikę rozmytą oraz algorytmy ewolucyjne i genetyczne, umożliwiając bardziej skuteczne rozwiązanie wielu problemów niż klasyczne metody algorytmicz-ne.
Można znaleźć wiele definicji sztucznej inteligencji, ale wszystkie one mówią, że sztuczna inteligencja jest próbą modelowania aspektów ludzkiego rozumowania (my-ślenia) za pomocą komputerów, czy też próbą rozwiązywania za pomocą komputera
* Politechnika Wrocławska, Instytut Maszyn, Napędów i Pomiarów Elektrycznych, 50-372 Wrocław, ul. Smoluchowskiego 19, [email protected]
takich problemów, które człowiek rozwiązuje szybciej. Wszystkie metody sztucznej inteligencji cechują się inspiracją neurobiologiczną. Sztuczne sieci neuronowe (SN) powstały w wyniku prób odwzorowania działania
neuronów biologicznych - elementarnych komórek ludzkiego mózgu i ich połączeń. A więc sztuczne sieci neuronowe, naśladując do pewnego stopnia działanie mózgu, wy-kazują zdolności uczenia się oraz generalizacji.
Układy logiki rozmytej (FL) wykorzystują tzw. zmienne lingwistyczne do opisu i modelowania złożonych systemów fizycznych, przy użyciu zestawu reguł logicznych i odpowiedniego sposobu wnioskowania. Zarówno sposób tworzenia reguł jak i wnio-skowania odwzorowuje sposób rozumowania człowieka oraz intuicyjny opis działania układów fizycznych.
Algorytmy genetyczne (AG), wykorzystując analogie związane z biologicznymi procesami ewolucyjnymi, z powodzeniem znajdują zastosowania jako narzędzia optymalizacji w złożonych nieliniowych problemach, do których często nie mogą być zastosowane klasyczne metody optymalizacyjne oparte na rachunku różniczkowym.
Tak więc można stwierdzić, że metody sztucznej inteligencji są wykorzystywane do rozwiązywania problemów, które dotychczas nie znalazły satysfakcjonujących roz-wiązań przy wykorzystaniu metod algorytmicznych lub tam, gdzie istniejące metody algorytmiczne są bardzo skomplikowane i często zawodne.
Ze względu na swoje interesujące właściwości i skuteczność w rozwiązywaniu wielu problemów nieliniowych, metody sztucznej inteligencji znalazły również zastosowanie w przekształtnikowych układach napędowych, do modelowania, identyfikacji, estymacji zmiennych stanu, sterowania oraz optymalizacji i są obecnie prowadzone w wielu ośrodkach krajowych i zagranicznych.
W ośrodku wrocławskim, w połowie lat 90. zostały podjęte prace nad zastosowa-niem sieci neuronowych do estymacji zmiennych stanu silnika indukcyjnego i były pierwszymi w kraju [5]-[8]. Opracowano neuronowe estymatory strumienia wirnika silnika indukcyjnego oparte na sieciach wielowarstwowych o różnej strukturze oraz estymatory prędkości kątowej wirnika bazujące na metodzie modelowania neuronowego (sieci o liniowej funkcji aktywacji) oraz na metodzie neuronowej identyfikacji (sieci wielowarstwowe o różnych strukturach). Wynikiem prac prowadzonych w tej tematyce było szereg wystąpień i publikacji na konferencjach zagranicznych i krajowych, publikacji w czasopismach (m.in. [5] – [12]) oraz rozprawa doktorska [4]. Część wyników tych prac została opublikowana w monografii wydawnictwa Physica-Verlag, w serii: Studies in Fuzziness and Soft Computing [2] oraz w książce [15].
Metody sztucznej inteligencji (sieci neuronowych, logiki rozmytej, algorytmów genetycznych) stanowiły również przedmiot zainteresowań zespołu badawczego z Instytutu Maszyn Napędów i Pomiarów Elektrycznych w zastosowaniu do sterowania napędami elektrycznymi i do realizacji regulatorów odpornych na zmiany parametrów i warunków pracy napędu. W szczególności regulatory rozmyte, w tym adaptacyjne, umożliwiają uzyskanie bardzo dobrych właściwości dynamicznych regulacji prędkości
lub śledzenia zadanej trajektorii ruchu w obecności zakłóceń, zarówno dla układów ze sztywnym jak i elastycznym połączeniem mechanicznym. W szczególności w przypadku tego ostatniego, regulatory rozmyte umożliwiają znacznie bardziej skuteczne tłumienie drgań prędkości mechanizmu roboczego niż klasyczne regulatory liniowe typu PI. Wyniki prac z tego zakresu opublikowano w czasopismach i na renomowanych konferencjach zagranicznych oraz krajowych (m. in. [13], [14]. [20], [21]). Efektem badań prowadzonych w tej tematyce była dwie rozprawy doktorskie [1], [22], zrealizowane w ramach grantów promotorskich KBN.
Metody sztucznej inteligencji – sieci neuronowe i algorytmy genetyczne były również z powodzeniem stosowane do identyfikacji parametrów układów napędowych z silnikami prądu stałego i przemiennego, a ich wyniki zaprezentowano w publikacjach [3], [16]-[18]. Obecnie w trakcie realizacji jest rozprawa doktorska zwiazana z zastosowaniem algorytmów ewolucyjnych do identyfikacji parametrów elektrycznych i mechanicznych złożonych układów napędowych.
W dalszej części zostaną przedstawione najważniejsze wyniki badań zrealizowa-nych w Instytucie, dotyczących zastosowań metod sztucznej inteligencji do identyfi-kacji, estymacji zmiennych stanu i sterowania silników prądu stałego i indukcyjnych, zrealizowanych przez zespół w składzie: Krzysztof Jaszczak, Czesław Kowalski, Piotr Migas, Marcin Pawlak, Krzysztof Szabat, pod kierunkiem autorki tego artykułu.
2. ZASTOSOWANIE SIECI NEURONOWYCH W NAPĘDZIE ELEKTRYCZNYM
2.1. WPROWADZENIE
Sieci neuronowe są wykorzystywane do rozwiązywania problemów, które dotych-czas nie znalazły satysfakcjonujących rozwiązań lub tam, gdzie istniejące metody al-gorytmiczne są bardzo skomplikowane i często zawodne. Znalazły one szereg zasto-sowań w wielu dziedzinach techniki, również w energoelektronice i napędzie elektrycznym, dzięki takim zaletom jak:
− aproksymacja dowolnych nieliniowych odwzorowań, − adaptacja, czyli zdolność uczenia się, − równoległe przetwarzanie danych, − odporność na zakłócenia, − generalizacja, tzn. możliwość obróbki danych niekompletnych lub nieco
odmiennych od tych, dla których sieć była uczona [15]. Powszechne zastosowanie przekształtnikowych układów napędowych do sterowania i automatyzacji procesów technologicznych sprawia, że wśród zadań, których realizację można powierzyć sztucznym sieciom neuronowym są takie jak: sterowanie, identyfi-kacja, estymacja zmiennych stanu oraz sterowanie (rys.1).
NAPĘD ELEKTRYCZNY
MODELOWANIE IDENTYFIKACJA ESTYMACJA STANU STEROWANIE
SZTUCZNE SIECINEURONOWE
Rys. 1. Możliwości zastosowania sieci neuronowych w napędzie elektrycznym
Fig. 1. Application of neural networks in the electrical drive systems
W następnych podrozdziałach zostaną przedstawione przykłady zastosowania sieci neuronowych do rozwiązania powyższych zadań, zrealizowane w ośrodku wrocław-skim.
2.2. MODELOWANIE I IDENTYFIKACJA SILNIKÓW ELEKTRYCZNYCH
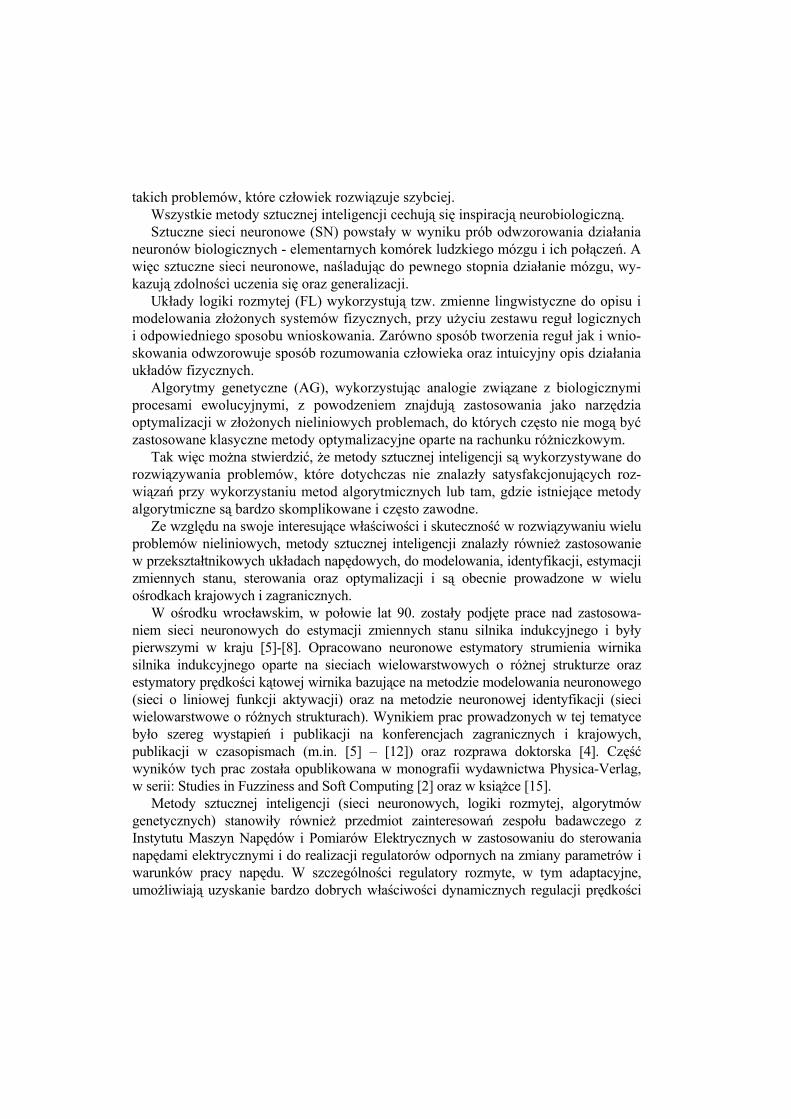
Problemy modelowania i związane z nimi problemy identyfikacji układów napę-dowych oraz ich elementów stanowią jedno z podstawowych zagadnień przy rozwią-zywaniu zadania syntezy układów sterowania. Znajomość dokładnego opisu matema-tycznego układu daje efektywne możliwości opracowania odpowiednich układów sterowania napędem. Atrakcyjność stosowania sieci neuronowych w zagadnieniach modelowania i identyfikacji obiektów wynika przede wszystkim ze wspomnianych już możliwości aproksymacji dowolnych nieliniowości oraz dostrajania przyjętej struktu-ry na podstawie danych eksperymentalnych. Na rysunku 2 przedstawiono ogólną strukturę układu realizującego model neuronowy układu napędowego.
NAPĘDELEKTRYCZNY
ALGORYTMUCZENIA
u
y
ym
ε
MODEL
Rys. 2. Schemat uczenia neuronowego modelu układu napędowego Fig. 2. Scheme of the neural model training for the electrical drive
Przedstawiona sytuacja odpowiada procesowi uczenia sieci neuronowej. Informa-
cja o wartości błędu ε będącego różnicą pomiędzy wyjściem obiektu y, a wyjściem

symulatora neuronowego ym, stanowi informację wejściową w algorytmie uczenia. Ponieważ w układach sterowania procesy mają charakter dynamiczny, neuronowe
modelowanie wymaga stosowania specjalnych rozwiązań. Jednym z nich może być użycie sieci typu propagacji wstecznej, o nieliniowej funkcji aktywacji.
Drugie podejście, wykorzystywane w sytuacji, kiedy opis matematyczny obiektu jest dobrze znany i przedstawiany w postaci liniowych równań różniczkowych zwy-czajnych, opiera się na odwzorowaniu tych równań za pomocą pojedynczych linio-wych neuronów. Proces strojenia wag tych neuronów umożliwia identyfikację para-metrów modelu obiektu. Takie podejście było wykorzystywane do identyfikacji parametrów schematu zastępczego silników prądu stałego i przemiennego. Poniżej zo-stanie zilustrowane to podejście na przykładzie silnika prądu stałego. Jego model ma-tematyczny można przedstawić w formie dyskretnej w następujący sposób [3]:
( ) ( ) ( ) ( ) TcTK
kTTK
kuT
Tkikia
a
a
at
att Δ⋅−Δ⋅+⎥
⎦
⎤⎢⎣
⎡ Δ−=+ φω11 (1)
( ) ( ) ( ) TJ
MT
JckiT
Jbkk o
t Δ−Δ⋅+⎥⎦⎤
⎢⎣⎡ Δ−=+
φωω 11 (2)
gdzie: ΔT – krok dyskretyzacji, Ta, Ka, J – elektromagnetyczna stała czasowa, współ-czynnik wzmocnienia i moment bezwładności twornika, ut, it, ω, φ - odpowiednio na-pięcie, prąd, prędkość twornika oraz strumień wzbudzenia, b – współczynnik tarcia, Mo – moment obciążenia. Postać tych równań przypomina opis neuronów o liniowej funkcji aktywacji. Tak więc równaniom (1) i (2) odpowiadać będzie następujący opis w wersji „neuronowej”:
( ) ( ) ( ) ( )kwkuwkywky tii ω3211 ++=+ (3)
( ) ( ) ( ) ot Mwkiwkywky 6541 ++=+ ωω (4)
gdzie: 1 – wagi neuronu, którego wyjściem jest prąd twornika:
a
a
a
a
a TTcKw
TTKw
TTw Δ
−=Δ
=Δ
−=φ
321 ,,1 , (5)
2 – wagi neuronu, którego wyjściem jest prędkość wirnika:
JTw
JTcw
JTbw Δ
−=Δ
=Δ
−= 654 ,,1 φ . (6)

ową ilustrację neuronu o liniowej funkcji aktywacji odpowiadającego równaniu (3).
Rys. 3 lnika
Fig.3. Neural form of armature current equation for DC motor
ż
Na rys. 3 przedstawiono przykład
Liniowa funkcjaaktywacji
z-1
ω(k)
it (k)
ut (k) it(k){w2}
{w1}
s(k+1)y(k+1)
y(k)
{w3}
. Postać neuronu odpowiadającego równaniu prądu twornika si
Realizując procedurę uczenia neuronu z rys. 3 metodą wstecznej propagacji błędu
(według schematu z rys. 2), mo na uzyskać wartości wag neuronu i na ich podstawie wyznaczyć parametry Ta, Ka i φc silnika. Podobnie realizuje się zadanie identyfikacji parametrów mechanicznych b, J silnika, na podstawie treningu neuronowego modelu równania (4). Szczegółowe wyniki tych badań przedstawiono w [3]. Wykorzystując to samo podejście, opracowano procedurę identyfikacji neuronowej parametrów schema-tu zastępczego silnika indukcyjnego w stanie zatrzymanym.
2.3. ESTYMACJA ZMIENNYCH STANU SILNIKA INDUKCYJNEGO
2.3.1. PODZIAŁ METOD
erwacji oraz ostatnio metody neuronowe, wy
ych stanu obiektów dyna-mic
ne; – estymacja zmiennych stanu off-line,
co
W ostatnich latach prowadzono intensywne badania związane z odtwarzaniem zmiennych stanu silników prądu przemiennego, takich jak: składowe wektorów prze-strzennych strumienia wirnika lub stojana silnika indukcyjnego, prędkość i położenie silnika indukcyjnego i synchronicznego z magnesami trwałymi, momentu elektroma-gnetycznego oraz momentu obciążenia [15]. Wśród metod odtwarzania zmiennych stanu silników elektrycznych można wyróżnić metody fizykalne – oparte na asymetrii magnetycznej silników prądu przemiennego, metody algorytmiczne – oparte na mode-lach matematycznych silników i teorii obs
korzystujące sztuczne sieci neuronowe. Zastosowania sieci neuronowych do estymacji zmiennznych opierają się na podejściu związanym z [2], [15]: - modelowaniem neuronowym – estymacja zmiennych stanu on-li- neuronową identyfikacjąprzedstawiono na rys. 4. W układzie pracującym on-line, liniowa sieć neuronowa jest używana w układzie z
modelem odniesienia, którym jest model matematyczny obiektu dynamicznego. Po-
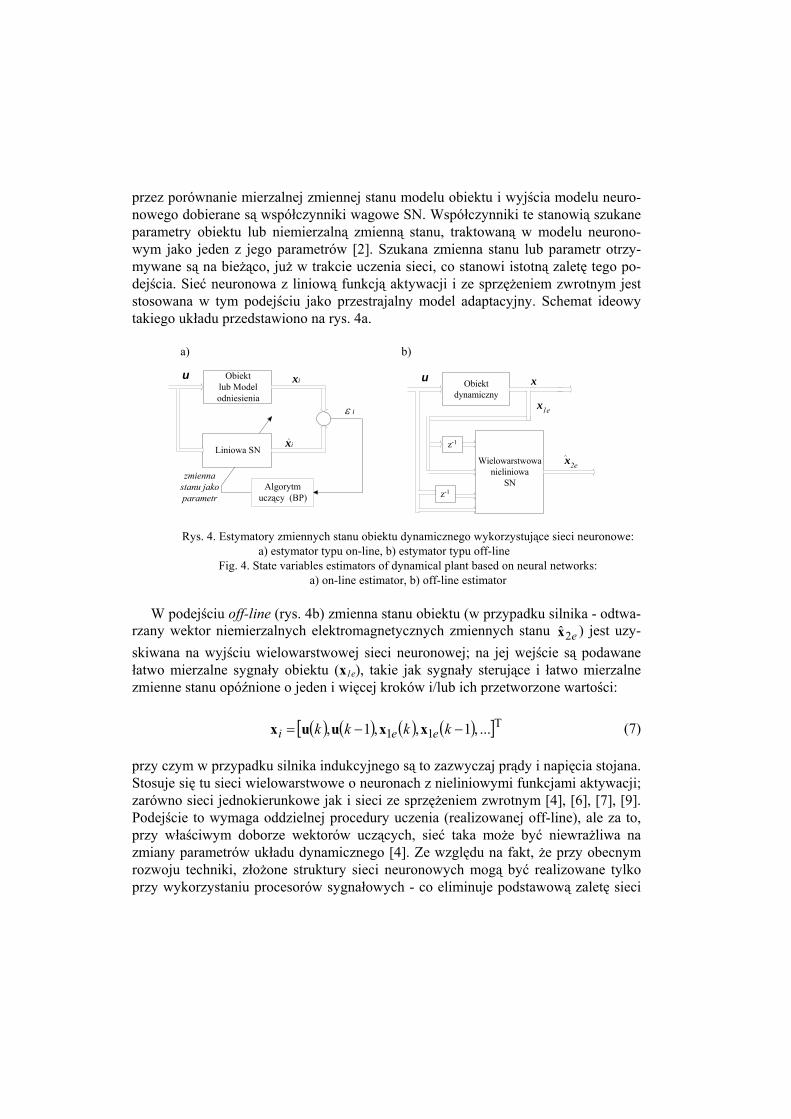
jalny model adaptacyjny. Schemat ideowy takiego układu przedstawiono na rys. 4a.
a) b)
przez porównanie mierzalnej zmiennej stanu modelu obiektu i wyjścia modelu neuro-nowego dobierane są współczynniki wagowe SN. Współczynniki te stanowią szukane parametry obiektu lub niemierzalną zmienną stanu, traktowaną w modelu neurono-wym jako jeden z jego parametrów [2]. Szukana zmienna stanu lub parametr otrzy-mywane są na bieżąco, już w trakcie uczenia sieci, co stanowi istotną zaletę tego po-dejścia. Sieć neuronowa z liniową funkcją aktywacji i ze sprzężeniem zwrotnym jest stosowana w tym podejściu jako przestra
Obiektlub Modelodniesienia
ε i
Liniowa SN
u
Algorytmuczący (BP)
xi
xi
∧
zmiennastanu jakoparametr
Obiektdynamiczny
Wielowarstwowanieliniowa
SN
u
x2e
x
∧
x1e
z-1
z-1
tory zmiennych stanu obiektu dynamicznego wykorzyRys. 4. Estyma stujące sieci neuronowe:
Fig. 4. State variab neural networks: a) on-line estimator, b) off-line estimator
ne zmienne stanu opóźnione o jeden i więcej kroków i/lub ich przetworzone wartości:
(7)
a) estymator typu on-line, b) estymator typu off-line les estimators of dynamical plant based on
W podejściu off-line (rys. 4b) zmienna stanu obiektu (w przypadku silnika - odtwa-
rzany wektor niemierzalnych elektromagnetycznych zmiennych stanu e2x̂ ) jest uzy-skiwana na wyjściu wielowarstwowej sieci neuronowej; na jej wejście są podawane łatwo mierzalne sygnały obiektu (x1e), takie jak sygnały sterujące i łatwo mierzal
( ) ( ) ( ) ( )[ ]T11 ... ,1,,1, −−= kkkk eei xxuux
przy czym w przypadku silnika indukcyjnego są to zazwyczaj prądy i napięcia stojana. Stosuje się tu sieci wielowarstwowe o neuronach z nieliniowymi funkcjami aktywacji; zarówno sieci jednokierunkowe jak i sieci ze sprzężeniem zwrotnym [4], [6], [7], [9]. Podejście to wymaga oddzielnej procedury uczenia (realizowanej off-line), ale za to, przy właściwym doborze wektorów uczących, sieć taka może być niewrażliwa na zmiany parametrów układu dynamicznego [4]. Ze względu na fakt, że przy obecnym rozwoju techniki, złożone struktury sieci neuronowych mogą być realizowane tylko przy wykorzystaniu procesorów sygnałowych - co eliminuje podstawową zaletę sieci
całego złożonego układu sterowania i odtwarzania w strukturze jednoproceso-row
u metod do esty-macji strumienia i prędkości kątowej wirnika silnika indukcyjnego.
2.3.2. METODA MODELOWANIA NEURONOWEGO – PRZYKŁADY ZASTOSOWAŃ
szy opisany przez Ben-Brahima i Kurosawę [2], [15] i przedstawiony jest na rys. 6a.
a) b)
neurono-wych, jaką jest przetwarzanie równoległe - stosowanie takich estymatorów zmiennych stanu silnika indukcyjnego jest ograniczone możliwościami realizacji prak-tycznej
ej. W artykule przedstawiono wybrane wyniki badań prowadzonych w ośrodku wro-
cławskim w ostatnim dziesięcioleciu, związane z zastosowaniem ob
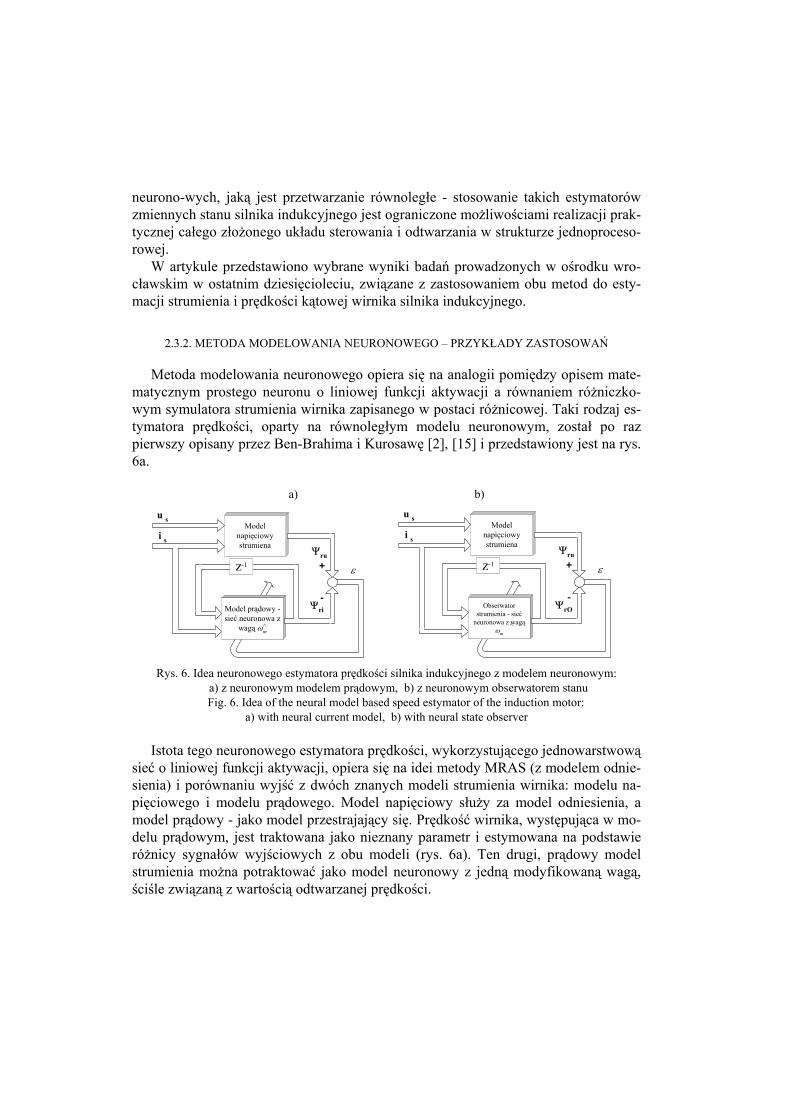
Metoda modelowania neuronowego opiera się na analogii pomiędzy opisem mate-matycznym prostego neuronu o liniowej funkcji aktywacji a równaniem różniczko-wym symulatora strumienia wirnika zapisanego w postaci różnicowej. Taki rodzaj es-tymatora prędkości, oparty na równoległym modelu neuronowym, został po raz pierw
Modelnapięciowystrumiena
-
+
i s
u s
Model prądowy -sieć neuronowa z
wagą ωm^
Ψru
ε
Ψri
z-1
Modelnapięciowystrumiena
-
+
i s
u s
Obserwatorstrumienia - sieć
neuronowa z wagąωm
^
Ψru
ε
ΨrO
z-1
Rys. 6. Ide ym:
Fig. 6. ion motor: a) with neural current model, ) with neural state observer
wy z jedną modyfikowaną wagą, ściśle związaną z wartością odtwarzanej prędkości.
a neuronowego estymatora prędkości silnika indukcyjnego z modelem neuronowa) z neuronowym modelem prądowym, b) z neuronowym obserwatorem stanu
Idea of the neural model based speed estymator of the induct b
Istota tego neuronowego estymatora prędkości, wykorzystującego jednowarstwową sieć o liniowej funkcji aktywacji, opiera się na idei metody MRAS (z modelem odnie-sienia) i porównaniu wyjść z dwóch znanych modeli strumienia wirnika: modelu na-pięciowego i modelu prądowego. Model napięciowy służy za model odniesienia, a model prądowy - jako model przestrajający się. Prędkość wirnika, występująca w mo-delu prądowym, jest traktowana jako nieznany parametr i estymowana na podstawie różnicy sygnałów wyjściowych z obu modeli (rys. 6a). Ten drugi, prądowy model strumienia można potraktować jako model neurono

Model napięciowy strumienia wirnika, bazujący na równaniach napięciowych sto-jana [15], ma postać:
N
NssM
rur Ttd
dTxr
xx
tdd 1
⎟⎟
⎠
⎞⎜⎜⎝
⎛−−= s
ssi
iuΨ σ , (8)
oraz odpowiednio model prądowy strumienia wirnika:
( )N
irm
irM
r
rir T
jxxr
tdd 1 ⎥
⎦
⎤⎢⎣
⎡+−= ΨΨiΨ s ω . (9)
Model prądowy można zapisać w następujący sposób dla potrzeb modelowania neuronowego:
( ) ( ) ( ) ( )11ˆ ˆ321 −+−Ψ+=Ψ kwkwwk s
ir
ir iJI (10)
gdzie: , ⎥⎦
⎤⎢⎣
⎡ −=⎥
⎦
⎤⎢⎣
⎡=
0110
,1001
JI
oraz: rs, rr – rezystancja uzwojenia stojana i wirnika, xs, xr, xM – odpowiednio reaktan-cje stojana, wirnika i magnesująca, rNrr rTxT / = – stała czasowa wirnika, . rsM xxx /1 2−=σ
Model (10) przekształcony do układu współrzędnych (α,β), można potraktować jako połączenie dwóch neuronów o liniowej funkcji aktywacji każdy. Jednym ze współczynników wagowych tych neuronów – w2, jest prędkość silnika, która może być uzyskana w wyniku zastosowania algorytmu wstecznej propagacji błędu ε (rys. 6a):
( ) ( ) ( )kwkwkw 222 1 Δ+−= η (11)
gdzie:
( ) ( ) ( )
( )( ) ( ) ( )( )22
22
ˆˆ21
21 ;ˆ
,1 1ˆ
kkkek
kwkkw
ir
uri
r
ir
ΨΨEΨ
EΨJ
−===
−Δ+−−=Δ
∂∂δ
αδη
, (12)
oraz; η - współczynnik uczenia, α - współczynnik momentum. W wyniku wykorzystania dwóch składowych (α-β) wektora strumienia wirnika,
algorytm wstecznej propagacji modyfikujący wagę w2 (ωm) przyjmuje postać:
[ ] [ ] ( )[ ] [ ]111 −Δ+−Ψ+Ψ−−−= kakeekk mir
irmm ωηωω αββα (13)

gdzie: , )()()(,
)( ir
ur
ir
ur ee βββααα ψψψψ −=−=
η, α – odpowiednio, współczynniki uczenia i momentum. Neuronowy estymator prędkości z rys. 6a bazuje na pomiarze prądów i napięć
uzwojenia stojana oraz informacji o parametrach schematu zastępczego silnika. Pracu-je on poprawnie w przypadku przyjęcia znamionowych parametrów silnika w obu modelach wykorzystywanych strukturze typu MRAS [11]. Jednak, modele matema-tyczne (8) i (9) są wrażliwe na zmiany wszystkich parametrów schematu zastępczego silnika, tak jak wszystkie symulatory strumienia wirnika silnika indukcyjnego [15]. W przypadku, gdy neurony posiadają liniową funkcję aktywacji, trudno uznać taki esty-mator za rzeczywistą sieć neuronową, wraz z jej podstawowa właściwością związaną z odpornością na zmiany parametrów obiektu, nabytą w trakcie procesu uczenia. Dlate-go przebadano wrażliwość tego estymatora na zmiany wszystkich parametrów sche-matu zastępczego silnika i stwierdzono, że błędy estymacji prędkości w przypadku przyjęcia niedokładnych wartości parametrów silnika w modelu napięciowym i mode-lu neuronowym (rys. 6a), są znaczne. Niektóre wyniki tych badań zostały przedsta-wione w [2], [11].
Aby zmniejszyć wrażliwość przedstawionego wyżej estymatora prędkości na błędy identyfikacji parametrów schematu zastępczego silnika, zamiast samonastrajającego się modelu prądowego strumienia wirnika, zastosowano obserwator stanu zredukowa-nego rzędu (rys. 6b) [12]. Model matematyczny takiego obserwatora, szczegółowo opisanego w [15], ma postać następującą w przedziale próbkowania prądów i napięć stojana Ti, które stanowią wielkości wejściowe obserwatora:
( ) ( )uHyKzFz ii ωω ++=& , (14)
przy czym macierz stanu obserwatora jest specjalnej postaci:
( )i λdiag=F , (15)
gdzie λi - wartości własne obserwatora, stałe lub zmienne w funkcji prędkości kąto-wej, ω i - wartość prędkości w przedziale próbkowania prądów stojana, z, y, u – odpowiednio wektory stanu obserwatora, wyjścia i wektor sterowania.
Estymaty zmiennych stanu wyznacza się zgodnie z [15] w następujący sposób:
. (16) ( ) ( ) ( )zVyPzy
TC
x ii iωe
1ˆ ωω +=⎥
⎦
⎤⎢⎣
⎡−
⎥⎦
⎤⎢⎣
⎡=
Zastąpienie prądowego symulatora strumienia obserwatorem stanu jest korzystne, ponieważ w porównaniu z modelem prądowym (9), obserwator strumienia wirnika

opisany równaniem (14) charakteryzuje się dużo większą odpornością na zmiany pa-rametrów schematu zastępczego silnika [15]. Model obserwatora, podobnie jak model prądowy strumienia, można potraktować jako prostą sieć neuronową, która posiada dwa neurony (w osi α i β) o liniowej funkcję aktywacji. Jedną z modyfikowanych wag tej sieci stanowi estymowana prędkość silnika. Tak więc, dla potrzeb modelowania neuronowego, model matematyczny obserwatora (14), (16) przyjmuje następującą po-stać:
( ) ( ) ( ) ( ) ( )1 1 1 321 −+−+−= kwkwkwk ss uizz λ (17)
( ) ( ) ( ) ( )( ) ( )1 1 1 ˆ1211 −−−−−= kkj tktkk sr izΨ . (18)
gdzie: w1 – w3 – współczynniki wagowe modelu neuronowego, t11, t12 – jak w [16]. Algorytm dostrajania wag (13) przyjmuje w tym przypadku postać następującą:
[ ] [ ] ( )[ ] [ ]111 −Δ+−Ψ+Ψ−−−= kkeekk mor
ormm ωαηωω αββα , (22)
gdzie: , . or
ure ααα Ψ−Ψ= o
rure βββ Ψ−Ψ=
Na rys. 7 przedstawiono przykładowe przebiegi odtwarzania prędkości za pomocą obydwu estymatorów.
a) b)
Rys. 7. Przebiegi prędkości mierzonej i estymowanej za pomocą neuronowych estymatorów podczas roz-ruchu i zmiany prędkości zadanej: a) dla parametrów znamionowych silnika, b) w przypadku zmiany
rezystancji stojana rs = 1.5 rsN
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.80
0.5
1
1.5
2
2.5 Nominal parameters
Motor
Estimator with observer
Ben-Brahim estimator
t [s] 0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 0
0.5
1
1.5
2
2.5
Ben-Brahim estimator
Estimator with observer
Motor
Rr = 1.5*RrN
t [s]
Fig. 7. Transients of motor speed and speed reconstructed by neural estimators during motor start-up and speed reference changes: a) for nominal motor parameters, b) in the case of stator resistance changes rs =
1.5 rsN
Na rys.8 przedstawiono wyniki badań nowego estymatora, zrealizowane w za-mkniętym układzie regulacji polowo-zorientowanej, w różnych warunkach pracy na-

pędu. W celu przetestowania opracowanego estymatora w całym zakresie zmian pręd-kości obrotowej, zmieniano wartość prędkości zadanej skokowo o wartość 0.2 [p.u.], od wartości –1 do wartości +1[p.u.]. Wykonano również testy rozruchu i płynnej zmiany wartości prędkości zadanej.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 t[s] 5.5
-1
-0.5
0
0.5
1
ω [p.u.]
prędkość zadana
prędkość estymowana
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
0
0.2
0.4
0.6
0.8
1
1.2
t [s]
ω [-
]
prędkość silnika
prędkość zadana
prędkość estymowana
Rys. 8. Przebiegi prędkości zadanej i estymowanej w układzie zamkniętym: a) przy skokowej zmianie prędkości zadanej w trakcie nawrotu; b) przy płynnej zmianie prędkości zadanej
Fig. 8. Speed reference and speed reconstructed by the new neural speed estimator in the cloned-loop system: a) for step changes of the speed reference during reversal operation, b) for smooth change of the
speed reference during drive start-up
Na podstawie powyższych przebiegów oraz wyników zamieszczonych w [11], [12] i [15] można sformułować następujące wnioski dotyczące estymatorów prędkości sil-nika indukcyjnego wykorzystujących metodą neuronowego modelowania:
- rozwiązanie oparte na dwóch symulatorach strumienia wirnika jest bardzo wraż-liwe na zmiany parametrów silnika; estymator ten pracuje poprawnie, jeśli parametry te są znane lub na bieżąco identyfikowane;
- zastosowanie obserwatora zredukowanego rzędu zamiast modelu prądowego znacznie poprawia jakość estymacji prędkości w przypadku błędnej identyfikacji pa-rametrów silnika;
- odpowiedni wybór wartości własnych obserwatora oraz współczynników uczenia w algorytmie wstecznej propagacji błędu zapewnia niską wrażliwość estymatora pręd-kości na zmiany parametrów schematu zastępczego silnika;
- proces trenowania estymatora może być prowadzony na bieżąco i zaproponowa-ny nowy estymator może stanowić interesujące rozwiązanie nawet w sytuacji, kiedy parametry silnika nie są dokładnie znane.
2.3.2. METODA NEURONOWEJ IDENTYFIKACJI – PRZYKŁADY ZASTOSOWAŃ
Drugie podejście do estymacji trudnomierzalnych zmiennych stanu silników in-dukcyjnych było testowane w ośrodku wrocławskim już w połowie lat 90. ubiegłego wieku. Uzyskano bardzo interesujące wyniki publikowane w kraju i za granicą [7]-[10], a efektem tych badań była rozprawa doktorska [4] obroniona z wyróżnieniem w
roku 2002. Wybrane wyniki tych prac zostaną przedstawione w tym podrozdziale. Głównym celem prowadzonych badań było uzyskanie estymacji strumienia i pręd-
kości wirnika silnika indukcyjnego na podstawie pomiaru prądów i napięć stojana, przy wykorzystaniu możliwie prostych struktur sieci neuronowych, uczonych metodą wstecznej propagacji błędu.
Przetestowano różne struktury sieci neuronowych, których uogólniony schemat można przedstawić w postaci tzw. sieci kombinowanej, jak na rys. 9. W zależności od rodzaju połączeń poszczególnych warstw sieci, można wyróżnić: wielowarstwowe sieci jednokierunkowe, sieci kaskadowe, sieci z lokalnymi sprzężeniami zwrotnymi, sieci ze sprzężeniami międzywarstwowymi, sieci z globalnym sprzężeniem zwrotnym [4], [10].
L1 L2 L3
z -1 z -1
z -1z -1
z -1 Rys. 9. Schemat sieci kombinowanej wykorzystującej wszystkie możliwe połączenia
(L1, L2 – 1sza i 2ga warstwa ukryta layers, L3 – warstwa wyjściowa) Fig. 9. Scheme of the combined network with all possible connections
(L1, L2 – 1st and 2nd hidden layers, L3 – output layer) Testowano różne struktury tych sieci (jednokierunkowe, Elamana – z lokalnym
sprzężeniem zwrotnym, rekurencyjne – z zewnętrznym oraz międzywarstwowymi sprzężeniami zwrotnymi), przy wykorzystaniu algorytmu Levenberga-Marquardta oraz zastosowaniu różnych sygnałów wejściowych:
− składowych wektora prądu stojana i ich wartości opóźnionych, − składowych wektora prądu stojana i ich częstotliwości,
− składowych wektora napięcia stojana oraz modułów wektorów napięcia i prądu stojana.
Na rys. 10 przedstawiono przebieg estymowanego strumienia wirnika w czasie roz-ruchu bezpośredniego, a na rys. 11 – 13 przebiegi estymowanej i mierzonej prędkości silnika indukcyjnego oraz błędów estymacji w różnych warunkach pracy silnika i przy zastosowaniu różnych sygnałów wejściowych sieci neuronowych [9], [10].

0 0 .1 0 .2 0 .3 0 .4 0 .50
0 .2
0 .4
0 .6
0 .8
1.0
M
NN
t [s]
Ψ r a)
0.1 0.2 0.3 0.40
0.2
0.4
0.6
0.8
1
M
NN
z2-0503f---bz00000000a.mat
t [s]
ψr [pu]
a)
0 0.1 0.2 0.3 0.4
-0.1
-0.05
0
0.05
0.1
0.15
t [s]
εψ
[pu]
b) uozmmr09a.mat
Rys. 10. Przebiegi estymacji amplitudy strumienia wirnika za pomocą sieci Elmana 5-15-7-1 ze skła-dowymi i amplitudą prądu stojana na wejściu (a – cały proces przejściowy) oraz za pomocą sieci jedno-
kierunkowej 4-5-3-1 ze składowymi prądu stojana na wejściu (b,c, - końcowa faza rozruchu) Fig.10. Transients of the rotor flux estimation of IM using 4-15-7-1 Elman network with the stator
current components and its magnitude as input signals (a – whole transient process) and 4-5-3-1 feedforward NN with stator current components only (b,c – end of transient process)
Rys. 11. Przebieg estymacji prędkości wirnika (a) za pomocą sieci jednokierunkowej 4-10-5-1 (składowe prądu i ich wartości opóźnione na wejściu) podczas rozruchu bezpośredniego
(b – błąd estymacji)
z2-1005v---z-00000000.mat
0 0.1 0.2 0.30
0.2
0.4
0.6
0.8
1
t [s]
ω [pu]
a) t4n1
NN
M
0 0.1 0.2 0.3
-0.1
-0.05
0
0.05
0.1
0.15
t [s]
ε [pu]
b)
Fig.11. Transients of speed estimation using 4-10-5-1 feedforward NN (stator current components and their delayed values as NN inputs) in the line-start operation of IM (b – estimation error)
Na podstawie przeprowadzonych badań można sformułować następujące wnioski:
− struktura sieci neuronowej istotnie wpływa na jakość estymacji zmiennych sta-nu silnika indukcyjnego,
− struktura sieci powinna być tym bardziej rozbudowana (większa liczba neuro-nów w warstwach ukrytych, więcej warstw - aczkolwiek nie więcej niż 2, zgod-nie z twierdzeniem o zdolnościach do aproksymacji i generalizacji sieci neuro-nowych),
− liczba i rodzaj sygnałów wejściowych istotnie zależy od rodzaju pracy silnika: w przypadku pracy silnika indukcyjnego przy stałej częstotliwości napięcia za-silającego wystarczy stosować sygnały chwilowe prądu stojana i ich opóźnione wartości jako wejścia sieci, natomiast przy sterowaniu częstotliwościowym na-
leży wprowadzić dodatkowo amplitudę napięcia stojana lub jego częstotliwość; − sieci neuronowe do odtwarzania prędkości lub strumienia wirnika powinny być
trenowane przy użyciu danych otrzymanych dla zmiennych parametrów (np. re-zystancji wirnika) i warunków pracy silnika (momentu obciążenia), aby uzy-skać odporność sieci w rzeczywistym układzie napędowym.
0 0.5 1 1.5-0.2
0
0.2
0.4
0.6
0.8
1
1.2 xj3anorvb/ jedno./ 7-7-15-1/ 3I+f/ v/ /tr1
t [s] 0 0.5 1 1.5-0.1
-0.05
0
0.05
0.1
0.15
0.25
t [s]
a) b) ω [pu] ε [pu]
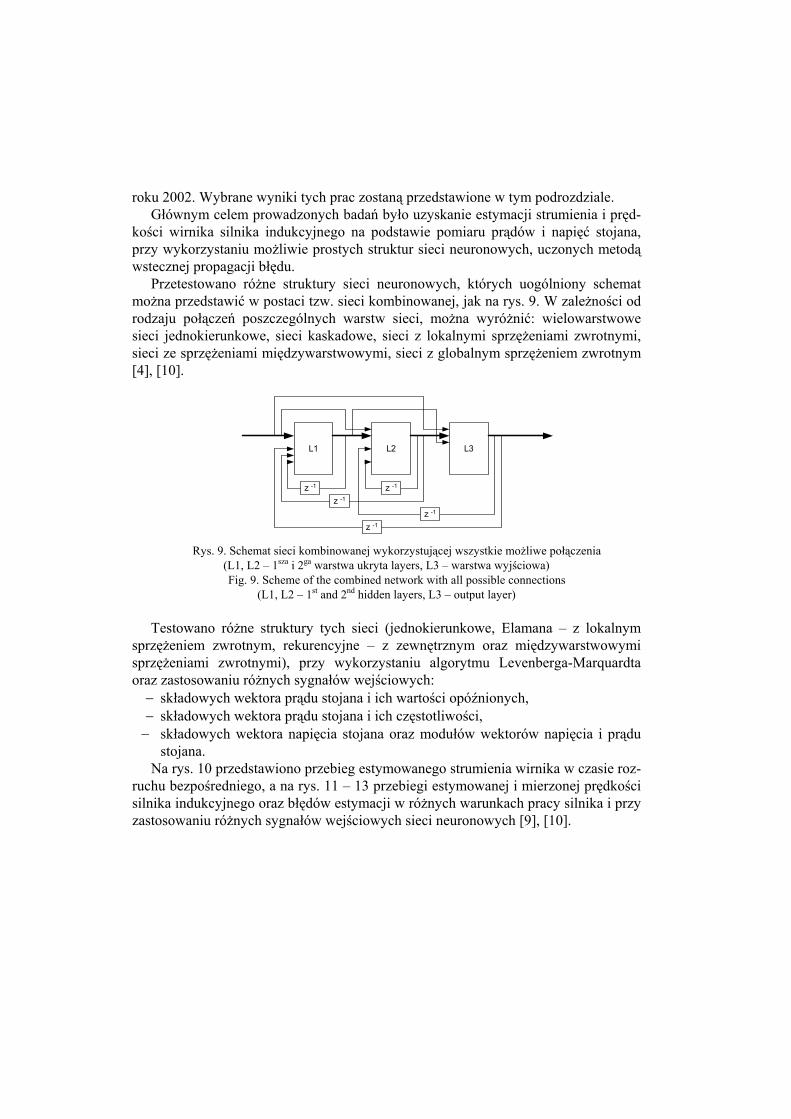
Rys. 12. Przebieg estymacji prędkości wirnika za pomocą sieci Elmana 7-15-7-1 (składowe prądu stojana, ich wartości opóźnione i częstotliwość prądu na wejściu) podczas rozruchu częstotliwościowego
Fig.12. Speed estimation using 7-15-7-1 Elman NN (stator current components and its frequency as NN inputs) in the frequency starting operation of the motor
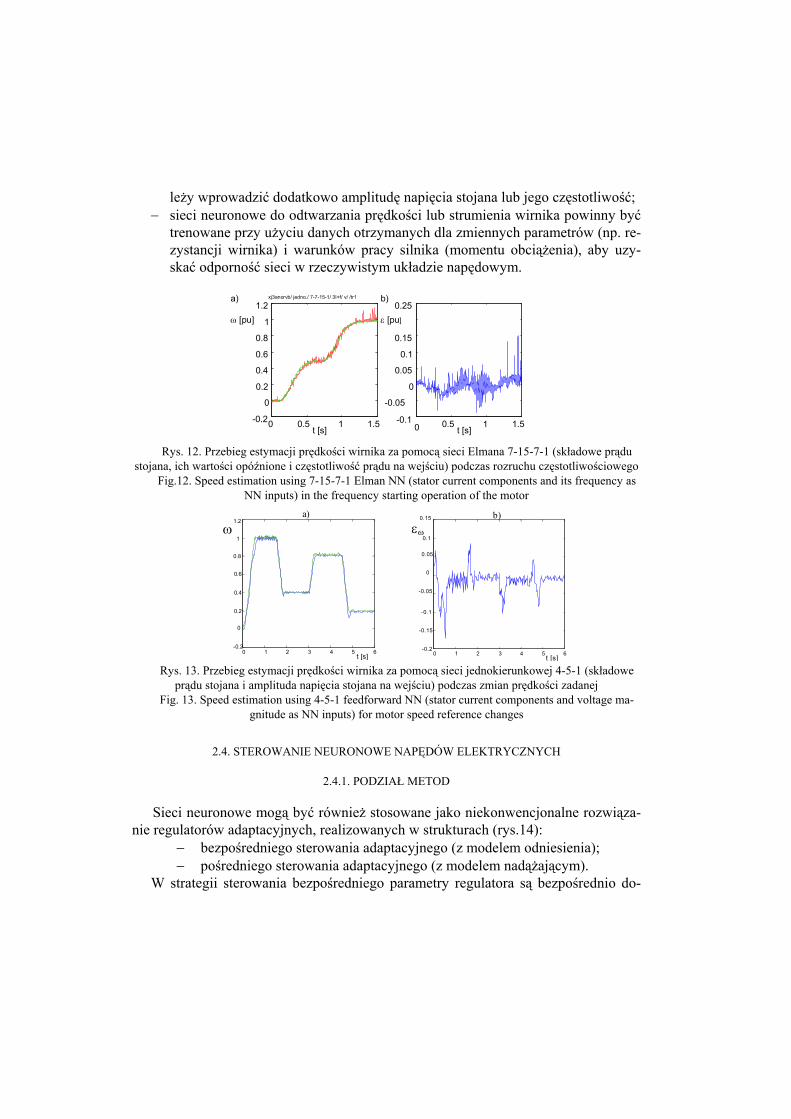
Rys. 13. Przebieg estymacji prędkości wirnika za pomocą sieci jednokierunkowej 4-5-1 (składowe prądu stojana i amplituda napięcia stojana na wejściu) podczas zmian prędkości zadanej
Fig. 13. Speed estimation using 4-5-1 feedforward NN (stator current components and voltage ma-gnitude as NN inputs) for motor speed reference changes
2.4. STEROWANIE NEURONOWE NAPĘDÓW ELEKTRYCZNYCH
2.4.1. PODZIAŁ METOD
Sieci neuronowe mogą być również stosowane jako niekonwencjonalne rozwiąza-nie regulatorów adaptacyjnych, realizowanych w strukturach (rys.14):
− bezpośredniego sterowania adaptacyjnego (z modelem odniesienia); − pośredniego sterowania adaptacyjnego (z modelem nadążającym).
W strategii sterowania bezpośredniego parametry regulatora są bezpośrednio do-
0 1 2 3 4 5 6 -0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
t [s]
εω
b)1.2
0 1 2 3 4 5 6-0.2
0
0.2
0.4
0.6
0.8
1
a) ω
t [s]
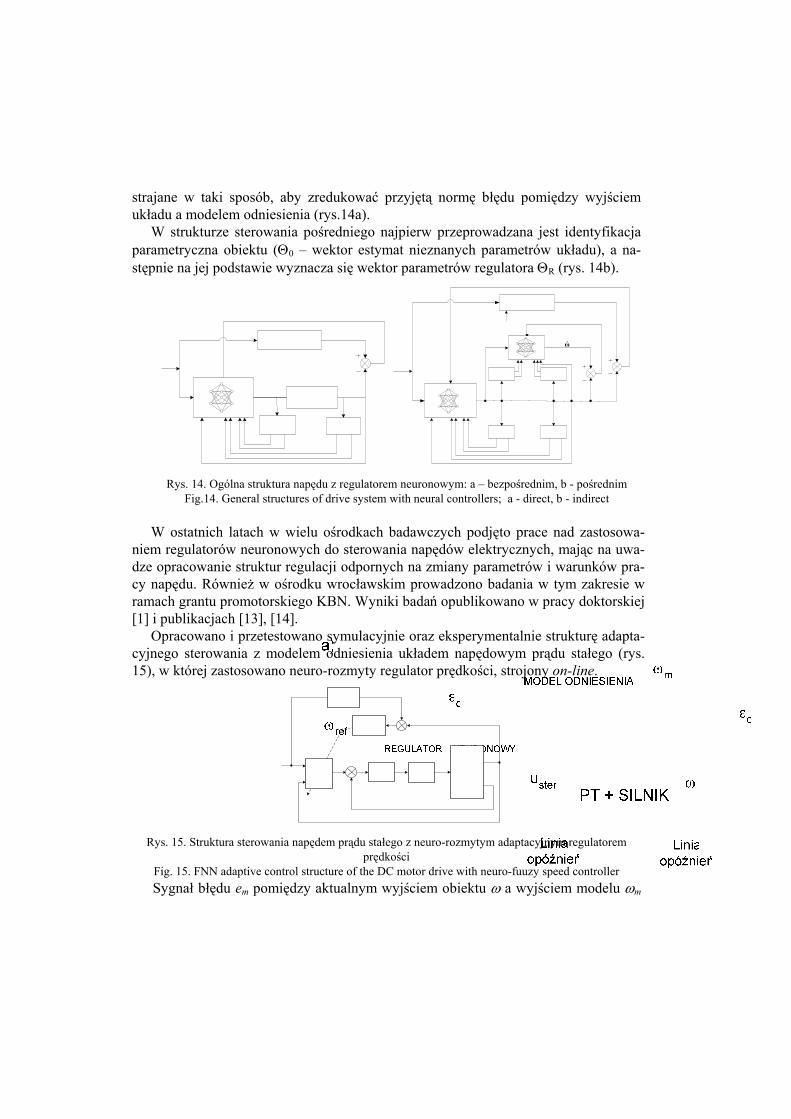
strajane w taki sposób, aby zredukować przyjętą normę błędu pomiędzy wyjściem układu a modelem odniesienia (rys.14a).
W strukturze sterowania pośredniego najpierw przeprowadzana jest identyfikacja parametryczna obiektu (Θ0 – wektor estymat nieznanych parametrów układu), a na-stępnie na jej podstawie wyznacza się wektor parametrów regulatora ΘR (rys. 14b).
ω̂
Rys. 14. Ogólna struktura napędu z regulatorem neuronowym: a – bezpośrednim, b - pośrednim Fig.14. General structures of drive system with neural controllers; a - direct, b - indirect
W ostatnich latach w wielu ośrodkach badawczych podjęto prace nad zastosowa-
niem regulatorów neuronowych do sterowania napędów elektrycznych, mając na uwa-dze opracowanie struktur regulacji odpornych na zmiany parametrów i warunków pra-cy napędu. Również w ośrodku wrocławskim prowadzono badania w tym zakresie w ramach grantu promotorskiego KBN. Wyniki badań opublikowano w pracy doktorskiej [1] i publikacjach [13], [14].
Opracowano i przetestowano symulacyjnie oraz eksperymentalnie strukturę adapta-cyjnego sterowania z modelem odniesienia układem napędowym prądu stałego (rys. 15), w której zastosowano neuro-rozmyty regulator prędkości, strojony on-line.
Rys. 15. Struktura sterowania napędem prądu stałego z neuro-rozmytym adaptacyjnym regulatorem
prędkości Fig. 15. FNN adaptive control structure of the DC motor drive with neuro-fuuzy speed controller Sygnał błędu em pomiędzy aktualnym wyjściem obiektu ω a wyjściem modelu ωm
wykorzystano do automatycznego strojenia parametrów regulatora rozmytego poprzez mechanizm adaptacyjny wykorzystujący metodę spadku gradientu błędu em.
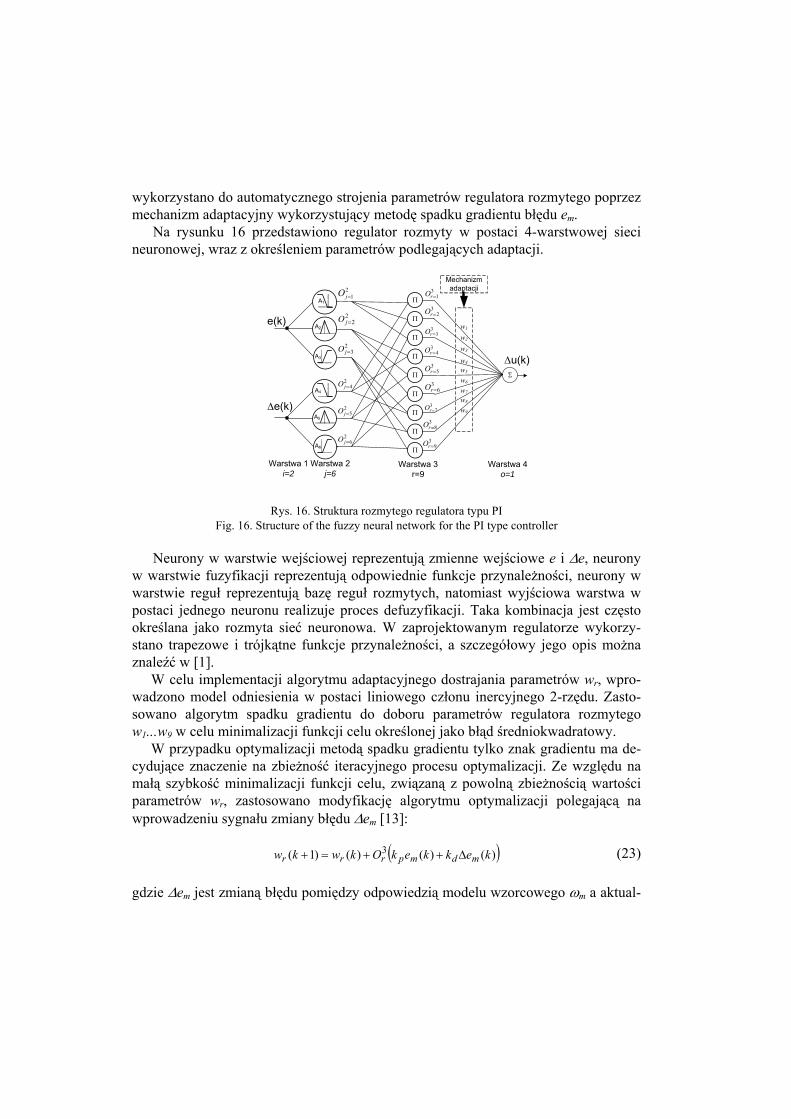
Na rysunku 16 przedstawiono regulator rozmyty w postaci 4-warstwowej sieci neuronowej, wraz z określeniem parametrów podlegających adaptacji.
e(k)
Δe(k)
Π
Π
Π
Π
Π
Π
Π
Π
Π
Σ
Δu(k)
Warstwa 1i=2
Warstwa 2j=6
Warstwa 3r=9
Warstwa 4o=1
A1
A2
A3
A4
A5
A6
21=jO
22=jO
23=jO
24=jO
25=jO
26=jO
31=rO
32=rO
33=rO
34=rO
35=rO
36=rO
37=rO
38=rO
39=rO
w1
w2
w3
w4
w5
w6
w7
w8
w9
Mechanizm adaptacji
Rys. 16. Struktura rozmytego regulatora typu PI Fig. 16. Structure of the fuzzy neural network for the PI type controller
Neurony w warstwie wejściowej reprezentują zmienne wejściowe e i Δe, neurony w warstwie fuzyfikacji reprezentują odpowiednie funkcje przynależności, neurony w warstwie reguł reprezentują bazę reguł rozmytych, natomiast wyjściowa warstwa w postaci jednego neuronu realizuje proces defuzyfikacji. Taka kombinacja jest często określana jako rozmyta sieć neuronowa. W zaprojektowanym regulatorze wykorzy-stano trapezowe i trójkątne funkcje przynależności, a szczegółowy jego opis można znaleźć w [1].
W celu implementacji algorytmu adaptacyjnego dostrajania parametrów wr, wpro-wadzono model odniesienia w postaci liniowego członu inercyjnego 2-rzędu. Zasto-sowano algorytm spadku gradientu do doboru parametrów regulatora rozmytego w1...w9 w celu minimalizacji funkcji celu określonej jako błąd średniokwadratowy.
W przypadku optymalizacji metodą spadku gradientu tylko znak gradientu ma de-cydujące znaczenie na zbieżność iteracyjnego procesu optymalizacji. Ze względu na małą szybkość minimalizacji funkcji celu, związaną z powolną zbieżnością wartości parametrów wr, zastosowano modyfikację algorytmu optymalizacji polegającą na wprowadzeniu sygnału zmiany błędu Δem [13]:
( ))()()()1( 3 kekkekOkwkw mdmprrr Δ++=+ (23)
gdzie Δem jest zmianą błędu pomiędzy odpowiedzią modelu wzorcowego ωm a aktual-
ną prędkością napędu ω, a określa stopień spełnienia reguły r dla danych wartości zmiennych e i Δe.
3rO
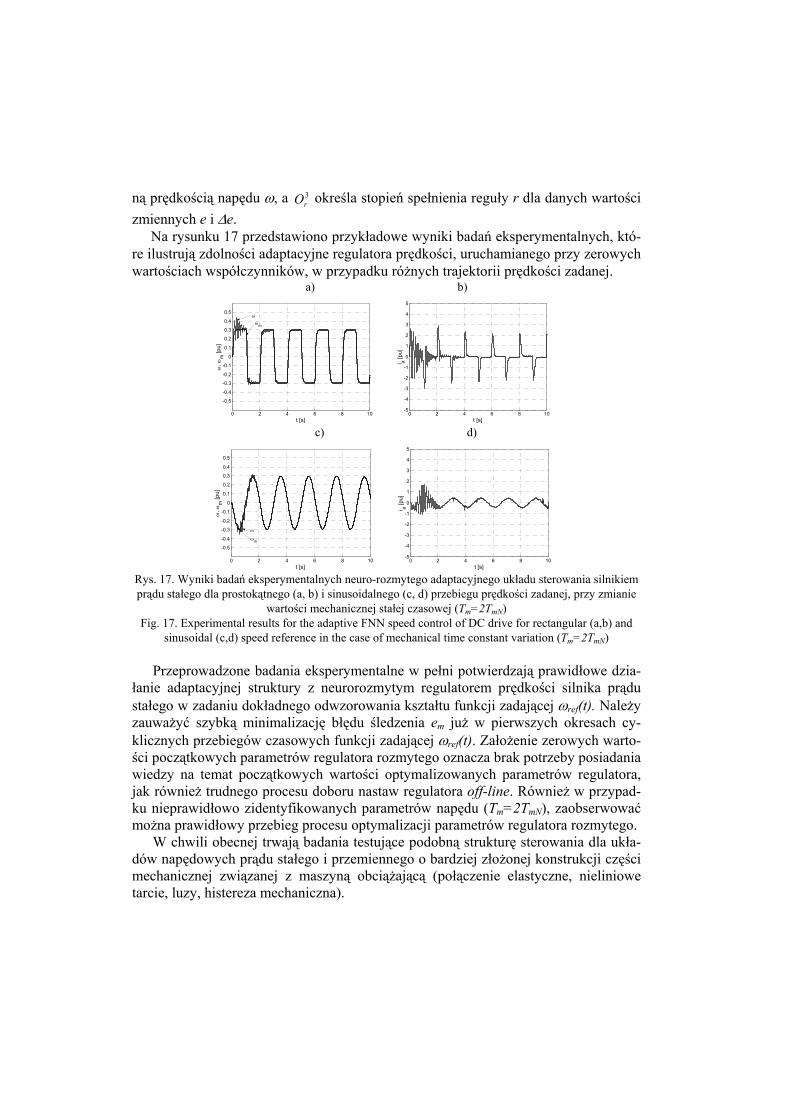
Na rysunku 17 przedstawiono przykładowe wyniki badań eksperymentalnych, któ-re ilustrują zdolności adaptacyjne regulatora prędkości, uruchamianego przy zerowych wartościach współczynników, w przypadku różnych trajektorii prędkości zadanej.
a) b)
0 2 4 6 8 10
-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5ω
ωm
t [s]
ω, ω
m [p
u]
0 2 4 6 8 10-5
-4
-3
-2
-1
0
1
2
3
4
5
t [s]
i a [pu]
c) d)
0 2 4 6 8 10
-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
ω
ωm
t [s]
ω, ω
m [p
u]
0 2 4 6 8 10-5
-4
-3
-2
-1
0
1
2
3
4
5
t [s]
i a [pu]
Rys. 17. Wyniki badań eksperymentalnych neuro-rozmytego adaptacyjnego układu sterowania silnikiem prądu stałego dla prostokątnego (a, b) i sinusoidalnego (c, d) przebiegu prędkości zadanej, przy zmianie
wartości mechanicznej stałej czasowej (Tm=2TmN) Fig. 17. Experimental results for the adaptive FNN speed control of DC drive for rectangular (a,b) and
sinusoidal (c,d) speed reference in the case of mechanical time constant variation (Tm=2TmN) Przeprowadzone badania eksperymentalne w pełni potwierdzają prawidłowe dzia-
łanie adaptacyjnej struktury z neurorozmytym regulatorem prędkości silnika prądu stałego w zadaniu dokładnego odwzorowania kształtu funkcji zadającej ωref(t). Należy zauważyć szybką minimalizację błędu śledzenia em już w pierwszych okresach cy-klicznych przebiegów czasowych funkcji zadającej ωref(t). Założenie zerowych warto-ści początkowych parametrów regulatora rozmytego oznacza brak potrzeby posiadania wiedzy na temat początkowych wartości optymalizowanych parametrów regulatora, jak również trudnego procesu doboru nastaw regulatora off-line. Również w przypad-ku nieprawidłowo zidentyfikowanych parametrów napędu (Tm=2TmN), zaobserwować można prawidłowy przebieg procesu optymalizacji parametrów regulatora rozmytego.
W chwili obecnej trwają badania testujące podobną strukturę sterowania dla ukła-dów napędowych prądu stałego i przemiennego o bardziej złożonej konstrukcji części mechanicznej związanej z maszyną obciążającą (połączenie elastyczne, nieliniowe tarcie, luzy, histereza mechaniczna).
3. ZASTOSOWANIE ALGORYTMÓW GENETYCZNYCH W NAPĘDZIE ELEKTRYCZNYM
3.1. WPROWADZENIE
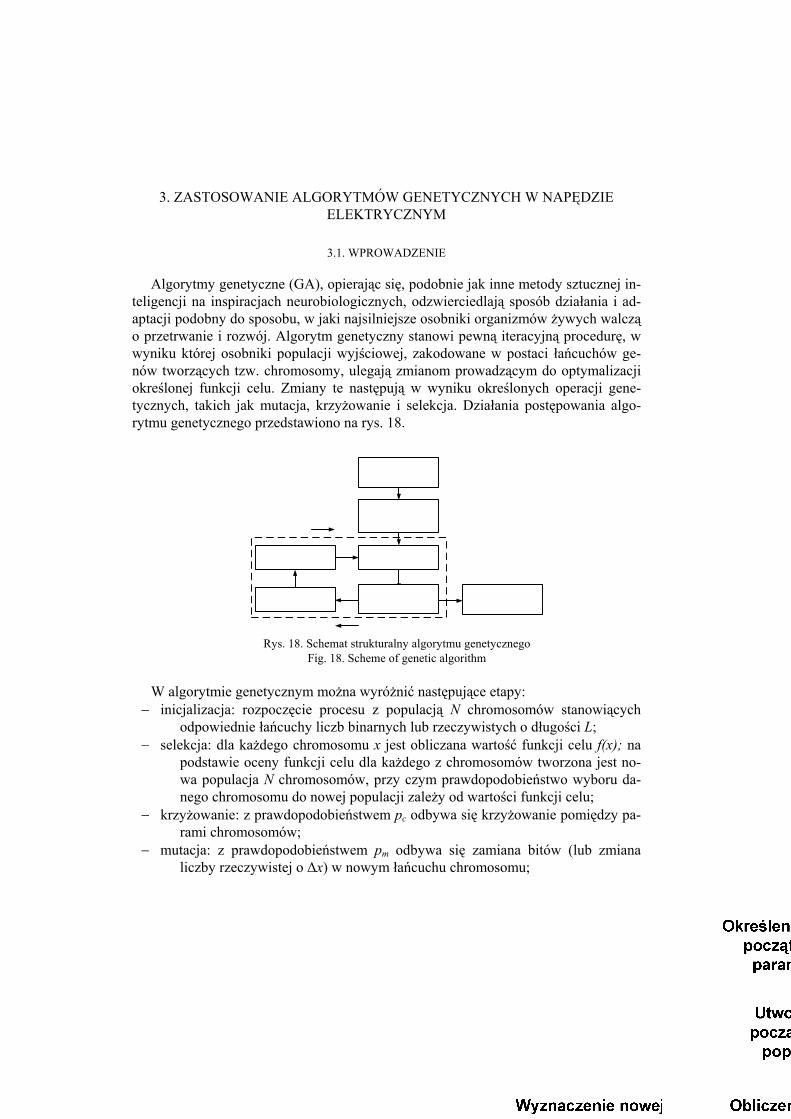
Algorytmy genetyczne (GA), opierając się, podobnie jak inne metody sztucznej in-teligencji na inspiracjach neurobiologicznych, odzwierciedlają sposób działania i ad-aptacji podobny do sposobu, w jaki najsilniejsze osobniki organizmów żywych walczą o przetrwanie i rozwój. Algorytm genetyczny stanowi pewną iteracyjną procedurę, w wyniku której osobniki populacji wyjściowej, zakodowane w postaci łańcuchów ge-nów tworzących tzw. chromosomy, ulegają zmianom prowadzącym do optymalizacji określonej funkcji celu. Zmiany te następują w wyniku określonych operacji gene-tycznych, takich jak mutacja, krzyżowanie i selekcja. Działania postępowania algo-rytmu genetycznego przedstawiono na rys. 18.
Rys. 18. Schemat strukturalny algorytmu genetycznego
Fig. 18. Scheme of genetic algorithm
W algorytmie genetycznym można wyróżnić następujące etapy: − inicjalizacja: rozpoczęcie procesu z populacją N chromosomów stanowiących
odpowiednie łańcuchy liczb binarnych lub rzeczywistych o długości L; − selekcja: dla każdego chromosomu x jest obliczana wartość funkcji celu f(x); na
podstawie oceny funkcji celu dla każdego z chromosomów tworzona jest no-wa populacja N chromosomów, przy czym prawdopodobieństwo wyboru da-nego chromosomu do nowej populacji zależy od wartości funkcji celu;
− krzyżowanie: z prawdopodobieństwem pc odbywa się krzyżowanie pomiędzy pa-rami chromosomów;
− mutacja: z prawdopodobieństwem pm odbywa się zamiana bitów (lub zmiana liczby rzeczywistej o Δx) w nowym łańcuchu chromosomu;
− iteracja: powtarzanie powyższych operacji genetycznych w celu otrzymania no-wych generacji o optymalnej, w sensie przyjętego kryterium, wartości funkcji celu;
− zatrzymanie obliczeń, jeżeli uzyskano zadowalające rozwiązanie lub wyczerpano przewidzianą liczbę kroków.
Algorytmy genetyczne znajdują zastosowania przede wszystkim: − w zagadnieniach optymalizacji, szczególnie w przypadku optymalizacji wielokry-
terialnej, przy zmieniającej się w czasie funkcji celu, w obecności zakłóceń, − w układach adaptacyjnych, gdzie wymagane jest poszukiwanie rozwiązań zmie-
niających się iteracyjnie; − w zadaniach uczenia, np. sieci neuronowych itp..
W napędzie elektrycznym AG genetyczne były stosowane między innymi do iden-tyfikacji parametrów elektrycznych i mechanicznych silnika prądu stałego[16] jak również do identyfikacji parametrów schematu zastępczego silnika indukcyjnego [17], [18].
W zadaniu identyfikacji parametrów silnika indukcyjnego, które zostały zakodo-wane jako odpowiednie ciągi liczb binarnych [17] lub rzeczywistych [18], testowano dwa podejścia: 1 - na podstawie przebiegów prądu i prędkości w stanach dynamicz-nych (w czasie rozruchu bezpośredniego); 2 - w stanie zatrzymanym, na podstawie odpowiedzi prądu stojana na skokową zmianę napięcia zasilającego. Przeprowadzono szereg badań mających na celu określenie wpływu rodzaju stosowanych operacji ge-netycznych na jakość i szybkość procesu optymalizacji przyjętej funkcji celu [17].
W pierwszym przypadku nie uzyskano zadowalającej dokładności identyfikacji pa-rametrów, głównie ze względu na uproszczenia zastosowane w przyjętym, konwen-cjonalnym modelu matematycznym silnika (pominięto nieliniowość charakterystyki magnesowania, zmianę parametrów schematu zastępczego w czasie rozruchu). Nato-miast dla drugiej metody, wykorzystującej odpowiedź skokową prądu stojana w stanie zatrzymanym, uzyskano dobrą dokładność identyfikacji parametrów silnika. Metoda ta może być stosowana dla napędów bezczujnikowych [18]. Wykazano, że właściwy dobór rozmiaru populacji oraz rodzaju operacji genetycznych umożliwia poprawienie dokładności i skrócenie czasu realizacji algorytmu identyfikacji. W szczególności, za-stosowanie optymalizacji hybrydowej, przy zastosowaniu algorytmu genetycznego wspomaganego algorytmem gradientowym w ostatniej fazie poszukiwania optimum, lub wprowadzenie algorytmu ewolucyjnego, umożliwia skrócenie czasu dysponowa-nego na zadanie identyfikacji w realizacji praktycznej bezczujnikowego układu stero-wania napędem [18]. Trwają dalsze prace doskonalące tę metodę oraz rozszerzające ją na zadanie identyfikacji parametrów mechanicznych napędu indukcyjnego.
Jak zostanie pokazane w następnym podrozdziale, algorytmy genetyczne i gen-tyczno-gradientowe były również z powodzeniem stosowane do optymalizacji para-metrów regulatorów klasycznych i rozmytych dla układów napędowych [21].
3. ZASTOSOWANIE LOGIKI ROZMYTEJ W NAPĘDZIE ELEKTRYCZNYM
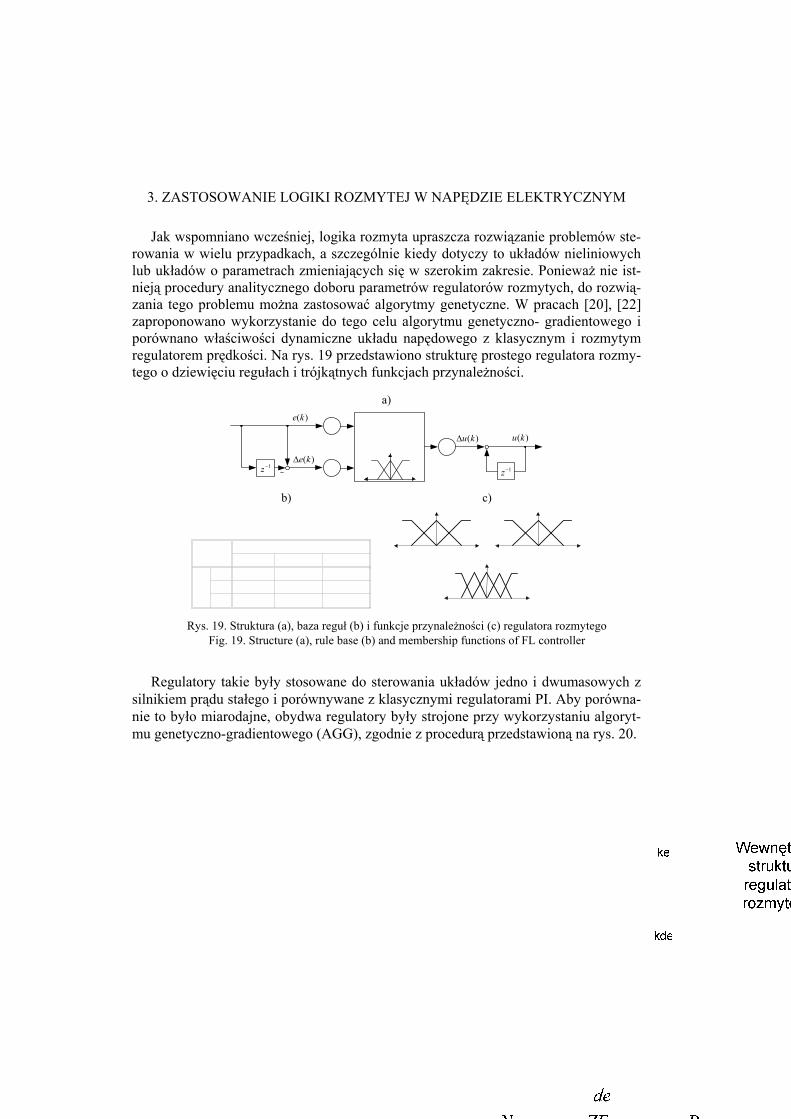
Jak wspomniano wcześniej, logika rozmyta upraszcza rozwiązanie problemów ste-rowania w wielu przypadkach, a szczególnie kiedy dotyczy to układów nieliniowych lub układów o parametrach zmieniających się w szerokim zakresie. Ponieważ nie ist-nieją procedury analitycznego doboru parametrów regulatorów rozmytych, do rozwią-zania tego problemu można zastosować algorytmy genetyczne. W pracach [20], [22] zaproponowano wykorzystanie do tego celu algorytmu genetyczno- gradientowego i porównano właściwości dynamiczne układu napędowego z klasycznym i rozmytym regulatorem prędkości. Na rys. 19 przedstawiono strukturę prostego regulatora rozmy-tego o dziewięciu regułach i trójkątnych funkcjach przynależności.
a)
1−z 1−z)(keΔ
)(ke
)(kuΔ )(ku
b) c)
Rys. 19. Struktura (a), baza reguł (b) i funkcje przynależności (c) regulatora rozmytego Fig. 19. Structure (a), rule base (b) and membership functions of FL controller
Regulatory takie były stosowane do sterowania układów jedno i dwumasowych z
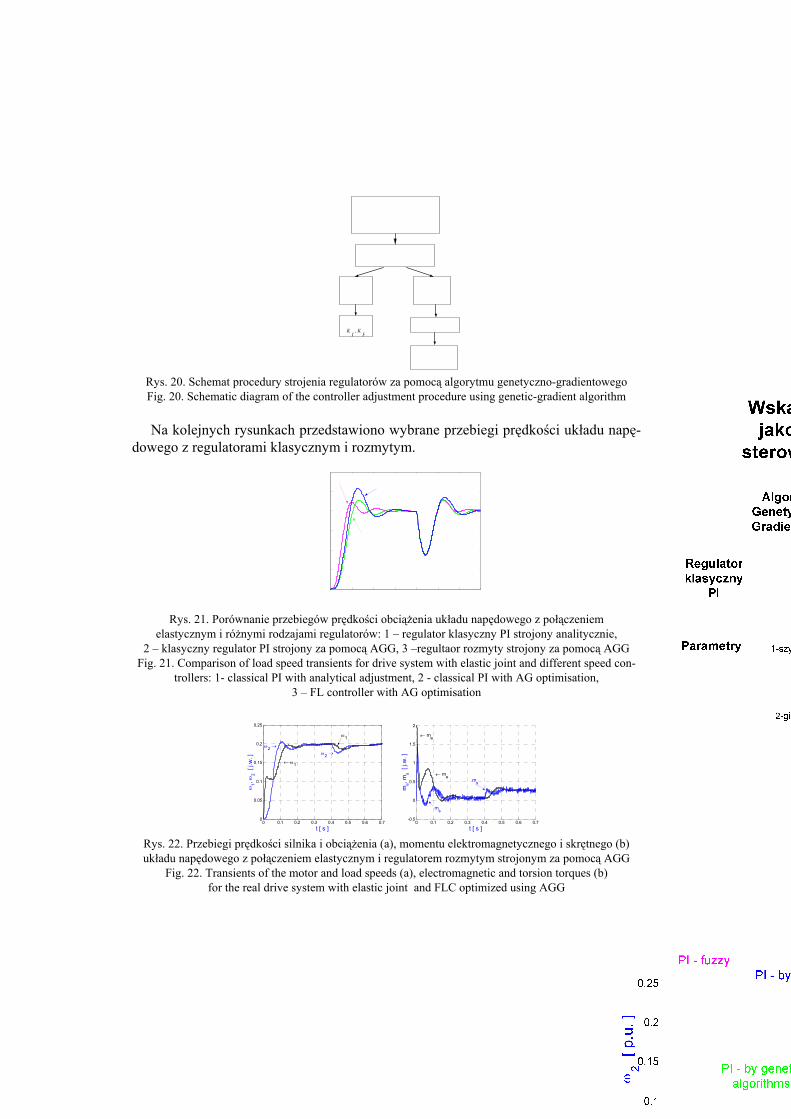
silnikiem prądu stałego i porównywane z klasycznymi regulatorami PI. Aby porówna-nie to było miarodajne, obydwa regulatory były strojone przy wykorzystaniu algoryt-mu genetyczno-gradientowego (AGG), zgodnie z procedurą przedstawioną na rys. 20.
PK,
IK
Rys. 20. Schemat procedury strojenia regulatorów za pomocą algorytmu genetyczno-gradientowego Fig. 20. Schematic diagram of the controller adjustment procedure using genetic-gradient algorithm Na kolejnych rysunkach przedstawiono wybrane przebiegi prędkości układu napę-
dowego z regulatorami klasycznym i rozmytym.
Rys. 21. Porównanie przebiegów prędkości obciążenia układu napędowego z połączeniem
elastycznym i różnymi rodzajami regulatorów: 1 – regulator klasyczny PI strojony analitycznie, 2 – klasyczny regulator PI strojony za pomocą AGG, 3 –regultaor rozmyty strojony za pomocą AGG
Fig. 21. Comparison of load speed transients for drive system with elastic joint and different speed con-trollers: 1- classical PI with analytical adjustment, 2 - classical PI with AG optimisation,
3 – FL controller with AG optimisation
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7-0.5
0
0.5
1
1.5
2
← me
← me
ms
ms
t [ s ]
me, m
s [ j.
w. ]
0 0.1 0.2 0.3 0.4 0.5 0.6 0.70
0.05
0.1
0.15
0.2
0.25
ω1
← ω1
ω2 →
t [ s ]
ω1, ω
2 [ j.
w. ]
ω2 →
Rys. 22. Przebiegi prędkości silnika i obciążenia (a), momentu elektromagnetycznego i skrętnego (b) układu napędowego z połączeniem elastycznym i regulatorem rozmytym strojonym za pomocą AGG
Fig. 22. Transients of the motor and load speeds (a), electromagnetic and torsion torques (b) for the real drive system with elastic joint and FLC optimized using AGG
Lepsze właściwości układu z regulatorem rozmytym wynikają z faktu, że regulator ten posiada nieliniową płaszczyznę sterowania, która umożliwia lepsze dopasowanie właściwości regulatora do obiektu sterowania, w szczególności, gdy wskaźnik jakości sterowania jest nieliniowy [22].
Przedstawione wyniki badań symulacyjnych i eksperymentalnych dowodzą, że dzięki zastosowaniu algorytmów genetycznych oraz logiki rozmytej do projektowania regulatorów dla układów napędowych można uzyskać znaczną poprawę właściwości dynamicznych oraz skuteczne tłumienie oscylacji w napędzi z połączeniem elastycz-nym [21], [22]. W chwili obecnej prowadzone są w Instytucie badania dotyczące za-stosowania regulatorów rozmytych i neuro-rozmytych w układach napędowych wie-lokrotnie sprzężonych, o nieliniowych i niestacjonarnych parametrach części mechanicznej.
4. PODSUMOWANIE
W artykule, na tle krótkiego przeglądu metod sztucznej inteligencji, przedstawiono możliwości ich zastosowania w napędzie elektrycznym do identyfikacji parametrów modeli matematycznych silników elektrycznych, estymacji trudnomierzalnych zmien-nych stanu silników prądu przemiennego oraz do sterowania prędkością układów napędowych. Wyniki badań prowadzonych w tej dziedzinie w ośrodku wrocławskim, na przestrzeni ostatnich dziesięciu, lat potwierdziły dużą przydatność tych metod w rozważanych zagadnieniach.
Między innymi opracowano metodykę projektowania neuronowych estymatorów strumienia i prędkości wirnika wykorzystującą jednokierunkowe i rekurencyjne sieci wielowarstwowe, oceniając między innymi wpływ struktury oraz rodzaj sygnałów wejściowych sieci neuronowych na jakość i dokładność odtwarzania rozważanych zmiennych stanu silnika indukcyjnego.
Zaproponowano nowy estymator prędkości wykorzystujący metodę modelowania neuronowego i neuronową realizację obserwatora strumienia wirnika. Wykazano, że estymator ten pracuje poprawnie w całym zakresie zmian prędkości zadanej.
Opracowano i przetestowano adaptacyjne struktury sterowania wykorzystujące sieć neuro-rozmytą w roli regulatora prędkości układu napędowego ze sztywnym i elastycznym połączeniem mechanicznym. Wykazano, że taki regulator adaptacyjny może pracować przy zmieniających się parametrach napędu, a uruchomienie napędu nie wymaga żadnej wstępnej informacji o parametrach układu – regulator ulega do-strojeniu w trakcie normalnej pracy, pod warunkiem, że sygnał prędkości zadanej ule-ga częstym zmianom (np. w sposób cykliczny).
Przeprowadzono również szereg badań związanych z optymalizacją regulatorów rozmytych przy wykorzystaniu algorytmów genetycznych, co umożliwiło nie tylko ich proste strojenie, ale również wiarygodne porównanie z innymi rodzajami regulato-
rów prędkości napędów elektrycznych, przy zachowaniu takiej samej metody optyma-lizacji.
Algorytmy genetyczne oraz sieci neuronowe były również stosowane do identyfi-kacji parametrów modeli matematycznych silników prądu stałego i przemiennego; uzyskano bardzo dobre wyniki, potwierdzone eksperymentalnie.
Aktualne trendy obserwowane w literaturze technicznej dotyczącej zastosowań metod sztucznej inteligencji w różnych dziedzinach techniki, jak również w energo-elektronice i napędzie elektrycznym, związane są z łączeniem różnych metod i technik w celu uzyskania bardziej uniwersalnych rozwiązań. Przykładem takiego podejścia może być przedstawione w niniejszym artykule łączenie algorytmów genetycznych i logiki rozmytej w zagadnieniu strojenia regulatorów rozmytych, lub łączenie metod logiki rozmytej i sieci neuronowych w celu utworzenia regulatorów neuro-rozmytych. Tendencje te są coraz bardziej zauważalne i, jak wskazują zdobyte doświadczenia, prowadzą do bardziej uniwersalnych i niezawodnych rozwiązań.
LITERATURA
[1] JASZCZAK K., Adaptacyjne sterowanie rozmyte w układzie napędowym z silnikiem prądu stałego, Rozprawa doktorska, Politechnika Wrocławska, Wydział Elektryczny, 2004
[2] KAZMIERKOWSKI M.P., ORLOWSKA-KOWALSKA T., NN state estimation and control in con-verter-fed induction motor drives, Chapter 2 in a book: “Soft Computing in Industrial Electronics”, Eds. J.Ovaska, L.M.Sztandera, Physica-Verlag, Springer, 2002, Heilderberg, Germany, (Studies in Fuziness and Soft Computing, vol.110), pp.45-94
[3] MIGAS P., ORŁOWSKA-KOWALSKA T., Identyfikacja parametrów silników elektrycznych za pomocą sieci neuronowych na przykładzie napędu prądu stałego, Mater. IV Kraj. Konfer. SENE’99, Łódź, 1999, str.45-504.
[4] MIGAS P., Zastosowanie sieci neuronowych do odtwarzania zmiennych stanu silnika indukcyjnego, Rozprawa doktorska, Politechnika Wrocławska, Wydział Elektryczny, 2002
[5] ORŁOWSKA-KOWALSKA T., KOWALSKI CZ., Zastosowanie sieci neuronowych w napędzie elektrycznym, Mater. II Konfer. Sterowanie w Energoelektronice i Napędzie Elektrycznym, SE-NE’95, Łódź, 1995, t.2, s.683-697
[6] ORLOWSKA-KOWALSKA T., KOWALSKI C.T., Neural network based flux estimator for the induction motor, Proc. of PEMC’96, Budapest, Hungary, 1996, pp. 187-191.
[7] ORLOWSKA-KOWALSKA T., KOWALSKI CZ., Neural Network Application for Flux and Speed Estimation In the Sensorless Induction Motor Drive, Confer.Proc. IEEE/ISIE’97, Guimares, Portu-gal, 1997, vol.3, pp.1253-1258
[8] ORLOWSKA-KOWALSKA T., Artificial neural networks in the electrical drives control - a sur-vey, Archives of Electrical Engineering, vol. XLVII, No.2, 1998, pp. 127-143.
[9] ORLOWSKA-KOWALSKA T., MIGAS P., Neural speed estimator for the induction motor drive, Proc. of PEMC’98, Prague, Czech Republic, 1998, pp. 7.89-7.94.
[10] ORLOWSKA-KOWALSKA T., MIGAS P., Analysis of the induction motor speed estimation qual-ity using neural networks of different structure, Archives of Electrical Engineering, 2001, vol. 50, No.4, pp.411-425
[11] ORLOWSKA-KOWALSKA T., PAWLAK M., Induction motor speed estimation based on neural modeling method, Archives of Electrical Engineering, 49, no. 1, 2000, pp. 35-48.
[12] ORLOWSKA-KOWALSKA T., PAWLAK M., Induction Motor Drive Monitoring using New Neu-ral Speed Estimator, Proc. of IEEE-SDEMPED’2001, Grado-Gorizia, 2001, pp.453-458
[13] ORLOWSKA-KOWALSKA T., JASZCZAK K., An Adaptive Fuzzy Neural Network Control Sys-tem for DC Drive, Proc. of EPE’03, Toulouse, France, 2003, CD.
[14] ORLOWSKA-KOWALSKA T., JASZCZAK K., Comparative Study of the Adaptive Fuzzy-Logic Control Concepts for DC Drive, Proc. of 15th Intern. Confer. EDPE’03, High Tatras, Slovak Repub-lik, 2003, pp.503-508
[15] ORŁOWSKA-KOWALSKA T., Bezczujnikowe układy napędowe z silnikami indukcyjnymi, ser. Wyd. Postępy Napędu Elektrycznego i Energoelektroniki KE PAN, tom 48, Oficyna Wydawnicza PWr, Wrocław, 2003
[16] ORLOWSKA-KOWALSKA T., SZABAT K., Application of genetic algorithms to parameter iden-tification of DC motor drive, Proc. of 14th Intern. Confer. EDPE’01, High Tatras, Slovak Republic, 2001, pp.219-224
[17] ORŁOWSKA-KOWALSKA T., SZABAT K., RITTER W., Identyfikacja parametrów silnika in-dukcyjnego za pomocą algorytmów genetycznych, Prace Naukowe IMNiPE, Nr 54, ser. Studia i Ma-teriały, Nr 23, 2003, str.
[18] ORLOWSKA-KOWALSKA T., LIS J., SZABAT K., Application of Soft Computing Methods for Identification of Induction Motor Parameters at Standstill, Proc. of XVIII Symp. EPNC'2004, Poznan, Poland, 2004, CD
[19] ORLOWSKA-KOWALSKA T., SZABAT K., JASZCZAK K., The Influence of Parameters and Structure of PI-type Fuzzy Controller on DC Drive System Dynamics, Fuzzy Sets and Systems, 2002, vol.131, No.2, pp.251-264
[20] ORLOWSKA-KOWALSKA T., SZABAT K., Fuzzy-Logic control of two-mass DC drive system, Proc. of 14th Intern. Confer. EDPE’01, High Tatras, Slovak Republic, 2001, pp.141-145
[21] ORLOWSKA-KOWALSKA T., SZABAT K., Optimization of Fuzzy-Logic Speed Controller for DC Drive System with Elastic Joints, IEEE Transactions on Industry Applications, vol.40, No.4, July/August, 2004
[22] SZABAT K., Analiza układów sterowania napędu prądu stałego z połączeniem sprężystym z regula-torami klasycznymi i rozmytymi, Rozprawa doktorska, Politechnika Wrocławska, Wydział Elek-tryczny, 2003
ARTIFICIAL INTELIGENCE METHODS IN THE IDENTIFICATION, STATE VARIABLE ESTIMATION AND CONTROL OF ELECTRICAL DRIVES
The basic problems connected with the application of artificial intelligence methods in electrical drive systems, for the identification of mathematical models, state variable estimation and speed control of the DC and AC motors were demonstrated. A short presentation of the main features and properties of such methods as artificial neural networks, fuzzy logic and genetic algorithms was made and chosen ap-plication examples, developed during last ten years by the Wroclaw research team, were described. The basic problems which concern the proposed solutions were characterized as well as chosen simulation and experimental results were presented.