meccanica -...
TRANSCRIPT

MECCANICA
• Si occupa dei fenomeni connessi al
MOVIMENTO dei corpi
CINEMATICA: movimento senza
preoccuparsi delle cause
DINAMICA: causa del movimento = Forza F
STATICA: fenomeni di non alterazione del
moto (equilibrio)
MECCANICA

CINEMATICA
• Il moto è studiato senza preoccuparsi delle cause
Def. di MOTO e sistemi di riferimento: grandezze fisiche implicate (s,t,v,a)
TIPI di moto
MOTO
UNIFORME
MOTO UNIF. ACC
Legge
oraria: s =s(t)

DINAMICA
• COSA provoca il moto?
• CAUSA = azione di una FORZA
LA FORZA E’ UN VETTORE (cosa sono i vett.?)
COME LA FORZA
INFLUENZA IL MOTO
LEGGI DI NEWTON:
concetto di inerzia
PRINCIPALI FORZE
F peso
F attrito
F elastica
Reazioni vincolari

STATICA
• EQUILIBRIO = “non moto” = conservazione dello stato di moto
Come le forze
determinano situazione di
equilibrio?
Risp.
TRASLAZIONE
Risp.
ROTAZIONE

IL MOTO
• DEF: Un corpo C si muove se varia
la sua posizione s nel tempo t

DEVO DEFINIRE: posizione s, tempo t
POSIZIONE: mi serve un sistema di riferimento (posizione rispetto a cosa?)
TEMPO: devo poterlo definire e misurare

SISTEMI DI RIFERIMENTO
• 1D, 2D, 3D
•ORIGINE O
•VERSO
•UNITA’ DI
MISURA (m)
o 1D
Es. binari treno
2D Es. moto palla su
un tavolino
3D
Es., volo di una
farfalla
x
x
y
x
y
z
S.R.

Moto rettilineo Particolare moto: la traiettoria è una retta.
Possiamo sempre farla coincidere con l’asse x.
0 = origine del sistema di riferimento
s1 = s(t1) = posizione occupata all’istante t1
s2 = s(t2) = posizione occupata all’istante t2
s = s2 – s1 = distanza percorsa
t = t2 – t1 = tempo impiegato a percorre s
s
s1 s2 x 0
GRAZIE AL SISTEMA DI RIFERIMENTO io posso definire la posizione s (in metri!)
s = dove si trova il corpo (in un certo istante) =
DISTANZA dall’origine
O X
OX = s

LO SPOSTAMENTO
• Si misura in metri (S.I.)
s
0 10m 15m
15-10 = 5 m
0sss f
fs0s

MISURA DEL TEMPO t [secondi!]
• Il moto, come tutti i fenomeni, ha una certa
durata temporale Δt = tf – t0 [cronometro]
Devo “fotografare” i due istanti Di solito t0 =0 s
t0 tf
Δt

MOTO = una variazione di t implica una
variazione di s (il corpo si sposta al
trascorrere del tempo)
LEGAME FRA Δs e Δt (legge oraria = mi
consente di prevedere dove il corpo si troverà
dopo un certo tempo)

MOTI DI
BASE
VARIAZIONE
COSTANTE di s in t
(prop.diretta)
MOTO
UNIFORME
VARIAZIONE
NON
COSTANTE di s
in t
MOTO
VARIO

IL MOTO in generale è combinazione di moti uniformi e vari (varie fasi)
Es. auto: parte da ferma, accelera,
mantiene costante la velocità, decelera,
poi si ferma

MOTO UNIFORME
Nel moto uniforme vengono percorsi spazi uguali in
tempi uguali
Es. ogni secondo, un metro
4m 3m 2m 1m s
4s 3s 2s 1s t

VELOCITA’
• Nel moto uniforme è costante
il rapporto fra spazio percorso e tempo
t
sv
VELOCITA’
MEDIA DEL
CORPO (costante)
Nel moto rettilineo!
RICORDA: è una GRANDEZZA
DERIVATA

MISURA DI v
smt
sv /
][
][][
Nel S.I.
Si deve fare il rapporto fra l’UDM dello spazio e
l’UDM del tempo

Nelle applicazioni pratiche è più comodo usare il
Km/h
sms
mhKm /27777,03600
1000/1
hKmh
Kmsm /6,3
3600/1
001,0/1
Per passare da m/s a Km/h SI MOLTIPLICA per
3,6: es. 5 m/s = 18 Km/h
Per passare da Km/h a m/s SI MOLTIPLICA per
0,277777: es. 100 Km/h = 27,77 m/s

LEGGE ORARIA
del moto uniforme
v
t
sSe cost
)( 00 ttvsstvs
ALLORA:
s = s(t)
???
Di solito t0 =0 s

A cosa serve la legge oraria?
Ci dà la possibilità di sapere (nota v = cost e t) la
posizione s del corpo all’istante t!!!
• es. se s = 2t, significa che v = 2 m/s, per cui dopo t =10
sec il corpo si trova a s = 2· 10 = 20 m
• es. data s = 0,5t, a che t s=3m? [t = 3/0,5 = 6 s]

GRAFICI DEL MOTO
• Se t x e s y, posso costruire il grafico spazio-tempo (t,s)
s0
Ma cosa è graficamente v?
s = vt+ s0 ricorda y = mx+q
v = pendenza della retta!
Allora: il la legge oraria s = s(t) è
rappresentat sul piano (t,s) da una RETTA!
t
s

Sul grafico (t,s) il moto uniforme è rappresentato
da una retta la cui pendenza è la velocità!
Tre moti uniformi con velocità
crescente e stesso s0
v = coefficiente angolare della
retta!
t
s
s0
v1
v3
v2
v1 < v2 < v3

Moto con velocità negativa
(il corpo si muove all’indietro!)
Moto con velocità v = 0
(corpo fermo nella posizione s0)
s0
s0
t
t
s
s
Se s0 =0, la retta passa per l’origine
1
2
3
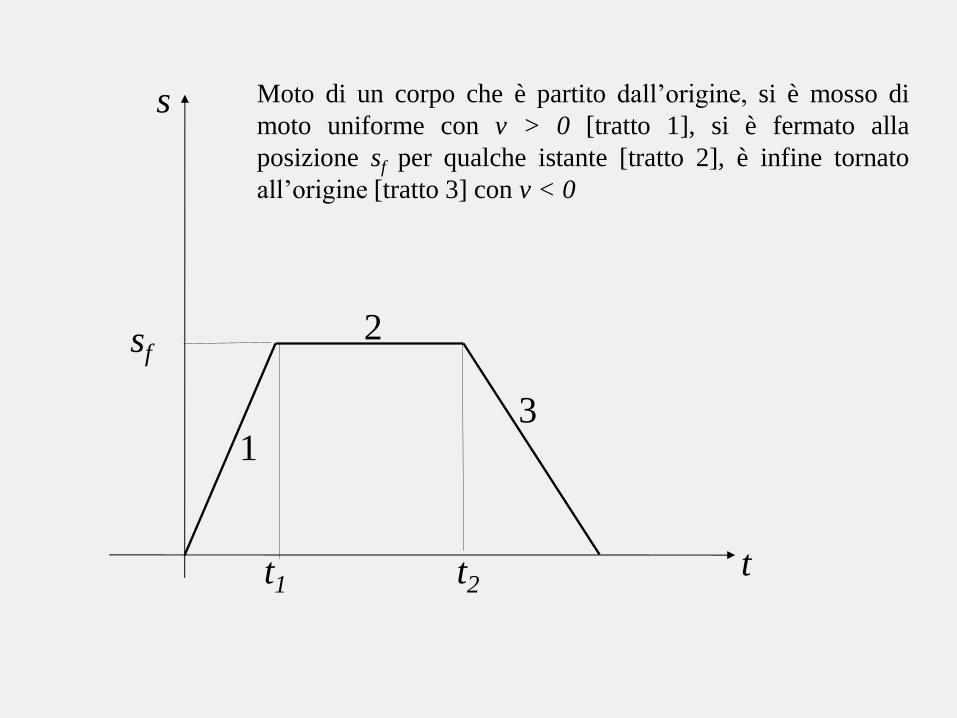
Moto di un corpo che è partito dall’origine, si è mosso di
moto uniforme con v > 0 [tratto 1], si è fermato alla
posizione sf per qualche istante [tratto 2], è infine tornato
all’origine [tratto 3] con v < 0
s
t
sf
t1 t2

MOTO VARIO v ≠ cost
Es. auto che parte e si ferma
t varia:
PARTENZA: v = 0
MOTO: v ≠ 0
SOSTA: v = 0
v varia nel
tempo!
Compare Δv

ACCELERAZIONE a
• È la grandezza fisica che indica la variazione della velocità nel tempo
Δv = vf - v0
t
va
Sempre nel moto
rettilineo!

MISURA DELL’ACCELERAZIONE
• Che UDM ha a? Se nel SI: [s]=m , [t]=s , [v] = m/s
quindi
2
/
][
][][
s
m
s
sm
t
va
1 m/s2 è l’accelerazione di un corpo che varia la propria velocità di
1m/s in un secondo

MOTO UNIFORMEMENTE
ACCELERATO
• E’ un moto in cui la velocità varia proporzionalmente al tempo
3m/s 2m/s 1m/s v
3s 2s 1s t
Es. ogni secondo, la velocità aumenta di 1 m/s
21
1
/1
s
m
s
sma
a = cost

LEGAME FRA a, v, t
C’è una importante formula che ci dà la
dipendenza di v da t
)(000 ttavtavvt
va
Legame di proporzionalità diretta fra v e t!

DIAGRAMMI DEL MOTO UNIF
ACC.
Qui è interessante il legame: t x, v y grafico (t,v)
v =at + v0 ricorda y =mx+q
Sul piano (t,v) il moto u.a. è rappresentato da una retta!
Qui m = a!
v
t v0
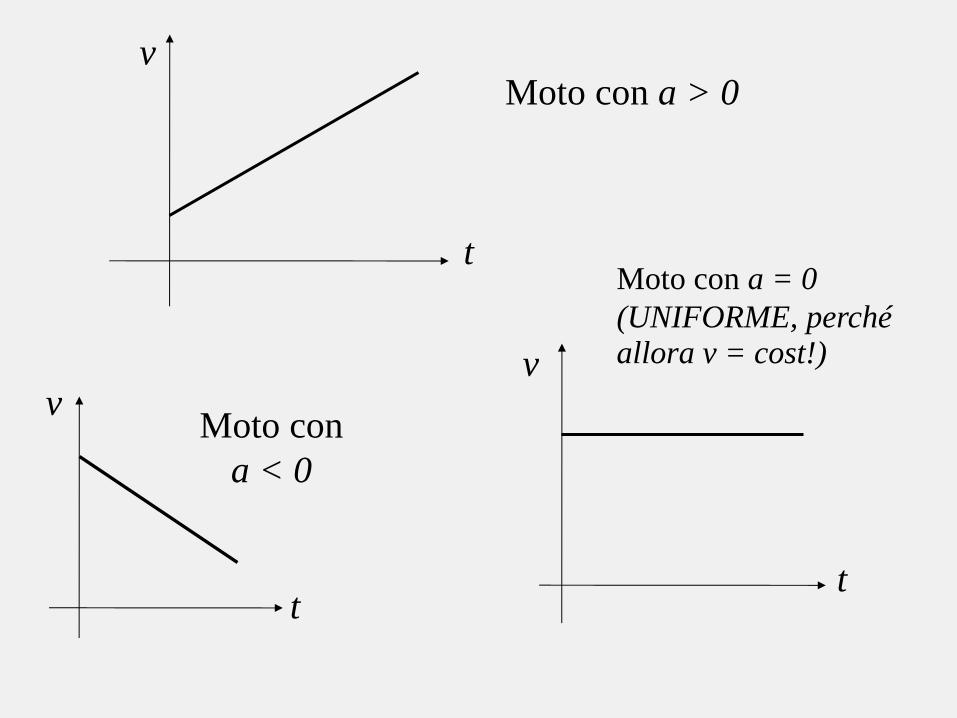
Moto con a > 0
Moto con
a < 0
Moto con a = 0
(UNIFORME, perché allora v = cost!)
t
v
v
t t
v

LEGGE ORARIA DEL MOTO
UNIF .ACC.
• Ma allora come cambia s al variare di t? Cioè che espressione ha nel moto unif acc la s = s(t)???
Osservo che:
Nel moto uniforme a velocità
v = cost,
il prodotto vt è lo spazio percorso
= area rettangolo sul piano (t,v)
v
t vt = s

IDEA!!
Allora, sul grafico (t,v) l’area sotto la retta che
rappresenta il moto è pari allo spazio percorso!!
Estendo il ragionamento anche al caso in cui v non è
costante!
Due moti
uniformi
v
t t
v
Non avrò più un rettangolo!

STAVOLTA CALCOLO AREA DI UN TRAPEZIO!
Area trap. = somma basi
per altezza diviso due!
tvvsA )(2
10
0vtav Ma ricordo che:
v
v
v0
t
QUINDI OTTENGO:

LEGGE ORARIA DEL MOTO UNIF .ACC.
tvattvvtatvvs 0
2
0002
1)(
2
1)(
2
1
tvats 0
2
2
1

tvats 0
2
2
1
Lo spazio dipende quadraticamente dal tempo!
Cioè se raddoppio t, s diventa 4 volte tanto!
Sul piano (t,s) il m.u.a. è
rappresentato da un arco di
parabola!
t
s

La traiettoria comporta
VARIAZIONE DI DIREZIONE NEL MOTO
Δv =
In altre parole: v deve variare, oltre che
in modulo, anche in direzione e verso!
v

MOTO CIRCOLARE
E’ quello che si svolge su una traiettoria che è
una circonferenza (completa o solo un arco)
C
r
Anti-orario
orario
Origine
arbitraria
2D
2 VERSI

MOTO CIRCOLARE UNIFORME
E’ quello in cui archi uguali vengono percorsi in tempi
uguali
Il corpo ci mette sempre lo stesso Δt per
percorrere un giro completo (orbita)
T = PERIODO = tempo necessario per percorrere
un’orbita completa ( si misura in s perché è un tempo)
f = FREQUENZA = numero di giri al secondo: si
misura in HERTZ (Hz) [1 Hz = 1 giro al secondo]

VELOCITA’ TANGENZIALE
nel moto circolare uniforme
r
frT
r
t
sv
2
2
v
C
Sia T il
periodo
v
ha modulo
costante
rv
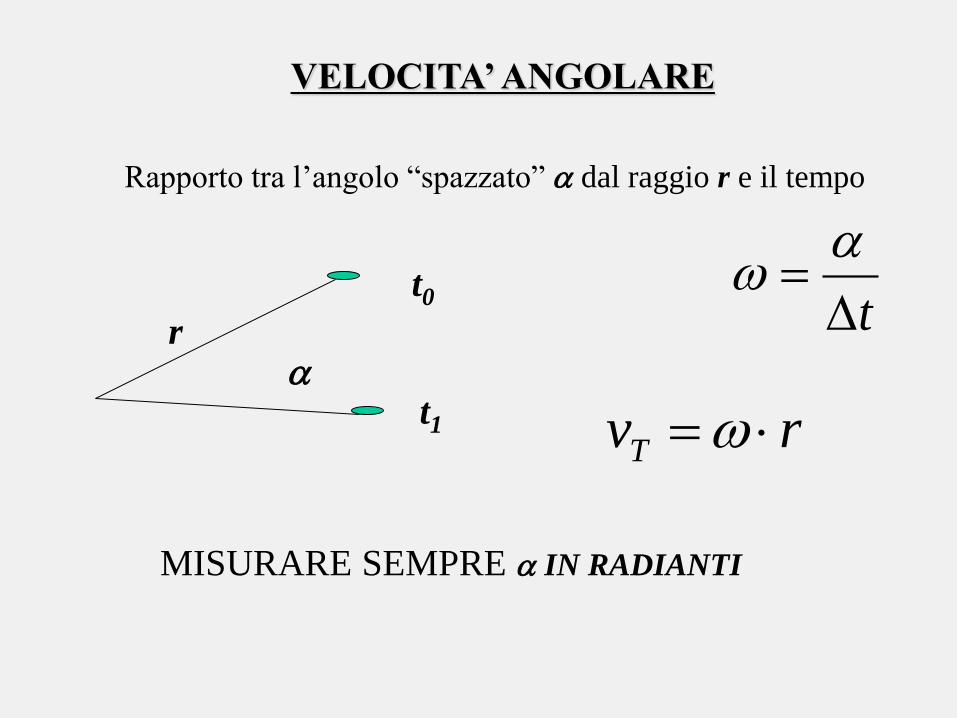
VELOCITA’ ANGOLARE
Rapporto tra l’angolo “spazzato” dal raggio r e il tempo
t0
t1
r t
rvT
MISURARE SEMPRE IN RADIANTI

ACCELERAZIONE
CENTRIPETA nel m.c.u.
L’accelerazione nel moto piano è
sempre diretta verso il centro della
traiettoria (centro della crf.)
v
ca
r
vac
2