mecatronica r.i 2
TRANSCRIPT

1
Ingeniería de Procesos Robotizados
Robótica Industrial
Dr. Ing. Ricardo Prado Gardini

Robot producto Mecatrónico

Manipulador multifuncional reprogramable con varios grados de libertad, capaz de
manipular materias, piezas, herramientas o dispositivos especiales según
trayectorias variables programadas para realizar tareas diversas (Normas ISO).
Robot Industrial (2)
Ingeniería de Procesos Robotizados

Un robot industrial es un manipulador
controlado por computadora que consta
de algunos elementos rígidos conectados
en serie mediante articulaciones
prismáticas o de revolución.
El final de la cadena puede estar fijo a
una base soporte para poder
desplazarse, mientras el otro extremo
esta libre y equipado con una
herramienta para manipular objetos.
Armario de control
Robot con garra multi-propósito
Robot Industrial (3)
Ingeniería de Procesos Robotizados

robot Armario de control
Teach pendant
Robot Industrial (4)
Ingeniería de Procesos Robotizados
Partes Básicas (externo)

Robot Industrial (6)
Ingeniería de Procesos Robotizados
Partes Básicas (interno) Estructura Mecánica
Actuadores
Reductores
Sensores
Sistema de control
Programación
Cinemática
Dinámica

Ingeniería de Procesos Robotizados
Estructura Mecánica
Rigidez
Resistividad
Temperatura

Ingeniería de Procesos Robotizados
Estructura Mecánica
Criterios de selección:
Ligeros
Rígidos
Mecanizables

Ingeniería de Procesos Robotizados
Estructura Mecánica Con el uso de CAD en el diseño mecánico
se logra: Optimizar y ser eficientes en el
material y en la cantidad del mismo.

Ingeniería de Procesos Robotizados
Estructura Mecánica

Ingeniería de Procesos Robotizados

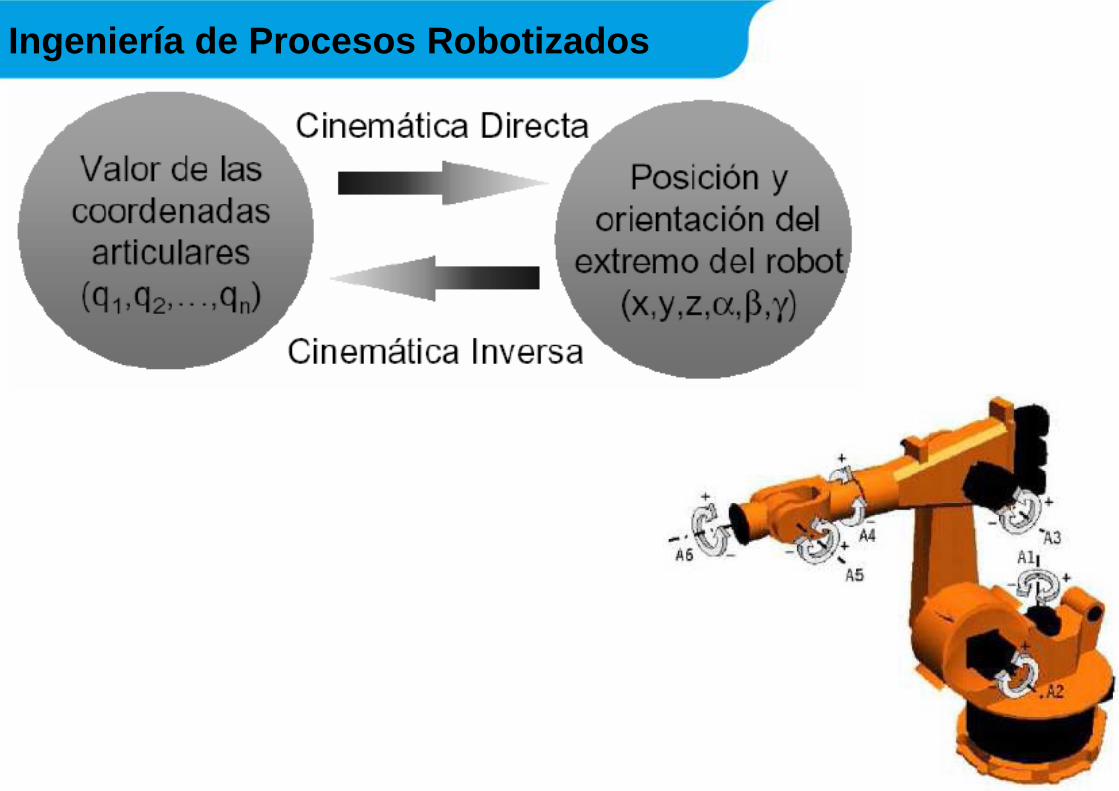
Estudia el movimiento del robot con respecto a un sistema de referencia, sin importar las
fuerzas y momentos necesarios para llevarla a cabo.
Ingeniería de Procesos Robotizados
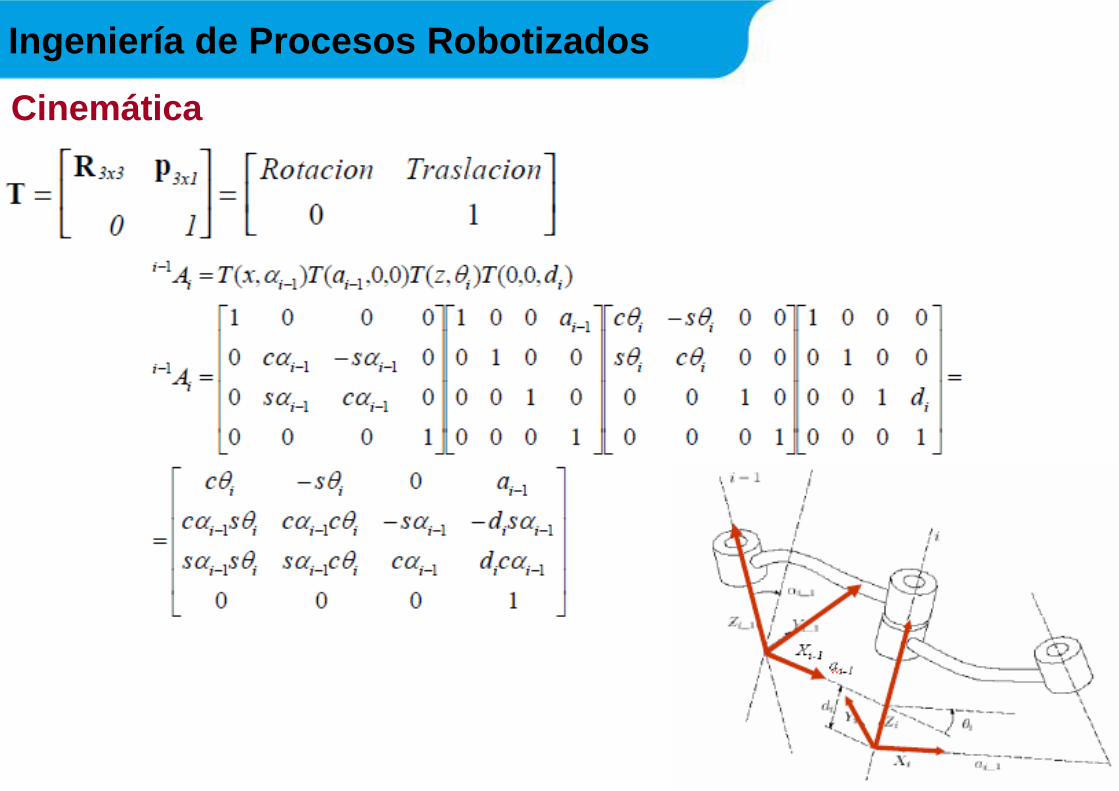
Cinemática
Cinemática
Ingeniería de Procesos Robotizados

Ingeniería de Procesos Robotizados
Cinemática

Ingeniería de Procesos Robotizados
Cinemática

Ingeniería de Procesos Robotizados
Cinemática

Grados de Libertad._ Representa el número y tipo de movimiento del robot.
Ingeniería de Procesos Robotizados
Cinemática

Ingeniería de Procesos Robotizados
Cinemática
Ingeniería de Procesos Robotizados

Ingeniería de Procesos Robotizados
Cinemática

21
Preguntas!!
Según lo explicado en clase:
1) Por que un robot es un dispositivo mecatrónico?
2) Que es un robot industrial?
3) Cuales son las tres partes básicas de un robot industrial?
4) Para obtener el material que compone el cuerpo de un robot
industrial que análisis se realiza?
5) Que CAD se usa generalmente para determinar el material que esta
echo el robot?
6) Que es la cinemática?
7) Como se define la localización de un cuerpo con respecto a otro?
8) Cuantos grados de libertad se requiere para alcanzar cualquier
localización dentro del espacio del trabajo del robot?
9) Que herramienta matemática se usa generalmente en robótica para
modelar la cinemática del robot?
10) Que es el espacio de trabajo del robot y que se necesita para
determinarla?
Ingeniería de Procesos Robotizados

Dinámica
Estudia el movimiento del robot y las fuerzas implicadas en el mismo.
Ingeniería de Procesos Robotizados





Servo mecanismos, Motores y reductores
Ingeniería de Procesos Robotizados

Servo-Motores (AC- Brushless)
Ingeniería de Procesos Robotizados

Servo-Motores (AC- Brushless)
el servomotor (con encoder o resolver acoplado) y su elemento de control. El elemento
de control puede ser autónomo (servodriver) ó una tarjeta especial de un PLC.
El servodriver incorpora todos los elementos necesarios para el control del servo: CPU
(de 32 bits), amplificador de salida (conversor –inversor), entradas de información para
el control (digitales y analógicas), salidas para el accionamiento del servomotor,
conexión a PC para su programación, etc.
La programación se realiza mediante el software correspondiente que permite
programar todos los parámetros de usuario que se necesitan para un total control del
servomotor.
En la actualidad, los distintos fabricantes ofrecen el servomotor junto a su controlador, lo
que facilita la simplificación de la instalación al suministrar todo el conjunto de cables de
conexión y alimentación ya preparados.
La versatilidad que dan este tipo de accionamientos se traduce en multitud de
aplicaciones del tipo: Desplazamientos, posicionamientos, transporte, giro, regulaciones
de caudal, máquinas herramientas de todo tipo, manipulaciones, maquinaria
industrial,etc.
Ingeniería de Procesos Robotizados

Servo-Motores (AC- Brushless)
Ingeniería de Procesos Robotizados

Transmisiones y Reductores
Ingeniería de Procesos Robotizados

Transmisiones y Reductores
Ingeniería de Procesos Robotizados

Sensores
Ingeniería de Procesos Robotizados
Dispositivos eléctricos y/o mecánicos que convierte magnitudes físicas a valores medibles
de dicha magnitud.
Aporta información tanto del entorno de trabajo de un dispositivo o maquina-herramienta
como de su estado interno.

Sensores
Encoders
Ingeniería de Procesos Robotizados

Sensores Internos Encoders
Ingeniería de Procesos Robotizados

Control
Ingeniería de Procesos Robotizados


Ingeniería de Proceso (28)
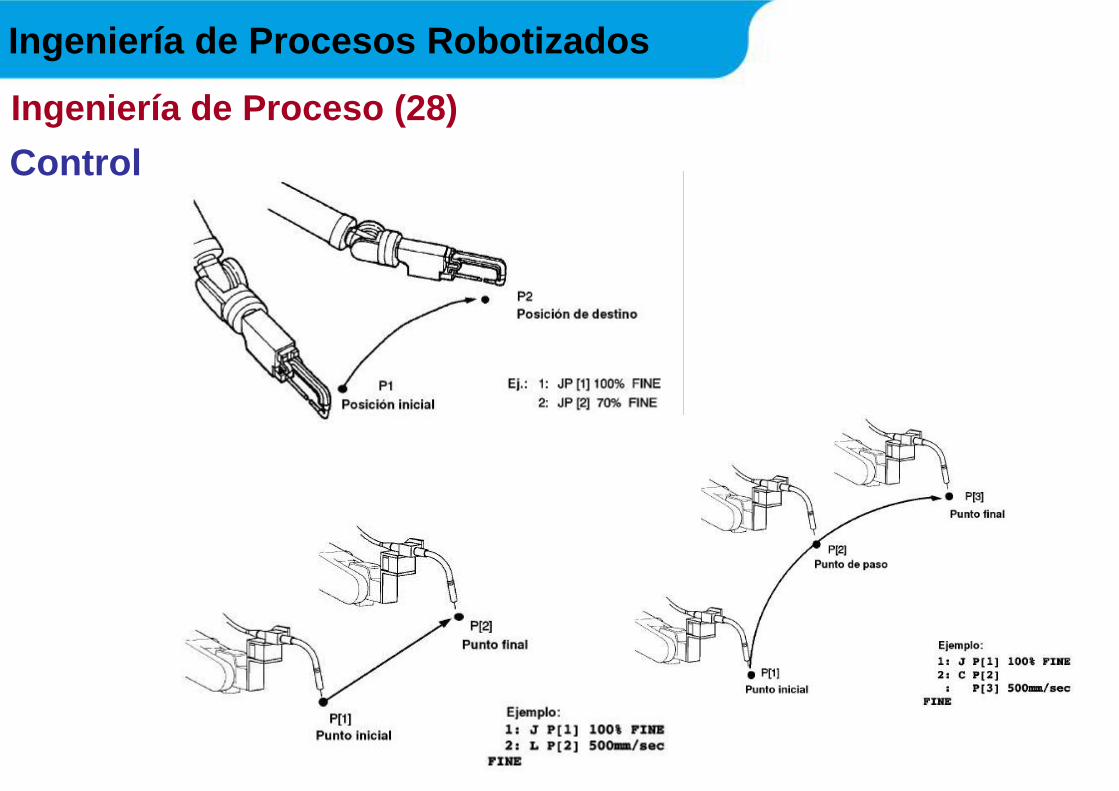
Control
Ingeniería de Procesos Robotizados

Control
Ingeniería de Procesos Robotizados

Control
Ingeniería de Procesos Robotizados

Programación de Robots Industriales
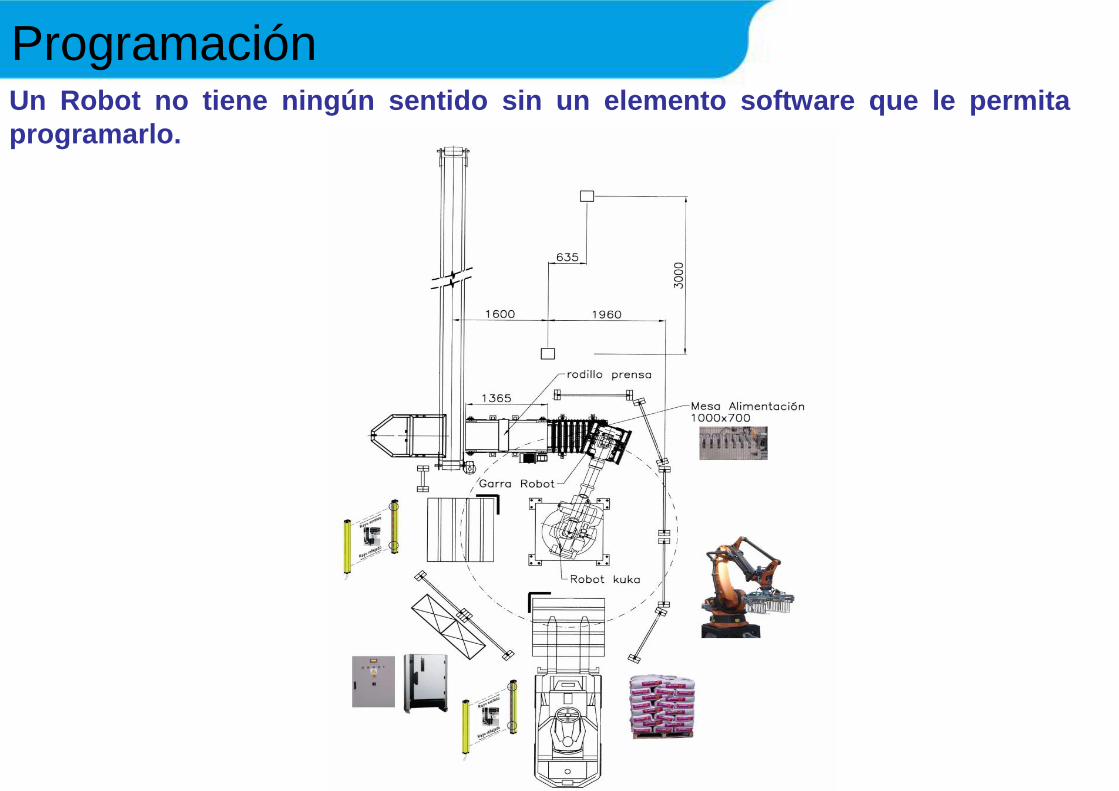
Programación Un Robot no tiene ningún sentido sin un elemento software que le permita
programarlo.

Programación La programación permite definir la tarea a realizar y el control de la misma.
Para ello interacciona con:
La memoria del sistema

Programación El sistema Cinemático y Dinámico

Programación Entradas y Salidas del sistema

Programación En general se puede decir que existe dos clases de programación:
Programación On-Line
Programación Off-Line

Programación Programación On-Line
Se requiere la presencia física del robot para generar la trayectoria de trabajo
deseada.

Programación Programación Off-Line (1)
Se realiza utilizando paquetes de software que permiten simular los
movimientos del robot.
Entorno de trabajo del robot Cinemática y Dinámica

Programación Programación Off-Line (2)
Permite programar los robots con un PC en oficina técnica y preparar con
antelación programas de robots.

Programación
Definición de trayectorias

Programación

Programación

55
Preguntas!! Según lo explicado en clase:
1) Que es la Dinámica?
2) Que fenómenos físicos se consideran en el análisis de la Dinámica?
3) Indique la secuencia lógica entre el controlador, motor, transmisores,
reductores, electrónica de potencia y articulación?
4) Actualmente cual es el actuador mas usado en robótica industrial?
5) Que es un transmisor?
6) Que es un reductor?
7) Que es un sensor?
8) Que es un encoder y como funciona?
9) Que permite el control en robótica?
10) Que permite la programación en Robótica?
11) Cuantos tipos de programación hay?
12) Que es la programación off-line?
13) Que es la programación On-line?
Ingeniería de Procesos Robotizados