mÁster de postgrado en ingenierÍa … · aplicaciones calm1 y en especial de mathcadtm, ... la...
TRANSCRIPT

UNIVERSIDAD DE LEÓN UNIVERSIDAD DE VALLADOLID
MÁSTER DE POSTGRADO EN
INGENIERÍA ACÚSTICA Y VIBRACIONES
PROYECTO FIN DE MÁSTER
APLICACIÓN DE LAS HERRAMIENTAS DE SIMULACIÓN AVANZADA EN LA DOCENCIA DE LA DINÁMICA DE
ESTRUCTURAS
Autor
D. Luis Alfredo Suárez Vivar
Tutor
Dr. D. Manuel San Juan Blanco
Vº Bº
Valladolid, Septiembre de 2010.

II
Documento editado en LATEX

AgradecimientosAgradecer a mi tutor de proyecto Dr. D. Manuel San Juan su atención permanente ybuenos consejos para llevar a buen puerto este documento, a los desinteresados desa-rrolladores de aplicaciones freeware, a los profesores del Master por su infinita pacien-cia conmigo, al personal del Departamento de Ingeniería Civil de la Universidad deBurgos por su apoyo técnico y a mi familia por su apoyo en toda circunstancia.
III

IV

V
VI
Resumen
Vivimos un momento de cambio en las estructuras universitarias, la integración en elespacio europeo de educación superior exige cambios importantes en la forma de abor-dar la docencia en materias científico tecnológicas.
El campo vibro-acústico no es ajeno a este cambio y resulta positivo plantear cam-bios en los objetivos y métodos didácticos basados en la experiencia profesional y enla existencia de un conjunto de herramientas muy avanzadas que pueden apoyar dichocambio.
La materia asociada al campo vibro-acústico resulta crítica desde el punto de vista deldesarrollo de sistemas avanzados tecnológicamente. En cualquier campo industrial confuerte contenido tecnológico como son el aeroespacial, la automoción, el ferroviario,los bienes de equipo y las estructuras civiles como puentes de gran luz y rascacielos,la dinámica ocupa un lugar destacado a la hora de cubrir requisitos de diseño para lamejora del producto.
La aplicación de los conocimientos dinámicos en el campo profesional no está exentade dificultades y esta condicionada por diversos factores como la complejidad intrín-seca de la materia que exige un importante nivel de conocimientos matemáticos, yaque el fundamento básico se centra en la formulación de ecuaciones de onda y estosignifica una interrelación del tiempo y el espacio, lo que dificulta extremadamente lacomprensión del problema.
El bajo nivel de conocimientos, que en general presentan los técnicos en este cam-po, motivado fundamentalmente por un bajo nivel de formación que se fundamenta enla poca atención que en general presentan los planes de estudio al campo dinámicohace que no se disponga de mucho tiempo para su estudio por lo que interesa disponerde herramientas fáciles de usar que apoyen las tareas
Dada la condición de docente del autor, la aproximación a los problemas identificadospasan por un replanteamiento más en el campo del método docente, que estrictamenteen el campo de los contenidos. Está claro que un avance metodológico acarreará unmejora en los contenidos a desarrollar.
Identificado el problema de fondo, la necesidad de un cambio de estrategia docenteen el campo de la dinámica estructural basado en el uso intensivo de herramientas desimulación, fijamos como objetivo del proyecto realizar una evaluación general de lasaplicaciones CALM1 y en especial de MATHCADTM, que es la aplicación selecciona-da para marcar una directriz de cambio basada en prácticas que ayuden a comprendermejor las tareas básicas en este campo.
Por lo tanto el proyecto se centra en evaluar a fondo las capacidades de la aplica-
1CALM: Computer Aided Learnig of Mathematics

VII
ción seleccionada resolviendo un conjunto de problemas clásicos en la docencia de ladinámica estructural.
El documento se estructura de manera clásica en dos partes, memoria y apéndices.En la memoria se estudiará resumidamente el conjunto de las aplicaciones que actual-mente están en uso y su potencial didáctico. A partir de una primera definición derequisitos a cubrir, justificaremos la selección de la herramienta usada MATHCADTM
de entre el conjunto actual de herramientas CALM existentes y su capacidad de inte-gración en un entorno docente. Consecutivamente analizaremos un conjunto de tareastípicas, estructuradas en prácticas, con las que podremos evaluar la capacidad de laaplicación para enfrentarse este reto.
Las prácticas se han incorporado directamente en la memoria para que pueda seguirsemejor su lectura, en vez relegarse a un apéndice, por lo que la memoria es algo extensa.

VIII

Índice general
1. Introducción 11.1. Antecedentes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2. Identificación del problema . . . . . . . . . . . . . . . . . . . . . . . 11.3. Entorno educativo . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.4. Aproximación al problema . . . . . . . . . . . . . . . . . . . . . . . 31.5. Objetivos del Proyecto . . . . . . . . . . . . . . . . . . . . . . . . . 51.6. Estructura del documento . . . . . . . . . . . . . . . . . . . . . . . . 5
2. Herramientas de simulación 72.1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72.2. El software freeware . . . . . . . . . . . . . . . . . . . . . . . . . . 82.3. Matemáticas Asistidas por Computador (CALM) . . . . . . . . . . . 92.4. MATHCAD . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112.5. Otras aplicaciones CALM . . . . . . . . . . . . . . . . . . . . . . . 12
2.5.1. MAPLETM . . . . . . . . . . . . . . . . . . . . . . . . . . . 122.5.2. MATHEMATICATM . . . . . . . . . . . . . . . . . . . . . 132.5.3. MATLABTM - SIMULINKTM . . . . . . . . . . . . . . . . 132.5.4. PYTHONTM . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.6. Conclusiones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3. Estudio de la agudeza en resonancia 193.1. Objetivos para los contenidos . . . . . . . . . . . . . . . . . . . . . . 193.2. Objetivos instrumentales . . . . . . . . . . . . . . . . . . . . . . . . 19
4. Cargas definidas por tramos 294.1. Objetivos para los contenidos . . . . . . . . . . . . . . . . . . . . . . 294.2. Objetivos instrumentales . . . . . . . . . . . . . . . . . . . . . . . . 29
5. Derivadas temporales de la FRIU 395.1. Objetivos para los contenidos . . . . . . . . . . . . . . . . . . . . . . 395.2. Objetivos instrumentales . . . . . . . . . . . . . . . . . . . . . . . . 39
6. Integral de Duhamel 476.1. Objetivos para los contenidos . . . . . . . . . . . . . . . . . . . . . . 476.2. Objetivos instrumentales . . . . . . . . . . . . . . . . . . . . . . . . 48
IX
X ÍNDICE GENERAL
7. Máquinas rotativas: RDMF 557.1. Objetivos para los contenidos . . . . . . . . . . . . . . . . . . . . . . 557.2. Objetivos instrumentales . . . . . . . . . . . . . . . . . . . . . . . . 55
8. TR, La función de Transmisibilidad 618.1. Objetivos para los contenidos . . . . . . . . . . . . . . . . . . . . . . 628.2. Objetivos instrumentales . . . . . . . . . . . . . . . . . . . . . . . . 62
9. Respuesta y batido en resonancia 719.1. Objetivos para los contenidos . . . . . . . . . . . . . . . . . . . . . . 729.2. Objetivos instrumentales . . . . . . . . . . . . . . . . . . . . . . . . 72
10. Respuesta a cargas periódicas 7910.1. Objetivos para los contenidos . . . . . . . . . . . . . . . . . . . . . . 7910.2. Objetivos instrumentales . . . . . . . . . . . . . . . . . . . . . . . . 80
11. FT, Función de Transferencia 9711.1. Objetivos para los contenidos . . . . . . . . . . . . . . . . . . . . . . 9811.2. Objetivos instrumentales . . . . . . . . . . . . . . . . . . . . . . . . 98
12. FRF, Función de Respuesta en Frecuencia 10912.1. Objetivos para los contenidos . . . . . . . . . . . . . . . . . . . . . . 11012.2. Objetivos instrumentales . . . . . . . . . . . . . . . . . . . . . . . . 110
13. Integración con MS− Excel 12713.1. Objetivos para los contenidos . . . . . . . . . . . . . . . . . . . . . . 12813.2. Objetivos instrumentales . . . . . . . . . . . . . . . . . . . . . . . . 128
14. Respuesta al Terremoto de El Centro 13914.1. Objetivos para los contenidos . . . . . . . . . . . . . . . . . . . . . . 14014.2. Objetivos instrumentales . . . . . . . . . . . . . . . . . . . . . . . . 140
15. Desacoplamiento modal 15315.1. Objetivos para los contenidos . . . . . . . . . . . . . . . . . . . . . . 15315.2. Objetivos instrumentales . . . . . . . . . . . . . . . . . . . . . . . . 154
16. FRIU de un sistema de n GDL 17316.1. Objetivos para los contenidos . . . . . . . . . . . . . . . . . . . . . . 17316.2. Objetivos instrumentales . . . . . . . . . . . . . . . . . . . . . . . . 174
17. FRF de un sistema de n GDL 18717.1. Objetivos para los contenidos . . . . . . . . . . . . . . . . . . . . . . 18717.2. Objetivos instrumentales . . . . . . . . . . . . . . . . . . . . . . . . 188
18. Modelos con incertidumbre 19918.1. Objetivos para los contenidos . . . . . . . . . . . . . . . . . . . . . . 20018.2. Objetivos instrumentales . . . . . . . . . . . . . . . . . . . . . . . . 200

ÍNDICE GENERAL XI
19. El Método de los Elementos Finitos 22119.1. Objetivos para los contenidos . . . . . . . . . . . . . . . . . . . . . . 22119.2. Objetivos instrumentales . . . . . . . . . . . . . . . . . . . . . . . . 222
20. Integración con MATLAB 24120.1. Objetivos para los contenidos . . . . . . . . . . . . . . . . . . . . . . 24220.2. Objetivos instrumentales . . . . . . . . . . . . . . . . . . . . . . . . 242
A. Ejemplo de libro de teoría 251
B. Ejemplo presentaciones de teoría 267
C. Ejemplo artículos de investigación 315

XII ÍNDICE GENERAL
Índice de figuras
1.1. Integración de herramientas avanzadas de simulación y ensayo . . . . 4
2.1. Aplicaciones de la distribución Enthought . . . . . . . . . . . . . . . 142.2. Imagen generada en MAYAVI . . . . . . . . . . . . . . . . . . . . . . 162.3. Imagen de un campo magnético generada en MAYAVI . . . . . . . . . 16
XIII

XIV ÍNDICE DE FIGURAS
Índice de cuadros
2.1. Tabla de acrónimos típicos en inglés . . . . . . . . . . . . . . . . . . 8
XV

Capítulo 1
Introducción
1.1. AntecedentesEl presente documento se redacta para cumplir con la Normativa del Programa MásterInter Universitario en Ingeniería de Vibraciones y Acústica y obtener el correspondien-te Título de Máster.
1.2. Identificación del problemaLa materia asociada al campo vibro-acústico resulta crítica desde el punto de vista deldesarrollo de sistemas avanzados tecnológicamente. En cualquier campo industrial confuerte contenido tecnológico como son el aeroespacial, la automoción, el ferroviario,los bienes de equipo y las estructuras avanzadas como puentes de gran luz, rascacielos,la dinámica ocupa un lugar destacado a la hora de cubrir requisitos de diseño avanza-dos para la mejora del producto.
La aplicación de los conocimientos dinámicos en el campo profesional no está exentade dificultades y esta condicionada por diversos factores:
1. La complejidad intrínseca de la materia, exige un importante nivel de conoci-mientos matemáticos, ya que el fundamento básico se centra en la formulaciónde las ecuaciones de onda y esto significa una interrelación del tiempo y el es-pacio, lo que dificulta extremadamente la comprensión del problema.
2. El bajo nivel de conocimientos, que en general presentan los técnicos en estecampo, motivado fundamentalmente por un bajo nivel de formación basado enla poca atención que en general presentan los planes de estudio al campo diná-mico.
3. El campo dinámico exige acumular un importante nivel de conocimientos ma-temáticos, ya que en el fondo de la cuestión se utilizan sistemáticamente co-nocimientos avanzados como: ecuaciones diferenciales, transformadas, cálculo
1

2 1. Introducción
matricial avanzado, variable compleja, teoría de sistemas, cálculo numérico, ins-trumentación, procesado digital de la señal, análisis multivariante, que no pue-den ser reducidos a la toma de valores de una tabla como puede suceder en otrasmaterias.
4. Por otra parte el campo dinámico es una encrucijada de caminos entre diferentesdisciplinas que de manera clásica al menos en España, están distribuidas endiversos campos de la ingeniería por lo que resulta difícil tener una buena visiónde estos conocimientos desde la óptica de una sola carrera.
5. Existen numerosas herramientas de modelado de problemas vibro-acústicos ymás en general dinámicos pero tienen un coste elevado y su manejo exige tenerun buen fondo tecnológico sobre la materia lo que hace que no sean excesiva-mente populares frente a otras herramientas avanzadas como las estructurales detipo estático.
6. Una dificultad complementaria para el establecimiento de estas herramientas esla ausencia generalizada de procedimientos de cálculo dinámico claros e inte-grados con las fases de diseño y validación, cuestión que está directamente rela-cionada con el conocimiento de qué se puede calcular, cómo se puede calculary cuándo se debe calcular, derivado en general del déficit formativo tecnológicoen esta materia.
7. Otra dificultad, difícil de salvar si no se combina la actividad académica con lainvestigadora o de servicios, es el elevado coste de los sistemas de medida quehay que usar en las fases de investigación, desarrollo y validación de producto yque necesitan un buen fondo técnico para ser manejadas. Los sistemas de me-dida resultan críticos para comprender el funcionamiento del campo dinámico,ya que la formulación teórica debe de estar relacionada con la fase experimen-tal y conformar una única unidad, cuestión de la máxima importancia cuando lavariabilidad del proceso estocástico que medimos es del orden del propio fenó-meno. De esta cuestión se deriva la importancia de la formulación estadística eneste campo.
8. Resulta sorprendente comprobar que muchos sistemas de validación se utilizansin el apoyo de un modelo de simulación, por lo que el conjunto de medidasque se obtienen no realimentan de manera óptima el ciclo de diseño. Esta cues-tión que en el fondo es un debilidad y una fuente de ineficiencia organizativaestá causada en muchos casos por el desconocimiento de cómo se puede ajustarun modelo, cuestión derivada de otro déficit formativo en la denominada mate-mática experimental en la que se basa el diseño de experimentos y el análisismultivariante, que nos permiten el ajuste y calibración de modelos.

1.3. Entorno educativo 3
1.3. Entorno educativo
Vivimos un momento de cambio en las estructuras universitarias, la integración en elESHE 1, exige cambios importantes en la forma de abordar la docencia en materiascientífico tecnológicas. El campo vibro-acústico no es ajeno a este cambio y resultapositivo el plantear cambios en los objetivos y método basándonos en la experienciaprofesional y en una realidad de herramientas muy avanzadas que pueden apoyar dichocambio.
1.4. Aproximación al problema
Dada la condición de docente del autor, la aproximación a los problemas identificadospasan por un replanteamiento más en el campo del método docente, que estrictamenteen el campo de los contenidos. Está claro que un avance metodológico acarreará unmejora en los contenidos a desarrollar.
Existe un conjunto muy importante de herramientas probadas ya durante más de unadécada cada una con un perfil determinado muy condicionado por su origen y su mer-cado. Seleccionar un conjunto de herramientas no es una tarea fácil ya que dependedel perfil que estas han ido adoptando con el tiempo y sobre todo del conocimientoespecífico que sobre ellas se tengan.
Dado el estado del arte de las potenciales herramientas de simulación avanzada, és-tas van a ser sin duda una de las claves para la adaptación a este cambio del entornoeducativo.
Siempre hay un alto grado de subjetividad en la selección de las herramientas deapoyo bien por su disponibilidad, por el fondo tecnológico previamente desarrolladocon ellas, los recursos económicos disponibles o los gustos personales. Por lo tanto esevidente que la selección y uso de este tipo de herramientas está sesgada por estos mo-tivos. Este proyecto no escapa a esta cuestión ya que las herramientas que se proponenlas lleva utilizando el autor durante un cierto tiempo, tanto en uso académico comoprofesional.
De aquí podríamos derivar que un conjunto diferente de herramientas pueden cubrirperfectamente objetivos similares y por lo tanto plantea las limitaciones de facto delproyecto.
La herramienta central usada en este proyecto será MATHCADTM, en parte por al-gunas razones objetivas y en parte por otras derivadas de las cuestiones expuestas en elpárrafo anterior, también veremos integraciones con otras herramientas de simulaciónavanzada como MATLABTM, SIMULINKTM.
1ESHE: European Space for Higher Education - EEES: Espacio Europeo de Educación Superior

4 1. Introducción
Figura 1.1: Integración de herramientas avanzadas de simulación y ensayo
En tareas más avanzadas de servicios e investigación se usan aplicaciones comple-jas y potentes como MD− ADAMSTM, MD− NASTRANTM, MD− PATRANTM,FEMToolsTM, HyperWorksTM o CATIATM. Este tipo de aplicaciones son difícilesde integrar en tareas docentes básicas ya que tienen un rampa importante de entrada.
Otras herramientas complementarias claves para entender el proceso de generaciónde documentos son el uso de LATEX como editor de textos, MS− PowerPointTM comogenerador de presentaciones y de MathTypeTM como generador cruzado de ecuacio-nes entre las diferentes aplicaciones. Finalmente los documentos se compilan a *.PDFcon SumatraPDFTM y se editan en AdobeAcrobatTM.

1.5. Objetivos del Proyecto 5
1.5. Objetivos del ProyectoIdentificado el problema de fondo, la necesidad de un cambio de estrategia docenteen el campo de la dinámica estructural basado en el uso intensivo de herramientas desimulación, fijamos como objetivo del proyecto realizar una evaluación general de lasaplicaciones CALM2 y en especial de MATHCADTM, que es la aplicación selecciona-da para marcar una directriz de cambio basada en prácticas que ayuden a comprendermejor las tareas básicas en este campo.
Por lo tanto el proyecto se centra en evaluar a fondo las capacidades de la aplica-ción seleccionada resolviendo un conjunto de problemas clásicos en la docencia de ladinámica estructural.
1.6. Estructura del documentoEl documento se estructura de manera clásica en dos partes, memoria y apéndices. Enla memoria se estudiará resumidamente el conjunto de las aplicaciones que actualmen-te están en uso y su potencial didáctico. A partir de una primera definición de requisitosa cubrir, justificaremos la selección de la herramienta usada MATHCADTM de entreel conjunto actual de herramientas CALM existentes y su capacidad de integración enun entorno docente. Consecutivamente analizaremos un conjunto de tareas típicas, es-tructuradas en prácticas, con las que podremos evaluar la capacidad de la aplicaciónpara enfrentarse este reto.
Las prácticas se han incorporado directamente en la memoria para que pueda seguirsemejor su lectura, en vez relegarse a un apéndice, por lo que la memoria es algo extensa.
En cuanto a la organización de la memoria, ésta se articula en:
Introducción.
Herramientas de simulación.
Practicas desarrolladas
Bibliografía.
En los anexos se presenta un conjunto de documentos que muestran el potencial deintegración de estas herramientas:
Ejemplo de libro de teoría.
Ejemplo de presentación de teoría.
Ejemplo de artículo de investigación.
2CALM: Computer Aided Learnig of Mathematics

6 1. Introducción
Capítulo 2
Herramientas de simulación
2.1. IntroducciónEn este capítulo se analizar un conjunto de herramientas de simulación matemáti-ca, disponibles a partir de las cuales se va comprender mejor las razones del uso deMATHCAD como corazón para el desarrollo de una metodología docente.
Tal y como se ha comentado en la sección en la sección 1.4, cada aplicación tieneun perfil diferente diferente generalmente basado en el entorno en el que nació, susobjetivos iniciales, el perfil de sus desarrolladores y su mercado objetivo actual.
La herramientas que se utilizan en el entorno de la dinámica estructural se puedenclasificar en:
Matemáticas Asistidas por Computador (CALM).
Simulación por Elementos Finitos o de Contorno (CAE).
Simulación Multibody (MB).
Simulación de Sistemas de Control (CSS).
Diseño Asistido por Computador (CAD).
Instrumentación virtual y control de cadenas de medida (VIS)
Procesado de textos y simulación (CAT).
El cuadro 2.1 aclara el significado de los acrónimos utilizados en la clasificación de lasherramientas.
En algunos casos la separación por tipos de aplicaciones es difusa, en general lasaplicaciones ya no tiene un borde de separación claro por lo que en realidad podríanencajar en más de un tipo. Esta cuestión se produce por la tendencia del los fabrican-tes de software a ofrecer más soluciones al cliente final que productos individualizados.
7

8 2. Herramientas de simulación
Esta tendencia a generado la creación de alianzas estratégicas entre los diferentes fabri-cantes para ofrecer entornos que ofrezcan un único espacio de trabajo. De esta formadisponer de un entorno de ingeniería con un CAD que proporciones conexiones conun CAE que a su vez enlacen fácilmente con sistemas de gestión documental y queenlacen con aplicaciones matemáticas para cálculos no típicos, que a su vez enlacencon los ensayos de validación VIS y ajuste de modelos.
En contexto se produce una permanente fagocitación de un conjunto de compañíassobre otras, que dará lugar a una reducción del numero de fabricantes. Como conse-cuencia de esta tendencia se ha producido una aceleración del ritmo de desarrollo delas aplicaciones que hace que tiende a desestabilizar los entornos de trabajo y tenga unalto coste el mantener los niveles de actualización.
Como consecuencia la integración de herramientas para definir metodologías de traba-jo solo tiene sentido en un momento dado y un determinado contexto. Desde el puntode vista docente esta cuestión es algo menos crítica pero en el fondo el campo profe-sional arrastra al campo docente en esta cuestión.
2.2. El software freeware
Una opción para las cuestiones docentes es la implementación de soluciones freewa-re que algunas comunidades desarrollan permanentemente. En este sentido internet acontribuido, como en muchas otras cuestiones, a la creación de este tipo de comunida-des desarrolladoras. Mención especial cabe mencionar el ejemplo de MODELICATM,PYTHONTM o el propio LATEXTM como potenciales entornos de trabajo con el quevarios fabricantes de software tradicional ya tienen interrelación.
La principal desventaja de los entornos freeware es que en muchas ocasiones no sonfáciles de montar y si aparece algún problema, se carece de derechos por el tipo delicencia.
Acrónimo Significado
CALM Computer Aided Learning of MathematicsCAE Computer Aided EngineeringMBS Multubody SoftwareCSS Control Simulation Software
CAD Computer Aided DesignVIS Virtual Instrument Software
CATP Computer Aided of Tex Processing
Cuadro 2.1: Tabla de acrónimos típicos en inglés

2.3. Matemáticas Asistidas por Computador (CALM) 9
Formar en entornos profesionales puede tener un mayor valor añadido para los alumnosy un mayor coste institucional que no siempre puede abordarse, por lo tanto siemprees una opción a tener en cuenta para el desarrollo de un metodología.
2.3. Matemáticas Asistidas por Computador (CALM)Las aplicaciones CALM realmente nacieron como Aprendizaje matemático Asistidopor Computador, sin embargo el desarrollo que han adquirido hace que el términoaprendizaje resulte muy restrictivo por lo que usaremos el más acorde de MatemáticasAsistidas por Computador que integra funciones de aprendizaje y de soporte del mun-do físico.
En esta sección daremos un repaso a las principales aplicaciones evaluando some-ramente los pros y contras de su aplicación.
Este tipo de herramientas, CALM, son la clave en la elaboración de un programadocente, al menos en una primera aproximación ya que en esta etapa se deben fijar losfundamentos físico-matemáticos del problema.
El uso de aplicaciones CALM no es impedimento para la utilización de aplicacionesmás específicas de cálculo mecánico o estructural, bien de corte generalista como lasaplicaciones clásicas FEM o bien propios del cálculo y dimensionamiento estructuralbasados sobre todo en normativas tecnológicas. En todo caso las técnicas en las que sebasa el software específico deberían ser explicadas con este tipo de software ya que engeneral los programas de uso profesional suelen ocultar sus algoritmos.
Dentro de esta categoría nos encontramos con un amplio conjunto de aplicacionespara las matemáticas asistidas por computador.
Para evaluar este tipo de aplicaciones en un entorno docente (y en el fondo en unentorno profesional) hay que fijarse en un conjunto de características claves:
1. Rampa de aprendizaje suave. Salvo que se tenga una coordinación con otrasasignaturas no se dispone de mucho tiempo para explicar su comportamiento,por lo que es importante que casi se pueda aprender simultáneamente con laejecución de las prácticas.
2. Concepción desde la ingeniería. Es muy importante que la aplicación se adaptea la forma de trabajo de la ingeniería que se basa en el anexo de cálculo, es deciruna hoja en la que desarrollamos nuestros cálculos. En este sentido nada peorque una aplicación concebida por y para matemáticos, más bien necesitamosaplicaciones concebidas por ingenieros, desarrolladas por científicos y muy biendocumentadas por ingenieros o científicos para las diferentes vertientes de uso.
10 2. Herramientas de simulación
3. Integración de unidades. En ingeniería se trabaja con unidades que fijan el or-den de magnitud de nuestras operaciones y dan razón de ser a los cálculos por lotanto necesitamos aplicaciones que permitan de manera natural integrar unida-des y mezclar de manera flexible diferentes sistemas ya que hay muchos camposen los que se mezcla el Sistema Internacional y el Sistema Imperial.
4. Capacidad de programación. Resulta clave disponer de una alta capacidad deprogramación para poder diseñar nuevos algoritmos y funciones. Si embargo nodebe ser una aplicación orientada a la programación. Nada peor que un meroentorno de programación que ofrece muy poca visibilidad para abordar una tareacompleja de cálculo, desintegrada del resto de cuestiones como la documenta-ción o grafismos. Este tipo de entornos exigen copiar y pegar en procesadores detexto los códigos desarrollados para conformar un anexo de cálculo.
5. Integración con el cálculo simbólico. Aunque la mayor parte de operacionesrequeridas son de cálculo numérico es importante disponer de una alta capaci-dad de integración del solver numérico con el solver simbólico, de tal forma queen circunstancias concretas podamos integrar una demostración en medio de uncálculo numérico sin tener que recurrir a terceras aplicaciones.
6. Integración de otras aplicaciones CALM. Es muy importante la capacidad deintegración con otras aplicaciones CALM ya que en muchas ocasiones se podráreutilizar código escrito en una aplicación diferente.
7. Integración con aplicaciones CAD/CAM. Es muy importante que las tareas delectura/escritura puedan estar encadenadas on-line con el objeto de que se pue-dan regenerar rápidamente las tareas asociadas ya que los procesos de diseño soncíclicos por lo que la capacidad paramétrica es clave.
8. Integración con herramientas de proceso de texto y gráficos. Que permitantransferir información de texto, ecuaciones y figuras.
9. Integración con aplicaciones SIV. Es importante la capacidad de leer ficherosde datos y si es posible capturar información on-line de aplicaciones de controlde instrumentación.
10. Procesado de señal. Resulta un factor clave que estén integradas funciones deprocesado digital de la señal ya que numerosas operaciones en dinámica de es-tructura exigen recortar, enventanar, transformar, filtrar, etc.
11. Integración de funciones estadísticas. Las funciones estadísticas son extrema-damente importantes cuando las señales son no deterministas. El diseño de expe-rimentos (DOE1), los ajustes, las técnicas de regresión, el análisis multivariante,las redes neuronales, nos permiten usar la aplicación para el desarrollo de méto-dos de identificación que usan las técnicas de análisis modal.
1DOE: Design of Experiments
2.4. MATHCAD 11
12. Lectura de formatos de datos. Poder leer datos en formatos de aplicaciones co-mo MS− Excel, MATLAB, Texto Plano, UFF, WAV, y formatos nativos de lasaplicaciones FEM o CAD/CAM resultan muy importantes.
13. Coste reducido. Fundamentalmente el coste esta regulado por las políticas dedescuentos por uso académico de las licencias en el mejor de los casos con li-cencias para alumnos off-campus.
Resumiendo las condiciones que buscamos son: fácil de usar, orientación a la ingenie-ría, buena visión del trabajo de conjunto, integración con un entorno de aplicaciones ycoste contenido.
2.4. MATHCAD
MATHCAD fue concebido y escrito originalmente por Allen Razdow2 (co-fundadorde Mathsoft Inc.) durante su estancia en el MIT3 en la que generó algunas de las pa-tentes claves del desarrollo.
Mathsoft Inc., fue propietaria de la aplicación hasta abril de 2006 fecha en la que lacorporación PTC 4 adquirió la compañía y por lo tanto paso a ser la nueva propietariade MATHCAD, pasando Allen Razdow a formar parte de PTC.
PTC es una compañía que tradicionalmente ha dedicado sus esfuerzos al desarrollode productos en el entorno de CAD y del PDM5.
Algunas de sus aplicaciones típicas son:
Pro/ENGINEERTM. Aplicación informática CAD/CAM/CAE 3D paramétrica.Esta aplicación ha sido y es una de las referencias en el sector mecánico.
WINDCHILLTM. Aplicación informática PDM. Esta es una de las claves dedesarrollo de la compañía ya que la gestión de documentación en los proyectosde ingeniería se considera una de las claves de desarrollo. Esta gestión de do-cumentación integra tanto ficheros de CAD, CAM, CAE como otros ficheros detexto, hojas de cálculo, pedidos, integración con las aplicaciones de gestión, etc.Este tipo de aplicaciones permite integrar toda la información de un producto alo largo de toda su vida útil.
MATHCADTM ha sido escogida por PTC como soporte básico para su PDM, buscan-do una aplicación que permitiera integrar de manera sencilla operaciones tradicionalesde cálculo matemático unidas a su CAD/CAE Pro/ENGINEERTM.
2Allen Razdow dispone de un intersante blog en http://www.razdow.com.3MIT: Massachusetts Institute of Technology4Web corporativo de PTC en http://www.ptc.com5PDM: Product Data Management

12 2. Herramientas de simulación
En este sentido Pro/ENGINEER soporta un enlace directo con MATHCAD en am-bas direcciones, permitiendo leer y grabar variables lo que permite realizar cálculosenlazados on-line con el CAD/CAE.
Este interés que PTC ha mostrado por MATHCAD es en el fondo el interés que per-seguimos para este tipo de aplicación en nuestro entorno docente.
Como se podrá ver a lo largo del trabajo, las prácticas propuestas cumplen perfec-tamente con los requisitos expresados en la sección 2.3, por lo que es la aplicaciónseleccionada, sin óbice para que otras puedan también cumplir ya que hay una ten-dencia generalizada a que la presentación de resultados se haga directamente desde laaplicación CALM.
2.5. Otras aplicaciones CALM
Podemos evaluar sucintamente, las ventajas y desventajas que aportan el resto de apli-caciones CALM típicas.
2.5.1. MAPLETM
MAPLE es una aplicación desarrollada en 1980 por el Symbolic Computation Groupde la Universidad de Waterloo en Waterloo, Ontario, Canada. Maplesoft R© su actualpropietario es un Spin-Off de dicha universidad.
Podemos encontrar más información en http://www.maplesoft.com.
Su especialidad es el cálculo simbólico. Si esta es nuestra necesidad esta debe serla selección, compartida quizás con MATHEMATICATM, tradicionalmente el kernelde MAPLE a sido incorporado en terceras aplicaciones como MATHEMATICA.
Tiene limitaciones para su integración en la documentación aunque las últimas ver-siones han ido avanzando para poder generar documentos multimedia.
Las versiones de MATHCAD liberadas ente 1994 y 2006 han incluido un motor sim-bólico derivado de MAPLE.
Por otra parte el Symbolic Math Toolbox de MATLAB ha contenido durante michasrevisiones una porción importante del motor simbólico MAPLE 10. En la actualidadusa MuPAD R©.
2.5. Otras aplicaciones CALM 13
2.5.2. MATHEMATICATM
Originalmente fue concebido en 1988 por Stephen Wolfram, quien continúa siendo ellíder del grupo de matemáticos y programadores que desarrollan el producto en Wol-fram Research R©, compañía ubicada en Champaign, Illinois.
Podemos encontrar más información en http://www.wolfram.com/.
Es quizás la aplicación que más ha cambiado desde su origen, desarrollando nume-rosos paquetes de ingeniería y actualmente tiene un buen motor de procesamiento pa-ralelo, por lo que es la más rápida. Es una opción en cálculos muy intensivos que no sequieran compilar a otros lenguajes.
En cuanto a su capacidad para generar documentos multimedia es muy alta por loque es un opción clara de futuro en este aspecto.
Sus limitaciones se derivan como en el resto que tiende e ser un lenguaje de programa-ción con extensiones para la generación de documentos y en ese aspecto sigue siendosuperior MATHCAD.
2.5.3. MATLABTM - SIMULINKTM
MATLAB (abreviatura de MATrix LABoratory, es un software matemático que ofreceun entorno de desarrollo integrado (IDE) con un lenguaje de programación propio, ellenguaje M.
MATLAB, fue creado por Cleve Moler en 1984, surgiendo la primera versión conla idea de emplear paquetes de subrutinas escritas en Fortran, en los cursos de álgebralineal y análisis numérico, sin necesidad de escribir programas en dicho lenguaje. Ellenguaje de programación M fue creado en 1970 para proporcionar un sencillo accesoal software de matrices LINPACK y EISPACK sin tener que usar Fortran.
En este momento es probablemente el software más utilizado en programación cientí-fica y sobre todo por SIMULINKTM, un entorno para el desarrollo de aplicaciones decontrol y por lo tanto muy atractivo para el uso de control de vibraciones.
Adolece del mismo problema que el resto de software: ha sido concebido como unlenguaje de programación pero no es fácil integrar la documentación de maera auto-mática.
2.5.4. PYTHONTM
PYTHON es un entorno interpretado para generar scrips, muy usado para programaroperaciones sobre el sistema operativo o sobre terceros programas.

14 2. Herramientas de simulación
Figura 2.1: Aplicaciones de la distribución Enthought
Es un entorno feeware por lo que en principio no tiene coste la licencia sin embar-go hay compilaciones similares a las LinuxTM generadas por empresas de desarrolloque incluyen licencias de uso y soporte.
Compilación Enthought, Inc.
Esta compilación se puede encontrar en http://www.enthought.com/ y dis-pone de una versión académica freeware. La compilación montará el entorno 2.6 dePYTHON, aunque que no es el último oficialmente aprobado, con la ventaja de lacoherencia en las distribuciones de las aplicaciones y librerías que contiene.
Componentes de la compilación
Tal y como vemos en la figura 2.1 la ventaja de esta compilación es que incluye variasutilidades:
Un editor y el motor del interprete PYTHON.
2.5. Otras aplicaciones CALM 15
Más de 75 librerías para diversos usos que podemos visitar en http://www.enthought.com/products/epdlibraries.php.
Un entorno 3D interactivo de manejo de gráficos denominado MAYAVITM po-demos encontrar en más información:http://code.enthought.com/projects/mayavi/
Uso de objetos TVTK, para generar geometrías junto a los datos.
Un editor de gráficos 2D denominado CHACO.
Librerías ScyPi.org
Estas librerías ofrecen capacidades numéricas y graficas muy amplias y son la base delas aplicaciones interactivas TVTK, MAYAVI y Chaco. Estas se encuentran en la direc-ción:http://www.scipy.org/.
Las librerías básicas son:
Utilidades científicas en SciPy.
Computo científico NumPy.
Librería matplotlibTM
Merece un capitulo aparte la librería matplotlib que es uno de los componentes básicosde las aplicaciones interactivas. Dispone de comandos compatibles con MATLAB yMATHEMATICA.
la pagina principal se puede visitar en:http://matplotlib.sourceforge.net/.
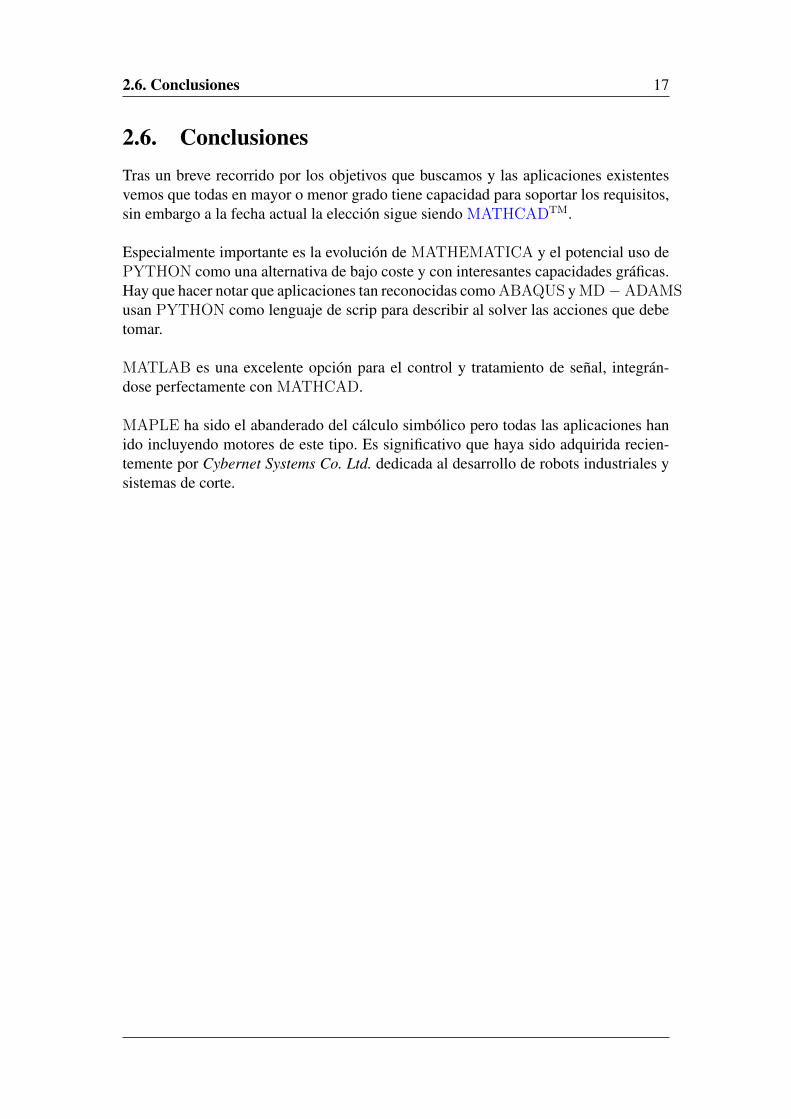
MAYAVITM
El entorno permite incorporar datos externos como una nube de puntos, objetos crea-dos y generarlos directamente con un scrip de PYTHON.
ChacoTM
Un entorno para crear gráficos 2D, que permite incorporar datos externos como imáge-nes, objetos creados, funciones y generarlos directamente con un scrip de PYTHON,similar a MAYAVI.
16 2. Herramientas de simulación
Figura 2.2: Imagen generada en MAYAVI
Figura 2.3: Imagen de un campo magnético generada en MAYAVI
2.6. Conclusiones 17
2.6. ConclusionesTras un breve recorrido por los objetivos que buscamos y las aplicaciones existentesvemos que todas en mayor o menor grado tiene capacidad para soportar los requisitos,sin embargo a la fecha actual la elección sigue siendo MATHCADTM.
Especialmente importante es la evolución de MATHEMATICA y el potencial uso dePYTHON como una alternativa de bajo coste y con interesantes capacidades gráficas.Hay que hacer notar que aplicaciones tan reconocidas como ABAQUS y MD− ADAMSusan PYTHON como lenguaje de scrip para describir al solver las acciones que debetomar.
MATLAB es una excelente opción para el control y tratamiento de señal, integrán-dose perfectamente con MATHCAD.
MAPLE ha sido el abanderado del cálculo simbólico pero todas las aplicaciones hanido incluyendo motores de este tipo. Es significativo que haya sido adquirida recien-temente por Cybernet Systems Co. Ltd. dedicada al desarrollo de robots industriales ysistemas de corte.

18 2. Herramientas de simulación
Capítulo 3
Estudio de la agudeza en resonancia
Esta es una práctica de introducción al uso de MATHCAD en el entorno de problemasde vibraciones de 1 GDL excitados con una carga armónica.
3.1. Objetivos para los contenidos1. Crear una carga armónica de excitación.
2. Obtener frecuencias amortiguadas y de resonancia.
3. Estudiar el DMF.
4. Estudiar la FASE.
5. Obtener la respuesta estacionaria.
6. Comprobar los efectos de las aproximaciones.
7. Estudiar el DMFmax contra el ratio de amortiguamiento ζ .
8. Estudiar los HHP 1.
9. Estudiar el factor de calidad Q, gráficamente.
3.2. Objetivos instrumentales1. Activar un sistema de unidades (SI).
2. Crear parámetros (variables MATHCAD) y asignarles valores.
3. Crear subíndices de texto en las variables.
4. Asignar unidades a las variables.
1HHP: Half Power Point
19

20 3. Estudio de la agudeza en resonancia
5. Leer los valores almacenados en las variables.
6. Crear nuevos parámetros mediante expresiones.
7. Crear funciones.
8. Gobernar variables con controles tipo slider.
9. Crear un rango de datos para una variable.
10. Crear funciones de dos variables para parametrizar.
11. Crear un gráfico con dos ejes.
12. Crear un gráfico con varias entradas.
13. Incluir cabeceras y pies al documento MATHCAD.

Agudeza_en_Resonancia_R_01_01.xmcd
TRABAJO FINAL DE MASTERMASTER INTER-UNIVERSITARIO EN VIBRACIONES Y ACÚSTICAUNIVERSIDAD DE VALLADOLID - UNIVERSIDAD DE LEÓNESTUDIO DEL PICO DE RESONANCIA DEL DMFCopyright (c) 2010 LUIS ALFREDO SUAREZ VIVAR - [email protected]
Objetivos de la práctica
En esta práctica se van revisar algunos conceptos básicos para la respuesta estacionaria deun sistema de 1 GDL como son;
- Frecuencia natural.- Frecuencia de resonancia.- Frecuencia amortiguada.- Respuesta estacionaria temporal.- El Factor de Amplificación Dinámico (DMF).- La Fase d4e la respuesta.- Los HPP.
Se utilizarán recursos de propios de Mathcad como sliders para fijar el valor de la carga,funciones y gráficos 2D.
Sistema
Sobre un sistema de 1 GDL con los siguientes parámetros:
me = 150 kg
ke = 48000 N/m
ζ = 15 %
Se aplica una carga armónica:
Q0 = 500 N
Cuestiones a estudiar:
- Calcular el resto de los parámetros del sistema.- Definir la carga de ensayo, para lo que usaremos "sliders" tanto para la amplitud comopara la frecuencia.
- Determinar las gráficas del DMF y la FASE, en función de la frecuencia en Hz.- Determinar la respuesta temporal estacionaria y compararla gráficamente con la carga.- Estudiar los puntos singulares del máximo y los HPP (half power point).- Calcular el gráfico de DMFmax en función de ζ.
- Determinar los valores de r1, r2, etc.
- Calcular el valor ζcálculo, Δf y Q, factor de calidad.
- Comprobar como evolucionan los valores aproximados cuando sube el ζ.- Incorporar cualquier cuestión que se considere interesante sobre el tema.
NOTA: Podemos variar con los sliders los valores de ωex y Q0.
26/08/2010 - 19:31 1/7

Copyright (c) 2010 Luis Alfredo Suárez Vivar Agudeza_en_Resonancia_R_01_01.xmcd
Desarrollo tutorado
Parámetros que definen el sistema
Masa equivalente del sistema: me 150 kg me 150 kg
Rigidez translacional del sistema: ke 60000N
m ke 60000
1
mN
Vamos a estudiar un sistema SUBAMORTIGUADO
Ratio de amortiguamiento: ζe 0.150 ζe 0.15 ζe 15.00 %
Parámetros calculados del sistema
Frecuencia natural del sistema: ωn
ke
me
ωn 20rad
s
fn
ωn
2π fn 3.183 Hz
Periodo natural del sistema: Tn1
fn Tn 0.314 s
Frecuencias amortiguada del sistema: ωd ωn 1 ζe2
ωd 19.774
rad
s
fd
ωd
2π fd 3.147 Hz
Periodo amortiguado del sistema:Td
1
fd Td 0.318 s
Amortiguamiento crítico del sistema: Cc 2 me ωn Cc 6000N s
m
Constante de amortiguamiento del sistema: ce Cc ζe ce 900N s
m
26/08/2010 - 19:31 2/7
Copyright (c) 2010 Luis Alfredo Suárez Vivar Agudeza_en_Resonancia_R_01_01.xmcd
Carga de ensayo
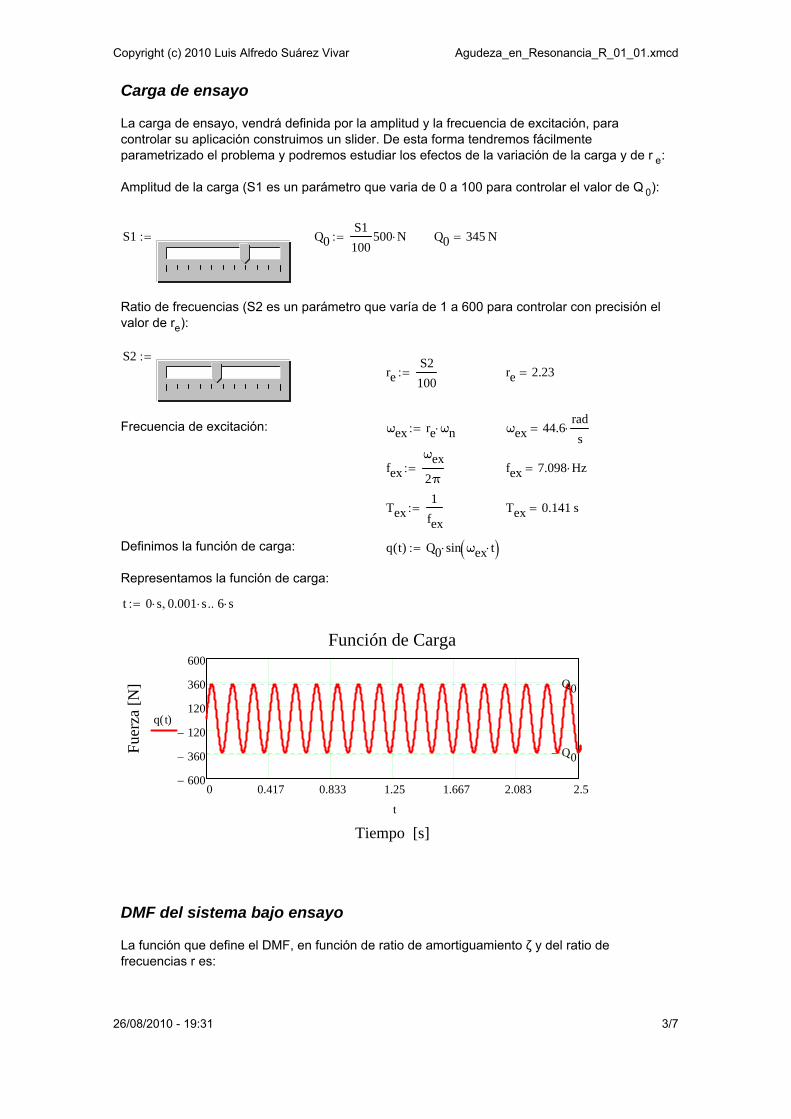
La carga de ensayo, vendrá definida por la amplitud y la frecuencia de excitación, paracontrolar su aplicación construimos un slider. De esta forma tendremos fácilmenteparametrizado el problema y podremos estudiar los efectos de la variación de la carga y de r e:
Amplitud de la carga (S1 es un parámetro que varia de 0 a 100 para controlar el valor de Q 0):
S1 Q0S1
100500 N Q0 345 N
Ratio de frecuencias (S2 es un parámetro que varía de 1 a 600 para controlar con precisión elvalor de re):
S2 re
S2
100 re 2.23
Frecuencia de excitación: ωex re ωn ωex 44.6rad
s
fex
ωex
2π fex 7.098 Hz
Tex1
fex Tex 0.141 s
Definimos la función de carga: q t( ) Q0 sin ωex t
Representamos la función de carga:
t 0 s 0.001 s 6 s
0 0.417 0.833 1.25 1.667 2.083 2.5600
360
120
120
360
600
Función de Carga
Tiempo [s]
Fue
rza
[N]
Q0
Q0
q t( )
t
DMF del sistema bajo ensayo
La función que define el DMF, en función de ratio de amortiguamiento ζ y del ratio defrecuencias r es:
26/08/2010 - 19:31 3/7

Copyright (c) 2010 Luis Alfredo Suárez Vivar Agudeza_en_Resonancia_R_01_01.xmcd
0 1 2 3 4 5 6 7 8 9 10
0
2
4
Fase de la respuesta relativa a la carga
Frecuencia de Excitación [Hz]
Fas
e [r
ad] π
π
2ψ ζe f
fn fex
f
DMF ζe f 1
1f
fn
2
2
2ζef
fn
2
El valor de la frecuencia de excitación viene dado por: fex 7.098 Hz rex
fex
fn rex 2.23
El valor del DMF para fex y ζ: DMFe DMF ζe fex DMFe 0.24821
ζe 15 %
0 1 2 3 4 5 6 7 8 9 101
0
1
2
3
4
Gráfico del DMF, para un amortiguamiento dado
Frecuencia de Excitación [Hz]
DM
F [
Ad]
1
DMFe
DMF ζe f
fex
f
fn 3.183 Hz fex 7.098 Hz
Fase de la respuesta del sistema
Determinamos la fase del sistema como:
ψ ζ f( ) atan2 1f
fn
2
2 ζef
fn
ψe ψ ζe fex ψe 2.975 rad
ζe 15 %
fn 3.183 Hz fex 7.098 Hz
Respuesta temporal del sistema en desplazamiento
El desplazamiento estático equivalente, el desplazamiento que tendría la estructura siaplicásemos la carga Q0 estáticamente viene dado por:
26/08/2010 - 19:31 4/7

Copyright (c) 2010 Luis Alfredo Suárez Vivar Agudeza_en_Resonancia_R_01_01.xmcd
X0
Q0
ke X0 0.00575 m
A partir de este valor la amplitud de la respuesta estacionaria vendrá dada por:
Valor del DMF: DMFe 0.24821
Xf X0 DMFe Xf 0.00143 m
Respuesta estacionaria:
xes t( ) X0 DMFe sin ωex t ψe
0 0.117 0.235 0.352 0.47 0.587 0.704414
207
0
207
414
2 103
1 103
0
1 103
2 103
Carga y Respuesta estacionaria
Tiempo [s]
Des
plaz
amie
nto
[m]
Q0
Q0
q t( )
Xf
Xf
xes t( )
Tex
t
Puntos singulares del DMF
Frecuencia exacta de resonancia:
rmax 1 2ζe2
ωres rmax ωn ωres 19.545rad
s
fres
ωres
2π fres 3.111 Hz
Frecuencia aproximada de resonancia calculada con r = 1:
rmax_aprox 1 ωres_aprox rmax_aprox ωn ωres_aprox 20rad
s
fres_aprox
ωres_aprox
2π fres_aprox 3.183 Hz
Marcado de los puntos de máxima potencia (res) y de mitad de potencia (half power point)
26/08/2010 - 19:31 5/7
Copyright (c) 2010 Luis Alfredo Suárez Vivar Agudeza_en_Resonancia_R_01_01.xmcd
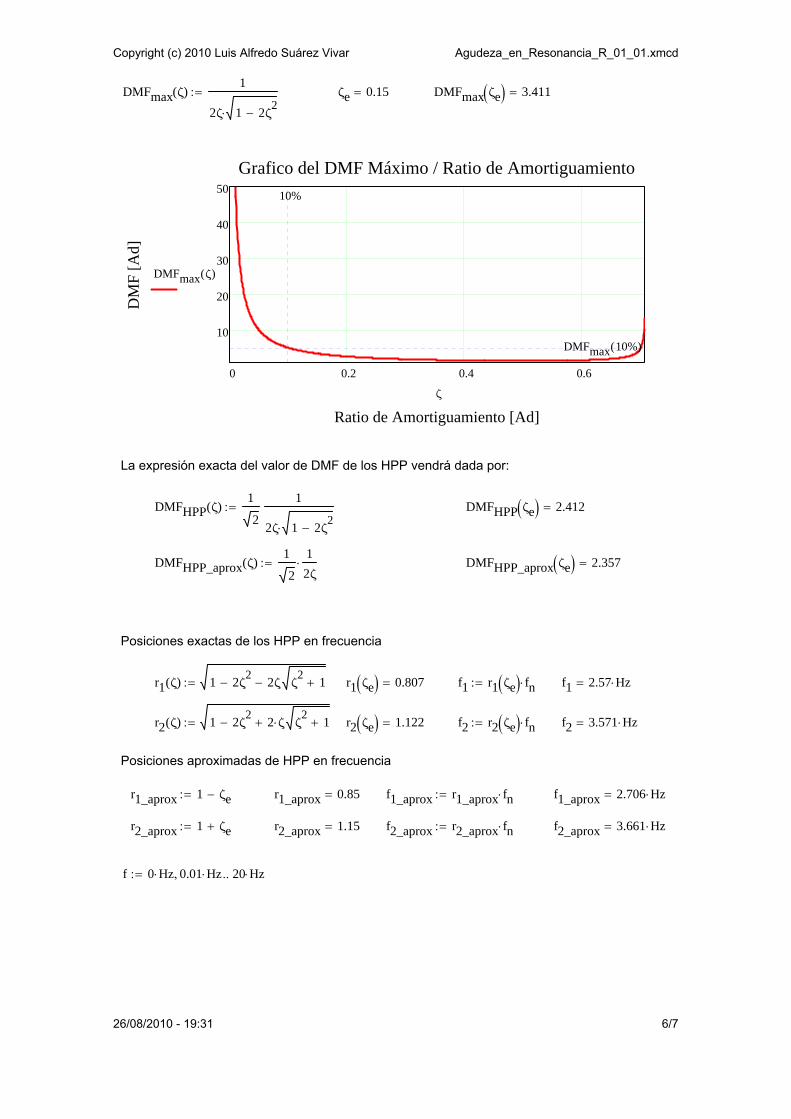
DMFmax ζ( )1
2ζ 1 2ζ2
ζe 0.15 DMFmax ζe 3.411
0 0.2 0.4 0.6
10
20
30
40
50
Grafico del DMF Máximo / Ratio de Amortiguamiento
Ratio de Amortiguamiento [Ad]
DM
F [
Ad]
DMFmax 10%( )
DMFmax ζ( )
10%
ζ
La expresión exacta del valor de DMF de los HPP vendrá dada por:
DMFHPP ζ( )1
2
1
2ζ 1 2ζ2
DMFHPP ζe 2.412
DMFHPP_aprox ζ( )1
2
1
2ζ DMFHPP_aprox ζe 2.357
Posiciones exactas de los HPP en frecuencia
r1 ζ( ) 1 2ζ2
2ζ ζ2
1 r1 ζe 0.807 f1 r1 ζe fn f1 2.57 Hz
r2 ζ( ) 1 2ζ2
2 ζ ζ2
1 r2 ζe 1.122 f2 r2 ζe fn f2 3.571 Hz
Posiciones aproximadas de HPP en frecuencia
r1_aprox 1 ζe r1_aprox 0.85 f1_aprox r1_aprox fn f1_aprox 2.706 Hz
r2_aprox 1 ζe r2_aprox 1.15 f2_aprox r2_aprox fn f2_aprox 3.661 Hz
f 0 Hz 0.01 Hz 20 Hz
26/08/2010 - 19:31 6/7

Copyright (c) 2010 Luis Alfredo Suárez Vivar Agudeza_en_Resonancia_R_01_01.xmcd
0 1 2 3 4 5 6 7 8 9 101
0.286
0.429
1.143
1.857
2.571
3.286
4
Gráfico del DMF, con los valores exáctos
Frecuencia de Excitación [Hz]
DM
F [
Ad]
DMFmax ζe
DMFHPP ζe DMF ζe f DMFmax ζe DMFmax ζe
f1 f2
f fres fn
fres 3.111 Hz fn 3.183 Hz
ζe 15 %
f1 2.57 Hz f2 3.571 Hz
Vamos a determinar, con los valores de r1 y r2 aproximados el valor de ζ:
Ancho de banda de los HPP: Δfaprox f2_aprox f1_aprox Δfaprox 0.955 Hz
fres_aprox_2
f1_aprox f2_aprox
2 fres_aprox_2 3.183 Hz
ζcalculado
Δfaprox
2 fres_aprox_2 ζcalculado 0.150
Factor de Calidad Q: Q1
2ζcalculado Q 3.333
Bibliografía.
1. Tedesco JW. et al. Structural Dynamics, Theory and Applications. Addison WesleyLongman, Inc. 2725 Sand Hill Road. Menlo Park, California 94025. ISBN 0-673-98052-9.1999. Capítulo 5
2. Suárez LA. Apuntes de la Asignatura de Ampliación de Mecanica. Departamento deIngeniería Civil. Universidad de Burgos. 2010.
3. Mathcad User Guide, Release 15. Mathsoft. June 2010. Parametric TechnologyCorporation, 140 Kendrick Street, Needham, MA 02494 USA
26/08/2010 - 19:31 7/7

28 3. Estudio de la agudeza en resonancia
Capítulo 4
Cargas definidas por tramos
En esta práctica se utilizan las capacidades de programación de MATHCAD para ge-nerar cargas por tramos.
El entorno de programación de MATHCAD se fundamenta en la creación de fun-ciones. Estas funciones se construyen mediante la adición de lineas en las que se in-corporarán funciones típicas para el control del flujo como son las clausulas tipo for,while, if u otherwise.
Estas funciones permiten crear cargas, o cualquier otro ente, perfectamente parame-trizado. Estas cargas una vez definidas pueden ser operadas como cualquier otra pu-diendo derivarse, integrase, con las limitaciones de definición de éstas.
La programación de MATHCAD puede ser recursiva, es decir una función se pue-de llamar a sí misma, cuestión que es muy útil para la creación de trenes de impulsos.Este tipo de cargas es su uso como transitorios de excitación para los sistemas.
4.1. Objetivos para los contenidos1. Crear una función de carga por tramos.
2. Crear una función de carga por tramos parametrizada.
3. Crear una función de carga por tramos recursiva.
4. Crear trenes de impulsos de diversos tipos.
4.2. Objetivos instrumentales1. Añadir lineas a una función para crear un programa.
2. Usar la clausula if para crear cargas por tramos.
29

30 4. Cargas definidas por tramos
3. Usar la clausula otherwise para controlar valores no declarados especialmente.

Cargas_definidas_por_tramos_R_01_01.xmcd
TRABAJO FINAL DE MASTERMASTER INTER-UNIVERSITARIO EN VIBRACIONES Y ACÚSTICAUNIVERSIDAD DE VALLADOLID - UNIVERSIDAD DE LEÓNCARGAS DEFINIDAS POR TRAMOSCopyright (c) 2010 LUIS ALFREDO SUAREZ VIVAR - [email protected]
Objetivos de la práctica
Esta práctica describe los procedimientos para crear en Mathcad funciones definidas portramos. Estas funciones permiten la definición de transitorios, pulsos, trenes de pulsos yfunciones periódicas.
Funciones a definir:
1. Carga temporal trapezoidal.2. Carga trapezoidal temporal usando parámetros.3. Pulso rectangular, parametrizado.5. Seno rectificado.6. Tres pulsos rectangulares.7. Tren de pulsos en diente de sierra.
03/09/2010 - 20:03 1/8

Copyright (c) 2010 Luis Alfredo Suárez Vivar Cargas_definidas_por_tramos_R_01_01.xmcd
Desarrollo tutorado
Funciones básicas definidas por tramos
1. Carga trapezoidal temporal
Ftrap1 t( )200N
20 st
0 s t 20 sif
200 N( ) 20 s t 60 sif
200N200N
20 st 60 s( )
60s t 80 sif
0 otherwise
20 0 20 40 60 80 100 120
0
100
200
300
Función de Carga Trapezoidal
Tiempo [s]
Car
ga [
N]
0 N
200 N
Ftrap1 t( )
20 s 60 s
t
03/09/2010 - 20:03 2/8

Copyright (c) 2010 Luis Alfredo Suárez Vivar Cargas_definidas_por_tramos_R_01_01.xmcd
20 0 20 40 60 80 100 120
0
100
200
300
Función de Carga Trapezoidal
Tiempo [s]
Car
ga [
N]
0 N
F0
Ftrap2 t( )
ts tb
t
2. Carga trapezoidal temporal usando parámetros
Definimos como parámetros de la función:
Carga máxima: F0 200 N
ΔT1 30 s ΔT2 40 s ΔT3 40 sIntervalos de carga:
Tiempo de inicio: ti 0 s
Tiempo de subida: ts ti ΔT1
Tiempo de bajada: tb ti ΔT1 ΔT2
Tiempo final: tf tb ΔT3
Función de carga:
Ftrap2 t( )F0
ΔT1t
0 s t tsif
F0 ts t tbif
F0
F0
ΔT3t tb
tb t tfif
0 otherwise
F0 200.0 N
ΔT1 30.0 s ΔT2 40.0 s ΔT3 40.0 s
03/09/2010 - 20:03 3/8
Copyright (c) 2010 Luis Alfredo Suárez Vivar Cargas_definidas_por_tramos_R_01_01.xmcd
10 0 10 20 30
0
200
400
Carga en función del tiempo
Tiempo [s]
Car
ga [
N]
0 N
P0
Fpulso t( )
ti tf
t
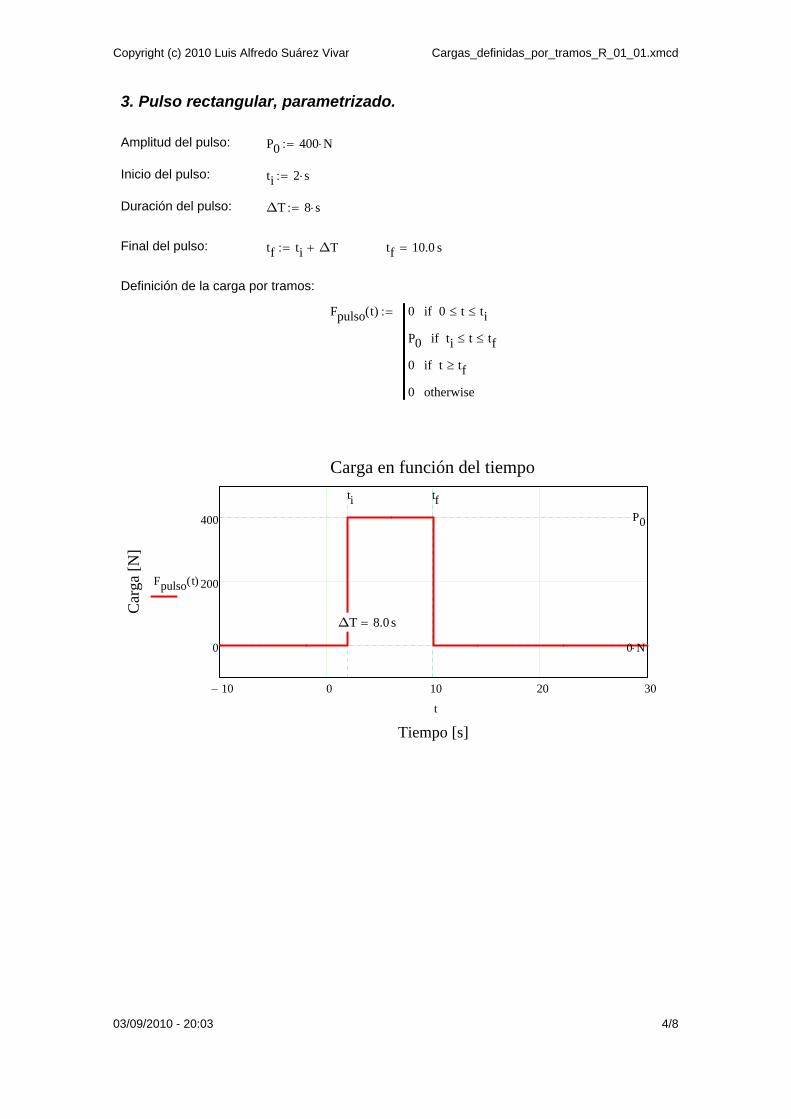
3. Pulso rectangular, parametrizado.
Amplitud del pulso: P0 400 N
Inicio del pulso: ti 2 s
Duración del pulso: ΔT 8 s
Final del pulso: tf ti ΔT tf 10.0 s
Definición de la carga por tramos:
Fpulso t( ) 0 0 t tiif
P0 ti t tfif
0 t tfif
0 otherwise
ΔT 8.0 s
03/09/2010 - 20:03 4/8

Copyright (c) 2010 Luis Alfredo Suárez Vivar Cargas_definidas_por_tramos_R_01_01.xmcd
Funciones recursivas.
Son funciones que se llaman así mismas en su definición. Son muy útiles para definir trenesde pulsos o bien funciones periódicas.
4. Diente de sierra parabólico
Generar una función periódica de tipo parabólico, continua, y(t) = t^2, de periodo 5, conexistencia entre 0 e infinito.
ysierra_pa x( ) x2
0 x 5if
ysierra_pa x 5( ) x 5if
10 0 10 20 30 40
0
10
20
Función Periódica
Variable independiente
Var
iabl
e de
pend
ient
e
0
52
ysierra_pa x( )
5
x
La función está indefinida en valores menores de cero. Para concretar este valorinequívocamente podemos utilizar la cláusula otherwise.
ysierra_pa2 x( ) x2
0 x 5if
ysierra_pa2 x 5( ) x 5if
0 otherwise
10 5 0 5 10 15 20 25 30 35 40
0
10
20
Función Periódica
Variable independiente
Var
iabl
e de
pend
ient
e
0
52
ysierra_pa2 x( )
5
x
03/09/2010 - 20:03 5/8

Copyright (c) 2010 Luis Alfredo Suárez Vivar Cargas_definidas_por_tramos_R_01_01.xmcd
5. Seno rectificado.
Generar una señal de carga sinusoidal rectificada (todos los lóbulos positivos con periodo de1 s, amplitud de 3 N entre cero e infinito. ¿Qué cambios hay que realizar para tener valorceros garantizado en los t < 0 (negativos)?. Comprobar el valor para 1 s, 1.2 s y -1.2 s.
Periodo T 1 s Frecuencia f1
T f 1.0 Hz Amplitud F0 3 N
Frecuencia circular ω 2 π f ω 6.3rad
s
Fsin_ref1 t( ) F0 sin ω t( ) 0 tT
2if
Fsin_ref1 tT
2
tT
2if
0 2 4 6
0
2
4
Seno rectificado periódico
Tiempo [s]
Car
ga [
N]
0 N
F0
Fsin_ref1 t( )
T
2
0 s
t
Fsin_ref1 1s( ) 0.0 N Fsin_ref1 1.2 s( ) 2.9 N Fsin_ref1 1.2 s( ) Fsin_ref1 1.2 s( ) NO SE EVALUA
Fsin_ref2 t( ) F0 sin ω t( ) 0 tT
2if
Fsin_ref2 tT
2
tT
2if
0 otherwise
0 2 4 6
0
2
4
Seno rectificado periódico
Tiempo [s]
Car
ga [
N]
0 N
F0
Fsin_ref2 t( )
T
2
0 s
t
Fsin_ref2 1s( ) 0.0 N Fsin_ref2 1.2 s( ) 2.9 N Fsin_ref2 1.2 s( ) 0.0 N SI SE EVALUA
03/09/2010 - 20:03 6/8
Copyright (c) 2010 Luis Alfredo Suárez Vivar Cargas_definidas_por_tramos_R_01_01.xmcd
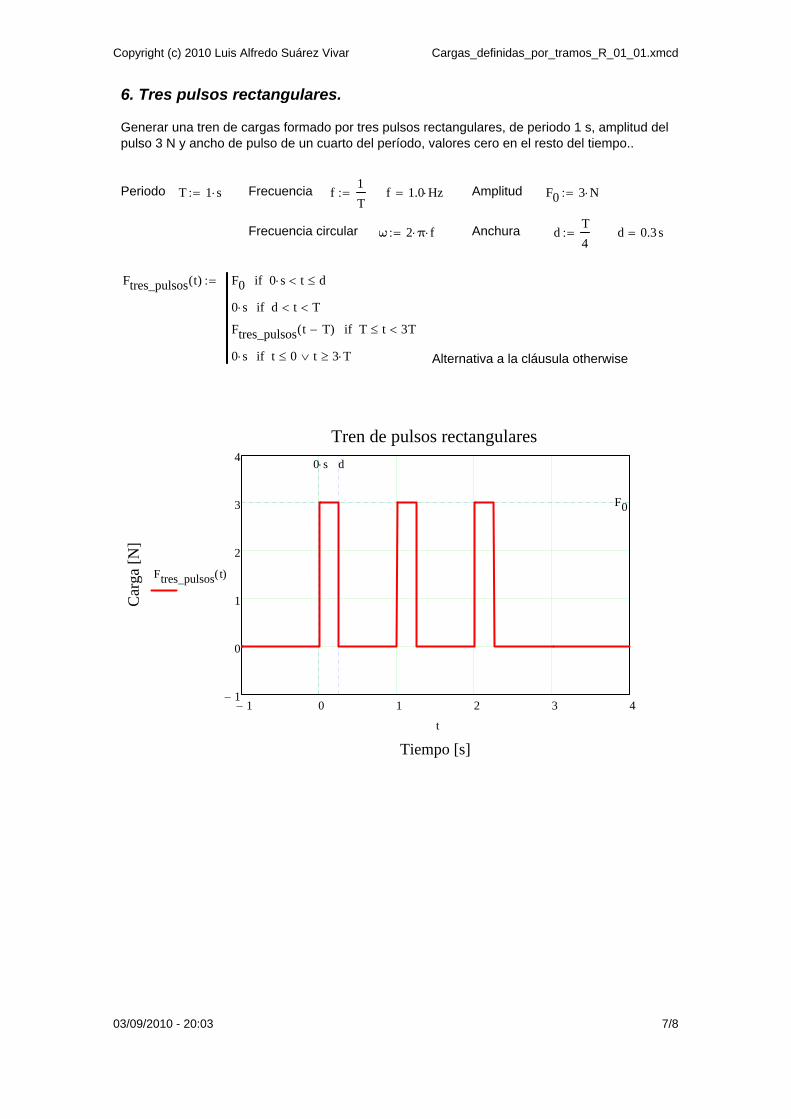
6. Tres pulsos rectangulares.
Generar una tren de cargas formado por tres pulsos rectangulares, de periodo 1 s, amplitud delpulso 3 N y ancho de pulso de un cuarto del período, valores cero en el resto del tiempo..
Periodo T 1 s Frecuencia f1
T f 1.0 Hz Amplitud F0 3 N
Frecuencia circular ω 2 π f Anchura dT
4 d 0.3 s
Ftres_pulsos t( ) F0 0 s t dif
0 s d t Tif
Ftres_pulsos t T( ) T t 3Tif
0 s t 0 t 3 Tif
Alternativa a la cláusula otherwise
1 0 1 2 3 41
0
1
2
3
4
Tren de pulsos rectangulares
Tiempo [s]
Car
ga [
N]
F0
Ftres_pulsos t( )
0 s d
t
03/09/2010 - 20:03 7/8

Copyright (c) 2010 Luis Alfredo Suárez Vivar Cargas_definidas_por_tramos_R_01_01.xmcd
7. Diente de sierra.
Generar una seña de carga en diente de sierra con Amplitud de 3 N, Periodo 2 s y cero en elresto del tiempo.
Periodo T 2 s Frecuencia f1
T f 0.5
1
s Amplitud F0 3 N
Frecuencia circular ω 2 π f
Fsierra_tri t( ) F0 t 0 t Tif
Fsierra_tri t T( ) T t 6Tif
0 otherwise
4 2 0 2 4 6 8 10 12 14 16
0
2
4
6
Tren pulsos en diente de sierra
Tiempo [s]
Car
ga [
N]
0 N
F0T
s
Fsierra_tri t( )
T0 s
t
Bibliografía.
1. Tedesco JW. et al. Structural Dynamics, Theory and Applications. Addison WesleyLongman, Inc. 2725 Sand Hill Road. Menlo Park, California 94025. ISBN 0-673-98052-9. 1999.
2. Suárez LA. Apuntes de la Asignatura de Ampliación de Mecanica. Departamento deIngeniería Civil. Universidad de Burgos. 2010.
3. Mathcad User Guide, Release 14. Mathsoft. February 2007. Parametric TechnologyCorporation, 140 Kendrick Street, Needham, MA 02494 USA
03/09/2010 - 20:03 8/8

Capítulo 5
Derivadas temporales de la FRIU
En esta práctica se introduce el uso del motor simbólico de MATHCAD como proce-dimiento para obtener las sucesivas derivadas de la Función de Respuesta al ImpulsoUnitario (FRIU) también conocida como h(t).
La función h(t) caracteriza al sistema textitLTI1 en el dominio del tiempo y depen-de de los parámetros básicos (masa, frecuencia natural y ratio de amortiguamiento).Convolucionando h(t) y la fuerza transitoria que excita un sistema podemos obtener larespuesta transitoria del mismo.
A las sucesivas derivadas de h(t), h′(t) y h′′(t) se las denomina Dh(t) y DDh(t).Estas funciones nos servirán para calcular las respuestas del sistema convolucionán-dolas con la fuerza de excitación del sistema y obteniendo respectivamente respuestasen términos de la primera derivada del grado de libertad (velocidad) y la segunda deri-vada del grado de libertad (aceleración).
5.1. Objetivos para los contenidos1. Obtener la expresión de h′(t).
2. Obtener fa expresión de h′′(t).
3. Graficar para comparar h(t), h′(t) y h′′(t).
5.2. Objetivos instrumentales1. Utilizar el entorno simbólico.
2. Asignar un respuesta simbólica a una función MATHCAD.
3. Realizar derivadas simbólicas.1LTI: Lineal e Invariante con el Tiempo
39

40 5. Derivadas temporales de la FRIU
4. Utilizar modificadores simbólicos.
Derivadas_Simbolicas_FRIU_R_01_01.xmcd
TRABAJO FINAL DE MASTERMASTER INTER-UNIVERSITARIO EN VIBRACIONES Y ACÚSTICAUNIVERSIDAD DE VALLADOLID - UNIVERSIDAD DE LEÓNESTUDIO DE LA FUNCIÓN DE RESPUESTA AL IMPULSO UNITARIO: FRIUCopyright (c) 2010 LUIS ALFREDO SUAREZ VIVAR - [email protected]
Objetivos de la práctica
Los objetivos didácticos de la práctica son consolidar los conocimientos relativos a la definición de la Función de Respuesta al Impulso Unitario(FRIU) que caracteriza al sistema en el dominio del tiempo. Posteriormente servirá para calcular la respuesta a un transitorio arbitrario mediante laintegra de Duhamel.
Sistema me 20 kgMasa de sistema:
Frecuencia circular natural del sistema: ωn 5rads
Ratio de amortiguamiento viscoso: ζe 15%
Cuestiones a estudiar- Determinar el resto de parámetros que definen el sistema: frecuencia natural en Hz, frecuencias amortiguadas, periodos, rigidez del sistema yconstante de amortiguamiento del sistema.
- Determinar la Función de Respuesta al Impulso Unitario (FRI o FRIU) h(t), del sistema.
- Gráfica la FRIU.
- Obtener mediante el motor simbólico las sucesivas derivadas de la FRIU: Dh(t) y DDh(t).
- Comprobar su aspecto gráficamente.
31/08/2010 - 20:04 1/6

Copyright (c) 2010 Luis Alfredo Suárez Vivar Derivadas_Simbolicas_FRIU_R_01_01.xmcd
Desarrollo tutorado
Cálculo simbólico de las sucesivas derivadas de las FRIU
Función de Respuesta al Impulso Unitario (FRIU) del sistema. La función de respuesta al impulso unitario depende esencialmente de los parámetros delsistema:
Sistema meMasa de sistema:
Frecuencia circular natural del sistema: ωn
Ratio de amortiguamiento viscoso: ζe
Frecuencia amortiguada: ωd ωn ζe ωn 1 ζe2
NOTA: para ser más claros en el procedimiento de derivación simbólica, eliminaremos lasunidades de la formulación de la FRIU y sustituimos la expresión de la frecuenciaamortiguada.:
Definiremos la respuesta alimpulso unitario, como unafunción del tiempo y de losparámetros del sistema:
h t me ωn ζe 1
me ωn 1 ζe2
eζe ωn t
sin ωn 1 ζe2
t
31/08/2010 - 20:04 2/6
Copyright (c) 2010 Luis Alfredo Suárez Vivar Derivadas_Simbolicas_FRIU_R_01_01.xmcd
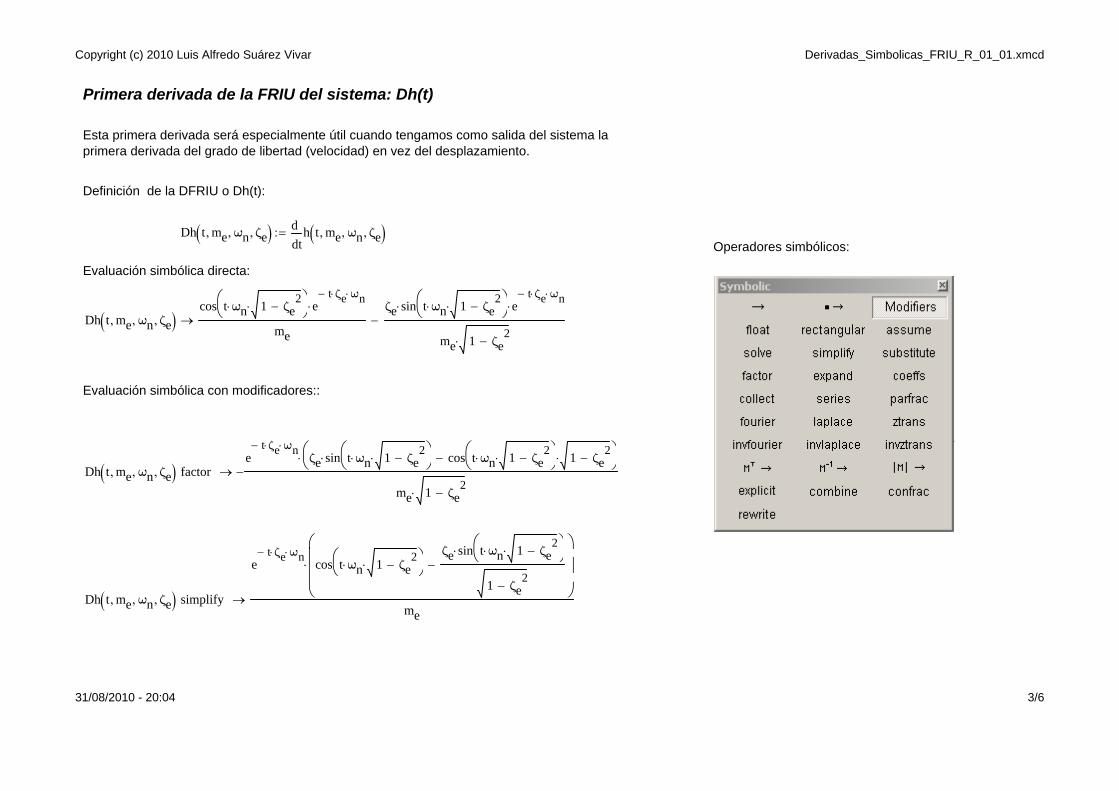
Primera derivada de la FRIU del sistema: Dh(t)
Esta primera derivada será especialmente útil cuando tengamos como salida del sistema laprimera derivada del grado de libertad (velocidad) en vez del desplazamiento.
Definición de la DFRIU o Dh(t):
Dh t me ωn ζe th t me ωn ζe d
d
Operadores simbólicos:
Evaluación simbólica directa:
Dh t me ωn ζe cos t ωn 1 ζe
2
e
t ζe ωn
me
ζe sin t ωn 1 ζe2
e
t ζe ωn
me 1 ζe2
Evaluación simbólica con modificadores::
Dh t me ωn ζe factore
t ζe ωnζe sin t ωn 1 ζe
2
cos t ωn 1 ζe
2
1 ζe
2
me 1 ζe2
Dh t me ωn ζe simplify
et ζe ωn
cos t ωn 1 ζe2
ζe sin t ωn 1 ζe2
1 ζe2
me
31/08/2010 - 20:04 3/6

Copyright (c) 2010 Luis Alfredo Suárez Vivar Derivadas_Simbolicas_FRIU_R_01_01.xmcd
Segunda derivada de la FRIU del sistema: DDh(t)
Esta segunda derivada será especialmente útil cuando tengamos como salida del sistema lasegunda derivada del grado de libertad (aceleración) en vez del desplazamiento.
Definición de la DDFRIU o DDh(t):
DDh t me ωn ζe 2th t me ωn ζe d
d
2
Evaluación simbólica directa:
DDh t me ωn ζe ζe
2ωn sin t ωn 1 ζe
2
e
t ζe ωn
me 1 ζe2
2 ζe ωn cos t ωn 1 ζe2
e
t ζe ωn
me
ωn sin t ωn 1 ζe2
e
t ζe ωn 1 ζe
2
me
Evaluación simbólica con modificadores::
DDh t me ωn ζe factore
t ζe ωnωn 2 ζe
2 sin t ωn 1 ζe
2
sin t ωn 1 ζe
2
2 ζe cos t ωn 1 ζe
2
1 ζe
2
me 1 ζe2
DDh t me ωn ζe simplifyωn e
t ζe ωn sin t ωn 1 ζe
2
2 ζe
2 sin t ωn 1 ζe
2
2 ζe cos t ωn 1 ζe
2
1 ζe
2
me 1 ζe2
31/08/2010 - 20:04 4/6

Copyright (c) 2010 Luis Alfredo Suárez Vivar Derivadas_Simbolicas_FRIU_R_01_01.xmcd
Gráficos comparativos de la FRIU y sus derivadas
Para estudiar el aspecto de las funciones obtenidas, usaremos el sistema definido en elenunciado de la práctica:
Masa de sistema: me 20 kg
Frecuencia circular natural del sistema: ωn 5rads
Ratio de amortiguamiento viscoso: ζe 15%
Definición y evaluación de la DFRIU o Dh(t):
0 2 4 6 8 100.3
0.2
0.1
0
0.1
0.2
Evaluación numérica de la FRIU y sus derivadas
h t me ωn ζe Dh t me ωn ζe DDh t me ωn ζe
t
31/08/2010 - 20:04 5/6
Copyright (c) 2010 Luis Alfredo Suárez Vivar Derivadas_Simbolicas_FRIU_R_01_01.xmcd
Bibliografía.
1. Tedesco JW. et al. Structural Dynamics, Theory and Applications. Addison Wesley Longman, Inc.2725 Sand Hill Road. Menlo Park, California 94025. ISBN 0-673-98052-9. 1999.
2. Rao, S.S. (2004), Mechanical vibrations, Pearson/Prentice Hall, Upper Saddle River, N.J.
3. Suárez LA. Apuntes de la Asignatura de Ampliación de Mecanica. Departamento de IngenieríaCivil. Universidad de Burgos. 2010.
4. Mathcad User Guide, Release 15. Mathsoft. June 2010. Parametric Technology Corporation, 140Kendrick Street, Needham, MA 02494 USA.
31/08/2010 - 20:04 6/6
Capítulo 6
Integral de Duhamel
En esta práctica se introduce el uso de la Integral de Duhamel o Integral de Convolu-ción como técnica básica para determinar la respuesta temporal de un sistema LTIa untransitorio en el dominio del tiempo.
Nos aprovechamos de la facilidad que proporciona MATHCAD para generar una in-tegral de convolución de de una manera similar a la que usamos para presentar elproblema teóricamente:
xP (t) =
∫ t
0
F (τ)h(t− τ)dτ → F (t) ∗ h(t) (6.1)
El ejemplo está tratado en el entorno de cálculo numérico de MATHCAD y obtene-mos representaciones gráficas numéricas tanto de h(t) como de F (t) y de las diversasrespuestas xP (t), xest, xCI(t) y del Overshot(t).
Resulta muy instructivo comprobar las diferencias entre la respuesta estática y la res-puesta dinámica, esta última genera desplazamientos negativos con cargas siemprepositivas y comprobando el overshot1 que aparece.
Esta práctica justifica la adición de armaduras negativas en los forjados por si apa-recen sobrecargas dinámicas (rápidas). Es una caso típico que se produece en las obrasal posar o levantar los gruistas un palet de carga en un forjado.
6.1. Objetivos para los contenidos1. Obtener la expresión numérica de h(t).
2. Incorporar unidades a la definición de h(t)
3. Plantear la integral de Duhamel.1Overshot: Pico que aparece en la respuesta como parte de respuesta dinámica del sistema LTI
47

48 6. Integral de Duhamel
4. Comprobar las diferencias entre un cálculo estático y uno dinámico.
5. Efecto de tener condiciones iniciales no nulas en un transitorio.
6.2. Objetivos instrumentales1. Definir una función por tramos en el entorno de programación.
2. Plantear una integral de convolución en MATHCAD.
3. Manipular funciones.
Integral_de_Duhamel_R_03_01.xmcd
10 0 10 20 30
0
200
400
Carga en función del tiempo
Tiempo [s]
Car
ga [
N]
0 N
P0
F t( )
ti tf
t
TRABAJO FINAL DE MASTERMASTER INTER-UNIVERSITARIO EN VIBRACIONES Y ACÚSTICAUNIVERSIDAD DE VALLADOLID - UNIVERSIDAD DE LEÓNRESPUESTA A UN TRANSITORIO MEDIANTE LA INTEGRAL DE DUHAMELCopyright (c) 2010 LUIS ALFREDO SUAREZ VIVAR - [email protected]
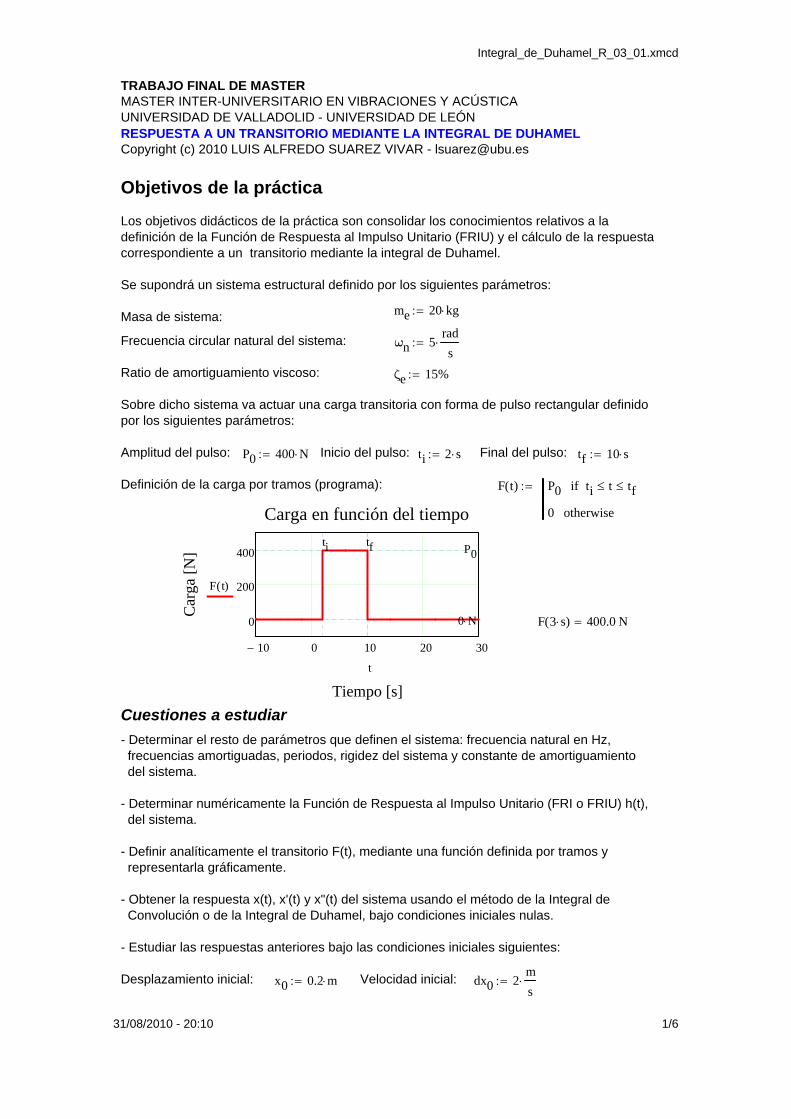
Objetivos de la práctica
Los objetivos didácticos de la práctica son consolidar los conocimientos relativos a ladefinición de la Función de Respuesta al Impulso Unitario (FRIU) y el cálculo de la respuestacorrespondiente a un transitorio mediante la integral de Duhamel.
Se supondrá un sistema estructural definido por los siguientes parámetros:
me 20 kgMasa de sistema:
Frecuencia circular natural del sistema: ωn 5rad
s
Ratio de amortiguamiento viscoso: ζe 15%
Sobre dicho sistema va actuar una carga transitoria con forma de pulso rectangular definidopor los siguientes parámetros:
Amplitud del pulso: P0 400 N Inicio del pulso: ti 2 s Final del pulso: tf 10 s
Definición de la carga por tramos (programa): F t( ) P0 ti t tfif
0 otherwise
F 3 s( ) 400.0 N
Cuestiones a estudiar
- Determinar el resto de parámetros que definen el sistema: frecuencia natural en Hz,frecuencias amortiguadas, periodos, rigidez del sistema y constante de amortiguamientodel sistema.
- Determinar numéricamente la Función de Respuesta al Impulso Unitario (FRI o FRIU) h(t),del sistema.
- Definir analíticamente el transitorio F(t), mediante una función definida por tramos yrepresentarla gráficamente.
- Obtener la respuesta x(t), x'(t) y x"(t) del sistema usando el método de la Integral deConvolución o de la Integral de Duhamel, bajo condiciones iniciales nulas.
- Estudiar las respuestas anteriores bajo las condiciones iniciales siguientes:
Desplazamiento inicial: x0 0.2 m Velocidad inicial: dx0 2m
s
31/08/2010 - 20:10 1/6

Copyright (c) 2010 Luis Alfredo Suárez Vivar Integral_de_Duhamel_R_03_01.xmcd
Desarrollo tutorado
Determinar el resto de parámetros que definen el sistema.
Los parámetros con los que nos han definido el sistema son:
Masa de sistema: me 20.0 kg
Frecuencia circular natural del sistema: ωn 5.01
srad
Ratio de amortiguamiento viscoso: ζe 0.2
Vamos a determinar los siguientes parámetros:
Frecuencia natural en Hz: fn
ωn
2π fn 0.8 Hz
Período amortiguado del sistema: Tn1
fn Tn 1.3 s
Frecuencia circular amortiguada del sistema: ωd ωn 1 ζe2
ωd 4.91
srad
Frecuencia amortiguada del sistema: fd
ωd
2π fd 0.8 Hz
Período amortiguado del sistema: Td1
fd Td 1.3 s
Rigidez del sistema: ke ωn2
me ke 500.01
mN
Amortiguamiento del sistema: ce 2 me ωn ζe ce 30.0s
mN
31/08/2010 - 20:10 2/6
Copyright (c) 2010 Luis Alfredo Suárez Vivar Integral_de_Duhamel_R_03_01.xmcd
10 0 10 20 30
0
200
400
Carga en función del tiempo
Tiempo [s]
Car
ga [
N]
0 N
P0
F t( )
ti tf
t
1 1.2 3.4 5.6 7.8 100.011
0.0066
0.0022
0.0022
0.0066
0.011
Función de Respuesta al Impulso Unitario
Tiempo en [s]
Des
plaz
amie
ntos
[m
]
1 N s
me ωde
ζe ωnTd
4
0
h t( )
1
met
1
me ωde
ζe ωn t
1
me ωde
ζe ωn t
0 s Td
t
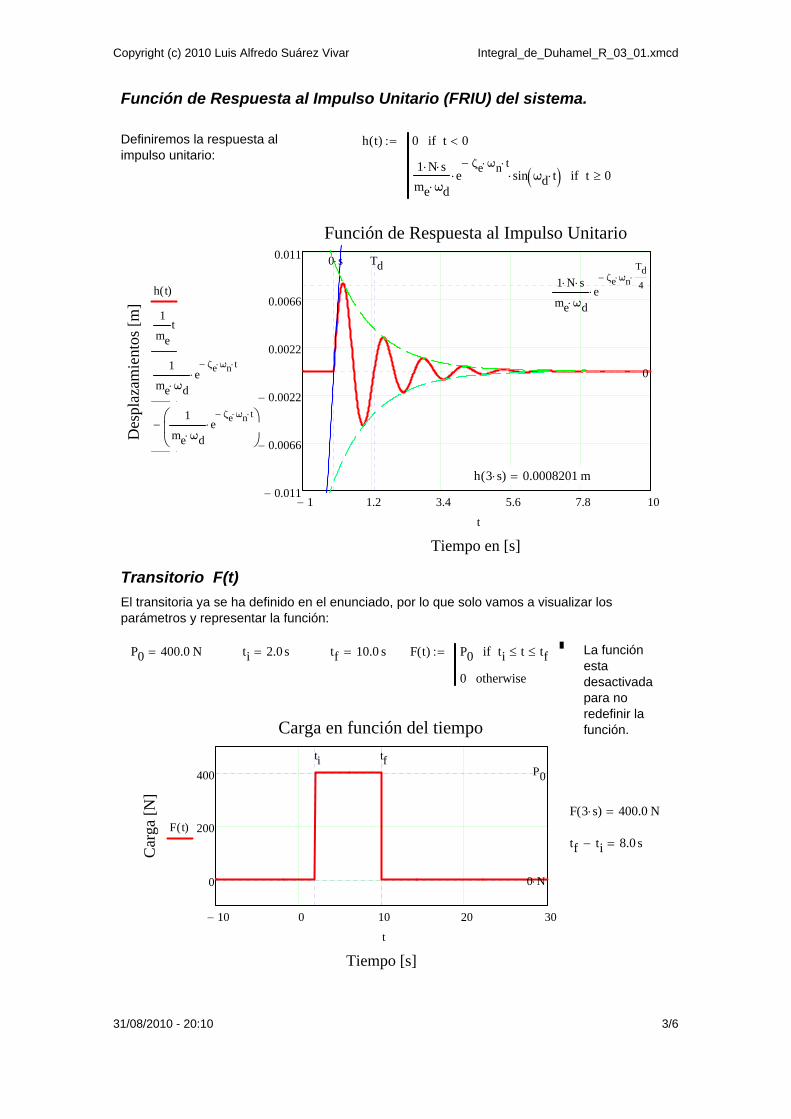
Función de Respuesta al Impulso Unitario (FRIU) del sistema.
Definiremos la respuesta alimpulso unitario:
h t( ) 0 t 0if
1 N s
me ωde
ζe ωn t sin ωd t t 0if
h 3 s( ) 0.0008201 m
Transitorio F(t)
El transitoria ya se ha definido en el enunciado, por lo que solo vamos a visualizar losparámetros y representar la función:
P0 400.0 N ti 2.0 s tf 10.0 s F t( ) P0 ti t tfif
0 otherwise
La funciónestadesactivadapara noredefinir lafunción.
F 3 s( ) 400.0 N
tf ti 8.0 s
31/08/2010 - 20:10 3/6

Copyright (c) 2010 Luis Alfredo Suárez Vivar Integral_de_Duhamel_R_03_01.xmcd
0 10 20 30200
0
200
400
600
0
1
Carga de la Estructura y Respuesta de la Estructura
Tiempo [s]
Car
ga [
N]
Des
plaz
amie
nto
[m]
0 s
P0
F t( )
0
P0
ke xP t( )
ti tf
t
Respuesta a la carga F(t): Integral de Duhamel
Para calcular la respuesta utilizamos la Integral de Duhamel, definida como la integra deconvolución:
xP t( )
0 s
t
τF τ( )
N sh t τ( )
dt 0 s 0.01 s 30 s
Overshot
Tn 1.3 s
xP 3 s( ) 0.7692708 m
tf ti 8.0 s
Podemos observar que pese a que aplicamos una carga en escalón la respuesta queaparece es oscilante y se estabiliza al amortiguarse. Cuando cesa la carga, el sistemavuelve a la cota cero pero oscilando hasta que la respuesta se estabiliza amortiguándose.
xest t( )P0
keti t tfif
0 otherwise
La respuesta estática vendría dada por:
0 10 20 30
0
1
Carga de la Estructura y Respuesta de la Estructura
Tiempo [s]
Car
ga [
N]
0 s
P0
kexP t( )
xest t( )
ti tf
t
xest 3 s( ) 0.8 m
31/08/2010 - 20:10 4/6

Copyright (c) 2010 Luis Alfredo Suárez Vivar Integral_de_Duhamel_R_03_01.xmcd
2 0 2 4 6 8 100.6
0.4
0.2
0
0.2
0.4
0.6
Respuesta a las condiciones iniciales
Carga [N]
Tie
mpo
[s]
0 s
x0xCI t( )
x0 dx0 t
x0
0 s Td
t t 0 s
Overshot
Overshot t( ) xP t( ) xest t( )
0 10 20 30
1
0
1
Overshot
Tiempo [s]
Car
ga [
N]
0 s
P0
ke
Overshot t( )
ti tf
t
Podemos comprobar el nivel de error que tenemos si no tenemos en cuenta la respuestadinámica y nos conformamos con la respuesta estática, más simple de determinar..
Respuesta del sistema con condiciones iniciales.
La respuesta del sistema sometido solo a condiciones iniciales vendrá dada por:
xCI t( ) eζe ωn t dx0 ζe ωn x0
ωdsin ωd t x0 cos ωd t
t 0 sif
0 s otherwise
Para las siguientes condiciones iniciales, tendremos que:
Desplazamiento inicial: x0 0.2 m Velocidad inicial: dx0 2.0m
s
t 10 s 9.99 s 30 s
xCI 3 s( ) 0.0217940 m
31/08/2010 - 20:10 5/6
Copyright (c) 2010 Luis Alfredo Suárez Vivar Integral_de_Duhamel_R_03_01.xmcd
0 10 20 30
0
500
0
1
Respuesta combinada a F(t) y CI
Tiempo [s]
Car
ga [
N]
Des
plaz
amie
nto
[m]
0
P0
F t( )
0
P0
kex t( )
ti tf
t
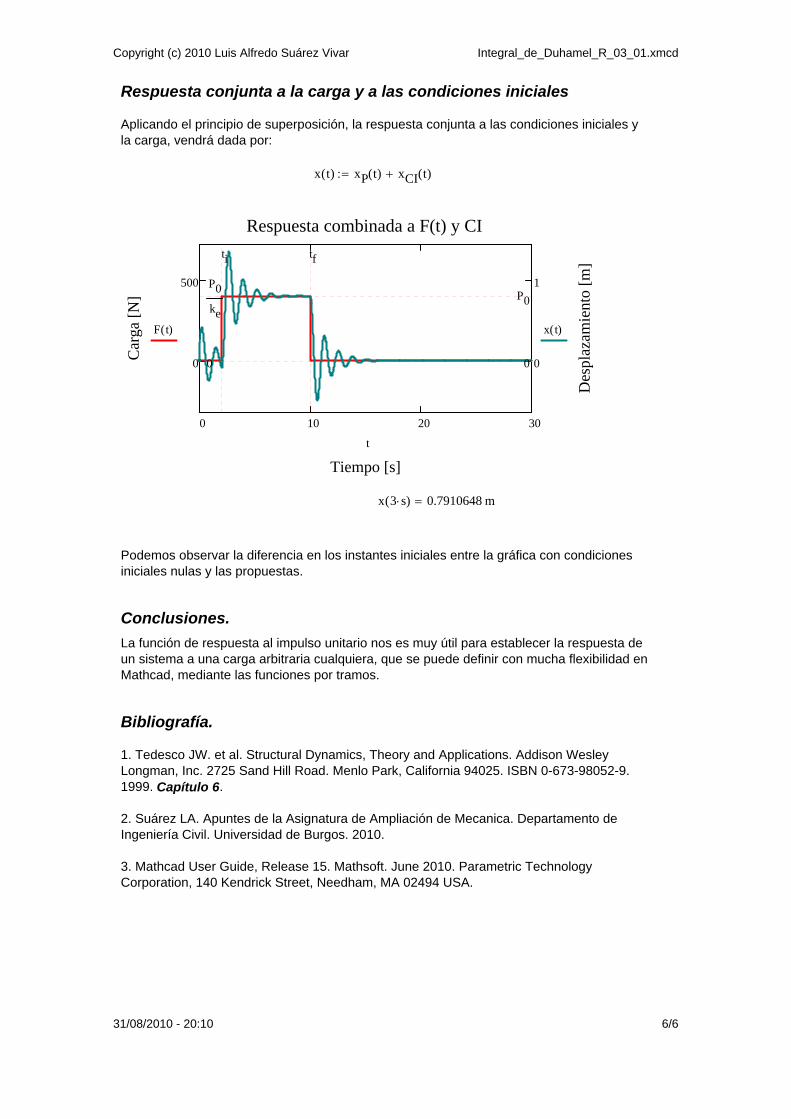
Respuesta conjunta a la carga y a las condiciones iniciales
Aplicando el principio de superposición, la respuesta conjunta a las condiciones iniciales yla carga, vendrá dada por:
x t( ) xP t( ) xCI t( )
x 3 s( ) 0.7910648 m
Podemos observar la diferencia en los instantes iniciales entre la gráfica con condicionesiniciales nulas y las propuestas.
Conclusiones.
La función de respuesta al impulso unitario nos es muy útil para establecer la respuesta deun sistema a una carga arbitraria cualquiera, que se puede definir con mucha flexibilidad enMathcad, mediante las funciones por tramos.
Bibliografía.
1. Tedesco JW. et al. Structural Dynamics, Theory and Applications. Addison WesleyLongman, Inc. 2725 Sand Hill Road. Menlo Park, California 94025. ISBN 0-673-98052-9.1999. Capítulo 6.
2. Suárez LA. Apuntes de la Asignatura de Ampliación de Mecanica. Departamento deIngeniería Civil. Universidad de Burgos. 2010.
3. Mathcad User Guide, Release 15. Mathsoft. June 2010. Parametric TechnologyCorporation, 140 Kendrick Street, Needham, MA 02494 USA.
31/08/2010 - 20:10 6/6

Capítulo 7
Máquinas rotativas: RDMF
En esta práctica se introduce el uso del RDMF o Factor de Amplificación DinámicoRotativo de uso típico en problemas de máquina rotativa basado en el DMF.
EL RDMF presenta una visión similar a la que proporciona el DMF en el dominiode la frecuencia para sistemas rotativos.
En la práctica se utilizan gráficos en formatos lineales, logarítmicos y doblemente loga-rítmicos para explorar su eficacia en la representación de las magnitudes en frecuencia.
Así mismo se el método básico para trabajar en dBref para expresar este tipo de mag-nitudes.
7.1. Objetivos para los contenidos1. Crear la expresión del RDMF (ζ, r).
2. Determinar la amplitud de la respuesta estacionaria
3. Comprobar las diferencias entre los escalados de ejes.
4. Presentar magnitudes en dB1.
7.2. Objetivos instrumentales1. Crear gráficos con ejes logarítmicos.
2. Crear gráficos con magnitudes en dB1.
55

RDMF_o_DMF_Rotativo_R_01_01.xmcd
TRABAJO FINAL DE MASTERMASTER INTER-UNIVERSITARIO EN VIBRACIONES Y ACÚSTICAUNIVERSIDAD DE VALLADOLID - UNIVERSIDAD DE LEÓNFACTOR DE AMPLIFICACIÓN DINAMICOP ROTATIVO (RDMF)Copyright (c) 2010 LUIS ALFREDO SUAREZ VIVAR - [email protected]
Objetivos de la práctica
El RDMF(ζ,r) o Factor de Amplificación Dinámica Rotativo, se define a partir del DMF(ζ,r)como:
r2DMF(ζ,r)En la práctica supondremos que:
- El ratio de amortiguamiento viene dado por ζ.- El ratio de frecuencia de giro (excitación) frecuencia natural viene dado por: r.- El ratio de masa rotante desequilibrada /masa total viene dado por rm.
- Suponemos que la masa total esta dada por la suma de la masa no rotante y lamasa rotante equilibrada.
Ratios: ζce
Cc= rm
mr
m= r
ωex
ωn=
Ω ωex=Frecuencia de excitación:
Respuesta estacionaria debida a una masa desequilibrada: xp t( ) Xf sin Ω t ψ( )=
Amplitud de la respuesta estacionaria:
Xf
mr
me
r2
1 r2
2 2ζ r( )2
= Xf
mr
me RDMF ζ r( )=
Definición del DMF(ζ,r): DMF ζ r( )1
1 r2
2 2ζ r( )2
=
Definición de RDMF(ζ,r): RDMF ζ r( ) r2
DMF ζ r( )= RDMF ζ r( )r2
1 r2
2 2ζ r( )2
=
Cuestiones a estudiar
Se va a estudiar en esta práctica el RDMF o factor de amplificación dinámica rotativo, endiferentes formatos de ejes.
- Ejes y-x lin-lin. - Ejes y-x log-lin. - Ejes y-x log-log. - Ejes y-x dB-log.
31/08/2010 - 21:22 1/5

Copyright (c) 2010 Luis Alfredo Suárez Vivar RDMF_o_DMF_Rotativo_R_01_01.xmcd
Desarrollo tutorado
RDMF(ζ,r), en gráficos y-x lineal/lineal.
Definición del DMF(ζ,r), que vendrá dado por:
DMF ζ r( )1
1 r2
2 2ζ r( )2
Definición del RDMF(ζ,r)
RDMF ζ r( ) r2
DMF ζ r( )
Puntos de cálculo para el gráfico:
r 0 0.01 20Gráfico lineal/lineal:
0 1.25 2.5 3.75 5 6.25 7.5 8.75 100
20
40
60
1 %10 %20 %50 %70 %
RDMF: Factor de Amplificación Dinámica Rotativo
Ratio de Frecuencias [Ad]
RD
MF
[A
d]
10
1
Como se puede observar el gráfico lineal/lineal de RDMF, es poco indicativo, al incluir gráficoscon el ratio de amortiguamiento relativamente bajos (1%) que elevan mucho el valor de RDMF.
31/08/2010 - 21:22 2/5
Copyright (c) 2010 Luis Alfredo Suárez Vivar RDMF_o_DMF_Rotativo_R_01_01.xmcd
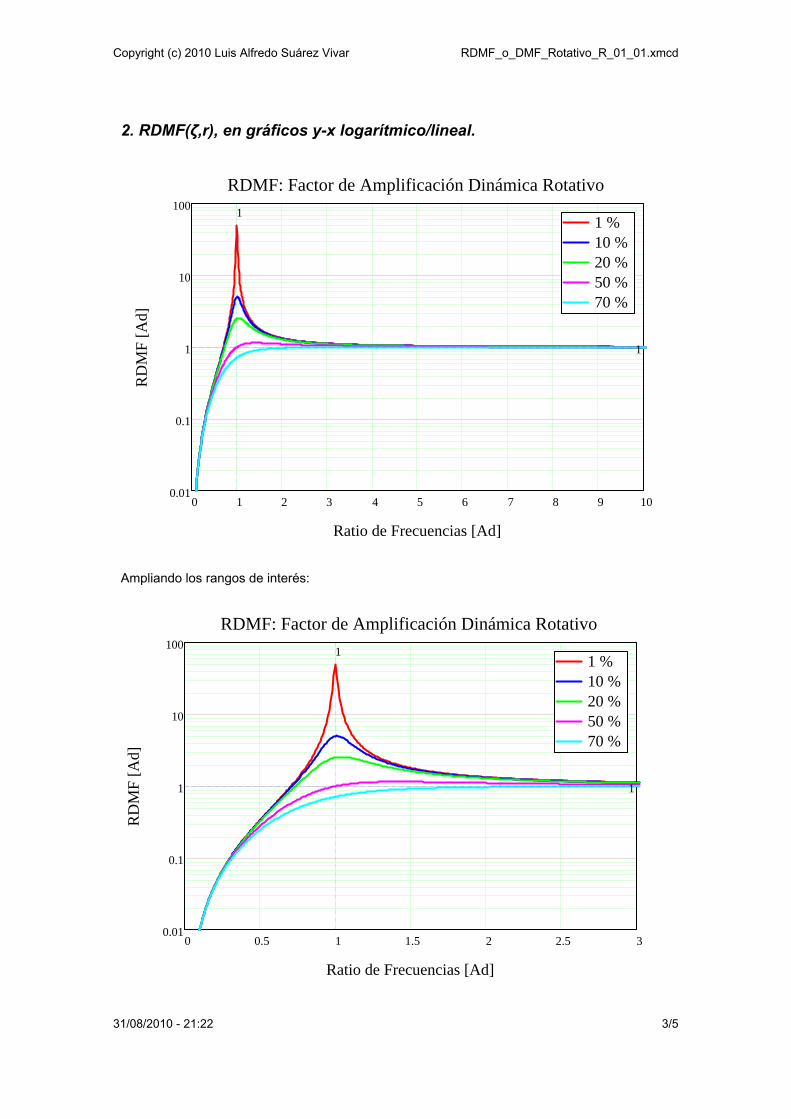
2. RDMF(ζ,r), en gráficos y-x logarítmico/lineal.
0 1 2 3 4 5 6 7 8 9 100.01
0.1
1
10
100
1 %10 %20 %50 %70 %
RDMF: Factor de Amplificación Dinámica Rotativo
Ratio de Frecuencias [Ad]
RD
MF
[A
d]
1
1
Ampliando los rangos de interés:
0 0.5 1 1.5 2 2.5 30.01
0.1
1
10
100
1 %10 %20 %50 %70 %
RDMF: Factor de Amplificación Dinámica Rotativo
Ratio de Frecuencias [Ad]
RD
MF
[A
d]
1
1
31/08/2010 - 21:22 3/5

Copyright (c) 2010 Luis Alfredo Suárez Vivar RDMF_o_DMF_Rotativo_R_01_01.xmcd
RDMF(ζ,r), en gráficos y-x logarítmico/logarítmico.
Como podemos observar se aplana una zona por delante de la resonancia y otra zona pordetrás de la resonancia, que podrían reformularse como proporcionales a la frecuencia eindependiente de la frecuencia respectivamente:
0.1 1 100.01
0.1
1
10
100
1 %10 %20 %50 %70 %
Factor de Amplificación Dinámica Rotativo
Ratio de Frecuencias [Ad]
RD
MF
[A
d]
1
1
Detalle de las zonas aproximadamente lineales por delante de la resonancia:
0.1 10.01
0.1
1
10
RDMF
Ratio de Frecuencias [Ad]
RD
MF
[A
d] 1
1 10 1000.01
0.1
1
10
RDMF
Ratio de Frecuencias [Ad]
RD
MF
[A
d] 1
31/08/2010 - 21:22 4/5

Copyright (c) 2010 Luis Alfredo Suárez Vivar RDMF_o_DMF_Rotativo_R_01_01.xmcd
0.1 1 1050
40
30
20
10
0
10
20
30
40
50
60
1 %10 %20 %50 %70 %
RDMF: Factor de Amplificación Dinámica Rotativo
Ratio de Frecuencias [Ad]
RD
MF
[dB
ref
1]
0
RDMFdB 1% 0.9( )
0.9
RDMF(ζ,r), en gráficos y-x dBref 1/logarítmico.
Definimos una nueva función RDMFdB(ζ,r) para estudiar el RDMF en dB:
RDMFdB ζ r( ) 20 log RDMF ζ r( )( )
Para poder añadir la "unidad" dB, definimos la unidad dB:=1: dB 1
RDMFdB 1% 0.9( ) 12.556 dB
Para ζ = 1% y para r = 0.9:
RDMFdB 1% 0.9( ) 12.556
Pudiendo expresar el resultado en dB, si hemos hecho previa miente su definición:
RDMFdB 1% 0.9( ) 12.556 dB
Bibliografía.
1. Tedesco JW. et al. Structural Dynamics, Theory and Applications. Addison WesleyLongman, Inc. 2725 Sand Hill Road. Menlo Park, California 94025. ISBN 0-673-98052-9.1999. Capítulo 5.
2. Suárez LA. Apuntes de la Asignatura de Ampliación de Mecanica. Departamento deIngeniería Civil. Universidad de Burgos. 2010.
3. Mathcad User Guide, Release 15. Mathsoft. June 2010. Parametric TechnologyCorporation, 140 Kendrick Street, Needham, MA 02494 USA
31/08/2010 - 21:22 5/5
Capítulo 8
TR, La función de Transmisibilidad
En esta práctica se introduce el uso de la función TR o Función de Transmisibilidad.Similar al DMF, la transmisibilidad TR es tanbien en el fondo una función complejaque arrastra siempre para cada valor de frecuencia un módulo y una fase.
En la práctica se trata a la función compleja TR como dos funciones reales aunqueMATHCAD tiene una buena capacidad de manejo de números y funciones complejos,tal y como se ve en las prácticas asociadas al estudio de las FRF1.
La función TR se usa intensivamente en el diseño de suspensiones ya que gobiernael nivel de vibraciones que transmite un equipo a través de la suspensión al terreno yel nivel de vibraciones que le llega a un equipo a través de la suspensión, siendo unaherramienta de diseño clave.
La función de TR presenta en su módulo un punto de cruce en el que se independi-za el valor de TR del ratio de amortiguamiento ζ que presente la suspensión.
Podemos comprobar que la TR presenta un desfase total β sobre la carga aplicadao movimiento de base que la genera y un desfase parcial γ respecto del movimiento dela masa.
Se pueden observar sobre la práctica las diferencias que presentan los gráficos en fun-ción del uso de escalas lineales, logarítmicas y doblemente logarítmicas.
La función de TR, también puede ser expresada en dB1, en general con referenciaa la unidad.
1FRF: Frecuency Response Function
61

62 8. TR, La función de Transmisibilidad
8.1. Objetivos para los contenidos1. Crear la expresión del TR(ζ, r) y de la β(ζ, r).
2. Obtener los gráficos de la TR en escalas lineales
3. Obtener los gráficos de la TR en escalas logarítmicas
4. Comprobar las diferencias entre los escalados de ejes.
5. Presentar magnitudes en dB1.
8.2. Objetivos instrumentales1. Crear gráficos con ejes logarítmicos.
2. Crear gráficos con múltiples funciones.
3. Crear gráficos con magnitudes en dB1.

Definimos como transmisibilidad al ratio entre el módulo de la fuerza aplicada sobre elsistema y el módulo de la fuerza que aparecerá sobre los apoyos (reacción).
Así mismo aparece un desfase entre la carga aplicada y la reacción sobre el apoyo:
TRABAJO FINAL DE MASTERMASTER INTER-UNIVERSITARIO EN VIBRACIONES Y ACÚSTICAUNIVERSIDAD DE VALLADOLID - UNIVERSIDAD DE LEÓNTRANSMISIBILIDAD: MAGNITUD TR(ζ,r) y FASE β(ζ,r)Copyright (c) 2010 LUIS ALFREDO SUAREZ VIVAR - [email protected]
Objetivos de la práctica
TR ζ r( ) 1 2ζ r( )2
DMF ζ r( )= TR ζ r( )1 2ζ r( )
2
1 r2
2 2ζ r( )2
=
γ ζ r( ) atan2 1 2ζ r( )= ψ ζ r( ) atan2 1 r2
2ζ r =
β ζ r( ) ψ ζ r( ) γ ζ r( )=
Cuestiones a desarrollar:
- Función de transmisibilidad: Módulo TR(ζ,r) y Fase β(ζ,r). - Transmisibilidad en escalas logarítmicas. - Estudio en detalle de la TR para valores grandes de r, en doble escala logarítmica. - Estudio en detalle de la función de TR, en dB. - Estudio del desfase carga aplicada/reacción en los apoyos.
01/09/2010 - 11:39 1/8

Copyright (c) 2010 Luis Alfredo Suárez Vivar Transmisibilidad_TR_R_02_01.xmcd
Desarrollo tutorado
Función de transmisibilidad: Módulo TR(ζ,r) y Fase β(ζ,r).
La transmisibilidad relaciona la relación entre el módulo de una carga aplicada y el módulo dela carga transmitida a los apoyos.
DMF ζ r( )1
1 r2
2 2ζ r( )2
TR ζ r( ) 1 2ζ r( )2
DMF ζ r( )
Podemos representar la función TR mediante un gráfico, para varios valores deamortiguamiento tendremos:
r 0 0.005 100
0 2.5 5 7.5 100
10
20
30
40
50
60
1 %
Módulo de la Transmisibilidad
Ratio de Frecuencias [Ad]
Tra
nsm
isib
ilid
ad [
Ad]
1
TR 1% r( )
1 2
r
ψ ζ r( ) atan2 1 r2
2ζ r γ ζ r( ) atan2 1 2ζ r( ) β ζ r( ) ψ ζ r( ) γ ζ r( )
0 2 4 6 8 101.571
0.503
0.565
1.634
2.702
3.77
Fase f(t)/x(t)Fase x(t)/R(t)Fase f(t)/R(t)
Fase de la Transmisibilidad
Ratio de Frecuencias [Ad]
Tra
nsm
isib
ilid
ad [
Ad] π
ψ 10% r( )
γ 10% r( )
β 10% r( )
1
r
01/09/2010 - 11:39 2/8

Copyright (c) 2010 Luis Alfredo Suárez Vivar Transmisibilidad_TR_R_02_01.xmcd
0 1.2 2.4 3.6 4.8 60
0.429
0.857
1.286
1.714
2.143
2.571
3
1 %20 %30 %40 %50 %60 %Punto de Cruce
Transmisibilidad en función del amortiguamiento
Ratio de Frecuencias [Ad]
Tra
nsm
isib
ilid
ad [
Ad]
1
0
1 2
Incorporando diferentes valores del ratio de amortiguamiento obtenemos:
rc 2
Transmisibilidad en escalas logarítmicas.
Los gráficos en escala lineal tienen poca visibilidad por lo que interesan lasrepresentaciones logarítmicas en ambos ejes.
0 0.5 1 1.5 2 2.510
0
10
20
30
40
50
60
1 %2 %5 %7 %10 %Punto de Cruce
Módulo de la Transmisibilidad
Ratio de Frecuencias [Ad]
Tra
nsm
isib
ilid
ad [
Ad]
10
1 2
01/09/2010 - 11:39 3/8
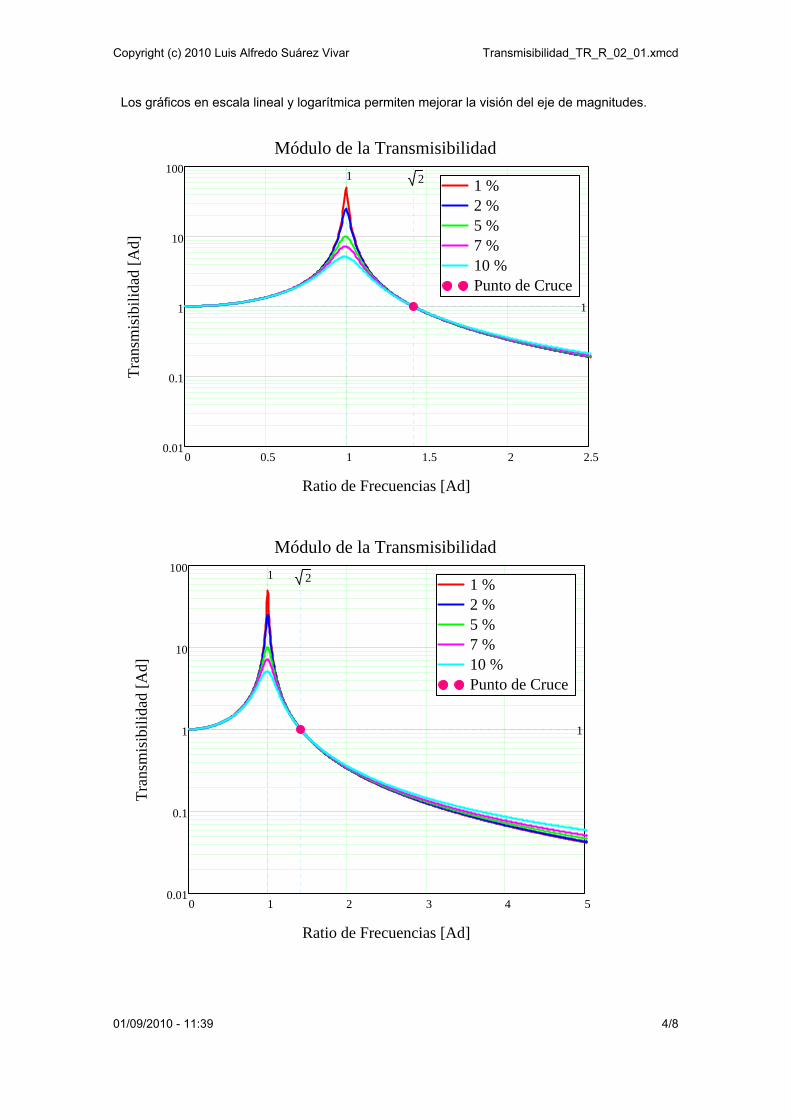
Copyright (c) 2010 Luis Alfredo Suárez Vivar Transmisibilidad_TR_R_02_01.xmcd
Los gráficos en escala lineal y logarítmica permiten mejorar la visión del eje de magnitudes.
0 0.5 1 1.5 2 2.50.01
0.1
1
10
100
1 %2 %5 %7 %10 %Punto de Cruce
Módulo de la Transmisibilidad
Ratio de Frecuencias [Ad]
Tra
nsm
isib
ilid
ad [
Ad]
1
1 2
0 1 2 3 4 50.01
0.1
1
10
100
1 %2 %5 %7 %10 %Punto de Cruce
Módulo de la Transmisibilidad
Ratio de Frecuencias [Ad]
Tra
nsm
isib
ilid
ad [
Ad]
1
1 2
01/09/2010 - 11:39 4/8

Copyright (c) 2010 Luis Alfredo Suárez Vivar Transmisibilidad_TR_R_02_01.xmcd
Los gráficos en doble escala logarítmica permiten mejorar la visión tanto del eje demagnitudes como del eje de frecuencias.
0.1 1 10 1000.001
0.01
0.1
1
10
100
1 %2 %5 %7 %10 %Punto de Cruce
Módulo de la Transmisibilidad
Ratio de Frecuencias [Ad]
Tra
nsm
isib
ilid
ad [
Ad]
1
1 2
01/09/2010 - 11:39 5/8
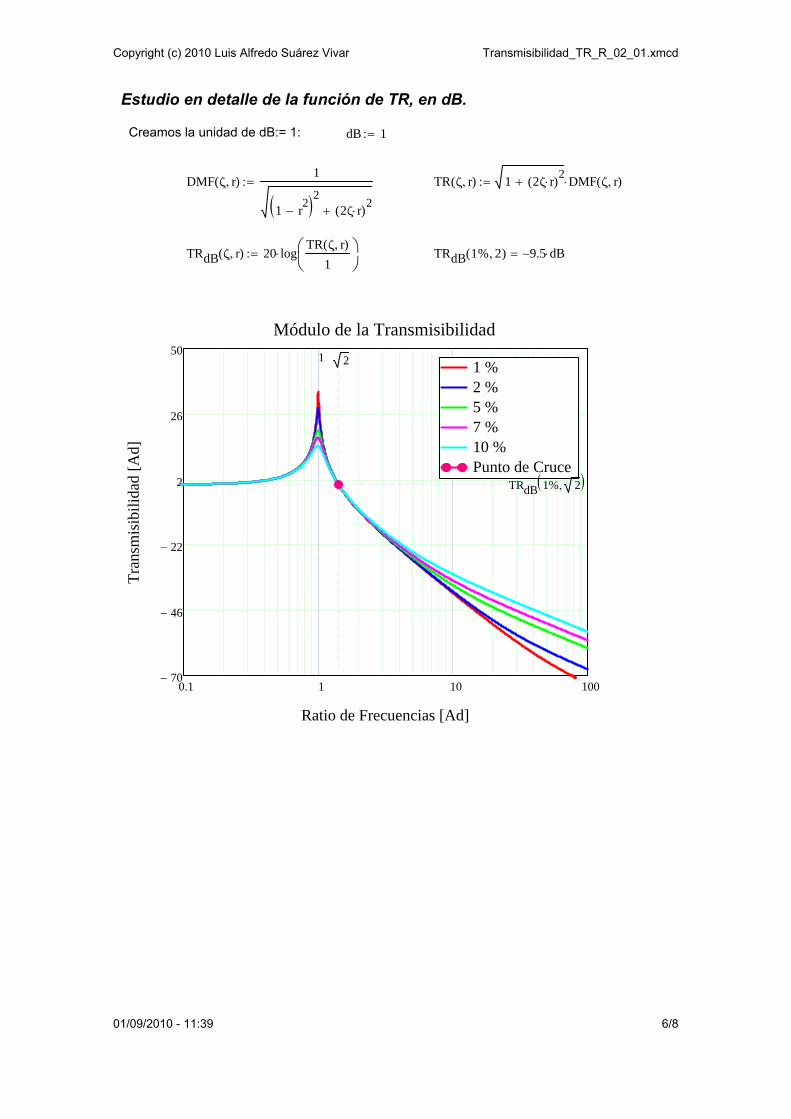
Copyright (c) 2010 Luis Alfredo Suárez Vivar Transmisibilidad_TR_R_02_01.xmcd
Estudio en detalle de la función de TR, en dB.
Creamos la unidad de dB:= 1: dB 1
DMF ζ r( )1
1 r2
2 2ζ r( )2
TR ζ r( ) 1 2ζ r( )2
DMF ζ r( )
TRdB ζ r( ) 20 logTR ζ r( )
1
TRdB 1% 2( ) 9.5 dB
0.1 1 10 10070
46
22
2
26
50
1 %2 %5 %7 %10 %Punto de Cruce
Módulo de la Transmisibilidad
Ratio de Frecuencias [Ad]
Tra
nsm
isib
ilid
ad [
Ad]
TRdB 1% 2
1 2
01/09/2010 - 11:39 6/8

Copyright (c) 2010 Luis Alfredo Suárez Vivar Transmisibilidad_TR_R_02_01.xmcd
Estudio del desfase carga aplicada/reacción en los apoyos.
En escala lineal de frecuencias tendremos:
0 2 4 6 8 101
0
1
2
3
4
1 %2 %3 %5 %7 %10 %20 %
Fase de la Transmisibilidad
Ratio de Frecuencias [Ad]
Fas
e de
la T
rans
mis
ibil
idad
[ra
d]
0
π
1
En la escala de frecuencias logarítmica, la fase tendrá este aspecto:
0.1 1 10 1001
0
1
2
3
4
1 %2 %3 %5 %7 %10 %20 %
Fase de la Transmisibilidad
Ratio de Frecuencias [Ad]
Fas
e de
la T
rans
mis
ibil
idad
[ra
d]
0
π
1
01/09/2010 - 11:39 7/8

Copyright (c) 2010 Luis Alfredo Suárez Vivar Transmisibilidad_TR_R_02_01.xmcd
Bibliografía.
1. Tedesco JW. et al. Structural Dynamics, Theory and Applications. Addison WesleyLongman, Inc. 2725 Sand Hill Road. Menlo Park, California 94025. ISBN 0-673-98052-9. 1999.Capítulo 5
2. Suárez LA. Apuntes de la Asignatura de Ampliación de Mecanica. Departamento deIngeniería Civil. Universidad de Burgos. 2010.
3. Mathcad User Guide, Release 15. Mathsoft. June 2010. Parametric TechnologyCorporation, 140 Kendrick Street, Needham, MA 02494 USA.
01/09/2010 - 11:39 8/8
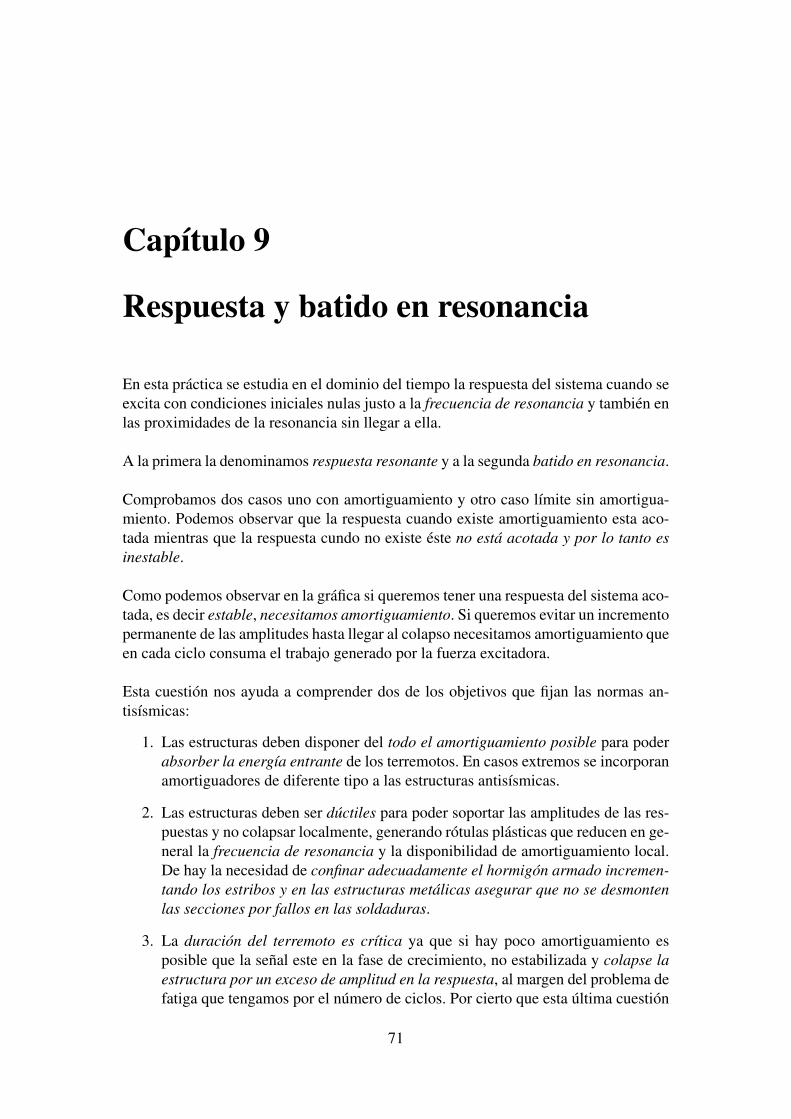
Capítulo 9
Respuesta y batido en resonancia
En esta práctica se estudia en el dominio del tiempo la respuesta del sistema cuando seexcita con condiciones iniciales nulas justo a la frecuencia de resonancia y también enlas proximidades de la resonancia sin llegar a ella.
A la primera la denominamos respuesta resonante y a la segunda batido en resonancia.
Comprobamos dos casos uno con amortiguamiento y otro caso límite sin amortigua-miento. Podemos observar que la respuesta cuando existe amortiguamiento esta aco-tada mientras que la respuesta cundo no existe éste no está acotada y por lo tanto esinestable.
Como podemos observar en la gráfica si queremos tener una respuesta del sistema aco-tada, es decir estable, necesitamos amortiguamiento. Si queremos evitar un incrementopermanente de las amplitudes hasta llegar al colapso necesitamos amortiguamiento queen cada ciclo consuma el trabajo generado por la fuerza excitadora.
Esta cuestión nos ayuda a comprender dos de los objetivos que fijan las normas an-tisísmicas:
1. Las estructuras deben disponer del todo el amortiguamiento posible para poderabsorber la energía entrante de los terremotos. En casos extremos se incorporanamortiguadores de diferente tipo a las estructuras antisísmicas.
2. Las estructuras deben ser dúctiles para poder soportar las amplitudes de las res-puestas y no colapsar localmente, generando rótulas plásticas que reducen en ge-neral la frecuencia de resonancia y la disponibilidad de amortiguamiento local.De hay la necesidad de confinar adecuadamente el hormigón armado incremen-tando los estribos y en las estructuras metálicas asegurar que no se desmontenlas secciones por fallos en las soldaduras.
3. La duración del terremoto es crítica ya que si hay poco amortiguamiento esposible que la señal este en la fase de crecimiento, no estabilizada y colapse laestructura por un exceso de amplitud en la respuesta, al margen del problema defatiga que tengamos por el número de ciclos. Por cierto que esta última cuestión
71

72 9. Respuesta y batido en resonancia
así como la no linealidad de la respuesta, no están contempladas en la actualNormativa Sismorresistente Española.
9.1. Objetivos para los contenidos1. Crear la expresión de la respuesta resonante general.
2. Crear la expresión de la respuesta resonante no amortiguada.
3. Obtener los gráficos con las envolventes de las respuestas
4. Crear la expresión de la respuesta en batido
5. Estudiar la respuesta en batido para diferentes condiciones.
9.2. Objetivos instrumentales1. Crear gráficos con envolventes.
2. Usar los showmarket en los gráficos.

Respuesta_en_Resonacia_R_01_01.xmcd
TRABAJO FINAL DE MASTERMASTER INTER-UNIVERSITARIO EN VIBRACIONES Y ACÚSTICAUNIVERSIDAD DE VALLADOLID - UNIVERSIDAD DE LEÓNRESPUESTA RESONANTE Y BATIDO EN LAS PROXIMIDADES DE LA RESONANCIACopyright (c) 2010 LUIS ALFREDO SUAREZ VIVAR - [email protected]
Objetivos de la práctica
Sobre un sistema de 1 GDL definido por los siguientes parámetros vamos a estudiar larespuesta en resonancia y la respuesta en las proximidades de la resonancia, sobre el queactúa una carga de excitación armónica:
Parámetros que definen el sistema
Masa equivalente del sistema: me 100 kg me 100 kg
Rigidez translacional del sistema: ke 40000N
m ke 40000
1
mN
Ratio de amortiguamiento: ζ 0.10 ζ 0.1 ζ 10.00 %
Por lo tanto vamos a estudiar un sistema SUBAMORTIGUADO
Parámetros que definen la carga
Amplitud de la carga: F0 4000 N F0 4000 N
Amplitud de la respuestaestática:
X0
F0
ke X0 0.1 m
Cuestiones a estudiar:
- Estudiar la representación gráfica de la respuesta en resonancia con amortiguamiento.- Estudiar la representación gráfica de la respuesta en resonancia con amortiguamiento. - Estudiar la respuesta estacionaria para una re = 0.90.
- Estudiar una situación de batido en resonancia para los valores de ε 10%, 5% y un 2%, dela frecuencia natural.
01/09/2010 - 12:43 1/6
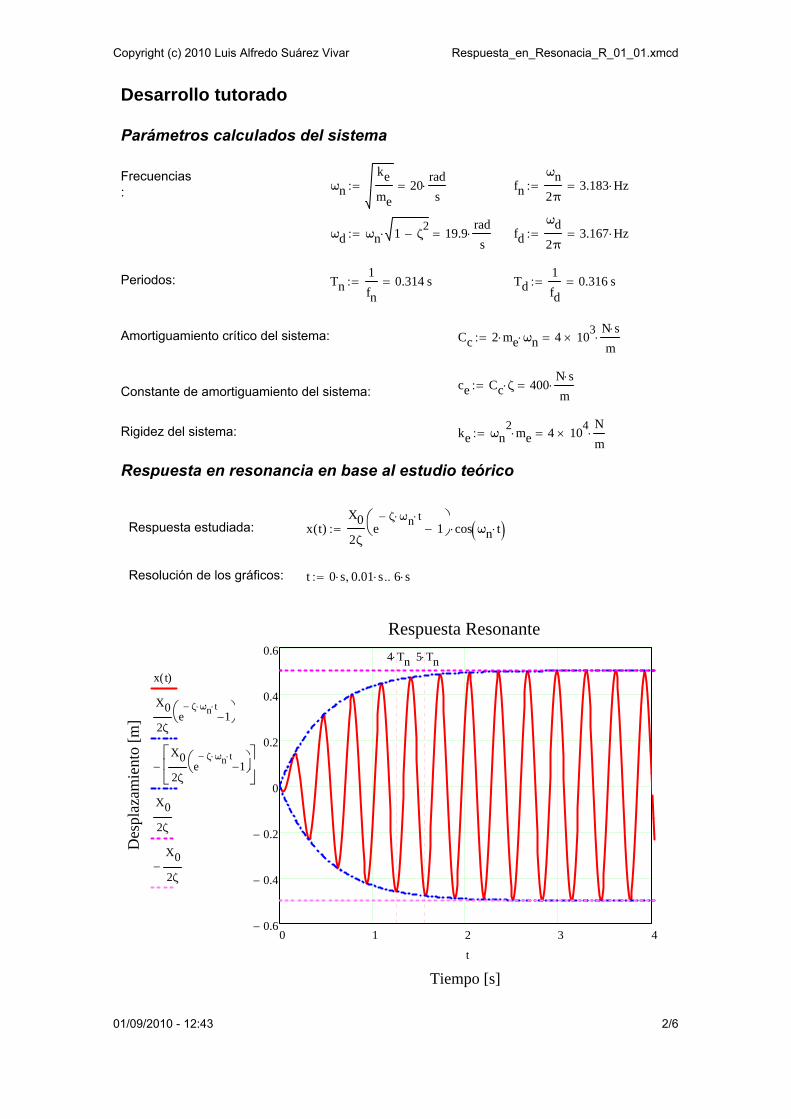
Copyright (c) 2010 Luis Alfredo Suárez Vivar Respuesta_en_Resonacia_R_01_01.xmcd
Desarrollo tutorado
Parámetros calculados del sistema
Frecuencias: ωn
ke
me20
rad
s fn
ωn
2π3.183 Hz
ωd ωn 1 ζ2
19.9rad
s fd
ωd
2π3.167 Hz
Periodos: Tn1
fn0.314 s Td
1
fd0.316 s
Amortiguamiento crítico del sistema: Cc 2 me ωn 4 103
N s
m
ce Cc ζ 400N s
mConstante de amortiguamiento del sistema:
Rigidez del sistema: ke ωn2
me 4 104
N
m
Respuesta en resonancia en base al estudio teórico
Respuesta estudiada: x t( )X0
2ζe
ζ ωn t1
cos ωn t
Resolución de los gráficos: t 0 s 0.01 s 6 s
0 1 2 3 40.6
0.4
0.2
0
0.2
0.4
0.6
Respuesta Resonante
Tiempo [s]
Des
plaz
amie
nto
[m]
x t( )
X0
2ζe
ζ ωn t1
X0
2ζe
ζ ωn t1
X0
2ζ
X0
2ζ
5 Tn4 Tn
t
01/09/2010 - 12:43 2/6

Copyright (c) 2010 Luis Alfredo Suárez Vivar Respuesta_en_Resonacia_R_01_01.xmcd
Respuesta en resonancia con amortiguamiento nulo.
Respuesta estudiada: x t( )
X0 ωn
2 t cos ωn t
0 1 2 3 44
2
0
2
4
Respuesta Resonante con amortiguamiento nulo
Tiempo [s]
Des
plaz
amie
nto
[m]
x t( )
X0 ωn
2t
X0 ωn
2 t
5 Tn4 Tn
t
Respuesta temporal para un re = 0.90.
Expresión del DMF y FASE: DMF ζ r( )1
1 r2
2 2 ζ r( )2
ψ ζ r( ) atan2 1 r2
2 ζ r
Ratio de frecuencias: re 0.90
Frecuencia de excitación: fex re fn fex 2.865 Hz
Amplitud estática: X0 0.1 m
01/09/2010 - 12:43 3/6

Copyright (c) 2010 Luis Alfredo Suárez Vivar Respuesta_en_Resonacia_R_01_01.xmcd
Respuesta estacionaria:x t( ) X0 DMF ζ re sin ωn t ψ ζ re
Resolución de los gráficos: t 0 s 0.01 s 16 s
0 0.75 1.5 2.25 30.4
0.2
0
0.2
0.4
Respuesta Estacionaria
Tiempo [s]
Des
plaz
amie
nto
[m]
5 Tn4 Tn
Batido en resonancia con ε = 10%, 5% y 2% de la frecuencia natural.
Frecuenciadiferencia:
ε 10% ωn ε 2rad
s ωn 20
rad
s
Batido en resonancia: x t( )X0 ωn
2ε cos ωn t sin ε t( )
0 3.75 7.5 11.25 150.6
0.4
0.2
0
0.2
0.4
0.6
Batido en resonancia al 10 % de la frec. natural
Tiempo [s]
Des
plaz
amie
nto
[m]
x t( )
X0 ωn
2εsin ε t( )
X0 ωn
2ε sin ε t( )
5 Tn4 Tn
t
01/09/2010 - 12:43 4/6

Copyright (c) 2010 Luis Alfredo Suárez Vivar Respuesta_en_Resonacia_R_01_01.xmcd
Frecuenciadiferencia:
ε 5% ωn ε 1rad
s ωn 20
rad
s
Batido en resonancia: x t( )X0 ωn
2ε cos ωn t sin ε t( )
0 4 8 12 161
0.5
0
0.5
1
Batido en resonancia al 5 % de la frec. natural
Tiempo [s]
Des
plaz
amie
nto
[m]
X0 ωn
2εsin ε t( )
X0 ωn
2ε cos ωn t
t
0 4 8 12 161
0.5
0
0.5
1
Batido en resonancia al 5 % de la frec. natural
Tiempo [s]
Des
plaz
amie
nto
[m]
x t( )
X0 ωn
2εsin ε t( )
X0 ωn
2ε sin ε t( )
5 Tn4 Tn
t
01/09/2010 - 12:43 5/6

Copyright (c) 2010 Luis Alfredo Suárez Vivar Respuesta_en_Resonacia_R_01_01.xmcd
Frecuencia diferencia: ε 2% ωn ε 0.4rad
s ωn 20
rad
s
Batido en resonancia: x t( )X0 ωn
2ε cos ωn t sin ε t( )
0 4 8 12 163
2
1
0
1
2
3
Batido en resonancia al 2 % de la frec. natural
Tiempo [s]
Des
plaz
amie
nto
[m]
5 Tn4 Tn
Bibliografía.
1. Tedesco JW. et al. Structural Dynamics, Theory and Applications. Addison WesleyLongman, Inc. 2725 Sand Hill Road. Menlo Park, California 94025. ISBN 0-673-98052-9. 1999.Capítulo 5.
2. Suárez LA. Apuntes de la Asignatura de Ampliación de Mecanica. Departamento deIngeniería Civil. Universidad de Burgos. 2010.
3. Mathcad User Guide, Release 15. Mathsoft. June 2010. Parametric TechnologyCorporation, 140 Kendrick Street, Needham, MA 02494 USA
01/09/2010 - 12:43 6/6

Capítulo 10
Respuesta a cargas periódicas
En esta práctica se estudia el procedimiento para determinar la solución estacionaria deun sistema de 1 GDL sometido a una carga periódica, que también va a ser periódica.
Como técnica básica de resolución se usa la descomposición en Series de Fourier me-diante esta técnica determinamos los coeficientes de la serie de que ajusta la carga. Lasfrecuencias a las que determinamos los coeficientes de la Serie de Fourier son múlti-plos de la frecuencia fundamental de la carga
Cada uno de estos coeficientes se asocia al armónico que le corresponde en el cálcu-lo. A la asociación de estos coeficientes con las frecuencias es lo que denominamosespectro. De esta forma una carga dada periódica se puede describir mediante su des-composición en Serie de Fourier o lo que es lo mismo su espectro. Por este motivo, losespectros solo tiene valores en ese conjunto de frecuencias discretas, en contraposicióna los de las cargas no periódicas que son continuos.
En esta práctica se introduce el concepto vector o matriz en MATHCAD así comoel acceso a sus elementos mediante el uso de subíndices de matriz.
Un correcto uso de los índices junto con un definicón de rangos de índices permitedefinir formulas potentes de cálculo.
10.1. Objetivos para los contenidos
1. Crear la definición de los coeficientes de Fourier.
2. Crear la función reconstruida aproximada de la carga.
3. Gráficar los espectros en magnitud y fase.
4. Gráficar los espectros en real e imaginario.
79

80 10. Respuesta a cargas periódicas
5. Estudiar los errores de reconstrucción
6. Crear la definición de los DMF para cada armónico.
7. Determinar la respuesta estacionaria basada en la serie de Fourier.
8. Gráficar los espectros de la respuesta.
10.2. Objetivos instrumentales1. Comprender la función de la variable ORIGIN .
2. Generar un rango de valores para los índices.
3. Definir un elemento de matriz en función de su índice.
4. Crear gráficos de elementos de un vector o matriz .
5. Crear un programa que reconstruya carga descompuesta.

TRABAJO FINAL DE MASTERMASTER INTER-UNIVERSITARIO EN VIBRACIONES Y ACÚSTICAUNIVERSIDAD DE VALLADOLID - UNIVERSIDAD DE LEÓNCARGAS PERIÓDICAS Y SERIES DE FOURIER: ESPECTROS.Copyright (c) 2010 LUIS ALFREDO SUAREZ VIVAR - [email protected]
Objetivos de la práctica
El objetivo de la práctica es estudiar el procedimiento a utilizar cuando nos encontramos anteuna carga de tipo periódico, pero no armónica.
La aparición de estas cargas esta motivada por diversas circunstancias, en general asociadasa equipos rotativos o recíprocos, aunque también pueden aparecer, como la que se muestraen la práctica, porque se usan mucho como cargas de prueba. .
Algunas de ellas construidas con funciones analíticas, como los trenes de pulsosrectangulares, dientes de sierra, etc. se usan para evaluar la respuesta de los sistemas enlos laboratorios y realizar ensayos ambientales.
En esta práctica estudiaremos una función periódica creada a partir de un pulso rectangular.
La expresión que usaremos para descomponer la carga p(t) será:
pr t( )a
0
21
Q
q
aq
cos q ω1
t bq
sin q ω1
t
=
( )x t
( )f t
eqceqk
eqm
01/09/2010 - 19:33 1/15

Copyright (c) 2010 Luis Alfredo Suárez Vivar Cargas_Periodicas_R_06_02.xmcd
ORIGIN 0 para quelossubíndicescomiencenen cero
Desarrollo tutorado
Definición de la estructura.
( )x t
( )f t
eqceqk
eqm
Periodo natural en s:Tn 0.37 s
Frecuencia natural enHz:
fn1
Tn2.70 Hz
Masa en kg: meq 200 kg 200.00 kg
Ratio de amortiguamiento viscoso: ζeq 15% 0.15
En realidad este sistema equivale a cualquier estructura quese asimile a 1 GDL.
Definición de la Carga Periódica a Descomponer.
Período fundamental: T1
0.9 s f1
1
T1
1.11 Hz ω1
2 π f1
6.98 Hz
Subida de la carga: Ti 0.125 T1
Bajada de la carga: Tf 0.625 T1
Amplitud de la carga: Pmáx 400 N Pmáx 400.00 N
Carga fundamental: Carga periódica (definición recursiva):
pf t( ) 0 0 t Tiif
Pmáx Ti t Tfif
0 Tf t T1
if
0 otherwise
p t( ) pf t( ) 0 t T1
if
p t T1
t T1
if
0 t 0if
Número de periodos a representar en los gráficos: Np 4
0.9 0 0.9 1.8 2.7 3.6
200
200
400
600
Carga Fundamental
Tiempo (s)
Car
ga (
N)
0
Pmáx
pf t( )
Ti Tf
t
01/09/2010 - 19:33 2/15

Copyright (c) 2010 Luis Alfredo Suárez Vivar Cargas_Periodicas_R_06_02.xmcd
0.9 0 0.9 1.8 2.7 3.6
200
200
400
600
Carga Periódica
Tiempo (s)
Car
ga (
N)
0
Pmáx
p t( )
T1 2 T1
t
Definición de los índices y términos a usar.Puesto que vamos a ajustar la carga mediante una Serie de Fourier, formada por armónicosmúltiplos de la frecuencia fundamental, definiremos cuantos términos armónicos usaremos,teniendo en cuenta que el primer término es 0.
Número de términos para la aproximación: Q 6
órdenes o múltiplo del armónico principal: q 0 1 Q
Definición de los coeficientes de la serie:
Coeficientes de los cosenos: Coeficientes de los senos:
aq
2
T1 0
T1
tp t( ) cos q ω1
t
d bq
2
T1 0
T1
tp t( ) sin q ω1
t
d
a
0
01
2
3
4
400.000-180.063
0.000
-60.021
...
N
b
0
01
2
3
4
0.000180.063
-0.000
-60.021
...
N
01/09/2010 - 19:33 3/15

Copyright (c) 2010 Luis Alfredo Suárez Vivar Cargas_Periodicas_R_06_02.xmcd
Definición de las frecuencias discretas y periodos discretos
Períodos Órdenes Frecuencias Frecuencias circulares
Tq
q T1
fq
q f1
ωq
q ω1
T
0
01
2
3
4
00.9
1.8
2.7
...
s
q0
01
2
3
4
01
2
3
...
f
0
01
2
3
4
0.0001.111
2.222
3.333
...
Hz
ω
0
01
2
3
4
06.981
13.963
20.944
...
1
srad
Descripción de los coeficientes de la serie.
Podemos gráfica los coeficientes aq y bq de la serie en función del orden q o bien de la
frecuencia discreta que deseemos representar: fq = qf1 o bien ωq = qω1. También se podría
usar los periodos discretos Tq = qT1 diagrama que constituye el espectro discreto en
frecuencia de la carga y que son los coeficientes de la serie de Fourier.
Como podemos ver se cumplen las cuestiones básicas de la Teoría de las Series de Fourier:
1) El término, que sirve para ajustar el valor medio de la función
Valor medio de la carga en el periodo T1: Pm1
T1 0
T1
tp t( )
d 200.00 N
a0 es el doble del valor medio de la función de carga. a0
400.00 N 2 Pm 400.00 N
2) Los términos ap, ajustan las propiedades de pares o simétricas de la forma de la función
respecto del origen y serán cero, si la función de carga es impar o antisimétrica.
3) Los términos bp, ajustan las propiedades de impares o antisimétricas de la forma de la
función respecto del origen y serán cero, si la función de carga es par o simétrica.
Como podemos ver además de poder clasificar una función como par o impar globalmente (enel dominio del tiempo), la podemos clasificar par o impar parcialmente para una frecuenciadiscreta concreta (dominio de la frecuencia) cuando el coeficiente correspondiente sea cero..
Espectros en frecuencia de la carga
De acuerdo con la expresión, que hemos usado para el desarrollo en serie de Fourier usado:
pr t( )a
0
21
Q
q
aq
cos q ω1
t bq
sin q ω1
t
=
01/09/2010 - 19:33 4/15
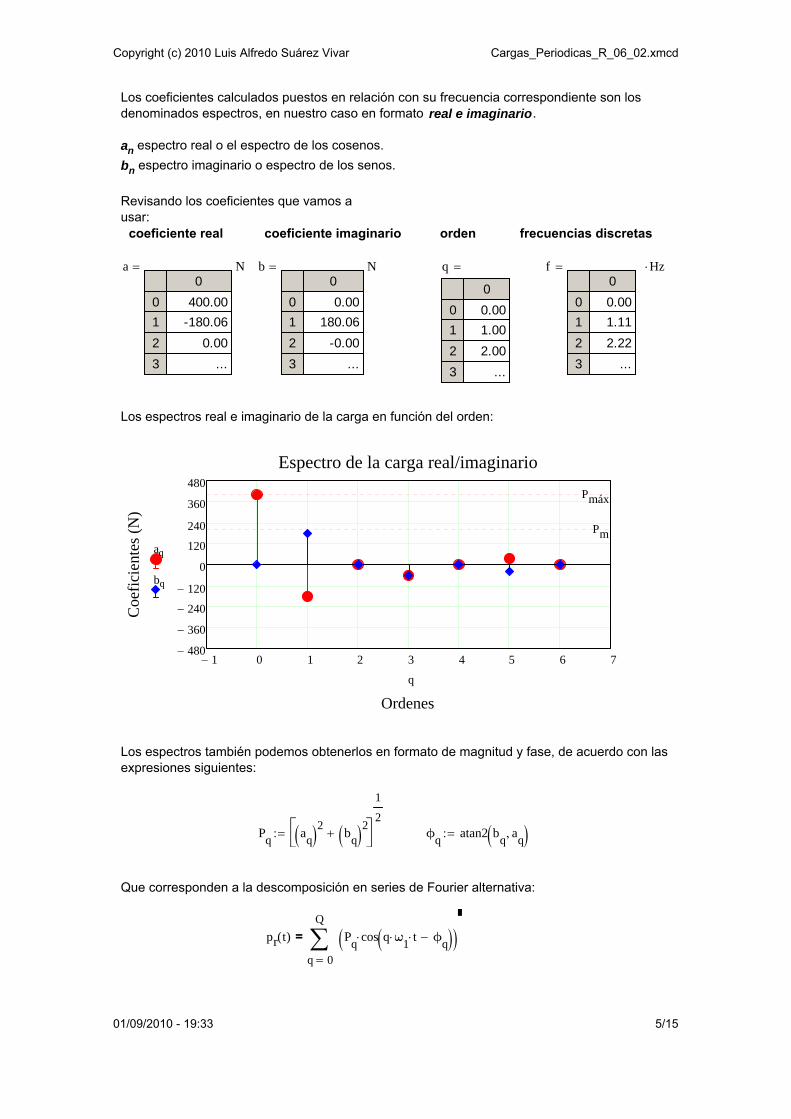
Copyright (c) 2010 Luis Alfredo Suárez Vivar Cargas_Periodicas_R_06_02.xmcd
Los coeficientes calculados puestos en relación con su frecuencia correspondiente son losdenominados espectros, en nuestro caso en formato real e imaginario.
an espectro real o el espectro de los cosenos.
bn espectro imaginario o espectro de los senos.
Revisando los coeficientes que vamos ausar:
coeficiente real coeficiente imaginario orden frecuencias discretas
a0
01
2
3
400.00-180.06
0.00
...
N b0
01
2
3
0.00180.06
-0.00
...
N q
0
01
2
3
0.001.00
2.00
...
f0
01
2
3
0.001.11
2.22
...
Hz
Los espectros real e imaginario de la carga en función del orden:
1 0 1 2 3 4 5 6 7480
360
240
120
0
120
240
360
480
Espectro de la carga real/imaginario
Ordenes
Coe
fici
ente
s (N
)
Pmáx
Pmaq
bq
q
Los espectros también podemos obtenerlos en formato de magnitud y fase, de acuerdo con lasexpresiones siguientes:
Pq
aq 2 b
q 2
1
2 ϕ
qatan2 b
qa
q
Que corresponden a la descomposición en series de Fourier alternativa:
pr t( )
0
Q
q
Pq
cos q ω1
t ϕq
=
01/09/2010 - 19:33 5/15

Copyright (c) 2010 Luis Alfredo Suárez Vivar Cargas_Periodicas_R_06_02.xmcd
Revisando los datos numéricos que vamos a usar:
magnitud fase orden frecuencias discretas
P0
01
2
3
400.00254.65
0.00
...
N ϕ0
01
2
3
1.57-0.79
2.44
...
q
0
01
2
3
0.001.00
2.00
...
f
0
01
2
3
0.001.11
2.22
...
Hz
Los espectros de la carga en magnitud y fase en función el orden (armónico número ...)
1 0 1 2 3 4 5 6 7480
240
0
240
480
3
1.5
0
1.5
3
Espectro de la carga magnitud/fase
Ordenes
Mag
nitu
d (N
)
Fas
e (r
ad)Pm
Pmáx
Pq ϕq
q
El mismo espectro en función de los armónicos de la frecuencia discretaf1:
f1
1.11 Hz
1.111 0 1.111 2.222 3.333 4.444 5.556 6.667 7.778480
240
0
240
480
3
1.5
0
1.5
3
Espectro de la carga magnitud/fase
Frecuencias discretas (Hz)
Mag
nitu
d (N
)
Fas
e (r
ad)Pm
Pmáx
P ϕ
f
01/09/2010 - 19:33 6/15

Copyright (c) 2010 Luis Alfredo Suárez Vivar Cargas_Periodicas_R_06_02.xmcd
0 1 2 380
60
200
340
480
Carga original y reconstruida con la Serie de Fourier
Tiempo (s)
Car
ga (
N)
Pmáx
Pm
p t( )
pr t( )
2 T1T1
t
Reconstrucción de la carga con la serie de Fourier aproximada
Usaremos la descomposición básica de la serie de Fourier como serie de senos y cosenos.Sustituiremos la carga real p(t) por la carga aproximada por la Serie de Fourier p r(t):
pr t( )a0
21
Q
q
aq
cos q ω1
t bq
sin q ω1
t
t 0 sif
0 otherwise
t T1
T1
0.001s 10 T1
Q 6
Error de reconstrucción.
Como podemos observar, variando Q (número de términos usados en la aproximación) queestamos usando, generaremos una función aproximada p r(t).
La función que estamos aproximando es difícil de ajustar bien en las esquinas como sepuede observar y el error de ajuste se denomina error de Gibb (en honor al físiconorteamericano Josiah Willard Gibb). Estos picos aparecerán siempre que tengamosdiscontinuidades
Podemos estudiar el error dereconstrucción:
Error en el intervalo: err t( ) p t( ) pr t( ) 0 t T1
if
0 otherwise
Error medio: err_med1
T1 0
T1
terr t( )
d err_med 0.000 N
Error medio cuadrático o error rms: err_rms1
T1 0
T1
terr t( )2
d err_rms 51.747 N
01/09/2010 - 19:33 7/15
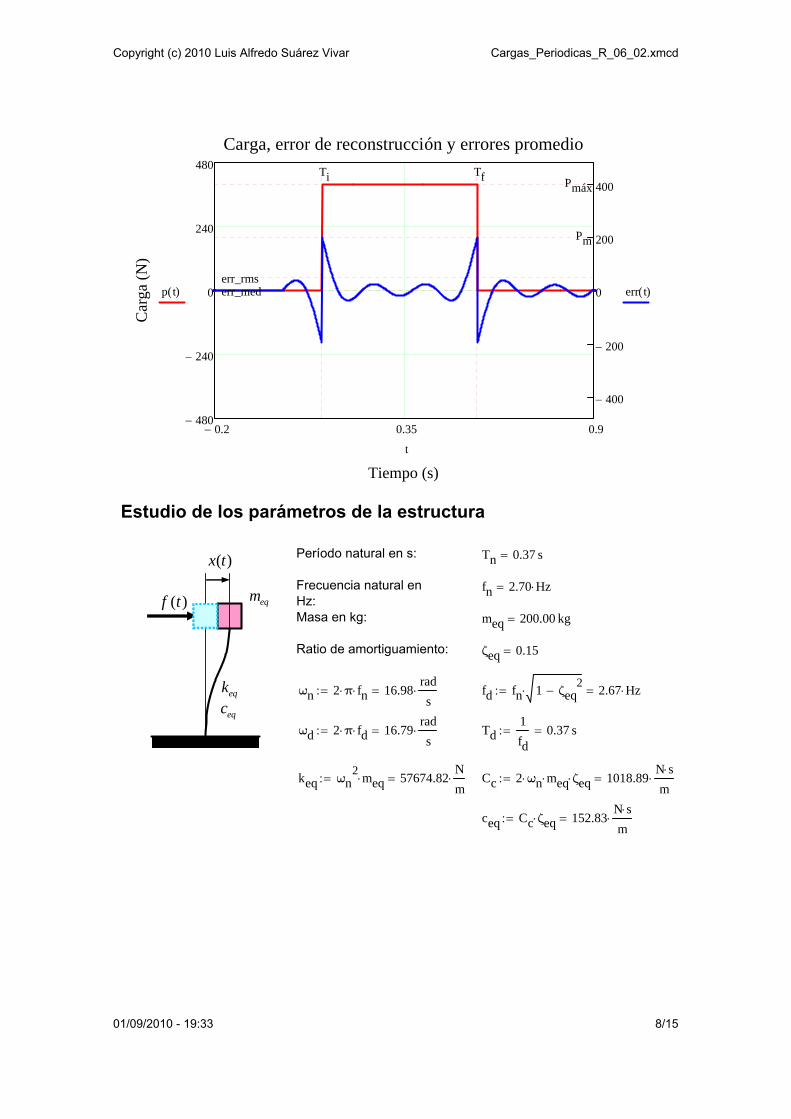
Copyright (c) 2010 Luis Alfredo Suárez Vivar Cargas_Periodicas_R_06_02.xmcd
0.2 0.35 0.9480
240
0
240
480
400
200
0
200
400
Carga, error de reconstrucción y errores promedio
Tiempo (s)
Car
ga (
N)
Pm
Pmáx
p t( )err_rmserr_med err t( )
Ti Tf
t
Estudio de los parámetros de la estructura
( )x t
( )f t
eqceqk
eqm
Período natural en s: Tn 0.37 s
Frecuencia natural enHz:
fn 2.70 Hz
Masa en kg: meq 200.00 kg
Ratio de amortiguamiento: ζeq 0.15
ωn 2 π fn 16.98rad
s fd fn 1 ζeq
2 2.67 Hz
ωd 2 π fd 16.79rad
s Td
1
fd0.37 s
keq ωn2
meq 57674.82N
m Cc 2 ωn meq ζeq 1018.89
N s
m
ceq Cc ζeq 152.83N s
m
01/09/2010 - 19:33 8/15

Copyright (c) 2010 Luis Alfredo Suárez Vivar Cargas_Periodicas_R_06_02.xmcd
Calculo del ratio de frecuencias, DMF y desfase.
Como tenemos excitaciones a un conjunto defrecuencias fq, tenemos que estudiar lasrespuestas a cada una de ellas, por lo que elratio r, dependerá de q y también el DMF y lafase de la respuesta:
rq
fq
fn o bien: r
f1
fn
para la frecuencia fundamental (q = 1), tendremos:
Ratio de frecuenciasbásico:
rω
1
ωn0.411
DMF para q: Desfase para q:
DMFq
1
1 q r( )2
2
2 ζeq q r 2
ψq
π
21 q
2r2
0=if
atan2 1 q r( )2
2 ζeq q r
1 q
2r2
0if
DMF
0
01
2
3
4
11.19
2.456
1.565
...
ψ
0
01
2
3
4
00.147
0.651
2.524
...
Respuesta de la estructura en base a los DMF y desfase ψ.
La respuesta a la carga reconstruida con la serie de Fourier vendrá dada por la siguientefunción, evaluada como superposición de la respuesta a cada armónico:
xr t( )a0
2
1
keq
1
Q
q
aq
1
keq DMF
q cos q ω
1 t ψ
q
bq
1
keq DMF
q sin q ω
1 t ψ
q
t 0 sif
0 otherwise
Espectro real: xaq
aq
1
keq DMF
q
Espectro imaginario: xbq
bq
1
keq DMF
q
01/09/2010 - 19:33 9/15

Copyright (c) 2010 Luis Alfredo Suárez Vivar Cargas_Periodicas_R_06_02.xmcd
Desde el punto de vista de la descomposición de la carga tenemos:
Promedio Pm de carga en T1: Pm 200.00 N Término
a0/2:
a0
2200.00 N
Desde el punto de vista de la descomposición de la respuesta el valor medio del pérfido T 1
vendrá dado por Xm relacionado de manera similar a su homónimo de la carga cono ax 0.
Xm xa0
0.007 m xa0
0.007 m
a0
1
keq DMF
0 0.007 m a
01
keq 0.007 m DMF
01.000
t T1
T1
0.001s 5 T1
0 2 4200
0
200
400
600
0
0.01
0.02
Carga, Carga Reconstruida y Respuesta
Tiempo (s)
Car
ga (
N)
Des
plaz
amie
nto
(m)
Pm
Pmáx
p t( )
pr t( ) Xm
xr t( )
T1 2 T1
t
Espectros de la respuesta
De manera similar a como hemos hecho con la carga, la respuesta puede ser estudiada en eldominio de la frecuencia mediante la graficación de los coeficientes de los armónicos de larespuesta, en términos real/imaginario cuando se obtenga la respuesta en series de cosenosy senos y en término de magnitud y fase si se recambiarte a un coseno desfasado.
xr t( ) a0
1
keq
1
Q
q
aq
1
keq DMF
q cos q ω
1 t ψ
q
bq
1
keq DMF
q sin q ω
1 t ψ
q
t 0 sif
0 otherwise
Como podemos ver en la expresión de xr(t), respuesta reconstruida con la serie de Fourier,
cada término q (orden), esta desfasado respecto de su homólogo de la carga -ψ q
01/09/2010 - 19:33 10/15

Copyright (c) 2010 Luis Alfredo Suárez Vivar Cargas_Periodicas_R_06_02.xmcd
Podemos representar los espectros real/imaginario de la respuesta en función de los órdenes(q):
1.111 0 1.111 2.222 3.333 4.444 5.556 6.667 7.7788.3225 10
3
6.2419 103
4.1613 103
2.0806 103
0
2.0806 103
4.1613 103
6.2419 103
8.3225 103
2
0
2
Espectro real/imaginario/desfase
Frecuencias Discretas (Hz)
Coe
fici
ente
s (N
) Xm
2
xaq
xbq
ψq
fq
Si deseamos estudiar el espectro en términos de magnitud y fase, tendremos una expresión,similar a la de la carga:
xr t( )
0
Q
q
Xq
cos q ω1
t ψq
θq
=
Donde los coeficientes de magnitud, serán:
Xq
aq
1
keq DMF
q
2
bq
1
keq DMF
q
2
1
2
Y las fases parciales
θq
atan2 bq
1
keq DMF
q a
q1
keq DMF
q
θq
0
01
2
1.57-0.79
...
01/09/2010 - 19:33 11/15

Copyright (c) 2010 Luis Alfredo Suárez Vivar Cargas_Periodicas_R_06_02.xmcd
No obstante como cada término de la serie ya tenía un desfase previo tanto para el senocomo para el coseno, la fase completa relativa a la carga será la suma de ambos desfases ψ
qθ
q :
Los espectros en magnitud/fase de la respuesta x(t)r, vendrán dados por:
1.111 0 1.111 2.222 3.333 4.444 5.556 6.667 7.7788.3225 10
3
6.2419 103
4.1613 103
2.0806 103
0
2.0806 103
4.1613 103
6.2419 103
8.3225 103
5
0
5
Espectro de la respuesta magnitud/fase
Frecuencias Discretas (Hz)
Coe
fici
ente
s (N
) Xm
2
Xq ψq θq
fq
Influencia del periodo fundamental de la carga (T1) en el aspecto delespectro en magnitud
Si variamos el periodo fundamenta T1, podemos comprobar que:
¡¡ Los coeficientes de Fourier ... NO DEPENDEN DEL PERÍODO!!
Sin embargo su posición en el espectro a 0x, 1x, 2x, 3x si cambiará ya que f1 depende de T1
(es su inversa).
Al representar en un mismo gráfico los coeficientes de Fourier de la misma carga dada,pero con diferente período fundamental observaremos que se produce una compresióndel espectro y los coeficientes tienden a juntarse.
En el límite, si analizásemos una carga no periódica (transitorio) el valor del períodofundamental tenderá a infinito y los coeficientes tenderán a estar infinitamentepróximos, por lo que el espectro pasará de ser discreto a ser continuo:
Los valores de los coeficientes de carga no varían al cambiar el periodo fundamental:
01/09/2010 - 19:33 12/15

Copyright (c) 2010 Luis Alfredo Suárez Vivar Cargas_Periodicas_R_06_02.xmcd
1 0 1 2 3 4 5 6 7 8
80
90
260
430
600
Espectro de la carga en magnitud para diferentes períodos
Frecuencias discretas (Hz)
Mag
nitu
d (N
)
Pm
PmáxPT1
PT2
PT3
f1 f2 f3
Periodo fundamental coeficientes de Fourier frecuencias discretas nxf1:
T1 1 T1
0.90 s PT1 P
400.00
254.65
0.00
84.88
0.00
50.93
0.00
N f1
0
1
2
3
4
5
6
1
T1
0.00
1.11
2.22
3.33
4.44
5.56
6.67
Hz
T2 2 T1
1.80 s PT2 P
400.00
254.65
0.00
84.88
0.00
50.93
0.00
N f2
0
1
2
3
4
5
6
1
2 T1
0.00
0.56
1.11
1.67
2.22
2.78
3.33
Hz
T3 3 T1
PT3 P
400.00
254.65
0.00
84.88
0.00
50.93
0.00
N f3
0
1
2
3
4
5
6
1
3 T1
0.00
0.37
0.74
1.11
1.48
1.85
2.22
Hz
T1 0.90 s
T2 1.80 s
T3 2.70 s
01/09/2010 - 19:33 13/15

Copyright (c) 2010 Luis Alfredo Suárez Vivar Cargas_Periodicas_R_06_02.xmcd
En el gráfico observamos claramente como se produce la compresión de los Q+1coeficientes al aumentar el pérfido fundamental de la carga.
El siguiente gráfico permite ver la evolución de la carga fundamenta (que repetida constituirála carga periódica:
pf t T( ) 0 0 t Tiif
Pmáx Ti t TiT
2if
0 otherwise
1 0 1 2 3 4200
0
200
400
600
Carga periódica fundametal con diferentes periodos
Tiempo (s)
Car
ga (
N)
Pmáx
pf t T3( )
pf t T2( )
pf t T1( )
Ti T3
t
T1 0.90 s
T2 1.80 s
T3 2.70 s
Tareas propuestas
Jugar con cambios en la definición de la carga como por ejemplo el periodo fundamental,para alejarlo o acercarlo de la frecuencia natural del sistema y observar los cambios en larespuesta.
Jugar con cambios en el amortiguamiento del sistema y ver los efectos.
Jugar con el número de armónicos de ajuste, reduciendo y ampliando e intentar sacarconclusiones para comprender cuantos armónicos son necesarios para ajustar la respuesta.
Cambiar a otros tipos de cargas periódicas como puede ser un diente de sierra o una sumade armónicos similar a la de la teoría y observar que pasa cuando uno de los armónicos seaproxima a la frecuencia natural del sistema.
Estudiar el EXAMPLE 8.1 del TEDESCO y verificarle los resultados.
01/09/2010 - 19:33 14/15
Copyright (c) 2010 Luis Alfredo Suárez Vivar Cargas_Periodicas_R_06_02.xmcd
Bibliografía.
1. Tedesco JW. et al. Structural Dynamics, Theory and Applications. Addison WesleyLongman, Inc. 2725 Sand Hill Road. Menlo Park, California 94025. ISBN 0-673-98052-9.1999.
2. Suárez LA. Apuntes de la Asignatura de Ampliación de Mecanica. Departamento deIngeniería Civil. Universidad de Burgos. 2010.
3. Mathcad User Guide, Release 14. Mathsoft. February 2007. Parametric TechnologyCorporation, 140 Kendrick Street, Needham, MA 02494 USA
01/09/2010 - 19:33 15/15

96 10. Respuesta a cargas periódicas

Capítulo 11
FT, Función de Transferencia
Hay una cierta confusión sobre el término Función de Transferencia o FT y el términoFunción de Respuesta en Frecuencia o FRF
Cara a esta práctica las FRF serán funciones que caracterizan al sistema y representanuna función compleja dependiente de la frecuencia de excitación la cual multiplicadapor la transformada al dominio de la frecuencia de la fuerza de entrada nos da la salidacinemática transformada al dominio de la frecuencia.
En el análisis en el domino de la frecuencia se utilizan intensivamente las Funcio-nes de Respuesta en Frecuencia. Cuando la salida del sistema es el desplazamiento,la FRF que obtenemos es la receptancia, cuando la salida es la velocidad la FRF quetenemos es la movilidad y cuando la salida es la aceleración, la FRF que obtenemos esla acelerancia o inertancia.
La receptancia es prácticamente la versión en variable compleja del DMF divididopor la rigidez.
La práctica comenzará con el estudio de la receptancia que es el cociente de la trans-formada X(ω) del desplazamiento x(t) o salida, dividido por la transformada F (ω) dela entrada f(t).
El resto de las FRF se estudiarán como derivadas en el dominio de la frecuencia dela receptancia. La derivada en el dominio de la frecuencia equivale a multiplicar lafunción por jω. De esta forma obtendremos la movilidad multiplicando la receptanciapor jω. La acelerancia la obtendremos multiplicando por jω la movilidad.
Las FRF inversas se obtendrán invirtiendo la receptancia, movilidad y acelerancia deesta forma obtendremos la rigidez dinámica, impedancia mecánica y masa aparente.
En esta práctica se introducen las técnicas para trabajar en el campo complejo, de-finiendo el numero básico j =
√−1, las funciones Re() e Im() etc.
97

98 11. FT, Función de Transferencia
11.1. Objetivos para los contenidos1. Definición de la receptancia en base al DMF.
2. Graficado de la receptancia en magnitud/fase y real/imaginaria.
3. Graficado de la movilidad en magnitud/fase y real/imaginaria.
4. Graficado de la aceleranciaa en magnitud/fase y real/imaginaria.
5. Graficado de los diagramas de Nyquist
6. Graficado de la rigidez dinámica en magnitud/fase y real/imaginaria.
7. Graficado de la impedancia mecánica en magnitud/fase y real/imaginaria.
8. Graficado de la masa aparente en magnitud/fase y real/imaginaria.
11.2. Objetivos instrumentales1. Uso de las funciones para manipular complejos.
2. Introducción en los gráficos de funciones complejos.
Funciones_de_Transferencia_Laplace_.xmcd
TRABAJO FINAL DE MASTERMASTER INTER-UNIVERSITARIO EN VIBRACIONES Y ACÚSTICAUNIVERSIDAD DE VALLADOLID - UNIVERSIDAD DE LEÓNFUNCIONES DE TRANFERENCIA EN EL DOMINIO DE LAPLACECopyright (c) 2010 LUIS ALFREDO SUAREZ VIVAR - [email protected]
Objetivos de la práctica
Sistema
Sobre un sistema de 1 GDL con los siguientes parámetros:
meq 200 kg fn 20 Hz ζeq 10%
Se va a estudiar su función de transferencia en el dominio de Laplace y en el dominio deFourier.
Cuestiones a estudiar:
- Obtener la función de transferencia receptancia FT del sistema en el dominio de Laplace.- Definir los rangos de estudio de los ejes σ y ω de Laplace.- Obtener los gráficos de la FT en real/imaginario en mapa de contornos y 3D.- Obtener los gráficos de la FT en magnitud/fase en mapa de contornos y 3D.- Particularizar el estudio para σ = 0 y obtener la FT en el dominio de Fourier.- Obtener la FT en el dominio de Fourier y comprobar que es igual a la de laplace con σ = 0.- Repetir el estudio para la movilidad y acelerancia.- Repetir el estudio para la rigidez dinámica, impedancia mecánica y masa aparente.
01/09/2010 - 21:34 1/9

Copyright (c) 2010 Luis Alfredo Suárez Vivar Funciones_de_Transferencia_Laplace_.xmcd
Desarrollo tutorado
Transformada del sistema de segundo orden
El sistema que nos han dado tiene como parámetros: meq 200 kg
fn 20 Hz
ζeq 0.1
ωn 2 π fn 125.664rad
sSu frecuencia natural circular vendrá dada por:
Su rigidez equivalente vendrá dada por: keq meq ωn2
3.158 106
N
m
La transformación al dominio de Laplace viene dada por:
2
2 2
1( ) 2 ( ) ( ) ( )
1( ) 2 ( ) ( ) ( )
eq n neq
eq n neq
x t x t x t f tm
s X s sX s X s F sm
Definimos la función de transferencia receptancia como:
2 2
1
( )( )
( ) 2eq
eq n n
mX sH s
F s s s
s j
Aunque la definición de "s" como variable de Laplace plantea algunos problemas deambigüedad con la definición de segundo, podemos definir s, como una función de
s σ ω( ) σ j ω H s( )
1
meq
s2
2 ζeq ωn s ωn 2
Podemos romper la ambigüedad de la definición mediante el uso del NAME ESPACEOPERATOR >> [Ctrl] [Shift] N y usar el identificador unit para denotar que estamos usandola unidad segundo:
H 1rad
s[unit] 2
rad
s[unit] j
3.162 107
1.085i 109
m
N
Podemos incorporar σ y ω directamente en la formulación de H(s) pasando a ser H(σ,ω):
H σ ω( )1
meq
1
σ j ω( )2
2 ζeq ωn σ j ω( ) ωn2
01/09/2010 - 21:34 2/9
Copyright (c) 2010 Luis Alfredo Suárez Vivar Funciones_de_Transferencia_Laplace_.xmcd
Para crear las funciones gráficas en 3D ...
Creamos un rango de datos de representación:
σmin 1000 Hz σmax 1000 Hz Δσ 1 Hz σ σmin σmin Δσ σmax
ωmin 0 Hz ωmax 5 ωn Δω 1 Hz ω ωmin Δω ωmax
vectores de representación:
real / imaginaria magnitud / fase
Re_H σ ω( ) Re H σ ω( )( )Ma_H σ ω( ) H σ ω( )( )
Im_H σ ω( ) Im H σ ω( )( )Fa_H σ ω( ) arg H σ ω( )( )
01/09/2010 - 21:34 3/9
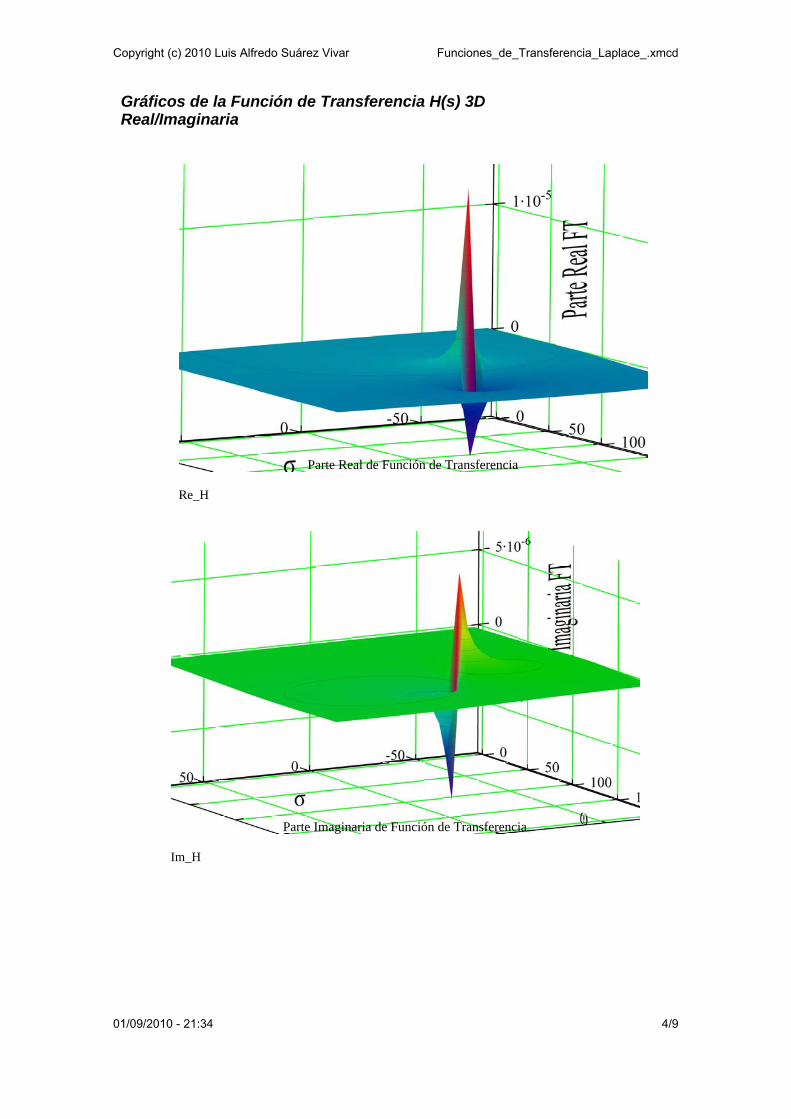
Copyright (c) 2010 Luis Alfredo Suárez Vivar Funciones_de_Transferencia_Laplace_.xmcd
Gráficos de la Función de Transferencia H(s) 3DReal/Imaginaria
Parte Real de Función de Transferencia
Re_H
Parte Imaginaria de Función de Transferencia
Im_H
01/09/2010 - 21:34 4/9
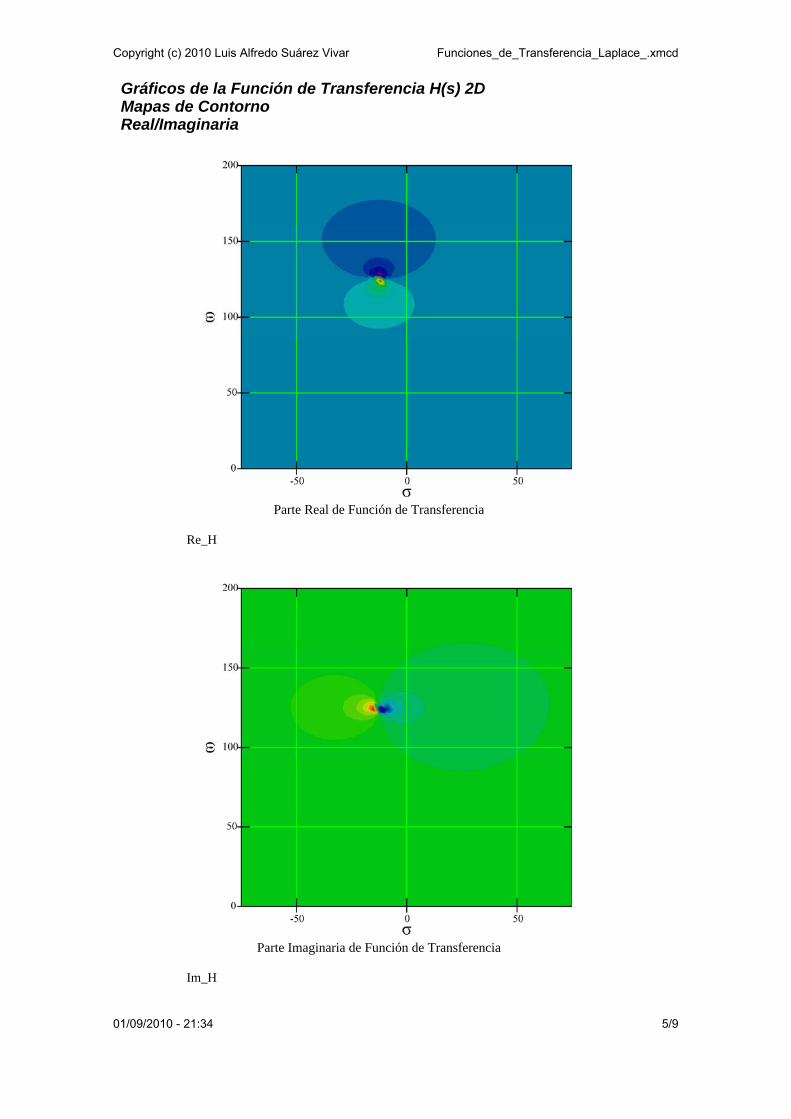
Copyright (c) 2010 Luis Alfredo Suárez Vivar Funciones_de_Transferencia_Laplace_.xmcd
Gráficos de la Función de Transferencia H(s) 2DMapas de ContornoReal/Imaginaria
Parte Real de Función de Transferencia
Re_H
Parte Imaginaria de Función de Transferencia
Im_H
01/09/2010 - 21:34 5/9

Copyright (c) 2010 Luis Alfredo Suárez Vivar Funciones_de_Transferencia_Laplace_.xmcd
Gráficos de la Función de Transferencia H(s) 3DMagnitud/Fase
Magnitud de Función de Transferencia
Ma_H
Fase de la Función de Transferencia
Fa_H
01/09/2010 - 21:34 6/9
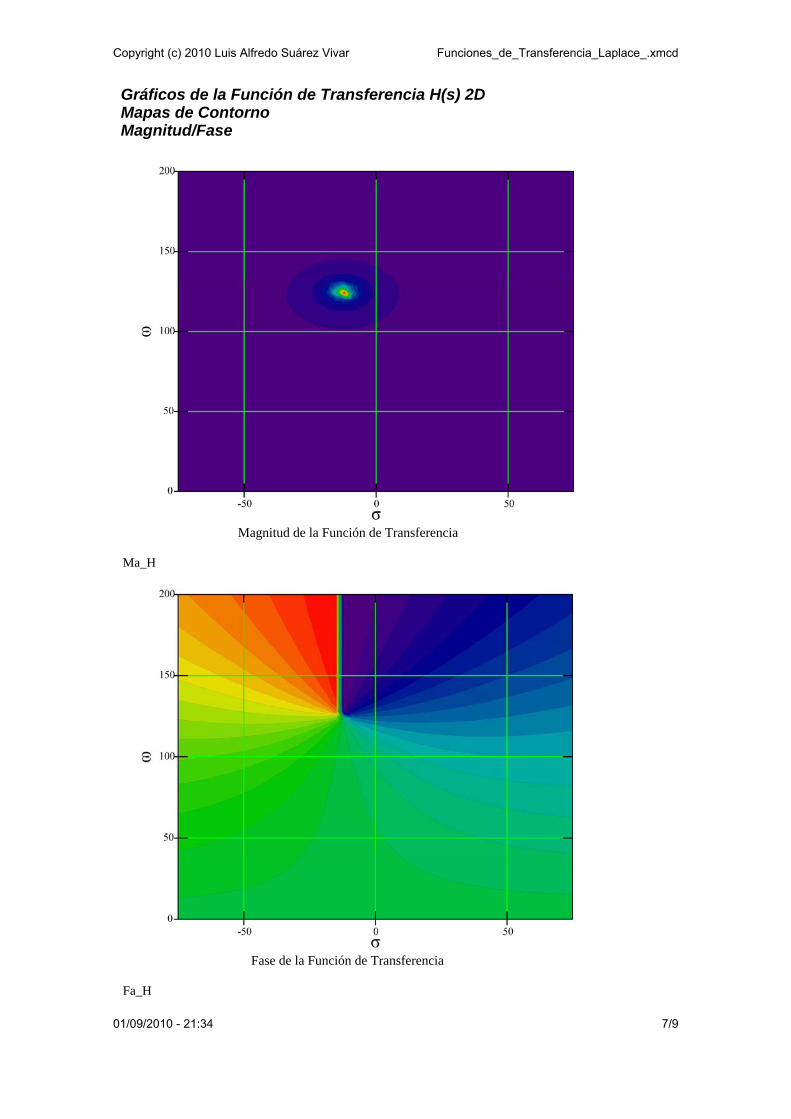
Copyright (c) 2010 Luis Alfredo Suárez Vivar Funciones_de_Transferencia_Laplace_.xmcd
Gráficos de la Función de Transferencia H(s) 2DMapas de ContornoMagnitud/Fase
Magnitud de la Función de Transferencia
Ma_H
Fase de la Función de Transferencia
Fa_H
01/09/2010 - 21:34 7/9
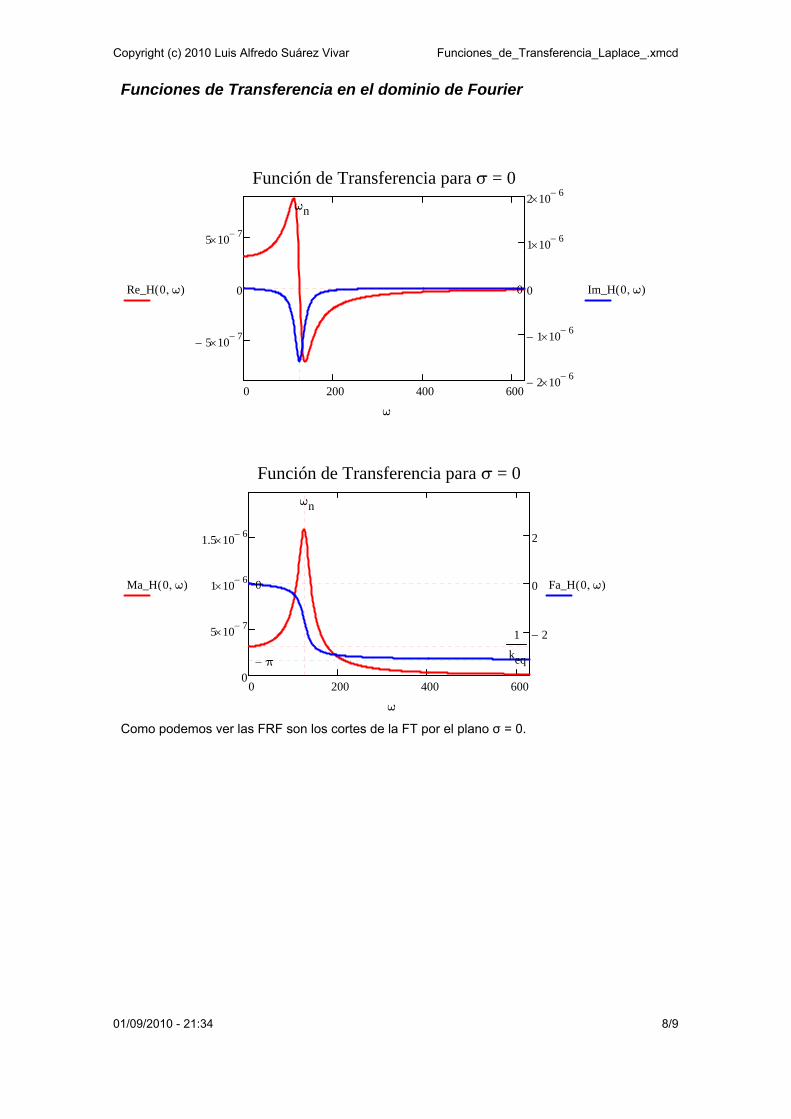
Copyright (c) 2010 Luis Alfredo Suárez Vivar Funciones_de_Transferencia_Laplace_.xmcd
Funciones de Transferencia en el dominio de Fourier
0 200 400 600
5 107
0
5 107
2 106
1 106
0
1 106
2 106
Función de Transferencia para σ = 0
0Re_H 0 ω( ) Im_H 0 ω( )
ωn
ω
0 200 400 6000
5 107
1 106
1.5 106
2
0
2
Función de Transferencia para σ = 0
1
keq
Ma_H 0 ω( ) 0
π
Fa_H 0 ω( )
ωn
ω
Como podemos ver las FRF son los cortes de la FT por el plano σ = 0.
01/09/2010 - 21:34 8/9

Copyright (c) 2010 Luis Alfredo Suárez Vivar Funciones_de_Transferencia_Laplace_.xmcd
Bibliografía.
1. Tedesco JW. et al. Structural Dynamics, Theory and Applications. Addison WesleyLongman, Inc. 2725 Sand Hill Road. Menlo Park, California 94025. ISBN 0-673-98052-9. 1999.
2. Suárez LA. Apuntes de la Asignatura de Ampliación de Mecanica. Departamento deIngeniería Civil. Universidad de Burgos. 2010.
3. Mathcad User Guide, Release 15. Mathsoft. June 2010. Parametric Technology Corporation,140 Kendrick Street, Needham, MA 02494 USA
01/09/2010 - 21:34 9/9

108 11. FT, Función de Transferencia
Capítulo 12
FRF, Función de Respuesta enFrecuencia
Cara a esta práctica las FRF serán funciones que caracterizan al sistema y representanuna función compleja dependiente de la frecuencia de excitación la cual multiplicadapor la transformada al dominio de la frecuencia de la fuerza de entrada nos da la salidacinemática transformada al dominio de la frecuencia.
En el análisis en el domino de la frecuencia se utilizan intensivamente las Funcio-nes de Respuesta en Frecuencia. Cuando la salida del sistema es el desplazamiento,la FRF que obtenemos es la receptancia, cuando la salida es la velocidad la FRF quetenemos es la movilidad y cuando la salida es la aceleración, la FRF que obtenemos esla acelerancia o inertancia.
La receptancia es la versión en variable compleja del DMF.
La práctica comenzará con el estudio de la receptancia que es el cociente de la trans-formada X(ω) del desplazamiento x(t) o salida, dividido por la transformada F (ω) dela entrada f(t).
El resto de las FRF se estudiarán como derivadas en el dominio de la frecuencia dela receptancia. La derivada en el dominio de la frecuencia equivale a multiplicar lafunción por jω. De esta forma obtendremos la movilidad multiplicando la receptanciapor jω. La acelerancia la obtendremos multiplicando por jω la movilidad.
Las FRF inversas se obtendrán invirtiendo la receptancia, movilidad y acelerancia deesta forma obtendremos la rigidez dinámica, impedancia mecánica y masa aparente.
En esta práctica se introducen las técnicas para trabajar en el campo complejo, de-finiendo el numero básico j =
√−1, las funciones Re() e Im() etc.
109

110 12. FRF, Función de Respuesta en Frecuencia
12.1. Objetivos para los contenidos1. Definición de la receptancia en base al DMF.
2. Graficado de la receptancia en magnitud/fase y real/imaginaria.
3. Graficado de la movilidad en magnitud/fase y real/imaginaria.
4. Graficado de la aceleranciaa en magnitud/fase y real/imaginaria.
5. Graficado de los diagramas de Nyquist
6. Graficado de la rigidez dinámica en magnitud/fase y real/imaginaria.
7. Graficado de la impedancia mecánica en magnitud/fase y real/imaginaria.
8. Graficado de la masa aparente en magnitud/fase y real/imaginaria.
12.2. Objetivos instrumentales1. Uso de las funciones para manipular complejos.
2. Introducción en los gráficos de funciones complejos.
FRF_1_GDL_R_01_01.xmcd
TRABAJO FINAL DE MASTERMASTER INTER-UNIVERSITARIO EN VIBRACIONES Y ACÚSTICAUNIVERSIDAD DE VALLADOLID - UNIVERSIDAD DE LEÓNESTUDIO DE LAS DIFERENTES FUNCIONES DE RESPUESTA EN FRECUENCIA EN 1 GDLCopyright (c) 2010 LUIS ALFREDO SUAREZ VIVAR - [email protected]
Objetivos de la práctica
En el análisis en el domino de la frecuencia se utilizan intensivamente las Funciones deRespuesta en Frecuencia (FRF).
Cuando la salida del sistema es el desplazamiento, la FRF que obtenemos es lareceptancia. Cuando la salida es la velocidad la FRF que tenemos es la movilidad ycuando la salida es la aceleración, la FRF que tenemos es la acelerancia.
La práctica comenzará con el estudio de la receptancia que es el cociente de la transformadaX(ω) del desplazamiento x(t) dividido por la transformada F(ω) de la entrada f(t).
El resto de FRF se estudiarán como derivadas en el dominio de la frecuencia de lareceptancia, obteniendo así la movilidad y la acelerancia. Las FRF inversas las obtendremosinvirtiendo la receptancia, movilidad y acelerancia: rigidez dinámica, impedancia mecánicay masa aparente.
Datos del sistema a estudiar
Supondremos un sistema de 1 GDL definido por los siguientes parámetros:
Masa equivalente del sistema: meq 200 kg
Frecuencia circular natural del sistema: ωn 30rad
s
Ratio de amortiguamiento viscoso equivalente del sistema: ζeq 15%
Cuestiones a estudiar
Estudiar las FT, que se pueden establecer en el sistema:
- Receptancia y rigidez dinámica.- Movilidad e impedancia mecánica.- Acelerancia y masa aparente.
01/09/2010 - 20:22 1/15

Copyright (c) 2010 Luis Alfredo Suárez Vivar FRF_1_GDL_R_01_01.xmcd
Desarrollo tutorado
Parámetros de la hoja de cálculo.
ORIGIN 1 para que los subíndices comiencen en uno.
Datos del problema
Masa equivalente: meq 200 kg
Frecuencia circular natural: ωn 30rad
s
Ratio de amortiguamiento viscoso equivalente: ζeq 15 %
Parámetros des sistema calculados
Frecuencia natural: fn
ωn
2 π4.775
rad
s
Periodo natural: Tn1
fn0.209 s
Rigidez equivalente del sistema: keq ωn2
meq 1.8 105
N
m
Amortiguamiento crítico: Cc 2 ωn meq ζeq 1.8 103
N s
m
ceq Cc ζeq 270N s
mAmortiguamiento equivalente del sistema:
Frecuencia natural amortiguada: fd fn 1 ζeq2
4.721 Hz
Frecuencia natural circular amortiguada: ωd 2 π fd 29.661rad
s
Periodo amortiguado: Td1
fd0.212 s
Frecuencia circular de resonancia: ωr ωn 1 2 ζeq 25.1rad
s
Frecuencia de resonancia: fr
ωr
2π3.995 Hz
01/09/2010 - 20:22 2/15

Copyright (c) 2010 Luis Alfredo Suárez Vivar FRF_1_GDL_R_01_01.xmcd
Obtención de la Receptancia en base al DMF y la FASE
Vamos a justificar la expresión de la receptancia como función compleja dependiente de ω,en base al DMF y la FASE, ya estudiadas.
Es la FT Receptancia y viene dada por: α ω( )X ω( )
F ω( )=
Donde X(ω) es la Transformada de Fourier de x(t) y F(ω) es la transformada de f(t) de Fourier,siempre y cuando estas transformadas existan. Vamos a estudiar la respuesta en terminomide la frecuencia circular de excitación ω. También podríamos estudiarla en función de lafrecuencia f de excitación o del ratio de frecuencia de excitación - frecuencia natural r.
Recordando la respuesta de las estructuras (que son sistemas de segundo orden) a una cargaarmónica:
Cuando aplicamos una carga al sistema: f t( ) F0 sin ω t( )=
El sistema responde con: x t( )F0
keqDMF ζeq ω sin ωt ψ ζeq ω =
El DMF afecta a la amplitud de la respuesta : DMF ζeq ω 1
1ω
ωn
2
2
2ζeqω
ωn
2
=
El desfase cambia la fase de la respuesta: ψ ζeq ω atan2 1ω
ωn
2
2 ζeqω
ωn
=
Interpretando la carga o ENTRADA o EXCITACIÓN del sistema como un vector o complejo:
Módulo: F0Fase: 0
f t( ) F0 sin ω t( )= F0 ej 0
Interpretamos el desplazamiento o SALIDA o RESPUESTA del sistema como un vector ocomplejo:
Módulo: F0
keqDMF ζeq ω
Fase: ψ ζ r( )
x t( )F0
keqDMF ζeq ω sin ωt ψ ζeq ω = Im
F0
keqDMF ζeq ω e
j ψ ζeq ω
La receptancia es la función α(ω), que determina la salida X(ω) al multiplicarse por la entrada:
X ω( ) α ω( ) F ω( )=
01/09/2010 - 20:22 3/15

Copyright (c) 2010 Luis Alfredo Suárez Vivar FRF_1_GDL_R_01_01.xmcd
Observando la salida en términos de función compleja:
X ω( )F0
keqDMF ζeq ω e
j ψ ζeq ω =
Observando la entrada en términos de función compleja:
F ω( ) F0 ej 0
=
Podemos concluir que α(ω) en términos de magnitud y fase será:
Módulo o magnitud: α ω( )DMF ζeq ω
keq=
Fase: arg α ω( )( ) ψ ζeq ω =
α ω( )DMF ζeq ω
keqe
j ψ ζeq ω =
Definición numérica a partir de DMF y la fase:
DMF ζeq ω 1
1ω
ωn
2
2
2ζeqω
ωn
2
ψ ζeq ω atan2 1ω
ωn
2
2 ζeqω
ωn
Definición de la receptancia:
ρ ω( )DMF ζeq ω
keqe
j ψ ζeq ω
Gráficas de las FT
Si disponemos de una función compleja como α(ω), podemos representarla de diferentesformas:
- En notación exponencial: diagramas de magnitud y fase o de BODE.- En parte real e imaginaria: diagramas en CUADRATURA.- Eliminando ω, entre ambas partes: diagramas de NYQUIST.
Cada tipo de diagrama genera una información distinta.
Mathcad dispone de funciones especificas para manejar complejos. En principio paradiagramar una función compleja tendremos que representarla mediante los diagramas de suscomponentes, en función del tipo de representación que queramos.
01/09/2010 - 20:22 4/15
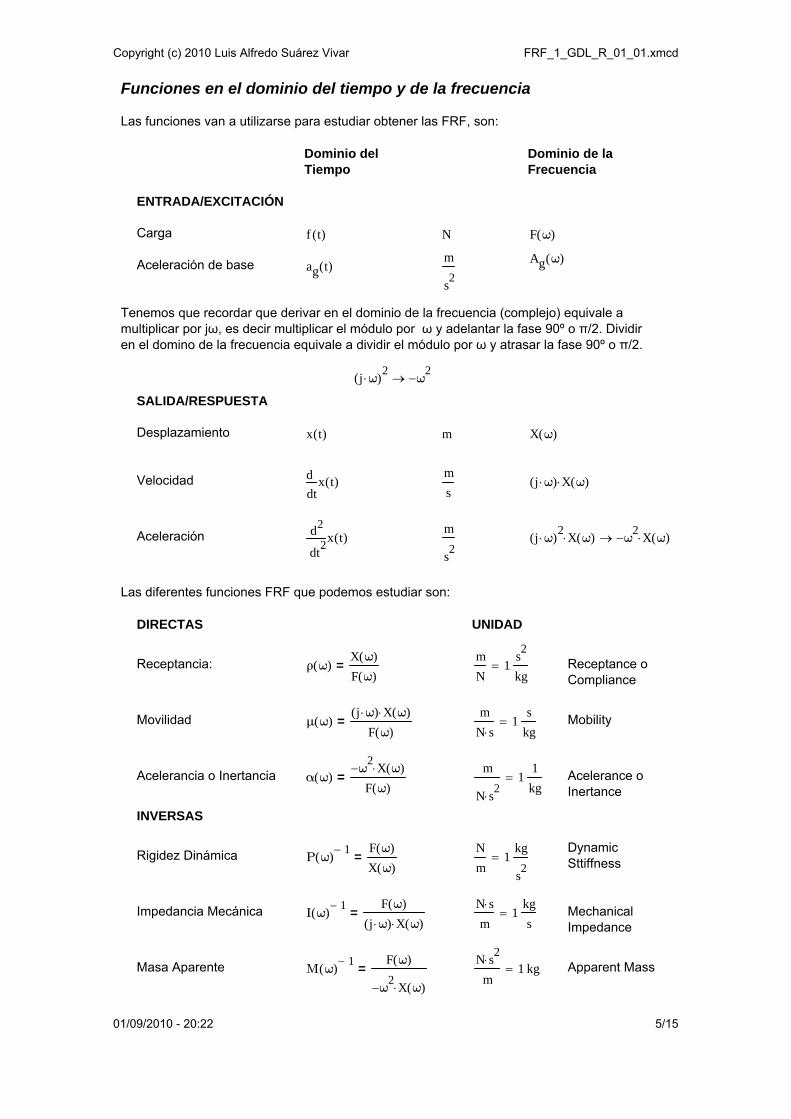
Copyright (c) 2010 Luis Alfredo Suárez Vivar FRF_1_GDL_R_01_01.xmcd
Funciones en el dominio del tiempo y de la frecuencia
Las funciones van a utilizarse para estudiar obtener las FRF, son:
Dominio delTiempo
Dominio de laFrecuencia
ENTRADA/EXCITACIÓN
Carga f t( ) N F ω( )
Ag ω( )Aceleración de base ag t( )m
s2
Tenemos que recordar que derivar en el dominio de la frecuencia (complejo) equivale amultiplicar por jω, es decir multiplicar el módulo por ω y adelantar la fase 90º o π/2. Dividiren el domino de la frecuencia equivale a dividir el módulo por ω y atrasar la fase 90º o π/2.
j ω( )2
ω2
SALIDA/RESPUESTA
Desplazamiento x t( ) m X ω( )
Velocidad tx t( )d
d
m
sj ω( ) X ω( )
Aceleración 2
tx t( )d
d
2 m
s2
j ω( )2
X ω( ) ω2
X ω( )
Las diferentes funciones FRF que podemos estudiar son:
DIRECTAS UNIDAD
Receptancia: ρ ω( )X ω( )
F ω( )=
m
N1
s2
kg Receptance o
Compliance
Movilidad μ ω( )j ω( ) X ω( )
F ω( )=
m
N s1
s
kg Mobility
Acelerancia o Inertancia α ω( )ω
2 X ω( )
F ω( )=
m
N s2
1
1
kg Acelerance o
Inertance
INVERSAS
DynamicSttiffness
Rigidez Dinámica Ρ ω( )1 F ω( )
X ω( )=
N
m1
kg
s2
Impedancia Mecánica Ι ω( )1 F ω( )
j ω( ) X ω( )=
N s
m1
kg
s Mechanical
Impedance
Masa Aparente Μ ω( )1 F ω( )
ω2
X ω( )=
N s2
m1 kg Apparent Mass
01/09/2010 - 20:22 5/15

Copyright (c) 2010 Luis Alfredo Suárez Vivar FRF_1_GDL_R_01_01.xmcd
0 20 40 60 80 1000
5 106
1 105
1.5 105
2 105
0
1
2
3
Receptancia en Mag/ Fase
Fecuencia [rad/s]
Mag
nitu
d [m
/N]
Fas
e [r
ad]
1
keq
ρ ω( )π
2
π
arg ρ ω( )( )
ωn
ω
Graficación de la Receptancia (Receptance o Compliance)
Ya se ha definido la receptancia α(ω) y pasamos a graficar en diagramas 2D en magnitud/fase -real/imaginario o Nyquist:
ρ 30rad
s
1.852 105
m1
N
ζeq 15 %
0 20 40 60 80 100
2 105
1 105
0
1 105
2 105
2 105
1 105
0
1 105
2 105
Receptancia en parte Real/Imag.
Fecuencia [rad/s]
Par
te R
eal [
m/N
]
Par
te I
mag
inar
ia [
m/N
]
1
keqRe ρ ω( )( ) 0 Im ρ ω( )( )
ωn
ω
ζeq 15 %
01/09/2010 - 20:22 6/15

Copyright (c) 2010 Luis Alfredo Suárez Vivar FRF_1_GDL_R_01_01.xmcd
1.25 105 6.25 10
6 0 6.25 106 1.25 10
51 10
6
5.5 106
1.2 105
1.85 105
2.5 105
Nyquist de la Receptancia
Parte Real [m/N]
Par
te I
mag
inar
ia [
m/N
]
0
Im ρ ω( )( )
Im ρ ωn Im ρ ωr
0
Re ρ ω( )( ) Re ρ ωn Re ρ ωr
El diagrama de Nyquist se construye a partir de la parte real e imaginaria, eliminando entreambas la variable ω.
ω 0rad
s 0.01
rad
s 200
rad
s
ζeq 15 %
El rombo azul nos marca la frecuencia natural y el verde la frecuencia de resonancia.
01/09/2010 - 20:22 7/15
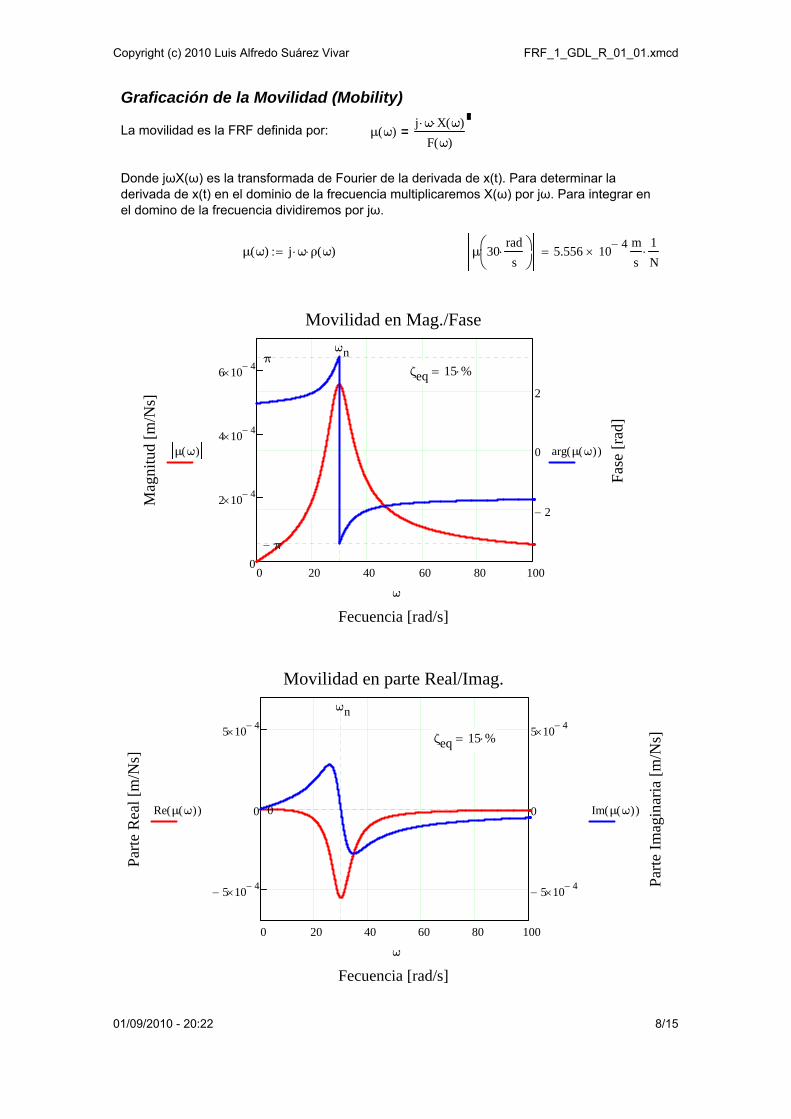
Copyright (c) 2010 Luis Alfredo Suárez Vivar FRF_1_GDL_R_01_01.xmcd
Graficación de la Movilidad (Mobility)
La movilidad es la FRF definida por: μ ω( )j ω X ω( )
F ω( )=
Donde jωX(ω) es la transformada de Fourier de la derivada de x(t). Para determinar laderivada de x(t) en el dominio de la frecuencia multiplicaremos X(ω) por jω. Para integrar enel domino de la frecuencia dividiremos por jω.
μ ω( ) j ω ρ ω( ) μ 30rad
s
5.556 104
m
s
1
N
0 20 40 60 80 1000
2 104
4 104
6 104
2
0
2
Movilidad en Mag./Fase
Fecuencia [rad/s]
Mag
nitu
d [m
/Ns]
Fas
e [r
ad]
μ ω( )
π
π
arg μ ω( )( )
ωn
ω
ζeq 15 %
0 20 40 60 80 100
5 104
0
5 104
5 104
0
5 104
Movilidad en parte Real/Imag.
Fecuencia [rad/s]
Par
te R
eal [
m/N
s]
Par
te I
mag
inar
ia [
m/N
s]
Re μ ω( )( ) 0 Im μ ω( )( )
ωn
ω
ζeq 15 %
01/09/2010 - 20:22 8/15
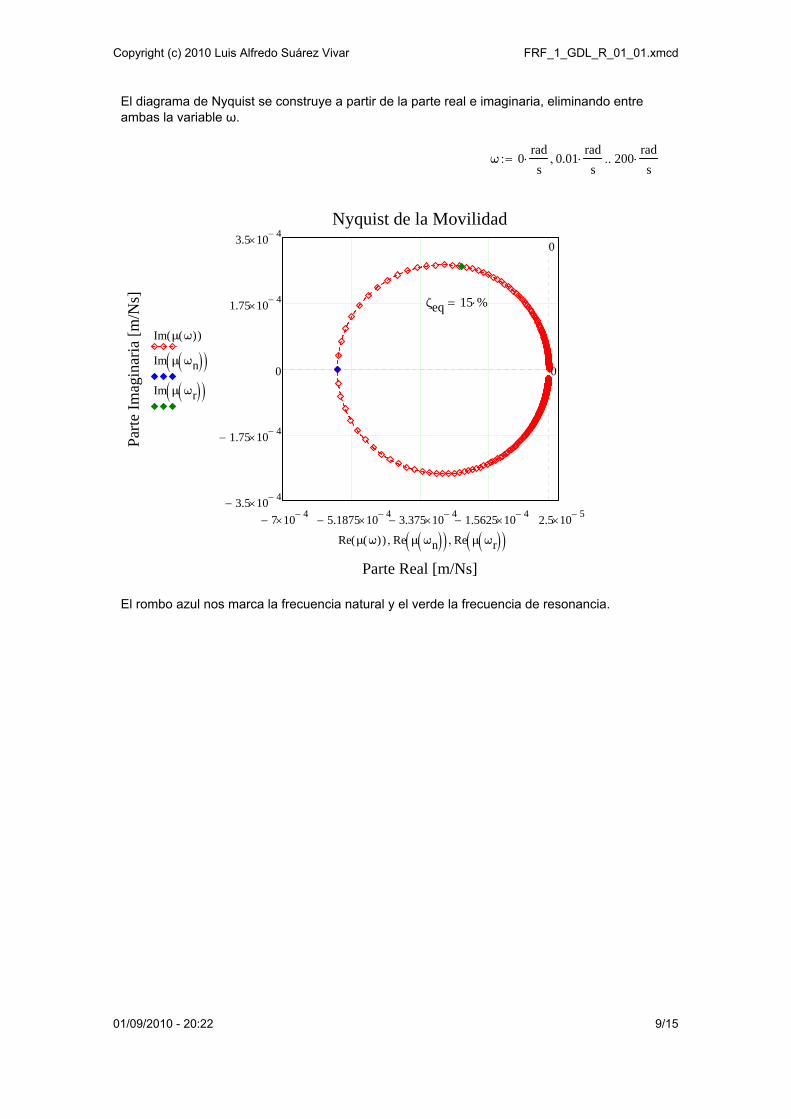
Copyright (c) 2010 Luis Alfredo Suárez Vivar FRF_1_GDL_R_01_01.xmcd
7 104 5.1875 10
4 3.375 104 1.5625 10
4 2.5 105
3.5 104
1.75 104
0
1.75 104
3.5 104
Nyquist de la Movilidad
Parte Real [m/Ns]
Par
te I
mag
inar
ia [
m/N
s]
0
Im μ ω( )( )
Im μ ωn Im μ ωr
0
Re μ ω( )( ) Re μ ωn Re μ ωr
El diagrama de Nyquist se construye a partir de la parte real e imaginaria, eliminando entreambas la variable ω.
ω 0rad
s 0.01
rad
s 200
rad
s
ζeq 15 %
El rombo azul nos marca la frecuencia natural y el verde la frecuencia de resonancia.
01/09/2010 - 20:22 9/15

Copyright (c) 2010 Luis Alfredo Suárez Vivar FRF_1_GDL_R_01_01.xmcd
0 20 40 60 80 100
0.01
0
0.01
0.01
0
0.01
Acelerancia en parte Real e Imaginaria
Fecuencia [rad/s]
Par
te R
eal [
m/N
s2]
Par
te I
mag
inar
ia [
m/N
s2]
Re α ω( )( ) 0 Im α ω( )( )
ωn
ω
Graficación de la Acelerancia o Inertancia (Acelerance o Inertance)
La acelerancia es la FRF definida por: α ω( )ω
2 X ω( )
F ω( )=
Donde a(ω) es la transformada de Fourier de la derivada de a(t). Para determinar la derivada
segunda de x(t) en el dominio de la frecuencia multiplicaremos X(ω) por (jω) 2. Para integrar enel dominio de la frecuencia dividiremos por jω.
α ω( ) j ω( )2
ρ ω( ) α 30rad
s
0.0171
kg
0 20 40 60 80 1000
5 103
0.01
0.015
2
0
2
Acelerancia en Magnitud y Fase
Fecuencia [rad/s]
Mag
nitu
d [m
/Ns2
]
Fas
e [r
ad]
α ω( )
π
π
2
arg α ω( )( )
ωn
ω
ζeq 15 %
ζeq 15 %
01/09/2010 - 20:22 10/15
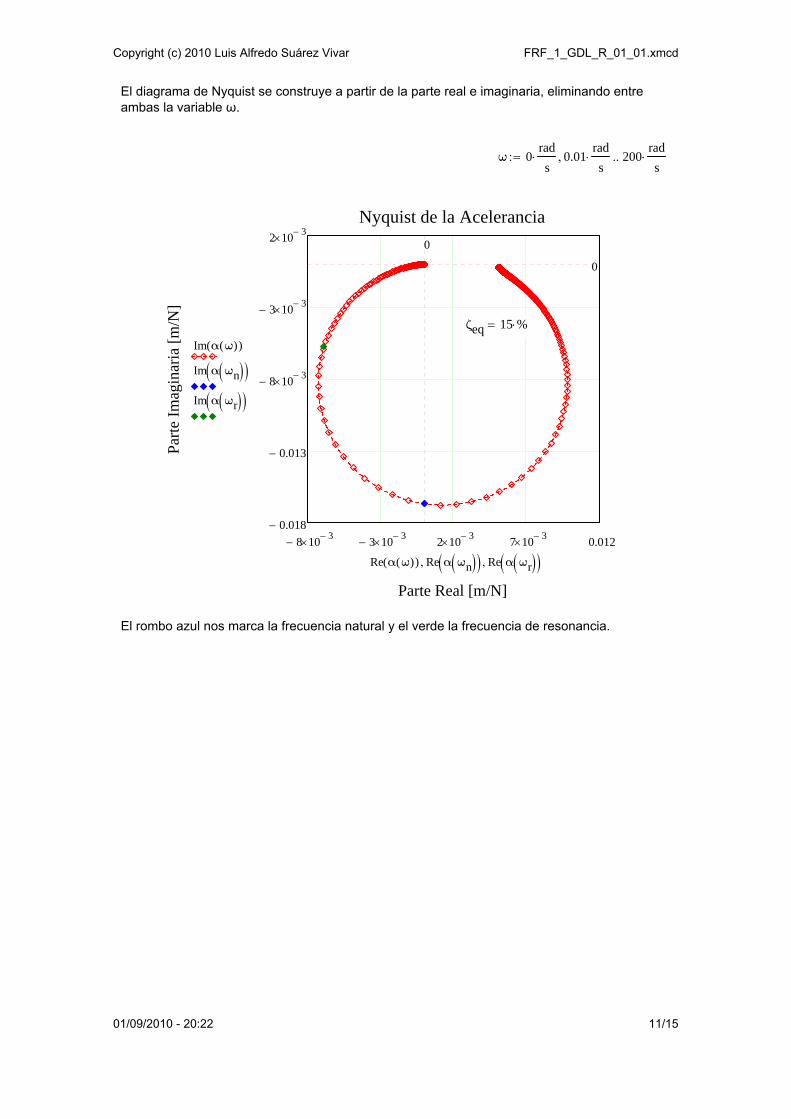
Copyright (c) 2010 Luis Alfredo Suárez Vivar FRF_1_GDL_R_01_01.xmcd
8 103 3 10
3 2 103 7 10
3 0.012
0.018
0.013
8 103
3 103
2 103
Nyquist de la Acelerancia
Parte Real [m/N]
Par
te I
mag
inar
ia [
m/N
]
0
Im α ω( )( )
Im α ωn Im α ωr
0
Re α ω( )( ) Re α ωn Re α ωr
El diagrama de Nyquist se construye a partir de la parte real e imaginaria, eliminando entreambas la variable ω.
ω 0rad
s 0.01
rad
s 200
rad
s
ζeq 15 %
El rombo azul nos marca la frecuencia natural y el verde la frecuencia de resonancia.
01/09/2010 - 20:22 11/15

Copyright (c) 2010 Luis Alfredo Suárez Vivar FRF_1_GDL_R_01_01.xmcd
Graficación de la Rigidez Dinámica (Dynamic Stiffness)
La movilidad es la FRF definida por: Ρ ω( )j ω X ω( )
F ω( )= Ρ ω( ) ρ ω( )
1
Donde V(ω) es la transformada de Fourier de la derivada de x(t). Para determinar la derivada dex(t) en el dominio de la frecuencia multiplicaremos X(ω) por jω. Para integrar en el domino dela frecuencia dividiremos por jω.
ρ 30rad
s
15.4 10
4
1
mN
0 20 40 60 80 1000
5 105
1 106
1.5 106
2 106
2
0
2
Rigidez Dinámica en Mag./Fase
Fecuencia [rad/s]
Mag
nitu
d [N
/m]
Fas
e [r
ad]
ρ ω( )1
π
2
0 arg ρ ω( )1
ωn
ω
ζeq 15 %
0 20 40 60 80 1002 10
6
1 106
0
2 106
1 106
0
Rigidez Dinámica en Real/Imag.
Fecuencia [rad/s]
Par
te R
eal [
N/m
]
Par
te I
mag
inar
ia [
N/m
]
Re ρ ω( )1
0
Im ρ ω( )1
ωn
ω
ζeq 15 %
01/09/2010 - 20:22 12/15

Copyright (c) 2010 Luis Alfredo Suárez Vivar FRF_1_GDL_R_01_01.xmcd
0 20 40 60 80 1000
5 104
1 105
1.5 105
2 105
2
0
2
Impedancia en Mag.\Fase
Fecuencia [rad/s]
Mag
nitu
d [m
/Ns]
Fas
e [r
ad]
μ ω( )1
π
π
arg μ ω( )1
ωn
ω
0 20 40 60 80 1003 10
5
2 105
1 105
0
2 104
0
2 104
Impedancia en parte Real/Imag.
Fecuencia [rad/s]
Par
te R
eal [
m/N
s]
Par
te I
mag
inar
ia [
m/N
s]
Re μ ω( )1 0 Im μ ω( )
1
ωn
ω
Graficación de la Impedancia Mecánica (Mechanical Impedance)
La movilidad es la FT definida por: Ι ω( )j ω X ω( )
F ω( )= Ι ω( ) μ ω( )
1
Donde j ω X ω( ) es la derivada de la transformada de Fourier de x(t).
μ 30rad
s
11.8 10
3
s
mN
ζeq 15 %
Re μ ωn 1
1.8 10
3
s
mN
ζeq 15 %
Im μ ωn 1
1.1 10
13
s
mN
01/09/2010 - 20:22 13/15
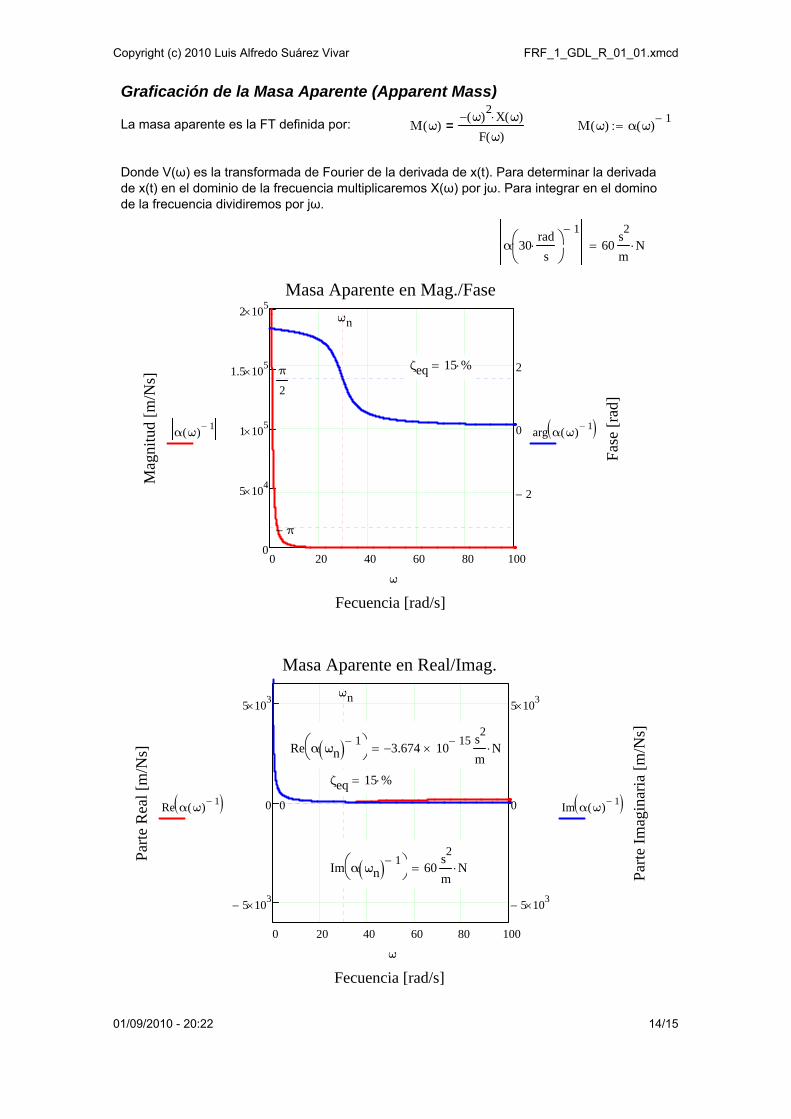
Copyright (c) 2010 Luis Alfredo Suárez Vivar FRF_1_GDL_R_01_01.xmcd
0 20 40 60 80 100
5 103
0
5 103
5 103
0
5 103
Masa Aparente en Real/Imag.
Fecuencia [rad/s]
Par
te R
eal [
m/N
s]
Par
te I
mag
inar
ia [
m/N
s]
Re α ω( )1 0 Im α ω( )
1
ωn
ω
Graficación de la Masa Aparente (Apparent Mass)
La masa aparente es la FT definida por: Μ ω( )ω( )
2 X ω( )
F ω( )= Μ ω( ) α ω( )
1
Donde V(ω) es la transformada de Fourier de la derivada de x(t). Para determinar la derivadade x(t) en el dominio de la frecuencia multiplicaremos X(ω) por jω. Para integrar en el dominode la frecuencia dividiremos por jω.
α 30rad
s
160
s2
mN
0 20 40 60 80 1000
5 104
1 105
1.5 105
2 105
2
0
2
Masa Aparente en Mag./Fase
Fecuencia [rad/s]
Mag
nitu
d [m
/Ns]
Fas
e [r
ad]
α ω( )1
π
π
2
arg α ω( )1
ωn
ω
ζeq 15 %
Re α ωn 1
3.674 10
15
s2
mN
ζeq 15 %
Im α ωn 1
60
s2
mN
01/09/2010 - 20:22 14/15

Copyright (c) 2010 Luis Alfredo Suárez Vivar FRF_1_GDL_R_01_01.xmcd
Bibliografía.
1. Tedesco JW. et al. Structural Dynamics, Theory and Applications. Addison WesleyLongman, Inc. 2725 Sand Hill Road. Menlo Park, California 94025. ISBN 0-673-98052-9. 1999.
2. Suárez LA. Apuntes de la Asignatura de Ampliación de Mecanica. Departamento deIngeniería Civil. Universidad de Burgos. 2010.
3. Mathcad User Guide, Release 14. Mathsoft. February 2007. Parametric TechnologyCorporation, 140 Kendrick Street, Needham, MA 02494 USA
01/09/2010 - 20:22 15/15

126 12. FRF, Función de Respuesta en Frecuencia

Capítulo 13
Integración con MS− Excel
En esta práctica verificamos la capacidad de MATHCAD para importar datos des-de MS− Excel y manipularlos de manera básica. Esta capacidad se extiende a otroformatos como son los de:
Texto Plano.
dBase III R©.
MATLAB.
La práctica comenzará con la creación en MS− Excel del conjunto de datos en la hojade cálculo y a partir de su creación se de definen un conjunto de áreas con nombre quepermiten un acceso mas sencillo a los datos desde MATHCAD.
En MATHCAD se leen los datos mediante el correspondiente componente que seinserta. Los datos se pasan un conjunto de vectores y con ellos se definirá un spli-ne que ajuste los datos y a partir de la definición del spline se crea una función queMATHCAD podrá interpolar automáticamente cuando esto sea requerido por el en-torno.
La función así creada MATHCAD funcionará como cualquier otra con las únicas li-mitaciones impuestas por su naturaleza (continuidad, derivabilidad o integrabilidad).
En este caso los datos leídos se van a aplicar a crear una carga dinámica (transito-rio) sobre un sistema de 1 GDL y se va calculará su respuesta mediante la Integral deDuhamel.
Si bien es cierto que el manejo posterior de estas funciones creadas a partir de datoses elegante y sencilla, se paga un alto precio en tiempo de ejecución. Podemos redu-cir hasta en 50 veces el tiempo de ejecución si los cálculos los hacemos directamentecon los puntos bien programando en MATHCAD o bien permitiendo que el cálculo lorealice MATLAB mediante un objeto integrado en MATHCAD. Esta cuestión se trataen otra práctica posterior.
127

128 13. Integración con MS− Excel
13.1. Objetivos para los contenidos1. Crear el conjunto de datos en MS− Excel.
2. Importar el conjunto de datos en MS− Excel.
3. Crear la función de carga mediante un ajuste y una interpolación.
4. Definir la FRIU del sistema.
5. calcular la respuesta al transitorio mediante una convolución.
6. Graficar las soluciones
13.2. Objetivos instrumentales1. Creación de datos en MS− Excel.
2. Creación de áreas con nombre en MS− Excel.
3. Pasar datos importados a vectores MATHCAD.
4. Ajustar los datos con cspline.
5. Crear la función con la función interp.
6. Convolucionar F (t) con h(t).

Importacion_de_datos_desde_Excel_R_01_01.xmcd
TRABAJO FINAL DE MASTERMASTER INTER-UNIVERSITARIO EN VIBRACIONES Y ACÚSTICAUNIVERSIDAD DE VALLADOLID - UNIVERSIDAD DE LEÓNIMPORTACION DE DATOS DESDE EXCELCopyright (c) 2010 LUIS ALFREDO SUAREZ VIVAR - [email protected]
Objetivos de la prácticaLa práctica nos introduce en la técnica básica para importar un conjunto de datos, querepresentarán una carga dinámica, que posteriormente se convertirán mediante un ajuste a unspline y una interpolación en un función Mathcad que podrá ser utilizada en este caso paraobtener la respuesta mediante la Integral de Convolución de Duhamel.
Carga transitoria propuesta:Tiempo Forma Fuerza
s N0,00 0 0,000,02 0,3 30000,000,04 0,4 40000,000,06 0,5 50000,000,08 0,5 50000,000,10 0,55 55000,000,12 0,58 58000,000,14 0,59 59000,000,16 0,6 60000,000,18 0,67 67000,000,20 0,7 70000,000,22 0,9 90000,000,24 0,95 95000,000,26 0,96 96000,000,28 0,97 97000,000,30 0,98 98000,000,32 0,97 97000,000,34 0,95 95000,000,36 0,93 93000,000,38 0,91 91000,000,40 0,75 75000,000,42 0,7 70000,000,44 0,6 60000,000,46 0,4 40000,000,48 0,38 38000,000,50 0,34 34000,000,52 0,33 33000,000,54 0,3 30000,000,56 0,2 20000,000,58 0,1 10000,000,60 0 0,00
Sistema estructural:
Masa de sistema:
me 200 kg
Frecuencia circular natural del sistema:
ωn 30rad
s
Ratio de amortiguamiento viscoso:
ζe 15%
Condiciones iniciales:
Desplazamiento inicial: x0 0.1 m
Velocidad inicial: dx0 1m
s
01/09/2010 - 22:40 1/9
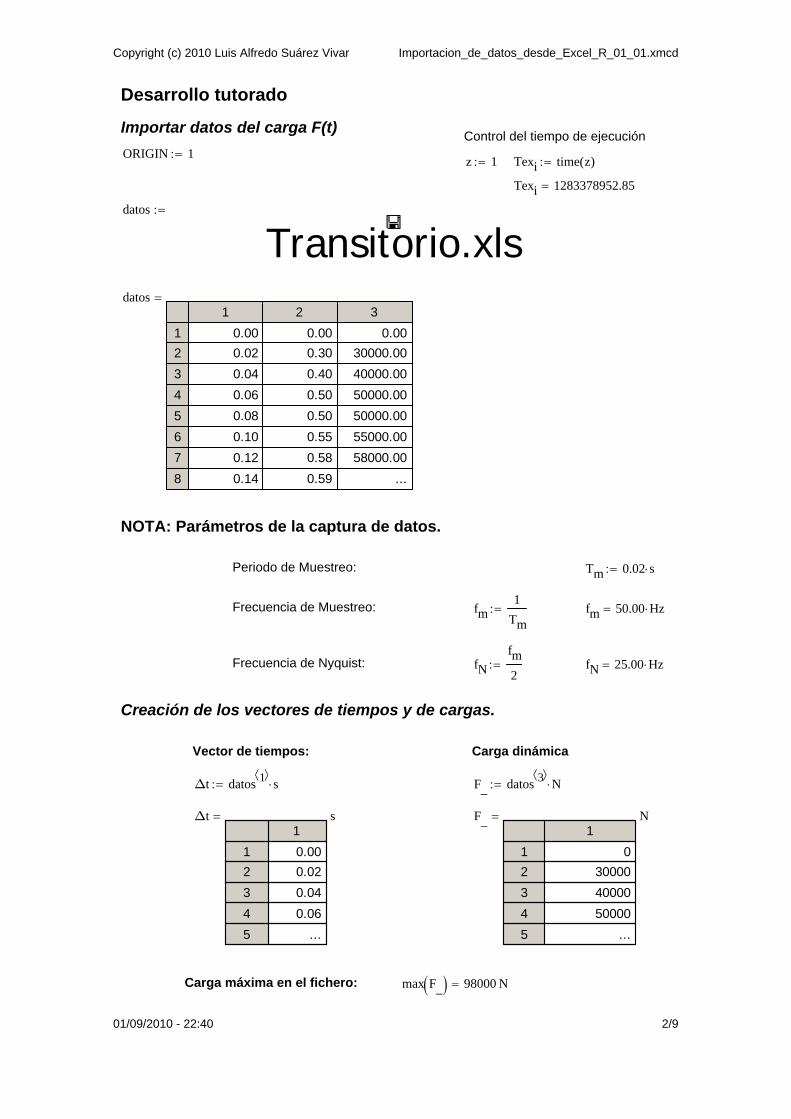
Copyright (c) 2010 Luis Alfredo Suárez Vivar Importacion_de_datos_desde_Excel_R_01_01.xmcd
Desarrollo tutorado
Importar datos del carga F(t)Control del tiempo de ejecución
ORIGIN 1z 1 Texi time z( )
Texi 1283378952.85
datos
Transitorio.xls
datos1 2 3
12
3
4
5
6
7
8
0.00 0.00 0.000.02 0.30 30000.00
0.04 0.40 40000.00
0.06 0.50 50000.00
0.08 0.50 50000.00
0.10 0.55 55000.00
0.12 0.58 58000.00
0.14 0.59 ...
NOTA: Parámetros de la captura de datos.
Periodo de Muestreo: Tm 0.02 s
Frecuencia de Muestreo: fm1
Tm fm 50.00 Hz
Frecuencia de Nyquist: fN
fm
2 fN 25.00 Hz
Creación de los vectores de tiempos y de cargas.
Vector de tiempos: Carga dinámica
Δt datos 1 s F_ datos 3 N
Δt1
12
3
4
5
0.000.02
0.04
0.06
...
s F_1
12
3
4
5
030000
40000
50000
...
N
Carga máxima en el fichero: max F_ 98000 N
01/09/2010 - 22:40 2/9

Copyright (c) 2010 Luis Alfredo Suárez Vivar Importacion_de_datos_desde_Excel_R_01_01.xmcd
0.0 0.3 0.6 0.9 1.2 1.5 1.8
0
50000
100000
Carga Dinámica F(t)
Tiempo [s]
Car
ga [
N]
max F_
F t( )
F t( )
0.6 s
t
Control de los datos leídos.
Longitud vector de la base de tiempos: length Δt( ) 31.00 Número de registros.
Longitud vector de cargas: length F_ 31.00 Número de registros.
Ultimo registro de tiempo: Δtlength Δt( )
0.60 s
Control de los ejes de tiempos de los diagramas:
Control de los diagramas: tmax 3 Δtlength Δt( )
tmax 1.8 s
Tamaño del paso de resolución paso 0.01 s paso 0.01 s
Conjunto de puntos de cálculo: t 0 s paso tmax t
0.000.01
...
s
Ajuste (fitting) de los datos.
Obtención de los coeficientes de lossplines de cuarto orden:
Coef_Spline cspline Δt F_
Coef_Spline1
12
3
4
5
03
2
-125735757.05
...
m kg
s4
Creación de la funciónMathcad de cargainterpolando los datos delspline:
F t( ) interp Coef_Spline Δt F_ t 0 s t Δtlength Δt( )
if
0 otherwise
Determinar la función de carga f(t).
max F_ 98000.00 N
min F_ 0.00 N
01/09/2010 - 22:40 3/9

Copyright (c) 2010 Luis Alfredo Suárez Vivar Importacion_de_datos_desde_Excel_R_01_01.xmcd
Propiedades del sistema mecánico:
Los parámetros con los que nos han definido el sistema son:
Masa de sistema: me 200.00 kg
Frecuencia circular natural del sistema: ωn 30.001
srad
Ratio de amortiguamiento viscoso: ζe 0.15
Vamos a determinar del sistema los siguientes parámetros:
Frecuencia natural en Hz: fn
ωn
2π fn 4.77
1
s
Período amortiguado del sistema: Tn1
fn Tn 0.2094 s
Frecuencia circular amortiguada del sistema: ωd ωn 1 ζe2
ωd 29.661
srad
Frecuencia amortiguada del sistema: fd
ωd
2π fd 4.72 Hz
Período amortiguado del sistema: Td1
fd Td 0.21 s
Rigidez del sistema: ke ωn2
me ke 180000.00N
m
Amortiguamiento del sistema: ce 2 me ωn ζe ce 1800.00N s
m
01/09/2010 - 22:40 4/9

Copyright (c) 2010 Luis Alfredo Suárez Vivar Importacion_de_datos_desde_Excel_R_01_01.xmcd
Generación de la función de respuesta al impulso unitario h(t).
Definiremos la respuesta alimpulso unitario:
h t( )1 N s
me ωde
ζe ωn t sin ωd t t 0if
0 otherwise
Comprobamos que la respuesta viene dada en m: h 1.7 s( ) 0.000000 m
Tiempos de representación: t 2 s 2 sTn
20
10 Tn
0.4189 0 0.4189 0.8378 1.2566 1.6755 2.09440.000185
0.000111
0.000037
0.000037
0.000111
0.000185
Función de Respuesta al Impulso Unitario
Tiempo en [s]
Des
plaz
amie
nto
[m]
1 N s
me ωde
ζe ωnTn
4
0 m
h t( )
1 N s
met
1 N s
me ωde
ζe ωn t
1 N s
me ωde
ζe ωn t
0 s Tn
t
Respuestas del sistema
Para calcular la respuesta utilizamos la Integral de Duhamel, definida como la integra deconvolución:
xP t( )
0
t
τF τ( )
N sh t τ( )
d
Tiempos de cálculo y representación: t 0 s paso tmax
01/09/2010 - 22:40 5/9

Copyright (c) 2010 Luis Alfredo Suárez Vivar Importacion_de_datos_desde_Excel_R_01_01.xmcd
0 0.45 0.9 1.35 1.80.2
0.075
0.05
0.175
0.3
0.425
0.55
0.675
0.8
Respuesta del sistema a F(t)
Tiempo [s]
Des
plaz
amie
nto
[m]
0 m
xP t( )
xP t( )
0.6 s
t
Detalles de la respuesta al final del periodo de carga
0.4000 0.5250 0.6500 0.7750 0.90000.20000.0750
0.0500
0.1750
0.3000
0.4250
0.5500
0.6750
0.8000
Respuesta del sistema a F(t)
Tiempo [s]
Des
plaz
amie
nto
[m]
0 m
0.6 s
0.4500 0.7875 1.1250 1.4625 1.80000.20000.0750
0.0500
0.1750
0.3000
0.4250
0.5500
0.6750
0.8000
Respuesta del sistema a F(t)
Tiempo [s]
Des
plaz
amie
nto
[m]
0 m
0.6 s
01/09/2010 - 22:40 6/9
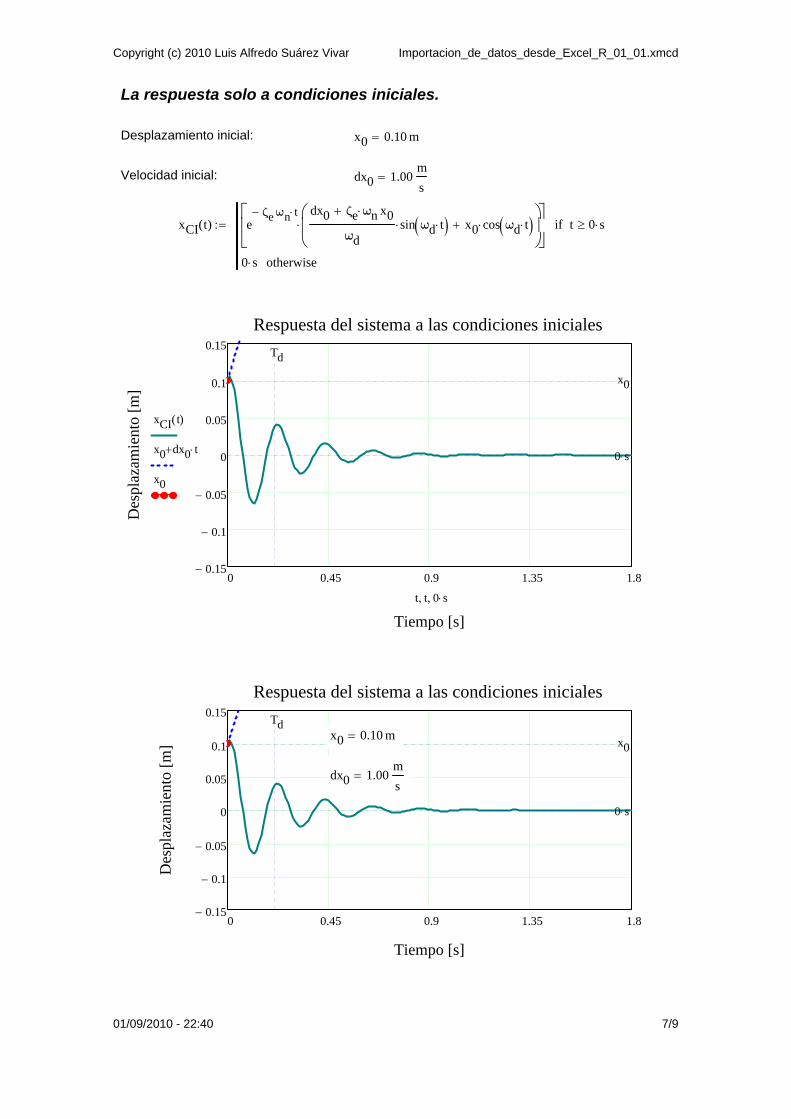
Copyright (c) 2010 Luis Alfredo Suárez Vivar Importacion_de_datos_desde_Excel_R_01_01.xmcd
0 0.45 0.9 1.35 1.80.15
0.1
0.05
0
0.05
0.1
0.15
Respuesta del sistema a las condiciones iniciales
Tiempo [s]
Des
plaz
amie
nto
[m]
0 s
x0
Td
La respuesta solo a condiciones iniciales.
Desplazamiento inicial: x0 0.10 m
Velocidad inicial: dx0 1.00m
s
xCI t( ) eζe ωn t dx0 ζe ωn x0
ωdsin ωd t x0 cos ωd t
t 0 sif
0 s otherwise
0 0.45 0.9 1.35 1.80.15
0.1
0.05
0
0.05
0.1
0.15
Respuesta del sistema a las condiciones iniciales
Tiempo [s]
Des
plaz
amie
nto
[m]
0 s
x0
xCI t( )
x0 dx0 t
x0
Td
t t 0 s
x0 0.10 m
dx0 1.00m
s
01/09/2010 - 22:40 7/9

Copyright (c) 2010 Luis Alfredo Suárez Vivar Importacion_de_datos_desde_Excel_R_01_01.xmcd
Respuesta completa del sistema
Aplicando el principio de superposición, la respuesta completa a las condiciones iniciales y lacarga, vendrá dada por:
x t( ) xP t( ) xCI t( )
0 0.45 0.9 1.35 1.80.2
0.0333
0.1333
0.3
0.4667
0.6333
0.8
Respuesta conjunta del sistema
Tiempo [s]
Des
plaz
amie
nto
[N]
0 m
x t( )
x t( )
t
0 0.45 0.9 1.35 1.80.224
0.0533
0.1173
0.288
0.4587
0.6293
0.8
Respuesta a la Carga y Respuesta Completa
Tiempo [s]
Des
plaz
amie
nto
[m]
x t( )
x t( )
xP t( )
xP t( )
t
Detalle de la respuesta cerca del origen:
0 0.106 0.212 0.318 0.4240.224
0.0573
0.1093
0.276
0.4427
0.6093
0.776
Respuesta a la Carga y Respuesta Completa
Tiempo [s]
Des
plaz
amie
nto
[m]
01/09/2010 - 22:40 8/9
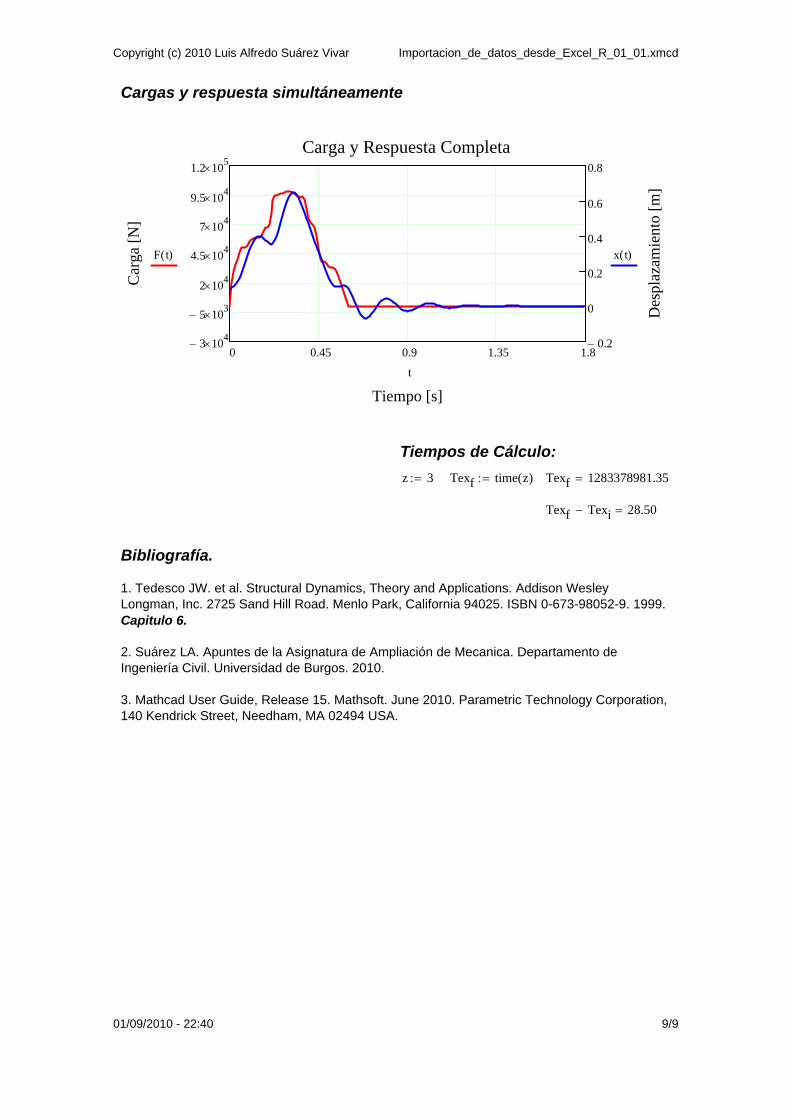
Copyright (c) 2010 Luis Alfredo Suárez Vivar Importacion_de_datos_desde_Excel_R_01_01.xmcd
0 0.45 0.9 1.35 1.83 10
4
5 103
2 104
4.5 104
7 104
9.5 104
1.2 105
0.2
0
0.2
0.4
0.6
0.8
Carga y Respuesta Completa
Tiempo [s]
Car
ga [
N]
Des
plaz
amie
nto
[m]
F t( ) x t( )
t
Cargas y respuesta simultáneamente
Tiempos de Cálculo:
z 3 Texf time z( ) Texf 1283378981.35
Texf Texi 28.50
Bibliografía.
1. Tedesco JW. et al. Structural Dynamics, Theory and Applications. Addison WesleyLongman, Inc. 2725 Sand Hill Road. Menlo Park, California 94025. ISBN 0-673-98052-9. 1999.Capitulo 6.
2. Suárez LA. Apuntes de la Asignatura de Ampliación de Mecanica. Departamento deIngeniería Civil. Universidad de Burgos. 2010.
3. Mathcad User Guide, Release 15. Mathsoft. June 2010. Parametric Technology Corporation,140 Kendrick Street, Needham, MA 02494 USA.
01/09/2010 - 22:40 9/9

138 13. Integración con MS− Excel
Capítulo 14
Respuesta al Terremoto de El Centro
En esta práctica verificamos la capacidad de MATHCAD para importar datos experi-mentales previamente importados a MS− Excel.En esta práctica tratamos ya un problema de volumen de datos y hay que sacar conse-cuencias sobre la factibilidad de los cálculo en condiciones de reales de trabajo.
Los ficheros de los registros aceleraciones del terreno para un terremoto concreto pue-den obtenerse on-line en diversos web de las redes nacionales de control sísmico endiversos formatos de texto plano que hay que tratar.
En general no hay un formato de fichero único. Estos ficheros tienen en común al-gunas características:
1. Son ficheros planos de texto es decir caracteres ASCII sin formatear por lo quese pueden abrir con cualquier procesador de textos, teniendo cuidado en no con-vertirlos a formatos no planos.
2. De manera típica los registros son de aceleración, aunque dependiendo de latecnología de los sismógrafos podrían obtenerse datos en desplazamiento o ve-locidad, no sin el correspondiente error en la transformación.
3. Los registros de aceleración pueden estar en m/s2, cm/s2, g, in/s2, feet/s2.
4. De manera típica los registros se suelen dar cada 0,02 s o lo que es lo mismo sehan capturado con una frecuencia de muestreo de 50 Hz, esta situación limita losrangos de frecuencia de análisis de acuerdo con el Teorema de Nyquist a unos25 Hz como máximo, suficiente para el análisis de edificaciones y obras civilespero para otras cuestiones un limitado.
5. En general los registros serán diferentes en cada estación sismológica y la ubi-cación que tenga relativa al epicentro del seísmo.
6. Como datos básicos del registro estan la temporización del evento (Horas, minu-tos, segundos, décimas y centésimas de segundo) y la dirección es la que se hamedido: N-S, E-O, Vertical.
139
140 14. Respuesta al Terremoto de El Centro
El Terremoto de El Centro sucedió el 18 de mayo de 1940 a las 8:37 PST y es el primerterremoto bien registrado y al margen de sus características, sobre el se han realizadomuchos estudios, por lo que es la referencia de los terremotos.
14.1. Objetivos para los contenidos1. Crear el conjunto de datos en MS− Excel.
2. Importar el conjunto de datos en MS− Excel.
3. Crear la función de carga mediante un ajuste y una interpolación.
4. Definir la FRIU del sistema.
5. calcular la respuesta al transitorio mediante una convolución.
6. Graficar las soluciones
7. Medir los tiempos de ejecución
14.2. Objetivos instrumentales1. Creación de datos en MS− Excel.
2. Creación de áreas con nombre en MS− Excel.
3. Pasar datos importados a vectores MATHCAD.
4. Ajustar los datos con cspline.
5. Crear la función con la función interp.
6. Convolucionar F (t) con h(t).
7. Usar la función time() para medir tiempos de ejecución.

Respuesta_a_Terremotos_AL_R_01_01.xmcd
TRABAJO FINAL DE MASTERMASTER INTER-UNIVERSITARIO EN VIBRACIONES Y ACÚSTICAUNIVERSIDAD DE VALLADOLID - UNIVERSIDAD DE LEÓNRESPUESTA AL TERREMOTO DE EL CENTRO DE UN SISTEMA DE 1 GDLCopyright (c) 2010 LUIS ALFREDO SUAREZ VIVAR - [email protected]
Objetivos de la prácticaLos objetivos didácticos de la práctica son aprender a trabajar con datos de origenexperimental, con estos datos vamos a definir funciones de aceleración de base, carga, etc.
Estos datos se pueden tratar básicamente de dos formas:
a) Creando procedimientos numéricos ad hoc para tratar los datos, generando lascorrespondientes funciones y subrutinas de cálculo (por ejemplo programando un algoritmode Newmark-Beta para la integración de la ecuación diferencial de movimiento).
b) Convirtiendo estos datos en funciones típicas de Mathcad y aplicando procedimientosestándares.
De estas dos formas de trabajo, la primera resulta en general más compleja a priori, ya quehay que programar ad hoc las funciones de cálculo, pero a cambio el cálculo puede resultarmuy rápido, sobre todo si se opera haciendo llamadas a funciones Matlab.
El segundo procedimiento nos ayuda a comprender un procedimiento general de trabajosencillo de aplicar. A cambio se van a tener tiempos de cálculo mayores.
En la práctica que se propone, trabajaremos de la segunda forma. Importaremos un conjuntode datos, los convertiremos en una función de Mathcad, obtendremos la carga equivalentecorrespondiente y como transitorio que es, calcularemos la respuesta del sistema utilizandola Integral de Duhamel o de Convolución. Puesto que estos cálculos son costosos en tiempo,se recomienda desactivar la opción de recálculo automático de la hoja de trabajo ycalcular paso a paso el problema.
Dado un sistema estructural definido mediante los siguientes parámetros:
me 200 kg ωn 5rad
s ζe 15%
Sobre sistema se va a aplicar una aceleración de base dada por el sismo de El Centro, quese encuentra en el fichero excel "Datos de Terremotos R01.01.xls".
Adicionalmente vamos a tener unas condiciones iniciales dadas por:
Desplazamiento inicial: x0 0.2 m Velocidad inicial: dx0 0m
s
Cuestiones a estudiar
- Revisar la hoja Excel: "Datos de Terremotos R01.01.xls".- Importar los datos y asignarlos a un array denominado datos.- Determinar la función de aceleración de base: ag(t).
- Determinar los parámetros del sistema.- Determinar la función de carga equivalente aplicada sobre la estructura: psis(t).
- Generar la función de respuesta al impulso unitario h(t).- Obtener la respuesta a la carga del sistema: xP(t), la respuesta las CI xCI(t) y la respuesta
conjunta x(t).
02/09/2010 - 0:08 1/12

Copyright (c) 2010 Luis Alfredo Suárez Vivar Respuesta_a_Terremotos_AL_R_01_01.xmcd
Desarrollo tutoradoRevisar la hoja Excel: Datos de Terremotos R01.01.xls
Los ficheros de los registros aceleraciones del terreno para un terremoto concreto puedenobtenerse on-line en diversos web de las redes nacionales de control sísmico.
En general no hay un formato de fichero único. Estos ficheros tienen en común algunascaracterísticas:
1. Son ficheros planos de texto es decir caracteres ascii sin formatear por lo que se puedenabrir con cualquier procesador de textos, teniendo cuidado en no convertirlos a formatos noplanos como por ejemplo el .doc de word.
2. En general los ficheros tiene que indicar varias cuestiones :
- De manera típica los registros son de aceleración, aunque dependiendo de latecnología de los sismógrafos podrían obtenerse datos en desplazamiento ovelocidad.
- Los registros de aceleración pueden estar en m/s2, cm/s2, g, in/s2, feet/s2.- De manera típica los registros se suelen dar cada 0,02 s o lo que es lo mismo sehan capturado con una frecuencia de muestreo de 50 Hz, esta situación limita losrangos de frecuencia de análisis de acuerdo con el Teorema de Nyquist a unos 25Hz como máximo, suficiente para el análisis de edificaciones y obras civiles.
- Terremoto en cuestión, su fecha y hora de comienzo: El Centro, 18 de mayo de1940 a las 8:37 PST.
- La estación sismológica que los registro , en general los registros serán diferentesen cada estación sismológica y la ubicación que tenga relativa al epicentro delseismo.
- Temporización del registro (Horas, minutos, segundos, décimas y centésimasde segundo).
- Dirección es la que se ha medido: N-S, E-O, Vertical.
3. Consejos de trabajo:
- Al importar los datos se nos da la oportunidad de indicar un área de datos connombre o bien marcar directamente un conjunto de celdas con los datos que nosinterese.
- En general los registros experimentales son grandes por lo que tardarán enprocesarse. Es conveniente para para poner a punto la hoja de trabajo utilizar unsubconjunto de los datos, pequeño que nos permitirá formatear el resultado delfichero completo.
- Para que los cálculos sean precisos, conviene usar un paso pequeño de 0.02 s omenor, ya que en la técnica que usaremos interpolaren datos.
- Sin embargo un paso pequeño conlleva mucha tarea de cálculo por lo quepara tener resultados preliminares usaremos un valor de paso relativamentegrande de 0.1 s o 0.2 s que se ejecutará rápidamente. Posteriormente ajustaremosel paso de resolución final para que mejoren los resultados.
- Finalmente cuando la hoja funcione bien y estén corregidos todos los errores, selanza un calculo con todos los puntos, importando de nuevo los datos con elrango y con el paso bien ajustado.
- Este cálculo puede durar ente 4000 s y 5000 s, dependiendo del equipo.
02/09/2010 - 0:08 2/12

Copyright (c) 2010 Luis Alfredo Suárez Vivar Respuesta_a_Terremotos_AL_R_01_01.xmcd
Función para obtener el tiempo de cálculo: z 1 Texi time z( )
Texi 1283379388.7
Importar los datos y asignarlos a un array denominado datos.
El libro de MS-Excel, contiene tres Áreas de Datos con Nombre:
De 0.00 s a 10.00 sDe 0.00 s a 16.48 s. (acaba la aceleración en 0.00 m/s2)De 0.00 s a 57.00 s. (Terremoto completo, acaba la aceleración en 0.00 m/s2)
Si interesa se pueden crear Áreas con nombre alternativas o complementarias
Fijar el origen de la matrices a 1: ORIGIN 1
datos
Datos Terremotos R01.01.xls
datos1 2 3
12
3
4
5
0.00000 0.00110 0.010790.02000 0.00110 0.01079
0.04000 0.00130 0.01275
0.06000 0.00140 0.01373
0.08000 0.00130 ...
NOTA: Parámetros de la captura de datos.
Periodo de Muestreo: Tm 0.02 s
Frecuencia de Muestreo: fm1
Tm fm 50.0 Hz
De acuerdo con el Teorema de Nyquist, no podemos recolectar datos en frecuencia delterremoto a frecuencias superiores a la frecuencia de Nyquist:
Frecuencia de Nyquist: fN
fm
2 fN 25.0 Hz
Por lo que los análisis no pueden estar por encima de de 25 Hz. Esto significa que nopodríamos evaluar los efectos que tienen las frecuencias contenidas en el terremoto para unmodo que este a 100 Hz.
Esta limitación se justifica por que en el fondo las edificaciones y las obras civiles susfrecuencias más significativas suelen estar por debajo de 30 Hz, por lo que la información essuficiente.
Para no tener errores en el registro, supondremos que los sistemas de captura de datosdisponen de un filtros de anti aliasing que evitan la entrada en el sistema de la banda defrecuencias 25 Hz a 50 Hz.
02/09/2010 - 0:08 3/12

Copyright (c) 2010 Luis Alfredo Suárez Vivar Respuesta_a_Terremotos_AL_R_01_01.xmcd
0 12.35 24.7 37.05 49.4 61.75 74.14
2
0
2
4
Datos Realmente Importados de la Aceleración de Base
Tiempo [s]
Ace
lera
ción
[m
/s2]
max a_g
a_g
Δt
Vector de tiempos: Δt datos 1 s Aceleración de base(tierra/ground):
a_g datos 3 m
s2
Datos leídos:Δt
1
12
3
4
5
0.000.02
0.04
0.06
...
s a_g1
12
3
4
5
0.01078770.0107877
0.0127491
0.0137298
...
m
s2
length Δt( ) 2851.0
length a_g 2851.0
Δtlength Δt( )
57.0 s
Datos terremoto completo:
Δtcompleto 57.0 s
Control de los diagramas:
tmax 1.3Δtcompleto tmax 74.1 sTiempo a estudiar en los diagramas, será un 30%mayor que el tiempo del terremoto leído, para poderver los efectos de la vibración residual libre:
La variable paso regula la resolución de cálculo delos gráficos, resulta conveniente fijarla en un valorgrande al principio de 0.2 s y cuado se han ajustadolos gráficos al valor del periodo de muestreo de laseñal dado por Tm de 0.02 s.
paso Tm 0.0200 s
Puntos que se calcularán en los gráficos t 0 s paso tmax
Numero de puntos calculados:Np
tmax
paso3705.0
max a_g 3.4275465m
s2
02/09/2010 - 0:08 4/12

Copyright (c) 2010 Luis Alfredo Suárez Vivar Respuesta_a_Terremotos_AL_R_01_01.xmcd
3 3.167 3.333 3.5 3.667 3.833 44
2
0
2
4
Datos Realmente Importados de la Aceleración de Base
Tiempo [s]
Ace
lera
ción
[m
/s2]
max a_g
a_g
Δt
0 12.35 24.7 37.05 49.4 61.75 74.14
2
0
2
4
Curva Interpolada de la Aceleración de Base
Tiempo [s]
Ace
lera
ción
[m
/s2]
max a_g
ag t( )
t
Puesto que son muchos datos podemos observar mediante un zoom (cambiando los limitesde la variable tiempo), los datos que realmente hemos importado.
max a_g 3.4275465m
s2
Ajuste de los datos.
Para ajustar los datos y crear una función operable en Mathcad realizaremos un ajuste linealde aceleración de base que nos han dado tabulada. Este ajuste es el que menos tiempo decalculo necesita frente a ajustes más sofisticados como los realizados con splines cúbicos.
El problema de un ajuste lineal, es que la función resultante presentará discontinuidad en laprimera y segunda derivada pero como los datos son de aceleración, no necesitaremosdeterminar sus derivadas.
Si los datos fuesen de desplazamiento, entonces sí necesitaríamos un ajuste con primera ysegunda derivada continua, ya que tendríamos que derivar dos veces el desplazamiento paraobtenerla la aceleración y de ahí la carga sísmica equivalente.
Por lo tanto, estamos interpolando linealmente la aceleración, los métodos de integraciónbasados en la consideración de una aceleración lineal son los más habituales.
Creación de la función ag(t),
por interpolación lineal delos datos:
ag t( ) linterp Δt a_g t 0 s t Δtlength Δt( )
if
0 otherwise
Aceleración de base interpoladas:
max a_g 3.4275465m
s2
02/09/2010 - 0:08 5/12

Copyright (c) 2010 Luis Alfredo Suárez Vivar Respuesta_a_Terremotos_AL_R_01_01.xmcd
3 3.167 3.333 3.5 3.667 3.833 44
2
0
2
4
4
2
0
2
4
Aceleración de Base
Tiempo [s]
Ace
lera
ción
[m
/s2]
max a_g
ag t( ) a_g
t Δt
Precisión del ajuste de la interpolación lineal
El siguiente gráfico, en el que se representa por una parte la función interpolada a g(t) y por
otra los datos importados a_g podemos comprobar la bondad del ajuste realizado que es
función del valor dado en paso, cuando se ejecuta la interpolación.
max a_g 3.4275465m
s2
Determinar los parámetros del sistema.
Los parámetros con los que nos han definido el sistema son:
Masa de sistema: me 200.0 kg
Frecuencia circular natural del sistema: ωn 5.01
srad
Ratio de amortiguamiento viscoso: ζe 0.2
Vamos a determinar del sistema los siguientes parámetros adicionales importantes:
Frecuencia natural en Hz: fn
ωn
2π fn 0.8
1
s
Período amortiguado del sistema: Tn1
fn Tn 1.3 s
Frecuencia circular amortiguada del sistema: ωd ωn 1 ζe2
ωd 4.91
srad
Frecuencia amortiguada del sistema: fd
ωd
2π fd 0.8 Hz
Período amortiguado del sistema: Td1
fd Td 1.3 s
Rigidez del sistema: ke ωn2
me ke 5000.01
mN
Amortiguamiento del sistema: ce 2 me ωn ζe ce 300.0s
mN
02/09/2010 - 0:08 6/12
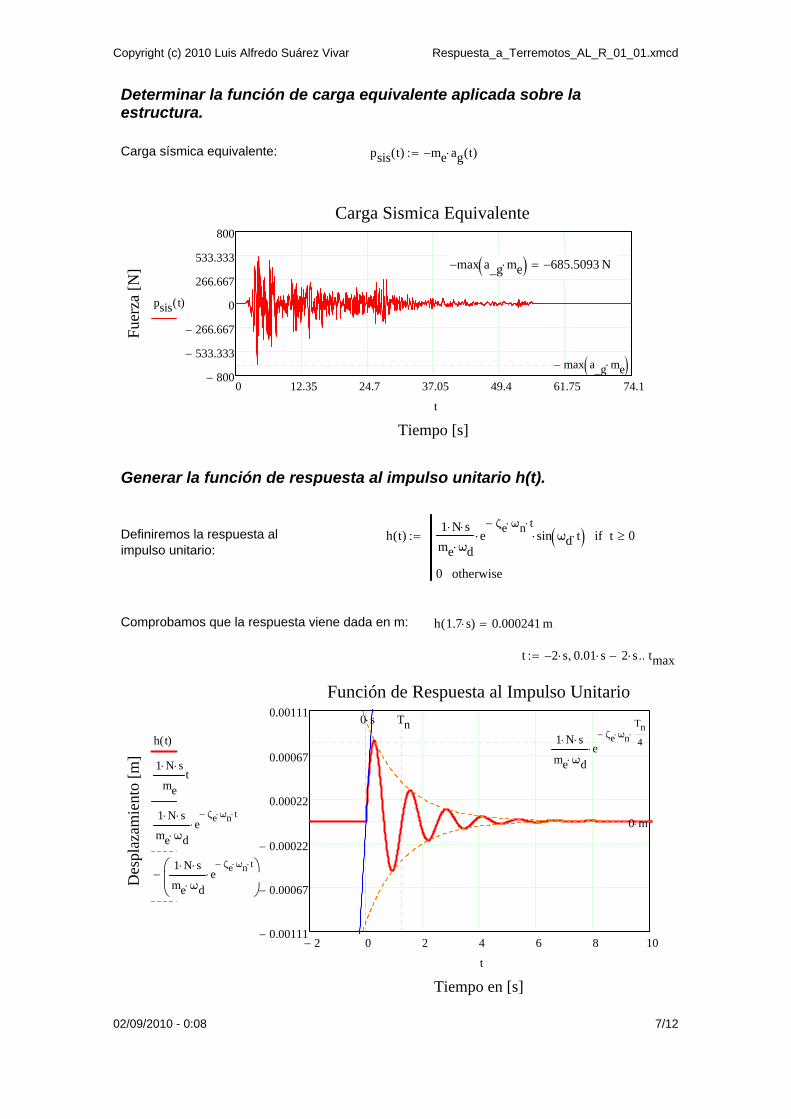
Copyright (c) 2010 Luis Alfredo Suárez Vivar Respuesta_a_Terremotos_AL_R_01_01.xmcd
0 12.35 24.7 37.05 49.4 61.75 74.1800
533.333
266.667
0
266.667
533.333
800
Carga Sismica Equivalente
Tiempo [s]
Fue
rza
[N]
max a_g me
psis t( )
t
Determinar la función de carga equivalente aplicada sobre laestructura.
Carga sísmica equivalente: psis t( ) me ag t( )
max a_g me 685.5093 N
Generar la función de respuesta al impulso unitario h(t).
Definiremos la respuesta alimpulso unitario:
h t( )1 N s
me ωde
ζe ωn t sin ωd t t 0if
0 otherwise
Comprobamos que la respuesta viene dada en m: h 1.7 s( ) 0.000241 m
t 2 s 0.01 s 2 s tmax
2 0 2 4 6 8 100.00111
0.00067
0.00022
0.00022
0.00067
0.00111
Función de Respuesta al Impulso Unitario
Tiempo en [s]
Des
plaz
amie
nto
[m]
1 N s
me ωde
ζe ωnTn
4
0 m
h t( )
1 N s
met
1 N s
me ωde
ζe ωn t
1 N s
me ωde
ζe ωn t
0 s Tn
t
02/09/2010 - 0:08 7/12
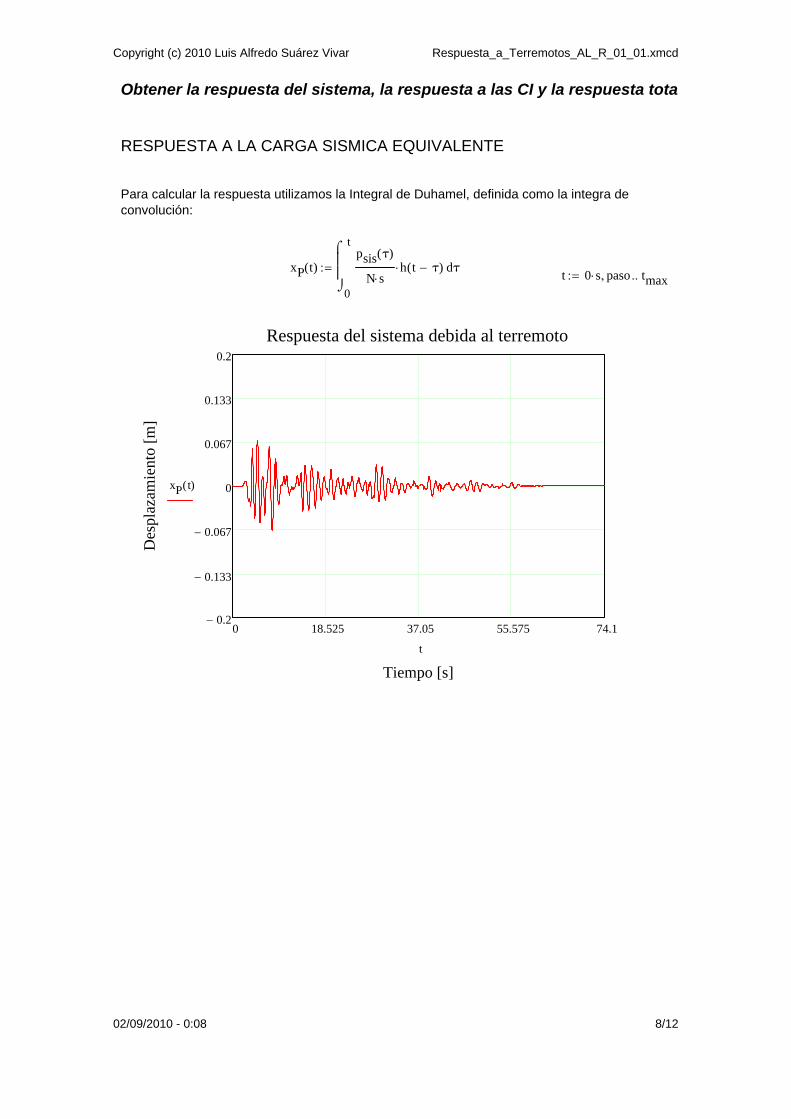
Copyright (c) 2010 Luis Alfredo Suárez Vivar Respuesta_a_Terremotos_AL_R_01_01.xmcd
Obtener la respuesta del sistema, la respuesta a las CI y la respuesta tota
RESPUESTA A LA CARGA SISMICA EQUIVALENTE
Para calcular la respuesta utilizamos la Integral de Duhamel, definida como la integra deconvolución:
xP t( )
0
t
τpsis τ( )
N sh t τ( )
dt 0 s paso tmax
0 18.525 37.05 55.575 74.10.2
0.133
0.067
0
0.067
0.133
0.2
Respuesta del sistema debida al terremoto
Tiempo [s]
Des
plaz
amie
nto
[m]
xP t( )
t
02/09/2010 - 0:08 8/12
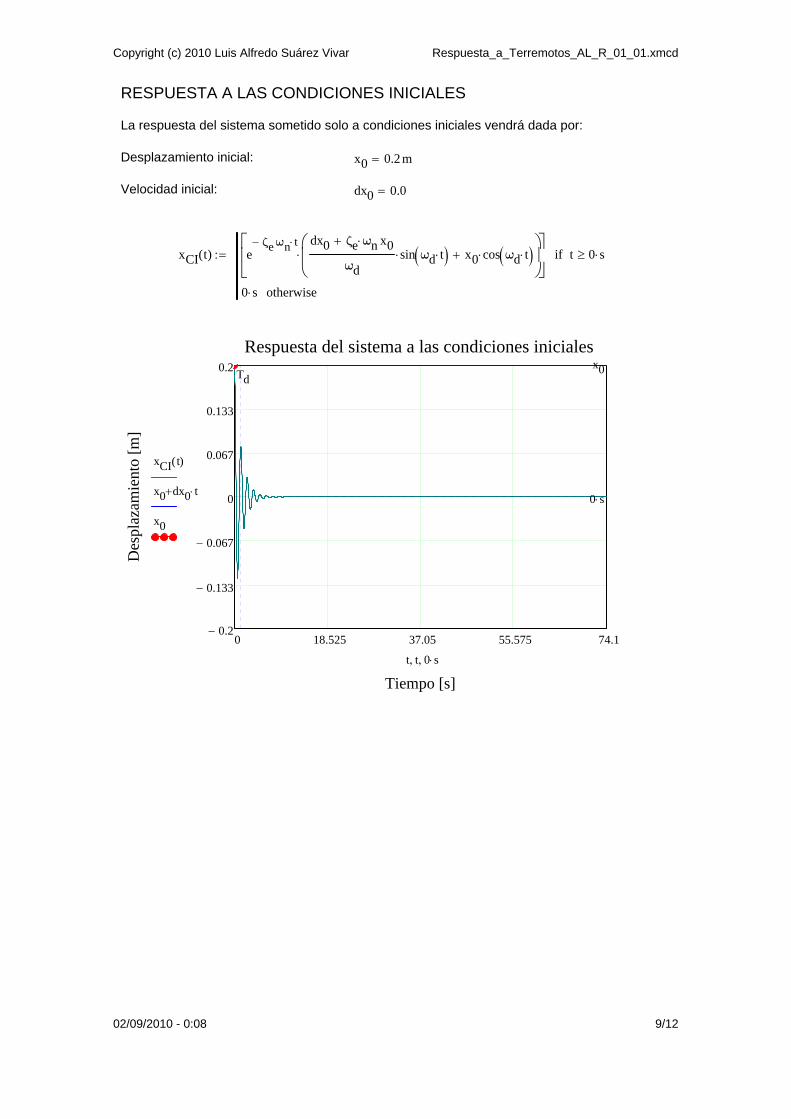
Copyright (c) 2010 Luis Alfredo Suárez Vivar Respuesta_a_Terremotos_AL_R_01_01.xmcd
0 18.525 37.05 55.575 74.10.2
0.133
0.067
0
0.067
0.133
0.2
Respuesta del sistema a las condiciones iniciales
Tiempo [s]
Des
plaz
amie
nto
[m]
0 s
x0
xCI t( )
x0 dx0 t
x0
Td
t t 0 s
RESPUESTA A LAS CONDICIONES INICIALES
La respuesta del sistema sometido solo a condiciones iniciales vendrá dada por:
Desplazamiento inicial: x0 0.2 m
Velocidad inicial: dx0 0.0
xCI t( ) eζe ωn t dx0 ζe ωn x0
ωdsin ωd t x0 cos ωd t
t 0 sif
0 s otherwise
02/09/2010 - 0:08 9/12

Copyright (c) 2010 Luis Alfredo Suárez Vivar Respuesta_a_Terremotos_AL_R_01_01.xmcd
RESPUESTA COMPLETA
Aplicando el principio de superposición, la respuesta completa a las condiciones iniciales y lacarga, vendrá dada por:
x t( ) xP t( ) xCI t( )
0 18.525 37.05 55.575 74.10.2
0.133
0.067
0
0.067
0.133
0.2
Respuesta conjunta del sistema
Tiempo [s]
Des
plaz
amie
nto
[N]
0 mx t( )
t
02/09/2010 - 0:08 10/12
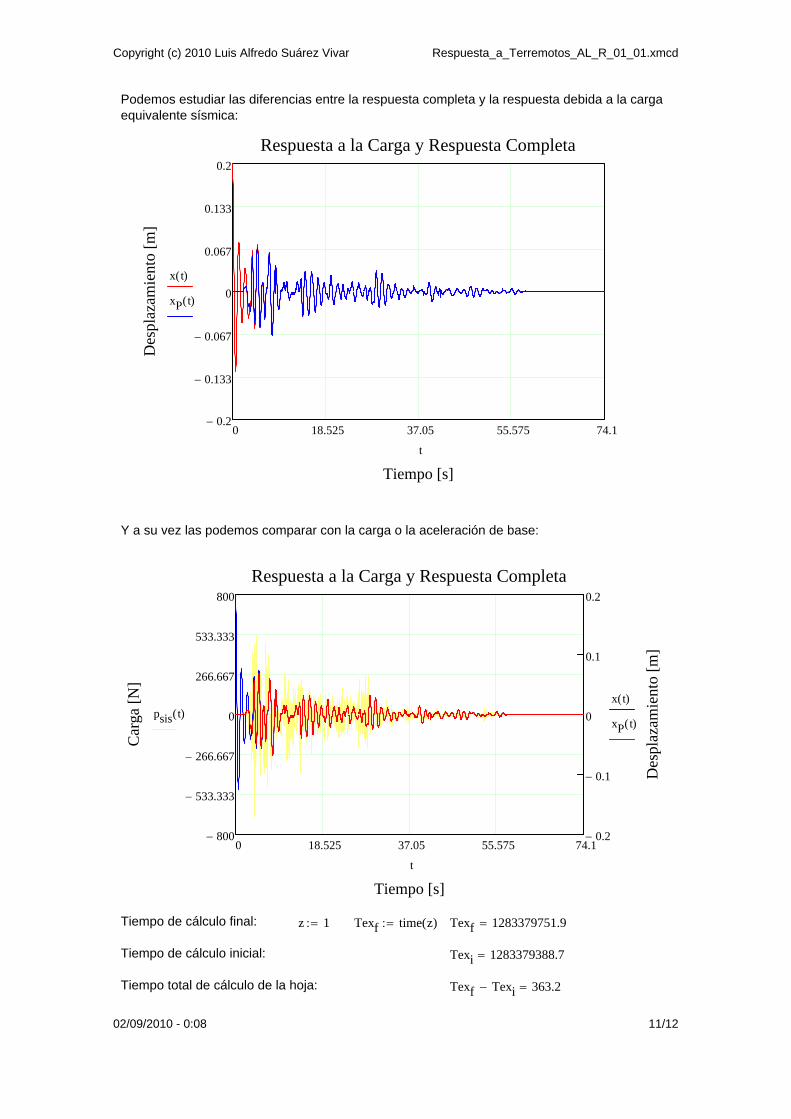
Copyright (c) 2010 Luis Alfredo Suárez Vivar Respuesta_a_Terremotos_AL_R_01_01.xmcd
0 18.525 37.05 55.575 74.1800
533.333
266.667
0
266.667
533.333
800
0.2
0.1
0
0.1
0.2
Respuesta a la Carga y Respuesta Completa
Tiempo [s]
Car
ga [
N]
Des
plaz
amie
nto
[m]
psis t( )x t( )
xP t( )
t
Podemos estudiar las diferencias entre la respuesta completa y la respuesta debida a la cargaequivalente sísmica:
0 18.525 37.05 55.575 74.10.2
0.133
0.067
0
0.067
0.133
0.2
Respuesta a la Carga y Respuesta Completa
Tiempo [s]
Des
plaz
amie
nto
[m]
x t( )
xP t( )
t
Y a su vez las podemos comparar con la carga o la aceleración de base:
Tiempo de cálculo final: z 1 Texf time z( ) Texf 1283379751.9
Tiempo de cálculo inicial: Texi 1283379388.7
Tiempo total de cálculo de la hoja: Texf Texi 363.2
02/09/2010 - 0:08 11/12
Copyright (c) 2010 Luis Alfredo Suárez Vivar Respuesta_a_Terremotos_AL_R_01_01.xmcd
Bibliografía.
1. Tedesco JW. et al. Structural Dynamics, Theory and Applications. Addison WesleyLongman, Inc. 2725 Sand Hill Road. Menlo Park, California 94025. ISBN 0-673-98052-9. 1999.Capítulos 6, 17 y 18.
2. Suárez LA. Apuntes de la Asignatura de Ampliación de Mecanica. Departamento deIngeniería Civil. Universidad de Burgos. 2010.
3. Mathcad User Guide, Release 14. Mathsoft. February 2007. Parametric TechnologyCorporation, 140 Kendrick Street, Needham, MA 02494 USA.
02/09/2010 - 0:08 12/12

Capítulo 15
Desacoplamiento modal
En la práctica se determina el procedimiento para desacoplar un sistema de dos GDL,basado en un edificio de altura en el que se ha practicado la simplificación típica de losdiafragmas rígidos.
Establecidas las EDM 1 representaremos el problema en términos de ecuaciones ma-triciales obteniendo las matrices nodales de masa y rigidez.
El amortiguamiento se plantea de tipo clásico o proporcional, lo que permite cons-truir la matriz de amortiguamiento en función de las matrices de masa o rigidez. Estaespecial situación permite que se obtengas vectores modales normales reales y se sueledenominar desacoplamiento mediante vectores reales modales.
En el caso de que se siga teniendo un problema lineal pero con amortiguamiento noproporcional, tendremos que usar una técnica algo distinta (álgebra compleja) paraobtener los valores y vectores propios complejos de la matriz de sistema una vez con-vertido este en la representación de espacio de estados típica de la Teoría de Sistemas.
Una vez desacoplado el sistema mediante las funciones eigenvals() y eigevec()se determinan las matrices de masa, rigidez y amortiguamiento modal en diversas nor-malizaciones verificando en todo caso la ortogonalidad de los modos.
15.1. Objetivos para los contenidos1. Determinar las EDM de la estructura.
2. Crear la matrices nodales de masa, rigidez y amortiguamiento.
3. Obtener la matriz dinámica D.
4. Obtener los valores y vectores propios de D.1EDM: Ecuaciones Diferenciales del Movimiento
153

154 15. Desacoplamiento modal
5. Obtener las frecuencias, ratios de amortiguamiento y vectores modales.
6. Obtener las matrices de masa, rigidez y amortiguamiento modal.
7. Normalizar los resultados de diversas formas.
8. Verificar las ortogonalidades.
15.2. Objetivos instrumentales1. Crear matrices a partir de parámetros externos.
2. Extraer valores propios con la función eigenvals() y clasificarlos con la funciónsort().
3. Extraer vectores propios con la función eigenvec().

Desacoplamiento_Modal_2_GDL_R_01_01.xmcd
PROGRAMACION PARA LA ADQUISICÓN, MODELADO Y VISUALIZACION DE DATOSDOCTORADO EN INGENIERIAUNIVERSIDAD DE BURGOS - DEPARTAMENTO DE INGENEIRIA CIVILDESACOPLAMIENTO MODAL ESTANDAR DE UN SISTEMA DE 2 GDLCopyright (c) 2010 LUIS ALFREDO SUAREZ VIVAR - [email protected]
Objetivos de la hoja de trabajoEl problema que se plantea es el desacoplamiento de las ecuaciones diferenciales delmovimiento mediante los modos normales de vibración. Esta técnica está restringida aproblemas lineales y es el paso previo para obtener la respuesta del sistema.
Parámetros del problema
El sistema que proponemos es una estructura de edificación (figura 1), formada por dosplantas y supondremos infinitamente rígidos los dinteles . Adicionalmente el dintelsuperior se supone unido al inercial con una rigidez Kin, definida.
Se supondrá que el amortiguamiento es del tipo proporcional, definido por lasconstantes αD y βD, por lo que los modos que aparecerán son modos normales .
Masa del forjado inferior:
m1 700 kg
Masa del forjado superior:
m2 300 kg
Cotas verticales:
b1 4 m
b2 7 m
Módulo elástico del acero:
Es 210 GPa
Momento de inercia Iz de los pilares:
Iz 541 cm4
Figura 1. Estructura a estudiar
Rigidez de unión del forjado superior al inercial: kin 1.5 105
N
m
Amortiguamiento clásico:
Coeficiente αD (masa) del amortiguamiento clásico: αD 0.02N s
m kg
Coeficiente βD (rigidez) del amortiguamiento clásico: βD 0.01 s
06/09/2010 - 2:09 1/18

Copyright (c) 2010 Luis Alfredo Suárez Vivar Desacoplamiento_Modal_2_GDL_R_01_01.xmcd
Cuestiones
- Parámetros de Mathcad.- Ecuaciones diferenciales del movimiento sin amortiguamiento.- Expresiones tabuladas de las rigideces equivalentes de los pilares de los pórticos.- Determinar las matrices de masa y rigidez NODAL.- Determinar para cada modo las frecuencias modales naturales en Hz y rad/s, periodos
modales naturales, en s.-. Determinar los vectores modales y la matriz modal.-. Graficar los modos de vibración.- Incorporación del amortiguamiento.- Determinar las matrices de masa, rigidez y amortiguamiento MODAL.
- Comprobar la ortogonalidad de los modos frente a las matrices de masa y rigidez modal. - Normalización a la masa modal.
Etapas de resolución
El problema lo abordaremos en etapas que se resumen en:
a) Preparar a Mathcad para el problema, definiendo variables como ORIGIN, unidadesque no existan, etc como podrían ser GPa, en función de la versión.
b) Simplificar la estructura real, suponiendo la hipótesis de diafragmas rígidos, es decirque los dinteles de los pórticos se van a considerar infinitamente rígidos. Esto permiteconsiderar solo los grados de libertad correspondientes a los movimientos horizontales ysimplificar el problema, describiéndole con los grados de libertad x(t)1 y x(t)2.
c) La estructura se describe con un comportamiento desde el punto de vista de la disipaciónde la energía con un amortiguamiento clásico, es decir que la matriz deamortiguamiento es una combinación lineal de las matrices de masa y de rigidez ,también denominado amortiguamiento proporcional. Esta particularidad hace que noaparezcan modos de vibración complejos, que exigen un cálculo algo diferentes ysolo tengamos modos normales que son los que aparecen cuando no hayamortiguamiento. Por este motivo trataremos inicialmente el problema como unproblema sin amortiguamiento y determinaremos las frecuencias naturales modales,los vectores modales y la matriz modal.
d) Interpretaremos gráficamente los vectores modales, en términos de movimiento dela estructura.
d) Obtenida la matriz modal del sistema, calcularemos y determinaremos las matrices demasa y rigidez modales.
e) Basándonos en que el tipo de amortiguamiento que tenemos es del tipo proporcionalcalcularemos las matrices de amortiguamiento nodal y modal , basadas en lasmatrices de masa y rigidez.
Completados los datos, estaremos en condiciones de calcular la respuesta del sistemalineal a cualquier conjunto de cargas o condiciones iniciales.
El problema se puede fácilmente generalizar a N GDL.
06/09/2010 -2:09 2/18
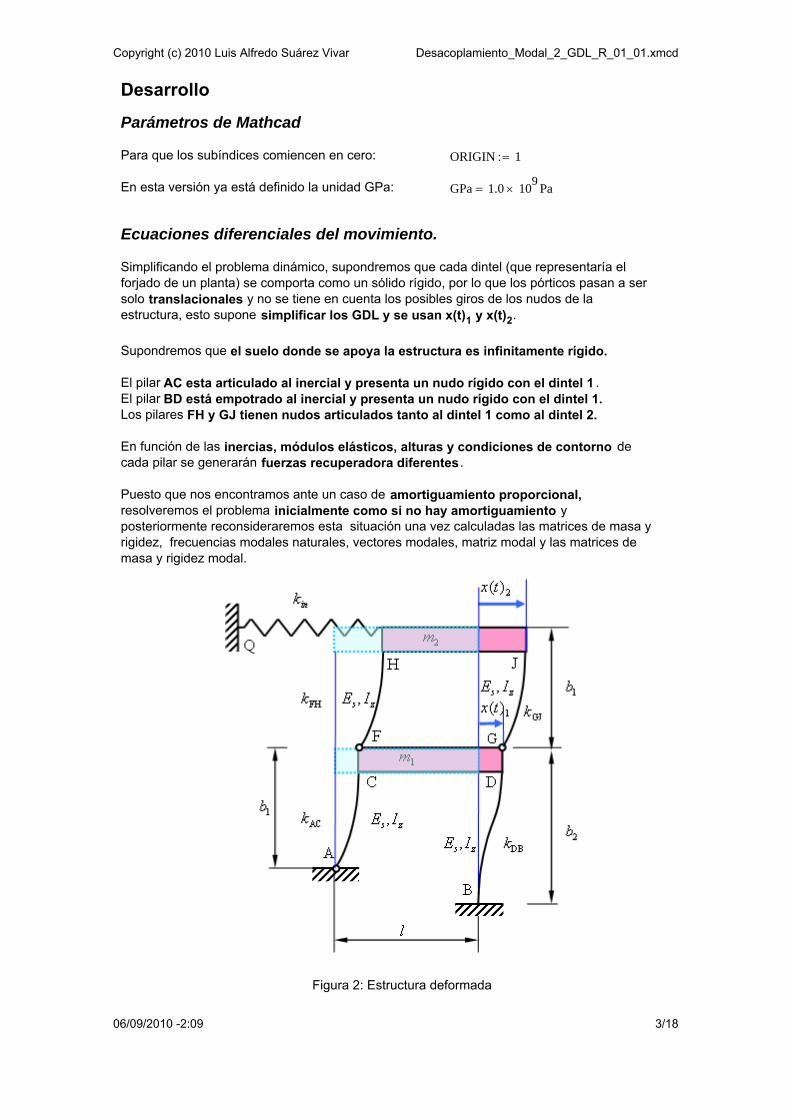
Copyright (c) 2010 Luis Alfredo Suárez Vivar Desacoplamiento_Modal_2_GDL_R_01_01.xmcd
Desarrollo
Parámetros de Mathcad
Para que los subíndices comiencen en cero: ORIGIN 1
En esta versión ya está definido la unidad GPa: GPa 1.0 109
Pa
Ecuaciones diferenciales del movimiento.
Simplificando el problema dinámico, supondremos que cada dintel (que representaría elforjado de un planta) se comporta como un sólido rígido, por lo que los pórticos pasan a sersolo translacionales y no se tiene en cuenta los posibles giros de los nudos de laestructura, esto supone simplificar los GDL y se usan x(t)1 y x(t)2.
Supondremos que el suelo donde se apoya la estructura es infinitamente rígido.
El pilar AC esta articulado al inercial y presenta un nudo rígido con el dintel 1 .El pilar BD está empotrado al inercial y presenta un nudo rígido con el dintel 1.Los pilares FH y GJ tienen nudos articulados tanto al dintel 1 como al dintel 2.
En función de las inercias, módulos elásticos, alturas y condiciones de contorno decada pilar se generarán fuerzas recuperadora diferentes .
Puesto que nos encontramos ante un caso de amortiguamiento proporcional,resolveremos el problema inicialmente como si no hay amortiguamiento yposteriormente reconsideraremos esta situación una vez calculadas las matrices de masa yrigidez, frecuencias modales naturales, vectores modales, matriz modal y las matrices demasa y rigidez modal.
Figura 2: Estructura deformada
06/09/2010 -2:09 3/18

Copyright (c) 2010 Luis Alfredo Suárez Vivar Desacoplamiento_Modal_2_GDL_R_01_01.xmcd
Estudio de fuerzas actuantes sobre los elementos
Figura 3: Fuerzas y momentos sobre los elementos
06/09/2010 -2:09 4/18

Copyright (c) 2010 Luis Alfredo Suárez Vivar Desacoplamiento_Modal_2_GDL_R_01_01.xmcd
Figura 4: Fuerzas horizontales
06/09/2010 -2:09 5/18

Copyright (c) 2010 Luis Alfredo Suárez Vivar Desacoplamiento_Modal_2_GDL_R_01_01.xmcd
Basándonos en los esquemas
Aplicando el primer teorema de la dinámica solo con las fuerzas recuperadoras obtenemos:
1 1 1 2 1
2 2 2 2 1
( ) ( ) ( ) ( )( ( ) ( ))
( ) ( ) ( )( ( ) ( ))AC BD FH GJ
in FH GJ
M x t k k x t k k x t x t
M x t K x t K K x t x t
Pasando todo al miembro de la izquierda e igualando acero:
1 1 1 2 1
2 2 2 2 1
( ) ( ) ( ) ( )( ( ) ( )) 0
( ) ( ) ( )( ( ) ( )) 0AC BD FH GJ
in FH GJ
M x t K K x t K K x t x t
M x t K x t K K x t x t
Agrupando por grados de libertad:
1 1 1 2
2 2 2 1
( ) ( ) ( ) ( ) ( ) 0
( ) ( ) ( ) ( ) ( ) 0AC BD FH GJ FH GJ
in FH GJ FH GJ
M x t K K K K x t K K x t
M x t K K K x t K K x t
Comprobamos que se puede ordenar como un conjunto de matrices:
1 11
2 2 2
( ) ( )( )0 0
( )0 ( ) ( ) 0AC BD FH GJ FH GJ
FH GJ in FH GJ
x t x tK K K K K KM
K K K K KM x t x t
Estas serán los elementos de cada matriz:
1,1 1,2 1,1 1,2
2,1 2,2 2,1 2,2
1 1
2 2
( ) ( ) 0
( ) ( ) 0
n n n n
n n n n
M M K Kx t x t
M M x t K K x t
Teniendo en cuenta que la matriz de masa es diagonal al no haber acoplamiento en la masa:
1,1 1,1 1,2
2,2 2,1 2,2
1 1
2 2
0 ( ) ( ) 0
0 ( ) ( ) 0
n n n
n n n
M K Kx t x t
M x t K K x t
De manera resumida:
( ) ( ) 0n nM x t K x t
06/09/2010 -2:09 6/18

Copyright (c) 2010 Luis Alfredo Suárez Vivar Desacoplamiento_Modal_2_GDL_R_01_01.xmcd
Rigideces equivalentes de los pilares de los pórticos.
Rigidez del muelle de acoplamientodel segundo forjado al inercial. kin 1.500 10
5
1
mN
De acuerdo con la tabla 3.1, del la pagina 62 de Tedesco WJ [1], tendremos para pórticos conpilares articulados/empotrados las siguientes expresiones:
empotrado - empotrado empotrado - articulado
kem_em E Iz L 12E Iz
L3
kar_em E Iz L 3E Iz
L3
Pilar AC: AC b1 4 m kAC kar_em Es Iz AC 53254.688N
m
Pilar BD: BD b2 7 m kBD kem_em Es Iz BD 39746.939N
m
Pilar FH: FH b1 4 m kFH kar_em Es Iz FH 53254.688N
m
Pilar GJ: GJ b1 4 m kGJ kar_em Es Iz GJ 53254.688N
m
Determinación de las matrices de masa y rigidez NODAL.
Introducíamos las masas de los forjados en la matriz:
Mn
m1
0
0
m2
Mn700
0
0
300
kg
A partir de este momento podremos acceder a las masas nodales llamando alcorrespondiente elemento de la diagonal principal de la matriz de MASA NODAL, ya que elresto de los elementos es cero al no haber acoplamiento por masa.
Mn1 1700 kg Mn1 2
0 kg
Mn2 10 kg Mn2 2
300 kg
Llamándoles a través de los índices p y q tendremos:
p 1 q 1 Mnp q700 kg
p 1 q 2 Mnp q0 kg
06/09/2010 -2:09 7/18

Copyright (c) 2010 Luis Alfredo Suárez Vivar Desacoplamiento_Modal_2_GDL_R_01_01.xmcd
Introducimos las rigideces de los forjados en la matriz, en base a la ecuación diferencial:
Kn
kAC kBD kFH kGJ
kFH kGJ
kFH kGJ
kin kFH kGJ
Kn199511.001
106509.375
106509.375
256509.375
1
mN
A partir de este momento podremos acceder a las rigideces nodales llamando alcorrespondiente elemento de la matriz de RIGIDEZ NODAL.
Kn1 1199511.001
1
mN Kn1 2
106509.3751
mN
Kn2 1106509.375
1
mN Kn2 2
256509.3751
mN
Llamándoles a través de los índices p y q tendremos acceso por ejemplo a:
p 1 q 1 Knp q1.995 10
5
1
mN
p 2 q 2 Knp q2.565 10
5
1
mN
06/09/2010 -2:09 8/18

Copyright (c) 2010 Luis Alfredo Suárez Vivar Desacoplamiento_Modal_2_GDL_R_01_01.xmcd
Determinación de los parámetros modales
Matriz dinámica.
Dado que el sistema presenta un amortiguamiento clásico, el proceso del desacoplamiento lorealizaremos con el METODO DEL DESACOPLAMIENTO MODAL , con los VECTORESMODALES NORMALES.
La MATRIZ DINAMICA, la obtendremos a través de la matrices nodales de masa y rigidez:
D Mn1
Kn D285.016
355.031
152.156
855.031
1
s2
Frecuencias naturalesmodales.Las FRECUENCIAS NATURALES MODALES, las obtendremos como las raíces cuadradasde los valores propios de la matriz dinámica:
Normalmente los valores propios se ORDENAN de menor a mayor, por lo que conviene utilizaruna función que clasifique los valores automáticamente aunque en este caso no haría falta.
λe sort eigenvals D( )( )202.26
937.787
1
s2
Configuraremos la MATRIZ de FRECUENCIAS NATURALES como un a matriz diagonaldenominada MATRIZ EXPECTRAL, con los valores de las frecuencias naturales modales.
Definimos los índices p y q, para el resto de la práctica, para asignar rápidamentelos valores:
Índices de acceso a las matrices: p 1 2 2 q 1 2 2
ωnp qλep
p q=if
0 p qif
ωn
14.222
0
0
30.623
1
srad
De manera similar crearemos las matrices de frecuencias naturales modales en Hz suinversa, la de períodos naturales modales en s.
fnp q
ωnp q
2 πp q=if
0 p qif
fn
2.263
0
0
4.874
Hz
Tnp q
1
fnp q
p q=if
0 p qif
Tn
0.442
0
0
0.205
s
06/09/2010 -2:09 9/18

Copyright (c) 2010 Luis Alfredo Suárez Vivar Desacoplamiento_Modal_2_GDL_R_01_01.xmcd
Determinación de los vectores modales y la matriz modal.
Los vectores modales SON LOS VECTORES PROPIOS DE LA MATRIZ DINAMICA.Podemos asignando a un vector columna un vector propio. Con una sola expresión nos bastaya que p y q están predefinidos.
Mathcad responde de manera automática con VECTORES NORMALIZADOS AL MÓDULOUNIDAD, por lo que los denominaremos con un subíndice de texto n1. A otrasnormalizaciones las asignaremos subíndices diferentes.
Ψn1p eigenvec D ωnp p
2
Vector modal normalizado al modulo unidad:
Quedando automáticamente conformada la MATRIZ MODAL normalizada al módulo unidad:
Matriz modal normalizada al módulo unidad: Ψn10.878
0.478
0.227
0.974
Podemos definir otras normalizaciones como son a la primera componente la unidadidentificada con el subíndice 1c o a la máxima componente la unidad identificada conm1. Sin embargo, la más utilizada de todas es a la masa modal, que denotaremos sinsubíndice. Para esta última normalización es necesario determinar previamente la masamodal.
La normalización a la primera componente la realizaremos dividiendo cada componente decada vector modal por su primera componente:
Ψ1cp Ψn1
p
Ψn11 p
Matriz modalnormalizada a laprimera componente:
Ψ1c1
0.544
1
4.29
Nota para normalizar a la masa modal, primero tenemos que calcular la masa modal concualquiera de las normalizaciones realizadas.
06/09/2010 -2:09 10/18

Copyright (c) 2010 Luis Alfredo Suárez Vivar Desacoplamiento_Modal_2_GDL_R_01_01.xmcd
Interpretación gráfica de los modos de vibración.
PRIMER MODOVector Modal:
Ψ1c1 1
0.544
Frecuencia y periodos naturalesmodales:
ωn1 114.222
1
srad
fn1 12.263 Hz
Tn1 10.442 s
Deformada modal:
Ψ1c1
2 1
0.544 Ψ1c1
2 1
0.544
Ψ1c1
1 1
1 Ψ1c1
1 1
1
06/09/2010 -2:09 11/18

Copyright (c) 2010 Luis Alfredo Suárez Vivar Desacoplamiento_Modal_2_GDL_R_01_01.xmcd
Interpretación gráfica de los modos de vibración.
SEGUNDO MODO
Vector modal: Ψ1c2 1
4.29
Frecuencia y periodos naturalesmodales:
ωn2 230.623
1
srad
fn2 24.874 Hz
Tn2 20.205 s
Deformada modal:
Ψ1c2
2 1
4.29 Ψ1c2
2 1
4.29
Ψ1c2
1 1
1 Ψ1c2
1 1
1
06/09/2010 -2:09 12/18

Copyright (c) 2010 Luis Alfredo Suárez Vivar Desacoplamiento_Modal_2_GDL_R_01_01.xmcd
Incorporación del amortiguamiento.
Puesto que nos definen el amortiguamiento como clásico o proporcional, la MATRIZ DEAMORTIGUAMIENTO NODAL, se establecera como proporcional a las de masa y rigidezmediante los coeficientes αD y βD.
Cn αD Mn βD Kn Cn2009.11
1065.094
1065.094
2571.094
s
mN
A partir de este momento podremos acceder a las constantes de amortiguamiento nodalesllamando al correspondiente elemento de la matriz de AMORTIGUAMIENTO NODAL.
Cn1 12009.11
s
mN Cn1 2
1065.094s
mN
Cn2 11065.094
s
mN Cn2 2
2571.094s
mN
Llamándoles a través de los índices p y q tendremos por ejemplo acceso:
p 2 q 1 Cnp q1.065 10
3
s
mN
p 2 q 2 Cnp q2.571 10
3
s
mN
Matriz modal de masa
La MATRIZ MODAL DE MASA, en general depende de la normalización usada en la matrizmodal, por lo que con las normalizaciones al módulo unidad (n1) o a la primera componente launidad (1c), los resultados serán distintos.
Esto no afecta al proceso de recuperación de las variables nodales, ya que se anula esteefecto pero sí conviene darse cuenta que las masas, rigideces y amortiguamientos modalesque se van a obtener son distintos en función de la normalización.
Para la normalización al módulo unidad (n1), tendremos:
Mm_n1 Ψn1T
Mn Ψn1 Mm_n1608.687
0
0
320.613
kg
La condición de la ortogonalidad de los modos de vibración respecto de las matrices demasa, rigidez, hace que los valores fuera de la diagonal principal sean nulos.
En nuestro caso no son nulos por los errores de redondeamiento durante el cálculo interno,pero los valores resultantes son despreciables frente a los de la diagonal principal.
Para la normalización a la primera componente (1c) tendremos:
Mm_1c Ψ1cT
Mn Ψ1c Mm_1c788.743
0
0
6221.577
kg
Observamos efectivamente que las masas modales, los valores de la diagonal principal sondiferentes.
06/09/2010 -2:09 13/18

Copyright (c) 2010 Luis Alfredo Suárez Vivar Desacoplamiento_Modal_2_GDL_R_01_01.xmcd
Matriz modal de rigidez
La MATRIZ MODAL DE RIGIDEZ, con por el mismo razonamiento que la matriz modal demasa en general depende de la normalización usada en la matriz modal, por lo que con lasnormalizaciones al módulo unidad (n1) o a la primera componente la unidad (1c), losresultados serán distintos.
Esto no afecta al proceso de recuperación de las variables nodales, ya que se anula esteefecto pero sí conviene darse cuenta que las masas, rigideces y amortiguamientos modalesque se van a obtener son distintos, función de la normalización.
Para la normalización al módulo unidad (n1), tendremos:
Km_n1 Ψn1T
Kn Ψn1 Km_n1123113.388
0
0
300666.524
N
m
Hay que hacer notar la misma advertencia sobre los valores nulos fuera de ladiagonal principal que en la matriz de modal de masa.
Para la normalización a la primera componente (1c) tendremos:
Km_1c Ψ1cT
Kn Ψ1c Km_1c159531.465
0
0
5834510.705
N
m
Observamos efectivamente que los valores de las masas modales fuera de la diagonalprincipal son diferentes.
Matriz modal de amortiguamiento
La MATRIZ MODAL DE AMORTIGUAMIENTO la podemos determinar a partir de las matricesmodeales de masa y de rigidez modal, o transformando la MATRIZ NODAL DEAMORTIGUAMIENTO con una de las matrices modales.
Cada normalización nos dará resultados diferentes.
Cm_n1 Ψn1T
Cn Ψn1 Cm_n11243.308
0
0
3013.077
N s
m
Puesto que se trata de amortiguamiento clásico también podemos obtenerla como:
Cm_n1 αD Mm_n1 βD Km_n1 Cm_n11243.308
0
0
3013.077
kg
s
Comprobamos un ligero cambio en error de los elementos fuera de la diagonal.
Cm_1c Ψ1cT
Cn Ψ1c Cm_1c1611.09
0
0
58469.539
kg
s
Cm_1c αD Mm_1c βD Km_1c Cm_1c1611.09
0
0
58469.539
kg
s
De nuevo comprobamos un ligero cambio en el error de los elementos fuera de la diagonal.
06/09/2010 -2:09 14/18

Copyright (c) 2010 Luis Alfredo Suárez Vivar Desacoplamiento_Modal_2_GDL_R_01_01.xmcd
Ortogonalidad de la matriz modal respecto de la matriz de masa
Para vectores iguales:
Mm_n11 1608.687 kg
Ψn11
TMn Ψn1
1 608.687 kg
Mm_n12 2320.613 kg
Ψn12
TMn Ψn1
2 320.613 kg
Para vectores distintos, poniéndole en formato decimal:
Mm_n11 20.000 kg
Ψn11
TMn Ψn1
2 0.000 kg
Mm_n12 10.000 kg
Ψn12
TMn Ψn1
1 0.000 kg
Para evitar los errores de redondeamiento, podemos asignar recursivamente valores cero alos miembros fuera de la diagonal principal:
Mm_n1p qMm_n1p q
p q=if
0 p qif
Mm_n1
608.687
0
0
320.613
kg
Ortogonalidad de la matriz modal respecto de la matriz de rigidez
Para vectores iguales:
Km_n11 1123113.388
1
mN
Ψn11
TKn Ψn1
1 1.231 105
1
mN
Km_n12 2300666.524
1
mN
Ψn12
TKn Ψn1
2 3.007 105
1
mN
Para vectores distintos, poniéndole en formato decimal:
Km_n11 20
1
mN
Ψn11
TKn Ψn1
2 01
mN
Km_n12 10
1
mN
Ψn12
TKn Ψn1
1 01
mN
Para evitar los errores de redondeamiento, podemos asignar recursivamente valores cero a losmiembros fuera de la diagonal principal:
Km_n1p qKm_n1p q
p q=if
0 p qif
Km_n1
123113.388
0
0
300666.524
1
mN
06/09/2010 -2:09 15/18

Copyright (c) 2010 Luis Alfredo Suárez Vivar Desacoplamiento_Modal_2_GDL_R_01_01.xmcd
Ortogonalidad de la matriz modal respecto de la matriz deamortiguamiento clásica
Para vectores iguales:
Cm_n11 11243.308
s
mN
Ψn11
TCn Ψn1
1 1.243 103
s
mN
Cm_n12 23013.077
s
mN
Ψn12
TCn Ψn1
2 3.013 103
s
mN
Para vectores distintos, poniéndole en formato decimal:
Cm_n11 20
s
mN
Ψn11
TCn Ψn1
2 0s
mN
Cm_n12 10
s
mN
Ψn12
TCn Ψn1
1 0s
mN
Para evitar los errores de redondeamiento, podemos asignar recursivamente valores cero a losmiembros fuera de la diagonal principal:
Km_n1p qKm_n1p q
p q=if
0 p qif
Km_n1
123113.388
0
0
300666.524
1
mN
Normalización a la masa modal.
Es la normalización más utilizada por lo que no usaremos subíndices para indicarla y sebasa en la normalización de las ecuaciones diferenciales desacopladas o modales, al dividirambos términos de las ecuaciones por cada masa modal, respectivamente.
p 1 2 2 q 1 2 2
Ψp Ψn1
p
Mm_n1p p
kg
Ψ0.036
0.019
0.013
0.054
Podemos observar que la masa modal interviene sin unidad, por lo que en la fórmula, usamosla masa modal dividida por su unidad el kg.
Mm ΨT
Mn Ψ Mm1
0
0
1
kg
Km ΨT
Kn Ψ Km202.26
0
0
937.787
1
mN
Cm ΨT
Cn Ψ Cm2.043
0
0
9.398
s
mN
06/09/2010 -2:09 16/18

Copyright (c) 2010 Luis Alfredo Suárez Vivar Desacoplamiento_Modal_2_GDL_R_01_01.xmcd
Comprobamos de nuevo los errores de redondeamiento y los corregimos, redefiniendo lasmatrices modales::
Mmp qMmp q
p q=if
0 p qif
Mm
1
0
0
1
kg
Kmp qKmp q
p q=if
0 p qif
Km
202.26
0
0
937.787
1
mN
Cmp qCmp q
p q=if
0 p qif
Cm
2.043
0
0
9.398
s
mN
Podemos comprobar que con esta normalización la matriz de masa pasa a ser la matrizdiagonal unidad y que la matriz de rigidez es la matriz espectral al cuadrado:
Mm1
0
0
1
kg ωn2 202.26
0
0
937.787
rad
s
2
Km
kg
202.26
0
0
937.787
rad
s
2
Esto motiva el uso común de esta normalización en los programas de elementos finitos. Engeneral es la que siempre utilizaremos.
Amortiguamiento crítico y ratio de amortiguamiento
Amortiguamientos críticos:
Ccp q2 Mmp q ωnp q
Cc28.444
0
0
61.247
s
mN
Ratios de amortiguamiento modal:
ζp q
Cmp q
Ccp q
p q=if
0 p qif
ζ
0.072
0
0
0.153
Frecuencias amortiguadas y de resonancia
Frecuencias amortiguadas:
ωdp qωnp q
1 ζp q 2
ωd14.185
0
0
30.261
1
s
Frecuencias de resonancia:
06/09/2010 -2:09 17/18

Copyright (c) 2010 Luis Alfredo Suárez Vivar Desacoplamiento_Modal_2_GDL_R_01_01.xmcd
ωrp qωnp q
1 2 ζp q 2 ωr
14.148
0
0
29.894
1
s
Ecuaciones matriciales modales
Suponiendo que no hay cargas (vibraciones libres) tendremos:
1,1 1,1 1,1
2,2 2,2 2,2
1,1
2,2
1 1
2 2
1
2
0 0 0( ) ( )...
0 ( ) 0 0 ( )
0 ( ) 0...
0 ( ) 0
m m m
D Dm m m
m
m
M M Kq t q t
M q t M K q t
K q t
K q t
( ) ( ) ( ) 0m D m D m mM q t M K q t K q t
( ) ( ) ( ) 0m m mM x t C x t K x t
m D m D mC M K
1,1 1,1 1,1 1,1
2,2 2,2 2,2 2,2
1 1 1
2 2 2
( ) ( ) ( ) 0
( ) ( ) ( ) 0
m D m D m m
m D m D m m
M q t M K q t K q t
M q t M K q t K q t
1,1 1,1 1,1
2,2 2,2 2,2
1 1 1
2 2 2
( ) ( ) ( ) 0
( ) ( ) ( ) 0
m m m
m m m
M q t C q t K q t
M q t C q t K q t
Conclusiones.
La técnica de desacoplamiento mediante los modos normales es rápida y sencilla pero solopuede utilizarse en al caso de que el amortiguamiento del sistema sea del tipo clásico oproporcional.
Al aplicar la técnica obtenemos un conjunto de ecuaciones diferenciales del movimiento,desacopladas, es decir que en cada una de ellas solo interviene un grado de libertad.
Cada una de estas ecuaciones desacopladas es equivalente a las estudiadas con 1 GDL, porlo que es de aplicación lo estudiado hasta la fecha y tendremos que resolver con la técnicacorrespondiente n problemas de 1 GDL que sustituirán a n ecuaciones con n GDL acoplados.
Bibliografía.
1. Tedesco JW. et al. Structural Dynamics, Theory and Applications. Addison WesleyLongman, Inc. 2725 Sand Hill Road. Menlo Park, California 94025. ISBN 0-673-98052-9. 1999.
2. Suárez LA. Apuntes de la Asignatura de Ampliación de Mecanica. Departamento deIngeniería Civil. Universidad de Burgos. 2010.
3. Mathcad User Guide, Release 14. Mathsoft. February 2007. Parametric TechnologyCorporation, 140 Kendrick Street, Needham, MA 02494 USA
06/09/2010 -2:09 18/18

Capítulo 16
FRIU de un sistema de n GDL
Con el mismo sistema que se ha utilizado para estudiar el desacoplamiento modal, seestudia la sintetización de las Funciones de Respuesta al Impulso Unitario o FRIU,que caracterizan al sistema en el dominio del tiempo.
Esta práctica se enlaza directamente con la práctica del capítulo 15 sobre el desacopla-miento modal utilizando una reference (referencia) de MATHCAD al fichero.
Esta referencia permite utilizar cualquier resultado previo contenido en una variableo reutilizar una función creada ya.
Los ficheros de referencia son una de las múltiples formas de estructurar el trabajoen el entorno.
El análisis modal en el dominio del tiempo es la técnica inversa a la síntesis de FRIU.Medidas las FRIU en el espacio nodal, reconstruimos estas en el espacio modal y deellas obtenemos los parámetros modales y de estos finalmente las propiedades de laestructura.
16.1. Objetivos para los contenidos
1. Reutilzar componentes de las técnicas de desacoplamiento modal.
2. Crear la matriz de FRIU modales.
3. Generar la transformación de FRIU modal a nodal.
4. Crear la matriz de FRIU nodales.
5. Representar las FRIU modales y nodales.
173

174 16. FRIU de un sistema de n GDL
16.2. Objetivos instrumentales1. Crear una reference a un fichero.
2. Crear la matriz de FRIU modales programando MATHCAD.
3. Crear la matriz de FRIU nodales mediante una transformación.
4. Representar las FRIU graficamente selecionando subíndices.

TRABAJO FINAL DE MASTERMASTER INTER-UNIVERSITARIO EN VIBRACIONES Y ACÚSTICAUNIVERSIDAD DE VALLADOLID - UNIVERSIDAD DE LEÓNSINTESIS DE FRIU EN SISTEMAS DE 2 GDLCopyright (c) 2010 LUIS ALFREDO SUAREZ VIVAR - [email protected]
Objetivos de la prácticaEl objetivo de la práctica es sintetizar las Funciones de Respuesta al Impuso Unitario (FRIU)en el espacio nodal (real) a partir del conocimiento del sistema.
Dado que le problema que se plantea es de 2 GDL, tendremos dos potenciales nodos en losque inyectar la carga excitadora y dos potenciales nodos en los que medir la respuesta, por loque tendrermos 4 FRIU potenciales, lo que conllevará a organizarlas en un matriz de FRIU,que denominaremos matriz de FRIU NODAL.
Partiremos de los conceptos básicos estudiados del comportamiento de sistemas lineales einvariantes con el tiempo.
La práctica se fundamenta en el desacoplamiento modal del sistema, basado en su linealidad,determinación de las FRIU en el espacio modal, obtención de la matriz de FRIU MODAL y latransformación de esta para obtener la matriz de FRIU NODAL.
Para incorporar los datos usaremos una referencia al fichero:
Reference:J:\DATOS\TFM\anexos\practicas\Desacoplamiento_Modal_2_GDL_R_01_01.xmcd(R)
Una vez referenciado el fichero disponemos de todas sus variables o funciones. Por lo tantono necesitamos redefinir los parámetros del problema.
Parámetros del sistema Origen de matrices y vectores
ORIGIN 1.0
Figura 1. Estructura de la referencia a estudiarm1 700.0 kg
m2 300.0 kg
b1 4.0 m
b2 7.0 m
Es 2.1 1011
Pa
Iz 5.41 106
m4
kin 1.5 105
N
m
αD 0.01
s
βD 0.0 s
Rev. 01.01 08/09/2010 - 14:48 1/12

Copyright (c) 2010 Luis Alfredo Suárez Vivar FRIU_2_GDL_R_01_01.xmcd
Desarrollo tutoradoDatos de la referenciadel desacoplamientomodal.
Grados de libertad de problema referenciado
nGDL length Mm1
2
Rigidez de los elementos estructurales.
Rigidez del muelle de acoplamiento del segundo forjado al inercial.
kin 150000.0N
m
Rigideces equivalentes de los pilares de los pórticos.
Pilar AC: AC 4.0 m kAC 53254.7N
m Pilar FH: FH 4.0 m kFH 53254.7
N
m
Pilar BD: BD 7.0 m kBD 39746.9N
m Pilar GJ: GJ 4.0 m kGJ 53254.7
N
m
Matrices NODALES
Matriz de masa Matriz de rigidez Matriz deamortiguamiento
Mn700.0
0.0
0.0
300.0
kg Kn199511.0
106509.4
106509.4
256509.4
N
m Cn
2009.1
1065.1
1065.1
2571.1
N s
m
Desacoplamiento modal.
Matriz dinámica Autovalores ordenados dela matriz dinámica
D285
355
152.2
855
1
s2
λe202.3
937.8
1
s2
rad
Parametro modales directos
Matriz de frecuenciasmodales naturales
Matriz de masa modaldirecta (normalizada almódulo unidad)
Matriz modal directa(normalizada amódulo unidad)
ωn14.222
0.000
0.000
30.623
rad
s Mm_n1
608.7
0.0
0.0
320.6
kgΨn1
0.9
0.5
0.2
1.0
Rev. 01.01 08/09/2010 - 14:48 2/12

Copyright (c) 2010 Luis Alfredo Suárez Vivar FRIU_2_GDL_R_01_01.xmcd
Matriz modalnormalizada a lamasa modal
Ψ0.036
0.019
0.013
0.054
Parámetros modales normalizados a la masa modal
Matriz de masa modalnormalizada a lamasa modal
Matriz de rigidez modalnormalizada a ala masamodal
Matriz deamortiguamientomodal normalizadoa la masa modal
Mm1.000
0.000
0.000
1.000
kg Km202.260
0.000
0.000
937.787
1
mN
Cm2.043
0.000
0.000
9.398
s
mN
Matriz deamortiguamientocrítico modalnormalizado a lamasa modal
Vector de ratios deamortiguamientomodal
Matriz de frecuenciasmodalesamortiguadas
Cc28.4
0.0
0.0
61.2
N s
m ζ
0.072
0.000
0.000
0.153
ωd14.185
0.000
0.000
30.261
rad
s
Matriz de frecuenciasmodales deresonanica
ωr14.148
0.000
0.000
29.894
rad
s
indices de acceso a los elementos
p
1.02.0
q
1.02.0
Rev. 01.01 08/09/2010 - 14:48 3/12
Copyright (c) 2010 Luis Alfredo Suárez Vivar FRIU_2_GDL_R_01_01.xmcd
Determinación de las FRIU MODALES
Teniendo en cuenta la estrategia planteada en los objetivos de la práctica, lo primero adeterminar son las Funciones de Respuesta al Impulso Unitario (FRIU), en el espaciomodal.
En el espacio modal el sistema está desacoplado por lo que cada ecuación modal es de 1GDL y para los sistema de 1 GDL com¡nocemos la expresión de FRIU:
1( ) ( )eq nt
deq d
h t e sen tm
Para un sistema de n GDL, para cada grado p, podemos escribir :
, ,
,
, ,
__,
1( ) si
( )
0 si
eq mp q p q
p q
p q p q
t
m dm m dm p q
e sen t p qMh t
p q
Que se podrá ordenar en una matriz de FRIU modales, diagonal:
1,1 1,2 1, 1,1
2,2 2,2 2, 2,2
,1 ,2 , ,
( ) ( ) ( ) ( ) 0 0
( ) ( ) ( ) 0 ( ) 0( )
( ) ( ) ( ) 0 0 ( )
m m m p m
m m m p m
m
m p m p m p p m p p
h t h t h t h t
h t h t h t h th t
h t h t h t h t
( ) ( )m m ph t diag h t
Para cada ecuación modal, tendremos una FRIU diferente, en función de los valores de lamasa modal, frecuencia natural modal, frecuencia natural modal amortiguada y ratio deamortiguamiento modal, siendo las FRIU fuera de la diagonal distintas de cero.
Hay que hacer notar la necesidad de que para valores de tiempo menores de cero la funciónde tener valor nulo, para que si se utilizan para realizar una convolución no generemos unerror con la zona negativa con valores diferentes a cero..
Rev. 01.01 08/09/2010 - 14:48 4/12
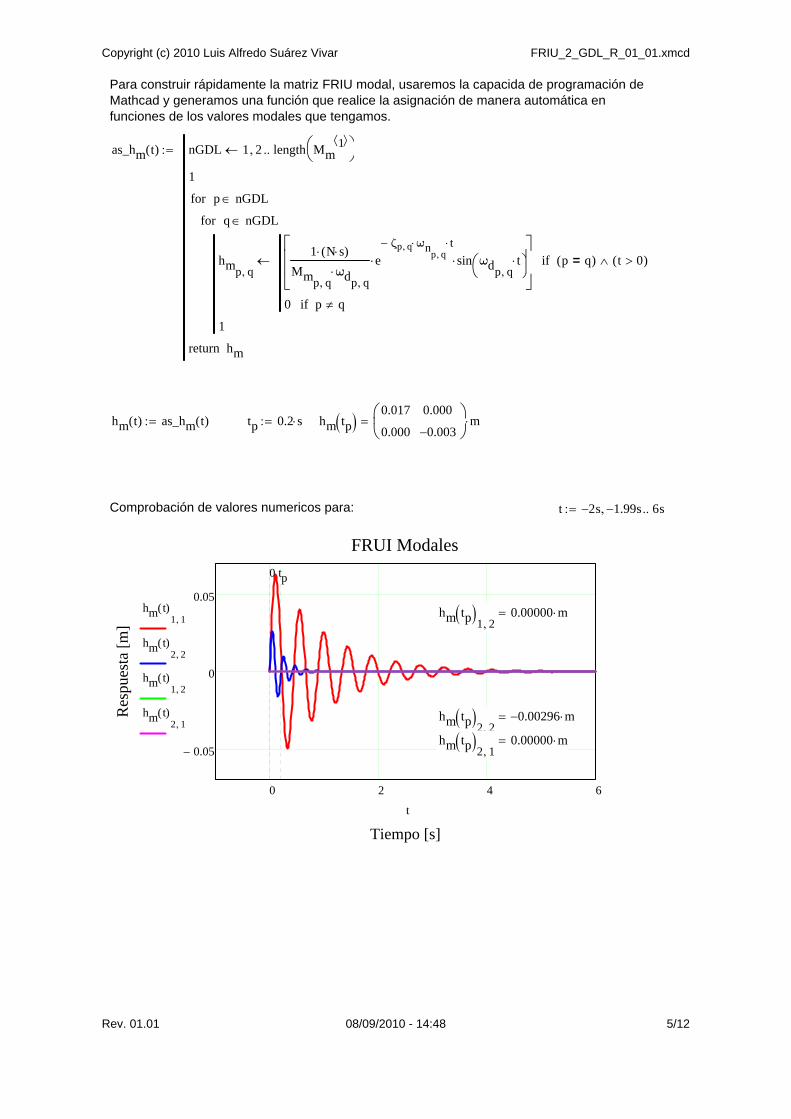
Copyright (c) 2010 Luis Alfredo Suárez Vivar FRIU_2_GDL_R_01_01.xmcd
0 2 4 6
0.05
0
0.05
FRUI Modales
Tiempo [s]
Res
pues
ta [
m]
hm t( )1 1
hm t( )2 2
hm t( )1 2
hm t( )2 1
0 tp
t
Para construir rápidamente la matriz FRIU modal, usaremos la capacida de programación deMathcad y generamos una función que realice la asignación de manera automática enfunciones de los valores modales que tengamos.
as_hm t( ) nGDL 1 2 length Mm1
1
hmp q
1 N s( )
Mmp qωdp q
e
ζp q ωnp q
t sin ωdp q
t
p q=( ) t 0( )if
0 p qif
1
q nGDLfor
p nGDLfor
hmreturn
hm t( ) as_hm t( ) tp 0.2 s hm tp 0.017
0.000
0.000
0.003
m
Comprobación de valores numericos para: t 2 s 1.99 s 6s
hm tp 1 2
0.00000 m
hm tp 2 2
0.00296 m
hm tp 2 1
0.00000 m
Rev. 01.01 08/09/2010 - 14:48 5/12
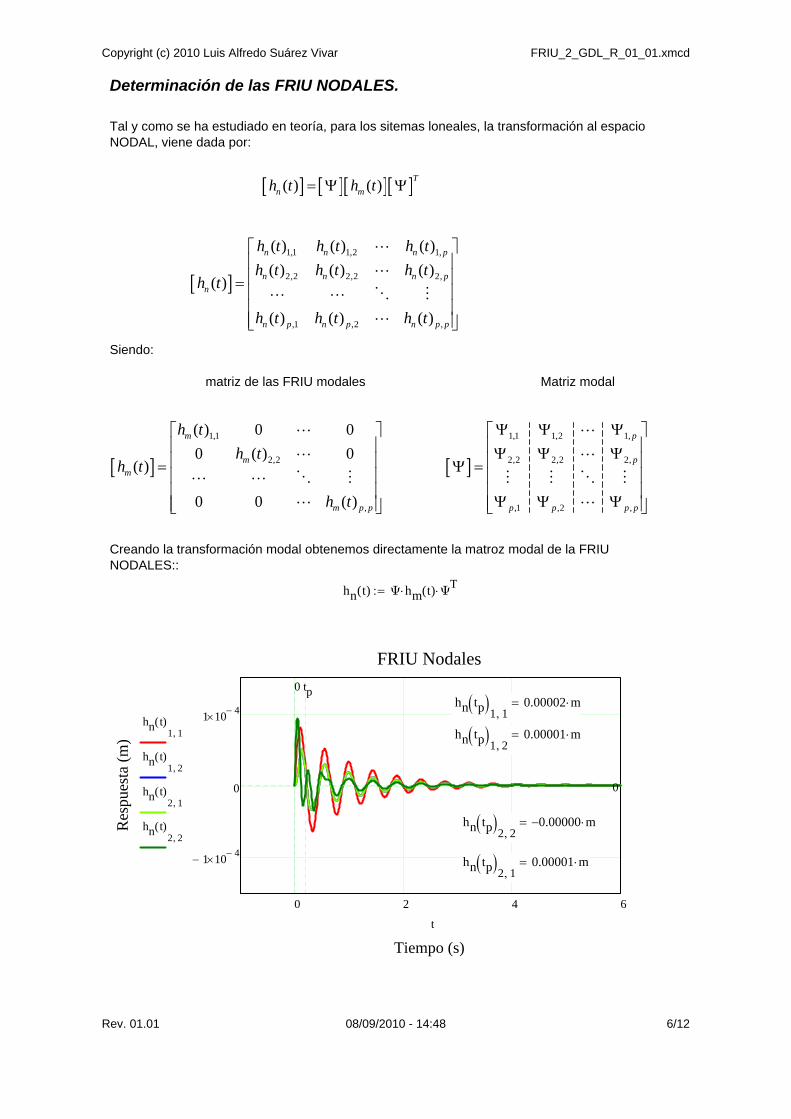
Copyright (c) 2010 Luis Alfredo Suárez Vivar FRIU_2_GDL_R_01_01.xmcd
Determinación de las FRIU NODALES.
Tal y como se ha estudiado en teoría, para los sitemas loneales, la transformación al espacioNODAL, viene dada por:
( ) ( )T
n mh t h t
1,1 1,2 1,
2,2 2,2 2,
,1 ,2 ,
( ) ( ) ( )
( ) ( ) ( )( )
( ) ( ) ( )
n n n p
n n n p
n
n p n p n p p
h t h t h t
h t h t h th t
h t h t h t
Siendo:
matriz de las FRIU modales Matriz modal
1,1
2,2
,
( ) 0 0
0 ( ) 0( )
0 0 ( )
m
m
m
m p p
h t
h th t
h t
1,1 1,2 1,
2,2 2,2 2,
,1 ,2 ,
p
p
p p p p
Creando la transformación modal obtenemos directamente la matroz modal de la FRIUNODALES::
hn t( ) Ψ hm t( ) ΨT
0 2 4 6
1 104
0
1 104
FRIU Nodales
Tiempo (s)
Res
pues
ta (
m)
0
hn t( )1 1
hn t( )1 2
hn t( )2 1
hn t( )2 2
0 tp
t
hn tp 1 1
0.00002 m
hn tp 1 2
0.00001 m
hn tp 2 2
0.00000 m
hn tp 2 1
0.00001 m
Rev. 01.01 08/09/2010 - 14:48 6/12
Copyright (c) 2010 Luis Alfredo Suárez Vivar FRIU_2_GDL_R_01_01.xmcd
Independecia de las FRIU MODALES y las FRIU MODALES
En el espacion madal tenemos tantas FRIU como GDL presente el sistema. En este caso 2 y2 son las FRIU modales que tenemos.
Puesto que las FRIU en el espacio nodal las determinamos a parti de 2 FRIU modal, tambienserán 2 las FRIU nodales independientes.
Estro fundamenta las dos técnicas básicas de excitación del analisis modal experimental:excitación móvil (martillo de impacto normalmente) con acelerómetro fijo y excitación fija(shaker o martillo de impacto) con acelerómetro móvil.
En un caso leeremos una fila o bien una columna de FRIU, es decir tantas como GDL tiene elsistema. Medir más es redundante y puede ayudar a mejorar la medida pero no sonestructamente necesarias.
Adicionalmente podemos observar que las FRIU cruzadas son iguales. Esta cuestión esconsecuencia de la linealida de la estructura (Teorema de Maxwell Betti).
1,2 2,1( ) ( )n nh t h t
Bibliografía.
1. Tedesco JW. et al. Structural Dynamics, Theory and Applications. Addison WesleyLongman, Inc. 2725 Sand Hill Road. Menlo Park, California 94025. ISBN 0-673-98052-9. 1999.
2. Suárez LA. Apuntes de la Asignatura de Ampliación de Mecanica. Departamento deIngeniería Civil. Universidad de Burgos. 2010.
3. Mathcad User Guide, Release 14. Mathsoft. February 2007. Parametric TechnologyCorporation, 140 Kendrick Street, Needham, MA 02494 USA
Rev. 01.01 08/09/2010 - 14:48 7/12
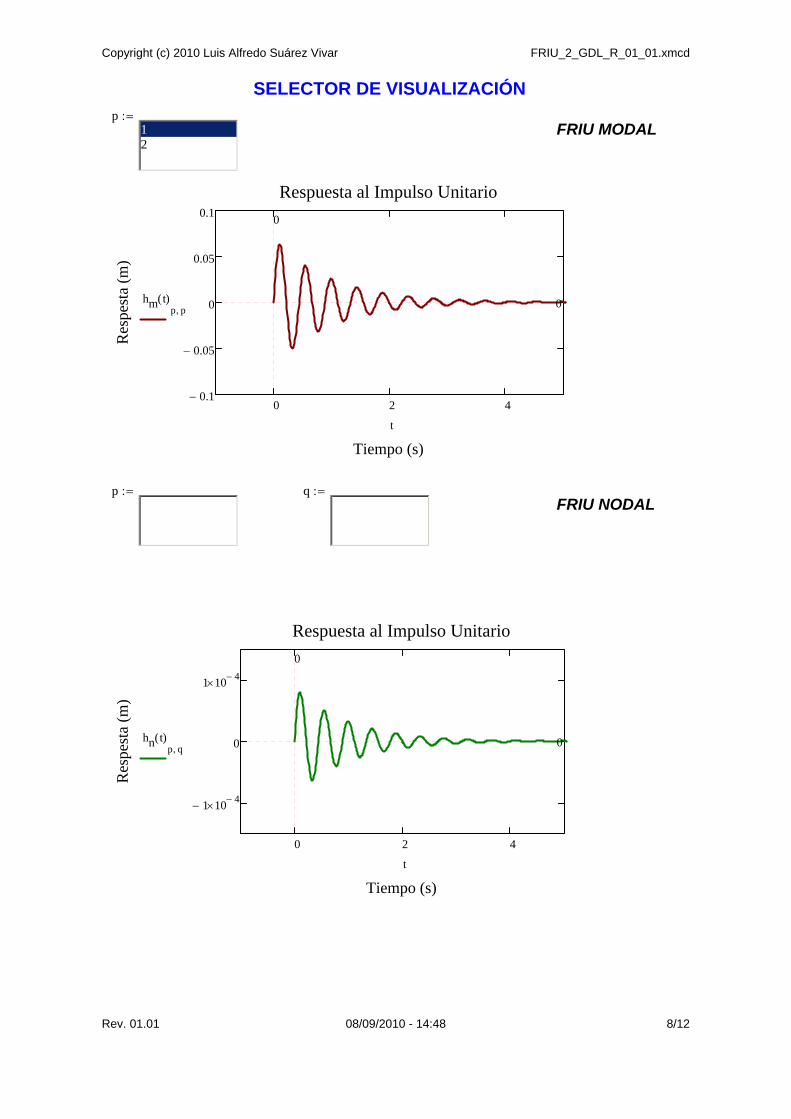
Copyright (c) 2010 Luis Alfredo Suárez Vivar FRIU_2_GDL_R_01_01.xmcd
SELECTOR DE VISUALIZACIÓN
p12
FRIU MODAL
0 2 40.1
0.05
0
0.05
0.1
Respuesta al Impulso Unitario
Tiempo (s)
Res
pest
a (m
)
0hm t( )p p
0
t
p q FRIU NODAL
0 2 4
1 104
0
1 104
Respuesta al Impulso Unitario
Tiempo (s)
Res
pest
a (m
)
0hn t( )p q
0
t
Rev. 01.01 08/09/2010 - 14:48 8/12
Copyright (c) 2010 Luis Alfredo Suárez Vivar FRIU_2_GDL_R_01_01.xmcd
Conclusiones
El problema es de 2 GDL, en el espacio modal nos aparece 2 FRIU. Sin embargo en elnodal, nos aparecen 4 FRIU, como se aprecia en la relación matricial existente ente ambaslas CUATRO FRIU del espacio NODAL son una combinación lineal de SOLO DOS FRIU delespacio MODAL.
Si deseamos identificar un sistema solo podremos hacerlo cargando en sus GDL NODALESo GEOMTERICOS y midiendo en los GDL NODALES o GEOMETRICOS y apartir de lamedida de las FRIU en el espacio NODAL, realizaremos el proceso inverso de obtención delas FRIU MODALES y de ellas los parámetros modales de masa, rigidez, amortiguamientoasi como la matriz modal.
Esta técnica si se realiza con las FRIU se denomina ANALISIS MODAL EXPERIMENTALcon identificación de los parámetros modales mediante la FRIU en el DOMINIO DELTIEMPO.
Rev. 01.01 08/09/2010 - 14:48 9/12

Copyright (c) 2010 Luis Alfredo Suárez Vivar FRIU_2_GDL_R_01_01.xmcd
Notas técnicas sobre el uso de Mathcad.Como la práctica contiene estos elementos de programación o scrip, al acceder al archivoaparece el siguiente mensaje:
Debemos de contestar SI, y posterriorme hacer lo que indica el mensaje, click con el botónderecho del ratón sobre los controles y activarlos:
Aspecto de scrip una vez activado:
Rev. 01.01 08/09/2010 - 14:48 10/12
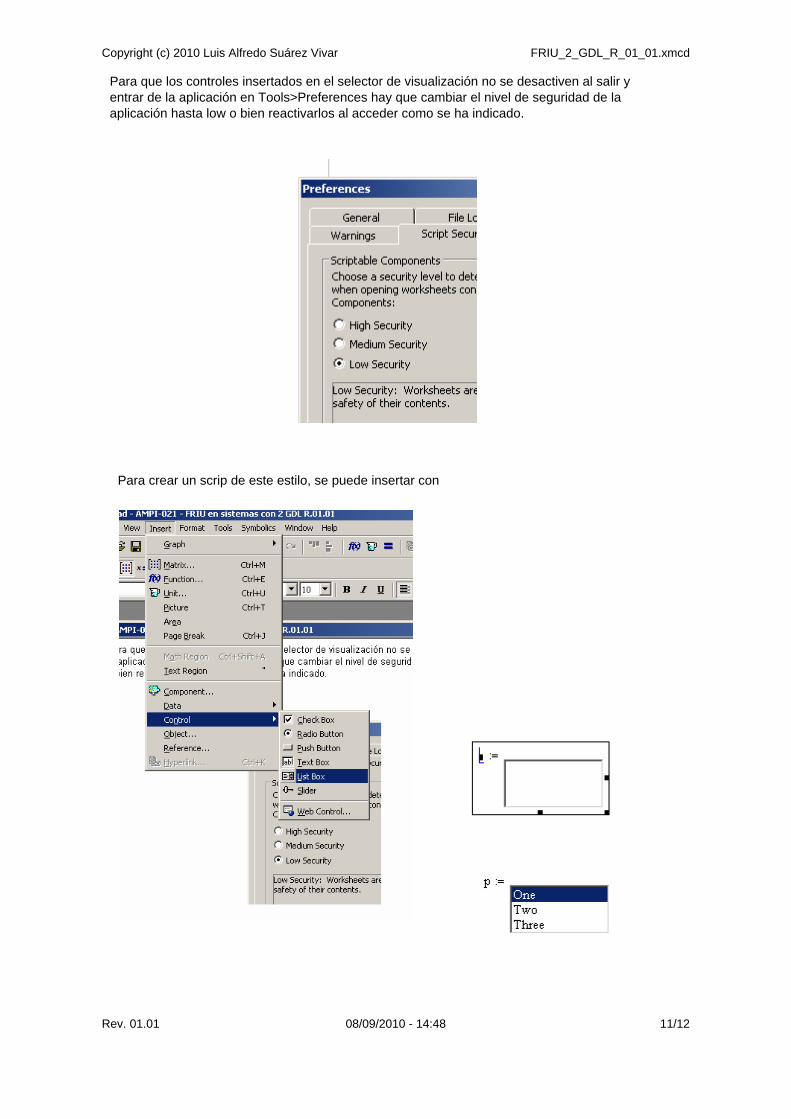
Copyright (c) 2010 Luis Alfredo Suárez Vivar FRIU_2_GDL_R_01_01.xmcd
Para que los controles insertados en el selector de visualización no se desactiven al salir yentrar de la aplicación en Tools>Preferences hay que cambiar el nivel de seguridad de laaplicación hasta low o bien reactivarlos al acceder como se ha indicado.
Para crear un scrip de este estilo, se puede insertar con
Rev. 01.01 08/09/2010 - 14:48 11/12

Copyright (c) 2010 Luis Alfredo Suárez Vivar FRIU_2_GDL_R_01_01.xmcd
Posteriormente se hace click con el botón derecho del raton y se edita el scrip paratraducirlo o cabiarlo.
Rev. 01.01 08/09/2010 - 14:48 12/12
Capítulo 17
FRF de un sistema de n GDL
Con el mismo sistema que se ha utilizado para estudiar el desacoplamiento modal, seestudia la sintetización de las Funciones de Respuesta en Frecuencia o FRF, que ca-racterizan al sistema en el dominio de la frecuencia.
Esta práctica se enlaza directamente con la práctica del capítulo 15 sobre el desacopla-miento modal utilizando una reference (referencia) de MATHCAD al fichero.
Esta referencia permite utilizar cualquier resultado previo contenido en una variableo reutilizar una función creada ya.
Los ficheros de referencia son una de las múltiples formas de estructurar el trabajoen el entorno.
El análisis modal en el dominio de la frecuencia es la técnica inversa a la síntesisde FRF. Medidas las FRF en el espacio nodal, reconstruimos estas en el espacio modaly de ellas obtenemos los parámetros modales y de estos finalmente las propiedades dela estructura.
La síntesis de FRF frente a la síntesis de FRIU estriba sobre todo en el carácter com-plejo de las FRF, que obliga a usar funciones como módulo y argumento o real eimaginaria en la ejecución.
17.1. Objetivos para los contenidos
1. Reutilzar componentes de las técnicas de desacoplamiento modal.
2. Crear la matriz de FRF modales.
3. Generar la transformación de FRF modal a nodal.
4. Crear la matriz de FRF nodales.
187
188 17. FRF de un sistema de n GDL
5. Representar las FRF modales y nodales.
17.2. Objetivos instrumentales1. Crear una reference a un fichero.
2. Crear la matriz de FRF modales programando MATHCAD.
3. Crear la matriz de FRF nodales mediante una transformación.
4. Representar las FRF graficamente selecionando subíndices.

TRABAJO FINAL DE MASTERMASTER INTER-UNIVERSITARIO EN VIBRACIONES Y ACÚSTICAUNIVERSIDAD DE VALLADOLID - UNIVERSIDAD DE LEÓNSINTESIS DE FRF EN SISTEMAS DE 2 GDLCopyright (c) 2010 LUIS ALFREDO SUAREZ VIVAR - [email protected]
Objetivos de la prácticaEl objetivo de la práctica es sintetizar las Funciones de Respuesta en Frecuencia (FRF) en elespacio nodal (real) a partir del conocimiento del sistema.
Dado que le problema que se plantea es de 2 GDL, tendremos dos potenciales nodos en losque inyectar la carga excitadora y dos potenciales nodos en los que medir la respuesta, por loque tendrermos 4 FRF potenciales, lo que conllevará a organizarlas en un matriz de FRF, quedenominaremos matriz de FRF NODAL.
Partiremos de los conceptos básicos estudiados del comportamiento de sistemas lineales einvariantes con el tiempo.
La práctica se fundamenta en el desacoplamiento modal del sistema, basado en su linealidad,determinación de las FRF en el espacio modal, obtención de la matriz de FRF MODAL y latransformación de esta para obtener la matriz de FRF NODAL.
Para incorporar los datos usaremos una referencia al fichero:
Reference:J:\DATOS\TFM\anexos\practicas\Desacoplamiento_Modal_2_GDL_R_01_01.xmcd(R)
Una vez referenciado el fichero disponemos de todas sus variables o funciones. Por lo tantono necesitamos redefinir los parámetros del problema.
Parámetros del sistema Origen de matrices y vectores
ORIGIN 1
Figura 1. Estructura de la referencia a estudiarm1 700 kg
m2 300 kg
b1 4 m
b2 7 m
Es 2.1 1011
Pa
Iz 5.41 106
m4
kin 1.5 105
N
m
αD 0.021
s
βD 0.01 s
Rev. 1.1 03/09/2010 - 19:50 1/10

Copyright (c) 2008 Luis Alfredo Suárez Vivar FRF_2_GDL_R_01_01.xmcd
Desarrollo tutoradoDatos de la referenciadel desacoplamientomodal.
Grados de libertad de problema referenciado
nGDL length Mm1
2
Rigidez de los elementos estructurales.
Rigidez del muelle de acoplamiento del segundo forjado al inercial.
kin 1.5 105
N
m
Rigideces equivalentes de los pilares de los pórticos.
Pilar AC: AC 4 m kAC 5.325 104
N
m Pilar FH: FH 4 m kFH 5.325 10
4
N
m
Pilar BD: BD 7 m kBD 3.975 104
N
m Pilar GJ: GJ 4 m kGJ 5.325 10
4
N
m
Matrices NODALES
Matriz de masa Matriz de rigidez Matriz deamortiguamiento
Mn700
0
0
300
kg Kn199511
106509.4
106509.4
256509.4
N
m Cn
2009.1
1065.1
1065.1
2571.1
N s
m
Desacoplamiento modal.
Matriz dinámica Autovalores ordenados dela matriz dinámica
D285
355
152.2
855
1
s2
λe202.3
937.8
1
s2
rad
Parametro modales directos
Matriz de frecuenciasmodales naturales
Matriz de masa modaldirecta (normalizada almódulo unidad)
Matriz modal directa(normalizada amódulo unidad)
ωn14.222
0.000
0.000
30.623
rad
s Mm_n1
608.7
0
0
320.6
kg Ψn10.878
0.478
0.227
0.974
Rev. 01.02 03/09/2010 - 19:50 2/10

Copyright (c) 2008 Luis Alfredo Suárez Vivar FRF_2_GDL_R_01_01.xmcd
Matriz modalnormalizada a lamasa modal
Ψ0.036
0.019
0.013
0.054
Parámetros modales normalizados a la masa modal
Matriz de masa modalnormalizada a lamasa modal
Matriz de rigidez modalnormalizada a ala masamodal
Matriz deamortiguamientomodal normalizadoa la masa modal
Mm1.000
0.000
0.000
1.000
kg Km202.3
0.0
0.0
937.8
1
mN
Cm2.043
0.000
0.000
9.398
s
mN
Matriz deamortiguamientocrítico modalnormalizado a lamasa modal
Vector de ratios deamortiguamientomodal
Matriz de frecuenciasmodalesamortiguadas
Cc28.444
0
0
61.247
N s
m ζ
0.072
0.000
0.000
0.153
ωd14.185
0.000
0.000
30.261
rad
s
Matriz de frecuenciasmodales deresonanica
ωr14.148
0.000
0.000
29.894
rad
s
indices de acceso a los elementos
p
12
q
12
Rev. 01.02 03/09/2010 - 19:50 3/10

Copyright (c) 2008 Luis Alfredo Suárez Vivar FRF_2_GDL_R_01_01.xmcd
Determinación de las FRF MODALES
Para construir rápidamente la matriz FRF modal, usaremos la capacida de programación deMathcad y generamos una función que realice la asignación de manera automática enfuncion de los valores modales que tengamos.
as_Hm ω( ) nGDL 1 2 length Mm1
1
Hmp q
1
Mmp q
1
ωnp q
2ω
2
j 2 ζp q ωnp q
ω
p q=if
0 j 0 p qif
1
q nGDLfor
p nGDLfor
Hmreturn
Hm ω( ) as_Hm ω( ) Hm 10rad
s
0.009 0.002j
0.000
0.000
0.001 0.000j
m
N
En parte real e imaginaria:
0 10 20 30 400.04
0.02
0
0.02
0.04
0.04
0.02
0
0.02
0.04
FRF - Real/Imaginaria
Frecuencia de excitación (rad/s)
FR
F R
eal
(m/N
)
FR
F I
mag
inar
ia (
m/N
)
0
Re Hm ω( )1 1
Re Hm ω( )2 2
Im Hm ω( )1 1
Im Hm ω( )2 2
0
ω
Rev. 01.02 03/09/2010 - 19:50 4/10

Copyright (c) 2008 Luis Alfredo Suárez Vivar FRF_2_GDL_R_01_01.xmcd
En magnitud y fase:
0 10 20 30 40
0
0.02
0.04
2
0
2
FRF - Magnitud/Fase
Frecuencia de excitación (rad/s)
FR
F M
agni
tud
(m/N
)
FR
F F
ase
(rad
)
0
Hm ω( )1 1
Hm ω( )2 2
0
π
2
arg Hm ω( )1 1
arg Hm ω( )2 2
ωn1 1ωn2 2
ω
ω 0rad
s 0.1
rad
s 100
rad
s a 5 10
2
0.02 0 0.02
0.04
0.02
0
Diagramas de Nyquist
0
Im Hm ω( )1 1
Im Hm ω( )2 2
0
Re Hm ω( )1 1
Re Hm ω( )2 2
Rev. 01.02 03/09/2010 - 19:50 5/10

Copyright (c) 2008 Luis Alfredo Suárez Vivar FRF_2_GDL_R_01_01.xmcd
Determinación de las FRF NODALES
Tal y como se ha estudiado en teoría, para los sitemas loneales, la transformación al espacioNODAL, viene dada por:
Hn ω( ) Ψ Hm ω( ) ΨT
Automáticamente obtenemos los elementso de la matriz de funciones de transferencia delespacio NODAL.
1,1 1,2
2,1 2,2
( ) ( )( )
( ) ( )n n
nn n
H HH
H H
Representando las funciones en parte real e imaginaria tenemos:
0 20 40 60
2 105
0
2 105
FRF Real
Frecuencia de excitación (rad/s)
FR
F R
eal (
m)
0
Re Hn ω( )1 1
Re Hn ω( )1 2
Re Hn ω( )2 1
Re Hn ω( )2 2
0
ω
0 20 40 60
4 105
2 105
0
FRF Imaginaria
Frecuencia de excitación (rad/s)
FR
F R
eal (
m)
0Im Hn ω( )1 1
Im Hn ω( )1 2
Im Hn ω( )2 1
Im Hn ω( )2 2
ωn1 1ωn2 2
ω
Rev. 01.02 03/09/2010 - 19:50 6/10

Copyright (c) 2008 Luis Alfredo Suárez Vivar FRF_2_GDL_R_01_01.xmcd
Representando en magnitud y fase:
0 20 40 60
0
2 105
4 105
FRF - Real
Frecuencia de excitación (rad/s)
FR
F R
eal (
m)
0
Hn ω( )1 1
Hn ω( )1 2
Hn ω( )2 1
Hn ω( )2 2
ωn1 1ωn2 2
ω
0 20 40 60
2
0
2
FRF - Imaginaria
Frecuencia de excitación (rad/s)
FR
F R
eal (
m)
π
2
π
2
arg Hn ω( )1 1
arg Hn ω( )1 2
arg Hn ω( )2 1
arg Hn ω( )2 2
ωn1 1ωn2 2
ω
Podemos observar que las FRF cruzadas son iguales, consecuencia del teorema dereciprocidad dada la linealidad de la estructura:
1,2 2,1( ) ( ) 0 ,n nH t H t en general
Rev. 01.02 03/09/2010 - 19:50 7/10

Copyright (c) 2008 Luis Alfredo Suárez Vivar FRF_2_GDL_R_01_01.xmcd
SELECTOR DE VISUALIZACIÓN
p12
FRF MODAL
0 20 40 600.04
0.02
0
0.02
0.04
0.02
0
0.02
FRF Real/Imaginaria
Frecuencia de excitación (rad/s)
0Re Hm ω( )
p p
1
Kmp p
1
2 ζp p
Im Hm ω( )p p
ωnp p
ω
p12
FRF MODAL
0 20 40 60
0
0.02
0.04
0
1
2
3
FRF Magnitud/Fase
Frecuencia de excitación (rad/s)
0
1
Kmp p
1
2 ζp p
Hm ω( )p p
0
π
2arg Hm ω( )
p p
ωnp p
ω
Rev. 01.02 03/09/2010 - 19:50 8/10

Copyright (c) 2008 Luis Alfredo Suárez Vivar FRF_2_GDL_R_01_01.xmcd
p12
q12
FRF NODAL
0 20 40 60
4 105
2 105
0
2 105
4 105
4 105
2 105
0
2 105
FRF Real/Imaginaria
Frecuencia de excitación (rad/s)
0Re Hn ω( )p q
Im Hn ω( )p q
ωn1 1ωn2 2
ω
p12
q12
FRF NODAL
0 20 40 60
0
2 105
4 105
2
0
2
FRF Magnitud/Fase
Frecuencia de excitación (rad/s)
0
Hn ω( )p q
π
π
2
arg Hn ω( )p q
ωn1 1ωn2 2
ω
Rev. 01.02 03/09/2010 - 19:50 9/10
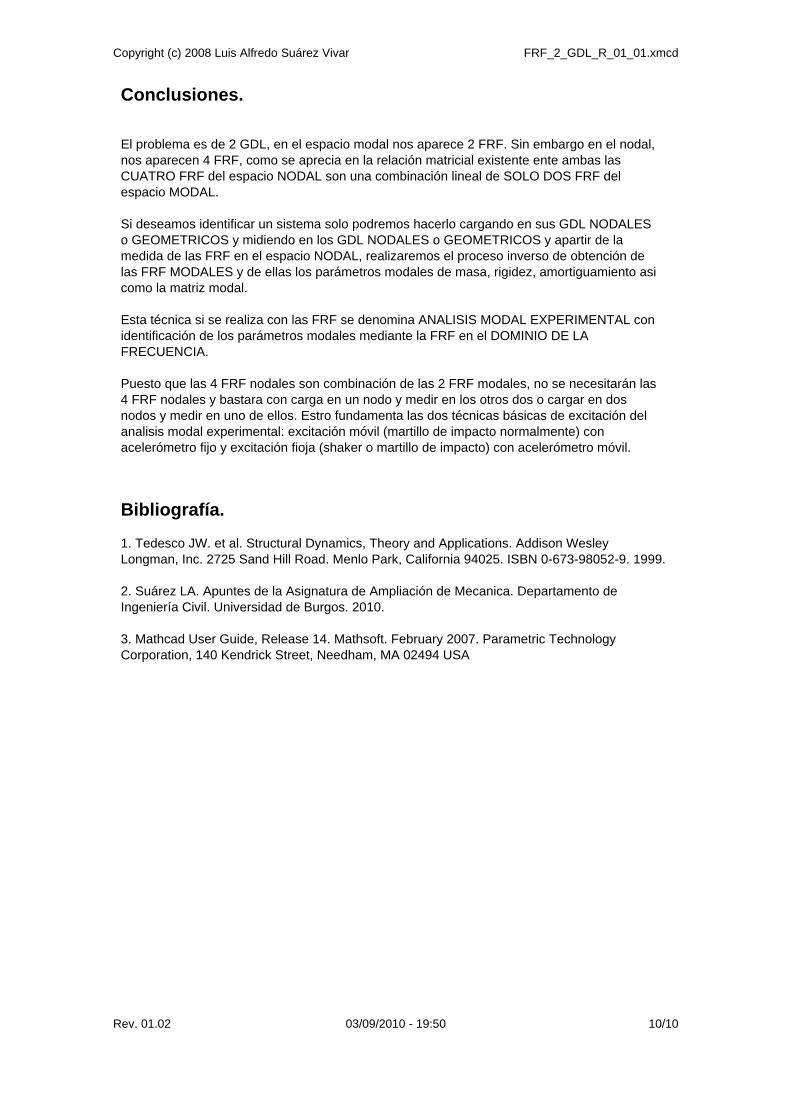
Copyright (c) 2008 Luis Alfredo Suárez Vivar FRF_2_GDL_R_01_01.xmcd
Conclusiones.
El problema es de 2 GDL, en el espacio modal nos aparece 2 FRF. Sin embargo en el nodal,nos aparecen 4 FRF, como se aprecia en la relación matricial existente ente ambas lasCUATRO FRF del espacio NODAL son una combinación lineal de SOLO DOS FRF delespacio MODAL.
Si deseamos identificar un sistema solo podremos hacerlo cargando en sus GDL NODALESo GEOMETRICOS y midiendo en los GDL NODALES o GEOMETRICOS y apartir de lamedida de las FRF en el espacio NODAL, realizaremos el proceso inverso de obtención delas FRF MODALES y de ellas los parámetros modales de masa, rigidez, amortiguamiento asicomo la matriz modal.
Esta técnica si se realiza con las FRF se denomina ANALISIS MODAL EXPERIMENTAL conidentificación de los parámetros modales mediante la FRF en el DOMINIO DE LAFRECUENCIA.
Puesto que las 4 FRF nodales son combinación de las 2 FRF modales, no se necesitarán las4 FRF nodales y bastara con carga en un nodo y medir en los otros dos o cargar en dosnodos y medir en uno de ellos. Estro fundamenta las dos técnicas básicas de excitación delanalisis modal experimental: excitación móvil (martillo de impacto normalmente) conacelerómetro fijo y excitación fioja (shaker o martillo de impacto) con acelerómetro móvil.
Bibliografía.
1. Tedesco JW. et al. Structural Dynamics, Theory and Applications. Addison WesleyLongman, Inc. 2725 Sand Hill Road. Menlo Park, California 94025. ISBN 0-673-98052-9. 1999.
2. Suárez LA. Apuntes de la Asignatura de Ampliación de Mecanica. Departamento deIngeniería Civil. Universidad de Burgos. 2010.
3. Mathcad User Guide, Release 14. Mathsoft. February 2007. Parametric TechnologyCorporation, 140 Kendrick Street, Needham, MA 02494 USA
Rev. 01.02 03/09/2010 - 19:50 10/10
Capítulo 18
Modelos con incertidumbre
En general estamos acostumbrados a resolver los problemas estructurales de una ma-nera determinista, esta es una tendencia que está cambiando merced a la potencia decálculo de los sistemas informáticos y la capacidad creciente del software para in-corporar estos cálculos con facilidad. El cálculo dinámico no es una excepción, en lapráctica del capítulo 15 se han obtenido las dos frecuencias naturales modales de laestructura como dos valores deterministas.
Sin embargo si algunos de los factores (parámetros de definición de la estructura) tie-ne un comportamiento no determinista, porque sobre ellos se incorpora incertidumbredefinida mediante un conjunto de estadísticos como pueden ser su media, su coefi-ciente de variación y su distribución probabilista, las respuestas en este caso, todos losparámetros modales, también serán no deterministas y por lo tanto deberán ser carac-terizados con sus estadísticos correspondientes de manera similar a los factores.
Esta cuestión exige estudiar como se propaga la incertidumbre. En este caso se a pro-puesto una simulación por el Método de Montecarlo que realiza 50.000 cálculos deldesacoplamiento, (en menos de 20 s incluido el refresco de los gráficos), suponiendoque solo dos factores son relevantes: el módulo elástico del material y el momento deinercia de la sección.
El estudio de la variabilidad de la respuesta resulta clave para obtener resultados aco-tados desde el punto de vista de una tolerancia de diseño (¿porque tener más calidaden los factores, si el resultado esta dentro de tolerancia exigida a la respuesta?) y desdeotro punto de vista que es la optimización de factores (parámetros de la estructura) caraa una mejora del diseño.
Otra motivación para la inclusión de este tipo de cálculos es que son el corazón delas técnicas de identificación de parámetros cuando se dispone de un modelo y de unconjunto de ensayos.
El Método de Montecarlo nos permitirá abordar el cálculo no determinista y abre
199

200 18. Modelos con incertidumbre
las puertas a estudios más eficientes basados en el DOE 1 que reduzcan a unos pocoscálculos las necesidades de cómputo. En general todos los métodos se suelen contras-tar contra una Simulación de Montecarlo si no se puede, como es lo normal, explicitarla función de respuesta y determinar la propagación de la incertidumbre con la matrizJacobiana.
18.1. Objetivos para los contenidos1. Crear una función de respuesta sintética.
2. Definir los estadísticos de los factores.
3. Generar la simulación.
4. Estudiar los estadísticos de los factores y las respuestas.
18.2. Objetivos instrumentales1. Programar una función para el desacoplamiento.
2. Definir el vector de funciones de distribución de los factores.
3. Definir el vector de estadísticos de los factores.
4. Usar la función montecarlo().
5. Usar la función histogram().
6. Usar la función mean(), qt(), Stdev().
1DOE: Design Of Experiments

Incertidumbre_parametros_modales_2P_R_05_01.xmcd
TRABAJO FINAL DE MASTERMASTER INTER-UNIVERSITARIO EN VIBRACIONES Y ACÚSTICAUNIVERSIDAD DE VALLADOLID - UNIVERSIDAD DE LEÓNPROPAGACIÓN DE LA INCERTIDUMBRE EN EL DESACOPLAMIENTO MODALCopyright (c) 2010 LUIS ALFREDO SUAREZ VIVAR - [email protected]
Objetivos de la hoja de trabajoDeseamos comprobar como se propaga la incertidumbre de los parámetros geométricos y delos materiales a los parámetros modales posteriormente determinados como son lasfrecuencias, amortiguamientos y vectores modales.
Parámetros del problema
El sistema que proponemos es una estructura de edificación formada por dos plantas ysupondremos infinitamente rígidos los dinteles . Adicionalmente el dintel superior sesupone unido al inercial con una rigidez Kin, definida.
Se supondrá que el amortiguamiento es del tipo proporcional, definido por lasconstantes αD y βD, por lo que los modos que aparecerán son modos normales .
ORIGIN 1
Masa del forjado inferior:
m1 700
Masa del forjado superior:
m2 300
Cotas verticales:
b1 4
b2 7
Módulo elástico del acero(parámetro aleatorio)::
Es 210 1 109
Momento de inercia Iz de
los pilares (parámetroaleatorio):
Figura 1. Estructura a estudiar Iz 5.41 106
Rigidez de unión delforjado superior alinercial:
kin 1.5 105
Amortiguamiento clásico:
Coeficiente αD (masa) del amortiguamiento clásico: αD 0.02
Coeficiente βD (rigidez) del amortiguamiento clásico: βD 0.01
08/09/2010 - 23:16 1/20
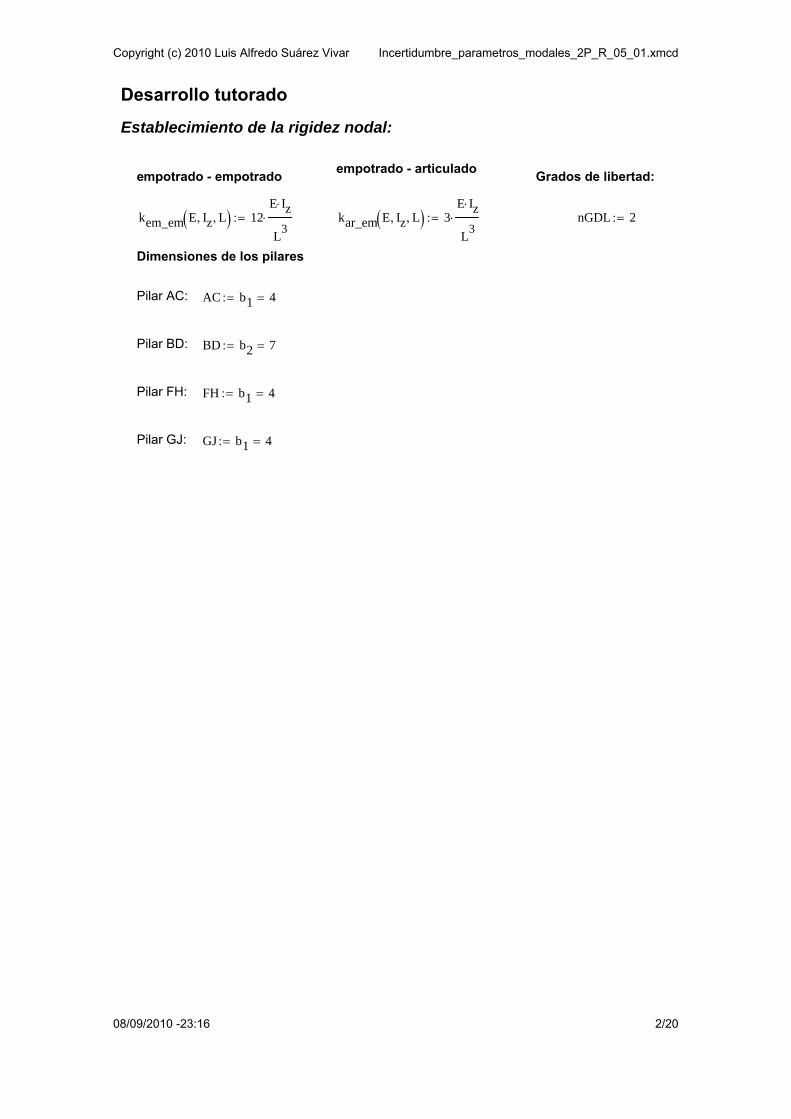
Copyright (c) 2010 Luis Alfredo Suárez Vivar Incertidumbre_parametros_modales_2P_R_05_01.xmcd
Desarrollo tutorado
Establecimiento de la rigidez nodal:
empotrado - articuladoempotrado - empotrado Grados de libertad:
kem_em E Iz L 12E Iz
L3
kar_em E Iz L 3E Iz
L3
nGDL 2
Dimensiones de los pilares
Pilar AC: AC b1 4
Pilar BD: BD b2 7
Pilar FH: FH b1 4
Pilar GJ: GJ b1 4
08/09/2010 -23:16 2/20
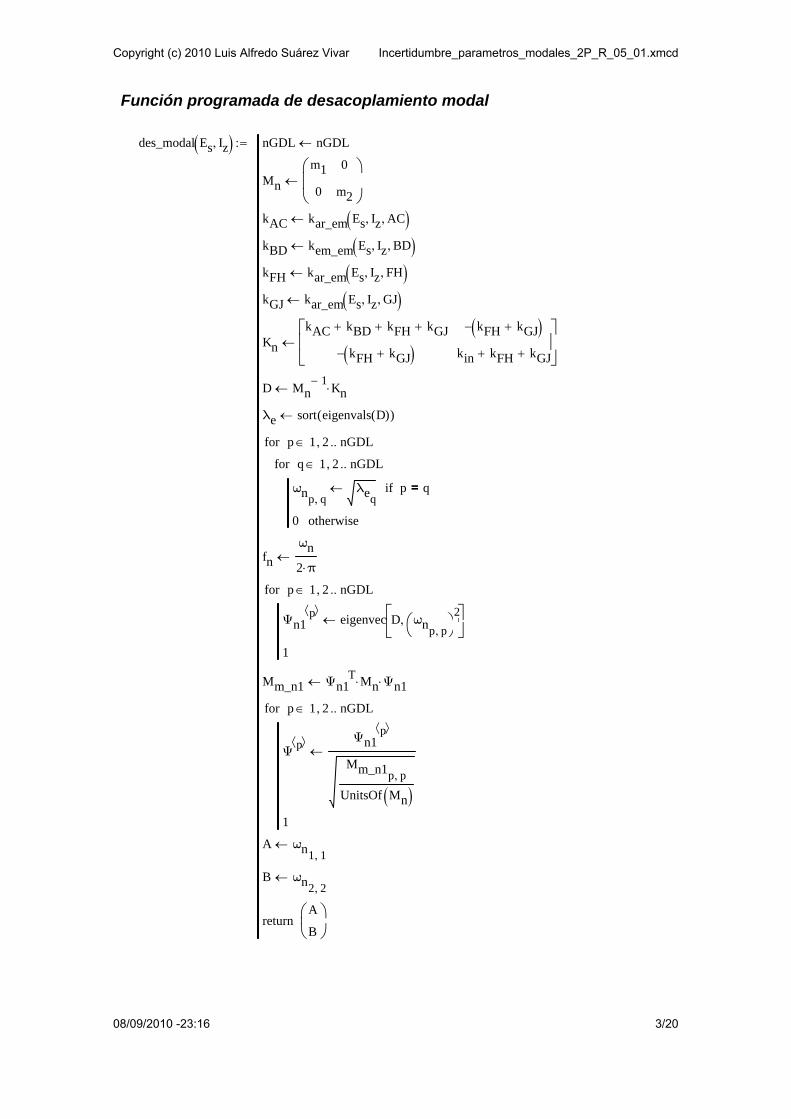
Copyright (c) 2010 Luis Alfredo Suárez Vivar Incertidumbre_parametros_modales_2P_R_05_01.xmcd
Función programada de desacoplamiento modal
des_modal Es Iz nGDL nGDL
Mn
m1
0
0
m2
kAC kar_em Es Iz AC
kBD kem_em Es Iz BD
kFH kar_em Es Iz FH
kGJ kar_em Es Iz GJ
Kn
kAC kBD kFH kGJ
kFH kGJ
kFH kGJ
kin kFH kGJ
D Mn1
Kn
λe sort eigenvals D( )( )
ωnp qλeq
p q=if
0 otherwise
q 1 2 nGDLfor
p 1 2 nGDLfor
fn
ωn
2 π
Ψn1p eigenvec D ωnp p
2
1
p 1 2 nGDLfor
Mm_n1 Ψn1T Mn Ψn1
Ψp Ψn1
p
Mm_n1p p
UnitsOf Mn
1
p 1 2 nGDLfor
A ωn1 1
B ωn2 2
A
B
return
08/09/2010 -23:16 3/20

Copyright (c) 2010 Luis Alfredo Suárez Vivar Incertidumbre_parametros_modales_2P_R_05_01.xmcd
Parámetros estadísticos de los factores
Número de parámetros a estudiar: nPAR 2
medias coeficientes de variación desviaciones típicas
μ_Es 210 1 109
cov_Es 20% σ_Es μ_Es cov_Es
μ_Iz 5.41 106
cov_Iz 20% σ_Iz μ_Iz cov_Iz
Distribuciones de cada factor: distribucionesNormal
Normal
Matriz de estadísticos de los factores:
esta_par
"Es"
"Iz"
μ_Es
UnitsOf μ_Es μ_Iz
UnitsOf μ_Iz
σ_Es
UnitsOf μ_Es σ_Iz
UnitsOf μ_Iz
"Es"
"Iz"
2.1 1011
5.41 106
4.2 1010
1.082 106
No se establecen límites a la simulación
limite_sup NaN
lim_muestreoNaN
NaN
NaN
NaN
Funciones de respuestasω1 x( ) des_modal x
1x
2 1 1
ω2 x( ) des_modal x1
x2
2 1
Ejecuciones de la simulación: n 50000
Número de intervalos de los histogramas nINT 20
08/09/2010 -23:16 4/20

Copyright (c) 2010 Luis Alfredo Suárez Vivar Incertidumbre_parametros_modales_2P_R_05_01.xmcd
Primera frecuencia modal
Matriz de Montecarlo factores y respuesta de la primera frecuencia modal
M1 montecarlo ω1 n esta_par lim_muestreo distribuciones
M11 2 3
12
3
4
5
"Es" "Iz" "Output"111.891·10 -66.41·10 11.456·10112.717·10 -65.185·10 11.535·10112.651·10 -65.504·10 11.554·10111.503·10 -63.672·10 ...
Respuestas
ω1 R1 M15 3 10.751
Factores Muestras
x0 X11 M15 1 150346681974.04
x1 X12 M15 2 3.672 10
6
Eliminación de encabezados
Creamos el índice i: i 1 2 rows M1( ) 1( )
Vector de muestras X1: X11i
M1i 1 1 X11
11.891 10
11 M1
1 1 "Es"
Vector de muestras Y1: X12i
M1i 1 2 X12
16.41 10
6 M1
1 2 "Iz"
Vector de Respuestas R1: R1i
M1i 1 3 R1
11.456 10
1 M1
1 3 "Output"
length M1 1 50001 length X11 1 50000
Comprobación de la respuesta: ω1
X111
X121
14.555
08/09/2010 -23:16 5/20

Copyright (c) 2010 Luis Alfredo Suárez Vivar Incertidumbre_parametros_modales_2P_R_05_01.xmcd
0 2 1011 4 10
11
0
5 106
1 105
Nube de puntos muestreados de los parámetros R1
μ_IzX12
μ_Es
X11
08/09/2010 -23:16 6/20
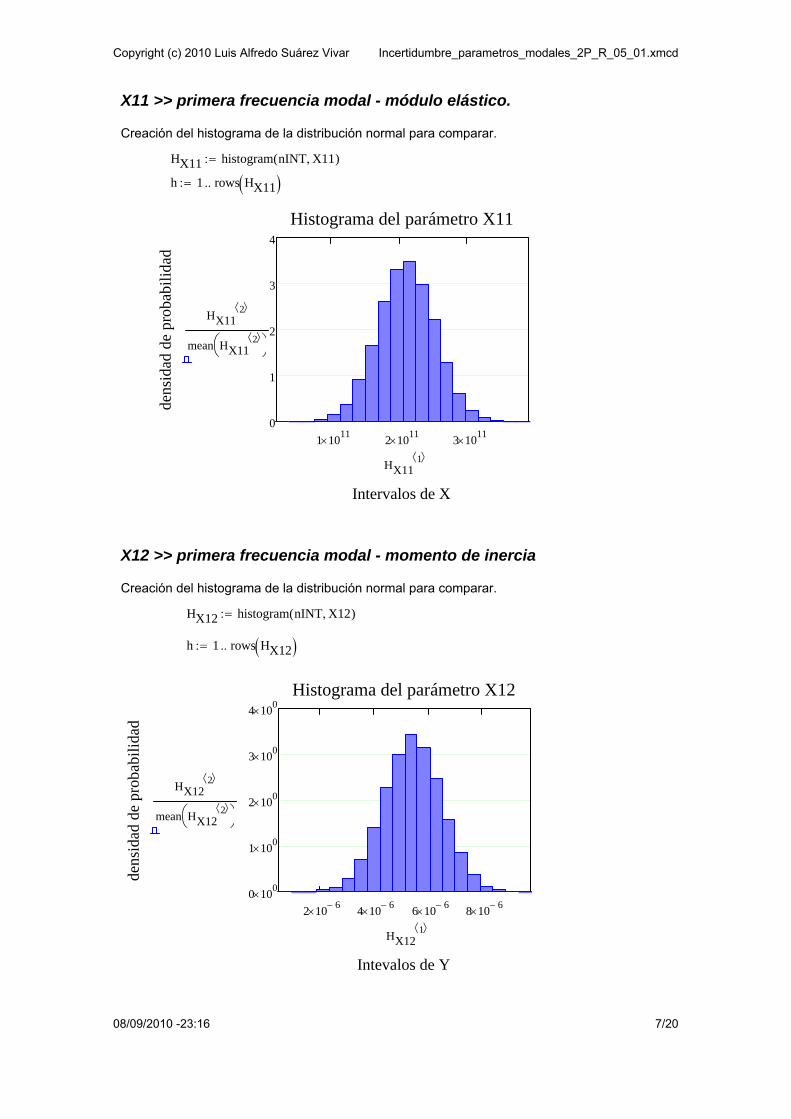
Copyright (c) 2010 Luis Alfredo Suárez Vivar Incertidumbre_parametros_modales_2P_R_05_01.xmcd
X11 >> primera frecuencia modal - módulo elástico.
Creación del histograma de la distribución normal para comparar.
HX11 histogram nINT X11( )
h 1 rows HX11
1 1011 2 10
11 3 1011
0
1
2
3
4
Histograma del parámetro X11
Intervalos de X
dens
idad
de
prob
abil
idad
HX112
mean HX112
HX111
X12 >> primera frecuencia modal - momento de inercia
Creación del histograma de la distribución normal para comparar.
HX12 histogram nINT X12( )
h 1 rows HX12
2 106 4 10
6 6 106 8 10
60 10
0
1 100
2 100
3 100
4 100
Histograma del parámetro X12
Intevalos de Y
dens
idad
de
prob
abil
idad
HX122
mean HX122
HX121
08/09/2010 -23:16 7/20
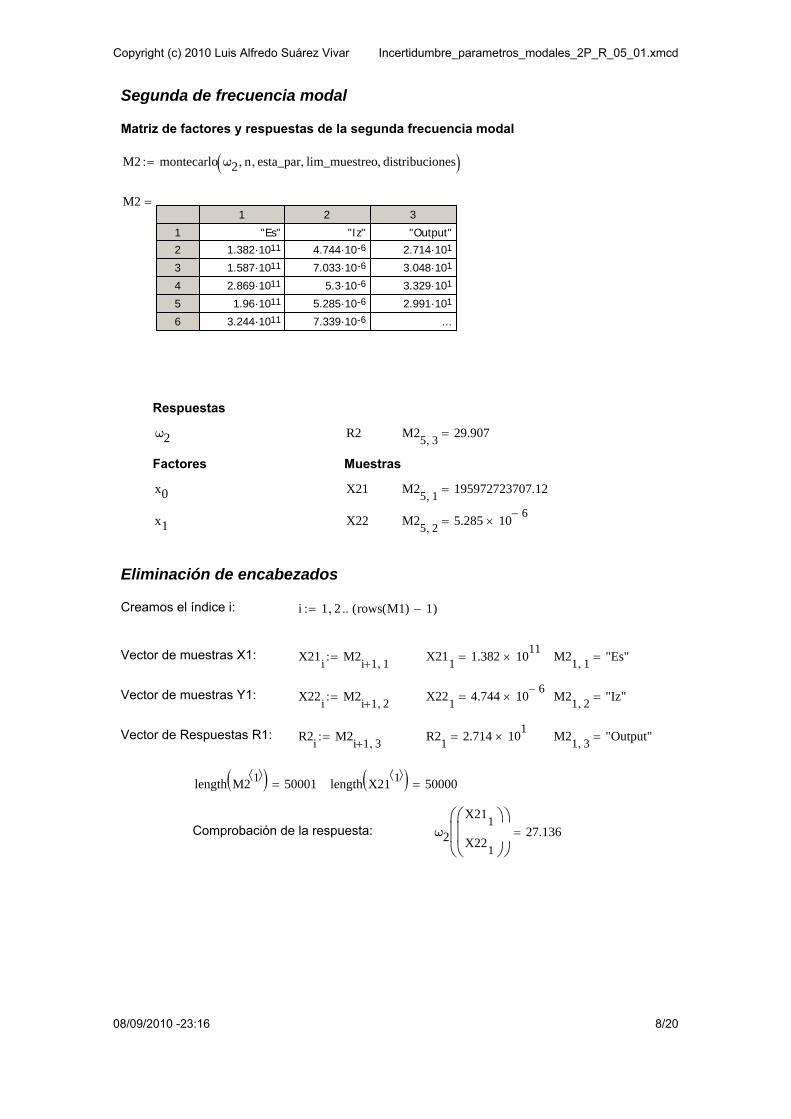
Copyright (c) 2010 Luis Alfredo Suárez Vivar Incertidumbre_parametros_modales_2P_R_05_01.xmcd
Segunda de frecuencia modal
Matriz de factores y respuestas de la segunda frecuencia modal
M2 montecarlo ω2 n esta_par lim_muestreo distribuciones
M21 2 3
12
3
4
5
6
"Es" "Iz" "Output"111.382·10 -64.744·10 12.714·10111.587·10 -67.033·10 13.048·10112.869·10 -65.3·10 13.329·10111.96·10 -65.285·10 12.991·10113.244·10 -67.339·10 ...
Respuestas
ω2 R2 M25 3 29.907
Factores Muestras
x0 X21 M25 1 195972723707.12
x1 X22 M25 2 5.285 10
6
Eliminación de encabezados
Creamos el índice i: i 1 2 rows M1( ) 1( )
Vector de muestras X1: X21i
M2i 1 1 X21
11.382 10
11 M2
1 1 "Es"
Vector de muestras Y1: X22i
M2i 1 2 X22
14.744 10
6 M2
1 2 "Iz"
Vector de Respuestas R1: R2i
M2i 1 3 R2
12.714 10
1 M2
1 3 "Output"
length M2 1 50001 length X21 1 50000
Comprobación de la respuesta: ω2
X211
X221
27.136
08/09/2010 -23:16 8/20
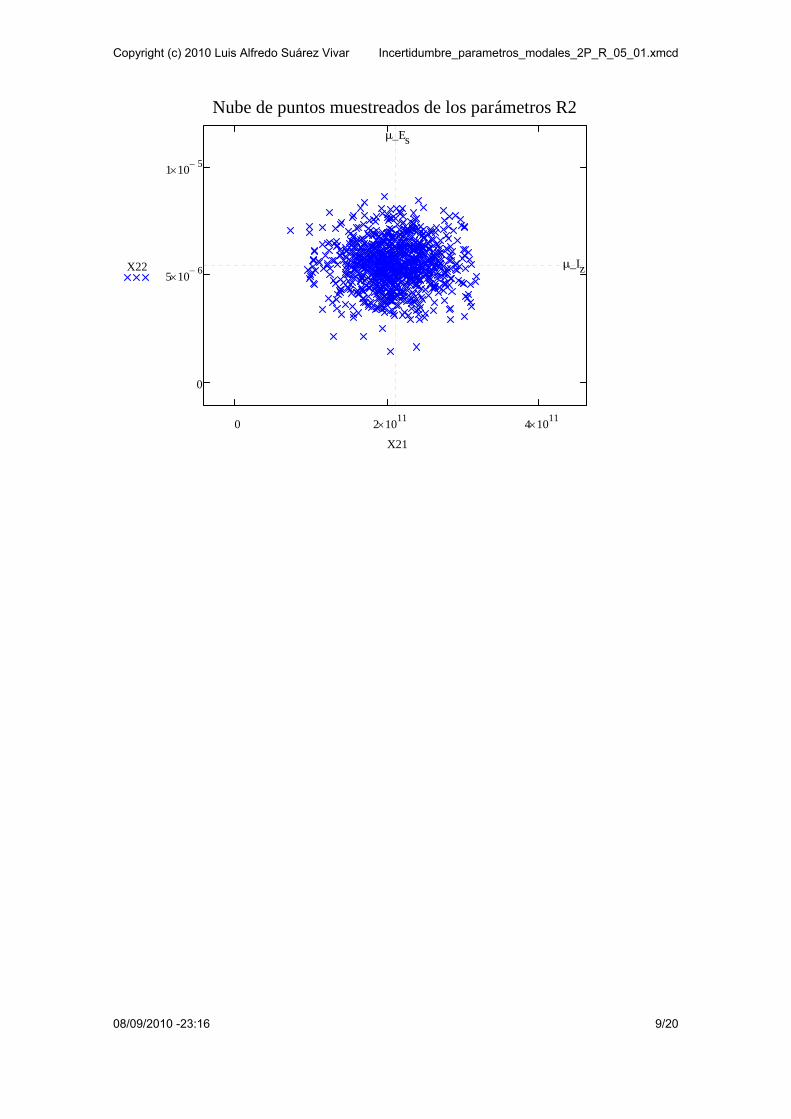
Copyright (c) 2010 Luis Alfredo Suárez Vivar Incertidumbre_parametros_modales_2P_R_05_01.xmcd
0 2 1011 4 10
11
0
5 106
1 105
Nube de puntos muestreados de los parámetros R2
μ_IzX22
μ_Es
X21
08/09/2010 -23:16 9/20
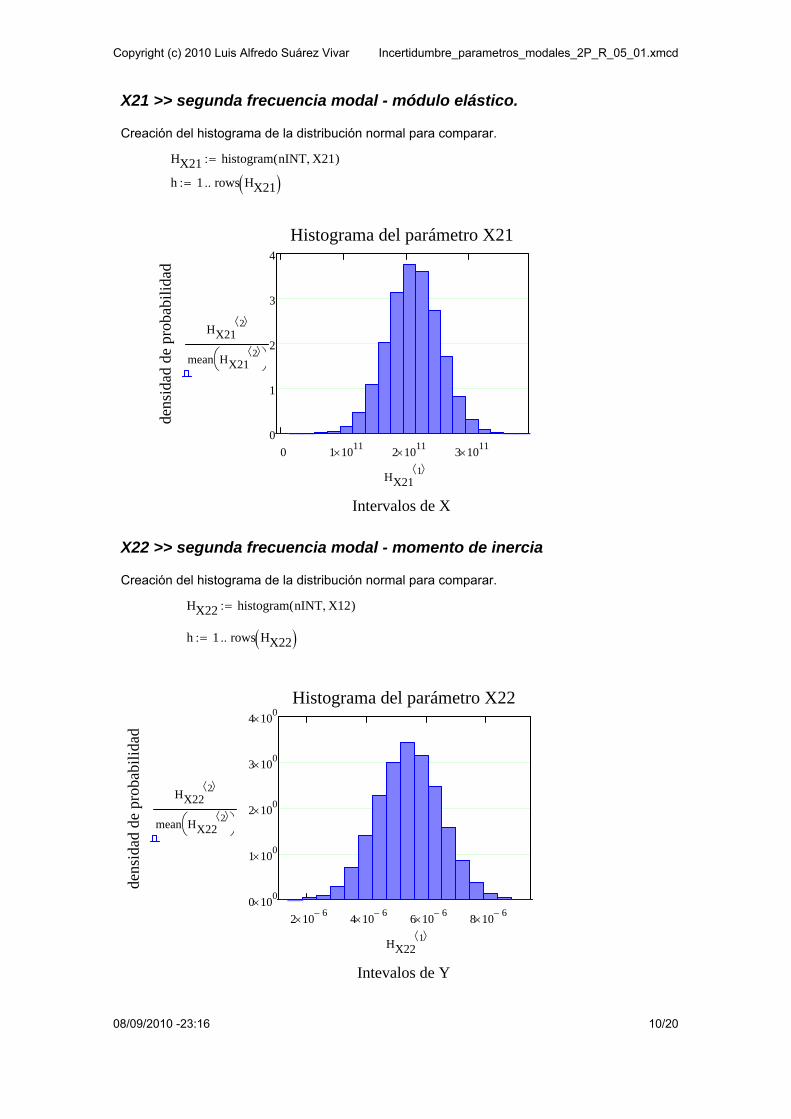
Copyright (c) 2010 Luis Alfredo Suárez Vivar Incertidumbre_parametros_modales_2P_R_05_01.xmcd
X21 >> segunda frecuencia modal - módulo elástico.
Creación del histograma de la distribución normal para comparar.
HX21 histogram nINT X21( )
h 1 rows HX21
0 1 1011 2 10
11 3 1011
0
1
2
3
4
Histograma del parámetro X21
Intervalos de X
dens
idad
de
prob
abil
idad
HX212
mean HX212
HX211
X22 >> segunda frecuencia modal - momento de inercia
Creación del histograma de la distribución normal para comparar.
HX22 histogram nINT X12( )
h 1 rows HX22
2 106 4 10
6 6 106 8 10
60 10
0
1 100
2 100
3 100
4 100
Histograma del parámetro X22
Intevalos de Y
dens
idad
de
prob
abil
idad
HX222
mean HX222
HX221
08/09/2010 -23:16 10/20
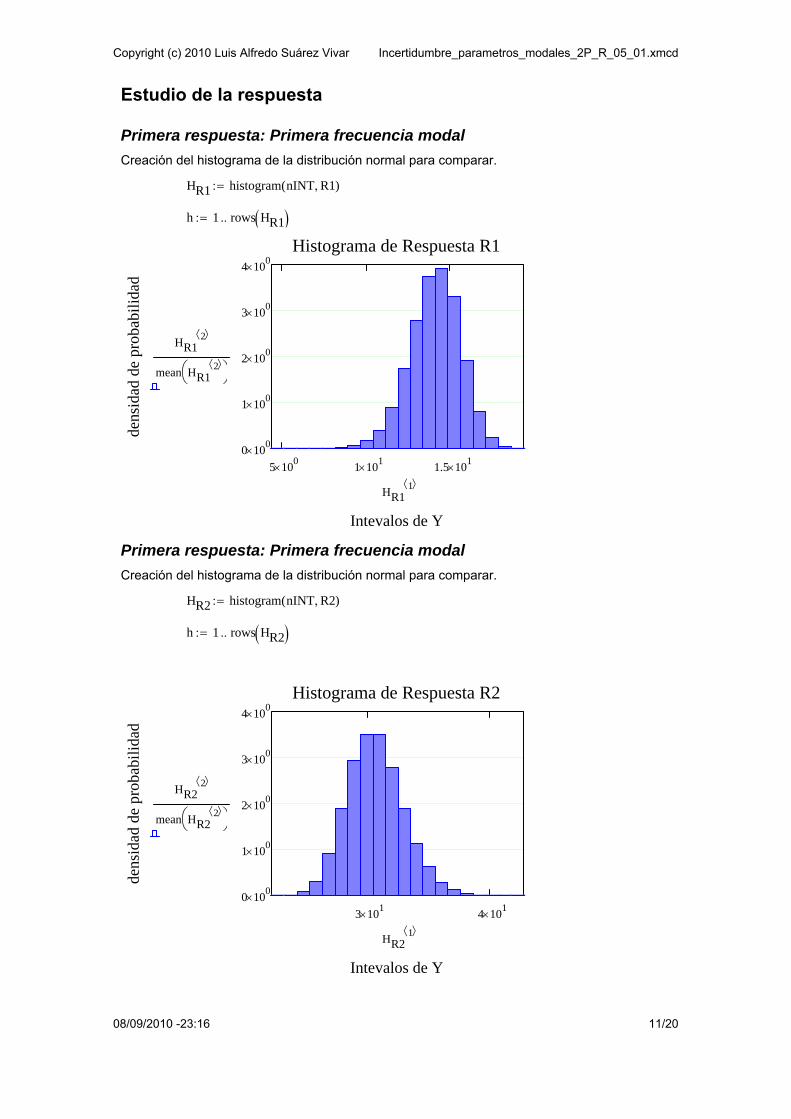
Copyright (c) 2010 Luis Alfredo Suárez Vivar Incertidumbre_parametros_modales_2P_R_05_01.xmcd
Estudio de la respuesta
Primera respuesta: Primera frecuencia modal
Creación del histograma de la distribución normal para comparar.
HR1 histogram nINT R1( )
h 1 rows HR1
5 100 1 10
1 1.5 101
0 100
1 100
2 100
3 100
4 100
Histograma de Respuesta R1
Intevalos de Y
dens
idad
de
prob
abil
idad
HR12
mean HR12
HR11
Primera respuesta: Primera frecuencia modal
Creación del histograma de la distribución normal para comparar.
HR2 histogram nINT R2( )
h 1 rows HR2
3 101 4 10
10 10
0
1 100
2 100
3 100
4 100
Histograma de Respuesta R2
Intevalos de Y
dens
idad
de
prob
abil
idad
HR22
mean HR22
HR21
08/09/2010 -23:16 11/20

Copyright (c) 2010 Luis Alfredo Suárez Vivar Incertidumbre_parametros_modales_2P_R_05_01.xmcd
Respuesta Factor X11 - Es
Media m_R1 mean R1( ) 14.048 m_X11 mean X11( ) 2.1 1011
μ_R1 median R1( ) 14.124Mediana μ_X11 median X11( ) 2.10097 1011
S_R1 Stdev R1( ) 1.507Desviación
Estándar S_X11 Stdev X11( ) 41898213079.61S_R1 stdev R1( )
n
n 1 1.507
S_X11 stdev X11( )n
n 1 41898213079.61
S_R12
2.271Varianza S_X11
21755460259264428800000
Var X11( ) 1755460259264428300000Var R1( ) 2.271
Error_X11m_X11 μ_Es
μ_Es0.011 %
Factor X21 - IzFactor 1: μ_Es 210000000000
m_X12 mean X12( ) 5.413 106
σ_Es 42000000000
μ_X12 median X12( ) 5.41531 106
S_X12 Stdev X12( ) 1.078 106
Factor 2: μ_Iz 5.41 106
σ_Iz 1.082 106
S_X12 stdev X12( )n
n 1 1.078 10
6
S_X122
1.162 1012
Var X12( ) 1.162 1012
Error_X12m_X12 μ_Iz
μ_Iz0.054961 %
Intervalos de confianza
α 0.05 Nivel de confianza: 1 α 95 %
Usando la distribución de Student:
L_R1 U_R1( ) m_R1 qtα
2n 1
S_R1
n m_R1 qt
α
2n 1
S_R1
n
U_R1 14.061L_R1 U_R1( ) 14.035 14.061( ) i 1 n
m_R1 14.048L_R1 14.035
08/09/2010 -23:16 12/20
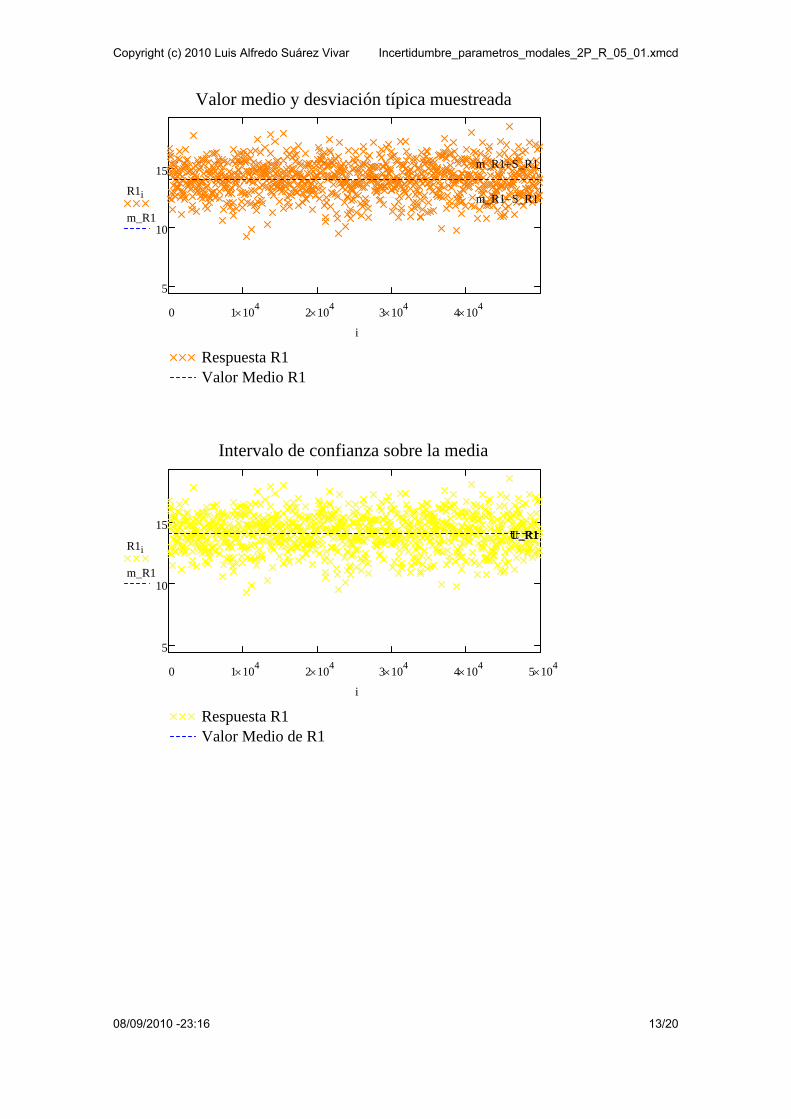
Copyright (c) 2010 Luis Alfredo Suárez Vivar Incertidumbre_parametros_modales_2P_R_05_01.xmcd
0 1 104 2 10
4 3 104 4 10
4
5
10
15
Respuesta R1Valor Medio R1
Valor medio y desviación típica muestreada
m_R1 S_R1
m_R1 S_R1
R1i
m_R1
i
0 1 104 2 10
4 3 104 4 10
4 5 104
5
10
15
Respuesta R1Valor Medio de R1
Intervalo de confianza sobre la media
L_R1U_R1R1i
m_R1
i
08/09/2010 -23:16 13/20
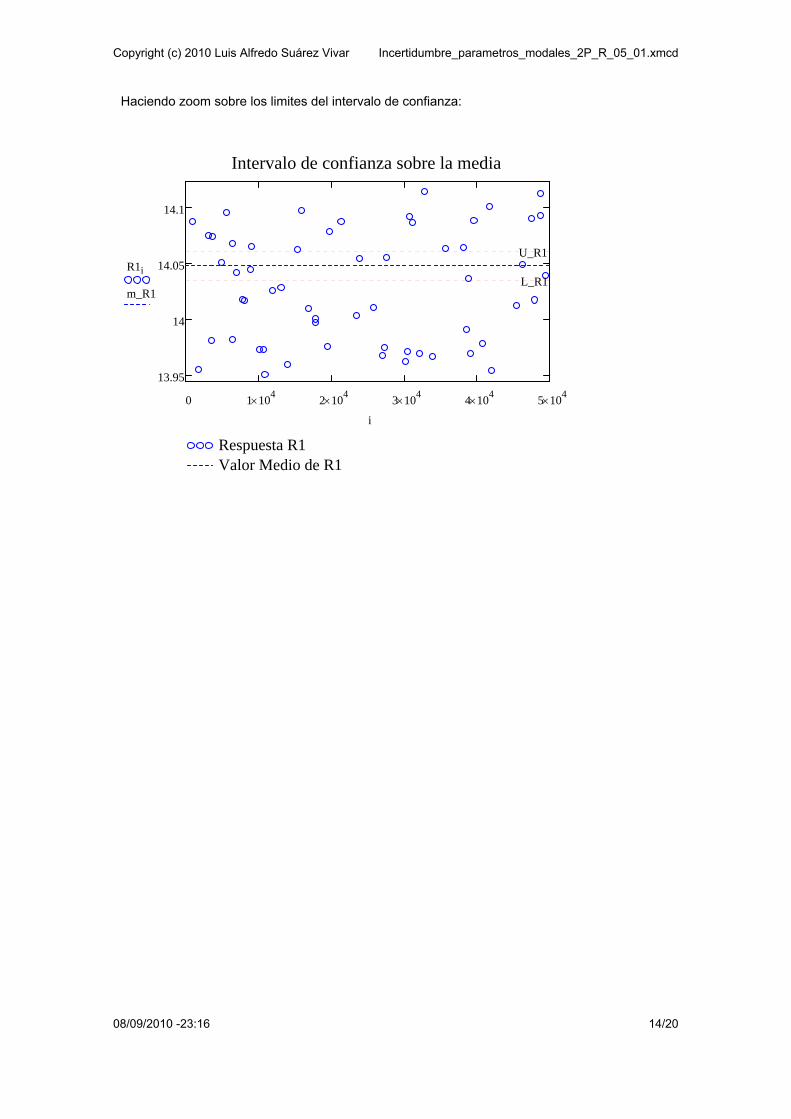
Copyright (c) 2010 Luis Alfredo Suárez Vivar Incertidumbre_parametros_modales_2P_R_05_01.xmcd
Haciendo zoom sobre los limites del intervalo de confianza:
0 1 104 2 10
4 3 104 4 10
4 5 104
13.95
14
14.05
14.1
Respuesta R1Valor Medio de R1
Intervalo de confianza sobre la media
L_R1
U_R1R1i
m_R1
i
08/09/2010 -23:16 14/20

Copyright (c) 2010 Luis Alfredo Suárez Vivar Incertidumbre_parametros_modales_2P_R_05_01.xmcd
Estudio de la respuesta
Segunda respuesta: Segunda frecuencia modal
Respuesta Factor X21 - Es
Media m_R2 mean R2( ) 30.59 m_X21 mean X21( ) 2.101 1011
μ_R2 median R2( ) 30.474Mediana μ_X21 median X21( ) 2.10137 1011
S_R2 Stdev R2( ) 2.281Desviación
Estándar S_X21 Stdev X21( ) 42015553538.415S_R2 stdev R2( )
n
n 1 2.281
S_X21 stdev X21( )n
n 1 42015553538.415
S_R22
5.204Varianza S_X21
21765306739139435300000
Var X21( ) 1765306739139434800000Var R2( ) 5.204
Error_X21m_X21 μ_Es
μ_Es0.067 %
Factor X22 - IzFactor 1: μ_Es 210000000000
m_X22 mean X22( ) 5.411 106
σ_Es 42000000000
μ_X22 median X22( ) 5.40284 106
S_X22 Stdev X22( ) 1.082 106
Factor 2: μ_Iz 5.41 106
σ_Iz 1.082 106
S_X22 stdev X22( )n
n 1 1.082 10
6
S_X222
1.17 1012
Var X22( ) 1.17 1012
Error_X22m_X22 μ_Iz
μ_Iz0.027593 %
Intervalos de confianza
Usando la distribución de Student:
L_R2 U_R2( ) m_R2 qtα
2n 1
S_R2
n m_R2 qt
α
2n 1
S_R2
n
U_R2 30.61L_R2 U_R2( ) 30.57 30.61( ) i 1 n
m_R2 30.59L_R2 30.57
08/09/2010 -23:16 15/20

Copyright (c) 2010 Luis Alfredo Suárez Vivar Incertidumbre_parametros_modales_2P_R_05_01.xmcd
0 1 104 2 10
4 3 104 4 10
4
30
40
Respuesta R1Valor Medio R1
Valor medio y desviación típica muestreada
R2i
m_R2
i
0 1 104 2 10
4 3 104 4 10
4
30
40
Respuesta R1Valor Medio de R1
Intervalo de confianza sobre la media
L_R2U_R2
R2i
m_R2
i
08/09/2010 -23:16 16/20

Copyright (c) 2010 Luis Alfredo Suárez Vivar Incertidumbre_parametros_modales_2P_R_05_01.xmcd
Haciendo zoom sobre los limites del intervalo de confianza:
1 104 2 10
4 3 104 4 10
4 5 104
30.5
30.6
30.7
Respuesta R1Valor Medio de R1
Intervalo de confianza sobre la media
L_R2
U_R2R2i
m_R2
i
08/09/2010 -23:16 17/20

Copyright (c) 2010 Luis Alfredo Suárez Vivar Incertidumbre_parametros_modales_2P_R_05_01.xmcd
Intervalos de confianza de los factores simulados
Es
L_X11 U_X11( ) m_X11 qtα
2n 1
S_X11
n m_X11 qt
α
2n 1
S_X11
n
L_X11 U_X11( ) 2.096 1011
2.103 1011
U_X11 210344445024.902
m_X11 209977188852.711
L_X11 209609932680.519
Iz
L_X12 U_X12( ) m_X12 qtα
2n 1
S_X12
n m_X12 qt
α
2n 1
S_X12
n
L_X12 U_X12( ) 5.404 106
5.422 106
U_X12 5.422 106
m_X12 5.413 106
L_X12 5.404 106
Es
L_X21 U_X21( ) m_X21 qtα
2n 1
S_X21
n m_X21 qt
α
2n 1
S_X21
n
L_X21 U_X21( ) 2.098 1011
2.105 1011
Iz
L_X22 U_X22( ) m_X22 qtα
2n 1
S_X22
n m_X22 qt
α
2n 1
S_X22
n
L_X22 U_X22( ) 5.402 106
5.421 106
U_X22 5.421 106
m_X22 5.411 106
L_X22 5.402 106
08/09/2010 -23:16 18/20

Copyright (c) 2010 Luis Alfredo Suárez Vivar Incertidumbre_parametros_modales_2P_R_05_01.xmcd
Respuestas contra parámetros
Módulo elástico
1 1011 2 10
11 3 1011
0
10
20
30
40
50
Respuesta contra parámetro X11 y X21
R1
R2
μ_Es
X11 X21
Momento de inercia
2 106 4 10
6 6 106 8 10
60
10
20
30
40
50
Respuestra contra parametro X12 y X22
R1
R2
μ_Iz
X12 X22
08/09/2010 -23:16 19/20

Copyright (c) 2010 Luis Alfredo Suárez Vivar Incertidumbre_parametros_modales_2P_R_05_01.xmcd
Bibliografía.
1. Tedesco JW. et al. Structural Dynamics, Theory and Applications. Addison WesleyLongman, Inc. 2725 Sand Hill Road. Menlo Park, California 94025. ISBN 0-673-98052-9. 1999.
2. Suárez LA. Apuntes de la Asignatura de Ampliación de Mecanica. Departamento deIngeniería Civil. Universidad de Burgos. 2010.
3. Mathcad User Guide, Release 14. Mathsoft. February 2007. Parametric TechnologyCorporation, 140 Kendrick Street, Needham, MA 02494 USA.l
4. Antony, JIju, Design of Experiments for Engineers and Scientist. Butterworth-Heinemann.Oxford ; Burlinton, MA.
08/09/2010 -23:16 20/20

Capítulo 19
El Método de los Elementos Finitos
Cuando los sistemas son complejos la determinación de las matrices de rigidez y masason una tarea complicada. El método de los elementos finitos MEF 1es la mejor baza.En esta práctica se propone una introducción al problema creando un matriz de rigidezpara un problema lineal y con elementos triangulares. El problema contempla comodeterminar la respuesta a cargas ubicadas en dos nodos.
En el ejercicio se propone la evaluación del cálculo mediante un procedimiento pa-ra determinar el error del modelo basado en la proyección de flujo. Este método estadesarrollado por Zienkiewicz y Taylor.
La práctica nos permite verificar la capacidad de MATHCAD para programar unaaplicación, ejecutarla con rapidez y de una manera bastante compacta y visual.
Una vez obtenida la matriz de rigidez, es trivial obtener la de masas concentradas(pasar la masa delos triángulos a los nodos adyacentes) o la matriz de masa consisten-te.
Obtenidas éstas, podemos aplicar los conceptos del capítulo 15 y desacoplar para ob-tener las FRF, FRIU y respuestas del sistema a cualquier tipo de carga.
19.1. Objetivos para los contenidos1. Comprender el método de los elementos finitos.
2. Determinar las matrices de material, de deformación.
3. Crear funciones de cambio de coordenadas locales <>globales.
4. Estudiar las tensiones en los elementos, en los nodos y las tensiones recuperadaspara realizar un alisado y determinar el error de la simulación.
1FEM, en inglés: Finite Element Method
221

222 19. El Método de los Elementos Finitos
19.2. Objetivos instrumentales1. Estructurar el problema en funciones.
2. Importar datos desde MS− Excel.
3. Exportar datos desde MS− Excel.

MEF_Matriz_de_Rigidez_Tensiones
TRABAJO FINAL DE MASTERMASTER INTER-UNIVERSITARIO EN VIBRACIONES Y ACÚSTICAUNIVERSIDAD DE VALLADOLID - UNIVERSIDAD DE LEÓNAPLICACIÓN A PROBLEMAS LINEALES Y ELEMENTOS TRIANGULARES Copyright (c) LUIS ALFREDO SUAREZ VIVAR - [email protected]
Objetivos de la hoja de trabajoEn esta hoja de trabajo se incorpora el método FEM para sistemas lineales y con elementostriangulares, en términos de funciones Mathcad para que se puedan utilizar en otras hojas detrabajo que a ella se referencien.
ne
datos_MEF.xls nxy
datos_MEF.xls fn
datos_MEF.xls
rn
datos_MEF.xls E
datos_MEF.xls ν
datos_MEF.xls
d
datos_MEF.xls
08/09/2010 - 17:02 1/18
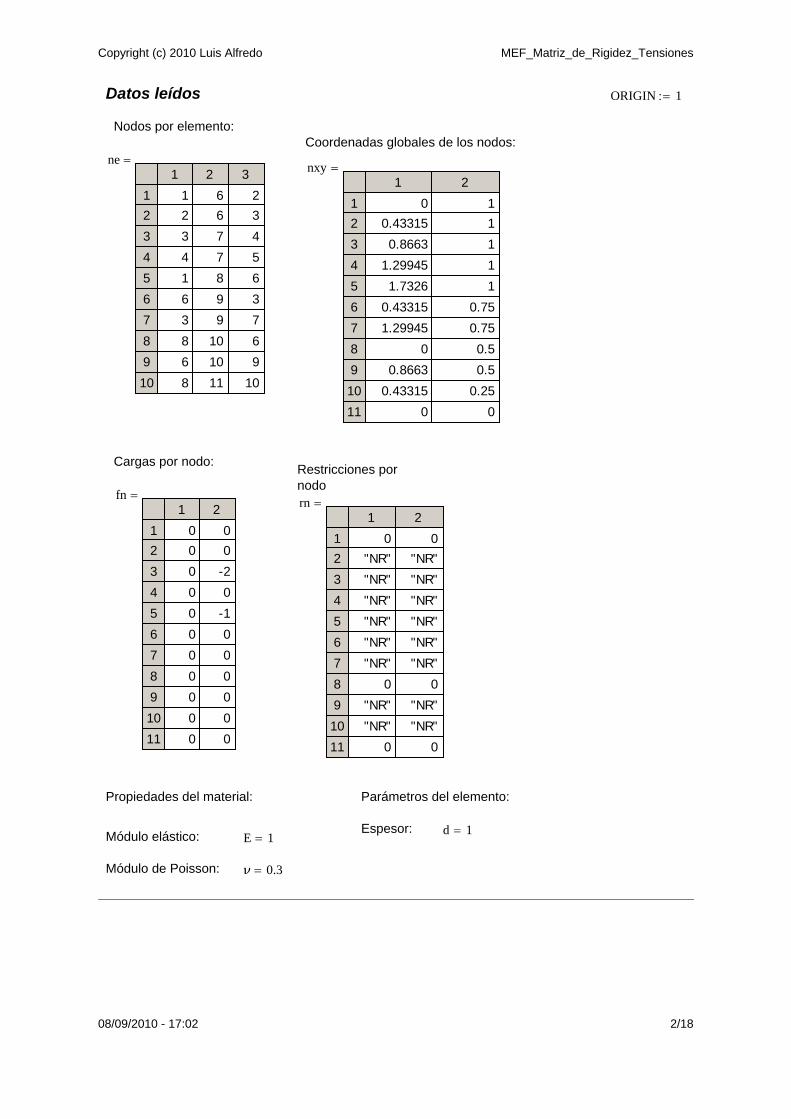
Copyright (c) 2010 Luis Alfredo MEF_Matriz_de_Rigidez_Tensiones
Datos leídos ORIGIN 1
Nodos por elemento:Coordenadas globales de los nodos:
ne1 2 3
12
3
4
5
6
7
8
9
10
1 6 22 6 3
3 7 4
4 7 5
1 8 6
6 9 3
3 9 7
8 10 6
6 10 9
8 11 10
nxy
1 2
12
3
4
5
6
7
8
9
10
11
0 10.43315 1
0.8663 1
1.29945 1
1.7326 1
0.43315 0.75
1.29945 0.75
0 0.5
0.8663 0.5
0.43315 0.25
0 0
Cargas por nodo: Restricciones pornodo
fn1 2
12
3
4
5
6
7
8
9
10
11
0 00 0
0 -2
0 0
0 -1
0 0
0 0
0 0
0 0
0 0
0 0
rn
1 2
12
3
4
5
6
7
8
9
10
11
0 0"NR" "NR"
"NR" "NR"
"NR" "NR"
"NR" "NR"
"NR" "NR"
"NR" "NR"
0 0
"NR" "NR"
"NR" "NR"
0 0
Propiedades del material: Parámetros del elemento:
Espesor: d 1Módulo elástico: E 1
Módulo de Poisson: ν 0.3
08/09/2010 - 17:02 2/18

Copyright (c) 2010 Luis Alfredo MEF_Matriz_de_Rigidez_Tensiones
Numero de elementos y de nodos
Nel length ne 1 10 Nno length nxy 1 11
Datos para el gráfico de presentación de los nodos
min_y min nxy 2 0 max_y max nxy 2 1
min_x min nxy 2 0 max_x max nxy 1 1.7326
Matriz constitutiva de tensión plana:
DE
1 ν2
1
ν
0
ν
1
0
0
0
1 ν
2
D
1.099
0.33
0
0.33
1.099
0
0
0
0.385
Funcionespara obtenercoordenadasde un nodode unelemento:
x el( )
nxyneel 1 1
nxyneel 2 1
nxyneel 3 1
y el( )
nxyneel 1 2
nxyneel 2 2
nxyneel 3 2
Determinación de lasuperficie deun elementotriangular:
A el( )
1
1
1
x el( )1
x el( )2
x el( )3
y el( )1
y el( )2
y el( )3
Se el( )1
2A el( )
Coeficientes de las funciones de forma
a el( )
x el( )2
y el( )3
x el( )3
y el( )2
x el( )3
y el( )1
x el( )1
y el( )3
x el( )1
y el( )2
x el( )2
y el( )1
b el( )
y el( )2
y el( )3
y el( )3
y el( )1
y el( )1
y el( )2
c el( )
x el( )3
x el( )2
x el( )1
x el( )3
x el( )2
x el( )1
Matriz de deformación
B el( )
b el( )1
0
c el( )1
0
c el( )1
b el( )1
b el( )2
0
c el( )2
0
c el( )2
b el( )2
b el( )3
0
c el( )3
0
c el( )3
b el( )3
08/09/2010 - 17:02 3/18

Copyright (c) 2010 Luis Alfredo MEF_Matriz_de_Rigidez_Tensiones
Matriz de rigidez del elemento en GDL locales
KL el( )1
4 Se el( ) 2B el( )T D B el( ) Se el( ) d
Función de conversión de gdl locales a gdl globales
L_a_G el i( ) neel 1 1 2 1 i 1=if
neel 1 1 2 2 i 2=if
neel 2 1 2 1 i 3=if
neel 2 1 2 2 i 4=if
neel 3 1 2 1 i 5=if
neel 3 1 2 2 i 6=if
Función para convertir matrices en gdl locales a gdl globales
CLaCG KK el( ) KKL identity Nno 2 identity Nno 2
11
p L_a_G el s( )
trace p( )
q L_a_G el r( )
KKLp q KK el( )
s r
r 1 6for
s 1 6for
KKL
Conversión de la matriz de rigidez local a global
KG el( ) CLaCG KL el
Adición de todas la matrices globales de todos los elementos
KGS
1
Nel
el
KG el( )
Función para convertir una matriz de Nno x 2 en 2Nno x 1
para crear el vector de cargas:
mat_a_vec fn( )
vfn2 i 1 fn
i 1
vfn2 i fn
i 2
i 1 2 length fn 1 for
vfnreturn
08/09/2010 - 17:02 4/18
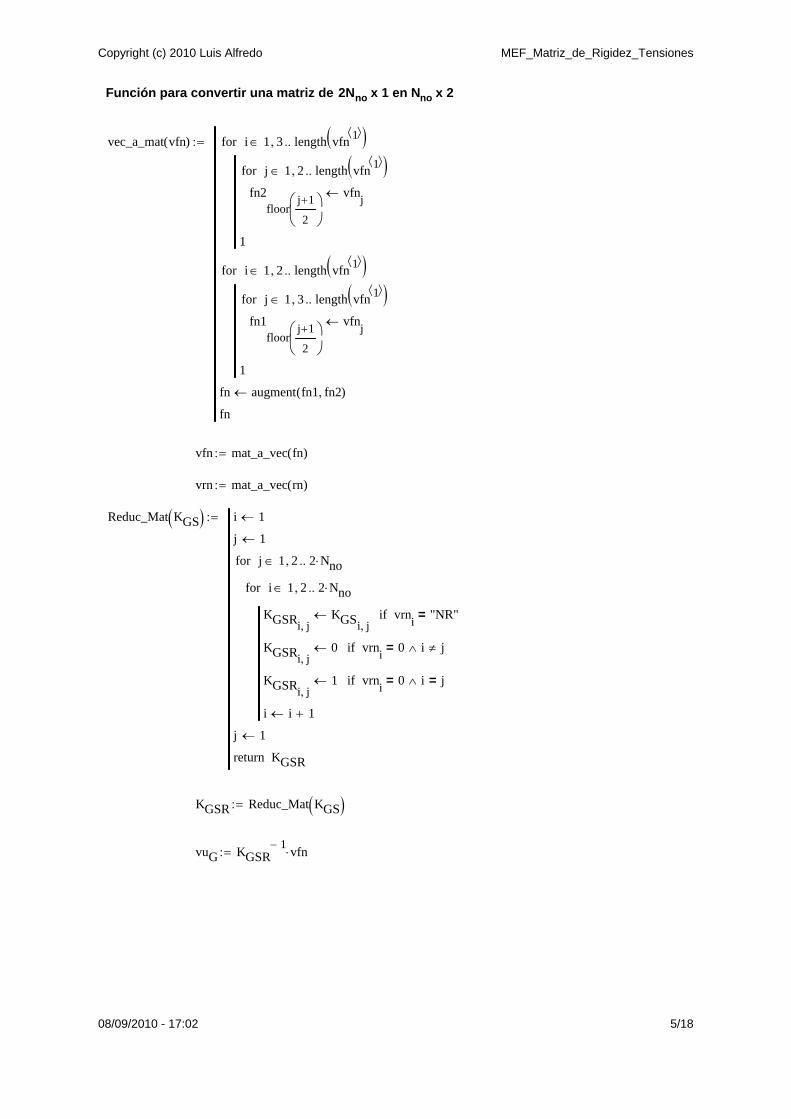
Copyright (c) 2010 Luis Alfredo MEF_Matriz_de_Rigidez_Tensiones
Función para convertir una matriz de 2Nno x 1 en Nno x 2
vec_a_mat vfn( )
fn2floor
j 1
2
vfnj
j 1 2 length vfn 1 for
1
i 1 3 length vfn 1 for
fn1floor
j 1
2
vfnj
j 1 3 length vfn 1 for
1
i 1 2 length vfn 1 for
fn augment fn1 fn2( )
fn
vfn mat_a_vec fn( )
vrn mat_a_vec rn( )
Reduc_Mat KGS i 1
j 1
KGSRi jKGSi j
vrni
"NR"=if
KGSRi j0 vrn
i0= i jif
KGSRi j1 vrn
i0= i j=if
i i 1
i 1 2 2 Nnofor
j 1 2 2 Nnofor
j 1
KGSRreturn
KGSR Reduc_Mat KGS
vuG KGSR1
vfn
08/09/2010 - 17:02 5/18

Copyright (c) 2010 Luis Alfredo MEF_Matriz_de_Rigidez_Tensiones
Función de conversión de desplazamientos globales a locales:
G_a_L el( ) vuL1vuG neel 1 1 2 1
vuL2vuG neel 1 1 2 2
vuL3vuG neel 2 1 2 1
vuL4vuG neel 2 1 2 2
vuL5vuG neel 3 1 2 1
vuL6vuG neel 3 1 2 2
vuL
vuL el( ) G_a_L el( )
Cálculo de las deformaciones unitarias en el elemento:
ε el( )1
2 Se el( )B el( ) vuL el( )
Cálculo de las tensiones en el elemento:
σ el( )1
2 Se el( )DB el( ) vuL el( )
suma_col NE( ) 1
SNE1 no
1
Nel
el
NET no el
no 1 2 length NET 1
for
1
SNEreturn
NET
1 2 3 4 5 6 7 8 9 10
12
3
4
5
6
7
8
9
10
11
1 0 0 0 1 0 0 0 0 01 1 0 0 0 0 0 0 0 0
0 1 1 0 0 1 1 0 0 0
0 0 1 1 0 0 0 0 0 0
0 0 0 1 0 0 0 0 0 0
1 1 0 0 1 1 0 1 1 0
0 0 1 1 0 0 1 0 0 0
0 0 0 0 1 0 0 1 0 1
0 0 0 0 0 1 1 0 1 0
0 0 0 0 0 0 0 1 1 1
0 0 0 0 0 0 0 0 0 1
08/09/2010 - 17:02 6/18

Copyright (c) 2010 Luis Alfredo MEF_Matriz_de_Rigidez_Tensiones
Matriz de tensiones en los elementos
σE 1
1
σEel coordσ el( )
coord
el 1 2 length ne 1 for
coord 1 2 3for
1
σEreturn
suma_col NE( )T
1
12
3
4
5
6
7
8
9
10
11
22
4
2
1
6
3
3
3
3
1
Matriz de tensiones en los nodos
σN 1
σNno coord
NE no σE
coord
suma_col NE( )T no
coord 1 2 3for
1
el 1 2 Nelfor
no 1 2 Nnofor
1
σNreturn
Matriz de tensiones recuperadas
σR 1
σRel coord
NET el σN
coord
suma_col NET T
el
coord 1 2 3for
1
el 1 2 Nelfor
no 1 2 Nnofor
1
σRreturn
08/09/2010 - 17:02 7/18
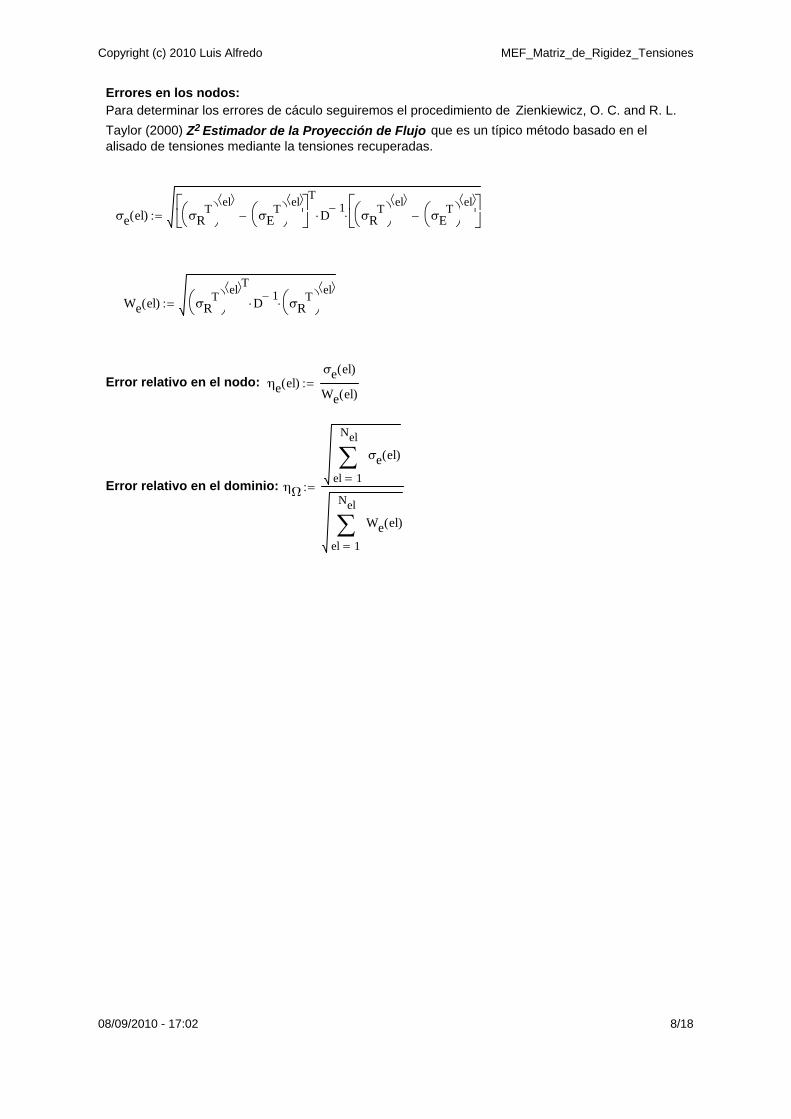
Copyright (c) 2010 Luis Alfredo MEF_Matriz_de_Rigidez_Tensiones
Errores en los nodos:Para determinar los errores de cáculo seguiremos el procedimiento de Zienkiewicz, O. C. and R. L.
Taylor (2000) Z2 Estimador de la Proyección de Flujo que es un típico método basado en elalisado de tensiones mediante la tensiones recuperadas.
σe el( ) σRT
el σE
T
el
T
D1
σRT
el σE
T
el
We el( ) σRT
el T
D1
σRT
el
Error relativo en el nodo: ηe el( )σe el( )
We el( )
Error relativo en el dominio: ηΩ1
Nel
el
σe el( )
1
Nel
el
We el( )
08/09/2010 - 17:02 8/18

Copyright (c) 2010 Luis Alfredo MEF_Matriz_de_Rigidez_Tensiones
SOLUCION DEL PROBLEMA
Tabla de nodos por elemento Tabla de coordenadas globales de nodos
ne
1 2 3
12
3
4
5
6
7
8
9
10
1 6 22 6 3
3 7 4
4 7 5
1 8 6
6 9 3
3 9 7
8 10 6
6 10 9
8 11 10
nxy
1 2
12
3
4
5
6
7
8
9
10
11
0.000 1.0000.433 1.000
0.866 1.000
1.299 1.000
1.733 1.000
0.433 0.750
1.299 0.750
0.000 0.500
0.866 0.500
0.433 0.250
0.000 0.000
Fuerzas nodales Condiciones de contorno Material
fn
1 2
12
3
4
5
6
7
8
9
10
11
0 00 0
0 -2
0 0
0 -1
0 0
0 0
0 0
0 0
0 0
0 0
rn
1 2
12
3
4
5
6
7
8
9
10
11
0 0"NR" "NR"
"NR" "NR"
"NR" "NR"
"NR" "NR"
"NR" "NR"
"NR" "NR"
0 0
"NR" "NR"
"NR" "NR"
0 0
Módulo elástico:
E 1
Módulo de Poisson:
ν 0.3
Espesor:
d 1
Número de elementos: Nel 10
Número de nodos: Nno 11
08/09/2010 - 17:02 9/18
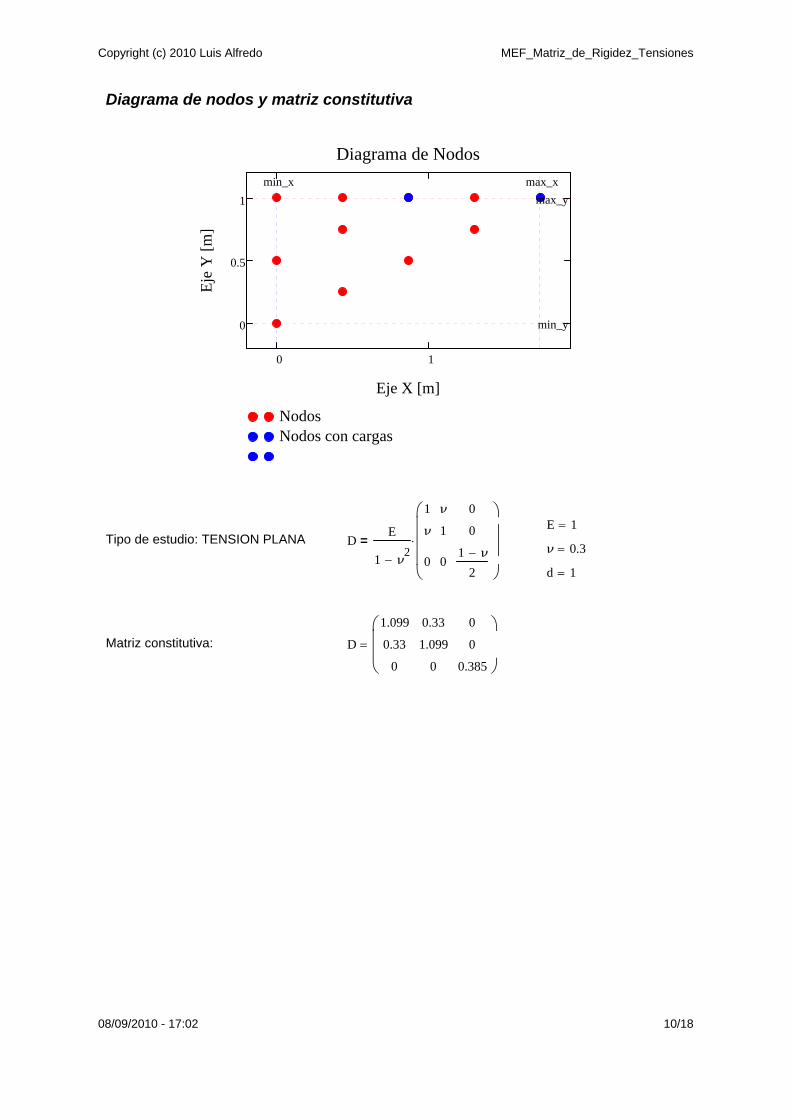
Copyright (c) 2010 Luis Alfredo MEF_Matriz_de_Rigidez_Tensiones
Diagrama de nodos y matriz constitutiva
0 1
0
0.5
1
NodosNodos con cargas
Diagrama de Nodos
Eje X [m]
Eje
Y [
m]
min_y
max_y
min_x max_x
E 1Tipo de estudio: TENSION PLANA D
E
1 ν2
1
ν
0
ν
1
0
0
0
1 ν
2
=ν 0.3
d 1
Matriz constitutiva: D
1.099
0.33
0
0.33
1.099
0
0
0
0.385
08/09/2010 - 17:02 10/18

Copyright (c) 2010 Luis Alfredo MEF_Matriz_de_Rigidez_Tensiones
Matrices de cada elemento
Selección de elementoNodos del elemento
el12345678910
neT el T
3 9 7( )
Coordenadas de los nodos del elemento
submatrix A el( ) 1 3 2 3( )
0.866
0.866
1.299
1
0.5
0.75
Coeficientes de la funciones de forma del elemento
a el( )
0
0.65
0.433
b el( )
0.25
0.25
0.5
c el( )
0.433
0.433
0
Matriz B
B el( )
0.25
0
0.43315
0
0.43315
0.25
0.25
0
0.43315
0
0.43315
0.25
0.5
0
0
0
0
0.5
Matriz de rigidez del elemento local
KL el( )
0.325159
0.178571
0.008034
0.013736
0.317125
0.192308
0.178571
0.531486
0.013736
0.420492
0.164835
0.110994
0.008034
0.013736
0.325159
0.178571
0.317125
0.192308
0.013736
0.420492
0.178571
0.531486
0.164835
0.110994
0.317125
0.164835
0.317125
0.164835
0.63425
0
0.192308
0.110994
0.192308
0.110994
0
0.221987
ε el( )
3.048374
3.525076
14.029174
σ el( )
4.511974
4.878668
5.395836
Errores en el elemento:
σe el( ) 6.05827 We el( ) 6.805449 ηe el( ) 89.020876 %
08/09/2010 - 17:02 11/18

Copyright (c) 2010 Luis Alfredo MEF_Matriz_de_Rigidez_Tensiones
Matriz de rigidez del elemento en coordenadas globales
KG el( )
1 2 3 4 5
12
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
0 0 0 0 00 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0.325
0 0 0 0 -0.179
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 -0.317
0 0 0 0 0.192
0 0 0 0 0
0 0 0 0 0
0 0 0 0 -0.008
0 0 0 0 -0.014
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 ...
08/09/2010 - 17:02 12/18

Copyright (c) 2010 Luis Alfredo MEF_Matriz_de_Rigidez_Tensiones
RESULTADOS GLOBALES DE LA ESTRUCTURA
Matriz de rigidez de la estructura
KGS
1 2 3 4 5 6 7 8
12
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
0.642 -0.179 -0.317 -0.165 0 0 0 0-0.179 0.642 -0.192 -0.111 0 0 0 0
-0.317 -0.192 1.301 0 -0.317 0.192 0 0
-0.165 -0.111 0 2.126 0.165 -0.111 0 0
0 0 -0.317 0.165 1.285 0 -0.317 -0.165
0 0 0.192 -0.111 0 1.285 -0.192 -0.111
0 0 0 0 -0.317 -0.192 1.301 0
0 0 0 0 -0.165 -0.111 0 2.126
0 0 0 0 0 0 -0.317 0.165
0 0 0 0 0 0 0.192 -0.111
-0.317 0.357 -0.666 0 -0.317 -0.357 0 0
0.357 -0.111 0 -1.904 -0.357 -0.111 0 0
0 0 0 0 -0.317 0.357 -0.666 0
0 0 0 0 0.357 -0.111 0 -1.904
-0.008 0.014 0 0 0 0 0 0
-0.014 -0.42 0 0 0 0 0 0
0 0 0 0 -0.016 0 0 0
0 0 0 0 0 -0.841 0 0
0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 ...
MEF_K_GS.xlsKGS
08/09/2010 - 17:02 13/18
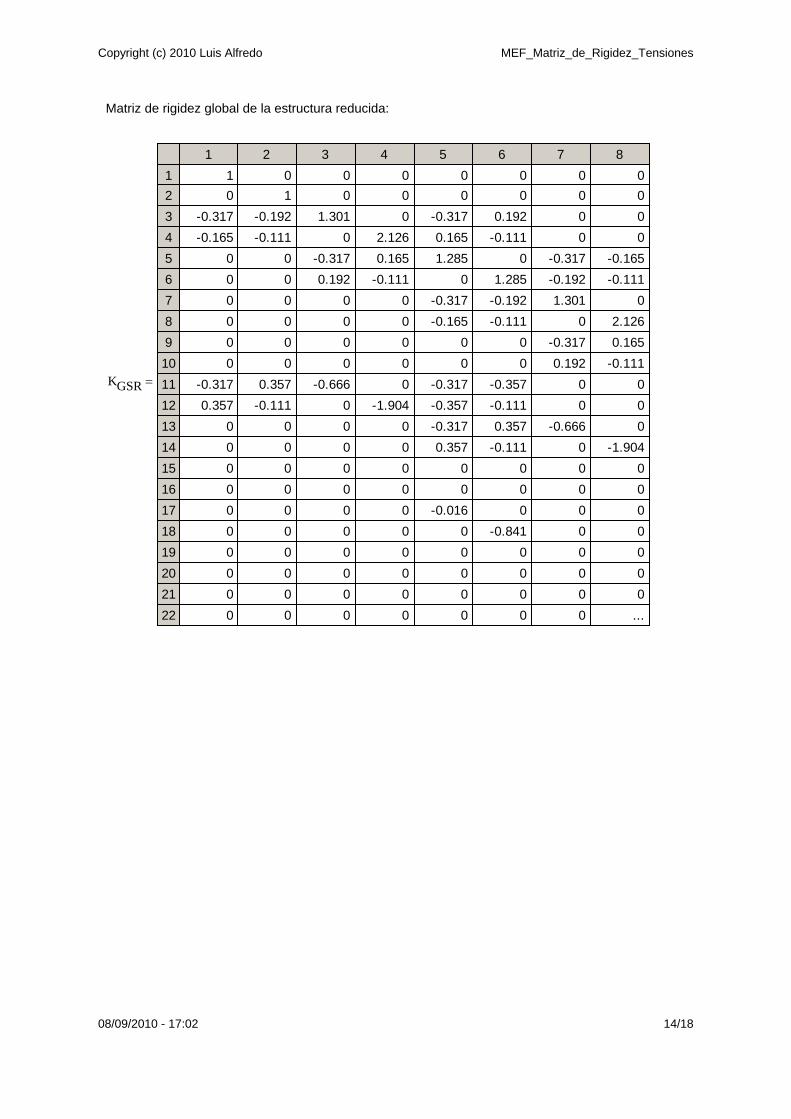
Copyright (c) 2010 Luis Alfredo MEF_Matriz_de_Rigidez_Tensiones
Matriz de rigidez global de la estructura reducida:
KGSR
1 2 3 4 5 6 7 8
12
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
1 0 0 0 0 0 0 00 1 0 0 0 0 0 0
-0.317 -0.192 1.301 0 -0.317 0.192 0 0
-0.165 -0.111 0 2.126 0.165 -0.111 0 0
0 0 -0.317 0.165 1.285 0 -0.317 -0.165
0 0 0.192 -0.111 0 1.285 -0.192 -0.111
0 0 0 0 -0.317 -0.192 1.301 0
0 0 0 0 -0.165 -0.111 0 2.126
0 0 0 0 0 0 -0.317 0.165
0 0 0 0 0 0 0.192 -0.111
-0.317 0.357 -0.666 0 -0.317 -0.357 0 0
0.357 -0.111 0 -1.904 -0.357 -0.111 0 0
0 0 0 0 -0.317 0.357 -0.666 0
0 0 0 0 0.357 -0.111 0 -1.904
0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0
0 0 0 0 -0.016 0 0 0
0 0 0 0 0 -0.841 0 0
0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 ...
08/09/2010 - 17:02 14/18

Copyright (c) 2010 Luis Alfredo MEF_Matriz_de_Rigidez_Tensiones
Cálculo de desplazamientosnodales
Restricciones aplicadas:Cargas aplicadas
vrn1
12
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
00
"NR"
"NR"
"NR"
"NR"
"NR"
"NR"
"NR"
"NR"
"NR"
"NR"
"NR"
"NR"
0
0
"NR"
"NR"
"NR"
"NR"
0
0
vfn
1
12
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
00
0
0
0
-2
0
0
0
-1
0
0
0
0
0
0
0
0
0
0
0
0
vec_a_mat vrn( )1 2
12
3
4
5
6
7
8
9
10
11
0 0"NR" "NR"
"NR" "NR"
"NR" "NR"
"NR" "NR"
"NR" "NR"
"NR" "NR"
0 0
"NR" "NR"
"NR" "NR"
0 0
vec_a_mat vfn( )1 2
12
3
4
5
6
7
8
9
10
11
0 00 0
0 -2
0 0
0 -1
0 0
0 0
0 0
0 0
0 0
0 0
08/09/2010 - 17:02 15/18

Copyright (c) 2010 Luis Alfredo MEF_Matriz_de_Rigidez_Tensiones
Posición de los Nodosantes de la carga
Desplazamientos de losnodos (vector calculado):
vuG1
12
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
00
7.852
-8.163
13.154
-23.994
17.291
-46.026
17.872
-80.211
2.141
-6.577
2.761
-44.909
0
0
-4.992
-22.232
-4.534
-6.865
0
0
nxy
1 2
12
3
4
5
6
7
8
9
10
11
0 10.43315 1
0.8663 1
1.29945 1
1.7326 1
0.43315 0.75
1.29945 0.75
0 0.5
0.8663 0.5
0.43315 0.25
0 0
dnxy nxy vec_a_mat vuG
Matriz de desplazamiento nodales:
dnxy1 2
12
3
4
5
6
7
8
9
10
11
0 18.28509 -7.162597
14.019861 -22.994337
18.590529 -45.025885
19.604259 -79.210907
2.574384 -5.826743
4.060053 -44.158912
0 0.5
-4.125248 -21.731799
-4.100585 -6.615051
0 0
vec_a_mat vuG
1 2
12
3
4
5
6
7
8
9
10
11
0 07.85194 -8.162597
13.153561 -23.994337
17.291079 -46.025885
17.871659 -80.210907
2.141234 -6.576743
2.760603 -44.908912
0 0
-4.991548 -22.231799
-4.533735 -6.865051
0 0
08/09/2010 - 17:02 16/18

Copyright (c) 2010 Luis Alfredo MEF_Matriz_de_Rigidez_Tensiones
Diagrama de Nodos Originales y Nodos Desplazados
ed ed 68
Escala de desplazamientos:
ed ed 3 105
dnxy_r nxy ed vec_a_mat vuG
0 1
0
0.5
1
DeformadaSin deformar
Diagrama de Nodos
Eje X [m]
Eje
Y [
m]
min_y
max_y
min_x max_x
08/09/2010 - 17:02 17/18
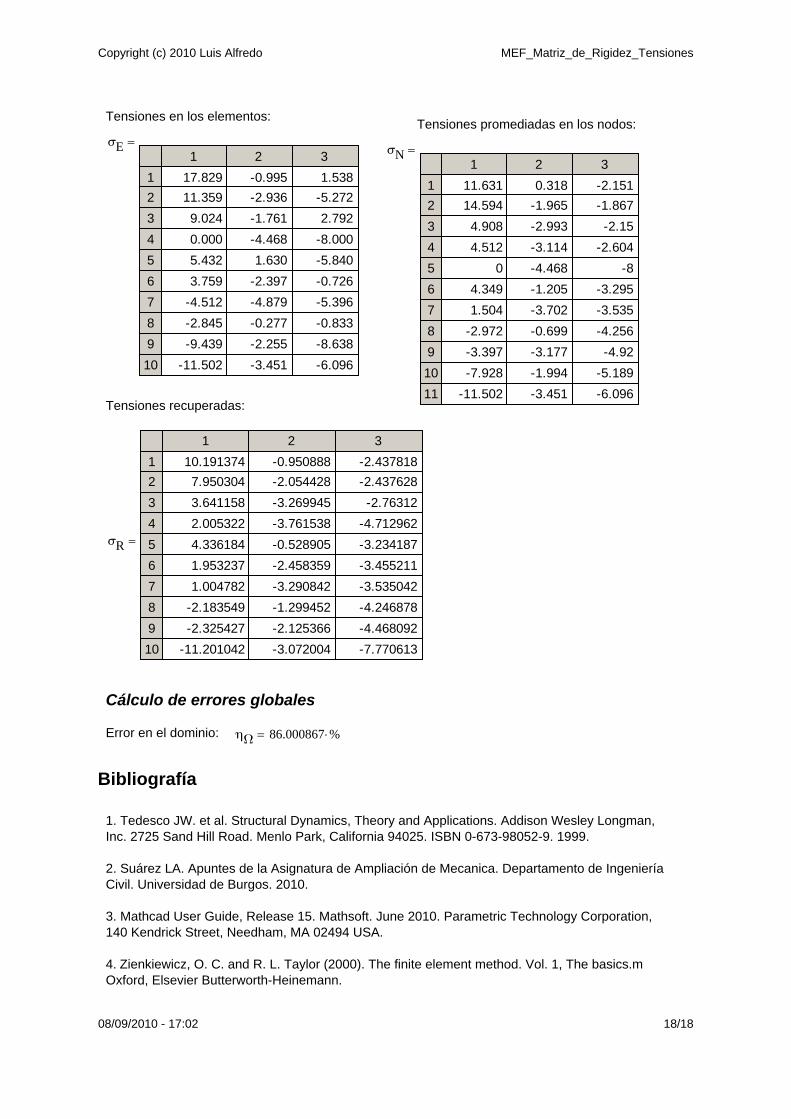
Copyright (c) 2010 Luis Alfredo MEF_Matriz_de_Rigidez_Tensiones
Tensiones en los elementos:Tensiones promediadas en los nodos:
σE1 2 3
12
3
4
5
6
7
8
9
10
17.829 -0.995 1.53811.359 -2.936 -5.272
9.024 -1.761 2.792
0.000 -4.468 -8.000
5.432 1.630 -5.840
3.759 -2.397 -0.726
-4.512 -4.879 -5.396
-2.845 -0.277 -0.833
-9.439 -2.255 -8.638
-11.502 -3.451 -6.096
σN
1 2 3
12
3
4
5
6
7
8
9
10
11
11.631 0.318 -2.15114.594 -1.965 -1.867
4.908 -2.993 -2.15
4.512 -3.114 -2.604
0 -4.468 -8
4.349 -1.205 -3.295
1.504 -3.702 -3.535
-2.972 -0.699 -4.256
-3.397 -3.177 -4.92
-7.928 -1.994 -5.189
-11.502 -3.451 -6.096
Tensiones recuperadas:
σR
1 2 3
12
3
4
5
6
7
8
9
10
10.191374 -0.950888 -2.4378187.950304 -2.054428 -2.437628
3.641158 -3.269945 -2.76312
2.005322 -3.761538 -4.712962
4.336184 -0.528905 -3.234187
1.953237 -2.458359 -3.455211
1.004782 -3.290842 -3.535042
-2.183549 -1.299452 -4.246878
-2.325427 -2.125366 -4.468092
-11.201042 -3.072004 -7.770613
Cálculo de errores globales
Error en el dominio: ηΩ 86.000867 %
Bibliografía
1. Tedesco JW. et al. Structural Dynamics, Theory and Applications. Addison Wesley Longman,Inc. 2725 Sand Hill Road. Menlo Park, California 94025. ISBN 0-673-98052-9. 1999.
2. Suárez LA. Apuntes de la Asignatura de Ampliación de Mecanica. Departamento de IngenieríaCivil. Universidad de Burgos. 2010.
3. Mathcad User Guide, Release 15. Mathsoft. June 2010. Parametric Technology Corporation,140 Kendrick Street, Needham, MA 02494 USA.
4. Zienkiewicz, O. C. and R. L. Taylor (2000). The finite element method. Vol. 1, The basics.mOxford, Elsevier Butterworth-Heinemann.
08/09/2010 - 17:02 18/18
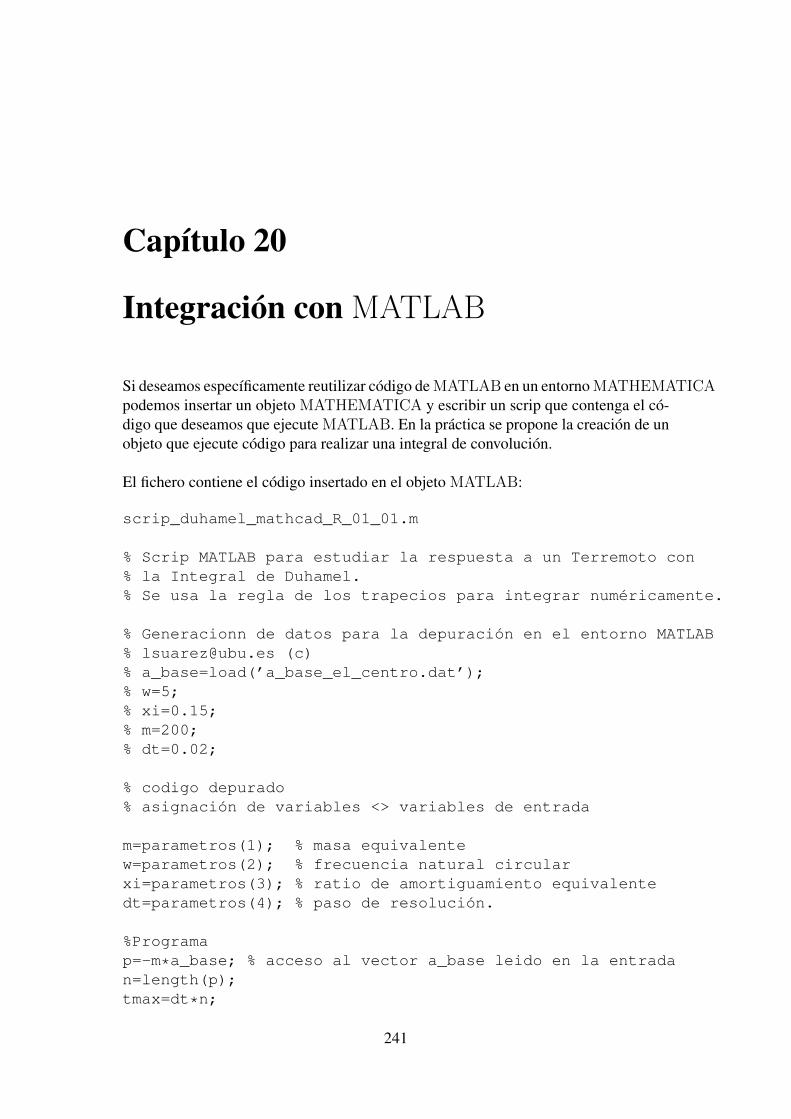
Capítulo 20
Integración con MATLAB
Si deseamos específicamente reutilizar código de MATLAB en un entorno MATHEMATICApodemos insertar un objeto MATHEMATICA y escribir un scrip que contenga el có-digo que deseamos que ejecute MATLAB. En la práctica se propone la creación de unobjeto que ejecute código para realizar una integral de convolución.
El fichero contiene el código insertado en el objeto MATLAB:
scrip_duhamel_mathcad_R_01_01.m
% Scrip MATLAB para estudiar la respuesta a un Terremoto con% la Integral de Duhamel.% Se usa la regla de los trapecios para integrar numéricamente.
% Generacionn de datos para la depuración en el entorno MATLAB% [email protected] (c)% a_base=load(’a_base_el_centro.dat’);% w=5;% xi=0.15;% m=200;% dt=0.02;
% codigo depurado% asignación de variables <> variables de entrada
m=parametros(1); % masa equivalentew=parametros(2); % frecuencia natural circularxi=parametros(3); % ratio de amortiguamiento equivalentedt=parametros(4); % paso de resolución.
%Programap=-m*a_base; % acceso al vector a_base leido en la entradan=length(p);tmax=dt*n;
241

242 20. Integración con MATLAB
t=linspace(1,tmax,n)’;wa=w*sqrt(1-xi^2);f=p.*cos(wa*t);g=p.*sin(wa*t);f1=[0; f(1:n-1)];g1=[0; g(1:n-1)];pc=f1*exp(-xi*w*dt)+f;ps=g1*exp(-xi*w*dt)+g;pc=pc*dt/m/wa/2;ps=ps*dt/m/wa/2;
for i=1:n;if i==1
c(i,1)=pc(i,1);s(i,1)=ps(i,1);
elsec(i,1)=c(i-1,1)*exp(-xi*w*dt)+pc(i,1);s(i,1)=s(i-1,1)*exp(-xi*w*dt)+ps(i,1);
endend
d=c.*sin(wa*t)-s.*cos(wa*t);v=w*c.*cos(wa*t)-w*s.*sin(wa*t);a=-w^2*c.*sin(wa*t)+w^2*s.*cos(wa*t);plot(t,d,t,v,t,a);
%%
20.1. Objetivos para los contenidos1. Comprender el método numérico para generar una integración por trapecios.
2. Comprender el método numérico de la integral de convolución.
3. Comprobar los tiempos de ejecución y comparar entornos.
20.2. Objetivos instrumentales1. Insertar objetos MATLAB.

Copyright (c) 2010 Luis Alfredo Suárez Vivar Integracion_MATLAB_MATHCAD_R_01_01.xmcd
PROGRAMACION PARA LA ADQUISICIÓN, MODELADO Y VISUALIZACION DE DATOSDOCTORADO EN INGENIERIAUNIVERSIDAD DE BURGOS DEPARTAMENTO DE INGENEIRIA CIVILINTEGRACIÓN DEL CODIGO Y EJECUCION DEL CODIGO DE MATLAB EN MATHCADCopyright (c) 2010 LUIS ALFREDO SUAREZ VIVAR - [email protected]
Objetivos de la práctica
En muchas ocasiones se desea incluir código de MATLAB, bien por que se desea reutilizar,por que resulta ser un código más compacto que el de MATHCAD o más rápido.
La opción de reutilización es incrustar un componente que define una función especial conentradas y salidas que invocará mediante un enlace DDE que ejecutará el interprete deMATLAB pasándole los correspondientes parámetros de entrada y recibiendo loscorrespondientes parámetros de salida:
Componente MATLAB:
Dado que Matlab no maneja bien unidades los parámetros a pasar no deben incorporarlas. Alrecuperar las salidas incorporaremos de nuevo las unidades.
El ejercicio consiste en crear en MATLAB una función que calcule la Integral de Duhamel(convolución entre la función de respuesta al impulso unitario y una señal de carga) de la cargaefectiva que genera un terremoto (El Centro) que leeremos de un fichero de texto plano.
La rutina usa la regla de los trapecios para obtener la integral numérica y deriva la respuestaen desplazamiento obtenida determinando las respuestas en velocidad y aceleración.
estas señales se comparan con las obtenidas por MATHCAD directamente. hay que hacernotar la notable velocidad de MATLAB sobre MATHCAD para este cálculo, lo que nos lleva apensar que puede ser muy interesante programar en MATLAB e integrar el desarrollo enMATHCAD más potente en cuanto a la organización documental.
Parámetros dinámicos
Supongamos un sistema de segundo orden cuyos parámetro vienen dados por:
Masa equivalente: meq 20 kg
Frecuencia circular: ωn 5rad
s
Ratio de amortiguamiento viscoso: ζeq 15%
Paso de integración: ΔT 0.02 s
Insertamos un componerte para importar datos a MATHCAD, en este caso solo es un fichero detexto plano de los valores de aceleración tomados cada 0.02 s en la estación de Imperial ValeyEl Centro, 18 de mayo de 1940 a las 8:37 PST
Asignaremos el comienzo de los arrays a 1: ORIGIN 1
a_base
a_base_el_centro.dat
05/09/2010 - 20:15 1/10

Integracion_MATLAB_MATHCAD_R_01_01.xmcd
Desarrollo
Como elcomponenteMATLAB estálimitado acuatro entradasy cuatrossalidas, si sedesea trabajarcon más, esnecesarioagruparlas enun array, sinunidades comoel definido:
Comprobación del fichero leído:
a_base1
12
3
4
5
0.0110.011
0.013
0.014
...
parametros
meq
UnitsOf meq ωn
UnitsOf ωn ζeq
ΔT
UnitsOf ΔT( )
Incrustación del componente MATLAB:
x
Dx
DDx
t
0 10 20 30 40 50 60-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
parametros a_base( )
Podemos ver que el componente refleja el estado final de MATLAB, en esta caso el scripdel componente grafica las soluciones de desplazamiento, velocidad y aceleración que hansalido.
05/09/2010 - 20:15 2/10

Integracion_MATLAB_MATHCAD_R_01_01.xmcd
Terminado de ejecutar el comando tenemos a nuestra disposición cuatro vectores para serusados directamente o construir una función con ellos mediante interpolación.
Desplazamientos (m) Velocidades Aceleraciones
x1
12
3
4
5
0-6-4.171·10-5-1.235·10-5-2.51·10
...
Dx1
12
3
4
5
-59.767·10-42.687·10-44.096·10-45.097·10
...
DDx1
12
3
4
5
0-41.043·10-43.088·10-46.275·10
...
0 20 40 602
1
0
1
2
Grafico de desplazamientos, velocidades y aceleraciones
Tiempo
x1
Dx1
DDx1
t1
Bibliografía.
1. Tedesco JW. et al. Structural Dynamics, Theory and Applications. Addison WesleyLongman, Inc. 2725 Sand Hill Road. Menlo Park, California 94025. ISBN 0-673-98052-9.1999.
2. Suárez LA. Apuntes de la Asignatura de Ampliación de Mecanica. Departamento deIngeniería Civil. Universidad de Burgos. 2010.
3. Mathcad User Guide, Release 14. Mathsoft. February 2007. Parametric TechnologyCorporation, 140 Kendrick Street, Needham, MA 02494 USA
05/09/2010 - 20:15 3/10

Integracion_MATLAB_MATHCAD_R_01_01.xmcd
Integración de datos
Desde Menu > Insert > Component : Usaremos el Component Wizard > Data Import Wizartpara insertar un fichero *.dat de texto plano ASCII con datos procedentes de MATLAB, demanera similar a como lo hacemos con MS-Excel:
05/09/2010 - 20:15 4/10

Integracion_MATLAB_MATHCAD_R_01_01.xmcd
Nos aparecerá una tabla con un punto de inserción en un tabla para incluir la variable quecontedrá el array:
Quedando la variable r:
r1 2 3
12
3
4
0.137 0.299 0.0650.012 0.661 0.988
0.894 0.284 0.583
0.199 0.469 0.423
r
0.137
0.012
0.894
0.199
0.299
0.661
0.284
0.469
0.065
0.988
0.583
0.423
Generación de una función para que sea ejecutada enMATLAB desde MathCAD
Podemos generar una función f(x) que se calcue en MATLAB, desde una hoja de trabajo deMathcad.
Desde Menu>Insert>Component
05/09/2010 - 20:15 5/10

Integracion_MATLAB_MATHCAD_R_01_01.xmcd
Nos aparece un objeto con dos posiciones de entrada. Generaremos una función f(x).
Cuando se inserta elcomponente,aparece con unavariable de entrada yuna de salida,aunqueesto se puedemodificar haciendoclick con el botonderecho sobre elcomponenteMATLAB.:
Con Add InputVariable o AddOutput Variablepodemos añadir másentradas (segundoplace holder) osalidas (primer placeholder).
Incorporamos al place holder del lado izquierdo la función y en el segundo place holder lavariable independinte:
Función que queremos calcular en MATLAB: x2
4
05/09/2010 - 20:15 6/10

Integracion_MATLAB_MATHCAD_R_01_01.xmcd
Para asignar los nombres de lasvariables que se usarán enMATLAB, en correspondencia conlas usadas en Mathcad editamoslas Propiedades del componente,hacindo click con el botón derechodel ratón
in0 se corresponde con x
out0 se corresponde con y
05/09/2010 - 20:15 7/10
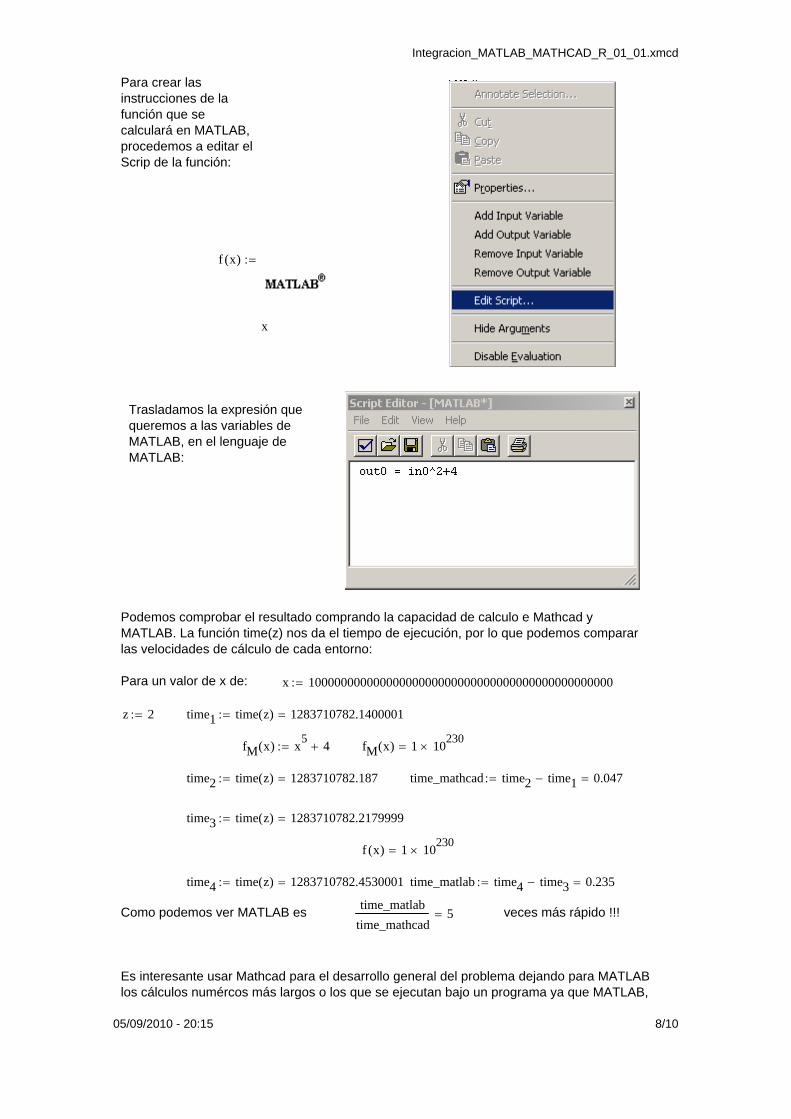
Integracion_MATLAB_MATHCAD_R_01_01.xmcd
Para crear lasinstrucciones de lafunción que secalculará en MATLAB,procedemos a editar elScrip de la función:
f x( )
x
Trasladamos la expresión quequeremos a las variables deMATLAB, en el lenguaje deMATLAB:
Podemos comprobar el resultado comprando la capacidad de calculo e Mathcad yMATLAB. La función time(z) nos da el tiempo de ejecución, por lo que podemos compararlas velocidades de cálculo de cada entorno:
Para un valor de x de: x 10000000000000000000000000000000000000000000000
z 2 time1 time z( ) 1283710782.1400001
fM x( ) x5
4 fM x( ) 1 10230
time2 time z( ) 1283710782.187 time_mathcad time2 time1 0.047
time3 time z( ) 1283710782.2179999
f x( ) 1 10230
time4 time z( ) 1283710782.4530001 time_matlab time4 time3 0.235
Como podemos ver MATLAB es time_matlab
time_mathcad5 veces más rápido !!!
Es interesante usar Mathcad para el desarrollo general del problema dejando para MATLABlos cálculos numércos más largos o los que se ejecutan bajo un programa ya que MATLAB,
05/09/2010 - 20:15 8/10

Apéndice A
Ejemplo de libro de teoría
En este apéndice podemos apreciar la capacidad de integración en un texto de teoríaestándar de todas las imágenes procedentes de prácticas de MATHCAD, el ejemplo esun simulación para parte de un capítulo sobre el amortiguamiento.
251

Capítulo 3
Fundamentos del amortiguamiento
3.1. IntroducciónLa capacidad de una estructura para absorber la energía inyectada en forma de vibra-ción se denomina amortiguamiento. En general la capacidad de amortiguamiento quetiene una estructura tiene su origen en diversos fenómenos físicos que tienden a com-binarse.Esta es una de las principales dificultades que aparecen a la hora de estimar elamortiguamiento que va a tener un sistema mecánico o estructura que estemos proyec-tando.
En función del origen el amortiguamiento se suele clasificar en:
Amortiguamiento del material, al que nos referiremos cuando la fuente de laspérdidas de energía se deban a las fricciones internas al material. Por lo tantoindirectamente estamos definiendo una propiedad del material que denomina-remos amortiguamiento. Esta propiedad deberá quedar reflejada en la ecuaciónconstitutiva del material.
Amortiguamiento estructural, al que nos referiremos cuando la fuente de laspérdidas de energía se deban a los enlaces de los componentes estructurales . Engeneral estas pérdidas energéticas se producen por contacto de unos elementoscontra otros en los puntos de unión y el análisis de la forma de trabajar de lasuniones resulta clave para la comprensión del fenómeno. Las fricciones son unade las contribuciones más importantes a este tipo de amortiguamiento.
Amortiguamiento por interacción fluido estructura, al que nos referiremoscuando la fuente de las pérdidas de energía se deban a las interacciones de loselementos estructurales con los fluidos colindantes. Esta pérdida queda reflejadacomo amortiguamiento aunque en realidad en primera instancia es una trans-misión de estado de movimiento (energía cinética) al fluido colindante y poste-riormente es el fluido el que establecerá el mecanismo interno de disipación.
Amortiguamiento por elementos disipativos o amortiguadores, en este casonos referimos a elementos colocados entre nodos de la estructura que concentran
13

14 3. Fundamentos del amortiguamiento
Figura 3.1: Pórtico traslacional de 1 GDL
una gran capacidad de amortiguamiento. Un ejemplo típico son los amortigua-dores hidráulicos de un vehículo. De manera similar en una estructura de edifica-ción o de obra civil ente nodos específicos se pueden ubicar como elementos demitigación de las respuestas a las cargas dinámicas amortiguadores de diferentestecnologías: hidráulicos, de fricción, de deformación plástica, activos, etc.
Amortiguamiento por elementos activos, que se produce en las denominadasestructuras inteligentes, que resultan ser estructuras que se han instrumentadocon sensores conectados a un control y a un actuador de una determinada tecno-logía, el cual en base a una determinada lógica de control inyectará energía en elsistema de tal manera que se produzca de una manera preestablecida un trabajonegativo sobre la estructura que anule la energía inyectada por las cargas diná-micas externas y favorezca su disipación. Los sistemas activos se pueden basaren un actuador que aplique una carga directa y controlada sobre la estructura,movimientos de masas activadas por actuadores normalmente servohidráulicos,tensado de tendones, amortiguadores magnetoreológicos, etc.
En este capítulo vamos a tratar de los fundamentos del amortiguamiento por lo queestudiaremos en primera instancia el problema de 1 GDL con amortiguamiento viscosolineal. Esta formulación lineal simplifica notablemente las soluciones analíticas. Antesde seguir profundizando en el origen y tipos de amortiguamiento conviene describir demanera breve las ecuaciones diferenciales del movimiento dinámica para 1 GDL, conel fin de comprender mejor el mecanismo de disipación de la energía.
3.2. Modelo dinámico básicoEl pórtico de la figura representa un sistema dinámico de 1 GDL y proviene de reali-zar una simplificación estructural para el análisis dinámico, denominada hipótesis dediafragmas rígidos típica del análisis de edificios en la Ingeniería Sísmica.
Aplicando está simplificación por la que un pórtico general plano, con 3 GDL genéri-cos pasa a sustituirse por un pórtico plano de 1 GDL traslacional se basa en que paralos esfuerzos horizontales típicos de un seísmo los forjados son muy resistentes y los
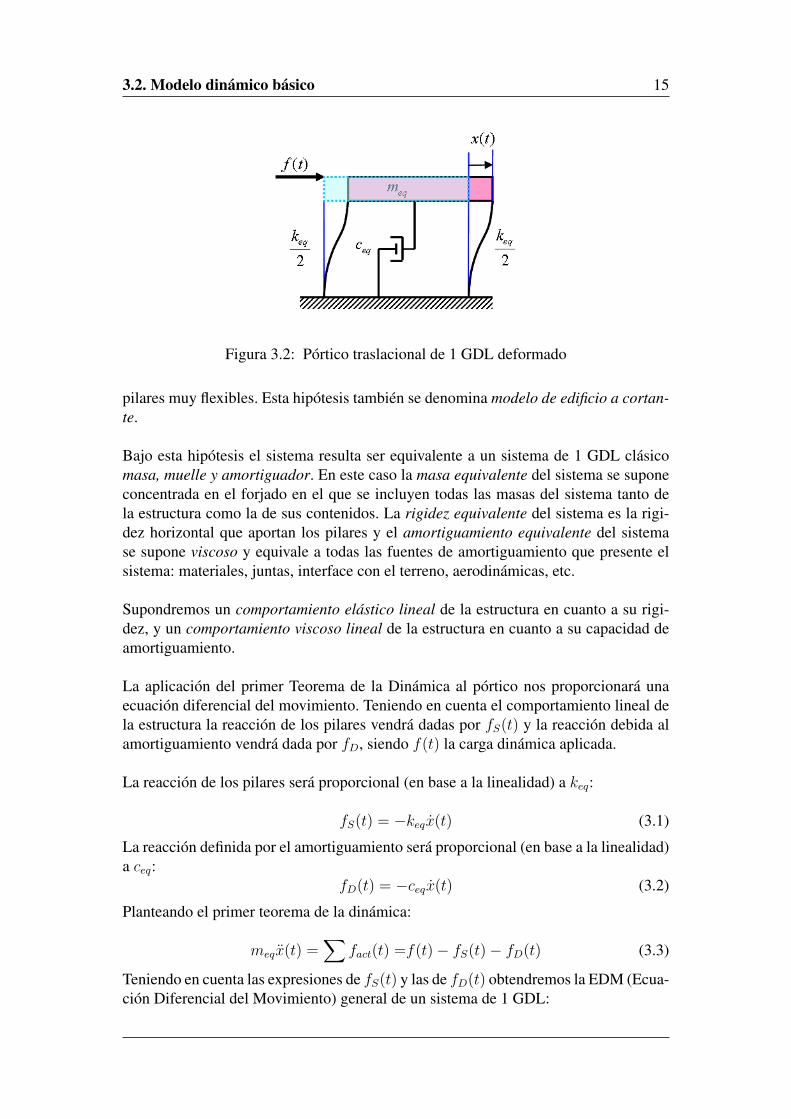
3.2. Modelo dinámico básico 15
Figura 3.2: Pórtico traslacional de 1 GDL deformado
pilares muy flexibles. Esta hipótesis también se denomina modelo de edificio a cortan-te.
Bajo esta hipótesis el sistema resulta ser equivalente a un sistema de 1 GDL clásicomasa, muelle y amortiguador. En este caso la masa equivalente del sistema se suponeconcentrada en el forjado en el que se incluyen todas las masas del sistema tanto dela estructura como la de sus contenidos. La rigidez equivalente del sistema es la rigi-dez horizontal que aportan los pilares y el amortiguamiento equivalente del sistemase supone viscoso y equivale a todas las fuentes de amortiguamiento que presente elsistema: materiales, juntas, interface con el terreno, aerodinámicas, etc.
Supondremos un comportamiento elástico lineal de la estructura en cuanto a su rigi-dez, y un comportamiento viscoso lineal de la estructura en cuanto a su capacidad deamortiguamiento.
La aplicación del primer Teorema de la Dinámica al pórtico nos proporcionará unaecuación diferencial del movimiento. Teniendo en cuenta el comportamiento lineal dela estructura la reacción de los pilares vendrá dadas por fS(t) y la reacción debida alamortiguamiento vendrá dada por fD, siendo f(t) la carga dinámica aplicada.
La reacción de los pilares será proporcional (en base a la linealidad) a keq:
fS(t) = −keqx(t) (3.1)
La reacción definida por el amortiguamiento será proporcional (en base a la linealidad)a ceq:
fD(t) = −ceqx(t) (3.2)
Planteando el primer teorema de la dinámica:
meqx(t) =∑
fact(t) =f(t)− fS(t)− fD(t) (3.3)
Teniendo en cuenta las expresiones de fS(t) y las de fD(t) obtendremos la EDM (Ecua-ción Diferencial del Movimiento) general de un sistema de 1 GDL:

16 3. Fundamentos del amortiguamiento
meqx(t) + ceqx(t) + keqx(t) = f(t) (3.4)
Para el caso particular del pórtico de la figura 3.1 la keq tendrá el siguiente valor:
keq = 212EIzL3
(3.5)
Sin embargo para la ceq no tenemos una expresión similar a la anterior, que podamosobtener en base al material de los pilares, las juntas, el terreno. Esta cuestión estámotivada por que el amortiguamiento tiene diferentes orígenes.
3.3. Respuesta libreSi estudiamos el problema de vibraciones libres, es decir la ecuación 3.4 con f(t) = 0ésta se transforma en:
meqx(t) + ceqx(t) + keqx(t) = 0 (3.6)
En esta situación la excitación de la estructura vendrá dada por las condiciones inicia-les a las que esté sometida: x(0) = x0 y x(0) = x0.
Se denomina frecuencia natural circular ωn a la frecuencia a la que vibraría la estruc-tura si esta no estuviese amortiguada cundo se la excita con condiciones iniciales, susunidades son rad/s y su valor viene dado por:
ωn =
√keqmeq
(3.7)
La frecuencia natural también se puede expresar en Hz como fn:
fn = 2π
√keqmeq
(3.8)
La solución de la EDM 3.6 cambia en función del valor que tenga ceq en relación conla meq y la ωn.
Se denomina precisamente amortiguamiento crítico al valor de comparación del ceq yque permite determinar el tipo de solución que obtendremos. Su expresión viene dadapor:
ccr = 2meqωn = 2√keqmeq (3.9)
Las soluciones posibles de la EDM 3.6 que refleja la situación de vibración libre vienendadas por:
Sistema crítico se denomina así al sistema cuando ceq = ccr y el sistema res-ponde sin oscilaciones con una respuesta monótona decreciente hasta que llegaa la configuración de equilibrio. Este es un caso frontera entre los dos siguientes.

3.4. Respuesta armónica 17
Sistema sobreamortiguado se denomina así al sistema cuando ceq > ccr y elsistema responde de manera similar al sistema crítico sin oscilaciones con unarespuesta monótona decreciente hasta que llega a la configuración de equilibrio.
Sistema subamortiguado se denomina así al sistema cuando ceq < ccr y elsistema responde con oscilaciones de amplitud decreciente hasta que llega a laconfiguración de equilibrio.
Hay que hacer notar que prácticamente todas las estructuras se comportan como comosistemas subamortiguados ya que de manera natural los amortiguamientos en generaltienen un valor bajo, aunque artificialmente, añadiendo elementos de amortiguaciónéste se puede incrementar.Para poder comparar de manera más sencilla los diferentes tipos de sistemas en rela-ción con su amortiguamiento, se define el ratio de amortiguamiento viscoso adimen-sional como:
ζ =ceqccr
=ceq
2meqωeq=
ceq
2√meqkeq
(3.10)
Los sistemas subamortiguados tiene un ratio de amortiguamiento viscoso adimensio-nal menor que la unidad. Los valores típicos del ratio de amortiguamiento están pordebajo del 10 % para la mayor parte de las estructuras de 1 GDL con frecuencias na-turales bajas (menores de 100 Hz).
La respuesta de los sistemas subamortiguados obedecen a la siguiente expresión:
x(t) = e(−ζω)t
(x0 + ζωx0
ωdsinωdt+ x0 cosωdt
)(3.11)
El gráfico 3.3 refleja la respuesta sub amotiguada típica x(t).
3.4. Respuesta armónicaCuando la f(t) 6= 0 la respuesta se denomina forzada. Para una carga armónica la ex-presión de la carga vendrá dada por:
f(t) = f0 · sen (ωext) (3.12)
La EDM resultante vendrá dada por:
meqx(t) + ceqx(t) + keqx(t) = f0 · sen (ωext) (3.13)
De acuerdo con lo que sabemos sobre las ecuaciones diferenciales lineales de segundoorden y de coeficientes constantes, la solución completa la obtendremos como sumade la solución general de la homogénea xh(t) y la solución particular de la completaxp(t):
x(t) = xh(t) + xp(t) (3.14)

18 3. Fundamentos del amortiguamiento
Figura 3.3: Gráfico de la respuesta libre sub-amortiguada
Cada parte de la respuesta debe cumplir la ecuación diferencial de la que proviene:
meqxh(t) + ceqxh(t) + keqxh(t) = 0meqxp(t) + ceqxp(t) + keqxp(t) = f0 sin(ωext)
(3.15)
Respuesta debida a las condiciones iniciales xh(t): que es similar a la respuestalibre que si el sistema es subamortiguado responderá a una ecuación similar a laecuación 3.11 y tendrá un aspecto similar al gráfico 3.3.
Respuesta debida a la carga de excitación armónica xp(t): que es un armónicode amplitud constante de la misma frecuencia que la excitación ωex y en generaldesfasado una ángulo θ.
Para el caso que nos ocupa la parte de la respuesta que nos interesa es la respuestaparticular de la completa o respuesta estacionaria ya que la respuesta general de lahomogénea debida a las condiciones iniciales tendera a cero en poco tiempo y solopermanecerá la respuesta estacionaria. El período en el que actúa la solución homogé-nea se denomina régimen transitorio y el período en el que solo permanece la soluciónestacionaria se denomina régimen permanente o estacionario.
Para expresar la respuesta estacionaria, previamente se va a definir el ratio adimensio-nal de frecuencias r:
r =ωexω
(3.16)
La expresión de la solución estacionaria viene dada por:
xp(t) = xest ·DMF (r, ζ) · sin(ωext+ θ(r, ζ)) (3.17)

3.4. Respuesta armónica 19
Figura 3.4: Gráfico de la respuesta estacionaria
Figura 3.5: Gráfico de la respuesta completa

20 3. Fundamentos del amortiguamiento
Figura 3.6: Gráfico del factor de amplificación dinámica (DMF)
Donde xest es al denominada respuesta estática y es la respuesta que tendría el sistemasi la carga fuese estática (ωex = 0), su valor viene dado por la siguiente expresión:
xest =f0
keq(3.18)
El DMF (ζ, r) es el denominado factor de amplificación dinámica y al igual queθ(ζ, r) que es el desfase de la respuesta frente a la carga dependen del ratio de fre-cuencias y de ratio de amortiguamiento viscoso:
DMF (ζ, r) =1√
(1− r2)2 + (2ζr)2(3.19)
θ(ζ, r) = tan−1
( −2ζr
1− r2
)(3.20)
La figura 3.6 nos muestra el aspecto del gráfico del DMF (ζ, r) para varios amortigua-mientos. La figura 3.7 nos muestra el aspecto del gráfico de desfase θ(ζ, r) para variosamortiguamiento.
3.5. ResonanciaLa frecuencia a la que aparece un máximo en el gráfico del factor de amplificacióndinámica se la denomina frecuencia de resonancia ωres y en función de la frecuencianatural y del ratio de amortiguamiento del sistema vale:
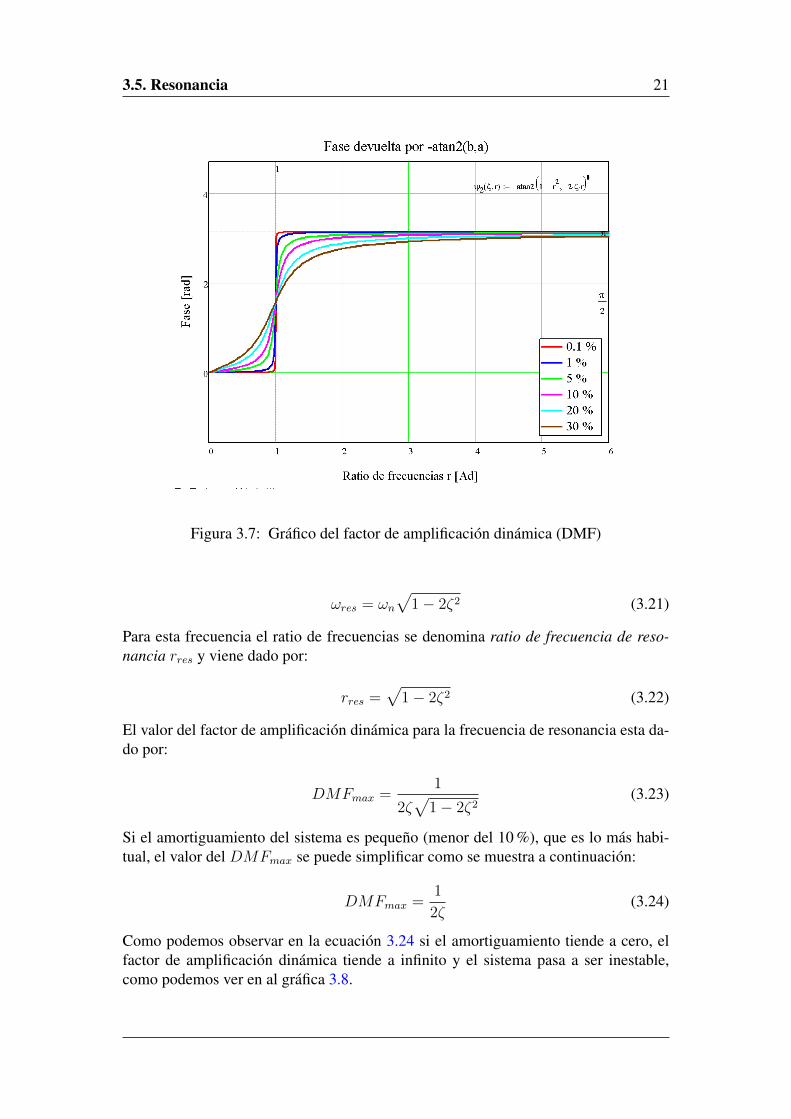
3.5. Resonancia 21
Figura 3.7: Gráfico del factor de amplificación dinámica (DMF)
ωres = ωn√
1− 2ζ2 (3.21)
Para esta frecuencia el ratio de frecuencias se denomina ratio de frecuencia de reso-nancia rres y viene dado por:
rres =√
1− 2ζ2 (3.22)
El valor del factor de amplificación dinámica para la frecuencia de resonancia esta da-do por:
DMFmax =1
2ζ√
1− 2ζ2(3.23)
Si el amortiguamiento del sistema es pequeño (menor del 10 %), que es lo más habi-tual, el valor del DMFmax se puede simplificar como se muestra a continuación:
DMFmax =1
2ζ(3.24)
Como podemos observar en la ecuación 3.24 si el amortiguamiento tiende a cero, elfactor de amplificación dinámica tiende a infinito y el sistema pasa a ser inestable,como podemos ver en al gráfica 3.8.

22 3. Fundamentos del amortiguamiento
Figura 3.8: DMF para valores muy bajos de amortiguamiento
Es interesante estudiar como es la respuesta en el dominio temporal cuando excitamosel sistema exactamente con una fuerza armónica de frecuencia la frecuencia de reso-nancia.
3.6. Respuesta resonanteSe denomina respuesta resonante a la respuesta que tiene el sistema cuando se excitacon una fuerza armónica a la frecuencia de resonancia. Suponiendo condiciones ini-ciales nulas y realizando algunas operaciones sobre la respuesta general estacionariaexpresada por la ecuación 3.4 y llevando al límite la expresión cuando ωex → ωresllegamos la siguiente expresión de la respuesta resonante en el dominio del tiempo:
xres(t) =xest2ζ
[e−ζωt − 1
]cos (ωrest) (3.25)
Sobre la respuesta resonante hay que hacer notar varias cuestiones:
La amplitud de la respuesta depende del tiempo. Podemos observar que comien-za en cero (condiciones iniciales nulas), va creciendo hasta que se estabiliza entre±xest
2ζ.
La amplitud máxima viene dada por ±xest2ζ
por lo que depende de la respuestaestática que esta gobernada or la ecuación 3.18. y por lo tanto depende de la

3.6. Respuesta resonante 23
Figura 3.9: Gráfico de la respuesta resonante

24 3. Fundamentos del amortiguamiento
amplitud de la carga f0 y la keq.
De acuerdo con estas apreciaciones podemos establecer que la amplitud, tambien sepede expresar como:
xmax =xest2ζ
=1
2ζ
f0
keq(3.26)
Podríamos preguntarnos como actuar si deseamos limitar el máximo de la respuestaresonante xmax, en otras palabras si tenemos que soportar un incremento de f0 comoactuar. ¿Basta con incrementar la keq?, incrementando por ejemplo la sección de lospilares del pórtico.
En el siguiente punto vamos a estudiar el efecto de control sobre la respuesta del siste-ma que tiene el amortiguamiento.
3.7. Efecto del amortiguamiento sobre la respuestaLa respuesta inmediata que se daría desde un punto de vista estático es que efecti-vamente para controlar la respuesta máxima basta con incrementar la rigidez de lospilares.
Sin embargo desde un punto de vita dinámico dado que se está inyectando perma-nentemente energía mediante la carga f(t), necesitamos un mecanismo de disipaciónpermanente de la energía este mecanismo lo proporciona el amortiguamiento.
Si estudiamos la respuesta resonante cuando ζ → 0 podemos entender mejor el efectodel amortiguamiento. Haciendo operaciones y tendiendo al límite la expresión dadapor la ecuación 3.25:
lımζ→0
xres(t) = lımζ→0
xest2ζ
[e−ζωrest − 1
]cos (ωrest) (3.27)
Y obtenemos la siguiente expresión cuando el amortiguamiento tiende a cero:
lımζ→0
xres(t) = −1
2xestωrest cos (ωrest) (3.28)
A la vista del gráfico 3.10 y de la ecuación 3.28 podemos sacra las siguientes conclu-siones.
Si no tenemos amortiguamiento da igual la rigidez keq que establezcamos quelas oscilaciones se irán incrementando permanentemente hasta llegar al colapso.
El efecto del incremento de la rigidez es conseguir que las oscilaciones seanmenores o más bien que tarde más en alcanzarse un nivel de oscilación determi-nado.

3.7. Efecto del amortiguamiento sobre la respuesta 25
Figura 3.10: Gráfico de la respuesta resonante

26 3. Fundamentos del amortiguamiento
3.8. El amortiguamiento en la Ingeniería SísmicaPor ductilidad de una estructura entendemos su capacidad para someterse a grandesdesplazamientos sin colapsar. El amortiguamiento de una estructura mide su capaci-dad de absorber energía por ciclo e impedir que esta se convierta en energía cinética(velocidad) o energía potencial elástica (deformación).
A la vista de los gráficos de la respuesta resonante se entienden las dos claves que re-flejan todos los códigos antisísmicos:
Amortiguamiento: intentar por todos los medios posibles incrementar el amor-tiguamiento de la estructura de poco más del 2.0 - 5.0 % natural para controlarla respuesta máxima.
Ductilidad: intentar por toso los medios que la estructura pueda deformarse sincolapsar. Por este motivo se da una gran importancia en todos los códigos sís-micos a las uniones, recomendando y exigiendo incrementos en las longitudesde anclaje de los armados, continuidad a los pilares, refuerzos de las soldaduraspara evitar colapsos de platabandas, etc.
Hay que pensar que un terremoto es un transitorio aleatorio con contenidos en bajafrecuencia (hasta 100 Hz) continuos por lo que cuando se reciben en una estructurasiempre se excitan sus resonancias y se van a obtener respuestas como las estudiadasy cuyo control se consigue a base de tener suficiente amortiguamiento para que lasrespuestas máximas sean soportables. y suficiente ductilidad para poder oscilar con lasrespuestas máximas sin colapsar.
Otra cuestión aveces ignorada (como en la Norma Sismorresistente Española NCSE-02) es la duración de la excitación. Si un terremotos dura poco tendremos pocas osci-laciones y quizás no se llegue a los máximos en la respuesta y al haber sufrido menosciclos los daños por fatiga serán menores. Por lo tanto la duración de un terremoto esun factor clave de su perfil destructor.
FIN DE LA PRUEBA

266 A. Ejemplo de libro de teoría

Apéndice B
Ejemplo presentaciones de teoría
En este apéndice podemos apreciar la capacidad de integración en un texto de teoríaestándar de las imágenes procedentes de prácticas de MATHCAD, el ejemplo es lapresentación correspondiente al tema que estudia las respuestas a cargas impulsivas ya transitorios.
267

1
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
1
AMTE – 006Transitorios Arbitrarios y Cargas Impulsivas
1 GDLR.01.01
Copyright © 2009 Luis Alfredo Suárez [email protected]
Laboratorio de Vibraciones, Acústica y Dinámica de EstructurasDepartamento de Ingeniería Civil
Universidad de Burgos
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
2
Objetivos
► En este capitulo vamos a estudiar el comportamiento de los sistemas dinámicos sometidos a cargas transitorias, también denominadostransitorios. En este grupo de cargas incluiremos los denominado pulsos, trenes de pulsos, impulsos y trenes de duración infinitesimal, cargas debidas a explosiones y cargas sísmicas generadas por terremotos.
► De estas cargas resulta especialmente interesante estudiar la respuesta los sistemas dinámicos a un tipo singular carga impulsiva, definida por la Delta de Dirac δ(t) y denominada genéricamente Función de Respuesta al Impulso Unitario h(t). Dicha respuesta es básica para comprender el mecanismo de respuesta de las estructuras en el dominio temporal.
► Estudiaremos la respuesta estándar de los sistemas dinámicos a una carga transitoria arbitraria y finita, tanto en magnitud como en duración. La respuesta se estudia a través de la denominada Integral de Duhamel, que consiste en sustituir la carga transitoria por una sucesión de impulsos tipo Delta de Dirac e integrar la respuesta. La integral que aporta la respuesta resulta ser una Integral de Convolución. La Integral de Duhamel resulta ser un producto de convolución, lo que no va a permitir realizar una formulación de la respuesta dinámica similar a la estática.
2
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
3
Indice 1/6
► Objetivos► Índice► Introducción
▪ Definición de carga transitoria▪ Ejemplos de cargas transitorias
► Cargas Transitorias▪ La magnitud física impulso▪ El teorema del impulso y la cantidad de movimiento▪ Pulsos: Tipos especiales de transitorios▪ Diferenciación entre un pulso y un transitorio▪ Formas y caracterización de los pulsos▪ Algunas formas de pulsos analíticos▪ Pulsos Experimentales▪ Martillo de Impactos▪ Martillo de Impacto KISTLER 9728A20000
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
4
Indice 2/6
▪ Contenidos frecuenciales de un impacto real▪ Pulsos experimentales: excitador (shaker)▪ Control realimentado de la excitación▪ Otros métodos de generación de pulsos▪ Tipos especiales de pulsos
► Impulso Infinitesimal Unitario o Impulso Unitario▪ Pulso rectangular finito, en origen▪ Pulso rectangular finito, en τ▪ Del pulso rectangular a la Delta de Dirac▪ Representación grafica de la Delta de Dirac▪ Delta de Dirac fuera del origen
► Respuesta al Impulso Unitario h(t) en sistemas de 1 GDL amortiguados▪ Situación física▪ Definición de la percusión y el tiempo▪ Determinación de x(0+) y x’(0+)▪ Respuesta a las CI generadas por δ(t)
3
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
5
Indice 3/6
▪ Resumen del efecto de δ(t)▪ Aplicación al modelo del impulso unitario δ(t)▪ Respuesta del modelo al impulso unitario δ(t)▪ Respuesta al impulso unitario δ(t-τ)▪ Respuesta al impulso no unitario Jδ(t-τ)▪ Resumen respuesta al impulso unitario▪ Respuesta al impulso no unitario
► Respuesta al impulso unitario en sistemas sin amortiguamiento▪ Sistemas no amortiguados ζeq = 0▪ Resumen respuesta al impulso unitario▪ Respuesta al impulso no unitario▪ Definición del Transitorio▪ Descripción del problema: CI nulas▪ Respuesta a un impulso unitario
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
6
Indice 4/6
▪ Respuesta a un impulso diferencial▪ Gráfico de la respuesta a un impulso diferencial▪ Respuesta xP(t) como superposición▪ Análisis de la Carga▪ Análisis de la Respuesta▪ Ampliación de la zona de vibración libre▪ Integral de Duhamel▪ Producto de convolución▪ Propiedades del producto de convolución▪ Función a convolucionar F(t) – Función corredera h(t)▪ Descripción del problema: CI no nulas▪ Aplicación del principio de superposición▪ Respuesta debida a las cargas F(t)▪ Respuesta debida a las CI no nulas▪ Respuesta combinada a F(t) y CI

4
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
7
Indice 5/6
▪ Influencia en la respuesta conjunta de las CI▪ Semejanzas con el calculo estático▪ La caja negra: black box▪ El sistema mecánico como caja negra▪ h(t), caracteriza el sistema▪ Como determinamos h(t) ▪ Caracterización del sistema → determinar h(t)▪ Análisis Modal Experimental: Obtener h(t)
► Generación Real de un transitorio▪ Introducción▪ Equipos físicos▪ Esquema de control simplificado▪ Esquema de control▪ Esquema de control asociado el equipo físico
► Ejemplo de determinación de la respuesta a un pulso rectangular▪ Definición de la carga y el sistema
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
8
Indice 6/6
▪ Definición de h(t)▪ Definición del pulso rectangular▪ Integral de Duhamel▪ Sobrecarga dinámica (Overshot)▪ Respuesta a Condiciones Iniciales▪ Respuesta combinada completa a CI y Carga
► Conclusiones► Bibliografía
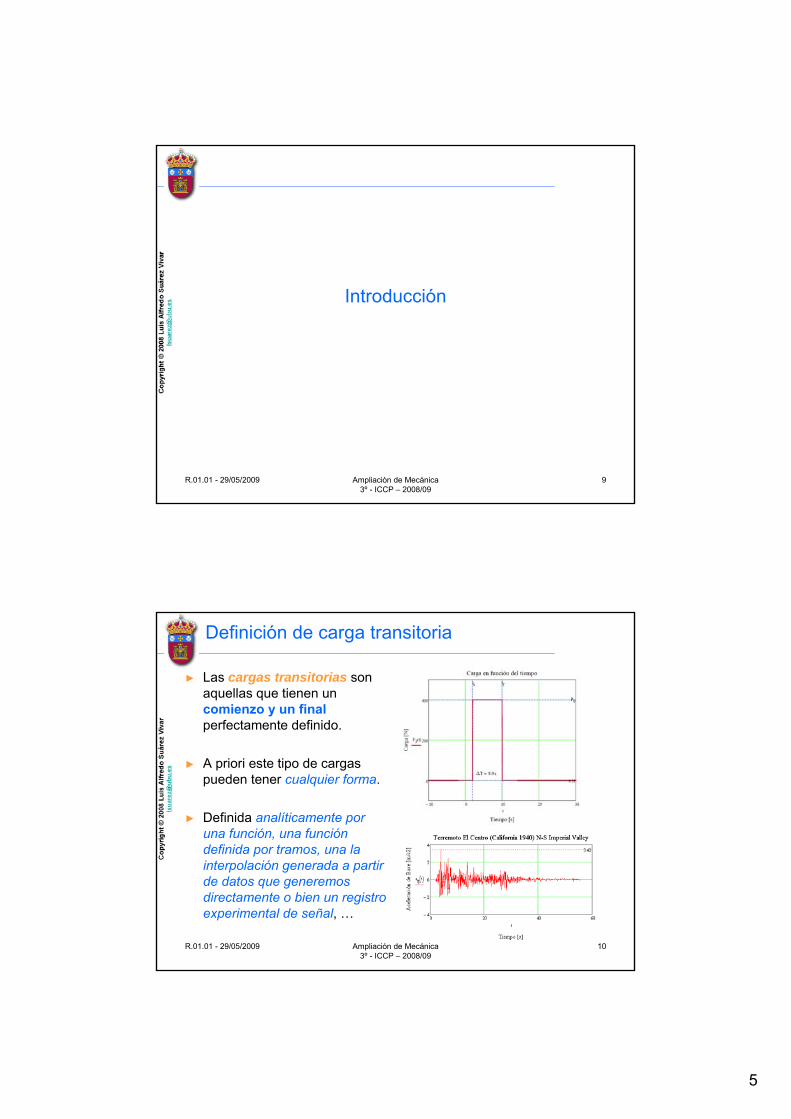
5
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
9
Introducción
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
10
Definición de carga transitoria
► Las cargas transitorias son aquellas que tienen un comienzo y un finalperfectamente definido.
► A priori este tipo de cargas pueden tener cualquier forma.
► Definida analíticamente por una función, una función definida por tramos, una la interpolación generada a partir de datos que generemos directamente o bien un registro experimental de señal, …

6
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
11
Ejemplos de cargas transitorias
▪ Pulsos o Impulsos (analítica)
▪ Terremoto (experimental)
▪ Trenes de impulsos (analítica)
▪ Impactos (experimental)
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
12
Pulsos o Impulsos

7
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
13
La magnitud física impulso
► Definida una fuerza que depende del tiempo, el diferencial de impulso se define como:
► Es decir es el área bajo la gráfica de F(t):
► El impulso integralse definirá como: 0
( ) ( )t
I t f dτ τ= ∫
( )dI f dτ τ=
tτ dτ
0t
( )I t
( )F τ
( )F t
( )F t( )F dτ τ+
dI
Carga Dinámica F(t)
Tiempo [s]
Car
ga [N
]
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
14
El teorema del impulso y la cantidad de movimiento
► Recordando la definición de la magnitud física cantidad de movimiento:
► Teniendo en cuenta la definición de la Segunda ley de Newton:
► Esta expresión refleja el teorema de la cantidad de movimiento, suponiendo la masa constante en el tiempo.:
► El teorema indica que el impulsoque genera la fuerza F(t) se convierte en un incremento de la cantidad de movimiento.
► Esto significa que se incrementará la velocidadfinalmente.
( ) ( )f t m a t= ⋅
dI dp=
( )mv t
( )( ) dv tf t mdt
=
( ) ( ) ( ( ))f t dt mdv t d mv t= =
dI m dv= ⋅
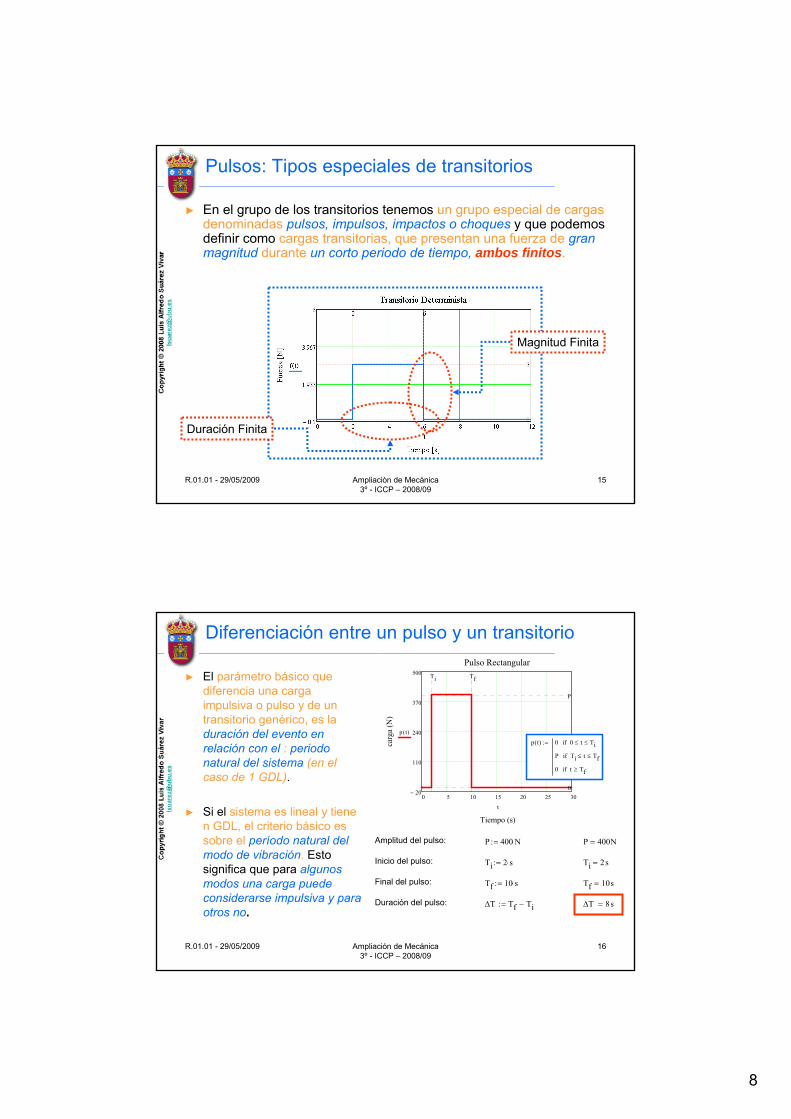
8
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
15
Pulsos: Tipos especiales de transitorios
► En el grupo de los transitorios tenemos un grupo especial de cargas denominadas pulsos, impulsos, impactos o choques y que podemos definir como cargas transitorias, que presentan una fuerza de gran magnitud durante un corto periodo de tiempo, ambos finitos.
Magnitud Finita
Duración Finita
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
16
0 5 10 15 20 25 3020−
110
240
370
500Pulso Rectangular
Tiempo (s)
carg
a (N
)
0
P
p t( )
Ti Tf
t
Diferenciación entre un pulso y un transitorio
► El parámetro básico que diferencia una carga impulsiva o pulso y de un transitorio genérico, es la duración del evento en relación con el : periodo natural del sistema (en el caso de 1 GDL).
► Si el sistema es lineal y tiene n GDL, el criterio básico es sobre el período natural del modo de vibración. Esto significa que para algunos modos una carga puede considerarse impulsiva y para otros no.
p t( ) 0 0 t≤ Ti≤if
P Ti t≤ Tf≤if
0 t Tf≥if
:=
Amplitud del pulso: P 400 N⋅:= P 400N=
Inicio del pulso: Ti 2 s⋅:= Ti 2s=
Final del pulso: Tf 10 s⋅:= Tf 10s=
Duración del pulso: ΔT Tf Ti−:= ΔT 8s=
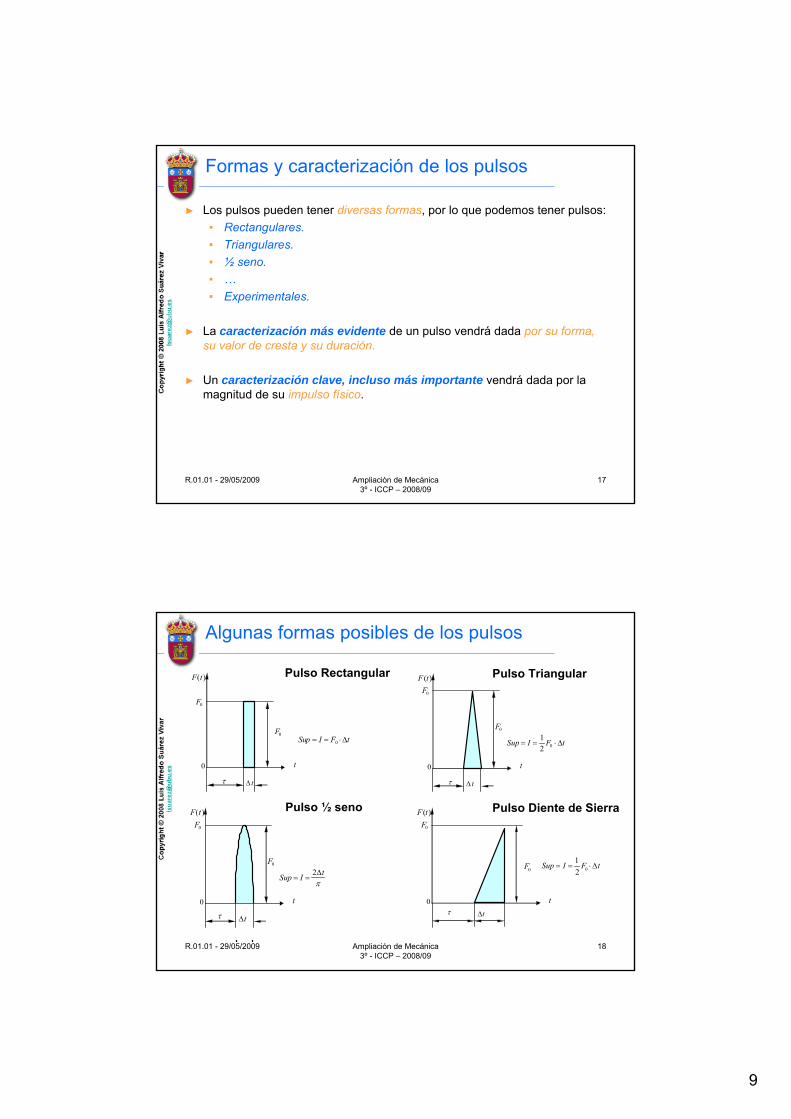
9
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
17
Formas y caracterización de los pulsos
► Los pulsos pueden tener diversas formas, por lo que podemos tener pulsos:▪ Rectangulares.▪ Triangulares.▪ ½ seno.▪ …▪ Experimentales.
► La caracterización más evidente de un pulso vendrá dada por su forma, su valor de cresta y su duración.
► Un caracterización clave, incluso más importante vendrá dada por la magnitud de su impulso físico.
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
18
Algunas formas posibles de los pulsos
Pulso Rectangular Pulso Triangular
Pulso ½ seno
0F
0
( )F t
t
tΔ
0F0Sup I F t= = ⋅Δ
τ
( )F t
0F
0 t
tΔ
0F
012
Sup I F t= = ⋅Δ
τ
0F
0
( )F t
t
tΔ
0F2 tSup IπΔ
= =
τ
0F
0
( )F t
ttΔ
0F
τ
012
Sup I F t= = ⋅Δ
Pulso Diente de Sierra
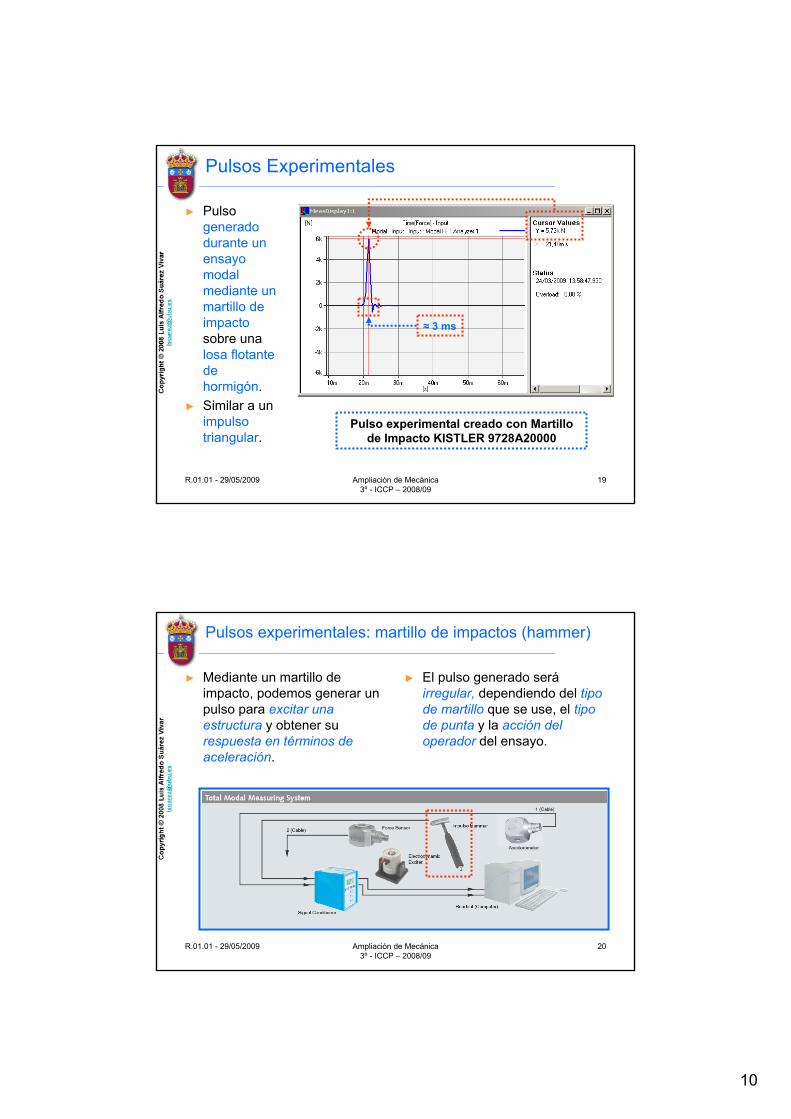
10
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
19
Pulsos Experimentales
► Pulso generado durante un ensayo modal mediante un martillo de impactosobre una losa flotante de hormigón.
► Similar a un impulso triangular.
≈ 3 ms
Pulso experimental creado con Martillo de Impacto KISTLER 9728A20000
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
20
Pulsos experimentales: martillo de impactos (hammer)
► Mediante un martillo de impacto, podemos generar un pulso para excitar una estructura y obtener surespuesta en términos de aceleración.
► El pulso generado seráirregular, dependiendo del tipo de martillo que se use, el tipo de punta y la acción del operador del ensayo.

11
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
21
Martillo de Impacto KISTLER 9728A20000
Martillo de Impacto KISTLER 9728A20000
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
22
Contenidos en frecuencias de un impacto real del martillo
Contenidos frecuenciales teóricos de un impacto de un martillo.
Contenidos frecuenciales reales de los del martillo

12
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
23
Pulsos experimentales: excitador (shaker)
► Mediante un motor de inducción lineal denominado excitador o shaker podemos generar señales casi de cualquier tipo como pueden ser señales aleatorias, armónicas, pulsos y trenes de pulsos.
► El pulso generado será más regular, que el generado con una martillo de impacto si el excitador tiene que seguir una consigna determinada, necesitará un circuito de control realimentado.
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
24
Control realimentado de la excitación
► Para generar una carga controlada, es decir que siga con una precisión suficiente un consigna de alguna de las variables que intervienen:▪ Fuerza.▪ Desplazamiento.▪ Velocidad.▪ Aceleración.
► El circuito de control usará un transductor para medir la variable a controlar y corregirálas señales enviadas al excitador para que la consigna se mantenga en el valor correcto.
( )F t ( )x t
+( )FCu t
ESTRUCTURA
( )FSu t−=
( )x t( )x t
( )FMu t
PERTURBACIONES
EXCITADOR
CONTROL

13
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
25
Otros métodos de generación de pulsos
► Para garantizar que los mecanismos y las estructuras soportan estetipo de cargas es necesario generarlas para los denominados ensayos ambientales.
► En este caso se generan pulsos con control en lazo cerrado.
► Los pulsos son fuerzas muy importantes ya que se generan habitualmente en los choques mecánicos, explosiones, golpes de mar, por lo que es necesario verificar el comportamiento de los sistemas hacia este tipo de acciones.
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
26
Duración infinitesimal del pulso
Pulsos finitos de duración infinitesimal► Dentro de los pulsos, tenemos un tipo especial que son los
denominados Pulsos Finitos de Duración Infinitesimal que son aquellos cuya duración tiende a cero y su magnitud tiende a infinito, de tal forma que el impulso de la carga se mantiene finito.
Pulso Infinitesimal Unitario o Impulso Unitario δ(t).► Entre los pulsos finitos de duración infinitesimal es especialmente
importante el denominado Pulso o Impulso Unitario, que es un pulso de duración infinitesimal cuyo impulso vale la unidad.
14
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
27
Impulso Infinitesimal Unitario o Impulso Unitario
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
28
0F
0
( )F t
t
tΔ
0F
0Sup I F t= = ⋅ Δ
Pulso rectangular finito, en origen
► Una fuerza impulsiva, pulso o impulso, es una fuerza de gran magnitud y corta duración.
► En la figura tenemos una fuerza impulsiva finita de magnitud F0 y duración Δt, con forma rectangular.
► Se denomina pulso rectangular.
► El rea bajo la curva de F(t), es el impulso asociado a dicha fuerza:
0I F t= ⋅Δ

15
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
29
Pulso rectangular finito, en τ
► La misma fuerza puede estar desfasada desde el origen de tiempos.
► Se denominará pulso rectangular desfasado :
► El impulso que genera F(t), vendrá dado por:
τ
τ
0I F t= ⋅Δ
0F
0
( )F t
t
tΔ
0F0Sup I F t= = ⋅ Δ
τ
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
30
Del pulso rectangular a la Delta de Dirac
► Podemos construir a partir de un pulso rectangular de impulso unitario una nueva fuerza impulsiva de duración infinitesimal pero con un impulso finito de magnitud 1, que se denomina Delta de Dirac.
01Fε
= → ∞
0t εΔ = →
00
1( ) 1I g t dt F t εε
∞= = ⋅ Δ = ⋅ =∫
1ε
0
( )F t
t
tΔ
0F
0 1I t F= Δ ⋅ =
0
( )tδ
tε
01Fε
= → ∞
1 1I εε
= =
Delta de Dirac

16
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
31
Representación grafica de la Delta de Dirac
► A la Delta de Dirac, se la suele representar mediante el gráfico siguiente:
0lim ( )tε
δ→
= ∞
0
( )F t
t
( )tδ
0( ) 1I t dtδ
∞= =∫
0
( )tδ
tε
01Fε
= → ∞
1 1I εε
= =
( )F t
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
32
Delta de Dirac fuera del origen
► Si desplazamos en el tiempo, la función δ(t) un tiempo τ, obtendremos la función δτ(t) o δ(t-τ):
0
( )F t
tτ
( ) ( )t tτδ δ τ= −
0( ) 1I t dtδ τ
∞= − =∫
0
( )F t
t
( )tδ
0( ) 1I t dtδ
∞= =∫

17
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
33
Respuesta al Impulso Unitario h(t)en sistemas de 1 GDL amortiguados
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
34
Situación física
► La situación física del problema es la siguiente:
0
( )F t
t
( )tδ
0( ) 1I t dtδ
∞= =∫
eqc
eqk
eqm
( )x t
( )F t
0lim ( )tε
δ→
= ∞

18
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
35
0
( )F t
t
( )tδ
Definición de la percusión y el tiempo
► Puesto que se trata de un impacto o choque, supondremos que se cumple la teoría de percusiones.
► Al aplicar una percusión, modelada por una δ(t) (Delta de Dirac) a un punto material o a un sólido rígido, se producirá un cambio instantáneo del campo de velocidades sin variar el campo de desplazamientos.
(0 ) 00
(0 ) 0x
tx
−−
+
⎧ =⎪= → ⎨=⎪⎩
0
0
(0 ) 00
(0 ) 0
x xt
x x
++
+
⎧ = =⎪= → ⎨= ≠⎪⎩
0t −= 0t +=
( ) 1I t dtδ∞
−∞= =∫
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
36
Determinación de x(0+) y x’(0+)
► Teniendo en cuenta el teorema de la cantidad de movimiento, proyectado sobre el eje asociado al GDL:
( )dI d mv=
1 (0 ) (0 )I mx mx+ −= = −
( ) 1I t dtδ∞
−∞= =∫
(0 ) 0 0mx m− = =
011 (0 ) (0 )mx x xm
+ += → = =
0
0
01
xCI
xm
=⎧ ⎫⎪ ⎪→ ⎨ ⎬
=⎪ ⎪⎩ ⎭
Situación antes del choque
Situación después del choque
Impulso unitarioCondiciones del sistema después del choque
0 0I mv mv+ −= −

19
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
37
Respuesta a las CI generadas por δ(t)
► Las CI que tenemos tras la aplicación de una δ(t) o impulso unitario vienen dadas por:
► La respuesta general de un sistema de segundo orden amortiguado vendrá dada por:
( ) 0 00( ) sin cost
d dd
x xx t e t x tζω ζω ω ωω
− ⎛ ⎞+= +⎜ ⎟
⎝ ⎠
0
0
01
xCI
xm
=⎧ ⎫⎪ ⎪→ ⎨ ⎬
=⎪ ⎪⎩ ⎭
( ) 1( ) sintd
d
x t e tm
ζω ωω
− ⎛ ⎞= ⎜ ⎟
⎝ ⎠
( )1( ) sintd
d
h t e tm
ζω ωω
−=
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
38
Resumen del efecto de δ(t)
► Dado que la respuesta a δ(t) es un conjunto de condiciones iniciales CI, podemos establecer la equivalencia entre ambos fenómenos.
► Más aún unascondiciones inicialesde desplazamiento nulo y velocidad inicial distinta de cero, son en realidad laconsecuencia de un δ(t), generalmente producido por un choque.
0
( )F t
t
( )tδ
( ) 1I t dtδ∞
−∞= =∫
0
0
01
xCI
xm
=⎧ ⎫⎪ ⎪→ ⎨ ⎬
=⎪ ⎪⎩ ⎭
( )1( ) sintd
d
h t e tm
ζω ωω
−=

20
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
39
Aplicación al modelo del impulso unitario δ(t)
0
( )F t
t
( )tδ
0( ) 1I t dtδ
∞= =∫
eqc
eqk
eqm
( )x t
( )F t
( )1( ) sineq td
eq d
h t e tm
ζ ω ωω
−=
21d eqω ω ζ= −
1− 0.8 2.6 4.4 6.2 8
0.01−
0.01
h(t)
Tiempo en [s ]
Des
plaz
amie
ntos
[m]
0
eq
eq
km
ω =
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
40
Respuesta del modelo al impulso unitario δ(t)
( )h t( )tδ
eqm
2eqk
2eqk
eqc1− 0.8 2.6 4.4 6.2 8
0.01−
0.01
h(t)
Tiempo en [s ]
Des
plaz
amie
ntos
[m]
0
( )1( ) sineq td
eq d
h t e tm
ζ ω ωω
−=21d eqω ω ζ= −eq
eq
km
ω =
0
( )F t
t
( )tδ
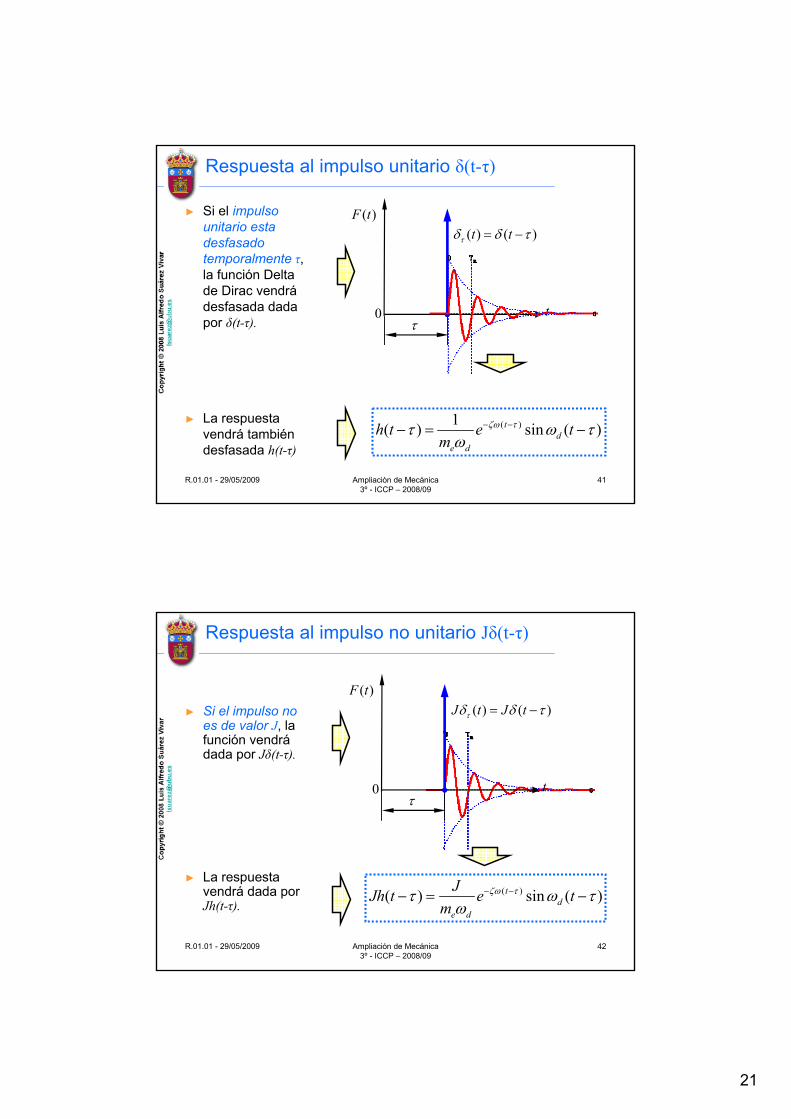
21
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
41
Respuesta al impulso unitario δ(t-τ)
► Si el impulso unitario esta desfasado temporalmente τ, la función Delta de Dirac vendrádesfasada dada por δ(t-τ).
► La respuesta vendrá también desfasada h(t-τ)
0
( )F t
tτ
( ) ( )t tτδ δ τ= −
( )1( ) sin ( )td
e d
h t e tm
ζω ττ ω τω
− −− = −
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
42
Respuesta al impulso no unitario Jδ(t-τ)
► Si el impulso no es de valor J, la función vendrádada por Jδ(t-τ).
► La respuesta vendrá dada por Jh(t-τ).
( )( ) sin ( )td
e d
JJh t e tm
ζω ττ ω τω
− −− = −
0
( )F t
tτ
( ) ( )J t J tτδ δ τ= −
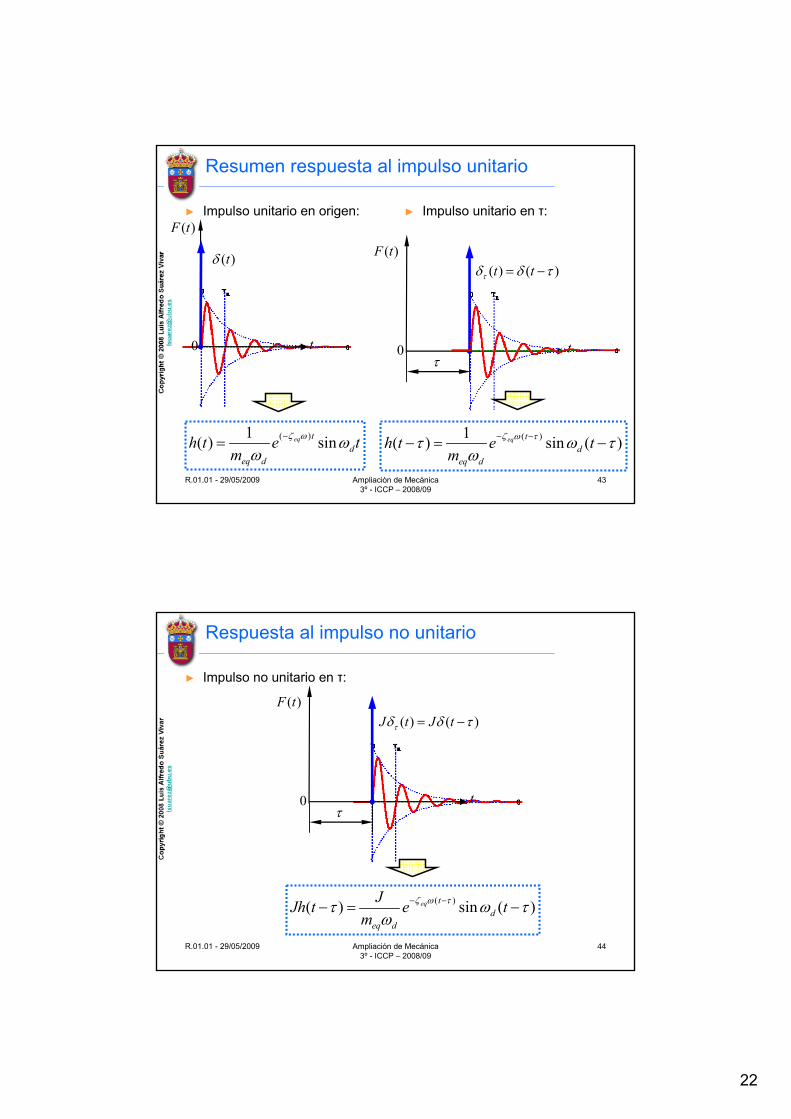
22
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
43
Resumen respuesta al impulso unitario
0
( )F t
t
( )tδ
( )1( ) sineq td
eq d
h t e tm
ζ ω ωω
−=
► Impulso unitario en origen: ► Impulso unitario en τ:
0
( )F t
tτ
( ) ( )t tτδ δ τ= −
( )1( ) sin ( )eq td
eq d
h t e tm
ζ ω ττ ω τω
− −− = −
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
44
Respuesta al impulso no unitario
► Impulso no unitario en τ:
( )( ) sin ( )eq td
eq d
JJh t e tm
ζ ω ττ ω τω
− −− = −
0
( )F t
tτ
( ) ( )J t J tτδ δ τ= −

23
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
45
Respuesta al impulso unitarioen sistemas sin amortiguamiento
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
46
Sistemas no amortiguados ζeq = 0
20 1eq eq dζ ζ ω ω= → − → =
( )1 1( ) sin ( ) sineq td
eq d eq
h t e t h t tm m
ζ ω ω ωω ω
−= → =
( )1 1( ) sin ( ) ( ) sin ( )eq td
eq d eq
h t e t h t tm m
ζ ω ττ ω τ τ ω τω ω
− −− = − → − = −
Evidentemente si no hay amortiguamiento las respuestas serán armónicos puros

24
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
47
Resumen respuesta al impulso unitario
1( ) sineq
h t tm
ωω
=
► Impulso unitario en origen: ► Impulso unitario en τ:
0
( )F t
tτ
( ) ( )t tτδ δ τ= −
1( ) sin ( )eq
h t tm
τ ω τω
− = −
0
( )F t
t
( )tδ
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
48
Respuesta al impulso no unitario desfasado
► Impulso no unitario en τ:
( ) sin ( )eq
JJh t tm
τ ω τω
− = −
0
( )F t
tτ
( ) ( )J t J tτδ δ τ= −

25
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
49
Respuesta a un Transitorio
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
50
0.0 0.3 0.6 0.9 1.2 1.5 1.8
0
50000
100000
Carga Dinámica F(t)
Tiempo [s]
Car
ga [N
]
max F_( )0.6 s⋅
max F_( ) 98000.00N=
min F_( ) 0.00N=
Definición del Transitorio
Comienza en t = 0,0 sTermina en t = 0,6 s
Zona de Carga Zona de Vibración Libre
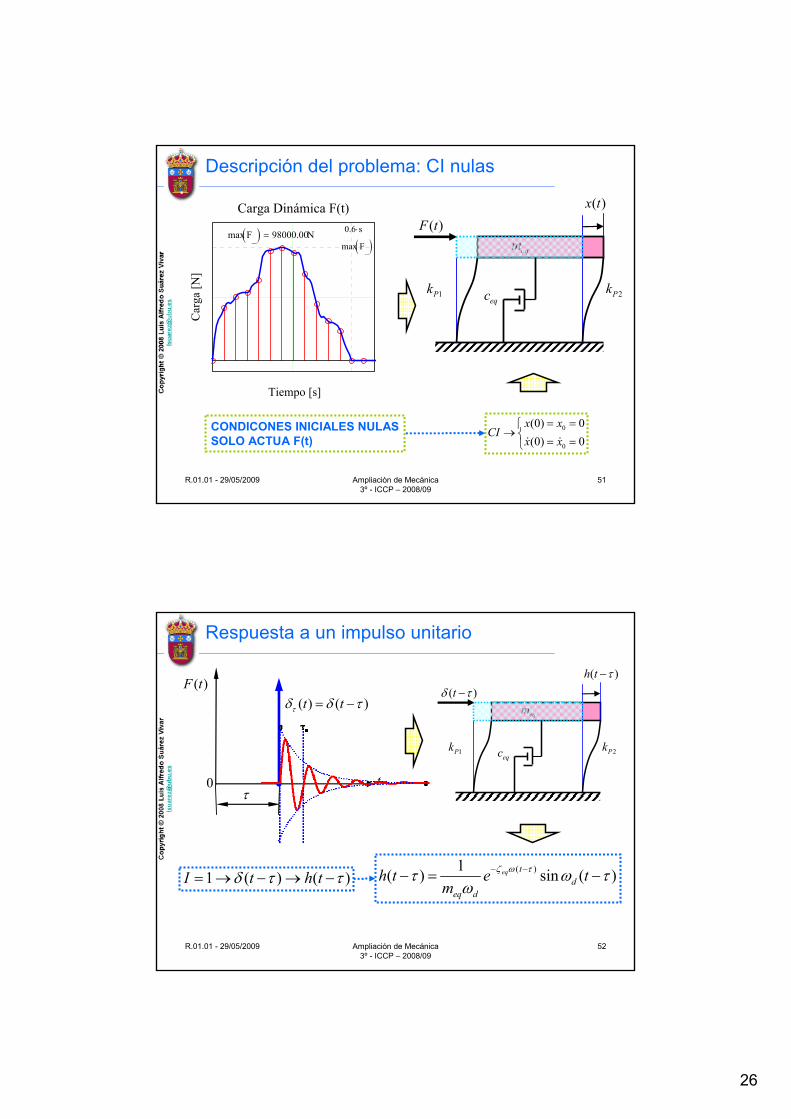
26
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
51
Descripción del problema: CI nulas
0
0
(0) 0(0) 0x x
CIx x
= =⎧→ ⎨ = =⎩
( )x t( )F t
eqm
1Pk 2Pkeqc
CONDICONES INICIALES NULASSOLO ACTUA F(t)
Carga Dinámica F(t)
Tiempo [s]
Car
ga [N
]
max F_( )0.6 s⋅max F_( ) 98000.00N=
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
52
Respuesta a un impulso unitario
0
( )F t
tτ
( ) ( )t tτδ δ τ= −
( )1( ) sin ( )eq td
eq d
h t e tm
ζ ω ττ ω τω
− −− = −
( )h t τ−
( )tδ τ−
eqm
1Pk 2Pkeqc
1 ( ) ( )I t h tδ τ τ= → − → −

27
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
53
Respuesta a un impulso diferencial
( )( )( ) ( ) sin ( )eq td
eq d
F ddI dx t e tm
ζ ω ττ ττ τ ω τω
− −=→ − = −
[ ]( ) ( )
( ) ( ) ( )dI F dF d h t dx t
τ τ ττ τ τ τ= →
→ − = −
Impulso diferencial (infinitesimal)
Carga Dinámica f(t)
Tiempo [s]
Car
ga [N
]
tτ dτ0
t
( )I t
( )F τ
( )F t
( )F t( )F dτ τ+
dI
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
54
Grafico de la respuesta a un impulso diferencial
( )( )( ) sin ( )eq td
eq d
F ddx t e tm
ζ ω ττ ττ ω τω
− −− = −
Respuesta diferencial (infinitesimal)
Amplitud diferencial
tτ dτ
0t
( )I t
( )F τ
( )F t
( )F t( )F dτ τ+
dI
Tiempo [s]
Car
ga [N
]

28
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
55
0.0000 0.4500 0.9000 1.3500 1.80000.2000−
0.0750−
0.0500
0.1750
0.3000
0.4250
0.5500
0.6750
0.8000Respuesta del sistema a F(t)
Tiempo [s]D
espl
azam
ient
o [m
]
0 m⋅
0.6 s⋅
Respuesta xP(t) como superposición
∑
t
( )F τ
( )F t
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
56
0.0 0.3 0.6 0.9 1.2 1.5 1.8
0
50000
100000
Carga Dinámica F(t)
Tiempo [s]
Car
ga [N
]
max F_( )0.6 s⋅
max F_( ) 98000.00N=
Análisis de la Carga
Zona de Carga Zona de Vibración Libre
Comienza en t = 0,0 sTermina en t = 0,6 s

29
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
57
0 0.45 0.9 1.35 1.80.2−
0.075−
0.05
0.175
0.3
0.425
0.55
0.675
0.8Respuesta del sistema a F(t)
Tiempo [s]
Des
plaz
amie
nto
[m]
0 m⋅
0.6 s⋅
Análisis de la Respuesta
Zona de Carga Zona de Vibración Libre
Comienza en t = 0,0 sTermina en t = 0,6 s
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
58
0.4500 0.7875 1.1250 1.4625 1.80000.2000−
0.0750−
0.0500
0.1750
0.3000
0.4250
0.5500
0.6750
0.8000Respuesta del sistema a F(t)
Tiempo [s]
Des
plaz
amie
nto
[m]
0 m⋅
0.6 s⋅
0 0.45 0.9 1.35 1.80.2−
0.075−
0.05
0.175
0.3
0.425
0.55
0.675
0.8Respuesta del sistema a F(t)
Tiempo [s]
Des
plaz
amie
nto
[m]
0 m⋅
0.6 s⋅
Ampliación de la zona de vibración libre

30
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
59
Integral de Duhamel
► La respuesta debida al conjunto de impulsos elementales vendrádada por su integral entre 0 y t:
( )( )( ) sin ( )eq td
eq d
F ddx t e tm
ζ ω ττ ττ ω τω
− −− = −
( )
0 0
( )( ) sin ( )eq
t tt
P deq d
Fx t dx e t dm
ζ ω ττ ω τ τω
− −= = −∫ ∫
( )
0
1( ) ( ) sin ( )eq
tt
P deq d
x t F e t dm
ζ ω ττ ω τ τω
− −= −∫
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
60
Producto de convolución
► Partiendo de la Integral de Duhamel.
► A esta respuesta también se la denomina Producto de Convolución.
0
( ) ( ) ( )t
Px t F h t dτ τ τ= −∫
( )
0 0
( )( ) sin ( )eq
t tt
P deq d
Fx t dx e t dm
ζ ω ττ ω τ τω
− −= = −∫ ∫
( ) ( ) ( )Px t F t h t= ∗
Símbolo del Producto de Convolución

31
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
61
Propiedades del producto de convolución
► Propiedad conmutativa:
► Propiedad distributiva:
► Ley asociativa:
► Elemento nulo o función nula:
0
( ) ( ) ( )t
Px t F h t dτ τ τ= −∫ ( ) ( ) ( )Px t F t h t= ∗
( ) ( ) ( )* ( )h t f t f t h t∗ =
( )( )* ( ) ( ) ( )* ( ) ( )* ( )f t g t h t f t g t f t h t+ = +
( ) ( )( )* ( ) * ( ) ( )* ( )* ( )f t g t h t f t g t h t=
( )*0 0* ( ) 0f t f t= =
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
62
t
( )F τ
( )F t
Función a convolucionar F(t) – Función corredera h(t)
( ) ( ) ( )Px t h t F t= ∗
CARGA APLICADA
FUNCION CORREDERA
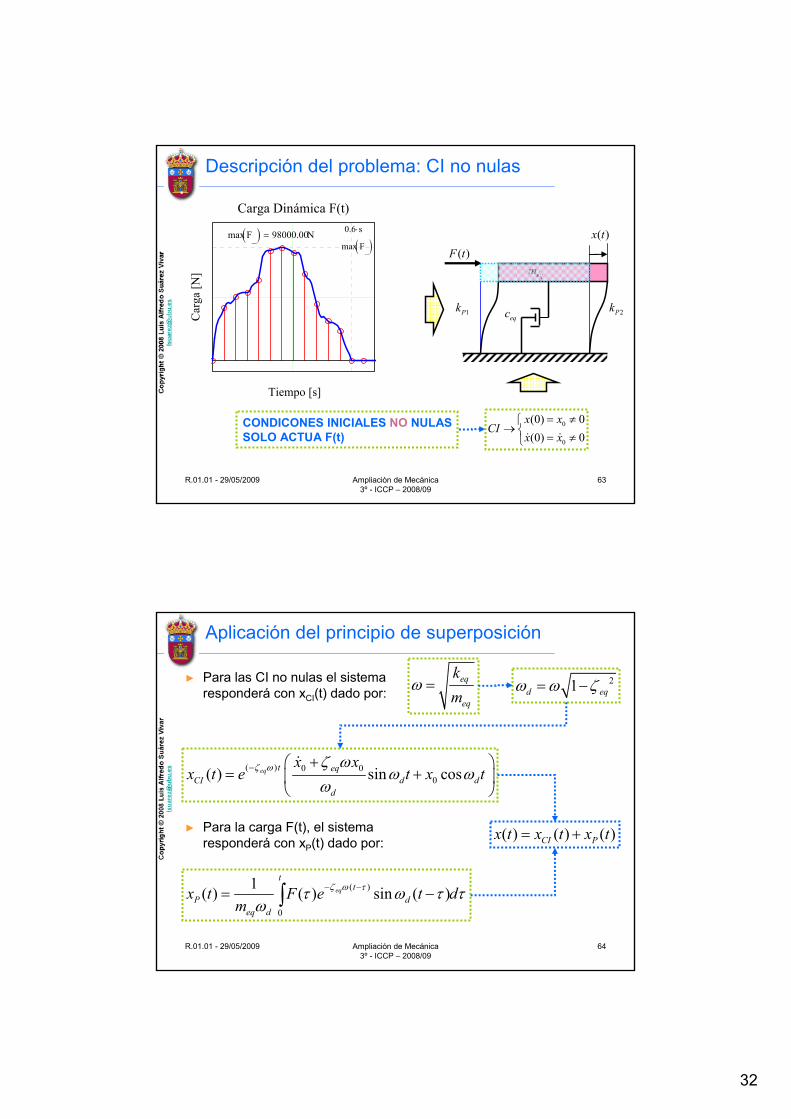
32
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
63
Descripción del problema: CI no nulas
0
0
(0) 0(0) 0x x
CIx x
= ≠⎧→ ⎨ = ≠⎩
( )x t( )F t
eqm
1Pk 2Pkeqc
CONDICONES INICIALES NO NULASSOLO ACTUA F(t)
Carga Dinámica F(t)
Tiempo [s]
Car
ga [N
]
max F_( )0.6 s⋅max F_( ) 98000.00N=
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
64
Aplicación del principio de superposición
► Para las CI no nulas el sistema responderá con xCI(t) dado por:
► Para la carga F(t), el sistema responderá con xP(t) dado por:
( ) 0 00( ) sin coseq t eq
CI d dd
x xx t e t x tζ ω ζ ω
ω ωω
− +⎛ ⎞= +⎜ ⎟
⎝ ⎠
21d eqω ω ζ= −eq
eq
km
ω =
( )
0
1( ) ( ) sin ( )eq
tt
P deq d
x t F e t dm
ζ ω ττ ω τ τω
− −= −∫
( ) ( ) ( )CI Px t x t x t= +

33
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
65
0 0.45 0.9 1.35 1.80.2−
0.075−
0.05
0.175
0.3
0.425
0.55
0.675
0.8Respuesta del sistema a F(t)
Tiempo [s]
Des
plaz
amie
nto
[m]
0 m⋅
0.6 s⋅
Respuesta debida a las cargas F(t)
Zona de Carga Zona de Vibración Libre
Comienza en t = 0,0 sTermina en t = 0,6 s
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
66
0 0.45 0.9 1.35 1.80.15−
0.1−
0.05−
0
0.05
0.1
0.15Respuesta del sistema a las condiciones iniciales
Tiempo [s]
Des
plaz
amie
nto
[m]
0 s⋅
x0
Td
x0 0.10m=
dx0 1.00ms
=
Respuesta debida a las CI no nulas

34
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
67
Respuesta combinada a F(t) y CI
0 0.45 0.9 1.35 1.80.2−
0.0333−
0.1333
0.3
0.4667
0.6333
0.8Respuesta conjunta del sistema
Tiempo [s]
Des
plaz
amie
nto
[N]
0 m⋅
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
68
Influencia en la respuesta conjunta de las CI
0 0.45 0.9 1.35 1.80.2−
0.0333−
0.1333
0.3
0.4667
0.6333
0.8Respuesta conjunta del sistema
Tiempo [s]
Des
plaz
amie
nto
[N]
0 m⋅
0 0.45 0.9 1.35 1.80.2−
0.0333−
0.1333
0.3
0.4667
0.6333
0.8Respuesta a la Carga y Respuesta Completa
Tiempo [s]
Des
plaz
amie
nto
[m]
0 0.05 0.1 0.15 0.20.224−
0.0573−
0.1093
0.276
0.4427
0.6093
0.776

35
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
69
Semejanzas con el calculo estático
eqm
eqc eqk
( )F t
( )y t
(0)y(0)y► Desde el punto de vista estático, tendremos:
► Desde un punto de vista dinámico podemos establecer:
1 *est est est est est estF k x x F x f Fk
= ⋅ → = → =
( ) ( ) ( ) ( ) ( ) ( )P Px t F t h t x t h t F t= ∗ → = ∗
( , , , ) ( , , , )h t m h t m k cω ζ ↔1k
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
70
La caja negra: black box
► El nombre de caja negra,procede de la industria aeronáutica y hace referencia a los sistemas de aviónica(electrónica de control de los aviones) en los que entran señales y en función de los procesos de control definidosse generan salidas.
► Las mas famosas son la que registran lo parámetros de vuelo Flight Data Recorder(FDR) o Accident Data Recorder (ADR) y las conversaciones de cabina Cockpit Voice Recorder (CVR).
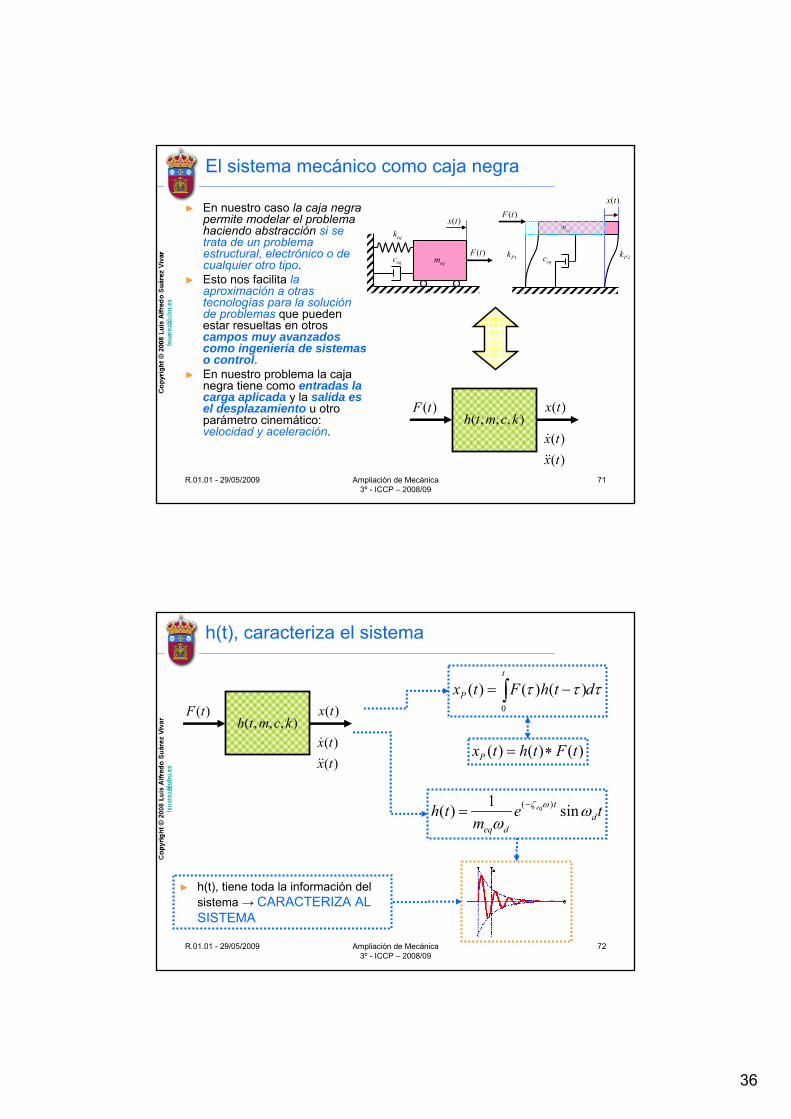
36
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
71
El sistema mecánico como caja negra
► En nuestro caso la caja negra permite modelar el problema haciendo abstracción si se trata de un problema estructural, electrónico o de cualquier otro tipo.
► Esto nos facilita la aproximación a otras tecnologías para la solución de problemas que pueden estar resueltas en otros campos muy avanzados como ingeniería de sistemas o control.
► En nuestro problema la caja negra tiene como entradas la carga aplicada y la salida es el desplazamiento u otro parámetro cinemático: velocidad y aceleración.
eqc
eqk
eqm
( )x t
( )F t
( , , , )h t m c k( )F t ( )x t
( )x t( )x t
( )x t( )F t
eqm
1Pk 2Pkeqc
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
72
( ) ( ) ( )Px t h t F t= ∗
0
( ) ( ) ( )t
Px t F h t dτ τ τ= −∫
( , , , )h t m c k( )F t ( )x t
( )x t( )x t
h(t), caracteriza el sistema
► h(t), tiene toda la información del sistema → CARACTERIZA AL SISTEMA
( )1( ) sineq td
eq d
h t e tm
ζ ω ωω
−=
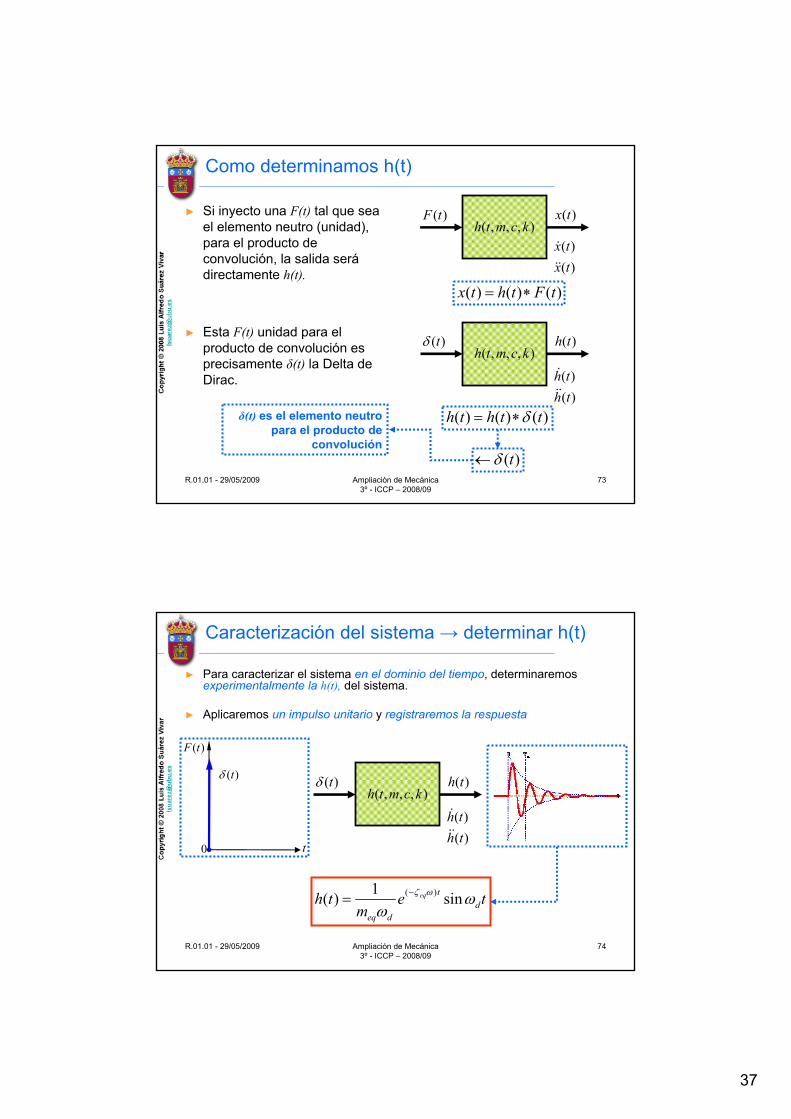
37
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
73
Como determinamos h(t)
► Si inyecto una F(t) tal que sea el elemento neutro (unidad), para el producto de convolución, la salida serádirectamente h(t).
► Esta F(t) unidad para el producto de convolución es precisamente δ(t) la Delta de Dirac.
( , , , )h t m c k( )F t ( )x t
( )x t( )x t
( ) ( ) ( )x t h t F t= ∗
( , , , )h t m c k( )tδ ( )h t
( )h t( )h t
( ) ( ) ( )h t h t tδ= ∗
( )tδ←
δ(t) es el elemento neutro para el producto de
convolución
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
74
Caracterización del sistema → determinar h(t)
► Para caracterizar el sistema en el dominio del tiempo, determinaremos experimentalmente la h(t), del sistema.
► Aplicaremos un impulso unitario y registraremos la respuesta
( , , , )h t m c k( )tδ ( )h t
( )h t( )h t
0
( )F t
t
( )tδ
( )1( ) sineq td
eq d
h t e tm
ζ ω ωω
−=

38
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
75
Análisis Modal Experimental: Obtener h(t)
► El análisis modal experimental es una técnica para caracterizar el sistema, es decir averiguar el valor de la masa, el amortiguamiento y la rigidez.
► Una de los métodos para realizar un análisis modal es aplicar impactos en lazo abierto (sin control), que son los utilizados para determinar la respuesta que será la respuesta a un impulso infinitesimal unitario o no.
► Como más adelante se estudiar los impactos contiene un banda de frecuencias muy ancha, en función de como es el impacto.
f(t)
a(t)
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
76
Generación Real de un transitorio
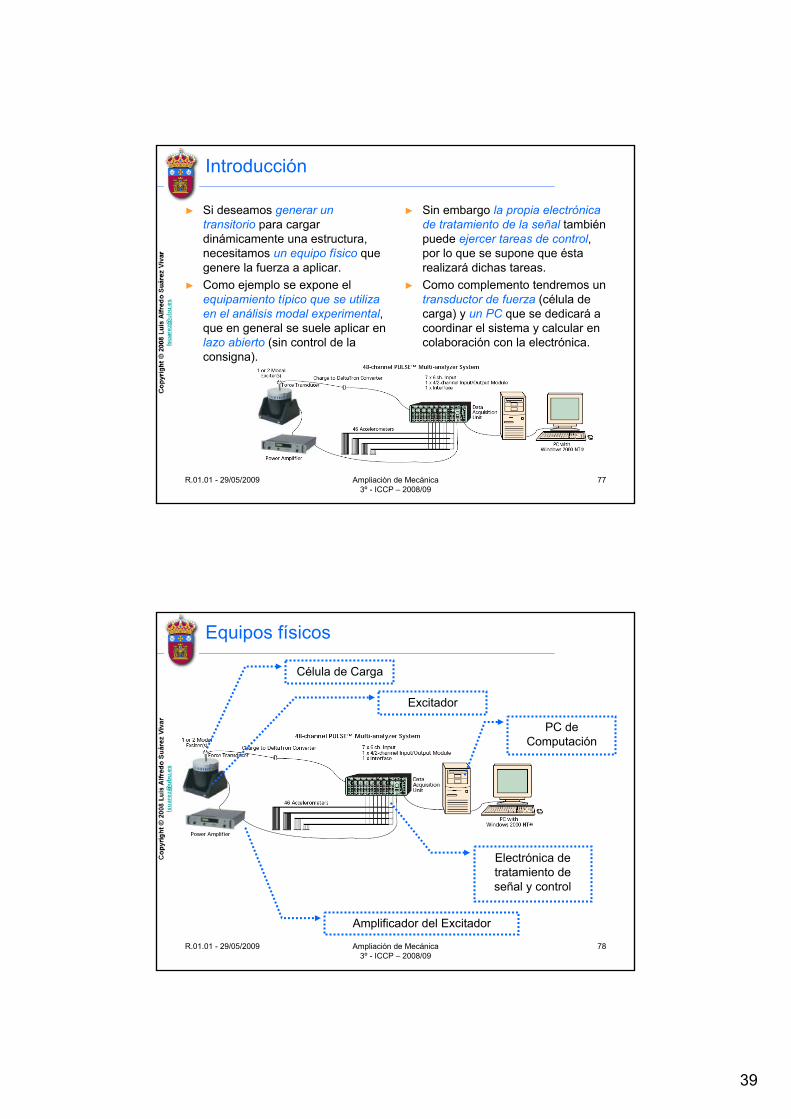
39
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
77
Introducción
► Si deseamos generar un transitorio para cargar dinámicamente una estructura, necesitamos un equipo físico que genere la fuerza a aplicar.
► Como ejemplo se expone el equipamiento típico que se utiliza en el análisis modal experimental, que en general se suele aplicar en lazo abierto (sin control de la consigna).
► Sin embargo la propia electrónica de tratamiento de la señal también puede ejercer tareas de control, por lo que se supone que ésta realizará dichas tareas.
► Como complemento tendremos un transductor de fuerza (célula de carga) y un PC que se dedicará a coordinar el sistema y calcular en colaboración con la electrónica.
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
78
Equipos físicos
Amplificador del Excitador
Electrónica de tratamiento de señal y control
Célula de Carga
Excitador
PC de Computación

40
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
79
Esquema de control simplificado
► Representamos los bloques de control, que supondremos de comportamiento lineal mediante sus funciones de respuesta al impulso unitario.
ConsignaCarga que queremos aplicar
Carga obtenida
RespuestaDesplazamiento del Sistema
( )F t ( )x t
+( )FCu t
ESTRUCTURA
( )FSu t−=
( )x t( )x t
( )FMu t
PERTURBACIONES
EXCITADOR
CONTROL
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
80
Esquema de control
( )F t( )Eh t
( )x t( )Sh t
+( )FCu t
( )Ah t( )i t
( )Ch t( )FSu t( )FSu t−=
( )Th t
( )x t( )x t
( )FMu t
PERTURBACIONES
0 0.45 0.9 1.35 1.80.2−
0.075−
0.05
0.175
0.3
0.425
0.55
0.675
0.8Respuesta del sistema a F(t)
Tiempo [s]
Des
plaz
amie
nto
[m]
0 m⋅
0.6 s⋅
Carga Dinámica F(t)
Tiempo [s]
Car
ga [N
]
max F_( )0.6 s⋅max F_( ) 98000.00N=
Carga Dinámica F(t)
Tiempo [s]
Car
ga [N
]
max F_( )0.6 s⋅max F_( ) 98000.00N=
ConsignaCarga que queremos aplicar
Carga obtenida
RespuestaDesplazamiento del Sistema

41
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
81
Esquema de control asociado el equipo físico
( )F t( )Eh t
( )x t( )Sh t
+( )FCu t
( )Ah t( )i t
( )Ch t( )FSu t( )FSu t−=
( )Th t
( )x t( )x t
( )FMu t
PERTURBACIONESESTRUCTURAEXCITACIÓN
ELECTRÓNICA DEPROCESAMIENTO Y CONTROL
AMPLIFICADOR
EXCITADOR
TRANSDUCTORES
ELECTRONICA DE CONTROL
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
82
Ejemplo de determinación de la respuesta a un pulso rectangular
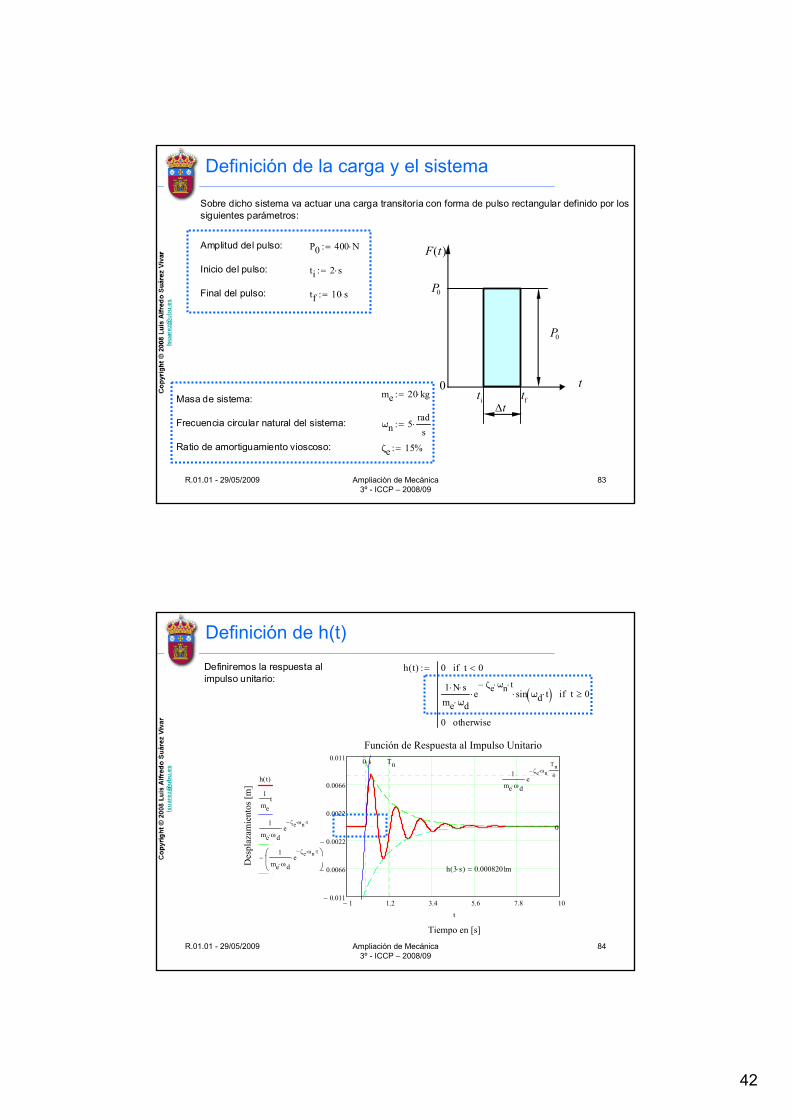
42
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
83
Definición de la carga y el sistema
Sobre dicho sistema va actuar una carga transitoria con forma de pulso rectangular definido por lossiguientes parámetros:
0P
0
( )F t
t
0P
it fttΔ
Amplitud del pulso: P0 400 N⋅:=
Inicio del pulso: ti 2 s⋅:=
Final del pulso: tf 10 s⋅:=
me 20 kg⋅:=Masa de sistema:
Frecuencia circular natural del sistema: ωn 5rads
⋅:=
Ratio de amortiguamiento vioscoso: ζe 15%:=
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
84
Definición de h(t)
Definiremos la respuesta alimpulso unitario:
h t( ) 0 t 0<if
1 N⋅ s⋅me ωd⋅
eζe− ωn⋅ t⋅
⋅ sin ωd t⋅( )⋅ t 0≥if
0 otherwise
:=
1− 1.2 3.4 5.6 7.8 100.011−
0.0066−
0.0022−
0.0022
0.0066
0.011
Función de Respuesta al Impulso Unitario
Tiempo en [s]
Des
plaz
amie
ntos
[m]
1
me ωd⋅e
ζe− ωn⋅Tn4
⋅⋅
0
h t( )
1
met
1
me ωd⋅e
ζe− ωn⋅ t⋅⋅
1
me ωd⋅e
ζe− ωn⋅ t⋅⋅⎛
⎜⎝
⎞⎟⎠
−
0 s⋅ Tn
t
h 3 s⋅( ) 0.0008201m=

43
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
85
Definición del pulso rectangularParámetros que definen la carga:
P0 400.0N=
ti 2.0s=
tf 10.0 s=
F t( ) 0 0 t≤ ti≤if
P0 ti t≤ tf≤if
0 t tf≥if
0 otherwise
:=
10− 0 10 20 30
0
200
400
Carga en función del tiempo
Tiempo [s]
Car
ga [N
]
0 N⋅
P0
F t( )
ti tf
t
tf ti− 8.0s=
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
86
Integral de Duhamel
Para calcular la rspuesta utilizamos la Integral de Duhamel, definida como la integra de convolución:
xP t( )
0 s⋅
t
τF τ( )N s⋅
h t τ−( )⋅⌠⎮⎮⌡
d:= t 0 s⋅ 0.01 s⋅, 30 s⋅..:=
0 10 20 30
0
500
0
1
Carga de la Estructura y Respuesta de la Estructura
Tiempo [s]
Car
ga [N
]
Des
plaz
amie
nto
[m]
0 s⋅
P0
F t( )
0
P0
ke
xP t( )
ti tf
t
0 s
Overshot Tn 1.3s=
tf ti− 8.0s=
xP 3 s⋅( ) 0.7692708m=

44
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
87
Sobrecarga dinámica (Overshot)
Overshot t( ) xP t( ) xest t( )−:=
0 10 20 30
1−
0
1
Overshot
Tiempo [s]
Car
ga [N
]
0 s⋅
P0
ke
Overshot t( )
ti tf
t
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
88
Respuesta a Condiciones Iniciales
xCI t ωn, ζ, x0, dx0, ( ) eζ− ωn t⋅ dx0 ζ ωn⋅ x0+
ωdsin ωd t⋅( )⋅ x0 cos ωd t⋅( )⋅+
⎛⎜⎝
⎞⎟⎠
⋅⎡⎢⎣
⎤⎥⎦
t 0 s⋅≥if
0 s⋅ otherwise
:=
Para las siguientes condiciones iniciales, tendremos que:
Desplazamiento inicial: x0 0.2m=
Velocidad inicial: dx0 2.0ms
= t 10− s⋅ 9.99− s⋅, 30 s⋅..:=
2− 0 2 4 6 8 100.6−
0.4−
0.2−
0
0.2
0.4
0.6Respuesta a las condiciones iniciales
Carga [N]
Tiem
po [s
]
0 s⋅
x0xCI t ωn, ζe, x0, dx0, ( )x0 dx0 t⋅+
x0
0 s⋅ Td
t t, 0 s⋅,
xCI 3 s⋅ ωn, ζe, x0, dx0, ( ) 0.0217940m=

45
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
89
Respuesta combinada completa a CI y Carga
x t( ) xP t( ) xCI t ωn, ζe, x0, dx0, ( )+:=
0 10 20 30
0
500
0
1
Respuesta combinada a F(t) y CI
Tiempo [s]
Car
ga [N
]
Des
plaz
amie
nto
[m]
0
P0
F t( )
0
P0
ke
x t( )
ti tf
t
x 3 s⋅( ) 0.7910648m=
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
90
Conclusiones
► Se ha estudiado el problema desde una perspectiva lineal, es decir el problema se puede representar mediante una EDM de segundo orden lineal y de coeficientes (propiedades) constantes y se cumplirá el Teorema de Reprocidad o de Maxwell-Betti y será aplicable el Principio de Superposición.
► Resulta fundamental el estudio de un tipo de carga denominado impulso de duración infinitesimal e impulso físico unidad se denomina coloquialmente Impulso Unitario (IU) y se corresponde con la definición matemática de la función singular Delta de Dirac.
► La respuesta de la IU se denomina Función de Respuesta al Impulso Unitario (FRIU) y se suele denominar genéricamente h(t) y es en el fondo la respuesta libre de una estructura sometida a una condición inicial de velocidad.
► La respuesta general a un transitorio se puede determinar convolucionando la carga F(t) transitoria con la h(t) (FRIU),presentando un formato similar al cálculo estático, donde la flexibilidad (inverso de la rigidez) queda sustituido por la h(t) y el producto entre la flexibilidad y la carga se sustituye por el producto de convolución.
46
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
91
Bibliografía
► Structural Dynamics, Theory and Applications de J. W. Tedesco, W. G. McDougal y c. Allen Ross. Editorial Addison-Wesley. Menlo Park, California (USA). 1999.
► Mathcad User Guide, Release 14. Mathsoft. February 2007. Parametric Technology Corporation, 140 Kendrick Street, Needham,MA 02494 USA.
► Apuntes de la Asignatura de Ampliación de Mecánica de L. A. Suárez. Departamento de Ingeniería Civil. Universidad de Burgos. 2008.
R.01.01 - 29/05/2009 Ampliación de Mecánica3º - ICCP – 2008/09
92
FIN DE LA PRESENTACIÓN
¡¡¡ GRACIAS POR VUESTRA ATENCION !!!
¿Preguntas?
Preguntas

314 B. Ejemplo presentaciones de teoría

Apéndice C
Ejemplo artículos de investigación
En este apéndice podemos apreciar la capacidad de integración en los diagramas yecuaciones de procedentes de MATHCAD con un artículo de investigación presen-tado en el 2008 en el Abaqus Users Conference por Diehl, T de DuPont R© y BodieTechnology, Inc R© desarrolladora de Kornucopia R©.
El documento se puede encontrar en:http://www.bodietech.com/Publications.html
315

2008 Abaqus Users’ Conference 1
Integrating Theory, Experiments, and FEA to Solve Challenging Nonlinear Mechanics Problems
Ted Diehl
DuPont Engineering Technology, Chestnut Run, Bldg 722, Wilmington, DE 19880-0722 [email protected]
Bodie Technology, Inc., 103 Mougins Circle, Kennett Square, PA 19348
Abstract: Solutions to challenging structural mechanics problems often rely on approaches that properly integrate theoretical analysis, experiments, and finite element simulation, along with judgment and practical approximations. Combining these elements is important not only for the original methods development of a given problem class, but also for repeated applications of such methods. This paper describes how multiple software solutions, namely Abaqus, Mathcad®, and Kornucopia™ have been blended together to create robust approaches to address several challenging problems in nonlinear mechanics. The examples highlighted will include the evaluation of performance characteristics for a nonwoven envelope under inflation loads to burst, “methods development” for simulating peeling mechanics and failure, and the efficient analysis of tedious shock acceleration post-processing calculations for models with a large number of output sensors. Techniques discussed will include creation of an average nonlinear material description from measured data containing large variations, the salvaging and improving of “non-ideal” experimental data, and additional post-FE analysis that can significantly improve analysis efficiency and/or results interpretation. Keywords: Nonlinear FEA, Averaging Multiple Data Curves, Applied DSP (Digital Signal Processing), Filtering, Smoothing, Healing, Extrapolation, Failure, Nonwoven Fabric, Energy Methods, Implicit Finite Element Analysis, Explicit Dynamics, Abaqus, Mathcad, Kornucopia.
1. Introduction
In many cases, finite element analysis (FEA) alone is not sufficient to create the needed methodology for addressing challenging problems in industry and research. Solutions in these cases require the analyst to augment their FEA with one or more of the following: theoretical mechanics analyses, experimental data, and/or additional pre/post processing calculations. These additional requirements, beyond just FEA, usually become significant stumbling blocks, preventing or delaying the analyst from doing a proper and accurate engineering job.
Consider the following issues. Raw experimental data is often “messy” and non-ideal, requiring data manipulation of potentially multiple large data files, various data “clean-up” steps that often

2 2008 Abaqus Users’ Conference
require judgment, additional processing techniques, and ultimately interpretation of how to use this data in conjunction with a given FE analysis. Pre/post processing calculations (applied to experimental data or FE results) may require theoretical development, solving of non-trivial equations, and numerical manipulation of digital data such as trimming, interpolation, extrapolation, re-mapping, smoothing or other DSP (Digital Signal Processing) filtering, differentiation, integration, etc.
While these types of tasks should be, in principle, familiar to the FE analyst, they are NOT tasks that they commonly perform, nor are they tasks that any commercially available FE software alone is capable of addressing. FE users attempting to perform such task may use a variety of software tools, but the most likely tool that will be employed is the ubiquitous spreadsheet. While a spreadsheet is a useful calculation tool and generally easy to use, it has significant short comings relative to addressing all the needs for combining experimental data, theoretical calculations, and performing pre/post processing calculations.
To be successful, the FE analyst needs numerical tools with the flexibility to easily address these types of calculations and data manipulations. A new software tool called Kornucopia™ (www.BodieTech.com), which runs in Mathcad® (www.ptc.com), provides unique functionality that fills this important need. This paper presents examples and discussion that demonstrate how the addition of Mathcad® and Kornucopia™ to the overall FEA process enables the analyst to readily integrate theory, experiments, and FEA to solve challenging nonlinear mechanics problems. Gains in overall analysis accuracy, work-flow efficiency, and improved documentation of the analysis process and results are also presented.
2. Creating an average curve from multiple curves
Most analyses, FEA or otherwise, require material properties to perform calculations. These properties are usually derived from experiments, which typically involve testing multiple samples to obtain an average representation and its variation. Consider the case of obtaining the elastic modulus (initial tangent modulus) for a material. Multiple samples are tested, an elastic modulus for each sample is computed from the test data, and then the mean of these moduli is numerically calculated to represent the average modulus for the material. A variation might also be calculated, but generally only the average value is repeatedly published and used in practice.
What about obtaining an average nonlinear stress-strain curve for the material? Experience shows that, in general, the process just described is NOT followed. Instead, a representative curve is often visually selected amongst the samples measured, and then this curve is reported and becomes the de facto average curve for the material. For the elastic modulus calculation described earlier, would it be acceptable to plot (or list) all the elastic moduli measured and then visually select the modulus value that looks to be in the “middle of the pack?” Not likely. So why is this approach acceptable for nonlinear curves of data? Answer − producing an average curve via calculation has traditionally been too difficult in most cases (given the tools being used).

2008 Abaqus Users’ Conference 3
Figure 1a presents three stress-strain curves, from which, an average curve is desired.1 How should the average stress-strain curve for this data be computed? Attempting to supply this data to the function AVERAGE(dataRange) in a spreadsheet will not work. Most FE analysts (and other engineers, experimentalists, and statisticians) will struggle to quickly obtain an answer to this request because calculating a plausible average for such data can be highly problematic.
Using Kornucopia™, a general-purpose solution is now available. The entire image of Figure 1 (all the graphs and additional comments) is a single screen capture from a Kornucopia™ worksheet that demonstrates using four different averaging approaches to create an average representation to the data in Figure 1a. It is seen that the user easily computed average curve representations while having the flexibility of selecting from several viable approaches. This was all accomplished by utilizing a single Kornucopia™ function averageXY_k(data, method, Adv), where method was selected as “X” or “arc length”, and where the Adv argument was taken as default (“”) in some cases and was modified to “norm:yes” in other cases. A description of how this one function computes an average curve is described below.
Regardless of the method selected, the first step is to map all the data curves to a common incrementation relative to some independent variable, and then average the data at common values of that independent variable. This is all done automatically inside the averageXY_k function, no user intervention or additional coding is required. Figure 1c shows a result, “X ave”, computed this way, where the independent variable was taken as strain (X-axis). This result looks plausible, but can only be computed up to a strain of approximately 0.4⋅m/m because Sample 1 has no data beyond this value. Further evaluation of the “X ave” result reveals that the last value of Sample 1 (perhaps a failure value, or perhaps the value at which the test was simply stopped) is being averaged with a value that is clearly on a different portion of the curve for samples 2 and 3 (not near their end values). Is that calculation appropriate? Engineering judgment and perhaps other factors are needed to answer that question. If you think not, then the other average result presented in Figure 1c, “Normalized X ave”, may be deemed more appropriate. In this calculation, the X-based average is created by first normalizing the strain data for all three samples to a common range before averaging. This allows for the first values of all the data curves to be averaged together, the final values of all the data curves to be averaged together, and then all the data in between to be averaged accordingly. This “Normalized X ave” result is also plausible.
Figure 1d presents a different averaging scheme in which a temporary independent vector is automatically created based on computing the arc length of the XY curve for each sample. Two variations of this approach are presented, one without normalization (denoted in the figure as “Arc length ave”) and one with normalization (where the arc length is the normalized entity, not the strain axis). In these arc length techniques, the strain values for each data sample are averaged at common XY arc length locations (similar calculation is done for stresses) and then the resulting average stress and strain curves are plotted together (the temporary arc length is discarded automatically). For these particular data sets, the arc length approaches might be considered more plausible than the “X-based’ methods of Figure 1c, again depending on engineering judgment. 1 It is noted that some of the non-ideal aspects of these particular data sets have been enhanced for illustrative purposes. However, the author has experienced actual cases with data containing similar severity of issues.

4 2008 Abaqus Users’ Conference
0 0.1 0.2 0.3 0.4 0.5 0.6 0.70
10
20
30
40
Strain (m/m)
Stre
ss (M
Pa)
a) Raw data sets b) Calculating average curve with various methods
desc
"X average"
"X ave with Normalization"
"Arc length average"
"Arc length ave with Normalization"
⎛⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎠
:=
ave1 averageXY_k data "x", "", ( ):=
ave2 averageXY_k data "x", "norm : yes", ( ):=
ave3 averageXY_k data "arc length", "", ( ):=
ave4 averageXY_k data "arc len", "norm : yes", ( ):=
c) Averages using "X-based" methods d) Averages using "Arc-based" methods
0 0.1 0.2 0.3 0.4 0.5 0.6 0.70
10
20
30
40
Strain (m/m)
Stre
ss (M
Pa)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.70
10
20
30
40
Strain (m/m)
Stre
ss (M
Pa)
Sample 1Sample 2Sample 3
Sample 1Sample 2Sample 3
X ave
Normalized X ave
Sample 1Sample 2Sample 3
Normalized arc length ave
Arc length ave
0 0.1 0.2 0.3 0.4 0.5 0.6 0.70
10
20
30
40
Strain (m/m)
Stre
ss (M
Pa)
a) Raw data sets b) Calculating average curve with various methods
desc
"X average"
"X ave with Normalization"
"Arc length average"
"Arc length ave with Normalization"
⎛⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎠
:=
ave1 averageXY_k data "x", "", ( ):=
ave2 averageXY_k data "x", "norm : yes", ( ):=
ave3 averageXY_k data "arc length", "", ( ):=
ave4 averageXY_k data "arc len", "norm : yes", ( ):=
c) Averages using "X-based" methods d) Averages using "Arc-based" methods
0 0.1 0.2 0.3 0.4 0.5 0.6 0.70
10
20
30
40
Strain (m/m)
Stre
ss (M
Pa)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.70
10
20
30
40
Strain (m/m)
Stre
ss (M
Pa)
Sample 1Sample 2Sample 3
Sample 1Sample 2Sample 3
Sample 1Sample 2Sample 3
Sample 1Sample 2Sample 3
X ave
Normalized X ave
Sample 1Sample 2Sample 3
Sample 1Sample 2Sample 3
Normalized arc length ave
Arc length ave
Figure 1: Using Kornucopia™ to easily compute an average curve based on the selection of different engineering assumptions.
The calculations utilized to obtain these average curves are relatively simple in concept, but very tedious and difficult to actually perform with most software tools in use by FE analysts. However, with Kornucopia™, the calculation is easily performed and automatically documented in a clear fashion that can be readily used for a report or presentation.

2008 Abaqus Users’ Conference 5
It is also useful to point out that the use of such averaging methods for curves is applicable to many other aspects of advanced FE analysis and data analysis in general. The parametric-based arc length averaging method works well for a variety of other uses including the creation of an average representation of data depicting the outline of any general 2-D shape (circles, distorted ellipsoids, outline of a fiber tow reinforcement in a set of samples, etc.).
3. Application demonstrations
This section presents brief summaries of four different nonlinear mechanics problems where FEA simulations were significantly improved by the inclusion of theoretical considerations, experimental data, and pre/post processing of FE data. A list of additional publications where the author has used these types of “inclusive” analyses is found in the reference section.
3.1 Analyzing the inflation of a nonwoven envelope
Figures 2 - 4 present the analysis method and results for the inflation to failure of a nonwoven polymeric envelope (see Diehl, Design News, 2004 for additional details). The problem has many nonlinear aspects: material plasticity, failure, large strains, and complex deformations including wrinkling and buckling. In addition, the nonwoven material shows modest variation in material properties at different locations across the sheet. The results presented in the three figures are single screen captures of the Kornucopia™ worksheet that created the material law from raw experimental data and also postprocessed the FEA simulations for comparison to various experiments.
Figure 2 documents the creation of a material law representation derived from measured experimental stress-strain data. Figures 2a and b show some interesting aspects of the raw data that needed to be addressed. First, the material exhibited mild anisotropic behavior when uniaxial tests were performed in two orthogonal directions (MD and XD). Based on pragmatic engineering judgment, the differences were not considered large enough to attempt an orthotropic plasticity analysis. So all the MD and XD data was to be averaged using the arc length method without normalization (it was deemed that failure in MD and XD was too separate to use normalization).
However, before averaging could be performed, the raw data needed to be cleaned-up. Figure 2b shows a zoomed view of the beginning of the measured stress/strain curves – they are not all aligned to begin at strain = 0 and they all show some undesirable curvature at the beginning which is intentionally created by the testing protocol. To avoid accidental over-stressing of the test samples during initial fixturing, the protocol requires the sheet samples to be mounted with a small amount of slack, hence creating the artifacts in Figure 2b. The Kornucopia™ computation syntax2 displayed in the middle of Figure 2 “heals” all 20 data curves by first trimming away the initial parts of each curve for stress below a minimum threshold (1.0⋅MPa) and also trimming away the
2 The three lines of syntax used to compute “healedi” is actually a simple example of using the Mathcad®’s programming language. The programming capability in Mathcad® is quite powerful, including the ability to easily make function subprograms and libraries of reference functions to use as needed.

6 2008 Abaqus Users’ Conference
0 10 20 300
20
40
60
c) Cleaned data and average
Biot Strain (%)
Nom
inal
Stre
ss (M
Pa)
0 0.5 1 1.50
2
4
6
8
10d) Zoom of cleaned data & average
Biot Strain (%)
Nom
inal
Stre
ss (M
Pa)
0 0.5 1 1.50
5
10b) Zoom of initial region of raw data
Biot Strain (%)N
omin
al S
tress
(MPa
)
1
0 10 20 300
20
40
60
a) Raw data
Biot Strain (%)
Nom
inal
Stre
ss (M
Pa) MD & XD curves
intermixed in thiszoomed view
MD
XD
healedi trimmed trim_k data i data i( ) y⟨ ⟩, 1, "max", "", ⎡
⎣⎤⎦←
tweaked tweakXY_k "start" trimmed, y, 0.0, 5 %⋅, "", ( )←
shiftData_k tweaked "start", 0 ""( ), "", [ ]
:=
Select averagingmethod
Normalizeduring
averaging?
AVE averageXY_k healed method, adv, ( ):=
AVEMD
XD
MD, XD, & AVEcurves areintermixed in thiszoomed view
Figure 2: Healing and averaging stress-strain data from 20 uniaxial test samples of a nonwoven fabric.
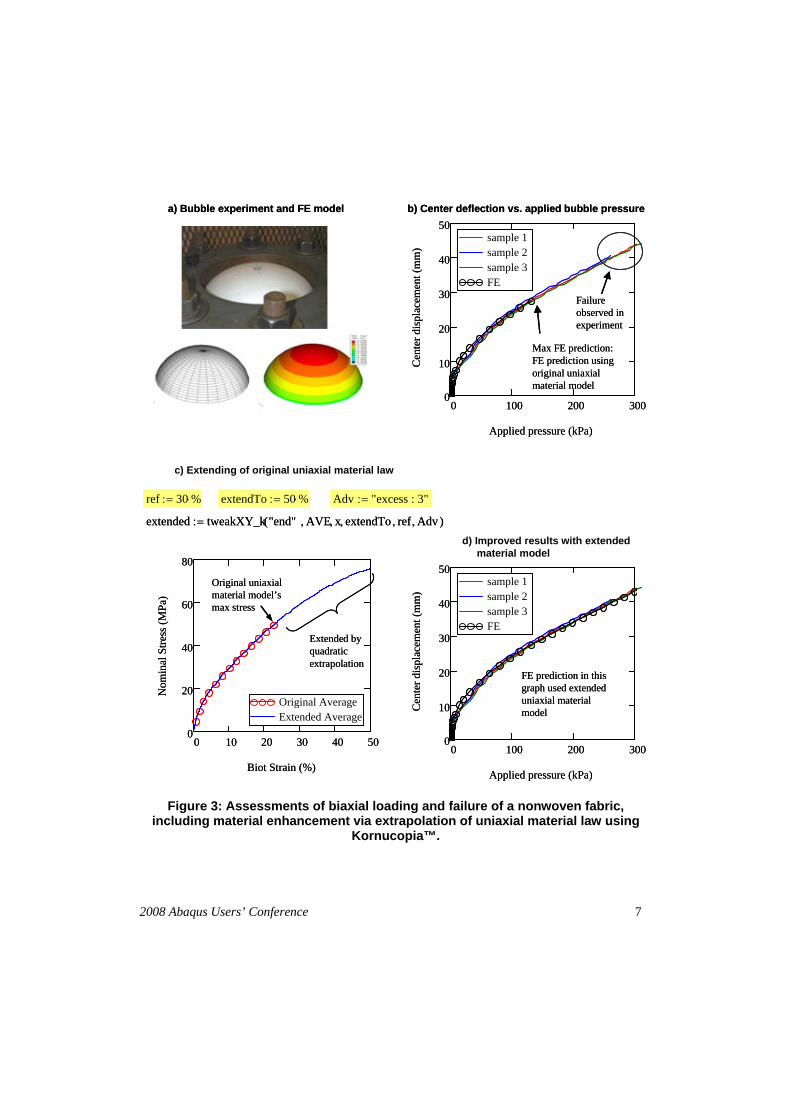
2008 Abaqus Users’ Conference 7
0 100 200 3000
10
20
30
40
50sample 1sample 2sample 3FE
Applied pressure (kPa)
Cen
ter d
ispl
acem
ent (
mm
)0 100 200 300
0
10
20
30
40
50sample 1sample 2sample 3FE
Applied pressure (kPa)C
ente
r dis
plac
emen
t (m
m)
c) Extending of original uniaxial material law
ref 30 %⋅:= extendTo 50 %⋅:= Adv "excess : 3":=
extended tweakXY_k "end" AVE, x, extendTo, ref, Adv, ( ):=d) Improved results with extended material model
0 10 20 30 40 500
20
40
60
80
Original AverageExtended Average
Biot Strain (%)
Nom
inal
Stre
ss (M
Pa)
Original uniaxial material model’s max stress
Max FE prediction:FE prediction using original uniaxial material model
FE prediction in this graph used extended uniaxial material model
Extended by quadratic extrapolation
Failure observed in experiment
a) Bubble experiment and FE model b) Center deflection vs. applied bubble pressure
c) Extending of original uniaxial material law
d) Improved results with extended material model
0 100 200 3000
10
20
30
40
50sample 1sample 2sample 3FE
Applied pressure (kPa)
Cen
ter d
ispl
acem
ent (
mm
)0 100 200 300
0
10
20
30
40
50sample 1sample 2sample 3FE
Applied pressure (kPa)C
ente
r dis
plac
emen
t (m
m)
c) Extending of original uniaxial material law
ref 30 %⋅:= extendTo 50 %⋅:= Adv "excess : 3":=
extended tweakXY_k "end" AVE, x, extendTo, ref, Adv, ( ):=d) Improved results with extended material model
0 10 20 30 40 500
20
40
60
80
Original AverageExtended Average
Biot Strain (%)
Nom
inal
Stre
ss (M
Pa)
Original uniaxial material model’s max stress
Max FE prediction:FE prediction using original uniaxial material model
FE prediction in this graph used extended uniaxial material model
Extended by quadratic extrapolation
Failure observed in experiment
a) Bubble experiment and FE model b) Center deflection vs. applied bubble pressure
c) Extending of original uniaxial material law
d) Improved results with extended material model
Figure 3: Assessments of biaxial loading and failure of a nonwoven fabric, including material enhancement via extrapolation of uniaxial material law using
Kornucopia™.

8 2008 Abaqus Users’ Conference
a) Undeformed b) Low pressure c) Moderate pressure
d) Near burst pressure e) Strain at center of envelope vs. inflation pressure
0 50 100 1500
5
10
15
20
25
Envelope inflation pressure (kPa)
Bio
t stra
in a
t cen
ter o
f env
elop
e (%
)
FEA prediction
ExperimentsSample 1Sample 2Sample 3Sample 4Sample 5
a) Undeformed b) Low pressure c) Moderate pressure
d) Near burst pressure e) Strain at center of envelope vs. inflation pressure
0 50 100 1500
5
10
15
20
25
Envelope inflation pressure (kPa)
Bio
t stra
in a
t cen
ter o
f env
elop
e (%
)
FEA prediction
ExperimentsSample 1Sample 2Sample 3Sample 4Sample 5
ExperimentsSample 1Sample 2Sample 3Sample 4Sample 5
Figure 4: Product-level assessment of FE model accuracy on predicting bag inflation performance.

2008 Abaqus Users’ Conference 9
“failure drop-offs” after the max stress has been reached (Figure 2a). This trimmed data is then automatically extrapolated to a value of stress = 0 by the tweakXY_k function (using the first 5% of the trimmed data to create a quadratic extrapolation function for each curve). Finally the strain values are all shifted and reset to start at 0. This set of operations is automatically looped through the index counter i for all 20 samples. The healed experimental data, being stored in a nested array (an array of 20 elements where each array element holds the array of stress vs. strain for that sample), is then fed into the averageXY_k function which readily computes an average of the data curves using the options selected (results shown in Figure 2c and d). To complete the FEA material law definition, this data is then converted to true stress and logarithmic strain, from which stress vs. plastic strain is computed (This last step, converting to true values and obtaining the plastic table, was also done in this Kornucopia™ worksheet, but is not shown for brevity).
Figure 3 presents evaluation of a bubble test, designed to assess the biaxial characteristics of the material. The bubble test inflates a flat circular sheet, clamped around its perimeter, until it bursts. A measurement of the strain at the center of the bubble and the center vertical displacement are recorded (for brevity, only the displacement results are depicted in the figure). Figure 3b shows that the FE model matches the experimental results well, but that the FE model significantly under-predicts failure. This is caused by surface non-uniformity in the material, which in a long slender uniaxial tension test specimen causes early failure (like the preverbal weakest link of a chain). However, in a biaxial loaded state of a larger sample, load paths around weak spots are more likely, allowing the structure to survive larger loads. As shown in Figure 3c, addressing this issue is easily accommodated in the FE model by modifying the uniaxial-based stress/strain material average curve using the Kornucopia™ tweakXY_k function. This time the first parameter is set to extrapolate at the end of the data (previous demonstration of this function extrapolated at the start of the data). The extrapolation shown is longer than the reference section of the data being used to create the extrapolation, so an error (warning) is initially issued. This was overridden by an advanced option stating that extrapolation could be up to 3 times the length of the reference section of the data used. As seen in Figure 3d, the bubble simulation, using the extended data, now correlates well with the measurement over the entire range of interest.
Figure 4 presents the final results of envelop inflation, both simulation and experiments. Figure 4d shows how strain at the center of the envelope increases with inflation pressure. The figure presents five experimental test samples along with the FE model prediction (using the material law developed and described in Figures 2 and 3). Excellent correlation is observed.
Relative to clearly and efficiently documenting analysis work, all this data, including the images of deformed shapes, resides inside the Kornucopia™ document within Mathcad®. The Abaqus/Explicit FE deformed shape and deformed strain contour images were simply pasted into Kornucopia™ worksheet from Abaqus/Viewer.
3.2 T-bracket failure analysis
Figure 5 presents Abaqus/Standard (implicit) and Abaqus/Explicit (explicit) simulation results for the failure of a metal T-bracket. The goal of the analysis is “methods development” for the use of cohesive elements for this type of event (computed with both implicit and explicit FEA techniques).

10 2008 Abaqus Users’ Conference
0 0.02 0.04 0.060
100
200
300a) Implicit model raw data
Opening Displacement
Ope
ning
For
ce
0 0.02 0.04 0.061000−
500−
0
500
1000b) Explicit model raw data
Opening Displacement
Ope
ning
For
ceLowpass filtering (smoothing) explicit model
smooth% 96 %⋅:= <= Valid range (0 - 1)
quasi smoothXY_k explicit smooth%, "", ( ):=
Shifting implicit model to correct for artificial forces
shift "" "" 40( ):= (time, X, Y)
impAdj shiftData_k implicit "-", shift, "", ( ):=
0 0.02 0.04 0.06100−
0
100
200
300d) Results after smoothing filter
Opening Displacement
Ope
ning
For
ce
0
0 0.02 0.04 0.06100−
0
100
200
300e) Results after shifting Implicit
Opening Displacement
Ope
ning
For
ce
0
0 0.02 0.04 0.061000−
500−
0
500
1000c) Comparing raw data
Opening Displacement
Ope
ning
For
ce
Implicit
Explicit
Implicit
Explicit
Implicit
Explicit
Figure 5: Using Kornucopia™ to significantly improve interpretation of both an implicit static and explicit dynamics quasi-static simulation of a T-bracket failure.

2008 Abaqus Users’ Conference 11
Displacement and reaction forces at the loading points of the structure are exported from the Abaqus odb files from Abaqus/Viewer via the Report XY feature. For the explicit model, the Abaqus run-time antialiasing filter was used to obtain a reasonable size output (~ 700 time points) representation of the event while avoiding aliasing. (See Abaqus, 2007, Diehl, 2000, and Diehl Bodie Technology, 2007 for information about avoiding aliasing and properly working with noisy data). This data is then read into Mathcad®, plotted, and further processed with the Kornucopia™ worksheet depicted in Figure 5.
The first issue to be addressed is smoothing the explicit dynamics results. Since the model is intended to be quasi-static, the user is unlikely to have any knowledge about natural frequencies of the structure. Hence, the analyst will find using classical DSP lowpass filtering methods uncomfortable to use because they will require information that is not readily available. Kornucopia™ provides an easy-to-use DSP-based smoothing filter, smoothXY_k, that can be controlled with single smoothing parameter that ranges from 0 (no smoothing) to less than 1 (remove all frequency content). Comparing filtered explicit results with the non-noisy implicit results, the user quickly gains experience on filtering the explicit model results. It is important to note that attempting to smooth this type of data with a non-DSP “running average” method, like the Abaqus/Viewer operator smooth()or similar functions in Mathcad® (or elsewhere) may work too, but often these methods will not yield as good a result as a DSP-based filter (such as smoothXY_k) due to smoothXY_k’s flat passband characteristics (Diehl, BodieTech, 2007).
Once the noise is removed from the explicit results, a direct comparison to the implicit result can be obtained. This comparison, Figure 5d, shows similar results, but clearly demonstrates that the implicit model predicts higher peak force. Further inspection indicates that the implicit model predicted a nearly constant, non-zero load well after the two parts had fully failed and completely separated – a physically impossible result! This issue with the implicit result was not noticed by the FE analyst initially working this model (they did not have the explicit model for comparison initially). The problem with the implicit model is excessively high artificial forces being created by numerical penalty parameters set by the user to enable this very challenging failure problem to compute in an implicit solution. Plotting of model energies from the implicit model would have alerted the analyst to the problem, but this was apparently not done (which is commonly the case for many analysts). A simple shifting of the implicit result and comparison to the explicit result shows that this artificial force was corrupting the analysis from the very beginning (Figure 5e).
This example is an interesting case of the implicit model helping to guide understanding of how to smooth explicit results, while at the same time the explicit results pointing out a significant distortion in the implicit model that had previously gone unnoticed.
3.3 Peeling of an epoxy-bonded Aluminum strip
Figure 6 presents details from one of the key findings related to using a novel penalty framework for enhancing the use of the Cohesive-Zone Method (CZM) in finite element models simulating crack initiation and crack propagation of surface-bonded structures (Diehl, IJAA 2008). In this work, Diehl studied a variety of modeling parameters related to CZM use, ultimately running and post-processing 246 different Abaqus/Explicit models for the study.

12 2008 Abaqus Users’ Conference
A) aluminum peel arm, B) top ½ of epoxy,C) Cohesive layer, D) bottom ½ of epoxy
b) Highly zoomed view showing model detailnear crack front (all solids model)
a) Explicit transient finite element model of 135º peel at various stages during solution
A
BCD
Initial crack length = 10 mm
Lo = 300 mm
P(t), ux(t)
θ
0.0 100.0 200.0 300.0 400.00.0
2.0
4.0
6.0
8.0d) Improving peel force estimation
Peel distance (mm)
Peel
forc
e/w
idth
(N/m
m) 350
Adjusting the Peel force by removing the force associated with the kinetic energy
Number of FE models to analyze PKE ux
ALLKEdd t
ALLKEdd
1
tuxd
d⎛⎜⎝
⎞⎟⎠
⋅ALLKE'
ux'numOfCases 246=
i 1 numOfCases..:=Computing numerical derivatives
ALLKE'i derivative1_k ti ALLKEi, "", ( ):= ux'i derivative1_k ti uxi, "", ( ):=
Calculation of quasi-static peel force without kinetic energy contributions
PKEi
ALLKE'iux'i
:= => Pqs iPtotali
PKEi−:=
Specify a case to plot num 63:= cases num "case_22g_135deg_1p32G"=
0.0 100.0 200.0 300.0 400.00.0
0.5
1.0
1.5
2.0
2.5c) Energy plots
Peel distance (mm)
Ener
gy (J
)
350
External work
Kinetic energyPKE
Pqs
Ptotal
A) aluminum peel arm, B) top ½ of epoxy,C) Cohesive layer, D) bottom ½ of epoxy
b) Highly zoomed view showing model detailnear crack front (all solids model)
a) Explicit transient finite element model of 135º peel at various stages during solution
A
BCD
Initial crack length = 10 mm
Lo = 300 mm
P(t), ux(t)
θ
0.0 100.0 200.0 300.0 400.00.0
2.0
4.0
6.0
8.0d) Improving peel force estimation
Peel distance (mm)
Peel
forc
e/w
idth
(N/m
m) 350
Adjusting the Peel force by removing the force associated with the kinetic energy
Number of FE models to analyze PKE ux
ALLKEdd t
ALLKEdd
1
tuxd
d⎛⎜⎝
⎞⎟⎠
⋅ALLKE'
ux'numOfCases 246=
i 1 numOfCases..:=Computing numerical derivatives
ALLKE'i derivative1_k ti ALLKEi, "", ( ):= ux'i derivative1_k ti uxi, "", ( ):=
Calculation of quasi-static peel force without kinetic energy contributions
PKEi
ALLKE'iux'i
:= => Pqs iPtotali
PKEi−:=
Specify a case to plot num 63:= cases num "case_22g_135deg_1p32G"=
0.0 100.0 200.0 300.0 400.00.0
0.5
1.0
1.5
2.0
2.5c) Energy plots
Peel distance (mm)
Ener
gy (J
)
350
External work
Kinetic energyKinetic energyPKE
Pqs
Ptotal
Figure 6: Significantly enhancing analysis accuracy and solution speed by adjusting the calculated peel load using derivatives of computed energy terms.

2008 Abaqus Users’ Conference 13
The results displayed in Figure 6 show how peel force estimation from an explicit dynamics model, intended to represent quasi-static peeling, can be significantly improved by compensating for forces caused by the continual increase of kinetic energy due to an ever-increasing peel arm. Based on energy methods principles, the derivation of a “kinetic energy force,” PKE, is defined and then computed numerically for all 246 explicit dynamics models. Figures 6c and d show specific result details for one particular case, namely a 135° peeling with a critical energy release rate, Gc, of 1.32 kJ/m2. In this particular case, the correction in peel force when the model is in steady-state (~ 350 mm peel distance) is significant, Pqs/Ptotal = 0.58. Allowing the explicit models to run with this amount of kinetic energy, without the correction, would generally create an unacceptable distortion in the reported peel force. But with the correction, computational speed-ups of 2 times to 4 times are achieved with significant improvement in accuracy. For a study using 246 runs, where individual simulations range between 20 minutes and 2 hours, such savings are significant.
The results presented in Figure 6 were created by a single Kornucopia™ worksheet that imported all 246 abaqus.rpt files (not shown in figure), all of which were automatically generated from Abaqus result output databases by a custom Python script. While it is true that such energy derivative calculations could have been done in Abaqus/Viewer, driven by a Python script to loop through all the models, such a method would not create as clear a set of documentation for the methodology and its implementation. Within the Mathcad® software that Kornucopia™ runs in, this type of “numerically operable” derivation and documentation is natural and easy to exploit.
Additionally, developing and implementing the methodology within Kornucopia™ has the benefit of keeping the fundamental principles and equations in view of the engineer. In this particular case, that work-flow led to the realization that such derivatives of FEA-computed energies could be used for other design guidance purposes. For peeling systems that have multiple layers, such as multi-layered polymeric films, computing derivatives of internal strain energy quantities (grouped by the different material layers) relative to peel distance provides a direct measure of how much each of the layers contributes to the total quasi-static peel force of the system. This calculation demonstrates that peel force is controlled by much more than how strong the interface is (characterized by Gc). This realization ultimately turned the CZM FE model into a powerful and insightful applied research and design tool to drive new experimental testing procedures and new product development plans.
3.4 Shock analysis of a structure with many output sensors
Figures 7 and 8 present efficient postprocessing of an impact analysis involving the evaluation of multiple output sensors from several transient explicit models. The models are run in Abaqus/Explicit using the run-time antialiasing filter feature for output requests, allowing for optimum-sized abaqus.rpt files to be generated without alias distortions. Each model output file contained transient data columns of time and 30 sensors (velocity output at various locations in various directions). The requirement of the analysis was to lowpass filter the sensor data using customer-specified filter parameters and then to take these filtered signals and compute average accelerations for the various sensors, using a customer-specified method.
For presentation brevity, only three models are evaluated and only three sensors within each model are selected from the 30 sensors computed. The actual customer DOE (Design of Experiments) study required evaluation of all 30 sensors from over 50 FE simulations.

14 2008 Abaqus Users’ Conference
names
"model1.rpt"
"model2.rpt"
"model3.rpt"
⎛⎜⎜⎝
⎞⎟⎟⎠
=
i 1 rows names( )..:=
data
{2511,31}
{2502,31}
{2498,31}
⎛⎜⎜⎝
⎞⎟⎟⎠
=
Select sensors of interest
sensors reorder_k sensors "keep", "cols", 1 5 13 6( ), "", [ ]:=
sensors "Time" "TopRear, X" "Front, X" "TopRear, Y"( )=
data i reorder_k data i "keep", "cols", 1 5 13 6( ), "", ⎡⎣ ⎤⎦:=
Perform DSP Define cutofffrequency
fsi samplingFreq_k data i( ) 1⟨ ⟩sec⋅ "", ⎡
⎣⎤⎦:= fs
10.043
10.006
9.956
⎛⎜⎜⎝
⎞⎟⎟⎠
kHz⋅=fc 50 Hz⋅:=
Ci cIIR_k "lp" "butter", fcfsi
, "", ⎛⎜⎝
⎞⎟⎠
:= dataf i filterXY_k data i Ci, "start assump : zero", ( ):=
select a sensor to view s 4:= sensors s⟨ ⟩"TopRear, Y"( )=
set a 1:= setb 3:=
0 0.05 0.1 0.15 0.260−
30−
0
30
60
Time (sec)
Vel
ocity
(in/
sec)
0 0.05 0.1 0.15 0.260−
30−
0
30
60
Time (sec)
Vel
ocity
(in/
sec)
namessetb"model3.rpt"=namesseta
"model1.rpt"=
unfiltered
filtered
unfiltered
filtered
Figure 7: Efficiently computing and clearly documenting an impact analysis with many output sensors, part 1 – sensor selection and Butterworth lowpass filter
application to computed FE results.

2008 Abaqus Users’ Conference 15
0 0.02 0.04 0.06 0.08 0.140−
20−
0
20
40
Time (sec)
Vel
ocity
(in/
sec)
0 0.02 0.04 0.06 0.08 0.140−
20−
0
20
40
Time (sec)
Vel
ocity
(in/
sec)
Specify a rough maximum time trigger tmax 0.1:= counter to loop through sensorsSpecify minimum velocity trigger trigger 5:= j 2 cols dataf 1( )..:=
Trim out the data section in each curve to be analyzed
analizei j, rough trim_k dataf i dataf i( ) 1⟨ ⟩, "", tmax, "", ⎡
⎣⎤⎦←
trim_k rough rough j⟨ ⟩, trigger, "max", j, ( )
:=
Assigning time and sensor velocity variables ti j, analizei j, ( ) 1⟨ ⟩
:= Vi j, analizei j, ( ) j⟨ ⟩:=
Computing mean acceleration values
Gavei j, slope ti j, sec⋅ Vi j, in
sec⋅, ⎛⎜
⎝⎞⎟⎠
:= Gplot t V, ( ) M slope t V, ( )←
B intercept t V, ( )←
M t⋅ B+
:=
Gplti j, Gplot ti j, Vi j, , ( ):=
namesseta"model1.rpt"= namessetb
"model3.rpt"=sensors s⟨ ⟩"TopRear, Y"( )=
Gaveseta s, 6.056g⋅= Gavesetb s, 2.132 g⋅=
Acceleration Summary (units = g)TopRear, X Front, X TopRear, Y
model1.rpt 8.67 24.69 6.06model2.rpt 1.00 20.81 2.15model3.rpt 0.99 20.78 2.13
data
region selectedGplt
Figure 8: Efficiently computing and clearly documenting an impact analysis with many output sensors, part 2 – average local acceleration calculation and summary.

16 2008 Abaqus Users’ Conference
The portion of the Kornucopia™ worksheet displayed in Figure 7 clearly and naturally documents the post-processing analysis, including filter parameter specification, application, and influence on the simulation data. Figure 8 documents how the customer-specified method to compute average accelerations from filtered velocity data was accomplished in an efficient manner. The data was first trimmed to keep data before 0.1 seconds, from which a low-level velocity trigger combined with a max value velocity trigger was used to automatically select the initial “velocity rise.” An average acceleration was then calculated based on the best-fit slope for this region. Both the details of the computation and the resulting values are clearly presented. Attempting this type of analysis with a spreadsheet, especially for 50+ models and 30 sensors, would be extremely difficult and even more difficult to present calculation details.
A summary table of accelerations for the sensors of interest across all models computed is displayed at the bottom of Figure 8. A quick inspection of this summary table indicates that the results for model1 are significantly different than the other two models. If only the summary table was reported, without displaying the calculations, this large difference could create significant concern amongst the engineers and managers working on this design study. Fortunately the documentation provided in Figure 7 and 8 easily explains the cause. Figure 8 show that the region (blue circles) used to compute the average acceleration (straight black line) is noticeably different due to the fact that the max velocity in model1 occurred at the first “hump” (~0.03 sec) while the max for model3 occurred at the second “hump” (~0.05 sec). Further evaluation of the influence of lowpass filtering from Figure 7 shows that before filtering, the maximum velocity for both models occurred at a similar time of ~0.03 sec, but that after filtering the location of the maximum velocity was noticeably altered for model3. This occurred because the frequency content defining the hump in model3 is slightly different as compared to model1 and just happened to be attenuated enough by the filter so that the second hump became the maximum. This type of subtlety is very common in this kind of analysis and presenting summary tables of results only, without calculation details to provide perspective, can be extremely misleading. If calculation documentation naturally occurs by the act of making the calculation, then these types of confusion are noticeably reduced.
4. Conclusions
Solutions to challenging structural mechanics problems often rely on approaches that properly integrate theoretical analysis, experiments, and finite element simulations, along with judgment and practical approximations. These additional requirements, beyond just FEA, often become significant stumbling blocks, preventing or delaying the analyst from doing a proper and accurate engineering job. The examples presented in this paper have shown that by using a combination of Abaqus Unified FEA (www.simulia.com), Mathcad® (www.ptc.com), and Kornucopia™ (www.BodieTech.com), many of these stumbling blocks are avoided and significant improvements in analysis accuracy and results communications are achieved. Additionally, techniques have been demonstrated for the creation of an average nonlinear material description from measured data containing large variations.

2008 Abaqus Users’ Conference 17
5. References
1. Abaqus, Abaqus Version 6.7 Documentation, SIMULIA, Dassault Systemes, 2007. 2. Carbajal, L., Diehl, T., Lamontia, M. A., Deakyne, C., “Modeling Techniques for Simulating
Lightweight Woven Fabric Barriers Protecting Body Simulants Subjected to a Non-Penetrating Impact Threat,” ABAQUS User’s Conference, Boston, MA, May, 2004.
3. Diehl, T., “Simulating the Transport of Very Flexible Sheets: Beam-Type Solutions,” Abaqus Users Conference, Aachen, Germany, 1993.
4. Diehl, T., “Methods of Improving ABAQUS/Standard Predictions for Problems Involving Sliding Contact,” ABAQUS User’s Conference Proceedings, Paris, France, June, 1995.
5. Diehl, T., Carroll, D., Nagaraj, B., “Ball Drop Simulation on Two-Way Radio Lens Using ABAQUS/Explicit,” ABAQUS User’s Conference, Chester, England, May, 1999.
6. Diehl, T., Carroll, D., Nagaraj, B., “Applications of DSP to Explicit Dynamic FEA Simulations of Elastically-Dominated Impact Problems”, Journal of Shock and Vibration, Vol. 7, Number 3, 2000.
7. Diehl, T., “Modeling the “Shrink-Wrap Effect” in Polymers and Elastomers, Including the Influence of Very Large Elastic and Inelastic Strains,” ABAQUS User’s Conference Proceedings, Newport, RI, May, 2002.
8. Diehl, T., Dixon, R. D., Lamontia. M. A., Hanks, J. A., “The Development and Use of a Robust Modeling Approach for Predicting Structural Performance of Woven Fabrics Using ABAQUS,” ABAQUS User’s Conference Proceedings, Munich, Germany, May, 2003.
9. Diehl, T., “A Few Tips for Solving the Unsolvable,” Machine Design, V. 75, June 5, 2003. 10. Diehl, T., Sloan, J., Dickerson, D., Lamontia, M. A., Deakyne, C., “An Up-Close Model
Characterizing a Highly Nonlinear, Fluffy-cored, Skinned, Composite Material Used in a Local Buckling Analysis,” ABAQUS User’s Conference, Boston, MA, May, 2004.
11. Diehl, T., “How To Deal with a Nasty, Nonlinear Problem,” Design News, Oct. 25, 2004. 12. Diehl, T., Improving Abaqus/Explicit Analysis via Filtering and DSP, short course, Bodie
Technology, Inc., www.BodieTech.com, 2007. 13. Diehl, T., “On the Measurement and Modeling of Polymeric Materials that Exhibit Unstable
Localized Necking,” Abaqus Users Conference, Paris, France, 2007, pp. 188 – 201. 14. Diehl, T., “On Using a Penalty-Based Cohesive-Zone Finite Element Approach, Part I: Elastic
Solution Benchmark,” International Journal of Adhesion and Adhesives, Vol 28, No. 4-5, June 2008, pp. 237-255.
15. Diehl, T., “On Using a Penalty-Based Cohesive-Zone Finite Element Approach, Part II: Inelastic Peeling of an Epoxy-Bonded Aluminum Strip,” International Journal of Adhesion and Adhesives, Vol 28, No. 4-5, June 2008, pp. 256-265.
16. Hanks, J., A., Scott, B., R., Lamontia, M. A., Diehl, T., Dixon, R., Hamlet, S., “The Testing, Modeling, and Analysis of Residential Wall Panels Designed to Resist Tornado Borne Debris,” Proceedings of the 20th International Symposium on Ballistics, Technomic Publishing, Orlando, Sept. 2002.
Bibliografía
[1] Journal of sound and vibration, 1964. Semanal. Vol. 1, no. 1 (Jan. 1964)-.
[2] Maurice L. Adams. Rotating machinery vibration [Recurso electrónico] : fromanalysis to troubleshooting. Marcel Dekker, New York, 2001. Maurice L. Adams,Jr. Mechanical engineering. Índice.
[3] Leo L. Beranek and István Vér. Noise and vibration control engineering : prin-ciples and applications. John Wiley & Sons, New York, 1992. edited by Leo L.Beranek, István L. Vér. 24 cm.
[4] S. Chakraverty. Vibration of plates [Recurso electrónico]. CRC Press, BocaRaton, 2009. S. Chakraverty. Índice.
[5] Clarence W. Da Silva. Vibration [Recurso electrónico] : fundamentals and prac-tice. CRC Press, Boca Raton (Florida) [etc.], 2000. Clarence W. Da Silva. Índi-ces.
[6] Clarence W. De Silva. Vibration and shock handbook [Recurso electrónico].Taylor & Francis, Boca Raton, 2005. edited by Clarence W. de Silva. Mechanicalengineering. Índice.
[7] Clarence W. De Silva. Computer techniques in vibration [Recurso electrónico].CRC Press, Boca Raton, 2007. edited by Clarence W. de Silva. Mechanical en-gineering series. Índice.
[8] Clarence W. De Silva. Vibration damping, control, and design [Recurso elec-trónico]. Taylor & Francis, Boca Raton, 2007. edited by Clarence W. de Silva.Mechanical engineering series. Índice.
[9] Clarence W. De Silva. Vibration monitoring, testing, and instrumentation [Re-curso electrónico]. CRC Press/Taylor & Francis, Boca Raton, 2007. edited byClarence W. de Silva. Mechanical engineering series. Índice.
[10] Frank Fahy and Paolo Gardonio. Sound and structural vibration [Recurso elec-trónico] : radiation, transmission and response. Academic, Amsterdam, 2ndedition, 2007. Frank Fahy, Paolo Gardonio. Índice.
[11] Ladislav Fryba. Vibration of solids and structures under moving loads. ThomasTelford, London, 3rd edition, 1999. Ladislav Fryba. gráf. ; 24 cm.
333

334 BIBLIOGRAFÍA
[12] Michael R. Hatch. Vibration simulation using MATLAB and ANSYS [Recursoelectrónico]. Chapman & Hall/CRC, Boca Ratón (Florida), [etc.], 2000. MichaelR. Hatch. Índices.
[13] Jimin He and Zhi-Fang Fu. Modal analysis. Butterworth-Heinemann, Oxford; Boston, 2001. 2001037430 Jimin He and Zhi-Fang Fu. ill. ; 25 cm. Includesbibliographical references and index.
[14] R. Keith Mobley. Vibration fundamentals [Recurso electrónico]. Elsevier New-nes, Boston, 1999. R. Keith Mobley. Plant engineering maintenance series. Índi-ces.
[15] Institute of Electrical and Electronics Engineers. IEEE guide for aeolian vibra-tion field measurement of overhead conductors [Recurso electrónico]. Instituteof Electrical and Electronics Engineers, New York, 2006. sponsor Transmissionand Distribution Committee of the IEEE Power Engineering Society. IEEE Std1368-2006 Índice.
[16] Thomas D. Rossing and Neville H. Fletcher. Principles of vibration and sound.Springer-Verlag, New York, 1995. Thomas D. Rossing, Neville H. Fletcher. il ;25 cm.
[17] Douglas Thorby. Structural dynamics and vibration in practice [Recurso elec-trónico] : an engineering handbook. Butterworth-Heinemann, Oxford, 2008.Douglas Thorby. Índice.
[18] Petr Tovstik, Andrei L. Smirnov, Peter R. Frise, and Ardéshir Guran. Asymptoticmethods in the buckling theory of elastic shells. World Scientific, Singapore,2001. Petr E. Tovstik, Andrei L. Smirnov ; edited by Peter R. Frise, ArdéshirGuran. 24 cm. Series on Stability, Vibration and Control of Systems. Series A ;4. Índices.
[19] Victor Wowk. Machinery vibration : mesurement and analysis. McGraw-Hill,New York [etc.], 1991. Victor Wowk. il., gráf. ; 24 cm.
[20] Victor Wowk. Machinery vibration : balancing. McGraw-Hill, New York [etc.],1994. Victor Wowk. il. ; 24 cm.