kalkulus variasi - tbakhtiar.staff.ipb.ac.idtbakhtiar.staff.ipb.ac.id/files/2016/02/handout3.pdf ·...
TRANSCRIPT

Kalkulus VariasiPersamaan Euler, Masalah Kalkulus Variasi Berkendala, Syarat Batas
Toni Bakhtiar
Departemen Matematika IPB
Februari 2014
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 1 / 85

Outline
Persamaan Euler1 Bentuk diperumum2 Bentuk khusus
Masalah kalkulus variasi berkendala1 Metode lagrange, metode substitusi2 Kendala titik3 Kendala persamaan diferensial4 Kendala isoperimetrik
Syarat batas
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 2 / 85
Persamaan Euler Bentuk Baku
(Dari slide sebelumnya): Misalkan
J(ε) =∫ T0 f (x + εh, x + εh, t) dt.
Penguraian Taylor memberikan
J(ε) ≈∫ T0 (f + εhfx + εhfx ) dt
=∫ T0 f dt + ε
∫ T0 (hfx + hfx ) dt
= J(x) + εδJ(x).
J(ε) identik dengan J(x) jika dan hanya jika δJ(x) = 0. Akibatnya,
δJ(x) = 0 ⇔∫ T0 (hfx + hfx ) dt = 0
⇔∫ T0 (fx −
ddt fx )h dt = 0 (dengan integral parsial)
⇔ fx − ddt fx = 0. (Persamaan Euler)
Persamaan Euler kadang kala ditulis dalam bentuk integral:∫fx dt = fx .
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 3 / 85

Persamaan Euler Diperumum
Fungsi f berpeubah banyak
Diberikan fungsional objektif
J(x) =∫ T
0f (x , x , t) dt
dengan x = (x1, x2, . . . , xn) dan x = (x1, x2, . . . , xn).Persamaan Euler:
fxi −ddtfxi = 0, i = 1, 2, . . . , n.
IlustrasiMisalkan f = f (x1, x2, x1, x2, t). Didefinisikan fungsional
J(ε) =∫ T0 f (x1 + ε1h1, x1 + ε1h1, x2 + ε2h2, x2 + ε2h2, t) dt.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 4 / 85

Persamaan Euler Diperumum
Fungsi f berpeubah banyakPenguraian Taylor memberikan
J(ε) ≈∫ T0 (f + ε1h1fx1 + ε1h1fx1 + ε2h2fx2 + ε2h2fx2) dt
=∫ T0 f dt + ε1
∫ T0 (h1fx1 + h1fx1) dt + ε2
∫ T0 (h2fx2 + h2fx2) dt
= J(x) + ε1δJ(x1) + ε2δJ(x2).
J(ε) = J(x) jika dan hanya jika δJ(x1) = 0 dan δJ(x2) = 0. Jadi,
fx1 −ddtfx1 = 0, fx2 −
ddtfx2 = 0.
ExampleTentukan ekstremum dari
J(x) =∫ 10
0(x21 + x
22 + e
t ) dt,
x1(0) = 1, x1(10) = 11, x2(0) = 2, x2(10) = 6.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 5 / 85

Persamaan Euler Diperumum
Fungsi f memuat turunan ke-n
Diberikan fungsional objektif
J(x) =∫ T
0f (x , x , x , . . . , x (n), t) dt
dengan x (i )(0) = x (i )0 dan x (i )(T ) = x (i )T .
Syarat perlu δJ(x) = 0 memberikan∫ T
0
(hfx + hfx + hfx + · · ·+ h(n)fx (n)
)dt = 0.
Integral parsial suku kedua integran:∫ T
0hfx dt = −
∫ T
0hddtfx dt.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 6 / 85

Persamaan Euler Diperumum
Fungsi f memuat turunan ke-n
Integral parsial suku ketiga integran:∫ T
0hfx dt =
∫ T
0hd2
dt2fx dt.
Integral parsial suku ke-n integran:∫ T
0h(n)fx (n) dt = (−1)n
∫ T
0hdn
dtnfx (n) dt.
Syarat perlu δJ(x) = 0 menjadi∫ T
0h(fx −
ddtfx +
d2
dt2fx − · · ·+ (−1)n
dn
dtnfx (n)
)dt = 0.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 7 / 85

Persamaan Euler Diperumum
Fungsi f memuat turunan ke-n
Persamaan Euler-Poisson:
fx −ddtfx +
d2
dt2fx − · · ·+ (−1)n
dn
dtnfx (n) = 0.
ExampleTentukan ekstremum dari
J(x) =∫ 1
0(x2 + x + at) dt,
x(0) = 0, x(0) = 1, x(1) = 1, x(1) = 1.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 8 / 85

Kasus Khusus Persamaan Euler
Fungsi f tidak memuat x
Diberikan fungsional objektif
J(x) =∫ T
0f (x , t) dt,
sehingga diperoleh fx = 0.Persamaan Euler:
ddtfx = 0⇔ fx x x + fx t = 0.
ExampleTentukan ekstremum dari
J(x) =∫ 1
0(tx + x2) dt,
x(0) = 0, x(1) = 1.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 9 / 85

Kasus Khusus Persamaan Euler
Fungsi f memuat x sajaDiberikan fungsional objektif
J(x) =∫ T
0f (x) dt,
sehingga diperoleh fx = 0.Persamaan Euler:
ddtfx = 0 ⇔ fx x x = 0
⇔ fx x = 0 atau x = 0.
Example (Masalah Lintasan Terpendek)Tentukan ekstremum dari
J(y) =∫ a
0
√1+ y2dx ,
y(0) = 0, y(a) = b.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 10 / 85

Kasus Khusus Persamaan Euler
Fungsi f Tidak Memuat t
Diberikan fungsional objektif
J(x) =∫ T
0f (x , x) dt.
Persamaan Euler:
fx −ddtfx = 0 ⇔ fx − (fx x x + fx x x) = 0
⇔ fx x − fx x x2 − fx x x x = 0
⇔ ddt(f − x fx ) = 0.
Diperoleh persamaan Beltrami:
f − x fx = k.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 11 / 85

Kasus Khusus Persamaan Euler
Fungsi f Tidak Memuat t
Example (Brachistochrone Problem)Tentukan ekstremum dari
J(x) =∫ 1
0
√1+ y2
ydx ,
y(0) = 0, y(1) = 1.
Solution (Brachistochrone Problem)Diperoleh
f (y , y) =
√1+ y2
y, fy (y , y) =
y√y(1+ y2)
.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 12 / 85

Kasus Khusus Persamaan Euler
Solution (Brachistochrone Problem)Persamaan Beltrami f − x fx = k memberikan
1√y(1+ y2)
= k1 ⇔ y(1+ y2) = k2
⇔ y =
√k2y− 1
⇔√
yk2 − y
dy = dx .
⇔ x =∫ √ y
k2 − ydy .
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 13 / 85
Kasus Khusus Persamaan Euler
Solution (Brachistochrone Problem)
Diperoleh persamaan sikloid (lihat bukti di halaman berikut)
x = −√k2y − y2 − 1
2k2 arcsin(1− 2y
k2
)+ k3.
Nilai awal memberikan
0 = −π4 k2 + k3
1 = −√k2 − 1− 1
2k2 arcsin(1− 2
k2
)+ k3.
Diperoleh k2 = 1.1458 dan k3 = π4 k2, sehingga
x = −√1.1458y − y2 − 1.1458
2 arcsin(1− 2y
1.1458
)+ 1.1458π
4 .
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 14 / 85

Kasus Khusus Persamaan Euler
Brachistochrone Path (please rotate 90◦ clockwise)
0.0 0.2 0.4 0.6 0.8 1.00.0
0.2
0.4
0.6
0.8
1.0
y
x
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 15 / 85

Bukti Integral
Kontribusi Dwilaras Athina (G54120002)
I =∫ √ y
k − y dy
=∫ √ y
k − y ·yydy
=∫ y√
ky − y2dy
=∫ y√
( 12k)2 − (y − 1
2k)2dy
=∫ y√
a2 − (y − a)2dy , a := 1
2k
=∫ u + a√
a2 − u2du, u := y − a.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 16 / 85

Bukti Integral
I =∫ u√
a2 − u2du︸ ︷︷ ︸
I1
+∫ a√
a2 − u2du︸ ︷︷ ︸
I2
.
Dengan integral fungsi trigonometri invers diperoleh
I2 = a arcsinua= a arcsin
y − aa
= − 12k arcsin(1− 2y
k
)+ C2.
Selanjutnya,
I1 = − 12∫ 1√
tdt, t := a2 − u2
= −√t + C1 = −
√a2 − u2 + C1 = −
√a2 − (y − a)2 + C1
= −√2ay − y2 + C1 = −
√ky − y2 + C1. �
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 17 / 85

Kasus Khusus Persamaan Euler
Another try...
Solution (Brachistochrone Problem)
Pengintegralan kedua ruas memberikan∫ √ y
k2−y dy =∫dx .
Misalkan y = k2 sin2 θ, diperoleh dy = 2k2 sin θ cos θ dθ sehingga
2k2∫sin2 θ dθ =
∫dx ⇔ k2
∫(1− cos 2θ) dθ =
∫dx
⇔ k2(θ − 12 sin 2θ) + k3 = x .
Nilai awal y(0) = 0 membuat θ = 0 dan k3 = 0, sehingga solusi diberikansecara parametrik:
x(θ) = k2(θ − 12 sin 2θ)
y(θ) = k2 sin2 θ.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 18 / 85

Kasus Khusus Persamaan Euler
Solution (Brachistochrone Problem)
Koefisien k2 diperoleh dengan menggunakan nilai akhir y(1) = 1, yaitu
k2(θ − 12 sin 2θ) = 1
k2 sin2 θ = 1
sehingga diperoleh k2 = 1.1458. Solusi masalah brachistochrone diberikanoleh persamaan parametrik
x(θ) = 1.1458(θ − 12 sin 2θ)
y(θ) = 1.1458 sin2 θ.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 19 / 85

Kasus Khusus Persamaan Euler
Fungsi f Tidak Memuat t
Example (Minimum Surface Area)Tentukan ekstremum dari
min J = 2π∫ x2
x1y√1+ y2dx
y(x1) = y1,
y(x2) = y2.
Solution
Persamaan Euler dengan f (y , y) = y√1+ y2
fy −ddtfy = 0⇔
√1+ y2 − d
dt
[y y√1+ y2
]= 0.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 20 / 85
SolutionSlamet Nuridin (G54130066) menjabarkan:
√1+ y2 =
ddt
[y y√1+ y2
]
⇔√1+ y2 =
(y2 + y y)√1+ y2 − y y 2 y√
1+y 2
1+ y2
⇔ 1+ y2 =(y2 + y y)(1+ y2)− y y2y
1+ y2
⇔ (1+ y2)2 = y2 + y4 + y y + y y2y − y y2y⇔ 1+ 2y2 + y4 = y2 + y4 + y y .
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 21 / 85

SolutionDiperoleh persamaan diferensial taklinear berikut
y y − y2 = 1.
Misalkan u = y/y sehingga didapatkan
u =y y − y2y2
=1y2
dan kemudianu = −2y
y3= −2uu.
Jadiu + 2uu = 0⇔ u + u2 = k2.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 22 / 85

SolutionSelanjutnya
u = k2 − u2 ⇔ uk2 − u2 = 1
⇔∫ duk2 − u2 =
∫dx
⇔ − 12k ln
∣∣∣∣u − ku + k
∣∣∣∣ = x + c1⇔ ln
∣∣∣∣u − ku + k
∣∣∣∣ = −2kx + c2⇔ u − k
u + k= ce−2kx
⇔ u(x) = −k + kce−2kx
ce−2kx − 1 .
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 23 / 85

Karena
u = −−2k2ce−2kx (ce−2kx − 1)− (k + kce−2kx )(−2kce−2kx )
(ce−2kx − 1)2
=2kce−2kx [k(ce−2kx − 1)− (k + kce−2kx )]
(ce−2kx − 1)2
= − 4k2ce−2kx
(ce−2kx − 1)2 =1y2,
maka1y=2k√−ce−kx
ce−2kx − 1 ⇔ y(x) =ce−2kx − 12k√−ce−kx
.
Misal diberikan nilai awal y(0) = 5 dan y(2) = 1 maka
c − 12k√−c
= 5
ce−4k − 12k√−ce−2k
= 1
sehingga diperoleh c = −0.00954 dan k = −1.033 [email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 24 / 85

y(x) =−0.00954e2(1.033 7)x − 1
2(−1.033 7)√0.00954e1.033 7x
.
1 0 1 2 3 4
2
4
6
8
10
x
y
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 25 / 85

ProblemDari contoh soal terakhir dan dari slide sebelumnya, masalah minimumsurface area memiliki solusi berbentuk
y(x) =ce−2kx − 12k√−ce−kx
,
y(x) = C1 cosh(x + C2C1
).
Tunjukkan bahwa kedua solusi di atas ekuivalen.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 26 / 85

Kasus Khusus Persamaan Euler
Fungsi f Tidak Memuat x
Diberikan fungsional objektif J(x) =∫ T0 f (x , t) dt.
Persamaan Euler:
fx −ddtfx = 0⇔ fx = 0
yang merupakan persamaan aljabar biasa sehingga tidak memiliki freeparameter (koefisien integrasi).
ExampleSeorang pengusaha ingin memaksimumkan fungsional pendapatan∫ T0 R(x) dt dengan R(x) = xp(x) dan p(x) = −ax + b (fungsipermintaan). Tentukan tingkat produksi optimal x∗(t).
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 27 / 85

Persamaan Euler
ExampleSeorang pengusaha ingin memaksimumkan fungsional keuntungan∫ T0 π(x) dt dengan π(x) = xp(x)− (ax2 + bx + c). Tentukan tingkatproduksi optimal x∗(t).
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 28 / 85

Kasus Khusus Persamaan Euler
Fungsi f Linear terhadap x
Diberikan fungsional objektif J(x) =∫ T0 f (x , t) dt dengan
f (x , x , t) = a(x , t) + b(x , t)x .
Persamaan Euler:
fx −ddtfx = 0⇔ ax + bx x −
dbdt= 0.
Karenaddtb(x , t) = bx x + bt ⇔ −bt = bx x −
dbdt,
maka diperoleh kondisiax − bt = 0,
yang merupakan persamaan aljabar biasa.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 29 / 85

Kasus Khusus Persamaan Euler
Example
Jika J(x) =∫ T0 (x
2 + 3xtx) dt maka persamaan Euler memberikan
2x − 3x = 0⇔ x∗ ≡ 0.
Example
Diberikan fungsional J(x) =∫ T0 (px − (ax2 + bx + c + dx)) dt.
Definisikan
a(x , t) = px − ax2 − bx − c = −ax2 + (p − b)x − c ,b(x , t) = −d .
Persamaan Euler memberikan
ax − bt = 0⇔ −2ax + p − b = 0⇔ x∗ =p − b2a
.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 30 / 85

Persamaan Euler: Ringkasan
Problem (Degenerate Case)Tentukan ekstremum dari
J =∫ 1
0((t2 + 3x2)x + 2tx) dt, x(0) = 1, x(1) = 2.
Kasus Persamaan Eulerf (x1, . . . , xn, x1, . . . , xn, t) fxi − d
dt fxi = 0, i = 1, . . . , n.f (x , x , x , . . . , x (n), t) fx +∑n
k=1(−1)i dk
dtk fx (k ) = 0f (x , t) fx x x + fx t = 0f (x) fx x x = 0f (x , x) f − x fx = kf (x , t) fx = 0f = a(x , t) + b(x , t)x ax − bt = 0
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 31 / 85

MKV Berkendala
Kendala titik dan kendala PDDiberikan masalah variasi berkendala berikut
opt J(x) =∫ T
0f (x , x , t) dt, x = (x1, . . . , xn)T
s.t. gi = 0, 1 ≤ i ≤ r ≤ nx(0) = x0x(T ) = xT .
Jika gi = gi (x , x , t) maka disebut kendala PD. Jika gi = gi (x , t) makadisebut kendala titik.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 32 / 85

MKV Berkendala: Metode Lagrange
Masalah pengoptimuman berkendala dalam kalkulus biasa:
max z := f (x1, x2)s.t. g(x1, x2) = 0.
Fungsi Lagrange:
L(x1, x2,λ) = f (x1, x2) + λg(x1, x2).
FOC:
∂L∂x1
= 0⇔ fx1 + λgx1 = 0,
∂L∂x2
= 0⇔ fx2 + λgx2 = 0,
∂L∂λ= 0⇔ g(x1, x2) = 0.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 33 / 85

MKV Berkendala: Metode Lagrange
Definisikan fungsi Lagrange:
L := f (x , x , t) + λ(t) · g(x , x , t),
dengan
λ(t) =
λ1(t)...
λr (t)
, g(x , x , t) = g1(x , x , t)
...gr (x , x , t)
.Maka
L := f (x , x , t) +r
∑i=1
λi (t)gi (x , x , t).
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 34 / 85

MKV Berkendala: Metode Lagrange
Definisikan fungsional imbuhan (augmented functional):
JL :=∫ T
0L(x , x , t,λ) dt.
Variasi pertama dari JL
δJL =∫ T
0
(Lxh1 + Lx h1 + Lλh2
)dt
(integral by part) =∫ T
0
[(Lx −
ddtLx
)h1 + Lλh2
]dt.
Syarat (perlu) optimalitas: δJL = 0 dan kendala terpenuhi, yaitu
Lx −ddtLx = 0∧ Lλ = 0.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 35 / 85
MKV Berkendala: Metode Lagrange
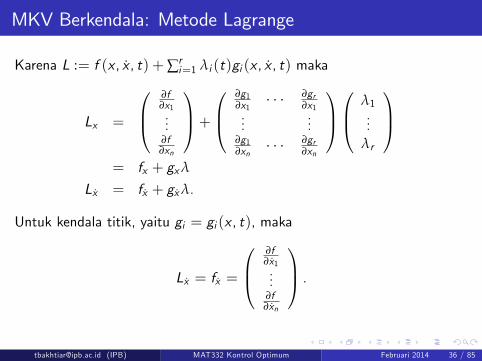
Karena L := f (x , x , t) +∑ri=1 λi (t)gi (x , x , t) maka
Lx =
∂f∂x1...
∂f∂xn
+
∂g1∂x1
· · · ∂gr∂x1
......
∂g1∂xn
· · · ∂gr∂xn
λ1
...λr
= fx + gxλ
Lx = fx + gxλ.
Untuk kendala titik, yaitu gi = gi (x , t), maka
Lx = fx =
∂f∂x1...
∂f∂xn
.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 36 / 85

MKV Berkendala Titik
ExampleSelesaikan masalah kalkulus variasi berkendala titik berikut:
min J =∫ T
0
√1+ y zx
dx
s.t y = z + 1
y(0) = 0, y(T ) = yT .
Solution (Metode Lagrange)Definisikan fungsi Lagrange:
L =(1+ y zx
)1/2
+ λ(y − z − 1).
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 37 / 85

MKV Berkendala Titik
Solution (Metode Lagrange, lanjutan...)Persamaan Euler bagi L diberikan oleh:
Ly −ddxLy = 0 ⇔ λ− d
dxz
2√x(1+ y z)
= 0,
Lz −ddxLz = 0 ⇔ −λ− d
dxy
2√x(1+ y z)
= 0.
Eliminasi terhadap λ memberikan
ddx
y + z√x(1+ y z)
= 0⇔ y + z√x(1+ y z)
= k1.
Syarat Lλ = 0 memberikan y = z + 1⇒ y = z , sehingga diperoleh
y√x(1+ y2)
= k2 ⇔ y =√
xk3 − x
⇔ y =∫ √ x
k3 − xdx .
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 38 / 85

MKV Berkendala Titik
Solution (Metode Substitusi)Di lain pihak, karena y = z + 1 maka y = z , sehingga masalah kalkulusvariasi dapat direduksi menjadi
min J =∫ T
0
√1+ y2
xdx
y(0) = 0, y(T ) = yT .
Persamaan Euler fy − ddx fy = 0 memberikan syarat optimalitas yang sama
dengan metode Lagrange, yaitu:
ddx
y√x(1+ y2)
= 0⇔ y√x(1+ y2)
= k2 ⇔ y =∫ √ x
k3 − xdx .
Untuk menghitung integral di atas, lihat bukti integral oleh Athina (2014).
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 39 / 85

MKV Berkendala PD
ExampleSelesaikan masalah kalkulus variasi berkendala PD berikut:
min J =∫ 1
0
12 (x
21 + x
22 ) dt
s.t x1 = x2x1(0) = x2(0) = 0
x1(1) = e − 2x2(1) = e − 1.
Solution (Metode Lagrange)Definisikan fungsi Lagrange
L = 12 (x
21 + x
22 ) + λ(x2 − x1).
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 40 / 85

MKV Berkendala PD
Solution (Metode Lagrange, lanjutan...)
Syarat orde pertama (persamaan Euler):
Lx1 −ddtLx1 = 0⇔ d
dt(x1 − λ) = 0⇔ x1 − λ = k1,
Lx2 −ddtLx2 = 0⇔ λ− d
dt(x2) = 0⇔ x2 = λ.
Dari kedua syarat di atas dan Lλ = 0⇔ x1 = x2 diperoleh PD:
x2 = x2 − k1 ⇔ x2(t) = c1et + c2e−t + k1⇒ x1(t) = c1et − c2e−t + k1t + k2.
Syarat-syarat awal memberikan c1 = 1, c2 = 0, k1 = k2 = −1, sehingga
x∗1 (t) = et − t − 1,x∗2 (t) = et − 1.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 41 / 85

MKV Berkendala Isoperimetrik
Kendala Isoperimetrik (iso: sama, perimeter : keliling)
Awalnya: masalah mencari daerah terluas yang dimiliki oleh kurvatertutup dengan keliling sama, K .
Bacalah kisah Queen Dido of Carthage (814 SM).Sekarang: masalah variasi dengan kendala integral:
opt J(x) =∫ T
0f (x , x , t) dt, x = (x1, . . . , xn)T
s.t.∫ T
0gi (x , x , t) dt = `i (konst.), 1 ≤ i ≤ r ≤ n
x(0) = x0, x(T ) = xT .
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 42 / 85

MKV Berkendala Isoperimetrik
Definisikan
yi (t) =∫ t
0gi (x(s), x(s), s) ds
sehingga diperoleh
yi (0) = 0,
yi (T ) = `i ,
yi (t) = gi (x , x , t)⇔ yi − gi (x , x , t)︸ ︷︷ ︸Gi (x ,x ,t)
= 0.
Masalah kendala isoperimetrik berubah menjadi kendala PD:
opt J(x) =∫ T
0f (x , x , t) dt
s.t. Gi (x , x , t) = 0, 1 ≤ i ≤ r ≤ n.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 43 / 85

MKV Berkendala Isoperimetrik
ExampleSelesaikan masalah variasi berkendala isoperimetrik
max J(x) =∫ 1
0x2 dt
s.t.∫ 1
0(1+ x) dt = 3,
x(0) = 0,
x(1) = 1.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 44 / 85

MKV Berkendala Isoperimetrik
Solution
Definisikan y(t) :=∫ t0 (1+ x(s)) ds sehingga diperoleh y(0) = 0,
y(1) = 3, dan y(t) = 1+ x(t). MKV berkendala isoperimetrik berubahmenjadi MKV berkendala PD:
max J(x) =∫ 1
0x2 dt s.t. y − 1− x = 0.
Definisikan fungsi Lagrange
L := x2 + λ(1+ x − y).
Persamaan Euler:
Lx −ddtLx = 0 ⇔ λ− d
dt(2x) = 0⇔ x = 1
2λ
Ly −ddtLy = 0 ⇔
ddt(λ) = 0⇔ λ(t) = A.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 45 / 85

MKV Berkendala Isoperimetrik
SolutionDari dua kondisi di atas diperoleh:
x = 12A⇔ x = 1
2At + B ⇔ x(t) = 14At
2 + Bt + C .
Dari x(0) = 0 dan x(1) = 1 diperoleh C = 0 dan B = 1− 14A, sehingga
x(t) = 14At
2 + (1− 14A)t.
Syarat perlu Lλ = 0⇔ y = 1+ x ⇔∫ 10 (1+ x) dt = 3 memberikan∫ 1
0(1+ 1
4At2 + (1− 1
4A)t) dt = 3⇔ A = −36.
Jadi ekstremum dari masalah variasi di atas adalah
x∗(t) = −9t2 + [email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 46 / 85

MKV Berkendala Isoperimetrik
Example (Dido Problem)
Sebuah kurva x = x(t) memiliki panjang K dan kedua ujungnyamenghubungkan titik-titik A(a, 0) dan B(b, 0), dengan a < b. Tentukankurva x sedemikian sehingga memiliki luas daerah di bawah kurva terbesar.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 47 / 85

MKV Berkendala Isoperimetrik
Solution (Dido Problem)Luas daerah di bawah kurva
J(x) =∫ ba x(t) dt.
Panjang kurva: dK =√dt2 + dx2 =
√1+ x2dt,sehingga
K =∫ ba
√1+ x2 dt.
Masalah variasi:
max J(x) =∫ ba x(t) dt
s.t.∫ ba
√1+ x2 dt = K ,
x(a) = 0,
x(b) = 0.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 48 / 85
MKV Berkendala Isoperimetrik
Solution (Dido Problem, lanjutan ...)
Definisikan y(t) :=∫ ta
√1+ x2 ds sehingga diperoleh y(a) = 0,
y(b) = K , dan y(t) =√1+ x2. Definisikan fungsi Lagrange
L := x + λ(√
1+ x2 − y).
Persamaan Euler terhadap y memberikan Ly − ddt Ly = 0⇔
dλdt = 0
sehingga λ(t) = C. Persamaan Euler terhadap x:
Lx −ddtLx = 0 ⇔ 1− λ
ddt
(x√1+ x2
)= 0
⇔ Cd(
x√1+ x2
)= dt
⇔ Cx√1+ x2
= t + k1.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 49 / 85

MKV Berkendala Isoperimetrik
Solution (Dido Problem, lanjutan ...)Pemisahan peubah:
C 2x2
1+ x2= (t + k1)2 ⇔ (C 2 − (t + k1)2)x2 = (t + k1)2
⇔ x = ± t + k1√C 2 − (t + k1)2
⇔ x(t) = ±√C 2 − (t + k1)2 + k2.
Diperoleh persamaan lingkaran berpusat di (−k1, k2) berjari-jari C :
x − k2 = ±√C 2 − (t + k1)2 ⇔ (x − k2)2 + (t + k1)2 = C 2.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 50 / 85
MKV Berkendala Isoperimetrik
Solution (Dido Problem, lanjutan ...)Karena kedua titik A dan B berada di sumbu-t maka k2 = 0 dan−k1 = a+b
2 sehingga
x(t) =√C 2 − (t − a+b
2 )2.
Untuk menentukan pengganda Lagrange λ(t) = C :
∫ ba
√1+ x2 dt = K ⇔
∫ b
a
√1+
(t − a+b2 )
2
C 2 − (t − a+b2 )
2dt = K .
Cara mudah: Jari-jari lingkaran: C , keliling 12 lingkaran: K = πC,
sehingga C = Kπ . Dengan demikian persamaan lingkaran diberikan oleh
x2 + (t − a+b2 )
2 = K 2π2.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 51 / 85

MKV Berkendala Isoperimetrik
ProblemSelesaikan MKV berkendala isoperimetrik berikut:
min∫ 10 x
2 dt
s.t.∫ 10 x dt = 1, x(0) = 0, x(1) = 2.
ProblemSelesaikan MKV berkendala isoperimetrik berikut:
min∫ 10 x
2 dt
s.t.∫ 10 x
2 dt = 2, x(0) = 0, x(1) = 1.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 52 / 85

MKV Berkendala Isoperimetrik
ProblemTentukan kurva AB yang memenuhi kondisi-kondisi berikut:
melewati titik-titik A(0, 4) dan B(4, 4),
memiliki luas daerah di bawah kurva K,
panjang kurva minimum.
ProblemSelesaikan MKV berkendala isoperimetrik berikut:
1 min∫ T0 e
−rtx dt s.t.∫ T0
√x dt = A.
2 min∫ b0
√1+ x2 dt s.t.
∫ b0 x dt = c, b, c > 0.
3 min∫ 10 (2x − x2) dt s.t.
∫ 10 tx dt = 1.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 53 / 85

Syarat Batas MKV
Tinjau kembali masalah variasi: opt J =∫ T0 f (x , x , t) dt.
Syarat optimalitas:
δJ = 0 ⇔∫ T0
(hfx + hfx
)dt = 0
(integral by part) ⇔ hfx |T0 +∫ T0
(fx −
ddtfx
)h dt = 0.
Kasus I: x(0) = x0 dan x(T ) = xT (fixed)
h(0) = h(T ) = 0 berlaku.
hfx |T0 = 0.Syarat optimalitas:
∫ T0
(fx − d
dt fx)h dt = 0⇔ fx − d
dt fx = 0.
Persamaan Euler merupakan PD orde-2 yang solusinya melibatkandua konstanta pengintegralan yang nilainya dapat ditentukan darisyarat batas.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 54 / 85

Syarat Batas MKV
Kasus II: x(0) dan/atau x(T ) tidak diketahui (free)
h(0) = h(T ) = 0 tidak berlaku.
Syarat optimalitas: fx − ddt fx = 0 dan hfx |T0 = 0.
hfx |T0 = 0 dapat dipenuhi jika fx |t=0 = 0 dan fx |t=T = 0.fx |t=0 = 0 dan/atau fx |t=T = 0 disebut sebagai syarat batasalamiah.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 55 / 85

Syarat Batas MKV
ExampleMasalah jarak terdekat
min J(x) =∫ 100
√1+ x2 dt
x(0) = 4
x(10) tidak diketahui.
ExampleSelesaikan masalah variasi berikut:
min J(x) =∫ 20
(x2 + xx + 2x + 4x
)dt
x(0) dan x(2) tidak diketahui.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 56 / 85

Waktu Akhir Bebas (Free Terminal Time)
Untuk δT dan h(T ) cukup kecil:
EC =ECδT
δT = mgsδT ≈ x∗(T )δT ≈ x(T )δT
h(T ) = FC − EC ≈ δx(T )− x(T )δT [email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 57 / 85

Waktu Akhir Bebas (Free Terminal Time)
Variasi dari J :
δJ(x) =
T+δT∫0
f (x + h, x + h, t) dt −T∫0
f (x , x , t) dt
=
T∫0
[f (x + h, x + h, t)− f (x , x , t)
]dt
+
T+δT∫T
f (x + h, x + h, t) dt
≈T∫0
(fxh+ fx h
)dt +
T+δT∫T
f (x + h, x + h, t) dt.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 58 / 85

Waktu Akhir Bebas (Free Terminal Time)
Misalkan F (t) =∫f (x + h, x + h, t) dt sehingga F ′(t) = f (t).
TNR: Jika F kontinu dan terturunkan di (T ,T + δT ) maka adac ∈ (T ,T + δT ) sehingga
F ′(c) =F (T + δT )− F (T )(T + δT )− T
⇔ f (c) =F (T + δT )− F (T )
δT⇔ f (c)δT = F (T + δT )− F (T ).
Misalkan c = T + θδT dengan 0 < θ < 1, maka
f |t=T+θδT δT =∫ T+δT
Tf (x + h, x + h, t) dt.
f |t=T+θδT ≈ f |t=T ketika δT → 0.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 59 / 85

Waktu Akhir Bebas (Free Terminal Time)
Variasi dari J :
δJ(x) ≈∫ T
0
(fxh+ fx h
)dt + f |t=T δT
=∫ T
0
(fx −
ddtfx
)h dt + hfx |t=T + f |t=T δT .
Syarat optimalitas δJ = 0 :
1 Persamaan Euler
fx −ddtfx = 0.
2 Syarat transversalitas hfx |T + f |T δT = 0
⇔ h(T )fx |T + f |T δT = 0
⇔ [δxT − x(T )δT ] fx |T + f |T δT = 0
⇔ [f |T − x fx |T ] δT + fx |T δxT = 0.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 60 / 85
Waktu Akhir Bebas (Free Terminal Time)
Ringkasan:
opt J(x) =∫ T
0f (x , x , t) dt
x(0) = x0, T bebas (tidak ditentukan).
Syarat optimalitas:
1 Persamaan Euler
fx −ddtfx = 0.
2 Syarat transversalitas
(f − x fx )δt|T + fx δx(t)|T = 0.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 61 / 85

Waktu Awal Bebas (Free Initial Time)
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 62 / 85

Waktu Awal Bebas (Free Initial Time)
Ringkasan (analog waktu akhir bebas):
opt J(x) =∫ T
t0f (x , x , t) dt
x(T ) = xT , t0 bebas (tidak ditentukan).
Syarat optimalitas:
1 Persamaan Euler
fx −ddtfx = 0.
2 Syarat transversalitas
(f − x fx )δt|t0 + fx δx(t)|t0 = 0.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 63 / 85


Waktu Awal dan Akhir Bebas
Ringkasan (gabungan waktu awal dan akhir bebas):
opt J(x) =∫ T
t0f (x , x , t) dt
t0 dan T bebas (tidak ditentukan).
Syarat optimalitas:
1 Persamaan Euler
fx −ddtfx = 0.
2 Syarat transversalitas
(f − x fx )δt|t0,T + fx δx(t)|t0,T = 0.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 65 / 85

Syarat Batas (Kasus Khusus)
Titik akhir B bergerak sepanjang kurva g(t)
Diperoleh
δx(T ) =δx(T )
δTδT = mgsδT ≈ g(T )δT .
Syarat transversalitas (f − x fx )δt|T + fx δx(t)|T = 0 berubah menjadi(f + (g − x)fx ) δt|T = 0.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 66 / 85

Syarat Batas (Kasus Khusus)
Titik awal A bergerak sepanjang kurva g(t)
Syarat transversalitas:
(f + (g − x)fx ) δt|t0 = 0.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 67 / 85

Syarat Batas (Kasus Khusus)
Kedua titik ujung bergerak sepanjang kurva g1(t) dan g2(t)
Syarat transversalitas:
(f + (g1 − x)fx ) δt|t0 = 0,
(f + (g2 − x)fx ) δt|T = [email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 68 / 85

Syarat Batas (Kasus Khusus)
Titik awal A terletak pada garis t = t0 dan titik akhir B terletakpada garis t = T
δt0 = 0δT = 0δx(t0) 6= 0δx(T ) 6= 0
Syarat transversalitas:
fx δx(t)|t0,T = 0⇔ fx |t0,T = 0.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 69 / 85

Syarat Batas (Kasus Khusus)
x0, t0, xT fixed, T free
δt0 = 0δT 6= 0δx(t0) = 0δx(T ) = 0
Syarat transversalitas:
(f − x fx )δt|T = 0⇔ (f − x fx |T = 0.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 70 / 85

Syarat Batas (Kasus Khusus)
x0, xT fixed, t0,T free
δt0 6= 0δT 6= 0δx(t0) = 0δx(T ) = 0
Syarat transversalitas:
(f − x fx )δt|t0,T = 0⇔ (f − x fx |t0,T = 0.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 71 / 85
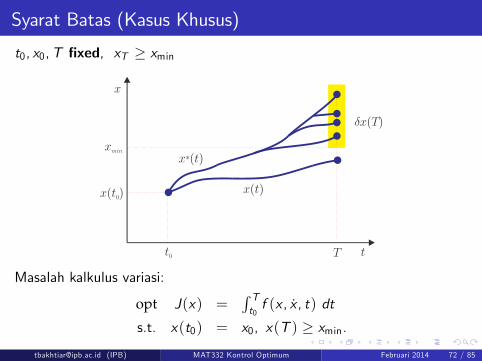
Syarat Batas (Kasus Khusus)
t0, x0,T fixed, xT ≥ xmin
Masalah kalkulus variasi:
opt J(x) =∫ Tt0f (x , x , t) dt
s.t. x(t0) = x0, x(T ) ≥ [email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 72 / 85

Syarat Batas (Kasus Khusus)
t0, x0,T fixed, xT ≥ xminCara menyelesaikan:
1 Selesaikan MKV di atas dengan x(T ) bebas. Periksa apakahx(T ) ≥ xmin? Jika ya, maka solusi sudah ditemukan.
2 Jika tidak, selesaikan MKV di atas dengan x(T ) = xmin (masalahtitik ujung tetap).
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 73 / 85

Syarat Batas (Kasus Khusus)
t0, x0,T fixed, xT ≥ xminExampleSelesaikan masalah kalkulus variasi:
opt J(x) =∫ 20 (t + x
2) dt
s.t. x(0) = 4,
x(2) ≥ 5.
SolutionPertama akan dianalisis MKV berikut:
opt J(x) =∫ 20 (t + x
2) dt
s.t. x(0) = 4,
x(2) bebas.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 74 / 85

SolutionPersamaan Euler:
ddt(2x) = 0 ⇔ x = 0
⇔ x(t) = At + B.
Dengan memasukkan nilai awal x(0) = 4 diperoleh B = 4 sehinggadiperoleh x(t) = At + 4. Nilai A dapat ditentukan dari syarat batasalamiah:
fx |t=2 = 0⇔ (2x |t=2 = 0⇔ 2A = 0⇔ A = 0.
Dengan demikian,x∗(t) = 4,
sehingga x(2) = 4 � 5.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 75 / 85

SolutionLakukan analisis terhadap MKV berikut:
opt J(x) =∫ 20 (t + x
2) dt
s.t. x(0) = 4,
x(2) = 5.
Dengan memasukkan syarat batas x(2) = 5 ke solusi x(t) = At + 4diperoleh A = 1
2 , sehingga
x∗(t) = 12 t + 4.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 76 / 85

Syarat Batas
ExampleSelesaikan masalah variasi berikut:
opt J(x) =∫ T
t0(x + x2) dt.
1 t0 = 0,T = 2, x(0) = 1, x(2) = 10.2 t0 = 0,T = 2, x(0) = 1, x(2) free.3 t0 = 0, x(0) = 1, x(T ) = 4,T free but T > 2.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 77 / 85

Syarat Batas
Example
Tentukan kurva x(t) terpendek yang menghubungkan garis g(t) dan titikA(4, 4):
1 tanpa menggunakan kalkulus variasi,2 dengan menggunakan kalkulus variasi.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 78 / 85

Solution (Tanpa menggunakan KV)
Diperoleh persamaan garis g adalah g(t) = − 12 t + 3. Lintasan terpendekyang menghubungkan garis g dengan titik A adalah garis yang tegak lurusg dan melalui A, yaitu
x − 4 = 2(t − 4)⇔ x(t) = 2t − 4.
Koordinat B dapat ditentukan sebagai berikut:
− 12 t + 3 = 2t − 4⇔ t = 145 , x(
145 ) =
85 .
Jadi B = ( 145 ,85 ).
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 79 / 85

Solution (Dengan menggunakan KV)Masalah di atas dapat dirumuskan sbb:
min J(x) =∫ 4
t0
√1+ x2dt,
t0 belum ditentukan,
x(t0) = − 12 t0 + 3,x(4) = 4.
Misalkan f (x) =√1+ x2 = (1+ x2)1/2. Persamaan Euler:
fx −ddtfx = 0⇔ x = 0⇔ x(t) = At + B.
Dengan memasukkan syarat batas x(4) = 4 diperoleh:
B = 4− 4A⇔ x(t) = At + 4− 4A.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 80 / 85

Solution
Syarat transversalitas (f + (g − x)fx |t=t0 = 0 dengan g(t) = −12 t + 3 :
⇔((1+ x2)1/2 + (− 12 − x)
x(1+ x2)1/2
∣∣∣∣t=t0
= 0
⇔((1+ A2)1/2 + (− 12 − A)
A(1+ A2)1/2
∣∣∣∣t=t0
= 0
⇔ − A− 22√1+ A2
= 0
⇔ A = 2.
Jadix∗(t) = 2t − 4.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 81 / 85

Kuis 2 (open book, but strictly individual)
ProblemTunjukkan bahwa x(t) = A+ B ln t, dengan A,B ∈ R, memenuhipersamaan Euler dari MKV berikut:
min J(x) =∫ 1
t0tx2 dt, x(t0) = 0, x(1) = 1.
Tentukan syarat bagi t0.
ProblemSeorang produsen memproduksi x(t) unit barang pada saat t, dengant ∈ [0, 1]. Tingkat produksi di awal periode adalah 0 dan target tingkatproduksi di akhir periode adalah 2 unit barang. Produsen menghadapibiaya produksi sebesar c1 = 4x2 + 4x + 1 dan biaya lain sebesarc2 = x2 + 3x + 2t. Jika diasumsikan harga barang konstan yaitu p = 20,tentukan kurva produksi yang memaksimumkan keuntungan.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 82 / 85
Solution (Kuis)
Definisikan f (x , t) = tx2. Persamaan Euler fx − ddt fx = 0 memberikan
ddt(2tx) = 0⇔ x + tx = 0.
Jika x(t) = A+ B ln t maka
x + tx =Bt− t B
t2= 0.
Terbukti bahwa x(t) = A+ B ln t memenuhi persamaan Euler.Selanjutnya dengan memasukkan syarat batas x(t0) = 0 dan x(1) = 1diperoleh
x(t) = 1− ln tln t0
.
Jelas 0 < t0 < 1.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 83 / 85

Solution (Kuis)Fungsi keuntungan:
π(x , x , t) = px − c1 − c2= 20x − (4x2 + 4x + 1)− (x2 + 3x + 2t)= −4x2 + 16x − 1− x2 − 3x − 2t.
Masalah kalkulus variasi:
max Π(x) =∫ 1
0(−4x2 + 16x − 1− x2 − 3x − 2t) dt
s.t. x(0) = 0, x(1) = 2.
Persamaan Euler πx − ddtπx = 0 memberikan
(−8x + 16) + ddt(2x + 3) = 0.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 84 / 85

Solution (Kuis)Persamaan Euler berupa PD linear takhomogen orde dua:
−8x + 16+ 2x = 0⇔ x − 4x = −8,
dengan solusi umum
x(t) = Ae2t + Be−2t + 2.
Dari syarat batas diperoleh A = 2e4−1 dan B = −(A+ 2) =
2e4e4−1 , sehingga
x∗(t) =2
e4 − 1e2t − 2e4
e4 − 1e−2t + 2.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 85 / 85