improvised architeture of visual attention model
TRANSCRIPT
BARATH MUTHU KUMAR BLENU4CSE08023
RAVIKIRAN CH BLENU4CSE08027
V SUBASHINI BLENU4CSE08510
GUIDE
DR.AMUDHA J
ASSOCIATE PROFESSOR
AMRITA SCHOOL OF ENGG.,BANGLORE
Amrita School of Engineering,Bangalore-35

Problem statement
Detailed Design(Training)
Detailed Design(Testing)
Coding Guidelines
Implementation
Performance Evaluation
References
Conclusion
Amrita School of Engineering,Bangalore-35

Given an Image frame or a video, analyse it using
Improvised VAM to generate Salient region and
find the target object.
Amrita School of Engineering,Bangalore-35

IMAGE
VAM
VAM
WINNER
TAKE ALL
EXTRACTED
FEATURES
DECISION
TREE
CLASSIFIER
FEATURE
SELECTION
TYPE
SM
90FM2
BYFM3
BYFM1
FEATURE MAPS
B
O
T
T
O
M
-
U
P
M
O
D
U
L
E
CONSPICUITY MAPS
SALIENCY
MAP
PYRAMID
CONSTRUCTION
FEATURE
NO.
TYPE
1 RGFM1
2 SM
3 RGFM3
4 BYFM4
5 90FM2
6 INTFM1
7 INTFM5
8 BYFM3
9 0FM1
10 BYFM1
11 135FM3
Amrita School of Engineering,Bangalore-35

REQUIRED
FEATURES
TYPE
SM
90FM2
BYFM3
BYFM1
T
O
P
-
D
O
W
N
M
O
D
U
L
E
CLASSIFIER
DETECT TARGET
OBJECT
TEST IMAGE
Amrita School of Engineering,Bangalore-35

IDE:
Using CodeBlocks cross platform IDE
CodeBlocks console project(.cbp)
Variable Naming Convention:
Names relevant to the use of variable.
For ex: variable that stores original image read from Hard
disk is named as original_img.
Documented beside each variable to state the data it holds.
Amrita School of Engineering,Bangalore-35

Function Naming Convention:
Named relevant to functionality.
For ex: function to find pyramids is named as find_pyramids()
Seperate function to perform each modular task in the project.
Data Structures:
Used data structures present in “cxcore.h” header file of
Opencv libraries.
Ex: “Mat” to store image
Made use of vectors and scalars in C++.
Amrita School of Engineering,Bangalore-35

Predefined
cv.h
highgui.h
cxcore.h
mll.h
User Defined
color.h
intensity.h
orientation.h
saliency.h
Winner_takeall.h
color_feature.cpp
Intensity_feature.
cpp
orientation_feature
.cpp
Saliency.cpp
Amrita School of Engineering,Bangalore-35
buildPyramid()
pyrup()
absdiff()
minMaxLoc()
Winner take
all.cpp

Function name: buildPyramid
Number of Parameters: 3
Parameters:
1. Actual image
2. Variable of type vector to store different levels of Pyramid
3. Number of levels
Syntax:
buildPyramid( image, dest vec, no of levels)
Output:
Images at different levels of pyramids
Amrita School of Engineering,Bangalore-35

Function name: pyrUp
Number of Parameters: 3
Parameters:
1. Actual image
2. Variable to store resized image
3. Destination size
Syntax:
pyrUp( image, dest , size)
Output:
Resized image
Amrita School of Engineering,Bangalore-35

Function name: absdiff
Number of Parameters: 3
Parameters:
1. Image 1
2. Image 2
3. Destination to store difference of image1 and image2
Syntax:
absdiff( image1,image2,dest)
Output:
Difference image
Amrita School of Engineering,Bangalore-35

Function name: minMaxLoc
Number of Parameters: 3
Parameters:
1. Image
2. Variable to store minimum intensity
3. Variable to store maximum intensity
Syntax:
minMaxLoc( image,&min,&max)
Output:
Minimum and Maximum intensities in an image
Amrita School of Engineering,Bangalore-35

color_feature.cpp
Called through “color_feature( )”
Finds colour pyramids
Finds RG,BY colour maps
Colour Feature maps.
Colour conspicuity map
Amrita School of Engineering,Bangalore-35

Amrita School of Engineering,Bangalore-35
Color_feature.cpp
R=r-(g+b)/2.
G=g-(r+b)/2.
B=b-(r+g)/2.
Y=r+g-2(|r-g|+b)
RG_fmap=|(R(c)-G(c) ) - (R(s)-G(s) )|
BY-fmap=|(B(c)-Y(c) ) - (B(s)-Y(s) )|

intensity_feature.cpp
Called through “intensity_feature( )”
Finds intensity pyramids
Intensity Feature maps.
Intensity conspicuity map
Amrita School of Engineering,Bangalore-35

intensity_feature.cpp
I=(r+g+b)/3.
Intensity_fmap=|I(c)-I(s)|
Amrita School of Engineering,Bangalore-35

orientation_feature.cpp
Called through “orientation_feature( )”
Finds orientation pyramids
Finds orientation feature maps
Uses Gabor function with kernel size of 21x21
Feature maps are found for 4 orientation angles viz. 0, 45,90
and 135 degrees respectively.
Amrita School of Engineering,Bangalore-35
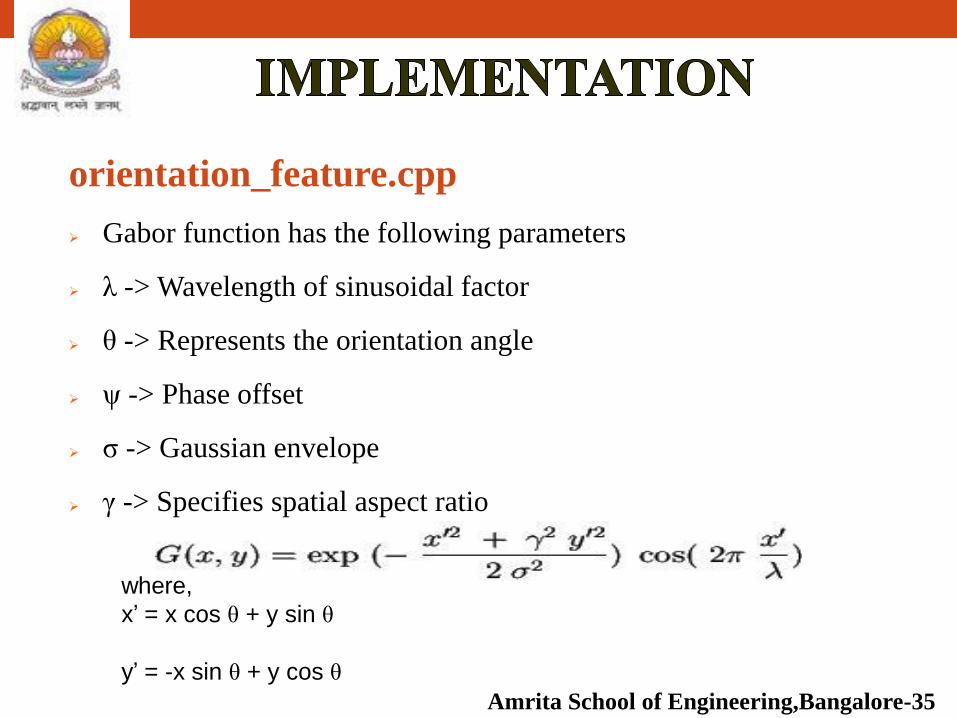
orientation_feature.cpp
Gabor function has the following parameters
λ -> Wavelength of sinusoidal factor
θ -> Represents the orientation angle
ψ -> Phase offset
σ -> Gaussian envelope
γ -> Specifies spatial aspect ratio
Amrita School of Engineering,Bangalore-35
where,
x’ = x cos θ + y sin θ
y’ = -x sin θ + y cos θ

saliency.cpp
Uses the results from color_feature.cpp, intensity_feature.cpp
and orientation_feature.cpp
Finds average of all the conspicuity maps to obtain saliency
map.
Saliency_map=(color_consp+int_consp+orient_consp)/3;
Amrita School of Engineering,Bangalore-35

Signboard Class No of samples
Pedestrain Sb 16
Bike sb 16
Crossing sb 16
Total 48
Images
Signboard Class No of samples
Pedestrain Sb 6
Bike sb 6
Crossing sb 6
Total 18
Training Testing

Two classes on total
1.Signboard(SB)
2. Non signboard(NSB)
Every object detected must belong to one of the above
mentioned classes.
Amrita School of Engineering,Bangalore-35

Four Categories for every classification:
1.True Positive
2.True Negative
3.False Positive
4.False Negative
Amrita School of Engineering,Bangalore-35

Consider the following example:
A study Evaluating a new test that screens people for a disease.
Each person taking test will
1.Either have disease (sick class)
2.Does not have disease(nsick class)
The test results may be
1.positive->stating disease
2.Negative->No disease
Amrita School of Engineering,Bangalore-35

True Positive OR True Negative:
Outcome belongs to class to which it is from.
i.e. With respect to our example
Healthy people correctly diagnosed as Healthy or vice versa.
False Positive OR False Negative:
Outcome does not belongs to original class.
i.e. With respect to our example
Healthy people incorrectly diagnosed as sick or vice versa.
Amrita School of Engineering,Bangalore-35

Confusion Matrix:
• A 2D-array showing all the four possible classifications.
• Shown as below
SB NSB
SB True positive False Negative
NSB False positive True negative
Amrita School of Engineering,Bangalore-35

Detection Rate:
Ratio of total number of objects correctly detected to the
total number of detections.
Gives the efficiency of the system.
Detection Rate=(true+ve + true-ve) / total detections
where total detections=sum of all values in confusion
matrix
Amrita School of Engineering,Bangalore-35

Sensitivity:
It relates to the system’s ability to identify positive results.
Sensitivity=(true+ve)/(true+ve + true-ve)
It gives the probability of classification being correct given it is
a signboard.
Amrita School of Engineering,Bangalore-35

Specificity:
It relates to the system’s ability to identify negative results.
Specificity=( true-ve)/(true+ve + True-ve)
It gives the probability of classification being correct given it is a not a signboard.
Amrita School of Engineering,Bangalore-35

Precision:
It is a measure of system’s accuracy.
Proportion of the samples which truly belong to a class x to
the total classified under class x.
Precision=(no of true+ve)/(true+ve + false+ve)
Amrita School of Engineering,Bangalore-35

Computation Time:
Time taken to construct required feature maps,detect and classify object in a given image.
Depends on the number of feature maps to be constructed.
Lesser the computational time,more efficient the system is.
Amrita School of Engineering,Bangalore-35
Completed Literature survey
Completed design
Completed 60% of implementation
Amrita School of Engineering,Bangalore-35

• An M-tech thesis on Computational Attention Model for Traffic Sign Detection System, by N.V.P Kiran Yarlagadda, July 2011
• Computational Visual Attention Systems and their Congnitive Foundations, by Simon Frintrop, Eric Rome, Henrik I. Christensen. ACM transactions,Vol. 7, No.1, 2011.
• B.Alefs, G.Eschemann , H.Ramoser and C.Beleznai,”Road Sign Detection From Edge orientation Histograms” in Intelligent Vehicle Symposium in IEEE 2007
• N.Dalal and B.Triggs, “Histograms of Oriented Gradients for human Detection in Computer Vision and Pattern Recognition”,2005 (IEEE)
• Visual Attention: From Bio-inspired modelling to Real-time Implementation, by Nabil Ouerhani,2003
Amrita School of Engineering,Bangalore-35

• Itti, L., Koch, C. and Niebur, E. “A Model of Saliency-Based
Visual Attention for Rapid Scene Analysis”. IEEE Trans. on
PAMI 20 (11, 1998) 1254–1259.
• http://ilab.usc.edu/bu/
• http://opencv.willowgarage.com
• http://www.websters-online-dictionary.org/
Amrita School of Engineering,Bangalore-35

THANK YOU
Amrita School of Engineering,Bangalore-35