horizontal contact resonances of vibration pickup with rectangular bases on soil surfaces
TRANSCRIPT

Horizontal contact resonances of vibration
rectangular bases on soil surfaces Sadao Omata and Sakae Morita
pickup with
College of Engineering, Nihon Unioersity, Tokusada, Koriyama, Fukushimaken 963, Japan (Received 12 March 1980; accepted for publication 2 May 1980)
The horizontal contact resonance, which is formed by the resonant system due to the mass of a vibration pickup and the contact compliance of a setting point, causes errors in measurement and places restrictions on the measurement frequency range. The characteristics of the horizontal resonance depend on the type and condition of the ground surface and the method of planting the vibration pickup. This paper indicates the characteristics of the horizontal contact resonances of the rectangular vibration pickup with various base shapes, and derives expressions for a coupled motion of the pickup. It is suggested that the horizontal resonance and the response of the coupling system of the rectangular vibration pickup are significantly affected by the height of the center of gravity, the base area, and the base shape. The relationships are represented by a simple curve for the horizontal resonance. The agreements between the analog equations derived here and the values of the measurement on actual fields are well within the accuracy required for engineering analysis. The derived solutions provide adequate accuracy for practical applications to machine foundations with various rectangular bases. '
PACS numbers: 43.85.Dj, 43.40.Vn
INTRODUCTION
In the last few years a system of instrumentation called vibration levelmeter, or VLM, has been widely used to measure a ground vibration from external sources, which may include construction works, high- way traffic, surface and subsurface railways, and fac- tories in nearby locations. The systems VLM which might be used to measure low-level, low-frequency ground motion, would incorporate a high-sensitivity piezoelectric accelerometer, and also would be those which have a large inertia mass for getting a high sen- sitivity. In general, the measurement frequency range of the system VLM covers 1 to several hundreds of Hz.
When such a typical inertia-type vibration pickup is set directly on the surface of a ground motion, as al- ready known, the system has a contact resonant fre- quency caused by the mass of the pickup and the contact compliance of the setting point. The characteristics of this system depend on the type and condition of the ground surface, the method of planting the vibration pickup, and moreover the weight and the base area of it. Therefore if the resonant frequency comes within the measurement frequency range of the system VLM, the values of the measurements should be much af-
fected by it. Consequently, the resonant frequency pro- duced in the measurement system causes errors in measurement and places restrictions on the measure-
ment frequency ra, nge. Such errors in measurement caused by the resonant
frequency of the system VLM in a vertical direction have been examined by studies of the authors. •'2 Fur- thermore the authors 3'4 have examined the character-
istics of the horizontal resonant frequency for the mea- surement of the ground vibration in a horizontal direc- tion and graphically indicated the relationship between the resonant frequency, the height of the center of gravity, and the base area of the vibration pickup.
Until now the obtained results are those which have
been examined only for the vibration pickup with a cir- cular base. However, the sensing pickups now used in
the system VLM have various kinds of figures and weights, so they have different heights of the center of gravity and base shapes. In particular, the vibration pickups with a rectangular base have various kinds of base shapes for the same contact areas. The horizon- tal contact resonances of the rectangular vibration pick- up appear to have a close relation with the shape of the contact base. Hence it follows that the characteristics
of the horizontal resonance depend on the height of the center of gravity and the contact area, and moreover the base shape. Consequently, when the various vi- bration pickups are placed on the same soil surface, significant differences of the values of the measurement for each vibration pickup are attributed to differences in the heights of the center of gravity and base shapes.
In order to make such systems clear, it is necessary to know the dynamical contact impedances of a pickup with a rectangular base on the surface of ground. The dynamic force-displacement relationships, which lead to the contact impedance, for a rigid body attached to an elastic half-space play an important role in the study of machine foundations as well as the study of pickup- soil interaction. The dynamical behavior of the rec- tangular rigid body in this problem depends on the elas-. tic properties of the ground, the shape of the loading area, and the frequency of the disturbing force. A con- siderable amount of work has been done on such a dy-
namic problem for the rectangular rigid footing. Awo- jobi s solved the problem of a rigid strip undergoing forced rocking oscillations. Karasudhi, Keer, and Lee 6 have treated the horizontal and rocking oscillations of a rigid strip footing, and moreover the response of a rigid strip has been investigated by Luco and West- mann 7 for vertical, horizontal, and rocking motions. Subsequently attempts 6'9 have been made by many re- searchers to represent the soil-structure system of the rigid strip footing. Analytic means of such a prob- lem, which is a mixed-boundary value problem, pose many difficulties in formulating, solving, and treating the exact mathematical model, and moreover, the mathematical treatment of solutions obtained is not
393 J. Acoust. Soc. Am. 68(2), Aug. 1980 0001-4966/80/080393-11500.80 ¸ 1980 Acoustical Society of America 393
Redistribution subject to ASA license or copyright; see http://acousticalsociety.org/content/terms. Download to IP: 129.21.35.191 On: Sat, 20 Dec 2014 19:08:51

easy to apply to an actual case. However, Tajimi •ø had proposed the simplified analog solutions to calcu- late the horizontal displacements and the rocking mo- tions of a rectangular rigid plate under a harmonic ex- citation. The treatment of the solution obtained by Tajimi, which was an analog solution and was derived in the same way as the analytic means for the horizon- tal and rocking motions of a rigid circular plate, was comparatively simple.
The objectives of this paper are to extend Tajimi's solutions, and examine the characteristics of the cou- pled horizontal and rocking motion of the vibration pickup with a rectangular contact base on the surface of an elastic half-space, and also investigate in more detail the characteristics of the horizontal resonant
frequency which causes errors in measurement of the system VLM.
I. APPROXIMATE EVALUATIONS OF DYNAMIC CONTACT IMPEDANCES OF RECTANGULAR BODIES
We consider a rectangular rigid body of length 2b and width 2a placed on the surface of an elastic half- space as shown in Fig. 1. In the horizontal translation and rocking mode, the motion of a body is constrained to be translational along X and rotational about Y, re- spectively. When a periodic disturbing force acts on the center of gravity of the system, Tajimi derived the following analog solutions for the modes of horizontal translation and rocking motion.
When a concentrated periodic force Pe iwt acts on the surface of semi-infinite elastic, the displacement in a horizontal direction at any point • on the surface of the medium from the force point, according to Tajimi's solution, is
Pe iwt 1 [(2 - v)sin20 e TM+ (2 - v) x= 2
x(1-2sin20)(e"•2r- sinK2r-i(1- cosK2r)) 2r
and similarly for the rotational disturbing force M e •t, the angular displacement is
a. X
b
Y
FIG. 1. Coordinate system of a rectangular rigid plate on an infinite elastic medium and integration. m =weight of plate, G = shear modulus, u = Poisson's ratio, p=density of medium.
1 - v M e iwt cos0 •- 2vG r •. (1 + i•r)e 'i•r , (2)
in which G is the shear modulus of half-space mediums, u is Poisson's ratio; •. are the constants derived from the function of the Poisson's ratio, •.= 1.04 (u=0), K•. = 0.92 (y = 0.25), •. = 0.86 (y = 0.5); • = 1.33 (constants); j = w/Vs, and Vs is the shear wave velocity.
The distributions of pressure at the contact between the rectangular plate and the surface of the medium are assumed to be both rigid distributions r,=BsPe•Wt/ (R • - r•)•/• for the horizontal disturbing force Pe • and r•= B• rcosOM eiW•/(R2-r2) •/• for the periodic dis- turbing torque, Me •wt, and where
Bs = • a log tan •+ •tan '•
and
+blogtan +•tan '• ,
3 Slogtan +•tan '• +bS +
llogtan + tan '• ,
in which B is derived from a loading force and a dis- placement of a rigid plate.
With these assumptions the central displacement of the rectangular plate in the direction of the exciting force, Pe •, according to Tajimi's solution from Eq.
is
and similarly for the rotation about a horizontal axis, y, through the center of plate the average angular displace- ment is
394 J. Acoust. Soc. Am., Vol. 68, No. 2, August 1980 S. Omata and S. Morita: Resonances of vibration pickups 394
Redistribution subject to ASA license or copyright; see http://acousticalsociety.org/content/terms. Download to IP: 129.21.35.191 On: Sat, 20 Dec 2014 19:08:51

l-•B 't[f 'I,•= G •Me'W -o
+ _ftan -1 (a/b) øLeos0/ ( K•b \ / K•.b + +( cosO/ \eosO! \coso dO], (4) in which the subscript B denotes the rigid distributions, Jo, J• are Bessel's function of order zero and first, re- spectively, and where
2 (z Z3 Z 5 ) •o( z) =• - • . • + • :• . • .... ,
H• (z): •' [ z• z• z• ) •\1" .3- 1" '3 •' '5 + 1" .3" .5" .7 ..... On the other hand, when the shear-stress distribution due to a horizontal disturbing force Pe iwt is assumed to be
•z : PeiWt/4ab for a uniform distribution, and the direct stress due to a disturbing torque Me • is assumed to be
•z = (3r cosO/4a3b)Me • for a triangular distribution, with these assumptions the dynamic horizontal displacement and the average angular displacement is derived from Eqs. (1) and (2) in the same way as in Tajimi's solutions, and they are as follows:
_ (2 - v)sin•'0 -- s•n - i 1 - cos + (2 - u)(1 - 2 sin"0) sin\cos 0 2vG ab -o K•. cos0 \cosO]J
(c )]1 K2 a •/cos0) sin•2r _i(1_ cos•2r) d +(1 -2 sin•) 2 dr--- -i -cos os0 - •r jr •
x{sin(:•o)_i[l_coS(c"•:O)]l)]dO + fo '•'• •/•I( 2 _ y)cos•.0•/sin [ ,•b• [1 s( K2b_•] \cos•/- i - co \cos0/J }
+ (2- y)(1 - osa/- - cOSkcos0}]} - fo ("øøsø• sin,,.r - i(1 - cos,,.r) dr)+ (1 - 2 cos•'0)
X 2 - - ]r • ,nLcos0}-i -COSLcos0} j dO , (5)
for a horizontal displacement, and
1-y , 3 [•otaa'•(a/•) l(2cos•0s•nLcos0}_cos•9(K•a•cos _i{2cos•0[ 1 •' 2vb a•-• ' •-• \cos 0! \cos0! - cøSLcose)J
-cøs29(c•:O) sin (•o•:0)}) dO+ fo taa'•(•/•) 1 t• in( •xb ) c •-• sin•'0 s \cos0
_ sin•O( •b •cos( K•b •_i{2 sin•. • I1 cos(:•bs0)]- \coso/ \coso/ - ' (6)
for a rocking displacement, in which subscript U denotes uniform distributions and T for the triangular distribu- tions.
Hence, in expanding equations obtained here, it is convenient to choose a nondimensional frequency parameter defined by a o-aw/V• and designate the ratio of the side length of the rectangular plate by •, b/a: •. With these de- finitions, expanding Eqs. (3)-(6) with respect to •xa o and •.ao, the contact compliances of the rigid plate are shown approximately, in practical cases where a nondimensional frequency, ao, is a small quantity, as following:
395 J. Acoust. Soc. Am., Vol. 68, No. 2, August 1980 S. Omata and S. Morita' Resonances of vibration pickups 395
Redistribution subject to ASA license or copyright; see http://acousticalsociety.org/content/terms. Download to IP: 129.21.35.191 On: Sat, 20 Dec 2014 19:08:51

(7)
and
2 - v [Rxv(X ) _ i (tr•.ao)Ixv(X)], Yxv -2•raG
Rxv(X)=• 1øgtan +• tan'• - sintan'XX-sintan'Xx -2''v'• logtan +•tan 'x
-log tan(• +• tan'•-lx)]-(-lx sin tan'XX - sin tan'X-Ix) } , Ixv(X)=• tan tan'•X + X tantan '• ,
y•s 3(1 - v) (X, a o) iI•s(X, ao) ] - 8aSG B•,[R•s - ,
B•: ogtanrr+•tan 'x +X3t• x 1+ -•1ogtan +•tan'Xx
(8)
(9)
R•s(X'aø)=• tan'XX+tan'X +• in2tan'XX-sin2tan'X + 4 ' tan'XX+2Xa tantan'Xx -tan'x '
I,• (X, ao) = ' " 4(trxao)3 IX)] sin tan'X-1 ' " Xa cøs•'tan'•x 9•r ogtan +•tan'• + 1 1 1øgtan(• 1 • -• +•tan '• ,
3(1 - v) [R•v(X ' ao) - iI•v(X, ao)], (10) Y•v = 27raSG
R•r(x'aø)=xsintan'•x-sintan'•+løgtan +• tan'• + "6' ' logtan +•tan '•
sin tan' • •
+x • x 1 (• 1 • 1 -•1ogtan •+• tan '• , eos2tan-•x
1
I•r(x'aø) (• ø)a • sinta• (2cøsatan'• 0 = xa cøsatan'•x tan tan'•X + } + - tan tan'• ,
in which the subscript X denotes the horizont• translation and ½ the an•lar displ•ement.
The dynamic• contact compliance derived here are an•og solutions for the horizont• and rocking motions, and the terms higher than second order of a o in Eqs. (7), (8) and fourth order of it in Eqs. (9), (10) are neglected since their effects are sm•l.
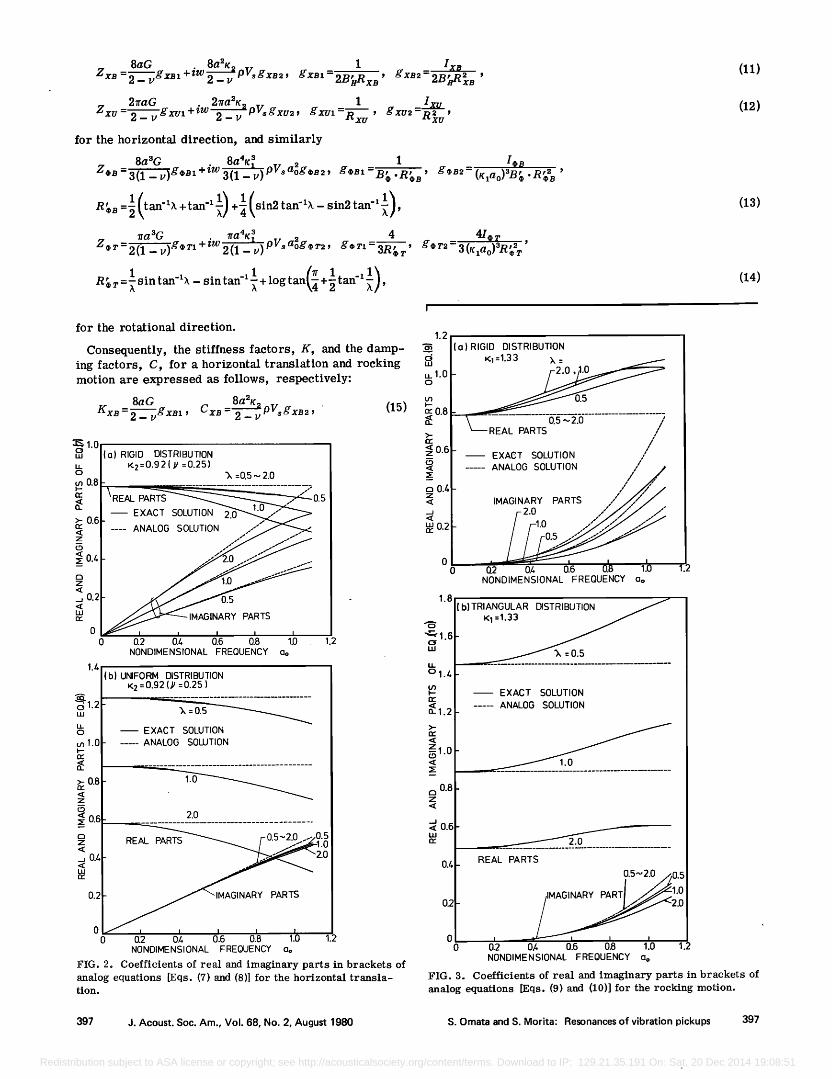
Figures 2 and 3 show a comparison between the exact and analog solution of Eqs. (7)-(10). The real parts of analog equations in Fig. 3 are plotted as the values whose terms higher than second order of a o are neglected. 'In these figures, the curves are represented for Poisson's ratio, v=0.25, but as described in Eq. (10), Fig. 2(b) plotted as uniform distributions is affectedby Poisson's ratio essentially. The errors due to the analog solutions increase with the nondimensional frequency, but for lower values of the nondimensional frequency, the exact and analog solutions coincide approximately.
From Eqs. (7)-(10), the dynamical impedances of the rectangular plate set on the surface of a medium can be written as
396 J. Acoust. Soc. Am., Vol. 68, No. 2, August 1980 S. Omata and S. Morita: Resonances of vibration pickups 396
Redistribution subject to ASA license or copyright; see http://acousticalsociety.org/content/terms. Download to IP: 129.21.35.191 On: Sat, 20 Dec 2014 19:08:51
8aG 8a2•2 1 ZxB-2_ u, gxB • +iw 2-u PVsgxs2' •xs•-2BgRxs' gXB2=2B•B '
1 _ Ixu 2•aG 2•a,•,pV•gxu•, •Xm=Rxu Zxu=2' u gxm+iw 2-• ' •XU2-R•U' for the horizont• direction, and similarly
8aaG 8a4• 1 I• z.. 3(1 •)g"• +iw 3(1 - •).v. • = , .... --
Rg•=• tan'•X+tan '• +{ sin2tan'•X sin2tan '• •aaO •a• 4
Rg r =•sin tan-•x - sin tan-• + log tan +•tan -• ,
for the rotational direction. 1.2
Consequently, the stiffness factors, K, and the damp- ing factors, C, for a horizontal translation and rocking motion are expressed as follows respectively: u_l.0 ,
8aG 8a2t/• PVsgx•. , (15) - - KxB 2 - v gx•t ' Cx• 2 - v
a)RIGID DISTRIBUTION
"h =1.33 X = --
_ "f.o, 1• • REAL PARTS /
!Io) RIO,D DISTRIBUTION •0.6- EXACT SOLUTION // • • =o.5•2.o _ ,
. • IMAOINARY PARTS • o.= •.o ...-' ...-' ...--'"
o, , , ,
• o o.= o.• 0.6 o.• •.o .... •0 .......... NONDIMENSIONAL FREOUENCY 0.2 1.8
I ••'UAOINARYPARTS 0 • • • I I •1.6
0 0.2 0.• 0.6 0.8 10 1.2 NONDIMENSIONAL FREOUENCY •o
1.4
0.6
0.4
0.2
0 0
(b) UNIFORM DISTRIBUTION K 2 =0.92 (J• =0.25 )
__=_
EXACT SOLUTION
ANALOG SOLUTION
2.0
_ -'' 2.0
i I I I I
0.2 0/-. 0.6 0.8 1.0 1.2 NONDIMENSIoNAL FREQUENCY ao
FIG. 2. Coefficients of real and imaginary parts in brackets of analog equations [Eqs. (7) and (8)] for the horizontal transla- tion.
Z_l.0
0.8 z
<• 0.6
( b) TRIANGULAR DISTRIBUTION
. K1 =1.33 • •, =0.5
EXACT SOLUTION
ANALOG SOLUTION
(11)
(12)
(13)
(14)
0.L
0.2-
REAL PARTS
0.5-'2.0 /50 c
I •----t--'• I I I 0.2 fit, 0.6 0.8 1.0 1.2 NONDIMENSIoNAL FREOUENCY ao
FIG. 3. Coefficients of real and imaginary parts in brackets of analog equations [Eqs. (9) and (10)] for the rocking motion.
397 J. Acoust. Soc. Am., Vol. 68, No. 2, August 1980 S. Omata and S. Morita: Resonances of vibration pickups 397
Redistribution subject to ASA license or copyright; see http://acousticalsociety.org/content/terms. Download to IP: 129.21.35.191 On: Sat, 20 Dec 2014 19:08:51
2•raG 27ra• pVsg. xv•. ' Kxu- 2 - •'gxm ' C xu = 2- • 8a3G 8a4•L
- (18) •a3G)gevx, Cev- _ in which coefficients gx and g• are given o•y as the •netion of the side-length ratio of the reetan•lar b•e.
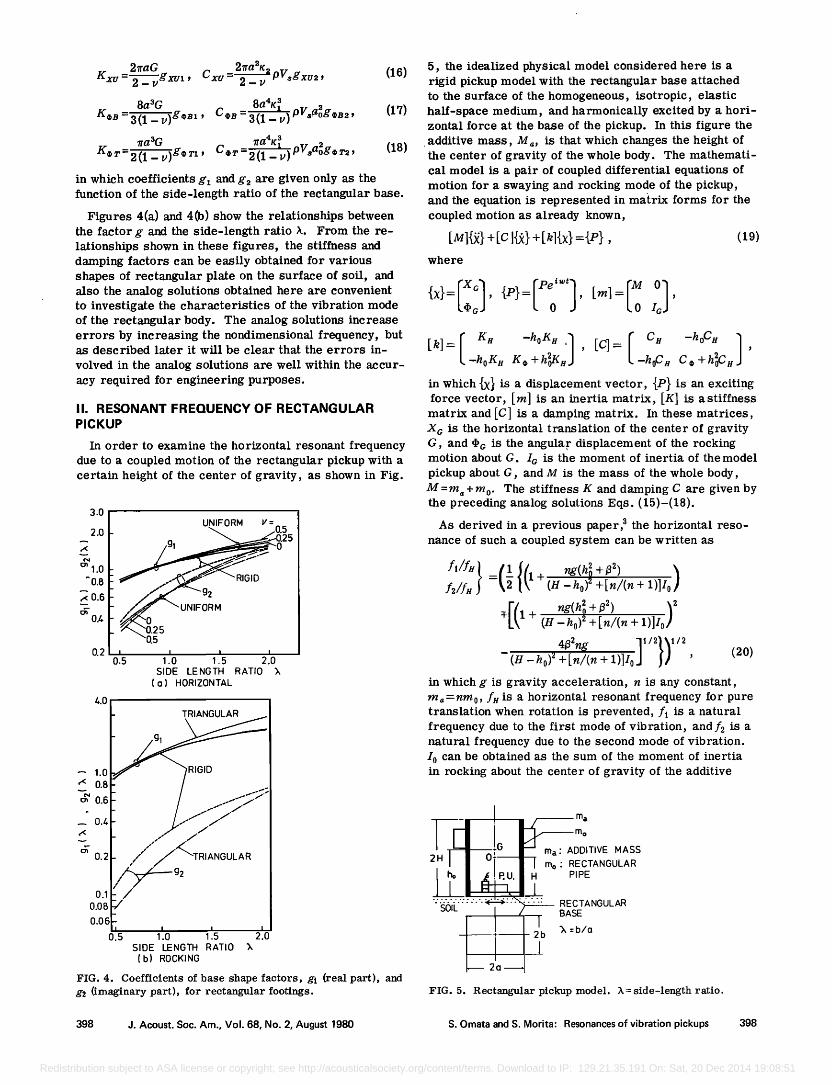
Fibres 4(a) and 4•) show the relationships between the factor g and the side-len•h ratio X. From the re- lationships shown in these fibres, the stiffness and din. ping factors can be e•ily obtained for various shapes of reetan•lar plate on the surface of soil, and •so the an•og solutions obtained here are convenient to investigate the eharateristies of the vibration mode of the rectangular body. The an•og solutions inc rede errors by incteeing the nondimension• frequency, but • described later it will be clear that the errors in-
volred in the anaog solutions are well within the accur- acy required for engineering purposes.
(16)
(17)
II. RESONANT FREQUENCY OF RECTANGULAR
PICKUP
In order to examine the horizontal resonant frequency due to a coupled motion of the rectangular pickup with a certain height of the center of gravity, as shown in Fig.
3.0
2.0
0.6
0./-.
0.2
4.0
UNIFORM Y = 0.5 - .
/u• •,,•0
//ff•" • g2
C'.o •o.2• •o.5 I I I I
0.5 1.0 1.5 2.0 SIDE LENGTH RATIO
(•) HORIZONTAL
- TRIANGULAR
' gl
-- 1.0
,'< o.8-
•0.6_- ..... /'
.-- 0.4- /J/,/- /./' ,,..- .
• 0 2 ,/// ./"•"TRIANGULAR
0 1 g2 0.0' K' 0'06 h • , ,
0.5 1.0 1.5 2.0 SIDE LENGTH RATIO X
lb) ROCKING
FIG. 4. Coefficients of base shape factors, gl (real part), and g2 (imaginary part), for rectangular footings.
5, the idealized physical model considered here is a rigid pickup model with the rectangular base attached to the surface of the homogeneous, isotropic, elastic half-space medium, and harmonically excited by a hori- zontal force at the base of the pickup. In this figure the additive mass, Ma, is that which changes the height of the center of gravity of the whole body. The mathemati- cal model is a pair of coupled differential equations of motion for a swaying and rocking mode of the pickup, and the equation is represented in mairix forms for the coupled motion as already known,
(19) + [c1½} + where
ec t. 0 Ic
-h0/<, /4. +h•nJ -ho c, C• +h2o c,
in which {X} is a displacement vector, {P3 is an exciting force vector, [m] is an inertia matrix, [K] is astiffness matrix and [C] is a damping matrix. In these matrices, X c is the horizontal translation of the center of gravity G, and (I)a is the angulaT displacement of the rocking motion about G. Ia is the moment of inertia of the model pickup about G, and M is the mass of the whole body, M =ma + mo- The stiffness K and damping C are given by the preceding analog solutions Eqs. (15)-(18).
As derived in a previous paper, 3 the horizontal reso- nance of such a coupled system can be written as
f '/fn t =(21- + (H - h o) +[n/(n + 1)]10) f ,, )
[( ng(h• + t•2) :• 1 + (/_/_h0) 2 +[n/(n + 1)]I 0
4132ng. ]1/2})1/2 - (H" ho) • +[n/(n + 1)]Io , (20)
in which g is gravity acceleration, n is any constant, rna=nrno, fn is a horizontal resonant frequency for pure translation when rotation is prevented, fl is a natural frequency due to the first mode of vibration, and f2 is a natural frequency due to the second mode of vibration. I 0 can be obtained as the sum of the moment of inertia in rocking about the center of gravity of the additive
• m a
mo' RECTANGULAR
J - ._•::.. ?.-.-.-.: v '•'Oi•."::"'" k' RECTA NGUL AR BASE
+ 2b 'X = b/a
FIG. 5. Rectangular pickup model. X= side-length ratio.
398 J. Acoust. Soc. Am., Vol. 68, No. 2, August 1980 S. Omata and S. Morita' Resonances of vibration pickups 398
Redistribution subject to ASA license or copyright; see http://acousticalsociety.org/content/terms. Download to IP: 129.21.35.191 On: Sat, 20 Dec 2014 19:08:51
mass, the inner rectangular body and the base plate, respectively. /• is the ratio of the rocking stiffness K, to the horizontal stiffness Ks.
The values of • can be changed according to the types of pressure distributions of the stiffness obtained from Eqs. (15)-(18), and hence these are
/•2BB =a2(2 - v)g,Bt/3(1 - v)gx• t ,
•2VT =a2(2 - v)g•Tl/4(1 - v)gxm ,
in which the subscript BB denotes both the rigid distri- butions to the horizontal and rocking stiffness, and UT denotes the uniform distributions to the horizontal stiff-
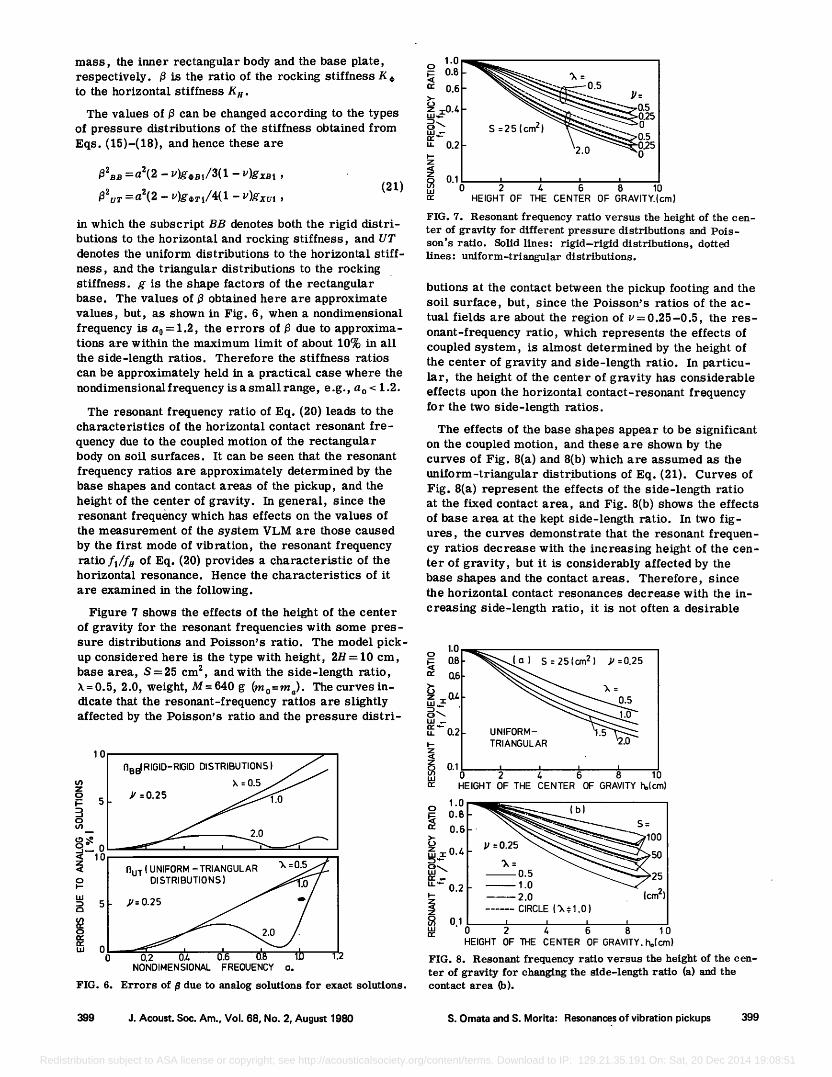
ness, and the triangular distributions to the rocking stiffness. g is the shape factors of the rectangular base. The values of fi obtained here are approximate values, but, as shown in Fig. 6, when a nondimensional frequency is a 0 = 1.2, the errors of/3 due to approxima- tions are within the maximum limit of about 10% in all the side-length ratios. Therefore the stiffness ratios can be approximately held in a practical case where the nondimensional frequency is a small range, e.g., a o < 1.2.
The resonant frequency ratio of Eq. (20) leads to the characteristics of the horizontal contact resonant fre-
quency due to the coupled motion of the rectangular body on soil surfaces. It can be seen that the resonant frequency ratios are approximately determined by the base shapes and contact areas of the pickup, and the height of the center of gravity. In general, since the resonant frequency which has effects on the values of the measurement of the system VLM are those caused by the first mode of vibration, the resonant frequency ratio ft/f, of Eq. (20) provides a characteristic of the horizontal resonance. Hence the characteristics of it
are examined in the following.
Figure ? shows the effects of the height of the center of gravity for the resonant frequencies with some pres- sure distributions and Poisson's ratio. The model pick- up considered here is the type with height, 2H= 10 cm, base area, S = 25 cm 2, and with the side-length ratio, X=0.5, 2.0, weight, M=640 g (rno=rn,). The curves in- dicate that the resonant-frequency ratios are slightly affected by the Poisson's ratio and the pressure distri-
10
z o
.,• 10 z
o
:::> 5
o
,,, 0 0
fiBE• RIGID-RIGID DISTRIBUTIONS)
0.25 •
o'.6 NONDIMENSIONAL FREQUENCY o.
FIG. 6. Errors of • due to analog solutions for exact solutions.
399 J. Acoust. Soc. Am., Vol. 68, No. 2, August 1980
,,zO, .,- '• .... -'"'-•-•0.25
• / S:25(cm2') .'-• •0 .... "0'21' •2.0-•...••0.5 0 25 g / .c2 0.11, • 0 2 4 6 8, 10 rr HEIGHT OF THE CENTER OF GRAVITY.(cm)
FIG. 7. Resonant frequency ratio versus the height of the cen- ter of gravity for different pressure distributions and Pois- son's ratio. Solid lines: rigid-rigid distributions, dotted lines: uniform-triangular distributions.
butions at the contact between the pickup footing and the soil surface, but, since the Poisson's ratios of the ac- tual fields are about the region of u =0.25-0.5, the res- onant-frequency ratio, which represents the effects of coupled system, is almost determined by the height of the center of gravity and side-length ratio. In particu- lar, the height of the center of gravity has considerable effects upon the horizontal contact-resonant frequency for the two side-length ratios.
The effects of the base shapes appear to be significant on the coupled motion, and these are shown by the curves of Fig. 8(a) and 8(b) which are assumed as the uniform-triangular distributions of Eq. (21). Curves of Fig. 8(a) represent the effects of the side-length ratio at the fixed contact area, and Fig. 8(b) shows the effects of base area at the kept side-length ratio. In two fig- ures, the curves demonstrate that the resonant frequen- cy ratios decrease with the increasing height of the cen- ter of gravity, but it is considerably affected by the base shapes and the contact areas. Therefore, since the horizontal contact resonances decrease with the in-
creasing side-length ratio, it is not often a desirable
o 1.0
ec 0.6
u_ 0.2
z
z o
• (•2) 'X •=0.25 ' -0.5
i i I I
0 2 4 6 8 10 HEIGHT OF THE CENTER OF GRAVITY ho(crn)
o 1.0 • 0.6 n- 0.6
:7 0.4
o
u_"- 0.2 z
z
• 0.1
- 50 %=
_ 1.
..... 2.0 (cm 2) CIRCLE (%,1.0)
I I I I
0 2 4 6 8, 10
HEIGHT OF THE CENTER OF GRAVlTY. ho(cm)
FIG. 8. Resonant frequency ratio versus the height of the cen- ter of gravity for changing the side-length ratio (a) and the contact area (b).
S. Omata and S. Morita: Resonances of vibration pickups 399 ß
Redistribution subject to ASA license or copyright; see http://acousticalsociety.org/content/terms. Download to IP: 129.21.35.191 On: Sat, 20 Dec 2014 19:08:51
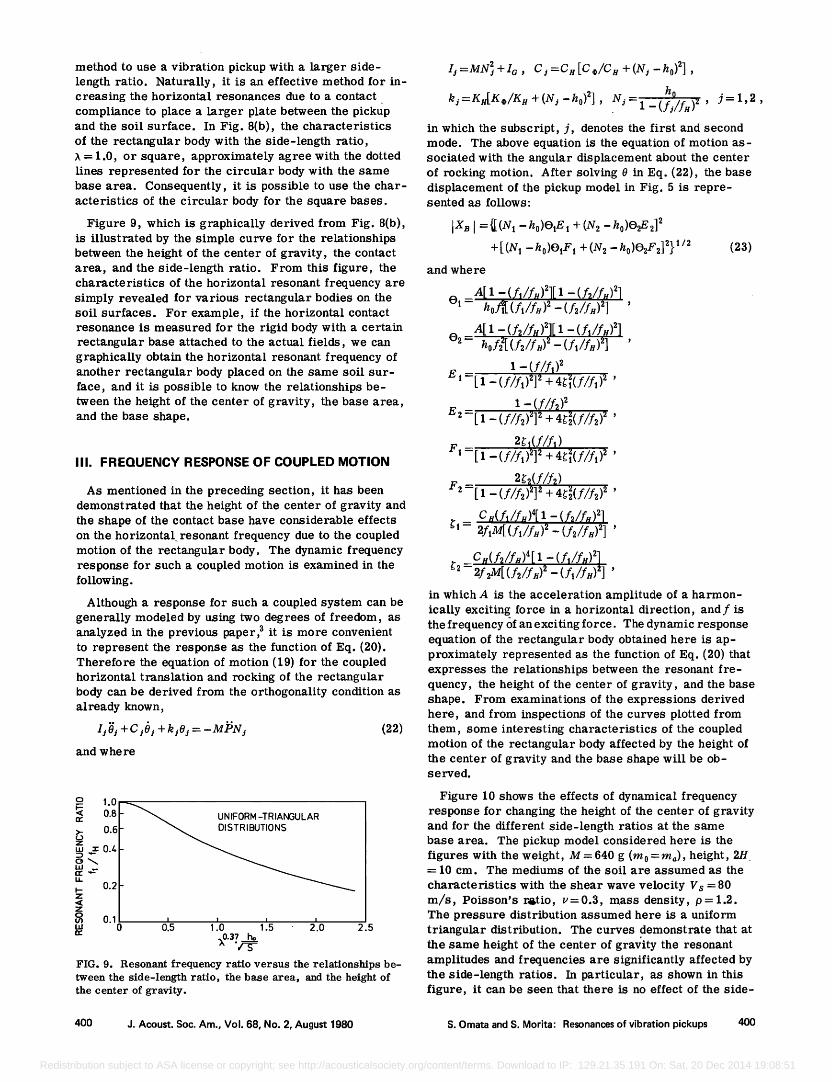
method to use a vibration pickup with a larger side- length ratio. Naturally, it is an effective method for in- creasing the horizontal resonances due to a contact compliance to place a larger plate between the pickup and the soil surface. In Fig. 8(b), the characteristics of the rectangular body with the side-length ratio, X = 1.0, or square, approximately agree with the dotted lines represented for the circular body with the same base area. Consequently, it is possible to use the char- acteristics of the circular body for the square bases.
Figure 9, which is graphically derived from Fig. 8(b), is illustrated by the simple curve for the relationships between the height of the center of gravity, the contact area, and the side-length ratio. From this figure, the characteristics of the horizontal resonant frequency are simply revealed for various rectangular bodies on the soft surfaces. For example, if the horizontal contact resonance is measured for the rigid body with a certain rectangular base attached to the actual fields, we can graphically obtain the horizontal resonant frequency of another rectangular body placed on the same soft sur- face, and it is possible to know the relationships be- tween the height of the center of gravity, the base area, and the base shape.
III. FREQUENCY RESPONSE OF COUPLED MOTION
As mentioned in the preceding section, it has been demonstrated that the height of the center of gravity and the shape of the contact base have considerable effects on the horizontal resonant frequency due to the coupled motion of the rectangular bodyø The dynamic frequency response for such a coupled motion is examined in the following.
Although a response for such a coupled system can be generally modeled by using two degrees of freedom, as analyzed in the previous paper, a it is more convenient to represent the response as the function of Eq. (20). Therefore the equation of motion (19) for the coupled horizontal translation and rocking of the rectangular body can be derived from the orthogonality condition as already known,
I•b'• +C • + k• = -MPN• (22) and whe re
o 1.0 • 0.8
>. 0.6 z LU 'r' 0.4
• 0.:2- z
z o u• 0.1, LU 0
UNIFORM -TRIANGULAR DISTRIBUTIONS
[ I [5 0.5 1.0 1. 2.0 2.5
S
FIG. 9. Resonant frequency ratio versus the relationships be- tween the side-length ratio, the base area, and the height of the center of gravity.
6 =•:v•; +zo. c•=c.[c./c. +(•v•-•of]. ho
kj=KH[K•>/KH+(Nj-ho)2], ,NJ--l_(f•/f.)2 , j=l,2, in which the subscript, j, denotes the first and second mode. The above eqmtion is the equation of motion as- sociated with the angular displacement about the center of rocking motion. After solving 0 in Eq. (22), the base displacement of the pickup model in Fig. 5 is repre- sented as follows:
Ix• [ =• (N• - ho)ef • + (N2 - ho)e f •]• +[(Nt-ho)OtF • +(N 2 -ho)O2F212} 1/2 (23)
and where
Ot _A[ 1 _(f•/f•)2][ 1 - (f•/fu) 2] - hof• (fl/fH)2 _ (f2/fH)2]
A[ 1 -(f2/fl-t )2][ 1 -(ft/fH) 2] 0•. = h0•][ (•/•)= - (•/•)•]
1 - (•/A) • e • -[ 1 - (•/•)•]• + 4C•(•/• )• '
1 - (•/&)• e•-[ 1 - (•/•)•]• + 4t•(•/•) • '
2•l(f /fl) _ • =[ x -(///•):]: + 4•(///•): '
-- 2•2(f /f2) • )2 , F2 --[ 1 -(f/f2)2] 2 + 4•2(f /f2 C n(f•/f.)4[ 1 -(f2/f•)2]
C • = 2/• (/•//,,)2 _ (A//,,)2] , C i.i(f2/fH)4[ 1 - (f•/fl.l) 2]
•2 = 2f 2]•/[ (f2/fH) 2 --(fl/fH) 2] ' in which .4 is the acceleration amplitude of a harmon- ically exciting force in a horizontal direction, and f is the frequency of an exciting force. The dynamic response equation of the rectangular body obtained here is ap- proximately represented as the function of Eq. (20) that expresses the relationships between the resonant fre- quency, the height of the center of gravity, and the base shape. From examinations of the expressions derived here, and from inspections of the curves plotted from them, some interesting characteristics of the coupled motion of the rectangular body affected by the height of the center of gravity and the base shape will be ob- served.
Figure 10 shows the effects of dynamical frequency response for changing the height of the center of gravity and for the different side-length ratios at the same base area. The pickup model considered here is the figures with the weight, M =640 g (m0=ma) , height, 2H = 10 cm. The mediums of the soil are assumed as the
characteristics with the shear wave velocity V s =80 m/s, Poisson's r&tio, u=0.3, mass density, p= 1.2. The pressure distribution assumed here is a uniform triangular distribution. The curves demonstrate that at
,
the same height of the center of gravity the resonant amplitudes and frequencies are significantly affected by the side-length ratios. In particular, as shown in this figure, it can be seen that there is no effect of the side-
400 J. Acoust. Soc. Am., Vol. 68, No. 2, August 1980 S. Omata and S. Morita: Resonances of vibration pickups 400
Redistribution subject to ASA license or copyright; see http://acousticalsociety.org/content/terms. Download to IP: 129.21.35.191 On: Sat, 20 Dec 2014 19:08:51
•oo
200- S = 25{cm 2) l!•ho=?.0(crn) '-; •i IF /
? _ --o.s I! iiliI.F / ß • II
10 •0 •0 60 80100 200 •00 FREOUENCY f {Hz}
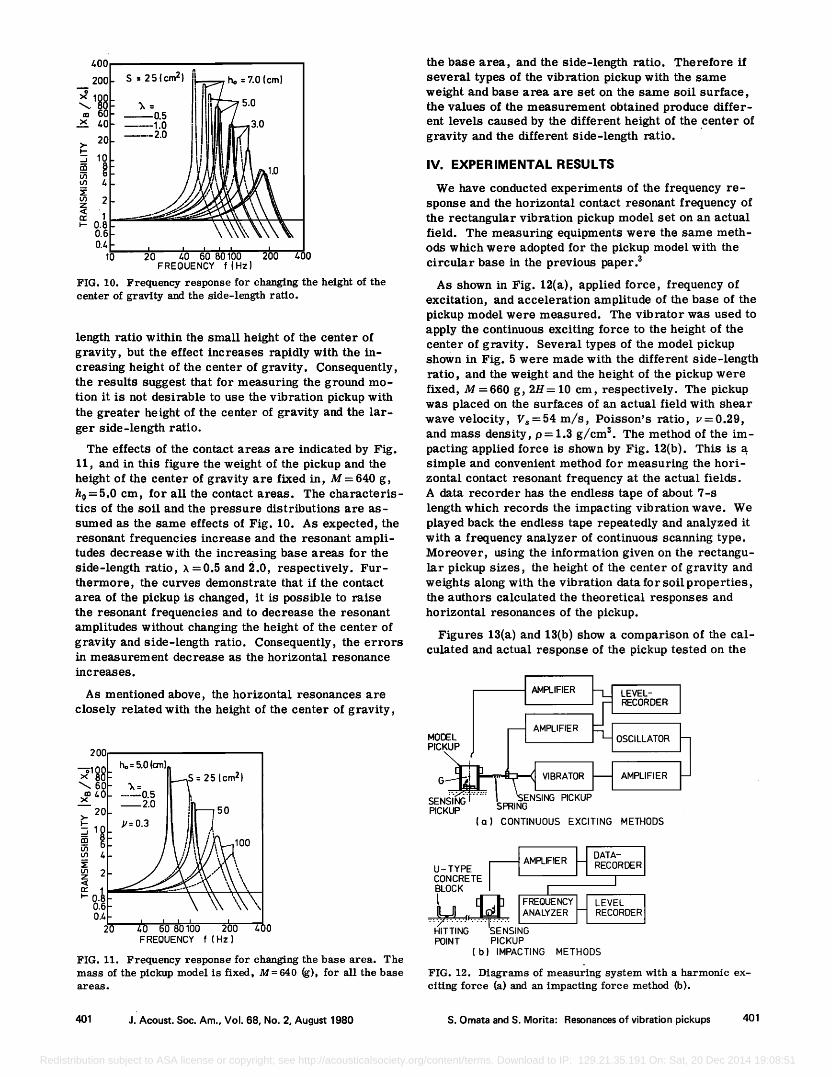
FIG. 10. Frequency response for changing the height of the center of gravity and the side-length ratio.
length ratio within the small height of the center of gravity, but the effect increases rapidly with the in- creasing height of the center of gravity. Consequently, the results suggest that for measuring the ground mo- tion it is not desirable to use the vibration pickup with the greater height of the center of gravity and the lar- ger side-length ratio.
The effects of the contact areas are indicated by Fig. 11, and in this figure the weight of the pickup and the height of the center of gravity are fixed in, M = 640 g, h 0 =5.0 cm, for all the contact areas. The characteris- tics of the soil and the pressure distributions are as- sumed as the same effects of Fig. 10. As expected, the resonant frequencies increase and the resonant ampli- tudes decrease with the increasing base areas for the side-length ratio, X = 0.5 and 2.0, respectively. Fur- thermore, the curves demonstrate that if the contact area of the pickup is changed, it is possible to raise the resonant frequencies and to decrease the resonant amplitudes without changing the height of the center of gravity and side-length ratio. Consequently, the errors in measurement decrease as the horizontal resonance
increases.
As mentioned above, the horizontal resonances are closely related with the height of the center of gravity,
200.
= 25 (cm 2) • 60F 'x= _m z. 01- ...... 0.5
I >- 20[-
• 100
'q ', ', 0.4 • I • i i
20 40 60 80100 200 /,00 FREOUENCY f (Hz)
FIG. 11. Frequency response for changing the base area. The mass of the pickup model is fixed, M = 640 (g), for all the base areas.
the base area, and the side-length ratio. Therefore if several types of the vibration pickup with the same weight and base area are set on the same soil surface, the values of the measurement obtained produce differ- ent levels caused by the different height of the center of gravity and the different side-length ratio.
IV. EXPERIMENTAL RESULTS
We have conducted experiments of the frequency re- sponse and the horizontal contact resonant frequency of the rectangular vibration pickup model set on an actual field. The measuring equipments were the same meth- ods which were adopted for the pickup model with the circular base in the previous paper. 3
As shown in Fig. 12(a), applied force, frequency of excitation, and acceleration amplitude of the base of the pickup model were measured. The vibrator was used to apply the continuous exciting force to the height of the center of gravity. Several types of the model pickup shown in Fig. 5 were made with the different side-length ratio, and the weight and the height of the pickup were fixed, M =660 g, 2H= 10 cm, respectively. The pickup was placed on the surfaces of an actual field with shear wave velocity, Vs=54 m/s, Poisson's ratio, v=0.29, and mass density, p = 1.3 g/cm 3. The method of the im- pacting applied force is shown by Fig. 12(b). This is a simple and convenient method for measuring the hori- zontal contact resonant frequency at the actual fields. A data recorder has the endless tape of about 7-s length which records the impacting vibration wave. We played back the endless tape repeatedly and analyzed it with a frequency analyzer of continuous scanning type. Moreover, using the information given on the rectangu- lar pickup sizes, the height of the center of gravity and weights along with the vibration data for soil properties, the authors calculated the theoretical responses and horizontal resonances of the pickup.
Figures 13(a) and 13(b) show a comparison of the cal- culated and actual response of the pickup tested on the
AMPLIFIER
AMPLIFIER
G••=r••{• VIBRATOR SE N.•i'•"6"i" ..... I 'SENSING PICKUP PICKUP SPRING
{o) CONTINUOUS EXCITING METHODS
LEVEL- RECORDER
OSCILLATOR
AMPLIFIER
AMPLIFIER • DATA- U- TYPE RECORDER CONCRETE [ BLOCK [
• -'----• FREOUENCY H LEVEL ß . ........ ::,. ANALYZER RECORDER
POINT PICKUP (b) IMPACTING METHODS
FIG. 12. Diagrams of measuring system with a harmonic ex- citing force (a) and an impacting force method (b).
401 J. Acoust. Soc. Am., Vol. 68, No. 2, August 1980 S. Omata and S. Morita: Resonances of vibration pickups 401
Redistribution subject to ASA license or copyright; see http://acousticalsociety.org/content/terms. Download to IP: 129.21.35.191 On: Sat, 20 Dec 2014 19:08:51
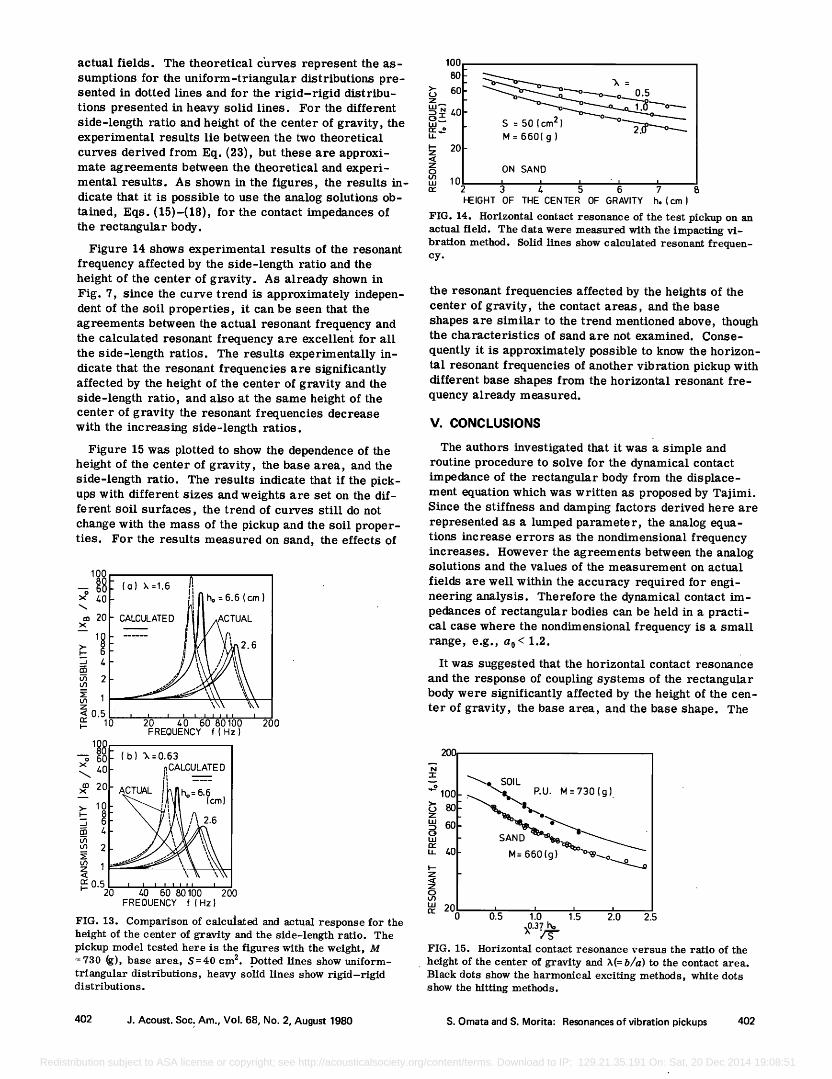
actual fields. The theoretical chrves represent the as- sumptions for the uniform-triangular distributions pre- sented in dotted lines and for the rigid-rigid distribu- tions presented in heavy solid lines. For the different side-length ratio and height of the center of gravity, the experimental results lie between the two theoretical
curves derived from Eq. (23), but these are approxi- mate agreements between the theoretical and experi- mental results. As shown in the figures, the results in- dicate that it is possible to use the analog solutions ob- tained, Eqs. (15)-(18), for the contact impedances of the rectangular body.
Figure 14 shows experimental results of the resonant frequency affected by the side-length ratio and the height of the center of gravity. As already shown in Fig. 7, since the curve trend is approximately indepen- dent of the soft properties, it can be seen that the agreements between the actual resonant freque. ncy and the calcuMted resonant frequency are excellent for all the side-length ratios. The results experimentally in- dicate that the resonant frequencies are significantly affected by the height of the center of gravity and the side-length ratio, and also at the same height of the center of gravity the resonant frequencies decrease with the increasing side-length ratios.
Figure 15 was plotted to show the dependence of the height of the center of gravity, the base area, and the side-length ratio. The results indicate that if the pick- ups with different sizes and weights are set on the dif- ferent soft surfaces, the trend of curves still do not change with the mass of the pickup and the soil proper- ties. For the results measured on sand, the effects of
10o
x z,o ,-,-, 20
(.n 1
"½0.5 10 20 40 60 80100
FREQUENCY f(Hz)
60 (b) •,=0.63 40 CALCULATE[) 20- ACTUAL
n'0. 5 20 • •0 t t t t II I 60 8O 100
FREQUENCY f (Hz)
ho :6.6 (cm)
//•ACTUAL r',,
I I I II I
200
200
FIG. 13. Comparison of calculated and actual response for the height of the center of gravity and the side-length ratio. The pickup model tested here is the figures with the weight, M = 730 (g), base area, S=40 cm 2. Dotted lines show uniform- triangular distributions, heavy solid lines show rigid-rigid distributions.
100
80
>' 60 z
,,o,_
• 20 z
z o
L.U 10 Od 2
ON SAND
HEIGHT OF THE CENTER OF GRAVITY ho (cm)
FIG. 14. Horizontal contact resonance of the test pickup on an actual field. The data were measured with the impacting vi- bration method. Solid lines show calculated resonant frequen- cy.
the resonant frequencies affected by the heights of the center of gravity, the contact areas, and the base shapes are similar to the trend mentioned above, though the characteristics of sand are not examined. Conse-
quently it is approximately possible to know the horizon- tal resonant frequencies of another vibration pickup with different base shapes from the horizontal resonant fre- quency already measured.
V. CONCLUSIONS
The authors investigated that it was a simple and routine procedure to solve for the dynamical contact impedance of the rectangular body from the displace- ment equation which was written as proposed by Tajimi. Since the stiffness and damping factors derived here are represented as a lumped parameter, the analog equa- tions increase errors as the nondimensional frequency increases. However the agreements between the analog solutions and the values of the measurement on actual
fields are well within the accuracy required for engi- neering analysis. Therefore the dynamical contact im- pedances of rectangular bodies can be held in a practi- cal case where the nondimensional frequency is a small range, e.g., a 0 < 1.2.
It was suggested that the horizontal contact resonance and the response of coupling systems of the rectangular body were significantly affected by the height of the cen- ter of gravity, the base area, and the base shape. The
200
N
• 100
z
• 60 o
EL 40
z
z o
•. SOl L - •a. P.U. M:730(g)
_
o 0'.5 •0 •.5 ,,0.37 ho
FIG. 15. Horizontal contact resonance versus the ratio of the height of the center of gravity and 7•(= b/a) to the contact area. Black dots show the harmonical exciting methods, white dots show the hitting methods.
402 J. Acoust. Soc. Am., Vol. 68, No. 2, August 1980 S. Omata and S. Morita' Resonances of vibration pickups 402
Redistribution subject to ASA license or copyright; see http://acousticalsociety.org/content/terms. Download to IP: 129.21.35.191 On: Sat, 20 Dec 2014 19:08:51

relationships between the height of the center ofgravity, the contact area, and the base shape were represented by a simple curve for the horizontal resonance.
The mass of the pickup and the soil properties have direct effects upon the horizontal resonance. However the effects of the shape and the height of the center of gravity for the horizontal resonances are approximately independent of the conditions of the soil. The horizontal resonance decreases with the increasing height of the center of gravity and side-length ratio for the rectangu- lar vibration pickup with the same base area, and hence it follows that the errors of the measurement of the
VLM system increase as the horizontal resonance de- creases. Therefore it is considered that if various
vibration pickups with the same weight and base area, and with the different height of the center of gravity and base area, are placed on the same soil surface, the values of the measurements for each vibration pickup are possibly different for the same ground motion, since the horizontal resonance is affected by the height of the center of gravity and base shape. Consequently, it is necessary to take sufficient care in using the vibration pickup and placing it on soil surface.
It is a simple procedure to solve such responses of the rectangular body from the analog solutions, and those derived here provide adequate accuracy for prac- tical applications to machine foundations with various rectangular bases.
ACKNOWLEDGMENT
The authors wish to thank Professor H. Tajimi of Nihon University for his contributions through many
suggestions and discussions.
lS. Morita and S. Omata, "Contact Compliance of Vibration Pickups on Actual Measuring Surface," Proc. Int-Noise 75, 519-522 (1975).
2S. Morita and S. Omata, "Contact Resonance of Vibration Pickup and its Control," J. Acoust. Soc. Japan 33, 601-605 (1977) (in Japanese).
3S. Omata and S. Motira, "Horizontal Resonant Frequencies of Vibration Pickup on Soil Surfaces," J. Acoust. Soc. Am. 66, 965-975 (1979).
4S. Omata and S. Morita, "Investigations of Horizontal Contact Resonance of Vibration Pickup," J. Acoust. Soc. Japan 36, 88-95 (1980) (in Japanese).
5A. O. Awojobi, "Harmonic Rocking of a Rigid Rectangular Body on a Semi-Infinite Elastic Medium," J. Appl. Mech. 33, 547-552 (1966).
6p. Karasudhi, L. M. Keer, and S. L. Lee, '%qbratory Motion of a Body on an Elastic Half Plane," J. Appl. Mech. 35, 697- 705 (1968).
?J. E. Luco and R. A. Westmann, '•Dynamic Response of a Rigid Footing Bonded to an Elastic Half Space," J. Appl. Mech. 94, 527-534 (1972).
•f. Kobori, R. Minai, T. Suzuki, and K. Kusaka, '•ynamic Characteristics of Soil-Foundation Systems Detected from Oscillator Tests (Part 1)," Bull. Disaster Prevention Re- search Institute, Kyoto Univ. 17(B), 115-138 (1974) (in Jap- anese).
9T. Kobori, R. Minai, T. Suzuki, and K. Kusaka, "Dynamic Characteristics of Soil-Foundation Systems Detected from Oscillator Tests (Part 3)," Bull. Disaster Prevention Re- search Institute, Kyoto Univ. 18(B), 59-78 (1975) (in Japa- nese).
1øH. Tajimi, 'q3asic Theories on Aseismic Design of Struc- tures," Rep. Inst. Ind. Science Tokyo Univ. 8(4), 1-46 (1959) (in Japanese).
403 J. Acoust. Soc. Am., Vol. 68, No. 2, August 1980 S. Omata and S. Morita: Resonances of vibration pickups 403
Redistribution subject to ASA license or copyright; see http://acousticalsociety.org/content/terms. Download to IP: 129.21.35.191 On: Sat, 20 Dec 2014 19:08:51