geomulticast: architectures and protocols for mobile ad hoc wireless networks
TRANSCRIPT
J. Parallel Distrib. Comput. 63 (2003) 182–195
Geomulticast: architectures and protocols for mobilead hoc wireless networks$
Beongku An and Symeon Papavassiliou�
Broadband, Mobile and Wireless Networking Lab, Department of Electrical and Computer Engineering, New Jersey Center for Wireless Networking and
Internet Security, New Jersey Institute of Technology, University Heights, Newark, NJ 07102-1982, USA
Received 17 October 2002
Abstract
Geomulticast is a specialized location-dependent multicasting technique, where messages are multicast to some specific user
groups within a specific zone. In this paper, we propose architectures and protocols for supporting geomulticast services in a cost
effective way and with high message delivery accuracy in the challenging environment of mobile ad hoc wireless networks. Since in
mobile ad hoc networks there is no fixed infrastructure as in cellular networks we use mobility-based clustering to cluster the various
mobile nodes. Using this clustering approach as the basis, we describe several geomulticast zone formulation and representation
methods that present trade offs between accuracy, simplicity and cost effectiveness. Moreover, we propose a direction guided
routing (DGR) protocol which creates cluster-head based limited mesh structure within a guided region, in order to deliver packets
with reliability and reduced overhead to the final destinations. Two geomulticast membership management strategies which depend
on geolocation storage position are also presented and investigated. Finally, we define and formulate a framework in order to
evaluate the performance of the design alternatives used for the support of geomulticast services in mobile ad hoc networks. Based
on this framework we evaluate the performance of the proposed architectures and protocols, and we, obtain some insight about the
impact of the various design and operational parameters on the overall system performance.
r 2003 Elsevier Science (USA). All rights reserved.
Keywords: Geomulticast; Mobile ad hoc wireless networks; Geolocation update
1. Introduction
Geomulticast is a specialized location-dependentmulticasting technique, where messages are multicastto some specific user groups within a specific geogra-phical zone. While conventional multicast protocolsdefine a multicast group as a set of nodes with amulticast address and geocast defines a geocast group asall the nodes within a specified zone at a given time, ageomulticast group is defined as a set of nodes of somespecific groups within a specified zone. In generalmulticast is more efficient than multiple unicasts andbroadcasts in terms of communication costs. Cost
considerations are more critical in mobile ad hocwireless networks because these networks presentdynamic, sometimes rapidly changing, random, multi-hop topologies and the mobile nodes communicate witheach other over wireless links. In this paper, we proposearchitectures and protocols for supporting geomulticastservices in a cost-effective way and with high messagedelivery accuracy in the challenging environment ofmobile ad hoc wireless networks.The problem of geocasting has become an active
research topic over the last few years. In [22] theproblem of GPS-based geographic addressing androuting in networks with a fixed infrastructure isconsidered. This work focuses mainly on the integrationof the concept of physical position into the currentdesign of the Internet, thus assuming fixed geographicrouters. To support geocast services, the authors usedlocation aware routers, multicast routing modifying IPmulticast, and an application layer solution usingextended Domain Name Service (DNS). When no fixed
$This work was supported in part by the New Jersey Commission
on Science and Technology via the New Jersey Center for Wireless
Networking and Internet Security, and in part by the New Jersey
Commission on Higher Education via the NJI-Tower project.�Corresponding author.
E-mail addresses: [email protected] (B. An),
[email protected] (S. Papavassiliou).
0743-7315/03/$ - see front matter r 2003 Elsevier Science (USA). All rights reserved.
doi:10.1016/S0743-7315(02)00063-1
infrastructure is available, as in ad hoc networks, amechanism distributed among all the mobile nodes ofthe network has to be provided for maintaining positionawareness. This requires that the position coordinates ofeach node are disseminated throughout the network. In[20] geocasting protocols in networks with no fixedinfrastructure were considered. In that paper, theflooding algorithm was used to deliver packets to mobilenodes within a specific area (geocast area). With the useof the forwarding zone concept, geocast packets areforwarded by a smaller set of nodes as compared to justgeocast flooding.Recently, the use of geographic position as a means of
routing has become increasingly popular in mobile, adhoc networks. In [11] the authors, based upon ZoneRouting Protocol (ZRP) [16] scheme and the GPS queryoptimization mechanism, have proposed a routingmechanism with the objective to reduce the number ofthe route queries within the ZRP protocol. This scheme(GZRP) examines an adaptation of the reactive part ofZRP and uses the position of neighboring mobile nodes,thereby taking advantage of the Global PositioningSystem (GPS) within the ZRP protocol. In [6,12] routingprotocols that combine the advantages of reactiveprotocols, such as the Dynamic Source Routing (DSR)protocol [19], with the improved performance that canbe achieved by the location-based solutions to reducedelay, bandwidth and energy, and improve efficiency,are provided and evaluated.In [7] a mechanism for the efficient dissemination of
geographic position information in ad hoc networks, ispresented. The basic principles of this scheme is thateach node should adapt its own dissemination frequencylocally, according to its own mobility rate, and that thegreater the distance separating two nodes, the slowerthey appear to be moving with respect to each other.Thus, nodes that are far apart, need to update eachother’s position less frequently than nodes closertogether. Based on this dissemination concept severalmultipoint communication protocols for mobile ad hocwireless networks have been proposed in the literature[e.g. [8,9]. In [9] a simulation-based detailed perfor-mance evaluation that compares various characteristics,such as throughput, end-to-end delay and overhead ofseveral on-demand routing protocols for mobile ad hocnetworks is presented. Furthermore [10,13] consideredand studied the problem of congestion control in mobilead hoc networks, with the objective of reducingdynamically the amount of traffic routed through anode which is temporarily congested.
1.1. Paper objective and outline
In general, geomulticast combines geocast and multi-cast for dynamic message delivery to a specific groupwithin a geomulticast zone. If a specific geographic zone
is very large and there are many different kind of groupswithin this zone, we do not need to broadcast to allnodes within the specific zone. In this paper weintroduce several geomulticast zone formulation meth-ods that range from simple specific techniques (i.e. circlewith given radius) to the most general case where thezone is formulated arbitrarily. In general a geomulticastzone is represented by some closed n-sided polygon,where each vertex of each polygon is represented usingGPS coordinates. The general zone formulation methodmay involve high overhead if the target area (geomulti-cast zone) is very complicated. Therefore, we use severalapproximation methods for geomulticast zone represen-tation to reduce routing overhead. For the implementa-tion of an efficient geomulticast strategy to supportlocation-dependent services, the mapping of the bound-aries of the specific area to the mobile nodes within thisarea is required. In mobile cellular networks, themapping is obtained in a cost effective and timelymanner using the given cellular structure. In mobile adhoc wireless networks there are no fixed base stations.However, we may extend this concept to ad hocnetworks if we use clustering techniques to cluster thevarious mobile nodes. Clustering is the method whichaggregates nodes into groups (clusters) to provide aconvenient framework for the development of importantfeatures in mobile ad hoc networks (i.e routing,bandwidth allocation, mobility and topology manage-ment). For every subset of nodes (cluster) one node isselected as the clusterhead (CH) of the cluster. Theclusterhead, that can be dynamically selected among theset of nodes, acts as a local coordinator of transmissionswithin the cluster. An efficient clustering scheme tendsto preserve its structure when a few nodes are movingand/or when the motion is coordinated. Otherwise highprocessing and communications overheads will be paidto reconstruct the clusters. To achieve this objective, inthis paper, we use a mobility-based clustering (MBC) [2]approach as the underlying structure to facilitate thesupport of geomulticast services in a similar mannerwith the cellular networks. MBC uses combination ofboth physical and logical partitions of the network (i.e.geographic proximity and functional relation betweennodes, such as mobility pattern, etc.), as well as theconcept of relative mobility to characterize the degree ofmobility of a node with respect to its peers. Using thisstructure as the basis, we propose a direction-guidedrouting (DGR) protocol which creates cluster-headbased limited mesh structure within a guided region.The objective of the DGR is to deliver packets withreliability and reduced overhead. Two geomulticastmembership management strategies which depend ongeolocation storage position are presented and investi-gated. The first strategy is used to reduce the deliveryerror while the second one aims to minimize the delay.Moreover, we define and formulate a framework in
B. An, S. Papavassiliou / J. Parallel Distrib. Comput. 63 (2003) 182–195 183
order to evaluate the performance of the designalternatives used for the support of geomulticast servicesin mobile ad hoc networks. Based on this framework weevaluate the performance of the proposed architecturesand protocols, and via a numerical study we gain someinsight about the impact of the various design para-meters and operational characteristics, on the systemperformance.The remaining of the paper is organized as follows.
Section 2 describes in detail the proposed architecturesand protocols for supporting geomulticast services. InSection 3 we provide the performance analysis frame-work used to evaluate geomulticast architectures andprotocols. Section 4 presents the corresponding numer-ical results and some discussion, while Section 5concludes the paper.
2. Architectures and protocols for geomulticast
In the following we present our proposed architecturefor supporting cost-effective geographic message ser-vices to special user groups in mobile ad hoc wirelessnetworks. Since bandwidth and energy limitations are
very critical issues in mobile ad hoc wireless networks,the proposed architectures (mechanisms) place specialemphasis on their efficiency. The main questions andissues that are addressed in such an architecture includethe following: (i) How do we formulate the target area?(ii) How do we efficiently represent the target area? and(iii) What is the mechanism to efficiently send a messageto the target area in order to reduce the overhead andwasted bandwidth?
2.1. Geomulticast zone formulation and representation
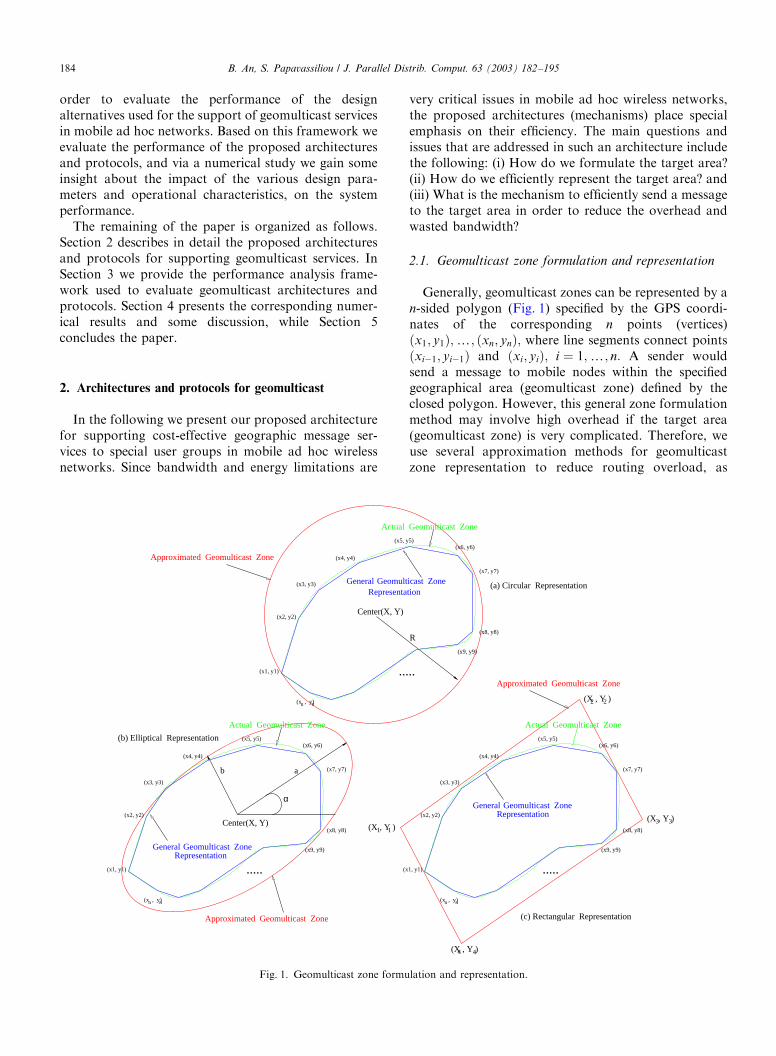
Generally, geomulticast zones can be represented by an-sided polygon (Fig. 1) specified by the GPS coordi-nates of the corresponding n points (vertices)ðx1; y1Þ;y; ðxn; ynÞ; where line segments connect pointsðxi�1; yi�1Þ and ðxi; yiÞ; i ¼ 1;y; n: A sender wouldsend a message to mobile nodes within the specifiedgeographical area (geomulticast zone) defined by theclosed polygon. However, this general zone formulationmethod may involve high overhead if the target area(geomulticast zone) is very complicated. Therefore, weuse several approximation methods for geomulticastzone representation to reduce routing overload, as
n n(x , y)
n n(x , y)
n n(x , y)
(x1, y1)
(x2, y2)
(x3, y3)
(x4, y4)
.....
(x5, y5)(x6, y6)
(x7, y7)
(x8, y8)
(x9, y9)
(a) Circular Representation
(b) Elliptical Representation
(c) Rectangular Representation
(x1, y1)
(x2, y2)
(x3, y3)
(x4, y4)
.....
(x5, y5)(x6, y6)
(x7, y7)
(x8, y8)
(x9, y9)
R
Center(X, Y)
(X , Y )
(X , Y )
(X , Y )
(X , Y )
(x1, y1)
(x2, y2)
(x3, y3)
(x4, y4)
.....
(x5, y5)(x6, y6)
(x7, y7)
(x8, y8)
(x9, y9)
b a
Center(X, Y)
α
1 1
4 4
2 2
3 3
Approximated Geomulticast Zone
Approximated Geomulticast Zone
Actual Geomulticast Zone
Approximated Geomulticast Zone
Actual Geomulticast Zone
General Geomulticast ZoneRepresentation
General Geomulticast ZoneRepresentation
General Geomulticast ZoneRepresentation
Actual Geomulticast Zone
Fig. 1. Geomulticast zone formulation and representation.
B. An, S. Papavassiliou / J. Parallel Distrib. Comput. 63 (2003) 182–195184
follows: circular representation, elliptical representation,and rectangular representation. Fig. 1 provides a gra-phical illustration of these representation methods. Thechoice of the appropriate representation method maydepend on the actual application and desired accuracy.Circular representation is the simplest method. Only thecenter ðx; yÞ position and radius are needed forgeomulticast zone representation. However, large un-necessary additional regions may be included into thegeomulticast zone. The elliptical representation methodrequires the centerðx; yÞ position, length(a), height(b),and the slope angle a: If a is equal to b; this method isthe same as circular representation method. Arbitraryparks and battle fields can be represented by thismethod. Finally, the rectangular representation needsfour position information: ðx1; y1Þ; ðx2; y2Þ; ðx3; y3Þ andðx4; y4Þ: This method for example can be applied whenthe target area (geomulticast zone) is a highway.
2.2. Network structure and components
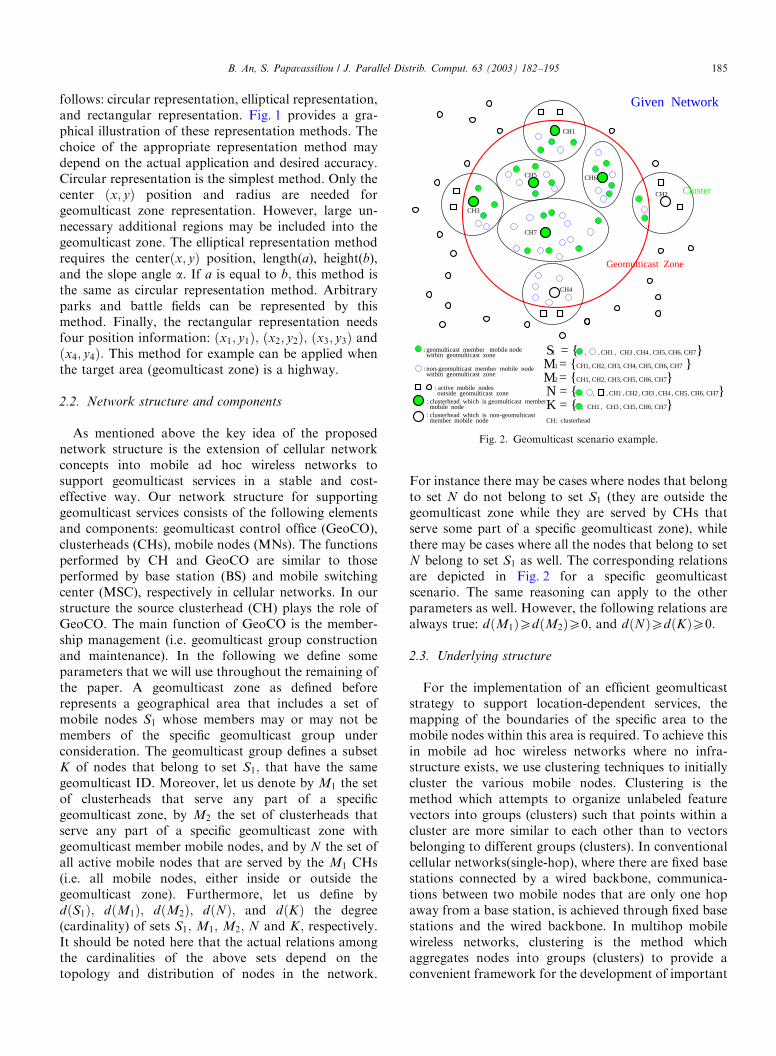
As mentioned above the key idea of the proposednetwork structure is the extension of cellular networkconcepts into mobile ad hoc wireless networks tosupport geomulticast services in a stable and cost-effective way. Our network structure for supportinggeomulticast services consists of the following elementsand components: geomulticast control office (GeoCO),clusterheads (CHs), mobile nodes (MNs). The functionsperformed by CH and GeoCO are similar to thoseperformed by base station (BS) and mobile switchingcenter (MSC), respectively in cellular networks. In ourstructure the source clusterhead (CH) plays the role ofGeoCO. The main function of GeoCO is the member-ship management (i.e. geomulticast group constructionand maintenance). In the following we define someparameters that we will use throughout the remaining ofthe paper. A geomulticast zone as defined beforerepresents a geographical area that includes a set ofmobile nodes S1 whose members may or may not bemembers of the specific geomulticast group underconsideration. The geomulticast group defines a subsetK of nodes that belong to set S1; that have the samegeomulticast ID. Moreover, let us denote by M1 the setof clusterheads that serve any part of a specificgeomulticast zone, by M2 the set of clusterheads thatserve any part of a specific geomulticast zone withgeomulticast member mobile nodes, and by N the set ofall active mobile nodes that are served by the M1 CHs(i.e. all mobile nodes, either inside or outside thegeomulticast zone). Furthermore, let us define bydðS1Þ; dðM1Þ; dðM2Þ; dðNÞ; and dðKÞ the degree(cardinality) of sets S1; M1; M2; N and K ; respectively.It should be noted here that the actual relations amongthe cardinalities of the above sets depend on thetopology and distribution of nodes in the network.
For instance there may be cases where nodes that belongto set N do not belong to set S1 (they are outside thegeomulticast zone while they are served by CHs thatserve some part of a specific geomulticast zone), whilethere may be cases where all the nodes that belong to setN belong to set S1 as well. The corresponding relationsare depicted in Fig. 2 for a specific geomulticastscenario. The same reasoning can apply to the otherparameters as well. However, the following relations arealways true: dðM1ÞXdðM2ÞX0; and dðNÞXdðKÞX0:
2.3. Underlying structure
For the implementation of an efficient geomulticaststrategy to support location-dependent services, themapping of the boundaries of the specific area to themobile nodes within this area is required. To achieve thisin mobile ad hoc wireless networks where no infra-structure exists, we use clustering techniques to initiallycluster the various mobile nodes. Clustering is themethod which attempts to organize unlabeled featurevectors into groups (clusters) such that points within acluster are more similar to each other than to vectorsbelonging to different groups (clusters). In conventionalcellular networks(single-hop), where there are fixed basestations connected by a wired backbone, communica-tions between two mobile nodes that are only one hopaway from a base station, is achieved through fixed basestations and the wired backbone. In multihop mobilewireless networks, clustering is the method whichaggregates nodes into groups (clusters) to provide aconvenient framework for the development of important
N = { CH1 CH2 CH3 CH4, , , , , , , CH5, CH6, CH7},K = { CH1 , CH3 , CH5, CH6, CH7}
1S = { CH3 CH4, , CH1 , , , CH5, CH6, CH7}1M = {CH1, CH2, CH3, CH4, CH5, CH6, CH7
2M = {CH1, CH2, CH3, CH5, CH6, CH7}
Geomulticast Zone
CH2
Given Network
Cluster
CH3
CH1
CH4
CH5 CH6
CH7
geomulticast member mobile node:
: non-geomulticast member mobile node
: clusterhead which is geomulticast member mobile node
within geomulticast zone
within geomulticast zone
: clusterhead which is non-geomulticast member mobile node
: active mobile nodes
}
CH: clusterhead
outside geomulticast zone
Fig. 2. Geomulticast scenario example.
B. An, S. Papavassiliou / J. Parallel Distrib. Comput. 63 (2003) 182–195 185
features(i.e. routing, bandwidth allocation, mobility andtopology management). For every subset of nodes(cluster) one node is selected as the clusterhead of thecluster. The clusterhead acts as a local coordinator oftransmissions within the cluster. It differs from the basestation concept in current cellular systems, in that it doesnot have special hardware and in fact is dynamicallyselected among the set of stations. The objective of theclustering procedure is to find a feasible interconnectedset of clusters covering the entire node population. Agood clustering algorithm should be stable to radiomotion, that is should not change cluster configurationdrastically and often, when a few nodes are moving andthe motion is coordinated. Otherwise the clusterheadswill lose control of their clusters and thus their role aslocal coordinators and managers [15], and therefore highprocessing and communications overhead will be paid toreconstruct the clusters.In general there are two families of distributed
clustering algorithms. One is the lowest-ID algorithm[14], where the lowest-ID node in a neighborhood iselected as the clusterhead. The other one is the highest-connectivity (degree) algorithm [15]. In this case thehighest connectivity (degree) node in a neighborhoodbecomes the clusterhead. One of the most importantcriterion in clustering is stability. The frequent changesof cluster head may adversely affect the performance ofother protocols such as scheduling and resource alloca-tion which rely on it. In [21] an adaptive hybrid schemein which node mobility-based parameters are introducedto bound the probability of intra-cluster path failure wasproposed. In this work the authors assumed theexistence of some underlying proactive intra-clusterrouting algorithm and they utilize path availabilityinformation maintained by this routing protocol todetermine cluster feasibility. Moreover, mobility-based-criteria were also utilized in the scheme proposed in [5].However, that scheme builds clusters that consist only ofa set of nodes that are adjacent to a clusterhead. In thispaper we adopt the adaptive and dynamic creation ofmulti-hop clusters depending on both individual nodeand group mobility characteristics.
2.3.1. Mobility-based clustering
The clustering approach used in this paper, namelythe mobility-based clustering (MBC) is based onmobility concepts (individual mobility, group mobility)[17] and the availability of position information via areliable position locating system (i.e. GPS). It usescombination of both physical and logical partitions ofthe network (i.e. geographic proximity and functionalrelation between nodes, such as mobility pattern, etc.),as well as the concept of relative mobility to characterizethe degree of mobility of a node with respect to its peers,without the need of an underlying unicast routingprotocol. The mobility-based hierarchical clustering
algorithm MBC may result in variable-size clustersdepending on the mobility characteristics of the nodes.A group may consist of clusters that present similarmobility characteristics. Several groups can be hier-archically merged into one group depending on themobility of each group. The introduction of the conceptof relative mobility in order to characterize the degree ofmobility a node exhibits with respect to its peers for agiven period of time, is mainly motivated by theobservation that mobile ad hoc networks supportmultipoint communications among nodes that demon-strate group-oriented mobility patterns [17,24] and tendto coordinate their movements. Since our objective is thecreation of adaptive clusters for the purpose ofgeomulticasting support, our approach uses directlyindividual and group mobility information, and doesnot depend on the use of any underlying routingprotocol. This is different from the algorithm proposedin [21] that adaptive clustering schemes are proposedusing a probabilistic model that characterizes the futureavailability of network links maintained by someunderlying unicast proactive routing algorithm, andtherefore implicitly they adapt to mobility. In general anode with high relative mobility is more prone tounstable behavior than a node with less relative mobilityand therefore should not be elected as clusterhead. Anode may compute its relative mobility by exchangingits mobility profile with current and potential peernodes. As a node moves, its relative mobility may alsochange, and therefore the relative mobility of a nodemust be periodically reevaluated to allow for adaptationto future states of the network. A detailed descriptionand an in-depth performance analysis of MBC can befound in [2]. The performance evaluation of MBC hasshown that this strategy creates a very stable underlyingstructure that reduces significantly the need for cluster-head changes and therefore provides an ideal vehicle forthe implementation of mobility management andgeomulticast functions in mobile ad hoc networks.Specifically as shown in [2] MBC algorithm outperformsboth of the lowest-ID and highest connectivity cluster-ing algorithms by improving the cluster stability metricsby more than 50% in the case of random movement.Furthermore, the improvement is considerably higher inscenarios involving group movements where MBCalgorithm reduces the clusterhead change ratio byapproximately 10 times compared to the lowest-IDalgorithm and 20 times compared to the highest-connectivity algorithm. For the sake of completenessin the following subsection we provide a brief descrip-tion of the MBC clustering method.
2.3.2. MBC algorithm description
Let us consider a network topology which is modeledby a graph G ¼ ðV ;EÞ; where V is the set of nodes, andE is the set of bi-directional links which operate
B. An, S. Papavassiliou / J. Parallel Distrib. Comput. 63 (2003) 182–195186

independently in each direction. The distance dðx; yÞ oftwo nodes x and y of G is defined to be the minimalnumber of hops between nodes x and y: A cluster CiCV
is a set of nodes, where for any two nodes x;yACi; dðx; yÞpL: Namely, any two nodes in a clusterare at most L- hops away. L is a parameter that dependson the network stability. Let us define by W the set of allfeasible clusters Ci: A cluster coverage Kl in ourclustered topology is defined as follows:
Kl ¼ Ci;CiAW and Ci-Cj ¼ 0 and[
ciAkl
Ci ¼ V
( ):
ð1Þ
In the following let us denote by vðm; tÞ; the velocityvector of node m and vðn; tÞ; the velocity vector of noden at time t: Please note that velocity vectors vðm; tÞ andvðn; tÞ have two parameters, namely speed and direction.The relative velocity vðm; n; tÞ between nodes m and n attime t is defined as
vðm; n; tÞ ¼ vðm; tÞ � vðn; tÞ: ð2Þ
The relative mobility, Mm;n;T ; between any pair ðm; nÞ ofnodes during period T is defined as their absoluterelative speed averaged over time T : That is
Mm;n;T ¼ 1
N
XN
i¼1jvðm; n; tiÞj; ð3Þ
where N is the number of discrete times ti that velocityinformation is calculated and disseminated to othernodes within time interval T. We define two kinds ofcluster mobilities as follows. CM1i presents the motionbehavior(speed, direction) of a cluster Ci as a whole. Toobtain CM1i as defined here, we add the velocities(vec-tors) of all nodes in the cluster Ci; and then average overthe total number of nodes in the cluster. Thus
CM1i ¼1
Mi
XnkAci
vðnk;TÞ; ð4Þ
where Mi denotes the number of all nodes in the cluster,Ci: CM2i represents the motion behavior(uncertainty)of nodes within a cluster, Ci: To obtain CM2i as definedhere, we add the relative mobilities for all node pairs(m;n) in the cluster Ci; and then take average over thenumber of all node pairs in the cluster. Thus
CM2i ¼1
Ni
Xðm;nÞAci
Mm;n;T ; ð5Þ
where Ni denotes the number of all node pairs (m; n) inthe cluster Ci: These two cluster mobilities are used togroup clusters hierarchically.In the following we provide a description of the
mobility-based algorithm in order to construct andmaintain the various clusters.
Step 1: Mobility information dissemination: Each noden periodically disseminates its velocity information
ðvðn; tiÞ; i ¼ 1; 2;yÞ which have speed and direction toits neighboring nodes.
Step 2: Calculation of mobility metrics: Upon recep-tion of node’s n velocity information each node m
calculates its relative velocity between itself and node n
respectively. Specifically for every neighbor n; the nodem under consideration calculates parameter vðm; n; tÞaccording to relation (2). Then periodically(with periodT) each node m calculates the relative mobility Mm;n;T
between itself and node n:Step 3: Initial (tentative) cluster construction: Let us
denote by Sm the set that includes node m and all thenodes from which node m receives mobility information.Among the nodes of Sm the node i with the lowest IDthat satisfies the following condition: Mm;i;ToThmob;iASm is selected as tentative clusterhead (TCH). That is
TCH ¼ LeastiASmfIDjMm;i;ToThmobg: ð6Þ
Then node m requests clustering (i.e to become part ofthis clusterhead’s cluster) to node TCH: It should benoted here that the mobility threshold Thmob is a designparameter of our algorithm and can be used to controlthe stability of the generated clusters in differentnetworks. Moreover different mobility threshold para-meters that may change dynamically and adaptivelyduring the operation of the network can be used, inorder to provide a realistic representation of a mobile adhoc network where random mobility and group mobilitypatterns can occur simultaneously.
Step 4: Cluster merging: If a tentativeclusterheadðTCH1Þ is to be included into anotherclusterðTCH2Þ according to step 3, then the child cluster(the tentative clusterðTCH1Þ) joins into the parentcluster(uppercluster, TCH2) with its current clustermembers. There is an upperbound(i.e. L hops) rule forcluster merging. After merging the clusterheads(CHs), thehighest-parent cluster’s head is selected as the cluster-head(CH) of the new generated cluster. Each node in thechild clusterðTCH1Þ holds TCH1 information(mobile id).TCH1 holds its parent clusterhead information(mobileid), and so on. The new generated CH holds routinginformation of all nodes within the new cluster.
Step 5: Cluster maintenance/reconstruction: When anode m in cluster Ci moves into a cluster Cj; if a node nin the cluster Cj satisfies the condition: Mm;n;ToThmob;and node n is the clusterhead of the cluster Cj then nodem requests clustering to node n(no clusterhead change).If these conditions are not satisfied, node m repeats step5 during its motion.
2.4. Direction guided routing
In this section we propose a direction guided routing(DGR) protocol which creates cluster-head basedlimited mesh structure within a guided region. Thisguided region can be adjusted based on the network
B. An, S. Papavassiliou / J. Parallel Distrib. Comput. 63 (2003) 182–195 187
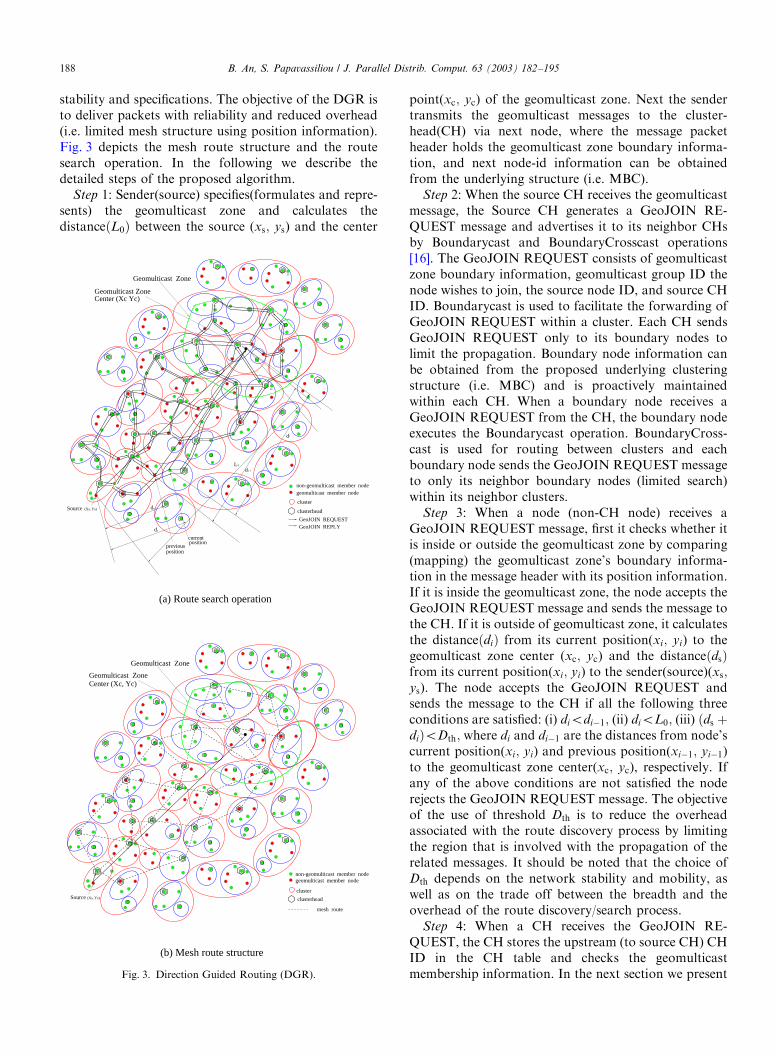
stability and specifications. The objective of the DGR isto deliver packets with reliability and reduced overhead(i.e. limited mesh structure using position information).Fig. 3 depicts the mesh route structure and the routesearch operation. In the following we describe thedetailed steps of the proposed algorithm.
Step 1: Sender(source) specifies(formulates and repre-sents) the geomulticast zone and calculates thedistanceðL0Þ between the source (xs; ys) and the center
point(xc; yc) of the geomulticast zone. Next the sendertransmits the geomulticast messages to the cluster-head(CH) via next node, where the message packetheader holds the geomulticast zone boundary informa-tion, and next node-id information can be obtainedfrom the underlying structure (i.e. MBC).
Step 2: When the source CH receives the geomulticastmessage, the Source CH generates a GeoJOIN RE-QUEST message and advertises it to its neighbor CHsby Boundarycast and BoundaryCrosscast operations[16]. The GeoJOIN REQUEST consists of geomulticastzone boundary information, geomulticast group ID thenode wishes to join, the source node ID, and source CHID. Boundarycast is used to facilitate the forwarding ofGeoJOIN REQUEST within a cluster. Each CH sendsGeoJOIN REQUEST only to its boundary nodes tolimit the propagation. Boundary node information canbe obtained from the proposed underlying clusteringstructure (i.e. MBC) and is proactively maintainedwithin each CH. When a boundary node receives aGeoJOIN REQUEST from the CH, the boundary nodeexecutes the Boundarycast operation. BoundaryCross-cast is used for routing between clusters and eachboundary node sends the GeoJOIN REQUEST messageto only its neighbor boundary nodes (limited search)within its neighbor clusters.
Step 3: When a node (non-CH node) receives aGeoJOIN REQUEST message, first it checks whether itis inside or outside the geomulticast zone by comparing(mapping) the geomulticast zone’s boundary informa-tion in the message header with its position information.If it is inside the geomulticast zone, the node accepts theGeoJOIN REQUEST message and sends the message tothe CH. If it is outside of geomulticast zone, it calculatesthe distanceðdiÞ from its current position(xi; yi) to thegeomulticast zone center (xc; yc) and the distanceðdsÞfrom its current position(xi; yi) to the sender(source)(xs;ys). The node accepts the GeoJOIN REQUEST andsends the message to the CH if all the following threeconditions are satisfied: (i) diodi�1; (ii) dioL0; (iii) ðds þdiÞoDth; where di and di�1 are the distances from node’scurrent position(xi; yi) and previous position(xi�1; yi�1)to the geomulticast zone center(xc; yc), respectively. Ifany of the above conditions are not satisfied the noderejects the GeoJOIN REQUEST message. The objectiveof the use of threshold Dth is to reduce the overheadassociated with the route discovery process by limitingthe region that is involved with the propagation of therelated messages. It should be noted that the choice ofDth depends on the network stability and mobility, aswell as on the trade off between the breadth and theoverhead of the route discovery/search process.
Step 4: When a CH receives the GeoJOIN RE-QUEST, the CH stores the upstream (to source CH) CHID in the CH table and checks the geomulticastmembership information. In the next section we present
12
33
i-1d
di
32
8
L0
ds
ds-1
33
Geomulticast Zone
(Xs, Ys)Source
previous position
currentposition
Geomulticast Zone Center (Xc Yc)
geomulticast member node
cluster
non-geomulticast member node
clusterhead
GeoJOIN REQUESTGeoJOIN REPLY
32
8
33
Geomulticast Zone
12
Geomulticast ZoneCenter (Xc, Yc)
Source (Xs, Ys)
non-geomulticast member nodegeomulticast member node
cluster
clusterhead
mesh route
(a) Route search operation
(b) Mesh route structure
Fig. 3. Direction Guided Routing (DGR).
B. An, S. Papavassiliou / J. Parallel Distrib. Comput. 63 (2003) 182–195188
two membership management strategies for supportinggeomulticast services. There are two operations in step4. First, if there are geomulticast memberships, it replieswith GeoJOIN REPLY to its upstream (to source CH)CHs using CH table information. When each CHreceives GeoJOIN REPLY message, the CH stores thedownstream (to geomulticast zone) CH ID. When thesource CH (i.e. GeoCO) receives the GeoJOIN REPLYmessage, the first operation is completed. In the secondoperation, the CH forwards the GeoJOIN REQUESTto its neighbor CHs by using steps 2 and 3 while thereare neighbor CHs.
Step 5: While the source CH holds the GeoJOINREPLY message during a specified time interval, theCH transmits the geomulticast packets over the meshroutes to the geomulticast members within the geomul-ticast zone.
2.5. Geomulticast group construction and maintenance
In this section we present and discuss two geomulticastmembership management strategies which depend on thegeolocation storage position. In the first strategy, eachmobile node holds its geolocation information via GPSwhile in the second strategy each CH holds geolocationinformation of all its members. In the following wepresent the main operational steps for each strategy.
Strategy 1
Step 1: When a CH receives a GeoJOIN REQUEST,the CH simply relays this information to all the MNs inits respective service area.
Step 2: The MNs compare their geolocation with thegeomulticast zone boundaries included in the GeoJOINREQUEST message and decide whether they are insideor outside the geomulticast zone.
Step 3: If a MN decides that it is inside thegeomulticast zone and has the geomulticast group ID,then it returns a positive response to the CH, where
geomulticast ID is generated and transmitted fromsource CH and is used to identify a specific multicastgroup. Please see step 2 in Direction Guided Routing.
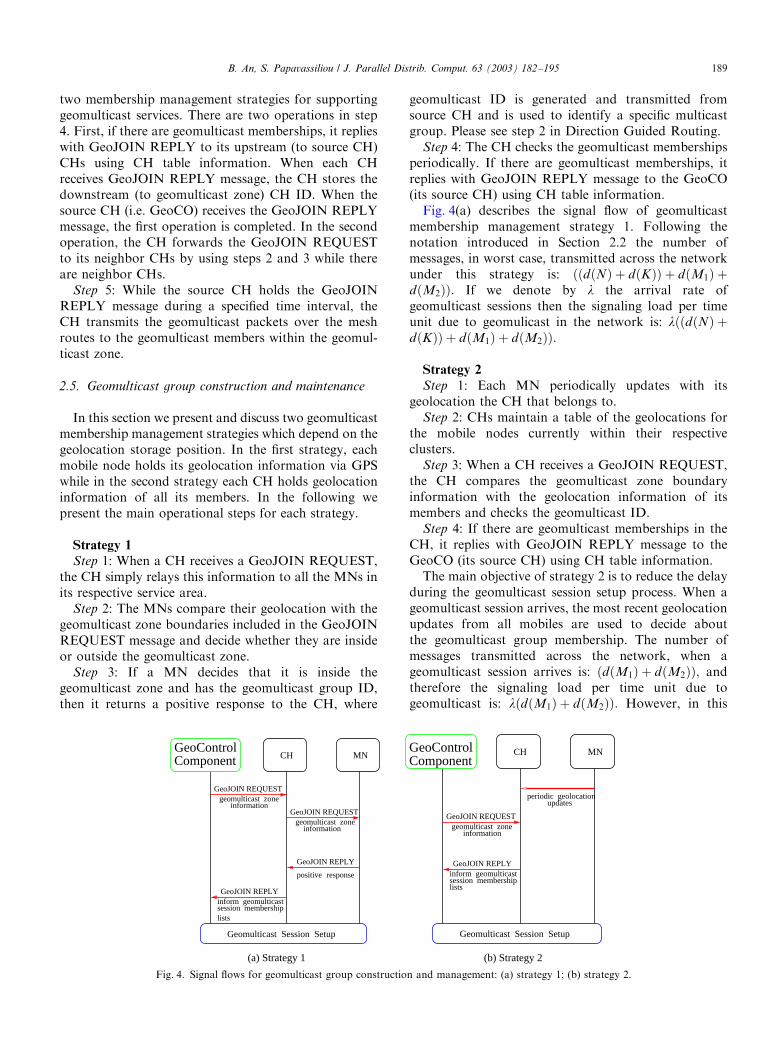
Step 4: The CH checks the geomulticast membershipsperiodically. If there are geomulticast memberships, itreplies with GeoJOIN REPLY message to the GeoCO(its source CH) using CH table information.Fig. 4(a) describes the signal flow of geomulticast
membership management strategy 1. Following thenotation introduced in Section 2.2 the number ofmessages, in worst case, transmitted across the networkunder this strategy is: ððdðNÞ þ dðKÞÞ þ dðM1Þ þdðM2ÞÞ: If we denote by l the arrival rate ofgeomulticast sessions then the signaling load per timeunit due to geomulicast in the network is: lððdðNÞ þdðKÞÞ þ dðM1Þ þ dðM2ÞÞ:
Strategy 2
Step 1: Each MN periodically updates with itsgeolocation the CH that belongs to.
Step 2: CHs maintain a table of the geolocations forthe mobile nodes currently within their respectiveclusters.
Step 3: When a CH receives a GeoJOIN REQUEST,the CH compares the geomulticast zone boundaryinformation with the geolocation information of itsmembers and checks the geomulticast ID.
Step 4: If there are geomulticast memberships in theCH, it replies with GeoJOIN REPLY message to theGeoCO (its source CH) using CH table information.The main objective of strategy 2 is to reduce the delay
during the geomulticast session setup process. When ageomulticast session arrives, the most recent geolocationupdates from all mobiles are used to decide aboutthe geomulticast group membership. The number ofmessages transmitted across the network, when ageomulticast session arrives is: ðdðM1Þ þ dðM2ÞÞ; andtherefore the signaling load per time unit due togeomulticast is: lðdðM1Þ þ dðM2ÞÞ: However, in this
CH MN
Geomulticast Session Setup
GeoJOIN REQUEST
geomulticast zone information
GeoJOIN REQUEST
positive response
GeoJOIN REPLY
listssession membershipinform geomulticastGeoJOIN REPLY
geomulticast zone information
ComponentGeoControl CH MN
Geomulticast Session Setup
GeoJOIN REPLYinform geomulticastsession membershiplists
GeoJOIN REQUEST geomulticast zone
information
periodic geolocationupdates
GeoControlComponent
(a) Strategy 1 (b) Strategy 2
Fig. 4. Signal flows for geomulticast group construction and management: (a) strategy 1; (b) strategy 2.
B. An, S. Papavassiliou / J. Parallel Distrib. Comput. 63 (2003) 182–195 189
signaling load we need to add the signaling load thatresults from the periodic updates of the geolocationinformation that each mobile node generates. Thisadditional load depends on the update time interval,and can be immense with increasing number of mobilesand decreasing update intervals. It should be noted herethat there is a trade off between the signaling load andthe probability of error in the geomulticast groupmembership. This trade off, which is closely related tothe periodic update interval, is discussed and studied inmore detail in the following sections. If we denote by L
the set that represents all the active mobile nodes in thenetwork, by dðLÞ the cardinality of set L; and by a therate at which geolocation updates are generated by amobile node (e.g. updates per time unit) the signalingload due to geomulticast session setup is: lðdðM1Þ þdðM2ÞÞ þ adðLÞ: Fig. 4(b) describes the signal flow ofgeomulticast membership management strategy 2.
3. A framework for performance analysis and evaluation
In this section, we define and formulate a frameworkin order to evaluate the performance of the designalternatives, algorithms and implementations used forgeomulticast services in mobile ad hoc wireless net-works. Since one of the main objectives of our efforts isto design architectures that support geomulticast ser-
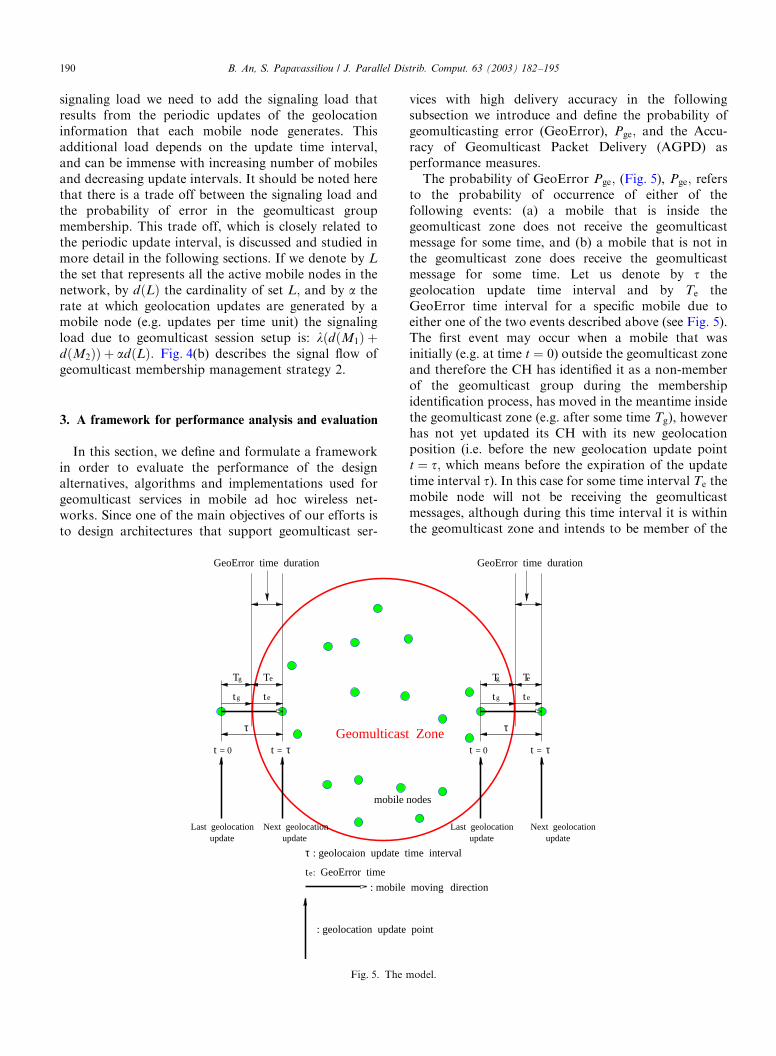
vices with high delivery accuracy in the followingsubsection we introduce and define the probability ofgeomulticasting error (GeoError), Pge; and the Accu-racy of Geomulticast Packet Delivery (AGPD) asperformance measures.The probability of GeoError Pge; (Fig. 5), Pge; refers
to the probability of occurrence of either of thefollowing events: (a) a mobile that is inside thegeomulticast zone does not receive the geomulticastmessage for some time, and (b) a mobile that is not inthe geomulticast zone does receive the geomulticastmessage for some time. Let us denote by t thegeolocation update time interval and by Te theGeoError time interval for a specific mobile due toeither one of the two events described above (see Fig. 5).The first event may occur when a mobile that wasinitially (e.g. at time t ¼ 0) outside the geomulticast zoneand therefore the CH has identified it as a non-memberof the geomulticast group during the membershipidentification process, has moved in the meantime insidethe geomulticast zone (e.g. after some time Tg), howeverhas not yet updated its CH with its new geolocationposition (i.e. before the new geolocation update pointt ¼ t; which means before the expiration of the updatetime interval t). In this case for some time interval Te themobile node will not be receiving the geomulticastmessages, although during this time interval it is withinthe geomulticast zone and intends to be member of the
: geolocaion update time intervalτ
te
Te Te
te
Tg
tg tg
Tg
t = 0 t = 0t = τ t = τGeomulticast Zone
mobile nodes
τ τ
GeoError time duration GeoError time duration
te
Last geolocation update
Next geolocationupdate
Last geolocation update
Next geolocationupdate
: mobile moving direction
: GeoError time
: geolocation update point
Fig. 5. The model.
B. An, S. Papavassiliou / J. Parallel Distrib. Comput. 63 (2003) 182–195190

geomulticast group. The mobile node will become amember of the intended geomulticast group and willstart receiving the corresponding messages at the nextgeolocation update point. Similarly the second eventmay occur when a mobile node that was initially (e.g. attime t ¼ 0) inside the geomulticast zone and its CH hasidentified it as a member of the geomulticast groupduring the membership identification process, hasmoved in the meantime outside the geomulticast zone(e.g. after some time Tg), however has not yet updatedits CH with its new geolocation position (i.e. before thenew geolocation update point t ¼ t; which means beforethe expiration of the update time interval t). In this casefor some time interval Te the mobile node will continueto receive the geomulticast messages, although it isoutside the geomulticast zone and is not supposed to bemember of the geomulticast group.From the above discussion it is obvious that the rate
of geomulticast zone boundary crossing, lc; before thegeomulticast membership list is updated is one of themost significant contributors to the total probability ofGeoError, especially when the geomulticast membershipdecision is made at the network level, where the mobilesneed to send periodic updates of their geolocation to theclusterhead (i.e. strategy 2). Overall the geomulticasterror probability depends on the packet to mobilityratio, i.e. how often a user receives a packet and howmobile the node is, as well as on the geolocation updatetime interval. Optimization of location update mechan-ism and interval has been a subject of intense research inthe framework of cellular networks mainly for locationmanagement [1,3,4,18]. In general there is a strong andcomplicated relation between the update interval andother system and traffic parameters. Here we develop aframework in order to evaluate the effects andassociated trade offs, and we gain some insight aboutthe optimum location update interval through anumerical study. Specifically we study the effect of themobile node geolocation periodic update interval on thepacket delivery accuracy and the associated overhead(signaling load). As this update interval decreases theprobability of geomulticast error decreases as well, atthe cost of increased signaling traffic and processing inorder to maintain accurate mobile node positioninformation at the CH, propagate the updated informa-tion from each individual node to the CH, and compare(map) this position to the geomulticat zone boundaryinformation.
3.1. The model
For the purposes of the performance evaluation, inthis work the movement of the mobile nodes is modeledby a random and uniform model [3,25]. This modelassumes that the mobile nodes move with constantvelocity during time interval t in a random direction y
that is uniformly distributed in ½0; 2p�: Considering ageomulticast area with perimeter S where r mobileterminals per unit area are located the rate ofgeomulticast zone boundary crossing per unit time(average number of mobile nodes crossing the areaborder per unit of time), denoted by lc is [3,25]: lc ¼rVSbp ; where b denotes the activity ratio of mobiles (in the
following without loss of generality we may assumeb ¼ 1), and V is the average mobile node velocity. Forexample, if the geomulticast zone is represented by acircle with radius R then lc ¼ 2rVR: In general lcdepends on the actual size of the geomulticast zone, thenetwork density, and the mobility pattern of the mobilenodes (e.g. velocity).We assume that the number of messages that arrive at
a mobile node during a time t is a Poisson randomvariable with rate la: Moreover let us denote by te therandom variable that represents the GeoError timeinterval (i.e. the time between the point that a mobile iserroneously considered (or not considered) member ofthe geomulticast session due to the two events describedbefore, and the point until the next position update).Assuming that the interval between two boundarycrossing of a mobile is much longer than t; whichshould be case in any practical system, then te has auniform distribution [23] in interval ½0; t�: That is thedensity function feðteÞ of te is
feðteÞ ¼1
t0ptept;
0 teXt:
8<: ð7Þ
Thus, the probability of k message arrival during timeTe is
Pe½n ¼ k� ¼Z t
0
P½n ¼ kjTe ¼ t�feðtÞdt
¼Z t
0
e�latðlatÞk
k!
1
tdt: ð8Þ
Since as mentioned before te follows a uniformdistribution between ½0; t� we can easily show based onthe properties of conditional expectation, that theaverage rate of error ðE½error packet rate�Þ messagearrival is
E½error packet rate� ¼ 2 � lc � la �t2� h; ð9Þ
where we multiply by two to account for the two casesof possible errors that may occur and correspond to theoccurrence of the two events described in the beginningof Section 3, and by h we denote the percentage of thetotal number of nodes within the zone, that are membersof the geomulticast group under consideration (for thespecial case that all nodes within the zone aregeomulticast members we have h ¼ 1; otherwise ho1).Then we can calculate the probability of GeoErrorðPgeÞ
B. An, S. Papavassiliou / J. Parallel Distrib. Comput. 63 (2003) 182–195 191

as follows:
Pge ¼E½error packet rate�
E½desired packet rate� ¼2 � la � lc � t
2� h
la � B
¼ lc � t � h
B; ð10Þ
where B denotes the average number of nodes within thegeomulticast zone that are geomulticast members. Basedon the model under consideration the total number ofnodes within a zone of area F is given by r � F ; andtherefore h ¼ B
r�F: Substituting this in the previous
relation we obtain: Pge ¼ lc�tr�F
:The Accuracy of Geomulticast Packet Deliver-
y(AGPD) can be defined as AGPD ¼ 1� Pge:Of course one would like to reduce the probability of
GeoError and therefore increase the Accuracy ofGeomulticast Packet Delivery. When geomulticastmanagement strategy 2 is employed this could be doneby having the mobiles to update their location often (i.e.small t). However location updates consume wirelessresources and processing power and should not be toofrequent. On the other hand as mentioned beforeinfrequent updates may result in errors in packetdelivery. In the following we develop a cost functionto quantify the trade off between the penalty associatedwith the occurrence of errors in packet delivery and theassociated cost for supporting certain degree of accuracyin the proposed geomulticast architecture. We consideronly the cost directly related to the geomulticast sessionsetup, the update of the geolocation and the loss ofpackets due to the inaccuracy of position information asa result of the node mobility and the geolocation updatetime interval, while other cost associated with functionssuch as cluster construction and maintenance, systemmaintenance, etc., is the same for different cases(depends only on the underlying structure) and is notconsidered here. Therefore the following estimated costcontain: the average cost per time unit of geolocationupdates, the average cost per time unit of geomulticastsession setup and the average error cost (penalty) pertime unit, due to the inaccuracy of position informationas a result of the node mobility and the geolocationupdate time interval. Let us denote by cs the per signalcost for geomulticast session setup, by cg the cost of asingle geolocation update per node, and by Cerror theGeoError cost per time unit. Then the correspondingaverage cost per time unit, Costtotal; is
Costtotal ¼ Costsetup þ Costgeo-update þ Costerror ð11Þ
¼ cs � lðdðM1Þ þ dðM2ÞÞ þ cgdðLÞa þ Cerror:
ð12Þ
Let us denote by cn; n ¼ 1; 2;y; the cost of loosing n
calls. Then the corresponding average GeoError cost per
time unit, Cerror is
Cerror ¼ 2 � lc � h �XNn¼1
cnPe½n�: ð13Þ
For the sake of simplicity in the following we canreasonably assume that the cost of loosing the nthmessage arrival after geomulticast zone boundary cross-ing by a mobile node is independent of n: Thus, 8n; cn =nc1: Consequently
Cerror ¼ 2 � lc � h � c1XNn¼1
nPe½n� !
ð14Þ
¼ c1 � E½error packet rate�
¼ c1 � 2 � lc � h � la �t2: ð15Þ
Finally substituting relation (15) in (12) we get:
Costtotal ¼ cs � lðdðM1Þ þ dðM2ÞÞ þ cg � dðLÞ � a
þ c1 � lc � h � la � t: ð16Þ
4. Numerical study and discussion
In this section we present some numerical results thatwe obtained based on the analytical framework wedeveloped in the previous section, as well as viamodeling and simulation using the Optimized NetworkEngineering Tool (OPNET). The aim of this numericalstudy is to evaluate the performance of the proposedarchitectures and obtain some insight about the impacton the overall system performance, of the designparameters, as well as of various operational parametersand characteristics such as mobility, geolocation updaterate, geomulticast group size, etc.
4.1. Simulation framework
A mobile ad hoc network consisting of 50 mobilenodes that are placed randomly within a rectangularregion of 1000 m 1000 m is modeled for the purposesof this study. The results presented in the followingsection correspond to the use of circular geomulticastzone with radius R ð150 m2300 mÞ: The mobile nodesare assumed to have constant radio range of Z ¼ 300 m:Throughout our study we assume that a link fails, orreappears, as a node goes out or in transmission range ofanother node, due to the mobility of the nodes. Mobilenodes are assumed to be moving around throughout thenetwork. The speed and the direction of each move areuniformly distributed, with speed range ½0; 80 km=h�and direction range ½0; 2p�; respectively. We use onegeomulticast source node (sender) while the geomulti-cast members are selected randomly within the geomul-ticast zone.
B. An, S. Papavassiliou / J. Parallel Distrib. Comput. 63 (2003) 182–195192
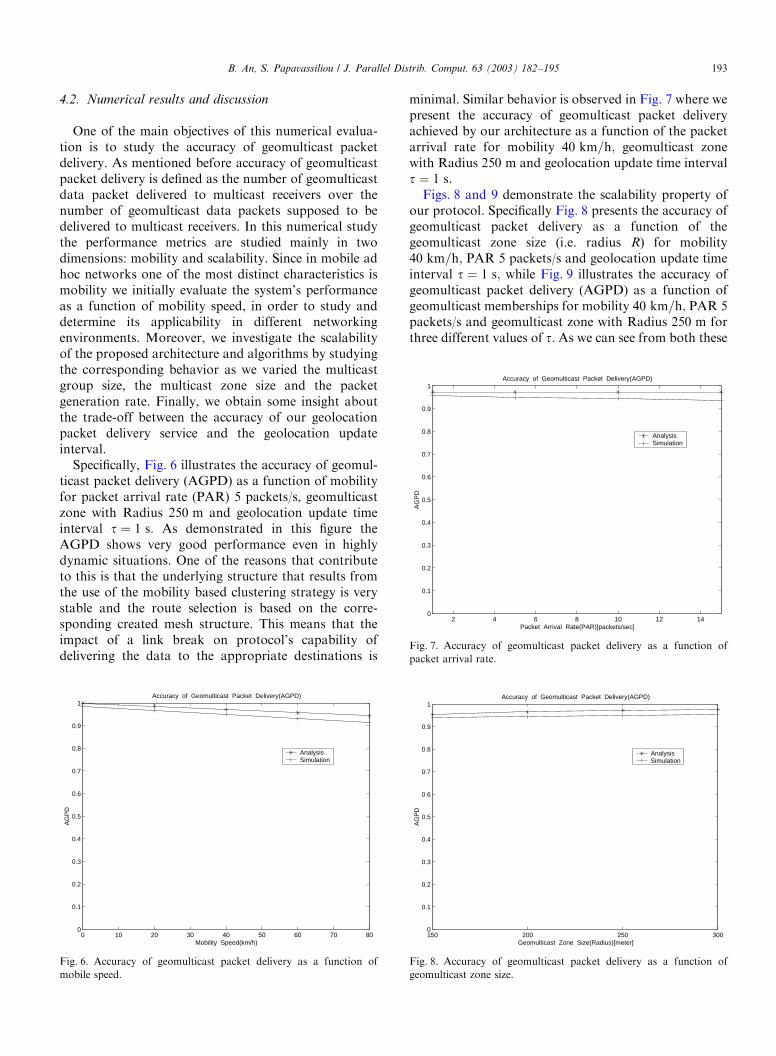
4.2. Numerical results and discussion
One of the main objectives of this numerical evalua-tion is to study the accuracy of geomulticast packetdelivery. As mentioned before accuracy of geomulticastpacket delivery is defined as the number of geomulticastdata packet delivered to multicast receivers over thenumber of geomulticast data packets supposed to bedelivered to multicast receivers. In this numerical studythe performance metrics are studied mainly in twodimensions: mobility and scalability. Since in mobile adhoc networks one of the most distinct characteristics ismobility we initially evaluate the system’s performanceas a function of mobility speed, in order to study anddetermine its applicability in different networkingenvironments. Moreover, we investigate the scalabilityof the proposed architecture and algorithms by studyingthe corresponding behavior as we varied the multicastgroup size, the multicast zone size and the packetgeneration rate. Finally, we obtain some insight aboutthe trade-off between the accuracy of our geolocationpacket delivery service and the geolocation updateinterval.Specifically, Fig. 6 illustrates the accuracy of geomul-
ticast packet delivery (AGPD) as a function of mobilityfor packet arrival rate (PAR) 5 packets/s, geomulticastzone with Radius 250 m and geolocation update timeinterval t ¼ 1 s: As demonstrated in this figure theAGPD shows very good performance even in highlydynamic situations. One of the reasons that contributeto this is that the underlying structure that results fromthe use of the mobility based clustering strategy is verystable and the route selection is based on the corre-sponding created mesh structure. This means that theimpact of a link break on protocol’s capability ofdelivering the data to the appropriate destinations is
minimal. Similar behavior is observed in Fig. 7 where wepresent the accuracy of geomulticast packet deliveryachieved by our architecture as a function of the packetarrival rate for mobility 40 km=h; geomulticast zonewith Radius 250 m and geolocation update time intervalt ¼ 1 s:Figs. 8 and 9 demonstrate the scalability property of
our protocol. Specifically Fig. 8 presents the accuracy ofgeomulticast packet delivery as a function of thegeomulticast zone size (i.e. radius R) for mobility40 km=h; PAR 5 packets/s and geolocation update timeinterval t ¼ 1 s; while Fig. 9 illustrates the accuracy ofgeomulticast packet delivery (AGPD) as a function ofgeomulticast memberships for mobility 40 km=h; PAR 5packets/s and geomulticast zone with Radius 250 m forthree different values of t: As we can see from both these
0 10 20 30 40 50 60 70 800
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Mobility Speed(km/h)
AG
PD
Accuracy of Geomulticast Packet Delivery(AGPD)
Analysis Simulation
Fig. 6. Accuracy of geomulticast packet delivery as a function of
mobile speed.
2 4 6 8 10 12 140
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Packet Arrival Rate(PAR)[packets/sec]
AG
PD
Accuracy of Geomulticast Packet Delivery(AGPD)
Analysis Simulation
Fig. 7. Accuracy of geomulticast packet delivery as a function of
packet arrival rate.
150 200 250 3000
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Geomulticast Zone Size(Radius)[meter]
AG
PD
Accuracy of Geomulticast Packet Delivery(AGPD)
Analysis Simulation
Fig. 8. Accuracy of geomulticast packet delivery as a function of
geomulticast zone size.
B. An, S. Papavassiliou / J. Parallel Distrib. Comput. 63 (2003) 182–195 193
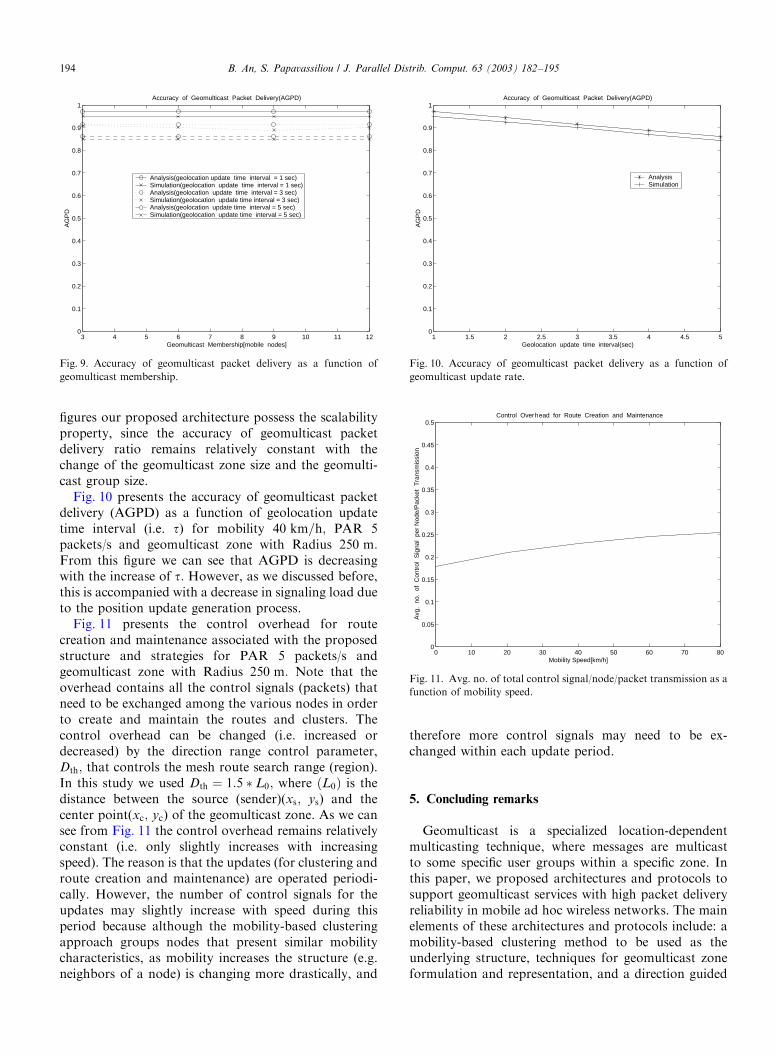
figures our proposed architecture possess the scalabilityproperty, since the accuracy of geomulticast packetdelivery ratio remains relatively constant with thechange of the geomulticast zone size and the geomulti-cast group size.Fig. 10 presents the accuracy of geomulticast packet
delivery (AGPD) as a function of geolocation updatetime interval (i.e. t) for mobility 40 km=h; PAR 5packets/s and geomulticast zone with Radius 250 m:From this figure we can see that AGPD is decreasingwith the increase of t: However, as we discussed before,this is accompanied with a decrease in signaling load dueto the position update generation process.Fig. 11 presents the control overhead for route
creation and maintenance associated with the proposedstructure and strategies for PAR 5 packets/s andgeomulticast zone with Radius 250 m: Note that theoverhead contains all the control signals (packets) thatneed to be exchanged among the various nodes in orderto create and maintain the routes and clusters. Thecontrol overhead can be changed (i.e. increased ordecreased) by the direction range control parameter,Dth; that controls the mesh route search range (region).In this study we used Dth ¼ 1:5 � L0; where ðL0Þ is thedistance between the source (sender)(xs; ys) and thecenter point(xc; yc) of the geomulticast zone. As we cansee from Fig. 11 the control overhead remains relativelyconstant (i.e. only slightly increases with increasingspeed). The reason is that the updates (for clustering androute creation and maintenance) are operated periodi-cally. However, the number of control signals for theupdates may slightly increase with speed during thisperiod because although the mobility-based clusteringapproach groups nodes that present similar mobilitycharacteristics, as mobility increases the structure (e.g.neighbors of a node) is changing more drastically, and
therefore more control signals may need to be ex-changed within each update period.
5. Concluding remarks
Geomulticast is a specialized location-dependentmulticasting technique, where messages are multicastto some specific user groups within a specific zone. Inthis paper, we proposed architectures and protocols tosupport geomulticast services with high packet deliveryreliability in mobile ad hoc wireless networks. The mainelements of these architectures and protocols include: amobility-based clustering method to be used as theunderlying structure, techniques for geomulticast zoneformulation and representation, and a direction guided
3 4 5 6 7 8 9 10 11 120
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Geomulticast Membership[mobile nodes]
AG
PD
Accuracy of Geomulticast Packet Delivery(AGPD)
Analysis(geolocation update time interval = 1 sec) Simulation(geolocation update time interval = 1 sec)Analysis(geolocation update time interval = 3 sec) Simulation(geolocation update time interval = 3 sec) Analysis(geolocation update time interval = 5 sec) Simulation(geolocation update time interval = 5 sec)
Fig. 9. Accuracy of geomulticast packet delivery as a function of
geomulticast membership.
1 1.5 2 2.5 3 3.5 4 4.5 50
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Geolocation update time interval(sec)
AG
PD
Accuracy of Geomulticast Packet Delivery(AGPD)
Analysis Simulation
Fig. 10. Accuracy of geomulticast packet delivery as a function of
geomulticast update rate.
0 10 20 30 40 50 60 70 800
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
Mobility Speed[km/h]
Avg
. no
. of
Con
trol
Sig
nal
per
Nod
e/P
acke
t T
rans
mis
sion
Control Overhead for Route Creation and Maintenance
Fig. 11. Avg. no. of total control signal/node/packet transmission as a
function of mobility speed.
B. An, S. Papavassiliou / J. Parallel Distrib. Comput. 63 (2003) 182–195194

geomulticast routing strategy. The direction guidedrouting (DGR) protocol creates cluster-head basedlimited mesh structure within a guided region, in orderto deliver packets with reliability and reduced overheadto the final destinations. Moreover, two geomulticastmembership management strategies which depend ongeolocation storage position are also presented andinvestigated. The first strategy is used to reduce themessage delivery error while the second one aims tominimize the session setup delay.We have also presented a framework in order to
evaluate the performance of the design alternatives foralgorithms and implementations used for geomulticastservices. The probability of GeoError and the accuracyof geomulticast packet delivery are derived and thetradeoff between the geolocation update interval andsignaling load is discussed. The performance evaluationof the proposed architectures has demonstrated theirefficiency in terms of accuracy of geomulticast packetdelivery, scalability, and control overhead, as a functionof mobility, geomulticast zone size, geolocation updatetime interval, number of geomulticast memberships, andtherefore indicate that the proposed architectures can beused to support geomulticast services with high messagedelivery accuracy in mobile ad hoc networks.
References
[1] I.F. Akyildiz, J.S.M. Ho, Dynamic mobile user location update
for wireless PCS networks, Wireless Networks 1 (1995) 187–196.
[2] B. An, S. Papavassiliou, A mobility-based clustering approach to
support mobility management and multicast routing in mobile ad
hoc wireless networks, Int. J. Network Management 11 (6) (2001)
387–395.
[3] L.P. Araujo, J.R. Boisson de Marca, Paging and location update
algorithms for cellular systems, IEEE Trans. Vechicular Technol.
49 (5) (2000) 1606–1614.
[4] A. Bar-Noy, I. Kessler, M. Sidi, Mobile users: to update or not to
update?, Wireless Networks 1 (1995) 175–186.
[5] S. Basagni, Distributed clustering for ad hoc networks, in: A.Y.
Zomaya, D.F. Hsu, O. Ibarra, S. Origuchi, D. Nassimi, M. Palis,
(Eds.), Proceedings of 1999 I-SPAN’99, Australia, June 1999, pp.
310–315.
[6] S. Basagni, I. Chlamtac, V.R. Syrotiuk, Dynamic source routing
for ad hoc networks using the global positioning system,
Proceedings of WCNC(the IEEE Wireless Communications and
Networking Conference), Vol. 1, New Orleans, LA, USA, 1999,
301–305.
[7] S. Basagni, I. Chlamtac, V.R. Syrotiuk, Geographic messaging in
wireless ad hoc networks, Proceedings of VTC1999, Spring,
Vol. 3, Dallas, TX, USA, 1999, pp. 1957–1961.
[8] S. Basagni, I. Chlamtac, V.R. Syrotiuk, Location aware one-to-
many communication in mobile multi-hop wireless networks,
Proceedings of VTC2000, Spring, Vol. 1, Tokyo, Japan, 2000,
pp. 288–292.
[9] A. Boukerche, Simulation based study of on-demand routing
protocols for ad hoc wireless networks, Proceedings of 34th
Annual Simulation Symposium, April 2001, pp. 85–92.
[10] A. Boukerche, S.K. Das, A. Fabbri, Analysis of randomized
congestion control with DSDV routing in ad hoc wireless
networks, J. Parallel Distrib. Computing 61 (2001) 967–995.
[11] A. Boukerche, S. Rogers, GPS query optimization in mobile
and wireless ad hoc networking, Proceedings of Sixth IEEE
Symposium on Computer and Communications, July 2001,
pp. 198–203.
[12] A. Boukerche, V. Sheetal, M. Choe, A route discovery optimiza-
tion scheme using GPS system, SCS/ACM/IEEE Annual
Simulation Symposium, San Diego, April 2002.
[13] M. Bui, S.K. Das, Randomized mobile agent based routing in
wireless networks, Proceedings of SIROCCO 2000 (the Seventh
International Colloquium on Structural Information and Com-
putation Complexity), L’Aquila, Italy, 2000.
[14] A. Ephremides, J.E. Wieselthier, D.J. Baker, A design concept for
reliable mobile radio networks with frequency hopping signaling,
Proceedings of IEEE 75 (1) (1987) 56–73.
[15] M. Gerla, J.T. Tsai, Multicluster, mobile, multimedia, radio
network, ACM/Baltzer J. Wireless Networks J. 1 (3) (1995)
255–265.
[16] Z.J. Hass, A new routing protocol for the reconfigurable wireless
networks, Proceedings of ICUPC’97, San Diego, CA, USA, 1997,
pp. 562–566.
[17] X. Hong, M. Gerla, G. Pei, C.-C. Chiang, A group mobility
model for ad hoc wireless networks, Proceedings of ACM/IEEE
MSWiM’99, Seattle, WA, August 1999.
[18] R. Jain, Y.-B. Lin, An auxiliary user location strategy employing
forwarding pointers to reduce network impacts of PCS, Wireless
Networks 1 (1995) 197–210.
[19] D. Johnson, D. Maltz, Dynamic source routing in ad hoc wireless
networks, in: T. Imielinski, H. Korth (Eds.), Mobile Computing,
Kluwer, Dordrecht, 1996 (Chapter 5).
[20] Y.-B. Ko, N.H. Vaidya, Geocasting in mobile ad hoc networks:
location-based multicast algorithms, Proceedings of IWMC-
SA’99, New Orleans, USA, 1999.
[21] A.B. McDonald, T.F. Znati, A mobility-based framework for
adaptive clustering in wireless ad hoc networks, IEEE J. Selected
Areas Commun. 17 (8) (1999) 1466–1487.
[22] J.C. Navas, T. Imielinski, GeoCast–geographic addressing and
routing, Proceedings of MOBICOM’97, Budapest, Hungary,
September 26–30, 1997, pp. 151–160.
[23] A.R. Noerpel, L.F. Chang, Y.-B. Lin, Polling deregistration for
unlicensed PCS, IEEE J. Selected Areas Commun. 14 (4) (1996)
728–734.
[24] R. Ramanathan, M. Steenstrup, Hierarchically-organized, multi-
hop mobile wireless networks for quality-of-service support,
ACM/Baltzer Mobile Networks Appl. 3 (1) (1998) 101–119.
[25] R. Thomas, H. Gilbert, G. Mazziotto, Influence of the moving of
the mobile stations on the performance of a radio mobile cellular
network, Proceedings of Third Nordic Seminar, Copenhagen,
September 1988.
B. An, S. Papavassiliou / J. Parallel Distrib. Comput. 63 (2003) 182–195 195