generalites sur les differents types d
DESCRIPTION
Le but de notre projet est l’étude d’une ALIMENTATION A DECOUPAGE. Pour ce faire il faut tout d’abord montrer l’intérêt de ce type d’alimentation.TRANSCRIPT

:
GENERALITES SUR LES DIFFERENTS TYPES
D’ALIMENTATIONS
Introduction...................................................................7
I- L’alimentation linéaire stabilisée, constitution et
fonctionnement………………………………………………9
II- Les alimentations continu-continu…………………….15
1- Convertisseur continu-continu sans isolation galvanique
(HACHEUR)…………………………………………………16
Projet de Fin d’Etudes l’alimentation 1

a-Définition et symbole………………………………16
b-Les quatre structures de base des hacheurs……16
c- Principe de fonctionnement d’un hacheur
série………………………………………………..17
d-Valeur moyenne de la tension en sortie du
hacheur…………………………………………………19
2- Débit sur une charge inductive………………………….20
Avantages et inconvénient des alimentations
précédentes……………………………………………25
GENERALITES SUR L’ALIMENTATION A DECOUPAGE
I-Introduction………………………………………………28
II-Comparaison entre la régulation linéaire et le
découpage……………………………………………….30
III-Types d’alimentations à découpage………………..31
Iν- Flaybac………………………………………………..32
1- Principe………………………………………………32
2- mode de fonctionnement…………………………..34
ANNEXE
L’isolation galvanique........................................41
La commutation ................................................44
Conclusion et
bibliographie..........................................46
Projet de Fin d’Etudes l’alimentation 2

Le but de notre projet est l’étude d’une ALIMENTATION
A DECOUPAGE. Pour ce faire il faut tout d’abord montrer
Projet de Fin d’Etudes l’alimentation 3

l’intérêt de ce type d’alimentation. De ce fait il faut
définir les différents types d’alimentation existant dans
le domaine électronique et électrique et faire une petite
comparaison entre ces différentes alimentations
Projet de Fin d’Etudes l’alimentation 4

Introduction :
Un circuit d’alimentation doit assurer deux
fonctions principales :
Délivrer une ou plusieurs tensions (ou courants)
bien précises et souvent stables.
Fournir une énergie électrique avec un minimum
de pertes.
La tension d’entrée est généralement alternative en
provenance d’un réseau de distribution, et la tension de
sortie est souvent continue et constante quelque soit la
consommation du circuit utilisateurs.
Projet de Fin d’Etudes l’alimentation 5

La grande majorité des équipements électroniques ont besoin d’une source de courant continu qui peut être une pile ou une batterie, mais qui est généralement constituée d’un circuit transformant le courant continu du secteur en courant continu : l’alimentation stabilisée.
Le rôle d’une alimentation continue est de fournir
les tensions et courants nécessaires au fonctionnement
des circuits électroniques avec le minimum
d’ondulation résiduelle et la meilleure régulation
possible. Elles doivent, de plus, souvent limiter le
courant fourni en cas de surcharge ainsi que la tension
continu qu’elle délivre, ceci afin de protéger les
composants fragiles.
Il existe des moyens divers pour produire une
tension continue à partir d’une tension alternative ;
Trois méthodes sont fréquemment employées :
L’alimentation stabilisée linéaire .
Le hacheur.
L’alimentation à découpage.
Projet de Fin d’Etudes l’alimentation 6
Toutes trois ont leurs avantages et leurs
inconvénients, on va essayer donc à faire une
comparaison entre eux.
I - L’alimentation linéaire stabilisée, constitution et
fonctionnement :
Le principe de cette alimentation est
représenté par la figure 1 :
Figure 1
Le transformateur remplit deux fonctions :
isolement galvanique entre l’équipement et le secteur ;
transformation de la tension alternative du réseau,
déterminée par le rapport entre le nombre de spires du
secondaire et du primaire.
Le redresseur convertit la tension alternative du
secondaire du transformateur en impulsions
unidirectionnelles de courant. Le montage le plus utilisé
actuellement est : le redresseur PD 2 qui assure un
redressement double alternances, il est constitué par
Projet de Fin d’Etudes l’alimentation 7

un pont appelé souvent ‘pont de Graetz’ (figure 2). Le
pont de Graetz est constitué de quatre diodes. Il existe
des ponts de diodes intégrés, c’est à dire que l’on a
moulé les quatre diodes dans un seul boîtier. Ce bloc
est plus facile à utiliser mais a un inconvénient.
Lorsqu’une des diodes moulées est défectueuse, il faut
changer l’ensemble.
Figure 2
La valeur moyenne de la tension continue est donnée
par :
=
Le filtre (figure 3). Il sert à lisser le courant
redressé brut fourni par le redresseur sous forme de
tension pulsée. Sur nos matériels de faible puissance on
utilise des filtres à capacité d’entrée (condensateur),
celle-ci servant de stockage pour les impulsions
débitées par le redresseur.
Projet de Fin d’Etudes l’alimentation 8
2UR/

figure3
La figure ci-dessous représente la forme de la
tension ; Vc ; aux bornes du condensateur en fonction
du temps :
On voit que la forme de la tension est une suite de
charges et décharges plus prolongées. La visualisation
de cette forme de tension est obtenue avec un
oscilloscope. La différence entre le haut et le bas de la
forme de cette tension s’appelle la tension résiduelle ou
la résiduelle ; elle doit être la plus faible possible. On
emploi des condensateurs de fortes capacités pour la
réduire. Certaines remarques doivent être faites
concernant le remplacement de cette capacité réservoir
:
Projet de Fin d’Etudes l’alimentation 9
t
Vc

a)Un condensateur électrolytique est polarisé et
l’on doit absolument respecter sa polarité lors de
son changement.
b) La tension d’utilisation du remplaçant doit être
supérieure à la tension maximale (Crète) du
transformateur.
c) Il ne faut pas utiliser un condensateur de plus
faible capacité lors de son échange.
Un condensateur sous dimensionné peut chauffer
et même exploser.
La valeur nécessaire de la capacité peut atteindre
10000uF.
Le dernier bloc est le régulateur dont le but est de
maintenir la tension de sortie quel que soit le débit de
l’alimentation ou la variation de la tension secteur. Ces
deux fonctions sont respectivement appelées régulation
et stabilisation. Tous les régulateurs linéaires
comprennent les éléments suivants:
a) un circuit de régulation.
b) un élément de référence (diode Zener
usuellement).
c) un circuit d’erreur, rebouclé sur la régulation.
La figure 5 montre le schéma de principe d’un
régulateur linéaire :
Projet de Fin d’Etudes l’alimentation 10

Figure 5
la tension de sortie doit rester inchangée. Quatre
éléments de base sont nécessaires pour exécuter une
excellente régulation:
un élément de référence.
un échantillon de la sortie.
un comparateur amplificateur d’erreur.
un élément de contrôle.
L’élément de référence est le fondement de tout
bon régulateur; c’est sur celle-ci que repose la qualité
de tout bon régulateur. Généralement, une diode Zener
ou mieux encore, une tension de référence intégrée, est
la pierre angulaire de tout bon régulateur.
Projet de Fin d’Etudes l’alimentation 11

Puisqu’on utilise la tension d’entrée comme
alimentation, il est préférable d’avoir un élément qui
est stable. L’entrée étant ondulée, un diviseur de
tension résistif seul ne suffirait pas à la tâche. Ce
dernier refléterait directement, à la sortie, la tension
d’ondulation.
Afin de pouvoir régulariser, c’est-à-dire garder la
tension de sortie exempte de variations extérieures,
l’on doit échantillonner les changements possibles à la
sortie et effectuer rapidement les correctifs. À cet
endroit, seul un diviseur résistif reflète exactement,
mais à une plus faible échelle, les variations de sortie.
Habituellement un amplificateur opérationnel est
utilisé pour comparer l’échantillon de la sortie à la
tension de référence. Si une erreur survient, le
comparateur donnera une commande à l’élément
terminal qui lui corrigera et régularisera la tension de
sortie.
Généralement, un transistor de puissance permet de laisser passer plus ou moins de courant selon les besoins de la sortie. Si une variation se produit, le comparateur en prend note, la compare avec la tension de référence et corrige en activant plus ou moins l’élément terminal dans le sens inverse de la variation.
II - Les alimentations continu-continu :
Projet de Fin d’Etudes l’alimentation 12

On distingue généralement deux classes de
convertisseurs continu-continu:
Les convertisseurs qui débitent sur un
récepteur destiné à être alimenter sous une tension
continu variable, un moteur à courant continu par
exemple.
Les convertisseurs destinés à fournir à leurs
sorties une tension continue constante pour servir
l'alimentation régulée.
Les convertisseurs continu-continu de la première
classe sont généralement appelés HACHEUR, ceux de la
deuxième constituent des ALIMENTATIONS À
DECOUPAGE
1 -Convertisseur continu-continu sans isolation
galvanique (HACHEUR).
a -définition et symbole.
Le principe consiste à obtenir un signal de sortie
périodique ayant une valeur moyenne E1 à partir d’un
signal continu E.
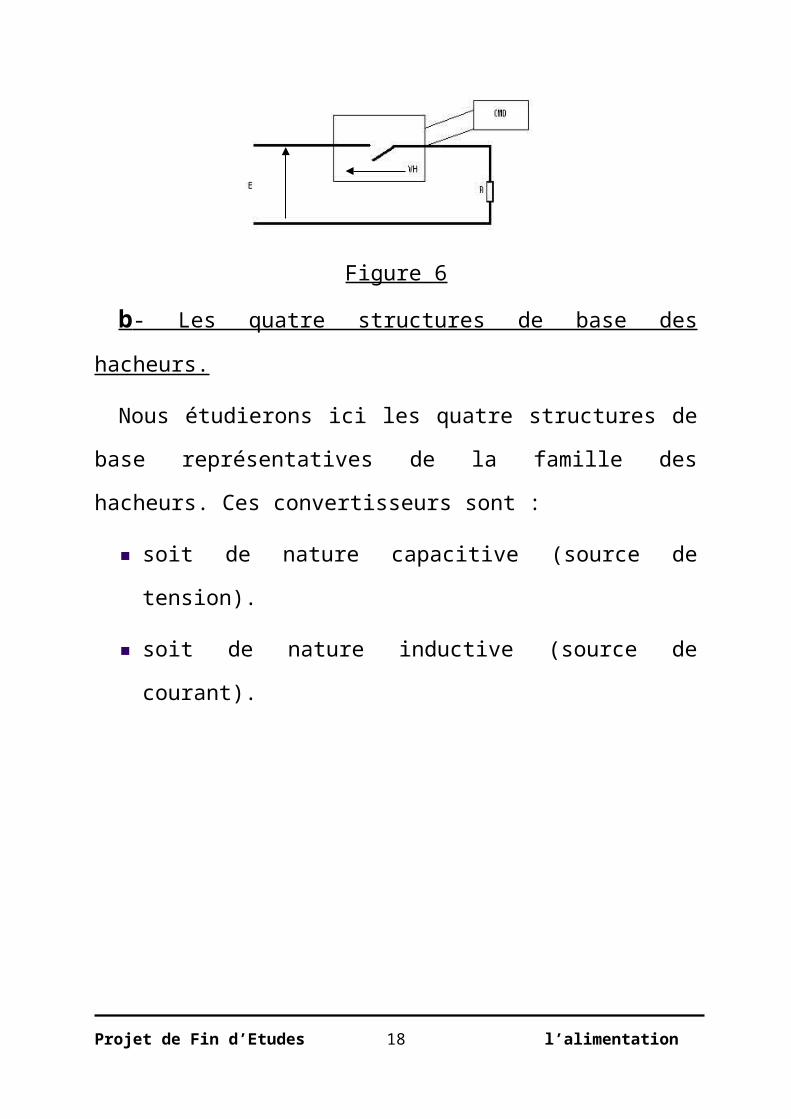
On peut matérialiser un hacheur par un
interrupteur comme montre la figure 6 :
Projet de Fin d’Etudes l’alimentation 13

Figure 6
b - Les quatre structures de base des hacheurs.
Nous étudierons ici les quatre structures de base
représentatives de la famille des hacheurs. Ces
convertisseurs sont :
soit de nature capacitive (source de tension).
soit de nature inductive (source de courant).
Figure 7
c -Principe de fonctionnement d’un hacheur série :
Projet de Fin d’Etudes l’alimentation 14

Montage de principe : Débit sur une charge
résistive
(En réalité l’interrupteur est remplacé par un transistor)
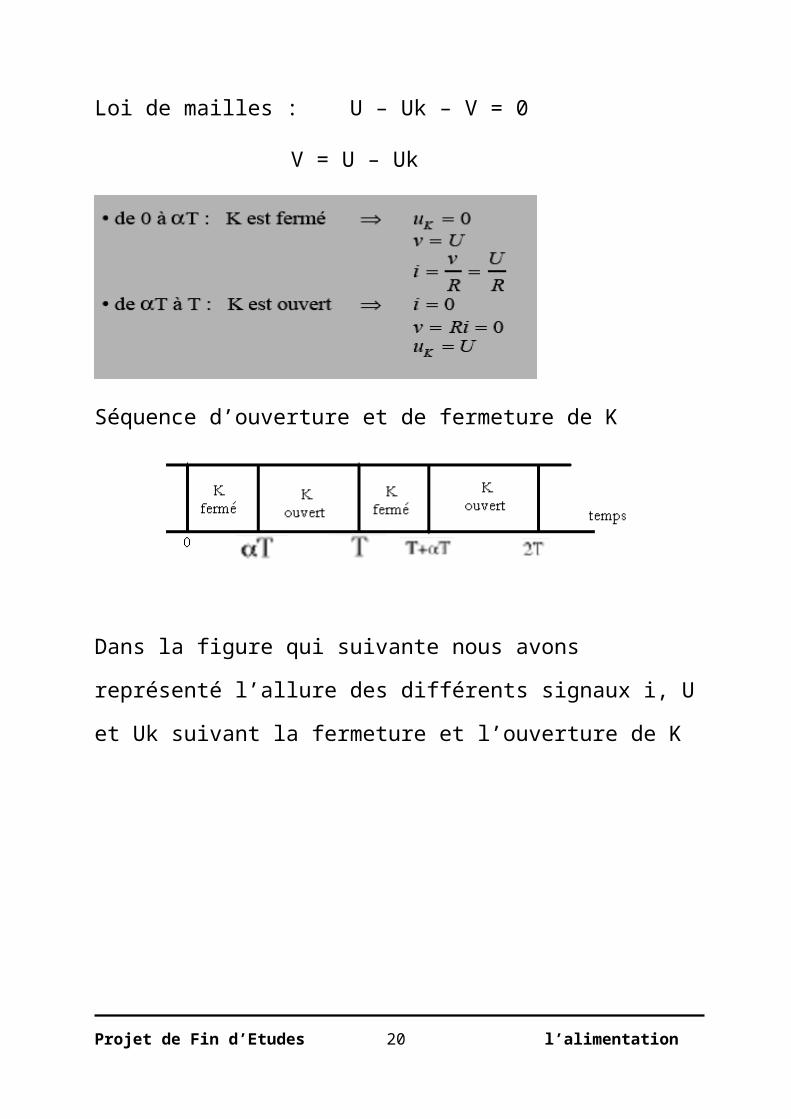
Loi de mailles : U – Uk – V = 0
V = U – Uk
Séquence d’ouverture et de fermeture de K
Projet de Fin d’Etudes l’alimentation 15

Dans la figure qui suivante nous avons représenté
l’allure des différents signaux i, U et Uk suivant la
fermeture et l’ouverture de K
Commentaires :
• La tension de sortie du hacheur (tension v) n’est pas
continue mais toujours positive. Lorsque la période est
assez faible (fréquence de 100 à 1000 Hz) la charge ne
« voit » pas les créneaux mais la valeur moyenne de la
tension.
• Le rapport cyclique α peut être réglé. Par conséquent
la valeur moyenne v (ou < v >) de v va varier.
d - Valeur moyenne de la tension en sortie du hacheur
Exprimons la valeur moyenne de u en fonction du
rapport cyclique α.
Projet de Fin d’Etudes l’alimentation 16

Pour cela nous calculons sa valeur moyenne sur une période :
Valeur moyenne :
2- Débit sur une charge inductive
2.1 / Propriété des inductances :
Equation fondamentale :
De cette équation nous pouvons démontrer les
propriétés ci-dessous.
En régime continu établi : l’inductance se comporte
comme un court-circuit.
établi En régime périodique: la tension moyenne est nulle :
En régime quelconque : d’une façon générale:
• Le courant dans une inductance ne peut pas subir
de discontinuité.
Projet de Fin d’Etudes l’alimentation 17
• L’inductance s’oppose aux variations du courant
qui la traverse, et ce d’autant plus que :
- L est grand .
- la tension aux bornes de l’inductance est plus
faible.
Conclusion :
Une inductance lisse le courant.
2.2/ Problème lié aux charges inductives :
A la fermeture de K le courant s’établit.
A l’ouverture de K deux phénomènes
contradictoires ont lieu :
• La commande qui veut annuler subitement le
courant
• La bobine qui ne peut subir de discontinuité
de courant
Projet de Fin d’Etudes l’alimentation 18

Résultat du conflit :
C’est la bobine qui « gagne » en provoquant un arc
électrique aux bornes de l’interrupteur pour maintenir
le courant.
Conséquence :
L’interrupteur qui est en réalité un transistor subit alors
à chaque blocage une surtension qui peut être
destructrice. Il faut prévoir un système qui permette le
blocage normal du transistor.
2.3/Solution et analyse du fonctionnement :
Projet de Fin d’Etudes l’alimentation 19
Analyse du fonctionnement :
• De 0 à αT : K est fermé.
La source U alimente la charge.
Le courant ne peut pas passer par la diode.
Uk = 0 V = U
i = i k et iD = 0
• De αT à T : K est ouvert.
La bobine maintient le courant à travers la diode.
V = 0 Uk = U
i = iD et ik = 0
Comme la charge n’est pas alimentée, le courant diminue progressivement.
Projet de Fin d’Etudes l’alimentation 20

Fig :8
Projet de Fin d’Etudes l’alimentation 21

Avantages et inconvénients des
alimentations précédentes :
Bien que les alimentations linéaires présentent des
avantages considérables d’en on site d’abord
l’isolation galvanique entre la charge et la partie
puissance, et qui est réalisée par le transformateur,
ainsi la simplicité, l’adaptation au niveau des tensions
et une commutation naturelle. Ils présentent aussi
des inconvénients, tels que la nécessité d’utiliser des
composants et un transformateur encombrants du
fait d’avoir utiliser une fréquence réduite (50KHz)
pour réduire les pertes. Le transistor utilisé dans
l’alimentation linéaire fonctionne en régime linéaire,
ce qui produit des pertes supplémentaires à celles
dues à la commutation et à la conduction des semi-
conducteurs.
Les hacheurs, malgré les faibles pertes dues à la
commutation et à la conduction, présentent le grand
inconvénient de l’absence d’une isolation galvanique.
C’est pour ces raisons qu’on a pensé à un autre
type d’alimentation qui utilise les principes des
hacheurs, ainsi les pertes sont faibles, et un
transformateur qui assure l’isolation galvanique qui
est utilisé en fréquence élevée ce qui réduit
Projet de Fin d’Etudes l’alimentation 22

considérablement le poids et le volume. Ce type
d’alimentation est L’ALIMENTATION À DECOUPAGE.
Projet de Fin d’Etudes l’alimentation 23

I -Introduction :
Depuis les années 70, la grande majorité des
appareils électroniques utilisent des Alimentations à
découpage comme alimentation principale. Ce n'est pas
étonnant car elles présentent un rendement très élevé
(entre 80% et 95%), pour une faible tension
d'ondulation de sortie.
Le découpage consiste à accumuler de l'énergie et
la transférer à la charge tout en interrompant de
manière cyclique la consommation de courant
électrique. La fréquence de fonctionnement d'une
Projet de Fin d’Etudes l’alimentation 24

alimentation à découpage est généralement élevée car
cela diminue l'encombrement des bobinages et facilite
le filtrage des tensions continues de sorties.
Lorsque l'accumulation d'énergie est simultanée au
transfert d'énergie, l'alimentation est dite "forward".
Lorsque l'accumulation d'énergie est alternée avec le
transfert d'énergie, l'alimentation est dite "flyback". La
majorité de la documentation à ce sujet y fait référence.
La réalisation pratique fait souvent appel à
l'accumulation sous forme magnétique dans un premier
temps et sous forme électrostatique dans les
condensateurs de sorties. Le principe repose sur un
interrupteur électronique et une bobine (ou
transformateur) placés en série avec la tension
continue (DC) d'entrée.
Lorsque l'interrupteur (TS) est fermé, l'inductance
(L) accumule de l'énergie sous forme magnétique.
Projet de Fin d’Etudes l’alimentation 25

Elle restitue cette énergie à un condensateur (C)
quand l'interrupteur est ouvert.
Dans un troisième temps, le condensateur alimente
la charge pendant que la bobine reçoit à nouveau
l'énergie perdue. La fréquence de commutation est
généralement comprise entre 20kHz et 100kHz.
Le circuit de commande régule le temps
d'ouverture et de fermeture de l'interrupteur de
manière à garder une tension fixe sur la charge quelque
soit les variations de la tension d'entrée et les
variations de la résistance de charge.
II-Comparaison entre la régulation
linéaire et le découpage : Les caractéristiques comparées des alimentations à découpage et
des alimentations a régulations linéaires sont résumées dans le
tableau ci après :
Caractéristique découpage Régulation
linéaire
Rendement 65 à 90% 35à 55 %
Puissance
massique
20 à 200W/Kg 10 à 30 W/Kg
Régulation en
linge et charge
0.5% 0.01%
Régulation
dynamique
+ 5% + 1%
Projet de Fin d’Etudes l’alimentation 26

Dépassement-
durée
1ms 50us
Ondulation
résiduelle
1% 0.1%
Le principal intérêt du découpage est donc son
excellent rendement.
III-Types d’alimentations à découpage :
Le tableau ci-après résume les caractéristiques
principales des différentes structures :
Topolog
ie
Fonction Gamme
de
puissan
ce (W)
Tensio
n
d’entré
e (V)
Isolatio
n
Entrée-
sortie
Rendeme
nt
typique
(%)
Buck Abaisse
ur
0-1000 5-1000 Non 78
Boost Elévate
ur
0-150 3-600 Non 80
Buck-
Boost
Mixte 0-150 3-600 Non 80
Projet de Fin d’Etudes l’alimentation 27

flaybac
k
0-150 5-500 Oui 80
Half
Forward
- 0-150 5-500 Oui 78
Push
Pull
- 100-
1000
50-
1000
Oui 75
Half
bridge
- 100-
500
50-
1000
Oui 75
Full
bridge
- 400-
2000
50-
1000
oui 75
Pour notre étude nous avons choisis le montage
Flayback pour ses avantages sur les autres montages,
avec un rendement de 80%, présence d’une isolation
galvanique, une puissance allant jusqu'à 200W et une
tension de sortie supérieure à 10V.
I ν - Flayback :
1-Principe :
La figure ci-dessous représente le schéma de
principe d’une alimentation à découpage Flayback :
Projet de Fin d’Etudes l’alimentation 28

Figure 9
Le fonctionnement est tout à fait semblable à celui d'un
hacheur survolteur (boost) ou dévolteur (Buck). On peut
distinguer deux phases :
Phase 1 : on accumule de l'énergie dans L1 (transistor
passant et diode D bloquée)
Phase 2 : on bloque le transistor, D s'amorce et
l'énergie est transférée à la sortie à travers D.
Le condensateur Ce sert de découplage pour le câblage
de l'entrée et fournit la composante alternative du
courant absorbé à l'entrée.
Le condensateur Cf lisse la tension de sortie.
Le primaire L1 et le secondaire L2 ne conduisent
jamais en même temps (contrairement à la structure
"forward"), ce qui justifie le pointage opposé (sur le
schéma) des enroulements.
Il existe deux modes de fonctionnement avec chacun
ses avantages et inconvénients :
Projet de Fin d’Etudes l’alimentation 29

- démagnétisation complète ou régime discontinu.
- démagnétisation incomplète ou régime continu.
Dans la suite du texte, on pose k = n2/n1 : rapport du
nombre de spires secondaire/primaire et on assimile les
composants commutant à des interrupteurs idéaux.
2-Modes de Fonctionnement :
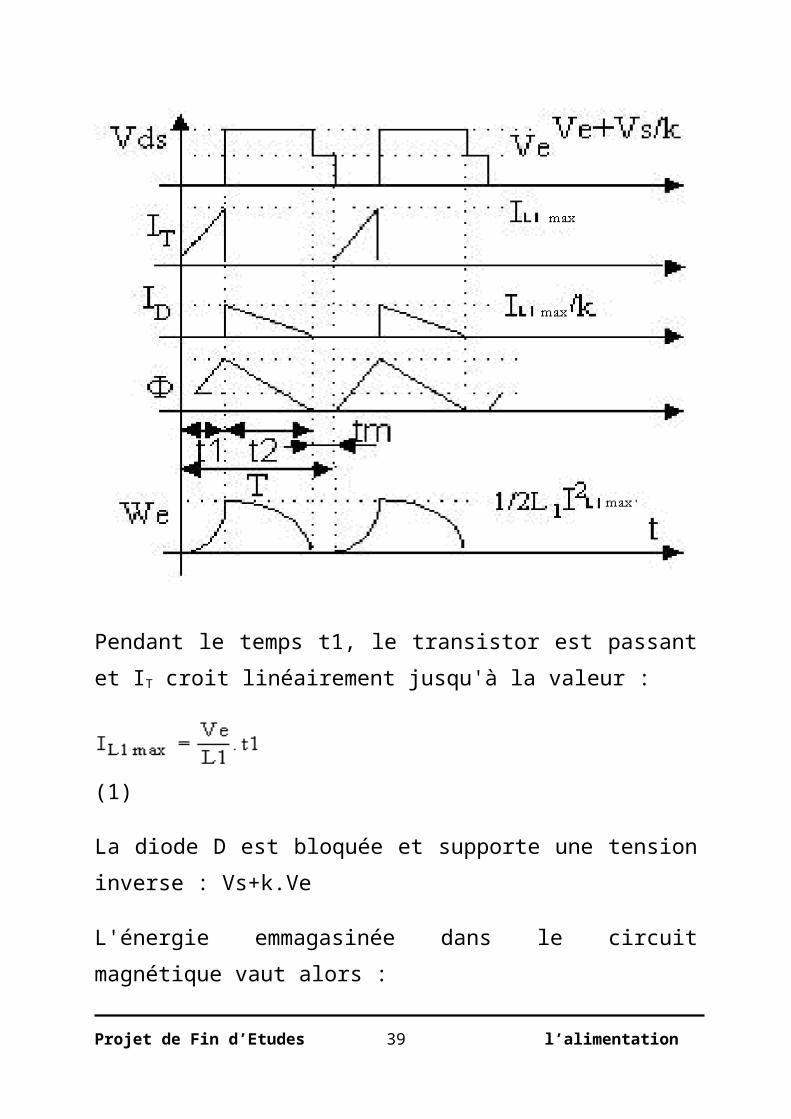
a) Discontinu
Le mode de fonctionnement est appelé discontinu
lorsque le flux dans les enroulements a le temps de
s'annuler au cours d'un cycle.
Projet de Fin d’Etudes l’alimentation 30

Pendant le temps t1, le transistor est passant et IT croit
linéairement jusqu'à la valeur :
(1)
La diode D est bloquée et supporte une tension
inverse : Vs+k.Ve
L'énergie emmagasinée dans le circuit magnétique vaut
alors :
We= ½. L1.I2L1max (2)
En posant t1=T, il vient de (1) et (2) :
We= ½.Ve2. (T) 2/L1 (3)
L'énergie ne pouvant pas subir de discontinuité, on a,
au moment du blocage du transistor :
We= ½. L1.I2L1max = ½ L2 I2L2max avec n2. IL2max = n1.
IL1max (4)
D devient alors passante. La tension de sortie Vs (supposée constante) se
retrouve aux bornes du secondaire (à 1 Vd près). Elle est ramenée au
primaire dans le rapport 1/k d'où :
Vds = Ve + Vs/k.
Le courant Id décroît linéairement avec une pente
-Vs/L2. Si le temps de blocage du transistor est assez
long, Id s'annule, le flux magnétique également. Toute
Projet de Fin d’Etudes l’alimentation 31
(5)
(5)

l'énergie a été transférée. Il s'en suit un temps mort
pendant lequel il n'y a plus aucune variation (dV/dt=0)
donc Vds "retombe" à la valeur Ve.
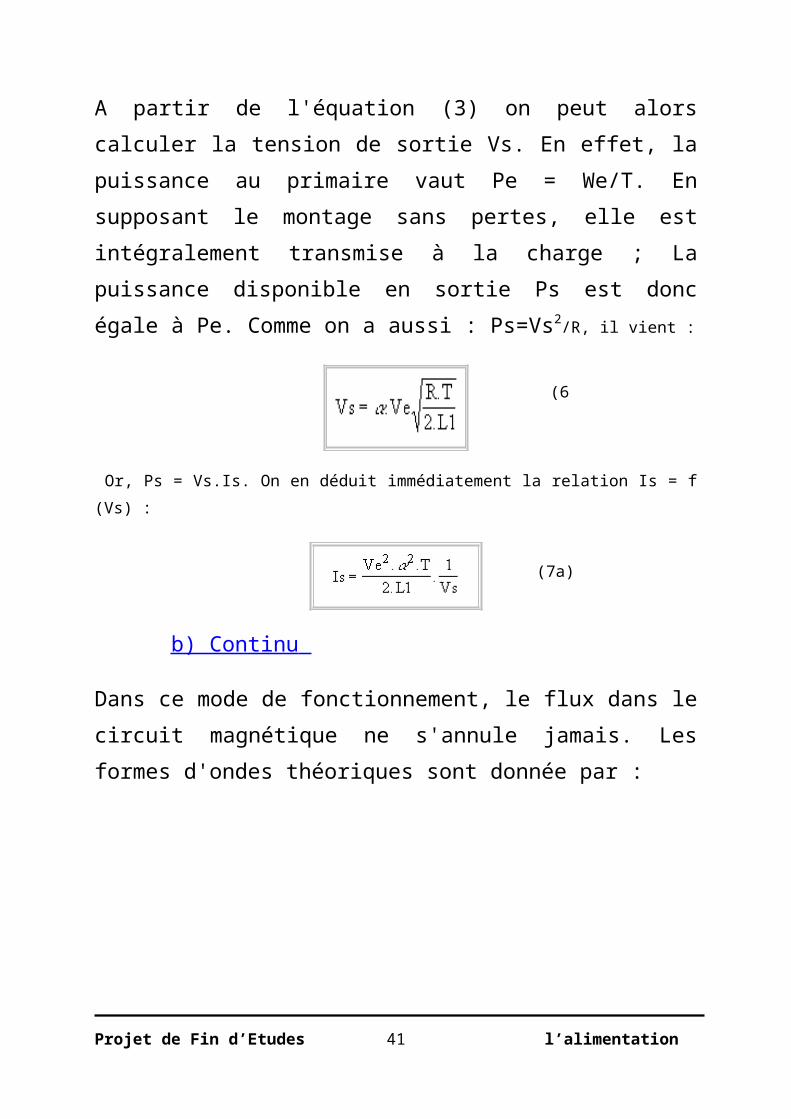
A partir de l'équation (3) on peut alors calculer la
tension de sortie Vs. En effet, la puissance au primaire
vaut Pe = We/T. En supposant le montage sans pertes,
elle est intégralement transmise à la charge ; La
puissance disponible en sortie Ps est donc égale à Pe.
Comme on a aussi : Ps=Vs2/R, il vient :
Or, Ps = Vs.Is. On en déduit immédiatement la relation Is = f (Vs) :
b) Continu
Dans ce mode de fonctionnement, le flux dans le circuit
magnétique ne s'annule jamais. Les formes d'ondes
théoriques sont donnée par :
Projet de Fin d’Etudes l’alimentation 32
(6)
(7a)

Le courant moyen dans L1 étant constant, la
tension moyenne aux bornes du primaire est nulle. On a
donc :
.T. Ve = Vs/k (1-) T
(Avec t1+t2=T et t1=T)
D'où :
Par ailleurs on a toujours :
Vdsmax = Ve+ Vs/k
Projet de Fin d’Etudes l’alimentation 33
(11)

La puissance disponible pour la charge s'écrit :
Ps= Vs.Is avec Is = Idmoyen
D'où l'on tire la valeur moyenne Ism de l'impulsion de courant (durée t2)
au secondaire :
En supposant le montage sans pertes, (Ps = Pe), on
déduit la valeur moyenne Ipm de l'impulsion de courant
(durée t1) au primaire :
Pour calculer L1, on se place à la limite du régime
continu.(forme d'onde trapèze -> triangle). On a alors :
IL1max = 2.Ipm et comme
on obtient :
Les équations (11), (12), (13), (14) servent de base au
calcul et au dimensionnement de l'alimentation en
mode continu.
On remarque que la relation (11) est (à k près) très
similaire à celle du dévolteur ou du survolteur. En
Projet de Fin d’Etudes l’alimentation 34
(12)
(13)
(14)

contrôlant, on peut passer d'un abaisseur à un
élévateur de tension.
La tension de sortie dépend du rapport de
transformation k et du rapport cyclique mais n'est plus
fonction de la charge R. Contrairement au régime
discontinu, le système est une source de tension. La
tenue en tension du transistor doit être supérieure à
E+Vs/k soit, d'après (11), E/(1-α). Un bornage supérieur
de est donc indispensable.
Projet de Fin d’Etudes l’alimentation 35

L’isolation galvanique
Projet de Fin d’Etudes l’alimentation 36

1) Définition
Une isolation galvanique permet de transmettre un
signal par couplage optique et magnétique d’un point
vers un autre.
Il n’y a donc aucune liaison électrique entre les 2 points
2) Intérêt
Le plus souvent, elle permet de protéger le milieu isolé
de fortes tensions ou de perturbations importantes
provenant du milieu non isolé. Le milieu isolé peut être
une partie d’un circuit électronique (système micro
programmé) ou le corps humain.
Bien souvent on retrouve des isolations galvaniques en
électronique industrielle et en électronique médicale.
3) Les différents types d’isolation galvanique
- Le transformateur
- L’opto-coupleur
- L’ampli d’isolement
Projet de Fin d’Etudes l’alimentation 37
La commutation
Pour réaliser la commutation le montage ci-dessous
est utilisé.
Le transistor est commandé par une impulsion de
courant de base. Le transistor passe de l'état bloqué à
l'état saturé en lui appliquant une impulsion positive de
courant.
Le circuit de sortie est constitué par une résistance de
charge RL telle que la valeur du rapport VCC/RL soit
inférieure à la valeur du courant de collecteur
maximum supportable par le transistor.
Projet de Fin d’Etudes l’alimentation 38
Les temps de commutation (switching time) sont
les temps nécessaires au transistor pour passer d'un
état à l'autre. Ils correspondent en première
approximation aux temps d'établissement et de
disparition de la charge stockée dans la base.
Projet de Fin d’Etudes l’alimentation 39

Durant les deux années de nos études supérieures,
nous avons acquis suffisamment de connaissances bien
variées dans les différents domaines technologiques, et
en particulier électriques, dont chacun d’entre nous
prouvera l’efficacité en menant à bout son projet de fin
d’étude (PFE).
Les difficultés rencontrées pendant la discussion de
notre projet, nous ont permis d’acquérir un esprit de
synthèse, et de trouver les bonnes solutions aux
problèmes rencontrés.
En effet, ce projet vient donc compléter notre
formation en nous apportant une flexibilité dans nos
compétences, et notre savoir faire.
Projet de Fin d’Etudes l’alimentation 40
Alimentation à découpage Convertisseurs à résonance (3ème édition)
François Forest
Alimentation électronique
R.Damaye-C.Gagne
UNIVERSITE DE SAVOIEUFR Sciences Fondamentales et Appliquées
LICENCE EEAModule Energie et Convertisseurs d’énergie (U6)
Physique Appliquée
G. Pinson
Projet de Fin d’Etudes l’alimentation 41