friction: modeling, analysis & identification · friction: modeling, ... – without friction...
TRANSCRIPT
Friction: Modeling, Identification, & Analysis K. Craig 1
FrictionModeling, Identification, & Analysis
• Objectives– Understand the friction phenomenon as it relates
to motion systems.– Develop a control-oriented model with
appropriate simplifying assumptions for the phenomenon.
– Determine system identification techniques for the parameters in the model.
– Analyze the model and run simulations using the model to demonstrate its effectiveness.
Friction: Modeling, Identification, & Analysis K. Craig 2
Friction: Modeling, Identification, & Analysis K. Craig 3
Key Papers on Friction Modeling
• These four papers, along with the references listed in each paper, represent the state-of-the-art in friction modeling. They were all published in the IEEE Control Systems Magazine, December 2008.– Characterization of Friction Force Dynamics by F. Al-
Bender and J. Swevers.– Modeling and Measuring Friction Effects by A.
Harnoy, B. Friedland, and S. Cohn.– Nanotribilogy and Nanoscale Friction by Y. Guo, Z.
Qu, Y. Braiman, and J. Barhen.– Revisiting the Lugre Friction Model by K. Astrom and
C. Canudas-De-Wit.
Friction: Modeling, Identification, & Analysis K. Craig 4
Background on Friction• Friction, the tangential reaction force between two surfaces
in contact, is one of nature’s most useful phenomena.– Without friction there would be no belt drives, no
clutches, no wheels, and no brakes. Walking, and even standing upright on a moderately inclined surface, would be impossible. The cork would not stay in the wine bottle!
• However, in machinery in which friction is not the driving force, it is an undesirable parasitic phenomenon, generating heat and wasting energy.
• Conserving energy and sustainability are today the most compelling reasons for a mechatronics approach to design.
Friction: Modeling, Identification, & Analysis K. Craig 5
• The most promising alternative energy source is energy efficiency– Machines must do more with less energy and
efficiency results from many components working well together.
– Like any design variable, there is a price associated with efficiency, but the greater costs are incurred when efficiency is overlooked.
• In industrial equipment, consider the relationship between excess heat and imprecision, vibration and premature wear, thermal cycles and lifetime, energy consumption and profitability.
• Efficiency matters, and in motion systems, it is a collective property, resulting from many components working together.
Friction: Modeling, Identification, & Analysis K. Craig 6
• What is Ecotribology?– Ecotribology: Environmentally-Acceptable Tribological
Practices, Wilfried Bartz, 2006.– Tribology is the study of friction and wear.– To reduce friction and wear in machines, main energy
culprits, the proper combination of geometry, materials, and lubrication must be employed in a design, i.e., a proper tribological approach.
– It has been estimated that the correct application of tribology throughout U.S. industry could save the country $500 billion annually.
– Saving resources and energy and reducing impact on the environment through optimum design and operation practices covering the life of a machine are the two most important aspects.
Friction: Modeling, Identification, & Analysis K. Craig 7
• When friction is the source of traction and braking, it is important to keep friction at a high level. – In traction applications, the process starts with the
vehicle at rest.– In braking applications, the process ends with the
vehicle at rest.– In both applications, the behavior of friction when the
velocity of the vehicle crosses zero is of little interest.• In motion-control applications, the velocity of the
controlled object typically crosses zero, often several times, during operation. Therefore, it is necessary to understand the behavior of friction in the vicinity of zero velocity.
Friction: Modeling, Identification, & Analysis K. Craig 8
• The challenge to good control posed by friction is often thought of as being stick-slip, which is an alternation between sliding and sticking due to static friction. Stick-slip is most common when integral control is used and can prevent a machine from ever reaching its intended goal position.
• Other forms of frictional disturbance can be of equal or greater importance.– The tracking error introduced by friction into multi-axis
motion is an example.– A two-axis machine will fail to accurately track a
desired circular contour because as one axis goes through zero velocity, it is arrested for a moment by static friction while the other axis continues to move.
Friction: Modeling, Identification, & Analysis K. Craig 9
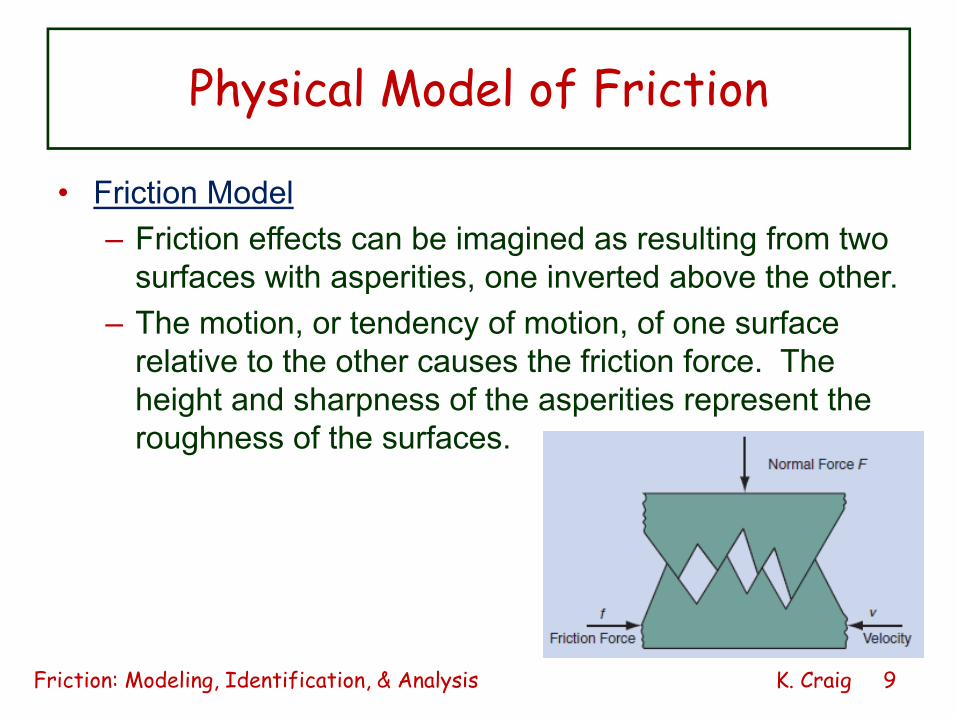
Physical Model of Friction
• Friction Model– Friction effects can be imagined as resulting from two
surfaces with asperities, one inverted above the other.– The motion, or tendency of motion, of one surface
relative to the other causes the friction force. The height and sharpness of the asperities represent the roughness of the surfaces.
Friction: Modeling, Identification, & Analysis K. Craig 10
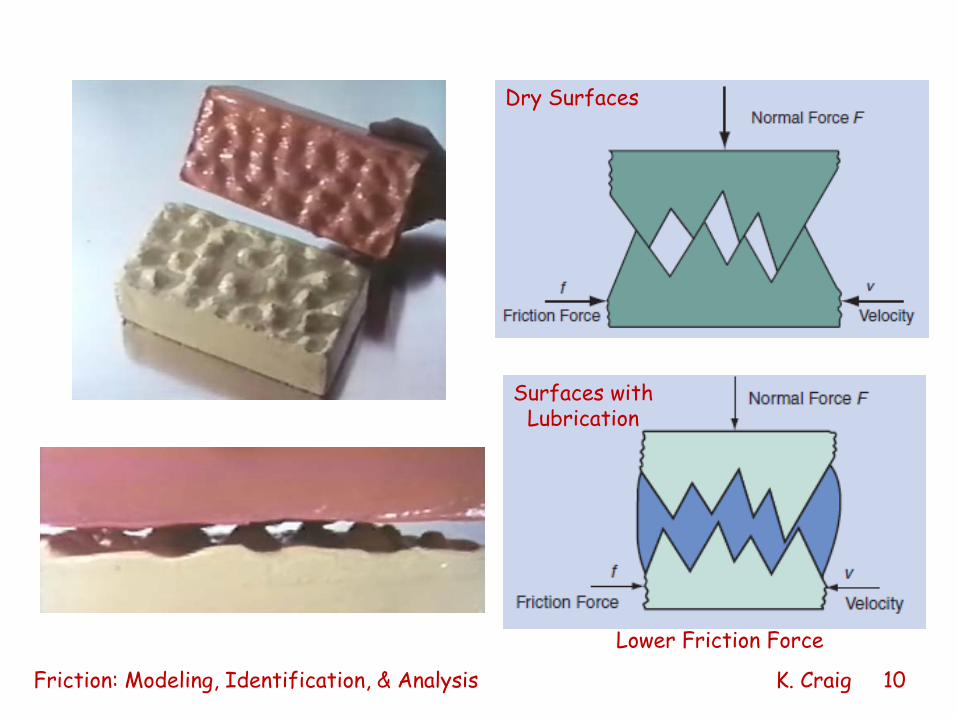
Dry Surfaces
Surfaces withLubrication
Lower Friction Force
Friction: Modeling, Identification, & Analysis K. Craig 11
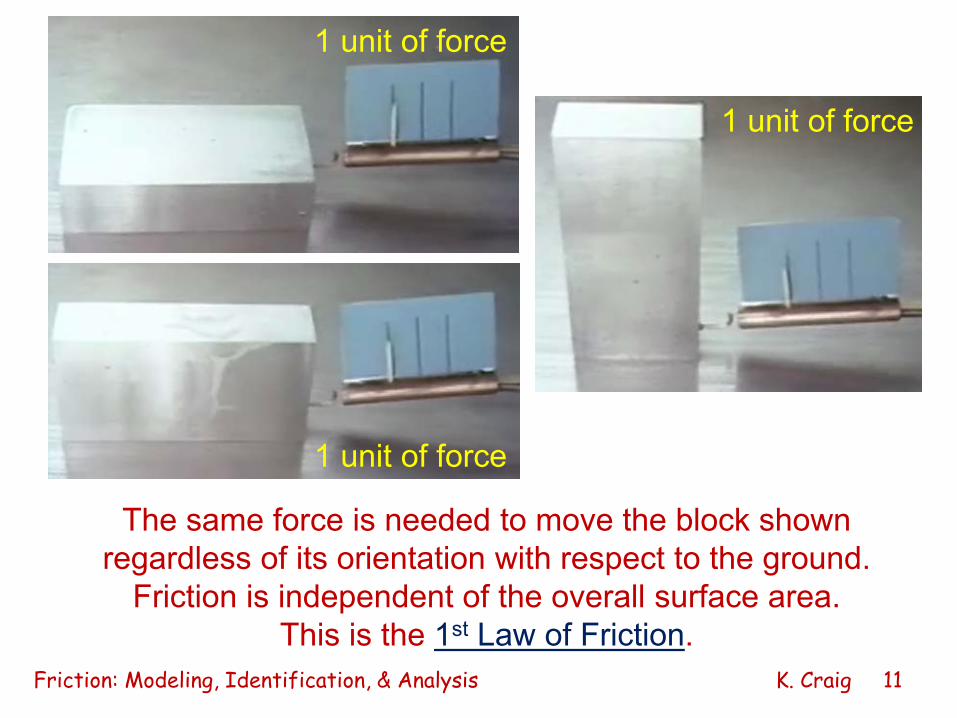
The same force is needed to move the block shown regardless of its orientation with respect to the ground.
Friction is independent of the overall surface area.This is the 1st Law of Friction.
1 unit of force
1 unit of force
1 unit of force
Friction: Modeling, Identification, & Analysis K. Craig 12
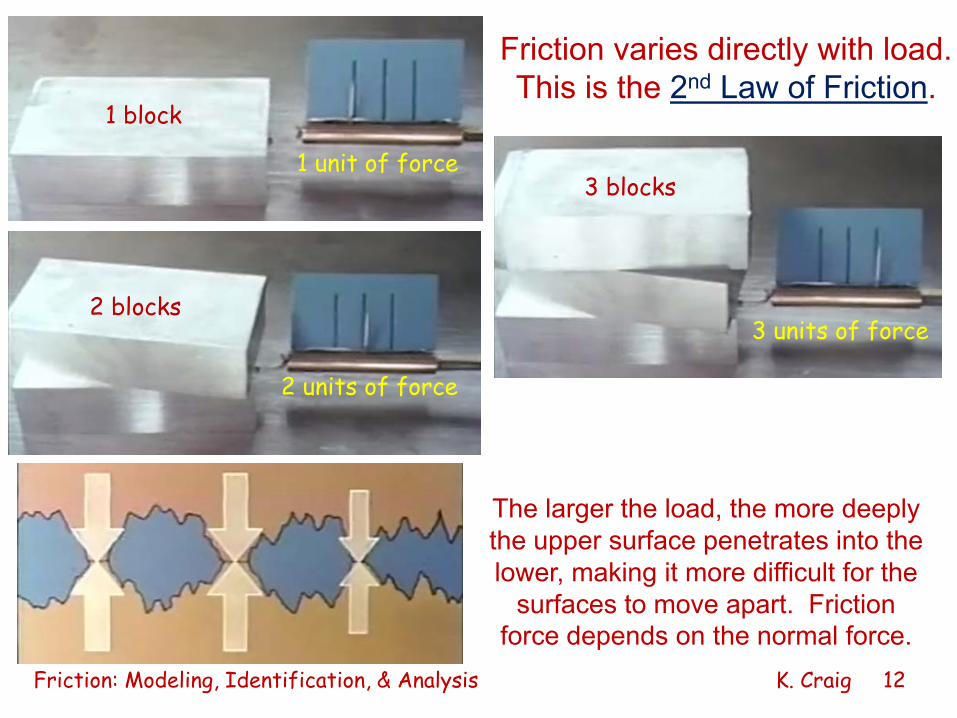
Friction varies directly with load.This is the 2nd Law of Friction.
1 unit of force
2 units of force
1 block
2 blocks
3 blocks
3 units of force
The larger the load, the more deeply the upper surface penetrates into the lower, making it more difficult for the
surfaces to move apart. Friction force depends on the normal force.
Friction: Modeling, Identification, & Analysis K. Craig 13
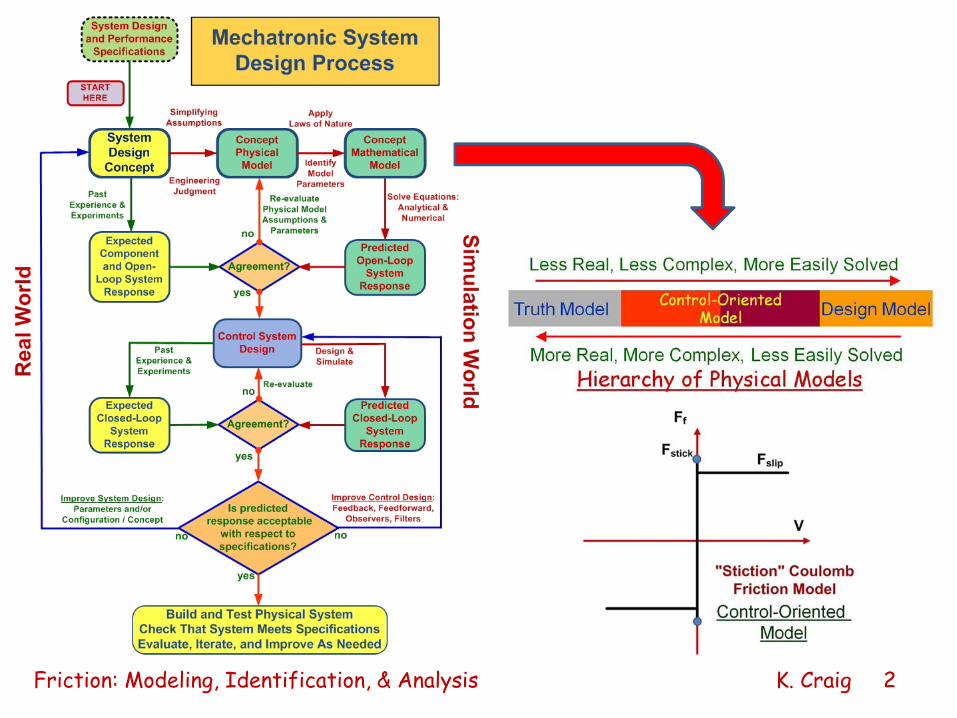
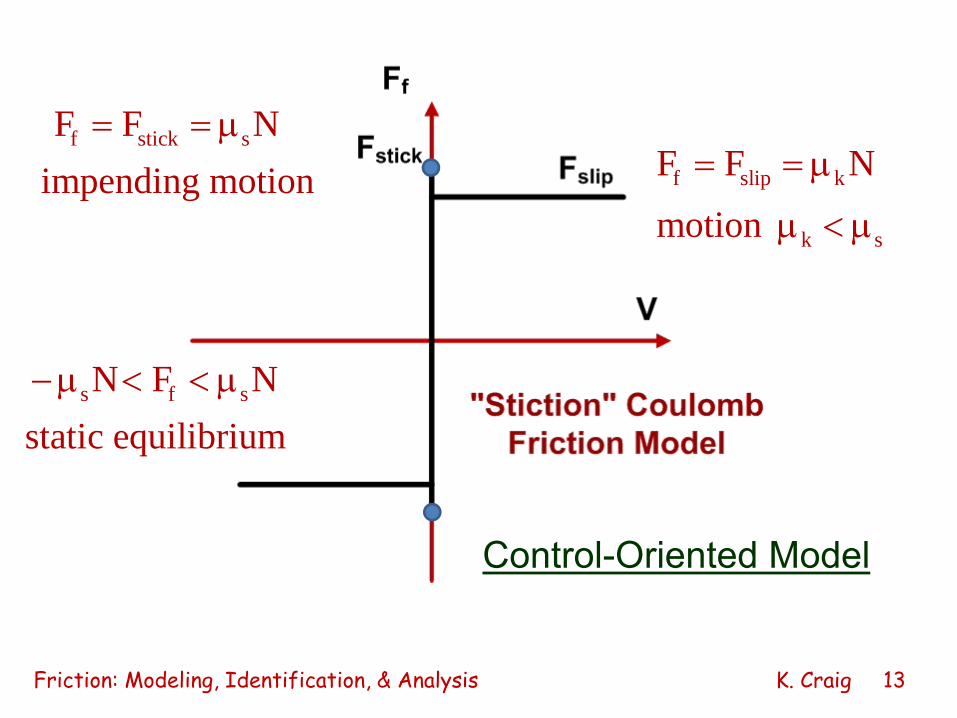
s f sN F Nstatic equilibrium−μ < < μ
f stick sF F Nimpending motion
= = μf slip k
k s
F F N
motion
= = μ
μ < μ
Control-Oriented Model
Friction: Modeling, Identification, & Analysis K. Craig 14
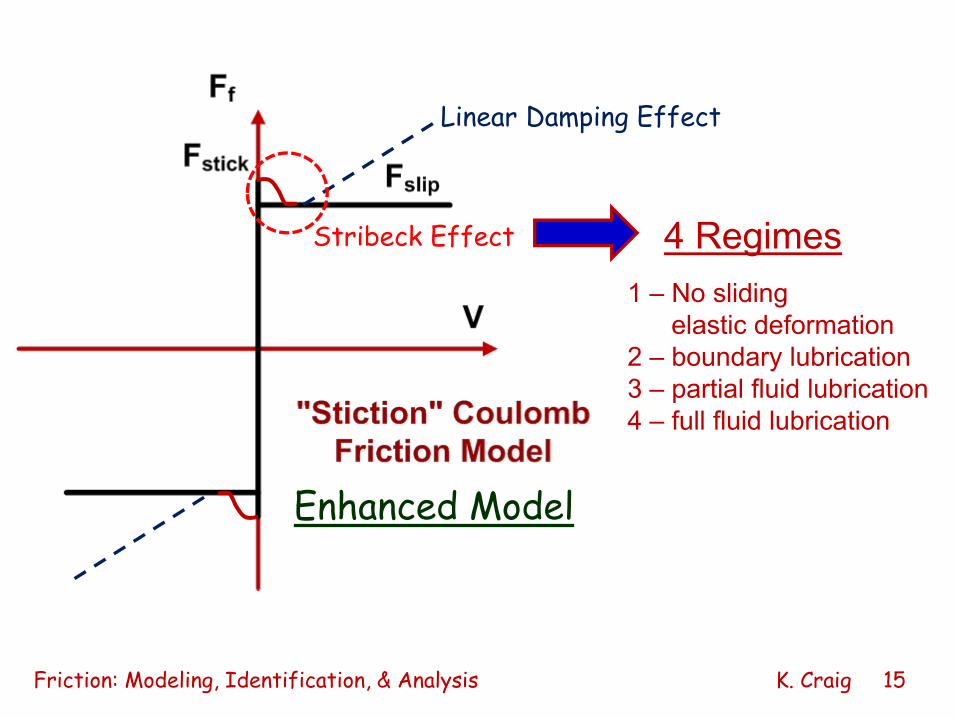
Friction: Modeling, Identification, & Analysis K. Craig 15
Linear Damping Effect
Stribeck Effect
Enhanced Model
4 Regimes1 – No sliding
elastic deformation2 – boundary lubrication3 – partial fluid lubrication4 – full fluid lubrication
Friction: Modeling, Identification, & Analysis K. Craig 16
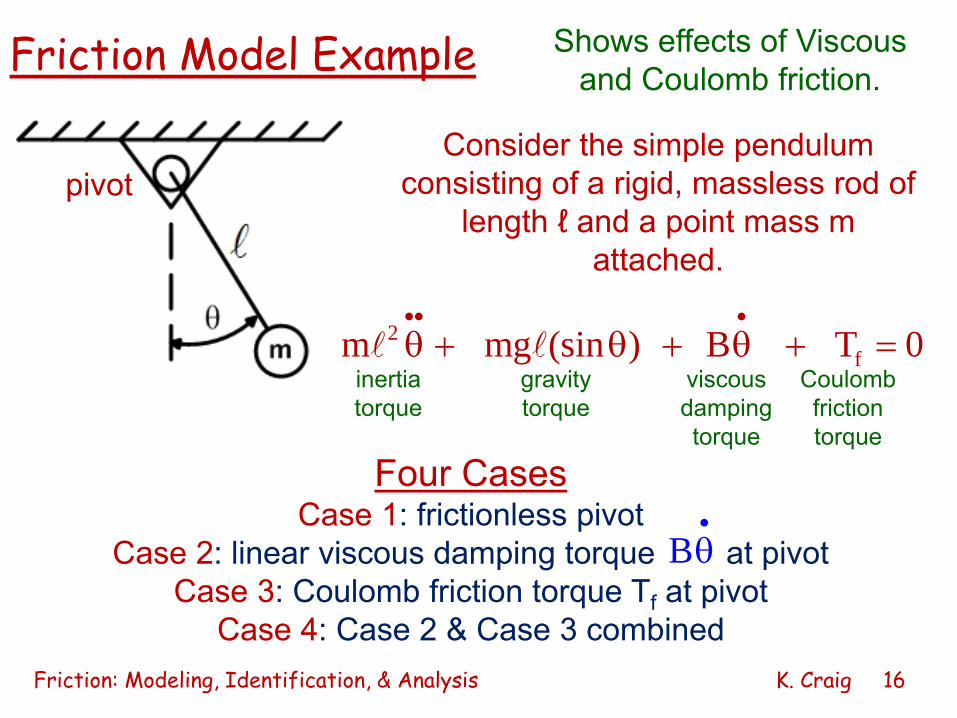
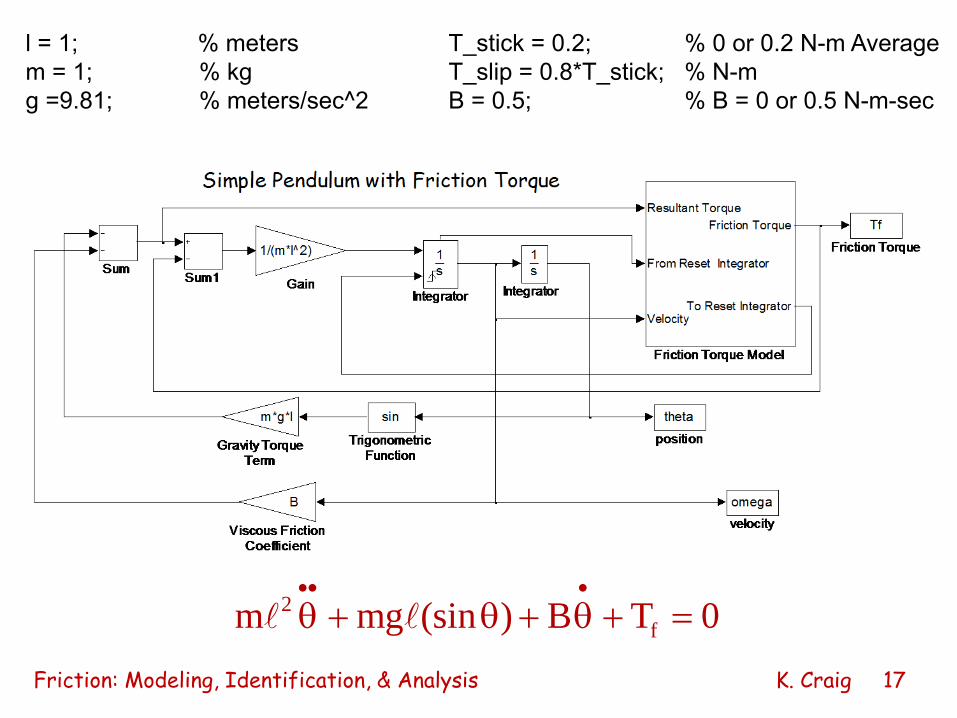
Friction Model Example
Consider the simple pendulum consisting of a rigid, massless rod of
length ℓ and a point mass m attached.
Four CasesCase 1: frictionless pivot
Case 2: linear viscous damping torque at pivotCase 3: Coulomb friction torque Tf at pivot
Case 4: Case 2 & Case 3 combined
2fm mg (sin ) B T 0
•• •
θ + θ + θ + =
B•
θ
pivot
gravitytorque
viscousdampingtorque
Coulombfrictiontorque
inertiatorque
Shows effects of Viscous and Coulomb friction.
Friction: Modeling, Identification, & Analysis K. Craig 17
l = 1; % metersm = 1; % kgg =9.81; % meters/sec^2
T_stick = 0.2; % 0 or 0.2 N-m AverageT_slip = 0.8*T_stick; % N-mB = 0.5; % B = 0 or 0.5 N-m-sec
2fm mg (sin ) B T 0
•• •
θ + θ + θ + =
Friction: Modeling, Identification, & Analysis K. Craig 18
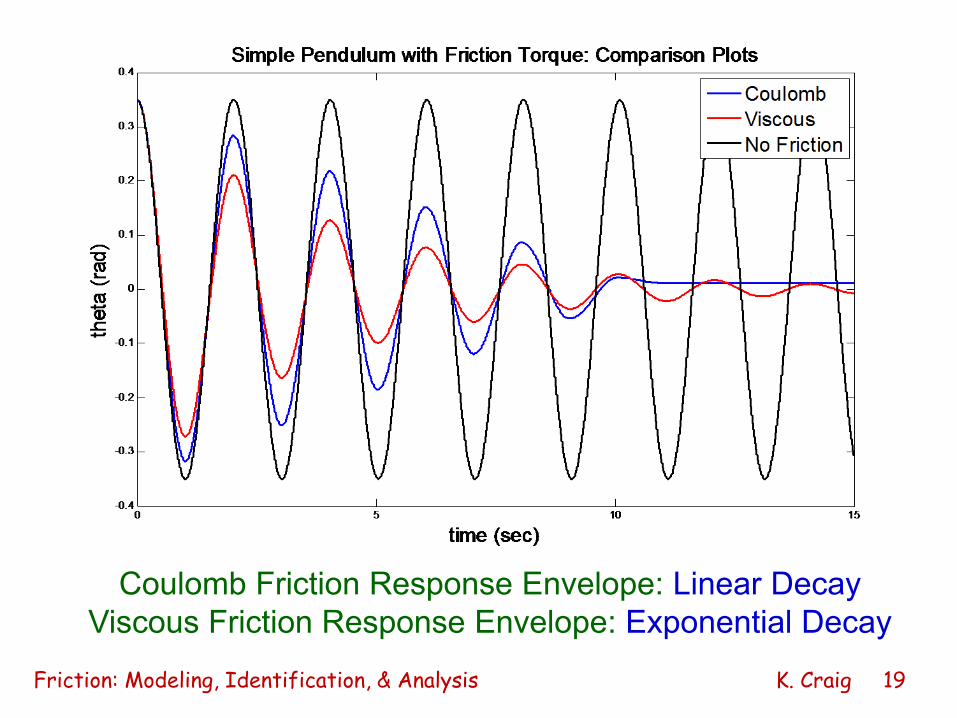
Friction: Modeling, Identification, & Analysis K. Craig 19
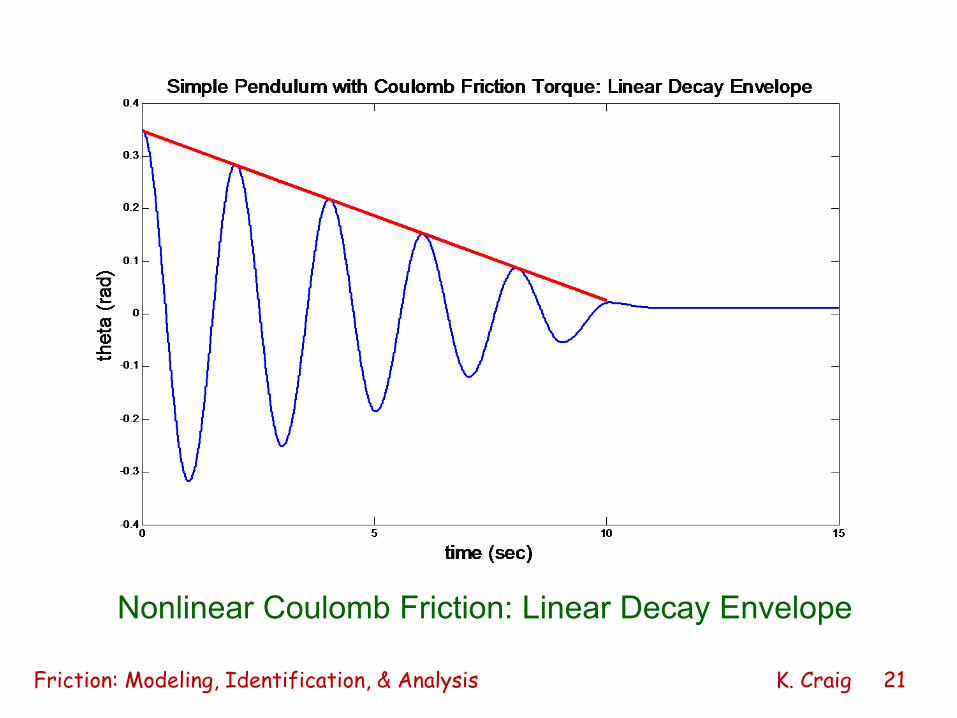
Coulomb Friction Response Envelope: Linear DecayViscous Friction Response Envelope: Exponential Decay
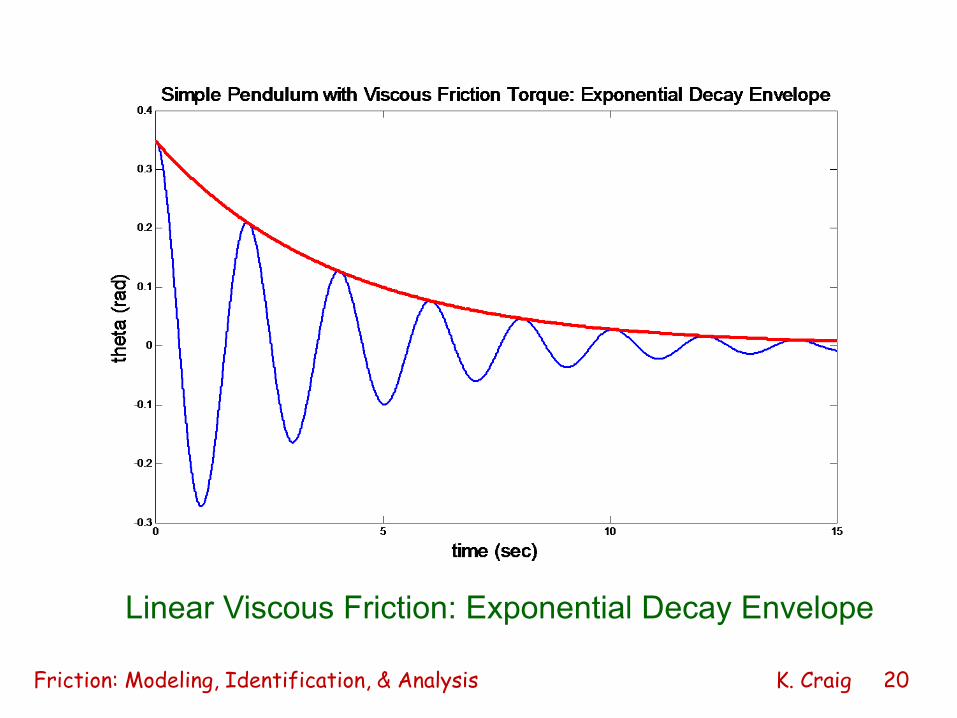
Friction: Modeling, Identification, & Analysis K. Craig 20
Linear Viscous Friction: Exponential Decay Envelope
Friction: Modeling, Identification, & Analysis K. Craig 21
Nonlinear Coulomb Friction: Linear Decay Envelope
Friction: Modeling, Identification, & Analysis K. Craig 22
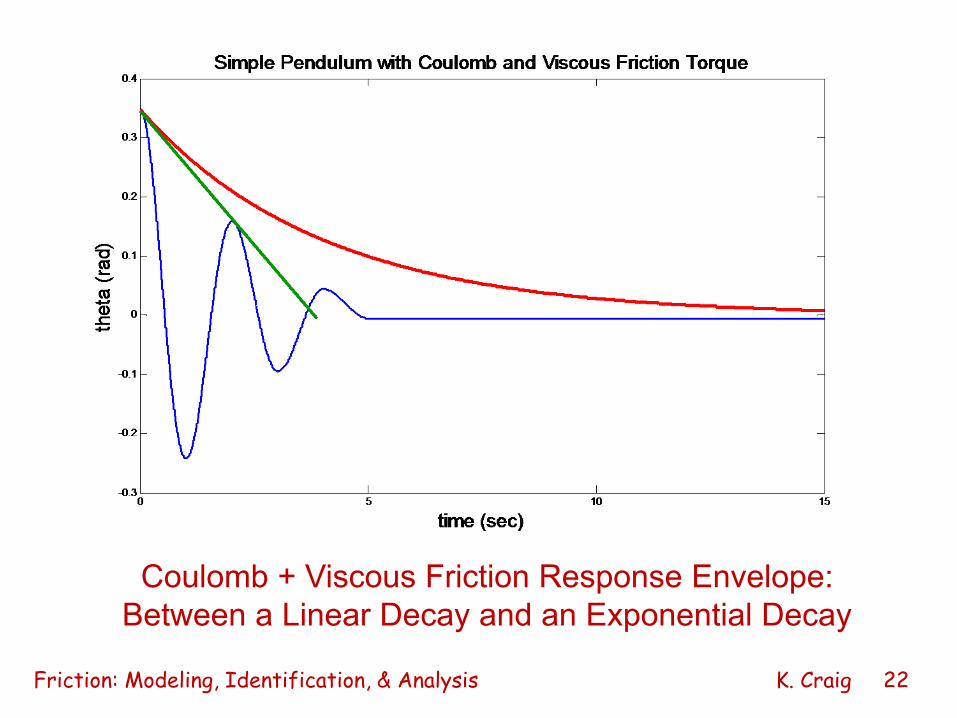
Coulomb + Viscous Friction Response Envelope:Between a Linear Decay and an Exponential Decay
Friction: Modeling, Identification, & Analysis K. Craig 23
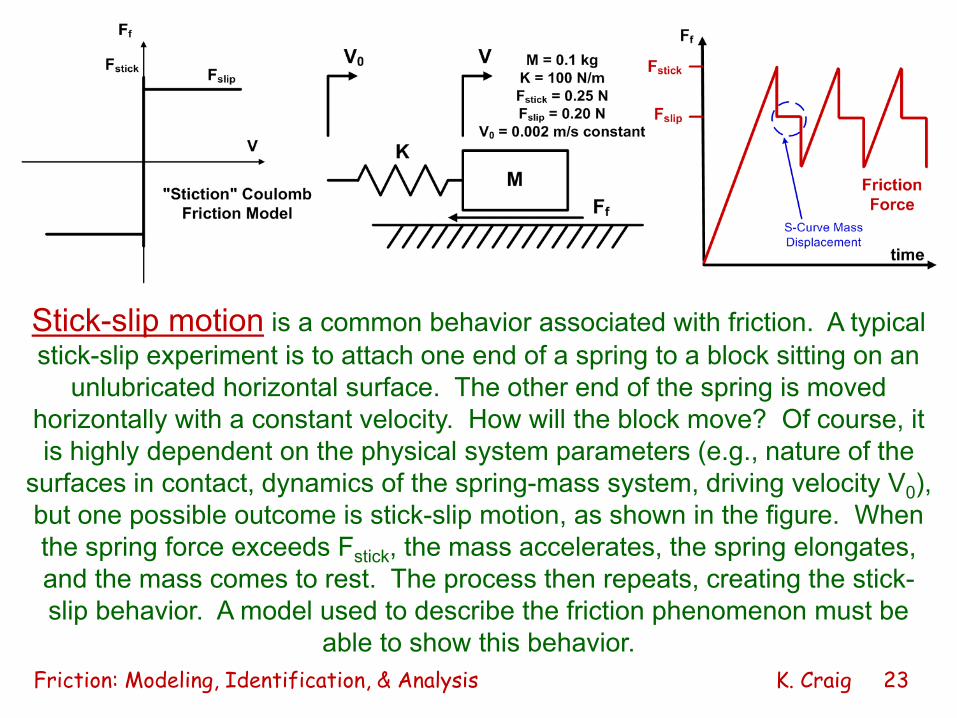
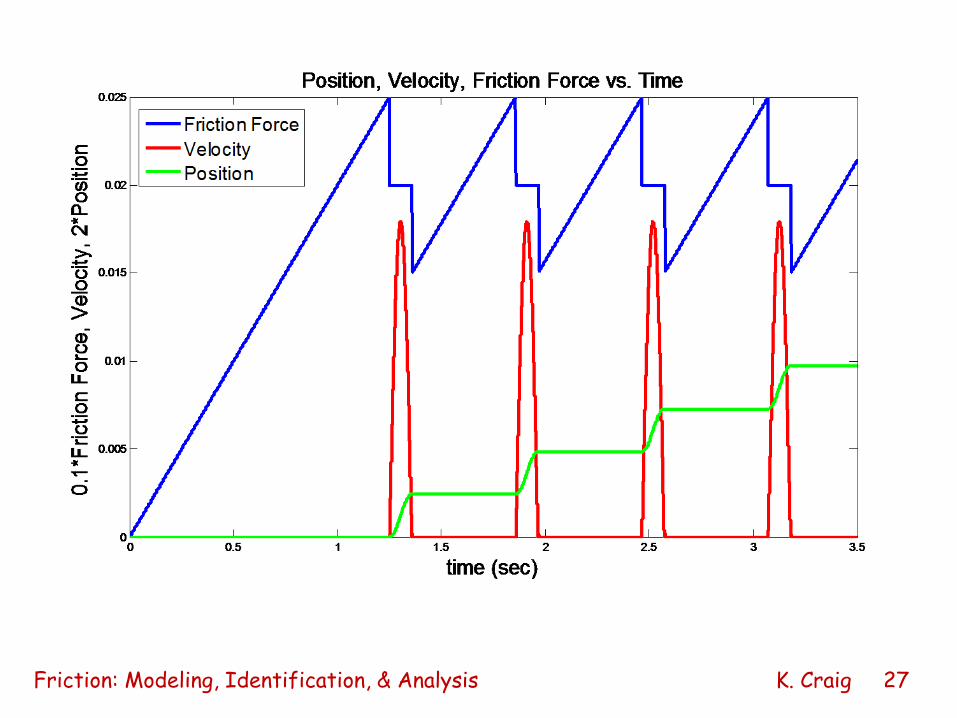
Stick-slip motion is a common behavior associated with friction. A typical stick-slip experiment is to attach one end of a spring to a block sitting on an
unlubricated horizontal surface. The other end of the spring is moved horizontally with a constant velocity. How will the block move? Of course, it is highly dependent on the physical system parameters (e.g., nature of the
surfaces in contact, dynamics of the spring-mass system, driving velocity V0), but one possible outcome is stick-slip motion, as shown in the figure. When the spring force exceeds Fstick, the mass accelerates, the spring elongates, and the mass comes to rest. The process then repeats, creating the stick-slip behavior. A model used to describe the friction phenomenon must be
able to show this behavior.
Friction: Modeling, Identification, & Analysis K. Craig 24
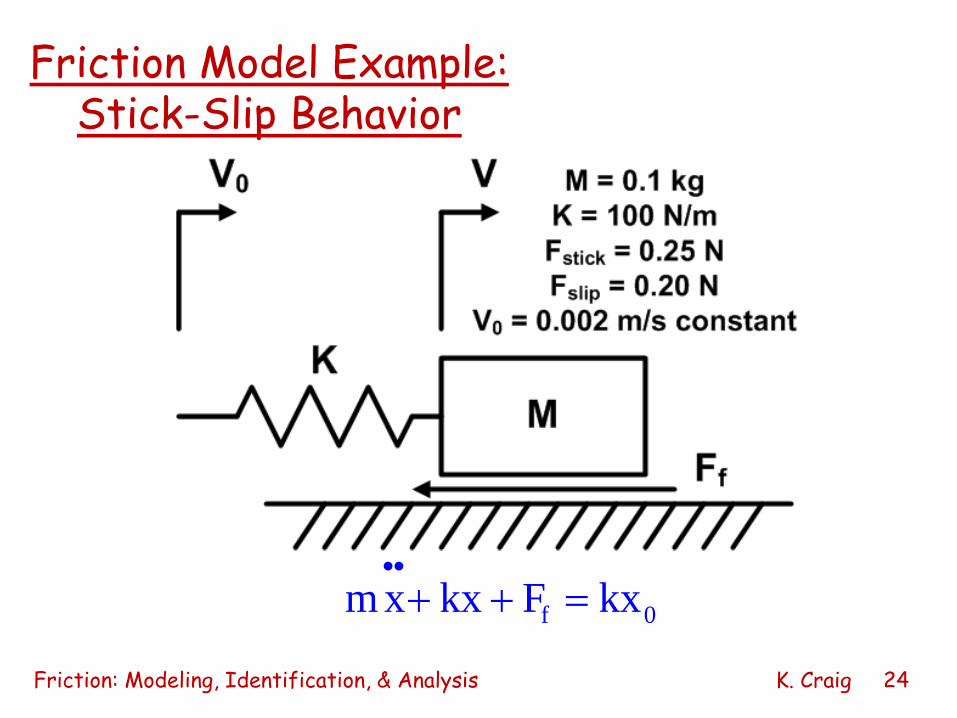
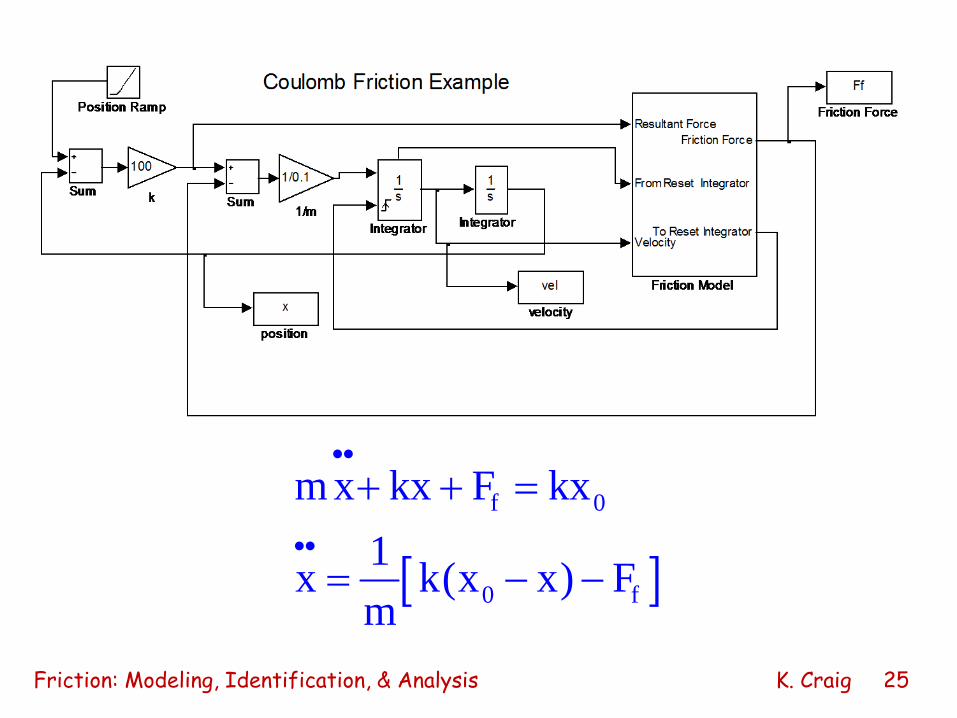
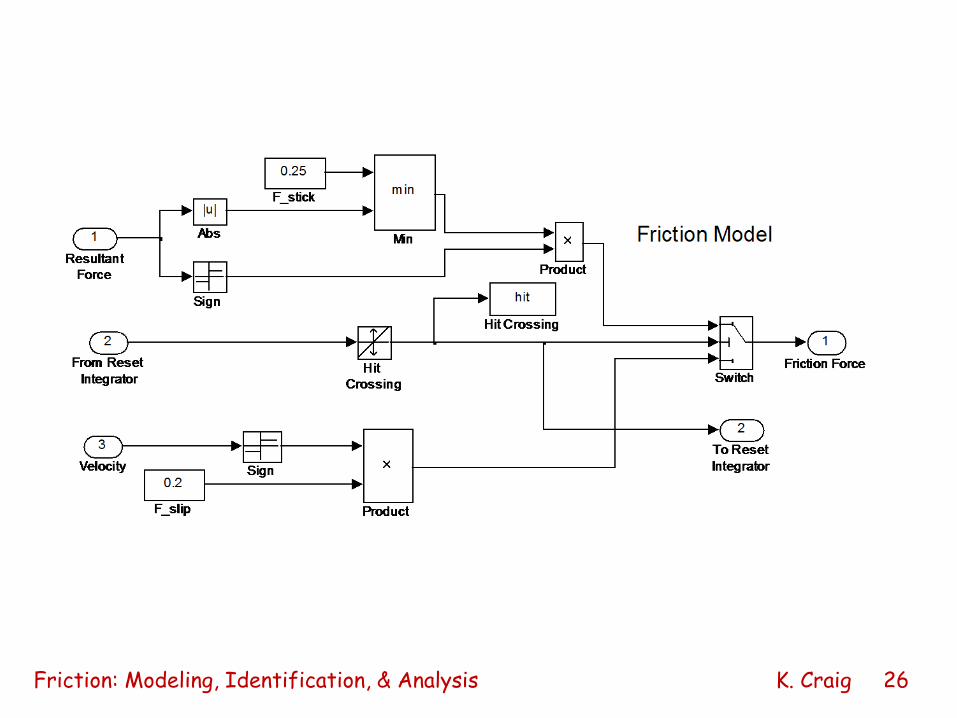
Friction Model Example:Stick-Slip Behavior
f 0m x kx F kx••
+ + =
Friction: Modeling, Identification, & Analysis K. Craig 25
[ ]f 0
0 f
m x kx F kx1x k(x x) Fm
••
••
+ + =
= − −
Friction: Modeling, Identification, & Analysis K. Craig 26
Friction: Modeling, Identification, & Analysis K. Craig 27
Friction: Modeling, Identification, & Analysis K. Craig 28
Parameter IdentificationStatic and Dynamic Coulomb Friction Torque
Linear Viscous Friction Torque
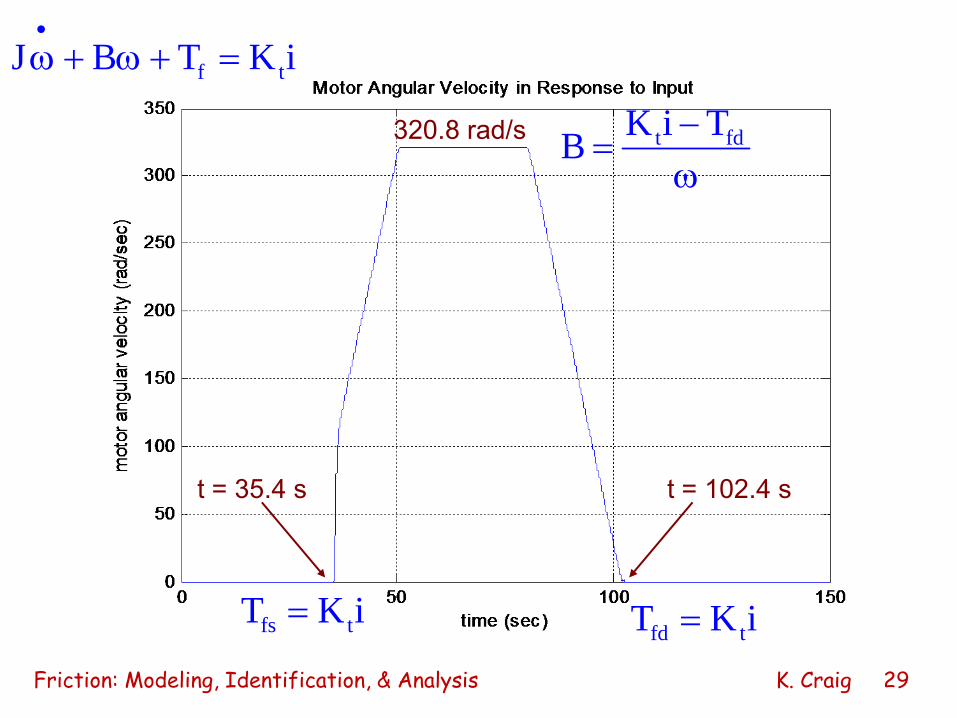
• For a motor + load system, to determine the friction characteristics of the system, follow the following steps:– Run the motor + load with a servo-amplifier in the torque
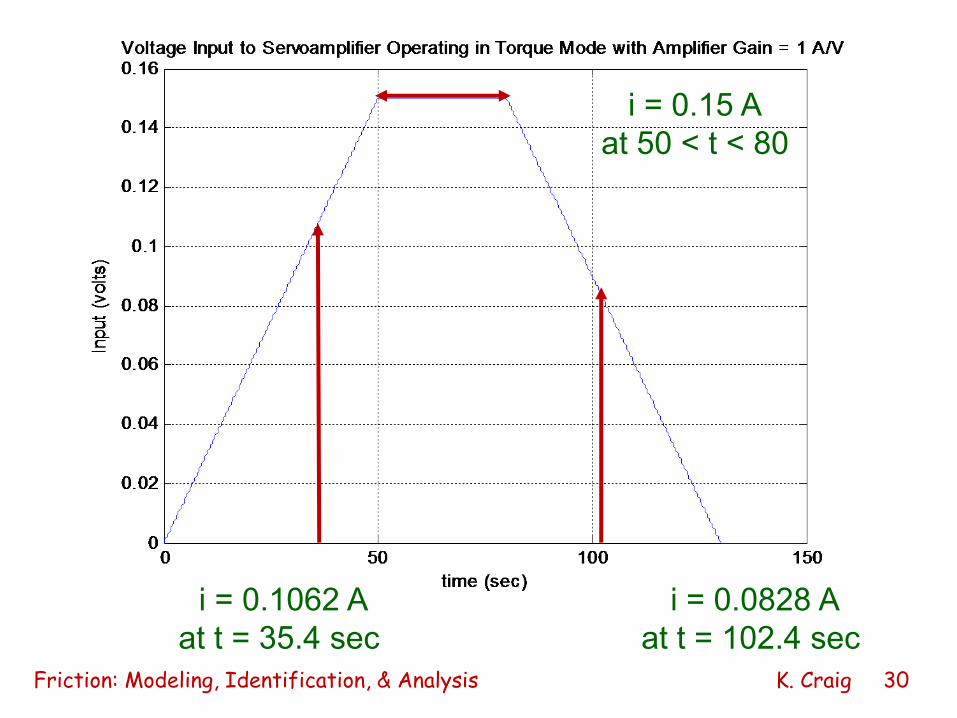
mode (1 A/V).– Input a trapezoid voltage profile with a period of slow
linearly-increasing voltage, a period of constant voltage, and a period of slow linearly-decreasing voltage. Insure that the power supply is not saturated during the test.
– Record the velocity from a tachometer or encoder as a function of time during the test.
– See plots on next two slides for procedure.
Friction: Modeling, Identification, & Analysis K. Craig 29
t = 35.4 s t = 102.4 s
320.8 rad/s
f tJ B T K i•
ω + ω + =
fs tT K i=fd tT K i=
t fdK i TB −=
ω
Friction: Modeling, Identification, & Analysis K. Craig 30
i = 0.1062 Aat t = 35.4 sec
i = 0.0828 Aat t = 102.4 sec
i = 0.15 Aat 50 < t < 80
Friction: Modeling, Identification, & Analysis K. Craig 31
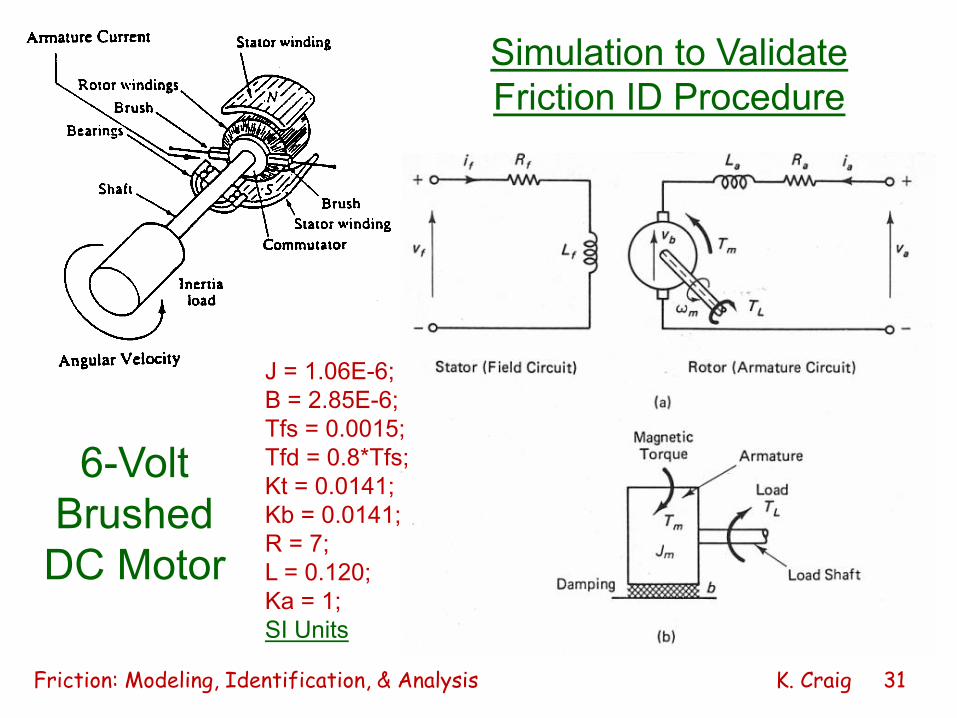
J = 1.06E-6;B = 2.85E-6;Tfs = 0.0015;Tfd = 0.8*Tfs;Kt = 0.0141;Kb = 0.0141;R = 7;L = 0.120;Ka = 1;SI Units
6-VoltBrushedDC Motor
Simulation to ValidateFriction ID Procedure
Friction: Modeling, Identification, & Analysis K. Craig 32
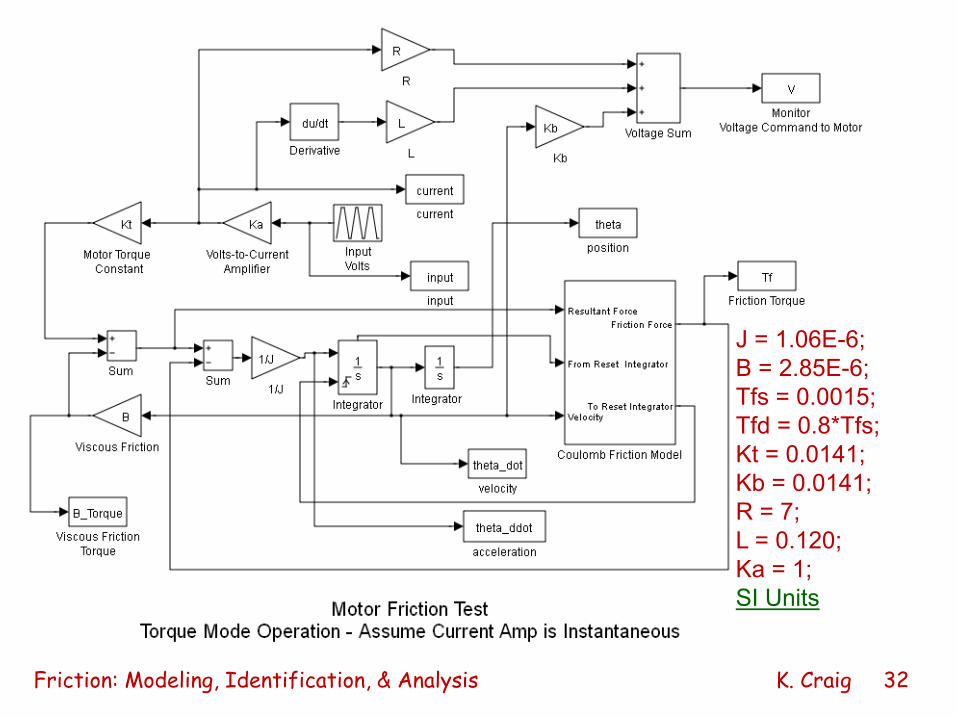
J = 1.06E-6;B = 2.85E-6;Tfs = 0.0015;Tfd = 0.8*Tfs;Kt = 0.0141;Kb = 0.0141;R = 7;L = 0.120;Ka = 1;SI Units

Friction: Modeling, Identification, & Analysis K. Craig 33