frequency domain filtering finalkmlee.gatech.edu/me6406/frequency domain filtering (sh...
TRANSCRIPT
Frequency Domain FilteringFrequency Domain Filtering
Correspondence between Spatial and Frequency Filtering
Fourier TransformBrief IntroductionSampling Theoryp g y2‐D Discrete Fourier Transform
Convolution
Spatial AliasingSpatial Aliasing
Frequency domain filtering fundamentals
ApplicationsppImage smoothingImage sharpeningSelective filteringSelective filtering
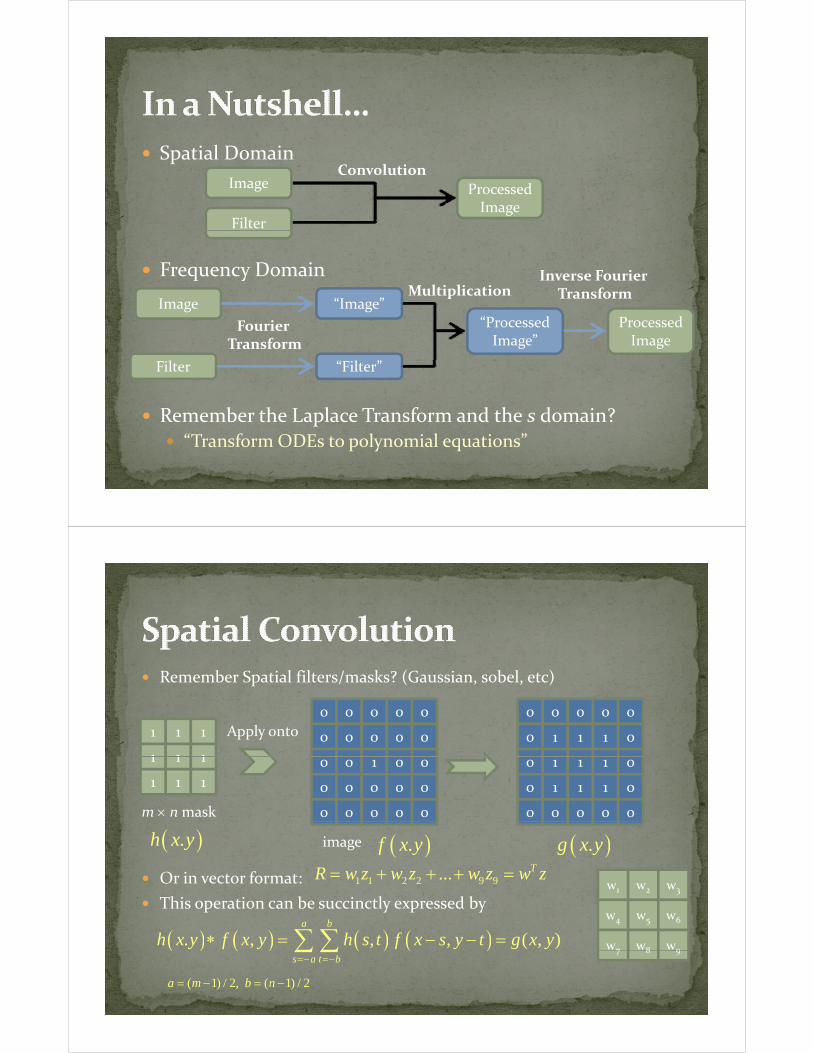
Spatial DomainC l ti
Image
Filter
Processed Image
Convolution
Frequency DomainMultiplication
Inverse Fourier Transform
ImageProcessed Image
“Image”
Fourier Transform
“Processed Image”
Multiplication Transform
Remember the Laplace Transform and the s domain?
Filter “Filter”
p“Transform ODEs to polynomial equations”
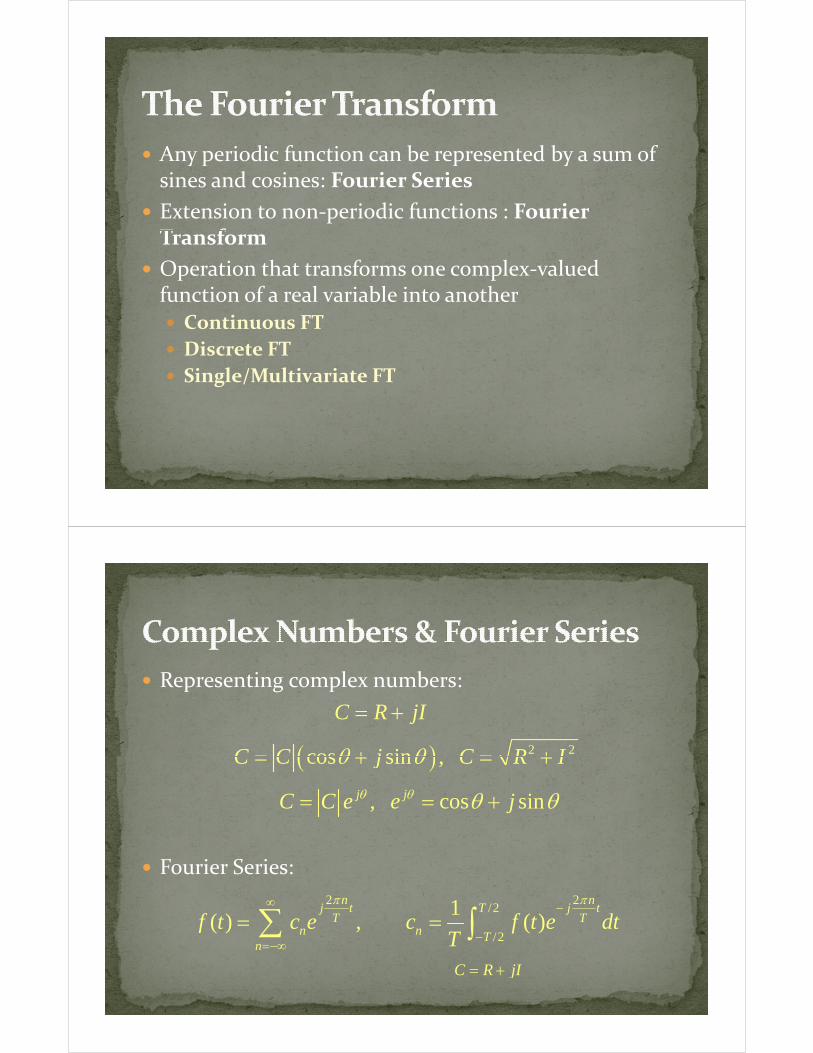
Remember Spatial filters/masks? (Gaussian, sobel, etc)
1 1 1
1 1 1
0 0 0
0 0 0
0 0
0 0Apply onto
0 0 0
0 1 1
0 0
1 0
1 1 1
1 1 1
m × n mask
0 0 1 0 0
0 0
0 0
0 0 0
0 0 0
0 1 1 1 0
0 1
0 0
1 1 0
0 0 0
Or in vector format:
image( ).h x y ( ).f x y ( ).g x y
1 1 2 2 9 9... TR w z w z w z w z= + + + =w w w
This operation can be succinctly expressed by
( ) ( ) ( ) ( ). , , , ( , )a b
h x y f x y h s t f x s y t g x y∗ = − − =∑ ∑
w1 w2 w3
w4 w5 w6
w7 w8 w9( ) ( ) ( ) ( )
s a t b=− =−∑ ∑
( 1) / 2, ( 1) / 2a m b n= − = −
7 8 9
Any periodic function can be represented by a sum of sines and cosines: Fourier Series
Extension to non‐periodic functions : Fourier T fTransform
Operation that transforms one complex‐valued function of a real variable into anotherfunction of a real variable into another
Continuous FT
Discrete FT
Single/Multivariate FT
Representing complex numbers:g
C R jI= +
( ) 2 2cos sinC C j C R Iθ θ= + = +( )cos sin ,C C j C R Iθ θ= + = +
, cos sinj jC C e e jθ θ θ θ= = +
Fourier Series:
2 2/2
/2
1( ) , ( )
n nTj t j t
T Tn n T
n
f t c e c f t e dtT
π π∞ −
−=−∞
= =∑ ∫C R jI= +
Continuous single variate:g
{ } ( ) 2( ) ( ) j tf t F f t e dtπμμ∞ −
−∞ℑ = = ∫
Conversely, Inverse Fourier Transform:
Fourier Transform Pair
( ){ } ( )1 2( ) j tf t F F e dtπμμ μ∞−
−∞= ℑ = ∫
Using Euler’s formula,
( ) ( ) ( )( ) cos 2 sin 2F f t t j t dtμ πμ πμ∞
= −⎡ ⎤⎣ ⎦∫( ) ( ) ( )( ) cos 2 sin 2F f t t j t dtμ πμ πμ−∞
= −⎡ ⎤⎣ ⎦∫
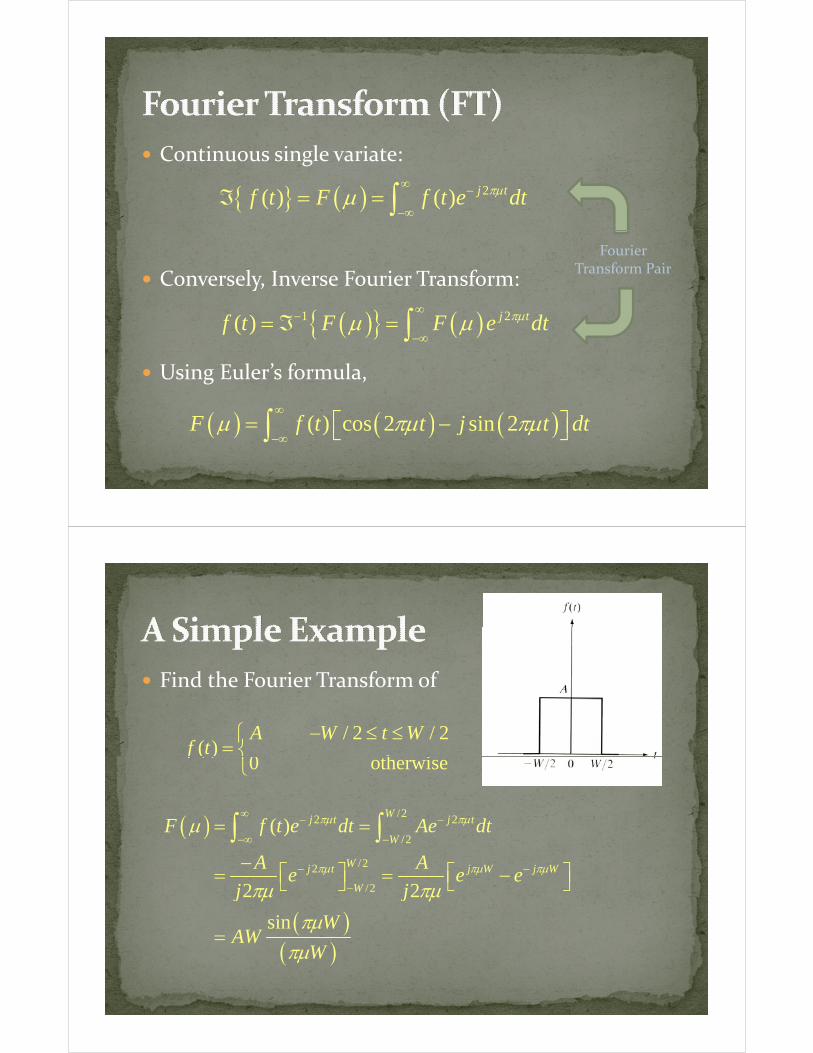
Find the Fourier Transform of
/ 2 / 2( )
0 h i
A W t Wf t
− ≤ ≤⎧= ⎨⎩
( )0 otherwise
f ⎨⎩
( )/22 2( )
Wj t j tF f t dt A dtπμ πμ∞ − −∫ ∫( ) 2 2
/2
/22
/2
( )
2 2
j t j t
W
Wj t j W j W
W
F f t e dt Ae dt
A Ae e e
j j
πμ πμ
πμ πμ πμ
μ−∞ −
− −
= =
− ⎡ ⎤ ⎡ ⎤= = −⎣ ⎦ ⎣ ⎦
∫ ∫
( )( )
/22 2
sin
Wj j
WAW
W
πμ πμπμ
πμ
−⎣ ⎦ ⎣ ⎦
=( )Wπμ
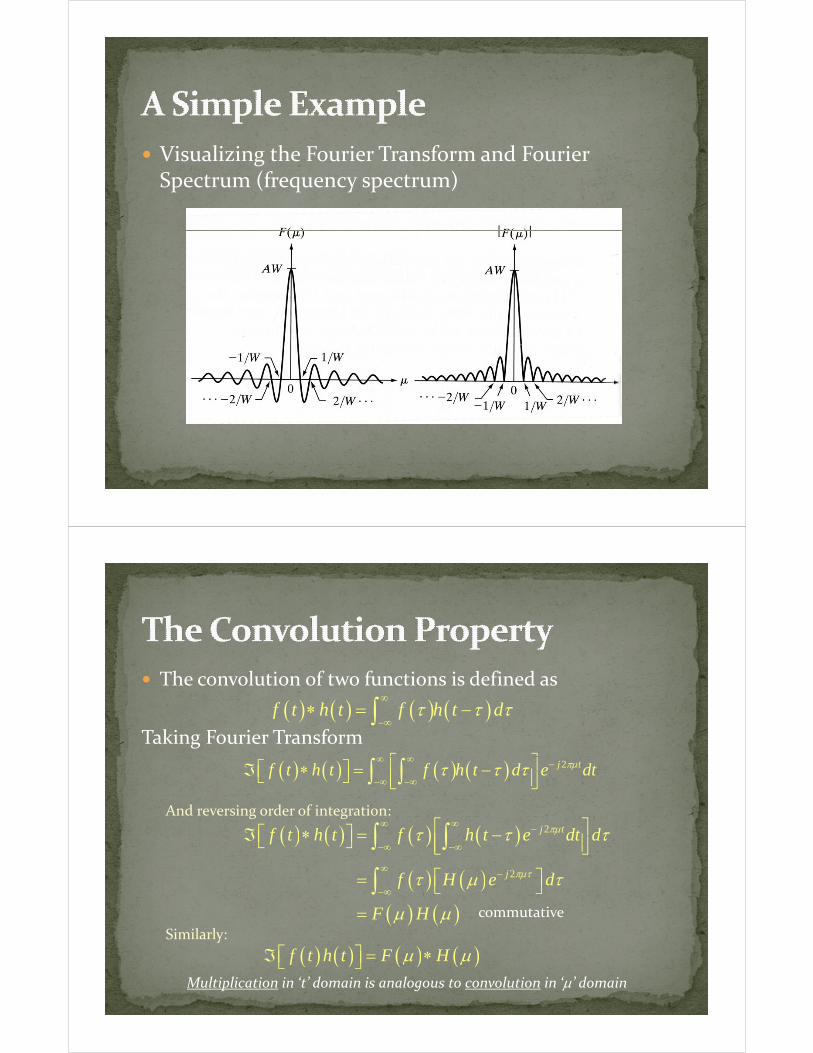
Visualizing the Fourier Transform and Fourier gSpectrum (frequency spectrum)
The convolution of two functions is defined as
Taking Fourier Transform
( ) ( ) ( ) ( )f t h t f h t dτ τ τ∞
−∞∗ = −∫
⎡ ⎤
And reversing order of integration:
( ) ( ) ( ) ( ) 2j tf t h t f h t d e dtπμτ τ τ∞ ∞ −
−∞ −∞
⎡ ⎤ℑ ∗ = −⎡ ⎤⎣ ⎦ ⎢ ⎥⎣ ⎦∫ ∫
⎡ ⎤( ) ( ) ( ) ( )
( ) ( )
2
2
j t
j
f t h t f h t e dt d
f H e d
πμ
πμτ
τ τ τ
τ μ τ
∞ ∞ −
−∞ −∞
∞ −
⎡ ⎤ℑ ∗ = −⎡ ⎤⎣ ⎦ ⎢ ⎥⎣ ⎦
⎡ ⎤= ⎣ ⎦
∫ ∫
∫
Similarly:
( ) ( )( ) ( )
f
F H
μ
μ μ−∞ ⎣ ⎦
=∫
commutative
( ) ( ) ( ) ( )f h F Hℑ⎡ ⎤⎣ ⎦( ) ( ) ( ) ( )f t h t F Hμ μℑ = ∗⎡ ⎤⎣ ⎦Multiplication in ‘t’ domain is analogous to convolution in ‘μ’ domain
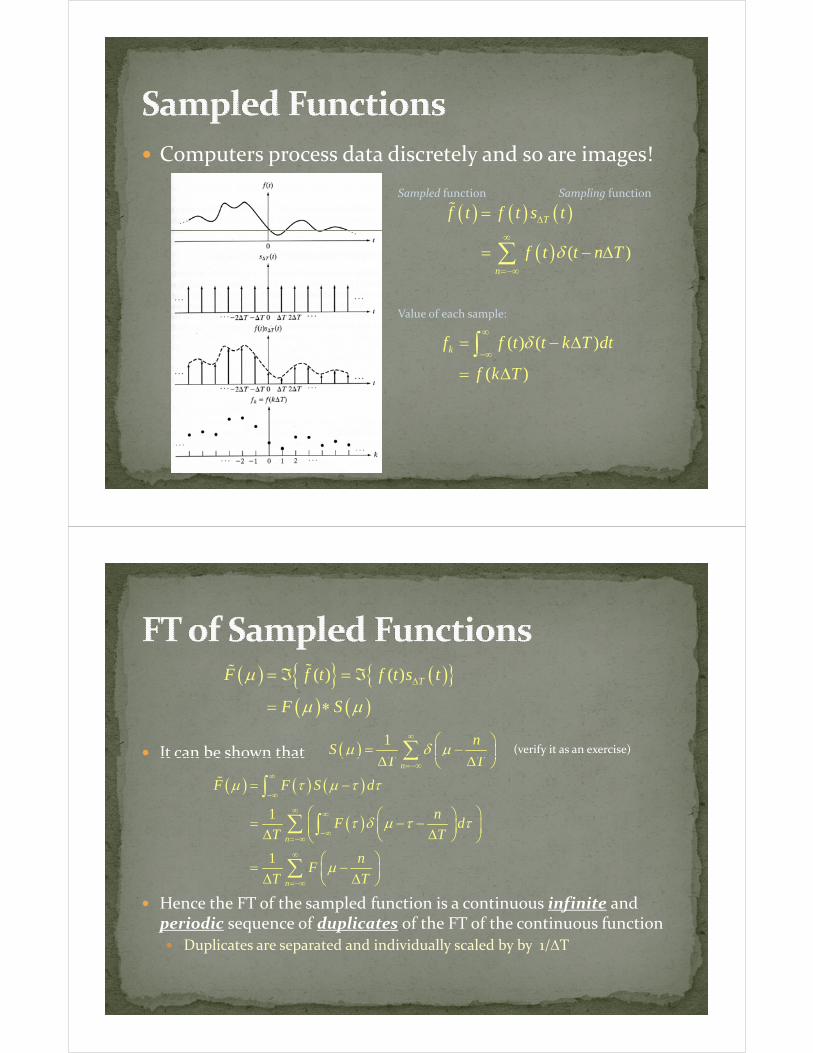
Computers process data discretely and so are images!g
( ) ( ) ( )Tf t f t s tΔ=Sampled function Sampling function
( ) ( )n
f t t n Tδ∞
=−∞
= − Δ∑
Value of each sample:
( ) ( )kf f t t k T dtδ∞
−∞= − Δ∫
( )f k T= Δ
( ) { } ( ){ }( ) ( ) TF f t f t s tμ Δ= ℑ = ℑ
It can be shown that
( ) ( )F Sμ μ= ∗
( ) 1 nS
T Tμ δ μ
∞ ⎛ ⎞= −⎜ ⎟Δ Δ⎝ ⎠∑ (verify it as an exercise)It can be shown that ( )
nT Tμ μ
=−∞⎜ ⎟Δ Δ⎝ ⎠
∑( ) ( ) ( )
( )1
F F S d
nF d
μ τ μ τ τ
τ δ μ τ τ
∞
−∞
∞ ∞
= −
⎛ ⎞⎛ ⎞⎜ ⎟⎜ ⎟
∫
∑ ∫ ( )
1
n
n
F dT T
nF
T T
τ δ μ τ τ
μ
−∞=−∞
∞
=−∞
= − −⎜ ⎟⎜ ⎟Δ Δ⎝ ⎠⎝ ⎠⎛ ⎞= −⎜ ⎟Δ Δ⎝ ⎠
∑ ∫
∑Hence the FT of the sampled function is a continuous infinite and periodic sequence of duplicates of the FT of the continuous function
Duplicates are separated and individually scaled by by 1/ΔT
⎝ ⎠
p p y y y /
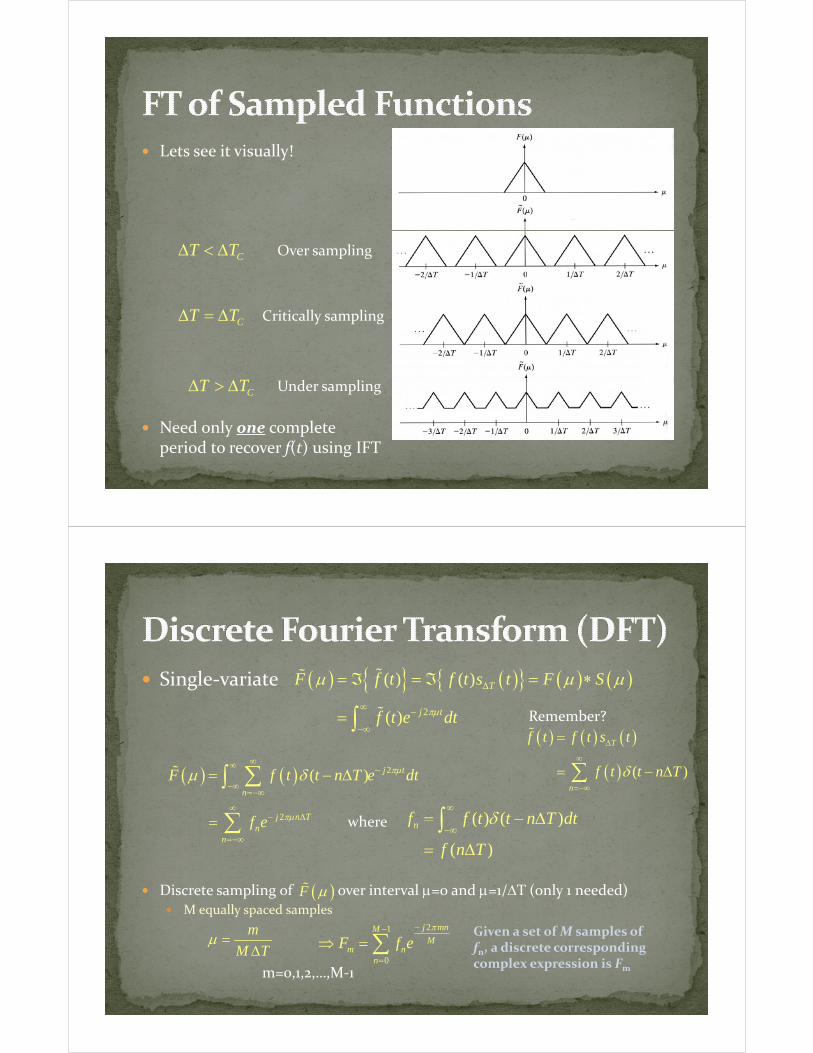
Lets see it visually!
Over samplingCT TΔ < Δ
Critically samplingCT TΔ = Δ
N d l l t
Under samplingCT TΔ > Δ
Need only one complete period to recover f(t) using IFT
Single‐variate ( ) { } ( ){ } ( ) ( )( ) ( ) TF f t f t s t F Sμ μ μΔ= ℑ = ℑ = ∗{ }2( ) j tf t e dtπμ∞ −
−∞= ∫
( ) ( ) ( )Tf t f t s tΔ=Remember?
( ) ( )n
f t t n Tδ∞
=−∞
= − Δ∑( ) ( ) 2
2
( ) j t
n
j n T
F f t t n T e dt
f e
πμ
πμ
μ δ∞∞ −
−∞=−∞
∞− Δ
= − Δ
=
∑∫
∑ where ( ) ( )f f t t n T dtδ∞
= − Δ∫
Di li f i l d /ΔT ( l d d)
jn
n
f e μ
=−∞
= ∑ where ( ) ( )
( )
nf f t t n T dt
f n T
δ−∞
Δ
= Δ∫
( )Discrete sampling of over interval μ=0 and μ=1/ΔT (only 1 needed)M equally spaced samples
( )F μ
m
M Tμ =
Δ
21 j mnMM
m nF f eπ−−
⇒ = ∑Given a set of M samples of f , a discrete corresponding M TΔ
0m n
n
f=∑
m=0,1,2,…,M‐1
fn, a discrete corresponding complex expression is Fm
Conversely given a set of Fm discrete data points, a g m
sample set of fn can be recovered.211 j mnMM
n mf F eM
π−
= ∑IDFT: DFT:
21
0
j mnMM
m nF f eπ−−
= ∑ m,n=0,1,2,…,M‐1
( )
0mM =∑
0n=
Discrete Fourier Transform Pair
In image (spatial) processing, the more natural and widely used expression is:
( ) ( )21
0
1 j uxMM
u
f x F u eM
π−
=
= ∑ ( ) ( )21
0
j uxMM
x
F u f x eπ−−
=
= ∑
Image Processing: x y are spatial variables and u v are ‘spatial frequency’ variables
u,x=0,1,2,…,M‐1
Image Processing: x,y are spatial variables and u,v are spatial frequency variables
Signal Processing: t is a temporal variable and μ is a frequency variable
Periodicity
( ) ( )F u F u kM= + ( ) ( )f x f x kM= + k integer
Discrete version of convolution (aka circular convolution)
1M −
( ) ( ) ( ) ( )1
0
M
m
f x h x f m h x m=
∗ = −∑ m=0,1,2,…,M‐1
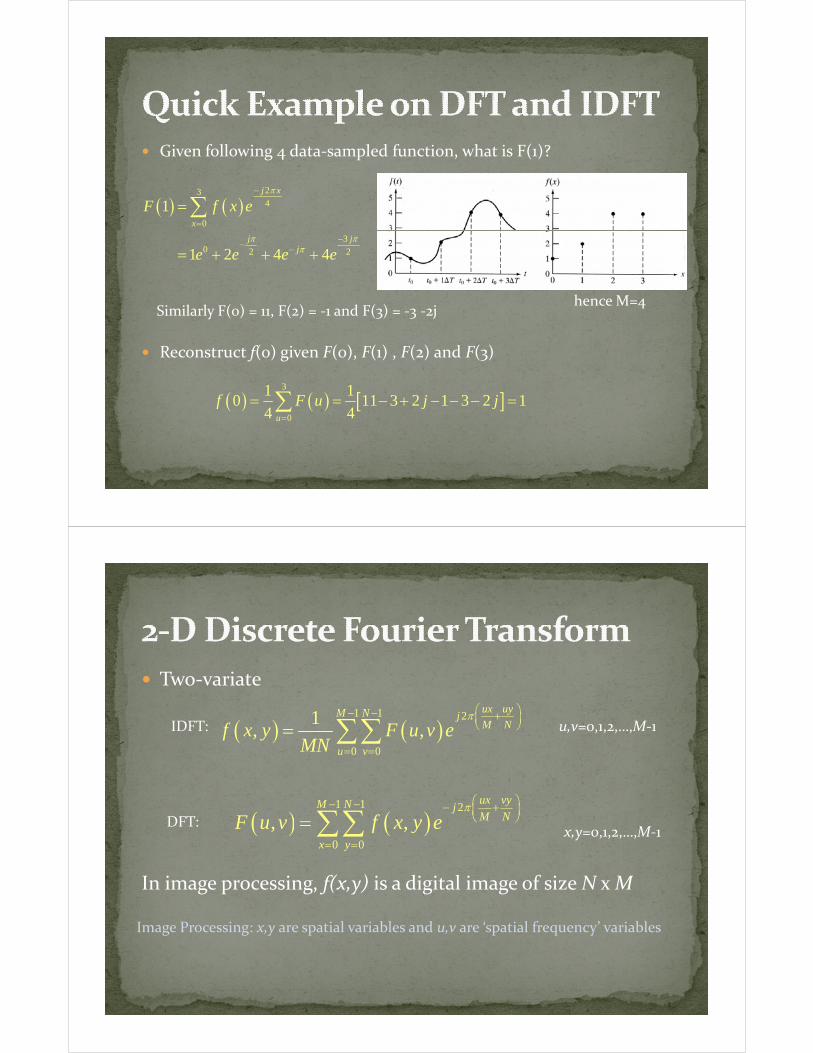
Given following 4 data‐sampled function, what is F(1)?
( ) ( )234
0
1j x
x
F f x eπ−
=
=∑
h M
30 2 21 2 4 4
j jje e e e
π ππ
−− −= + + +
Reconstruct f(0) given F(0), F(1) , F(2) and F(3)
hence M=4Similarly F(0) = 11, F(2) = ‐1 and F(3) = ‐3 ‐2j
f( ) g ( ) ( ) ( ) (3)
( ) ( ) [ ]3
0
1 10 11 3 2 1 3 2 1
4 4u
f F u j j=
= = − + − − − =∑
Two‐variate
IDFT: ( ) ( )1 1 2
0 0
1, ,
ux uyM N jM N
u v
f x y F u v eMN
π ⎛ ⎞− − +⎜ ⎟⎝ ⎠
= =
= ∑∑ u,v=0,1,2,…,M‐1
DFT: ( ) ( )1 1 2
ux vyM N jM NF u v f x y e
π ⎛ ⎞− − − +⎜ ⎟⎝ ⎠= ∑∑
In image processing f(x y) is a digital image of size N x M
DFT: ( ) ( )0 0
, ,x y
F u v f x y e ⎝ ⎠
= =
= ∑∑ x,y=0,1,2,…,M‐1
In image processing, f(x,y) is a digital image of size N x M
Image Processing: x,y are spatial variables and u,v are ‘spatial frequency’ variables
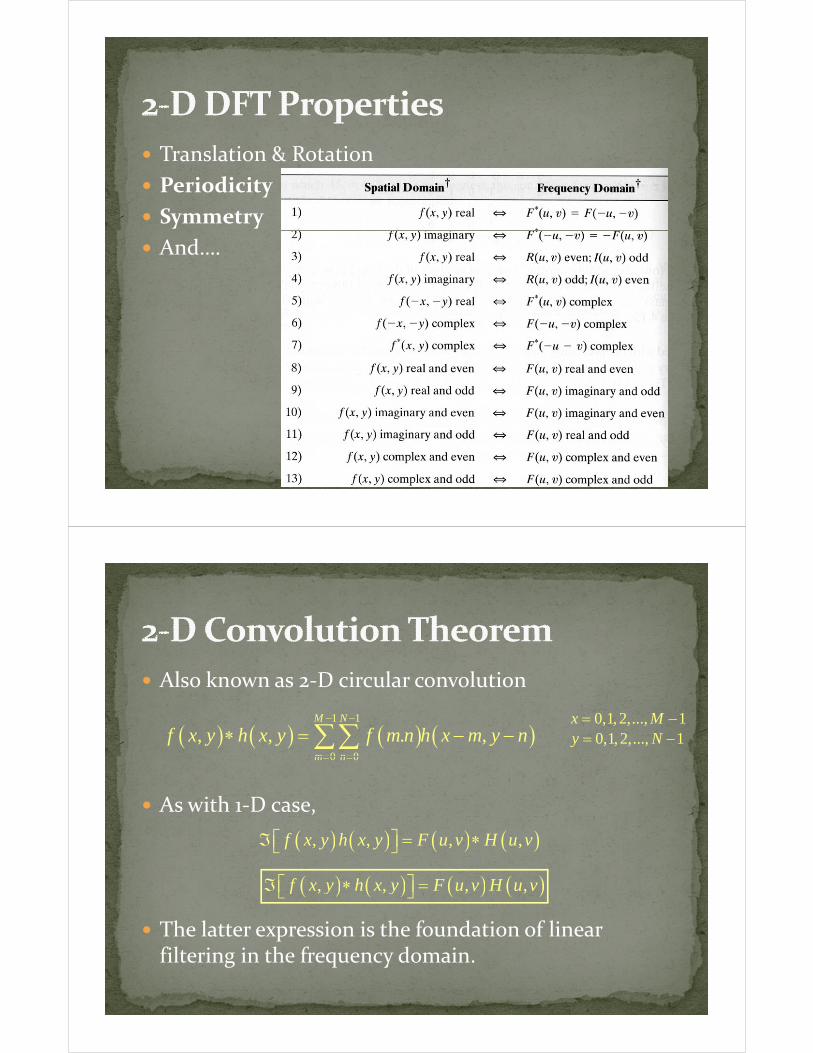
Translation & Rotation
Periodicity
Symmetry
And….
Also known as 2‐D circular convolution
( ) ( ) ( ) ( )1 1
0 0
, , . ,M N
m n
f x y h x y f m n h x m y n− −
= =
∗ = − −∑∑0,1,2,..., 1x M= −0,1,2,..., 1y N= −
As with 1‐D case,
0 0m n= =
( ) ( ) ( ) ( ), , , ,f x y h x y F u v H u vℑ = ∗⎡ ⎤⎣ ⎦
( ) ( ) ( ) ( )f x y h x y F u v H u vℑ ∗ =⎡ ⎤⎣ ⎦
The latter expression is the foundation of linear filt i i th f d i
( ) ( ) ( ) ( ), , , ,f x y h x y F u v H u vℑ ∗ =⎡ ⎤⎣ ⎦
filtering in the frequency domain.
Before foraging into frequency domain filtering, lets do a quick digress into aliasing in digital imaging
What is Aliasing?High frequency components “masquerading” as lower High frequency components masquerading as lower frequencies
Temporal Aliasing
Pertains to time intervals between images in a sequencePertains to time intervals between images in a sequence
The “wagon wheel” effect
Capturing frame rate too low
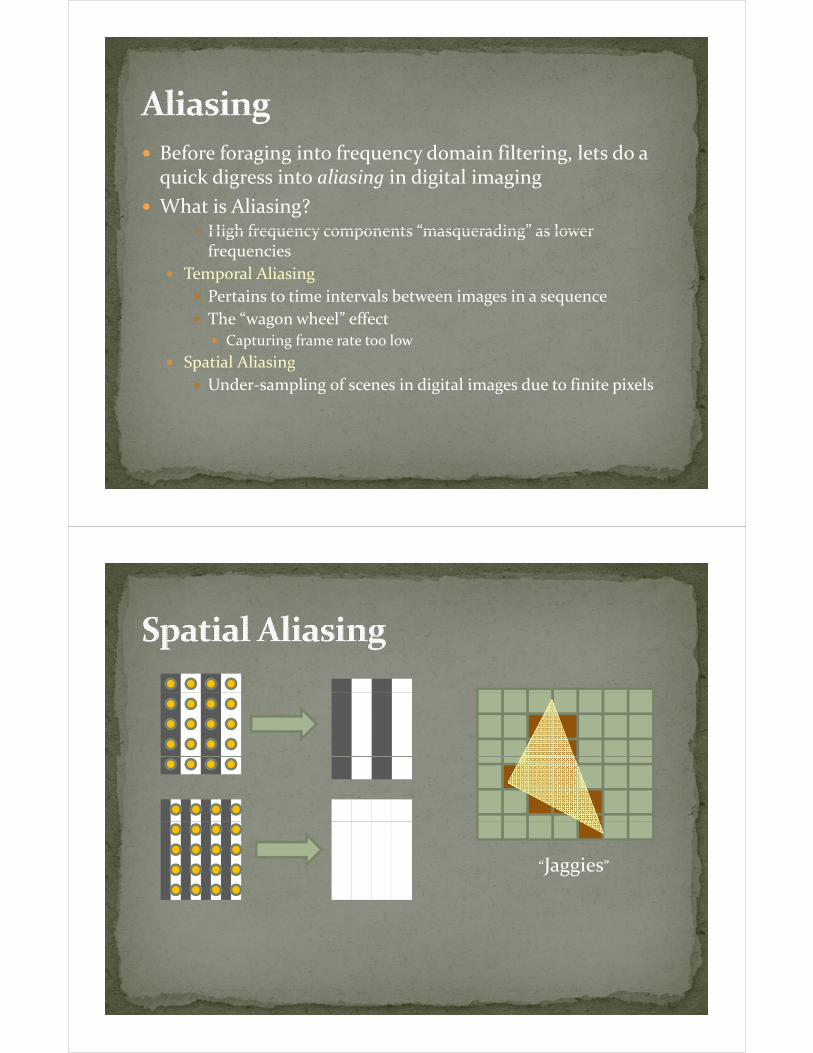
Spatial AliasingSpatial Aliasing
Under‐sampling of scenes in digital images due to finite pixels
“Jaggies”
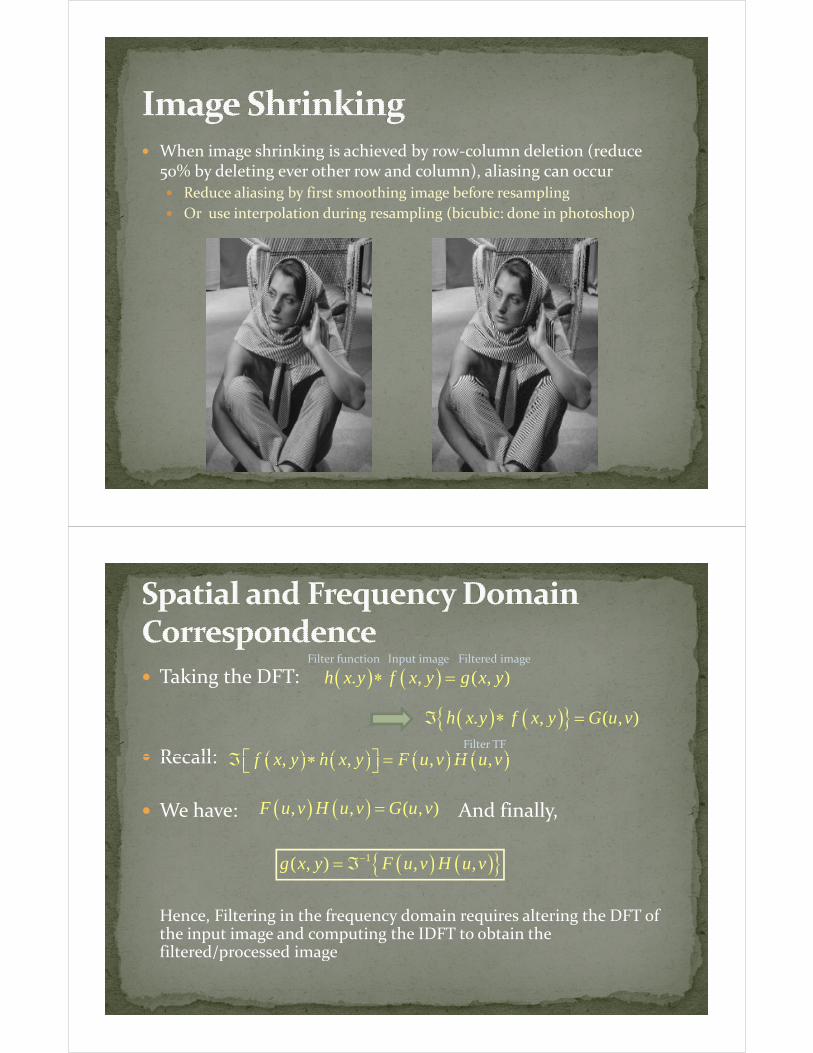
When image shrinking is achieved by row‐column deletion (reduce % b d l i h d l ) li i 50% by deleting ever other row and column), aliasing can occur
Reduce aliasing by first smoothing image before resampling
Or use interpolation during resampling (bicubic: done in photoshop)
Taking the DFT: ( ) ( ). , ( , )h x y f x y g x y∗ =Input imageFilter function Filtered image
Recall:
( ) ( ){ }. , ( , )h x y f x y G u vℑ ∗ =
( ) ( ) ( ) ( )f h F Hℑ ∗⎡ ⎤⎣ ⎦Filter TF
Recall:
We have: And finally,
( ) ( ) ( ) ( ), , , ,f x y h x y F u v H u vℑ ∗ =⎡ ⎤⎣ ⎦
( ) ( ), , ( , )F u v H u v G u v= y
( ) ( ){ }1( , ) , ,g x y F u v H u v−= ℑ
Hence, Filtering in the frequency domain requires altering the DFT of the input image and computing the IDFT to obtain the filtered/processed imagefiltered/processed image
Each term of F(u,v) contains all values of f(x,y) making f y gdirect association of component values to image properties difficult
H F( ) i i l However F(u=0,v=0) is proportional to average intensity of image
v Increasing rate of change of pixel intensities
u
F(u,v)
From ( ) ( ){ }1( , ) , ,g x y F u v H u v−= ℑ
If f is an impulse, ( )( , ) ( , ) , 1f x y x y F u vδ= ⇒ =
Then: where h(x,y) is a spatial filter( ){ } ( )1 , ,H u v h x y−ℑ =
As this filter is obtained from the response of a frequency domain filter to an impulse, h(x,y) is also called the impulse response of H(u v)impulse response of H(u,v).
And since filter contain only finite quantities , they are also called Finite Impulse Response (FIR)filters
Edges and noise contribute to the high‐frequency g gcomponents of an image’s FT
Smoothing or blurring is achieved by high‐frequency i attenuation
Low‐Pass FiltersIdeal lowpass filters (sharp)Ideal lowpass filters (sharp)
Butterworth lowpass filter
Gaussian Lowpass filter (smooth)p
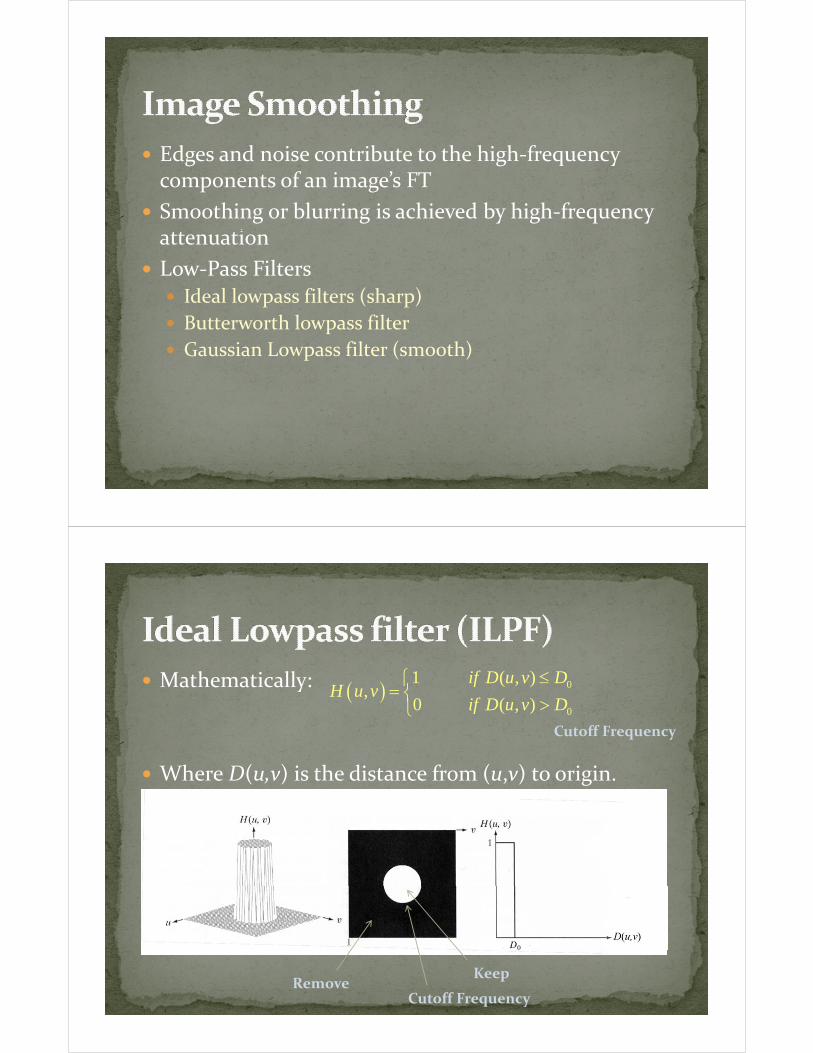
Mathematically: ( ) 01 ( , )if D u v DH u v
≤⎧= ⎨( )
0
,0 ( , )
H u vif D u v D
= ⎨ >⎩Cutoff Frequency
Where D(u,v) is the distance from (u,v) to origin.
RemoveKeep
Cutoff Frequency
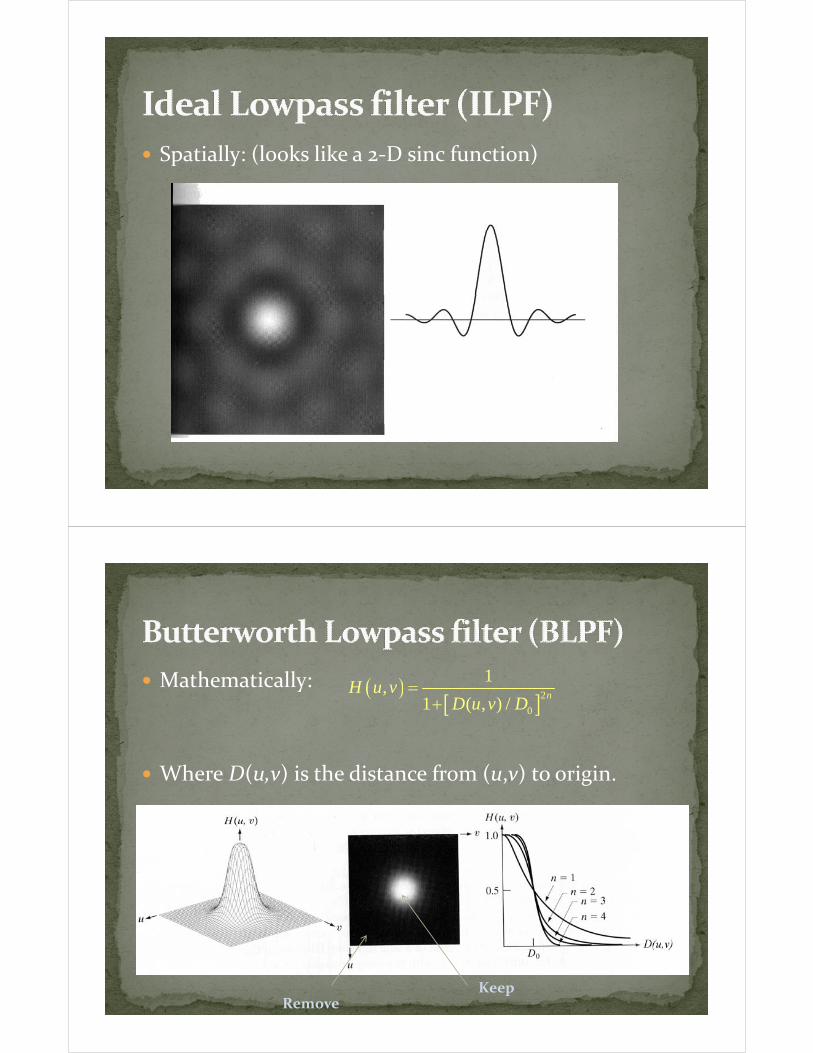
Spatially: (looks like a 2‐D sinc function)
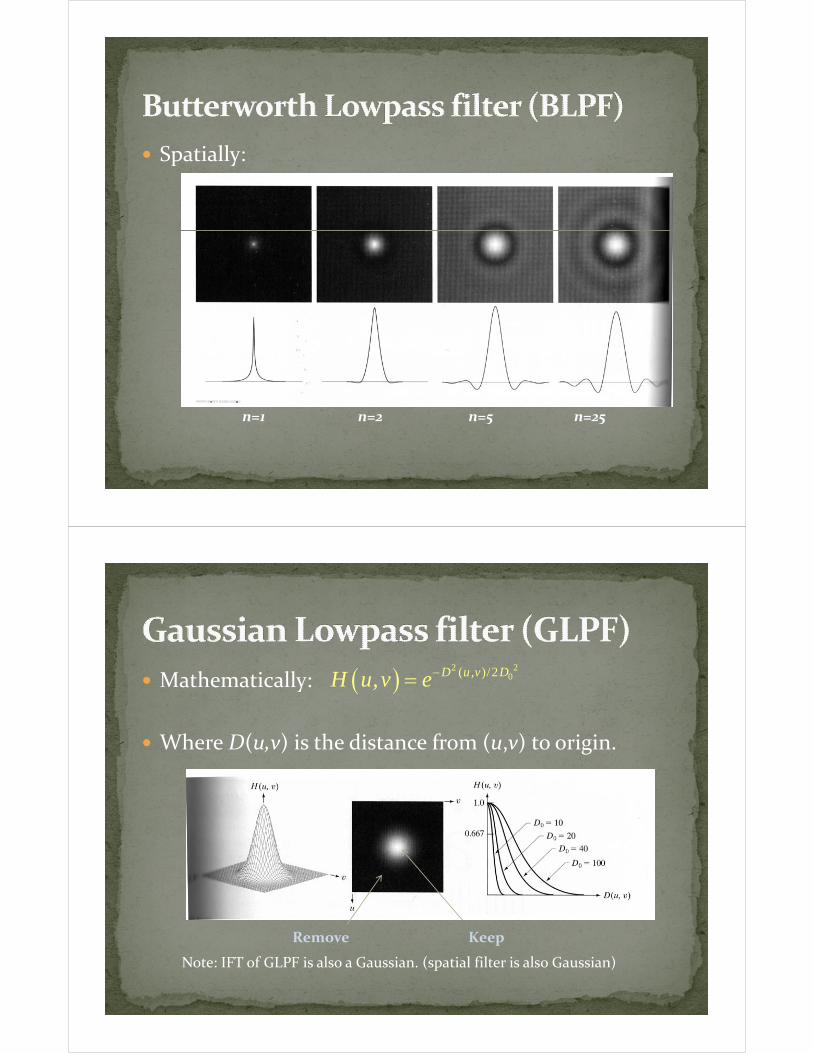
Mathematically: ( ) 2
1,H u v =( )
[ ]20
,1 ( , ) /
nH u vD u v D+
Where D(u,v) is the distance from (u,v) to origin.
RemoveKeep
Spatially:
n=1 n=2 n=5 n=25
Mathematically: ( ) 2 20( , )/2, D u v DH u v e−=
Where D(u,v) is the distance from (u,v) to origin.
( )
Remove Keep
Note: IFT of GLPF is also a Gaussian. (spatial filter is also Gaussian)
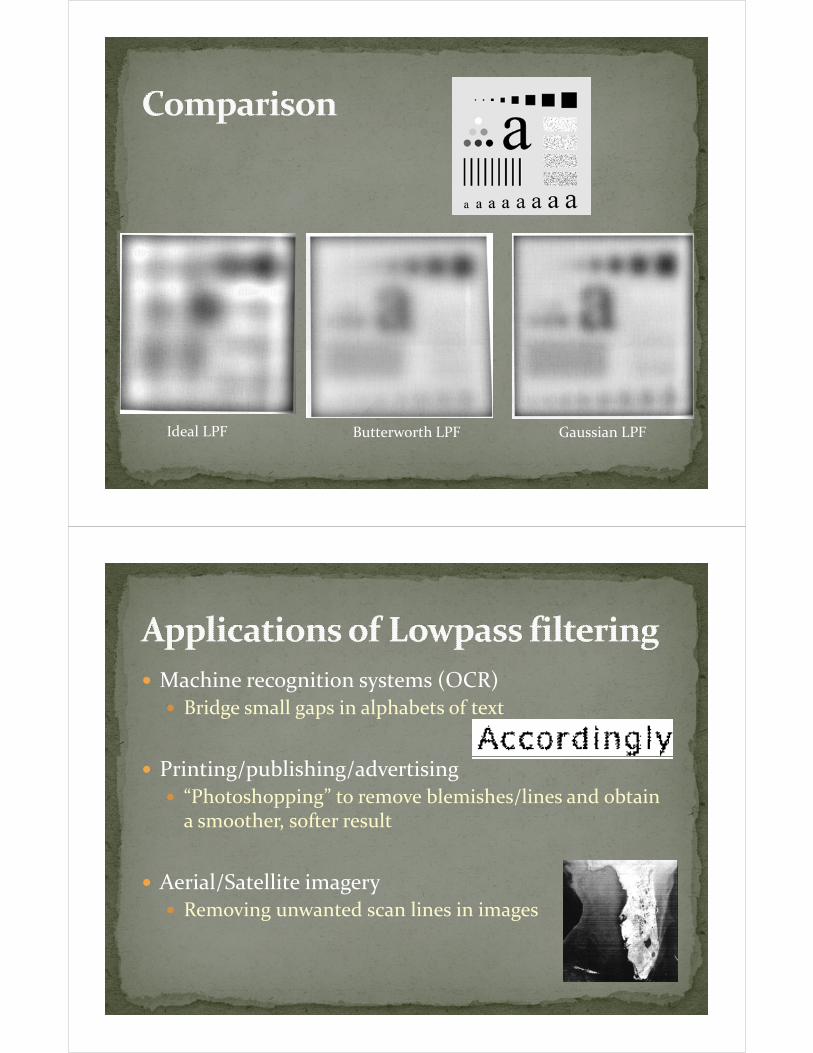
Ideal LPF Butterworth LPF Gaussian LPF
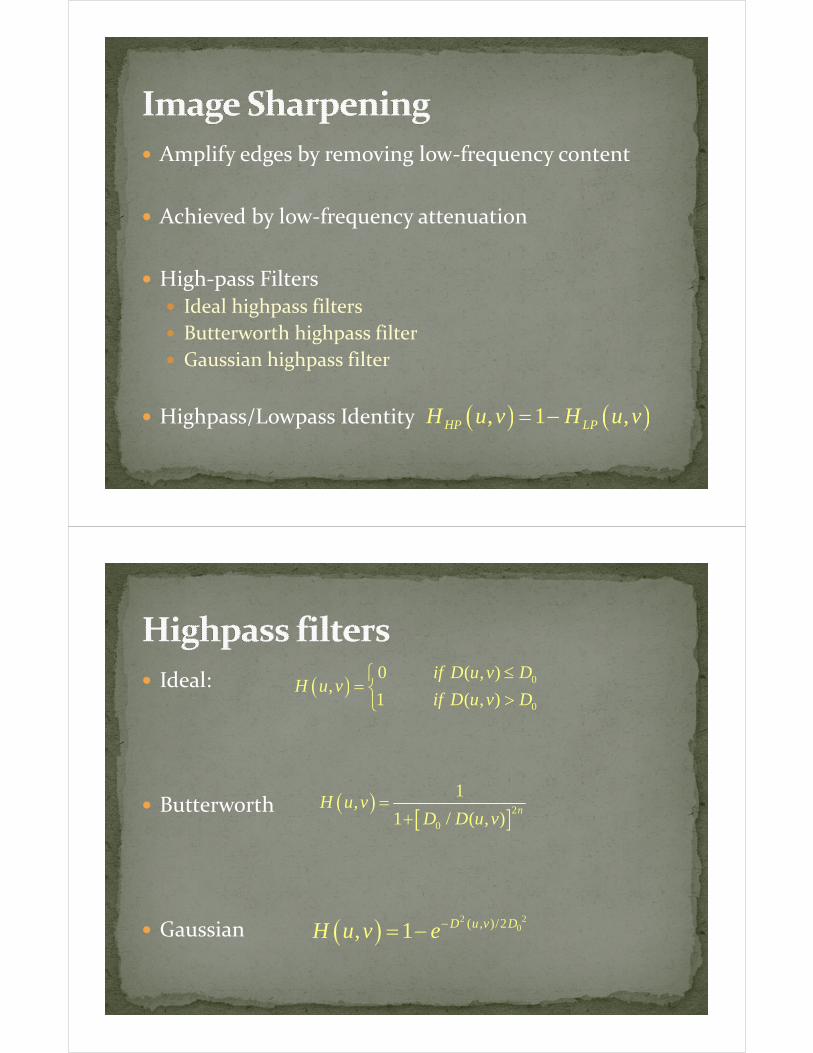
Machine recognition systems (OCR)gBridge small gaps in alphabets of text
Printing/publishing/advertising“Photoshopping” to remove blemishes/lines and obtain a smoother softer resulta smoother, softer result
Aerial/Satellite imageryAerial/Satellite imageryRemoving unwanted scan lines in images
Amplify edges by removing low‐frequency contentg g
Achieved by low‐frequency attenuation
High‐pass FiltersIdeal highpass filters
Butterworth highpass filter
Gaussian highpass filterGaussian highpass filter
Highpass/Lowpass Identity ( ) ( ), 1 ,HP LPH u v H u v= −g p / p y ( ) ( ), ,HP LP
Ideal: ( ) 00 ( , ),
if D u v DH u v
≤⎧= ⎨( )
0
,1 ( , )if D u v D⎨ >⎩
Butterworth ( )[ ]2
1,
1 / ( )nH u v
D D u v=
+[ ]01 / ( , )D D u v+
Gaussian ( ) 2 20( , )/2, 1 D u v DH u v e−= −
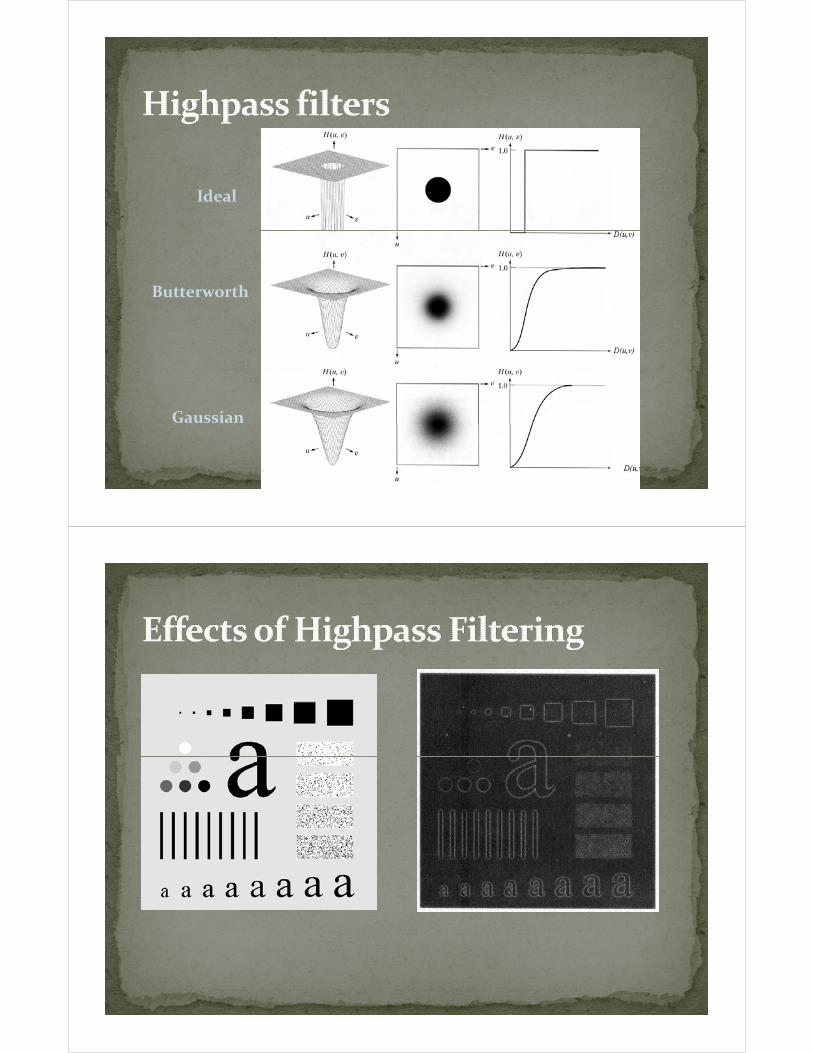
Ideal
ButterworthButterworth
Gaussian
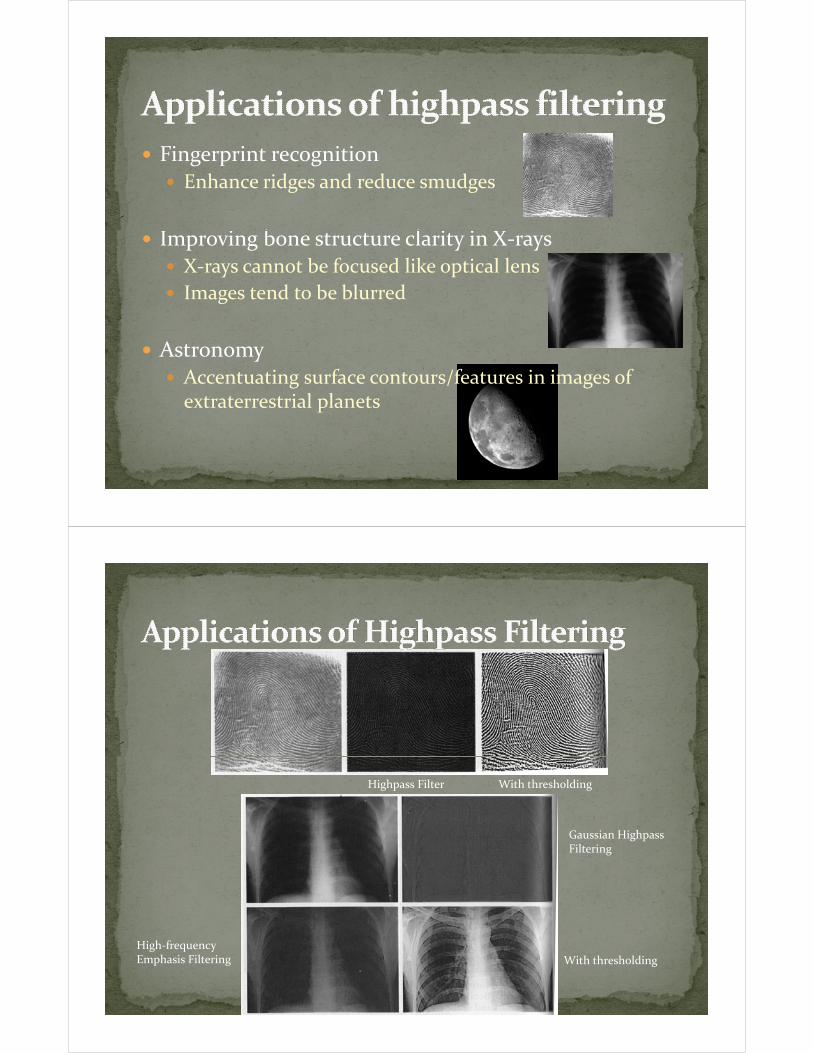
Fingerprint recognitiong gEnhance ridges and reduce smudges
I i b l i i XImproving bone structure clarity in X‐raysX‐rays cannot be focused like optical lens
Images tend to be blurredImages tend to be blurred
AstronomyyAccentuating surface contours/features in images of extraterrestrial planets
Highpass Filter With thresholding
Gaussian HighpassFiltering
High‐frequency
With thresholding
g q yEmphasis Filtering
Process specific bands / small regions of frequenciesg
Bandreject filters / Bandpass filtersIdeal filters
Butterworth filter
Gaussian filter
Notch filtersNotch filtersIdeal filters
Butterworth filter
Gaussian filter
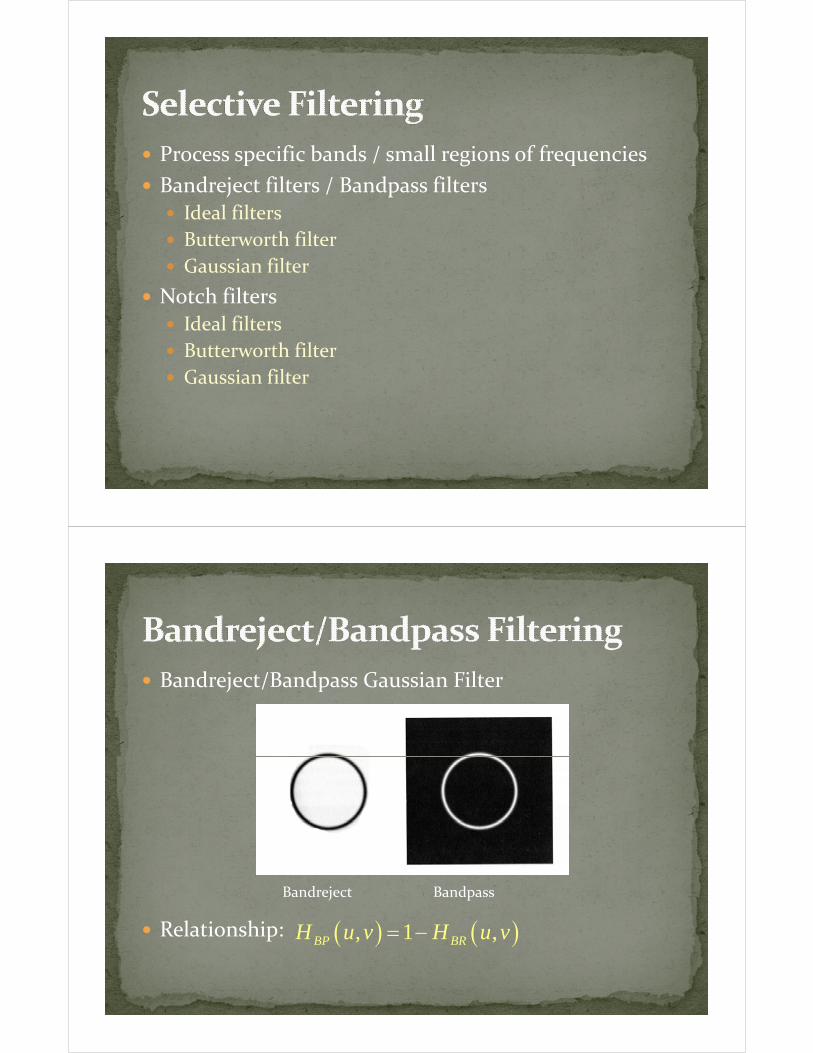
Bandreject/Bandpass Gaussian Filterj
d d
Relationship: ( ) ( ), 1 ,BP BRH u v H u v= −
Bandreject Bandpass
NF reject (or passes) frequencies in a predefined neighborhood about the center of the frequency rectangle
Constructed as products of highpass filters whose centers have been translated to the centers of the notcheshave been translated to the centers of the notches
( )1
, ( , ) ( , )Q
NR k kk
H u v H u v H u v−= ∏
where Hk(u,v) and H‐k(u,v) are HP filters centered at
1k−
(uk,vk) & (‐uk,‐vk)
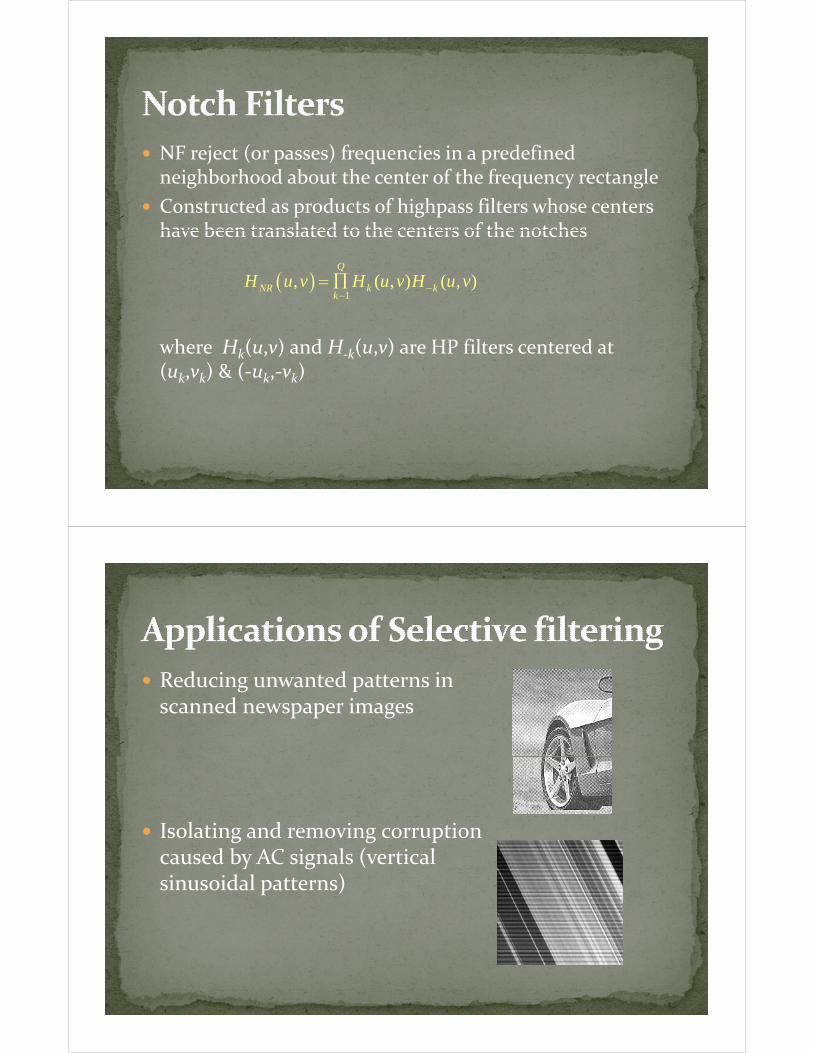
Reducing unwanted patterns in gscanned newspaper images
Isolating and removing corruption caused by AC signals (vertical sinusoidal patterns)sinusoidal patterns)

Implementing filtering in frequency domaing g2‐D DFT and IDFT is computationally intensive
(MN)2 order of summations and additions
1024 x 1024 image would require ~ a trillion operations for 1 DFT1024 x 1024 image would require ~ a trillion operations for 1 DFT
Fast Fourier Transform (FFT)MNlog2(MN) operations
i ld i illi i1024 x 1024 image would require ~ 20 million operations
Filter design in frequency domainUse frequency domain for “prototyping” of filterUse frequency domain for prototyping of filter
Find equivalent spatial filter
Implement filter in spatial domain
Digital Image Processing using Matlab, R. C. g g g gGonzalez, R. E. Woods and S. Eddins, Prentice Hall, 2004
Digital Image Processing, R. C. Gonzalez and R. dE. Woods, Prentice Hall, 3rd Edition, 2008