forajul si echipamente de foraj
DESCRIPTION
Forajul. Variante uzuale de ciocane hidraulice folosite în forajul percutant. Principiul de funcţionare al ciocanului hidraulic funcţionând strict cu elementele de bazăTRANSCRIPT
45
CAP.3. FORAJUL ŞI CIOCANELE HIDRAULICE AFERENTE
FORAJULUI
3.1. Forajul percutant
Forajul reprezintă întregul complex de lucrări de traversare, consolidare şi izolare a
formaţiunilor geologice, de la suprafaţă şi până la o anumită adâncime, în scopul realizării unei
sonde.
Prin sondă se înţelege o construcţie minieră specială, de formă cilindrică, executată
vertical sau înclinat şi cu instalaţii speciale (instalaţii de foraj), şi care este caracterizată printr-un
raport mare între adâncimea (lungimea) şi diametrul său.
Forajul se execută prin mijloace mecanizate şi cu toate că înglobează mai multe etape,
printre care şi lucrările de suprafaţă şi lucrările pregătitoare, în practică, însă, se foloseşte destul
de frecvent noţiunea de „foraj” doar pentru a descrie procesul mecanic de dislocare a rocilor (de
săpare).
Dintre metodele de foraj, metoda percutantă a apărut pe la mijlocul secolului al XIX-
lea. Numită şi forajul percutant, ea se bazează pe un piston care repetitiv se ridică şi cade pentru
a genera sarcini de compresie de durată scurtă. Pistonul loveşte ritmic fie instrumentul de
dislocare, fie racordul cu instrumentul de dislocare sau cu garnitura de prăjini, fie arborele
canelat al angrenajului de roţi dinţate din mecanismul de rotaţie. Instrumentul de dislocare, la
rândul lui, aplică percuţiile materialului de dislocat.
Definiţii ale termenilor de specialitate utilizaţi frecvent în foraj se găsesc în literatura de
specialitate. Asfel, din referinţele menţionate reiese că garnitura de foraj este formată din tuburi
metalice (prăjini) şi racorduri speciale, făcând legătura între instrumentul de dislocare şi
dispozitivul de antrenare în mişcare de percuţie, rotaţie sau de rotopercuţie (cap hidraulic, cap
universal, perforator sau ciocan). Funcţiile garniturii de foraj sunt multiple:
Cu ajutorul lor se introduc şi se extrag din talpa sondei (partea inferioară a găurii de
sondă), instrumentele de dislocare;
Transmit de la suprafaţă, mişcarea de percuţie, de rotaţie sau de rotopercuţie,
instrumentului de dislocare;
Asigură prin propria sa greutate, o apăsare pe sapă necesară menţinerii contactului
între instrumentul de dislocare şi formaţiunea de dislocat, facilitând totodată
procesul de dislocare;
46
Prin canalele prevăzute în garnitura de foraj, se permite circulaţia unui fluid special
(fluid sau noroi de foraj) de la suprafaţă spre talpa sondei, şi invers. Prin circularea
acestui fluid special, se răceşte instrumentul de dislocat şi se curăţă talpa sondei de
detritusul format. Evacuarea detritusului din talpa sondei ajută şi la împiedicarea
gripării instrumentului de dislocare.
Atunci când forajul percutant este combinat cu forajul rotativ, eficienţa procesului de
dislocare este mărită. Forajul rezultat poartă numele de foraj rotopercutor. El se caracterizează
atât prin percuţii şi apăsare asupra instrumentului de dislocare, cât şi prin rotirea acestuia.
Apăsarea este forța aplicată ciocanului perforator în direcția de penetrare, pentru a uşura
şi accelera pătrunderea în rocă. Apăsarea pe sapă, sau forţa de apăsare, este obţinută fie prin
intermediul prăjinilor grele, fie cu ajutorul cilindrilor hidraulici. Totodată, această forţă se aplică
pentru a menţine instrumentul de dislocare în contact cu formaţiunea de dislocat (rocă, fundaţii,
asfalt, beton sau alte structuri de materiale). Mai mult, deoarece se doreşte protejarea
echipamentul de foraj, forţa de apăsare trebuie să fie optimă pentru a reduce cât mai mult forţa de
recul ce ia naştere după coliziunea dintre intrumentul de dislocat şi formaţiunea de pătruns.
Această forţă la recul ar cauza suplimentar vibraţii nedorite în echipamentul de foraj.
Pe măsură ce se înaintează în sondă, în vederea realizării adâncimii vizate pentru sondă,
se adaugă prăjini astfel ca instrumentul de dislocare să fie în contact permanent cu talpa sondei.
Spălarea are o importanţă deosebită, asigurând numeroase funcţii, printre care, răcirea şi
lubrifierea instrumentului de dislocare, evacuarea detritusului din talpa sondei, colmatarea
peretelui sondei, asigurarea contrapresiunii pe peretele găurii de sondă pentru a nu se surpa rocile
friabile, reducerea rezistenţei rocilor prin umectare şi absorbţie. Spălarea se realizează cu fluid de
foraj prin echipamentul de circulaţie.
În ceea ce priveşte mişcarea de rotaţie, ea îmbunătăţeşte performanţa forajului prin
transmiterea impactului, şi deci şi a undelor mecanice, în diferite direcţii la contactul cu
formaţiunea de dislocat şi penetrat. Mişcarea de rotaţie este asigurată de către o masă rotativă sau
de un motor rotativ (în funcţie de tipul de foraj ales sau cerut) şi imprimată garniturii de foraj şi,
mai departe, instrumentului de dislocare, sau direct instrumentului de dislocare. În urma mişcării
de rotaţie a instrumentului de dislocare, are loc aşchierea formaţiunii de dislocat.
Pe lângă mişcarea de rotaţie şi apăsare, în forajul rotopercutant mai este nevoie de
asigurarea mişcării de percuţie. Această mişcare de percuţie este caracteristică şi esenţială atât
forajului percutant cât şi forajului rotopercutant, după cum se sugerează şi prin denumirea tipului
de foraj. Pentru obţinerea mişcării de percuţie se foloseşte în principiu un pistonul cărui i se
imprimă o mişcare rectilinie oscilatorie şi care este pus să aplice lovituri fie asupra unei reducţii,
fie asupra unui arbore canelat, fie direct asupra instrumentului de dislocare. În structura
47
mecanismului de percuţie, pistonul delimitează în genere două camere de lucru definind astfel un
motor hidraulic liniar. Comanda motorului este în general, hidraulică sau pneumatică, pistonul
glisând în alezajul cilindric al acestuia.
Energia cinetică a pistonului percutant, în urma coliziunilor produse la contactul
acestuia cu suprafaţa de lovire (arbore canelat, reducţie, instrument de dislocare), este trimisă
mai departe sub formă de unde mecanice. Impactul produs deci prin lovitura dată de piston,
generează o undă de şoc care traversează garnitura de prăjini până la instrumentul de dislocare.
Viteza undei este mare, cu o formă ce depinde în esenţă de configuraţia pistonului percutant.
Aceste unde acţionează pe o direcţie axială şi într-o manieră pulsatorie.
Transmiterea energiei undei de către instrumentul de dislocare, formaţiunii de pătruns,
este condiţionată de prezenţa contactului dintre cele două. Când unda ajunge la instrumentul de
dislocare, dacă acesta se află în contact cu formaţiunea de dislocat, o parte din energia trimisă
este transformată în lucru mecanic. Lucrul mecanic ce are loc prin operaţia de dislocare,
cauzează în acest caz penetrarea instrumentului de dislocare în formaţiunea de dislocat. Dacă
forma undei transmise garniturii de prăjini nu corespunde formei undei pe care formaţiunea de
dislocat o poate absorbi, o parte din energia undei transmise este reflectată.
3.2. Variante uzuale de ciocane hidraulice folosite în forajul percutant
Mecanismul hidraulic de percuţie utilizat în forajul percusiv şi în forajul rotopercusiv,
relevă o structură care de-a lungul timpului s-a caracterizat prin grade diferite de complexitate.
Cu denumirea generală de ciocan hidraulic, dar şi de perforator hidraulic, el se utilizează pentru
realizarea de găuri în rocă şi reprezintă un mecanism de forţă mare, care funcţionează pe
principiul fundamental al hidrostaticii (legea lui Pascal). Acest principiu susţine că, prin
acţionarea asupra unui capăt al unei coloane de lichid închise (aflată sub presiune), presiunea
exercitată în acel capăt se transmite integral în toate punctele din lichid, adică în toată masa
lichidului şi în toate direcţiile. Presiunea transmisă permite obţinerea la capătul celălalt al
coloanei a unei forţei proporţională cu aceasta.
Loviturile, şocurile, sunt aplicate de pistonul mecanismului hidraulic de percuţie.
Pistonul percutant este antrenat într-o mişcare oscilatorie rectilinie şi culisează într-un alezaj
cilindric realizat în corpul perforatorului (ciocanului). Mişcarea oscilatorie rectilinie a pistonului
este sugerată prin săgeţiile din ilustraţiile din figura 1.1, în care se prezintă câteva scheme de
principiu ale forajului percutant.
48
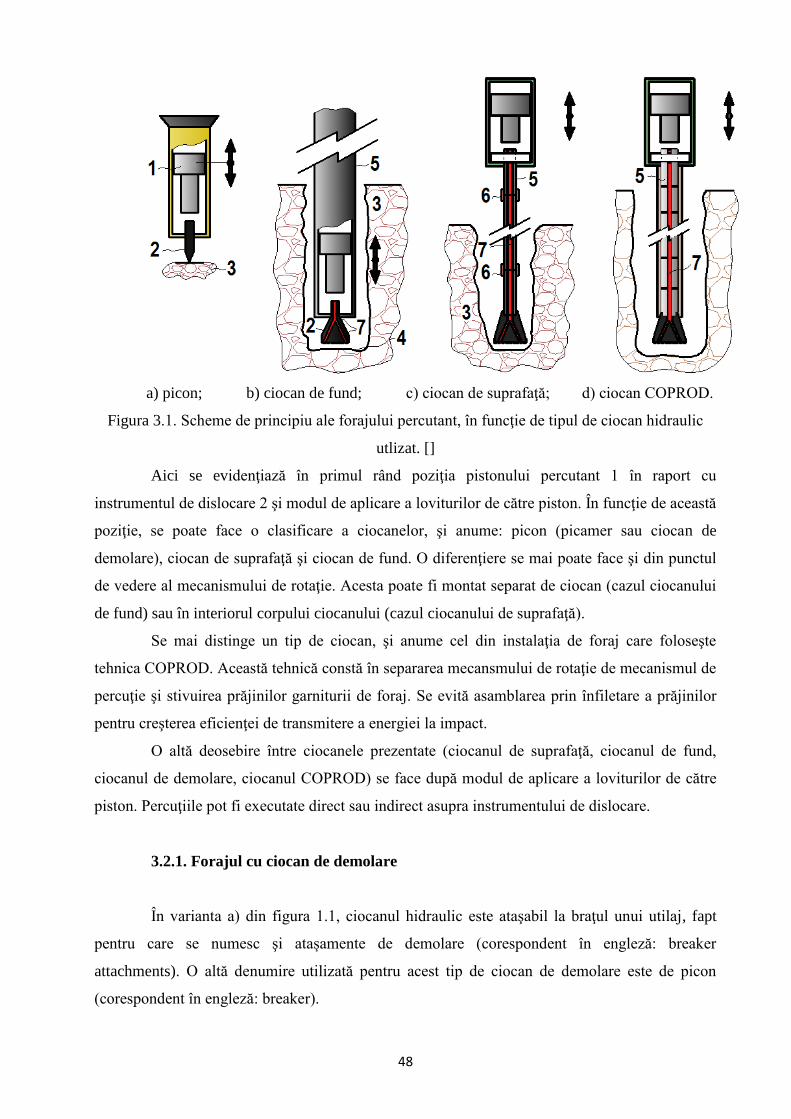
a) picon; b) ciocan de fund; c) ciocan de suprafaţă; d) ciocan COPROD.
Figura 3.1. Scheme de principiu ale forajului percutant, în funcţie de tipul de ciocan hidraulic
utlizat. []
Aici se evidenţiază în primul rând poziţia pistonului percutant 1 în raport cu
instrumentul de dislocare 2 şi modul de aplicare a loviturilor de către piston. În funcţie de această
poziţie, se poate face o clasificare a ciocanelor, şi anume: picon (picamer sau ciocan de
demolare), ciocan de suprafaţă şi ciocan de fund. O diferenţiere se mai poate face şi din punctul
de vedere al mecanismului de rotaţie. Acesta poate fi montat separat de ciocan (cazul ciocanului
de fund) sau în interiorul corpului ciocanului (cazul ciocanului de suprafaţă).
Se mai distinge un tip de ciocan, şi anume cel din instalaţia de foraj care foloseşte
tehnica COPROD. Această tehnică constă în separarea mecansmului de rotaţie de mecanismul de
percuţie şi stivuirea prăjinilor garniturii de foraj. Se evită asamblarea prin înfiletare a prăjinilor
pentru creşterea eficienţei de transmitere a energiei la impact.
O altă deosebire între ciocanele prezentate (ciocanul de suprafaţă, ciocanul de fund,
ciocanul de demolare, ciocanul COPROD) se face după modul de aplicare a loviturilor de către
piston. Percuţiile pot fi executate direct sau indirect asupra instrumentului de dislocare.
3.2.1. Forajul cu ciocan de demolare
În varianta a) din figura 1.1, ciocanul hidraulic este ataşabil la braţul unui utilaj, fapt
pentru care se numesc şi atașamente de demolare (corespondent în engleză: breaker
attachments). O altă denumire utilizată pentru acest tip de ciocan de demolare este de picon
(corespondent în engleză: breaker).
49
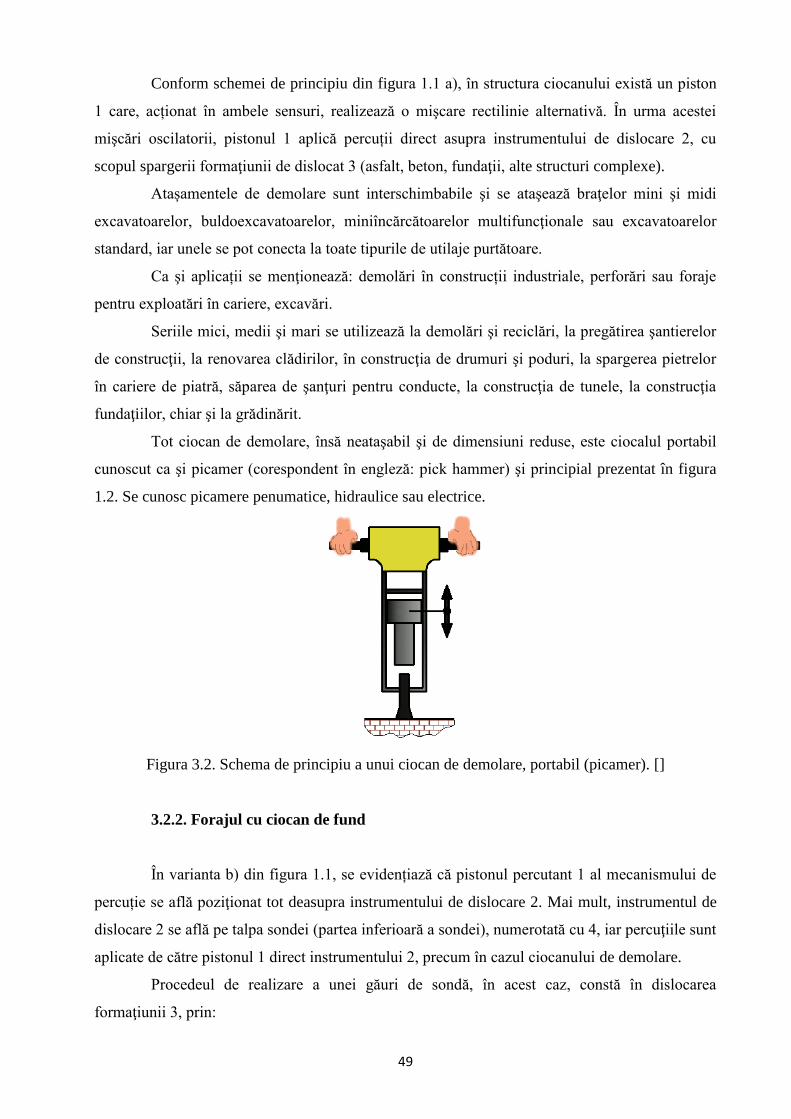
Conform schemei de principiu din figura 1.1 a), în structura ciocanului există un piston
1 care, acționat în ambele sensuri, realizează o mişcare rectilinie alternativă. În urma acestei
mişcări oscilatorii, pistonul 1 aplică percuții direct asupra instrumentului de dislocare 2, cu
scopul spargerii formaţiunii de dislocat 3 (asfalt, beton, fundaţii, alte structuri complexe).
Atașamentele de demolare sunt interschimbabile şi se ataşează braţelor mini şi midi
excavatoarelor, buldoexcavatoarelor, miniîncărcătoarelor multifuncţionale sau excavatoarelor
standard, iar unele se pot conecta la toate tipurile de utilaje purtătoare.
Ca şi aplicații se menţionează: demolări în construcții industriale, perforări sau foraje
pentru exploatări în cariere, excavări.
Seriile mici, medii şi mari se utilizează la demolări şi reciclări, la pregătirea şantierelor
de construcţii, la renovarea clădirilor, în construcţia de drumuri şi poduri, la spargerea pietrelor
în cariere de piatră, săparea de şanţuri pentru conducte, la construcţia de tunele, la construcţia
fundaţiilor, chiar şi la grădinărit.
Tot ciocan de demolare, însă neataşabil şi de dimensiuni reduse, este ciocalul portabil
cunoscut ca şi picamer (corespondent în engleză: pick hammer) şi principial prezentat în figura
1.2. Se cunosc picamere penumatice, hidraulice sau electrice.
Figura 3.2. Schema de principiu a unui ciocan de demolare, portabil (picamer). []
3.2.2. Forajul cu ciocan de fund
În varianta b) din figura 1.1, se evidențiază că pistonul percutant 1 al mecanismului de
percuție se află poziţionat tot deasupra instrumentului de dislocare 2. Mai mult, instrumentul de
dislocare 2 se află pe talpa sondei (partea inferioară a sondei), numerotată cu 4, iar percuţiile sunt
aplicate de către pistonul 1 direct instrumentului 2, precum în cazul ciocanului de demolare.
Procedeul de realizare a unei găuri de sondă, în acest caz, constă în dislocarea
formaţiunii 3, prin:

50
percuţie, asigurată de mecanismul de percuţie;
apăsare, asigurată de propria greutate a garniturii de prăjini;
rotirea garniturii de foraj şi a instrumentului de dislocare (figura 1.3).
Denumirea primită de dispozitivul de percuţie este de ciocan de fund iar corespondentul
în limba engleză a acestui tip de ciocan este „down-the-hole hammer”. Găurile de sondă realizate
prin forajul cu ciocan de fund au diametrul cuprins între 75 mm şi 200 mm (dar şi 915 mm) în
lucrările de suprafaţă, iar în lucrările subterane, între 100 mm şi 165 mm. Forarea cu ciocan de
fund se foloseşte pentru adâncimi mai mari de 20 m.
Forajul rotopercutant cu ciocan de fund se utilizează de exemplu în cariere cu rocă
moale, cu rocă fisurată, în forajul geotermal, în forarea puţurilor de alimentare cu apă.
Aplicarea loviturilor pistonului 1 direct instrumentului de dislocare 2 (sapă de foraj),
duce la obţinerea de performanţe mai ridicate deoarece undele de șoc nu vor mai fi transmise şi
prin reducţiile dintre prăjinile garniturii de foraj.
Se mai menţionează că la utilajele de foraj prin rotopercuţie şi cu ciocan de fund, apare
o altă particularitate, şi anume, mecanismul de rotație introdus pentru rotirea garniturii de foraj
(figura 1.3 a)) şi a instrumentului de dislocare, este poziționat separat de mecanismul de percuție,
la suprafața sondei. În literatura de specialitate, o mişcare de rotaţie poate fi aplicată
instrumentului de dislocare şi cu ajutorul unei turbini montate în apropierea mecanismului de
percuţie.
Caracteristic ciocanelor de fund este şi faptul că, faţă de verticală, gradul de deviaţie a
găurii de sondă este mult mai mic faţă de cel obţinut prin forajul cu ciocan de suprafaţă.
Importanţa verticalităţii este cu atât mai mare cu cât găurile executate sunt pentru plasare de
explozibil. Gradul permis de flexibilitate al prăjinilor, şi deci şi deviaţiile corespunzătoare
rezultate, diferă în funcţie de tipul lucrării de foraj şi de cerinţe. Se sublinează că o greutate
liniară relativ mică a garniturii de prăjini, în forajul cu ciocan de fund, măreşte eficienţa
transmiterii undelor de şoc.
Principiul forajului prin rotopercuţie este descris în figura 1.3, unde se foloseşte
simbolic un ciocan de mână în locul de aplicare al percuţiilor, şi o săgeată circulară pentru
simbolizarea mişcării de rotaţie imprimate. Poziţia săgeţii arată şi locul mecanismului de rotaţie
care, conform figurii 1.3, se află deasupra găurii de sondă, şi deci deasupra solului 3.
51
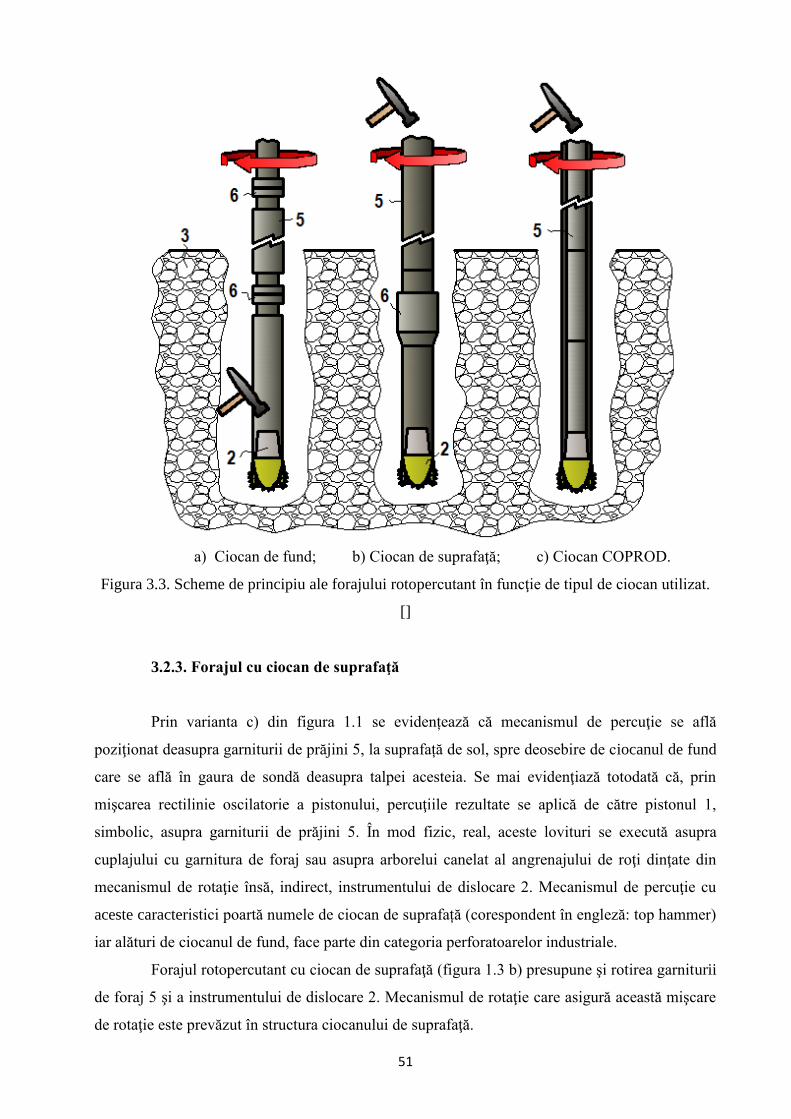
a) Ciocan de fund; b) Ciocan de suprafaţă; c) Ciocan COPROD.
Figura 3.3. Scheme de principiu ale forajului rotopercutant în funcţie de tipul de ciocan utilizat.
[]
3.2.3. Forajul cu ciocan de suprafaţă
Prin varianta c) din figura 1.1 se evidențează că mecanismul de percuţie se află
poziţionat deasupra garniturii de prăjini 5, la suprafață de sol, spre deosebire de ciocanul de fund
care se află în gaura de sondă deasupra talpei acesteia. Se mai evidenţiază totodată că, prin
mişcarea rectilinie oscilatorie a pistonului, percuţiile rezultate se aplică de către pistonul 1,
simbolic, asupra garniturii de prăjini 5. În mod fizic, real, aceste lovituri se execută asupra
cuplajului cu garnitura de foraj sau asupra arborelui canelat al angrenajului de roţi dinţate din
mecanismul de rotaţie însă, indirect, instrumentului de dislocare 2. Mecanismul de percuţie cu
aceste caracteristici poartă numele de ciocan de suprafață (corespondent în engleză: top hammer)
iar alături de ciocanul de fund, face parte din categoria perforatoarelor industriale.
Forajul rotopercutant cu ciocan de suprafaţă (figura 1.3 b) presupune şi rotirea garniturii
de foraj 5 şi a instrumentului de dislocare 2. Mecanismul de rotaţie care asigură această mişcare
de rotaţie este prevăzut în structura ciocanului de suprafaţă.
52
În urma percuţiilor ritmice aplicate de pistonul 1, prin intermediul garniturii de prăjini 5
se transmit unde mecanice longitudinale instrumentului de dislocare 2. Energia cinetică a
pistonului este trimisă sub formă de undă, indirect, instrumentului de dislocare. La suprafaţa de
separare a celor două medii (instrument de dislocare şi formaţiunea de dislocat), dacă forma
undei transmise garniturii 5 nu corespunde formei undei pe care formaţiunea de dislocat 3 o
poate absorbi, au loc simultan, reflexia şi refracţia undei. O parte din energia undei pătrunde prin
suprafaţa de separare în celălalt mediu, efectuând un lucru mecanic de penetrare, de înaintare.
Energia rămasă este direcţionată în mediul de provenienţă, unda reflectată întorcându-se prin
garnitura de prăjini.
Calitatea forajului rotopercusiv cu ciocan de suprafaţă este influenţată, pe de-o parte,
atât de gradul de flexibilitate al prăjinilor şi cât şi de tensiunile din reducţii. Deviaţiile rezultate
şi reducţiile dintre prăjini influenţează negativ eficienţa transmiterii energiei, pierzându-se din
energia trasportată de undele rezultate. Prezența filetelor din cuplajele prăjinilor constituie deci
un dezavantaj al ciocanelor de suprafaţă deoarece ele duc la distorsiunea undelor de șoc,
compromiţând astfel energia trimisă pentru utizarea ei în procesul de dislocare.
Ca şi aplicaţii, se menţionează: lucrări de foraj pentru exploatări în cariere cu rocă de
duritate medie sau ridicată. Ciocanele de suprafaţă au fost folosite inițial în forajul subteran. În
timp, au ajuns să fie folosite și în forajul la suprafață complementar perforatoarelor pneumatice.
Cu ajutor ciocanelor de suprafaţă se realizează găuri cu diametre de maxim 140 mm.
În lucrările de suprafaţă, cu ajutorul ciocanelor de suprafaţă se forează găuri de sondă cu
diametrul cuprins între 50 mm şi 127 mm. În lucrările subterane, cu ajutorul ciocanelor de
suprafaţă se realizează găuri cu diametrul cuprins între 38-65 mm.
3.2.4. Forajul COPROD
Forajul caracterizat prin tehnica COPROD, figura 1.1 d) şi figura 1.3 c), utilizează un
ciocan de suprafaţă. Această tehnică COPROD presupune separarea mecanismului de rotație de
mecanismul de percuție, montarea mecanismului de percuţie deasupra garniturii de prăjini și
stivuirea prăjinilor. Mişcarea de rotaţie, care la ciocanele de suprafaţă şi de fund din forajul
rotopercutant se transmite prin prăjini, este transmisă în forajul COPROD de către ţevile în care
sunt stivuite prăjinile garniturii 5.
Avantajul acestui tip de foraj este că, prăjinile nefiind asamblate prin reducţii cu filet,
undele de șoc nu se vor distorsiona și nu va fi afectată energia trimisă de ciocan, instrumentului
de dislocare. Totodată, deoarece ţevile în care prăjinile sunt stivuite, au o rigide mai mare decât a
53
prăjinilor, gradul de deviaţie al găurii de sondă este redus. Un ultim avantaj, care este valabil
ciocanelor de suprafaţă, este că oferă posibilitatea utilizării unei forţe mari la ieşire.
Se evidenţiază în figura 1.1 b), c) şi d) existenţa unor canale 7 prin care circulă fluid sub
presiune. Fluidul antrenat poartă numele de noroi de foraj. El este transportat de la o pompă de
noroi, prin capul de spalare (introdus prezent în structura ciocanului), garnitura de prăjini şi prin
instrumentul de dislocare, până în talpa sondei. Utilitatea acestuia se remarcă prin faptul că
răceşte şi lubrifiază instrumentul de dislocare, prelungindu-i astfel durata de viaţă, şi prin faptul
că evacuează detritusul format în talpa sondei de către instrumentul de dislocare şi colmatează
peretele găurii în timpul forajului, evitându-se în acest mod griparea instrumentului de dislocare.
Prezenţa noroiului de foraj în talpa sondei reduce în acelaşi timp rezistenţa rocii, prin umectare şi
absorbţie.
3.2.5. Forajul sonic
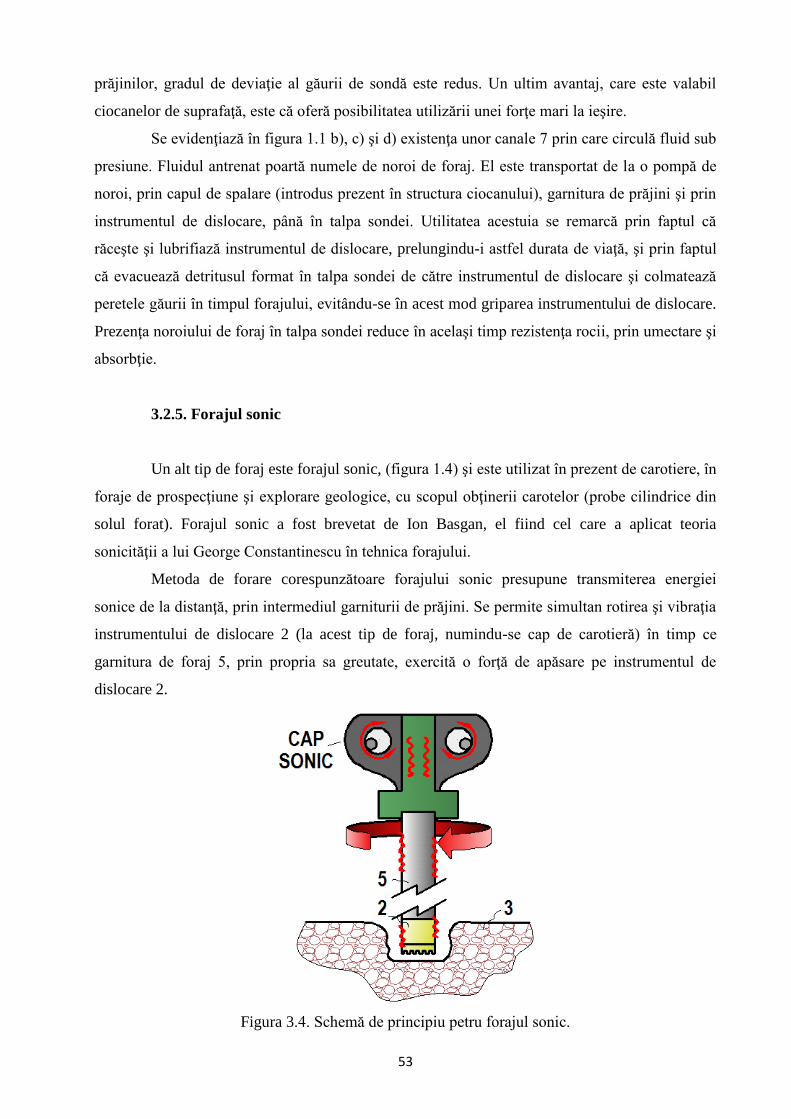
Un alt tip de foraj este forajul sonic, (figura 1.4) şi este utilizat în prezent de carotiere, în
foraje de prospecţiune şi explorare geologice, cu scopul obţinerii carotelor (probe cilindrice din
solul forat). Forajul sonic a fost brevetat de Ion Basgan, el fiind cel care a aplicat teoria
sonicităţii a lui George Constantinescu în tehnica forajului.
Metoda de forare corespunzătoare forajului sonic presupune transmiterea energiei
sonice de la distanţă, prin intermediul garniturii de prăjini. Se permite simultan rotirea şi vibraţia
instrumentului de dislocare 2 (la acest tip de foraj, numindu-se cap de carotieră) în timp ce
garnitura de foraj 5, prin propria sa greutate, exercită o forţă de apăsare pe instrumentul de
dislocare 2.
Figura 3.4. Schemă de principiu petru forajul sonic.
54
Conform schemei de principiu din figura 1.4, forajul sonic se caracterizează printr-o
mişcare de rotaţie imprimată garniturii de foraj 5 şi instrumentului de dislocare 2, printr-o
mişcare vibratorie generată de capul sonic şi prin apăsarea asigurată de garnitura de prăjini. Se
observă că, spre deosebire de celelalte metode de foraj (ilustrate în figurile 1.1, 1.2 şi 1.3), unde
se utilizează un mecanismului de percuţie cu piston percutant, în forajul sonic mişcarea
vibratorie este indusă de capul sonic. Acest cap sonic are ca element de bază un oscilator sub
forma unei perechi de excentrice (role), excentricele rotindu-se cu viteză mare şi în sens opus.
Oscilatorul este cel care produce efectul sonic şi este acţionat, în general, de un motor
hidraulic rotativ. Complementar cu un arc pneumatic, oscilatorul generează forţe mari,
sinusoidale pe care le transmite instrumentului de dislocare ca şi unde vibratorii. Instrumentul de
dislocare 2, sau capul de carotieră, foloseşte aceste unde de rezonanţă pentru a disloca materialul
de pătruns.
Mecanismul de rotaţie utilizat la rotirea instrumentului de dislocare se află montat tot în
capul sonic. Prin rotirea şi prin apăsarea pe capul de carotieră, concomitent cu vibraţia capului de
carotieră 2, are loc avansul capului de carotieră. Parametrii de bază care caracterizează operaţia
acestui tip de foraj sunt forţa centrifugă şi momentul excentric.
Deşi o metodă uzuală este cea cu excentrice de tip rolă în forajul sonic se pot utiliza de
asemenea şi actuatori piezolectrici, fie un piston antrenat în miscare rectilinie longitudinală, sau
metoda circulaţiei inverse.
Metoda circulaţiei inverse presupune antrenarea de către pompa de foraj a noroiului de
foraj prin garnitura de prăjini. Această antrenare duce la propagarea de unde în garnitura de
prăjini şi în noroiul de foraj care circulă în interiorul acesteia. Undele progresive rezultate
transportă energie şi, ajungând la capul de carotieră, sunt folosite pentru a disloca materialul de
pătruns. Instrumentul de dislocare vibrează pe verticală, aplicând percuţii cu o frecvenţă
controlată, iar verticalitatea forării se asigură de către prăjinile grele.
Forajul sonic este o metodă modernă care are ca avantaje reducerea presiunii de săpare,
creşterea timpului de lucru a uneltei de dislocare în teren, obţinerea de găuri nedeviate. Forajul
sonic are indicii de forare, superiori celorlalte procedee clasice. Frecvenţa poate fi variată în
funcţie de condiţiile de lucru.
Aria de interes în studiul de faţă încadrează doar metodele care presupun utilizarea unui
mecanism de percuţie cu piston percutant. Însă, pe lângă cele cinci metode de foraj descrise,
există şi alte metode de foraj, printre care se exemplifică, forarea cu sape elicoidale, forarea
hidraulică rotativă, forarea clasică cu cablu, forarea cu percuţie şi jet de aer, forarea cu jet de aer.
55
3.3. Principiul de funcţionare al ciocanului hidraulic funcţionând strict cu
elementele de bază
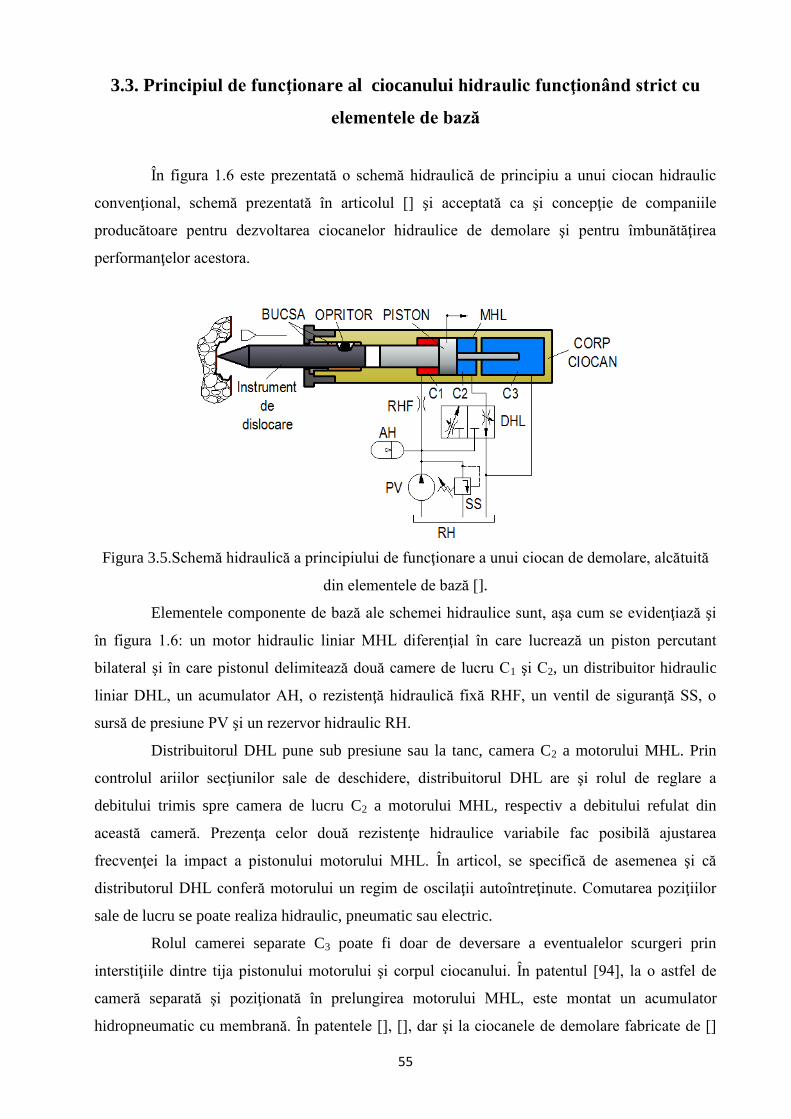
În figura 1.6 este prezentată o schemă hidraulică de principiu a unui ciocan hidraulic
convenţional, schemă prezentată în articolul [] şi acceptată ca şi concepţie de companiile
producătoare pentru dezvoltarea ciocanelor hidraulice de demolare şi pentru îmbunătăţirea
performanţelor acestora.
Figura 3.5.Schemă hidraulică a principiului de funcţionare a unui ciocan de demolare, alcătuită
din elementele de bază [].
Elementele componente de bază ale schemei hidraulice sunt, aşa cum se evidenţiază şi
în figura 1.6: un motor hidraulic liniar MHL diferenţial în care lucrează un piston percutant
bilateral şi în care pistonul delimitează două camere de lucru C1 şi C2, un distribuitor hidraulic
liniar DHL, un acumulator AH, o rezistenţă hidraulică fixă RHF, un ventil de siguranţă SS, o
sursă de presiune PV şi un rezervor hidraulic RH.
Distribuitorul DHL pune sub presiune sau la tanc, camera C2 a motorului MHL. Prin
controlul ariilor secţiunilor sale de deschidere, distribuitorul DHL are şi rolul de reglare a
debitului trimis spre camera de lucru C2 a motorului MHL, respectiv a debitului refulat din
această cameră. Prezenţa celor două rezistenţe hidraulice variabile fac posibilă ajustarea
frecvenţei la impact a pistonului motorului MHL. În articol, se specifică de asemenea şi că
distributorul DHL conferă motorului un regim de oscilaţii autoîntreţinute. Comutarea poziţiilor
sale de lucru se poate realiza hidraulic, pneumatic sau electric.
Rolul camerei separate C3 poate fi doar de deversare a eventualelor scurgeri prin
interstiţiile dintre tija pistonului motorului şi corpul ciocanului. În patentul [94], la o astfel de
cameră separată şi poziţionată în prelungirea motorului MHL, este montat un acumulator
hidropneumatic cu membrană. În patentele [], [], dar şi la ciocanele de demolare fabricate de []
56
camera C3 este o cameră etanşă cu nitrogen, prevening loviturile în gol şi amplificând puterea
transmisă în timpul cursei de înaintare a pistonului sau puterea la impact. În structura altor
ciocane de demolare, camera C3 poate să nu aibă rol de amortizor şi să fie doar o cameră care-i
oferă tijei pistonului spaţiul necesar atunci când pistonul realizează cursa de retragere [], [].