final year project-i (full report)
TRANSCRIPT
1
Independent Component Analysis Techniques for Source
Separation
Sumanapala D.R. (E/10/347)
Sumanapala D.R. (E/10/348)
Thushan S. (E/10/361)
Supervised by,
Dr. Godaliyadda G.M.R.I.
Dr. Suraweera S.A.H.A.
Dr. Wijayakulasooriya J.V.
Group 15
i
Abstract
Utilization of Blind Source Separation (BSS) techniques to extract and interpret
data from various types of multi-sensory systems is recognized as a highly
demanding area of modern day research and studies. The significance is that, BSS
techniques do not rely on the information related to the source signals which are
totally unknown and yet to be extracted. Further, the sensor measurements are
always noisy in practice making this a noise reduction problem coupled with a
source separation problem. And also, most source signals in a noisy mixture have
overlapping bandwidths making it impossible to use standard filtering techniques
to separate the sources. In our project, we show that the Independent Component
Analysis (ICA) [1, 2] based adaptive method can be used to overcome this problem
to extract source signals effectively from a given over-determined source signal
mixture.
Due to the fact that ICA utilizes higher order statistics such as mutual
independence, kurtosis, entropy etc., it has the capacity to extract sources with
overlapping spectral contents as well.
This blind source separation (BSS) technique we propose can be applicable to a wide
array of applications including but not limited to acoustics, communication, context
aware networks, computer vision, defense and security systems and bio-medicine.
We have analyzed a brute force approach for source separation through the
identification of local maxima points for the mixtures. Due to its limitations in
higher dimensions, a gradient based adaptive approach was proposed. The
adaptation process attempts to converge to a local maximum (in the super Gaussian
case) through a gradient ascent approach.
We conducted a detailed analysis of the kurtosis based gradient ascent ICA
algorithm in the weight vector normalized subspace and the adaptation path and
the variation of the weight vector are depicted. This enabled us to understand the
behavior of the kurtosis surface gradient in the reduced space and realize its
limitations as a convergence criterion. Thus, a method based on stability of the

ii
weight vector was proposed as the convergence criterion for the adaptation process.
The proposed adaptation method was extended for sub Gaussian and super-sub
Gaussian mixtures as well.
Later we explored the complex valued ICA [3, 4] for the blind source separation
from complex valued mixtures which involves complex valued kurtosis. This method
was more accurate and fast compared to the real valued algorithm. Further, the
complex valued algorithm was improved to a frequency domain algorithm [5] which
can be effectively used to extract sources from non-linearly mixed source signals.
The implemented algorithms were used for different applications including acoustic
source extraction and image restoration problems to get a solid verification and to
mark the significance of ICA based BSS methods.

iii
Acknowledgements
We would like to gratefully acknowledge the supportive and enthusiastic
supervision by Dr. G.M.R.I. Godaliyadda, Dr. J.V. Wijayakulasooriya, Dr. S.A.H.A.
Suraweera and Dr. M.P.B. Ekanayake. Their vision, comments and the cooperation
helped us to take our project really high. The guidance, encouragement,
enlightenment and the cooperation they made in the course of this project have
been invaluable for us. None of this will be successful without their immense help
they made by sacrificing hours of their valuable time to discuss matters, solutions
and improvements that we had to make during the time of this undergraduate
project.
And also we hereby thank Prof. J.B. Ekanayake, Head of the Department of
Electrical and Electronic Engineering, University of Peradeniya, for his cooperation
as the subject coordinator of EE548.
Instructors and all the other staff members of the department of electrical and
electronic engineering who supported us in many ways should be thanked here as
well.
Last but not least, we wish to thank all our friends and colleagues who always
encouraged and helped us one way or the other to make our project even more
successful.
iv
Contents
Chapter 1: Introduction ............................................................................................ 1
1.1 Overview ............................................................................................................... 1
1.2 Objective ................................................................................................................ 4
1.3 Signals used for the preliminary study ............................................................... 5
Chapter 2: Independent Component Analysis and Strategies for Blind
Source Separation ...................................................................................................... 6
2.1 Introduction .......................................................................................................... 6
2.2 Mathematical representation of signals .............................................................. 7
2.3 Comparing Signal mixtures and sources graphically. ........................................ 8
2.3.1 Using the Scatter Plot .................................................................................... 8
2.3.2 Using the Histogram ...................................................................................... 8
2.4 Mixing of signals ................................................................................................... 9
2.5 Un-mixing of signals ........................................................................................... 10
Chapter 3: Kurtosis Based Blind Source Separation through the Brute
Force approach ......................................................................................................... 12
3.1 Introduction ........................................................................................................ 12
3.2 Mathematical model ........................................................................................... 14
3.2.1 Dimension Reduction Process ...................................................................... 14
3.2.2 Unmixing Process ......................................................................................... 17
3.2.3 Un-mixing sources from a mixture of four signals ...................................... 18
3.3 Conclusions: Limitations for the Brute force method ....................................... 21
Chapter 4: Source Extraction by Gradient based Algorithms........................ 23
4.1 Introduction ........................................................................................................ 23
4.2 The convergence criteria ................................................................................... 26
4.2.1 Minimum gradient ........................................................................................ 26
4.2.2 Minimum kurtosis difference between two adjacent points ....................... 26
4.2.3 Checking the stability of the weight vector ................................................. 27
4.3 Preliminary work ................................................................................................ 27
4.3.1 Gradient Ascent: Un-mixing a super Gaussian source signal .................... 28
4.3.2 Gradient Descent: Un-mixing a sub Gaussian source signal ..................... 29
4.4 Results and conclusions ...................................................................................... 31
v
4.4.1 Un-mixing the mixture with 4 source signals ............................................. 31
Chapter 5: Extension of ICA for Complex Valued Mixtures ........................... 33
5.1 Complex kurtosis and its gradient ..................................................................... 33
5.2 Gradient of Kurtosis ........................................................................................... 33
5.2.1 Definition: Wirtinger Differential Operator ................................................ 34
5.3 Update equation ................................................................................................. 36
5.4 Unmixing source signals using complex valued ICA ....................................... 36
5.4.1 Un-mixing the mixture with 4 source signals ............................................. 36
Chapter 6: Frequency domain ICA for source extraction in frequency
domain ........................................................................................................................ 38
6.1 Unmixing source signals using frequency domain ICA .................................... 38
6.1.1 Un-mixing the mixture with 4 source signals ............................................. 39
Chapter 7: Application of ICA for acoustic signal mixtures ........................... 40
7.1 Possible applications ........................................................................................... 40
7.2 Extracting sources from linear acoustic signal mixtures .................................. 40
7.2.1 Results ........................................................................................................... 40
7.2.2 Performance of three algorithms for linear acoustic signal mixtures ........ 41
7.3 Extracting sources from non-linear acoustic signal mixtures .......................... 42
7.3.1 Process of extraction ..................................................................................... 42
Chapter 8: Application of ICA for extracting sources from image mixtures
...................................................................................................................................... 45
8.1 Application of ICA techniques for image mixtures ........................................... 45
8.2 Image inverting problem ................................................................................... 46
8.3 Applying ICA to linear image mixtures ............................................................. 48
8.4 Removing reflections using this concept ............................................................ 50
8.5 Extracting sources from non-linear image mixtures ......................................... 51
8.6 Extracting background using frequency domain ICA ....................................... 53
8.7 Conclusion .......................................................................................................... 54
Chapter 9: Enhancing images using complex valued ICA ............................... 56
9.1 Image enhancement process and results comparison ..................................... 56
9.2 Selecting the best equalized image ................................................................... 59
9.3 Conclusions ......................................................................................................... 60
Chapter 10: Conclusions ......................................................................................... 61
References .................................................................................................................. 63

vi
vii
List of figures
Fig. 1. 1 Histograms (a) for one source, (b) for two sources (c) for three source 3
Fig. 1. 2 Application of Blind Source Separation 4
Fig. 1.3 Four acoustic source signals used 5
Fig. 2.1 (a) Scatter plot for two mixtures. (b) Scatter plot for two source signals 8
Fig. 2.2 (a) Histogram for a source signal (b) Histogram for a mixture of 4
sources 8
Fig. 2.3 The basic model for the blind source separation process based on ICA 11
Fig. 3.1 Reduced space for two signal mixtures 13
Fig. 3.2 Variance distribution of the principal components 15
Fig. 3.3 Logarithmic variance distribution of the principal components 16
Fig. 3.4 Variance distribution of logarithmic signal power of the first n
Principal components 16
Fig. 3.5 Derivative of variance distribution of logarithmic signal power of
the first n principal components 16
Fig. 3.6 Original sources 18
Fig. 3.7 Two of six sample mixtures 18
Fig. 3.8 Polar plot for the kurtosis variance of last two source mixtures 18
Fig. 3.9 Extracted source signals 19
Fig. 3.10 Comparison of the original sources and the extracted ones 20
Fig. 3.11 Kurtosis variation for a three source case 21
Fig. 4.1 Reaching the maximum kurtosis by the gradient ascent 27
Fig. 4.2 Kurtosis variation for the gradient ascent 27
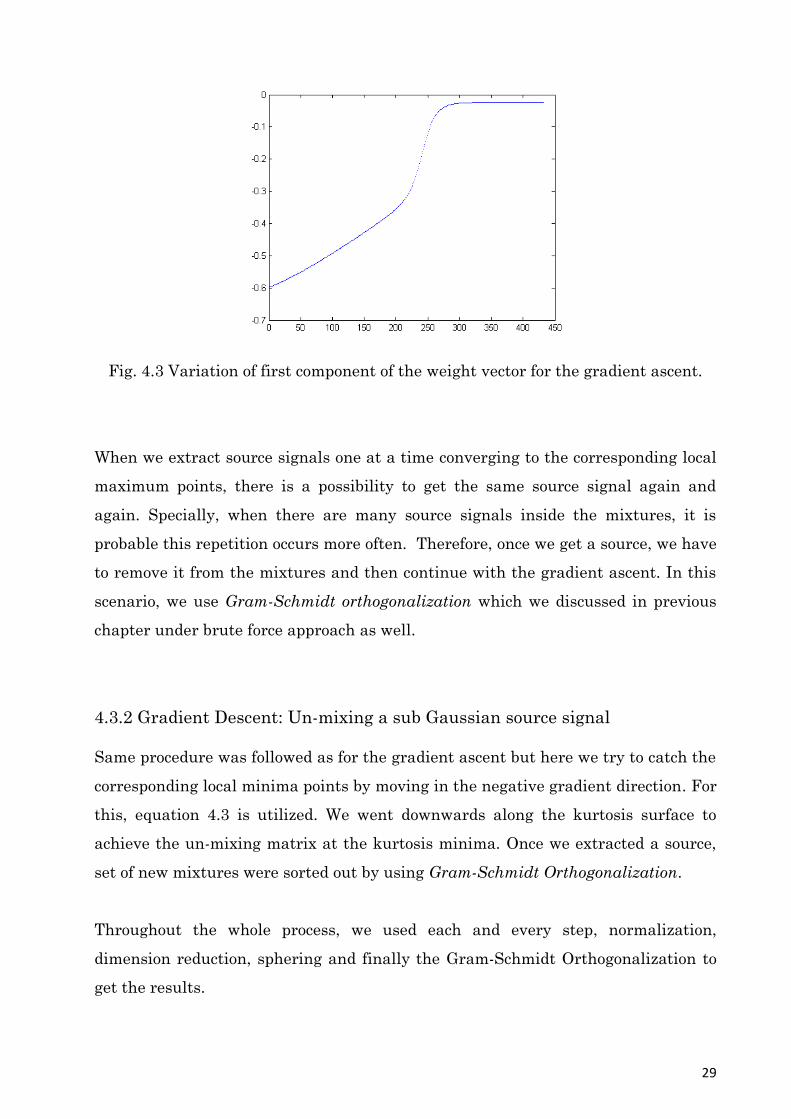
Fig. 4.3 Variation of first component of the weight vector for the
gradient ascent 28
Fig. 4.4 Reaching the minimum kurtosis point for a sub Gaussian source signal 29
Fig. 4.5 Kurtosis variation for gradient descent 29

viii
Fig. 4.6 Variation of first component of the weight vector for the
gradient ascent 29
Fig. 4.7 Two samples of six mixtures used 30
Fig. 4.8 (a) Original sources (b) extracted sources 30
Fig. 5.1 Two of six mixtures used 35
Fig. 5.2 (a) Original sources (b) extracted sources using complex valued ICA 36
Fig. 6.1 Two of six mixtures used 38
Fig. 6.2 (a) Original sources (b) extracted sources using frequency domain ICA 38
Fig. 7.1 (a) Original sources, extracted sources using (b) real valued ICA,
(c) complex valued ICA, (d) frequency domain ICA 40
Fig. 7.2 Original source signal 42
Fig. 7.3 Three samples of eight distorted acoustic signals 42
Fig. 7.4 Sample of extracted sources using time domain complex
Valued algorithm 43
Fig. 7.5 Extracted source using frequency domain complex valued algorithm 43
Fig. 8.1 Converting image to a signal 45
Fig. 8.2 Unwrapped signal of a (a) un-inverted image (b) inverted image 46
Fig. 8.3 Source images used for generating the mixtures 47
Fig. 8.4 Four samples of the image mixtures 47
Fig. 8.5 Extracted sources for real valued ICA with ŋ = 0.1 and Stabilizing w
for 5 decimal points 48
Fig. 8.6 Extracted sources for complex valued time domain ICA with ŋ = 1 and
stabilizing w for 4 decimal points 48
Fig. 8.7 Extracted sources for complex valued frequency domain ICA
With ŋ = 1 and stabilizing w for 4 decimal points 48
Fig. 8.8 Sample images with two different levels of reflections 49
Fig. 8.9 (a) Extracted background, (b) extracted refection part 49
Fig. 8.10 (a) Source images (b) extracted sources from the time domain complex
valued ICA (c) extracted sources from the frequency domain complex
valued ICA 51

ix
Fig. 8.11 (a) Extracted background image from complex valued time domain ICA
(b) Extracted background image from the frequency domain Complex
valued ICA 51
Fig. 8.12 Three samples of the 10 occluded source images 53
Fig. 8.13 Extracted image using time domain complex valued ICA algorithm 53
Fig. 8.14 Extracted image using frequency domain complex valued
ICA algorithm 53
Fig. 9.1 Original image used for equalization 56
Fig. 9.2 (a) Red component of the image (b) Green component of the image (c) Blue
component of the image 56
Fig. 9.3 Extracted images from RGB components using complex ICA algorithm 56
Fig. 9.4 RGB images obtained by replacing value component of HSV image with the
extracted independent components (a), (b), (c) separately 56
Fig. 9.5 Image obtained by averaging RGB components of the original image 57
Fig. 9.6 RGB image obtained by replacing value component of the HSV
representation of the image 57
Fig. 9.7 Results obtained for frequency domain ICA 58
Fig. 9.8 Waveforms of the images when they are ordered according to variance in
descending order with (a) largest, (b) second largest and (c) smallest variance
waveform 59
Fig. 9.9 Images corresponding to (a), (b) and (c) of Fig.9.8 59

1
Chapter 1
Introduction
1.1 Overview
In today’s world, information plays a vital role. Day by day, the ability to access
data is improving and many problems arise when we try to extract out only the
important information from a given collection of data. Most often, that collection of
data can be too noisy or it can be originated from a mixture of unknown sources. If
the information comes in the form of signals, it would be a problem of extracting
source signals from a set of noisy signals mixtures. The process of extracting those
unknown source signals is called Blind Source Separation (BSS). [1] As the name
implies, BSS methods do not rely on the information related to the source signals
which are to be extracted. Generally, the number of mixtures is kept higher than
the possible number of sources to be extracted. In that case, the problem is said to
be over-determined.
In this project, our target is to introduce a reliable BSS method based on
Independent component Analysis (ICA) to extract sources from over-determined
signal mixtures. And also with our algorithms, we are trying to make that
extraction process faster and solid keeping the processing power at a lower level.
Also we associate some mathematical concepts such as Principal Component
Analysis (PCA) throughout the process. [6]
ICA is widely used in many applications including biomedical applications (ECG,
EEG [7], MRI and fMRI [8] etc.), face and speech recognition [9], finance, traffic
sensor systems and wireless communication.
A key concept that constitutes the foundation of independent component analysis is
statistical independence. To simplify the above statement, consider the case of two
different random variables s1 and s2. The random variable s1 is independent of s2,
if the information about the value of s1 does not provide any information about the

2
value of s2, and vice versa. Here, s1 and s2 could be random signals originating
from two different physical processes that are not related to each other.
In natural processes, basically the signal mixtures are formed by adding up each of
the independent source signals together by different proportions. This way, each
source can be assigned with some weightage. This weightage can be considered as a
mixing coefficient. By putting up those coefficients in to a matrix we get the mixing
matrix.[1] This kind of a mixing process is called a linear mixing process.
The sampled signals are written in the form of matrices or vectors. Their entries
form distributions that can be statistically analyzed, and in this project we compare
the statistical independency of the sources vs. mixtures. Statistical independence
associates with the Gaussianity of data points and the parameter kurtosis can give
a decent numerical value to measure how the sources are statistically independent
when the mixtures are not. The kurtosis can be calculated by the simple equation,
∑
∑
.
(1.1)
Source signals have their kurtosis values maximally higher (negatively or
positively) according to the nature of the signal. Gaussian signals have zero
kurtosis. Super-Gaussian signals have positive kurtosis value and it will be
negative for sub-Gaussian signals.[1]
When the source signals keep adding up mixing together by different proportions,
Gaussianity increases and the magnitude of the kurtosis becomes smaller. This
concept can be theoretically proved by the well-known central limit theorem and
also can be clearly observed by looking at the distributions of the related entries.
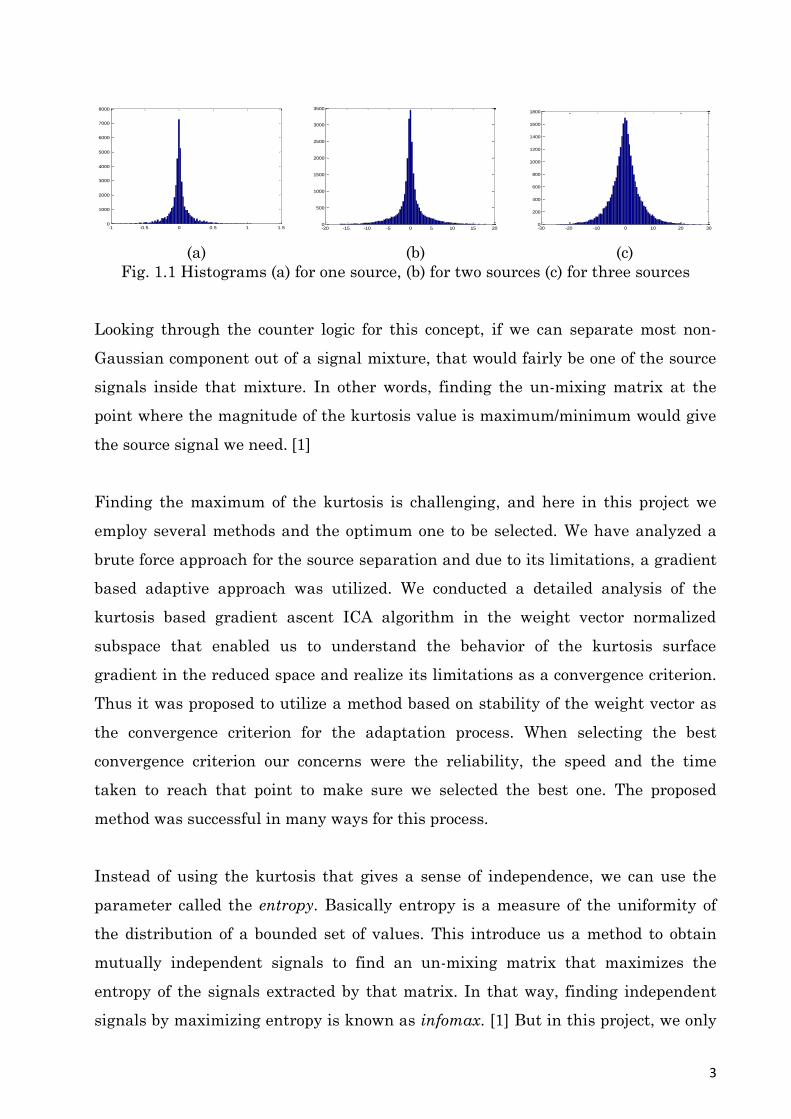
Fig.1.1 illustrates how the Gaussianity increases when more and more source
signals are added together.
3
(a) (b) (c)
Fig. 1.1 Histograms (a) for one source, (b) for two sources (c) for three sources
Looking through the counter logic for this concept, if we can separate most non-
Gaussian component out of a signal mixture, that would fairly be one of the source
signals inside that mixture. In other words, finding the un-mixing matrix at the
point where the magnitude of the kurtosis value is maximum/minimum would give
the source signal we need. [1]
Finding the maximum of the kurtosis is challenging, and here in this project we
employ several methods and the optimum one to be selected. We have analyzed a
brute force approach for the source separation and due to its limitations, a gradient
based adaptive approach was utilized. We conducted a detailed analysis of the
kurtosis based gradient ascent ICA algorithm in the weight vector normalized
subspace that enabled us to understand the behavior of the kurtosis surface
gradient in the reduced space and realize its limitations as a convergence criterion.
Thus it was proposed to utilize a method based on stability of the weight vector as
the convergence criterion for the adaptation process. When selecting the best
convergence criterion our concerns were the reliability, the speed and the time
taken to reach that point to make sure we selected the best one. The proposed
method was successful in many ways for this process.
Instead of using the kurtosis that gives a sense of independence, we can use the
parameter called the entropy. Basically entropy is a measure of the uniformity of
the distribution of a bounded set of values. This introduce us a method to obtain
mutually independent signals to find an un-mixing matrix that maximizes the
entropy of the signals extracted by that matrix. In that way, finding independent
signals by maximizing entropy is known as infomax. [1] But in this project, we only
-1 -0.5 0 0.5 1 1.50
1000
2000
3000
4000
5000
6000
7000
8000
-20 -15 -10 -5 0 5 10 15 200
500
1000
1500
2000
2500
3000
3500
-30 -20 -10 0 10 20 300
200
400
600
800
1000
1200
1400
1600
1800

4
focus on ICA based on kurtosis since it has many advantages compared with the
infomax approach. Unlike the kurtosis based method, infomax method can only
separate source signals from super-super Gaussian mixtures. It won’t work with the
sub-sub Gaussian and super-sub mixtures and that is a major drawback of that
method. On the other hand, infomax method is much complex. In this method,
matrix is bigger. That makes the related calculations computationally exhaustive.
Here we need to know the number of sources we have in the mixture which is
impractical in some cases. The other thing is, for infomax method, we need to use a
model pdf for sources and that would definitely add some errors. The good thing
about infomax is it extracts every source signal at once, so that no iterative process
to be followed. And also this process is pretty much systematic and orderly. After
considering all these aspects, it was easy to decide that kurtosis based method is
the most suitable method for our project.
1.2 Objective
This study mainly deals with proposing a reliable BSS method based on ICA for
given over-determined noisy mixtures of signals. The proposed method should be
effective for any form of signal in many applications and able to run with low
amount of processing power with higher speed.
Fig. 1.2 Application of Blind Source Separation

5
1.3 Signals used for the preliminary study
In this project we used 4 acoustic source signals for basic testing, understanding
and comparing the extraction process of the developed ICA algorithms. The 4 source
signals used for these purposes are shown in Fig.1.3.
Fig.1.3 Four acoustic source signals used

6
Chapter 2
Independent Component Analysis
and Strategies for Blind Source
Separation
2.1 Introduction
ICA has been applied in many fields related to signal processing which can be
diverse as speech processing, brain imaging (eg. fMRI [8] and Optical Imaging),
electrical brain systems (Eg. EEG signals) telecommunications and the stock
market prediction. [1]
ICA is based on simple, generic and physically realistic assumption that if different
signals are from different physical processes (natural or artificial), then those
signals are statistically independent. ICA takes advantage of the fact that the
implication of this assumption can be reversed, leading to a new assumption that is
proven to be practically true by numerous observations in practice. This new
assumption nicely points out that if statistically independent signals can be
extracted from signal mixtures, then these extracted signals must be from different
physical processes. Accordingly, ICA separates signal mixtures in to statistically
independent signals. If the assumptions of statistical independence is valid, then
each of the signals extracted by the independent component analysis should have
been generated by a different physical process, and therefore be a desired signal. [1]
As we discussed earlier, the mutual independence of the sources can be measured
using another parameter called the entropy. However same argument as it is
mentioned in the above paragraph can be adapted for the mutual independence.[1]
If the extracted signals have their entropy maximized, we can approximate that
they are very closer to the sources (that we need to extract) with a high certainty
level. This method is called the infomax.

7
ICA has its own model for the signals and the systems and the related operations
and calculations on them. The preceding content of this chapter represent those
facts.
2.2 Mathematical representation of signals
Mathematical representation of a sampled signal would be in matrix form as a row
vector.
S = (s1, s2, s3,…………, sn) (2.1)
This includes the amplitude values for each time step from 1 to n.
For “m” number of signals,
S1 = (
)
S2 = (
)
. . . . . . . . . . . . . . . . . . .
Sm = (
)
Including all the values of signals together in to one matrix having size of m×n,
(
)
For easiness of representation, we will take the ith column of this matrix as
Si = [
]T, so that the collection of signals would be the matrix S,
where S = [ S1 S2 S3 ………. Sn ].
8
2.3 Comparing Signal mixtures and sources graphically.
2.3.1 Using the Scatter Plot
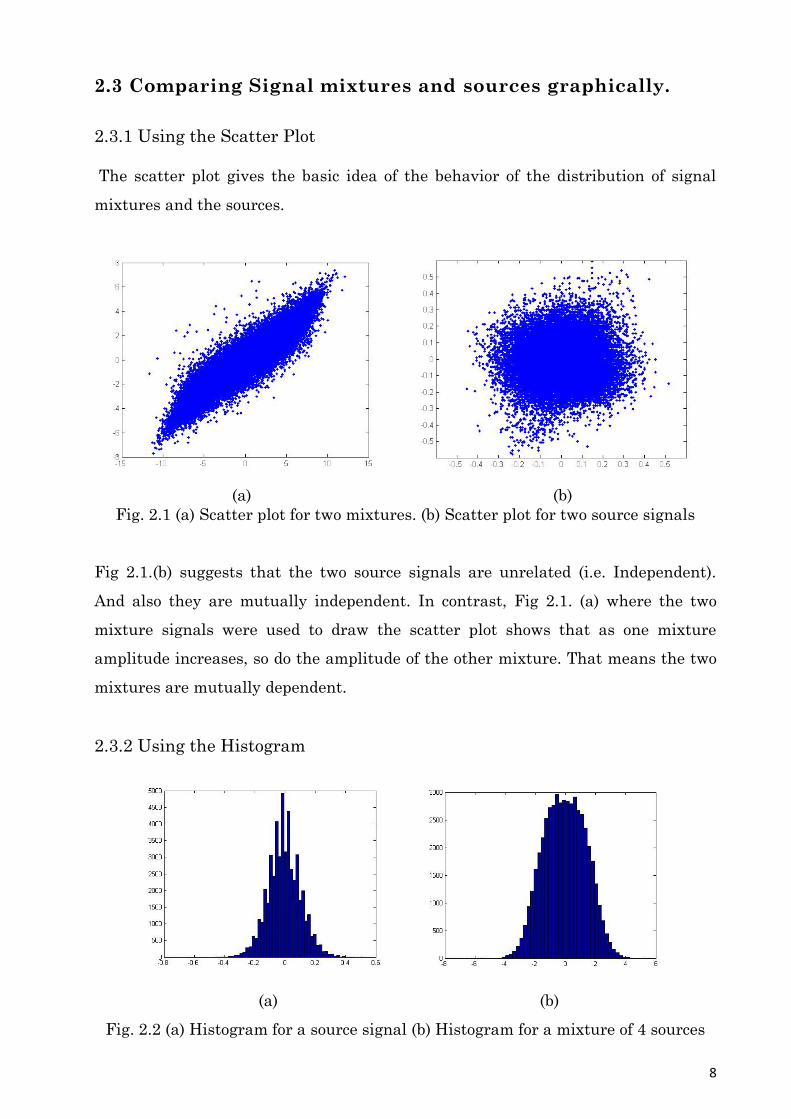
The scatter plot gives the basic idea of the behavior of the distribution of signal
mixtures and the sources.
(a) (b)
Fig. 2.1 (a) Scatter plot for two mixtures. (b) Scatter plot for two source signals
Fig 2.1.(b) suggests that the two source signals are unrelated (i.e. Independent).
And also they are mutually independent. In contrast, Fig 2.1. (a) where the two
mixture signals were used to draw the scatter plot shows that as one mixture
amplitude increases, so do the amplitude of the other mixture. That means the two
mixtures are mutually dependent.
2.3.2 Using the Histogram
(a) (b)
Fig. 2.2 (a) Histogram for a source signal (b) Histogram for a mixture of 4 sources

9
Fig. 2.2 shows that the histogram of any source signal is more non-Gaussian (i.e.
peaky) than the histogram of any signal mixture containing that source signal.
2.4 Mixing of signals
The fact that the outputs of the sensors compromise of some proportions of each
source signal presumably with some added noise, leads to the idea of mixing
coefficients. For a simple case of two signals mixing together, the following model is
proposed. [1]
We denote a signal mixture taken from a sensor we deploy as x1 and the two sources
are S1 and S2. And also the relative proportion of each signal is a and b. We specify
the magnitude of the mixture at the time t as .
= a×
+ b× (2.2)
If we consider x1, s1 and s2 over all n time indices then,
) = a ×
) + b ×
) (2.3)
This can be written more succinctly as,
x1 = a×s1 + b×s2 (2.4)
As we are concerned here un-mixing a set of two signal mixtures, a second mixture
can be given as,
x2 = c×s1 + d×s2 (2.5)
where the mixing coefficient c and d are different from a and b because the two
sensors mix the sources in a different manner.
10
If there are more sources we need same number of mixtures and this forms a
mixing matrix of the system. We denote it as .
A = (
) (2.6)
so that,
(
) (
) (
) (2.7)
or,
x = As (2.8)
It is possible to extend these equations in case of having any number of sources and
mixtures.
2.5 Un-mixing of signals
The mixtures are generated by different proportions of source signals. This leads us
to come to the idea that each source signal can be recovered by recombining those
mixtures. Nature of these re-combinations is determined by the un-mixing
γ, δ)
(2.9)
(2.10)
Thus, the problem solved by all blind source separation methods consists of finding
values for these un-mixing coefficients. Those un-mixing coefficients form the un-
mixing matrix which is our target to find in order to get the source signals. In this
report, we denote this un-mixing matrix as . For the case of two source signals,
( ) (2.11)

11
so that extraction of the signal represent in the mathematical sense, it would be,
(
) (
) (
) (2.12)
or,
s = x
(2.13)
Begining from an initial random un-mixing matrix, our aim is to tune up the matrix
until we get the source signals. In kurtosis based approach, we tune this for the
maximum kurtosis and in infomax we tune this for maximum entropy. [1] However,
both methods will extract some signals which can be effectively considered as
statistically independent sources.
Fig. 2.3 The basic model for the blind source separation process based on ICA

12
Chapter 3
Kurtosis Based Blind Source
Separation through the Brute
Force approach
3.1 Introduction
Brute force method is the simplest approach to find the un-mixing matrix where the
maximum or the minimum kurtosis occurs, and that point is to be tracked by
considering kurtosis values for all the weight vectors one by one. This is because
theoretically, each and every maxima or the minima should represent a source
signal which can be extracted. Here the maximum points will always extract out the
super Gaussian source signals and in case of the sub-Gaussian source signals, it
would be the minimum points. [1]
The Kurtosis can be calculated using the following equation. Here the kurtosis
plays a role as the measure of non-Gaussianity. Kurtosis can be expressed as,
∑
∑
(3.1)
It is known that the separated sources using ICA can be a scalar-multiplied version
of the original source signals. That means, there can always be a multiplication
factor and that would be a scalar quantity. This happens because the scalar
multiplication of the signal does not make any difference in its kurtosis value.
Therefore, all the weight vectors can be multiplied by different scalars. But their
direction keeps un-changed. Irrelevant of the magnitude, it is enough to know the
direction specified to proceed with the source extraction process. [1]

13
Therefore, it is only the direction of weight vector that matters for the ICA process,
because we don’t care how much the extracted sources are attenuated or amplified
compared to the original sources. We can later amplify or attenuate the extracted
sources depending on the requirement. Here, the problem is to somehow extract the
sources at any amplitude level. For our convenience, we extract the source signals
in the basis of having the un-mixing matrix , which has a unit modulus or a norm.
Note that in case of extracting one source signal, is a vector.
We keep = 1 for all randomly generated un-mixing matrices. Hence, the norm
of the un-mixing matrix is always equal to 1. That means, for 2 signal mixtures, we
are only considering WT vectors related to the points on the circumference of the
unit circle | |=1 from the entire space made by the coefficients of the un-mixing
matrix. That will be a subspace of the space made up by the coefficients of the un-
mixing matrix or the weight vector. For an example, three source cases generate
unit sphere. Two source cases generate a unit circle. In this case, the points in
consideration are only the ones on the circumference of this unit circle drawn on the
X−Y plane.
Fig. 3.1 Reduced space for two signal mixtures
Fig.3.1 depicts the unit circle drawn in the space defined by the un-mixing
coefficients along x and y directions. Note that if there are more source signals, un-
mixing coefficients would form complex multi-dimensional space.
14
3.2 Mathematical model
For the preliminary study, combinations of super-Gaussian and sub-Gaussian
signals were taken and mixed them together with random mixing process and those
mixtures were taken as the input to the process of separating those original signals
back. The mixture signals form the observed mixture space in the sense of vector
representation. The observed mixture space can be modeled as,
(3.2)
Here, S is the matrix representing original source signals with each row
representing one source signal. A is the unknown mixing matrix. N is the
measurement noise and is the generated mixture matrix which has all the source
signal mixtures. This mixture matrix is what we get as the sensor measurements.
Before applying ICA, the dimension of this mixture should be reduced since there
are a larger number of mixtures than the containing source signals in it. Therefore,
a Principal Component Analysis (PCA) [6] based dimension reduction process is
carried out prior to the unmixing process.
3.2.1 Dimension Reduction Process
Since in practice, there is no prior information about the sources, it is advisable to
utilize as much sensory information as possible. This implies that the assumption of
an over determined scenario is probable. Thus a dimension reduction is done using
PCA prior to ICA unmixing process. This process reduces the dimension of the
mixture so that the dimension of required will reduce. This is achieved by finding
an approximation to the M signal mixtures in terms of K < M new signal mixtures,
where these K new mixtures are Principal Components. This is done through,
(3.3)
15
where is the signal subspace which contains the dominant eigenvectors of the
observation space. As the data are now approximated to K principal components
(PCs), simply a smaller K×1 un-mixing vector is all that required. In that way, we
can make the extraction process easier and time saving by discarding irrelevant
data of the M number of observed signal mixtures. We call this the dimension
reduction process. [1]
In this process, we select only the signal mixtures with dominant non-zero Eigen
values which has a lesser dimension. This selection is what that makes the
dimension reduction.
In this project, for selecting the bottom margin for reducing the dimension, a new
technique is used. Using this method, the number of sources can be identified, and
the unwanted redundant mixtures can be effectively removed from .
For understanding this, we will consider a case where, 15 mixtures are generated
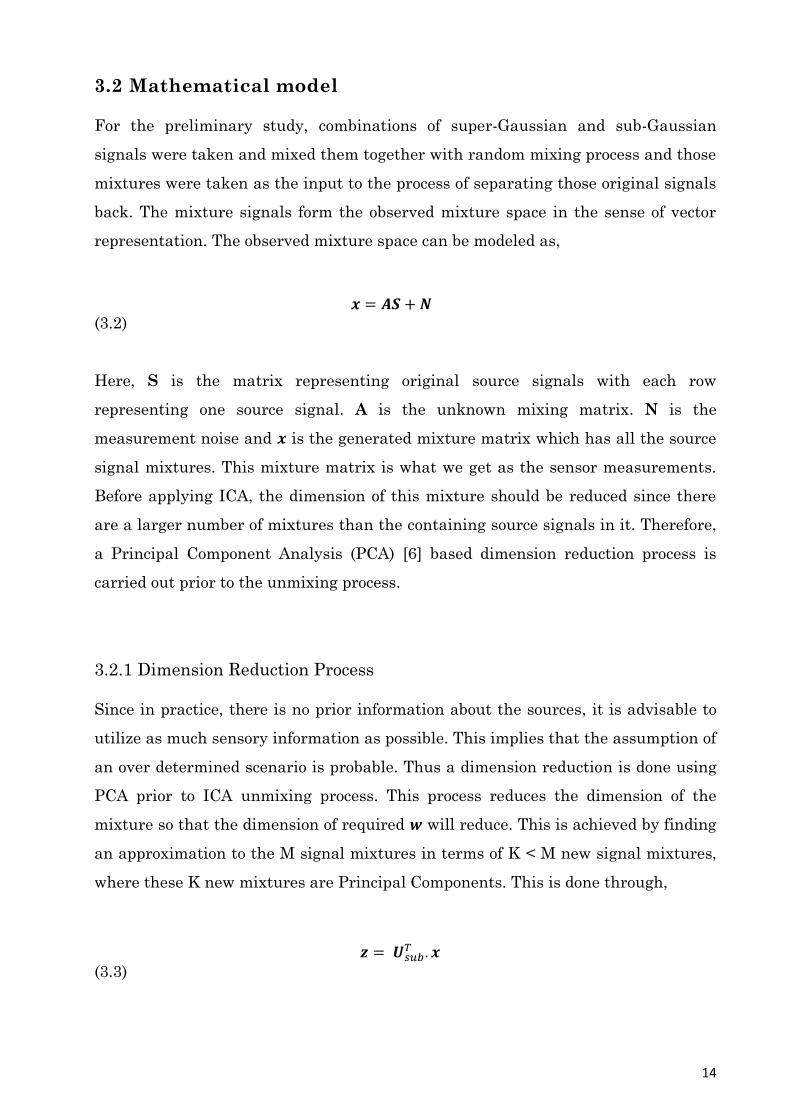
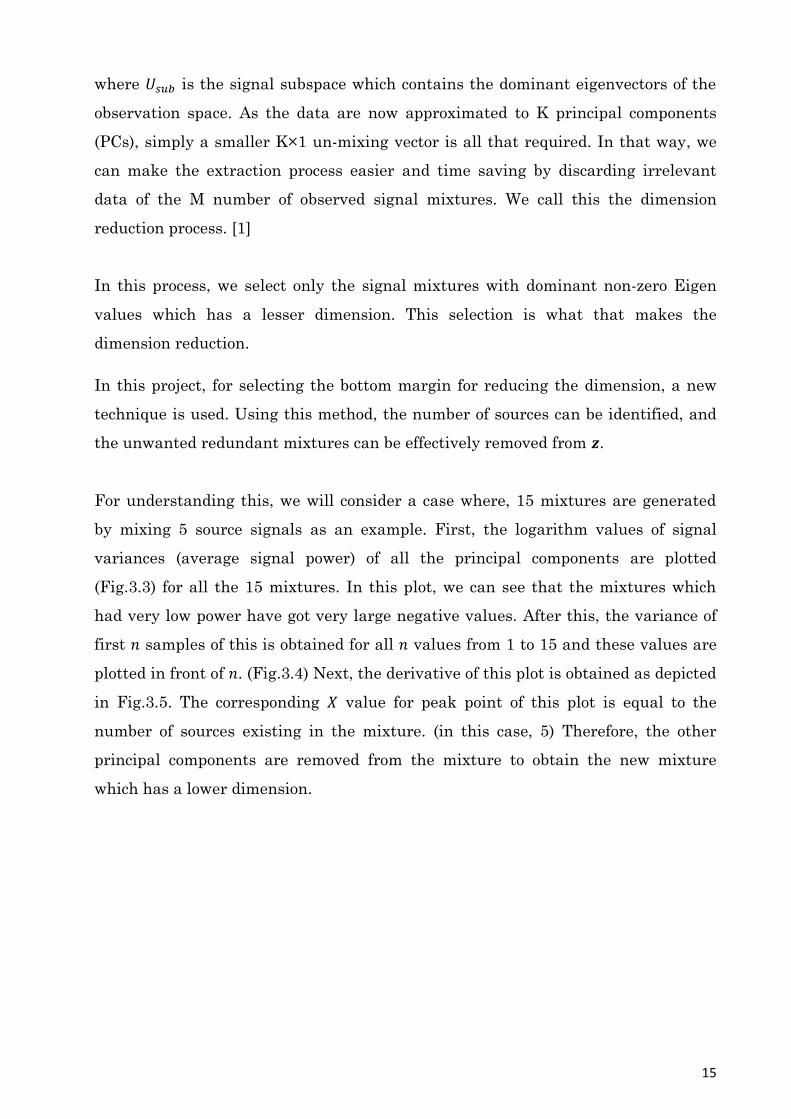
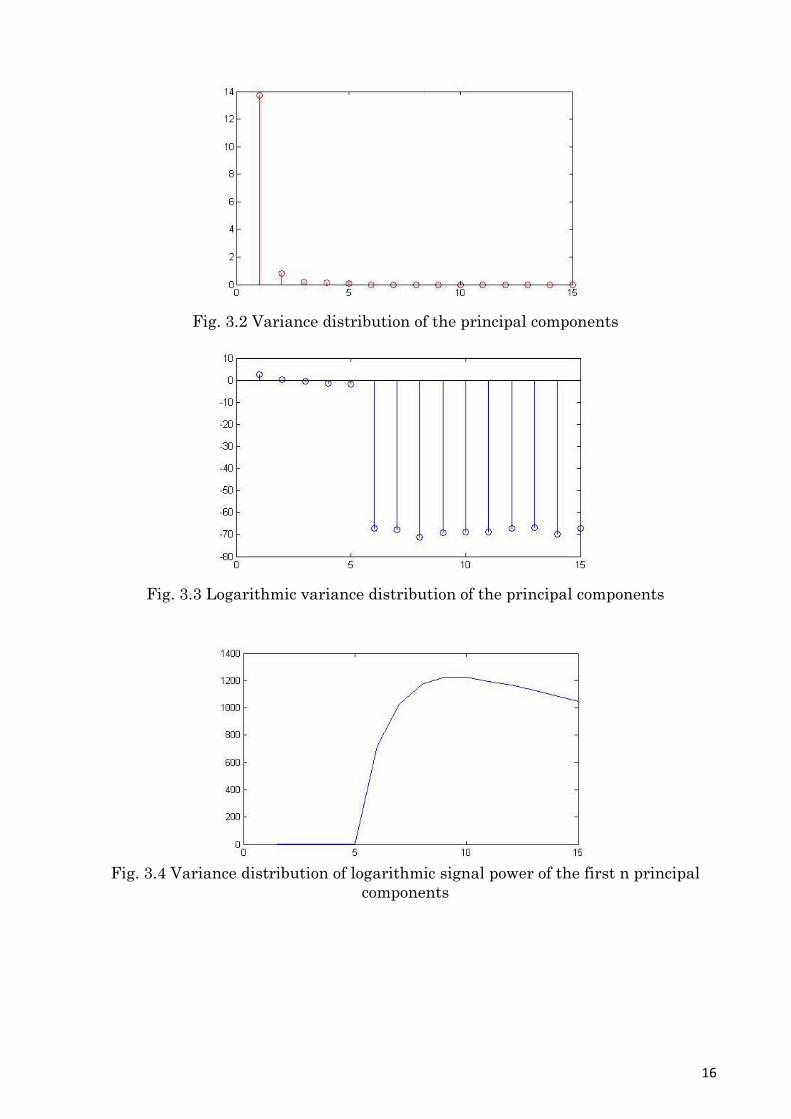
by mixing 5 source signals as an example. First, the logarithm values of signal
variances (average signal power) of all the principal components are plotted
(Fig.3.3) for all the 15 mixtures. In this plot, we can see that the mixtures which
had very low power have got very large negative values. After this, the variance of
first samples of this is obtained for all values from 1 to 15 and these values are
plotted in front of . (Fig.3.4) Next, the derivative of this plot is obtained as depicted
in Fig.3.5. The corresponding value for peak point of this plot is equal to the
number of sources existing in the mixture. (in this case, 5) Therefore, the other
principal components are removed from the mixture to obtain the new mixture
which has a lower dimension.
16
Fig. 3.2 Variance distribution of the principal components
Fig. 3.3 Logarithmic variance distribution of the principal components
Fig. 3.4 Variance distribution of logarithmic signal power of the first n principal
components

17
Fig. 3.5 Derivative of variance distribution of logarithmic signal power of the first n
principal components
3.2.2 Unmixing Process
An unmixing weight vector is applied to the dimension reduced mixture of for
source extraction. It is tuned such that the kurtosis of the resultant output signal is
maximized for a super-Gaussian source (or minimized for sub-Gaussian source).
For a mixture with 2 source signals, after dimension reduction, the normalized
weight vector to be tuned takes the form,
(
), (3.4)
where is the independent variable in the brute force approach. This satisfies the
basis of having | | as well. (According to the identity,√ )
Using the Kurtosis as a measure of non-Gaussianity, we can now examine how the
kurtosis of a signal y = extracted from a set of K < M mixtures vary with the
weight vector . Note that here, is the dimension reduced space where you have
the un-correlated set of signal mixtures.
Z =
(3.5)
(3.6)

18
Weight vector is rotated around the origin with respect to For each value of ,
the associated kurtosis is plotted as a distance from the origin in the direction of ,
giving a continuous curve. We called this plot the polar plot for the kurtosis
variation.
3.2.3 Un-mixing sources from a mixture of four signals
Four acoustic source signals containing different music were used as the sources. As
shown in the Fig.3.3 they were mixed randomly and modeled exactly the same way
as it is discussed in equation 3.2. Our target was to extract the original sources back
without using any of the information related to those source signals.
Fig. 3.6 Original sources
19
Fig. 3.7 Two of six sample mixtures
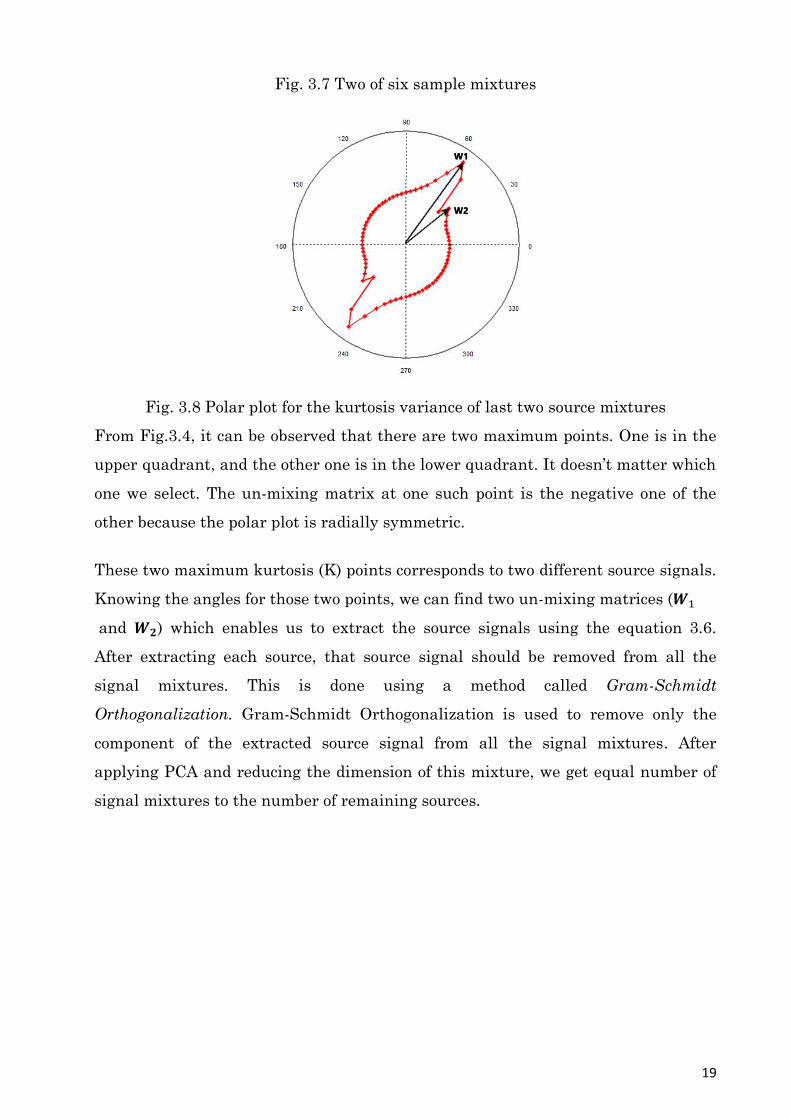
Fig. 3.8 Polar plot for the kurtosis variance of last two source mixtures
From Fig.3.4, it can be observed that there are two maximum points. One is in the
upper quadrant, and the other one is in the lower quadrant. It doesn’t matter which
one we select. The un-mixing matrix at one such point is the negative one of the
other because the polar plot is radially symmetric.
These two maximum kurtosis (K) points corresponds to two different source signals.
Knowing the angles for those two points, we can find two un-mixing matrices (
and ) which enables us to extract the source signals using the equation 3.6.
After extracting each source, that source signal should be removed from all the
signal mixtures. This is done using a method called Gram-Schmidt
Orthogonalization. Gram-Schmidt Orthogonalization is used to remove only the
component of the extracted source signal from all the signal mixtures. After
applying PCA and reducing the dimension of this mixture, we get equal number of
signal mixtures to the number of remaining sources.

20
Fig. 3.9 Extracted source signals
(3.7)

21
Fig. 3.10 Comparison of the original sources and the extracted ones
It can be seen that the extracted signals are mostly the same as the original source
signals before mixing process.
3.3 Conclusions: Limitations for the Brute force method
Generally, the brute force approach would give us good results. But, finding the
maximum/ minimum points on the kurtosis surface is computationally exhaustive
task to accomplish. For three signal mixtures, the kurtosis variation will be a 3-
dimensional surface as shown in Fig 3.6. For n number of signals, this will be an n-
dimensional surface. Therefore, in this approach, the computational complexity
increases exponentially with the number of source signals. On the other hand, this
method is less accurate since it is not practically possible to check for all the
possible weight vectors because there is infinite number of possibilities for the
weight vector in the n-dimensional space.
22
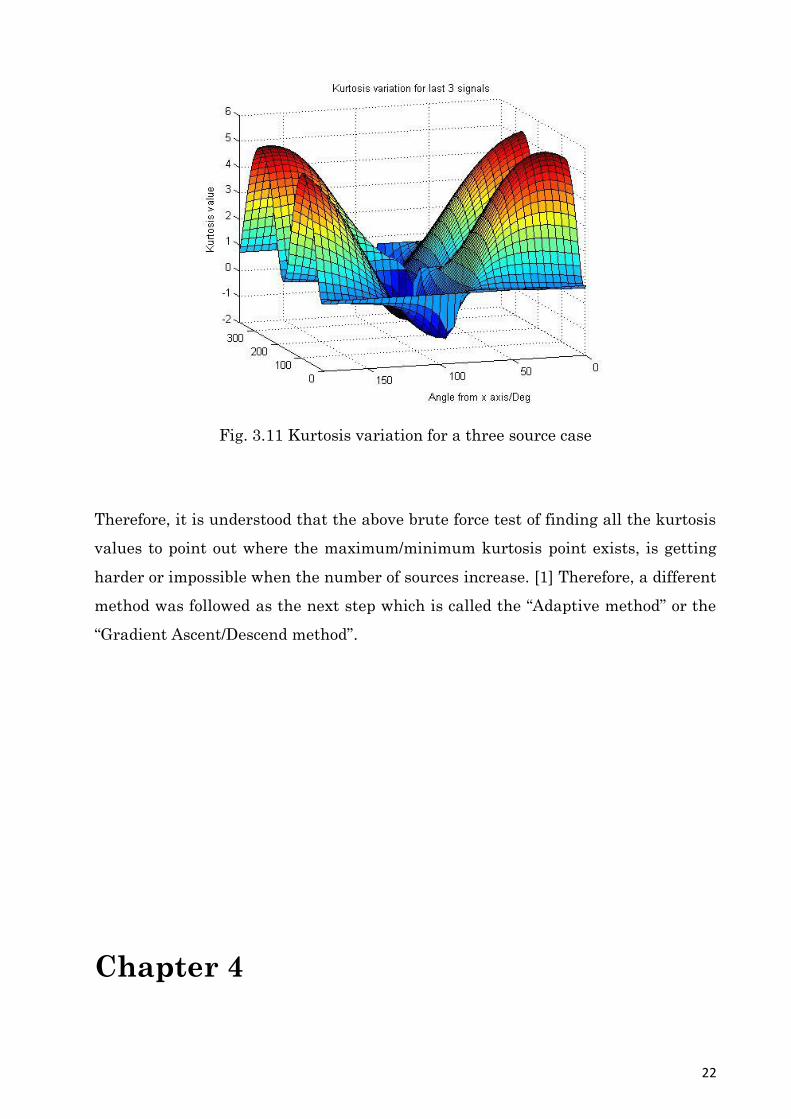
Fig. 3.11 Kurtosis variation for a three source case
Therefore, it is understood that the above brute force test of finding all the kurtosis
values to point out where the maximum/minimum kurtosis point exists, is getting
harder or impossible when the number of sources increase. [1] Therefore, a different
method was followed as the next step which is called the “Adaptive method” or the
“Gradient Ascent/Descend method”.
Chapter 4
23
Source Extraction by Gradient
based Algorithms
4.1 Introduction
We know that, in practice, the statistical independence can be used to separate
sources from a set of noisy mixtures. The more independent the extracted signals
are, the more likely they are to be the required source signals. Yet, we haven’t
considered a method for maximizing such measures like independence other than
by the brute force method which we discussed in Chapter 3. Brute force method
becomes an exhaustive exercise to deal with as the number of source signals
increase beyond four. Moreover, it wastes the time and the processing power which
can be vital in practical cases. Therefore, we have to have several alternative
methods which bring us better search strategies to accomplish the task.
Due to these reasons, the gradient ascend/descend method is introduced. This
method is based on the observation that if it is desired to reach the top of the hill or
the very bottom of the hill, the one simple strategy is to keep moving until there is
no more uphill (for gradient ascend) or no more downhill (for the gradient descend)
left. Therefore, our ultimate destination should be the peak point or the bottom
point.[1]
The kurtosis measures the non-Gaussianity. And also we know that the
independence means more non-Gaussianity. The height of the surface corresponds
to the amount of kurtosis. And the weight vector corresponds to different values of
the two un-mixing coefficients. We increase the kurtosis to pick the un-mixing
coefficients related to any super-Gaussian signal we want to extract. For a sub-
Gaussian source we should go down to a local minimum of the kurtosis surface to
pick the related coefficients.
Starting from the initial point on the kurtosis surface, we move in the direction of
the steepest slope or the gradient of the surface. Along the direction of gradient, one

24
step down assures the kurtosis of the extracted signal become less whereas one step
uphill assures an extracted signal with a higher kurtosis.
The most efficient method to find the direction of steepest slope at a given point is
to calculate the rate of change or the derivative of the local kurtosis with respect to
each un-mixing coefficient. At a given point, the gradient of kurtosis is different for
each un-mixing coefficient. Together, their combined gradients define the direction
on the ground plane. As a fact, this direction corresponds to a direction of
ascend/descend on the kurtosis surface. The gradient of the kurtosis surface with
respect to the weight vector is given by,
[ ] (4.1)
In order to make the step to the next point on the kurtosis surface, we add a
multiplier of this gradient to the previous We use proven recurrence formulae to
perform the gradient ascent with respect to the un-mixing parameters.
(4.2)
Here, is sufficiently small value to make sure the convergence at the top point of
the hill. In this method, is guaranteed to extract a signal with a higher
kurtosis than the signal extracted by .
In the same manner, for the gradient descent, the recurrence formulae will be in the
form,
(4.3)
Now we can make our step to a new point along the direction of the steepest
gradient using the recurrence formulae. Then again we have to find the direction to
proceed in the same way that we have done calculations for the previous point.
Likewise, beginning from an initial point, we can follow the direction along the
steepest gradient and finally stop at a local maximum or a local minimum point on
the kurtosis surface.

25
Note that the gradient descent will work only for the sub-Gaussian signals. For the
mixtures which have only the sub-Gaussian signals in it, we can straight away use
gradient descent.
At the same time, the gradient ascent will work only for the super-Gaussian
signals. For the mixtures which have only the super-Gaussian signals in it, we can
straight away use gradient ascent.
What if there are both super-Gaussian and sub-Gaussian sources are available in
the mixtures?
As we know, the gradient ascent method extract super-Gaussian source signals
whereas the gradient descent method extract sub-Gaussian sources from the given
signal mixtures. But real world signal mixtures comprise of both type of source
signals. Therefore, we cannot use only one method straight away for source
extraction from such mixtures. Accordingly, before we start this gradient based
adaptive method, we have to make sure which kind of a source signal is going to be
extracted in the first place.
It is a known thing that the sub-Gaussian signals have negative kurtosis value and
super-Gaussian signals have positive kurtosis value. Thus, the sign of the K gives
us the impression which kind of a signal we are dealing with. Here, our criterion is
the sign of the kurtosis at the initial point where we start the gradient based
algorithm. We have added a simple modification to our gradient based recurrence
formulae to make it easier.
(4.4)
Note that we calculate K at the initial point. Our logic is that if the initial K value is
positive, there should be at least one super-Gaussian signal, and if the initial K
value is negative, there should be at least one sub-Gaussian source signal within
the mixture.

26
To summarize, if the kurtosis at the initial point on the kurtosis surface is positive,
our algorithm switches to the normal gradient ascent algorithm. Otherwise, it
switches to the gradient descend algorithm.
Note that the critical points (maxima and minima) corresponding to the sources are
local ones. Each local maxima/minima corresponds to a source signal to be
extracted. In order to make sure we reach a maximum or the minimum point of the
kurtosis surface, we need an effective convergence criterion.
4.2 The convergence criteria
It is understood that we can use different criteria or else combinations of them to
seek the best one for testing the convergence. At the end of the day, what we need is
the un-mixing coefficients which can extract the source signals with a minimum
error. We stop the gradient ascend/descend process when we reach the convergence
point. There are the three basic criteria that we can count on.
4.2.1 Minimum gradient
This is with the simple argument that, if the gradient value is zero (or very close to
zero), that point should be a critical point (maxima or minima). Practically, we
cannot assure that we reach the critical point exactly. Therefore, the gradient value
may or may not be zero. Here we have some tolerance level.
Gradient can be calculated as follows. Note that Z is for the sphered mixtures and y
is what we extracted from this process.
Gradient wK =
(4.5)
4.2.2 Minimum kurtosis difference between two adjacent points
Whenever we get closer to a critical point on a surface, the kurtosis difference of two
adjacent points should be clearly decreasing. In that way we can fairly approximate
27
the critical point. For example, when the kurtosis difference is less than 0.00001 it
can be assumed that we have reached the critical point.
4.2.3 Checking the stability of the weight vector
Above two methods have their own drawbacks since if the kurtosis value of the
source signal is relatively small, it is difficult to get accurate extraction of the
source since this kurtosis difference or the gradient value can be always very small
for such case even if the weight vector has not reached closer to the peak point of
the kurtosis surface.
To counter this problem, weight vector stability checking method is proposed. When
we get closer to a critical point on the kurtosis surface, changing speed of the weight
vector becomes smaller. This means, when the weight vector becomes constant, we
can stop the gradient ascent/descent process. The stability of the weight vector can
be checked only for a certain number of decimal points. This is because, even after
reaching the local maxima or minima, there will be very small changes in the
weight vector because practically, we cannot assure that the weight vector reaches
the maximum point exactly.
This method is the preferable as this method uses the weight vector to identify the
convergence. Weight vector is what that determines the extracted source signal.
Therefore, if the weight vector is stationary, there is no point of continuing the
gradient ascent/descent process because the extracted sources will be the same.
4.3 Preliminary work
Before the gradient ascent process, the basic pre-processing of signal mixtures
should be done. First, the signal mixtures should be normalized. After that, we do
the dimension reduction process using PCA and again the normalizing is done.
After that, we do the sphering and then again normalize the resulting mixtures.
After that, the mixtures are ready for the gradient ascent or the descent process.
28
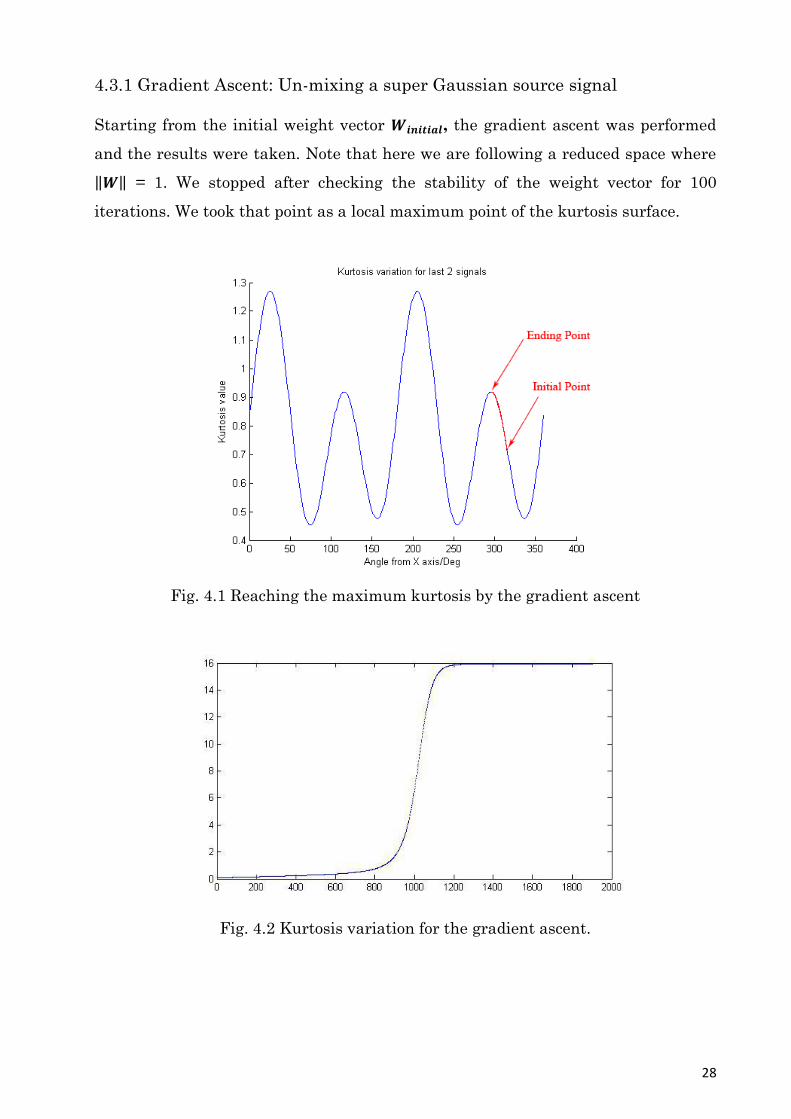
4.3.1 Gradient Ascent: Un-mixing a super Gaussian source signal
Starting from the initial weight vector , the gradient ascent was performed
and the results were taken. Note that here we are following a reduced space where
‖ ‖ = 1. We stopped after checking the stability of the weight vector for 100
iterations. We took that point as a local maximum point of the kurtosis surface.
Fig. 4.1 Reaching the maximum kurtosis by the gradient ascent
Fig. 4.2 Kurtosis variation for the gradient ascent.
29
Fig. 4.3 Variation of first component of the weight vector for the gradient ascent.
When we extract source signals one at a time converging to the corresponding local
maximum points, there is a possibility to get the same source signal again and
again. Specially, when there are many source signals inside the mixtures, it is
probable this repetition occurs more often. Therefore, once we get a source, we have
to remove it from the mixtures and then continue with the gradient ascent. In this
scenario, we use Gram-Schmidt orthogonalization which we discussed in previous
chapter under brute force approach as well.
4.3.2 Gradient Descent: Un-mixing a sub Gaussian source signal
Same procedure was followed as for the gradient ascent but here we try to catch the
corresponding local minima points by moving in the negative gradient direction. For
this, equation 4.3 is utilized. We went downwards along the kurtosis surface to
achieve the un-mixing matrix at the kurtosis minima. Once we extracted a source,
set of new mixtures were sorted out by using Gram-Schmidt Orthogonalization.
Throughout the whole process, we used each and every step, normalization,
dimension reduction, sphering and finally the Gram-Schmidt Orthogonalization to
get the results.

30
Fig. 4.4 Reaching the minimum kurtosis point for a sub Gaussian source signal.
Fig. 4.5 Kurtosis variation for gradient descent
Fig. 4.6 Variation of first component of the weight vector for the gradient ascent.
31
4.4 Results and conclusions
4.4.1 Un-mixing the mixture with 4 source signals
Fig. 4.7 Two samples of six mixtures used
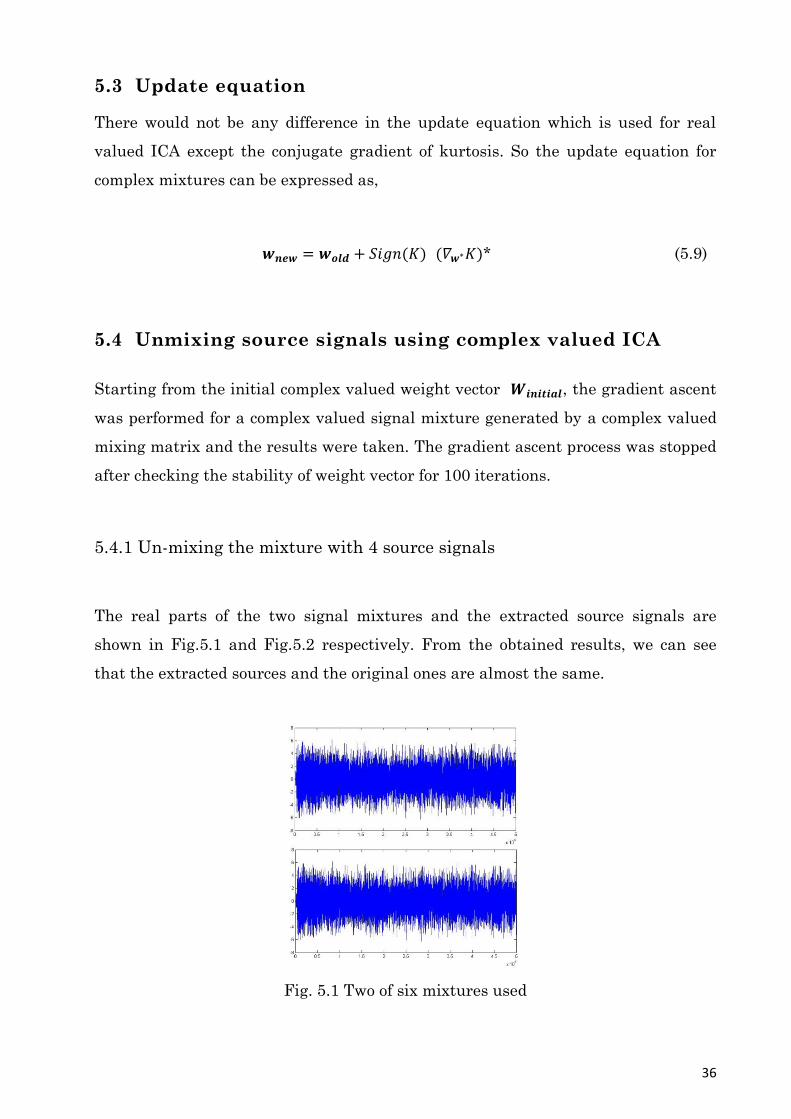
From the obtained results, we can see that the extracted sources and the original
ones are almost the same.
(a) (b)
Fig. 4.8 (a) Original sources (b) extracted sources

32
So that we can conclude that this gradient based adaptive method is successful and
it has many advantages like easier calculations, better approximation of the
sources, ability to apply for all super-super, super-sub and sub-sub cases for the
source signals. And we do not want to know any of the information related to the
source signals. But in this kurtosis based approach, we have to extract sources one
by one. And we cannot predict the order in which the source signals are extracted.

33
Chapter 5
Extension of ICA for Complex
Valued Mixtures
For real signals mixed through a real gain matrix, the above real valued ICA
method reliably works for super Gaussian, sub Gaussian or super-sub coupled
mixtures and for any number of sources as long as they are independent and non-
Gaussian. But in some scenarios, the real sources can be mixed through a certain
complex valued gain so that the mixtures are complex valued. Under such cases, it
is necessary to extend the ICA algorithm for a complex kurtosis based algorithm [4].
This complex valued ICA method is just a generalization of real valued algorithm so
that this algorithm can be used for both cases when the mixing matrix is real
valued as well as when the mixing matrix is complex valued. To extend the ICA
algorithm for a complex valued algorithm, we need to determine complex kurtosis
and its gradient.
5.1 Complex kurtosis and its gradient
Kurtosis of a complex valued signal is still a real number. The kurtosis of a complex
valued signal can be written as,
[ ] [ ] [ ] . (5.1)
5.2 Gradient of Kurtosis
Although the signals are complex, the objective of ICA is same. In particular, even
for complex valued signals, the Gaussianity implies zero kurtosis, super-
Gaussianity implies positive kurtosis and sub-Gaussianity implies negative
kurtosis. Therefore, un-mixing an independent signal from a set of complex valued
measurement signals given by , would involve finding a complex valued weight

34
vector such that the unmixed complex valued signal would yield a source. This
involves optimizing the kurtosis of over as before. In principle, it should be
possible to use a gradient based algorithm for this optimization process similar to
that in the real valued case.
Under the classical definition of the complex differentiation, is not differentiable
in as it is a real valued function of complex variable. However, it is possible to
utilize Wirtinger calculus [4] to find the gradient of over . Wirtinger calculus is a
popular choice in many complex valued signal processing applications including
adaptive signal processing [10].
5.2.1 Definition: Wirtinger Differential Operator
Let is a complex number with x and y being the real and imaginary parts
respectively. Then, the Wirtinger Differential operator is denoted by
and written
as,
, (5.2)
where and are arbitrary constants. Typically they are set to
and
.
With this definition, using above a1 and a2, and when is the conjugate
of , we can immediately write down,
. (5.3)
If is a scalar function of a complex vector , we can extend the
Wirtinger derivative operator to obtain the gradient of kurtosis in terms of
analogous to the real counterpart:
. (5.4)
As defined in (5.1), the kurtosis of the extracted signal consists of three parts:
[ ] [ ] and [ ] where . Therefore, we need the gradient of

35
each of these components with respect to the complex variable . In particular, it is
needed to find [ ] [ ] and [ ] .
Using the definitions (5.2), (5.3), and (5.4) it can be shown that,
[ ] ( [ ]
[ ]
)
,
[ ] [ ]. (5.5)
[ ] ( [ ]
[ ]
)
,
[ ] [ ] [ ] (5.6)
Furthermore, since
[ ]
[ ] [ ]
,
[ ]
[ ] [ ] . (5.7)
We get,
[ ] [ ] [ ] [ ]
[ ] [ ] [ ]. (5.7)
Combining these results the gradient of the complex kurtosis described in (5.1) can
be expressed as,
[ ] [ ] [ ]
[ ] [ ] [ ] [ ] [ ]. (5.8)
36
5.3 Update equation
There would not be any difference in the update equation which is used for real
valued ICA except the conjugate gradient of kurtosis. So the update equation for
complex mixtures can be expressed as,
* (5.9)
5.4 Unmixing source signals using complex valued ICA
Starting from the initial complex valued weight vector , the gradient ascent
was performed for a complex valued signal mixture generated by a complex valued
mixing matrix and the results were taken. The gradient ascent process was stopped
after checking the stability of weight vector for 100 iterations.
5.4.1 Un-mixing the mixture with 4 source signals
The real parts of the two signal mixtures and the extracted source signals are
shown in Fig.5.1 and Fig.5.2 respectively. From the obtained results, we can see
that the extracted sources and the original ones are almost the same.
Fig. 5.1 Two of six mixtures used

37
(a) (b)
Fig. 5.2 (a) Original sources (b) extracted sources using complex valued ICA
So that we can conclude that the gradient based adaptation method for complex
valued ICA is successful for extraction of source signals mixed through a complex
valued mixing matrix.
38
Chapter 6
Frequency domain ICA for source
extraction in frequency domain
As we have discussed previously, the complex valued ICA method can be effectively
used for extraction of independent source signals from signal mixtures which are
mixed using a complex valued mixing matrix. But for non-linear mixing processes,
it is not possible to use complex valued algorithm to extract sources. This is
because, when the mixture is convolutive (non-linear), the source extraction cannot
be done in time domain. Therefore, complex valued ICA algorithm cannot be
directly used to extract non-linearly mixed source signals. Therefore, a frequency
domain unmixing process should be used to extract sources under these conditions
[5]. To extend the complex valued ICA algorithm to a frequency domain unmixing
algorithm, the mixture matrix is converted to frequency domain by applying the
Fast Fourier transform [11] to each row of the matrix separately. Then, the same
complex valued ICA process is carried out for extracting sources while remaining in
the frequency domain. After extracting the source signals, the output matrix is
again converted back to time domain by applying the inverse Fast Fourier
transform operation. The real or imaginary part of the resulting vectors will
represent the sources.
6.1 Unmixing source signals using frequency domain ICA
Starting from the initial complex valued weight vector , the gradient ascent
was performed in frequency domain for a complex valued signal mixture generated
using a complex valued mixing matrix. The gradient ascent process was stopped
after checking the stability of weight vector for 100 iterations, and the results were
obtained.
39
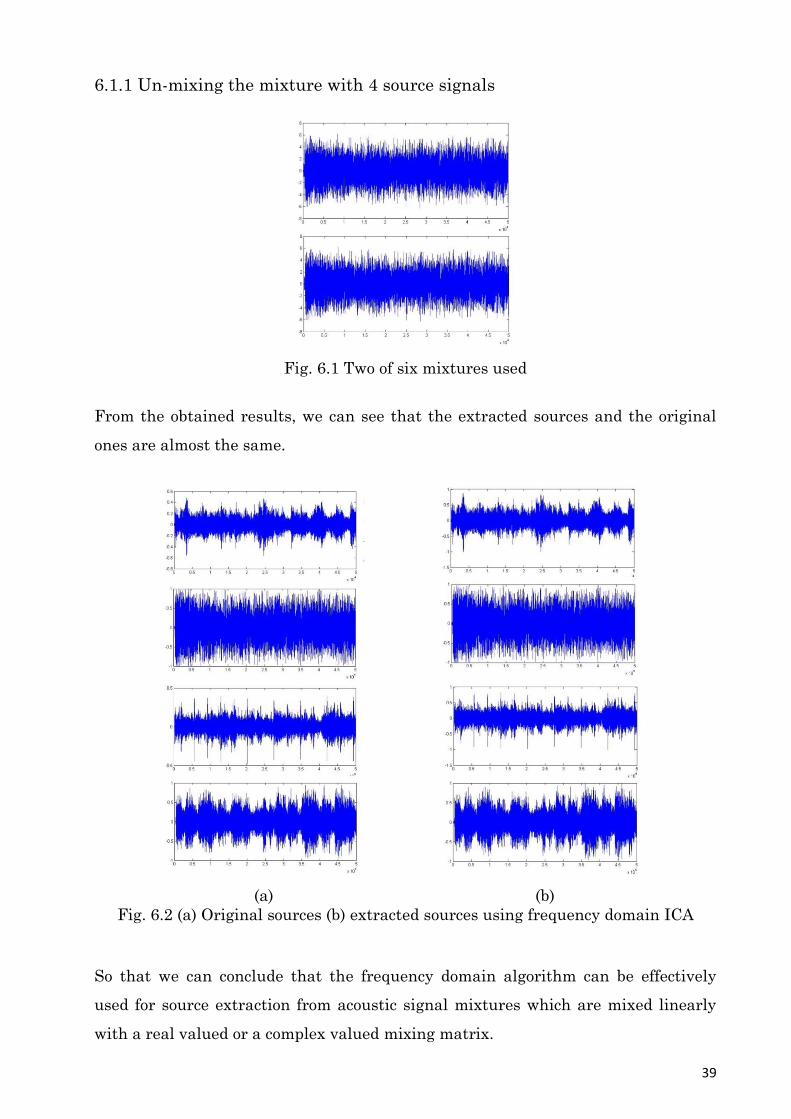
6.1.1 Un-mixing the mixture with 4 source signals
Fig. 6.1 Two of six mixtures used
From the obtained results, we can see that the extracted sources and the original
ones are almost the same.
(a) (b)
Fig. 6.2 (a) Original sources (b) extracted sources using frequency domain ICA
So that we can conclude that the frequency domain algorithm can be effectively
used for source extraction from acoustic signal mixtures which are mixed linearly
with a real valued or a complex valued mixing matrix.
40
Chapter 7
Application of ICA for acoustic
signal mixtures
7.1 Possible applications
Generally, ICA has been applied to countless applications in vast array of fields
related to signal processing, neuroimaging, face recognition [9], mobile phone
communications and even for analyzing and predicting the stock market prices.
The algorithms and the theory developed in this project can be directly use for some
applications. We targeted our algorithms for two types of cases. They are, for
acoustic signals and images. As discussed in the previous chapters, all three
algorithms were capable of effectively extracting sources from a mixture of linearly
mixed acoustic source signals. In this chapter, first, the performance of the three
algorithms for linear acoustic signal mixtures is compared.
7.2 Extracting sources from linear acoustic signal mixtures
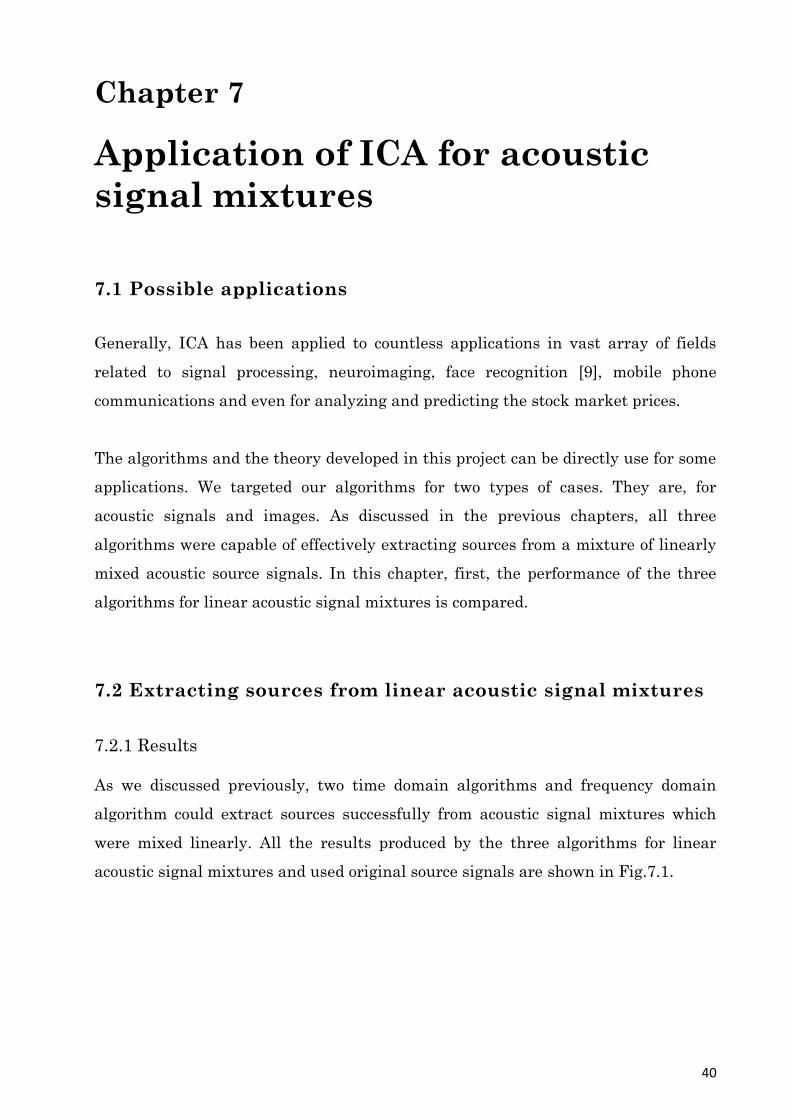
7.2.1 Results
As we discussed previously, two time domain algorithms and frequency domain
algorithm could extract sources successfully from acoustic signal mixtures which
were mixed linearly. All the results produced by the three algorithms for linear
acoustic signal mixtures and used original source signals are shown in Fig.7.1.
41
(a) (b) (c) (d)
Fig. 7.1 (a) Original sources, extracted sources using (b) real valued ICA, (c)
complex valued ICA, (d) frequency domain ICA
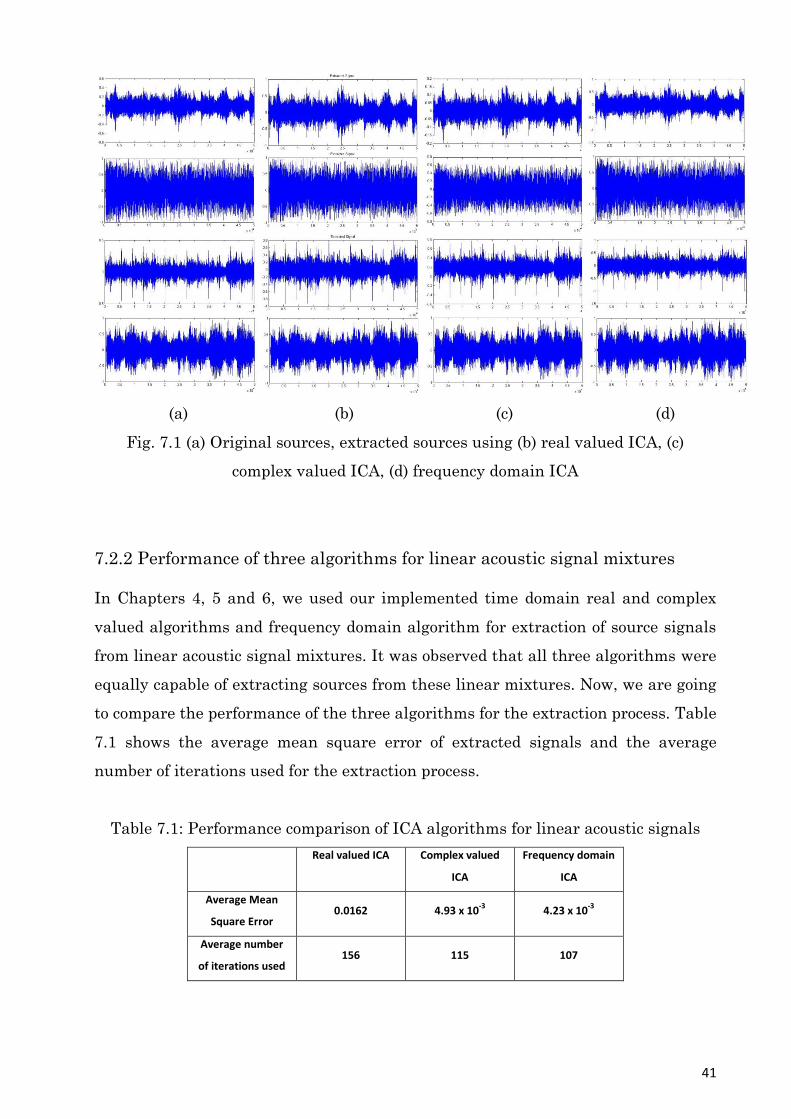
7.2.2 Performance of three algorithms for linear acoustic signal mixtures
In Chapters 4, 5 and 6, we used our implemented time domain real and complex
valued algorithms and frequency domain algorithm for extraction of source signals
from linear acoustic signal mixtures. It was observed that all three algorithms were
equally capable of extracting sources from these linear mixtures. Now, we are going
to compare the performance of the three algorithms for the extraction process. Table
7.1 shows the average mean square error of extracted signals and the average
number of iterations used for the extraction process.
Table 7.1: Performance comparison of ICA algorithms for linear acoustic signals
Real valued ICA Complex valued
ICA
Frequency domain
ICA
Average Mean
Square Error 0.0162 4.93 x 10
-3 4.23 x 10
-3
Average number
of iterations used 156 115 107
42
These results clearly indicate that the complex valued time domain algorithm and
frequency domain algorithm have better accuracy for extracted sources from linear
acoustic signal mixtures. Out of the two complex valued algorithms, frequency
domain algorithm showed slightly better results. When it comes to speed, frequency
domain algorithm was the fastest while real valued algorithm being the slowest.
Both complex valued algorithms are equally capable of extracting sources when the
source signal mixtures are real valued or complex valued. But the real valued
algorithm is only capable of extracting sources when they are mixed with a real
valued mixing matrix.
7.3 Extracting sources from non-linear acoustic signal
mixtures
Due to linear time domain unmixing process, the time domain ICA algorithms are
highly limited to applications where the mixing process is assumed to be linear.
When the mixing process is non-linear, these algorithms fail to produce desirable
results. Therefore, it is important to go for the frequency domain algorithm which
can capture these non-linearities so that convoluted temporal signals generated by
non-linear mixing processes can be extracted.
Blind source separation of convoluted acoustic signals is of great interest for many
categories of applications such as audio editing, speech recognition, hands-free
telephony or hearing devices. Due to the convolutive mixing process, the unmixing
process should be done in frequency domain. This is done via the frequency domain
complex valued ICA algorithm. In this project, only one kind of a non-linearity is
discussed and reliable extraction of sources is demonstrated.
7.3.1 Process of extraction
We will take 8 acoustic signals in which all the signals are distorted by making
randomly selected regions zero such that there is no single sound signal which
represents the complete source signal. These 8 signals were used as the rows of the
mixture matrix and the time and frequency domain algorithms were applied.
43
Since both time domain algorithms produce same results for real valued mixtures,
only complex valued algorithm is used for analysis. Original undistorted source
signal and 3 out of 8 samples of distorted signals are given in Fig.7.2 and Fig.7.3
respectively. Fig.7.4 and Fig.7.5 shows the extracted sources for time and frequency
domain algorithms respectively.
The obtained results show that the frequency domain algorithm is an effective
method for extraction of sources under this kind of situations.
Fig.7.2. Original source signal
Fig. 7.3. Three samples of eight distorted acoustic signals

44
Fig.7.4. Sample of extracted sources using time domain complex valued algorithm
Fig.7.5. Extracted source using frequency domain complex valued algorithm
The average mean square errors for time and frequency domain algorithms were
1.43 and 0.0808 respectively. Therefore, it is clear that the frequency domain
algorithm has a superior performance for extraction of the source signal under the
above non-linear mixing process. This method can be effectively used to improve
corrupted signals of digital communication systems, since the received signals will
be in the above form for digital transmission when the signal strength is very small.

45
Chapter 8
Application of ICA for extracting
sources from image mixtures
Image restoration based blind source separation techniques are widely used in
many applications such as, vision based surveillance applications, face recognition
[9], MRI etc. The above ICA algorithms can be directly use for extraction of sources
from a set of images.
As we discussed above, conventional time domain ICA algorithms assume the signal
mixtures to be linear. Therefore, time domain algorithms cannot be effectively used
when the mixtures are non-linear convoluted mixtures. These, non-linearities
include phase delays, occlusion, distortion of the waveform/ image etc. The
frequency domain implementation of the algorithm enables reliable separation of
occluded content under various foreground disturbance conditions. In this chapter,
the performance of the frequency domain algorithm is analyzed and compared for
image restoration with the time domain ICA algorithms.
8.1 Application of ICA techniques for image mixtures
For application of the ICA algorithm to images, first the images should be converted
to one-dimensional signals. Therefore, before applying ICA, the images are
converted into 1-dimensional signals by breaking up the rows of the image and
stacking or concatenating them together as shown by the Fig 8.1. After this, the
resulting vectors can be arranged as rows of the matrix where each row
representing one unwrapped image and each column represents a particular pixel’s
value for all the images.
46
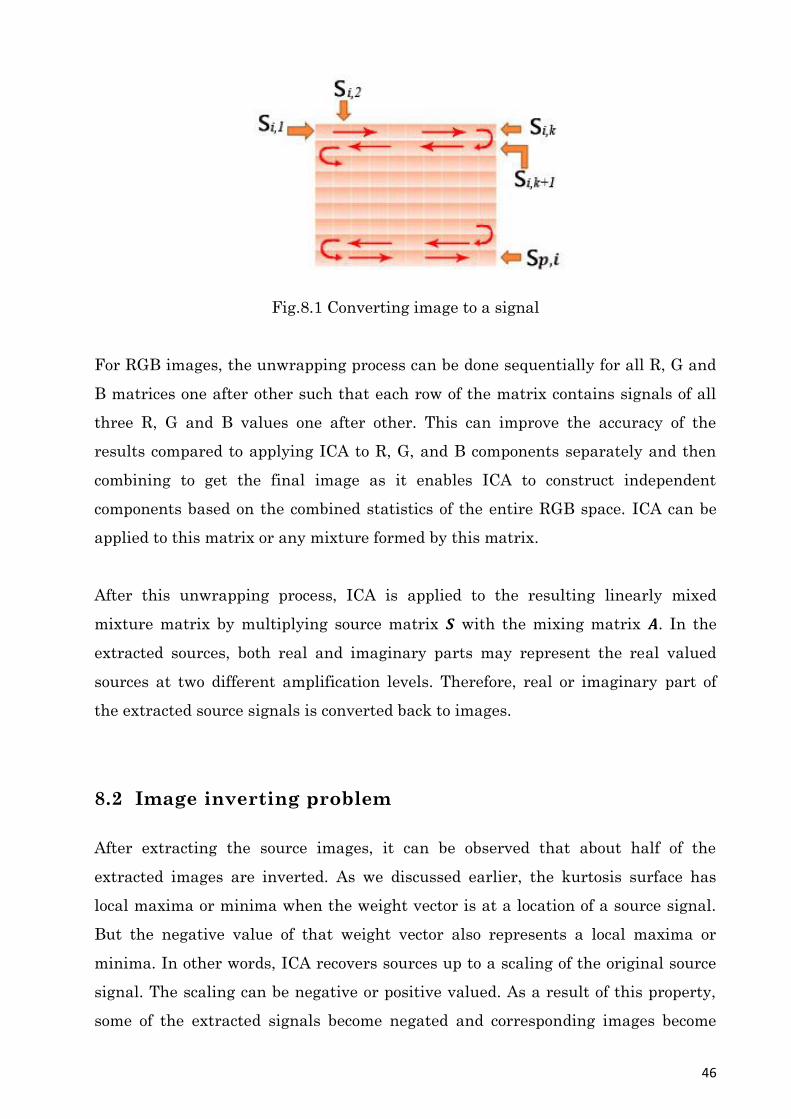
Fig.8.1 Converting image to a signal
For RGB images, the unwrapping process can be done sequentially for all R, G and
B matrices one after other such that each row of the matrix contains signals of all
three R, G and B values one after other. This can improve the accuracy of the
results compared to applying ICA to R, G, and B components separately and then
combining to get the final image as it enables ICA to construct independent
components based on the combined statistics of the entire RGB space. ICA can be
applied to this matrix or any mixture formed by this matrix.
After this unwrapping process, ICA is applied to the resulting linearly mixed
mixture matrix by multiplying source matrix with the mixing matrix . In the
extracted sources, both real and imaginary parts may represent the real valued
sources at two different amplification levels. Therefore, real or imaginary part of
the extracted source signals is converted back to images.
8.2 Image inverting problem
After extracting the source images, it can be observed that about half of the
extracted images are inverted. As we discussed earlier, the kurtosis surface has
local maxima or minima when the weight vector is at a location of a source signal.
But the negative value of that weight vector also represents a local maxima or
minima. In other words, ICA recovers sources up to a scaling of the original source
signal. The scaling can be negative or positive valued. As a result of this property,
some of the extracted signals become negated and corresponding images become

47
inverted. Therefore, a method for detecting and re-correcting the inverted images is
required. In order to detect the inverted images, a new method was proposed in this
work. For understanding this method, let’s take a look at the waveforms of inverted
and un-inverted 8-bit images shown in Fig 8.2 (a) and (b) respectively.
(a) (b)
Fig.8.2 Unwrapped signal of a (a) un-inverted image (b) inverted image
From the waveforms, it can be observed that in the waveform of un-inverted image,
most of the pixel values are below 255/2, and for the inverted image, most of the
pixel values are above 255/2. Therefore, the number of pixels is counted for two
cases where the pixel value is larger than 255/2 and smaller than 255/2 for all three
R, G and B matrices of the image. If the number of pixels which have higher value
than 255/2 is greater than the number of pixels which have lower value than 255/2,
then the image is considered to be inverted.
This method can be generalized based on context where for each application the
general unwrapped images statics such as RGB mean etc. are analyzed to detect
inverted images.
After finding the inverted images using this method, those images are inverted back
in the algorithm to get proper un-inverted images. Any image under normal
lighting conditions can be detected using this method.
48
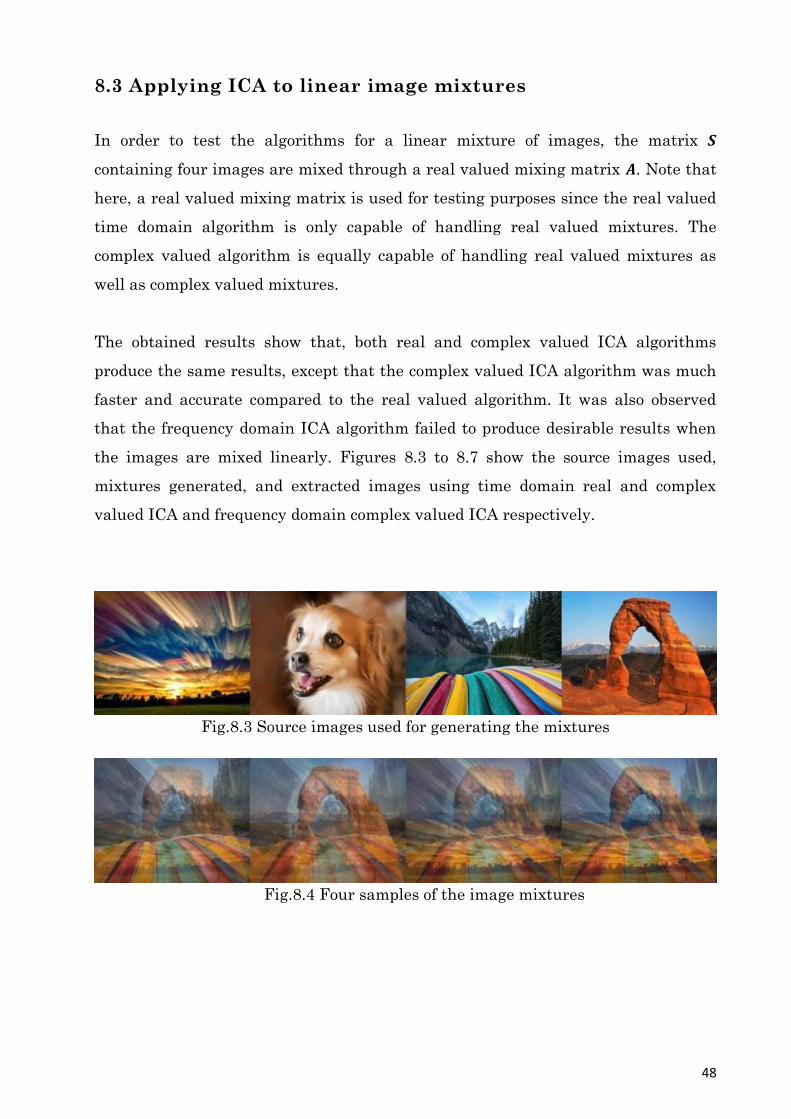
8.3 Applying ICA to linear image mixtures
In order to test the algorithms for a linear mixture of images, the matrix
containing four images are mixed through a real valued mixing matrix . Note that
here, a real valued mixing matrix is used for testing purposes since the real valued
time domain algorithm is only capable of handling real valued mixtures. The
complex valued algorithm is equally capable of handling real valued mixtures as
well as complex valued mixtures.
The obtained results show that, both real and complex valued ICA algorithms
produce the same results, except that the complex valued ICA algorithm was much
faster and accurate compared to the real valued algorithm. It was also observed
that the frequency domain ICA algorithm failed to produce desirable results when
the images are mixed linearly. Figures 8.3 to 8.7 show the source images used,
mixtures generated, and extracted images using time domain real and complex
valued ICA and frequency domain complex valued ICA respectively.
Fig.8.3 Source images used for generating the mixtures
Fig.8.4 Four samples of the image mixtures

49
Fig.8.5 Extracted sources for real valued ICA with ŋ = 0.1 and stabilizing w for
5 decimal points
Fig.8.6 Extracted sources for complex valued time domain ICA with ŋ = 1 and
stabilizing w for 4 decimal points
Fig.8.7 Extracted sources for complex valued frequencydomain ICA with ŋ = 1
and stabilizing w for 4 decimal points
As can be observed from the obtained results in Fig.8.5, 8.6 and 8.7, it is clear that
the complex valued time domain ICA algorithm has superior performance compared
with the real valued time domain algorithm even when lower number of decimal
points is used for stabilizing the weight vector for the complex valued ICA
algorithm. Therefore, complex valued ICA algorithm has better performance in
terms of both speed and the accuracy. The real and complex valued algorithms took
231 and 122 average number of iterations respectively for extraction of the four
images. Another fact is that in the real valued ICA algorithm, as ŋ is increased, the
accuracy of the obtained results goes down. But for the complex valued time domain
ICA algorithm, as ŋ is increased, both the accuracy and the speed of the extraction
process increase. But if ŋ is increased too much, sometimes there is a problem for
50
convergence so that it takes longer time to extract the sources. This property helps
to successfully manipulate the parameter to get the best performance from the
complex valued algorithm.
The obtained results for frequency domain algorithm (Fig. 8.7.) clearly shows that
the frequency domain algorithm does not produce desirable results for linearly
mixed image mixtures as linear mixing in time domain implies convoluted mixing
in frequency domain.
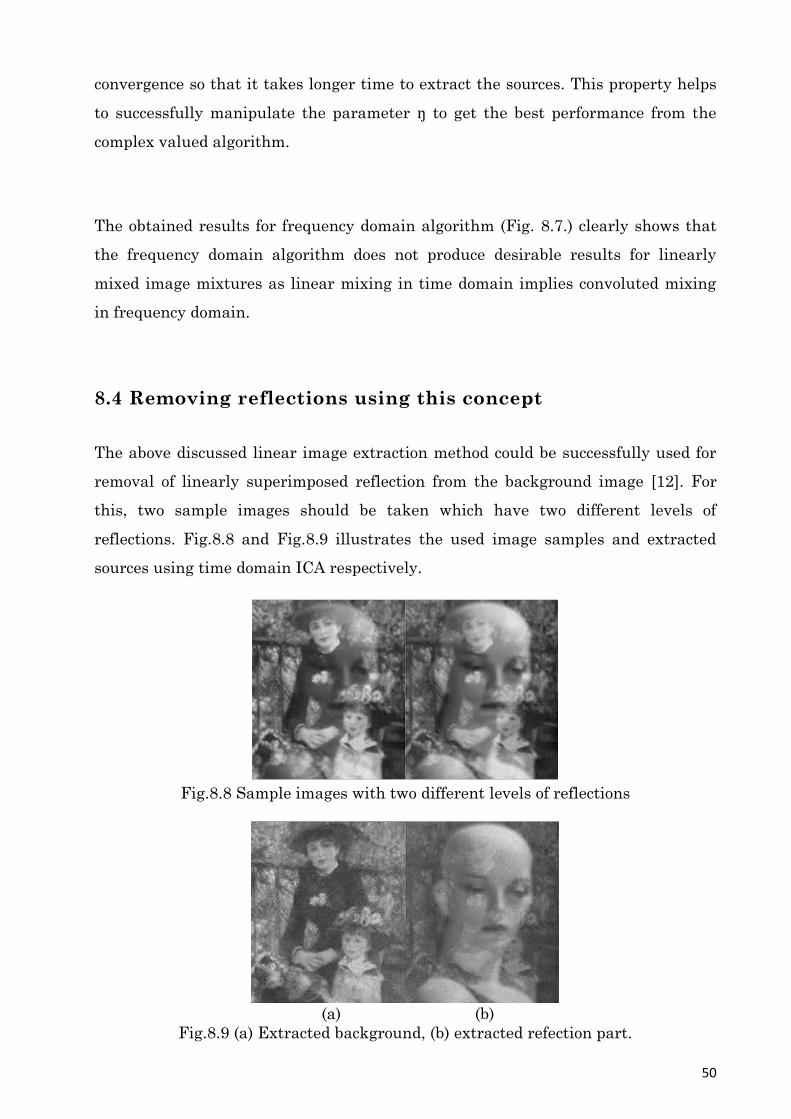
8.4 Removing reflections using this concept
The above discussed linear image extraction method could be successfully used for
removal of linearly superimposed reflection from the background image [12]. For
this, two sample images should be taken which have two different levels of
reflections. Fig.8.8 and Fig.8.9 illustrates the used image samples and extracted
sources using time domain ICA respectively.
Fig.8.8 Sample images with two different levels of reflections
(a) (b)
Fig.8.9 (a) Extracted background, (b) extracted refection part.
51
Two different levels of reflections as in this example can be practically obtained by
placing a polarizing filter in front of the camera lens before taking the photograph.
For most modern cameras, a circular polarizer is typically used. Since reflections
tend to be at least partially linearly-polarized, a linear polarizer can be used to
change the balance of the light in the photograph so that the reflection level in the
photograph can be changed accordingly. The rotational orientation of the filter can
be adjusted for the preferred effect in the photograph and two different levels of
reflections can be obtained from the photograph exactly as explained in this
example.
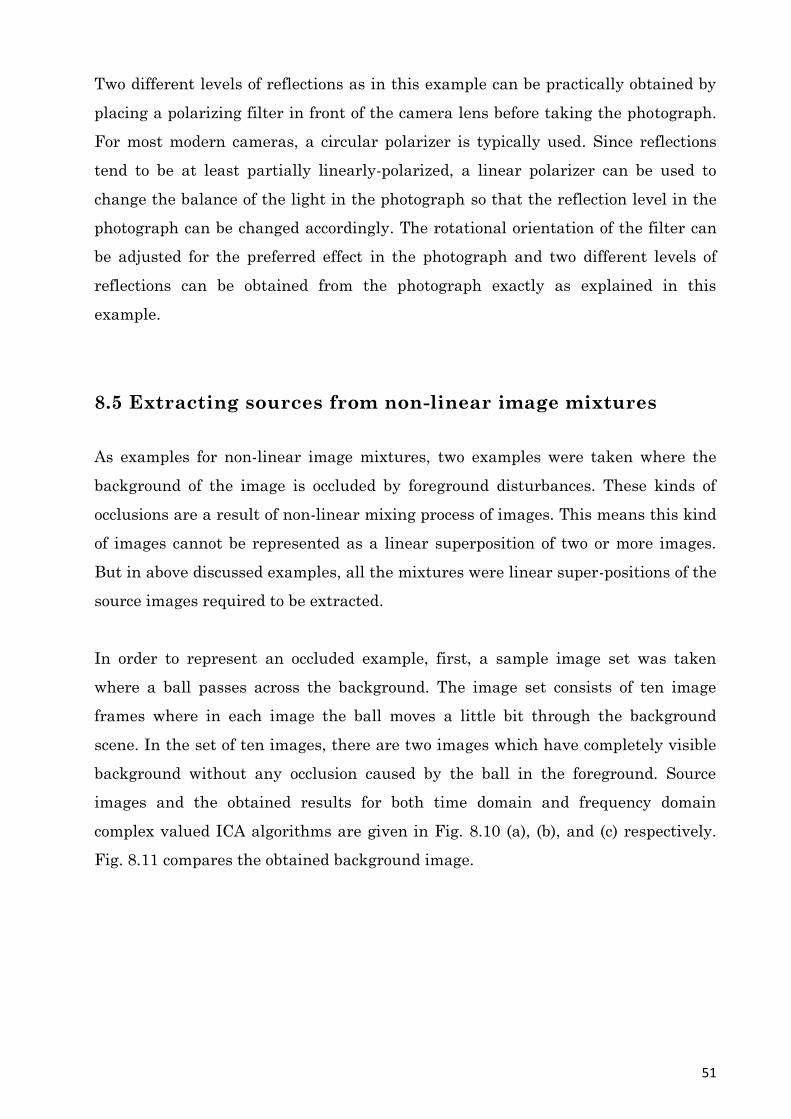
8.5 Extracting sources from non-linear image mixtures
As examples for non-linear image mixtures, two examples were taken where the
background of the image is occluded by foreground disturbances. These kinds of
occlusions are a result of non-linear mixing process of images. This means this kind
of images cannot be represented as a linear superposition of two or more images.
But in above discussed examples, all the mixtures were linear super-positions of the
source images required to be extracted.
In order to represent an occluded example, first, a sample image set was taken
where a ball passes across the background. The image set consists of ten image
frames where in each image the ball moves a little bit through the background
scene. In the set of ten images, there are two images which have completely visible
background without any occlusion caused by the ball in the foreground. Source
images and the obtained results for both time domain and frequency domain
complex valued ICA algorithms are given in Fig. 8.10 (a), (b), and (c) respectively.
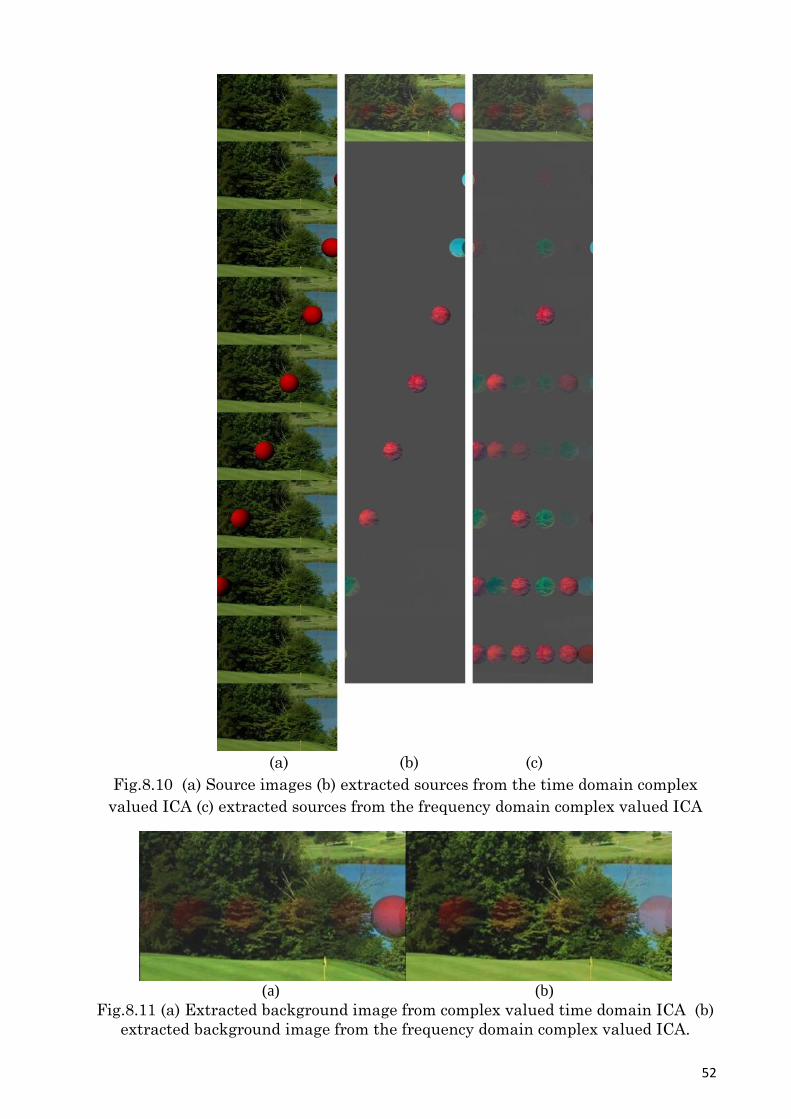
Fig. 8.11 compares the obtained background image.
52
(a) (b) (c)
Fig.8.10 (a) Source images (b) extracted sources from the time domain complex
valued ICA (c) extracted sources from the frequency domain complex valued ICA
(a) (b)
Fig.8.11 (a) Extracted background image from complex valued time domain ICA (b)
extracted background image from the frequency domain complex valued ICA.

53
This case is taken as non-linear since the ball and the background image is not a
linear superposition of two or more images unlike in earlier cases. As can be
observed from the obtained results, it is possible to state that the complex valued
time domain ICA algorithm could separate the foreground ball and the background
scene of the image clearly. But the frequency domain algorithm could not extract
the foreground ball properly. This shows that, for this kind of situations, complex
valued time domain method is better for foreground extraction as a complex mixing
in the time domain is more representative for this scenario. But as depicted in
Fig.8.11. (a) and (b) it can be seen that the frequency domain algorithm yields
better results for the separated image of the background.
As mentioned above, in the above example, the input source image set contains two
images in which the background is completely visible without any foreground
occlusion. This makes it easier for the algorithms to separate the background and
foreground of the image set.
8.6 Extracting background using frequency domain ICA
As mentioned above, in the above example, the input source image set contains two
images in which the background is completely visible without any foreground
occlusion. This makes it easier for the algorithms to separate the background and
foreground of the image set.
Therefore, next we will consider an example in which the source image set does not
contain any image that the background is completely visible. This means all the
images are occluded by some foreground disturbance. For this, a black line grid is
used to cover the background of an image. And for each image, the foreground grid
is shifted horizontally by a small amount randomly. Target was to extract the
background of the image using ICA. The used source image samples, extracted
sources using time and frequency domain ICA algorithms are given in Fig 8.12, 8.13
and 8.14 respectively. Note that the position of the foreground grid used in the
source images are not the same. This is a typical case in surveillance applications.

54
Fig.8.12 Three samples of the 10 occluded source images
Fig.8.13 Extracted image using time domain complex valued ICA algorithm
Fig.8.14 Extracted image using frequency domain complex valued ICA algorithm
The obtained results clearly show that only the frequency domain algorithm is
capable of extracting the background image as the time domain complex valued
algorithm does not produce a proper extraction of the background.
8.7 Conclusion
For most image mixtures, real valued ICA algorithm and the time domain complex
valued algorithm reliably estimates the sources if the underlying mixing process is
linear and real valued. However, the complex valued ICA algorithm showed faster
convergence and more accurate results compared to the time domain real valued

55
algorithm. When the mixing process is complex valued, the real valued time domain
algorithm cannot be used for source extraction. It is also possible to say that when
the mixing process is linear, the frequency domain algorithm cannot be used for
extracting the sources properly as a result of convoluted frequency domain mixing.
However, the linear image extraction method was successfully used to remove a
foreground reflection using time domain ICA when the reflection is linearly
superimposed on the background image. When the mixing process is non-linear,
such as in the occluded case discussed above, it was observed that the time domain
algorithms were incapable of providing desirable results. Therefore, the frequency
domain implementation of ICA should be used for source extraction under non-
linear occlusive mixtures.
56
Chapter 9
Enhancing images using complex
valued ICA
Image equalization and shadow removal are key pre-activities performed in many
image applications. For example, image equalization is a widely used process
exploited in video & image editing applications. Shadows in an image will cause loss
of information, infects the results of target tracking, object recognition, image
segmentation, image matching and related problems in computer vision. In this
chapter, there are details for image enhancement by removing shadowy and dark
areas and obtaining intensity equalized image which has a high quality appearance
compared to the original image.
9.1 Image enhancement process and results comparison
This method utilizes the unwrapped signals of RGB components of the original
image as 3 mixtures. The time domain ICA is applied to this mixture to successfully
generate the equalized intensity component of the image. This intensity component
is then used to replace the value component of the hue-saturation-value (HSV)
representation of the original image to obtain the intensity equalized image. Since,
three images are used as input to the algorithm, in most cases, there will be three
significant independent components in the output. Out of those, only one image
represents the intensity component for the properly equalized image. For
understanding this phenomenon, let’s take an example image and observe the
results obtained by applying the complex valued ICA algorithm to the RGB
components of the image. Figures 9.1 to 9.4 show the original image, RGB
components of the original image, extracted independent components and the RGB
images obtained by replacing value component of HSV representation respectively.

57
Fig.9.1: Original image used for equalization
(a) (b) (c)
Fig.9.2: (a) Red component of the image. (b) Green component of the image. (c)
Blue component of the image.
(a) (b) (c)
Fig.9.3: Extracted images from RGB components using complex ICA algorithm
(a) (b) (c)
Fig.9.4: RGB images obtained by replacing value component of HSV image with
the extracted independent components (a), (b), (c) separately
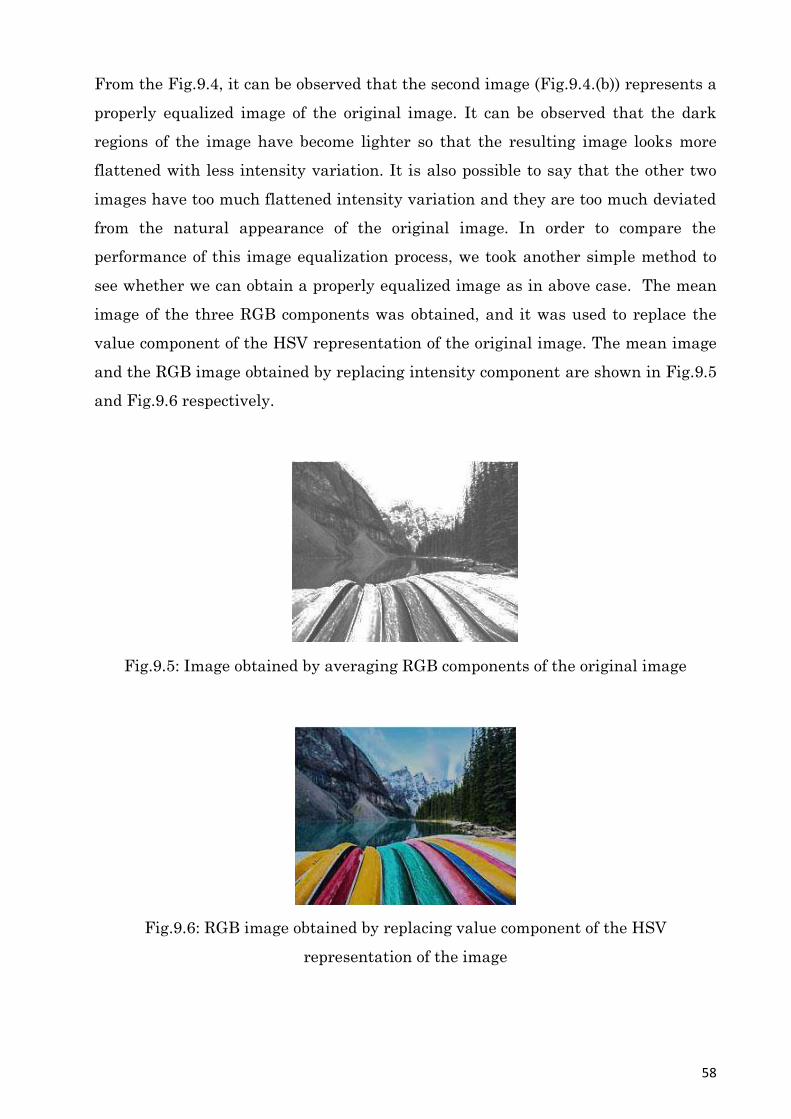
58
From the Fig.9.4, it can be observed that the second image (Fig.9.4.(b)) represents a
properly equalized image of the original image. It can be observed that the dark
regions of the image have become lighter so that the resulting image looks more
flattened with less intensity variation. It is also possible to say that the other two
images have too much flattened intensity variation and they are too much deviated
from the natural appearance of the original image. In order to compare the
performance of this image equalization process, we took another simple method to
see whether we can obtain a properly equalized image as in above case. The mean
image of the three RGB components was obtained, and it was used to replace the
value component of the HSV representation of the original image. The mean image
and the RGB image obtained by replacing intensity component are shown in Fig.9.5
and Fig.9.6 respectively.
Fig.9.5: Image obtained by averaging RGB components of the original image
Fig.9.6: RGB image obtained by replacing value component of the HSV
representation of the image
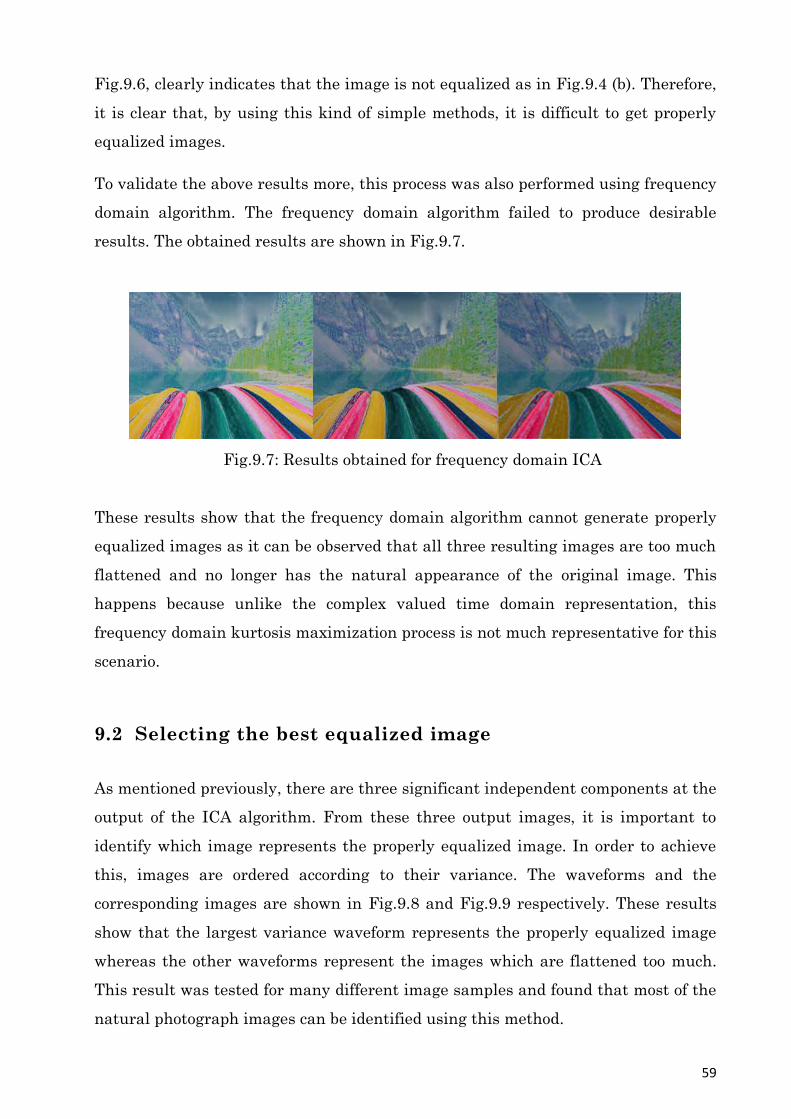
59
Fig.9.6, clearly indicates that the image is not equalized as in Fig.9.4 (b). Therefore,
it is clear that, by using this kind of simple methods, it is difficult to get properly
equalized images.
To validate the above results more, this process was also performed using frequency
domain algorithm. The frequency domain algorithm failed to produce desirable
results. The obtained results are shown in Fig.9.7.
Fig.9.7: Results obtained for frequency domain ICA
These results show that the frequency domain algorithm cannot generate properly
equalized images as it can be observed that all three resulting images are too much
flattened and no longer has the natural appearance of the original image. This
happens because unlike the complex valued time domain representation, this
frequency domain kurtosis maximization process is not much representative for this
scenario.
9.2 Selecting the best equalized image
As mentioned previously, there are three significant independent components at the
output of the ICA algorithm. From these three output images, it is important to
identify which image represents the properly equalized image. In order to achieve
this, images are ordered according to their variance. The waveforms and the
corresponding images are shown in Fig.9.8 and Fig.9.9 respectively. These results
show that the largest variance waveform represents the properly equalized image
whereas the other waveforms represent the images which are flattened too much.
This result was tested for many different image samples and found that most of the
natural photograph images can be identified using this method.

60
(a) (b) (c)
Fig.9.8: Waveforms of the images when they are ordered according to variance
in descending order with (a) largest, (b) second largest and (c) smallest variance
waveform.
(a) (b) (c)
Fig.9.9: Images corresponding to (a), (b) and (c) of Fig.9.8.
9.3 Conclusions
Complex valued time domain ICA is capable of generating intensity equalized
images when photographed or natural images are used. But the frequency domain
algorithm could not produce properly equalized images. Furthermore, the proposed
variance based method can be successfully used to identify the correct independent
components.

61
Chapter 10
Conclusions
In this project, time domain real and complex valued ICA algorithms and a complex
valued frequency domain algorithm were implemented for source extraction from
linear and non-linear acoustic signal mixtures and image mixtures. For acoustic
signals, both time and frequency domain algorithms were effective for extracting
sources if the mixing process is linear. But only frequency domain algorithm was
successful for source extraction from the discussed non-linear corrupted acoustic
signal mixture. This was because of the convoluted time domain mixing behavior of
the non-linear mixtures. However, the complex valued ICA algorithm showed faster
convergence and more accurate results compared to the time domain real valued
algorithm. The algorithms were also used for source extraction from linear and non-
linear image mixtures which can be used for some synthetic and typical image
restoration problems. For most image mixtures, real valued ICA algorithm and the
time domain complex valued algorithm reliably estimates the sources if the
underlying mixing process is linear and real valued. When the mixing process is
complex valued, the real valued time domain algorithm cannot be used for source
extraction. It is also possible to say that when the mixing process is linear, the
frequency domain algorithm cannot be used for extracting the sources from images
properly, as a result of convoluted frequency domain mixing. However, the linear
image extraction method was successfully used to remove a foreground reflection
using time domain ICA when the reflection is linearly superimposed on the
background image. When the mixing process is non-linear, such as in the occluded
case discussed in this project, it was observed that the time domain algorithms were
incapable of providing desirable results. Therefore, the frequency domain
implementation of ICA is used for source extraction under non-linear occlusive
mixtures and the reliable extraction of sources under such cases was demonstrated
for image restoration. Finally, a new image equalizing method was proposed and it
was found that the ICA time domain implementations are capable of generating
intensity equalized images when photographed or natural images are used.
Furthermore, the proposed variance based method can be successfully used to

62
identify the correct independent component from three intensity components
extracted using time domain ICA.
Finally, we can conclude that the proposed ICA based BSS methods in this project
perform really well in many different applications and they are highly competitive
and feasible ways of separating independent source signals out of a mixture.

63
References
[1] James V Stone, Independent component analysis; a tutorial, 2nd ed., Bradford
book, The MIT press, England, 2002.
[2] Hyva¨rinen,nE. Oja, “Independent Component Analysis: Algorithms and
Applications”,Neural Networks, vol.13,pp. 411- 430,2000.
[3] J. C. Rajapakse and W. Chen, “Complex ICA-R,” in Neural Networks (IJCNN),
The 2010 International Joint Conference on, 2010, pp. 1–8.
[4] W. V. D. Wijesinghe, G. Godaliyadda, M. P. B. Ekanayake, and H. K. Garg,
“Department of Electrical and Electronic Engineering, University of Peradeniya,
Sri Lanka,” in Industrial and Information Systems (ICIIS), 2013 8th IEEE
International Conference on, 2013, pp. 144–149.
[5] P. Smaragdis, "Blind Separation of convolved mixtures in the frequency
domain," Neurocomputing, Vol. 22, pp.21-34, 1998.
[6] I.T. Jolliffe. Principal Component Analysis. Springer-Verlag,1986
[7] Anemüller, Jörn, Terrence J. Sejnowski, and Scott Makeig. “Complex
Independent Component Analysis of Frequency-Domain
Electroencephalographic Data.” Neural Networks 16, no. 9 (November 2003):
1311–23. doi:10.1016/j.neunet.2003.08.003.
[8] Biswal, Bharat B.; Ulmer, John L., “Blind Source Separation of Multiple Signal
Sources of fMRI Data Sets Using Independent Component Analysis”, Journal of
Computer Assisted Tomography: March/April 1999.
[9] Kinage, Kishor S., and S. G. Bhirud. “Face Recognition Using Independent
Component Analysis of GaborJet (GaborJet-ICA).” In Signal Processing and Its
64
Applications (CSPA), 2010 6th International Colloquium on, 1–6. IEEE, 2010.
http://ieeexplore.ieee.org/xpls/abs_all.jsp?arnumber=5545318.
[10] Farhang -Boroujeny, B., Adaptive Filters Theory and Applications, John Wiley
and Sons, Chichester, UK, 1998.
[11] Mateer, Todd. “Fast Fourier Transform Algorithms with Applications.”
Clemson University, 2008. http://cr.yp.to/f2mult/mateer-thesis.pdf.
[12] M. Bronstein, M. M. Bronstein, M. Zibulevsky, and Y. Y. Zeevi, “Blind
separation of reflections using sparse ica,” in Proc. Int. Conf. ICA2003, Nara,
Japan, 2003, pp. 227–232.