Download - RINGKASAN go 1

RINGKASAN
NAMA :ABDUL RAHMAN
NIM :1305779
Osilasi Harmonis
1. Osilator Harmonis Sederhanaa. Osilator massa pegaas
a.Pegasposisi setmbang F= 0b. Pegas teregang F = - k.xc. Pegas tertekan F = k.x
Persamaan ini mengandung turunan terhadap fungsi x, sehinggadisebut persamaan diferensial.Persamaan ini juga dijumpai pada : Getaran senar dan Ayunan.Begitu pula dalam listrik (arus bolak-balik) dimana sebagaiganti perpindahan x, digunakan V(t) (Potensial listrik) atauarus listrik I(t).Gerak osilasi suatu gerak yang sangat penting untuk diketahui,karena berhubungan dengan getaran, misalnya : mesin, bumi,molekul dan ataom di dalam bahan.
F = - k . x ; F = m . g = m . a

Sehingga :m . a = - k . x
m.a + k.x = 0
Dari kalkulus diferensial fungsi sinus atau cosinus memenuhisifat, yaitu :
sehingga dapat ditulis :
Persamaan diatas diturunkan dua kali, sehingga :
sedangkan :
sehingga persamaan menjadi :

Dari persamaan diatas terlihat bahwa :
maka untuk :
b. Pendulum
adalah sistem yang terdiri dari sebuah massa yangdigantung dengan tali tanpa massa dan tidak dapat mulur.Ayunan sederhana disebut juga gerak osilasi periodik.

Sebuah ayunan dengan panjang l, dengan sebuah benda bermassam.Berayun dalam bidang vertikal dengan pengaruh grafitasi,membentuk sudut θ terhadap arah vertikal.Gaya yang bekerja pada benda adalah gaya berat (mg) dan gayatarik (T) dari tali.Uraian dari gaya berat mg, yaitu terdiri dari :Arah radial = mg cos θArah tangensial = mg sin θ adalah (gerak lingkar)Pada arah radial bekerja percepatan sentripental.Arah tangensial adalah gaya pembalik pada benda m yangmengembalikan pada posisi setimbang.Jadi gaya pembalik adalah : F = - mg sin θJika sudut kecil, maka : sin θ ≈ θSimpangan lintasan :
maka :
Jika dilihat pada persamaan pegas : F = -k . x maka :
Sehingga dipeoleh Perioda ayunan jika amplitudo kecil adalah :
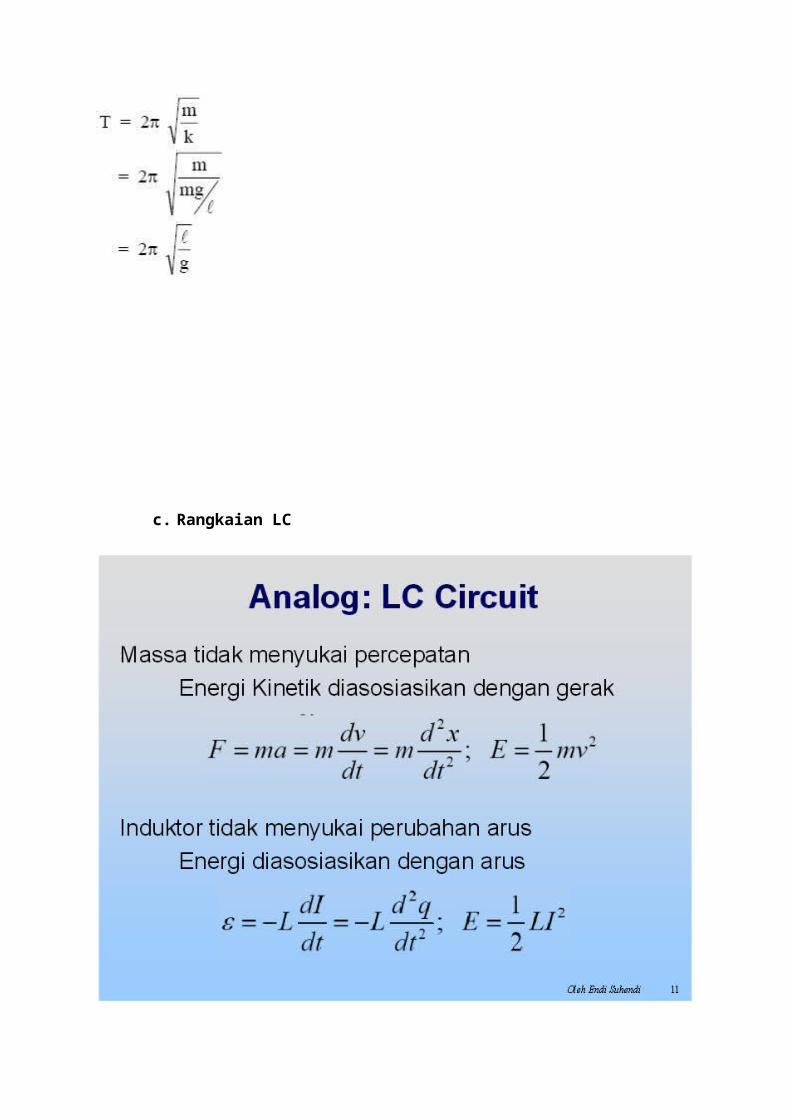
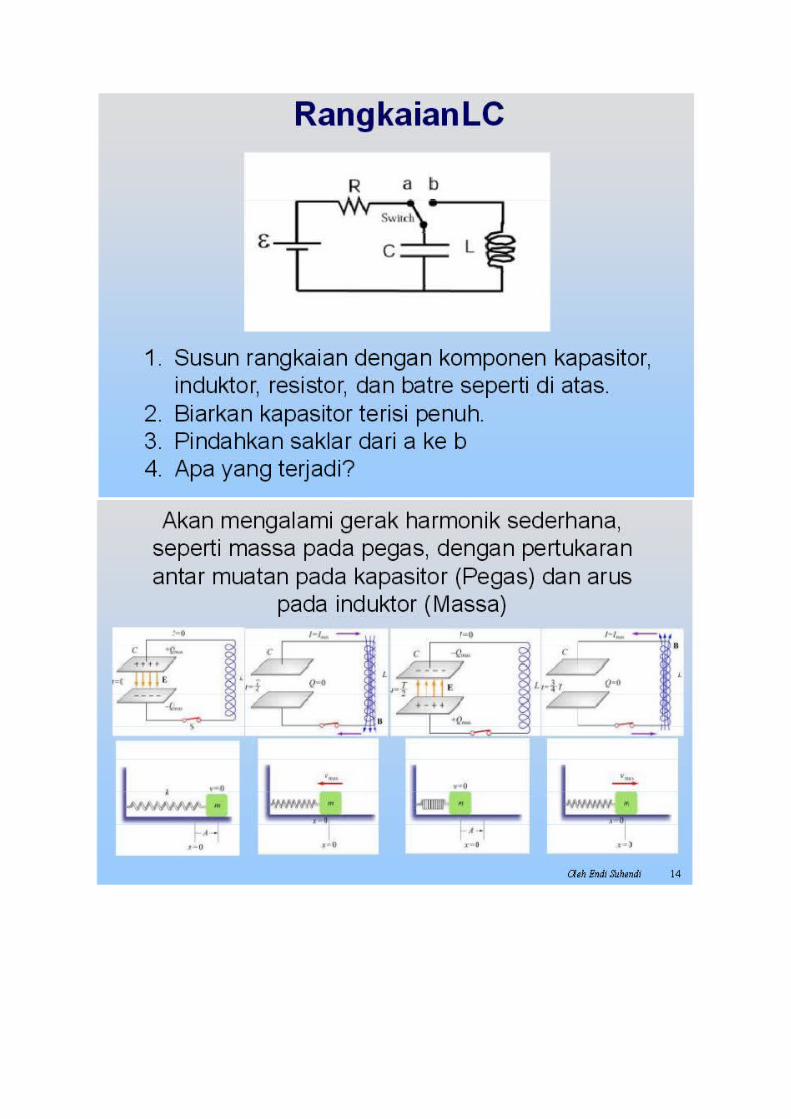
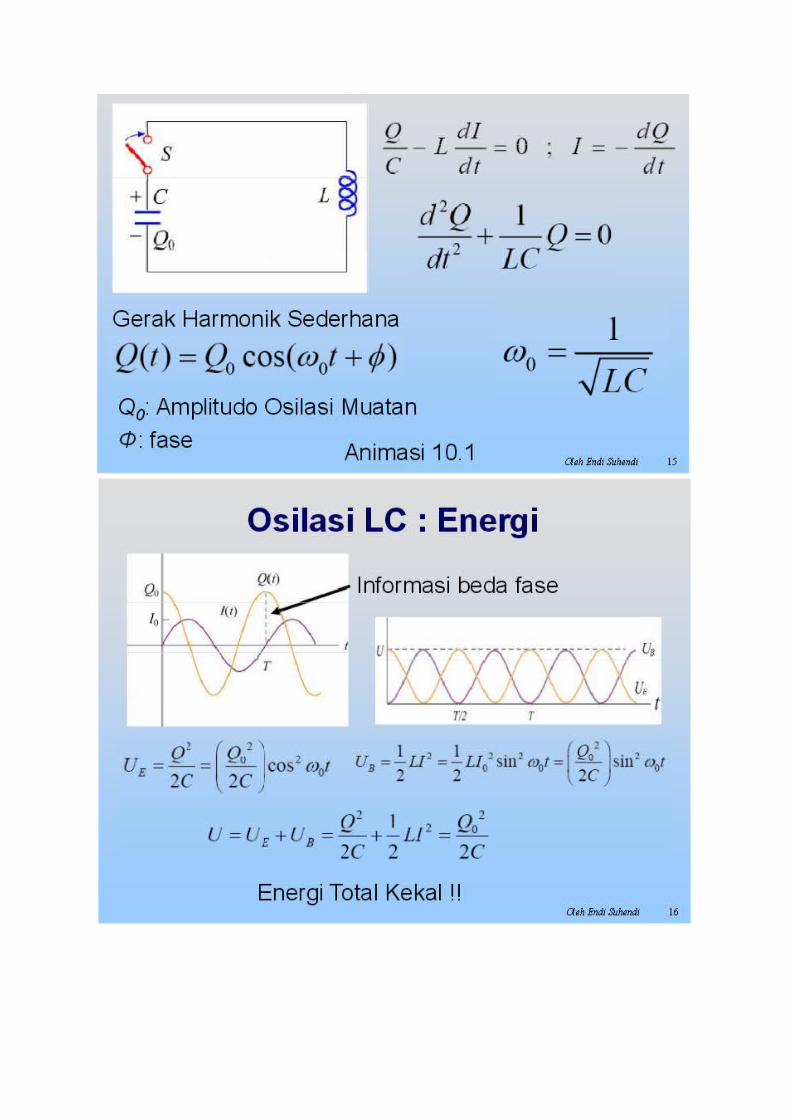
c. Rangkaian LC

2. Sistem Osilator Bergandeng
Contoh sederhana sebuah sistem yang bergandeng adalah duaosilator harmonik yang dihubungkan oleh pegas, seperti yangditunjukkan dalam gambar 3. Tiap osilator harmonik mempunyaipartikel dengan massa m, dan tetapan pegas masing-masingadalah k1 dan k2. Keduanya dihubungkan oleh pegas lain yangtetapannya k'. Gerakan kedua massa dibatasi pada sepanjang arahyang menghubungkan kedua massa, misalkan sepanjang sumbu X.Sistem tersebut memiliki dua derajat kebebasan yang dinyatakanoleh koordinat x1 dan x2. Konfigurasi sistem dinyatakan denganpergeseran dari kedudukan setimbang O1 dan O2. Pergeseranpositif diambil dalam arah kanan dan pergeseran negatif dalamarah kiri. Jika kedua osilator tidak saling digandengkan, makafrekuensi masing-masing adalah :
ω10=√k1m
ω20=√k2m(5)
Jika kedua osilator dihubungkan oleh pegas dengan tetapan k',sistem akan bergetar dengan frekuensi yang nilainya berbedadari frekuensi yang dinyatakan dalam persamaan (5).
Energi kinetiknya adalah
T=12 mx1
2+ 12 mx2
2
(6)
dan energi potensialnya adalah :
V=12 k1x1
2+12 k2x2
2+12 k'(x1−x2 )
2
(7)
Oleh karena itu fungsi Lagrangian dapat ditulis :
L = T - V
= 12m x1
2+12 mx2
2−12 k1x1
2− 12k2x2
2−12 k'(x1−x2)
2 (8)
Persamaan Lagrange untuk gerak di atas adalah :
ddt ( ∂L
∂ x1 )− ∂L∂x1
=0 dan
ddt ( ∂L
∂ x2 )− ∂L∂x2
=0
(9)
Dengan menggunakan kedua persamaan di atas, diperoleh solusi :
mx1+k1x1+k'(x1−x2 )=0
(10)
mx2+k2x2+k'(x2−x1 )=0
(11)
Suku ketiga dalam persamaan di atas muncul oleh kedua osilatortergandeng. Jika kedua osilator tidak tergandeng satu samalain, osilator tersebut akan bergetar dengan frekuensi sepertiyang ditunjukkan dalam persamaan (5). Persamaan diferensialpada di atas dapat ditulis :

mx1+(k1+k')x1−k'x2=0
(12)
mx2+(k2+k')x2−k'x1=0
(13)
Kedua persamaan di atas adalah independen seandainya sukuketiga tidak muncul. Hal ini berarti bahwa jika massa keduadalam keadaan diam x2 = 0, frekuensi getaran adalah sama denganfrekuensi osilator pertama, dan dari persamaan (12)diperoleh :
ω11=√k1+k'm
(14)
Dan jika massa m1 dalam keadaan diam, x1 = 0, frekuensigetaran adalah frekuensi osilator kedua
ω21=√k2+k'm
(15)
Frekuensi ω1'dan ω2
' adalah lebih besar dari ω10 dan ω20 yang
dinyatakan dalam persamaan (5). Alasannya adalah bahwa tiapmassa dihubungkan pada kedua pegas.
Untuk memperoleh mode getaran yang berbeda, kita harusmemecahkan secara simultan persamaan diferensial linier ordedua yang dinyatakan dalam persamaan (10) dan (11). Persoalanini dapat dibuat menjadi sederhana dengan menganggap bahwa

kedua osilator benar-benar identik (sama), yakni k1 = k2 = k. Jadipersamaan diferensialnya adalah :
mx1+(k+k')x1−k'x2=0
(16)
mx2+(k+k')x2−k'x1=0
(17)
Kita mencoba penyelesaian persamaan diferensial di atas denganmengambil salah satu dari tiga bentuk berikut :
x=Acos(ωt+φ)
(18)
x=Acosωt+Asinωt (19)
x=Aei(ωt+δ )
(20)
dimana adalah faktor fase awal. Misalkan kita mengambilpersamaan (20) sebagai solusi. Jadi :
x1=Aei(ωt+δ1 )
dan x2=Aei(ωt+δ2)
(21)
Substitusi ke persamaan (16) dan (17) diperoleh :
(k+k'−mω2 )A−k'B=0(22)
−k'A+(k+k'−mω2)B=0(23)

Gambar 3.3.
Osilator Tergandeng
Kita peroleh dua persamaan dengan tiga bilangan yang takdiketahui A, B dan . Persamaan di atas dapat diselesaikanuntuk memperoleh rasio A dan B.
AB
=k'
k+k'−mω2 =k+k'−mω2
k' (24)
Kita dapat menyelesaikan persamaan di atas dengan menganggapbahwa determinan koefisien A dan B sama dengan nol, yangberarti
|k+k'−mω2 −k'
−k' k+k'−mω2|=0
(25)
Persamaan di atas disebut persamaan sekuler. Penyelesaianselanjutnya :
(k+k'−mω2)2−k'2=0(26)
Akar-akar yang diperoleh dari persamaan di atas adalah :
ω=±ω1=±(km )
1/2
(27)
ω=±ω2=±(k+2k'
m )1/2
(28)
Jika dinyatakan dalam akar-akar 1 dan 2, solusi umumpersamaan (16) dan (17) dapat ditulis :
x1=A1eiω1t+A−1e
−iω1t+A2eiω2t+A−2e
iω2t
(29)

x2=B1eiω1t+B−1e
−iω1t+B2eiω2t+B−2e
iω2t
(30)
Kedua persamaan di atas mengandung delapan tetapan yang tidakindependen. Dengan mensubstitusi persamaan (27) dan (28)dalam persamaan (23) dan (24) diperoleh rasio A/B sebagaiberikut :
Jika = 1 A = +B
Jika = 2 A = -B
Jadi solusi yang diperoleh menjadi :
x1=A1eiω1t+A−1e
−iω1t+A2eiω2t+A−2e
iω2t
(31)
x2=A1eiω1t+A−1e
−iω1t+A2eiω2t+A−2e
iω2t
(32)
Kita dapat mereduksi dari 8 tetapan menjadi 4 tetapan. Nilaidari keempat tetapan tersebut dapat dicari dari syarat awalyang ditetapkan.
Contoh :
1. Gambar di bawah ini memperlihatkan sistim pegas-bendabermassa dengan peredaman. Tentukan persamaan geraknyadengan menggunakan persamaan Lagrange.
Gambar 3.4.
Osilator tergandeng dengan redaman

Persamaan Lagrange untuk system peredaman adalah :
ddt
∂ (K⋅E)∂ qi
−∂ (K⋅E)∂ qi
+∂ (P⋅E)∂ qi
+∂ (D⋅E )∂ qi
=0
dimana D⋅E=
12c1 x1
2+12c2 (x1−x2 )2+12c3 x2
2
adalah energi peredaman.
K⋅E=12m1 x1
2+12m2 x2
2
P⋅E=12k1x1
2+12k2 (x1−x2)
2+12k3x2
2
Masing-masing adalah energi kinetik dan energi potensialpegas.
Sekarang
,
ddt
∂ (K⋅E )∂ x1
=m1 x1 ,
∂ (K⋅E )∂ x1
=0 ,
∂ (P⋅E)∂ x1
=k1x1+k2 (x1−x2)∂ (D⋅E )∂ x1
=c1 x1+c2 (x1−x2)
m1 x1+(c1+c2) x1+(k1+k2)x1−c2 x2−k2x2=0
ddt
∂ (K⋅E )∂ x2
=m2 x2 ,
∂ (K⋅E )∂ x2
=0 ,
∂ (P⋅E)∂ x2
=k3x2−k2 (x1−x2 )∂ (D⋅E )∂ x2
=c3 x2−c2(x1−x2)
m2 x2+(c2+c3) x2+(k2+k3)x2−c2 x1−k2x1=0
3. Osilasi Teredam
Secara umum gerak osilasi sebenarnya teredam. Energi mekanik
terdisipasi (berkurang) karena adanya gaya gesek. Maka jika
dibiarkan, osilasi akan berhenti, yang artinya GHS-nya
teredam. Gaya gesekan biasanya dinyatakan sebagai arah
berlawanan dan b adalah konstanta menyatakan besarnya redaman,
dimana amplitudo dan = frekuensi angular pada GHS teredam.
Besaran fisika pada ayunan bandul
1. Periode(T)
Benda yang bergerak harmonis sederhana pada ayunan
sederhana memiliki periode.periode ayunan (T)adalah waktu yang
diperlukan benda untuk melakukan satu getaran.benda dikatakan
melakukan satu getaran jika benda bergerak dari titik dimana
benda tersebut mulai bergerak dan kembali lagi ketitik
tersebut.satu periode adalah sekon atau detik.
2. Frekuensi(f)
Frekuensi adalah banyaknya getaran yang dilakukan oleh
benda selama satu detik,yang dilakukan oleh benda selama satu
detik,yang dimaksudnya dengan getran disini adalah getran
lengkap.satu frekuensi adalah hertz.
Hubungan antara periode dan frekuensi
Frekuensi adalah banyaknya getaran yang terjadi
selama satu detik,dengan demikian selang waktu yang dibutuhkan
untuk melakukan satu getaran adalah
1getaran /f getaran x 1 sekon = 1 /f sekon

Selang waktu yang dibutuhkan untuk melakukan suatu
getaran adalah periode.dengan demikian,secara matematis
hubungan antara periode dan frekuensi adalah sebagai berikut:
T = 1 / f
T = 1 /T







