Download - Aula 9 SEM0104

SEM0104 SEM0104 -- Aula 9Aula 9
Engrenagens e Trens de Engrenagens e Trens de EngrenagensEngrenagensEngrenagensEngrenagens
Prof. Dr. Marcelo Prof. Dr. Marcelo BeckerBeckerSEM - EESC - USP
�� IntroduçãoIntrodução� Representações
� Cinemática e Análise de Torque
� Montagens
Sumário da AulaSumário da Aula
� Montagens
� Transmissões Veiculares
� Software TEPiciclo (Visual Basic 5.0)
� Exemplos
EESC-USP © M. Becker 2009 2/81
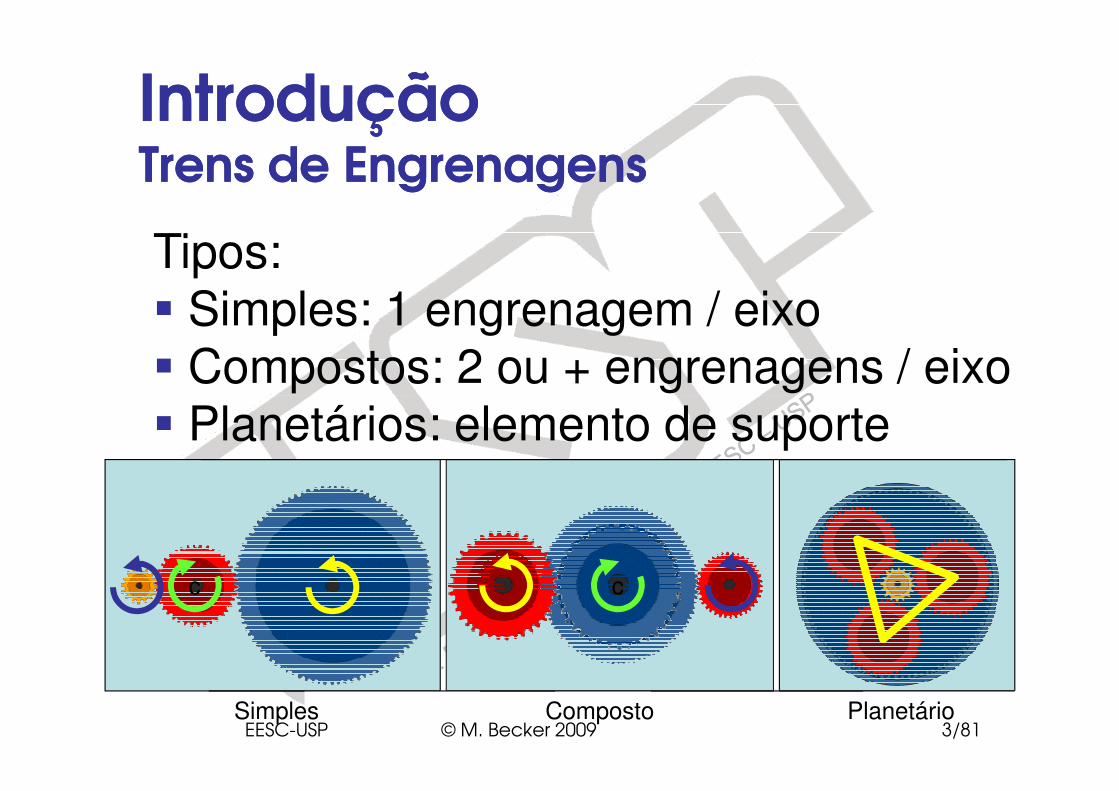
IntroduçãoIntroduçãoTrens de EngrenagensTrens de Engrenagens
Tipos:
� Simples: 1 engrenagem / eixo
� Compostos: 2 ou + engrenagens / eixo
� Planetários: elemento de suporte
Simples Composto Planetário
c c
EESC-USP © M. Becker 2009 3/81
Anular
Braço
IntroduçãoIntroduçãoTrens de Engrenagens PlanetáriasTrens de Engrenagens Planetárias
SolarPlaneta
EESC-USP © M. Becker 2009 4/81
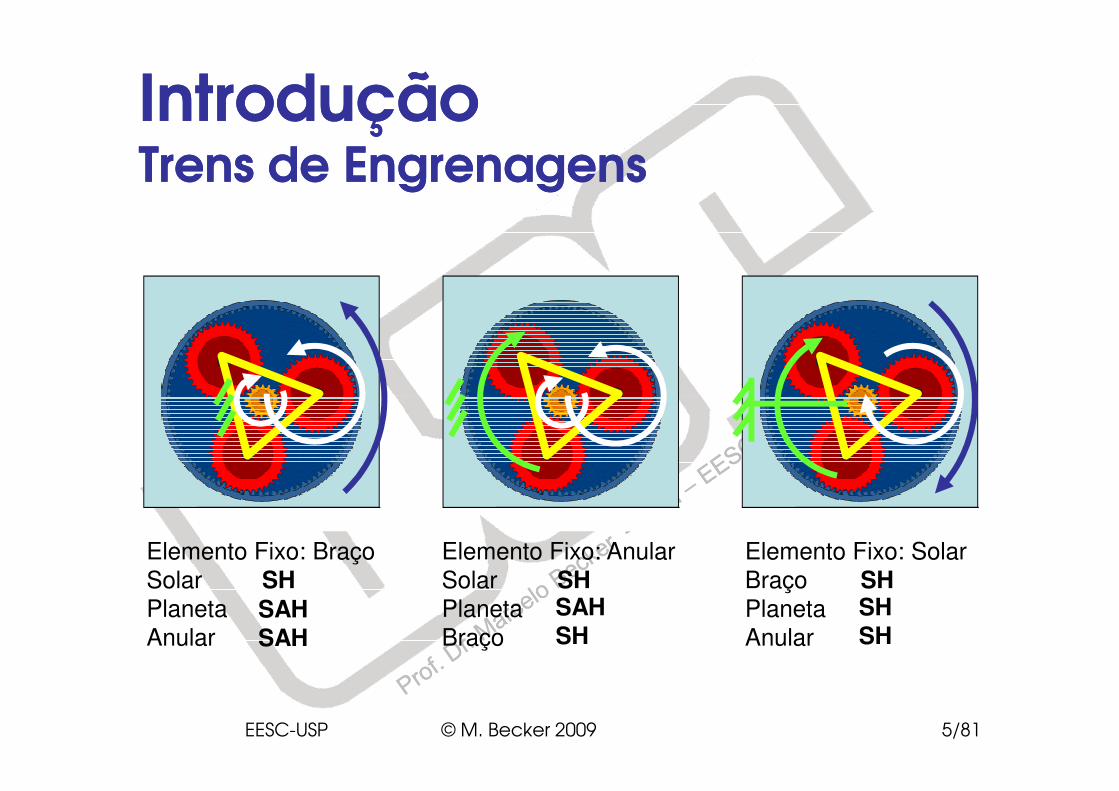
IntroduçãoIntroduçãoTrens de EngrenagensTrens de Engrenagens
Elemento Fixo: Braço
Solar SHPlaneta
Anular
Elemento Fixo: Anular
Solar SHPlaneta
Braço
Elemento Fixo: Solar
Braço SHPlaneta
AnularSAHSAH
SAHSH
SHSH
EESC-USP © M. Becker 2009 5/81

IntroduçãoTrens de Engrenagens Planetárias
Histórico
� Arquimedes: 212 a.C.
� Carruagem Chinesa: 2.634 a.C.
� Leonardo da Vinci: 1.500
� FORD T: 1908 a 1927
� Hoje em dia…
EESC-USP © M. Becker 2009 6/81

IntroduçãoIntroduçãoTrens de Engrenagens PlanetáriasTrens de Engrenagens Planetárias
Carruagem Chinesa (2.634 a.C.)
Imperador Huang Di (China)
EESC-USP © M. Becker 2009 7/81
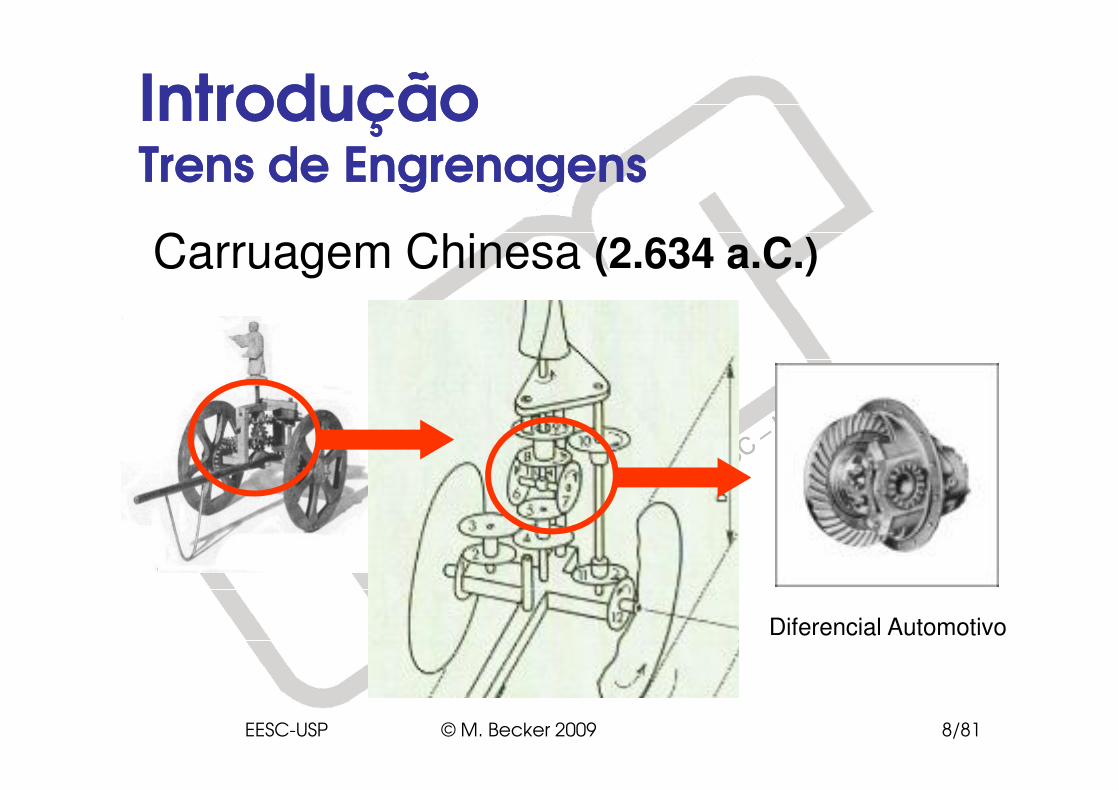
IntroduçãoIntroduçãoTrens de EngrenagensTrens de Engrenagens
Carruagem Chinesa (2.634 a.C.)
Diferencial Automotivo
EESC-USP © M. Becker 2009 8/81
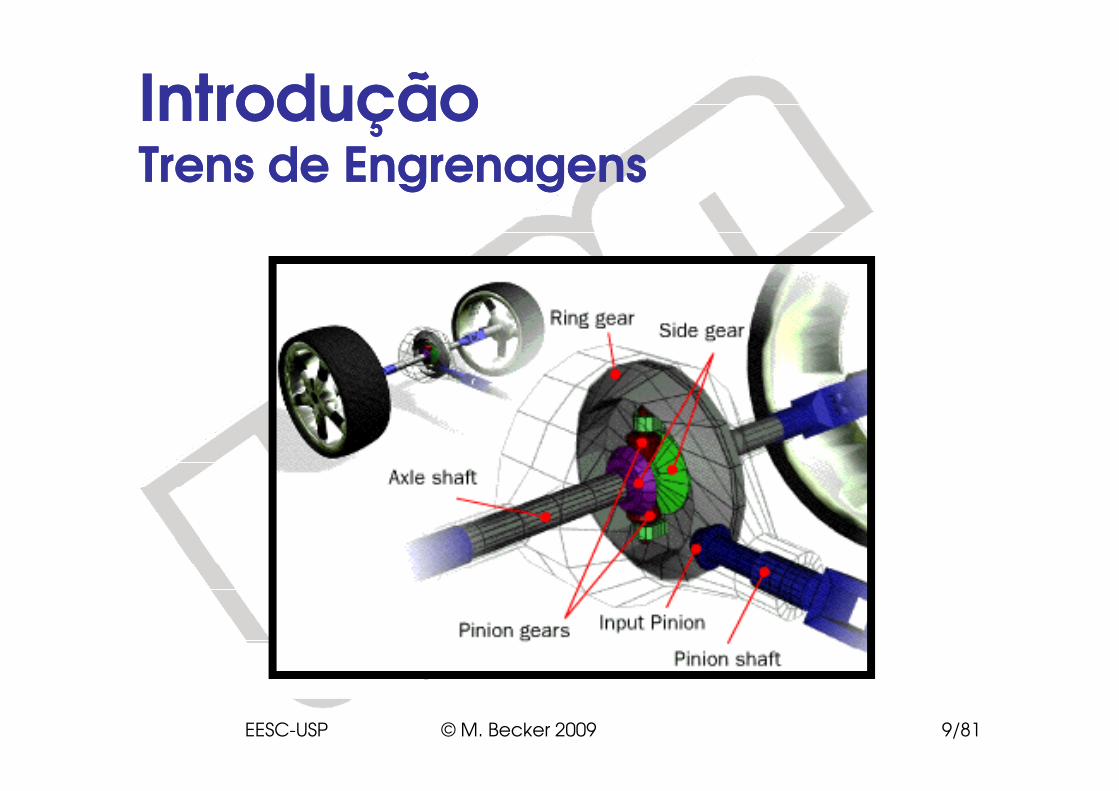
IntroduçãoIntroduçãoTrens de EngrenagensTrens de Engrenagens
EESC-USP © M. Becker 2009 9/81
• 2 GDL• Alta Complexidade Cinemática• “Difícil de Entender”• Permanentemente Engrenado
IntroduçãoIntroduçãoTrens de Engrenagens PlanetáriasTrens de Engrenagens Planetárias
• Permanentemente Engrenado• Alta Confiabilidade• Compacto• Alta Redução / Multiplicação• Adição ou Divisão de Torque • Múltiplas RTs
EESC-USP © M. Becker 2009 10/81
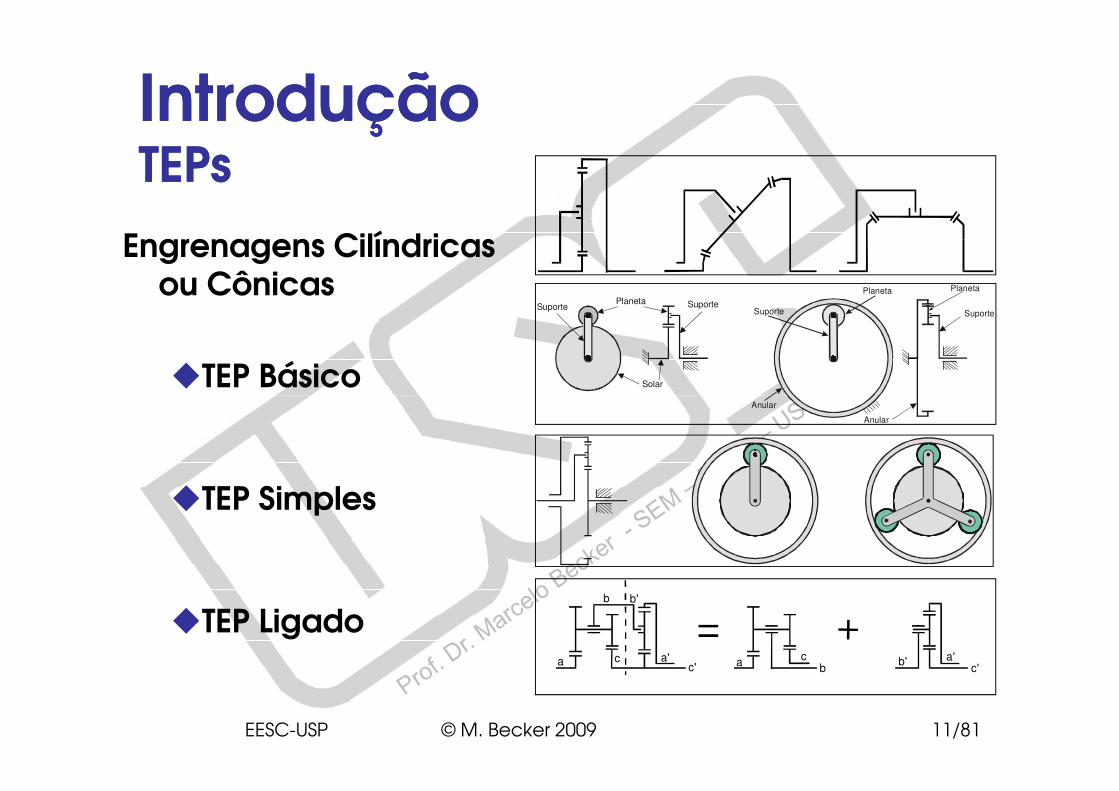
Engrenagens Cilíndricas ou Cônicas
�TEP Básico
ZA>ZS ZA=ZSSuporte SuportePlaneta
Solar
Suporte
Planeta Planeta
Suporte
IntroduçãoIntroduçãoTEPsTEPs
�TEP Simples
�TEP Ligado
Tipo P(PP)P + Tipo P(P)N
aa a'a' ccc'c' b
b
b'
b'
Anular
Anular
EESC-USP © M. Becker 2009 11/81
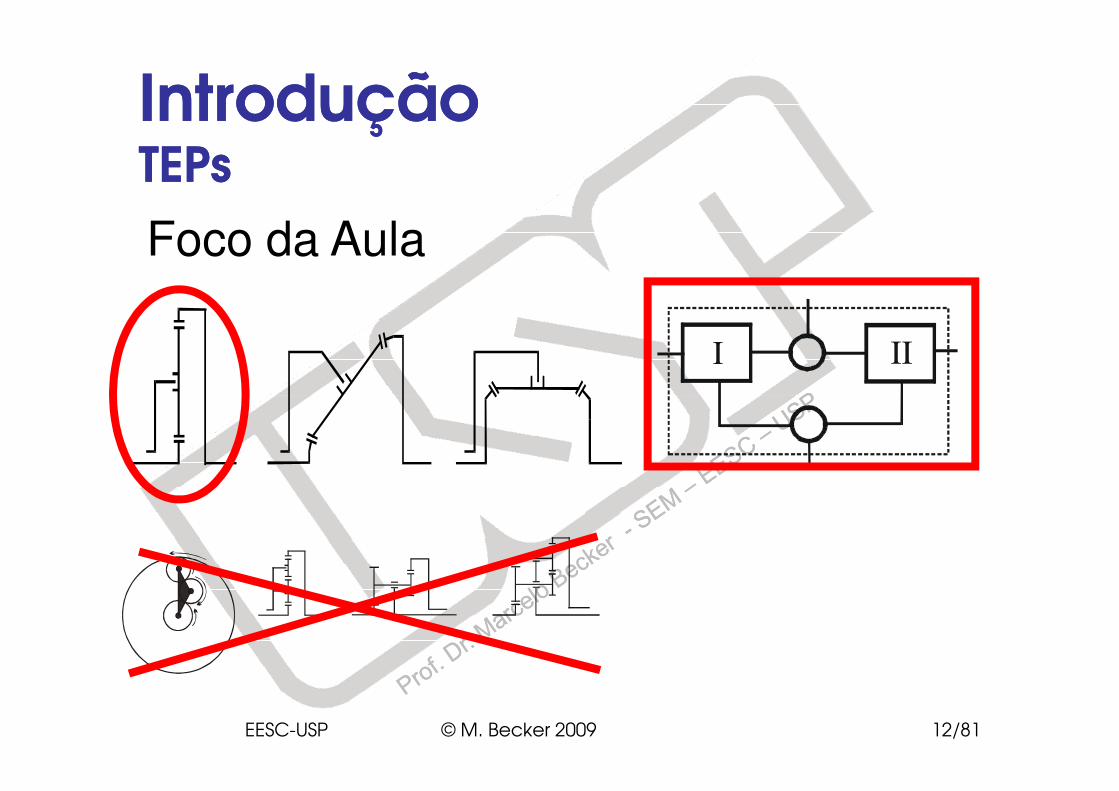
I II
IntroduçãoIntroduçãoTEPsTEPs
Foco da Aula
EESC-USP © M. Becker 2009 12/81

�� IntroduçãoIntrodução�� RepresentaçõesRepresentações
� Cinemática e Análise de Torque
� Montagens
Sumário da AulaSumário da Aula
EESC-USP © M. Becker 2009 13/81
� Montagens
� Transmissões Veiculares
� Software TEPiciclo (Visual Basic 5.0)
� Exemplos
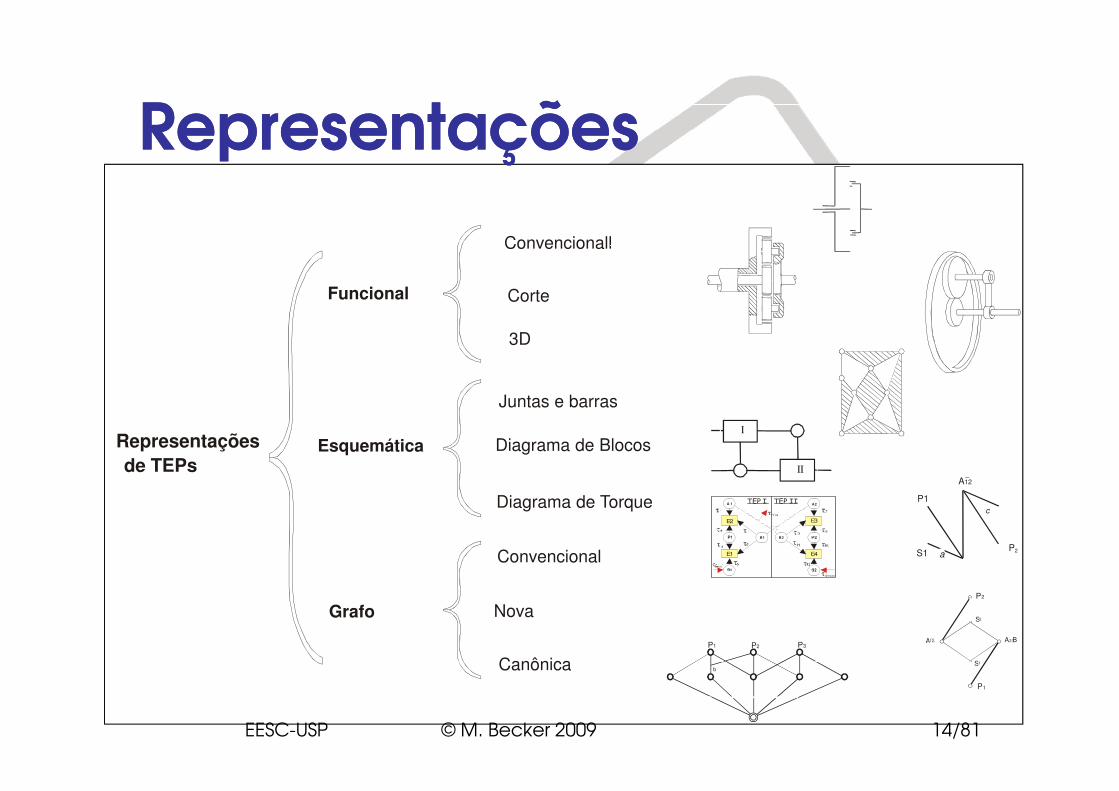
Funcional
Convencionall
Corte
3D
Juntas e barras
RepresentaçõesRepresentações
Representações
de TEPsEsquemática
Grafo
Juntas e barras
Diagrama de Blocos
Convencional
Nova
Canônica
I
II
c
P1
AB12
P2S1 a
S1
AB12
S2
A21B
P2
P1
P1 P2 P3
bc
d
Diagrama de Torque A 1 A2
B1 B2
Entrada
E1
E3E2
E4
TEP I TEP II
EESC-USP © M. Becker 2009 14/81
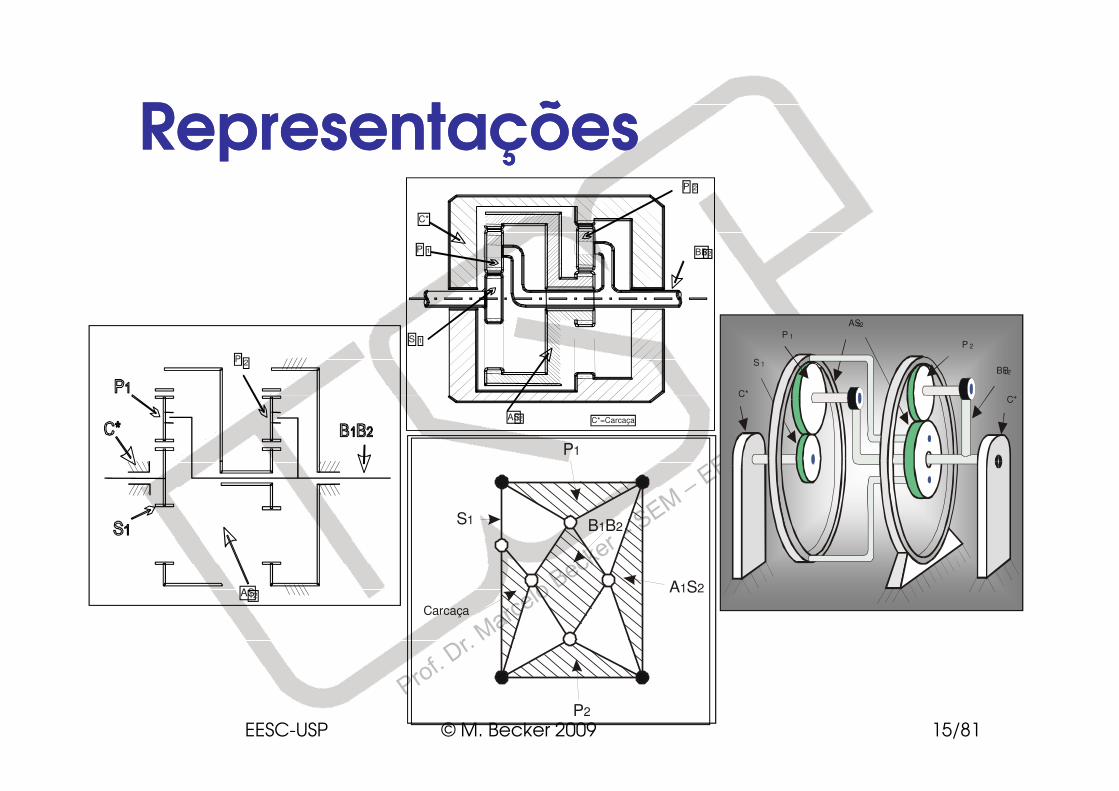
P 1 BB12
P 2
C*
S 1
P 2 S 1
P 1
AS12
BB12
P 2
C*C*
RepresentaçõesRepresentações
AS12 C*=Carcaça
AS12
P1
B B1 2
P2
A S1 2
S1
Carcaça
C*C*
EESC-USP © M. Becker 2009 15/81
�� IntroduçãoIntrodução�� RepresentaçõesRepresentações
�� Cinemática e Análise de TorqueCinemática e Análise de Torque
� Montagens
Sumário da AulaSumário da Aula
EESC-USP © M. Becker 2009 16/81
� Montagens
� Transmissões Veiculares
� Software TEPiciclo (Visual Basic 5.0)
� Exemplos

CinemáticaCinemáticaDeterminação da Rotação de Saída:Velocidade Relativa...
BABA
ww
ww
w
w
−
−=/
Razão BásicabZ
Z
ww
wwR
A
S
BS
BASA
B =−=−
−=,
Fixo
InOut
BSBS www −=
/
EESC-USP © M. Becker 2009 17/81
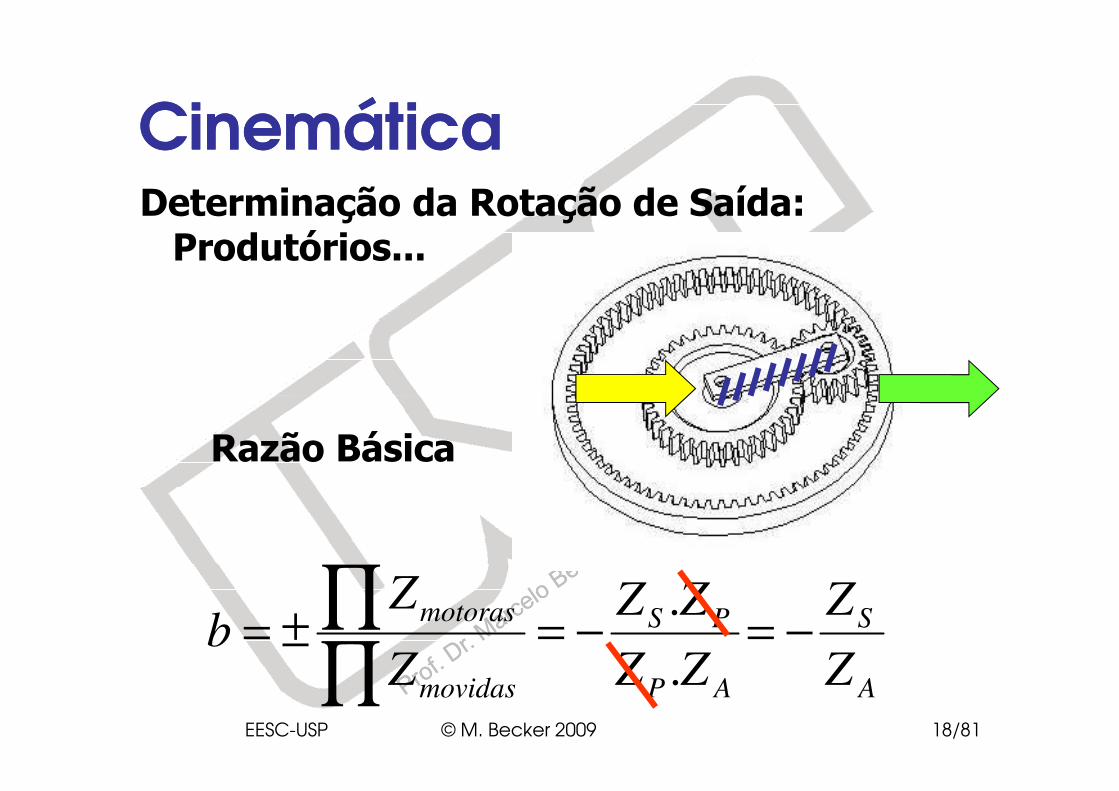
CinemáticaCinemáticaDeterminação da Rotação de Saída:Produtórios...
Razão Básica
A
S
AP
PS
movidas
motoras
Z
Z
ZZ
ZZ
Z
Zb −=−=±=
∏∏
.
.
EESC-USP © M. Becker 2009 18/81
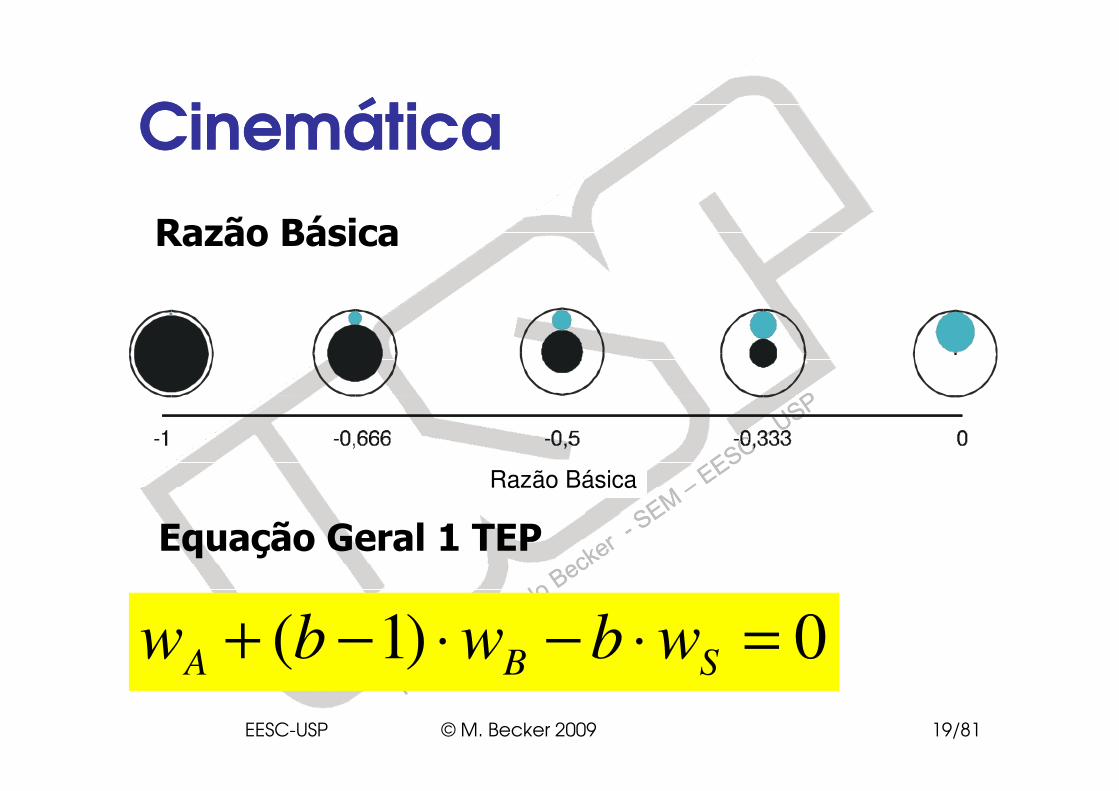
CinemáticaCinemática
Razão Básica
0)1( =⋅−⋅−+ SBA wbwbw
Equação Geral 1 TEP
Razão Básica
EESC-USP © M. Becker 2009 19/81
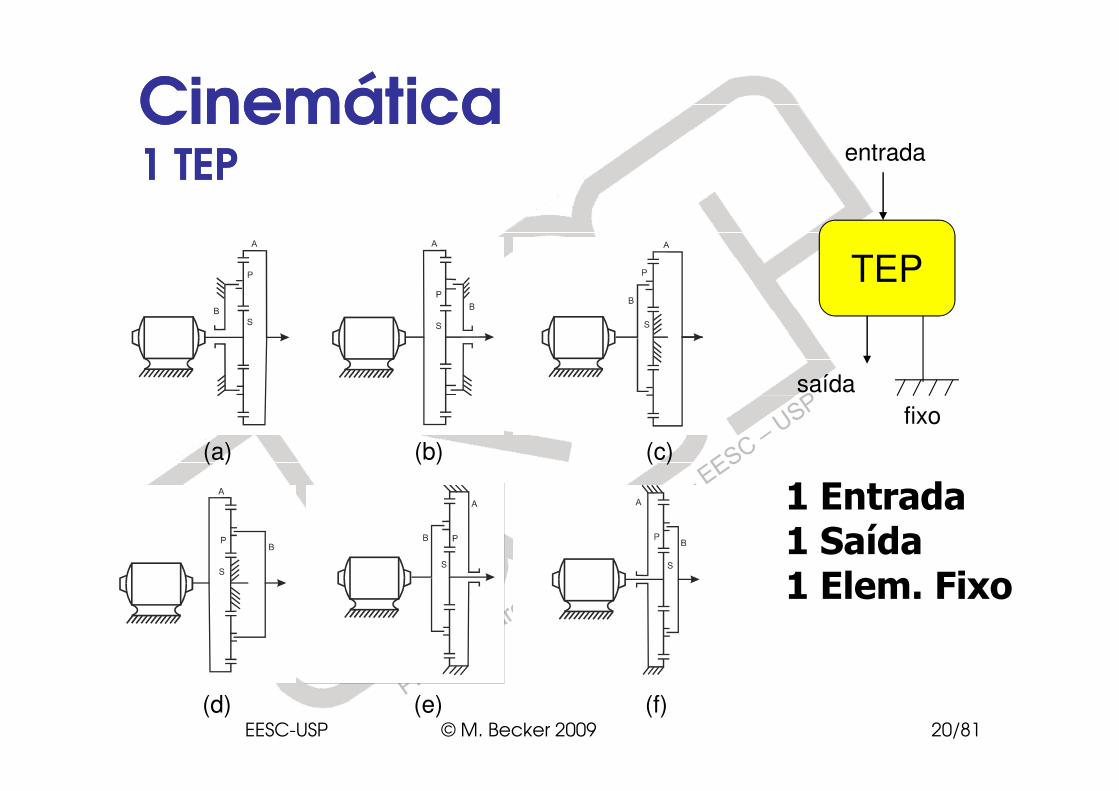
CinemáticaCinemática1 TEP1 TEP
TEP
entrada
saída
1 Entrada1 Saída1 Elem. Fixo
fixo
saída
(a) (b) (c)
(d) (e) (f)EESC-USP © M. Becker 2009 20/81
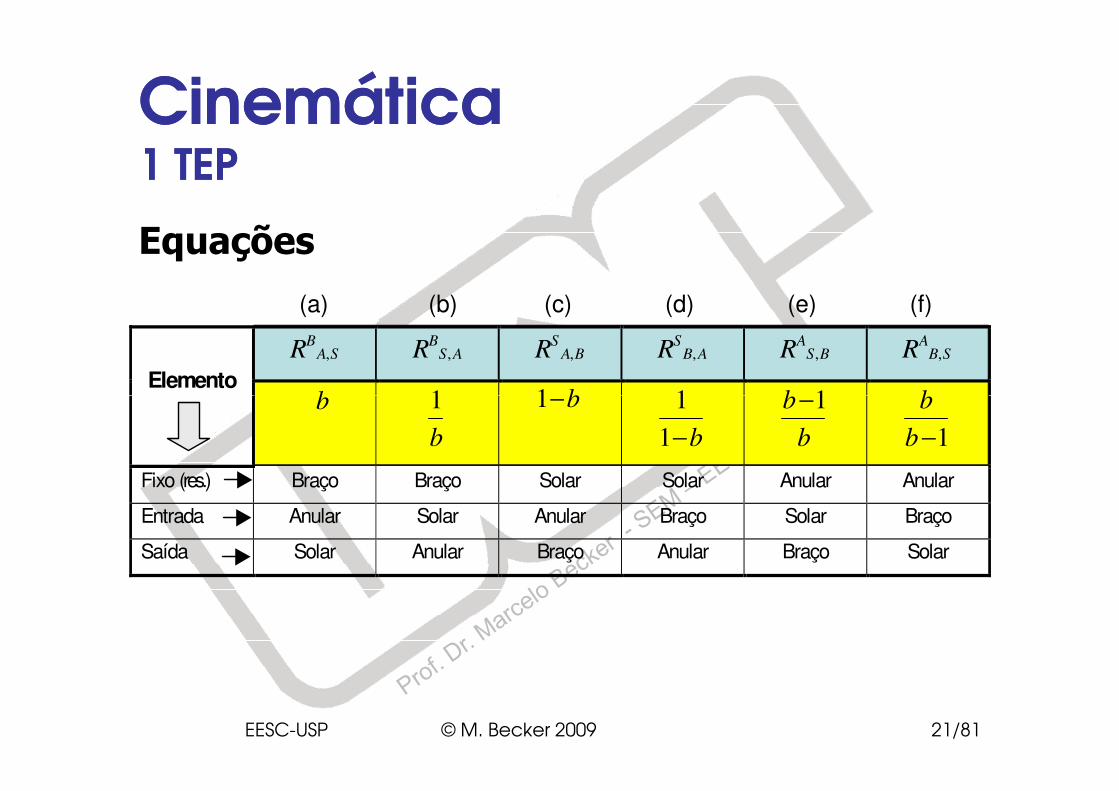
SAB
R , ASB
R , BAS
R , ABS
R , BSA
R , SBA
R ,
Elementob 1 b−1 1 b 1− b
CinemáticaCinemática1 TEP1 TEP
Equações
(a) (b) (c) (d) (e) (f)
b
b
1 b−1
b−1
1
b
b 1−
1−b
b
Fixo (res.) Braço Braço Solar Solar Anular Anular
Entrada Anular Solar Anular Braço Solar Braço
Saída Solar Anular Braço Anular Braço Solar
EESC-USP © M. Becker 2009 21/81
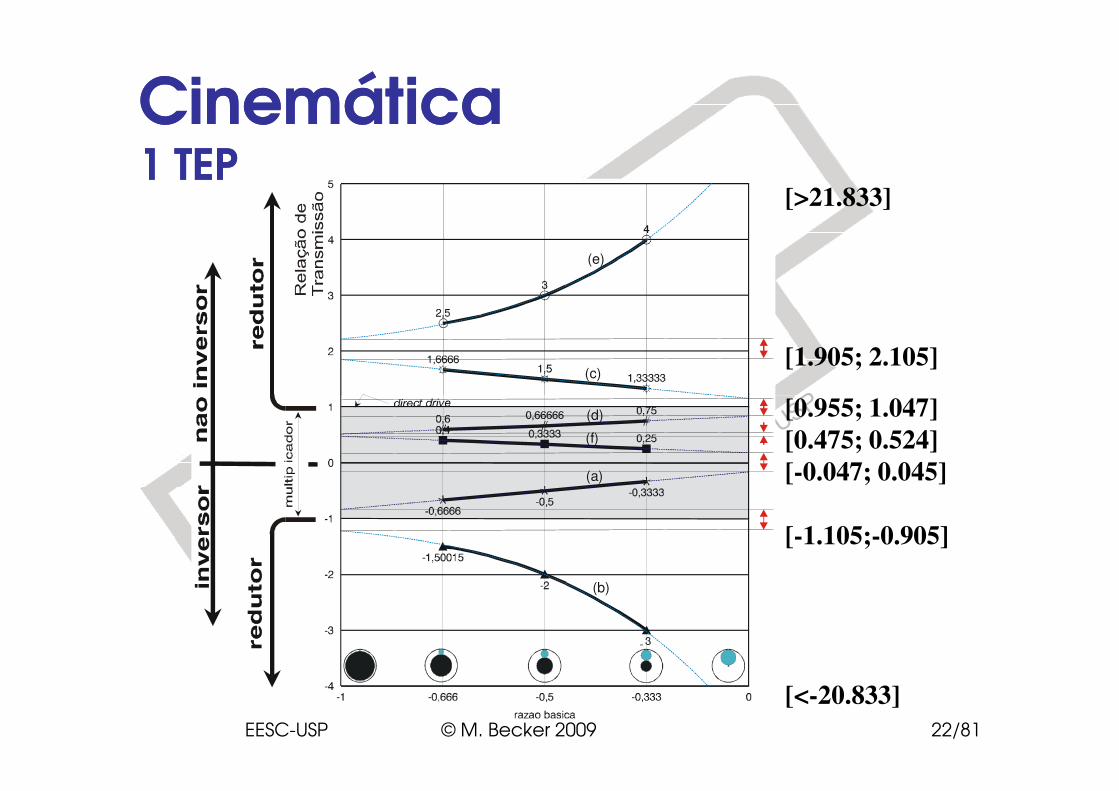
(e)
(c)
[>21.833]
[1.905; 2.105]
[0.955; 1.047]
CinemáticaCinemática1 TEP1 TEP
(f)
(a)
(b)
(d) [0.955; 1.047]
[0.475; 0.524]
[-0.047; 0.045]
[-1.105;-0.905]
[<-20.833]
EESC-USP © M. Becker 2009 22/81
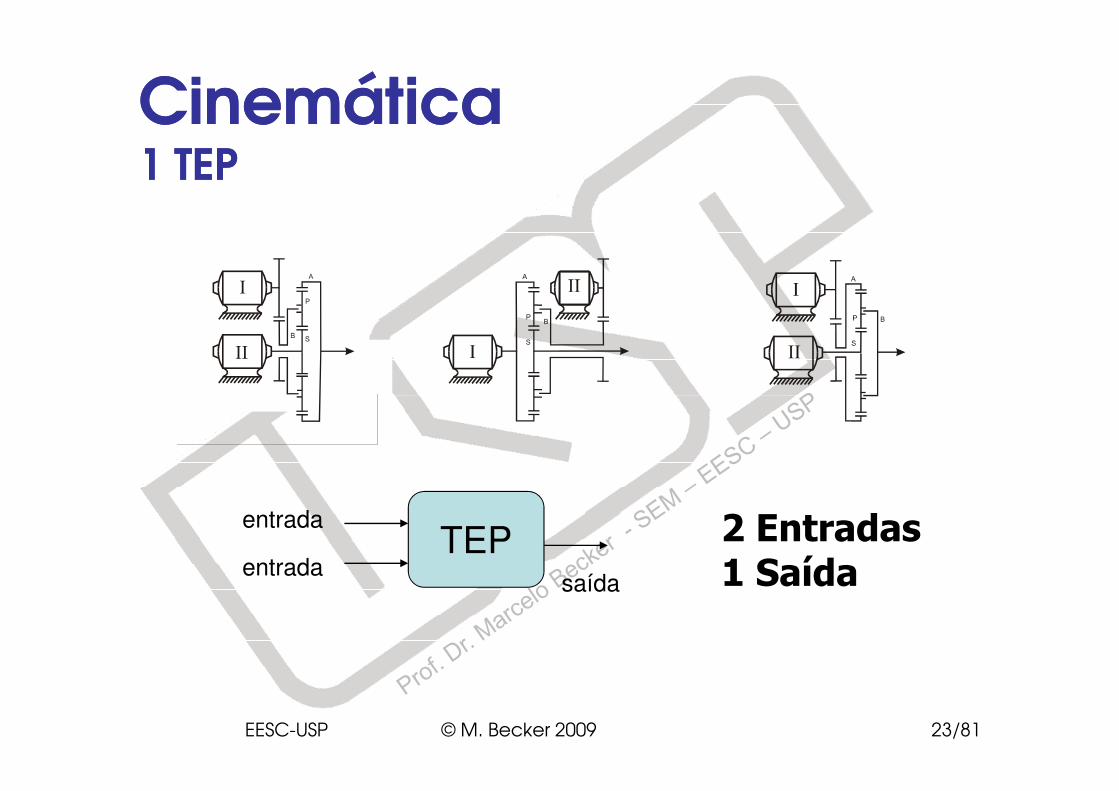
CinemáticaCinemática1 TEP1 TEP
2 Entradas1 Saída
TEPentrada
entrada
saída
EESC-USP © M. Becker 2009 23/81
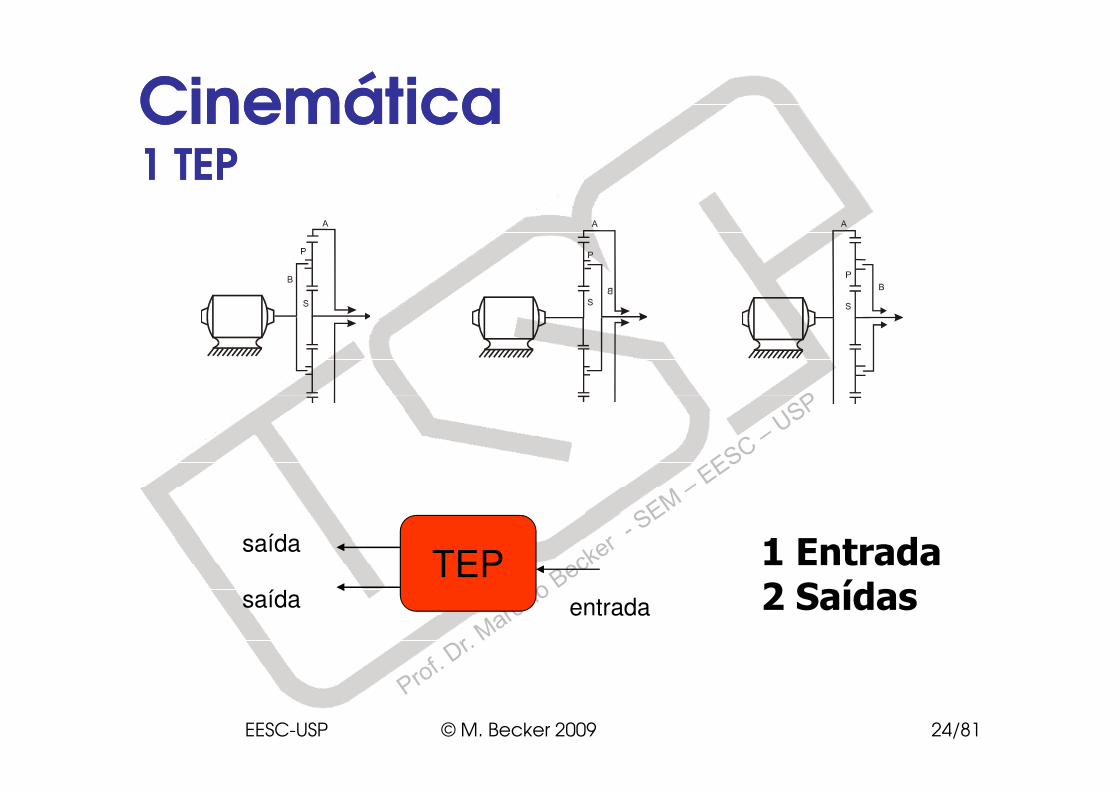
CinemáticaCinemática1 TEP1 TEP
1 Entrada2 Saídas
TEPentradasaída
saída
EESC-USP © M. Becker 2009 24/81
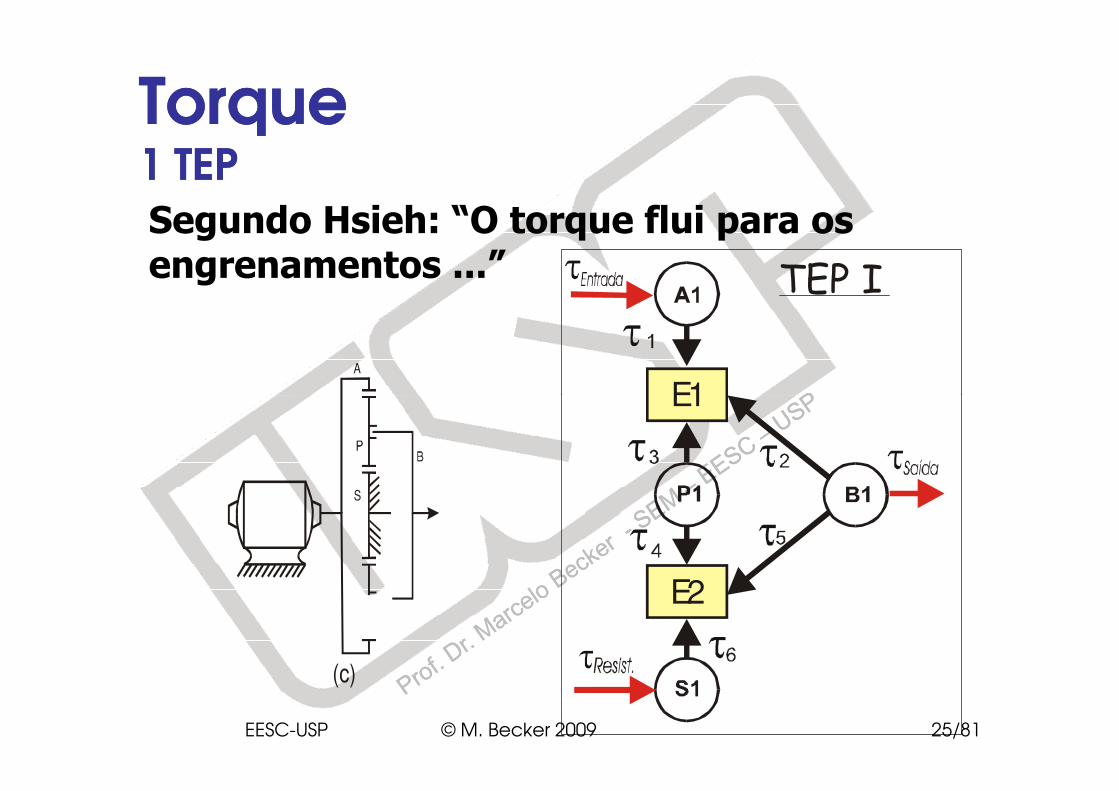
E1
TEP I
Segundo Hsieh: “O torque flui para os engrenamentos ...”
A
TorqueTorque1 TEP1 TEP
E1
E2
S
C.(c)
EESC-USP © M. Becker 2009 25/81
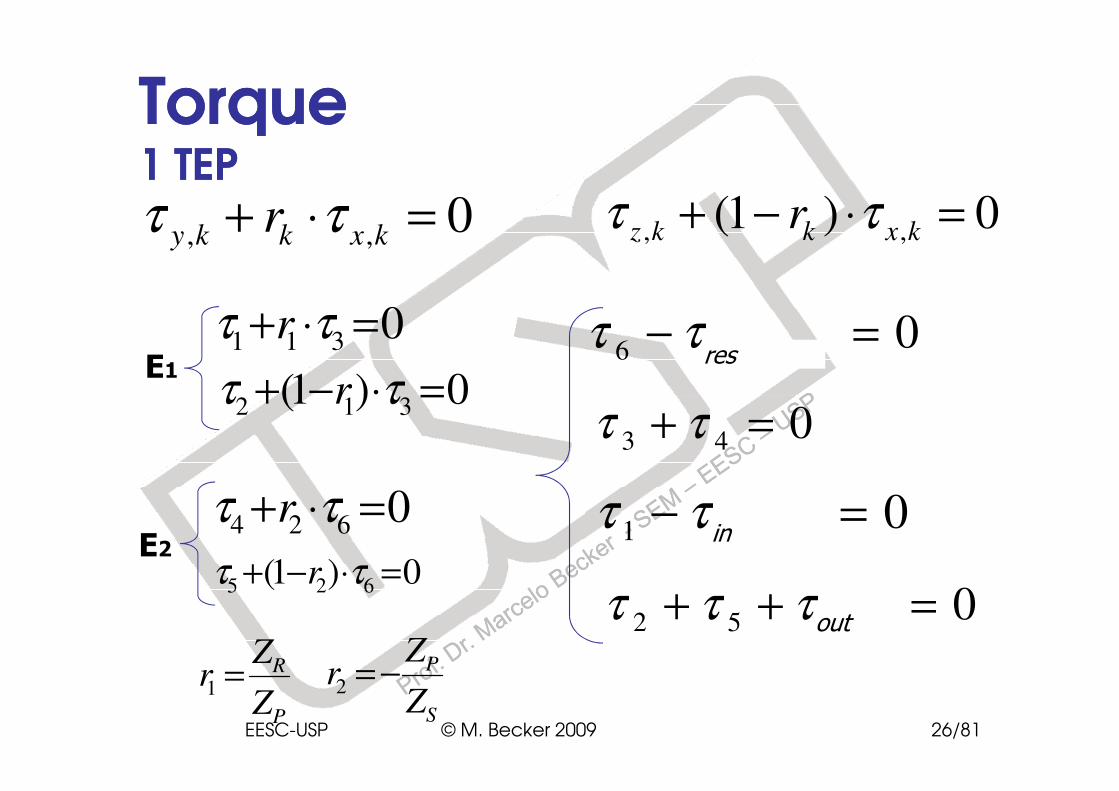
06 =− resistenteττ
=+ ττ
0311 =⋅+ ττ r
0)1( 312 =⋅−+ ττ rE1
0,, =⋅+ kxkky r ττ 0)1( ,, =⋅−+ kxkkz r ττ
res
TorqueTorque1 TEP1 TEP
043 =+ ττ
01 =− entradaττ
052 =++ saídaτττ
0)1( 312 =⋅−+ ττ r
0624 =⋅+ ττ r
0)1( 625 =⋅−+ ττ rE2
out
in
P
R
Z
Zr =1
S
P
Z
Zr −=2
EESC-USP © M. Becker 2009 26/81
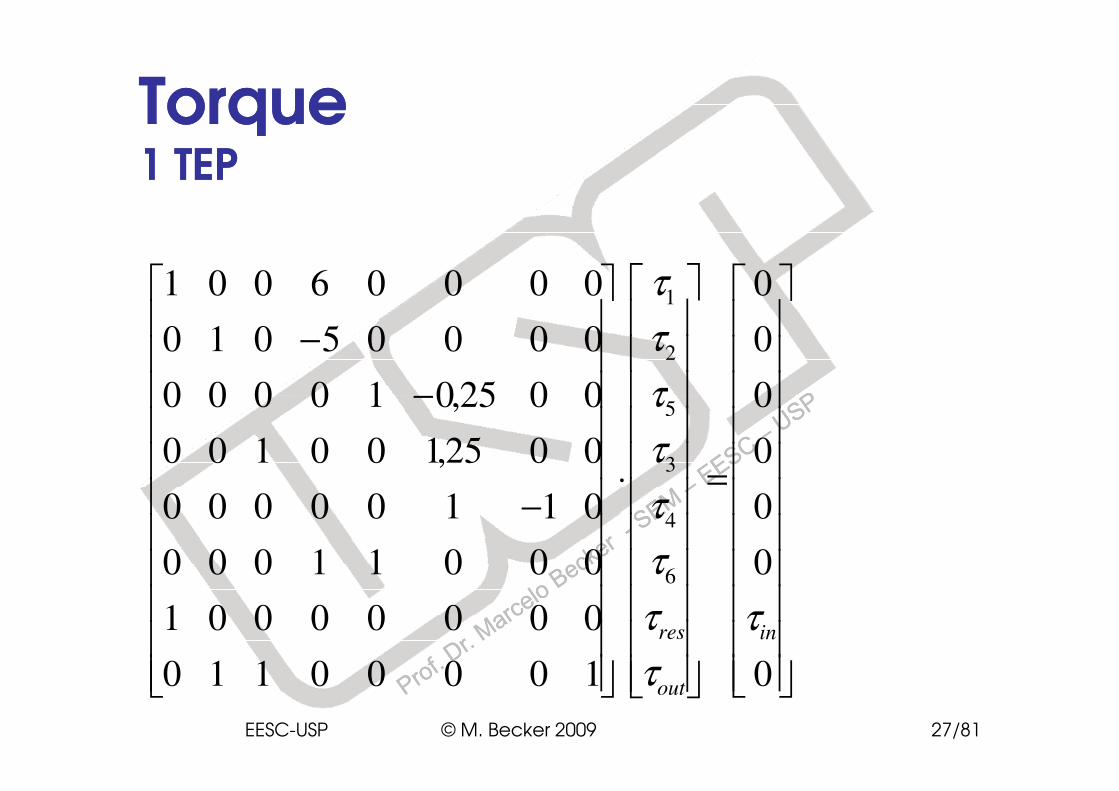
−
−
0
0
0
0025,010000
00005010
00006001
2
1
τ
τ
τ
TorqueTorque1 TEP1 TEP
=
⋅
−
−
0
0
0
0
0
10000110
00000001
00011000
01100000
0025,100100
0025,010000
6
4
3
5
in
out
res τ
τ
τ
τ
τ
τ
τ
EESC-USP © M. Becker 2009 27/81
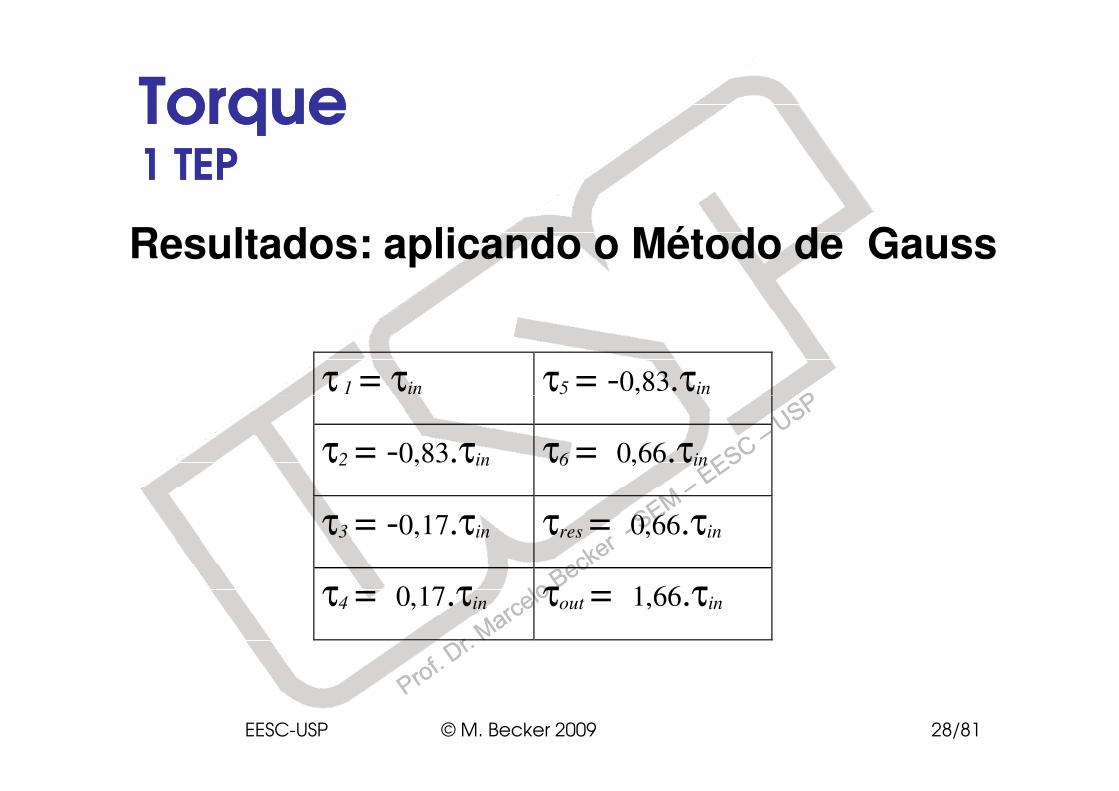
Resultados: aplicando o Método de Gauss
τ 1 = τin τ5 = -0,83.τin
TorqueTorque1 TEP1 TEP
τ 1 = τin τ5 = -0,83.τin
τ2 = -0,83.τin τ6 = 0,66.τin
τ3 = -0,17.τin τres = 0,66.τin
τ4 = 0,17.τin τout = 1,66.τin
EESC-USP © M. Becker 2009 28/81
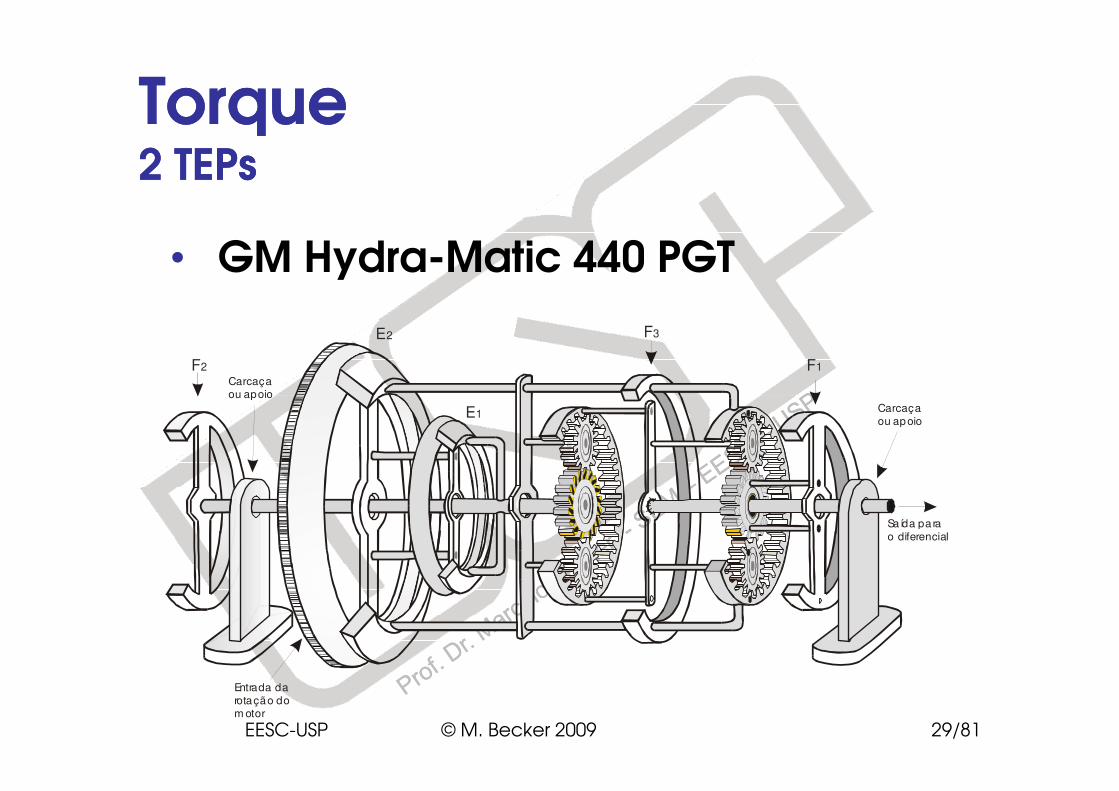
• GM Hydra-Matic 440 PGT
Carcaça
ou apoio
F3E2
F1F2
TorqueTorque2 TEPs2 TEPs
ou apoio
Entrada da
rotação do
m otor
Carcaça
ou apoioE1
Saída para
o diferencial
EESC-USP © M. Becker 2009 29/81

E3E2
TEP I TEP II
TorqueTorque2 TEPs2 TEPs
Carcaça
ou apoio
Carcaça
ou apoio
F3E2
E1
Sa ída para
o diferencial
F1F2
Entrada
E1 E4
Entrada da
rotaçã o dom otor
EESC-USP © M. Becker 2009 30/81
Torque Torque Torque
τ = 1,24.τ τ = 0,52.τ τ = -1,38.τ
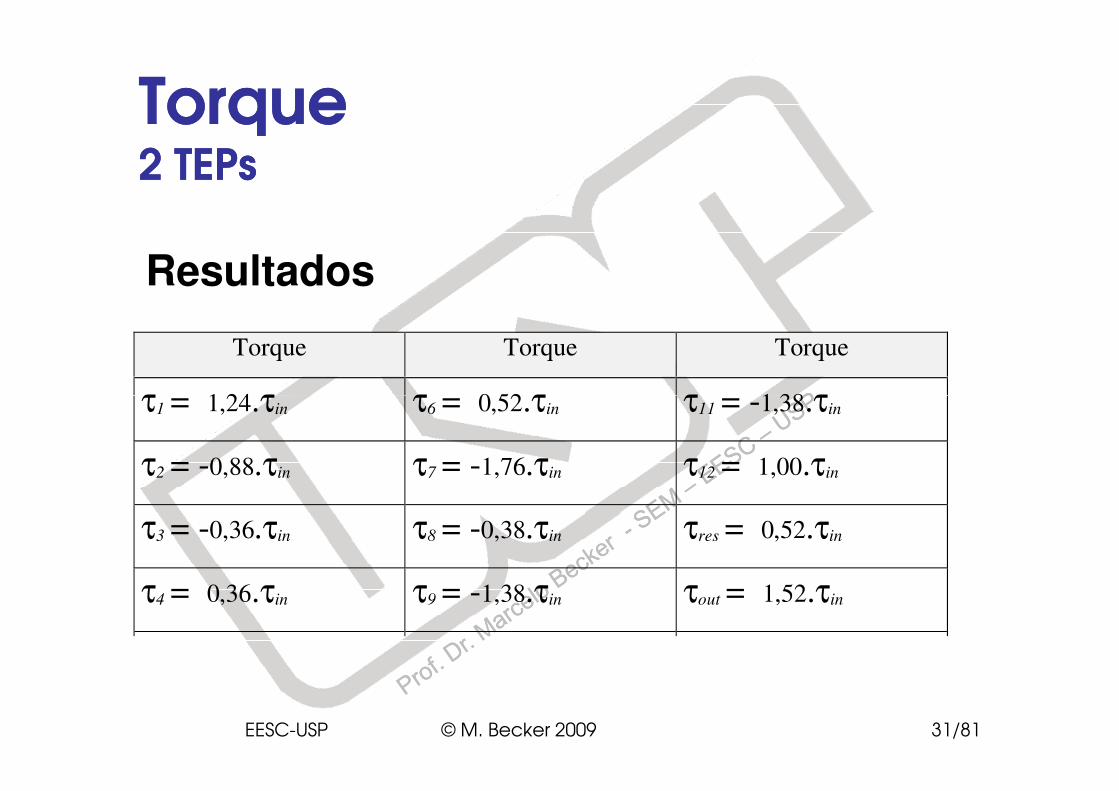
Resultados
TorqueTorque2 TEPs2 TEPs
τ1 = 1,24.τin τ6 = 0,52.τin τ11 = -1,38.τin
τ2 = -0,88.τin τ7 = -1,76.τin τ12 = 1,00.τin
τ3 = -0,36.τin τ8 = -0,38.τin τres = 0,52.τin
τ4 = 0,36.τin τ9 = -1,38.τin τout = 1,52.τin
τ = - .τ τ = .τ
EESC-USP © M. Becker 2009 31/81
�� IntroduçãoIntrodução�� RepresentaçõesRepresentações
�� Cinemática e Análise de TorqueCinemática e Análise de Torque
�� MontagensMontagens
Sumário da AulaSumário da Aula
�� MontagensMontagens
� Transmissões Veiculares
� Software TEPiciclo (Visual Basic 5.0)
� Exemplos
EESC-USP © M. Becker 2009 32/81
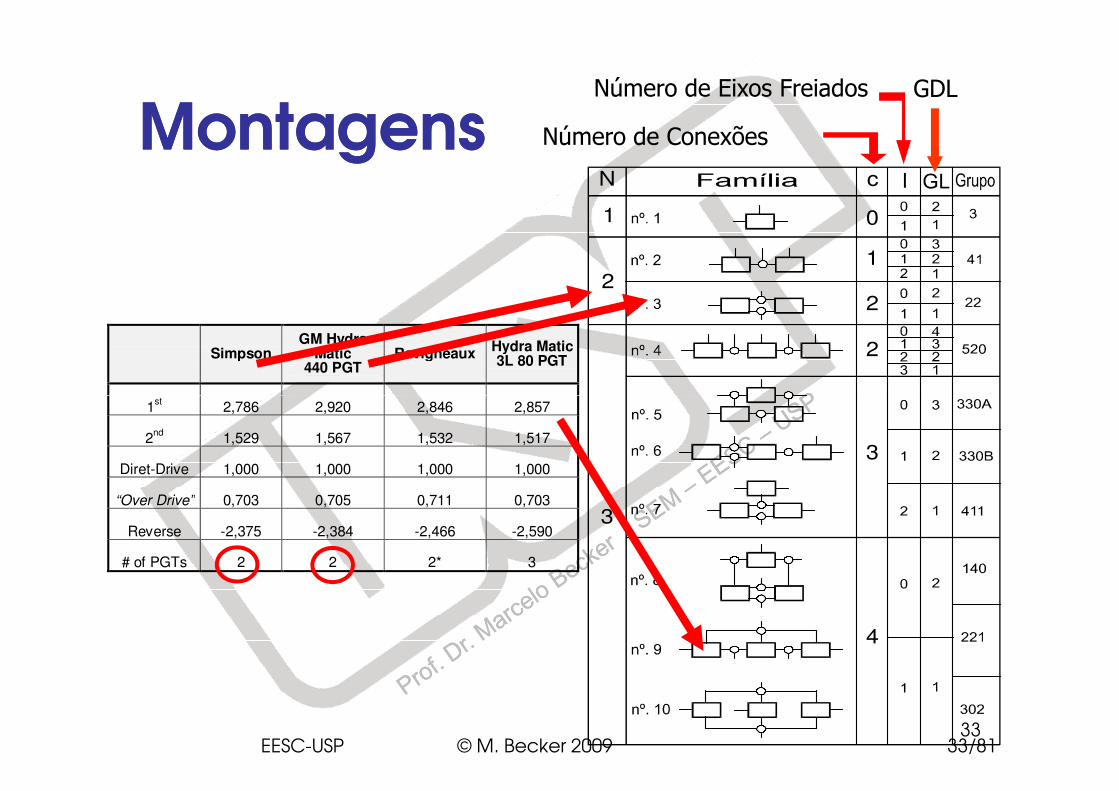
SimpsonGM Hydra
Matic440 PGT
RavigneauxHydra Matic3L 80 PGT
N
2
2
1
0
2
1
c l
GDLNúmero de Eixos Freiados
Número de ConexõesMontagensMontagens
33
1st
2,786 2,920 2,846 2,857
2nd
1,529 1,567 1,532 1,517
Diret-Drive 1,000 1,000 1,000 1,000
“Over Drive” 0,703 0,705 0,711 0,703
Reverse -2,375 -2,384 -2,466 -2,590
# of PGTs 2 2 2* 3
3
4
3
EESC-USP © M. Becker 2009 33/81
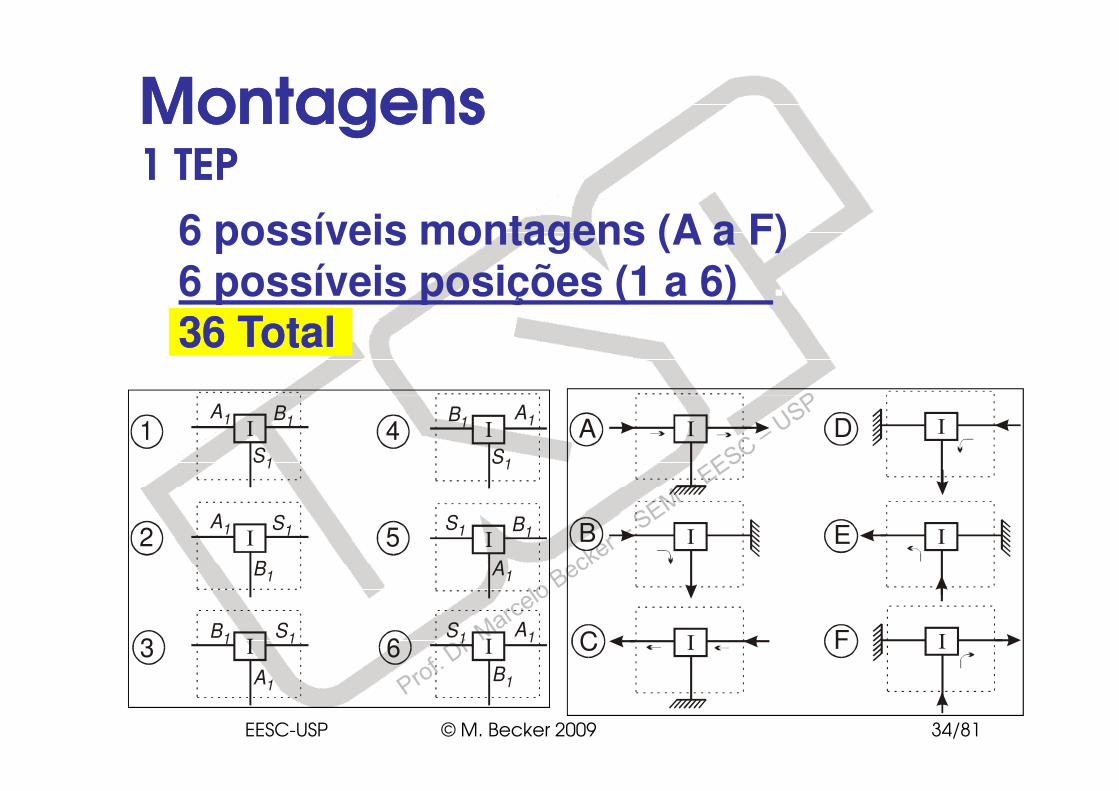
6 possíveis montagens (A a F)6 possíveis posições (1 a 6) .36 Total36 Total
MontagensMontagens1 TEP1 TEP
B1
S1
A1
I
B1
S1
A1
I
B1
S1
A1
I
B1
S1
A1
I
B1
S1
A1
I
B1
S1
A1
I1
2
3
4
5
6 I
I
I
I
I
IA
B E
C F
D
EESC-USP © M. Becker 2009 34/81
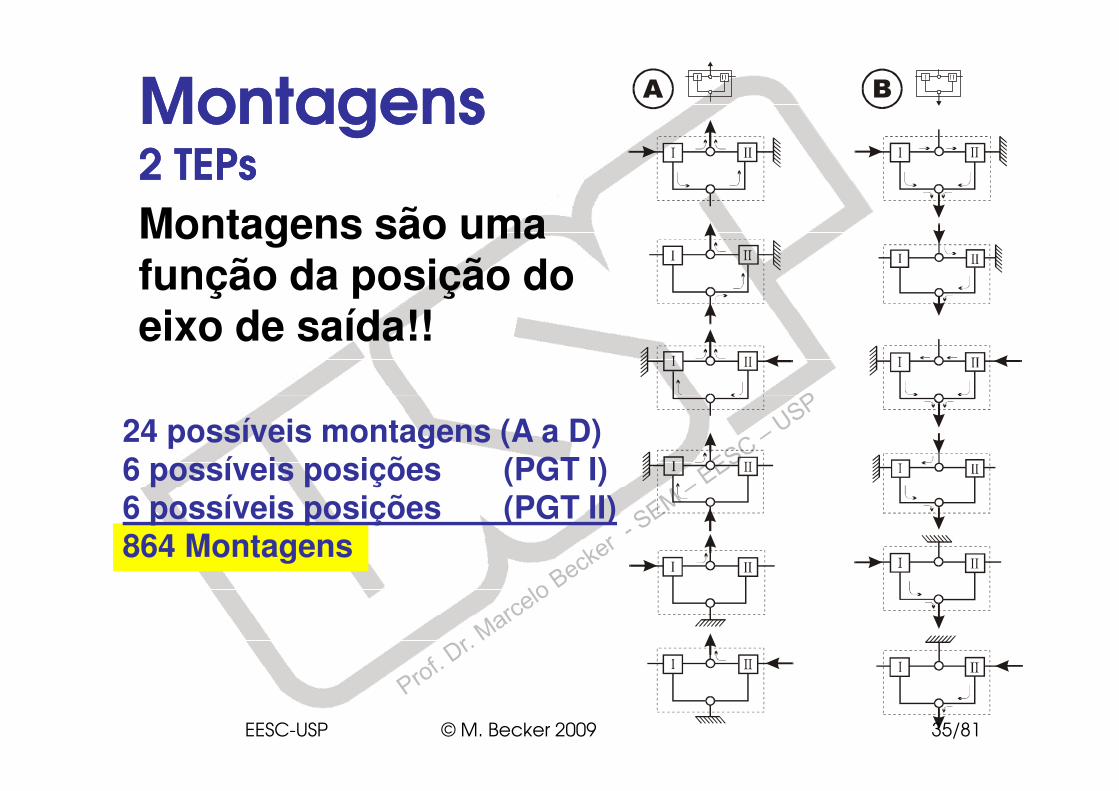
A B
Montagens são uma função da posição do eixo de saída!!
MontagensMontagens2 TEPs2 TEPs
24 possíveis montagens (A a D)6 possíveis posições (PGT I)6 possíveis posições (PGT II)864 Montagens
EESC-USP © M. Becker 2009 35/81
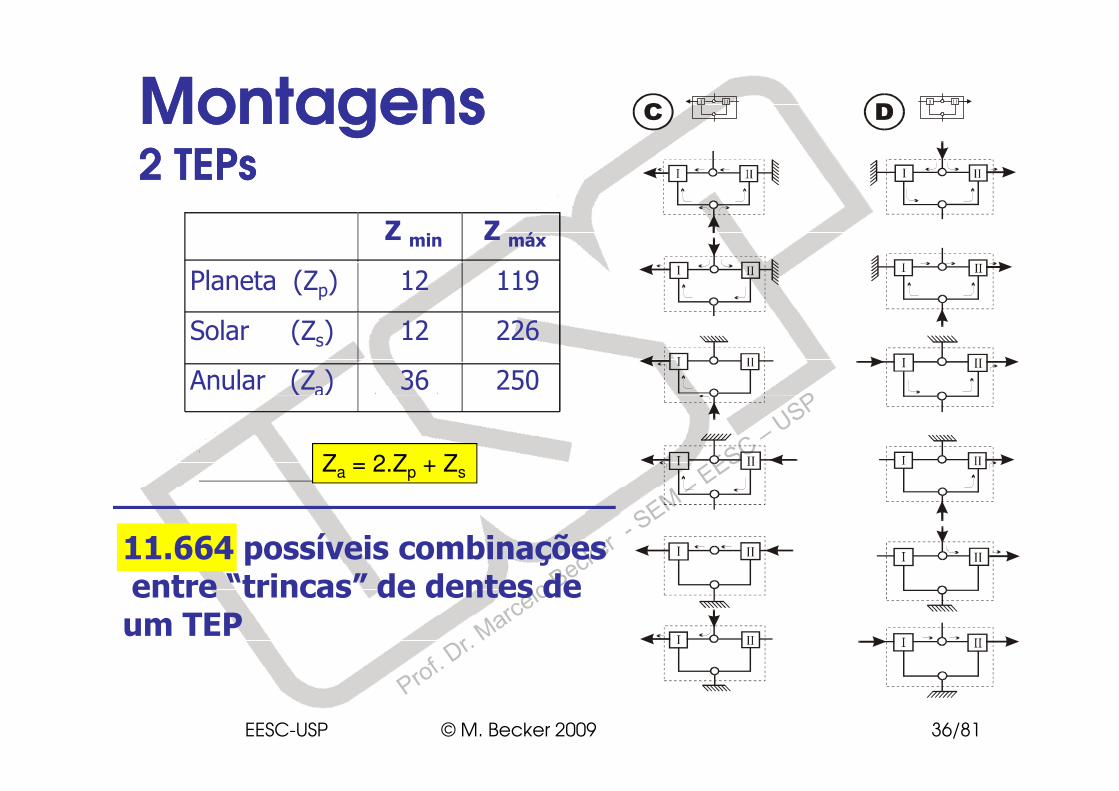
C D
Z min Z máx
Planeta (Zp) 12 119
Solar (Zs) 12 226
Anular (Za) 36 250
MontagensMontagens2 TEPs2 TEPs
11.664 possíveis combinaçõesentre “trincas” de dentes de um TEP
Za = 2.Zp + Zs
EESC-USP © M. Becker 2009 36/81
11.664 possíveis combinações TEP I
MontagensMontagens2 TEPs2 TEPs
864 possíveis montagens
11.664 possíveis combinações TEP I
11.664 possíveis combinações TEP II
Total: 117.546.246.144 Possíveis Montagens
EESC-USP © M. Becker 2009 37/81
�� IntroduçãoIntrodução�� RepresentaçõesRepresentações
�� Cinemática e Análise de TorqueCinemática e Análise de Torque
�� MontagensMontagens
Sumário da AulaSumário da Aula
�� MontagensMontagens
�� Transmissões VeicularesTransmissões Veiculares
� Software TEPiciclo (Visual Basic 5.0)
� Exemplos
EESC-USP © M. Becker 2009 38/81

Transmissões Transmissões Veiculares Veiculares OntemOntem
Ford Modelo T (1908 - 1928)
Transmissão Automática
Anel SincronizadorAnel Sincronizador
Transmissões Manuais
BMW Série 7 (2001)
Transmissão Automática
EESC-USP © M. Becker 2009 39/81
Fiat Stilo (2008)
Transmissão Dual-logic
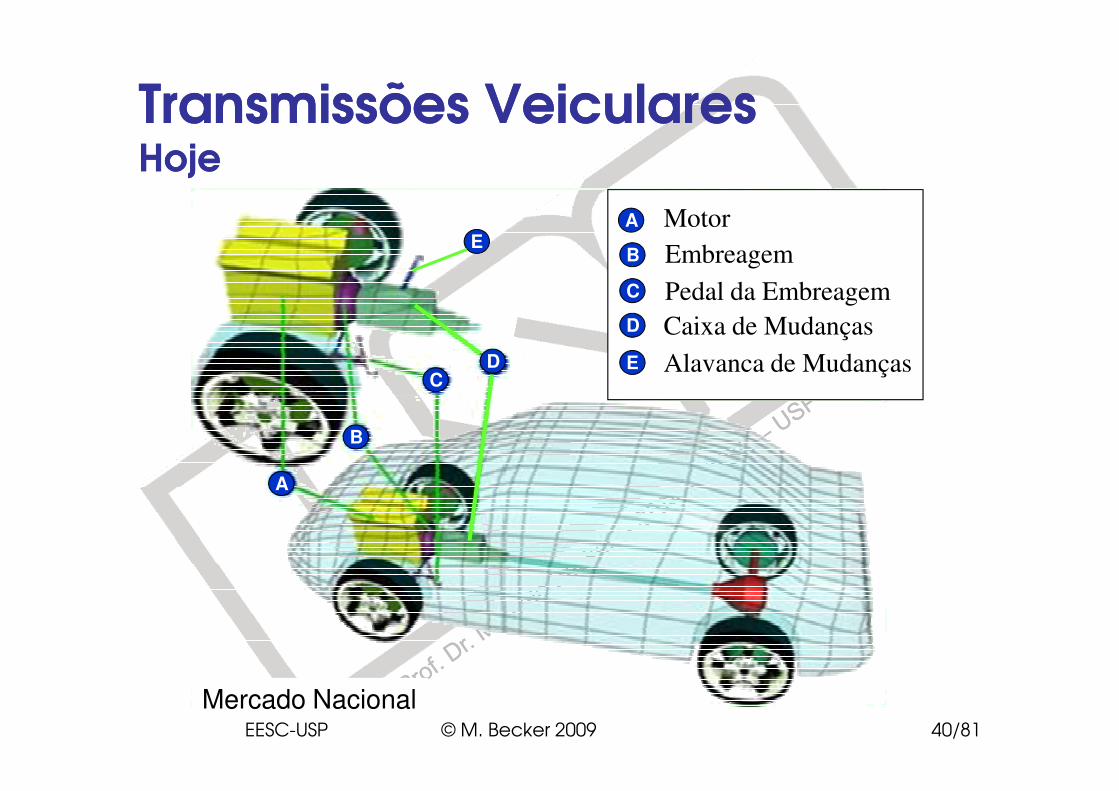
A
B
C
D
E
Motor
Embreagem
Pedal da Embreagem
Caixa de Mudanças
Alavanca de Mudanças
E
CD
Transmissões Transmissões Veiculares Veiculares HojeHoje
A
B
Mercado NacionalEESC-USP © M. Becker 2009 40/81
Mercado Brasileiro: supremacia da Transmissão Manual
Mercado Americano: supremacia da Transmissão
Automática
Transmissões Automobilísticas Transmissões Automobilísticas HojeHoje
Mercado Europeu: supremacia da Trans. Automática e
Servo-assistida
Mercado Asiático: supremacia da Transmissão
Automática
EESC-USP © M. Becker 2009 41/81
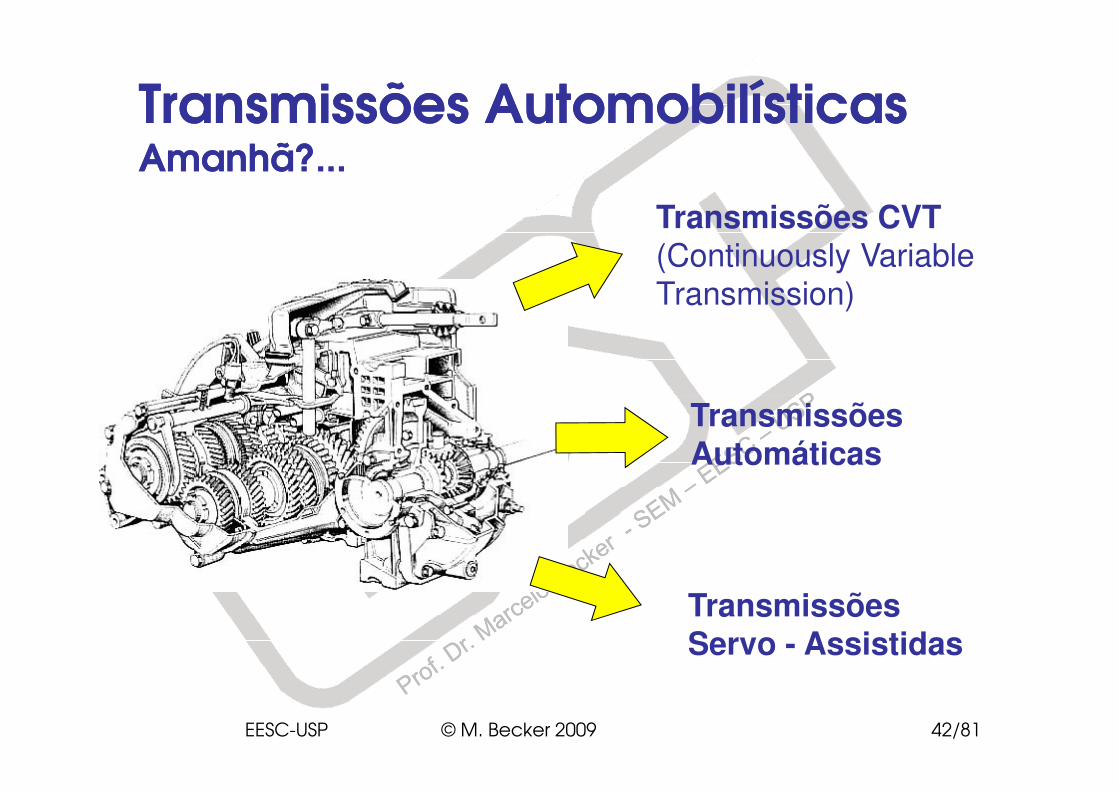
Transmissões CVT(Continuously Variable
Transmission)
Transmissões Automobilísticas Transmissões Automobilísticas Amanhã?...Amanhã?...
Transmissões Automáticas
Transmissões Servo - Assistidas
EESC-USP © M. Becker 2009 42/81
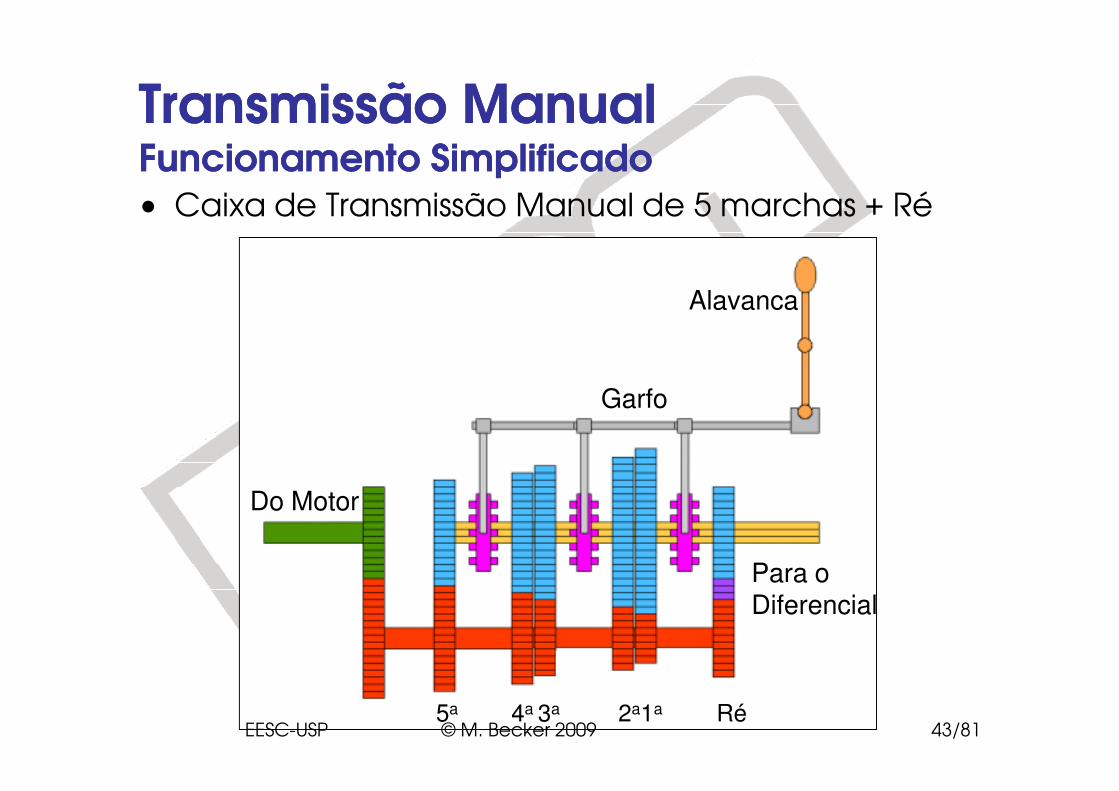
• Caixa de Transmissão Manual de 5 marchas + Ré
Garfo
Alavanca
Transmissão Manual Transmissão Manual Funcionamento SimplificadoFuncionamento Simplificado
Garfo
Do Motor
Para o Diferencial
5a 4a 3a 2a1a RéEESC-USP © M. Becker 2009 43/81
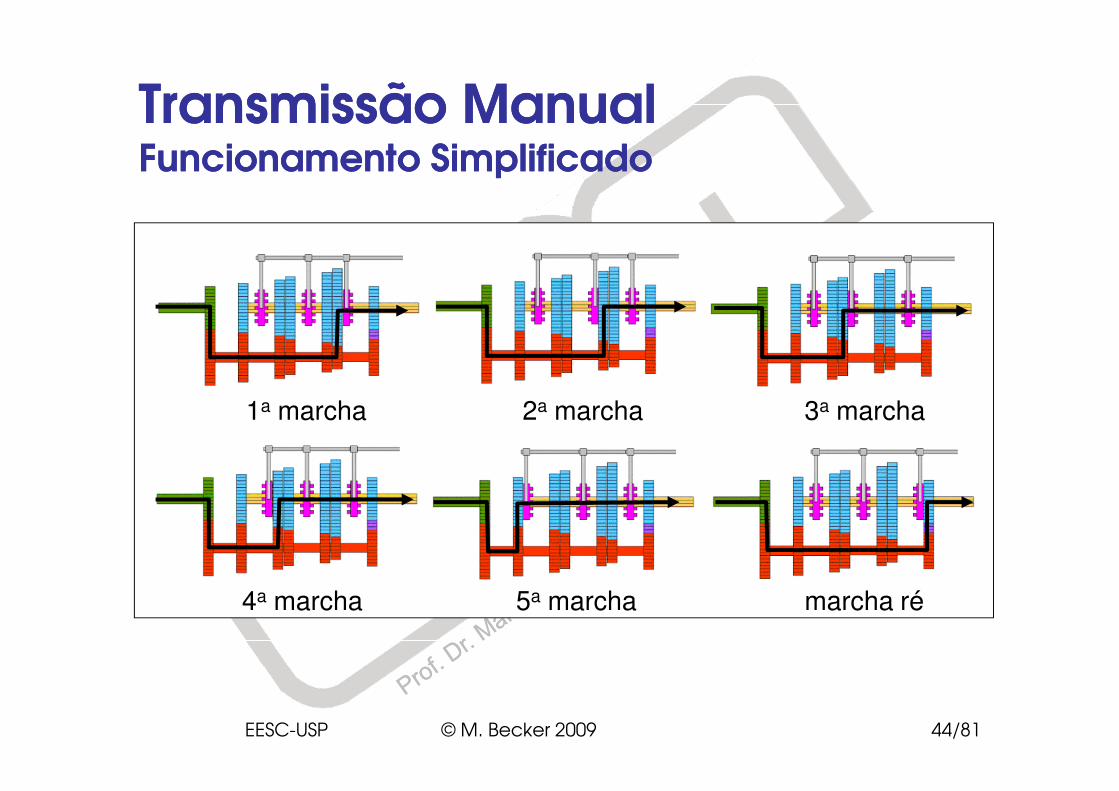
Transmissão Manual Transmissão Manual Funcionamento SimplificadoFuncionamento Simplificado
1a marcha
4a marcha
2a marcha 3a marcha
5a marcha marcha ré
EESC-USP © M. Becker 2009 44/81
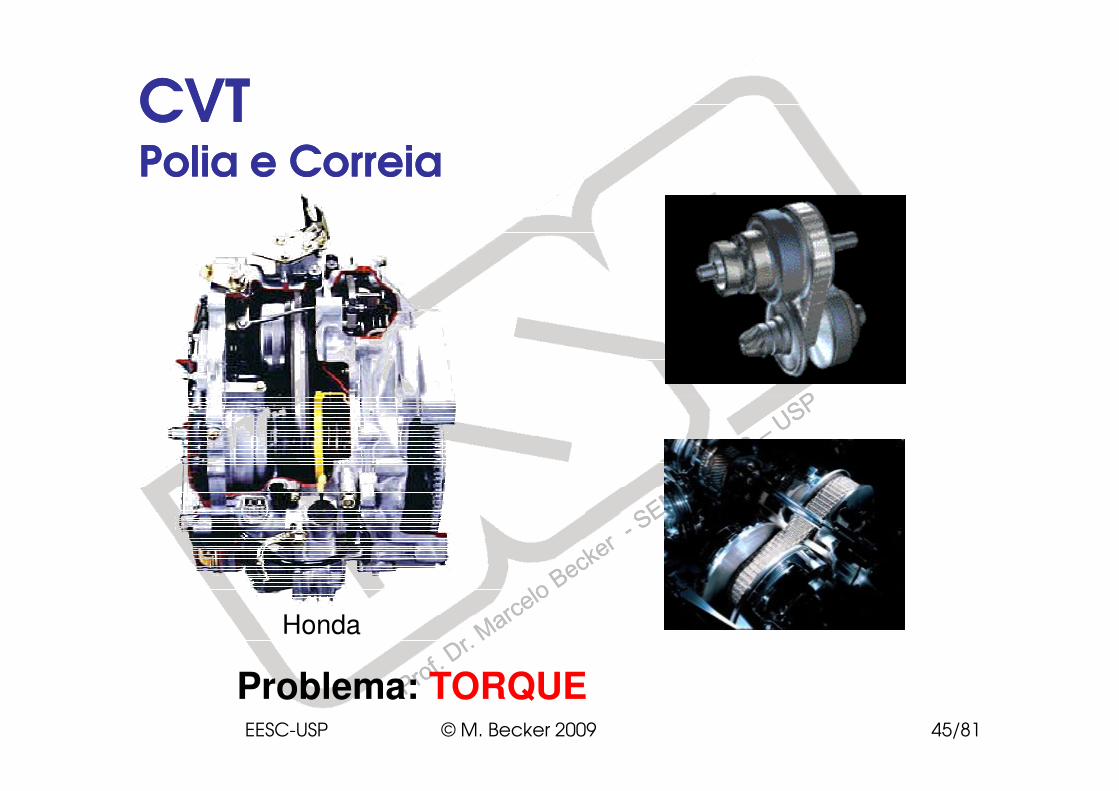
CVTCVTPolia e CorreiaPolia e Correia
Problema: TORQUE
Honda
EESC-USP © M. Becker 2009 45/81
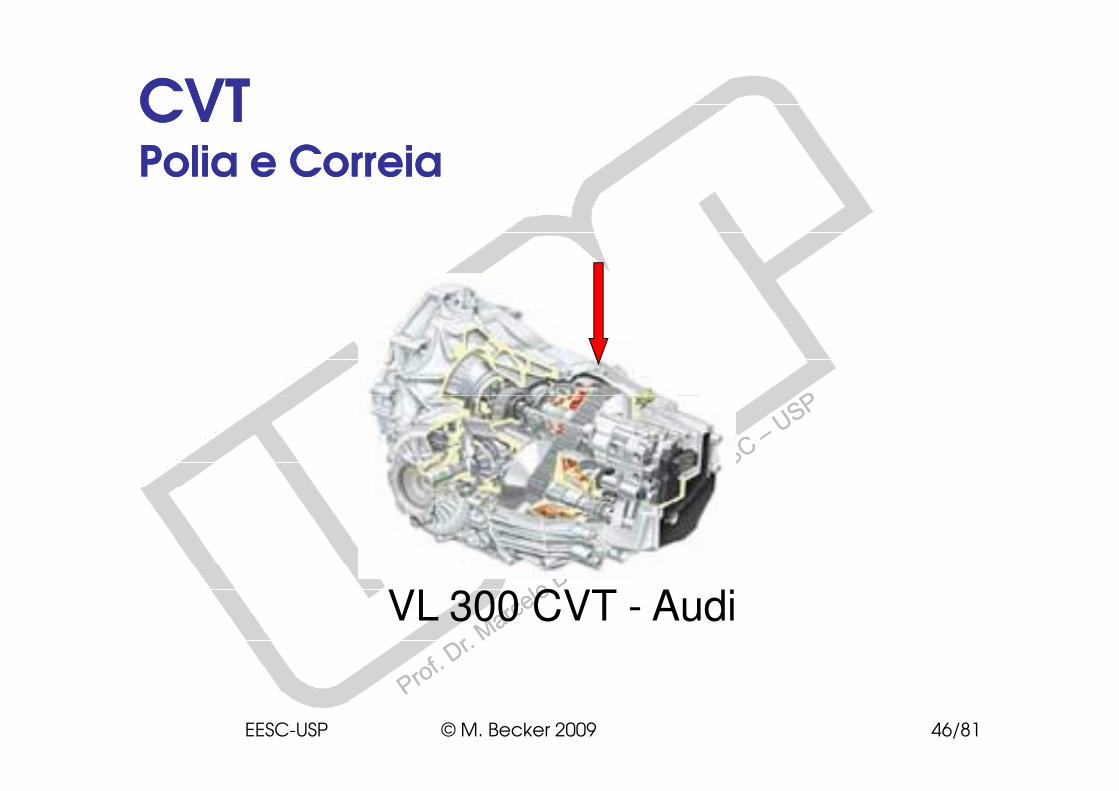
CVTCVTPolia e CorreiaPolia e Correia
VL 300 CVT - Audi
EESC-USP © M. Becker 2009 46/81
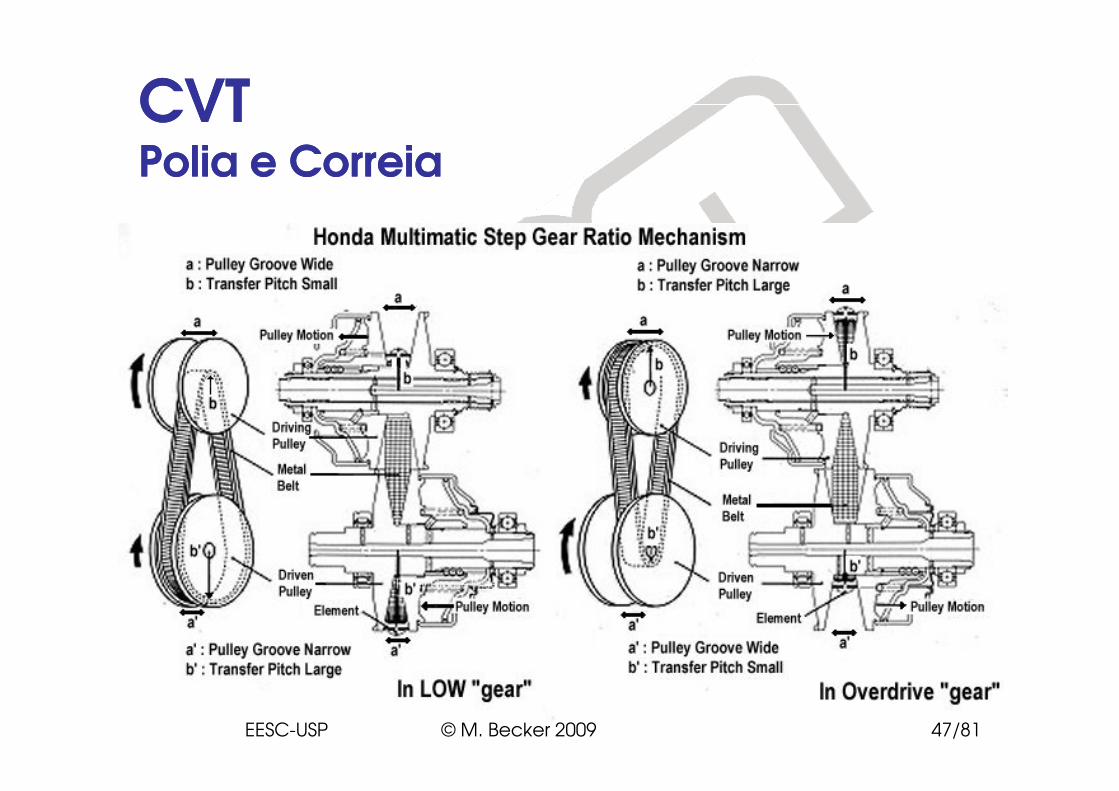
CVTCVTPolia e CorreiaPolia e Correia
EESC-USP © M. Becker 2009 47/81
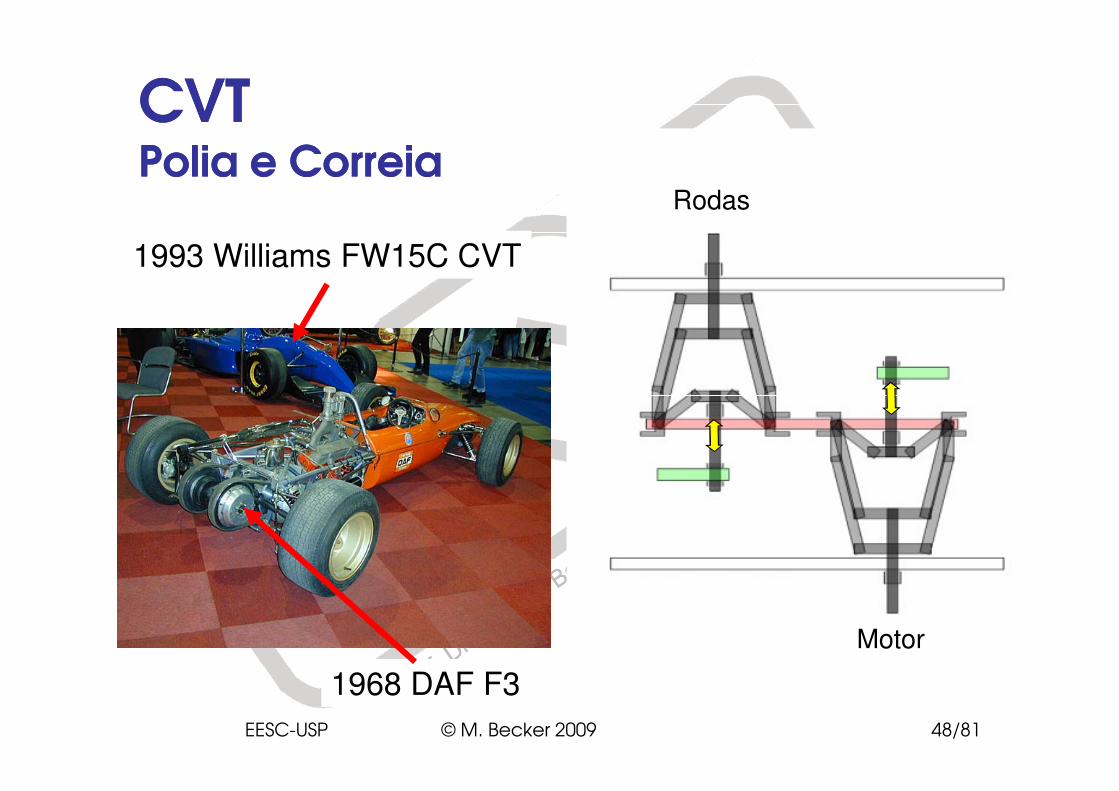
Rodas
1993 Williams FW15C CVT
CVTCVTPolia e CorreiaPolia e Correia
Motor
1968 DAF F3
EESC-USP © M. Becker 2009 48/81
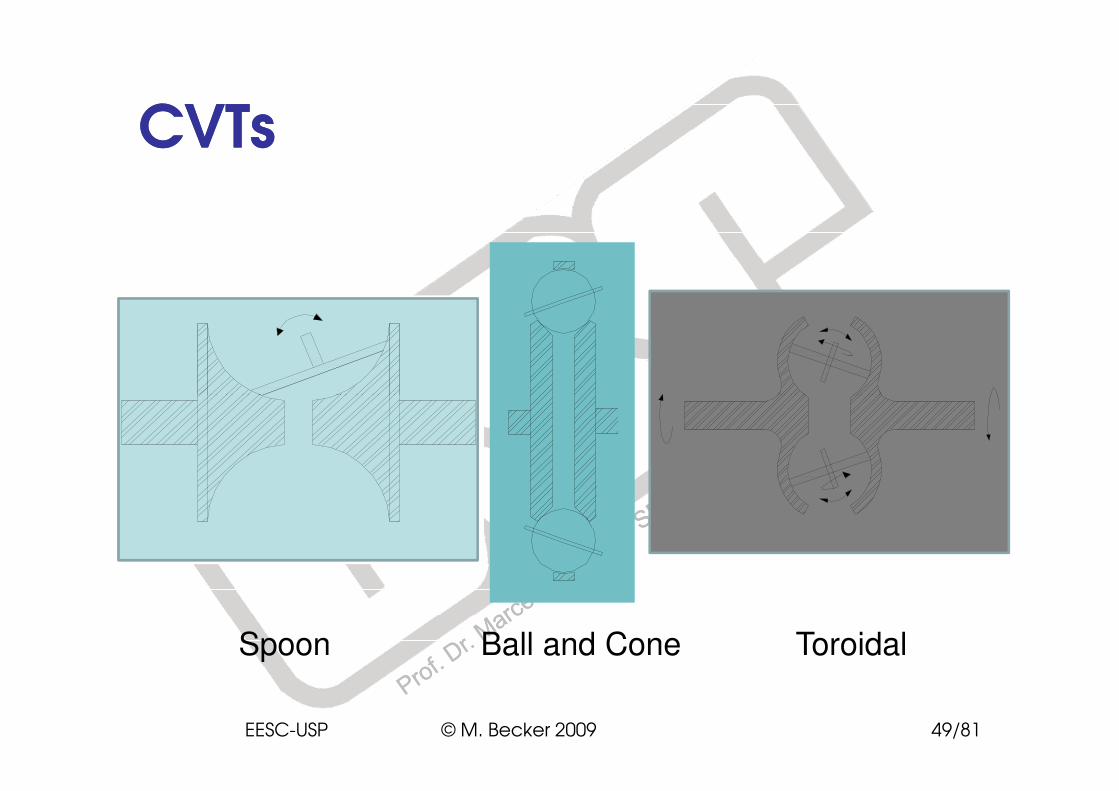
CVTsCVTs
Spoon Ball and Cone Toroidal
EESC-USP © M. Becker 2009 49/81
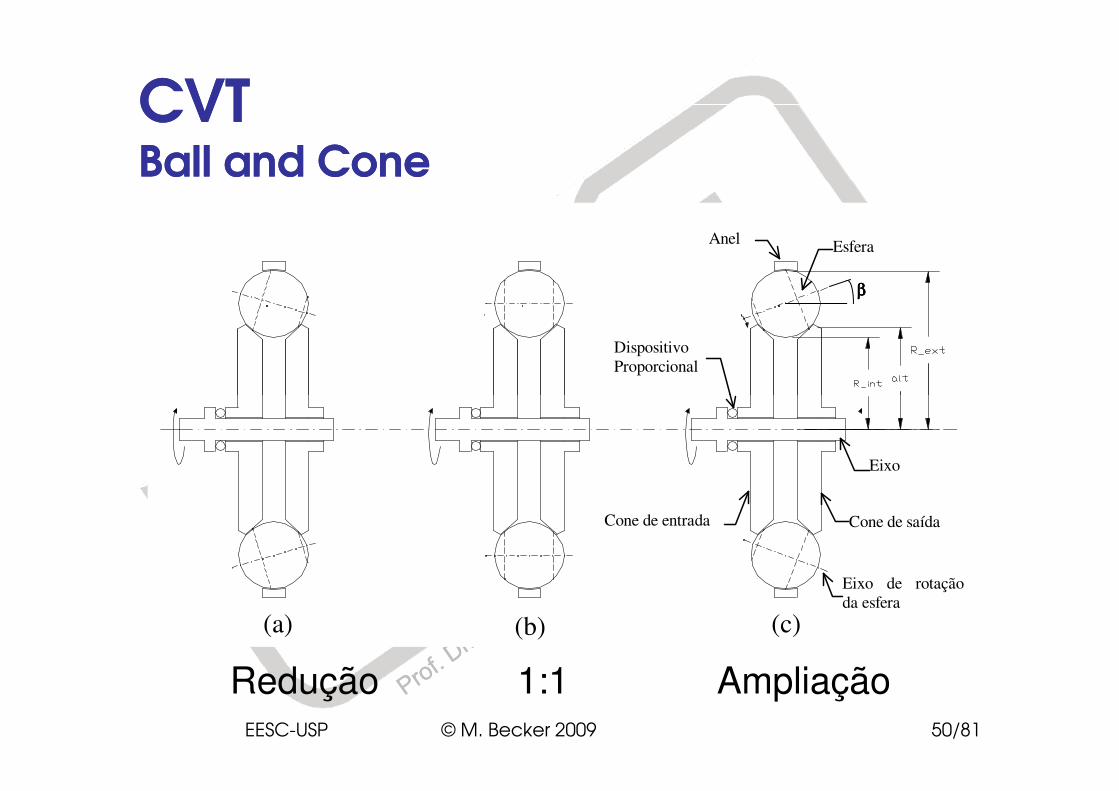
CVTCVTBall and ConeBall and Cone
AnelEsfera
Dispositivo
Proporcional
ββββ
Eixo
Cone de entrada Cone de saída
Eixo de rotação
da esfera
(a) (b) (c)
Redução 1:1 AmpliaçãoEESC-USP © M. Becker 2009 50/81
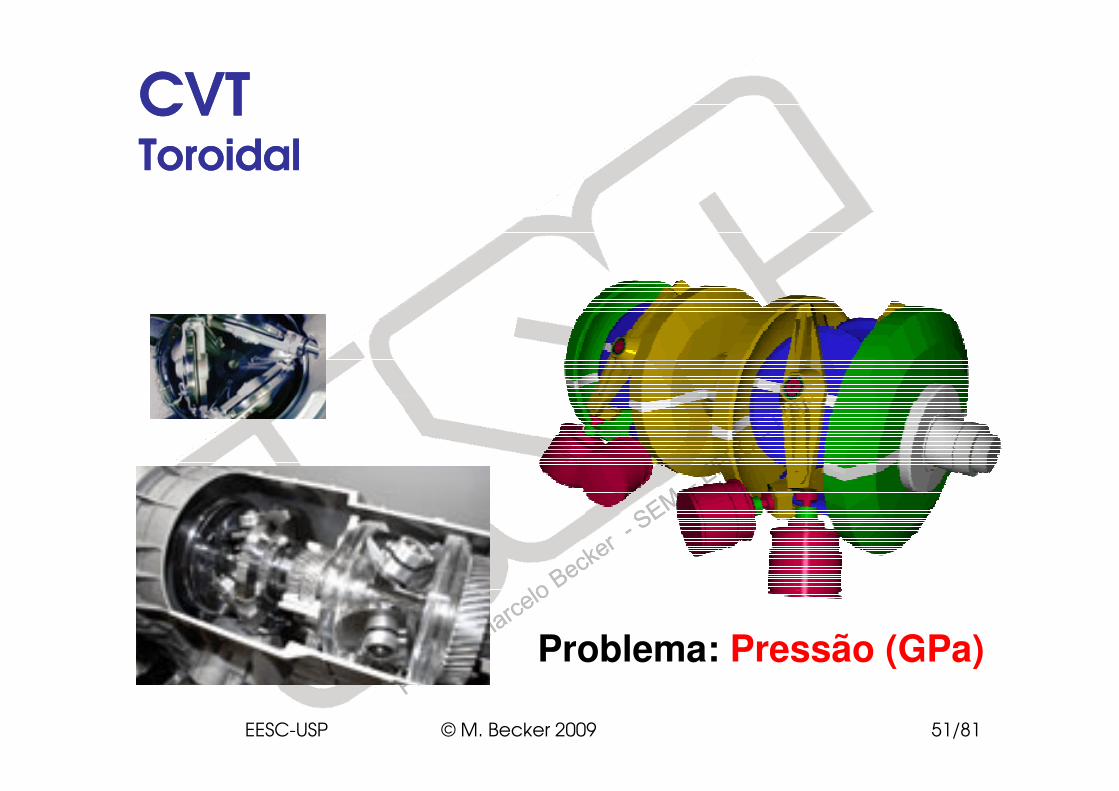
CVTCVTToroidalToroidal
Problema: Pressão (GPa)
EESC-USP © M. Becker 2009 51/81

CVT CVT Toroidal Toroidal -- LEGOLEGO
Controle Controle
Redução Ampliação
Motor MotorSaída Saída
EESC-USP © M. Becker 2009 52/81
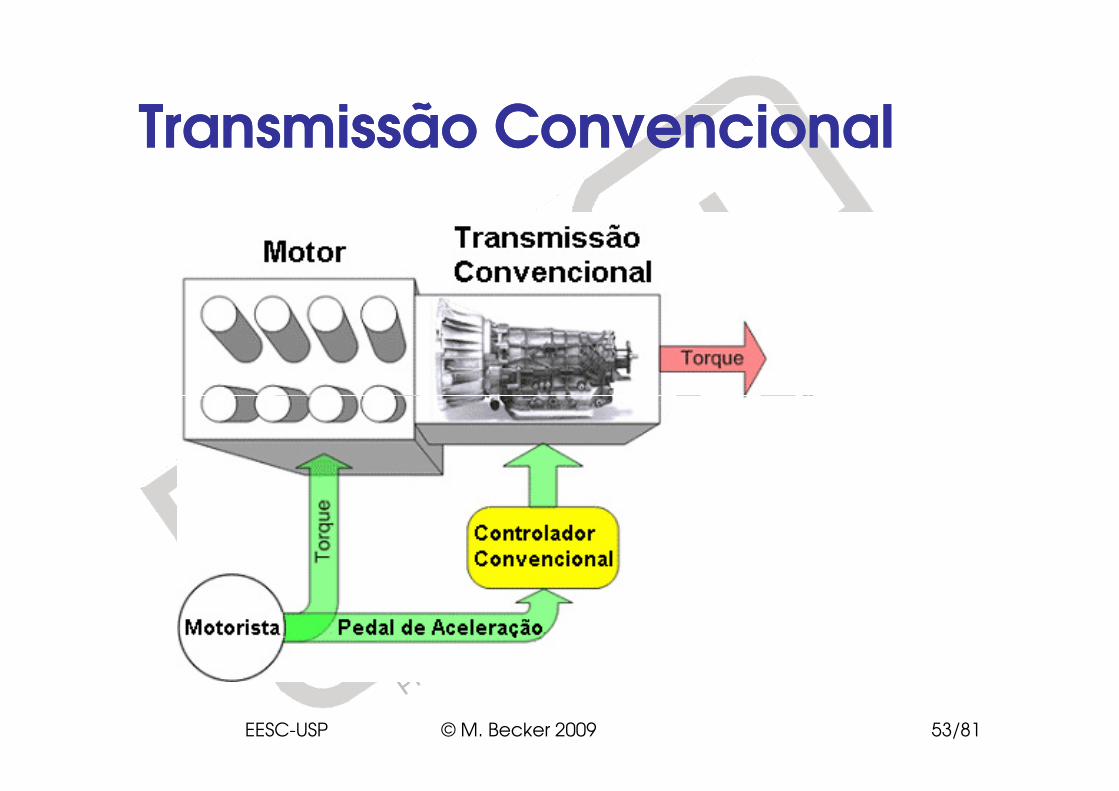
Transmissão ConvencionalTransmissão Convencional
EESC-USP © M. Becker 2009 53/81
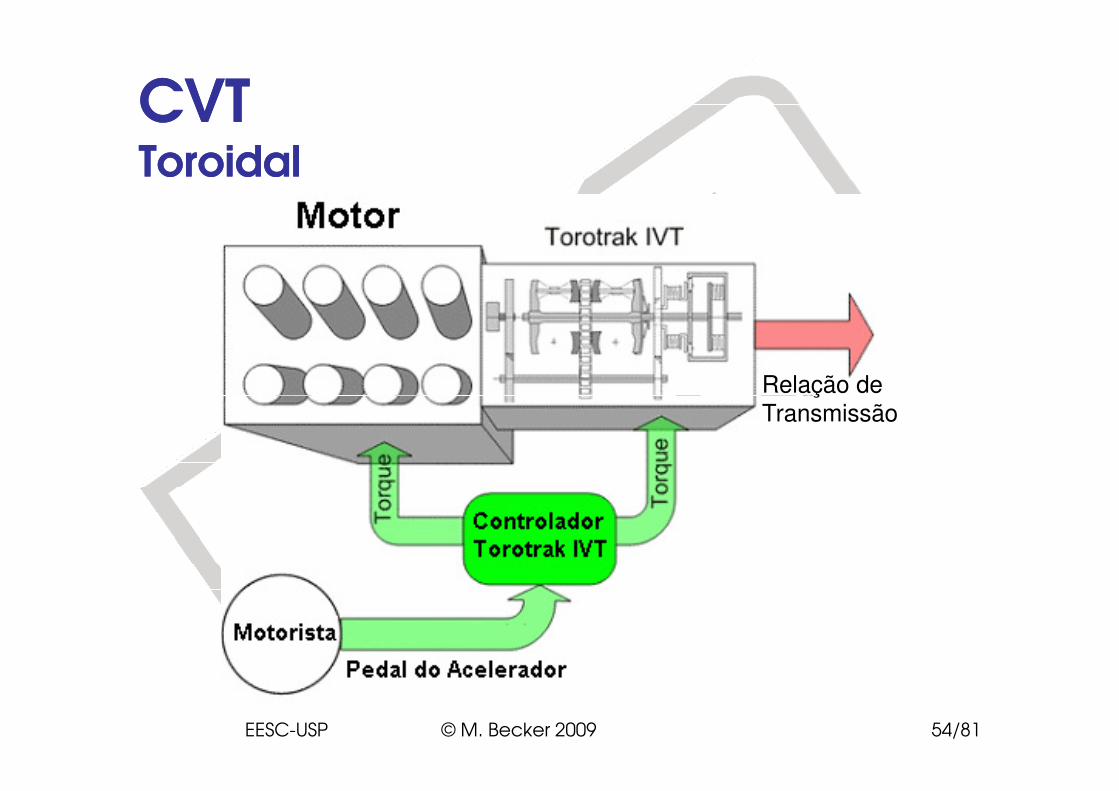
CVT CVT ToroidalToroidal
Relação de Relação de
Transmissão
EESC-USP © M. Becker 2009 54/81
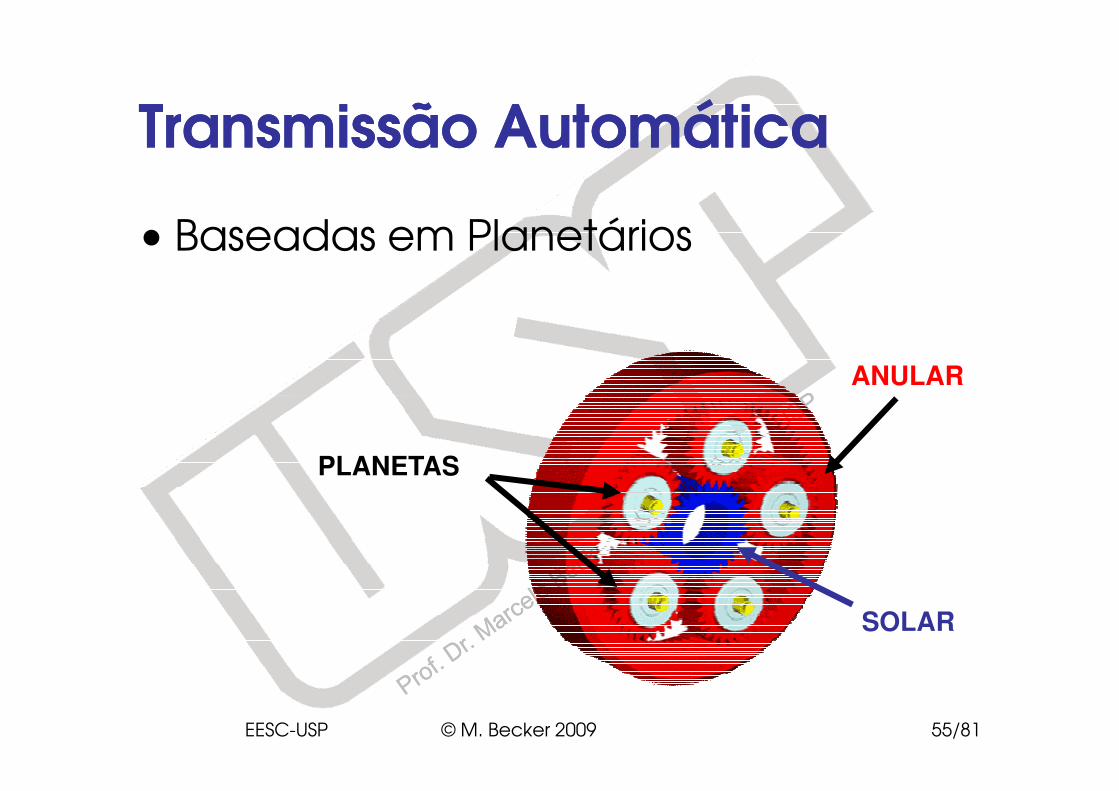
Transmissão AutomáticaTransmissão Automática
• Baseadas em Planetários
ANULAR
SOLAR
PLANETAS
EESC-USP © M. Becker 2009 55/81
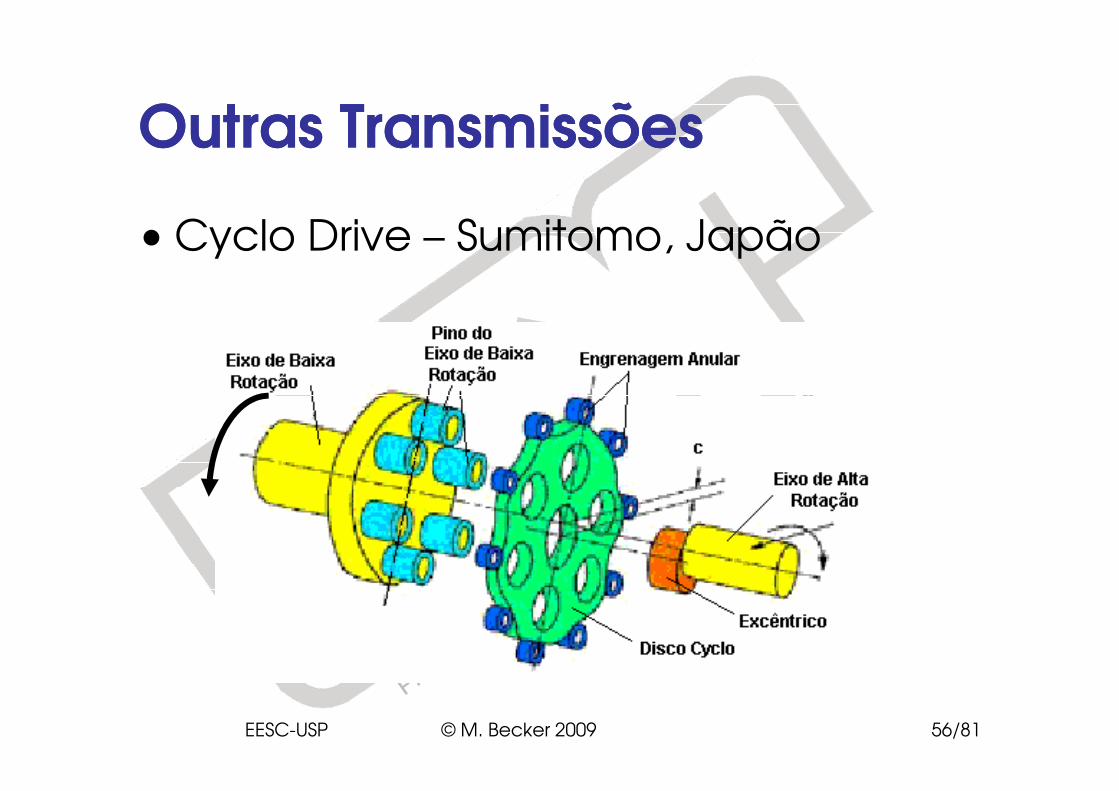
• Cyclo Drive – Sumitomo, Japão
Outras TransmissõesOutras Transmissões
EESC-USP © M. Becker 2009 56/81
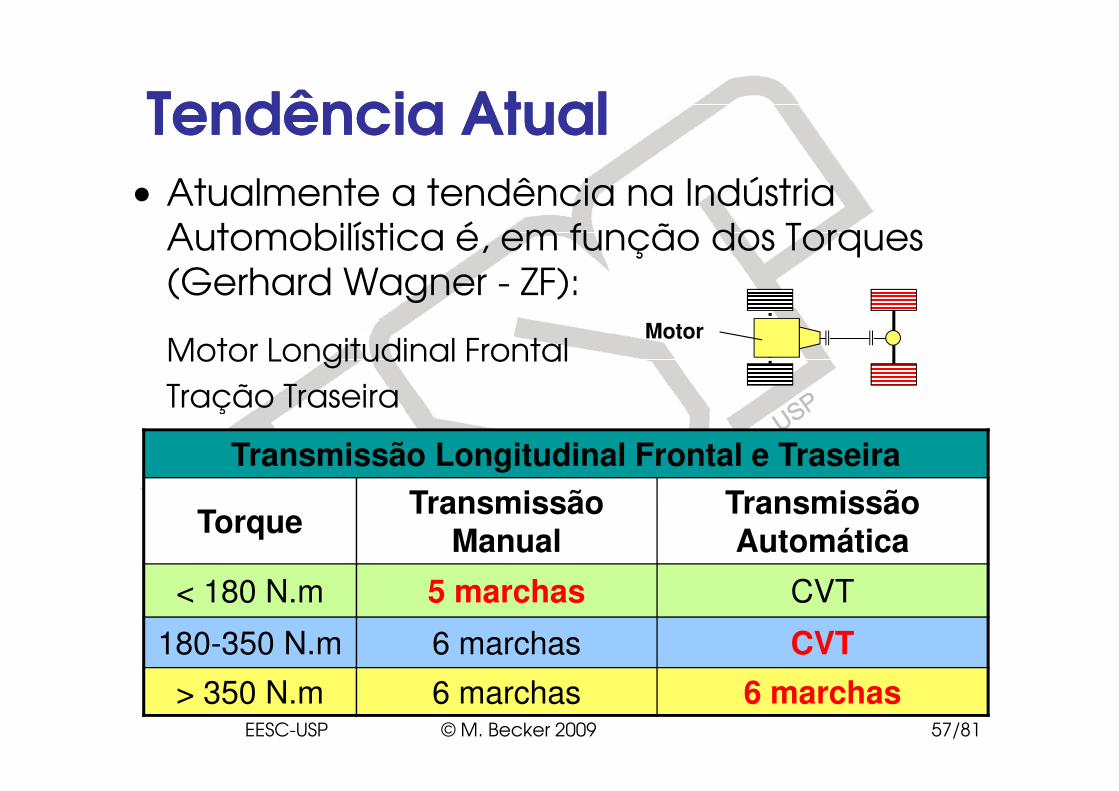
Tendência AtualTendência Atual
Motor
• Atualmente a tendência na Indústria Automobilística é, em função dos Torques (Gerhard Wagner - ZF):
Motor Longitudinal Frontal
Tração Traseira
Transmissão Longitudinal Frontal e Traseira
TorqueTransmissão
ManualTransmissão Automática
< 180 N.m 5 marchas CVT
180-350 N.m 6 marchas CVT
> 350 N.m 6 marchas 6 marchas
Tração Traseira
EESC-USP © M. Becker 2009 57/81

Tendência AtualTendência Atual
Motor Transversal Frontal
Tração 4-Rodas
Motor
Transmissão Transversal Frontal e Traseira
TorqueTransmissão
Manual
Transmissão servo-
assistida
Transmissão
Automática
< 180 N.m 5 marchas 5 marchas CVT
180-350 N.m 5 marchas - CVT
> 350 N.m - - 5 e 6 marchasEESC-USP © M. Becker 2009 58/81
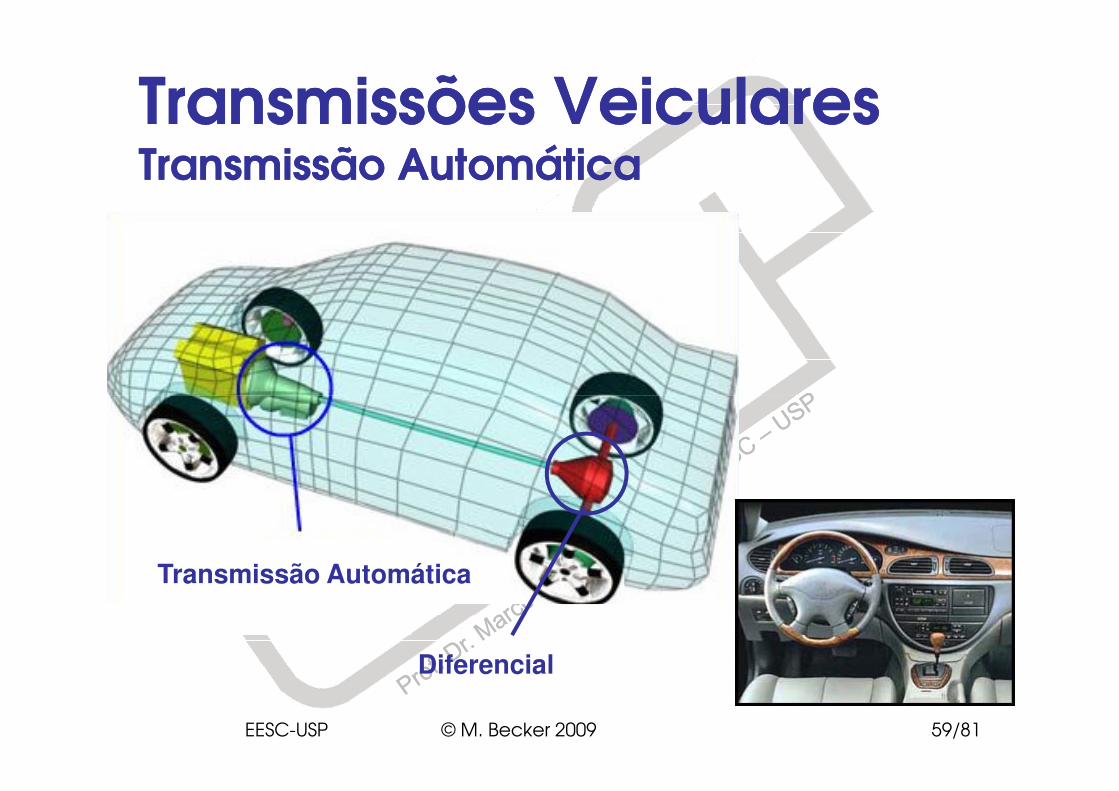
Transmissões VeicularesTransmissões VeicularesTransmissão AutomáticaTransmissão Automática
Transmissão Automática
Diferencial
EESC-USP © M. Becker 2009 59/81
Carcaça
ou apoio
Carcaça
ou apoio
F3E2
E1
F1F2
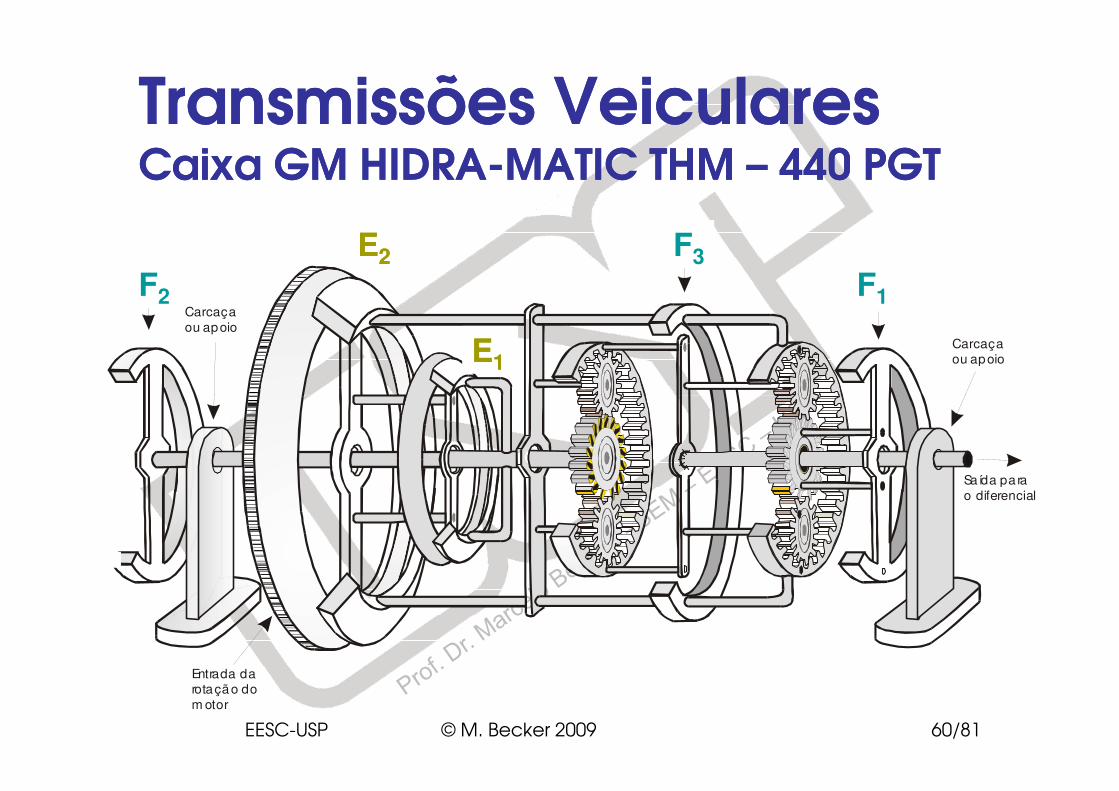
Transmissões VeicularesTransmissões VeicularesCaixa GM HIDRACaixa GM HIDRA--MATIC THM MATIC THM –– 440 PGT440 PGT
F1
EE22
EE11
F2
F3
Entrada da
rotação do
m otor
Saída para
o diferencial
EESC-USP © M. Becker 2009 60/81
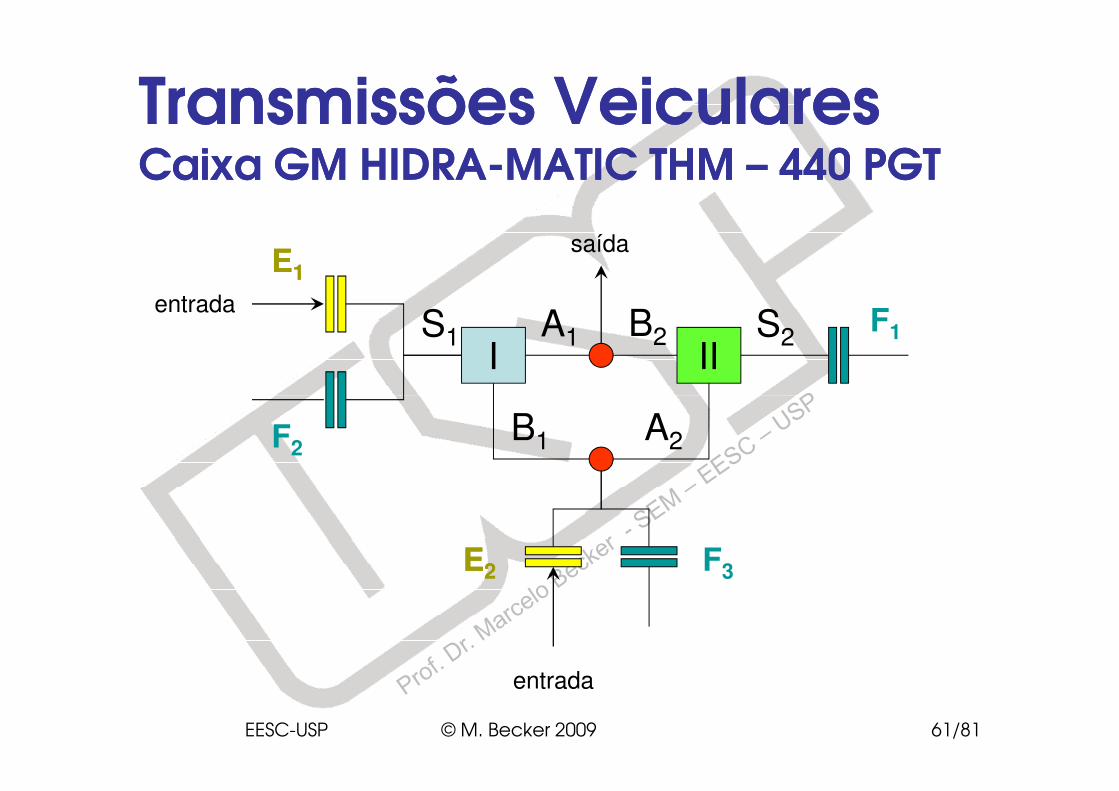
Transmissões VeicularesTransmissões VeicularesCaixa GM HIDRACaixa GM HIDRA--MATIC THM MATIC THM –– 440 PGT440 PGT
I IIS1 A1 B2 S2
F1
EE11
entrada
saída
B1 A2
F3EE22
entrada
F2
EESC-USP © M. Becker 2009 61/81
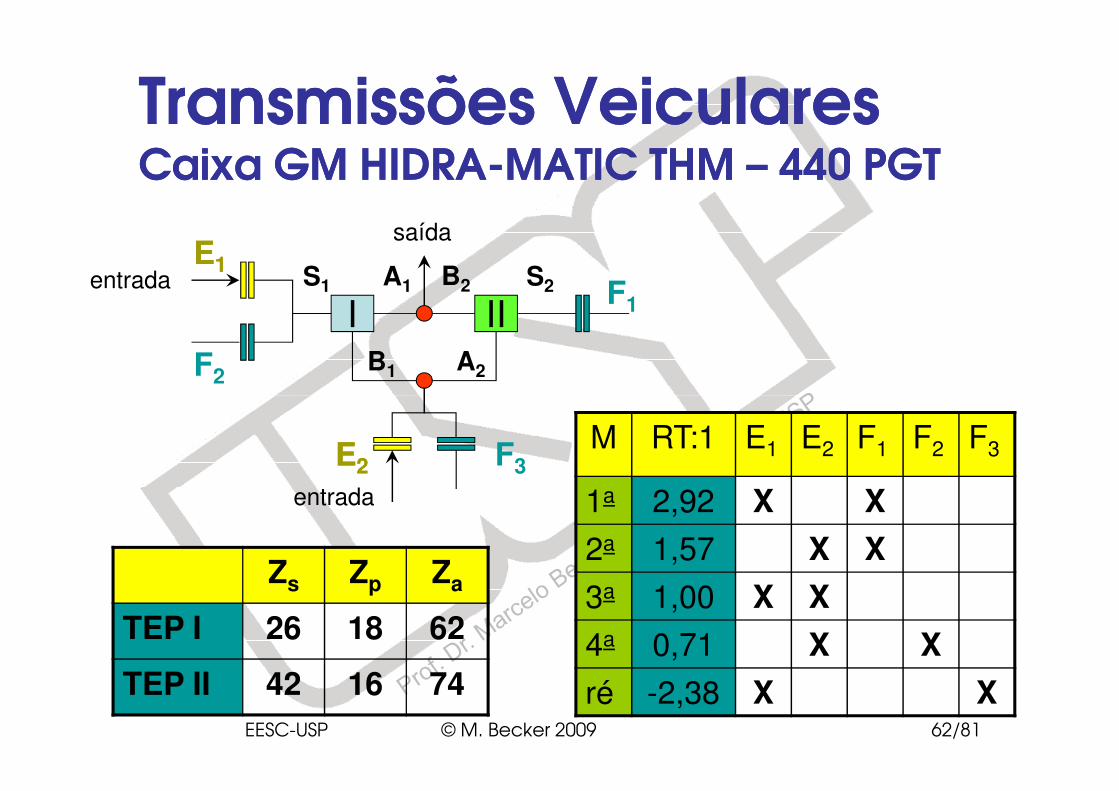
Transmissões VeicularesTransmissões VeicularesCaixa GM HIDRACaixa GM HIDRA--MATIC THM MATIC THM –– 440 PGT440 PGT
I IIS1 A1
B1
B2 S2
A2
F1
EE11entrada
saída
F2
F3EE22
entrada
M RT:1 E1 E2 F1 F2 F3
1a 2,92 X X
2a 1,57 X X
3a 1,00 X X
4a 0,71 X X
ré -2,38 X X
Zs Zp Za
TEP I 26 18 62
TEP II 42 16 74
EESC-USP © M. Becker 2009 62/81

Transmissões VeicularesTransmissões VeicularesTransmissão AutomáticaTransmissão Automática
BMW 7 SeriesSedan
EESC-USP © M. Becker 2009 63/81
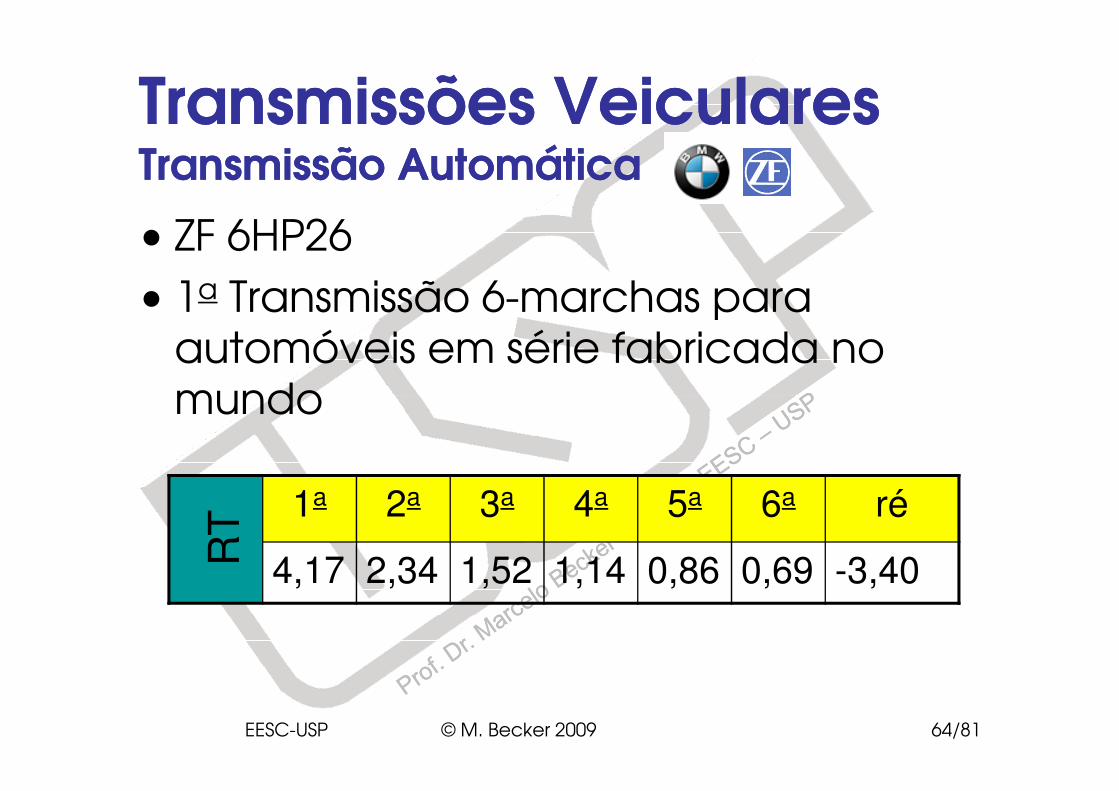
• ZF 6HP26
• 1a Transmissão 6-marchas para automóveis em série fabricada no mundo
Transmissões VeicularesTransmissões VeicularesTransmissão AutomáticaTransmissão Automática
mundo
1a 2a 3a 4a 5a 6a ré
4,17 2,34 1,52 1,14 0,86 0,69 -3,40RT
EESC-USP © M. Becker 2009 64/81
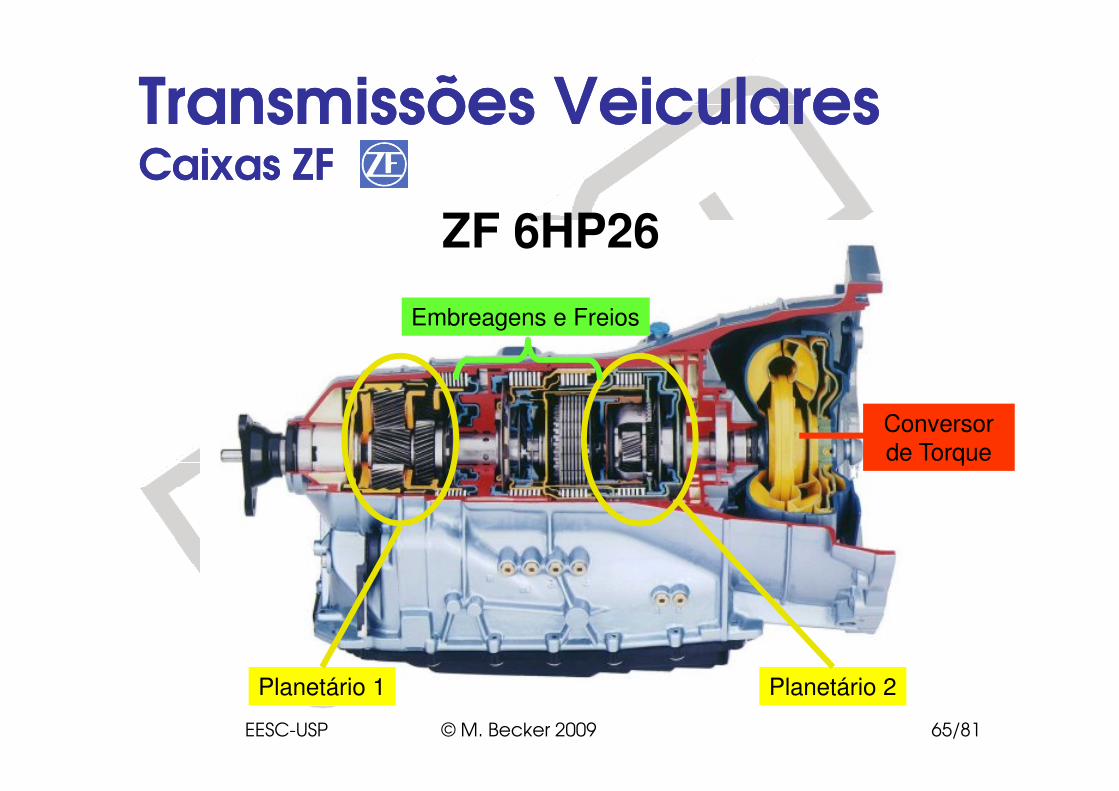
Transmissões VeicularesTransmissões VeicularesCaixas ZFCaixas ZF
ZF 6HP26
Embreagens e Freios
Planetário 1 Planetário 2
Conversor
de Torque
EESC-USP © M. Becker 2009 65/81
Transmissões VeicularesTransmissões VeicularesCaixas ZFCaixas ZF
EESC-USP © M. Becker 2009 66/81
�� IntroduçãoIntrodução�� RepresentaçõesRepresentações
�� Cinemática e Análise de TorqueCinemática e Análise de Torque
�� MontagensMontagens
Sumário da AulaSumário da Aula
�� MontagensMontagens
�� Transmissões VeicularesTransmissões Veiculares
�� Software Software TEPicicloTEPiciclo (Visual (Visual BasicBasic 5.0)5.0)
� Exemplos
EESC-USP © M. Becker 2009 67/81







