exeter 2014 bbn_pdf
TRANSCRIPT

A multi-dimensional covariance model to combine and interpolate Sea Surface Salinity with Sea Surface
Temperature
Bruno Buongiorno Nardelli, Riccardo Droghei, Lia Santoleri Consiglio Nazionale delle Ricerche-Italia

A multi-dimensional covariance model to combine and interpolate Sea Surface Salinity with Sea Surface
Temperature
Bruno Buongiorno Nardelli, Riccardo Droghei, Lia Santoleri Consiglio Nazionale delle Ricerche-Italia

OUTLINE

OUTLINE
Background on optimal interpolation, state vectors and covariance models

OUTLINE
Background on optimal interpolation, state vectors and covariance models
Algorithm combining in situ/SMOS SSS and satellite SST to get mesoscale resolving SSS

OUTLINE
Background on optimal interpolation, state vectors and covariance models
Algorithm combining in situ/SMOS SSS and satellite SST to get mesoscale resolving SSS
Choice and preparation of input observations and background data

OUTLINE
Background on optimal interpolation, state vectors and covariance models
Algorithm combining in situ/SMOS SSS and satellite SST to get mesoscale resolving SSS Choice and preparation of input
observations and background data
CAL/VAL approach and preliminary results

OUTLINE
Background on optimal interpolation, state vectors and covariance models
Algorithm combining in situ/SMOS SSS and satellite SST to get mesoscale resolving SSS
Choice and preparation of input observations and background data
CAL/VAL approach and preliminary results
Conclusions and way forward

xanalysis = xbackground +C(R+C)−1(yobs. −xbackground )
Optimal Interpolation, state vectors and covariance models
Optimal estimate of a state vector is obtained from linear combination of observations as:
with:
C =E εbεbT}{ =E (xbackground −xtrue)(xbackground −xtrue)
T}{
R =E εoεoT}{ =E (yobs. −xtrue)(yobs. −xtrue)
T}{
xyobs.
observation error covariance matrix
background error covariance matrix

xanalysis = xbackground +C(R+C)−1(yobs. −xbackground )
Optimal Interpolation, state vectors and covariance models
Optimal estimate of a state vector is obtained from linear combination of observations as:
with:
R accounts for different observations accuracy/representativeness !crucial parameter for combining insitu and satellite data observations
C =E εbεbT}{ =E (xbackground −xtrue)(xbackground −xtrue)
T}{
R =E εoεoT}{ =E (yobs. −xtrue)(yobs. −xtrue)
T}{
xyobs.
observation error covariance matrix
background error covariance matrix

xanalysis = xbackground +C(R+C)−1(yobs. −xbackground )
Optimal Interpolation, state vectors and covariance models
Optimal estimate of a state vector is obtained from linear combination of observations as:
with:
choice of the state vector and error covariance models are intimately linked and hide assumptions on the physics
C =E εbεbT}{ =E (xbackground −xtrue)(xbackground −xtrue)
T}{
R =E εoεoT}{ =E (yobs. −xtrue)(yobs. −xtrue)
T}{
xyobs.
observation error covariance matrix
background error covariance matrix

Optimal Interpolation, state vectors and covariance models
Maximum likelihood estimator of Covariance matrix
Sample state vector Data matrix

Optimal Interpolation, state vectors and covariance models
Maximum likelihood estimator of Covariance matrix
• Huge amount of satellite data makes this approach impractical • Most systems based on pre-determined (analytical) covariance functions
and simplifying assumptions
Sample state vector Data matrix
C=C(Δr) Covariance function
Δr = separation between sample elements

Optimal Interpolation, state vectors and covariance models
State vector choice and corresponding covariance model
Background error covariance matrix only describes SPATIAL variability, 2D covariance function
Single parameter, single snapshot
C=C(Δx, Δy)

Optimal Interpolation, state vectors and covariance models
State vector choice and corresponding covariance model
Background error covariance matrix only describes SPATIAL variability, 2D covariance function
Single parameter, single snapshot
Single parameter, temporal sequence
Background error covariance matrix includes information on TEMPORAL and SPATIAL variability, 3D covariance function
C=C(Δx, Δy)
C=C(Δx, Δy,Δt)

Optimal Interpolation, state vectors and covariance models
Multivariate State vectors lead to complex covariance models
multiple parameters, temporal sequence
Background error covariance matrix includes information on TEMPORAL and SPATIAL variability and relations with other parameters !multi-dimensional covariance function

Multi-dimensional covariance model
Algorithm combining in situ/SMOS SSS and satellite SST
Hypothesis: sea surface temperature (SST) and sea surface salinity (SSS) variations correlated at scales smaller than the ones dominating atmospheric variability (in the open ocean) à T and S pairs identify water masses, thus basically modified only by advection and mixing once large scale variations are filtered out
C(Δr ,Δt,ΔSST )= e−Δtτ
#
$%%
&
'((
2
e−ΔrL
#
$%%
&
'((
2
e−ΔSSTfiltered
T
#
$
%%
&
'
((
2

Multi-dimensional covariance model
Algorithm combining in situ/SMOS SSS and satellite SST
C(Δr ,Δt,ΔSST )= e−Δtτ
#
$%%
&
'((
2
e−ΔrL
#
$%%
&
'((
2
e−ΔSSTfiltered
T
#
$
%%
&
'
((
2
satellite (spatially high-pass filtered) SST differences are included in the covariance estimation
Hypothesis: sea surface temperature (SST) and sea surface salinity (SSS) variations correlated at scales smaller than the ones dominating atmospheric variability (in the open ocean) à T and S pairs identify water masses, thus basically modified only by advection and mixing once large scale variations are filtered out
Multi-dimensional covariance model
Algorithm combining in situ/SMOS SSS and satellite SST
C(Δr ,Δt,ΔSST )= e−Δtτ
#
$%%
&
'((
2
e−ΔrL
#
$%%
&
'((
2
e−ΔSSTfiltered
T
#
$
%%
&
'
((
2
“Forces” SSS interpolated field to follow isotherms
Hypothesis: sea surface temperature (SST) and sea surface salinity (SSS) variations correlated at scales smaller than the ones dominating atmospheric variability (in the open ocean) à T and S pairs identify water masses, thus basically modified only by advection and mixing once large scale variations are filtered out

Multi-dimensional covariance model
Algorithm combining in situ/SMOS SSS and satellite SST
C(Δr ,Δt,ΔSST )= e−Δtτ
#
$%%
&
'((
2
e−ΔrL
#
$%%
&
'((
2
e−ΔSSTfiltered
T
#
$
%%
&
'
((
2
spatial (L), temporal (τ) and thermal (T) decorrelation scales and spatial filtering) determined empirically minimizing OI errors vs independent surface observations
• Buongiorno Nardelli, B., 2012: A Novel Approach for the High-Resolution Interpolation of In Situ Sea Surface Salinity. J. Atmos. Ocean. Technol., 29, 867–879, doi:10.1175/JTECH-D-11-00099.1.
• Buongiorno Nardelli, B., et al., 2012: Towards high resolution mapping of 3-D mesoscale dynamics from observations, Ocean Sci., 8, 885-901, doi:10.5194/os-8-885-2012, 2012.
• Buongiorno Nardelli B., 2013: Vortex waves and vertical motion in a mesoscale cyclonic eddy, J. Geophys. Res., 118, 5609–5624, doi:10.1002/jgrc.20345.
Hypothesis: sea surface temperature (SST) and sea surface salinity (SSS) variations correlated at scales smaller than the ones dominating atmospheric variability (in the open ocean) à T and S pairs identify water masses, thus basically modified only by advection and mixing once large scale variations are filtered out

Input observations and background data
OI spatial domain and space-time resolution: Southern Ocean (10°-65° S), resolution 1/4°x1/4°, daily SSS: ISAS/CORA4.0 optimally interpolated SSS (insitu, space-time cov.) (1/2°, monthly) background Quality controlled insitu SSS used for MyOcean CORA4.0 objective analysis input SMOS - BEC Reprocessed L3 mixed (1/4°, 3days) input SST: Reynolds Optimally Interpolated SST from insitu/infrared/microwave data (1/4°, daily) input

Input observations and background data
Insitu (1 month) SMOS (3 days)

Input observations and background data
SMOS - BEC Reprocessed L3 mixed (1/4°, 3days) àlarge scale bias àsmall scale noise

Input observations and background data
SMOS - BEC Reprocessed L3 mixed (1/4°, 3days) !large scale bias: estimated vs CORA4 and removed (5°x5°moving avg.) àsmall scale noise

Input observations and background data
SMOS - BEC Reprocessed L3 mixed (1/4°, 3days) !large scale bias: estimated vs CORA4 and removed (5°x5°moving avg.) àsmall scale noise: filtered through outlier detection procedure |SMOS-CORA4| <σ(SMOS-CORA4) |SMOS-SMOSsmooth| <σ(SMOS-SMOSsmooth) (1°x1°moving avg.)

CAL/VAL approach
Tuning of SMOS error covariance values (expressed as noise-to-signal ratio) !run OI* with different noise-to-signal values for SMOS (between .5 and 3.) àcompute statistics of differences between OI SSS and independent ThermoSalinoGraph (TSG) data, and between OI SSS gradient and gradients estimated from TSG data àfind best configuration (minimum RMS errors) *Space/Time/Thermal decorrelation scales and insitu noise-to-signal ratio taken from previous studies.

CAL/VAL approach
Preliminary analysis carried out only on 5 days, selected looking at TSG matchup distribution (2-6 January 2012)
Tuning of SMOS error covariance values (expressed as noise-to-signal ratio) !run OI* with different noise-to-signal values for SMOS (between .5 and 3.) àcompute statistics of differences between OI SSS and independent ThermoSalinoGraph (TSG) data, and between OI SSS gradient and gradients estimated from TSG data àfind best configuration (minimum RMS errors) *Space/Time/Thermal decorrelation scales and insitu noise-to-signal ratio taken from previous studies.

Examples of OI SSS with different configurations
Background

OI SSS built from insitu/SST
Examples of OI SSS with different configurations

OI SSS built from SMOS/SST (noise-to-signal=0.5)
Examples of OI SSS with different configurations

OI SSS built from insitu/SMOS/SST (noise-to-signal=0.5)
Examples of OI SSS with different configurations

OI SSS built from insitu/SMOS/SST (noise-to-signal=1.)
Examples of OI SSS with different configurations

OI SSS built from insitu/SMOS/SST (noise-to-signal=1.5)
Examples of OI SSS with different configurations

OI SSS built from insitu/SMOS/SST (noise-to-signal=2.0)
Examples of OI SSS with different configurations

OI SSS built from insitu/SMOS/SST (noise-to-signal=2.5)
Examples of OI SSS with different configurations

OI SSS built from insitu/SMOS/SST (noise-to-signal=3.0)
Examples of OI SSS with different configurations

CAL/VAL statistics (preliminary results)
Daily TSG matchup data (all)
(noise-to-signal=2.0) (noise-to-signal=0.5)
(noise-to-signal=2.0) (noise-to-signal=0.5)
RMSE SSS insitu/SMOS/SST = 0.38 ± 0.01 RMSE SSS SMOS/SST = 0.361 ± 0.009 RMSE SSS insitu/SST = 0.283 ± 0.007 RMSE CORA4 = 0.41 ± 0.01 RMSE SSS grad. insitu/SMOS/SST = 0.00209 ± 9. e-05 RMSE SSS grad. SMOS/SST = 0.00205 ± 8. e-05 RMSE SSS grad. insitu/SST = 0.00214 ± 9. e-05 RMSE CORA4 grad. = 0.00226 ± 9. e-05
Confidence intervals estimated through bootstrapping

Daily TSG matchup data (only open ocean)
(noise-to-signal=2.0) (noise-to-signal=0.5)
(noise-to-signal=2.0) (noise-to-signal=0.5)
RMSE SSS insitu/SMOS/SST = 0.137 ± 0.002 RMSE SSS SMOS/SST = 0.211 ± 0.005 RMSE SSS insitu/SST = 0.136 ± 0.004 RMSE CORA4 = 0.148 ± 0.002 RMSE SSS grad. insitu/SMOS/SST = 0.00213 ± 9. e-05 RMSE SSS grad. SMOS/SST = 0.00206 ± 8. e-05 RMSE SSS grad. insitu/SST = 0.00215 ± 9. e-05 RMSE CORA4 grad. = 0.00228 ± 9. e-05
Confidence intervals estimated through bootstrapping
CAL/VAL statistics (preliminary results)

TSG matchup data (only open ocean, within ± 6h nominal SST @me)
(noise-to-signal=2.0) (noise-to-signal=0.5)
(noise-to-signal=2.0) (noise-to-signal=0.5)
RMSE SSS insitu/SMOS/SST = 0.128 ± 0.003 RMSE SSS SMOS/SST = 0.201 ± 0.006 RMSE SSS insitu/SST = 0.131 ± 0.003 RMSE CORA4 = 0.145 ± 0.003 RMSE SSS grad. insitu/SMOS/SST = 0.00169 ± 9. e-05 RMSE SSS grad. SMOS/SST = 0.00178 ± 9. e-05 RMSE SSS grad. insitu/SST = 0.00170 ± 9. e-05 RMSE CORA4 grad. = 0.0019 ± 0.0001
Confidence intervals estimated through bootstrapping
CAL/VAL statistics (preliminary results)

CAL/VAL: Analysis of spatial wavenumber spectra
Mean spatial power spectral density computed from gap/land free sub-images • de-trended samples • Blackmann-Harris windowing to reduce spectral leakage • FFT

CAL/VAL: Analysis of spatial wavenumber spectra
Mean zonal power spectral density computed from gap/land free sub-images • de-trended samples • Blackmann-Harris windowing to reduce spectral leakage • FFT
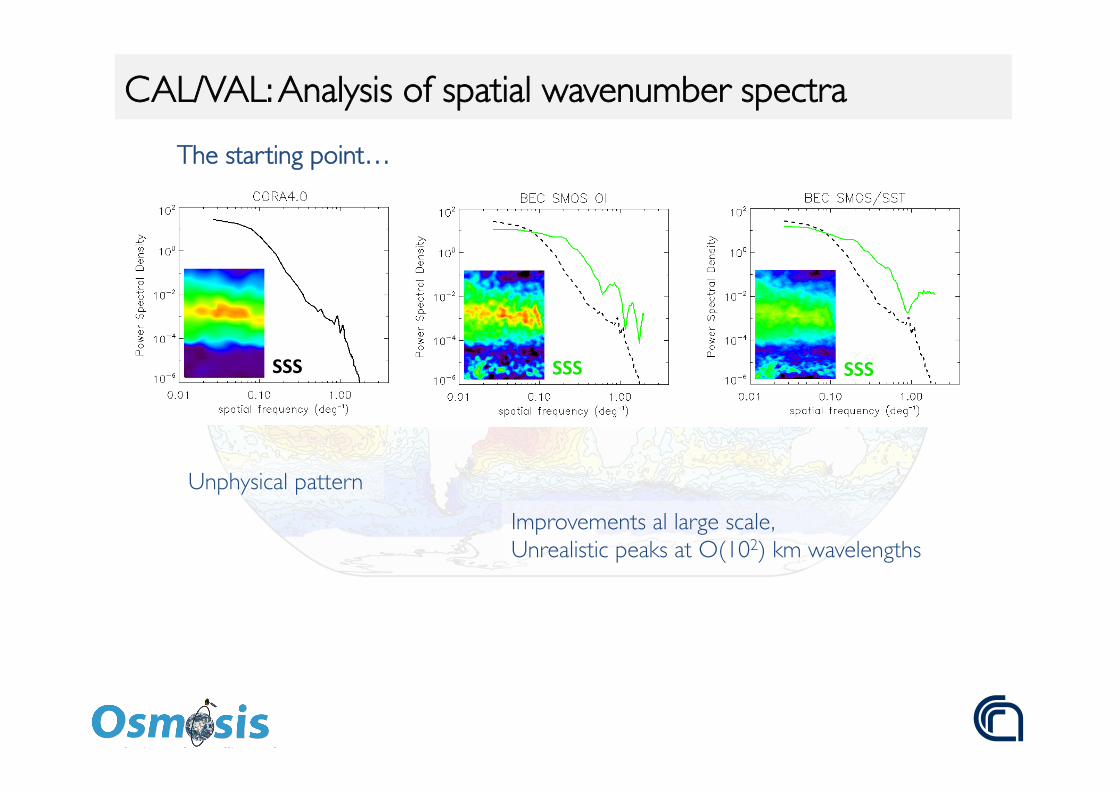
CAL/VAL: Analysis of spatial wavenumber spectra
SSS
SSS
SSS
The starting point…
Unphysical pattern Improvements al large scale, Unrealistic peaks at O(102) km wavelengths

CAL/VAL: Analysis of spatial wavenumber spectra
(noise-to-signal=2.0) (noise-to-signal=0.5)
SST SSS
SST SSS
SST SSS
SSS
SSS
SSS
Existing vs new products

CAL/VAL: Analysis of spatial wavenumber spectra
(noise-to-signal=2.0) (noise-to-signal=0.5)
SST SSS
SST SSS
SST SSS
SST SSS
What should we expect…
Same computation applied to 1/4° ocean model reanalysis CGLORS (assimilating SST, altimeter, in situ)

Conclusions and way forward
Combination/interpolation of insitu/SMOS/SST data using new multi-dimensional covariance model appears promising Need to optimize filtering of SMOS data, include Aquarius/SAC-D CAL/VAL of optimal interpolation configuration needs to be extended to longer dataset Produce/disseminate full processed OSMOSIS dataset (2010-2012, daily resolution, one file per week) Find a framework/project to go global, NRT, daily…