ee 2145230 chapter 8 electric motorpioneer.netserv.chula.ac.th/~tthavatc/ch 8 electric...
TRANSCRIPT

1
EE 2145230 Chapter 8 Electric Motor
8.1 Motor Theory
• An electric motor is a device that changes electrical energy to mechanical energy.
Electrical Energy
Mechanical Energy
Motor
Generator
• Motors can be classified as DC and AC motors.
• Electromagnetism: Whenever an electric current flows in a conductor a magnetic field is set up in the space surrounding the conductor. The field spreads out around the conductor in concentric circles with the greatest density of magnetic flux nearest to the conductor.
• If we place a current‐carrying conductor in a magnetic field, the conductor has a force exerted on it. If the conductor is free to move this force will produce motion.

2
8.2 DC Motor
• DC motors are described in part by the type of field winding and armature winding connection. There are four types: separately excited, series, shunt and compound DC motor.
• The principle of DC motor: ( )F I l B= × → F Bli= → tT K Iaφ=
Repulsion of like magnetic poles and attraction of unlike magnetic poles.
• Characteristics of DC motors
• There are two main windings:
1. Field winding (Stator): This winding provides magnetic flux and is static.
2. Armature winding (Rotor): Current‐carrying wires in B (from Stator) ⇒ Force ⇒ Torque.

3
• The action of the commutator continually switches the input current to new sections of the armature winding so that the top of the armature is always a north pole; hence the armature continues to rotate in an effort to align itself with the field poles.
• Counter or Back emf: As an armature rotates and cuts through the magnetic flux from the field circuit, an induced voltage occurs. This is because an electromotive force (emf) will be induced across the ends of a conductor when there is relative motion between it and a magnetic field.
( )e l v B= × → tE K N=Kb φ φω=
KVL on armature circuit: b t a aE V I R= −
Separately excited DC motor: Field circuit and armature circuit are separated.

4
Shunt DC motor: L a fI I I= +
‐ Low starting torque
‐ The speed is almost constant for all reasonable loads.
‐ Loads: electric fans and pumps
Series DC motor: T A A A F AV E R I R I= + +
‐ High starting torque
‐ If a series motor is not connected mechanically to a load, the speed of the motor will continue to increase for as long as the counter emf is substantially below the applied emf. The speed may increase far above the normal operating speed of the motor, and this may result in the armature flying apart because of the centrifugal force developed by the rapid rotation. A series motor should always be connected mechanically to a load to prevent it from “running away”.
‐ Loads: engine starter, landing gear

5
• DC motor efficiency: Losses100% 100% 100%
Lossesout out in
in out in
P P PP P P
η −= × = × = ×
+
Four major losses are
1. Copper losses (Cu losses): losses from field and armature windings
2. Core loss: Hysteresis and Eddy current losses
3. Mechanical losses: Friction and windage losses
4. Stray load losses: 1% of output power
Note that core and mechanical losses are called rotational losses.
• Speed control
1. For separately excited motors, speed can be controlled by varying the field current, varying the armature source voltage or by inserting additional resistance in series with the armature.
2. For shunt‐connected motors, speed can be controlled by varying the field current or by inserting additional resistance in series with the armature.
3. For series‐connected motors, its torque is almost inversely proportional to the square of its speed. This type of motor is suitable for starting heavy loads. It can reach dangerous speeds if the load is totally removed
8.3 AC Motor
• Because the speed of an AC motor is determined by the frequency of the AC supply that is applied it, AC motors are well suited to constant speed applications. The principle of all AC motors is based on the generation of a rotating magnetic field. It is this rotating field that causes the motor’s rotor to turn.
• AC motors can be grouped into 1) Synchronous motors and 2) Induction motors
• If three windings are placed round a stator frame, and three‐phase AC is applied to the windings, the magnetic fields generated in each of the three windings will combine into a magnetic field that rotates. At any given instance, these fields combine together in order to produce a resultant field that which acts on the rotor. The rotor turns because the magnetic field rotates.

6
• Synchronous motor: AC is applied to the stator and DC is applied to the rotor.
• If the rotor winding is energized with DC, it will act like a bar magnet and it will rotate in sympathy with the rotating field. The speed of rotation of the magnetic field depends on the frequency of the three‐phase AC supply and, provided that the supply frequency remains constant, the rotor will turn at a constant speed. Furthermore, the speed of rotation will remain constant regardless of the load applied.
• The synchronous motor is so called because its rotor is synchronized with the rotating field set up by the stator. Its construction is essentially the same as that of a simple AC generator (alternator).
• Synchronous motors are not self‐starting and must be brought up to near synchronous speed before they can continue rotating by themselves. When the motor speed reaches approximately 97% of nameplate RPM, the DC field current is applied to the rotor producing Pull‐in Torque and the rotor will pull‐in ‐step and “synchronize” with the rotating flux field in the stator. The motor will run at synchronous speed and produce Synchronous Torque.
• The requirement to have an external DC voltage source as well as the AC field excitation makes this type of motor somewhat unattractive!

7
• Advantages of synchronous motors
1) Precise speed regulation makes the synchronous motor an ideal choice for certain industrial processes and as a prime mover for generators.
2) Synchronous motors have speed / torque characteristics which are ideally suited for direct drive of large horsepower, low‐rpm loads such as reciprocating compressors.
3) Synchronous motors operate at an improved power factor, thereby improving overall system power factor and eliminating or reducing utility power factor penalties. An improved power factor also reduces the system voltage drop and the voltage drop at the motor terminals.
• Induction motor (IM): most commonly used AC motors.
• The induction motor derives its name from the fact that AC currents are induced in the rotor circuit by the rotating magnetic field in the stator. The stator construction of the induction motor and of the synchronous motor is almost identical, but their rotors are completely different.
• Two types of rotor winding are 1) Squirrel cage and 2) Wound rotor
• The essential parts of an induction motor are the rotor and the stator. The stator is in the form of a shell with longitudinal slots on the inner surface. The rotor in an induction motor consists of a laminated iron core in which are placed longitudinal conductors. Additional resistance can be added to wound rotor type through slip rings, while no resistance can be added for squirrel cage type.

8
Stator Winding Squirrel cage rotor
End ring
3 supply
Stator Winding Wound rotor winding
Slip ring
Brushes
External variable resistor
3 supply
(Stator Winding may be Y or connection.)
• The induction motor is the most commonly used AC motor because of its simplicity, its robust construction and its relatively low cost. These advantages arise from the fact that the rotor of an induction motor is a self‐contained component that is not actually electrically connected to an external source of voltage.
• The induction motor has the same stator as the synchronous motor. The rotor is different in that it does not require an external source of power. Current is induced in the rotor by the action of the rotating field cutting through the rotor conductors. This rotor current generates a magnetic field which interacts with the stator field, resulting in a torque being exerted on the rotor and causing it to rotate.
• The rotating magnetic field generated in the stator induces an e.m.f. in the rotor. The current in the rotor circuit caused by this induced e.m.f. sets up a magnetic field. The two fields interact, and cause the rotor to turn. Note that the rotor circuit is a closed‐loop circuit.
• The rotor of an induction motor rotates at less than synchronous speed, in order that the rotating field can cut through the rotor conductors and induce a current flow in them. This percentage difference between the synchronous speed and the rotor speed is known as slip. Slip varies very little with normal load changes, and the induction motor is therefore considered to be a constant‐speed motor. If the speeds were exactly the same, no relative motion would exist between the two, and so no e.m.f. would be induced in the rotor.
9
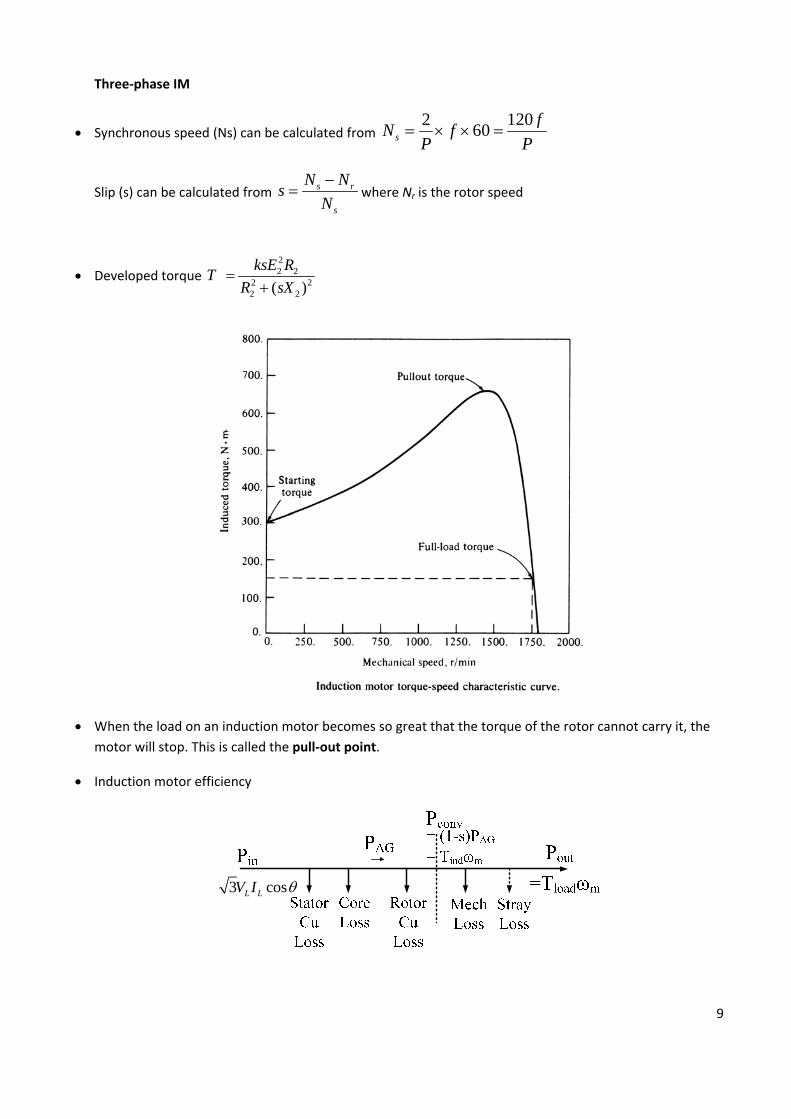
Three‐phase IM
• Synchronous speed (Ns) can be calculated from 2 12060s
fN fP P
= × × =
Slip (s) can be calculated from s r
s
N NsN−
= where Nr is the rotor speed
• Developed torque 22 2
2 22 2
( )
ksE RTR sX
=+
• When the load on an induction motor becomes so great that the torque of the rotor cannot carry it, the motor will stop. This is called the pull‐out point.
• Induction motor efficiency
3 cosL LV I θ

10
Four major losses are
1. Stator Copper losses (PSCL): losses from the stator winding
2. Core loss: Hysteresis and Eddy current losses
3. Rotor Copper losses (PRCL): losses from the rotor winding
4. Mechanical losses: Friction and windage losses
5. Stray load losses: 1% of output power
Two‐phase IM
• In the case of a two‐phase induction motor, two windings are placed at right angles to each other. By exciting these windings with current which is 90 degrees out of phase, a rotating magnetic field can be created.
Single‐phase IM
• A single‐phase induction motor, on the other hand, has only one phase. This type of motor is extensively used in applications which require small low‐output motors. The advantage gained by using single‐phase motors is that in small sizes they are less expensive to manufacture than other types. Also they eliminate the need for a three‐phase supply.
• A single‐phase induction motor has only one stator winding; therefore the magnetic field generated does not rotate. A single‐phase induction motor with only one winding cannot start rotating by itself. Some means of starting is required for all single‐phase induction motors. Once the rotor is started rotating, however, it will continue to rotate and come up to speed.

11
• Three types of commonly used single‐phase IM
1) Split‐phase IM: This IM should not start frequently. Rating between 60W – 250 W (1/12 hp‐ 1/3 hp). Split stator winding into main winding and auxiliary winding with different wire sizes.
2) Capacitor‐type IM: This IM can start often and gives high starting torque. Rating between 120 W – 7.5 kW (1/6 hp‐10 hp). The performance is better due to the capacitor.

12
3) Shaded‐pole IM: This IM gives low starting torque. Rating lower than 0.05 hp (40 W).
In the shaded pole induction motor, a section of each pole face in the stator is shorted out by a metal strap. This has the effect of moving the magnetic field back and forth across the pole face. The moving magnetic field has the same effect as a rotating field, and the motor is self‐starting when switched on.
References:
Textbooks # 1 and # 2
EE 2145230 Aircraft Electricity and Electronics
Asst. Prof. Thavatchai Tayjasanant, Ph.D.