Download - Saobracaj I. Deo
1.Geopoliticki kriterijum kategorizacije puteva
Magistralni-povezuju drustvene,privredne i politicke
centre i povezuju se sa medjunarodnim putevima.
Regionalni-povezuju centre u okviru privrednih i
geopolitickih zajednica, vezuju se za magistralne
puteve.
Lokalni- medjuopstinski i lokalni saobracaj.
Magistralni i regionalni putevi su u nadleznosti
drzave,a lokalni su u nadleznosti opstine.
MeĎunaodni putevi(E- putevi; TEM-putevi).
2.Tehnicki kriterijum kategorizacije kolovoza
-Kvalitet kolovoznog zastora
a) sa savremenim kolovozom (od asfaltnof,
cementnobetonskog zastora, sa montaznim
elementima)
b) sa nesavremenim kolovozom (kaldrma, zemljani
putevi)
-Topografske karakteristike terena karakter terena se
definise kao ravnicarski, brezuljkasti, brdovit ili
planinski
3.Kategorizacija puteva prema topografskim
odlikama terena
Karakter terena se definise kao ravnicarski (relativna
visinska razlika reljefa na 1km neznatna, nagib
padina do 1:10), brezuljkast (relativna visinska
razlika reljefa na 1km do 70m, nagib padina 1:10 do
1:5), brdovit (70-150m, 1:5 do 1:1) ili planinski
(>150m, >1:1) .
4.Eksploatacioni kriterijumkategorizacije puteva
Prema saobrac. rezimu i vrsti saobrac. puteve delimo
na:
1.Autoputevi- za motorni saobracaj koji se u svakom
smeru odvija po fizicki odvojenom kolovozu sa
najmanje dve saobracajne trake.rezim neprekinutih
tokova, visok stepen bezbednosti, udobnosti, brzine,
savremen kolovoz.
2.Putevi za motorni saobracaj- za motorna vozila,
savremen kolovoz sa najmanje dve sobracajne trake,
magistrelni putevi i putevi nizeg ranga.
3.Putevi za mesoviti saobracaj- , za sve vrste vozila i
pesaka. Uglavnom lokalni i regionalni putevi.
Prema velicini motornog saobracaja koji sa izrazava
kao PGDS u oba smera klasiraju:
I razred – preko 12000;
II razred - 7000-12000;
III razred – 3000-7000;
IVraz.-1000-3000;
Vraz- do 1000.
5.Eksploatacioni pokazatelji
Izbor i dimenzionisanje konstruktivnih elemenata
puta se vrsi na osnovu eksploatacionih pokazatelja:
-saobracajno opterecenje,
-propusna moc (kapacitet),
-nivo usluge,
-racunska brzina,
-merodavno vozilo
6.Saobracajno opterecenje kao eksploatacioni
pokazatelj
Saobracajno opterecenje predstavlja merodavni broj
vozila koji u odredjenom vremenskom intervalu
prolazi ili se ocekuje da ce proci kroz odredjeni putni
presek.
-Postoji postojece i planirano saobracajno
opterecenje.
-Saobracajno opterecenje varira u toku
dana,sedmice,godine.
-Saobracajna deonica je deo putnog pravca izmedju
dva uzastopna saobracajna cvora
-Sobracajni cvor je mjesto suceljavanja dva ili vise
putnih pravaca gdje saobracajni tokovi mogu mjenjati
putni pravac ili smjer kretanja.
-Neprekidni saobracajni tok - nema kolizije sa
drugim saobracajnim tokovima.
-Saobracajna traka predstavlja funkcionalni deo
ukupnog poprecnog profila puta
PGDS je ukupan broj vozila/365 [voz/dan]
PDS je ukupan broj vozila/broj dana [voz/dan]
za brojanje tokom 7 dana u vreme prosečnih meseci
(april, maj, okt.)
A,B-gradski i prigradski putevi;
C-vangradski;
D-putni pravci koji vode ka turističkim
centrima
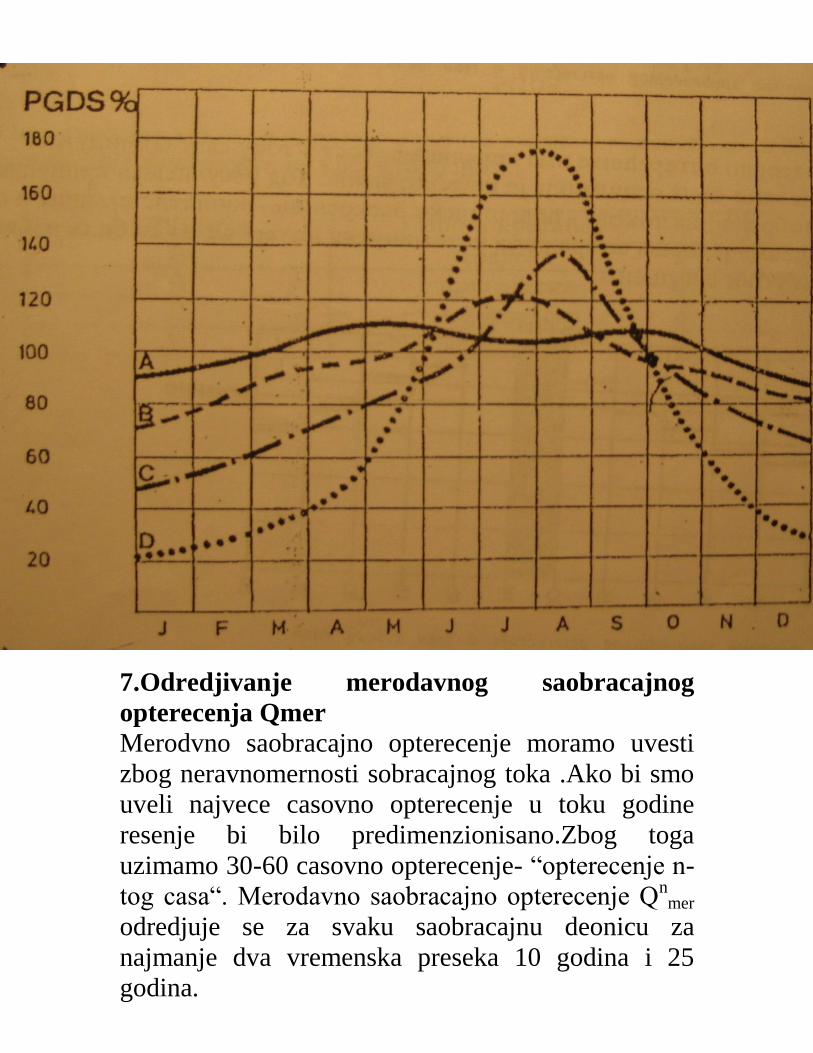
7.Odredjivanje merodavnog saobracajnog
opterecenja Qmer
Merodvno saobracajno opterecenje moramo uvesti
zbog neravnomernosti sobracajnog toka .Ako bi smo
uveli najvece casovno opterecenje u toku godine
resenje bi bilo predimenzionisano.Zbog toga
uzimamo 30-60 casovno opterecenje- “opterecenje n-
tog casa“. Merodavno saobracajno opterecenje Qnmer
odredjuje se za svaku saobracajnu deonicu za
najmanje dva vremenska preseka 10 godina i 25
godina.
Na osnovu Q25mer vrsi se dimenzionisanje putnog
profila i utvrdjuje sirina putnog pojasa na osnovu
Q10mer projektuje i gradi prva etapa.
PA-putnički automobili
LTV-laka teretna vozila (do 5t)
STV-teretna vozila nosivosti 1.5-5t
TTV-teška teretna vozila nosivosti preko 5t
AV-autovozovi
BUS-autobusi
Qnmer=PGDS*(FNČ/100)[voz/h]
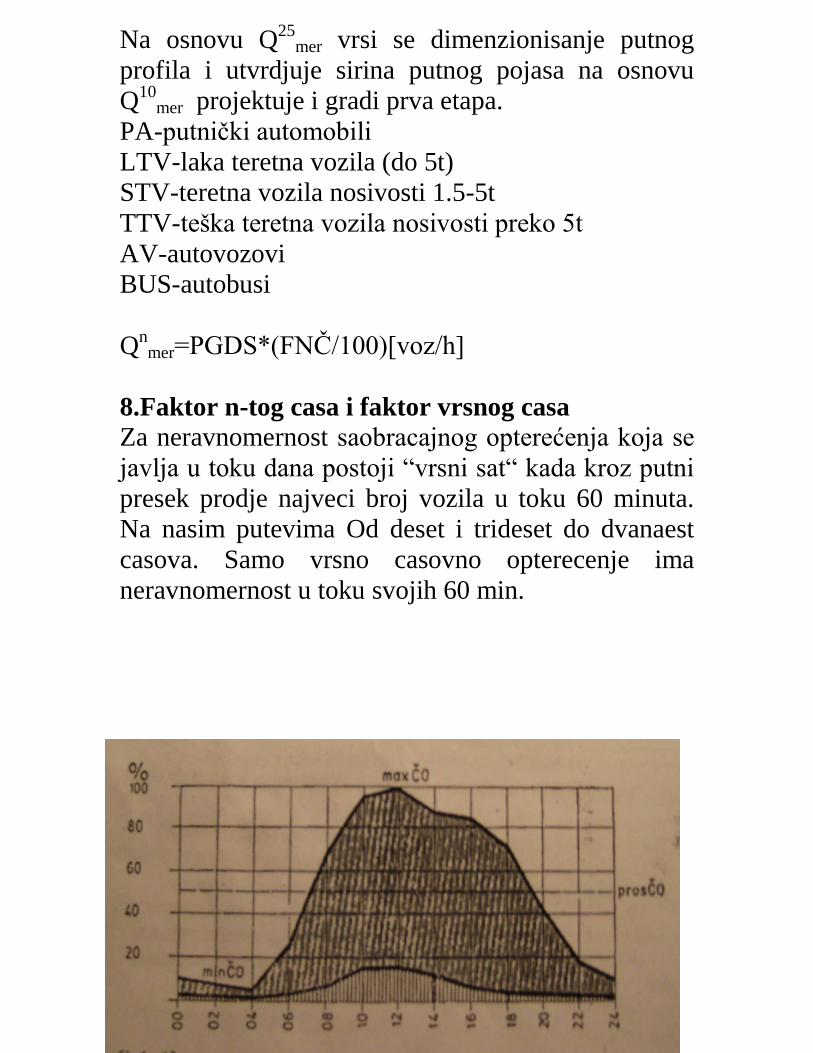
8.Faktor n-tog casa i faktor vrsnog casa
Za neravnomernost saobracajnog opterećenja koja se
javlja u toku dana postoji “vrsni sat“ kada kroz putni
presek prodje najveci broj vozila u toku 60 minuta.
Na nasim putevima Od deset i trideset do dvanaest
casova. Samo vrsno casovno opterecenje ima
neravnomernost u toku svojih 60 min.
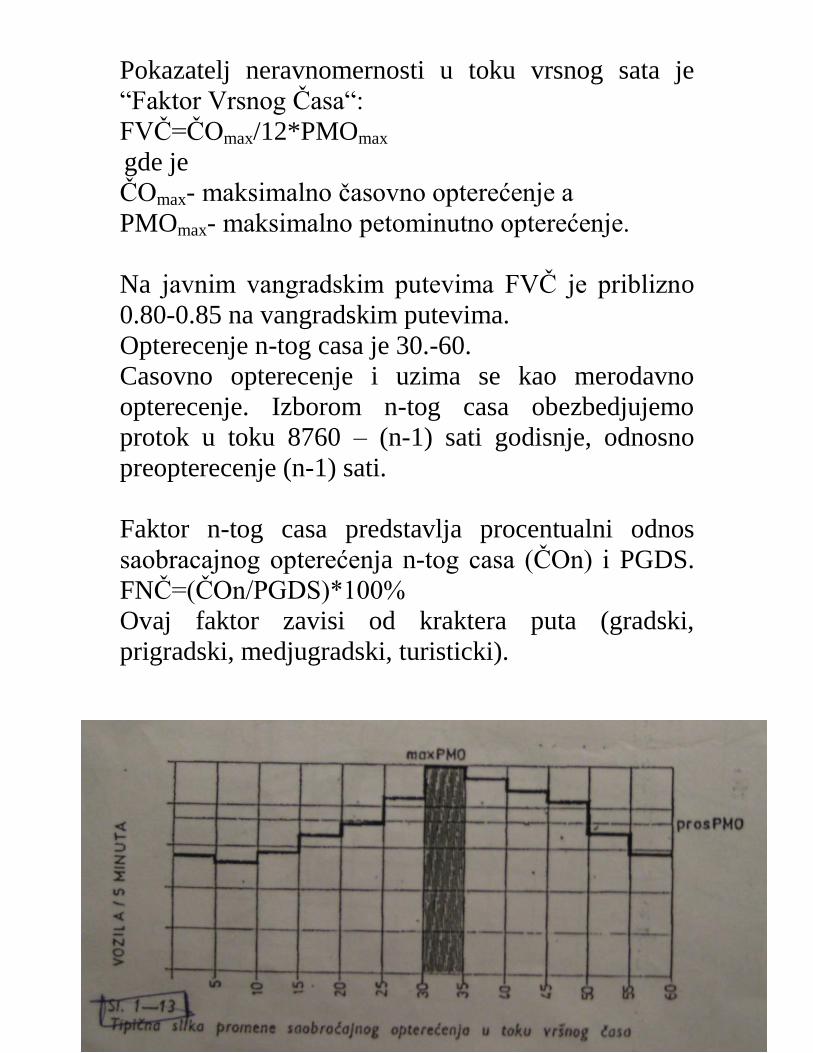
Pokazatelj neravnomernosti u toku vrsnog sata je
“Faktor Vrsnog Časa“:
FVČ=ČOmax/12*PMOmax
gde je
ČOmax- maksimalno časovno opterećenje a PMOmax- maksimalno petominutno opterećenje.
Na javnim vangradskim putevima FVČ je priblizno
0.80-0.85 na vangradskim putevima.
Opterecenje n-tog casa je 30.-60.
Casovno opterecenje i uzima se kao merodavno
opterecenje. Izborom n-tog casa obezbedjujemo
protok u toku 8760 – (n-1) sati godisnje, odnosno
preopterecenje (n-1) sati.
Faktor n-tog casa predstavlja procentualni odnos
saobracajnog opterećenja n-tog casa (ČOn) i PGDS.
FNČ=(ČOn/PGDS)*100%
Ovaj faktor zavisi od kraktera puta (gradski,
prigradski, medjugradski, turisticki).
9.Definicija gustine saobracajnog toka
Prve teoriske nauke kretanja vozila po putu zasnivale
su se na pretpostavci da se saobracajni tok ponasa
kao fluid, odnosno da je homogen. Analize su vrsene
za jednu saobracajnu traku na osnovu odseka puta
pod predpostavkom da svi ucesnici u saobracaju duz
cjelog puta imaju obezbjedjene iste iste uslove
voznje.
Osnovna zakonitost toka:
Q=G*V
Q-protok saob. toka
G-gustina saobracajnog toka
V-brzina saob. toka
10.Definicija protoka saobracajnog toka
Broj vozila koji u odredjenom periodu vremena
prodje kroz odredjeni putni presek predstavlja protok
(Q)
Q= G*V [voz/h];
G- gustina saobracajnog toka [voz/km];
V-brzina saobracajnog toka [km/h]
Ova zakonitost vazi za uslove da je saobracajni tok
homogen, odnosno da se ponasa kao fluid.
Posto nije tako, moramo definisati sledece parametre
Srednje vremensko odstojanje vozila u saobracajnom
toku:
∆t=3600/Q [sec]
Srednje odstojanje vozila u jednom vremenskom
periodu:
∆Ssr=1000/G [m]
Odatle sledi da je Q=1000*V/∆Ssr.
Ako kazemo da je V=const. onda mozemo reci da je
virtuelna duzina vozila lv=aV2+bV+c [m]
(a, b, c – faktori vrste vozila, kocenja, uslova puta,
vozaca...).
Prema tome dobijamo da je protok u funkciji brzine
jednak
Q=(1000*V)/( aV2+bV+c)
11.Odnos gustine, brzine i protoka saobracajnog
toka
Makroskopski - preko analogije sa fluidima.
Q= G*V – ako poznajemo zavisnost brzine od
gustine
V=f(g); Q=f(g); V=f(q)
N-propusna moć
Granične teorijske vrednosti pri idealnim uslovima
saobraćajnih toka na jednoj saobraćajnoj traci
N=Qmax 2400-2800 (PA/h);
Vkrit=50-60 (km/h);
G krit=40-45 (PA/km);
∆Ssr=22-25(m);
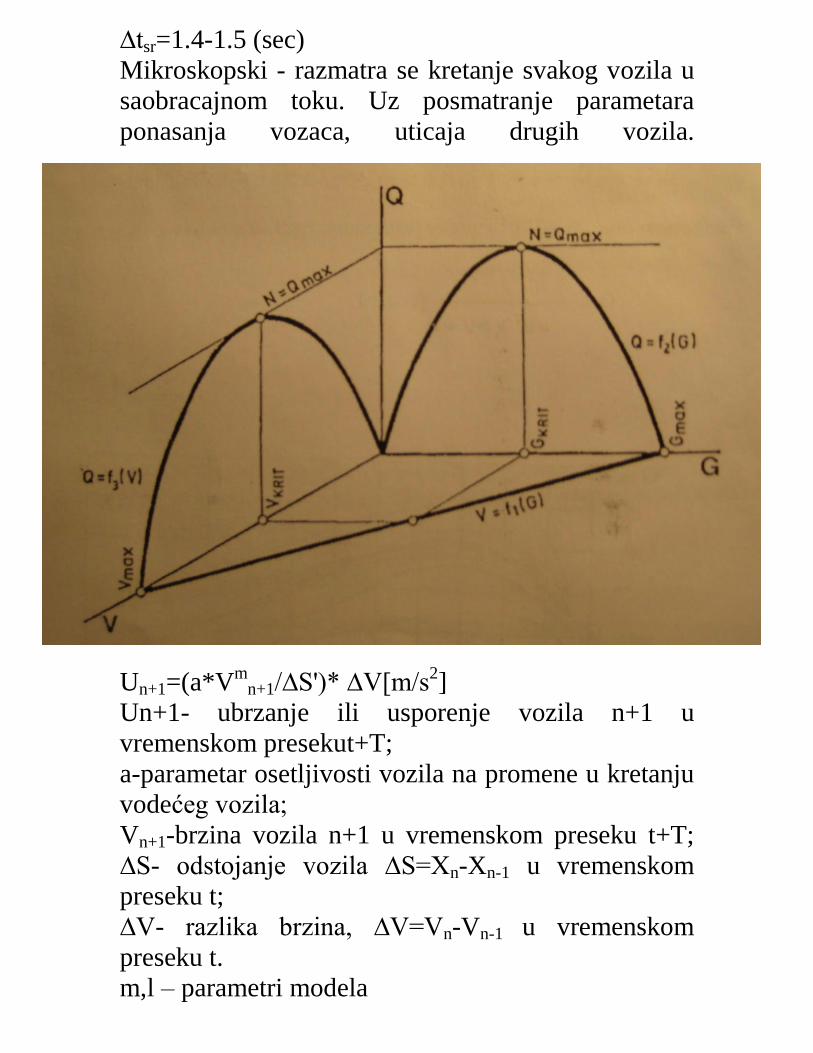
∆tsr=1.4-1.5 (sec)
Mikroskopski - razmatra se kretanje svakog vozila u
saobracajnom toku. Uz posmatranje parametara
ponasanja vozaca, uticaja drugih vozila.
Un+1=(a*Vmn+1/∆S')* ∆V[m/s2]
Un+1- ubrzanje ili usporenje vozila n+1 u
vremenskom presekut+T;
a-parametar osetljivosti vozila na promene u kretanju
vodećeg vozila;
Vn+1-brzina vozila n+1 u vremenskom preseku t+T;
∆S- odstojanje vozila ∆S=Xn-Xn-1 u vremenskom
preseku t;
∆V- razlika brzina, ∆V=Vn-Vn-1 u vremenskom
preseku t.
m,l – parametri modela
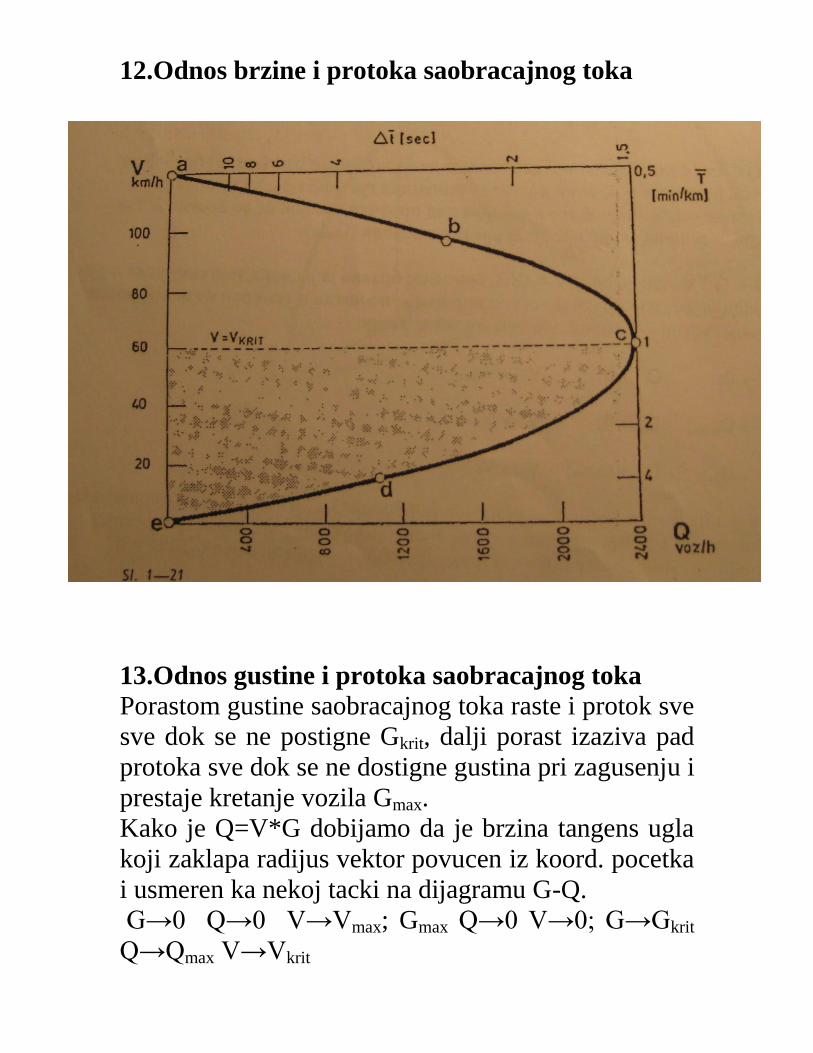
12.Odnos brzine i protoka saobracajnog toka
13.Odnos gustine i protoka saobracajnog toka
Porastom gustine saobracajnog toka raste i protok sve
sve dok se ne postigne Gkrit, dalji porast izaziva pad
protoka sve dok se ne dostigne gustina pri zagusenju i
prestaje kretanje vozila Gmax.
Kako je Q=V*G dobijamo da je brzina tangens ugla
koji zaklapa radijus vektor povucen iz koord. pocetka
i usmeren ka nekoj tacki na dijagramu G-Q.
G→0 Q→0 V→Vmax; Gmax Q→0 V→0; G→Gkrit
Q→Qmax V→Vkrit
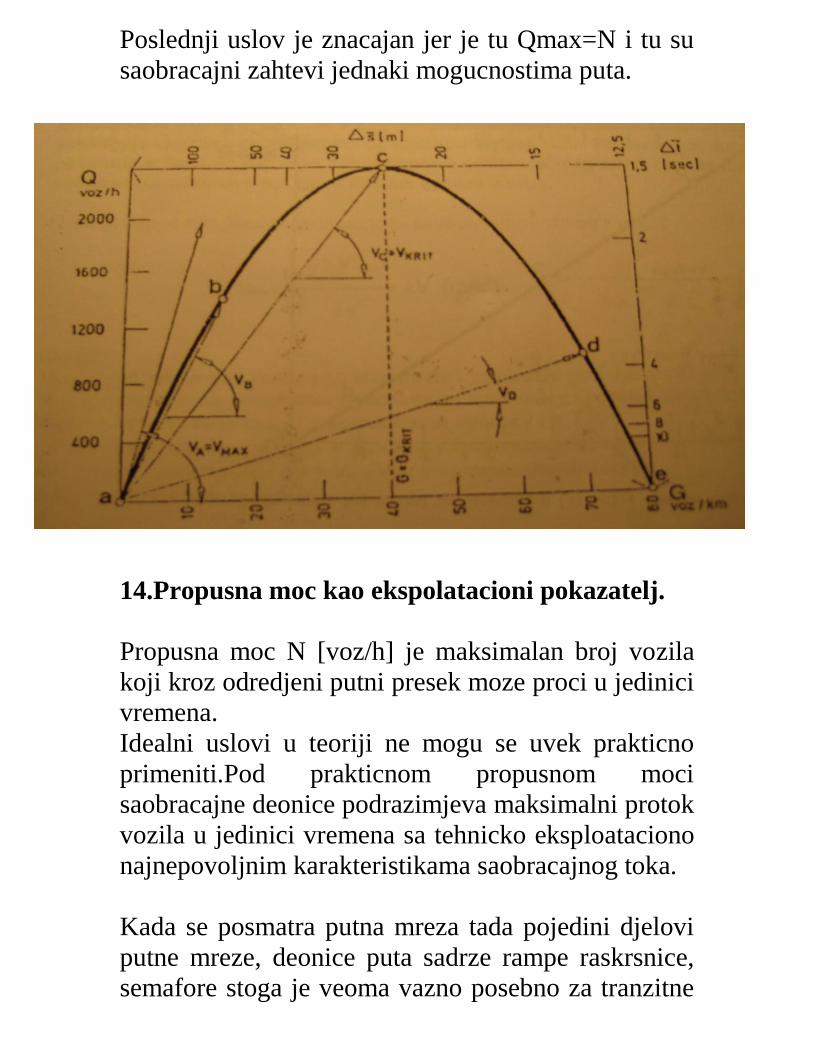
Poslednji uslov je znacajan jer je tu Qmax=N i tu su
saobracajni zahtevi jednaki mogucnostima puta.
14.Propusna moc kao ekspolatacioni pokazatelj.
Propusna moc N [voz/h] je maksimalan broj vozila
koji kroz odredjeni putni presek moze proci u jedinici
vremena.
Idealni uslovi u teoriji ne mogu se uvek prakticno
primeniti.Pod prakticnom propusnom moci
saobracajne deonice podrazimjeva maksimalni protok
vozila u jedinici vremena sa tehnicko eksploataciono
najnepovoljnim karakteristikama saobracajnog toka.
Kada se posmatra putna mreza tada pojedini djelovi
putne mreze, deonice puta sadrze rampe raskrsnice,
semafore stoga je veoma vazno posebno za tranzitne
putne deonice da se proracuna propusna moc ili
kapacitet saobracajnice.
Prakticni obrasci za proracun N za autoputeve.
N=Qmax=2,000*N*Pc*Tc*Bc(voz/h po smeru).
N-propusna moc po smeru;
n-broj sobtracajnih traka po smeru;
Pc- korekcioni faktor koji odrazava zbirni uticaj
sirine saobracajne trake i udaljenost bocne smetnje za
t≥3,75 i udaljenost bocne smetnje >1,90m Pc=1
t- saobracajna traka;
Tc- korektivni faktor koji izrazava uticajucesca
teretnih vozila u saobracajnom toku.(za 0% teretnih
vozila Tc=1,0);
Bc-korektivni faktor koji odrazava uticaj ucesca
autobusa u saobracajnom toku (za 0% autobusa
Bc=1,0)
15.Merodavne brzine u razlicitim fazama
projektnih analiza
Brzina je polazni parametar u dimenzionisanju
elemenata situacionog i nivelacionog plana. Na njoj
se temelje svi kriterijumi kojima se ocenjuje
bezbednost i udobnost voznje. U zavisnosti od
stepena razrade projekta razlikuju se racunska (Vr) i
projektna (Vp) brzina.
16.Osnovna brzina Vo
U praksi se na jednom dionici puta ne primenjuju isti
elementi projektne geometrije tj prmjenjivace se
razliciti radijusi krivina iz ostrih u blage, razliciti
proticaji saobracaja... Kao polazni uslov definise se
osnovna brzinaV0. Osnovna brzina je indikator nivoa
usluge kada je proticaj saobracaja merodavan Qmer.
Odredjuje se na osnovu znacaja puta i konfiguracije
terena. Vo je priblizno jednaka srednjoj brzini Vo ≈
Vsr iz uslova V=f(Q) istovremeno se definise i kao
dozvoljen saobracajno opterecenje(Qd). Da bi bila
postignuta osnovna brzina potrebno je da je ostvarena
parcijalna preglednost.
17.Racunska brzina Vr
Racunska brzina Vr je usvojena teorijska vrednost
koja sluzi za proracun granicnih geometrijskih
parametara koji se mogu upotrebiti u procesu
trasiranja puta. Ona mora biti u saglasnosti sa
osnovnom brzinom Vo.
Ona mora ispunjavati uslov maksimalne usluge puta
stoga mora biti Vr>Vo.
Vr je najveca bezbedna brzina usamljenog vozila u
najostrijim uslovima puta. Vr=Vo + 20 km/h.
U odnosu na razne uslove puta, prostora, investicija
odredjujemo Vri (racunska investiciona brzina) za
pojedine deonice, sto predslavlja polazni programski
zadatak za idejni projekat
18.Projektna brzina Vp
Vp je teorijska vrednost brzine merodavna za
dimenzionisanje odredjenog elementa puta pri
uslovima sigurne i udobne voznje u slobodnom
saobracajnom toku.
To je realna brzina kojom ce se vozila kretati.
Merodavni faktor za njeno odredjivanje je sigurnost i
udobnost.
Odredjuje se prema projektovanoj trasi i mora se
nalaziti izmedju
Vri≤Vp≤maxVr .
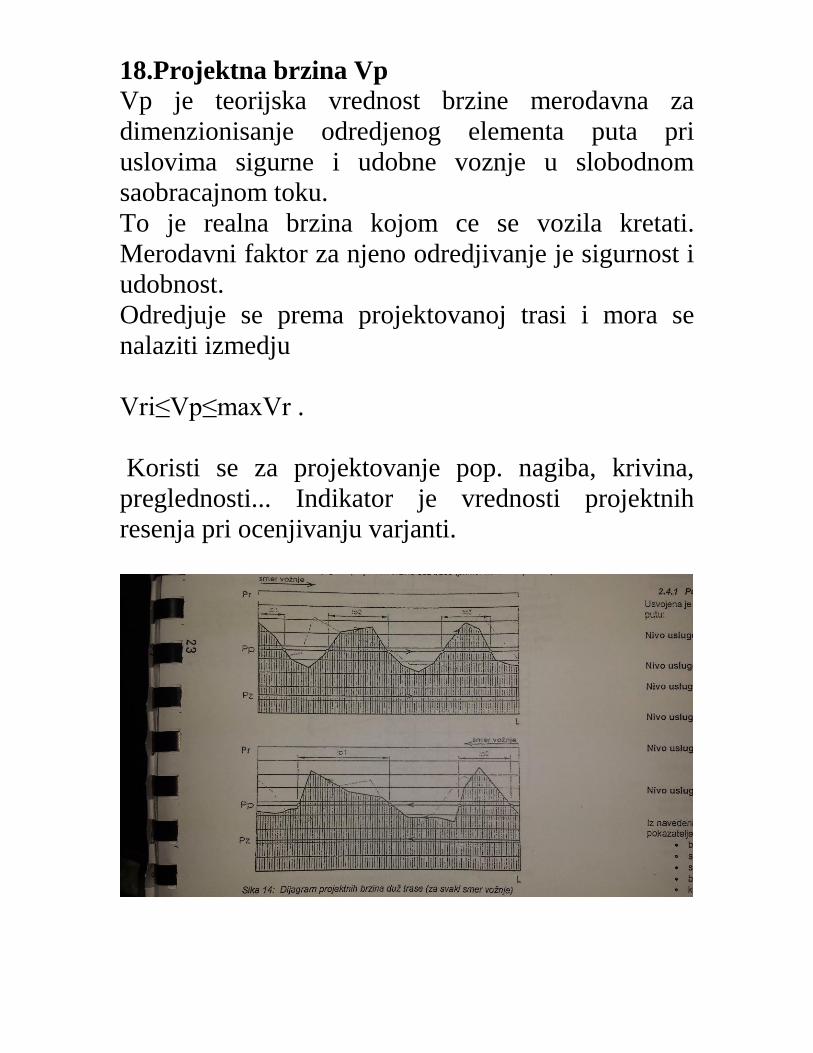
Koristi se za projektovanje pop. nagiba, krivina,
preglednosti... Indikator je vrednosti projektnih
resenja pri ocenjivanju varjanti.
19.Nivo usluge kao eksploatacioni kriterijum
Nivo opterecenja Qmax=N ne pruza zadovoljavajuce
uslove i nije komforan za voznju. Ako znamo da sa
porastom gustine opada brzina, nivo opterecenja
racunamo na jedan od ova dva nacina:
1. Definisemo Qd dozvoljano< Qmax i racunamo
ostale potrebne parametre(V).
2. Za Vi i Gi utvrditi granicne protoke (Qi) i sa
njima uporedjivati realno opterecenje.Za ovaj
postupak neophodno je prethodno odrediti
zeljeni stepen saobracajnog komfora.
Drugi pristup omogucava bolju ocjenu odredjenog
stanja, pa u tom smislu HCM(Highway capacity
manual) uvodi pojam Level of service koji daje u
uvid stepen koriscenja propusne moci (Q/N) i srednju
brzinu saobracajnog toka (Vi).
Nivo usluge u sebi sadrzi sledece pokazatelje:
brzinu saob. toka,
stepen ometanja saobracaja,
slobodu manevrisanja,
bezbednost, komfor,
troskove eksploatacije.
Podeljen je na 6 nivoa usluge koji se oznacavaju
abecednim slovima od
A - uslovi slobodnog toka sa velikim brzinama
punom slobodom manervisanja
B – slobodan tok sa brzinama djelimicno
ogranicenim gustinom saobracaja
C – stanje stabilnog toka sa ogranicenim
brzinama i mogucnosti manervisanja
D – priblizava se satanju slabog manervisanja i
nestabilnog toka i malih brzina
E – uslovi nestabilnog toka sa voznjama u koloni
G=Gkrt , protok jednak propusnoj moci
Q=Qmax=N, V=Vkrt
F – brzine ispod kriticne velike gustine G>Gkrt i
protok od 0 do N
20.Brzina kao indikator nivoa usluge
Kao kvantitativni pokazatelj za kategorizaciju puteva
uvodi se brzina saobracajnog toka i stepen
iskoriscenja propusne moci (Qi/N).
Posto je protok u funkciji brzine, dolazimo da
zakljucka da je brzina osnovni pokazatelj nivoa
usluge.
Znamo da postoji medjuzavisnost brzina-protok
V=f(Q) stoga je V=f(Qi/N) pa je brzina saobracajnog
toka osnovni pokazatelj nivoa usluge.
21.Odredjivnje granicnog protoka Q za zadati
nivo usluga
Za autoputeve:
Qi=2,000*n*Pci*Tci*Bci(Qi/N)*FVC[voz/h/smeru]
Za puteve sa dve saobracajne trake:
Qi=2,000*Pci*Tci*Bci*(Qi/N)[voz/h/oba smera]
Qi protok na nivou usluge (i);
n- broj saobracajnih traka po smeru
Pci,Tci,Bci- korekcioni faktori za sirinu saobracajne
trake i bocne smetnje, ucesce teretnih vozila i ucesce
autobusa u funkciji nivoa usluga
FVC- faktor vrsnog casa za nivo usluga C i D.
22.Pokazatelji stanja saobracajnog toka
Pokazatelji stanja saobracajnog toka su (V) i (Qi/N)-
stepen iskoriscenja propusne moci.
Pored njih postoji i vremensko odstojanje vozila Δt
koji je bitan pokazatelj i njegova srednja vrednost
zavisi od protoka: ∆tsr=3600/Q[sec]
Sa porastom protoka opada srednje vremensko
odstojanje Δt=5[s]
-vremenska granica slobodne voznje
- voznja u koloni
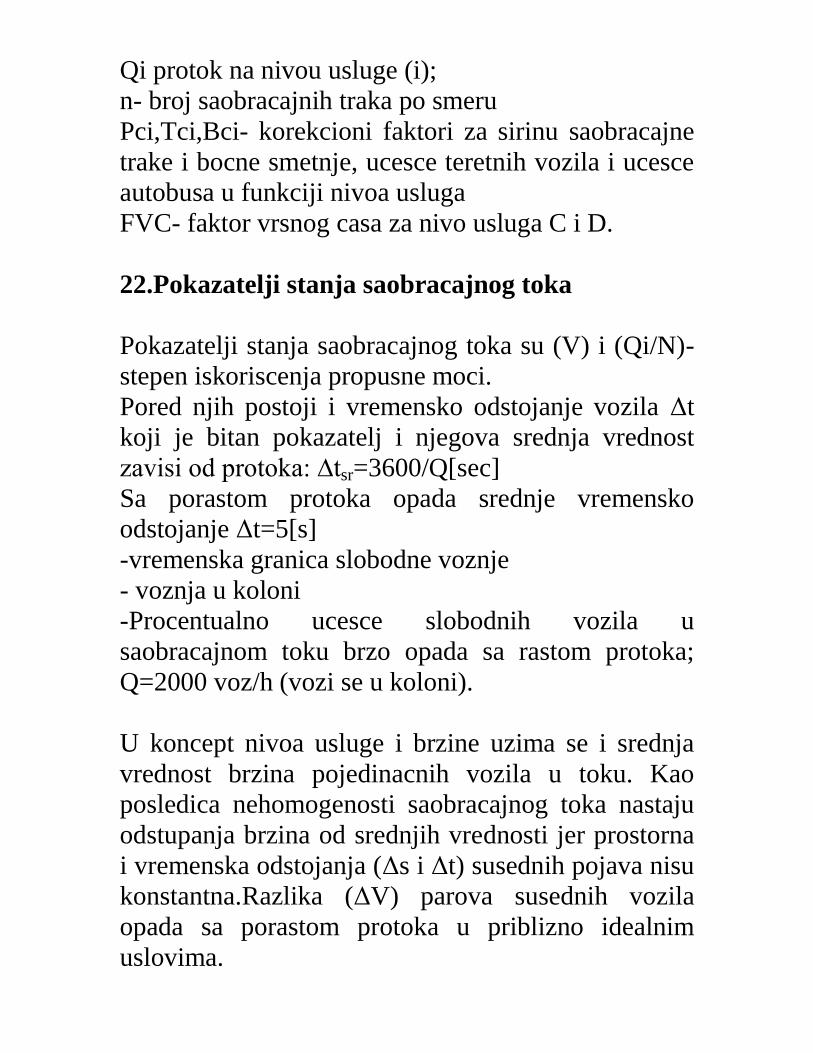
-Procentualno ucesce slobodnih vozila u
saobracajnom toku brzo opada sa rastom protoka;
Q=2000 voz/h (vozi se u koloni).
U koncept nivoa usluge i brzine uzima se i srednja
vrednost brzina pojedinacnih vozila u toku. Kao
posledica nehomogenosti saobracajnog toka nastaju
odstupanja brzina od srednjih vrednosti jer prostorna
i vremenska odstojanja (Δs i Δt) susednih pojava nisu
konstantna.Razlika (ΔV) parova susednih vozila
opada sa porastom protoka u priblizno idealnim
uslovima.
Pokazano je na slici i granicno podrucije slobodna
voznja – voznja u koloni tj. granica koja definise
izvor inforamcija prema kojoj vozac uskladjuje svoje
ponasanje.
23.Preticanje-potrebe i mogucnosti sa aspekta
stanja saobracajnog toka
Mogucnost preticanja sporih vozila je presudan
parametar kod puta sa ukupno dve saobracajne trake.
Preticanje zavisi od duzine preglednosti, opterecenja
suprotnog smera, karakteristika vozaca,vrste vozila.
Potrebe za preticanjem rastu sa povecanjem Q;
V=f(Q).Imajuci u vidu da protok zavisi od gustine
saobracaja broj izvedeneh manevara ima svoj
maksimum pri nekom ogranicenom protoku.
Pri nivou usluge
A (P→0)(M→ Mmax);
E ( P→ Pmax)(M→0)
Granicni protok Qpkrit, broj realizovanih manevara
preticanja je 400 do 1000 voz/h/oba smera
Kod autoputeva broj promena saobracajnih traka za
Qkrit=1800 do 2200 voz/h/smer je 600-800 po satu za
jedan kilometar puta.Ova broj manevara je moguc jer
su manervi mnogo jednostavni zbog nivoa usluge i
prisustva dvije trake.
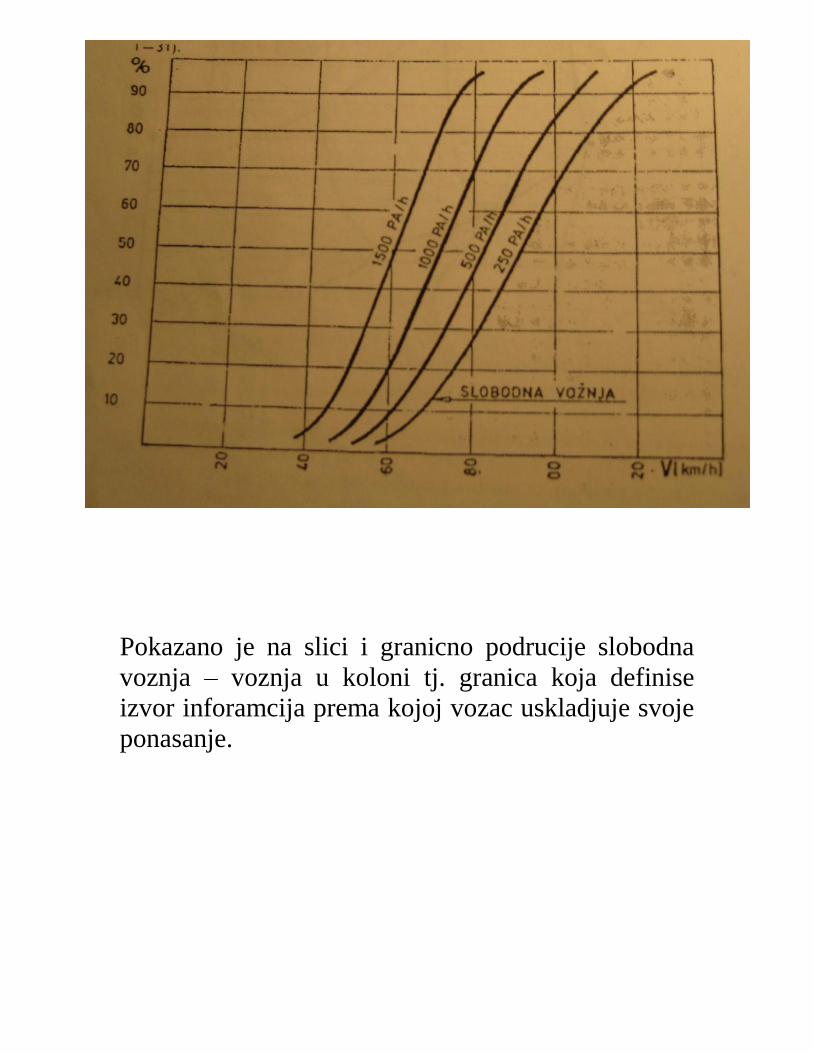
Stepen ometanja (So) se izrazava kao zbir tezina svih
nezavisnih kolona vozila koja predju kroz jedan putni
presek tokom jednog casa.Stepen ometanja je
kvantitativni pokazatelj preticajne potrebe.
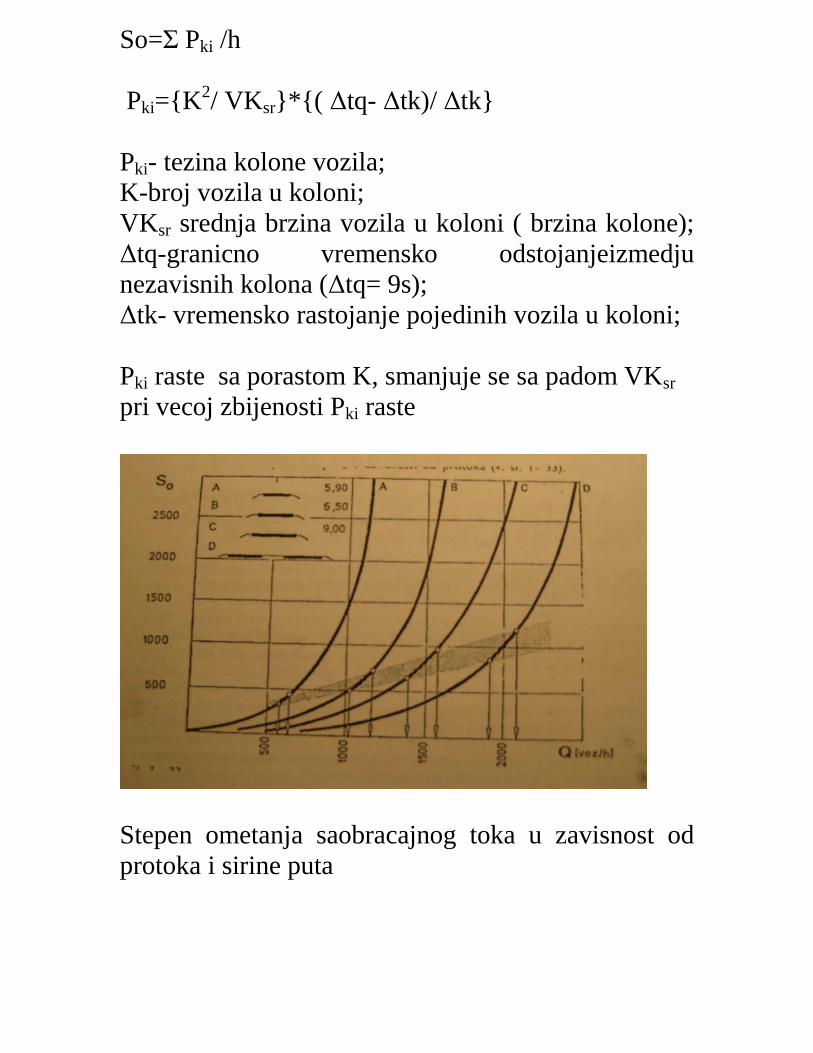
So=Σ Pki /h
Pki={K2/ VKsr}*{( Δtq- Δtk)/ Δtk}
Pki- tezina kolone vozila;
K-broj vozila u koloni;
VKsr srednja brzina vozila u koloni ( brzina kolone);
Δtq-granicno vremensko odstojanjeizmedju
nezavisnih kolona (Δtq= 9s);
Δtk- vremensko rastojanje pojedinih vozila u koloni;
Pki raste sa porastom K, smanjuje se sa padom VKsr
pri vecoj zbijenosti Pki raste
Stepen ometanja saobracajnog toka u zavisnost od
protoka i sirine puta
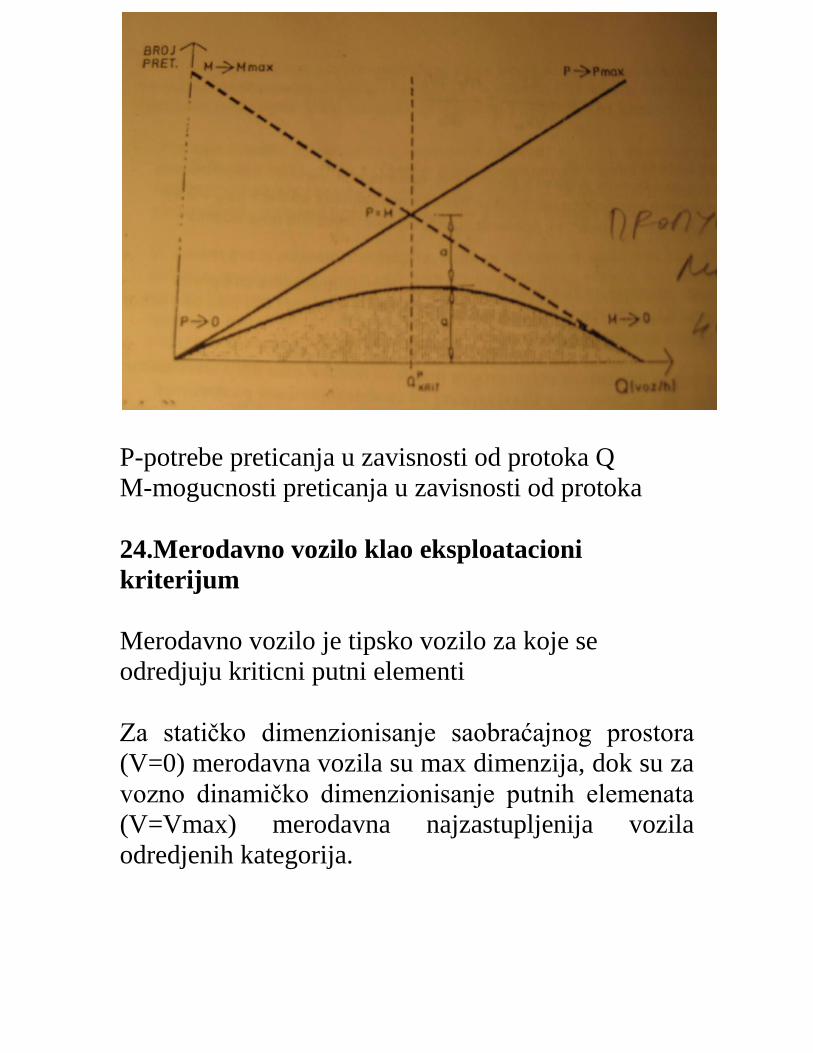
P-potrebe preticanja u zavisnosti od protoka Q
M-mogucnosti preticanja u zavisnosti od protoka
24.Merodavno vozilo klao eksploatacioni
kriterijum
Merodavno vozilo je tipsko vozilo za koje se
odredjuju kriticni putni elementi
Za statičko dimenzionisanje saobraćajnog prostora
(V=0) merodavna vozila su max dimenzija, dok su za
vozno dinamičko dimenzionisanje putnih elemenata
(V=Vmax) merodavna najzastupljenija vozila
odredjenih kategorija.
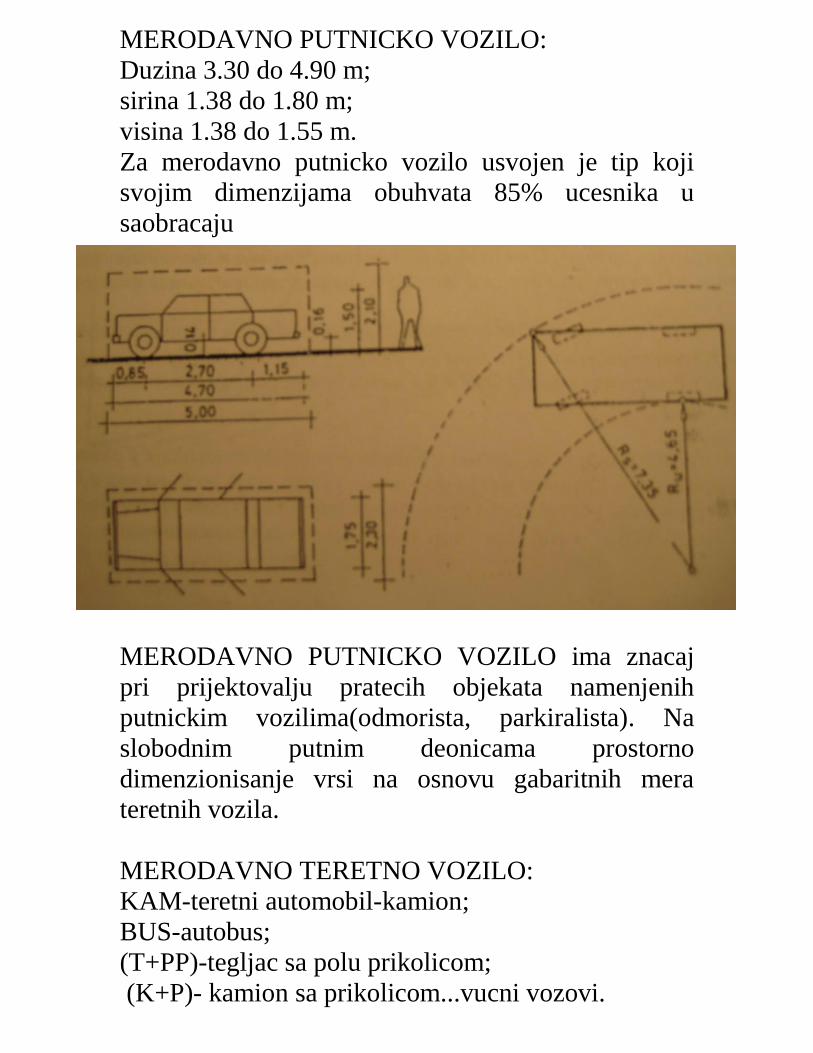
MERODAVNO PUTNICKO VOZILO:
Duzina 3.30 do 4.90 m;
sirina 1.38 do 1.80 m;
visina 1.38 do 1.55 m.
Za merodavno putnicko vozilo usvojen je tip koji
svojim dimenzijama obuhvata 85% ucesnika u
saobracaju
MERODAVNO PUTNICKO VOZILO ima znacaj
pri prijektovalju pratecih objekata namenjenih
putnickim vozilima(odmorista, parkiralista). Na
slobodnim putnim deonicama prostorno
dimenzionisanje vrsi na osnovu gabaritnih mera
teretnih vozila.
MERODAVNO TERETNO VOZILO:
KAM-teretni automobil-kamion;
BUS-autobus;
(T+PP)-tegljac sa polu prikolicom;
(K+P)- kamion sa prikolicom...vucni vozovi.
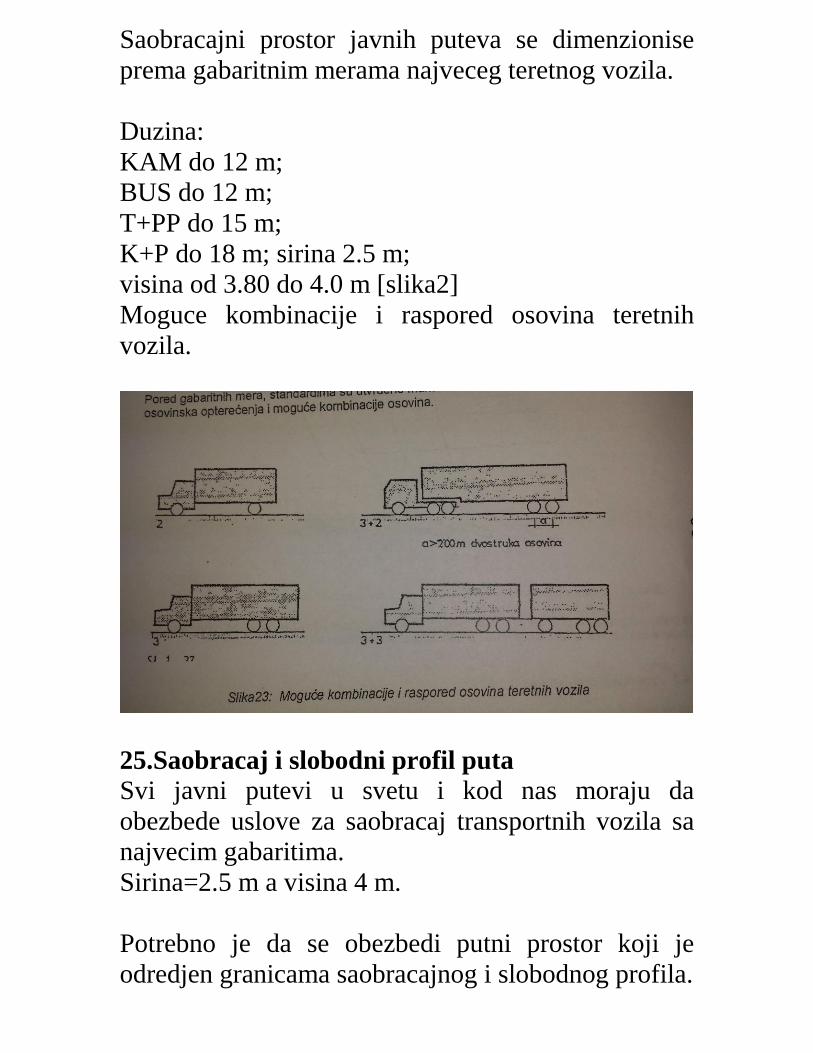
Saobracajni prostor javnih puteva se dimenzionise
prema gabaritnim merama najveceg teretnog vozila.
Duzina:
KAM do 12 m;
BUS do 12 m;
T+PP do 15 m;
K+P do 18 m; sirina 2.5 m;
visina od 3.80 do 4.0 m [slika2]
Moguce kombinacije i raspored osovina teretnih
vozila.
25.Saobracaj i slobodni profil puta
Svi javni putevi u svetu i kod nas moraju da
obezbede uslove za saobracaj transportnih vozila sa
najvecim gabaritima.
Sirina=2.5 m a visina 4 m.
Potrebno je da se obezbedi putni prostor koji je
odredjen granicama saobracajnog i slobodnog profila.
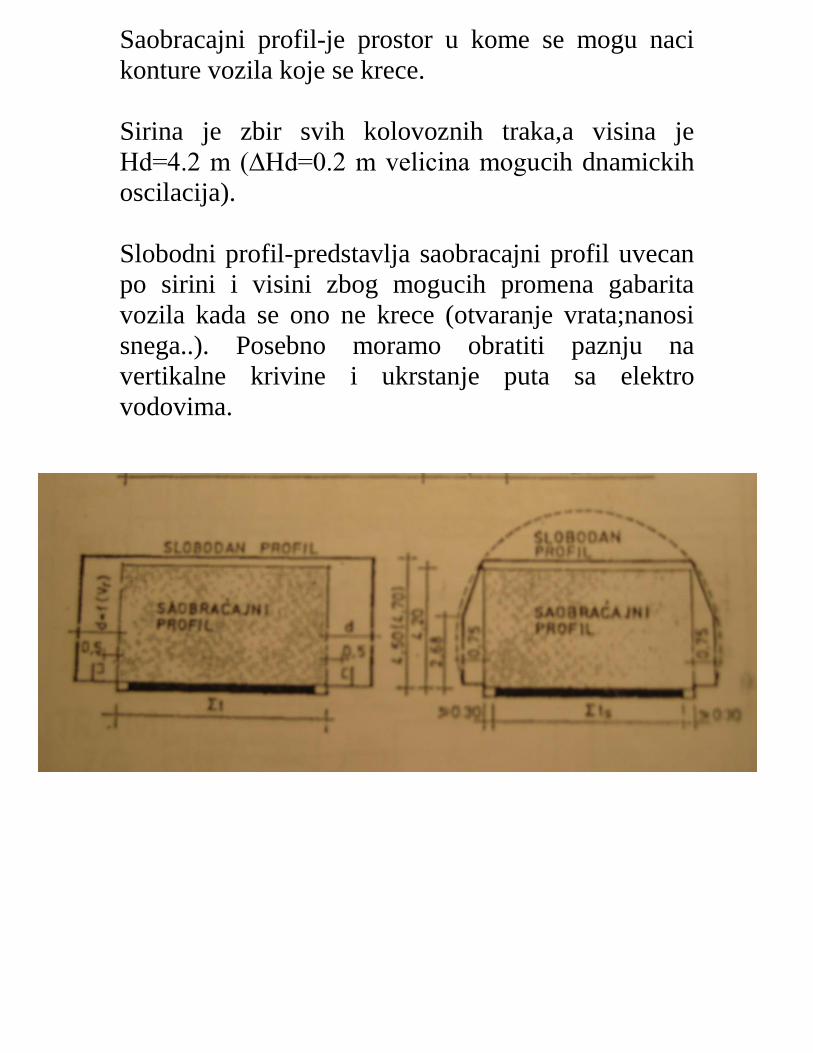
Saobracajni profil-je prostor u kome se mogu naci
konture vozila koje se krece.
Sirina je zbir svih kolovoznih traka,a visina je
Hd=4.2 m (∆Hd=0.2 m velicina mogucih dnamickih
oscilacija).
Slobodni profil-predstavlja saobracajni profil uvecan
po sirini i visini zbog mogucih promena gabarita
vozila kada se ono ne krece (otvaranje vrata;nanosi
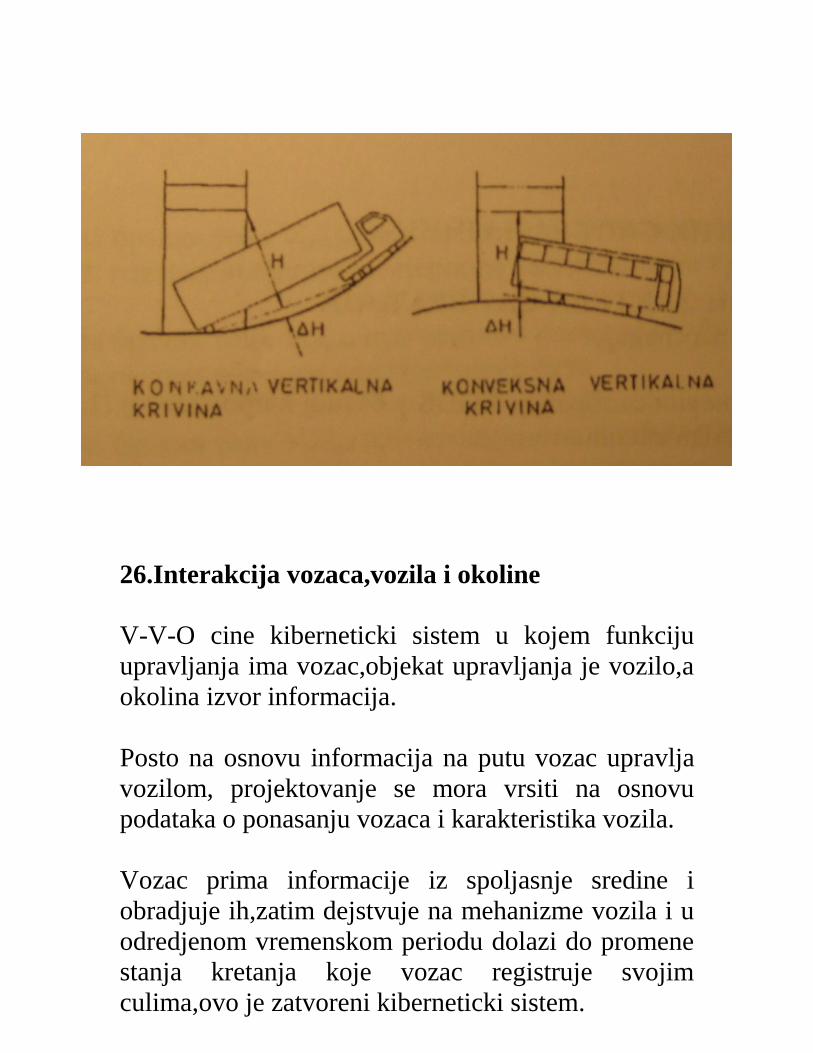
snega..). Posebno moramo obratiti paznju na
vertikalne krivine i ukrstanje puta sa elektro
vodovima.
26.Interakcija vozaca,vozila i okoline
V-V-O cine kiberneticki sistem u kojem funkciju
upravljanja ima vozac,objekat upravljanja je vozilo,a
okolina izvor informacija.
Posto na osnovu informacija na putu vozac upravlja
vozilom, projektovanje se mora vrsiti na osnovu
podataka o ponasanju vozaca i karakteristika vozila.
Vozac prima informacije iz spoljasnje sredine i
obradjuje ih,zatim dejstvuje na mehanizme vozila i u
odredjenom vremenskom periodu dolazi do promene
stanja kretanja koje vozac registruje svojim
culima,ovo je zatvoreni kiberneticki sistem.
Posto se pri projektivanju neki elementi idealizuju
nekad je potrebno da se iskljuci uticaj vozaca (racuna
se sa idealnim vozacem) i u ovom slucaju ne postoji
povratna sprega,ovo se naziva otvoreni kiberneticki
sistem.
Nivo idealizacije parametara zavisi od analize koja se
vrsi.Kod analize koeficijenta trenja idealizujemo
uslove okoline na mokar,ravan i cist kolovoz.Pri
dimenzionisanju granicnih elemenata puta uzima se
za merodavno kretanje usamljenog vozila.Za analizu
nivoa usluge i propusne moci uzima se za merodavno
vise vozila.
27.Reakcija vozaca
Proces reagovanja vozaca na trenutno nastalu
situaciju sastoji se iz
percepcije -uocavanja spoljnog nadrazaja(culom
vida);
identifikacija-izdvajanje kriticnog dela i shvatanje
stepena opasnosti(npr. Pjesak na putu);
procena-donosenje odluke (kociti, ubrzati,skrenuti);
sprovodjenje-akcija u kojoj se realizuje resenje.
Ovo se sve dogodi za neko realno vreme
(∆tr-vreme reakcije vozaca).
Ono zavisi od individualnih karakteristika vozaca.
Veoma su vazne i psihofizicke karakteristike vozaca
(umor,alkohol,starost,zdravstveno stanje).
Procenjuje se da je reakcija vozaca u stvarnim
uslovima 0.7-2.5 sekundi cak i 4 sekunde.
Razlikujemo reakciju vozaca kada je nadrazaj poznat
(voznja u koloni) tada je brza reakcija,i kad nadrazaj
nije poznat.
(tr)-merodavno vreme reakcije usvaja kao vreme
izmereno u 85% slucajeva,
za Evropu tr=2 sekunde
U toku (tr) vozilo predje Lr-prelazni put do momenta
delovanja kocnica.
Lr =V*tr/3.6 [m] ,
tr=2 sekunde sledi Lr = 0.556*V [m].
Fizioloska ogranicenja:Ljudski organizam ne reaguje
na brzinu kretanja vec samo na promenu brzine.Pri
promeni pravca javlja se radijalno ubrzanje na koje je
covek mnogo osetljiviji nego na poduzno ubrzanje.
Pri usporenju u=4.22 [m/s2] (~0.5g) javljaju se
nezeljene posledice.
Elementi puta se dimenzionisu za 0.25g do 0.35g.U
normalnim uslovima retko se prelazi u=0.3g.
Za radijalno ubrzanje gornja granica udobnosti je
0.35g; relativna udobnost je za <0.25g.
28.Vozac kao deo sistema V-V-O
Sa gledista bezbednosti saobracaja i udobnosti voznje
postoje tri vazna faktora:
vidno polje;
reakcija vozaca;
fizioloska ogranicenja.
Vidno polje je prostor koji je saglediv jednim
usmerenim pogledom.Njegove granice su odredjene
sirinom i dubinom.
Podrucja vidljivosti su:
periferno γ=120 o -180o;
izostreno α=3 o-5 o;
relativne ostrine β=10 o-15 o.
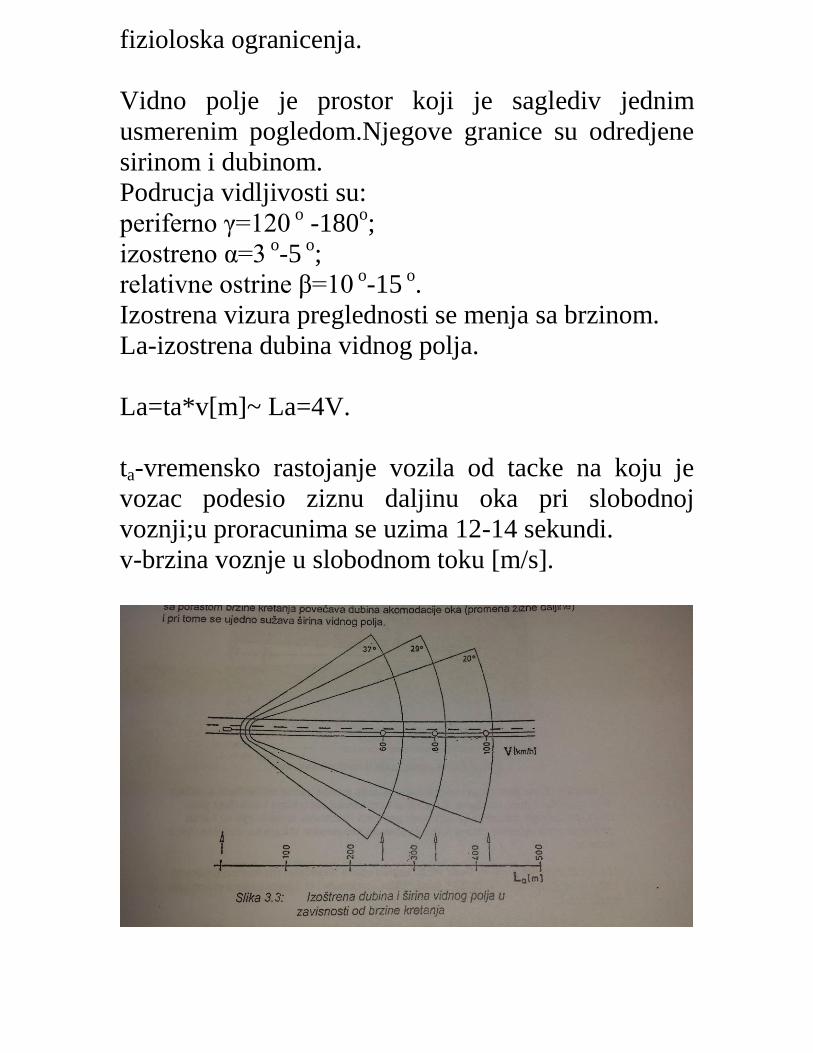
Izostrena vizura preglednosti se menja sa brzinom.
La-izostrena dubina vidnog polja.
La=ta*v[m]~ La=4V.
ta-vremensko rastojanje vozila od tacke na koju je
vozac podesio ziznu daljinu oka pri slobodnoj
voznji;u proracunima se uzima 12-14 sekundi.
v-brzina voznje u slobodnom toku [m/s].
V=100km/h , La oko 400m-ova duzina je dvostruko
veca od duzine zaustavnog puta.
U vremenu ta postoji rezerva za reakciju(donosenje
odluke i njeno izvrsavanje).
Kao krajnja granica dubine vidnog polja smatra se
1.5-2km.
Sa povecanjem vidnog polja (La) menja se sirina.Sa
prostornom brzinom povecava se dubina
akomodacije oka i suzava sirina vidnog
polja.Merodavna pozicija oka je na visini od 1.2m i
udaljenosti od desne ivice vozne trake datog smera
voznje 1.5m. Pri kretanju vozila u koloni vozac se
fokusira na vozilo ispred sebe,zanemaruje okolinu.U
slobodnoj voznji se vozac fokusira na informacije o
putu.
Ivicne linije imaju najznacajniju ulogu u upravljanju.
Desna ivica 33.5%; osovina 42.4%.
29.Znacaj hrapavosti kolovozne povrsine, koef.
trenja
Otpor klizanju pruza sila trenja (T), ona je jednaka
proizvodu normalne sile (N) i koef. trenja (f).
T=N*f.
Koeficijent trenja je bezdimenziona velicina koja
zavisi od brzina, vlaznost kolovoza, temperatura,
vrsta i stanje pneumatika, vrsta i stanje kolovoznog
zastora.Na f uticu i ulje, prasina i blato.
Pri velikim brzinama pneumatik nema vremena da
istisne vodu u kontaktnoj zoni vec lebdi podrzavan
hidraulickim potiskom. ''Aqua-planing''. To se desava
pri brzini >60km/h i debljini H2O vecoj od 2mm.
Standardno stanje kolovoza je: ravan, cist ili vlazan
kolovoz normalne hrapavosti. Za te uslove su
definisani tangencijalni (ft – u pravcu kretanja vozila)
i radijalni (fr).
ft se koristi pri analizama puta kocenja, pri proracunu
preglednosti i minimalnog radijusa vertikalnih
krivina. A fr u analizama horizontalnih krivina
(minR, Ipk)
30.Staticki i dinamicki parametri merodavnih
vozila
Staticke karatkteristike vozila
PA (duzina: 4.7m , sirina 1.75m ,visina 1.5m ,
Rs=6m);.
TV (broj osovina 3 , duzina 12.0m , sirina 2.5m ,
visina 4.0m , Rs=9.60m).
BUS (broj osovina 2 , duzina 12.0m , sirina 2.5m ,
visina 3.4m , Rs=11.50m).
TTV+PPR-autovoz (broj osovina 2+3 , duzina 15.5m
, sirina 2.5m, visina 4.0m , Rs=6.65m).
TTV+PR(vucni voz) (broj osovina 3+2 , duzina 18m
, sirina 2.5m , visina 4.0m , Rs=10.5m)
Gabaritni i dinamicki parametri merodavnih vozila su
osnova za oblikovanje saobracajnog prostora i
dimenzionisanje putnih elemenata.
Definise se zavisnosti minimalnog poluprecnika
spoljasnjeg kruga okretanja Rs i srednjeg radijusa R2
u funkciji ugla ukrstanja gama za potrebe
konstrujisanja raskrsnica,okretnca,serpentina, pristupi
objektima
Dinamicki parametri merodavnog putnickog vozila-
za proucavanje sigurnosti i udobnosti voznje
proucavaju se podaci sa grafika.
Za konstrukciju profila projektne brzine koriste se
navedene zavisnosti u podrucijima sa konstantnim
brzinama(kruzne krivine,poduzni nagib), dok se za
podrucija prilagodjavane brzine koriste:
Ubrzanje (usporenje)
merodavnog putnickog vozila je a=d=0.8m/s2,
teretnog vozila u=0,75-0,30 m/s2
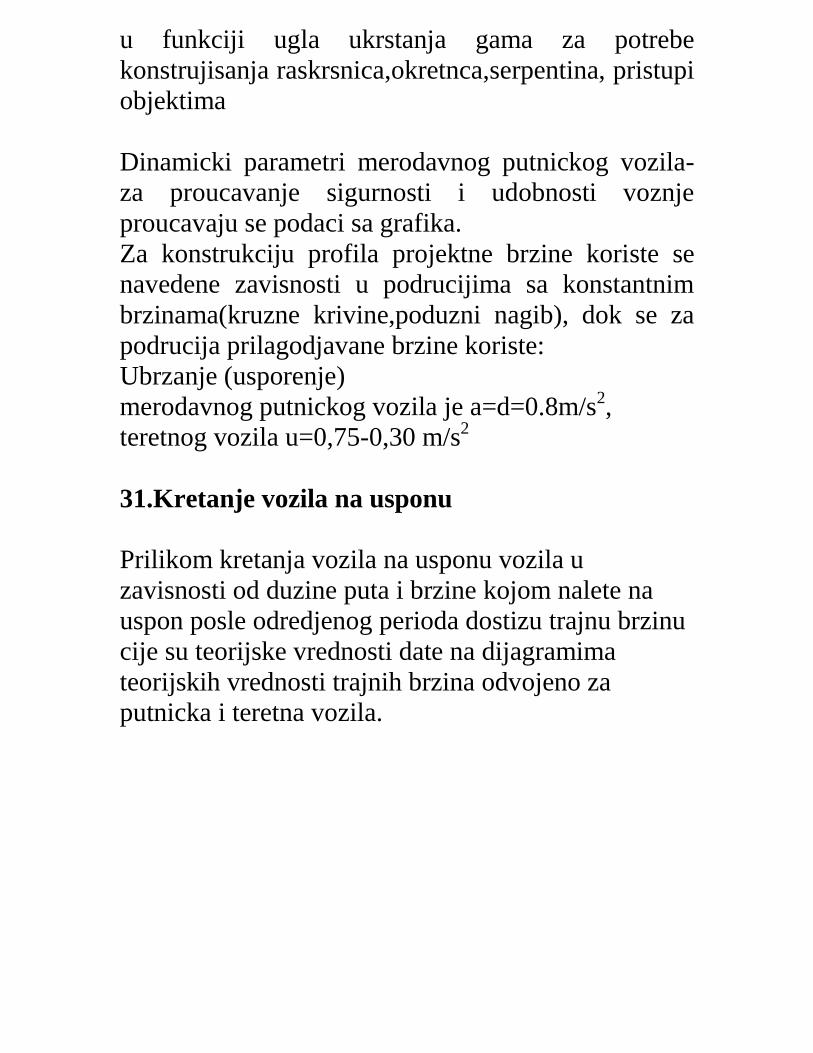
31.Kretanje vozila na usponu
Prilikom kretanja vozila na usponu vozila u
zavisnosti od duzine puta i brzine kojom nalete na
uspon posle odredjenog perioda dostizu trajnu brzinu
cije su teorijske vrednosti date na dijagramima
teorijskih vrednosti trajnih brzina odvojeno za
putnicka i teretna vozila.
Teoriske vrednosti trajnih brzina merodavnog
putnickog vozila koje se koriste za konstrukciju
profila projektne brzine za putnicko vozilo
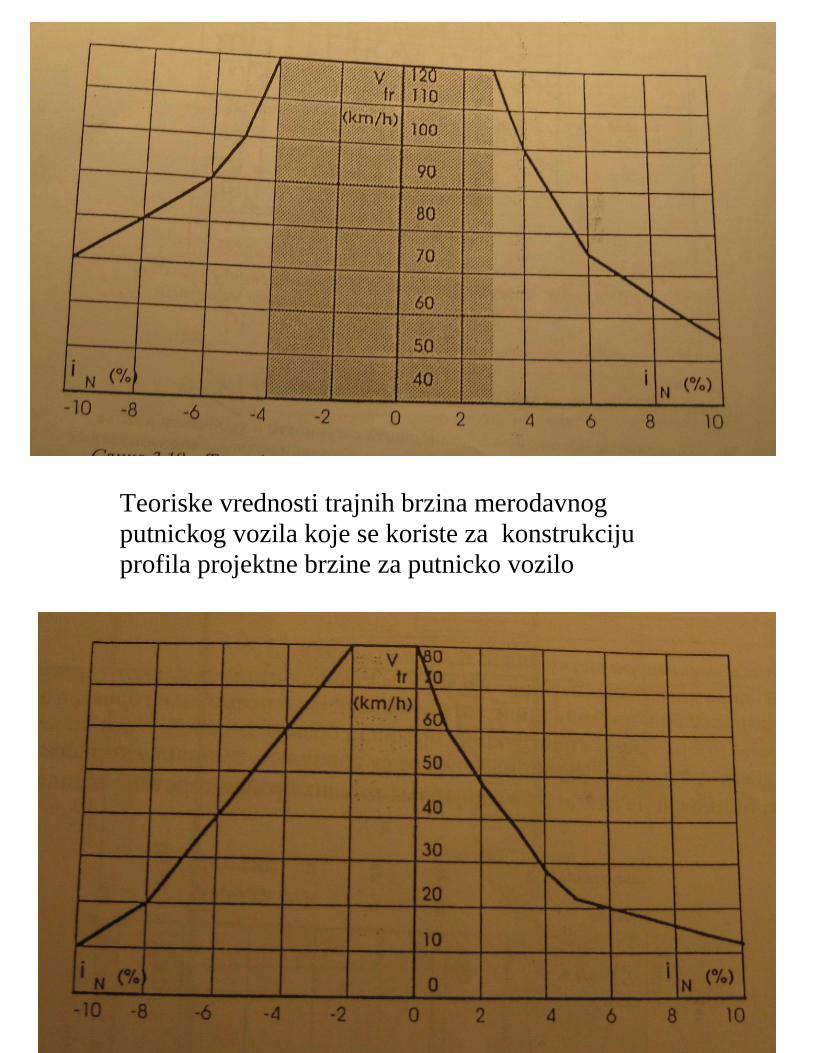
Teoriske vrednosti trajnih brzina merodavnog
putnickog vozila koje se koriste za konstrukciju
profila projektne brzine za teretno vozilo
32.Otpori kretanja vozila
Otpor pri kotrljanju (Wk) potice od trenja u lezistima
tockova, trenje na kontaktu tocka i kolovoza,
unutrasnjeg trenja u pneumatiku prilikom
deformacije, trenja kod prikljucnog vozila u vucnim
uredjajima.
Wk=wk*Gbr[N],
ako je voz na usponu
Wk=ωk*Gbr*cosα[N].
wk-raste sa porastom brzine, za brzinu do 80km/h wk
je 0.012 (za ravan kolovoz) a 0.040 (za ishaban
kolovoz).
Otpor nagiba (Wi)-to je sila koja se na usponu (+)
suprotstavlja a na padu (-) pomaze.
Negativna vrednost Wi predstavlja dopusku vucnu
silu
Wi=Gbr*iN [N]
Otpor vazduha (Wv) predstavlja ceoni
pritisakvazdusnih masa koje se suprotstavljaju
kretanju vozila, u manjoj meri otpor usled strujanja
vazduha oko vozila i otpor prostrujavanja Wv zavisi
od relativne brzine strujanja vazdusnih cestica (Vr),
ceone povrsine (F), aerodinamicke karakteristike
vozila – koef otpora vazduha (c);
od brzine kretanja, oblika vozila, gustine vazduha.
Wv=0,05*c*F*Vr2[N] za
PA (c=0.3-0.5; F=1.5-2.5m2);
za KAM (c=0.6-0.9; F=4-8 m2);
za BUS (c=0.7; F=6-8 m2)
Otpor inercijalnih sila (Wj) javlja se pri ubrzanom
kretanju vozila. Masa vozila dobija translatorno
ubrzanje, tocak rotciono ubrzanje
Wj=±Gbr/g*dv/dt*ρ [N].
ρ-koef. ucesca obrtnih masa, zavisi od konstrukcije
vozila i stepena prenosa.
ΣW=Wk±Wi+Wv = Gbr(Wk±iN)+Wv ...
Gbr(Wk±iN) – predstavlja ukupnu silu koja zavisi od
uslova puta.
33.Vucne karakteristike vozila
Kretanje vozila zavisi od uzajamnog dejstva motora,
stepena prenosa vucne sile na tockove i uzajamnog
dejstva tockova i podloge. Jednacina za vucnu silu
motora
Z=3.6*Ne*η/V [N]
Ne-snaga motora u [W],
V-brzina,
η-stepen korisnosti transmisije.
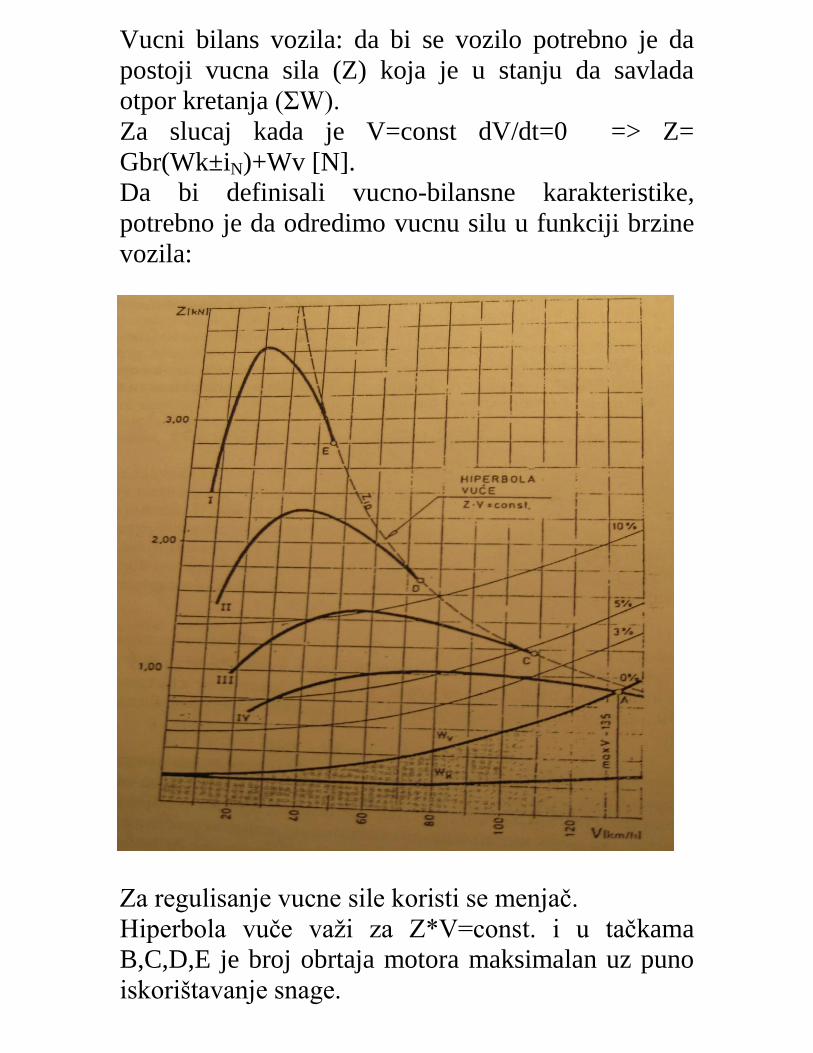
Vucni bilans vozila: da bi se vozilo potrebno je da
postoji vucna sila (Z) koja je u stanju da savlada
otpor kretanja (ΣW).
Za slucaj kada je V=const dV/dt=0 => Z=
Gbr(Wk±iN)+Wv [N].
Da bi definisali vucno-bilansne karakteristike,
potrebno je da odredimo vucnu silu u funkciji brzine
vozila:
Za regulisanje vucne sile koristi se menjač.
Hiperbola vuče važi za Z*V=const. i u tačkama
B,C,D,E je broj obrtaja motora maksimalan uz puno
iskorištavanje snage.
Tačka A predstavlja max brzinu kretanja vozila.
Najveća vrednost vučne sile u prvom stepenu
prenosa, a najmanja u direktnom (IV) stepenu
prenosa.
Za brzine manje od 80km/h otpor kotrljanja (Wk) je
konstantan.
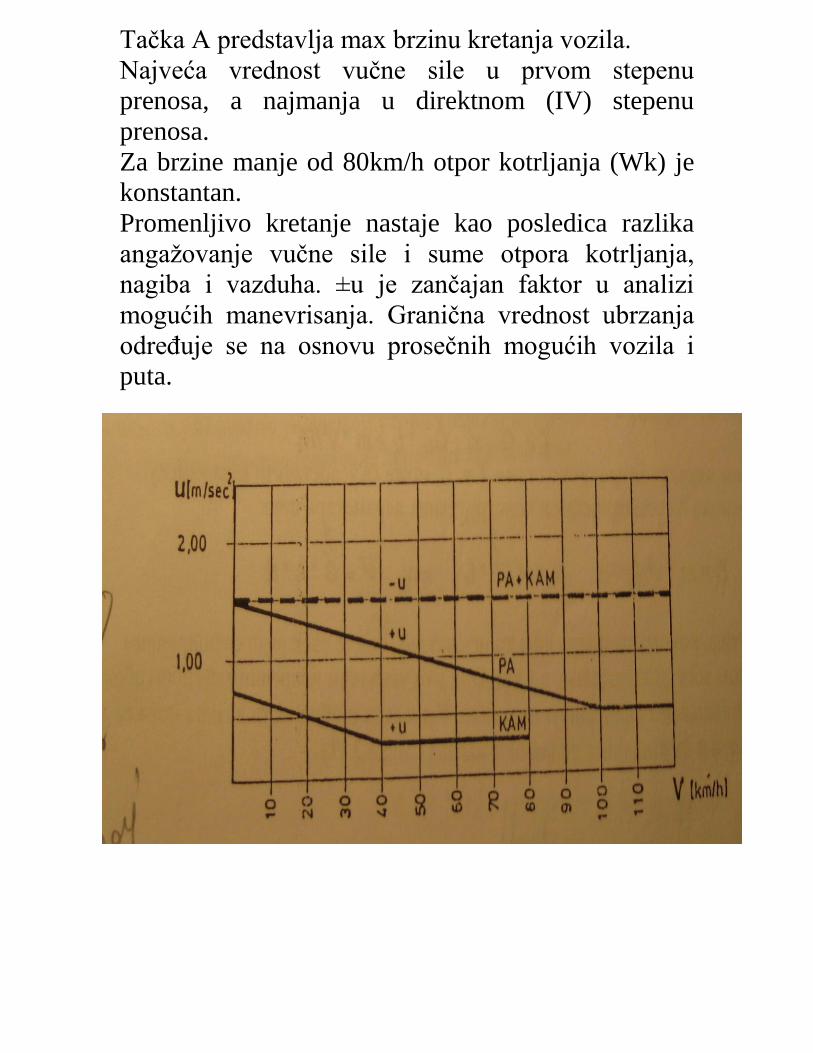
Promenljivo kretanje nastaje kao posledica razlika
angažovanje vučne sile i sume otpora kotrljanja,
nagiba i vazduha. ±u je zančajan faktor u analizi
mogućih manevrisanja. Granična vrednost ubrzanja
odreĎuje se na osnovu prosečnih mogućih vozila i
puta.
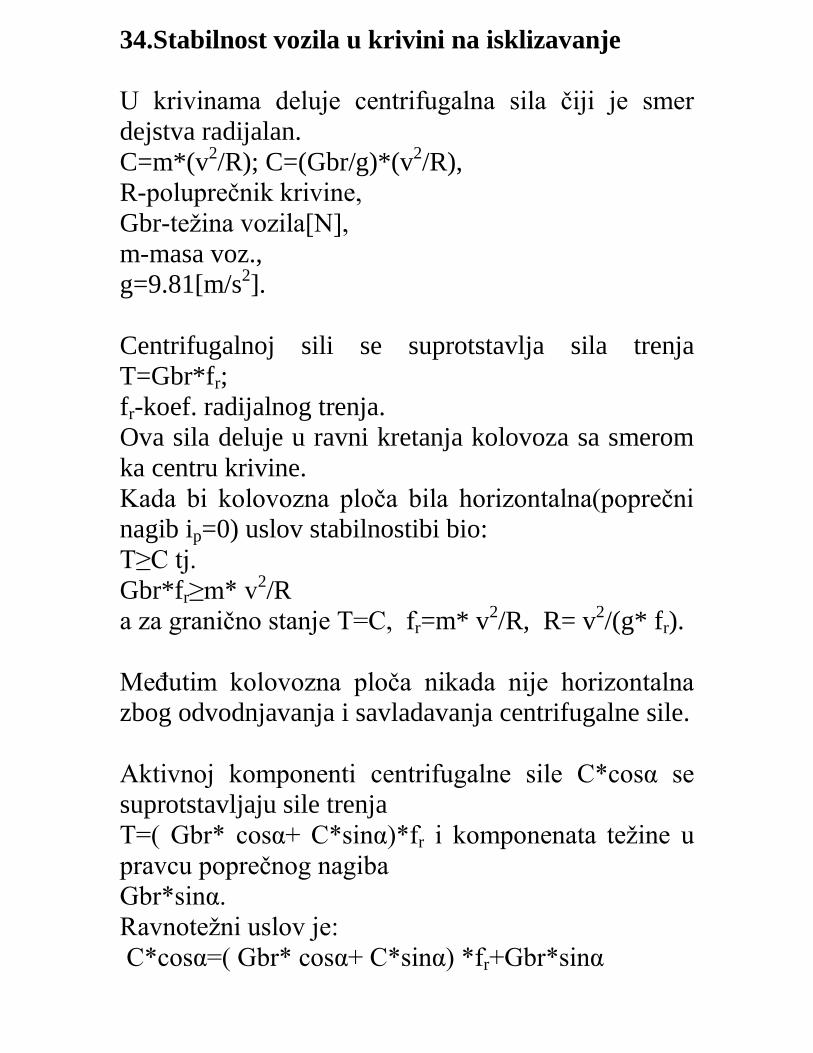
34.Stabilnost vozila u krivini na isklizavanje
U krivinama deluje centrifugalna sila čiji je smer
dejstva radijalan.
C=m*(v2/R); C=(Gbr/g)*(v2/R),
R-poluprečnik krivine,
Gbr-težina vozila[N],
m-masa voz.,
g=9.81[m/s2].
Centrifugalnoj sili se suprotstavlja sila trenja
T=Gbr*fr;
fr-koef. radijalnog trenja.
Ova sila deluje u ravni kretanja kolovoza sa smerom
ka centru krivine.
Kada bi kolovozna ploča bila horizontalna(poprečni
nagib ip=0) uslov stabilnostibi bio:
T≥C tj.
Gbr*fr≥m* v2/R
a za granično stanje T=C, fr=m* v2/R, R= v2/(g* fr).
MeĎutim kolovozna ploča nikada nije horizontalna
zbog odvodnjavanja i savladavanja centrifugalne sile.
Aktivnoj komponenti centrifugalne sile C*cosα se
suprotstavljaju sile trenja
T=( Gbr* cosα+ C*sinα)*fr i komponenata težine u
pravcu poprečnog nagiba
Gbr*sinα.
Ravnotežni uslov je:
C*cosα=( Gbr* cosα+ C*sinα) *fr+Gbr*sinα
za cosα ≈1; sinα ≈tgα=ip i fr*ip≈0 kada se izraz
uprosti:
C/Gbr= fr+ip;
odnos C/Gbr=c predstavlja jediničnu centrifugalnu
silu.
Poprečni nagib se direktno suprotstavlja
centrifugalnoj sili dok ostatak (∆c=c- ip) poništava
radijalna komponenta trenja sa (fr); taj deo
centrifugalne sile osećaju vozilo i putnici kao bočni
pritisak.
Maksimalna vrednost bočnog pritiska je max∆c=max
fr, u slučaju ∆c>maxfr dolazi do bočnog klizanja.
Iz
C=(Gbr/g)*(v2/R) i C/Gbr= fr+ip
sledi osnovna jednačina stabilnosti:
v2*(g*R)= fr+ip ili R=v2/[g*( fr+ip)] [m]
u ovaj izraz se zamene
g=9.81 i v[m/s]=v[km/h]/3.6
dobije se
R=v2/[127*( fr+ip)] [m]
ovim je uspostavljena zakonitost odnosa
geometrijskih ikonstruktivnih parametara (R, fr, ip)
prema brzini vožnje.
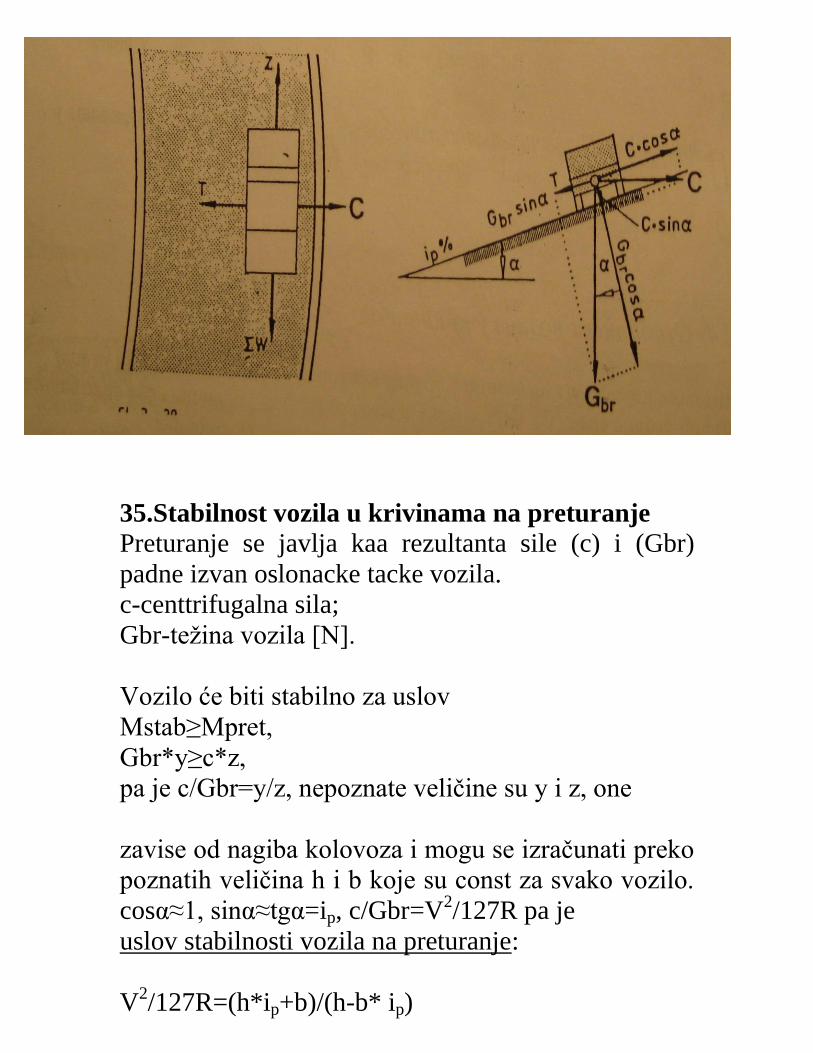
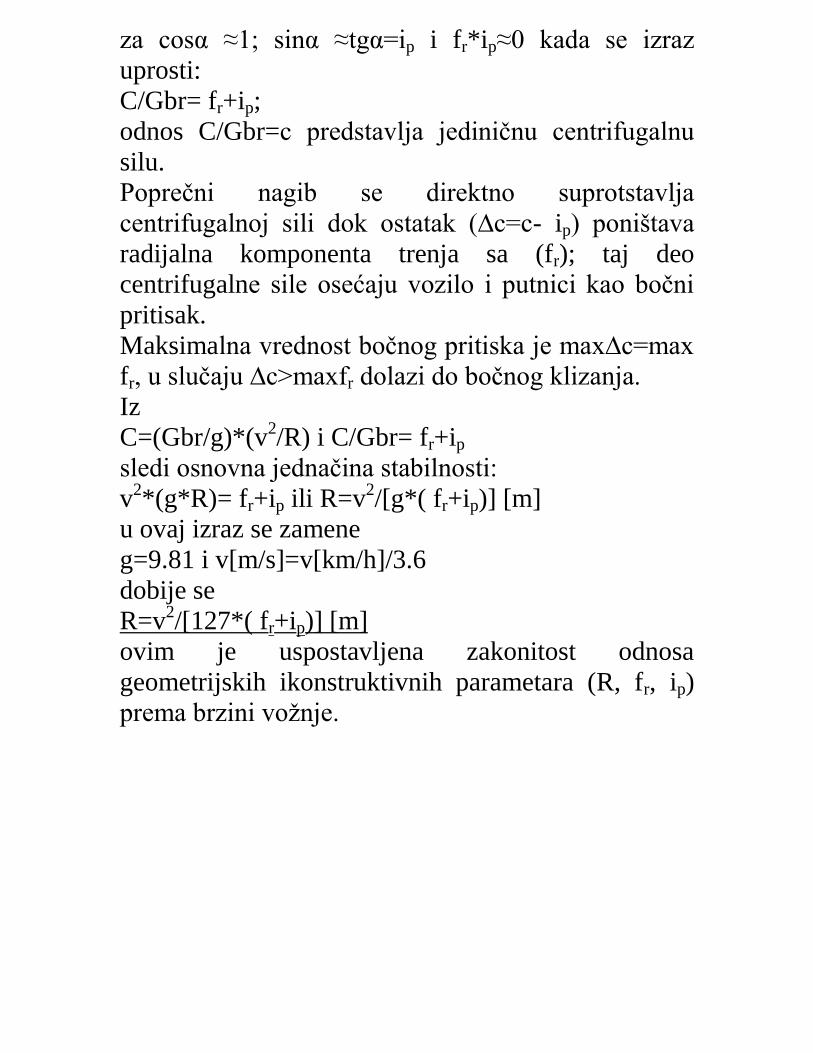
35.Stabilnost vozila u krivinama na preturanje
Preturanje se javlja kaa rezultanta sile (c) i (Gbr)
padne izvan oslonacke tacke vozila.
c-centtrifugalna sila;
Gbr-težina vozila [N].
Vozilo će biti stabilno za uslov
Mstab≥Mpret,
Gbr*y≥c*z,
pa je c/Gbr=y/z, nepoznate veličine su y i z, one
zavise od nagiba kolovoza i mogu se izračunati preko
poznatih veličina h i b koje su const za svako vozilo.
cosα≈1, sinα≈tgα=ip, c/Gbr=V2/127R pa je
uslov stabilnosti vozila na preturanje:
V2/127R=(h*ip+b)/(h-b* ip)
Na preturanje opasna su izuzetno uska i visoka vozila
kada na njih deluje jaka(c) sila. U datim situacijama
obično se dolazi do istupanja otpora na klizanje tako
da se opasnost na preturanje ne dovodi u pitanje. U
dimenzionisanju se uzima samo stabilnost vozila na
bočno isklizavanje a provera stabilnosti vozila na
preturanje se vrši za dvospratne autobuse i specijalne
vrste teretnih vozila.
36.Vozno dinamički uslovi za određivanje minR
kružne krivine
minR možemo odrediti iz uslova stabilnosti vozila u
krivini.
minR će biti onaj pri kojem se koristi ((maxfr) max
vrednost koeficijenta radijalnog trenja i(maxip) max
poprečni nagib za datu (Vr) računsku brzinu.
minR= Vr2/127(maxfr+ maxip) [m].
maxip=7%
Minimalni radijusi se koriste kada je to jedino
prihvatljivo rešenje.
KOČENJE
Kočenjem se energija kretanja pretvori u toplotnu
energiju.Ona nastaje kada se aktivira sistem za
kočenje i stvara vestacki otpor koji je veći od otpora
pri normalnom kretanju.
Veličina sile kočenja (k) zavisi od otpora klizanja
(T).
Granično stanja prema teoriji se javlja pri
maxk=maxT.
Kočenje se javlja pri k<maxT, a k>maxT točkovi
vozila ce biti blokirani i nastupa čisto klizanje.
Maksimalna vrednost usporenja vozila je 9[m/s2], a
normalna vrednost je 3.5[m/s2].
U normalnim uslovima kocenje se vrsi bez
iskljucenja kvacila.
Pri projektnim analizama se razmatra kočenje sa
isključenim kvačilom sto je na stranu sigurnosti, pa
takvom kočenju zaustavni put je duži. Osnovna
diferencijalna jednačina kočenja:
-dV/dt=u=g(ft+wk+iN) [m/s2].
iN-podužni nagib puta
wk-koeficijent otpora kotrljanja
ft-koeficijent tangencijalnog trenja
(ako je – onda je pad, a ako je + onda je uspon)
37.Forsirano kočenje vozila
Ukoliko se naglim pritiskom kočnice trenutno
angazuje max ft i ono koristi do zaustavljanja vozila,
kretanje će na celoj dužini puta kočenja biti jednako
usporeno.
Dužina puta kočenja(Lfk) se izračunava
integraljenjem osnovne jednačine kretanja i jednaka
je:
Lfk=V2/254(ft+wk±iN) [m]
Da bi se ostvarilo forsirano kočenje potrebno je da
sila kočenja (k) bude trenutno angazovana i da se
ostvari max ft trenja.
MeĎutim vreme aktiviranja kočnica je 0.6[s]. I pri
angažovanju max ft javlja se max usporenja kod
(maxft+wk±iN) koje prelazi granice udobnosti.
Usporenje se javlja podužni udar ili trzaj ST=du/dt
koji predstavljaju udobnost. Relativna udubnost se
javlja za promenu ubrzanja ST=1.0(1.5)[m/s2] .Tako
da forsirano kočenje ne moze biti i udobno.
Forsirano kocenje se primenjuje kada se na putu javi
iznenada prepreka.
Slucaj forsiranog kočenja se uzima kao merodavan za
utvrĎivanje minimalne preglednosti.
38.Definicija zaustavnog puta i elementi za
sračunavanje pri forsiranom kočenju
Zaustavni put Lzp je put koji vozilo predje od trenutka
kada vozač uoči smetnju do momenta zaustavljanja.
On se sastoji od Lr put slobodne vožnje za vreme
reakcije vozača i Lik put koji vozilo preĎe od
aktiviranja kočnice do zaustavljanja:
Lzp= Lr+ Lik
Lzf=(tr*V/3,6)+(V2/254*(ft+Wk±iN)) [m]
Zaustavni put pri forsiranom kočenju se koristi u
proračunu vizure preglednosti za slučaj iznenadne
pojave nepokretne smetnje.
Za koeficijent trenja ft se uzima onaj koji pripada
početnoj brzini.
Wk specificni otpor kotrljanja je veoma mali pa se
zanemaruje.
iN poduzni nagib se uvodi pri usponima i
padovima>2%.
(tr) vreme reakcije u evropskim zemljama se uzima
tr=2,0[s] i smatra se da je ovim pokriven i vremenski
gubitak ”prihvatanja kočnice”.
39. Slobodno kočenje vozila
Kada se vozač naĎe u situaciji u kojoj ima dovoljno
vremena da sagleda situaciju i počne postepeno da
koči javlja se slobodno kočenje vozila koje se sastoji
iz tri faze:
1)usporenje je postepeno i raste od nule do odreĎene
vrednosti. u~2,0[m/s2], promena usporenja ST=du/dt
je ravnomerna u ST≤1.5[m/s2].
2)usporenje je const.
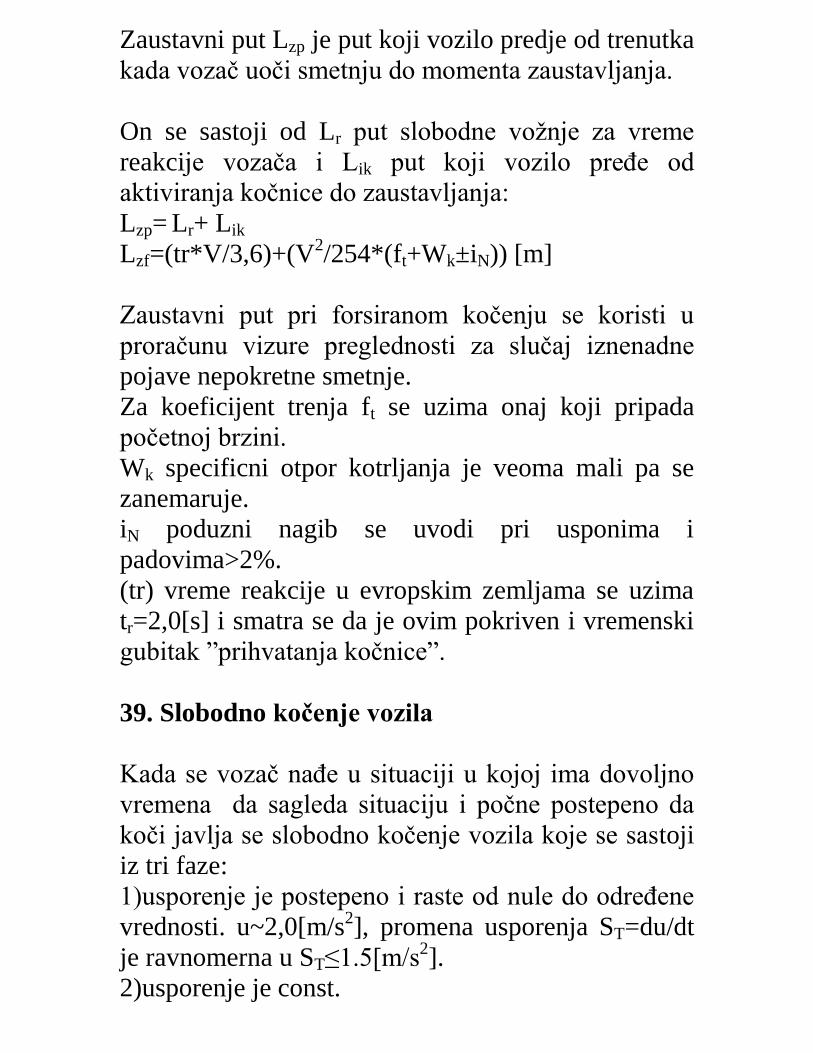
3)postupno opada do nule. Dužina puta kočenja se
može izračunati kao površina V/t dijagrama.
40.Definicija zaustavnog puta i elementi za
sračunavanje pri slobodnom kočenju
Zaustavni put (Lzp) je put koji vozilo preĎe od
trenutka kada vozač uoči smetnju do momenta
zaustavljanja. On se sastoji od (Lr) put slobodne
vožnje za vreme reakcije vozača i (Lik) put koji
vozilo preĎe od aktiviranja kočnica do zaustavljanja.
Lzp= Lr+ Lik.
Postoji zaustavni put pri forsiranom i slobodnom
kočenju. Zaustavni put pri slobodnom kočenju se
koristi u proračunu vizure preglednosti.
Glavni faktori su usporenje (u) i podužni udar (ST).
Pošto se kočenje obavlja postupno proračun se vrši sa
linearnim priraštajem do vrednosti maxST=1.5[m/s2] i
maxu=2.0[m/s3]







