
AUTO POSITIONER OCTOPUZ
AUTO POSITIONER
日本語版
REV.4.19.2018
SYNC THE TOOLPATH AND PART FROM MASTERCAM AUTO POSITIONER
AUTO POSITIONER Page 1
Auto Positioner
Auto Positioner 機能は、外部の軸ポジショナーを使用して作業用ロボット操作を構築するための、非
常に優れたソリューションです。これを使うと、ワークポジショナーを必要に応じて動かすことによって、
プログラム全体にわたってロボット位置をセットすることができます。新たな加工の可能性を作り出し、
またジョイントエラー、リミットエラーの回避に役立つものとなっています。ロボットとワーク間を接続し
て、さらに効率的かつ簡単に操作できます。
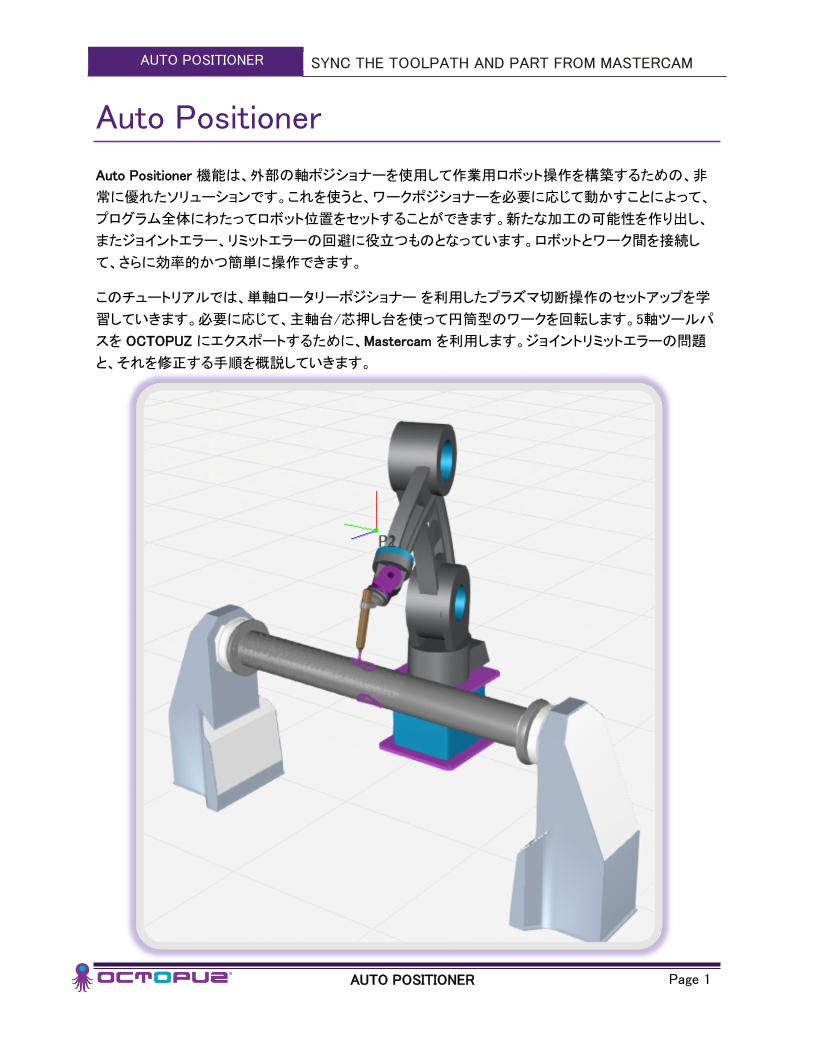
このチュートリアルでは、単軸ロータリーポジショナー を利用したプラズマ切断操作のセットアップを学
習していきます。必要に応じて、主軸台/芯押し台を使って円筒型のワークを回転します。5軸ツールパ
スを OCTOPUZ にエクスポートするために、Mastercam を利用します。ジョイントリミットエラーの問題
と、それを修正する手順を概説していきます。
SYNC THE TOOLPATH AND PART FROM MASTERCAM AUTO POSITIONER
AUTO POSITIONER Page 2
STEP1: Mastercamからのツールパスとパーツを同期する
Mastercamでパーツとツールパスの作成が完了したところから、このチュートリアルを開始します。
OCTOPUZにパーツとツールパスをインポートする前に、ツールパスが正しいものかどうかをチェッ
クしておく事をお勧めします。完了したら、OCTOPUZとツールパスを同期することにします。
1.1 OCTOPUZにパスとパーツを同期する
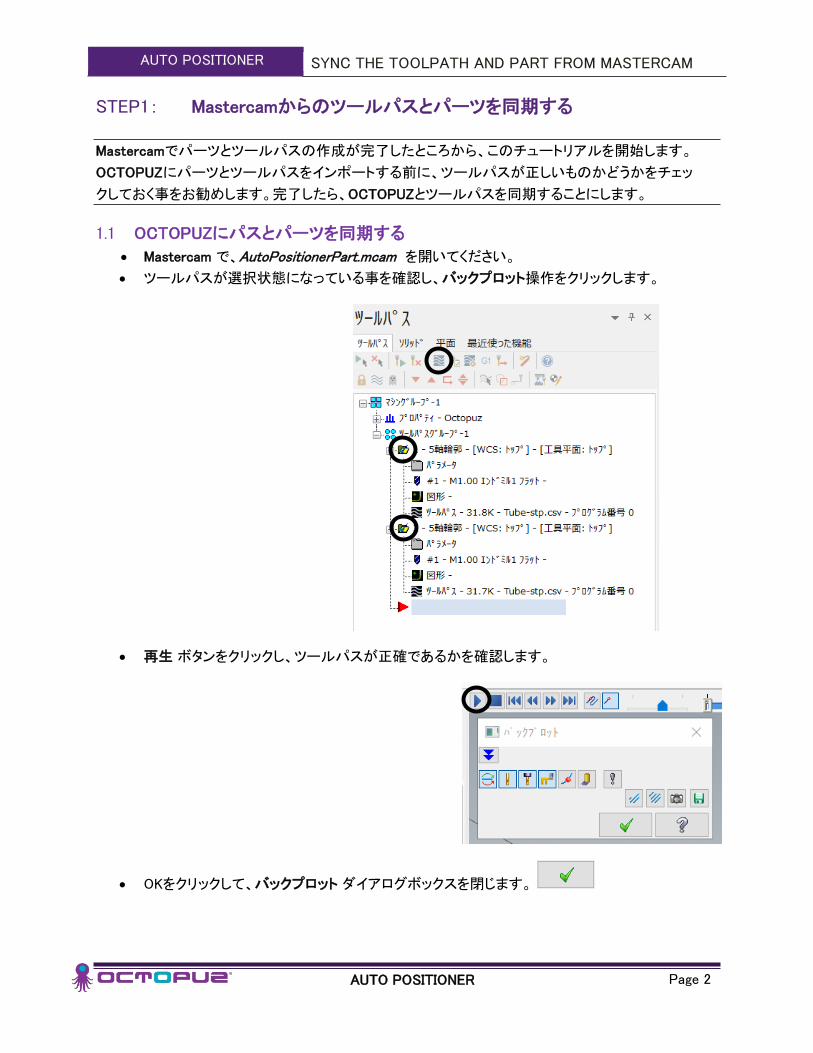
Mastercam で、AutoPositionerPart.mcam を開いてください。
ツールパスが選択状態になっている事を確認し、バックプロット操作をクリックします。
再生 ボタンをクリックし、ツールパスが正確であるかを確認します。
OKをクリックして、バックプロット ダイアログボックスを閉じます。
SYNC THE TOOLPATH AND PART FROM MASTERCAM AUTO POSITIONER
AUTO POSITIONER Page 3
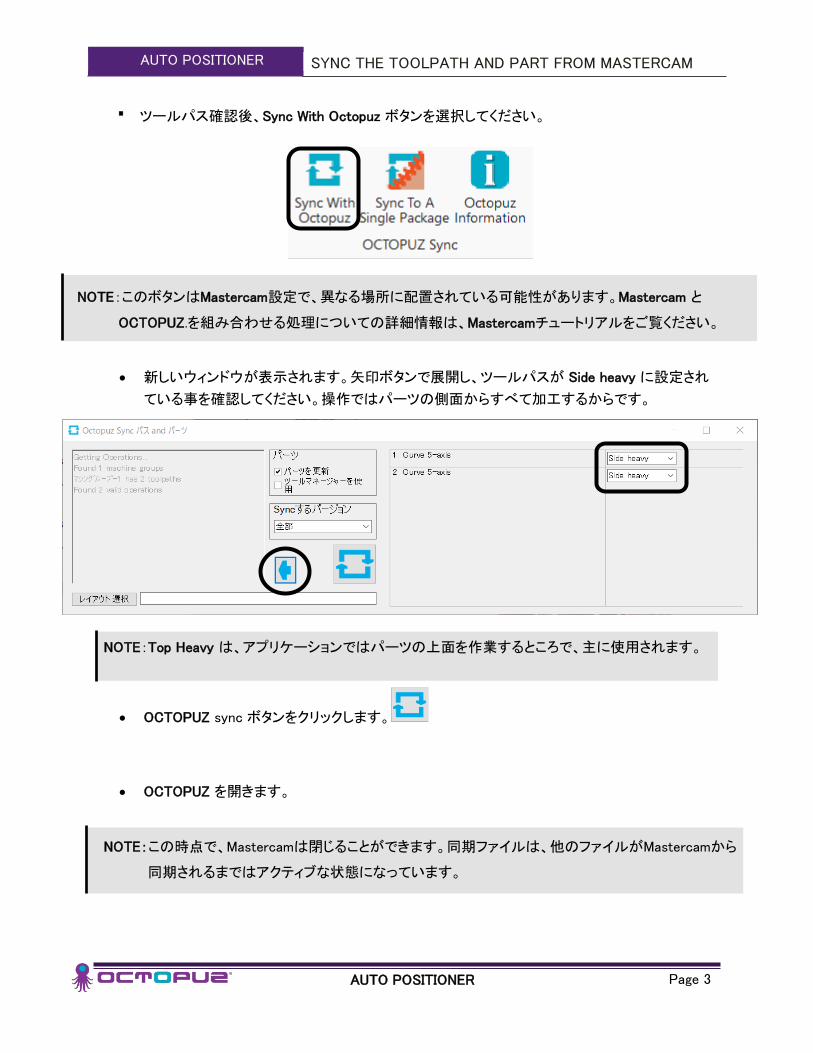
・ ツールパス確認後、Sync With Octopuz ボタンを選択してください。
NOTE:このボタンはMastercam設定で、異なる場所に配置されている可能性があります。Mastercam と
OCTOPUZ.を組み合わせる処理についての詳細情報は、Mastercamチュートリアルをご覧ください。
新しいウィンドウが表示されます。矢印ボタンで展開し、ツールパスが Side heavy に設定され
ている事を確認してください。操作ではパーツの側面からすべて加工するからです。
NOTE:Top Heavy は、アプリケーションではパーツの上面を作業するところで、主に使用されます。
OCTOPUZ sync ボタンをクリックします。
OCTOPUZ を開きます。
NOTE:この時点で、Mastercamは閉じることができます。同期ファイルは、他のファイルがMastercamから
同期されるまではアクティブな状態になっています。
SETTING UP THE WORK AREA AUTO POSITIONER
AUTO POSITIONER Page 4
STEP2: 作業領域を設定する
このステップでは、セル レイアウトを修正してコンポーネントを配置するための基礎部分に修正を行っ
ていきます。
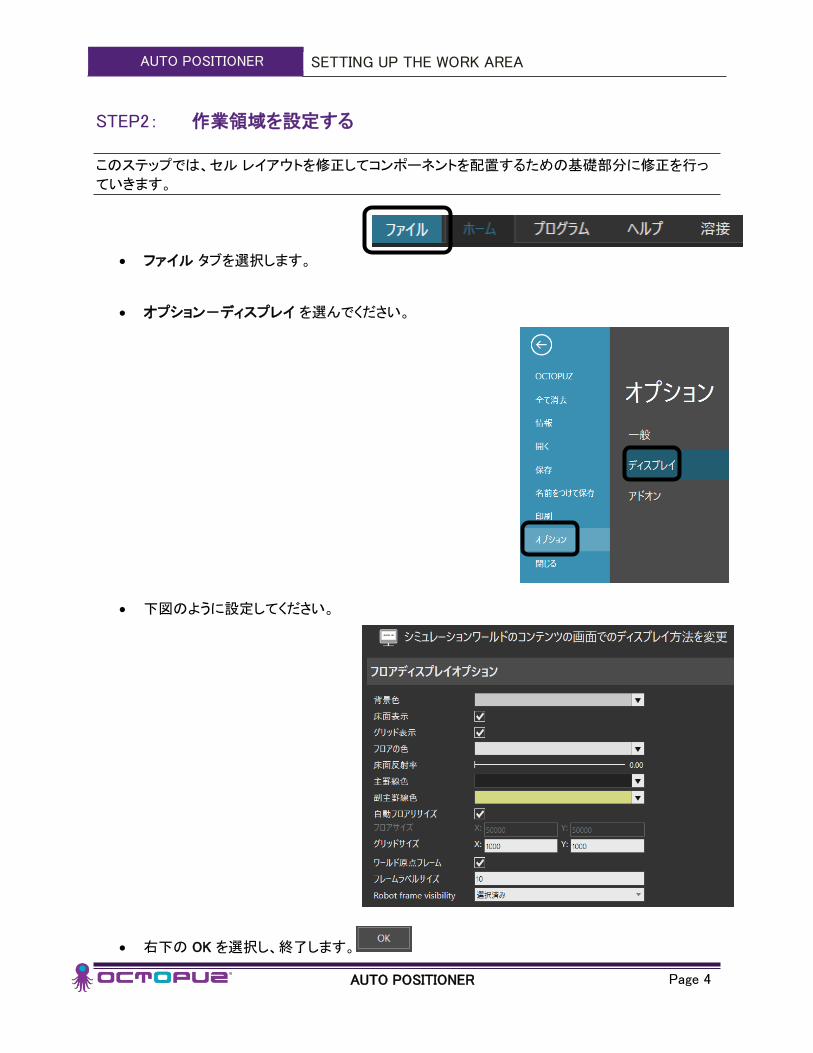
ファイル タブを選択します。
オプション-ディスプレイ を選んでください。
下図のように設定してください。
右下の OK を選択し、終了します。
SET UP THE ROBOT CELL
AUTO POSITIONER
AUTO POSITIONER Page 5
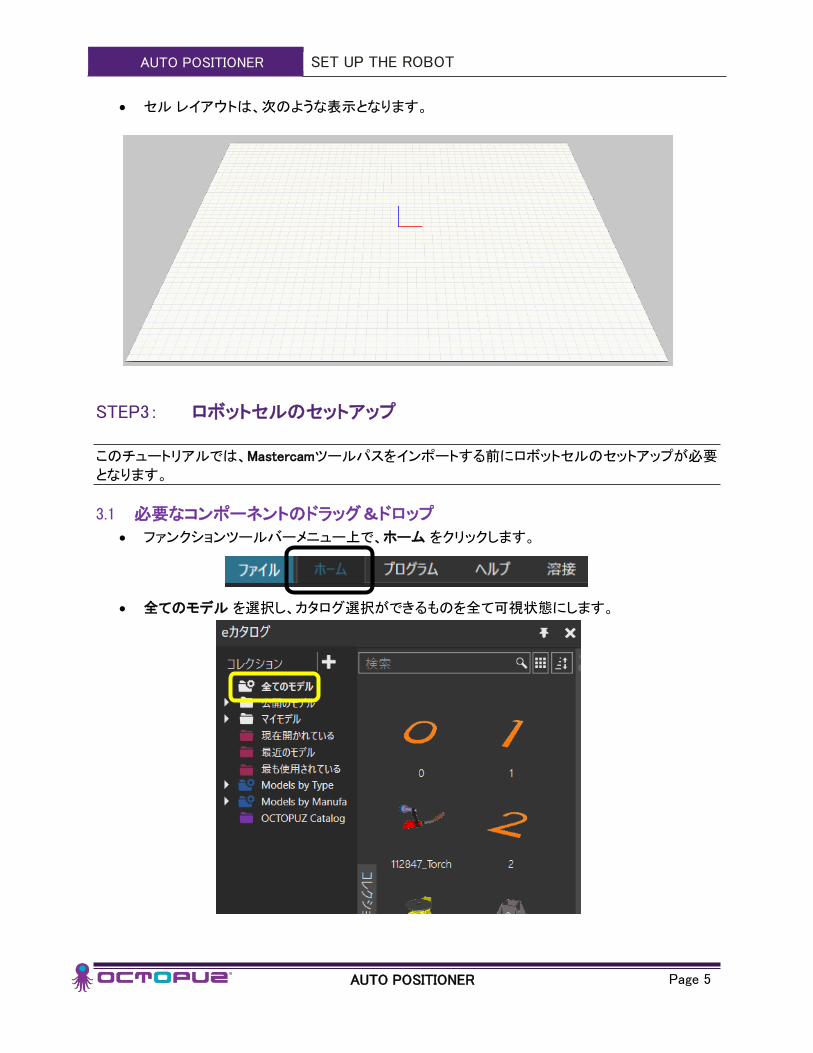
セル レイアウトは、次のような表示となります。
STEP3: ロボットセルのセットアップ
このチュートリアルでは、Mastercamツールパスをインポートする前にロボットセルのセットアップが必要
となります。
3.1 必要なコンポーネントのドラッグ&ドロップ
ファンクションツールバーメニュー上で、ホーム をクリックします。
全てのモデル を選択し、カタログ選択ができるものを全て可視状態にします。
SET UP THE ROBOT CELL
AUTO POSITIONER
AUTO POSITIONER Page 6
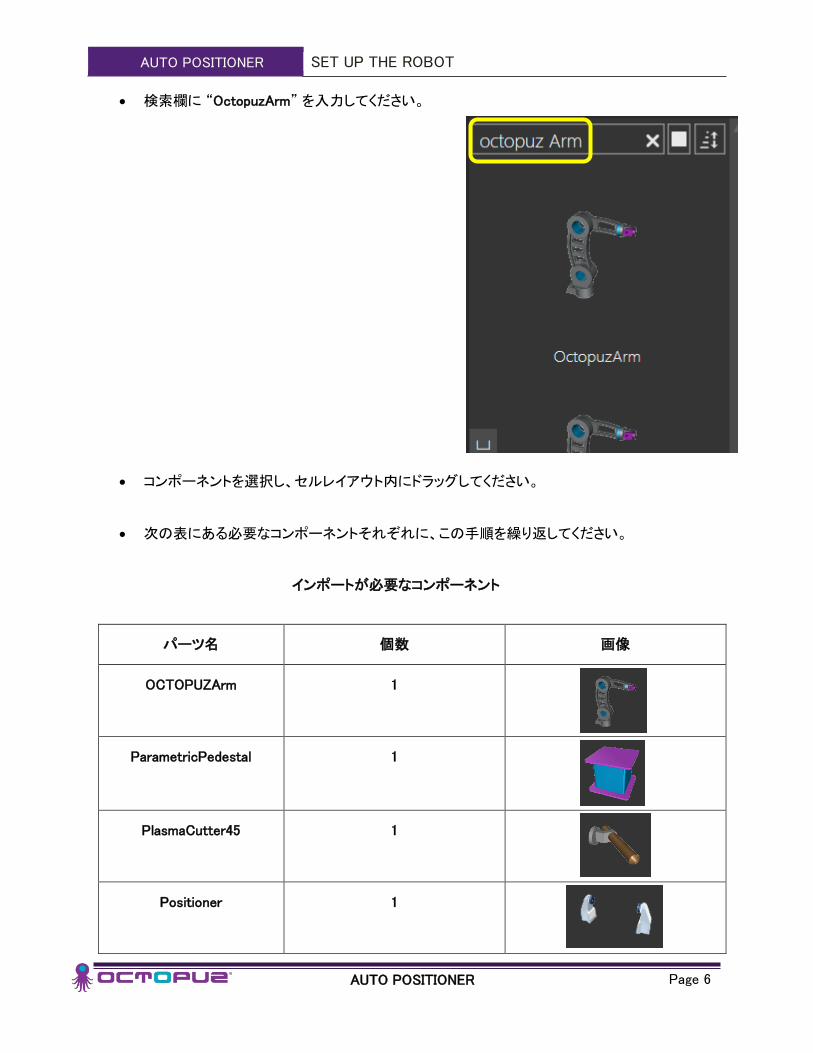
検索欄に “OctopuzArm” を入力してください。
コンポーネントを選択し、セルレイアウト内にドラッグしてください。
次の表にある必要なコンポーネントそれぞれに、この手順を繰り返してください。
インポートが必要なコンポーネント
パーツ名 個数 画像
OCTOPUZArm 1
ParametricPedestal 1
PlasmaCutter45 1
Positioner 1

SET UP THE ROBOT CELL
AUTO POSITIONER
AUTO POSITIONER Page 7
セルはだいたい次のような表示となっています。
NOTE:ファンクションツールバーメニュー上の 移動 ボタンを使用すると、コンポーネントはセルの
色々なところに動かすことができるようになります。
SET UP THE ROBOT CELL
AUTO POSITIONER
AUTO POSITIONER Page 8
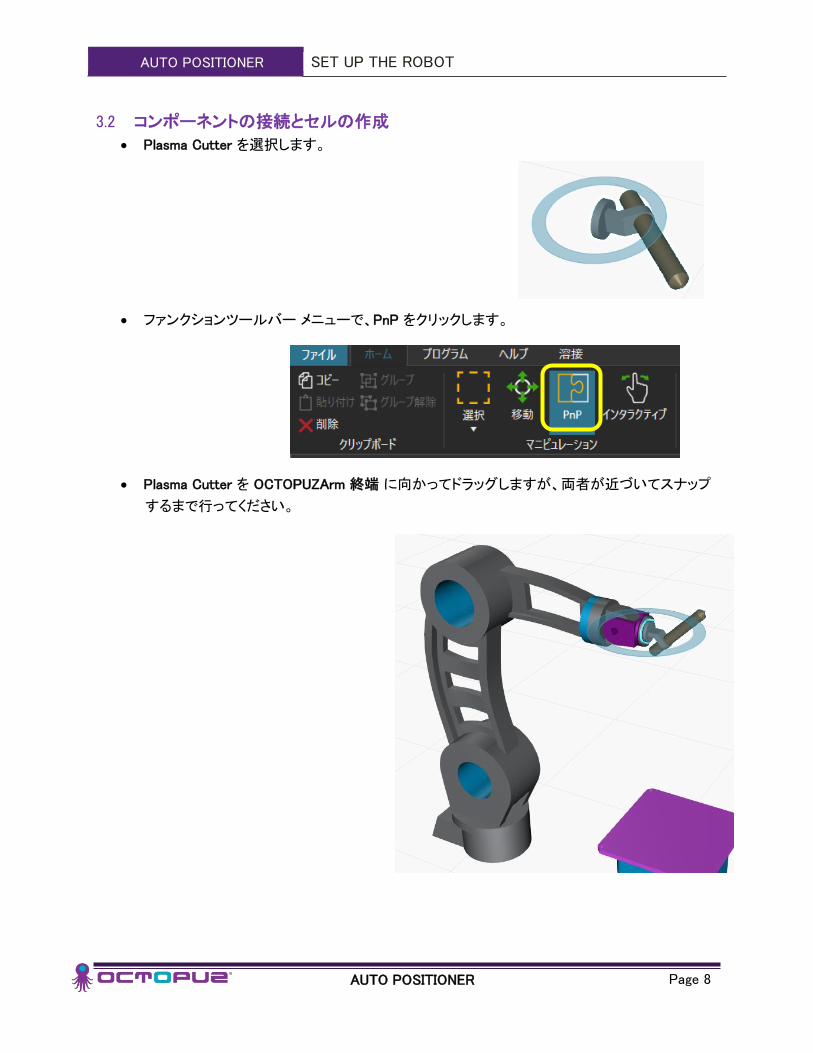
3.2 コンポーネントの接続とセルの作成
Plasma Cutter を選択します。
ファンクションツールバー メニューで、PnP をクリックします。
Plasma Cutter を OCTOPUZArm 終端 に向かってドラッグしますが、両者が近づいてスナップ
するまで行ってください。

SET UP THE ROBOT CELL
AUTO POSITIONER
AUTO POSITIONER Page 9
Plasma Cutter は OCTOPUZArm に上下逆にスナップします。画面の上部にある移動アイコ
ンを選択してください。
X軸回転で180°回転させ、ツールを回転してください。
画面右側にあるコンポーネントプロパティにて、Rxが90になればツールは下図のように表示され
ます。

SET UP THE ROBOT CELL
AUTO POSITIONER
AUTO POSITIONER Page 10
画面上部にある 選択 アイコンをクリックします。
OCTOPUZArm を選択してください。
ファンクションツールバー メニューで、PnP をクリックします。
OCTOPUZArm を Parametric Pedestal に向かってドラッグしますが、両者が近づいてスナップ
するまで行ってください。

IMPORT/POSITION THE MASTERCAM TOOLPATH/GEOMETRY AUTO POSITIONER
AUTO POSITIONER Page 11
Parametric Pedestal を選択後、ファンクションツールバー メニューで、移動 をクリックします。
画面右側の コンポーネントプロパティ にて X, Y, Z 座標をすべて 0 に変更してください。
NOTE:これらのアイコンのいずれかをクリックすると、その値がゼロにリセットされます。
移動 コマンドのまま、ポジショナーを選択してください (Positioner)。
座標値を X = 1250. Y = 500. Z = 0. RX = 0. RY = 0. RZ = 90. に変更し、
ポジショナーをロボットの正面に配置します。
NOTE:ここでの寸法は、一般的な指標となるものです。セル内のどこにでも自由に
コンポーネントを配置し、必ずシミュレーションでは現実と同様になるようにします。
IMPORT/POSITION THE MASTERCAM TOOLPATH/GEOMETRY AUTO POSITIONER
AUTO POSITIONER Page 12
STEP4:
Mastercamのツールパス/図形のインポートと位置決め
ロボットセルがセットアップされたら、次はMastercamからツールパスをインポートする必要があります。
パーツはロボットが届くところに配置され、プラズマカッターの終端にはツールが取り付けられます。
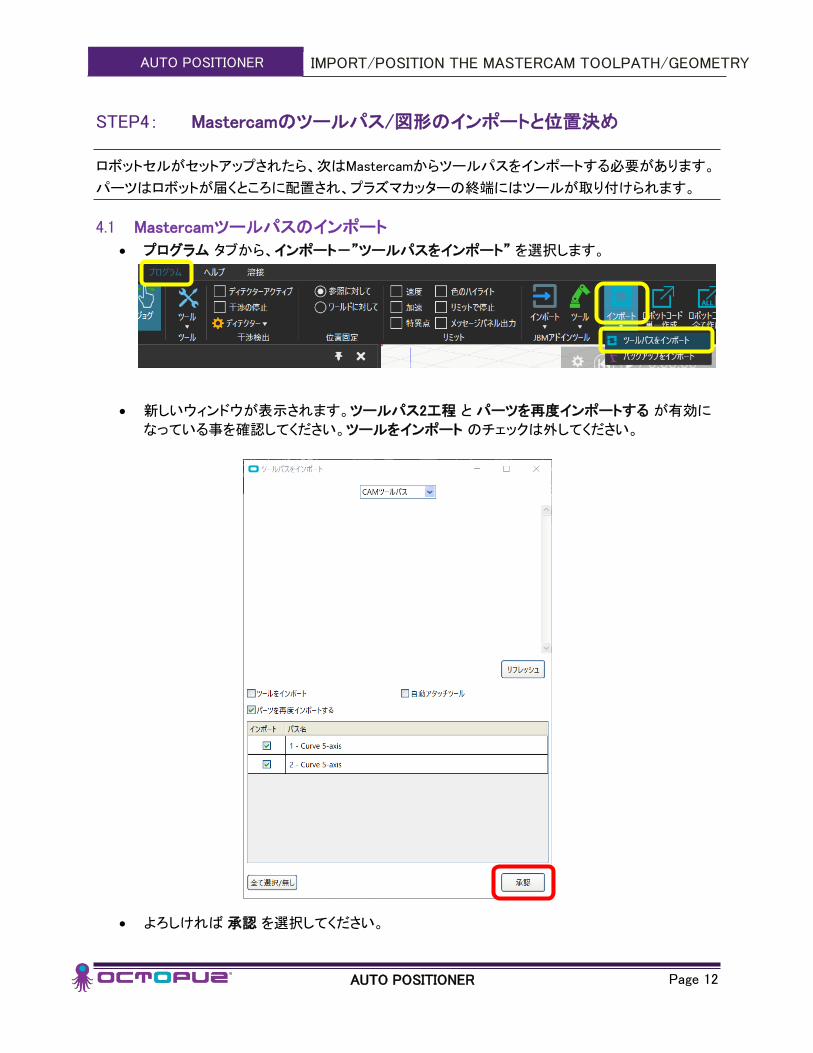
4.1 Mastercamツールパスのインポート
プログラム タブから、インポート-”ツールパスをインポート” を選択します。
新しいウィンドウが表示されます。ツールパス2工程 と パーツを再度インポートする が有効に
なっている事を確認してください。ツールをインポート のチェックは外してください。
よろしければ 承認 を選択してください。
IMPORT/POSITION THE MASTERCAM TOOLPATH/GEOMETRY AUTO POSITIONER
AUTO POSITIONER Page 13
パーツとツールパスが、セル内に表示されます。
IMPORT/POSITION THE MASTERCAM TOOLPATH/GEOMETRY AUTO POSITIONER
AUTO POSITIONER Page 14
4.2 インポートしたパーツを位置決めする
シミュレーション用に、ワークを現実に即した位置に移動する必要があります。また、Auto Positioner
を正しく機能させるのであれば、ワークはワークポジショナーとも親子関係にしなければなりません。
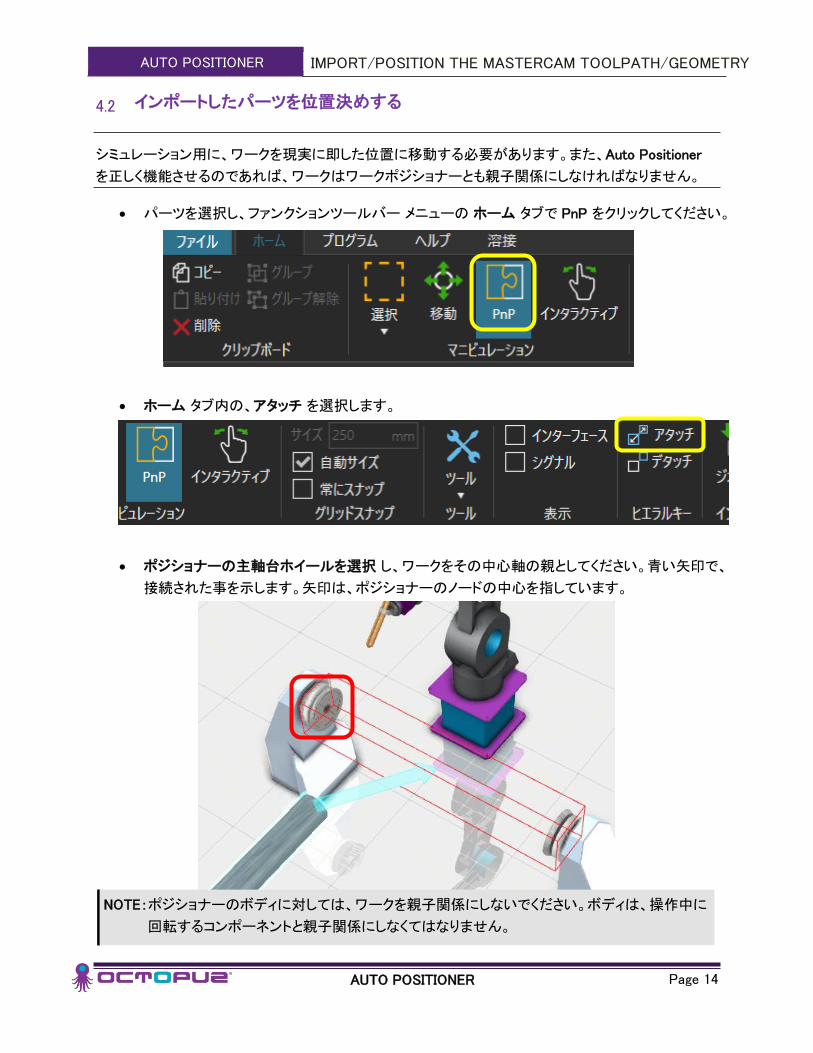
パーツを選択し、ファンクションツールバー メニューの ホーム タブで PnP をクリックしてください。
ホーム タブ内の、アタッチ を選択します。
ポジショナーの主軸台ホイールを選択 し、ワークをその中心軸の親としてください。青い矢印で、
接続された事を示します。矢印は、ポジショナーのノードの中心を指しています。
NOTE:ポジショナーのボディに対しては、ワークを親子関係にしないでください。ボディは、操作中に
回転するコンポーネントと親子関係にしなくてはなりません。
IMPORT/POSITION THE MASTERCAM TOOLPATH/GEOMETRY AUTO POSITIONER
AUTO POSITIONER Page 15
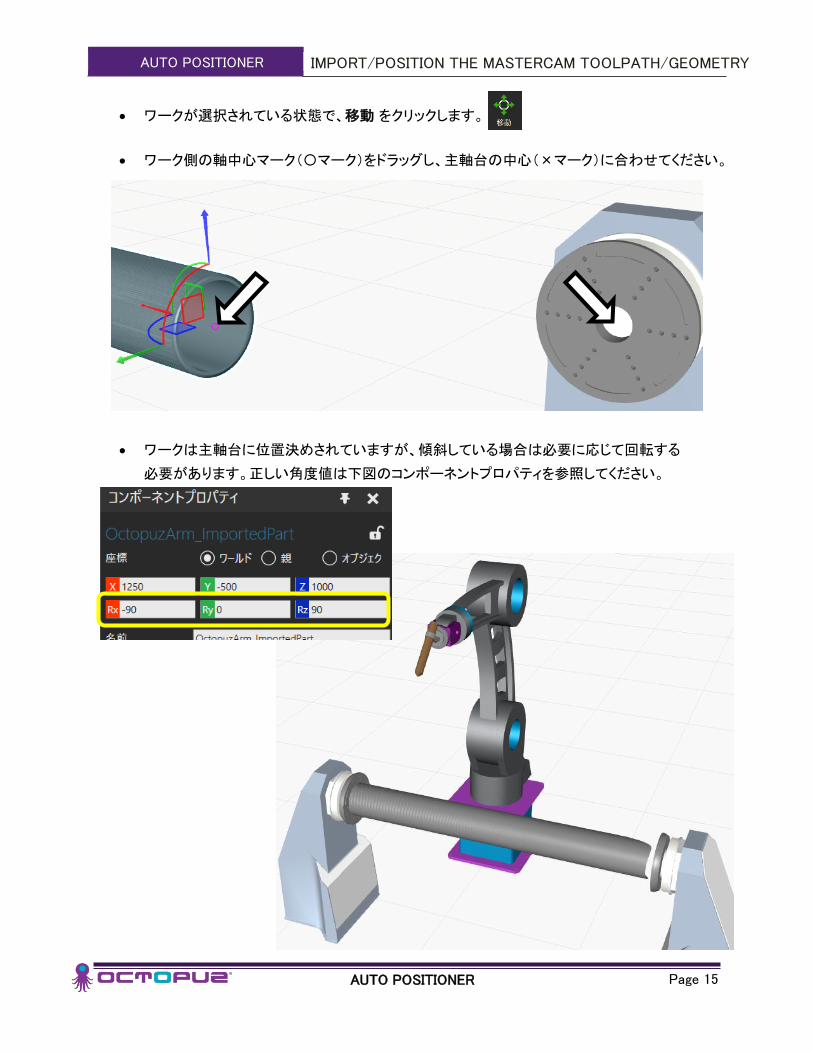
ワークが選択されている状態で、移動 をクリックします。
ワーク側の軸中心マーク(〇マーク)をドラッグし、主軸台の中心(×マーク)に合わせてください。
ワークは主軸台に位置決めされていますが、傾斜している場合は必要に応じて回転する
必要があります。正しい角度値は下図のコンポーネントプロパティを参照してください。
SET UP THE ROBOT AUTO POSITIONER
AUTO POSITIONER Page 16
STEP5: ロボットのセットアップ
ロボットのBase とTool Center Point (TCP) が設定されている必要があります。また、ワークポジショナ
ーもロボットに接続されている必要があります。
5.1 ロボットベースのセットアップ
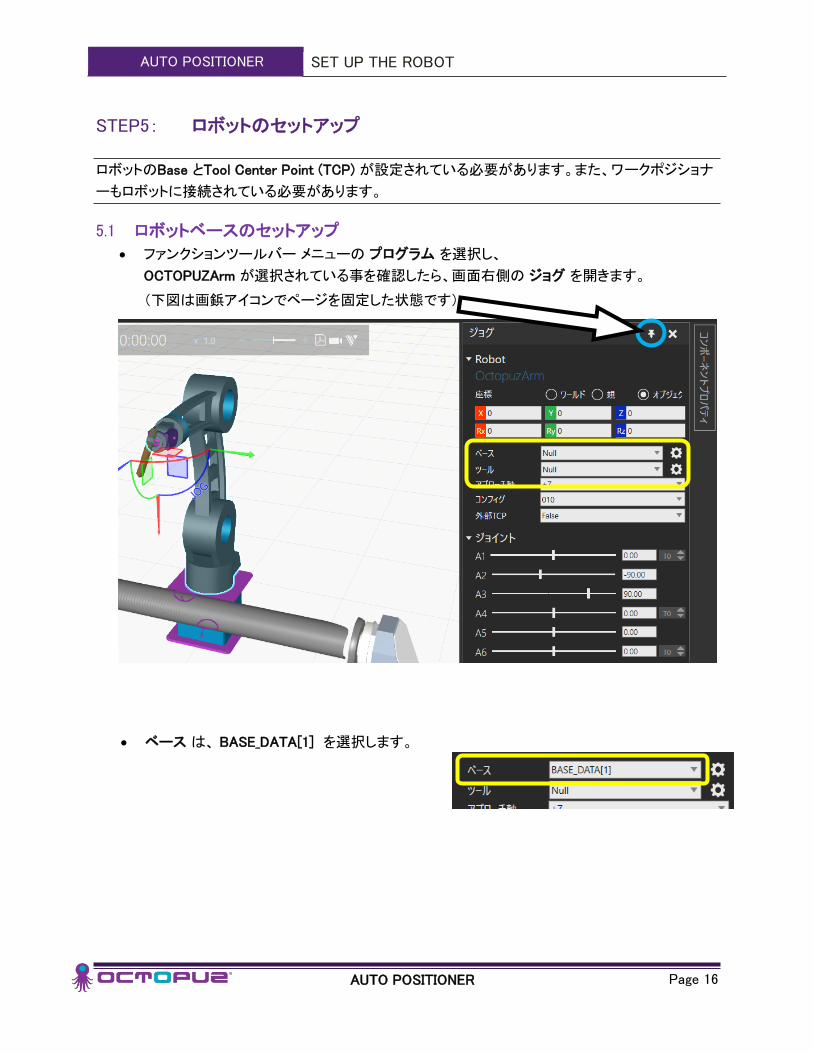
ファンクションツールバー メニューの プログラム を選択し、
OCTOPUZArm が選択されている事を確認したら、画面右側の ジョグ を開きます。
(下図は画鋲アイコンでページを固定した状態です)
ベース は、 BASE_DATA[1] を選択します。
SET UP THE ROBOT AUTO POSITIONER
AUTO POSITIONER Page 17
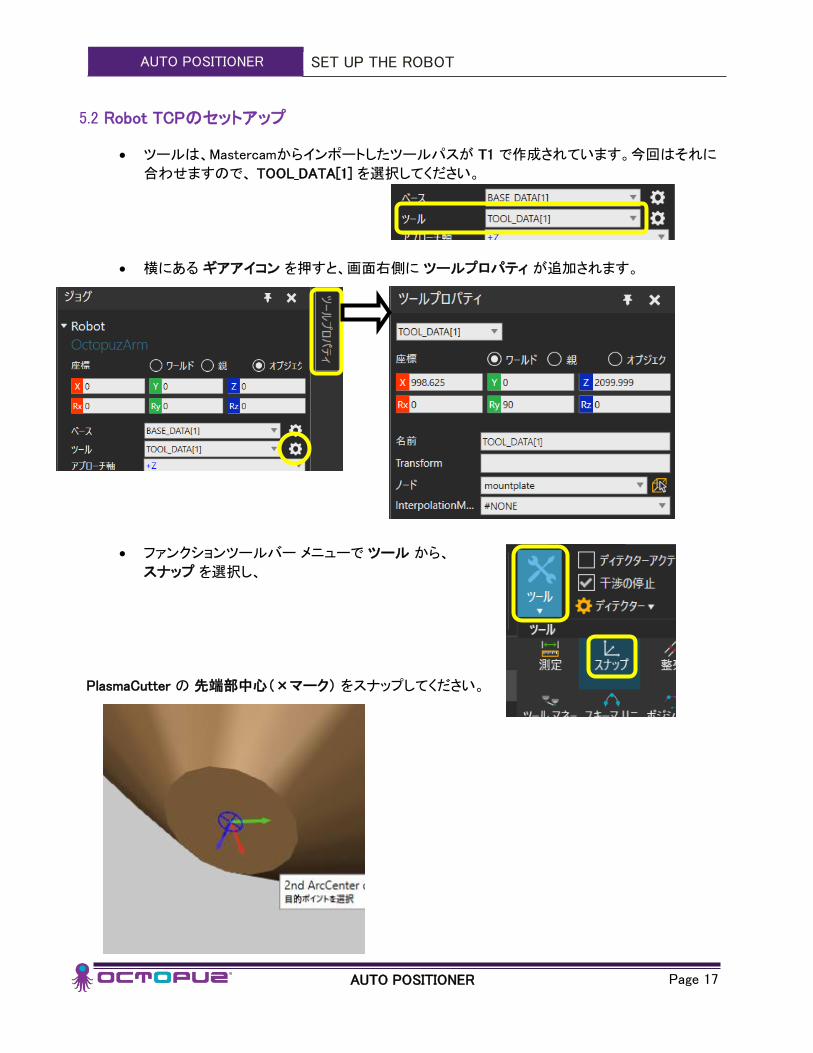
5.2 Robot TCPのセットアップ
ツールは、Mastercamからインポートしたツールパスが T1 で作成されています。今回はそれに
合わせますので、 TOOL_DATA[1] を選択してください。
横にある ギアアイコン を押すと、画面右側に ツールプロパティ が追加されます。
ファンクションツールバー メニューで ツール から、
スナップ を選択し、
PlasmaCutter の 先端部中心(×マーク) をスナップしてください。
SET UP THE ROBOT AUTO POSITIONER
AUTO POSITIONER Page 18
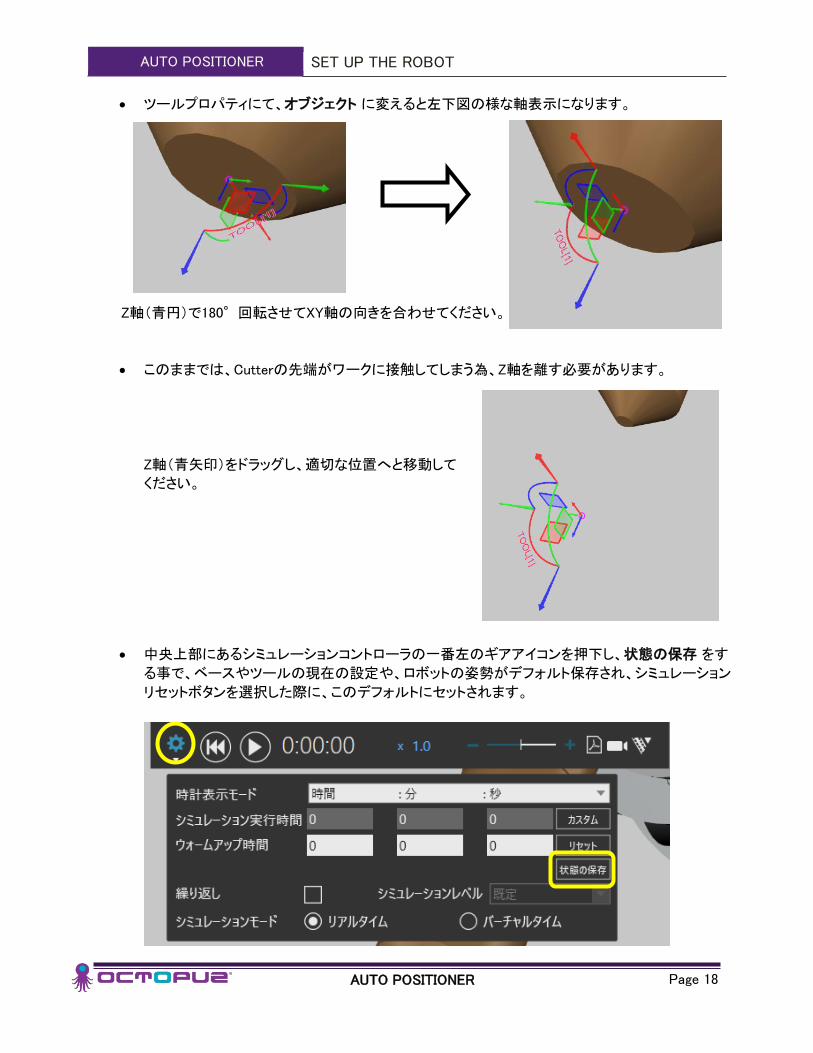
ツールプロパティにて、オブジェクト に変えると左下図の様な軸表示になります。
Z軸(青円)で180°回転させてXY軸の向きを合わせてください。
このままでは、Cutterの先端がワークに接触してしまう為、Z軸を離す必要があります。
Z軸(青矢印)をドラッグし、適切な位置へと移動して
ください。
中央上部にあるシミュレーションコントローラの一番左のギアアイコンを押下し、状態の保存 をす
る事で、ベースやツールの現在の設定や、ロボットの姿勢がデフォルト保存され、シミュレーション
リセットボタンを選択した際に、このデフォルトにセットされます。
SET UP THE ROBOT AUTO POSITIONER
AUTO POSITIONER Page 19
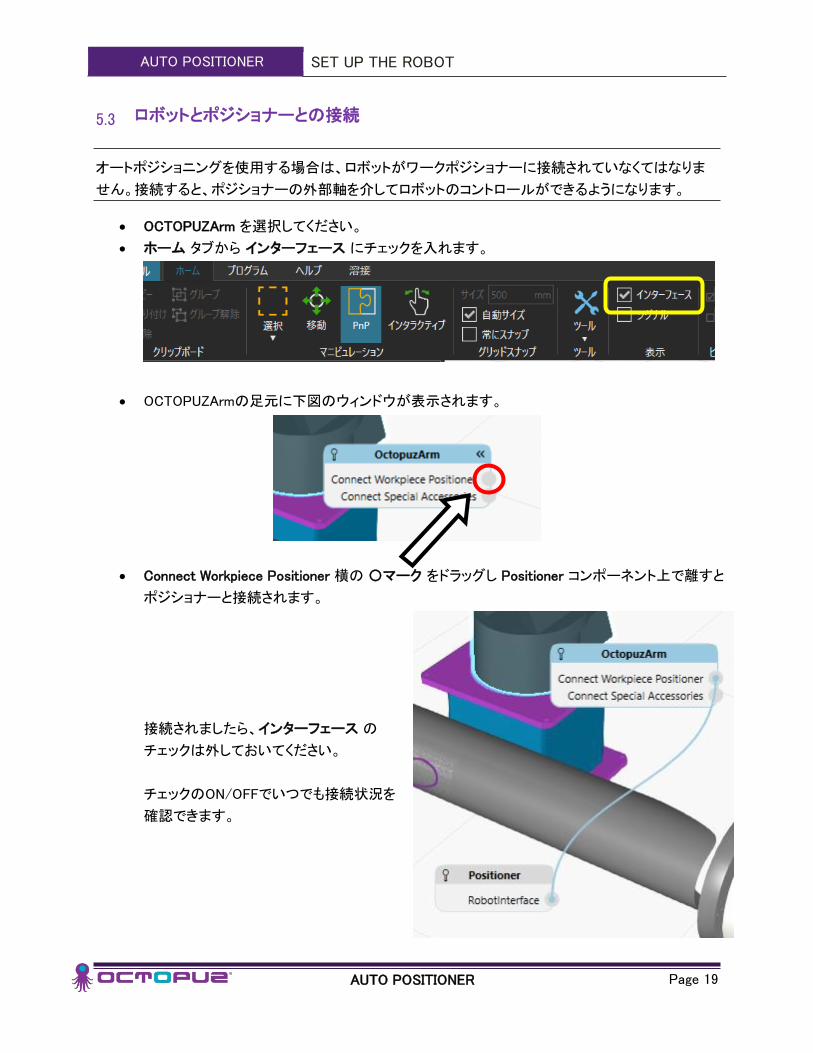
5.3 ロボットとポジショナーとの接続
オートポジショニングを使用する場合は、ロボットがワークポジショナーに接続されていなくてはなりま
せん。接続すると、ポジショナーの外部軸を介してロボットのコントロールができるようになります。
OCTOPUZArm を選択してください。
ホーム タブから インターフェース にチェックを入れます。
OCTOPUZArmの足元に下図のウィンドウが表示されます。
Connect Workpiece Positioner 横の 〇マーク をドラッグし Positioner コンポーネント上で離すと
ポジショナーと接続されます。
接続されましたら、インターフェース の
チェックは外しておいてください。
チェックのON/OFFでいつでも接続状況を
確認できます。
SET UP THE ROBOT AUTO POSITIONER
AUTO POSITIONER Page 20
STEP6: オートポジショナーの作成
現在の状況でシミュレーションを実行した場合、途中でワークを貫通する動作が起きてしまいます。
ワークが静止しているままだと、現在のツールパスはこのロボットセットアップでは加工が不可能です。
ワーク上のツールパスにオートポジショナー を使用する事を、これから学習していきます。
6.1
6.2
シミュレーションでテストする
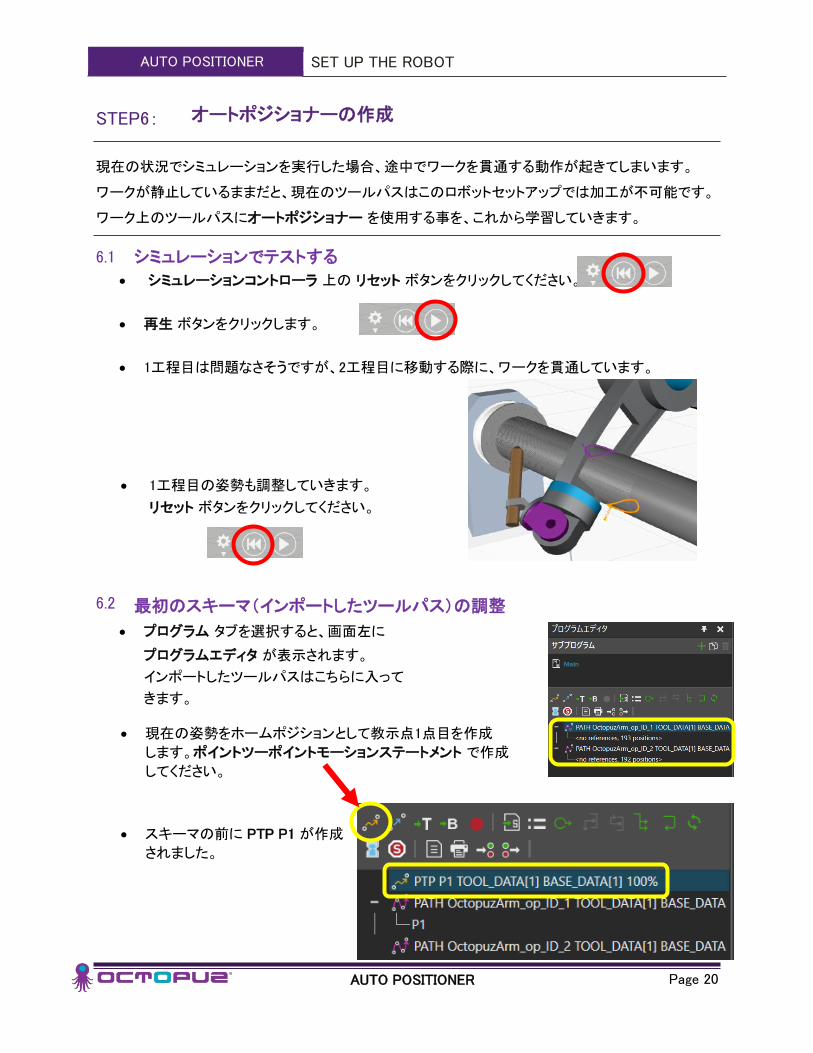
シミュレーションコントローラ 上の リセット ボタンをクリックしてください。
再生 ボタンをクリックします。
1工程目は問題なさそうですが、2工程目に移動する際に、ワークを貫通しています。
1工程目の姿勢も調整していきます。
リセット ボタンをクリックしてください。
最初のスキーマ(インポートしたツールパス)の調整
プログラム タブを選択すると、画面左に
プログラムエディタ が表示されます。
インポートしたツールパスはこちらに入って
きます。 現在の姿勢をホームポジションとして教示点1点目を作成
します。ポイントツーポイントモーションステートメント で作成
してください。
スキーマの前に PTP P1 が作成
されました。
SET UP THE ROBOT AUTO POSITIONER
AUTO POSITIONER Page 21
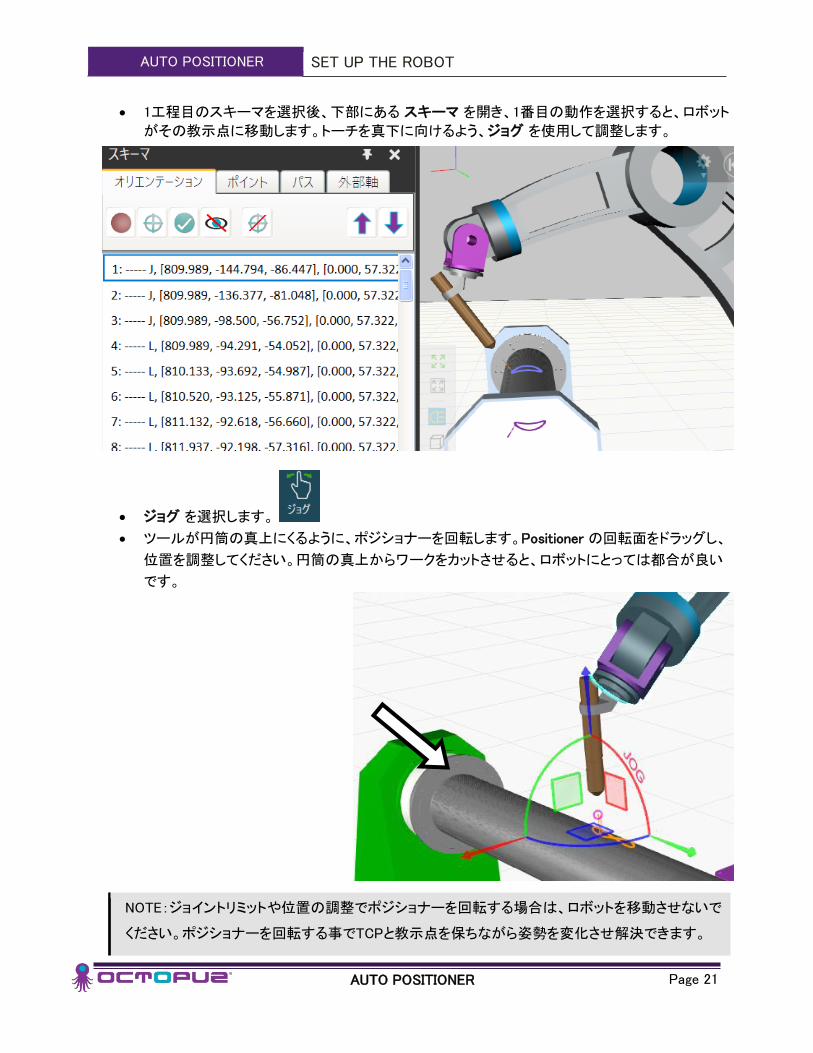
1工程目のスキーマを選択後、下部にある スキーマ を開き、1番目の動作を選択すると、ロボット
がその教示点に移動します。トーチを真下に向けるよう、ジョグ を使用して調整します。
ジョグ を選択します。
ツールが円筒の真上にくるように、ポジショナーを回転します。Positioner の回転面をドラッグし、
位置を調整してください。円筒の真上からワークをカットさせると、ロボットにとっては都合が良い
です。
NOTE:ジョイントリミットや位置の調整でポジショナーを回転する場合は、ロボットを移動させないで
ください。ポジショナーを回転する事でTCPと教示点を保ちながら姿勢を変化させ解決できます。
SET UP THE ROBOT AUTO POSITIONER
AUTO POSITIONER Page 22
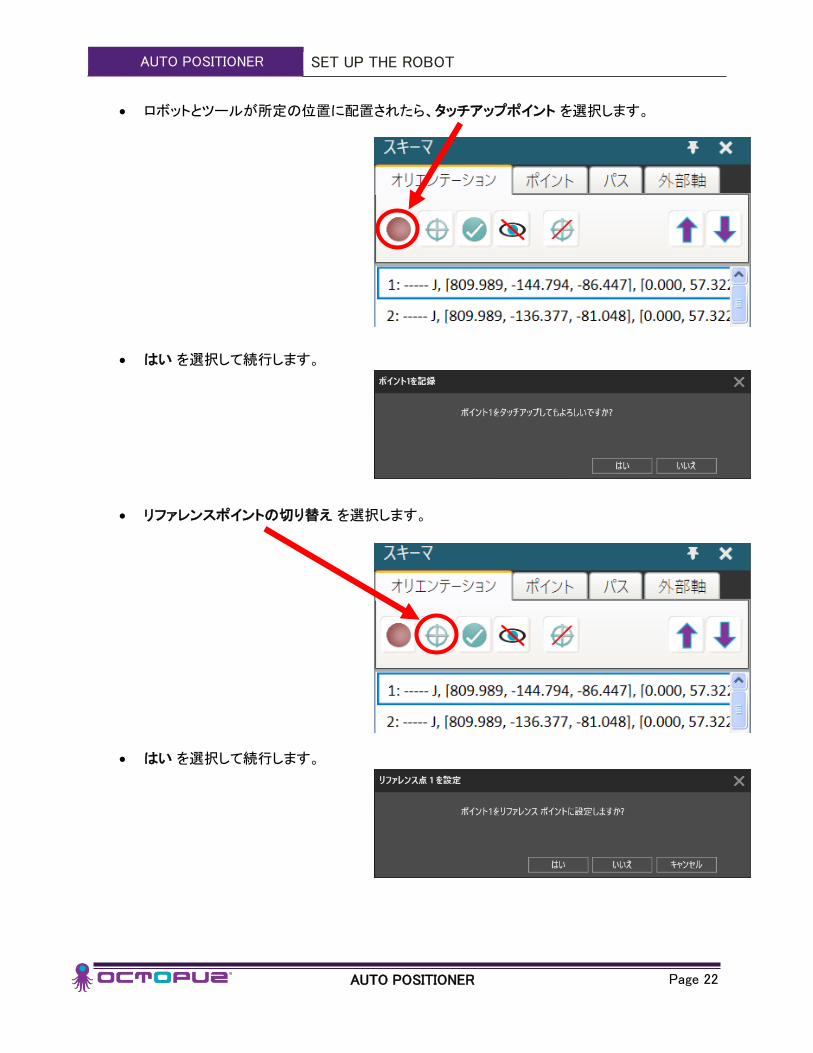
ロボットとツールが所定の位置に配置されたら、タッチアップポイント を選択します。
はい を選択して続行します。
リファレンスポイントの切り替え を選択します。
はい を選択して続行します。
SET UP THE ROBOT AUTO POSITIONER
AUTO POSITIONER Page 23
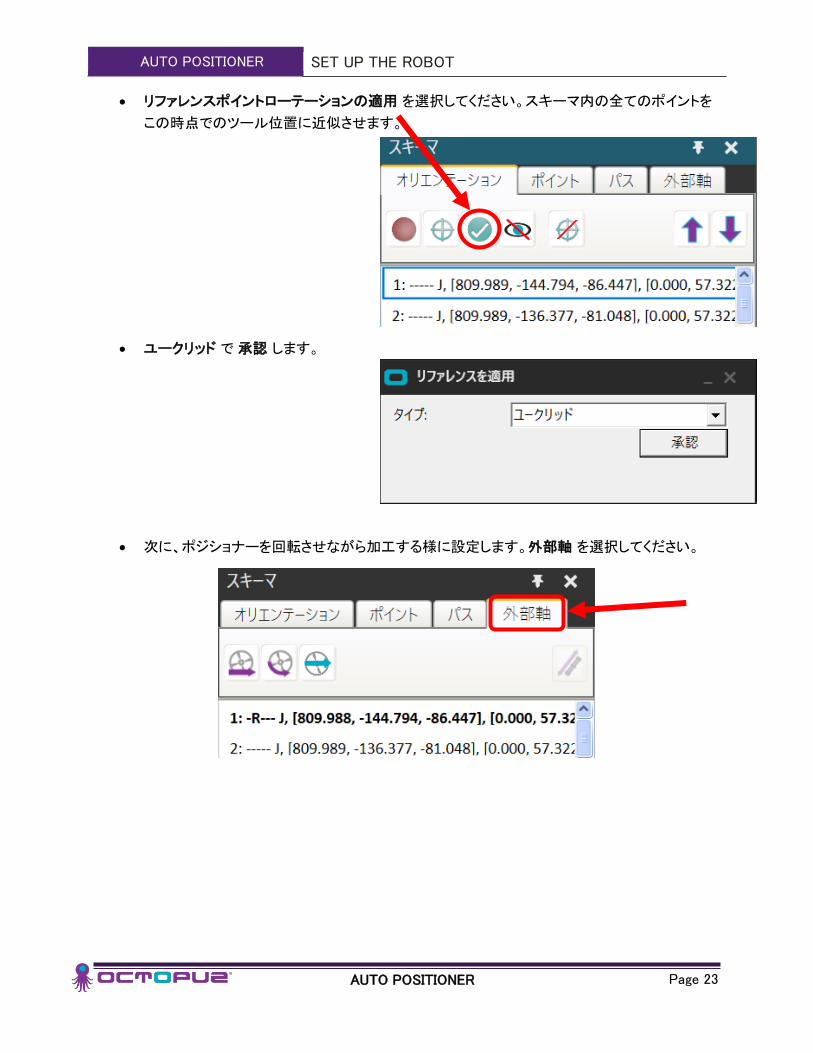
リファレンスポイントローテーションの適用 を選択してください。スキーマ内の全てのポイントを
この時点でのツール位置に近似させます。
ユークリッド で 承認 します。
次に、ポジショナーを回転させながら加工する様に設定します。外部軸 を選択してください。
SET UP THE ROBOT AUTO POSITIONER
AUTO POSITIONER Page 24
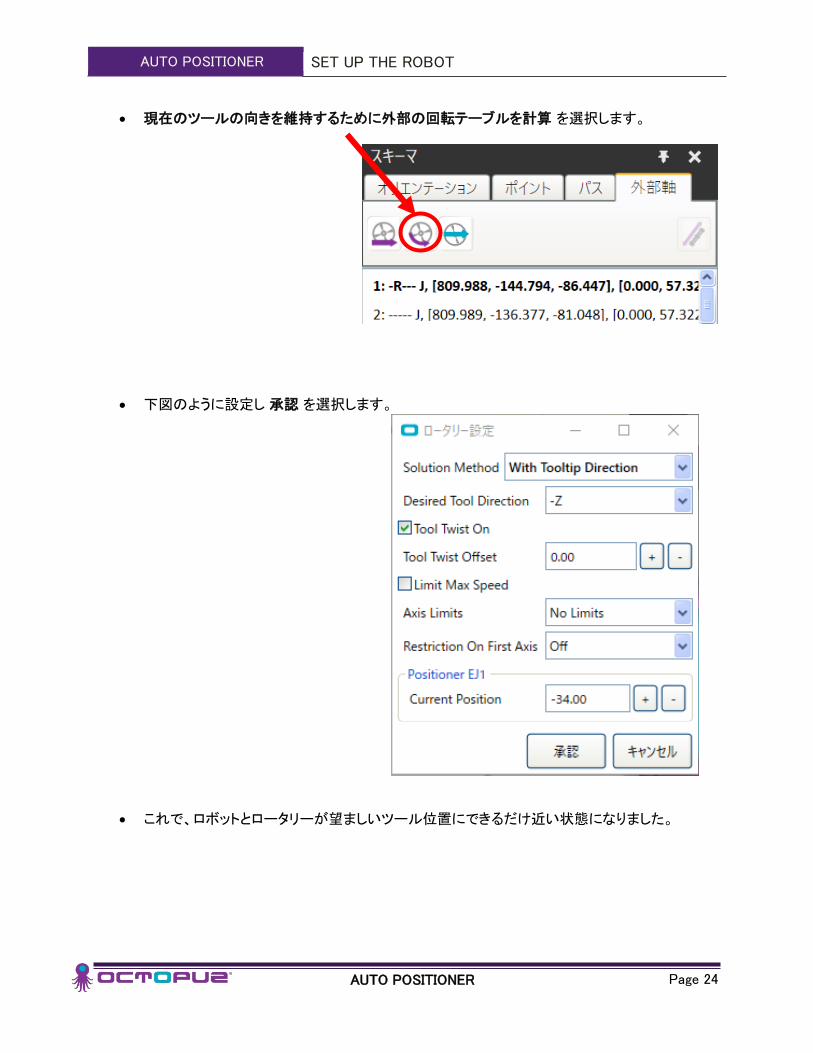
現在のツールの向きを維持するために外部の回転テーブルを計算 を選択します。
下図のように設定し 承認 を選択します。
これで、ロボットとロータリーが望ましいツール位置にできるだけ近い状態になりました。

SET UP THE ROBOT AUTO POSITIONER
AUTO POSITIONER Page 25
6.3 シミュレーションでテストする
シミュレーションコントローラ 上の リセット ボタンをクリックしてください。
再生 ボタンをクリックします。
ロボットはプログラム位置へと動作していきます。ワークポジショナーが円筒を回転し、ツールを
ツールパスと整列します。その後ワークが回転して、ロボットがその垂直方向にプログラムされた
位置を保つようにします。
もし、ロボットが特異点に達してしまう事がありましたら、下図のようにひねるようにすると、そ
れを解決する事ができます。このような場合も、 ジョグ を使用してZ軸で回転させてください。
CREATE AUTO POSITIONER AUTO POSITIONER
AUTO POSITIONER Page 26
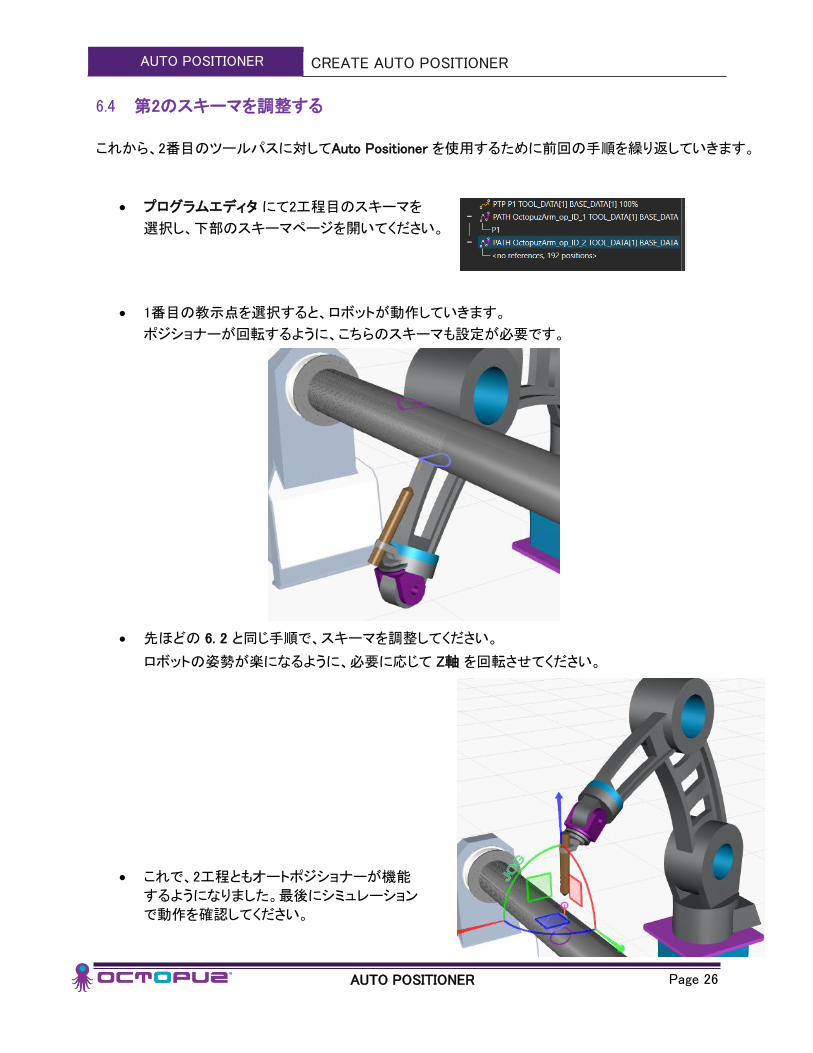
6.4 第2のスキーマを調整する
これから、2番目のツールパスに対してAuto Positioner を使用するために前回の手順を繰り返していきます。
プログラムエディタ にて2工程目のスキーマを
選択し、下部のスキーマページを開いてください。
1番目の教示点を選択すると、ロボットが動作していきます。
ポジショナーが回転するように、こちらのスキーマも設定が必要です。
先ほどの 6. 2 と同じ手順で、スキーマを調整してください。
ロボットの姿勢が楽になるように、必要に応じて Z軸 を回転させてください。
これで、2工程ともオートポジショナーが機能
するようになりました。最後にシミュレーション
で動作を確認してください。

CREATE AUTO POSITIONER AUTO POSITIONER
AUTO POSITIONER Page 27
MEMO
発行元:株式会社 ジェービーエム
〒578-0965 大阪府東大阪市本庄西2丁目6-23 TEL06-6744-7331 FAX06-6744-7431
URL:http://www.jbm.co.jp 2018年5月 ジェービーエム 発行
●本製品およびマニュアルの一部または全部の無断転記・無断複写は禁止されています。
●本プログラム・マニュアルの内容は事前の予告なしに変更することがございます。







