LA ARQUITECTURA Y SU RELACION CON LA MATEMATICAS
La Arquitectura pertenece al área de físico- matemáticas y desde ahí se percibe que las matemáticas son de gran uso en esta área. El objetivo principal de la Arquitectura es el construir las formas volumétricas que ordenan los espacios en que se desarrollan las funciones de la vida humana, y para ello, usa la geometría euclídea pero no a nivel funcional o constructivo, sino estético desde el minimalismo actual hasta las proporciones clásicas.Este tipo de geometría, propone una nueva relación de la arquitectura con otras geometrías. Se disertó sobre las matemáticas de geometrías distintas a la euclídea, llamándose geometría visual o proyectiva. Se propone también como parte de la geometría pre-euclídea, los cálculos abstractos, con números infinitos y sobre todo los “no dibujables”. La arquitectura se define como arte que se mueve o que debe moverse en la cualidad, la intuición, de la figuración y de la sensibilidad geométrica.
“Gracias a las Matemáticas el arquitecto tiene hoy día más libertad de diseño”
Las matemáticas tienen una gran aplicación directa en arquitectura. Porque antes de poner manos a la obra, el arquitecto tiene que comprobar que la estructura que quiere construir es realizable teniendo en cuenta la resistencia de los materiales que empleará, las cargas que tienen que soportar y quizás también el coste económico, parece que esta aplicación se reduce sólo a esto, al cálculo de estabilidades, de tensiones, etc., pero de ninguna forma al diseño del objeto arquitectónico mismo. Pensamos que con respecto a la creación artística, el arquitecto aparta de su mesa de trabajo las matemáticas y deja volar la imaginación en la búsqueda de la forma deseada, y no es exactamente así. Las matemáticas también pueden ayudar, si no en el mismo
momento mágico de creación artística, sí en el inmediatamente posterior. “Toda creación arquitectónica es geometría’’ es una máxima que se puede encontrar en los tratados de geometría descriptiva. Los arquitectos siempre aprovechan superficies de las que pueden calificarse de clásicas y las combinaban acertadamente. Y en nuestros días, también lo continúan haciendo.
Una de las superficies que más se han aplicado en arquitectura es la paraboloide hiperbólico. El paraboloide hiperbólico es un espécimen ya conocido por los griegos en donde las curvas cónicas (la elipse, la parábola y la hipérbole) son para la dimensión dos, en dimensión tres lo son las superficies cuádricas. Los nombres de estas superficies tienen que ver con las curvas que aparecen como secciones con planos. En el paraboloide hiperbólico, una de las superficies cuádricas, estas secciones son parábolas y hipérbolas. El mejor ejemplo se puede encontrar en el restaurante “Los Manantiales” (1958) del parque de Choximilco en la ciudad de México. El techo está formado por ocho paraboloides hiperbólicos. Las matemáticas a través de dimensiones y formas completan el diseño de un edificio y le confieren una belleza aceptada universalmente y Arquitectónicamente.
Las Matemáticas se encuentran presentes en las plantas y elementos decorativos de los edificios que nos rodean. Basta con situarnos delante de uno de ellos y contemplarlo con detenimiento, para observar que el orden que se refleja en su imagen arquitectónica está íntimamente relacionado con la inserción en el mismo de figuras geométricas, y con la existencia de relaciones entre los elementos de éstas, de forma que la composición arquitectónica está estrechamente ligada a las matemáticas, y a la geometría. Saber ver la arquitectura es, en cierto modo, descubrir en ella la
perfección que le confiere su diseño geométrico y su ordenamiento matemático.
LOGARITMOS
En matemáticas, el logaritmo de un número es el exponente al cual hay que elevar la base para obtener dicho número. Por ejemplo, el logaritmo de 1000 en base 10 es 3, porque 1000 es igual a 10 a la potencia 3: 1000 = 103 = 10×10×10.
De la misma manera que la operación opuesta de la suma es la resta y la de la multiplicación la división, el cálculo de logaritmos es la operación inversa a la exponenciación de la base del logaritmo.
Para representar la operación de logaritmo en una determinada base se escribe la abreviatura log y como subíndice la base y después el número
resultante del que deseamos hallar el logaritmo. Por ejemplo, 35=243 luego log3243=5. Cuando se sobreentiende la base, se puede omitir.
Los logaritmos fueron introducidos por John Napier a principios del siglo XVII como un medio de simplificación de los cálculos. Estos fueron prontamente adoptados por científicos, ingenieros, banqueros y otros para realizar operaciones fácil y rápidamente, usando reglas de cálculo y tablas de logaritmos. Estos dispositivos se basan en el hecho más importante — por identidades logarítmicas — que el logaritmo de un producto es la suma de los logaritmos de los factores:
La noción actual de los logaritmos viene de Leonhard Euler, quien conectó estos con la función exponencial en el siglo XVIII.
Definición:
Dado un número real (argumento x), la función logaritmo le asigna el exponente n (o potencia) a la que un número fijo b (base) se ha de elevar para obtener dicho argumento. Es la función inversa de b a la potencia n. Esta función se escribe como: n = logb x, lo que permite obtener n.1
(esto se lee como: logaritmo en base b de x es igual a n; si y sólo si b elevado a la n da por resultado a x)
Para que la definición sea válida, no todas las bases y números son posibles. La base b tiene que ser positiva y distinta de 1, luego b> 0 y b ≠ 1, x tiene que ser un número positivo x > 0 y n puede ser cualquier número real (n ∈ R).2
Así, en la expresión 102 = 100, el logaritmo de 100 en base 10 es 2, y se escribe como log10 100 = 2.
Propiedades generales:

Los logaritmos, independientemente de la base elegida, cumplen una serie de propiedades comunes que los caracterizan. Así, logaritmo de su base es siempre 1; logb b = 1 ya que b1 = b. El logaritmo de 1 es cero (independientemente de la base); logb 1=0 ya que b0 = 1.
Si el número real a se encuentra dentro del intervalo 0 < a < 1 entonces logb a da un valor negativo o se dice que es un logaritmo negativo. Es evidente, ya que si logaritmo de 1 es cero, entonces valores reales menores que uno serán negativos por ser la función logarítmica estrictamente creciente y cuyo recorrido es (-∞, +∞). También se puede demostrar usando la identidad logarítmica logb(x/y)=logb x - logb y; puesto que a pertenece al intervalo 0 < a < 1, su inverso a-1 será mayor que uno, con lo que logb(a)=logb(1/a-1) = logb 1 - logb(a-1)= -logb(a-1).
Los números negativos no tienen logaritmo en el cuerpo de los reales R, ya que cualquiera que sea el exponente n, se tendrá siempre que bn será mayor que cero, bn > 0; en consecuencia, no hay ningún valor real de n que pueda satisfacer bn = x cuando x sea menor que 0. Sin embargo, este obstáculo se puede salvar, ampliando el dominio de definición al cuerpo de los números complejos C, pudiendo calcular logaritmos de números negativos usando el logaritmo complejo o recurriendo a la fórmula de Euler.
Las potencias consecutivas de una base forman una progresión geométrica y la de los exponentes una progresión aritmética. Por ejemplo, las potencias de 2 son 1,2,4,8,16,32,64...etc y sus exponentes serán 0, 1, 2, 3, 4... etc ya que 20 = 1, 21 = 2, 22 = 4, 23 = 8, y 24 = 16 etc. luego log2 1 = 0, log2 2 = 1, log2 4 = 2, log2 8 = 3 y log2 16 = 4 etc.
Identidades logarítmicas:
Los logaritmos mantienen ciertas identidades aritméticas muy útiles a la hora de realizar cálculos:
••
• El logaritmo de un producto es igual a la suma de los logaritmos de los factores.
•• El logaritmo de un cociente es igual al logaritmo del numerador menos
el logaritmo del denominador.
•• El logaritmo de una potencia es igual al producto entre el exponente y el
logaritmo de la base de la potencia.
•• El logaritmo de una raíz es igual al producto entre la inversa del índice y
el logaritmo del radicando.
En realidad la tercera y cuarta identidad son equivalentes, sin más que hacer:
Elección y cambio de base:
Entre los logaritmos más utilizados se encuentra el logaritmo natural, cuya base es e, base 10 (logaritmo común), base 2 (logaritmo binario), o en base indefinida (logaritmo indefinido). La elección de un determinado número como base de los logaritmos no es crucial, ya que todos son proporcionales entre sí. Es útil la siguiente fórmula que define al
logaritmo de x en base b (suponiendo que b, x, y k son números reales positivos y que tanto b como k son diferentes de 1):
en la que k es cualquier base válida. Si hacemos k=x, obtendremos:
El logaritmo más ampliamente utilizado es el natural, ya que tiene multitud de aplicaciones en física, matemáticas, ingeniería y en ciencias en general. También es bastante utilizado el logaritmo decimal, que se
indica como , en ciencias que hacen uso de las matemáticas, como la química en la medida de la acidez (denominada pH) y en física en magnitudes como la medida de la luminosidad (candela), de intensidad de sonido (dB), de la energía de un terremoto (escala sismológica de Richter), etc. En informática se usa el logaritmo en base 2 la mayoría de veces.
Función logarítmica:
Para justificar la definición de logaritmos, es necesario mostrar que la ecuación exponencial
tiene una solución x y que esta solución es única, provista de que y es positivo y que b es positivo y distinto de 1. Una demostración de este hecho requiere del teorema del valor intermedio del cálculo elemental.3 Este teorema establece que una función continua que produce dos valores m y n también produce cualquier valor que se encuentre entre m y n. Una
función es continua si esta no «salta», esto es, si su gráfico puede ser escrito sin levantar el lápiz del papel.
Esta propiedad se puede demostrar que se cumple para la función f(x) = bx. Puesto que f toma arbitrariamente valores grandes positivos y valores pequeños positivos, cualquier número y > 0 que se encuentra entre f(x0) y f(x1) para un adecuado x0 y x1. Por lo tanto, el teorema del valor intermedio asegura que la ecuación f(x) = y tiene una solución. Más aún, hay únicamente una solución para esta ecuación, puesto que la función f es estrictamente creciente (para b > 1), o estrictamente decreciente (para 0 < b < 1).4
La única solución x es el logaritmo de y en la base b, logb(y). La función que asigna a cada y su logaritmo se llama función logaritmo o función
logarítmica (o logaritmo a secas).
Aplicaciones de los logaritmos:
Las aplicaciones comunes de los logaritmos incluyen:
• El Uso De Logaritmo En la Tasa De Crecimiento :
Un ejemplo de uso de los logaritmos es por ejemplo, si conoces la tasa de crecimiento promedio de una población, y quieres saber cuántos años tardará en llegar a cierta cantidad (por ejemplo duplicarse) necesitas el logaritmo. Para que entiendas este ejemplo, dada una población (base) y otra cantidad a la que hay que llegar (potencia), cuántas veces hay que aplicar la tasa de crecimiento (exponente) para llegar a esa cantidad; lo que necesitas obtener es el exponente, por lo que usas logaritmos.

Una curiosidad de aplicaciones de logaritmos en la vida real es la siguiente, en el testamento de Benjamin Franklin, famoso científico, éste donaba 1.000 libras a los habitantes de Boston, a condición de que se prestasen al 5% a artesanos jóvenes. Según Franklin, al cabo de 100 años, se habrían convertido en 131.000 libras. Comprobemos si esto es cierto:
El capital final al cabo de esos 100 años será x = 1.000 · 1,05100. Para calcular esa enorme potencia usaremos los logaritmos:
x = 1.000 · 1,05100; log x = log 1.000 + 100 · log 1,05
log x = 3 + 100 · 0,0212 = 5,12; x = 105,12 = 131.825,67 libras
Otro beneficio de los logaritmos es en el campo de la química, ya que nos permite ahorrarnos el engorro de usar comas en números pequeños y a la

vez nos podemos evitar poner numerosos ceros en los números grandes. Otro logaritmo muy famoso en el mundo de la química es el logaritmo de pH, que se utiliza para calcular el nivel de acidez a de determinados productos. El logaritmo es el siguiente:
• Uso Logaritmo En La Antropología :
Pero no crean que se trata de un asunto sólo de las ciencias. Los historiadores también lo usan cuando datan la antigüedad de los restos orgánicos por el método del C14. La datación por Carbono-14 es un procedimiento para determinar la edad de ciertos objetos arqueológicos que tengan un origen biológico con una antigüedad de hasta cerca de 60.000 años. Se utiliza para fechar cosas tales como: huesos, madera, fibras vegetales que fueron creadas en un pasado relativamente reciente por actividades humanas
El carbono-14 es radioactivo, siendo su “período de semidesintegración” de 5760 años(es decir, a los 5760 años de la muerte de un ser vivo la cantidad deC-14 en sus restos fósiles se reduce a la mitad).
En cuanto los organismos vegetales o animales mueren, cesa el intercambio con la atmósfera y cesa el reemplazo de carbono de sus tejidos. Desde ese momento el porcentaje de C-14 de la materia orgánica
muerta comienza a disminuir, ya que se transmuta en N-14 y no es reemplazado.
La masa de C-14 de cualquier fósil disminuye a un ritmo exponencial que es conocido. Se sabe que a los 5760 años de la muerte de un ser vivo la cantidad de C-14 en sus restos fósiles se ha reducido a la mitad y que a los 57600 años es de tan solo el 0,01% del que tenía cuando estaba vivo.
( Otros autores consideran este periodo de 5730 años con un error de más menos 40 años. En Paleontología un error de este calibre se considera mínimo)
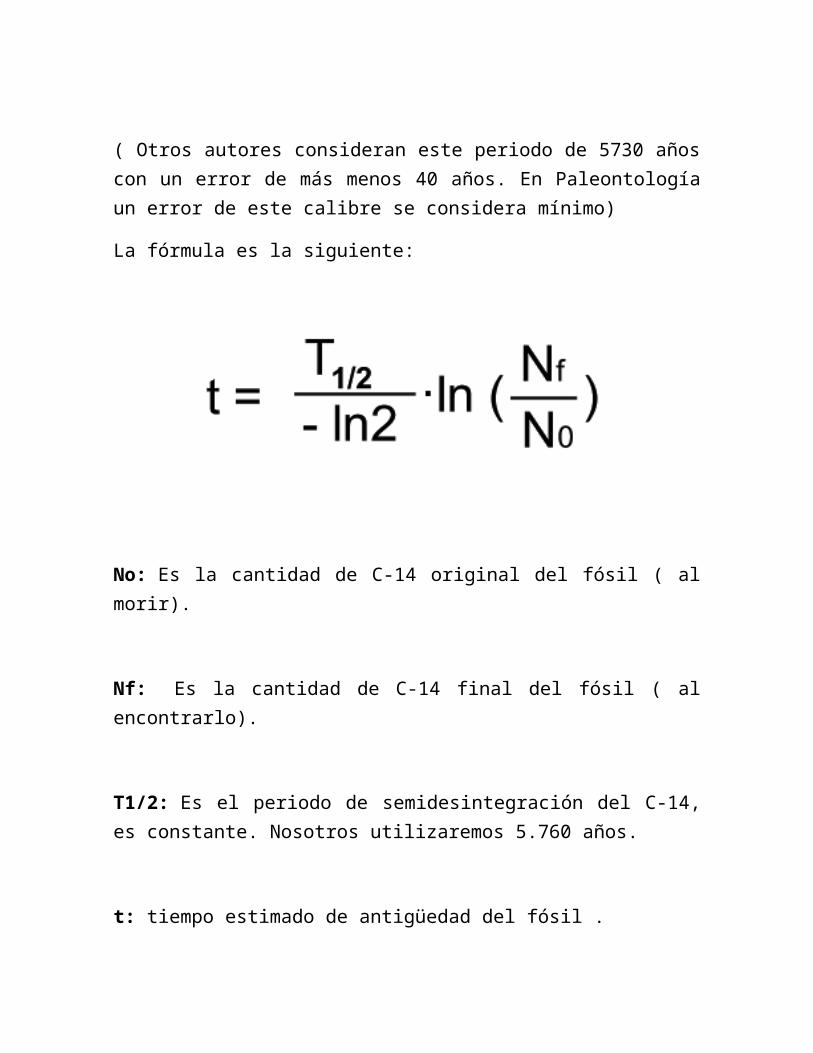
La fórmula es la siguiente:
No: Es la cantidad de C-14 original del fósil ( al morir).
Nf: Es la cantidad de C-14 final del fósil ( al encontrarlo).
T1/2: Es el periodo de semidesintegración del C-14, es constante.

Nosotros utilizaremos 5.760 años.
t: tiempo estimado de antigüedad del fósil .
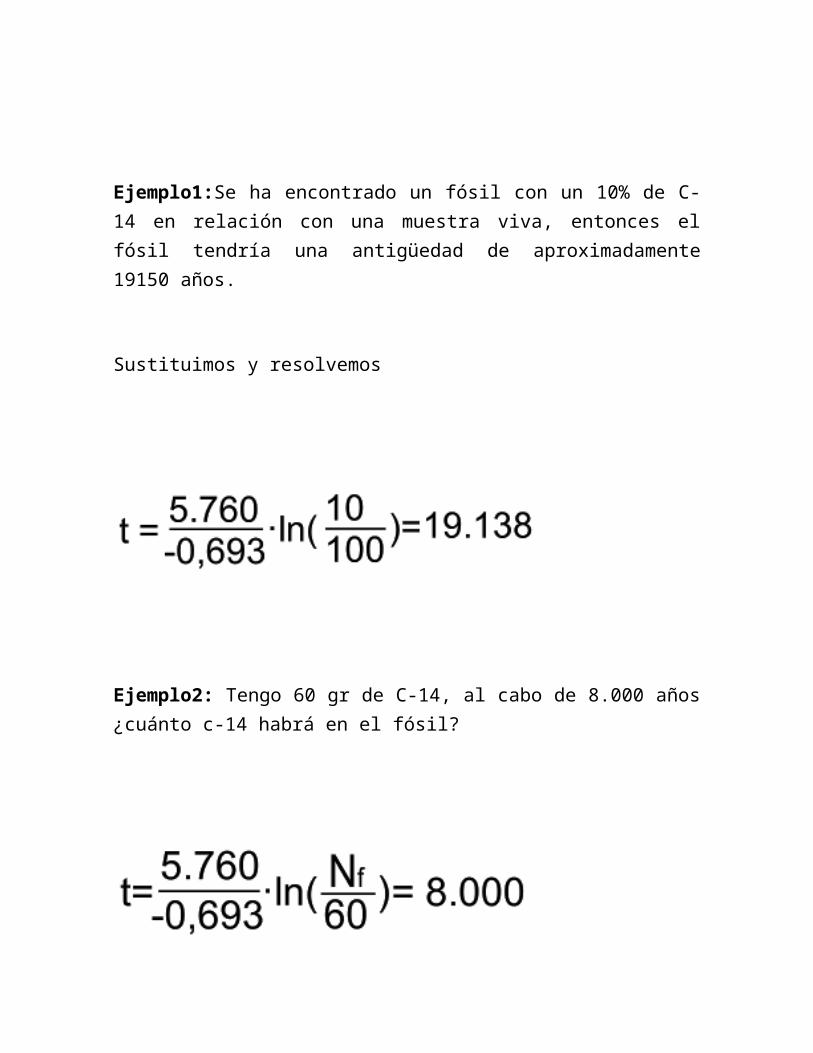
Ejemplo1:Se ha encontrado un fósil con un 10% de C-14 en relación con una muestra viva, entonces el fósil tendría una antigüedad de aproximadamente 19150 años.
Sustituimos y resolvemos
Ejemplo2: Tengo 60 gr de C-14, al cabo de 8.000 años ¿cuánto c-14 habrá en el fósil?
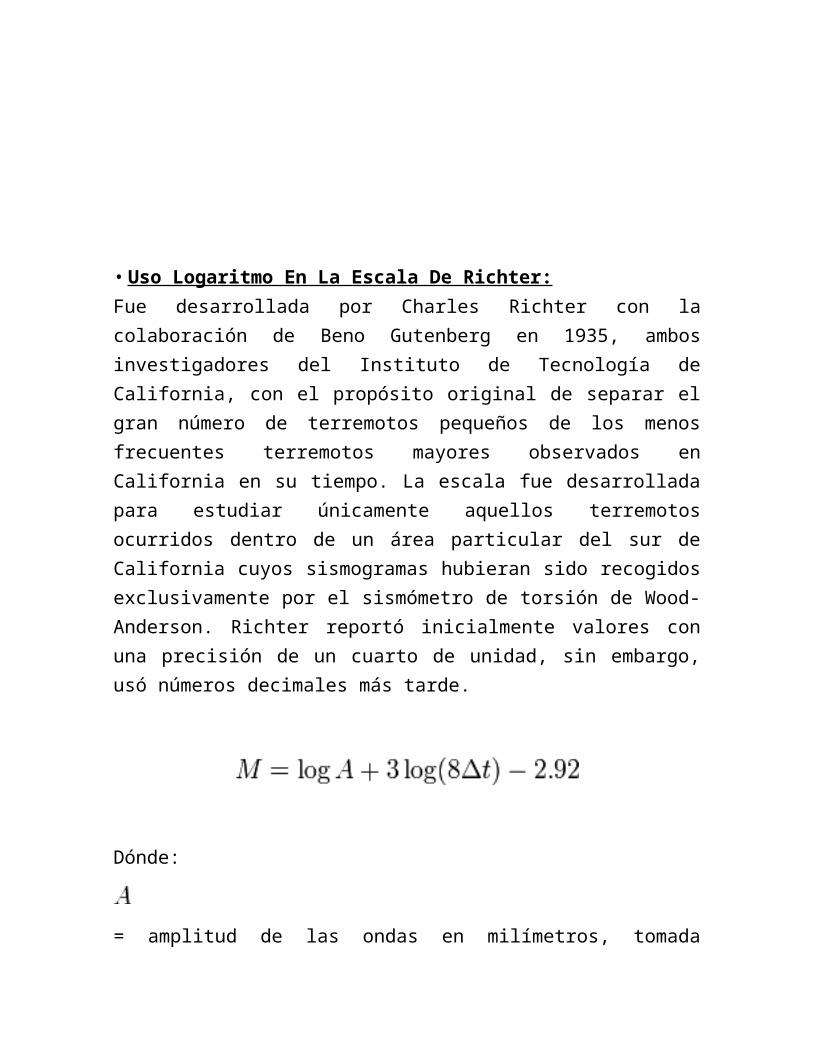
• Uso Logaritmo En La Escala De Richter: Fue desarrollada por Charles Richter con la colaboración de Beno Gutenberg en 1935, ambos investigadores del Instituto de Tecnología de California, con el propósito original de separar el gran número de terremotos pequeños de los menos frecuentes terremotos mayores observados en California en su tiempo. La escala fue desarrollada para estudiar únicamente aquellos terremotos ocurridos dentro de un área particular del sur de California cuyos sismogramas hubieran sido recogidos exclusivamente por el sismómetro de torsión de Wood-Anderson. Richter reportó inicialmente valores con una precisión de un cuarto de unidad, sin embargo, usó números decimales más tarde.
Dónde:
= amplitud de las ondas en milímetros, tomada directamente en el sismograma.

= tiempo en segundos desde el inicio de las ondas P (Primarias) al de las ondas S (Secundarias).
= magnitud arbitraria pero constante a terremotos que liberan la misma cantidad de energía.
El uso del logaritmo en la escala es para reflejar la energía que se desprende en un terremoto. El logaritmo incorporado a la escala hace que los valores asignados a cada nivel aumenten de forma logarítmica, y no de forma lineal. Richter tomó la idea del uso de logaritmos en la escala de magnitud estelar, usada en la astronomía para describir el brillo de las estrellas y de otros objetos celestes. Richter arbitrariamente escogió un temblor de magnitud 0 para describir un terremoto que produciría un desplazamiento horizontal máximo de 1 m en un sismograma trazadoμ por un sismómetro de torsión Wood-Anderson localizado a 100 km de distancia del epicentro. Esta decisión tuvo la intención de prevenir la asignación de magnitudes negativas. Sin embargo, la escala de Richter no tenía límite máximo o mínimo, y actualmente habiendo sismógrafos modernos más sensibles, éstos comúnmente detectan movimientos con magnitudes negativas.
Debido a las limitaciones del sismómetro de torsión Wood-Anderson usado para desarrollar la escala, la magnitud original ML no puede ser calculada para temblores mayores a 6,8. Varios investigadores propusieron extensiones a la escala de magnitud local, siendo las más populares la magnitud de ondas superficiales MS y la magnitud de las ondas de cuerpo Mb.
• Uso Logaritmo En El Peso Animal:
TRIGONOMETRIA
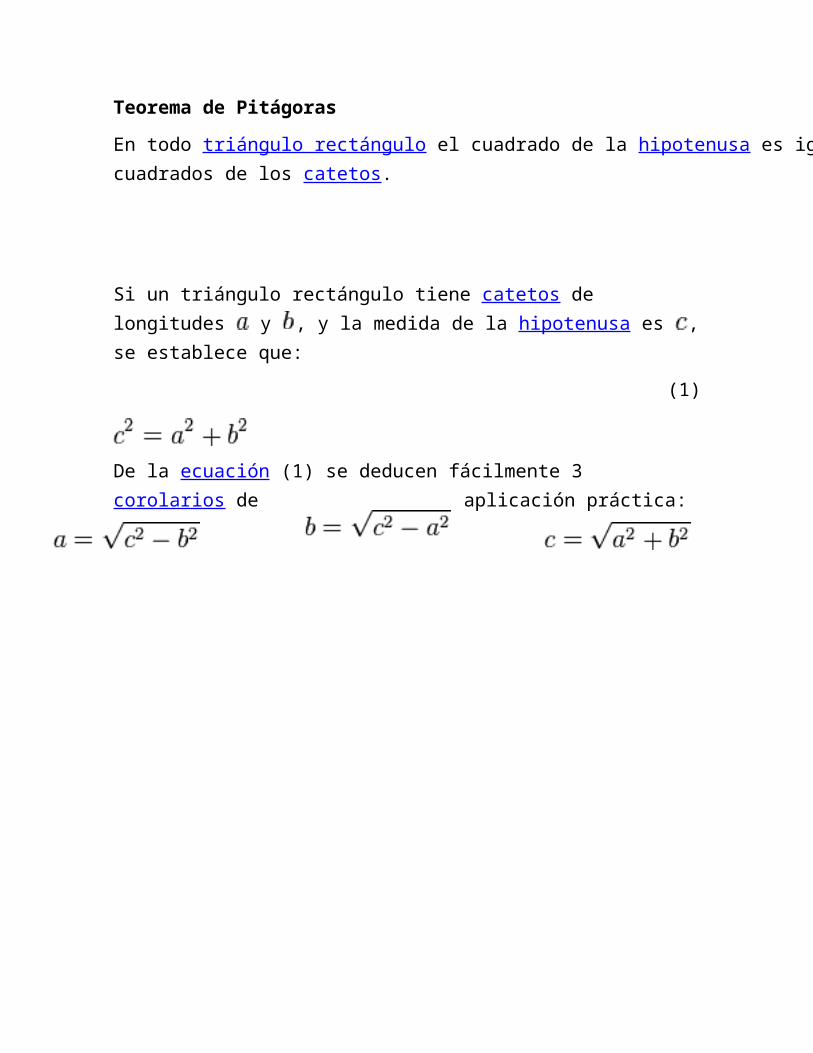
Teorema de Pitágoras
El teorema de Pitágoras establece que en todo triángulo rectángulo, el cuadrado de la hipotenusa ("el lado de mayor longitud del triángulo rectángulo") es igual a la suma de los cuadrados de los catetos (los dos lados menores del triángulo, los que conforman el ángulo recto).
Teorema de Pitágoras
En todo triángulo rectángulo el cuadrado de la hipotenusa es igual a la suma de los cuadrados de los

Si un triángulo rectángulo tiene catetos de longitudes y , y la medida de la hipotenusa es , se establece que:
(1)
De la ecuación (1) se deducen fácilmente 3 corolarios de aplicación práctica:


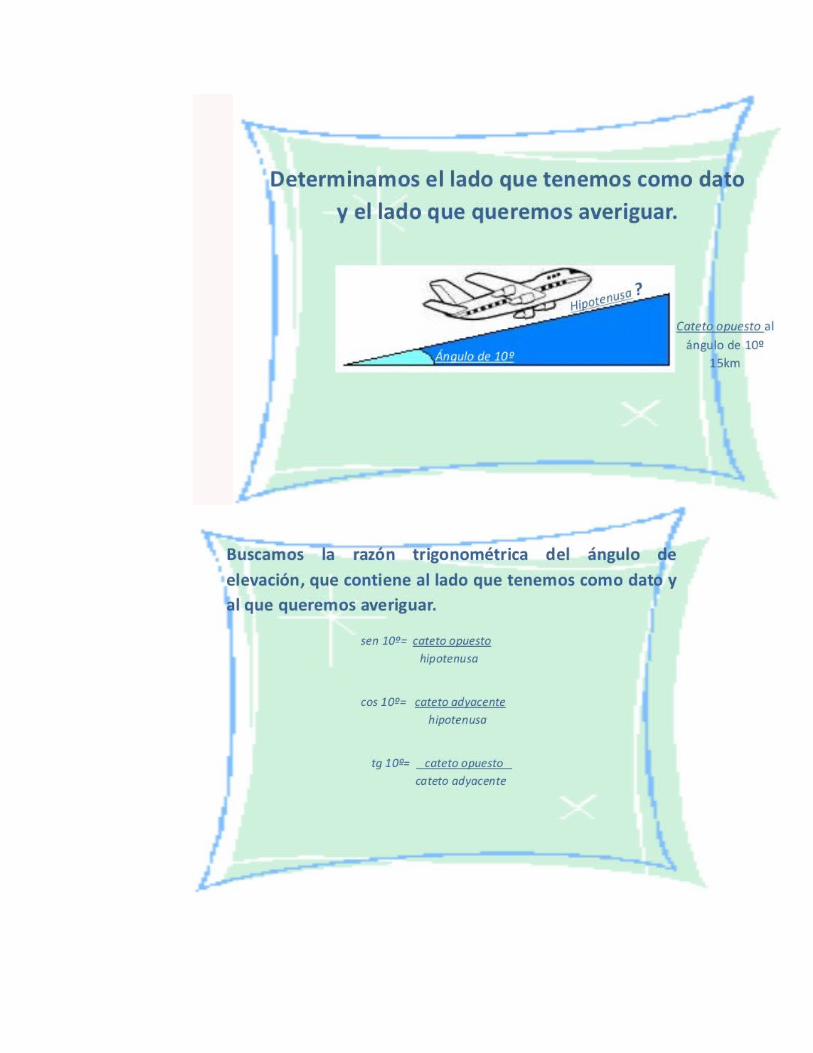
Razones trigonométricas
Razones trigonométricas en un triángulo rectángulo
Seno
El seno del ángulo B
es la razón entre el cateto opuesto al ángulo y la
hipotenusa .
Se denota por sen B .
Coseno
El coseno del ángulo B es la razón entre el cateto contiguo al ángulo y la hipotenusa .

Se denota por cos B .
Tangente
La tangente del ángulo B es la razón entre el cateto opuesto al ángulo y el cateto contiguo al ángulo .
Se denota por tg B .
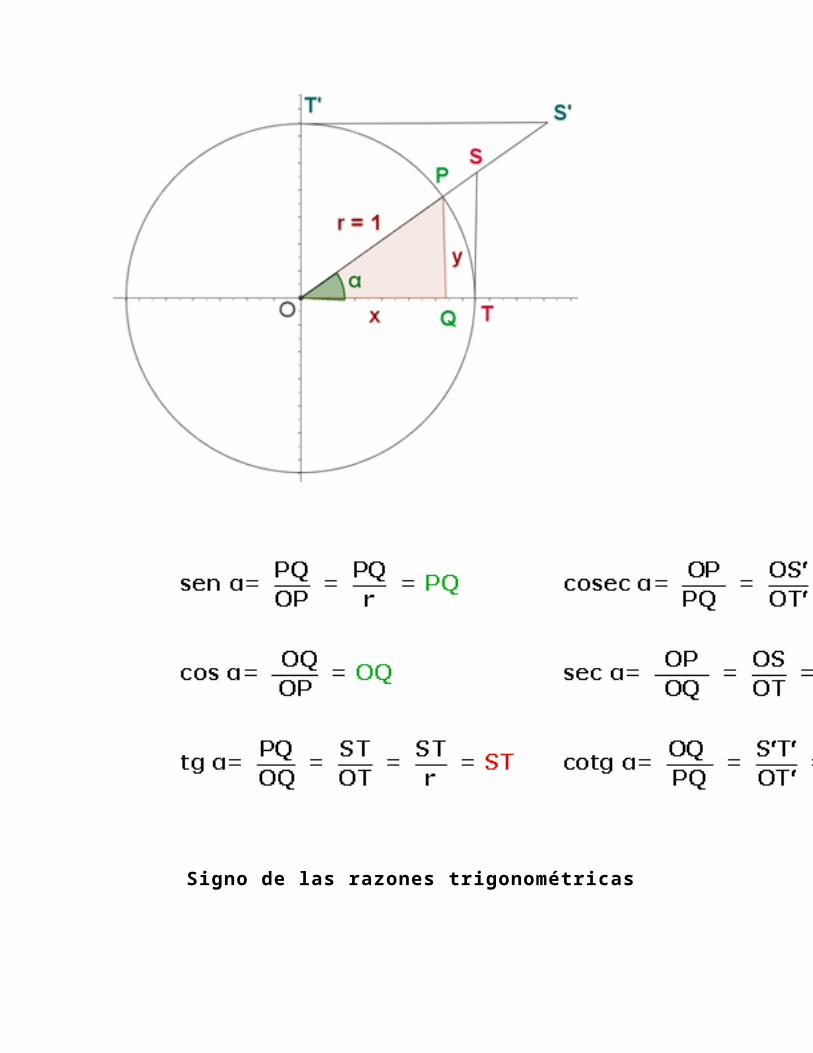
Razones trigonométricas en una circunferencia
Se llama circunferencia goniométrica a aquélla que tiene su centro en el origen de coordenadas y su radio es la unidad .
En la circunferencia goniométrica los ejes de coordenadas delimitan cuatro cuadrantes que se numeran en sentido contrario a las agujas del reloj.
QOP y TOS son triángulos semejantes.
QOP y T'OS′ son triángulos semejantes.

El seno es la ordenada.
El coseno es la abscisa.
-1 ≤ sen ≤ 1α
-1 ≤ cos ≤ 1α
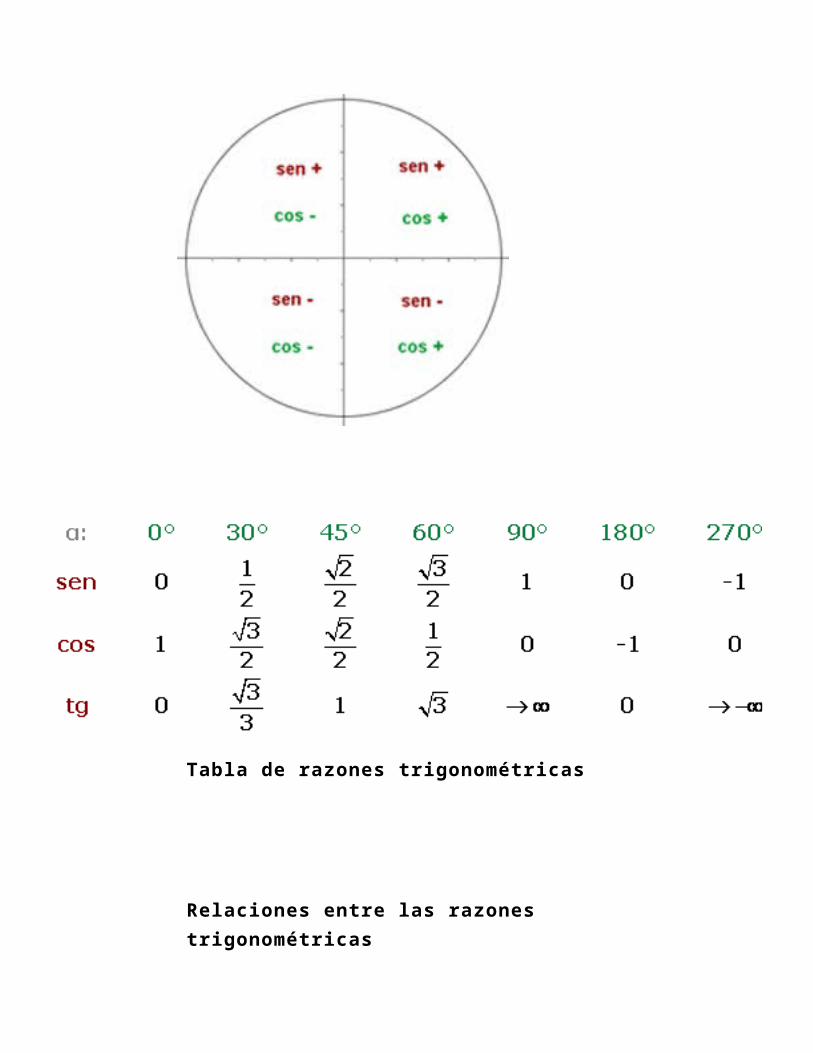
Signo de las razones trigonométricas
Tabla de razones trigonométricas
Relaciones entre las razones trigonométricas
cos² + sen² = 1α α
sec² = 1 + tg² α α
cosec² = 1 + cotg² α α
Relaciones entre las razones trigonométricas de algunos ángulos
Ángulos complementarios
Ángulos suplementarios
Ángulos que difieren en 180°

Ángulos opuestos
Ángulos negativos
Mayores de 360º

Ángulos que difieren en 90º
Ángulos que suman en 270º
Ángulos que difieren en 270º

Razones trigonométricas de la suma y diferencia de ángulos
Razones trigonométricas del ángulo doble
Razones trigonométricas del ángulo mitad
Transformaciones de sumas en productos
Transformaciones de productos en sumas
Razones trigonométricas de la suma y
diferencia de ángulos
Razones trigonométricas del ángulo
doble
Razones trigonométricas del ángulo
mitad
Transformaciones de sumas en
productos

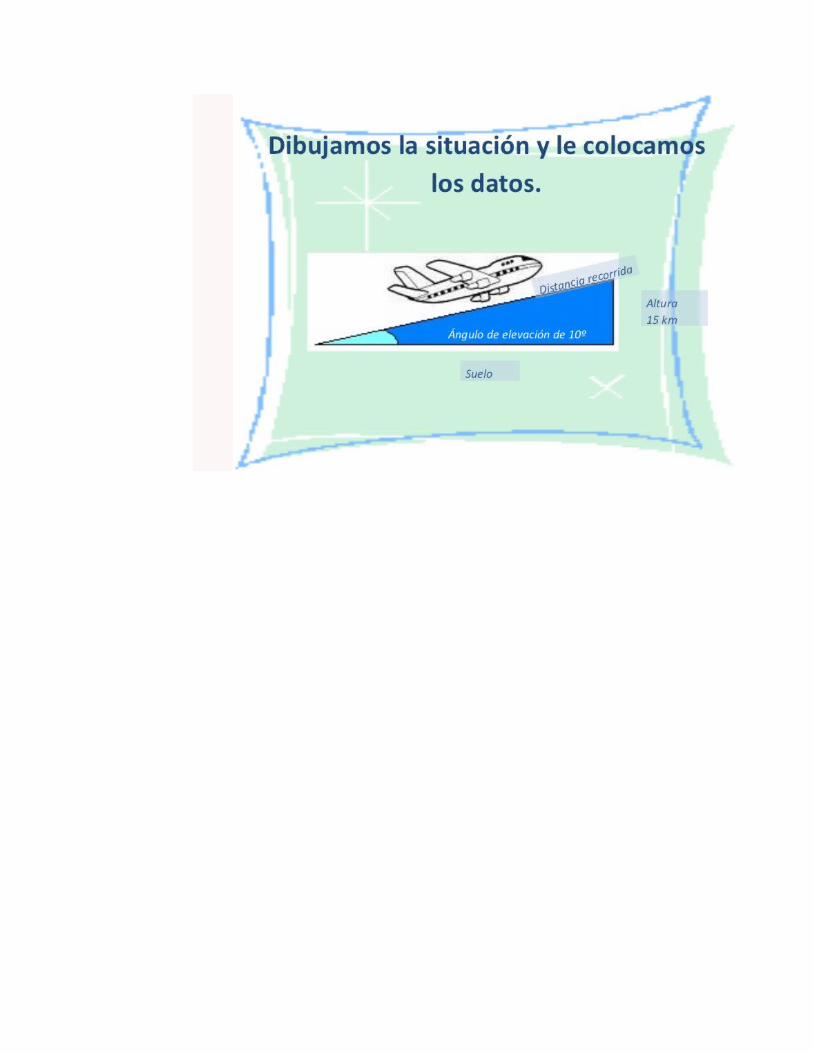
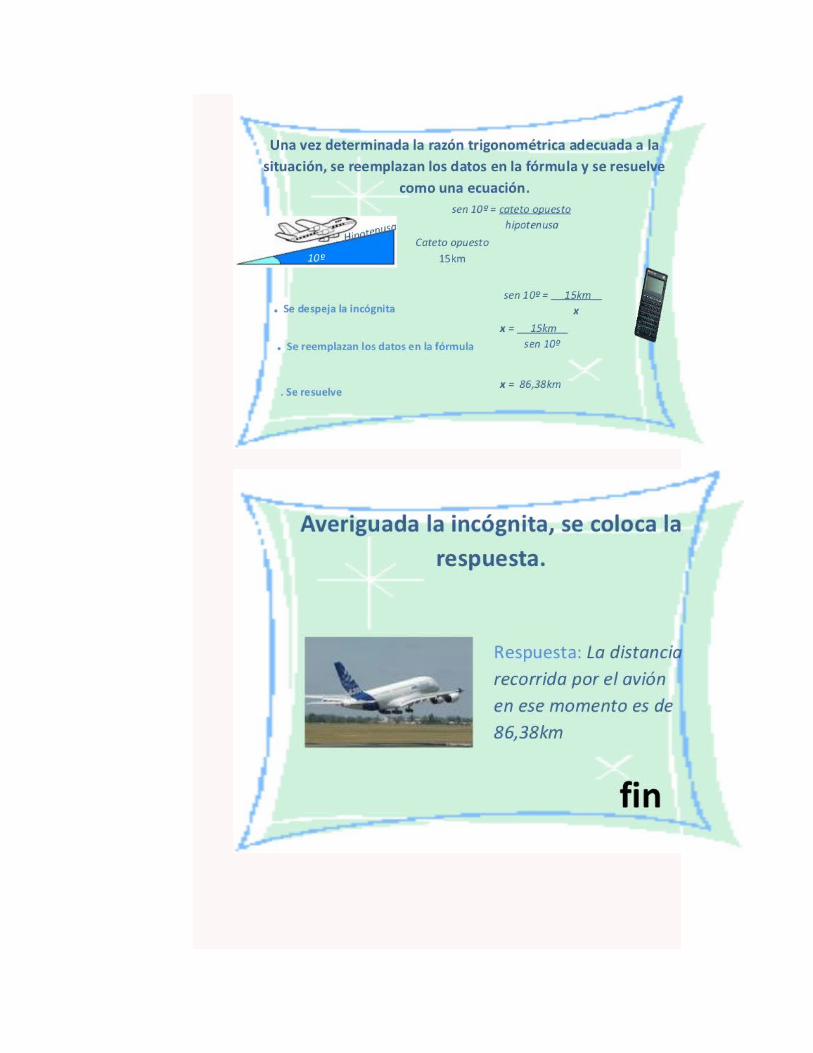
Aplicaciones de la Trigonometría
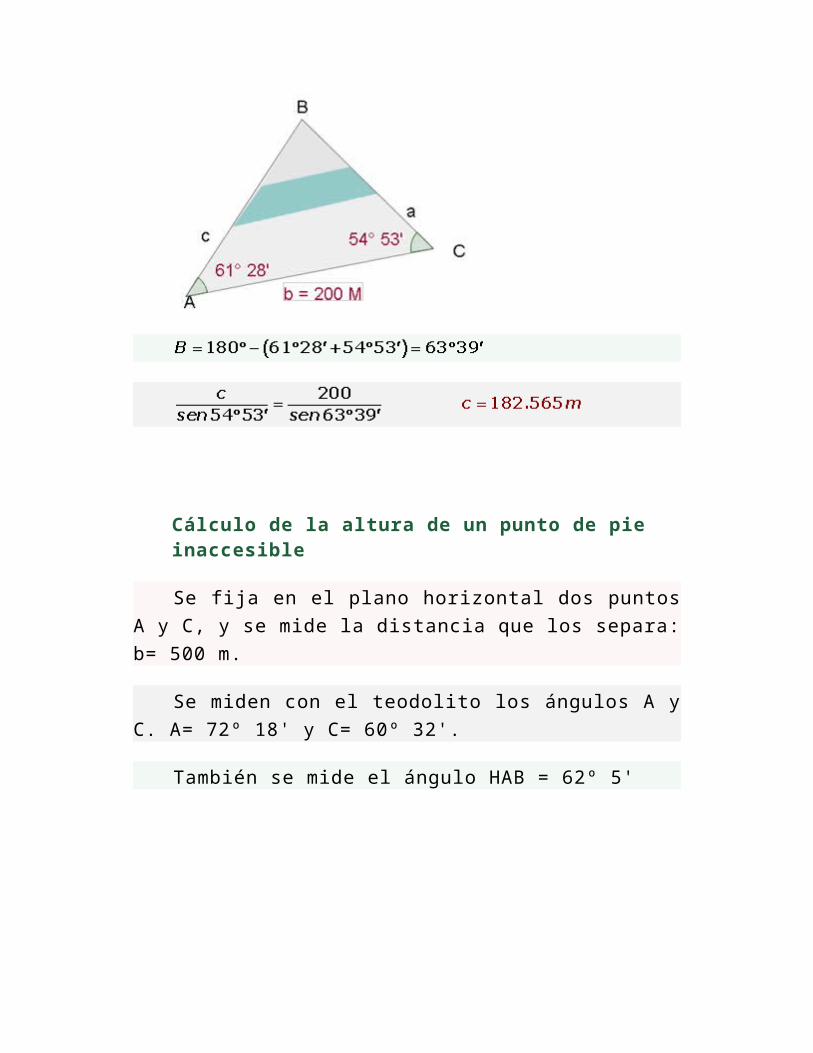
Cálculo de la distancia entre dos puntos, uno de los cuales es inaccesibleSe fija en el plano horizontal dos puntos A y C, y
se mide la distancia que los separa: b= 200 m.
Se miden con el teodolito los ángulos A y C. A=
61º 28' y C= 54º 53'.

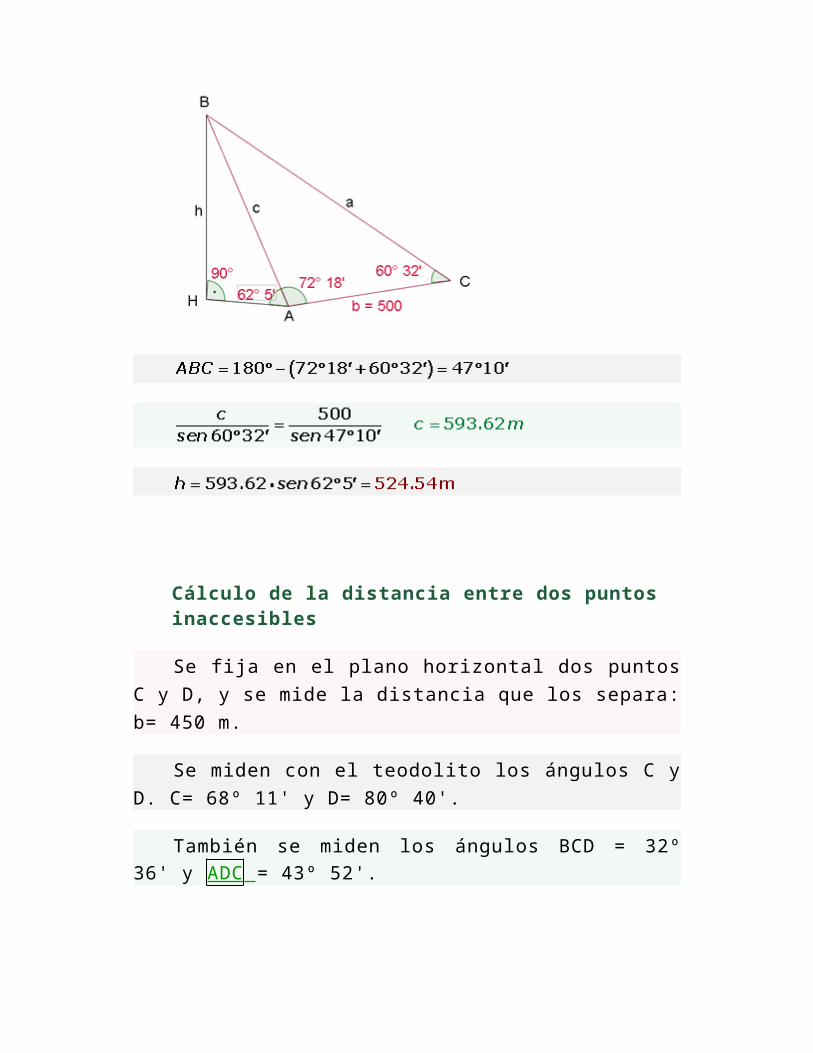
Cálculo de la altura de un punto de pie inaccesible
Se fija en el plano horizontal dos puntos A y C, y
se mide la distancia que los separa: b= 500 m.
Se miden con el teodolito los ángulos A y C. A=
72º 18' y C= 60º 32'.
También se mide el ángulo HAB = 62º 5'

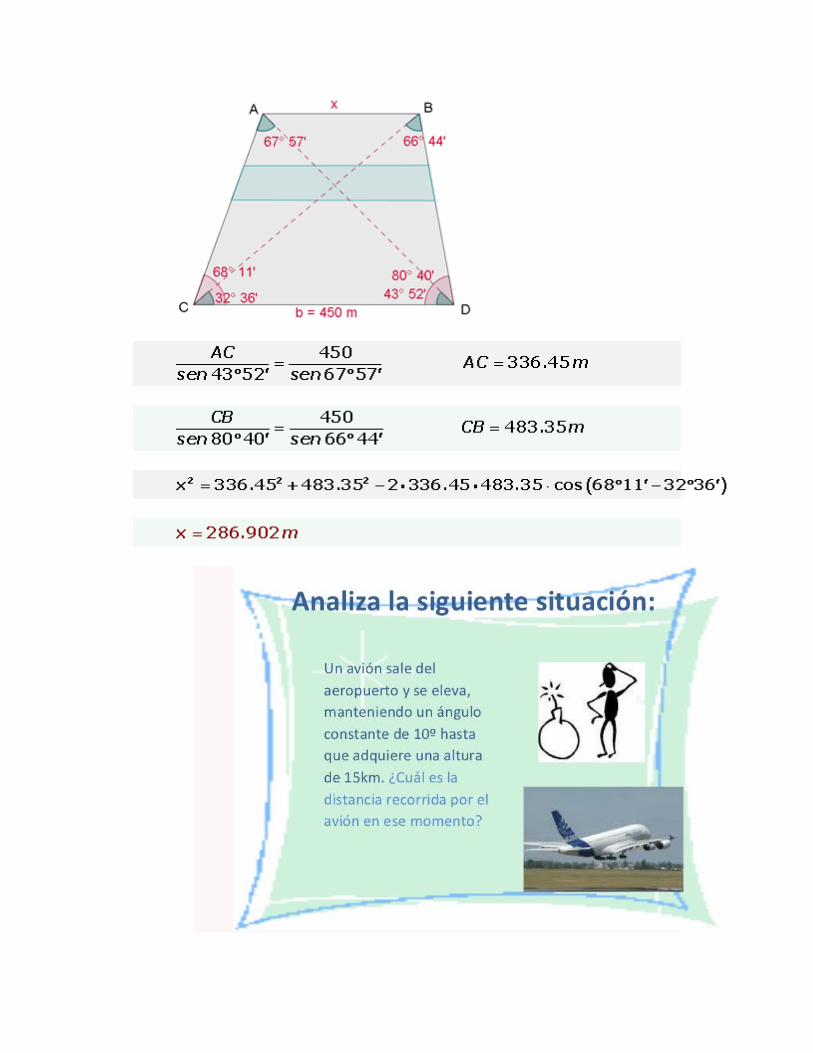
Cálculo de la distancia entre dos puntos inaccesibles
Se fija en el plano horizontal dos puntos C y D, y
se mide la distancia que los separa: b= 450 m.
Se miden con el teodolito los ángulos C y D. C=
68º 11' y D= 80º 40'.
También se miden los ángulos BCD = 32º 36' y ADC = 43º 52'.




Conversión de medidas de ángulos
Un radián se define como la medida de un ángulo central cuyos lados cortan un arco de igual longitud al radio del círculo. Ya que la longitud de este arco es igual a un radio del círculo, se dice que la medida de este ángulo es un radián y equivale a 57.296º.
Como puedes observar, en 360° caben exactamente:
6 radianes completos + 0.283 de radian, es decir: 6.283 radianes:
El uso de radianes en vez de grados ayuda a simplificar muchas fórmulas trigonométricas.
1) Para convertir de grados a radianes, se multiplica por y se divide entre 180º; y se simplifica. Es decir:
2) Para convertir de radianes a grados, se multiplica por 180º y se divide entre ; y se simplifica. Es decir:
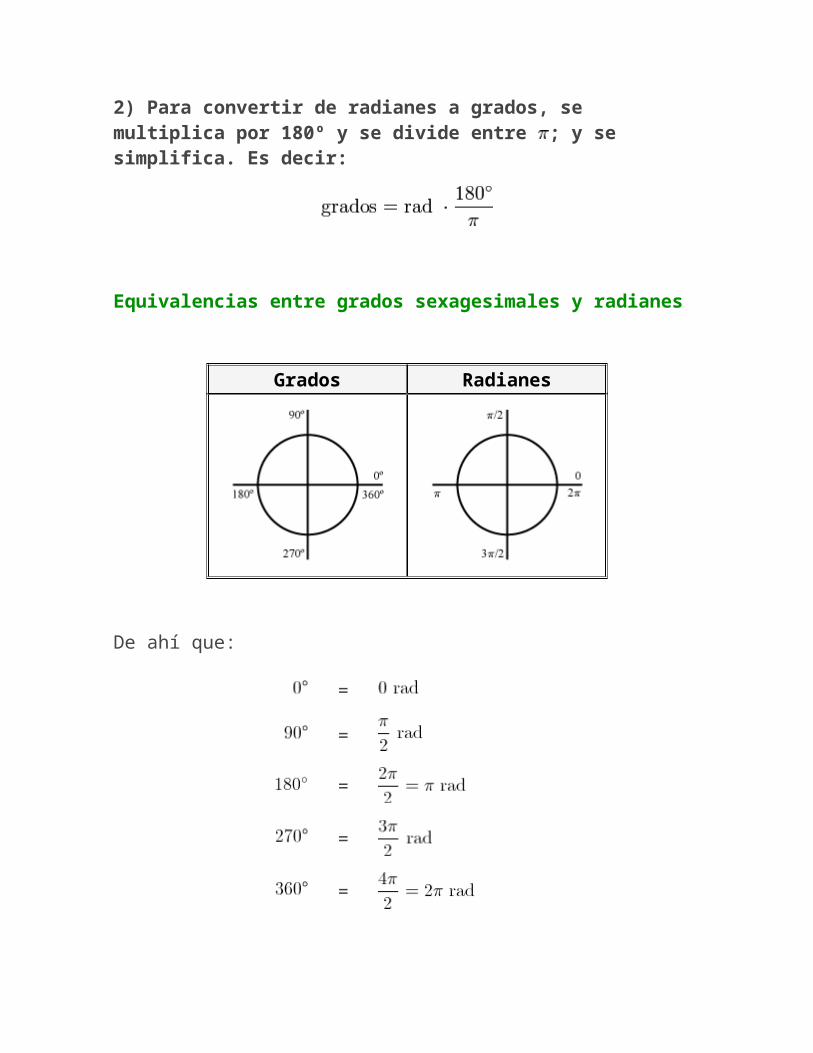
Equivalencias entre grados sexagesimales y radianes
Grados Radianes
De ahí que:
=
=
=
=
=
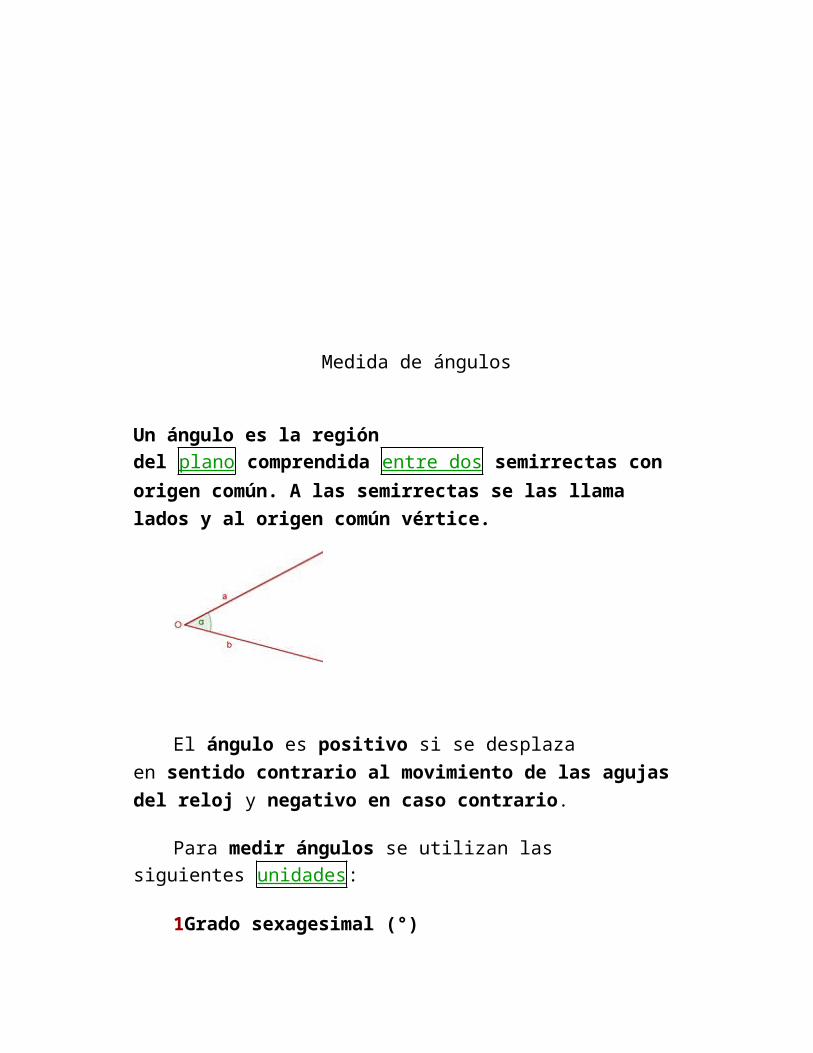
Medida de ángulos
Un ángulo es la región del plano comprendida entre dos semirrectas
con origen común. A las semirrectas se las llama lados y al origen
común vértice.
El ángulo es positivo si se desplaza en sentido contrario al
movimiento de las agujas del reloj y negativo en caso contrario.
Para medir ángulos se utilizan las siguientes unidades:
1Grado sexagesimal (°)
Si se divide la circunferencia en 360 partes iguales, el ángulo
central correspondiente a cada una de sus partes es un ángulo de un
grado (1°) sexagesimal.
Un grado tiene 60 minutos (') y un minuto tiene 60 segundos ('').
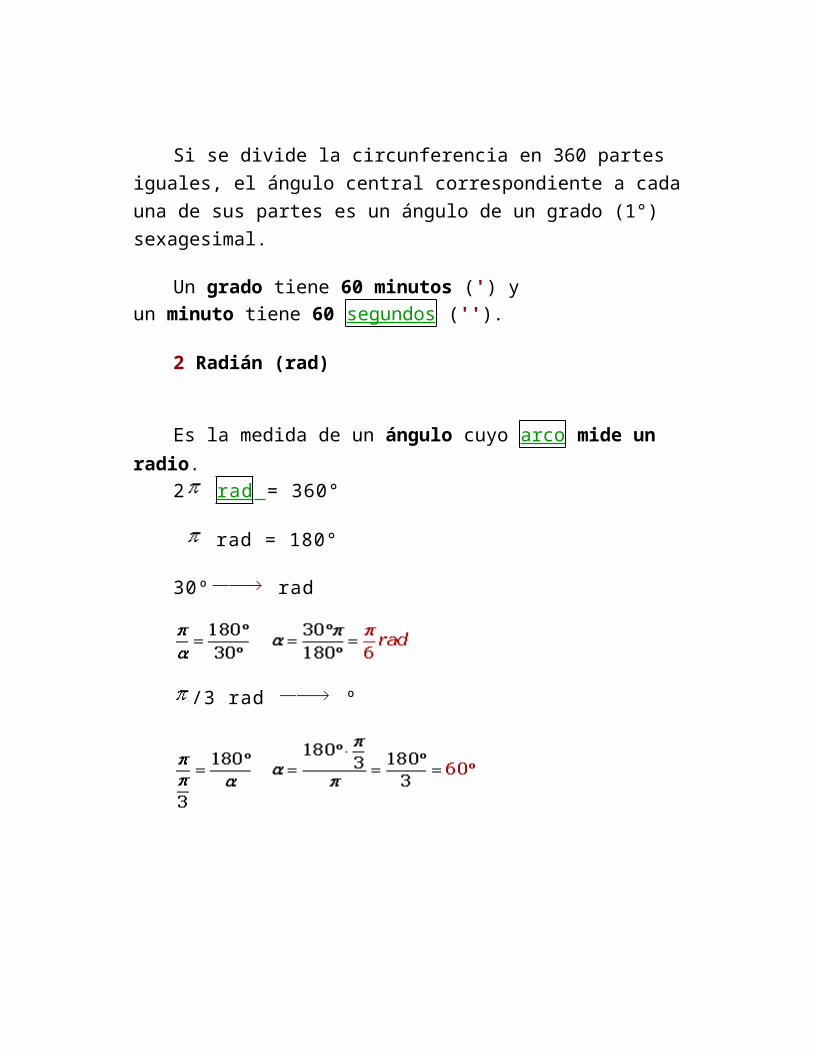
2 Radián (rad)
Es la medida de un ángulo cuyo arco mide un radio.
2 rad = 360°
rad = 180°
30º rad
/3 rad º
Triángulos oblicuángulos
Para resolver triángulos oblicuángulos vamos
a utilizar los teoremas del seno y del coseno .
Dependiendo de los elementos que conozcamos, nos encontramos con cuatro tipos de resolución de
triángulos oblicuángulos:
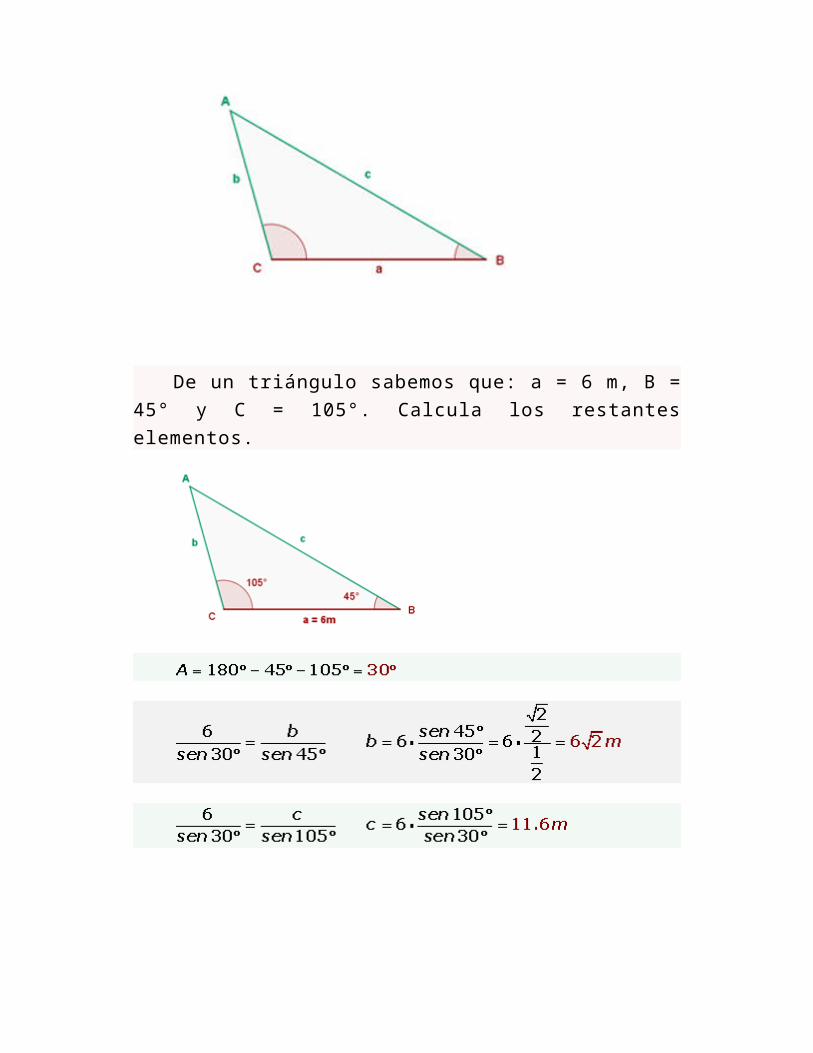
1º. Conociendo un lado y dos ángulos adyacentes a él
De un triángulo sabemos que: a = 6 m, B = 45°
y C = 105°. Calcula los restantes elementos.
2º. Conociendo dos lados y el ángulo comprendido
De un triángulo sabemos que: a = 10 m, b = 7 m
y C = 30°. Calcula los restantes elementos.
3º Conociendo dos lados y un ángulo opuesto
Sen B > 1. No hay solución
Sen B = 1 Triángulo rectángulo
sen B < 1. Una o dos soluciones

Supongamos que tenemos a, b y A; al aplicar el teorema de los senos puede suceder:
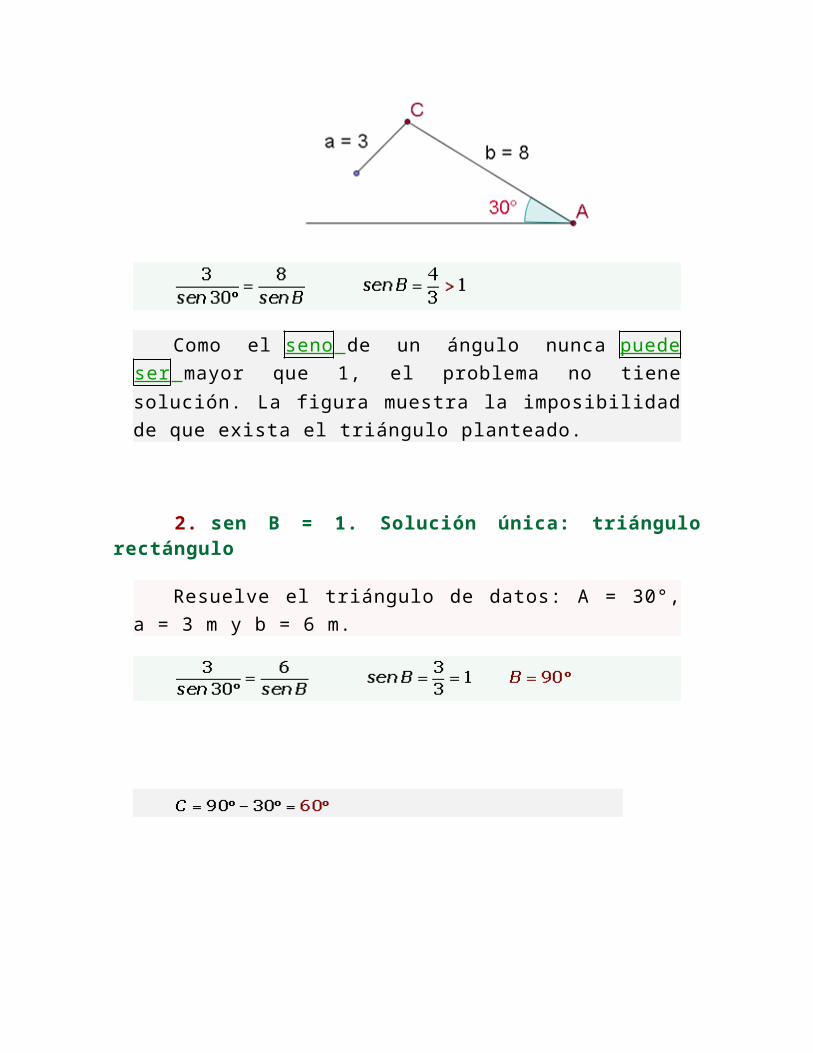
1. sen B > 1. No hay solución.
Resuelve el triángulo de datos: A = 30°, a = 3 m
y b = 8 m.
Como el seno de un ángulo nunca puede
ser mayor que 1, el problema no tiene solución. La
figura muestra la imposibilidad de que exista el
triángulo planteado.
2. sen B = 1. Solución única: triángulo rectángulo
Resuelve el triángulo de datos: A = 30°, a = 3 m
y b = 6 m.
3. sen B < 1. Una o dos soluciones
Resuelve el triángulo de datos: A = 60°, a = 8 m
y b = 4 m.
Resuelve el triángulo de datos: A = 30°, a = 3 m
y b = 4 m.
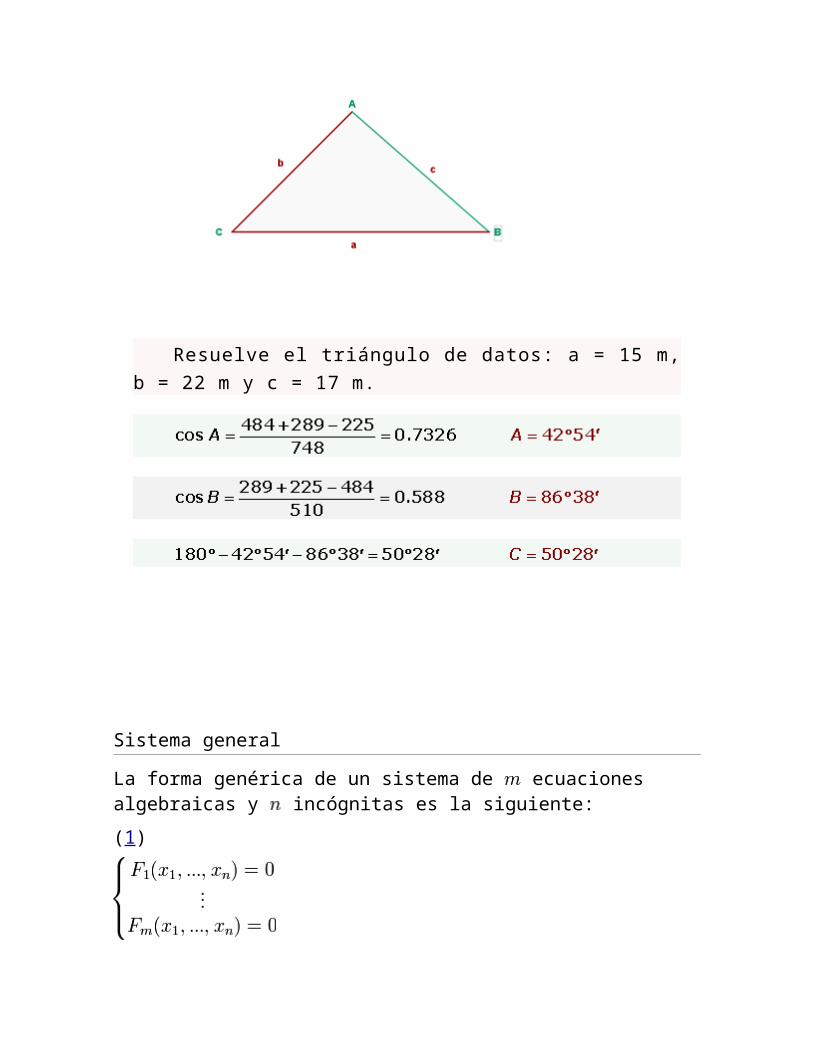
4º. Conociendo los tres ladosAds by ShowPasswordAd Options
Resuelve el triángulo de datos: a = 15 m, b = 22
m y c = 17 m.
Sistema general
La forma genérica de un sistema de ecuaciones algebraicas y incógnitas es la siguiente:
(1)

Donde son funciones de las incógnitas. La solución, perteneciente al espacio euclídeo , será tal que el resultado de evaluar cualquier expresión con los valores de dicha solución, verifique la ecuación.
Representación gráfica
Los sistemas de 2 o 3 incógnitas reales admiten representaciones gráficas cuando las funciones en (1) son continuas a tramos. En cada ecuación se representa como una curva o una superficie curva. La existencia de soluciones en ese caso puede deducirse a partir de la existencia de intersecciones comunes a dichas curvas o superficies curvas.
Clasificación de los sistemas
Un sistema de ecuaciones sobre puede clasificarse de acuerdo con el número de soluciones o cardinal del conjunto de soluciones , de acuerdo con este criterio un sistema puede ser:
Sistema compatible cuando admite alguna solución que a su vez pueden dividirse en: Sistemas compatibles determinados cuando admiten un
conjunto finito de soluciones, o un conjunto infinito de soluciones aisladas sin puntos de acumulación .
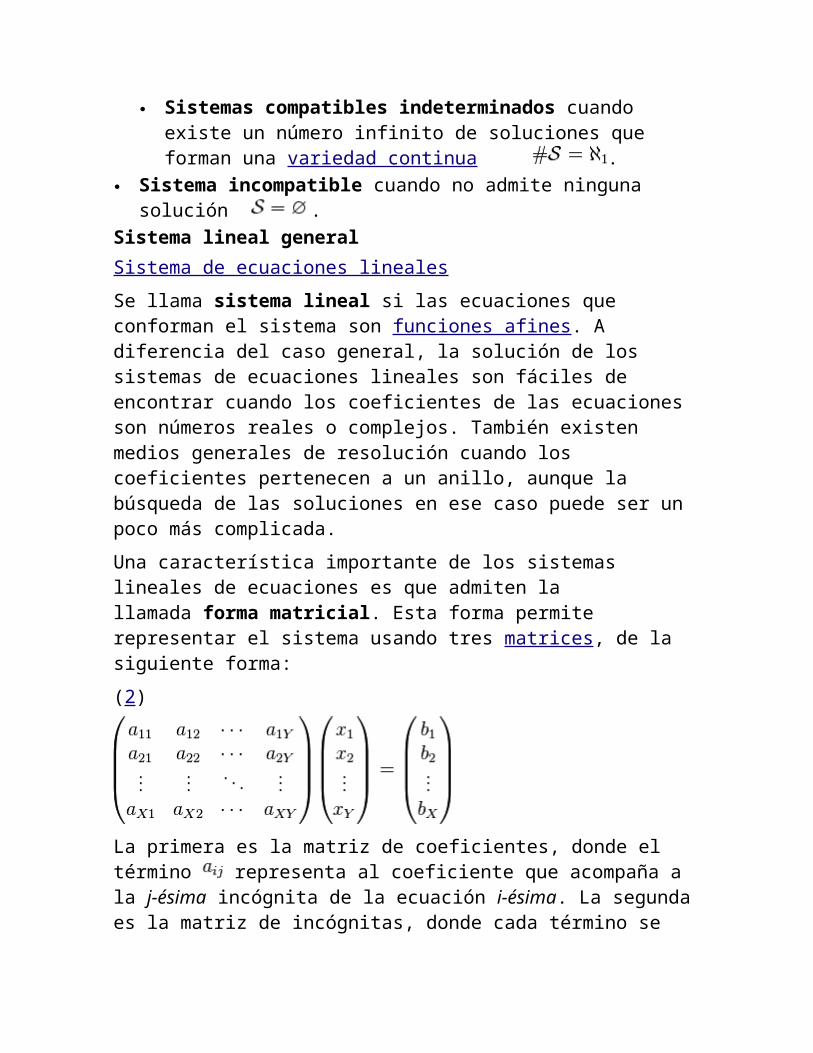
Sistemas compatibles indeterminados cuando existe un número infinito de soluciones que forman una variedad continua
.
Sistema incompatible cuando no admite ninguna solución .
Sistema lineal general
Sistema de ecuaciones lineales
Se llama sistema lineal si las ecuaciones que conforman el sistema son funciones afines. A diferencia del caso general, la solución de los sistemas de ecuaciones lineales son fáciles de encontrar cuando los coeficientes de las ecuaciones son números reales o complejos. También existen medios generales de resolución cuando los coeficientes pertenecen a un anillo, aunque la búsqueda de las soluciones en ese caso puede ser un poco más complicada.
Una característica importante de los sistemas lineales de ecuaciones es que admiten la llamada forma matricial. Esta forma permite representar el sistema usando tres matrices, de la siguiente forma:
(2)
La primera es la matriz de coeficientes, donde el término representa al coeficiente que acompaña a la j-ésima incógnita de la ecuación i-ésima. La segunda es la matriz de incógnitas, donde cada término se corresponde con una de las incógnitas. La tercera matriz es la de términos independientes, donde el cada representa al término independiente de la ecuación i-ésima.
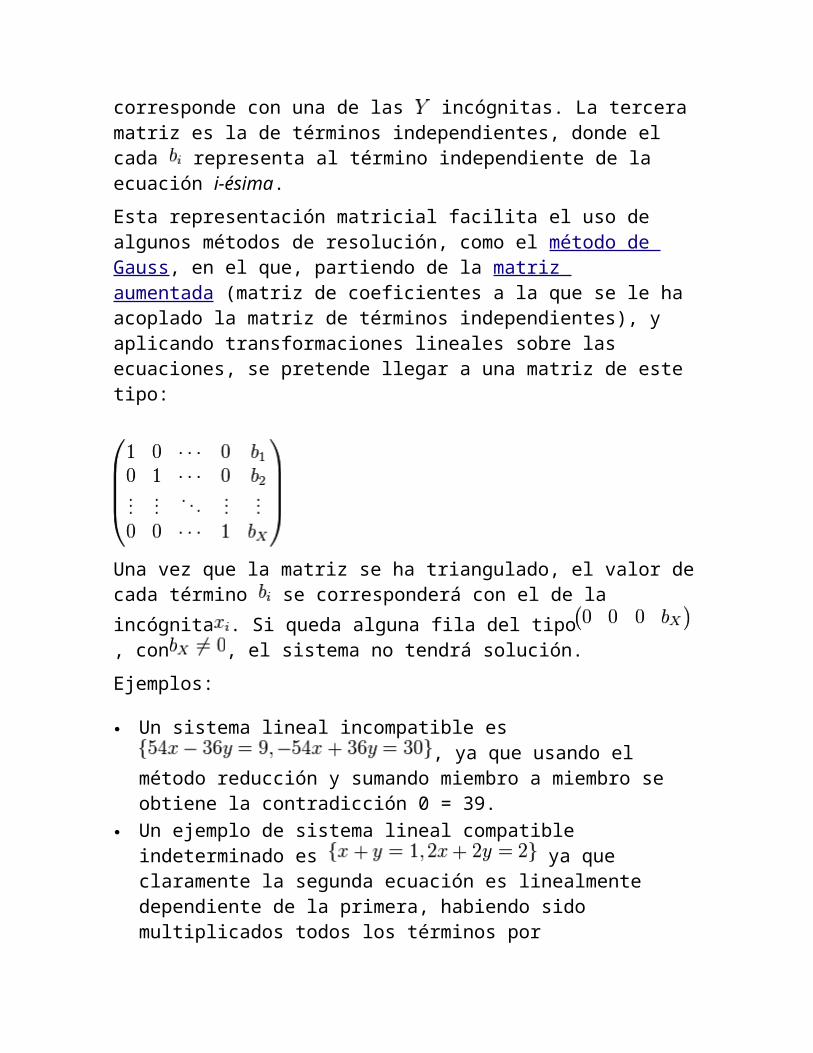
Esta representación matricial facilita el uso de algunos métodos de resolución, como el método de Gauss, en el que, partiendo de la matriz aumentada (matriz de coeficientes a la que se le ha acoplado la matriz de términos independientes), y aplicando transformaciones lineales sobre las ecuaciones, se pretende llegar a una matriz de este tipo:

Una vez que la matriz se ha triangulado, el valor de cada término se corresponderá con el de la incógnita . Si queda alguna fila del tipo
, con , el sistema no tendrá solución.
Ejemplos:
Un sistema lineal incompatible es, ya que usando el método
reducción y sumando miembro a miembro se obtiene la contradicción 0 = 39.
Un ejemplo de sistema lineal compatible indeterminado es ya que claramente la segunda ecuación es linealmente dependiente de la primera, habiendo sido multiplicados todos los términos por
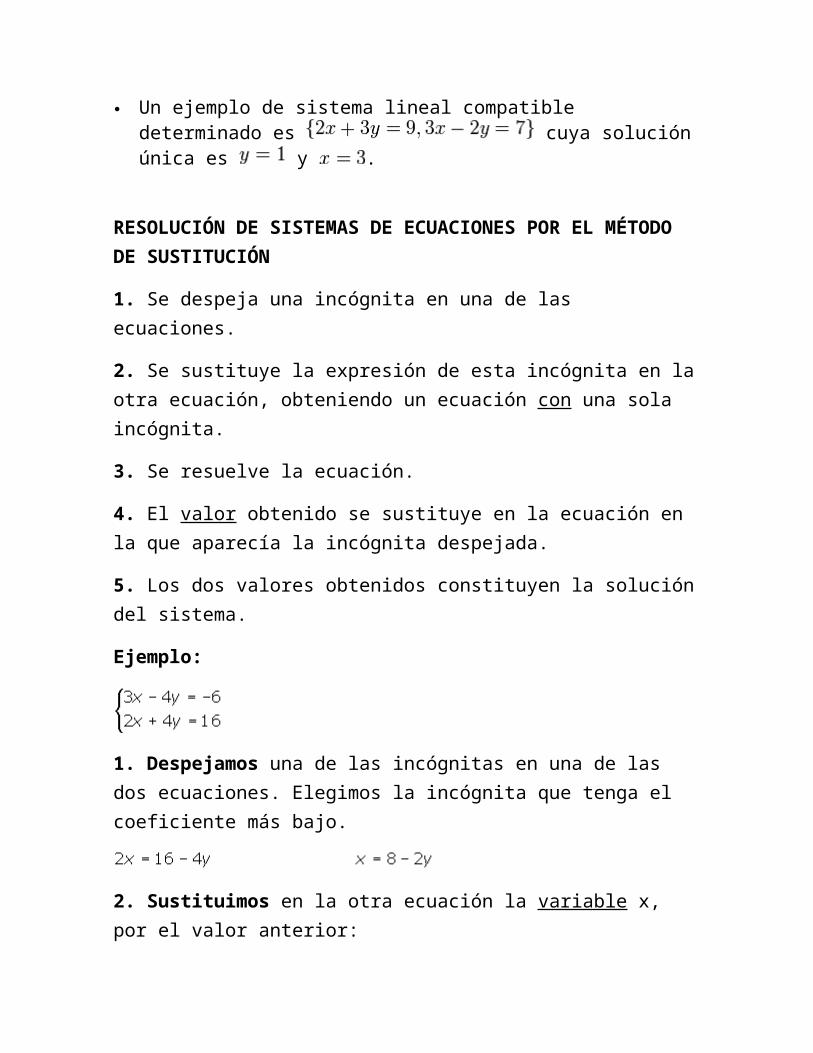
Un ejemplo de sistema lineal compatible determinado es cuya solución única es y .
RESOLUCIÓN DE SISTEMAS DE ECUACIONES POR EL MÉTODO DE SUSTITUCIÓN
1. Se despeja una incógnita en una de las ecuaciones.
2. Se sustituye la expresión de esta incógnita en la otra ecuación, obteniendo un ecuación con una sola incógnita.
3. Se resuelve la ecuación.
4. El valor obtenido se sustituye en la ecuación en la que aparecía la incógnita despejada.
5. Los dos valores obtenidos constituyen la solución del sistema.

Ejemplo:
1. Despejamos una de las incógnitas en una de las dos ecuaciones. Elegimos la incógnita que tenga el coeficiente más bajo.
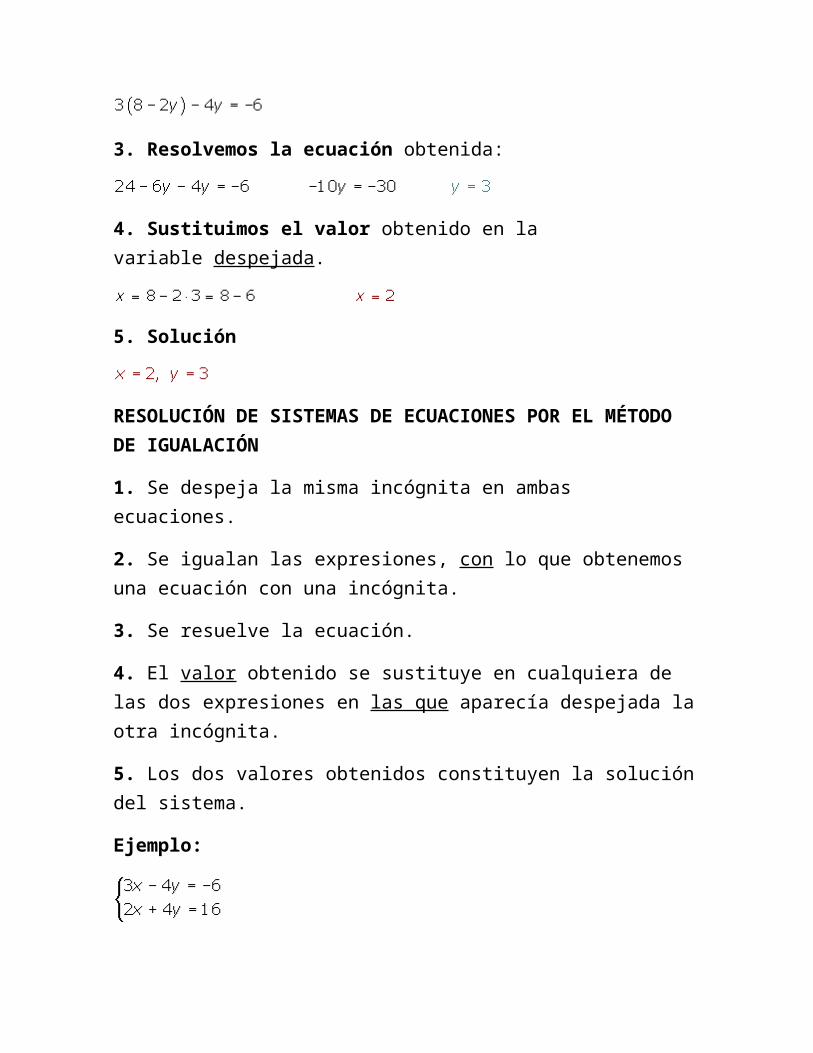
2. Sustituimos en la otra ecuación la variable x, por el valor anterior:
3. Resolvemos la ecuación obtenida:
4. Sustituimos el valor obtenido en la variable despejada.
5. Solución
RESOLUCIÓN DE SISTEMAS DE ECUACIONES POR EL MÉTODO DE IGUALACIÓN
1. Se despeja la misma incógnita en ambas ecuaciones.
2. Se igualan las expresiones, con lo que obtenemos una ecuación con una incógnita.
3. Se resuelve la ecuación.
4. El valor obtenido se sustituye en cualquiera de las dos expresiones en las que aparecía despejada la otra incógnita.
5. Los dos valores obtenidos constituyen la solución del sistema.
Ejemplo:
1 Despejamos, por ejemplo, la incógnita x de la primera y segunda ecuación:
2 Igualamos ambas expresiones:
3 Resolvemos la ecuación:
4 Sustituimos el valor de y, en una de las dos expresiones en las que tenemos despejada la x:
5 Solución:
RESOLUCIÓN DE SISTEMAS DE ECUACIONES POR EL MÉTODO DE REDUCCIÓN
1. Se preparan las dos ecuaciones, multiplicándolas por los números que convenga.
2. La restamos, y desaparece una de las incógnitas.
3. Se resuelve la ecuación resultante.

4. El valor obtenido se sustituye en una de las ecuaciones iniciales y se resuelve.
5. Los dos valores obtenidos constituyen la solución del sistema.
Ejemplo:
Lo más fácil es suprimir la y, de este modo no tendríamos que preparar las ecuaciones; pero vamos a optar por suprimir la x, para que veamos mejor el proceso.
Restamos y resolvemos la ecuación:
Sustituimos el valor de y en la segunda ecuación inicial.
Solución:
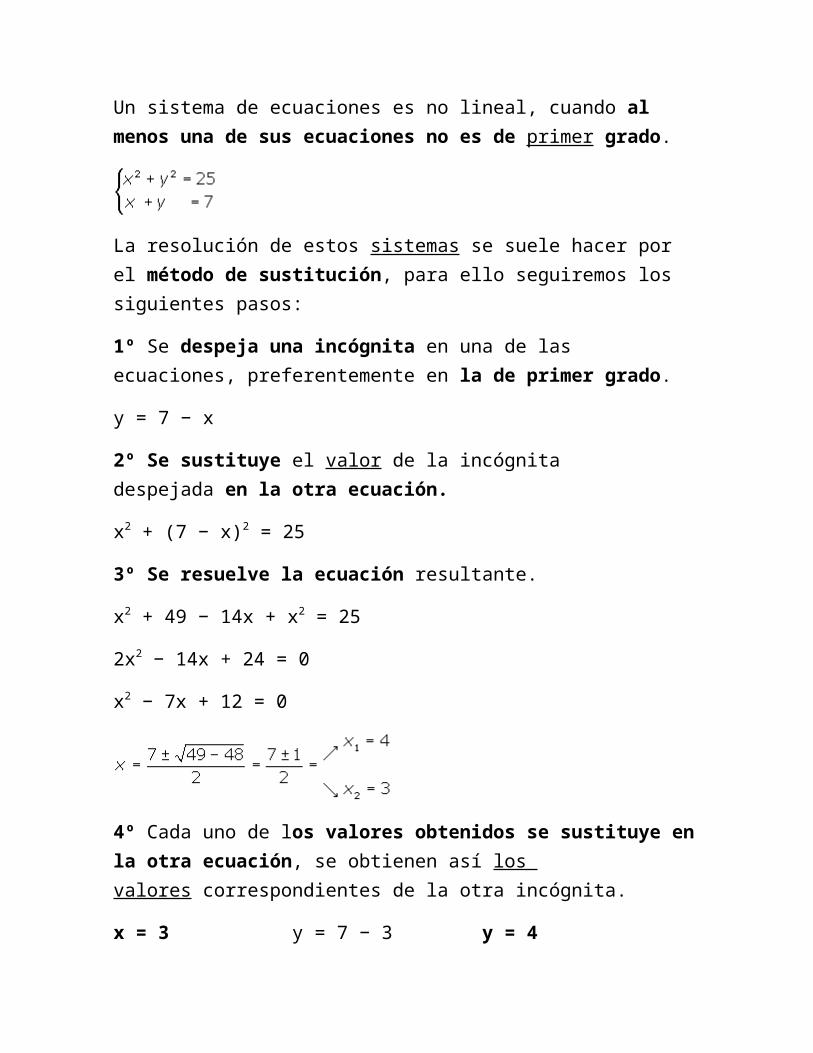
SISTEMAS DE ECUACIONES NO LINEALES
Un sistema de ecuaciones es no lineal, cuando al menos una de sus ecuaciones no es de primer grado.

La resolución de estos sistemas se suele hacer por el método de sustitución, para ello seguiremos los siguientes pasos:
1º Se despeja una incógnita en una de las ecuaciones, preferentemente en la de primer grado.
y = 7 − x
2º Se sustituye el valor de la incógnita despejada en la otra ecuación.
x2 + (7 − x)2 = 25
3º Se resuelve la ecuación resultante.
x2 + 49 − 14x + x2 = 25
2x2 − 14x + 24 = 0
x2 − 7x + 12 = 0
4º Cada uno de los valores obtenidos se sustituye en la otra ecuación, se obtienen así los valores correspondientes de la otra incógnita.
x = 3 y = 7 − 3 y = 4
x = 4 y = 7 − 4 y = 3
SISTEMAS DE ECUACIONES LINEALES.
Cuando nos planteamos la resolución de varias ecuaciones a la vez con varias incógnitas, estamos ante un sistema y en el caso más sencillo, donde todas las ecuaciones sean lineales, se llama sistema de ecuaciones lineales. Existen muchas formas de resolver dichos sistemas, empezando por las clásicas de reducción, sustitución e igualación que son las primeras que nos enseñan, puesto que son muy fáciles de asimilar. Ahora bien, dado un sistema no siempre es necesario resolverlo sino que, a veces, sólo hace falta saber si
tiene o no solución: discutir el sistema; en este caso utilizaremos el conocido teorema de Rouché-Frobenius, y las consecuencias de dicho teorema. En cuando a la resolución daremos algunos sencillos métodos y comentaremos el método de Gauss como otra alternativa de resolución.
Definición.
Se llama sistema de ecuaciones lineales a un conjunto de ecuaciones de la forma:
Donde x1, ..., xn son las incógnitas, b1, ..., bm se denominan términos independientes y los números aij se llaman coeficientes de las incógnitas, formando una matriz que denominaremos A, matriz de coeficientes. Cuando el término independiente sea cero, estamos ante un caso particular de sistemas que denominamos homogéneos.
Un conjunto de n números que verifiquen todas las ecuaciones se llama solución del sistema. Dado un sistema de ecuaciones, el objetivo principal es hallar todas sus soluciones, es decir, hallar todos los valores de x1, ..., xn que verifican todas las ecuaciones.
Atendiendo al número de soluciones, los sistemas de ecuaciones lineales podemos clasificarlos en tres tipos:
Sistema incompatible: son aquellos que no poseen solución.
Sistema compatible: son aquellos que poseen solución. Dentro de ellos, podemos hablar de:
Sistema compatible determinado: sistemas con una única solución.
Sistema compatible indeterminado: sistemas con infinitas soluciones.

En un sistema de ecuaciones lineales sólo se pueden dar estas tres situaciones, es decir, o no tiene solución, o tiene una, o tiene infinitas, por lo tanto, nunca podemos encontrar un sistema lineal, con, por ejemplo, tres soluciones.
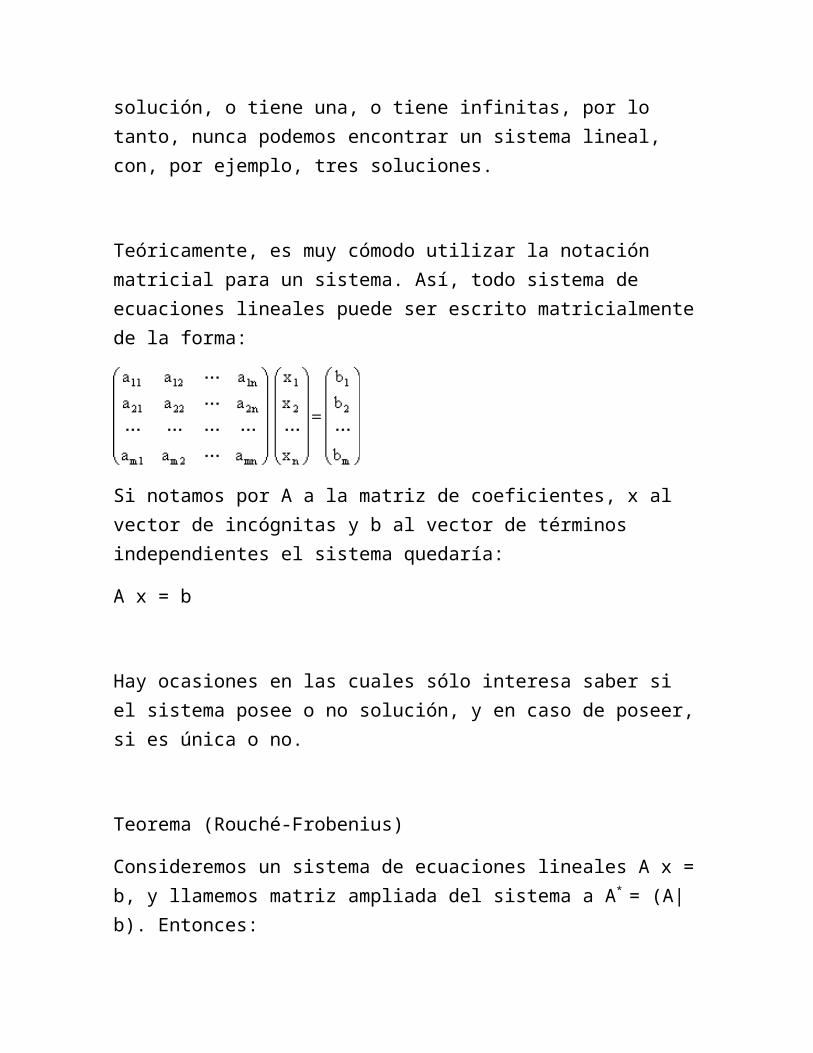
Teóricamente, es muy cómodo utilizar la notación matricial para un sistema. Así, todo sistema de ecuaciones lineales puede ser escrito matricialmente de la forma:
Si notamos por A a la matriz de coeficientes, x al vector de incógnitas y b al vector de términos independientes el sistema quedaría:
A x = b
Hay ocasiones en las cuales sólo interesa saber si el sistema posee o no solución, y en caso de poseer, si es única o no.
Teorema (Rouché-Frobenius)
Consideremos un sistema de ecuaciones lineales A x = b, y llamemos matriz ampliada del sistema a A* = (A|b). Entonces:
Si Rango(A) < Rango(A*), el sistema resulta incompatible.
Si Rango(A) = Rango(A*) = n (nº incógnitas), el sistema resulta compatible determinado.
Si Rango(A) = Rango(A*) < n (nº incógnitas), el sistema resulta compatible indeterminado.
Para la resolución de los sistemas lineales existen varios métodos, si bien resaltaremos dos. Cuando el sistema sea compatible determinado, esto es, el determinante de la matriz de coeficientes sea distinto de cero, siempre podemos “despejar” del sistema de la forma:
x = A-1 b
Hacemos hincapié que este método sólo es posible aplicarlo en el caso que exista la inversa de A, es decir, para sistemas compatibles determinados.
En segundo lugar, podemos utilizar la regla de Cramer, válida para cualquier sistema compatible, la cual mostramos en el siguiente ejemplo.
Ejemplo
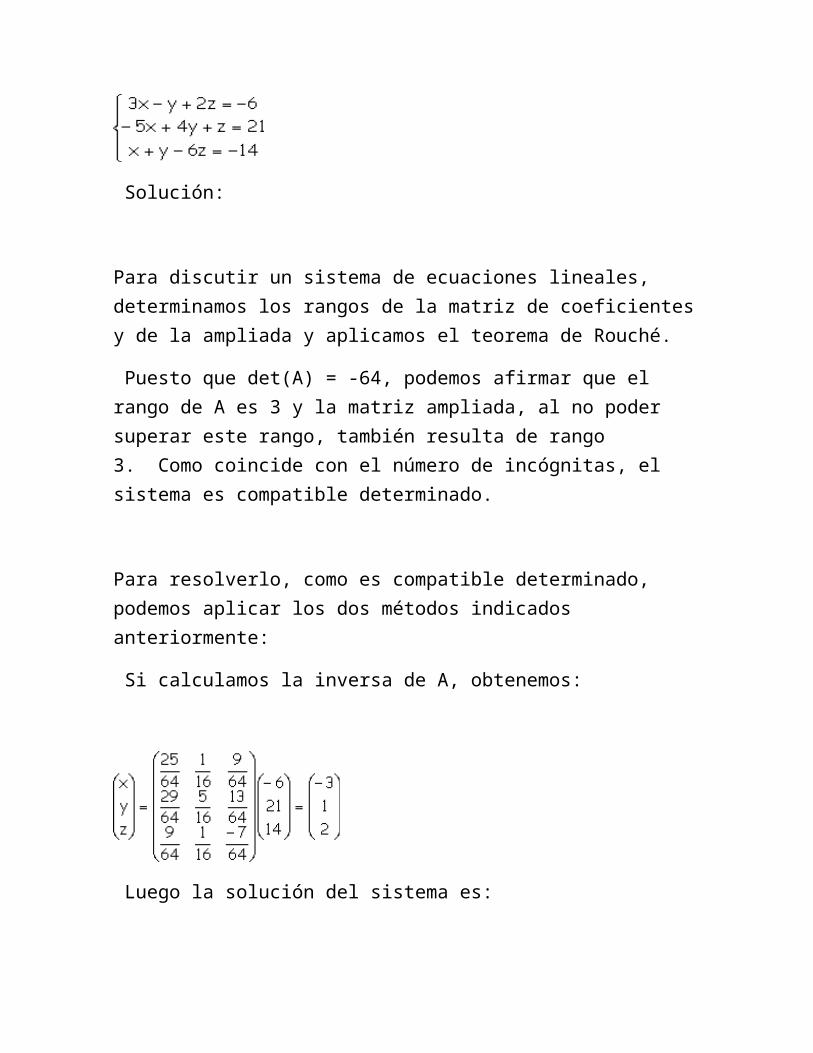
Discutir y resolver el sistema:
Solución:
Para discutir un sistema de ecuaciones lineales, determinamos los rangos de la matriz de coeficientes y de la ampliada y aplicamos el teorema de Rouché.
Puesto que det(A) = -64, podemos afirmar que el rango de A es 3 y la matriz ampliada, al no poder superar este rango, también resulta de rango 3. Como coincide con el número de incógnitas, el sistema es compatible determinado.
Para resolverlo, como es compatible determinado, podemos aplicar los dos métodos indicados anteriormente:
Si calculamos la inversa de A, obtenemos:
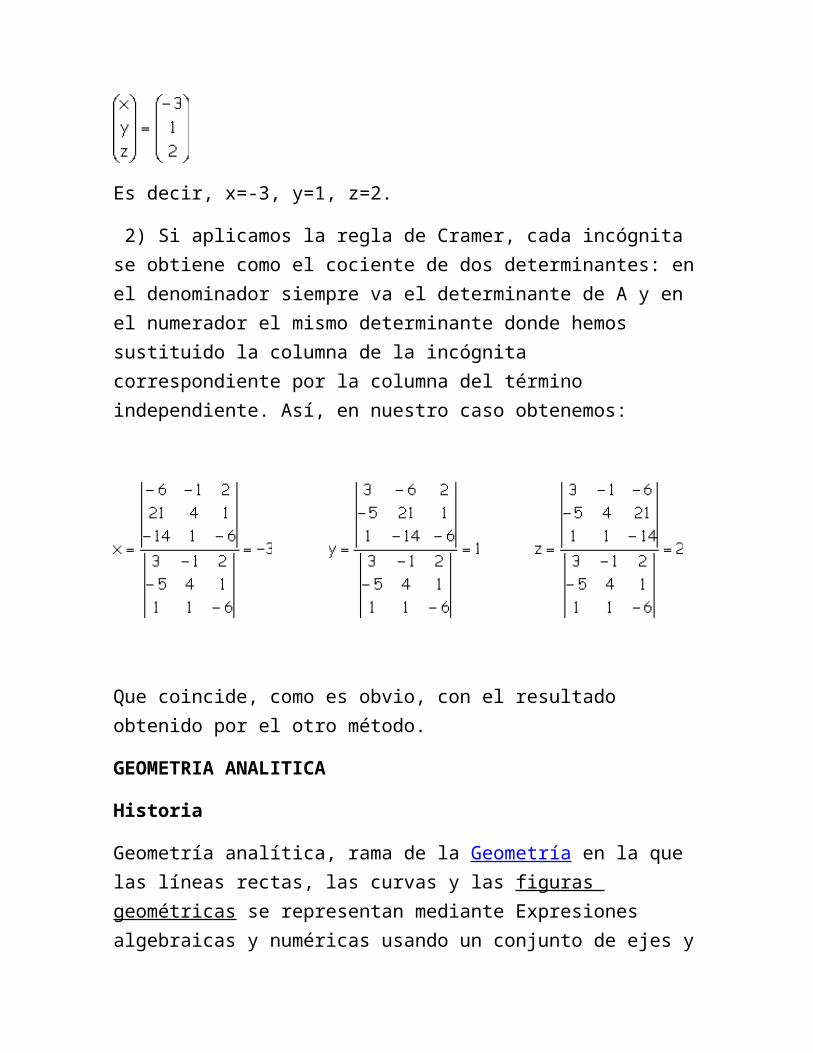
Luego la solución del sistema es:
Es decir, x=-3, y=1, z=2.
2) Si aplicamos la regla de Cramer, cada incógnita se obtiene como el cociente de dos determinantes: en el denominador siempre va el determinante de A y en el numerador el mismo determinante donde hemos sustituido la columna de la incógnita correspondiente por la columna del término independiente. Así, en nuestro caso obtenemos:
Que coincide, como es obvio, con el resultado obtenido por el otro método.
GEOMETRIA ANALITICA
Historia
Geometría analítica, rama de la Geometría en la que las líneas rectas, las curvas y las figuras geométricas se representan mediante Expresiones algebraicas y numéricas usando un conjunto de ejes y coordenadas. Cualquier punto del Plano se puede localizar con respecto a un par de ejes Perpendiculares dando las distancias del punto a cada uno de los ejes.
Uno los filósofos más notables que contribuyó al desarrollo de las Matemáticas fue [René Descartes]] pues realizó la sistematización de la Geometría Analítica. Fue el primer matemático que intentó clasificar las curvas conforme al tipo de ecuaciones que las producen y contribuyó también a la elaboración de la teoría de las ecuaciones.
Nacido el 31 de marzo de 1596 en La Haye, hoy Descartes, era hijo de un miembro de la baja nobleza y pertenecía una familia que había dado algunos hombres doctos.
En 1649 fue invitado a acudir a Estocolmo para impartir clases de filosofía a la reina Cristina de Suecia. Falleció, en la capital sueca, el 11 de febrero de 1650.
DISTANCIA ENTRE DOS PUNTOS.
Dados dos puntos cualesquiera A(x1,y1), B(x2,y2), definimos la distancia entre ellos, d(A,B), como la longitud del segmento que los separa.
El Plano cartesiano se usa como un sistema de referencia para localizar puntos en un plano. Otra de las utilidades de dominar los conceptos sobre el Plano cartesiano radica en que, a partir de la ubicación de las coordenadas de dos puntos es posible calcular la distancia entre ellos. Cuando los puntos se encuentran ubicados sobre el eje x (de las abscisas) o en una recta paralela a este eje, la distancia entre los puntos corresponde al valor absoluto de la diferencia de sus abscisas (x2 – x1).
Cuando los puntos se encuentran ubicados sobre el eje y (de las ordenadas) o en una recta paralela a este eje, la distancia entre los puntos corresponde al valor absoluto de la diferencia de sus ordenadas. (y1 - y2)
Ahora, si los puntos se encuentran en cualquier lugar del sistema de coordenadas, la distancia queda determinada por la relación:
Sean P1 (x1, y1) y P2 (x2, y2) dos puntos en el plano.
La distancia entre los puntos P1 y P2 denotada por d =
PENDIENTE DE UNA RECTA
Es el grado (medida) de inclinación de una recta, la razón de cambio en y con respecto al cambio en x.

Si una recta pasa por dos puntos distintos (x1, y1) y (x2, y2), entonces su pendiente (m) está dada por:
Esto es,
Ejemplo para discusión: Dibuja la recta que pasa por los puntos dados y halla la pendiente para cada caso.
1) (-3,4) y (6, -2)
2) (-3, -4) y (3, 2)
3) (-4, 2) y (3, 2)
4) (2, 4) y (2, -3)
Con los ejemplos discutidos podemos observar la interpretación geométrica de la pendiente de una recta:
Pendiente Tipo de recta
positiva recta ascendente
negativa recta descendente

cero recta horizontal
no definida recta vertical
Ejercicio: Halla la pendiente de la recta que pasa por cada par de puntos.
1) (-3, -3) y (2, -3)
2) (0, 4) y (2, -4)
3) (-2, -1) y (1, 2)
4) (-3, 2) y (-3, -1)
Ecuaciones de la forma pendiente-intercepto
Ecuaciones de la forma y = mx + b donde m representa la pendiente y b el intercepto en y se conocen como ecuaciones de la forma pendiente-intercepto.
Por ejemplo, la ecuación y = -3x + 5 está expresada de la forma pendiente-intercepto donde la pendiente (m) es -3 y el intercepto en y es (0, 5).
Nota: Una ecuación de la forma y = mx representa una recta que pasa por el origen.
Ejemplo: La pendiente (m) es -3 y el intercepto en y es (0, 4). ¿Cuál es la ecuación de la recta de la forma pendiente-intercepto?
Ejercicio: Escribe la ecuación de la recta de la forma pendiente-intercepto con pendiente 3 y el intercepto en y en (0, 5).
Ecuaciones lineales en dos variables de forma general
Definición: Una ecuación de la forma ax + by = c donde a, b y c son constantes con a diferente de cero, b diferente de cero, x, y variables se conoce como una ecuación lineal en dos variables de forma general.
Ejemplos: 2x + y = 4; 3x - 4y = 9.
Las ecuaciones y = -3x + 5 y y = -2x son ecuaciones lineales en dos variables pero no están expresadas de la forma general. Lo podemos lograr cambiando de lugar los términos correspondientes. De manera que:
y = -3x + 5 en la forma general es 3x + y = 5
y = -2x en la forma general es 2x + y = 0
La ecuación x + y = 2 no está expresada de la forma pendiente-intercepto. Pero lo podemos hacer cambiando términos de posición, esto es, y = -x + 2. Donde la pendiente (m) es -1 y el intercepto en y es (0, 2).

Ejemplo: Determina la pendiente y el intercepto en y de la recta cuya ecuación es 2x + y = 1. Dibuja la gráfica.
Rectas verticales y horizontales
La ecuación de una recta vertical se expresa de la forma x = a, donde a es una constante. Recuerda que en una recta vertical la pendiente no está definida.
La ecuación de una recta horizontal se expresa de la forma y = b, donde b es una constante. La pendiente de una recta horizontal es cero.
Ejemplos: Construye la gráfica de cada ecuación:
1) X = -2
2) y - 5 = 0
3) 2y + 12 = 0
4) 3x – 15 = 0
Ecuaciones de la forma punto-pendiente
La ecuación de la recta que pasa por un punto (x1, y1) con pendiente m en la forma punto-pendiente es y – y1 = m(x – x1).
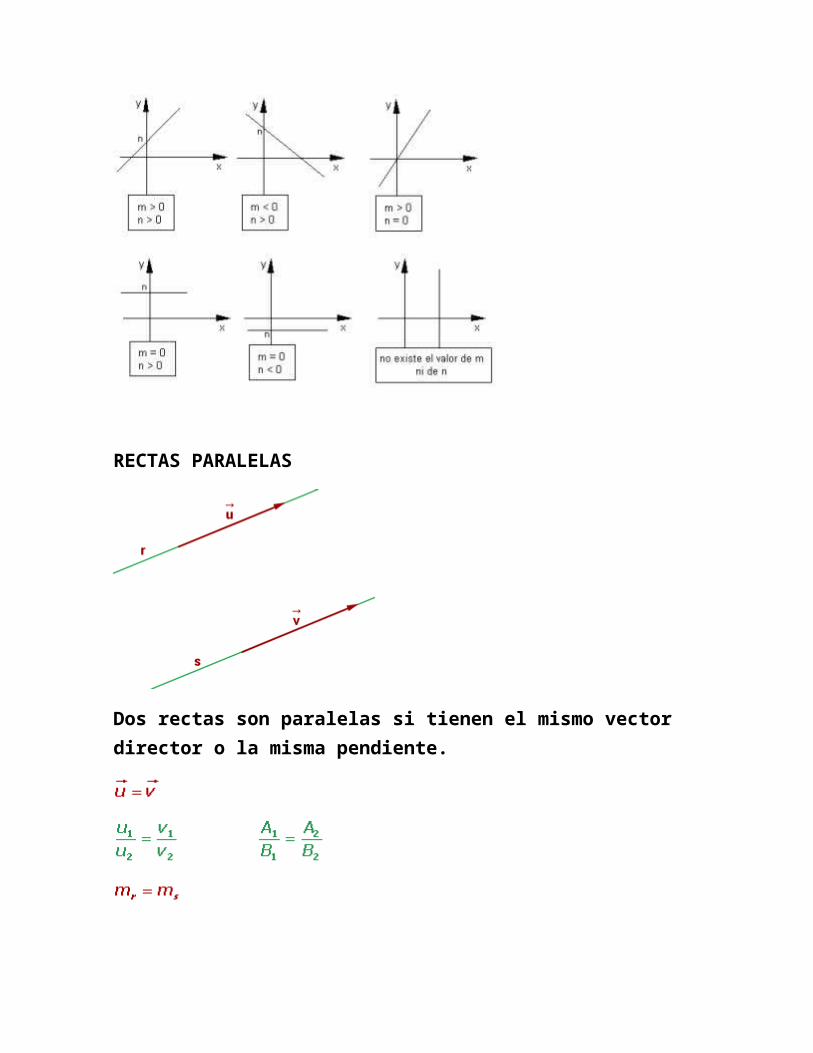
RECTAS PARALELAS
Dos rectas son paralelas si tienen el mismo vector director o la misma pendiente.
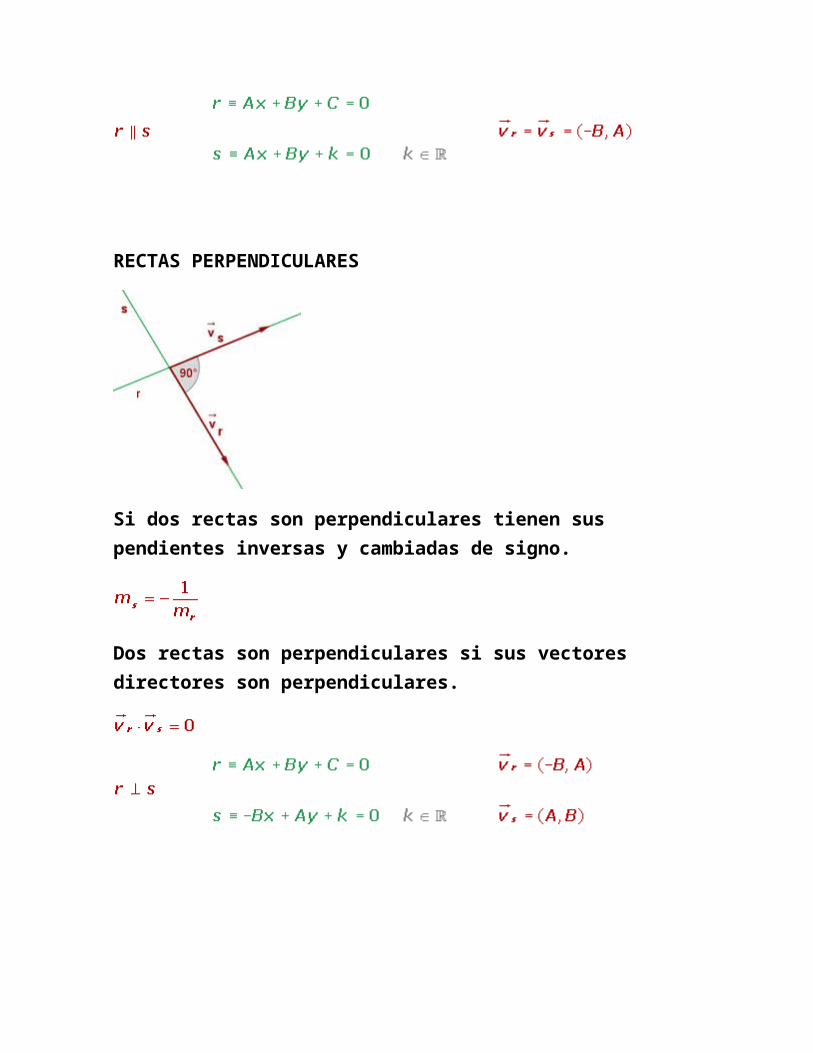
RECTAS PERPENDICULARES
Si dos rectas son perpendiculares tienen sus pendientes inversas y cambiadas de signo.
Dos rectas son perpendiculares si sus vectores directores son perpendiculares.
Hallar una recta paralela y otra perpendicular a r ≡ x + 2 y + 3 = 0, que pasen por el punto A(3,5).
Calcula k para que las rectas r ≡ x + 2y - 3 = 0 y s ≡ x - ky + 4 = 0, sean paralelas y perpendiculares.
CIRCUNFERENCIA
La circunferencia es una línea curva cerrada cuyos puntos están todos a la misma distancia de un punto fijo llamado centro.
Elementos de la circunferencia
Centro de la circunferencia
El centro es el punto del que equidistan todos los puntos de la circunferencia.
Radio de la circunferencia
El radio es el segmento que une el centro de la circunferencia con un punto cualquiera de la misma.
Cuerda
La cuerda es un segmento que une dos puntos de la circunferencia.
Diámetro
El diámetro es una cuerda que pasa por el centro de la circunferencia.
El diámetro mide el doble del radio.
Arco
Un arco es cada una de las partes en que una cuerda divide a la circunferencia.
Se suele asociar a cada cuerda el menor arco que delimita.
Semicircunferencia
Una semicircunferencia es cada uno de los arcos iguales que abarca un diámetro.

Longitud de una circunferencia
La longitud de una circunferencia es igual a pi por el diámetro.
La longitud de una circunferencia es igual a 2 pi por el radio.
Ejercicios de la longitud de una circunferencia.
Ángulos en la circunferencia
Ángulo central
El ángulo central tiene su vértice en el centro de la circunferencia y sus lados son dosradios.
La medida de un arco es la de su ángulo central correspondiente.
Ángulo inscrito

El ángulo inscrito tiene su vértice está en la circunferencia y sus lados son secantes a ella.
Mide la mitad del arco que abarca.
Ángulo semiinscrito
El vértice de ángulo semiinscrito está en la circunferencia, un lado secante y el otro tangente a ella.
Mide la mitad del arco que abarca.
Ángulo interior
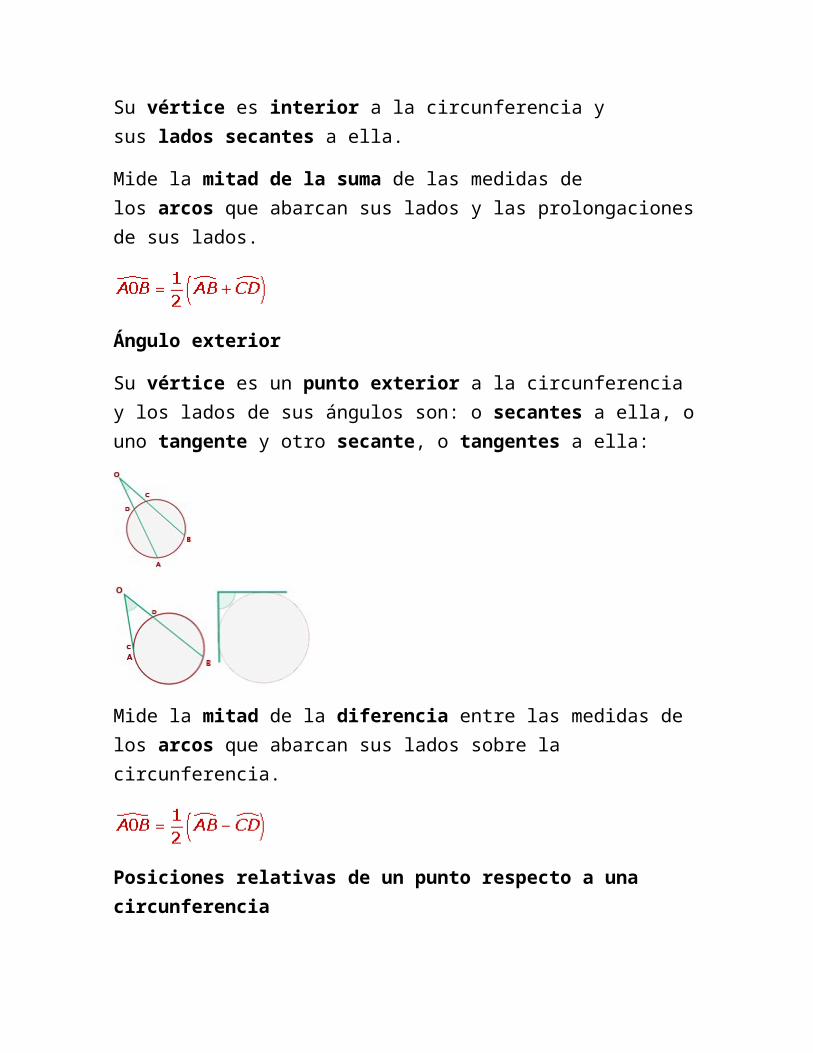
Su vértice es interior a la circunferencia y sus lados secantes a ella.
Mide la mitad de la suma de las medidas de los arcos que abarcan sus lados y las prolongaciones de sus lados.
Ángulo exterior

Su vértice es un punto exterior a la circunferencia y los lados de sus ángulos son: o secantes a ella, o uno tangente y otro secante, o tangentes a ella:
Mide la mitad de la diferencia entre las medidas de los arcos que abarcan sus lados sobre la circunferencia.
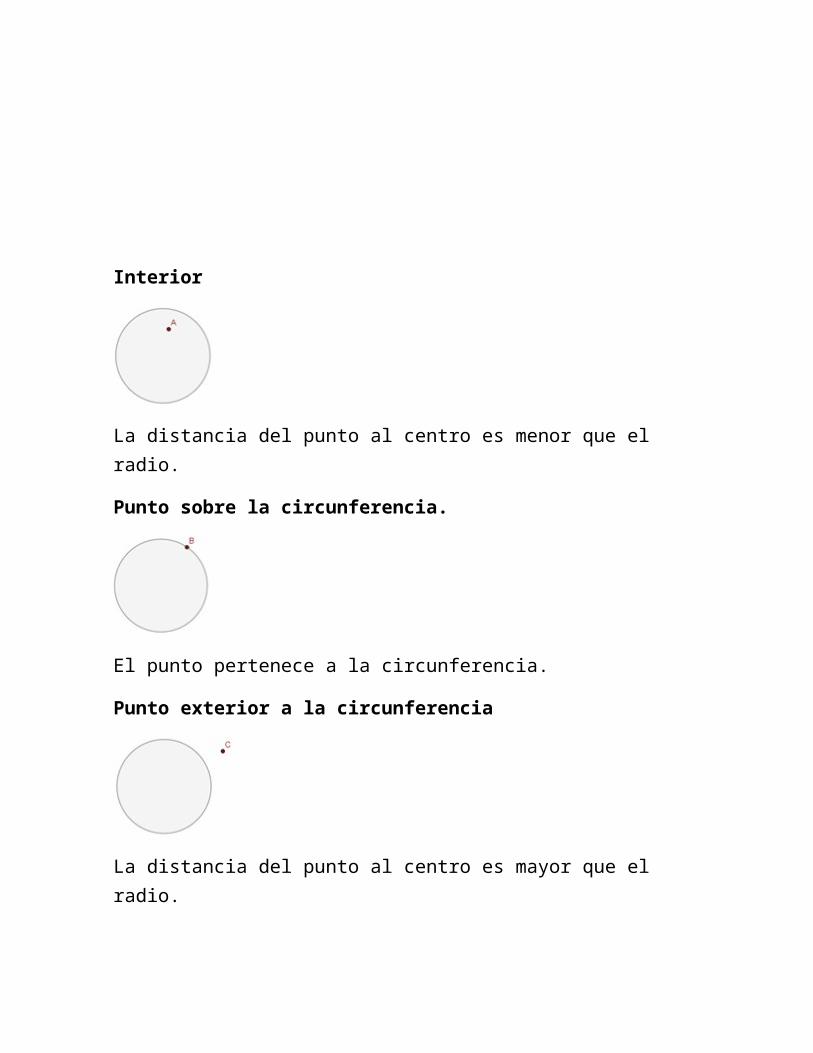
Posiciones relativas de un punto respecto a una circunferencia
Interior
La distancia del punto al centro es menor que el radio.
Punto sobre la circunferencia.

El punto pertenece a la circunferencia.
Punto exterior a la circunferencia
La distancia del punto al centro es mayor que el radio.
Posiciones relativas de una recta y una circunferencia
Recta secante
La recta corta a la circunferencia en dos puntos.
Recta tangente
La recta corta a la circunferencia en un punto.
Recta exterior
No tiene ningún punto de corte con la circunferencia.
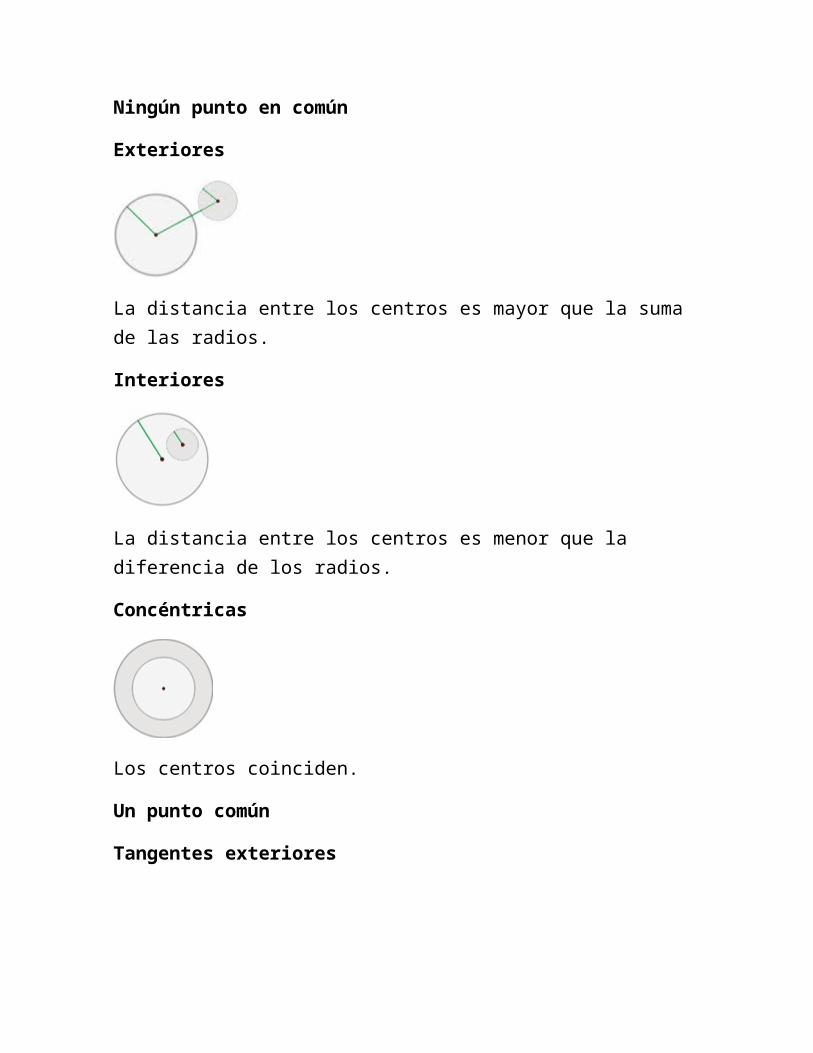
Posiciones relativas de dos circunferencias
Ningún punto en común
Exteriores
La distancia entre los centros es mayor que la suma de las radios.
Interiores
La distancia entre los centros es menor que la diferencia de los radios.
Concéntricas
Los centros coinciden.
Un punto común
Tangentes exteriores
La distancia entre los centros es igual a la suma de los radios.
Tangentes interiores
La distancia entre los centros es igual a la diferencia de los radios.
Dos puntos en común
Secantes
La distancia entre los centros es mayor que la diferencia de los radios.
ECUACIÓN DE LA ELIPSE
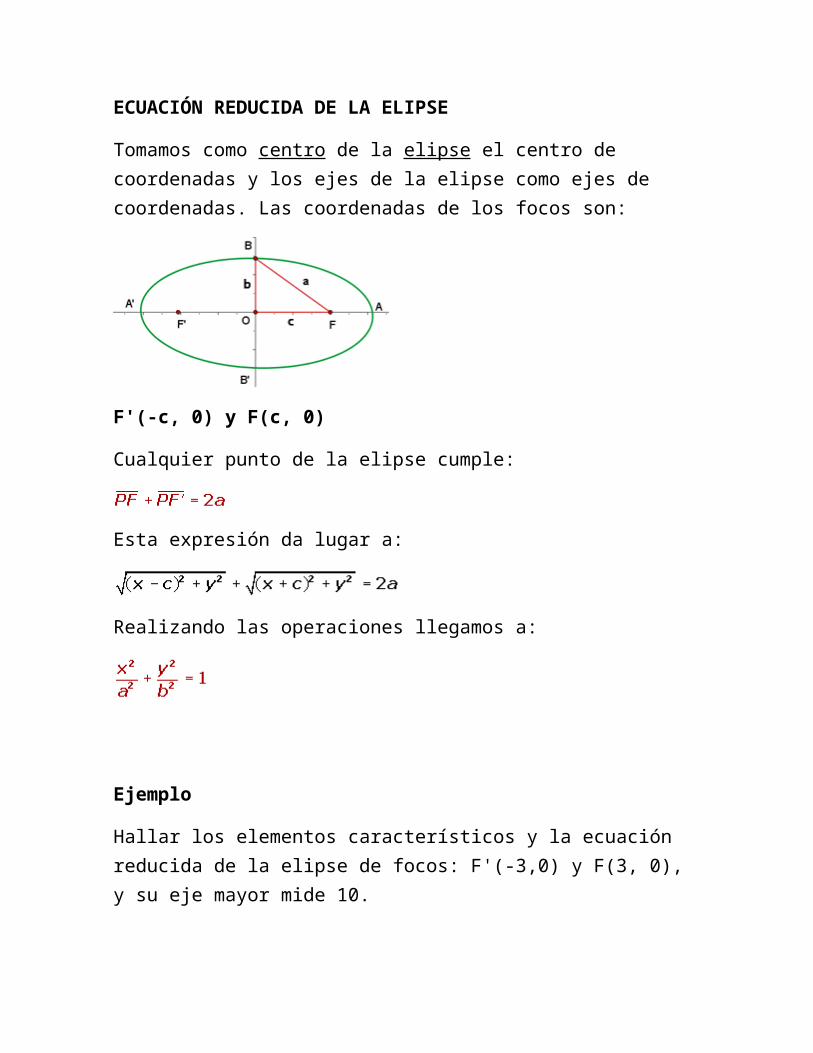
ECUACIÓN REDUCIDA DE LA ELIPSE
Tomamos como centro de la elipse el centro de coordenadas y los ejes de la elipse como ejes de coordenadas. Las coordenadas de los focos son:
F'(-c, 0) y F(c, 0)
Cualquier punto de la elipse cumple:
Esta expresión da lugar a:
Realizando las operaciones llegamos a:
Ejemplo
Hallar los elementos característicos y la ecuación reducida de la elipse de focos: F'(-3,0) y F(3, 0), y su eje mayor mide 10.

Semieje mayor
Semidistancia focal
Semieje menor
Ecuación reducida
Excentricidad
Ecuación reducida de eje vertical de la elipse
Si el eje principal está en el de ordenadas se obtendrá la siguiente ecuación:
Las coordenadas de los focos son:
F'(0, -c) y F(o, c)
Ejemplo
Dada la ecuación reducida de la elipse , hallar las coordenadas de los vértices de los focos y la excentricidad.
Ecuación de la elipse
Si el centro de la elipse C(x0,y0) y el eje principal es paralelo a OX, los focos tienen de coordenadas F(X0+c, y0) y F'(X0-c, y0). Y la ecuación de la elipse será:
Al quitar denominadores y desarrollar se obtiene, en general, una ecuación de la forma:
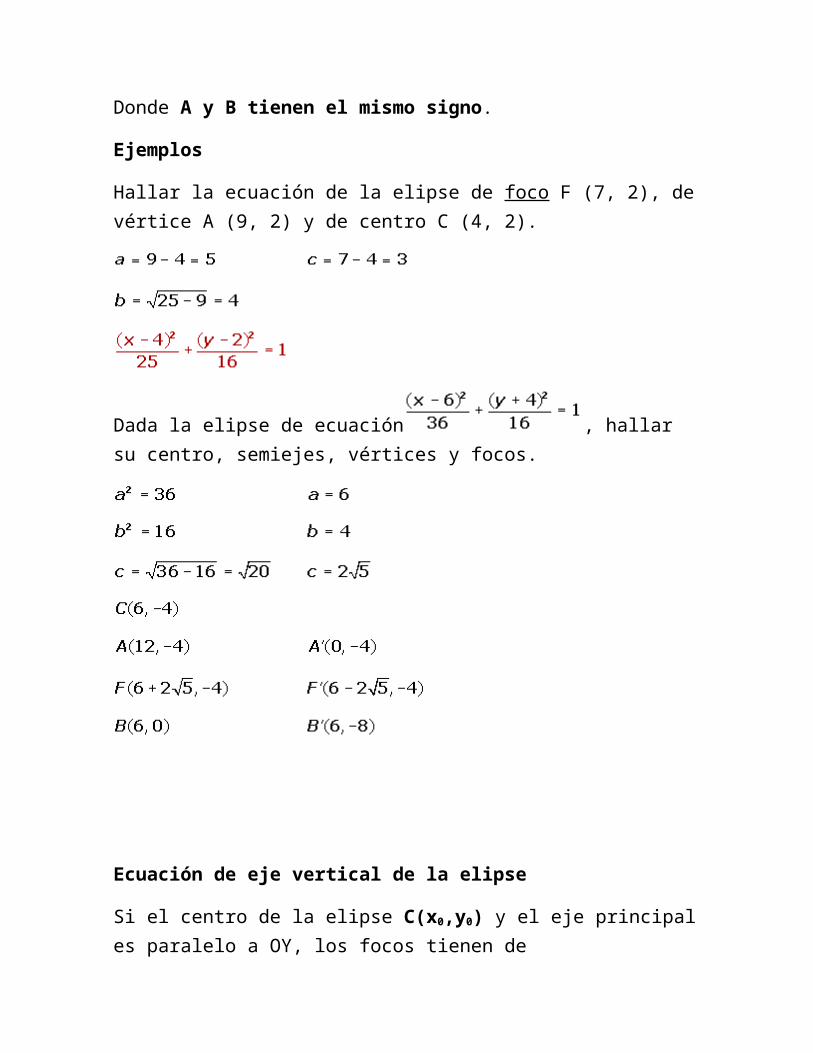
Donde A y B tienen el mismo signo.
Ejemplos
Hallar la ecuación de la elipse de foco F (7, 2), de vértice A (9, 2) y de centro C (4, 2).

Dada la elipse de ecuación , hallar su centro, semiejes, vértices y focos.
Ecuación de eje vertical de la elipse
Si el centro de la elipse C(x0,y0) y el eje principal es paralelo a OY, los focos tienen de coordenadas F(X0, y+c) y F'(X0, y0-c). Y la ecuación de la elipse será:
VECTORES
Un vector fijo es un segmento orientado que va del punto A (origen) al punto B (extremo).
Elementos de un vector
Dirección de un vector
La dirección del vector es la dirección de la recta que contiene al vector o de cualquier recta paralela a ella.
Sentido de un vector
El sentido del vector es el que va desde el origen A al extremo B.
Módulo de un vector
El módulo del vector es la longitud del segmento AB, se representa
por .
El módulo de un vector es un número siempre positivo o cero.
Módulo de un vector a partir de sus componentes
Módulo a partir de las coordenadas de los puntos

Coordenadas de un vector
Si las coordenadas de los puntos extremos, A y B, son:
Las coordenadas del vector son las coordenadas del extremo menos las coordenadas del origen.
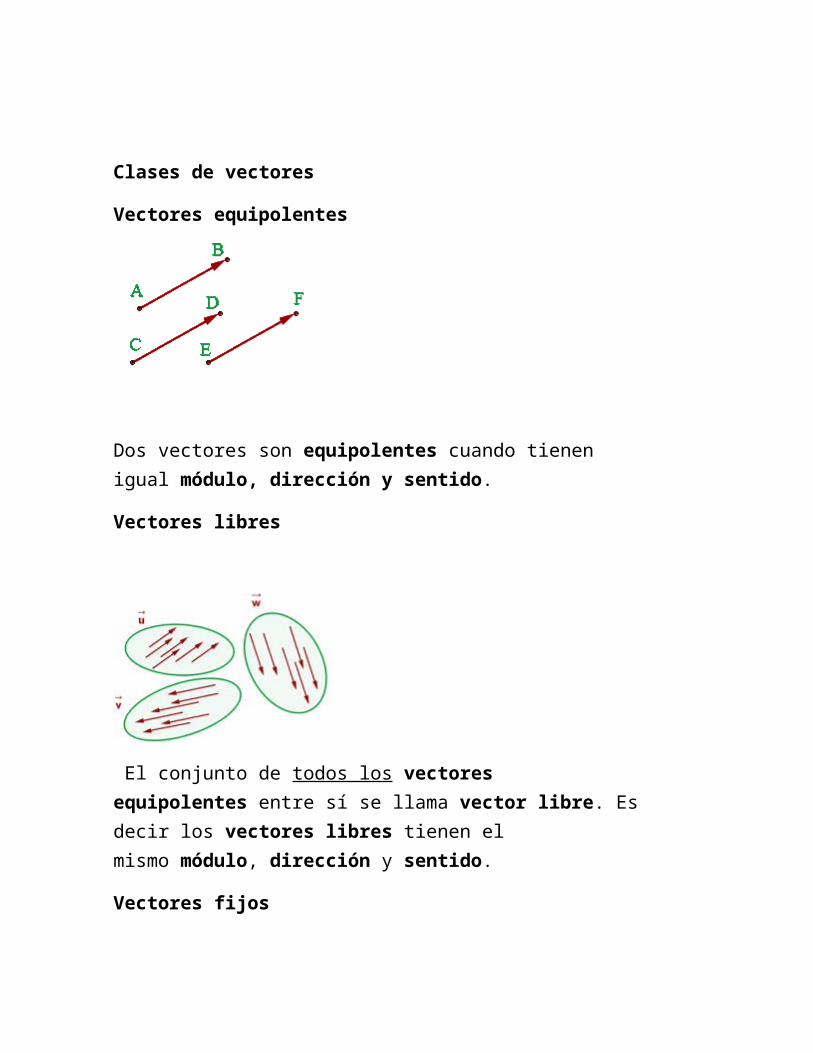
Clases de vectores
Vectores equipolentes

Dos vectores son equipolentes cuando tienen igual módulo, dirección y sentido.
Vectores libres
El conjunto de todos los vectores equipolentes entre sí se llama vector libre. Es decir los vectores libres tienen el mismo módulo, dirección y sentido.
Vectores fijos
Un vector fijo es un representante del vector libre. Es decir, los vectores fijos tienen el mismo módulo, dirección, sentido y origen.
Vectores ligados
Los vectores ligados son vectores equipolentes que actúan en la misma recta. Es decir, los vectores fijos tienen el mismo módulo, dirección, sentido y se encuentran en la misma recta.
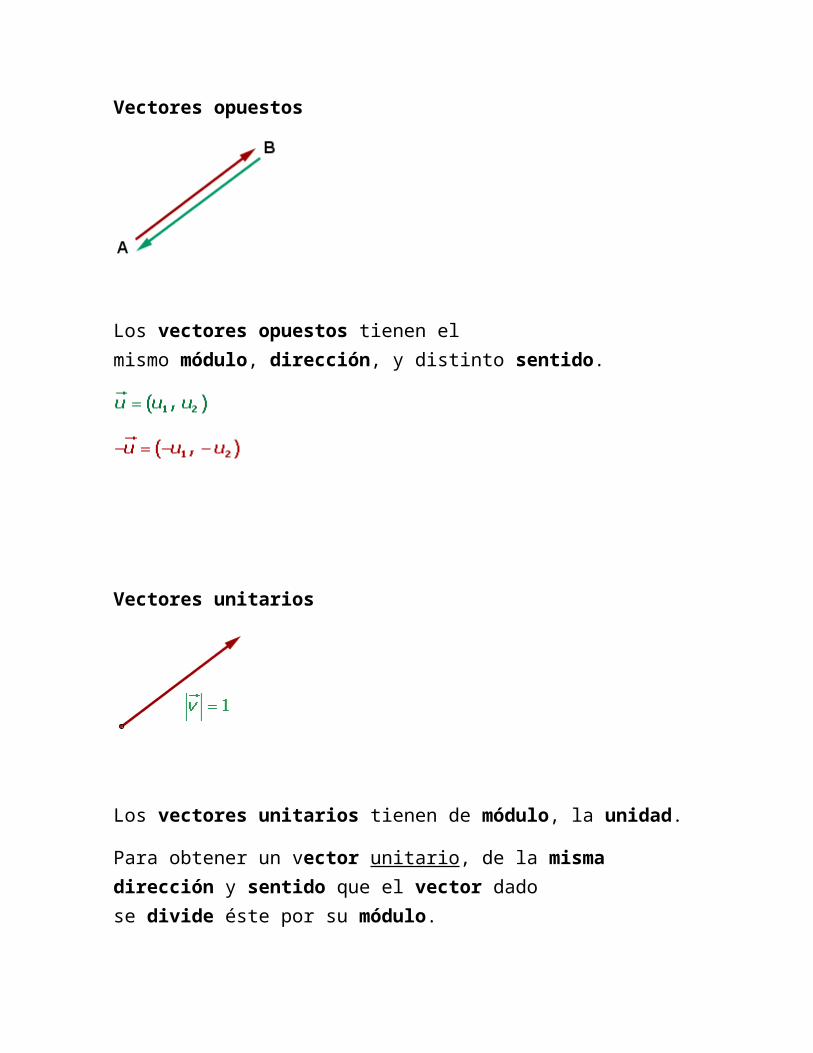
Vectores opuestos
Los vectores opuestos tienen el mismo módulo, dirección, y distinto sentido.
Vectores unitarios
Los vectores unitarios tienen de módulo, la unidad.
Para obtener un vector unitario, de la misma dirección y sentido que el vector dado se divide éste por su módulo.
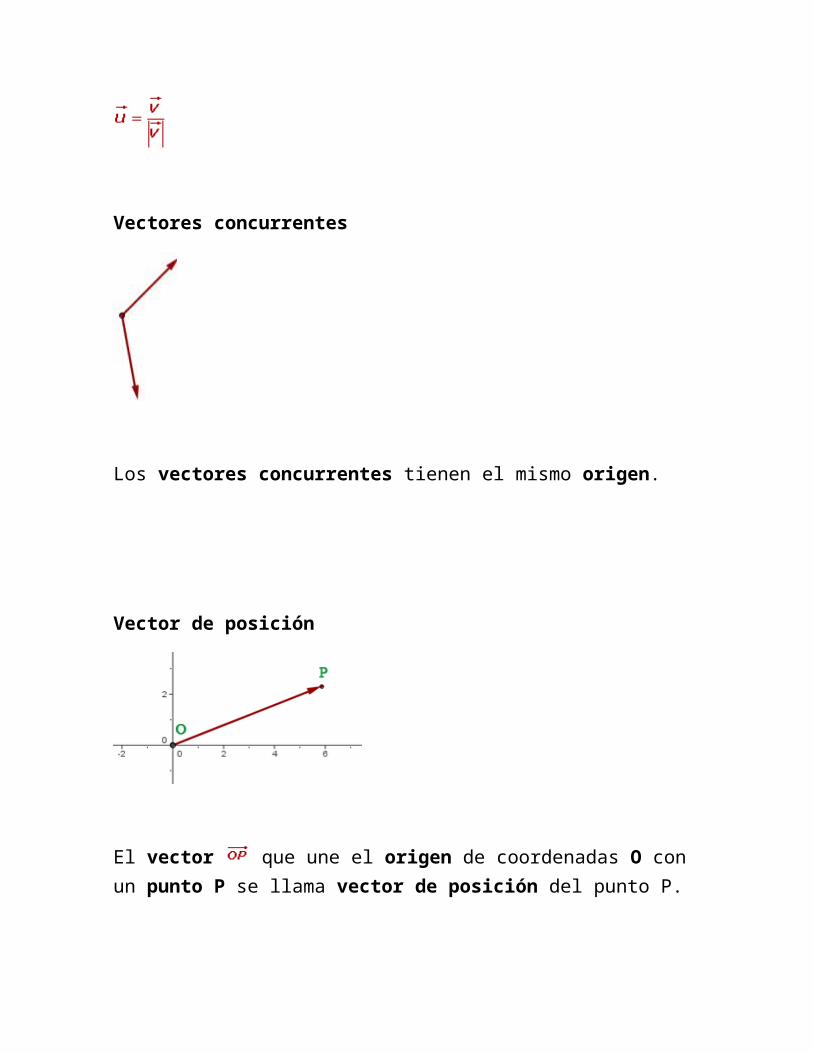
Vectores concurrentes
Los vectores concurrentes tienen el mismo origen.

Vector de posición
El vector que une el origen de coordenadas O con un punto P se llama vector de posición del punto P.
Vectores linealmente dependientes
Varios vectores libres del plano son linealmente dependientes si existe una combinación lineal de ellos que sea igual al vector cero, sin que sean cero todos los coeficientes de la combinación lineal.
Vectores linealmente independientes
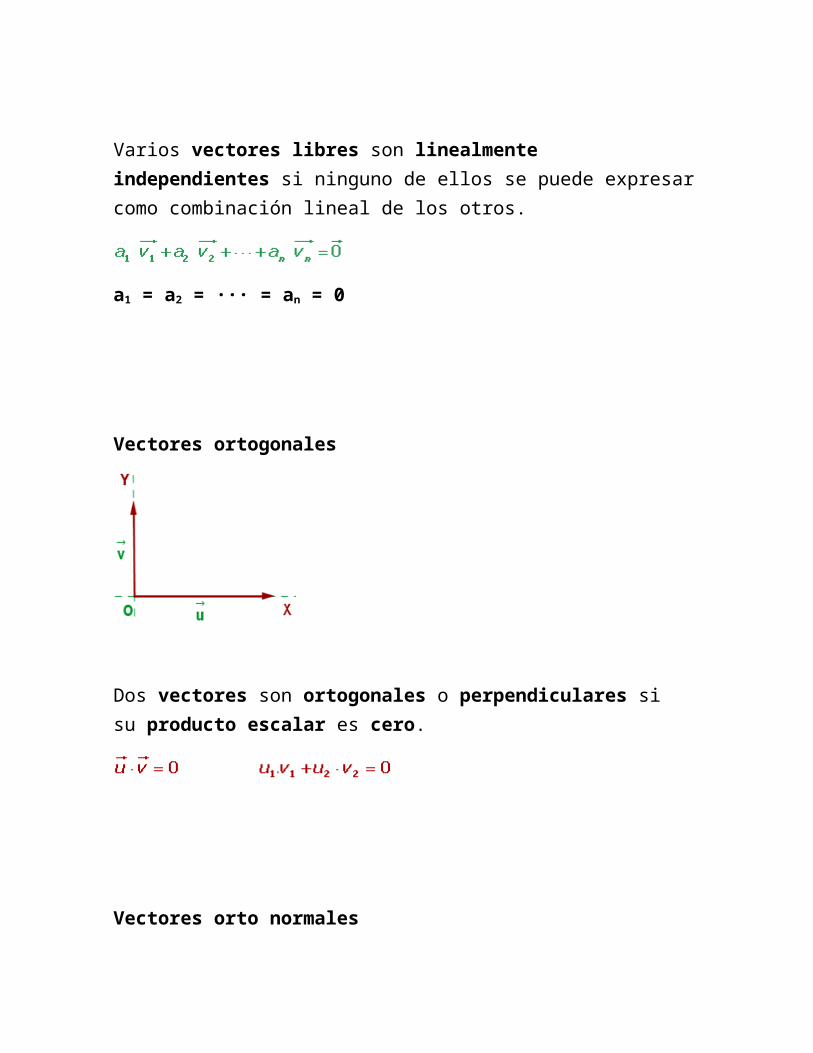
Varios vectores libres son linealmente independientes si ninguno de ellos se puede expresar como combinación lineal de los otros.
a1 = a2 = ··· = an = 0
Vectores ortogonales
Dos vectores son ortogonales o perpendiculares si su producto escalar es cero.

Vectores orto normales
Dos vectores son orto normales si:
1. Su producto escalar es cero.
2. Los dos vectores son unitarios.
PARÁBOLA
Si das una patada a una pelota de fútbol (o disparas una flecha o un misil, o tiras una piedra) seguirá un arco en el aire y caerá de vuelta...
... ¡siguiendo una parábola!
(Excepto por el efecto del aire.)
Definición
Una parábola es una curva en la que los puntos están a la misma distancia de:
un punto fijo (el foco), y
una línea fija (la directriz)
En una hoja de papel, dibuja una línea recta, y marca un punto gordo para el foco (¡que no esté en la línea!).
Ahora juega un poco midiendo con una regla hasta que encuentres un punto que esté a la misma distancia del foco y de la línea.
Repite hasta que tengas muchos puntos, uniéndolos tendrás una parábola.
Nombres
Estos son los nombres más importantes:
la directriz y el foco (están explicados arriba)
el eje de simetría (pasa por el

foco, perpendicular a la directriz)
el vértice (donde la parábola hace el giro más fuerte) está a medio camino entre el foco y la directriz.
Reflector
Y la parábola tiene la siguiente propiedad sorprendente:
Un rayo paralelo al eje de simetría se refleja en la superficie directamente hacia el foco.
Así las parábolas se pueden usar para:
antenas (antena parabólica),
radares,
concentrar los rayos solares para calentar un punto,
los espejos dentro de focos y linternas
etc.
Y por eso el punto central se llama foco... ¡porque ahí es donde se enfocan todos los rayos!

También sale una parábola cuando seccionas un cono (el corte tiene que ser paralelo al lado del cono).
Por tanto, la parábola es una sección cónica (una sección de un cono).
Ecuaciones
Si pones la parábola en coordenadas cartesianas (gráfico x-y) con:
el vértice en el origen "O" y
el eje de simetría en el eje x,
entonces la curva queda definida por la ecuación:
y2 = 4ax
Ejemplo: ¿dónde está el foco de la ecuación y2=5x?
Si ponemos y2 = 5x en la forma y2 = 4ax, tenemos que y2 = 4 (5/4) x,
Así que a = 5/4, y el foco de y2=5x es:
F = (a,0) = (5/4,0)
Las ecuaciones de las parábolas en las distintas orientaciones son:

y2 = 4ax y2 = -4ax x2 = 4ay x2 = -4ay
Medidas para una antena parabólica
Si quieres construir una antena parabólica que tenga el foco 200 mm sobre la superficie, ¿qué medidas necesitas?
Para que sea fácil de hacer, digamos que apunte hacia arriba, y así tenemos la ecuación x2 = 4ay.
Y queremos que "a" sea 200, así que la ecuación queda:
x2 = 4ay = 4 × 200 × y = 800y
Lo reescribimos para poder calcular las alturas:
y = x2/800
Aquí tienes algunas medidas de alturas que van saliendo:
Distancia horizontal ("x")Altura ("y")
0 mm 0.0 mm
100 mm 12.5 mm
200 mm 50.0 mm
300 mm 112.5 mm
400 mm 200.0 mm
500 mm 312.5 mm
600 mm 450.0 mm
Suma de vectores
Para sumar dos vectores libres y se escogen como representantes dos vectores tales que el extremo de uno coincida con el origen del otro vector.
Regla del paralelogramo Se toman como representantes dos vectores con el origen en común, se trazan rectas paralelas a los vectores obteniéndose un paralelogramo cuya diagonal coincide con la suma de los vectores.
Para sumar dos vectores se suman sus respectivas componentes.
Propiedades de la suma de vectores
Asociativa

+ ( + ) = ( + ) +
Conmutativa
+ = +
Elemento neutro
+ =
Elemento opuesto
+ (− ) =
Resta de vectores
Para restar dos vectores libres y se suma con el opuesto de .
Las componentes del vector resta se obtienen restando las componentes de los vectores.
Ejemplo

DETERMINANTES
A cada matriz cuadrada A se le asocia un número denominado determinante de A.
El determinante de A se denota por |A| o por det (A).
A =
Determinante de orden uno
|a 11| = a 11
|5| = 5
Determinante de orden dos
= a 11 a 22 - a 12 a 21
Determinante de orden tres
Consideremos una matriz 3 x 3 arbitraria A = (aij). El determinante de A se define como sigue:

=
= a11 a22 a33 + a12 a23 a 31 + a13 a21 a32 -
- a 13 a22 a31 - a12 a21 a 33 - a11 a23 a32.
=
3 · 2 · 4 + 2 · (-5) · (-2) + 1 · 0 · 1 -
- 1 · 2 · (-2) - 2 · 0 · 4 - 3 · (-5) · 1 =
= 24 + 20 + 0 - (-4) - 0 - (-15) =
= 44 + 4 + 15 = 63
Obsérvese que hay seis productos, cada uno de ellos formado por tres elementos de la matriz. Tres de los productos aparecen consigno positivo (conservan su signo) y tres con signo negativo (cambian su signo).
Regla de Sarrus
La regla de Sarrus es una utilidad para calcular determinantes de orden 3.
Los términos con signo + están formados por los elementos de la diagonal principal y los de las diagonales paralelas con su correspondiente vértice opuesto.
Los términos con signo - están formados por los elementos de la diagonal secundaria y los de las diagonales paralelas con su correspondiente vértice opuesto.
Ejemplo
Menor complementario de un elemento de un determinante
Se llama menor complementario de un elemento aij al valor del determinante de orden n-1 que se obtiene al suprimir en la matriz la fila i y la columna j.
Adjunto de un elemento de un determinante
Se llama adjunto del elemento aij al menor complementario anteponiendo:
El signo es + si i+j es par.
El signo es - si i+j es impar.

El valor de un determinante es igual a la suma de productos de los elementos de una línea por sus adjuntos correspondientes:
= 3(8+5) - 2(0-10) + 1(0+4) = 39 + 20 + 4 = 63
Cálculo de un determinante de cualquier orden
Consiste en conseguir que una de las líneas del determinante esté formada por elementos nulos, menos uno: el elemento base o pivote, que valdrá 1 ó -1.
Seguiremos los siguientes pasos:
1. Si algún elemento del determinante vale la unidad, se elige una de las dos líneas: la fila o la columna, que contienen a dicho elemento (se debe escoger aquella que contenga el mayor número posible de elementos nulos).
2. En caso negativo:
1. Nos fijamos en una línea que contenga el mayor número posible de elementos nulos y operaremos para que uno de los elementos de esa línea sea un 1 ó -1 (operando con alguna línea paralela).
2. Dividiendo la línea por uno de sus elementos, por lo cual deberíamos multiplicar el determinante por dicho elemento para que su valor no varié. Es decir sacamos factor común en una línea de uno de sus elementos.
3. Tomando como referencia el elemento base, operaremos de modo que todos los elementos de la fila o columna, donde se encuentre, sean ceros.
4. Tomamos el adjunto del elemento base, con lo que obtenemos un determinante de orden inferior en una unidad al original.
= 2(-58)
Propiedades de los determinantes
1.|At|= |A|
El determinante de una matriz A y el de su traspuesta At son iguales.
2. |A|=0 Si:
Posee dos líneas iguales
Todos los elementos de una línea son nulos.
Los elementos de una línea son combinación lineal de las otras.

F3 = F1 + F2
3. Un determinante triangular es igual al producto de los elementos de la diagonal principal..
4. Si en un determinante se cambian entre sí dos líneas paralelas su determinante cambia de signo.
5. Si a los elementos de una línea se le suman los elementos de otra paralela multiplicados previamente por un nº real el valor del determinante no varía.
6. Si se multiplica un determinante por un número real, queda multiplicado por dicho número cualquier línea, pero sólo una.
7. Si todos los elementos de una fila o columna están formados por dos sumandos, dicho determinante se descompone en la suma de dos determinantes.
8. |A·B| =|A|·|B|
El determinante de un producto es igual al producto de los determinantes.







