1
TMR4225 Marine Operations, 2007.02.01
JAMSTEC website: http://www.jamstec.go.jp/jamstec-e/ships.html
2
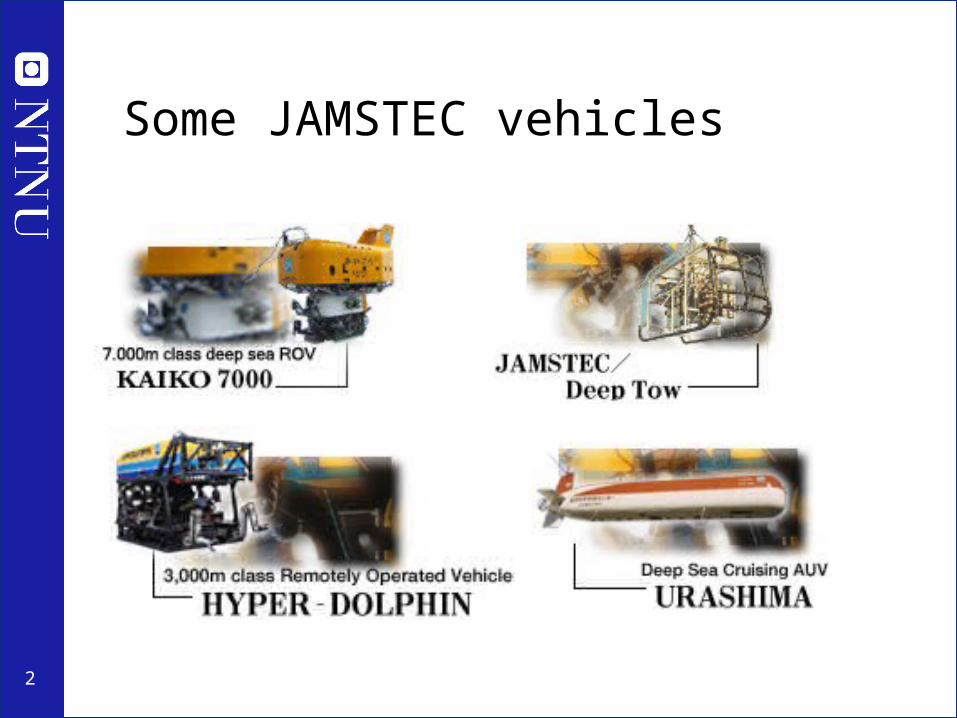
Some JAMSTEC vehicles
3
TMR4225 Marine Operations, 2007.02.01
• Lecture content:– ROV types
– Rov operations
– Hydrodynamics of ROVs
– Simulation as a tool for operational validation
– ROV pilot training

4
ROV overview
• ROV: – Remotely Operated Vehicle with umbilical connection to mother
vessel
– Umbilical is used for power transfer to the vehicle and for communication between it and its pilot
– Important working tool for subsea installations and maintenance
– Increasing depth rating – systems designed for operation down to 2500 – 3000 m
– Umbilical handling is critical for most ROV operations

5
ROV types/classes
• A common classification is:– Low cost observation ROV (electric)
– Small observation ROV (electric)
– Large observation/light work ROV (electric)
– Ultra-deep observation/sampling ROV (electric)
– Medium light/medium work ROV (electro/hydraulic)
– Large heavy work/large payload ROV (electro/hydraulic)
– Ultra-deep heavy work/large payload ROV (electro/hydraulic)

6
Hydro Products RCV 225 on sea trials for Taylor Diving, 1976
7
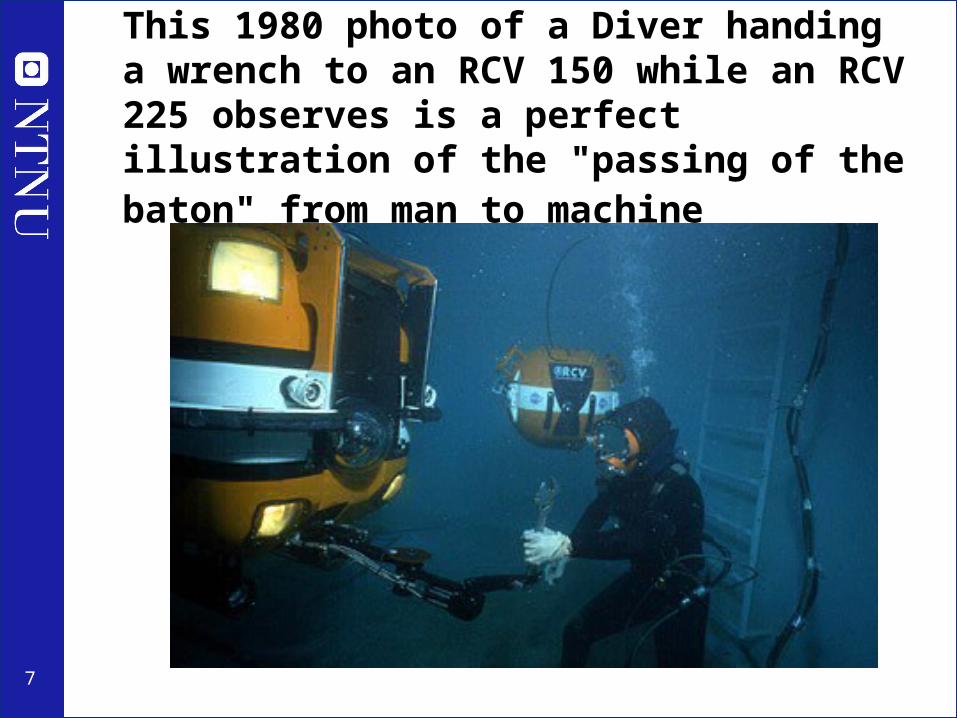
This 1980 photo of a Diver handing a wrench to an RCV 150 while an RCV 225 observes is a perfect illustration of the "passing of the baton" from man to machine

8
Deep Ocean Engineering Phantom 300 Under-ice Dive
9
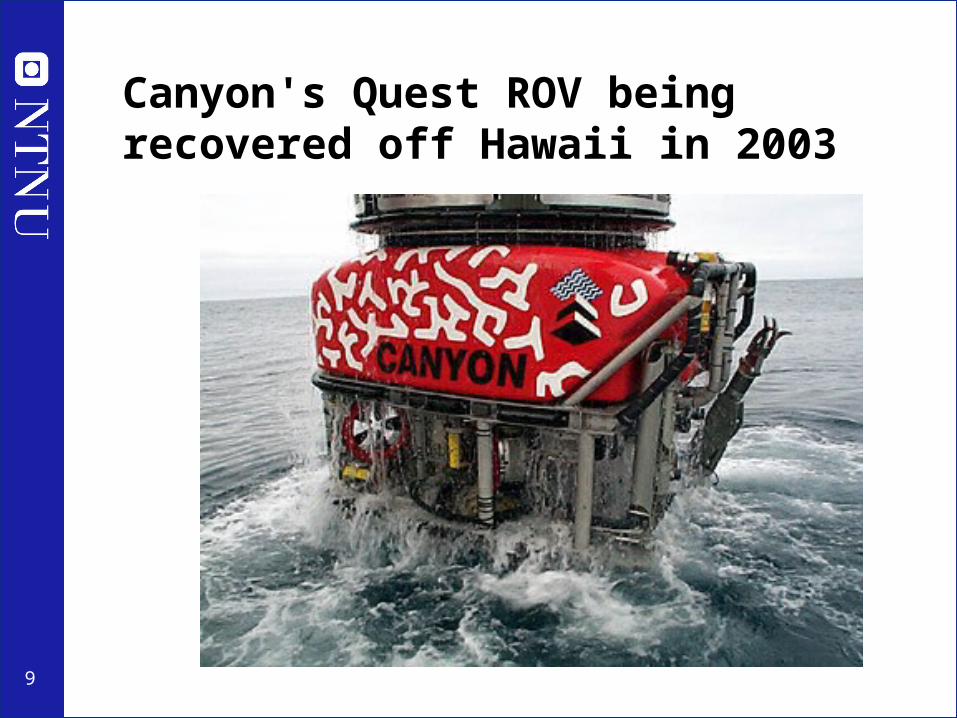
Canyon's Quest ROV being recovered off Hawaii in 2003
10
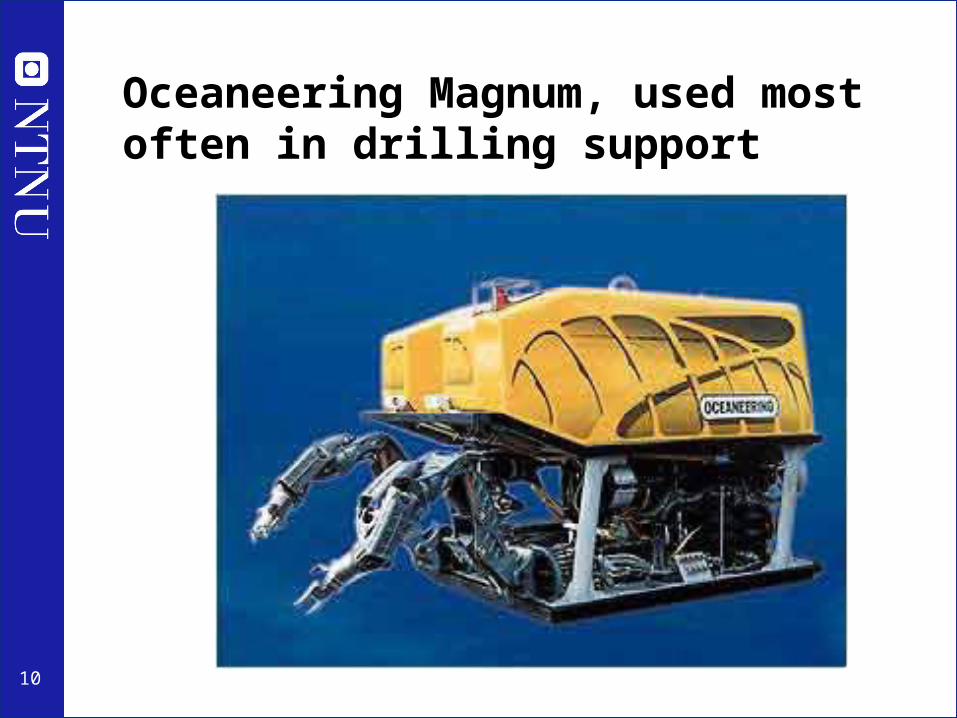
Oceaneering Magnum, used most often in drilling support

11
Subsea 7 – Hercules rated for 2000 m waterdepth
12
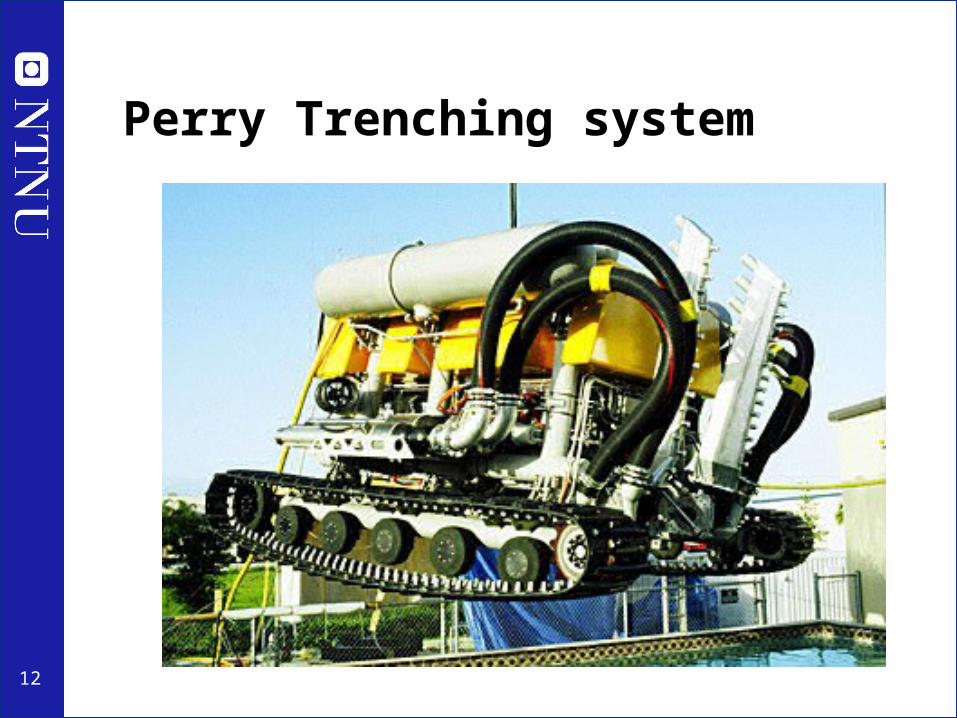
Perry Trenching system

13
Work Class ROV systems operating worldwide
Oceaneering International, Inc. 152
Subsea 7 (Halliburton/Subsea) 78
Stolt (Stolt/Comex/Seaway) 35
Sonsub (Saipem) 59
Fugro (ex Racal/Thales) 36
Canyon (Cal Dive) 23
Technip-Coflexip 22
Others- Approximate number of specialty systems, plus systems operated by smaller companies.(Source: Drew Michel interviewing contractors March 2004)
30
Total Systems 435
From MTS ROV site, 2004 estimates

14
Examples of ROVs
• Check organisational web sites– http://www.rov.org– http://www.rov.net– http://www.rovworld.com– http://www.diveweb.com/rovs/features/uv-wi99.01.htm
• Check suppliers and operators websites:– http://www.kystdesign.no– http://www.sperre-as.com– http://www.oceaneering.com– http://www.stoltoffshore.com

15
NTNU ROV Minerva
• NTNU has bought an ROV for biological research
• 2 Dr. ing studies have been allocated to develop tools and procedures for scientific use of the ROV
• For more info see the web site:– http://www.ivt.ntnu.no/imt/minerva

16
Minerva ROV
17
18
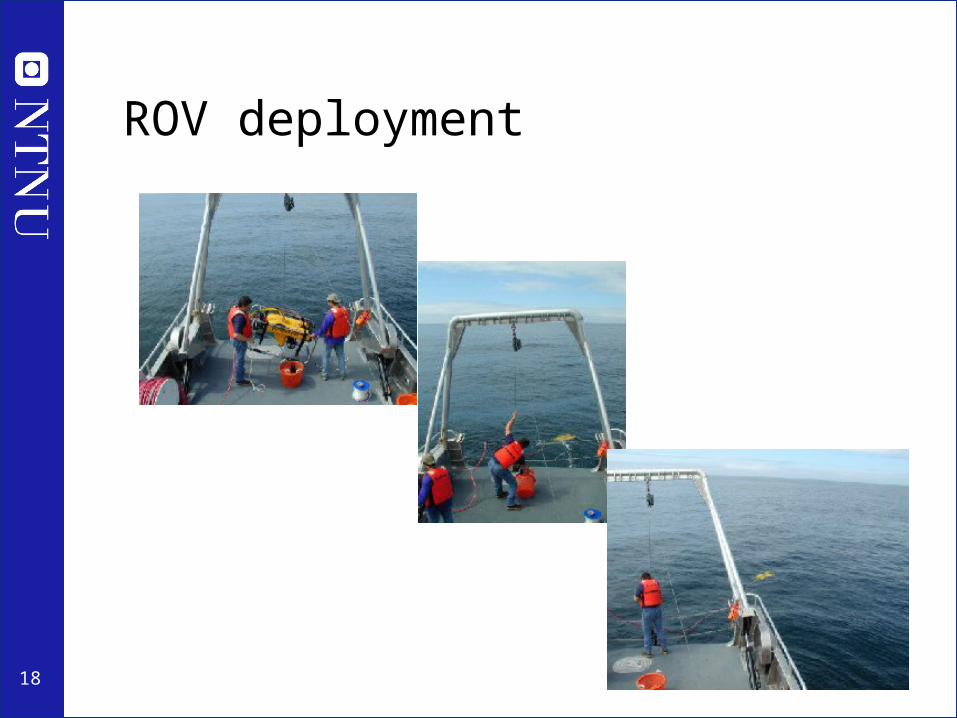
ROV deployment
19
ROV operational goals
• Visual inspection– Inspection of underwater structures
– Observation of ongoing work tasks on subsea structures
– Biological observation
• Different types of mechanical inspection
• Non destructive testing
• Mechanical work
• Biological sampling, water column and bottom

20
Flow characteristics for standard operations
• ROV– Non-streamlined body
– Mostly turbulent flow due to separation on edges
– Low speed
– Large angles of attack; have to be able to operate in cross current
– Different characteristics for up and down motion
– Complex flow due to interacting thrusters
– Umbilical drag can be high for operations at large depths
– Tether management system can be used to remove umbilical
induced motion of ROV
21
ROV umbilicals
• Vessel motion and indusced motion at the upper end of the umbilical
• Umbilical geometry resulting from depth varying current
• Use of buoyancy and weight elements to obtain a S-form to reduce umbilical forces on the ROV
• Induced transverse vibrations of umbilical
• Forces and motions at lower end of umbilical

22
Equation of motion for ROVs
• 6 degree of freedom (6DOF) model
• No defined steady state motion as a baseline for development of motion equations
• ROVs are usually asymmetrical up-down and fore-aft
• As far as possible the ROVs are designed for port-starboard symmetry
• See section 4.6 of lecture note for ROV motion equation

23
Hydrodynamic added mass/moment of inertia
• 6 x 6 matrix• Non-diagonal terms exists• Terms may have different values for positive and negative
accelerations, especially for heave and pitch motion• Ideal fluid sink-source methods can be used• Motion decay tests can be used to find some terms• Generalized Planar Motion Mechanism tests can be used to
find all terms• Simplified 2D crossections can be used to estimate some
of the terms

24
Velocity dependent forces (drag and lift)
• Non linear terms are important
• Streamlining of bouyancy elements influence both drag and lift forces and moments
• Motion decay tests can be used to find some drag terms
• Generalized Planar Motion Mechanism tests can be used to find all terms

25
Minerva ROV

26
MINERVA tests
• Drag tests, varying speed
• Drag test, varying angle of attack
• Full scale tests
• Use of vehicle to generate input to parametric identification of mathematical model characteristics
• Exercise no. 4 includes comparison of own calculations with model test results for MINERVA

27
Minerva 1:5 scale model test

28
Minerva 1:5 scale model test

29
Other forces
• Gravity and buoyancy forces and moments
• Thruster forces and moments
• Control forces from any additional control units
• Umbilical forces
• Environmental forces
• Interaction forces from bottom and/or sea bed structures

30
Summary ROV
• Observation platform to support topside operators performing complex subsea work tasks
• Workhorse for installation and maintenance tasks
• Tether management system is a must for ”workhorse” ROVs







