diseño analógico de controladores digitales. · diseño analógico de controladores digitales....
TRANSCRIPT
44 CAPITULO
Diseño analógico de controladores digitales.
Aquel que no ha fracasado es porque nunca ha intentado
algo nuevo Albert Einstein.
Contenido:
Tema 4.1: Controladores PID digitales Tema 4.2: Rediseño utilizando la retroalimentación de estado. Tema 4.3: Métodos de diseño utilizando la respuesta en frecuencia.
Instituto Tecnológico de Puebla
Control Digital.
Tema 4.1 Controladores PID digitales.
Introducción El controlador PID es por mucho el algoritmo de control más común. La mayoría de los
lazos de retroalimentación son controlados por este algoritmo o por algunas variaciones menores de él. Es implementado de muchas formas diferentes, como un controlador autosuficiente o como parte de un sistema de Control Digital Directo (DDC) o de un sistema de control de procesos distribuido jerárquicamente.
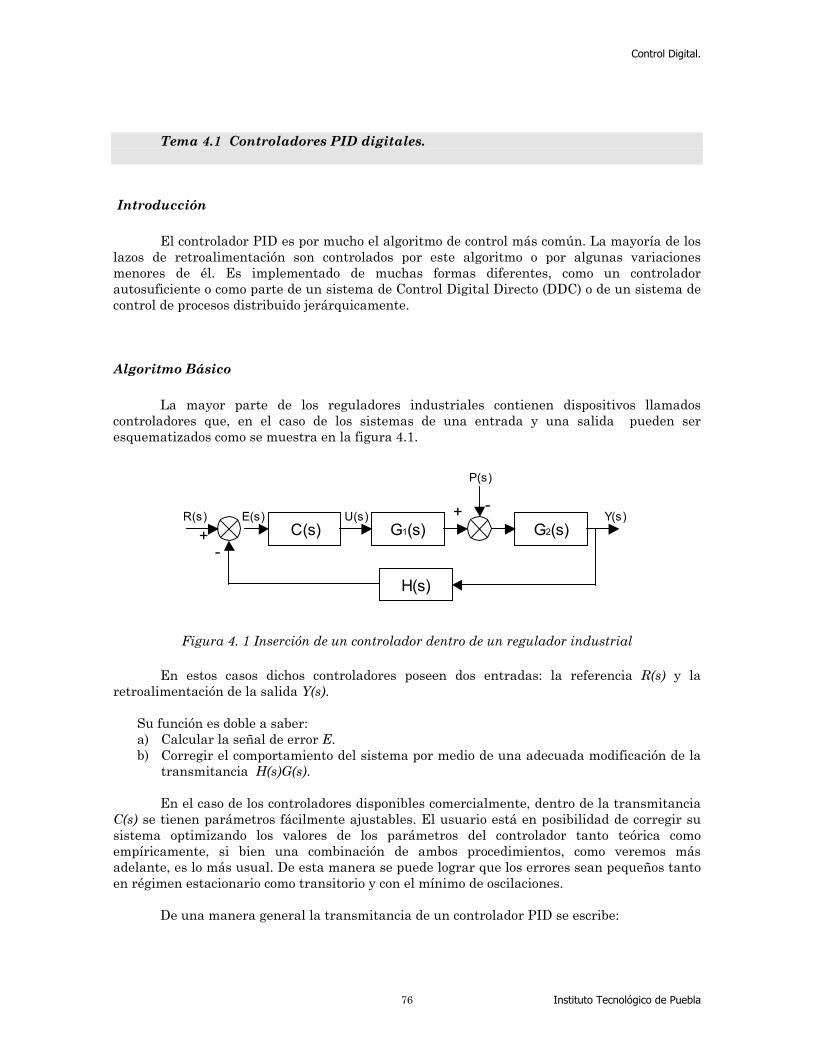
Algoritmo Básico La mayor parte de los reguladores industriales contienen dispositivos llamados
controladores que, en el caso de los sistemas de una entrada y una salida pueden ser esquematizados como se muestra en la figura 4.1.
E(s) R(s)
+ C(s) G1(s) G2(s)
H(s)
Y(s)
P(s)
-
+ - U(s)
Figura 4. 1 Inserción de un controlador dentro de un regulador industrial
En estos casos dichos controladores poseen dos entradas: la referencia R(s) y la
retroalimentación de la salida Y(s). Su función es doble a saber: a) Calcular la señal de error E. b) Corregir el comportamiento del sistema por medio de una adecuada modificación de la
transmitancia H(s)G(s).
En el caso de los controladores disponibles comercialmente, dentro de la transmitancia C(s) se tienen parámetros fácilmente ajustables. El usuario está en posibilidad de corregir su sistema optimizando los valores de los parámetros del controlador tanto teórica como empíricamente, si bien una combinación de ambos procedimientos, como veremos más adelante, es lo más usual. De esta manera se puede lograr que los errores sean pequeños tanto en régimen estacionario como transitorio y con el mínimo de oscilaciones.
De una manera general la transmitancia de un controlador PID se escribe:
Instituto Tecnológico de Puebla 76

Control Digital.
ss
KsC βα++=)(
4. 1 Así se tiene un términos de proporcionalidad (K) un término de integración (α/s) y un
término de derivación (βs), de donde este controlador toma su nombre. Si buscamos una definición más técnica, la versión básica del algoritmo PID, tiene la siguiente forma:
++= sT
sTKsC d
ip
11)(
4. 2 donde: Kp = Ganancia proporcional.
Ti = Tiempo integral. Td = Tiempo derivativo.
Si la entrada al controlador es e(t) , la salida u(t) del controlador está dada por:
++= ∫ dt
tdeTdtteT
teKtu di
p)()(11)()(
4. 3 donde u(t) es la variable de control (salida del controlador) y e(t) es el error de control, el cual es la diferencia entre el punto de referencia r(t) y la salida del sistema (valor medido) y(t) . La variable de control es entonces la suma de tres términos: el término P (el cual es proporcional al error), el término I (el cual es proporcional a la integral del error) y el término D (el cual es proporcional a la derivada del error). Las constantes Kp, el tiempo integral T y el tiempo
derivativo T son los parámetros del controlador. i
d
La ecuación 4.2 también podemos escribirla como
sKs
KKsC d
ip ++=)(
4. 4 donde: Kp = Ganancia proporcional. Ki = Ganancia integral. Kd = Ganancia derivativa.
En este caso Kp, Kd y Ki son los parámetros del controlador.
Instituto Tecnológico de Puebla 77
Control Digital.
Acción proporcional En el caso de control proporcional puro, la ecuación 4.2 se reduce a:
pKsEsUsC ==)()()(
y de aquí: )()( teKtu p=
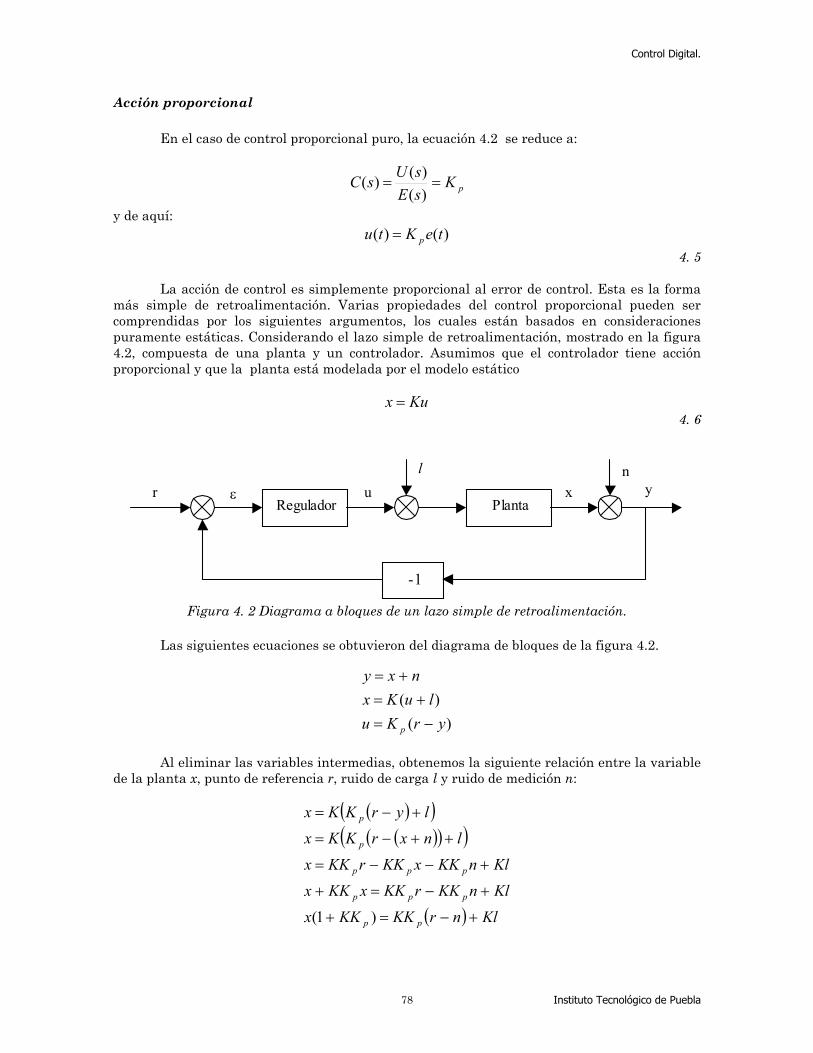
4. 5 La acción de control es simplemente proporcional al error de control. Esta es la forma más simple de retroalimentación. Varias propiedades del control proporcional pueden ser comprendidas por los siguientes argumentos, los cuales están basados en consideraciones puramente estáticas. Considerando el lazo simple de retroalimentación, mostrado en la figura 4.2, compuesta de una planta y un controlador. Asumimos que el controlador tiene acción proporcional y que la planta está modelada por el modelo estático
Kux =
4. 6
Regulador
Planta
-1
r
ε
u
l x
n y
Figura 4. 2 Diagrama a bloques de un lazo simple de retroalimentación.
Las siguientes ecuaciones se obtuvieron del diagrama de bloques de la figura 4.2.
)()(yrKu
luKxnxy
p −=+=
+=
Al eliminar las variables intermedias, obtenemos la siguiente relación entre la variable de la planta x, punto de referencia r, ruido de carga l y ruido de medición n:
( )( )( )( )( )
( ) KlnrKKKKx
KlnKKrKKxKKx
KlnKKxKKrKKx
lnxrKKxlyrKKx
pp
ppp
ppp
p
p
+−=+
+−=+
+−−=
++−=
+−=
)1(
Instituto Tecnológico de Puebla 78

Control Digital.
lKKKnr
KKKK
xpp
p
++−
+=
1)(
1
4. 7
El producto KKp es un número adimensional llamado ganancia de lazo. Algunas propiedades interesantes del sistema de lazo cerrado pueden observarse en la ecuación 4.7. La ganancia de lazo debe ser alta para asegurar que la salida de la planta x sea cercana al punto de referencia r. Un alto valor de la ganancia de lazo hará también insensible el sistema al ruido de carga l. Como podemos ver en la ecuación 4.7 el ruido de medición n influye en la salida de la planta de la misma manera que el punto de referencia r. Una alta ganancia de lazo hace entonces sensible el sistema al ruido de medición. También podemos ver en la ecuación 4.7 que siempre existirá un error de estado estacionario con el control proporcional. Esto puede ser deducido intuitivamente desde la observación de la ecuación 4.5 en la que el error de control es necesario para no tener una señal de control de orden cero. Los controladores proporcionales por consiguiente son provistos algunas veces de un término de “offset” I para obtener una salida correcta en estado estacionario. La ecuación 4.5 queda entonces:
ItKetu += )()( 4. 8
donde I es el término de “offset”. Los argumentos anteriores, los cuales están basados en la asunción de que la planta puede ser descrita por un modelo estático, nos muestran algunas propiedades importantes de la dinámica de los sistemas de lazo cerrado. La más importante es que un sistema de lazo cerrado sería normalmente inestable para altas ganancias de lazo si se considerara la dinámica de la planta. En la práctica la máxima ganancia de lazo es determinada por la dinámica de la planta. Una manera de incluir la dinámica de la planta en la ecuación 4.7, sería hacer la ganancia de la planta dependiente de la frecuencia. Pero sin importar el mecanismo en sí y la potencia que lo alimenta, el controlador proporcional es esencialmente un amplificador con ganancia ajustable.
Acción integral. La principal función de la acción integral es hacer estable la salida del proceso de acuerdo al punto de referencia en estado estable. Como vimos anteriormente con el controlador proporcional es necesario que exista un error para tener una señal de control no nula. Con la acción integral, un pequeño error positivo siempre conduciría a un incremento en la señal de control y un error negativo daría un decremento en la señal de control no importando qué tan pequeño sea el error. En este caso la ecuación 4.2 se reduce de tal forma que la acción de un controlador integral está definida por la ecuación 4.9 ó 4.10.
sK
sC i=)(
4. 9
Instituto Tecnológico de Puebla 79

Control Digital.
ó
∫=t
i dtteKtu0
)()(
4. 10 Si se duplica el valor de e(t) el valor de u(t) varía a doble velocidad. Ante un error igual a cero , el valor de u(t) permanece estacionario. En ocasiones la acción de control integral recibe el nombre de control de reposición o reestablecimiento. De acuerdo a la ecuación 4.2, la acción de un controlador proporcional – integral queda definida por la ecuación 4.11.
+=
sTKsC
ip
11)(
4. 11 Donde Kp es la ganancia proporcional y Ti es el tiempo integral. Ambos valores Kp y Ti son ajustables. El tiempo integral regula la acción de control integral, mientras que una modificación en Kp afecta tanto a la parte integral como a la proporcional de la acción de control. El recíproco del tiempo integral Ti recibe el nombre de frecuencia de reposición. La frecuencia de reposición es la cantidad de veces por minuto que se repite la acción proporcional y se mide en términos de repeticiones por minuto. Los siguientes argumentos nos muestran que el error en estado estacionario deberá ser siempre cero. Si asumimos que el sistema en estado estacionario tiene una señal de control u(t) y un error constante e(t). Partiendo de la ecuación 4.11, tenemos
+==
sTK
sEsUsC
ip
11)()()(
+= ∫
t
ip dtte
TteKtu
0)(1)()(
4. 12 Si resolvemos la ecuación 4.12 la señal de control está dada por
+= t
TteteKtui
)()()(
4. 13
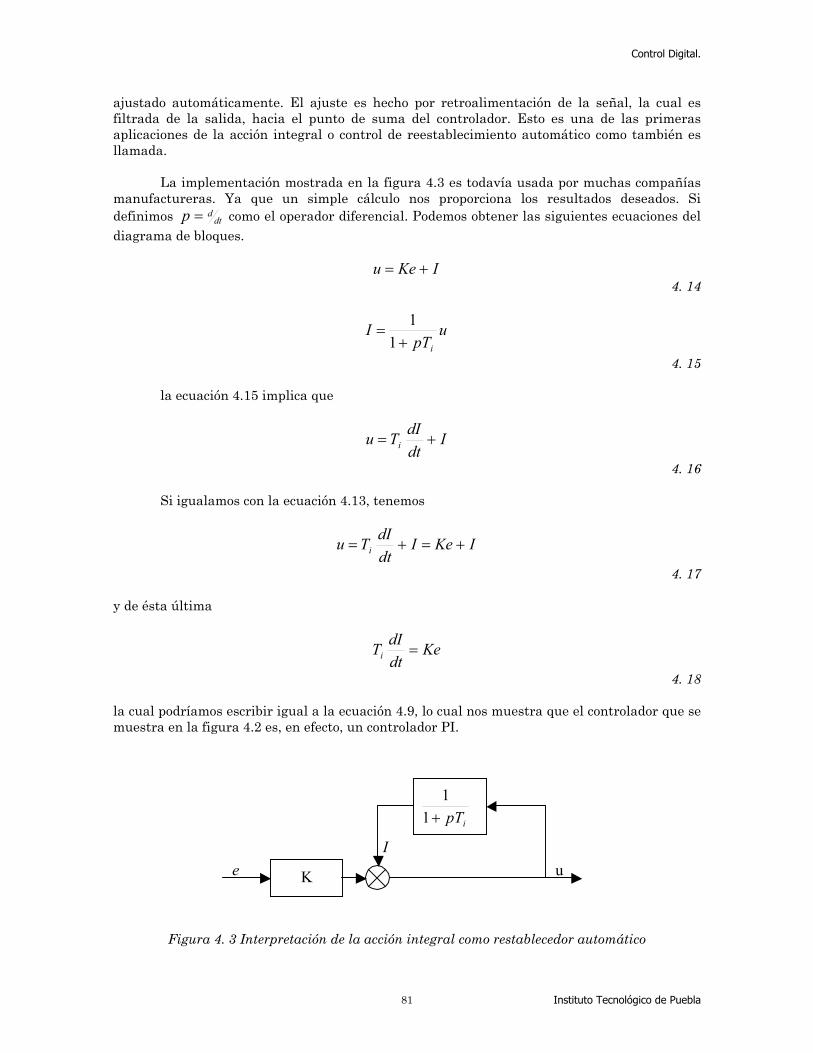
tal que e(t) ≠ 0; esto claramente contradice la asunción de que u(t) es constante. Un controlador con acción integral deberá entonces dar un error igual a cero en estado estacionario. La acción integral puede ser utilizada entonces como un dispositivo que reestablece automáticamente al controlador proporcional. Esto se ilustra en el diagrama de bloques de la figura 4.3, el cual nos muestra un controlador proporcional con restablecimiento que es
Instituto Tecnológico de Puebla 80
Control Digital.
ajustado automáticamente. El ajuste es hecho por retroalimentación de la señal, la cual es filtrada de la salida, hacia el punto de suma del controlador. Esto es una de las primeras aplicaciones de la acción integral o control de reestablecimiento automático como también es llamada.
La implementación mostrada en la figura 4.3 es todavía usada por muchas compañías manufactureras. Ya que un simple cálculo nos proporciona los resultados deseados. Si definimos dt
dp = como el operador diferencial. Podemos obtener las siguientes ecuaciones del diagrama de bloques.
IKeu +=
4. 14
upT
Ii+
=1
1
4. 15
la ecuación 4.15 implica que
IdtdITu i +=
4. 16
Si igualamos con la ecuación 4.13, tenemos
IKeIdtdITu i +=+=
4. 17 y de ésta última
KedtdITi =
4. 18 la cual podríamos escribir igual a la ecuación 4.9, lo cual nos muestra que el controlador que se muestra en la figura 4.2 es, en efecto, un controlador PI.
K
e
I u
ipT+11
Figura 4. 3 Interpretación de la acción integral como restablecedor automático
Instituto Tecnológico de Puebla 81

Control Digital.
Acción derivativa. El propósito de la acción derivativa es proveer al lazo cerrado de estabilidad. El mecanismo de estabilidad, hablando ligeramente, puede ser descrito como sigue. Dado que la dinámica de la planta conducirá a un cambio en la variable de control que es notable en la salida de la planta. La acción de un controlador con acción proporcional y derivativa puede ser interpretada como si la salida del control predijera la salida de la planta donde la predicción es hecha por la extrapolación del error mediante la tangente de la curva del error, (ver figura 4.4)
El tiempo de predicción es Td.
Tiempo
Error de salida
Error actual
t t+Td
Error predicho
dtdeTe d+
Figura 4. 4 Predicción de la acción derivativa como una predicción de control.
Modificación de los términos derivativos. El algoritmo del término derivativo es:
−==
dttdy
dttdrKT
dttdeTKtC ddp
)()()()(
4. 19 donde el punto de referencia r es normalmente constante con algunos cambios abruptos. Esto normalmente no contribuye con el término derivativo. Sin embargo, el término de
dttdr )(
cambiará drásticamente cuando el punto de referencia cambie. Por esta razón es común
en la práctica aplicar la acción derivativa únicamente a la salida del proceso. El término derivativo es entonces implementado como
Instituto Tecnológico de Puebla 82

Control Digital.
dttdyTKtc dp)()( −=
4. 20
Limitantes de la ganancia derivativa. La acción derivativa puede provocar dificultades si están a altas frecuencias las mediciones de ruido. Una señal sinusoidal de ruido
wtatn sin)( = tendrá la siguiente contribución en la señal de control:
wtwaKTdt
tdnKTtu dd cos)()( ==
4. 21 La amplitud de la señal de control puede ser arbitrariamente grande si el ruido tiene frecuencia suficientemente alta (w). La ganancia de frecuencia alta del término derivativo es por eso empleada para evitar esta dificultad. Esto puede ser llevado a cabo implementando el término derivativo como
dtdyKTD
dtdD
NT
dd −=+
4. 22 Continuando, la ecuación 4.22 que se modificó con el término derivativo puede ser representada por la ecuación 4.23:
yNpT
pKTD
d
d
/1+−=
4. 23 La modificación puede así ser interpretada como un filtro ideal derivativo para un sistema de primer orden con una constante de tiempo Td/N. La aproximación actuará como un derivador para componentes de señales a bajas frecuencias. La ganancia es, algunas veces, limitada a N. Esto indica que en las mediciones a altas frecuencias el ruido es amplificado más por un factor N.
Criterios de selección del PID
¿Cuándo puede ser utilizado un controlador PID? Los requerimientos de un sistema de control puede incluir muchos factores como
respuesta a señales de mando, insensibilidad al ruido y variaciones del proceso y rechazo a
Instituto Tecnológico de Puebla 83
Control Digital.
disturbios en la carga. El diseño de un sistema de control envuelve también procesos dinámicos, saturación de actuadores y disturbios característicos. Se puede, por consiguiente, sorprenderse ante el buen trabajo que puede realizar un controlador PID. La observación empírica general es que la mayoría de los procesos industriales pueden ser controlados razonablemente bien con un controlador PID cuando las demandas en el desempeño del control no son muy altas. Los siguientes párrafos ahondan más allá dentro de este problema primero considerando los casos cuando un controlador PID es suficiente y después discutiendo algunos problemas genéricos donde controladores más sofisticados son aconsejables.
¿Cuándo es suficiente un controlador PI? Frecuentemente la acción derivativa no es usada. Esta es una observación interesante
ya que muchos controladores industriales únicamente tienen acciones PI y en otros la acción derivativa puede ser ( y frecuentemente es) cancelada de los lazos de control. Se puede observar que los controladores PI son adecuados para los procesos donde las dinámicas son esencialmente de primer orden (controladores de nivel en tanques, agitadores en tanques de reacción para un perfecto mezclado, etc.), es bastante fácil encontrar en este caso por medición, la respuesta al escalón o la respuesta en frecuencia de estos procesos.
Si en la respuesta se observa que el sistema es de primer orden o, si la gráfica de Nyquist está en el primer y cuarto cuadrante únicamente entonces, el controlador PI es suficiente.
Otra razón es que el proceso haya sido diseñado para no requerir un nivel de control fino. En este caso el proceso puede tener una dinámica de alto orden, en la que es necesaria la acción integral para proporcionar un error de estado estacionario nulo, y una adecuada respuesta transitoria debida a la acción proporcional.
¿Cuándo es suficiente un controlador PID? Similarmente, un controlador PID es suficiente para procesos donde las dinámicas
dominantes son de segundo orden, lo cual implica más dificultad para estabilizarlos. Una medida a su respuesta en frecuencia es una posibilidad. Si la respuesta en frecuencia es monótona con un retraso de fase menor a 180° , entonces el sistema es de segundo orden.
Un caso típico en que la acción derivativa mejora la respuesta es cuando la dinámica está caracterizada por constantes de tiempo de diferente magnitud. La acción derivativa puede entonces ser aprovechada para mejorar la velocidad de respuesta. Un controlador de temperatura es el caso típico. El control derivativo es también benéfico cuando se requiere un control alto para un sistema de orden alto. El alto orden de la dinámica limita el valor de la ganancia para un buen control. Con la acción derivativa se mejora el amortiguamiento y puede ser usado un alto valor en la ganancia proporcional para elevar la velocidad de la respuesta transitoria.
¿Cuándo es necesario un controlador más complejo? Los sistemas de control con un tiempo de retardo dominante son notoriamente
dificultosos. Este es un tema en el cual hay muchas y diferentes opiniones acerca del mérito del controlador PID. Estamos generalmente de acuerdo en que la acción derivativa no ayuda mucho en procesos con retardos de tiempo dominantes. Para procesos estables en lazo abierto,
Instituto Tecnológico de Puebla 84
Control Digital.
la respuesta a señales de control pueden mejorarse sustancialmente introduciendo tiempos muertos de compensación. El rechazo a los disturbios en la carga puede ser mejorado con algunos grados debido a que el compensador de tiempo muerto permite una ganancia de lazo más alta que el controlador PID. Los sistemas con retardos dominantes de tiempo son entonces candidatos para controladores más sofisticados.
Para algunos sistemas con variaciones de parámetros grandes es posible diseñar
controladores lineales que permiten la operación sobre un ancho de banda del rango de los parámetros . Estos controladores, sin embargo, son de un orden muy alto. El control de las variables del proceso esta estrechamente relacionado a la cuestión económica Por lo que en los lazos de control es frecuentemente necesario seleccionar el controlador con respecto a las características de los disturbios. Esto nos lleva a estrategias de control que no son del tipo PID. Estos problemas con frecuencia están asociados con retardos de tiempo. Un controlador general debe proteger al modelo de disturbios originados dentro del sistema. Como un controlador PID tiene una complejidad limitada, no puede proteger de disturbios complejos en particular de los disturbios periódicos.
Digitalización de un PID
Introducción Algunos aspectos importantes de la implementación de controladores PID en computadoras digitales, serán mostrados en esta sección, problemas tales como: el prefiltrado, aliasing, aproximaciones digitales, diferentes ruidos de filtrado y códigos de computadoras para buenas implementaciones. Algunos aspectos en el uso y desuso de los controladores PID, son presentados en ejemplos de sistemas donde el controlador PID puede trabajar bien o no, debido a que los esquemas de discretización de estos controladores son aproximaciones.
Aliasing Como sabemos las acciones del controlador están basadas en los valores de la salida del proceso únicamente en tiempos discretos. Este procedimiento es llamado muestreo , en el caso normal se muestrea periódicamente con un periodo h, pero el mecanismo de muestreo introduce un fenómeno inesperado, el cual debe ser tomado en cuenta para obtener una buena implementación digital de un controlador PID.
Para explicar esto consideremos las siguientes ecuaciones
( )ttnts s ωω ±= cos)( 4. 24
)cos()( ttsa ω= 4. 25
Donde [ sradhs /2πω =
, kkh
]
]
es la frecuencia de muestreo. Según las fórmulas de la
función coseno podemos deducir que los valores de las señales representadas por las ecuaciones anteriores en los instantes [ tienen la propiedad L,2,1,0=
Instituto Tecnológico de Puebla 85

Control Digital.
)()cos()cos()( khskhkhnkhkhs as ωωωω ==±= 4. 26
Por lo que las señales s y sa tienen el mismo valor en ese instante de muestreo. Y si únicamente conocemos los valores en estos instantes de muestreo no hay manera de separar ambas señales. La señal sa es entonces llamada “alias” de la señal s. Este efecto lo vemos ilustrado en la figura 4.5.
Figura 4. 5 Ejemplo de "Aliasing" en el dominio del tiempo.
Una consecuencia del efecto “aliasing” es que puede aparecer una frecuencia de ruido
después de muestrear como una componente de baja frecuencia. Por ejemplo, si el periodo de muestreo de una señal es 18mS. Para una señal sinusoidal de frecuencia de 50Hz, después de muestrear aparecerá como una señal sinusoidal con frecuencia
Hzf a 6.5018.150 =−=
El efecto “aliasing” puede crear serias dificultades si no se toman las precauciones
debidas. Para altas frecuencias es efectivamente eliminado con un filtro pasabajas (prefiltrado).3
Transformación Bilineal Antes de aplicar con ventaja los métodos de diseño ya desarrollados, a los controladores
de tiempo discreto, son necesarias ciertas modificaciones. Supongamos que se dispone de un controlador en tiempo continuo Kc(s), y deseamos convertirlo para propósitos de implementación en un controlador digital, donde el periodo de muestreo es T segundos por lo que la frecuencia de muestreo es
Tf s
1=
4. 27
Tws
π2=
4. 28 3 Sistemas de Control en Tiempo Discreto; Ogata, Katsuhiko; Ed. Prentice Hall. P.p.
Instituto Tecnológico de Puebla 86

Control Digital.
Una manera común de convertir una función de transferencia continua a una discreta es la Transformación Bilineal (BLT) o Aproximación de Tustin. Como nosotros sabemos, la relación entre la transformada de Laplace (variable s) y la transformada z (variable z) está dada por (Oppenheim y Schafer 1975). De aquí, por expansión de series podemos ver sTez =
2121
Ts
Tsez sT
−
+≈=
4. 29 Nosotros podemos invertir esta transformación y definir
112'
+−
=zz
Ts
4. 30 La transformación bilineal corresponde a una integral aproximada usando la regla trapezoidal, donde si
1
1
112
112
)()(
−
−
+−
=+−
=zz
Tzz
TzUzY
4. 31 Entonces (recordemos que z-1 es un retardo unitario en el dominio del tiempo tal que
) 11
−− = kk uuz
( )11 2 −− ++= kkkk yyTuu
4. 32
Método MPZ (Matched Pole-Zero)
Una segunda técnica de aproximación para convertir una función de transferencia continua a discreta es el método MPZ (Matched Pole – Zero). En este método, los polos y ceros de la función de transferencia son mapeados a el plano Z usando la transformación , como se muestra a continuación:
sTe
1. Si K tiene un polo (o un cero finito) en s , entonces K(z) tendrá un polo (o cero
finito) en )(sc is=
Tsi
iez =
2. Si el grado relativo de es r, tal que tiene r ceros en el infinito, entonces r ceros de
K(z) se encuentran en z = -1 multiplicados por el factor .
)(sK c
( )rz+13. La ganancia de K(z) es seleccionada tal que la ganancia DC de y K(z) sean la
misma: )(sK c
Tal que
)0()1( cKK =
Una alternativa al paso 2 es mapear únicamente de los ceros infinitos en el plano s dentro de . Esto permite que el grado relativo de K(z) sea igual a uno, el cual permite un
1−r1−=z
Instituto Tecnológico de Puebla 87

Control Digital.
periodo de muestreo para el tiempo de control computacional, llamaremos a esta variación método modificado MPZ.4
Algoritmo de control para el PID discreto La ley de control para el controlador PID, en el caso continuo, se puede escribir como:
++= ∫ dt
tdeTdtteT
teKtu d
t
i
)()(1)()(0
4. 33 donde es el error entre la variable de referencia r(t) y la variable controlada y(t). u(t) es la variable de control. En términos de datos muestreados para un periodo de muestreo T se tiene:
)()()( tytrte −=
)()();();( kTyyykTrrkTuukTee kkkk ====
donde k es un entero k = 1,2,3,... La ecuación 4.33 en el dominio del tiempo discreto es:
−+
+++
++= −−
Tee
TTeeee
Teku kk
dkk
ikk
1110
221
L
4. 34 En la ecuación 4.34 la integración del error fue reemplazada por una operación de suma del área de trapecios y la diferenciación mediante una aproximación por diferencias. El algoritmo de Control Digital Directo normalmente aceptado en la práctica tiene la diferencia como la salida del controlador (algoritmo de velocidad). De modo que la ecuación 4.34 en el algoritmo de velocidad se transforma como sigue:
1−−=∆ kkk uuU
( )
+−+
++−=∆ −−+
− Teee
TTee
TeeKU kkk
dkk
ikkk
2111
22
1
4. 35 Si se sustituye en la ecuación 4.35 y suponiendo que , se tiene
kkk yre −= 21 −− == kkk rrr
( ) ( )
−−+
+−+−=∆ −−
−− kkk
d
i
kkkkkk yyy
TT
TTyy
ryyKU 211
1 22
4. 36
Si reemplazamos los parámetros de control por: di TyTK ,
4 Applied Optimal Control & Estimation; Lewis, Frank L.; Ed. Prentice Hall. p.p. 255,257
Instituto Tecnológico de Puebla 88

Control Digital.
TKT
kTTKkkKk d
di
iip ==−=21
4. 37
)
Y se obtiene entonces la expresión.5
( ) ( ) ( kkkdkkikkpk yyykyrkyykU −−+−+−=∆ −−− 211 2 4. 38
Función de transferencia pulso de un controlador PID discreto
Para obtener la función de transferencia pulso del controlador PID discreto, se utiliza la ecuación discretizada. Al aproximar el término integral mediante la sumatoria trapezoidal y el término derivativo mediante la diferencia de dos puntos, se obtiene la ecuación 4.39 que ahora expresaremos de la siguiente manera
[ ]
−−+
+−+= ∑
=
))1(()(2
)())1(()()(1
TkekTeTThTeThe
TTkTeKkTu
k
h
d
i
4. 39 se define
0)0(),(2
)())1((==
+− fhTfhTeThe
4. 40 entonces
∑∑==
=+− k
h
k
hhTfhTeThe
11)(
2)())1((
4. 41 al tomar la transformada Z de esta última ecuación, se obtiene
[ ] )(1
1)0()(1
1)(2
)())1((11
11
zFz
fzFz
hTfzhTeTheZk
h
k
h−−
== −=−
−=
=
+− ∑∑
Nótese que
[ ] )(2
1)()(1
zEzhTfZzF−+
==
Por lo tanto,
5 Control Digital; Álvarez Gallegos, Joaquín; Álvarez Gallegos, Jaime; Centro de Investigación y de Estudios Avanzados del IPN; Departamento de Ingeniería Eléctrica. P.p. 168, 169
Instituto Tecnológico de Puebla 89

Control Digital.
)()1(2
12
)())1((1
1
1zE
zzhTeTheZ
k
h−
−
= −+
=
+−∑
4. 42
Entonces la transformada Z de la ecuación da como resultado
( ) )(111
21)( 1
1
1
zEzTT
zz
TTKzU d
i
−+
−+
+= −−
−
4. 43 Esta última ecuación se puede rescribir como sigue:
( )
( ) )(11
)(
)(11
12
1)(
11
11
zEzkz
KkzU
zEzTT
zTT
TTKzU
di
p
d
ii
−+−
+=
−+
−+−=
−−
−−
4. 44 donde
alproporcionGananciaK
KT
KTKk i
ip =−=−=
22
DerivativaGananciaT
KTk d
d ==
IntegralGananciaTKT
ki
==1
Nótese que la ganancia proporcional kp para el controlador PID digital es más pequeña que la ganancia K para el controlador PID analógico por un factor de ki / 2.
La función de transferencia pulso para el controlador PID digital se convierte en
( )11 1
1)()()( −
−−+
−+== zk
zk
kzEzMzG d
ipD
4. 45 La función de transferencia pulso del controlador PID digital dada por la ecuación anterior se conoce como forma posicional del esquema de control PID.3
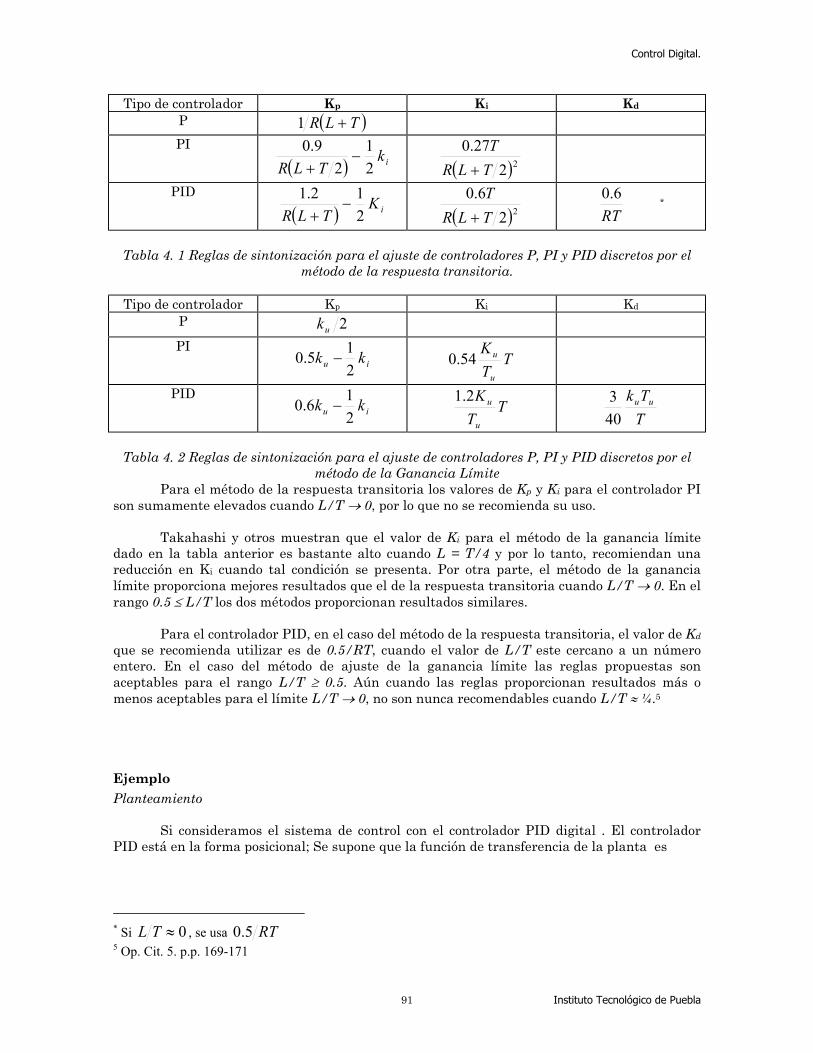
Métodos de sintonización para controladores discretos Takahashi, Chan y Auslander propusieron en 1970, un conjunto de reglas, que utilizan los dos métodos propuestos por Ziegler y Nichols para el controlador PID en continuo, a fin de determinar valores aceptables para . Las siguientes tablas muestran los valores propuestos por Takahashi y otros para el ajuste de los parámetros del controlador PID discreto.
dip kykk ,
3 Op. Cit. 3. p.p.
Instituto Tecnológico de Puebla 90
Control Digital.
Tipo de controlador Kp Ki Kd
P ( )TLR +1 PI
( ) ikTLR 2
12
9.0−
+
( )2227.0
TLRT
+
PID
( ) iKTLR 2
12.1−
+
( )226.0TLRT
+
RT6.0
*
Tabla 4. 1 Reglas de sintonización para el ajuste de controladores P, PI y PID discretos por el
método de la respuesta transitoria.
Tipo de controlador Kp Ki Kd
P 2uk
PI iu kk
215.0 − T
TK
u
u54.0
PID iu kk
216.0 − T
TK
u
u2.1
TTk uu
403
Tabla 4. 2 Reglas de sintonización para el ajuste de controladores P, PI y PID discretos por el
método de la Ganancia Límite Para el método de la respuesta transitoria los valores de Kp y Ki para el controlador PI son sumamente elevados cuando L/T → 0, por lo que no se recomienda su uso. Takahashi y otros muestran que el valor de Ki para el método de la ganancia límite dado en la tabla anterior es bastante alto cuando L = T/4 y por lo tanto, recomiendan una reducción en Ki cuando tal condición se presenta. Por otra parte, el método de la ganancia límite proporciona mejores resultados que el de la respuesta transitoria cuando L/T → 0. En el rango 0.5 ≤ L/T los dos métodos proporcionan resultados similares.
Para el controlador PID, en el caso del método de la respuesta transitoria, el valor de Kd que se recomienda utilizar es de 0.5/RT, cuando el valor de L/T este cercano a un número entero. En el caso del método de ajuste de la ganancia límite las reglas propuestas son aceptables para el rango L/T ≥ 0.5. Aún cuando las reglas proporcionan resultados más o menos aceptables para el límite L/T → 0, no son nunca recomendables cuando L/T ≈ ¼.5
Ejemplo Planteamiento
Si consideramos el sistema de control con el controlador PID digital . El controlador
PID está en la forma posicional; Se supone que la función de transferencia de la planta es
* Si 0≈TL , se usa RT5.0 5 Op. Cit. 5. p.p. 169-171
Instituto Tecnológico de Puebla 91
Control Digital.
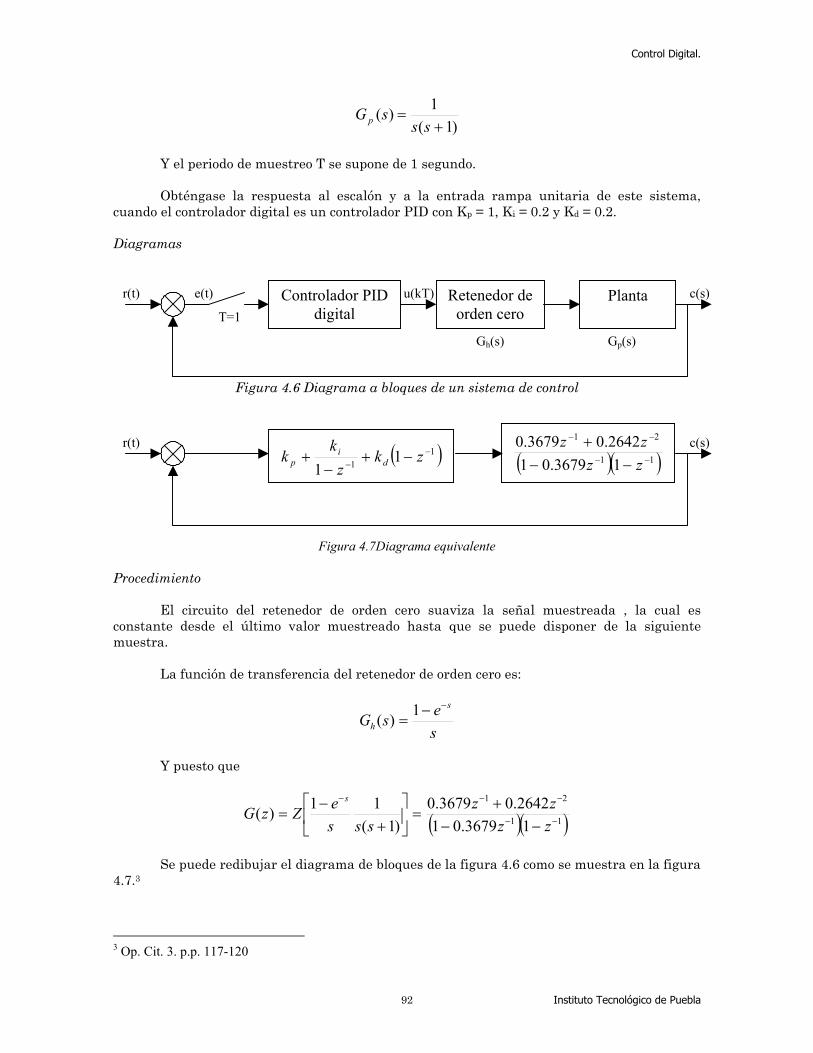
)1(1)(+
=ss
sG p
Y el periodo de muestreo T se supone de 1 segundo.
Obténgase la respuesta al escalón y a la entrada rampa unitaria de este sistema, cuando el controlador digital es un controlador PID con Kp = 1, Ki = 0.2 y Kd = 0.2. Diagramas c(s)
Gp(s) Gh(s)
u(kT)
T=1
r(t) e(t) Planta Retenedor de orden cero
Controlador PID digital
Figura 4.6 Diagrama a bloques de un sistema de control
( )11 1
1−
−−+
−+ zk
zk
k di
p ( )( )11
21
13679.012642.03679.0
−−
−−
−−+
zzzz c(s) r(t)
Figura 4.7Diagrama equivalente Procedimiento El circuito del retenedor de orden cero suaviza la señal muestreada , la cual es constante desde el último valor muestreado hasta que se puede disponer de la siguiente muestra. La función de transferencia del retenedor de orden cero es:
sesG
s
h
−−=
1)(
Y puesto que
( )( )11
21
13679.012642.03679.0
)1(11)( −−
−−−
−−+
=
+
−=
zzzz
ssseZzG
s
Se puede redibujar el diagrama de bloques de la figura 4.6 como se muestra en la figura
4.7.3
3 Op. Cit. 3. p.p. 117-120
Instituto Tecnológico de Puebla 92

Control Digital.
Su sustituimos los parámetros del controlador en la función de transferencia pulso, obtenemos la función de transferencia del controlador digital GD:
( )( ) ( )
( )
1
21
1
211
1
211
1
211
11
12.04.14.1)(
12.04.02.02.01)(
1212.02.01)(
112.02.01)(
12.01
2.01)(
−
−−
−
−−−
−
−−−
−
−−
−−
−+−
=
−+−++−
=
−+−++−
=
−−++−
=
−+−
+=
zzzzG
zzzzzG
zzzzzG
zzzzG
zz
zG
D
D
D
D
D
Entonces la función de transferencia pulso en lazo cerrado se convierte en:
4321
4321
0528.06642.05906.18528.110528.02963.01452.0515.0
)()(
)()(1)()(
)()(
−−−−
−−−−
+−+−+−−
=
+=
zzzzzzzz
zRzC
zGzGzGzG
zRzC
D
D
Para obtener la respuesta al escalón unitario y la rampa unitaria, utilizaremos MATLAB. Simulación en MATLAB
Se realizó la simulación con el siguiente programa, para obtener la respuesta al escalón: % Respuesta al escalón unitario num=[0 0.5151 -0.1452 -0.2963 0.0528]; den=[1 -1.8528 1.5906 -0.6642 0.0528]; r=ones(1,41); v=[0 40 0 2]; axis(v); k=0:40; c=filter(num,den,r); plot(k,c,'o',k,c,'-') grid title('Respuesta al escalón unitario') xlabel('k') ylabel('c(k)')
Instituto Tecnológico de Puebla 93
Control Digital.
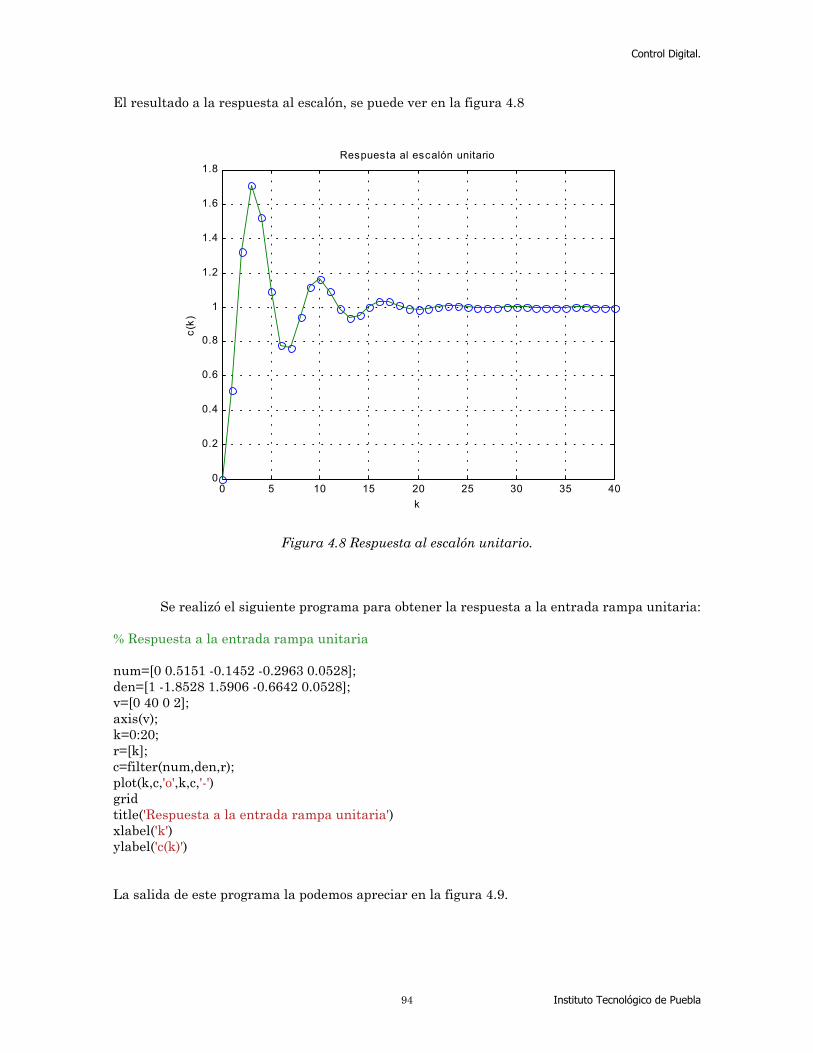
El resultado a la respuesta al escalón, se puede ver en la figura 4.8
0 5 10 15 20 25 30 35 400
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8Respuesta al escalón unitario
k
c(k)
Figura 4.8 Respuesta al escalón unitario.
Se realizó el siguiente programa para obtener la respuesta a la entrada rampa unitaria: % Respuesta a la entrada rampa unitaria num=[0 0.5151 -0.1452 -0.2963 0.0528]; den=[1 -1.8528 1.5906 -0.6642 0.0528]; v=[0 40 0 2]; axis(v); k=0:20; r=[k]; c=filter(num,den,r); plot(k,c,'o',k,c,'-') grid title('Respuesta a la entrada rampa unitaria') xlabel('k') ylabel('c(k)') La salida de este programa la podemos apreciar en la figura 4.9.
Instituto Tecnológico de Puebla 94

Control Digital.
0 2 4 6 8 10 12 14 16 18 200
5
10
15
20
25Respuesta a la entrada rampa unitaria
k
c(k)
Figura 4.9 Respuesta a la entrada rampa unitaria Implementación de un PID utilizando un microcontrolador PIC. /************************************************************** Description: programa que ejecuta un controlador PID digital esta relacionado con otros 2 programas uno para obtener la velocidad actual Yk y otro para obtener la referencia. *************************************************************/ #include <p18F458.h> #include <adc.h> #include <pwm.h> // Global variables declaration #define rkx PORTD //de referencia #define Ukx PORTB //al convertidor D/A #define control PORTEbits.RE0 //INICIA PROGRAMA PRINCIPAL void main(void) {int Yk_1, Yk_2, Yk, Uk, Uk_1, rk; int Kp,Ki,Kd;
Instituto Tecnológico de Puebla 95
Control Digital.
// configure A/D convertor OpenADC( ADC_FOSC_8 & ADC_RIGHT_JUST & ADC_3ANA_0REF, ADC_CH0 & ADC_INT_OFF ); //configura PWM TMR2 = 0x07; //prescaler 16 para TMR2 TRISC = 0; OpenPWM1(255); //1875 Hz //CONFIGURA PUERTOS E/S TRISE = 0xff; TRISD = 0xff; TRISB = 0; //inicializa variables Yk_2 = 0; Yk_1 = 0; Yk = 0; rk = 0; Uk_1 = 0; Kp = 9.6; Kd = 0.0125; Ki = 15; do //do-while principal { if(control == 0) //rk por RA0 analogica { SetChanADC( ADC_CH0 ); ConvertADC(); // Start conversion while( BusyADC() ); // Wait for completion rk = ReadADC(); //lee referencia SetChanADC( ADC_CH1 ); ConvertADC(); // Start conversion while( BusyADC() ); // Wait for completion Yk = ReadADC(); //lee retro Yk = Yk*2; //asigna variables Yk_2 = Yk_1; Yk_1 = Yk; Uk_1 = Uk; //ejecuta algoritmo PID Uk = Kp*(rk - Yk); //parte proporcional Uk = Uk + Ki*(rk - Yk); //perte integrativa Uk = Uk + Kd*(2*Yk_1 - Yk_2 - Yk); //parte derivativa Uk = Uk - Uk_1; //de delta de k if(Uk < 0) Uk = (-1)*Uk; //asigna salida a PWM y portb Ukx = Uk; SetDCPWM1(Uk);
Instituto Tecnológico de Puebla 96
Control Digital.
} else //rk por puerto d { //asigna variables SetChanADC( ADC_CH1 ); ConvertADC(); // Start conversion while( BusyADC() ); // Wait for completion Yk = ReadADC(); //lee retro Yk = Yk*2; Yk_2 = Yk_1; Yk_1 = Yk; Uk_1 = Uk; rk = rkx; //lee de puerto d rk = rk*3.2736; //ejecuta algoritmo PID Uk = Kp*(Yk_1 - Yk); //parte proporcional Uk = Uk + Ki*(rk - Yk); //perte integrativa Uk = Uk + Kd*(2*Yk_1 - Yk_2 - Yk); //parte derivativa Uk = Uk - Uk_1; //de delta de k if(Uk < 0) Uk = (-1)*Uk; //asigna salida a PWM y portb Ukx = Uk; SetDCPWM1(Uk); } } while(1); // fin do-while global }// fin main El circuito utilizado es:
Instituto Tecnológico de Puebla 97
Control Digital.
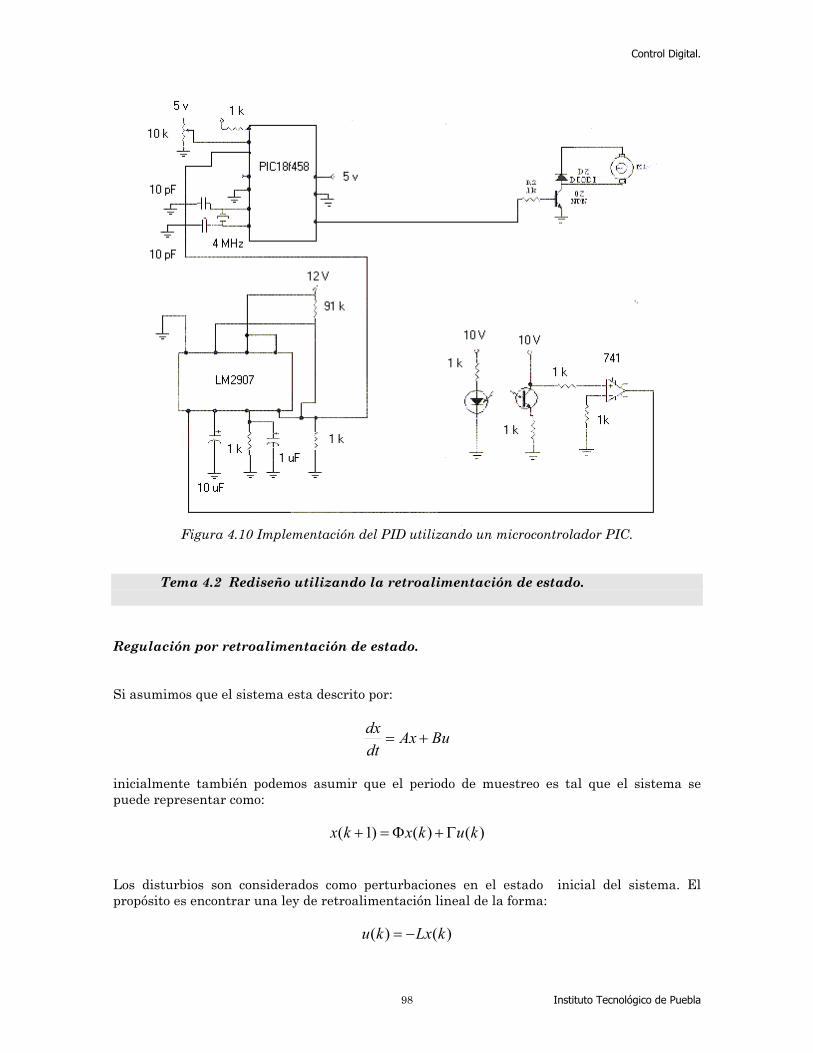
Figura 4.10 Implementación del PID utilizando un microcontrolador PIC.
Tema 4.2 Rediseño utilizando la retroalimentación de estado.
Regulación por retroalimentación de estado. Si asumimos que el sistema esta descrito por:
BuAxdtdx
+=
inicialmente también podemos asumir que el periodo de muestreo es tal que el sistema se puede representar como:
)()()1( kukxkx Γ+Φ=+ Los disturbios son considerados como perturbaciones en el estado inicial del sistema. El propósito es encontrar una ley de retroalimentación lineal de la forma:
)()( kLxku −=
Instituto Tecnológico de Puebla 98

Control Digital.
de tal manera que el sistema en lazo cerrado tenga una ecuación característica especificada., lo cual garantiza que las perturbaciones decaigan de una manera especificada. Por ejemplo: Sea el siguiente sistema:
)(2/
)(10
1)1(
2
kuh
hkx
hkx
+
=+
Una retroalimentación lineal a podemos definir como:
2211 xlxlu −−= Con esta retroalimentación, el sistema en lazo cerrado es:
)(1
2/2/1)1(
21
22
21 kx
hlhlhlhhl
kx
−−−−
=+
La ecuación característica del sistema en lazo cerrado es:
012
22 2
21
2
212 =
+−+
−++ hlhlzhlhlz
Asumiendo que la ecuación característica deseada es:
0212 =++ pzpz
Esto conduce a las siguientes ecuaciones lineales para l1 y l2 :
22
21
12
21
12
22
phlhl
phlhl
=+−
=−+
Estas ecuaciones tienen la solución:
)3(21
)1(1
212
2121
pph
l
pph
l
−+=
++=
En este ejemplo siempre es posible encontrar los parámetros del controlador, para la ecuación característica arbitraria dada del sistema de lazo cerrado. El sistema de ecuaciones lineales para l1 y l2 tienen solución para todos los valores de p1 y p2 .
Instituto Tecnológico de Puebla 99

Control Digital.
El caso general La solución del problema del lugar de los polos para sistemas con una señal de entrada será tratado como; Sea el sistema descrito por variables de estado en tiempo discreto y el polinomio característico de la matriz sea: Φ
nnn azaz +++ − ...1
1 Asumiendo que el sistema es alcanzable, entonces podemos transformarlo a la forma canónica alcanzable, cambiando las variables de estado a través de la transformación z=Tx , quedando de la siguiente forma:
)(~)(~)1( kukzkz Γ+Φ=+ donde:
−−−−
=Φ
−
01...00...00...1000...01
...
~
121 nn aaaa
Γ
=
0.001
~
Los coeficientes del polinomio característico que determinan los polos de lazo cerrado aparecen explícitamente en esta representación. Siguiendo con la ley de retroalimentación:
( )zapapapzLu nn −−−−=−= ...~2211
da un sistema de lazo cerrado con el polinomio característico:
nnn pzpzzP +++= − ...)( 1
1 Para encontrar la solución al problema original simplificaremos la transformación a las coordenadas originales. Dando:
LxTxLzLu −=−=−= ~~ Solo falta determinar la matriz de transformación T . Una manera simple de determinarla es basándose en la propiedad de alcanzabilidad de las matrices Sea:
( )ΓΦΦΓΓ= −1... ncW
Las matrices son relacionadas a través de W cc TW=~
La matriz de alcanzabilidad se transforma en coordenadas, es decir:
Instituto Tecnológico de Puebla 100

Control Digital.
1~ −= ccWWT realizando los cálculos llegamos a :
= −
−
−
1...00...
...10
...1
~ 2
11
1 n
n
c
aaa
W
( ) 12211
~... −−−−= ccnn WWapapapL Teorema: Considerar el sistema anterior , y asumiendo que solo existe una señal de entrada. El sistema es alcanzable si existe una retroalimentación lineal que no da un sistema en lazo cerrado con el polinomio característico P(z). La retroalimentación viene dada por:
)()( kLxku −= con
( )( ) )(10...0
~...1
12211
Φ=
−−−=−
−
PW
WWapapapL
c
ccnn
donde W y W son las matrices de controlabilidad de ambos sistemas. c
~c
Prueba. Para probar el resultado debemos observar que:
IapapIppP nnn
nnn )(...)(...~~)~( 1
111
1 −++Φ−=++Φ+Φ=Φ −− La segunda igualdad se obtiene del Teorema de Cayley – Hamilton. Introduciendo ei como un vector renglón con todos su elementos igual a cero excepto el i-esimo elemento que es 1; Tenemos:
1~ −=Φ ii ee
entonces y obtenemos )(~ Φ=t
PeL n )(~)()(~ 11 Φ=Φ=Φ== −− PWWeTPeTTTPeTLL ccnnn
como e de aquí obtenemos: n
cn eW =−1~
Instituto Tecnológico de Puebla 101

Control Digital.
( )( ) )(10...0
~...1
12211
Φ=
−−−=−
−
PW
WWapapapL
c
ccnn
que es la formula de Ackermann. Cabe notar que el problema del lugar de los polos puede formularse como el siguiente problema abstracto. Dadas la matrices y , encontrar la matriz L tal que la matriz tenga los eigenvalores prescritos.
Φ Γ LΓ−Φ
También se observa que:
( )Γ++Φ+ΓΦΓ+ΦΓΓ= −−−−
12
11
11 ...... n
nn aaaT Es fácil resolver el diseño de un problema del lugar de los polos, cabe ahacer notar que la alcanzabilidad es una condición necesaria y suficiente para resolver el problema, para aplicar este método es necesario entender las propiedades de los sistemas de lazo cerrado y como esta su influencia con respecto a los parámetros.
Tema 4.3 Métodos de diseño utilizando la respuesta en frecuencia.
Diseño de reguladores digitales por respuesta en frecuencia En el capitulo anterior se han descrito diferentes técnicas de discretización para obtener una función de transferencia en tiempo discreto que simule aproximadamente el comportamiento de otra en tiempo continuo. Además de otras aplicaciones, estas técnicas pueden usarse para obtener un regulador en tiempo discreto a partir del diseñado para un sistema en tiempo continuo. Este procedimiento es aplicable cuando el periodo de muestreo es pequeño. Cuando el periodo de muestreo es mayor, el enfoque anterior puede conducir a serios errores, debidos a dos causas: 1) el modelo de la planta no tiene en cuenta los efectos del muestreo; 2) la discretización del control no es exacta. Se discutirá la primera causa, la mas importante,
introduciendo una aproximación del efecto del muestreo que permite también obtener ciertos criterios para la selección del periodo de muestreo Ts o, mas precisamente, para evaluar las implicaciones de distintas selecciones de Ts.
Si el modelo de la planta tiene en cuenta los efectos del muestreo, de forma exacta o suficientemente aproximada, puede diseñarse el control por procedimientos de respuesta en frecuencia idénticos a los de los sistemas en tiempo continuo. Una discretización particular (transformación bilineal con prewarping) garantiza la misma respuesta a la frecuencia de diseño. Esquema básico y modelos de un sistema de control digital Los sistemas de control digitales son frecuentemente sistemas mixtos en tiempo continuo (la planta, o sistema a controlar) y en tiempo discreto (el procesador digital, con un algoritmo de control). La interfaz entre ambos es bidireccional: las medidas de la planta se adquieren mediante muestreo (con periodo Ts ) y conversión A/D; la señal de mando del regulador digital se aplica a través de una conversión D/A y un retenedor de orden cero. En la Figura 4.11 se
Instituto Tecnológico de Puebla 102

Control Digital.
eliminan los convertidores, ya que no se tiene de momento en cuenta la cuantización (en otras palabras, se supone que tienen toda la resolución necesaria, o son de infinito numero de bits).
Figura 4.11 Esquema básico de un sistema de control digital
Se describen a continuación tres modelos que pueden emplearse, respectivamente, para periodos de muestreo pequeños, medianos y grandes. Se parte del modelo de la Figura 4.11, con control proporcional: C[z] = Kp. Modelo analógico (puro) Consiste simplemente en despreciar el efecto del muestreo y la retención, modelando la planta mediante su modelo en tiempo continuo, y diseñando el sistema de control también por procedimientos de tiempo continuo, para posteriormente discretizar el regulador, obteniendo un algoritmo mas o menos equivalente que se programa en el procesador de control. Este modelo solamente puede emplearse para periodos de muestreo pequeños.
Figura 4.12 Modelo analógico Modelo (analógico) modificado Una aproximación del efecto del muestreo y la retención es suponer que son equivalentes a un retardo de la mitad del periodo de muestreo, que se multiplica por la función de transferencia de la planta en tiempo continuo. Esta aproximación no será valida para periodos de muestreo grandes, pero tiene varias ventajas: a) es sencilla; b) es fácil ver el efecto de variar el periodo de muestreo; c) encierra en si misma una cierta medida de su validez: si el retraso de fase no es muy grande (hasta unos 30°), será frecuentemente valida para esas frecuencias; si el retraso de fase es pequeño (menor de 5°), la modificación es pequeña y podría usarse el modelo anterior.
Instituto Tecnológico de Puebla 103

Control Digital.
Figura 4.13 Modelo modificado
Modelo digital (exacto) Se ha explicado que existe un modelo en tiempo discreto equivalente de manera exacta a un modelo de tiempo continuo, seguido de un muestreador y precedido de un retenedor. A partir de ahí, se realiza el diseño en tiempo discreto, obteniendo un regulador sin necesidad de discretizar. Aunque este modelo es exacto para cualquier periodo de muestreo, solamente es imprescindible cuando Ts es grande y fracasan los modelos anteriores. En efecto, el modelo equivalente es relativamente laborioso de obtener (aunque pueden emplearse programas de computadora) y, sobre todo, no ofrece una medida clara y sencilla del efecto de variar Ts : hay que repetir el proceso de obtención para cada valor de Ts.
Figura 4.14 Modelo digital Ejemplo 4.1 Planta analógica con integración y constante de tiempo. Modelo analógico
Modelo modificado
Instituto Tecnológico de Puebla 104

Control Digital.
Modelo digital
Figura 4.15 Gráficos de Black de los modelos
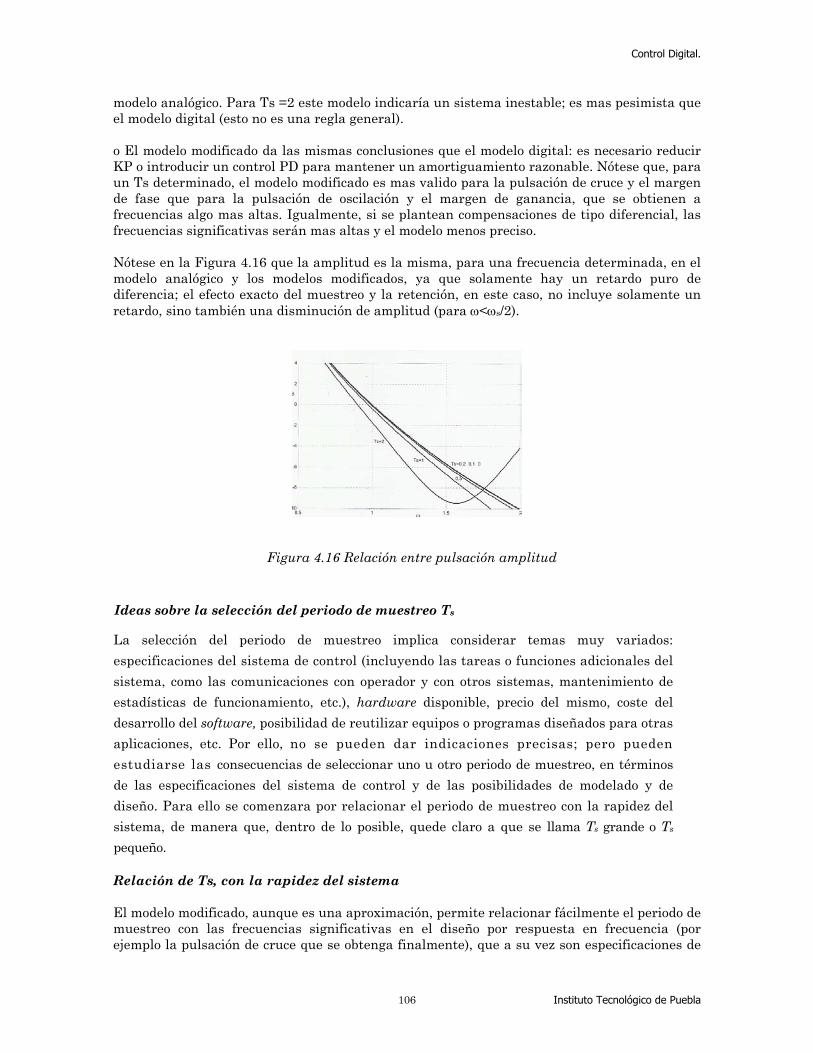
La Figura 4.15 recoge gráficos de Black de estos modelos, añadiendo una ganancia de control proporcional KP =1.41. Se representan para valores del periodo de muestreo desde Ts =0 hasta Ts = 2. El modelo modificado se indica con línea de trazos. Pueden identificarse las pulsaciones correspondientes en la Figura 4.16. o El modelo analógico (línea de puntos) corresponde a Ts=0. Con el valor de KP = l.4l elegido, el margen de fase es Φm =45° y la pulsación de cruce es ωo = 1. Nótese que en este ejemplo ωo Ts =Ts. o El modelo digital es exacto, y sirve como referencia. Para valores de Ts = 0.1 o incluso Ts =0.2 el margen de fase se reduce muy poco, y por tanto un diseño basado en el modelo analógico (respetando el valor de KP) seria razonable. Sin embargo, para valores mayores hay una perdida considerable de margen de fase, llegando hasta un sistema casi inestable para Ts = 2. Para mantener el margen de fase, debería disminuirse el valor de KP, dando un sistema con menos precisión y rapidez; o bien usarse un adelanto de fase (PD). o En el modelo digital, para Ts =2, puede observarse que se ha sobrepasado la frecuencia de Nyquist ωs /2 = π/Ts = 1,57, y la respuesta en frecuencia repite la amplitud y cambia de signo la fase, produciendo un lazo en el grafico de Black. o El modelo modificado da una aproximación buena hasta Ts =0,5 o incluso Ts = 1; la aproximación empeora al crecer ω o Ts. Para Ts =0,2 o menor la modificación no es grande para la pulsación de cruce; pero es critica para obtener la pulsación de oscilación, que no existe en el
Instituto Tecnológico de Puebla 105
Control Digital.
modelo analógico. Para Ts =2 este modelo indicaría un sistema inestable; es mas pesimista que el modelo digital (esto no es una regla general). o El modelo modificado da las mismas conclusiones que el modelo digital: es necesario reducir KP o introducir un control PD para mantener un amortiguamiento razonable. Nótese que, para un Ts determinado, el modelo modificado es mas valido para la pulsación de cruce y el margen de fase que para la pulsación de oscilación y el margen de ganancia, que se obtienen a frecuencias algo mas altas. Igualmente, si se plantean compensaciones de tipo diferencial, las frecuencias significativas serán mas altas y el modelo menos preciso. Nótese en la Figura 4.16 que la amplitud es la misma, para una frecuencia determinada, en el modelo analógico y los modelos modificados, ya que solamente hay un retardo puro de diferencia; el efecto exacto del muestreo y la retención, en este caso, no incluye solamente un retardo, sino también una disminución de amplitud (para ω<ωs/2).
Figura 4.16 Relación entre pulsación amplitud
Ideas sobre la selección del periodo de muestreo Ts
La selección del periodo de muestreo implica considerar temas muy variados: especificaciones del sistema de control (incluyendo las tareas o funciones adicionales del sistema, como las comunicaciones con operador y con otros sistemas, mantenimiento de estadísticas de funcionamiento, etc.), hardware disponible, precio del mismo, coste del desarrollo del software, posibilidad de reutilizar equipos o programas diseñados para otras aplicaciones, etc. Por ello, no se pueden dar indicaciones precisas; pero pueden estudiarse las consecuencias de seleccionar uno u otro periodo de muestreo, en términos de las especificaciones del sistema de control y de las posibilidades de modelado y de diseño. Para ello se comenzara por relacionar el periodo de muestreo con la rapidez del sistema, de manera que, dentro de lo posible, quede claro a que se llama Ts grande o Ts pequeño. Relación de Ts, con la rapidez del sistema El modelo modificado, aunque es una aproximación, permite relacionar fácilmente el periodo de muestreo con las frecuencias significativas en el diseño por respuesta en frecuencia (por ejemplo la pulsación de cruce que se obtenga finalmente), que a su vez son especificaciones de
Instituto Tecnológico de Puebla 106
Control Digital.
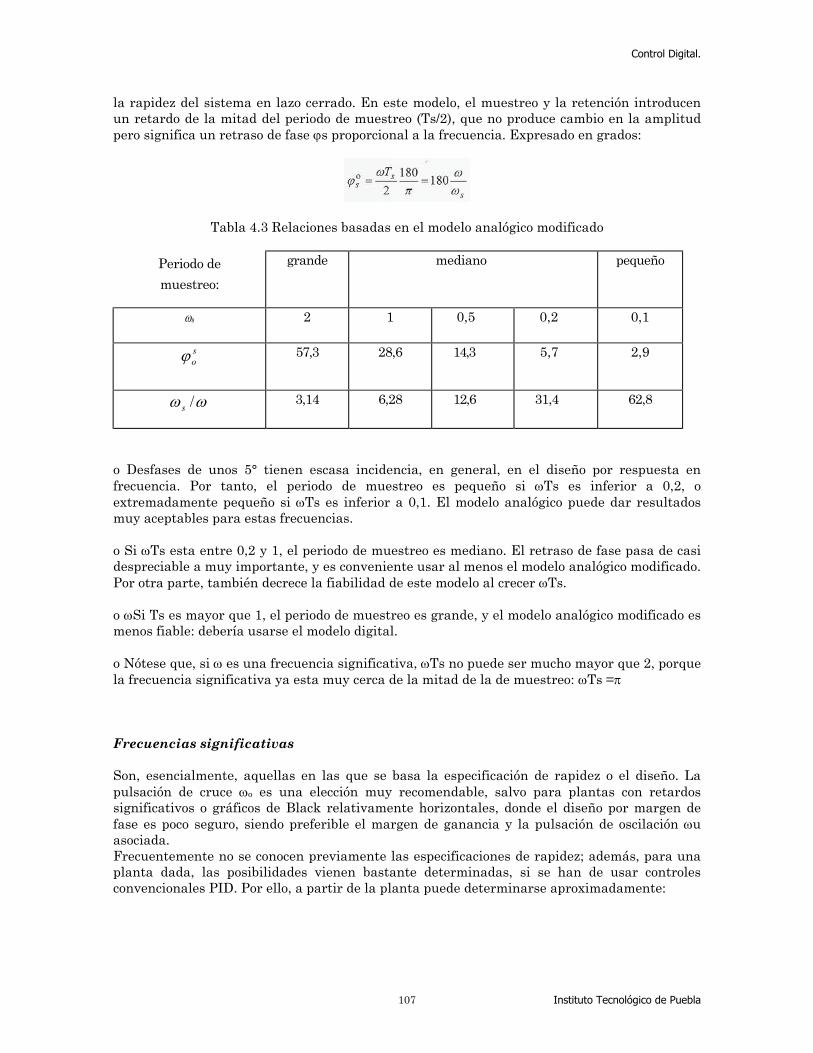
la rapidez del sistema en lazo cerrado. En este modelo, el muestreo y la retención introducen un retardo de la mitad del periodo de muestreo (Ts/2), que no produce cambio en la amplitud pero significa un retraso de fase ϕs proporcional a la frecuencia. Expresado en grados:
Tabla 4.3 Relaciones basadas en el modelo analógico modificado
Periodo de muestreo:
grande mediano pequeño
ωs 2 1 0,5 0,2 0,1
soϕ 57,3 28,6 14,3 5,7 2,9
ωω /s 3,14 6,28 12,6 31,4 62,8
o Desfases de unos 5° tienen escasa incidencia, en general, en el diseño por respuesta en frecuencia. Por tanto, el periodo de muestreo es pequeño si ωTs es inferior a 0,2, o extremadamente pequeño si ωTs es inferior a 0,1. El modelo analógico puede dar resultados muy aceptables para estas frecuencias. o Si ωTs esta entre 0,2 y 1, el periodo de muestreo es mediano. El retraso de fase pasa de casi despreciable a muy importante, y es conveniente usar al menos el modelo analógico modificado. Por otra parte, también decrece la fiabilidad de este modelo al crecer ωTs. o ωSi Ts es mayor que 1, el periodo de muestreo es grande, y el modelo analógico modificado es menos fiable: debería usarse el modelo digital. o Nótese que, si ω es una frecuencia significativa, ωTs no puede ser mucho mayor que 2, porque la frecuencia significativa ya esta muy cerca de la mitad de la de muestreo: ωTs =π Frecuencias significativas Son, esencialmente, aquellas en las que se basa la especificación de rapidez o el diseño. La pulsación de cruce ωo es una elección muy recomendable, salvo para plantas con retardos significativos o gráficos de Black relativamente horizontales, donde el diseño por margen de fase es poco seguro, siendo preferible el margen de ganancia y la pulsación de oscilación ωu asociada. Frecuentemente no se conocen previamente las especificaciones de rapidez; además, para una planta dada, las posibilidades vienen bastante determinadas, si se han de usar controles convencionales PID. Por ello, a partir de la planta puede determinarse aproximadamente:
Instituto Tecnológico de Puebla 107
Control Digital.
Control P: ajustar un amortiguamiento razonable, y obtener la pulsación asociada. Se observara que en el ejemplo anterior se ha ajustado un margen de fase de 45°, introduciendo KP =1.41 y obteniendo ωo=1. Nótese bien que la pulsación de cruce obtenida para amortiguamientos no adecuados (la equivocación típica es obtenerla para KP =1, es decir, a partir de la respuesta en frecuencia de la planta sin mas) puede ser muy diferente, y no orientar en absoluto acerca de la rapidez del sistema. Aunque algunas veces, casualmente, KP =1 da un amortiguamiento adecuado (y entonces no se nota el error de concepto), la expresión "pulsación de cruce de la planta" es incorrecta, y es muy peligroso tomarla como valor significativo. Control PI: la rapidez es algo menor que con P, pero no mucho; puede estimarse la misma pulsación. Control PD: el adelanto de fase introducido no suele pasar de unos 50°: búsquese una pulsación mayor que la anterior, que requiera ese adelanto. Como un margen de fase razonable es también unos 50°, ωo con PD suele ser parecida a la ωu obtenida con control P. Control PID: una pulsación algo menor que con PD, o la misma aproximadamente. A su vez, estas frecuencias dependen del periodo Ts. Puede comenzarse con el modelo analógico, y retocar si el efecto de Ts es apreciable según el modelo analógico modificado: resultaran típicamente frecuencias mas bajas. Recomendaciones En términos generales, un periodo Ts mediano o grande degrada el diseño de control. Como se ha ilustrado en el ejemplo anterior, el muestreo y la retención producen un desplazamiento hacia la izquierda del grafico de Black, que obliga a rebajar la ganancia de control proporcional, y por tanto la precisión y la rapidez. Relacionado con todo ello esta la dificultad de seguir referencias rápidas (la pulsación de corte siempre estará por debajo de ωs/2), y que quizá se detecten demasiado tarde los efectos de las perturbaciones. Sin embargo, podrían darse ahorros apreciables en precio del hardware y el software, razón por la cual no cabe descartar los periodos Ts medianos y grandes. Un periodo Ts razonablemente pequeño permite unas prestaciones similares a las del control analógico. Sin embargo, en sistemas rápidos este periodo puede originar grandes gastos, al ser necesarios procesadores muy rápidos. Un periodo Ts excesivamente pequeño normalmente no esta justificado, incluso si no incrementa los costes de equipo (típicamente, en sistemas lentos). El ejemplo anterior demuestra que poco puede ganarse con Ts inferior a 0.1. Por una parte, puede ser preferible liberar tiempo de calculo para otras funciones del sistema; pero también es importante señalar que cuanto mas pequeño sea el periodo de muestreo, mas sensible es el sistema a los errores introducidos por la aritmética de la computadora, por lo que es necesario prever mas precisión en los cálculos, como se ilustra en el Ejemplo siguiente. Por todo ello, no es recomendable adoptar la actitud de "muestrear tan rápido como permita el hardware seleccionado". Ejemplo Longitud de palabra para almacenar una integración
Instituto Tecnológico de Puebla 108
Control Digital.
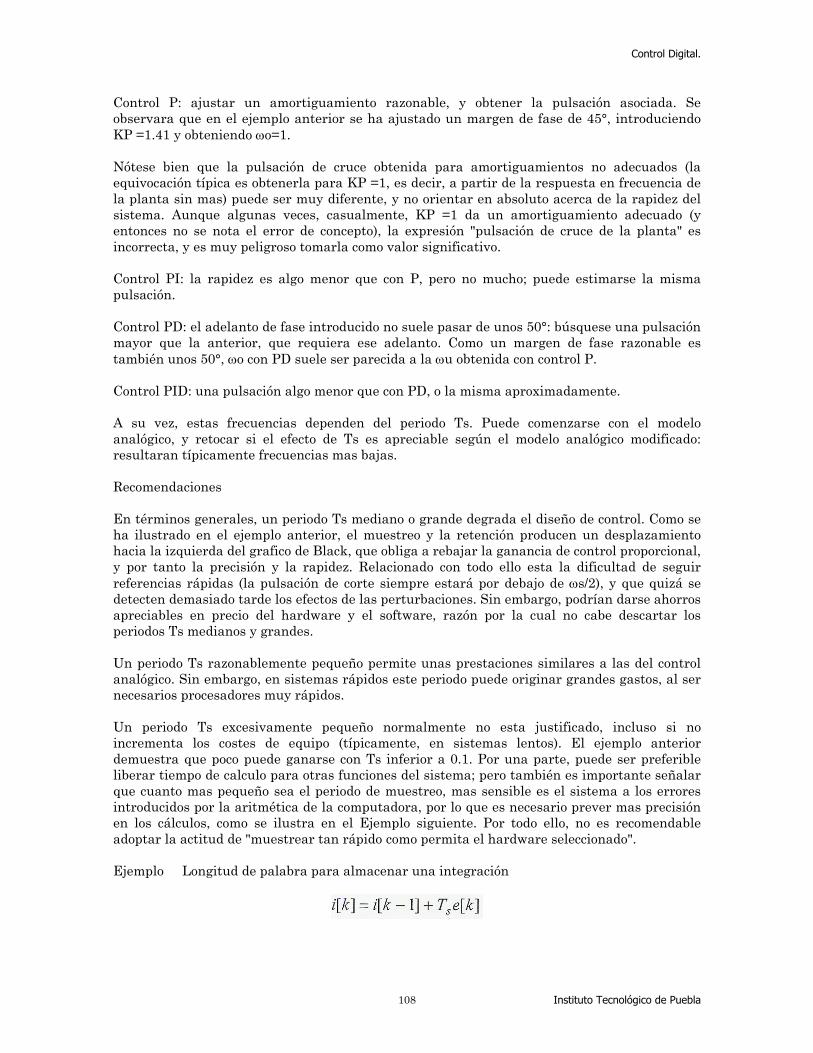
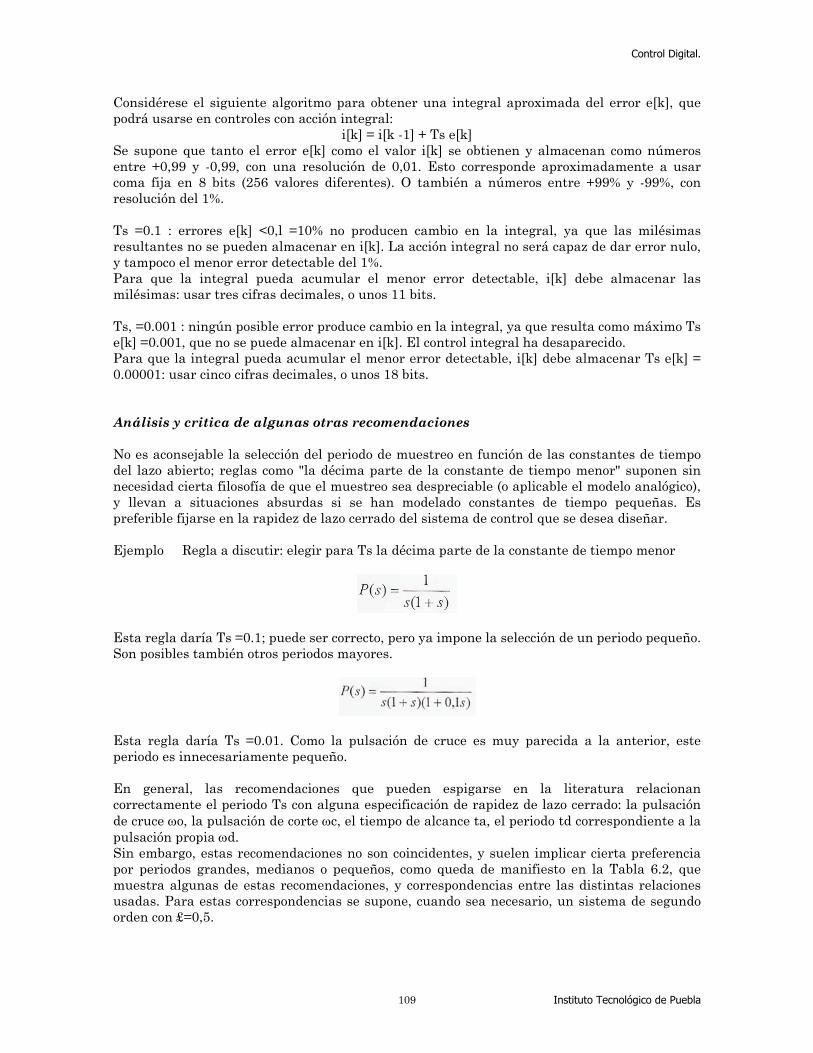
Considérese el siguiente algoritmo para obtener una integral aproximada del error e[k], que podrá usarse en controles con acción integral:
i[k] = i[k -1] + Ts e[k] Se supone que tanto el error e[k] como el valor i[k] se obtienen y almacenan como números entre +0,99 y -0,99, con una resolución de 0,01. Esto corresponde aproximadamente a usar coma fija en 8 bits (256 valores diferentes). O también a números entre +99% y -99%, con resolución del 1%. Ts =0.1 : errores e[k] <0,l =10% no producen cambio en la integral, ya que las milésimas resultantes no se pueden almacenar en i[k]. La acción integral no será capaz de dar error nulo, y tampoco el menor error detectable del 1%. Para que la integral pueda acumular el menor error detectable, i[k] debe almacenar las milésimas: usar tres cifras decimales, o unos 11 bits. Ts, =0.001 : ningún posible error produce cambio en la integral, ya que resulta como máximo Ts e[k] =0.001, que no se puede almacenar en i[k]. El control integral ha desaparecido. Para que la integral pueda acumular el menor error detectable, i[k] debe almacenar Ts e[k] = 0.00001: usar cinco cifras decimales, o unos 18 bits. Análisis y critica de algunas otras recomendaciones No es aconsejable la selección del periodo de muestreo en función de las constantes de tiempo del lazo abierto; reglas como "la décima parte de la constante de tiempo menor" suponen sin necesidad cierta filosofía de que el muestreo sea despreciable (o aplicable el modelo analógico), y llevan a situaciones absurdas si se han modelado constantes de tiempo pequeñas. Es preferible fijarse en la rapidez de lazo cerrado del sistema de control que se desea diseñar. Ejemplo Regla a discutir: elegir para Ts la décima parte de la constante de tiempo menor
Esta regla daría Ts =0.1; puede ser correcto, pero ya impone la selección de un periodo pequeño. Son posibles también otros periodos mayores.
Esta regla daría Ts =0.01. Como la pulsación de cruce es muy parecida a la anterior, este periodo es innecesariamente pequeño. En general, las recomendaciones que pueden espigarse en la literatura relacionan correctamente el periodo Ts con alguna especificación de rapidez de lazo cerrado: la pulsación de cruce ωo, la pulsación de corte ωc, el tiempo de alcance ta, el periodo td correspondiente a la pulsación propia ωd. Sin embargo, estas recomendaciones no son coincidentes, y suelen implicar cierta preferencia por periodos grandes, medianos o pequeños, como queda de manifiesto en la Tabla 6.2, que muestra algunas de estas recomendaciones, y correspondencias entre las distintas relaciones usadas. Para estas correspondencias se supone, cuando sea necesario, un sistema de segundo orden con £=0,5.
Instituto Tecnológico de Puebla 109
Control Digital.
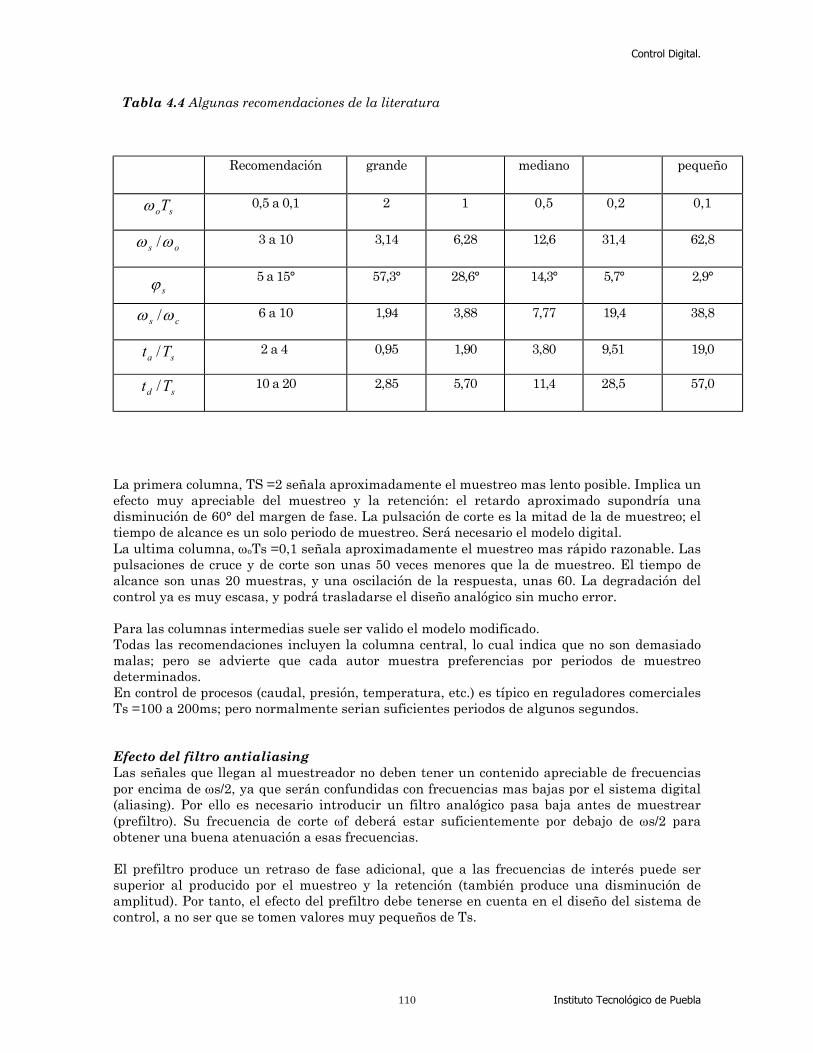
Tabla 4.4 Algunas recomendaciones de la literatura
Recomendación grande mediano pequeño
soTω 0,5 a 0,1 2 1 0,5 0,2 0,1
os ωω / 3 a 10 3,14 6,28 12,6 31,4 62,8
sϕ 5 a 15° 57,3° 28,6° 14,3° 5,7° 2,9°
cs ωω / 6 a 10 1,94 3,88 7,77 19,4 38,8
sa Tt / 2 a 4 0,95 1,90 3,80 9,51 19,0
sd Tt / 10 a 20 2,85 5,70 11,4 28,5 57,0
La primera columna, TS =2 señala aproximadamente el muestreo mas lento posible. Implica un efecto muy apreciable del muestreo y la retención: el retardo aproximado supondría una disminución de 60° del margen de fase. La pulsación de corte es la mitad de la de muestreo; el tiempo de alcance es un solo periodo de muestreo. Será necesario el modelo digital. La ultima columna, ωoTs =0,1 señala aproximadamente el muestreo mas rápido razonable. Las pulsaciones de cruce y de corte son unas 50 veces menores que la de muestreo. El tiempo de alcance son unas 20 muestras, y una oscilación de la respuesta, unas 60. La degradación del control ya es muy escasa, y podrá trasladarse el diseño analógico sin mucho error. Para las columnas intermedias suele ser valido el modelo modificado. Todas las recomendaciones incluyen la columna central, lo cual indica que no son demasiado malas; pero se advierte que cada autor muestra preferencias por periodos de muestreo determinados. En control de procesos (caudal, presión, temperatura, etc.) es típico en reguladores comerciales Ts =100 a 200ms; pero normalmente serian suficientes periodos de algunos segundos. Efecto del filtro antialiasing Las señales que llegan al muestreador no deben tener un contenido apreciable de frecuencias por encima de ωs/2, ya que serán confundidas con frecuencias mas bajas por el sistema digital (aliasing). Por ello es necesario introducir un filtro analógico pasa baja antes de muestrear (prefiltro). Su frecuencia de corte ωf deberá estar suficientemente por debajo de ωs/2 para obtener una buena atenuación a esas frecuencias. El prefiltro produce un retraso de fase adicional, que a las frecuencias de interés puede ser superior al producido por el muestreo y la retención (también produce una disminución de amplitud). Por tanto, el efecto del prefiltro debe tenerse en cuenta en el diseño del sistema de control, a no ser que se tomen valores muy pequeños de Ts.
Instituto Tecnológico de Puebla 110

Control Digital.
Ejemplo Filtro de primer orden para una atenuación de 5 veces a la frecuencia de Nyquist.
A la pulsación ω se introduce una fase -ϕs y una disminución de amplitud (negativa en dB):
Tabla 4.5 Retraso de fase y amplitud del filtro antialiasing ωTs 2 1 0,5 0,2 0,1
ϕs 57,3° 28,6° 14,3° 5,7° 2,9°
ϕf 71,6° 57,9° 38,5° 13,7° 9,0°
Af dB -10,5 -5,5 -2,1 -0,4 -0,1
Nótese que, aunque se ha elegido una atenuación relativamente pequeña, la constante de tiempo del prefiltro es el triple del retardo equivalente Ts/2. El retraso introducido por el prefiltro es superior al del modelo modificado. Procedimiento de diseño
Figura 4.17 Sistema de control
Modelo exacto:
Instituto Tecnológico de Puebla 111

Control Digital.
Modelo aproximado:
1. Sustituir P(jw) por Pd[ejwt] o por Pm(jw) si se usa el modelo aproximado; comprobar si se parecen Ac y ϕc 2. Sustituir s por w. Diseñar un control
3. Transformación bilineal con prewarping: Conservara la respuesta a esa frecuencia, y por tanto el margen de estabilidad y la pulsación característica usados en el diseño. También pueden dar buen resultado otras discretizaciones que no los conserven exactamente.
Demuéstrese que c debe ser similar (algo menor) a 2/Ts, para Ts pequeño o mediano. Transformación de polos y ceros , sin olvidar los factores constantes:
Obviamente, hay que eliminar las partes correspondientes si no hay control I o D. Ejemplo
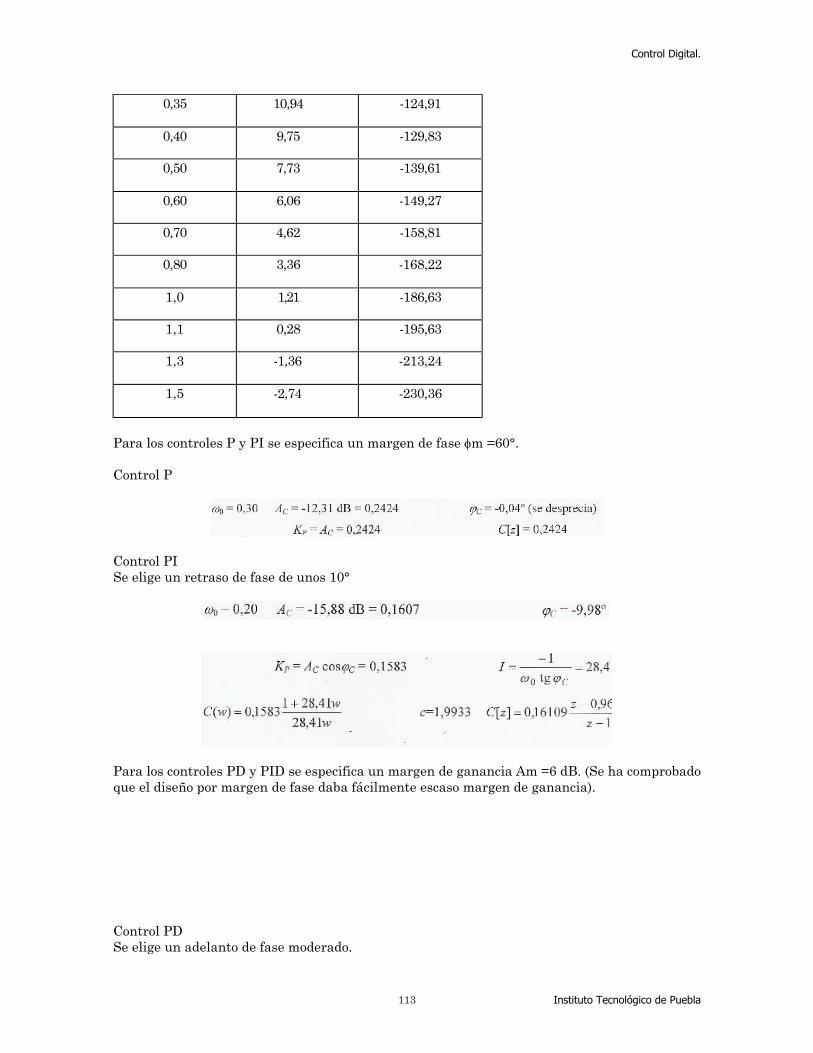
Como no se especifica, se tomara Ts=1. Esto equivale a que el periodo de muestreo es la unidad de tiempo (UT) y las pulsaciones serán rad/UT; o bien se interpretan como o)Ts. En primer lugar se presenta una tabla de la respuesta en frecuencia de la planta Pd[z] (grafico de Black).
ω A dB ϕ°
0,10 21,93 -100,02
0,15 18,39 -105,03
0,20 15,88 -110,02
0,25 13,92 -115,00
0,30 12,31 -119,96
Instituto Tecnológico de Puebla 112
Control Digital.
0,35 10,94 -124,91
0,40 9,75 -129,83
0,50 7,73 -139,61
0,60 6,06 -149,27
0,70 4,62 -158,81
0,80 3,36 -168,22
1,0 1,21 -186,63
1,1 0,28 -195,63
1,3 -1,36 -213,24
1,5 -2,74 -230,36
Para los controles P y PI se especifica un margen de fase φm =60°. Control P
Control PI Se elige un retraso de fase de unos 10°
Para los controles PD y PID se especifica un margen de ganancia Am =6 dB. (Se ha comprobado que el diseño por margen de fase daba fácilmente escaso margen de ganancia). Control PD Se elige un adelanto de fase moderado.
Instituto Tecnológico de Puebla 113

Control Digital.
Se elige un filtrado cercano al máximo: f = 0.25.
Control PID Se elige el mismo punto de diseño que para el PD.
Se elige el retraso de fase del PI: ϕPI = -10°
Se elige un filtrado típico: f = 0.1.
En el ejemplo anterior solamente se ha pretendido ilustrar el mecanismo de diseño; las elecciones pueden no ser las mejores. Deben comprobarse los diseños obteniendo respuestas en
Instituto Tecnológico de Puebla 114

Control Digital.
frecuencia del lazo abierto, lazo cerrado y sensibilidad, y respuestas temporales a referencias y perturbaciones. Con acción diferencial, debe vigilarse la presencia de oscilaciones alternadas en el mando. Oscilaciones alternadas en el mando La constante de tiempo de filtro del control PD, a través de la transformación bilineal, puede producir en el regulador un polo negativo (entre 0 y -1). El ejemplo mas sencillo es el PD ideal (f = 0), que produce un termino (z + 1); en el Ejemplo 6.5 se da también el caso, tanto en PD como en PID. Este es un polo del lazo abierto, que en lazo cerrado puede o no hacer sentir su influencia. Cuando ello ocurre, son visibles en el mando oscilaciones alternadas (a la mitad de frecuencia de muestreo) que, aunque amortiguadas, pueden ser peligrosas para el actuador, e incluso transmitirse a la salida.
Referencias bibliográficas
[ 1 ] Computer controlled system Karl J. Astrom, Bjorm Wittenmark
Prentice Hall. [ 2 ] Digital control of dynamic system Gene F. Franklin, J. David Powell Addison-Wesley [ 3 ] Automating tuning of PID controllers Karl J. Astrom, Tore Hagglund Instrument Society of America [ 4 ] Digital computer control System G. S. Virk Mc Graw Hill, 1991
Instituto Tecnológico de Puebla 115