digital image processing lectures 5 & 6
TRANSCRIPT

Digital Image ProcessingLectures 5 & 6
Mahmood (Mo) Azimi, Professor
Colorado State University
Fort Collins, Co 80523
email : [email protected]
Each time you have to click on this icon
wherever it appears to load the next sound file
To advance click enter or page down to go back use page up

1. Parseval’s Theorem and Inner Product Preservation
Another important property of FT is that the inner product of
two functions is equal to the inner product of their FT’s.∫ ∫ ∞
−∞x(v, u)y∗(u, v)dudv
=1
4π2
∫ ∫ ∞
−∞X(ω1, ω2)Y ∗(ω1, ω2)dω1dω2
where ∗ stands for complex conjugate operation. When x = y
we obtain the well-known Parseval energy conservation formula
i.e.∫ ∫ ∞
−∞|x(u, v)|2dudv =
14π2
∫ ∫ ∞
−∞|X(ω1, ω2)|2dω1dω2
i.e. the total energy in the function is the same as in its FT.
2. Frequency Response and Eigenfunctions of 2-D LSI Systems
An eigen-function of a system is defined as an input function
To advance click enter or page down to go back use page up 1
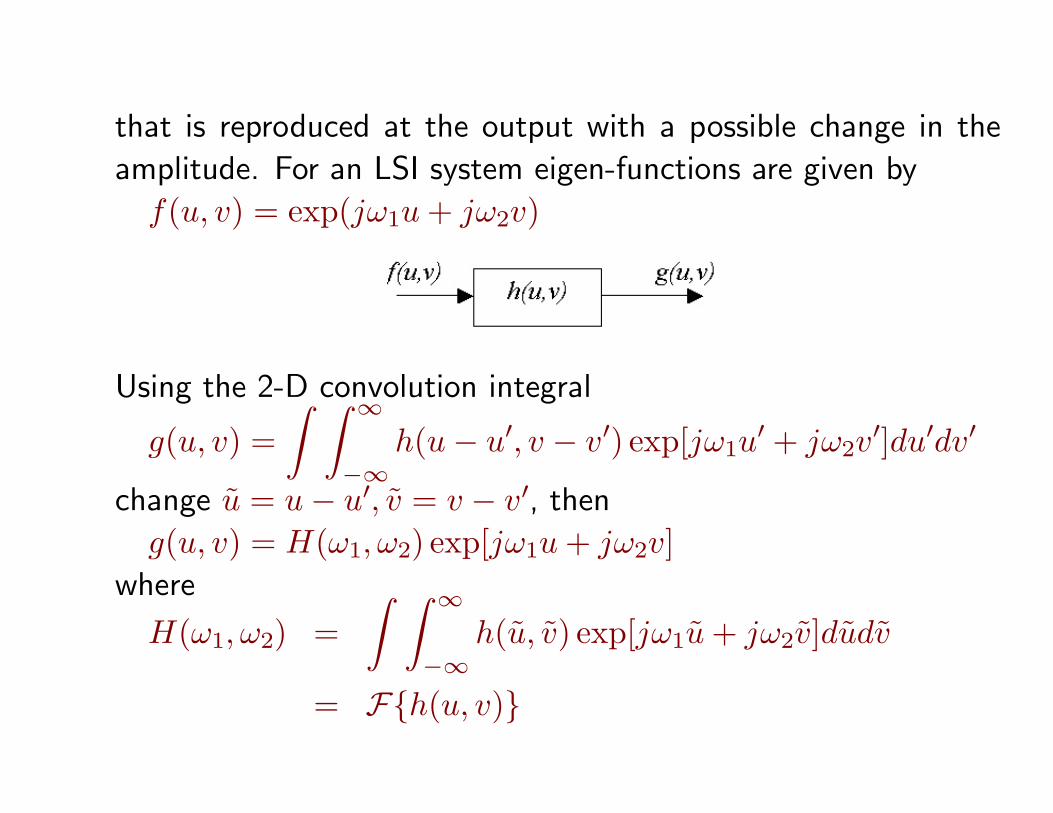
that is reproduced at the output with a possible change in the
amplitude. For an LSI system eigen-functions are given by
f(u, v) = exp(jω1u + jω2v)
Using the 2-D convolution integral
g(u, v) =∫ ∫ ∞
−∞h(u− u′, v − v′) exp[jω1u
′ + jω2v′]du′dv′
change u = u− u′, v = v − v′, then
g(u, v) = H(ω1, ω2) exp[jω1u + jω2v]where
H(ω1, ω2) =∫ ∫ ∞
−∞h(u, v) exp[jω1u + jω2v]dudv
= Fh(u, v)
To advance click enter or page down to go back use page up 2
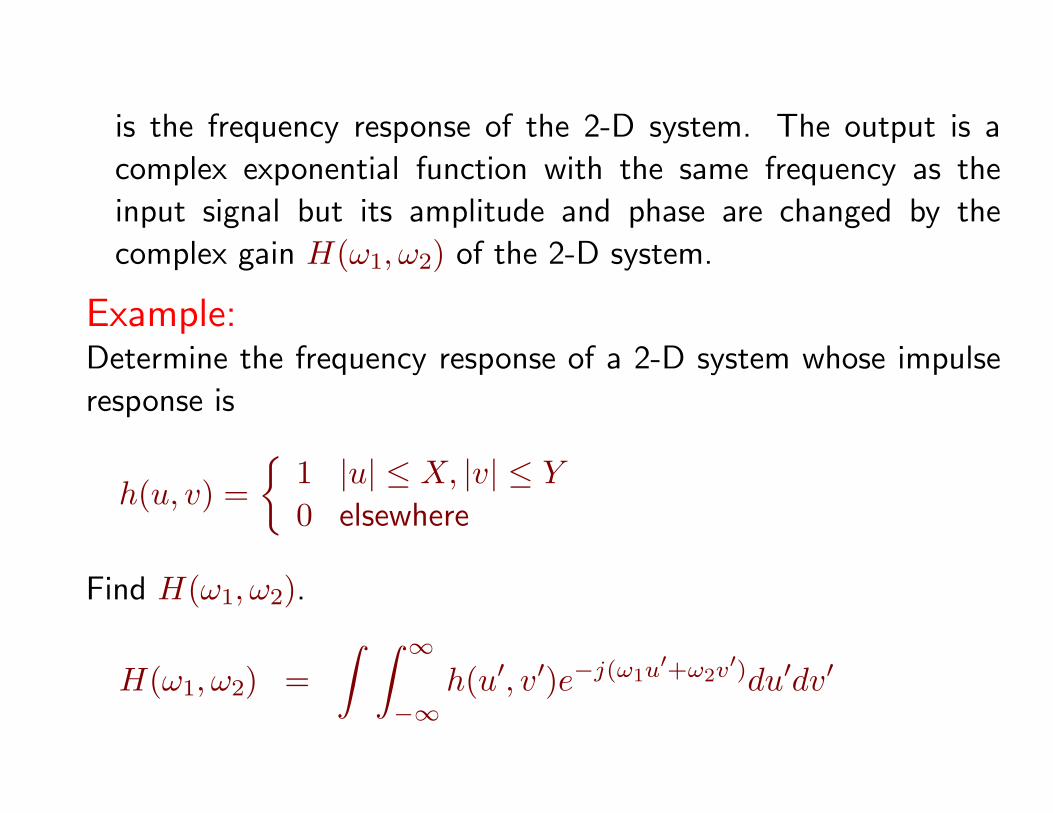
is the frequency response of the 2-D system. The output is a
complex exponential function with the same frequency as the
input signal but its amplitude and phase are changed by the
complex gain H(ω1, ω2) of the 2-D system.
Example:Determine the frequency response of a 2-D system whose impulse
response is
h(u, v) =
1 |u| ≤ X, |v| ≤ Y
0 elsewhere
Find H(ω1, ω2).
H(ω1, ω2) =∫ ∫ ∞
−∞h(u′, v′)e−j(ω1u′+ω2v′)du′dv′
To advance click enter or page down to go back use page up 3
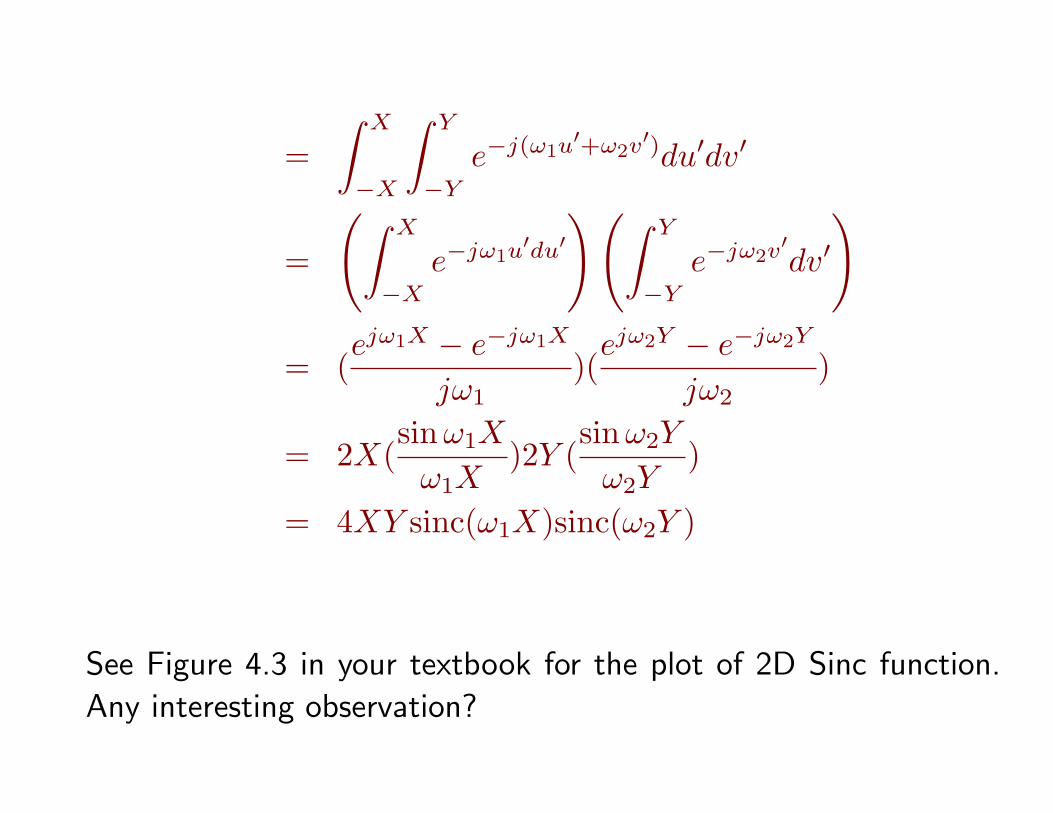
=∫ X
−X
∫ Y
−Y
e−j(ω1u′+ω2v′)du′dv′
=
(∫ X
−X
e−jω1u′du′
)(∫ Y
−Y
e−jω2v′dv′
)
= (ejω1X − e−jω1X
jω1)(
ejω2Y − e−jω2Y
jω2)
= 2X(sinω1X
ω1X)2Y (
sinω2Y
ω2Y)
= 4XY sinc(ω1X)sinc(ω2Y )
See Figure 4.3 in your textbook for the plot of 2D Sinc function.
Any interesting observation?
To advance click enter or page down to go back use page up 4
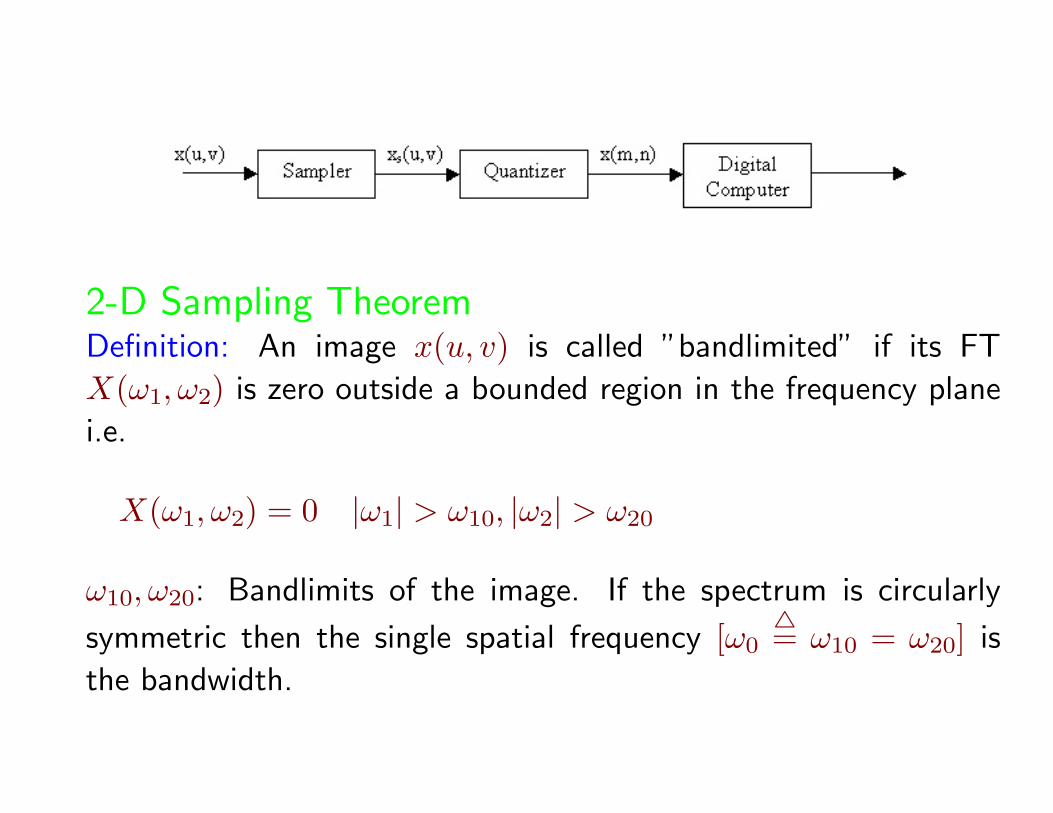
Image Sampling and QuantizationThe most basic requirement for computer processing of images is
that the images must be available in digital form i.e. arrays of
integer numbers. For digitization the given image is sampled on a
discrete grid and each sample or pixel is quantized to an integer
value representing a gray level. The digitized image can then be
processed by the computer.
To advance click enter or page down to go back use page up 5
2-D Sampling TheoremDefinition: An image x(u, v) is called ”bandlimited” if its FT
X(ω1, ω2) is zero outside a bounded region in the frequency plane
i.e.
X(ω1, ω2) = 0 |ω1| > ω10, |ω2| > ω20
ω10, ω20: Bandlimits of the image. If the spectrum is circularly
symmetric then the single spatial frequency [ω04= ω10 = ω20] is
the bandwidth.
To advance click enter or page down to go back use page up 6
Sampling Vs. ReplicationThe FT of a sampled image is a scaled, periodic replication of the
FT of the original image. To show this result, we sample x(u, v)using and ideal image sampling function, sa(u, v) that is defined as
sa(u, v;∆u, ∆v)4=
∞∑m=−∞
∞∑n=−∞
δ(u−m∆u, v − n∆v)
with the “sampling intervals” ∆u, ∆v. The sampled image is
xs(u, v) = x(u, v)sa(u, v;∆u, ∆v)
=∑ ∞∑
m,n=−∞x(m∆u, n∆v)δ(u−m∆u, v − n∆v)
It can be shown that the FT of the sampling function with spacing
To advance click enter or page down to go back use page up 7

∆u, ∆v is another sampling function with spacing 2π∆u, 2π
∆v. Then,
using the convolution in frequency domain we get
Xs(ω1, ω2) =1
∆u∆v
∑ ∞∑k,l=−∞
X(ω1 −2πk
∆u, ω2 −
2πl
∆v)
Let us define discrete frequency variables (i.e. in discrete
domain) Ω1∆=ω1∆u,Ω2
∆=ω2∆v, then we get 2-D Discrete Space Fourier
Transform (DSFT),
Xs(Ω1,Ω2) =1
∆u∆v
∑ ∞∑k,l=−∞
X(Ω1 − 2πk
∆u,Ω2 − 2πl
∆v)
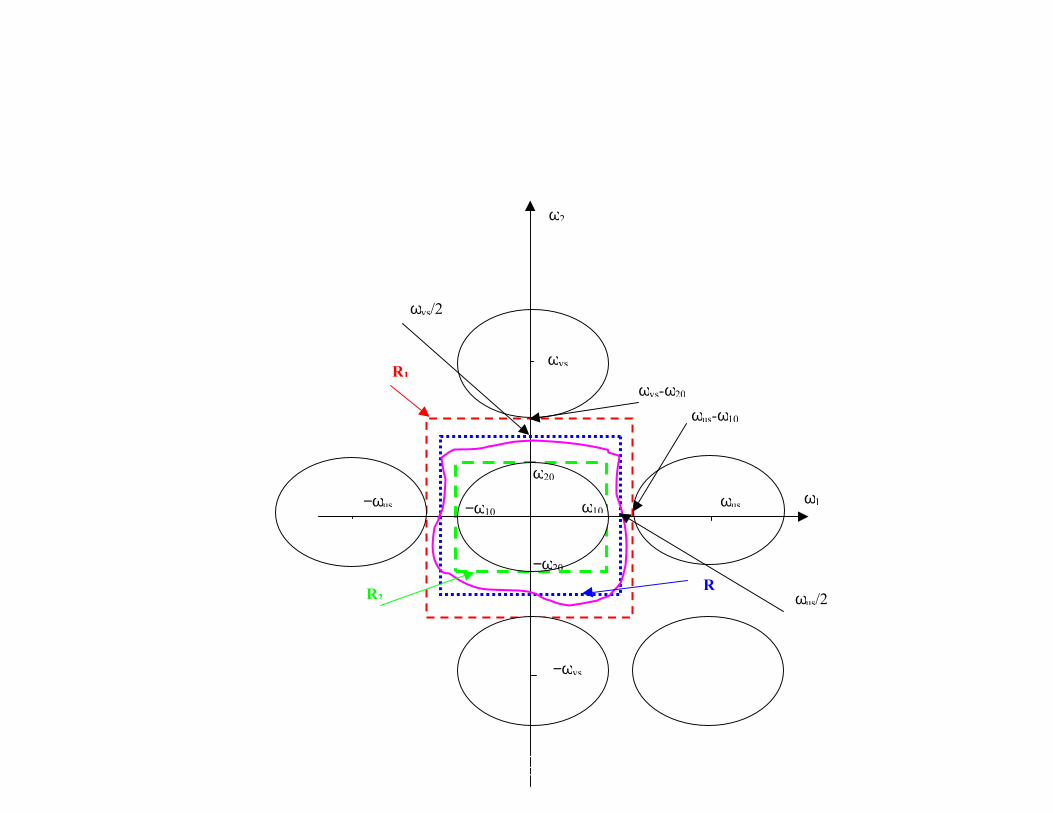
This result shows sampling in the spatial domain causes periodicity
in the frequency domain (See Figure).
To advance click enter or page down to go back use page up 8
ω20
−ω10 ω10
−ω20
ω2
ω1
ωvs
−ωvs
−ωus ωus
ωus-ω10
ωvs-ω20
R1
R R2
ωvs/2
ωus/2
To advance click enter or page down to go back use page up 9
Let ωus∆= 2π
∆u and ωvs∆= 2π
∆v (i.e. sampling frequencies), then
alternatively
Xs(ω1, ω2) =1
4π2ωusωvs
∑ ∞∑k,l=−∞
X(ω1 − kωus, ω2 − lωvs)
As can be seen from the Figure, for no overlapping between the
replica the lower bounds on the sampling frequencies are 2ω10 and
2ω20. These frequencies are referred to as ”Nyquist frequencies”.
Their reciprocals are called ”Nyquist intervals”. The samplingfrequency must be equal to or greater than twice the frequencyassociated with the finest detail in the image (edges).
To advance click enter or page down to go back use page up 10
ReconstructionIf the sampling frequencies ωus and ωvs are greater than twice
of the bandlimits i.e. ωus ≥ 2ω10, ωvs ≥ 2ω20 then X(ω1, ω2)can be recovered from Xs(ω1, ω2) by a 2-D ideal low-pass filter
(interpolation filter) with frequency response
H(ω1, ω2) =
∆u∆v ω1, ω2 ∈ R
0 otherwise
where R is any region whose boundary aR is contained within the
region between R1 and R2 as shown in the Figure. Then
X(ω1, ω2) = H(ω1, ω2)Xs(ω1, ω2) = X(ω1, ω2)
i.e. exact reconstruction.
To advance click enter or page down to go back use page up 11
A typical choice for R is a rectangular region, e.g. R =[−ωus
2 , ωus2
]×[−ωvs
2 , ωvs2
]for which the impulse response is the
ideal 2-D interpolation function i.e.
h(u, v) = Sinc(uωus)sinc(vωvs)
That is, X(ω1, ω2) = H(ω1, ω2) ·Xs(ω1, ω2), gives
x(u, v) = h(u, v) ∗ ∗xs(u, v)
=∑ ∞∑
m,n=−∞x(m∆u, n∆v)sinc(ωus(u−m∆u))
sinc(ωvs(v − n∆v))
To advance click enter or page down to go back use page up 12
Remarks
1. The above equation is an infinite order interpolation that
reconstructs the continuous function x(u, v) from its samples
x(m∆u, n∆v).2. For a rectangular passband with size W1 × W2, the
impulse response of the interpolation filter is h(u, v) =sinc(uW1)sinc(vW2).
Undersampling and Aliasing EffectsIf the sampling frequencies are below the Nyquist rates i.e. ωus <
2ω10 and ωvs < 2ω20, then the periodic replications of X(ω1, ω2)will overlap, resulting in a distorted spectrum Xs(ω1, ω2) from
which X(ω1, ω2) cannot be recovered. The frequencies above
half the sampling frequencies, that is, above ωus2 ,ωvs
2 are called
To advance click enter or page down to go back use page up 13
the ”fold-over frequencies”. This overlapping causes some of the
high frequencies (or fold-over frequencies) in the original image to
appear as low frequencies (below ωus2 ,ωvs
2 ) in the sampled image.
This phenomenon is called ”Aliasing”. Aliasing cannot be removed
by post filtering but can be avoided by pre low pass filtering the
image so that its bandlimits are less than one-half of the sampling
frequencies.
In images aliasing causes edge smearing and loss of details. The
spectrum of an undersampled image can be written as
Xs(ω1, ω2) =1
∆u∆v[X(ω1, ω2) + E(ω1, ω2)]
To advance click enter or page down to go back use page up 14

where
E(ω1, ω2) =∑ ∞∑
k, l = −∞(k, l) 6= (0, 0)
X(ω1 − kωus, ω2 − lωvs)
After the filtering with a 2-D LPF
H(ω1, ω2) =
∆u∆v |ω1| ≤ ωus2 , |ω2| ≤ ωvs
2
0 otherwise
we get X(ω1, ω2) = H(ω1, ω2)Xs(ω1, ω2). In the spatial domain,
we get
x(u, v) = x(u, v) + e(u, v)
To advance click enter or page down to go back use page up 15
where
e(u, v) =1
4π2
∫ ωus2
−ωus2
∫ ωvs2
−ωvs2
E(ω1, ω2) exp[j(ω1u + ω2v)]dω1dω2
represents the aliasing error artifact in the reconstructed image
after the filtering.
Example: An image described by the function
x(u, v) = 2 cos (3u + 4v)
is sampled at ∆u = ∆v = 0.4π. Find the reconstructed image
x(u, v).
To advance click enter or page down to go back use page up 16
Expand
cos(3u + 4v) = ej(3u+4v) + e−j(3u+4v)/2
and use the property Fejω0t = 2πδ(ω − ω0), to find the 2D
spectrum of x(u, v) as
X(ω1, ω2) = (2π)2[δ(ω1 − 3, ω2 − 4) + δ(ω1 + 3, ω2 + 4)]
which is bandlimited since X(ω1, ω2) = 0 for |ω1| > 3,|ω2| > 4Thus ω10 = 3 and ω20 = 4. Also ωus = 2π
∆u = 5 and ωvs = 2π∆v = 5
which are less than the Nyquist frequencies 2ω10 = 6 and 2ω20 = 8.
Thus aliasing is inevitable. The spectrum of the sampled image is
Xs(ω1, ω2) =1
∆u∆v
∑ ∞∑k,l=−∞
X(ω1 −2π
∆uk, ω2 −
2π
∆vl)
To advance click enter or page down to go back use page up 17
= 25∑ ∞∑
k,l=−∞
[δ(ω1 − 3− 5k, ω2 − 4− 5l)
+δ(ω1 + 3− 5k, ω2 + 4− 5l)]
The LPF has a rectangular passband with cutoff frequencies at half
the Nyquist frequencies i.e.
H(ω1, ω2) =
(0 · 4π)2 |ω1| ≤ 2.5, |ω2| ≤ 2.50 otherwise
After filtering we obtain
X(ω1, ω2) = (2π)2[δ(ω1 − 2, ω2 − 1) + δ(ω1 + 2, ω2 + 1)]
To advance click enter or page down to go back use page up 18
which gives
x(u, v) = 2 cos (2u + v)
Remarks
1. Any frequency component in the original image which is above
[ωus2 , ωvs
2 ] by (∆ωu,∆ωv) is reproduced (or aliased) as a lower
frequency component at [ωus2 −∆ωu, ωvs
2 −∆ωv]. In the previous
example, the frequency components 3,4 are above ωus2 = 2.5 and
ωvs2 = 2.5 by ∆ωu = 0.5 and ∆ωv = 1.5, respectively. Thus,
these frequencies will be aliased at 2.5−0.5 and 2.5−1.5, which
give x(u, v) = 2 cos (2u + v).2. Images corrupted by additive wideband noise have spectra with
long tails. Thus, sampling based upon the bandlimits of the
To advance click enter or page down to go back use page up 19

original image will result in aliasing effects as the tail of the
spectrum will fold-over into the bandlimits of the image. This
obviously causes additional noise in the reconstructed image.
To prevent this problem the image must be prefiltered prior to
sampling.
To advance click enter or page down to go back use page up 20