deterministic one-way simulation of two-way real-time cellular automata and its related problems
TRANSCRIPT
Volume 14, Number 4 INFORMAT!ON PROCESSING LETTERS 13 June 1982
1. introduction
DETER~ISTIC ONE-WAY SIMULATION OF TWO-WAY REAL-- CELLULAR AUTOMATA AND ITS RELATED PROBLEMS
Hiroshi UMEO Junior College Division, Osaka Eiectro-Communication University, Neyagawa-shi 512, Japan
Kenichi MORITA and Kazuhiro SUGk_TA Department of Biological Engineering, Faculty of Engineering Science, Osaka University, Toyonaka-shi, Osaka 562, Japan
Received 2 November 1981; revised version received i March 1982
Keywords: Cellular automata theory, computational complexity, parallel processing
With the advent of VLSI technology there has been increasing interest in the study or” cellular I ,usomata as a model of parallel co_mputation. Dyer [2] considered the capability of qhe cellul.ar au- tomata in which the direction of the information flow was restricted. In [2] it was shown that one- way and two-way cellular automata were computa- tionally equivalent in the nondeterministic case. Such a relation in the deterministic case, however, has been left open.
In this paper we show that for any deterministic two-way real-time cellular automaton, M, there exists a deterministic one-way cellular automaton which can simulate M in twice real-time. Moreover we present a new type of deterministic one-way cellular automata, called circular cellular au- tomata, which are computationally equivalent to deterministic two-way celhtlar automata.
2. Definition
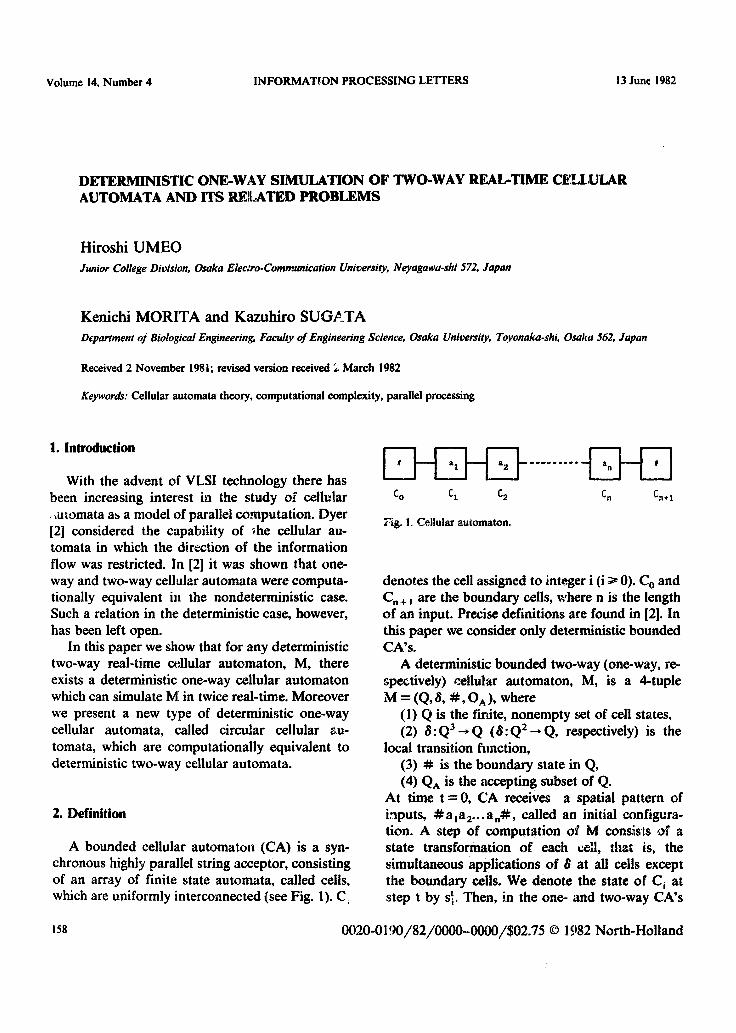
A bounded cellular automaton (CA) is a syn- chronous highly parallel string acceptor, consisting of an array of finite state automata, called cells, which are uniformly interconnected (see Fig. 1). C i
CO Cl C2 C" C n+l
Fig. 5. Cellular automaton.
denotes the cell as,signed to integer i (i > 0). C, and C ,,+ , are the boundary cells, where n is the length of an input. Precise definitions are found in [2]. In this paper we consider only deterministic bounded CA%.
A deterministic bounded two-way (one-way, re- spectively) cellular automaton, M, is a 4-tuple M = (Q, 6, #, O,), where
(1) Q is the finite, nonempty set of cell states, (2) 8: Q3 -, Q (6: Q* + Q, respectively) is the
local transition function, (3) # is the boundary state in Q, (4) QA is the accepting subset of Q.
At time t = 0, CA receives a spatial pattern of inputs, #a,a,... a,#, called an initial configura- tion. A step of computation oif M conskts 04 a state transformation of each cell, that is, the simultaneous applications of Cs at all cells except the boundary cells. We denote the state of Ci at step t by s:. Then, in the one- and two-way CA’s
158 0020-0190/82/oooO-oooO/$O2.75 0 1982 North-Holland
Volume 14, Number 4 iNFORMATION PROCESSING LETTERS 13 June 1982
42 C _ w-m
i+l : ” 7, :- . crl # Cl C, u-_lo
d Ci
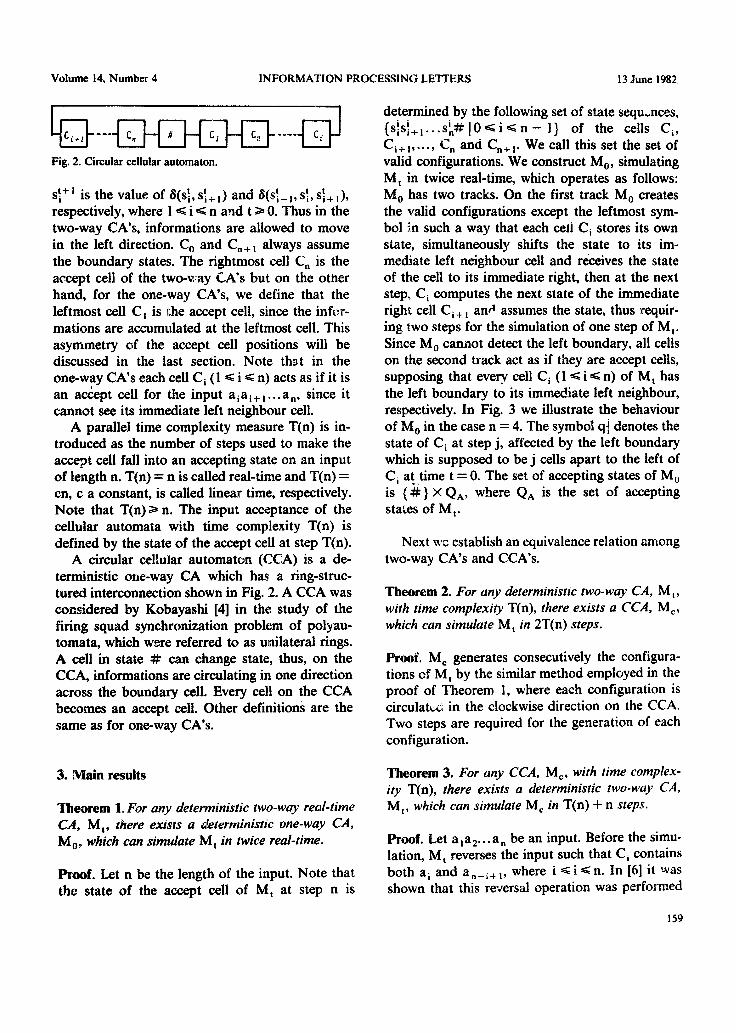
Fig. 2. Circular cellular automaton.
s:+’ is the value of 6(s\, sI+,) and 6(s:__,, si, sI+ I), respectively, where 1 G i 6 n and t z 0. Thus in the two-way CA’s, informations are allowed to move in the left direction. C, and C,, , always assume the boundary states. The rightmost cell C, is the accept cell of the two-way CA’s but on the other hand, for the one-way CA’s, we define that the leftmost cell C, is tthe accept cell, since the infor- mations are accumulated at the leftmost cell. This asymmetry of the accept cell positions will be discussed in the last section. Note that in the one-way CA’s each cell Ci (1 G i G n) acts as if it is an accept cell for the input aiai+,...an, since it cannot see its immediate left neighbour cell.
A parallel time complexity measure T(n) is in- troduced as the number of steps used to make the accept cell fall into an accepting state on an input of length n. T(n) = n is called real-time and T(n) = cn, c a constant, is called linear time, respectively. Note that T(n)2 n. The input acceptance of the cellular automata with time complexity T(n) is defined by the state of the accept cell at step T(n).
A circular cellular automaton (CCA) is a de- terministic one-way CA which has a ring-struc- tured interconnection shown in Fig. 2. A CCA was considered by Kobayashi [4] in the study of the firing squad synchronization problem of polyau- tomata, which were referred to as unilateral rings. A cell in state r# can change state, thus, on the CCA, informations are circulating in one direction across the boundary cell. Every cell on the CCA becomes an accept cell. Other definitions are the same as for one-way CA’s.
3. Main results
Theorem 1. For any deterministic two-way real-time CA, M,, there exists a deterministic one-way CA, MS,,, which can simulate M, in twice real-time.
Proiof. Let n be the length of the input. Note that the state of the accept cell of M, at step n is
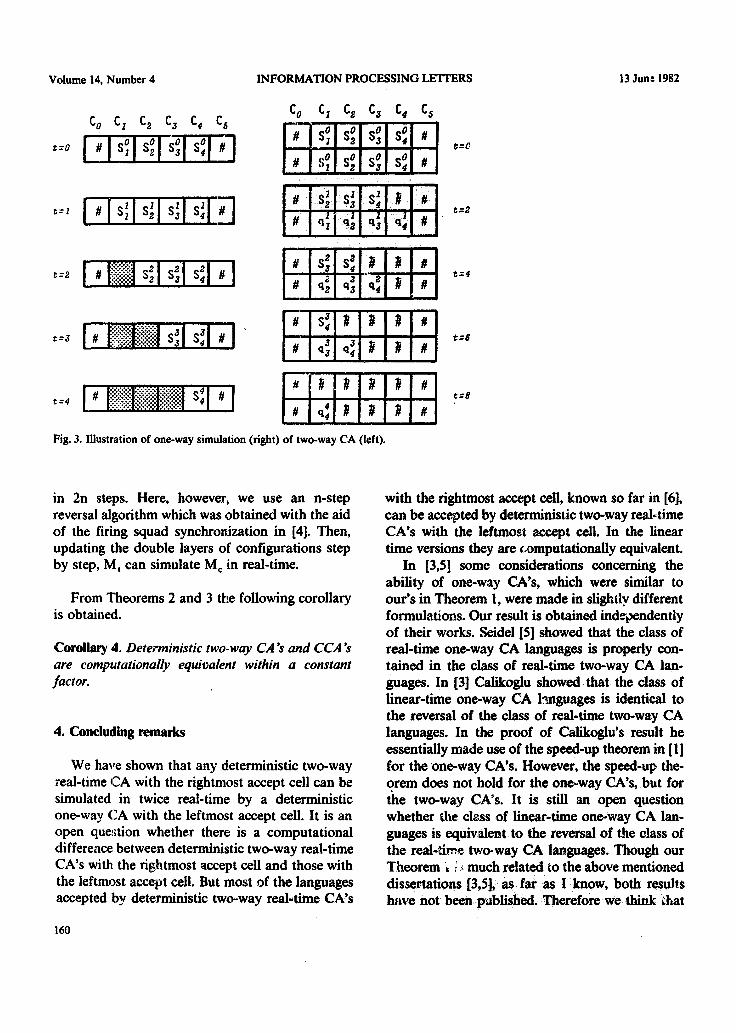
determined by the following set of state sequ;nces, {sisi+, . . . sL#]OGiGn- 1) of the cells Ci, C i+i,***, C, and C,,+,. We call this set the set of valid configurations. We construct M,, simulating M, in twice real-time, which operates as follows: MI, has two tracks. On the first track M, creates the valid configurations except the leftmost sym- bol in such a way that each cd Ci stores its own state, simultaneously shifts the state to its im- mediate left neighbour cell and receives the state of the cell to its immediate right, then at the next step, Ci computes the next state of the immediate right cell Ci+ 1 anA assumes the state, thus requir- ing two steps for the simulation of one step of M,. Since M, cannot detect the left boundary, all cells on the second track act as if they are accept cells, supposing that every cell Ci (1 G i G n) of M, has the left boundary to its immediate left neighbour, respectively. In Fig. 3 we illustrate the behaviour of M, in the case n = 4. The symbol q{ denotes the state of Ci at step j, affected by the left boundary which is supposed to be j cells apart to the left of Ci aLtime t = 0. The set of accepting states of M,
is (#)xQA, where Q,+ is the set of accepting sta:es of M,.
Next we establish an equivalence relation among two-way CA’s and CCA’s.
Theorem 2. For any deterministrc two-way CA, M , , with time complexity T(n), there exists a CCA, M,, which can simulate M, in 2T(n) steps.
PRW~. M, generates consecutively the configura- tions of M, by the similar method employed in the proof of Theorem 1, where each configuration is circulated in the clockwise direction on the CCA. Two steps are required for the generation of each configuration.
Theorem 3. For any CCA, M,, with time complex- ity T(n), there exists a deterministic two-way CA, M,, which can simulate M, in T(n) + n steps.
Proof. Let a,a,... a,, be an input. Before the simu- lation, M, reverses the input such that Ci contains both ai and a,_,+,, where i G i G n. In [6] it was
shown that this reversal operation was performed
159
Volume 14, Number 4
t=4
INFORMATION PROCESSING LETTERS
Fig. 3. Illustration of one-way simulation (right) of two-way CA (left).
in 2n steps. Here, however, we use an n-step reversal algorithm which was obtained with the aid of the firing squad synchronization in [4]. Then, updating the double layers of configurations step by step, M, can simulate M, in real-time.
From Theorems 2 and 3 the following corollary is obtained.
Corollary 4. Deterministic two-way CA ‘s and CCA ‘s are computationally equivalent within a constant factor.
4. Concluding remarks
We have shown that any deterministic two-way real-time CA with the rightmost accept cell can be simulated in twice real-time by a deterministic one-way CA with the leftmost accept cell. It is an open que!;tion whether there is a computational difference between deterministic two-way real-time
tmost accept cell and those with the leftmost accept cell. But most of the languages accepted by deterministic two-way real-time CA’s
160
13 June 1982
with the rightmost accept cell, known so far in [6], can be accepted by deterministic two-way real-time CA’s with the leftmost accept cell. In the linear time versions they are computationally equivalent.
In [3,S] some considerations concerning the ability of one-way CA’s, which were similar to our’s in Theorem 1, were made in slightly different formulations. Our result is obtained independently of their works. Seidel [S] showed that the class of real-time one-way CA languages is properly con- tained in the class of real-time two-way CA lan- guages. In [3 3 Calikoglu showed that the class of linear-time one-way CA lrurguages is identical to the reversal of the class of real-time two-way CA languages. In the proof of Calikoglu’s result he essentially made use of the speed-up theorem in [l] for the one-way CA’s. However, the speed-up the- orem does not hold for the one-way CA’s, but for the two-way CA%. It is still an open question whether the class of linear-time one-way CA lan- guages is equivirllent to the reversal of the class of the real-time two-way CA languages. Though our Theorem r r .* much related to the above mentioned dissertations [3,5], as far as I know, both results have not been pubIished. Therefore we think that
Volume 14.. Number 4 INFORMATION PROc *. SSING LE’ITERS 13 June 19PZ
it may be consid.ered relevant for publication in open literature.
(21
VI
Acknowledgement
The author would like to thank the referee who pointed out the existance of the two Ph.D. disser- tations ([3,5]).
VI
VI
[61
References VI
[I] W.T. Beyer, Recognition of topological invariants by itera- tive arrays, Project MAC Tech. Rept. TR-66, MIT, Cam- bridge, MA, 1969.
C.R. Dyer, One-way bounded cellular automata, Inform. and Control 44 (1980) 26 l-28 1. D. Calikoglu, On the computational properties of a class of cellular automata, Department of Computer Science, Uni- versity of Iowa, Tech. Relrt. 73-l 1, 1973. K. Kobayashi, The firing squad synchronization problem for a class of polyautomata networks, Studies on Polyau- tomata ( 1977) 189-207. S.R. Seidel, Language recognition and the synchronization of cellular automata, Department of Computer Science, University of Iowa, Tech. Rept. 79-02, 1979. A.R. Smith III, Real-time language recognition by one-di- mensional cellular automata, J. Comput. System Sci. 6 (1972) 233-253. H. Umeo, K. Morita and K. Sugata, A generalized firing squad synchronization problem, Language and Automata Symposium at Tokai University, 1981 (in Japanese).
161