data smoothing raymond cuijpers. index the moving average convolution the difference operator...
Post on 21-Dec-2015
230 views
TRANSCRIPT
Data smoothing
Raymond Cuijpers
Index
• The moving average
• Convolution
• The difference operator
• Fourier transforms
• Gaussian smoothing
• Butterworth filters
0
1/3
i i+1i-1
Si
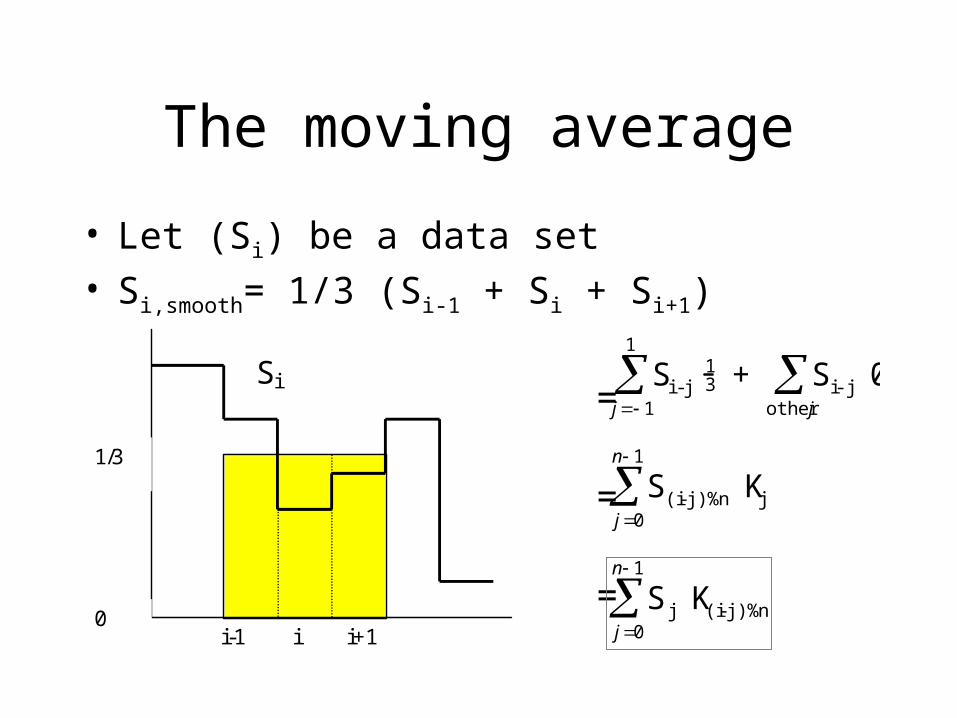
The moving average
• Let (Si) be a data set• Si,smooth= 1/3 (Si-1 + Si + Si+1)
=
=
=
Si - j 13
j 1
1
+ Si- j 0other j
S(i - j)%n Kjj 0
n 1
S j K(i - j)%nj 0
n 1
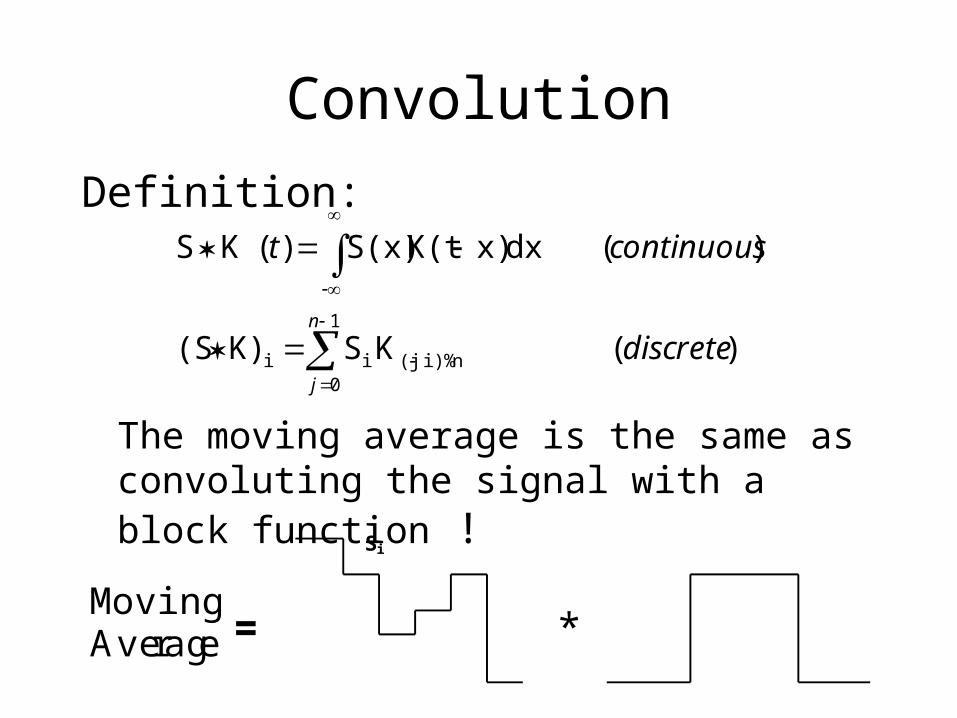
Convolution
Definition:
The moving average is the same as convoluting the signal with a block function !
S K (t) S(x)
K(t x)dx (continuous )
(S K)i Si K(j i)% nj0
n 1
(discrete )
Si
*MovingAverage =
Convolution
f * g = g * f
f * (g + h) = f * g + f * h
(f * g) * h = f * (g * h)
f * 0 = 0
But
1 * g ≠ g
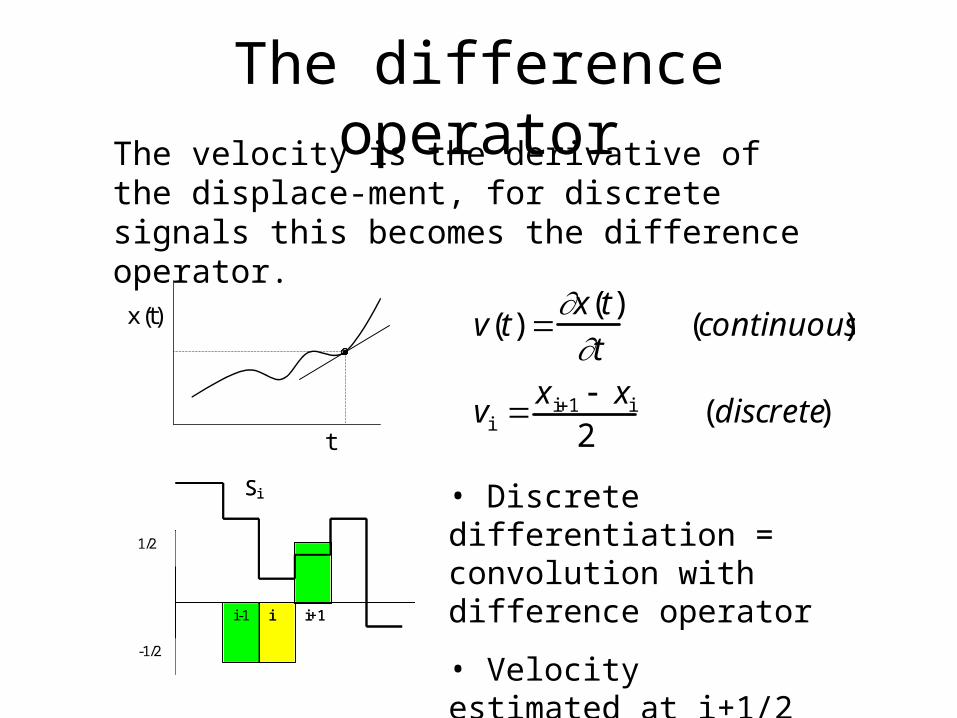
The difference operatorThe velocity is the derivative of the displace-ment, for discrete signals this becomes the difference operator.
x(t)
t
v(t) x(t)
t(continuous )
vi x i1 xi
2(discrete )
-1/2
1/2
i i+1
Si • Discrete differentiation = convolution with difference operator
• Velocity estimated at i+1/2i
-1/2
1/2
i+1
Si
i-1
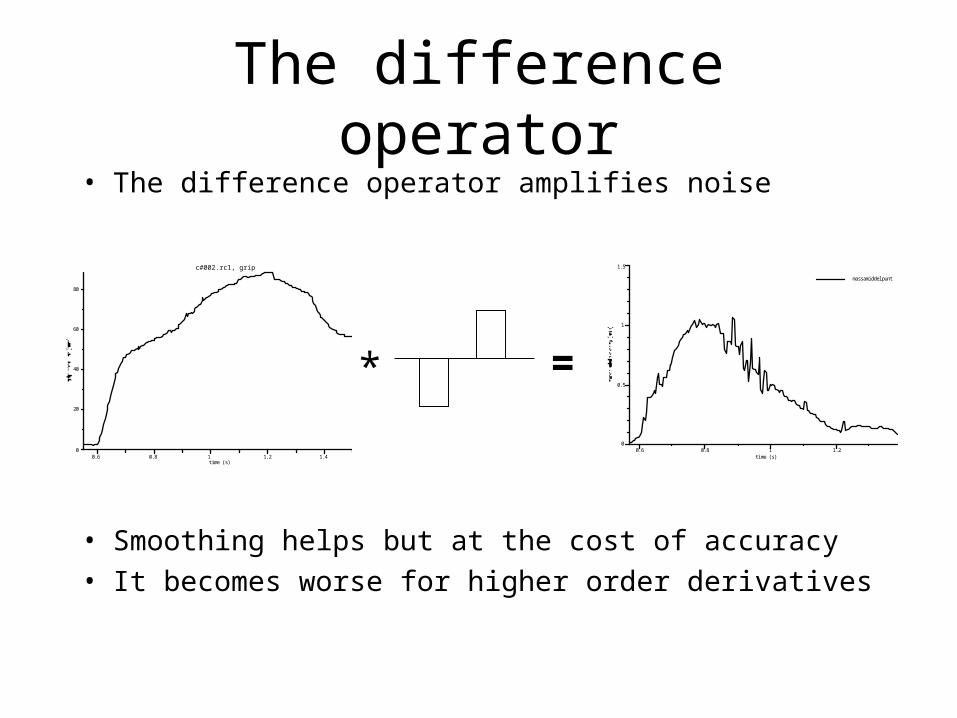
The difference operator• The difference operator amplifies noise
• Smoothing helps but at the cost of accuracy
• It becomes worse for higher order derivatives
0.6 0.8 1 1.2 1.4time (s)
0
20
40
60
80
c#002.rc1, grip
* =
0.6 0.8 1 1.2time (s)
0
0.5
1
1.5
massamiddelpunt
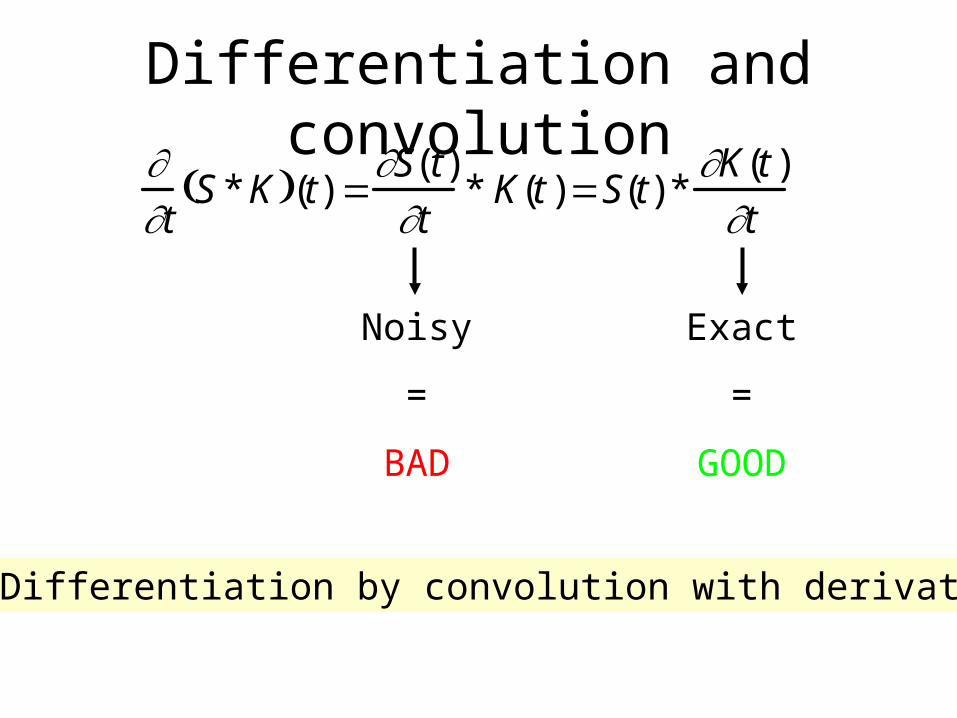
Differentiation and convolutiont
S * K (t) S( t)
t* K(t ) S(t) *
K(t )
t
Noisy
=
BAD
Exact
=
GOOD
• Differentiation by convolution with derivative
Fourier TransformsDefinition:
In the Fourier domain:• convolution becomes multiplication
• differentiation becomes multiplication with iw
F (S)() S(t)e i tdt
(continuous )
F (S)k Sr e2 i r k / n
r0
n 1
(discrete )
F (S K) F (S)F (K)
F (S' (t)) i F (S(t)) or 2 irF (Sk )
Fourier Transforms• Calculating convolutions using Fourier transforms is much
faster for large data sets than direct computation:
• There are many other transforms/expansions– Sine and Cosine transforms– Laplace transform– Legendre polynomials – Hermite polynomials (=Gaussian)– Bessel Functions– …
n
t n S K FFT 1 (2ik)n FFT (S) FFT (K)
Gaussian smoothingLet S(t) be a signal then the blurred signal is
Where is the Gaussian kernel
The derivative of a noisy S(t) is ill-posed, but
G(t, ) 1
2e
t 2
2 2
t
S(t) * G(t, ) S(t)
t*G(t, )
G(t, )
t* S(t)
Sblurred S(t)* G(t, )
Gaussian smoothingThe n-th order proper derivative of scale s is
So in the discrete case we get
n, S(t) S(t) * nG(t, )
tn
n , S(ti ) FFT -1 FFT S(t i) FFTnG(ti , )
t n
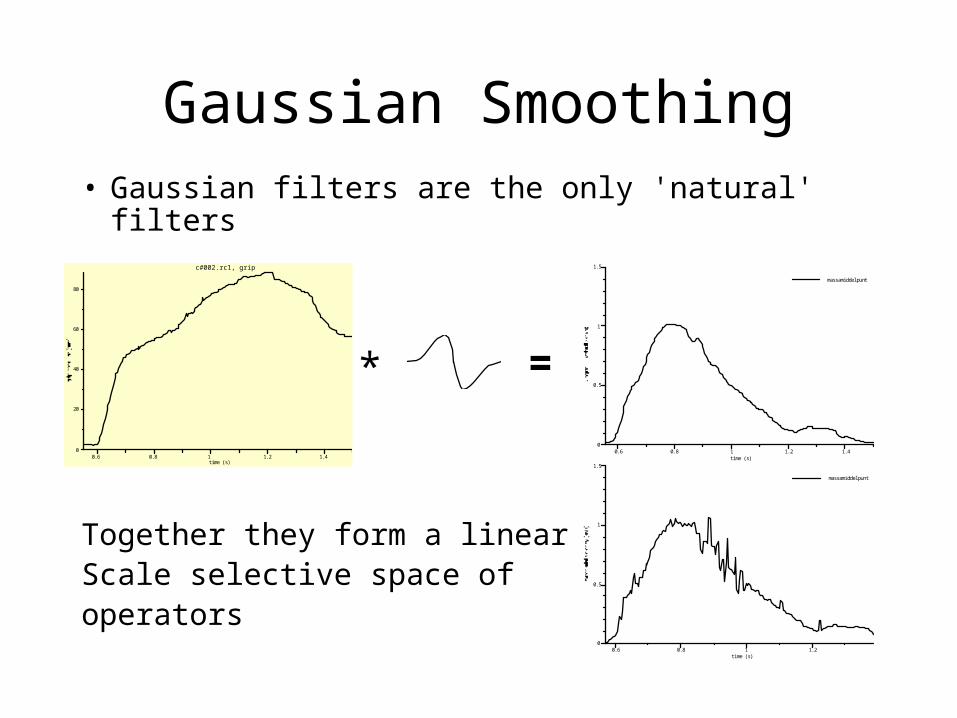
Gaussian Smoothing• Gaussian filters are the only 'natural' filters
Together they form a linearScale selective space of operators
0.6 0.8 1 1.2 1.4time (s)
0
20
40
60
80
c#002.rc1, grip
* =
0.6 0.8 1 1.2time (s)
0
0.5
1
1.5
massamiddelpunt
0.6 0.8 1 1.2 1.4time (s)
0
0.5
1
1.5
massamiddelpunt
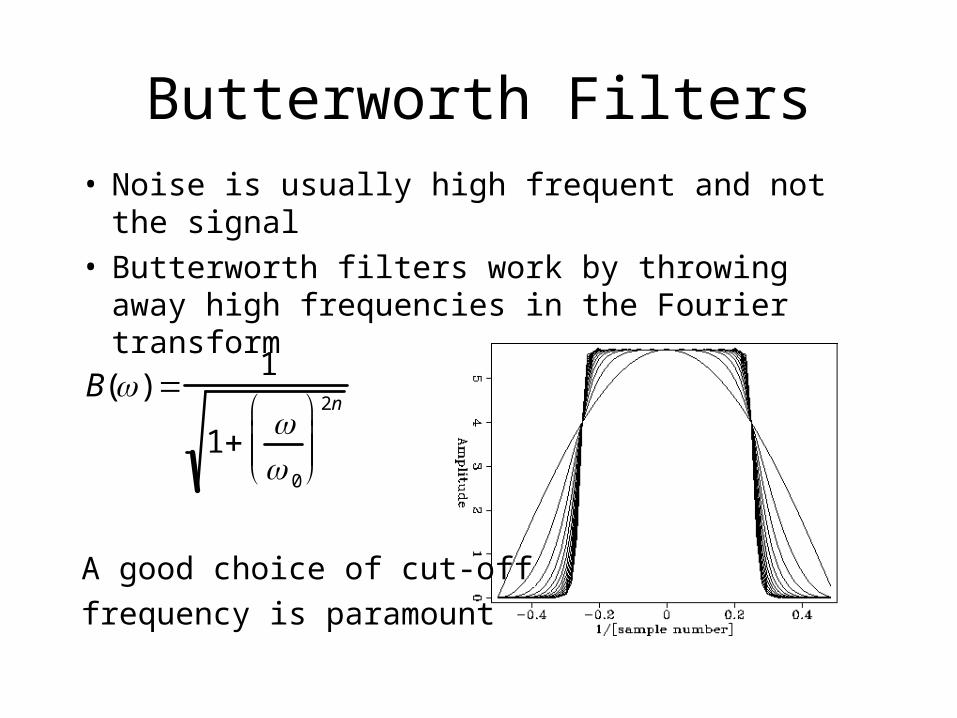
Butterworth Filters• Noise is usually high frequent and not the signal• Butterworth filters work by throwing away high
frequencies in the Fourier transform
A good choice of cut-off
frequency is paramount
B() 1
1 0
2n
Butterworth filtersAdvantage:• Easy to implement in electronic circuit
Disadvantage:• Introduces a phase shift. Solution is to apply it
twice in opposite directions• 'Ringing': jumps in the signal produces oscillations• Depends strongly on the nature of the noise and
the choice of cut-off frequency