csce 441 computer graphics: keyframe animation/smooth curves jinxiang chai
Post on 19-Dec-2015
228 views
TRANSCRIPT
CSCE 441 Computer Graphics: Keyframe Animation/Smooth Curves
Jinxiang Chai
Outline
• Keyframe interpolation
• Curve representation and interpolation - natural cubic curves
- Hermite curves
- Bezier curves
• Required readings: HB 8-8,8-9, 8-10
Computer Animation
• Animation - making objects moving
• Compute animation - the production of consecutive images, which,
when displayed, convey a feeling of motion.
Animation Topics
• Rigid body simulation - bouncing ball
- millions of chairs falling down
Animation Topics
• Rigid body simulation - bouncing ball
- millions of chairs falling down
• Natural phenomenon
- water, fire, smoke, mud, etc.
Animation Topics
• Rigid body simulation - bouncing ball
- millions of chairs falling down
• Natural phenomenon
- water, fire, smoke, mud, etc.
• Character animation
- articulated motion, e.g. full-body animation
- deformation, e.g. face
Animation Topics
• Rigid body simulation - bouncing ball
- millions of chairs falling down
• Natural phenomenon
- water, fire, smoke, mud, etc.
• Character animation
- articulated motion, e.g. full-body animation
- deformation, e.g. face
• Cartoon animation
Animation Criterion
• Physically correct
- rigid body-simulation
- natural phenomenon
• Natural
- character animation
• Expressive
- cartoon animation
Keyframe Animation
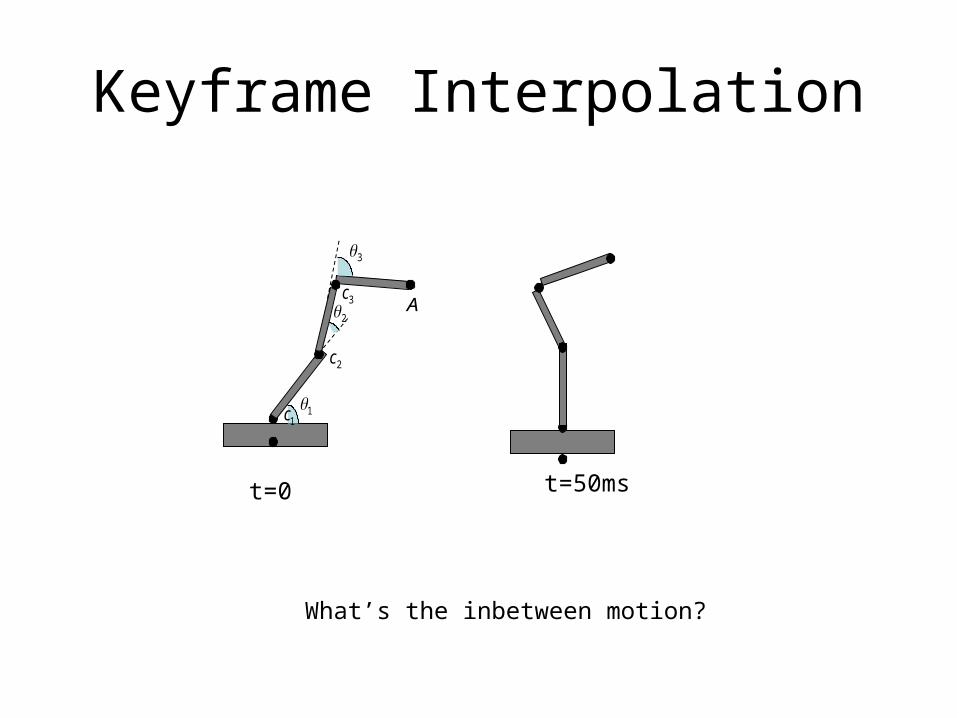
Keyframe Interpolation
1
2
3
3c
2c
1c
A
What’s the inbetween motion?
t=0 t=50ms
Outline
• Process of keyframing• Key frame interpolation• Hermite and bezier curve• Splines• Speed control
2D Animation
• Highly skilled animators draw the key frames• Less skilled (lower paid) animators draw the in-
between frames• Time consuming process• Difficult to create physically realistic animation
3D Animation
• Animators specify important key frames in 3D• Computers generates the in-between frames• Some dynamic motion can be done by
computers (hair, clothes, etc)• Still time consuming; Pixar spent four years to
produce Toy Story
The Process of Keyframing
• Specify the keyframes
• Specify the type of interpolation
- linear, cubic, parametric curves
• Specify the speed profile of the interpolation
- constant velocity, ease-in-ease-out, etc
• Computer generates the in-between frames
A Keyframe
• In 2D animation, a keyframe is usually a single image
• In 3D animation, each keyframe is defined by a set of parameters
Keyframe Parameters
What are the parameters?– position and orientation– body deformation– facial features– hair and clothing– lights and cameras
Outline
• Process of keyframing• Key frame interpolation• Hermite and bezier curve• Splines• Speed control
Inbetween Frames
• Linear interpolation
• Cubic curve interpolation
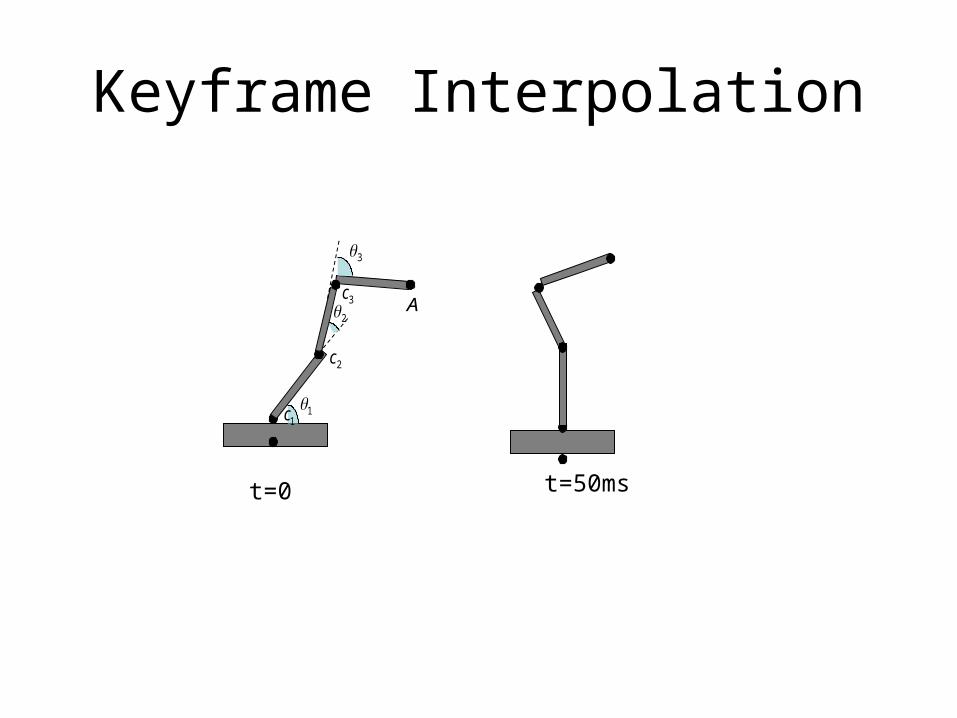
Keyframe Interpolation
1
2
3
3c
2c
1c
A
t=0 t=50ms
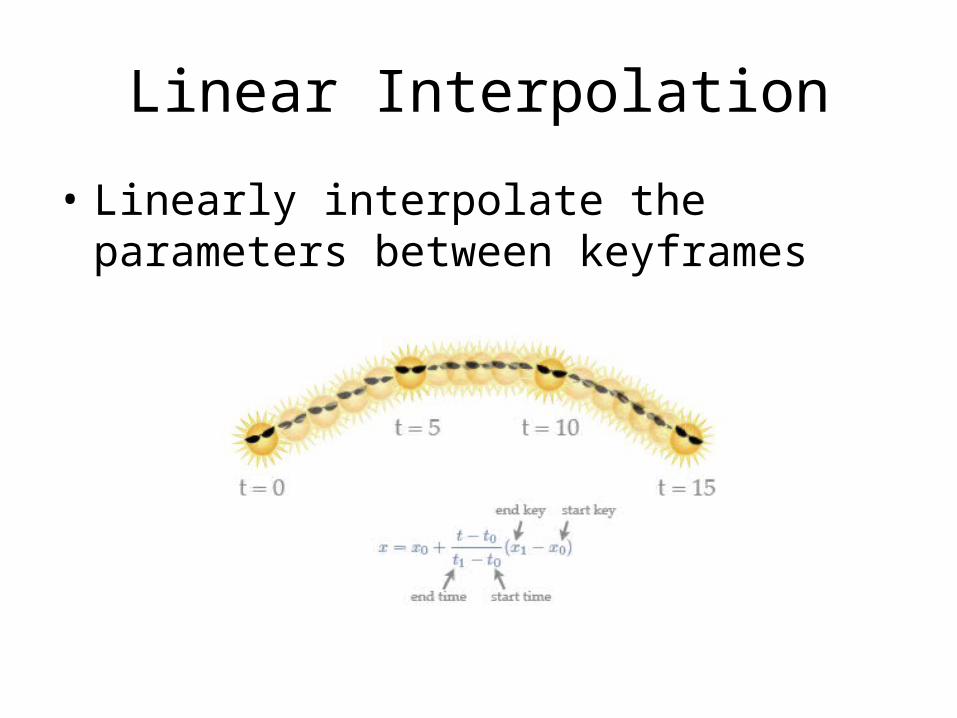
Linear Interpolation
• Linearly interpolate the parameters between keyframes
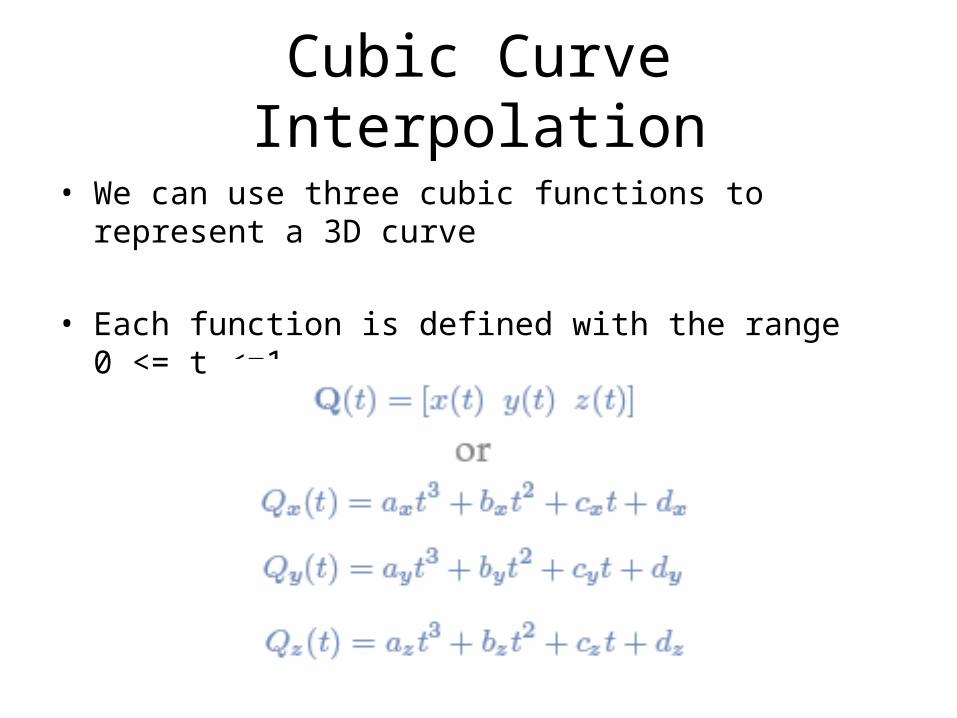
Cubic Curve Interpolation
• We can use three cubic functions to represent a 3D curve
• Each function is defined with the range 0 <= t <=1
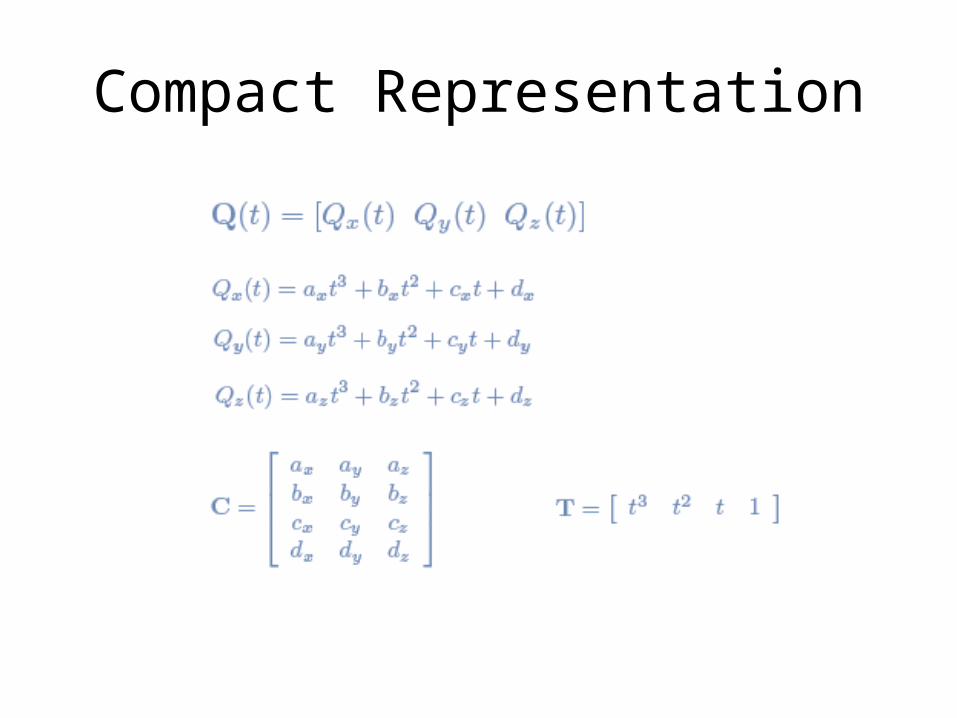
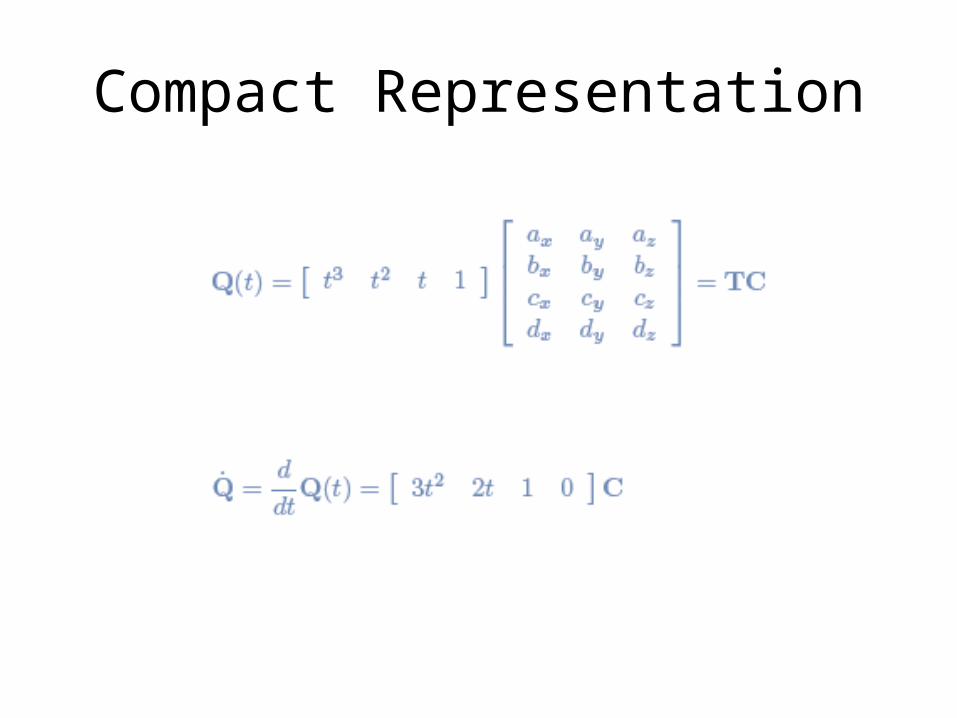
Compact Representation
Compact Representation
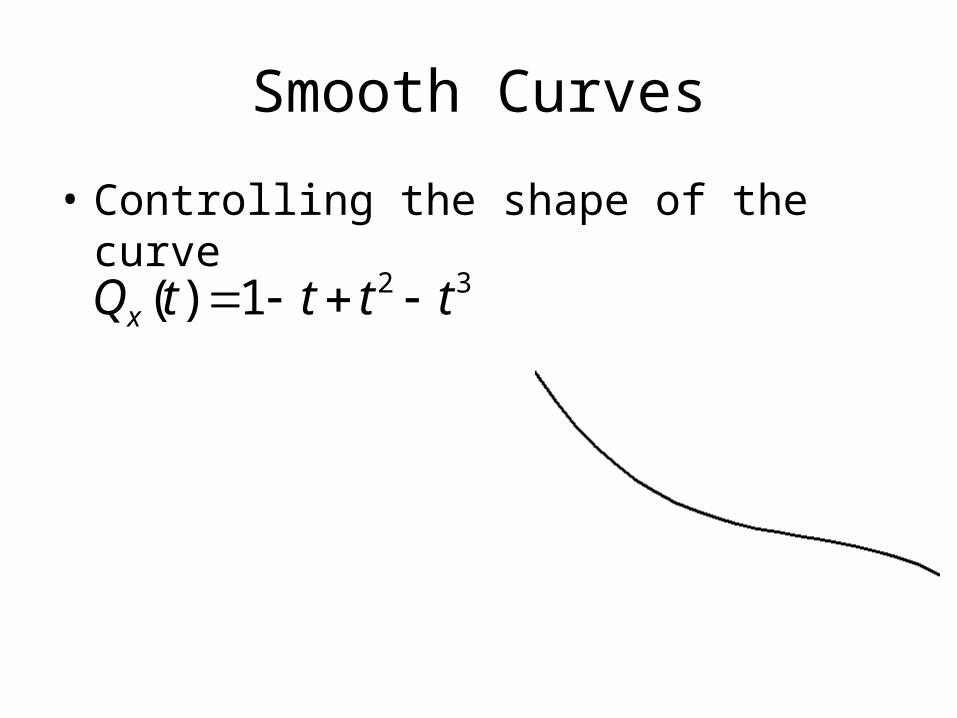
Smooth Curves
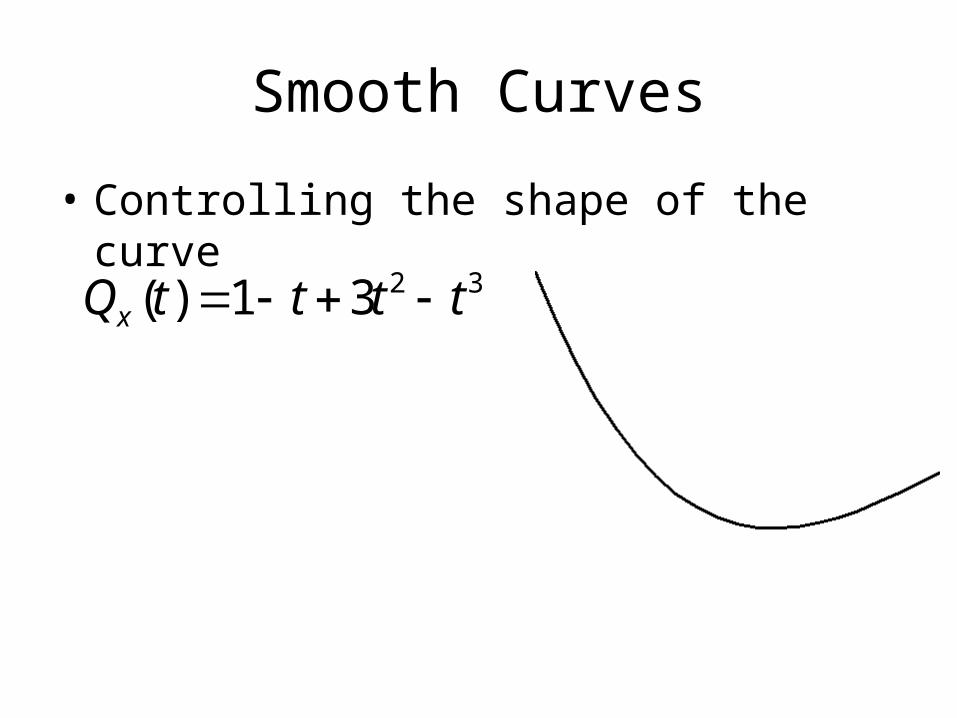
• Controlling the shape of the curve
321)( ttttQx
Smooth Curves
• Controlling the shape of the curve
323)( ttttQx
Smooth Curves
• Controlling the shape of the curve
321)( ttttQ x
Smooth Curves
• Controlling the shape of the curve
321)( ttttQx
Smooth Curves
• Controlling the shape of the curve
321)( ttttQx
Smooth Curves
• Controlling the shape of the curve
3231)( ttttQx
Constraints on the cubics
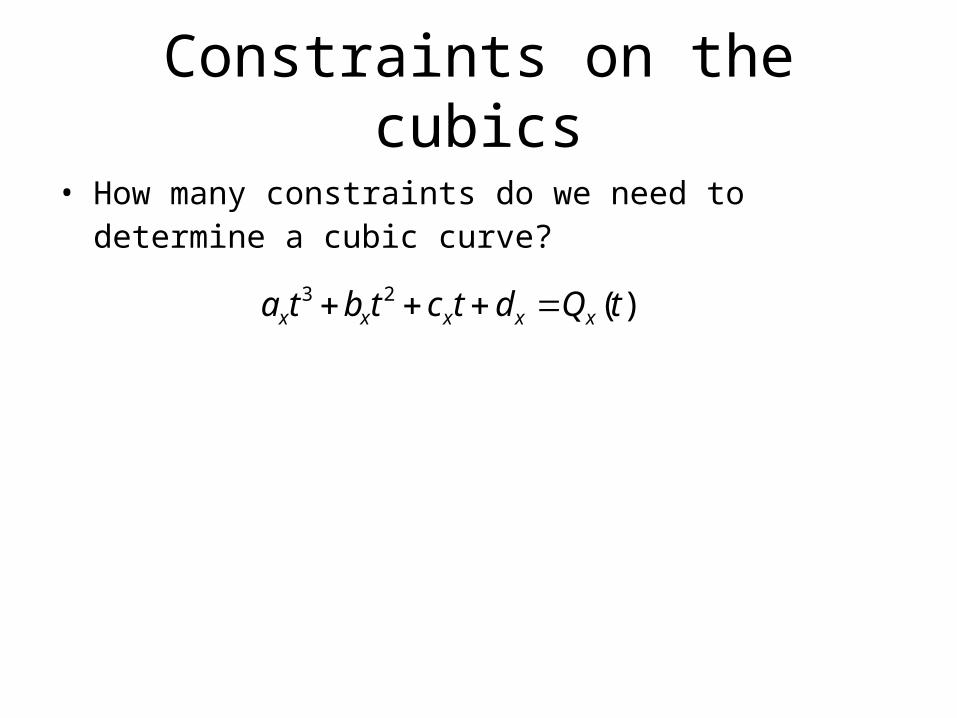
• How many constraints do we need to determine a cubic curve?
)(23 tQdtctbta xxxxx
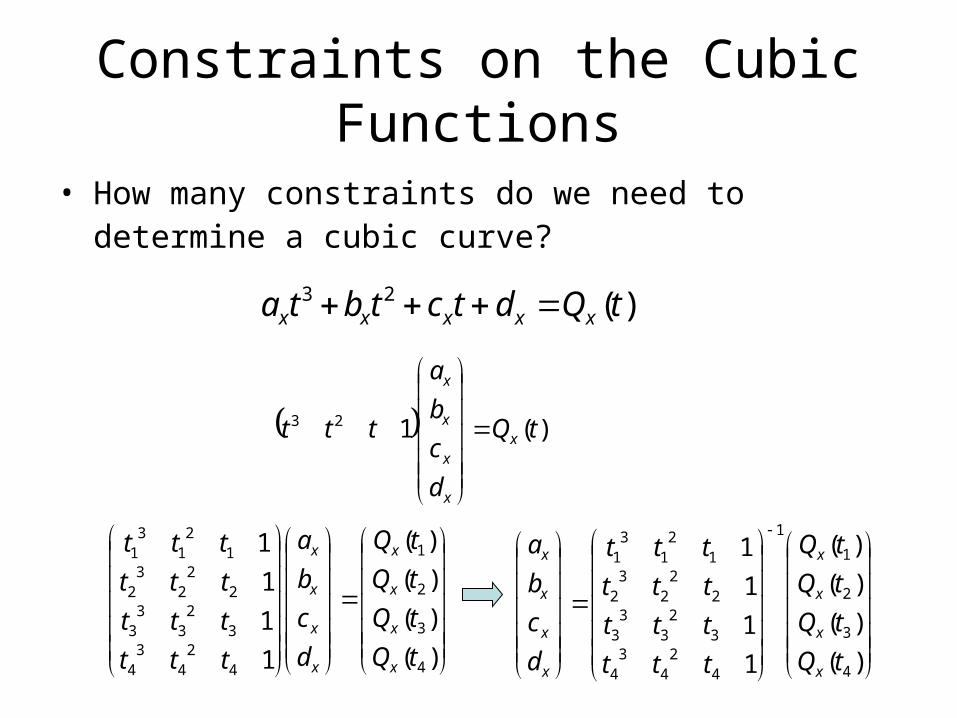
Constraints on the Cubic Functions
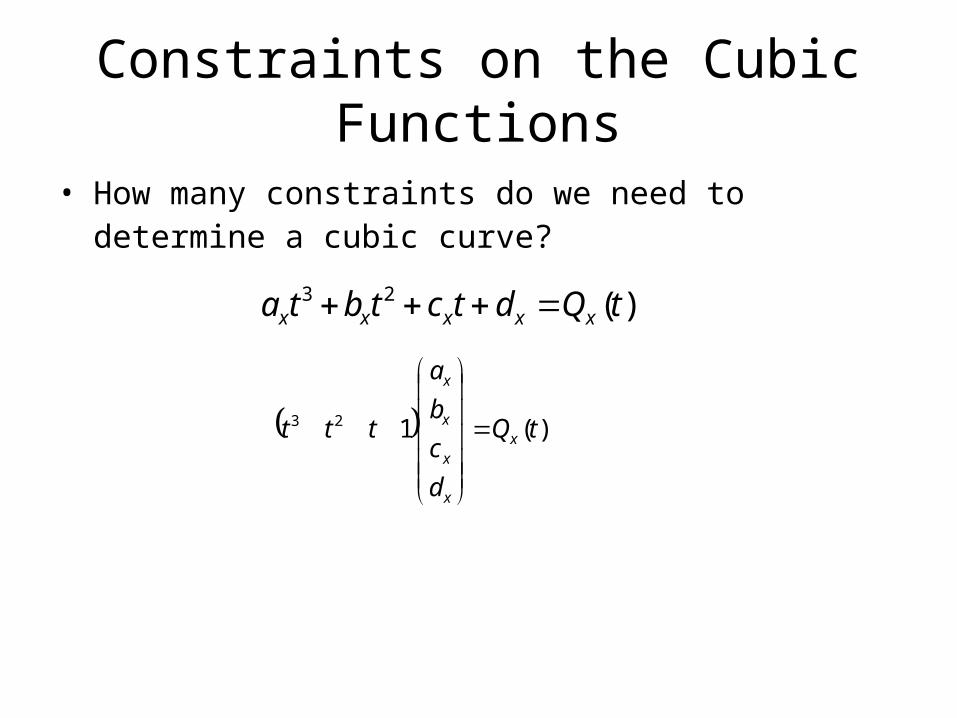
• How many constraints do we need to determine a cubic curve?
)(23 tQdtctbta xxxxx
)(123 tQ
d
c
b
a
ttt x
x
x
x
x
Constraints on the Cubic Functions
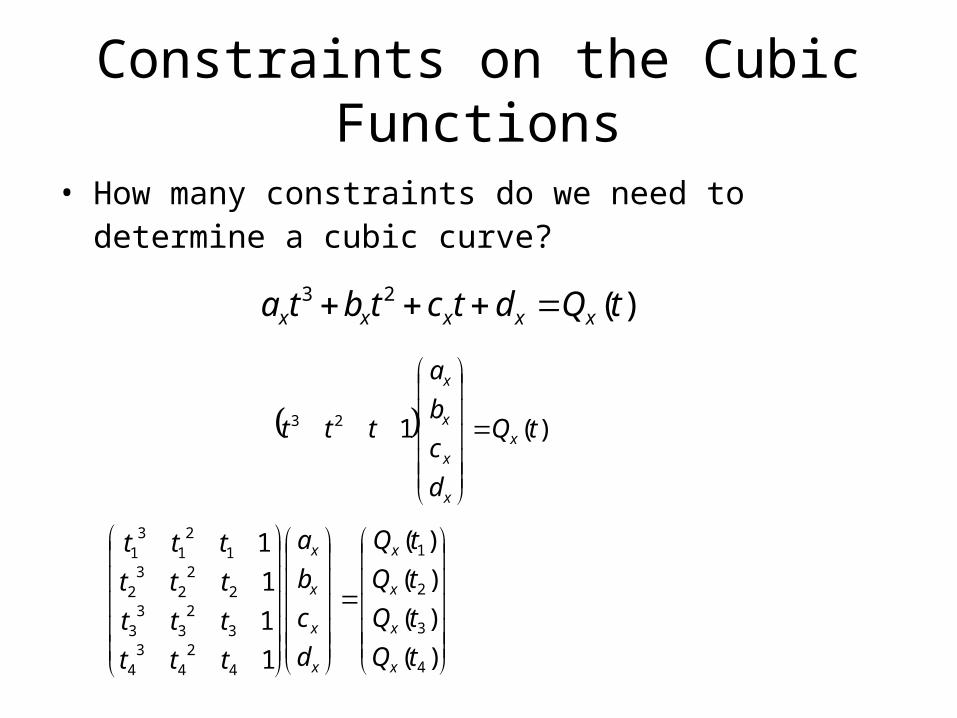
• How many constraints do we need to determine a cubic curve?
)(23 tQdtctbta xxxxx
)(123 tQ
d
c
b
a
ttt x
x
x
x
x
)(
)(
)(
)(
1
1
1
1
4
3
2
1
424
34
323
33
222
32
121
31
tQ
tQ
tQ
tQ
d
c
b
a
ttt
ttt
ttt
ttt
x
x
x
x
x
x
x
x
Constraints on the Cubic Functions
• How many constraints do we need to determine a cubic curve?
)(23 tQdtctbta xxxxx
)(123 tQ
d
c
b
a
ttt x
x
x
x
x
)(
)(
)(
)(
1
1
1
1
4
3
2
1
424
34
323
33
222
32
121
31
tQ
tQ
tQ
tQ
d
c
b
a
ttt
ttt
ttt
ttt
x
x
x
x
x
x
x
x
)(
)(
)(
)(
1
1
1
1
4
3
2
1
1
424
34
323
33
222
32
121
31
tQ
tQ
tQ
tQ
ttt
ttt
ttt
ttt
d
c
b
a
x
x
x
x
x
x
x
x
Constraints on the Cubic Functions
• How many constraints do we need to determine a cubic curve? 4
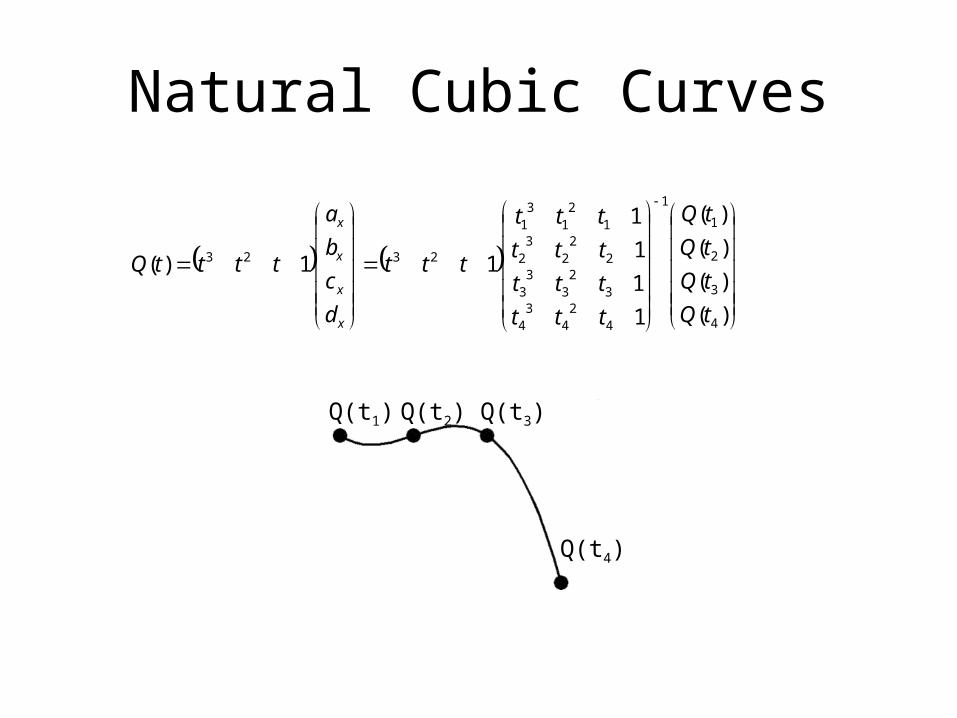
Natural Cubic Curves
)(
)(
)(
)(
1
1
1
1
11)(
4
3
2
1
1
424
34
323
33
222
32
121
31
2323
tQ
tQ
tQ
tQ
ttt
ttt
ttt
ttt
ttt
d
c
b
a
ttttQ
x
x
x
x
Q(t1) Q(t2) Q(t3)
Q(t4)
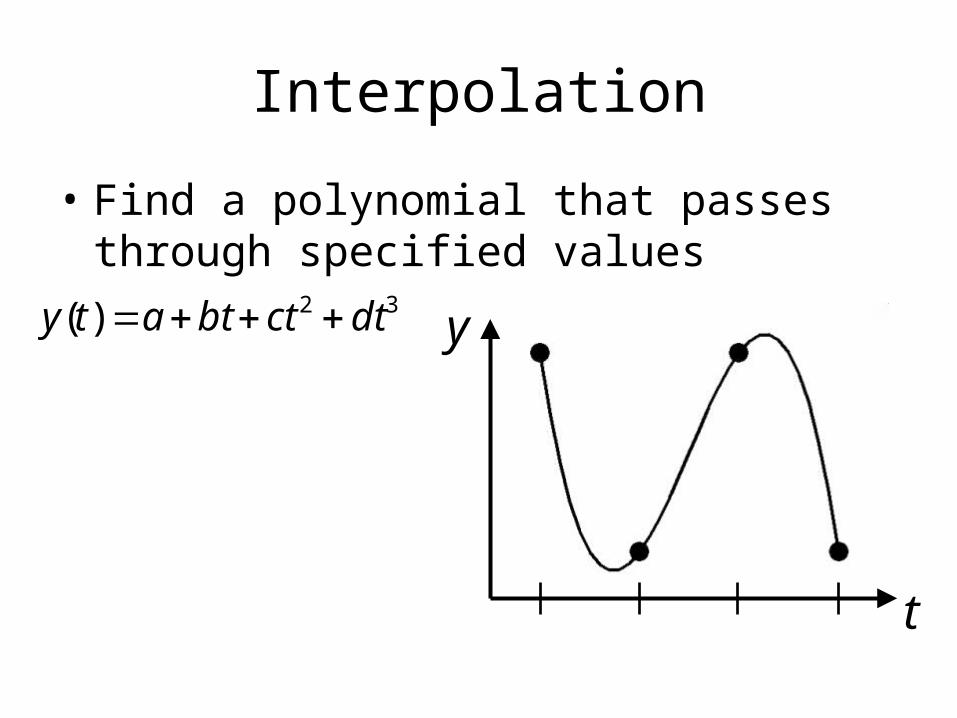
Interpolation
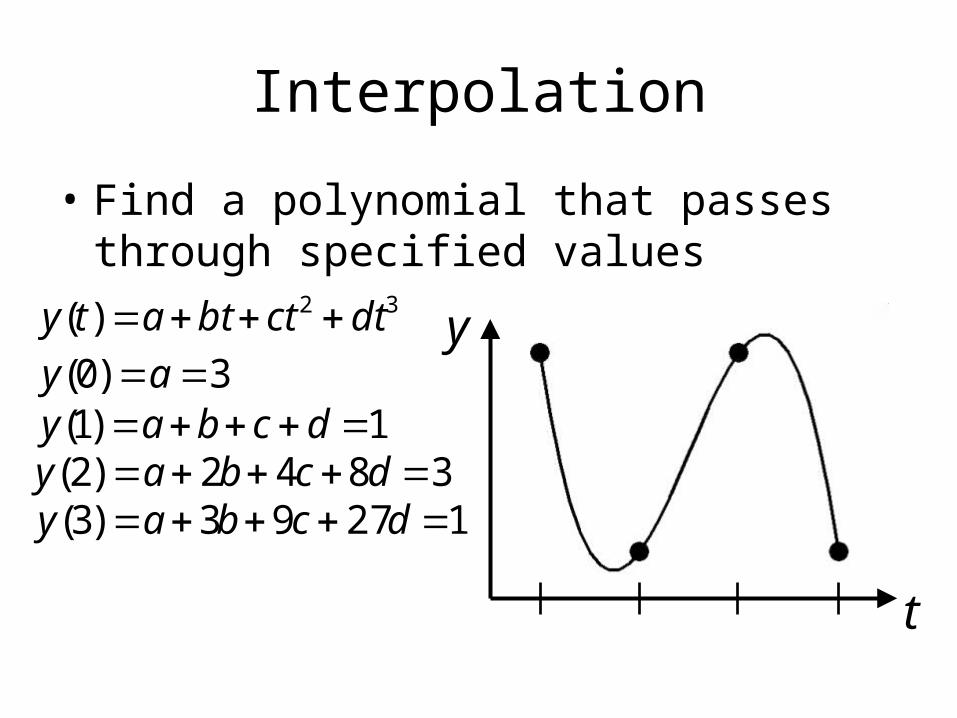
• Find a polynomial that passes through specified values
y
t
32)( dtctbtaty
Interpolation
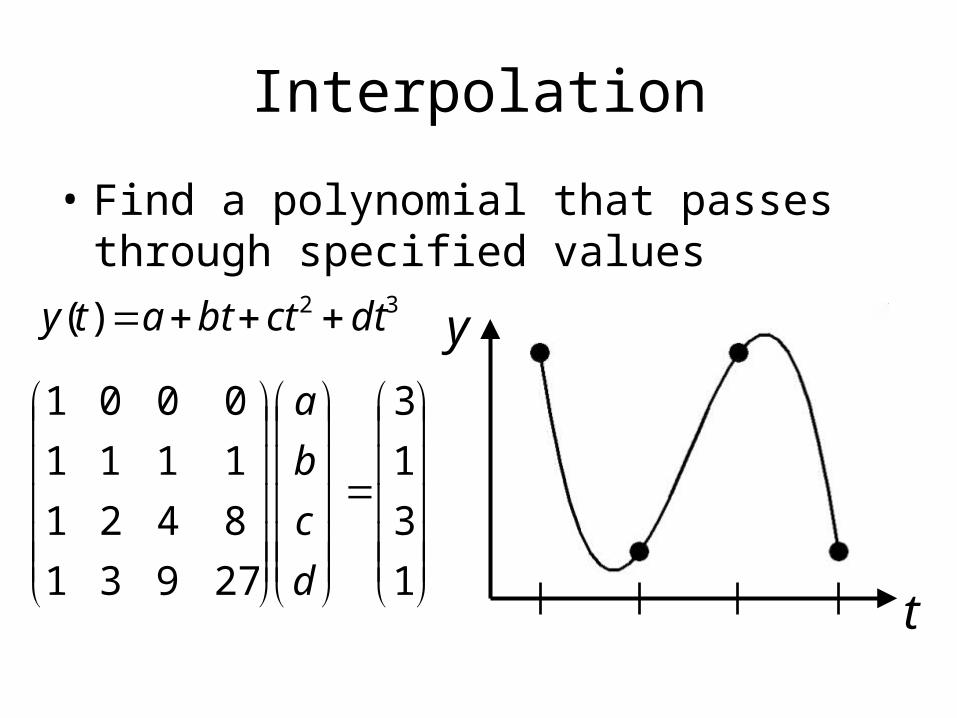
• Find a polynomial that passes through specified values
y
t
32)( dtctbtaty 3)0( ay
1)1( dcbay3842)2( dcbay12793)3( dcbay
Interpolation
• Find a polynomial that passes through specified values
y
t
32)( dtctbtaty
1
3
1
3
27931
8421
1111
0001
d
c
b
a
Interpolation
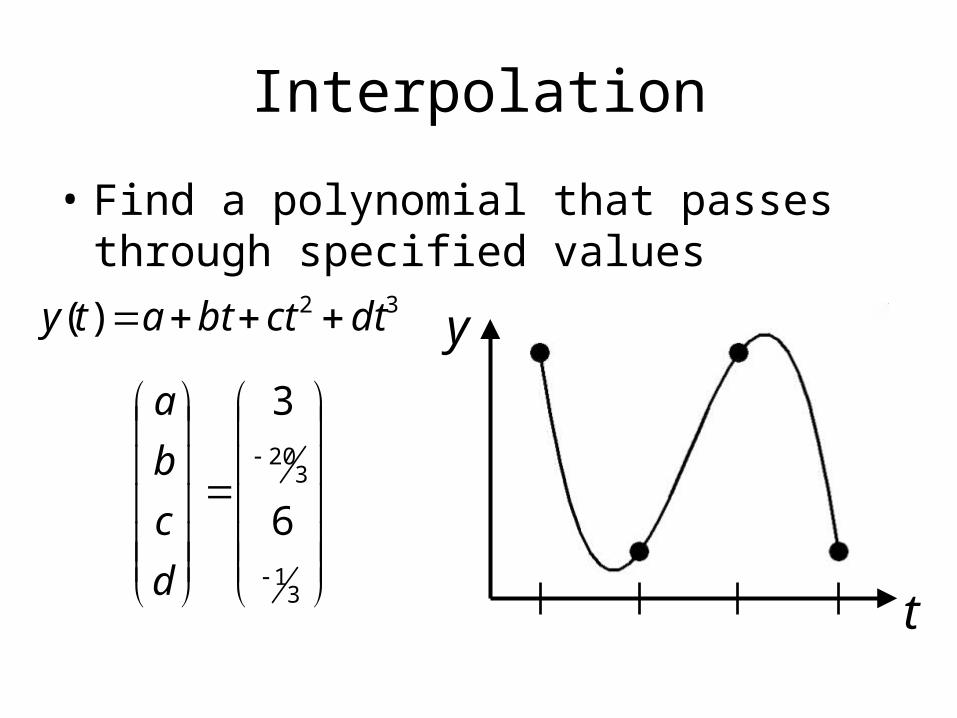
• Find a polynomial that passes through specified values
y
t
32)( dtctbtaty
31
320
6
3
d
c
b
a
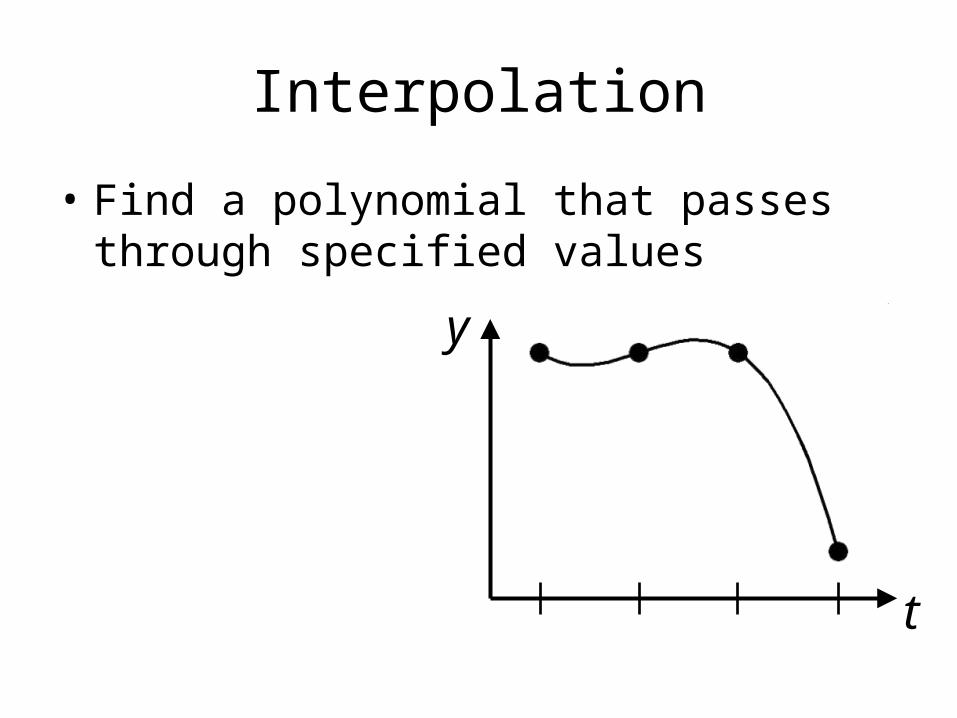
Interpolation
• Find a polynomial that passes through specified values
y
t
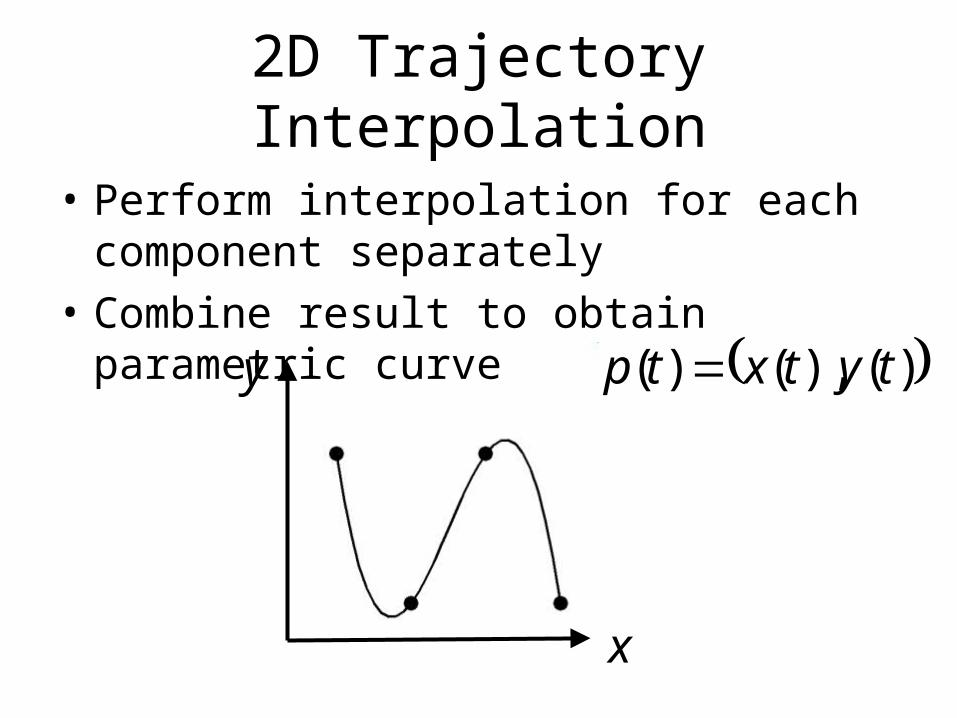
2D Trajectory Interpolation
• Perform interpolation for each component separately
• Combine result to obtain parametric curvey
x
)(),()( tytxtp
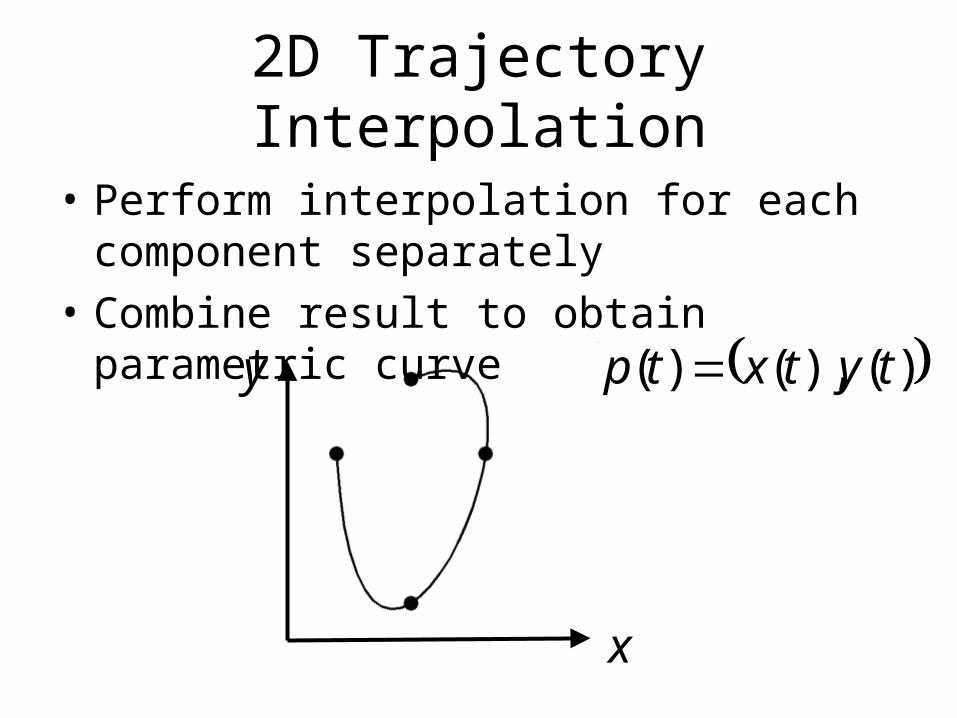
2D Trajectory Interpolation
• Perform interpolation for each component separately
• Combine result to obtain parametric curvey
x
)(),()( tytxtp
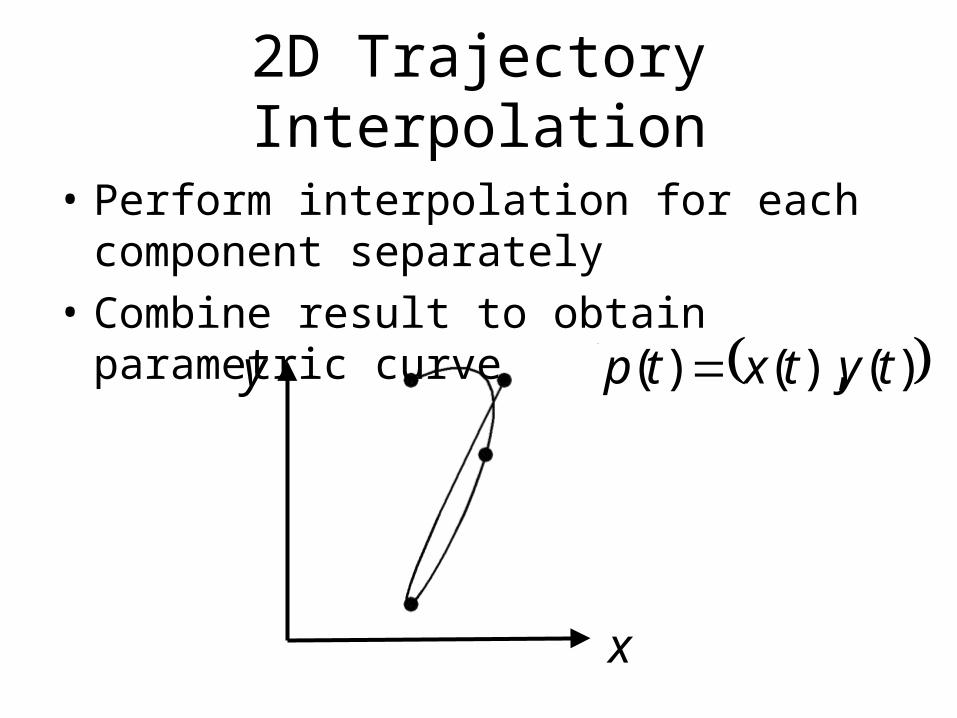
2D Trajectory Interpolation
• Perform interpolation for each component separately
• Combine result to obtain parametric curvey
x
)(),()( tytxtp
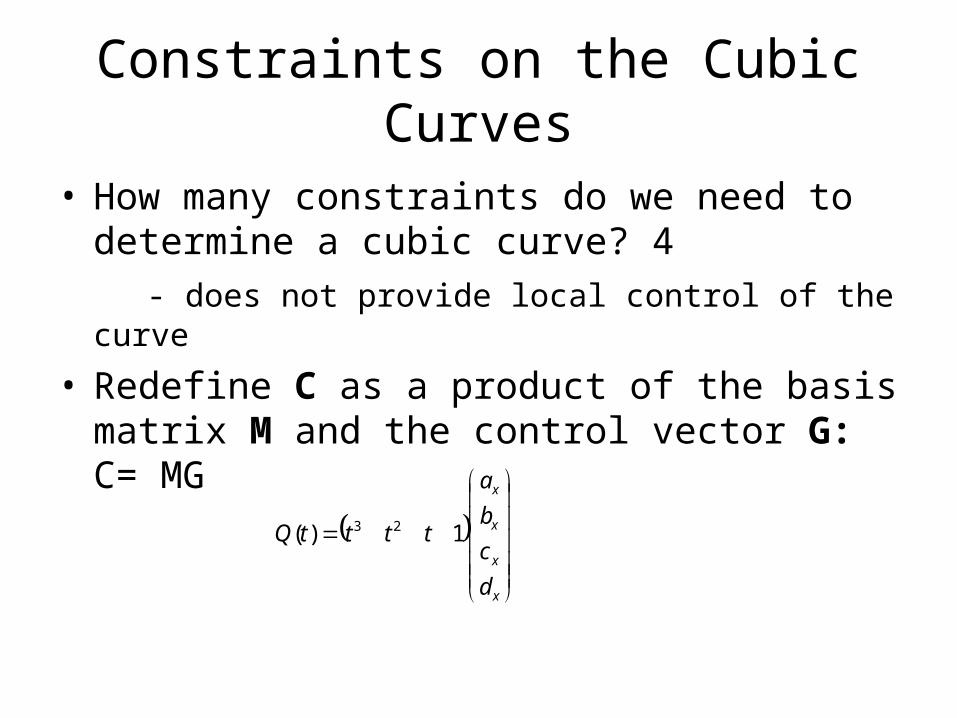
Constraints on the Cubic Curves
• How many constraints do we need to determine a cubic curve? 4
- does not provide local control of the curve
x
x
x
x
d
c
b
a
ttttQ 1)( 23
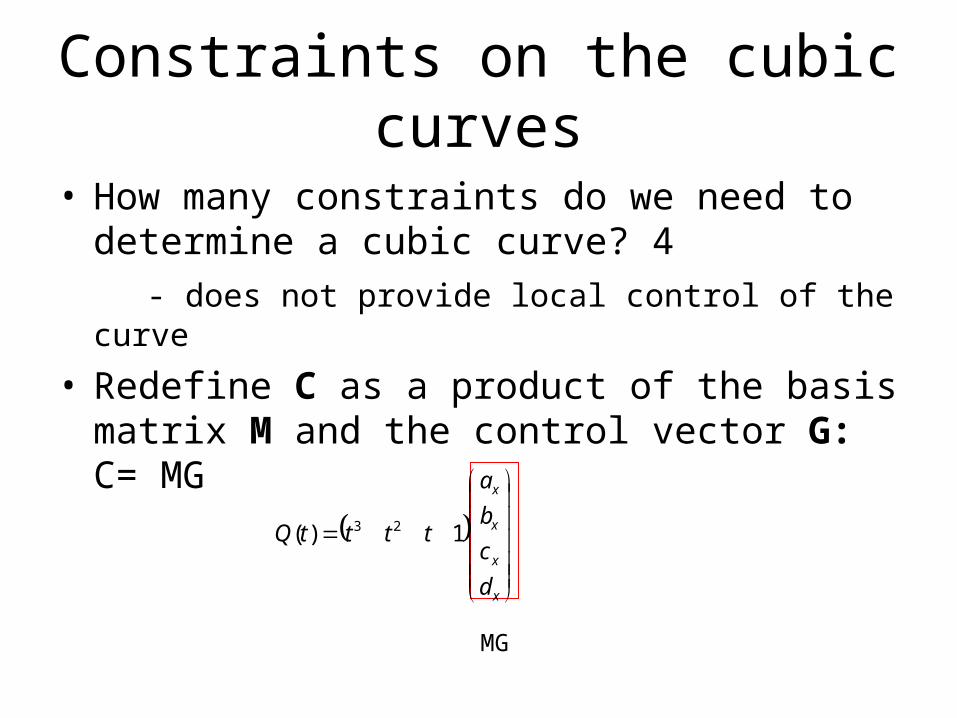
Constraints on the Cubic Curves
• How many constraints do we need to determine a cubic curve? 4
- does not provide local control of the curve
• Redefine C as a product of the basis matrix M and the control vector G: C= MG
Constraints on the cubic curves
• How many constraints do we need to determine a cubic curve? 4
- does not provide local control of the curve
• Redefine C as a product of the basis matrix M and the control vector G: C= MG
x
x
x
x
d
c
b
a
ttttQ 1)( 23
MG
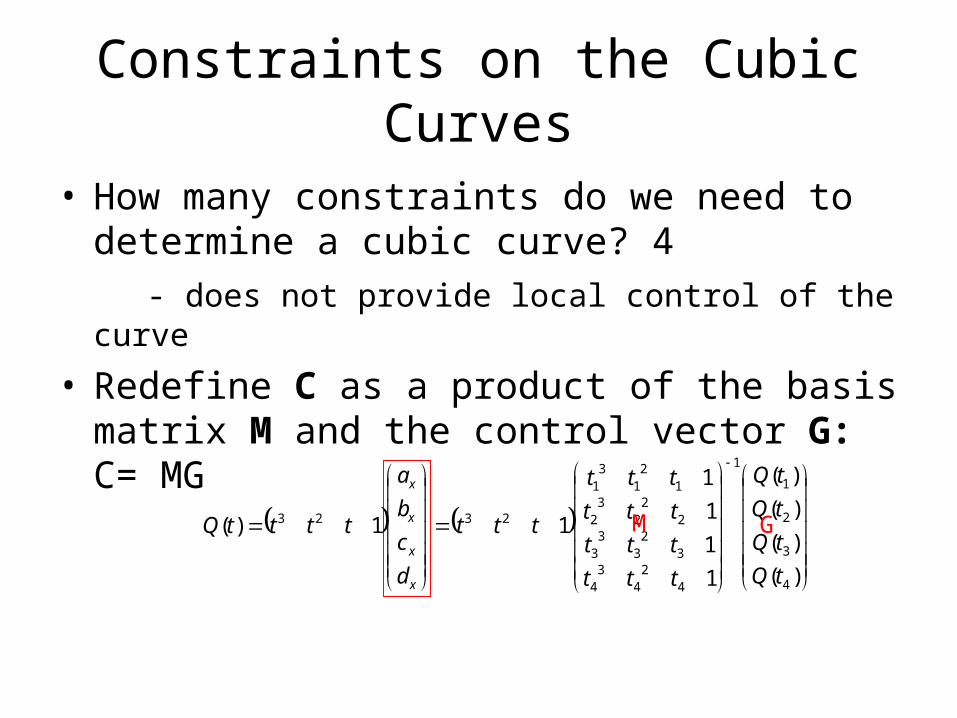
Constraints on the Cubic Curves
• How many constraints do we need to determine a cubic curve? 4
- does not provide local control of the curve
• Redefine C as a product of the basis matrix M and the control vector G: C= MG
)(
)(
)(
)(
1
1
1
1
11)(
4
3
2
1
1
424
34
323
33
222
32
121
31
2323
tQ
tQ
tQ
tQ
ttt
ttt
ttt
ttt
ttt
d
c
b
a
ttttQ
x
x
x
x
M G
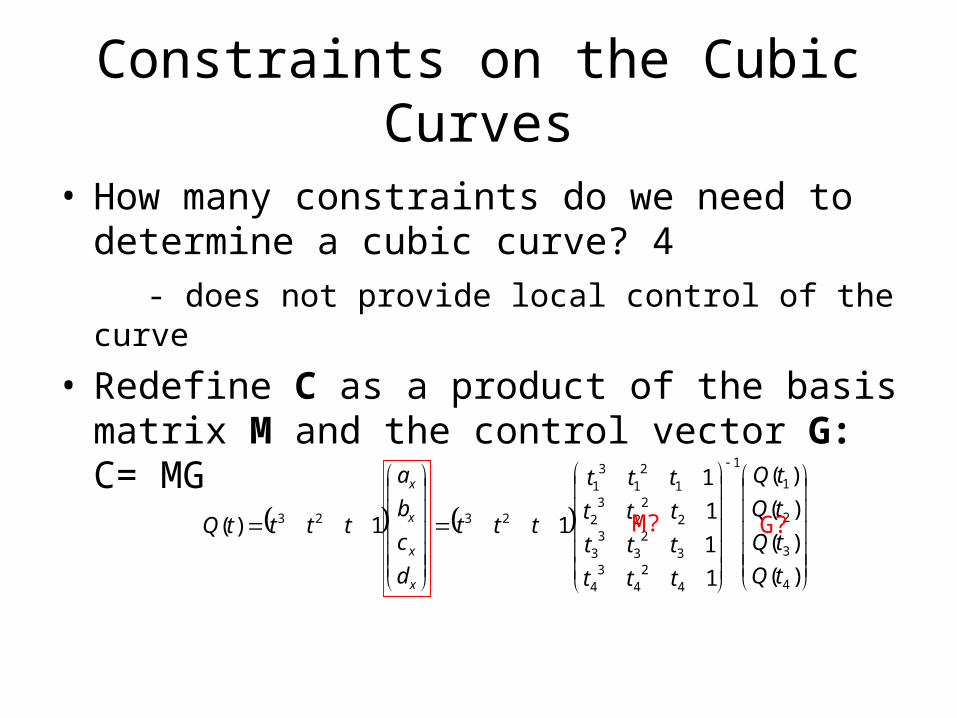
Constraints on the Cubic Curves
• How many constraints do we need to determine a cubic curve? 4
- does not provide local control of the curve
• Redefine C as a product of the basis matrix M and the control vector G: C= MG
)(
)(
)(
)(
1
1
1
1
11)(
4
3
2
1
1
424
34
323
33
222
32
121
31
2323
tQ
tQ
tQ
tQ
ttt
ttt
ttt
ttt
ttt
d
c
b
a
ttttQ
x
x
x
x
M? G?
Outline
• Process of keyframing• Key frame interpolation• Hermite and bezier curve• Splines• Speed control
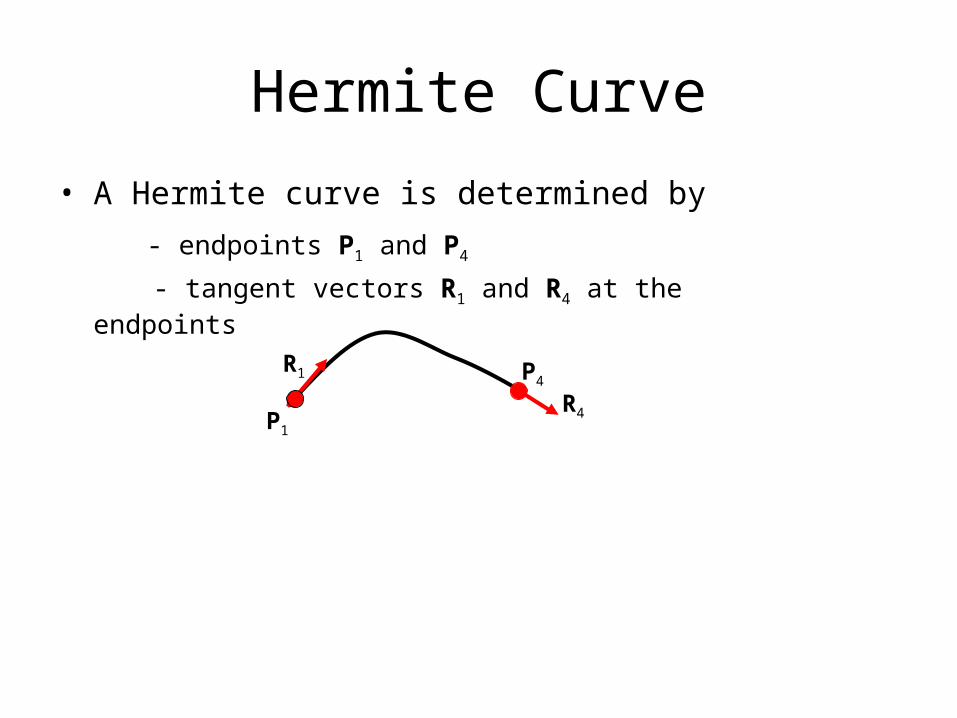
Hermite Curve
• A Hermite curve is determined by
- endpoints P1 and P4
- tangent vectors R1 and R4 at the endpoints
P1
R1 P4
R4
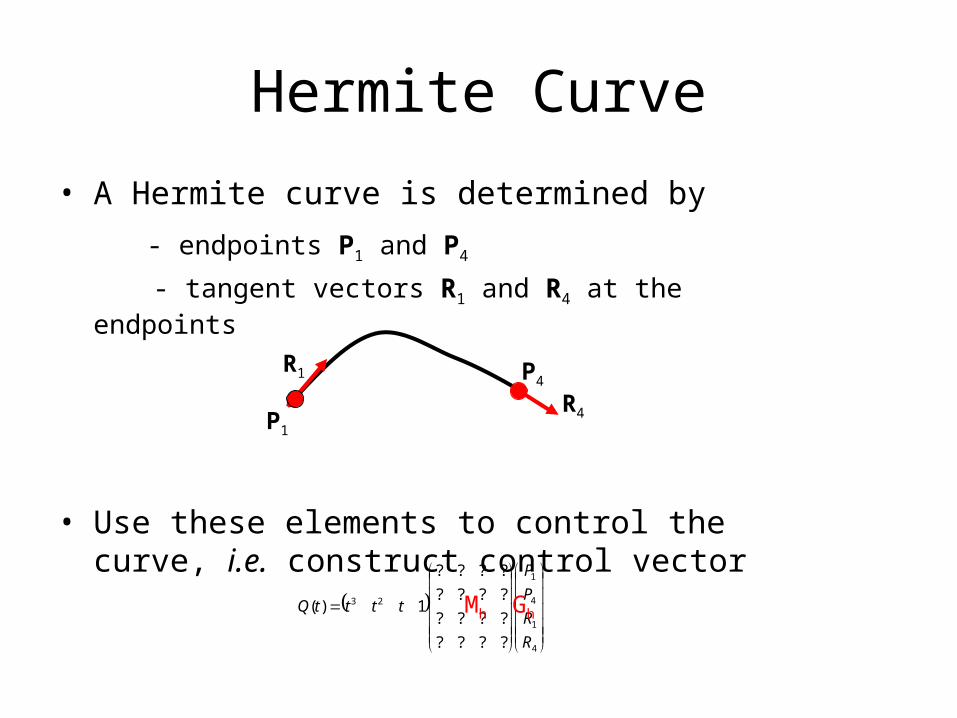
Hermite Curve
• A Hermite curve is determined by
- endpoints P1 and P4
- tangent vectors R1 and R4 at the endpoints
• Use these elements to control the curve, i.e. construct control vector
P1
R1 P4
R4
4
1
4
1
23
????
????
????
????
1)(
R
R
P
P
ttttQ Mh Gh
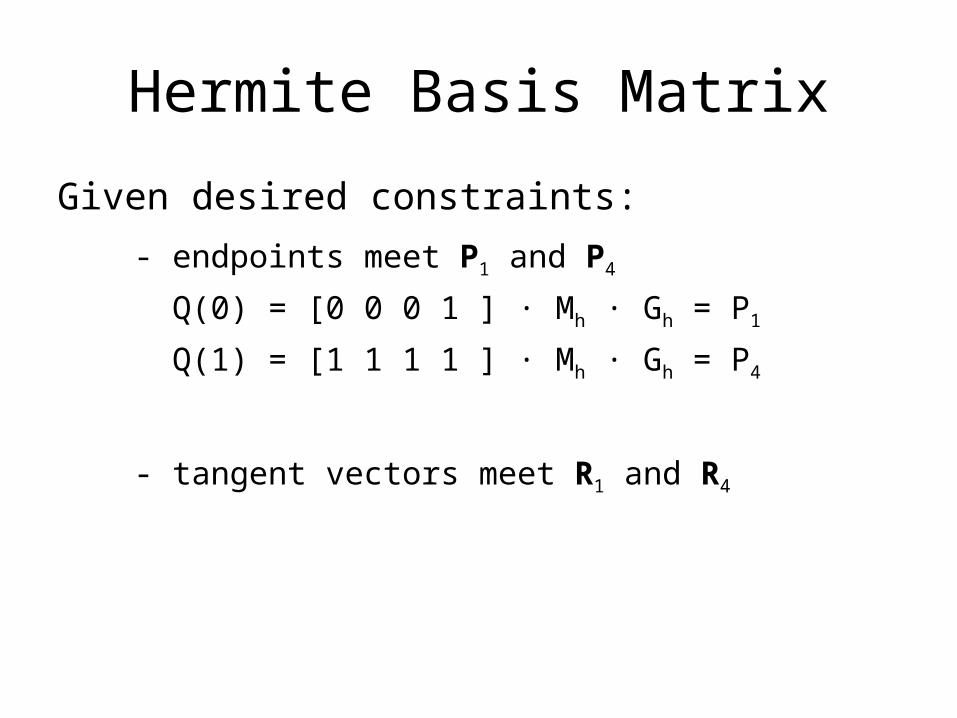
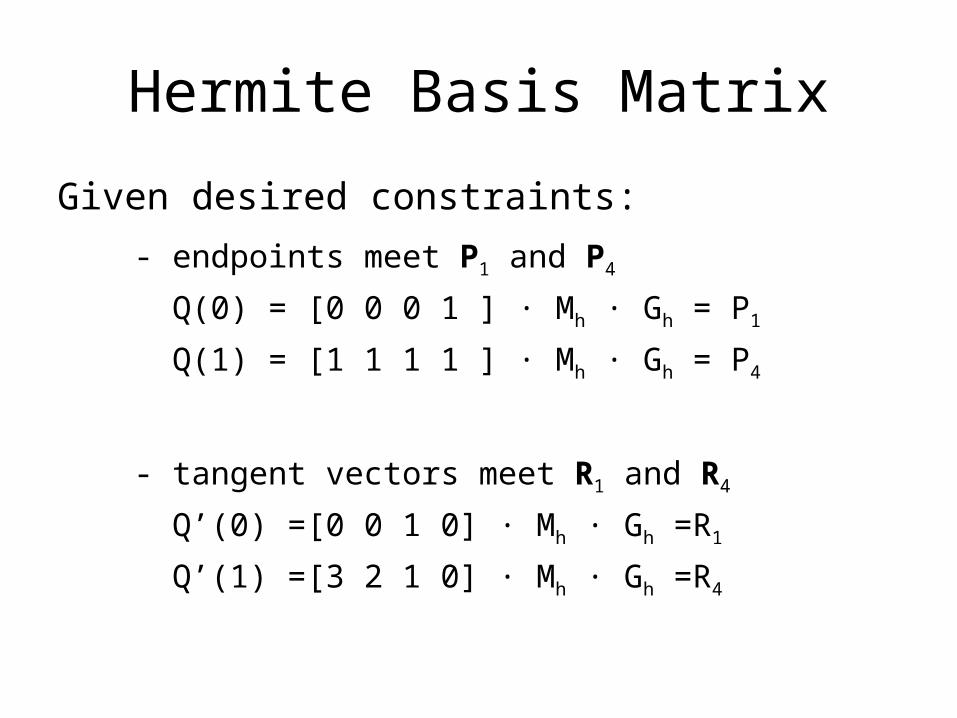
Hermite Basis Matrix
Given desired constraints:
- endpoints meet P1 and P4
Q(0) = [0 0 0 1 ] · Mh · Gh = P1
Q(1) = [1 1 1 1 ] · Mh · Gh = P4
- tangent vectors meet R1 and R4
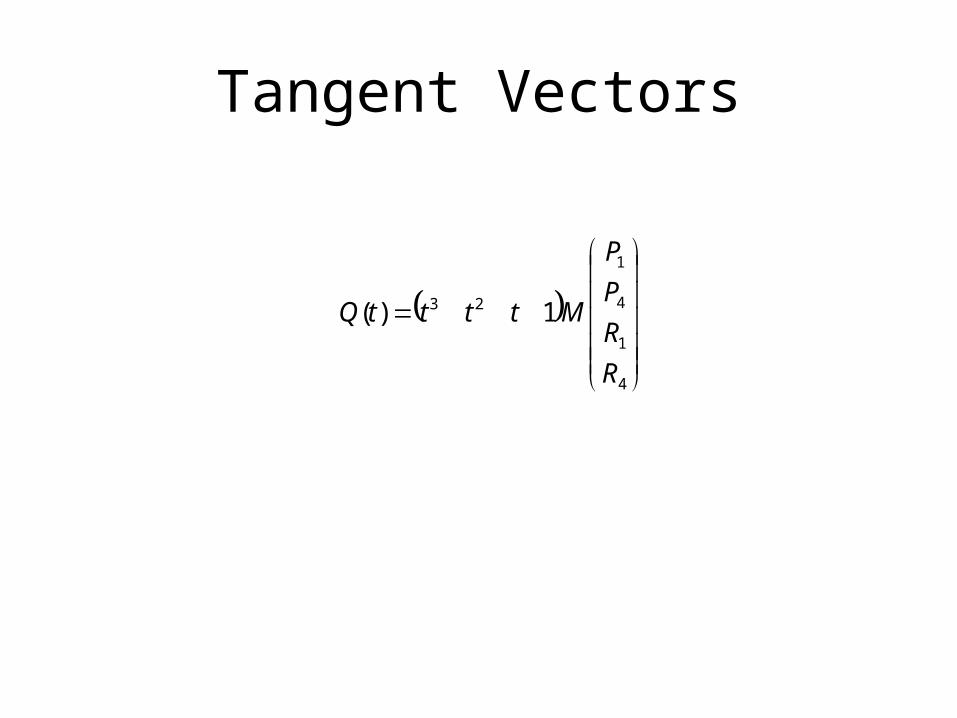
Tangent Vectors
4
1
4
1
23 1)(
R
R
P
P
MttttQ
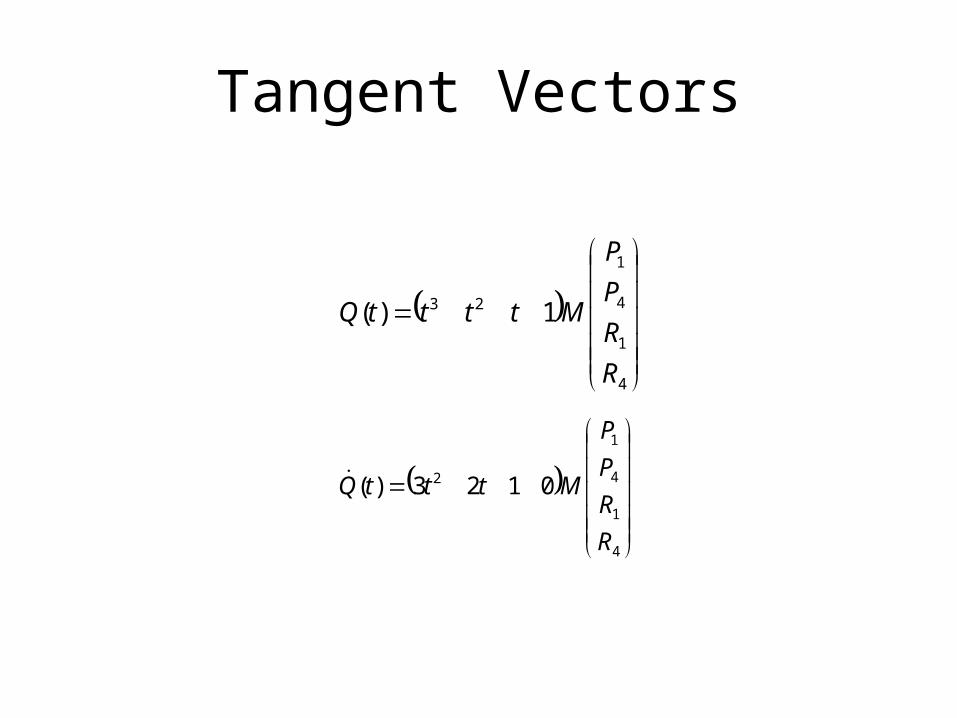
Tangent Vectors
4
1
4
1
23 1)(
R
R
P
P
MttttQ
4
1
4
1
2 0123)(
R
R
P
P
MtttQ
Hermite Basis Matrix
Given desired constraints:
- endpoints meet P1 and P4
Q(0) = [0 0 0 1 ] · Mh · Gh = P1
Q(1) = [1 1 1 1 ] · Mh · Gh = P4
- tangent vectors meet R1 and R4
Q’(0) =[0 0 1 0] · Mh · Gh =R1
Q’(1) =[3 2 1 0] · Mh · Gh =R4
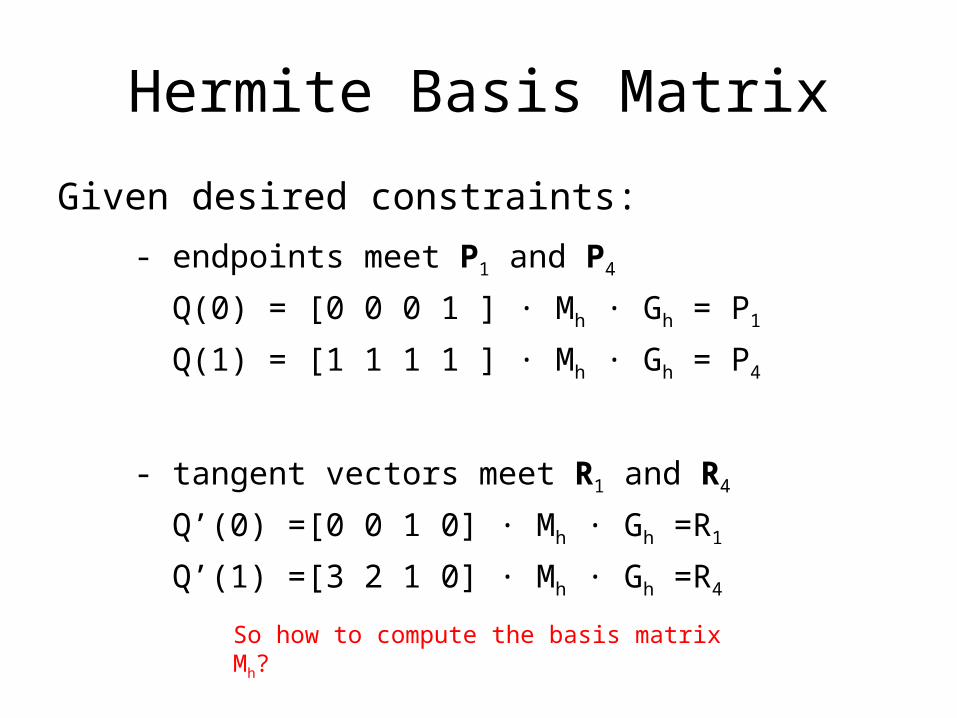
Hermite Basis Matrix
Given desired constraints:
- endpoints meet P1 and P4
Q(0) = [0 0 0 1 ] · Mh · Gh = P1
Q(1) = [1 1 1 1 ] · Mh · Gh = P4
- tangent vectors meet R1 and R4
Q’(0) =[0 0 1 0] · Mh · Gh =R1
Q’(1) =[3 2 1 0] · Mh · Gh =R4
So how to compute the basis matrix Mh?
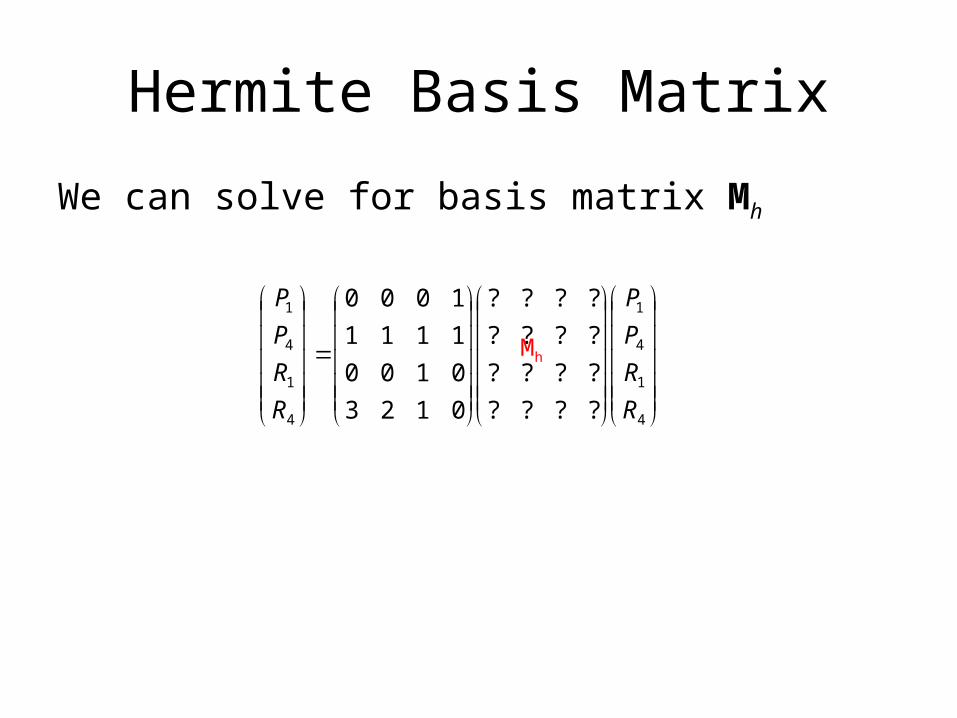
Hermite Basis Matrix
We can solve for basis matrix Mh
4
1
4
1
4
1
4
1
????
????
????
????
0123
0100
1111
1000
R
R
P
P
R
R
P
P
Mh
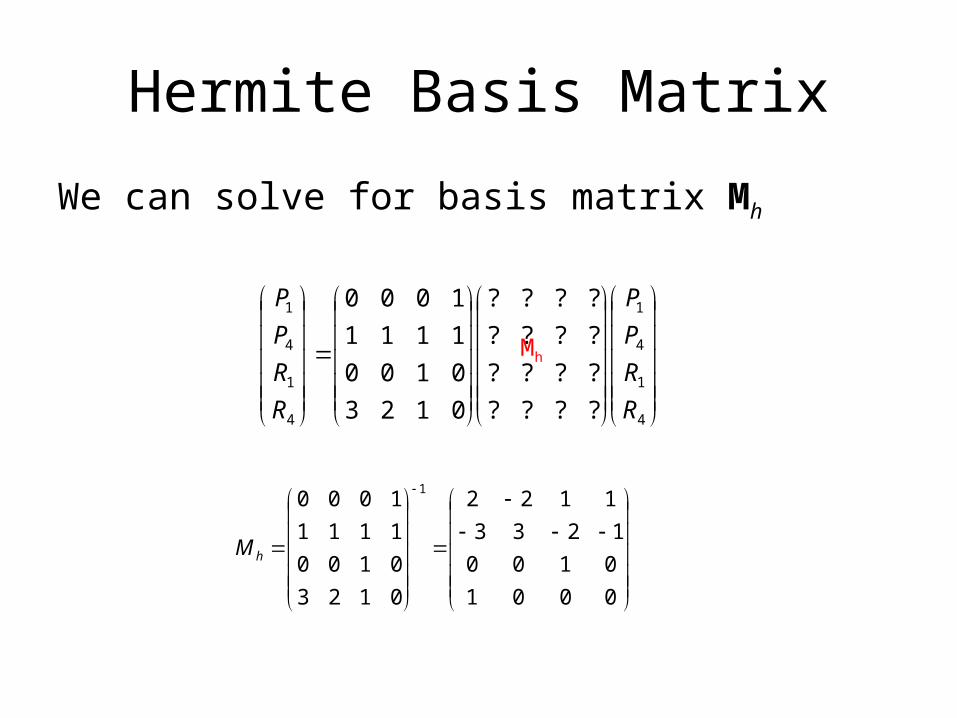
Hermite Basis Matrix
We can solve for basis matrix Mh
4
1
4
1
4
1
4
1
????
????
????
????
0123
0100
1111
1000
R
R
P
P
R
R
P
P
Mh
0001
0100
1233
1122
0123
0100
1111
10001
hM
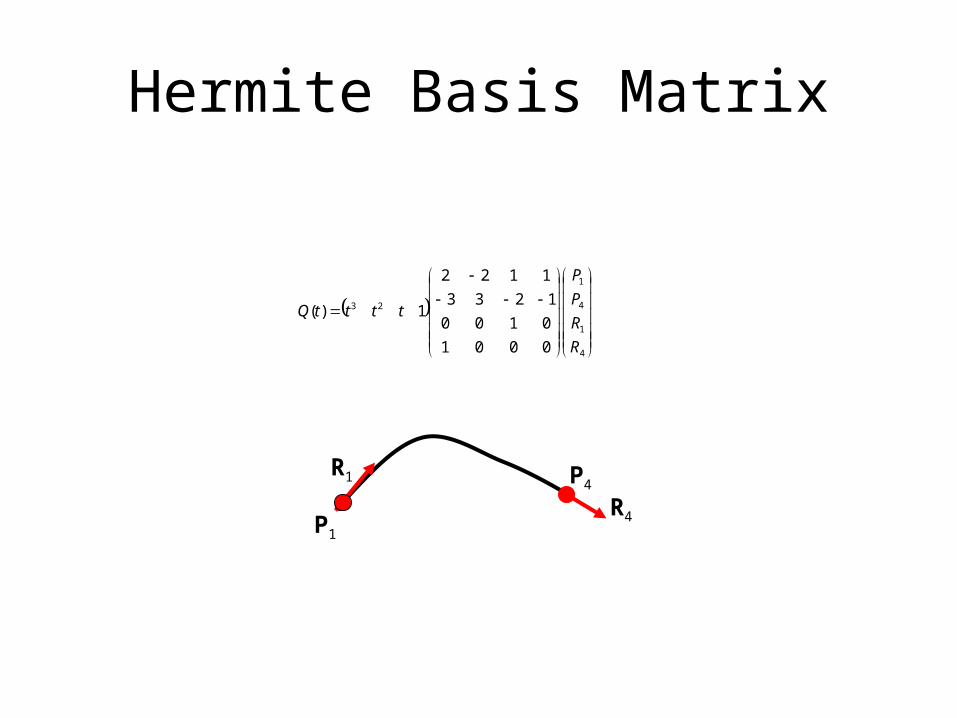
Hermite Basis Matrix
P1
R1 P4
R4
4
1
4
1
23
0001
0100
1233
1122
1)(
R
R
P
P
ttttQ
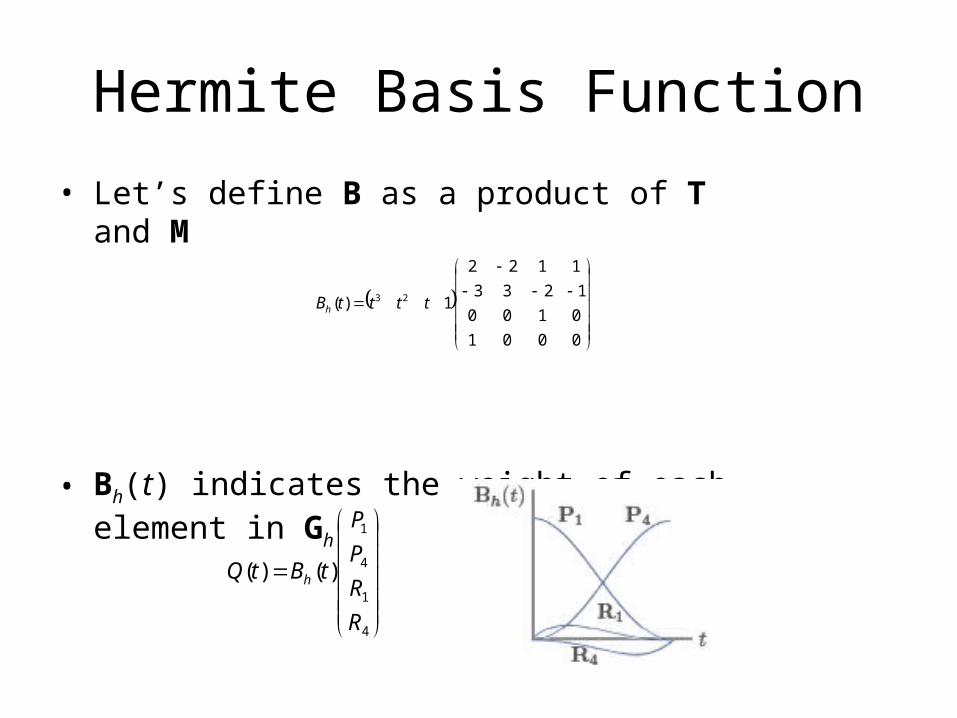
Hermite Basis Function
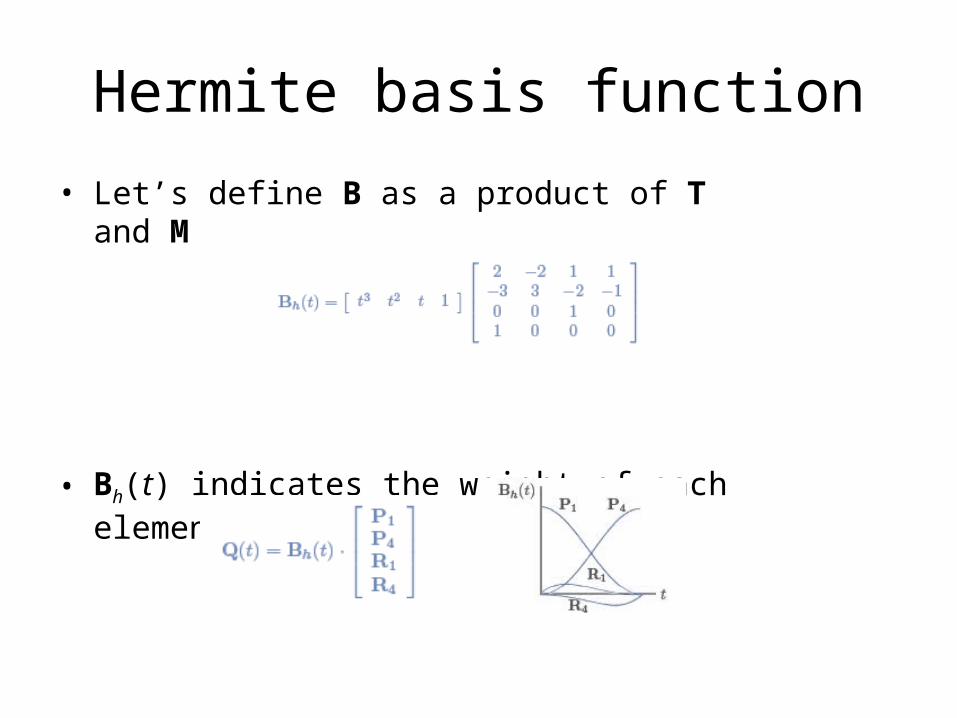
• Let’s define B as a product of T and M
• Bh(t) indicates the weight of each element in Gh
0001
0100
1233
1122
1)( 23 ttttBh
4
1
4
1
)()(
R
R
P
P
tBtQ h
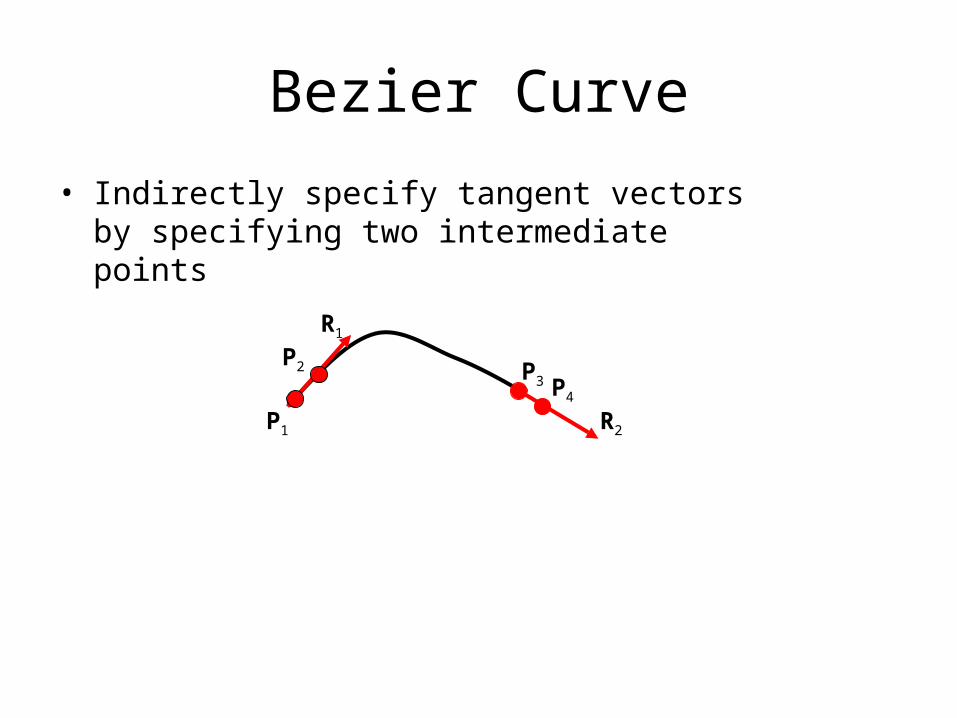
Bezier Curve
• Indirectly specify tangent vectors by specifying two intermediate points
P1
R1
P3
R2
P2
P4
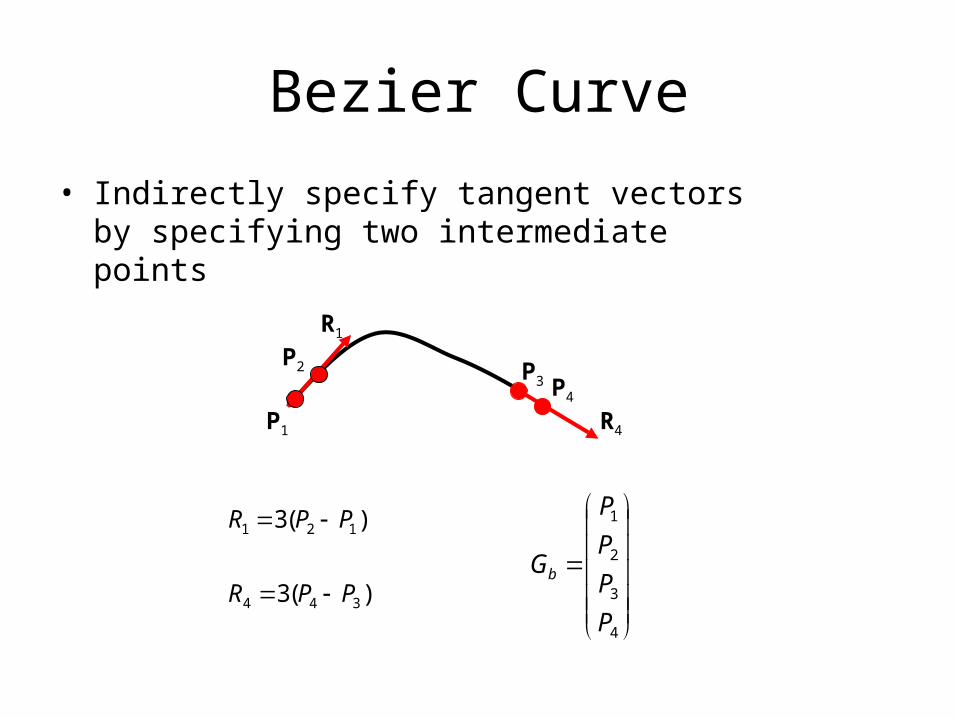
Bezier Curve
• Indirectly specify tangent vectors by specifying two intermediate points
P1
R1
P3
R4
P2
P4
)(3
)(3
344
121
PPR
PPR
4
3
2
1
P
P
P
P
Gb
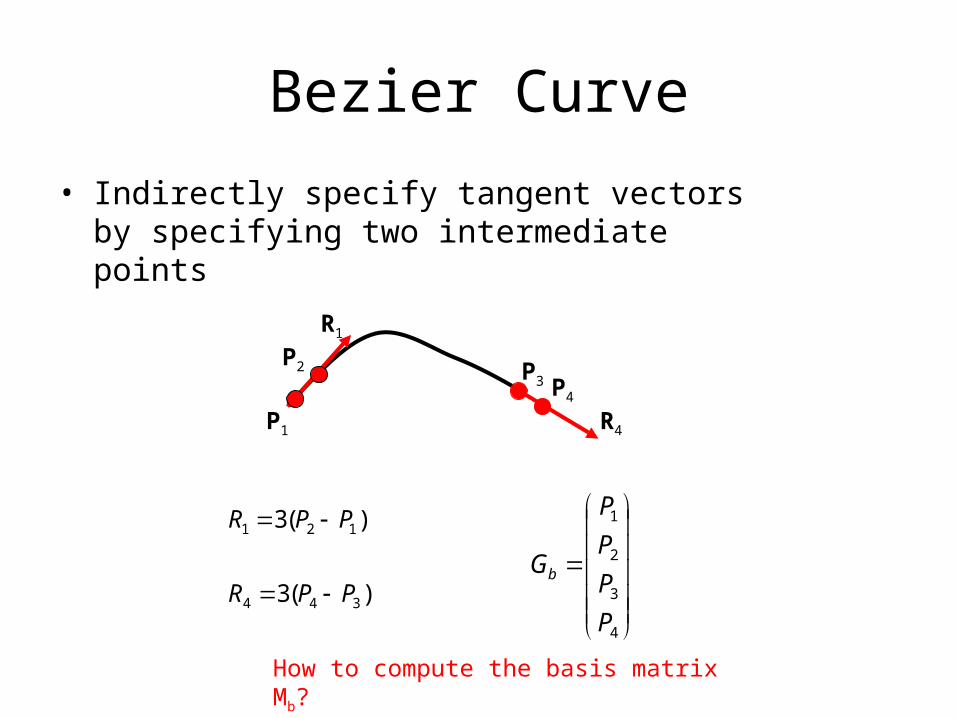
Bezier Curve
• Indirectly specify tangent vectors by specifying two intermediate points
P1
R1
P3
R4
P2
P4
)(3
)(3
344
121
PPR
PPR
4
3
2
1
P
P
P
P
Gb
How to compute the basis matrix Mb?
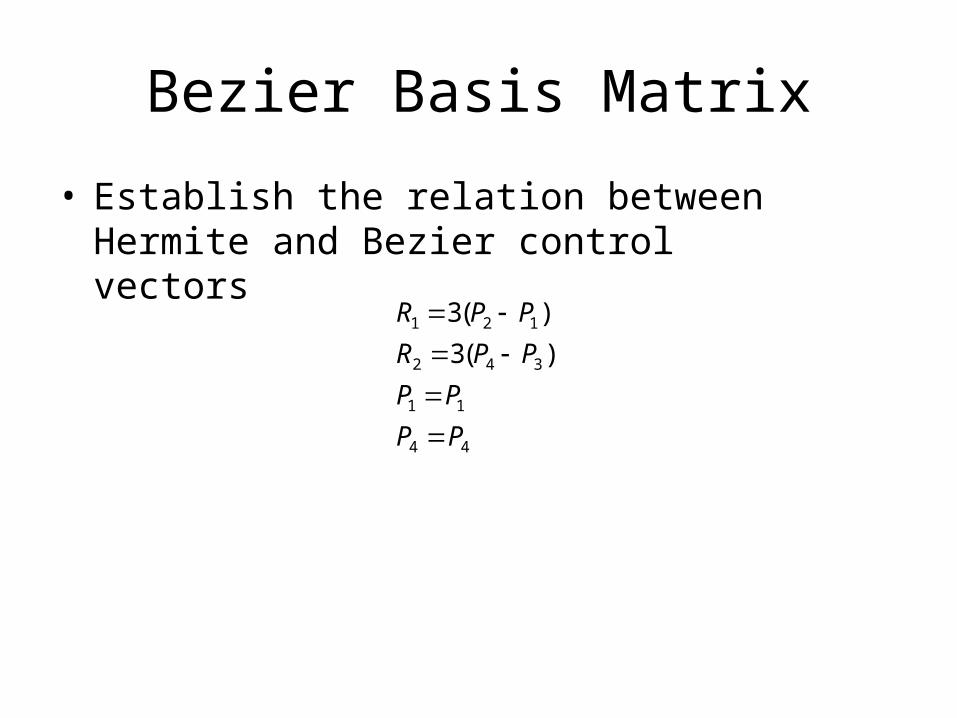
Bezier Basis Matrix
• Establish the relation between Hermite and Bezier control vectors
44
11
342
121
)(3
)(3
PP
PP
PPR
PPR
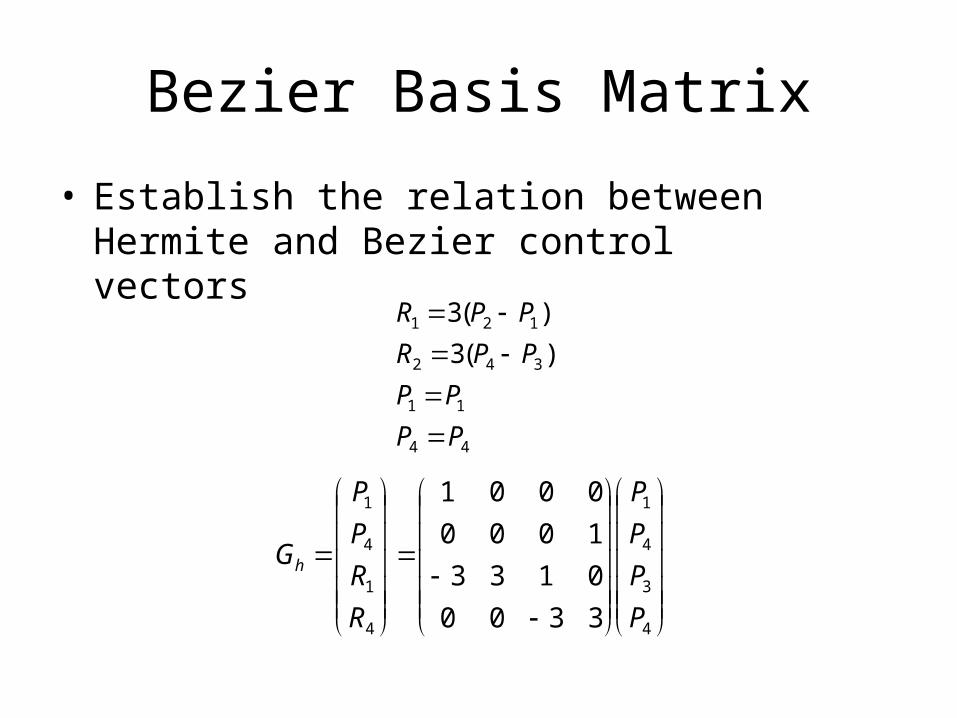
Bezier Basis Matrix
• Establish the relation between Hermite and Bezier control vectors
44
11
342
121
)(3
)(3
PP
PP
PPR
PPR
4
3
4
1
4
1
4
1
3300
0133
1000
0001
P
P
P
P
R
R
P
P
Gh

Bezier Basis Matrix
• Establish the relation between Hermite and Bezier control vectors
44
11
342
121
)(3
)(3
PP
PP
PPR
PPR
4
3
4
1
4
1
4
1
3300
0133
1000
0001
P
P
P
P
R
R
P
P
GhMhb Gb
Bezier Basis Matrix
4
1
4
1
23
0001
0100
1233
1122
1)(
R
R
P
P
ttttQ
4
3
2
1
4
1
4
1
3300
0033
1000
0001
P
P
P
P
R
R
P
P
4
1
4
1
23
0001
0100
1233
1122
1)(
R
R
P
P
ttttQ
4
3
2
1
23
4
1
4
1
23
0001
0033
0363
1331
1
0001
0100
1233
1122
0001
0100
1233
1122
1
P
P
P
P
ttt
R
R
P
P
ttt
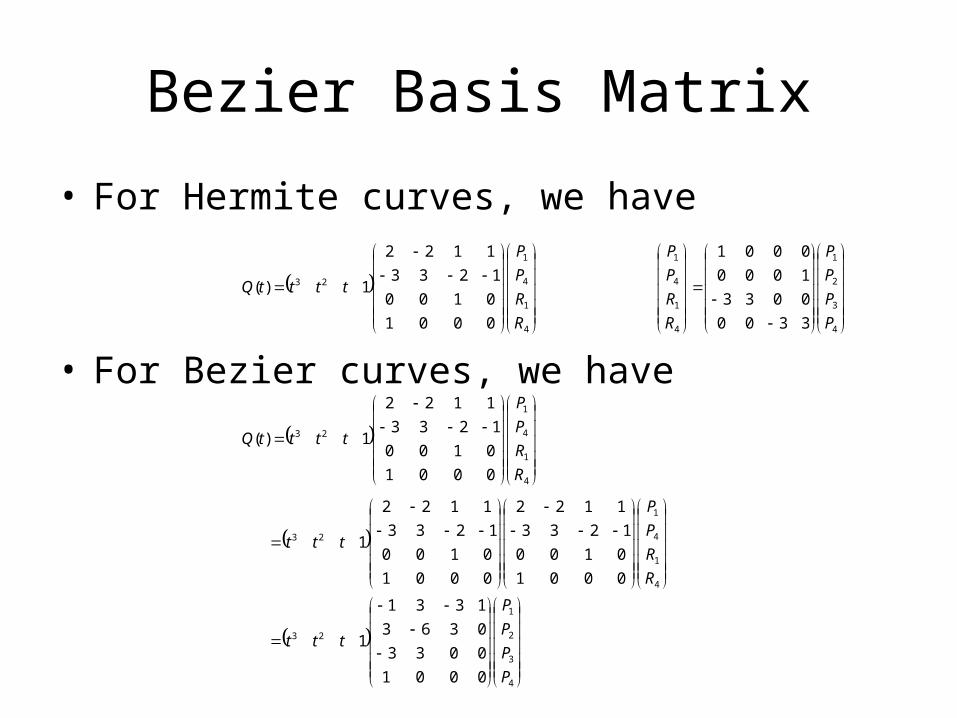
• For Hermite curves, we have
• For Bezier curves, we have
Bezier Basis Matrix
4
1
4
1
23
0001
0100
1233
1122
1)(
R
R
P
P
ttttQ
4
3
2
1
4
1
4
1
3300
0033
1000
0001
P
P
P
P
R
R
P
P
4
1
4
1
23
0001
0100
1233
1122
1)(
R
R
P
P
ttttQ
4
3
2
1
23
4
1
4
1
23
0001
0033
0363
1331
1
0001
0100
1233
1122
0001
0100
1233
1122
1
P
P
P
P
ttt
R
R
P
P
ttt
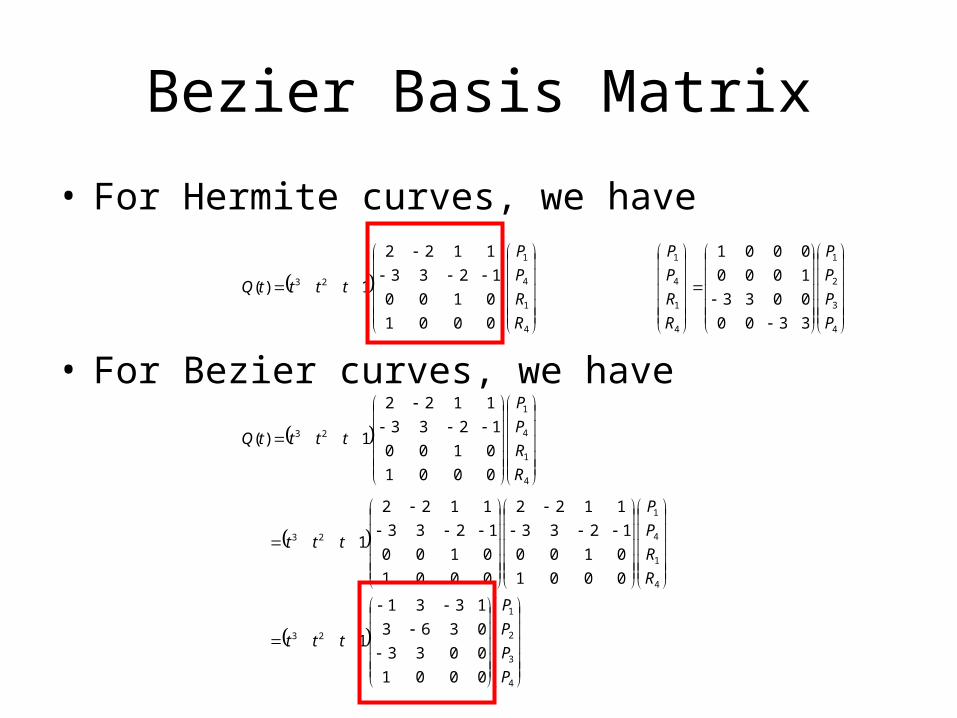
• For Hermite curves, we have
• For Bezier curves, we have
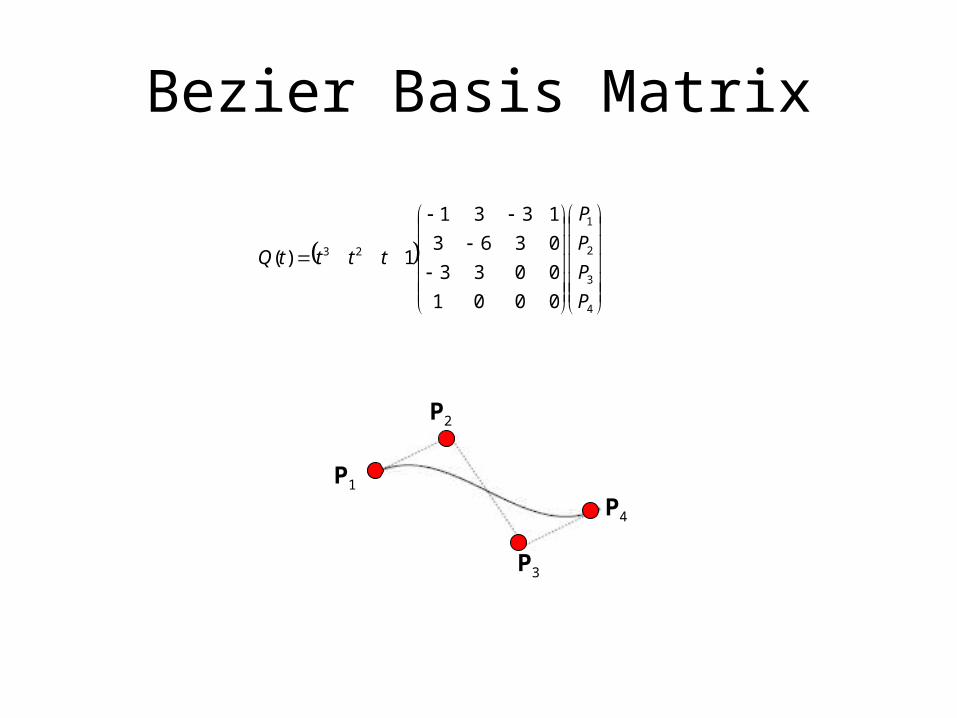
Bezier Basis Matrix
4
3
2
1
23
0001
0033
0363
1331
1)(
P
P
P
P
ttttQ
P1
P3
P2
P4
Hermite basis function
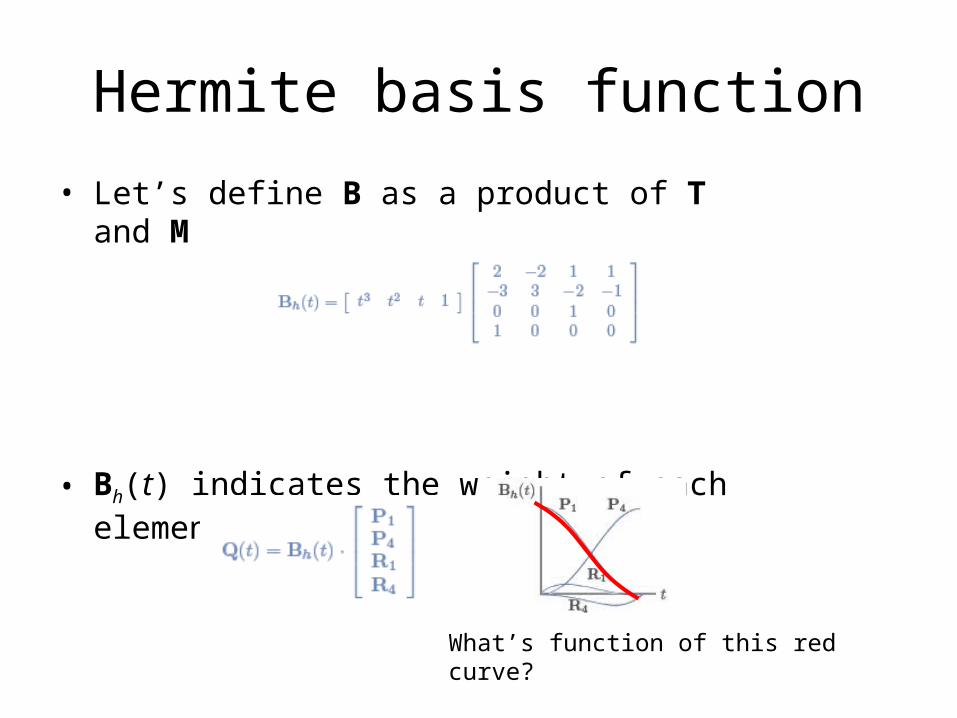
• Let’s define B as a product of T and M
• Bh(t) indicates the weight of each element in Gh
Hermite basis function
• Let’s define B as a product of T and M
• Bh(t) indicates the weight of each element in Gh
What’s function of this red curve?
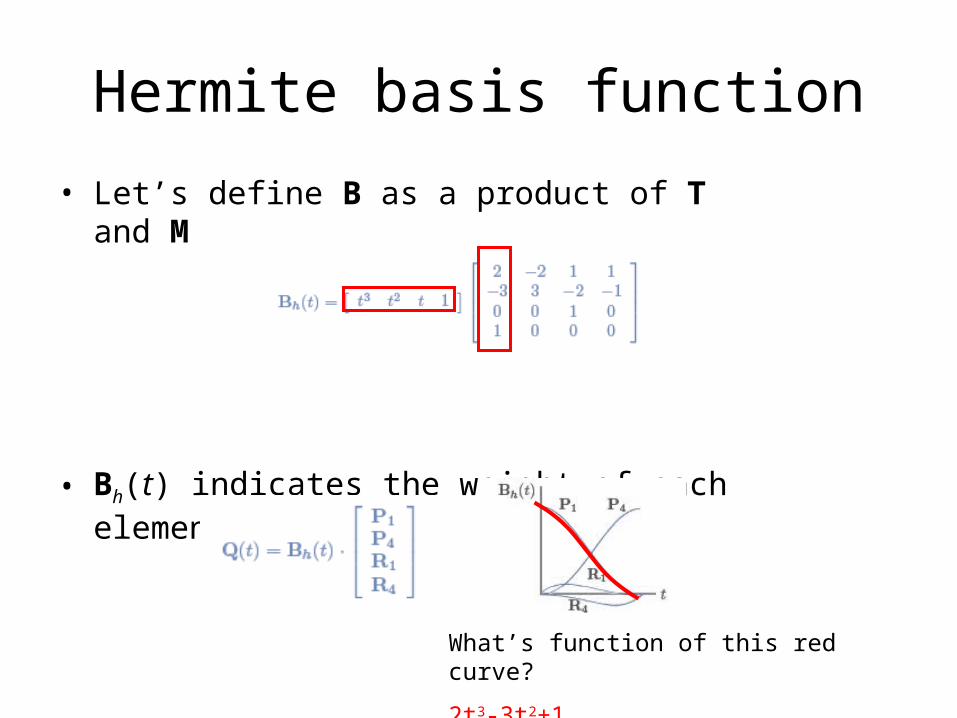
Hermite basis function
• Let’s define B as a product of T and M
• Bh(t) indicates the weight of each element in Gh
What’s function of this red curve?
2t3-3t2+1
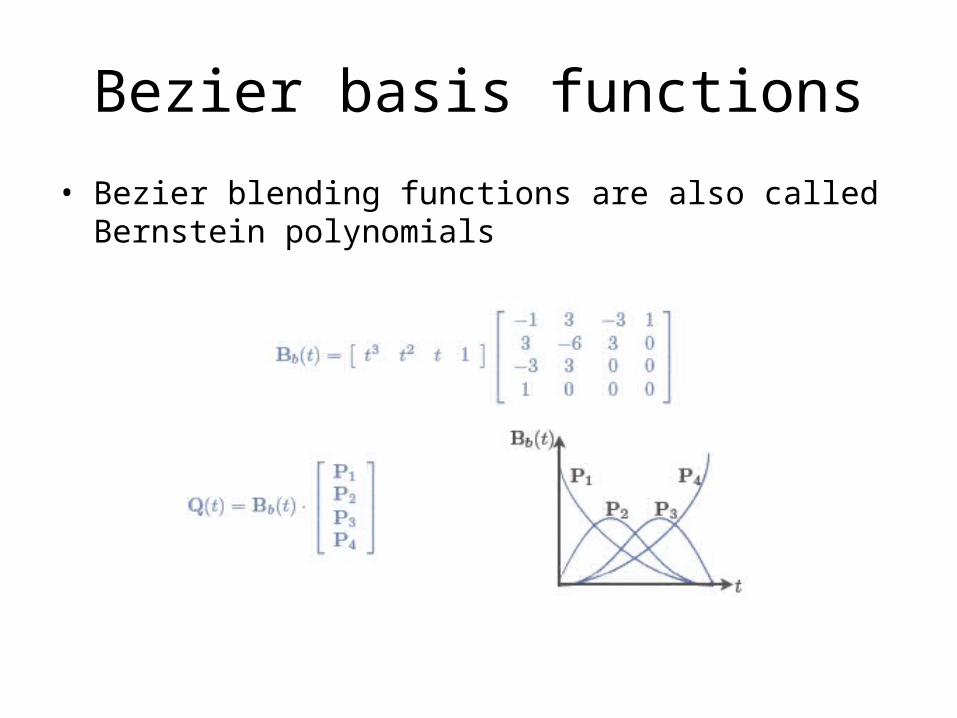
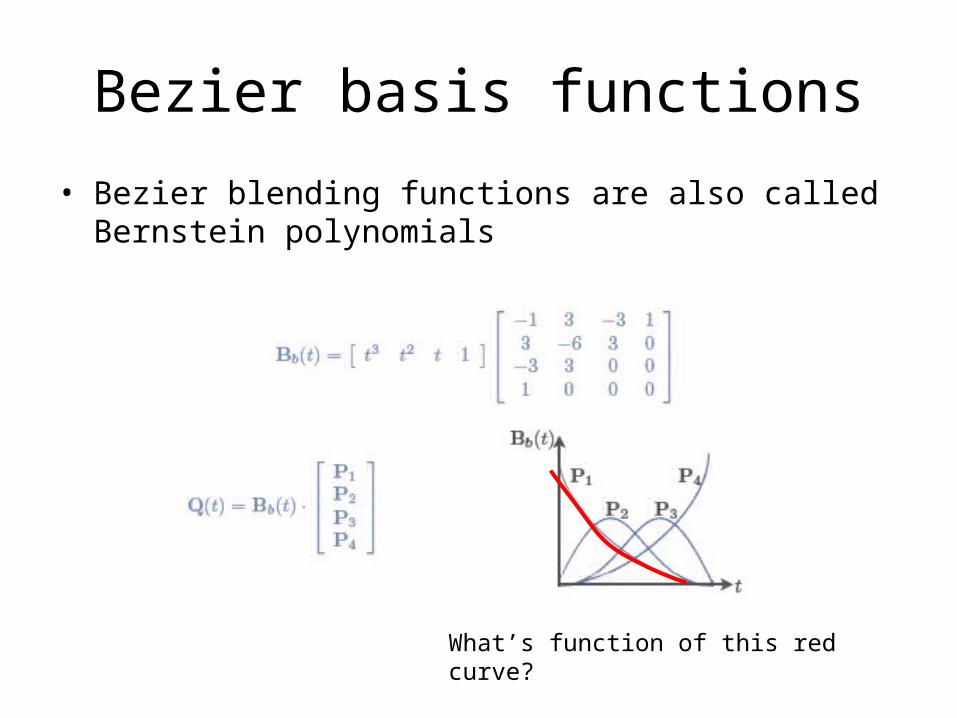
Bezier basis functions
• Bezier blending functions are also called Bernstein polynomials
Bezier basis functions
• Bezier blending functions are also called Bernstein polynomials
What’s function of this red curve?
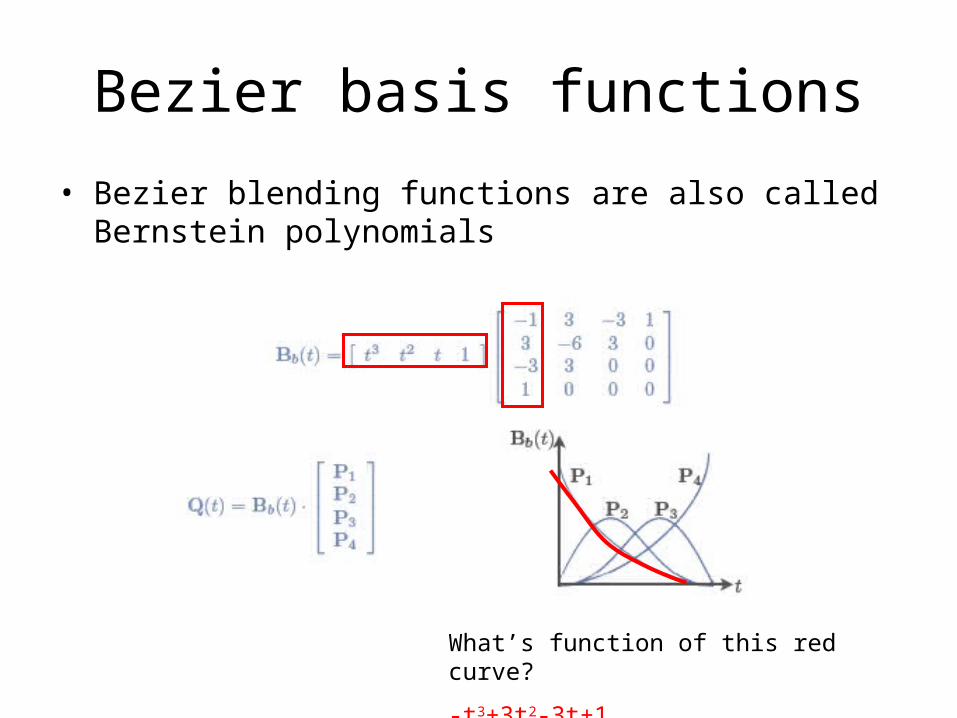
Bezier basis functions
• Bezier blending functions are also called Bernstein polynomials
What’s function of this red curve?
-t3+3t2-3t+1
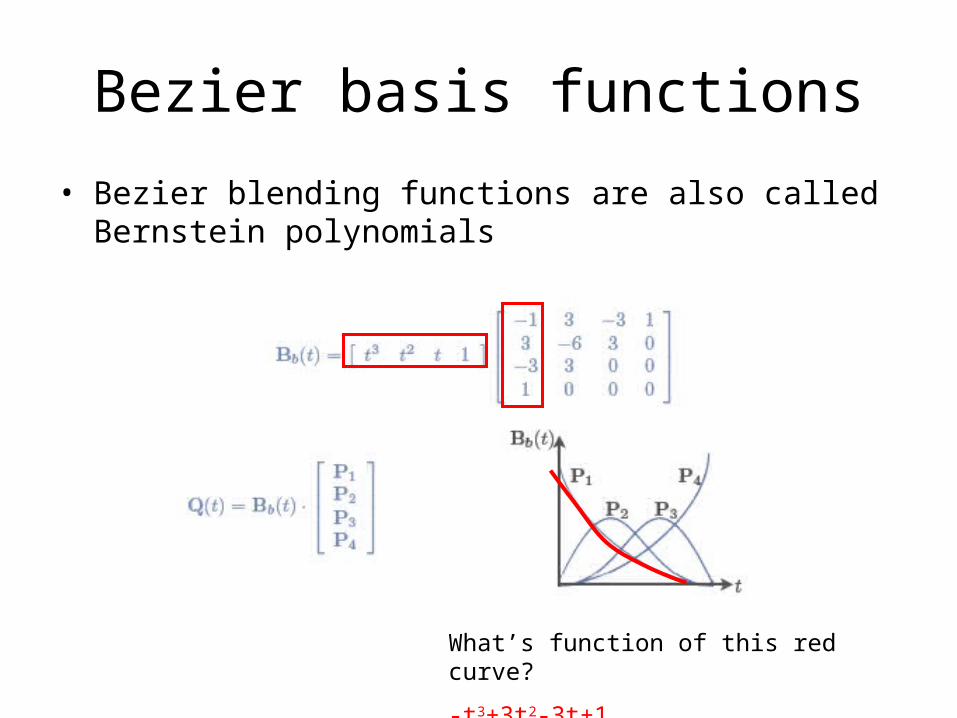
Bezier basis functions
• Bezier blending functions are also called Bernstein polynomials
What’s function of this red curve?
-t3+3t2-3t+1
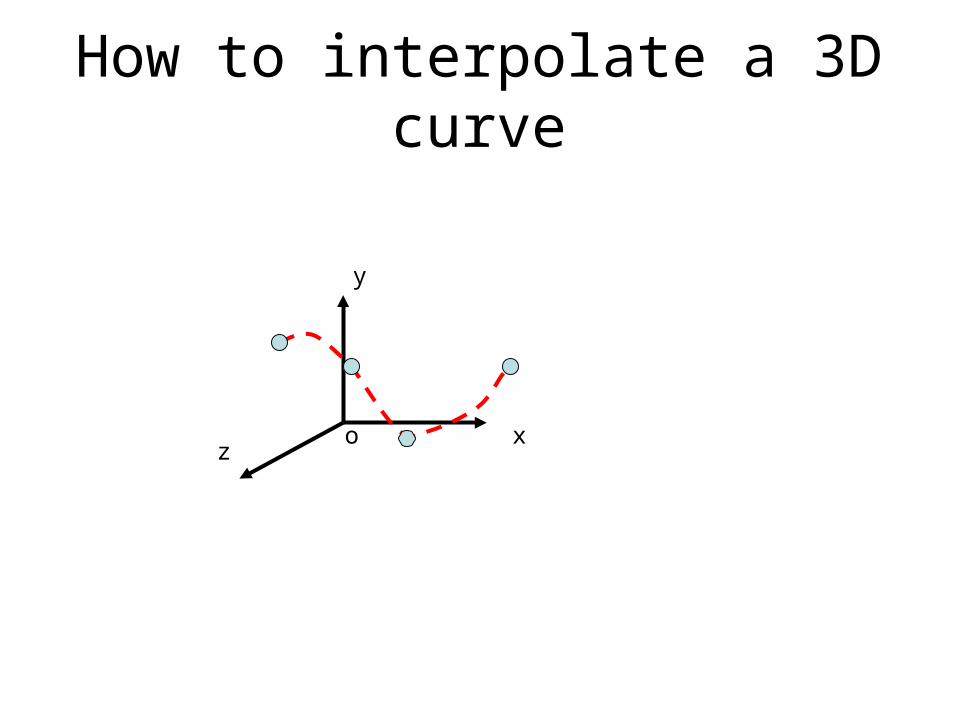
How to interpolate a 3D curve
x
y
zo
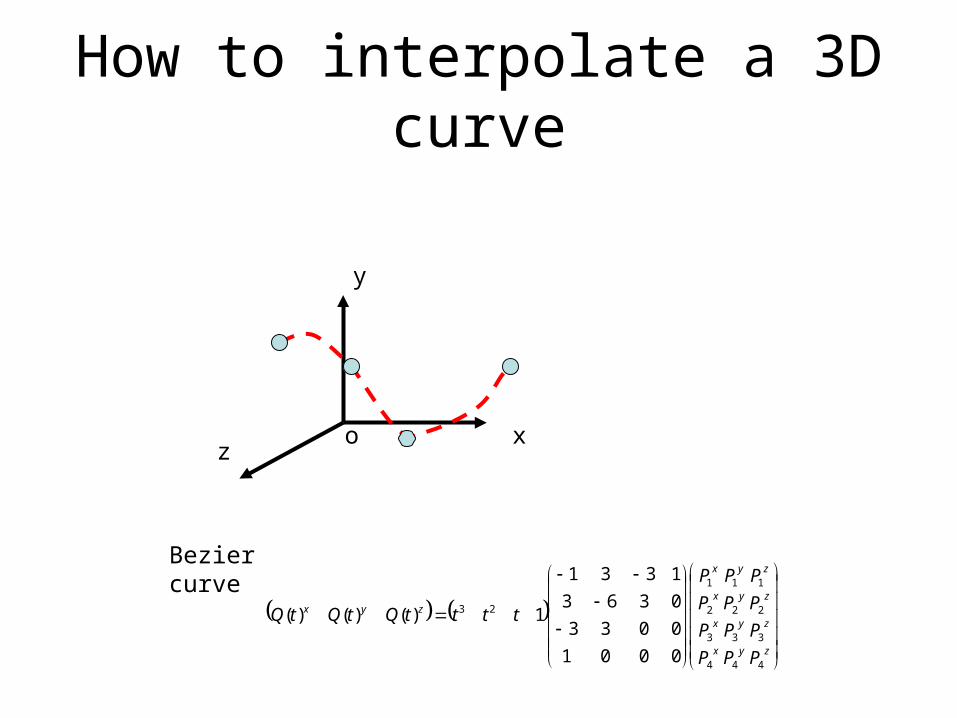
How to interpolate a 3D curve
x
y
zo
z
z
z
z
y
y
y
y
x
x
x
x
zyx
P
P
P
P
P
P
P
P
P
P
P
P
ttttQtQtQ
4
3
2
1
4
3
2
1
4
3
2
1
23
0001
0033
0363
1331
1)()()(
Bezier curve
• Try this online at
- Move the interpolation point, see how the others (and the point on curve) move
- Control points (can even make loops)
Bezier java applet
http://www.cse.unsw.edu.au/~lambert/splines/
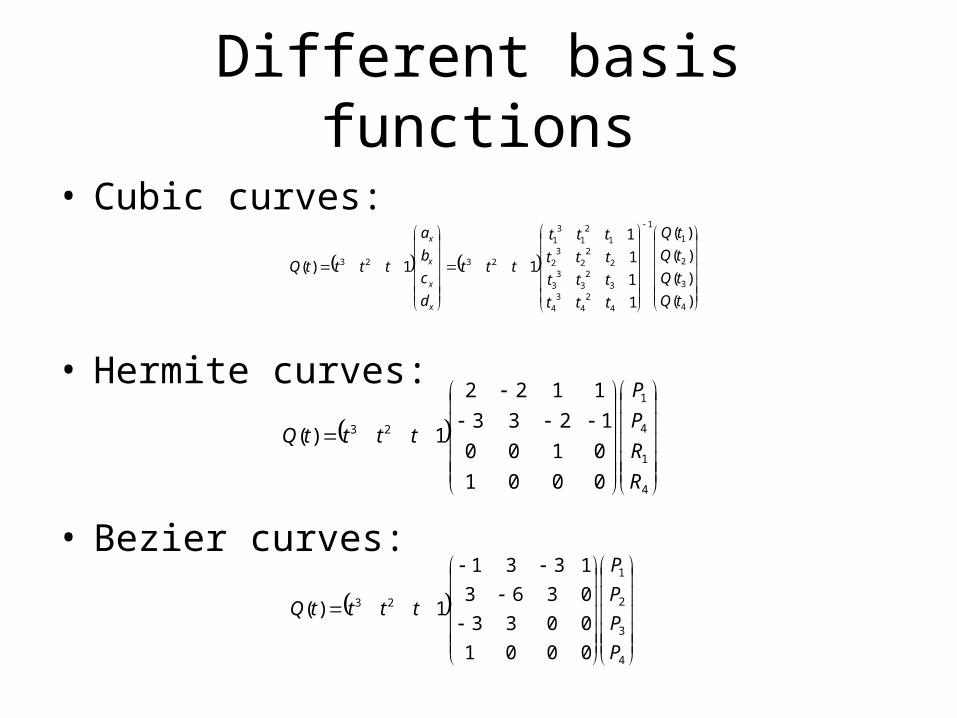
• Cubic curves:
• Hermite curves:
• Bezier curves:
Different basis functions
4
3
2
1
23
0001
0033
0363
1331
1)(
P
P
P
P
ttttQ
4
1
4
1
23
0001
0100
1233
1122
1)(
R
R
P
P
ttttQ
)(
)(
)(
)(
1
1
1
1
11)(
4
3
2
1
1
424
34
323
33
222
32
121
31
2323
tQ
tQ
tQ
tQ
ttt
ttt
ttt
ttt
ttt
d
c
b
a
ttttQ
x
x
x
x
Complex curves
• Suppose we want to draw a more complex curve
Complex curves
• Suppose we want to draw a more complex curve
How can we represent this curve?
Complex curves
• Suppose we want to draw a more complex curve Why not use a high-order Bézier?
- Wiggly curves
- No local control
Complex curves
• Suppose we want to draw a more complex curve Why not use a high-order Bézier?
- Wiggly curves
- No local control
• Instead, we’ll splice together a curve from individual segments that are cubic Béziers
Complex curves
• Suppose we want to draw a more complex curve Why not use a high-order Bézier?
- Wiggly curves
- No local control
• Instead, we’ll splice together a curve from individual segments that are cubic Béziers
Complex curves
• Suppose we want to draw a more complex curve Why not use a high-order Bézier?
- Wiggly curves
- No local control
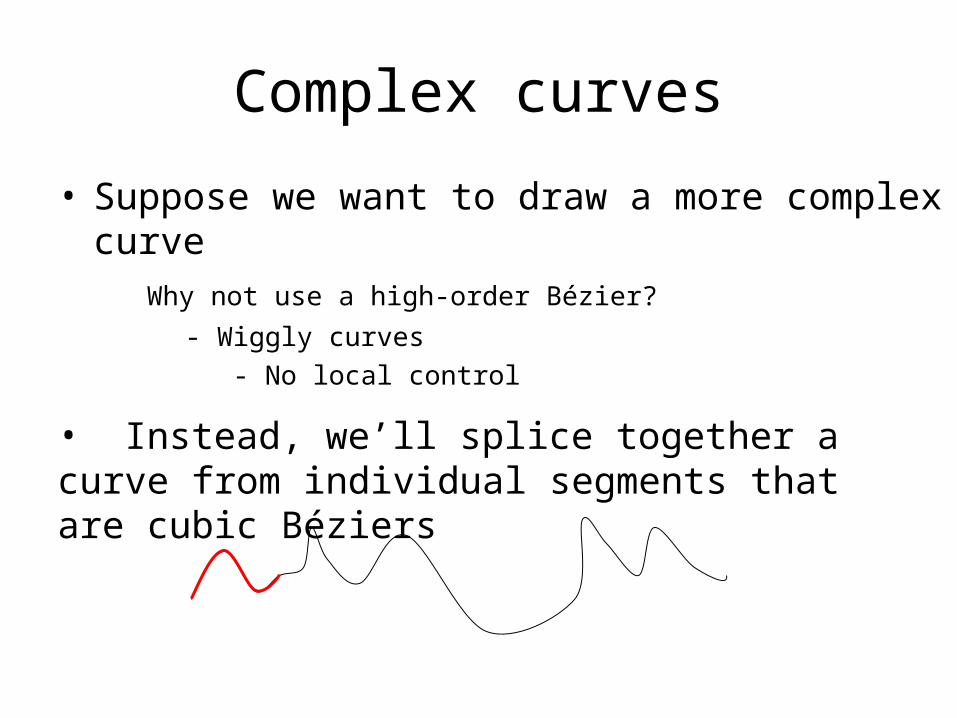
• Instead, we’ll splice together a curve from individual segments that are cubic Béziers
Complex curves
• Suppose we want to draw a more complex curve Why not use a high-order Bézier?
- Wiggly curves
- No local control
• Instead, we’ll splice together a curve from individual segments that are cubic Béziers Why cubic? - Lowest dimension with control for the second derivative - Lowest dimension for non-planar polynomial curves
Next lecture
• Spline curve and more key frame interpolation