controlling spatiotemporal chaos in coupled nonlinear oscillators
TRANSCRIPT

PHYSICAL REVIEW E JULY 1997VOLUME 56, NUMBER 1
Controlling spatiotemporal chaos in coupled nonlinear oscillators
Ljupco Kocarev,1 Ulrich Parlitz,2 Toni Stojanovski,3 and Predrag Janjic´ 11Department of Electrical Engineering, ‘‘Sv. Kiril i Metodij’’ University, P.O. Box 574, 91000 Skopje, Macedonia
2Drittes Physikalisches Institut, Universita¨t Gottingen, Burgerstrabe 42-44, D-37073 Go¨ttingen, Germany3CATT Centre, RMIT University, 723 Swanston Street, Melbourne, Australia
~Received 3 March 1997!
A method for controlling spatiotemporal chaos in coupled ordinary differential equations is presented. It isbased on two ideas: stabilization of unstable periodic patterns embedded in spatiotemporal chaos, and pertur-bation of dynamical variables only at regular time intervals.@S1063-651X~97!13306-2#
PACS number~s!: 05.45.1b, 64.60.Cn
srseif-di
otdcoiin
rko
-
iarGY
cove
sndbleu
inpagaseth
a
sYreenm
alsoisens-
theurers
tors-
er aos-on-en-
thenter
ed.
he-
Many nonlinear systems such as current-biased serierays of Josephson junctions@1#, dynamic arrays of nonlineaelectrical circuits@2#, discrete reaction-diffusion equation@3#, and networks of neurons and cardiac pacemaker c@4#, to mention only a few, are modeled by an array of dfusively coupled oscillators or, in other words, coupled ornary differential equations~CODE’s!. The most typical typeof behavior encountered in large interconnections of chaoscillators is spatiotemporal chaos, where the observednamics exhibits chaotic properties both in time and spaHowever, in many applications, it is advantageous to avchaos. In this paper we propose a method for controllspatiotemporal chaotic dynamics in CODE’s.
Since the seminal paper by Ott, Grebogi, and Yo~OGY! @5#, there has been wide activity in the area of chacontrol across many disciplines@6#. Control of spatiotempo-ral chaos in coupled map lattices~CML’s! and systems described with partial differential equations~PDE’s! has beenconsidered recently@7–11#. In Refs.@7,8# it was shown thatthe complex spatiotemporal behavior in CML’s can be elimnated in favor of a coherent state in which all elementssynchronized to a prescribed periodic orbit using the Omethod@5# and a linear feedback approach@12,13#. By in-jecting negative feedback at a certainx-space point, Hu andHe @9# successfully stabilized unstable steady states andtrolled chaos in a one-dimensional nonlinear drift-waequation driven by a sinusoidal wave. In@10#, control of aclass of spatialy extended systems was achieved via thebilization of an active source of traveling waves. Lu, Yu, aHarrison@11# successfully demonstrated control of unstaroll patterns in a transversely extended three-level laser,ing a time- and space-dependent feedback approach.
Recently @14#, the taming of spatiotemporal chaosCODE’s was achieved by random variations of a singlerameter along the array. However, as stressed by Stro@15#, no one knows what complex periodic pattern will ariafter disorder is introduced. The approach we propose inBrief Report is based on two ideas:~i! stabilization of un-stable periodic patterns embedded in spatiotemporal chand ~ii ! perturbation of dynamical variables~not the systemparameters! only at regular time intervals. To control chaoby stabilizing periodic orbits is a crucial idea of the OGmethod, and it has been successfully applied in varioussystems@16#. On the other hand, systems which are drivonly at discrete time intervals in such a way that some co
561063-651X/97/56~1!/1238~4!/$10.00
ar-
lls
-
icy-e.dg
es
-e
n-
ta-
s-
-tz
is
os,
al
-
ponents of the state vector are reset to new values wereinvestigated recently. For example, systems driven by nowere considered in Ref.@17# with important consequences iMonte Carlo applications. Recently, this type of driven sytem was applied successfully to synchronize chaos@18,19#and spatiotemporal chaos@20#.
Generally speaking, control always means to influencesystem in such a way that it performs in a desired way. Ocontrol strategy is based on the application of controlldispersed periodically in space with periodP. Each of themperturbs the value of a single-state variable of the oscillaor ODE where it is connected with. For simplicity we asume that the perturbations areT periodic in time. The mo-tivation for such a control is twofold:~i! to reduce the num-ber of controlling points, and~ii ! to make possible thecontrol throughtime-discontinuousmonitoring and influenc-ing of the controlled state variables. Therefore, we considclass of systems where only control of state variables is psible, and not control of system parameters. The type of ctrol we used in this paper can be implemented experimtally as described in Ref.@21#.
Let us consider a one-dimensional array ofN diffusivelycoupled oscillators with periodic boundary conditions
u i5f ~u i !1D~u i1122u i1u i21!1Gv~ t !, ~1!
where u i , i51, . . . ,N, are n-dimensional vectors,D5diag(d1 ,d2 , . . . ,dn), andG5diag(g1 ,g2 , . . . ,gn) areconstant diagonal matrices, andv(t) is ann-dimensional in-put signal representing the influence of the controllers toCODE’s. In the following we assume that only one elemeof the matrixG is equal to 1, and all others are zero. In othwords, only one variable, say they variable, of the statevector of each oscillator can be monitored and/or controllLet s(t) be a solution for a single oscillator~clearly it is alsoa solution of the coupled oscillators without driving! thatshould be stabilized~the control goal!. The input signalv(t) has the following form:
v~ t !5gT~s~ t !,u i !D i ,P , ~2!
wheregT is a function describing the control law~see be-low!, andT is a parameter playing the role of a period. Tlast term in Eq.~2! is a modification of the Kronecker symbol and denotes
1238 © 1997 The American Physical Society
iols
e
s
-
-
b
oeblac-
)
resyn
bFti
th
-
ofhe
. In
etroled.
e-n-
nzahero-
is
56 1239BRIEF REPORTS
D i ,P5H 1 for imodP50
0 for imodPÞ0.
The controllers are located periodically in space with perP ~since we consider periodic boundary conditions, we aassume thatN/P is an integer!. The functiongT can be de-scribed as follows@22#: the CODE ~1! oscillates unforcedand free from the controlling signals(t), except for the equi-distant timesnT, when they variables of theN/P oscillatorsare simultaneously forced to new values, that is,
yi~nT!5sy~nT!, i5P,2P, . . . ,N
wheresy(t) is the y projection of the control goals(t) attimesnT. Thus we say that the CODE~1! is controlled bythe sequence$sy(nT)%. Our control strategy relies on thfollowing.
Theorem: Consider the dynamical system
u5f~u!, ~3!
and its solutions(t). Decompose the state vector of this sytem into two partsw andv, and the vector fieldf into fw andfv, respectively. Assume that the system
v5fv„sw~ t !,v…
is asymptotically stable when continuously driven bysw(t).Then system~3! can be controlled with the sequence of impulses$sw(nT)%; that is, the solution of Eq.~3! approachesthe goals(t) as time goes to infinity, provided that the sampling periodT is sufficiently small@23,24#.
We stress here that the errore(t)5iu(t)2s(t)i ap-proaches zeroonly if s(t) is anexact solutionof Eq. ~3!. If,for example, the control goal is an unstable periodic orwhich is only approximately known, thene(t) is only closeto zero and never reaches it.
Therefore, the better one knows the unstable periodicbits, the closer the errore(t) goes to zero. We emphasizthat this effect is not caused by the sampling of the unstaperiodic orbit, and it is a common phenomenon in all simicontrol methods. An example is the linear control feedbamethodu5f(u)1k@s(t)2u# , wheres(t) is an unstable periodic orbit.
In CODE’s in general, the following types~phases! ofbehavior are possible@25#: ~i! Coherent (synchronizedphase: all oscillators synchronize.~ii ! Ordered phase: groupsof oscillators are clustered, and in each group a cohephase appears.~iii ! Turbulent phase: each oscillator operatein a chaotic regime, and all oscillators are completely deschronized.
Now we show how the turbulent phase in CODE’s caneliminated in favor of coherent and/or ordered phases.the numerical simulations presented in this paper, we useLorenz system, but similar results have been obtained wother dynamical systems. In the following, the values ofparameters in the Lorenz system are fixed tos510, r523,andb51. We also consider onlyy-drive throughout the paper, that is,g150, g251, andg350.
In the first simulation, the control goal is a chaotic orbita single Lorenz oscillator. As a result of the control, t
do
-
it
r-
lerk
nt
-
eorhethe
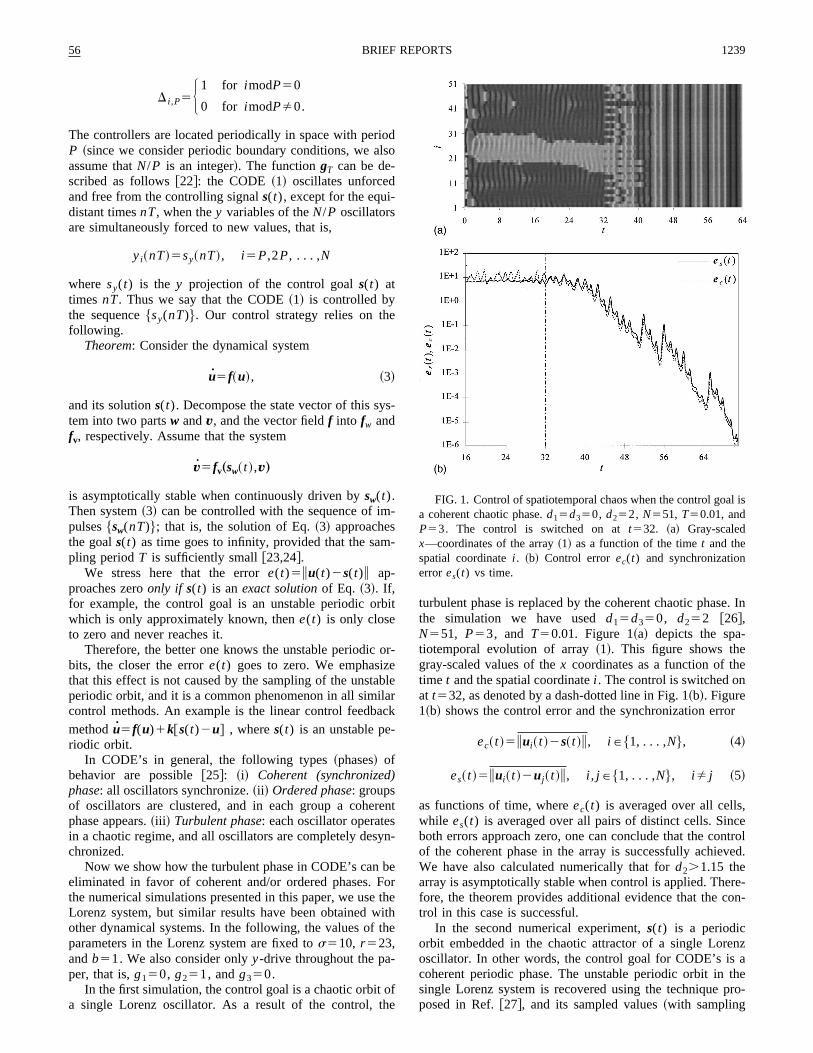
turbulent phase is replaced by the coherent chaotic phasethe simulation we have usedd15d350, d252 @26#,N551, P53, and T50.01. Figure 1~a! depicts the spa-tiotemporal evolution of array~1!. This figure shows thegray-scaled values of thex coordinates as a function of thetime t and the spatial coordinatei . The control is switched onat t532, as denoted by a dash-dotted line in Fig. 1~b!. Figure1~b! shows the control error and the synchronization error
ec~ t !5iui~ t !2s~ t !i , iP$1, . . . ,N%, ~4!
es~ t !5iui~ t !2uj~ t !i , i , jP$1, . . . ,N%, iÞ j ~5!
as functions of time, whereec(t) is averaged over all cells,while es(t) is averaged over all pairs of distinct cells. Sincboth errors approach zero, one can conclude that the conof the coherent phase in the array is successfully achievWe have also calculated numerically that ford2.1.15 thearray is asymptotically stable when control is applied. Therfore, the theorem provides additional evidence that the cotrol in this case is successful.
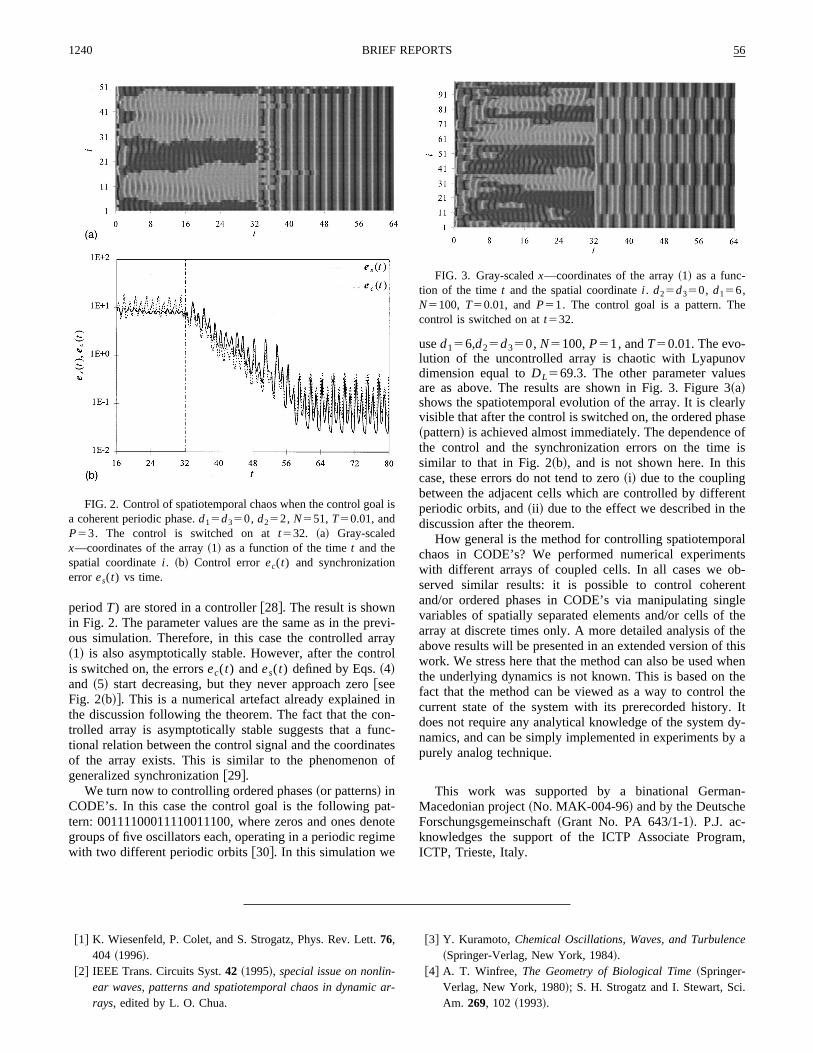
In the second numerical experiment,s(t) is a periodicorbit embedded in the chaotic attractor of a single Loreoscillator. In other words, the control goal for CODE’s iscoherent periodic phase. The unstable periodic orbit in tsingle Lorenz system is recovered using the technique pposed in Ref.@27#, and its sampled values~with sampling
FIG. 1. Control of spatiotemporal chaos when the control goala coherent chaotic phase.d15d350, d252, N551, T50.01, andP53. The control is switched on att532. ~a! Gray-scaledx—coordinates of the array~1! as a function of the timet and thespatial coordinatei . ~b! Control errorec(t) and synchronizationerrores(t) vs time.
ce
-
vs3rlyaseofis
s
ente
ralntsb-ntglethethethishenthethe. Itdy-y a
n-
m,
i
e
1240 56BRIEF REPORTS
periodT) are stored in a controller@28#. The result is shownin Fig. 2. The parameter values are the same as in the preous simulation. Therefore, in this case the controlled arra~1! is also asymptotically stable. However, after the controis switched on, the errorsec(t) andes(t) defined by Eqs.~4!and ~5! start decreasing, but they never approach zero@seeFig. 2~b!#. This is a numerical artefact already explained inthe discussion following the theorem. The fact that the controlled array is asymptotically stable suggests that a funtional relation between the control signal and the coordinatof the array exists. This is similar to the phenomenon ogeneralized synchronization@29#.
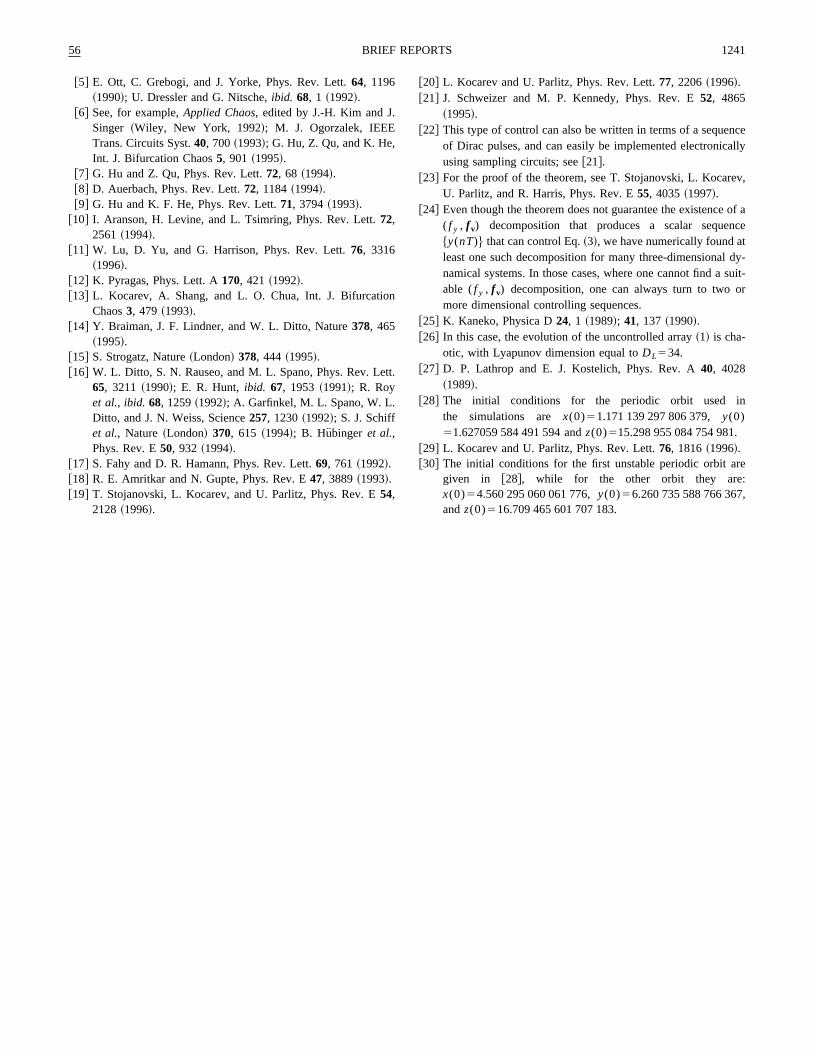
We turn now to controlling ordered phases~or patterns! inCODE’s. In this case the control goal is the following pattern: 00111100011110011100, where zeros and ones dengroups of five oscillators each, operating in a periodic regimwith two different periodic orbits@30#. In this simulation we
FIG. 2. Control of spatiotemporal chaos when the control goala coherent periodic phase.d15d350, d252,N551,T50.01, andP53. The control is switched on att532. ~a! Gray-scaledx—coordinates of the array~1! as a function of the timet and thespatial coordinatei . ~b! Control errorec(t) and synchronizationerrores(t) vs time.
a
vi-yl
--sf
otee
used156,d25d350,N5100,P51, andT50.01. The evo-lution of the uncontrolled array is chaotic with Lyapunodimension equal toDL569.3. The other parameter valueare as above. The results are shown in Fig. 3. Figure~a!shows the spatiotemporal evolution of the array. It is cleavisible that after the control is switched on, the ordered ph~pattern! is achieved almost immediately. The dependencethe control and the synchronization errors on the timesimilar to that in Fig. 2~b!, and is not shown here. In thicase, these errors do not tend to zero~i! due to the couplingbetween the adjacent cells which are controlled by differperiodic orbits, and~ii ! due to the effect we described in thdiscussion after the theorem.
How general is the method for controlling spatiotempochaos in CODE’s? We performed numerical experimewith different arrays of coupled cells. In all cases we oserved similar results: it is possible to control cohereand/or ordered phases in CODE’s via manipulating sinvariables of spatially separated elements and/or cells ofarray at discrete times only. A more detailed analysis ofabove results will be presented in an extended version ofwork. We stress here that the method can also be used wthe underlying dynamics is not known. This is based onfact that the method can be viewed as a way to controlcurrent state of the system with its prerecorded historydoes not require any analytical knowledge of the systemnamics, and can be simply implemented in experiments bpurely analog technique.
This work was supported by a binational GermaMacedonian project~No. MAK-004-96! and by the DeutscheForschungsgemeinschaft~Grant No. PA 643/1-1!. P.J. ac-knowledges the support of the ICTP Associate PrograICTP, Trieste, Italy.
s
FIG. 3. Gray-scaledx—coordinates of the array~1! as a func-tion of the timet and the spatial coordinatei . d25d350, d156,N5100, T50.01, andP51. The control goal is a pattern. Thcontrol is switched on att532.
ce
i.
@1# K. Wiesenfeld, P. Colet, and S. Strogatz, Phys. Rev. Lett.76,404 ~1996!.
@2# IEEE Trans. Circuits Syst.42 ~1995!, special issue on nonlin-ear waves, patterns and spatiotemporal chaos in dynamicrays, edited by L. O. Chua.
r-
@3# Y. Kuramoto,Chemical Oscillations, Waves, and Turbulen~Springer-Verlag, New York, 1984!.
@4# A. T. Winfree, The Geometry of Biological Time~Springer-Verlag, New York, 1980!; S. H. Strogatz and I. Stewart, ScAm. 269, 102 ~1993!.
.
n
tt
nceally
ev,
of ancetdy-suit-or
n
re:,
56 1241BRIEF REPORTS
@5# E. Ott, C. Grebogi, and J. Yorke, Phys. Rev. Lett.64, 1196~1990!; U. Dressler and G. Nitsche,ibid. 68, 1 ~1992!.
@6# See, for example,Applied Chaos, edited by J.-H. Kim and JSinger ~Wiley, New York, 1992!; M. J. Ogorzalek, IEEETrans. Circuits Syst.40, 700~1993!; G. Hu, Z. Qu, and K. He,Int. J. Bifurcation Chaos5, 901 ~1995!.
@7# G. Hu and Z. Qu, Phys. Rev. Lett.72, 68 ~1994!.@8# D. Auerbach, Phys. Rev. Lett.72, 1184~1994!.@9# G. Hu and K. F. He, Phys. Rev. Lett.71, 3794~1993!.
@10# I. Aranson, H. Levine, and L. Tsimring, Phys. Rev. Lett.72,2561 ~1994!.
@11# W. Lu, D. Yu, and G. Harrison, Phys. Rev. Lett.76, 3316~1996!.
@12# K. Pyragas, Phys. Lett. A170, 421 ~1992!.@13# L. Kocarev, A. Shang, and L. O. Chua, Int. J. Bifurcatio
Chaos3, 479 ~1993!.@14# Y. Braiman, J. F. Lindner, and W. L. Ditto, Nature378, 465
~1995!.@15# S. Strogatz, Nature~London! 378, 444 ~1995!.@16# W. L. Ditto, S. N. Rauseo, and M. L. Spano, Phys. Rev. Le
65, 3211 ~1990!; E. R. Hunt, ibid. 67, 1953 ~1991!; R. Royet al., ibid. 68, 1259~1992!; A. Garfinkel, M. L. Spano, W. L.Ditto, and J. N. Weiss, Science257, 1230~1992!; S. J. Schiffet al., Nature ~London! 370, 615 ~1994!; B. Hubinger et al.,Phys. Rev. E50, 932 ~1994!.
@17# S. Fahy and D. R. Hamann, Phys. Rev. Lett.69, 761 ~1992!.@18# R. E. Amritkar and N. Gupte, Phys. Rev. E47, 3889~1993!.@19# T. Stojanovski, L. Kocarev, and U. Parlitz, Phys. Rev. E54,
2128 ~1996!.
.
@20# L. Kocarev and U. Parlitz, Phys. Rev. Lett.77, 2206~1996!.@21# J. Schweizer and M. P. Kennedy, Phys. Rev. E52, 4865
~1995!.@22# This type of control can also be written in terms of a seque
of Dirac pulses, and can easily be implemented electronicusing sampling circuits; see@21#.
@23# For the proof of the theorem, see T. Stojanovski, L. KocarU. Parlitz, and R. Harris, Phys. Rev. E55, 4035~1997!.
@24# Even though the theorem does not guarantee the existence( f y , f v) decomposition that produces a scalar seque$y(nT)% that can control Eq.~3!, we have numerically found aleast one such decomposition for many three-dimensionalnamical systems. In those cases, where one cannot find aable (f y , f v) decomposition, one can always turn to twomore dimensional controlling sequences.
@25# K. Kaneko, Physica D24, 1 ~1989!; 41, 137 ~1990!.@26# In this case, the evolution of the uncontrolled array~1! is cha-
otic, with Lyapunov dimension equal toDL534.@27# D. P. Lathrop and E. J. Kostelich, Phys. Rev. A40, 4028
~1989!.@28# The initial conditions for the periodic orbit used i
the simulations are x(0)51.171 139 297 806 379,y(0)51.627059 584 491 594 andz(0)515.298 955 084 754 981.
@29# L. Kocarev and U. Parlitz, Phys. Rev. Lett.76, 1816~1996!.@30# The initial conditions for the first unstable periodic orbit a
given in @28#, while for the other orbit they arex(0)54.560 295 060 061 776,y(0)56.260 735 588 766 367andz(0)516.709 465 601 707 183.