controladora robolab lego
DESCRIPTION
Practicas de LegoTRANSCRIPT

LEGO - ROBOLAB
Curso 14AL57ES081 2014
Tarjeta controladora

KIT DE CONSTRUCCIÓN

-La tarjeta controladora viene con un kit de piezas de construcción que incorpora:
• Torre de transmisión de infrarrojos.(USB)(Debe sincronizarse con el puerto com del pc)
CARACTERISTICAS DE LA CONTROLADORA
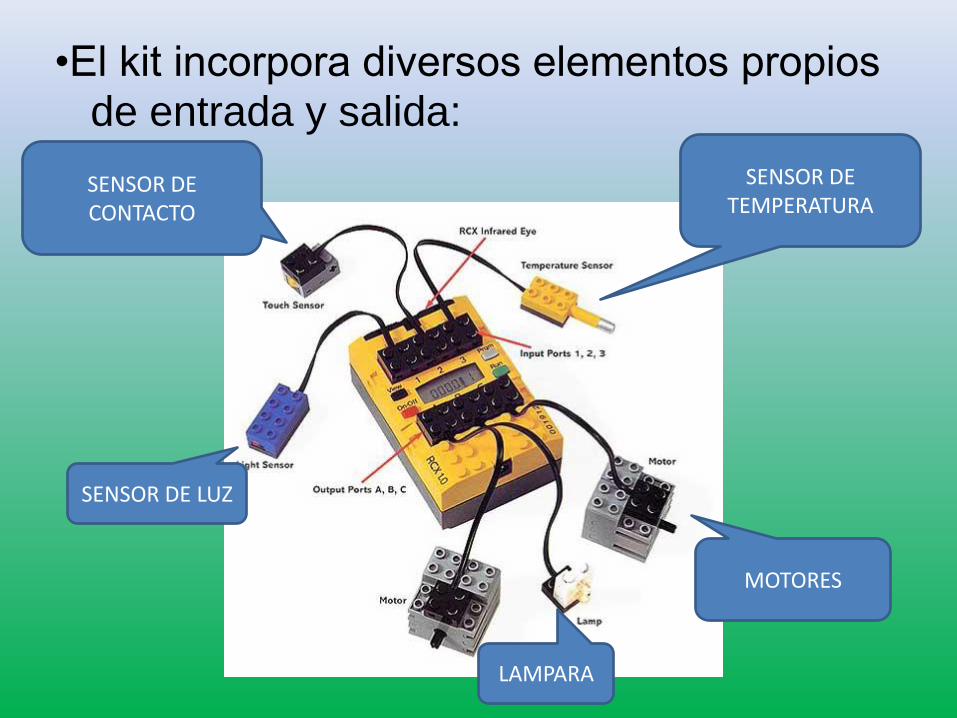
•El kit incorpora diversos elementos propios de entrada y salida:
SENSOR DE CONTACTO
MOTORES
SENSOR DE TEMPERATURA
SENSOR DE LUZ
LAMPARA

SALIDAS
-VISOR DE ENTRADAS
-INICIO-SELECTOR DE PROGRAMA
-ENCENDIDO
EMISOR –RECEPTOR INFRARROJOS
ENTRADAS
COMPARTIMENTO PARA PILAS
“Ladrillo” : controladora

SOFTWARE ROBOLAB
Instalación e inicio del programa:
INICIO DEL PROGRAMA
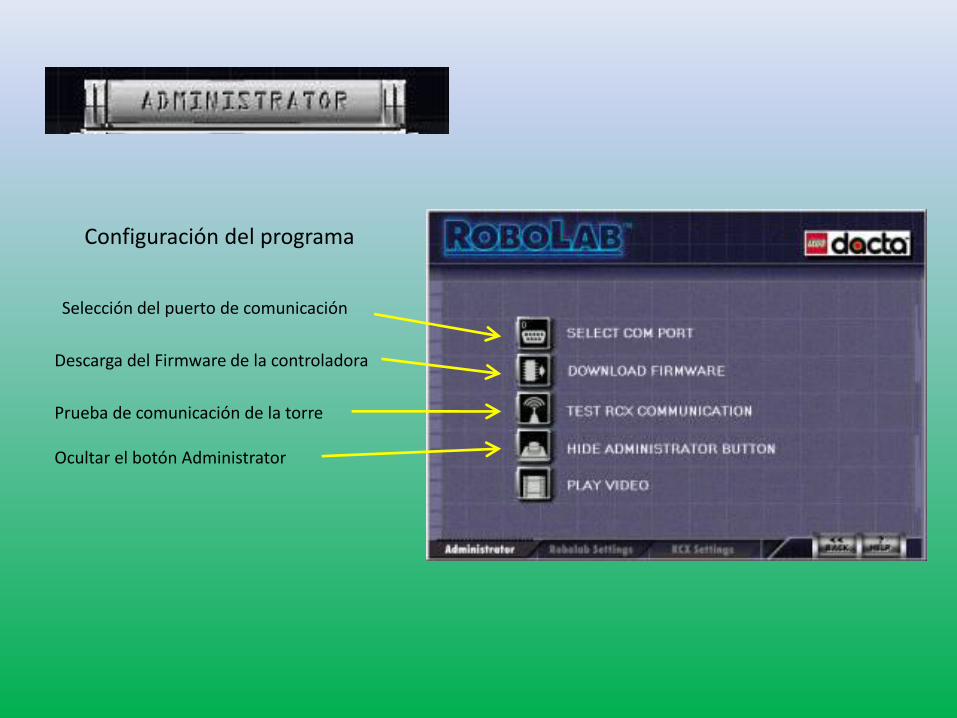
Configuración del programa
Selección del puerto de comunicación
Descarga del Firmware de la controladora
Prueba de comunicación de la torre
Ocultar el botón Administrator
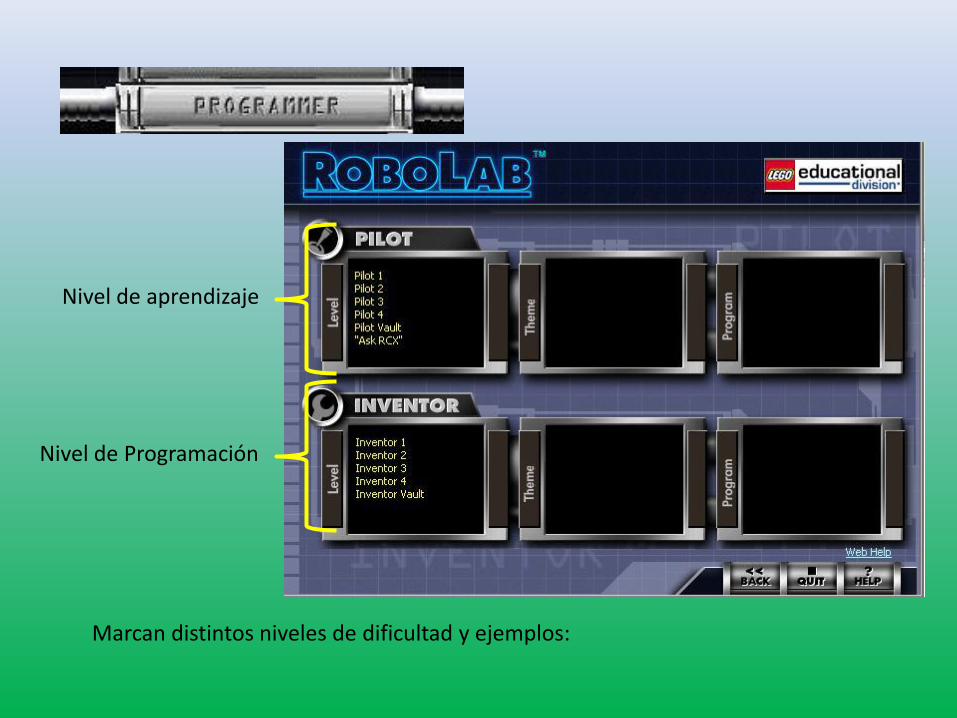
Nivel de aprendizaje
Nivel de Programación
Marcan distintos niveles de dificultad y ejemplos:

Programador diseñado para la adquisición de datos:
Permite almacenar datos tomados por los sensores, para luego procesarlos y representarlos en graficas.
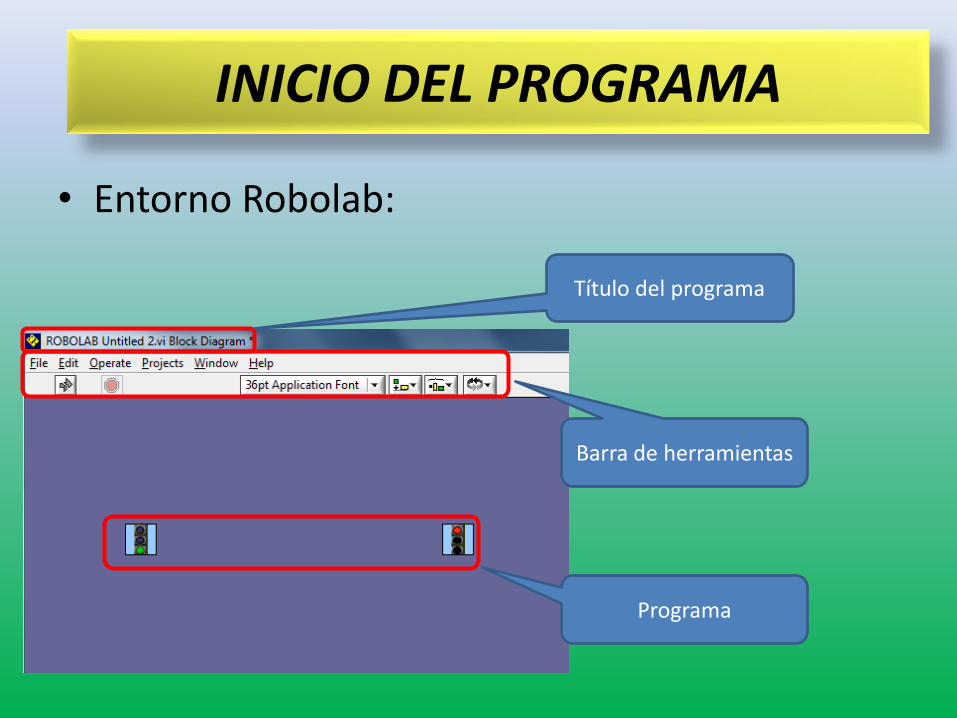
• Entorno Robolab:
INICIO DEL PROGRAMA
Título del programa
Barra de herramientas
Programa
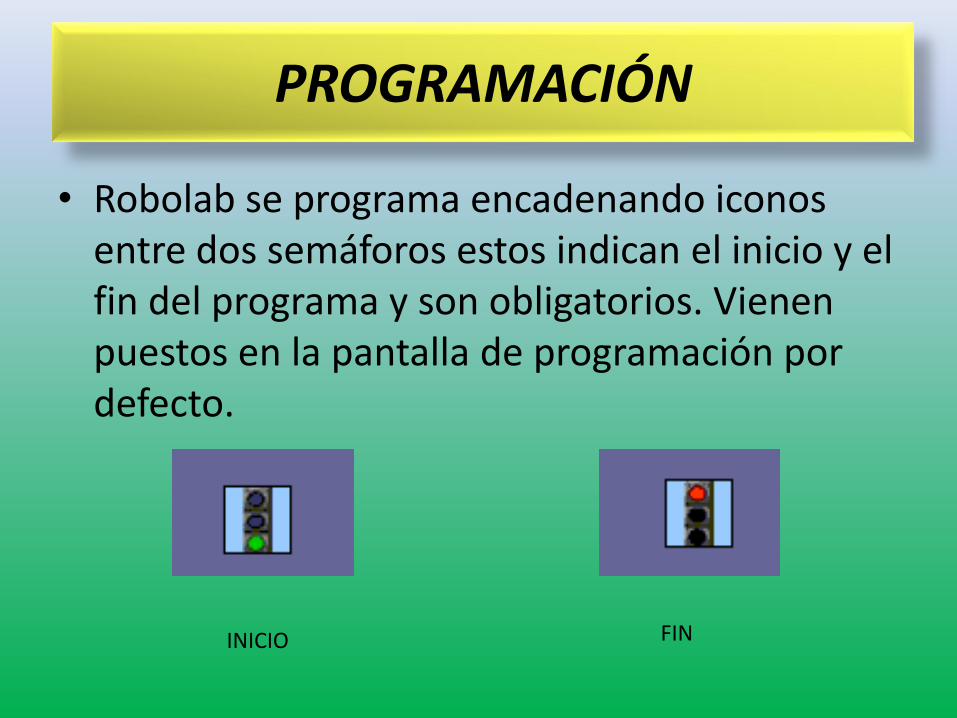
• Robolab se programa encadenando iconos entre dos semáforos estos indican el inicio y el fin del programa y son obligatorios. Vienen puestos en la pantalla de programación por defecto.
PROGRAMACIÓN
INICIO FIN
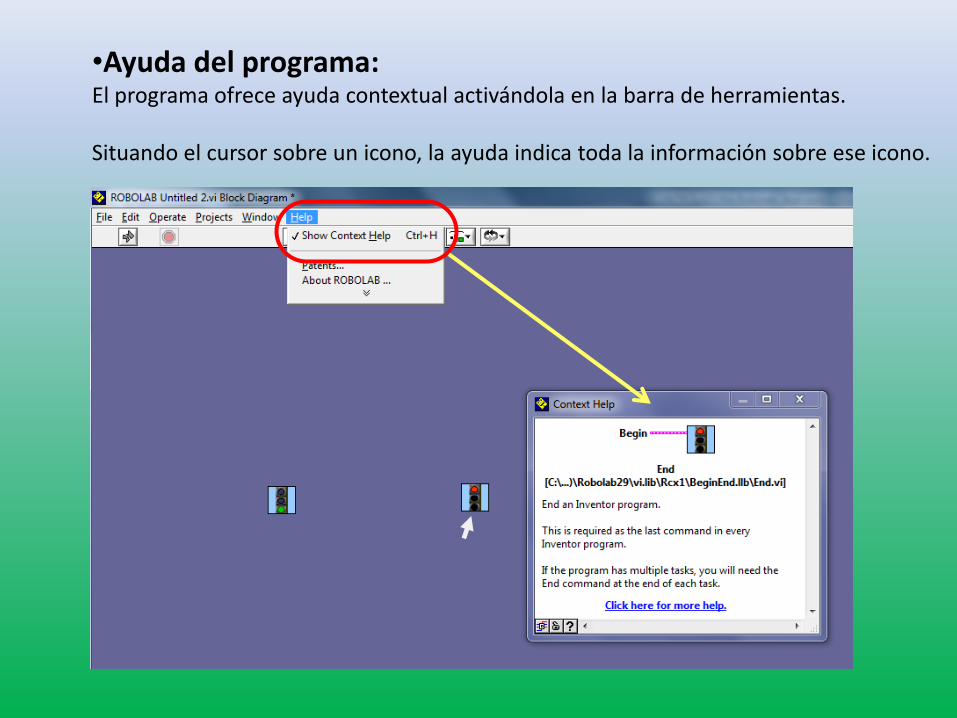
•Ayuda del programa:El programa ofrece ayuda contextual activándola en la barra de herramientas.
Situando el cursor sobre un icono, la ayuda indica toda la información sobre ese icono.
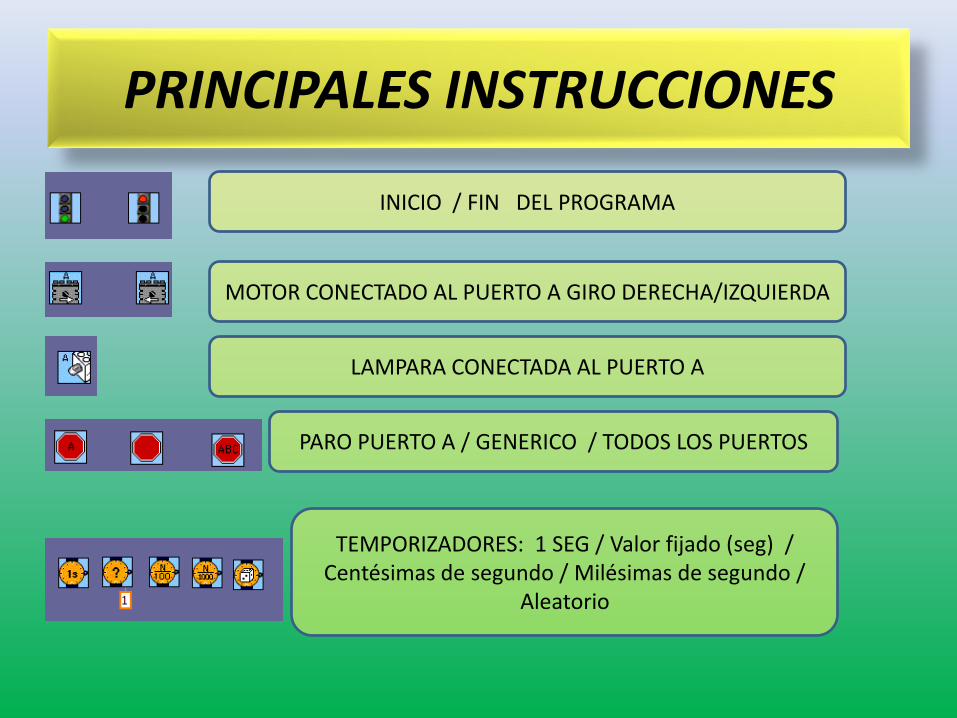
PRINCIPALES INSTRUCCIONES
INICIO / FIN DEL PROGRAMA
MOTOR CONECTADO AL PUERTO A GIRO DERECHA/IZQUIERDA
LAMPARA CONECTADA AL PUERTO A
PARO PUERTO A / GENERICO / TODOS LOS PUERTOS
TEMPORIZADORES: 1 SEG / Valor fijado (seg) / Centésimas de segundo / Milésimas de segundo /
Aleatorio
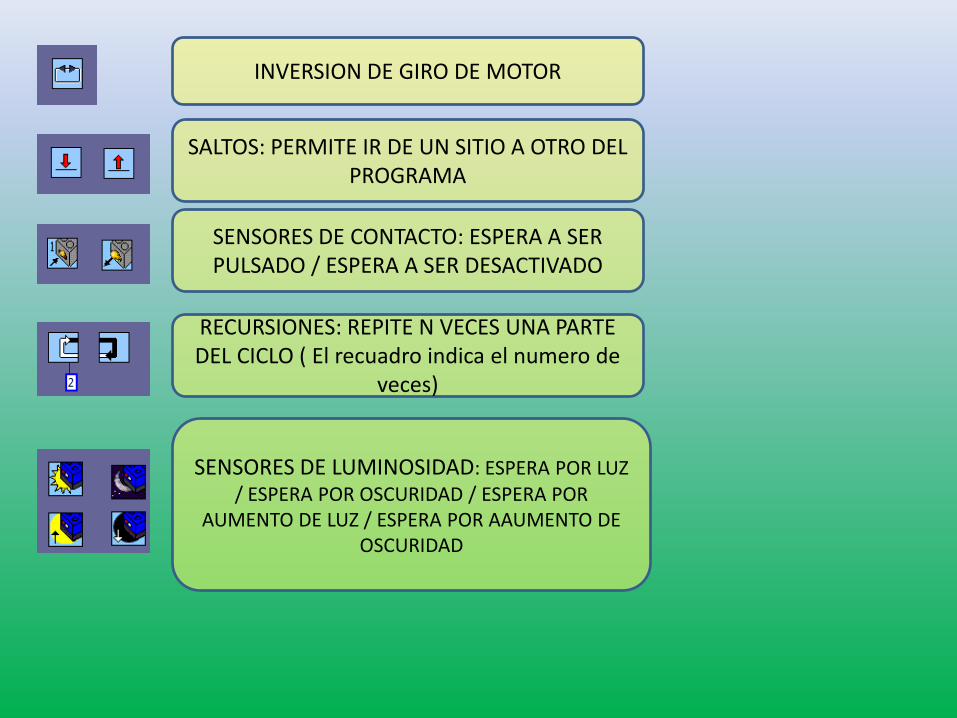
INVERSION DE GIRO DE MOTOR
SALTOS: PERMITE IR DE UN SITIO A OTRO DEL PROGRAMA
SENSORES DE CONTACTO: ESPERA A SER PULSADO / ESPERA A SER DESACTIVADO
RECURSIONES: REPITE N VECES UNA PARTE DEL CICLO ( El recuadro indica el numero de
veces)
SENSORES DE LUMINOSIDAD: ESPERA POR LUZ / ESPERA POR OSCURIDAD / ESPERA POR
AUMENTO DE LUZ / ESPERA POR AAUMENTO DE OSCURIDAD
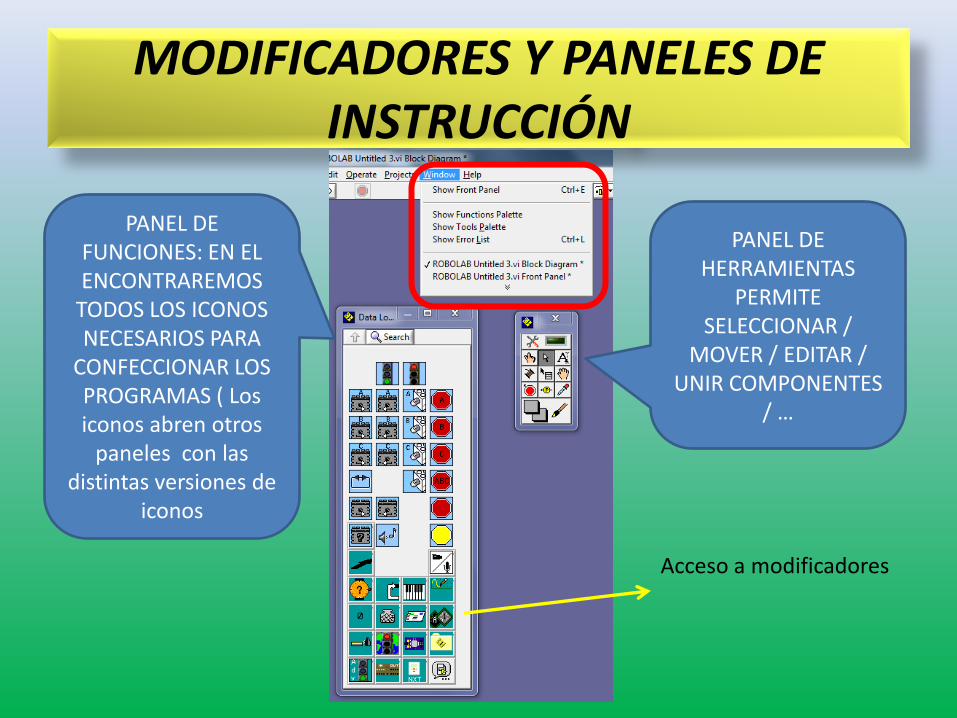
MODIFICADORES Y PANELES DE INSTRUCCIÓN
PANEL DE FUNCIONES: EN EL ENCONTRAREMOS
TODOS LOS ICONOS NECESARIOS PARA
CONFECCIONAR LOS PROGRAMAS ( Los iconos abren otros
paneles con las distintas versiones de
iconos
PANEL DE HERRAMIENTAS
PERMITE SELECCIONAR /
MOVER / EDITAR / UNIR COMPONENTES
/ …
Acceso a modificadores
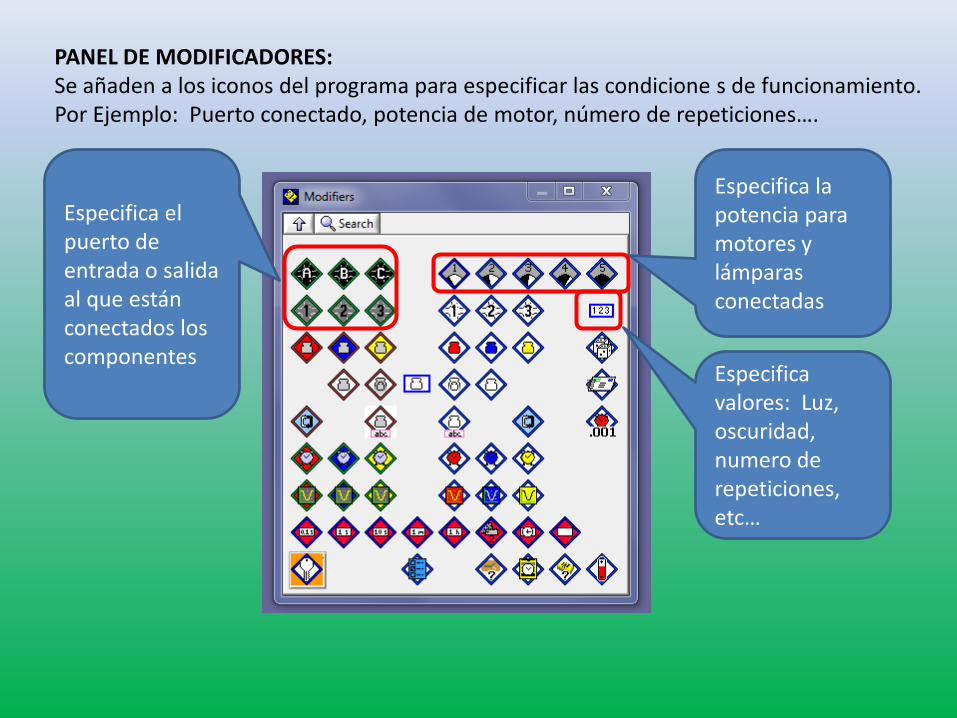
PANEL DE MODIFICADORES:Se añaden a los iconos del programa para especificar las condicione s de funcionamiento.Por Ejemplo: Puerto conectado, potencia de motor, número de repeticiones….
Especifica el puerto de entrada o salida al que están conectados los componentes
Especifica la potencia para motores y lámparas conectadas
Especifica valores: Luz, oscuridad, numero de repeticiones, etc…
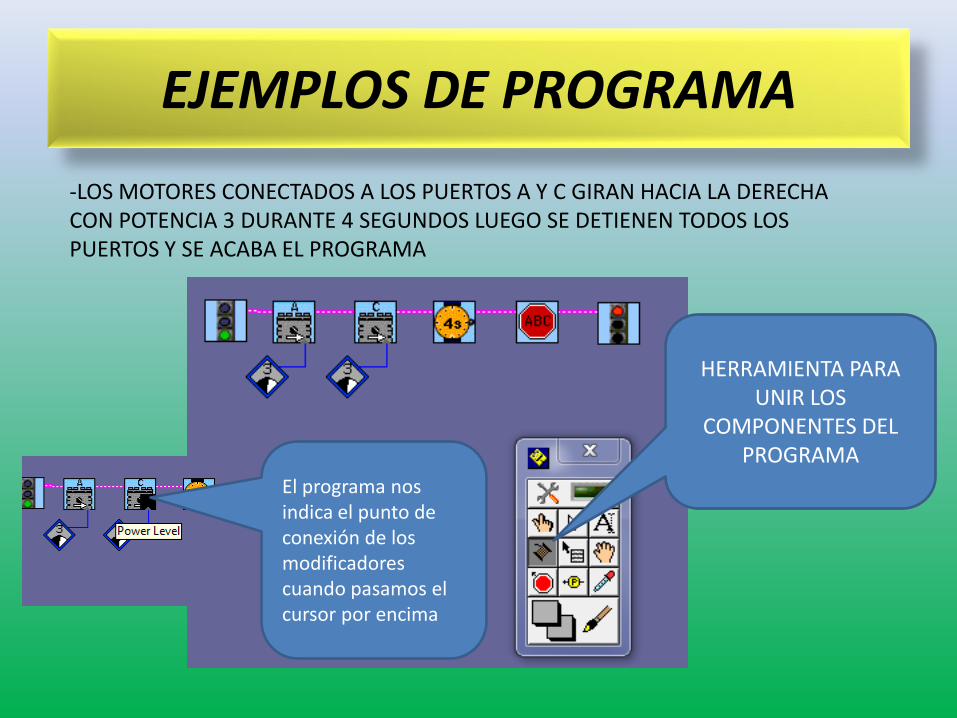
EJEMPLOS DE PROGRAMA
-LOS MOTORES CONECTADOS A LOS PUERTOS A Y C GIRAN HACIA LA DERECHA CON POTENCIA 3 DURANTE 4 SEGUNDOS LUEGO SE DETIENEN TODOS LOS PUERTOS Y SE ACABA EL PROGRAMA
HERRAMIENTA PARA UNIR LOS
COMPONENTES DEL PROGRAMA
El programa nos indica el punto de conexión de los modificadores cuando pasamos el cursor por encima
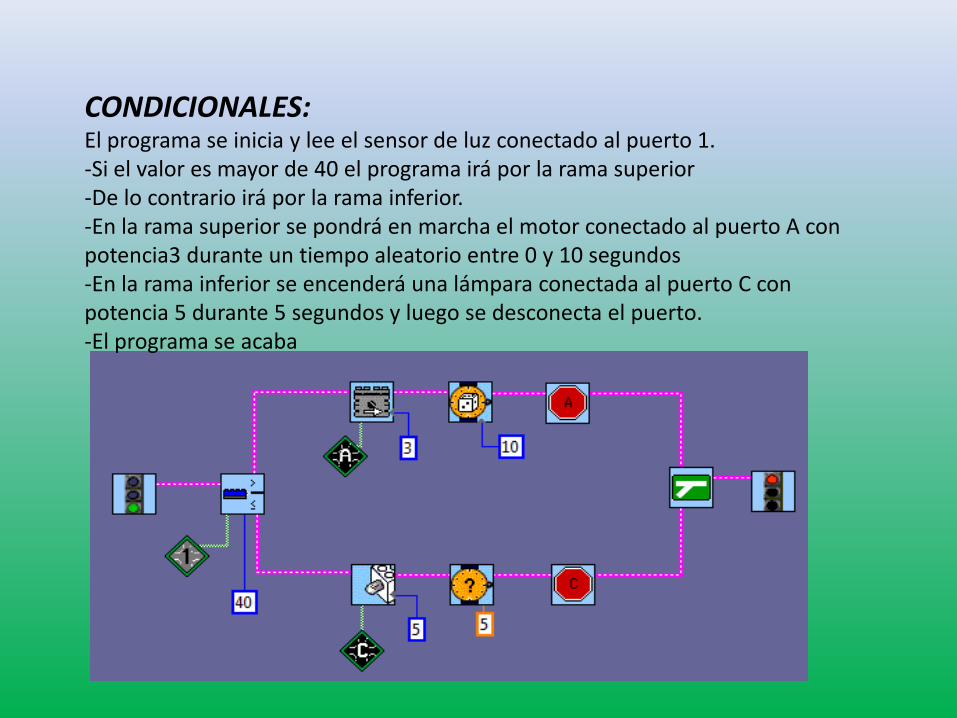
CONDICIONALES:El programa se inicia y lee el sensor de luz conectado al puerto 1.-Si el valor es mayor de 40 el programa irá por la rama superior-De lo contrario irá por la rama inferior.-En la rama superior se pondrá en marcha el motor conectado al puerto A con potencia3 durante un tiempo aleatorio entre 0 y 10 segundos-En la rama inferior se encenderá una lámpara conectada al puerto C con potencia 5 durante 5 segundos y luego se desconecta el puerto.-El programa se acaba
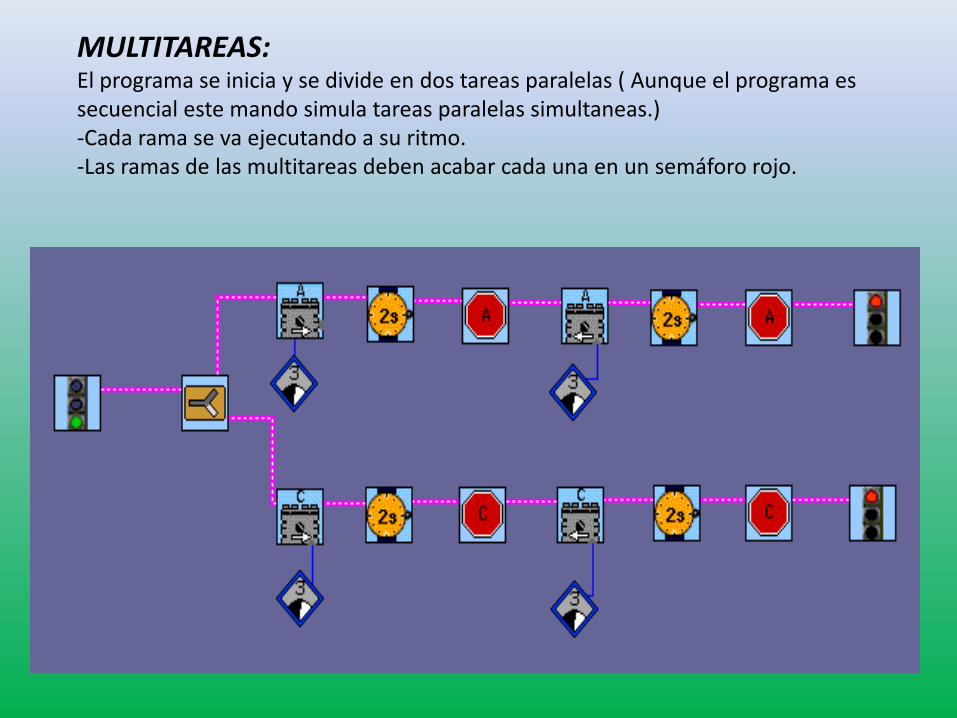
MULTITAREAS:El programa se inicia y se divide en dos tareas paralelas ( Aunque el programa es secuencial este mando simula tareas paralelas simultaneas.)-Cada rama se va ejecutando a su ritmo.-Las ramas de las multitareas deben acabar cada una en un semáforo rojo.
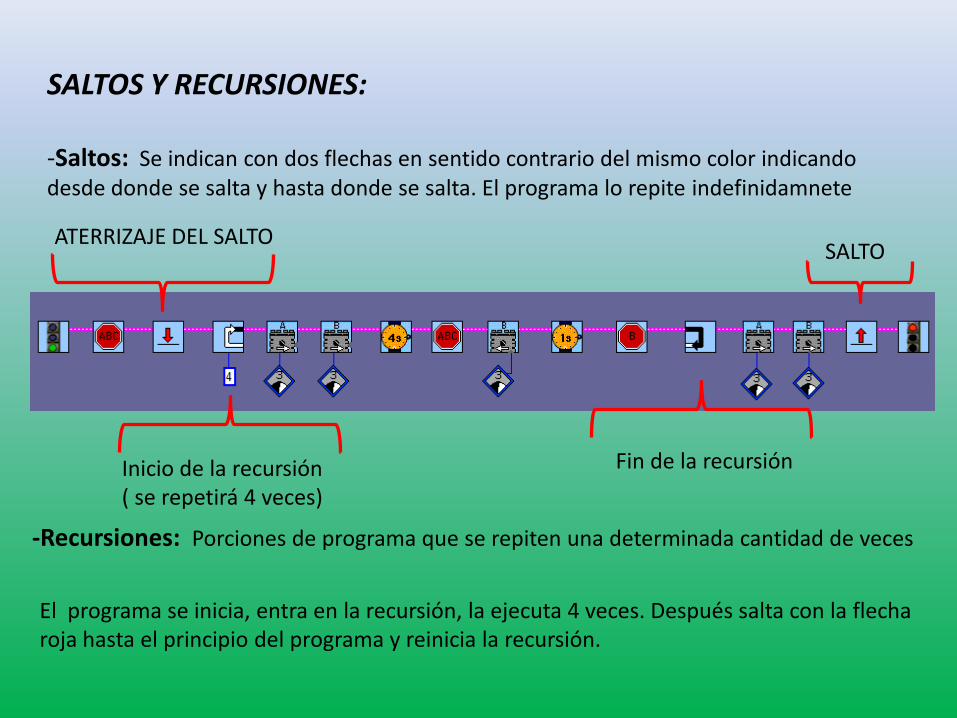
SALTOS Y RECURSIONES:
-Saltos: Se indican con dos flechas en sentido contrario del mismo color indicando desde donde se salta y hasta donde se salta. El programa lo repite indefinidamnete
ATERRIZAJE DEL SALTOSALTO
-Recursiones: Porciones de programa que se repiten una determinada cantidad de veces
Inicio de la recursión ( se repetirá 4 veces)
Fin de la recursión
El programa se inicia, entra en la recursión, la ejecuta 4 veces. Después salta con la flecha roja hasta el principio del programa y reinicia la recursión.
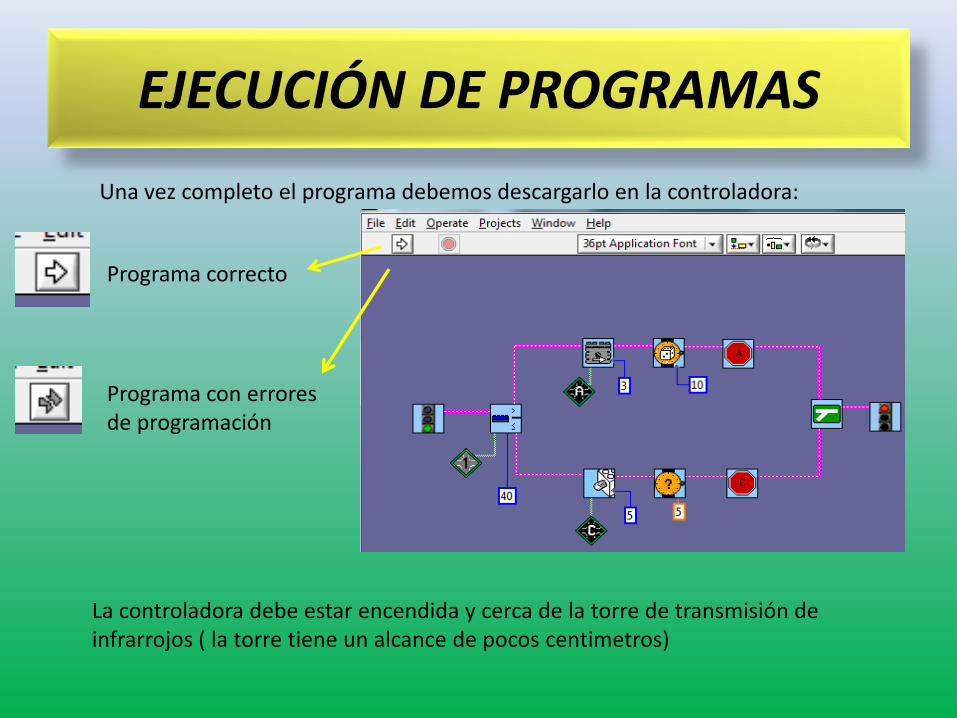
EJECUCIÓN DE PROGRAMAS
Una vez completo el programa debemos descargarlo en la controladora:
Programa correcto
Programa con errores de programación
La controladora debe estar encendida y cerca de la torre de transmisión de infrarrojos ( la torre tiene un alcance de pocos centimetros)
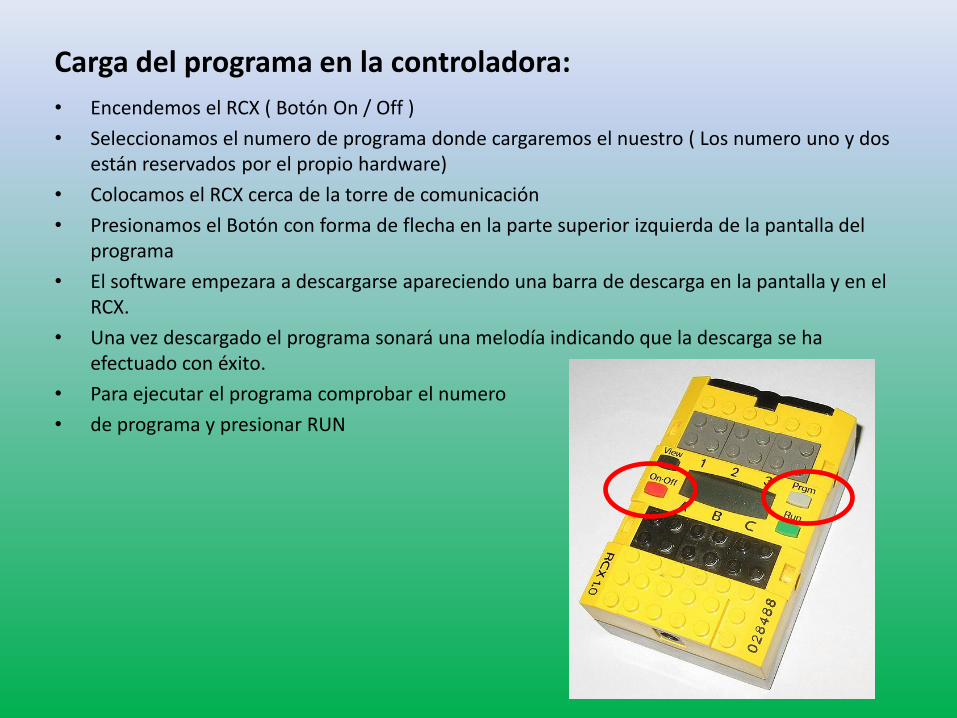
• Encendemos el RCX ( Botón On / Off )
• Seleccionamos el numero de programa donde cargaremos el nuestro ( Los numero uno y dos están reservados por el propio hardware)
• Colocamos el RCX cerca de la torre de comunicación
• Presionamos el Botón con forma de flecha en la parte superior izquierda de la pantalla del programa
• El software empezara a descargarse apareciendo una barra de descarga en la pantalla y en el RCX.
• Una vez descargado el programa sonará una melodía indicando que la descarga se ha efectuado con éxito.
• Para ejecutar el programa comprobar el numero
• de programa y presionar RUN
Carga del programa en la controladora: