computational photography image-based modeling (cont.)
DESCRIPTION
Computational Photography Image-based Modeling (Cont.). Jinxiang Chai. Image-based Modeling and Rendering. Model. Panoroma. Image-based rendering. Image based modeling. Images + Depth. Geometry+ Images. Camera + geometry. Images user input range scans. Images. Geometry+ Materials. - PowerPoint PPT PresentationTRANSCRIPT
Computational PhotographyImage-based Modeling (Cont.)
Jinxiang Chai
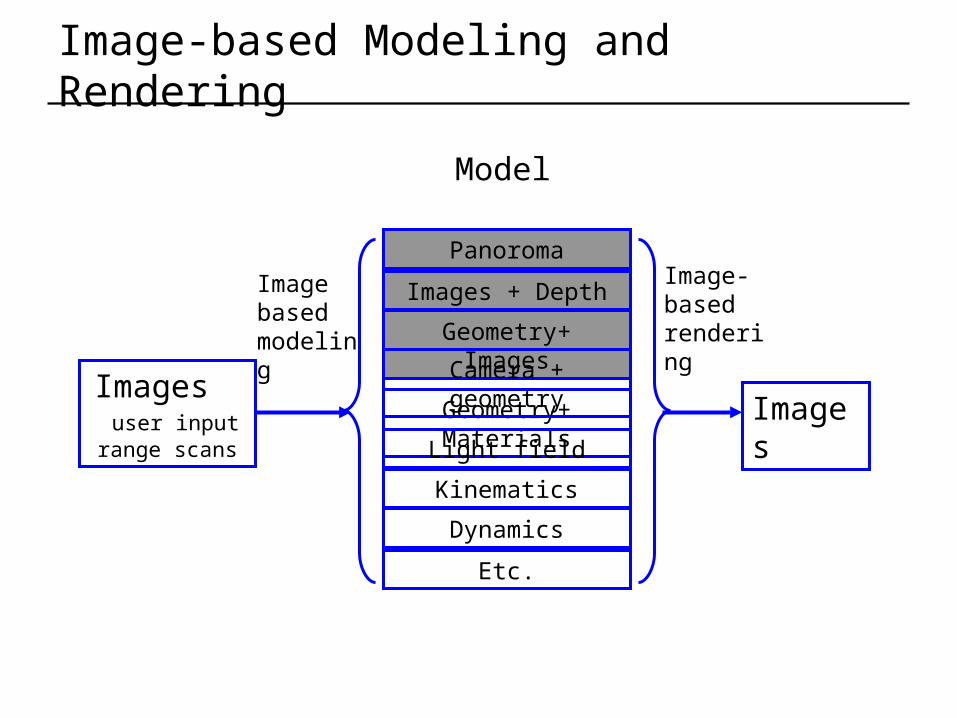
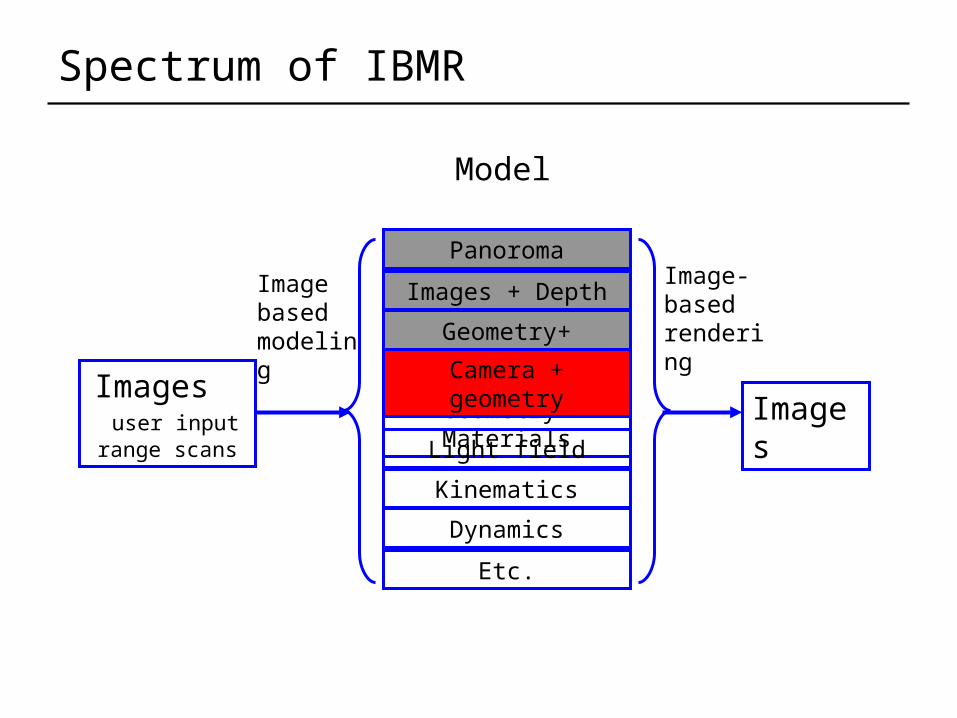
Image-based Modeling and Rendering
Images user input range
scans
Model
Images
Image based modeling
Image-based renderingGeometry+ Images
Geometry+ Materials
Images + Depth
Light field
Panoroma
Kinematics
Dynamics
Etc.
Camera + geometry
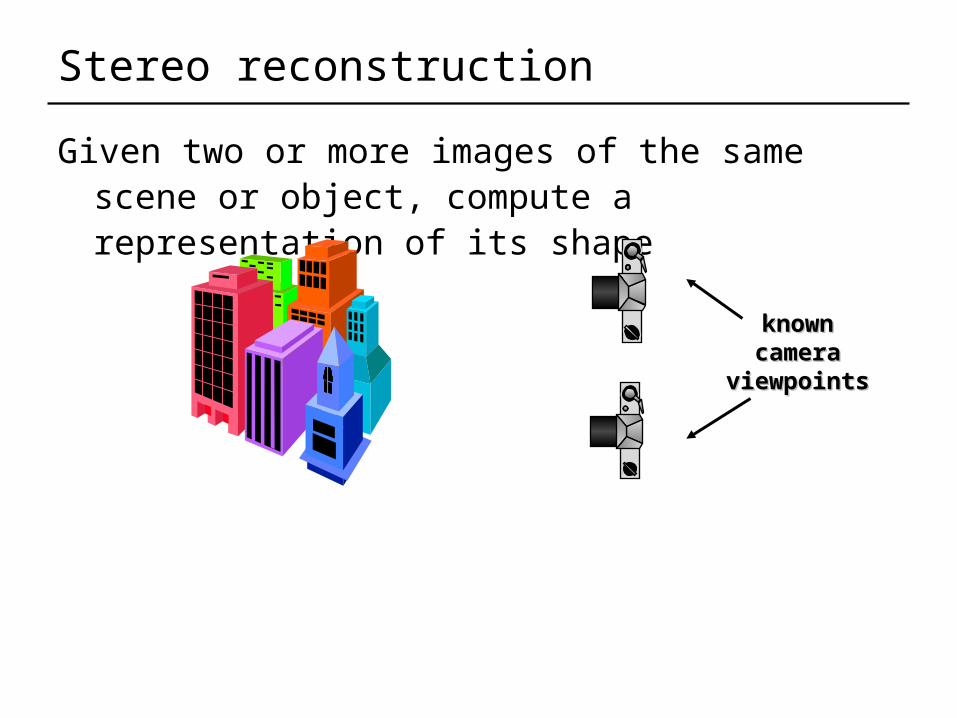
Stereo reconstruction
Given two or more images of the same scene or object, compute a representation of its shape
knownknowncameracamera
viewpointsviewpoints
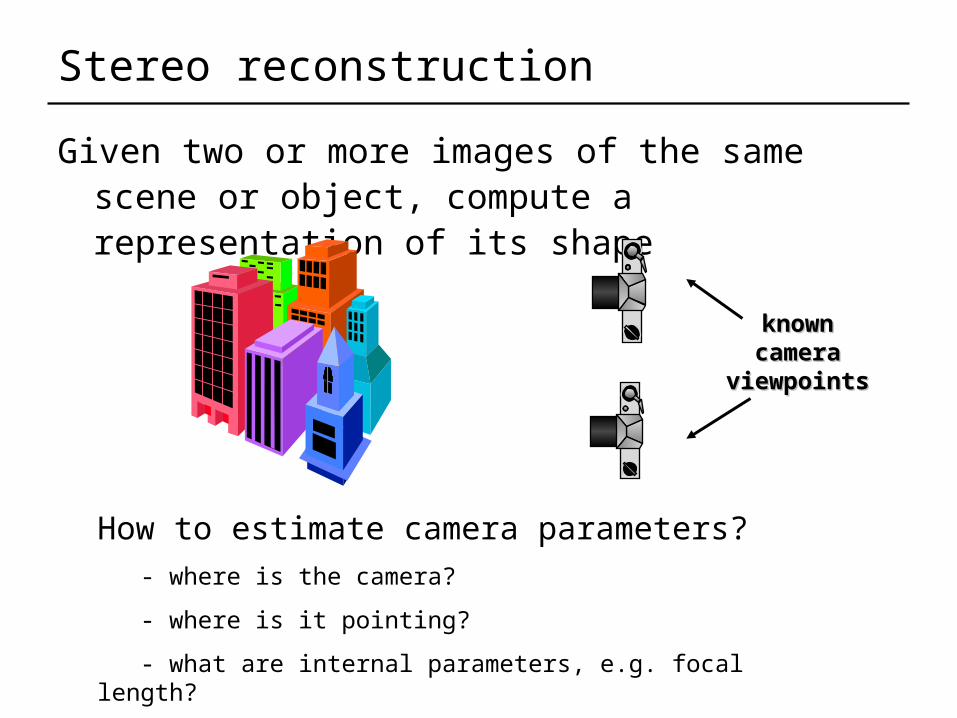
Stereo reconstruction
Given two or more images of the same scene or object, compute a representation of its shape
knownknowncameracamera
viewpointsviewpoints
How to estimate camera parameters?
- where is the camera?
- where is it pointing?
- what are internal parameters, e.g. focal length?
Spectrum of IBMR
Images user input range
scans
Model
Images
Image based modeling
Image-based renderingGeometry+ Images
Geometry+ Materials
Images + Depth
Light field
Panoroma
Kinematics
Dynamics
Etc.
Camera + geometry
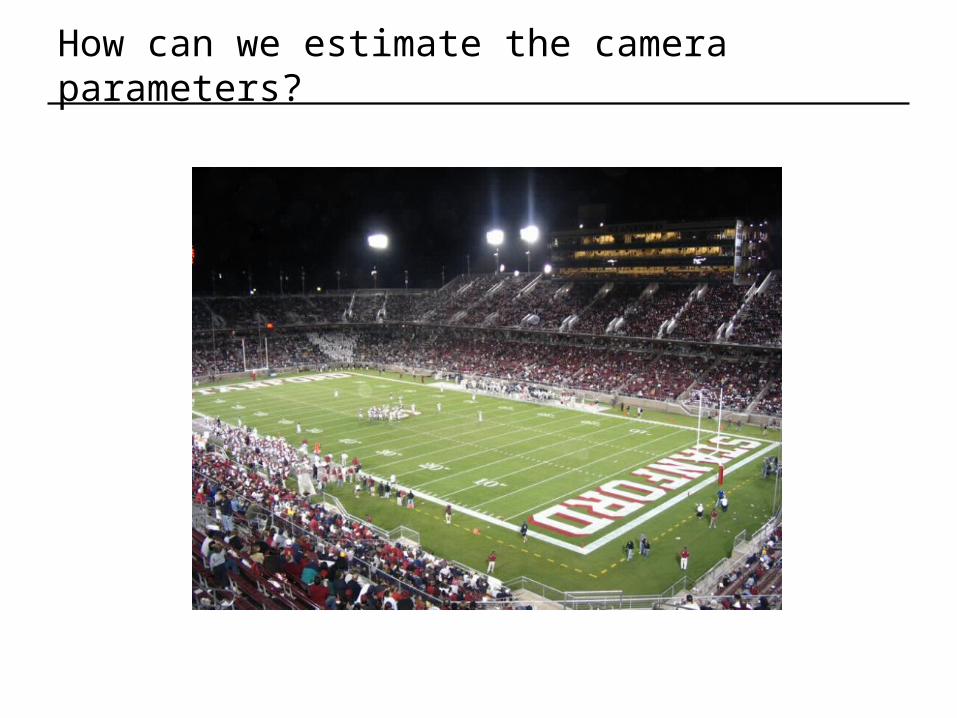
How can we estimate the camera parameters?
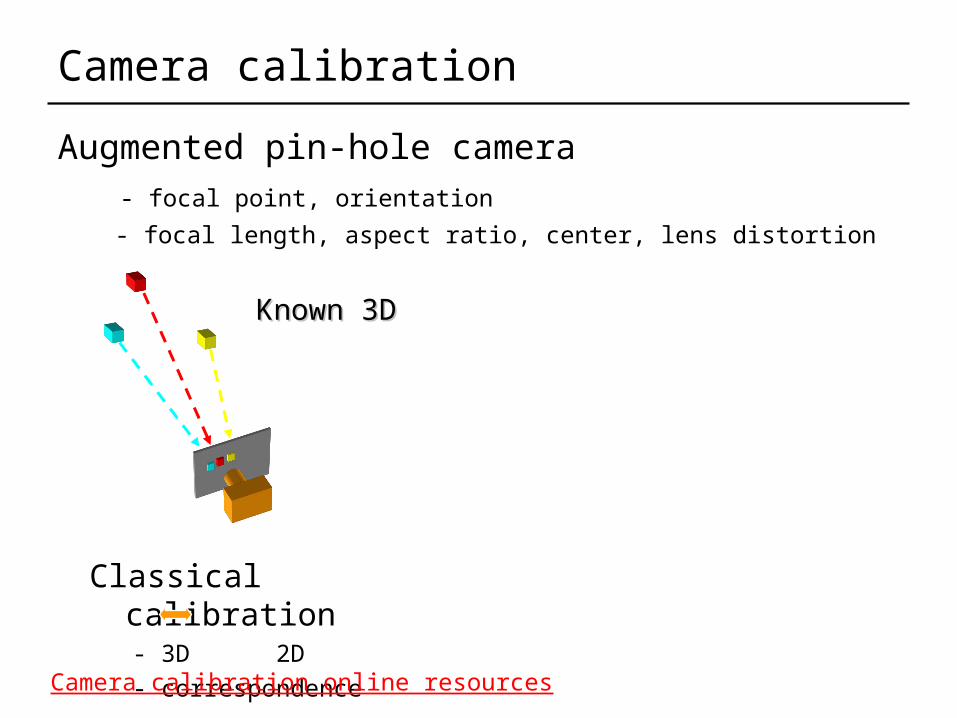
Camera calibration
Augmented pin-hole camera - focal point, orientation
- focal length, aspect ratio, center, lens distortion
Known 3DKnown 3D
Classical calibration - 3D 2D
- correspondenceCamera calibration online resources
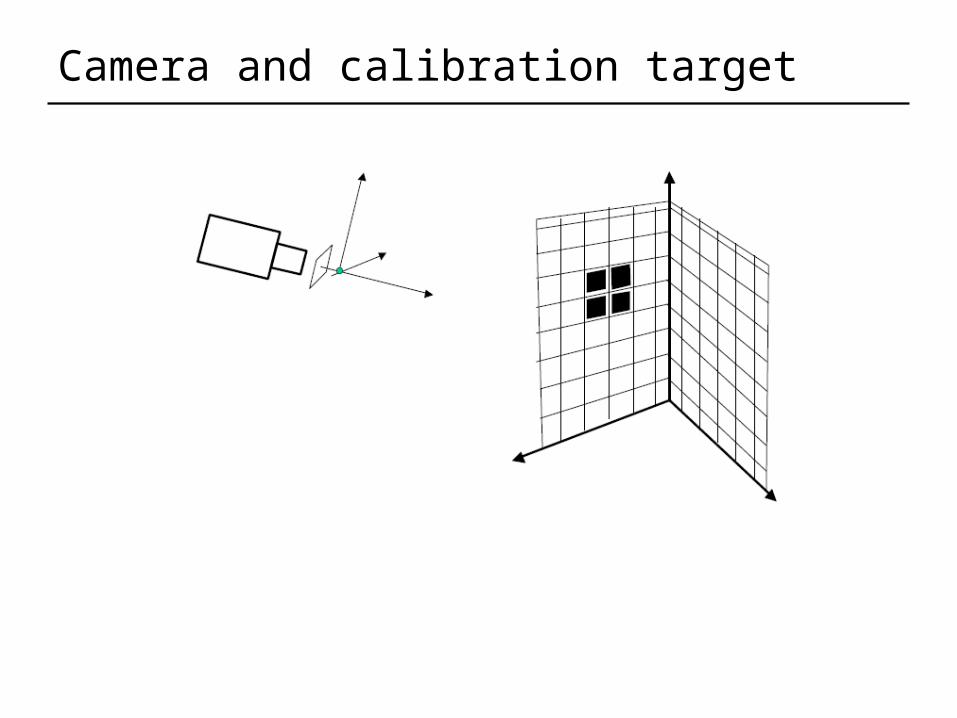
Camera and calibration target
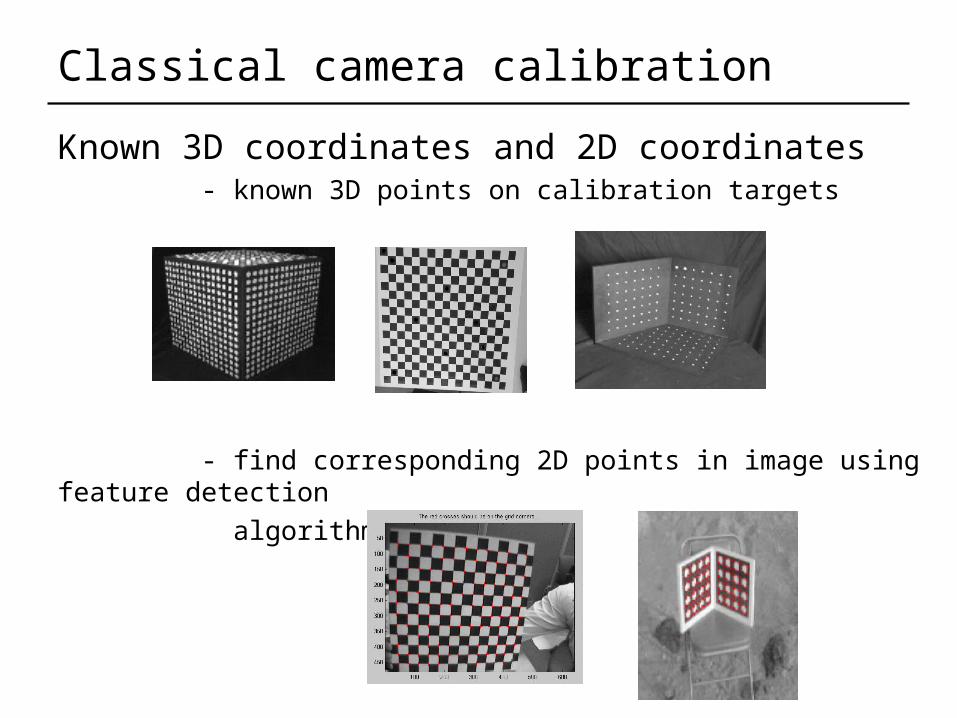
Classical camera calibration
Known 3D coordinates and 2D coordinates - known 3D points on calibration targets
- find corresponding 2D points in image using feature detection
algorithm
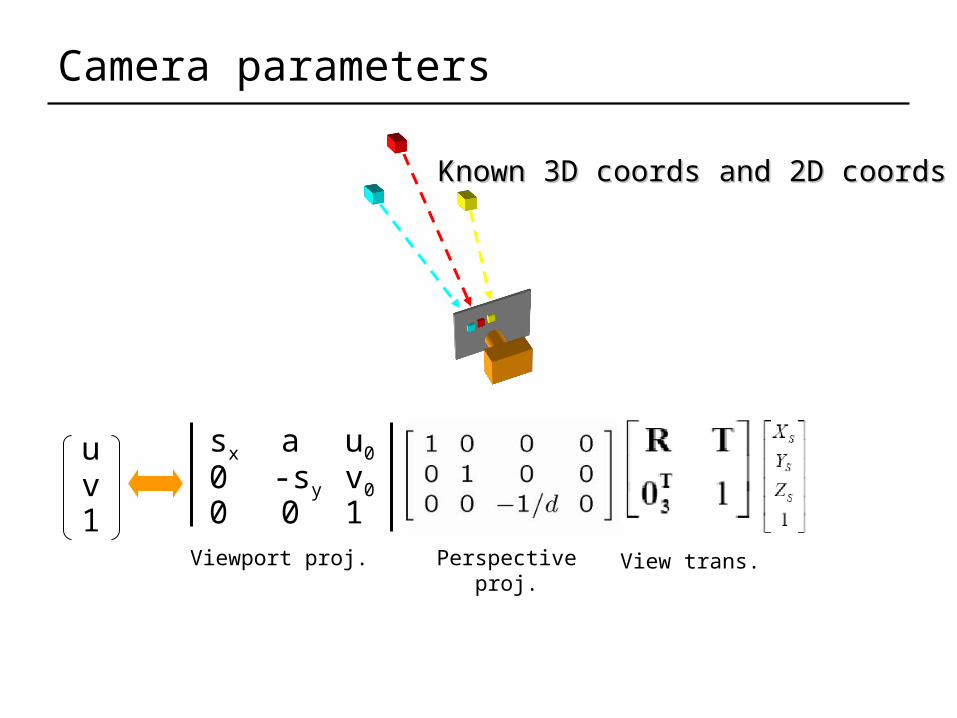
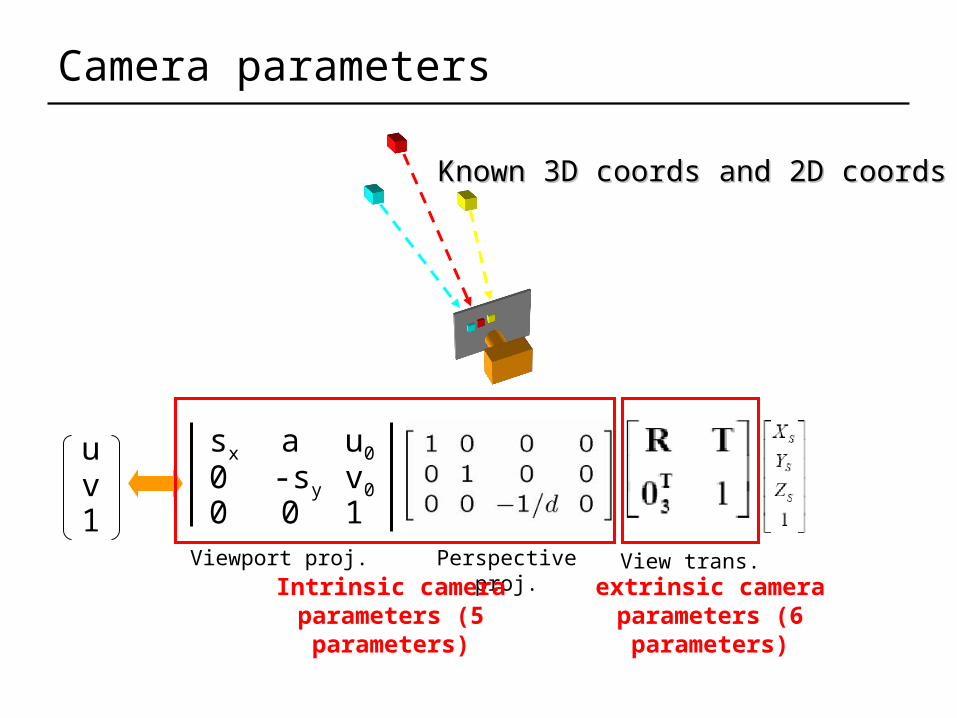
Camera parameters
u0
v0
100-sy0
sx аuv1
Perspective proj. View trans.Viewport proj.
Known 3D coords and 2D coordsKnown 3D coords and 2D coords
Camera parameters
u0
v0
100-sy0
sx аuv1
Perspective proj. View trans.Viewport proj.
Known 3D coords and 2D coordsKnown 3D coords and 2D coords
Intrinsic camera parameters (5 parameters)
extrinsic camera parameters (6 parameters)
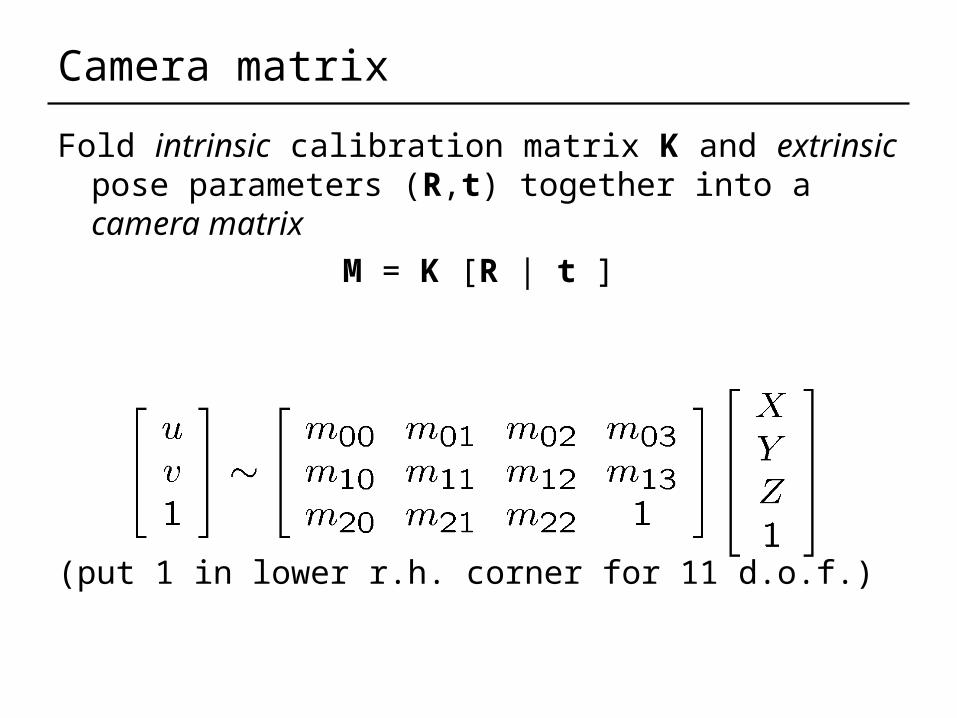
Camera matrix
Fold intrinsic calibration matrix K and extrinsic pose parameters (R,t) together into acamera matrix
M = K [R | t ]
(put 1 in lower r.h. corner for 11 d.o.f.)
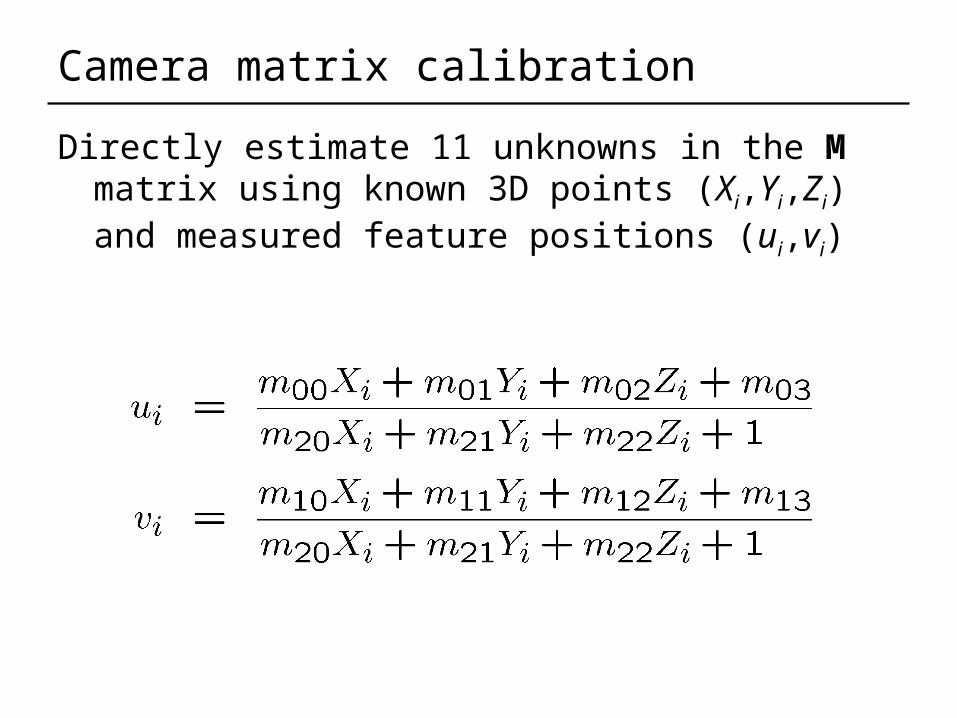
Camera matrix calibration
Directly estimate 11 unknowns in the M matrix using known 3D points (Xi,Yi,Zi) and measured feature positions (ui,vi)
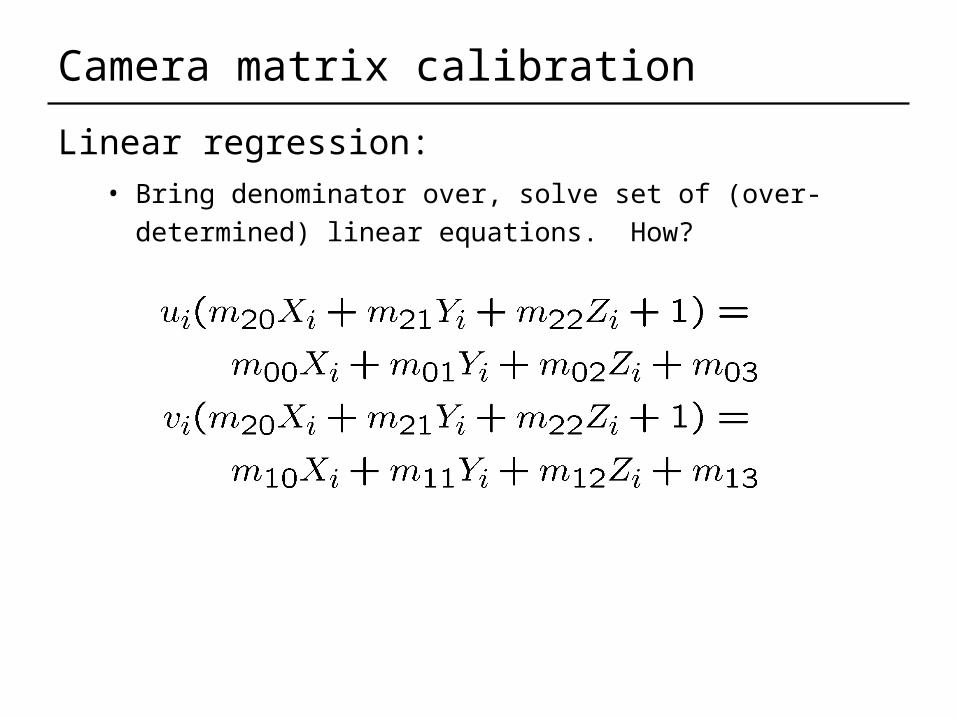
Camera matrix calibration
Linear regression:• Bring denominator over, solve set of (over-determined) linear
equations. How?
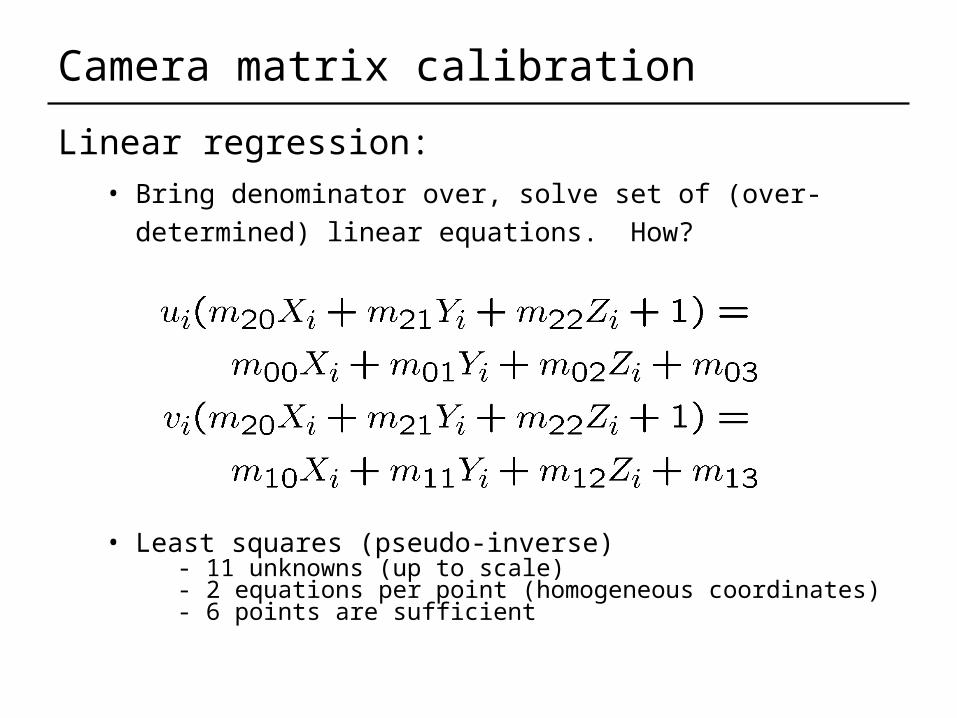
Camera matrix calibration
Linear regression:• Bring denominator over, solve set of (over-determined) linear
equations. How?
• Least squares (pseudo-inverse) - 11 unknowns (up to scale) - 2 equations per point (homogeneous coordinates) - 6 points are sufficient
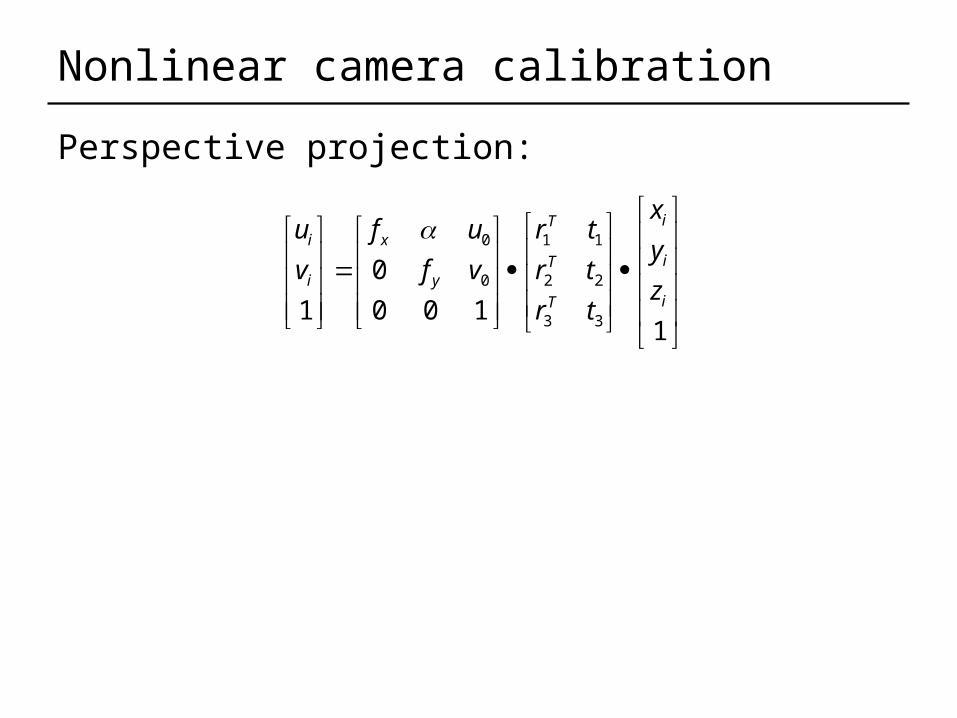
Nonlinear camera calibration
Perspective projection:
1100
0
1 3
2
1
3
2
1
0
0
i
i
i
T
T
T
y
x
i
i
z
y
x
t
t
t
r
r
r
vf
uf
v
u
Nonlinear camera calibration
Perspective projection:
1100
0
1 3
2
1
3
2
1
0
0
i
i
i
T
T
T
y
x
i
i
z
y
x
t
t
t
r
r
r
vf
uf
v
u
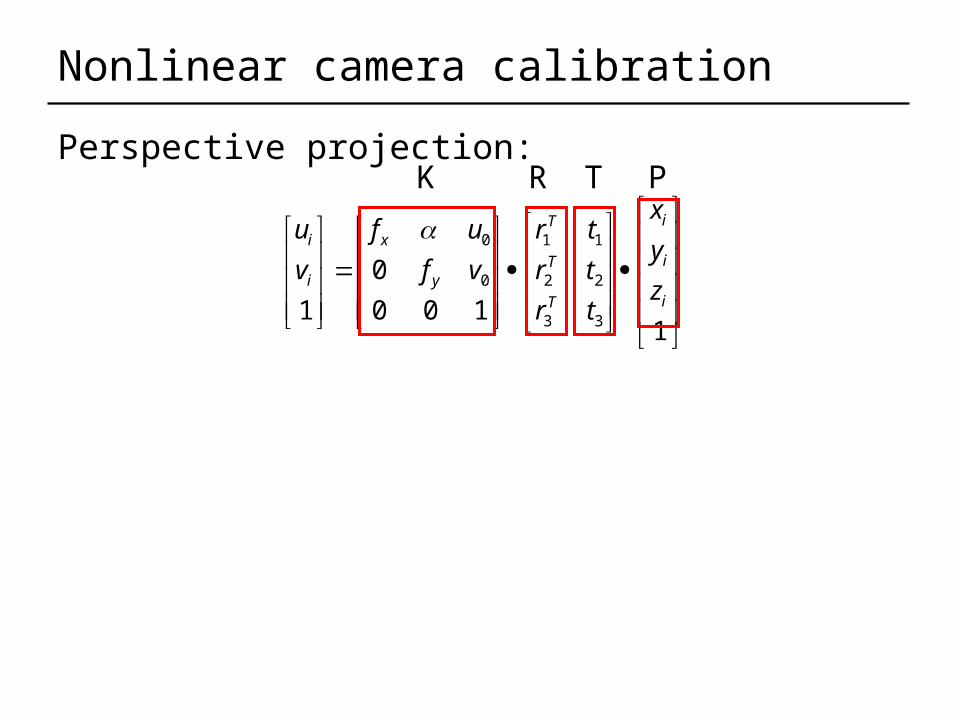
K R T P
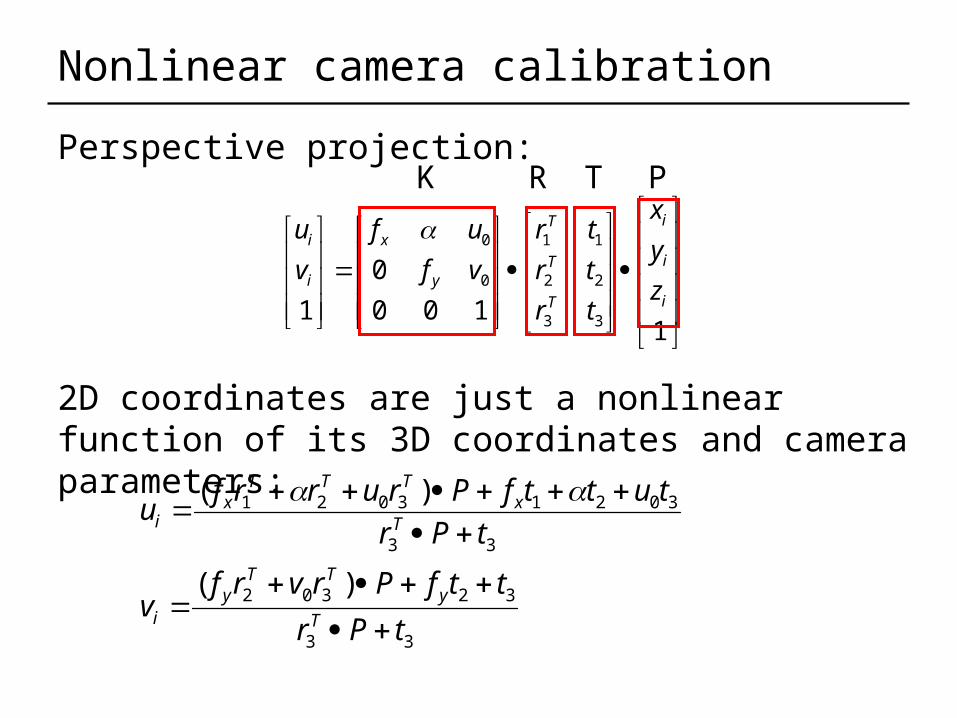
Nonlinear camera calibration
Perspective projection:
2D coordinates are just a nonlinear function of its 3D coordinates and camera parameters:
1100
0
1 3
2
1
3
2
1
0
0
i
i
i
T
T
T
y
x
i
i
z
y
x
t
t
t
r
r
r
vf
uf
v
u
K R T P
33
32302
33
30213021
)(
)(
tPr
ttfPrvrfv
tPr
tuttfPrurrfu
T
yTT
yi
Tx
TTTx
i
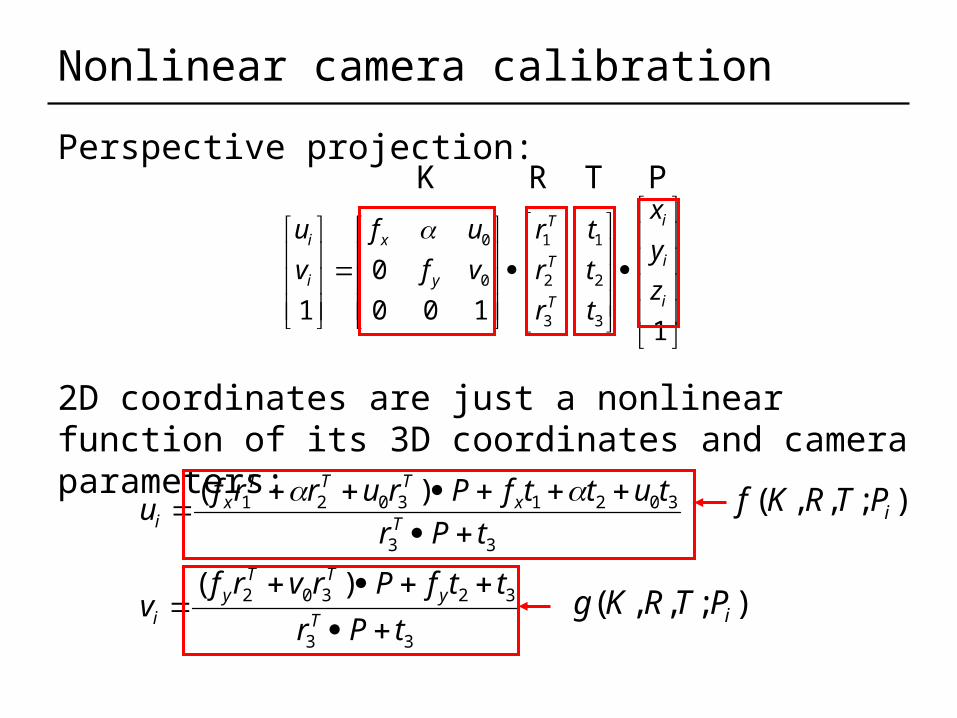
Nonlinear camera calibration
Perspective projection:
2D coordinates are just a nonlinear function of its 3D coordinates and camera parameters:
1100
0
1 3
2
1
3
2
1
0
0
i
i
i
T
T
T
y
x
i
i
z
y
x
t
t
t
r
r
r
vf
uf
v
u
33
32302
33
30213021
)(
)(
tPr
ttfPrvrfv
tPr
tuttfPrurrfu
T
yTT
yi
Tx
TTTx
i
K
);,,( iPTRKf
);,,( iPTRKg
R T P
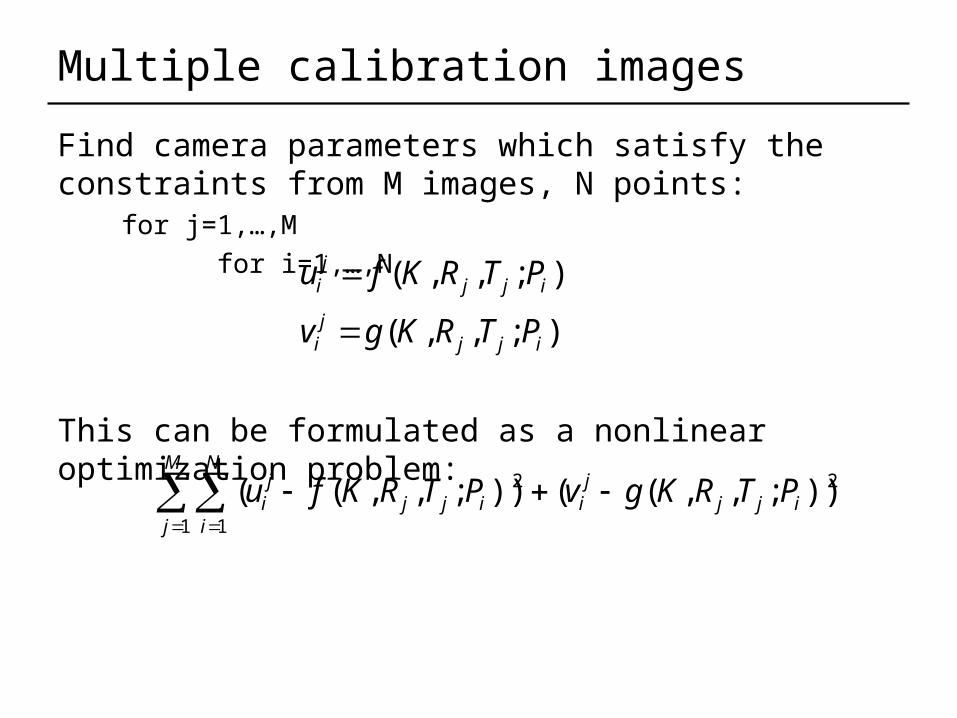
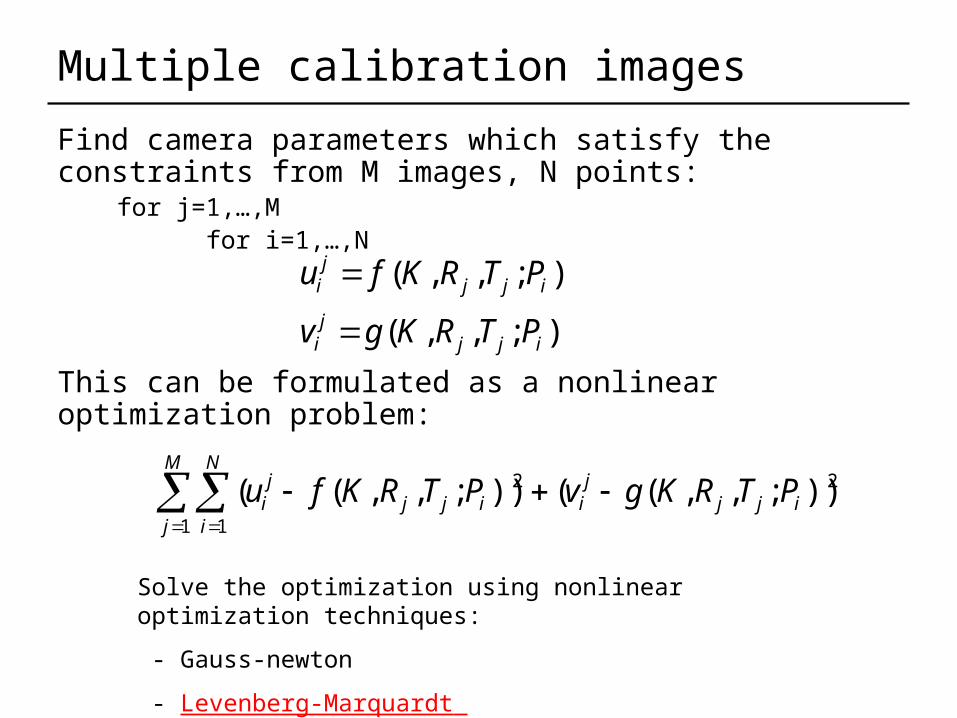
Multiple calibration images
Find camera parameters which satisfy the constraints from M images, N points: for j=1,…,M
for i=1,…,N
This can be formulated as a nonlinear optimization problem:
);,,(
);,,(
ijjji
ijjji
PTRKgv
PTRKfu
M
j
N
iijj
jiijj
ji PTRKgvPTRKfu
1 1
22 ));,,(());,,((
Multiple calibration images
Find camera parameters which satisfy the constraints from M images, N points: for j=1,…,M for i=1,…,N
This can be formulated as a nonlinear optimization problem:
);,,(
);,,(
ijjji
ijjji
PTRKgv
PTRKfu
M
j
N
iijj
jiijj
ji PTRKgvPTRKfu
1 1
22 ));,,(());,,((
Solve the optimization using nonlinear optimization techniques:
- Gauss-newton
- Levenberg-Marquardt
Nonlinear approach
Advantages:• can solve for more than one camera pose at a time
• fewer degrees of freedom than linear approach
• Standard technique in photogrammetry, computer vision, computer graphics
- [Tsai 87] also estimates lens distortions (freeware @ CMU)http://www.cs.cmu.edu/afs/cs/project/cil/ftp/html/v-source.html
Disadvantages:• more complex update rules
• need a good initialization (recover K [R | t] from M)
How can we estimate the camera parameters?
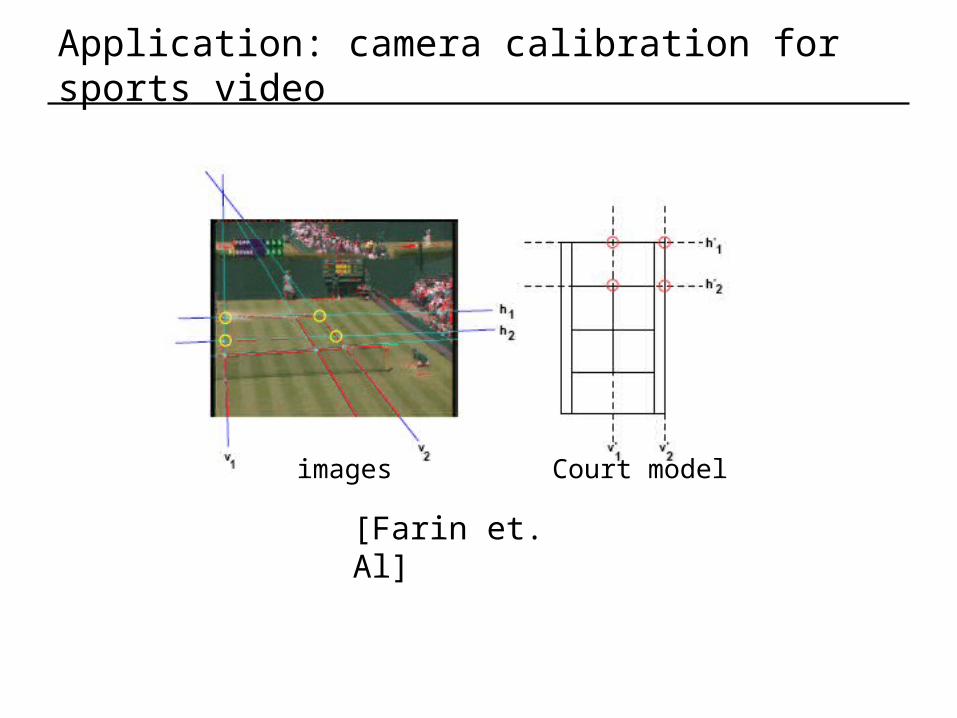
Application: camera calibration for sports video
[Farin et. Al]
images Court model
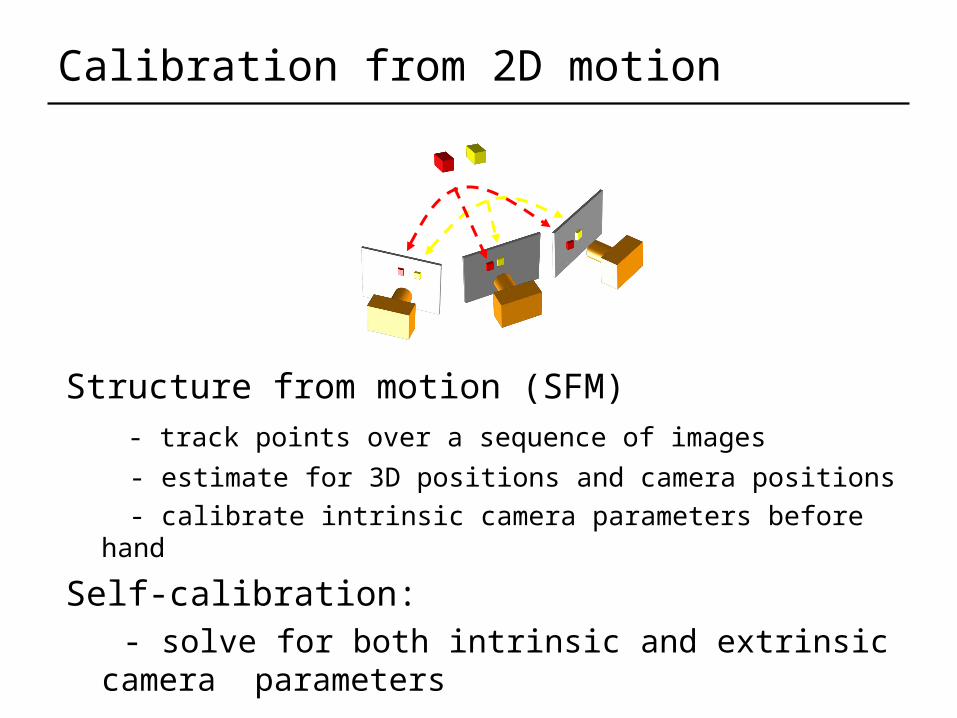
Calibration from 2D motion
Structure from motion (SFM) - track points over a sequence of images
- estimate for 3D positions and camera positions
- calibrate intrinsic camera parameters before hand
Self-calibration: - solve for both intrinsic and extrinsic camera parameters
SFM = Holy Grail of 3D Reconstruction
Take movie of object
Reconstruct 3D model
Would be
commercially
highly viable
How to Get Feature Correspondences
Feature-based approach
- good for images
- feature detection (corners)
- feature matching using RANSAC (epipolar line)
Pixel-based approach
- good for video sequences
- patch based registration with lucas-kanade algorithm
- register features across the entire sequence
Structure from Motion
Two Principal Solutions• Bundle adjustment (nonlinear optimization)
• Factorization (SVD, through orthographic approximation, affine geometry)
Nonlinear Approach for SFM
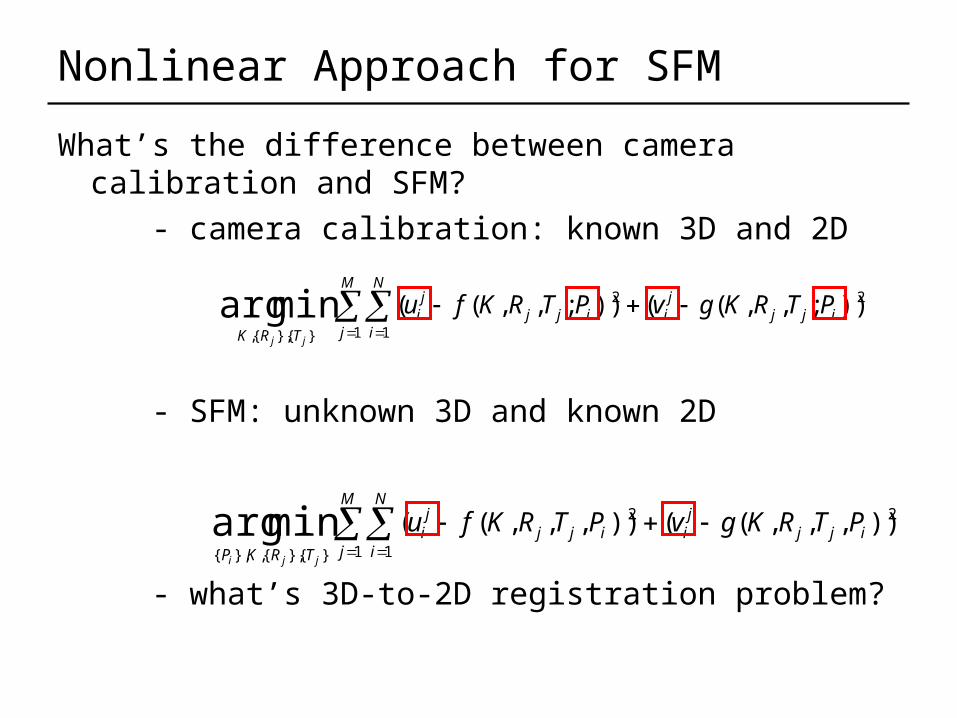
What’s the difference between camera calibration and SFM?
Nonlinear Approach for SFM
M
j
N
iijj
jiijj
ji
TRK
PTRKgvPTRKfujj
1 1
22
}{},{,
));,,(());,,((minarg
What’s the difference between camera calibration and SFM?
- camera calibration: known 3D and 2D
Nonlinear Approach for SFM
M
j
N
iijj
jiijj
ji
TRKP
PTRKgvPTRKfujji
1 1
22
}{},{,},{
)),,,(()),,,((minarg
M
j
N
iijj
jiijj
ji
TRK
PTRKgvPTRKfujj
1 1
22
}{},{,
));,,(());,,((minarg
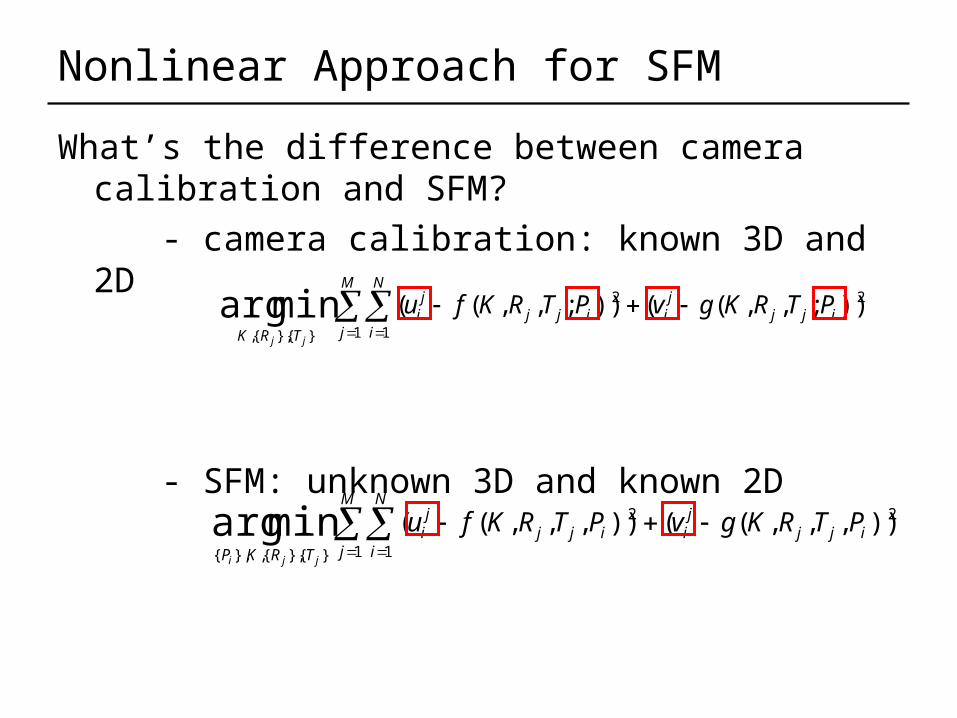
What’s the difference between camera calibration and SFM?
- camera calibration: known 3D and 2D
- SFM: unknown 3D and known 2D
Nonlinear Approach for SFM
M
j
N
iijj
jiijj
ji
TRKP
PTRKgvPTRKfujji
1 1
22
}{},{,},{
)),,,(()),,,((minarg
M
j
N
iijj
jiijj
ji
TRK
PTRKgvPTRKfujj
1 1
22
}{},{,
));,,(());,,((minarg
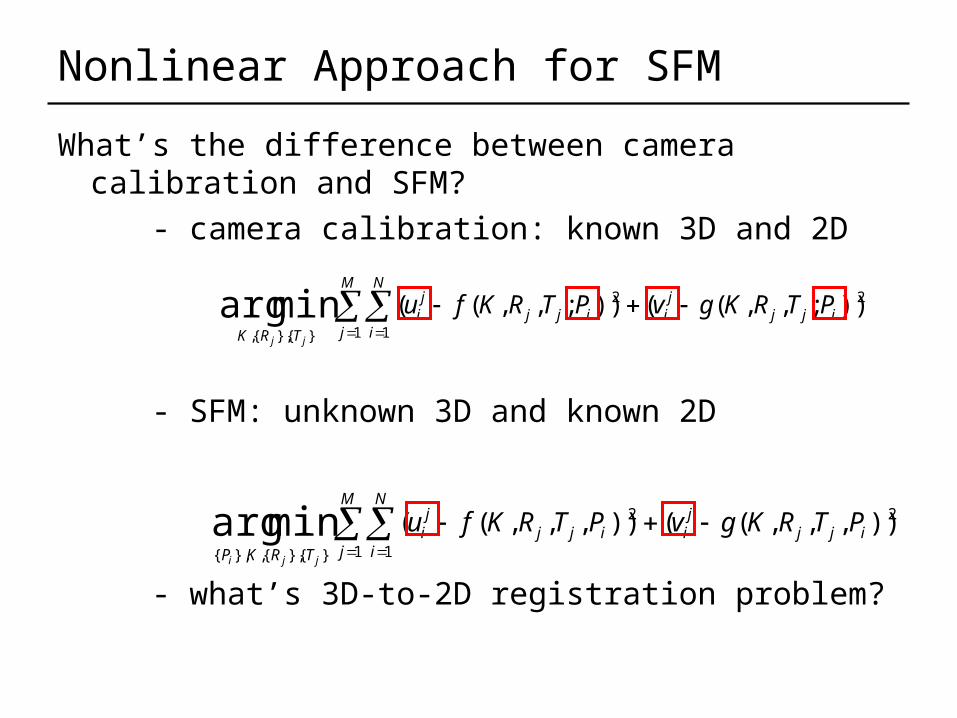
What’s the difference between camera calibration and SFM?
- camera calibration: known 3D and 2D
- SFM: unknown 3D and known 2D
- what’s 3D-to-2D registration problem?
Nonlinear Approach for SFM
M
j
N
iijj
jiijj
ji
TRKP
PTRKgvPTRKfujji
1 1
22
}{},{,},{
)),,,(()),,,((minarg
M
j
N
iijj
jiijj
ji
TRK
PTRKgvPTRKfujj
1 1
22
}{},{,
));,,(());,,((minarg
What’s the difference between camera calibration and SFM?
- camera calibration: known 3D and 2D
- SFM: unknown 3D and known 2D
- what’s 3D-to-2D registration problem?
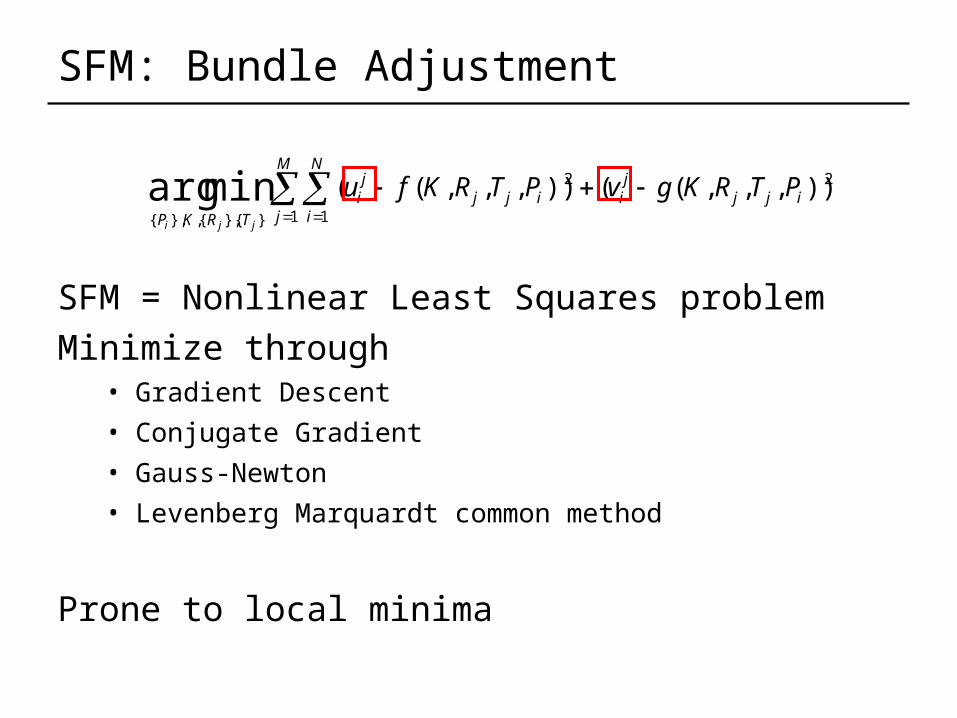
SFM: Bundle Adjustment
SFM = Nonlinear Least Squares problem
Minimize through• Gradient Descent
• Conjugate Gradient
• Gauss-Newton
• Levenberg Marquardt common method
Prone to local minima
M
j
N
iijj
jiijj
ji
TRKP
PTRKgvPTRKfujji
1 1
22
}{},{,},{
)),,,(()),,,((minarg
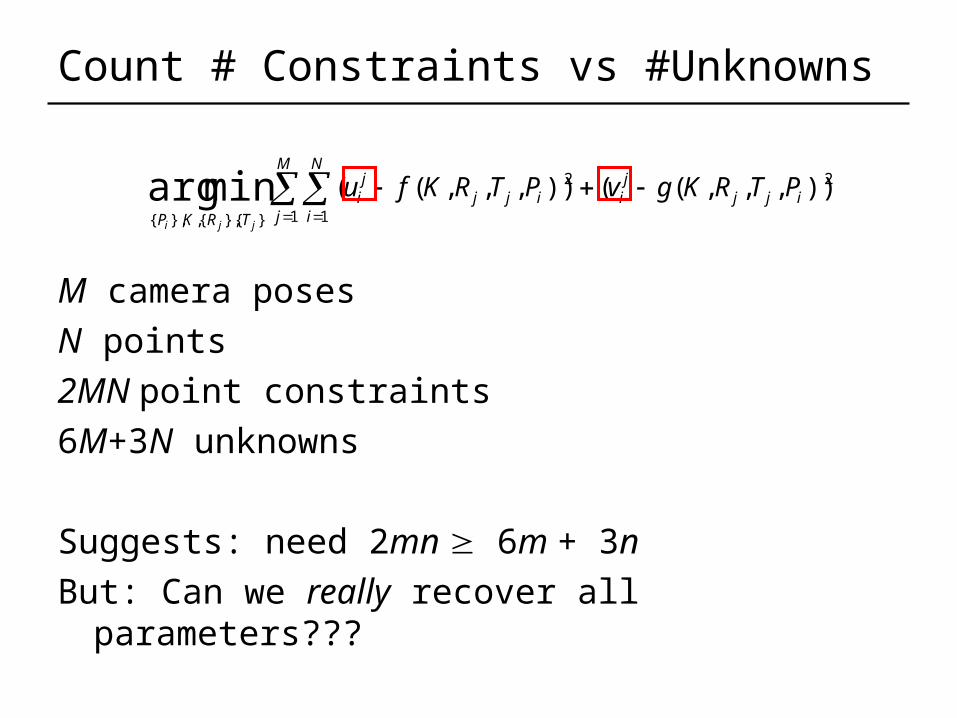
Count # Constraints vs #Unknowns
M camera poses
N points
2MN point constraints
6M+3N unknowns
Suggests: need 2mn 6m + 3n
But: Can we really recover all parameters???
M
j
N
iijj
jiijj
ji
TRKP
PTRKgvPTRKfujji
1 1
22
}{},{,},{
)),,,(()),,,((minarg
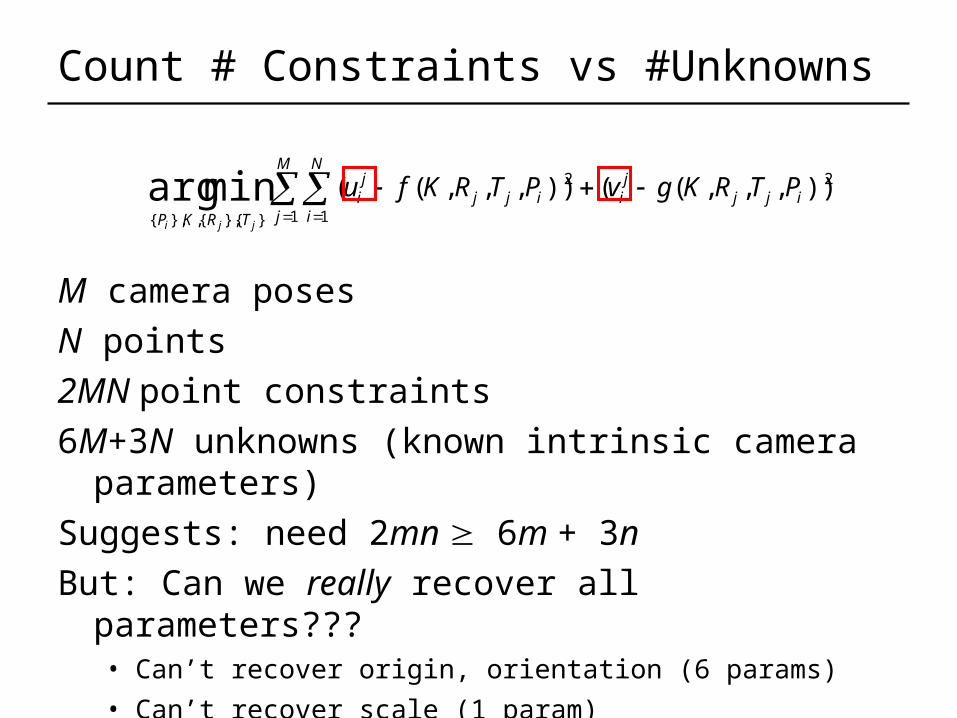
Count # Constraints vs #Unknowns
M camera poses
N points
2MN point constraints
6M+3N unknowns (known intrinsic camera parameters)
Suggests: need 2mn 6m + 3n
But: Can we really recover all parameters???• Can’t recover origin, orientation (6 params)
• Can’t recover scale (1 param)
Thus, we need 2mn 6m + 3n - 7
M
j
N
iijj
jiijj
ji
TRKP
PTRKgvPTRKfujji
1 1
22
}{},{,},{
)),,,(()),,,((minarg
Are We Done?
No, bundle adjustment has many local minima.
SFM Using Factorization
12
1
2
1
i
i
i
T
T
i
i
z
y
x
t
t
r
r
v
u
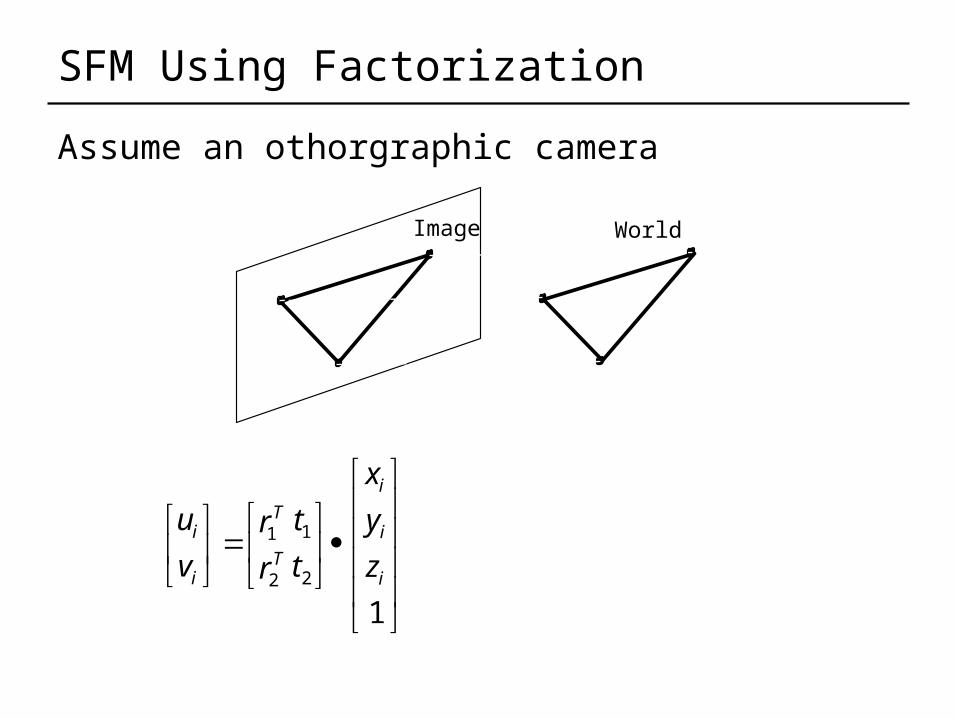
Assume an othorgraphic camera
Image World
SFM Using Factorization
12
1
2
1
i
i
i
T
T
i
i
z
y
x
t
t
r
r
v
u
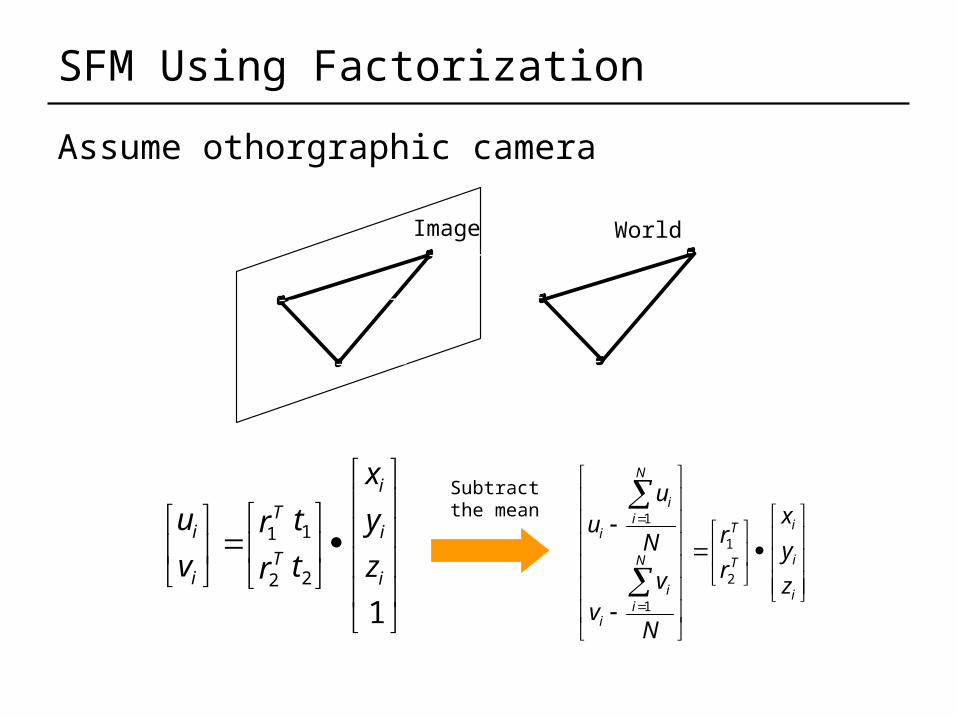
Assume othorgraphic camera
Image World
i
i
i
T
T
N
ii
i
N
ii
i
z
y
x
r
r
N
vv
N
uu
2
1
1
1
Subtract the mean
SFM Using Factorization
N
N
N
T
T
N
N
z
y
x
z
y
x
z
y
x
r
r
v
u
v
u
v
u
...
...
...
~
~
...
...~
~
~
~
2
2
2
1
1
1
2
1
2
2
1
1
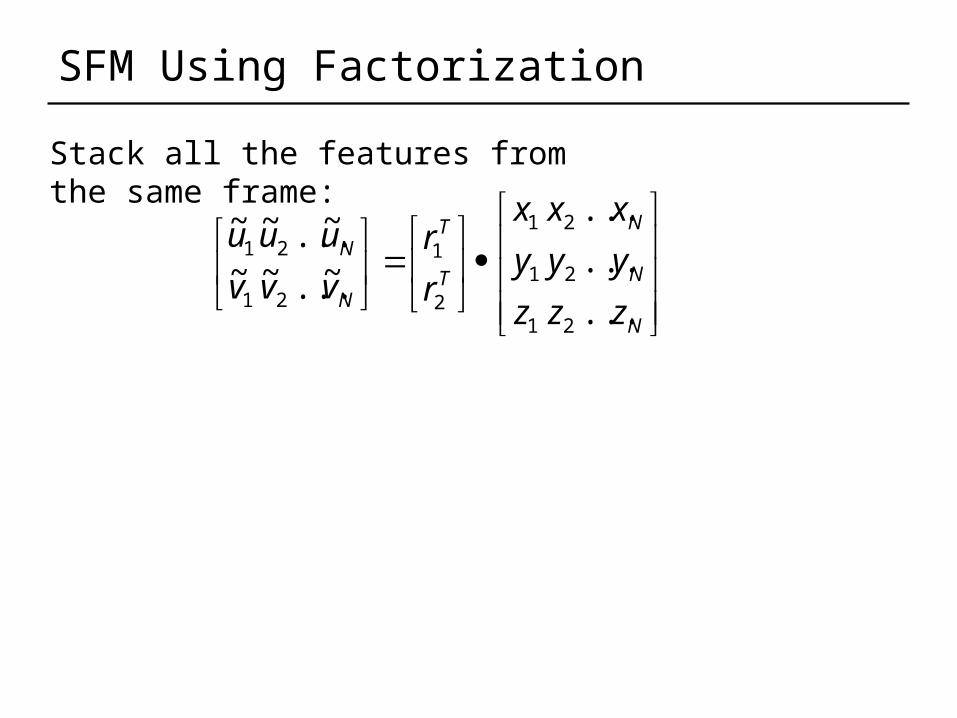
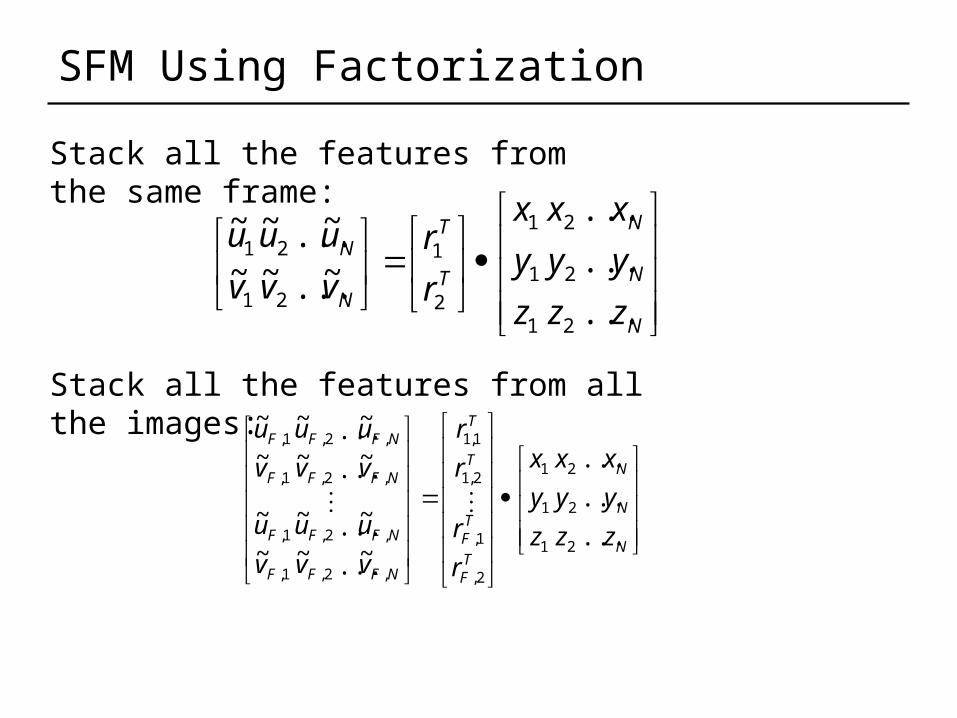
Stack all the features from the same frame:
SFM Using Factorization
N
N
N
T
T
N
N
z
y
x
z
y
x
z
y
x
r
r
v
u
v
u
v
u
...
...
...
~
~
...
...~
~
~
~
2
2
2
1
1
1
2
1
2
2
1
1
N
N
N
TF
TF
T
T
NF
NF
F
F
F
F
NF
NF
F
F
F
F
z
y
x
z
y
x
z
y
x
r
r
r
r
v
u
v
u
v
u
v
u
v
u
v
u
...
...
...
~
~
...
...~
~
~
~
~
~
...
...~
~
~
~
2
2
2
1
1
1
2,
1,
2,1
1,1
,
,
2,
2,
1,
1,
,
,
2,
2,
1,
1,
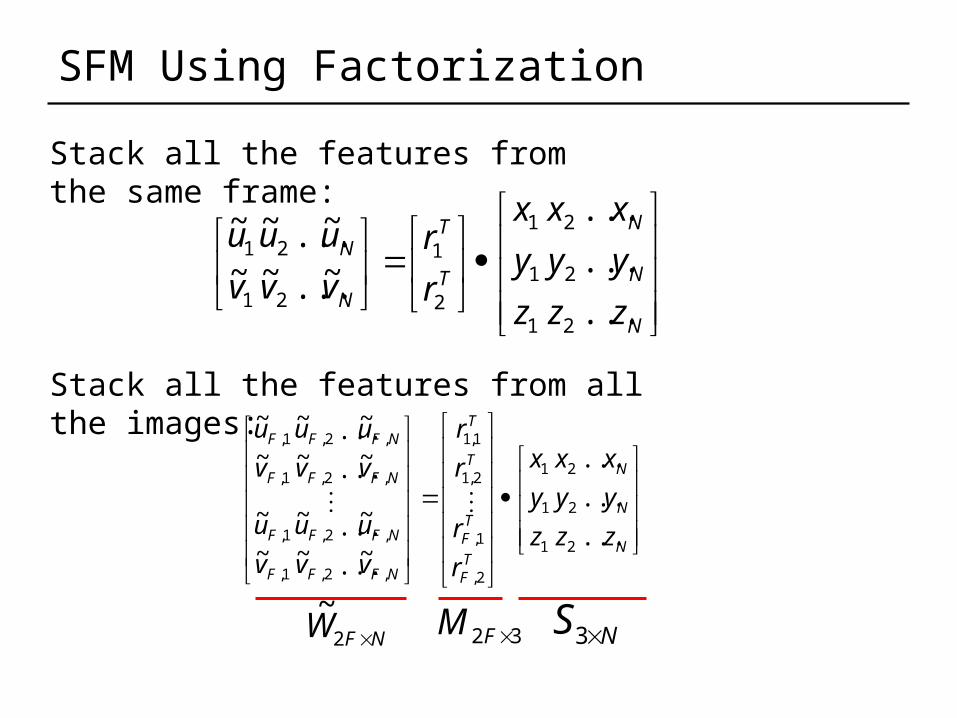
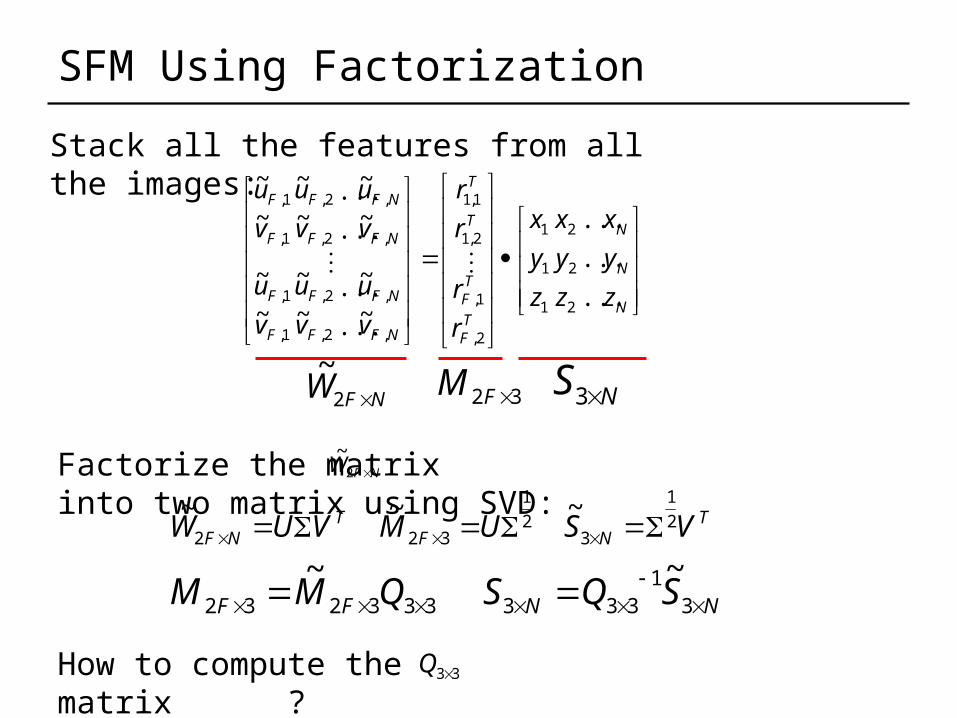
Stack all the features from the same frame:
Stack all the features from all the images:
W
SFM Using Factorization
N
N
N
T
T
N
N
z
y
x
z
y
x
z
y
x
r
r
v
u
v
u
v
u
...
...
...
~
~
...
...~
~
~
~
2
2
2
1
1
1
2
1
2
2
1
1
N
N
N
TF
TF
T
T
NF
NF
F
F
F
F
NF
NF
F
F
F
F
z
y
x
z
y
x
z
y
x
r
r
r
r
v
u
v
u
v
u
v
u
v
u
v
u
...
...
...
~
~
...
...~
~
~
~
~
~
...
...~
~
~
~
2
2
2
1
1
1
2,
1,
2,1
1,1
,
,
2,
2,
1,
1,
,
,
2,
2,
1,
1,
NFW 2
~
Stack all the features from the same frame:
Stack all the features from all the images:
W
32 FM NS 3
SFM Using Factorization
N
N
N
TF
TF
T
T
NF
NF
F
F
F
F
NF
NF
F
F
F
F
z
y
x
z
y
x
z
y
x
r
r
r
r
v
u
v
u
v
u
v
u
v
u
v
u
...
...
...
~
~
...
...~
~
~
~
~
~
...
...~
~
~
~
2
2
2
1
1
1
2,
1,
2,1
1,1
,
,
2,
2,
1,
1,
,
,
2,
2,
1,
1,
NFW 2
~32 FM
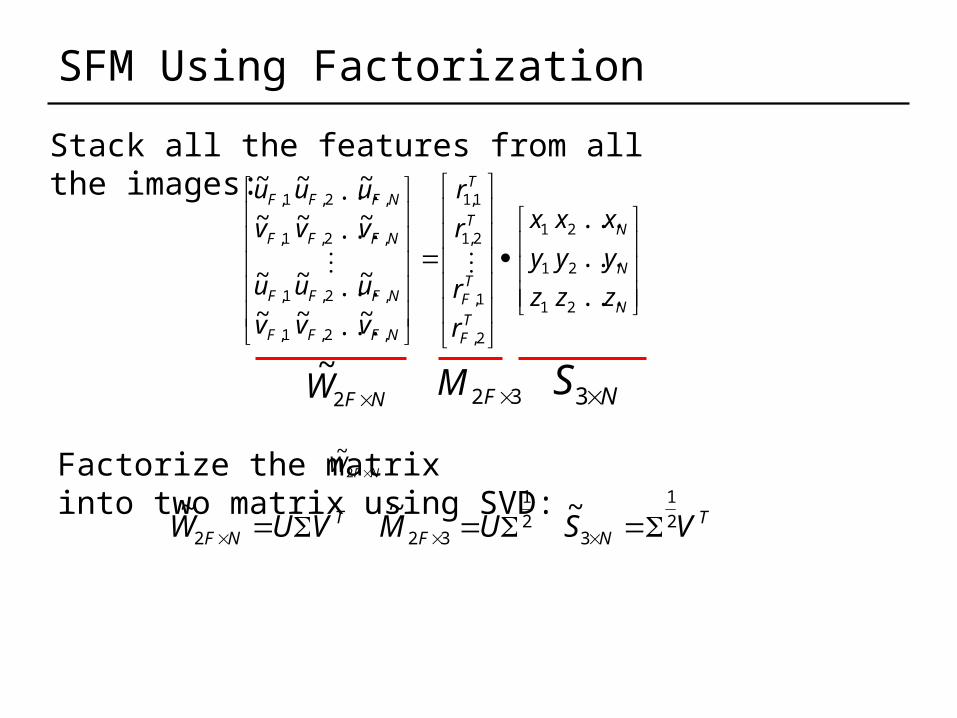
Stack all the features from all the images:
W
NS 3
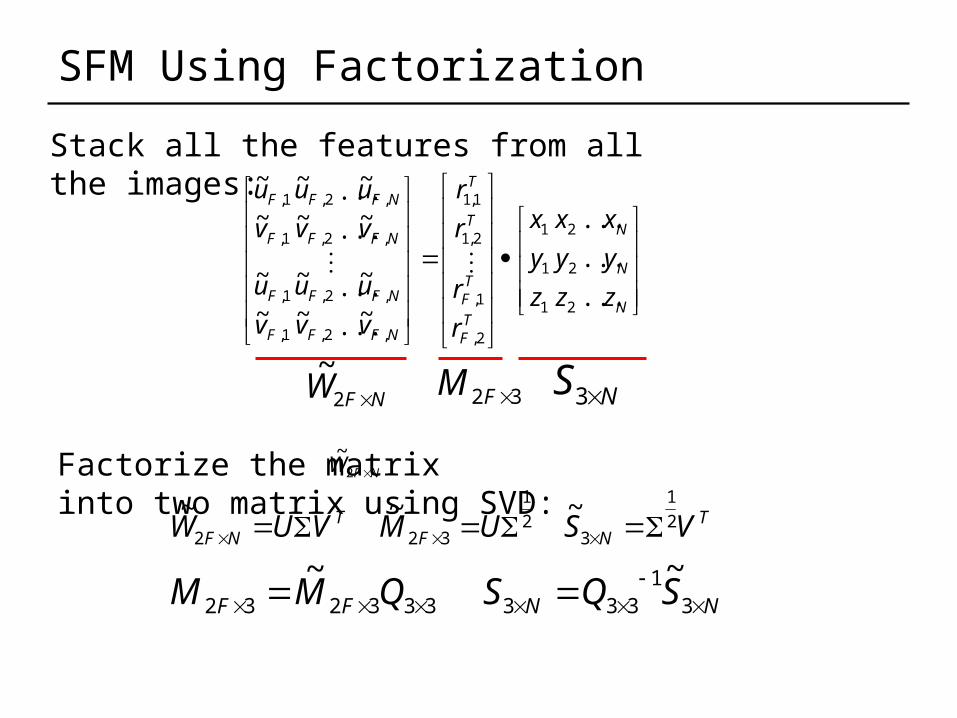
Factorize the matrix into two matrix using SVD:
NFW 2
~
TNF
TNF VSUMVUW 2
1
32
1
322
~~~
SFM Using Factorization
N
N
N
TF
TF
T
T
NF
NF
F
F
F
F
NF
NF
F
F
F
F
z
y
x
z
y
x
z
y
x
r
r
r
r
v
u
v
u
v
u
v
u
v
u
v
u
...
...
...
~
~
...
...~
~
~
~
~
~
...
...~
~
~
~
2
2
2
1
1
1
2,
1,
2,1
1,1
,
,
2,
2,
1,
1,
,
,
2,
2,
1,
1,
NFW 2
~32 FM
Stack all the features from all the images:
NS 3
Factorize the matrix into two matrix using SVD:
NFW 2
~
TNF
TNF VSUMVUW 2
1
32
1
322
~~~
NNFF SQSQMM
31
333333232
~~
SFM Using Factorization
N
N
N
TF
TF
T
T
NF
NF
F
F
F
F
NF
NF
F
F
F
F
z
y
x
z
y
x
z
y
x
r
r
r
r
v
u
v
u
v
u
v
u
v
u
v
u
...
...
...
~
~
...
...~
~
~
~
~
~
...
...~
~
~
~
2
2
2
1
1
1
2,
1,
2,1
1,1
,
,
2,
2,
1,
1,
,
,
2,
2,
1,
1,
NFW 2
~32 FM
Stack all the features from all the images:
W
NS 3
Factorize the matrix into two matrix using SVD:
NFW 2
~
TNF
TNF VSUMVUW 2
1
32
1
322
~~~
NNFF SQSQMM
31
333333232
~~
How to compute the matrix ? 33Q
SFM Using Factorization
2,2,2,11,1
2,
1,
2,1
1,1
3232 FF
TF
TF
T
T
TFF rrrr
r
r
r
r
MM
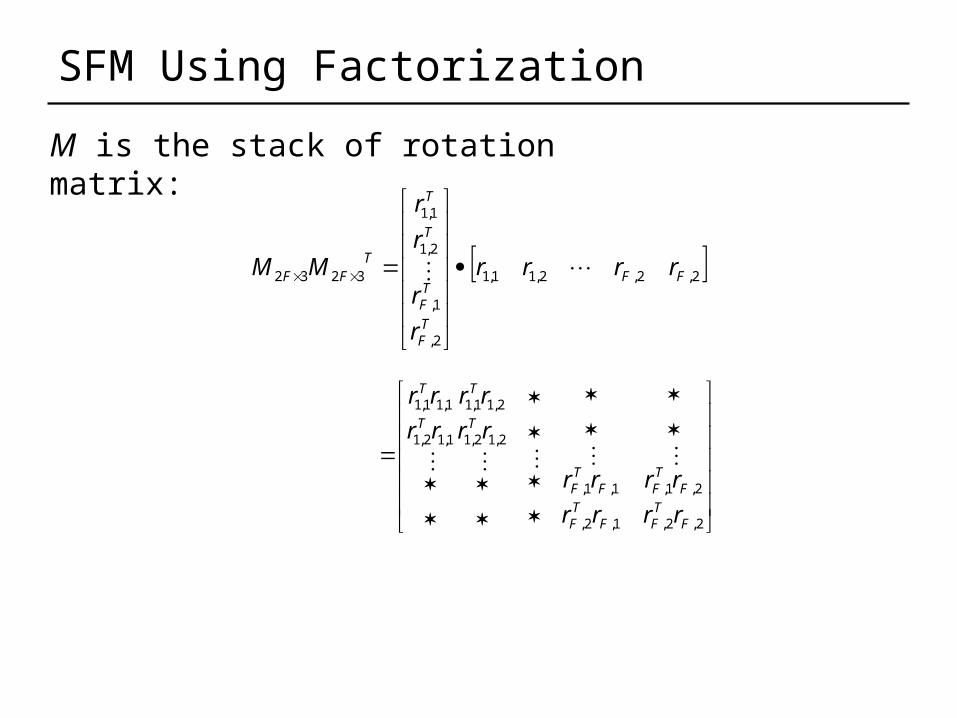
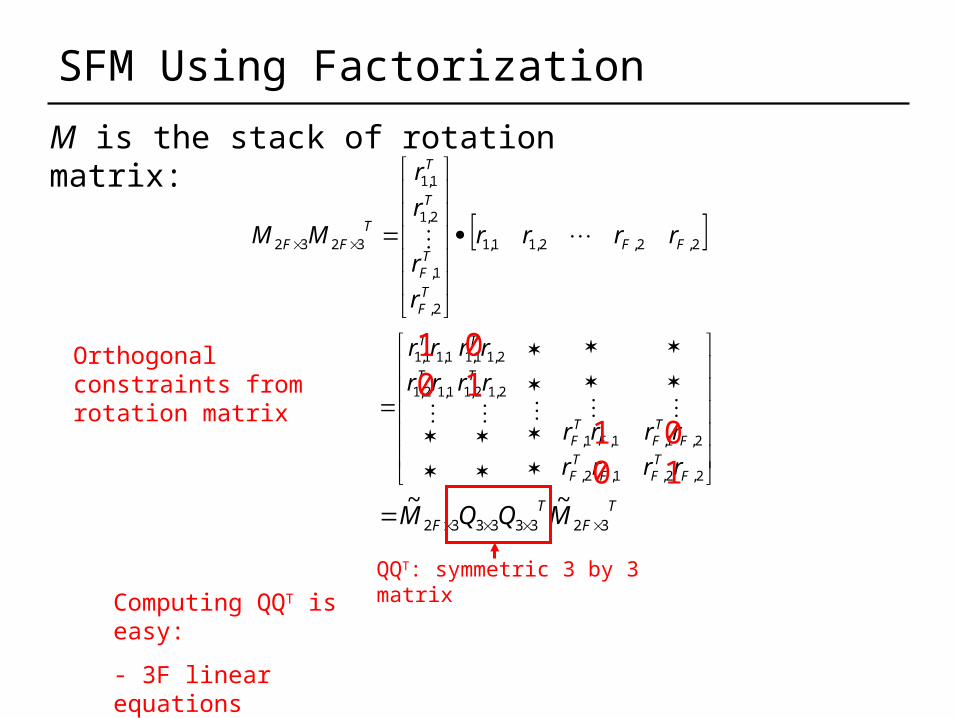
M is the stack of rotation matrix:
2,2,
2,1,
1,2,
1,1,
2,12,1
2,11,1
1,12,1
1,11,1
FTF
FTF
FTF
FTF
T
T
T
T
rr
rr
rr
rr
rr
rr
rr
rr
SFM Using Factorization
2,2,2,11,1
2,
1,
2,1
1,1
3232 FF
TF
TF
T
T
TFF rrrr
r
r
r
r
MM
M is the stack of rotation matrix:
2,2,
2,1,
1,2,
1,1,
2,12,1
2,11,1
1,12,1
1,11,1
FTF
FTF
FTF
FTF
T
T
T
T
rr
rr
rr
rr
rr
rr
rr
rr
1 010
1 010
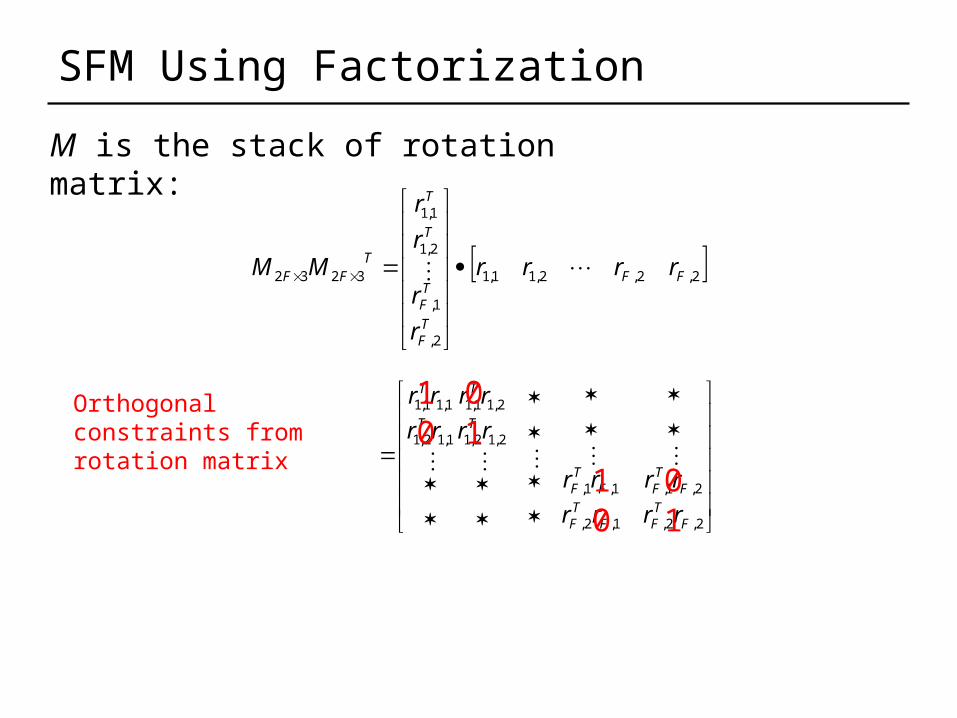
Orthogonal constraints from rotation matrix
SFM Using Factorization
2,2,2,11,1
2,
1,
2,1
1,1
3232 FF
TF
TF
T
T
TFF rrrr
r
r
r
r
MM
2,2,
2,1,
1,2,
1,1,
2,12,1
2,11,1
1,12,1
1,11,1
FTF
FTF
FTF
FTF
T
T
T
T
rr
rr
rr
rr
rr
rr
rr
rr
M is the stack of rotation matrix:
1 010
1 010
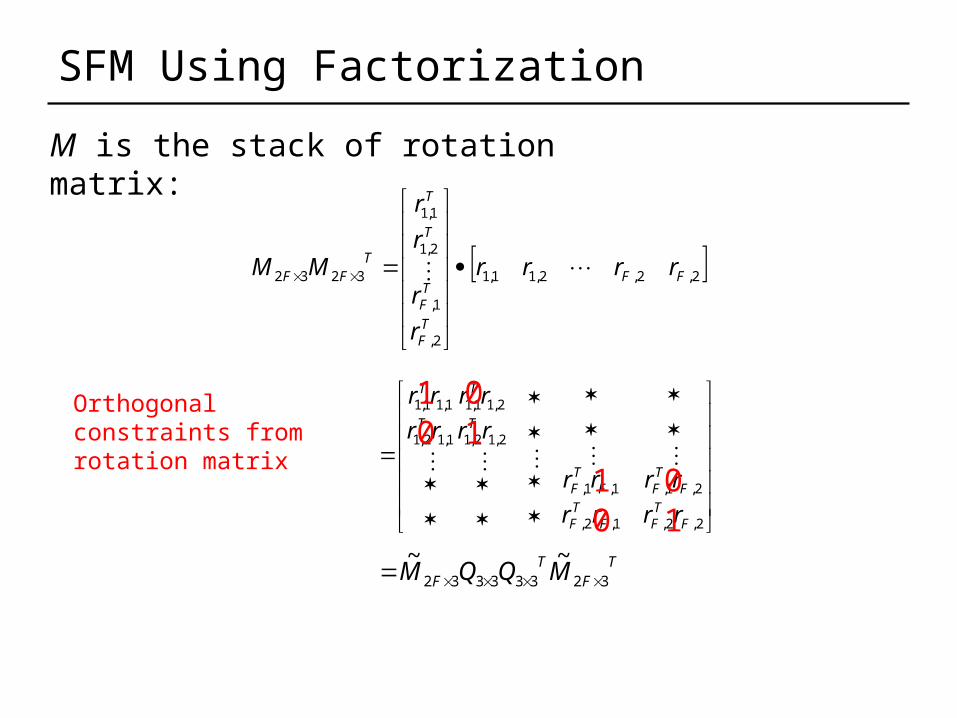
Orthogonal constraints from rotation matrix
TF
TF MQQM 32333332
~~
SFM Using Factorization
TF
TF MQQM 32333332
~~
2,2,
2,1,
1,2,
1,1,
2,12,1
2,11,1
1,12,1
1,11,1
FTF
FTF
FTF
FTF
T
T
T
T
rr
rr
rr
rr
rr
rr
rr
rr
1 010
1 010
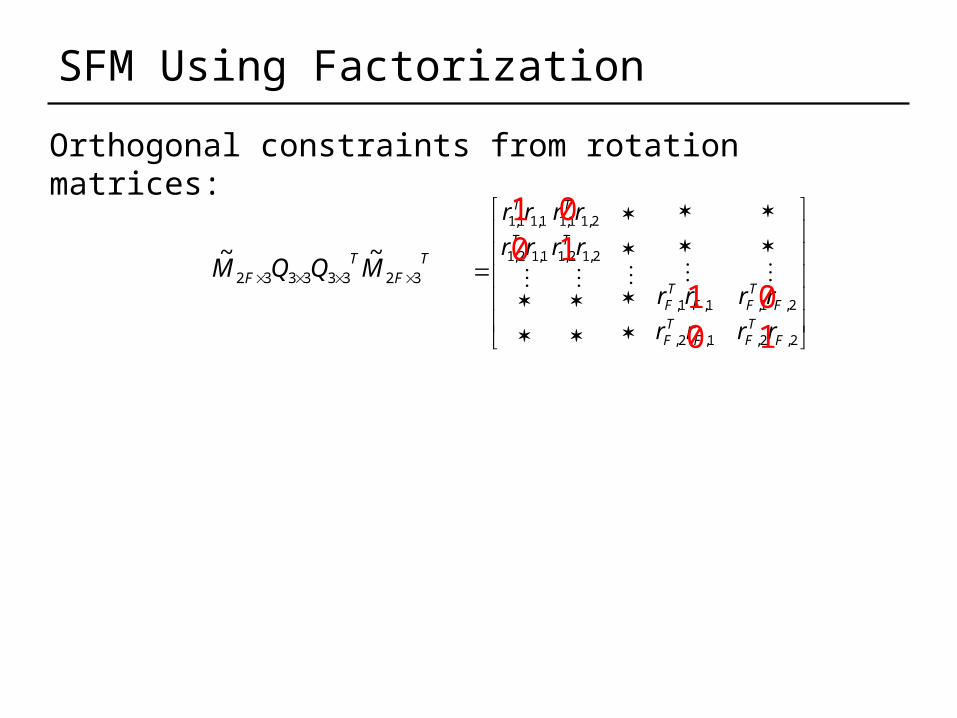
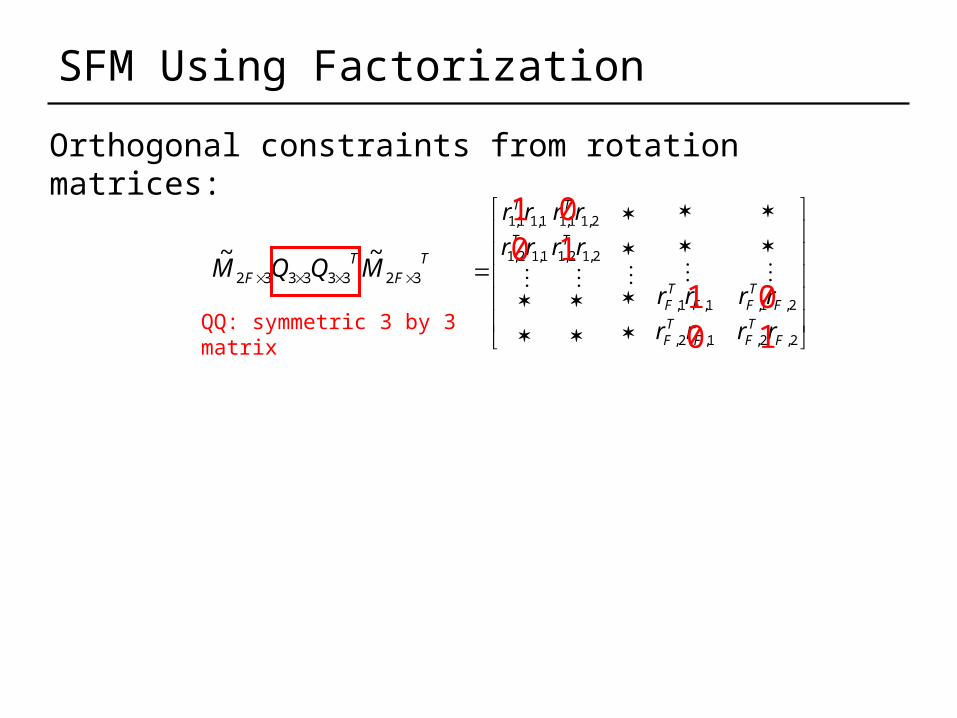
Orthogonal constraints from rotation matrices:
SFM Using Factorization
TF
TF MQQM 32333332
~~
2,2,
2,1,
1,2,
1,1,
2,12,1
2,11,1
1,12,1
1,11,1
FTF
FTF
FTF
FTF
T
T
T
T
rr
rr
rr
rr
rr
rr
rr
rr
1 010
1 010
Orthogonal constraints from rotation matrices:
QQ: symmetric 3 by 3 matrix
SFM Using Factorization
TF
TF MQQM 32333332
~~
2,2,
2,1,
1,2,
1,1,
2,12,1
2,11,1
1,12,1
1,11,1
FTF
FTF
FTF
FTF
T
T
T
T
rr
rr
rr
rr
rr
rr
rr
rr
1 010
1 010
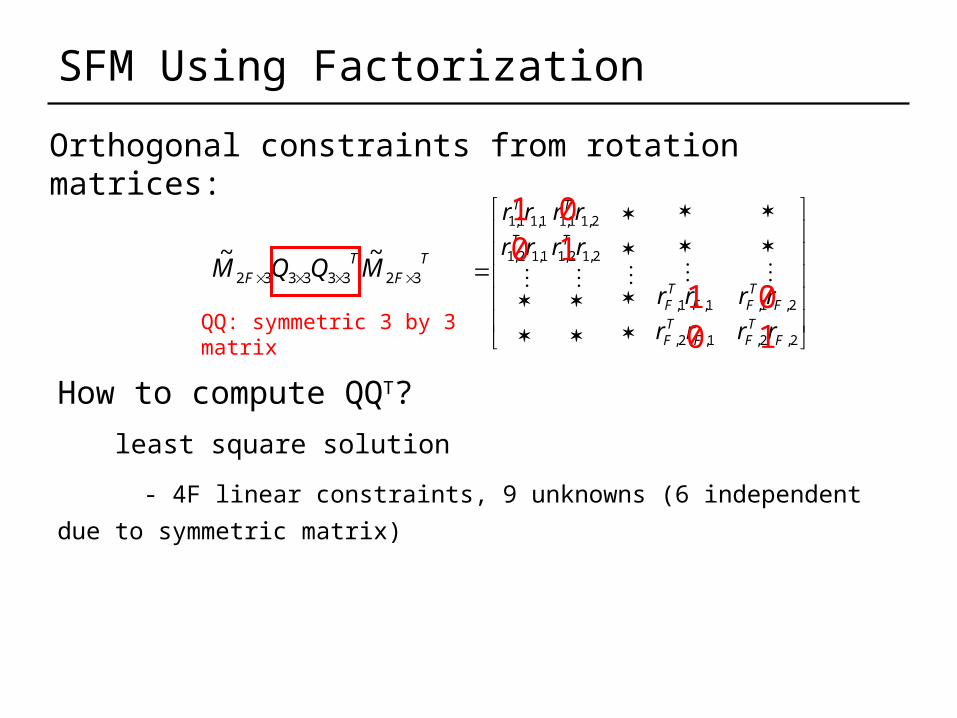
Orthogonal constraints from rotation matrices:
How to compute QQT?
least square solution
- 4F linear constraints, 9 unknowns (6 independent due to symmetric matrix)
QQ: symmetric 3 by 3 matrix
SFM Using Factorization
TF
TF MQQM 32333332
~~
2,2,
2,1,
1,2,
1,1,
2,12,1
2,11,1
1,12,1
1,11,1
FTF
FTF
FTF
FTF
T
T
T
T
rr
rr
rr
rr
rr
rr
rr
rr
1 010
1 010
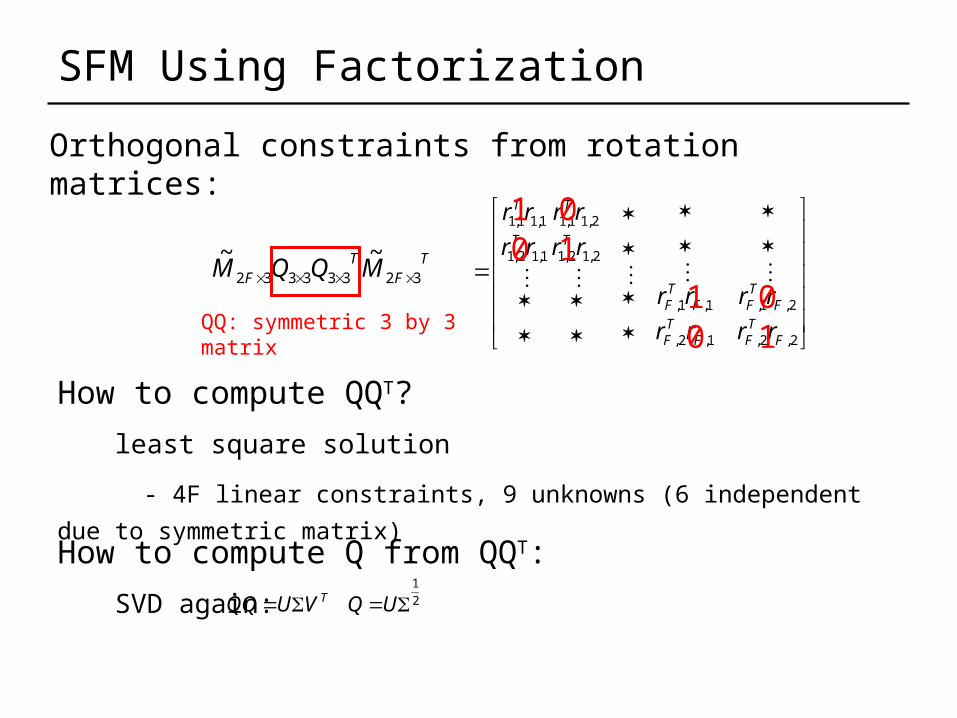
Orthogonal constraints from rotation matrices:
How to compute QQT?
least square solution
- 4F linear constraints, 9 unknowns (6 independent due to symmetric matrix) How to compute Q from QQT:
SVD again: 2
1
UQVUQQ T
QQ: symmetric 3 by 3 matrix
SFM Using Factorization
2,2,2,11,1
2,
1,
2,1
1,1
3232 FF
TF
TF
T
T
TFF rrrr
r
r
r
r
MM
2,2,
2,1,
1,2,
1,1,
2,12,1
2,11,1
1,12,1
1,11,1
FTF
FTF
FTF
FTF
T
T
T
T
rr
rr
rr
rr
rr
rr
rr
rr
M is the stack of rotation matrix:
1 010
1 010
Orthogonal constraints from rotation matrix
TF
TF MQQM 32333332
~~
QQT: symmetric 3 by 3 matrix
Computing QQT is easy:
- 3F linear equations
- 6 independent unknowns
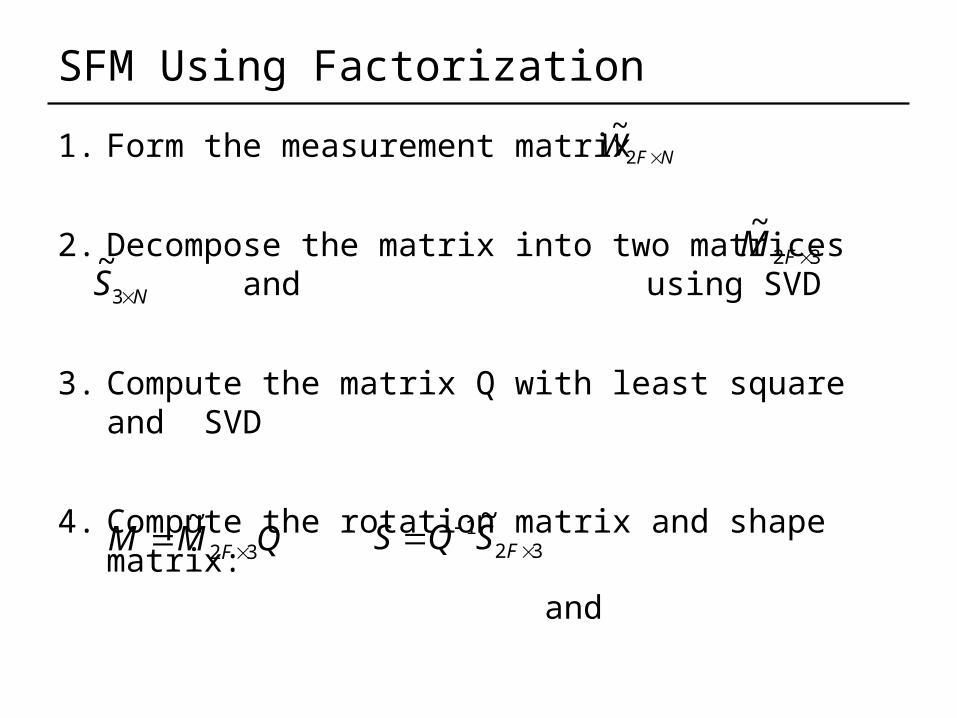
SFM Using Factorization
1. Form the measurement matrix
2. Decompose the matrix into two matrices and using SVD
3. Compute the matrix Q with least square and SVD
4. Compute the rotation matrix and shape matrix:
and
NFW 2
~
NS 3
~ 32
~FM
QMM F 32
~ 32
1 ~
FSQS
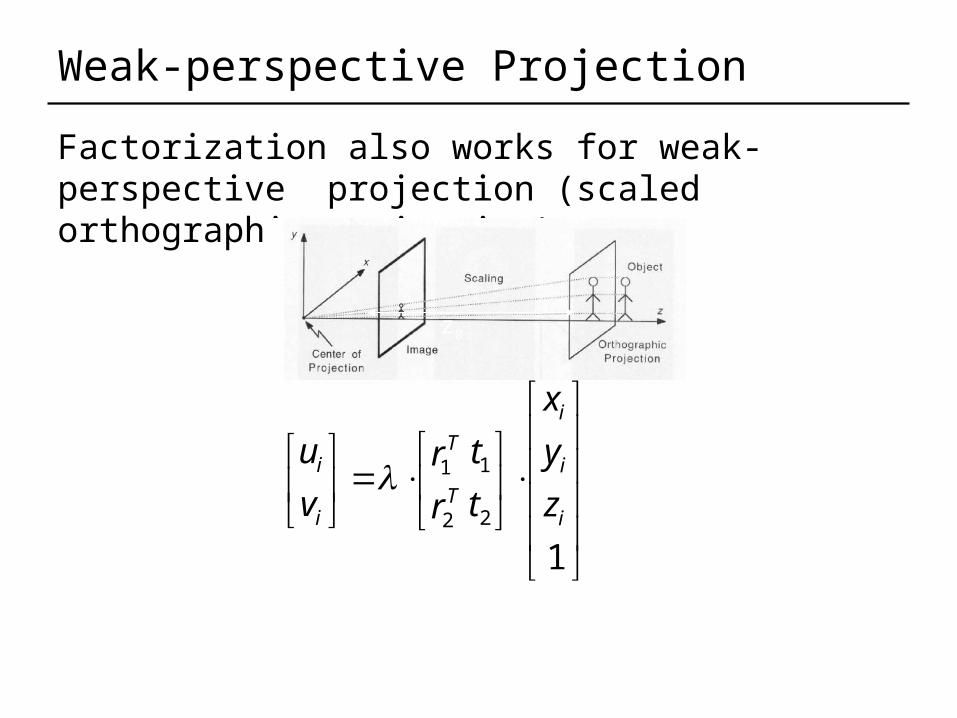
Weak-perspective Projection
Factorization also works for weak-perspective projection (scaled orthographic projection):
d z0
12
1
2
1
i
i
i
T
T
i
i
z
y
x
t
t
r
r
v
u
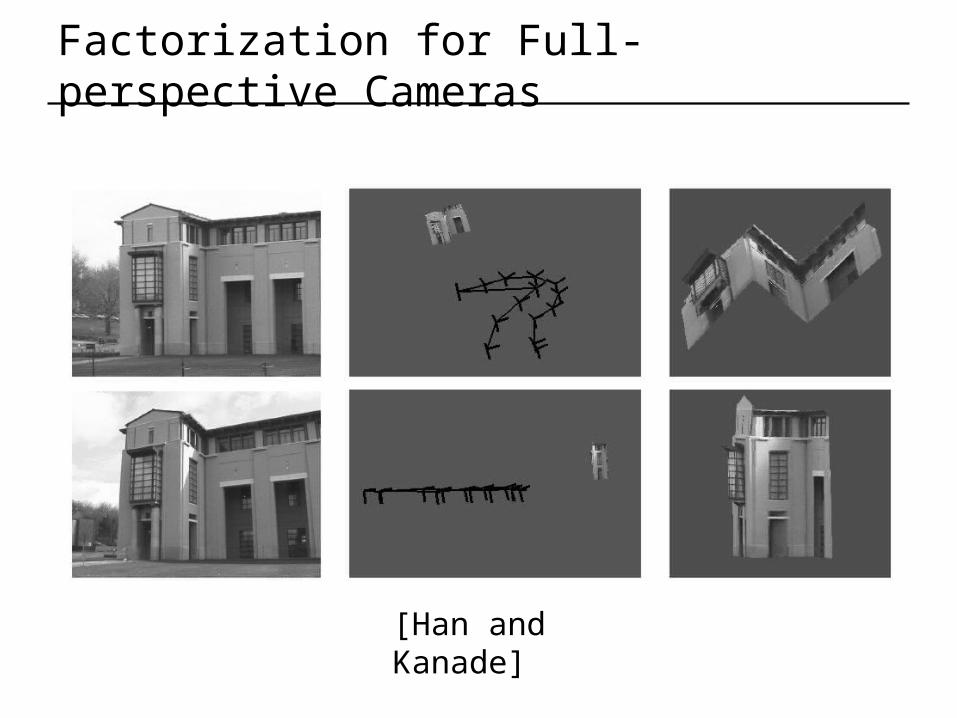
Factorization for Full-perspective Cameras
[Han and Kanade]
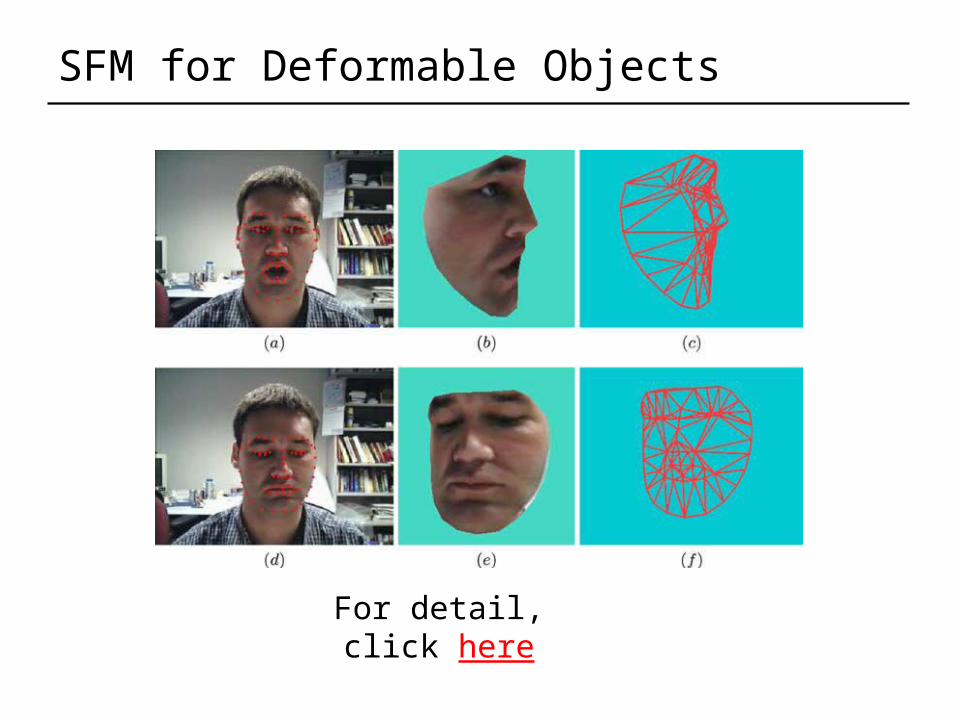
SFM for Deformable Objects
For detail, click here
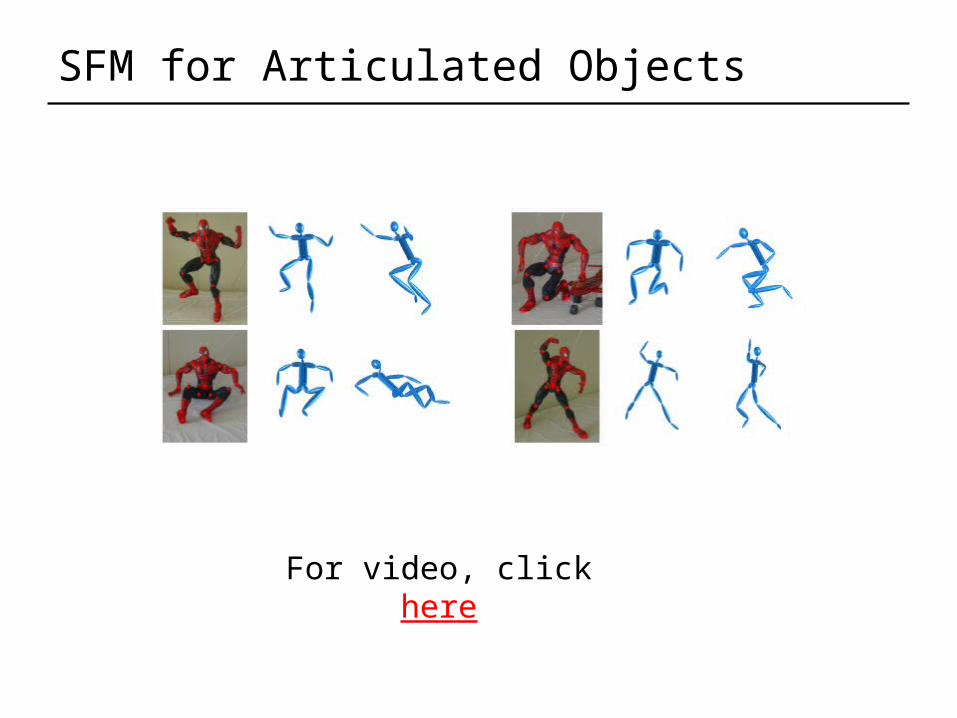
SFM for Articulated Objects
For video, click here
SFM Using Factorization
Bundle adjustment (nonlinear optimization) - work with perspective camera model - work with incomplete data - prone to local minima
Factorization: - closed-form solution for weak perspective camera - simple and efficient - usually need complete data - becomes complicated for full-perspective camera model
Phil Torr’s structure from motion toolkit in matlab (click here)
Voodoo camera tracker (click here)
All Together Video
Click here
- feature detection
- feature matching (epipolar geometry)
- structure from motion
- stereo reconstruction
- triangulation
- texture mapping