chap 6 motion capture (mocap)
DESCRIPTION
Chap 6 Motion Capture (Mocap). What is motion capture?. Key-frames, forward kinematics, inverse kinematics A daunting task for creating physically realistic motion Requires a large amount of animation talent Record the motion and map it into a synthetic object Much easier Realistic motion. - PowerPoint PPT PresentationTRANSCRIPT

Chap 6Motion Capture (Mocap)
Animation (U) Chap 6 Animation (U) Chap 6 Motion CaptureMotion Capture 1

CS, NCTU, J. H. Chuang2
What is motion capture? Key-frames, forward kinematics, inverse
kinematics A daunting task for creating physically realistic
motion Requires a large amount of animation talent
Record the motion and map it into a synthetic object Much easier Realistic motion
Animation (U) Chap 6 Motion CaptureAnimation (U) Chap 6 Motion Capture
CS, NCTU, J. H. Chuang3
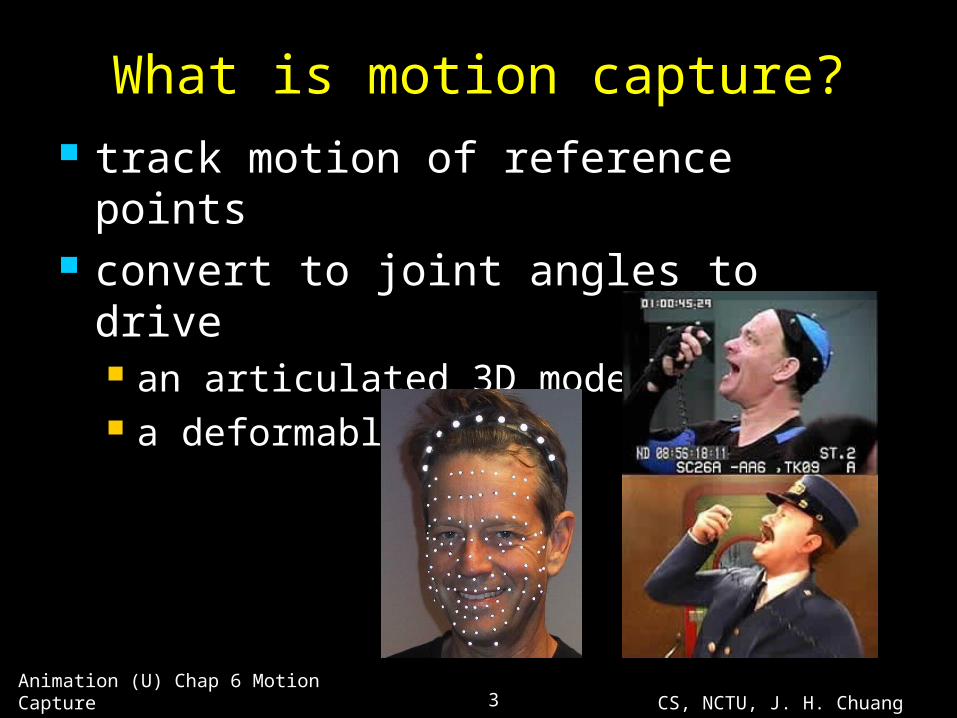
What is motion capture? track motion of reference points convert to joint angles to drive
an articulated 3D model a deformable surface
Animation (U) Chap 6 Motion CaptureAnimation (U) Chap 6 Motion Capture

CS, NCTU, J. H. Chuang4
What is motion capture? Objective
Reconstruct the 3D motion of a physical object and apply it to a synthetic object
Recording 3D live action, including whole body face hands animals
Animation (U) Chap 6 Motion CaptureAnimation (U) Chap 6 Motion Capture
CS, NCTU, J. H. Chuang5
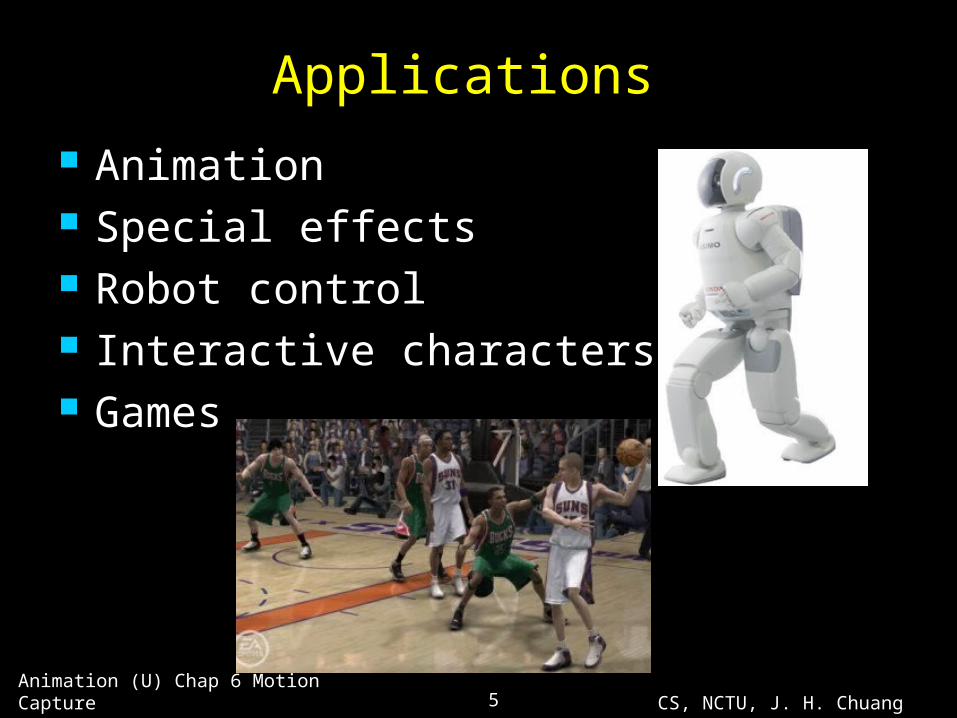
Applications
Animation Special effects Robot control Interactive characters Games
Animation (U) Chap 6 Motion CaptureAnimation (U) Chap 6 Motion Capture
CS, NCTU, J. H. Chuang6
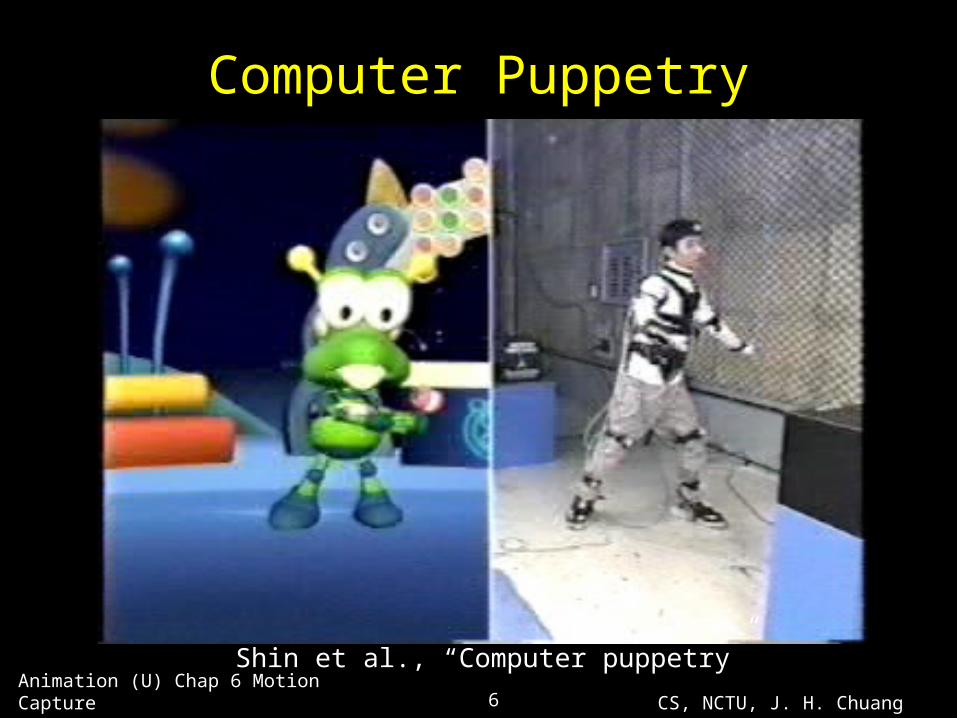
Computer Puppetry
Shin et al., “Computer puppetry”
Animation (U) Chap 6 Motion CaptureAnimation (U) Chap 6 Motion Capture

CS, NCTU, J. H. Chuang7
VideoOptical Motion Capture in Games
Animation (U) Chap 6 Motion CaptureAnimation (U) Chap 6 Motion Capture

CS, NCTU, J. H. Chuang8
Video: Lord of the rings: Gollum
Animation (U) Chap 6 Motion CaptureAnimation (U) Chap 6 Motion Capture
CS, NCTU, J. H. Chuang9
Video
Facial Mocap in King Kong
Animation (U) Chap 6 Motion CaptureAnimation (U) Chap 6 Motion Capture

CS, NCTU, J. H. Chuang10
Video: Irobot
Animation (U) Chap 6 Motion CaptureAnimation (U) Chap 6 Motion Capture

CS, NCTU, J. H. Chuang11
Pros and Cons of Motion Capture
Pros All fine details of human motion will be recorded
-- if they can be captured Cons
Not so easy to Edit Generalize Control
Not cheap
Animation (U) Chap 6 Motion CaptureAnimation (U) Chap 6 Motion Capture

CS, NCTU, J. H. Chuang12
What is captured?
What do we need to know? X,Y,Z roll, pitch, yaw
Errors cause Joints to come apart Links to grow/shrink Bad contact points
Animation (U) Chap 6 Motion CaptureAnimation (U) Chap 6 Motion Capture

CS, NCTU, J. H. Chuang13
What is captured?
Large and small scale
Animation (U) Chap 6 Motion CaptureAnimation (U) Chap 6 Motion Capture

CS, NCTU, J. H. Chuang14
How to use the data?
Off-line Processed by filtering, inverse kinemtics Produce libraries of motion trajectories
Choose among them Blend between them Modify on the fly
On-line (performance animation) Driving character directly based on what actor
does in real time
Animation (U) Chap 6 Motion CaptureAnimation (U) Chap 6 Motion Capture

CS, NCTU, J. H. Chuang15
History of the technology Recording motion for biomechanics
High accuracy Fewer recorded pints Hand digitizing film Supplement with force plate, muscle activity
Computer animation Rotoscoping
VR tracking technology Less accuracy required Fewer sensors
Animation (U) Chap 6 Motion CaptureAnimation (U) Chap 6 Motion Capture
CS, NCTU, J. H. Chuang16
Optical Motion Capture (Passive) Passive reflection
Camera Infrared, visible, or near infrared strobes High resolution (1 to 4 million pixels) 120-240 frames/sec (max 2000 frames/sec)
Not outdoors No glossy or reflective materials Tight clothing Occlusion of markers by limbs or props
Animation (U) Chap 6 Motion CaptureAnimation (U) Chap 6 Motion Capture

CS, NCTU, J. H. Chuang17
Optical Motion Capture (Active)
Active output of the LED No marker confusion problem Outdoor capture 120 frames/sec (128 markers or four persons) 480 frames/sec (32 markers or single person) 1/3 the cost of passive systems
Animation (U) Chap 6 Motion CaptureAnimation (U) Chap 6 Motion Capture
CS, NCTU, J. H. Chuang18
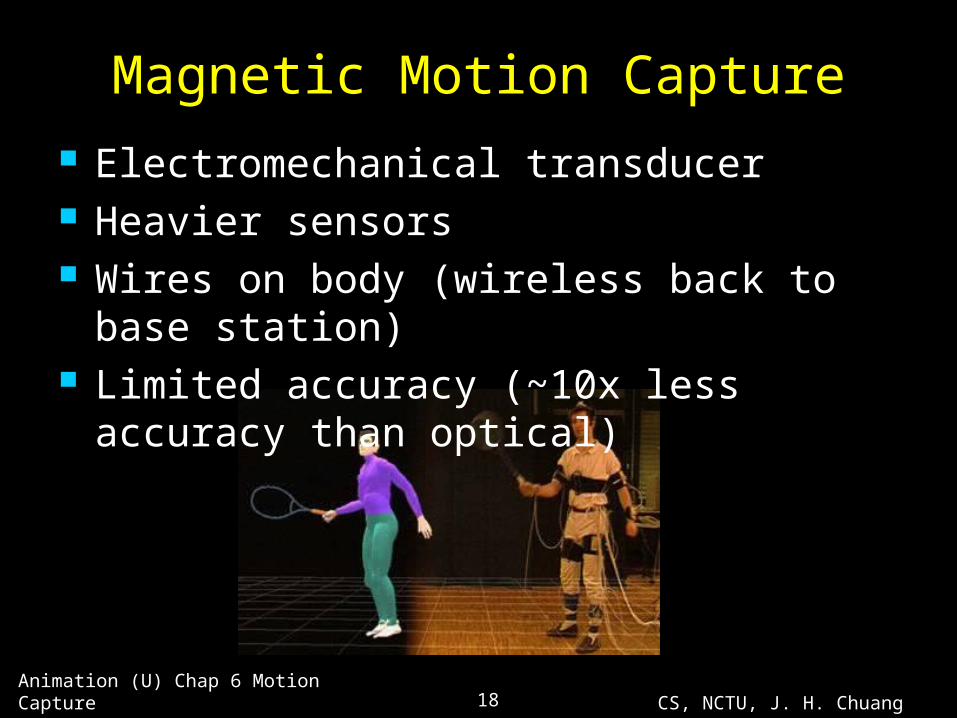
Magnetic Motion Capture
Electromechanical transducer Heavier sensors Wires on body (wireless back to base station) Limited accuracy (~10x less accuracy than
optical)
Animation (U) Chap 6 Motion CaptureAnimation (U) Chap 6 Motion Capture

CS, NCTU, J. H. Chuang19
Magnetic Motion Capture (cont.)
Smaller workspace Sensors are the cost Sensitive to EMI/metal Relatively cheaper than
optical device
Ascension MotionStar Wireless
Animation (U) Chap 6 Motion CaptureAnimation (U) Chap 6 Motion Capture
CS, NCTU, J. H. Chuang20
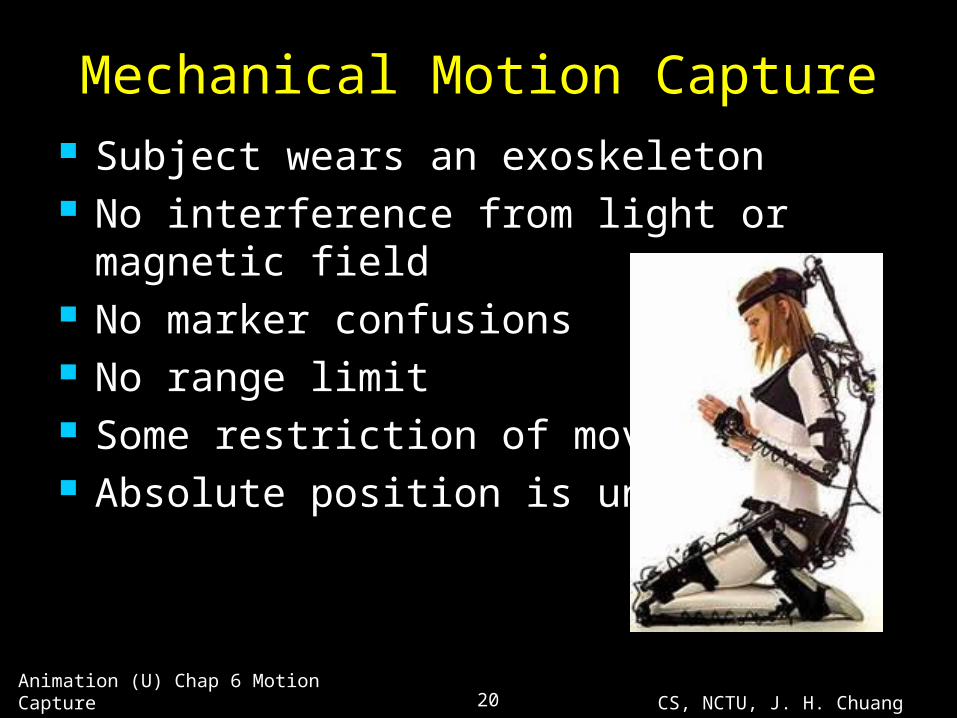
Mechanical Motion Capture Subject wears an exoskeleton No interference from light or magnetic field No marker confusions No range limit Some restriction of movement Absolute position is unknown
Animation (U) Chap 6 Motion CaptureAnimation (U) Chap 6 Motion Capture

CS, NCTU, J. H. Chuang21
Mechanical Motion Capture
Data glove Bend sensor + optical tracking 6 DOF
video
http://www.vrealities.com/glove.html
Animation (U) Chap 6 Motion CaptureAnimation (U) Chap 6 Motion Capture
CS, NCTU, J. H. Chuang22
Technology Issues
Resolution/range of motion Calibration Accuracy
Marker movement Sensor noise Restrictions on the environment Capture rate
Occlusion/correspondence
Animation (U) Chap 6 Motion CaptureAnimation (U) Chap 6 Motion Capture

CS, NCTU, J. H. Chuang23
Markers - Examples
Animation (U) Chap 6 Motion CaptureAnimation (U) Chap 6 Motion Capture

CS, NCTU, J. H. Chuang24
Skin Motion Capture Park & Hodgins, SIGGRAPH’06
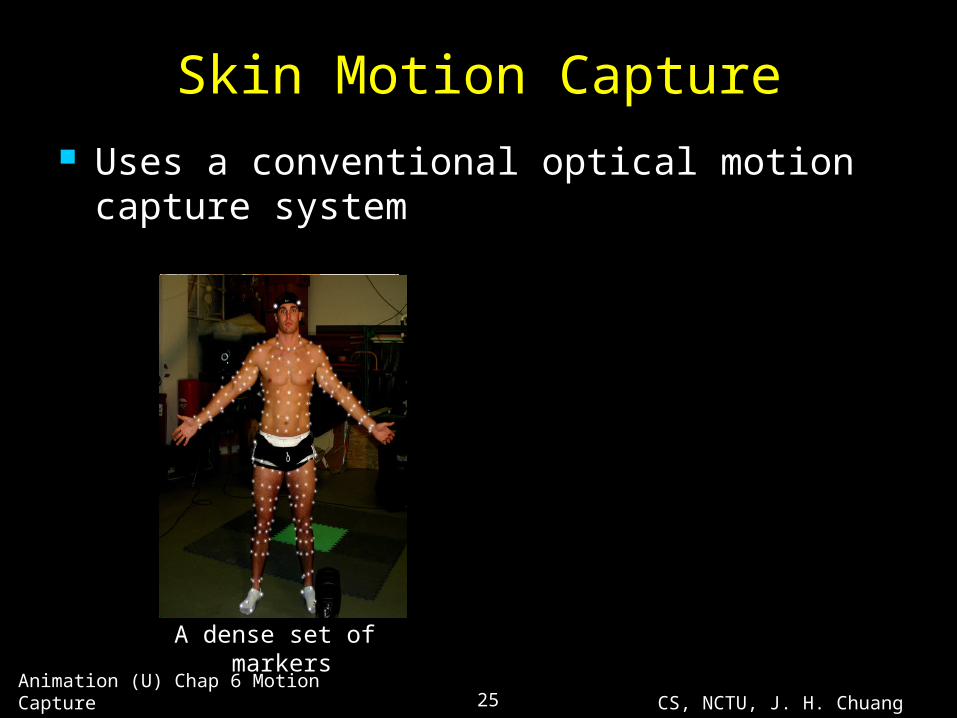
Uses a conventional optical motion capture system
40-60 markers
Animation (U) Chap 6 Motion CaptureAnimation (U) Chap 6 Motion Capture
CS, NCTU, J. H. Chuang25
Skin Motion Capture Uses a conventional optical motion capture system
A dense set of markers
Animation (U) Chap 6 Motion CaptureAnimation (U) Chap 6 Motion Capture

CS, NCTU, J. H. Chuang26
Skin Motion Capture Uses a conventional optical motion capture system
A dense set of markers
Animation (U) Chap 6 Motion CaptureAnimation (U) Chap 6 Motion Capture

CS, NCTU, J. H. Chuang27
Skin Motion Capture Uses a conventional optical motion capture system
A dense set of markers
Detailedsurface model
Animation (U) Chap 6 Motion CaptureAnimation (U) Chap 6 Motion Capture

CS, NCTU, J. H. Chuang28
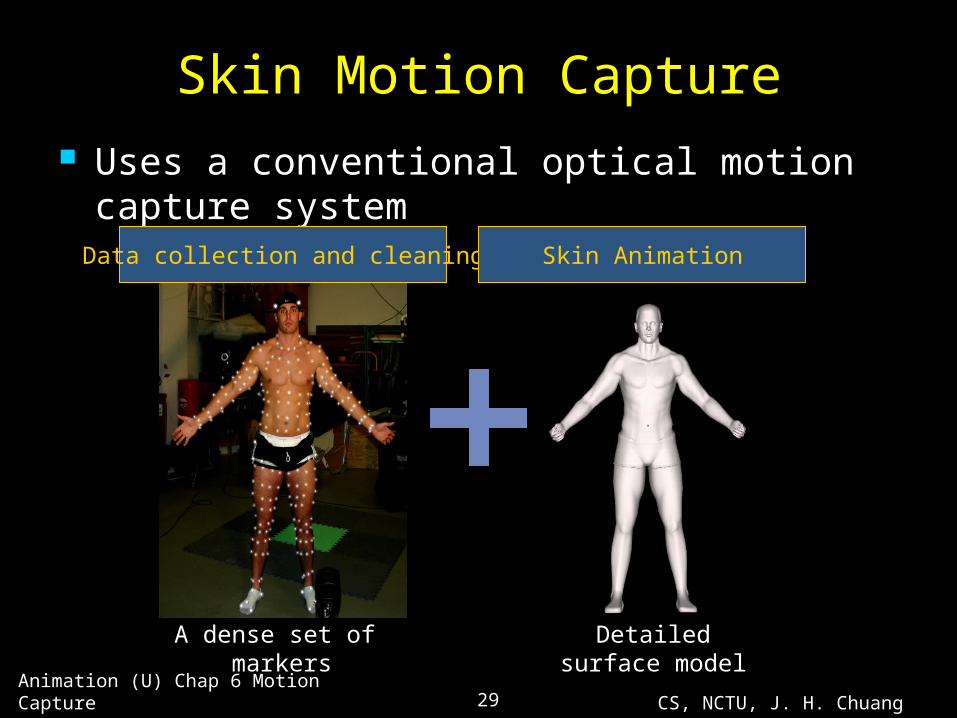
Skin Motion Capture Uses a conventional optical motion capture system
A dense set of markers
Detailedsurface model
Data collection and cleaning
Animation (U) Chap 6 Motion CaptureAnimation (U) Chap 6 Motion Capture
CS, NCTU, J. H. Chuang29
Skin Motion Capture Uses a conventional optical motion capture system
A dense set of markers
Detailedsurface model
Data collection and cleaning Skin Animation
Animation (U) Chap 6 Motion CaptureAnimation (U) Chap 6 Motion Capture

CS, NCTU, J. H. Chuang30
What is motion capture?Steps after motion is captured
Process 2D images to locate, identify, and correlated the markers in multiple video streams
Requires image processing techniques Reconstruct the 3D locations of the markers
Requires camera calibration Overcome numerical inaccuracies
Constrain the 3D marker locations to a model of physical system whose motion is being captured
Require satisfying constraints between relative marker positions
Animation (U) Chap 6 Motion CaptureAnimation (U) Chap 6 Motion Capture
CS, NCTU, J. H. Chuang31
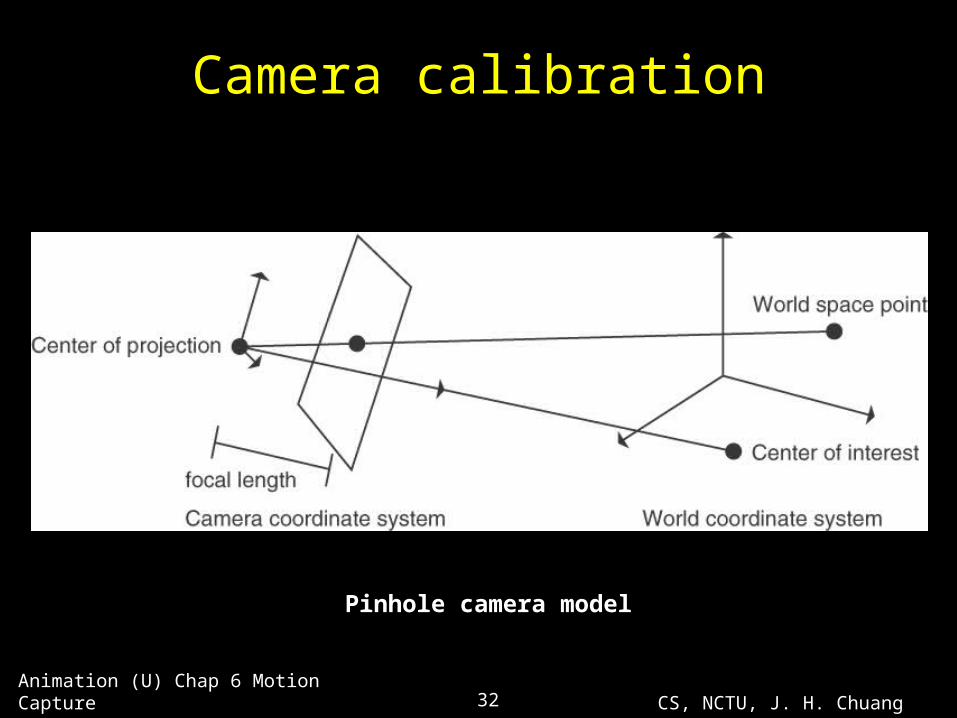
Camera calibration Find the locations and orientations of cameras
in world space and the intrinsic properties of the camera such as focal length, image center, and aspect ratio Use a simple pinhole camera model
An idealized model Usually sufficient for graphics and animation
Animation (U) Chap 6 Motion CaptureAnimation (U) Chap 6 Motion Capture
CS, NCTU, J. H. Chuang32
Camera calibration
Animation (U) Chap 6 Motion CaptureAnimation (U) Chap 6 Motion Capture
Pinhole camera model
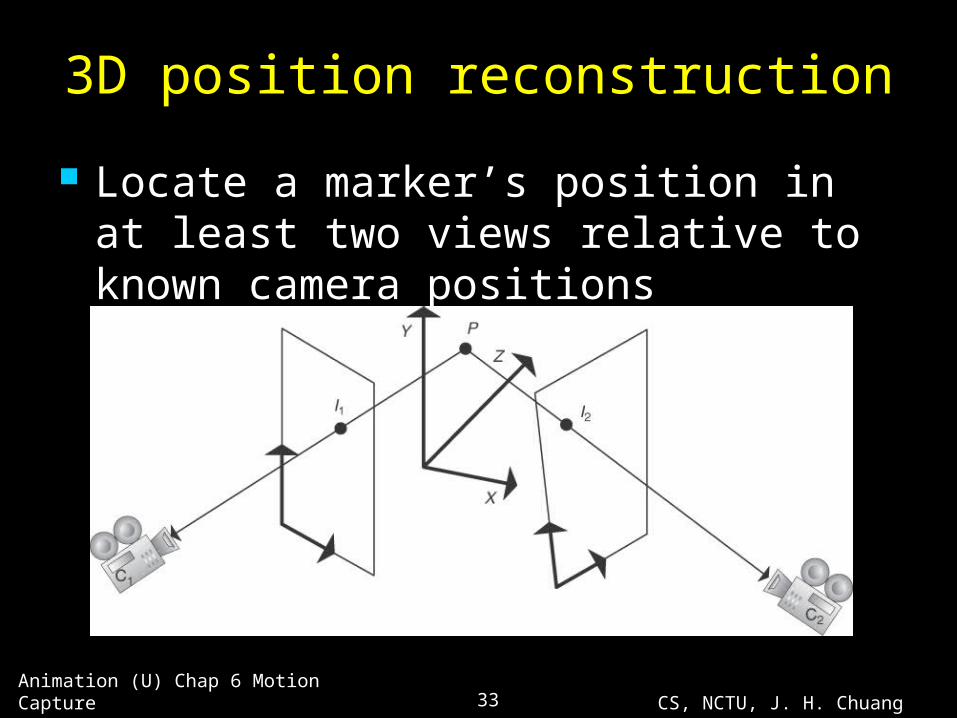
3D position reconstruction
Locate a marker’s position in at least two views relative to known camera positions
Animation (U) Chap 6 Motion CaptureAnimation (U) Chap 6 Motion Capture CS, NCTU, J. H. Chuang33
3D position reconstruction Locate a marker’s position in at least two
views relative to known camera positions
Animation (U) Chap 6 Motion CaptureAnimation (U) Chap 6 Motion Capture CS, NCTU, J. H. Chuang34
. and ofmidpoint thebecan position 3D The
. and for solve and
0)()(
0)()(
:lineeach on pointsclosest theFind
intersect.exactly not willequations 2 thesepractice,In
. and for solve and
)(
)(
Form
21
21
2212
1112
21
2222
1111
PP
PP
CIPP
CIPP
kk
PCIkC
PCIkC

Fitting to the skeleton After the motion of the individual markers looks
smooth and reasonable, Attach markers to the underlying skeletal structure that
is to be controlled by the digitized motion The position of each marker is used to absolutely
position a specific joint Is not straight due to noise, smoothing, and inaccuracy Change in bone length can be significant Markers are located outside the joints at the surface
Animation (U) Chap 6 Motion CaptureAnimation (U) Chap 6 Motion Capture CS, NCTU, J. H. Chuang35
Fitting to the skeleton Given marker location and the relative distance
from marker to the joint is not sufficient since the direction of displacement is not known Put markers on both side of the joint
Work fine for simple joints, but not the complex joints (such as shoulder and spine)
Use normal of a plane formed by 3 markers Wrist-elbow-shoulder markers plane normal
Offset the elbow marker in the direction of plane normal by the amount measured from the performer
Animation (U) Chap 6 Motion CaptureAnimation (U) Chap 6 Motion Capture CS, NCTU, J. H. Chuang36
Manipulating motion capture data Processing the signal
Motion signal processing and Motion warping Considers how frequency components capture various qualities
of the motion. And warps the signal in order to satisfy user-supplied key-frame-like constraints
Retargeting the motion Map the motion onto the mismatched synthetic character
and modify it to satisfy important constraints Combining the motion
Assemble motion segments into longer sequence
Animation (U) Chap 6 Motion CaptureAnimation (U) Chap 6 Motion Capture CS, NCTU, J. H. Chuang37

Processing the signal
Motion parameter values as a time-varying signal Consider values of an individual parameter of the
captured motion as a time-varying signal Signal can be decomposed into frequencies, time-warped,
interpolated with other signals Multidimensional signal (vector-valued signal) A function of time m(t): R -> Rn
Not really in Rn
3 DOF in translation, 3 DOF in absolute orientation, many DOF in relative orientations
Animation (U) Chap 6 Motion CaptureAnimation (U) Chap 6 Motion Capture CS, NCTU, J. H. Chuang38
Processing the signal
Motion signal processing Considers how frequency components capture
various qualities of the motion. Lower frequencies – represent base activities (walking) Higher frequencies – idiosyncratic movements
(walking with limp)
Motion manipulation/editing/warping Warps the signal in order to satisfy user-supplied
key-frame-like constraints.
Animation (U) Chap 6 Motion CaptureAnimation (U) Chap 6 Motion Capture CS, NCTU, J. H. Chuang39
Processing the signalMotion signal processing
Treat motion as a multi-dimensional signal Low pass filtering
noise removal High pass filtering
style change High frequency component can be motion
details, not just noise Modify a motion through filtering is not easy
Physical constraints (joint limit, ground contact)? Naturalness?
Animation (U) Chap 6 Motion CaptureAnimation (U) Chap 6 Motion Capture CS, NCTU, J. H. Chuang40
Processing the signalMotion signal processing
Frequency bands can be extracted, manipulated, and reassembled to allow the user to modify certain qualities of the signal while leaving others undisturbed. Signal is successively convolved with expanded
versions of a filter kernel. Gains of each band are adjusted by the user
and can be summed to reconstruct a motion signal.
Animation (U) Chap 6 Motion CaptureAnimation (U) Chap 6 Motion Capture CS, NCTU, J. H. Chuang41

Motion signal processing
PROBLEM: High frequencies can be important! Getting rid of them makes motion look soggy
ANSWER: Do not over-apply LPF Small amounts of Low-Pass Filtering Noise modeling Non-linear filters
Animation (U) Chap 6 Motion CaptureAnimation (U) Chap 6 Motion Capture CS, NCTU, J. H. Chuang42
?

Motion signal processing
High frequencies are important! Don’t occur often Always significant
Impact Rapid, sudden movement Emphasis
Sensitivity of perception Eye is sensitive to high frequencies
Animation (U) Chap 6 Motion CaptureAnimation (U) Chap 6 Motion Capture CS, NCTU, J. H. Chuang43
Motion manipulation/editing/warpingWhy?
What you get is not what you want You get observations of the performance
Specific performer (a real human) Specific motion With the noise and “realism” of real sensors
You want animation A character Doing something Or something similar but not the same
Animation (U) Chap 6 Motion CaptureAnimation (U) Chap 6 Motion Capture CS, NCTU, J. H. Chuang44
Motion manipulation/editing/warping
Manipulate time Time warp / Speed control m(t) = m0( f(t) ) f : R R
Manipulate value m(t) = f(m0(t) ) f : Rn Rn
Animation (U) Chap 6 Motion CaptureAnimation (U) Chap 6 Motion Capture CS, NCTU, J. H. Chuang45
Motion manipulation/editing/warpingManipulating time
m(t) = m0( f (t) ) Time scaling
f(t) = k t Time shifting
f(t) = t + k Time warping
Interpolate a table Align events
Speed control Ease in/Ease out
Animation (U) Chap 6 Motion CaptureAnimation (U) Chap 6 Motion Capture CS, NCTU, J. H. Chuang46
Motion manipulation/editing/warpingManipulating values
Scale Shift Blending Filtering Transition between motions Cyclification Change style Constraints on the motion Concatenation
Animation (U) Chap 6 Motion CaptureAnimation (U) Chap 6 Motion Capture CS, NCTU, J. H. Chuang47

Motion manipulation/editing/warpingMotion warping
Animation (U) Chap 6 Motion CaptureAnimation (U) Chap 6 Motion Capture CS, NCTU, J. H. Chuang48
Witkin and Popovic, “Motion Warping,” SIGGRAPH’95
Keyframes as constraints in smooth deformation
Keyframe placing the ball on the racket at impact
)()()()(' tbttat )()()()(' iiiii tbttat
),( ii t

Motion manipulation/editing/warpingMotion warping
Animation (U) Chap 6 Motion CaptureAnimation (U) Chap 6 Motion Capture CS, NCTU, J. H. Chuang49
ed.interpolat becan )( and )( which from ),( ofset a
obtain will We).,( sconstraint frame-keysatisfy and
)()()()(
let i.e., ,sconstraint frame-key the
satisfy tocurve original thenslatingand/or tra scalingby
),()( warpingcurvemotion a creates
s.constraint warp time
theinginterpolatby )( mapping warp timea creates
:procedure pingMotion war
sconstraint warp timeofset a :),( frames.-key ofset a:),(
signal. original :)(
'
'
'
tbtaba
t
tbttat
tft
tgt
ttt
t
ii
ii
iiii

Manipulating motion capture dataRetargeting the motion
Map the captured motion onto the mismatched synthetic character and then modify it to satisfy important constraints Constraints:
avoid foot penetration of the floor, avoid self-penetration, no feet sliding when walking
A new motion is constructed, as close to the original motion as possible, while enforcing the constraints.
New motion is formulated as a space-time, non-linear constrained optimization problem.
Animation (U) Chap 6 Motion CaptureAnimation (U) Chap 6 Motion Capture CS, NCTU, J. H. Chuang50

Retargeting the motion
Animation (U) Chap 6 Motion CaptureAnimation (U) Chap 6 Motion Capture CS, NCTU, J. H. Chuang51

Retargeting the motion
Define constraints
Apply to a new character
Animation (U) Chap 6 Motion CaptureAnimation (U) Chap 6 Motion Capture CS, NCTU, J. H. Chuang52

Retargeting the motion
Add Translational Offset (approximated answer)
Solve for constraints(Nonlinear constrained optimization)
Animation (U) Chap 6 Motion CaptureAnimation (U) Chap 6 Motion Capture CS, NCTU, J. H. Chuang53

Manipulating motion capture dataCombing motions
Motions are captured in segments whose duration last a few minutes each.
Assemble motion segments into longer sections. Need to blend the end of one segment into the
beginning of the next segment Portions to be blended need to be similar Both motion signal processing and motion warping can
be used to isolate, overlap, and then blend two motion segments together.
Animation (U) Chap 6 Motion CaptureAnimation (U) Chap 6 Motion Capture CS, NCTU, J. H. Chuang54
Motion blending
“Add” two (or more) motions together Really interpolate
m(t) = a m0(t) + (1-a) m1(t)
This is a per-frame operation We’re really interpolating between a series of poses!
m(t) = a(t) m0(t) + (1-a(t)) m1(t)
Animation (U) Chap 6 Motion CaptureAnimation (U) Chap 6 Motion Capture CS, NCTU, J. H. Chuang55

Motion blending approaches
Radial Basis Function (RBF) Interpolation Rose et al., “Verbs and Adverbs,” IEEE CG&A,
1998 Rose et al., “Artist-directed IK using radial basis
function interpolation,” Eurographics’01 (shown in kinematics lecture)
align example motions use B-spline to represent a motion apply RBF to interpolate between B-spline
coefficients IK to maintain constraints
Animation (U) Chap 6 Motion CaptureAnimation (U) Chap 6 Motion Capture CS, NCTU, J. H. Chuang56

Motion blending approachesTutorial on RBF Interpolation
A radial basis function (RBF) is a real-valued function whose value depends only on the distance form the center
RBF types Gaussian Thin plate spline Multiquadric
Animation (U) Chap 6 Motion CaptureAnimation (U) Chap 6 Motion Capture CS, NCTU, J. H. Chuang57
2
)( ded
)log()( 2 ddd
22)( dd
cxd

dN
iii RRrAs
xxxxx i ,)()()(1
Motion blending approachesRBF Interpolation
Approximates a real valued function f(x) by s(x) given the set of values f = (f1, …, fN) at distinct points X = {x1, x2, …, xN}
s(x) is a weighted sum of translations of a radially symmetric basic function augmented by a polynomial term
Animation (U) Chap 6 Motion CaptureAnimation (U) Chap 6 Motion Capture CS, NCTU, J. H. Chuang58
polynomial of degree at most k
real-valued weight
radial basis function
Motion blending approachesRBF Interpolation
The coefficients in s(x) are obtained by solving a system of linear equations
RBFs are popular for interpolating scattered data as the associated system of linear equations is invertible under very mild conditions on the locations of the data points.
Animation (U) Chap 6 Motion CaptureAnimation (U) Chap 6 Motion Capture CS, NCTU, J. H. Chuang59
,...,Nifs ii 1 )( x
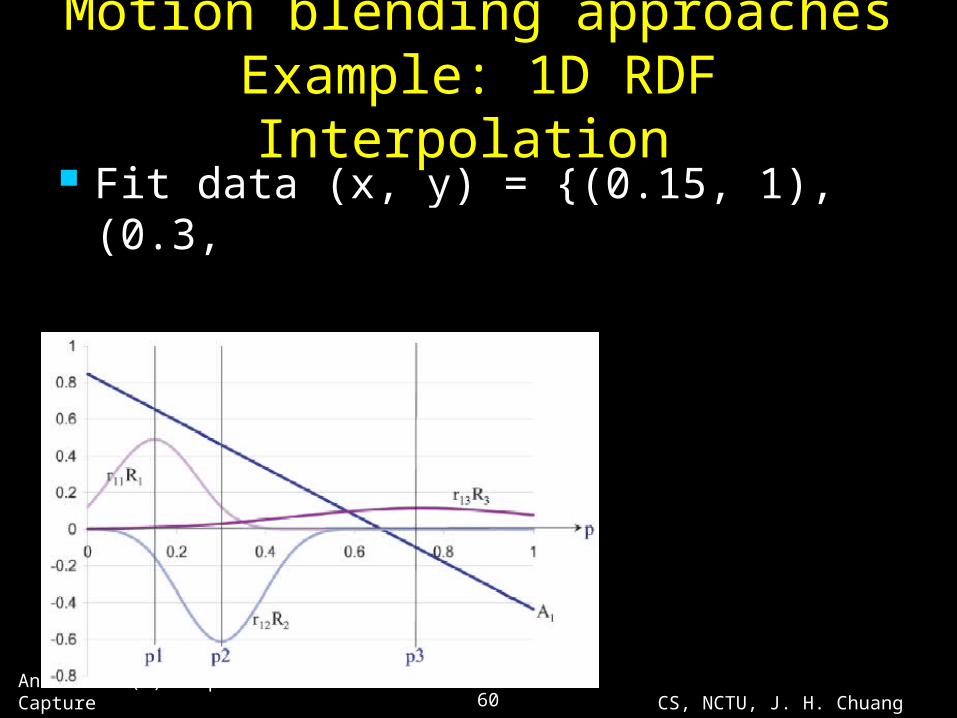
Motion blending approachesExample: 1D RDF Interpolation
Animation (U) Chap 6 Motion CaptureAnimation (U) Chap 6 Motion Capture CS, NCTU, J. H. Chuang60
Fit data (x, y) = {(0.15, 1), (0.3, 0), (0.75, 0)}
3
1
)()()(i
iii xxRrxAxs

Motion blendingMotion Transition
Animation (U) Chap 6 Motion CaptureAnimation (U) Chap 6 Motion Capture CS, NCTU, J. H. Chuang61
m1m0
m0 m1
m0
m1
Motion blendingMotion Transition
Animation (U) Chap 6 Motion CaptureAnimation (U) Chap 6 Motion Capture CS, NCTU, J. H. Chuang62
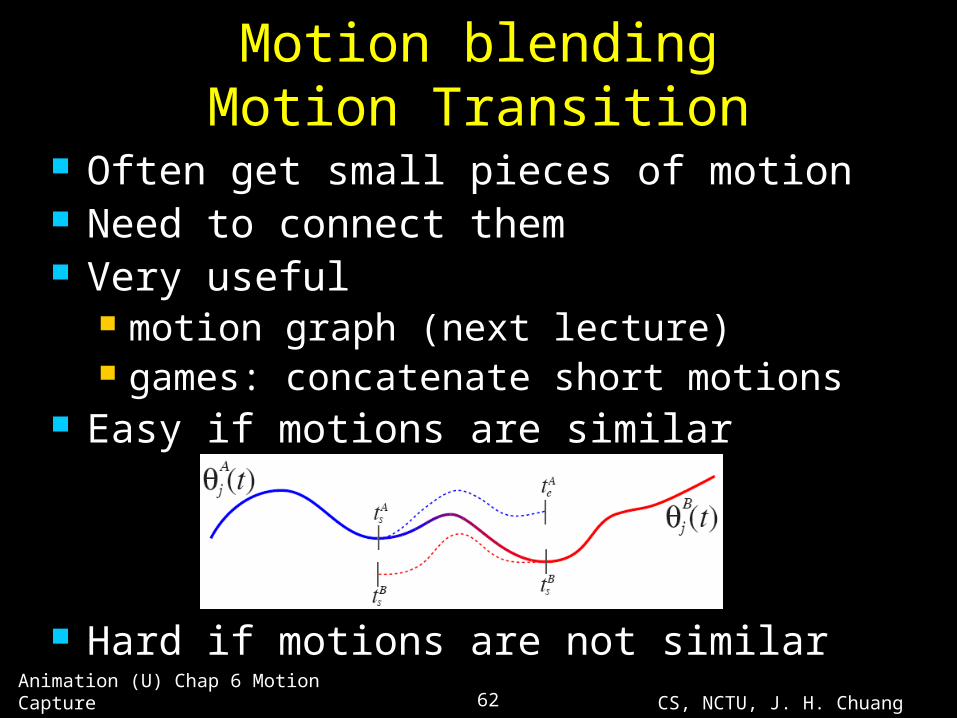
Often get small pieces of motion Need to connect them Very useful
motion graph (next lecture) games: concatenate short motions
Easy if motions are similar
Hard if motions are not similar