chap. 3: kinematics (2d) - physics and astronomy at...
TRANSCRIPT
Kinematics (2D)
Chap. 3: Kinematics
(2D)
Recap: Kinematics (1D)
1. Vector Kinematics
2. Projectile Motion
3. Uniform Circular Motion
4. Relative Velocity
1
Kinematics (2D)
Last, This and Next Weeks
• [Last Week]
– Chap. 1 and Chap. 2
• [This Week]
– Chap. 3 Chap. 4
• [Next Week]
– Chap. 5
Question?
2
Kinematics (2D)
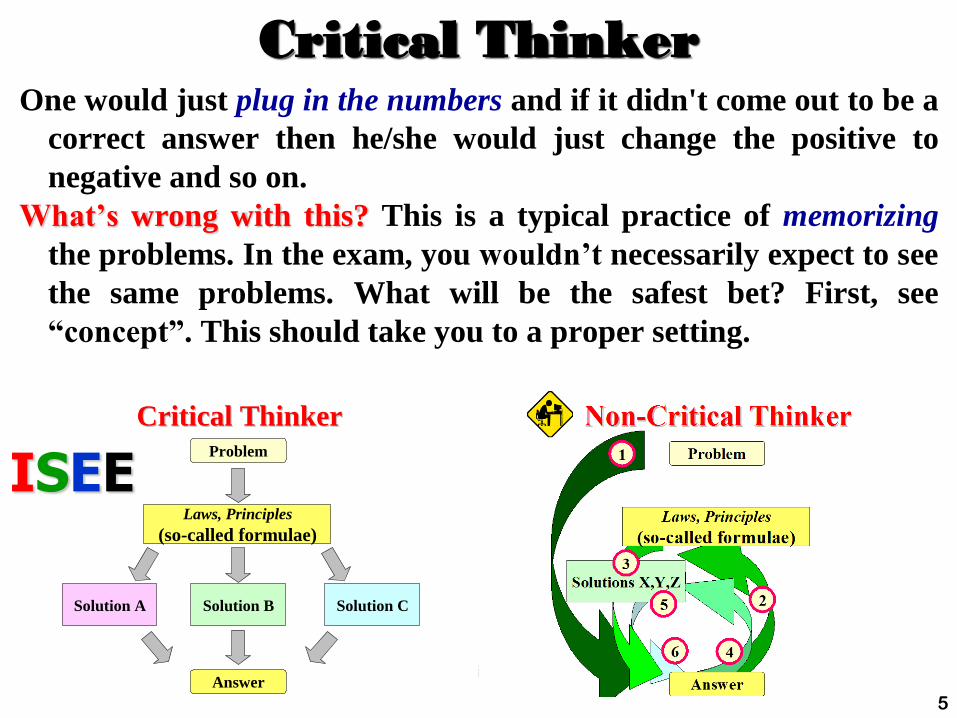
Critical Thinker
Kinematics (2D)
Laws, Principles
(so-called formulae)
Solution A Solution B Solution C
Problem
Answer
Critical ThinkerCritical Thinker
One would just plug in the numbers and if it didn't come out to be a
correct answer then he/she would just change the positive to
negative and so on.
What’s wrong with this? This is a typical practice of memorizing
the problems. In the exam, you wouldn’t necessarily expect to see
the same problems. What will be the safest bet? First, see
“concept”. This should take you to a proper setting.
ISEE
5
Kinematics (2D)
Common Steps for Thinker
Step 1: Draw a diagram (or picture) of the
situation, with coordinate axes.
Step 2: Think about which principle(s) of physics
apply in this problem.
Step 3: Write down principle(s).
Step 4: Solve them.
ISEE
ISEE
ISEE
6
Kinematics (2D)
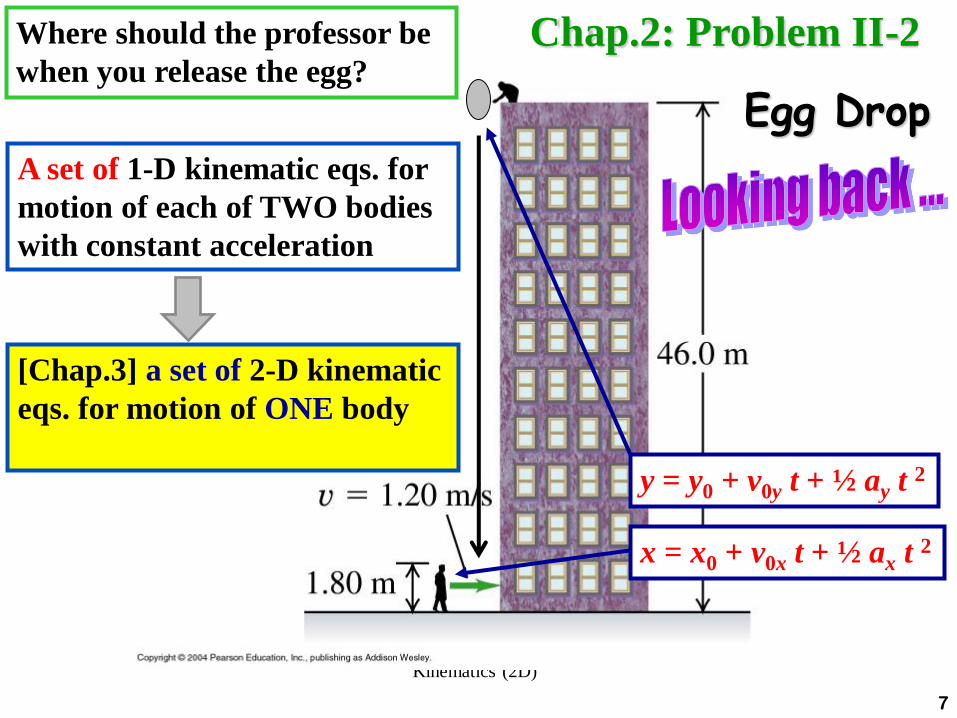
Where should the professor be
when you release the egg?
Egg Drop
Chap.2: Problem II-2
x = x0 + v0x t + ½ ax t 2
y = y0 + v0y t + ½ ay t 2
7
A set of 1-D kinematic eqs. for
motion of each of TWO bodies
with constant acceleration
[Chap.3] a set of 2-D kinematic
eqs. for motion of ONE body
Kinematics (2D)
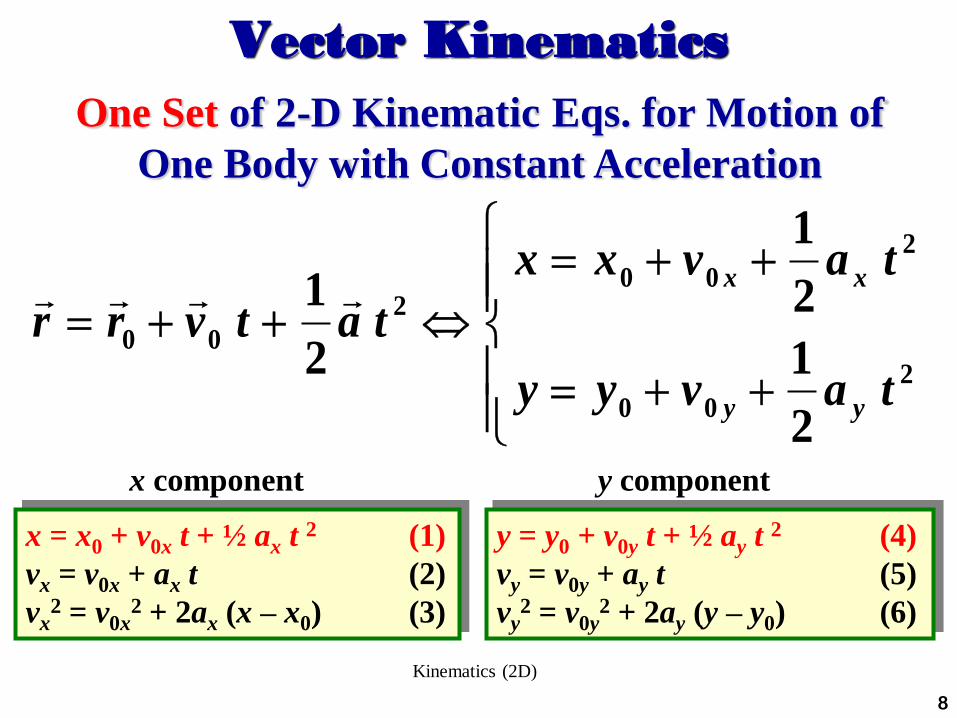
Vector Kinematics
x = x0 + v0x t + ½ ax t 2 (1)
vx = v0x + ax t (2)
vx2 = v0x
2 + 2ax (x – x0) (3)
y = y0 + v0y t + ½ ay t 2 (4)
vy = v0y + ay t (5)
vy2 = v0y
2 + 2ay (y – y0) (6)
One Set of 2-D Kinematic Eqs. for Motion of
One Body with Constant Acceleration
2
00
2
002
00
2
1
2
1
2
1
tavyy
tavxx
tatvrr
yy
xx
x component y component
8
Kinematics (2D)
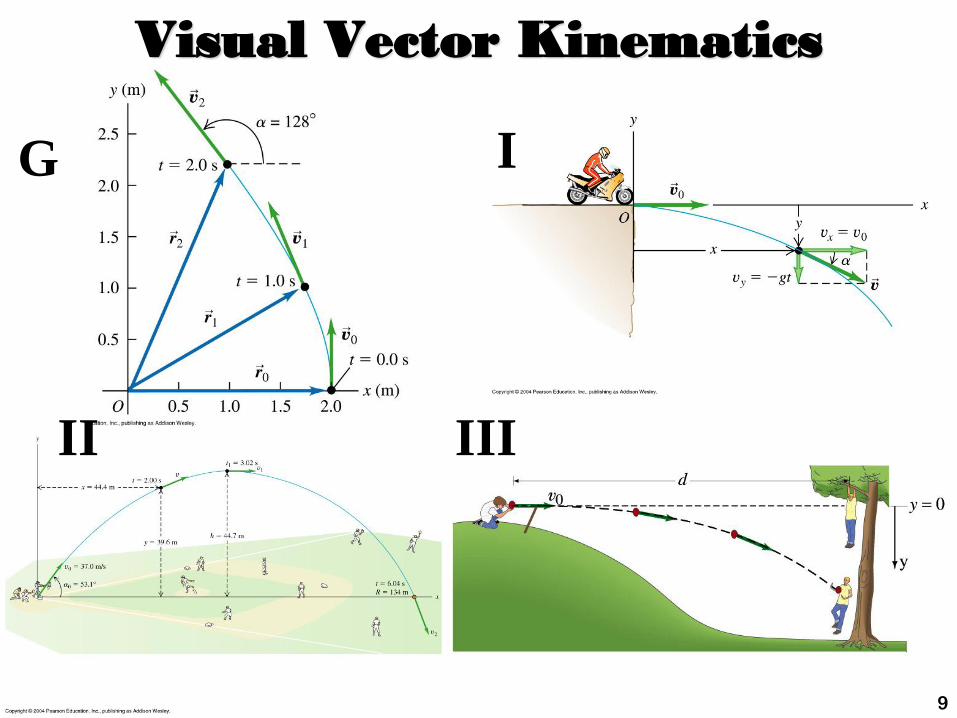
I
III
G
Visual Vector Kinematics
II
9
Kinematics (2D)
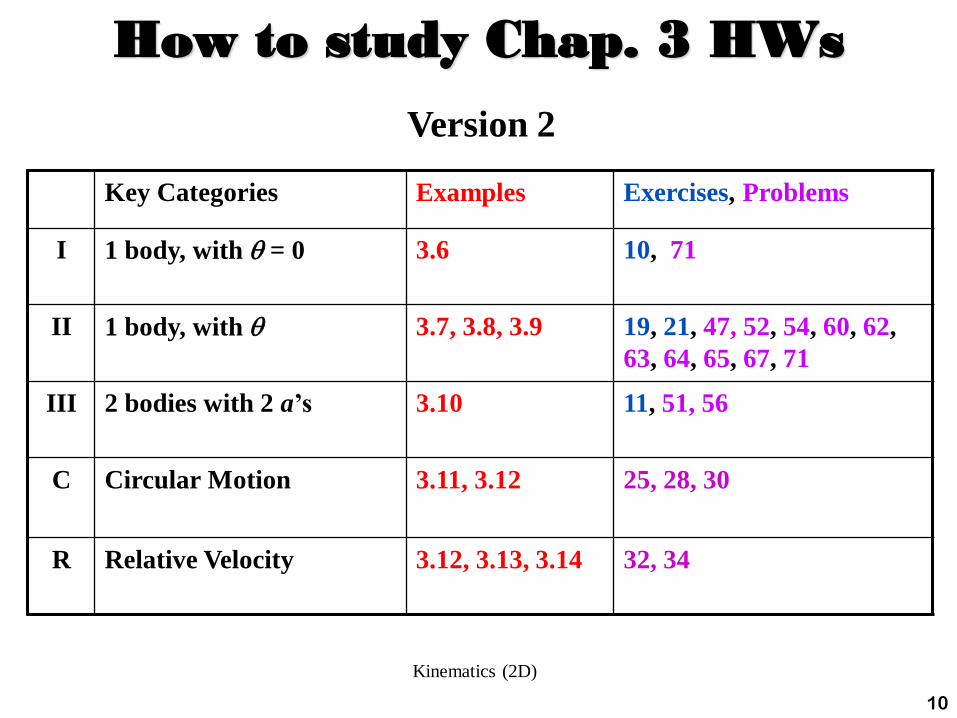
How to study Chap. 3 HWs
Key Categories Examples Exercises, Problems
I 1 body, with q = 0 3.6 10, 71
II 1 body, with q 3.7, 3.8, 3.9 19, 21, 47, 52, 54, 60, 62,
63, 64, 65, 67, 71
III 2 bodies with 2 a’s 3.10 11, 51, 56
C Circular Motion 3.11, 3.12 25, 28, 30
R Relative Velocity 3.12, 3.13, 3.14 32, 34
10
Version 2
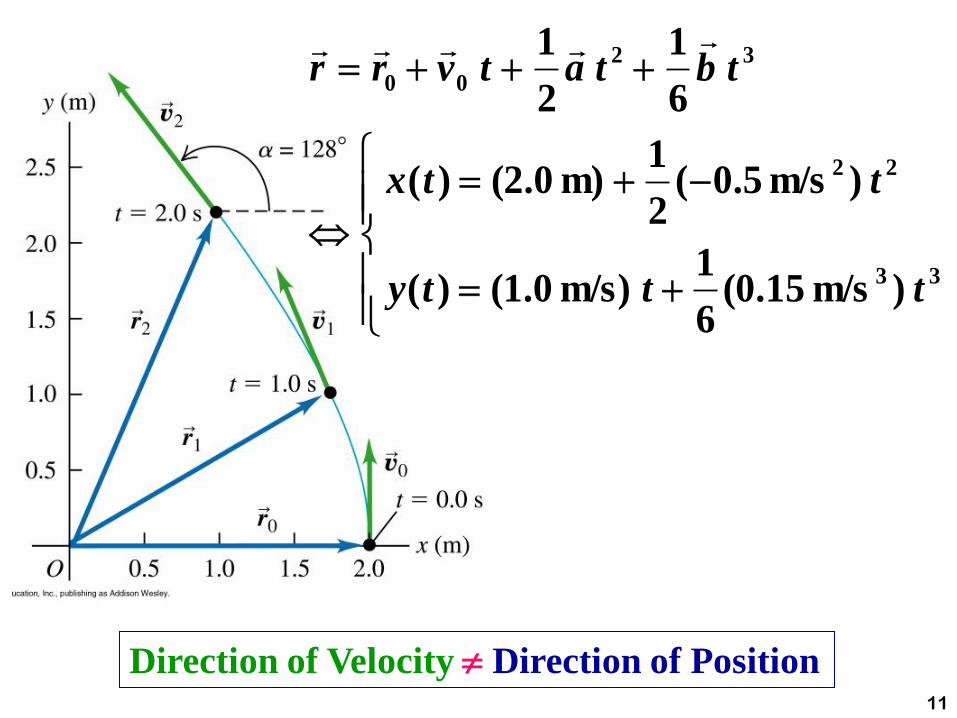
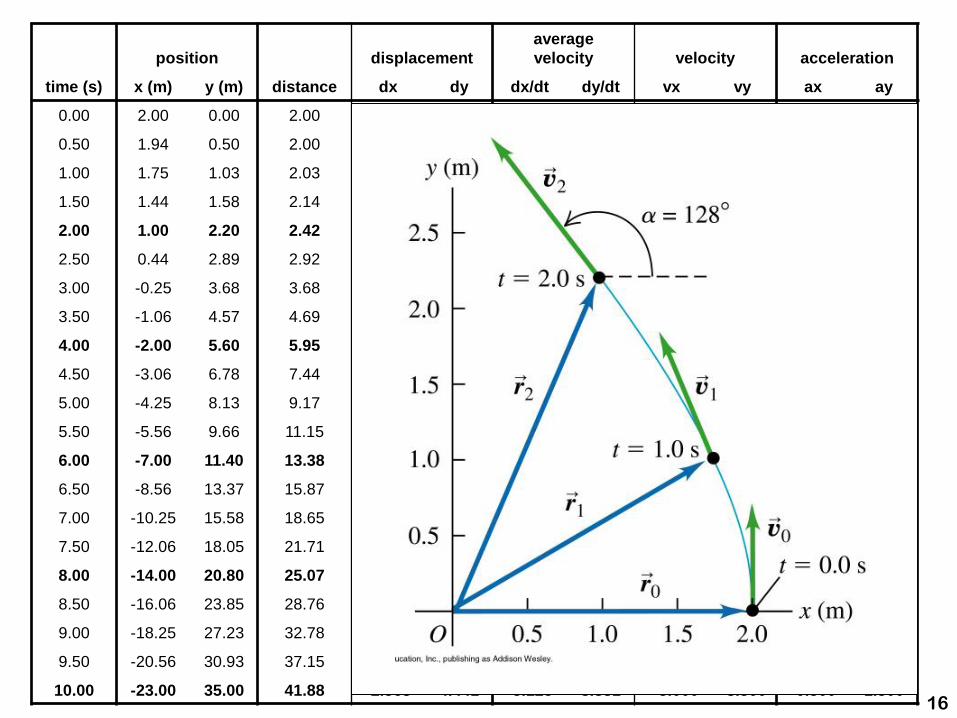
Kinematics (2D) Direction of Velocity Direction of Position
33
22
32
00
)m/s (0.156
1 m/s) (1.0)(
)m/s 0.5(2
1m) (2.0)(
6
1
2
1
ttty
ttx
tbtatvrr
11
Kinematics (2D)
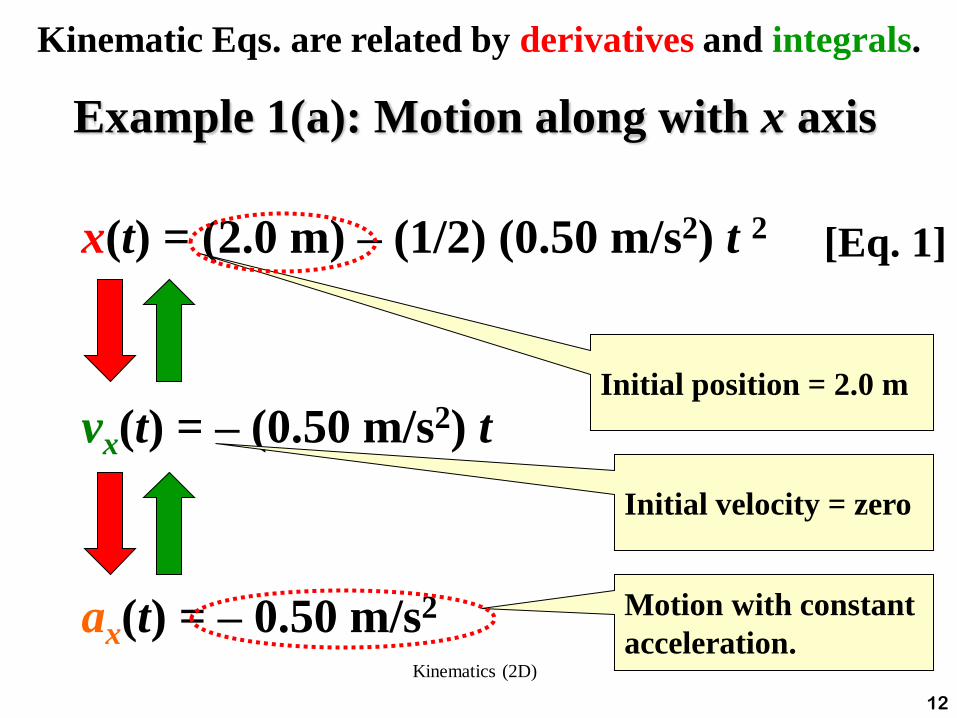
x(t) = (2.0 m) – (1/2) (0.50 m/s2) t 2
vx(t) = – (0.50 m/s2) t
ax(t) = – 0.50 m/s2
Example 1(a): Motion along with x axis
Kinematic Eqs. are related by derivatives and integrals.
Motion with constant
acceleration.
Initial velocity = zero
Initial position = 2.0 m
[Eq. 1]
12
Kinematics (2D)
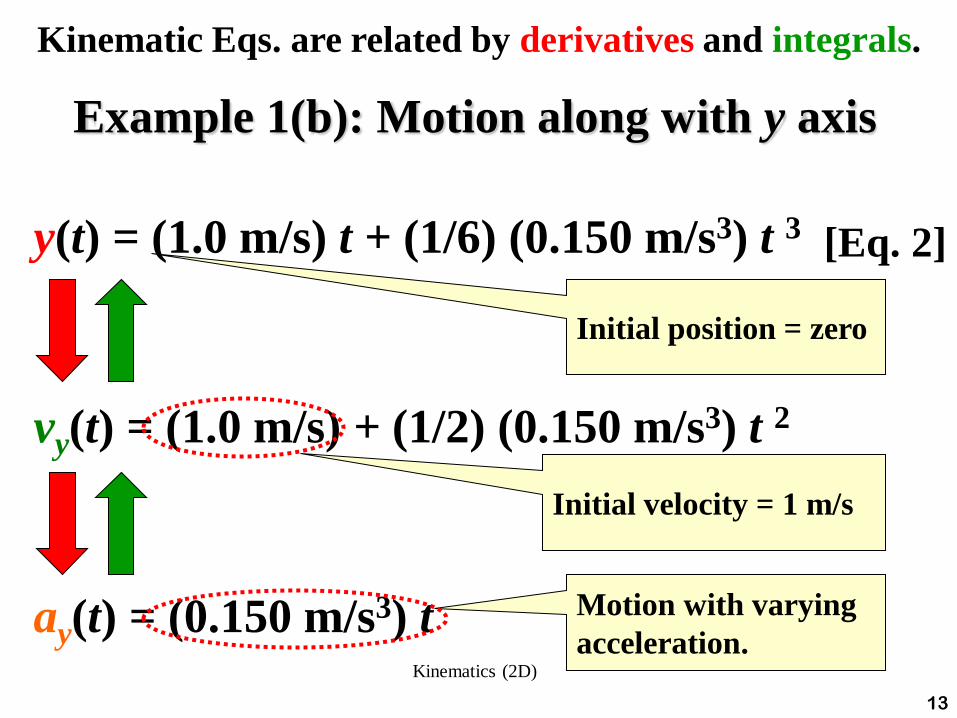
y(t) = (1.0 m/s) t + (1/6) (0.150 m/s3) t 3
vy(t) = (1.0 m/s) + (1/2) (0.150 m/s3) t 2
ay(t) = (0.150 m/s3) t
Example 1(b): Motion along with y axis
Kinematic Eqs. are related by derivatives and integrals.
Motion with varying
acceleration.
Initial velocity = 1 m/s
Initial position = zero
[Eq. 2]
13
Kinematics (2D)
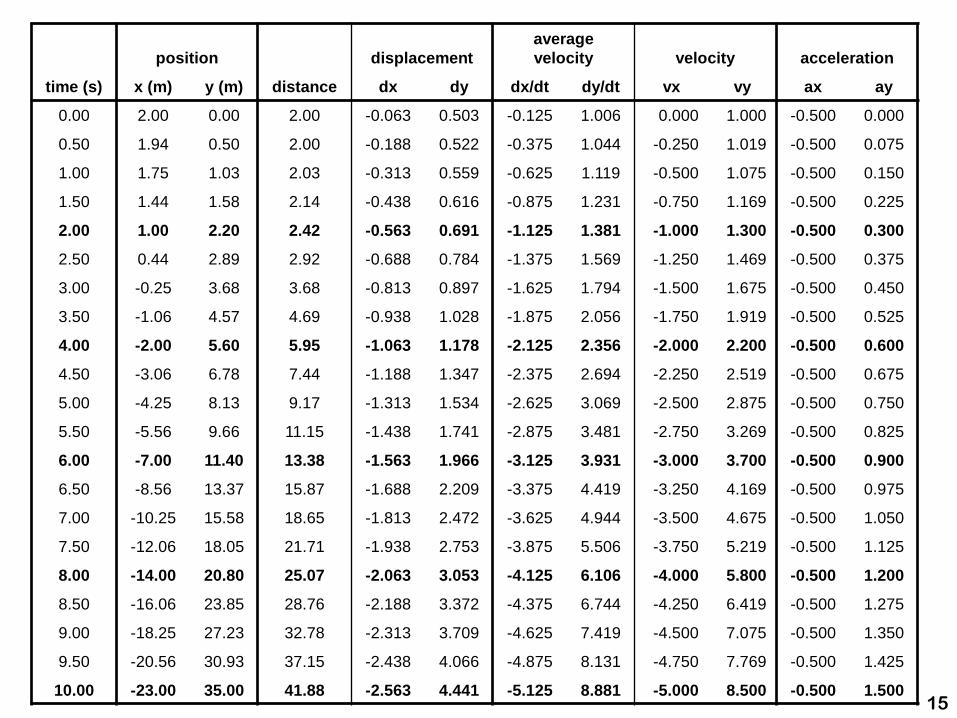
ONE 2D Motion (Eqs. 1 & 2)
Study each motion between 0 s and 10 s
using spreadsheet:
• Calculate position every 0.5 s and plot them.
• Calculate displacement
• Calculate average velocity
• Calculate velocity every 0.5 s
• Calculate acceleration every 0.5 s
14
Kinematics (2D)
position displacement
average
velocity velocity acceleration
time (s) x (m) y (m) distance dx dy dx/dt dy/dt vx vy ax ay
0.00 2.00 0.00 2.00 -0.063 0.503 -0.125 1.006 0.000 1.000 -0.500 0.000
0.50 1.94 0.50 2.00 -0.188 0.522 -0.375 1.044 -0.250 1.019 -0.500 0.075
1.00 1.75 1.03 2.03 -0.313 0.559 -0.625 1.119 -0.500 1.075 -0.500 0.150
1.50 1.44 1.58 2.14 -0.438 0.616 -0.875 1.231 -0.750 1.169 -0.500 0.225
2.00 1.00 2.20 2.42 -0.563 0.691 -1.125 1.381 -1.000 1.300 -0.500 0.300
2.50 0.44 2.89 2.92 -0.688 0.784 -1.375 1.569 -1.250 1.469 -0.500 0.375
3.00 -0.25 3.68 3.68 -0.813 0.897 -1.625 1.794 -1.500 1.675 -0.500 0.450
3.50 -1.06 4.57 4.69 -0.938 1.028 -1.875 2.056 -1.750 1.919 -0.500 0.525
4.00 -2.00 5.60 5.95 -1.063 1.178 -2.125 2.356 -2.000 2.200 -0.500 0.600
4.50 -3.06 6.78 7.44 -1.188 1.347 -2.375 2.694 -2.250 2.519 -0.500 0.675
5.00 -4.25 8.13 9.17 -1.313 1.534 -2.625 3.069 -2.500 2.875 -0.500 0.750
5.50 -5.56 9.66 11.15 -1.438 1.741 -2.875 3.481 -2.750 3.269 -0.500 0.825
6.00 -7.00 11.40 13.38 -1.563 1.966 -3.125 3.931 -3.000 3.700 -0.500 0.900
6.50 -8.56 13.37 15.87 -1.688 2.209 -3.375 4.419 -3.250 4.169 -0.500 0.975
7.00 -10.25 15.58 18.65 -1.813 2.472 -3.625 4.944 -3.500 4.675 -0.500 1.050
7.50 -12.06 18.05 21.71 -1.938 2.753 -3.875 5.506 -3.750 5.219 -0.500 1.125
8.00 -14.00 20.80 25.07 -2.063 3.053 -4.125 6.106 -4.000 5.800 -0.500 1.200
8.50 -16.06 23.85 28.76 -2.188 3.372 -4.375 6.744 -4.250 6.419 -0.500 1.275
9.00 -18.25 27.23 32.78 -2.313 3.709 -4.625 7.419 -4.500 7.075 -0.500 1.350
9.50 -20.56 30.93 37.15 -2.438 4.066 -4.875 8.131 -4.750 7.769 -0.500 1.425
10.00 -23.00 35.00 41.88 -2.563 4.441 -5.125 8.881 -5.000 8.500 -0.500 1.500 15
Kinematics (2D)
position displacement
average
velocity velocity acceleration
time (s) x (m) y (m) distance dx dy dx/dt dy/dt vx vy ax ay
0.00 2.00 0.00 2.00 -0.063 0.503 -0.125 1.006 0.000 1.000 -0.500 0.000
0.50 1.94 0.50 2.00 -0.188 0.522 -0.375 1.044 -0.250 1.019 -0.500 0.075
1.00 1.75 1.03 2.03 -0.313 0.559 -0.625 1.119 -0.500 1.075 -0.500 0.150
1.50 1.44 1.58 2.14 -0.438 0.616 -0.875 1.231 -0.750 1.169 -0.500 0.225
2.00 1.00 2.20 2.42 -0.563 0.691 -1.125 1.381 -1.000 1.300 -0.500 0.300
2.50 0.44 2.89 2.92 -0.688 0.784 -1.375 1.569 -1.250 1.469 -0.500 0.375
3.00 -0.25 3.68 3.68 -0.813 0.897 -1.625 1.794 -1.500 1.675 -0.500 0.450
3.50 -1.06 4.57 4.69 -0.938 1.028 -1.875 2.056 -1.750 1.919 -0.500 0.525
4.00 -2.00 5.60 5.95 -1.063 1.178 -2.125 2.356 -2.000 2.200 -0.500 0.600
4.50 -3.06 6.78 7.44 -1.188 1.347 -2.375 2.694 -2.250 2.519 -0.500 0.675
5.00 -4.25 8.13 9.17 -1.313 1.534 -2.625 3.069 -2.500 2.875 -0.500 0.750
5.50 -5.56 9.66 11.15 -1.438 1.741 -2.875 3.481 -2.750 3.269 -0.500 0.825
6.00 -7.00 11.40 13.38 -1.563 1.966 -3.125 3.931 -3.000 3.700 -0.500 0.900
6.50 -8.56 13.37 15.87 -1.688 2.209 -3.375 4.419 -3.250 4.169 -0.500 0.975
7.00 -10.25 15.58 18.65 -1.813 2.472 -3.625 4.944 -3.500 4.675 -0.500 1.050
7.50 -12.06 18.05 21.71 -1.938 2.753 -3.875 5.506 -3.750 5.219 -0.500 1.125
8.00 -14.00 20.80 25.07 -2.063 3.053 -4.125 6.106 -4.000 5.800 -0.500 1.200
8.50 -16.06 23.85 28.76 -2.188 3.372 -4.375 6.744 -4.250 6.419 -0.500 1.275
9.00 -18.25 27.23 32.78 -2.313 3.709 -4.625 7.419 -4.500 7.075 -0.500 1.350
9.50 -20.56 30.93 37.15 -2.438 4.066 -4.875 8.131 -4.750 7.769 -0.500 1.425
10.00 -23.00 35.00 41.88 -2.563 4.441 -5.125 8.881 -5.000 8.500 -0.500 1.500 16
Kinematics (2D)
position displacement
average
velocity velocity acceleration
time (s) x (m) y (m) distance dx dy dx/dt dy/dt vx vy ax ay
0.00 2.00 0.00 2.00 -0.063 0.503 -0.125 1.006 0.000 1.000 -0.500 0.000
0.50 1.94 0.50 2.00 -0.188 0.522 -0.375 1.044 -0.250 1.019 -0.500 0.075
1.00 1.75 1.03 2.03 -0.313 0.559 -0.625 1.119 -0.500 1.075 -0.500 0.150
1.50 1.44 1.58 2.14 -0.438 0.616 -0.875 1.231 -0.750 1.169 -0.500 0.225
2.00 1.00 2.20 2.42 -0.563 0.691 -1.125 1.381 -1.000 1.300 -0.500 0.300
2.50 0.44 2.89 2.92 -0.688 0.784 -1.375 1.569 -1.250 1.469 -0.500 0.375
3.00 -0.25 3.68 3.68 -0.813 0.897 -1.625 1.794 -1.500 1.675 -0.500 0.450
3.50 -1.06 4.57 4.69 -0.938 1.028 -1.875 2.056 -1.750 1.919 -0.500 0.525
4.00 -2.00 5.60 5.95 -1.063 1.178 -2.125 2.356 -2.000 2.200 -0.500 0.600
4.50 -3.06 6.78 7.44 -1.188 1.347 -2.375 2.694 -2.250 2.519 -0.500 0.675
5.00 -4.25 8.13 9.17 -1.313 1.534 -2.625 3.069 -2.500 2.875 -0.500 0.750
5.50 -5.56 9.66 11.15 -1.438 1.741 -2.875 3.481 -2.750 3.269 -0.500 0.825
6.00 -7.00 11.40 13.38 -1.563 1.966 -3.125 3.931 -3.000 3.700 -0.500 0.900
6.50 -8.56 13.37 15.87 -1.688 2.209 -3.375 4.419 -3.250 4.169 -0.500 0.975
7.00 -10.25 15.58 18.65 -1.813 2.472 -3.625 4.944 -3.500 4.675 -0.500 1.050
7.50 -12.06 18.05 21.71 -1.938 2.753 -3.875 5.506 -3.750 5.219 -0.500 1.125
8.00 -14.00 20.80 25.07 -2.063 3.053 -4.125 6.106 -4.000 5.800 -0.500 1.200
8.50 -16.06 23.85 28.76 -2.188 3.372 -4.375 6.744 -4.250 6.419 -0.500 1.275
9.00 -18.25 27.23 32.78 -2.313 3.709 -4.625 7.419 -4.500 7.075 -0.500 1.350
9.50 -20.56 30.93 37.15 -2.438 4.066 -4.875 8.131 -4.750 7.769 -0.500 1.425
10.00 -23.00 35.00 41.88 -2.563 4.441 -5.125 8.881 -5.000 8.500 -0.500 1.500 17
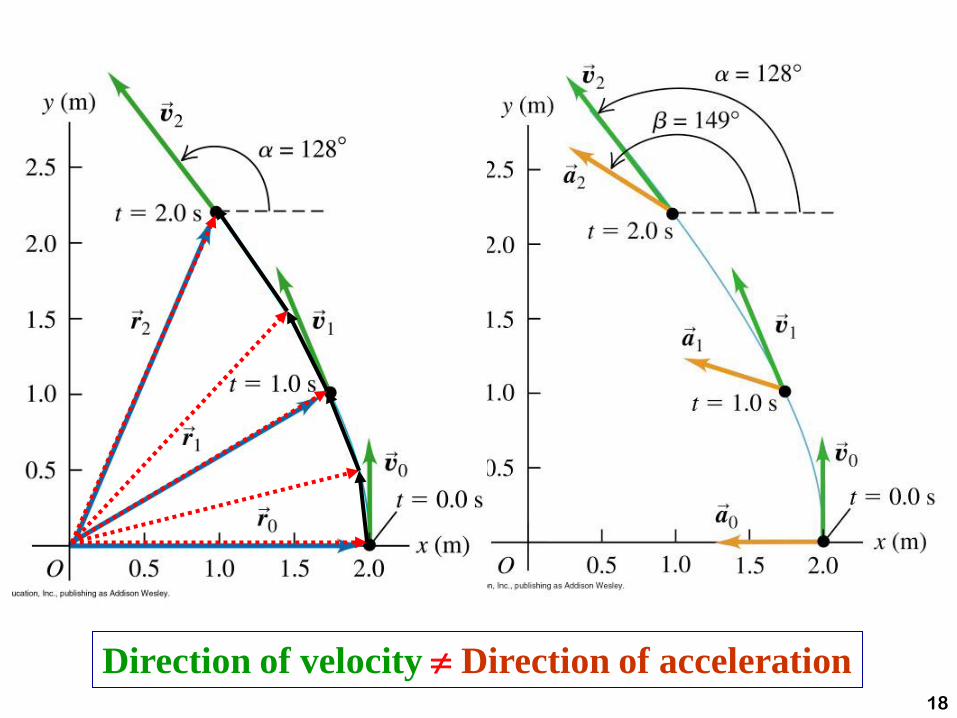
Kinematics (2D) Direction of velocity Direction of acceleration 18
Kinematics (2D)
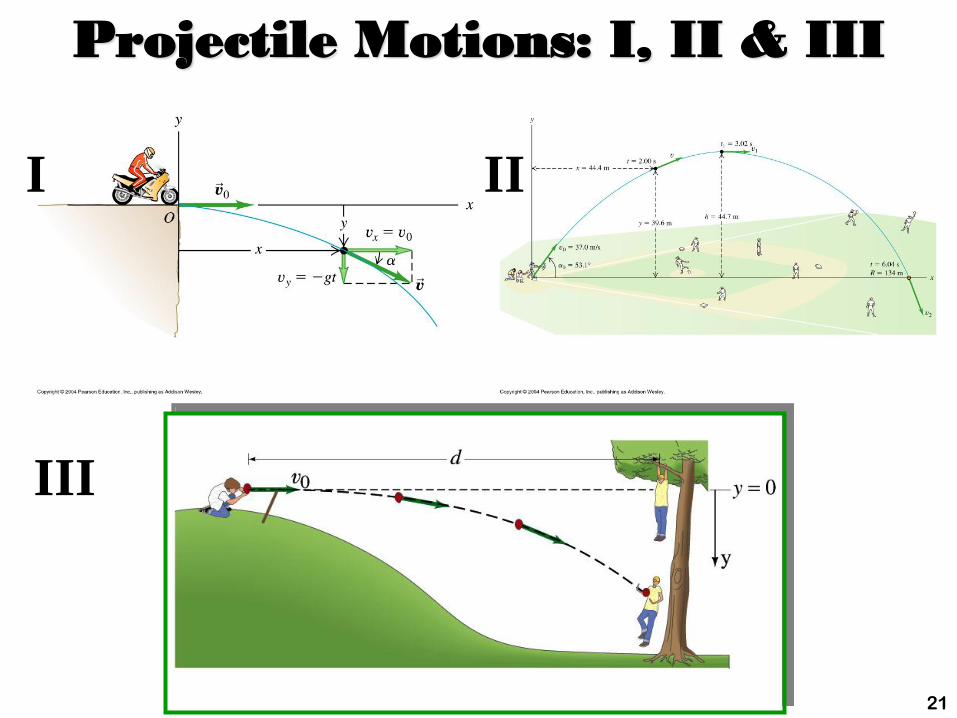
Projectile Motions: I, II & III
I II
III
21
Kinematics (2D)
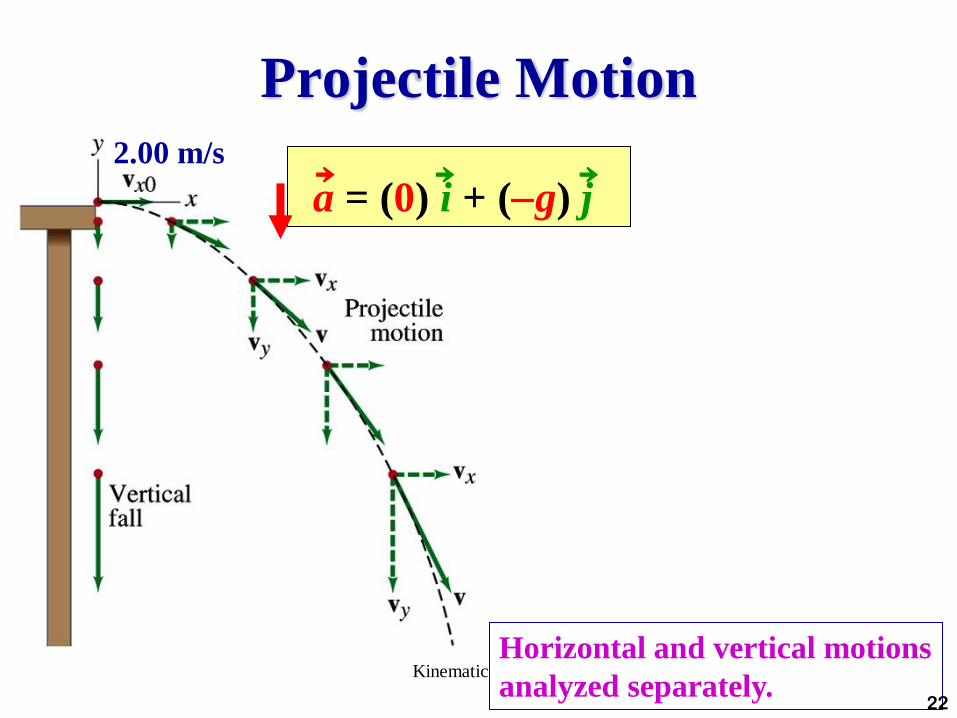
Projectile Motion
2.00 m/s
a = (0) i + (g) j → → →
Horizontal and vertical motions
analyzed separately. 22
Kinematics (2D)
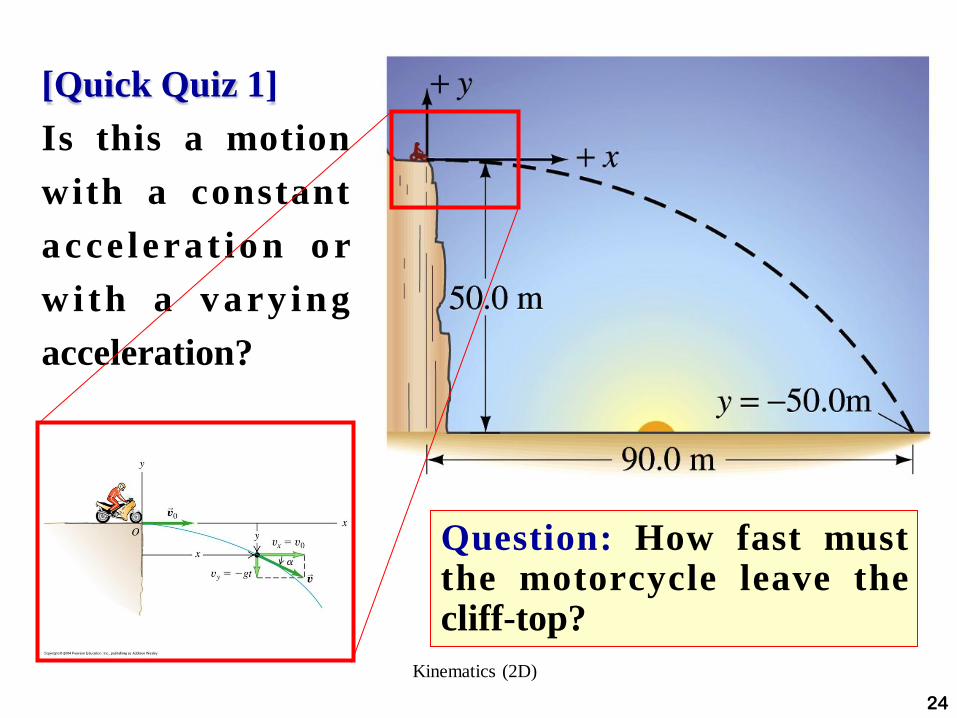
Question: How fast must the motorcycle leave the cliff-top?
[Quick Quiz 1]
Is this a motion
with a constant
acce lera t ion or
with a vary ing
acceleration?
24
Kinematics (2D)
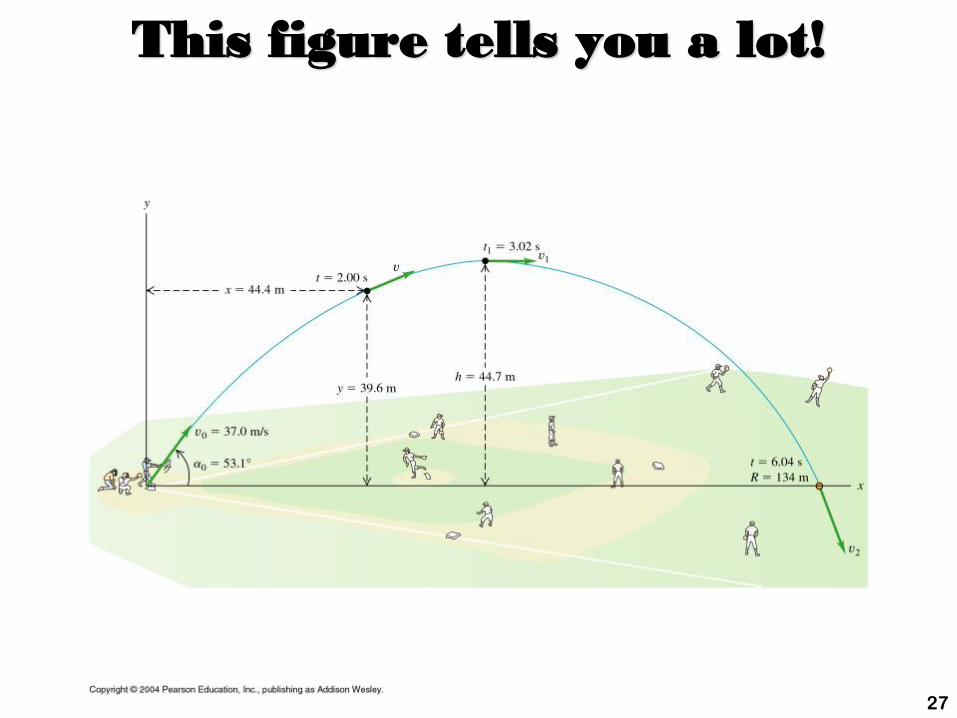
This figure tells you a lot!
27
Kinematics (2D)
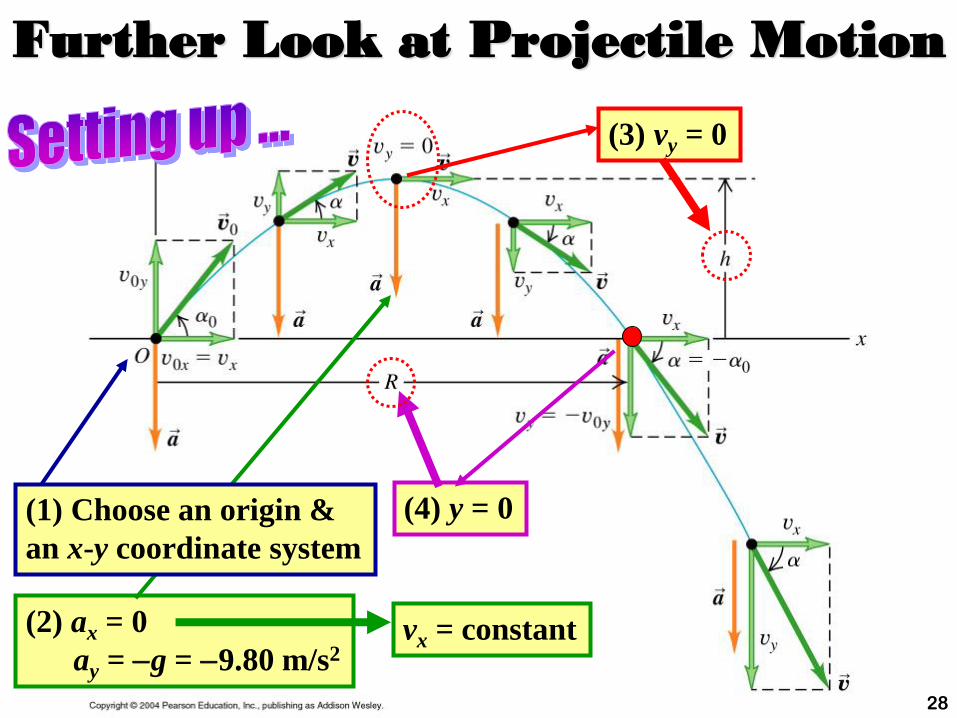
Further Look at Projectile Motion
(2) ax = 0
ay = g = 9.80 m/s2
(1) Choose an origin &
an x-y coordinate system
vx = constant
(3) vy = 0
(4) y = 0
28
Kinematics (2D)
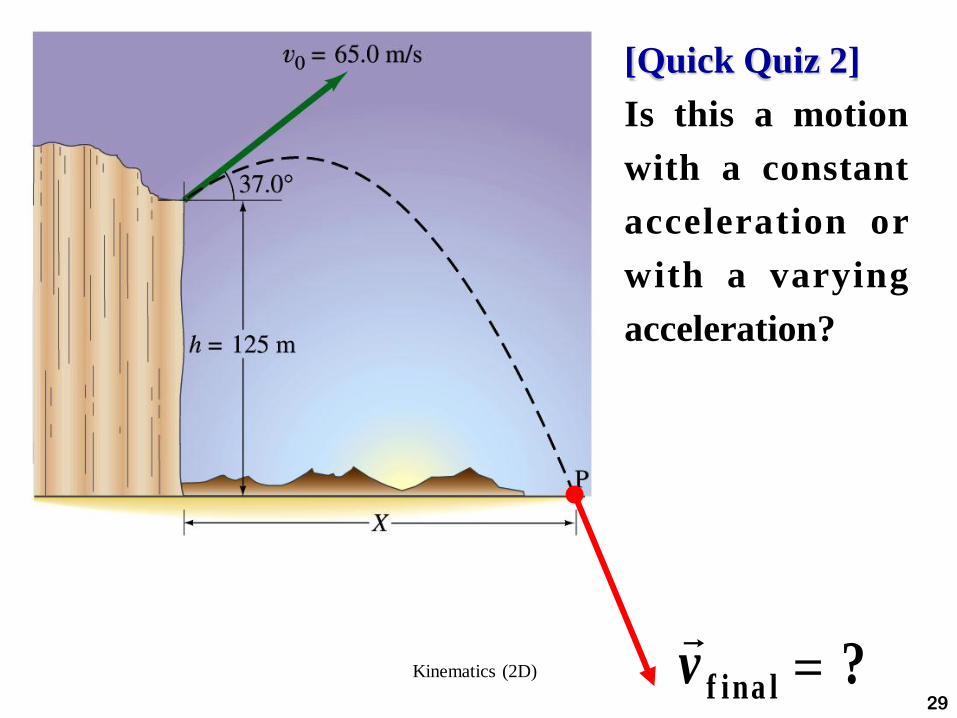
Projectile Motion
[Quick Quiz 2]
Is this a motion
with a constant
acceleration or
with a varying
acceleration?
?f ina l v
29
Kinematics (2D)
30
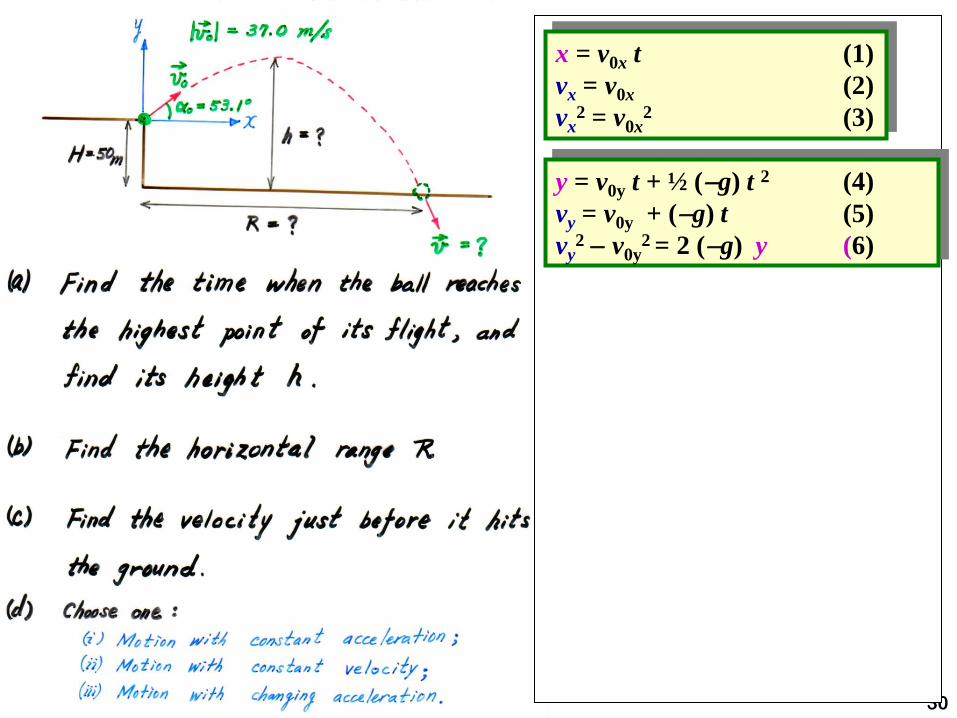
x = v0x t (1)
vx = v0x (2)
vx2 = v0x
2 (3)
y = v0y t + ½ (g) t 2 (4)
vy = v0y + (g) t (5)
vy2 v0y
2 = 2 (g) y (6)
Kinematics (2D)
Example 1: A Hunter
A hunter aims directly at a target (on the same
level) 65.0 m away. Note that the magnitude of
gravitational acceleration on the Earth is g = 9.80 m/s2.
(a) (10 pts) If the bullet leaves the gun at a speed
o f 145 m/s , by how much wil l i t miss the
target?
(b) (15 pts) At what angle should the gun be aimed
so the target will be hit?
33
Kinematics (2D)
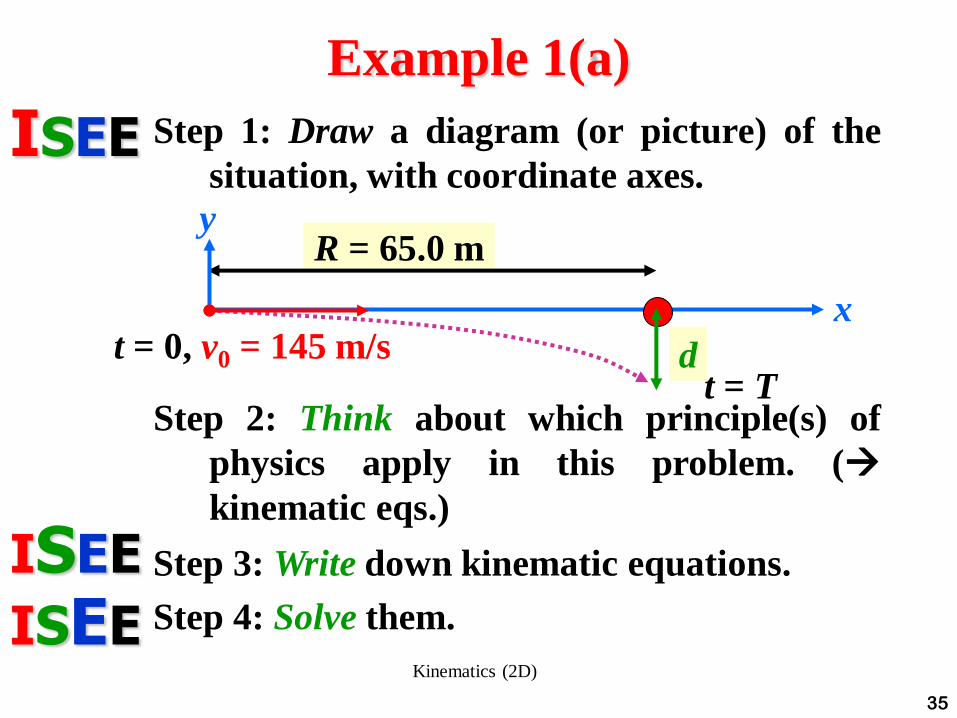
Example 1(a)
d
R = 65.0 m y
x t = 0, v0 = 145 m/s
Step 3: Write down kinematic equations.
Step 4: Solve them.
Step 2: Think about which principle(s) of
physics apply in this problem. (
kinematic eqs.)
t = T
ISEE
ISEE
ISEE
Step 1: Draw a diagram (or picture) of the
situation, with coordinate axes.
35
Kinematics (2D)
Example 1: A Hunter
A hunter aims directly at a target (on the same
level) 65.0 m away. Note that the magnitude of
gravitational acceleration on the Earth is g = 9.80 m/s2.
(a) (10 pts) If the bullet leaves the gun at a speed
o f 145 m/s , by how much wil l i t miss the
target?
(b) (15 pts) At what angle should the gun be aimed
so the target will be hit?
37
Kinematics (2D)
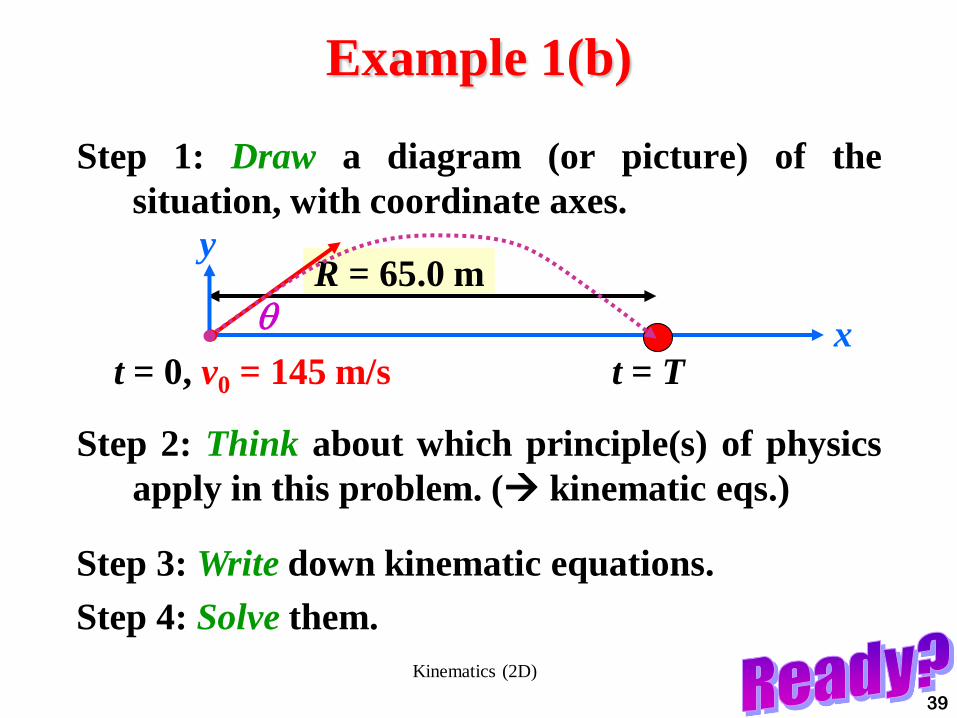
Example 1(b)
Step 1: Draw a diagram (or picture) of the
situation, with coordinate axes.
Step 3: Write down kinematic equations.
Step 4: Solve them.
Step 2: Think about which principle(s) of physics
apply in this problem. ( kinematic eqs.)
R = 65.0 m y
x t = 0, v0 = 145 m/s
q
t = T
39
Kinematics (2D)
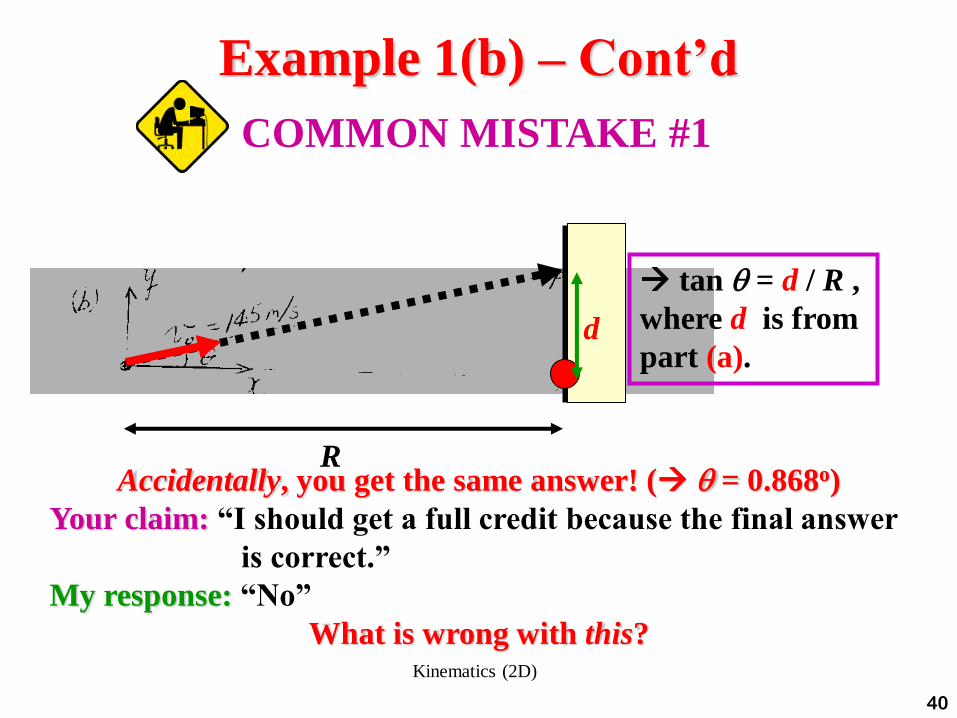
Accidentally, you get the same answer! ( q = 0.868o)
Your claim: “I should get a full credit because the final answer
is correct.”
My response: “No”
What is wrong with this?
COMMON MISTAKE #1
R
d
tan q = d / R ,
where d is from
part (a).
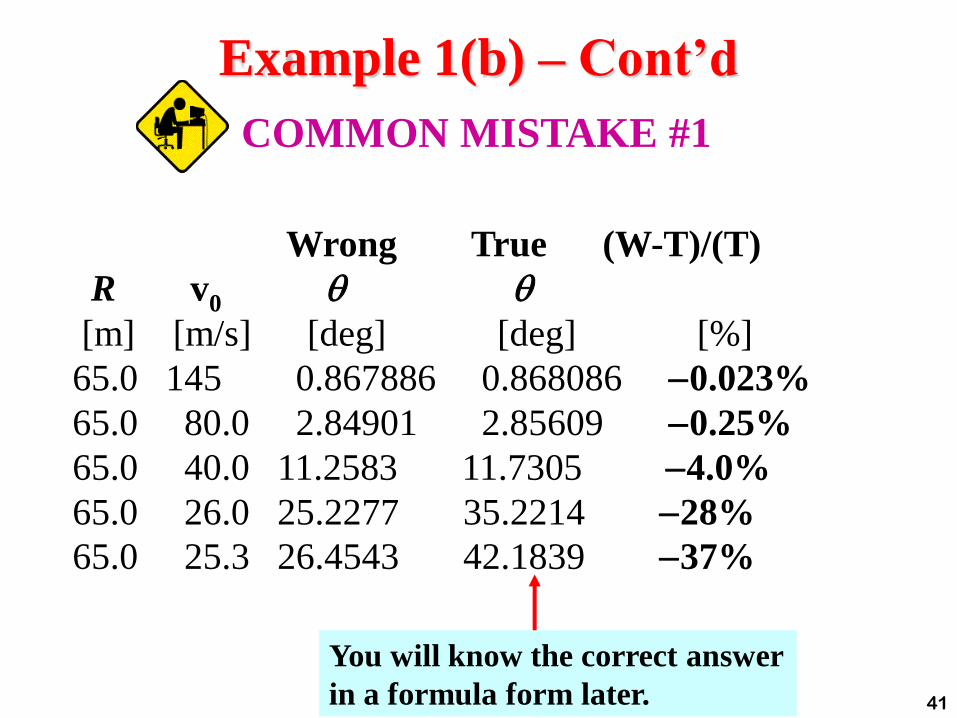
Example 1(b) – Cont’d
40
Kinematics (2D)
Wrong True (W-T)/(T)
R v0 q q
[m] [m/s] [deg] [deg] [%]
65.0 145 0.867886 0.868086 0.023%
65.0 80.0 2.84901 2.85609 0.25%
65.0 40.0 11.2583 11.7305 4.0%
65.0 26.0 25.2277 35.2214 28%
65.0 25.3 26.4543 42.1839 37%
Example 1(b) – Cont’d
COMMON MISTAKE #1
You will know the correct answer
in a formula form later. 41
Kinematics (2D)
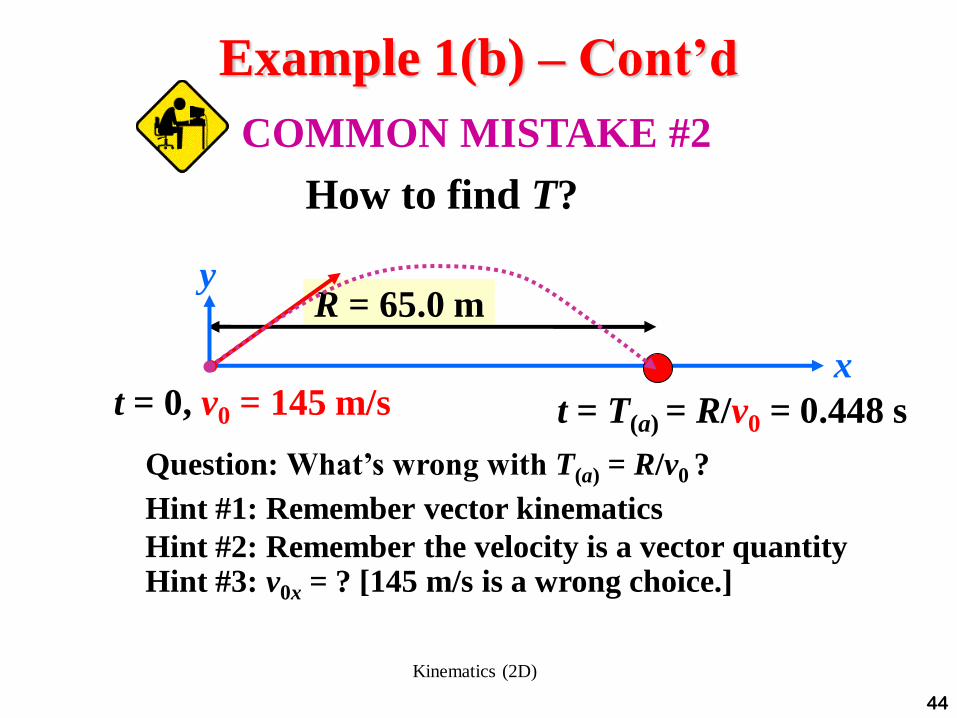
R = 65.0 m y
x t = 0, v0 = 145 m/s
COMMON MISTAKE #2
Example 1(b) – Cont’d
t = T(a) = R/v0 = 0.448 s
Question: What’s wrong with T(a) = R/v0 ?
Hint #1: Remember vector kinematics
Hint #2: Remember the velocity is a vector quantity
How to find T?
Hint #3: v0x = ? [145 m/s is a wrong choice.]
44
Kinematics (2D)
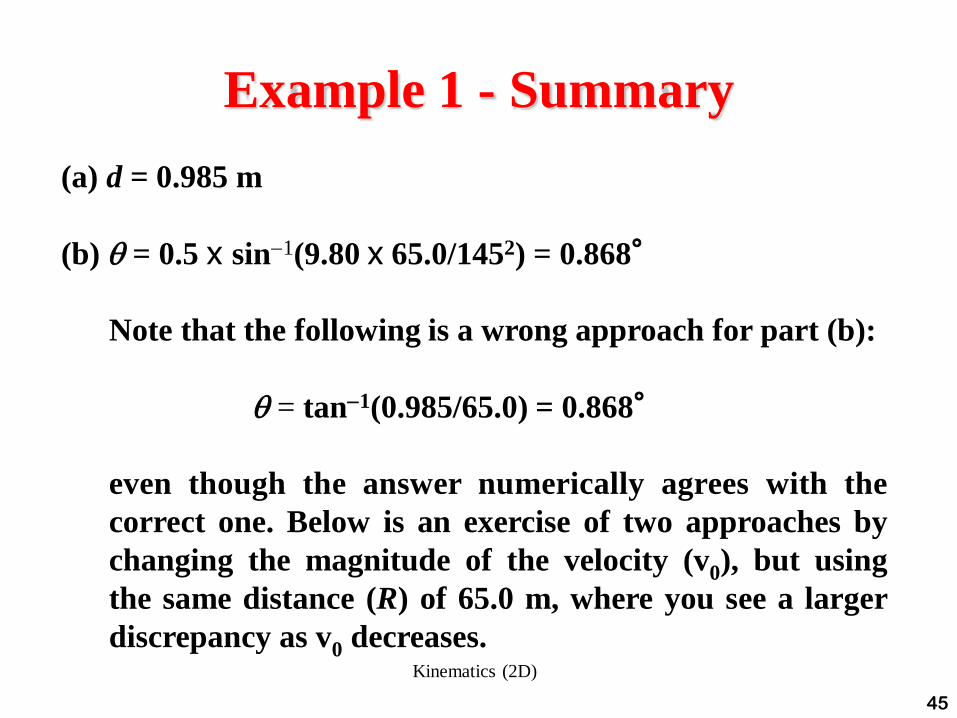
(a) d = 0.985 m
(b) q = 0.5 x sin1(9.80 x 65.0/1452) = 0.868°
Note that the following is a wrong approach for part (b):
q = tan1(0.985/65.0) = 0.868°
even though the answer numerically agrees with the
correct one. Below is an exercise of two approaches by
changing the magnitude of the velocity (v0), but using
the same distance (R) of 65.0 m, where you see a larger
discrepancy as v0 decreases.
Example 1 - Summary
45
Kinematics (2D)
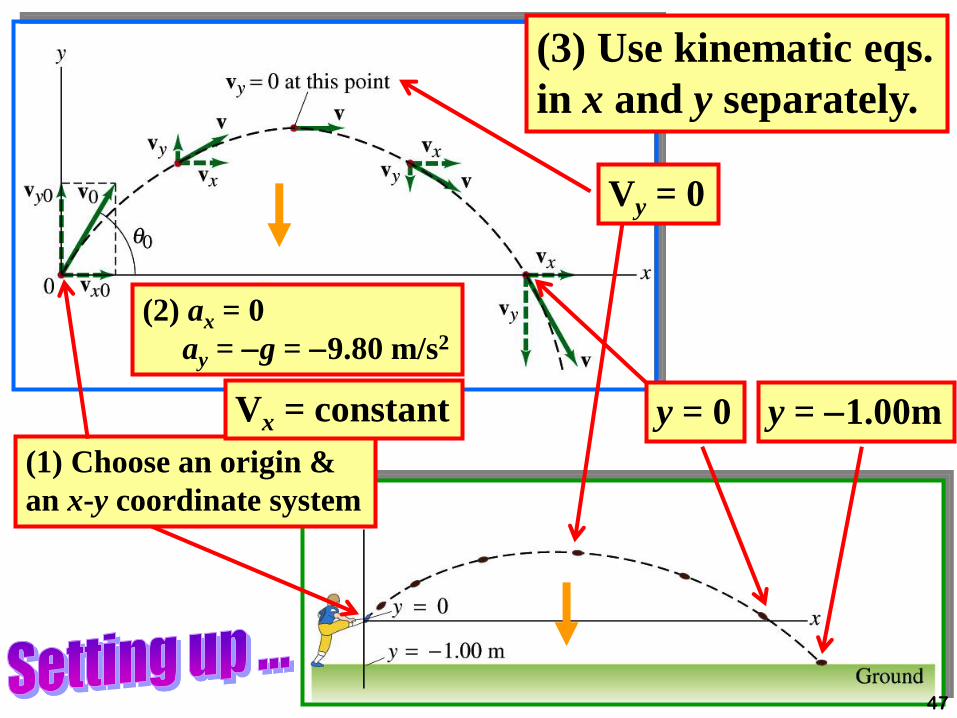
y = 0
Vy = 0
y = 1.00m
(1) Choose an origin &
an x-y coordinate system
(2) ax = 0
ay = g = 9.80 m/s2
(3) Use kinematic eqs.
in x and y separately.
Vx = constant
47
Kinematics (2D)
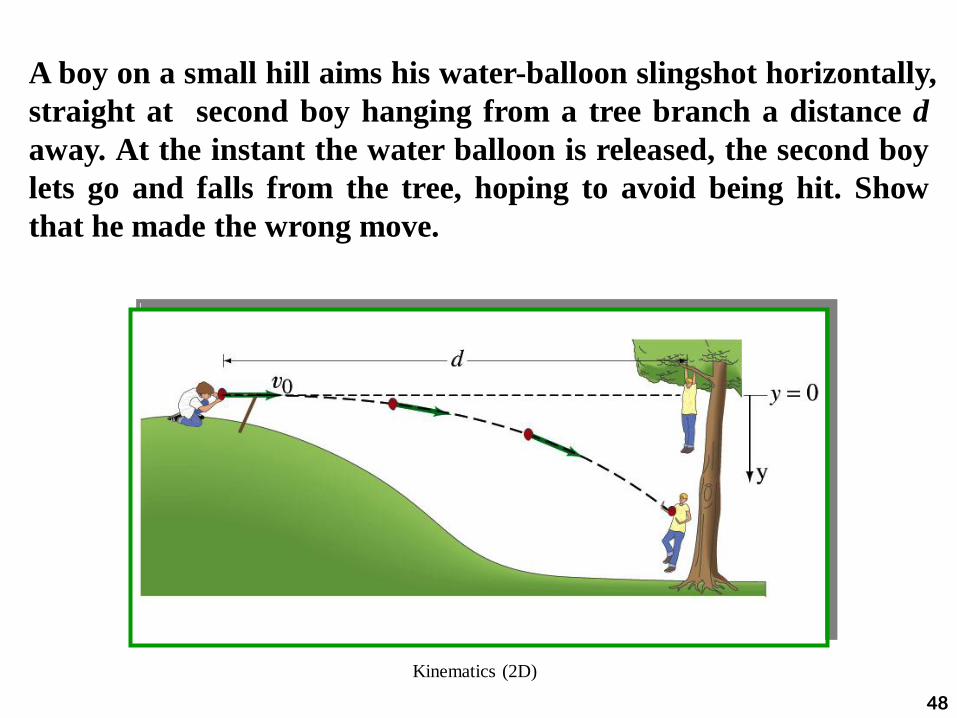
A boy on a small hill aims his water-balloon slingshot horizontally,
straight at second boy hanging from a tree branch a distance d
away. At the instant the water balloon is released, the second boy
lets go and falls from the tree, hoping to avoid being hit. Show
that he made the wrong move.
48
Kinematics (2D)
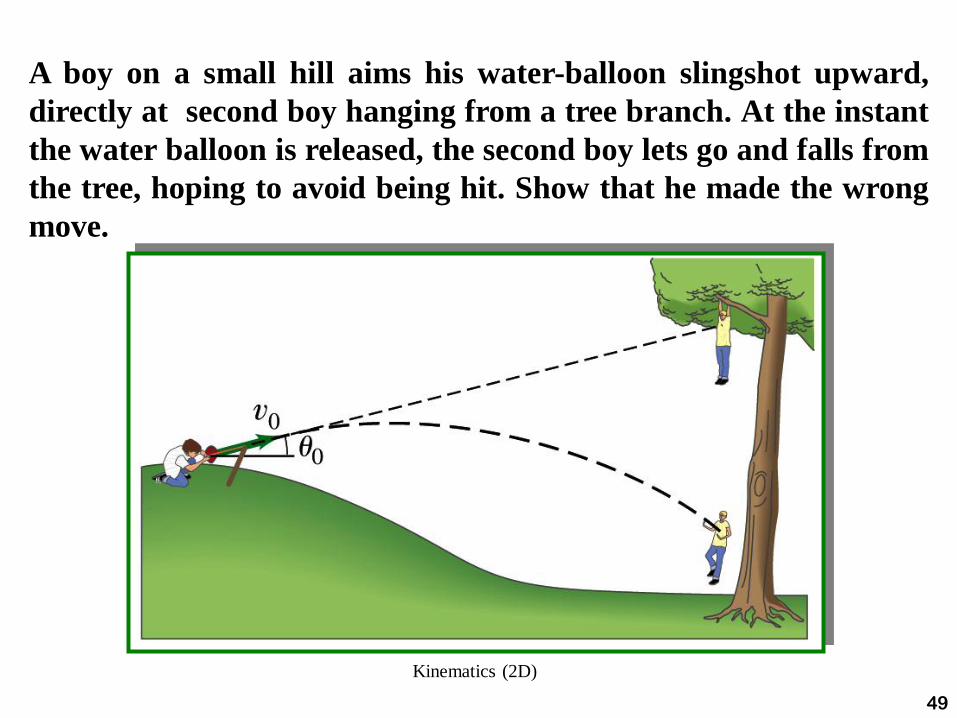
A boy on a small hill aims his water-balloon slingshot upward,
directly at second boy hanging from a tree branch. At the instant
the water balloon is released, the second boy lets go and falls from
the tree, hoping to avoid being hit. Show that he made the wrong
move.
49
Kinematics (2D)
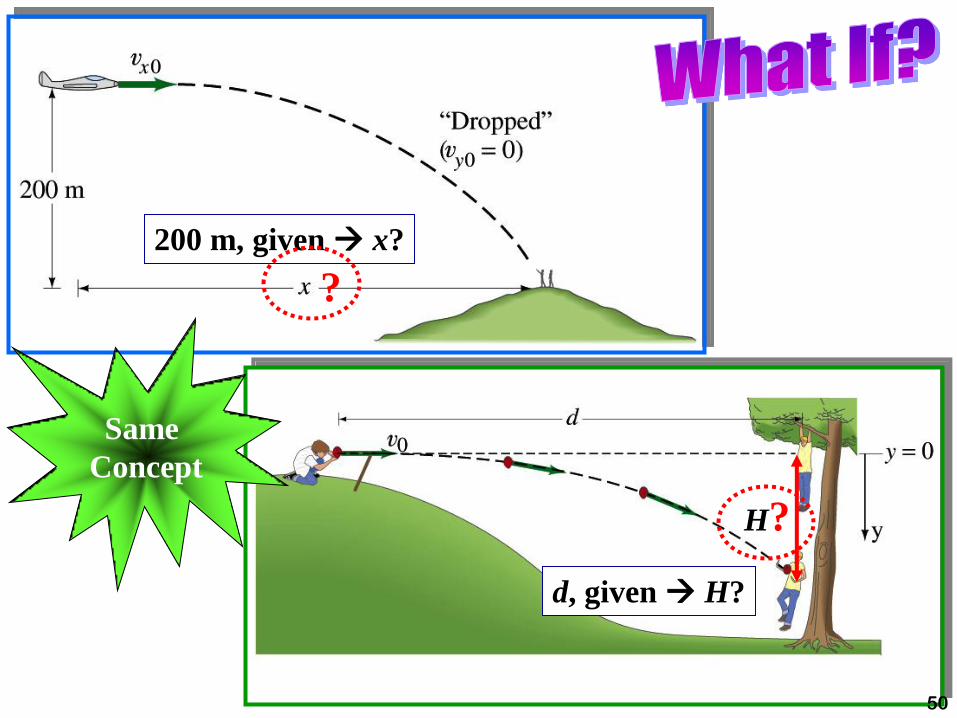
Same
Concept
200 m, given x?
d, given H?
H?
?
50
Kinematics (2D)
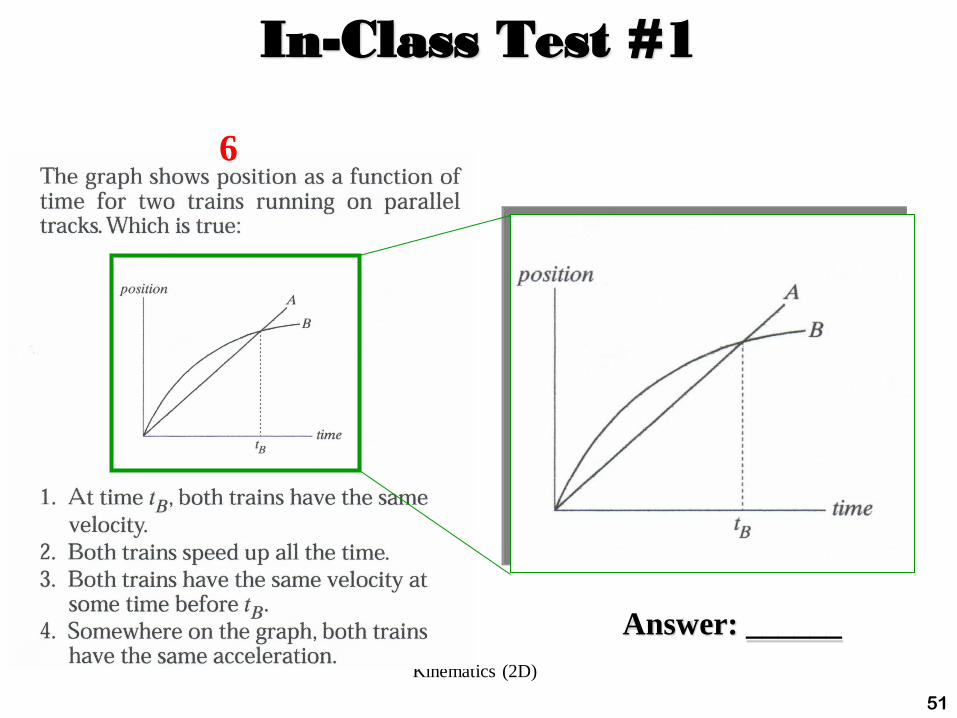
In-Class Test #1
6
51
Answer: ______
Kinematics (2D)
Example 1+1
Kinematics (2D)
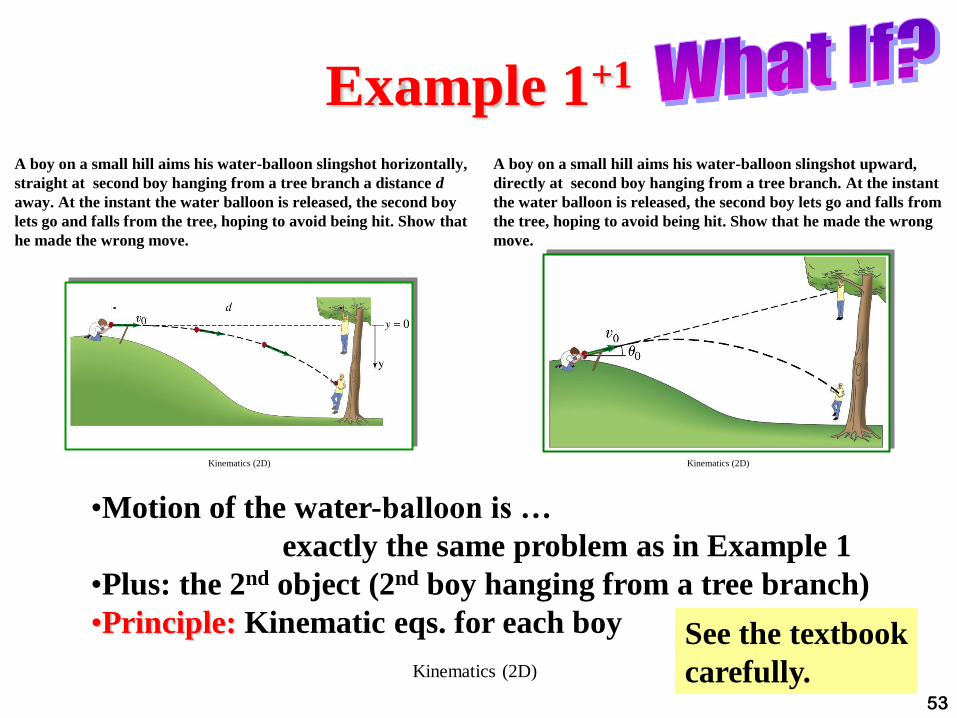
A boy on a small hill aims his water-balloon slingshot horizontally,
straight at second boy hanging from a tree branch a distance d
away. At the instant the water balloon is released, the second boy
lets go and falls from the tree, hoping to avoid being hit. Show that
he made the wrong move.
Kinematics (2D)
A boy on a small hill aims his water-balloon slingshot upward,
directly at second boy hanging from a tree branch. At the instant
the water balloon is released, the second boy lets go and falls from
the tree, hoping to avoid being hit. Show that he made the wrong
move.
•Motion of the water-balloon is …
exactly the same problem as in Example 1
•Plus: the 2nd object (2nd boy hanging from a tree branch)
•Principle: Kinematic eqs. for each boy See the textbook
carefully. 53
Kinematics (2D)
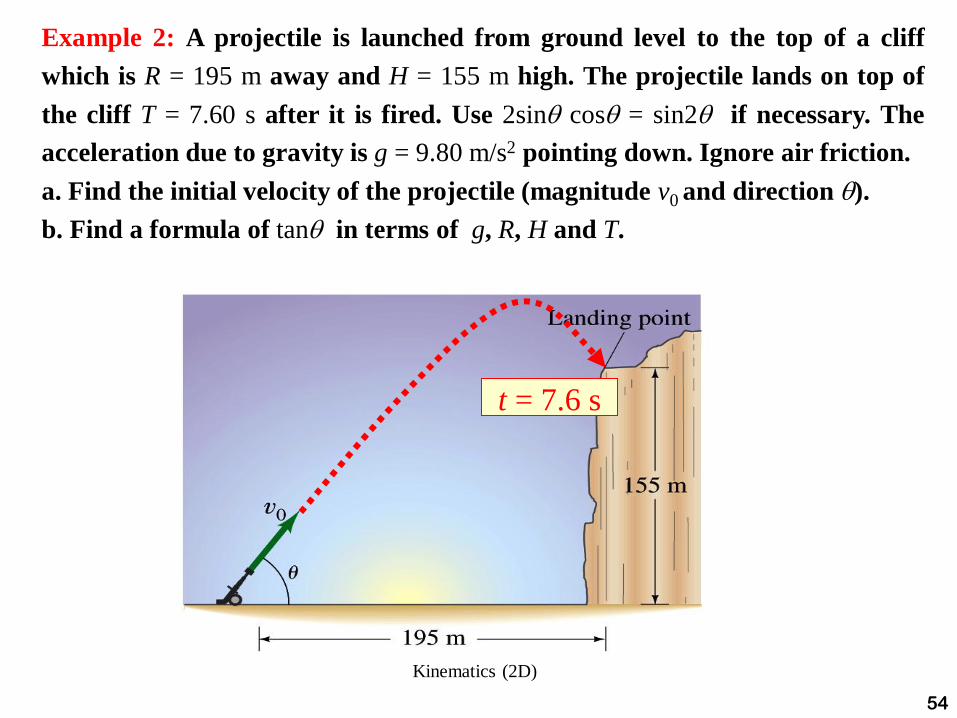
t = 7.6 s
Example 2: A projectile is launched from ground level to the top of a cliff
which is R = 195 m away and H = 155 m high. The projectile lands on top of
the cliff T = 7.60 s after it is fired. Use 2sinq cosq = sin2q if necessary. The
acceleration due to gravity is g = 9.80 m/s2 pointing down. Ignore air friction.
a. Find the initial velocity of the projectile (magnitude v0 and direction q).
b. Find a formula of tanq in terms of g, R, H and T.
54
Kinematics (2D)
Chap. 3: Kinematics
(2D) - Part II
55
Recap: Kinematics (1D)
1. Vector Kinematics
2. Projectile Motion
3. Uniform Circular Motion
4. Relative Velocity
Kinematics (2D)
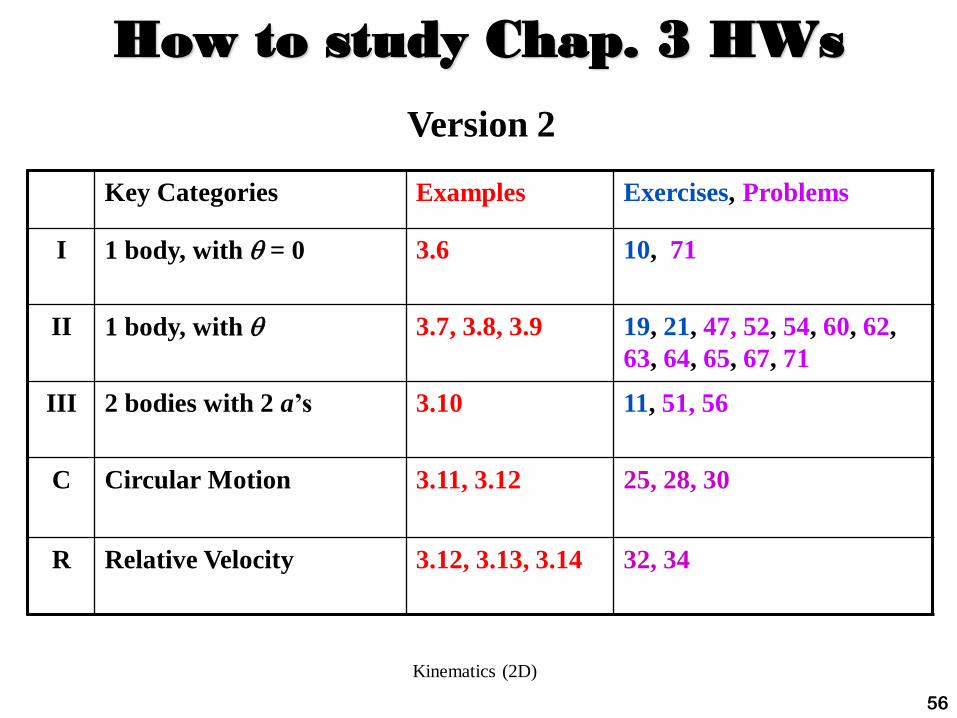
How to study Chap. 3 HWs
Key Categories Examples Exercises, Problems
I 1 body, with q = 0 3.6 10, 71
II 1 body, with q 3.7, 3.8, 3.9 19, 21, 47, 52, 54, 60, 62,
63, 64, 65, 67, 71
III 2 bodies with 2 a’s 3.10 11, 51, 56
C Circular Motion 3.11, 3.12 25, 28, 30
R Relative Velocity 3.12, 3.13, 3.14 32, 34
56
Version 2
Kinematics (2D)
Uniform Circular Motion
1. Kinematics
2. Coordinates: r-f
3. Newton’s 2nd Law (Future)
57
Kinematics (2D)
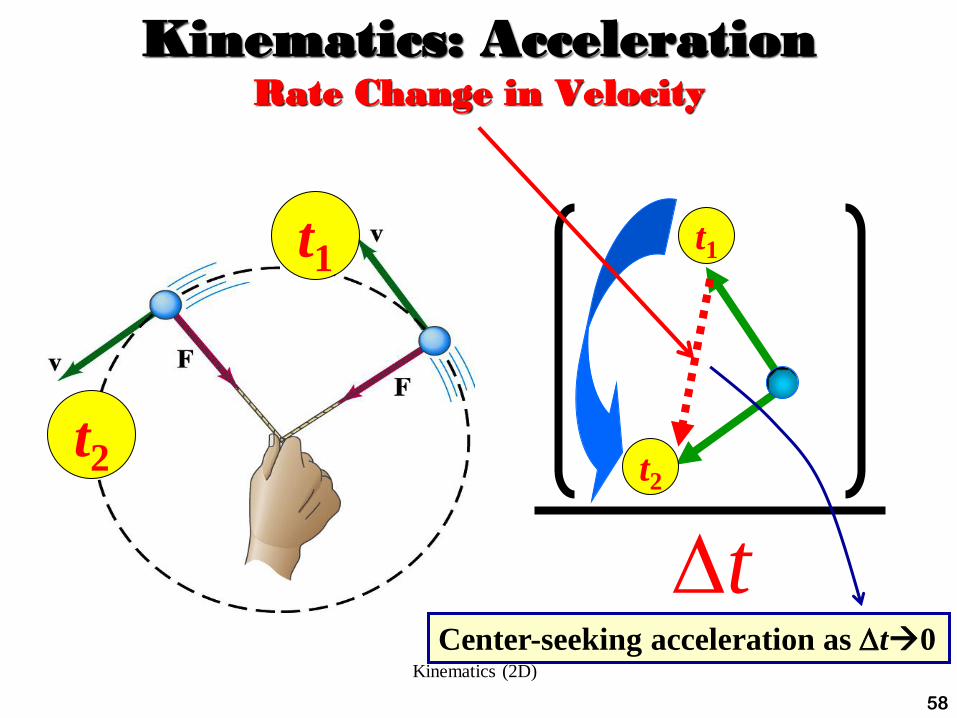
Kinematics: Acceleration Rate Change in Velocity
t2
t1
Center-seeking acceleration as Dt0
t1
t2
Dt
58
Kinematics (2D)
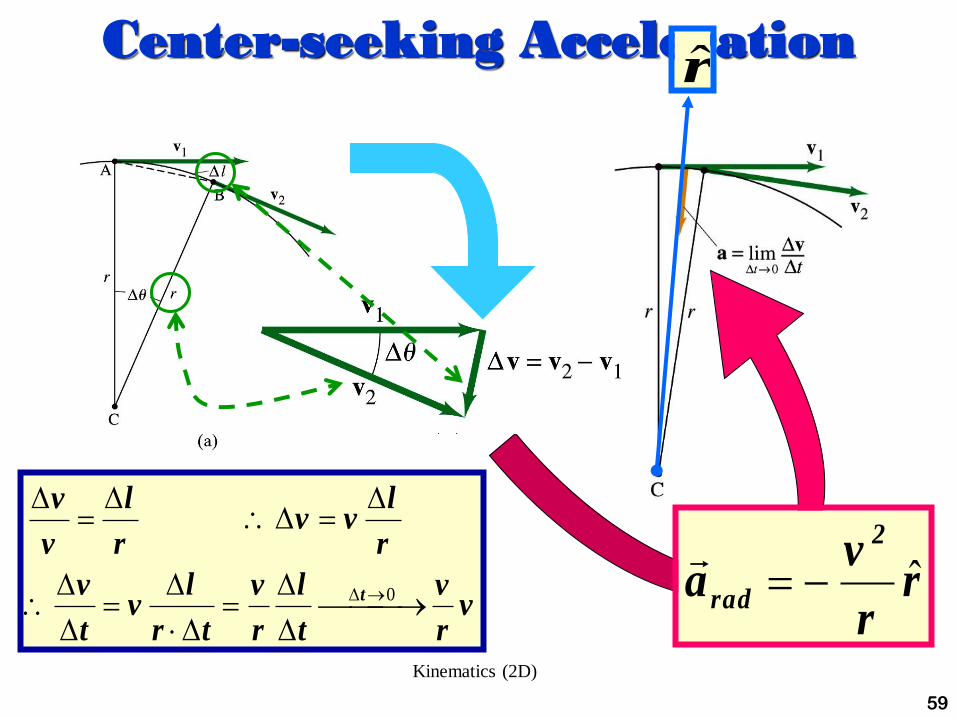
Center-seeking Acceleration
vvlvl
vv
lvv
l
v
v
rtrtr
t
r
r
t D
D
D
D
D
D
DD
D
D
D 0
rr
a2
radˆ
v
r̂
59
Kinematics (2D)
Example Problem 1 The radius of the semicircular drive in front of the
Administration Building is 200 m. How fast could a sports car
negotiate the turn, assuming that it could achieve the magnitude
of a radial acceleration arad = 0.8g? Ignore the stop sign at the
intersection with East Gate Drive.
60
Kinematics (2D)
Example Problem 2 People advocating space colonies say that it will be simple to
simulate gravity. One need only build a space module in the
form of a doughnut (torus) and let it revolve at an appropriate
rate. Consider a torus in circumference C = 10,000 m; it could
easily accommodate 25 dwellings plus landscaping and
gardens. How many times would the torus have to revolve
each hour in order that the magnitude of the radial
acceleration at the rim equal g?
62
rr
arad ˆv2
Kinematics (2D)
Problem: Relative Velocity in 1D
A railroad flatcar is traveling to the right at a speed of 13.0 m/s relative to an observer standing on the ground. A motor scooter is being ridden on the flatcar. Find the velocity (magnitude and direction) of the scooter relative to the flatcar if its velocity relative to the observer on the ground is: a) 20.0 m/s to the right; b) 4.00 m/s to the left; c) zero.
64
VP/A = VP/B + VB/A → → →
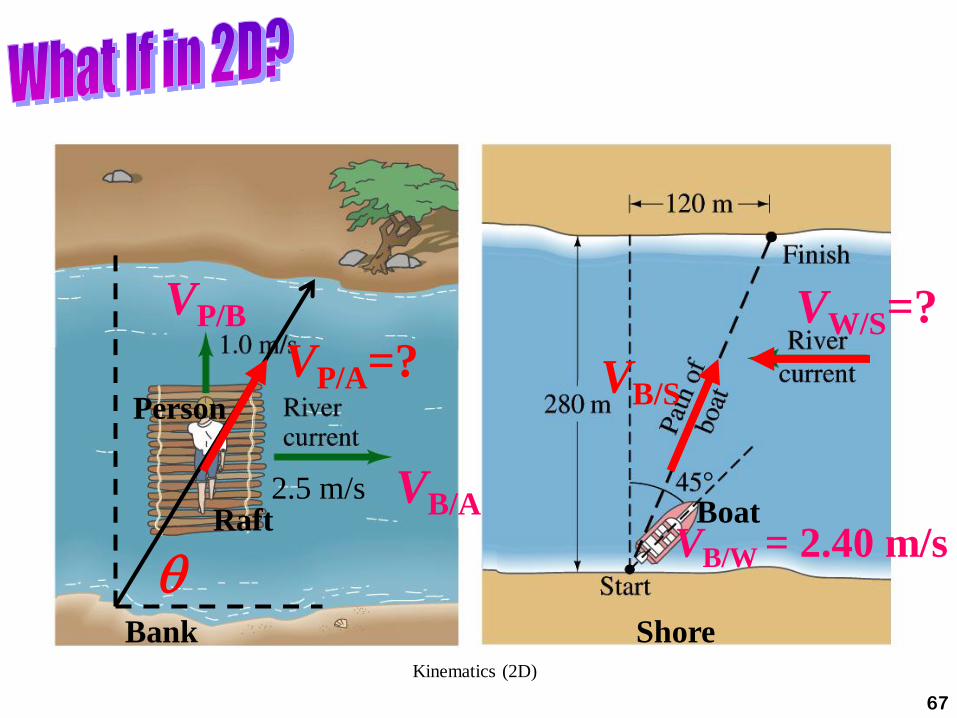
Kinematics (2D)
2.5 m/s
q
VP/A=?
Bank
Raft
Person
VP/B
Shore
Boat
VW/S=?
VB/W = 2.40 m/s
VB/S
VB/A
67