ch5 z transform
TRANSCRIPT
1
DIGITAL SIGNAL PROCESSING
Chapter 5: Z-TRANSFORM AND ITS APPLICATIONS TO THE ANALYSIS OF LTI SYSTEMS
Reference: S J.Orfanidis, ”Introduction to Signal Processing”, Prentice –Hall , 1996,ISBN 0-13-209172-0M. D. Lutovac, D. V. Tošić, B. L. Evans, “Filter Design for Signal Processing Using MATLAB and Mathematica”, Prentice Hall, 2001
Lectured by Assoc. Prof. Dr. Thuong Le-TienNational Distinguished LecturerTel: 08-38654184; 0903 787 989
Email: [email protected], [email protected]
Dated on Oct 2013
2
What the chapter can be presented.
1. Basis properties
2. Region of Convergence (ROC)
3. Causality and Stability
4. Frequency spectrum
5. Inverse Z-Transform
3
1. Basis Properties
Z-transform is basically as a tool for the analysis, Design and implementation of digital filters. Z transform of a discrete time signal x(n)
X(z) = … +x(-2)z2 + x(-1)z + x(0) + x(1)z-1 + x(2)z-2 + …
if x(n) is causal, only negative power z-n, n 0 appear in the expansion.
n
n
nznxzX
4
Z-transform of the transfer function h(n):
Example:
(a) h = {h0, h1, h2, h3} = {2,3,5,2}
(b) h = {h0, h1, h2, h3, h4} = {1,0,0,0,-1}
Their Z-transform
a) H(z)= h0 + h1z-1 + h2 z-2 + h3 z-3
= 2 + 3z-1 + 5z-2 + 2z-3
b) H(z)= h0 + h1z-1 + h2 z-2 + h3 z-3 + h4 z-4 =
1 - z-4
n
n
nznhzH
5
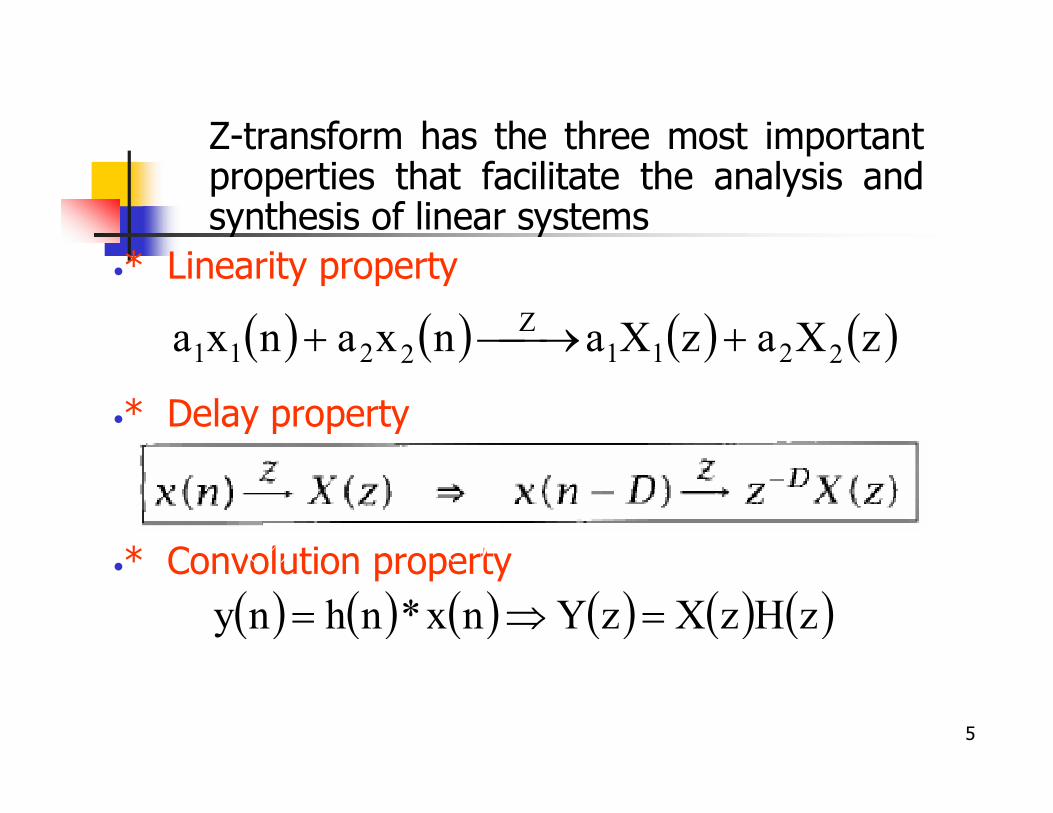
Z-transform has the three most important properties that facilitate the analysis and synthesis of linear systems
•* Linearity property
•* Delay property
•* Convolution property
zXazXanxanxa 2211Z
2211
zXzDnxzXnx DZZ
zHzXzYnx*nhny
6
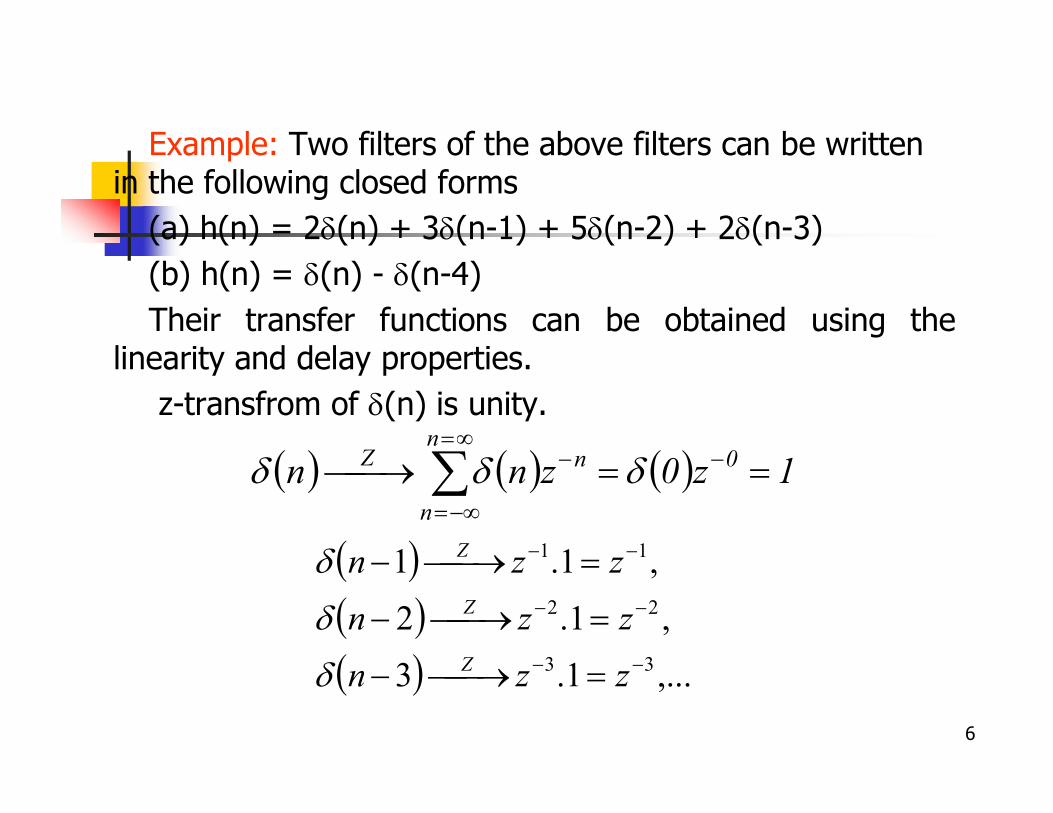
Example: Two filters of the above filters can be written in the following closed forms
(a) h(n) = 2(n) + 3(n-1) + 5(n-2) + 2(n-3)
(b) h(n) = (n) - (n-4)
Their transfer functions can be obtained using the linearity and delay properties.
z-transfrom of (n) is unity.
1z0znn 0n
n
nZ
,...1.3
,1.2
,1.1
33
22
11
zzn
zzn
zzn
Z
Z
Z
7
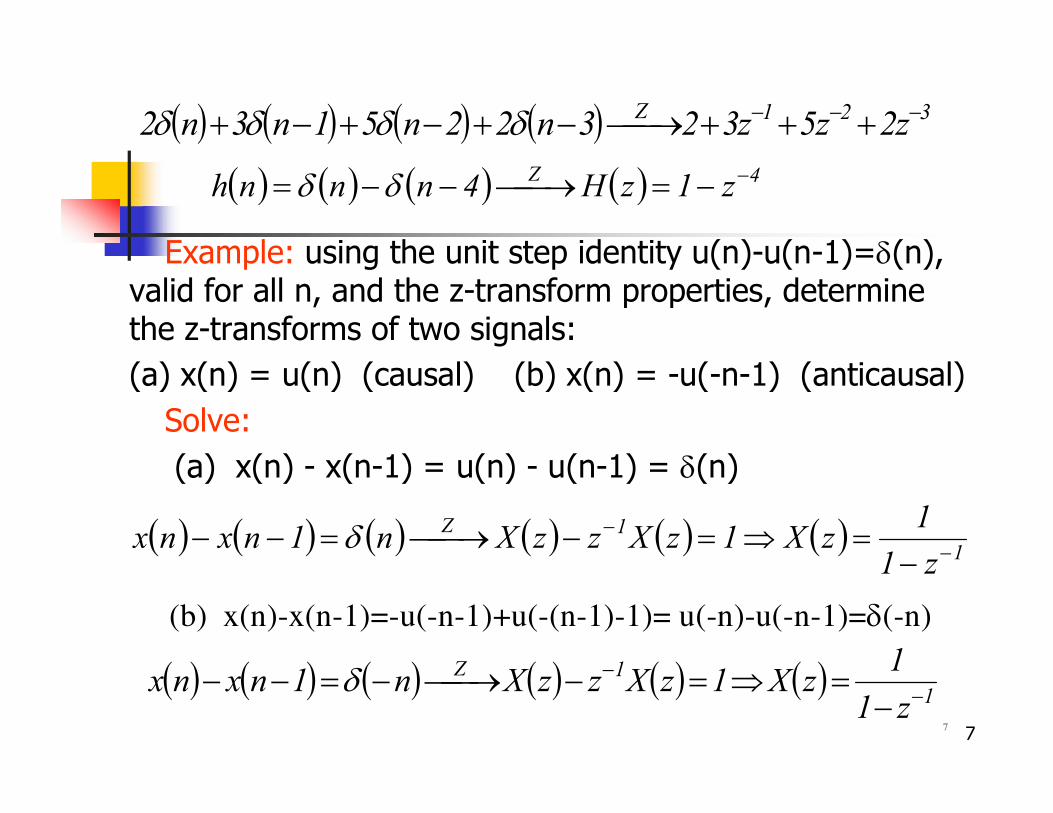
Example: using the unit step identity u(n)-u(n-1)=(n), valid for all n, and the z-transform properties, determine the z-transforms of two signals:
(a) x(n) = u(n) (causal) (b) x(n) = -u(-n-1) (anticausal)
Solve:
(a) x(n) - x(n-1) = u(n) - u(n-1) = (n)
1
1Z
z1
1zX1zXzzXn1nxnx
321Z z2z5z323n22n51n3n2
4Z z1zH4nnnh
(b) x(n)-x(n-1)=-u(-n-1)+u(-(n-1)-1)= u(-n)-u(-n-1)=(-n)
1
1Z
z1
1zX1zXzzXn1nxnx
7
8
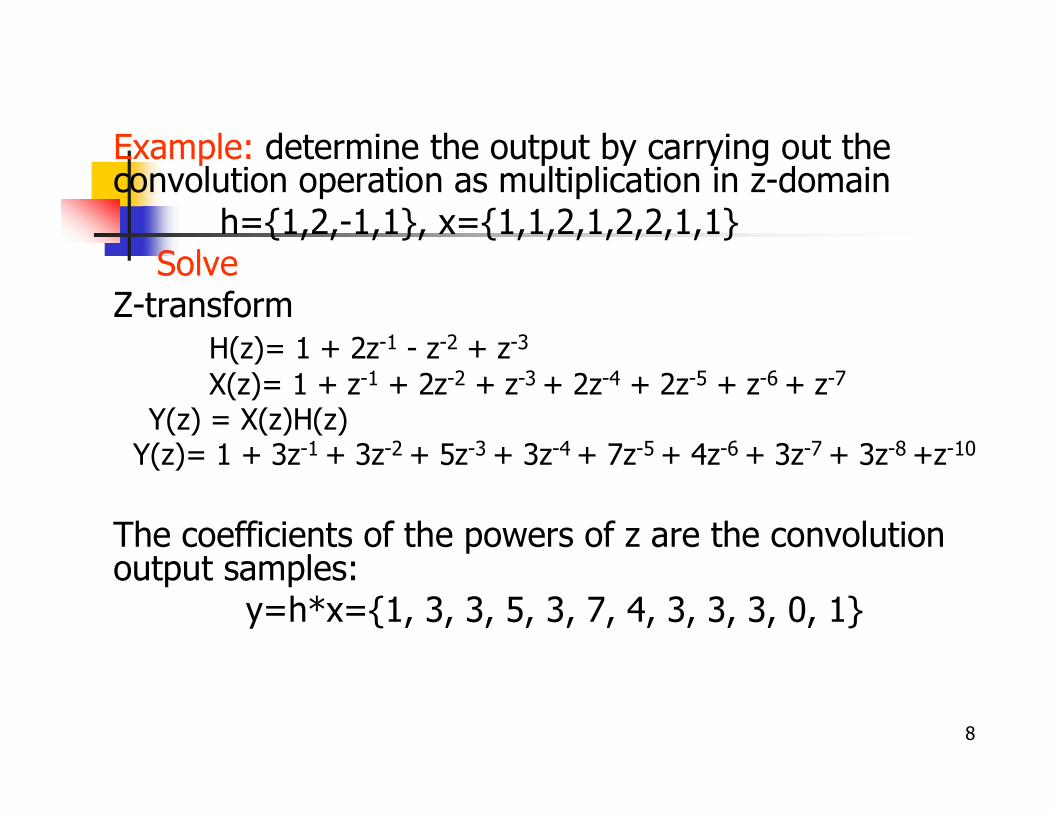
Example: determine the output by carrying out the convolution operation as multiplication in z-domain
h={1,2,-1,1}, x={1,1,2,1,2,2,1,1} Solve
Z-transformH(z)= 1 + 2z-1 - z-2 + z-3
X(z)= 1 + z-1 + 2z-2 + z-3 + 2z-4 + 2z-5 + z-6 + z-7
Y(z) = X(z)H(z)Y(z)= 1 + 3z-1 + 3z-2 + 5z-3 + 3z-4 + 7z-5 + 4z-6 + 3z-7 + 3z-8 +z-10
The coefficients of the powers of z are the convolution output samples:
y=h*x={1, 3, 3, 5, 3, 7, 4, 3, 3, 3, 0, 1}
9
2. Region of Convergence (ROC)ROC of X(z) is defined to be that subset of the complex z-plane C for which the series of the
formula converges, that is
The ROC is an important concept in many respects: It allows the unique inversion of the Z-transform and provides convenient characterizations of the causality and stability properties of a signal or system.
n
n
nznxzXCzROC
10
Example, a causal signal:
x(n)=(0.5)nu(n)={1,0.5,0.52,…}
Using the infinite geometric series formula
Which is valid for x < 1 and diverges otherwise
The convergence of the geometric series requires:
Then, ROC={zCz>0.5} outside the circle of radius 0.5
x1
1xz5.0zX
0n
n
0n
n1
5.0z
z
z5.01
1zX
1
5.0z1z5.0x 1
x1
1x...xxx1
0n
n32
11
Example for an anticausal signal x(n)=-(0.5)nu(-n-1)
Convergence with x < 1 and diverges otherwise
Let x=0.5z-1,
The same result as the causal case except the ROC
x1
xx...xxx
1m
m32
1m1
1m
1m
m1
z5.01
z5.0
x1
xxz5.0zX
1z5.01
1
5.0z
zzX
1m
m11
n
n11
n
nnz5.0z5.0z5.0zX
12
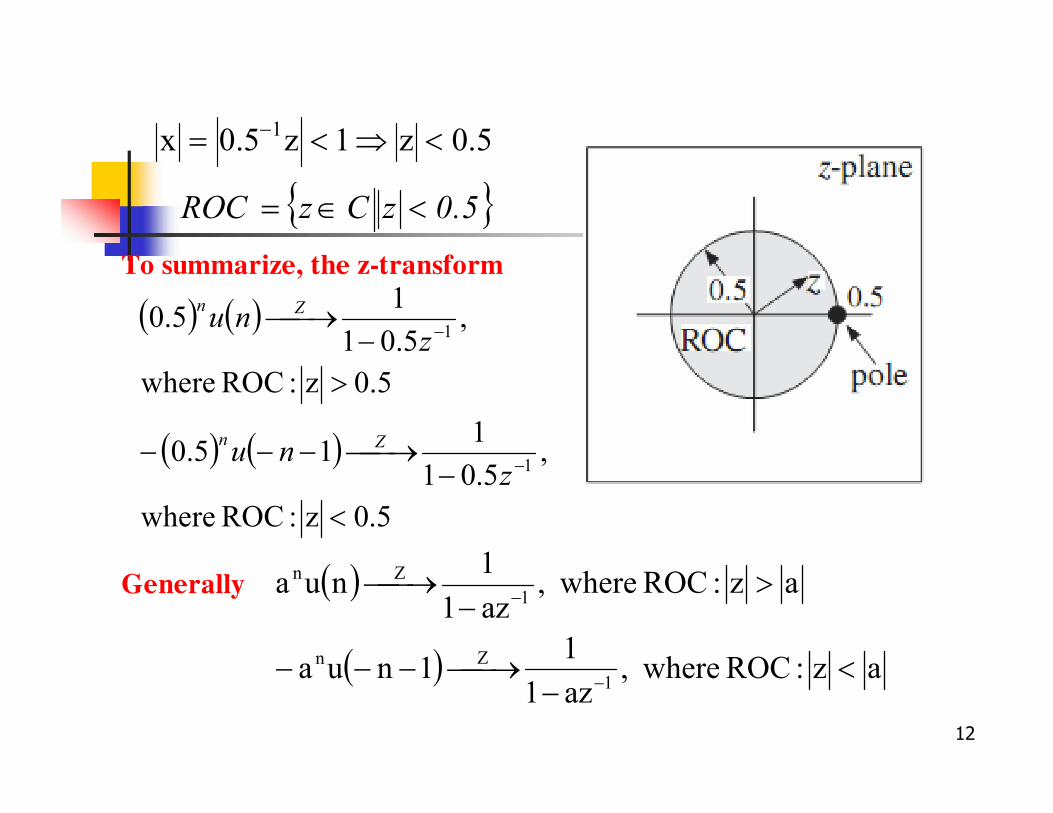
5.0z1z5.0x 1
5.0zCzROC
5.0z :ROC where
,5.01
115.0
5.0z :ROC where
,5.01
15.0
1
1
znu
znu
Zn
Zn
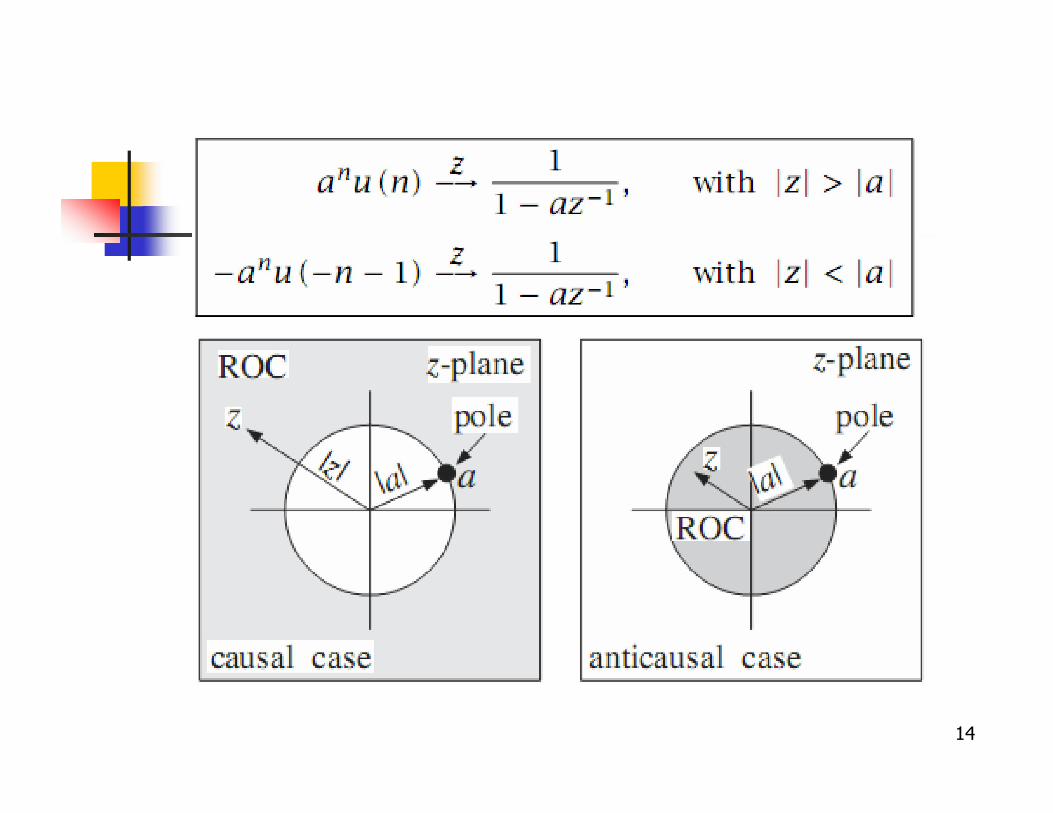
az :ROC where,az1
11nua
az :ROC where,az1
1nua
1
Zn
1
Zn
To summarize, the z-transform
Generally
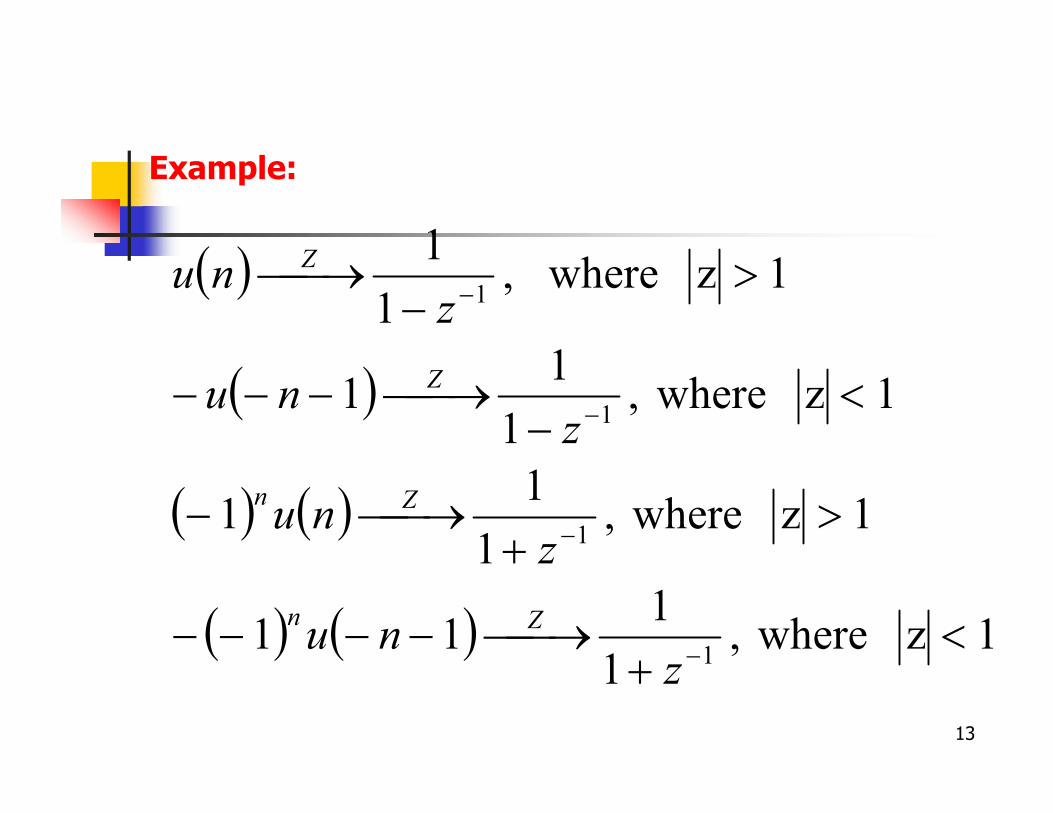
13
Example:
1z where,1
111
1z where,1
11
1z where,1
11
1z where ,1
1
1
1
1
1
znu
znu
znu
znu
Zn
Zn
Z
Z
14
15
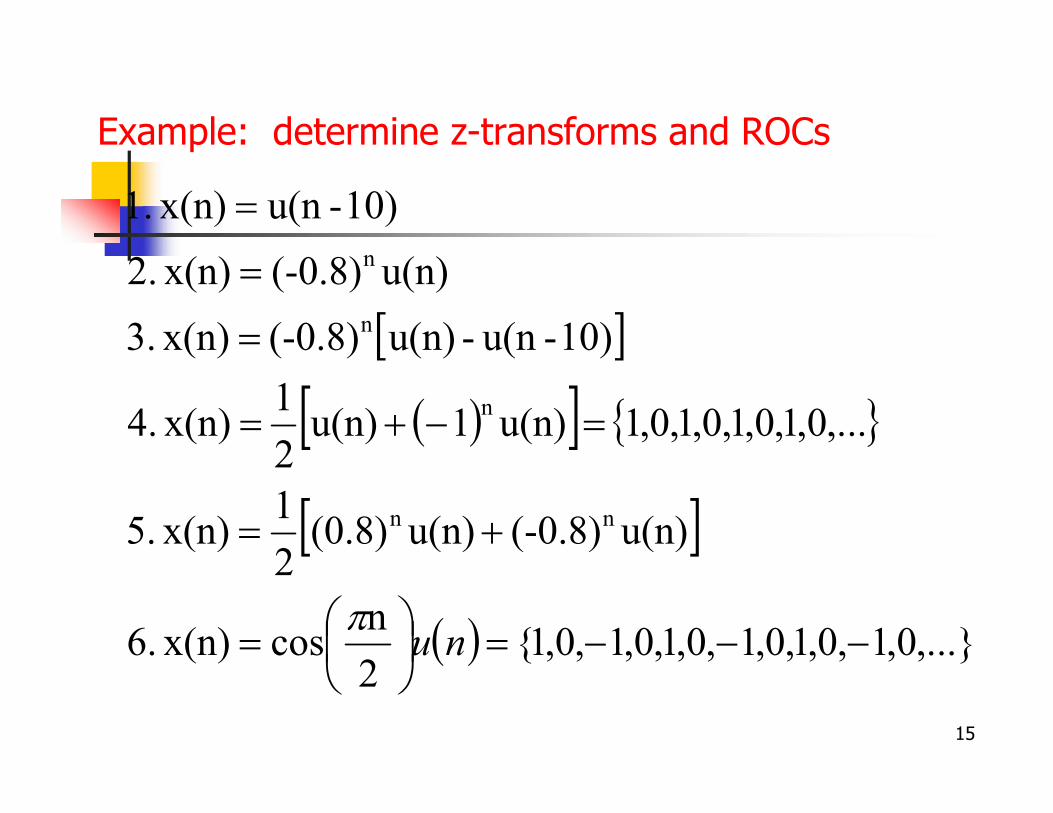
Example: determine z-transforms and ROCs
,...}0,1,0,1,0,1,0,1,0,1,0,1{2
ncos x(n)6.
u(n)(-0.8)u(n)(0.8)2
1 x(n)5.
,...0,1,0,1,0,1,0,1u(n)1u(n)2
1 x(n)4.
10)-u(n -u(n)(-0.8) x(n)3.
u(n)(-0.8) x(n)2.
10)-u(n x(n)1.
nn
n
n
n
nu
16
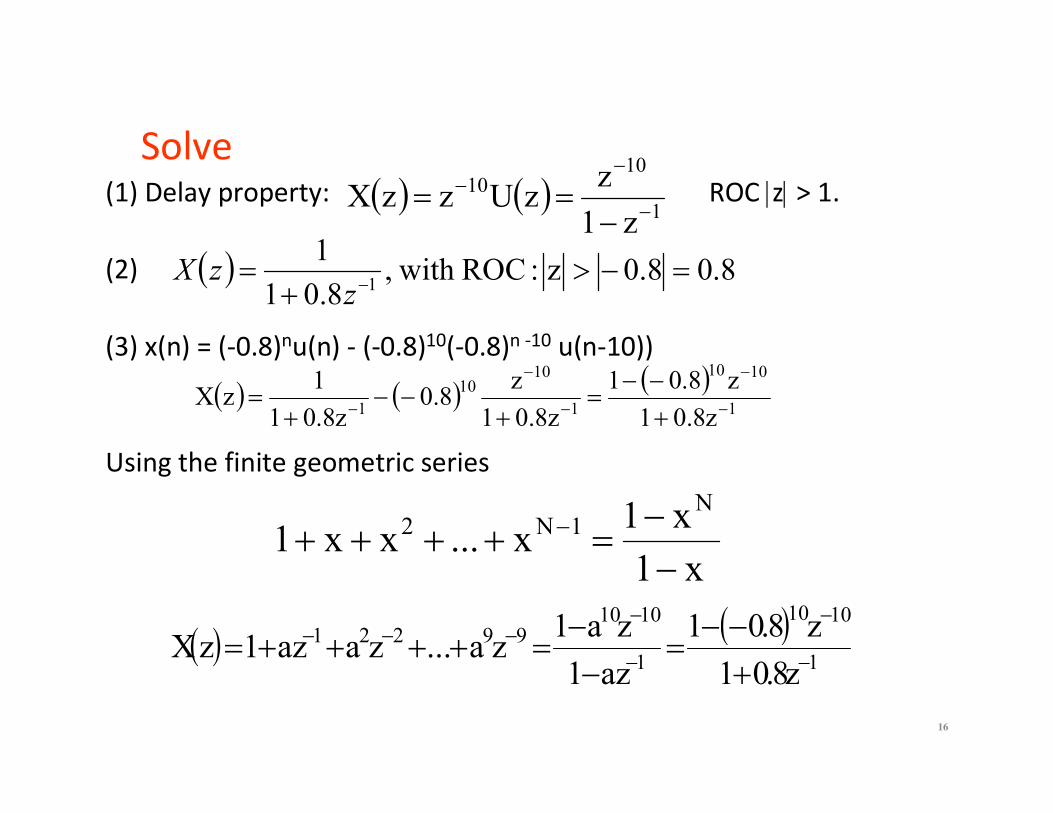
Solve (1) Delay property: ROC z > 1.
(2)
(3) x(n) = (-0.8)nu(n) - (-0.8)10(-0.8)n -10 u(n-10))
Using the finite geometric series
1
1010
1
1010
1 z8.01
z8.01
z8.01
z8.0
z8.01
1zX
x1
x1x...xx1
N1N2
1
1010
z1
zzUzzX
8.08.0z :ROC with ,8.01
11
z
zX
1
1010
1
101099221
z8.01
z8.01
az1
za1za...zaaz1zX
17
(4) ROC z > 1.
(5)
ROC z>0.8
(6)
211 z64.01
1
z8.01
1
z8.01
1
2
1zX
)n(ua)n(ua2
1)n(ue)n(ue
2
1nu
2
ncos)n(x n*n2/nj2/nj
211 1
1
1
1
1
1
2
1
zzzzX
a=e j/2 =j and a*=e -j/2 =-j.
211 z1
1
jz1
1
jz1
1
2
1zX
17
18
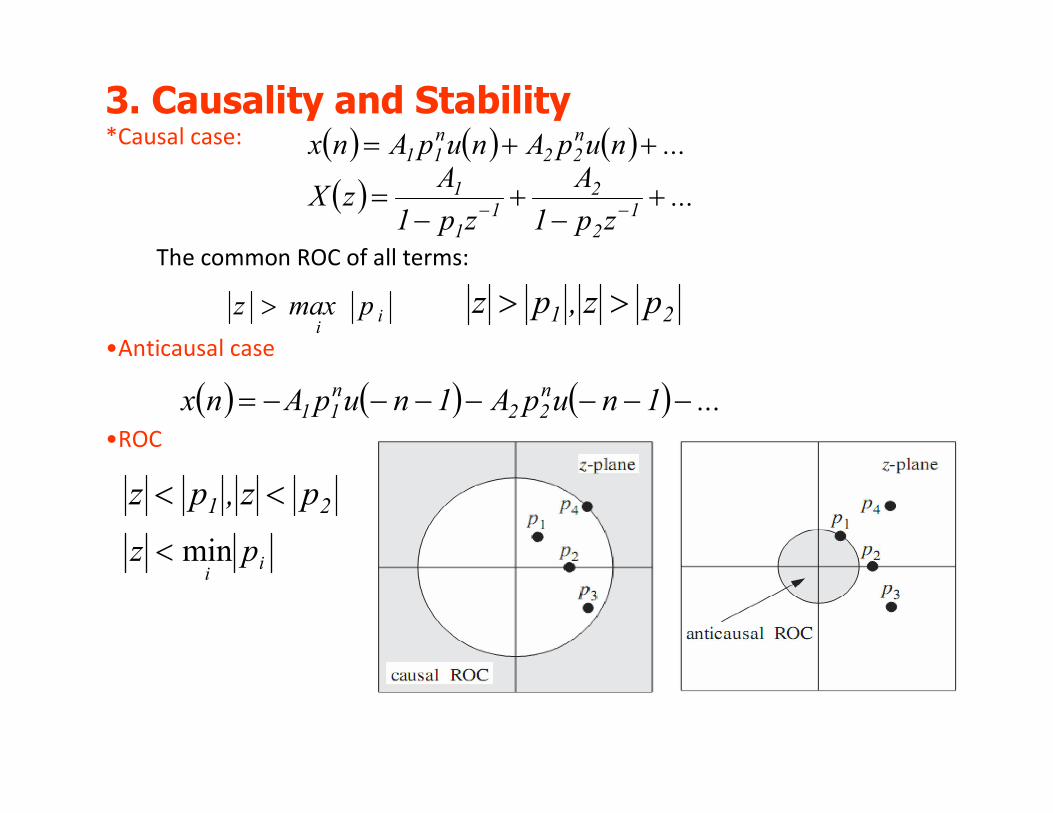
3. Causality and Stability*Causal case:
The common ROC of all terms:
•Anticausal case
•ROC
...1nupA1nupAnx n22
n11
21 pz,pz
...nupAnupAnx n22
n11
...zp1
A
zp1
AzX
12
21
1
1
21 pz,pz ii
pmaxz
ii
pz min
19
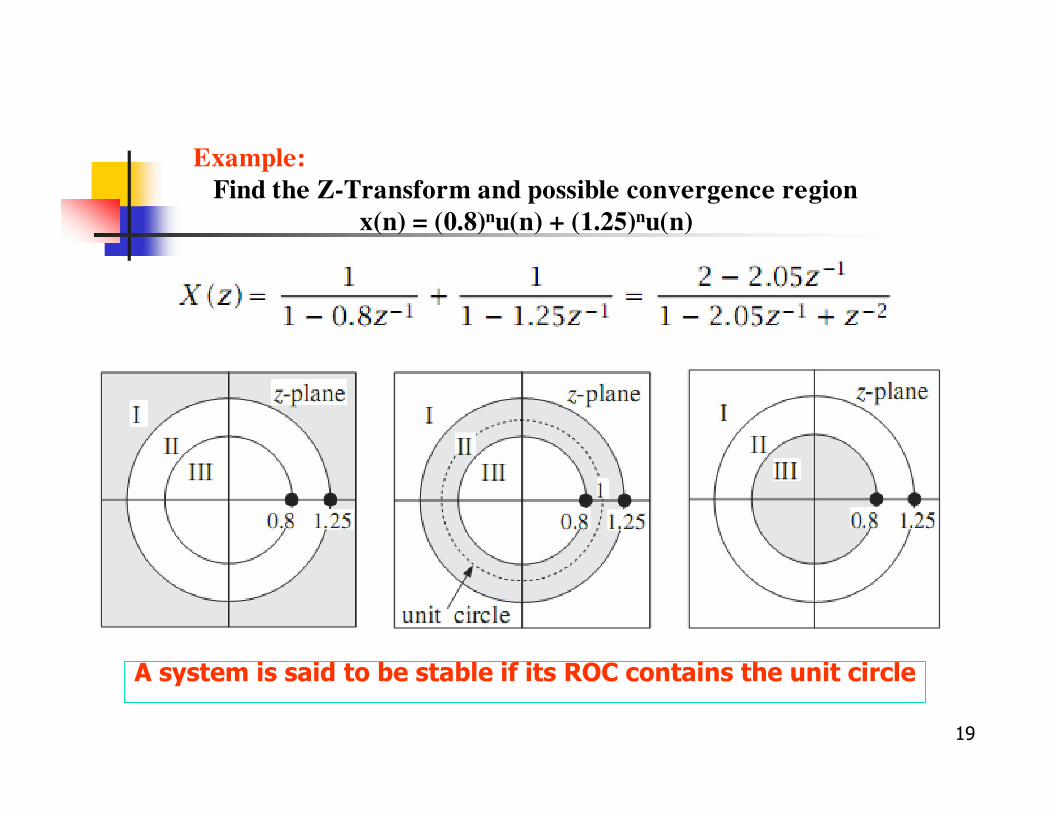
Example:Find the Z-Transform and possible convergence region
x(n) = (0.8)nu(n) + (1.25)nu(n)
A system is said to be stable if its ROC contains the unit circle
20
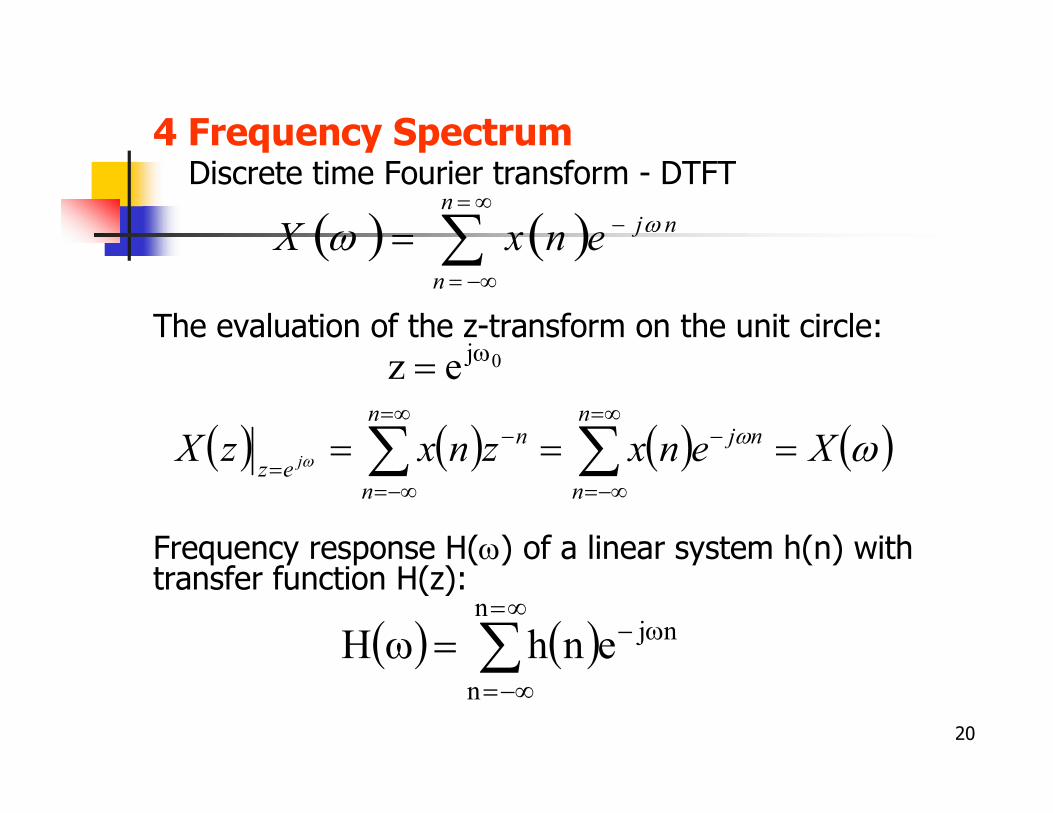
4 Frequency SpectrumDiscrete time Fourier transform - DTFT
The evaluation of the z-transform on the unit circle:
Frequency response H() of a linear system h(n) with transfer function H(z):
n
n
njenxX
0jez
XenxznxzX
n
n
njn
n
n
ez j
n
n
njenhH
21
Digital frequency:
Nyquist interval [-fs/2, fs/2] - < <
Fourier spectrum of signal x(nT) periodic replication of the original analog spectrum at multiples of fs.
jez
zHH
sf
f2
n
f/jfn2^
senTxfX
22
Example
deX2
1nx nj
n
22dX
2
1nx
dfefXf
1nx
S
S
S
f
f
f/jfn2
S
n- ,enx nj 0
m
0 m22X
INVERSE DTDT
Parseval
23
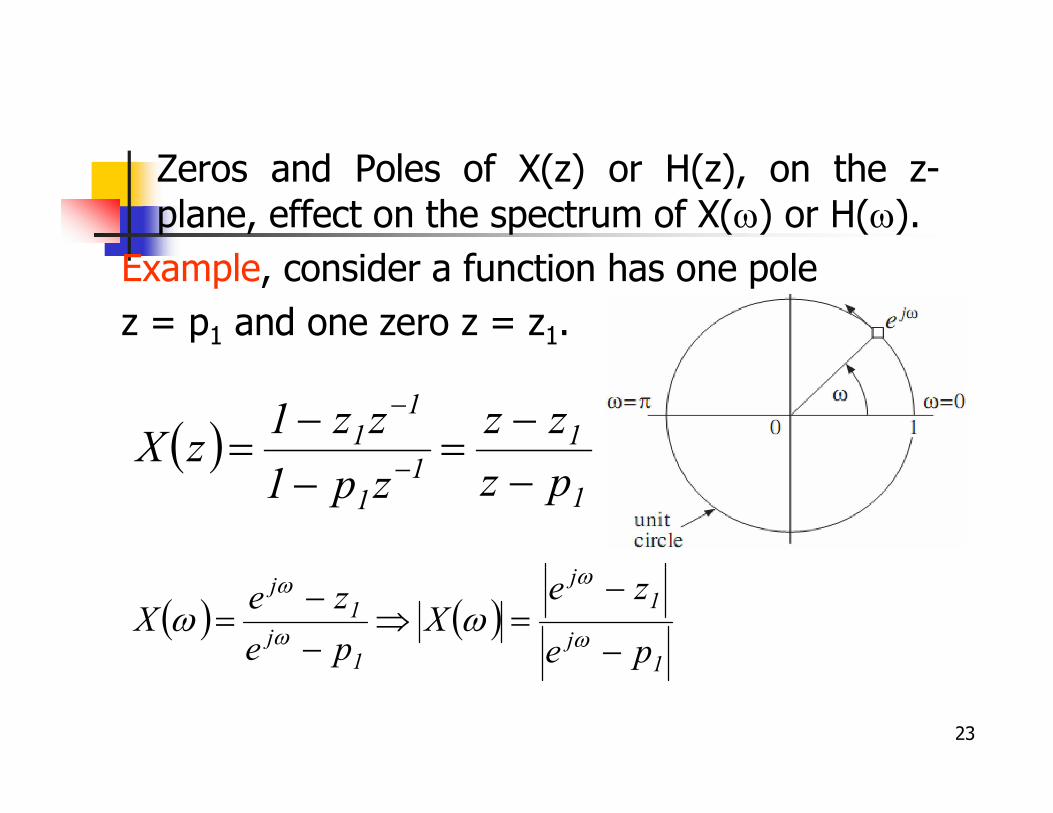
Zeros and Poles of X(z) or H(z), on the z-plane, effect on the spectrum of X() or H().
Example, consider a function has one pole
z = p1 and one zero z = z1.
1
11
1
11
pz
zz
zp1
zz1zX
1
j
1j
1j
1j
pe
zeX
pe
zeX
24
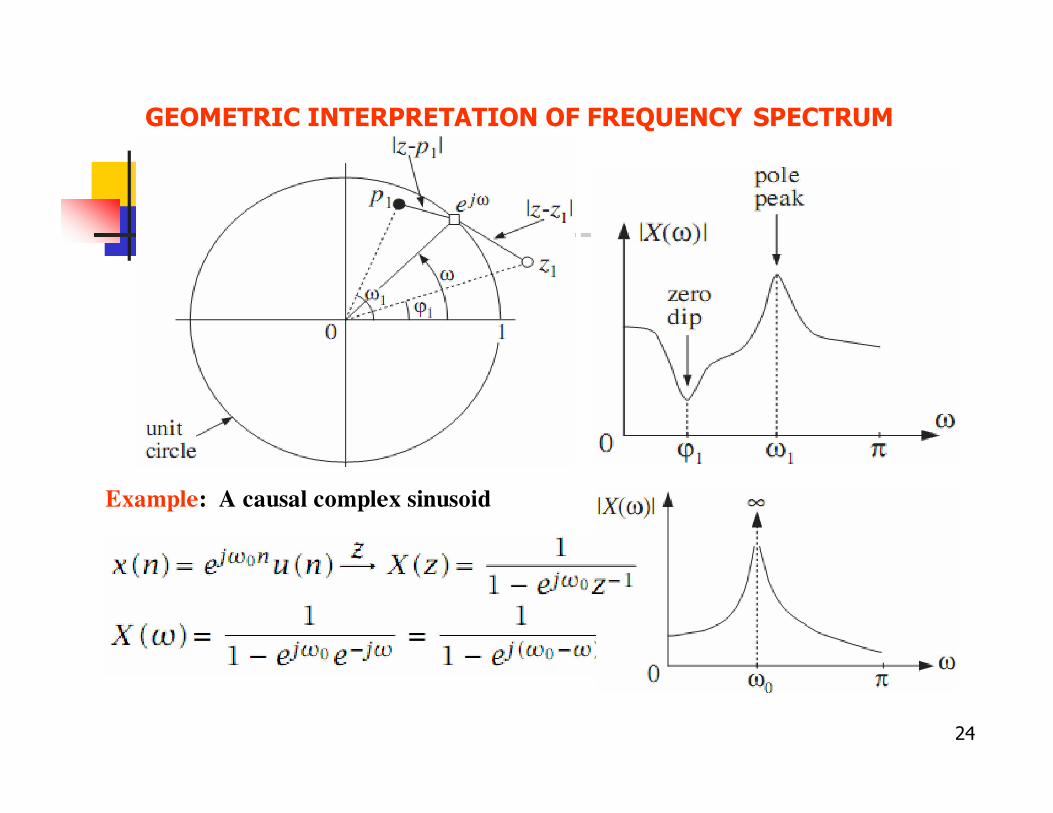
GEOMETRIC INTERPRETATION OF FREQUENCY SPECTRUM
Example: A causal complex sinusoid
25
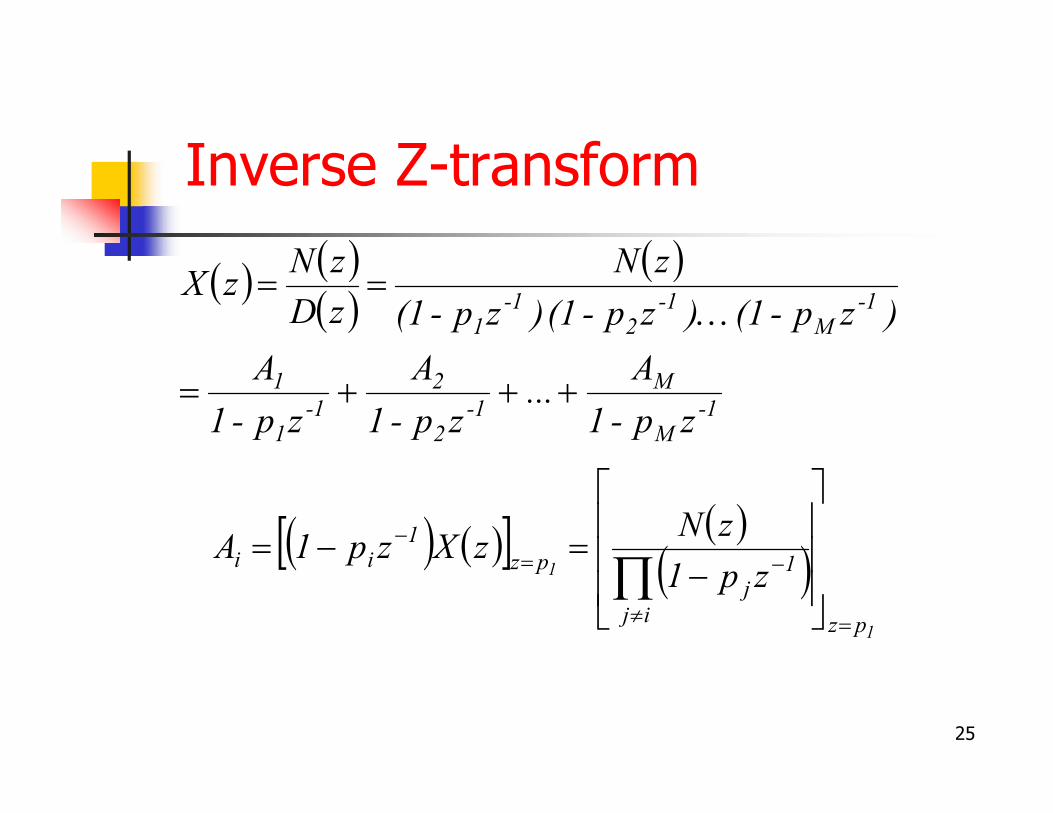
1-M
M1-
2
21-
1
1
1-M
1-2
1-1
zp-1
A...
zp-1
A
zp-1
A
)zp-(1 )zp-(1 )zp-(1
zN
zD
zNzX
1
1
pzij
1j
pz1
iizp1
zNzXzp1A
Inverse Z-transform
26
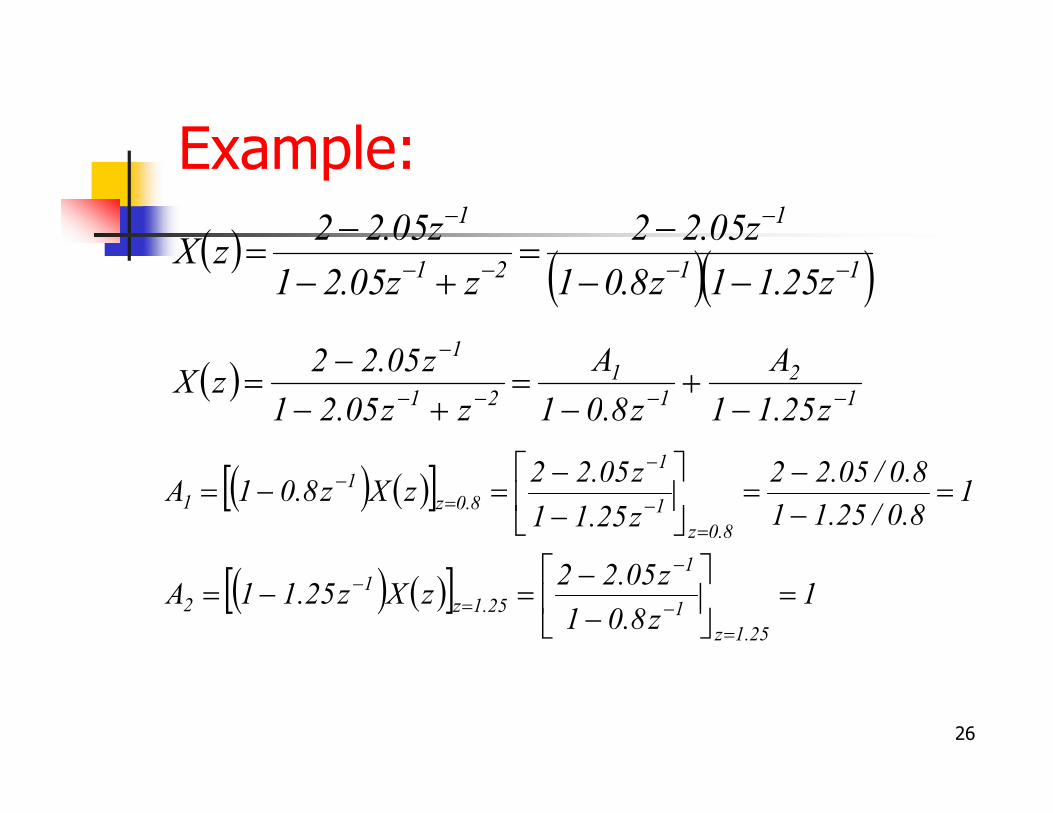
11
1
21
1
z25.11z8.01
z05.22
zz05.21
z05.22zX
1
21
121
1
z25.11
A
z8.01
A
zz05.21
z05.22zX
1z8.01
z05.22zXz25.11A
18.0/25.11
8.0/05.22
z25.11
z05.22zXz8.01A
25.1z
1
1
25.1z1
2
8.0z
1
1
8.0z1
1
Example:
27
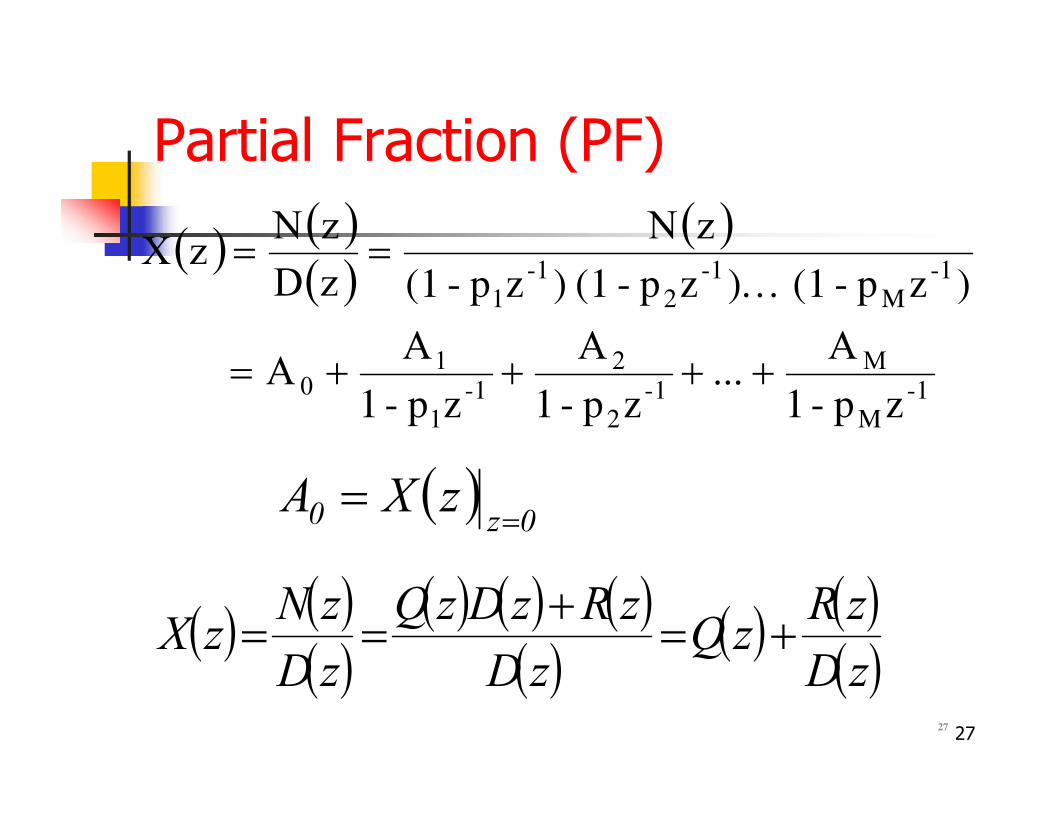
Partial Fraction (PF)
1-M
1-2
1-1
1-M
1-2
1-1
zp-1zp-1zp-1
)zp-(1 )zp-(1 )zp-(1
M210
A...
AAA
zN
zD
zNzX
0z0 zXA
zD
zRzQ
zD
zRzDzQ
zD
zNzX
27
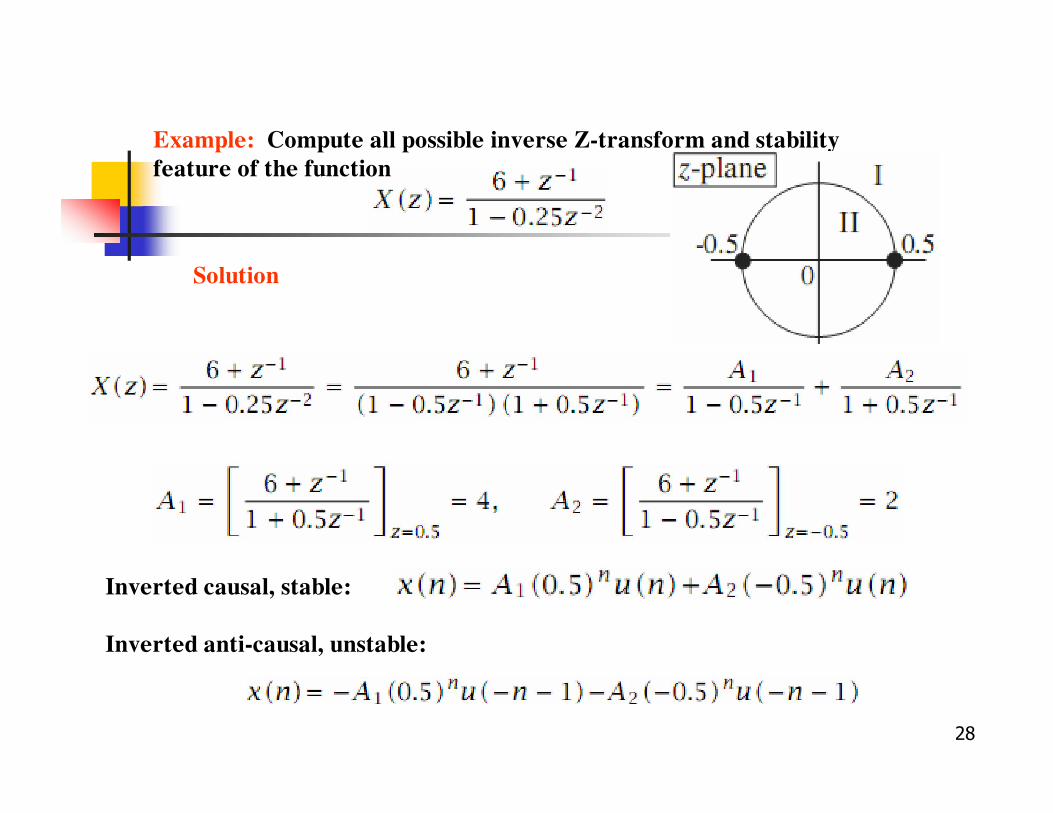
28
Example: Compute all possible inverse Z-transform and stabilityfeature of the function
Inverted causal, stable:
Inverted anti-causal, unstable:
Solution
29
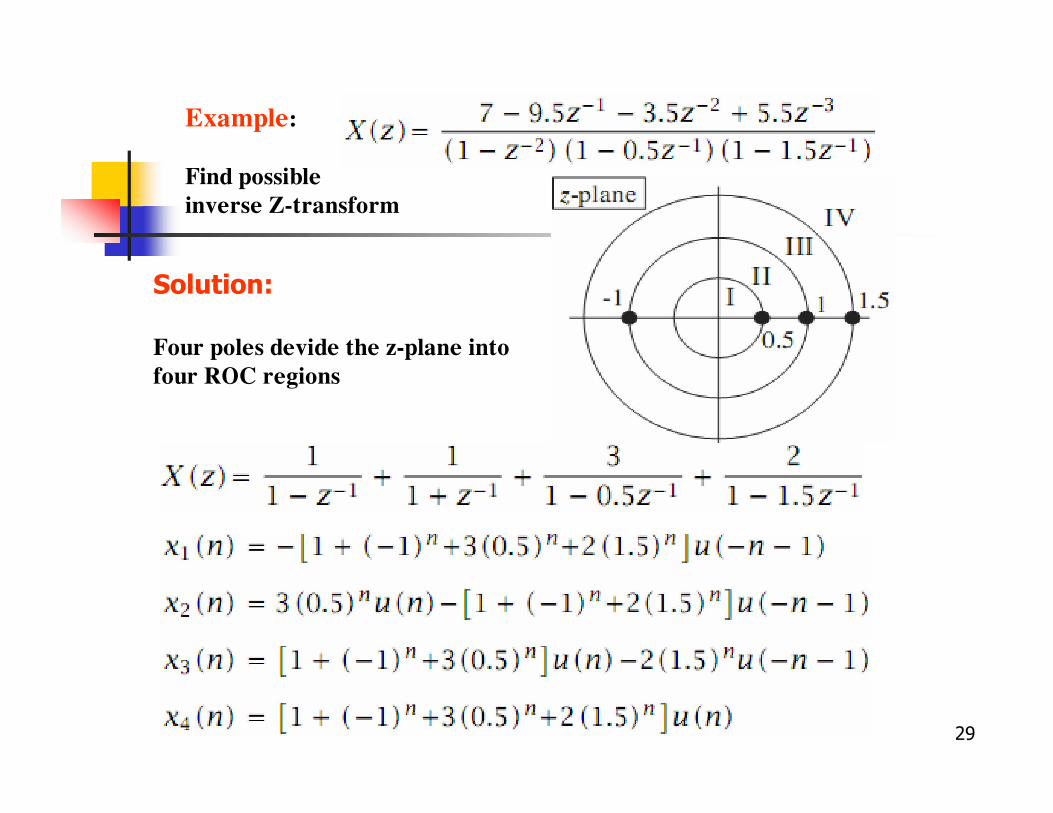
Example:
Find possible inverse Z-transform
Solution:
Four poles devide the z-plane into four ROC regions