cascada y feedforward
TRANSCRIPT

5/9/2018 cascada y feedforward - slidepdf.com
http://slidepdf.com/reader/full/cascada-y-feedforward 1/17
UNIVERSIDAD SIMÓN BOLÍVAR DEPARTAMENTO DE ELECTRÓNICA Y CIRCUITOS
SISTEMAS DE CONTROL II (PS2323)DANIEL CARDONA 0032631
JORGE UNAMO 9831328CONTROL EN CASCADA Y FEEDFORWARD
CONTROL AVANZADO
Hasta ahora hemos analizado y estudiado ciertas técnicas de diseño de sistemas de
control basándonos en requerimientos o especificaciones tanto del período transitorio
como del período estacionario, es decir, se observa el comportamiento del sistema a lo
largo del tiempo, desde el momento en que se introduce la entrada hasta cuando el
sistema ya se ha establecido y se diseñan compensadores que han de hacer que el sistema
se comporte de la manera deseada.
Pero otro aspecto que puede afectar el comportamiento de un sistema (además de la
entrada), son las perturbaciones externas, que pueden actuar después que el sistema ya ha
comenzado a funcionar y ya se encuentran en estado estacionario. A continuación
vamos a ver los métodos de diseño de realimentación y compensadores adecuados para
disminuir el efecto de las perturbaciones externas en el funcionamiento del sistema:
Control en cascada:
El control en cascada es una estructura alternativa al control en avance para rechazar
perturbaciones parcialmente medibles. La idea básica es realimentar variables
intermedias entre el punto donde entra la perturbación y la salida.
Esta estructura tiene dos lazos:
- Un lazo primario con un controlador primario K 1( s), y
- Un lazo secundario con un controlador secundario K 2( s).
El control secundario se diseña para atenuar el efecto de la perturbación antes de que
alcance a afectar significativamente la salida y(t ). Veamos un ejemplo para motivar la
idea.

5/9/2018 cascada y feedforward - slidepdf.com
http://slidepdf.com/reader/full/cascada-y-feedforward 2/17
El control en cascada se utiliza principalmente para:
•Eliminar el efecto de perturbaciones en la variable manipulada.
•Mejorar las características dinámicas de lazos de control en procesos que son
secuenciados o compuestos por sub-procesos.
En ambos casos es necesario tener acceso a por lo menos dos variables controladas.
¿Cómo hacer al sistema más robusto a perturbaciones externas?
V-1
V-2
Bomba
TCTT
LC
LT
Inter. De calor
Tanque
Control en cascada (esquema típico)
TC1 ProcesoValvula Proceso
TT2
TC2
TT1
-
+
-
+ Tv
Básicamente el esquema de control en cascada es un lazo de realimentación dentro de
otro lazo de realimentación, donde el lazo interno debe ser más rápido que el externo
para hacer al sistema lo mas insensible posible a las perturbaciones.
Para comprender mayor la justificación del empleo de este sistema de control vamos a
analizar un lazo de control de temperatura simple aplicado a un proceso discontinuo
(batch).

5/9/2018 cascada y feedforward - slidepdf.com
http://slidepdf.com/reader/full/cascada-y-feedforward 3/17
La figura siguiente muestra a un reactor en el cual se controla la temperatura de la masa
reaccionante regulando el caudal de agua de enfriamiento. Si suponemos que se produce
una perturbación que modifique la temperatura o la presión de entrada del agua de
refrigeración observamos que la perturbación tiene necesariamente que pasar a través del
proceso principal para que pueda ser contrarrestada.
De acuerdo a ello, una alteración de una variable secundaria hace necesario que la
variable principal cambie su valor deseado para que el controlador pueda ajustar el
caudal de agua al valor necesario en las nuevas condiciones de equilibrio.
Para evitar este inconveniente, se recurre a los sistemas en cascada (Ver figura siguiente)
cuyo diagrama funcional es el de la figura siguiente:
Observamos que hay dos sistemas de lazos acoplados. El lazo secundario (Variableesclava) controla por si solo la temperatura de salida C2 del agua de refrigeración. El
valor deseado del controlador secundario G2 es ajustado por el controlador primario G1
(maestro).

5/9/2018 cascada y feedforward - slidepdf.com
http://slidepdf.com/reader/full/cascada-y-feedforward 4/17
De este modo, si se produce una perturbación del tipo de la analizada anteriormente, el
controlador secundario la contrarresta de inmediato, sin necesidad de que la misma tenga
que pasar por el proceso principal G4.
Si suponemos que G3 es una etapa exponencial con una constante de tiempo, T3, alestablecerse el lazo de control secundario es sustituido por un bloque con una función de
transferencia de primer orden con una constante de tiempo T3 mucha menor que T3.
Desde este punto de vista mencionado a principio de este tema hacemos que la constante
de tiempo Th del proceso sea la única predominante. Por esta razón los sistemas en
cascada tienen una frecuencia de operación más elevada (menor tiempo de recuperación)
que los sistemas simples.
Por otra parte frente a perturbaciones que entran en el lazo secundario, la sobre-
desviación es siempre mucho más pequeña en los sistemas de cascada qué en los
simples.
En las aplicaciones específicas se trata de que el lazo interior sea de respuesta más rápida
que el exterior, de modo que para nuestro ejemplo de la figura anterior, se deberá buscar
otra variable distinta de la temperatura para el control secundario (G2), preferiblemente
caudal G presión. El esquema de control nos quedaría entonces, formando como variable
secundaria el caudal de fluido calefactor, tal como lo muestra la figura siguiente:

5/9/2018 cascada y feedforward - slidepdf.com
http://slidepdf.com/reader/full/cascada-y-feedforward 5/17
Como características generaba para sistemas de control en cascada pueden indicarse las
siguientes:
• El modo de control para el lazo interior debe ser el más simple compatible con
las necesidades del proceso (generalmente proporcional).
• El lazo de control interior (esclavo) se ajusta para lograr una re puesta enérgica
en la variable manipulada, por ejemplo para el control proporcional se deberá
utilizar una elevada ganancia.
• Los retardos de medición del lazo interior provocan una suerte de acción
derivativa para el lazo principal.- Por esta consecuencia, los retardos de medición
mencionados, no son necesariamente nocivos en este sistema, siempre que los
mismos no adquieran valores muy grandes.
5/9/2018 cascada y feedforward - slidepdf.com
http://slidepdf.com/reader/full/cascada-y-feedforward 6/17
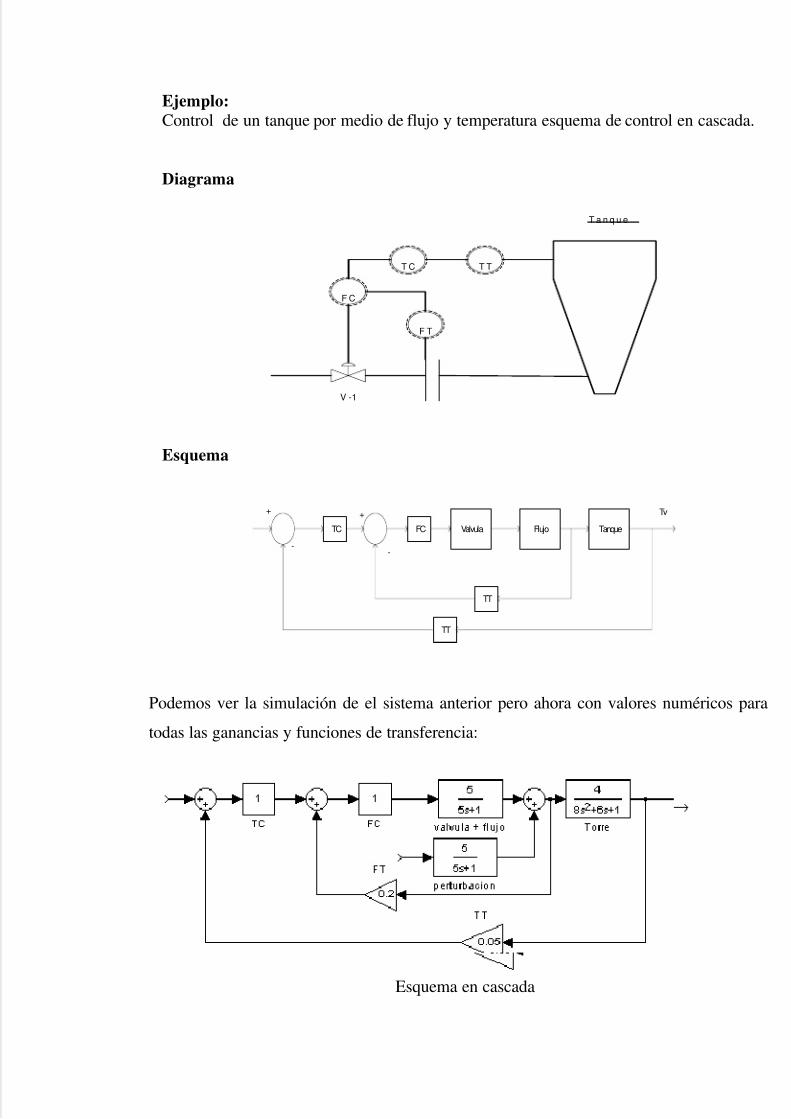
Ejemplo: Control de un tanque por medio de flujo y temperatura esquema de control en cascada.
Diagrama
V -1
T C T T
F C
F T
T a n q u e
Esquema
TC FlujoValvula Tanque
TT
FC
TT
-
+
-
+ Tv
Podemos ver la simulación de el sistema anterior pero ahora con valores numéricos para
todas las ganancias y funciones de transferencia:
Esquema en cascada
5/9/2018 cascada y feedforward - slidepdf.com
http://slidepdf.com/reader/full/cascada-y-feedforward 7/17
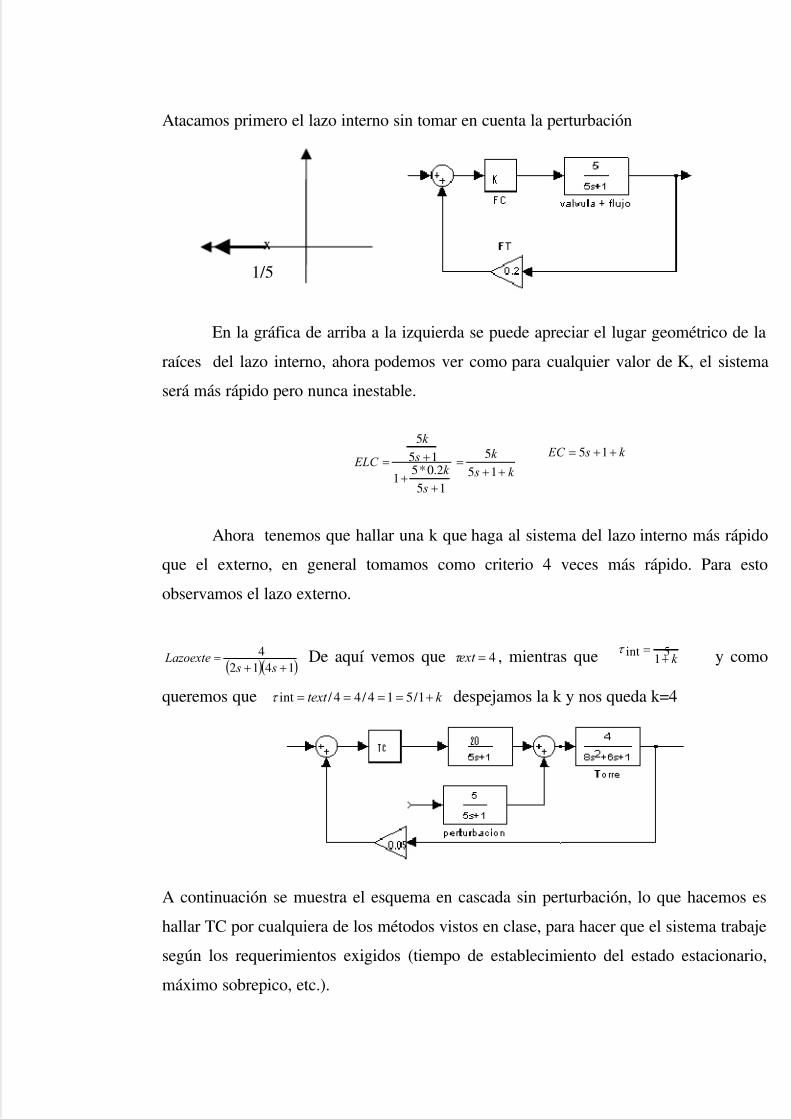
Atacamos primero el lazo interno sin tomar en cuenta la perturbación
En la gráfica de arriba a la izquierda se puede apreciar el lugar geométrico de la
raíces del lazo interno, ahora podemos ver como para cualquier valor de K, el sistema
será más rápido pero nunca inestable.
k s
k
s
k s
k
ELC ++
=
+
+
+=
15
5
15
2.0*51
15
5
k s EC ++= 15
Ahora tenemos que hallar una k que haga al sistema del lazo interno más rápido
que el externo, en general tomamos como criterio 4 veces más rápido. Para esto
observamos el lazo externo.
( )( )1412
4
++
=
s s Lazoexte De aquí vemos que 4=ext τ , mientras que k +
=
15intτ
y como
queremos que k text +==== 1 / 514 / 44 / intτ despejamos la k y nos queda k=4
A continuación se muestra el esquema en cascada sin perturbación, lo que hacemos es
hallar TC por cualquiera de los métodos vistos en clase, para hacer que el sistema trabaje
según los requerimientos exigidos (tiempo de establecimiento del estado estacionario,
máximo sobrepico, etc.).
1/5

5/9/2018 cascada y feedforward - slidepdf.com
http://slidepdf.com/reader/full/cascada-y-feedforward 8/17
Para verificar la efectividad del control en cascada mostraremos el esquema sin cascada
y le añadiremos una perturbación para observar su respuesta, y compararla con la
respuesta del esquema de control en cascada.
Esquema sin cascada
Para ambos casos tenemos que hallar TC según las exigencias por cualquiera de los
métodos vistos en clase.
Estos sistemas fueron simulados en Matlab, donde se observó la respuesta al escalón
unitario del sistema que sigue:

5/9/2018 cascada y feedforward - slidepdf.com
http://slidepdf.com/reader/full/cascada-y-feedforward 9/17
Al cual se le añadió un pulso cuadrado unitario como perturbación en el instante t=60 y
de ancho 1 segundo. La respuesta es la que se muestra a continuación:
Luego, se simuló el siguiente sistema que representa el mismo anterior pero sin la
realimentación en cascada:
La entrada a este sistema fue un escalón unitario igual que en el caso anterior y la
perturbación también fue idéntica. La respuesta que se observó fue la siguiente:

5/9/2018 cascada y feedforward - slidepdf.com
http://slidepdf.com/reader/full/cascada-y-feedforward 10/17
Se puede observar claramente que la perturbación en este caso alcanza valores de
sobrepico mayor y además tarda más el sistema en establecerse de nuevo.
Esto demuestra en cierta manera la importancia del control en cascada.
Control feedforward
El control Pre-alimentado o FeedForward (FF) es un esquema que utiliza el concepto de
control no-supervisado, es decir "si conozco bien como trabaja, no necesito medir lo que
resulta".
Bajo este concepto, si se conoce bien el modelo del proceso y todas las entradas
entonces se puede determinar sus salidas, o determinar cual debe ser el valor de una
entrada para obtener una salida deseada.
El Esquema FF es la base conceptual de la familia de controladores basadas en modelos
MBC de (ModelBasedControl).
Este es un esquema que se aplica cuando al sistema lo afecta una perturbación
significativa y no es posible controlarla.

5/9/2018 cascada y feedforward - slidepdf.com
http://slidepdf.com/reader/full/cascada-y-feedforward 11/17
Cuando, en los sistemas como el de la figura siguiente, la perturbación entra en el
proceso principal, el sistema denominado "realimentación de la perturbación" da mejores
resultados que los sistemas de cascada.
Este sistema pretende contrarrestar o compensar la perturbación antes de que la misma
ingrese al proceso. El procedimiento consiste en medir la perturbación u, y en función de
u introducir una corrección adicional que se suma a la señal de salida del controlador G1
(figura siguiente).
Obsérvese que aquí tenemos una combinación de realimentación en el lazo G1 G2 G3 H
y prealimentación (feedforward) en lazo abierto H2 G4 G2 G3. Para averiguar que
característica tiene que tener el elemento funcional G4 supongamos que:
G2=S p1 /(T 2 D+1) G3=S p3 /(T 3 D+1) N 3=SL3 /(T 3 D+1) H 1=H 2=1

5/9/2018 cascada y feedforward - slidepdf.com
http://slidepdf.com/reader/full/cascada-y-feedforward 12/17
Resolviendo el diagrama funcional:
c/u=(N+G2G3G4 )/(1+G1G2G3 )
para que la compensación sea exacta debe ser:
N 3+G2G3G4=0
Es decir que:
G4=-N 3 /(G2G3 ) (T 2 D+1)
Es decir que el elemento funcional necesario es un controlador proporcional derivativo
de acción inversa.
La ganancia es la necesaria para producir con Td = T2 la exacta compensación
ante un cambio de carga permanente. La misma se calcula con balances de masa y de
energía o por vía experimental. La acción derivativa es la necesaria para compensar el
retardo ocasionado por la etapa G2, es decir, para, que en la etapa transitoria, la
corrección llegue simultáneamente con la perturbación. Si G2 fuera una función de
segundo orden, teóricamente hará falta un controlador con acción proporcional a la
segunda derivada, pero puede de mostrarse que para moderadas frecuencias, el término
no interesa si se ajusta Td igual a la suma de las constantes de tiempo G2.
Una de las aplicaciones prácticas más difundidas de este sistema de control es para el
nivel de domo de calderas. En las calderas de elevo de capacidad de generación se
presente un problema crítico de control del nivel del domo toda vez que se produce una
variación brusca de carga, ya que en un primer momento al aumentar la demanda el nivel
aparente sube por la variación de densidad al disminuir la presión. Esto como resulta
obvio, provoca una acción de control exactamente opuesta a la requerida.
Con un sistema de control complejo que incluya un control realimentado común y un
feed - forward, tal como muestra la figura siguiente, este problema queda solucionado.

5/9/2018 cascada y feedforward - slidepdf.com
http://slidepdf.com/reader/full/cascada-y-feedforward 13/17
QA = Caudal de Agua
QV = Caudal de Vapor
El valor del set - point del controlador de caudal de agua queda de finido por la
expresión:
donde Y es el rango de variación de la salida del controlador (m).
Para simular el funcionamiento de un controlador feed-forward se realizó el siguiente
ejemplo:
Ejemplo:
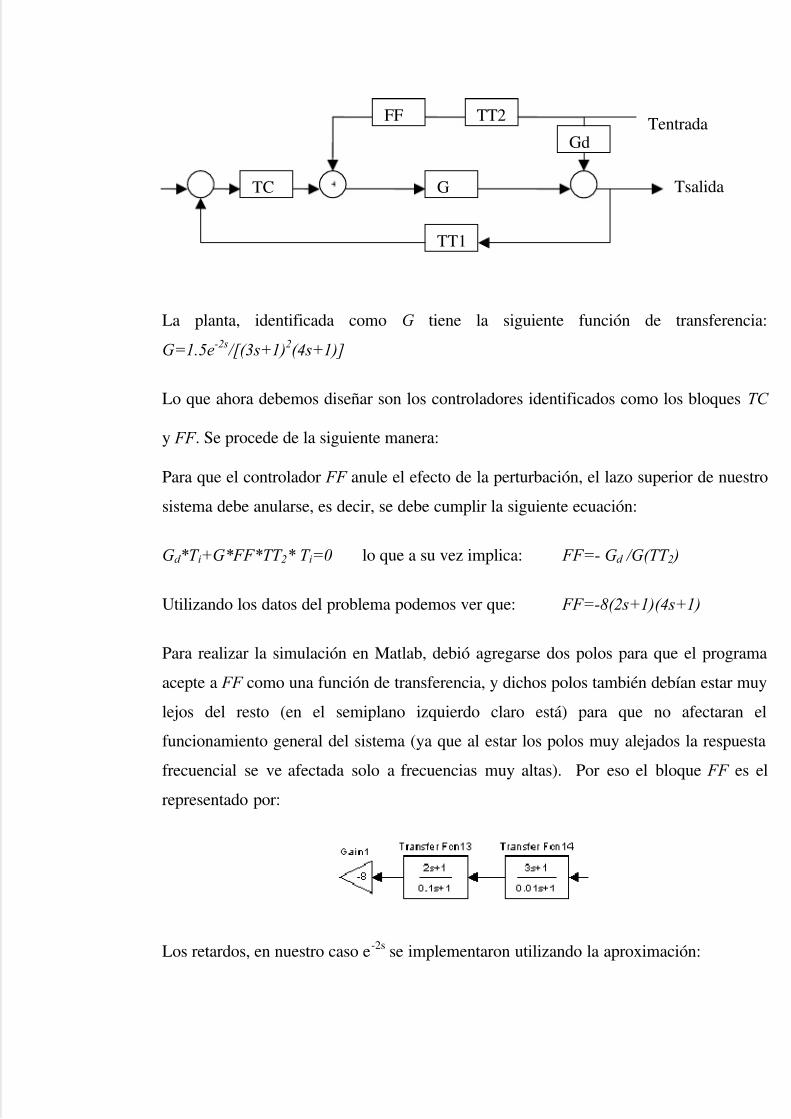
A continuación se tiene la forma genérica de un sistema con control feed-forward, los
datos de cada bloque se muestran a continuación:
El bloque que representa la función de transferencia entre una perturbación y la salida
del sistema (el bloque scope) es: Gd=24e-2s
/[(3s+1)(4s+1)]
Los bloques identificados como TT1 y TT2 tienen la siguiente función de transferencia:
TT 1= TT 2=2/(s+1)
5/9/2018 cascada y feedforward - slidepdf.com
http://slidepdf.com/reader/full/cascada-y-feedforward 14/17
La planta, identificada como G tiene la siguiente función de transferencia:
G=1.5e-2s
/[(3s+1)2(4s+1)]
Lo que ahora debemos diseñar son los controladores identificados como los bloques TC
y FF . Se procede de la siguiente manera:
Para que el controlador FF anule el efecto de la perturbación, el lazo superior de nuestro
sistema debe anularse, es decir, se debe cumplir la siguiente ecuación:
Gd *T i+G*FF*TT 2* T i=0 lo que a su vez implica: FF=- Gd /G(TT 2 )
Utilizando los datos del problema podemos ver que: FF=-8(2s+1)(4s+1)
Para realizar la simulación en Matlab, debió agregarse dos polos para que el programa
acepte a FF como una función de transferencia, y dichos polos también debían estar muy
lejos del resto (en el semiplano izquierdo claro está) para que no afectaran el
funcionamiento general del sistema (ya que al estar los polos muy alejados la respuesta
frecuencial se ve afectada solo a frecuencias muy altas). Por eso el bloque FF es el
representado por:
Los retardos, en nuestro caso e-2s
se implementaron utilizando la aproximación:
TC
FF TT2
G
GdTentrada
Tsalida
TT1

5/9/2018 cascada y feedforward - slidepdf.com
http://slidepdf.com/reader/full/cascada-y-feedforward 15/17
e-τ ds
≈[1-( τ d /2)s)/(1+( τ d /2)s]
entonces, cada retardo e-2s se implementó como el bloque:
Por lo tanto, el sistema que se usó para la simulación en Matlab fue el siguiente:
Donde la función de transferencia Gd es: y la planta G es:
Este sistema tuvo como entrada un escalón unitario en el instante t=1 y se le agregó
como perturbación en t=60 un pulso cuadrado de ancho 0.1 segundos (como la ganancia
de la función de transferencia entre la perturbación y la salida era 24, es decir muy alta,
se tuvo que introducir una perturbación de muy baja ganancia) y amplitud 1. La
respuesta observada fue la siguiente:

5/9/2018 cascada y feedforward - slidepdf.com
http://slidepdf.com/reader/full/cascada-y-feedforward 16/17
Luego, se simuló el mismo sistema pero sin utilizar el lazo de control feed-forward. El
sistema a simular fue el siguiente:
Tanto la entrada, como la perturbación de este sistema fueron similares a los del caso
con feed-forward. La respuesta observada fue la siguiente:

5/9/2018 cascada y feedforward - slidepdf.com
http://slidepdf.com/reader/full/cascada-y-feedforward 17/17
Se puede observar que la respuesta con feed-forward es mejor que sin el, ya que en el
primer caso se observó que la perturbación generó un sobrepico de amplitud menor a
0,15, mientras que en el segundo el sobrepico generado tuvo una amplitud mayor a 0.35.
En esta parte del curso hemos visto dos métodos de diseño de sistemas de control
basados en el control de la atenuación de posibles perturbaciones que se puedan
presentar y que también son capaces de cumplir con requerimientos de estado transitorio,
y estado estacionario (los bloques de control llamados TC). Finalmente se han hecho un
ejemplo para cada sistema de control y se ha comparado su efectividad con la que se
tendría sin dichos sistemas.