carlo mannino (from geir dahl and carlo mannino notes) · carlo mannino (from geir dahl and carlo...
TRANSCRIPT
Polyhedral Combinatorics
Carlo Mannino
(from Geir Dahl and Carlo Mannino notes)
University of Oslo, INF-MAT5360 - Autumn 2010 (Mathematical optimization)
Combinatorial Optimization Problem
Finite ground set E, weight function w : E R. (i.e. w RE)
Feasible solutions F = {F1, …, Fm}, with Fi E, i = 1, …, m
Combinatorial optimization problem (CO)
max {w(F): F F }, where
Let S {0,1}E be the set of the incidence vectors of the sets in F
S = {F: F F }
Combinatorial optimization problem (rewritten)
max {wTx: x S} 0-1 linear program
Solving (CO) and 0-1 LP is difficult (NP – hard)
Fe
ewFw )()(
FT
Fe
wewFw
)()(Remark:
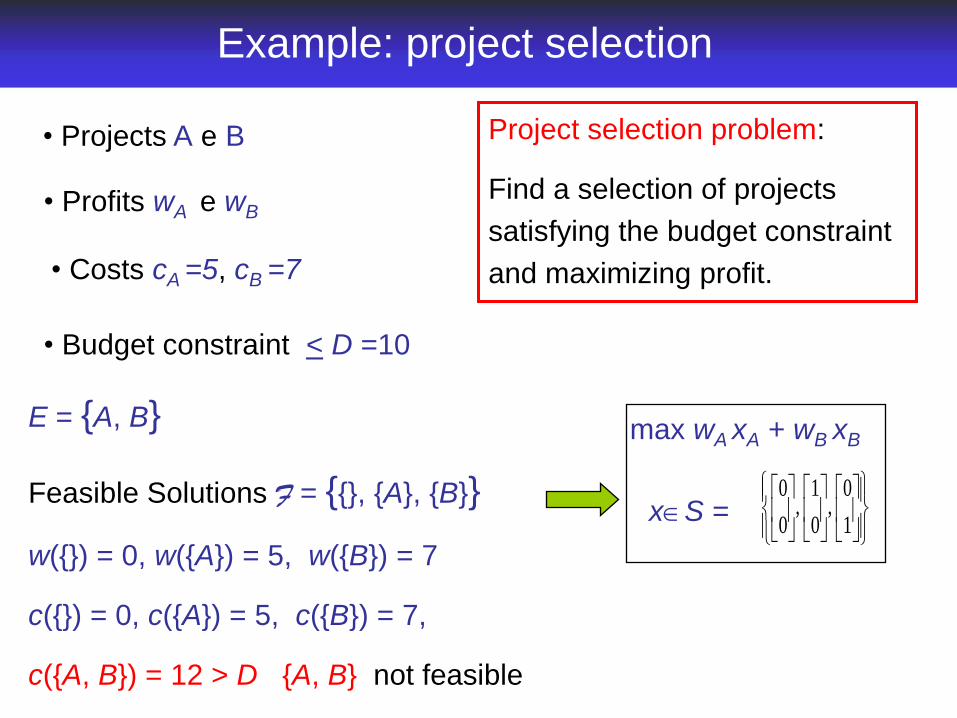
Example: project selection
• Projects A e B
• Profits wA e wB
• Budget constraint < D =10
• Costs cA =5, cB =7
xS =
1
0 ,
0
1 ,
0
0
max wA xA + wB xB
Project selection problem:
Find a selection of projects
satisfying the budget constraint
and maximizing profit.
E = {A, B}
Feasible Solutions F = {{}, {A}, {B}}
w({}) = 0, w({A}) = 5, w({B}) = 7
c({}) = 0, c({A}) = 5, c({B}) = 7,
c({A, B}) = 12 > D {A, B} not feasible
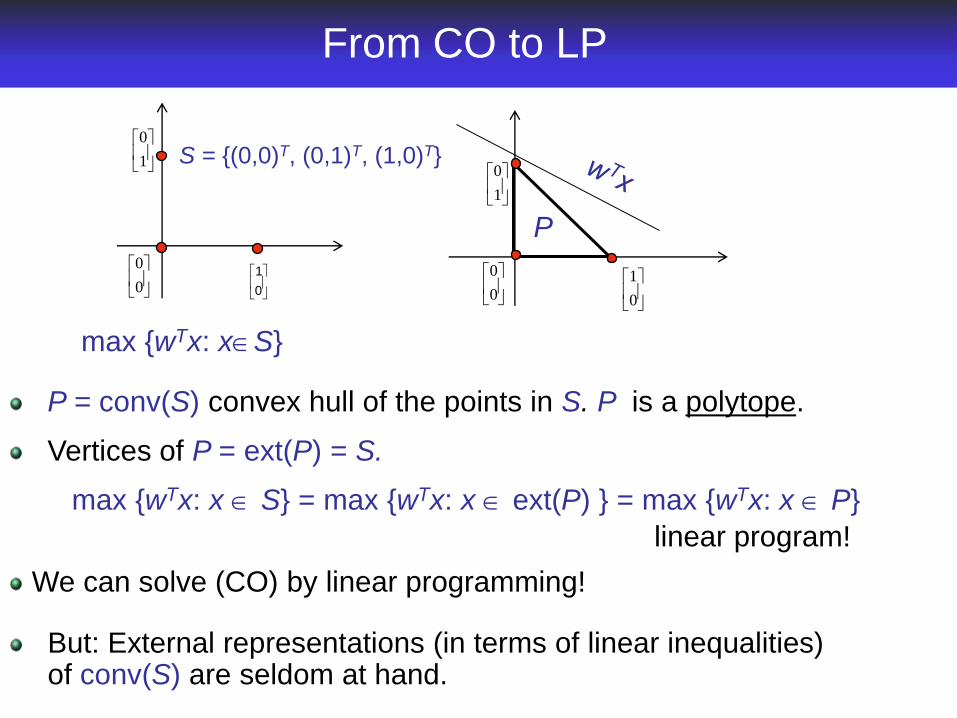
From CO to LP
max {wTx: xS}
P = conv(S) convex hull of the points in S. P is a polytope.
Vertices of P = ext(P) = S.
max {wTx: x S} = max {wTx: x ext(P) } = max {wTx: x P}
S = {(0,0)T, (0,1)T, (1,0)T}
0
1
0
0
1
0
0
1
0
0
1
0
linear program!
P
We can solve (CO) by linear programming!
But: External representations (in terms of linear inequalities) of conv(S) are seldom at hand.
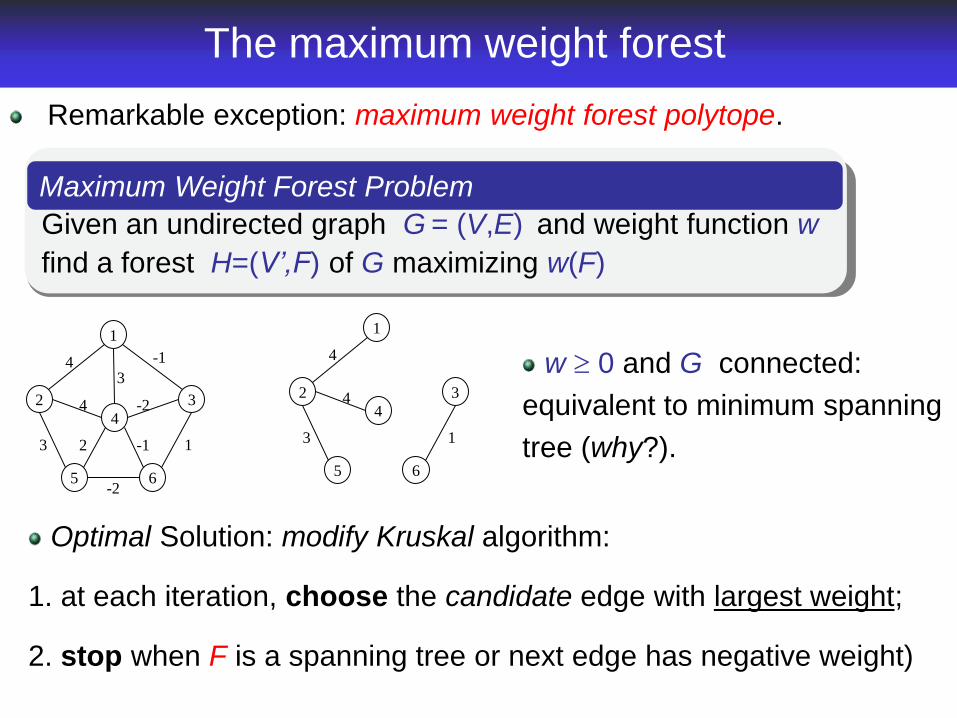
The maximum weight forest
Remarkable exception: maximum weight forest polytope.
w 0 and G connected:
equivalent to minimum spanning
tree (why?).
Given an undirected graph G = (V,E) and weight function w
find a forest H=(V’,F) of G maximizing w(F)
Maximum Weight Forest Problem
2
65
3
1
3
-2
4
34 -1
1
4-2
-12
2
65
3
1
3
4
4
1
4
Optimal Solution: modify Kruskal algorithm:
1. at each iteration, choose the candidate edge with largest weight;
2. stop when F is a spanning tree or next edge has negative weight)
Incidence vectors of forests
G = (V,E), S V: E(S) set of edges with both endpoints in S
H = (W,F) forest of G iff |E(S) F| |S|-1 for all S V
F(G) convex hull of the incidence vectors of forests of G
x {0,1}E incidence vector of a forest F iff x satisfies
x(E(S)) |S|-1, for all S V
Lemma 1.1 (Feasible incidence vectors of forests)
Let Q be feasible set to the following system of inequalities
xe 0 for all e E
x(E(S)) |S|-1, for all S V
Then Q = F(G)
Theorem 1.2 (Forest polytope)
Proof of Theorem 1.2
Q {0,1}E = incidence vectors of all forests of G (from Lemma 1.1)
By convexity F(G)Q
Proof.
Let x’ be a vertex of Q. We will show that x’ is a 0,1 vector. How:
1. Let c such that x’ is the unique solution to max {cTx: xQ} (such
c exists since x’ is a vertex of Q)
2. F = {e1, …,er} be the forest found by greedy algorithm with
weight c, in that sequence. F is the incidence vector of F.
3. We show F optimal to max {cTx: xQ}: by uniqueness x’ = F
We show that he vertices of Q are precisely the incidence vectors of
the forests of G (i.e. Q = F(G))
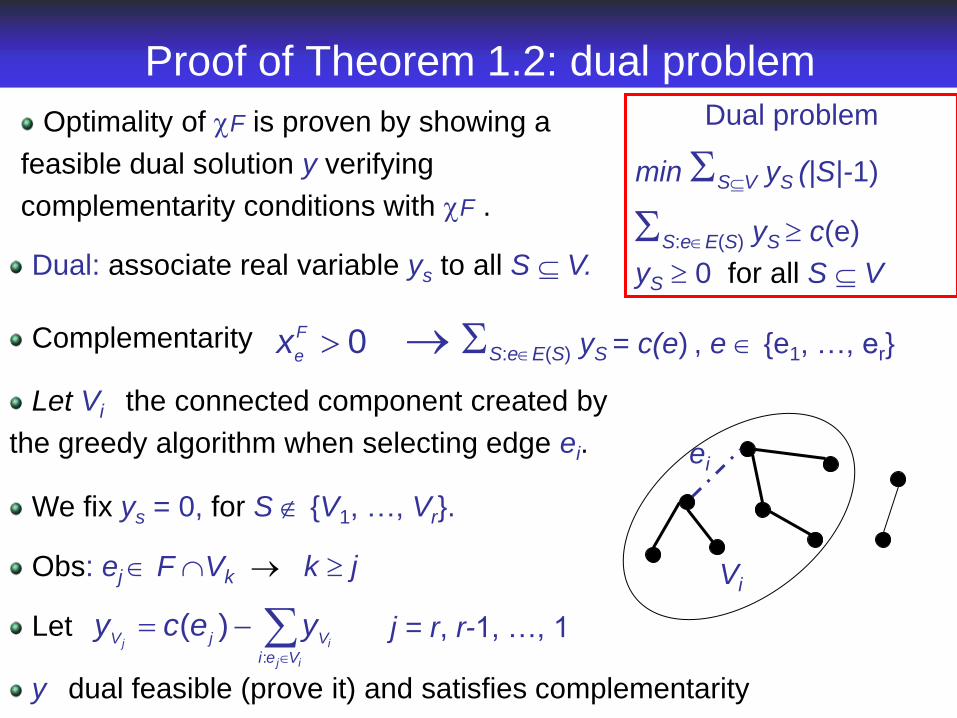
Proof of Theorem 1.2: dual problem
Dual: associate real variable ys to all S V.
y dual feasible (prove it) and satisfies complementarity
Dual problem
min SV yS (|S|-1)
S:eE(S) yS c(e)
yS 0 for all S V
ei
Vi
Optimality of F is proven by showing a
feasible dual solution y verifying
complementarity conditions with F .
Complementarity 0F
ex S:eE(S) yS = c(e) , e {e1, …, er}
We fix ys = 0, for S {V1, …, Vr}.
Obs: ej F Vk k j
Let
ij
ij
Vei
VjVyecy
:
)( j = r, r-1, …, 1
Let Vi the connected component created by
the greedy algorithm when selecting edge ei.
Formulations
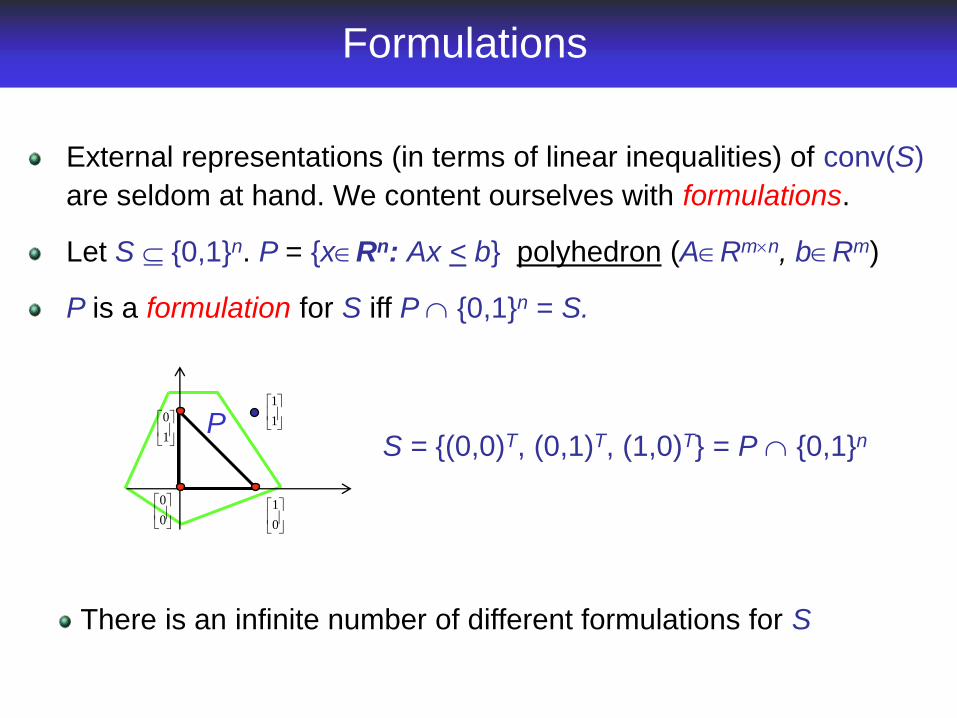
External representations (in terms of linear inequalities) of conv(S)
are seldom at hand. We content ourselves with formulations.
Let S {0,1}n. P = {xRn: Ax < b} polyhedron (ARmn, bRm)
P is a formulation for S iff P {0,1}n = S.
1
1
0
1
0
0
1
0 PS = {(0,0)T, (0,1)T, (1,0)T} = P {0,1}n
There is an infinite number of different formulations for S
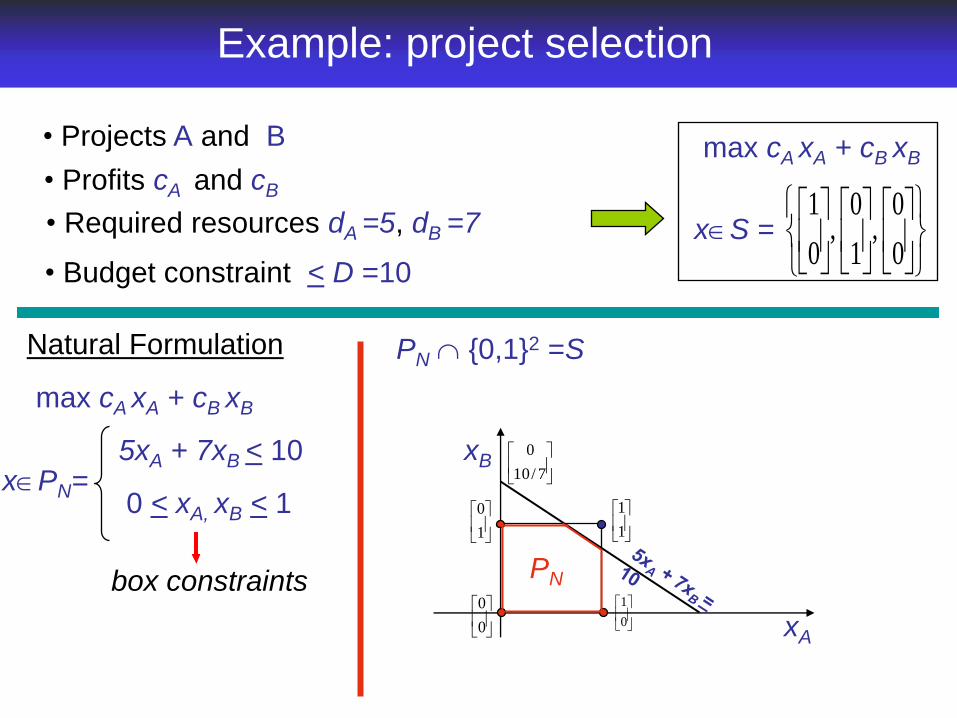
Example: project selection
• Projects A and B
• Profits cA and cB
• Budget constraint < D =10
• Required resources dA =5, dB =7 xS =
0
0 ,
1
0 ,
0
1
max cA xA + cB xB
PN {0,1}2 =S
box constraints
max cA xA + cB xB
xPN=
Natural Formulation
xA
xB
0
1
1
0
0
0
1
1
7/10
0
PN
0 < xA, xB < 1
5xA + 7xB < 10
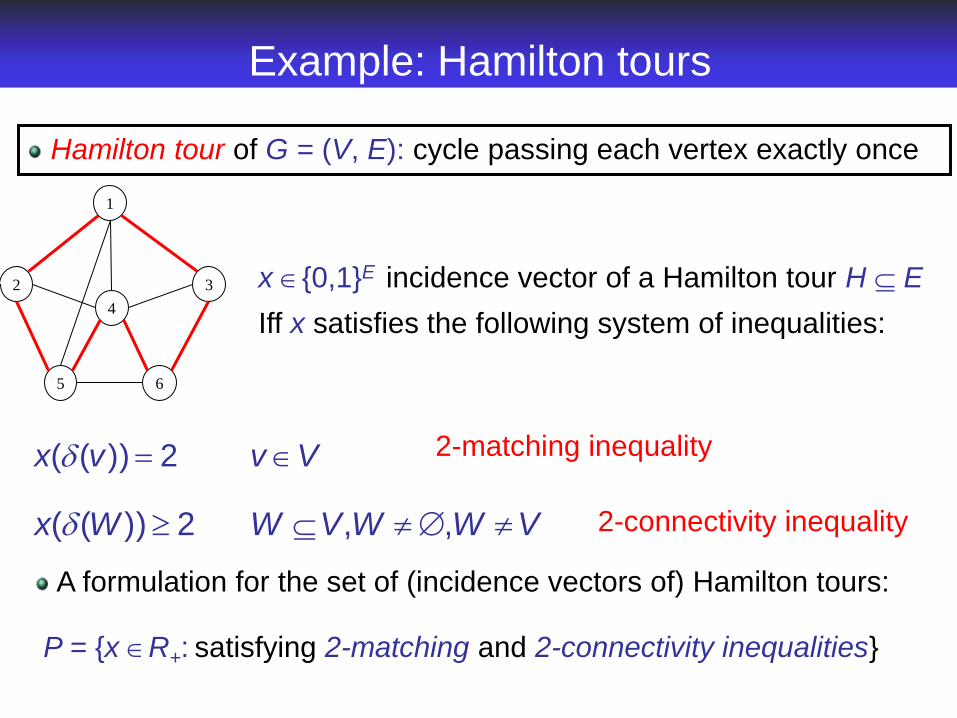
Example: Hamilton tours
Hamilton tour of G = (V, E): cycle passing each vertex exactly once
2
65
3
1
4
x {0,1}E incidence vector of a Hamilton tour H E
Iff x satisfies the following system of inequalities:
Vvvx 2))((
P = {x R+: satisfying 2-matching and 2-connectivity inequalities}
2-matching inequality
2-connectivity inequality VWWVWWx ,, 2))((
A formulation for the set of (incidence vectors of) Hamilton tours:
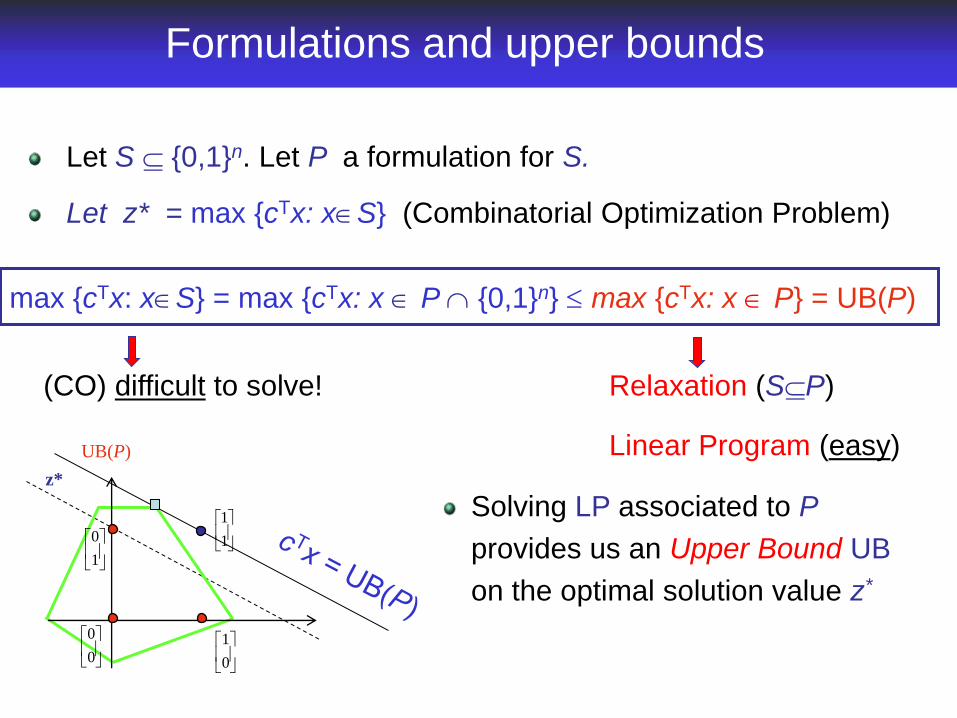
Formulations and upper bounds
Let S {0,1}n. Let P a formulation for S.
Let z* = max {cTx: xS} (Combinatorial Optimization Problem)
max {cTx: xS} = max {cTx: x P {0,1}n} max {cTx: x P} = UB(P)
UB(P)
z*
1
1
0
1
0
0
1
0
Relaxation (SP)
Linear Program (easy)
(CO) difficult to solve!
Solving LP associated to P
provides us an Upper Bound UB
on the optimal solution value z*

Formulations and certificates
max {cTx: x S}PL01:
UB(P) max {cTx: x S} = z*
• Computing z* is (in general) difficult
• Computing UB(P) is easy (LP program)
• If we know a feasible solution x S (with z =cTx lower bound)
then UB(P) provides a quality certificate for x .
UB(P)
z°
z* “gap”
UB(P)
z*
1
1
0
1
0
0
1
0
gap
z°
x°
cTx increasing
No “gap” x° optimal to PL01
(with S {0,1}n)
Comparing formulations
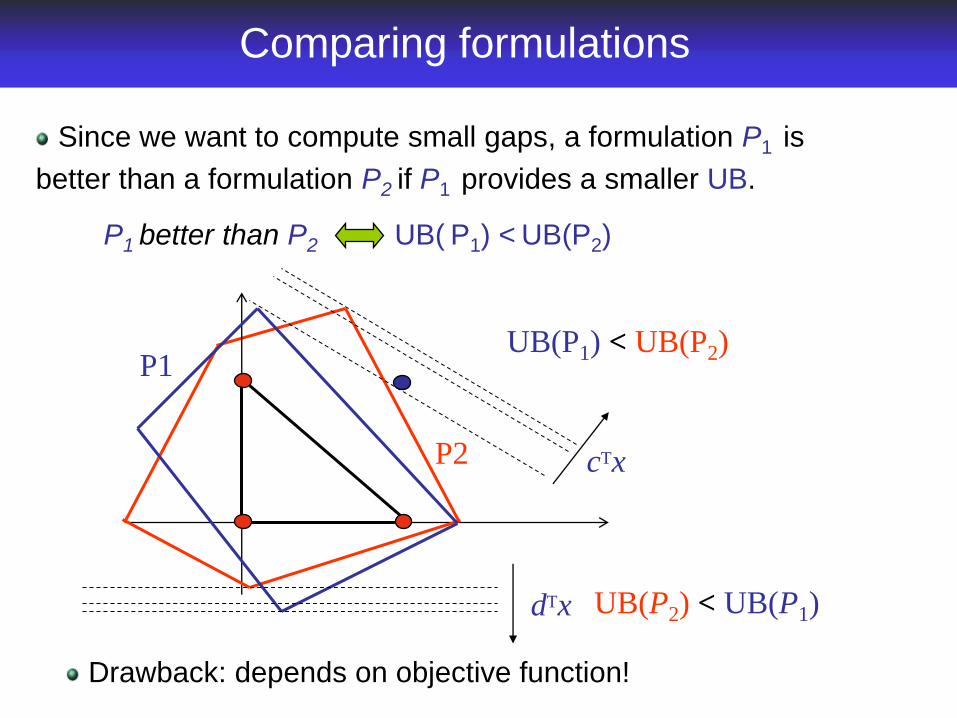
Since we want to compute small gaps, a formulation P1 is
better than a formulation P2 if P1 provides a smaller UB.
UB(P1) < UB(P2)P1
P2 cTx
dTx UB(P2) < UB(P1)
P1 better than P2 UB( P1) < UB(P2)
Drawback: depends on objective function!
Comparing formulations
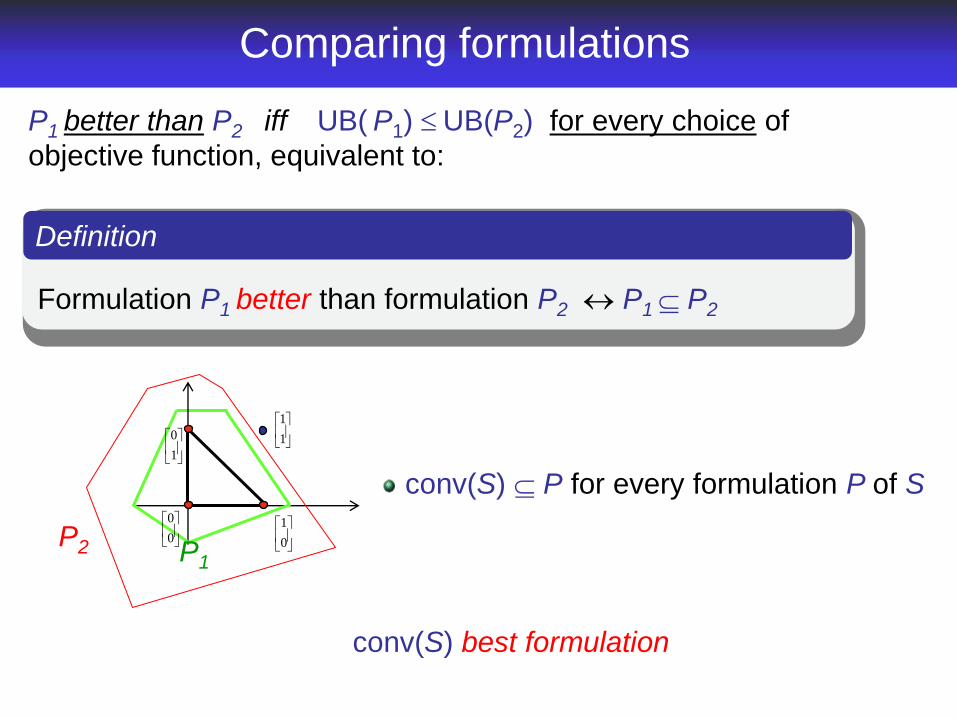
P1 better than P2 iff UB( P1) UB(P2) for every choice of
objective function, equivalent to:
Formulation P1 better than formulation P2 P1 P2
Definition
1
1
0
1
0
0
1
0
P2 P1
conv(S) P for every formulation P of S
conv(S) best formulation
Towards conv(S)
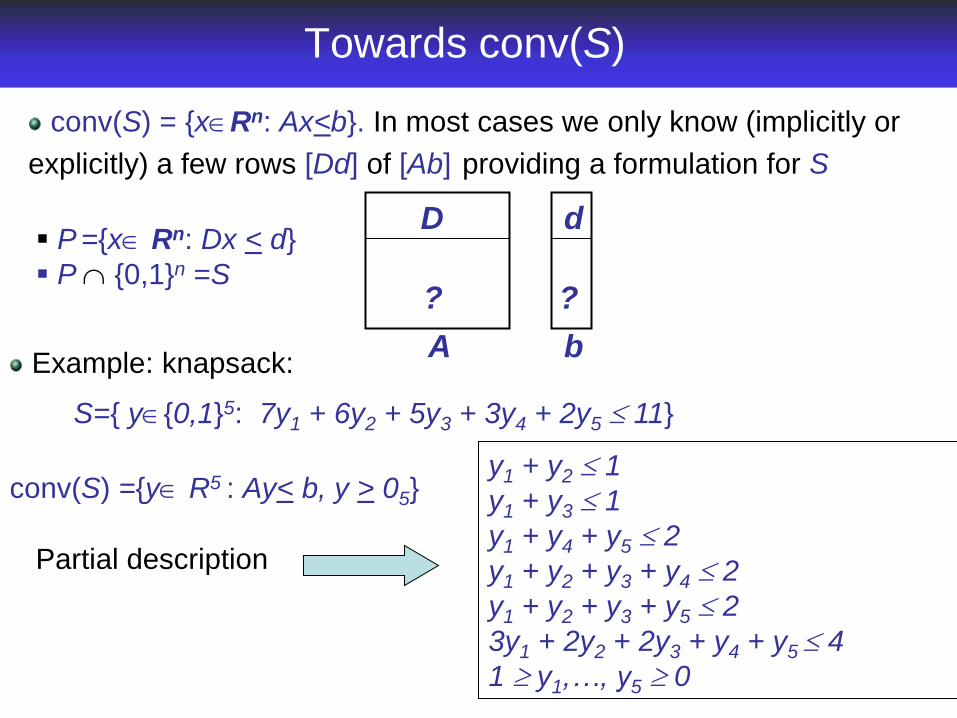
conv(S) = {xRn: Ax<b}. In most cases we only know (implicitly or
explicitly) a few rows [Dd] of [Ab] providing a formulation for S
P ={x Rn: Dx < d}
P {0,1}n =S
A
D d
? ?
b
S={ y{0,1}5: 7y1 + 6y2 + 5y3 + 3y4 + 2y5 11}
conv(S) ={y R5 : Ay< b, y > 05}y1 + y2 1
y1 + y3 1
y1 + y4 + y5 2
y1 + y2 + y3 + y4 2
y1 + y2 + y3 + y5 2
3y1 + 2y2 + 2y3 + y4 + y5 4
1 y1,…, y5 0
Partial description
Example: knapsack:
Relaxations anc conv(S)
Most often we only have relaxations of conv(S) = {xRn: Ax<b}
Relaxation: polyhedron P = {x Rn: Dx < d } with
1. P conv(S)
2. P {0,1}n = S (P is a formulation for S)
Some inequalities of Dx < d may appear in conv(S) (facet defining)
All inequalities of Dx < d are satisfied by the points in S (valid)
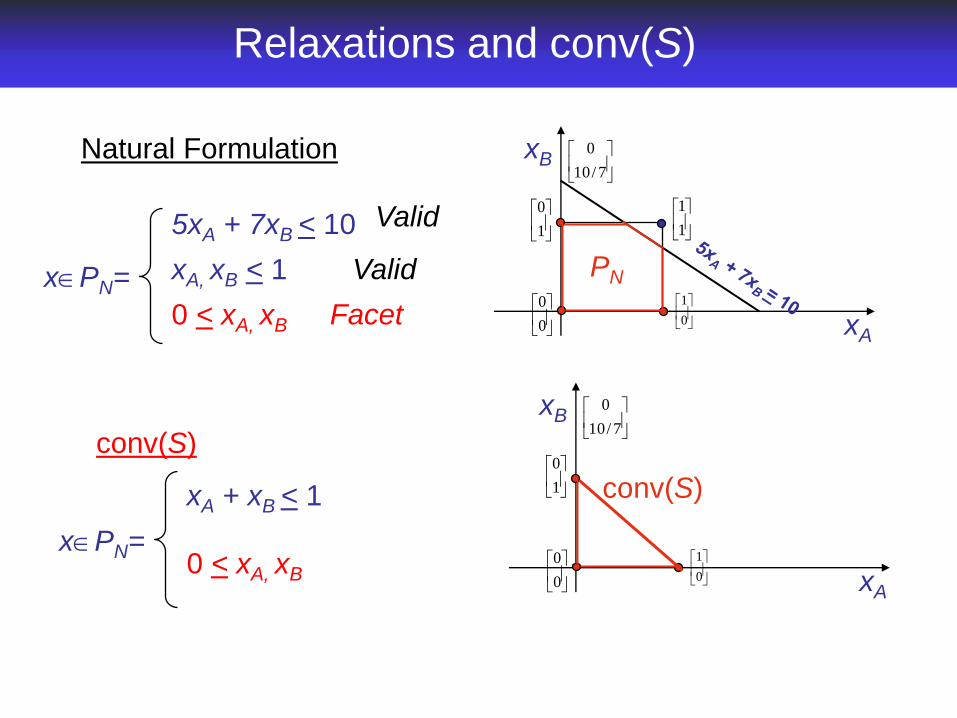
Relaxations and conv(S)
Facet
xPN=
Natural Formulation
xA
xB
0
1
1
0
0
0
1
1
7/10
0
PNxA, xB < 1
5xA + 7xB < 10
0 < xA, xB
Valid
Valid
xA
xB
0
1
1
0
0
0
7/10
0
conv(S)
xPN=
conv(S)
xA + xB < 1
0 < xA, xB
Separation Oracle
Let P be a polyhedron, Ax<b be an implicit description of P
and a point x’Rn, a separation oracle is an algorithm which
either establishes that x’P or finds a inequality ax bi in
Ax<b violated by x’, i.e. such that ax’ > bi
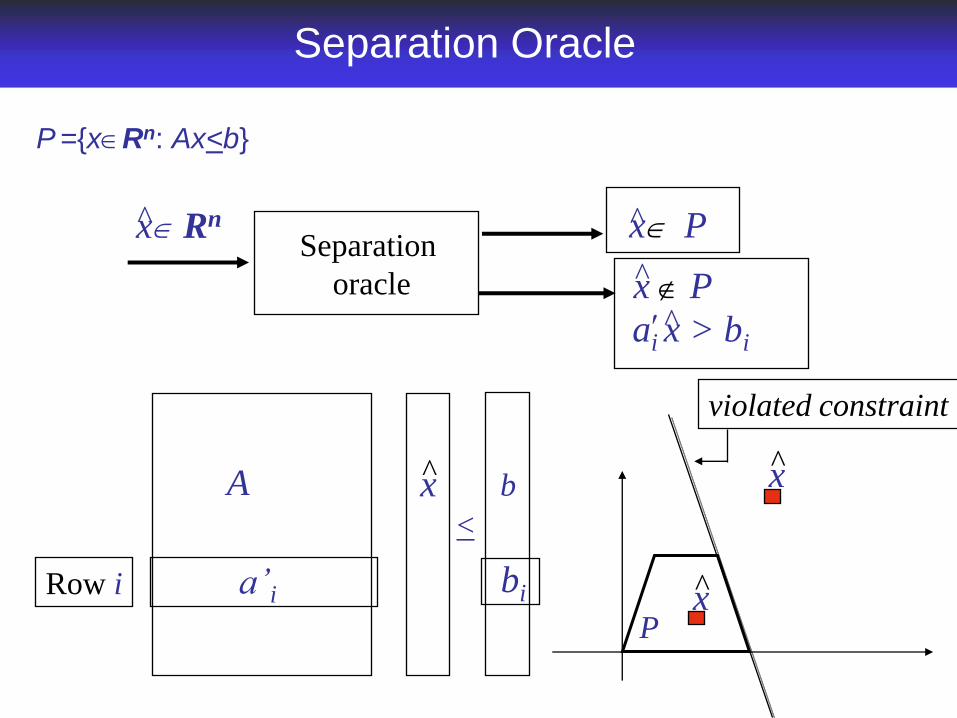
Separation Oracle
Separation Oracle
^ai x > bi
a’i Row i bi
x̂ PSeparation
oracle
x Rn^
x̂
x^
x̂ P
P ={xRn: Ax<b}
A x^
<
b
P
violated constraint
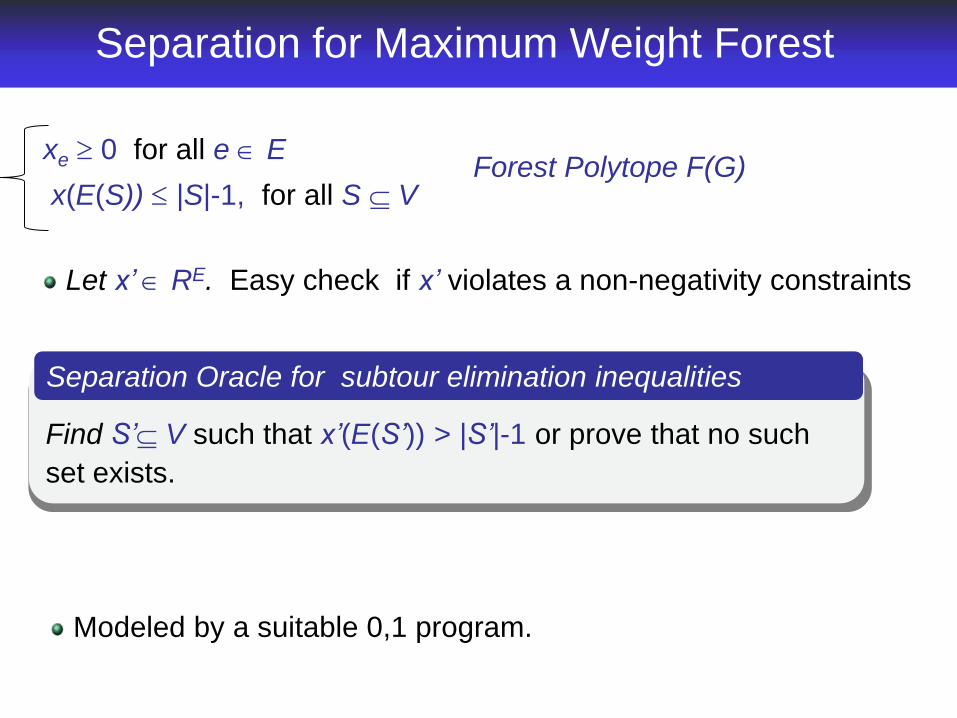
Separation for Maximum Weight Forest
Find S’ V such that x’(E(S’)) > |S’|-1 or prove that no such
set exists.
Separation Oracle for subtour elimination inequalities
xe 0 for all e E
x(E(S)) |S|-1, for all S VForest Polytope F(G)
Let x’ RE. Easy check if x’ violates a non-negativity constraints
Modeled by a suitable 0,1 program.
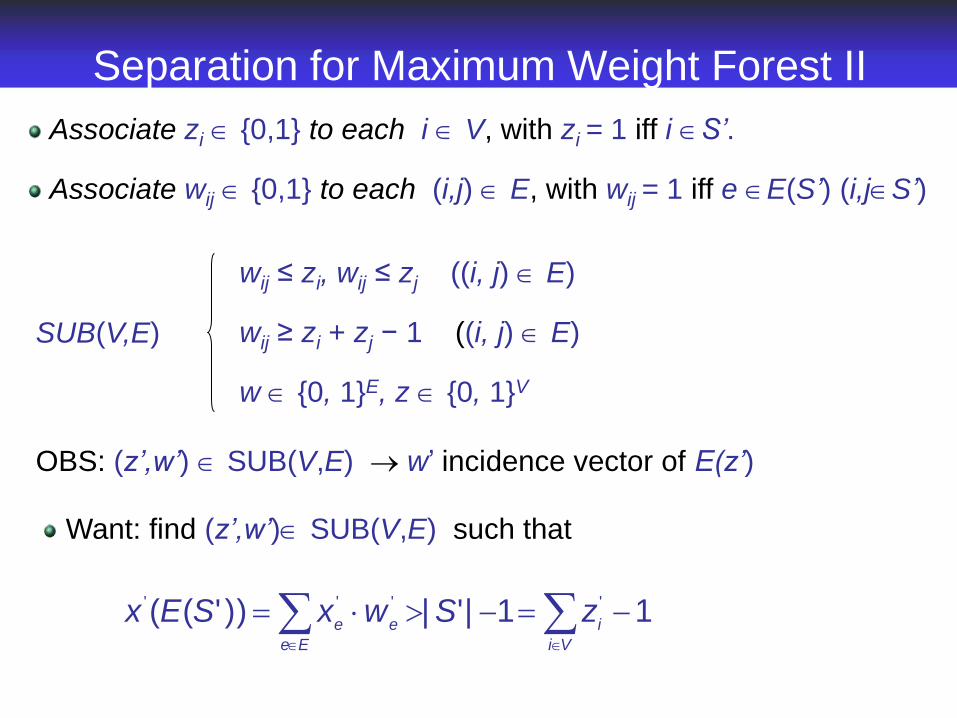
Separation for Maximum Weight Forest II
Associate zi {0,1} to each i V, with zi = 1 iff i S’.
Associate wij {0,1} to each (i,j) E, with wij = 1 iff e E(S’) (i,jS’)
wij ≤ zi, wij ≤ zj ((i, j) E)
wij ≥ zi + zj − 1 ((i, j) E)
w {0, 1}E, z {0, 1}V
SUB(V,E)
Want: find (z’,w’) SUB(V,E) such that
OBS: (z’,w’) SUB(V,E) w’ incidence vector of E(z’)
11|'|))'(( '''' Vi
ie
Ee
ezSwxSEx
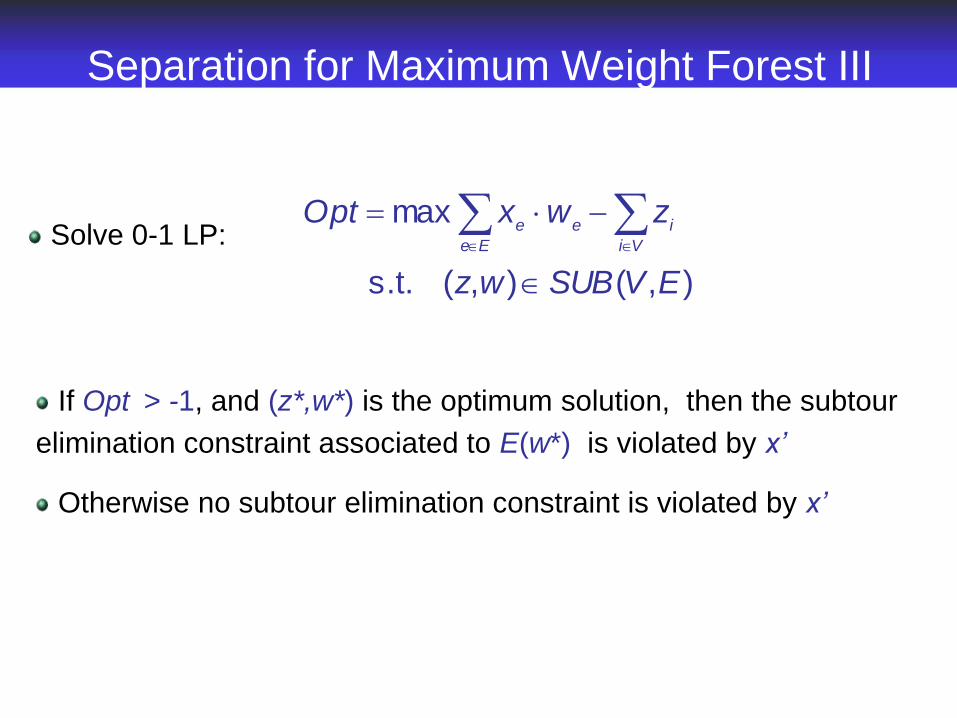
Separation for Maximum Weight Forest III
),(),( s.t.
max
EVSUBwz
zwxOptVi
ie
Ee
e
Solve 0-1 LP:
If Opt > -1, and (z*,w*) is the optimum solution, then the subtour
elimination constraint associated to E(w*) is violated by x’
Otherwise no subtour elimination constraint is violated by x’
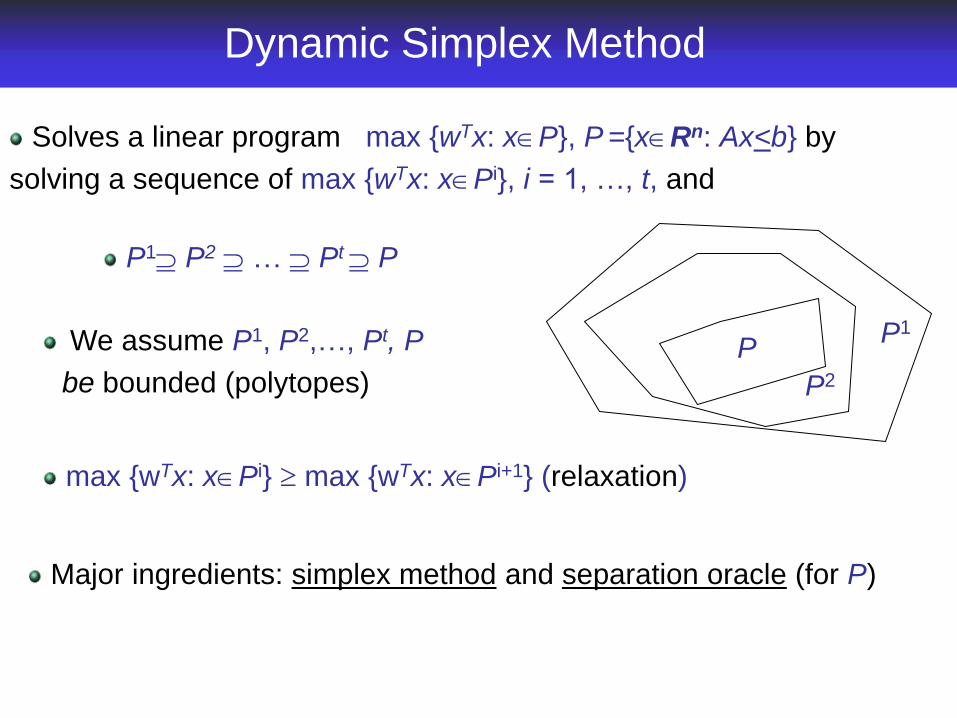
Dynamic Simplex Method
Solves a linear program max {wTx: xP}, P ={xRn: Ax<b} by
solving a sequence of max {wTx: xPi}, i = 1, …, t, and
max {wTx: xPi} max {wTx: xPi+1} (relaxation)
We assume P1, P2,…, Pt, P
be bounded (polytopes)
P1
P2
P
P1 P2 … Pt P
Major ingredients: simplex method and separation oracle (for P)
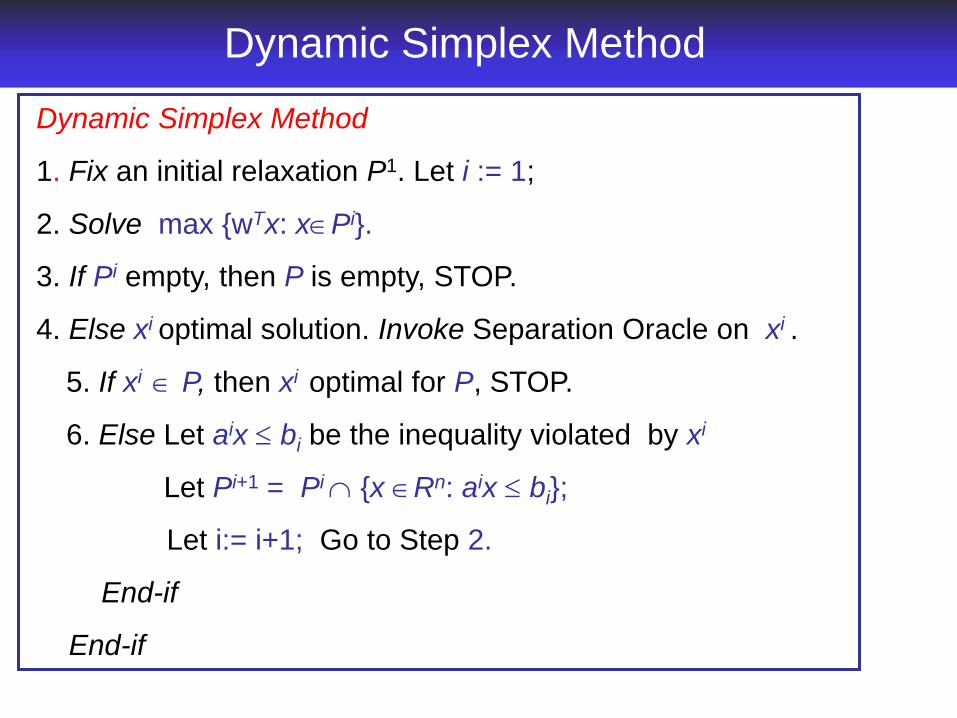
Dynamic Simplex Method
Dynamic Simplex Method
1. Fix an initial relaxation P1. Let i := 1;
2. Solve max {wTx: xPi}.
3. If Pi empty, then P is empty, STOP.
4. Else xi optimal solution. Invoke Separation Oracle on xi .
5. If xi P, then xi optimal for P, STOP.
6. Else Let aix bi be the inequality violated by xi
Let Pi+1 = Pi {x Rn: aix bi};
Let i:= i+1; Go to Step 2.
End-if
End-if
Exercises
Prove Lemma 1.1
Show that the Maximum Weight Forest Problem in a connected
graph with non-negative edge weights reduces to the minimum
spanning tree problem.
Show formally that the incidence vectors of Hamilton tour are
precisely the 0,1 vectors satisfying 2-matching and 2-connectivity
constraints.
Show formally that the dual solution in the proof of Theorem 2.1
is feasible.
If we apply the dynamic simplex method to the Maximum Weight
Forest Problem, then the last solution is a 0,1 solution. Why?