cálculo en varias variables - mario errol chavez gordillo
DESCRIPTION
calculo de varias variables e integracion multiple.TRANSCRIPT

lım(x,y,z)7→(a,b,c)
x2+y2>z2
∫∫∫
R
f(xr, ys, zt) dr ds dt
n∑i,j=1i6=j
|aij |2 maxk,l=1,...,n
k 6=l
a2kl
≤
α=s1︷ ︸︸ ︷∑
n≥1
an +
β=s2︷ ︸︸ ︷∑
n≥1
bn
︸ ︷︷ ︸¿γ=
∑n≥1(an+bn)?
ξ τ τ o
∫s
CALCULO EN VARIAS VARIABLES
Autor
MARIO ERROL CHAVEZ GORDILLO
La Paz - Bolivia2012
AB
S+
-S
Wu
Wss
0(s )
( )
Wu
0(s )s
s
s+
-
+
-
W ( )
s
s+
-
u
g
g
0

Indice general
1. Espacio Euclidiano n-dimensional 1
1.1. Operaciones entre vectores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2. Producto interno y Norma . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.3. Paralelismo y Perpendicularidad . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.4. Proyeccion y Componente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
1.5. Angulo entre vectores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.6. Producto vectorial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2. Geometrıa Analıtica Solida 22
2.1. Introduccion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
2.2. Distancia entre dos puntos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
2.3. La recta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
2.4. El Plano . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
2.5. Distancias entre puntos, rectas y planos . . . . . . . . . . . . . . . . . . . . . . . . 41
2.6. Superficies Cuadraticas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
3. Curvas 49
3.1. Derivada y Recta Tangente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
3.2. Longitud de Curva . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
3.3. Curvatura, Normal Principal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
4. Funciones Vectoriales de Variable Vectorial 58
4.1. Dominio y e imagen de una funcion . . . . . . . . . . . . . . . . . . . . . . . . . . 60
i

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 ii
4.2. Operaciones con funciones. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
4.3. Graficas de funciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
4.3.1. Secciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
4.3.2. Curvas de Nivel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
4.3.3. Superficies de Nivel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
5. Limites y Continuidad 67
5.1. Limites de funciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
5.2. Calculando lımites por sustitucion directa. . . . . . . . . . . . . . . . . . . . . . . 73
5.3. Calculo de lımites mediante operaciones algebraicas. . . . . . . . . . . . . . . . . . 74
5.4. Calculo de lımites usando el teorema de acotacion . . . . . . . . . . . . . . . . . . 78
5.5. Inexistencia de lımites . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
5.5.1. Lımites direccionales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
5.5.2. Lımites parciales iterados (o reiterados) . . . . . . . . . . . . . . . . . . . . 86
5.6. Continuidad de funciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
6. Derivacion de funciones reales de varias variables 90
6.1. Derivadas parciales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
6.1.1. Calculo de derivadas parciales usando reglas de derivacion. . . . . . . . . . 92
6.1.2. Interpretacion geometrica de las derivadas parciales . . . . . . . . . . . . . 102
6.2. La Derivada Parcial como razon de cambio . . . . . . . . . . . . . . . . . . . . . . 103
6.2.1. Productividad Marginal . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
6.2.2. Continuidad y derivadas parciales. . . . . . . . . . . . . . . . . . . . . . . . 111
6.3. Derivadas parciales de ordenes superiores . . . . . . . . . . . . . . . . . . . . . . . 112
6.4. Derivadas direccionales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
6.4.1. Continuidad y derivadas direccionales. . . . . . . . . . . . . . . . . . . . . 125
6.5. Funciones Diferenciables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126
6.6. La diferencial (total) de una funcion . . . . . . . . . . . . . . . . . . . . . . . . . . 128
6.7. Regla de la Cadena . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 136
6.8. El Teorema de la Funcion Implıcita . . . . . . . . . . . . . . . . . . . . . . . . . . 153
6.9. El Gradiente de una funcion diferenciable . . . . . . . . . . . . . . . . . . . . . . . 161
6.10. Formula de Taylor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172
6.11. Plano tangente y Recta Normal . . . . . . . . . . . . . . . . . . . . . . . . . . . . 181
ξρ∫s email: [email protected] ii Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 iii
6.11.1. Significado geometrico de la tangencia . . . . . . . . . . . . . . . . . . . . 189
7. Aplicaciones 191
7.1. Extremos relativos. Criterio del Hessiano . . . . . . . . . . . . . . . . . . . . . . . 191
7.2. Multiplicadores de Lagrange . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 214
7.2.1. Metodo de los multiplicadores de Lagrange. . . . . . . . . . . . . . . . . . 215
8. Derivacion de funciones vectoriales de varias variables 254
8.1. Diferenciabilidad y matriz Jacobiana . . . . . . . . . . . . . . . . . . . . . . . . . 254
8.2. Regla de la cadena . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 254
8.3. El Teorema de la aplicacion inversa . . . . . . . . . . . . . . . . . . . . . . . . . . 254
9. Integrales Multiples 255
9.1. Integrales Multiples. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 255
9.2. Integrales Dobles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 256
9.2.1. Invirtiendo el orden de integracion . . . . . . . . . . . . . . . . . . . . . . 269
9.2.2. Calculo de areas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 274
9.3. Cambio de variables en Integrales Dobles . . . . . . . . . . . . . . . . . . . . . . . 276
9.3.1. Integrales dobles en coordenadas polares . . . . . . . . . . . . . . . . . . . 288
9.4. Integrales triples . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 303
9.5. Cambio de variables en Integrales Triples . . . . . . . . . . . . . . . . . . . . . . . 310
9.5.1. Integrales triples en coordenadas cilındricas . . . . . . . . . . . . . . . . . 311
9.5.2. Integrales triples en coordenadas esfericas . . . . . . . . . . . . . . . . . . 319
10.Integrales de Linea 326
10.1. Definicion y Propiedades . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 326
10.2. orientacion en ua integral de lınea . . . . . . . . . . . . . . . . . . . . . . . . . . . 328
10.3. Teorema de Green . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 329
10.4. Area Encerrada por una Curva . . . . . . . . . . . . . . . . . . . . . . . . . . . . 335
10.5. Independencia del Camino de Integracion . . . . . . . . . . . . . . . . . . . . . . . 336
11.Integrales de Superficie 338
11.1. Definicion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 338
11.2. Teorema de la Divergencia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 339
ξρ∫s email: [email protected] iii Jasmer LPC
UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 iv
11.3. Teorema de Stokes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 339
12.Sucesiones y Series 340
12.1. Sucesiones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 340
12.2. Series . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 344
12.2.1. Criterios de Convergencia . . . . . . . . . . . . . . . . . . . . . . . . . . . 345
13.Funciones Gamma y Beta 355
13.1. Funcion Gamma . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 355
13.2. Funcion Beta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 359
ξρ∫s email: [email protected] iv Jasmer LPC

CAPITULO 1
Espacio Euclidiano n-dimensional
Se define el conjunto Rn de la siguiente manera:
Rn = (x1, ..., xn) : xi ∈ R, para i = 1, ..., n
1.1. Operaciones entre vectores
En Rn se define la suma y la multiplicacion escalar de la siguiente forma:
Suma.- Sean x, y en Rn tales que x = (x1, x2, x3, ..., xn), y = (y1, y2, y3, ..., yn), entonces
x+ y = (x1 + y1, x2 + y2, x3 + y3, ...., xn + yn)
La multiplicacion escalar.- Sea x = (x1, x2, x3, ..., xn) y c ∈ R, se define:
cx = (cx1, cx2, cx3, ..., cxn)
Se puede verificar que esta operaciones en Rn verifican las siguientes propiedades
1. x+ y = y + x, para todo x, y en Rn.
2. (x+ y) + z = x+ (y + z), para todo x, y, z en Rn.
3. Existe un elemento en Rn, denotado 0 y llamado vector cero, tal que para todo x en R
n
cumple que x+ 0 = 0 + x = x.
1

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 2
4. Para todo x en Rn, existe un elemento en R
n, denotado −x, tal que x+(−x) = (−x)+x = 0.
5. (a+ b)x = ax+ bx, para todo a, b en R, y para todo x en Rn.
6. a(x+ y) = ax+ ay, para todo a en R, y para todo x, y en Rn.
7. (ab)x = a(bx), para a, b en R, y para todo x en Rn.
8. 1x = x, para todo x en R.
Ası, Rn se dice que es un espacio vectorial real para las operaciones definidas anteriormente. Los
elementos de Rn reciben el nombre de vectores.
EJEMPLO 1.1. Mostrar que el vector que une los puntos medios de dos de los lados de untriangulo es paralelo al tercer lado y tiene la mitad de su longitud.
SOLUCION.- Denotemos por A, B y C los vertices de un triangulo. Tomemos los puntos medios
son P =A +B
2del lado AB y Q =
A+ C
2del lado AC. Puesto que
P −Q =A+B
2− A+ C
2=A +B − A− C
2=B − C
2
entonces el vector que une los puntos medios de dos de los lados AB y AC es paralelo al lado BCy tiene la mitad de su longitud. ♣
EJEMPLO 1.2. Mostrar que las diagonales de un paralelogramo se bisectan.
SOLUCION.- Consideremos el paralelogramo de vertices A, B, C y D, de modo que AD y BCsean sus diagonales. Denotemos los puntos medios de estas diagonales por
P =A +D
2, Q =
B + C
2
Primero que todo, estos puntos son iguales, en efecto, puesto que CD = AB, esto esD−C = B−A,
entonces D + A = B + C, esto es P =A +D
2=B + C
2= Q.
Por otro lado, puesto que
P − A =A+D
2−A =
A+D − 2A
2=D − A
2
D − P = D − A+D
2=
2D −A−D
2=D − A
2
Por tanto P − A = D − P , esto es AP = PD, un analisis similar muestra que BP = PC. Porconsiguiente las diagonales de un paralelogramo se bisectan. ♣
ξρ∫s email: [email protected] 2 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 3
EJEMPLO 1.3. Sean A, B, C, D, X, Y , Z, U , vertices de un paralelogramo, como en la figura.Expresar los vertices X, Y , Z, U en funcion de A, B, C, D.
SOLUCION.- Es claro de la figura que:
El vector−−→AX es paralelo al vector
−−→BC
El vector−→AB es paralelo al vector
−−→Y D
El vector−−→BC es paralelo al vector
−−→DU
El vector−→AB es paralelo al vector
−→ZU
ademas del hecho de que se trata de un paralelogramos se obtiene el siguiente sistema de ecuaciones
X − A = C −BB − A = D − YC − B = U −DB − A = U − Z
Despejando las variables X, Y , Z, U en funcion de A, B, C, D obtenemos
X = A + C −BY = A +D − BU = C − B +DZ = U − B + A = A + C +D − 2B
♣
1.2. Producto interno y Norma
DEFINICION 1.1. Para x = (x1, x2, x3, ..., xn), y = (y1, y2, y3, ..., yn) en Rn definimos el pro-
ducto interno porx • y = x1y1 + x2y2 + x3y3 + · · ·+ xnyn.
TEOREMA 1.1. El producto interno satisface:
1. x • x ≥ 0 para todo x ∈ Rn,
2. x • x = 0 si y solo si x = 0,
3. x • y = y • x para todo x, y ∈ Rn,
4. (cx) • y = c(x • y) para todo x, y ∈ Rn, c ∈ R
5. (x+ y) • z = x • y + y • z para todo x, y, z ∈ Rn.
ξρ∫s email: [email protected] 3 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 4
Demostracion.
EJEMPLO 1.4. Sean los vectores r = (x, y, z), a = (a1, a2, a3), b = (b1, b2, b3). Demostrar quela ecuacion (r − a) • (r − b) = 0 representa una esfera; encontrar su radio y centro.
SOLUCION.- ♣
DEFINICION 1.2. Para x = (x1, x2, x3, ..., xn) en Rn definimos la norma o longitud de x por
||x|| =√x • x =
√x2
1 + x22 + x2
3 + · · · + x2n.
TEOREMA 1.2. La norma satisface:
1. ||x|| ≥ 0 para todo x ∈ Rn,
2. ||x|| = 0 si y solo si x = 0,
3. ||cx|| = |c| ||x|| para todo x ∈ Rn, c ∈ R
4. |x • y| ≤ ||x|| ||y|| para todo x, y ∈ Rn.
5. ||x+ y|| ≤ ||x|| + ||y|| para todo x, y ∈ Rn.
Demostracion.
EJEMPLO 1.5. Determine los valores de c sabiendo que u = (−4,−1,−4) y ||cu|| = 5
SOLUCION.- Puesto que
||cu|| = |c| ||u|| = |c|√
(−4)2 + (−1)2 + (−4)2 = |c|√
33 = 6
de donde
|c| =6√33
por lo tanto los posibles valores para c son:
c =6√33
o c = − 6√33.
EJEMPLO 1.6. Analice la verdad o falsedad de la siguiente afirmacion. Si u es un vector unitarioen la direccion del vector v, entonces v = ||v|| u. Justifique su respuesta.
SOLUCION.- ♣
EJEMPLO 1.7. Mostrar que la recta que une el vertice de un triangulo isosceles con el puntomedio de su base es perpendicular a su base.
ξρ∫s email: [email protected] 4 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 5
SOLUCION.- Sean los vectores A, B y C los lados del triangulo isosceles. Asumamos que||A|| = ||B||. Si P el punto inicial de A y B, entonces C = A−B. Tomemos un punto Q en C de
modo que PQ =1
2(A+B). Debemos demostrar que C es perpendicular a PQ, esto es C •PQ = 0.
En efecto,
C • PQ = (A− B) • 1
2(A +B) =
1
2(||A||2 − ||B||2) = 0.
Una segunda demostracion. Tomemos los vectores A y B como lados del triangulo isosceles, demodo que B −A es el tercer lado. Asumamos que ||B|| = ||B −A||, de donde ||B||2 = ||B −A||2,ası B •B = B •B − 2A •B + A • A, de aquı A • A = 2A •B.
Por otro lado la recta que une el vertice comun a B y B−A con el punto medio de A tiene vector
direccion igual a M = B − 1
2A. Ahora bien, puesto que
A •M = A •(B − 1
2A
)= A •B − 1
2A • A = A •B −A •B = 0
se sigue que A es perpendicular a M , lo cual prueba el resultado. ♣
EJEMPLO 1.8. Demostrar ||A+B||2 = ||A||2 + ||B||2 si y solo si A •B = 0.
SOLUCION.- Puesto que
||A+B||2 = (A+B) • (A+B) = A • (A+B) +B • (A+ B)
= A • A+ A •B +B • A+B •B
= ||A||2 + 2A •B + ||B||2
Entonces ||A+B||2 = ||A||2 + ||B||2 si y solo si A •B = 0.
EJEMPLO 1.9. Demostrar ||A+B||2 + ||A−B||2 = 2||A||2 + 2||B||2.
SOLUCION.- De los ejercicios anteriores tenemos
||A+B||2 + ||A− B||2 = ||A||2 + 2A •B + ||B||2 + ||A||2 − 2A •B + ||B||2
= 2||A||2 + 2||B||2
EJEMPLO 1.10. Demostrar ||A+B||2 − ||A−B||2 = 4A •B.
ξρ∫s email: [email protected] 5 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 6
SOLUCION.- De los ejercicios anteriores tenemos
||A+B||2 − ||A− B||2 = ||A||2 + 2A •B + ||B||2 − ||A||2 + 2A •B − ||B||2
= 4A •B
EJEMPLO 1.11. Dados vectores distintos de cero A y B en R3, mostrar que el vector V =
||A||B + ||B||A biseca el angulo entre A y B.
SOLUCION.- Es suficiente probar que
A • V||A|| ||V || =
V •B||V || ||B||
En efecto.
A • V||A|| − B • V
||B|| = 0
(A
||A|| −B
||B||
)• V = 0
(A
||A|| −B
||B||
)•(||A||B + ||B||A
)= 0
A
||A|| • ||A||B +A
||A|| • ||B||A− B
||B|| • ||A||B − B
||B|| • ||B||A = 0
A •B +||B||||A|| A • A− ||A||
||B|| B •B −B • A = 0
||B||||A|| ||A||
2 − ||A||||B||||B||2 = 0
||B|| ||A|| − ||A|| ||B|| = 0
1.3. Paralelismo y Perpendicularidad
DEFINICION 1.3. Dos vectores en Rn son paralelos si uno es multiplo escalar del otro. Dos
vectores en Rn son perpendiculares u ortogonales si el producto interno entre ellos es igual a cero.
ξρ∫s email: [email protected] 6 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 7
EJEMPLO 1.12. Los vectores canonicos en Rn son dos a dos perpendiculares.
EJEMPLO 1.13. Analice si los vectores a = (2,−3, 1) y b = (−4,−2, 2) son paralelos, ortogo-nales o ninguna de amabas cosas.
SOLUCION.- ♣
EJEMPLO 1.14. Analice la verdad o falsedad de la siguiente afirmacion. Justifique su respuesta.Si a y b son ortogonales a c, entonces a+ b es ortogonal a c.
SOLUCION.- Esta es una afirmacion verdadera. En efecto, como a y b son ortogonales a c,entonces
a • c = 0 y b • c = 0.
Ahora bien, puesto que(a+ b) • c = a • c+ b • c = 0 + 0 = 0
se concluye que a + b es ortogonal a c.
EJEMPLO 1.15. Demostrar vectorialmente que las diagonales de un rombo se cortan en angulorecto.
SOLUCION.- Empecemos demostrando que si u y v son vectores tales que ||u|| = ||v||, entoncesu+ v es ortogonal a u− v. En efecto, esto se deduce inmediatamente de la igualdad:
(u+ v) • (u− v) = ||u||2 − u • v + v • u− ||v||2 = 0.
Ahora bien sean los puntos p0, p1, p2 y p3 los vertices de un rombo. Entonces, supongamos quelos vectores
u = −−→p0p1
yv = −−→p0p2.
son dos de sus lados adyacentes. Por otro lado se sabe que los lados de un rombo son todos iguales.Entonces ||u|| = ||v||. Luego por lo probado anteriormente se segue que u+ v es ortogonal a u− v.Pero como
u+ v = −−→p0p1 + −−→p0p2 = −−→p0p3.
yu− v = −−→p0p1 −−−→p0p2 = −−→p1p2.
Por tanto las diagonales del rombo −−→p0p3 y −−→p1p2 se cortan en angulo recto.
ξρ∫s email: [email protected] 7 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 8
EJEMPLO 1.16. Encuentre dos vectores en direcciones opuestas que sean ortogonales al vectoru = (5, 2, 1)
SOLUCION.- El vector (x, y, z) es ortogonal al vector u = (5, 2, 1) cuando (x, y, z)•(5, 2, 1) = 0,esto es,
5x+ 2y + z = 0.
Para obtener un ejemplo hagamos y = −1, z = −3 en la anterior ecuacion y despejando x se tieneque x = 1. Luego unos de los vectores buscado es
(1,−1,−3)
y su vector opuesto(−1, 1, 3)
tambien es ortogonal a u.
EJEMPLO 1.17. Calcula los valores x, y para que el vector (x, y, 1) sea ortogonal a los vectores(3, 2, 0) y (2, 1,−1). Respuesta. x = 2, y = −3.
SOLUCION.- ♣
EJEMPLO 1.18. Dados los vectores u = (3, 1,−1) y v = (2, 3, 4), halla un vector unitario y
ortogonal a u y a v. Respuesta.(√6
6,−
√6
6,
√6
6
).
SOLUCION.- ♣
EJEMPLO 1.19. Sabiendo que ||u|| = 3, ||v|| = 5 determinar para que valores de r los vectoresu+ rv y u− rv son ortogonales entre si.
SOLUCION.- ♣
EJEMPLO 1.20. Dados los vectores u, v, w que satisfacen la condicion u+v+w = 0 y sabiendoque ||u|| = 3, ||v|| = 1, ||w|| = 4. Calcular u • v + v • w + u • w.
SOLUCION.- ♣
EJEMPLO 1.21. Si los vectores u y v son tales que ||u|| = ||v|| probar que los vectores u+ v yu− v son ortogonales.
SOLUCION.- ♣
EJEMPLO 1.22. Demostrar vectorialmente que las diagonales de un rombo se cortan en angulorecto.
ξρ∫s email: [email protected] 8 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 9
SOLUCION.- ♣
EJEMPLO 1.23. Si u y v son vectores no nulos, demostrar que el vector u− rv es ortogonal a
v si r =u • v||v||2 .
SOLUCION.- ♣
1.4. Proyeccion y Componente
DEFINICION 1.4. Sean a, b vectores. La proyeccion del vector a en la direccion del vector b es
definido por Proyba =a • b||b||2 b. La componente del vector a en la direccion del vector b es definido
por Compba =a • b||b|| .
TEOREMA 1.3. Se tiene que Proyba = Compbab
||b|| , ademas el vector v = a − Proyba es
ortogonal al vector b.
Demostracion.
EJEMPLO 1.24. Sean los vectores a = 3i+ 5j + 2k y b = −4i + 3k tal que: a = u+ v, siendou paralelo a b y ortogonal a v. Hallar u y v.
SOLUCION.- Del hecho de que u es paralelo a b se sigue que u = λb para algun λ ∈ R, delmismo modo u ortogonal a v implica que u • v = 0. Como v = a− u = a− λb, se tiene que
u • v = 0
(λb) • (a− λb) = 0
λb • a− λ2b • b = 0
λ(b • a− λ||b||2) = 0
de donde λ =b • a||b||2 . Por tanto, u =
b • a||b||2 b y v = a− b • a
||b||2 b.
EJEMPLO 1.25. Dados los vectores u(4,−1, 6), v(5, 7,−2). Hallar: u • v, ||u||, ||v||, u
||u|| , el
angulo entre u y v, 3u− 1
2v,
u+ v
||u+ v|| , Proyvu, Compvu. El valor que debe tener el valor m para
que el vector (−2, m,−3m) sea ortogonal a u.
ξρ∫s email: [email protected] 9 Jasmer LPC
UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 10
SOLUCION.- ♣
EJEMPLO 1.26. Dados los vectores u = (−1, 2) y v = (3, 2)
(i) Halle la proyeccion Proyvu, de u en v.
(ii) Halle u− Proyvu
(iii) Verifique que u− Proyvu es ortogonal a v, es decir que (u− Proyvu) • v = 0.
SOLUCION.- ♣
EJEMPLO 1.27. Observe que u = Proyvu+ [u− Proyvu]. Si u = (−5, 9) y v = (1, 1), expresaru como la suma de un vector paralelo a v y un vector ortogonal a v. Repita este ejercicio cuandou = (1, 2, 3) y v = (1, 1, 0).
SOLUCION.- ♣
EJEMPLO 1.28. Hallar los vectores u, v tales que Proyvu = (1, 2, 3) y Proyuv = (2, 1, 3).
SOLUCION.- Es claro que Proyvu es un vector paralelo a v, esto es v = tProyvu = t(1, 2, 3)para algun t, del mismo modo se tiene que u = sProyuv = s(2, 1, 3) para algun s. Por otro lado,
como Proyvu =u • v||v||2 v obtenemos
‖(1, 2, 3)‖ = ‖Proyvu‖ =u • v||v|| =
s(2, 1, 3) • t(1, 2, 3)
||t(1, 2, 3)|| = s(2, 1, 3) • (1, 2, 3)
||(1, 2, 3)||
de donde
s =||(1, 2, 3)||2
(2, 1, 3) • (1, 2, 3), u =
||(1, 2, 3)||2(2, 1, 3) • (1, 2, 3)
(2, 1, 3)
Del mismo modo se tiene que
‖(2, 1, 3)‖ = ‖Proyuv‖ =v • u||u|| =
t(1, 2, 3) • s(2, 1, 3)
||s(2, 1, 3)|| = t(1, 2, 3) • (2, 1, 3)
||(2, 1, 3)||
de donde
t =||(2, 1, 3)||2
(1, 2, 3) • (2, 1, 3), v =
||(2, 1, 3)||2(1, 2, 3) • (2, 1, 3)
(2, 1, 3)
♣
ξρ∫s email: [email protected] 10 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 11
1.5. Angulo entre vectores
DEFINICION 1.5. El angulo entre los vectores x y y, es la magnitud que mide la amplitud derotacion o giro (abertura) del vector x alrededor del origen hasta el vector y en sentido contrarioa las agujas del reloj.
TEOREMA 1.4. Si θ es el angulo generado por los vectores x y y, entonces θ verifica la ecuacion
cos θ =x • y
||x|| ||y||
Demostracion.
EJEMPLO 1.29. ¿Que se sabe acerca del angulo entre los vectores no nulos a y b, si (i) a•b > 0?,(ii) a • b < 0?, (i) a • b = 0?
SOLUCION.-
(i) Si a • b > 0, entonces el angulo entre a y b esta entre 0 y π2.
(i) Si a • b < 0, entonces el angulo entre a y b esta entre π2
y π.
(i) Si a • b = 0, entonces el angulo entre a y b es π2.
EJEMPLO 1.30. ¿Que se sabe acerca del angulo entre los vectores no nulos a y b, si (i) a·b > 0?,(ii) a · b < 0?, (i) a · b = 0?
SOLUCION.- ♣
EJEMPLO 1.31. Halle el angulo θ , entre los vectores dados en cada caso:
(i) u = (−1, 2), v = (0, 1) Rta. θ = arccos2√
5/5
(ii) u = (−1, 2), v = (1, 1/2) Rta. θ = arccos0 = 90o
(iii) u = (1, 2), v = (7, 14) Rta. θ = arccos1 = 0o. ♣
SOLUCION.- ♣
EJEMPLO 1.32. Si θ es el angulo entre A y B, entonces demostrar ||A−B||2 = ||A||2+ ||B||2−2||A|| ||B|| cos θ.
ξρ∫s email: [email protected] 11 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 12
SOLUCION.-
||A−B||2 = (A− B) • (A− B) = A • (A−B) −B • (A−B)
= A • A−A •B − B • A+B •B
= ||A||2 − 2A •B + ||B||2
= ||A||2 + ||B||2 − 2||A|| ||B|| cos θ
EJEMPLO 1.33. Si θ es el angulo entre A y B en R3, entonces demostrar tan θ =
||A× B||A •B .
SOLUCION.-
tan θ =sen θ
cos θ=
||A×B||||A|| ||B||
A•B||A|| ||B||
=||A× B||A •B
EJEMPLO 1.34. Dados los puntos P (1,−1, 2), Q(4, 5,−7), R(−1, 2, 1) y S(2,−1, 3) hallar:
(i) Un vector a tal que a ⊥ −→PQ, a ⊥ −→
PR y ||a|| = 2.
(ii) Los cosenos directores del vector u =1
2
−→QR −−→
QP .
(iii) La proyeccion vectorial de a sobre−→QS. ♣
SOLUCION.- ♣
EJEMPLO 1.35. Si ||u|| = 10, ||v|| = 10 y ||u+ v|| = 20, hallar el angulo que forman u y v.
SOLUCION.- ♣
EJEMPLO 1.36. Sabiendo que ||u|| = 8, ||v|| = 5 y el angulo entre u y v esπ
3, calcule u • v.
SOLUCION.- ♣
EJEMPLO 1.37. Los vectores u y v forman un angulo de 60o con ||u|| = 5, ||v|| = 8 determinar||u− v|| y ||u+ v||.
SOLUCION.- ♣
EJEMPLO 1.38. Los vectores u y v forman un angulo de 30o con ||u|| = 1, ||v|| =√
3. Calcularel angulo formado por los vectores u+ v y u− v.
SOLUCION.- ♣
ξρ∫s email: [email protected] 12 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 13
1.6. Producto vectorial
El producto vectorial “×” esta definido para vectores en R3. Es decir, el producto vectorial de dos
vectores en R3 es otro vector en R
3. En efecto
DEFINICION 1.6. Si a = (a1, a2, a3) y b = (b1, b2, b3) son dos vectores en R3 el producto
vectorial entre a y b se denota por a× b, se lee a por b se define como
a× b = (a1, a2, a3) × (b1, b2, b3) = (a2b3 − a3b2, a3b1 − a1b3, a1b2 − a2b1)
Se verifican la siguientes propiedades
TEOREMA 1.5. Sean a, b, c vectores en R3, λ un numero real, entonces
(1) a× b es ortogonal tanto a a como a b
(2) El producto vectorial es anticonmutativo, esto es a× b = −b× a
(3) (λa) × b = λ(a× b)
(4) Propiedad distributiva a× (b+ c) = a× b+ a× c
(5) a× b =
∣∣∣∣∣∣
i j ka1 a2 a3
b1 b2 b3
∣∣∣∣∣∣donde i = (1, 0, 0), j = (0, 1, 0), k = (0, 0, 1)
Demostracion.∣∣∣∣∣∣
i j ka1 a2 a3
b1 b2 b3
∣∣∣∣∣∣= i
∣∣∣∣b b2
c c2
∣∣∣∣+ −j∣∣∣∣
1 b2
1 c2
∣∣∣∣+ k
∣∣∣∣1 b1 c
∣∣∣∣
= 1[bc2 − cb2] − a[1c2 − 1b2] + a2[c− b]
= (a2b3 − a3b2, a3b1 − a1b3, a1b2 − a2b1)
EJEMPLO 1.39. Analice la verdad o falsedad de la siguiente afirmacion. Justifique su respuesta.Es posible encontrar el producto vectorial de dos vectores en el espacio vectorial bidimensional.
SOLUCION.- El producto vectorial “×” esta definido para vectores en R3. El producto vectorial
de dos vectores en R3 es otro vector en R
3. Recordemos
(a1, a2, a3) × (b1, b2, b3) = (a2b3 − a3b2, a3b1 − a1b3, a1b2 − a2b1)
Sin embargo podemos “ver” de la forma (a1, a2, 0) como vectores del espacio bidimensional elplano xy. En este caso tenemos
(a1, a2, 0) × (b1, b2, 0) = (0, 0, a1b2 − a2b1)
ξρ∫s email: [email protected] 13 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 14
que no esta en el plano xy. En resumen NO es posible encontrar el producto vectorial de dosvectores en el espacio vectorial bidimensional.
EJEMPLO 1.40. Analice la verdad o falsedad de la siguiente afirmacion. Justifique su respuesta.Si se conocen a× b = d y a× c = d, entonces c es igual a b.
SOLUCION.- La respuesta depende de que si a = 0 o a 6= 0. Primero analicemos el caso en quea = 0. En este caso la igualdades a× b = 0 y a× c = 0 son siempre validas no importando quienessean b y c. Ası que no podemos garantizar que sean iguales.
Ahora analizamos el caso en que a 6= 0. De la hipotesis a× b = d y a× c = d concluimos que
a× (b− c) = a× b− a× c = d− d = 0,
lo cual implica que a es paralelo a b− c, de esto y del hecho de que se a 6= 0 se deduce que existeλ 6= 0, tal que, a = λ(b− c). Ahora bien, puesto que
||b− c|| =||a|||λ| 6= 0.
Lo cual muestra que b 6= c. En resumen la afirmacion es falsa.
EJEMPLO 1.41. Analice la verdad o falsedad de la siguiente afirmacion. Si a y b son paralelosal plano XY , entonces a× b es paralelo al eje Z.
SOLUCION.- ♣
EJEMPLO 1.42. Sean u, v y w vectores de R3 demostrar que
(1) (u− v) × (u+ v) = 2(u× v) (2) u× u = 0
(3) u • (b× c) = −v • (a× c) (4) a× (b× c) = (a • b)b− (a • b)c, ♣
SOLUCION.- ♣
TEOREMA 1.6. Sean a, b, c vectores en R3, λ un numero real, entonces
(1) ||a× b|| = ||a|| ||b|| sen θ(2) Si a× b = 0 entonces a y b son vectores paralelos.
(3) ||a× b|| es el area del paralelogramo de lados a y b
Demostracion. Si a× b = 0 entonces a y b son vectores paralelos. En efecto, puesto que
||a× b|| = ||a|| ||b|| sen θ,
ξρ∫s email: [email protected] 14 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 15
donde θ es el angulo entre a y b. Reemplazando a × b = 0 en la anterior ecuacion tenemos que||a|| ||b|| sen θ = 0, de donde sen θ = 0, de aquı se obtiene θ = 0. Esto quiere decir que el anguloentre a y b es cero, por tanto estos vectores deben ser paralelos.
EJEMPLO 1.43. Sean a y b vectores no nulos de R3 tales que a × b = 0. ¿Que condicion
geometrica deben cumplir los vectores a y b? para que sea cierta la afirmacion
SOLUCION.- Los vectores a y b deben ser paralelos.
EJEMPLO 1.44. Hallar el area del triangulo de vertices A(1, 1, 1); B(2, 4, 2); C(3, 4, 0).
SOLUCION.- Notemos que el area del triangulo dado es igual a la mitad del area del paralelo-gramo de lados B − A y C − A.
Un simple calculo muestra que
B − A = (2, 4, 2) − (1, 1, 1) = (1, 3, 1)
C − A = (3, 4, 0) − (1, 1, 1) = (2, 3,−1)
y ademas
(B − A) × (C −A) =
∣∣∣∣∣∣
i j k1 3 12 3 −1
∣∣∣∣∣∣= i
∣∣∣∣3 13 −1
∣∣∣∣− j
∣∣∣∣1 12 −1
∣∣∣∣ + k
∣∣∣∣1 32 3
∣∣∣∣ = (−6, 3,−3)
Lo cual implica que
area del triangulo =1
2||(B −A) × (C − A)|| =
1
2
√36 + 9 + 9 =
√54
2
♣
EJEMPLO 1.45. Hallar el area del triangulo de vertices A(3, 4, 0); B(1, 1, 1); C(3, 5, 3).
SOLUCION.- Notemos que el area del triangulo dado es igual a la mitad del area del paralelo-gramo de lados B − A y C − A.
Un simple calculo muestra que
B −A = (1, 1, 1) − (3, 4, 0) = (−2,−3, 1)
C −A = (3, 5, 3) − (3, 4, 0) = (0, 1, 3)
ξρ∫s email: [email protected] 15 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 16
y ademas
(B−A)× (C−A) =
∣∣∣∣∣∣
i j k−2 −3 10 1 3
∣∣∣∣∣∣= i
∣∣∣∣−3 11 3
∣∣∣∣− j
∣∣∣∣−2 10 3
∣∣∣∣+k
∣∣∣∣−2 −30 1
∣∣∣∣ = (−10, 6,−2)
Lo cual implica que
area del triangulo =1
2||(B −A) × (C − A)|| =
1
2
√100 + 36 + 4 =
√140
2
♣
EJEMPLO 1.46. Calcule el area del triangulo de vertices P (2, 4,−3), Q(0, 2, 1) y R(−1, 0,−2).
SOLUCION.- ♣
EJEMPLO 1.47. Halle el area del triangulo de vertices (1, 1, 1), (2, 4, 2) y (3, 4, 0).
SOLUCION.- ♣
EJEMPLO 1.48. Hallar el area del triangulo de vertices A(5, 3, 4), B(2, 4, 1) y C(4, 2, 3)
SOLUCION.- ♣
EJEMPLO 1.49. Calcule el area del triangulo de vertices (2,−1, 3), (4, 3, 5) y (2, 3, 1)
SOLUCION.- Nombremos a estos puntos por
p0 = (2,−1, 3), p1 = (4, 3, 5) y p2 = (2, 3, 1)
Luego para calcular el area del triangulo de vertices p0, p1 y p2, consideremos los vectores
u = −−→p0p1 = p1 − p0 = (4, 3, 5) − (2,−1, 3) = (2, 4, 2)
yv = −−→p0p2 = p2 − p0 = (2, 3, 1) − (2,−1, 3) = (0, 4,−2)
Estamos ahora listos para calcular el area buscada, en efecto, esta esta dada por
Area =||u× v||
2.
Basta con calcular ||u× v||,
u× v =
∣∣∣∣∣∣
i j k2 4 20 4 2
∣∣∣∣∣∣= i
∣∣∣∣4 24 2
∣∣∣∣− j
∣∣∣∣2 20 2
∣∣∣∣ + k
∣∣∣∣2 40 4
∣∣∣∣ = (0,−4, 8).
ξρ∫s email: [email protected] 16 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 17
se donde se sigue que||u× v|| =
√02 + (−4)2 + 82 =
√70.
Finalmente
Area =||u× v||
2=
√70
2.
EJEMPLO 1.50. Calcule el area del triangulo de vertices A(2,−1, 1), B(3, 1, 1) y C(4,−1, 3)
SOLUCION.- Nombremos a estos puntos por
A = (2,−1, 1), B = (3, 1, 1) y C = (4,−1, 3)
Luego para calcular el area del triangulo de vertices A, B y C, consideremos los vectores
u =−→AB = B − A = (3, 1, 1) − (2,−1, 1) = (1, 2, 0)
y
v =−→AC = C −A = (4,−1, 3) − (2,−1, 1) = (2, 0, 2)
Estamos ahora listos para calcular el area buscada, en efecto, esta esta dada por
Area =||u× v||
2.
Basta con calcular ||u× v||,
u× v =
∣∣∣∣∣∣
i j k1 2 02 0 2
∣∣∣∣∣∣= i
∣∣∣∣2 00 2
∣∣∣∣− j
∣∣∣∣1 02 2
∣∣∣∣+ k
∣∣∣∣1 22 0
∣∣∣∣ = (4,−2,−4).
se donde se sigue que||u× v|| =
√42 + (−2)2 + (−4)2 =
√36 = 6.
Finalmente
Area =||u× v||
2=
6
2= 3.
♣
EJEMPLO 1.51. Calcule el area del triangulo de vertices A(2,−1, 2), B(3, 1, 2) y C(4,−1, 4)
SOLUCION.- Nombremos a estos puntos por
A = (2,−1, 2), B = (3, 1, 2) y C = (4,−1, 4)
ξρ∫s email: [email protected] 17 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 18
Luego para calcular el area del triangulo de vertices A, B y C, consideremos los vectores
u =−→AB = B − A = (3, 1, 2) − (2,−1, 2) = (1, 2, 0)
y
v =−→AC = C −A = (4,−1, 4) − (2,−1, 2) = (2, 0, 2)
Estamos ahora listos para calcular el area buscada, en efecto, esta esta dada por
Area =||u× v||
2.
Basta con calcular ||u× v||,
u× v =
∣∣∣∣∣∣
i j k1 2 02 0 2
∣∣∣∣∣∣= i
∣∣∣∣2 00 2
∣∣∣∣− j
∣∣∣∣1 02 2
∣∣∣∣+ k
∣∣∣∣1 22 0
∣∣∣∣ = (4,−2,−4).
se donde se sigue que||u× v|| =
√42 + (−2)2 + (−4)2 =
√36 = 6.
Finalmente
Area =||u× v||
2=
6
2= 3. ♣
EJEMPLO 1.52. Calcule el area del triangulo de vertices (3, 2, 1), (2, 1, 2) y (1, 2, 3). Ademasgraficar este triangulo.
SOLUCION.- Nombremos a estos puntos por
p0 = (3, 2, 1), p1 = (2, 1, 2) y p2 = (1, 2, 3)
Luego para calcular el area del triangulo de vertices p0, p1 y p2, consideremos los vectores
u = −−→p0p1 = p1 − p0 = (2, 1, 2)− (3, 2, 1) = (−1,−1, 1)
yv = −−→p0p2 = p2 − p0 = (1, 2, 3) − (3, 2, 1) = (−2, 0, 2)
Estamos ahora listos para calcular el area buscada, en efecto, esta esta dada por
Area =||u× v||
2.
Basta con calcular ||u× v||,
u× v =
∣∣∣∣∣∣
i j k−1 −1 1−2 0 2
∣∣∣∣∣∣= i
∣∣∣∣−1 10 2
∣∣∣∣− j
∣∣∣∣−1 1−2 2
∣∣∣∣+ k
∣∣∣∣−1 −1−2 0
∣∣∣∣ = (−2, 0,−2).
ξρ∫s email: [email protected] 18 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 19
se donde se sigue que||u× v|| =
√(−2)2 + (0)2 + (−2)2 =
√8.
Finalmente
Area =||u× v||
2=
√8
2=
√2.
♣EJEMPLO 1.53. Usando vectores analice si los puntos (2,−3, 1), (6, 5,−1), (3,−6, 4) y (7, 2, 2)son los vertices de un paralelogramo y calcule su area.
SOLUCION.- Nombremos a estos puntos por
p0 = (2,−3, 1), p1 = (6, 5,−1), p2 = (3,−6, 4) y p3 = (7, 2, 2).
Luego para verificar si son o no esos puntos los vertices de un paralelogramo consideremos losvectores
−−→p0p1 = p1 − p0 = (6, 5,−1) − (2,−3, 1) = (4, 8,−2),
−−→p0p2 = p2 − p0 = (3,−6, 4) − (2,−3, 1) = (1,−3, 3),
−−→p3p1 = p1 − p0 = (6, 5,−1) − (7, 2, 2) = (−1, 3,−3),
y−−→p3p2 = p2 − p0 = (3,−6, 4) − (7, 2, 2) = (−4,−8, 2)
Puesto que los vectores −−→p0p1 y −−→p3p2 son paralelos al igual que los vectores −−→p0p2 y −−→p3p1 se deduceque los puntos p0, p1, p2 y p3 son los vertices de un paralelogramo.
AdemasArea = ||−−→p0p1 ×−−→p0p2||.
EJEMPLO 1.54. Verificar que los puntos (1, 1, 1), (2, 3, 4), (6, 5, 2) y (7, 7, 5) son los vertices deun paralelogramo y calcule su area.
SOLUCION.- ♣
EJEMPLO 1.55. Use vectores para probar que los puntos (2,−1, 1), (5, 1, 4), (0, 1, 1) y (3, 3, 4)son vertices de un paralelogramo y calcule su area.
SOLUCION.- ♣
EJEMPLO 1.56. Calcule el area del paralelogramo de lados a = (5, 4,−2); b = (6,−5,−3)
ξρ∫s email: [email protected] 19 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 20
SOLUCION.- Empecemos calculando a× b,
a× b =
∣∣∣∣∣∣
i j k5 4 −26 −5 −3
∣∣∣∣∣∣= i
∣∣∣∣4 −2−5 −3
∣∣∣∣− j
∣∣∣∣5 −26 −3
∣∣∣∣+ k
∣∣∣∣5 46 −5
∣∣∣∣
= (−12 − 10,−15 + 12,−25 − 24) = (−22,−3,−49).
se donde se sigue que
Area = ||a× b|| =√
(−22)2 + (−3)2 + (−49)2 =√
484 + 9 + 2401 =√
2894 = 53, 8.
EJEMPLO 1.57. Sean A y B vectores tales que ||A|| = 2, ||B|| = 3 y A • B = −1. Encuentrela norma del vector 2A+ 3B y la norma del vector A×B.
SOLUCION.-
||2A+ 3B||2 = (2A+ 3B) • (2A+ 3B) = 2A • (2A+ 3B) + 3B • (2A+ 3B)
= 4A • A + 6A •B + 6B • A+ 9B •B
= 4||A||2 + 12A •B + 9||B||2
= 4 · 4 + 12 · (−1) + 9 · 9 = 85
Por tanto ||2A+ 3B|| =√
85. Recordemos que
||A× B|| = ||A|| ||B|| sen θ
donde θ es el angulo entre A y B. Ademas
A •B = ||A|| ||B|| cos θ
Por tanto
||A×B|| = ||A|| ||B||
√
1 −(
A •B||A|| ||B||
)2
Reemplazando datos tenemos
||A×B|| = 2 · 3
√
1 −( −1
2 · 3
)2
= 6
√36 − 1
36=
√35
♣DEFINICION 1.7 (Producto Mixto). Sean a, b, c vectores en R
3, el producto mixto de definecomo a • (b× c).
TEOREMA 1.7. Sean a, b, c vectores en R3, entonces
ξρ∫s email: [email protected] 20 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 21
(1) a • (b× c) =
∣∣∣∣∣∣
a1 a2 a3
b1 b2 b3c1 c2 c3
∣∣∣∣∣∣(2) ||a • (b× c)|| es el volumen del paralelepıpedo de lados a, b y c
Demostracion.
EJEMPLO 1.58. Sean a, b y c vectores no nulos de R3 tales que a • (b× c) = 0. ¿Que condicion
geometrica deben cumplir los vectores a, b y c para que sea cierta la afirmacion?
SOLUCION.- El hecho de que |a•(b×c)| = 0, implica que el vector a es perpendicular al vectorb× c. Ahora como el vector b× c es perpendicular tanto al vector b como al vector c, se sigue quea esta en el plano que generan los vectores b y c. Esto quiere decir que los vectores a, b y c nogeneran un paralelepipedo.
EJEMPLO 1.59. Calcule el volumen del paralelepidedo que tiene como aristas adyacentes a losvectores a = (1, 3, 1), b = (0, 6, 6), c = (−4, 0,−4).
SOLUCION.- Empecemos calculando a • (b× c),
a • (b× c) =
∣∣∣∣∣∣
1 3 10 6 6−4 0 −4
∣∣∣∣∣∣= 1
∣∣∣∣6 60 −4
∣∣∣∣− 3
∣∣∣∣0 6−4 −4
∣∣∣∣+ 1
∣∣∣∣0 6−4 0
∣∣∣∣
= 1(−24 − 6) − 3(−4 + 24) + (0 + 24) = −30 − 60 + 24 = −66.
se donde se sigue queVolumen = |a • (b× c)| = | − 66| = 66.
EJEMPLO 1.60. Dados los vectores u = (1,−2, 3), v = (1, 1, 2) y w = (1,−3, 4). Calcular: Elarea del paralelogramo de lados u y v. El area del triangulo de lados u, w y w − u. El volumendel paralelepipedo de aristas u, v y w. El volumen del tetraedro de aristas u, v y w.
SOLUCION.- ♣
ξρ∫s email: [email protected] 21 Jasmer LPC
CAPITULO 2
Geometrıa Analıtica Solida
2.1. Introduccion
Las palabras posicion y dimension (largo, alto, ancho) no se definen. Por tanto a partir de estaspalabras enunciamos, sin definicion los conceptos primarios o los elementos fundamentales de lageometrıa que son el punto, las rectas y los planos, tambien llamados terminos indefinidos de lageometrıa.
Punto. Un punto es la unidad indivisible de la geometrıa. No tiene ninguna dimension (largo,alto, ancho). El conjunto de todos los puntos se llama espacio. Luego un punto solo tiene posicionen el espacio. Ası el punto es elemento geometrico que tiene posicion pero no dimension.
Llamaremos una figura geometrica a cualquier conjunto de puntos distribuidos de alguna maneraen el espacio. La Geometrıa es la rama de la matematica que tiene por objeto el estudio de laspropiedades de las figuras geometricas y las relaciones entre las figuras geometricas.
Una Recta es una figura geometrica, en la cual los puntos que la forman estan colocadas enuna misma direccion y se prolongan indefinidamente en dos sentidos. Una recta es una sucesionininterrumpida de puntos. Solo posee una dimension y contiene infinitos puntos. Tiene una soladireccion y dos sentidos. No se puede medir. No tiene ni primero ni ultimo elemento. No poseeprincipio ni fin. Dados dos puntos cualesquiera existe por lo menos otro situado entre esos dos. Larecta es de longitud ilimitada, derecha, sin grosor ni extremos.
POSTULADO 2.1 (El postulado de la recta). Dados dos puntos distintos cualesquiera, hayexactamente una recta que los contiene.
TEOREMA 2.1. Si dos rectas diferentes se intersectan su interseccion contiene un unico punto.
22

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 23
Un plano es una superficie que tiene longitud y anchura pero no espesor. El plano tiene dosdimensiones a diferencia de la mayorıa de los casos que nos rodean que estan en tres dimensiones.La geometrıa plana estudia por ejemplo los triangulos, cuadrilateros, circunferencia, cırculo.
POSTULADO 2.2 (Postulado de la recta). Si dos puntos de una recta estan en un plano,entonces la recta esta en el mismo plano.
TEOREMA 2.2. Si una recta intersecta a un plano que no la contiene entonces la interseccioncontiene un solo punto.
POSTULADO 2.3 (Postulado del plano). Tres puntos cualesquiera estan en al menos unplano y tres puntos cualesquiera no alineados estan exactamente en el plano.
TEOREMA 2.3. Dada una recta y un punto fuera de ella hay exactamente un plano que contienea ambos.
TEOREMA 2.4. Dados dos rectas distintas que se intersectan, hay exactamente un plano quelas contiene.
2.2. Distancia entre dos puntos
Para x = (x1, x2, x3, ..., xn), y = (y1, y2, y3, ..., yn) en Rn definimos la distancia de x a y por
d(x, y) = ||x− y||.
La distancia satisface:
1. d(x, y) ≥ 0 para todo x, y ∈ Rn,
2. d(x, y) = 0 si y solo si x = y,
3. d(x, y) = d(y, x) para todo x, y ∈ Rn,
4. d(x, z) ≤ d(x, y) + d(y, z) para todo x, y, z ∈ Rn.
Sean p ∈ Rn y r > 0:
La bola abierta con centro p y radio r es el conjunto
B(p, r) = x ∈ Rn : d(x, p) < r.
La bola cerrada con centro p y radio r es el conjunto
B(p, r) = x ∈ Rn : d(x, p) ≤ r.
Notar que la bola abierta no incluye el borde, la bola cerrada sı lo incluye.
ξρ∫s email: [email protected] 23 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 24
2.3. La recta
DEFINICION 2.1. Dados un punto p0 ∈ Rn y un vector v en R
n.
① La ecuacion vectorial de la recta que pasa por el punto p0 y tiene vector direccion igual a ves p = p0 + tv donde t ∈ R.
② Las ecuaciones parametricas de la recta que pasa por el punto p0(x0, y0, z0) y tiene vectordireccion igual a v(a, b, c) son
x = x0 + tay = y0 + tbz = z0 + tc
donde t ∈ R.
③ Las ecuaciones simetricas de la recta que pasa por el punto p0(x0, y0, z0) y tiene vectordireccion igual a v(a, b, c) son
x− x0
a=y − y0
b=z − z0c
EJEMPLO 2.1. Anote la expresion de una recta que pase por el origen de coordenadas.
SOLUCION.- La recta que pasa por el punto p0 y tiene vector direccion v es el conjunto depuntos p que se expresan como
p = p0 + tv, t ∈ R.
Puesto que la recta pasa por el origen de coordenadas, se tiene que p0 = 0, entonces su ecuaciones
p = tv, t ∈ R.
♣
EJEMPLO 2.2. Hallar la ecuacion de la recta que pasa por (1,−2, 3) en la direccion de (4,−2, 7).
SOLUCION.-
P0 = (1,−2, 3) + t(4,−2, 7).
EJEMPLO 2.3. Hallar la ecuacion de la recta que pasa por (5, 3,−1) y (7,−2,−1).
SOLUCION.-
P0 = (5, 3,−1) + t[(7,−2,−1) − (5, 3,−1)] = (5, 3,−1) + t(2,−5, 0).
ξρ∫s email: [email protected] 24 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 25
EJEMPLO 2.4. Halle las ecuaciones: (a) parametricas, (b) simetricas de la recta que pasa porlos puntos (5,−3,−2) y
(− 2
3, 2
3, 1).
SOLUCION.- Nombremos a estos puntos por
p0 = (5,−3,−2), y p1 =(− 2
3, 2
3, 1).
Luego la ecuacion vectorial de la recta que pasa a traves del puntos p0 = (5,−3,−2) y que tienevector direccion
u = −−→p0p1 = p1 − p0 =(− 2
3, 2
3, 1)− (5,−3,−2)
=(− 2
3− 5, 2
3+ 3, 1 + 2
)=(−2−15
3, 2+9
3, 3)
=(−17
3, 11
3, 3),
esp = p0 + tu
(x, y, z) = (5,−3,−2) + t(−17
3,11
3, 3)
de donde obtenemos las ecuaciones parametricas de la recta
x = 5 − −173t
y = −3 + 113t
z = −2 + 3t
Ademas, las ecuaciones simetricas de la recta son
x− 5−173
=y − (−3)
113
=z − (−2)
3
simplificando tenemos3(5 − x)
17=
3(y + 3)
11=z + 2
3.
EJEMPLO 2.5. Halle las ecuaciones parametricas de la recta que pasa por el punto (3,−2, 4) yes paralela (a) al eje X, (b) eje Y , (c) eje Z.
SOLUCION.- Para el inciso (a), el vector direccion de la recta que buscamos es u = (1, 0, 0),de ahı que la recta es
(x, y, z) = (3,−2, 4) + t(1, 0, 0)
de donde se sigue que las ecuaciones parametricas de la recta son
x = 3 + t
y = −2
z = 4.
ξρ∫s email: [email protected] 25 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 26
EJEMPLO 2.6. Determine si las rectas x3
= y−2−1
= z + 1 , x−14
= y + 2 = z+3−3
se cortan, y si esası halle el punto de interseccion y el coseno del angulo de interseccion.
SOLUCION.- La ecuacion vectorial de la recta x3
= y−2−1
= z + 1 es
(x, y, z) = (0, 2,−1) + t(3,−1, 1), t ∈ R (2.1)
y la ecuacion vectorial de la recta x−14
= y + 2 = z+3−3
es
(x, y, z) = (1,−2,−3) + s(4, 1,−3), s ∈ R (2.2)
Las dos rectas en (2.1) y (2.2) se intersectan siempre que podamos encontrar valores para t y s demodo que tengamos
(0, 2,−1) + t(3,−1, 1) = (1,−2,−3) + s(4, 1,−3).
De esta ultima ecuacion se obtiene el siguiente sistema de ecuaciones
3t = 1 + 4s
2 − t = −2 + s
−1 + t = −3 − 3s.
Despejando s de la segunda ecuacion se tiene que s = 4−t. Reemplazando este valor en la primeraecuacion obtenemos t = 17
7, ahora reemplazando en la tercera ecuacion se ve que t = 8. Como no
puede haber dos valores diferentes para t, se concluye que las dos retas no se intersectan.
2.4. El Plano
DEFINICION 2.2. Dados un punto p0 ∈ Rn y vectores u, v y N en R
n.
① La ecuacion parametrica del plano que pasa por el punto p0 y tiene vectores direccion u y ves p = p0 + tu+ sv donde t, s ∈ R.
② La ecuacion vectorial del plano que pasa por el punto p0 y tiene vector normal igual a N es(p− p0) •N = 0.
③ La ecuacion canonica del plano que pasa por el punto p0(x0, y0, z0) y tiene vector normaligual a N(a, b, c) es a(x− x0) + b(y − y0) + c(z − z0) = 0
④ La ecuacion general del plano es ax+ by + cz + d = 0
DEFINICION 2.3. Dos planos con vectores normales N1 y N2 son perpendiculares si N1 •N2 =0, son paralelos si N1 es un multiplo escalar de N2.
ξρ∫s email: [email protected] 26 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 27
EJEMPLO 2.7. Anote la expresion de un plano que pase por el origen de coordenadas.
SOLUCION.- El plano que pasa por el punto p0 y tiene vector normal N es el conjunto depuntos p que se expresan como
N · (p− p0) = 0.
Puesto que el plano pasa por el origen de coordenadas, se tiene que p0 = 0, entonces su ecuaciones
N · p = 0.
♣
EJEMPLO 2.8. Hallar la ecuacion del plano perpendicular a (−2, 2, 2) y que pasa por (1,−2, 3).
SOLUCION.-
[(x, y, z) − (1,−2, 3)] • (−2, 2, 2) >= 0
(x, y, z) • (−2, 2, 2) − (1,−2, 3) • (−2, 2, 2) = 0
(x, y, z) • (−2, 2, 2) = (1,−2, 3) • (−2, 2, 2)
−2x+ 2y + 2z = −2 − 4 + 6 = 0
EJEMPLO 2.9. Utilice el producto cruz para obtener una ecuacion del plano que pasa por lospuntos (−2, 2, 2), (−8, 1, 6) y (3, 4,−1).
SOLUCION.- Sean
a = (−8, 1, 6) − (−2, 2, 2) = (−6,−1, 4)
b = (3, 4,−1) − (−2, 2, 2) = (5, 2,−3)
a× b =
∣∣∣∣∣∣
i j k−6 −1 45 2 −3
∣∣∣∣∣∣
a× b = i
∣∣∣∣−1 42 −3
∣∣∣∣− j
∣∣∣∣−6 45 −3
∣∣∣∣+ k
∣∣∣∣−6 −15 2
∣∣∣∣
ξρ∫s email: [email protected] 27 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 28
a× b = i(3 − 8) − j(18 − 20) + k(−12 + 5) = −5i− 2j − 7k = (−5, 2,−7)
[(x, y, z) − (−2, 2, 2)] • (−5, 2,−7) = 0
(x, y, z) • (−5, 2,−7) − (−2, 2, 2) • (−5, 2,−7) = 0
−5x+ 2y − 7z = 10 + 4 − 14 = 0
||a× b|| =√
(−5)2 + (−2)2 + (−7)2 =√
25 + 4 + 49 = 8,83
TEOREMA 2.5. El punto de interseccion entre la Recta p = p0 + tu y el Plano (p− q0) •N = 0
es dado por p0 + (q0−p0)•Nu•N N
DEMOSTRACION. Consideremos la recta que pasa por el punto p0 y tiene vector direccionalal vector u y consideremos tambien el plano que pasa por el punto q0 y tiene como vector normalal vector N . Esto es,
Recta p = p0 + tuPlano (p− q0) •N = 0
Supongamos que la recta intersecta al plano, en tal caso, existe un numero real t de modo que elpunto p0 + tu es un punto del plano, de donde
(p0 + tu− q0) •N = 0
de aquıp0 •N + t u •N − q0 •N = 0
de donde
t =(q0 − p0) •N
u •N .
Luego el punto de interseccion entre la recta y el plano es
p0 +(q0 − p0) •N
u •N N (2.3)
EJEMPLO 2.10. Halle la interseccion del plano 2x−3y+2z = 3 con la recta x− 12
=y+ 3
2
−1= z+1
2
ξρ∫s email: [email protected] 28 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 29
SOLUCION.- Para el plano 2x− 3y+ 2z = 3 tenemos que N = (2,−3, 2) y ademas si hacemosx = z = 0, se obtiene que y = −1, de donde q0 = (0,−1, 0).
Para la recta x− 12
=y+ 3
2
−1= z+1
2se tiene que p0 = (1
2,−3
2,−1) y u = (1,−1, 2).
Finalmente el punto de interseccion que buscamos se obtiene reemplazando estos datos en (2.3):
p =(
12,−3
2,−1
)+
((0,−1,0)−( 12,− 3
2,−1))•(2,−3,2)
(1,−1,2)•(2,−3,2)(2,−3, 2)
=(
12,−3
2,−1
)+
(− 12,−1+ 3
2,1)•(2,−3,2)
(1,−1,2)•(2,−3,2)(2,−3, 2)
=(
12,−3
2,−1
)+
(− 12)2+(−2+3
2)(−3)+1(2)
2(1)+(−3)(−1)+2(2)(2,−3, 2)
=(
12,−3
2,−1
)+
−1− 32+2
9(2,−3, 2) =
(12,−3
2,−1
)+ 1
18(2,−3, 2)
=(
12
+ 218,−3
2− 3
18,−1 + 2
18
)=(
9+218, (−9)3−3
18, −18+2
18
)=(
1118, 30
18, −16
18
).
EJEMPLO 2.11. Sea Q0 = (1, 2, 3), P0 = (3, 2, 1) y N = (1, 2, 1). Encontrar el punto deinterseccion de la recta que pasa por P0 con direccion N y el plano que pasa por Q0 y que esperpendicular a N .
SOLUCION.- El punto de interseccion es
P = P0 +(Q0 − P0) •N
||N ||2 N
(x, y, z) = (3, 2, 1) +[(1, 2, 3) − (3, 2, 1)] • (1, 2, 1)
||(1, 2, 1)||2 (1, 2, 1)
(x, y, z) = (3, 2, 1) +(−2, 0, 2) • (1, 2, 1)
12 + 22 + 12(1, 2, 1)
(x, y, z) = (3, 2, 1) +−2 + 0 + 2
12 + 22 + 12(1, 2, 1) = (3, 2, 1).
EJEMPLO 2.12. Halle las ecuaciones parametricas de la recta que pasa por el punto (−3, 2,−1)y es perpendicular al plano dado por −2x+ 3y + z = 5.
SOLUCION.- El vector normal al plano −2x + 3y + z = 5 es N = (−2, 3, 1). Como la rectaque buscamos es perpendicular al plano, entonces el vector direccion del plano es precisamente el
ξρ∫s email: [email protected] 29 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 30
vector normal al plano, por lo tanto la ecuacion vectorial de la recta pasa por el punto (−3, 2,−1)y tiene vector direccion N = (−2, 3, 1) es
(x, y, z) = (−3, 2,−1) + t(−2, 3, 1)
de donde se sigue que las ecuaciones parametricas de la recta son
x = −3 − 2t
y = 2 + 3t
z = −1 + t
EJEMPLO 2.13. Halle la ecuacion del plano que pasa por los puntos (1, 2, 3), (3, 2, 1) y (−1,−2, 2)
SOLUCION.- Nombremos a estos puntos por
p0 = (1, 2, 3), p1 = (3, 2, 1) y p2 = (−1,−2, 2).
Ahora los siguientes vectores estan sobre el plano que buscamos
−−→p0p1 = p1 − p0 = (3, 2, 1) − (1, 2, 3) = (2, 0,−2)
y−−→p0p2 = p2 − p0 = (−1,−2, 2) − (1, 2, 3) = (−2,−4,−1),
Puesto que los vectores −−→p0p1 y −−→p0p2 viven en el plano, su producto vectorial −−→p0p2×−−→p0p1 es el vectornormal al plano.
Calculemos −−→p0p2 ×−−→p0p1,
−−→p0p2 ×−−→p0p1 =
∣∣∣∣∣∣
i j k2 0 −2−2 −4 −1
∣∣∣∣∣∣= i
∣∣∣∣0 −2−4 −1
∣∣∣∣− j
∣∣∣∣2 −2−2 −1
∣∣∣∣ + k
∣∣∣∣2 0−2 −4
∣∣∣∣
= (0 − 8,−(−2 − 4),−8 − 0) = (−8, 6,−8).
Ahora nos toca encontrar la ecuacion del plano que pasa por el punto p0 = (1, 2, 3) y que tengavector normal N = −−→p0p2 ×−−→p0p1 = (−8, 6,−8).
(p− p0) •N = 0, ((x, y, z) − (1, 2, 3)) • (−8, 6,−8) = 0
(x− 1, y − 2, z − 3) • (−8, 6,−8) = 0 − 8(x− 1) + 6(y − 2) − 8(z − 3) = 0
−8x+ 8 + 6y − 12 − 8z + 24 = 0, −8x+ 6y − 8z + 20 = 0
4x− 3y + 4z = 10
ξρ∫s email: [email protected] 30 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 31
EJEMPLO 2.14. Halle la ecuacion del plano que pasa por el punto (3, 2, 2) y es perpendiculara la recta x−1
4= y + 2 = z+3
−3
SOLUCION.- Como el plano que buscamos es perpendicular a la recta x+15
= y+2−4
= z−5−2
,entonces su vector normal es precisamente el vector direccion de la recta.
Por otro lado el vector direccion de la recta x+15
= y+2−4
= z−5−2
es (5,−4,−2). Luego la ecuacion delplano que pasa por el punto (3, 2, 2) y tiene vector normal igual a N = (5,−4,−2) es:
(p− p0) •N = 0, ((x, y, z) − (3, 2, 2)) • (5,−4,−2) = 0
(x− 3, y − 2, z − 2) • (5,−4,−2) = 0 5(x− 3) − 4(y − 2) − 2(z − 2) = 0
10x− 15 − 4y + 8 − 2z + 4 = 0, 10x− 4y − 2z − 3 = 0.
EJEMPLO 2.15. Hallar la ecuacion de la recta que pasa por el punto (1, 1, 2) y es perpendicularal plano x+ y + z = 2.
SOLUCION.- El vector normal al plano x + y + z = 2 es N = (1, 1, 1). Como la recta quebuscamos es perpendicular al plano, entonces el vector direccion del plano es precisamente elvector normal al plano, por lo tanto la ecuacion vectorial de la recta pasa por el punto (1, 1, 2) ytiene vector direccion N = (1, 1, 1) es
(x, y, z) = (1, 1, 2) + t(1, 1, 1)
de donde se sigue que las ecuaciones parametricas de la recta son
x = 1 + t
y = 1 + t
z = 2 + t
Ademas, las ecuaciones simetricas de la recta son
x− 1
1=y − 1
1=z − 2
1.
♣EJEMPLO 2.16. Hallar la ecuacion del plano que pasa por el punto Q(2, 1,−1) y contiene a la
recta L :x− 1
3= y + 2 =
z + 1
2.
ξρ∫s email: [email protected] 31 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 32
SOLUCION.- La rectax− 1
3= y + 2 =
z + 1
2pasa por el punto P (1,−2,−1) y tiene vector
direccion igual a u(3, 1, 2). Luego los siguientes vectores estan sobre este plano
−→PQ = Q− P = (2, 1,−1) − (1,−2,−1) = (1, 3, 0)
yu = (3, 1, 2).
Puesto que los vectores−→PQ y u viven en el plano, su producto vectorial
−→PQ×u es el vector normal
al plano que buscamos.
Calculemos−→PQ× u,
−→PQ× u =
∣∣∣∣∣∣
i j k1 3 03 1 2
∣∣∣∣∣∣= i
∣∣∣∣3 01 2
∣∣∣∣− j
∣∣∣∣1 03 2
∣∣∣∣+ k
∣∣∣∣1 33 1
∣∣∣∣
= (6,−2, 1 − 9) = (6,−2,−8).
Ahora nos toca encontrar la ecuacion del plano que pasa por el punto Q(2, 1,−1) y que tenga
vector normal M =−→PQ× u = (6,−2,−8).
(p−Q) •N = 0, ((x, y, z) − (2, 1,−1)) • (6,−2,−8) = 0
(x− 2, y − 1, z + 1) • (6,−2,−8) = 0 6(x− 2) − 2(y − 1) − 8(z + 1) = 0
4x− 12 − 2y + 1 − 8z − 8 = 0, 4x− 2y − 8z − 19 = 0. ♣
EJEMPLO 2.17. Halle la ecuacion del plano que contiene a las rectas:x− 1
−2=y − 4
1=z
1;
x− 2
−3=y − 1
4=z − 2
−1.
SOLUCION.- Como el plano que contiene a las rectas: x−1−2
= y−41
= z1; x−2
−3= y−1
4= z−2
−1, se
sigue que los vectores direccion de estas rectas estan contenidas en el plano.
Vemos que el vector direccion de la recta x−1−2
= y−41
= z1
es u = (−2, 1, 1). Y el vector direccion
de la recta x−2−3
= y−14
= z−2−1
es v = (−3, 4,−1). Ahora con los vectores u y v podemos obtener elvector normal al plano que es dado por N = u× v,
u× v =
∣∣∣∣∣∣
i j k−2 1 1−3 4 −1
∣∣∣∣∣∣= i
∣∣∣∣1 14 −1
∣∣∣∣− j
∣∣∣∣−2 1−3 −1
∣∣∣∣+ k
∣∣∣∣−2 1−3 4
∣∣∣∣
= (−1 − 4,−(2 + 3),−8 + 3) = (−5,−5,−5).
ξρ∫s email: [email protected] 32 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 33
Ahora necesitamos hallar un punto p0 por donde la recta pasa. Esto es facil, por que podemostomar el punto por donde pasa la recta x−1
−2= y−4
1= z
1, es decir,
p0 = (1, 4, 0)
Luego la ecuacion del plano que pasa por p0 = (1, 4, 0) y es ortogonal al vector N = (−5,−5,−5)es
(p− p0) •N = 0, ((x, y, z) − (1, 4, 0)) • (−5,−5,−5) = 0
(x− 1, y − 4, z) • (−5,−5,−5) = 0 − 5(x− 1) − 5(y − 4) − 5z = 0
−5x+ 5 − 5y + 20 − 5z = 0, −5x− 5y − 5z = −25 x+ y + z = 5.
EJEMPLO 2.18. Halle la ecuacion del plano que contiene a las rectas: x−1−2
= y = z + 1;x+1−2
= y − 1 = z − 2.
SOLUCION.- Identico al anterior.
EJEMPLO 2.19. Halle la ecuacion del plano que contiene a todos los puntos equidistantes a lospuntos (2, 2, 0), (0, 2, 2).
SOLUCION.- Un punto (x, y, z) es equidistante a los puntos (2, 2, 0) y (0, 2, 2) si la distanciade (x, y, z) a (2, 2, 0) es igual a la distancia de (x, y, z) a (0, 2, 2). Esto es,
√(x− 2)2 + (y − 2)2 + z2 =
√x2 + (y − 2)2 + (z − 2)2
x2 − 4x+ 4 + y2 − 4y + 4 + z2 = x2 + y2 − 4y + 4 + z2 − 4z + 4
−4x+ 4 − 4y + 4 = −4y + 4 − 4z + 4
−4x+ 4z = 0, x− z = 0.
EJEMPLO 2.20. Determine si los planos son: paralelo, perpendiculares, o ninguna de las doscosas. Si no son paralelos ni perpendiculares, hallar el angulo de interseccion. 5x − 3y + z = 4,x+ 4y + 7z = 1.
ξρ∫s email: [email protected] 33 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 34
SOLUCION.-
El vector normal al plano 5x− 3y + z = 4 es n1 = (5,−3, 1)El vector normal al plano x+ 4y + 7z = 1 es n2 = (1, 4, 7)
Observemos que n1 y n2 no son paralelos. Ademas como
n1 • n2 = (5,−3, 1) • (1, 4, 7) = 5 − 12 + 7 = 0
entonces los planos son ortogonales.
EJEMPLO 2.21. Determine si los planos son: paralelo, perpendiculares, o ninguna de las doscosas. Si no son paralelos ni perpendiculares, hallar el angulo de interseccion. 4x + y − z = 2,−x− 2y − 4z = 2.
SOLUCION.-
El vector normal al plano 4x+ y − z = 2 es n1 = (4, 1,−1)El vector normal al plano −x− 2y − 4z = 2 es n2 = (−1,−2,−4)
Observemos que n1 y n2 no son paralelos. Ademas como
n1 • n2 = (4, 1,−1) • (−1,−2,−4) = −4 − 2 + 4 = −2
entonces los planos no son ortogonales.
Ahora el angulo θ entre los dos planos verifica
cos θ =|n1 • n2|
||n1|| ||n2||=
| − 2|√(4)2 + (1)2 + (−1)2
√(−1)2 + (−2)2 + (−4)2
=2√
18√
21
por tanto
θ = arc cos
(2√378
)
EJEMPLO 2.22. Determine si los planos son: paralelo, perpendiculares, o ninguna de las doscosas. Si no son paralelos ni perpendiculares, hallar el angulo de interseccion. 2x − 3y + 2z = 3,x+ 3y + 2z = 4.
SOLUCION.-
El vector normal al plano 2x− 3y + 2z = 3 es n1 = (2,−3, 2)El vector normal al plano x+ 3y + 2z = 4 es n2 = (1, 3, 2)
Observemos que n1 y n2 no son paralelos. Ademas como
n1 • n2 = (2,−3, 2) • (1, 3, 2) = 2 − 9 + 4 = −3
entonces los planos no son ortogonales.
Ahora el angulo θ entre los dos planos verifica
cos θ =|n1 • n2|
||n1|| ||n2||=
| − 3|√(2)2 + (−3)2 + (2)2
√(1)2 + (3)2 + (2)2
=3√
17√
14
ξρ∫s email: [email protected] 34 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 35
por tanto
θ = arc cos
(3√238
)
EJEMPLO 2.23. Halle las ecuaciones parametricas de la recta de interseccion entre los planosx− 4y + 2z = 0, 3x+ 2y − z = 7.
SOLUCION.- Haciendo z = t, del sistema
x− 4y + 2z = 0
3x+ 2y − z = 7se obtiene
x− 4y = −2t
3x+ 2y = t+ 7
Multiplicando por −3 a la primera ecuacion y luego sumando hacia abajo tenemos
10y = −6t+ t+ 7, y =−5t+ 7
10= −1
2t+
7
10
ademas
x = −2t+ 4y = −2t− 4
2t+
28
10= −4t+
14
5Por tanto las ecuaciones parametricas de la recta son
x = −4t+ 145
y = −12t+ 7
10
z = t.
EJEMPLO 2.24. Determinar la ecuacion del plano ortogonal al plano P = (1,−1, 1)+s(2, 1, 2)+t(−2, 0, 1), donde t, s son numeros reales, y que contenga a la recta P = (3, 1,−1) + t(1,−2, 3),donde t es real.
SOLUCION.- Consideremos el vector normal N del plano P = (1,−1, 1)+s(2, 1, 2)+t(−2, 0, 1),que es dado por
N = (2, 1, 2) × (−2, 0, 1) =
∣∣∣∣∣∣
i j k2 1 2−2 0 1
∣∣∣∣∣∣= i
∣∣∣∣1 20 1
∣∣∣∣− j
∣∣∣∣2 2−2 1
∣∣∣∣ + k
∣∣∣∣2 1−2 0
∣∣∣∣ = (1,−6, 2).
Como el plano buscado contenga a la recta P = (3, 1,−1) + t(1,−2, 3), se tiene que este pasa por
(3, 1,−1) y tiene vector normal igual a N = N × (3, 1,−1) = (1,−6, 2) × (3, 1,−1) esto es
N =
∣∣∣∣∣∣
i j k1 −6 23 1 −1
∣∣∣∣∣∣= i
∣∣∣∣−6 21 −1
∣∣∣∣− j
∣∣∣∣1 23 −1
∣∣∣∣ + k
∣∣∣∣1 −63 1
∣∣∣∣ = (4, 7, 19).
Por tanto el plano buscado es 4(x− 3) + 7(y − 1) + 19(z + 1) = 0. ♣
ξρ∫s email: [email protected] 35 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 36
EJEMPLO 2.25. Analice la verdad o falsedad de la siguiente afirmacion: La recta
x+ 4
3=y − 3
4=z − 2
2
y el plano 3x+ 4y + 2z − 6 = 0 son paralelos. Justifique su respuesta.
SOLUCION.- La ecuacionx+ 4
3=y − 3
4=z − 2
2es la ecuacion de la recta que pasa por el
punto (−4, 3, 2) y tiene vector direccion u = (3, 4, 2). Por otro lado la ecuacion 3x+4y+2z−6 = 0es la ecuacion del plano que tiene como vector normal al vector N = (3, 4, 2). Recordemos que unplano y una recta son paralelos siempre y cuando el vector normal del plano es ortogonal al vectordireccion de la recta. En nuestro caso, tenemos
u •N = (3, 4, 2) • (3, 4, 2) = 9 + 16 + 4 = 29 6= 0
por tanto nuestra recta y plano no son paralelos. ♣
EJEMPLO 2.26. Analice la verdad o falsedad de la siguiente afirmacion: La recta
x+ 4
2=y − 3
4=z − 2
3
y el plano 2x+ 4y + 2z − 8 = 0 son paralelos. Justifique su respuesta.
SOLUCION.- La ecuacionx+ 4
2=y − 3
4=z − 2
3es la ecuacion de la recta que pasa por el
punto (−4, 3, 2) y tiene vector direccion u = (2, 4, 3). Por otro lado la ecuacion 2x+4y+2z−8 = 0es la ecuacion del plano que tiene como vector normal al vector N = (2, 4, 2). Recordemos que unplano y una recta son paralelos siempre y cuando el vector normal del plano es ortogonal al vectordireccion de la recta. En nuestro caso, tenemos
u •N = (2, 4, 3) • (2, 4, 2) = 4 + 8 + 6 = 14 6= 0
por tanto nuestra recta y plano no son paralelos. ♣
EJEMPLO 2.27. Halla la ecuacion cartesiana del plano que contiene a la recta:
R
x = 1 + ty = −1 + 2tz = t
y es perpendicular al plano∏
cuya ecuacion es 2x+ y − z = 2
SOLUCION.- La ecuacion parametrica del plano que pasa por el punto A(x0, y0, z0) y tienevectores direccion u y v es p = A+ tu+ sv. Esta ecuacion es equivalente a
(p− A) • u× v =
∣∣∣∣∣∣
x− x0 y − y0 z − z0u1 u2 u3
u1 u2 u3
∣∣∣∣∣∣= 0
ξρ∫s email: [email protected] 36 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 37
Sea Ω el plano buscado. Un vector paralelo al plano Ω es el vector direccion de la recta R: v(1, 2, 1).Otro vector paralelo al plano Ω es el vector normal del plano perpendicular
∏: u = (2, 1,−1). Un
punto del plano es un punto de la recta R: P (1,−1, 0). Luego la ecuacion del plano Ω es:
∣∣∣∣∣∣
x− 1 y + 1 z2 1 −11 2 1
∣∣∣∣∣∣= 0
de donde 3x− 3y + 3z − 6 = 0 y finalmente Ω tiene por ecuacion a x− y + z = 2 ♣
EJEMPLO 2.28. Determine la ecuacion del plano que pasa por los puntos P (2, 5, 4), Q(3, 4, 2)y es perpendicular al plano x+ y − 2z = 4.
SOLUCION.- Nombremos al vector normal del plano x+ y− 2z = 4 por N = (1, 1,−2). Ahorabien, N es paralelo al plano que buscamos. Luego los siguientes vectores estan sobre este plano
−→PQ = Q− P = (3, 4, 2) − (2, 5, 4) = (1,−1,−2)
yN = (1, 1,−2).
Puesto que los vectores−→PQ y N viven en el plano, su producto vectorial
−→PQ × N es el vector
normal al plano.
Calculemos−→PQ×N ,
−→PQ×N =
∣∣∣∣∣∣
i j k1 −1 −21 1 −2
∣∣∣∣∣∣= i
∣∣∣∣−1 −21 −2
∣∣∣∣− j
∣∣∣∣1 −21 −2
∣∣∣∣+ k
∣∣∣∣1 −11 1
∣∣∣∣
= (2 + 2,−(−2 + 2), 1 + 1) = (4, 0, 2).
Ahora nos toca encontrar la ecuacion del plano que pasa por el punto P (2, 5, 4) y que tenga vector
normal M =−→PQ×N = (4, 0, 2).
(p− P ) •M = 0, ((x, y, z) − (2, 5, 4)) • (4, 0, 2) = 0
(x− 2, y − 5, z − 4) • (4, 0, 2) = 0 4(x− 2) + 0(y − 5) + 2(z − 4) = 0
4x− 8 + 2z − 8 = 0, 2x+ z − 8 = 0. ♣
EJEMPLO 2.29. Determine la ecuacion del plano que pasa por los puntos P (2, 4, 5), Q(3, 2, 4)y es perpendicular al plano x− y + 2z = 8.
ξρ∫s email: [email protected] 37 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 38
SOLUCION.- Nombremos al vector normal del plano x− y+ 2z = 8 por N = (1,−1, 2). Ahorabien, N es paralelo al plano que buscamos. Luego los siguientes vectores estan sobre este plano
−→PQ = Q− P = (3, 2, 4) − (2, 4, 5) = (1,−2,−1)
yN = (1,−1, 2).
Puesto que los vectores−→PQ y N viven en el plano, su producto vectorial
−→PQ × N es el vector
normal al plano.
Calculemos−→PQ×N ,
−→PQ×N =
∣∣∣∣∣∣
i j k1 −2 −11 −1 2
∣∣∣∣∣∣= i
∣∣∣∣−2 −1−1 2
∣∣∣∣− j
∣∣∣∣1 −11 2
∣∣∣∣+ k
∣∣∣∣1 −21 −1
∣∣∣∣
= (−4 − 1,−(2 + 1),−1 + 2) = (−5,−3, 1).
Ahora nos toca encontrar la ecuacion del plano que pasa por el punto P (2, 4, 5) y que tenga vector
normal M =−→PQ×N = (−5,−3, 1).
(p− P ) •M = 0, ((x, y, z) − (2, 4, 5)) • (−5,−3, 1) = 0
(x− 2, y − 4, z − 5) • (−5,−3, 1) = 0 − 5(x− 2) − 3(y − 4) + (z − 5) = 0
−5x+ 10 − 3y + 12 + z − 5 = 0, −5x− 3y + z + 17 = 0. ♣
EJEMPLO 2.30. Anote la condicion que debe cumplir m para que la recta x+3 = y−2 =z − 1
2sea paralela al plano 2x+ 4y +mz = 2.
SOLUCION.- El vector direccion de la recta x+ 3 = y − 2 =z − 1
2es u = (1, 1, 2) y el vector
normal del plano 2x+ 4y +mz = 2 es N = (2, 4, m). Recordemos que una recta es paralela a unplano si el vector direccion de la recta es perpendicular al vector normal del plano, ası tenemosque
(1, 1, 2) • (2, 4, m) = 0
2 + 4 + 2m = 0
de aquı obtenemos que m = −3. ♣EJEMPLO 2.31. Probar que la recta de interseccion de los planos x + 2y − z − 2 = 0 y 3x +2y + 2z − 8 = 0 es paralela a la recta p = (1, 1, 1) + t(6,−5,−4). Encuentre la ecuacion del planoque forman estas dos rectas.
ξρ∫s email: [email protected] 38 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 39
SOLUCION.- Denotemos por p = p0 + tu la recta de interseccion de ambos planos. Para hallarel punto p0 hagamos x = 0, en ambas ecuaciones, luego obtenemos el siguiente sistema
2y − z = 2
2y + 2z = 8
4y − 2z = 42y + 2z = 8
6y = 12y = 2
2(2) − z = 2z = 2
Luego p0(0, 2, 2). El vector direccion es
u = N0 ×N1 =
∣∣∣∣∣∣
i j k1 2 −13 2 2
∣∣∣∣∣∣= i
∣∣∣∣2 −12 2
∣∣∣∣− j
∣∣∣∣1 −13 2
∣∣∣∣+ k
∣∣∣∣1 23 2
∣∣∣∣
= (4 + 2,−(2 + 3), 2 − 6) = (6,−5,−4).
Entonces la recta es p = (0, 2, 2) + t(6,−5,−4). Comparando con la que tenemos p = (1, 1, 1) +t(6,−5,−4), se obtiene que ambos son paralelos. Ahora construyamos un plano que contenga aestas dos rectas. Recordemos que la ecuacion del plano es N • (p− q0) = 0. Tenemos los siguientedados q0 = (0, 2, 2). Tomemos w = (1, 1, 1) − (0, 2, 2) = (1,−1,−1), luego
N = (6,−5,−4) × (1,−1,−1) =
∣∣∣∣∣∣
i j k6 −5 −41 −1 −1
∣∣∣∣∣∣= i
∣∣∣∣−5 −4−1 −1
∣∣∣∣− j
∣∣∣∣6 −41 −1
∣∣∣∣+ k
∣∣∣∣6 −51 −1
∣∣∣∣
= (5 − 4,−(−6 + 4),−6 + 5) = (1, 2,−1).
luego el plano buscado tiene por ecuacion (1, 2,−1)•(x, y−2, x−2) = 0, esto es, x+2y−z−2 = 0.
Otra manera de resolver este problema es la siguiente: Hagamos z = t,
x+ 2y − t− 2 = 0
3x+ 2y + 2t− 8 = 0
−x− 2y + t+ 2 = 03x+ 2y + 2t− 8 = 0
2x+ 3t− 6 = 0
x =6 − 3t
2= −3
2t+ 3
y =t+ 2 − x
2=t+ 2
2− x
2=t+ 2
2− 6 − 3t
4=
2t+ 4 − 6 + 3t
4
=5t− 2
4=
5
4t− 1
2
Luego
(x, y, z) =
(−3
2t+ 3,
5
4t− 1
2, t
)=
(−3
2,5
4, 1
)t+ (3,−1
2, 0) = −1
4t (6,−5,−4) + (3,−1
2, 0)
♣
ξρ∫s email: [email protected] 39 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 40
EJEMPLO 2.32. Probar que la recta de interseccion de los planos Π1: x + 2y − z = 2 y Π2:3x + 2y + 2z = 8 es paralela a la recta R: p = (1, 1, 1) + t(6,−5,−4). Encuentre la ecuacion delplano que forman estas rectas.
SOLUCION.- Haciendo z = t, del sistema
x+ 2y − z = 2
3x+ 2y + 2z = 8se obtiene
x+ 2y = 2 + t
3x+ 2y = 8 − 2t
Multiplicando por −3 a la primera ecuacion y luego sumando hacia abajo tenemos
−4y = 2 − 5t, y =5t− 2
4=
5
4t− 1
2
ademas
x = t+ 2 − 2y = t+ 2 − 5
2t+ 1 = −3
2t+ 3
Por tanto las ecuaciones parametricas de la recta son
x = −3
2t+ 3, y =
5
4t− 1
2, z = t.
Por tanto (x, y, z) = (3,−1/2, 0)+t(−3/2, 5/4, 1) = (−1/2, 3, 0)−t/4(6,−5,−4), lo cual demuestraque ambas rectas son paralelas.
Ahora bien, puesto que ambas rectas p = (1, 1, 1)+t(6,−5,−4) y p = (3,−1/2, 0)+t(−3/2, 5/4, 1)son paralelas, es suficiente definir los vectores
u = (3,−1/2, 0) − (1, 1, 1) = (2,−3/2,−1) y v = (6,−5,−4)
y con ellos tomar N = (2,−3/2,−1) × (6,−5,−4)
N =
∣∣∣∣∣∣
i j k2 −3/2 −16 −5 −4
∣∣∣∣∣∣= i
∣∣∣∣−3/2 −1−5 −4
∣∣∣∣− j
∣∣∣∣2 −16 −4
∣∣∣∣+ k
∣∣∣∣2 −3/26 −5
∣∣∣∣ = (−1, 2,−1).
Por tanto el plano buscado es −(x− 1) + 2(y − 1) − 1(z − 1) = 0. ♣
EJEMPLO 2.33. Halla la ecuacion de la recta que pasa por el punto P (2,−1, 1) y corta perpen-dicularmente a la recta R dada por:
x− 2
2=y − 1
2= z
ξρ∫s email: [email protected] 40 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 41
SOLUCION.- En primer lugar hay que hallar el plano P perpendicular a la recta R que pasapor el punto P (2,−1, 1). Despues se halla el punto de interseccion P ′ de la recta R y del plano P.La recta pedida es la que pasa por P y P ′.
El vector direccion del plano P es n(2, 2, 1), luego el plano P que pasa por el punto P (2,−1, 1) ytiene vector normal n es 2(x− 2) + 2(y + 1) + z − 1 = 0 o 2x+ 2y + z = 3.
Se pasa la recta R a su forma parametrica
R
x = 2 + 2ty = 1 + 2tz = t
y se sustituyen los valores de x, y, z en la ecuacion del plano P
2(2 + 2t) + 2(1 + 2t) + t = 3
despejando t, t = −1/3, luego el punto de interseccion P ′ es P ′(4/3, 1/3,−1/3). Ahora, el vectordireccion de la recta buscada es v = P ′ − P = (−2/3, 4/3,−4/3). Podemos tomar v = (1,−2, 2),ası la recta es
x− 2 =y + 1
2=z − 1
2 ♣
2.5. Distancias entre puntos, rectas y planos
DEFINICION 2.4. La distancia entre dos figuras geometricas se define como el valor mınimode las distancias entre puntos de cada una de las figuras geometricas.
TEOREMA 2.6 (Distancia de un punto a una recta). La distancia entre un punto q y larecta l que pasa por el punto p0 y tiene vector direccion igual a u “p = p0 + tu” puede ser calculadousando una de las siguientes formulas:
d(q, l) =||(q − p0) × u||
||u|| =
∣∣∣∣∣∣∣∣(q − p0) +
(q − p0) • u||u||2 u
∣∣∣∣∣∣∣∣
Demostracion.
EJEMPLO 2.34. Halle la distancia del punto (4,−1, 5) a la recta x = 3, y = 1 + 3t, z = 1 + t.
SOLUCION.- De las ecuaciones parametricas de la recta
x = 3
y = 1 + 3t
z = 1 + t.
ξρ∫s email: [email protected] 41 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 42
obtenemos(x, y, z) = (3, 1 + 3t, 1 + t) = (3, 1, 1) + t(0, 3, 1).
Por tanto en nuestro caso tenemos que q = (4,−1, 5), p0 = (3, 1, 1) y u = (0, 3, 1).
Ahora bien, comoq − p0 = (4,−1, 5) − (3, 1, 1) = (1,−2, 4),
se tiene que
(q − p0) × u =
∣∣∣∣∣∣
i j k1 −2 40 3 1
∣∣∣∣∣∣= i
∣∣∣∣−2 43 1
∣∣∣∣− j
∣∣∣∣1 40 4
∣∣∣∣ + k
∣∣∣∣1 −20 3
∣∣∣∣
= (−2 − 12,−(4 − 0), 3 − 0) = (−14,−4, 3).
Cuya longitud es dado por
||(q − p0) × u|| =√
(−14)2 + (−4)2 + (3)2 =√
196 + 16 + 9 =√
221.
Por tanto a distancia del punto (4,−1, 5) a la recta x = 3, y = 1 + 3t, z = 1 + t es
D =
√221√
(0)2 + (3)2 + (1)2=
√221√10
=
√221
10.
TEOREMA 2.7 (Distancia entre dos rectas no paralelas). Si los vectores u y v son noparalelos, entonces la distancia entre la recta l que pasa por el punto p0 y tiene vector direccionigual a u “p = p0 + tu” y la recta m que pasa por el punto q0 y tiene vector direccion igual a v“p = q0 + tv” es
d(l,m) = ||Proyu×v−−→p0q0|| =
∣∣∣∣(q0 − p0) • (u× v)
||u× v||
∣∣∣∣
Demostracion.
EJEMPLO 2.35. Halle la distancia entre las rectas paralelas L1 : x = 2−t, y = 3+2t, z = 4+t;L2 : x = 3t, y = 1 − 6t, z = 4 − 3t
SOLUCION.- En este caso hallemos primero un punto sobre la recta L1, este punto es q =(2, 3, 4). Ahora la distancia entre las rectas paralelas L1 y L2 es precisamente la distancia delpunto q = (2, 3, 4) a la recta L2. Y para hallar esta distancia se procede como en el anteriorejercicio.
TEOREMA 2.8 (Distancia de un punto a un plano). La distancia entre un punto q(x1, y1, z1)al plano P que pasa por el punto p0(x0, y0, z0) y tiene vector normal igual a N(a, b, c) “(p−p0)•N =0” es
d(q,P) = ||ProyN−→p0q|| =
|(q − p0) •N |||N || =
|a(x1 − x0) + b(y1 − y0) + c(z1 − z0)|√a2 + b2 + c2
ξρ∫s email: [email protected] 42 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 43
Si el plano es dado en su forma canonica ax+ by + cz + d = 0, entonces
d(q,P) =|ax1 + by1 + cz1 + d|√
a2 + b2 + c2
Demostracion.
TEOREMA 2.9 (Distancia entre dos planos paralelos). La distancia entre los planos a1x+
b1y + c1z + d1 = 0 y a2x + b2y + c2z + d2 = 0 es d =
∣∣∣∣d1
||N1||− d2
||N2||
∣∣∣∣ donde N1(a1, b1, c1) y
N2(a2, b2, c2). En particular si N1 = N2, entonces d =|d1 − d2|√a2 + b2 + c2
Demostracion. Consideremos los puntos p1(x1, y1, z1) en el plano a1x + b1y + c1z + d1 = 0 yp2(x2, y2, z2) en el plano a2x + b2y + c2z + d2 = 0. Luego la distancia de p1 al plano a2x + b2y +c2z + d2 = 0 es dado por
d =|(p1 − p2) •N2|
||N2||=
|p1 •N2 − p2 •N2|||N2||
Por otro lado las ecuaciones a1x1 + b1y1 + c1z1 + d1 = 0 y a2x2 + b2y2 + c2z2 + d2 = 0 implican quep1 •N1 = −d1 y p2 •N2 = −d2.
Ahora bien supongamos que N1 es paralelo a N2, por tanto N1 = kN2, ası ||N1|| = k||N2||, yademas k(p1 •N2) = −d1, ası:
d =| − d1
k+ d2|
||N2||=
∣∣∣∣d1
k||N2||− d2
||N2||
∣∣∣∣ =
∣∣∣∣d1
||N1||− d2
||N2||
∣∣∣∣
EJEMPLO 2.36. Halle la distancia del punto (2, 8, 4) al plano 4x− 2y − 4z = 2
SOLUCION.- En nuestro caso tenemos que q = (2, 8, 4) y N = (4,−2,−4). Hallamos p0 hacien-do x = z = 0, luego y = −1, ası p0 = (0,−1, 0). Reemplazando datos tenemos
D =|(q − p0) •N |
||N || =|((2, 8, 4)− (0,−1, 0) • (4,−2,−4)|
||(4,−2,−4)||
D =|(2, 9, 4) • (4,−2,−4)|√
(4)2 + (−2)2 + (−4)2=
|8 − 18 − 16|√16 + 4 + 16
=26√36
=26
6=
13
3
ξρ∫s email: [email protected] 43 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 44
EJEMPLO 2.37. Halle la distancia entre los planos paralelos 2x−3y+4z = 8, 4x−6y+8z = 18
SOLUCION.- Hallemos un punto q sobre el plano 2x − 3y + 4z = 8, esto se logra haciendox = y = 0, de donde z = 2, por tanto q = (0, 0, 2).
Del mismo modo hallemos un punto p0 sobre el plano 4x − 6y + 8z = 18, esta vez hagamosx = z = 0, de donde y = −3, por tanto p0 = (0,−3, 0). Luego el plano 4x − 6y + 8z = 18 pasapor el punto p0 = (0,−3, 0) y tiene vector normal N = (4,−6, 8). Ahora estamos en condicionesde aplicar la formula
D =|(q − p0) •N |
||N || =|((0, 0, 2)− (0,−3, 0) • (4,−6, 8)|
||(4,−6, 8)||
D =|(0, 3, 2) • (4,−6, 8)|√
(4)2 + (−6)2 + (8)2=
|0 − 18 − 16|√16 + 36 + 64
=34√116
.
EJEMPLO 2.38. Halle la distancia entre los planos paralelos x− 2y+ 2z = 7, 2x− 4y+ 4z = 8
SOLUCION.- Hallemos un punto q sobre el plano x − 2y + 2z = 7, esto se logra haciendoy = z = 0, de donde x = 7, por tanto q = (7, 0, 0).
Del mismo modo hallemos un punto p0 sobre el plano 2x − 4y + 4z = 8, esta vez hagamosy = z = 0, de donde x = 4, por tanto p0 = (4, 0, 0). Luego el plano 2x− 4y + 4z = 8 pasa por elpunto p0 = (4, 0, 0) y tiene vector normal N = (2,−4, 4). Ahora estamos en condiciones de aplicarla formula
D =|(q − p0) •N |
||N || =|((7, 0, 0)− (4, 0, 0) • (2,−4, 4)|
||(2,−4, 4)||
D =|(3, 0, 0) • (2,−4, 4)|√
(2)2 + (−4)2 + (4)2=
|6 − 0 + 0|√4 + 16 + 16
=6√36
=1
6.
♣
EJEMPLO 2.39. Se consideran los puntos: A(1, 1, 1), B(0,−2, 2), C(−1, 0, 2), D(2,−1,−2) a)Calcula la distancia del punto D al plano determinado por los puntos A, B y C. b) Halla unasecuaciones cartesianas de la recta que pasa por D y es perpendicular al plano determinado por lospuntos A, B y C
SOLUCION.- Empecemos determinando la ecuacion del plano∏
determinado por los puntosA, B y C. Los vectores direccion de este plano son
u = B −A = (−1,−3, 1), y v = C − A = (−2,−1, 1)
La ecuacion parametrica del plano que pasa por el punto A(x0, y0, z0) y tiene vectores direccion uy v es p = A+ tu+ sv. Esta ecuacion es equivalente a
(p− A) • u× v =
∣∣∣∣∣∣
x− x0 y − y0 z − z0u1 u2 u3
u1 u2 u3
∣∣∣∣∣∣= 0
ξρ∫s email: [email protected] 44 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 45
reemplazando datos ∣∣∣∣∣∣
x− 1 y − 1 z − 1−1 −3 1−2 −1 1
∣∣∣∣∣∣= 0
de donde 2x+ y+5z− 8 = 0. Ahora usando la formula de la distancia entre un punto q(x1, y1, z1)al plano es dado en su forma canonica ax+ by + cz + d = 0, dado por
d(q,P) =|ax1 + by1 + cz1 + d|√
a2 + b2 + c2
obtenemos
d =|2(2) + 1(−1) + 5(−2) − 8|√
22 + 12 + 52= 2, 74
b) Vector director de la rectaR es el vector normal al plano. n(2, 1, 5) pasa por el puntoD(2,−1,−2).
x− 2
2= y + 1 =
z + 2
5 ♣
2.6. Superficies Cuadraticas
DEFINICION 2.5. Una superficie cuadratica es la grafica de una ecuacion de segundo gradocon tres variables x, y, z. La forma general de la ecuacion es:
ax2 + by2 + cz2 + dxy + eyz + fxz + gx+ hy + iz + j = 0
donde a, b, c, d, e, f, g, h, i, j son constantes.
Las superficies cuadraticas mas importantes son las siguientes:
1. Elipsoide. Tiene por ecuacionx2
a2+y2
b2+z2
c2= 1
2. Hiperboloide de una hoja. Tiene por ecuacionx2
a2+y2
b2− z2
c2= 1
3. Hiperboloide de dos hojas. Tiene por ecuacion −x2
a2− y2
b2+z2
c2= 1
4. Paraboloide. Tiene por ecuacionx2
a2+y2
b2=z
c
5. Paraboloide hiperbolico. Tiene por ecuacionx2
a2− y2
b2=z
c
ξρ∫s email: [email protected] 45 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 46
6. Conos. Tiene por ecuacionx2
a2+y2
b2=z2
c2
7. Cilindro circular recto. Cuando una de las variables x, y o z no aparece en la ecuacion de lasuperficie, Entonces la superficie es un Cilindro.
a) Cilindro circular recto con eje en el eje z. Por ejemplo: x2 + y2 = a2 es un cilindro en elespacio ya que falta la variable z. Por lo tanto, la grafica del cilindro se extendera par-alelo al eje z.
b) Cilindro circular recto con eje en el eje y. Por ejemplo: x2 + z2 = a2.
c) Cilindro parabolico. Considere la ecuacion x2 + y = 0, que corresponde a una parabolaen el plano xy, al variar z se obtiene la superficie.
d) Cilindro elıptico con eje en el eje z. Considere la ecuacion de la elipse y2 + 4z2 = 4 enel plano yz , al recorrer el eje x se obtiene la superficie.
e) Cilindro hiperbolico con eje en el eje z. Considere la ecuacion y2 − x2 = 1 que corre-sponde a una hiperbola centrada en el (0, 0) en el plano xy, al recorrer z se obtiene lasuperficie
EJEMPLO 2.40. Para las ecuaciones siguientes, hacer un estudio completo: trazas, cortes conlos ejes, identificar la superficie y hacer un grafico aproximado.
ξρ∫s email: [email protected] 46 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 47
1) 4x2 − y2 + z2 − 8x+ 2y + 3 = 0.
Sol. hiperboloide de una hoja con centro en (1, 1,−1)2) x2 + y2 + z2 − 8x− 8y − 6z + 24 = 0.
Sol. esfera3) x2 + 2y2 − 4z2 − 8 = 0.
Sol. cono elıptico de 2 hojas.4) x2 − y2 + z2 − 10z + 25 = 0.
Sol. cono circular.5) x2 + 36y2 + 36z − 9 = 0.
Sol. paraboloide elıptico.6) x2 − z2 − 5y = 0.
Sol. paraboloide hiperbolico.7) x2 + 4y2 − 4z2 − 6x− 16y − 16z + 5 = 0.
Sol. hiperboloide de una hoja.8) y2 + z2 − 2x = 0.
Sol. paraboloide circular recto.9) z = 3x2 + 2y2 − 11.
Sol. paraboloide.
10)z2
4− y2
9− x2
9= 1.
Sol. hiperboloide de dos hojas.11) x2 + z2 = 1, x2 + z = 1, x2 − 4y2 = 1, 4x2 + y2 = 36, x = 4 − y2, x2 + 4y2 = 16.
Sol. cilindros
SOLUCION.- ♣
EJEMPLO 2.41. Halle la ecuacion estandar de la esfera que tiene los puntos (2, 0, 0) y (0, 6, 0)como extremos de un diametro.
SOLUCION.- Como los puntos (2, 0, 0) y (0, 6, 0) son extremos de un diametro, entonces elpunto medio entre los dos es el centro de la esfera. El punto medio entre (2, 0, 0) y (0, 6, 0) es
(2 + 0
2,0 + 6
2,0 + 0
2
)= (1, 3, 0).
Y ademas el radio de la esfera es la mitad del diametro, es decir,
r =1
2
√(2 − 0)2 + (0 − 6)2 + (0 − 0)2 =
1
2
√40
ξρ∫s email: [email protected] 47 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 48
Por tanto la esfera tiene por ecuacion
(x− 1)2 + (y − 3)2 + (z − 0)2 =
(1
2
√40
)2
(x− 1)2 + (y − 3)2 + z2 = 10.
EJEMPLO 2.42. Halle la ecuacion estandar de la esfera que tiene centro el punto (2, 3, 1) y estangente al plano xy.
SOLUCION.- El plano xy tiene por ecuacion z = 0 que es el plano que pasa por el puntop0 = (0, 0, 0) y tiene vector normal N = (0, 0, 1). Luego la distancia del punto q = (2, 3, 1) a esteplano calculado con la formula
D =|(q − p0) •N |
||N || =|(2, 3, 1) • (0, 0, 1)|
||(0, 0, 1)|| = 1.
es precisamente el radio de la esfera que tiene centro el punto (2, 3, 1) y es tangente al plano xy,por tanto su ecuacion es:
(x− 2)2 + (y − 3)2 + (z − 1)2 = 1
EJEMPLO 2.43. Halle la ecuacion estandar de la esfera que tiene centro el punto (4,−3, 1) yes tangente al plano 3x− 2y + z = 3.
SOLUCION.- El plano 3x − 2y + z = 3 pasa por el punto p0 = (1, 0, 0) y tiene vector normalN = (3,−2, 1). Luego la distancia del punto q = (4,−3, 1) a este plano calculado con la formula
D =|(q − p0) •N |
||N || =|(3,−3, 1) • (3,−2, 1)|
||(3,−2, 1)|| =16√14.
es precisamente el radio de la esfera que tiene centro el punto (4,−3, 1) y es tangente al plano3x− 2y + z = 3, por tanto su ecuacion es:
(x− 4)2 + (y + 3)2 + (z − 1)2 =
(16√14
)2
(x− 4)2 + (y + 3)2 + (z − 1)2 =256
14
ξρ∫s email: [email protected] 48 Jasmer LPC
CAPITULO 3
Curvas
EJEMPLO 3.1. Si f(t) = (3 sen t, 2 cos t), demuestre que el rango de f es una elipse.
SOLUCION.-
(3 sen t)2
32+
(2 cos t)2
22= 1
EJEMPLO 3.2. Trazar las curvas f(t) = (t, t), f(t) = (t, t2), f(t) = (1, t, t2), f(t) = (cos t, t, sen t),f(t) = (t, cos t, t, sen t)
SOLUCION.- ♣
EJEMPLO 3.3. Hallar la ecuacion de la recta que pasa por los puntos de interseccion de laesfera x2 + y2 + z2 = 5, con la helice ϕ(t) = (cos t, sen t, t)
SOLUCION.- Empecemos hallando los puntos de interseccion de la esfera x2 + y2 + z2 = 5, conla helice ϕ(t) = (cos t, sen t, t). Para esto resolvemos la ecuacion
cos2 t+ sen2 t+ t2 = 5
1 + t2 = 5
de esta ultima ecuacion obtenemos dos valores para t, en efecto, t = ±2. Luego puntos buscadosson (cos 2,− sen 2,−2) y (cos 2, sen 2, 2) . Nombremos a estos puntos por
49

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 50
p0 = (cos 2,− sen 2,−2), y p1 = (cos 2, sen 2, 2).
Luego la ecuacion vectorial de la recta que pasa a traves del puntos p0 = (cos 2,− sen 2,−2) y quetiene vector direccion
u = −−→p0p1 = p1 − p0 = (cos 2, sen 2, 2) − (cos 2,− sen 2,−2)
= (0, 2 sen 2, 4)
esp = p0 + tu
(x, y, z) = (cos 2,− sen 2,−2) + t(0, 2 sen 2, 4)
de donde obtenemos las ecuaciones parametricas de la recta
x = cos 2
y = − sen 2 + 2t sen 2
z = −2 + 4t
Ademas, las ecuaciones simetricas de la recta son
x = cos 2,y + sen 2
2 sen 2=z + 2
4.
♣
3.1. Derivada y Recta Tangente
EJEMPLO 3.4. Halle las ecuaciones parametricas de la recta tangente a la curva dada por
f(t) =(
t+1t, t2−1
t2, t3+1
t3
)en el punto p(2, 0, 2).
SOLUCION.- Observemos que si t = 1, f(1) = (2, 0, 2). Ahora bien, La derivada f ′(1) es elvector direccion de la recta tangente a la curva f que pasa por el punto f(1). Esta recta es dadapor
(x, y, z) = f(1) + tf ′(1).
Escribamos f(t) de la forma
f(t) =(1 + t−1, 1 − t−2, 1 + t−3
)
luegof ′(t) =
(1 − t−2, 1 + 2t−3, 1 − 3t−4
)
evaluando t = 1 se tienef ′(1) = (0, 3,−2)
Por tanto la recta que buscamos es
(x, y, z) = (2, 0, 2) + t(0, 3,−2).
ξρ∫s email: [email protected] 50 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 51
EJEMPLO 3.5. Halle la recta tangente a la curva definida por f(t) =(t2 + 2, 4t− 1, 1+t
t
)en el
punto p(3, 3, 2).
SOLUCION.- Observemos que si t = 1, f(1) = (3, 3, 2). Ahora bien, La derivada f ′(1) es elvector direccion de la recta tangente a la curva f que pasa por el punto f(1). Esta recta es dadapor
(x, y, z) = f(1) + tf ′(1).
Escribamos f(t) de la formaf(t) =
(t2 + 2, 4t− 1, 1 + t−1
)
luegof ′(t) =
(2t, 4,−t−2
)
evaluando t = 1 se tienef ′(1) = (2, 4,−1)
Por tanto la recta que buscamos es
(x, y, z) = (3, 3, 2) + t(2, 4,−1).
♣EJEMPLO 3.6. Halle la recta tangente a la curva f(t) =
(t2, t2−1
t2, t+1
t
)en el punto donde
t0 = 1. Respuesta. (x, y, z) = (1, 0, 2) + t(2, 2,−1).
SOLUCION.- ♣
EJEMPLO 3.7. Halle las ecuaciones parametricas de la recta tangente a la curva descrita por
f(t) =(t2, 2
3t3, t)
en el punto cuando t = 1.
SOLUCION.- ♣
EJEMPLO 3.8. Halle las ecuaciones parametricas de la recta tangente a la curva descrita porf(t) = (2 cos(3t), 2 sen(3t), t) en el punto cuando t = π
4.
SOLUCION.- ♣
EJEMPLO 3.9. Halle las ecuaciones parametricas de la recta tangente a la curva dada porf(t) = (2 cos(2t), 2 sen(2t), 3t) en t = π/2.
SOLUCION.- Observemos que si t = π/2,
f(π/2) = (2 cos(2π/2), 2 sen(2π/2), 3π/2) = (2 cos(π), 2 sen(π), 3π/2) = (−2, 0, (3/2)π).
ξρ∫s email: [email protected] 51 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 52
Ahora bien, La derivada f ′(π/2) es el vector direccion de la recta tangente a la curva f que pasapor el punto f(π/2). Esta recta es dada por
(x, y, z) = f(π/2) + tf ′(π/2).
Puesto quef(t) = (2 cos(2t), 2 sen(2t), 3t)
aplicando la regla de la cadena obtenemos
f ′(t) = (−4 sen(2t), 4 cos(2t), 3)
evaluando t = π/2 se tiene
f ′(π/2) = (−4 sen(2π/2), 4 cos(2π/2), 3) = (−4 sen(π), 4 cos(π), 3) = (0, 4, 3).
Por tanto la recta que buscamos es
(x, y, z) = (−2, 0, (3/2)π) + t(0, 4, 3).
igualando componentes obtenemos las ecuaciones parametricas de la recta
x = −2
y = 4t
z = (3/2)π + 3t.
EJEMPLO 3.10. Encontrar la recta tangente a la curva f(t) = (t, t2/2, t3) paralela a la rectax = t, y = 2 − t, z = 1 + 3t.
SOLUCION.- ♣
EJEMPLO 3.11. Encontrar todos los puntos en la curva f(t) = (sen t, cos t, sen(3t)) tiene unvector tangente paralelo al plano xy
SOLUCION.- ♣
EJEMPLO 3.12. Mostrar que todos los vectores tangentes a la helice f(t) = (a cos t, a sen t, bt)
forma un angulo constante con el eje Z y que el coseno de ese angulo esb√
a2 + b2. Halle la recta
tangente en t =π
4
SOLUCION.- Puesto que f(t) = (a cos t, a sen t, bt) aplicando la regla de la cadena obtenemosf ′(t) = (−a sen t, a cos t, b) evaluando t = s obtenemos los vectores tangentes a la helice f ′(s) =(−a sen s, a cos s, b). El vector direccion del eje Z es (0, 0, 1),
ξρ∫s email: [email protected] 52 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 53
Ahora bien, el angulo θ entre los vectores f ′(s) y (0, 0, 1) verifica
cos θ =|f ′(s) • (0, 0, 1)|
||f ′(s)|| ||(0, 0, 1)|| =|(−a sen s, a cos s, b) • (0, 0, 1)|
||(−a sen s, a cos s, b)|| ||(0, 0, 1)|| =b√
a2 + b2
La derivada f ′(s) es el vector direccion de la recta tangente a la curva f que pasa por el puntof(s). Esta recta es dada por
(x, y, z) = f(s) + tf ′(s). ♣
EJEMPLO 3.13. Mostrar que la curva cuyas ecuaciones parametricas son (e−t cos(t), e−t sen(t), e−t),esta sobre el cono x2 + y2 = z2, por lo tanto la curva se dibuja sobre este cono (observar que zpuede ser positivo y negativo).. Encontrar la ecuacion parametrica de la recta tangente de la curvar(t) = (e−t cos(t), e−t sen(t), e−t), en el punto (1, 0, 1).
SOLUCION.-
r′(t) = (−e−t(cos(t) + sen(t)), e−t(cos(t) − sen(t)),−e−t),
si t = 0 tenemos el punto (1, 0, 1), por lo tanto el vector tangente es r′(0) = (−1, 1,−1). Por lotanto la recta tangente es: (1 − t, t, 1 − t). ♣
EJEMPLO 3.14. Demostrard
dx
[λ(t) × λ′(t)
]= λ(t) × λ′′(t)
SOLUCION.- Sea λ(t) =(λ1(t), λ2(t), λ3(t)
)
λ(t) × λ′(t) =
∣∣∣∣∣∣
i j kλ1(t) λ2(t) λ3(t)λ′1(t) λ′2(t) λ′3(t)
∣∣∣∣∣∣= i
∣∣∣∣λ2(t) λ3(t)λ′2(t) λ′3(t)
∣∣∣∣− j
∣∣∣∣λ1(t) λ3(t)λ′1(t) λ′3(t)
∣∣∣∣+ k
∣∣∣∣λ1(t) λ2(t)λ′1(t) λ′2(t)
∣∣∣∣ .
por tanto
λ(t) × λ′(t) =(λ2(t)λ
′3(t) − λ′2(t)λ3(t), λ1(t)λ
′3(t) − λ′1(t)λ3(t), λ1(t)λ
′2(t) − λ′1(t)λ2(t)
)
♣
EJEMPLO 3.15. Encontrar la ecuacion de la recta tangente a la curva de interseccion del conox2 + y2 = z2 y el plano x+ y + z = 4 en el punto (0, 2, 2).
SOLUCION.- ♣
ξρ∫s email: [email protected] 53 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 54
3.2. Longitud de Curva
EJEMPLO 3.16. Para la curva descrita por f : [a, b] → R3, si L es la longitud de la curva.
Analice cuales de las siguientes afirmaciones son verdaderas:
(a) L =
∫ b
a
||f(t)||dt (b) L =
∫ b
a
||f ′(t)||dt (c) L =
∫ b
a
f ′(t)dt (d) L =
∣∣∣∣
∣∣∣∣∫ b
a
f ′(t)dt
∣∣∣∣
∣∣∣∣
SOLUCION.- ♣
EJEMPLO 3.17. Encontrar la longitud de la curva: r(t) = (√
2t, et, e−t) para 0 ≤ t ≤ 1.
SOLUCION.- Es claro que r′(t) = (√
2, et,−e−t), ademas ‖r′(t)‖ =√
(√
2)2 + (et)2 + (−e−t)2 =√
(et + e−t)2 = et + e−t, entonces L =∫ 1
0||f ′(t)|| dt =
∫ 1
0(et + e−t) dt = e− e−1. ♣
EJEMPLO 3.18. Halle la longitud de arco de la curva dada por f(t) = (sen(2t), cos(2t),√
5t),t ∈ [0, π/2]
SOLUCION.- La longitud de una curva f(t) desde f(a) hasta f(b) se define como la integralde la rapidez desde a hasta b. Es decir
L =
∫ b
a
||f ′(t)|| dt
Un facil calculo muestra que
f ′(t) = (2 cos(2t),−2 sen(2t),√
5)
y de ahı que
||f ′(t)|| =
√22 cos2(2t) + (−2)2 sen2(2t) + (
√5)2 =
√22 + 5 =
√9 = 3.
Por tanto, la longitud de arco de la curva es
L =
∫ π/2
0
||f ′(t)|| dt =
∫ π/2
0
3 dt =3
2π.
♣
EJEMPLO 3.19. Halle la longitud de arco de la curva dada por f(t) = (sen(4t), cos(4t), 3t),t ∈ [0, π/2]
ξρ∫s email: [email protected] 54 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 55
SOLUCION.- La longitud de una curva f(t) desde f(a) hasta f(b) se define como la integralde la rapidez desde a hasta b. Es decir
L =
∫ b
a
||f ′(t)|| dt
Un facil calculo muestra que
f ′(t) = (4 cos(4t),−4 sen(4t), 3)
y de ahı que
||f ′(t)|| =√
42 cos2(4t) + (−4)2 sen2(4t) + (3)2 =√
42 + 32 =√
25 = 5.
Por tanto, la longitud de arco de la curva es
L =
∫ π/2
0
||f ′(t)|| dt =
∫ π/2
0
5 dt =5
2π.
EJEMPLO 3.20. Calcular la longitud de al curva f(t) = (3 cos(2t), 3 sen(2t)), t ∈ [0, π].
SOLUCION.- ♣
EJEMPLO 3.21. Calcular la longitud de arco de curva dada por f(t) = (2 cos(2t), 2 sen(2t), 3t),t ∈ [0, π].
SOLUCION.- ♣
EJEMPLO 3.22. Calcular la longitud de arco de curva dada por f(t) = (3 cos(2t), 3 sen(2t), 8t),
t ∈[0, π
2
].
SOLUCION.- ♣
EJEMPLO 3.23. Hallar la longitud de arco de la curva dada por f(t) =(t, 2
3t
32 , 2), t ∈ [0, 3].
SOLUCION.- ♣
EJEMPLO 3.24. Calcule la longitud de arco de la curva f(t) = (3 cos t, 3 sen t, 4t), si t ∈ [0, 2π].
SOLUCION.- ♣
EJEMPLO 3.25. Halle la longitud de arco de la curva dada por f(t) = (2t + 1, t − 4, 3 − 2t),t ∈ [2, 5].
ξρ∫s email: [email protected] 55 Jasmer LPC
UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 56
SOLUCION.- La longitud de una curva f(t) desde f(2) hasta f(5) se define como la integralde la rapidez desde 2 hasta 5. Es decir
L =
∫ 5
2
||f ′(t)|| dt
Un facil calculo muestra quef ′(t) = (2, 1,−2)
y de ahı que||f ′(t)|| =
√22 + 12 + (−2)2 =
√9 = 3.
Por tanto, la longitud de arco de la curva es
L =
∫ 5
2
||f ′(t)|| dt =
∫ 5
2
3 dt = 3(5 − 2) = 9.
♣
EJEMPLO 3.26. Halle la longitud de arco de la curva dada por f(t) = (t − 3, 5 − 2t, 2t + 4),t ∈ [3, 7].
SOLUCION.- La longitud de una curva f(t) desde f(3) hasta f(7) se define como la integralde la rapidez desde 3 hasta 7. Es decir
L =
∫ 7
3
||f ′(t)|| dt
Un facil calculo muestra quef ′(t) = (1,−2, 2)
y de ahı que||f ′(t)|| =
√12 + (−2)2 + 22 =
√9 = 3.
Por tanto, la longitud de arco de la curva es
L =
∫ 7
3
||f ′(t)|| dt =
∫ 7
3
3 dt = 3(7 − 3) = 12.
♣
3.3. Curvatura, Normal Principal
EJEMPLO 3.27. Hallar el vector tangente unitario T , normal principal N y curvatura k parala curva f(t) = (t, t2, t3).
SOLUCION.- ♣
ξρ∫s email: [email protected] 56 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 57
EJEMPLO 3.28. Recuerde que la formula para la curvatura de f(t) es: k(t) =||f ′(t) × f ′′(t)||
||f ′(t)||3 .
Demuestre que si f(t) = (x(t), y(t)), entonces k(t) =|x ′(t) y ′′(t) − y ′(t) x ′′(t)|([x ′(t)]2 + [y ′(t)]2
)3/2.
SOLUCION.- ♣
EJEMPLO 3.29. Mostrar que el radio de curvatura de f(t) = (et, e−t,√
2t) esta dado por ρ =(et + e−t)2
√2
.
SOLUCION.- ♣
EJEMPLO 3.30. Mostrar que en el vertice de una parabola el radio de curvatura alcanza suvalor mınimo.
SOLUCION.- ♣
EJEMPLO 3.31. Hallar la curvatura de f(t) =
(t− t3
3, t2, t+
t3
3
)en cualquier punto t y luego
en t = 0.
SOLUCION.- ♣
EJEMPLO 3.32. Si una curva tiene la ecuacion cartesiana y = f(x), demostrar que la curvatura
en el punto (x, f(x)) es k(t) =|f ′′(x)|
(1 + [f ′(t)]2
)3/2. Aplicando es formula calcular la curvatura de
y = x2 − 2x en cualquier punto.
SOLUCION.- ♣
EJEMPLO 3.33. Demostrar que la helice f(t) = (a cos t, a sen t, bt) tiene curvatura constante
k =a
a2 + b2.
SOLUCION.- ♣
ξρ∫s email: [email protected] 57 Jasmer LPC
CAPITULO 4
Funciones Vectoriales de VariableVectorial
Iniciamos con unos de los conceptos fundamentales del calculo diferencial e integral en variasvariables cual es el concepto de funcion. Para aclarar ideas consideremos los siguientes ejemplos:
EJEMPLO 4.1. En el mercado de un bien o servicio concreto, se establece que:
La cantidad demandada “d′′ depende, al menos, del precio del propio bien “x′′ y la rentadisponible de los consumidores “x′′. En otras palabras la cantidad demandada esta en funciondel precio del bien y de la renta disponible de los consumidores. En sımbolos escribimos estopor d = f(x, y).
La cantidad ofertada “o′′ depende, al menos, del precio del propio bien “x′′ y los costes deproduccion “z′′. En otras palabras la cantidad ofertada esta en funcion del precio del bien ylos costes de produccion. En sımbolos escribimos esto por o = f(x, z)
DEFINICION 4.1. Sean n y m enteros positivos. Sea D un subconjunto de Rn, se denomina
funcion definida en D y con valores en Rm a toda regla de asignacion f : D → R
m que asociaa cada vector de D un unico vector en R
m. El conjunto D sobre el que se define la funcion sedenomina dominio de la funcion.
Observaciones
Una funcion f : R → R se llama una funcion real de variable real.
58

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 59
Una funcion f : R → Rm se llama una funcion vectorial de variable real o a veces camino,
curva o trayectoria.
Una funcion f : Rn → R se llama una funcion real de variable vectorial o a veces campo
escalar.
Una funcion f : Rn → R
m se llama una funcion vectorial de variable vectorial o a vecescampo vectorial.
EJEMPLO 4.2. Una empresa elabora dos productos A y B. El costo de los materiales y de lamano de obra es de bs 4 por cada unidad del producto A y de bs 7 por cada unidad del productoB. Los costos fijos son bs 1500 por semana. Exprese el costo total C en terminos de las unidadesA y B producidas cada semana.
SOLUCION.- Sea x el numero de unidades del producto A y y las unidades del producto Bque se elaboran, entonces los costos de mano de obra y materiales para los dos tipos de productosseran 4x y 7y bolivianos respectivamente. Ası que el costo total en bolivianos esta dado por
C(x, y) = Costo de mano de obra y materiales + costos fijos
C(x, y) = 4x+ 7y + 1500
Donde el costo C es una funcion de x y y.
EJEMPLO 4.3. Una empresa produce dos productos X y Y . Las unidades de costo de manode obra y de materiales son de Bs. 5 en el caso del producto X y de Bs. 12 por lo que respecta aY . Ademas, la empresa tambien tiene costos fijos de 3000 Bs. al mes. Exprese el costo mensual Cen bolivianos como una funcion de la unidades de X y Y producidas. ¿Cual es el costo total deproducir 200 unidades de X y 150 unidades de Y ?
SOLUCION.- Sea x el numero de unidades del producto X y y las unidades del producto Yque se elaboran, entonces los costos de mano de obra y materiales para los dos tipos de productosseran 5x y 12y bolivianos respectivamente. Ası que el costo total en bolivianos esta dado por
C(x, y) = Costo de mano de obra y materiales + costos fijos
C(x, y) = 5x+ 12y + 3000
Por tanto el costo total de producir 200 unidades de X y 150 unidades de Y es
C(x, y) = 5x+ 12y + 3000 = 5(200) + 12(150) + 3000 = 5800.
EJEMPLO 4.4. La Electronica S.R.L. fabrica dos tipos de cinta de cassetes, de 60 y 90 minutos.El costo por unidad de mano de obra para los dos tipos de 3 bs y de 4 bs. Ademas, la empresatiene costos fijos semanales de bs. 1200. (a) Encuentre la funcion del costo total mensual C enbolivianos. (b) Evalue el costo total de producir 10000 cintas de 60 minutos y 8000 cintas de 90minutos. (c) Si el ingreso total es de bs 60000 y la companıa vende los dos tipos de cintas a 6bs. y 7,50 bs cada una, respectivamente, obtenga la utilidad mensual como funcion del numero deunidades producidas y vendidas por semanas.
ξρ∫s email: [email protected] 59 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 60
SOLUCION.- Sea x el numero de cintas de cassetes de 60 minutos y y el numero de cintas decassetes de 90 minutos, entonces los costos de mano de obra para los dos cassetes seran 3x y 4ybolivianos respectivamente. Ası que el costo total en bolivianos esta dado por
C(x, y) = Costo de mano de obra + costos fijos
C(x, y) = 3x+ 4y + 1200
Por tanto el costo total de producir 10000 cintas de 60 minutos y 8000 cintas de 90 minutos es
C(x, y) = 3x+ 4y + 1200 = 3(10000) + 4(8000) + 1200 = 55200.
Si el ingreso total es de bs 60000 y la companıa vende los dos tipos de cintas a 6 bs. y 7,50 bscada una, respectivamente, la utilidad mensual como funcion del numero de unidades producidasy vendidas por semanas es
Utilidad total = Ingreso total - Costo total
I(x, y) = 60000 − (6x+ 7,5y + 1200) = −6x− 7, 5y + 58800
EJEMPLO 4.5. Si expresamos el area de un triangulo en funcion de la base y de la altura,tendremos una funcion de dos variables. En efecto, si b es la base del triangulo y h su altura, sesabe que, el area es igual a un medio de la base por la altura, es decir
a =1
2bh, aquı b > 0, h > 0.
Luego el area a esta en funcion de la base b y de la altura h, esto se escribe como
a = f(b, h), donde f(b, h) =1
2bh.
Luego tenemos definida la funcion “‘area” dado por
f : (0,∞) × (0,∞) → R
(b, h) 7→ f(b, h) = 12bh.
4.1. Dominio y e imagen de una funcion
SeaD subconjunto de Rn. Recordemos que una funcion deD en R
m es una regla de correspondenciatal que a cada punto x de D le corresponde un unico punto en R
m. El conjunto D se llama dominiode la funcion.
ξρ∫s email: [email protected] 60 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 61
Es usual definir las funciones dando simplemente la regla de correspondencia z = f(x), sin especi-ficar el dominio D. En tal caso se entiende que el dominio viene implıcito en la propia formula,y queda determinado por todos aquellos puntos x en R
n para los cuales tiene sentido aplicar laformula que define la funcion. O sea, el dominio esta formado por todos aquellos puntos x en R
n
tales que al sustituirlos en la formula y realizadas las operaciones indicadas se obtiene un puntof(x) en R
m. Es decir, se entiende que el dominio de la funcion f es el mayor subconjunto D de Rn
para el cual su imagen f(x) tiene sentido.
Por ejemplo, si definimos la funcion a = 12xy el dominio sera cualquier subconjunto de R
2, enparticular R
2 es el dominio mas grande de esta funcion. Ahora bien, si queremos que esta funcionrepresente el area de un triangulo, los valores x e y tienen que ser positivos. Por lo tanto dicharestriccion habra que indicarla junto con la formula, esto es, a = 1
2xy, donde x > 0, y > 0. Si no
se indica ninguna restriccion estamos suponiendo que el dominio es el “maximo permitido” porla formula. El conocimiento del dominio nos permite saber que puntos pueden sustituirse en laformula y cuales no.
EJEMPLO 4.6. Encontrar y hacer un esquema del dominio de definicion Dom(f) de la funcion
f : R2 → R dado por f(x, y) =
x2y
y2 − 9x.
EJEMPLO 4.7. Encontrar y graficar el dominio de definicion Dom(f) de la siguiente funcion
f : R3 → R dada por f(x, y, z) =
√y
log
(−x
2
22− y2
32+z2
42
)
SOLUCION.- El dominio de la funcion f es la interseccion de la region y ≥ 0 con la region queesta por fuera del cono siguiente:
X
Y
Z
EJEMPLO 4.8. Dado la funcion f(x, y) = −√
16 − x2 − y2 determinar dominio, rango y graficar.
SOLUCION.- Para hallar el dominio es suficiente resolver la desigualdad 16 − x2 − y2 ≥ 0, dedonde x2 + y2 ≤ 16, esto es, el dominio es el disco de centro el origen (0, 0) y radio 4. El rango esel intervalo cerrado [−1, 0]. Y finalmente su grafico es dado por:
ξρ∫s email: [email protected] 61 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 62
-5
0
5-5
0
5
-4
-3
-2
-1
0
♣
4.2. Operaciones con funciones.
Sean Df y Dg subconjuntos de Rn, y f : Df → R
m, g : Dg → Rm dos funciones, entonces la suma
de f y g es la funcion f + g : Df+g → Rm definida por
(f + g)(x) = f(x) + g(x), para todo x en Df+g
dondeDf+g = Df ∩Dg.
La resta de f y g es la funcion f − g : Df−g → Rm definida por
(f − g)(x) = f(x) − g(x), para todo x en Df−g
dondeDf−g = Df ∩Dg.
Sean Df y Dg subconjuntos de Rn, y f : Df → R, g : Dg → R dos funciones, entonces la
multiplicacion de f y g es la funcion fg : Dfg → R definida por
(fg)(x) = f(x)g(x), para todo x en Dfg
dondeDfg = Df ∩Dg.
La Division de f y g es la funcion fg
: Dfg → R definida por
(f
g
)(x) =
f(x)
g(x), para todo x en D f
g
dondeD f
g
= Df ∩Dg − x : g(x) = 0.
ξρ∫s email: [email protected] 62 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 63
Sean Df subconjunto de Rn y Dg subconjunto de R
m, y f : Df → Rm, g : Dg → R
k dos funciones,entonces la composicion de f con g es la funcion g f : Dgf → R
k definida por
(g f)(x) = g(f(x)), para todo x en Dgf
dondeDgf = Df ∩ f−1(Dg).
EJEMPLO 4.9. Halle la composicion de las siguientes funciones.
f : R2 → R g : R → R
3
(x, y) 7→ f(x, y) = x2 + y2. x 7→ g(x) = (cos(x), ex, x3)
SOLUCION.-
g(f(x, y)) = g(x2 + y2) = (cos(x2 + y2), ex2+y2
, (x2 + y2)3)
EJEMPLO 4.10. Halle la composicion de las siguientes funciones.
f : R → R2 g : R
2 → R3
x 7→ f(x) = (ex2, sen x2). (x, y) 7→ g(x, y) = (log x, exy4
, x+ y)
SOLUCION.-
g(f(x)) = g(ex2
, sen x2) = (log(ex2
), eex2(x2)4 , ex2
+ x2)
EJEMPLO 4.11. Halle la composicion de las funciones f y g, es decir halle g f donde
-
HH
HH
HH
HH
HHj ?
R2
R3
R2
f
gg f
f(x, y) = (x2y, sen(x2 − y2), x+ y), g(x, y, z) = (x+ y + z, xyz)
SOLUCION.-
g(f(x, y)) = g(x2y, sen(x2 − y2), x+ y
)=(x2y + sen(x2 − y2) + (x+ y), x2y sen(x2 − y2)(x+ y)
)
ξρ∫s email: [email protected] 63 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 64
4.3. Graficas de funciones
Sean Df un subconjunto de Rn y f : Df → R
m una funcion, entonces el grafico de f es elsubconjunto de R
n+m dado por
graf(f) = (x, f(x)) : x ∈ Df
4.3.1. Secciones
Sean c un numero real, Df un subconjunto de R2 y f : Df → R una funcion, para graficar
z = f(x, y) empezamos graficando las sus seciones:
La seccion vertical de y contra z correspondiente a c es la interseccion del grafico de f “graf(f)”y el plano x = c, esto es
V (c) = ((c, y), f(c, y)) : (c, y) ∈ Df = graf(f) ∩ x = c.
La seccion vertical de x contra z correspondiente a c es la interseccion del grafico de f “graf(f)”y el plano y = c, esto es
H(c) = ((x, c), f(x, c)) : (x, c) ∈ Df = graf(f) ∩ y = c.
EJEMPLO 4.12. El volumen de ventas de un artıculo particular depende de su precio y tambien,en muchos caso, de la cantidad que el fabricante gasta en promocion de publicidad. Sea p el precio yq el gasto el publicidad al mes ambos en bolivianos y v el volumen de ventas mensuales. v = f(p, q).Suponga que en cierto caso: v = 1000(5 − pe−kq) en donde k = 0,001.
Dibujar las secciones verticales de p contra v correspondiente a los valores q = 0, 500, 1000y 1500.
Dibujar las secciones verticales de q contra v correspondiente a los valores p = 1, 3, 5 y 8.
SOLUCION.-
4.3.2. Curvas de Nivel
Sean c un numero real, Df un subconjunto de R2 y f : Df → R una funcion, entonces el conjunto
de nivel c de f es la interseccion del grafico de f “graf(f)” y el plano z = c, esto es
f−1(c) = (x, y) : f(x, y) = c = graf(f) ∩ z = c
EJEMPLO 4.13. Graficar la funcion f(x, y) = 25 − x2 − y2.
ξρ∫s email: [email protected] 64 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 65
SOLUCION.- El dominio de la funcion es todo R2. Para hallar el grafico de la funcion sustituimos
f(x, y) por z, con lo que tenemos: z = 25 − x2 − y2.
Veamos los cortes de dicha superficie con los planos coordenados:
Corte con el plano x = 0. z − 25 = −y2 que es una parabola hacia abajo en el plano yz convertice en el punto (0, 0, 25).
Corte con el plano y = 0. z − 25 = −x2 que es una parabola hacia abajo en el plano xz convertice en el punto (0, 0, 25).
Corte con el plano z = 0. x2 + y2 = 25 que es una circunferencia en el plano xy con centroen el punto (0, 0, 0) y radio 5.
Para hallar las curvas de nivel suponemos z constante. Puesto que la formula z = 25− x2 − y2 esequivalente a la formula x2 + y2 = z−25, se tiene que para cada valor z < 25 tenemos la ecuacionde una circunferencia de centro el origen y de radio
√z − 25, esto es,
x2 + y2 = (√z − 25)2.
Ahora damos varios valores a z para curvas de nivel a distintas alturas.
Curva de nivel z = 0 es x2 + y2 = 25 la circunferencia de radio 5.
Curva de nivel z = 9 es x2 + y2 = 16 la circunferencia de radio 4.
Curva de nivel z = 16 es x2 + y2 = 9 la circunferencia de radio 3.
Curva de nivel z = 21 es x2 + y2 = 4 la circunferencia de radio 2.
Curva de nivel z = 24 es x2 + y2 = 4 la circunferencia de radio 1.
Curva de nivel z = 25 es x2 + y2 = 0 se reduce al punto (0, 0).
EJEMPLO 4.14. Esbozar las curvas de nivel y graficar la funcion f : R2 → R dada por f(x, y) =
x2 − y2
SOLUCION.-
4.3.3. Superficies de Nivel
Sean c un numero real, Df un subconjunto de R3 y f : Df → R una funcion, entonces el conjunto
de nivel c de f es el subconjunto de R3 dado por
f−1(c) = x : f(x) = c
ξρ∫s email: [email protected] 65 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 66
EJEMPLO 4.15. Hallar las superficies de nivel de la funcion f(x, y, z) = x2 + y2 + z2.
SOLUCION.- El dominio de la funcion es todo R3. Para hallar las superficies de nivel de la
funcion sustituimos f(x, y, z) por w, con lo que tenemos:
x2 + y2 + z2 = w
Ahora damos varios valores a w para hallar las superficies de nivel
Superficies de nivel w = 0 es x2 + y2 + z2 = 0 se reduce al punto (0, 0, 0).
Superficies de nivel w = 4 es x2 + y2 + z2 = 22 la esfera de radio 2.
Superficies de nivel w = 9 es x2 + y2 + z2 = 32 la esfera de radio 3.
Superficies de nivel w = 16 es x2 + y2 + z2 = 42 la esfera de radio 4.
Superficies de nivel w = 25 es x2 + y2 + z2 = 52 la esfera de radio 5.
Superficies de nivel w = 36 es x2 + y2 + z2 = 62 la esfera de radio 6.
ξρ∫s email: [email protected] 66 Jasmer LPC

CAPITULO 5
Limites y Continuidad
5.1. Limites de funciones
Al calcular el lımite de una funcion en un punto nos interesamos por los valores que toma lafuncion en los alrededores del punto. El lımite de la funcion en un punto va a ser el valor quedeberıa tomar la funcion en dicho punto, de acuerdo con los valores que toma en los alrededoresdel mismo. Este valor puede coincidir o no con el valor que realmente toma la funcion en el puntoen cuestion. Es decir, el lımite de una funcion en un punto x0 es l si los valores que toma la funcionen los alrededores de x0 estan tan cerca de l como queramos (el valor que la funcion tome en x0
no interesa a la hora de calcular el lımite)
Para poder hablar de lımite de una funcion en un punto, la funcion tiene que estar definida en losalrededores del punto. Formalmente la definicion de lımite es la siguiente:
DEFINICION 5.1. Sea f : Dom(f) ⊂ Rn → R
m una funcion y x0 ∈ Rn, l ∈ R
m. El lımite def en x0 es l (o f(x) tiende a l cuando x tiende a x0 o el lımite de f(x) cuando x tiende a x0 esl) que se escribe
lımx→x0
f(x) = l
si para todo ε > 0 existe δ = δ(ε) > 0 tales que
f(B(x0, δ)) ⊂ B(f(x0), ε).
Observemos que lımx→x0 f(x) = l quiere decir que el valor de f en x, f(x), esta arbitrariamentecerca de l cuando x esta suficientemente cerca de x0 pero distinto de x0.
67

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 68
lımx→0 x2 + 1 = 1 quiere decir que x2 + 1 esta arbitrariamente cerca de 1 cuando x esta sufi-
cientemente cerca de 0. lım(x,y,z)→(1,2,3)((x − 1)y, yz) = (0, 6) quiere decir que ((x − 1)y, yz) estaarbitrariamente cerca de (0, 6) cuando (x, y, z) esta suficientemente cerca de (1, 2, 3).
EJEMPLO 5.1. Demostrar que lım(x,y)7→(1,−1)
(x+ 2y + 3) = 2
SOLUCION.- Supongamos que ||(x, y)− (1,−1)|| =√
(x− 1)2 + (y + 1)2 < δ, donde (x−1)2 +(y+ 1)2 < δ2, por tanto (x− 1)2 < δ2 y (y+ 1)2 < δ2, ası |x− 1| < δ y |y+ 1| < δ, lo cual implica
−δ < x− 1 < δ, −δ + 1 < x < δ + 1
y−δ < y + 1 < δ, −δ − 1 < y < δ − 1, −2δ − 2 < 2y < 2δ − 2
sumando−3δ − 1 < x+ 2y < 3δ − 1, −3δ < x+ 2y + 1 < 3δ
por tanto |x+ 2y + 1| = |(x+ 2y + 3) − 2| < 3δ.
Para cada ε > 0, es suficiente tomar δ =ε
3. Asi, si ||(x, y)− (1,−1)|| < δ, entonces
|x+ 2y + 1| = |(x+ 2y + 3) − 2| < 3δ = 3ε
3= ε
♣
EJEMPLO 5.2. Mediante definicion, demostrar que lım(x,y)→(1,2)
(2x+ 3y) = 8.
SOLUCION.- Tomemos ε > 0, debemos demostrar que existe δ > 0 tal que
|2x+ 3y − 8| < ε siempre que ||(x, y) − (1, 2)|| < δ. (5.1)
Definamos δ siendo el siguiente numero
δ = maxε
4,ε
6
Ahora bien, supongamos que
||(x, y) − (1, 2)|| =√
(x− 1)2 + (y − 2)2 < δ (5.2)
de aquı se sigue que
(x− 1)2 < (x− 1)2 + (y − 2)2 < δ2 ≤ ε2
16
lo cual implica que
2|x− 1| < ε
2(5.3)
ξρ∫s email: [email protected] 68 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 69
Por otra parte, desde (5.2) tambien se deduce que
(y − 2)2 < (x− 1)2 + (y − 2)2 < δ2 ≤ ε2
36
de aquı se tiene que
3|y − 2| < ε
2(5.4)
sumando las desigualdades (5.3) y (5.4) obtenemos finalmente que
|2x+ 3y − 8| = |2(x− 1) + 3(y − 2)| ≤ 2|x− 1| + 3|y − 2| < ε.
♣EJEMPLO 5.3. Demostrar que lım
(x,y)7→(−1,1)(3x− 2y + 6) = 1
SOLUCION.- Supongamos que ||(x, y)− (−1, 1)|| =√
(x+ 1)2 + (y − 1)2 < δ, donde (x+1)2 +(y− 1)2 < δ2, por tanto (x+ 1)2 < δ2 y (y− 1)2 < δ2, ası |x+ 1| < δ y |y− 1| < δ, lo cual implica
−δ < x+ 1 < δ, −δ − 1 < x < δ − 1, −3δ − 3 < 3x < 3δ − 3
y−δ < y − 1 < δ, −δ + 1 < y < δ + 1, −2δ − 2 < −2y < 2δ − 2
sumando−5δ − 5 < 3x− 2y < 5δ − 5, −5δ < 3x− 2y + 5 < 5δ
por tanto |(3x− 2y + 6) − 1| = |3x− 2y + 5| < 5δ.
Para cada ε > 0, es suficiente tomar δ =ε
5. Ası, si ||(x, y)− (−1, 1)|| < δ, entonces
|(3x− 2y + 6) − 1| = |3x− 2y + 5| < 5δ = 5ε
5= ε
♣EJEMPLO 5.4. Demostrar que lım
(x,y)7→(1,−1)(2x2 + y + 4) = 5.
SOLUCION.- Empecemos demostrando que lım(x,y)7→(1,−1)
x2 = 1. En efecto, supongamos que
||(x, y) − (1,−1)|| =√
(x− 1)2 + (y + 1)2 < 1, donde (x − 1)2 + (y + 1)2 < 1, por tanto(x − 1)2 < 1 ası |x − 1| < 1 lo cual implica −1 < x − 1 < 1 de donde 1 < x + 1 < 3, portanto |x2 − 1| = |x− 1||x+ 1| < 3|x− 1|.Para cada ε > 0, es suficiente tomar δ =
ε
3. Asi, si |x− 1| < ||(x, y) − (1,−1)|| < δ, entonces
|x2 − 1| = |x− 1||x+ 1| < 3|x− 1| < 3δ = ε
Un analisis similar demuestra que lım(x,y)7→(1,−1)
(y + 4) = 3. Luego el resultado se sigue de las
propiedades del Lımite. ♣
ξρ∫s email: [email protected] 69 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 70
LEMA 5.1. Si f : Dom(f) → R es cualesquiera de la siguientes funciones
⋆ Polinomio : R → R ⋆ sen, cos : R → R
⋆ tan, sec : R − ±(2n+ 1)π2
: n ∈ N → R ⋆ exp : R → R
⋆ log : (0,∞) → R ⋆√· : [0,∞) → R
Entonces para todo x0 ∈ Dom(f) se tiene que
lımx→x0
f(x) = f(x0).
LEMA 5.2. Si una funcion f : Dom(f) ⊂ Rn → R solo depende de la variable xi para algun
i ∈ 1, ..., n entonces
lım(x1,...,xn)→(a1,...,an)
f(x1, ..., xn) = lımxi→ai
f(x1, ..., xn).
Sea f(x, y) = sen(x). Entonces
lım(x,y)→(π,3)
sen(x) = lımx→π
sen(x) = sen(π) = 0.
TEOREMA 5.1. Sea f : Dom(f) ⊂ Rn → R
m un funcion con funciones coordenadas fi :Dom(f) ⊂ R
n → R para i = 1, 2..., n, entonces
lımx→x0
f(x) =
(lım
x→x0
f1(x) , ... , lımx→x0
fn(x)
)
Sea f(x, y) = (sen(x), ey, x). Entonces
lım(x,y)→(π,3)
(sen(x), ey, x) =
(lımx→π
sen(x), lımy→3
ey, lımx→π
x
)= (0, e3, π).
TEOREMA 5.2. Sean f : Dom(f) ⊂ Rn → R
m y g : Dom(g) ⊂ Rn → R
m dos funciones talesque
lımx→x0
f(x) = l1 y lımx→x0
g(x) = l2.
Entonces
(a) lımx→x0 f(x) + g(x) = l1 + l2
(b) α ∈ R, lımx→x0 αf(x) = αl1
(c) m = 1, lımx→x0 f(x) · g(x) = l1 · l2
(d) m = 1 y l2 6= 0, lımx→x0
f(x)
g(x)=l1l2
.
ξρ∫s email: [email protected] 70 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 71
Demostracion. Sea ε > 0 existen δf = δf (ε) > 0 y δg = δg(ε) > 0 tales que
0 < d(x, x0) < δf ⇒ d(f(x), l1) < ε/2
y0 < d(x, x0) < δg ⇒ d(g(x), l2) < ε/2.
Puesto que
d(f(x) + g(x), l1 + l2) = ||f(x) + g(x) − (l1 + l2)|| ≤ ||f(x) − l1)|| + ||g(x) − l2|| < ε
siempre que d(x, x0) < mınδf , δg, tenemos probado (a).
Demostrando la parte (c). Como f : Rn → R es una funcion tal que
lımx 7→a
f(x) = l1,
esto quiere decir que: Para todo ε > 0, existe δ > 0 tal que
|f(x) − l1| < ε siempre que ||x− a|| < δ. (5.5)
En particular para ε = 1, existe δ1 > 0 tal que
|f(x) − l1| < 1 siempre que ||x− a|| < δ1.
Como|f(x)| − |l1| ≤ |f(x) − l1| < 1
se obtiene|f(x)| < 1 + |l1|. (5.6)
El hecho de que g : R2 → R es tambien continua en a implica que: Para todo ε > 0, existe δ > 0
tal que|g(x) − l2| < ε siempre que ||x− a|| < δ. (5.7)
Ahora observemos que
|(fg)(x) − (fg)a| = |f(x)g(x) − l1l2|
= |f(x)g(x) − f(x)l2 + f(x)l2 − l1l2|
≤ |f(x)g(x) − f(x)l2| + |f(x)l2 − l1l2|
≤ |f(x)| |g(x) − l2| + |f(x) − l1| |l2|
Ahora, para cualquier ε > 0, para el numero
ε
2(1 + |l1|)> 0
ξρ∫s email: [email protected] 71 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 72
la propiedad (5.7) asegura que existe δ2 > 0 tal que
|g(x) − l2| <ε
2(1 + |l1|)siempre que ||x− a|| < δ2. (5.8)
Por otro lado, para el numeroε
2|l2|> 0
la propiedad (5.5) asegura que existe δ3 > 0 tal que
|f(x) − l1| <ε
2|l2|siempre que ||x− a|| < δ3. (5.9)
Ahora tomando δ = mınδ1, δ2, δ3, de los incisos (5.6), (5.8) y (5.9) podemos concluir que si
||x− a|| < δ
entonces
|(fg)(x) − (fg)a| ≤ |f(x)| |g(x) − l2| + |f(x) − l1| |l2|
≤ (1 + |l1|)ε
2(1 + |l1|)+
ε
2|l2||l2|
≤ ε
2+ε
2
≤ ε.
Esto prueba que la parte (c) del teorema.
Sea f(x, y, z, w) = ysen(z). Entonces
lım(x,y,z,w)→(1,2,π,10)
ysen(z) = lım(y,z)→(2,π)
ysen(z) = 2sen(π) = 0.
LEMA 5.3. Si p : Rn → R es un polinomio entonces para todo x0 ∈ R
n se tiene que lımx→x0 p(x) =p(x0).
Sea p(x, y) = 3 − 4xy + x2y3 − 5x3. Entonces
lım(x,y)→(2,1)
3 − 4xy + x2y3 − 5x3 = 3 − 4(2)(1) + 22 · 13 − 5 · 23 = .
LEMA 5.4. Si p : Rn → R y q : R
n → R son polinomios con q(x0) 6= 0 para x0 ∈ Rn. Entonces
lımx→x0
p(x)
q(x)=p(x0)
q(x0).
ξρ∫s email: [email protected] 72 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 73
Sean p(x, y, z) = 3 + 2xy + x5y3z − 5x3z2 y q(x, y, z) = x+ y + z. Entonces
lım(x,y,z)→(1,0,0)
p(x, y, z)
q(x, y, z)=
3
1= 3.
TEOREMA 5.3. Sean f : Dom(f) ⊂ Rn → R
m y g : Dom(g) ⊂ Rm → R
k dos funciones talesque
lımx→x0
f(x) = l1 y lımy→l1
g(x) = l2.
Entonceslım
x→x0
f(g(x)) = l2.
Sea f(x, y) = log(x2 + 4xy3). Entonces
lım(x,y)→(1,1)
log(x2 + 4xy3) = log(5).
Calcular
lım(x,y)→(2,4)
(x2 + 2x− y), lım(x,y)→(1,1)
(2x2 − 2y + 4).
5.2. Calculando lımites por sustitucion directa.
Si f : Rn → R es una funcion obtenida haciendo operaciones algebraicas (suma, resta, multipli-
cacion, division y composicion de funiones) con las funciones Polinomio, sen, cos, tan, sec, exp,log,
√· y si la funcion f esta definida en un punto x0 ∈ Rn, esto es, x0 ∈ Dom(f), entonces para
calcular el lımite de f(x) en el punto x0 ∈ Rn bastara sustituir x por x0, esto es
lımx→x0
f(x) = f(x0).
El problema esta en los puntos en los que la funcion no esta definida. Por lo tanto, al calcularun lımite lo primero que intentaremos es la sustitucion directa, y solo en el caso de que nosencontremos con una indeterminacion intentaremos romperla por algun metodo.
Veamos algunos ejemplos:
Calcular el siguiente lımite
lım(x,y)7→(1,3)
3x2 − 7xy2 + 4xy = (3)12 − 7(1)32 + 4(1)3
Calcular el siguiente lımite
ξρ∫s email: [email protected] 73 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 74
lım(x,y)7→(1,1)
cos3(πxy) + e2yxlog(xy) = cos3(π · 1 · 1) + e2·1·1log(1 · 1)
En los siguientes ejemplos una sustitucion directa nos conduce a una indeterminacion.
lım(x,y)7→(1,3)
6x− 2y
9x2 − y2=
0
0/∈ R,
lım(x,y)7→(0,0)
(x2 + y2)sen
(1
xy
)= 0 · sen(∞) /∈ R
lım(x,y)7→(0,0)
y2
x+ y2=
0
0/∈ R.
5.3. Calculo de lımites mediante operaciones algebraicas.
Si f(x0) es ±∞ o alguna de las siguientes indeterminacines
0
0, 0 · ∞, 00, ∞0, 1∞, ∞−∞, y
∞∞ .
Para calcular el limite lımx→x0 f(x) podemos realizar una simplificacion algebraica en f(x) antesde reemplazar x por x0. Si el problema de indeterminacion persiste posiblemente el lımite noexista.
EJEMPLO 5.5. Sabiendo que
lımx 7→0
(1 + x)1/x = e, lımx 7→0
sen(x)
x= 1, lım
x 7→0
1 − cox(x)
x= 0,
lımx 7→0
ex − 1
x= 1, lım
x 7→1
x− 1
ln(x)= 1,
calcular los siguientes lımites.
EJEMPLO 5.6. Calcular el siguiente lımite lım(x,y)7→(0,0)
x2 + y2
ln(1 − x2 − y2).
SOLUCION.-
lım(x,y)7→(0,0)
x2 + y2
ln(1 − x2 − y2)= lım
u 7→1
u− 1
ln(u)
u = 1 − x2 − y2
u→ 1
= 1
ξρ∫s email: [email protected] 74 Jasmer LPC
UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 75
EJEMPLO 5.7. Calcular el siguiente lımite lım(x,y)7→(2,−2)
x2 − y2
ex+y − 1.
SOLUCION.-
lım(x,y)7→(2,−2)
x2 − y2
ex+y − 1= lım
(x,y)7→(2,−2)
(x+ y)(x− y)
ex+y − 1
= lımu 7→0
u
eu − 1(2 − (−2))
u = x+ y
u → 0
= 4
EJEMPLO 5.8. Calcular el siguiente lımite lım(x,y)7→(0,0)
sen(x2 − y2)
x+ y.
SOLUCION.-
lım(x,y)7→(0,0)
sen(x2 − y2)
x+ y= lım
(x,y)7→(0,0)
sen(x2 − y2)
x+ y
= lım(x,y)7→(0,0)
(x− y)sen(x2 − y2)
x2 − y2
= lım(x,y)7→(0,0)
(x− y) lımu 7→0
sen(u)
u
u = x2 − y2
u→ 0
= (0 − 1)1 = 0
EJEMPLO 5.9. Calcular el siguiente lımite lım(x,y)7→(0,3)
1 − cox(xy)
x.
SOLUCION.-
lım(x,y)7→(0,3)
1 − cox(xy)
x= lım
(x,y)7→(0,3)y[1 − cox(xy)]
xy
= lım(x,y)7→(0,3)
y lımu 7→0
1 − cox(u)
u
u = xy
u→ 0
= 3(0) = 0
EJEMPLO 5.10. Calcular el siguiente lımite lım(x,y)7→(a,−a)
ex+y − 1
x+ y.
SOLUCION.-
ξρ∫s email: [email protected] 75 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 76
lım(x,y)7→(a,−a)
ex+y − 1
x+ y= lım
u 7→0
eu − 1
u
u = x+ y
u→ 0
= 1
EJEMPLO 5.11. Calcular el siguiente lımite lım(x,y)7→(0,0)
sen(x)sen(y)
exy − 1.
SOLUCION.-
lım(x,y)7→(0,0)
sen(x)sen(y)
exy − 1= lım
(x,y)7→(0,0)
sen(x)sen(y)
xy
xy
exy − 1
= lım(x,y)7→(0,0)
sen(x)
x
sen(y)
y
xy
exy − 1
= lımx 7→0
sen(x)
xlımy 7→0
sen(y)
ylımu 7→0
u
eu − 1
u = xy
u→ 0
= 1
EJEMPLO 5.12. Calcular el siguiente lımite lım(x,y)7→(1,3)
6x− 2y
9x2 − y2.
SOLUCION.-
lım(x,y)7→(1,3)
6x− 2y
9x2 − y2= lım
(x,y)7→(1,3)
2(3x− y)
(3x+ y)(3x− y)
= lım(x,y)7→(1,3)
2
3x+ y
=2
3(1) + 3=
1
3
EJEMPLO 5.13. Calcular el siguiente lımite lım(x,y)7→(1,1)
[x2 − 1
x− 1− y − 1
y2 − 1
].
SOLUCION.-
ξρ∫s email: [email protected] 76 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 77
lım(x,y)7→(1,1)
[x2 − 1
x− 1− y − 1
y2 − 1
]= lım
(x,y)7→(1,1)
[(x− 1)(x+ 1)
x− 1− y − 1
(y − 1)(y + 1)
]
= lım(x,y)7→(1,1)
[x+ 1 − 1
y + 1
]
=
[1 + 1 − 1
1 + 1
]= 2 − 1
2=
4 − 1
2=
3
2
EJEMPLO 5.14. Calcular el siguiente lımite lım(x,y)7→(1,1)
(x3 − 1)(y4 − 1)
(x− 1)(y2 − 1).
SOLUCION.-
lım(x,y)7→(1,1)
(x3 − 1)(y4 − 1)
(x− 1)(y2 − 1)= lım
(x,y)7→(1,1)
(x− 1)(x2 + x+ 1)(y2 − 1)(y2 + 1)
(x− 1)(y2 − 1)
= lım(x,y)7→(1,1)
(x2 + x+ 1)(y2 + 1)
= (12 + 1 + 1)(12 + 1) = 3(2) = 6
EJEMPLO 5.15. Calcular el siguiente lımite lım(x,y)7→(0,0)
x2 + y2
√x2 + y2 + 1 − 1
.
SOLUCION.-
lım(x,y)7→(0,0)
x2 + y2
√x2 + y2 + 1 − 1
= lım(x,y)7→(0,0)
x2 + y2
√x2 + y2 + 1 − 1
√x2 + y2 + 1 + 1√x2 + y2 + 1 + 1
= lım(x,y)7→(0,0)
(x2 + y2)[√x2 + y2 + 1 + 1]
[√x2 + y2 + 1]2 − 12
= lım(x,y)7→(0,0)
(x2 + y2)[√x2 + y2 + 1 + 1]
x2 + y2 + 1 − 1
= lım(x,y)7→(0,0)
(x2 + y2)[√x2 + y2 + 1 + 1]
x2 + y2
= lım(x,y)7→(0,0)
√x2 + y2 + 1 + 1
=√
02 + 02 + 1 + 1 = 2
EJEMPLO 5.16. Calcular el siguiente lımite lım(x,y)7→(0,3)
(1 + x2y
) 1x2 .
ξρ∫s email: [email protected] 77 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 78
SOLUCION.-
lım(x,y)7→(0,3)
(1 + x2y
) 1x2 = lım
(x,y)7→(0,3)
(1 + x2y
) y
x2y
= lım(x,y)7→(0,3)
[(1 + x2y
) 1x2y
]y
=[lımu 7→0
(1 + u)1u
]3 u = x2y
u → 0
= e3
EJEMPLO 5.17. Calcular el siguiente lımite lım(x,y)7→(1,1)
x3y3 − 1
xy − 1.
SOLUCION.-
lım(x,y)7→(1,1)
x3y3 − 1
xy − 1= lım
(x,y)7→(1,1)
(xy)3 − 1
xy − 1
= lım(x,y)7→(1,1)
(xy − 1)[(xy)2 + xy + 1]
xy − 1
= lım(x,y)7→(1,1)
(xy)2 + xy + 1
= (1 · 1)2 + 1 · 1 + 1 = 3.
EJEMPLO 5.18. Calcular lım(x,y)7→(1,1)
2x2 + x− 2xy − y
y2 − x2
SOLUCION.-
lım(x,y)7→(1,1)
2x2 + x− 2xy − y
y2 − x2= lım
(x,y)7→(1,1)
2x(x− y) + x− y
(y − x)(y + x)
= − lım(x,y)7→(1,1)
(x− y)(2x+ 1)
(x− y)(y + x)
= − lım(x,y)7→(1,1)
2x+ 1
y + x= −2 · 1 + 1
1 + 1= −3
2
♣
5.4. Calculo de lımites usando el teorema de acotacion
TEOREMA 5.4 (Teorema de Acotacion). Si f, g : Dom(f) ⊂ Rn → R son funciones tales
quelım
x→x0
f(x) = 0 y g es acotada.
ξρ∫s email: [email protected] 78 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 79
Entonceslım
x→x0
f(x)g(x) = 0.
Demostracion.|f(x)g(x)| < ε
M·M.
EJEMPLO 5.19. Calcular el siguiente lımite lım(x,y)7→(0,0)
√x2 + y2sen
(1
x2 + y2
).
SOLUCION.-
lım(x,y)7→(0,0)
√x2 + y2 sen
(1
x2 + y2
)= lım
(x,y)7→(0,0)
tiende a 0︷ ︸︸ ︷√x2 + y2
acotado︷ ︸︸ ︷sen
(1
x2 + y2
)
= 0.
EJEMPLO 5.20. Calcular el siguiente lımite lım(x,y)7→(0,0)
5x2y
x2 + y2.
SOLUCION.-
lım(x,y)7→(0,0)
5x2y
x2 + y2= lım
(x,y)7→(0,0)
tiende a 0︷︸︸︷5y
acotado︷ ︸︸ ︷x2
x2 + y2
= 0.
EJEMPLO 5.21. Calcular el siguiente lımite lım(x,y)7→(0,0)
(x2 + y2)sen
(1
xy
).
SOLUCION.-
lım(x,y)7→(0,0)
(x2 + y2)sen
(1
xy
)= lım
(x,y)7→(0,0)
tiende a 0︷ ︸︸ ︷(x2 + y2)
acotado︷ ︸︸ ︷sen
(1
xy
)
= 0.
EJEMPLO 5.22. Calcular el siguiente lımite lım(x,y)7→(0,0)
x3
x2 + y2.
ξρ∫s email: [email protected] 79 Jasmer LPC
UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 80
SOLUCION.-
lım(x,y)7→(0,0)
x3
x2 + y2= lım
(x,y)7→(0,0)
tiende a 0︷︸︸︷x
acotado︷ ︸︸ ︷x2
x2 + y2
= 0.
EJEMPLO 5.23. Calcular el siguiente lımite lım(x,y)7→(0,0)
(x sen
1
y+ y sen
1
x
).
SOLUCION.-
lım(x,y)7→(0,0)
(x sen
1
y+ y sen
1
x
)= lım
(x,y)7→(0,0)
tiende a 0︷︸︸︷x
acotado︷ ︸︸ ︷sen
1
y+
tiende a 0︷︸︸︷y
acotado︷ ︸︸ ︷sen
1
x
= 0.
EJEMPLO 5.24. Calcular el siguiente lımite lım(x,y)7→(0,0)
x4y
x4 + y4.
SOLUCION.-
lım(x,y)7→(0,0)
x4y
x4 + y4= lım
(x,y)7→(0,0)
tiende a 0︷︸︸︷y
acotado︷ ︸︸ ︷x4
x4 + y4
= 0.
EJEMPLO 5.25. Calcular el siguiente lımite lım(x,y)7→(1,−2)
y(x− 1)3
(x− 1)2 + (y + 2)2.
SOLUCION.-
lım(x,y)7→(1,−2)
y(x− 1)3
(x− 1)2 + (y + 2)2= lım
(x,y)7→(0,0)
tiende a 0︷ ︸︸ ︷y(x− 1)
acotado︷ ︸︸ ︷(x− 1)2
(x− 1)2 + (y + 2)2
= 0.
EJEMPLO 5.26. Calcular el siguiente lımite lım(x,y)7→(0,0)
x3
√x2 + y2
.
ξρ∫s email: [email protected] 80 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 81
SOLUCION.-
lım(x,y)7→(0,0)
x3
√x2 + y2
= lım(x,y)7→(0,0)
tiende a 0︷︸︸︷x2
acotado︷ ︸︸ ︷x√
x2 + y2
= 0.
EJEMPLO 5.27. Calcular el siguiente lımite lım(x,y)7→(0,0)
xy√x2 + y2
.
SOLUCION.-
lım(x,y)7→(0,0)
xy√x2 + y2
= lım(x,y)7→(0,0)
tiende a 0︷︸︸︷x
acotado︷ ︸︸ ︷y√
x2 + y2
= 0.
5.5. Inexistencia de lımites
Cuando no sepamos calcular un lımite, intentaremos demostrar que dicho lımite no existe. Estolo podemos hacer por dos metodos:
Mediante los lımites direccionales.
Mediante los lımites reiterados.
5.5.1. Lımites direccionales
Aunque la definicion de lımite de funciones de dos variables va en total paralelismo con la defini-cion de lımite de funciones de una sola variable, existe una diferencia fundamental a la hora dedeterminar la existencia de un lımite. En una variable, la existencia del lımite, es equivalente a lacoincidencia de los lımites laterales. Es decir, para determinar si una funcion de una variable tienelımite en un punto determinado, solamente necesitamos comprobar que ocurre al aproximarnospor dos direcciones (por la izquierda y por la derecha). Si la funcion tiene el mismo lımite por laizquierda y por la derecha podemos concluir que el lımite existe. Si embargo, en dos variables estono es ası.
En dos variables, en principio, no tiene sentido hablar de lımites laterales ¿que significan derecha eizquierda en el plano?, por eso hablamos de lımites direccionales, ya que, en dos variables existen
ξρ∫s email: [email protected] 81 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 82
infinitos caminos para acercarnos al punto, es mas, podemos acercarnos siguiendo un camino rectoo un camino curvo. Es decir, al escribir
(x, y) → (x0.y0)
entendemos que el punto (x, y) se aproxima al punto (x0, y0) en cualquier direccion. Y, para queexista el lımite, los lımites siguiendo todas las direcciones o trayectorias tienen que coincidir. Laexigencia de la definicion a todos los puntos del entorno significa todas las posibles formas deaproximarse. En consecuencia, para ver que una funcion no tiene lımite en un punto se siguenvarios caminos de aproximacion al punto y si la funcion tiene un lımite distinto por cada camino,entonces el lımite ”doble“ no existe. El problema sera determinar si existe un camino que conducea otra parte. En la practica los caminos que se suelen seguir son rectas y parabolas. (El caminopor rectas se sigue cuando las potencias del denominador son del mismo grado, y el camino porparabolas cuando son de distinto grado, intentando igualar los grados). No debe olvidarse que larecta ha de pasar por el punto en cuestion, es decir su ecuacion ha de ser y − y0 = m(x− x0).
Hay que advertir que este metodo solo es refutativo, es decir, nos permite negar la existencia dellımite pero no afirmarla. Ası, si encontramos dos lımites direccionales diferentes, entonces podemosafirmar que el lımite “doble” no existe. Pero si todos los lımites direccionales que tomamos nosdan el mismo lımite, no por eso podemos afirmar la existencia del lımite. Lo mas que podemosdecir es que, de existir el lımite doble, su valor sera el de los direccionales, pero nadie asegura quesiguiendo otra direccion, diferente a las tomadas hasta ese momento, obtengamos un resultadodiferente.
EJEMPLO 5.28. Demostrar que el siguiente lımite no existe lım(x,y)7→(0,0)
xy
x2 + y2
SOLUCION.- El limite lım(x,y)7→(0,0)
xy
x2 + y2no existe como lo verificaremos a continuacion.
Consideremos las rectas y = mx una cada valor de m ∈ R.
lım(x,y)7→(0,0)
xy
x2 + y2= lım
x 7→0
xmx
x2 + (mx)2= lım
x 7→0
mx2
x2(1 +m2)= lım
x 7→0
m
1 +m2=
m
1 +m2.
Como el lımite depende del modo de como uno se aproxima al punto (0, 0) se concluye que ellımite no existe.
EJEMPLO 5.29. Demostrar que el siguiente lımite no existe lım(x,y)7→(0,0)
x2y
x4 + y2
SOLUCION.- El limite lım(x,y)7→(0,0)
x2y
x4 + y2no existe como lo verificaremos a continuacion.
Consideremos las rectas y = mx2 una cada valor de m ∈ R.
lım(x,y)7→(0,0)
x2y
x4 + y2= lım
x 7→0
x2mx2
x4 + (mx2)2= lım
x 7→0
x4m
x4(1 +m2)= lım
x 7→0
m
1 +m2=
m
1 +m2.
Como el lımite depende del modo de como uno se aproxima al punto (0, 0) se concluye que ellımite no existe.
ξρ∫s email: [email protected] 82 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 83
EJEMPLO 5.30. Demostrar que el siguiente lımite no existe lım(x,y)7→(0,0)
xy
x2 + y2.
SOLUCION.-
lım(x,y)7→(0,0)
xy
x2 + y2= lım
x 7→0
xmx
x2 + (mx)2
remplazar
y = mx
= lımx 7→0
mx2
x2(1 +m2)
= lımx 7→0
m
1 +m2=
m
1 +m2
EJEMPLO 5.31. Demostrar que el siguiente lımite no existe lım(x,y)7→(0,0)
y2
x+ y2.
SOLUCION.-
lım(x,y)7→(0,0)
y2
x+ y2= lım
y 7→0
y2
my2 + y2
remplazar
x = my2
= lımy 7→0
y2
y2(m+ 1)
= lımx 7→0
1
m+ 1=
1
m+ 1
EJEMPLO 5.32. Demostrar que el siguiente lımite no existe lım(x,y)7→(0,0)
2x2y
x4 + y2.
SOLUCION.-
lım(x,y)7→(0,0)
2x2y
x4 + y2= lım
x 7→0
2x2mx2
x4 + (mx2)2
remplazar
y = mx2
= lımx 7→0
2mx4
x4 +m2x4
= lımx 7→0
2mx4
x4(1 +m2)
= lımx 7→0
2m
1 +m2=
2m
1 +m2
EJEMPLO 5.33. Demostrar que el siguiente lımite no existe lım(x,y)7→(5,−2)
7x(x− 5)
y + 2.
ξρ∫s email: [email protected] 83 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 84
SOLUCION.-
lım(x,y)7→(5,−2)
7x(x− 5)
y + 2= lım
x 7→5
7x(x− 5)
m(x− 5)
remplazar
y + 2 = m(x− 5)
= lımx 7→5
7x
m=
35
m
EJEMPLO 5.34. Demostrar que el siguiente lımite no existe lım(x,y)7→(0,0)
(x− y)2
x2 + y2.
SOLUCION.-
lım(x,y)7→(0,0)
(x− y)2
x2 + y2= lım
x 7→0
(x−mx)2
x2 + (mx)2
remplazar
y = mx
= lımx 7→0
x2(1 −m)2
x2(1 +m2)
= lımx 7→0
(1 −m)2
1 +m2=
(1 −m)2
1 +m2
EJEMPLO 5.35. Demostrar que el siguiente lımite no existe lım(x,y)7→(0,0)
x+ y
x− y.
SOLUCION.-
lım(x,y)7→(0,0)
x+ y
x− y= lım
x 7→0
x+mx
x−mx
remplazar
y = mx
= lımx 7→0
x(1 +m)
x(1 −m)
= lımx 7→0
1 +m
1 −m=
1 +m
1 −m
EJEMPLO 5.36. Demostrar que el siguiente lımite no existe lım(x,y)7→(0,0)
x2 − y2
x2 + y2.
SOLUCION.-
ξρ∫s email: [email protected] 84 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 85
lım(x,y)7→(0,0)
x2 − y2
x2 + y2= lım
x 7→0
x2 − (mx)2
x2 + (mx)2
remplazar
y = mx
= lımx 7→0
x2(1 −m2)
x2(1 +m2)
= lımx 7→0
1 −m2
1 +m2=
1 −m2
1 +m2
EJEMPLO 5.37. Demostrar que el siguiente lımite no existe lım(x,y)7→(0,0)
x2
x2 − y2.
SOLUCION.-
lım(x,y)7→(0,0)
x2
x2 − y2= lım
x 7→0
x2
x2 − (mx)2
remplazar
y = mx
= lımx 7→0
x2
x2(1 −m2)
= lımx 7→0
1
1 −m2=
1
1 −m2
EJEMPLO 5.38. Calcular el siguiente lımite lım(x,y)7→(1,1)
xy − x− y + 1
x2 + y2 − 2x− 2y + 2.
SOLUCION.-
lım(x,y)7→(1,1)
xy − x− y + 1
x2 + y2 − 2x− 2y + 2= lım
(x,y)7→(1,1)
x(y − 1) − (y − 1)
x2 − 2x+ 1 + y2 − 2y + 1
= lım(x,y)7→(1,1)
(y − 1)(x− 1)
(x− 1)2 + (y − 1)2
remplazar
y − 1 = m(x− 1)
= lımx 7→1
m(x− 1)(x− 1)
(x− 1)2 + [m(x− 1)]2
= lımx 7→1
m(x− 1)2
(x− 1)2(1 +m2)
= lımx 7→1
m
1 +m2=
m
1 +m2
ξρ∫s email: [email protected] 85 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 86
5.5.2. Lımites parciales iterados (o reiterados)
Se pueden calcular los siguientes lımites:
lımx→x0
lımy → y0
x 6= x0
ylımy→y0
lımx → x0
y 6= y0
Si estos dos lımites son distintos, entonces la funcion no tiene lımite, pero si son iguales o algunode ellos no existe, entonces no se puede asegurar nada sobre el lımite doble.
5.6. Continuidad de funciones
DEFINICION 5.2. Una funcion f : A ⊂ Rn → R es continua en un punto x0 ∈ A si x0 ∈
Dom(f) ylım
x→x0
f(x) = f(x0).
La funcion f se dice continua en A si es continua en todos de A, y se dice continua si es continuaen todos los puntos de su dominio.
LEMA 5.5. Todas las funciones Polinomio, sen, cos, tan, sec, exp, log,√· son continuas en
sus respectivos dominios.
TEOREMA 5.5. La suma, resta, multiplicacion y composicion de funciones continuas es con-tinua. La division de funciones es continua siempre que la funcion del denominador no tieneceros.
TEOREMA 5.6. Si lımx→a f(x) = b y g continua en el punto b entonces lımx→a g(f(x)) = g(b).
EJEMPLO 5.39. Verifique que la siguiente funcion f : R2 → R es continuas en todo R
2.
f(x, y) =
6x− 2y
9x2 − y2si (x, y) 6= (1, 3)
1
3si (x, y) = (1, 3)
SOLUCION.-
ξρ∫s email: [email protected] 86 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 87
lım(x,y)7→(1,3)
6x− 2y
9x2 − y2= lım
(x,y)7→(1,3)
2(3x− y)
(3x+ y)(3x− y)
= lım(x,y)7→(1,3)
2
3x+ y
=2
3(1) + 3=
1
3= f(1, 3)
EJEMPLO 5.40. Verifique que la siguiente funcion f : R2 → R es continuas en todo R
2.
f(x, y) =
[x2 − 1
x− 1− y − 1
y2 − 1
]si (x, y) 6= (1, 1)
3
2si (x, y) = (1, 1)
SOLUCION.-
lım(x,y)7→(1,1)
[x2 − 1
x− 1− y − 1
y2 − 1
]= lım
(x,y)7→(1,1)
[(x− 1)(x+ 1)
x− 1− y − 1
(y − 1)(y + 1)
]
= lım(x,y)7→(1,1)
[x+ 1 − 1
y + 1
]
=
[1 + 1 − 1
1 + 1
]
= 2 − 1
2=
4 − 1
2=
3
2= f(1, 1)
EJEMPLO 5.41. Verifique que la siguiente funcion f : R2 → R es continuas en todo R
2.
f(x, y) =
(x3 − 1)(y4 − 1)
(x− 1)(y2 − 1)si (x, y) 6= (1, 1)
6 si (x, y) = (1, 1)
SOLUCION.-
lım(x,y)7→(1,1)
(x3 − 1)(y4 − 1)
(x− 1)(y2 − 1)= lım
(x,y)7→(1,1)
(x− 1)(x2 + x+ 1)(y2 − 1)(y2 + 1)
(x− 1)(y2 − 1)
= lım(x,y)7→(1,1)
(x2 + x+ 1)(y2 + 1)
= (12 + 1 + 1)(12 + 1) = 6 = f(1, 1)
ξρ∫s email: [email protected] 87 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 88
EJEMPLO 5.42. Verifique que la siguiente funcion f : R2 → R es continuas en todo R
2.
f(x, y) =
x2 + y2
√x2 + y2 + 1 − 1
si (x, y) 6= (0, 0)
2 si (x, y) = (0, 0)
SOLUCION.-
lım(x,y)7→(0,0)
x2 + y2
√x2 + y2 + 1 − 1
= lım(x,y)7→(0,0)
x2 + y2
√x2 + y2 + 1 − 1
√x2 + y2 + 1 + 1√x2 + y2 + 1 + 1
= lım(x,y)7→(0,0)
(x2 + y2)[√x2 + y2 + 1 + 1]
[√x2 + y2 + 1]2 − 12
= lım(x,y)7→(0,0)
(x2 + y2)[√x2 + y2 + 1 + 1]
x2 + y2 + 1 − 1
= lım(x,y)7→(0,0)
(x2 + y2)[√x2 + y2 + 1 + 1]
x2 + y2
= lım(x,y)7→(0,0)
√x2 + y2 + 1 + 1
=√
02 + 02 + 1 + 1 = 2 = f(0, 0)
EJEMPLO 5.43. Verifique que la siguiente funcion f : R2 → R es continuas en todo R
2.
f(x, y) =
x2 − y2
ex+y − 1si x > −y,
2x si x ≤ −y.
SOLUCION.-
Como el polinomio x2 − y2 es continua en todo R2 y la funcion ex+y − 1 es continua en todo R
2,y demas ex+y − 1 = 0 cuando x = −y, se tiene que si x > −y la funcion f(x, y) es continua enR
2 − (x, y) ∈ R2 : x = −y. Por otro lado para x ≤ −y, se tiene que f(x, y) es 2x por tanto
continua.
Falta examinar que ocurre en los puntos de al recta x = −y, es decir, tenemos que analizar lacontinuidad en puntos de la forma (a,−a) para todo a ∈ R.
Es facil ver quef(a,−a) = 2a.
Para el calculo delım
(x,y)7→(a,−a)f(x, y)
ξρ∫s email: [email protected] 88 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 89
tenemos que distinguir dos regiones x > −y y x ≤ −y esto por que la funcion esta definida porpedazos.
Empecemos analizando el caso en que x > −y:
lım(x,y)7→(a,−a)
x>−y
f(x, y) = lım(x,y)7→(a,−a)
x>−y
x2 − y2
ex+y − 1
= lım(x,y)7→(a,−a)
x>−y
(x+ y)(x− y)
ex+y − 1
= lım(x,y)7→(a,−a)
x>−y
(x+ y)
ex+y − 1(x− y)
= lımu 7→0
u
eu − 1(a− (−a)) u = x+ y
u→ 0
= 2a = f(a,−a)
Por otra parte, para el caso x ≤ −y, tenemos que:
lım(x,y)7→(a,−a)
x>−y
f(x, y) = lım(x,y)7→(a,−a)
x>−y
2x = 2a = f(a,−a)
Por tanto, el lımite existe y vale 2a = f(a,−a), es decir, f es continua en esos puntos.
DEFINICION 5.3. Un conjunto X ⊂ Rn es abierto si para todo x ∈ X. existe r > 0 tales que
B(x, r) ⊂ X. Un conjunto Y es cerrado si su complemento es abierto.
LEMA 5.6. Sea f : X → Rm una funcion definida en un subconjunto X ⊂ R
n. f es continua enX si y solo si la imagen inversa f−1(B) de todo abierto B ⊂ R
m es un conjunto abierto en X.
Demostracion.
DEFINICION 5.4. Un conjunto K ⊂ Rn es compacto si es cerrado y acotado.
TEOREMA 5.7 (Weierstrass). Toda funcion real continua f : K → R definida en un compactoK ⊂ R
n alcanza su maximo y su mınimo en K, esto es, existen puntos xmax, xmin ∈ K tales que
f(xmin) ≤ f(x) ≤ f(xmax), ∀x ∈ K.
ξρ∫s email: [email protected] 89 Jasmer LPC

CAPITULO 6
Derivacion de funciones reales de variasvariables
EJEMPLO 6.1. Demostrar que en R2, la representacion parametrica de la recta l(t) = (u1, u2)+
t(v1, v2) es equivalente a la representacion no parametrica y = mx+ b.
SOLUCION.- ♣
6.1. Derivadas parciales
Para funciones de dos variables z = f(x, y), la idea intuitiva de derivada parcial responde a lasiguiente cuestion: ¿Como se va a ver afectada una funcion de dos variables por una variacionde una de sus variables, mientras que la otra variable permanece fija?. Podemos responder a estacuestion derivando de la funcion con respecto a una variable, manteniendo constante la otra. Esteproceso se conoce como derivacion parcial, y su resultado se llama derivada parcial de la funcionrespecto a la variable independiente elegida. Para ello partimos de la idea del concepto de derivadade funciones de una variable: el lımite cuando el incremento de la variable tiende a cero, del cocientedel incremento de la funcion dividido entre el incremento de la variable. Suponemos que una delas variables es constante e incrementamos solo la otra, es decir, hacemos la derivada suponiendoque la funcion depende solo de una de las variables. Con ello se reduce la discusion al caso uni-dimensional considerando una funcion de dos variables como una funcion de una sola variable(cada variable separadamente), manteniendo fija la otra variable. A continuacion presentamos ladefinicion de derivada parcial de una funcion de varias variables.
90

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 91
DEFINICION 6.1. Sea f : U → R una funcion definida en un conjunto abierto U de Rn, y
sea p ∈ U . Se define la derivada parcial de f con respecto a su variable xi en el punto p, como elsiguiente lımite, si existe y es finito:
∂f
∂xi(p) = lım
t→0
f(p+ tei) − f(p)
t.
donde ei es el vector de Rn que tiene un i en su i-esima coordenada y 0 en la s restantes.
EJEMPLO 6.2. Calcular, aplicando la definicion, las dos derivadas parciales de la funcionf(x, y) = xy + x− y, en el punto p(0, 0).
SOLUCION.-
∂f
∂x(0, 0) = lım
t→0
f((0, 0) + te1) − f(0, 0)
t= lım
t→0
f(t, 0) − f(0, 0)
t
= lımt→0
t · 0 + t− 0 − 0
t= lım
t→0
t
t= lım
t→01 = 1
∂f
∂y(0, 0) = lım
t→0
f((0, 0) + te2) − f(0, 0)
t= lım
t→0
f(0, t) − f(0, 0)
t
= lımt→0
0 · t+ 0 − t− 0
t= lım
t→0
−tt
= lımt→0
(−1) = −1
Si hallamos las derivadas parciales de una funcion de dos variables z = f(x, y) en un punto generico(x, y) de su dominio, obtenemos, a su vez, funciones de dos variables, llamadas funciones derivadasparciales.
EJEMPLO 6.3. Hallar, aplicando la definicion, las derivadas parciales de la funcion: f(x, y) =x2y3 + 5.
SOLUCION.-
∂f
∂x(x, y) = lım
t→0
f((x, y) + te1) − f(x, y)
t= lım
t→0
f(x+ t, y) − f(x, y)
t
= lımt→0
(x+ t)2y3 + 5 − (x2y3 + 5)
t= lım
t→0
(x2 + 2xt+ t2)y3 + 5 − x2y3 − 5
t
= lımt→0
x2y3 + 2xty3 + t2y3 − x2y3
t= lım
t→0
2xty3 + t2y3
t
= lımt→0
t(2xy3 + ty3)
t= lım
t→0(2xy3 + ty3) = 2xy3
Un calculo semejante muestra que∂f
∂x(x, y) = 3x2y2.
ξρ∫s email: [email protected] 91 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 92
6.1.1. Calculo de derivadas parciales usando reglas de derivacion.
Si observamos los resultados del ejemplo anterior, podemos concluir que no es necesario aplicarla definicion para calcular las derivadas parciales, sino que se pueden calcular aplicando las reglasordinarias de derivacion. Esto se deduce de la propia definicion, ya que de la definicion de lasderivadas parciales, como derivadas ordinarias con la condicion de que se han fijado todas lasvariables excepto una, respecto de la cual se toma la derivada, se deduce que al calcular lasderivadas parciales se pueden utilizar las reglas del calculo de las derivadas ordinarias. Es decir,
∂f
∂xi(x1, .., yn)
Se puede calcular mediante las reglas de derivacion, es decir, como una derivada ordinaria, de lafuncion f respecto de la variable xi, suponiendo las restantes variables todas constantes (es decir,como si la funcion f dependiera solo de xi y las demas x1, .., xi−1, xi+1 ,..., xn fueran numeros).En consecuencia, consideramos que x1, .., xi−1, xi+1 ,..., xn constantes y derivamos con respecto axi aplicando todas las reglas de derivacion.
EJEMPLO 6.4. Hallar las derivadas parciales de la funcion f(x, y, z) = x2y cos z − z sen x cos y
SOLUCION.- Sea z = x2y cos z − z sen x cos y, entonces
zx = 2xy cos z − z cosx cos y
zy = x2 cos z + z sen x sen y
EJEMPLO 6.5. Empleando las reglas de derivacion, hallar:∂f
∂x(x, y) si f(x, y) = x2 cos y +
2x tan y
SOLUCION.-
∂f
∂x(x, y) = 2x cos y + 2 tan y
EJEMPLO 6.6. Empleando las reglas de derivacion, hallar:∂f
∂x(1, 0) si f(x, y) = ex2y+arctan(xy)
SOLUCION.-
∂f
∂x(x, y) = 2xyex2y +
y
1 + (xy)2
∂f
∂x(1, 0) = 2 · 1 · 0 · e12·0 +
0
1 + (1 · 0)2= 0.
ξρ∫s email: [email protected] 92 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 93
EJEMPLO 6.7. Empleando las reglas de derivacion, hallar:∂f
∂x(1, 0) si
f(x, y) = x sen(x2y) + ln(x2 + y2 + 1)
SOLUCION.-
∂f
∂x(x, y) = sen(x2y) + 2x2y sen(x2y) +
2x
x2 + y2 + 1
∂f
∂x(1, 0) = sen(12 · 0) + 2 · 12 · 0 sen(12 · 0) +
2 · 112 + 02 + 1
= 1.
EJEMPLO 6.8. Empleando las reglas de derivacion, hallar:∂f
∂y(0, 3) si
f(x, y) =
√x2 + y2
exy + 1
SOLUCION.-
∂f
∂y(x, y) =
−2y
2√x2 + y2
(exy + 1) −√x2 + y2 x exy
(exy + 1)2
∂f
∂y(x, y) = −
y(exy + 1)√x2 + y2
−√x2 + y2 x exy
(exy + 1)2
∂f
∂y(0, 3) = −
3(e0·3 + 1)√02 + 32
−√
02 + 32 0 · e0·3
(e0·3 + 1)2= −1
4.
EJEMPLO 6.9. Para la funcion f(x, y) =2x− y
x+ y, halle la expresion reducida de x
∂f
∂x+ y
∂f
∂y.
SOLUCION.- ♣
EJEMPLO 6.10. Para la funcion f(x, y) =x− y
x+ y+ e
y
x , halle la expresion reducida de x∂f
∂x+
y∂f
∂y
SOLUCION.- ♣
ξρ∫s email: [email protected] 93 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 94
EJEMPLO 6.11. Dada z =x3 + y3
xy, halle una expresion reducida de x
∂z
∂x+ y
∂z
∂y
SOLUCION.- ♣
EJEMPLO 6.12. Para la funcion f(x, y) =5x+ 4y
y2. Hallar la expresion reducida de: x
∂f
∂x+
y∂f
∂y.
SOLUCION.-
∂f
∂x=
5
y2
∂f
∂y=
(4)y2 − (5x+ 4y)2y
(y2)2=
4y2 − 10xy − 8y2
y4= − 4
y2− 10x
y3
Luego
x∂f
∂x+ y
∂f
∂y=
5x
y2− 4
y− 10x
y2=
−5x− 4y
y2= −f(x, y)
♣
EJEMPLO 6.13. Para la funcion f(x, y) =4x+ 5y
x2. Hallar la expresion reducida de: x
∂f
∂x+
y∂f
∂y.
SOLUCION.-
∂f
∂x=
(4)x2 − (4x+ 5y)2x
(x2)2=
4x2 − 10xy − 8x2
x4= − 4
x2− 10y
x3
∂f
∂y=
5
x2
Luego
x∂f
∂x+ y
∂f
∂y= −4
x− 10y
x2+
5y
x2=
−4x− 5y
x2= −f(x, y)
♣
ξρ∫s email: [email protected] 94 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 95
EJEMPLO 6.14. Si u(r, t) = ln tr
+ ln rt
probar que
r∂u
∂r− t
∂u
∂t= 0.
SOLUCION.-
r∂u
∂r− t
∂u
∂t= r
1tr
(−t)r2
− t1rt
(−r)t2
= 1 + 1 = 0
EJEMPLO 6.15. Si z = xy + x ey
x , demostrar que:
x∂z
∂x+ y
∂z
∂y− 2xy = x e
y
x .
SOLUCION.-
x∂z
∂x+ y
∂z
∂y− 2xy = x
[y + x e
yx
(−y)x2 + e
yx
]+ y
[x+ x e
yx
1x
]− 2xy
= x[y − y
xe
y
x + ey
x
]+ y
[x+ e
y
x
]− 2xy
= xy − y eyx + x e
yx + yx+ y e
yx − 2xy = x e
yx
EJEMPLO 6.16. Dada w =y2
√x2 + y2
, halle una expresion simplificada de x · wx + y · wy.
SOLUCION.-
Derivando respecto de x tenemos:
wx =
− 2xy2
2√x2 + y2
(√x2 + y2
)2 =
−xy2
√x2 + y2
(√x2 + y2
)2 =−xy2
(√x2 + y2
)3
del mismo modo derivando respecto de y obtenemos
ξρ∫s email: [email protected] 95 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 96
wy =
2y√x2 + y2 − 2x2y
2√x2 + y2
(√x2 + y2
)2 =
2y(√
x2 + y2)2
− x2y√x2 + y2
(√x2 + y2
)2
=
2yx2 + 2y3 − x2y√x2 + y2
(√x2 + y2
)2 =2y3 + xy2
(√x2 + y2
)3
Reemplazando se sigue que
x · wx + y · wy = x · −xy2
(√x2 + y2
)3 + y · 2y3 + xy2
(√x2 + y2
)3 =2y4 + xy3 − x2y2
(√x2 + y2
)3 .
EJEMPLO 6.17. Dada f(x, y) = exy , halle una expresion simplificada de x ·fx(x, y)+y ·fy(x, y).
SOLUCION.-
Derivando f(x, y) = exy respecto de x obtenemos:
fx(x, y) = exy
1
yy fy(x, y) = − e
xyx
y2
Por tanto
x · fx(x, y) + y · fy(x, y) = x · exy
1
y− y · ex
yx
y2=
x
y· ex
y − x
y· ex
y = 0.
EJEMPLO 6.18. Dada z =xy√x2 + y2
, halle una expresion simplificada de x∂z
∂x+ y
∂z
∂y.
SOLUCION.-
Derivando respecto de x tenemos:
ξρ∫s email: [email protected] 96 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 97
∂z
∂x=
y√x2 + y2 − 2x2y
2√x2 + y2
(√x2 + y2
)2 =
y(√
x2 + y2)2
− x2y√x2 + y2
(√x2 + y2
)2
=
yx2 + y3 − x2y√x2 + y2
(√x2 + y2
)2 =y3
(√x2 + y2
)3
del mismo modo derivando respecto de y obtenemos
∂z
∂y=
x√x2 + y2 − 2xy2
2√x2 + y2
(√x2 + y2
)2 =
x(√
x2 + y2)2
− xy2
√x2 + y2
(√x2 + y2
)2
=
x3 + xy2 − xy2
√x2 + y2
(√x2 + y2
)2 =x3
(√x2 + y2
)3
Reemplazando se sigue que
x∂z
∂x+ y
∂z
∂y= x
y3
(√x2 + y2
)3 + yx3
(√x2 + y2
)3
=xy3 + yx3
(√x2 + y2
)3 =xy(y2 + x2)
(x2 + y2)√x2 + y2
Finalmente
x∂z
∂x+ y
∂z
∂y=
xy√x2 + y2
EJEMPLO 6.19. Dada z =x2
y+y2
x, halle una expresion reducida de x
∂z
∂x+ y
∂z
∂y.
SOLUCION.- Derivando respecto de x tenemos:
ξρ∫s email: [email protected] 97 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 98
∂z
∂x= 2
x
y− y2
x2
del mismo modo derivando respecto de y obtenemos
∂z
∂y= −x
2
y2+ 2
y
x
Reemplazando se sigue que
x∂z
∂x+ y
∂z
∂y= x
[2x
y− y2
x2
]+ y
[−x
2
y2+ 2
y
x
]
= 2x2
y− y2
x− x2
y+ 2
y2
x
=2x3 − y3 − x3 + 2y3
xy=x3 + y3
xy
EJEMPLO 6.20. Dada z =x2 + y2
x− y+y2
x, halle la expresion reducida de x
∂z
∂x+ y
∂z
∂y.
SOLUCION.- Derivando respecto de x tenemos:
∂z
∂x=
2x(x− y) − (x2 + y2)
(x− y)2− y2
x2=x2 − 2xy − y2
(x− y)2− y2
x2
del mismo modo derivando respecto de y obtenemos
∂z
∂y=
2y(x− y) − (x2 + y2)(−1)
(x− y)2+ 2
y
x=x2 + 2xy − y2
(x− y)2+ 2
y
x
Reemplazando se sigue que
ξρ∫s email: [email protected] 98 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 99
x∂z
∂x+ y
∂z
∂y= x
[x2 − 2xy − y2
(x− y)2− y2
x2
]+ y
[x2 + 2xy − y2
(x− y)2+ 2
y
x
]
=x3 − 2x2y − xy2
(x− y)2− y2
x+
yx2 + 2xy2 − y3
(x− y)2+ 2
y2
x
=x3 − 2x2y − xy2 + yx2 + 2xy2 − y3
(x− y)2+y2
x
=x3 − x2y + xy2 − y3
(x− y)2+y2
x=x2(x− y) + y2(x− y)
(x− y)2+y2
x
Por tanto
x∂z
∂x+ y
∂z
∂y=
(x2 + y2)(x− y)
(x− y)2+y2
x=x2 + y2
x− y+y2
x= z.
♣
EJEMPLO 6.21. Dada z =x2 + y2
y − x+x2
y, halle la expresion reducida de x
∂z
∂x+ y
∂z
∂y.
SOLUCION.- Derivando respecto de x tenemos:
∂z
∂x=
2x(y − x) − (x2 + y2)(−1)
(y − x)2+ 2
y
x=y2 + 2xy − x2
(y − x)2+ 2
x
y
del mismo modo derivando respecto de y obtenemos
∂z
∂y=
2y(y − x) − (x2 + y2)
(y − x)2− x2
y2=y2 − 2xy − x2
(y − x)2− x2
y2
Reemplazando se sigue que
x∂z
∂x+ y
∂z
∂y= x
[y2 + 2xy − x2
(y − x)2+ 2
x
y
]+ y
[y2 − 2xy − x2
(y − x)2− x2
y2
]
=xy2 + 2x2y − x3
(y − x)2− x2
y+
y3 − 2xy2 − yx2
(y − x)2+ 2
x2
y
=xy2 + 2x2y − x3 + y3 − 2xy2 − yx2
(y − x)2+x2
y
=−xy2 + x2y − x3 + y3
(y − x)2+x2
y=y2(y − x) + x2(y − x)
(y − x)2+x2
y
ξρ∫s email: [email protected] 99 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 100
Por tanto
x∂z
∂x+ y
∂z
∂y=
(x2 + y2)(y − x)
(y − x)2+x2
y=x2 + y2
y − x+x2
y= z.
♣
EJEMPLO 6.22. Para la funcion f(x, y) = 4x +2x2 + y2
x+ y. Hallar la expresion reducida de
x∂f
∂x+ y
∂f
∂y.
SOLUCION.- Derivando respecto de x tenemos:
∂f
∂x= 4 +
4x(x+ y) − (2x2 + y2)(1)
(x+ y)2
del mismo modo derivando respecto de y obtenemos
∂f
∂y=
2y(x+ y) − (2x2 + y2)(1)
(x+ y)2
Reemplazando se sigue que
x∂z
∂x+ y
∂z
∂y= 4 +
4x(x+ y) − (2x2 + y2)(1)
(x+ y)2+
2y(x+ y) − (2x2 + y2)(1)
(x+ y)2
=4(x+ y)2 + 4x(x+ y) + 2y(x+ y) − 2(2x2 + y2)
(x+ y)2
=4(x+ y)2 + 4x2 + 4xy + 2yx+ 2y2 − 4x2 − 2y2
(x+ y)2
x∂z
∂x+ y
∂z
∂y=
4(x+ y)2 + 4xy + 2yx
(x+ y)2
=4(x+ y)2 + 6xy
(x+ y)2
♣EJEMPLO 6.23. Hallar las derivadas parciales de primer orden de la siguientes funciones f :R
n → R donde n = 2 o 3.
ξρ∫s email: [email protected] 100 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 101
(1) f(x, y) =x2y
y2 − 9x(2) f(x, y) =
√9x2 + 4y2 − 36
(3) f(x, y) = eysen(xy) + tg(2x− y) (4) f(x, y) = lnx2 − y2
x2 + y2
(5) f(x, y, z) = eau+bv2+cw3(6) f(x, y) = e−(x2+y2)cos(x2 + y2)
(7) f(x, y, z) = log(x2 + y2z − xz2) (8) f(x, y, z) =sen y
log(xyz)
SOLUCION.- ♣
EJEMPLO 6.24. Comprobar que la funcion z = log√x2y + arctg(x2y) verifica la igualdad x
∂z
∂x−
2y∂z
∂y= 0.
SOLUCION.- ♣
EJEMPLO 6.25. Dado w = x2y + xz2 + y2z probar∂w
∂x+∂w
∂y+∂w
∂z= (x+ y + z)2.
SOLUCION.- ♣
EJEMPLO 6.26. Si z = x f(x, y), mostrar que x∂z
∂x+ y
∂z
∂y= z
SOLUCION.- ♣
EJEMPLO 6.27. Si z = f(x, y), x = r cos θ, y = r sen θ probar
(∂z
∂r
)2
+1
r2
(∂z
∂θ
)2
=
(∂z
∂x
)2
+(∂z
∂y
)2
.
SOLUCION.- ♣
EJEMPLO 6.28. Establezca que la funcion z = xey + yex es solucion de la ecuacion diferencialparcial
∂3z
∂x3+∂3z
∂y3= x
∂3z
∂x∂y2+ y
∂3z
∂x2∂y
SOLUCION.- ♣
ξρ∫s email: [email protected] 101 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 102
EJEMPLO 6.29. Si u = ea1x1+a2x2+···+anxn, donde a21 + a2
2 + · · ·+ a2n = 1, establezca que:
∂2u
∂x1∂x1
+∂2u
∂x2∂x2
+ · · · ∂2u
∂xn∂xn
= u
SOLUCION.- ♣
EJEMPLO 6.30. Si W =Axn +Byn
Cx2 +Dy2, demostrar que xWx + yWy = (W − 2)W .
SOLUCION.- ♣
EJEMPLO 6.31. Si W =
(x− y + z
x+ y − z
)n
, demostrar que xWx + yWy + zWz = 0.
SOLUCION.- ♣
6.1.2. Interpretacion geometrica de las derivadas parciales
Sabemos que el grafico de una funcion f : R2 → R es un superficie en R
3. Si p = (x0, y0) ∈ R2, la
interseccion entre el grafico de la funcion z = f(x, y) con el plano y = y0 es una curva que es el
ξρ∫s email: [email protected] 102 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 103
grafico de la funcion g : I → R definida por
g(x) = f(x, y0),
donde I = x ∈ R : (x, y0) ∈ U. Por tanto
g′(x0) =∂f
∂x(x0, y0).
En consecuencia, la derivada parcial de la funcion f respecto de la variable x, en el punto (x0, y0)representa la pendiente de la tangente a la curva g(x) = f(x, y0) en el punto (x0, y0) relativo alplano (x, y), en otras palabras, es la inclinacion de la superficie z = f(x, y) en la direccion del ejex.
Analogamente, la funcion h(y) = f(x0, y) representa la curva que se obtiene de la interseccion dela superficie z = f(x, y) con el plano x = x0. La derivada parcial de la funcion f , respecto de lavariable y, en el punto (x0, y0) representa la pendiente de la tangente a la curva h(y) = f(x0, y)en el punto (x0, y0) correspondiente de la grafica, es decir, la inclinacion de la superficie en ladireccion del eje y.
En un lenguaje mas informal, diremos que los valores de ∂f∂x
y ∂f∂y
en el punto (x0, y0) representan
la pendiente de la superficie Graf(f) en el punto (x0, y0, f(x0, y0)) en las direcciones de los ejes xe y, respectivamente.
EJEMPLO 6.32. Hallar la pendiente a la superficie f(x, y) = 16 − x2 − 4y2 en el puntoP (3,−1, 3), en las direcciones de los ejes x e y.
SOLUCION.- En la direccion del eje Ox, la pendiente viene dada por
∂f
∂x(x, y) = −2x, evaluando en (3,−1) da
∂f
∂x(3,−1) = −6.
En la direccion del eje Oy, la pendiente viene dada por
∂f
∂x(x, y) = −2y, evaluando en (3,−1) da
∂f
∂x(3,−1) = 8.
El que la derivada parcial en una direccion sea positiva y en otra negativa significa que, desdeel punto p, en la direccion del eje Ox la funcion decrece, mientras que en la direccion del eje Oycrece.
6.2. La Derivada Parcial como razon de cambio
Si z = f(x, y), entonces la derivada parcial de z con respecto a x “∂f
∂x” mide la tasa de cambio
instantanea de f por cada unidad que cambia x cuando y permanece constante. Asi, las derivadasparciales pueden interpretarse como la razon de cambio instantaneo de la funcion respecto de unavariable, mientras la otra permanece fija. En particular:
ξρ∫s email: [email protected] 103 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 104
La derivada parcial de f con respecto a x en el punto (a, b) “∂f
∂x(a, b)” mide la razon de
cambio instantaneo de la funcion f cuando la variable y se conserva fija en y = b y varıa la
variable x. Esto es, f(a, b) unidades cambia varıa o incrementa en∂f
∂x(a, b) unidades por cada
unidad que cambia a cuando b se mantiene fija o permanece constante. En otras palabras,si incrementamos b en una unidad y mantenemos a constante, entonces f(a, b) incrementa
en∂f
∂x(a, b) unidades.
La derivada parcial de f con respecto a y en el punto (a, b) “∂f
∂x(a, b)” mide la razon de
cambio instantaneo de la funcion f cuando la variable x se conserva fija en x = a y varıa la
variable y. Esto es, f(a, b) unidades cambia varıa o incrementa en∂f
∂x(a, b) unidades por cada
unidad que cambia b cuando a se mantiene fija o permanece constante. En otras palabras,si incrementamos a en una unidad y mantenemos b constante, entonces f(a, b) incrementa
en∂f
∂x(a, b) unidades.
EJEMPLO 6.33. Un cilindro recto tiene 4 cm. de radio y 20 cm. de altura. Hallar la razon decambio del volumen del cilindro respecto del radio y respecto de la altura.
SOLUCION.- Tenemos que V = πr2h, luego: Para hallar la razon de cambio del volumenrespecto del radio, r, fijamos la altura, h, y derivamos con respecto a r. A continuacion evaluamosla derivada parcial para r = 4 y h = 20.
∂V
∂r= 2πrh,
evaluando en (4, 20) da
∂V
∂r(4, 20) = 2π · 4 · 20 = 160πcm3/cm de r.
Por tanto, si mantenemos fija la altura e incrementamos el radio, se produce un incremento delvolumen de 160πcm3/cm de r, esto es, V = V (4, 20) = 320π cm3 incrementa en ∂V
∂r(4, 20) = 160π
cm3 por cada cm que incrementa el radio cuando la altura esta fija en h = 20 cm.
Para hallar la razon de cambio del volumen respecto de la altura, h, fijamos el radio, r, y derivamoscon respecto a h. A continuacion evaluamos la derivada parcial para r = 4 y h = 20.
∂V
∂h= πr2,
evaluando en (4, 20) da∂V
∂h(4, 20) = π · 42 = 16πcm3/cm de h.
ξρ∫s email: [email protected] 104 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 105
Por tanto,si mantenemos fijo el radio e incrementamos la altura, se produce un incremento delvolumen de 16πcm3/cm de h, esto es, V = V (4, 20) = 320π cm3 incrementa en ∂V
∂h(4, 20) = 16π
cm3 por cada cm que incrementa la altura cuando el radio permanece constante en r = 4 cm.
EJEMPLO 6.34. Se lanza un nuevo producto al mercado. El volumen de ventas V se incre-menta como una funcion del tiempo t y depende tambien de la cantidad G gastada en la campanapublicitaria. Si, con t medido en meses y G en bolivianos.
V = 200(5 − e−0,002G
)(1 − e−t
)
Calcule∂V
∂t,∂V
∂G. Evalues estas derivadas cuando t = 1 y G = 400 e interpretelas.
SOLUCION.- Las derivadas parciales de V estan dadas por:
∂V
∂t= 200
(5 − e−0,002G
)e−t
∂V
∂G= 200
(− (−0,002)e−0,002G
)(1 − e−t
)= 0,4e−0,002G
(1 − e−t
)
Haciendo t = 1 y G = 400 obtenemos los valores:
200(5 − e−0,002(400)
)(1 − e−1
)= 531,51
∂V
∂t= 200
(5 − e−0,8
)e−1 = 335
∂V
∂G= 0,4e−0,8
(1 − e−1
)= 0,11
En lo que sigue interpretamos estos dos numeros.
La derivada parcial de V con respecto a t,∂V
∂t, mide la tasa de incremento instantanea en
el volumen de ventas V por cada unidad que incrementa el tiempo t cuando el gasto enpublicidad G permanece fijo. En particular son equivalentes:
La derivada parcial de V con respecto a t en un punto (1, 400),∂V
∂t(1, 400) = 335, mide
la tasa de incremento instantanea del volumen de ventas V (1, 400) = 531,51 por mescuando el gasto de 400 bolivianos permanece constante.
El volumen de ventas V (1, 400) = 531,51 incrementa en una tasa instantanea de∂V
∂t(1, 400) = 335 unidades por mes cuando el gasto esta fijo en 400 bolivianos.
ξρ∫s email: [email protected] 105 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 106
En el instante t = 1, cuando ya se han gastado 400 bolivianos en publicidad el volumende ventas es de V (1, 400) = 531,51 unidades. Ahora bien dentro de un mes este volumen
de ventas incrementa en∂V
∂t(1, 400) = 335 unidades.
La derivada parcial de V con respecto a G,∂V
∂G, mide la tasa de incremento instantanea
en el volumen de ventas V por cada unidad que incrementa el gasto G cuando el tiempo tpermanece fijo. En particular son equivalentes:
La derivada parcial de V con respecto a G en un punto (1, 400),∂V
∂G(1, 400) = 0,11,
mide la tasa de incremento instantanea del volumen de ventas V (1, 400) = 531,51 porcada boliviano gastado en publicidad cuando el tiempo t = 1 permanece constante.
El volumen de ventas V (1, 400) = 531,51 incrementa en una tasa instantanea de∂V
∂G(1, 400) = 0,11 unidades por cada boliviano adicional gastado cuando el tiempo
permanece fijo en t = 1.
En el instante t = 1, cuando ya se han gastado 400 bolivianos en publicidad el volumende ventas es de V (1, 400) = 531,51 unidades. Ahora bien un boliviano adicional gastado
en publicidad incrementa este volumen de ventas en∂V
∂G(1, 400) = 0,11 unidades.
6.2.1. Productividad Marginal
La produccion total del producto de una empresa depende de un gran numero de factores, loscuales la empresa a menudo tiene flexibilidad de modificar. Los dos factores mas importantes sonla cantidad de mano de obra “L” empleada por la empresa y el monto del capital “K” invertidoen edificios, maquinaria, etc. Entonces la produccion total P , es decir, el numero de unidades delproducto de la empresa producida al mes, es alguna funcion de L y K. Escribimos este hechocomo
P = f(L,K)
. Esta funcion se conoce como funcion produccion de la empresa y las variables L y K son factoresde produccion, esto es, variables que afectan el nivel de produccion. L y K a menudo son variablesindependientes en el contexto de al estrategia basica de la empresa.
La derivada parcial de P con respecto a L,∂P
∂L, se denomina la productividad marginal de
mano de obra y mide la el incremento instantaneo en la produccion P por cada unidad queincrementa la mano de obra empleada L cuando el capital invertido K se mantiene fijo.
La derivada parcial de P con respecto aK,∂P
∂K, se conoce como la productividad marginal del
capital y mide el incremento instantaneo en la produccion P por cada unidad que incrementael capital invertido K cuando la mano de obra empleada L se mantiene constante.
ξρ∫s email: [email protected] 106 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 107
EJEMPLO 6.35. La funcion de produccion de cierta empresa esta dada por
P = f(L,K) = 5L+ 2L2 + 3LK + 8K + 3K2 (6.1)
en donde L es el insumo de mano de obra medida en miles de horas-hombre por semana, K esel monto de capital invertido en miles de bolivianos por semana y P es la produccion en milesde artıculos. Determine las productividades marginales cuando L = 5 y K = 12 e interprete losresultados.
SOLUCION.- Las productividades marginales son
∂P
∂L= 5 + 4L+ 3K
∂P
∂K= 3L+ 8 + 6K
evaluando en L = 5 y K = 12 tenemos:
∂P
∂L= 5 + 4(5) + 3(12) = 61
∂P
∂K= 3(5) + 8 + 6(12) = 95
Ademas P = f(5, 12) = 5(5) + 2(5)2 + 3(5)(12) + 8(12) + 3(12)2 = 682
Interpretando la derivada parcial de P con respecto a L en el punto (5, 12),∂P
∂L= 61.
∂P
∂L(5, 12) = 61, mide el incremento instantaneo en la produccion P = f(5, 12) = 682
por cada unidad que incrementa la mano de obra empleada L cuando el capital invertidose mantiene fijo en 12000 bolivianos.
P = f(5, 12) = 682 unidades producidas al mes incrementa en∂P
∂L(5, 12) = 61 unidades
por cada unidad que incrementa la mano de obra empleada cuando el capital esta fijoen 12000 bolivianos. Por tanto, la produccion se incrementa en 6100 artıculos porsemana por cada 1000 horas-hombre adicionales de mano de obra empleada cuando Kse mantiene fija.
Si se emplean L = 5000 horas-hombre por semana y el monto invertido es de K = 12000bolivianos a la semana, entonces la produccion de f(5, 12) = 682 unidades incrementa
en∂P
∂L(5, 12) = 61 unidades por cada unidad que incrementa la mano de obra empleada
cuando el capital permanece constante.
ξρ∫s email: [email protected] 107 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 108
Interpretando la derivada parcial de P con respecto a K en el punto (5, 12),∂P
∂K= 95.
∂P
∂K(5, 12) = 95, mide el incremento instantaneo en la produccion P = f(5, 12) =
682 por cada unidad que incrementa el capital invertido K cuando la mano de obraempleada se mantiene fijo en 5000 horas-hombre.
P = f(5, 12) = 682 mil unidades producidas al mes incrementa en∂P
∂K(5, 12) = 95
mil unidades por cada unidad que incrementa el capital invertido K cuando la manode obra empleada se mantiene fijo en 5000 horas-hombre. Por tanto, la produccionse incrementa en 95000 artıculos por semana por cada 1000 bolivianos adicionales deincremento en el monto mensual del capital invertido cuando L se mantiene fijo.
Si se emplean L = 5000 horas-hombre por semana y el monto invertido es de K =12000 bolivianos a la semana, entonces la produccion de f(5, 12) = 682 mil unidades
incrementa en∂P
∂K(5, 12) = 95 mil unidades por cada unidad que incrementa el capital
cuando la mano de obra empleada permanece constante.
EJEMPLO 6.36. La funcion de produccion de cierta empresa esta dada por
P = f(L,K) = 7L+ 5K + LK − L2 − 2K2 (6.2)
en donde L es el insumo de mano de obra medida en miles de horas-hombre por semana, K esel monto de capital invertido en miles de bolivianos por semana y P es la produccion en milesde artıculos. Determine las productividades marginales cuando L = 3 y K = 10 e interprete losresultados.
SOLUCION.- Las productividades marginales son
∂P
∂L= 7 +K − 2L
∂P
∂K= 5 + L− 4K
evaluando en L = 3 y K = 10 tenemos:
∂P
∂L= 7 + 10 − 2(3) = 11
∂P
∂K= 5 + 3 − 4(10) = −32
Ademas P = f(3, 10) = 7(3) + 5(10) + (3)(10)− (3)2 − 2(10)2 = −108
Interpretando la derivada parcial de P con respecto a L en el punto (3, 10),∂P
∂L= 11.
ξρ∫s email: [email protected] 108 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 109
∂P
∂L(3, 10) = 11, mide el incremento instantaneo en la produccion P = f(3, 10) = −108
por cada unidad que incrementa la mano de obra empleada L cuando el capital invertidose mantiene fijo en K = 10 mil bolivianos.
P = f(3, 10) = −108 unidades producidas al mes incrementa en∂P
∂L(3, 10) = 11 mil
unidades por cada unidad que incrementa la mano de obra empleada cuando el capitalesta fijo en K = 10 mil bolivianos. Por tanto, la produccion se incrementa en 11mil artıculos por semana por cada 1 mil horas-hombre adicionales de mano de obraempleada cuando K se mantiene fija.
Si se emplean L = 3 mil horas-hombre por semana y el monto invertido es deK = 10 milbolivianos a la semana, entonces la produccion de f(3, 10) = −108 unidades incrementa
en∂P
∂L(3, 10) = 11 mil unidades por cada unidad que incrementa la mano de obra
empleada cuando el capital permanece constante.
Interpretando la derivada parcial de P con respecto a K en el punto (3, 10),∂P
∂K= −32.
∂P
∂K(3, 10) = −32, mide el incremento instantaneo en la produccion P = f(3, 10) =
−108 por cada unidad que incrementa el capital invertido K cuando la mano de obraempleada se mantiene fijo en L = 3 mil horas-hombre.
P = f(3, 10) = −108 mil unidades producidas al mes incrementa en∂P
∂K(3, 10) = −32
mil unidades por cada unidad que incrementa el capital invertido K cuando la mano deobra empleada se mantiene fijo en L = 3 mil horas-hombre. Por tanto, la produccionse reduce en 32 mil artıculos por semana por cada 1 mil bolivianos adicionales deincremento en el monto mensual del capital invertido cuando L se mantiene fijo.
Si se emplean L = 3 mil horas-hombre por semana y el monto invertido es de K = 10mil bolivianos a la semana, entonces la produccion de f(3, 10) = −108 mil unidades
incrementa en∂P
∂K(3, 10) = −32 mil unidades por cada unidad que incrementa el capital
cuando la mano de obra empleada permanece constante.
EJEMPLO 6.37.P = f(L,K) = 100L0.3K0.7 (6.3)
determine las productividades marginales
SOLUCION.- Las productividades marginales son
∂P
∂L= 100(0.3)L−0.7K0.7 = 30(K/L)0.7
∂P
∂K= 100(0.7)L0.3K−0.3 = 30(L/K)0.3
ξρ∫s email: [email protected] 109 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 110
EJEMPLO 6.38. Una funcion produccion de la forma
P = f(L,K) = cLaKb (6.4)
en donde a, b y c son constantes positivas y a + b = 1, se denomina funcion de produccion
Cob-Douglas. Pruebe que con respecto a esta funcion de produccion L∂P
∂L+ K
∂P
∂K= P .
SOLUCION.- Las productividades marginales son
∂P
∂L= acLa−1Kb
∂P
∂K= bcLaKb−1
L∂P
∂L+ K
∂P
∂K= LacLa−1Kb +K bcLaKb−1 = (a+ b)cLaKb = P
EJEMPLO 6.39. P = f(L,K) se dice que es homogenea de grado n si
L∂P
∂L+ K
∂P
∂K= nP (6.5)
con n alguna constante. Determine si la funcion de produccion dada por
P = f(L,K) = 5LK + L2 − 3K2 + a(L+K)
es homogenea o no. En caso afirmativo, ¿cual es el grado de su homogeneidad?.
SOLUCION.- Las productividades marginales son
∂P
∂L= 5K + 2L+ a
∂P
∂K= 5L− 6K + a
L∂P
∂L+ K
∂P
∂K= L(5K + 2L+ a) +K(5L− 6K + a)
= 5LK + 2L2 + aL+ 5KL− 6K2 + aK
= 10LK + 2L2 − 6K2 + a(L+K)
Por tanto no es homogenea.
ξρ∫s email: [email protected] 110 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 111
6.2.2. Continuidad y derivadas parciales.
Recordemos que para n = 1, es decir, para las funciones de una variable, de la existencia de laderivada en un punto se deriva tambien que la funcion es continua en ese punto. Sin embargo, parafunciones de varias variables, la existencia de las derivadas parciales no garantiza la continuidadde una funcion.
En efecto, la existencia de fx(a, b) depende del comportamiento de la funcion solo en la direcciondel eje x, y la existencia de fy(a, b) del comportamiento de la funcion solo en la direccion del ejey, mientras que la continuidad depende del comportamiento de la funcion en todos los puntos delentorno de (a, b) en R
2. Esto significa que una funcion puede tener derivadas parciales en un puntoaunque no sea continua en dicho punto.
Tenemos pues, que cuando n ≥ 2, incluso de la existencia de todas las derivadas parciales en ciertopunto, no se deduce la continuidad en ese punto.
Por otro lado, igual que ocurre para funciones de una variable, resulta evidente que de la con-tinuidad de las funciones de n variables en un punto dado, no se deriva la existencia de susderivadas parciales en ese punto.
En consecuencia, para funciones de n variables, n ≥ 2, ni de la continuidad de esa funcion enun punto se deduce la existencia de las derivadas parciales, ni de la existencia de las derivadasparciales se deduce la continuidad en el punto.
EJEMPLO 6.40. Probar que la siguiente funcion f : R2 → R no es continua en el punto p(0, 0),
y que las dos derivadas parciales en el punto p(0, 0) existen:
f(x, y) =
xy
x2 + y2si (x, y) 6= (0, 0),
0 si (x, y) = (0, 0).
SOLUCION.-
1. Continuidad: La funcion no es continua en el punto p(0, 0), ya que no existe el lımite endicho punto. En efecto, si nos acercamos al punto mediante las rectas y = mx resulta:
lım(x,y)7→(0,0)
f(x, y) = lım(x,y)7→(0,0)
y=mx
xy
x2 + y2= lım
(x,y)7→(0,0)y=mxx→0
xmx
x2 +m2x2=
m
1 +m2.
luego el lımite no existe ya que depende del valor de m. Es decir, segun la recta por la quenos aproximemos al punto tendrıamos un valor del lımite u otro.
2. Existencia de las derivadas parciales. A pesar de que la funcion no es continua en el puntop(0, 0), las derivadas parciales en dicho punto existen. En efecto:
ξρ∫s email: [email protected] 111 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 112
∂f
∂x(0, 0) = lım
t→0
f((0, 0) + te1) − f(0, 0)
t= lım
t→0
f(t, 0) − f(0, 0)
t
= lımt→0
t · 0t2 + 02
− 0
t= lım
t→0
0
t= lım
t→00 = 0
∂f
∂y(0, 0) = lım
t→0
f((0, 0) + te2) − f(0, 0)
t= lım
t→0
f(0, t) − f(0, 0)
t
= lımt→0
0 · t02 + t2
− 0
t= lım
t→0
0
t= lım
t→00 = 0.
6.3. Derivadas parciales de ordenes superiores
Las derivadas parciales de una funcion de dos variables f(x, y), son, a su vez, funciones de dos vari-ables, fx(x, y), fy(x, y) y, por lo tanto, podemos obtener de ellas, nuevamente, sus derivadas par-ciales. Llamadas derivadas parciales de segundo orden. Ası, resultan las siguientes cuatro derivadasparciales de segundo orden:
∂
∂x
(∂f
∂x
),
∂
∂y
(∂f
∂x
),
∂
∂x
(∂f
∂y
),
∂
∂y
(∂f
∂y
).
Notacion: Para simplificar los parentesis usaremos la siguiente notacion:
(fx)x = fxx =∂
∂x
(∂f
∂x
)=
∂2f
∂x2
(fx)y = fxy =∂
∂y
(∂f
∂x
)=
∂2f
∂y∂x
(fy)x = fyx =∂
∂x
(∂f
∂y
)=
∂2f
∂x∂y
(fy)y = fyy =∂
∂y
(∂f
∂y
)=
∂2f
∂y2
Para evitar confusion con el orden de derivacion, utilizaremos el siguiente criterio: se empiezaderivando por la variable mas cercana a la funcion. Ası, derivar primero con respecto a x y acontinuacion con respecto a y, se escribira con cualquiera de las expresiones:
fxy =∂2f
∂y∂x
ξρ∫s email: [email protected] 112 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 113
mientras que derivar primero con respecto a y y a continuacion con respecto a x, se escribira concualquiera de las expresiones:
fyx =∂2f
∂x∂y
++++++++++++Pg 224 Salvador
TEOREMA 6.1 (Teorema de Schwarz). Sea f : U → R una funcion real definida en un
abierto U ⊂ Rn. Si para todo 1 ≤ i, j ≤ n las derivadas parciales
∂2f
∂xixj: U → R existen y son
continuas en U , entonces∂2f
∂xj∂xi
=∂2f
∂xi∂xj
.
Demostracion.
EJEMPLO 6.41. Calcular las derivadas parciales de segundo orden para las siguientes funciones,verificando la igualdad de las derivadas parciales mixtas para aquellas funciones de clase C2. (a)
f(x, y) = x3y + exy2. (b) f(x, y, z) = ezy +
ey
x+ xy sen z. (c) f(x, y) = x2ey/x + y2
SOLUCION.- ♣
EJEMPLO 6.42. Hallar las derivadas parciales de primer orden y de segundo orden de la funcionf(x, y) = x2yex2+y2
. ¿Esta funcion verifica el Teorema de Schwarz?.
SOLUCION.- ♣
EJEMPLO 6.43. Calcular las derivadas parciales de primer orden y de orden dos de la funcionf(x, y) = ex sen y
SOLUCION.- Sea z = ex sen y
Empezamos calculando las derivadas parciales de primer orden:
zx = ex sen y, zy = ex cos y
Seguidamente calculamos las de orden dos:
zxx = ex sen y
zyy = −ex sen y
zyx = zxy = ex cos y
♣
ξρ∫s email: [email protected] 113 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 114
EJEMPLO 6.44. Dada z = 3(e−y − ey) · sen x halle una expresion reducida de zxx + zyy
SOLUCION.- Empezamos calculando las derivadas parciales de primer orden:
zx = 3(e−y − ey) · cosx, zy = 3(−e−y − ey) · sen x
Seguidamente calculamos las de orden dos:
zxx = −3(e−y − ey) · sen xzyy = 3(e−y − ey) · sen x
Por tanto zxx + zyy = 0.
♣
EJEMPLO 6.45. Mostrar que la funcion f(x, y) = 2(ex − e−x) cos y satisface la ecuacion deLaplace fxx + fyy = 0.
SOLUCION.- ♣
EJEMPLO 6.46. Demuestre que la funcion z = 12(ey−e−y) sen x satisface la ecuacion de Laplace
∂2z
∂x2+∂2z
∂y2= 0.
SOLUCION.- La ecuacion de Laplace de una funcion z es
∂2z
∂x2+∂2z
∂y2= 0.
Empecemos calculado∂z
∂x=
1
2(ey − e−y) cosx
De aquı obtenemos∂2z
∂x2= −1
2(ey − e−y) sen x
Por otra parte∂z
∂y=
1
2(ey + e−y) sen x
de donde se sigue que∂2z
∂y2=
1
2(ey − e−y) sen x.
Finalmente∂2z
∂x2+∂2z
∂y2= −1
2(ey − e−y) sen x+
1
2(ey − e−y) sen x = 0.
ξρ∫s email: [email protected] 114 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 115
EJEMPLO 6.47. Halle las cuatro derivadas parciales de segundo orden. z = ln(x−y) y muestreque las derivadas parciales mixtas de segundo orden son iguales
SOLUCION.- Primero de todo hallemos las dos derivadas parciales de primer orden.
zx =1
x− y, zy = − 1
x− y
Ahora estamos en condiciones de hallar las cuatro derivadas parciales de segundo orden.
zxx = − 1
(x− y)2, zyx =
1
(x− y)2
zxy =1
(x− y)2, zyy = − 1
(x− y)2
EJEMPLO 6.48. Halle las cuatro derivadas parciales de segundo orden. z =xy2
x− y2
SOLUCION.- Empecemos hallando las dos derivadas parciales de primer orden.
zx =y2(x− y2) − xy2
(x− y2)2, zy =
y2(x− y2) − xy2(−2y)
(x− y2)2
zx = − y4
(x− y2)2, zy =
xy2 − y4 + 2xy3
(x− y2)2
Ahora estamos en condiciones de hallar las cuatro derivadas parciales de segundo orden.
zxx = −2(x− y2)y4
(x− y2)4, zyx = −4y3(x− y2) − y4(−2y)
(x− y2)4
zxx = − 2y4
(x− y2)3, zyx = −4xy3 − 4y5 + 2y5
(x− y2)4
Dejamos al lector calcular zxy y zyy.
EJEMPLO 6.49. Halle las cuatro derivadas parciales de segundo orden. z = arc sen(y/x).
SOLUCION.- Las dos derivadas parciales de primer orden son dadas por:
zx =1√
1 − (y/x)2
(− y
x2
), zy =
1√1 − (y/x)2
(1
x
)
ξρ∫s email: [email protected] 115 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 116
Por este camino los calculos se hacen largos, en lugar de esto, derivemos implicitamente la ecuacion
sen z =y
x
Calculando las dos derivadas parciales de primer orden.
(cos z)zx = − y
x2, (cos z)zy =
1
x
Claramente cos z =√
1 − (y/x)2. Ahora derivando primero respecto de x la primera ecuaciontenemos:
(− sen z)zx + (cos z)zxx = 2y
x3
de donde
zxx =2 y
x3 + (sen z)zx
cos z=
2 yx3 +
(yx
)1√
1−(y/x)2
(− y
x2
)
√1 − (y/x)2
Dejamos al lector calcular zyx, zxy y zyy.
EJEMPLO 6.50. Demuestre que la funcion z =x2
x2 + y2satisface la ecuacion de Laplace.
SOLUCION.- Se procede como en el problema anterior. ♣
EJEMPLO 6.51. Halle una expresion simplificada de x fx(x, y)+y fy(x, y) donde f(x, y) = ey/x.
SOLUCION.- Puesto que fx(x, y) = eyx
(− y
x2
), por otro lado fy(x, y) = e
yx
(1
x
).
Luego
x fx(x, y) + y fy(x, y) = x ey
x
(− y
x2
)+ y e
y
x
(1
x
)= −e y
x
(yx
)+ e
y
x
(yx
)= 0.
♣
EJEMPLO 6.52. Dada z =y
x2 + y2, halle una expresion reducida de
∂2z
∂x2+∂2z
∂y2.
SOLUCION.- Empezamos calculando las derivadas parciales de primer orden:
zx =2x
(x2 + y2
)2 zy =2y
(x2 + y2
)2
ξρ∫s email: [email protected] 116 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 117
Seguidamente calculamos las derivadas parciales mixtas de segundo orden:
zxx =2(x2 + y2
)2 − 2x2(x2 + y2
)2x
(x2 + y2
)4 =2(x2 + y2
)[x2 + y2 − 4x2]
(x2 + y2
)4 =2[y2 − 3x2](x2 + y2
)3
zyy =2(x2 + y2
)2 − 2y2(x2 + y2
)2y
(x2 + y2
)4 =2(x2 + y2
)[x2 + y2 − 4y2]
(x2 + y2
)4 =2[x2 − 3y2](x2 + y2
)3
Por tanto
zxx + zyy =2[y2 − 3x2](x2 + y2
)3 +2[x2 − 3y2](x2 + y2
)3 =2[y2 − 3x2 + x2 − 3y2]
(x2 + y2
)3
=2[−2x2 − 2y2](x2 + y2
)3 =−4[x2 + y2](x2 + y2
)3 =−4
(x2 + y2
)2 .♣
EJEMPLO 6.53. Dada z = ex sen y + ey cosx, halle una expresion reducida de∂2z
∂x2+∂2z
∂y2.
SOLUCION.- Empezamos calculando las derivadas parciales de primer orden:
zx = ex sen y − ey sen x, zy = ex cos y + ey cosx
Seguidamente calculamos las derivadas parciales mixtas de segundo orden:
zxx = ex sen y − ey cosx
zyy = −ex sen y + ey cosx
Por tantozxx + zyy = ex sen y − ey cosx− ex sen y + ey cos x = 0 ♣
EJEMPLO 6.54. Dada z = ey sen x+ ex cos y, halle una expresion reducida de∂2z
∂x2+∂2z
∂y2.
SOLUCION.- ♣
EJEMPLO 6.55. Mostrar que la funcion f(x, y) = 2(ex − e−x) cos y satisface la ecuacion defxx + fyy = 0.
SOLUCION.- Sea z = 2(ex−e−x) cos y. Empezamos calculando las derivadas parciales de primerorden:
ξρ∫s email: [email protected] 117 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 118
zx = 2(ex + e−x) cos y, zy = −2(ex − e−x) sen y
Seguidamente calculamos las derivadas parciales mixtas de segundo orden:
zxx = 2(ex − e−x) cos y = 2ex cos y − 2e−x cos y
zyy = −2(ex − e−x) cos y = −2ex cos y + 2e−x cos y
Por tantozxx + zyy = 2ex cos y − 2e−x cos y − 2ex cos y + 2e−x cos y = 0 ♣
EJEMPLO 6.56. Dada z = ln(x+ 2y), halle una expresion reducida de zyy − 4zxx = 0.
SOLUCION.- Empezamos calculando las derivadas parciales de primer orden:
zx =1
x+ 2y, zy =
2
x+ 2y
Seguidamente calculamos las derivadas parciales mixtas de segundo orden:
zxx =1
(x+ 2y)2zyy =
4
(x+ 2y)2
Por tanto
zyy − 4zxx =4
(x+ 2y)2− 4
1
(x+ 2y)2= 0
♣
EJEMPLO 6.57. Si u = ea1x1+a2x2+···+anxn, donde a21 + a2
2 + · · ·+ a2n = 1, demuestre que:
∂2u
∂x1∂x1+
∂2u
∂x2∂x2+ · · ·+ ∂2u
∂xn∂xn= u
SOLUCION.- Tomemos i = 1, 2, 3, ..., n.∂u
∂xi= aie
a1x1+a2x2+···+anxn, de donde∂2u
∂x1∂x1=
a2i e
a1x1+a2x2+···+anxn, por tanto
n∑
j=0
∂2u
∂xj∂xj=
n∑
j=0
a2i e
a1x1+a2x2+···+anxn = u
♣EJEMPLO 6.58. Demostrar que la funcion u(x, y) = f(x, y) +
√xyg
(yx
)satisface la ecuacion
x2∂2u
∂x2− y2∂
2u
∂y2= 0.
ξρ∫s email: [email protected] 118 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 119
SOLUCION.- ♣
EJEMPLO 6.59. Verificar la ecuacion de Laplace∂2f
∂x2+∂2f
∂y2+∂2f
∂z2= 0 cuando:
(1) f(x, y, z) = x2 + y2 − 2z2 (2) f(x, y, z) = ln(x2 + y2 + z2)
(3) f(x, y, z) =1√
x2 + y2 + z2(4) f(x, y, z) = (x2 + y2 + z2)1/2
SOLUCION.- ♣
EJEMPLO 6.60. Una funcion f(x, y) se dice homogenea de grado n si f(λx, λy) = λnf(x, y).Sea f(x, y) homogenea de grado 2, demostrar que
x2 ∂2f
∂x2+ 2xy
∂2f
∂x∂y+ y2 ∂
2f
∂y2= 2f.
Ilustre esto mediante el caso particular f(x, y) = x2 ln(yx
).
SOLUCION.- ♣
6.4. Derivadas direccionales
Las derivadas parciales fx(x, y) y fy(x, y), representan, respectivamente, la pendiente de la super-ficie z = f(x, y) en las direcciones del eje OX y del eje OY . Para hallar la pendiente en cualquierotra direccion se utilizan las derivadas direccionales. Es decir, las derivadas parciales nos dan unamedida de la variacion de una funcion solamente en la direccion de cada eje coordenado. Es nat-ural buscar un concepto mas general de derivada a fin de que nuestras consideraciones no quedenrestringidas a las direcciones particulares de los ejes coordenados y nos permita estudiar la razonde incrementos en una direccion cualquiera. La derivada direccional responde a este proposito.
Queremos estudiar la variacion de la funcion f en el punto p cuando el argumento varıa en ladireccion marcada por el vector v. Para ello partimos de la idea del concepto de derivada defunciones de una variable: el lımite cuando el incremento de la variable tiende a cero, del cocientedel incremento de la funcion dividido entre el incremento de la variable.
DEFINICION 6.2. Sea f : U → R una funcion definida en un conjunto abierto U de Rn, y sea
p ∈ U y v ∈ Rn. La derivada direccional de f en el punto p en la direccion del vector v, es el
siguiente lımite, si existe y es finito:
∂f
∂v(p) = lım
t→0
f(p+ tv) − f(p)
t.
ξρ∫s email: [email protected] 119 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 120
Figura 6.1: Derivada direccional.
Desde el punto de vista grafico, el problema se ha reducido a dos dimensiones mediante la inter-seccion de la superficie con el plano vertical que pasa por el punto p y es paralelo al vector v.Este plano corta a la superficie mediante una curva C, y definimos la pendiente de la superficieen (x0, y0, z0) como la pendiente de la curva C en ese punto.
Observaciones.
La derivada direccional de f en el punto p el la direccion del vector v,∂f
∂v(p) es la pendiente
de la recta tangente a la superficie Graf(f) que pasa por el punto (p, f(p)) tiene vectordireccion igual a v.
El concepto de derivada direccional generaliza el concepto de derivada parcial, de maneraque las derivadas parciales pueden obtenerse como casos particulares de las derivadas direc-cionales. Ası, fx es la derivada direccional en la direccion del vector (1, 0) y fy en la direcciondel vector (0, 1), es decir:
∂f
∂ei(p) =
∂f
∂xi(p), i = 1, 2
Puede existir la derivada direccional de una funcion, en un punto, con respecto a un vector, y
ξρ∫s email: [email protected] 120 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 121
sin embargo, puede suceder que no exista la derivada direccional con respecto a otro vector.
Para el camino λ : (ε, ε) → Rn dado por λ(t) = p + tv, se tiene que λ(0) = p y λ′(0) = v,
ademas∂f
∂v(p) = (f λ)′(0).
Si α ∈ R, entonces∂f
∂αv(p) = α
∂f
∂v(p).
EJEMPLO 6.61. No necesariamente vale ∂f∂(v+w)
(p) = ∂f∂v
(p) + ∂f∂w
(p).
SOLUCION.- ♣
EJEMPLO 6.62. Hallar la derivada direccional de f(x, y) = x2 + 3xy2 en el punto p(1, 2), enla direccion que apunta hacia el origen.
SOLUCION.- Hallamos el vector director y comprobamos su modulo.
v = −→po = o− p = (0, 0) − (1, 2) = (−1,−2). ||v|| =√
1 + 4 =√
5.
luego,
u =v
||v|| =(−1√
5,−2√
5
)
p+ tu = (1, 2) + t(−1√
5,−2√
5
)=(1 − t√
5, 2 − 2t√
5
)
de donde,f(p) = f(1, 2) = 12 + 3 · 1 · 22 = 1 + 12 = 13
f(p+ tu) = f(1 − t√
5, 2 − 2t√
5
)=(1 − t√
5
)2
+ 3(1 − t√
5
)(2 − 2t√
5
)2
= 1 − 2t√5
+ t2
5+ 3(1 − t√
5
)(4 − 8t√
5+ 4t2
5
)
= 1 − 2t√5
+ t2
5+ 12 − 24t√
5+ 12t2
5− 12t√
5+ 24t2
5− 12t3
5√
5
= 13 − 38t√5
+ 37t2
5− 12t3
5√
5
con lo que resulta,
∂f
∂v(p) = lım
t→0
f(p+ tu) − f(p)
t= lım
t→0
13 − 38t√5
+ 37t2
5− 12t3
5√
5− 13
t
= lımt→0
(− 38√
5+
37t
5− 12t2
5√
5
)= − 38√
5
ξρ∫s email: [email protected] 121 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 122
El que la derivada direccional sea negativa significa que la funcion decrece en esa direccion. ♣
EJEMPLO 6.63. Calcular la derivada direccional de la funcion f(x, y) = 3x2 + y en el punto(0, 0) y en la direccion del vector (1, 1).
SOLUCION.- Vamos a obtener la derivada direccional. Por definicion
∂f
∂v(p) = lım
t→0
f(p+ tu) − f(p)
tdonde u =
v
||v|| .
Puesto que
v = (1, 1). ||v|| =√
1 + 1 =√
2.
luego,
u =v
||v|| =( 1√
2,
1√2
)
p+ tu = (0, 0) + t( 1√
2,
1√2
)=( t√
2,t√2
)
de donde,f(p) = f(0, 0) = 3 · 02 + 0 = 0
y
f(p+ tu) = f(
t√2, t√
2
)= 3(
t√2
)2
+ t√2
= 3t2
2+ t√
2
con lo que resulta,
∂f
∂v(p) = lım
t→0
f(p+ tu) − f(p)
t= lım
t→0
3t2
2+ t√
2
t
= lımt→0
(3t
2+
1√2
)=
1√2
Obtenemos como resultado final que la derivada direccional de la funcion f(x, y) = 3x2 + y en elpunto (0, 0) y en la direccion del vector (1, 1) es 1√
2. ♣
EJEMPLO 6.64. Calcule la derivada direccional de f(x, y) = 4− x2 − y2 en el punto p(1, 1) en
la direccion del vector u =(
1√2, 1√
2
)
ξρ∫s email: [email protected] 122 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 123
SOLUCION.- Usando la definicion tenemos que:
∂f
∂u(p) = lım
t→0
f(p+ tu) − f(p)
t= lım
t→0
f(1 + t√
2, 1 + t√
2
)− f(1, 1)
t
= lımt→0
4 −(1 + t√
2
)2
−(1 + t√
2
)2
− 2
t= lım
t→0
2 − 2(1 + t√
2
)2
t
usando la regla de Hospital:
∂f
∂u(p) = lım
t→0
−4(1 + t√
2
)1√2
1= − 4√
2= −2
√2,
esto nos dice que la razon de cambio de x en el punto p(1, 1) en la direccion del vector u es −2√
2,es decir que z es esta direccion esta decreciendo. Lo mismo se muestra en la figura de abajo.
♣
EJEMPLO 6.65. Hallar la derivada direccional de f(x, y, z) = xyz; en el punto P (1, 0,−1) enla direccion del vector v = i+ j + k
SOLUCION.- Buscamos el vector unitario de direccion y el punto.
v = (1, 1, 1), entonces ||v|| =√
3,
entonces el vector unitario en direccion de v es:
u =( 1√
3,
1√3,
1√3
)
ahora hallamos las derivadas parciales en el punto (1, 0,−1)
ξρ∫s email: [email protected] 123 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 124
Como ∂f∂x
, ∂f∂y
y ∂f∂z
son continuas, f es diferenciable y se puede aplicar la formula
∂f
∂u(p) =
∂f
∂y(p)u1 +
∂f
∂x(p)u2 +
∂f
∂z(p)u2.
Ası, reemplazando x = 1, y = 0, z = −1 en la siguiente ecuacion tenemos:
∂f
∂u(p) = yz
1√3
+ xz1√3
+ yz1√3
= − 1√3.
♣
EJEMPLO 6.66. Calcule la derivada direccional de f(x, y) = x3 − 3xy+ 4y2 en la direccion delvector unitario u dado por θ = π
6en el punto P (1, 2)
SOLUCION.- Primero encontremos el vector unitario
u = (cos 30o, sen 30o) =(1
2,
√3
2
)
por otro lado las derivadas parciales:
fx(x, y) = 3x2 − 3y fy(x, y) = −3x+ 8y;
de esta manera se obtiene que;
∂f
∂u(p) =
∂f
∂y(p)u1 +
∂f
∂x(p)u2 = (3x2 − 3y)
1
2+ (−3x+ 8y)
√3
2.
evaluando en el punto (1, 2):
∂f
∂u(1, 2) = (3 · 12 − 3 · 2)
1
2+ (−3 · 1 + 8 · 2)
√3
2=
1
2(−3 + 13
√3). ♣
EJEMPLO 6.67. Calcule la derivada direccional de f(x, y) = 3x2 − 2y2 en el punto (−1, 3) enla direccion que va desde P (−1, 3) hasta Q(1,−2)
SOLUCION.- Primero encontremos el vector que va de P a Q:
−→PQ = v = (1 + 1)i+ (−2 − 3)j = 2i− 5j = (2,−5)
y ahora un vector unitario en esta direccion es;
u =v
||v|| =( 2√
29,− 5√
29
)
por otro lado las derivadas parciales:
ξρ∫s email: [email protected] 124 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 125
fx(x, y) = 6x fy(x, y) = −4y;
de esta manera se obtiene que;
∂f
∂u(p) =
∂f
∂y(p)u1 +
∂f
∂x(p)u2 = (6x)
2√29
+ (−4y)(− 5√
29
).
evaluando en el punto (−1, 3):
∂f
∂u(−1, 3) = 6 · (−1)
2√29
− 4 · 3(− 5√
29
)=
−12√29
+60√29
=48√29.
EJEMPLO 6.68. Calcule la derivada direccional de f(x, y, z) = x sen(yz) en la direccion delvector v = i+ 2j − k en el punto P (1, 3, 0).
SOLUCION.- ♣
6.4.1. Continuidad y derivadas direccionales.
La existencia de todas las derivadas direccionales de una funcion en un punto no garantiza lacontinuidad de la funcion en dicho punto, ya que el calculo de las derivadas direccionales equivalea acercarse al punto solo mediante rectas.
EJEMPLO 6.69. Probar que la siguiente funcion f : R2 → R no es continua en el punto p(0, 0),
y que las derivadas direccionales en dicho punto existen en todas direcciones.
f(x, y) =
x2y
x4 + y2si (x, y) 6= (0, 0),
0 si (x, y) = (0, 0).
SOLUCION.- ♣
1. Continuidad: La funcion no es continua en el punto p(0, 0), ya que no existe el lımite endicho punto. En efecto, si nos acercamos al punto mediante las parabolas y = ax2 resulta:
lım(x,y)7→(0,0)
f(x, y) = lım(x,y)7→(0,0)
x2y
x4 + y2= lım
(x,y)7→(0,0)y=ax2
x→0
x2ax2
x4 + a2x4=
a
1 + a2.
luego el lımite no existe ya que depende del valor de a. Es decir, segun la parabola por laque nos aproximemos al punto tendrıamos un valor del lımite u otro.
ξρ∫s email: [email protected] 125 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 126
2. Existencia de las derivadas direccionales. A pesar de que la funcion no es continua en elpunto p(0, 0), las derivadas direccionales en dicho punto existen en todas direcciones. Enefecto, sea (a, b) ∈ R
2 un vector unitario dado. Supongamos que a 6= 0, luego:
∂f
∂(a, b)(0, 0) = lım
t→0
f((0, 0) + t(a, b)) − f(0, 0)
t= lım
t→0
f(ta, tb) − f(0, 0)
t
= lımt→0
(ta)2(tb)
(ta)4 + (tb)2
t= lım
t→0
t3a2b
t2(t2a4 + b2)
t
= lımt→0
t3a2b
t3(t2a4 + b2)= lım
t→0
a2b
t2a4 + b2
Por tanto, si b = 0, se tiene que
∂f
∂(a, b)(0, 0) = lım
t→0
a2 · 0t2a4 + 02
= 0.
Pero, si b 6= 0, obtenemos
∂f
∂(a, b)(0, 0) = lım
t→0
a2b
t2a4 + b2=
a2
b.
6.5. Funciones Diferenciables
DEFINICION 6.3. Sea f : U → R una funcion definida en un conjunto abierto U de Rn, y
sea p ∈ U . Diremos que la funcion f es diferenciable en el punto p cuando existen las derivadas
parciales∂f
∂x1
(p),...,∂f
∂xn
(p) y ademas para todo vector v = (v1, ..., vn) tal que p+ v ∈ U se tiene
f(p+ v) = f(p) +
n∑
i=1
∂f
∂xi(p)vi + r(v), donde lım
v→0
r(v)
||v|| = 0. (6.6)
Observemos que (6.6) puede ser reemplazado por
f(p+ v) = f(p) +
n∑
i=1
∂f
∂xi(p)vi + ρ(v)||v||, donde lım
v→0ρ(v) = 0.
donde la funcion ρ : Ua → R es una funcion tales que ρ(0) = 0 y es continua en v = 0.
LEMA 6.1. Si una funcion f : U → R es diferenciable en p entonces:
f es continua en p.
ξρ∫s email: [email protected] 126 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 127
f posee derivadas parciales en p.
f admite derivada direccional en p en la direccion de cualquier vector v = (v1, ..., vn) y valela formula
∂f
∂v(p) =
n∑
i=1
∂f
∂xi(p)vi.
∂f
∂αv(p) = α
∂f
∂v(p) y
∂f
∂(v + w)(p) =
∂f
∂v(p) +
∂f
∂w(p)
Demostracion.
DEFINICION 6.4. Sea f : U → R una funcion real definida en un conjunto abierto U de Rn.
1. f es de clase C0, si f es continua.
2. f es de clase C1 cuando existen en cada punto x ∈ U las derivadas parciales∂f
∂x1
(p),...,∂f
∂xn
(p)
y las n funciones∂f
∂xi
: U → R ası definidas son continuas.
3. f es de clase Ck cuando posee derivadas parciales en todos los puntos de U y las funciones∂f
∂xi: U → R son de clase Ck−1. Aquı k es un entero positivo.
4. f es de clase C∞ si f es de clase Ck para todo k ≥ 0.
Usaremos la notacion f ∈ Ck(U,R) para decir que f : U → R es una funcion de clase Ck.
LEMA 6.2. C∞(U,R) ⊂ · · ·Ck(U,R) ⊂ · · ·C1(U,R) ⊂ · · ·C0(U,R)
Demostracion.
TEOREMA 6.2. Toda funcion de clase C1 es diferenciable.
Demostracion.
LEMA 6.3. Todo polinomio es de clase C1.
1. Segun la definicion, hallar la derivada de las siguientes funciones f(x, y) = 3y − xy + 3,f(x, y) = (3x− 2y, 4x+ 3y).
2. Usando la formula f ′(x)h = lımt→0
f(x+ th) − f(x)
ty admitiendo las derivadas en cuestion,
calcule:
ξρ∫s email: [email protected] 127 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 128
a) f ′(z)h donde f : R2 → R
2 es definida por f(x, y) = (x2 + y, x + y2), z = (4,−1) yh = (1, 2).
b) ϕ ′(x)v donde x, v ∈ Rm son vectores arbitrarios y ϕ : R
m → R es definida por ϕ(x) =f(x)g(x), siendo f, g : R
m → R funciones lineales.
c) ψ ′(x)h donde h ∈ Rm es un vector unitario y ψ : U → R es definida en el abierto U ⊂
Rm del modo siguiente: son dadas f, g : U → R
p diferenciables y ψ(x) = 〈f(x), g(x)〉,para todo x ∈ U , es el producto interno de los vectores f(x) y g(x).
3. El ejercicio anterior muestra que, si existieran las derivadas f ′(x), ϕ′(x) y ψ′(x) ellas debentener las formas allı obtenidas. Pruebe ahora que las tres derivadas existen.
4. Sea Mn(R) el espacio de matrices n × n. (Se cree conveniente, identificar Mn(R) con Rn2
).Defina f : Mn(R) → Mn(R) poniendo f(X) = X3 para cada matriz X. Muestre que f esdiferenciable en todos los puntos de Mn(R).
5. Una transformacion lineal T : Rm → R
n es diferenciable en cada punto x ∈ Rm y T ′(x) = T .
6. El conjunto GLn(R) ⊂ L(Rn), de las transformaciones lineales invertibles T : Rn → R
n
es abierto. En efecto, T ∈ GLn(R) si y solamente si det(T ) 6= 0, y det : L(Rn) → R
es una funcion continua. Considere la aplicacion inversion f : GLn(R) → L(Rn), definidapor f(X) = X−1. La expresion clasica de X−1 en terminos de determinantes (metodo deCramer) muestra que f es continua. Afirmamos que f es diferenciable en cada X ∈ GLn(R)y que su derivada f ′(X) : L(Rn) → L(Rn) es la transformacion lienal dada por f ′(X)(H) =−X−1HX−1.
6.6. La diferencial (total) de una funcion
Sea U ⊂ Rn un abierto.
xi : Rn → Rp 7→ xi(p) = pi.
esta aplicacion es diferenciable. En efecto. Sea v = (v1, ..., vn) ∈ Rn, se tiene
xi(p+ v) = xi(p) +n∑
j=1
∂xi
∂xj
(p)vj + ri(v), donde lımv→0
ri(v)
||v|| = 0. (6.7)
Observemos que
∂xi
∂xj(p) =
1, si i = j
0 si i 6= j.
Por tanton∑
j=1
∂xi
∂xj
(p)vj = vi.
ξρ∫s email: [email protected] 128 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 129
De ahı que ri(v) = 0, verifica la ecuacion (6.7).
Ahora definamos la funcional lineal
dxi(p) : Rn → R
v 7→ dxi(p)(v) = vi.
DEFINICION 6.5. Sea f : U → R una funcion real definida en un abierto U ⊂ Rn, diferenciable
en un punto p ∈ U . La diferencial de f en el punto p es la funcional lineal df(p) : Rn → R cuyo
valor en v = (v1, ..., vn) ∈ Rn es dado por
df(p)(v) =∂f
∂v(p) =
n∑
i=1
∂f
∂xi
(p)vi.
Observemos que
df(p)(v) =n∑
i=1
∂f
∂xi
(p)dxi(p)(v)
de donde
df(p) =n∑
i=1
∂f
∂xi
(p)dxi(p)
luego podemos escribir
df =n∑
i=1
∂f
∂xi
dxi (6.8)
TEOREMA 6.3. Sean f, g : U → R dos funciones diferenciables en un punto p ∈ U ⊂ Rn.
Entonces
1. f + g : U → R es diferenciable y d(f + g) = df + dg.
2. fg : U → R es diferenciable y d(fg) = fdg + gdf .
3. Si g(x) 6= 0 para todo x ∈ U , entonces f/g : U → R es diferenciable y d(f/g) = (gdf +fdg)/g2.
Demostracion.
TEOREMA 6.4 (Teorema del Valor Medio). Sea f : U → R una funcion diferenciable enun abierto U ⊂ R
n y sean p ∈ U y v ∈ Rn de modo que [p, p + v] ⊂ U . Entonces existe t ∈ (0, 1)
tal quef(p+ v) − f(p) = df(p+ tv)(v).
Demostracion. Ver pg 123 y 124 Lima.
ξρ∫s email: [email protected] 129 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 130
COROLARIO 6.1. Sea U ⊂ Rn abierto y conexo. Si f : U → R una funcion diferenciable en U
y df(x) = 0 para todo x ∈ U entonces f es constante.
Demostracion. Sea p ∈ U , probaremos que f(q) = f(p) para todo q ∈ U . Existe v ∈ Rn de modo
que q = p + v.
Si una funcion es diferenciable en un punto p podemos, usando la definicion de diferenciabilidad,tomar ∆x suficientemente pequeno para obtener aproximaciones de las variaciones de f a partirde p mediante la diferencial total.
Sean∆z = f(p+ ∆x) − f(p)
y
dz =
n∑
i=1
∂f
∂xi(p)dxi(p)
Entonces desde (6.6)
∆z ≈ dz (6.9)
Por tanto, la diferencial total mide el cambio de la variable dependiente que se debe a un cambiopequeno de cada una de las variables independientes.
Una diferencial parcial mide el cambio de la variable dependiente de una funcion de varias variablescomo resultado de una cambio pequeno de una de las variables independientes suponiendo que lasotras variables independientes permanecen constantes. Por ejemplo si la variable xi es constantesentonces la diferencial parcial es:
∂z =n∑
j=1j 6=i
∂f
∂xj
(p)dxj (6.10)
EJEMPLO 6.70. Hallar el diferencial total de z = 2x sen y − 3x2y2.
SOLUCION.- El diferencial total de z = 2x sen y − 3x2y2 es
dz =∂z
∂xdx +
∂z
∂ydy = (2 sen y − 6xy2)dx+ (2x cos y − 6x2y)dy
EJEMPLO 6.71. Hallar el diferencial total de w = x2 + y2 + z2.
SOLUCION.- El diferencial total de w = x2 + y2 + z2 es
dw =∂w
∂xdx +
∂w
∂ydy +
∂w
∂zdz = 2xdx+ 2ydy + 2zdz.
EJEMPLO 6.72. Hallar las diferenciales totales de
ξρ∫s email: [email protected] 130 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 131
(1) z = 2x sen y − 3x2y2 (2) w = x2 + y2 + z2
(3) f(x, y) = ln(y +√x2 + y2) (4) f(x, y, z) = (xy)z
(5) f(x, y) = 2x3 − 4xy2 + 3y2 (6) f(x, y) = ln(x2 + y2 + z2)1/2
(7) f(x, y, z) = log(x2 + y2z − xz2) (8) f(x, y, z) =sen y
log(xyz)
SOLUCION.- ♣
EJEMPLO 6.73. Hallar df(2,−1, 3) si f(x, y, z) = x2−2y2+z2−xz siendo dx = 0,01, dy = 0,02,dz = 0,03.
SOLUCION.- ♣
EJEMPLO 6.74. El error producido al medir cada una de las dimensiones de una caja rectan-gular es ±0,1 milımetros. Las dimensiones de la caja son x = 50 centımetros, y = 20 centımetrosy z = 15 centımetros. Utilice dV para calcular el error propagado y el error relativo en el volumencalculado de la caja.
SOLUCION.- El volumen de la caja viene dado por V = xyz:
dV =∂V
∂xdx +
∂V
∂ydy +
∂V
∂zdz = yzdx+ xzdy + xydz.
Utilizando 0,1 milımetros = 0,01 centımetros, se tiene
dx = dy = dz = ±0,01
y el error propagado es aproximadamente igual a:
dV = (20)(15)(±0,01) + (50)(15)(±0,01) + (50)(20)(±0,01)
= 300(±0,01) + 750(±0,01) + 1000(±0,01) = 2050(±0,01) = ±20,5
centımetros cubicos.
Como el Volumen medido es: V = (50)(20)(15) = 15000 centimetros cubicos, el error relativo ∆VV
es aproximadamente:
∆V
V=dV
V=
20,5
15000≈ 0,14 %
♣
ξρ∫s email: [email protected] 131 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 132
EJEMPLO 6.75. El radio de la base y la altura de un cono circular recto miden 10 cm. y25 cm., respectivamente, con un posible error en la medicion de 0.1 cm., cuando mucho. Utilicediferenciales para estimar el error maximo en el volumen del cono.
SOLUCION.- El volumen de un cono es V = 13πr2h, con lo cual la diferencial total es:
dV =∂V
∂rdr +
∂V
∂hdh =
2
3πrh dr +
1
3πr2 dh
Puesto que los errores son, cuando mucho, del orden de 0.1 cm., tenemos que |∆x| ≤ 0,1 y|∆y| ≤ 0,1. Para estimar el maximo error en el volumen, tomamos el maximo error en las medidasde r y H . Por tanto, dr = 0,1 y dh = 0,1, junto con r = 10, h = 25,
dV =2
3π(10)(25) (0,1) +
1
3π(10)2 (0, 1) =
500π
3(0,1) +
100π
3(0,1) = 20π.
De esta forma el maximo error en el volumen es de aproximadamente 20π cm≈ 63 cm. Para queuna funcion de varias variables sea derivable en un punto (a, b) no basta con que las derivadasparciales existan, esto nos dice que la derivabilidad de una funcion de varias variables es mascompleja que la de una variable.
EJEMPLO 6.76. Dada la funcion z = f(x, y) =√
4 − x2 − y2, usar la diferencial total de zpara calcular el valor aproximado de f(1.01, 0.97).
SOLUCION.- En primer lugar buscamos un punto proximo a (1,01, 0,97) donde sea facil evaluarla funcion y sus derivadas parciales; en nuestro caso, tomaremos el punto (x0, y0) = (1, 1).
Las derivadas parciales de f,∂f
∂x= − x√
4 − x2 − y2
y∂f
∂y= − y√
4 − x2 − y2,
son continuas en (1, 1) y por tanto f es diferenciable en dicho punto, lo que nos garantiza que
∆z = f(1 + ∆x, 1 + ∆y) − f(1, 1) ≈ ∂f
∂x(1, 1) dx +
∂f
∂y(1, 1) dy
siendo ∆x = 1.01 − 1 = 0.01 y ∆y = 0.97 − 1 = −0.03. Luego
f(1.01, 0.97) − f(1, 1) ≈ − 1√2
(0.01) − 1√2
(−0.03)
de donde
f(1.01, 0.97) ≈√
2 −√
2
2(0.01) −
√2
2(−0.03)
ξρ∫s email: [email protected] 132 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 133
f(1.01, 0.97) ≈√
2
[1 − 0.01
2+
0.03
2
]=
√2(0.01) ≈ 1.4283
EJEMPLO 6.77. Utilizar el diferencial dz para aproximar el cambio en z =√
4 − x2 − y2
cuando (x, y) se desplaza del punto (1, 1) al punto (1.01, 0.97). Comparar esta aproximacion conel cambio exacto en z.
SOLUCION.- Ya que el punto inicial dado es (1, 1) y el incremento se da al punto (1.01, 0.97),esto quiere decir que de (x, y) a (x+ ∆x, y + ∆y) se obtiene que ∆x = 0.01, ∆y = −0.03, por lotanto el cambio en z puede aproximarse mediante:
∆z ≈ dz =∂z
∂xdx +
∂z
∂ydy =
−x√4 − x2 − y2
∆x +−y√
4 − x2 − y2∆y
cuando x = 1, e y = 1
∆z ≈ 1√2
(0.01) − 1√2
(−0.03) =0.02√
2=
√2(0.01) ≈ 0.0141
Por otro lado el cambio exacto corresponde a la diferencia entre las alturas de los dos puntos sobrela superficie de un hemisferio de la curva dada. Esta diferencia esta dada por:
∆z ≈ f(1.01,−0.97) − f(1, 1) =√
4 − (0.01)2 − (0.97)2 −√
4 − 12 − 12 ≈ 0.0137
EJEMPLO 6.78. Use diferenciales para un valor aproximado de:√
(2.01)2 + (1.98)2 + (1.05)2
SOLUCION.- Consideremos la funcion f(z, y, z) =√x2 + y2 + z2 y como punto en el que
conocemos el valor de la funcion es: f(2, 2, 1) =√
22 + 22 + 12 = 3. De la misma manera losincrementos: dx = ∆x = 0.01, dy = ∆y = −0.03, dz = ∆z = 0.05, ademas:
La diferencial de f se calcula;
dw =∂w
∂xdx +
∂w
∂ydy +
∂w
∂zdz
=x√
x2 + y2 + z2dx +
y√x2 + y2 + z2
dy +z√
x2 + y2 + z2dz
cuando (x, y, z) = (2, 2, 1), dx = ∆x = 0.01, dy = ∆y = −0.03, dz = ∆z = 0.05.
dw =2
3(0.01) − 2
3(0.03) +
1
3(0.05) =
1
3(0.01)
entonces podemos escribir que el calculo aproximado es:√
(2.01)2 + (1.98)2 + (1.05)2 = 0.0033.
ξρ∫s email: [email protected] 133 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 134
EJEMPLO 6.79. Use diferenciales para calcular un valor aproximado para√
3(1.95)3 + (5.1)2
SOLUCION.- Consideremos la funcion f(z, y) =√
3x3 + y2 y observe que podemos calcularcon facilidad f(2, 5) = 7. La diferencial de f se calcula;
df =∂f
∂xdx +
∂f
∂ydy
=3x2
√3x3 + y2
dx +y√
3x3 + y2dy
Por lo tanto, tomando x = 2 y y = 5, dx = ∆x = −0.05, dy = ∆y = 0.1,
df =3(2)2
√3(2)3 + 52
(−0.05) +5√
3(2)3 + 52(0.1)
=12
7(−0.05) +
5
7(0.1) = 6.98571
entonces podemos escribir que el calculo aproximado es:√
3(1.95)2 + (5.1)2 = 6.98571
EJEMPLO 6.80. Los costos de una empresa se relacionan con la produccion de dos artıculos xy y. La relacion funcional es C(x, y) = x2 − 0.5xy + y2
(a) Calcule el costo adicional de un incremento ligero de la produccion de x
(a) Estime los incrementos de los costos, si inicialmente son x = 100, y = 60 y ∆x = 3.
SOLUCION.-
(a) El costo adicional de una incremento ligero de la produccion de x lo da la diferencial parcial(6.10), esto es,
∂C(x, y) =∂C
∂x(x, y) dx = (2x− 0.5y) dx
(a) Los costos de los incrementos payores se puede estimar aproximadamente multiplicando laderivada parcial con respecto a x por el cambio de x, esto es,
∆C(x, y) ≈ ∂C
∂x(x, y) dx = (2x− 0.5y) ∆x
Si inicialmente son x = 100, y = 60 y ∆x = 3,
∆C(x, y) ≈ [2(100) − 0.5(60)] (3) = 510.
ξρ∫s email: [email protected] 134 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 135
EJEMPLO 6.81. Usando L unidades de mano de obra y K unidades de capital, una empresaque puede producir P = f(L,K), la empresa no conoce la forma precisa de esta produccion, perodispone de la siguiente informacion:
1. Cuando L = 40 y K = 20, P = 25000
2. Si L = 64 y K = 20, las productividades marginales de la mano de obra y del capital sonPL = 270 y PK = 350.
La empresa contempla una expansion de su planta que cambiara L a 69 y K a 24. Encuentre elincremento aproximado en la produccion que se obtendrıa.
SOLUCION.- Ya que el punto inicial dado es (40, 20) y el incremento se da al punto (69, 24),esto quiere decir que de (L,K) a (L + ∆L,K + ∆K) se obtiene que ∆L = 29, ∆K = 4, por lotanto el cambio en P puede aproximarse mediante:
∆P ≈ dP =∂P
∂LdL +
∂P
∂KdK = PL ∆L + PK ∆K
cuando L = 64 y K = 20 el incremento aproximado en la produccion es
∆P ≈ (270)(29) + (350)(4) = 9230.
Por tanto, la nueva produccion es:
P = f(69, 24) = f(40, 20) + ∆P ≈ 25000 + 9230 = 34230.
EJEMPLO 6.82. La funcion de produccion de una empresa esta dada por P (L,K) = 9L2/3K1/3,en donde P representa la produccion total cuando se emplean L unidades de mano de obra y Kunidades de capital. Aproxime la produccion total cuando L = 1003, K = 28, dL = ∆L = 5,dK = ∆K = 2.
SOLUCION.- Las productividades marginales son
∂P
∂L= 9
2
3L
23−1K
13 = 6
(K
L
) 13
= 6
(28
1003
) 13
= 1.82
∂P
∂K= 9
1
3L
23K
13−1 = 3
(L
K
) 23
= 3
(1003
28
) 23
= 32.59
Por lo tanto el cambio en P puede aproximarse mediante:
∆P ≈ dP =∂P
∂LdL +
∂P
∂KdK = (1.82)(5) + (32.59)(2) = 74.28
ξρ∫s email: [email protected] 135 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 136
6.7. Regla de la Cadena
TEOREMA 6.5 (Regla de la Cadena). Sean U ⊂ Rm, V ⊂ R
n abiertos, f = (f1, ..., fn) :U → R
n tal que f(U) ⊂ V y cada funcion coordenada fk : U → R es diferenciable en el puntop ∈ U . Sea g : V → R una funcion diferenciable en el punto f(a). Entonces la funcion compuestag f : U → R es diferenciable en el punto p y sus derivadas parciales son
∂(g f)
∂xi
(p) =n∑
k=1
∂g
∂yk
(f(p)) · ∂fk
∂xi
(p).
Demostracion.U0 =
TEOREMA 6.6 (Regla de la Cadena). Sean U ⊂ Rm, V ⊂ R
n abiertos, f = (f1, ..., fn) :U → R
n tal que f(U) ⊂ V y cada funcion coordenada fk : U → R es de clase Ck. Sea g : V → R
una funcion de clase Ck. Entonces la funcion compuesta g f : U → R es de clase Ck.
EJEMPLO 6.83. Utilizando la regla de la cadena apropiada, halledz
dt, siendo z = x3 + y3,
x = et sen t, y = et cos t
SOLUCION.- Por una aplicacion directa de la regla de la cadena tenemos
dz
dt=∂z
∂x
dx
dt+∂z
∂y
dy
dt
dz
dt= 3x2(et sen t+ et cos t) + 3y2(et cos t− et sen t).
EJEMPLO 6.84. Sabiendo que w = f(x, y) tal que x = u − v, y = v − u. Halle una expresion
simplificada de∂w
∂u+∂w
∂v.
SOLUCION.- Por una aplicacion directa de la regla de la cadena tenemos
∂w
∂u=
∂w
∂x
∂x
∂u+
∂w
∂y
∂y
∂u=
∂w
∂x− ∂w
∂y
y
∂w
∂v=
∂w
∂x
∂x
∂v+
∂w
∂y
∂y
∂v= − ∂w
∂x+
∂w
∂y
Por tanto∂w
∂u+∂w
∂v= 0
ξρ∫s email: [email protected] 136 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 137
EJEMPLO 6.85. Deducir expresiones para∂w
∂r,∂w
∂ten la composicion de funciones: w =
e−yz sen(xz); x = t2 − r2, y = 8r + 2t y z = 3.
SOLUCION.- ♣
EJEMPLO 6.86. Sea z = f(x, y), siendo x = r cos θ, y = r sen θ. Demostrar que zx = zr cos θ−zθ
sen θ
r.
SOLUCION.- Por una aplicacion directa de la regla de la cadena tenemos
∂z
∂r=
∂z
∂x
∂x
∂r+
∂z
∂y
∂y
∂r=
∂z
∂xcos θ +
∂z
∂ysen θ
zr = zx cos θ + zy sen θ
Por otro lado
∂z
∂θ=
∂z
∂x
∂x
∂θ+
∂z
∂y
∂y
∂θ= −r ∂z
∂xsen θ + r
∂z
∂ycos θ
zθ = −r zx sen θ + r zy cos θ = −r (zx sen θ − zy cos θ)
Por lo tanto
zr cos θ − zθsen θ
r= zx cos2 θ + zy sen θ cos θ + r (zx sen θ − zy cos θ)
sen θ
r
zr cos θ − zθsen θ
r= zx cos2 θ + zy sen θ cos θ + zx sen2 θ − zy cos θ sen θ = zx.
EJEMPLO 6.87. Sea Dada z = f(x, y), tal que x = v−3u y y = 3u−v por la regla de la cadena
halle:∂z
∂u+ 3
∂z
∂v.
SOLUCION.- Puesto que
∂x
∂u= −3
∂y
∂u= 3
∂x
∂v= 1
∂y
∂v= −1
Ahora bien, aplicando la regla de la cadena tenemos
ξρ∫s email: [email protected] 137 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 138
∂z
∂u=
∂z
∂x
∂x
∂u+
∂z
∂y
∂y
∂u= −3
∂z
∂x+ 3
∂z
∂y
∂z
∂v=
∂z
∂x
∂x
∂v+
∂z
∂y
∂y
∂v=
∂z
∂x− ∂z
∂y
Por tanto∂z
∂u+ 3
∂z
∂v= −3
∂z
∂x+ 3
∂z
∂y+ 3
∂z
∂x− 3
∂z
∂y= 0.
EJEMPLO 6.88. Dada z = ln(√x2 + y2), tal que x = r sen θ y y = r cos θ por la regla de la
cadena halle:∂z
∂ry∂z
∂θ.
SOLUCION.- Puesto que
∂z
∂x=
1√x2 + y2
· 2x
2√x2 + y2
=x
x2 + y2
∂z
∂y=
1√x2 + y2
· 2y
2√x2 + y2
=y
x2 + y2
∂x
∂r= sen θ
∂y
∂r= cos θ
∂x
∂θ= r cos θ
∂y
∂θ= −r sen θ
Ahora bien, aplicando la regla de la cadena tenemos
∂z
∂r=
∂z
∂x
∂x
∂r+
∂z
∂y
∂y
∂r=
x
x2 + y2sen θ +
y
x2 + y2cos θ
∂z
∂θ=
∂z
∂x
∂x
∂θ+
∂z
∂y
∂y
∂θ=
x
x2 + y2r cos θ − y
x2 + y2r sen θ
EJEMPLO 6.89. Sea z = cos(xy) + ey−1cosx, donde x = u2 + v, y = u− v2. Calcular∂z
∂uen el
punto (u, v) = (1, 1).
SOLUCION.- Aplicando la regla de la cadena tenemos
∂z
∂u=
∂z
∂x
∂x
∂u+
∂z
∂y
∂y
∂u
= [−y sen(xy) − ey−1 sen x]2u + [−x sen(xy) + ey−1 cos x]
ξρ∫s email: [email protected] 138 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 139
Ahora cuando (u, v) = (1, 1), u = 1, v = 1, entonces x = 12 + 1 = 2, y = 1 − 12 = 0. Ası (x, y) =(2, 0), por tanto
∂z
∂u(1, 1) = [−y sen(xy) − ey−1 sen x]2u + [−x sen(xy) + ey−1 cosx]
= [−0 sen(2 · 0) − e0−1 sen 2]2 · 1 + [−2 sen(2 · 0) + e0−1 cos 2]
= −2e−1 sen 2 + e−1 cos 2
EJEMPLO 6.90. Sea u = (x+y)4+y2(z+x)3, donde x = rse−t, y = rs log(1+t2), z = r2s cos t.
Calcular∂u
∂scuando r = 2, s = 1 y t = 0.
SOLUCION.- Aplicando la regla de la cadena tenemos:
∂u
∂s=
∂u
∂x
∂x
∂s+
∂u
∂y
∂y
∂s+
∂u
∂z
∂z
∂s
= [4(x+ y)3 + 3y2(z + x)2] r e−t +
[4(x+ y)3 + 2y(z + x)3] r log(1 + t2) + 3y2(z + x)2 r2 cos t
Ahora cuando r = 2, s = 1 y t = 0, se tiene
x = rse−t = 2 · 1e−0 = 2
y = rs log(1 + t2) = 2 · 1 log(1 + 02) = 0
z = r2s cos t = 22 · 1 cos 0 = 4
Por tanto
∂u
∂s(2, 1, 0) = [4(2 + 0)3 + 3 · 02(4 + 2)2] 2 e−0 +
[4(2 + 0)3 + 2 · 0(0 + 2)3] 2 log(1 + 02) + 3 · 02(0 + 2)2 22 cos 0
= 64
EJEMPLO 6.91. Sea u = x4y+y2z3+ϕ(
xy
), donde x = 1 + r s et, y = r s2 e−t, z = r2 s sen t.
Calcular∂u
∂scuando r = 2, s = 1 y t = 0 sabiendo que ϕ ′(3
2
)= −1.
SOLUCION.- Aplicando la regla de la cadena tenemos:
∂u
∂s=
∂u
∂x
∂x
∂r+
∂u
∂y
∂y
∂s+
∂u
∂z
∂z
∂t
=[4x3y + 1
yϕ ′(x
y
)]set +
[x4 + 2yz3 − x
y2ϕ′(x
y
)]2 r s e−t + 3y2z2 r2 s cos t
ξρ∫s email: [email protected] 139 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 140
Ahora cuando r = 2, s = 1 y t = 0, entonces
x = 1 + r s et = 1 + 2 · 1 e0 = 3
y = r s2 e−t = 2 · 12 e−0 = 2
z = r2 s sen t = 22 · 1 sen 0 = 4
por tanto
∂u
∂s(2, 1, 0) =
[4 · 33 · 2 + 1
2ϕ ′(3
2
)]1e0 +
[34 + 2 · 2 · 43 − 3
22ϕ′(3
2
)]2 · 2 · 1 · e−0 +
3 · 22 · 42 · 22 · 1 cos 0
=[216 + 1
2(−1)
]+[81 + 256 − 3
4(−1)
]4 + 768
=[216 − 1
2
]+[337 + 3
4
]4 + 768
= 4312
+[1348 + 3
]+ 768
EJEMPLO 6.92. Sea z = f(x, y), donde x = s4 + r4, y = 2rs2. Calcular∂z
∂x(2, 2) y
∂z
∂y(2, 2)
sabiendo que∂z
∂r(1, 1) = −2 y
∂z
∂s(1, 1) = 3.
SOLUCION.- Aplicando la regla de la cadena tenemos
∂z
∂r=
∂z
∂x
∂x
∂r+
∂z
∂y
∂y
∂r
∂z
∂s=
∂z
∂x
∂x
∂s+
∂z
∂y
∂y
∂s
(6.11)
Ahora cuando r = 1, s = 1, entonces
x = s4 + r4 = 14 + 14 = 2
y = 2rs2 = 2 · 1 · 12 = 2
Ademas∂x
∂r= 4r3 ∂x
∂s= 4s3
∂y
∂r= 2s2 ∂y
∂s= 4rs
Evaluando en el sistema (6.11),
ξρ∫s email: [email protected] 140 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 141
∂z
∂x(2, 2)
∂x
∂r(1, 1) +
∂z
∂y(2, 2)
∂y
∂r(1, 1) =
∂z
∂r(1, 1)
∂z
∂x(2, 2)
∂x
∂s(1, 1) +
∂z
∂y(2, 2)
∂y
∂s(1, 1) =
∂z
∂s(1, 1)
Sean a =∂z
∂x(2, 2) y b =
∂z
∂y(2, 2), reemplazando los datos tenemos:
a · 4 + b · 2 = −2
a · 4 + b · 4 = 3
Por tanto b = 5/2, a = −3/4.
EJEMPLO 6.93. Pruebe que la funcion F (x, y) = f
(y
x2 − y2
), donde f es una funcion real
derivable, verifique la igualdad1
x2 + y2
∂F
∂y+
1
2xy
∂F
∂x= 0.
SOLUCION.- Seaz =
y
x2 − y2
Aplicando la regla de la cadena tenemos
∂F
∂x=
df
dz
∂z
∂x=
df
dz
−2xy
(x2 − y2)2
∂F
∂y=
df
dz
∂z
∂y=
df
dz
(x2 − y2) − y(−2y)
(x2 − y2)2=
df
dz
x2 + y2
(x2 − y2)2
Por tanto1
x2 + y2
∂F
∂y+
1
2xy
∂F
∂x=
1
x2 + y2
x2 + y2
(x2 − y2)2+
1
2xy
−2xy
(x2 − y2)2= 0.
EJEMPLO 6.94. Sea Sea u = f(x, y), donde x = es cos t y y = es sen t. Justifique que
∂2u
∂x2+∂2u
∂y2= e−2s
(∂2u
∂s2+∂2u
∂t2
).
SOLUCION.- Aplicando la regla de la cadena tenemos
ξρ∫s email: [email protected] 141 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 142
∂u
∂s=
∂u
∂x
∂x
∂s+
∂u
∂y
∂y
∂s=
∂u
∂xes cos t +
∂u
∂yes sen t
∂u
∂t=
∂u
∂x
∂x
∂t+
∂u
∂y
∂y
∂t= −∂u
∂xes sen t +
∂u
∂yes cos t
Derivando nuevamente tenemos:
∂2u
∂s2=
∂2u
∂2x
∂x
∂ses cos t +
∂u
∂xes cos t +
∂2u
∂2y
∂y
∂ses sen t +
∂u
∂yes sen t
∂2u
∂2t= −∂
2u
∂2x
∂x
∂tes sen t − ∂u
∂xes cos t +
∂2u
∂2y
∂y
∂tes cos t − ∂u
∂yes sen t
De donde
∂2u
∂s2=
∂2u
∂2xes cos t es cos t +
∂u
∂xes cos t +
∂2u
∂2yes sen t es sen t +
∂u
∂yes sen t
∂2u
∂2t=
∂2u
∂2xes sen t es sen t − ∂u
∂xes cos t +
∂2u
∂2yes cos t es cos t − ∂u
∂yes sen t
Sumando estas dos ecuaciones tenemos
∂2u
∂s2+
∂2u
∂2t=∂2u
∂2xe2s[cos2 t+ sen2 t] +
∂2u
∂2ye2s[cos2 t+ sen2 t]
Finalmente∂2u
∂s2+
∂2u
∂2t= e2s
[∂2u
∂2x+∂2u
∂2y
]
♣
EJEMPLO 6.95. Si z = x3 f(yx,u
x
)mostrar que x
∂z
∂x+ y
∂z
∂y+ u
∂z
∂u= 3z.
SOLUCION.- ♣
EJEMPLO 6.96. Si z = f
(x− y
y
)demostrar que x
∂z
∂x+ y
∂z
∂y= 0.
SOLUCION.- ♣
EJEMPLO 6.97. Si z = f(x− y, y − x) satisface a la ecuacion∂z
∂x+∂z
∂y= 0.
ξρ∫s email: [email protected] 142 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 143
SOLUCION.- ♣
EJEMPLO 6.98. z = f(bx− ay), con a, b constantes, satisface a la ecuacion a∂z
∂x+ b
∂z
∂y= 0.
SOLUCION.- ♣
EJEMPLO 6.99. Demostrar que la funcion u(x, t) = f(x + at) + g(x − at) donde a es una
constante; f y g funciones diferenciables dos veces. Probar que∂2u
∂t2= a2 ∂
2u
∂x2.
SOLUCION.- ♣
EJEMPLO 6.100. Sea u = f(x, y, z) donde f tiene sus derivadas parciales continuas; ademas
x = ln(s2 + t2 + 1), y = t2 + s2, z = sen(s2 + t2). Demostrar que s∂u
∂t− t
∂u
∂s= 0.Si
SOLUCION.- ♣
EJEMPLO 6.101. Sea z = xy + xf(yx
)donde f es derivable. Demostrar que x
∂z
∂x+ y
∂z
∂y=
xy + z.
SOLUCION.- ♣
EJEMPLO 6.102. Sea f : R3 → R diferenciable y defina
w = f(2ax+ y, x+ 3bz, y − z)
Encuentre a y b tal que
∂f
∂x+∂f
∂y+∂f
∂z= 0 (6.12)
SOLUCION.- Hagamos u = 2ax + y, v = x + 3bz y w = y − z, entonces aplicando la regla dela cadena tenemos:
∂f
∂x=
∂f
∂u
∂u
∂x+
∂f
∂v
∂v
∂x+
∂f
∂w
∂w
∂x= 2a
∂f
∂u+
∂f
∂v+
∂f
∂w· 0
∂f
∂y=
∂f
∂u
∂u
∂y+
∂f
∂v
∂v
∂y+
∂f
∂w
∂w
∂y=
∂f
∂u· 1 +
∂f
∂v· 0 +
∂f
∂w· 1
∂f
∂z=
∂f
∂u
∂u
∂z+
∂f
∂v
∂v
∂z+
∂f
∂w
∂w
∂z=
∂f
∂u· 0 +
∂f
∂v· 3b +
∂f
∂w· (−1)
ξρ∫s email: [email protected] 143 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 144
Entonces la ecuacion (6.12) se transforma en:
(2a+ 1)∂f
∂u+ (3b+ 1)
∂f
∂v= 0
Luego para que esta ecuacion sea cierta es suficiente que a y b verifiquen las ecuaciones 2a+1 = 0y 3b+ 1 = 0, de donde obtenemos que
a = −1
2, b = −1
3.
♣EJEMPLO 6.103. Si f(x, y) = xy(x− y), x = 2u2 − 3uv, y = 2u− v3, hallar
∂f
∂u
∣∣∣∣(1,1)
,∂f
∂v
∣∣∣∣(1,1)
.
SOLUCION.- Aplicando la regla de la cadena tenemos
∂f
∂u=
∂f
∂x
∂x
∂u+
∂f
∂y
∂y
∂u
= [y(x− y) + xy](4u− 3v) + [x(x− y) + xy(−1)](2)
= [y(x− y) + xy](4u− 3v) + 2[x(x− y) − xy]
Ahora cuando (u, v) = (1, 1), u = 1, v = 1, entonces x = 2(1)2−3(1)(1) = −1, y = 2(1)−(1)3 = 1.por tanto
∂z
∂u(1, 1) = [1(−1 − 1) + (−1)(1)](4(1) − 3(1)) + 2[(−1)(−1 − 1) − (−1)(1)]
= [−2 − 1](1) + 2[2 + 1] = 3
♣
EJEMPLO 6.104. Si z = uv, y ademas
u2 + v2 = x+ y
u2 − v2 = −3x− y. Hallar
∂z
∂x
SOLUCION.- Resolviendo el sistema obtenemos u2 = −x, de donde ux = − 1
2u= − 1
2√−x ,
v =√
2x+ y, de donde vx =1√
2x+ y.
Otro modo de llegar a esto resultado es derivando parcialmente respecto de x ambas ecuaciones:
2uux + 2vvx = 1
2uux − 2vvx = −3
(2u 2v2u −2v
)(ux
vx
)=
1−3
ξρ∫s email: [email protected] 144 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 145
Luego usamos el metodo de Cramer y obtenemos los mismos resultados. Por tanto
zx = zuux + zvvx = − v
2√−x +
u√2x+ y
♣
EJEMPLO 6.105. Si u2 + v2 + xy = 1, uv + x2 − y2 = 1, hallar∂u
∂x,∂v
∂x.
SOLUCION.- Definamos las funciones F (x, y, u, v) = u2 + v2 + xy − 1 y G(x, y, u, v) = uv +x2 − y2 − 1, de donde
∂F
∂x+∂F
∂y0 +
∂F
∂u
∂u
∂x+∂F
∂v
∂v
∂x= 0
∂G
∂x+∂G
∂y0 +
∂G
∂u
∂u
∂x+∂G
∂v
∂v
∂x= 0
∂F
∂x+∂F
∂u
∂u
∂x+∂F
∂v
∂v
∂x= 0
∂G
∂x+∂G
∂u
∂u
∂x+∂G
∂v
∂v
∂x= 0
y + 2u∂u
∂x+ 2v
∂v
∂x= 0
2x+ v∂u
∂x+ u
∂v
∂x= 0
2u∂u
∂x+ 2v
∂v
∂x= −y
v∂u
∂x+ u
∂v
∂x= −2x
♣
EJEMPLO 6.106. Mostrar que la ecuacion
x2 ∂2u
∂x2+ y2 ∂
2u
∂y2+ x
∂u
∂x+ y
∂u
∂y= 0
se transforma en∂2u
∂r2+∂2u
∂s2= 0
bajo el cambio de variables x = er , y = es
SOLUCION.- Observemos que las variables x y y estan en funcion de las variables r y s, y lasvariables u esta en funcion de las variables x y y. Aplicando la regla de la cadena tenemos
ur = uxxr + uyyr
Derivando parcialmente respecto de r esta ecuacion tenemos
urr =(uxxxr + uxyyr
)xr + uxxrr +
(uyxxr + uyyyr
)yr + uyyrr
Puesto que x = er , y = es, se tiene
urr = uxxxx+ uxx = x2uxx + xux.
ξρ∫s email: [email protected] 145 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 146
Del mismo modo como us = uxxs + uyys se tiene que
uss =(uxxxs + uxyys
)xs + uxxss +
(uyxxs + uyyys
)ys + uyyss
y por tantouss = uyyyy + uyy = y2uyy + yuy.
Finalmente, las ecuaciones anteriores implican que
urr + uss = x2uxx + y2uyy + xux + yuy ♣
EJEMPLO 6.107. Sea u una funcion de x e y definida por la ecuacion u = F (x+u, yu). Hallar∂u
∂xy∂u
∂yen funcion de las derivadas parciales de F .
SOLUCION.- Aplicaciones de Calculo Diferencialxx pg365
Supongamos que u = g(x, y) para todo (x, y) en un cierto conjunto abierto S. Sustituyendo g(x, y)por u en la ecuacion original obtenemos
g(x, y) = F (u1(x, y), u2(x, y)), (6.13)
en donde u1(x, y) = x+g(x, y) y u2(x, y) = yg(x, y). Mantengamos ahora y fija y derivemos ambosmiembros de (6.13) respecto a x, empleando la regla de la cadena en el segundo miembro, con loque obtenemos
∂u
∂x= D1F
∂u1
∂x+D2F
∂u2
∂x. (6.14)
Pero∂u1
∂x= 1 +
∂g
∂x, y
∂u2
∂x= y
∂g
∂x. Luego (6.14) se convierte en
∂u
∂x= D1F
(1 +
∂g
∂x
)+D2F
(y∂g
∂x
).
Resolviendo esta ecuacion respecto a∂g
∂x(y poniendo
∂u
∂xen lugar de
∂g
∂x) obtenemos
∂u
∂x=
−D1F
D1F + yD2F − 1
Del mismo modo encontramos
∂g
∂y= D1F
∂u1
∂y+D2F
∂u2
∂y= D1F
∂g
∂y+D2F
(y∂g
∂x+ g(x, y)
).
Esto nos conduce a la ecuacion∂u
∂y=
−g(x, y)D2F
D1F + yD2F − 1
Las derivadas parciales D1F y D2F estan calculadas en el punto (x+ g(x, y), yg(x, y)). ♣
ξρ∫s email: [email protected] 146 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 147
EJEMPLO 6.108. Siendo z = ln(x/y)−arc sen(y/x), x = e2t+1, y = e−2t+1, hallar la derivadadz/dt.
SOLUCION.- Las derivadas parciales de z son, respectivamente,
∂z
∂x=
1/y
x/y− −y/x2
√1 − y2/x2
=1
x+
y√x2 − y2
∂z
∂y=
−x/y2
x/y− 1/x√
1 − y2/x2= −1
y− 1√
x2 − y2
∂z
∂t=
∂z
∂x
∂x
∂t+∂z
∂y
∂y
∂t
= 2e2t
[1
x+
y√x2 − y2
]+ 2e−2t
[1
y+
1√x2 − y2
]
Por la regla de derivacion de la funcion compuesta tenemos que ♣
EJEMPLO 6.109. Se consideran las funciones f(t) = (t, t2, et) y g(x, y, z) = x2 + y2 + z2.Calcular las derivadas de las funciones compuestas f g y g f .
SOLUCION.- (a) Como g f es una funcion real de una variable real,si llamamos x(t) = t,y(t) = t2, z(t) = et, su derivada es
(g f)′(t) =∂g
∂xx′(t) +
∂g
∂yy′(t) +
∂g
∂zz′(t) = 2x+ 4yt+ 2zet = 2t+ 4t3 + 2e2t.
(b) En este caso, tenemos f g : R3 → R
3. Por tanto, si llamamos f1(t) = t, f2(t) = t2 y f3(t) = et
a las componentes de la funcion f , su matriz jacobiana se obtiene con el siguiente producto:
D(f g)(x, y, z) =
f ′1(t)f ′
2(t)f ′
3(t)
( gx gy gz
)
=
12tet
( 2x 2y 2z
)=
2x 2y 2z4xt 4yt 4zt2xet 2yet 2zet
donde t = x2 + y2 + z2. ♣
EJEMPLO 6.110. Demostrar que la funcion z = φ(x2+y2) satisface la ecuacion y y∂z
∂x−x∂z
∂y=
0.
ξρ∫s email: [email protected] 147 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 148
SOLUCION.- Si llamamos t = x2 + y2, la funcion φ depende de x e y a traves del argumentointermedio t, por lo cual
∂z
∂x=
∂z
∂t
∂t
∂x= φ′(x2 + y2)2x
∂z
∂y=
∂z
∂t
∂t
∂y= φ′(x2 + y2)2y
de donde efectivamente
y∂z
∂x− x
∂z
∂y= yφ′(x2 + y2)2x− xφ′(x2 + y2)2y = 0.
♣
EJEMPLO 6.111. Si u(x, y, z) = xnϕ(y/xα, z/xβ), donde ϕ es una funcion diferenciable, com-
probar que x∂u
∂x+ αy
∂u
∂y+ βz
∂u
∂z= nu
SOLUCION.- Utilizaremos las variables auxiliares v = y/xα, w = z/xβ . Por la regla de lacadena y la formula de la derivada del producto,
∂u
∂x= nxnϕ(v, w) + xn
(∂ϕ
∂v
∂v
∂x+∂ϕ
∂w
∂w
∂x
)
= nxn−1ϕ(v, w)− αyxn−α−1∂ϕ
∂v− βzxn−β−1 ∂ϕ
∂w
∂u
∂y= xn
(∂ϕ
∂v
∂v
∂y+∂ϕ
∂w
∂w
∂y
)= xn−α∂ϕ
∂v
∂u
∂z= xn
(∂ϕ
∂v
∂v
∂z+∂ϕ
∂w
∂w
∂z
)= xn−β ∂ϕ
∂w
Con estos datos,basta sustituir en la expresion que se indica en el enunciado para obtener laigualdad propuesta ♣
EJEMPLO 6.112. Si z =f(x− y)
y, probar que z + y
∂z
∂x− y
∂z
∂y= 0.
SOLUCION.- Si llamamos u = x− y, las derivadas parciales de z son:
∂z
∂x=
1
yf ′(u)
∂u
∂x=
1
yf ′(x− y)
∂z
∂y=
yf ′(u)∂u
∂y− f(u)
y2=
−yf ′(x− y) − f(x− y)
y2
ξρ∫s email: [email protected] 148 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 149
De aquı deducimos que∂z
∂x+∂z
∂y= −f(x− y)
y2, lo que equivale a la igualdad buscada. ♣
EJEMPLO 6.113. Dada la funcion u(x, y) = xyf
(x+ y
xy
), siendo f arbitraria,demostrar que
x2∂u
∂x− y2∂u
∂y= (x− y)u
SOLUCION.- Aplicamos la regla de la cadena para calcular las derivadas parciales. Si utilizamos
la variable auxiliar z =x+ y
xy, obtenemos:
∂u
∂x= yf(z) + xyf ′(z)
∂z
∂x= yf(z) + xyf ′(z)
xy − y(x+ y)
x2y2
∂u
∂y
= xf(z) + xyf ′(z)∂z
∂y= xf(z) + xyf ′(z)
xy − x(x+ y)
x2y2
Por tanto,
x2∂u
∂x− y2∂u
∂y= x2yf(z) = xy2f(z) − xyf ′(z) + xyf ′(z)
= (x− y)xyf(z) = (x− y)u ♣
EJEMPLO 6.114. Sea Ω = f(u, v, w) una funcion diferenciable, con u3 = x3 + y3 + z3, v2 =
x2 + y2 + z2, w = x+ y + z. Demostrar que x∂f
∂x+ y
∂f
∂y+ z
∂f
∂z= u
∂f
∂u+ v
∂f
∂v+ w
∂f
∂w
SOLUCION.- Calculamos las derivadas parciales de f aplicando la regla de la cadena. Teniendoen cuenta que
u = 3√x3 + y3 + z3, v =
√x2 + y2 + z2, w = x+ y + z,
obtenemos
∂u
∂x=
3x2
3 3
√(x3 + y3 + z3
)2
∂u
∂y=
3y2
3 3
√(x3 + y3 + z3
)2
∂u
∂z=
3z2
3 3
√(x3 + y3 + z3
)2
∂v
∂x=
2x
2√x2 + y2 + z2
∂v
∂y=
2y
2√x2 + y2 + z2
∂v
∂z=
2z
2√x2 + y2 + z2
∂w
∂x= 1
∂w
∂y= 1
∂w
∂z= 1
ξρ∫s email: [email protected] 149 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 150
Resulta ası:∂f
∂x=∂f
∂u
∂u
∂x+∂f
∂v
∂v
∂x+∂f
∂w
∂w
∂x=∂f
∂u
3x2
3u2+∂f
∂v
2x
2v+∂f
∂w
∂f
∂y=∂f
∂u
∂u
∂y+∂f
∂v
∂v
∂y+∂f
∂w
∂w
∂y=∂f
∂u
3y2
3u2+∂f
∂v
2y
2v+∂f
∂w
∂f
∂z=∂f
∂u
∂u
∂z+∂f
∂v
∂v
∂z+∂f
∂w
∂w
∂z=∂f
∂u
3z2
3u2+∂f
∂v
2z
2v+∂f
∂w
Basta ahora sustituir este resultado en la expresion x∂f
∂x+ y
∂f
∂y+ z
∂f
∂zy obtener directamente
u∂f
∂u+ v
∂f
∂v+ w
∂f
∂w. ♣
EJEMPLO 6.115. Dada f(x, y) = ynex2/4y, hallar n para que se verifique∂f
∂y=
1
x2
∂
∂x
(x2∂f
∂x
)
SOLUCION.- Calculamos las derivadas parciales de la funcion:
∂f
∂x=
−xyn−1
2e−x2/4y
∂f
∂y= yn−1e−x2/4y
(n+
x2
4y
)
Como ademas
∂2f
∂x2=
[−yn−1
2+
−xyn−1
2
x
2y
]e−x2/4y = yn−1e−x2/4y
[−1
2+x2
4y
]
deducimos que
∂
∂x
(x2∂f
∂x
)= x
∂f
∂x+ x2∂
2f
∂x2
= −x2yn−1e−x2/4y + x2yn−1e−x2/4y
[−1
2+x2
4y
]
= x2yn−1e−x2/4y
[−3
2+x2
4y
]
En definitiva, como1
x2
∂
∂x
(x2∂f
∂x
)= yn−1e−x2/4y
[−3
2+x2
4y
]
basta hacer n = −3/2 para obtener la igualdad propuesta. ♣
ξρ∫s email: [email protected] 150 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 151
EJEMPLO 6.116. Dada la funcion u(x, y) = f(x − y) + g(x − y), donde f y g son funciones
reales diferenciables,comprobar la ecuacion∂2u
∂x2− ∂2u
∂y2= 0.
SOLUCION.- Por las reglas de derivacion de funciones compuestas,tenemos:
∂u
∂x= f ′(x− y) + g′(x− y)
∂2u
∂x2= f ′′(x− y) + g′′(x− y)
∂u
∂y= −f ′(x− y) − g′(x− y)
∂2u
∂y2= f ′′(x− y) + g′′(x− y)
Es evidente pues la igualdad propuesta. ♣
TEOREMA 6.7. Consideremos una funcion f : R2 → R, f(x, y) dos veces diferenciable y
ademas x = x(u, v) y y = y(u, v), entonces
∂2f
∂v∂u=
[∂2f
∂x2
∂x
∂u+
∂2f
∂y∂x
∂y
∂v
]∂x
∂u+∂f
∂x
∂2x
∂v∂u+
[∂2f
∂x∂y
∂x
∂v+∂2f
∂y2
∂y
∂v
]∂y
∂u+∂f
∂y
∂2y
∂v∂u
DEMOSTRACION. Aplicando la regla de la cadena obtenemos
∂f
∂u=∂f
∂x
∂x
∂u+∂f
∂y
∂y
∂u
Derivando parcialmente respecto de v la regla de la cadena implica que
∂2f
∂v∂u=
[∂2f
∂x2
∂x
∂v+
∂2f
∂y∂x
∂y
∂v
]∂x
∂u+∂f
∂x
∂2x
∂v∂u+
[∂2f
∂x∂y
∂x
∂v+∂2f
∂y2
∂y
∂v
]∂y
∂u+∂f
∂y
∂2y
∂v∂u
EJEMPLO 6.117. Hallar∂z
∂uy
∂2z
∂u∂vsi z = x2 − y2, x =
√u+ v, y ademas y =
√u− v.
SOLUCION.- (OJO EN ESTE PROBLEMA) Aplicando la regla de la cadena obtenemos
∂z
∂u=∂z
∂x
∂x
∂u+∂z
∂y
∂y
∂u
∂x
∂u=
1
2√u+ v
=(u+ v)−1/2
2,
∂x
∂v=
1
2√u+ v
,∂y
∂u=
1
2√u+ v
,∂y
∂v= − 1
2√u+ v
y ademas∂2x
∂v∂u= −(u+ v)−3/2
4= − 1
4√
(u+ v)3
ξρ∫s email: [email protected] 151 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 152
Por tanto, si definimos
z1 =∂z
∂u=∂z
∂x
∂x
∂u+∂z
∂y
∂y
∂u=∂z
∂x
1
2√u+ v
+∂z
∂y
1
2√u+ v
=∂z
∂x
1
2x+∂z
∂y
1
2x
que depende solo de x y de y, entonces
∂2z
∂v∂u=
∂z1∂v
=∂z1∂x
∂x
∂v+∂z1∂y
∂y
∂v
=
[∂2z
∂x2
1
2x− ∂z
∂x
1
2x2+
∂2z
∂x∂y
1
2x− ∂z
∂y
1
2x2
]∂x
∂v+
[∂2z
∂y∂x
1
2x+∂2z
∂y2
1
2x
]∂y
∂v
♣
EJEMPLO 6.118. Dada la funcion u = u(r, s) de clase C2, si x = 2r− s, y = r+ 2s, averiguar
el valor de∂2u
∂y∂x(x, y) en funcion de las derivadas con respecto a r y s.
SOLUCION.- Despejando r y s en funcion de x e y, tenemos que r =2x+ y
5, s =
2y − x
5, luego
∂r
∂x=
2
5,
∂s
∂x= −1
5,
∂r
∂y=
1
5,
∂s
∂y=
2
5,
Por tanto,
u1 =∂u
∂y=∂u
∂r
∂r
∂y+∂u
∂s
∂s
∂y=
1
5
∂u
∂r+
2
5
∂u
∂s
que depende solo de r y de s, entonces
∂2u
∂y∂x=
∂u1
∂x=∂u1
∂r
∂r
∂x+∂u1
∂s
∂s
∂x
=
(1
5
∂2u
∂r2+
2
5
∂2u
∂s∂r
)(2
5
)+
(1
5
∂2u
∂r∂s+
2
5
∂2u
∂s2
)(−1
5
)
=1
25
(2∂2u
∂r2+ 3
∂2u
∂r∂s− 2
∂2u
∂s2
)
pues, debido a que u es C2,∂2u
∂s∂r=
∂2u
∂r∂s. Dejamos como ejercicio comprobar que
∂2u
∂y∂x=
∂2u
∂x∂y.♣
EJEMPLO 6.119. Si f y g son funciones reales de una variable real que tienen derivadas deorden 2 continuas, se define y(x, t) = f(x+ at) + g(x− at). Probar que y verifica la ”ecuacion de
la cuerda vibrante”∂2y
∂t2= a2 ∂
2y
∂x2.
ξρ∫s email: [email protected] 152 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 153
SOLUCION.- Utilizando las variables auxiliares u = x + at, v = x − at, podemos escribiry = f(u) + g(v). Las derivadas parciales valen entonces
∂y
∂t=
∂y
∂u
∂u
∂t+
∂y
∂v
∂v
∂t= a f ′(u) − a g ′(v)
∂y
∂x=
∂y
∂u
∂u
∂x+
∂y
∂v
∂v
∂x= f ′(u) + g ′(v)
ambos dependen solo de u y de v. Derivando por segunda vez, si denotamos por y1 =∂y
∂te
y2 =∂y
∂x, se tiene:
∂2y
∂t2=∂y1
∂t=
∂y1
∂u
∂u
∂t+
∂y1
∂v
∂v
∂t= a2 f ′′(u) + a2 g ′′(v)
∂2y
∂x2=∂y2
∂x=
∂y2
∂u
∂u
∂x+
∂y2
∂v
∂v
∂x= f ′′(u) + g ′′(v)
Del resultado anterior se deduce de forma inmediata la ecuacion propuesta. ♣
6.8. El Teorema de la Funcion Implıcita
Sea F : U → R una funcion definida en un abierto U ⊂ R × Rn y c ∈ R.
Es posible despejar y en funcion de x de la ecuacion
F (x, y) = c.
Suponiendo que podemos despejar y en funcion de x de la ecuacion F (x, y) = c. Comopodemos hallar y′?.
DEFINICION 6.6. Sea F : U → R una funcion definida en un abierto U ⊂ R × Rn y c ∈ R.
Decimos que una funcion y = f(x) esta definida implicitamente por la expresion F (x, y) = c si
F (x, f(x)) = c.
LEMA 6.4. Sea F : U → R una funcion definida en un abierto U ⊂ Rn ×R de clase Ck y c ∈ R.
Si (x0, y0) ∈ U es tal que
F (x0, y0) = c, y∂F
∂y(x0, y0) 6= 0.
Entonces existen una bola B(x0, δ) ⊂ Rn y un intervalo (y0 − ε, y0 + ε) tales que
F−1(c) ∩ (B(x0, δ) × (y0 − ε, y0 + ε))
ξρ∫s email: [email protected] 153 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 154
es el grafico de una funcion f : B(x0, δ)×(y0−ε, y0+ε) de clase Ck. Ademas para todo x ∈ B(x0, δ),se tiene
∂f
∂xi(x) = −
∂F
∂xi(x, f(x))
∂F
∂y(x, f(x))
.
Demostracion.
NOTACION.- Al determinante de la matriz jacobiana de un campo vectorial F : Rn → R
n
lo llamaremos jacobiano de F y lo denotaremos:
∂(F1, F2, ..., Fn)
∂(x1, x2, ..., xn)= J(F ) =
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
∂F1
∂x1
∂F1
∂x2. . .
∂F1
∂xn
∂F2
∂x1
∂F2
∂x2. . .
∂F2
∂xn
......
. . ....
∂Fn
∂x1
∂Fn
∂x2
. . .∂Fn
∂xn
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
TEOREMA 6.8 (Teorema de la Funcion Implıcita). Consideremos las m ecuaciones:
F1(x1, x2, ..., xn, z1, z2, ..., zm) = 0
F2(x1, x2, ..., xn, z1, z2, ..., zm) = 0...
Fm(x1, x2, ..., xn, z1, z2, ..., zm) = 0
y un punto (x0, z0) = (x01, x
02, ..., x
0n, z
01 , z
02 , ..., z
0m) cumpliendo:
1. Fj(x0, z0) = 0 para j = 1, ..., m.
2. Todas las funciones Fj para j = 1, ..., m son diferenciables con derivada continua en unentorno del punto (x0, z0).
3.∂(F1, F2, ..., Fm)
∂(z1, z2, ..., zm)6= 0 en el punto (x0, z0)
Entonces, las m ecuaciones anteriores definen a las variables z1, z2, ... , zm como funcionesde las variables independientes x1, x2,..., xn en un cierto entorno del punto (x0, z0), es decir,zi = fi(x1, x2, ..., xn), i = 1, 2, ..., m. Es mas, si las funciones Fj son diferenciables hasta orden kentonces tambien lo seran las funciones fi y sus derivadas se pueden calcular mediante derivacionimplıcita.
ξρ∫s email: [email protected] 154 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 155
DEMOSTRACION.
EJEMPLO 6.120. Dada y2 + 2xy + z2 = 2y + 1, por derivacion implıcita halle: zx, zy, zyx
SOLUCION.- Seay2 + 2xy + z2 = 2y + 1 (6.15)
Para hallar zx, derivemos (6.15) respecto de x, haciendo esto obtenemos
2y + 2zzx = 0 (6.16)
de dondezx = −y
z.
Para hallar zy, derivemos (6.15) respecto de y, haciendo esto obtenemos
2y + 2x+ 2zzy = 2
de donde
zy =1 − y − x
z.
Para hallar zyx, de la ecuacion (6.16) se obtiene y+zzx = 0, derivando respecto de y esta ecuacionnos da
1 + zzyx + zyzx = 0
de aquı se sigue que
zyx = −zyzx + 1
z= −−1−y−x
zyz
+ 1
z= −
(x+y−1)yz2 + 1
z= −(x+ y − 1)y + z2
z3.
♣
EJEMPLO 6.121. Hallar∂z
∂xy
∂2z
∂y∂xsi y2z + z3 = x2y2 + 3xz + 5.
Seay2z + z3 = x2y2 + 3xz + 5 (6.17)
Para hallar zx, derivemos (6.17) respecto de x, haciendo esto obtenemos
y2zx + 3z2zx = 2xy2 + 3xzx (6.18)
de donde
zx =2xy2
y2 + 3z2 − 3x.
Para hallar zyx, derivamos la ecuacion (6.18) respecto de y:
2yzx + y2zyx + 6zzyzx + 3z2zyx = 4xy + 3xzyx
ξρ∫s email: [email protected] 155 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 156
de aquı se sigue que
zyx =4xy − 2yzx − 6zzyzx
y2 + 3z2 − 3x ♣
EJEMPLO 6.122. Dada z = ex sen(y + z), por derivacion implıcita halle:∂z
∂xy∂z
∂y.
SOLUCION.- Seaz = ex sen(y + z) (6.19)
Para hallar zx, derivemos (6.25) respecto de x, haciendo esto obtenemos
zx = ex sen(y + z) + ex cos(y + z) · zx
transponiendo terminos,zx(1 − ex cos(y + z)) = ex sen(y + z)
de donde∂z
∂x=
ex sen(y + z)
1 − ex cos(y + z).
Para hallar zy, derivemos (6.25) respecto de y, haciendo esto obtenemos
zy = ex cos(y + z) · (1 + zy)
transponiendo terminos,
zy
(1 − ex cos(y + z)
)= ex cos(y + z)
de donde∂z
∂y=
ex cos(y + z)
1 − ex cos(y + z).
♣
EJEMPLO 6.123. Dada z = e2x√y + z, por derivacion implıcita halle:
∂z
∂xy∂z
∂y.
SOLUCION.- Seaz = e2x
√y + z (6.20)
Para hallar zx, derivemos (6.25) respecto de x, haciendo esto obtenemos
zx = 2e2x√y + z + e2x 1
2√y + z
· zx
transponiendo terminos,
zx
(1 − e2x
2√y + z
)= 2e2x√y + z
de donde∂z
∂x=
2e2x√y + z
1 − e2x
2√y + z
.
♣ξρ∫s email: [email protected] 156 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 157
EJEMPLO 6.124. Dada eyz + x ln y = 8 − xyz2, por derivacion implıcita halle:∂z
∂x.
SOLUCION.- Seaeyz + x ln y = 8 − xyz2 (6.21)
Para hallar ∂z∂x
, derivemos (6.21) respecto de x, haciendo esto obtenemos
eyzyzx = −2xyzzx
transponiendo terminos,zx[e
yzy + 2xyz] = 0
de donde∂z
∂x= 0. ♣
EJEMPLO 6.125. Dada x2z + y ln x = 8 − z2, por derivacion implıcita halle:∂z
∂y.
SOLUCION.- Seax2z + y ln x = 8 − z2 (6.22)
Para hallar ∂z∂y
, derivemos (6.22) respecto de y, haciendo esto obtenemos
x2zy + ln x = −2zzy
transponiendo terminos,zy[x
2 + 2z] = − ln x
de donde∂z
∂y= − ln x
x2 + 2z.
♣
EJEMPLO 6.126. Dada y2z + z3 = x2y2 + 3xz + 5, por derivacion implıcita halle: zx y zy.
SOLUCION.- Seay2z + z3 = x2y2 + 3xz + 5 (6.23)
Para hallar zx, derivemos (6.23) respecto de x, haciendo esto obtenemos
y2zx + 3z2zx = 2xy2 + 3xzx + 3z
transponiendo terminos,zx[y
2 + 3z2 − 3x] = 2xy2 + 3z
de donde
zx =2xy2 + 3z
y2 + 3z2 − 3x.
Procediendo del mismo modo hallamos zy. ♣
ξρ∫s email: [email protected] 157 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 158
EJEMPLO 6.127. Halle las primeras derivadas de z por derivacion implicita, donde exz +xyz =4.
SOLUCION.- Derivando implicitamente tenemos
exz(z + xzx) + xyzx + yzx = 0, zx(x+ xy + y) = −exzz
por tanto
zx = − exzz
x+ xy + y ♣
EJEMPLO 6.128. Deducir expresiones para∂z
∂x,∂z
∂yen la funcion implıcita: z = e−xz cos(2y)+
4xy.
SOLUCION.- Seaz = e−xz cos(2y) + 4xy (6.24)
Para hallar zx, derivemos (6.25) respecto de x, haciendo esto obtenemos
zx = e−xz[(−1)z + (−x)zx
]cos(2y) + 4y
transponiendo terminos,
zx = e−xz[− z − xzx
]cos(2y) + 4y = −ze−xz cos(2y) − xzxe
−xz cos(2y) + 4y
zx + xzxe−xz cos(2y) = −ze−xz cos(2y) + 4y
zx
[1 + xe−xz cos(2y)
]= −ze−xz cos(2y) + 4y
de donde∂z
∂x=
4y − ze−xz cos(2y)
1 + xe−xz cos(2y).
Para hallar zy, derivemos (6.25) respecto de y, haciendo esto obtenemos
zy = e−xz[− xzy
]cos(2y) + e−xz(−1) sen(2y)2 + 4x = −xzye
−xz cos(2y) − e−xz sen(2y)2 + 4x
transponiendo terminos,
zy + xzye−xz cos(2y) = −e−xz sen(2y)2 + 4x
de donde∂z
∂y=
4x− 2e−xz sen(2y)
1 + xe−xz cos(2y).
♣
ξρ∫s email: [email protected] 158 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 159
EJEMPLO 6.129. Deducir expresiones para∂z
∂x,∂z
∂yen la funcion implıcita: z = e−yz sen(3x)−
2xy.
SOLUCION.- Seaz = e−yz sen(3x) − 2xy (6.25)
Para hallar zx, derivemos (6.25) respecto de x, haciendo esto obtenemos
zx = e−yz[− yzx
]sen(3x) + e−yz cos(3x)3 − 2y = −yzxe
−yz sen(3x) + e−yz cos(3x)3 − 2y
transponiendo terminos,
zx + yzxe−yz sen(3x) = e−yz cos(3x)3 − 2y
zx
[1 + ye−yz sen(3x)
]= e−yz cos(3x)3 − 2y
de donde∂z
∂y=e−yz cos(3x)3 − 2y
1 + ye−yz sen(3x).
Para hallar zy, derivemos (6.25) respecto de y, haciendo esto obtenemos
zy = e−yz[(−1)z + (−y)zy
]sen(3x) − 2x
transponiendo terminos,
zy = e−yz[− z − yzy
]sen(3x) − 2x = −ze−yz sen(3x) − yzye
−xz sen(3x) − 2x
zy + yzye−xz sen(3x) = −ze−yz sen(3x) − 2x
zy
[1 + ye−yz sen(3x)
]= −ze−yz sen(3x) − 2x
de donde∂z
∂y=
−ze−yz sen(3x) − 2x
1 + ye−yz sen(3x).
♣EJEMPLO 6.130. Por derivacion parcial implıcita, calcular
∂z
∂xpara la funcion eyz +4x2y = xz.
SOLUCION.- ♣
ξρ∫s email: [email protected] 159 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 160
EJEMPLO 6.131. Hallardw
dzsi w = x2 − y2 + 3; x2 + y + z = 0; y2 − x− z = 0.
SOLUCION.- Debido a la regla de la cadena se tiene
dw
dz=∂w
∂x
dx
dz+
∂w
∂y
dy
dz= 2x
dx
dz− 2y
dy
dz
Ahora bien, derivando implıcitamente el sistema de ecuaciones
x2 + y + z = 0
y2 − x− z = 0
2xdx
dz+
dy
dz+ 1 = 0
2ydy
dz− dx
dz− 1 = 0
2xdx
dz+
dy
dz= −1
dx
dz− 2y
dy
dz= −1
usando la regla de Gramer
dx
dz=
∣∣∣∣−1 1−1 −2y
∣∣∣∣∣∣∣∣
2x 11 −2y
∣∣∣∣=
2y + 1
−4xy − 1= − 2y + 1
4xy + 1,
dy
dz=
∣∣∣∣2x −11 −1
∣∣∣∣∣∣∣∣
2x 11 −2y
∣∣∣∣=
−2x+ 1
−4xy − 1=
1 − 2x
4xy + 1
Asıdw
dz= −2x
2y + 1
4xy + 1− 2y
1 − 2x
4xy + 1 ♣
EJEMPLO 6.132. Hallar∂z
∂uy∂z
∂vsi z = xy(x− y); u = x2 − y; v = x− y2.
SOLUCION.- Observemos que z = x2y − xy2. Por la regla de la cadena
∂z
∂u=∂z
∂x
∂x
∂u+
∂z
∂y
∂y
∂u= (2xy − y2)
∂x
∂u+ (x2 − 2xy)
∂y
∂u
con la derivacion implıcita respecto de u el siguiente sistema de ecuaciones
x2 − y = u
x− y2 = v
2x∂x
∂u− ∂y
∂u= 1
∂x
∂u− 2y
∂y
∂u= 0
usando la regla de Gramer
∂x
∂z=
∣∣∣∣1 −10 −2y
∣∣∣∣∣∣∣∣
2x −11 −2y
∣∣∣∣=
−2y
−4xy + 1=
2y
1 − 4xy,
∂y
∂z=
∣∣∣∣2x 11 0
∣∣∣∣∣∣∣∣
2x −11 −2y
∣∣∣∣=
−1
−4xy + 1=
1
1 − 4xy
ξρ∫s email: [email protected] 160 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 161
Ası∂w
∂z= (2xy − y2)
2y
1 − 4xy+ (x2 − 2xy)
1
1 − 4xy ♣
EJEMPLO 6.133. Si z = uv; u2 + v2 − x− y = 0; u2 − v2 + 3x+ y = 0. Calcular∂z
∂x
SOLUCION.- Por la regla de la cadena
∂z
∂x=∂z
∂u
∂u
∂x+
∂z
∂v
∂v
∂x= v
∂u
∂x+ u
∂v
∂x
con la derivacion implıcita respecto de x el siguiente sistema de ecuaciones
u2 + v2 − x− y = 0
u2 − v2 + 3x+ y = 0
2u∂u
∂x+ 2v
∂v
∂x− 1 = 0
2u∂u
∂x− 2v
∂v
∂x+ 3 = 0
2u∂u
∂x+ 2v
∂v
∂x= 1
2u∂u
∂x− 2v
∂v
∂x= −3
usando la regla de Gramer
∂u
∂x=
∣∣∣∣1 2v−3 −2v
∣∣∣∣∣∣∣∣
2u 2v2u −2v
∣∣∣∣=
4v
−8uv= −1
u,
∂v
∂x=
∣∣∣∣2u 12u −3
∣∣∣∣∣∣∣∣
2u 2v2u −2v
∣∣∣∣=
−8u
−8uv=
1
v
Ası∂z
∂x= −v
u+
u
v ♣
6.9. El Gradiente de una funcion diferenciable
Las derivadas parciales fxi, i = 1, 2, ..., n de una funcion diferenciable f : R
n → R desempenanun papel esencial, no solo ya en la determinacion del plano tangente a la superficie z = f(x) encada punto, sino tambien a la hora de calcular derivadas direccionales y direcciones de maximocrecimiento o decrecimiento de la funcion f . Por ello, la funcion ∇ : R
n → Rn que a un punto p
le asocia el vector de derivadas parciales ∇f(p) = (fx1(p), ..., fxn(p)) recibe un nombre especial,
gradiente. Ası, el gradiente de la funcion diferenciable f en el punto p es el vector (fx1(p), ..., fxn(p)).
DEFINICION 6.7. Sea f : U → R una funcion real definida en un abierto U ⊂ Rn, diferenciable
en un punto p ∈ U . El gradiente de f en el punto p es el vector ∇f(p) dado por
∇f(p) =
(∂f
∂x1(p), ...,
∂f
∂xn(p)
).
ξρ∫s email: [email protected] 161 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 162
Es importante recalcar que el gradiente de una funcion en un punto solo esta definido si la funciones diferenciable en dicho punto. La mera existencia del vector (fx1(p), ..., fxn
(p)) no basta paraque se le otorgue el nombre de gradiente, dado que ya hemos visto que hay funciones que admitentodas las derivadas direccionales en un punto y aun ası no son diferenciables en dicho punto. Elmotivo de esta particular exigencia es que el vector (fx1(p), ..., fxn
(p)) verifica unas propiedadescuando la funcion es diferenciable que de otro modo no verifica. Para poder distinguir una situacionde otra se reserva el termino gradiente para los vectores (fx1(p), ..., fxn
(p)) asociados a funcionesdiferenciables en el punto p en cuestion.
DEFINICION 6.8. Un camino en Rn es una aplicacion continua α : I → R
n definida en unintervalo I de la recta real.
DEFINICION 6.9. Sean S una superficie y p ∈ S. Un vector v ∈ Rn es tangente a S en p
si existen ε > 0 y un camino α : (−ε, ε) → Rn diferenciable en t = 0 tales que α(−ε, ε) ⊂ S,
α(0) = x y α′(0) = v. El vector α′(0) se llama vector velocidad del camino α en p.
DEFINICION 6.10. Sean S una superficie y p ∈ S. Un vector w ∈ Rn es perpendicular a S en
p si este es perpendicular a todo vector tangente a S en p.
DEFINICION 6.11. Sea c ∈ R, la preimagen de c bajo f , f−1(c) se llama superficie de nivel cde la funcion f . Cuando n = 2, f−1(c) se llama curva de nivel c de f
Sea f una funcion diferenciable. Las propiedades principales del gradiente ∇f(p) son:
TEOREMA 6.9. Sea f : U → R una funcion diferenciable en un abierto U ⊂ Rn. Si p ∈ U es tal
que ∇f(p) 6= 0. Entonces para todo vector v = (v1, ..., vn) ∈ Rn y cualquier camino α : (−δ, δ) → U
tal que α(0) = p y α ′(0) = v se tiene
(f α)′(0) =∂f
∂v(p) =< ∇f(p), v >=
n∑
i=1
∂f
∂xi
(p)vi.
Demostracion. Puesto que f α : (−δ, δ) → R, aplicamos la regla de la cadena para obtener
d(f α)(t)
dt=
n∑
i=1
∂f(α(t))
∂xi
dαi(t)
dt
de aquı se tiene
(f α)′(0) =n∑
i=1
∂f(α(0))
∂xi
dαi(0)
dt=
n∑
i=1
∂f(p)
∂xivi = 〈∇f(p), v〉
Por definicion
∂f
∂v(p) = lım
t→0
f(p+ tv) − f(p)
t= lım
t→0
n∑
i=1
∂f
∂xi(p)tvi + r(tv)
t=
n∑
i=1
∂f
∂xi
(p)vi + lımt→0
r(tv)
t
ξρ∫s email: [email protected] 162 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 163
Puesto que f una funcion diferenciable en un abierto U se tiene que lımt→0
r(tv)
t= 0, esto implica
que
∂f
∂v(p) =
n∑
i=1
∂f
∂xi(p)vi.
Esto es consecuencia de la regla de la cadena. En definitiva, estamos diciendo que los vectorestangentes a las curvas que pasan por el punto (p, f(p)) son combinaciones lineales de los vectorestangentes a la curva en ese punto segun las direcciones de los ejes OX1, OX2, ..., y OXn.
∂f
∂u(p) =
n∑
i=1
∂f
∂xi(p)ui.
Esto es evidente desde un punto de vista geometrico, desde el momento en que todos los vectoresestan situados sobre el plano tangente, y este viene dado por fx1(p), ... ,fxn
(p). Ası, en las funcionesdiferenciables es inmediato calcular las derivadas direccionales, reduciendolas a un simple productoescalar de vectores.
Recordemos que la derivada direccional de f en el punto p el la direccion del vector v,∂f
∂v(p) es la
pendiente de la recta tangente a la superficie Graf(f) que pasa por el punto (p, f(p)) tiene vector
direccion igual a v. Ahora, como∂f
∂v(p) = 〈∇f(p), v〉, entonces los vectores v que apuntan a las
direcciones a los largo de las cuales f crece son aquellas para los cuales se tiene 〈∇f(p), v〉 > 0,esto es, aquellos que forman un angulo menos a 90 grados con ∇f(p).
Decir que el crecimiento de f es mas rapido en la direccion del gradiente significa que: si v ∈ Rn
es tal que ||v|| = ||∇f(p)|| entonces
∂f
∂v(p) ≤ ∂f
∂∇f(p)(p)
TEOREMA 6.10. Sea f : U → R una funcion diferenciable en un abierto U ⊂ Rn. Si p ∈ U es
tal que ∇f(p) 6= 0. Entonces
1. df(p) = ∇f(p) dx.
2. El gradiente ∇f(p) apunta hacia la direccion donde la funcion es creciente.
3. Si p ∈ f−1(c) donde c ∈ R. El gradiente ∇f(p) es perpendicular a la superficie de nivelf−1(c).
Demostracion. Demostrar el inciso (2), para esto, colocando w = ∇f(p) tenemos
∂f
∂w(p) = 〈∇f(p), w〉 = ||∇f(p)||2 > 0
ξρ∫s email: [email protected] 163 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 164
Sea v ∈ Rn es tal que ||v|| = ||∇f(p)||, por la desigualdad de Schwarz:
∂f
∂v(p) = 〈∇f(p), v〉 ≤ ||∇f(p)|| ||v|| = ||∇f(p)||2 =
∂f
∂∇f(p)(p)
Ahora probaremos la tercera afirmacion: Se dice que w ∈ Rn es ortogonal al conjunto de nivel
f−1(c) significa que, dado cualquier camino α : (−ε, ε) → f−1(c) diferenciable en el punto t = 0con α(0) = p se tiene 〈w, α ′(0)〉 = 0. Ahora que α(t) ∈ f−1(c) significa que f(α(t)) = c para todot ∈ (−ε, ε), por tanto la funcion f α : (−ε, ε) → R es constante igual a c, luego (f α)′(0) = 0 osea 〈∇f(p), α ′(0)〉 = 0
EJEMPLO 6.134. Anote la expresion del vector gradiente en R3 para la funcion: f(x, y) =
x2 − 2y2 + xy.
SOLUCION.-
∇f(x, y) =(fx, fy
)=(2x+ y,−4y + x
)
♣
EJEMPLO 6.135. Anote la expresion del vector gradiente en R3 para la funcion: f(x, y) =
2x2 − y2 + xy.
SOLUCION.-∇f(x, y) =
(fx, fy
)=(4x+ y,−2y + x
)
♣
EJEMPLO 6.136. Halle el gradiente de f(x, y) = y ln x+ xy2 en el punto (1, 2)
SOLUCION.- Usando la definicion tenemos que:
fx(x, y) =y
x+ y2 fx(x, y) = ln x+ 2xy;
de esta manera tenemos que;
∇f(x, y) =(yx
+ y2, lnx+ 2xy),
evaluando ∇f en el punto (1, 2) se obtiene:
∇f(1, 2) =(2
1+ 22, ln 1 + 2 · 1 · 2
)= (6, 4).
♣
ξρ∫s email: [email protected] 164 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 165
Del ultimo ejemplo se observa que el gradiente de una funcion es un vector que muestra la direccionde cambio en un punto dado. Si hallamos el modulo a este vector tendremos la razon de cambioen ese punto.
||∇f(1, 2)|| = ||(6, 4)|| =√
62 + 42 = 7.21
Por otro lado si a ese vector lo multiplicamos punto por un vector unitario tendremos un escalarque es numericamente igual a la derivada direccional en la direccion de ese vector unitario. Estoquiere decir que:
∂f
∂u(1, 2) = < ∇f(1, 2), u >
EJEMPLO 6.137. Calcule la derivada direccional de f(x, y) = 3x2−2y2 en el punto P (−3/4, 0),en la direccion de P (−3/4, 0) a Q(0, 1) usando la forma alternativa del gradiente.
SOLUCION.- Primero busquemos el vector de direccion dado a traves de los dos puntos:
v =−→PQ = Q− P = (0, 1) − (−3/4, 0) = (3/4, 1). ||v|| =
√(3/4)2 + 1 = 5/4.
Ahora buscamos el vector unitario en esa direccion:
u =v
||v|| =(3
5,−4
5
)
por otro lado planteamos primero el gradiente:
∇f(x, y) =(6x,−4y
),
pero en el punto (−3/4, 0), el gradiente es:
∇f(−3/4, 0) =(− 9/2, 0
),
De esta manera la forma alternativa para hallar la derivada direccional por medio del gradientees igual a:
∂f
∂u(−3/4, 0) = < ∇f(−3/4, 0), u > =
⟨(− 9
2, 0),(3
5,−4
5
)⟩= −27
10 ♣
EJEMPLO 6.138. Calcule la derivada direccional de f(x, y) = x3 − 3xy + 4y2 en la direcciondel vector unitario u dado por θ = π
6en el punto P (1, 2).
SOLUCION.- Primero encontremos el vector unitario
u = (cos 30o, sen 30o) =(1
2,
√3
2
)
ξρ∫s email: [email protected] 165 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 166
por otro lado las derivadas parciales:
fx(x, y) = 3x2 − 3y fy(x, y) = −3x+ 8y,
de esta manera se obtiene que;
∇f(x, y) =(3x2 − 3y,−3x+ 8y
),
evaluando en el punto (1, 2):
∇f(1, 2) =(− 6, 12
),
luego la derivada direccional por medio del gradiente es igual a:
∂f
∂u(1, 2) = < ∇f(1, 2), u > =
⟨(− 6,−12
),(1
2,
√3
2
)⟩=
48√29
♣
EJEMPLO 6.139. Determinar en cada caso si existe una funcion f que satisfaga las condicionesrequeridas. Si existe alguna, encontrar todas.
(a) ∇f(x, y) = (3x2y + 2y2, x3 + 4xy − 1), f(1, 1) = 4.
(b) ∇f(x, y) = (5y, 2x).
(c)∂f
∂x(x, y) = exy + xyexy + cosx+ 1,
∂f
∂y(x, y) = x2exy.
(d) ∇f(x, y) = (ey + z2, xez2+ cosy, 2xzeyez2
), f(0, 0, 0) = 1.
SOLUCION.- ♣
Se ha visto que hay muchas derivadas direccionales en un punto (x, y) de una superficie. Enmuchas aplicaciones, se desea saber en que direccion moverse de manera que f(x, y) crezca masrapidamente. Esta direccion se llama la direccion de mayor ascenso y viene dada por el gradiente,como se establece en el teorema siguiente.
TEOREMA 6.11. Sea f : U → R una funcion real diferenciable en un abierto U ⊂ R2 y p ∈ U .
1. Si ∇f(p) = 0, entonces∂f
∂v(p) = 0 para todo vector unitario u.
2. El valor maximo de la derivada direccional∂f
∂u(p) es ||∇f(p)|| y se presenta cuando u tiene
la misma direccion que el vector gradiente ∇f(p), esto es, la direccion de maximo incrementode f esta dada por ∇f(p).
ξρ∫s email: [email protected] 166 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 167
3. La direccion de mınimo incremento de f esta dada por −∇f(p). El valor mınimo de∂f
∂v(p)
es −||∇f(p)||.
Demostracion. Debemos interpretar convenientemente el enunciado: nos referimos a la direccionen la que el valor de la funcion aumenta lo maximo posible, situados en el punto p. Es decir, la di-reccion unitaria u cuya derivada direccional en p es maxima entre todas las derivadas direccionalesen dicho punto.
Como∂f
∂u(p) = < ∇f(p), u > para toda direccion unitaria u, el valor de maximo cambio se
producira cuando el producto escalar < ∇f(p), u > sea maximo.
Dado que< ∇f(p), u > = ||∇f(p)|| ||u|| cos θ
para θ el angulo que forman los dos vectores ∇f(p) y u; el valor maximo se alcanzara cuando
cos θ sea 1, esto es, para θ = 0. Esto ocurre cuando u =∇f(p)
||∇f(p)|| , y el valor maximo coincide con
||∇f(p)||.
EJEMPLO 6.140. Hallar el gradiente ∇f(x, y, z) para la funcion dada: f(x, y, z) = x2 +y2−4zy hallar la direccion de maximo incremento de f en el punto (2,−1, 1).
SOLUCION.- El vector gradiente esta dado por:
∇f(x, y, z) =(fx(x, y, z), fy(x, y, z), fz(x, y, z)
)= (2x, 2y,−4)
por lo tanto la direccion de maximo crecimiento en el punto (2,−1, 1) es:
∇f(2,−1, 1) = (2, 2,−4).♣
EJEMPLO 6.141. Suponga que la temperatura en un punto (x, y, z) en el espacio esta dado por:
T (x, y, z) =80
1 + x2 + 2y2 + 3z2
donde T esta medida en grados centıgrados y “x”, “y” e “z” en metros. En que direccion aumentamas rapido la temperatura respecto al punto (1, 1,−2). ¿Cual es la maxima tasa de incremento?
SOLUCION.- No es difıcil establecer que
∇T (x, y, z) =
(− 160x
(1 + x2 + 2y2 + 3z2)2,− 320y
(1 + x2 + 2y2 + 3z2)2,− 420z
(1 + x2 + 2y2 + 3z2)2
)
Evaluando en el punto P (1, 1,−2) se tiene:
ξρ∫s email: [email protected] 167 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 168
∇T (1, 1,−2) =(− 5
8,5
4,−15
4
)=
5
8
(− 1, 2,−6
)
por tanto respecto a P (1, 1,−2) la temperatura se incrementa con mayor rapidez en la direcciondel vector gradiente v = (−1, 2,−6). La maxima tasa de incremento es la longitud del vectorgradiente:
||∇T (1, 1,−2)|| = 5
8||(− 1, 2,−6
)|| =
5√
41
8
Nota. Si buscaremos el mınimo valor tendrıamos que calcular −||∇f(p)|| y ocurre cuando tiene ladireccion opuesta al gradiente ∇f(p). ♣
EJEMPLO 6.142. Considere una placa rectangular. La temperatura en el punto (x, y) de laplaca esta dada por: T (x, y) = 5 + 2x2 + y2 determine la direccion en la que se debe mover uninsecto que esta en el punto (4, 2) para que se enfrıe lo mas rapido posible.
SOLUCION.- Puesto que ∇f(x, y) = (−4x,−2y), entonces ∇f(4, 2) = (−16,−4) o sea que sedebe ir en la direccion del vector v = (−16,−4). ♣
EJEMPLO 6.143. Hallar la direccion de maximo incremento. La temperatura en grados Celsiusen la superficie de una placa metalica en T (x, y) = 20 − 4x2 − y2 donde x y y se miden encentımetros. ¿En que direccion a partir de (2,−3) aumenta mas rapido la temperatura?. ¿Cual esla tasa o ritmo de crecimiento?.
SOLUCION.- El gradiente es∇T (x, y) = (−8x,−2y).
Se sigue que la direccion de maximo incremento esta dada por
∇T (2,−3) = (−16,+6)
y la tasa o el ritmo de incremento es
||∇T (2,−3)|| =√
256 + 36 =√
292 ≈ 17.09o por centımetro.♣
La solucion de este ejemplo puede entenderse erroneamente. Aunque el gradiente apunta en ladireccion de maximo incremento de la temperatura, no necesariamente apunta hacia el punto mascaliente de la placa. En otras palabras, el gradiente proporciona una solucion local para encontrarun incremento relativo de la temperatura en el punto (2,−3). Una vez que se abandona esa posicionla direccion de maximo incremento pude cambiar.
EJEMPLO 6.144. La altura de una montana, en metros sobre el nivel de mar, esta dada por:
f(x, y) = 2000 − x2
4− y2
2. Si un alpinista comienza su ascenso al nivel del mar en x = 20
√10
e y = 20√
5. ¿Cual es la trayectoria en el plano xy que corresponde a la ruta mas empinada deascenso a la montana?
ξρ∫s email: [email protected] 168 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 169
SOLUCION.- Sabemos que en cada punto de la montana, la direccion de ascenso con mayor
pendiente esa dada por el gradiente ∇f(x, y) =(− x
2,−y
).
Sea α(t) = (x(t), y(t)) la trayectoria en el plano xy que corresponde a la ruta mas empinada deascenso a la montana y que pasa por el punto (x, y) en el tiempo t. Puesto que la direccion demaximo incremento de f esta dada por ∇f , entonces el vector ∇f(x, y) es tangente a la trayectoriaα en el punto (x, y), es decir,
α′(t) = ∇f(x(t), y(t))
es decir (x ′, y ′) =(− x
2,−y
)de donde obtenemos el siguiente sistema de ecuaciones diferenciales:
x ′ = −x2
y ′ = −y
Para resolver este sistema
dy
dx=
dy
dtdx
dt
=−y−x
2
=2y
x
de dondedy
y= 2
dx
x
Integrando ∫dy
y= 2
∫dx
x
ln(y) = 2 ln(x) + c.
cuya solucion esy = cx2
y al usar el punto dado x = 20√
10 e y = 20√
5 la trayectoria es:
y =
√5
200x2
la grafica de esta trayectoria se muestra en la figura del lado. Esta grafica fue construida tomando
una curva de nivel para la cual z = 0. Se tiene que y =
√5
200x2. ♣
TEOREMA 6.12. Sea f : U → R una funcion real definida en un abierto U ⊂ Rn y sea p ∈ U
es tal que ∇f(p) 6= 0. Si p ∈ f−1(c) donde c ∈ R, entonces el gradiente ∇f(p) es perpendicular ala superficie de nivel f−1(c).
EJEMPLO 6.145. Sea f(x, y) = y − sen(x), hallar un vector normal a la curva de nivel 0.
ξρ∫s email: [email protected] 169 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 170
SOLUCION.- La curva de nivel 0 en el plano XY viene dada por z = 0. Es decir: 0 = y−sen(x),de aquı y = sen(x), esto es,
f−1(0) = (x, sen x) : x ∈ R
Por otro lado el vector gradiente esta dado por:
∇f(x, y) =(fx(x, y), fy(x, y)
)=(− cos(x), 1
)
Ya que el gradiente es un vector en el plano XY este vector es perpendicular a la curva de nivelen ese mismo plano en el punto (x, y). De esta manera el incremento es mayor en la superficiegenerada por la funcion. De esta manera algunos de los vectores generados son los siguientes:
∇f(−π, 0) = (1, 1) ∇f(− 2π
3,−
√3
2
)=(1
2, 1)
∇f(− π
2,−1
)= (0, 1) ∇f(0, 0) = (−1, 1)
EJEMPLO 6.146. Probar que toda recta normal al cono x2 = 2y2 + 2z2 corta al eje X.
SOLUCION.- Calculamos en primer lugar el vector gradiente de la funcion de tres variablesf(x, y, z) = x2 − 2y2 − 2z2:
∇f(x, y, z) = (2x,−4y,−4z).
El vector ∇f(x0, y0, z0) es el vector director de la recta normal al cono en un punto (x0, y0, z0). Laecuacion de la recta se escribe entonces como
x− x0
2x0
=y − y0
−4y0
=z − z0−4z0
Para que dicha recta corte al eje X, debe ser compatible el sistema
x− x0
2x0=
−y0
−4y0
y − y0
−4y0=
−z0−4z0
que resulta de hacer y = 0 y z = 0. En efecto, ambas ecuaciones dan la misma solucion x = 3x0/2,lo que prueba que la recta corta al eje X en el punto (3x0/2, 0, 0).
ξρ∫s email: [email protected] 170 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 171
En la grafica se muestran algunas rectas normales al cono en puntos de la circunferencia x20 =
2y2 + 2z2, x = x0 y se observa que todas ellas cortan al eje X en el punto (3x0/2, 0, 0). ♣
EJEMPLO 6.147. Encontrar la ecuacion de la recta tangente a la curva de interseccion delplano 6x+ 3y + 2z = 5 con el cono z2 = 4x2 + 9y2 por el punto (2, 1,−5).
SOLUCION.- Construimos las funciones f(x, y) =−6x− 3y + 5
2y g(x, y) = −
√4x2 + 9y2 que
representan al plano y al cono, respectivamente (observar el signo “-” de la raız debido a la posiciondel punto de interseccion de las superficies).
Las derivadas parciales de ambas funciones en el punto dado son:
fx(x, y) = −3, fy(x, y) = −3/2;
gx(x, y) = 4xg(x, y), gx(2, 1) = −8/5, gy(x, y) =9y
g(x, y), gy(2, 1) = −9/5.
De aquı deducimos que los vectores v1 = (−3,−3/2,−1) y v2 = (−8/5,−9/5,−1) son perpendic-ulares al plano y al cono,respectivamente. Un vector tangente a la curva interseccion de amboses
v = v1 × v2 =
∣∣∣∣∣∣
i j k−3 −3/2 −1−8/5 −9/5 −1
∣∣∣∣∣∣=
(− 3
10,−7
5, 3
)
En definitiva,la recta tangente a la curva citada tiene por ecuacion
r(t) =
(2 − 3
10t, 1 − 7
5t,−5 + 3t
)
♣
EJEMPLO 6.148. Demostrar que la suma de los cuadrados de las intersecciones con los ejescoordenados de todo plano tangente a la superficie x2/3 + y2/3 + z2/3 = a2/3 es constante.
SOLUCION.- Podemos considerar la superficie dada como una superficie de nivel de la funciong(x, y, z) = x2/3 +y2/3 +z2/3. El gradiente de dicha funcion en un punto (x0, y0, z0) de la superficiees
∇(x0, y0, z0) =2
3(x
−1/30 , y
−1/30 , z
−1/30 ).
Como dicho vector es perpendicular a la superficie,la ecuacion del plano tangente a la superficieen el punto citado es
x−1/30 (x− x0) + y
−1/30 (y − y0) + z
−1/30 (z − z0) = 0,
ξρ∫s email: [email protected] 171 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 172
donde x2/30 + y
2/30 + z
2/30 = a2/3 (pues el punto pertenece a la superficie).
Los puntos de interseccion de este plano con los ejes coordenados son
(x1/30 a2/3, 0, 0), (0, y
1/30 a2/3, 0), (0, 0, z
1/30 a2/3).
La suma de los cuadrados de dichas intersecciones vale:
x2 + y2 + z2 = a4/3(x2/30 + y
2/30 + z
2/30 ) = a2,
resultado que no depende del punto de tangencia. ♣
6.10. Formula de Taylor
Si f : Rn → R, x = (x1, ..., xn) con cada xi ∈ R, entonces:
Podemos definir las derivada parciales Dxif(x) ∈ L(R,R). Con respecto a xi en el modo
usual:
f(x1, ..., xi + h, ..., xn) − f(x1, ..., xi, ..., xn) −Dxif(x)h = o(|h|) cuando |h| → 0.
Notacion
Dxif(x) =
∂f
∂xi
(x) =∂f
∂xi
(y)
∣∣∣∣y=x
Las funciones coordenadas son denotadas y definidas por xi : Rn → R, que a cada x =
(x1, ..., xi, ..., xn) hace corresponder su i-esima coordenada xi. Como estas funciones sonlineales, se tiene que dxi(x) = xi para cada x ∈ R
n. Ademas Spandxini=1 = L(Rn,R), si
Df(x), Dxif(x) existen en L(Rn,R) y L(R,R) respectivamente escribimos
Df(x) =n∑
i=1
Dxif(x)dxi =
n∑
i=1
∂f
∂xi
(x)dxi,
la expresion anterior es un igualdad entre operadores lineales de Rn sobre R. Ello significa
que, para cada h = (h1, ..., hn) ∈ Rn con hi ∈ R,
Df(x)h =
n∑
i=1
Dxif(x) · (dxi · h) =
∂f(x)
∂x1h1 + · · ·+ ∂f(x)
∂xnhn
Definamos tambien las derivada parciales D2xixj
f(x) ∈ L(R × R,R).
Notacion
D2xixj
f(x) =∂2f(x)
∂xi∂xj
.
ξρ∫s email: [email protected] 172 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 173
Las funciones coordenadas son denotadas, definidas y dadas por
xixj : Rn × R
n → R × R
(a, b) 7→ xixj(a, b) = (ai, bj) = aibj .
Como estos operadores son lineales, se tiene que d(xixj)(a, b) = xixj , notacion d(xixj) =dxidxj . Ademas Spandxidxjn
i,j=1 = L(Rn×Rn,R), si D2f(x), D2
xixjf(x) existen en L(Rn×
Rn,R) y L(R × R,R) respectivamente escribimos
D2f(x) =
n∑
i=1
n∑
j=1
D2xixj
f(x)dxidxj =
n∑
i=1
n∑
j=1
∂2f
∂xi∂xj(x)dxidxj ,
la expresion anterior es una igualdad entre operadores lineales de Rn × R
n sobre R. Ellosignifica que, para cada (h, k) = ((h1, ..., hn), (k1, ..., kn)) ∈ R
n × Rn con hi ∈ R, ki ∈ R.
D2f(x)(h, k) =
n∑
i=1
n∑
j=1
D2xixj
f(x)dxidxj(h, k) =
n∑
i=1
n∑
j=1
∂2f(x)
∂xi∂xjhikj.
Si h = k, denotaremos (h, h) por h2.
De manera general tenemos que si hj = (hj1, ..., h
jn) para j = 1, ..., m, entonces
Dmf(x)(h1, ..., hm) =
n∑
i1=1
· · ·n∑
im=1
D2xi1
···ximf(x)dxi1 · · · dxim(h1, ..., hm)
Dmf(x)(h1, ..., hm) =
n∑
i1=1
· · ·n∑
im=1
∂2f(x)
∂xi1 · · ·∂xim
h1i1 · · ·h
mim
TEOREMA 6.13 (Formula de Taylor de Primer Orden). Sea f : U ⊂ Rn → R una
funcion cuyas derivadas parciales hasta segundo orden son continuas en un entorno de x0 ∈ U(sea E(x0) ⊂ U dicho entorno). Entonces si x0 + h ∈ E(x0) se cumple que
f(x0 + h) = f(x0) +
n∑
i=1
∂f
∂xi(x0)hi +R1(f, x0)(h)
siendo lım‖h‖→0
R1(f, x0)(h)
‖h‖ = 0
DEMOSTRACION.
ξρ∫s email: [email protected] 173 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 174
TEOREMA 6.14 (Formula de Taylor de Segundo Orden). Sea f : U ⊂ Rn → R una
funcion cuyas derivadas parciales hasta tercer orden son continuas en un entorno de x0 ∈ U (seaE(x0) ⊂ U dicho entorno). Entonces si x0 + h ∈ E(x0) se cumple que
f(x0 + h) = f(x0) +n∑
i=1
∂f(x0)
∂xihi +
1
2
n∑
i=1
n∑
j=1
∂2f(x0)
∂xi∂xjhihj +R2(f, x0)(h)
siendo lım‖h‖→0
R2(f, x0)(h)
‖h‖2= 0
DEMOSTRACION.
DEFINICION 6.12. [Matriz hessiana] Llamamos Matriz Hessiana a
Hf(x0) =
∂2f
∂x21
(x0)∂2f
∂x1∂x2(x0) . . .
∂2f
∂x1∂xn(x0)
∂2f
∂x2∂x1(x0)
∂2f
∂x22
(x0) . . .∂2f
∂x2∂xn(x0)
......
. . ....
∂2f
∂xn∂x1
(x0)∂2f
∂xn∂x2
(x0) . . .∂2f
∂x2n
(x0)
En estos terminos, la serie de Taylor de segundo orden descrita en el teorema anterior se puedeexpresar en la forma
f(x0 + h) = f(x0) + ∇f(x0) • h+1
2hT ·Hf(x0) · h+R2(f, x0)(h) (6.26)
Observe que2∑
i=1
2∑
j=1
aijhihj =(h1 h2
)( a11 a12
a21 a22
)(h1
h2
)
TEOREMA 6.15 (Formula de Taylor de m-esimo Orden). Sea U subconjunto abierto deR
n. Si f ∈ Cm(U,R), entonces
f(x+ h) = f(x) +Df(x)h+ · · · + 1
(m− 1)!Dm−1f(x)hm−1 +Rm(x, h) (6.27)
para x ∈ U , x+ sh ∈ U , 0 ≤ s ≤ 1, donde
Rm(x, h) =1
(m− 1)!
∫ 1
0
(1 − s)m−1Dmf(x+ sh)hmds. (6.28)
ξρ∫s email: [email protected] 174 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 175
Tambien,
f(x+ h) = f(x) +Df(x)h+ · · ·+ 1
m!Dmf(x)hm + g(x, h) (6.29)
donde g(x, h) = o(|h|m) cuando |h| → 0.
Estudiemos ahora la formula de Taylor para funciones de dos variables. Se verifica el siguiente
TEOREMA 6.16 (Formula de Taylor de n-esimo orden para dos variables). Sea z =f(x, y) definida en un entorno de P (a, b), con derivadas parciales continuas hasta el orden n en elmismo entorno y, existiendo todas las derivadas parciales de orden n+1 en dicho entorno. Entoncesf(x, y) se puede escribir en la forma f(x, y) = Pn(x, y) + Rn(x, y), (formula de Taylor) siendoPn(x, y) un polinomio de grado n en (x − a) e (y − b). Aquı Rn(x, y) representa un infinitesimode orden superior a ||(x, y) − (a, b)||n cuando (x, y) tiende a (a, b). Esto es,
lım(x,y)→(a,b)
f(x, y) − Pn(x, y)
||(x, y) − (a, b)||n = 0
La expresion concreta de Pn(x, y) es
Pn(x, y) =n∑
k=0
1
k!
k∑
i=0
k!
i!(k − i)!
∂kf
∂xi∂yk−i
∣∣∣∣p
(x− a)i(y − b)k−i
donde las potencias se entienden de manera simbolica, es decir, al actuar el exponente sobre lossımbolos de derivada parcial representaran derivacion sucesiva, y al actuar sobre (x− a) o (y− b)representaran potencias. Pn(x, y) recibe el nombre de polinomio de Taylor de la funcion f , degrado n, en el punto (a, b). Cuando a = b = 0, la formula de Taylor se llama de McLaurin.
Demostracion.
Aclaremos esto obteniendo Pn(x, y) para algunos valores de n:
n = 1,P1(x, y) = f(a, b) + fx(a, b)(x− a) + fy(a, b)(y − b)
n = 2,
P2(x, y) = f(a, b) + fx(a, b)(x− a) + fy(a, b)(y − b)+
1
2(fxx(a, b)(x− a)2 + 2fxy(a, b)(x− a)(y − b) + fyy(a, b)(y − b)2)
n = 3,
P3(x, y) = f(a, b) + fx(a, b)(x − a) + fy(a, b)(y − b)+
1
2(fxx(a, b)(x − a)2 + 2fxy(a, b)(x − a)(y − b) + fyy(a, b)(y − b)2)+
1
6(fxxx(a, b)(x − a)3 + 3fxxy(a, b)(x − a)2(y − b) + 3fxyy(a, b)(x − a)(y − b)2 + fyyy(a, b)(y − b)3)
ξρ∫s email: [email protected] 175 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 176
EJEMPLO 6.149. Escribir el desarrollo de Taylor de segundo orden de las funciones: (a)f(x, y) = −x2 + 2xy + 3y2 − 6x− 2y − 4 en el punto (−2, 1). (b) f(x, y) = e−x2−y2
cos(x+ y) enel punto (0, 0). (c) f(x, y) = xy en el punto (1, 1). (d) f(x, y) = ex+y en el punto (0, 0).
SOLUCION.- Calcularemos en todos los casos el vector gradiente y la matriz hessiana en elpunto correspondiente.
(a) Si f(x, y) = −x2 + 2xy + 3y2 − 6x− 2y − 4, entonces f(−2, 1) = 1. Ademas,
fx = −2x+ 2y − 6
fy = 2x+ 6y − 2
=⇒ ∇f(−2, 1) = (0, 0);
fxx = −2 fxy = 2
fyx = 2 fyy = 6
=⇒ Hf(−2, 1) =
(−2 22 6
).
Ası pues,
f(x, y) = f(−2, 1) + (0, 0) • (x+ 2, y − 1)
+1
2(x+ 2, y − 1)
(−2 22 6
)(x+ 2y − 1
)+R2(x, y)
= 1 − (x+ 2)2 + 2(x+ 2)(y − 1) + 3(y − 1)2 +R2(x, y).
Observemos en este caso que R2(x, y) = 0, es decir el polinomio de Taylor de segundo ordencoincide con la funcion al ser esta ya un polinomio de segundo grado.
(b) Como f(x, y) = e−x2−y2cos(x+ y), entonces f(0, 0) = 1. Por otra parte,
fx = e−x2−y2(− 2x cos(x+ y) − sen(x+ y)
)
fy = e−x2−y2(− 2y cos(x+ y) − sen(x+ y)
)
=⇒ ∇f(0, 0) = (0, 0);
Como ademas Hf(0, 0) =
(−3 −1−1 −3
), la formula de Taylor nos da la igualdad
f(x, y) = f(−2, 1) +1
2(x, y)
(−3 −1−1 −3
)(xy
)+R2(x, y)
= 1 − 3
2x2 − xy − 3
2y2 +R2(x, y).
En la grafica se observa el grado de aproximacion en un entorno del origen de la superficie querepresenta la funcion (por encima) y la grafica del polinomio de segundo grado que representa elpolinomio de Taylor de segundo orden (por debajo).
ξρ∫s email: [email protected] 176 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 177
(c) De f(x, y) = xy, deducimos que f(1, 1) = 1. Ademas,
fx = yxy−1
fy = xy ln x
=⇒ ∇f(1, 1) = (1, 0);
fxx = y(y − 1)xy−2 fxy = xy−1(1 + y ln x
)
fyx = xy−1(1 + y ln x
)fyy = xy
(ln x)2
=⇒ Hf(1, 1) =
(0 11 0
).
Sustituyendo en la formula de Taylor,obtenemos:
f(x, y) = f(1, 1) + (1, 0) • (x− 1, y − 1)
+1
2(x− 1, y − 1)
(0 11 0
)(x− 1y − 1
)+R2(x, y)
= 1 − y + xy +R2(x, y).
(d) Como f(x, y) = ex+y, f(0, 0) = 1. Por otra parte,
∇f(1, 1) =(ex+y, ex+y
)=⇒ ∇f(0, 0) = (1, 1);
Hf(1, 1) =
(ex+y ex+y
ex+y ex+y
)=⇒ Hf(0, 0) =
(1 11 1
).
Obtenemos entonces que
f(x, y) = f(0, 0) +1
2(x, y)
(1 11 1
)(xy
)+R2(x, y)
= 1 + (x+ y) +(x+ y)2
2+R2(x, y). ♣
EJEMPLO 6.150. Sea la funcion f(x, y) = eax+y2+ b sen(x2 + y2). Determinar los valores de a
y b para que el plano tangente a la superficie z = f(x, y) en el origen sea horizontal y el polinomiode Taylor de segundo orden centrado en el origen tome el valor 6 en el punto (1, 2).
ξρ∫s email: [email protected] 177 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 178
SOLUCION.- Para que el plano tangente sea horizontal,deben anularse las dos derivadas par-ciales de primer orden. Ası pues,como
∂f
∂x= aeax+y2
+ 2bx cos(x2 + y2
)
∂f
∂y= 2yeax+y2
+ 2by cos(x2 + y2
)
deducimos que∂f
∂x(0, 0) = a y
∂f
∂x(0, 0) = 0.
Basta hacer a = 0 para que ambas derivadas parciales se anulen. Sustituyendo en la funcion,resulta
f(x, y) = ey2
+ b sen(x2 + y2)
Para escribir el polinomio de Taylor, calculemos las derivadas parciales de segundo orden:
∂2f
∂x2= 2bx cos
(x2 + y2
)− 4bx2 sen
(x2 + y2
)
∂2f
∂x∂y= −4bxy sen
(x2 + y2
)
∂2f
∂y2=
(2 + 4y2
)ey2
+ 2b cos(x2 + y2
)− 4by2 sen
(x2 + y2
).
Sustituyendo en el punto (0,0),obtenemos la matriz hessiana
Hf(0, 0) =
(2b 00 2 + 2b
)
El polinomio de Taylor en el origen tiene la forma
P2f(x, y) = f(0, 0) +1
2(x, y)Hf(0, 0)
(xy
)= 1 + bx2 + (1 + b)y2.
Teniendo en cuenta el enunciado del problema, hacemos 6 = P2f(1, 2). Resulta ası: 6 = 1 + b +4(1 + b) de donde b = 1/5. ♣
EJEMPLO 6.151. Obtener la formula de McLaurin de orden dos para la funcion f(x, y) =ex cos y.
SOLUCION.- En este caso a = b = 0. Necesitamos calcular las derivadas parciales primerasy segundas: fx(x, y) = ex cos y, fy(x, y) = −ex sen y, fxx(x, y) = ex cos y, fyy(x, y) = −ex cos y,
ξρ∫s email: [email protected] 178 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 179
fxy(x, y) = −ex sen y. Sus valores en el punto (0, 0) son: fx(0, 0) = 1, fy(0, 0) = 0, fxx(0, 0) = 1,fyy(0, 0) = −1, fxy(0, 0) = 0, f(0, 0) = 1. Por lo tanto
ex cos y = 1 + x+1
2(x2 − y2) +R2(x, y)
donde R2(x, y) es un infinitesimo de orden superior a ||(x, y)||2, para (x, y) → (a, b). ♣
EJEMPLO 6.152. Obtener el desarrollo de Taylor de orden dos de la funcion f(x, y) = yx, enun entorno del punto (1, 1).
SOLUCION.- Calculemos las derivadas parciales de primer y segundo orden.
fx(x, y) = yx ln y, fy(x, y) = xyx−1, fxx(x, y) = ln yyx ln y = yx(ln y)2, fyy(x, y) = x(x − 1)yx−2,
fxy(x, y) = xyx−1 ln y + yx 1
y= xyx−1 ln y + yx−1 = yx−1(x ln y + 1). Sus valores en el punto (1, 1)
son: fx(1, 1) = 0, fy(1, 1) = 1, fxx(1, 1) = 0, fyy(1, 1) = 0, fxy(1, 1) = 1. Ademas f(1, 1) = 1.
Luego se tiene
yx = 1 + (y − 1) +1
22(x− 1)(y − 1) +R2(x, y)
= 1 + (y − 1) + (x− 1)(y − 1) +R2(x, y)
Donde R2(x, y) es un infinitesimo de orden superior a ||(x, y)− (1, 1)||2 ♣
EJEMPLO 6.153. (a) Hallar la formula de Taylor de segundo orden para las funciones dadasen el punto indicado. Escribir la forma de Lagrange del residuo. i) f(x, y) = (x + y)2 en (0, 0).
ii) f(x, y) =1
x2 + y2 + 1en (0, 0). iii) f(x, y) = ex sen y en (2, π/4). iv) f(x, y) = ln(1 + xy) en
(2, 3). v) f(x, y) = x + xy + 2y en (1, 1). vi) f(x, y) = xy en (1, 2). (b) Utilizando los resultados
anteriores evaluar (0.95)2.01. i) con error ε <1
500. ii) con error ε <
1
5000
SOLUCION.- ♣
EJEMPLO 6.154. Hallar el polinomio de segundo grado que mejor aproxima, en el origen, a lafuncion f(x, y) = sen x sen y
SOLUCION.- ♣
EJEMPLO 6.155. a) Supongamos que f es de clase C2 en R2 y que
∂2f
∂x∂y(x, y) = 0 ∀(x, y).
Probar que f(x, y) = g(x) + h(y). (b) Sean f de clase C2 en R2 y que
∂2f
∂x2− ∂2f
∂y2≡ 0. i). Si
llamamos u = x+ y y v = x− y, calcular∂2f
∂u∂v. ii) Probar que f(x, y) = g(x+ y) + h(x− y).
ξρ∫s email: [email protected] 179 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 180
SOLUCION.- Se sabe que
Df(x, y) =∂f
∂x(x, y) dx+
∂f
∂y(x, y) dy
D2f(x, y) =∂2f
∂x2(x, y) dx dx+
∂2f
∂x∂y(x, y) dx dy +
∂2f
∂y∂x(x, y) dy dx+
∂2f
∂y2(x, y) dy dy
Por tanto
D2f(x, y)(h, k)2 =∂2f
∂x2(x, y) h2 +
∂2f
∂y2(x, y) k2
Si i+ j = m, de la hipotesis tenemos que∂mf
∂xi∂yj(x, y) = 0 para todo (x, y). Esto implica que
Dmf(x, y)(h, k)m =∂mf
∂xm(x, y) hm +
∂mf
∂ym(x, y) km
Del teorema de Taylor tenemos
f(x, y) = f(a, b)+Df(a, b)(x−a, y−b)+· · ·+ 1
(m− 1)!Dm−1f(a, b)(x−a, y−b)m−1+Rm(x−a, y−b)
f(x, y) =∞∑
m=0
1
m!Dmf(a, b)(x− a, y − b)m
f(x, y) =
∞∑
m=0
1
m!
[∂mf
∂xm(a, b) (x− a)m +
∂mf
∂ym(a, b) (y − b)m
]
f(x, y) =
∞∑
m=0
1
m!
∂mf
∂xm(a, b) (x− a)m +
∞∑
m=0
1
m!
∂mf
∂ym(a, b) (y − b)m
Tomando a = b = 0, y definiendo
g(x) =
∞∑
m=0
1
m!
∂mf
∂xm(0, 0) xm, h(y) =
∞∑
m=0
1
m!
∂mf
∂ym(0, 0) ym
tenemosf(x, y) = g(x) + h(y)
u = x+ y
v = x− y
x =1
2(u+ v)
y =1
2(u− v)
ξρ∫s email: [email protected] 180 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 181
Puesto que
∂f
∂u=∂f
∂x
∂x
∂u+∂f
∂y
∂y
∂u
∂2f
∂v∂u=
[∂2f
∂x2
∂x
∂u+
∂2f
∂y∂x
∂y
∂v
]∂x
∂u+∂f
∂x
∂2x
∂v∂u+
[∂2f
∂x∂y
∂x
∂v+∂2f
∂y2
∂y
∂v
]∂y
∂u+∂f
∂y
∂2y
∂v∂u
∂x
∂u=
1
2,
∂x
∂v=
1
2,
∂y
∂u=
1
2,
∂y
∂v= −1
2
∂2f
∂v∂u=
[∂2f
∂x2
1
2− ∂2f
∂y∂x
1
2
]1
2+
[∂2f
∂x∂y
1
2− ∂2f
∂y2
1
2
]1
2
∂2f
∂v∂u=
1
4
∂2f
∂x2− 1
4
∂2f
∂y∂x+
1
4
∂2f
∂x∂y− 1
4
∂2f
∂y2= 0
por tanto si definimos
G(u, v) =
(1
2(u+ v),
1
2(u− v)
)
entoncesf(G((u, v)) = g(u) + h(v)
de aquıf(x, y) = g(x+ y) + h(x− y) ♣
6.11. Plano tangente y Recta Normal
Una superficie en R3 puede ser generado de dos maneras: Una como como conjunto de nivel de
una funcion del tipo f : R3 → R y la otra como siendo el grafico de una funcion f : R
2 → R.
Consideremos una funcion f : R3 → R y c ∈ R. El conjunto de nivel c o conjunto preimagen del
valor c, f−1(c), es llamado superficie. Desde el punto de vista geometrico se llama plano tangente auna superficie en un punto dado al plano que contiene a todas las rectas tangentes a la superficie endicho punto, o mejor dicho, a las rectas tangentes de todas las curvas trazadas sobre la superficieque pasan por el punto. Si todas las tangentes no estan sobre el mismo plano, entonces se dice queel plano tangente no existe. Desde el punto de vista analıtico para que exista el plano tangente auna superficie en un punto de la misma, la funcion que define la superficie ha de ser diferenciableen el punto correspondiente.
DEFINICION 6.13. Sean c ∈ R y f : R3 → R una funcion real diferenciable en un punto
p ∈ f−1(c) tal que ∇f(p) 6= 0.
ξρ∫s email: [email protected] 181 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 182
1. El plano tangente a la superficie f−1(c) el punto p es el plano que pasa por p y tiene vectornormal a ∇f(p), esto es,
P lano = q : < q,∇f(p) >=< p,∇f(p) >. (6.30)
2. La recta normal a la superficie f−1(c) el punto p es la recta que pasa por p y tiene vectordireccion a ∇f(p), esto es,
Recta = p+ t∇f(p) : t ∈ R. (6.31)
En las ecuaciones (6.30) y (6.31) hagamos q = (x, y, z), p = (x0, y0, z0) y
∇f(p) = ∇f(x0, y0, z0) = (fx(x0, y0, z0), fy(x0, y0, z0), fz(x0, y0, z0)).
de donde obtenemos la siguiente ecuacion para el plano
fx(x0, y0, z0)(x− x0) + fy(x0, y0, z0)(y − y0) + fz(x0, y0, z0)(z − z0) = 0. (6.32)
ademas la ecuacion de la recta normal a la superficie f−1(c) en el punto p viene definida por lasecuaciones:
x− x0
fx(x0, y0, z0)=
y − y0
fy(x0, y0, z0)=
z − z0fz(x0, y0, z0)
. (6.33)
Ahora bien, consideremos una funcion de R2 a R, f : R
2 → R. El grafico de una funcion f tambiendefine una superficie. En efecto, si
z = f(x, y)
entonces,z − f(x, y) = 0.
Ahora definamos la funcion F : R3 → R siendo F (x, y, z) = f(x, y)− z, luego el grafico de f es la
superficie dada por el conjunto de nivel 0 para F , esto es
Graf(f) = F−1(0).
Puesto que el plano tangente a la superficie F−1(0) en el punto p0 = (x0, y0, f(x0, y0)) es dado por(6.32) y ademas
∇F (p0) = (Fx(p0), Fy(p0), Fz(p0)) = (fx(x0, y0), fy(x0, y0),−1)
obtenemos que el plano tangente al grafico de f ,Graf(f), que pasa por el punto p0 = (x0, y0, f(x0, y0))es dado por
fx(x0, y0)(x− x0) + fy(x0, y0)(y − y0) − (z − f(x0, y0)) = 0.
o equivalentemente
z − f(x0, y0) = fx(x0, y0)(x− x0) + fy(x0, y0)(y − y0). (6.34)
ξρ∫s email: [email protected] 182 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 183
Ademas la ecuacion de la recta normal a la superficie F−1(0) en el punto p0 = (x0, y0, f(x0, y0))viene definida por las ecuaciones:
x− x0
fx(x0, y0)=
y − y0
fy(x0, y0)=z − f(x0, y0)
−1. (6.35)
EJEMPLO 6.156. ¿Cual es la ecuacion del plano tangente a la superficie z = f(x, y) en el puntoP0(x0, y0, z0)?
SOLUCION.- El plano tangente al grafico de f , Graf(f), que pasa por el punto p0 = (x0, y0, z0)es dado por
z − z0 = fx(x0, y0)(x− x0) + fy(x0, y0)(y − y0).
donde z0 = f(x0, y0). ♣
EJEMPLO 6.157. Analice la verdad o falsedad de la siguiente afirmacion: La ecuacion del planotangente a la superficie z = f(x, y) en el punto P0(x0, y0, z0) es
fx(x0, y0)(x− x0) + fy(x0, y0)(y − y0) + (z − z0) = 0.
Justifique su respuesta.
SOLUCION.- Definamos la funcion F : R3 → R siendo F (x, y, z) = f(x, y)− z, luego el grafico
de f es la superficie dada por el conjunto de nivel 0 para F , esto es
Graf(f) = F−1(0).
Puesto que el plano tangente a la superficie F−1(0) en el punto p0 = (x0, y0, f(x0, y0)) es dado por
Fx(x0, y0, z0)(x− x0) + Fy(x0, y0, z0)(y − y0) + Fz(x0, y0, z0)(z − z0) = 0.
y ademas∇F (p0) = (Fx(p0), Fy(p0), Fz(p0)) = (fx(x0, y0), fy(x0, y0),−1)
obtenemos que el plano tangente al grafico de f ,Graf(f), que pasa por el punto p0 = (x0, y0, f(x0, y0))es dado por
fx(x0, y0)(x− x0) + fy(x0, y0)(y − y0) − (z − f(x0, y0)) = 0.
o equivalentemente
z − f(x0, y0) = fx(x0, y0)(x− x0) + fy(x0, y0)(y − y0). ♣
EJEMPLO 6.158. Analice la verdad o falsedad de la siguiente afirmacion: La ecuacion de larecta normal a a la superficie z = f(x, y) en el punto (x0, y0, z0) es
(x0, y0, z0) = (x0, y0, z0) + t(fx(x0, y0, z0), fy(x0, y0, z0), 1).
Justifique su respuesta.
ξρ∫s email: [email protected] 183 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 184
SOLUCION.- Observemos que el grafico de una funcion de R2 a R, f : R
2 → R, define unasuperficie. En efecto, si
z = f(x, y)
entonces,z − f(x, y) = 0.
Ahora definamos la funcion F : R3 → R siendo F (x, y, z) = f(x, y)− z, luego el grafico de f es la
superficie dada por el conjunto de nivel 0 para F , esto es
Graf(f) = F−1(0).
La recta normal a la superficie F−1(c) el punto (x0, y0, z0) es la recta que pasa por (x0, y0, z0) ytiene vector direccion a ∇F (x0, y0, z0), esto es,
(x, y, z) = (x0, y0, z0) + t∇F (x0, y0, z0).
Por otra parte,∇F (x0, y0, z0) = (fx(x0, y0), fy(x0, y0),−1)
Por lo tanto,(x, y, z) = (x0, y0, z0) + t (fx(x0, y0), fy(x0, y0),−1).
♣
EJEMPLO 6.159. Hallar las ecuaciones del plano tangente y de la recta normal a la superficiede ecuacion z = x2 + y2 − 2xy + 2y − 2, en el punto P (1, 2, 3).
SOLUCION.- Dada la ecuacion z = x2 +y2−2xy+2y−2, encontramos las derivadas parciales;
fx(x, y) = 2x− 2y, fy(x, y) = 2y − 2x+ 2
en el punto dado (1, 2, 3):fx(1, 2) = −2, fy(1, 2) = 4,
de esta manera la ecuacion del plano tangente en el punto (1, 2, 3) es: z−3 = −2(x−1)+4(y−2)o bien z + 2x− 4y + 3 = 0. Por otro lado la recta normal esta dado por
x− 1
−2=y − 2
4=z − 3
−1.
♣
EJEMPLO 6.160. Hallar las ecuaciones del plano tangente y de la recta normal a la superficiede ecuacion z = xexy−2, en el punto P (2, 1, 2).
ξρ∫s email: [email protected] 184 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 185
SOLUCION.- Dada la ecuacion z = xexy−2, encontramos las derivadas parciales;
Fx(x, y) = exy−2 + xyexy−2, Fy(x, y) = x2exy−2
en el punto dado (2, 1, 2):
Fx(2, 1) = e0 + 2(1)e0 = 1 + 2 = 3, Fy(2, 1) = 4e0 = 4,
de esta manera la ecuacion del plano tangente en el punto (1, 2, 3) es: z− 2 = 3(x− 2) + 4(y− 1);o bien: z − 3x− 4y + 8 = 0, que es el plano buscado. Por otro lado la recta normal esta dado por
x− 1
3=y + 1
4=z − 2
−1.
♣
EJEMPLO 6.161. Halle la ecuacion de la recta normal a la superficie de ecuacion z = x2 +y2 − 2xy + 2y − 2, en el punto P (1, 2, 3).
SOLUCION.- Dada la ecuacion z = x2 +y2−2xy+2y−2, encontramos las derivadas parciales;
fx(x, y) = 2x− 2y, fy(x, y) = 2y − 2x+ 2
en el punto dado (1, 2, 3)
fx(1, 2) = −2, fy(1, 2) = 4,
de esta manera la ecuacion del plano tangente en el punto (1, 2, 3) es:
z − 3 = −2(x− 1) + 4(y − 2)
, o bien: z + 2x− 4y + 3 = 0. ♣
EJEMPLO 6.162. Hallar una ecuacion del plano tangente al hiperboloide z2 − 2x2 − 2y2 = 12en el punto (1,−1, 4).
SOLUCION.- Se comienza por expresar la ecuacion de la superficie como
z2 − 2x2 − 2y2 − 12 = 0.
Despues, considerandof(x, y, z) = z2 − 2x2 − 2y2 − 12
se tienefx(x, y, z) = −4x fy(x, y, z) = −4y y fz(x, y, z) = 2z.
ξρ∫s email: [email protected] 185 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 186
En el punto (1,−1, 4) las derivadas parciales son
fx(1,−1, 4) = −4 fy(1,−1, 4) = 4 y fz(1,−1, 4) = 8.
Por tanto la ecuacion del plano tangente en (1,−1, 4) es
(x, y, z) · ∇f(1,−1, 4) = (1,−1, 4) · ∇f(1,−1, 4)
(x, y, z) · (−4, 4, 8) = (1,−1, 4) · (−4, 4, 8)
−4x+ 4y + 8z = −4 − 4 + 32 = 24
−x+ y + 2z = 6♣
EJEMPLO 6.163. Hallar las ecuaciones del plano tangente y de la recta normal al hiperboloide:F (x, y, z) = z2 − 2x2 + 2y2 − 12 en el punto (1,−1, 4).
SOLUCION.- Primero expresemos la funcion como una ecuacion igual a cero: z2−2x2+2y2−12 =0, luego encontramos las derivadas parciales de la ecuacion del plano
Fx(x, y, z) = −4x, Fy(x, y, z) = −4y, Fz(x, y, z) = 2z,
en el punto dado:
Fx(1,−1, 4) = −4, Fy(1,−1, 4) = 4, F z(1,−1, 4) = 8,
de esta manera la ecuacion del plano tangente en el punto (1,−1, 4) es:
−4(x− 1) + 4(y + 1) + 8(z − 4) = 0
−4x+ 4 + 4y + 4 + 8z − 32 = 0
−4x+ 4y + 8z − 24 = 0
x− y − 2z + 6 = 0.
La ecuacion de la recta normal a la superficie z2 − 2x2 + 2y2 − 12 = 0 en el punto (1,−1, 4) vienedefinida por las ecuaciones:
x− 1
−4=y + 1
4=z − 4
8.
♣
EJEMPLO 6.164. Hallar el o los puntos de la esfera x2 + y2 + z2 = 4 en los cuales el planotangente es paralelo al plano x+ y + z = 4.
ξρ∫s email: [email protected] 186 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 187
SOLUCION.- Sea P (a, b, c) uno de estos puntos, entonces por esta en la esfera:
a2 + b2 + c2 = 4
Por otro lado, por ser el plano tangente a la esfera en el punto P y el plano x+y+z = 4 paralelos,sus vectores normales son paralelos, es decir; (2a, 2b, 2c) = α(1, 1, 1), donde (1, 1, 1) es el vectornormal del plano dado y (2a, 2b, 2c) es el vector gradiente de la funcion que tambien es un vectornormal a la esfera en el punto dado. Entonces obtenemos el siguiente sistema de ecuaciones
a2 + b2 + c2 = 42a = α2b = α2c = α
de las tres ultimas ecuaciones de tiene a = b = c =α
2que en la primera ecuacion 3a2 = 16, de
donde a = ± 4√3. Entonces los puntos buscados son:
( 4√3,
4√3,
4√3
)y(− 4√
3,− 4√
3,− 4√
3
). ♣
EJEMPLO 6.165. Hallar la ecuacion del plano tangente a la superficie de ecuacion x2 + 2y2 +3z2 = 21, que es paralelo al plano x+ 4y + 6z = 0.
SOLUCION.- Consideremos la funcion: F (x, y, z) = x2 + 2y2 + 3z2 − 21, encontramos lasderivadas parciales;
Fx(x, y, z) = 2x, Fy(x, y, z) = 4y, Fy(x, y, z) = 6z
El vector gradiente: ∇f(x, y, z) = 2xi+ 4yj+ 6zk, por otro lado el vector normal del plano dado:(1, 4, 6) ya que son paralelos se cumple que: (2x, 4y, 6z) = t(1, 4, 6) de aquı: 2x = 4y
4= 6z
6= t
entonces 2x = y = z = t, al sustituir esto en la funcion dada:
t2
4+ 2t2 + 3t2 = 21
de donde t = ±2, de esta manera los puntos de tangencia son: (1, 2, 2) y (−1,−2,−2) y los planostangentes son: 2(x− 1) + 8(y− 2) + 12(z − 2) = 0, simplificando esta expresion: x+ 4y+ 6z = 21y −2(x+ 1) − 8(y + 2) − 12(z + 2) = 0, simplificando esta expresion: x+ 4y + 6z = −21. ♣
EJEMPLO 6.166. Hallar la ecuacion del plano tangente a la superficie de ecuacion x2 + 2y2 +3z2 = 21, que es paralelo al plano x+ 4y + 6z = 0.
SOLUCION.- Consideremos la funcion: F (x, y, z) = x2 + 2y2 + 3z2 − 21, encontramos lasderivadas parciales;
Fx(x, y, z) = 2x, Fy(x, y, z) = 4y, Fy(x, y, z) = 6z
ξρ∫s email: [email protected] 187 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 188
El vector gradiente: ∇f(x, y, z) = 2xi+ 4yj+ 6zk, por otro lado el vector normal del plano dado:(1, 4, 6) ya que son paralelos se cumple que: (2x, 4y, 6z) = t(1, 4, 6) de aquı: 2x = 4y
4= 6z
6= t
entonces 2x = y = z = t, al sustituir esto en la funcion dada:
t2
4+ 2t2 + 3t2 = 21
de donde t = ±2, de esta manera los puntos de tangencia son: (1, 2, 2) y (−1,−2,−2) y los planostangentes son: 2(x− 1) + 8(y− 2) + 12(z − 2) = 0, simplificando esta expresion: x+ 4y+ 6z = 21y −2(x+ 1) − 8(y + 2) − 12(z + 2) = 0, simplificando esta expresion: x+ 4y + 6z = −21. ♣
EJEMPLO 6.167. Considere la superficie S dada por√x +
√y +
√z =
√a con a > 0 y
p0 = (x0, y0, z0) cualesquiera de sus puntos. Demostrar que la suma de las coordenadas de lospuntos de interseccion del plano tangente a S en p0 con los ejes coordenados es igual a a.
SOLUCION.- Se comienza por expresar la ecuacion de la superficie como
√x+
√y +
√z −
√a = 0.
Despues, considerandof(x, y, z) =
√x+
√y +
√z −
√a
se tiene
fx(x, y, z) =1
2√x
fy(x, y, z) =1
2√y
y fz(x, y, z) =1
2√z.
Tomemos el punto p0 = (x0, y0, z0) de la superficie, esto es
√x0 +
√y0 +
√z0 =
√a
y las derivadas parciales p0 son
fx(p0) =1
2√x0
fy(p0) =1
2√y0
y fz(p0) =1
2√z0.
Por tanto la ecuacion del plano tangente en p0 es
(x, y, z) · ∇f(p0) = p0 · ∇f(p0)
(x, y, z) ·(
1
2√x0,
1
2√y0,
1
2√z0
)= (x0, y0, z0) ·
(1
2√x0,
1
2√y0,
1
2√z0
)
x√x0
+y√y0
+z√z0
=x0√x0
+y0√y0
+z0√z0
x√x0
+y√y0
+z√z0
=√x0 +
√y0 +
√z0
x√x0
+y√y0
+z√z0
=√a
ξρ∫s email: [email protected] 188 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 189
Los puntos de interseccion con los ejes coordenado son:
(√a√x0, 0, 0
),(0,√a√y0, 0
),(0, 0,
√a√z0)
Sumando las coordenadas de estos puntos tenemos
√a√x0 +
√a√y0 +
√a√z0 =
√a(√
x0 +√y0 +
√z0
)=
√a√a = a
♣
6.11.1. Significado geometrico de la tangencia
Si la funcion f : R2 → R es diferenciable en el punto p0 = (x0, y0), sera:
f((x0, y0) + (h, k)
)= f(x0, y0) +
∂f
∂x(x0, y0)h+
∂f
∂y(x0, y0)k + r(h, k),
donde
lım(h,k)→(0,0)
r(h, k)
||(h, k)|| = 0.
con lo cual, poniendo h = x− x0, k = y − y0, la expresion anterior se convierte en:
f(x, y) = f(x0, y0) +∂f
∂x(x0, y0)(x− x0) +
∂f
∂y(x0, y0)(y − y0) + r(x− x0, y − y0),
donde
lım(x,y)→(x0,y0)
r(x− x0, y − y0)
||(x− x0, y − y0)||= 0.
Ahora bien, teniendo en cuenta la ecuacion del plano tangente (6.34) se tiene
z = f(x0, y0) + fx(x0, y0)(x− x0) + fy(x0, y0)(y − y0).
donde z representa la altura en el punto (x, y) hasta el plano tangente. Resulta que el residuor(x− x0, y − y0) se puede expresar como
r(x− x0, y − y0) = f(x, y) − z
Es decir, el residuo es la diferencia entre la z de la funcion z = f(x, y) en el punto (x, y) y la z enel mismo punto del plano tangente a la grafica en (x0, y0)
ξρ∫s email: [email protected] 189 Jasmer LPC
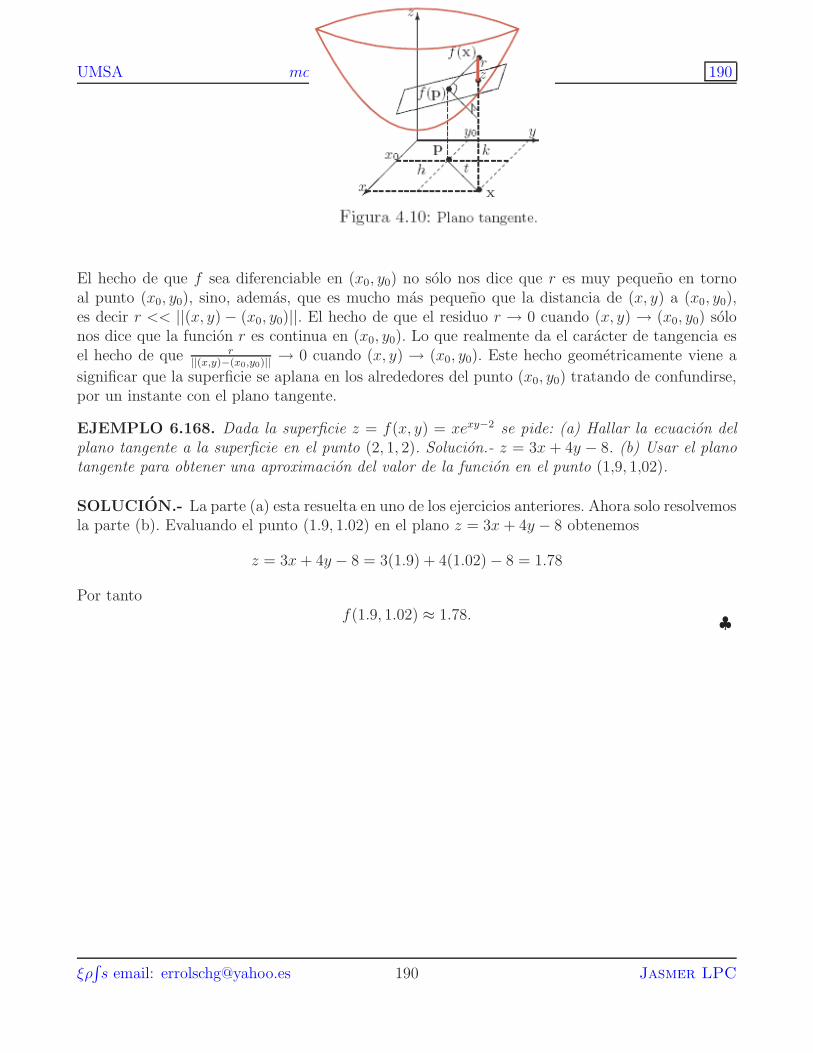
UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 190
El hecho de que f sea diferenciable en (x0, y0) no solo nos dice que r es muy pequeno en tornoal punto (x0, y0), sino, ademas, que es mucho mas pequeno que la distancia de (x, y) a (x0, y0),es decir r << ||(x, y) − (x0, y0)||. El hecho de que el residuo r → 0 cuando (x, y) → (x0, y0) solonos dice que la funcion r es continua en (x0, y0). Lo que realmente da el caracter de tangencia esel hecho de que r
||(x,y)−(x0,y0)|| → 0 cuando (x, y) → (x0, y0). Este hecho geometricamente viene a
significar que la superficie se aplana en los alrededores del punto (x0, y0) tratando de confundirse,por un instante con el plano tangente.
EJEMPLO 6.168. Dada la superficie z = f(x, y) = xexy−2 se pide: (a) Hallar la ecuacion delplano tangente a la superficie en el punto (2, 1, 2). Solucion.- z = 3x+ 4y − 8. (b) Usar el planotangente para obtener una aproximacion del valor de la funcion en el punto (1,9, 1,02).
SOLUCION.- La parte (a) esta resuelta en uno de los ejercicios anteriores. Ahora solo resolvemosla parte (b). Evaluando el punto (1.9, 1.02) en el plano z = 3x+ 4y − 8 obtenemos
z = 3x+ 4y − 8 = 3(1.9) + 4(1.02) − 8 = 1.78
Por tantof(1.9, 1.02) ≈ 1.78. ♣
ξρ∫s email: [email protected] 190 Jasmer LPC

CAPITULO 7
Aplicaciones
7.1. Extremos relativos. Criterio del Hessiano
DEFINICION 7.1. Diremos que una funcion f : Rn → R definida en un entorno de un punto
x0 presenta un maximo relativo en x0 cuando exista una bola centrada en x0 de manera que f(x0)es el valor mas grande de todos los valores de f en los puntos de la bola. Esto significa que exister > 0 tal que f(x) ≤ f(x0) para todo x ∈ B(x0, r). De modo similar se define el concepto demınimo relativo cuando existe r > 0 tal que f(x) ≥ f(x0) para todo x ∈ B(x0, r), es decir, sif(x0) es el valor mas pequeno de todos los valores de f en los puntos de alguna bola.
La ideal intuitiva de los extremos relativos es alcanzar el maximo o el mınimo valor localmente,en un entorno. Ası, en una cadena montanosa, en la cima de cada montana existira un maximorelativo. En la superficie que aparece a continuacion desde distintos puntos de vista se alcanzandiversos maximos y mınimos relativos (en la ultima grafica que se ve de perfil se observan todos).
191

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 192
El siguiente resultado da una condicion necesaria para hallar los extremos relativos (maximos omınimos)
TEOREMA 7.1. Supongamos que tenemos una funcion f : Rn → R diferenciable definida en una
bola B. Si f tiene en x0 ∈ B un extremo relativo (sea maximo o mınimo) entonces ∇f(x0) = 0,
es decir, todas las derivadas parciales de orden 1 de f se anulan en x0 o sea,∂f
∂xi
(x0) = 0 para
todo i = 1, 2, ..., n.
El resultado anterior nos da una condicion necesaria para que una funcion f tenga en un puntoun extremo relativo, la cual no es una condicion suficiente, pues hay casos en los que la diferencialse anula y sin embargo no hay extremo relativo (como ocurrira, por ejemplo, con los puntos desilla en funciones de dos variables, como despues veremos). Por lo tanto para buscar los extremosrelativos de f buscaremos entre los puntos que anulen a todas las derivadas parciales (estos losllamaremos puntos crıticos), los cuales seran los candidatos a ser extremos relativos, pues losextremos relativos (si los hay) estaran entre ellos. Y para hallar los puntos crıticos deberemosresolver el sistema de ecuaciones
∂f
∂x1= 0,
∂f
∂x2= 0, · · · ,
∂f
∂xn= 0
A continuacion veremos herramientas que, bajo ciertas condiciones, nos aseguraran si en un puntocrıtico se alcanza verdaderamente un extremo relativo, y en su caso, si se alcanza un maximo omınimo relativo. Para ello necesitamos estudiar lo que vamos a denominar matriz hessiana def en x0 (cuando f es de clase C2), que es la siguiente
Hf(x0) =
∂2f
∂x21
(x0)∂2f
∂x1∂x2
(x0) . . .∂2f
∂x1∂xn
(x0)
∂2f
∂x2∂x1
(x0)∂2f
∂x22
(x0) . . .∂2f
∂x2∂xn
(x0)
......
. . ....
∂2f
∂xn∂x1
(x0)∂2f
∂xn∂x2
(x0) . . .∂2f
∂x2n
(x0)
Como vemos la matriz hessiana es la que esta formada por todas las derivadas parciales segundasde la funcion. A continuacion vamos considerando la sucesion de menores principales de lamatriz hessiana (denominados tambien menores hessianos):
∆1(x0) =∂2f
∂x21
(x0), ∆2(x0) =
∣∣∣∣∣∣∣∣∣
∂2f
∂x21
(x0)∂2f
∂x1∂x2(x0)
∂2f
∂x2∂x1(x0)
∂2f
∂x22
(x0)
∣∣∣∣∣∣∣∣∣
ξρ∫s email: [email protected] 192 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 193
∆3(x0) =
∣∣∣∣∣∣∣∣∣∣∣∣∣∣
∂2f
∂x21
(x0)∂2f
∂x1∂x2(x0)
∂2f
∂x1∂x3(x0)
∂2f
∂x2∂x1(x0)
∂2f
∂x22
(x0)∂2f
∂x2∂x3(x0)
∂2f
∂x3∂x1(x0)
∂2f
∂x3∂x2(x0)
∂2f
∂x23
(x0)
∣∣∣∣∣∣∣∣∣∣∣∣∣∣
, ∆n(x0) = |Hf(x0)|
TEOREMA 7.2 (Criterio del Hessiano). Sea f : Rn → R una funcion diferenciable, x0 ∈ R
n
un punto crıtico de f , es decir ∇f(x0) = 0. Entonces
1. Si todos los menores hessianos son estrictamente positivos se tiene que f presenta en x0
un mınimo relativo.
2. Si la sucesion de menores hessianos es alternada en el siguiente sentido
∆1(x0) < 0, ∆2(x0) > 0, ∆3(x0) < 0, .... ,∆n(x0) > 0
se tiene que f presenta en x0 un maximo relativo.
3. Si no estamos ante ninguno de los dos casos anteriores y el determinante de la matrizhessiana es no nulo, podemos garantizar que no se alcanza ni maximo ni mınimo.
4. Si el determinante de la matriz hessiana es nulo, entonces se tiene una indeterminacion, esdecir, este criterio no nos aporta informacion suficiente para deducir el caracter del puntocritico.
Por su simplicidad y por su mayor aplicacion en la practica resulta interesante estudiar el casoparticular de funciones de dos variables, o sea, cuando n = 2, en el que la matriz hessiana es
Hf(x, y) =
(fxx(x, y) fxy(x, y)fyx(x, y) fyy(x, y)
)
En esta situacion particular se tiene que:
TEOREMA 7.3 (Criterio del Hessiano). Sea f : R2 → R una funcion con derivadas parciales
primeras y segundas continuas en una region abierta que contiene un punto (x0, y0), para el quefx(x0, y0) = 0 y fy(x0, y0) = 0. Y sea d el valor del siguiente determinante
|Hf(x0, y0)| =
∣∣∣∣fxx(x0, y0) fxy(x0, y0)fyx(x0, y0) fyy(x0, y0)
∣∣∣∣
1. Si fxx(x0, y0) > 0 y |Hf(x0, y0)| > 0, entonces f(x0, y0) es un mınimo relativo.
2. Si fxx(x0, y0) < 0 y |Hf(x0, y0)| > 0, entonces f(x0, y0) es un maximo relativo.
ξρ∫s email: [email protected] 193 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 194
3. Si |Hf(x0, y0)| < 0, entonces el punto (x0, y0) no es un extremo relativo, pues puede com-probarse que en toda bola centrada en (x0, y0) hay puntos en los que la funcion toma valoresmenores que f(x0, y0) y otros en los que la funcion toma valores mayores que f(x0, y0). Eneste caso particular se dice que f tiene en (x0, y0) un punto de silla.
4. Si |Hf(x0, y0)| = 0, entonces no podemos afirmar nada sobre lo que ocurre en (x0, y0), y paradeterminar que es lo que ocurre en el punto crıtico sera necesario estudiar el comportamientode la funcion en un entorno del punto.
TEOREMA 7.4 (Criterio del Hessiano). Si f : R3 → R, a ∈ R
3 es un punto crıtico de f yesta es de clase C2 en un entorno de a, la condicion de extremo relativo tiene la siguiente forma:
a) Si se verifica
fxx(a) > 0,
∣∣∣∣fxx(a) fxy(a)fxy(a) fyy(a)
∣∣∣∣ > 0,
∣∣∣∣∣∣
fxx(a) fxy(a) fxz(a)fyx(a) fyy(a) fyz(a)fzx(a) fzy(a) fzz(a)
∣∣∣∣∣∣> 0
entonces f alcanza en a un mınimo relativo.
b) Si se verifica
fxx(a) < 0,
∣∣∣∣fxx(a) fxy(a)fxy(a) fyy(a)
∣∣∣∣ > 0,
∣∣∣∣∣∣
fxx(a) fxy(a) fxz(a)fyx(a) fyy(a) fyz(a)fzx(a) fzy(a) fzz(a)
∣∣∣∣∣∣< 0
entonces f alcanza en a un maximo relativo.
EJEMPLO 7.1. Sabiendo que d = fxx(a, b) fyy(a, b) − [fxy(a, b)]2 > 0 y fxx(a, b) > 0, ¿podemos
concluir que (a, b) es punto maximo relativo de f?.
SOLUCION.- Recordemos que el Criterio del hessiano dice que si f es una funcion con derivadasparciales primeras y segundas continuas en una region abierta que contiene un punto (a, b), parael que fx(a, b) = 0 y fy(a, b) = 0. Y ademas si la matriz Hessiana
Hf(a, b) =
(fxx(a, b) fxy(a, b)fyx(a, b) fyy(a, b)
)
tiene determinante positiva detHf(a, b) > 0 y fxx(a, b) > 0, entonces (a, b) es un punto mınimorelativo. Por tanto, la afirmacion es falsa ya que falta el hecho de que el punto (a, b) sea puntocrıtico, ademas bajo esas condiciones el punto (a, b) es un punto mınimo relativo. ♣
EJEMPLO 7.2. Una condicion necesaria para que f(x0, y0) sea un valor maximo relativo de fes que el signo de fxx(x0, y0) sea negativo?.
ξρ∫s email: [email protected] 194 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 195
SOLUCION.- Es falso, ya que una condicion necesaria para que f(x0, y0) sea un valor maximorelativo de f es que el signo de fxx(x0, y0) sea positivo. ♣
EJEMPLO 7.3. Sabiendo que fxx(x0, y0) = −9, fyy(x0, y0) = 6 y fxy(x0, y0) = 10. Determine siel punto (x0, y0) es un valor extremo relativo o es un punto silla o si la informacion es insuficientepara determinar la naturaleza de la funcion f(x, y) en el punto crıtico (x0, y0)?
SOLUCION.- Apliquemos el criterio de Hessiano para responder a esta pregunta. Recordemosen primer lugar que el determinante de la matriz Hessiana es dado por
d = fxx(x0, y0) fyy(x0, y0) − [fxy(x0, y0)]2.
Notemos qued = (−9)(6) − (10)2 = −54 − 100 = −154 < 0,
y por lo tanto (x0, y0, f(x0, y0)) es un punto silla. ♣
EJEMPLO 7.4. Hallar y clasificar todos los puntos crıticos de la funcion f(x, y) = x3 − 9xy +y3 + 4.
SOLUCION.- Primero encontramos las derivadas parciales de f(x, y)
fx(x, y) = 3x2 − 9y, fy(x, y) = −9x+ 3y2.
Estas funciones estan definidas para todo (x, y), por lo tanto los unicos puntos crıticos que bus-caremos es cuando fx y fy son ceros. Esto es:
3x2 − 9y = 03y2 − 9x = 0
3y = x2
3x = y2
3y = x2
3y = (y2/3)2
27y = y4
y(y3 − 27) = 0y = 0, y = 3x = 0, x = 3
Resolviendo este sistema se obtienen los puntos crıticos: (0, 0) y (3, 3). Para determinar si se tratade maximo o mınimo, hallamos la matriz hessiana.
Hf(x, y) =
(fxx(x, y) fxy(x, y)fyx(x, y) fyy(x, y)
)=
(6x −9−9 6y
)
Con lo cual resulta:
|Hf(3, 3)| =∣∣∣∣
18 −9−9 18
∣∣∣∣ = (18)2− (9)2 = 324−81 = 243 > 0. y fxx(3, 3) = 18 > 0, entonces
(3, 3) se corresponde con un mınimo relativo.
|Hf(0, 0)| =∣∣∣∣
0 −9−9 0
∣∣∣∣ = 0− (8)2 = −81 < 0. Por lo que se tiene un punto silla en (0, 0, 4).
ξρ∫s email: [email protected] 195 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 196
♣
EJEMPLO 7.5. Encontrar los extremos relativos de la funcion: f(x, y) = x3 − 6xy + 3y2 − 1.
SOLUCION.- Hallamos las dos derivadas parciales y determinamos los puntos crıticos: Puntosen los que alguna de las derivadas parciales no esta definida, y puntos en los que las dos derivadasparciales son nulas. En el caso de funciones polinomicas las parciales estan siempre definidas, portanto:
fx(x, y) = 3x2 − 6yfy(x, y) = −6x+ 6y
3x2 − 6y = 0−6x+ 6y = 0
3x(x− 2) = 0x = y
x = 0x = 2
Luego los puntos crıticos son p(0, 0) y q(2, 2). Para estudiar la naturaleza de los puntos crıticos,hallamos la matriz hessiana en cada uno de ellos:
Hf(x, y) =
(fxx(x, y) fxy(x, y)fyx(x, y) fyy(x, y)
)=
(6x −6−6 6
)
Con lo cual resulta:
|Hf(0, 0)| =∣∣∣∣
0 −6−6 6
∣∣∣∣ = −36 < 0, entonces (0, 0,−1) es un punto silla.
|Hf(2, 2)| =
∣∣∣∣12 −6−6 6
∣∣∣∣ = 72 − 36 = 36 > 0 y fxx = 12 > 0, entonces (2, 2) es un punto
mınimo relativo.♣
EJEMPLO 7.6. Hallar y clasificar todos los puntos crıticos de la funcion f(x, y) = x4 + y4 +6x2y2 + 8x3.
SOLUCION.- Los puntos crıticos son aquellos que anulan simultaneamente las dos derivadasparciales, o bien donde alguna de las derivadas parciales no existe. Al ser la funcion dada unafuncion polinomica es diferenciable en todo R
2, luego los puntos crıticos vendran dado por lassoluciones del siguiente sistema de ecuaciones
fx(x, y) = 4x3 + 12xy2 + 24x2 = 0fy(x, y) = 4y3 + 12x2y = 0
x(4x2 + 12y2 + 24x) = 04y(y2 + 3x2) = 0
Para resolver el sistema igualamos a cero cada factor de la primera ecuacion con cada factor de lasegunda ecuacion:
x = 0 o 4x2 + 12y2 + 24x = 0y = 0 o y2 + 3x2 = 0
Para el caso en que x = 0, tenemos dos casos:
ξρ∫s email: [email protected] 196 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 197
y = 0. Por tanto, el punto crıtico es (0, 0)
y2 + 3x2 = 0. De donde y = 0. Por tanto, otra ves el punto crıtico es (0, 0)
Para el caso en que 4x2 + 12y2 + 24x = 0, tenemos dos casos:
y = 0. De donde 4x2 + 24x = 0, 4x(x + 6) = 0. Por tanto, los puntos crıticos son (0, 0),(−6, 0)
y2 + 3x2 = 0. De donde y2 = −3x2, luego 4x2 − 12(3)x2 + 24x = 0, −32x2 + 24x = 0,−8x(4x− 3) = 0. Para x = 0 el punto crıtico es (0, 0) y para x = 3/4 no existe y.
Luego los puntos crıticos son p(0, 0) y q(−6, 0). Para determinar si se trata de maximo o mınimo,hallamos la matriz hessiana.
Hf(x, y) =
(fxx(x, y) fxy(x, y)fyx(x, y) fyy(x, y)
)=
(12x2 + 12y2 + 48x 24xy
24xy 12y2 + 12x2
)
Con lo cual resulta:
|Hf(−6, 0)| =
∣∣∣∣144 00 432
∣∣∣∣ = 62208 > 0 y fxx = 144 > 0, entonces (−6, 0) se corresponde
con un mınimo relativo.
|Hf(0, 0)| =∣∣∣∣
0 00 0
∣∣∣∣ = 0 el hessiano no nos determina la naturaleza del punto crıtico.
♣
EJEMPLO 7.7. Hallar y clasificar todos los puntos crıticos de la funcion f(x, y) = x2y−xy2+xy.
SOLUCION.- Los puntos crıticos vendran dados por las soluciones del siguiente sistema deecuaciones.
fx(x, y) = 2xy − y2 + y = 0fy(x, y) = x2 − 2xy + x = 0
y(2x− y + 1) = 0x(x− 2y + 1) = 0
Para resolver el sistema igualamos a cero cada factor de la primera ecuacion con cada factor de lasegunda ecuacion:
y = 0 o 2x− y + 1 = 0x = 0 o x− 2y + 1 = 0
Para el caso en que y = 0, tenemos dos casos:
x = 0. Por tanto, el punto crıtico es (0, 0)
x− 2y + 1 = 0. De donde x = −1. Por tanto, otra ves el punto crıtico es (−1, 0)
ξρ∫s email: [email protected] 197 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 198
Para el caso en que 2x− y + 1 = 0, tenemos dos casos:
x = 0. De donde 2x− y + 1 = −y + 1 = 0, y = 1. Por tanto, el punto crıtico es (0, 1)
x− 2y+1 = 0. De donde x = 2y− 1, luego 2(2y− 1)− y+1 = 0, 4y− 2− y+1 = 0, 3y = 1,y = 1/3, ası x = 2/3 − 1 = −1/3. Luego, el punto crıtico es (−1/3, 1/3).
Luego los puntos crıticos son (0, 0), (−1, 0), (0, 1) y (−1/3, 1/3). Para determinar si se trata demaximo o mınimo, hallamos la matriz hessiana.
Hf(x, y) =
(fxx(x, y) fxy(x, y)fyx(x, y) fyy(x, y)
)=
(2y 2x− 2y + 1
2x− 2y + 1 −2x
)
Con lo cual resulta:
|Hf(0, 0)| =∣∣∣∣
0 11 0
∣∣∣∣ = −1 < 0, entonces (0, 0) es un punto silla.
|Hf(−1, 0)| =
∣∣∣∣0 −1−1 2
∣∣∣∣ = −1 < 0, entonces (−1, 0) es un punto silla.
|Hf(0, 1)| =∣∣∣∣
2 −1−1 0
∣∣∣∣ = −1 < 0, entonces (0, 1) es un punto silla.
|Hf(−1/3, 1/3)| =
∣∣∣∣2/3 1/31/3 2/3
∣∣∣∣ = 4/9 − 1/9 = 3/9 > 0 y fxx = 2/3 > 0, entonces
(−1/3, 1/3) se corresponde con un mınimo relativo.
v
EJEMPLO 7.8. Hallar y clasificar todos los puntos crıticos de la funcion f(x, y) = −x3 +4xy−2y2 + 1.
SOLUCION.- Primero encontramos las derivadas parciales de f(x, y)
fx(x, y) = −3x2 + 4y, fy(x, y) = 4x− 4y.
Estas funciones estan definidas para todo (x, y), por lo tanto los unicos puntos crıticos que bus-caremos es cuando fx y fy son ceros. Esto es:
−3x2 + 4y = 04x− 4y = 0
3x2 − 4y = 0x = y
x(3x− 4) = 0x = 0, x = 4/3
De esta manera tenemos un sistema de ecuaciones. Resolviendo este sistema se obtienen el puntocrıtico: (0, 0) y (4/3, 4/3).
ξρ∫s email: [email protected] 198 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 199
Para determinar si se trata de maximo o mınimo, hallamos la matriz hessiana.
Hf(x, y) =
(fxx(x, y) fxy(x, y)fyx(x, y) fyy(x, y)
)=
(−6x 4
4 −4
)
Con lo cual resulta:
|Hf(4/3, 4/3)| =∣∣∣∣−6(4/3) 4
4 −4
∣∣∣∣ = (−8)(−4)−(16) = 16 > 0 y fxx(4/3, 4/3) = −6(4/3) =
−8 < 0, entonces (4/3, 4/3) se corresponde con un maximo relativo.
|Hf(0, 0)| =∣∣∣∣−6(0) 4
4 −4
∣∣∣∣ = (0)(−4)− (16) = −16 < 0. Por lo que se tiene un punto silla.
♣
EJEMPLO 7.9. Hallar y clasificar todos los puntos crıticos de la funcion f(x, y) = x3+y3−3xy.
SOLUCION.- Primero encontramos las derivadas parciales de f(x, y)
fx(x, y) = 3x2 − 3y, fy(x, y) = 3y2 − 3x.
Estas funciones estan definidas para todo (x, y), por lo tanto los unicos puntos crıticos que bus-caremos es cuando fx y fy son ceros. Esto es:
x2 − y = 0y2 − x = 0
x2 − y = 0x = y2
(y2)2 − y = 0y(y3 − 1) = 0y = 0, y = 1
Resolviendo este sistema se obtienen los puntos crıticos: (0, 0) y (1, 1). Para determinar si se tratade maximo o mınimo, hallamos la matriz hessiana.
Hf(x, y) =
(fxx(x, y) fxy(x, y)fyx(x, y) fyy(x, y)
)=
(6x −3−3 6y
)
Con lo cual resulta:
|Hf(1, 1)| =∣∣∣∣
6 −3−3 6
∣∣∣∣ = (6)(1)(6)(1)− (9) = 27 > 0. y fxx(1, 1) = 6(1) = 6 > 0, entonces
(1, 1) se corresponde con un mınimo relativo.
|Hf(0, 0)| =∣∣∣∣
6x −3−3 6y
∣∣∣∣ = (6)(0)(6)(0) − (−3)2 < 0. Por lo que se tiene un punto silla.
♣
ξρ∫s email: [email protected] 199 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 200
EJEMPLO 7.10. Encuentre los puntos crıticos de
f(x, y) = 2x3 − 3x2 + 2y3 + 3y2
y determine si es maximo relativo, mınimo relativo o bien punto silla.
SOLUCION.- Los puntos crıticos son aquellos que anulan simultaneamente las dos derivadasparciales, o bien donde alguna de las derivadas parciales no existe. Al ser la funcion dada unafuncion polinomica es diferenciable en todo R
2, luego los puntos crıticos vendran dado por lassoluciones del siguiente sistema de ecuaciones
fx(x, y) = 6x2 − 6x = 0fy(x, y) = 6y2 + 6y = 0
6x(x− 1) = 06y(y + 1) = 0
Para resolver el sistema igualamos a cero cada factor de la primera ecuacion con cada factor de lasegunda ecuacion:
x = 0 o x− 1 = 0y = 0 o y + 1 = 0
Para el caso en que x = 0, tenemos dos casos:
y = 0. Por tanto, el punto crıtico es (0, 0)
y + 1 = 0. De donde y = −1. Por tanto, otra ves el punto crıtico es (0,−1)
Para el caso en que x− 1 = 0, tenemos dos casos:
y = 0. De donde x = 1. Por tanto, el punto crıtico es (1, 0).
y + 1 = 0. De donde x = 1 y y = −1. Ası el punto crıtico es (1,−1).
Luego los puntos crıticos son A(0, 0), B(0,−1), C(1, 0) y D(1,−1). Para determinar si se trata demaximo o mınimo, hallamos la matriz hessiana.
Hf(x, y) =
(fxx(x, y) fxy(x, y)fyx(x, y) fyy(x, y)
)=
(12x− 6 0
0 12y + 6
)
Con lo cual resulta:
|Hf(0, 0)| =∣∣∣∣−6 00 6
∣∣∣∣ = −36 < 0, entonces (0, 0, 0) es un punto silla.
|Hf(0,−1)| =
∣∣∣∣−6 00 −6
∣∣∣∣ = 36 > 0 y fxx = −6 < 0, entonces (0,−1) se corresponde con
un maximo relativo.
ξρ∫s email: [email protected] 200 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 201
|Hf(1, 0)| =∣∣∣∣
6 00 6
∣∣∣∣ = 36 > 0 y fxx = 6 > 0, entonces (1, 0) se corresponde con un mınimo
relativo.
|Hf(1,−1)| =
∣∣∣∣6 00 −6
∣∣∣∣ = −36 < 0, entonces (1,−1, f(1,−1)) es un punto silla.
♣
EJEMPLO 7.11. Encuentre los puntos crıticos de
f(x, y) = 2x3 − 3x2 + y5 − 40y2
y determine si es maximo relativo, mınimo relativo o bien punto silla.
SOLUCION.- Los puntos crıticos son aquellos que anulan simultaneamente las dos derivadasparciales, o bien donde alguna de las derivadas parciales no existe. Al ser la funcion dada unafuncion polinomica es diferenciable en todo R
2, luego los puntos crıticos vendran dado por lassoluciones del siguiente sistema de ecuaciones
fx(x, y) = 6x2 − 6x = 0fy(x, y) = 5y4 − 80y = 0
6x(x− 1) = 05y(y3 − 16) = 0
Para resolver el sistema igualamos a cero cada factor de la primera ecuacion con cada factor de lasegunda ecuacion:
x = 0 o x− 1 = 0y = 0 o y3 − 16 = 0
Para el caso en que x = 0, tenemos dos casos:
y = 0. Por tanto, el punto crıtico es (0, 0)
y3 − 16 = 0. De donde y = 2√
2. Por tanto, otra ves el punto crıtico es (0, 2√
2)
Para el caso en que x− 1 = 0, tenemos dos casos:
y = 0. De donde x = 1. Por tanto, el punto crıtico es (1, 0).
y3 − 16 = 0. De donde x = 1 y y = 2√
2. Ası el punto crıtico es (1, 2√
2).
Luego los puntos crıticos son A(0, 0), B(0, 2√
2), C(1, 0) y D(1, 2√
2). Para determinar si se tratade maximo o mınimo, hallamos la matriz hessiana.
Hf(x, y) =
(fxx(x, y) fxy(x, y)fyx(x, y) fyy(x, y)
)=
(12x− 6 0
0 20y3 − 80
)
Con lo cual resulta:
ξρ∫s email: [email protected] 201 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 202
|Hf(0, 0)| =∣∣∣∣−6 00 −80
∣∣∣∣ = 480 > 0, y fxx = −6 < 0, entonces (0, 0) se corresponde con un
maximo relativo.
|Hf(0, 2)| =∣∣∣∣−6 00 240
∣∣∣∣ = −1440 < 0, entonces (0, 2√
2, f(0, 2√
2)) es un punto silla.
|Hf(1, 0)| =∣∣∣∣
6 00 −80
∣∣∣∣ = −480 < 0, entonces (1, 0, f(1, 0)) es un punto silla.
|Hf(1, 2)| =
∣∣∣∣6 00 240
∣∣∣∣ = 1440 > 0 y fxx = 6 > 0, entonces (1, 2√
2) se corresponde con un
mınimo relativo.♣
EJEMPLO 7.12. Encuentre a y b tal que la funcion f(x, y) = x2 +y2−ax− by tenga en (1,−1)un punto crıtico, y determine su corresponde a un maximo relativo, mınimo relativo o bien puntosilla.
SOLUCION.- Hallamos las dos derivadas parciales y determinamos los puntos crıticos: Puntosen los que alguna de las derivadas parciales no esta definida, y puntos en los que las dos derivadasparciales son nulas. En el caso de funciones polinomicas las parciales estan siempre definidas, portanto:
fx(x, y) = 2x− afy(x, y) = 2y − b
2x− a = 02y − b = 0
x = a/2y = b/2
Luego el punto crıtico es (a/2, b/2) que sabemos debe ser igual a (1,−1), de donde:
a = 2, b = −2.
Para estudiar la naturaleza de el punto crıtico (1,−1), hallamos la matriz hessiana en cada unode ellos:
Hf(x, y) =
(fxx(x, y) fxy(x, y)fyx(x, y) fyy(x, y)
)=
(2 00 2
)
que evaluando en el punto crıtico resulta: |Hf(1,−1)| =
∣∣∣∣2 00 2
∣∣∣∣ = 4 > 0 y como fxx = 2 > 0,
entonces (1,−1) es un punto mınimo relativo. ♣
EJEMPLO 7.13. Una caja rectangular descansa en el plano xy con uno de sus vertices en elorigen de tal manera que el vertice opuesto a este ultimo descansa en el plano: 6x+4y+ 3z = 24.
ξρ∫s email: [email protected] 202 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 203
SOLUCION.- Sean x, y y z el largo, ancho y la altura de la caja. Como un vertice de la cajase encuentra en el plano 6x+ 4y + 3z = 24, despejando z se tiene z = (1/3)[24− 6x− 4y] de estamanera expresamos el volumen de la caja como un funcion de dos variables.
V (x, y) = xy(1/3)[24 − 6x− 4y] =1
3(24xy − 6x2y − 4xy2)
Para encontrar los puntos crıticos, buscamos las derivadas parciales y las igualamos a cero.
Vx(x, y) =1
3(24y − 12xy − 4y2) = 0, Vy(x, y) =
x
3(24 − 6x− 8y) = 0,
Para resolver el sistema igualamos a cero la primera ecuacion con cada factor de la segundaecuacion:
24y − 12xy − 4y2 = 0x = 0
4y(6 − y) = 0x = 0
y = 0, y = 6x = 0, x = 0
24y − 12xy − 4y2 = 024 − 6x− 8y = 0
24y − 12xy − 4y2 = 0
x =1
6(24 − 8y)
24y − 2(24 − 8y)y − 4y2 = 0−24y + 16y2 − 4y2 = 0−24y + 12y2 = 0−12y(2 − y) = 0y = 0, y = 2x = 4, x = 4/3
al resolver este sistema se obtiene los puntos crıticos: (0, 0), (0, 6), (4, 0) y (4/3, 2), para los valoresde (0, 0), (0, 6) y (4, 0) el volumen es cero ası que no nos interesa. Analizamos (4/3, 2)
Para determinar si se trata de maximo o mınimo, hallamos la matriz hessiana.
Hf(x, y) =
(fxx(x, y) fxy(x, y)fyx(x, y) fyy(x, y)
)=
−4y1
3(24 − 12x− 8y)
1
3(24 − 12x− 8y) −8
3x
Con lo cual resulta:
|Hf(4/3, 2)| =
∣∣∣∣∣∣∣
−81
3(24 − 16 − 16)
1
3(24 − 16 − 16) −32
9
∣∣∣∣∣∣∣= (−8)(32/9) − (−8/3)2 =
64
9> 0.
y fxx(4/3, 2) = −8 < 0, por lo que por el criterio de la segunda derivada el punto (4/3, 2) es unmaximo y el maximo volumen es:
V (4/3, 2) =1
3[24(4/3)(2) − 6(1/3)2(2) − 4(4/3)(2)2] =
64
9unidades cubicas.
♣
ξρ∫s email: [email protected] 203 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 204
EJEMPLO 7.14. Un fabricante de artıculos electronicos determina que la ganancia o beneficioB (en dolares) obtenido al producir x unidades de un reproductor de DVD y unidades de ungrabador de DVD se aproxima mediante el modelo:
B(x, y) = 8x+ 10y − (0,001)(x2 + xy + y2) − 10000.
Hallar el nivel de produccion que proporciona una ganancia o beneficio maximo. ¿Cual es laganancia maxima?
SOLUCION.- Primero encontramos los puntos crıticos, buscamos las derivadas parciales y lasigualamos a cero.
Bx(x, y) = 8 − (0,001)(2x+ y)By(x, y) = 10 − (0,001)(x+ 2y)
8 − (0,001)(2x+ y) = 010 − (0,001)(x+ 2y) = 0
2x+ y = 8000x+ 2y = 10000
Al resolver el ultimo sistema se obtiene que x = 2000; y = 4000. Obteniendo las 2das derivadasparciales:
Bxx(2000, 4000) = −(0,002) < 0
Byy(x, y) = −(0,001)(2) = −0,002
Bxy(x, y) = −(0,001)
y
|HB(2000, 4000)| = Bxx(2000, 4000)Byy(2000, 4000)− [Bxy(2000, 4000)]2
= (−0,002)2 − (−0,001)2 > 0
por lo que por el criterio de la segunda derivada el punto (2000, 4000) es un maximo. Al evaluareste punto en la funcion:
P (2000, 4000) = 8(2000) + 10 − (0,001)[20002 + (2000)(4000) + (4000)2]10000 = 18000.
♣
EJEMPLO 7.15. Encuentre la distancia mınima entre el origen y la superficie: z2 = x2y + 4.
SOLUCION.- Sea P (x, y, z) un punto cualquiera de la superficie. El cuadrado de la distanciaentre el origen y punto P es d2 = x2 + y2 + z2. Buscamos las coordenadas de P que hacen dque sea maxima. Ya que P pertenece a la superficie sus coordenadas tambien satisfacen la mismaecuacion, Sustituyendo z2 = x2y + 4 en d2 = x2 + y2 + z2 resulta una funcion de dos variables:
d2 = f(x, y) = x2 + y2 + x2y + 4,
ξρ∫s email: [email protected] 204 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 205
ahora lo que hacemos es buscar los puntos crıticos:
fx(x, y) = 2x+ 2xyfy(x, y) = 2y + x2
2x+ 2xy = 02y + x2 = 0
2x− xx2 = 0x(2 − x2) = 0
x = 0, x = ±√
2
Al resolver el ultimo sistema se obtiene que x = 0, x = ±√
2. Y los puntos crıticos son (0, 0),(√
2,−1) y (−√
2,−1).
Obteniendo las 2das derivadas parciales:
fxx(x, y) = 2 + 2y fxx(0, 0) = 2 > 0
fyy(x, y) = 2 fyy(0, 0) = 2
fxy(x, y) = 2xy fxy(0, 0) = 0
y
|Hf(0, 0)| = fxx(0, 0)fyy(0, 0) − [fxy(0, 0)]2
= (2)2 − (0)2 > 0
la distancia mınima se halla cuando (0, 0)
d2 = f(0, 0) = 02 + 02 + 020 + 4 = 4.
♣
EJEMPLO 7.16. Sea z = xy+a
x+b
yla ecuacion de una superficie donde a y b son constantes.
Si P = (1, 2) es un punto crıtico de z, determine si en P la funcion alcanza un maximo relativo,un mınimo relativo o un punto silla.
SOLUCION.- Como P = (1, 2) es punto crıtico, las derivadas parciales de z se anulan en P , esdecir
∂z
∂x
∣∣∣∣(1,2)
= 0
∂z
∂y
∣∣∣∣(1,2)
= 0
(y − a
x2
)∣∣∣(1,2)
= 0
(x− b
y2
)∣∣∣∣(1,2)
= 0
2 − a
12= 0
1 − b
22= 0
a = 2
b = 4
Ahora
detHf(x, y) = fxx(x, y)fyy(x, y) − [fxy(x, y)]2 =
(2a
x3
)(2a
x3
)− 12 =
(4
x3
)(8
x3
)− 1
ξρ∫s email: [email protected] 205 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 206
Luego detHf(1, 2) = 3 y zxx(1, 2) = 4 > 0. Por tanto, en el punto P = (1, 2) la funcion z alcanzaun mınimo relativo. ♣
EJEMPLO 7.17. Una empresa que produce dos artıculos x y y tiene la funcion de beneficiosque sigue:
B(x, y) = 64x− 2x2 + 4xy − 4y2 + 32y − 14.
Determinar el nivel de produccion que maximice el beneficio para cada uno de los dos artıculos ycomprobarlo.
SOLUCION.- Primero encontramos los puntos crıticos, buscamos las derivadas parciales y lasigualamos a cero.
Bx(x, y) = 64 − 4x+ 4y = 0By(x, y) = 4x− 8y + 32 = 0
Al resolver el ultimo sistema se obtiene que x = 40; y = 24.
Ahora hallamos las derivadas parciales de segundo orden:
Bxx(40, 24) = −4 < 0
Byy(40, 24) = −8
Bxy(40, 24) = 4
y
|HB(40, 24)| = Bxx(40, 24)Byy(40, 24) − [Bxy(40, 24)]2
= (−4)(−8) − (4)2 = 16 > 0
por lo que por el criterio de la segunda derivada el punto (40, 24) es un maximo. Al evaluar estepunto en la funcion:
B(40, 24) = 64(40) − 2(40)2 + 4(40)(24) − 4(24)2 + 32(24) − 14 = 1650.
♣
EJEMPLO 7.18. Decisiones sobre fijacion de precios. Una empresa que fabrica cremas dentıfric-as organicas produce crema para dientes en dos tamanos, de 100 y 150 mililitros. El costo de pro-duccion de cada tubo de cada tamano es de 6 bs y 9 bs, respectivamente. Las demandas semanalesq1 y q2 en miles para los dos tamanos son de:
q1 = 3(p2 − p1)q2 = 320 + 3p1 − 5p2
(7.1)
ξρ∫s email: [email protected] 206 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 207
donde p1 y p2 son los precios de los dentıfricos. Determine los precios p1 y p2 que maximicen lasutilidades de la empresa.
SOLUCION.- Puesto que el precio de cada tubo de 100 mililitros es de p1 bs y su costo deproduccion es de 6 bs , entonces la utilidad obtenida por cada tubo de 100 mililitros de cremadental es p1 −6. Por otro lado, como el precio de cada tubo de 150 mililitros es de p2 bs y su costode produccion es de 9 bs , entonces la utilidad obtenida por cada tubo de 150 mililitros de cremadental es p2 − 9.
Por tanto la utilidad total por la venta de ambas cremas sera:
U = (p1 − 6)q1 + (p2 − 9)q2.
Reemplazando (7.2) en esta ecuacion obtenemos
U(p1, p2) = (p1 − 6)3(p2 − p1) + (p2 − 9)(320 + 3p1 − 5p2).
Simplificando, obtenemos la funcion de utilidades de la empresa,
U(p1, p2) = −3p21 − 5p2
2 + 6p1p2 − 9p1 + 347p2) − 2880.
Primero encontramos los puntos crıticos, para esto encontramos las derivadas parciales y lasigualamos a cero.
∂U
∂p1= 6p2 − 6p1 − 9
∂U
∂p2
= 6p1 − 10p2 + 347
6p2 − 6p1 − 9 = 0
6p1 − 10p2 + 347 = 0
−6p1 + 6p2 = 9
6p1 − 10p2 = −347
Al resolver el ultimo sistema se obtiene que p1 = 83 bs; p2 = 84.50 bs. Para determinar si se tratade maximo hallamos las derivadas parciales de segundo orden
∂ 2U
∂p 21
= −6 < 0,∂ 2U
∂p 22
= −10,∂ 2U
∂p2∂p1= 6.
y
|HU(83, 84.50)| =∂ 2U
∂p 21
∂ 2U
∂p 22
−[∂ 2U
∂p2∂p1
]2
= (−6)(−10) − 62 > 0
En consecuencia, cuando se evalua los valores crıticos se producira ua utilidad maxima para laempresa. Con estos valores de p1 = 83 bs y p2 = 84.50 bs, las demandas son q1 = 4.5 y q2 = 146.5.
♣
ξρ∫s email: [email protected] 207 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 208
EJEMPLO 7.19. La empresa Estrella de dulces produce caramelos en dos tamanos a costosunitarios de 10 ctvs y 20 ctvs cada uno. Las demandas anuales q1 y q2 en miles estan dadas por
q1 = p2 − p1
q2 = 60 + p1 − 3p2
(7.2)
en donde p1 y p2 denotan por precios en centavos de los caramelos en los dos tamanos. Determinelos precios p1 y p2 que maximicen las utilidades semanales de la empresa.
SOLUCION.- Puesto que el precio de uno de los caramelos es de p1 bs y su costo de producciones de 10 ctvs, entonces la utilidad obtenida por cada uno de estos caramelos es de p1 − 10. Porotro lado, como el precio del otro caramelos es de p2 bs y su costo de produccion es de 20 ctvs,entonces la utilidad obtenida por cada uno de estos caramelos es de p2 − 20.
Por tanto la utilidad total por la venta de ambos caramelos sera:
U = (p1 − 10)q1 + (p2 − 20)q2.
Reemplazando (7.2) en esta ecuacion obtenemos
U(p1, p2) = (p1 − 10)(p2 − p1) + (p2 − 20)(60 + p1 − 3p2).
U = p1p2 − p21 − 10p2 + 10p1 + 60p2 + p2p1 − 3p2p2 − (20)60 − 20p1 + 60p2
= p1p2 + p2p1 − p21 − 3p2
2 − 10p2 + 60p2 + 60p2 + 10p1 − 20p1 − 1200
= 2p1p2 − p21 − 3p2
2 + 110p2 − 10p1 − 1200
Simplificando, obtenemos la funcion de utilidades de la empresa,
U(p1, p2) = −p21 − 3p2
2 + 2p1p2 − 10p1 + 110p2 − 1200.
Primero encontramos los puntos crıticos, para esto encontramos las derivadas parciales y lasigualamos a cero.
∂U
∂p1= −2p1 + 2p2 − 10
∂U
∂p2
= −6p2 + 2p1 + 110
−2p1 + 2p2 = 10
−6p2 + 2p1 = −110
−p1 + p2 = 5
−3p2 + p1 = −55
Al resolver el ultimo sistema se obtiene que −2p2 = −50, p2 = 25 bs; p1 = 20 bs. Para determinarsi se trata de maximo hallamos las derivadas parciales de segundo orden
∂ 2U
∂p 21
= −2 < 0,∂ 2U
∂p 22
= −6,∂ 2U
∂p2∂p1= 2.
ξρ∫s email: [email protected] 208 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 209
y
|HU(83, 84.50)| =∂ 2U
∂p 21
∂ 2U
∂p 22
−[∂ 2U
∂p2∂p1
]2
= (−2)(−6) − 22 = 8 > 0
En consecuencia, cuando se evalua los valores crıticos se producira ua utilidad maxima para laempresa. Con estos valores de p1 = 20 bs y p2 = 25 bs, las demandas son q1 = 5 y q2 = 5.
♣
EJEMPLO 7.20. A una empresa le cuesta 2 dolares por unidad elaborar su producto. Si A dolaresse gastan por mes en publicidad, entonces el numero de unidades por mes que se vendera esta dadopor
x = 30(1
3− e−0.001A
)(22 − p) (7.3)
donde p es el precio de venta. Halle los valores de A y p que maximizaran la utilidad mensual netade la empresa y calcule el valor de esta utilidad maxima.
SOLUCION.- Puesto que el precio de venta del producto es p bs y su costo de produccion es 2dolares por unidad, entonces la utilidad obtenida por cada uno de estos productos es de p− 2.
Por tanto la utilidad total por la venta de este producto sera:
U = (p− 2)x.
Reemplazando (7.3) en esta ecuacion obtenemos
U(A, p) = 30(p− 2)(1
3− e−0.001A
)(22 − p).
U = 30(
13− e−0.001A
)(22p− p2 − 44 + 2p)
= 30(
13− e−0.001A
)(24p− p2 − 44)
Simplificando, obtenemos la funcion de utilidades de la empresa,
U(A, p) = 30(1
3− e−0.001A
)(−p2 + 24p− 44)
Primero encontramos los puntos crıticos, para esto encontramos las derivadas parciales y lasigualamos a cero.
ξρ∫s email: [email protected] 209 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 210
∂U
∂A= (30)0.001e−0.001A(−p2 + 24p− 44)
∂U
∂p= 30
(1
3− e−0.001A
)(−2p+ 24)
−p2 + 24p− 44 = 0
13− e−0.001A = 0, −2p+ 24 = 0
p =−24 ±
√242 − 4(−1)(−44)
2(−1)
e−0.001A = 13, p = 12
p =−24 ±
√576 − 176
−2=
−24 ±√
400
−2
−0.001A = − ln 3, p = 12
p =−24 ± 20
−2= 2 o 22
A = 1000 ln 3, p = 12
Al resolver el ultimo sistema se obtiene que (A, p) = (1000 ln 3, 2), (A, p) = (1000 ln 3, 22). Paradeterminar si se trata de maximo hallamos las derivadas parciales de segundo orden
∂ 2U
∂A 2= −(30)(0.001)2e−0.001A(−p2 + 24p− 44) < 0
∂ 2U
∂p 2= −60
(1
3− e−0.001A
)
∂ 2U
∂p∂A= (30)0.001e−0.001A(−2p+ 24)
y
|HU(83, 84.50)| =∂ 2U
∂A 2
∂ 2U
∂p 2−[∂ 2U
∂A∂p
]2
= (−2)(−6) − 22 = 8 > 0
En consecuencia, cuando se evalua los valores crıticos se producira ua utilidad maxima para laempresa. Con estos valores de p1 = 20 bs y p2 = 25 bs, las demandas son q1 = 5 y q2 = 5.
♣
EJEMPLO 7.21. Hallar y clasificar los puntos crıticos de las siguientes funciones
(1) z = 4x+ 2y − x2 + xy − y2 (2) z = x3 − 3ax+ y2
(3) z = 18x2 − 32y2 − 36x− 128y − 110 (4) z = e−x2−y2
ξρ∫s email: [email protected] 210 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 211
SOLUCION.- ♣
EJEMPLO 7.22. Un fabricante tiene la funcion de produccion
P = 110x− 3x2 − 2xy − 2y2 + 140y.
Sea x =radios, y =gravadoras. ¿A que nivel de produccion maximizara sus beneficios si dosgravadoras equivalen a una radio?.
SOLUCION.- ♣
EJEMPLO 7.23. Encontrar los extremos relativos de la funcion f(x, y) = −x3 + 4xy − 2y2 + 1.
SOLUCION.- Hallamos las derivadas parciales y determinamos los puntos crıticos. Puntos enlos que alguna de las derivadas parciales no esta definida, y punts en los que las derivadas parcialesson nulas. En el caso de funciones polinomicas las parciales estan siembre definidos, por tanto:
fx = −3x2 + 4y
fy = 4x− 4y
−3x2 + 4y = 0
4x− 4y = 0
−3x2 + 4y = 0
x = y
x(−3x + 4) = 0
x = y
x = 0
x = 4/3
Luego los puntos crıticos son p(0, 0) y q(4/3, 4/3). Para estudiar la naturaleza de los puntos crıticos,hallamos la matriz hessiana en cada uno de ellos:
Hf(x, y) =
(fxx fxy
fyx fyy
)=
(−6x 4
4 −4
)
Con lo cual resulta: |Hf(0, 0)| =∣∣∣∣
0 44 −4
∣∣∣∣ = −16 < 0, por tanto p(0, 0) es un punto silla.
de modo similar |Hf(4/3, 4/3)| =
∣∣∣∣−8 44 −4
∣∣∣∣ = 32 − 16 = 13 > 0 y fxx(4/3, 2) = −8 < 0, por lo
que q(4/3, 4/3) es un maximo relativo. ♣
EJEMPLO 7.24. Encontrar e identificar los puntos crıticos del campo escalar F (x, y) = y3 +3x2y − 3x2 − 3y2 + 2.
SOLUCION.- Calculamos primero el gradiente de F ∇F (x, y) = [6xy − 6x, 3y2 + 3x2 − 6y] loigualamos al vector cero, entonces 6x(y − 1) = 0 tenemos que x = 0 o y = 1 reemplazando en lasegunda ecuacion para x = 0, 3y2 − 6y = 3y(y − 1) = 0, tenemos que y = 0 o y = 1.
Para y = 1, 3+3x2 − 6 = 3x2− 3 = 3(x− 1)(x+1) = 0 tenemos que x = 1 o x = −1 por lo tantolos puntos crıticos son (0, 0), (0, 1), (1, 1) y (−1, 1) hallamos ahora la matriz hessiana de F (x, y)
HF (x, y) =
(Fxx Fxy
Fyx Fyy
)=
(6y − 6 6x
6x 6y − 6
)
ξρ∫s email: [email protected] 211 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 212
cuyo determinante es |H(x, y)| = (6y − 6)2 − 36x2 clasificamos cada punto critico con el determi-nante:
|H(0, 0)| = 36 y Fxx(0, 0) = −6 < 0 entonces (0, 0, F (0, 0)) es maximo
|H(0, 2)| = 36 y Fxx(0, 2) = 6 > 0 entonces (0, 2, F (0, 2)) es mınimo
|H(1, 1)| = −36 entonces (1, 1, F (1, 1)) es punto de silla
|H(−1, 1)| = −36 entonces (−1, 1, F (−1, 1)) es punto de silla. ♣
EJEMPLO 7.25. Halla los extremos de la funcion f(x, y, z) = −x2 − y2 + z2
SOLUCION.- Calculamos las derivadas parciales de primer orden fx = −2x, fy = −2y yfx = 2z. Los puntos crıticos se obtienen igualando a cero las derivadas parciales −2x = 0, −2y = 0,2z = 0 y resolviendo el sistema obtenemos x = 0, y = 0, z = 0. Luego P (0, 0, 0) es el unico puntocrıtico de la funcion. Hallamos la matriz hessiana de f en P (0, 0, 0).
H =
fxx fxy fxz
fyx fyy fyz
fzx fzy fzz
=
−2 0 00 −2 00 0 −2
, H(0, 0, 0) =
−2 0 00 −2 00 0 −2
Con lo cual tenemos los siguientes determinantes:
∆1 = −2, ∆2 =
∣∣∣∣−2 00 −2
∣∣∣∣ = +4, ∆3 =
∣∣∣∣∣∣
−2 0 00 −2 00 0 −2
∣∣∣∣∣∣= +8
Con lo cual ni son todos positivos ni de signos alternos, luego hay duda.
Para determinar la naturaleza del punto crıtico hay que acudir a otros criterios, en este caso bastaobservar la funcion para ver que se trata de un punto silla f(x, y, z) = −x2 − y2 + z2 ≥ f(0, 0, 0)para los puntos del tipo (0, 0, z) y f(x, y, z) = −x2 − y2 + z2 ≤ f(0, 0, 0) para los puntos del tipo(x, y, 0). Observacion: Un punto silla no significa que la grafica tenga necesariamente la formade una “silla de montar”, sino simplemente que cerca del punto crıtico la funcion toma valoressuperiores y otros inferiores al valor que toma en dicho punto. ♣
EJEMPLO 7.26. Halla los extremos de la funcion f(x, y) = xye−x2−y2
SOLUCION.- Calculemos las parciales e igualemos a 0.
∂z
∂x= y(1 − 2x2)e−x2−y2
(1)
∂z
∂y= x(1 − 2y2)e−x2−y2
(2)
Gracias a (1), tenemos 2 opciones: O bien y = 0 o bien 1 − 2x2 = 0.
ξρ∫s email: [email protected] 212 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 213
Si y = 0, entonces (2) resulta: xe−x2= 0 de aquı x = 0 y obtenemos el punto P0 = (0, 0).
Si 1−2x2 = 0, es decir, x = ± 1√2, entonces (2) resulta ± 1√
2(1+2y2)e−1/2−y2
= 0, de donde
1 − 2y2 = 0, ası y = ± 1√2.
Por tanto obtenemos 4 puntos:
P1 =
(1√2,
1√2
), P2 =
(1√2,− 1√
2
), P3 =
(− 1√
2,
1√2
), P4 =
(− 1√
2,− 1√
2
),
Para saber que tipo de puntos son los obtenidos, debemos calcular el Hessiano.
∂2f
∂x2= −2xy(3 − 2x2)e−x2−y2 ∂2f
∂x∂y= (1 − 2x2)(1 − 2y2)e−x2−y2
∂2f
∂x∂y= (1 − 2x2)(1 − 2y2)e−x2−y2 ∂2f
∂y2= −2xy(3 − 2y2)e−x2−y2
Por tanto:
H(0, 0) =
∣∣∣∣0 11 0
∣∣∣∣ = −1 < 0, por tanto el punto (0, 0) es punto silla.
H(
1√2, 1√
2
)=
∣∣∣∣−2e−1 0
0 −2e−1
∣∣∣∣ = 4e−2 > 0, pero como fxx = −2e−1 < 0, tenemos un
maximo.
H(− 1√
2,− 1√
2
)=
∣∣∣∣−2e−1 0
0 −2e−1
∣∣∣∣ = 4e−2 < 0, pero como fxx = −2e−1 < 0, tenemos un
maximo.
H(− 1√
2, 1√
2
)=
∣∣∣∣2e−1 0
0 2e−1
∣∣∣∣ = 4e−2 > 0, pero como fxx = 2e−1 > 0, tenemos un mınimo.
H(
1√2,− 1√
2
)=
∣∣∣∣2e−1 0
0 2e−1
∣∣∣∣ = 4e−2 > 0, pero como fxx = 2e−1 > 0, tenemos un mınimo.
♣
EJEMPLO 7.27.
SOLUCION.- ♣
ξρ∫s email: [email protected] 213 Jasmer LPC
UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 214
7.2. Multiplicadores de Lagrange
En los problemas clasicos de maximos y mınimos se trata de hacer maxima o mınima una funcionf(x, y) sujeta a una restriccion g(x, y) = 0.
Graficamente el problema consiste en determinar el punto mas bajo (o mas alto) de la superficiede ecuacion z = f(x, y) que esta situado sobre la curva de ecuacion g(x, y) = 0, y se puede resolverde dos maneras diferentes:
a) Mediante un corte vertical de la superficie.
b) Mediante cortes horizontales (curvas de nivel).
Desde el punto de vista analıtico, el primer caso corresponde a reducir el problema a una variable,y el segundo al metodo de los multiplicadores de Lagrange.
Mediante las curvas de nivel.
Consideramos las curvas de nivel de la funcion f(x, y), f(x, y) = z
Como se trata de encontrar el maximo o el mınimo de la funcion f(x, y), se trata de encontrar elmaximo o el mınimo valor de z. Para ello imaginamos que las curvas de nivel se “desplazan” enla direccion del crecimiento de z.
Como el punto solucion (x, y) tambien ha de cumplir la ecuacion de la restriccion g(x, y) = 0,debera estar en la interseccion de una curva de nivel con la grafica de g(x, y) = 0, luego, se tratade encontrar:
(a) Si buscamos un mınimo: El primer punto en que las curvas de nivel tocan a la grafica de larestriccion g(x, y) = 0
(b) Si buscamos un maximo: el ultimo.
Nota: Este metodo es utilizado en programacion lineal para determinar la solucion optima de unafuncion objetivo sujeta a un conjunto de restricciones.
EJEMPLO 7.28. Hallar el mınimo de la funcion f(x, y) = x2+y2 condicionado por la restriccionx+ y − 1 = 0, mediante las curvas de nivel.
SOLUCION.- Consideramos las curvas de nivel de la funcion f(x, y) = x2 + y2. Para ellosustituimos f(x, y) por z, y consideramos que z es un numero, en cuyo caso tenemos que lascurvas de nivel vienen definidas por
x2 + y2 = z
luego se trata de circunferencias con centro en el origen de coordenadas y radio√z, y al crecer z,
las circunferencias se alejan del origen.
ξρ∫s email: [email protected] 214 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 215
Figura 7.1: Calculo de extremos mediante curvas de nivel.
La primera circunferencia que toca a la recta de ecuacion x + y − 1 = 0 lo hace en el punto(1/2, 1/2). Luego ese punto corresponde al menor valor de z, para el cual (x, y) esta en una curvade nivel y en la restriccion. En consecuencia el mınimo solicitado es f(1/2, 1/2) = 1/2.
La situacion en el espacio puede verse mediante el siguiente grafico
♣
Figura 7.2: Calculo de extremos mediante curvas de nivel.
7.2.1. Metodo de los multiplicadores de Lagrange.
En el metodo grafico de las curvas de nivel se trata de encontrar el punto (x, y) donde la curva denivel de la superficie de ecuacion z = f(x, y) es tangente a la curva de ecuacion g(x, y) = 0. Ahorabien, dos curvas son tangentes si sus vectores normales son paralelos. En consecuencia, dado quelos vectores normales a dichas curvas son los vectores gradientes, se tiene que, en el punto detangencia, el vector gradiente ∇f debe ser un multiplo escalar del vector gradiente ∇g. Luego
∇f(x, y) = λ∇g(x, y)
donde el escalar λ se conoce como multiplicador de Lagrange. Las condiciones necesarias para laexistencia de tales multiplicadores vienen recogidas en el siguiente teorema
TEOREMA 7.5 (Teorema de Lagrange). Sean f y g funciones con derivadas parcialesprimeras continuas tal que f tiene un extremo en el punto (x0, y0) de la curva de la ligadurag(x, y) = 0. Si ∇g(x0, y0) 6= 0, entonces existe un numero real λ tal que
∇f(x, y) = λ∇g(x, y)
ξρ∫s email: [email protected] 215 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 216
El teorema de Lagrange tambien se cumple para funciones de tres o mas variables, usando unargumento paralelo con las superficies de nivel.
El metodo de los multiplicadores de Lagrange usa el Teorema 7.5 para hallar los extremos de unafuncion f sujeta a una ligadura g(x, y) = 0.
TEOREMA 7.6 (Metodo de los multiplicadores de Lagrange). Si f y g satisfacen lashipotesis del teorema de Lagrange y f tiene un maximo o mınimo sujeto a la ligadura g(x, y) = 0,entonces dicho extremo se produce en uno de los puntos crıticos de la funcion L dada por
L(x, y, λ) = f(x, y) + λg(x, y).
Nota: Puesto que λ puede ser indiferentemente positivo o negativo, la relacion anterior puedesustituirse por esta otra:
L(x, y, λ) = f(x, y) + λg(x, y)
Para funciones de tres variables se tiene
L(x, y, z, λ) = f(x, y, z) + λg(x, y, z)
En consecuencia, si las funciones f y g tienen derivadas parciales continuas, entonces, los extremosde la funcion f(x, y), condicionados por la restriccion g(x, y) = 0, se producen en los puntos crıticosde la funcion:
L(x, y, λ) = f(x, y) + λg(x, y)
Dichos puntos crıticos vendran determinados por las soluciones del sistema:
Lx = 0
Ly = 0
Lλ = 0
fx + λgx = 0
fx + λgx = 0
g(x, y) = 0
El procedimiento mas comodo para resolver el sistema consiste en eliminar λ entre las dos primerasecuaciones y sustituir el resultado en la tercera. En el proceso de resolucion del sistema hay queprocurar evitar perder soluciones en las simplificaciones. Por ejemplo, de la ecuacion λx = x seobtienen dos soluciones x = 0 y λ = 1, mientras que si “tachamos” la x perdemos la solucionx = 0.
Para determinar la naturaleza de los puntos crıticos podemos seguir dos procedimientos:
Funcion implıcita. Consiste en suponer que el problema se ha resuelto por sustitucion dela variable, sin resolverlo por dicho metodo, pero estudiando la naturaleza de los puntoscrıticos como si ası se hubiera hecho. En el supuesto de que la ecuacion g(x, y) = 0 defina y
ξρ∫s email: [email protected] 216 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 217
como funcion implıcita respecto de la variable x, en un entorno del punto crıtico (x0, y0). Esdecir, y = h(x), con y0 = h(x0). Podemos suponer que hemos sustituido, en f(x, y), y por suvalor y = h(x), con lo que obtenemos una funcion de una sola variable f ∗(x) = f(x, h(x)).La naturaleza del punto crıtico (x0, y0) en f(x, y) condicionado por g(x, y) = 0, sera la delpunto crıtico x0 en f ∗. Es evidente que la funcion f(x, y) posee un maximo (resp., mınimo)condicionado por g(x, y) = 0, en (x0, y0) si y solamente si la funcion f ∗(x) = f(x, h(x))posee un maximo (resp., mınimo) en x0. Con lo cual el estudio de la naturaleza de lospuntos crıticos se hace en una funcion de una sola variable, acudiendo al signo de su segundaderivada f ′′(x0, h(x0), h
′(x0), h′′(x0))), sin que para ello sea necesario conocer la expresion
de y = h(x), puesto que h(x0), esta dado, por el punto crıtico; y h′(x0) y h′′(x0), se obtienendirectamente a partir de g(x, y) = 0, en virtud del teorema de la funcion implıcita.
El metodo se generaliza a mas de dos variables de manera natural. Ası, La funcion f(x, y, z)posee un maximo (resp., mınimo) condicionado por la restriccion g(x, y, z) = 0, en (x0, y0, z0)si y solamente la funcion f ∗(x, y) = f(x, y, h(x, y)) posee un maximo (resp., mınimo) en(x0, y0). Con lo cual el estudio de la naturaleza de los puntos crıticos se hace en una funcionde una variable menos, acudiendo al signo de su hessiano (ello siempre que la ecuaciong(x, y, z) = 0 defina implıcitamente z = h(x, y), en un entorno del punto (x0, y0)). Ası,
Hf ∗(x0, y0) =
∣∣∣∣f ∗
xx f ∗xy
f ∗yx f ∗
yy
∣∣∣∣
donde no es necesario conocer la expresion z = h(x, y), y los valores de z, zx, zy, zxx, zxy yzyy, en el punto (x0, y0), necesarios para el calculo de dicho hessiano, se determinan mediantela derivacion implıcita.
En el caso de dos variables, tambien puede estudiarse la naturaleza del punto crıtico estudi-amos el signo del determinante:
∆ =
∣∣∣∣∣∣
Lλλ Lλx Lλy
Lxλ Lxx Lxy
Lyλ Lyx Lyy
∣∣∣∣∣∣=
∣∣∣∣∣∣
0 gx gy
gx Lxx Lxy
gy Lyx Lyy
∣∣∣∣∣∣
Si ∆ < 0, entonces (x0, y0) es un punto mınimo.
Si ∆ > 0, entonces (x0, y0) es un punto maximo.
Si ∆ = 0, entonces el criterio no da informacion.
Metodo del Hessiano: Hallamos el hessiano de la funcion de Lagrange
L(x, y, λ) = f(x, y) + λg(x, y)
en el punto crıtico correspondiente (x0, y0):
HL(x0, y0) =
(Lxx(x0, y0) Lxy(x0, y0)Lyx(x0, y0) Lyy(x0, y0)
)
ξρ∫s email: [email protected] 217 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 218
1. Si detHL(x0, y0) > 0 y Lxx(x0, y0) > 0, entonces (x0, y0) es un mınimo condicionado.
2. Si detHL(x0, y0) > 0 y Lxx(x0, y0) < 0, entonces (x0, y0) es un maximo condicionado.
3. Si detHL(x0, y0) ≤ 0, entonces el criterio no da informacion. Habra que resolver porotro metodo.
Este procedimiento se hace extensivo a funciones de 3 variables reales del modo siguiente. SeaU = f(x, y, z) con restriccion g(x, y, z) = 0.
1. Definir la funcion de Lagrange
L(x, y, z, λ) = f(x, y, z) + λg(x, y, z)
2. Resolver el siguiente sistema que se da a continuacion para obtener el punto crıtico p =(x0, y0, z0, λ0):
Lx = 0
Ly = 0
Lz = 0
Lλ = 0
fx + λgx = 0
fx + λgx = 0
fz + λgz = 0
g(x, y, z) = 0
3. Calcular los determinantes:
∆1(p) =
∣∣∣∣∣∣
0 gx(p) gy(p)gx(p) fxx(p) fxy(p)gy(p) fyx(p) fyy(p)
∣∣∣∣∣∣, ∆2(p) =
∣∣∣∣∣∣∣∣
0 gx(p) gy(p) gz(p)gx(p) fxx(p) fxy(p) fxz(p)gy(p) fyx(p) fyy(p) fyz(p)gz(p) fzx(p) fzy(p) fzz(p)
∣∣∣∣∣∣∣∣
Si ∆1(p) > 0 y ∆2(p) < 0, entonces la funcion tiene un maximo relativo condicionadoen p.
Si ∆1(p) < 0 y ∆2(p) < 0, entonces la funcion tiene un mınimo relativo condicionadoen p.
Ahora resolvamos el problema de maximizar una funcion f en n variables f(x1, x2, ..., xn) cuandolas variables (x1, x2, ..., xn) estan sometidas a las restricciones
g1(x1, x2, ..., xn) = 0g2(x1, x2, ..., xn) = 0
... 0gm(x1, x2, ..., xn) = 0
ξρ∫s email: [email protected] 218 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 219
Definamos el conjunto
M = (x1, x2, ..., xn) ∈ Rn : gk(x1, x2, ..., xn) = 0, 1 ≤ k ≤ m
Denotemos por f |M la funcion f restringida a M , si f |M tiene o presenta un maximo o unmınimo local en un punto (a1, a2, ..., an) de M , entonces diremos que f(x1, x2, ..., xn) sometida alas restricciones
g1(x1, x2, ..., xn) = 0g2(x1, x2, ..., xn) = 0
... 0gm(x1, x2, ..., xn) = 0
tiene un extremo relativo en el punto (a1, a2, ..., an).
TEOREMA 7.7 (Teorema de Lagrange). Sean m, n con m < n y sean f : Rn → R y
g : Rn → R funciones con derivadas parciales continuas y que los vectores ∇g1(x1, x2, ..., xn),
∇g2(x1, x2, ..., xn),..., ∇gm(x1, x2, ..., xn) son linealmente independientes para todo (x1, x2, ..., xn)donde
g1(x1, x2, ..., xn) = 0g2(x1, x2, ..., xn) = 0
...gm(x1, x2, ..., xn) = 0
Si la funcion f(x1, x2, ..., xn) sometida a las restricciones
g1(x1, x2, ..., xn) = 0g2(x1, x2, ..., xn) = 0
...gm(x1, x2, ..., xn) = 0
tiene un extremo relativo en un punto (a1, a2, ..., an) entonces existen unos escalares λ1, λ2 ,...,λm, no todos nulos, tales que
∇f(a1, a2, ..., an) = λ1∇g1(a1, a2, ..., an) + λ2∇g2(a1, a2, ..., an) + · · ·+ λm∇gm(a1, a2, ..., an)
Los λk se les llama los multiplicadores de Lagrange para el punto (a1, a2, ..., an).
TEOREMA 7.8 (Metodo de los multiplicadores de Lagrange). Sean f : Rn → R y
g : Rn → R funciones con derivadas parciales continuas y que los vectores ∇g1(x1, x2, ..., xn),
∇g2(x1, x2, ..., xn),..., ∇gm(x1, x2, ..., xn) son linealmente independientes para todo (x1, x2, ..., xn)donde
g1(x1, x2, ..., xn) = 0g2(x1, x2, ..., xn) = 0
...gm(x1, x2, ..., xn) = 0
ξρ∫s email: [email protected] 219 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 220
Si la funcion f(x1, x2, ..., xn) sometida a las restricciones
g1(x1, x2, ..., xn) = 0g2(x1, x2, ..., xn) = 0
...gm(x1, x2, ..., xn) = 0
tiene un extremo relativo en un punto (a1, a2, ..., an) entonces (a1, a2, ..., an) es solucion del sigu-iente sistema de n +m ecuaciones con n+m incognitas x1, x2, ..., xn, λ1, λ2 ,..., λm:
∇f(x1, x2, ..., xn) = λ1∇g1(x1, x2, ..., xn) + · · ·+ λm∇gm(x1, x2, ..., xn)g1(x1, x2, ..., xn) = 0g2(x1, x2, ..., xn) = 0
...gm(x1, x2, ..., xn) = 0
(7.4)
Observacion. Si hacemos x = (x1, x2, ..., xn), entonces el sistema (7.4) puede escribirse como:
∂f
∂x1
∣∣∣∣x
+ λ1∂g1
∂x1
∣∣∣∣x
+ · · ·+ λm∂gm
∂x1
∣∣∣∣x
= 0
∂f
∂x2
∣∣∣∣x
+ λ1∂g1
∂x2
∣∣∣∣x
+ · · ·+ λm∂gm
∂x2
∣∣∣∣x
= 0
...
∂f
∂xn
∣∣∣∣x
+ λ1∂g1
∂xn
∣∣∣∣x
+ · · ·+ λm∂gm
∂xn
∣∣∣∣x
= 0
g1(x1, x2, ..., xn) = 0
g2(x1, x2, ..., xn) = 0
...
gm(x1, x2, ..., xn) = 0
(7.5)
Observacion. Si sabemos que f(x1, x2, ..., xn) sometida a las restricciones
g1(x1, x2, ..., xn) = 0g2(x1, x2, ..., xn) = 0
...gm(x1, x2, ..., xn) = 0
alcanza su maximo y su mınimo absolutos (por ejemplo, si
M = (x1, x2, ..., xn) ∈ Rn : gk(x1, x2, ..., xn) = 0, 1 ≤ k ≤ m
ξρ∫s email: [email protected] 220 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 221
es un conjunto compacto) entonces basta evaluar f en las soluciones del sistema (7.5) y quedarsecon los valores maximo y mınimo.
EJEMPLO 7.29. Desdoblar el numero 36 en tres numeros positivos de modo que su productosea el mayor posible.
SOLUCION.- Segun las condiciones del problema tenemos:
1.- Maximizar f(x, y, z) = xyz
2.- Sujeto a x+ y + z = 36
Transformemos este problema de extremos condicionado en un problema sin condiciones. Paraesto despejamos z de la ultima ecuacion z = 36 − x− y, reemplazando en xyz, tenemos
f(x, y) = xy(36 − x− y) = 36xy − x2y − xy2.
Primero encontramos las derivadas parciales de f(x, y)
fx(x, y) = 36y − 2xy − y2, fy(x, y) = 36x− x2 − 2xy.
Estas funciones estan definidas para todo (x, y), por lo tanto los unicos puntos crıticos que bus-caremos es cuando fx y fy son ceros. Esto es:
36y − 2xy − y2 = 036x− x2 − 2xy = 0
y(36 − 2x− y) = 0x(36 − x− 2y) = 0
y = 0, 2x+ y = 36x = 0, x+ 2y = 36
Para resolver el sistema igualamos a cero cada factor de la primera ecuacion con cada factor de lasegunda ecuacion:
x = 0 o 2x+ y = 36y = 0 o x+ 2y = 36
Para el caso en que x = 0, tenemos dos casos:
y = 0. Por tanto, el punto crıtico es (0, 0)
x+ 2y = 36. De donde y = 18. Por tanto, un punto crıtico es (0, 18)
Para el caso en que 2x+ y = 36, tenemos dos casos:
y = 0. De donde x = 18. Por tanto, un punto crıtico es (18, 0)
x+ 2y = 36. De donde
2x+ y = 36x+ 2y = 36
2x+ y = 36−2x− 4y = −72
−3y = −36y = 122x+ 12 = 36x = 12.
ξρ∫s email: [email protected] 221 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 222
Luego un punto crıtico es (12, 12). Para determinar si se trata de maximo o mınimo, hallamos lamatriz hessiana.
Hf(x, y) =
(fxx(x, y) fxy(x, y)fyx(x, y) fyy(x, y)
)=
(−2y 36 − 2x− 2y
36 − 2x− 2y −2x
)
Con lo cual resulta:
|Hf(0, 0)| =∣∣∣∣
0 00 0
∣∣∣∣ = 0 el hessiano no nos determina la naturaleza del punto crıtico.
|Hf(0, 18)| =
∣∣∣∣−2(18) 36 − 2(0) − 2(18)
36 − 2(0) − 2(18) −2(0)
∣∣∣∣ = 0 el hessiano no nos determina la
naturaleza del punto crıtico.
|Hf(18, 0)| =
∣∣∣∣−2(0) 36 − 2(18) − 2(0)
36 − 2(18) − 2(0) −2(18)
∣∣∣∣ = 0 el hessiano no nos determina la
naturaleza del punto crıtico.
|Hf(12, 12)| =
∣∣∣∣−2(12) 36 − 2(12) − 2(12)
36 − 2(12) − 2(12) −2(12)
∣∣∣∣ = 576 − 144 = 432 > 0 y fxx =
−24 < 0, entonces (12, 12) se corresponde con un maximo relativo.
Luego los numeros son x = 12, y = 12, z = 36 − 12 − 12 = 12 ♣
EJEMPLO 7.30. Identificar los valores extremos de la funcion: f(x, y) = 3x+ 3y si los puntos(x, y) deben verificar la condicion x2 + y2 = 2.
SOLUCION.- Identifiquemos las funciones:
1.- Funcion objetivo: f(x, y) = 3x+ 3y
2.- Funcion restriccion: g(x, y) = x2 + y2 − 2
Formamos la funcion de Lagrange:
L(x, y, λ) = f(x, y) + λg(x, y)
Que, en nuestro caso, es:
L(x, y, λ) = 3x+ 3y + λ(x2 + y2 − 2)
Los puntos crıticos de esta funcion vendran determinados por las soluciones del sistema:
ξρ∫s email: [email protected] 222 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 223
Lx = 3 + 2xλ = 0
Ly = 3 + 2yλ = 0
Lλ = x2 + y2 − 2 = 0
λ = − 3
2x
λ = − 3
2y
x2 + y2 = 2
− 3
2x= − 3
2y
x2 + y2 = 2
y = x
x2 + y2 = 2
x2 + x2 = 2
2x2 = 2
x2 = 1x = ±1
Tomando x = 1, obtenemos que y = 1 y ademas de que λ = −3
2. Luego uno de los puntos crıticos
de la funcion de Lagrange es(1, 1,−3
2
). Pero si tomamos x = −1, obtenemos que y = −1 y λ =
3
2,
por tanto el otro punto crıtico de la funcion de Lagrange es(− 1,−1, 3
2
).
Para determinar su naturaleza de estos puntos crıticos estudiamos el signo del determinante:
∆(x, y, λ) =
∣∣∣∣∣∣
0 gx gy
gx Lxx Lxy
gy Lyx Lyy
∣∣∣∣∣∣=
∣∣∣∣∣∣
0 2x 2y2x 2λ 02y 0 2λ
∣∣∣∣∣∣.
En efecto, evaluando en el punto(1, 1,−3
2
)tenemos
∆(1, 1,−3
2
)=
∣∣∣∣∣∣
0 2 22 −3 02 0 −3
∣∣∣∣∣∣= −2
∣∣∣∣2 02 −3
∣∣∣∣+ 2
∣∣∣∣2 −32 0
∣∣∣∣ = −2(−6 − 0) + 2(0 + 6) = 12
De aquı se sigue que el punto p(1, 1) es un punto maximo condicionado para f . Por otra parte si
evaluamos el punto(− 1,−1, 3
2
)obtendremos
∆(− 1,−1,
3
2
)=
∣∣∣∣∣∣
0 −2 −2−2 3 0−2 0 3
∣∣∣∣∣∣= 2
∣∣∣∣−2 0−2 3
∣∣∣∣− 2
∣∣∣∣−2 3−2 0
∣∣∣∣ = 2(−6 − 0) − 2(0 + 6) = −12
De aquı se sigue que el punto p(−1,−1) es un punto mınimo condicionado para f . ♣
EJEMPLO 7.31. Con el uso de los multiplicadores de Lagrange; calcular la mınima distanciaque existe entre el punto Q(5, 4) y la recta 4x+ 3y = 7.
SOLUCION.- Sea P (x, y) un punto cualquiera de la recta 4x+3y = 7. La distancia entre el puntoQ(5, 4) a un punto P (x, y) es dado por d =
√(x− 5)2 + (y − 4)2, esto es, d2 = (x−5)2 +(y−4)2.
ξρ∫s email: [email protected] 223 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 224
Buscamos las coordenadas de P que hacen que d o equivalentemente d2 sea mınima, esto es,tenemos que resolver el siguiente problema:
1.- Maximizar f(x, y) = (x− 5)2 + (y − 4)2
2.- Sujeto a 4x+ 3y = 7
Por tanto tenemos identificado las funciones:
1.- Funcion objetivo: f(x, y) = (x− 5)2 + (y − 4)2
2.- Funcion restriccion: g(x, y) = 4x+ 3y − 7
Formamos la funcion de Lagrange:
L(x, y, λ) = f(x, y) + λg(x, y)
Que, en nuestro caso, es:
L(x, y, λ) = (x− 5)2 + (y − 4)2 + λ(4x+ 3y − 7)
Los puntos crıticos de esta funcion vendran determinados por las soluciones del sistema:
Lx = 2(x− 5) + 4λ = 0
Ly = 2(y − 4) + 3λ = 0
Lλ = 4x+ 3y − 7 = 0
λ = −x− 5
2
λ = −2(y − 4)
3
4x+ 3y = 7
De las dos primeras ecuaciones obtenemos −x− 5
2= −2(y − 4)
3, 3x − 15 = 4y − 16 de donde
3x− 4y = −1, juntando con la tercera ecuacion tenemos el siguiente sistema de ecuaciones
3x− 4y = −1
4x+ 3y = 7
9x− 12y = −3
16x+ 12y = 28
25x = 25x = 14(1) + 3y = 7y = 1
de esta manera tenemos
y = 1, x = 1 λ = −x− 5
2= −1 − 5
2= 2
con lo cual, el unico punto crıtico es(1, 1), obtenido para λ = 2.
ξρ∫s email: [email protected] 224 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 225
Para determinar su naturaleza estudiamos el signo del determinante:
∆(x, y, λ) =
∣∣∣∣∣∣
0 gx gy
gx Lxx Lxy
gy Lyx Lyy
∣∣∣∣∣∣=
∣∣∣∣∣∣
0 4 34 2 03 0 2
∣∣∣∣∣∣
Evaluando en(1, 1, 2
)tenemos
∆(1, 2,−1) =
∣∣∣∣∣∣
0 4 34 2 03 0 2
∣∣∣∣∣∣= 0 − 8 − 6 = −14 < 0
De donde, el punto(1, 1)
es un punto mınimo y ademas el valor mınimo es
d =√
(1 − 5)2 + (1 − 4)2 =√
(−4)2 + (−3)2 =√
16 + 9 = 5. ♣
EJEMPLO 7.32. Minimizar la funcion f(x, y, z) = x2 + y2 + z2 sujeta a las condiciones x +2y + 3z = 6, x+ 3y + 9z = 9.
SOLUCION.- Para ello identifiquemos las funciones
Funcion objetivo: f(x, y, z) = x2 + y2 + z2
Funcion restriccion 1: g(x, y, z) = x+ 2y + 3z − 6
Funcion restriccion 2: h(x, y, z) = x+ 3y + 9z − 9
y de aquı obtenemos el sistema formado por las siguientes ecuaciones:
fx + λ1gx + λ2hx = 0fy + λ1gy + λ2hy = 0fz + λ1gz + λ2hz = 0
g(x, y, z) = 0h(x, y, z) = 0
2x+ λ1 + λ2 = 02y + 2λ1 + 3λ2 = 02x+ 3λ1 + 9λ2 = 0
x+ 2y + 3z = 6x+ 3y + 9z = 9
Despejamos x, y, z en las tres primeras y sustituimos en las dos ultimas obteniendo:
14λ1 + 34λ2 = −1234λ1 + 91λ2 = −18
y finalmente
λ1 = −240
59y λ2 =
78
59
Para estos valores de los multiplicadores de Lagrange obtenemos el punto P
(81
59,123
59,
9
59
)
♣
ξρ∫s email: [email protected] 225 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 226
EJEMPLO 7.33. Hallar los extremos de la funcion f(x, y) = 2xy − 3y2 − x2 bajo la restriccionx+ y = 16.
SOLUCION.- Formamos la funcion de Lagrange:
L(x, y, λ) = f(x, y) + λg(x, y)
Que, en nuestro caso, es:
L(x, y, λ) = 2xy − 3y2 − x2 + λ(x+ y − 16)
Los puntos crıticos de esta funcion vendran determinados por las soluciones del sistema:
Lx = 2y − 2x+ λ = 0
Ly = 2x− 6y + λ = 0
Lλ = x+ y − 16 = 0
λ = −2y + 2x
λ = −2x+ 6y
x+ y = 16
De las dos primeras ecuaciones obtenemos −2y + 2x = −2x+ 6y, de donde −8y = −4x, y = 12x,
y sustituyendo en la tercera resulta
x+ y = 16
x+ 12x = 16
32x = 16
x = 323
de esta manera tenemos x = 323, y = 16 − 32
3= 16
3, λ = 2 32
3− 6 16
3= 64−96
3= −32
3con lo cual, el
unico punto crıtico es(
323, 16
3
), obtenido para λ = −32
3.
Ahora bien, reemplazamos λ = −323
en las formulas para Lx y Ly y luego hallamos sus derivadasparciales segundas:
Lx = 2y − 2x− 32
3
Ly = 2x− 6y − 323
Lxx = −2
Lyy = −6
Lxy = 2
con lo cual:
HL(32
3,16
3
)=
(Lxx Lxy
Lyx Lyy
)=
(−2 22 −6
)
Para estudiar su naturaleza calculamos
ξρ∫s email: [email protected] 226 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 227
detHL(32
3,16
3
)= 8 − 4 = 4 > 0 y Lxx
(32
3,16
3
)= −2 < 0
luego la funcion presenta un maximo condicionado en el punto(
323, 16
3
).
♣
EJEMPLO 7.34. Hallar los maximos y mınimos de la funcion f(x, y) = 5x2 + 6y2 − xy bajo larestriccion x+ 2y = 24.
SOLUCION.- Identifiquemos las funciones:
1.- Funcion objetivo: f(x, y) = 5x2 + 6y2 − xy
2.- Funcion restriccion: g(x, y) = x+ 2y − 24
Formamos la funcion de Lagrange:
L(x, y, λ) = f(x, y) + λg(x, y)
Que, en nuestro caso, es:
L(x, y, λ) = 5x2 + 6y2 − xy + λ(x+ 2y − 24)
Los puntos crıticos de esta funcion vendran determinados por las soluciones del sistema:
Lx = 10x− y + λ = 0
Ly = 12y − x+ 2λ = 0
Lλ = x+ 2y − 24 = 0
λ = −10x+ y
λ = −6y + 12x
x+ 2y = 24
De las dos primeras ecuaciones obtenemos −10x+y = −6y+ 12x, −20x+2y = −12y+x de donde
−21x+ 14y = 0, juntando con la tercera ecuacion tenemos el sistema de ecuaciones
−21x+ 14y = 0
x+ 2y = 24
−21x+ 14y = 0
−21x− 42y = −504
−28y = −504
y = 18
de esta manera tenemos y = 18, x = 24 − 2(18) = −12, λ = −10x + y = −10(−12) + 18 = 138
con lo cual, el unico punto crıtico es(− 12, 18
), obtenido para λ = 138.
Ahora bien, reemplazamos λ = 138 en las formulas para Lx y Ly y luego hallamos sus derivadasparciales segundas:
ξρ∫s email: [email protected] 227 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 228
Lx = 10x− y + 138
Ly = 12y − x+ 276
Lxx = 10
Lyy = 12
Lxy = −1
con lo cual:
HL(− 12, 18
)=
(Lxx Lxy
Lyx Lyy
)=
(10 −1−1 12
)
Para estudiar su naturaleza calculamos
detHL(− 12, 18
)= 120 + 1 = 121 > 0 y Lxx
(32
3,16
3
)= 10 > 0
luego la funcion presenta un mınimo condicionado en el punto(− 12, 18
).
♣
EJEMPLO 7.35. Maximizar la funcion f(x, y) = 25− x2 − y2 sujeta a la restriccion 2x+ y = 4
SOLUCION.- Identifiquemos las funciones:
1.- Funcion objetivo: f(x, y) = 25 − x2 − y2
2.- Funcion restriccion: g(x, y) = 2x+ y − 4
Formamos la funcion de Lagrange:
L(x, y, λ) = 25 − x2 − y2 + λ(2x+ y − 4)
ahora, calculamos las derivadas parciales respecto de x, de y y respecto de λ.
Lx = −2x− 2λ
Ly = −2y − λ
Lλ = 2x+ y − 4
(7.6)
Los valores crıticos (optimos) se obtienen haciendo CERO las tres derivadas parciales y resolviendoel sistema.
−2x− 2λ = 0
−2y − λ = 0
2x+ y = 4
λ = −xλ = −2y
2x+ y = 4
ξρ∫s email: [email protected] 228 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 229
De las dos primeras ecuaciones obtenemos −x = −2y, de donde x − 2y = 0, juntando con latercera ecuacion tenemos el sistema de ecuaciones
x− 2y = 0
2x+ y = 4
−2x+ 4y = 0
2x+ y = 4
5y = 4
y =4
5
de esta manera encontramos que y = 45, x = 24
5= 8
5, λ = −8
5y estos son los puntos crıticos en la
funcion de Lagrange. Con lo cual, el unico punto crıtico es(
85, 4
5
), obtenido para λ = −8
5.
Ahora bien, reemplazamos λ = −85
en las formulas para Lx y Ly obtenidas en (7.6) y luegohallamos sus derivadas parciales segundas:
Lx = −2x+ 16
5
Ly = −2y + 85
Lxx = −2
Lyy = −2
Lxy = 0
con lo cual:
HL(8
5,4
5
)=
(Lxx Lxy
Lyx Lyy
)=
(−2 00 −2
)
Para estudiar su naturaleza calculamos
detHL(8
5,4
5
)= 4 > 0 y Lxx
(8
5,4
5
)= −2 < 0
luego la funcion presenta un maximo condicionado en el punto(
85, 4
5
).
♣
EJEMPLO 7.36. Hallar los valores extremos de la funcion f(x, y) = 2xy + 12x− y2 − 3x2 − 1si los puntos P (x, y) deben verificar la condicion x+ y = 12.
SOLUCION.- ♣
EJEMPLO 7.37. Halle los valores extremos de f(x, y) = x2 + y2 − 9 sujeto a la condicionx+ y = 2.
SOLUCION.- ♣
EJEMPLO 7.38. Halle los valores extremos de f(x, y) = 2x + 2xy + y sujeto a la condicion2x+ y = 100.
ξρ∫s email: [email protected] 229 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 230
SOLUCION.- ♣
EJEMPLO 7.39. Halle los valores extremos de f(x, y) = x2−y2 sujeto a la condicion x−2y+6 =0.
SOLUCION.- ♣
EJEMPLO 7.40. Hallar el mınimo de la funcion f(x, y) = x2+y2 condicionado por la restriccionx+ y − 1 = 0, mediante el metodo de los multiplicadores de Lagrange.
SOLUCION.- ♣
EJEMPLO 7.41. Hallar el mınimo de la funcion f(x, y) = x2+y2 condicionado por la restriccionx+ y − 1 = 0, mediante el metodo de los multiplicadores de Lagrange.
SOLUCION.- Formamos la funcion de Lagrange:
L(x, y, λ) = f(x, y) + λg(x, y)
Que, en nuestro caso, es:
L(x, y, λ) = x2 + y2 + λ(x+ y − 1)
Los puntos crıticos de esta funcion vendran determinados por las soluciones del sistema:
Lx = 2x+ λ = 0
Ly = 2y + λ = 0
Lλ = x+ y − 1 = 0
λ = −2x
λ = −2y
x+ y = 1
−2x = −2y
x+ y = 1
Resolviendo el ultimo sistema x = y = 1/2, luego el unico punto crıtico es el punto p(1/2, 1/2).Para determinar su naturaleza estudiamos el signo del determinante:
∆(1/2, 1/2,−1) =
∣∣∣∣∣∣
Lλλ Lλx Lλy
Lxλ Lxx Lxy
Lyλ Lyx Lyy
∣∣∣∣∣∣=
∣∣∣∣∣∣
0 1 11 2 01 0 2
∣∣∣∣∣∣= −2 − 2 = −4
De donde, el punto p(1/2, 1/2) es un punto mınimo.
♣
EJEMPLO 7.42. Inscribir un rectangulo de area maxima, con los lados paralelos a los ejes decoordenadas, en la region del primer cuadrante limitada por la parabola y = 3 − x2 y los ejes decoordenadas.
ξρ∫s email: [email protected] 230 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 231
Figura 7.3: y = 3 − x2
SOLUCION.-
La funcion a maximizar es el area del rectangulo, A = x · y. La restriccion viene determinada porel hecho de que el punto (x, y) debe pertenecer a la parabola y = 3 − x2, luego tenemos:
A(x, y) = xy, g(x, y) = x2 + y − 3
Formamos la funcion de Lagrange:
L(x, y, λ) = A(x, y) + λg(x, y)
Que, en nuestro caso, es:
L(x, y, λ) = xy + λ(x2 + y − 3)
Los puntos crıticos de esta funcion vendran determinados por las soluciones del sistema:
Lx = y + 2xλ = 0
Ly = x+ λ = 0
Lλ = x2 + y − 3 = 0
λ = − y
2x
λ = −xx2 + y = 3
− y
2x= −x
x2 + y = 3
2x2 = y
x2 + y = 3
x2 + 2x2 = 3
3x2 = 3
x2 = 1x = ±1
Y al ser x > 0 por ser (x, y) un punto del primer cuadrante, resulta:
x = 1, luego y = 2, ademas λ = −1.
Luego el unico punto crıtico es el punto P (1, 2). Para determinar su naturaleza estudiamos el signodel determinante:
ξρ∫s email: [email protected] 231 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 232
∆(x, y, λ) =
∣∣∣∣∣∣
0 gx gy
gx Lxx Lxy
gy Lyx Lyy
∣∣∣∣∣∣=
∣∣∣∣∣∣
0 2x 12x 2λ 01 2x 0
∣∣∣∣∣∣
Evaluando en (1, 2,−1) tenemos
∆(1, 2,−1) =
∣∣∣∣∣∣
0 2 12 −2 11 1 2
∣∣∣∣∣∣= 2 + 2 + 2 = 6 > 0
De donde, el punto p(1, 2) es un punto maximo.
♣
EJEMPLO 7.43. Mediante aplicacion de maximos y/o mınimos, hallar la distancia mınima queexiste entre el punto p(1, 1) y la recta 3x+ 4y − 12 = 0.
SOLUCION.- Sea P (x, y) un punto cualquiera de la recta. El cuadrado de la distancia entre elpunto p(1, 1) y punto P es d2 = (x− 1)2 + (y − 1)2. Buscamos las coordenadas de P que hacen dque sea mınima. Por tanto tenemos identificado las funciones:
1.- Funcion objetivo: f(x, y) = (x− 1)2 + (y − 1)2
2.- Funcion restriccion: g(x, y) = 4x+ 3y − 12
Formamos la funcion de Lagrange:
L(x, y, λ) = f(x, y) + λg(x, y)
Que, en nuestro caso, es:
L(x, y, λ) = (x− 1)2 + (y − 1)2 + λ(4x+ 3y − 12)
Los puntos crıticos de esta funcion vendran determinados por las soluciones del sistema:
Lx = 2(x− 1) + 4λ = 0
Ly = 2(y − 1) + 3λ = 0
Lλ = 4x+ 3y − 12 = 0
λ =x− 1
2
λ =2(y − 1)
3
4x+ 3y = 12
De las dos primeras ecuaciones obtenemosx− 1
2=
2(y − 1)
3, 3x−3 = 4y−4 de donde 3x−4y = −1,
juntando con la tercera ecuacion tenemos el siguiente sistema de ecuaciones
ξρ∫s email: [email protected] 232 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 233
3x− 4y = −1
4x+ 3y = 12
9x− 12y = −3
16x+ 12y = 48
25y = 45
y =9
5, x =
8
5
de esta manera tenemos
y =9
5, x =
8
5λ =
x− 1
2=
85− 1
2=
3
10
con lo cual, el unico punto crıtico es(8
5,9
5
), obtenido para λ =
3
10.
Para determinar su naturaleza estudiamos el signo del determinante:
∆(x, y, λ) =
∣∣∣∣∣∣
0 gx gy
gx Lxx Lxy
gy Lyx Lyy
∣∣∣∣∣∣=
∣∣∣∣∣∣
0 4 34 2 03 0 2
∣∣∣∣∣∣
Evaluando en(8
5,9
5,
3
10
)tenemos
∆(1, 2,−1) =
∣∣∣∣∣∣
0 4 34 2 03 0 2
∣∣∣∣∣∣= 0 − 8 − 6 = −14 < 0
De donde, el punto(8
5,9
5
)es un punto mınimo.
♣
EJEMPLO 7.44. Mediante multiplicadores de Lagrange, calcule la distancia mınima que existeentre el origen de coordenadas y la recta 3x+ 4y + 5 = 0.
SOLUCION.- ♣
EJEMPLO 7.45. Por multiplicadores de Lagrange, halle la distancia mınima del punto A(5, 4)a la recta 4x+ 3y = 7.
SOLUCION.- ♣
EJEMPLO 7.46. Mediante multiplicadores de Lagrange, calcule la distancia mınima del origen(0, 0) a la recta 4x+ 3y + 5 = 0.
SOLUCION.- ♣
EJEMPLO 7.47. Halle el punto de la circunferencia x2 + y2 = 1 mas cercano al punto (3, 5).
ξρ∫s email: [email protected] 233 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 234
SOLUCION.- Sea P (x, y) un punto cualquiera de la circunferencia x2 + y2 = 1. La distanciaentre el punto (3, 5) al punto P (x, y) es dado por d =
√(x− 3)2 + (y − 5)2, esto es, d2 = (x −
3)2 +(y−5)2. Buscamos las coordenadas de P que hacen que d o equivalentemente d2 sea mınima,esto es, tenemos que resolver el siguiente problema:
1.- Maximizar f(x, y) = (x− 3)2 + (y − 5)2
2.- Sujeto a x2 + y2 = 1
Por tanto tenemos identificado las funciones:
1.- Funcion objetivo: f(x, y) = (x− 3)2 + (y − 5)2
2.- Funcion restriccion: g(x, y) = x2 + y2 − 1
Formamos la funcion de Lagrange:
L(x, y, λ) = f(x, y) + λg(x, y)
Que, en nuestro caso, es:
L(x, y, λ) = (x− 3)2 + (y − 5)2 + λ(x2 + y2 − 1)
Los puntos crıticos de esta funcion vendran determinados por las soluciones del sistema:
Lx = 2(x− 3) + 2λx = 0
Ly = 2(y − 5) + 2λy = 0
Lλ = x2 + y2 − 1 = 0
λ =3 − x
x
λ =5 − y
y
x2 + y2 − 1
De las dos primeras ecuaciones obtenemos3 − x
x=
5 − y
y, 3y − xy = 5x− xy de donde 3y = 5x,
juntando con la tercera ecuacion tenemos el siguiente sistema de ecuaciones
y = (5/3)x
x2 + y2 = 1
x2 +
((5/3)x
)2
= 1
x2 + (25/9)x2 = 1
(31/9)x2 = 1x2 = 9/31
x = 3/√
31
y = (5/3)(3/√
31)
y = 5/√
31
ξρ∫s email: [email protected] 234 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 235
de esta manera tenemos
x =3√31, y =
5√31
λ =3 − x
x=
3 − 3√31
3√31
=√
31 − 1
con lo cual, el unico punto crıtico es(
3√31, 5√
31
), obtenido para λ =
√31 − 1.
Para determinar su naturaleza estudiamos el signo del determinante:
∆(x, y, λ) =
∣∣∣∣∣∣
0 gx gy
gx Lxx Lxy
gy Lyx Lyy
∣∣∣∣∣∣=
∣∣∣∣∣∣
0 2x 2y2x 2 + 2λ 02y 0 2 + 2λ
∣∣∣∣∣∣
Evaluando en(
3√31, 5√
31,√
31 − 1)
tenemos
∆( 3√
31,
5√31,√
31 − 1)
=
∣∣∣∣∣∣∣
0 6√31
10√31
6√31
2√
31 010√31
0 2√
31
∣∣∣∣∣∣∣= 0 − 2
√31
(10√31
)2
− 2√
31
(6√31
)2
< 0
De donde, el punto(
3√31, 5√
31
)es un punto mınimo y ademas el valor mınimo es
d =
√(3√31
− 3
)2
+
(5√31
− 5
)2
=
√9
31(1 −
√31)2 +
25
31(1 −
√31)2 = |1 −
√31|.
♣
EJEMPLO 7.48. Hallar los puntos de la superficie z = xy + 5 que sean los mas cercanos alorigen de coordenadas.
SOLUCION.- ♣
EJEMPLO 7.49. Inscribir un rectangulo de area maxima, con los lados paralelos a los ejes decoordenadas, en la region del primer cuadrante limitada por la parabola y = 3 − x2 y los ejes decoordenadas.
SOLUCION.- ♣
EJEMPLO 7.50. Supongamos que se necesitan x unidades de mano de obra y y unidades decapital para producir f(x, y) = 10000x
34 y
14 unidades de cierto artıculo. Si cada unidad de mano de
obra cuesta 20000 bs y cada unidad de capital cuesta 30000 bs y se dispone de un total de 6000000bs para la produccion; debemos determinar cuantas unidades de mano de obra y cuantas de capitaldeben usarse para maximizar la produccion.
ξρ∫s email: [email protected] 235 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 236
SOLUCION.- Recordemos que el costo total de x unidades de mano de obra a 20000 bs launidad y y unidades de capital a 30000 bs la unidad es igual a 20000x + 30000y = 6000000 ,ecuacion que representa a la funcion de restriccion.
Luego tenemos las funciones:
1.- Funcion objetivo: f(x, y) = 10000 x34 y
14
2.- Funcion restriccion: g(x, y) = 20000 x+ 30000 y − 6000000
Entonces, la funcion de lagrange la determinamos ası:
L(x, y, λ) = 10000 x34 y
14 + λ(20000 x+ 30000 y − 6000000)
Ahora, calculamos las derivadas parciales respecto de x, de y y respecto de λ.
Lx = 7500 x−14 y
14 + 20000λ = 7500
(yx
) 14
+ 20000λ
Ly = 2500 x34 y−
34 + 30000λ = 2500
(x
y
) 34
+ 30000λ
Lλ = 20000 x+ 30000 y − 6000000
(7.7)
Los valores crıticos (optimos) se obtienen haciendo CERO las tres derivadas parciales y resolviendoel sistema.
7500(yx
) 14
+ 20000λ = 0
2500
(x
y
) 34
+ 30000λ = 0
20000 x+ 30000 y − 6000000 = 0
Al despejar λ de las dos primeras ecuaciones, tenemos:
λ = − 7500
20000
(yx
) 14
= −3
8
(yx
) 14
λ = − 2500
30000
(x
y
)− 34
= − 1
12
(x
y
) 34
Como λ = λ, obtenemos la ecuacion
ξρ∫s email: [email protected] 236 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 237
−3
8
(yx
) 14
= − 1
12
(x
y
) 34
(x
y
)− 34 (y
x
) 14
=8
3
1
12
(yx
) 34+ 1
4=
8
36
De donde se tiene que y =2
9x, luego 9y = 2x, ası 2x − 9y = 0, juntando con la tercera ecuacion
tenemos el siguiente sistema de ecuaciones
2x− 9y = 0
20000 x+ 30000 y = 6000000
−20000 x+ 90000 y = 0
20000 x+ 30000 y = 6000000
de esta manera encontramos que y = 6000000120000
= 50, x = 92(50) = 225,
λ = −3
8
(50
225
) 14
= 0,257
y estos son los puntos crıticos en la funcion de Lagrange. Con lo cual, el unico punto crıtico es(225, 50
), obtenido para λ = 0,257.
Ahora bien, reemplazamos λ = 0,257 en las formulas para Lx y Ly obtenidas en (7.7) y luegohallamos sus derivadas parciales segundas:
Lx = 7500(yx
) 14
+ 20000 (0,257)
Ly = 2500
(x
y
) 34
+ 30000 (0,257)
Lxx = −1875(yx
)− 34 y
x2
Lyy = −18750
(x
y
)− 14 x
y2
Lxy = 7500(yx
)− 34 1
x
Puesto que(yx
)− 34 y
x2
(x
y
)− 14 x
y2=
(x
y
) 34− 1
4 1
xy=
(x
y
) 12 1
xy
entonces
LxxLyy = 35156250
(x
y
) 12 1
xy= 35156250
(225
50
) 12 1
(225)(50)= 4722362.8
ξρ∫s email: [email protected] 237 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 238
Por otro lado, como
(yx
)− 34 1
x
(yx
)− 34 1
x=(yx
)− 34− 3
4 1
x2=(yx
)− 32 1
x2
se tiene que
(Lxy)2 = 56250000
(yx
)− 32 1
x2= 56250000
(50
225
)− 32 1
(225)2= 10666.5
con lo cual:
detHL(225, 50
)= LxxLyy − (Lxy)
2 = 4722362.8 − 10666.5 > 0
y
Lxx
(225, 50
)< 0
luego la funcion presenta un maximo condicionado en el punto(225, 50
).
♣
EJEMPLO 7.51. Una empresa calcula que puede alcanzar unos beneficios anuales (en miles deeuros) dados por la funcion: B(x, y) = 4xy + 16y − x2 − 5y2 − 10 miles de euros donde x es lacantidad invertida en investigacion (en miles de euros) e y es la cantidad invertida en promocion(en miles de euros).
(a) Hallar las cantidades que la empresa ha de destinar a investigacion y promocion para obtenerel maximo beneficio.
(b) Si la empresa tiene un total de 9,000 euros para gastar en investigacion y promocion, ¿comodebe asignarse este dinero para generar el maximo beneficio posible?
(c) Si la empresa decide aumentar el presupuesto de gasto en investigacion y promocion en9,500 euros, calcule la forma en que los 500 euros adicionales afectaran el maximo beneficioobtenido.
SOLUCION (a).-Calculamos sus puntos crıticos:
Bx(x, y) = 4y − 2xBy(x, y) = 4x+ 16 − 10y
4y − 2x = 04x+ 16 − 10y = 0
x = 2y8y + 16 − 10y = 16 − 2yy = 8
Al resolver el ultimo sistema se obtiene que x = 16, x = 8. Y el punto crıtico es (16, 8).
ξρ∫s email: [email protected] 238 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 239
Hallamos la matriz Hessiana de la funcion objetivo
Bxx(x, y) = −2 < 0
Byy(x, y) = −10
Bxy(x, y) = 4
detHf(x, y) =
∣∣∣∣Bxx(x, y) Bxy(x, y)Byx(x, y) Byy(x, y)
∣∣∣∣ =
∣∣∣∣−2 44 −10
∣∣∣∣ = 4 > 0
yBxx(x, y) = −2 < 0
Luego (16, 8) es un maximo local. Ası, el beneficio maximo se obtiene cuando se destinan 16000euros a investigacion y 8000 euros a promocion. En este caso, el beneficio obtenido sera:
B(16, 8) = 4(16)(8) + 16(8)− (16)2 − 5(8)2 − 10 = 54.
miles de euros.
Solucion (b). En este caso tenemos que resolver:
1.- Maximizar B(x, y) = 4xy + 16y − x2 − 5y2 − 10
2.- Sujeto a x+ y = 9
Luego
1.- Funcion objetivo: B(x, y) = 4xy + 16y − x2 − 5y2 − 10
2.- Funcion restriccion: g(x, y) = x+ y − 9
Formamos la funcion de Lagrange:
L(x, y, λ) = B(x, y) + λg(x, y) = 4xy + 16y − x2 − 5y2 − 10 + λ(x+ y − 9).
Calculamos las derivadas parciales respecto de x, de y y respecto de λ de la funcion L.
Lx = 4y − 2x+ λ
Ly = 4x+ 16 − 10y + λ
Lλ = x+ y − 9
(7.8)
ξρ∫s email: [email protected] 239 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 240
Buscamos puntos crıticos de la funcion de Lagrange, para esto observemos que ∇g(x, y) = (1, 1) 6=0, y ademas L es diferenciable en todo su dominio, luego los puntos crıticos se obtendran haciendoCERO las tres derivadas parciales en (7.10) y resolviendo el sistema.
4y − 2x+ λ = 0
4x+ 16 − 10y + λ = 0
x+ y = 9
λ = 2x− 4y
λ = −4x− 16 + 10y
x+ y = 9
De las dos primeras ecuaciones obtenemos 2x− 4y = −4x− 16 + 10y, de donde 6x− 14y = −16,juntando con la tercera ecuacion tenemos el sistema de ecuaciones
6x− 14y = −16
x+ y = 9
6x− 14y = −16
−6x− 6y = −54
−20y = −70
y =7
2
de esta manera encontramos que y = 72, x = 9− 7
2= 11
2. El multiplicador de Lagrange asociado es
λ = 2x− 4y = 11 − 14 = −3
Con lo cual, el unico punto crıtico es(
72, 11
2
), obtenido para λ = −3. Para determinar su naturaleza
estudiamos el signo del determinante:
∆(x, y, λ) =
∣∣∣∣∣∣
0 gx gy
gx Lxx Lxy
gy Lyx Lyy
∣∣∣∣∣∣=
∣∣∣∣∣∣
0 1 11 1 41 4 −10
∣∣∣∣∣∣
Evaluando en(
72, 11
2,−3
)tenemos
∆(1, 2,−1) =
∣∣∣∣∣∣
0 1 11 1 41 4 −10
∣∣∣∣∣∣= −
∣∣∣∣1 41 −10
∣∣∣∣+∣∣∣∣
1 11 4
∣∣∣∣ = −(−10 − 4) = 14 > 0
De donde, el punto(
72, 11
2
)es un punto maximo. De forma que se han de destinar 5500 euros a
investigacion y 3500 euros a promocion, para obtener los maximos beneficios. El beneficio maximoen este caso sera:
B(7
2,11
2
)= 4(11
2
)(7
2
)+ 16
(7
2
)−(11
2
)2
− 5(7
2
)2
− 10 = 31,5.
miles de euros.
EJEMPLO 7.52. Encontrar los extremos de f(x, y) = x−y+z sujeto a la restriccion x2+y2+z2 =2
ξρ∫s email: [email protected] 240 Jasmer LPC
UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 241
SOLUCION.- ♣
EJEMPLO 7.53. Encontrar los extremos de f(x, y) = 2x − 2y − 3z sujeto a la restriccionx2 + 2y2 + 3z2 = 1
SOLUCION.- ♣
EJEMPLO 7.54. Halle la distancia mınima del punto (1, 2, 3) al plano 2x+ 3y + z = 12.
SOLUCION.- ♣
EJEMPLO 7.55. Hallar la distancia mınima desde el origen al cono z2 = (x− 1)2 + (y − 2)2.
SOLUCION.- ♣
EJEMPLO 7.56. Encontrar tres numeros x, y, z tales que x+ y+ z = 1 y xy+ xz+ yz sea tangrande como sea posible.
SOLUCION.- ♣
EJEMPLO 7.57. Encontrar el punto de la superficie z = xy − 1 mas cercano al origen.
SOLUCION.- ♣
EJEMPLO 7.58. Demostrar la siguiente desigualdad:x+ y + z
3≥ 3
√xyz para todo x, y, z ≥ 0.
Sugerencia: Buscar el maximo de la funcion u = xyz con la condicion x+ y + z = c.
SOLUCION.- ♣
EJEMPLO 7.59. Halle tres numeros positivos que sumados dan 30, tal que la suma de suscuadrados sea mınima.
SOLUCION.- ♣
EJEMPLO 7.60. Halle tres numeros positivos de suma 18, tal que su producto sea maximo.
SOLUCION.- ♣
EJEMPLO 7.61. Determinar las dimensiones del paralelepıpedo rectangular de lados paralelosa los ejes coordenados de maximo volumen que puede inscribirse en la esfera x2 + y2 + z2 = r2.
ξρ∫s email: [email protected] 241 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 242
SOLUCION.- Los planos coordenados dividen al paralelepıpedo rectangular en 8 partes igualescada uno en uno de los octantes. Si se denominan x, y, z a las longitudes de la parte del par-alelepıpedo rectangular que se encuentra en el primer octante. Entonces su volumen estara dadapor la funcion f(x, y, z) = 8xyz. Puesto que el paralelepıpedo rectangular esta inscrito en la esferax2 + y2 + z2 = r2, entonces el vertice (x, y, z) debe verificar esta ecuacion. Luego la condicion enel problema es:
x2 + y2 + z2 = r2
Definamos la funcion g(x, y, z) dado por
g(x, y, z) = x2 + y2 + z2 − r2
Los puntos en los que f(x, y, z) alcanza valores extremos son las soluciones del sistema:
fx + λgx = 0fy + λgy = 0fz + λgz = 0g(x, y, z) = 0
8yz + 2λx = 08xz + 2λy = 08xy + 2λz = 0
x2 + y2 + z2 = r2
Despejando λ de las primeras tres ecuaciones se tiene
−8yz
2x=
−8xz
2y=
−8xy
2z
de donde se sigue que x = y = z. Reemplazando en la cuarta ecuacion 3x2 = r2, por tanto
x = y = z = ± r√3. Observemos que podemos desechar los valores negativos de x, y, z debido
a que estos son distancia y no puedes ser negativos. Por tanto el unico punto crıtico valido es(r√3,r√3,r√3
)que debe ser un punto maximo. ♣
EJEMPLO 7.62. Cuales deben ser las dimensiones de un envase para leche de forma rectangular,volumen de 512 cm3 y costo mınimo, si el material de los lados de la caja cuestan 10 bs elcentımetro cuadrado y el material de la tapa y el fondo cuestan 20 bs el centımetro cuadrado.
SOLUCION.- Suponga que las dimensiones de la caja son x cm de ancho, y cm de largo yz cm de alto, entonces su volumen es: xyz = 512. Por otro lado, el costo total esta dado porC = 40xy + 20xz + 20yz. Definamos las funciones
C(x, y, z) = 40xy + 20xz + 20yz, V (x, y, z) = xyz − 512
Por tanto el problema a resolver es el siguiente:
Minimizar w = C(x, y, z)Sujeto a V (x, y, z) = 0
ξρ∫s email: [email protected] 242 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 243
Los puntos (x, y, z) soluciones del anterior problema se encuentran resolviendo en siguiente sistemade ecuaciones
Cx + λVx = 0Cy + λVy = 0Cz + λVz = 0V (x, y, z) = 0
40y + 20z − λyz = 040x+ 20z − λxz = 020y + 20x− λxy = 0
xyz = 512
Multiplicando la primera ecuacion por x > 0, la segunda por y > 0 y la tercera por z > 0 resulta
40xy + 20xz = 512λ40xy + 20yz = 512λ20yz + 20xz = 512λ
por tanto 40xy + 20xz = 40xy + 20yz, 20xz = 20yz, luego x = y, del mismo modo obtenemos2y = z. Por tanto xyz = 2x3 = 512, la unica solucion del sistema es x = y = 3
√256, z = 2 3
√256.
La unicidad de la solucion permite afirmar que las dimensiones de la caja con costo mınimo sonx = y = 3
√256, z = 2 3
√256. ♣
EJEMPLO 7.63. De un carton de 12 m2 se va a construir una caja rectangular sin tapa. De-termine el volumen maximo para tal caja.
SOLUCION.- Como V (x, y, z) = xyz y ademas 12 = 2xz + 2yx + xy, luego F (x, y, z, λ) =xyz + λ(2xz + 2yz + xy − 12)
Fx = yz + 2λz + λy = 0
Fy = xz + 2λz + λx = 0Fz = xy + 2λx+ 2λy = 0Fλ = 2xz + 2yz + xy − 12 = 0
Al multiplicar las primeras tres expresiones por x, y y z respectivamente se obtiene
xyz = −λ(2xz + xy)
xyz = −λ(2yz + xy)
xyz = −λ(2xz + 2yz)
Ası para λ 6= 0, igualado las dos primeras ecuaciones 2xz + xy = 2yz + xy, xz = yz, por tantocon z 6= 0 se tiene que x = y. Ademas igualado las dos ultimas ecuaciones 2yz + xy = 2xz + 2yz,xy = 2xz y para x 6= 0 (no volumen) y = 2z.
Por tanto se tiene que 12z2 = 12, de donde 12z2 = 12, z = ±1, x = y = 2, por tanto Vmax = 4 u2.♣
EJEMPLO 7.64. Utilice el metodo de los multiplicadores de Lagrange para calcular las dimen-siones de la caja de superficie mınima que encierra un volumen de 1 litro.
ξρ∫s email: [email protected] 243 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 244
SOLUCION.- Si x > 0, y > 0, z > 0 son las dimensiones de la caja, expresadas en cm., se tratade minimizar el Area S(x, y, z) = 2xy + 2xz + 2yz cuando las variables x, y, z estan sometidas ala condicion de que el volumen encerrado sea xyz = 1000 cm3. Este problema lo resolvemos comoun problema de extremos condicionados, para la funcion S(x, y, z) = 2xy + 2xz + 2yz sobre lasuperficie
M = (x, y, z) ∈ Ω : xyz = 1000, donde Ω = (x, y, z) : x > 0, y > 0, z > 0
Un razonamiento similar al efectuado en 5.39 permite justificar que S|M alcanza un mınimoabsoluto: El trozo de superficie
K = (x, y, z) ∈M : x ≥ 1, y ≥ 1, z ≥ 1
es cerrado y acotado (pues M ⊂ [1, 1000]3) y por lo tanto compacto. Cuando (x, y, z) ∈ M \ Kalguna de sus componentes es menor que 1, y si suponemos que x < 1 se tendra 2yz = 2000/x >2000, luego S(x, y, z) > 2000. Como existe p ∈ K con S(p) < 2000, podemos asegurar que elmınimo absoluto de S sobre el compacto K tambien es el mınimo absoluto de S|M .
Para cada (x, y, z) ∈ M , la funcion g(x, y, z) = xyz − 1000 cumple ∇g(x, y, z) = (yz, xz, xy) 6=(0, 0, 0) luego, en virtud de 9.10, el mınimo absoluto de S|M se alcanza en uno de los puntosestacionarios de S|M , es decir, en una de las soluciones del sistema de ecuaciones
2y + 2z − λyz = 02x+ 2z − λxz = 02y + 2x− λxy = 0
xyz = 1000
Multiplicando la primera ecuacion por x > 0, la segunda por y > 0 y la tercera por z > 0 resulta
2xy + 2xz = 1000λ2xy + 2yz = 1000λ2yz + 2xz = 1000λ
cuya unica solucion en Ω es x = y = z = 10, λ = 2/5. La unicidad de la solucion permite afirmarque el mınimo absoluto de S|M se alcanza cuando x = y = z = 10. ♣
EJEMPLO 7.65. Calcular los valores maximo y mınimo de la funcion f(x, y, z) = x2 + y2 + z2
sobre la superficie del elipsoide
M := f(x, y, z) ∈ R3 :
x2
64+y2
36+z2
25− 1 = 0
SOLUCION.- Al ser M un subconjunto compacto de R3; f alcanza los valores maximo y mınimo
en M : Ademas M es una variedad, por lo que aplicaremos el metodo de los multiplicadores deLagrange. Consideremos la funcion
F (x, y, z) = x2 + y2 + z2 + λ(x2
64+y2
36+z2
25− 1)
ξρ∫s email: [email protected] 244 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 245
Sabemos que los extremos relativos de f |M son puntos crıticos de F para algun valor de λ. Ası pues,debemos resolver el sistema de ecuaciones:
2x− 2λx
64= 0
2y − 2λy
36= 0
2z − 2λz
25= 0
x2
64+y2
36+z2
25= 1
x(1 − λ
1
64
)= 0
y(1 − λ
1
36
)= 0
z(1 − λ
1
25
)= 0
x2
64+y2
36+z2
25= 1
De la primera ecuacion tenemos que, o bien x = 0 o bien λ = 64. En el primer caso, sustituyendoen las otras tres ecuaciones obtendrıamos las soluciones (0, 0,±5), (0,±6, 0). Si λ = 64, al sustituiren las ecuaciones segunda y tercera obtenemos y = z = 0 y, llevando estos valores a la cuartanos queda x = ±8. Finalmente, deberemos calcular f(±8, 0, 0), f(0,±6, 0), f(0, 0,±5), de donderesulta que el valor maximo de f |M es 64 y el mınimo es 25. ♣
EJEMPLO 7.66. Resolver los siguientes problemas geometricos mediante el metodo de Lagrange:(a) Encontrar la distancia mas corta desde el punto (1, 2, 3) ∈ R
3 hasta el plano de ecuacionx+ y− z = 5. (b) Encontrar el punto sobre la recta de interseccion de los dos planos x+ y+ z = 3y 2x+6y−z = 0 que esta mas cerca del origen. (c) Mostrar que el volumen del mayor paralelepıpedo
rectangular que puede inscribirse en el elipsoidex2
9+y2
4+z2
25= 1 es
240
3√
3.
SOLUCION.- ♣
EJEMPLO 7.67. Deseamos calcular la distancia del origen (0, 0, 0) al plano cuya ecuacion esx+ y + z = 1. El objetivo es hallar un punto (x0, y0, z0) que satisfaga la ecuacion del plano y quesea un punto de mınimo de la funcion distancia de un punto al origen.
SOLUCION.- Esta funcion distancia la podemos tomar como f(x, y, z) = x2 + y2 + z2 y larestriccion g(x, y, z) = x + y + z − 1 = 0. Realmente la funcion distancia al origen que debemostomar es h = x2 + y2 + z2, pero es claro que los extremos de h son los mismos de f y con estaultima los calculos se simplifican.
De acuerdo con (3.8.1), y en este caso solo hay una restriccion, los puntos de mınimo de f condi-cionados a la restriccion g = 0 deben satisfacer el sistema
∇f(x, y, z) = ∇g(x, y, z) (7.9)
El sistema (7.9) es el sistema2x = λ2y = λ2z = λ
x+ y + z = 1
ξρ∫s email: [email protected] 245 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 246
Resolvemos el sistema anterior y encontramos que
λ =2
3, x =
1
3, y =
1
3, z =
1
3.
Entonces el punto(
13, 1
3, 1
3
)debe ser el punto que minimiza a f sujeto a la condicion g = 0.
Deducimos que la distancia del plano al origen es
√3
3. ♣
EJEMPLO 7.68. Se desea fabricar una caja sin tapa, con forma de paralelepıpedo recto y talque su volumen sea de 4 m3. Determina las dimensiones que debe tener la caja de modo que elcosto de la soldadura que se va a utilizar para soldar las caras y la base sea el mınimo.
SOLUCION.- Si x, y y z denotan las aristas de la caja, el problema es hallar el mınimo de lafuncion f(x, y, z) = 2x + 2y + 4z con la restriccion g(x, y, z) = xyz − 4, ya que el volumen debeser 4 m3. La ecuacion ∇f = λ∇g da lugar a las ecuaciones:
2 = λyz2 = λxz4 = λxy
Al dividir las dos primeras ecuaciones, encontramos que x = y. Al dividir la primera y la terceraecuaciones, encontramos que x = 2z, por lo que el volumen es 4 = xyz = 4z3, entonces z = 1 locual implica que x = y = 2. ♣
EJEMPLO 7.69. Encuentre las dimensiones de una caja rectangular de maximo volumen si elarea de su superficie total es 24 m2. Utilizar un criterio para garantizar que corresponde a maximovolumen. Explique.
SOLUCION.- Tomemos las variables x, y, z para indicar las longitudes de las aristas de la caja.Entonces su volumen esta dado por
f(x, y, z) = xyz
Puesto que el area de su superficie total es 24 m2, se tiene que 2xy + 2xz + 2yx = 24, esto es:
xy + xz + yx = 12.
En este caso el problema de optimizacion es el siguiente:
1.- Maximizar f(x, y, z) = xyz
2.- Sujeto a xy + xz + yz = 12
ξρ∫s email: [email protected] 246 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 247
Formamos la funcion de Lagrange:
L(x, y, z, λ) = f(x, y, z) + λg(x, y, z) = xyz + λ(xy + xz + yz − 12).
Calculamos las derivadas parciales respecto de x, de y, de z y respecto de λ de la funcion L.
Lx = yz + λ(y + z)
Ly = xz + λ(x+ z)
Lz = xy + λ(x+ y)
Lλ = xy + xz + yz − 12
(7.10)
Buscamos puntos crıticos de la funcion de Lagrange, para esto observemos que ∇g(x, y, z) =(y+ z, x+ z, x+ y) 6= 0, y ademas L es diferenciable en todo su dominio, luego los puntos crıticosse obtendran haciendo CERO las cuatro derivadas parciales en (7.10) y resolviendo el sistema.
yz + λ(y + z) = 0xz + λ(x+ z) = 0xy + λ(x+ y) = 0xy + xz + yz = 12
λ = − yz
y + z
λ = − xz
x+ z
λ = − xy
x+ y
xy + xz + yz = 12
Igualando dos a dos las primeras tres igualdades tenemos el siguiente sistema
− yz
y + z= − xz
x+ z
− yz
y + z= − xy
x+ y
− xz
x+ z= − xy
x+ y
y
y + z=
x
x+ z
z
y + z=
x
x+ y
z
x+ z=
y
x+ y
xy + yz = xy + xz
xz + yz = xy + xz
xz + yz = xy + yz
de esta manera encontramos que
yz = xz
yz = xy
xz = xy
z(y − x) = 0
y(z − x) = 0
x(z − y) = 0
Puesto que las variables x, y, z deben verificar la ecuacion xy + xz + yz = 12, tenemos que almenos dos de las variables no son ceros. Supongamos que x 6= 0 y y 6= 0. Por lo que del anteriorsistema se reduce a z − y = 0, z − x = 0. Tenemos dos casos z = 0 o que y − x = 0
ξρ∫s email: [email protected] 247 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 248
Si z = 0, entonces x = 0, lo cual es una contradiccion. Por lo tanto no nos queda mas que y−x = 0,de aquı se deduce que
x = y = z
Ahora reemplazando en la ecuacion xy + xz + yz = 12 otenemos
3x2 = 12
de aquı x = y = z = 2.
El multiplicador de Lagrange asociado es
λ = − yz
y + z= −4
4= −1
Con lo cual, el unico punto crıtico es (2, 2, 2), obtenido para λ = −1. Para determinar su naturalezaestudiamos el signo del determinante:
∆1(p) =
∣∣∣∣∣∣
0 gx(p) gy(p)gx(p) Lxx(p) Lxy(p)gy(p) Lyx(p) Lyy(p)
∣∣∣∣∣∣=
∣∣∣∣∣∣
0 y + z x+ zy + z 0 z + λx+ z z + λ 0
∣∣∣∣∣∣
Evaluando en (2, 2, 2,−1) tenemos
∆(2, 2, 2,−1) =
∣∣∣∣∣∣
0 4 44 0 14 1 0
∣∣∣∣∣∣= −4
∣∣∣∣4 14 0
∣∣∣∣ + 4
∣∣∣∣4 04 1
∣∣∣∣ = 16 + 16 = 32 > 0
Por otro lado calculemos el siguiente determiante
∆2(p) =
∣∣∣∣∣∣∣∣
0 gx(p) gy(p) gz(p)gx(p) Lxx(p) Lxy(p) Lxz(p)gy(p) Lyx(p) Lyy(p) Lyz(p)gz(p) Lzx(p) Lzy(p) Lzz(p)
∣∣∣∣∣∣∣∣=
∣∣∣∣∣∣∣∣
0 y + z x+ z x+ yy + z 0 z + λ y + λx+ z z + λ 0 x+ λx+ y y + λ x+ λ 0
∣∣∣∣∣∣∣∣
Evaluando en (2, 2, 2,−1) tenemos
∆2(2, 2, 2,−1) =
∣∣∣∣∣∣∣∣
0 4 4 44 0 1 14 1 0 14 1 1 0
∣∣∣∣∣∣∣∣= −
∣∣∣∣∣∣∣∣
4 0 1 10 4 4 44 1 0 14 1 1 0
∣∣∣∣∣∣∣∣= −
∣∣∣∣∣∣∣∣
4 0 1 1−16 4 0 00 1 −1 04 1 1 0
∣∣∣∣∣∣∣∣
= = −(−1)1+4
∣∣∣∣∣∣
−16 4 00 1 −14 1 1
∣∣∣∣∣∣=
∣∣∣∣∣∣
−16 4 04 2 04 1 1
∣∣∣∣∣∣
= (−1)3+3
∣∣∣∣−16 44 2
∣∣∣∣ = −32 − 16 = −48 < 0
ξρ∫s email: [email protected] 248 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 249
Como ∆1(p) > 0 y ∆2(p) < 0, entonces la funcion tiene un maximo relativo condicionado en(2, 2, 2). ♣
EJEMPLO 7.70. Determinar las dimensiones del paralelepıpedo rectangular de superficie totalS que tenga el maximo volumen.
SOLUCION.- Si se denominan x, y, z a las longitudes de los del paralelepıpedo rectangular, lafuncion volumen, de la que se quiere hallar los extremos, sera: f(x, y, z) = xyz. Y la condiciondada en el enunciado es:
2xy + 2xz + 2yz = S
Definamos la funcion g(x, y, z) dado por
g(x, y, z) = 2xy + 2xz + 2yz − S
Los puntos en los que f(x, y, z) alcanza valores extremos son las soluciones del sistema:
fx + λgx = 0fy + λgy = 0fz + λgz = 0g(x, y, z) = 0
yz + λ(2y + 2z) = 0xz + λ(2x+ 2z) = 0xy + λ(2x+ 2y) = 02xy + 2xz + 2yz = S
Al multiplicar las primeras tres expresiones por x, y y z respectivamente se obtiene
xyz = −λ(2yz + 2xy)
xyz = −λ(2xz + 2xy)
xyz = −λ(2xz + 2yz)
Ası para λ 6= 0, igualado las dos primeras ecuaciones 2yz + 2xy = 2xz + 2xy, yz = xz, por tantocon z 6= 0 se tiene que x = y. Ademas igualado las dos ultimas ecuaciones 2xz+2xy = 2xz+2yz,xy = yz y para y 6= 0 (no volumen) x = z.
Por tanto se tiene que 6z2 = S, de donde x = y = z = ±√S/6. Dado que el conjunto delimitado
por las condiciones del enunciado es compacto y la funcion volumen f(x, y, z) es continua, se debealcanzar el mınimo y el maximo necesariamente en alguno de los siguientes puntos: puntos:
(√S/6,
√S/6,
√S/6
),(−√S/6,−
√S/6,−
√S/6
)
Basta evaluar en ellos la funcion para encontrar el maximo y el mınimo de f(x, y, z)
f(√
S/6,√S/6,
√S/6)
= (√S/6)3
f(−√S/6,−
√S/6,−
√S/6
)= −(
√S/6)3
ξρ∫s email: [email protected] 249 Jasmer LPC
UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 250
Luego el valor mınimo de f se alcanza en(−√S/6,−
√S/6,−
√S/6
)y el valor maximo en
(√S/6,
√S/6,
√S/6). Por tanto las dimensiones del paralelepıpedo rectangular de superficie
total S que tenga el maximo volumen son x = y = z =√S/6 [m] y el maximo volumen es de
(√S/6)3 m3.
Observemos tambien que podemos desechar los valores negativos de x, y, z debido a que estos son
distancia y no puedes ser negativos. Por tanto el unico punto crıtico valido es(√
S/6,√S/6,
√S/6)
que debe ser un punto maximo. ♣
EJEMPLO 7.71. En una empresa se fabrican recipientes con forma de prisma rectangular conlas siguientes caracterısticas: la suma de todas sus aristas es de 30 metros y su superficie totales de 36 metros cuadrados. Determinar la capacidad maxima y mınima de estos recipientes enmetros cubicos.
SOLUCION.- Si se denominan x, y, z a las longitudes de las aristas del prisma, la funcionvolumen, de la que se quiere hallar los extremos, sera: V (x, y, z) = xyz Y las condiciones dadasen el enunciado seran:
condicion1 = 4x+ 4y + 4z − 30condicion2 = 2xy + 2xz + 2yz − 36
En este ejemplo se da una funcion de 3 variables y 2 condiciones. La funcion F (x, y, z) debe ser:
λµF (x, y, z) := V (x, y, z) + λcondicion1 + µcondicion2
Las derivadas parciales son:
Fx = ∂xF (x, y, z) = yz + 4λ+ (2y + 2z)µFy = ∂yF (x, y, z) = xz + 4λ+ (2x+ 2z)µFz = ∂zF (x, y, z) = xy + 4λ+ (2x+ 2y)µ
Los puntos en los que V (x, y, z) alcanza valores extremos son las soluciones del sistema:
Fx = 0Fy = 0Fz = 0
condicion1 = 0condicion2 = 0
yz + 4λ+ (2y + 2z)µ = 0xz + 4λ+ (2x+ 2z)µ = 0xy + 4λ+ (2x+ 2y)µ = 0
4x+ 4y + 4z − 30 = 02xy + 2xz + 2yz − 36 = 0
ξρ∫s email: [email protected] 250 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 251
λ = 1 µ = −1 x = 2 y = 2 z =7
2
λ = 1 µ = −1 x = 2 y =7
2z = 2
λ = 1 µ = −1 x =7
2y = 2 z = 2
λ =9
4µ =
3
2x =
3
2y = 3 z = 3
λ =9
4µ = −3
2x = 3 y =
3
2z = 3
λ =9
4µ = −3
2x = 3 y = 3 z =
3
2
Dado que el conjunto delimitado por las condiciones del enunciado es compacto y la funcionV (x, y, z) es continua, se debe alcanzar el mınimo y el maximo necesariamente en alguno de lossiguientes puntos: puntos:
(2, 2,
7
2
),
(2,
7
2, 2
),
(7
2, 2, 2
),
(3
2, 3, 3
),
(3,
3
2, 3
),
(3, 3,
3
2
)
Basta evaluar en ellos la funcion para encontrar el maximo y el mınimo de V (x, y, z)
V
(2, 2,
7
2
), V
(2,
7
2, 2
), V
(7
2, 2, 2
), V
(3
2, 3, 3
), V
(3,
3
2, 3
), V
(3, 3,
3
2
)=
14, 14, 14,
27
2,27
2,27
2
Luego la capacidad minima de los recipientes sera27
2m3 y la maxima 14 m3. ♣
EJEMPLO 7.72. Calcular la distancia entre el punto P (0, 1, 0) y la recta interseccion de losplanos x+ z = 1 e y + z = 0.
SOLUCION.- La distancia entre el punto P (0, 1, 0) y un punto arbitrario (x, y, z) de la rectaviene dada por
√x2 + (y − 1)2 + z2. Por tanto, el problema se reduce a encontrar el mınimo
absoluto de f(x, y, z) = x2 + (y − 1)2 + z2 condicionado a que (x, y, z) pertenezca a la recta encuestion (es obvio que tambien se trata de un mınimo relativo). Por la geometrıa del problema,sabemos que existe un unico punto en la recta que esta a la distancia mınima de P . Si denotamoseste punto por (a1, a2, a3), por el Teorema de Lagrange existen λ1 y λ2 tales que (a1, a2, a3), es unpunto crıtico de la funcion de Lagrange
Φ(x, y, z) = f(x, y, z) + λ1(x+ z − 1) + λ2(y + z).
ξρ∫s email: [email protected] 251 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 252
Los puntos crıticos de Φ son las soluciones del sistema
2x+ λ1 = 0
2(y − 1) + λ2 = 0
2z + λ1 + λ2 = 0
Al que hay que anadir las dos ecuaciones de ligadura x+ z − 1 = 0 e y + z = 0.
Para resolverlo, sumamos las dos primeras ecuaciones y resulta 2(x+y−1)+λ1 +λ2 = 0. Si ahorarestamos esta de la segunda ecuacion del sistema, obtenemos 2z − 2(x+ y − 1) = 0. Finalmente,resolviendo el sistema formado por esta ecuacion y las dos ultimas, encontramos que x = 1,y = 0 = z. Las dos primeras ecuaciones del sistema nos permiten obtener los multiplicadores:λ1 = −2 y λ2 = 2. Por tanto, la funcion de Lagrange solo tiene un punto crıtico: (1, 0, 0). Por elestudio que hemos realizado previamente, deducimos que (1, 0, 0) es el punto donde f alcanza sumınimo absoluto condicionado y la distancia mınima es igual a
√2. ♣
EJEMPLO 7.73. Un aro metalico cuya configuracion geometrica esta representada por las ecua-ciones
y − x = 0
x2 + y2 + 4z2 − 27 = 0
esta en un medio con temperatura T (x, y, z) = xyz + 10. Determina los puntos donde el aroesta mas caliente y mas frıo.
SOLUCION.- Este es un problema con dos restricciones. La ecuacion ∇T = λ1∇g1 + λ2∇g2 dalugar a las ecuaciones:
yz = −λ1 + 2λ2x
xz = λ1 + 2λ2y
yx = 8λ2z
De x = y tenemos que al sustituir en las primeras dos ecuaciones se obtiene λ1 = 0, con loque z = 2λ2, que al sustituir en la tercera ecuacion da x2 = 4z2, pero de la otra ecuacion derestriccion, 4z2 = 27 − 2x2. Esto implica que x2 = 27 − 2x2 de aquı x = ±3. Los puntos sonentonces (3, 3, 3/2), (3, 3,−3/2), (−3,−3, 3/2), (−3,−3,−3/2), con temperaturas respectivas de23.5, −3.5, 23.5 y −3.5. ♣
EJEMPLO 7.74. La funcion de produccion de Cobb-Douglas para un fabricante de softwareesta dada por f(x, y) = 100x
34y
14 , donde x representa las unidades de trabajo (a 150$ por unidad)
e y representa las unidades de capital (a 250$ por unidad). El costo total de trabajo y capitalesta limitado a 50000$. Hallar el nivel maximo de produccion de este fabricante.
SOLUCION.- De la funcion dada se tiene que
∇f(x, y) =(75x−
14y
14 , 25x
34y−
34
).
ξρ∫s email: [email protected] 252 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 253
El lımite para el costo de trabajo y capital viene dado por la restriccion g(x, y) = 150x+ 250y =50000. Por lo tanto λ∇g(x, y) = (150λ, 250λ), lo que da lugar al siguiente sistema de ecuaciones
75x−14 y
14 = 150λ, 25x
34y−
34 = 250λ, 150x+ 250y = 50000
Despejando λ en la primera ecuacion obtenemos λ =x−
14y
14
2, y llevando este valor a la segunda
ecuacion, nos queda x = 5y. Por ultimo sustituyendo en la tercera ecuacion, se consigue x = 250unidades de trabajo e y = 50 unidades de capital. Por tanto el nivel maximo de produccion esf(250, 50) = 100(250)
34 (50)
14 ≈ 16719 unidades del producto. Los economistas llaman al multipli-
cador de Lagrange obtenido en una funcion de produccion productividad marginal del capital. En
este caso, la productividad marginal de capital en x = 250 e y = 50 es λ =x−
14 y
14
2≈ 0,334. ♣
ξρ∫s email: [email protected] 253 Jasmer LPC

CAPITULO 8
Derivacion de funciones vectoriales devarias variables
8.1. Diferenciabilidad y matriz Jacobiana
EJEMPLO 8.1. Para la funcion
f(x, y) = (x5 + y−1/2, log(x) − tg(y), sen(x+ y)),
hallar el jacobiano de f en p = (x, y) y la diferencial de f en p = (x, y).
SOLUCION.- ♣
8.2. Regla de la cadena
8.3. El Teorema de la aplicacion inversa
2ra Prueba.-Fecha: Jueves 4 de Junio.
254

CAPITULO 9
Integrales Multiples
9.1. Integrales Multiples.
Una Particion P de un intervalo cerrado [a, b] es una sucesion t1, ..., tk donde a ≤ t0 ≤ t1 ≤· · · ≤ tk = b. La particion P divide al intervalo [a, b] en k subintervalos [ti−1, ti]. Una particionde un rectangulo [a1, b1] × · · · × [an, bn] es una coleccion P = (P1, ..., Pn) donde cada Pi es unaparticion del intervalo [ai, bi]. Si Pi divide a [ai, bi] en Ni subintervalos, entonces P = (P1, ..., Pn)divide [a1, b1] × · · · × [an, bn] en N = N1 · · ·Nn subrectangulos. Estos rectangulos se denominansubrectangulos de la particion P
Suponga ahora que A es un rectangulo, f : A → R es una funcion acotada, y P es una particionde A. Para cada subrectangulo S de la particion sea
mS(f) = ınff(x) : x ∈ S, MS(f) = supf(x) : x ∈ S
y sea v(S) el volumen de S. El volumen de un rectangulo [a1, b1] × · · · × [an, bn] y tambien de(a1, b1) × · · · × (an, bn) se define por (b1 − a1) · · · · · (bn − an). Las sumas inferior y superior de fcorrespondientes a la particion P estan definidas por
L(f, P ) =∑
S
mS(f) · v(S) y U(f, P ) =∑
S
MS(f) · v(S)
Una funcion f : A→ R se denomina integrable en el rectangulo A si f es acotada y
supP
L(f, P ) = ınfPU(f, P ).
255

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 256
Este numero comun se designa por
∫
A
f y se denomina la integral de f sobre A. Con frecuencia
se utiliza la notacion
∫· · ·∫
A
f(x1, ..., xn)dx1 · · · dxn.
TEOREMA 9.1 (Propiedades). Sean f, g : A → R funciones integrables en el rectanguloA ⊂ R
n, y sea c una numero real. Entonces,
1. cf : A→ R es integrable y
∫
A
cf = c
∫
A
f
2. f + g : A→ R es integrable y
∫
A
(f + g) =
∫
A
f +
∫
A
g
3.
∫
A
f ≥ 0, cuando f ≥ 0.
4.
∫
A
f =
∫
A1
f +
∫
A2
g, donde A es la union de dos subrectangulos A1 y a2 que no se sobreponen.
Hasta ahora solo se han considerado integrales sobre rectangulos. Integrales sobre otros conjuntosse reducen facilmente a este tipo. Si C ⊂ R
n, la funcion caracterıstica χC de C se define por
χC(x) =
0 si x /∈ C
1 si x ∈ C
Si C ⊂ A para algun rectangulo cerrado A y f : A→ R es acotada, entonces
∫
C
f se define como
∫
C
f =
∫
A
f · χC
supuesto que f · χC es integrable. Esto ocurre ciertamente si f y χC son integrables.
TEOREMA 9.2. La funcion χC : A→ R es integrable si y solo si la frontera de C tiene medida0.
9.2. Integrales Dobles
Vamos a definir la integral de una funcion de dos variables sobre una region R del plano. Consid-eremos una funcion f de R
2 en R y definida sobre un rectangulo R con lados paralelos a los ejesde coordenadas, es decir,
R = [a, b] × [c, d]
ξρ∫s email: [email protected] 256 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 257
Dividamos a R en n subrectangulos denotados por Ri. Sean ∆xi y ∆yi las longitudes de los ladosde Ri y sea ∆Ai = ∆xi ∆yi su area.
Ahora, de cada subrectangulos Ri elijamos arbitrariamente un punto (xi, yi) y formemos la sumade Riemann
Sn =
n∑
i=1
f(xi, yi)∆Ai (9.1)
Que corresponde (si f(x, y) ≥ 0) a la suma de los volumenes de n cajas. Si el lımite de Sn existe,cuando el numero de subdivisiones aumenta es decir, n → ∞, y los pedazos son cada vez maspequenos, es decir, ∆Ri → 0, entonces a tal lımite se llama integral doble de f(x, y) sobre la region
R y se representa por
∫∫
R
f(x, y) dA. Es decir
∫∫
R
f(x, y) dA = lımn→∞
n∑
i=1
f(xi, yi)∆Ai (9.2)
TEOREMA 9.3 (Propiedades). Sean f y g continuas en una region cerrada y acotada R delplano, y sea c una constante.
1.
∫∫
R
cf(x, y) dA = c
∫∫
R
f(x, y) dA
2.
∫∫
R
[f(x, y) ± g(x, y)] dA =
∫∫
R
f(x, y) dA ±∫∫
R
g(x, y) dA
3.
∫∫
R
f(x, y) dA ≥ 0, cuando f(x, y) ≥ 0.
4.
∫∫
R
f(x, y) dA =
∫∫
R1
f(x, y) dA +
∫∫
R2
g(x, y) dA, donde R es la union de dos subregiones R1
y R2 que no se sobreponen.
TEOREMA 9.4 (Teorema de Fubini). Sea f continua en una region cerrada y acotada R delplano.
1. Si R esta definida por a ≤ x ≤ b y c ≤ y ≤ d, entonces
34 (9.3)
∫∫
R
f(x, y) dA =
∫ x=b
x=a
∫ y=d
y=c
f(x, y) dy dx =
∫ b
a
∫ d
c
f(x, y) dy dx
ξρ∫s email: [email protected] 257 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 258
2. Si R esta definida por a ≤ x ≤ b y y1(x) ≤ y ≤ y2(x), donde y1 y y2 son continuas sobre[a, b], entonces
34 (9.4)∫∫
R
f(x, y) dA =
∫ x=b
x=a
∫ y=y2(x)
y=y1(x)
f(x, y) dy dx =
∫ b
a
∫ y2(x)
y1(x)
f(x, y) dy dx
3. Si R esta definida por c ≤ y ≤ d y x1(y) ≤ x ≤ x2(y), donde x1 y x2 son continuas sobre[c, d], entonces
34 (9.5)∫∫
R
f(x, y) dA =
∫ y=d
y=c
∫ x=x2(y)
x=x1(y)
f(x, y) dx dy =
∫ d
c
∫ x2(y)
x1(y)
f(x, y) dx dy
EJEMPLO 9.1. Calcular
∫∫
R
xy dx dy, donde R es la region limitada por la recta y = x y la
parabola y = x2
Primera solucion. La region de integracion esta limitada inferiormente por la parabola y = x2
y superiormente por la recta y = x. Por tanto, integramos primeramente con respecto a y, que vadesde y = x2 hasta y = x, y luego con respecto de x, sobre la proyeccion de la region R en el ejex, desde x = 0 y x = 1.
∫∫
R
xy dx dy =
∫ x=1
x=0
∫ y=x
y=x2
xy dy dx =
∫ x=1
x=0
(xy2
2
) ∣∣∣y=x
y=x2dx
=1
2
∫ x=1
x=0
(x3 − x5) dx =1
2
[x4
4− x6
6
] ∣∣∣x=1
x=0
=1
2
[14
4− 16
6
]=
1
24
Segunda solucion. La region de integracion esta limitada por la izquierda por la recta y = x ypor la derecha por la parabola y = x2. Por tanto, integramos primeramente con respecto a x, queva desde x = y hasta x =
√y, y luego con respecto de y, sobre la proyeccion de la region R en el
eje y, desde y = 0 y y = 1.
ξρ∫s email: [email protected] 258 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 259
∫∫
R
xy dx dy =
∫ y=1
y=0
∫ x=√
y
x=y
xy dx dy =
∫ y=1
y=0
(x2y
2
) ∣∣∣x=
√y
x=ydy
=1
2
∫ y=1
y=0
(y2 − y3) dy =1
2
[y3
3− y4
4
] ∣∣∣y=1
y=0
=1
2
[13
3− 14
4
]=
1
24
♣
EJEMPLO 9.2. Calcular
∫∫
R
y2 dx dy, siendo R el rectangulo limitado por x = 0, x = 1, y = 0,
y = 3.
Primera solucion. Como el rectangulo R que es la region de integracion, esta limitada inferior-mente por la recta y = 0 y superiormente por la recta y = 3. Entonces, primeramente integramoscon respecto a y entre estos lımites, que va desde y = 0 hasta y = 3. Con respecto de x, integramosen la proyeccion del rectangulo R sobre el eje x que va desde x = 0 y x = 1.
∫∫
R
y2 dx dy =
∫ x=1
x=0
∫ y=3
y=0
y2 dy dx =
∫ x=1
x=0
(y3
3
) ∣∣∣y=3
y=0dx
=
∫ x=1
x=0
9 dx = [9x]∣∣∣x=1
x=0= 9
Segunda solucion. La region de integracion R esta limitada por la izquierda por la recta x = 0y por la derecha por la recta x = 1. Por tanto, integramos primeramente con respecto a x, que vadesde x = 0 hasta x = 1. Con respecto de y, se integra sobre la proyeccion del rectangulo R sobreel eje y, desde y = 0 hasta y = 1.
∫∫
R
y2 dx dy =
∫ y=3
y=0
∫ x=1
x=0
y2 dx dy =
∫ y=3
y=0
(y2x) ∣∣∣
x=1
x=0dy
=
∫ y=3
y=0
y2 dy =
[y3
3
] ∣∣∣y=3
y=0= 9
♣
ξρ∫s email: [email protected] 259 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 260
EJEMPLO 9.3. Calcular
∫∫
R
(x + 2y) dx dy, si R es el triangulo limitado por x = 0, y = 0,
x+ y = 1.
Primera solucion. El triangulo R esta limitada por la izquierda por la recta x = 0 y por laderecha por la recta x = 1 − y, entonces primero integramos con respecto a x entre estos lımites.Con respecto de y integramos en la proyeccion del triangulo R sobre el eje y, desde y = 0 hastay = 1.
∫∫
R
(x+ 2y) dx dy =
∫ y=1
y=0
∫ x=1−y
x=0
(x+ 2y) dx dy =
∫ y=1
y=0
(x2
2+ 2xy
)∣∣∣x=1−y
x=0dy
=1
2
∫ y=1
y=0
(1 + 2y − 3y2) dy =1
2
[y + y2 + y3
] ∣∣∣y=1
y=0=
1
2
Segunda solucion. Como el triangulo R inferiormente esta limitada por la recta y = 0 y supe-riormente por la recta y = 1 − x, entonces integramos con respecto a y entre estos lımites. Conrespecto de x, integramos en la proyeccion del triangulo R sobre el eje x que va desde x = 0 yx = 1.
∫∫
R
(x+ 2y) dx dy =
∫ x=1
x=0
∫ y=1−x
y=0
(x+ 2y) dy dx =
∫ x=1
x=0
(xy + y2
) ∣∣∣y=1−x
y=0dx
=
∫ x=1
x=0
(1 − x) dx =
[x− x2
2
] ∣∣∣x=1
x=0=
1
2
Nota. Notemos que el los lımites de integracion la variable respecto de la cual se integra debeestas despejada.
♣
EJEMPLO 9.4. Calcular la integral:
∫ 1
0
∫ 2
2x
2e−y2
dy dx
ξρ∫s email: [email protected] 260 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 261
SOLUCION.-∫ 1
0
∫ 2
2x
2e−y2
dy dx =
∫ x=1
x=0
∫ y=2
y=2x
2e−y2
dy dx
=
∫ y=2
y=0
∫ x=y/2
x=0
2e−y2
dx dy
=
∫ y=2
y=0
[2e−y2
x] ∣∣∣
y/2
0dy
=
∫ y=2
y=0
2e−y2 y
2dy
u = −y2
du = −2ydy
=
∫ 2
0
eu du
−2= −1
2
[eu] ∣∣∣
2
0= −1
2
[e−y2
] ∣∣∣2
0
=1 − e−4
2
♣EJEMPLO 9.5. Calcular
∫∫
R
(2x− y) dx dy, si R es el cuadrilatero limitado por x = 0, x = 1,
x+ y = 1 y x+ y = 3.
SOLUCION.- Como la region de integracion R esta limitada inferiormente por la recta y = 1−xy superiormente por la recta y = 3 − x, entonces integramos primero con respecto a y entre estoslımites. Con respecto de x, integramos en la proyeccion de la region R sobre el eje x que va desdex = 0 a x = 1.
∫∫
R
(2x− y) dx dy =
∫ x=1
x=0
∫ y=3−x
y=1−x
(2x− y) dy dx =
∫ x=1
x=0
(2xy − y2
2
) ∣∣∣y=3−x
y=1−xdx
=
∫ x=1
x=0
(6x− 4) dx =
[6x2
2− 4x
] ∣∣∣x=1
x=0= −1
Nota. En este caso no conviene integrar primero con respecto a x por que la region de integracionR esta limitada por la izquierda por dos curvas dadas por x = 1−y y por x = 0. Lo mismo ocurrecon las curvas que la limitan por la derecha x = 1 y x = 3 − y.
♣
EJEMPLO 9.6. Calcular
∫∫
R
(1 + x) dx dy, si R es el triangulo limitado por y = x, x + y = 2,
y = 0.
ξρ∫s email: [email protected] 261 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 262
SOLUCION.- Como el triangulo R esta limitada por la izquierda por la recta x = y y por laderecha por la recta x = 2 − y, entonces primero integramos con respecto a x entre estos lımites.Con respecto de y integramos en la proyeccion del triangulo R sobre el eje y, desde y = 0 hastay = 1.
∫∫
R
(1 + x) dx dy =
∫ y=1
y=0
∫ x=2−y
x=y
(1 + x) dx dy =
∫ y=1
y=0
((1 + x)2
2
) ∣∣∣x=2−y
x=ydy
=
∫ y=1
y=0
(4 − y) dy =
[4y − 4y2
2
] ∣∣∣y=1
y=0= 2.
Nota. En este caso no conviene integrar primero con respecto de y por que la region de integracionR esta limitada superiormente por dos curvas y = x y por y = 2 − x.
♣
EJEMPLO 9.7. Calcular
∫∫
R
(x+ y) dx dy, siendo R la region limitada por x = y2, x+ y = 0.
SOLUCION.- Como la region de integracion R esta limitada por la izquierda por la parabolax = y2 y por la derecha por la recta x = −y, entonces integramos primero con respecto a x entreestos lımites. Con respecto de y integramos en la proyeccion de la region de integracion R sobreel eje y que va desde y = −1 hasta y = 0.
∫∫
R
(x+ y) dx dy =
∫ y=0
y=−1
∫ x=−y
x=y2
(x+ y) dx dy =
∫ y=0
y=−1
(x2
2+ xy
)∣∣∣x=−y
x=y2dy
= −1
2
∫ y=−1
y=0
(y4 + 2y3 + y2) dy =1
2
[y5
5+
2y2
4+ y3
] ∣∣∣y=−1
y=0= − 1
60
♣
EJEMPLO 9.8. Calcular
∫∫
R
xy dx dy, donde R es la region limitada por y = x3, y = x.
SOLUCION.- Observemos que la region de integracion R esta dividida en dos porciones.
La porcion que esta limitada sobre el primer cuadrante esta limitada inferiormente por la curvay = x3 y superiormente por la recta y = x, entonces integramos primero con respecto a y entreestos lımites. Con respecto de x, integramos en la proyeccion de esta porcion sobre el eje x que vadesde x = 0 y x = 1.
ξρ∫s email: [email protected] 262 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 263
Por otra parte, la porcion que esta en el tercer cuadrante esta limitada inferiormente por la rectay = x y superiormente por la curva y = x3, entonces integramos primero con respecto a y entreestos lımites. Con respecto de x, integramos en la proyeccion de esta porcion sobre el eje x que vadesde x = −1 a x = 0.
Por tanto sumando las integrales sobre cada porcion tenemos
∫∫
R
xy dx dy =
∫ x=1
x=0
∫ y=x
y=x3
xy dy dx+
∫ x=0
x=−1
∫ y=x3
y=x
xy dy dx
=
∫ x=1
x=0
(xy2
2
) ∣∣∣y=x
y=x3dx+
∫ x=0
x=−1
(xy2
2
) ∣∣∣y=x3
y=xdx
=1
2
∫ x=1
x=0
(x3 − x7) dx+1
2
∫ x=0
x=−1
(x7 − x3) dx
=1
2
[x4
4− x8
8
] ∣∣∣x=1
x=0+
1
2
[x8
8− x4
4
] ∣∣∣x=0
x=−1
=1
16+
1
16=
1
8
♣
EJEMPLO 9.9. Calcular
∫∫
R
6xy dx dy, siendo R la region limitada por y2 − x = 0, y − 2 = 0,
x = 0.
SOLUCION.- Como la region de integracion R esta limitada por debajo por la recta y = 0 ypor arriba con la recta y = 2, luego con respecto de y integramos desde y = 0 hasta y = 2. Porla izquierda esta acotada por la recta x = 0 y por la derecha por la parabola x = y2, entoncesintegramos con respecto a x entre estos lımites.
∫∫
R
6xy dx dy =
∫ y=2
y=0
∫ x=y2
x=0
6xy dx dy =
∫ y=2
y=0
6x2
2y∣∣∣x=y2
x=0dy
= 6
∫ y=2
y=0
y4
2y dy = 3
∫ y=2
y=0
y5 dy = 3
[y6
6
] ∣∣∣y=2
y=0= 3
26
6= 25 = 32
♣
EJEMPLO 9.10. Calcule la siguiente integral doble:
∫ 4
0
∫ 2
√y
3√
1 + x3 dx dy
ξρ∫s email: [email protected] 263 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 264
SOLUCION.-
∫ 4
0
∫ 2
√y
3√
1 + x3 dx dy =
∫ y=4
y=0
∫ x=2
x=√
y
3√
1 + x3 dx dy
=
∫ x=2
x=0
∫ y=x2
y=0
3√
1 + x3 dy dx
=
∫ x=2
x=0
[3√
1 + x3 y] ∣∣∣
x2
0dx
=
∫ x=2
x=0
3x2√
1 + x3 dx =[32(1 + x3)
32
] ∣∣∣2
0
=3
2(1 + 23)
32 − 3
2
♣
EJEMPLO 9.11. Calcule la siguiente integral doble:
∫ 2
0
∫ 2
x
x√
1 + y3 dy dx
SOLUCION.-
∫ 2
0
∫ 2
x
x√
1 + y3 dy dx =
∫ x=2
x=0
∫ y=2
y=x
x√
1 + y3 dy dx
=
∫ y=2
y=0
∫ x=y
x=0
x√
1 + y3 dx dy
=
∫ y=2
y=0
[x2
2
√1 + y3
] ∣∣∣x=y
x=0dy
=
∫ y=2
y=0
[y2
2
√1 + y3
]dy
=
∫ 2
0
1
2
√u
du
3
u = 1 + y3
du = 3y2dy
=u1/2+1
6(1/2 + 1)
∣∣∣2
0=
(1 + y3)3/2
9
∣∣∣2
0
=93/2
9− 13/2
9= 3 − 1
9=
26
9
♣
ξρ∫s email: [email protected] 264 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 265
EJEMPLO 9.12. Calcule la siguiente integral doble:
∫ 3
0
∫ 3
x
x√
9 + y3 dy dx
SOLUCION.-
∫ 3
0
∫ 3
x
x√
9 + y3 dy dx =
∫ x=3
x=0
∫ y=3
y=x
x√
9 + y3 dy dx
=
∫ y=3
y=0
∫ x=y
x=0
x√
9 + y3 dx dy
=
∫ y=3
y=0
[x2
2
√9 + y3
] ∣∣∣x=y
x=0dy
=
∫ y=3
y=0
[y2
2
√9 + y3
]dy
=
∫ 3
0
1
2
√u
du
3
u = 9 + y3
du = 3y2dy
=u1/2+1
6(1/2 + 1)
∣∣∣3
0=
(9 + y3)3/2
9
∣∣∣3
0
=(9 + 33)3/2
9− 93/2
9=
363/2
9− 3
♣
EJEMPLO 9.13. Calcule la siguiente integral doble:
∫ 1
0
∫ 1/2
y/2
e−x2
dx dy
SOLUCION.-
ξρ∫s email: [email protected] 265 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 266
∫ 1
0
∫ 1/2
y/2
e−x2
dx dy =
∫ y=1
y=0
∫ x=1/2
x=y/2
e−x2
dx dy
=
∫ x=1/2
x=0
∫ y=2x
y=0
e−x2
dy dx
=
∫ x=1/2
x=0
[e−x2
y] ∣∣∣
2x
0dx
=
∫ x=1/2
x=0
e−x2
2x dxu = −x2
du = −2xdx
= −∫ 1/2
0
eu du = −[eu] ∣∣∣
2
0= −
[e−x2
] ∣∣∣2
0
= 1 − e−4
♣
EJEMPLO 9.14. Calcule la siguiente integral doble:
∫ e
1
∫ e
1
1
xydy dx
SOLUCION.-
∫ e
1
∫ e
1
1
xydy dx =
∫ e
1
[ ln yx
] ∣∣∣e
1dx =
∫ e
1
[ ln ex
− ln 1
x
]dx
=
∫ e
1
1
xdx =
[ln y] ∣∣∣
e
1= 1
♣
EJEMPLO 9.15. Calcule
∫∫
R
(1 − xy) dx dy, siendo R la region limitada por x = 0, y = x,
y = 1.
SOLUCION.- De dos maneras distintas
∫∫
R
(1 − xy) dx dy =
∫ 1
0
∫ 1
x
(1 − xy) dy dx =
∫ 1
0
(y − xy2
2
)∣∣∣1
xdx
=
∫ 1
0
(1 − x
2− x+
x3
2
)dx =
∫ 1
0
(1 − 3
2x+
x3
2
)dx
ξρ∫s email: [email protected] 266 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 267
∫∫
R
(1 − xy) dx dy =
∫ 1
0
∫ y
0
(1 − xy) dx dy =
∫ 1
0
(x− x2y
2
)∣∣∣y
0dy
=
∫ 1
0
(y − y3
2− 0 +
02y
2
)dy =
∫ 1
0
(y − y3
2
)dy
Tarea: Complete el ejercicio.
♣
EJEMPLO 9.16. Calcule
∫∫
R
y
1 + x2dx dy, siendo R la region limitada por y = 0, y =
√x y
x = 3.
SOLUCION.-
∫∫
R
y
1 + x2dx dy =
∫ x=3
x=0
∫ y=√
x
y=0
y
1 + x2dy dx
=
∫ x=3
x=0
(y2
2(1 + x2)
) ∣∣∣√
x
0dx
=
∫ x=3
x=0
(√x)2
2(1 + x2)dx
=1
2
∫ x=3
x=0
x
1 + x2dx
1
2
∫x
1 + x2dx
u = 1 + x2
du = 2xdx
=
∫1
udu Cambio de variables
= ln u Por tabla
= ln(1 + x2) u = 1 + x2
Por tanto ∫∫
R
y
1 + x2dx dy = ln(1 + x2)
∣∣∣3
0= ln 10
♣
EJEMPLO 9.17. Hallar
∫∫
R
xy dx dy si R es la region en el primer cuadrante limitada por
y2 = 2x y x2 + y2 − 4y = 0.
ξρ∫s email: [email protected] 267 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 268
SOLUCION.- Juntamos las dos ecuaciones se tiene el sistema de ecuaciones
y2 = 2x
x2 + y2 = 4y
(y2/2)2 + y2 = 4y
y4/4 + y2 = 4y
y3 + 4y = 16
y3 + 4y − 16 = 0
esto es,(y − 2)(y2 + 2y + 8) = 0, y = 2, x = 2.
Despejando x de la ecuacion x2 + y2 − 4y = 0, tenemos
x =√
4y − y2.
∫∫
R
xy dx dy =
∫ y=2
y=0
∫ x=y2/2
x=√
4y−y2
xy dx dy
=
∫ y=2
y=0
(x2y
2
) ∣∣∣x=y2/2
x=√
4y−y2dy
=
∫ y=2
y=0
((y2/2)2y
2− (√
4y − y2)2y
2
)dy
=
∫ y=2
y=0
(y5
2− 4y2 − y3
2
)dy
=1
2
∫ 2
0
(y5 − 4y2 + y3
)dy
=1
2
(y6
6− 4
y3
3+y4
4
) ∣∣∣2
0
=1
2
(26
6− 4
23
3+
24
4
)
=25
6− 24
3+
23
4
♣
EJEMPLO 9.18. SiD = [−π, π] × [−π, π],
mostrar que1
e≤ 1
4π2
∫∫
D
esen(x+y) dy dx ≤ e.
ξρ∫s email: [email protected] 268 Jasmer LPC
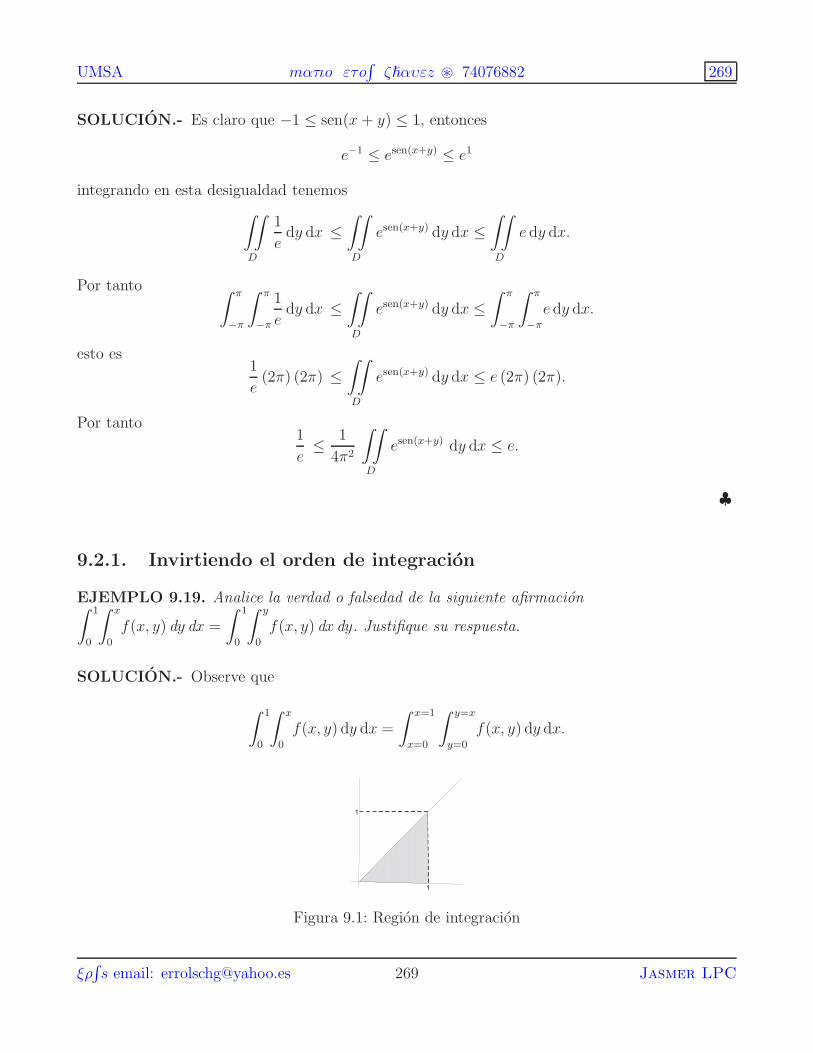
UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 269
SOLUCION.- Es claro que −1 ≤ sen(x+ y) ≤ 1, entonces
e−1 ≤ esen(x+y) ≤ e1
integrando en esta desigualdad tenemos
∫∫
D
1
edy dx ≤
∫∫
D
esen(x+y) dy dx ≤∫∫
D
e dy dx.
Por tanto ∫ π
−π
∫ π
−π
1
edy dx ≤
∫∫
D
esen(x+y) dy dx ≤∫ π
−π
∫ π
−π
e dy dx.
esto es1
e(2π) (2π) ≤
∫∫
D
esen(x+y) dy dx ≤ e (2π) (2π).
Por tanto1
e≤ 1
4π2
∫∫
D
esen(x+y) dy dx ≤ e.
♣
9.2.1. Invirtiendo el orden de integracion
EJEMPLO 9.19. Analice la verdad o falsedad de la siguiente afirmacion∫ 1
0
∫ x
0
f(x, y) dy dx =
∫ 1
0
∫ y
0
f(x, y) dx dy. Justifique su respuesta.
SOLUCION.- Observe que
∫ 1
0
∫ x
0
f(x, y) dy dx =
∫ x=1
x=0
∫ y=x
y=0
f(x, y) dy dx.
1
1
Figura 9.1: Region de integracion
ξρ∫s email: [email protected] 269 Jasmer LPC
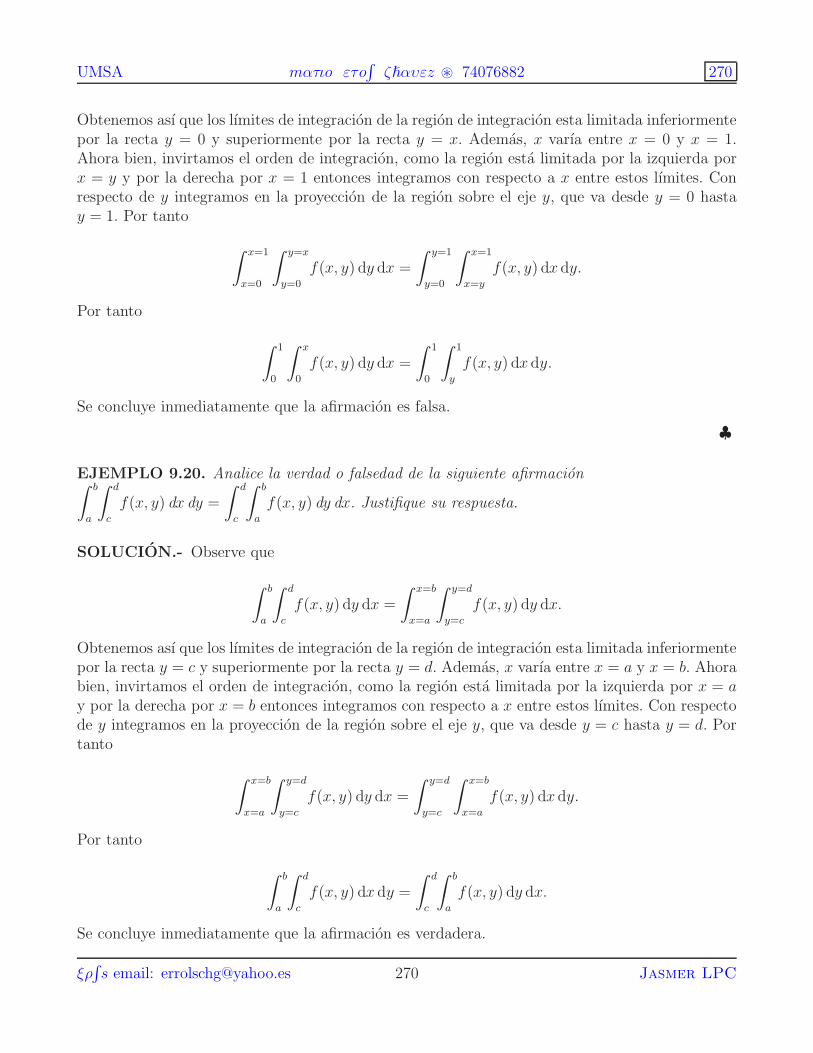
UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 270
Obtenemos ası que los lımites de integracion de la region de integracion esta limitada inferiormentepor la recta y = 0 y superiormente por la recta y = x. Ademas, x varıa entre x = 0 y x = 1.Ahora bien, invirtamos el orden de integracion, como la region esta limitada por la izquierda porx = y y por la derecha por x = 1 entonces integramos con respecto a x entre estos lımites. Conrespecto de y integramos en la proyeccion de la region sobre el eje y, que va desde y = 0 hastay = 1. Por tanto
∫ x=1
x=0
∫ y=x
y=0
f(x, y) dy dx =
∫ y=1
y=0
∫ x=1
x=y
f(x, y) dx dy.
Por tanto
∫ 1
0
∫ x
0
f(x, y) dy dx =
∫ 1
0
∫ 1
y
f(x, y) dx dy.
Se concluye inmediatamente que la afirmacion es falsa.
♣
EJEMPLO 9.20. Analice la verdad o falsedad de la siguiente afirmacion∫ b
a
∫ d
c
f(x, y) dx dy =
∫ d
c
∫ b
a
f(x, y) dy dx. Justifique su respuesta.
SOLUCION.- Observe que
∫ b
a
∫ d
c
f(x, y) dy dx =
∫ x=b
x=a
∫ y=d
y=c
f(x, y) dy dx.
Obtenemos ası que los lımites de integracion de la region de integracion esta limitada inferiormentepor la recta y = c y superiormente por la recta y = d. Ademas, x varıa entre x = a y x = b. Ahorabien, invirtamos el orden de integracion, como la region esta limitada por la izquierda por x = ay por la derecha por x = b entonces integramos con respecto a x entre estos lımites. Con respectode y integramos en la proyeccion de la region sobre el eje y, que va desde y = c hasta y = d. Portanto
∫ x=b
x=a
∫ y=d
y=c
f(x, y) dy dx =
∫ y=d
y=c
∫ x=b
x=a
f(x, y) dx dy.
Por tanto
∫ b
a
∫ d
c
f(x, y) dx dy =
∫ d
c
∫ b
a
f(x, y) dy dx.
Se concluye inmediatamente que la afirmacion es verdadera.
ξρ∫s email: [email protected] 270 Jasmer LPC
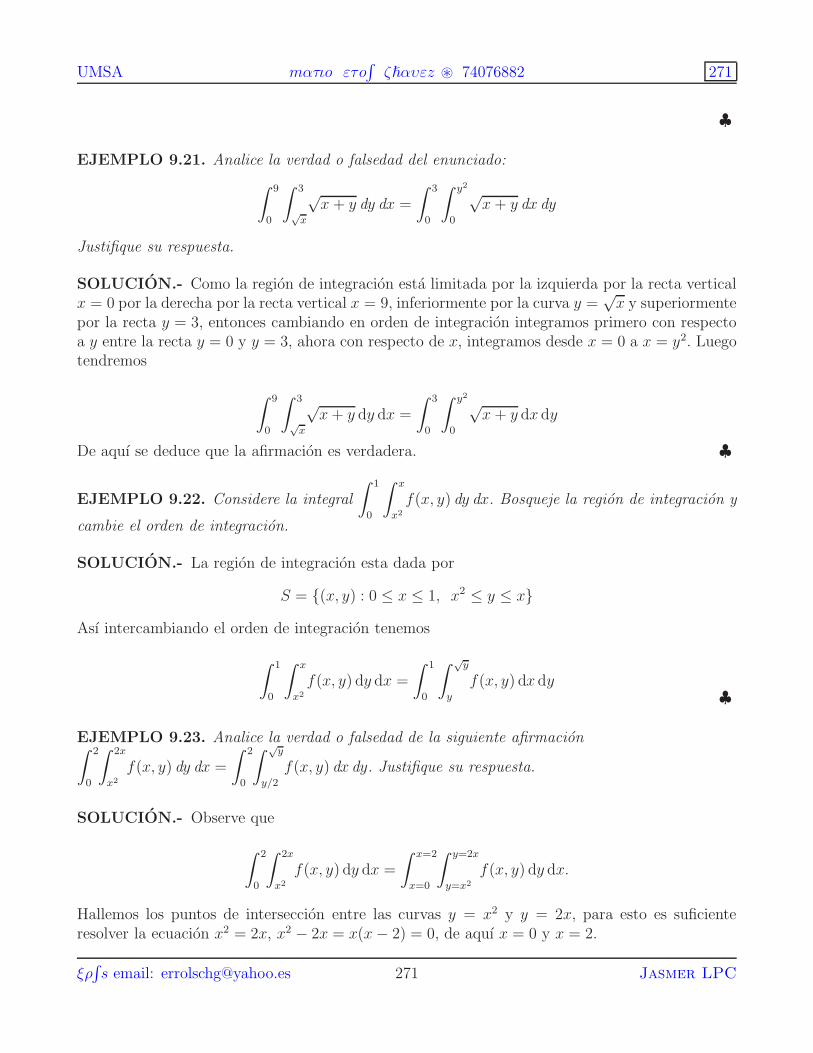
UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 271
♣
EJEMPLO 9.21. Analice la verdad o falsedad del enunciado:
∫ 9
0
∫ 3
√x
√x+ y dy dx =
∫ 3
0
∫ y2
0
√x+ y dx dy
Justifique su respuesta.
SOLUCION.- Como la region de integracion esta limitada por la izquierda por la recta verticalx = 0 por la derecha por la recta vertical x = 9, inferiormente por la curva y =
√x y superiormente
por la recta y = 3, entonces cambiando en orden de integracion integramos primero con respectoa y entre la recta y = 0 y y = 3, ahora con respecto de x, integramos desde x = 0 a x = y2. Luegotendremos
∫ 9
0
∫ 3
√x
√x+ y dy dx =
∫ 3
0
∫ y2
0
√x+ y dx dy
De aquı se deduce que la afirmacion es verdadera. ♣
EJEMPLO 9.22. Considere la integral
∫ 1
0
∫ x
x2
f(x, y) dy dx. Bosqueje la region de integracion y
cambie el orden de integracion.
SOLUCION.- La region de integracion esta dada por
S = (x, y) : 0 ≤ x ≤ 1, x2 ≤ y ≤ x
Ası intercambiando el orden de integracion tenemos
∫ 1
0
∫ x
x2
f(x, y) dy dx =
∫ 1
0
∫ √y
y
f(x, y) dx dy♣
EJEMPLO 9.23. Analice la verdad o falsedad de la siguiente afirmacion∫ 2
0
∫ 2x
x2
f(x, y) dy dx =
∫ 2
0
∫ √y
y/2
f(x, y) dx dy. Justifique su respuesta.
SOLUCION.- Observe que
∫ 2
0
∫ 2x
x2
f(x, y) dy dx =
∫ x=2
x=0
∫ y=2x
y=x2
f(x, y) dy dx.
Hallemos los puntos de interseccion entre las curvas y = x2 y y = 2x, para esto es suficienteresolver la ecuacion x2 = 2x, x2 − 2x = x(x− 2) = 0, de aquı x = 0 y x = 2.
ξρ∫s email: [email protected] 271 Jasmer LPC
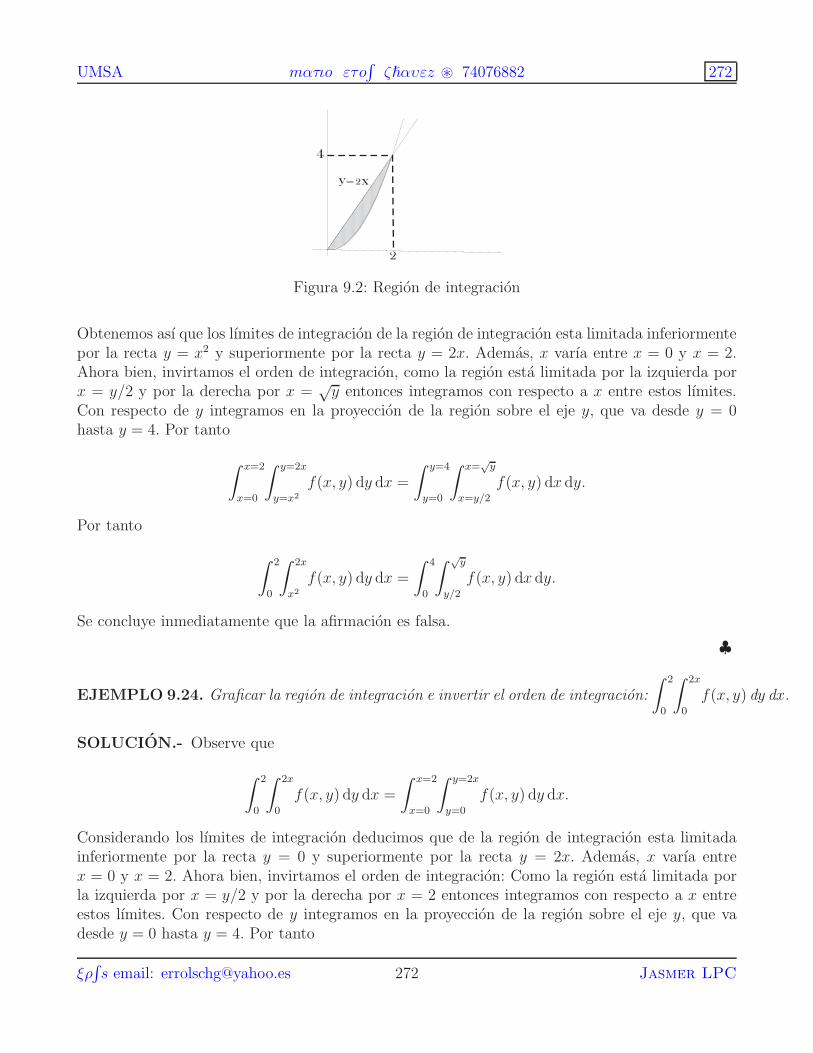
UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 272
y= x2
2
4
Figura 9.2: Region de integracion
Obtenemos ası que los lımites de integracion de la region de integracion esta limitada inferiormentepor la recta y = x2 y superiormente por la recta y = 2x. Ademas, x varıa entre x = 0 y x = 2.Ahora bien, invirtamos el orden de integracion, como la region esta limitada por la izquierda porx = y/2 y por la derecha por x =
√y entonces integramos con respecto a x entre estos lımites.
Con respecto de y integramos en la proyeccion de la region sobre el eje y, que va desde y = 0hasta y = 4. Por tanto
∫ x=2
x=0
∫ y=2x
y=x2
f(x, y) dy dx =
∫ y=4
y=0
∫ x=√
y
x=y/2
f(x, y) dx dy.
Por tanto
∫ 2
0
∫ 2x
x2
f(x, y) dy dx =
∫ 4
0
∫ √y
y/2
f(x, y) dx dy.
Se concluye inmediatamente que la afirmacion es falsa.
♣
EJEMPLO 9.24. Graficar la region de integracion e invertir el orden de integracion:
∫ 2
0
∫ 2x
0
f(x, y) dy dx.
SOLUCION.- Observe que
∫ 2
0
∫ 2x
0
f(x, y) dy dx =
∫ x=2
x=0
∫ y=2x
y=0
f(x, y) dy dx.
Considerando los lımites de integracion deducimos que de la region de integracion esta limitadainferiormente por la recta y = 0 y superiormente por la recta y = 2x. Ademas, x varıa entrex = 0 y x = 2. Ahora bien, invirtamos el orden de integracion: Como la region esta limitada porla izquierda por x = y/2 y por la derecha por x = 2 entonces integramos con respecto a x entreestos lımites. Con respecto de y integramos en la proyeccion de la region sobre el eje y, que vadesde y = 0 hasta y = 4. Por tanto
ξρ∫s email: [email protected] 272 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 273
∫ x=2
x=0
∫ y=2x
y=0
f(x, y) dy dx =
∫ y=4
y=0
∫ x=2
x=y/2
f(x, y) dx dy.
Por tanto
∫ 2
0
∫ 2x
0
f(x, y) dy dx =
∫ 4
0
∫ 2
y/2
f(x, y) dx dy.
EJEMPLO 9.25. Graficar la region de integracion e invertir el orden de integracion,
∫ 1
−1
∫ √1−x2
−√
1−x2
f(x, y) dy dx
SOLUCION.- ∫ 1
−1
∫ √1−x2
−√
1−x2
f(x, y) dy dx =
∫ 1
−1
∫ √1−y2
−√
1−y2
f(x, y) dx dy
♣EJEMPLO 9.26. Calcular
∫∫
R
12x2ey2
dx dy donde R es la region acotada por las curvas y = x3
y y = 3 en el primer cuadrante.
SOLUCION.- La region R es
Aquı es mejor primero un barrido horizontal ¿Por que? ¿Observe que ocurre si hacemos primeroun barrido vertical?. Planteando la integral doble con lımites y calculandola, tenemos:
∫∫
R
12x2ey2
dx dy =
∫ y=1
y=0
∫ x= 3√
y
x=y
12x2ey2
dx dy =
∫ 1
0
12ey2 x3
3
∣∣∣3√
y
ydy
=
∫ 1
0
4ey2[( 3√y)3 − y3
]dy =
∫ 1
0
4yey2
dy −∫ 1
0
4y3ey2
dy
ξρ∫s email: [email protected] 273 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 274
Haciendo cambio de variable t = y2. De aquı tenemos: dt = 2ydy. Reemplazando y resolviendo:
∫ 1
0
4yey2
dy −∫ 1
0
4y3ey2
dy =
∫ 1
0
4yet dt
2y−∫ 1
0
4y3et dt
2y=
∫ 1
0
4et dt−∫ 1
0
4tet dt
= 2et∣∣∣1
0− 2(tet − et
)∣∣∣1
0= 2e− 2 − 2[0 − (−1)] = 2e− 4
♣
9.2.2. Calculo de areas
Sea R una region en el plano xy, entonces
area de R =
∫∫
R
dA.
EJEMPLO 9.27. Sea R una region en el plano xy cuya area es A. Si f(x, y) = n para todo
(x, y) ∈ R, ¿Cual es el valor de
∫∫
R
f(x, y) dx dy? Explicar.
SOLUCION.- Se deduce rapidamente de la definicion y de las propiedades de la integral dobleque,
∫∫
R
f(x, y) dx dy =
∫∫
R
n dx dy = n
∫∫
R
dx dy
= nArea(R) = nA.
♣
EJEMPLO 9.28. ¿Que valor debe tener f(x, y) para que la integral doble
∫∫
R
f(x, y) dx dy rep-
resente el valor del area de la region R?
SOLUCION.- La funcion f(x, y) debe ser igual a la funcion contante 1. En efecto
∫∫
R
f(x, y) dx dy =
∫∫
R
dx dy = Area(R).
♣
EJEMPLO 9.29. calcular el area de la region limitada por y = x2, y = 2x+ 3.
ξρ∫s email: [email protected] 274 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 275
SOLUCION.- Como la region esta limitada inferiormente por la parabola y = x2 y superiormentepor la recta y = 2x + 3, entonces primero integramos con respecto de y entre estos lımites. Conrespecto de x integramos en la proyeccion sobre el eje x que va desde x = −1 hasta x = 3. Por lotanto el area es
A =
∫ x=3
x=−1
∫ y=2x+3
y=x2
dy dx =
∫ x=3
x=−1
y∣∣∣y=2x+3
y=x2dx
=
∫ x=3
x=−1
(2x+ 3 − x2) dx =
[x2 + 3x− x3
3
] ∣∣∣x=3
x=−1=
32
3
♣
EJEMPLO 9.30. calcular el area de la region limitada por x = 6y − y2, y = x.
SOLUCION.- La region esta limitada por la izquierda por por la recta x = y, y por la derechapor la parabola x = 6y − y2 entonces primero integramos con respecto de x entre estos lımites.Con respecto de y integramos en la proyeccion sobre el eje y que va desde y = 0 hasta y = 5. Porlo tanto el area es
A =
∫ y=5
y=0
∫ x=6y−y2
x=y
dx dy =
∫ y=5
y=0
x∣∣∣x=6y−y2
x=ydy
=
∫ y=5
y=0
(5y − y2) dy =
[5y2
2− y3
3
] ∣∣∣y=5
y=0=
125
6
♣
EJEMPLO 9.31. Calcule el area de la region limitada por las curvas x2 + y = 4, x− y + 2 = 0.
SOLUCION.- Despejando y de ambas ecuaciones tenemos
y = 4 − x2
y = x+ 2
Para hallar los puntos de interseccion, es suficiente resolver la ecuacion 4 − x2 = x+ 2, de dondex2 + x− 2 = 0, de aquı
x =−1 ±
√12 − 4(1)(−2)
2(1)=
−1 ±√
9
2=
−1 ± 3
2
x = 1, x = −2.
ξρ∫s email: [email protected] 275 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 276
Como la region esta limitada inferiormente por la recta y = x+2 y superiormente por la parabolay = 4−x2; entonces primero integramos con respecto al eje x desde −2 hasta 1. Luego integramosrespecto al eje y desde y = x+ 2 hasta y = 4 − x2.
A =
∫∫
R
dx dy =
∫ 1
−2
∫ y=4−x2
y=x+2
dy dx =
∫ 1
−2
[(4 − x2) − (x+ 2)] dx
=
∫ 1
−2
[−x2 − x+ 2] dx =
[−x
3
3− x2
2+ 2x
] ∣∣∣1
−2
=
[−13
3− 12
2+ 2(1)
]−[−(−2)3
3− (−2)2
2+ 2(−2)
]
=
[−5
6+ 2
]−[8
3− 4
2− 4
]=
7
6− 16 − 12 − 24
3=
7
6+
20
3
♣
9.3. Cambio de variables en Integrales Dobles
TEOREMA 9.5 (Cambio de Variables en Integrales Dobles). Si de las variables x, y sepasa a las variables u, v mediante las ecuaciones de cambio de variables x = x(u, v), y = y(u, v),entonces la integral doble de f sobre la region R esta dada por
∫∫
R
f(x, y) dx dy =
∫∫
R
f(x(u, v), y(u, v))
∣∣∣∣∂(x, y)
∂(u, v)
∣∣∣∣ du dv. (9.6)
done la imagen de la region R bajo el cambio de variables es la region original R y ademas el factor∣∣∣∣∂(x, y)
∂(u, v)
∣∣∣∣ es el valor absoluto del determinante de la matriz Jacobiana del cambio de variables, esto
es,∂(x, y)
∂(u, v)=
∣∣∣∣xu xv
yu yv
∣∣∣∣ (9.7)
Notemos que el determinante jacobiano (9.7) es el determinante de la matriz jacobiana de latransformacion que efectua el cambio de variable.
Geometricamente, el valor absoluto del determinante jacobiano mide la contraccion o dilatacion de
la region R, del plano uv, al transformarse en la region R del plano xy. Por ejemplo si
∣∣∣∣∂(x, y)
∂(u, v)
∣∣∣∣ = 2
en todo R, significa que el area de R es el doble de R.
ξρ∫s email: [email protected] 276 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 277
Si el valor de
∣∣∣∣∂(x, y)
∂(u, v)
∣∣∣∣ varıa segun el punto, significa que la contraccion o dilatacion de la region R
mediante la transformacion varıa segun el punto. Por esta razon, al determinante jacobiano puedeconsiderarse como el “factor de proporcionalidad de areas” del cambio de variable efectuado.
De (9.6) tenemos que cuando se efectua un cambio de variable se debe expresar la funcion f en
terminos de las nuevas variables u, v y multiplicarla por
∣∣∣∣∂(x, y)
∂(u, v)
∣∣∣∣ que se calcula segun (9.7) .
Algunas veces, cuando las variables originales no estan despejadas en las ecuaciones que efectuanel cambio de variables, es conveniente saber que
∂(x, y)
∂(u, v)=
1
∂(u, v)
∂(x, y)
(9.8)
En general, la eleccion de un cambio de variable especıfico esta sugerido por la forma de lasecuaciones de las curvas que limitan a la region de integracion y/o por al forma de la funcion quese integra.
EJEMPLO 9.32. Hallar el volume acotado por las curvas x+ y = 1, x+ y = −1, x− y = −1 yx− y = −3.
SOLUCION.- La forma de las ecuaciones dadas sugiere hacer el cambio de variables
u = x+ y, v = x− y
entonces
x+ y = 1 se transforma en u = 1
x+ y = −1 se transforma en u = −1
x− y = −1 se transforma en v = −1
x− y = −3 se transforma en v = −3
La region R se transforma en la region R. Como
∂(u, v)
∂(x, y)=
∣∣∣∣ux uy
vx vy
∣∣∣∣ =
∣∣∣∣1 11 −1
∣∣∣∣ = −2.
Por lo tanto el jacobiano de la transformacion es
∂(x, y)
∂(u, v)=
1
∂(u, v)
∂(x, y)
= −1
2
Integrando en la region R del plano uv, teniendo en cuenta el jacobiano de la transformacion,obtenemos el area pedida:
ξρ∫s email: [email protected] 277 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 278
∫∫
R
1 dx dy =
∫∫
R
1
∣∣∣∣∂(x, y)
∂(u, v)
∣∣∣∣ du dv =
∫ u=1
u=−1
∫ v=−1
v=−3
1
2dv du
=1
2
∫ 1
−1
v∣∣∣1
−3du =
∫ 1
−1
(1 + 3)dv = 4u∣∣∣1
−1= 4(1 + 1) = 8
♣
EJEMPLO 9.33. Calcule el area de la figura plana limitada por las rectas x + y − 2 = 0,x− y − 2 = 0 y y − 2 = 0.
SOLUCION.- Empecemos resolviendo el sistema de ecuaciones
x+ y − 2 = 0
x− y − 2 = 0
Sumando ambas ecuaciones obtenemos 2x = 4, x = 2, y = 0. Por tanto, la region esta limitadainferiormente por la recta y = 0 y superiormente por la recta y = 2, a la izquierda esta limitadapor la recta x+ y − 2 = 0 y a la derecha por la recta x− y − 2 = 0; entonces primero integramoscon respecto al eje y desde y = 0 hasta y = 2. Luego integramos respecto al eje x desde x = 2− yhasta x = 2 + y.
A =
∫ y=2
y=0
∫ x=2+y
x=2−y
dx dy =
∫ y=2
y=0
x∣∣∣x=2+y
x=2−ydy
=
∫ y=2
y=0
[(2 + y) − (2 − y)
]dy
=
∫ y=2
y=0
2y dy =
[2y2
2
] ∣∣∣y=2
y=0= 4
♣EJEMPLO 9.34. Hallar el area de la region limitada por x + y = 1, x + y = 2, y = 2x yy = 2x+ 2.
SOLUCION.- No conviene integrar sobre la region del plano xy por que tendrıamos que dividirla region en cuatro partes. Efectuando el cambio de variable
u = x+ y, v = y − 2x
vemos que
x+ y = 1 se transforma en u = 1,
x+ y = 2 se transforma en u = 2,
y = 2x se transforma en v = 0,
y = 2x+ 2 se transforma en v = 2,
ξρ∫s email: [email protected] 278 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 279
La region R se transforma en la region R. Como
∂(u, v)
∂(x, y)=
∣∣∣∣ux uy
vx vy
∣∣∣∣ =
∣∣∣∣1 1−2 1
∣∣∣∣ = 3
entonces el jacobiano de la transformacion es
∂(x, y)
∂(u, v)=
1
∂(u, v)
∂(x, y)
=1
3
Integrando en la region del plano uv, teniendo en cuenta el jacobiano de la transformacion, obten-emos el area pedida:
∫∫
R
dx dy =
∫∫
R
∣∣∣∣∂(x, y)
∂(u, v)
∣∣∣∣ du dv =
∫ v=2
v=0
∫ u=2
u=1
1
3du dv
=1
3
∫ 2
0
u∣∣∣2
1dv =
1
3(2 − 1)
∫ 2
0
dv =1
3(2 − 0) =
2
3
♣
EJEMPLO 9.35. Hallar el area de la region limitada por xy = 4, xy = 8, xy3 = 5 y xy3 = 15.
SOLUCION.-
La forma de las ecuaciones dadas sugiere hacer el cambio de variable
u = xy, v = xy3
vemos que
xy = 4 se transforma en u = 4,
xy = 8 se transforma en u = 8,
xy3 = 5 se transforma en v = 5,
xy3 = 15 se transforma en v = 15,
La region R se transforma en la region R. Como
∂(u, v)
∂(x, y)=
∣∣∣∣ux uy
vx vy
∣∣∣∣ =
∣∣∣∣y xy3 3xy2
∣∣∣∣ = 2xy2 = 2v
entonces el jacobiano de la transformacion es
∂(x, y)
∂(u, v)=
1
∂(u, v)
∂(x, y)
=1
2v
ξρ∫s email: [email protected] 279 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 280
Integrando en la region R del plano uv, teniendo en cuenta el jacobiano de la transformacion,obtenemos el area pedida:
∫∫
R
dx dy =
∫∫
R
∣∣∣∣∂(x, y)
∂(u, v)
∣∣∣∣ du dv =
∫ v=15
v=5
∫ u=8
u=4
1
2vdu dv
=1
2
∫ 15
5
u
v
∣∣∣8
4dv =
1
2
∫ 15
5
8 − 4
vdv =
4
2ln(v)
∣∣∣15
5
= 2 ln(15) − ln(5) = 2 ln(3).
♣
EJEMPLO 9.36. Hallar el area de la region limitada por y2 = x, y2 = 8x, x2 = y y x2 = 8y.
SOLUCION.- La forma de las ecuaciones dadas sugiere efectuar el cambio de variable
u =y2
x, v =
x2
y.
Entonces
y2 = x se transforma en u = 1,
y2 = 8x se transforma en u = 8,
x2 = y se transforma en v = 1,
x2 = 8y se transforma en v = 8,
La region R se transforma en la region R. Como
∂(u, v)
∂(x, y)=
∣∣∣∣ux uy
vx vy
∣∣∣∣ =
∣∣∣∣∣∣∣
−y2
x22y
x
2x
y−x
2
y2
∣∣∣∣∣∣∣= −3
entonces el jacobiano de la transformacion es
∂(x, y)
∂(u, v)=
1
∂(u, v)
∂(x, y)
= −1
3
Integrando en la region R del plano uv y teniendo en cuenta que el jacobiano de la transformacion
es −1
3, obtenemos el area pedida:
ξρ∫s email: [email protected] 280 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 281
∫∫
R
dx dy =
∫∫
R
∣∣∣∣∂(x, y)
∂(u, v)
∣∣∣∣ du dv =
∫ v=8
v=1
∫ u=8
u=1
1
3du dv
=1
3
∫ 8
1
u∣∣∣8
1dv =
1
3(8 − 1)
∫ 8
1
dv =7
3(8 − 1) =
49
3
♣
EJEMPLO 9.37. Hallar el area de la figura plana en el primer cuadrante limitada por las curvas:xy − 2 = 0, xy − 6 = 0, y − x = 0 y y − 4x = 0.
SOLUCION.- La forma de las ecuaciones dadas sugiere efectuar el cambio de variable
u = xy, v =y
x.
Entonces
xy − 2 = 0 se transforma en u = 2,
xy − 6 = 0 se transforma en u = 6,
y − x = 0 se transforma en v = 1,
y − 4x = 0 se transforma en v = 4,
La region R se transforma en la region R. Como
∂(u, v)
∂(x, y)=
∣∣∣∣ux uy
vx vy
∣∣∣∣ =∣∣∣∣∣
y x
−2y
x2
1
x
∣∣∣∣∣ =y
x+ 2
y
x= 3
y
x= 3v
entonces el jacobiano de la transformacion es
∂(x, y)
∂(u, v)=
1
∂(u, v)
∂(x, y)
=1
3v
Integrando en la region R del plano uv y teniendo en cuenta que el jacobiano de la transformacion
es1
3v, obtenemos el area pedida:
∫∫
R
dx dy =
∫∫
R
∣∣∣∣∂(x, y)
∂(u, v)
∣∣∣∣ du dv =
∫ v=4
v=1
∫ u=6
u=2
1
3vdu dv
=4
3
∫ 4
1
1
vdv =
4
3ln(v)
∣∣∣4
1=
4
3ln 4
♣ξρ∫s email: [email protected] 281 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 282
EJEMPLO 9.38. Calcular
∫∫
R
ex−y
x+y dA, donde R es la region limitada por x = 0, y = 0, x+y = 1.
SOLUCION.- La forma de las ecuaciones dadas sugiere hacer el cambio de variables
u = x− y, v = x+ y
entonces
x+ y = 1 se transforma en v = 1
x = 0 se transforma en u+ v = 0
y = 0 se transforma en v − u = 0
La region R se transforma en la region R. Como
∂(u, v)
∂(x, y)=
∣∣∣∣ux uy
vx vy
∣∣∣∣ =
∣∣∣∣1 −11 1
∣∣∣∣ = 2.
Por lo tanto el jacobiano de la transformacion es
∂(x, y)
∂(u, v)=
1
∂(u, v)
∂(x, y)
=1
2
f(x, y) = ex−y
x+y
x− y = ux+ y = v
2x = u+ vx = u+v
2
x− y = u−x− y = −v
−2y = u− vy = v−u
2
f(x(u, v), y(u, v)) = ex−y
x+y = euv
Integrando en la region R del plano uv, teniendo en cuenta el jacobiano de la transformacion,obtenemos el area pedida:
∫∫
R
ex−y
x+y dx dy =
∫∫
R
euv
∣∣∣∣∂(x, y)
∂(u, v)
∣∣∣∣ du dv.
=
∫ v=1
v=0
∫ u=v
u=−v
euv1
2du dv
=1
2
∫ 1
0
veuv
∣∣∣v
−vdv =
(e1 − e−1)
2
∫ 1
0
vdv
=(e− e−1)
2
v2
2
∣∣∣1
0=e− e−1
4
ξρ∫s email: [email protected] 282 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 283
♣
EJEMPLO 9.39. Calcule
∫∫
R
(x − y)ex+y dx dy, siendo R la region limitada por x + y = 1,
x+ y = −1, x− y = −1 y x− y = −3.
SOLUCION.- La forma de las ecuaciones dadas sugiere hacer el cambio de variables
u = x− y, v = x+ y
entonces
x+ y = 1 se transforma en v = 1
x+ y = −1 se transforma en v = −1
x− y = −1 se transforma en u = −1
x− y = −3 se transforma en u = −3
La region R se transforma en la region R. Como
∂(u, v)
∂(x, y)=
∣∣∣∣ux uy
vx vy
∣∣∣∣ =
∣∣∣∣1 −11 1
∣∣∣∣ = 2.
Por lo tanto el jacobiano de la transformacion es
∂(x, y)
∂(u, v)=
1
∂(u, v)
∂(x, y)
=1
2
f(x, y) = (x− y)ex+y
x− y = ux+ y = v
2x = u+ vx = u+v
2
x− y = u−x− y = −v
−2y = u− vy = v−u
2
f(x(u, v), y(u, v)) = (x− y)ex+y = uev
Integrando en la region R del plano uv, teniendo en cuenta el jacobiano de la transformacion,obtenemos el area pedida:
ξρ∫s email: [email protected] 283 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 284
∫∫
R
(x− y)ex+y dx dy =
∫∫
R
uev
∣∣∣∣∂(x, y)
∂(u, v)
∣∣∣∣ du dv.
=
∫ v=1
v=−1
∫ u=−1
u=−3
uev 1
2du dv
=1
2
∫ 1
−1
u2
2ev∣∣∣1
−3dv =
[(−1)2
2− (−3)2
2
] ∫ 1
−1
evdv
=
[1
2− 9
2
]ev∣∣∣1
−1=
[1
2− 9
2
](e1 − e−1)
♣
EJEMPLO 9.40. Sea P el paralelogramo acotado por y = 2x, y = 2x − 2, y = x + 1, y = x.
Utilizando el teorema de cambio de variable calcular
∫∫
P
xy dx dy.
SOLUCION.- La forma de las ecuaciones dadas sugiere hacer el cambio de variables
u = y − 2x, v = y − x
entonces
y = 2x se transforma en u = 0
y = 2x− 2 se transforma en u = −2
y = x+ 1 se transforma en v = 1
y = x se transforma en v = 0
luego la region P se transforma en la region P bajo este cambio de variables. Como
∂(u, v)
∂(x, y)=
∣∣∣∣ux uy
vx vy
∣∣∣∣ =
∣∣∣∣−2 1−1 1
∣∣∣∣ = −2 + 1 = −1.
Por lo tanto el jacobiano de la transformacion es
∂(x, y)
∂(u, v)=
1
∂(u, v)
∂(x, y)
=1
−1= 1
Ahora bien, despejando las variables x y y en funcion de las variables u y v
y − 2x = uy − x = v
y − 2x = u−y + x = −v
−x = u− vx = v − u
x = v − uy = 2v − u
ξρ∫s email: [email protected] 284 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 285
Luego la funcion f(x, y) = xy en las coordenadas u y v puede escribirse como
f(x(u, v), y(u, v)) = (v − u)(2v − u) = 2v2 − 3uv + u2
Integrando en la region P del plano uv, teniendo en cuenta el jacobiano de la transformacion,obtenemos el area pedida:
∫∫
P
xy dx dy =
∫∫
R
(2v2 − 3uv + u2)
∣∣∣∣∂(x, y)
∂(u, v)
∣∣∣∣ du dv =
∫ v=1
v=0
∫ u=0
u=−2
(2v2 − 3uv + u2) du dv
=
∫ 1
0
(2v2u− 3
2u2v +
1
3u3
) ∣∣∣0
−2dv = −
∫ 1
0
(2v2(−2) − 3
2(−2)2v +
1
3(−2)3
)dv
= −∫ 1
0
(−4v2 − 6v − 8
3
)dv =
(41
3v3 + 6
1
2v2 +
8
3v
) ∣∣∣1
0
= 41
3(1)3 +
1
2(1)2 +
8
3(1) =
4
3+
1
2+
8
3=
8 + 3 + 16
6=
27
6=
9
2♣
EJEMPLO 9.41. Calcula
∫∫
R
(x2 + y2) dx dy siendo R la region del primer cuadrante limitada
por las curvas x2 − y2 = 3, x2 − y2 = 6, xy = 1 y xy = 8. Sugerencia. Considera el cambio devariable u = x2 − y2, v = xy.
SOLUCION.- La forma de las ecuaciones dadas sugiere hacer el cambio de variables
u = x2 − y2, v = xy
entonces
x2 − y2 = 3 se transforma en u = 3
x2 − y2 = 6 se transforma en u = 6
xy = 1 se transforma en v = 1
xy = 8 se transforma en v = 8
La region R se transforma en la region R. Como
∂(u, v)
∂(x, y)=
∣∣∣∣ux uy
vx vy
∣∣∣∣ =
∣∣∣∣2x −2yy x
∣∣∣∣ = 2x2 + 2y2 = 2(x2 + y2).
Por lo tanto el jacobiano de la transformacion es
∂(x, y)
∂(u, v)=
1
∂(u, v)
∂(x, y)
=1
2(x2 + y2)
ξρ∫s email: [email protected] 285 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 286
f(x(u, v), y(u, v))
∣∣∣∣∂(x, y)
∂(u, v)
∣∣∣∣ = (x2 + y2)1
2(x2 + y2)=
1
2
Integrando en la region R del plano uv, teniendo en cuenta el jacobiano de la transformacion,obtenemos el area pedida:
∫∫
R
(x2 + y2) dx dy =
∫∫
R
f(x(u, v), y(u, v))
∣∣∣∣∂(x, y)
∂(u, v)
∣∣∣∣ du dv.
=
∫ u=6
u=3
∫ v=8
v=1
1
2du dv
=1
2
∫ 6
3
(8 − 1) dv =1
2(6 − 3)7 =
21
2♣
EJEMPLO 9.42. Calcular
∫∫
X
x2y2 dx dy, siendo X la region del primer cuadrante acotado por
las hiperbolas xy = 1, xy = 2 y las rectas y = x, y = 2x.
SOLUCION.- La forma de las ecuaciones dadas sugiere hacer el cambio de variable
u = xy, v =y
x
vemos que
xy = 1 se transforma en u = 1,
xy = 2 se transforma en u = 2,
y = x se transforma en v = 1,
y = 2x se transforma en v = 2,
La region R se transforma en la region R. Como
∂(u, v)
∂(x, y)=
∣∣∣∣ux uy
vx vy
∣∣∣∣ =
∣∣∣∣∣y x
− y
x2
1
x
∣∣∣∣∣ =y
x+y
x= 2
y
x= 2v
entonces el jacobiano de la transformacion es
∂(x, y)
∂(u, v)=
1
∂(u, v)
∂(x, y)
=1
2v
ξρ∫s email: [email protected] 286 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 287
Integrando en la region R del plano uv, teniendo en cuenta el jacobiano de la transformacion,obtenemos el area pedida:
∫∫
R
x2y2dx dy =
∫∫
R
∣∣∣∣∂(x, y)
∂(u, v)
∣∣∣∣ du dv =
∫ v=2
v=1
∫ u=2
u=1
u2
2vdu dv
=1
2
∫ 2
1
u3
3v
∣∣∣2
1dv =
1
6
∫ 2
1
23 − 13
vdv =
7
6ln(v)
∣∣∣2
1
=7
6(ln(2) − ln(1)) =
7
6ln(2).
♣
EJEMPLO 9.43. El centro de masa de una lamina plana X de densidad ρ(x, y) es el punto
∫∫
X
xρ(x, y) dx dy,
∫∫
X
yρ(x, y) dx dy
∫∫
X
ρ(x, y) dx dy
Encuentre el centro de masa de la lamina plana X determinada por
0 ≤ y ≤ 2 − x, x ≥ 0
cuya densidad es ρ(x, y) = xy.
SOLUCION.-
∫∫
R
xy dx dy =
∫ x=2
x=0
∫ y=2−x
y=0
xy dy dx =
∫ x=2
x=0
xy2
2
∣∣∣y=2−x
y=0dx
=
∫ x=2
x=0
x(2 − x)2
2dx =
1
2
∫ x=2
x=0
(x3 − 4x2 + 4x) dx
=1
2
[x4
4− 4
x3
3+ 4
x2
2
] ∣∣∣x=2
x=0=
1
2
[24
4− 4
23
3+ 4
22
2
].
ξρ∫s email: [email protected] 287 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 288
∫∫
R
x2y dx dy =
∫ x=2
x=0
∫ y=2−x
y=0
x2y dy dx =
∫ x=2
x=0
x2y2
2
∣∣∣y=2−x
y=0dx
=
∫ x=2
x=0
x2(2 − x)2
2dx =
1
2
∫ x=2
x=0
(x4 − 4x3 + 4x2) dx
=1
2
[x5
5− 4
x4
4+ 4
x3
3
] ∣∣∣x=2
x=0=
1
2
[25
4− 4
24
4+ 4
23
3
].
∫∫
R
xy2 dx dy =
∫ x=2
x=0
∫ y=2−x
y=0
xy2 dy dx =
∫ x=2
x=0
xy3
3
∣∣∣y=2−x
y=0dx
=
∫ x=2
x=0
x(2 − x)3
3dx =
1
3
∫ x=2
x=0
(23x− (3)22x2 + (3)2x3 + x4) dx
=1
3
[8x2
2− 12
x3
3+ 6
x4
4+x5
5
] ∣∣∣x=2
x=0=
1
3
[822
2− 12
23
3+ 6
24
4+
25
5
].
♣
9.3.1. Integrales dobles en coordenadas polares
Pasando a coordenadas polares tenemos
x = r cos θ
y = r sen θ
Luego, el determinante de la matriz Jacobiana del cambio de variables es dado por
∂(x, y)
∂(r, θ)=
∣∣∣∣xr xθ
yr yθ
∣∣∣∣ =
∣∣∣∣cos θ −r sen θsen θ r cos θ
∣∣∣∣ = r[cos2 θ + sen2 θ] = r.
Por (9.6) y esta ultima igualdad se tiene
∫∫
R
f(x, y) dx dy =
∫∫
R
f(r cos θ, r sen θ) r dr dθ.
TEOREMA 9.6 (Teorema de Fubini). Sea R una region plana que consta de todos los puntos(x, y) = (r cos θ, r sen θ) que satisfacen las condiciones
θ1 ≤ θ ≤ θ2 y 0 ≤ r1(θ) ≤ r ≤ r2(θ)
ξρ∫s email: [email protected] 288 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 289
donde 0 ≤ θ2−θ1 ≤ 2π. Si r1, r2 son funciones continuas sobre [θ1, θ2] y f continua en R entonces
∫∫
R
f(x, y) dA =
∫ θ=θ2
θ=θ1
∫ r=r2(θ)
r=r1(θ)
f(r cos θ, r sen θ) r dr dθ
=
∫ θ2
θ1
∫ r2(θ)
r1(θ)
f(r cos θ, r sen θ) r dr dθ
(9.9)
EJEMPLO 9.44. Analice la verdad o falsedad de la siguiente afirmacion∫∫
R
√x2 + y2 dx dy =
∫∫
R
r dr dθ?. Justifique su respuesta.
SOLUCION.- Observe que√x2 + y2 =
√(r cos θ)2 + (r sen θ)2 =
√r2 = r.
De esta igualdad y de (9.9) se deduce que∫∫
R
√x2 + y2 dx dy =
∫∫
R
r dr dθ
Concluimos entonces que la afirmacion es verdadera.
Coordenadas polares tenemosx = r cos θ
y = r sen θ
∫∫
R
f(x, y) dx dy =
∫∫
R
f(r cos θ, r sen θ) r dr dθ.
♣
EJEMPLO 9.45. Analice la verdad o falsedad de la siguiente afirmacion∫∫
R
ex2+y2
dx dy =
∫∫
R
er2
dr dθ?. Justifique su respuesta.
SOLUCION.- Observe que
x2 + y2 = (r cos θ)2 + (r sen θ)2 = r2.
De esta igualdad y de (9.9) se deduce que∫∫
R
ex2+y2
dx dy =
∫∫
R
er2
r dr dθ
ξρ∫s email: [email protected] 289 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 290
Concluimos entonces que la afirmacion es falsa.
♣
EJEMPLO 9.46. Analice la verdad o falsedad de la siguiente afirmacion: La integral doble∫∫
R
√x2 + y2 − 25 dx dy se transforma en coordenadas polares a
∫∫
R
√r2 − 25 dr dθ. Justifique su
respuesta.
SOLUCION.- Observe que
x2 + y2 = (r cos θ)2 + (r sen θ)2 = r2.
De esta igualdad y de (9.9) se deduce que
∫∫
R
√x2 + y2 − 25 dx dy =
∫∫
R
r√r2 − 25 dr dθ.
Concluimos entonces que la afirmacion es falsa.
♣
EJEMPLO 9.47. Calcule
∫∫
R
y√x2 + y2
dx dy, siendo R la region limitada por x2 + y2 = 16 y
y ≥ 0.
SOLUCION.- Pasando a coordenadas polares tenemos
x = r cos θ
y = r sen θ
Los lımites polares son 0 ≤ r ≤ 4 y 0 ≤ θ ≤ π. Ademas
y√x2 + y2
=r sen θ√
(r cos θ)2 + (r sen θ)2= sen θ.
Por tanto, se tiene
ξρ∫s email: [email protected] 290 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 291
∫∫
R
y√x2 + y2
dx dy =
∫ π
0
∫ 4
0
r sen θ dr dθ
=
∫ π
0
[r2
2sen θ
] ∣∣∣4
0dθ
=
∫ π
0
[(42
2sen θ) − (
02
2cos θ)
]dθ
= 8
∫ π
0
sen θ dθ = −8 cos θ∣∣∣π
0
= −8 cosπ + 8 cos 0 = 8 + 8 = 16.
♣
EJEMPLO 9.48. Calcular
∫∫
R
√4 − x2 − y2 dx dy, siendo R la region situada en el primer cuad-
rante limitada por x2 + y2 = 1.
SOLUCION.- Conviene pasar a coordenadas polares:
x = r cos θ
y = r sen θ
La circunferencia x2 + y2 = 1 se transforma en
(r cos θ)2 + (r sen θ)2 = 1
esto es, se escribe comor = 1
Que es la circunferencia con centro el punto (0, 0) y radio r = 1, ası los lımites polares son0 ≤ r ≤ 1 y 0 ≤ θ ≤ 2π.
Por otro lado, se tiene que
√4 − x2 − y2 =
√4 − (r cos θ)2 − (r sen θ)2 =
√4 − r2.
ξρ∫s email: [email protected] 291 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 292
Por tanto, se tiene
∫∫
R
√4 − x2 − y2 dx dy =
∫ 2π
0
∫ 1
0
√4 − r2 r dr dθ
= −1
2
∫ 2π
0
[(4 − r2)3/2
32]∣∣∣
1
0dθ
= −1
3(3√
3 − 8)
∫ 2π
0
dθ
=2π
3(8 − 3
√3)
♣
EJEMPLO 9.49. Calcule
∫∫
R
e−(x2+y2) dx dy, siendo R la region limitada por x2 + y2 = 16.
SOLUCION.- Los lımites polares son 0 ≤ r ≤ 4 y 0 ≤ θ ≤ 2π. Ademas
x2 + y2 = (r cos θ)2 + (r sen θ)2 = r2.
Por tanto, se tiene
∫∫
R
e−(x2+y2) dx dy =
∫ 2π
0
∫ 4
0
e−r2
r dr dθ
=
∫ 2π
0
[− e−r2
2
]∣∣∣4
0dθ
=
∫ 2π
0
[− e−16
2+e0
2
]dθ
= 2π[12− e−16
2
]
♣
EJEMPLO 9.50. Calcule
∫∫
R
ex2+y2
dx dy, siendo R la region anular limitada por las circunfer-
enciasx2 + y2 = 1 y x2 + y2 = 9.
SOLUCION.- Los lımites polares son 1 ≤ r ≤ 3 y 0 ≤ θ ≤ 2π. Ademas
ξρ∫s email: [email protected] 292 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 293
x2 + y2 = (r cos θ)2 + (r sen θ)2 = r2.
Por tanto, se tiene
∫∫
R
ex2+y2
dx dy =
∫ 2π
0
∫ 4
0
er2
r dr dθ
=
∫ 2π
0
[er2
2
] ∣∣∣3
1dθ
=
∫ 2π
0
[e9
2− e1
2
]dθ
= 2π
[e9
2− e
2
]
♣
EJEMPLO 9.51. Calcule
∫∫
R
√x2 + y2 dx dy, siendo R la region limitada por x2 + y2 = 4 y
y ≥ 0.
SOLUCION.- Los lımites polares son 0 ≤ r ≤ 2 y 0 ≤ θ ≤ π. Ademas
√x2 + y2 =
√(r cos θ)2 + (r sen θ)2 = r.
Por tanto, se tiene
∫∫
R
√x2 + y2 dx dy =
∫ π
0
∫ 2
0
r r dr dθ
=
∫ π
0
[r3
3
]∣∣∣2
0dθ
=
∫ π
0
[23
3− 03
3
]dθ
=8
3π
♣
EJEMPLO 9.52. Calcule
∫∫
R
sen√x2 + y2 dx dy, siendo R la region π2 ≤ x2 + y2 ≤ 4π2.
ξρ∫s email: [email protected] 293 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 294
SOLUCION.- Pasando a coordenadas polares tenemos
x = r cos θ
y = r sen θ
Luegoπ2 ≤ (r cos θ)2 + (r sen θ)2 ≤ 4π2
entoncesπ2 ≤ r2 ≤ 4π2
de aquıπ ≤ r ≤ 2π.
Por tanto, se tiene ∫∫
R
sen√x2 + y2 dx dy =
∫ 2π
0
∫ 2π
π
r sen r dr dθ
Hallemos la integral∫r sen r dr. Integrando por partes tenemos
u = r dv = sen rdr
du = dr v = −cosrentonces ∫
r sen r dr = −r cos r +
∫cos r dr = −r cos r + sen r
Por lo tanto
∫∫
R
sen√x2 + y2 dx dy =
∫ 2π
0
∫ 2π
π
r sen r dr dθ
=
∫ 2π
0
[−r cos r + sen r]∣∣∣2π
πdθ
=
∫ 2π
0
[(−2π cos 2π + sen 2π) − (−π cosπ + sen π)] dθ
=
∫ 2π
0
[−2π + π(−1)] dθ
= (−3π)(2π) = −6π2.
♣
EJEMPLO 9.53. Calcular la integral:
∫ 3
−3
∫ √9−x2
0
√x2 + y2 dy dx.
ξρ∫s email: [email protected] 294 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 295
SOLUCION.- La region de integracion esta limitada por la izquierda por la recta vertical x = −3por la derecha por la recta vertical x = 3, inferiormente por la recta y = 0 y superiormente por lacurva y =
√9 − x2. Para resolver este problema conviene pasar a coordenadas polares.
Elevando al cuadrado a ambos lados de la ecuacion y =√
9 − x2, obtenemos y2 = 9− x2, esto es,x2 + y2 = 9, que es la circunferencia de centro el origen y de radio 3.
Pasando a coordenadas polaresx = r cos θ
y = r sen θ
tenemos que la ecuacion x2 + y2 = 9 se transforma en
(r cos θ)2 + (r sen θ)2 = 9
entoncesr2 = 9
de aquır = 3.
Por tanto, los lımites polares de integracion son 0 ≤ θ ≤ π y 0 ≤ r ≤ 3. Por otro lado, se tieneque
√x2 + y2 =
√(r cos θ)2 + (r sen θ)2 = r.
Luego pasando a coordenadas polares obtenemos:
∫ 3
−3
∫ √9−x2
0
√x2 + y2 dy dx =
∫ π
0
∫ 3
0
r r dr dθ
=
∫ π
0
[r3
3
]∣∣∣3
0dθ
=
∫ π
0
[33
3− 03
3
]dθ
= 9π♣
EJEMPLO 9.54. Calcule la siguiente integral doble:
∫ a
0
∫ √a2−x2
0
√a2 − y2dy dx
SOLUCION.-
♣
EJEMPLO 9.55. Calcule la siguiente integral doble:
∫ a
−a
∫ √a2−x2
−√
a2−x2
dy dx
ξρ∫s email: [email protected] 295 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 296
SOLUCION.-
∫ a
−a
∫ √a2−x2
−√
a2−x2
dy dx =
∫ 2π
0
∫ a
0
r dr dθ
=
∫ 2π
0
a2
2dθ = πa2.
♣
EJEMPLO 9.56. Calcule
∫∫
R
x
x2 + y2dx dy, siendo R la region situada en el primer cuadrante
limitada por x2 + y2 = 2.
SOLUCION.- Pasando a coordenadas polares tenemos
x = r cos θ
y = r sen θ
Luego la ecuacion x2 + y2 = 2 se transforma en
(r cos θ)2 + (r sen θ)2 = 2
entoncesr2 = 2
de aquır =
√2.
Por otro lado, se tiene que
x
x2 + y2=
r cos θ
(r cos θ)2 + (r sen θ)2=
cos θ
r.
Por tanto, se tiene ∫∫
R
x
x2 + y2dx dy =
∫ π/2
0
∫ √2
0
rcos θ
rdr dθ
=
∫ π/2
0
∫ √2
0
cos θ dr dθ
=
∫ π/2
0
√2 cos θ dθ
=√
2 sen(π/2)
♣ξρ∫s email: [email protected] 296 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 297
EJEMPLO 9.57. Encuentre
∫∫
X
xye√
x2+y2dx dy, donde X es la region
x2 + y2 ≤ 1, x ≥ 0, y ≥ 0
SOLUCION.- Conviene pasar a coordenadas polares:
x = r cos θ
y = r sen θ
La circunferencia x2 + y2 = 1 se transforma en
(r cos θ)2 + (r sen θ)2 = 1
esto es, se escribe comor = 1
Que es la circunferencia con centro el punto (0, 0) y radio r = 1, por otro lado estamos interesadosen el primer cuadrante debido a que x ≥ 0 y y ≥ 0. Ası los lımites polares son 0 ≤ r ≤ 1 y
0 ≤ θ ≤ π
2.
Por otro lado, se tiene que
√x2 + y2 =
√(r cos θ)2 + (r sen θ)2 =
√r2 = r.
Ademasxy = r2 cos θ sen θ
Por tanto, se tiene
∫∫
R
xye√
x2+y2dx dy =
∫ π2
0
∫ 1
0
r2 cos θ sen θ er r dr dθ
=
[∫ π2
0
cos θ sen θ dθ
] [∫ 1
0
r3 er dr
]
=
[1
2sen2 θ
∣∣∣π2
0
] [(r3 − 3r2 + 6r − 6) er
∣∣∣1
0
]
=1
2
[(1 − 3 + 6 − 6)e− (−6)
]=
6 − 2e
2= 3 − e
♣EJEMPLO 9.58. Encuentre
∫∫
X
xe√
x2+y2dx dy, donde X es la region
x2 + y2 ≤ 1, 0 ≤ y ≤ x
ξρ∫s email: [email protected] 297 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 298
SOLUCION.- Conviene pasar a coordenadas polares:
x = r cos θ
y = r sen θ
La circunferencia x2 + y2 = 1 se transforma en
(r cos θ)2 + (r sen θ)2 = 1
esto es, se escribe comor = 1
Que es la circunferencia con centro el punto (0, 0) y radio r = 1, por otro lado estamos interesados
en la region 0 ≤ y ≤ x. Ası los lımites polares son 0 ≤ r ≤ 1 y 0 ≤ θ ≤ π
4.
Por otro lado, se tiene que
√x2 + y2 =
√(r cos θ)2 + (r sen θ)2 =
√r2 = r.
Por tanto, se tiene
∫∫
R
xe√
x2+y2dx dy =
∫ π4
0
∫ 1
0
r cos θ er r dr dθ
=
[∫ π4
0
cos θ dθ
] [∫ 1
0
r2 er dr
]
= sen θ∣∣∣
π4
0
[(r2 − 2r − 2) er
∣∣∣1
0
]
=1√2
[(1 − 2 − 2)e− (−2)] =−3e+ 2√
2 ♣
EJEMPLO 9.59. Calcular la integral
∫∫
R
y dx dy, donde R la region del plano xy en el primer
cuadrante limitada por x2 + y2 = 4x.
SOLUCION.- Completando cuadrados en la ecuacion x2 + y2 = 4x, tenemos
x2 + y2 = 4xx2 − 4x+ y2 = 0
x2 − 4x+ 22 + y2 = 22
esto es,(x− 2)2 + y2 = 22 (9.10)
ξρ∫s email: [email protected] 298 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 299
Pasando a coordenadas polares tenemos
x = r cos θ
y = r sen θ
Luego la ecuacion x2 + y2 = 4x se transforma en
(r cos θ)2 + (r sen θ)2 = 4r cos θ
entoncesr2 = 4r cos θ
de aquır = 4 cos θ.
Que es la circunferencia con centro el punto (2, 0) y radio r = 2 cuya ecuacion cartesiana es(9.10). Puesto que la region R esta situada en el primer cuadrante, entonces los lımites polares
son 0 ≤ θ ≤ π
2y 0 ≤ r ≤ 4 cos θ.
Por tanto, se tiene
∫∫
R
y dx dy =
∫ π2
0
∫ 4 cos θ
0
r r sen θ dr dθ =
∫ π2
0
[r3
3sen θ
]∣∣∣4 cos θ
0dθ =
∫ π2
0
43 cos3 θ sen θ
3dθ
=43
3
∫ π2
0
cos3 θ sen θ dθ = −43
3
∫ π2
0
u3 du = −43
3
u4
4
∣∣∣π2
0= −43
3
(cos θ)4
4
∣∣∣π2
0
= −43
3
cos4 θ
4
∣∣∣π2
0= −42
3
[cos4 θ
] ∣∣∣π2
0= −42
3
[cos4 π
2− cos4 0
]=
16
3
♣
EJEMPLO 9.60. Calcule
∫∫
R
√x2 + y2 dx dy, siendo R la region situada en el primer cuadrante
limitada por x2 + y2 = 4x.
SOLUCION.- Completando cuadrados en la ecuacion x2 + y2 = 4x, tenemos
x2 + y2 = 4xx2 − 4x+ y2 = 0
x2 − 4x+ 22 + y2 = 22
esto es,(x− 2)2 + y2 = 22 (9.11)
ξρ∫s email: [email protected] 299 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 300
Pasando a coordenadas polares tenemos
x = r cos θ
y = r sen θ
Luego la ecuacion x2 + y2 = 4x se transforma en
(r cos θ)2 + (r sen θ)2 = 4r cos θ
entoncesr2 = 4r cos θ
de aquır = 4 cos θ.
Que es la circunferencia con centro el punto (2, 0) y radio r = 2 cuya ecuacion cartesiana es(9.11). Puesto quer la region R esta situada en el primer cuadrante, entonces los lımites polares
son 0 ≤ θ ≤ π
2y 0 ≤ r ≤ 4 cos θ.
Por otro lado, se tiene que
√x2 + y2 =
√(r cos θ)2 + (r sen θ)2 = r.
Por tanto, se tiene
∫∫
R
√x2 + y2 dx dy =
∫ π2
0
∫ 4 cos θ
0
r r dr dθ =
∫ π2
0
[r3
3
]∣∣∣4 cos θ
0dθ =
∫ π2
0
43 cos3 θ
3dθ
=43
3
∫ π2
0
(1 − sen2 θ) cos θ dθ =43
3
[∫ π2
0
cos θ dθ −∫ π
2
0
sen2 θ cos θ dθ
]
=43
3
[sen θ
∣∣∣π2
0− sen3 θ
3
∣∣∣π2
0
]=
43
3
[1 − 1
3
]
♣
EJEMPLO 9.61. Calcule
∫∫
R
x
x2 + y2dx dy, siendo R la region situada en el primer cuadrante
limitada por x2 + y2 = 2x.
SOLUCION.- Pasando a coordenadas polares tenemos
x = r cos θ
y = r sen θ
ξρ∫s email: [email protected] 300 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 301
Luego la ecuacion x2 + y2 = 2x se transforma en
(r cos θ)2 + (r sen θ)2 = 2r cos θ
entoncesr2 = r cos θ
de aquır = cos θ.
Por otro lado, se tiene que
x
x2 + y2=
r cos θ
(r cos θ)2 + (r sen θ)2=
cos θ
r.
Por tanto, se tiene ∫∫
R
x
x2 + y2dx dy =
∫ π/2
0
∫ cos θ
0
rcos θ
rdr dθ
=
∫ π/2
0
∫ cos θ
0
cos θ dr dθ
=
∫ π/2
0
cos2 θ dθ
=
∫ π/2
0
1 + cos 2θ
2dθ
=1
2
(θ +
sen 2θ
2
)∣∣∣2π
0
♣
EJEMPLO 9.62. Calcule el area de la region situada en el primer cuadrante limitada por x2 +y2 = 2x.
SOLUCION 1.- Conviene pasar a coordenadas polares:
x = r cos θ
y = r sen θ
La circunferencia x2 + y2 = 2x se transforma en
(r cos θ)2 + (r sen θ)2 = 2r cos θ
esto es, se escribe comor = 2 cos θ
ξρ∫s email: [email protected] 301 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 302
Que es la circunferencia con centro el punto (1, 0) y radio r = 1, ası los lımites polares son0 ≤ θ ≤ 2π y 0 ≤ r ≤ 2 cos θ.
Por tanto, se tiene
A =
∫∫
R
dx dy =
∫ 2π
0
∫ 2 cos θ
0
r dr dθ =
∫ 2π
0
[r2
2
] ∣∣∣2 cos θ
0dθ
=
∫ 2π
0
[(42 cos2 θ
2) − (
02
2)
]dθ = 8
∫ 2π
0
cos2 θ dθ
= 8
[1
2θ +
1
4sen 2θ
] ∣∣∣2π
0= 8
[1
22π +
1
4sen 2(2)π
]= 8π
Solucion 2. Completando cuadrados en la ecuacion x2 + y2 = 2x, tenemos
x2 + y2 = 2xx2 − 2x+ y2 = 0
x2 − 2x+ 1 + y2 = 1(x− 1)2 + y2 = 1
Ası la region esta limitada inferiormente por la recta y = 0 y superiormente por la circunferenciay =
√2x− x2; entonces primero integramos con respecto al eje x desde 0 hasta 2. Luego integramos
respecto al eje y desde y = 0 hasta y =√
2x− x2.
A =
∫∫
R
dx dy =
∫ 2
0
∫ y=√
2x−x2
y=0
dy dx =
∫ 2
0
√2x− x2 dx
Puesto que
√2x− x2 =
√−(−2x + x2) =
√1 − (1 − 2x+ x2) =
√1 − (1 − x)2
entonces ∫ √2x− x2 dx =
∫ √1 − (1 − x)2 dx = −
∫ √1 − u2 du
Por formula ∫ √a2 − u2 du =
u
2
√a2 − u2 +
a2
2arc sen
u
a
se tiene que
∫ √2x− x2 dx = −
∫ √1 − u2 du = −u
2
√1 − u2 − 12
2arc sen u
ξρ∫s email: [email protected] 302 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 303
ası
∫ √2x− x2 dx = −1 − x
2
√1 − (1 − x)2 − 1
2arc sen(1 − x)
Por tanto
A =
[−1 − x
2
√1 − (1 − x)2 − 1
2arc sen(1 − x)
] ∣∣∣2
0
♣
9.4. Integrales triples
Sea f(x, y, z) una funcion en tres variables. Las integrales triples se definen sobre un solido tridi-mensional en lugar de una region plana. Es decir, la region de integracion en este caso es un solido.El grafico de la funcion f es un subconjunto de R
4 (que corresponde al grafico de la ecuacion:w = f(x, y, z)). Por esta razon no se puede representar la funcion en el espacio tridimensional.
Las integrales triples, que veremos en este capıtulo, estaran restringidas a ciertos solidos en elespacio. Mas especıficamente, un solido sera un solido de integracion si esta acotado por arribapor una superficie z = h2(x, y) y por abajo por una superficie z = h1(x, y) y sobre una region delplano R de tipo I, II o III. En sıntesis:
Ω = (x, y, z) : (x, y) ∈ R y h1(x, y) ≤ z ≤ h2(x, y) (9.12)
Entonces, la integral triple la funcion f(x, y, z) sobre el solido Ω puede ser calculado usando elsiguiente teorema:
TEOREMA 9.7 (Teorema fundamental de las integrales triples). Si f(x, y, z) es unafuncion integrable sobre el solido Ω definido en (9.12) entonces
∫∫∫
Ω
f(x, y, z) dx dy dz =
∫∫
R
[∫ h2(x,y)
h1(x,y)
f(x, y, z) dz
]dA
Demostracion.
Observe que la region R del plano xy se obtiene al proyectar el solido Ω en dicho plano.
TEOREMA 9.8 (Teorema de Fubini). Sean R una region cerrada y acotada de R3 y f : R →
R continua en R.
ξρ∫s email: [email protected] 303 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 304
1. Si R esta definida por R = [a1, b1] × [a2, b2] × [a3, b3], entonces
∫∫∫
R
f(x, y, z) dx dy dz =
∫ b1
a1
∫ b2
a2
∫ b3
a3
f(x, y, z) dz dy dx
2. Si R esta definida por a ≤ x ≤ b y y1(x) ≤ y ≤ y2(x), z1(x, y) ≤ z ≤ z2(x, y), donde y1,y2, z1 y z2 son continuas sobre [a, b] y (x, y) : x ∈ [a, b], y ∈ [y1(x), y2(x)] respectivamente,entonces ∫∫∫
R
f(x, y, z) dx dy dz =
∫ b
a
∫ y2(x)
y1(x)
∫ z2(x,y)
z1(x,y)
f(x, y, z) dz dy dx
EJEMPLO 9.63. Si V es el conjunto 0 ≤ x ≤ 2, 0 ≤ y ≤ 3, 1 ≤ z ≤ 2, Calcular aproximada-
mente la integral triple
∫∫∫
V
xyz dV .
SOLUCION.- ♣
EJEMPLO 9.64. Calcular la siguientes integrales iteradas
(1)
∫ 2
0
∫ 1
0
∫ 2
1
dz dy dx (2)
∫ π/2
0
∫ 1
0
∫ 2
1
zr2 sen θ dz dr dθ
(3)
∫ 4
0
∫ 2√
z
0
∫ √4z−x2
0
dy dx dz (4)
∫ 2
0
∫ 6−2y
2−y
∫ √4−y2
0
z dz dx dy
SOLUCION.- ♣
EJEMPLO 9.65. Calcular el volumen del tetraedro limitado porx
a+y
b+z
c= 1 y los planos
coordenados.
SOLUCION.- ♣
EJEMPLO 9.66. Hallar el volumen del solido limitado por x + y = 1, x = 2y, y = 0, z = 0,z = 4.
SOLUCION.- ♣
EJEMPLO 9.67. Hallar el volumen encerrado por x− y + 2z = 0, y = 2, x = 0, z = 0.
SOLUCION.- ♣
ξρ∫s email: [email protected] 304 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 305
EJEMPLO 9.68. Sea Ω el solido acotado por el plano x + y + z = 1, los planos x = 0, y = 0,
z = 0. Calcular
∫∫∫
Ω
ex(y + 2z) dV
SOLUCION.- El grafico de la region de interes es
techo de Ω: h2(x, y) = 1 − x− y
piso de Ω: h1(x, y) = 0
sombra de Ω: triangulo en el plano xy
Entonces, por la definicion anterior
∫∫∫
Ω
ex(y + 2z) dV =
∫∫
R
[∫ 1−x−y
0
ex(y + 2z) dz
]dA
Calculemos en primer lugar la integral parcial con respecto a z:
∫ 1−x−y
0
ex(y + 2z) dz =(exyz + exz2
)∣∣∣1−x−y
0
= exy(1 − x− y) + ex(1 − x− y)2
= ex + exx2 − 2exx+ exxy − exy
Luego integramos este resultado sobre la region del plano R.
ξρ∫s email: [email protected] 305 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 306
R = (x, y) : 0 ≤ x ≤ 1, 0 ≤ y ≤ 1 − x
Finalmente, la integral doble que resulta es facil de calcular (le dejamos al lector esta tarea) ydamos aquı el resultado numerico:
∫ 1
0
∫ 1−x
0
(ex + exx2 − 2exx+ exxy − exy
)dx dy =
6e− 21
8 ♣
EJEMPLO 9.69. Sea Ω el solido [1, 2] × [0, 3] × [2, 3]. Calcular
∫∫∫
Ω
(x+ y2 + z3) dV
SOLUCION.-
La region de integracion es la ilustrada:
En terminos analıticos, esta region se describe por:
R = (x, y) : 1 ≤ x ≤ 2, 0 ≤ y ≤ 3
Por lo tanto:
∫∫∫
Ω
(x+ y2 + z3) dV =
∫ 2
1
∫ 3
0
∫ 3
2
(x+ y2 + z2
)dz dy dx =
∫ 2
1
∫ 3
0
(xz + y2z +
z4
4
)∣∣∣∣3
2
dy dx
=
∫ 2
1
∫ 3
0
(x+ y2 +
65
4
)dy dx =
∫ 2
1
(xy +
y3
3+
65y
4
)∣∣∣∣3
0
dx
=
∫ 2
1
(3x+
27
3+
195
4
)dx =
(3x2
2+
231x
4
)∣∣∣∣2
1
=249
4♣
ξρ∫s email: [email protected] 306 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 307
EJEMPLO 9.70. Calcular el volumen del solido acotado por las siguientes superficies: cilindrox2 + y2 = 1 y los planos y = 0, x+ y + z = 2 y z = 0.
SOLUCION.- El grafico muestra el interior del semi-cilindro y su interseccion con el plano (vistodesde el eje x negativo).
En este caso, el techo (plano diagonal) corresponde a la superficie z = 2 − x − y. Asimismo, elpiso (plano) es la superficie z = 0 y finalmente, la region de integracion R es el semi-cırculo de lafigura.
V =
∫∫
R
[∫ 2−x−y
0
dz
]dA =
∫∫
R
(2 − x− y) dA =
∫ π
0
∫ 1
0
(2 − r cos θ − r sen θ
)r dr dθ
=
∫ π
0
∫ 1
0
(2r − r2 cos θ − r2 sen θ
)dr dθ
=
∫ π
0
(r2 − r3
3cos θ − r3
3sen θ
)∣∣∣∣1
0
dθ
=
∫ π
0
(1 − 1
3cos θ − 1
3sen θ
)dθ
= θ∣∣∣π
0− 1
3
∫ π
0
(cos θ − sen θ) dθ
= π − 1
3(cos θ − sen θ)
∣∣∣π
0= π − 1
3(0 + 1 − 0 + 1) = π − 2
3♣
ξρ∫s email: [email protected] 307 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 308
EJEMPLO 9.71. Sea Ω el solido acotada por arriba por el paraboloide hiperbolico z = 8+x2−y2 ypor abajo por el paraboloide z = x2+y2 sobre el rectangulo R = (x, y)|−2 ≤ x ≤ 2, −2 ≤ y ≤ 2.Calculemos el volumen de este solido y la integral dada:
∫∫∫
Ω
xyz dV
SOLUCION.-
Para calcular el volumen usamos la formula V =
∫∫∫
Ω
dV . Entonces,
V =
∫∫
R
[∫ 8+x2+y2
x2+y2
dz
]dA =
∫∫
R
(8 − 2y2) dA =
∫ 2
−2
∫ 2
−2
(8 − 2y2
)dy dx
=
∫ 2
−2
(8y − 2y3
3
)∣∣∣∣2
−2
dx =
∫ 2
−2
(32 − 32
3
)dx = 128 +
128
3
Nos abocamos ahora a calcular la integral
∫∫∫
Ω
xyz dV
∫∫∫
Ω
xyz dV =
∫ 2
−2
∫ 2
−2
∫ 8+x2−y2
x2+y2
xyz dzdy dx =
∫ 2
−2
∫ 2
−2
(xyz2
2
)∣∣∣∣8+x2−y2
x2+y2
dy dx
=
∫ 2
−2
∫ 2
−2
xy((8 + x2 − y2)2 − (x2 + y2)2
)dy dx
=
∫ 2
−2
∫ 2
−2
(64xy + 16x3y − 16xy3 − 4x3y3
)dy dx
=
∫ 2
−2
0 dx = 0
♣
EJEMPLO 9.72. Veremos ahora tres ejercicios de muestra para practicar la descripcion de unsolido de integracion en terminos de desigualdades, para llegar a plantear una integral iterada (queno calcularemos por el momento).
1. Ω es el solido acotado por el cilindro z = 1− y2 y los planos verticales x+ y = 1 y x+ y = 3y el plano xy.
2. Ω es el solido acotado por abajo por el paraboloide z = x2 + y2 y por arriba por la superficiex2 + y2 + z2 = 6.
3. Ω es el solido acotado por x = 4 − y2 (cilindro parabolico) y los planos z = x y z = 0.
ξρ∫s email: [email protected] 308 Jasmer LPC
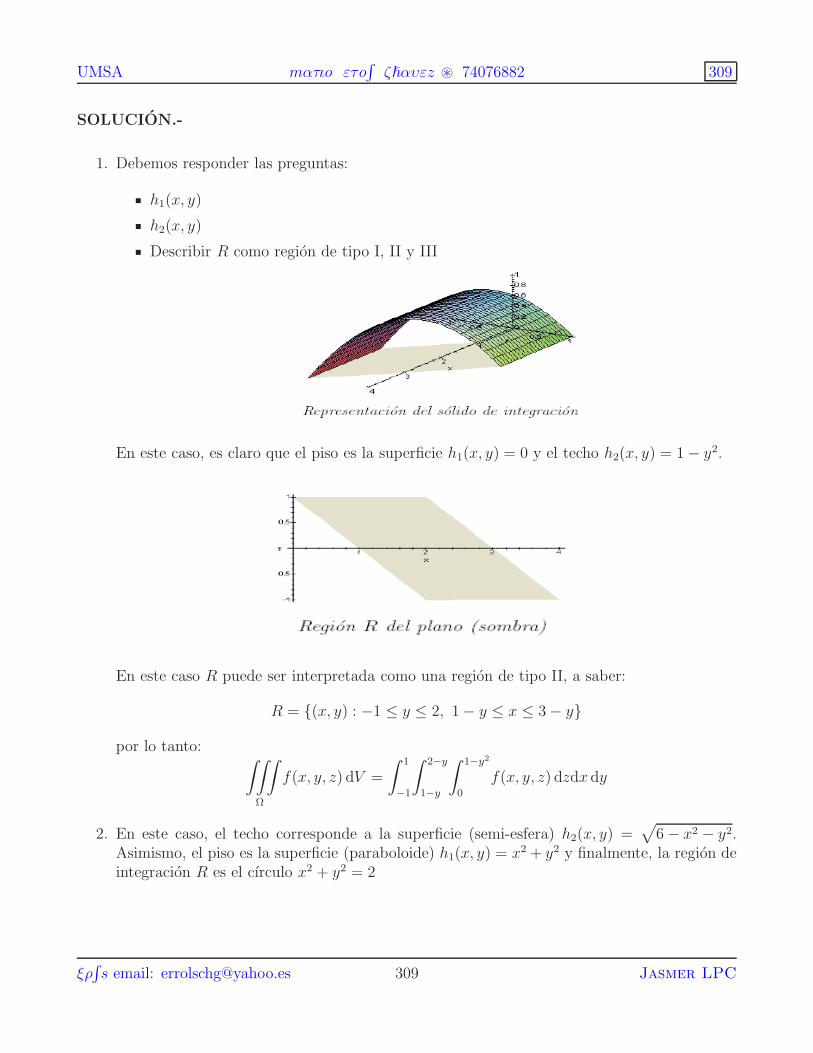
UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 309
SOLUCION.-
1. Debemos responder las preguntas:
h1(x, y)
h2(x, y)
Describir R como region de tipo I, II y III
En este caso, es claro que el piso es la superficie h1(x, y) = 0 y el techo h2(x, y) = 1 − y2.
En este caso R puede ser interpretada como una region de tipo II, a saber:
R = (x, y) : −1 ≤ y ≤ 2, 1 − y ≤ x ≤ 3 − y
por lo tanto: ∫∫∫
Ω
f(x, y, z) dV =
∫ 1
−1
∫ 2−y
1−y
∫ 1−y2
0
f(x, y, z) dzdx dy
2. En este caso, el techo corresponde a la superficie (semi-esfera) h2(x, y) =√
6 − x2 − y2.Asimismo, el piso es la superficie (paraboloide) h1(x, y) = x2 + y2 y finalmente, la region deintegracion R es el cırculo x2 + y2 = 2
ξρ∫s email: [email protected] 309 Jasmer LPC
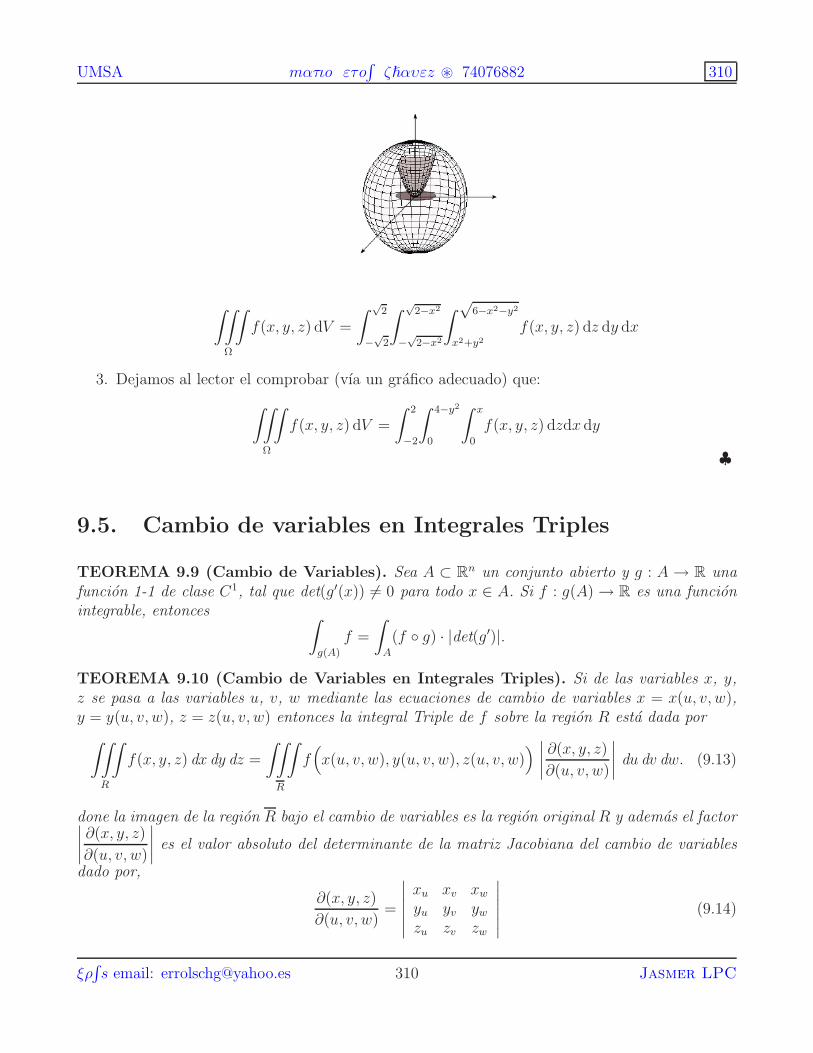
UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 310
∫∫∫
Ω
f(x, y, z) dV =
∫ √2
−√
2
∫ √2−x2
−√
2−x2
∫ √6−x2−y2
x2+y2
f(x, y, z) dz dy dx
3. Dejamos al lector el comprobar (vıa un grafico adecuado) que:
∫∫∫
Ω
f(x, y, z) dV =
∫ 2
−2
∫ 4−y2
0
∫ x
0
f(x, y, z) dzdx dy
♣
9.5. Cambio de variables en Integrales Triples
TEOREMA 9.9 (Cambio de Variables). Sea A ⊂ Rn un conjunto abierto y g : A → R una
funcion 1-1 de clase C1, tal que det(g′(x)) 6= 0 para todo x ∈ A. Si f : g(A) → R es una funcionintegrable, entonces ∫
g(A)
f =
∫
A
(f g) · |det(g′)|.
TEOREMA 9.10 (Cambio de Variables en Integrales Triples). Si de las variables x, y,z se pasa a las variables u, v, w mediante las ecuaciones de cambio de variables x = x(u, v, w),y = y(u, v, w), z = z(u, v, w) entonces la integral Triple de f sobre la region R esta dada por
∫∫∫
R
f(x, y, z) dx dy dz =
∫∫∫
R
f(x(u, v, w), y(u, v, w), z(u, v, w)
) ∣∣∣∣∂(x, y, z)
∂(u, v, w)
∣∣∣∣ du dv dw. (9.13)
done la imagen de la region R bajo el cambio de variables es la region original R y ademas el factor∣∣∣∣∂(x, y, z)
∂(u, v, w)
∣∣∣∣ es el valor absoluto del determinante de la matriz Jacobiana del cambio de variables
dado por,
∂(x, y, z)
∂(u, v, w)=
∣∣∣∣∣∣
xu xv xw
yu yv yw
zu zv zw
∣∣∣∣∣∣(9.14)
ξρ∫s email: [email protected] 310 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 311
9.5.1. Integrales triples en coordenadas cilındricas
Coordenadas cilındricas son una manera alternativa de representar puntos en el espacio. Descrip-cion de las coordenadas cilındricas: Todo punto en el espacio se puede representar por un triple(r, θ, z), en el que el par (r, θ) corresponde a la representacion en coordenadas polares del punto(x, y).
La figura que sigue muestra como se interpreta el punto (r, θ, z) en el espacio y la relacion con lascoordenadas rectangulares habituales. En particular, se tienen las siguientes relaciones:
x = r cos θ
y = r sen θz = z
(9.15)
El elemento solido de la descripcion mas simple tiene la siguiente forma:
Ω =
(r, θ, z) : a ≤ r ≤ b, α ≤ θ ≤ β, c ≤ z ≤ d
Luego, el determinante de la matriz Jacobiana del cambio de variables (9.15) es dado por
∂(x, y, z)
∂(r, θ, z)=
∣∣∣∣∣∣
xr xθ 0yr yθ 00 0 1
∣∣∣∣∣∣=
∣∣∣∣cos θ −r sen θsen θ r cos θ
∣∣∣∣ = r[cos2 θ + sen2 θ] = r.
Por (9.6) y esta ultima igualdad se tiene
ξρ∫s email: [email protected] 311 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 312
TEOREMA 9.11 (Cambio de variables a Coordenadas Cilındricas). Sean B ⊂
(r, θ, z) :
r ≥ 0, 0 ≤ θ < 2π
acotado, TC(r, θ, z) = (r cos θ, r sen θ, z) y f : TC(B) → R continua y acotada.
Entonces ∫∫∫
TC(B)
f(x, y, z) dx dy dz =
∫∫∫
B
f(r cos θ, r sen θ, z) r dr dθ dz.
DEMOSTRACION.
En particular si
Ω =
(r, θ, z) : r1 ≤ r ≤ r2, θ1 ≤ θ ≤ θ2, z1(θ, r) ≤ z ≤ z2(θ, r)
entonces
V ol(Ω) =
∫ θ=θ2
θ=θ1
∫ r=r2
r=r1
∫ z=z2(θ,r)
z=z1(θ,r)
r dz dr dθ
EJEMPLO 9.73. Sea el solido dado por x2 + y2 ≤ 1, 0 ≤ z ≤√x2 + y2. Hallar
∫∫∫
S
z dx dy dz
SOLUCION.- Cambiando a coordenadas cilındricas obtenemos
∫∫∫
S
z dx dy dz =
∫∫∫
S
rz dr dθ dz =
∫ 2π
0
∫ 1
0
∫ r
0
rz dz dr dθ =
∫ 2π
0
∫ 1
0
rz2
2
∣∣∣r
0dr dθ
=
∫ 2π
0
∫ 1
0
r3
2dr dθ =
1
2
∫ 2π
0
r4
4
∣∣∣∣1
0
dθ =1
8
∫ 2π
0
dθ =π
4♣
EJEMPLO 9.74. Determinar el volumen del solido limitado por el semicono z =√x2 + y2 y el
plano z = 4
SOLUCION.- En el plano xy solo existe un punto, pero en un plano paralelo al plano xy, z = 4,se forma la circunferencia x2 + y2 = 16
ξρ∫s email: [email protected] 312 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 313
Observe que
x2 + y2 = 16, (r cos θ)2 + (r sen θ)2 = 16, r2(cos2 θ + sen2 θ) = 16, r2 = 16, r = 4.
El cono en coordenadas cilındricas queda:
z =√x2 + y2, z =
√(r cos θ)2 + (r sen θ)2, z =
√r2(cos2 θ + sen2 θ), z =
√r2, z = r.
Nota: No es posible reemplazar en z = r el valor de r = 4 porque r = 4 corresponde a la figuraque queda en el plano xy, por lo tanto se esta trabajando en R
2, en cambio z = r correspondea la transformacion de una superficie, es decir, se esta trabajando en R
3. Luego, los sistemas sonincompatibles.
Por simetrıa
V ol(S) =
∫∫∫
S
dx dy dz =
∫∫∫
S
r dr dθ dz = 4
∫ π/2
0
∫ 4
0
∫ 4
r
r dz dr dθ = 4
∫ π/2
0
∫ 4
0
rz∣∣∣4
rdr dθ
= 4
∫ π/2
0
∫ 4
0
(4r − r2) dr dθ = 4
∫ π/2
0
(2r2 − r3
3
) ∣∣∣4
0dθ = 4
∫ π/2
0
32
3dθ =
128
3
∣∣∣π/2
0=
64
3π
♣
EJEMPLO 9.75. Determinar el volumen del solido, sobre el plano xy, limitado por el cilindrox2 + (y − 3)2 = 9 y el cono x2 + y2 = z2.
SOLUCION.- La region en el espacio y en plano:
El cilindro x2 + (y − 3)2 = 9 en coordenadas cilındricas:
x2 + y2 − 6y + 9 = 9
(r cos θ)2 + (r sen θ)2 − 6r sen θ = 0
r2 − 6r sen θ = 16r = 0 r = 6 sen θ
ξρ∫s email: [email protected] 313 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 314
El cono en coordenadas cilındricas queda:
z2 = x2 + y2, z2 = (r cos θ)2 + (r sen θ)2, z2 = r2(cos2 θ + sen2 θ), z2 = r2, z = r.
V ol(S) =
∫∫∫
S
dx dy dz =
∫∫∫
S
r dr dθ dz =
∫ π
0
∫ 6 sen θ
0
∫ r
0
r dz dr dθ
=
∫ π
0
∫ 6 sen θ
0
rz∣∣∣r
0dr dθ =
∫ π
0
∫ 6 sen θ
0
r2 dr dθ =
∫ π
0
r3
3
∣∣∣6 sen θ
0dθ
=1
3
∫ π
0
216 sen3 θ dθ = 72
∫ π
0
sen2 θ sen θ dθ = 72
∫ π
0
(1 − cos2 θ) sen θ dθ
= 72
∫ π
0
(sen θ − cos2 θ sen θ) dθ = 72
(− cos θ +
cos3 θ
3
) ∣∣∣π
0= 96
♣
EJEMPLO 9.76. Hallar el volumen encerrado por x2 + y2 = z, x2 + y2 = 4, z = 0. Sugerencia:use Coordenadas Cilındricas.
SOLUCION.- Conviene pasar a coordenadas cilındricas tenemos
x = r cos θ
y = r sen θz = z
entonces
z = x2 + y2 se transforma en z = r2
x2 + y2 = 4 se transforma en r = 2z = 0 se transforma en z = 0
El determinante de la matriz Jacobiana del cambio de variables es dado por
∂(x, y, z)
∂(r, θ, z)=
∣∣∣∣∣∣
xr xθ 0yr yθ 00 0 1
∣∣∣∣∣∣=
∣∣∣∣cos θ −r sen θsen θ r cos θ
∣∣∣∣ = r[cos2 θ + sen2 θ] = r.
Ahora, primeramente integramos con respecto de z desde el plano que lo limita inferiormente z = 0hasta el paraboloide z = r2 que lo limita superiormente. Con respecto a las otras dos variablesintegramos sobre la proyeccion en el plano xy que es un disco de radio 2, por tanto con respectode r integramos desde r = 0 hasta r = 2, para cubrir todo el cırculo el angulo θ debe variar desdeθ = 0 hasta θ = 2π:
ξρ∫s email: [email protected] 314 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 315
V olumen =
∫∫∫
R
1 dx dy dz =
∫∫∫
R
r dr dθ dz.
=
∫ 2π
0
∫ 2
0
∫ r2
0
r dz dr dθ =
∫ 2π
0
∫ 2
0
r3 dr dθ
=
∫ 2π
0
r4
4
∣∣∣∣2
0
dθ = 4
∫ 2π
0
dθ = 8π
♣
EJEMPLO 9.77. Calcule la integral∫∫∫
V
(2zx2 + 2zy2
)dx dy dz
siendo V el volumen exterior a la hoja superior del cono z2 = x2 + y2 e interior al cilindrox2 + y2 = 1, con z ≥ 0.
SOLUCION.- La interseccion del cono con el cilindro es:
x2 + y2 = z2
x2 + y2 = 1
la circunferencia x2 + y2 = 1 en el plano z = 1.
El conjunto V sera el conjunto descrito por:
V =
(x, y, z) ∈ R3 : x2 + y2 ≤ 1, 0 ≤ z ≤
√x2 + y2
Haciendo el cambio a coordenadas cilındricas
x = r cos θ
y = r sen θz = z
T : U → R3, T (r, θ, z) = (r cos θ, r sen θ, z)
siendo U =]0; +∞]×]0, 2π[×R, el determinante de la matriz Jacobiana es JT (r, θ, z) = r
ξρ∫s email: [email protected] 315 Jasmer LPC
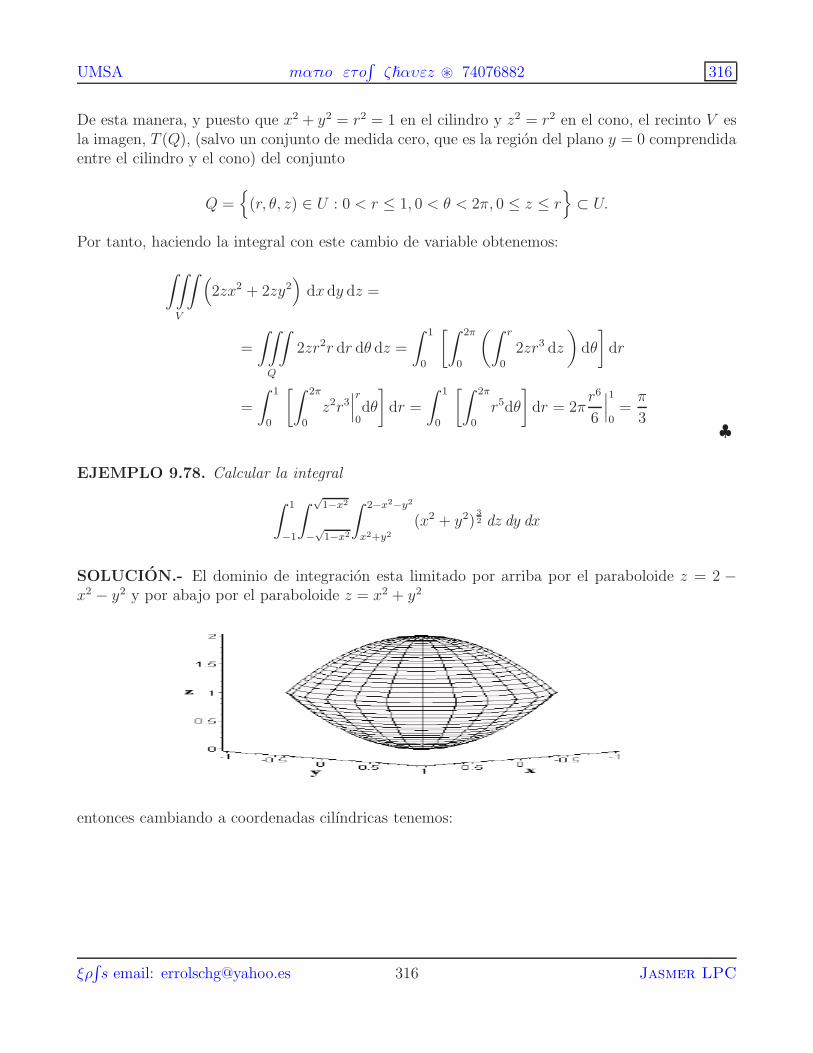
UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 316
De esta manera, y puesto que x2 + y2 = r2 = 1 en el cilindro y z2 = r2 en el cono, el recinto V esla imagen, T (Q), (salvo un conjunto de medida cero, que es la region del plano y = 0 comprendidaentre el cilindro y el cono) del conjunto
Q =
(r, θ, z) ∈ U : 0 < r ≤ 1, 0 < θ < 2π, 0 ≤ z ≤ r⊂ U.
Por tanto, haciendo la integral con este cambio de variable obtenemos:
∫∫∫
V
(2zx2 + 2zy2
)dx dy dz =
=
∫∫∫
Q
2zr2r dr dθ dz =
∫ 1
0
[∫ 2π
0
(∫ r
0
2zr3 dz
)dθ
]dr
=
∫ 1
0
[∫ 2π
0
z2r3∣∣∣r
0dθ
]dr =
∫ 1
0
[∫ 2π
0
r5dθ
]dr = 2π
r6
6
∣∣∣1
0=π
3♣
EJEMPLO 9.78. Calcular la integral
∫ 1
−1
∫ √1−x2
−√
1−x2
∫ 2−x2−y2
x2+y2
(x2 + y2)32 dz dy dx
SOLUCION.- El dominio de integracion esta limitado por arriba por el paraboloide z = 2 −x2 − y2 y por abajo por el paraboloide z = x2 + y2
entonces cambiando a coordenadas cilındricas tenemos:
ξρ∫s email: [email protected] 316 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 317
V =
∫ 1
−1
∫ √1−x2
−√
1−x2
∫ 2−x2−y2
x2+y2
(x2 + y2)32 dz dy dx =
∫ 2π
0
∫ 1
0
∫ 2−r2
r2
(r2) 3
2r dz dr dθ
=
∫ 2π
0
∫ 1
0
∫ 2−r2
r2
r4 dz dr dθ =
∫ 2π
0
∫ 1
0
z∣∣∣2−r2
r2r4 dz dr dθ =
∫ 2π
0
∫ 1
0
(2r4 − 2r6
)dr dθ
=
∫ 2π
0
[2r5
5− 2r7
7
] ∣∣∣1
0dθ =
4
35
∫ 2π
0
dθ =8π
35
♣
EJEMPLO 9.79. Calcular el volumen de una esfera de radio a.
SOLUCION.- Sabemos que
V olumen =
∫∫∫
Ω
1 dV
Por lo que necesitamos una descripcion de la esfera como un solido de integracion de manera quepodamos calcular la integral triple usando integrales iteradas. Para lograr esto, primero ubicamosla esfera en el espacio de modo que est´e centrada en el origen: la ecuacion de la esfera es x2 +y2 + z2 = a2. Entonces, el piso y el techo de la esfera corresponden a las siguientes superficies:z = −
√a2 − (x2 + y2) y z =
√a2 − (x2 + y2) respectivamente. La region R del plano (sombra)
de este solido es el cırculo de radio a2: x2 + y2 = a2. Ası, entonces se tiene:
V =
∫∫
R
[∫ √a2−(x2+y2)
−√
a2−(x2+y2)
dz
]dA =
∫ a
−a
∫ √a2−x2
−√
a2−x2
[∫ √a2−(x2+y2)
−√
a2−(x2+y2)
dz
]dy dx
Esta integral iterada presenta problemas tecnicos para su calculo. Sin embargo, si usamos coor-denadas cilındricas para representar el solido, el problema tecnico desaparece, como veremos acontinuacion.
V =
∫∫
R
[∫ √a2−(x2+y2)
−√
a2−(x2+y2)
dz
]dA =
∫ 2π
0
∫ a
0
[∫ √a2−r2
−√
a2−r2
dz
]r dr dθ
=
∫ 2π
0
∫ a
0
z r∣∣∣√
a2−r2
−√
a2−r2dr dθ =
∫ 2π
0
∫ a
0
2r√a2 − r2 dr dθ
= −2
3
∫ 2π
0
(a2 − r2
) 32∣∣∣a
0dθ =
2
3
∫ 2π
0
a3dθ =4π
3a3
Esta ultima es la formula clasica para el volumen de la esfera de radio a. ♣
ξρ∫s email: [email protected] 317 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 318
EJEMPLO 9.80. Encuentre el centroide de la parte del primer octante de la pelota solida limitadapor la esfera r2 + z2 = a2
SOLUCION.- ♣
EJEMPLO 9.81. Calcule la integral
∫∫∫
V
(x2 + y2) dx dy dz donde V es el volumen limitado por
la semiesfera x2 + y2 + z2 = 4, z ≥ 0 y cortada por el cilindro x2 + y2 = 1.
SOLUCION.- ♣
EJEMPLO 9.82. Exprese el volumen del solido entre las esferas x2 +y2 +z2 = 4 y x2 +y2 +z2 =
1 y dentro el cono z =1√3
√x2 + y2, usando (a) Coordenadas cartesianas y (b) Coordenadas
cilındricas.
SOLUCION.- ♣
EJEMPLO 9.83. Calcula el volumen del solido limitado por las superficies de ecuaciones y2 +z2 = 9, x+ z = 4, y y − 2x− 3z = 12.
SOLUCION.- El solido es un cilindro cortado por dos planos, y su proyeccion sobre el plano yzes el cırculo de radio 3 centrado en el origen. Para cada punto del cırculo, la altura x varıa entre
x =1
2y − 3
2z − 6 y x = 4 − z. Conviene que las coordenadas del cırculo sean polares; el volumen
es:∫∫∫
R
1 dx dy dz =
∫ 2π
0
∫ 3
0
4 − r cos θ∫
1
2r sen θ − 3
2r cos θ − 6
dx r dr dθ
=
∫ 2π
0
∫ 3
0
[−1
2r sen θ +
1
2r cos θ + 10
]r dr dθ
=
∫ 2π
0
[r3
6(cos θ − sen θ) + 5r2
]3
0
dθ
=
∫ 2π
0
[9
2(cos θ − sen θ) + 45
]dθ
= 90π ♣
1. Calcular el volumen encerrado por z = x2 + y2, x2 + y2 = a2, z = 0.
ξρ∫s email: [email protected] 318 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 319
2. Hallar el volumen del solido limitado por x2 + y2 = a2, x2 + y2 = az2, z = 0.
3. Calcular el volumen encerrado por los cilindros x2 + y2 = a2, y2 + z2 = a2
4. Calcular el volumen limitado por x2 + y2 = 4, z = 0, z = 2y.
5. Hallar el volumen limitado por el paraboloide z = x2 +y2, el cilindro x2−x+y = 0, el planoz = 0.
6. Hallar el volumen limitado por el paraboloide z = x2 + y2 y el cono z =√x2 + y2.
7. Hallar el volumen limitado por x2 + az = a2, x2 + y2 = a2, z = 0.
9.5.2. Integrales triples en coordenadas esfericas
Las coordenadas esfericas son una manera alternativa de describir un punto en el espacio tridi-mensional. Sea P un punto del espacio con coordenadas (x, y, z). Esto se ilustra en la figurasiguiente.
ρ =distancia al origen desde el punto
θ =angulo que tiene el punto con respecto al eje x (angulo en el plano xy de la proyeccionde P con el eje x)
φ =angulo del rayo OP con respecto al eje z
Las coordenadas esfericas de este punto son P (ρ, θ, φ). ¿Como transformar de un conjunto decoordenadas al otro? Observemos el siguiente triangulo:
ξρ∫s email: [email protected] 319 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 320
Puesto que cosφ =z
ρ, se tiene que z = ρ cosφ, del mismo modo como senφ =
r
ρ, entonces
r = ρ senφ
Mirando el plano xy,
x = r cos θy = r sen θ
Luego, si reemplazamos r por ρ senφ en la igualdad, obtenemos la relacion entre las coordenadasrectangulares y las esfericas.
x = ρ sen φ cos θ
y = ρ sen φ sen θz = ρ cosφ
Del mismo modo, observemos que conociendo las coordenadas x, y, z es posible obtener las coor-denadas ρ, θ, φ con las identidades siguientes.
x2 + y2 + z2 = ρ2 (9.16)
y
x= tan θ (9.17)
x2 + y2
z2= tan2 φ (9.18)
ξρ∫s email: [email protected] 320 Jasmer LPC
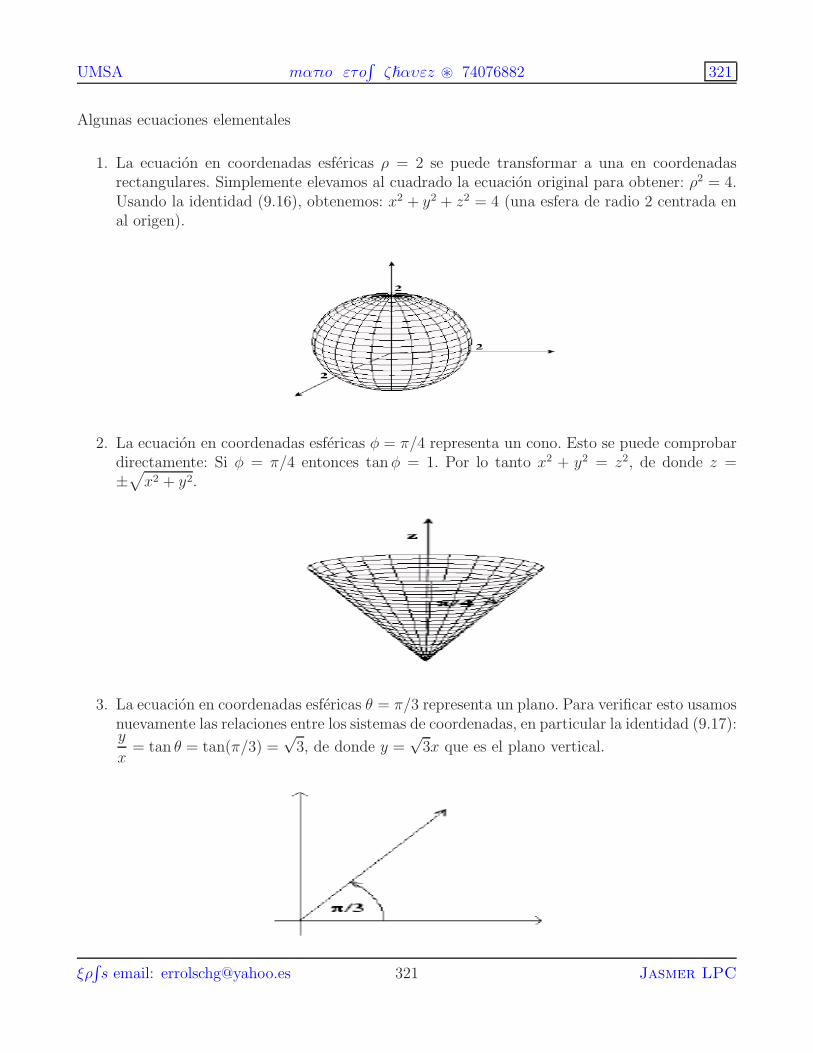
UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 321
Algunas ecuaciones elementales
1. La ecuacion en coordenadas esfericas ρ = 2 se puede transformar a una en coordenadasrectangulares. Simplemente elevamos al cuadrado la ecuacion original para obtener: ρ2 = 4.Usando la identidad (9.16), obtenemos: x2 + y2 + z2 = 4 (una esfera de radio 2 centrada enal origen).
2. La ecuacion en coordenadas esfericas φ = π/4 representa un cono. Esto se puede comprobardirectamente: Si φ = π/4 entonces tanφ = 1. Por lo tanto x2 + y2 = z2, de donde z =±√x2 + y2.
3. La ecuacion en coordenadas esfericas θ = π/3 representa un plano. Para verificar esto usamosnuevamente las relaciones entre los sistemas de coordenadas, en particular la identidad (9.17):y
x= tan θ = tan(π/3) =
√3, de donde y =
√3x que es el plano vertical.
ξρ∫s email: [email protected] 321 Jasmer LPC
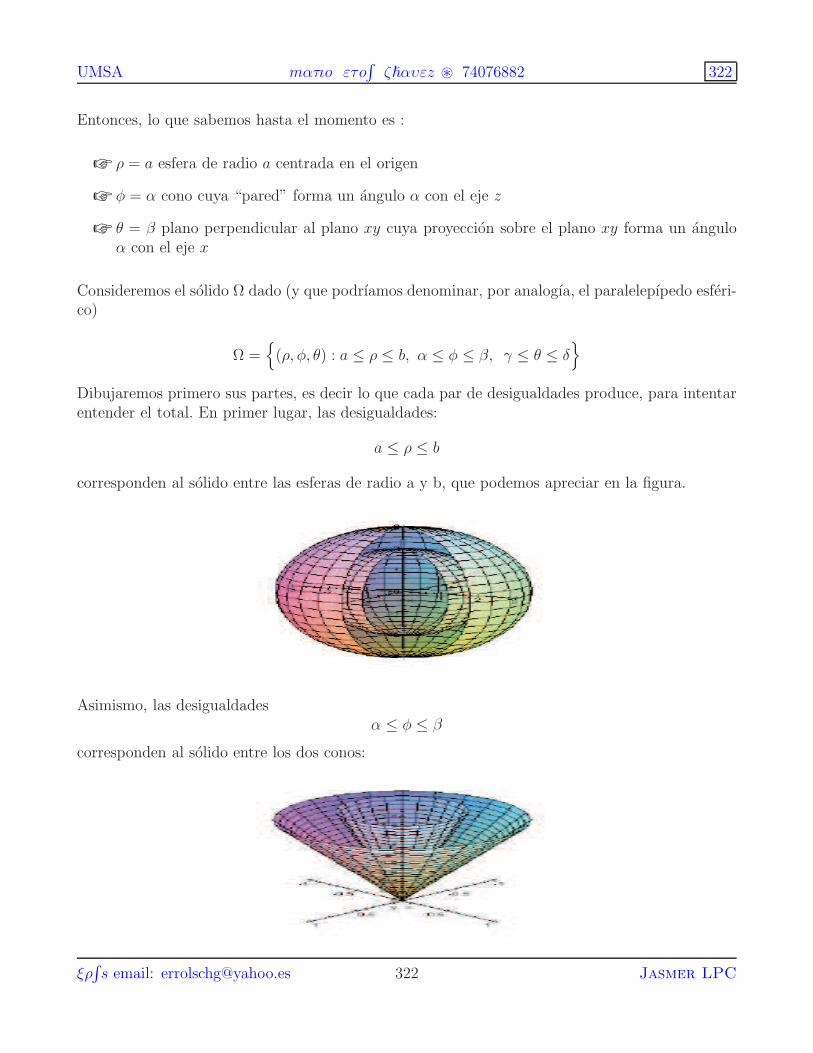
UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 322
Entonces, lo que sabemos hasta el momento es :
ρ = a esfera de radio a centrada en el origen
φ = α cono cuya “pared” forma un angulo α con el eje z
θ = β plano perpendicular al plano xy cuya proyeccion sobre el plano xy forma un anguloα con el eje x
Consideremos el solido Ω dado (y que podrıamos denominar, por analogıa, el paralelepıpedo esferi-co)
Ω =
(ρ, φ, θ) : a ≤ ρ ≤ b, α ≤ φ ≤ β, γ ≤ θ ≤ δ
Dibujaremos primero sus partes, es decir lo que cada par de desigualdades produce, para intentarentender el total. En primer lugar, las desigualdades:
a ≤ ρ ≤ b
corresponden al solido entre las esferas de radio a y b, que podemos apreciar en la figura.
Asimismo, las desigualdadesα ≤ φ ≤ β
corresponden al solido entre los dos conos:
ξρ∫s email: [email protected] 322 Jasmer LPC
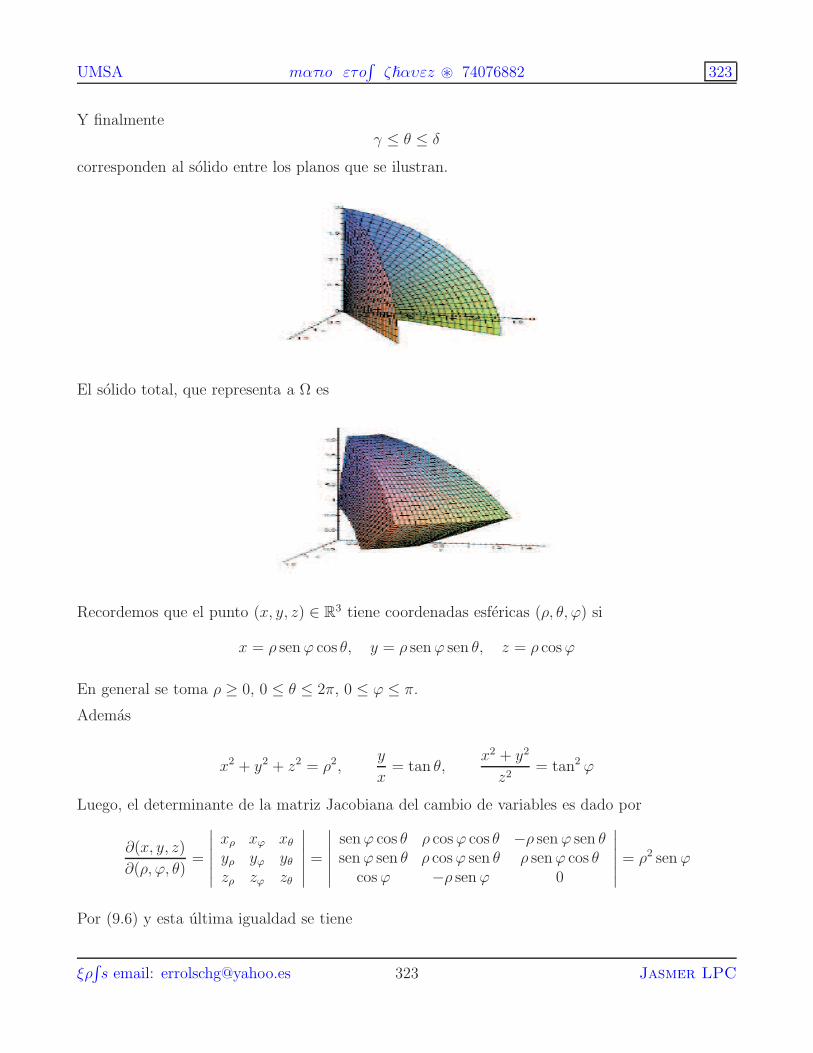
UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 323
Y finalmenteγ ≤ θ ≤ δ
corresponden al solido entre los planos que se ilustran.
El solido total, que representa a Ω es
Recordemos que el punto (x, y, z) ∈ R3 tiene coordenadas esfericas (ρ, θ, ϕ) si
x = ρ senϕ cos θ, y = ρ senϕ sen θ, z = ρ cosϕ
En general se toma ρ ≥ 0, 0 ≤ θ ≤ 2π, 0 ≤ ϕ ≤ π.
Ademas
x2 + y2 + z2 = ρ2,y
x= tan θ,
x2 + y2
z2= tan2 ϕ
Luego, el determinante de la matriz Jacobiana del cambio de variables es dado por
∂(x, y, z)
∂(ρ, ϕ, θ)=
∣∣∣∣∣∣
xρ xϕ xθ
yρ yϕ yθ
zρ zϕ zθ
∣∣∣∣∣∣=
∣∣∣∣∣∣
senϕ cos θ ρ cosϕ cos θ −ρ senϕ sen θsenϕ sen θ ρ cosϕ sen θ ρ senϕ cos θ
cosϕ −ρ senϕ 0
∣∣∣∣∣∣= ρ2 senϕ
Por (9.6) y esta ultima igualdad se tiene
ξρ∫s email: [email protected] 323 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 324
TEOREMA 9.12 (Cambio de variables a Coordenadas Esfericas). Sean
B ⊂
(r, θ, z) : ρ ≥ 0, 0 ≤ θ ≤ 2π, 0 ≤ ϕ ≤ π
acotado, TE(ρ, θ, ϕ) = (ρ senϕ cos θ, ρ senϕ sen θ, ρ cosϕ) y f : TE(B) → R continua y acotada.Entonces
∫∫∫
R
f(x, y, z) dx dy dz =
∫∫∫
R
f(ρ senϕ cos θ, ρ senϕ sen θ, ρ cosϕ) ρ2 senϕ dρ dϕ dθ.
DEMOSTRACION.
EJEMPLO 9.84. Calcular el volumen al interior del cono z =√x2 + y2 y bajo la esfera x2 +
y2 + z2 = 9
SOLUCION.- ♣
EJEMPLO 9.85. Calcular el volumen al interior del cono z =√x2 + y2 y bajo la esfera x2 +
y2 + z2 = a2
SOLUCION.- ♣
1. Hallar el volumen limitado superiormente por x2 + y2 + z2 = 1, e inferiormente por z =√x2 + y2.
2. Hallar el volumen de la region limitado superiormente por x2 + y2 + z2 = 1, e inferiormentepor z = x2 + y2.
3. Calcular el volumen encerrado por z2 + 4y − 4 = 0, x2 = y.
4. Hallar el volumen de la region limitado por x2 + y2 = 1, z = y, z = y2.
5. Hallar el volumen encerrado entre el paraboloide x2 + a2y2 + z = 1, x2 + a2y2 − 2z = 1.
EJEMPLO 9.86. Calcular
∫∫∫
V
(x2
a2+y2
b2+z2
c2
)dx dy dz siendo V la region encerrada por el
elipsoidex2
a2+y2
b2+z2
c2= 1.
SOLUCION.- Tomemos f(x, y, z) =x2
a2+y2
b2+z2
c2. Realizamos el cambio de variables
x = x(u, v, w) = au, y = y(u, v, w) = bv, z = z(u, v, w) = cw
ξρ∫s email: [email protected] 324 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 325
Entones ∣∣∣∣∂(x, y, z)
∂(u, v, w)
∣∣∣∣ =
∣∣∣∣∣∣
xu xv xw
yu yv yw
zu zv zw
∣∣∣∣∣∣=
∣∣∣∣∣∣
a 0 00 b 00 0 c
∣∣∣∣∣∣= abc
ademas
f(x, y, z) = f(au, bv, cw) =(au)2
a2+
(bv)2
b2+
(cw)2
c2= u2 + v2 + w2.
Sea V la region cuya bajo el cambio de variables es la region original V .
u2 + v2 + w2 = 1 ⇐⇒ (au)2
a2+
(bv)2
b2+
(cw)2
c2= 1 ⇐⇒ x2
a2+y2
b2+z2
c2= 1
Por tanto
∫∫∫
V
(x2
a2+y2
b2+z2
c2
)dx dy dz =
∫∫∫
V
(u2 + v2 + w2
)|abc| du dv dw
Pasando a coordenadas esfericas tenemos
u = ρ senϕ cos θ
v = ρ senϕ sen θw = ρ cosϕ
se tiene que
u2 + v2 + w2 = ρ2,∂(u, v, w)
∂(ρ, ϕ, θ)= ρ2 senϕ
Luego si tomamos la funcion g(u, v, w) =(u2 + v2 + w2
)|abc|, por tanto
g(ρ senϕ cos θ, ρ senϕ sen θ, ρ cosϕ) = ρ2 |abc|
Sea V la region cuya imagen bajo las coordenadas esfericas es la esfera unitaria V . Es claro que
V = (ρ, ϕ, θ) : 0 ≤ ρ ≤ 1, 0 ≤ ϕ ≤ 2π, 0 ≤ θ ≤ 2πPor tanto ∫∫∫
V
(u2 + v2 + w2
)|abc| du dv dw
=
∫∫∫
V
ρ2 |abc| ρ2 senϕ dρ dϕ dθ
= 8 |abc|∫ π
2
0
∫ π
2
0
∫ 1
0
ρ4 senϕ dρ dϕ dθ
♣
ξρ∫s email: [email protected] 325 Jasmer LPC
CAPITULO 10
Integrales de Linea
10.1. Definicion y Propiedades
Un camino o curva en Rn es una funcion diferenciable α : I → R
n, donde I es algun intervaloabierto en R. El vector velocidad en t del camino α : I → R
n es el vector α ′(t) definido por
α ′(t) = (α1′(t), ..., αn
′(t))
DEFINICION 10.1. Sean U un subconjunto abierto de Rn y f una funcion vectorial definida
en U , F : U → Rn. Supongamos que α esta definido sobre el intervalo [a, b] y tiene imagen en U .
Definimos la integral de linea de F a lo largo de α o sobre α, de la siguiente manera:
∫
α
F =
∫ b
a
F (α(t)) · α ′(t) dt.
EJEMPLO 10.1. Evaluar la integral de lınea de la funcion vectorial F (x, y, z) = xi + yj + zksobre la trayectoria de una helice σ(t) = (sen t, cos t, t) de [0, 2π].
SOLUCION.- Resolvemos la integral de acuerdo a la definicion
∫
σ
F =
∫ 2π
0
F (σ(t)) · σ′(t) dt =
∫ π/2
0
(sen t, cos t, t) • (cos t,− sen t, 1) dt
=
∫ 2π
0
(sen t cos t− sen t cos t+ t)dt =
∫ 2π
0
tdt =t2
2θ∣∣∣2π
0=
4π2
2
♣
326

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 327
Observemos que si F = (P1, P2, ..., Pn) y α = (x1, x2, ..., xn), entonces
∫
α
F =
∫ b
a
[P1
(x1(t), x2(t), ..., xn(t)
)x1
′(t) + · · ·+ Pn
(x1(t), x2(t), ..., xn(t)
)xn
′(t)]
dt
Usaremos la siguiente notacion para la integral de linea de F = (P1, P2, ..., Pn) a lo largo deα, ∫
α
F =
∫
α
P1 dx1 + · · ·+ Pn dxn.
TEOREMA 10.1. Sean U un subconjunto abierto de R2 y una funcion F : U → R
2 con F =(P,Q). Supongamos que α : [a, b] → U es un camino diferenciable de modo que α([a, b]) es elgrafico de una funcion y = g(x) con c ≤ x ≤ d. Entonces
∫
α
P dx+Q dy =
∫ d
c
P (x, g(x)) dx+Q(x, g(x))g′(x) dx
Demostracion.
EJEMPLO 10.2. Calcular
∫
α
(x2 − y) dx+ (x+ y2) dy a los largo de la recta que une (0, 0) con
(1, 2).
SOLUCION.- ♣
TEOREMA 10.2. Sean U un subconjunto abierto de R2 y una funcion F : U → R
2 con F =(P,Q). Supongamos que α : [a, b] → U es un camino diferenciable de modo que α([a, b]) es elgrafico de una funcion x = g(y) con c ≤ y ≤ d. Entonces
∫
α
P dx+Q dy =
∫ d
c
P (g(y), y)g′(y) dy +Q(g(y), y) dy
Demostracion.
TEOREMA 10.3. Sea γ un camino suave por trozos. Si P : a = t0 < t1 < · · · < tn = b es unaparticion del intervalo [a, b] con la propiedad de que γk la restriccion de γ al intervalo [tk−1, tk], esun camino suave para 1 ≤ k ≤ n, entonces la integral de linea de F a lo largo de γ es la siguientesuma ∫
γ
F =
∫
γ1
F +
∫
γ2
F + · · ·+∫
γn
F.
Demostracion.
ξρ∫s email: [email protected] 327 Jasmer LPC
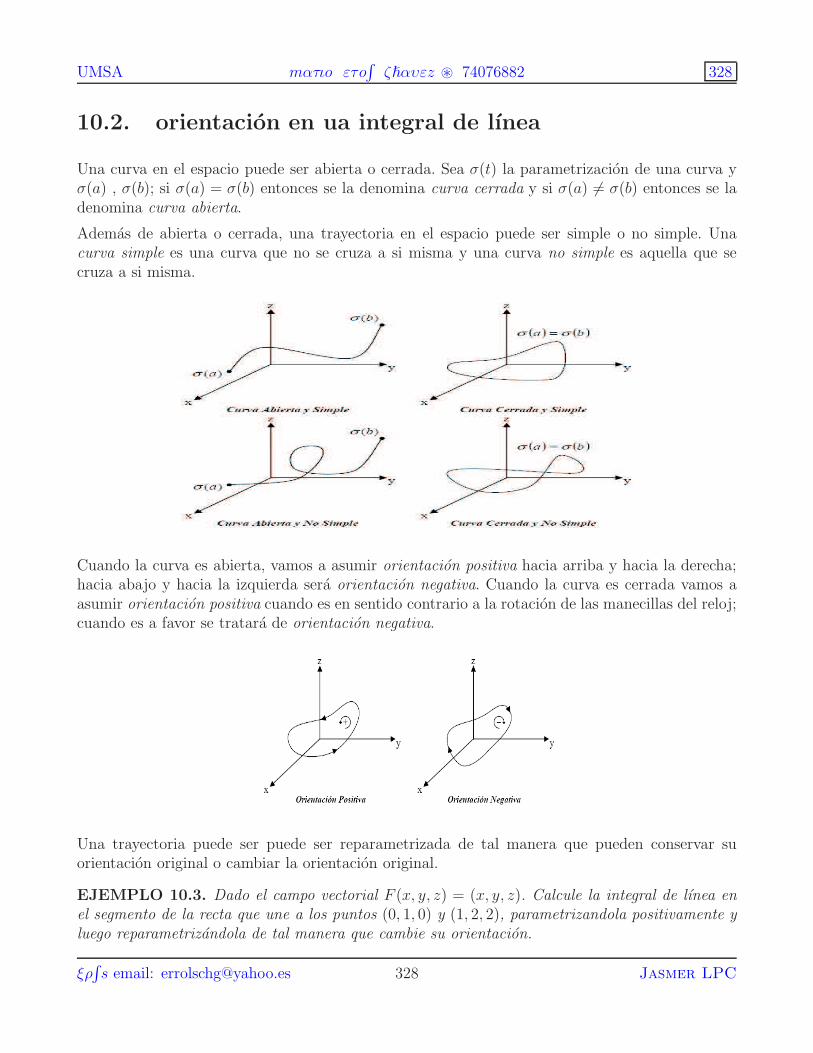
UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 328
10.2. orientacion en ua integral de lınea
Una curva en el espacio puede ser abierta o cerrada. Sea σ(t) la parametrizacion de una curva yσ(a) , σ(b); si σ(a) = σ(b) entonces se la denomina curva cerrada y si σ(a) 6= σ(b) entonces se ladenomina curva abierta.
Ademas de abierta o cerrada, una trayectoria en el espacio puede ser simple o no simple. Unacurva simple es una curva que no se cruza a si misma y una curva no simple es aquella que secruza a si misma.
Cuando la curva es abierta, vamos a asumir orientacion positiva hacia arriba y hacia la derecha;hacia abajo y hacia la izquierda sera orientacion negativa. Cuando la curva es cerrada vamos aasumir orientacion positiva cuando es en sentido contrario a la rotacion de las manecillas del reloj;cuando es a favor se tratara de orientacion negativa.
Una trayectoria puede ser puede ser reparametrizada de tal manera que pueden conservar suorientacion original o cambiar la orientacion original.
EJEMPLO 10.3. Dado el campo vectorial F (x, y, z) = (x, y, z). Calcule la integral de lınea enel segmento de la recta que une a los puntos (0, 1, 0) y (1, 2, 2), parametrizandola positivamente yluego reparametrizandola de tal manera que cambie su orientacion.
ξρ∫s email: [email protected] 328 Jasmer LPC
UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 329
SOLUCION.- Una parametrizacion positiva del segmento de recta es: σ(t) = (t, t+1, 2t); donde0 ≤ t ≤ 1. Evaluando la integral con dicha parametrizacion:
∫
σ
F =
∫ 1
0
(t, t+ 1, 2t) • (1, 1, 2) dt =
∫ 1
0
(6t+ 1) dt =[3t2 + t
]∣∣∣1
0= 4
Ahora reparametrizandola de tal manera que cambie su orientacion: σ(t) = (1 − t, 2 − t, 2 − 2t);donde 0 ≤ t ≤ 1. Evaluando la integral con dicha parametrizacion:
∫
σ
F =
∫ 1
0
(1 − t, 2 − t, 2 − 2t) • (−1,−1,−2) dt =
∫ 1
0
(6t− 7) dt =[3t2 − 7t
]∣∣∣1
0= −4
♣
TEOREMA 10.4. Sea f : U ⊂ Rn → R
n seccionalmente continua, σ la parametrizacion de unacurva suave, simple y orientada, y sea ρ la reparametrizacion de la curva, entonces:
∫
σ
F =
∫
ρ
F si ρ no cambia de orientacion de la curva
∫
σ
F = −∫
ρ
F si ρ cambia de orientacion de la curva
TEOREMA 10.5. Sea f : U ⊂ Rn → R
n seccionalmente continua, σ la parametrizacion de una
curva suave, no simple y orientada, y sea ρ la reparametrizacion de la curva, entonces:
∫
σ
F =
∫
ρ
F
sea que ρ cambie o no cambie la orientacion de la curva.
10.3. Teorema de Green
Ahora se estudiara una importante relacion entre integrales de lınea e integrales sobre regiones delplano. Sea α : [a, b] → U una curva cerrada simple diferenciable por partes del plano, es decir, αes una funcion uno-a-uno sobre el intervalo abierto (a, b) y α(a) = α(b). Ademas α′(t) es continuaexcepto en un numero finitos de puntos.
TEOREMA 10.6 (Teorema de la curva de Jordan). Todo camino cerrado simple α divideal plano en dos regiones, una region interior y una region exterior.
Demostracion.
Se aceptara este resultado y se hablara libremente del interior de una curva cerrada simple α.Ahora, en cada punto α(t), si existe α′(t) y es diferente de cero, α′(t) establece una direccion sobre
α. Sea T (t) =α′(t)
||α′(t)|| la tangente unitaria y sea N(t) la normal principal a la curva α en el punto
ξρ∫s email: [email protected] 329 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 330
α(t). Esto es, N(t) es un vector unitario perpendicular al vector tangente y ademas los vectores T ,N en ese orden, pueden obtenerse por rotacion de los vectores unitarios e1 = (1, 0) y e2 = (0, 1).
Recuerde que si u = (a, b) y v = (c, d) son vectores unitarios ortogonales, entonces existe unarotacion Rθ tal que u = Rθ(e1) y v = Rθ(e2) si y solo si el determinante
∣∣∣∣a cb d
∣∣∣∣ = 1.
Por consiguiente si
T (t) =(α′
1(t), α′1(t))
||α′(t)||es el vector tangente unitario y se define
N(t) =(−α′
2(t), α′1(t))
||α′(t)||entonces T (t) y N(t) son vectores unitarios que se pueden obtener de e1 = (1, 0) y e2 = (0, 1) poruna rotacion.
Cuando N(t) siempre apunta hacia el interior de la curva cerrada α, se dice que la curva α correen sentido contrario a las agujas del reloj, o que α esta orientada positivamente. Si N(t)siempre apunta hacia el exterior, entonces α corre en direccion a las agujas del reloj, o que αesta orientada negativamente.
Cuando α : [a, b] → U es una curva simple y cerrada, suave a trozos y orientada positivamente, la
integral de lınea del campo vectorial F sobre α se denota por
∮
α
F .
Ahora se esta en posicion de establecer el resultado que se conoce como el teorema de Green. Este
teorema expresa la integral de lınea
∮
α
F de un campo vectorial F sobre una curva cerrada simple
α como una integral doble sobre la region interior.
TEOREMA 10.7. Sea F un campo vectorial de clase C1 definido en un conjunto abierto Udel plano. Suponga que la curva cerrada simple suave por partes α junto con su region interiorS estan contenidos en U , suponga ademas que α recorre la frontera de S en direccion contrariaa las manecillas del reloj (α es orientada positivamente). Entonces, si P y Q son las funcionescoordenadas de F se tiene ∮
α
F =
∫∫
S
(∂Q
∂x− ∂P
∂y
)dxdy. (10.1)
Demostracion. La demostracion completa del teorema implica un argumento de aproximacion queno se dara en este texto. Sin embargo, el objetivo de la demostracion es primeramente comprobar(10.1) para curvas que recorren rectangulos y triangulos. Utilizando este resultado se demuestra(10.1) para curvas poligonales cerradas α. La etapa final es demostrar que ambas integrales
∫∫
S
(∂Q
∂x− ∂P
∂y
)dxdy y
∮
α
F
ξρ∫s email: [email protected] 330 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 331
pueden ser aproximadas arbitrariamente por integrales
∫∫
Sn
(∂Q
∂x− ∂P
∂y
)dxdy y
∮
αn
F
donde αn es una curva poligonal y Sn es su interior.
La demostracion de (10.1) para rectangulos es directa. Sean α1, α2, α3, α4 las cuatro paredesrectilıneas de α como se presenta en la figura:
Obviamente ∫∫
S
(∂Q
∂x− ∂P
∂y
)dxdy =
∫ d
c
∫ b
a
(∂Q
∂x− ∂P
∂y
)dx dy
Pero siβ1(x) = (x, c) a ≤ x ≤ b
β2(y) = (b, y) c ≤ y ≤ d
β3(x) = (x, d) a ≤ x ≤ b
β2(y) = (a, y) c ≤ y ≤ d
entonces α1 ∼ β1, α2 ∼ β2, α3 ∼ −β3, α4 ∼ −β4. Por consiguiente
∮
α
F =4∑
i=1
∫
αi
F =
∫
β1
F +
∫
β2
F −∫
β3
F −∫
β4
F
=
∫
β1
F −∫
β3
F +
∫
β2
F −∫
β4
F
Mas todavıa ∫
β1
F =
∫ b
a
F (β1(x)) · β ′1(x) dx =
∫ b
a
P (x, c) dx
y ∫
β3
F =
∫ b
a
F (β3(x)) · β ′3(x) dx =
∫ b
a
P (x, d) dx
Por lo tanto
∫
β1
F −∫
β3
F =
∫ b
a
[P (x, c) − P (x, d)
]dx = −
∫ b
a
[P (x, d) − P (x, c)
]dx
esto es ∫
β1
F −∫
β3
F = −∫ b
a
∫ d
c
∂P
∂ydy dx
ξρ∫s email: [email protected] 331 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 332
La ultima igualdad es valida en virtud del teorema fundamental del calculo. Analogamente∫
β2
F −∫
β4
F =
∫ d
c
[Q(b, y) −Q(a, y)
]dy =
∫ d
c
∫ b
a
∂Q
∂xdx dy
Por consiguiente sumando ambos resultados se tiene∮
α
F =
∫ d
c
∫ b
a
(∂Q
∂x− ∂P
∂y
)dx dy
que es el resultado pedido. La comprobacion de (10.1) para triangulos se hace en forma analoga.
Ahora sea α una curva poligonal cerrada simple que encierra ua region S. Se puede suponer queS es la union de rectangulos y triangulos Sk que tienen solo aristas comunes como se puede veren la figura. Sea γk una curva que recorre una vez la frontera de Sk en direccion contraria a lasmanecillas del reloj.
Ciertamente ∫∫
S
(∂Q
∂x− ∂P
∂y
)dx dy =
∑
k
∫∫
Sk
(∂Q
∂x− ∂P
∂y
)dxdy
por la propiedad de aditividad de las integrales sobre regiones que se traslapan en conjuntos demedida cero. Pero tambien ∮
α
F =∑
k
∮
αk
F.
Esta ultima igualdad es valida puesto que todas las integrales sobre segmentos de lınea interioresde las fronteras de conjuntos Sk se cancelan por pares. Esto se deduce puesto que cada uno esrecorrido en una direccion una vez y en direccion opuesta otra vez. Ası solamente queda la integralsobre la frontera que es
∮αF . Como se indico antes, la demostracion se termina, aproximando la
curva cerrada simple α mediante la curva poligonal αn.
EJEMPLO 10.4. Verificar el teorema de Green en la integral
∮
α
2(x2 + y2
)dx +
(x + y
)2
dy,
siendo C el contorno del triangulo con vertices en los puntos (1, 1), (2, 2) y (1, 3).
SOLUCION.- Como podemos observar en la figura abajo el problema nos pide determinar laintegral de lınea a lo largo de una curva cerrada que limita una region plana.
ξρ∫s email: [email protected] 332 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 333
Donde cada curva la parametrizamos:
C+1 :
x = ty = t
1 ≤ t ≤ 2
C−2 :
x = ty = 4 − t
1 ≤ t ≤ 2
C−3 :
x = 1y = t
1 ≤ t ≤ 3
Resolvemos la integral de lınea acuerdo a la definicion:∫
C
F =
∫
C+1
F +
∫
C−2
F +
∫
C−3
F
=
∫ 2
0
F (t, t) · (1, 1) dt−∫ 2
0
F (t, 4 − t) · (1,−1) dt−∫ 3
0
F (1, t) · (0, 1) dt
=
∫ 2
0
8t2 dt−∫ 2
0
(4t2 − 16t− 16) dt−∫ 3
0
(t2 + 2t+ 1) dt
=
[8t3
3
]2
1
−[4t3
3− 8t2 + 16t
]2
1
−[t3
3+ t2 + t
]3
1
=56
3− 28
3+ 24 − 16 − 26
3− 8 − 2 = −4
3
Ahora resolvemos aplicando el teorema de Green:
∫
C
F =
∮
C
2(x2 + y2
)dx+
(x+ y
)2
dy
=
∫∫
D
(∂Q
∂x− ∂P
∂y
)dxdy.
=
∫∫
D
(2(x+ y) − 4y
)dxdy =
∫ x=2
x=1
∫ y=4−x
y=x
(2x− 2y
)dy dx
=
∫ 2
1
(2xy − y2
) ∣∣∣y=4−x
y=xdx =
∫ 2
1
[2x(4 − 2x) − (4 − x)2 + x2
]dx
=
∫ 2
1
[− 4x2 + 16x− 16
]dx =
[−4
3x3 + 8x2 − 16
]2
1
= −28
3+ 24 − 16 = −4
3 ♣
EJEMPLO 10.5. Suponga que el camino α recorre la frontera de la region acotada por las curvasy2 = x, x = 1 en direccion contraria a las manecillas del reloj (α es orientada positivamente).
Calcular la integral curvilınea
∮
α
(2y − x) dx + (3y2 + xy) dy primero de forma directa y luego
usando el Teorema de Green.
SOLUCION.- Evaluando x = 1 en y2 = x se tiene que y = ±1. Luego α une los puntos (1,−1)y (1, 1).
ξρ∫s email: [email protected] 333 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 334
∮
α
(2y − x) dx+ (3y2 + xy) dy =
∫ 1
−1
(2y − y2)2y dy + (3y2 + y2y) dy
=
∫ 1
−1
(4y2 − 2y3 + 3y2 + y3
)dy
=
∫ 1
−1
(7y2 − y3
)dy
=(7
3y3 − 1
4y4)1
−1
Definamos la funcion F (x, y) = (2y − x, 3y2 + xy), si P y Q son las funciones coordenadas de F ,
esto es P (x, y) = 2y−x y Q(x, y) = 3y2 +xy se tiene que∂Q
∂x= y y
∂P
∂y= 2. Por tanto aplicando
el Teorema de Green
∮
α
(2y − x) dx+ (3y2 + xy)dy =
∮
α
F =
∫∫
S
(∂Q
∂x− ∂P
∂y
)dxdy.
=
∫∫
S
(y − 2) dxdy =
∫ y=1
y=−1
∫ x=1
x=y2
(y − 2)dx dy
=
∫ y=1
y=−1
(y − 2)(1 − y2) dy =
∫ y=1
y=−1
(−y3 + 2y2 + y − 2) dy
=(− 1
4y4 +
2
3y3 +
1
2y2 − 2y
)1
−1 ♣
EJEMPLO 10.6. Calcular la integral curvilınea
∮
α
(−x2y) dx + xy2 dy, donde C es el contorno
de la region limitada por las circunferencias x2 + y2 = 1, x2 + y2 = 9. Sugerencia: Usar Teoremade Green.
SOLUCION.- Definamos las funciones P (x, y) = −x2y y Q(x, y) = xy2. Derivando parcialmente∂Q
∂x= y2 y
∂P
∂y= −x2. Por tanto aplicando el Teorema de Green
∮
α
(−x2y) dx+ xy2 dy =
∫∫
S
(∂Q
∂x− ∂P
∂y
)dxdy =
∫∫
S
(y2 + x2) dxdy
=
∫ 2π
0
∫ 3
1
r2 r dr dθ =
∫ 2π
0
r4
4
∣∣∣∣3
1
dθ =
(34
4− 14
4
)∫ 2π
0
dθ = 40π
♣
ξρ∫s email: [email protected] 334 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 335
EJEMPLO 10.7. Utilizar el teorema de Green para calcular la siguiente integral de lınea:∮
C
y3 dx + (x3 + 3xy2) dy, siendo C el camino que va desde (0, 0) hasta (1, 1) por la grafica de
y = x3 y vuelve a (0, 0) por la recta y = x.
SOLUCION.- Si llamamos A a la region del plano limitada por la curva C anterior, entonces:
C = (x, y) ∈ R2 : 0 ≤ x ≤ 1, x3 ≤ y ≤ x
Como P (x, y) = y3 y Q(x, y) = x3 + 3xy2, tenemos que:
∮
C
y3 dx+ (x3 + 3xy2) dy =
∮
C
F =
∫∫
A
(∂Q
∂x− ∂P
∂y
)dxdy.
=
∫∫
A
((3x2 + 3y2) − 3y2
)dxdy =
∫ x=1
x=0
∫ y=x
y=x3
(3x2)dy dx
=
∫ 1
0
(3x2y
) ∣∣∣y=x
y=x3dx =
∫ 1
0
(3x3 − 3x5
)dx
=(3
4x4 +
1
2x6)1
0=
1
4
♣
10.4. Area Encerrada por una Curva
El area limitada por una curva cerrada simple C puede ser calculado con una integral de lınea,esto puede ser conveniente si esta integral no ofrece gran dificultad.
TEOREMA 10.8. Si D es una region plana limitada por una curva C; cerrada simple, regular a
trozos y orientada contra reloj, entonces el area de D viene dada por area(D) =1
2
∮
C
x dy − y dx.
DEMOSTRACION. Recordemos el Teorema de Green:
Sea F un campo vectorial de clase C1 definido en una conjunto abierto U delplano. Suponga que la curva cerrada simple suave por partes C junto con suregion interior X estan contenidos en U . suponga ademas que C recorre lafrontera de X en direccion contraria a las manecillas del reloj. Entonces, si Py Q son las funciones coordenadas de F se tiene
∫∫
X
(∂Q
∂x− ∂P
∂y
)dxdy =
∮
C
F =
∮
C
P dx+Q dy =
∫ b
a
F (C(t)) · C ′(t) dt
donde C : [a, b] → U es tales que C(a) = C(b).
ξρ∫s email: [email protected] 335 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 336
Definamos la aplicacion F : R2 → R
2 por F = (P,Q) donde P (x, y) = −y2
y Q(x, y) =x
2es claro
que∂Q
∂x− ∂P
∂y=
1
2+
1
2= 1
Por tanto aplicando el teorema de Green obtenemos:
area(D) =
∫∫
D
1 dxdy =
∫∫
D
(∂Q
∂x− ∂P
∂y
)dxdy
=
∮
C
P dx+Q dy =
∮
C
[−y
2
]dx+
x
2dy
=1
2
∮
C
x dy − y dx
EJEMPLO 10.8. Calcular el area de la elipsex2
a2+y2
b2= 1.
SOLUCION.- Parametrizamos la elipsex2
a2+y2
b2= 1 con C(t) = (a sen t, b cos t) con t ∈ [0, 2π].
Esta parametrizacion orienta la elipse contrareloj.
Empecemos probando que esta curva es una parametrizacion de la elipse, en efecto
(a sen t)2
a2+
(b cos t)2
b2= 1
Por lo tanto
area(X) =1
2
∮
C
x dy − y dx =
∫ 2π
0
(a cos tb cos t+ b sen ta cos t)dt =ab
22π = πab
♣
10.5. Independencia del Camino de Integracion
Para calcular
∫
C
P dx + Q dy segun la curva de integracion C sea cerrada o no, y segun sea
∂Q
∂x=∂P
∂yo no se procede como sigue:
1. Si C es no cerrada:
ξρ∫s email: [email protected] 336 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 337
a)∂Q
∂x=∂P
∂y: En este caso la integral es independiente del camino de integracion, entonces
se calcula la integral directamente eligiendo previamente un camino de integracionadecuado.
b)∂Q
∂x6= ∂P
∂y: Se calcula la integral directamente pasando a una integral simple.
2. Si C es cerrada:
a)∂Q
∂x=∂P
∂y: No es necesario calcular nada, pues en este caso
∫
C
P dx+Q dy = 0.
b)∂Q
∂x6= ∂P
∂y: Se calcula la integral directamente pasando a una integral doble (Teorema
de Green).
EJEMPLO 10.9. Demostrar que
∫ (1,2)
(0,1)
(x2 + y2)dx + 2xydy, es independiente del camino de
integracion y hallar su valor.
SOLUCION.- ♣
ξρ∫s email: [email protected] 337 Jasmer LPC

CAPITULO 11
Integrales de Superficie
11.1. Definicion
Sea R una region del plano y sea ϕ : R → R3 la parametrizacion de una superficie S, es decir, S
es la imagen de ϕ. Sea f : S → R una funcion sobre S, si f es continua, definimos la integral desuperficie de f sobre S mediate la formula
∫∫
S
f =
∫∫
R
f(ϕ(u, v))
∣∣∣∣
∣∣∣∣∂ϕ
∂u× ∂ϕ
∂v
∣∣∣∣
∣∣∣∣ du dv
Sea F : S → R3 un campo vectorial sobre S, definimos la integral de superficie de F sobre S
mediate la formula ∫∫
S
F ·N =
∫∫
R
F (ϕ(u, v)) ·(∂ϕ
∂u× ∂ϕ
∂v
)du dv
Sea F : R3 → R
3 un campo vectorial sobre R3, F = (F1, F2, F3). Definimos la divergencia de F
como la funcion
divF =∂F1
∂x+∂F2
∂y+∂F3
∂z.
Definimos ahora la rotacional de F como
∇× F =
(∂F3
∂y− ∂F2
∂z,∂F1
∂z− ∂F3
∂x,∂F2
∂x− ∂F1
∂y
)=
∣∣∣∣∣∣∣∣∣
i j k
∂
∂x
∂
∂y
∂
∂z
F1 F2 F3
∣∣∣∣∣∣∣∣∣
338

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 339
11.2. Teorema de la Divergencia
TEOREMA 11.1. Sea U una region de R3 que constituye el interior de una superficie S que es
suave. Sea F un campo vectorial de clase C1 sobre un conjunto abierto que contiene a U y a S.Sea N el vector unitario normal a S dirigido hacia afuera. Entonces
∫∫
S
F ·N =
∫∫∫
U
divF
donde la expresion de la derecha es la integral triple de la funcion divF sobre la region U .
11.3. Teorema de Stokes
TEOREMA 11.2. Sea S una superficie suave de R3 limitada por una curva cerrada C. Supongase
que la superficie es orientable y que la curva frontera esta orientada de modo que la superficie seencuentra a la izquierda de la curva. Sea F un campo vectorial de clase C1 sobre un conjuntoabierto que contiene a la superficie S y a su frontera. Entonces
∫∫
S
(∇× F ) ·N =
∮
C
F
donde la expresion de la derecha es la integral triple de la funcion divF sobre la region U .
ξρ∫s email: [email protected] 339 Jasmer LPC

CAPITULO 12
Sucesiones y Series
12.1. Sucesiones
DEFINICION 12.1. Una sucesion es una funcion cuyo dominio es el conjunto de los numerosreales N y cuyo recorrido es el conjunto de los numero reales R.
Consideremos una sucesion a : N → R, esto es, a es una funcion que a cada numero natural n sele asigna el numero real a(n). Denotaremos a(n) por an, esto es,
a(n) = an.
El numero an se llama termino n-esimo de la sucesion a. Luego podemos escribir la sucesion a por
a1, a2, ..., an
o podemos usar un sımbolo tal como an.Si damos una expresion explıcita al n-esimo de una sucesion, entonces podemos generar o deter-minar cada termino de la sucesion. Veamos algunos ejemplos.
Dados los siguientes formular explıcitas para los terminos n-esimos, hallar los primeros terminosde las sucesiones que generan.
① Si an = n, entonces la sucesion que se obtiene es
1, 2, 3, 4, 5, . . .
340

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 341
② Si an = 2n, entonces la sucesion que se obtiene es
2, 4, 8, 16, 32, . . .
③ Si an =1
2n, entonces la sucesion que se obtiene es
1
2,1
4,1
8,
1
16,
1
32, . . .
DEFINICION 12.2. La sucesion an converge a L si para todo ε > 0, existe un numero naturalN tal que
si n ≥ N entonces |an − L| < ε.
Escribimos este hecho como lımn 7→∞
an = L. Si la sucesion an no converge a ningun numero L,
decimos que la sucesion an diverge. Por tanto, la sucesion an en divergente si ocurre unos delos siguientes casos
lımn 7→∞
an = ∞, lımn 7→∞
an = −∞, lımn 7→∞
an no es unico
DEFINICION 12.3. Una sucesion an es monotona creciente si para todo n ≥ 1, an ≤ an+1.Una sucesion an es monotona decreciente si para todo n ≥ 1, an ≥ an+1. Una sucesion an esacotada si existe M > 0 tal que para todo n ≥ 1, |an| ≤M .
TEOREMA 12.1. Sean xn y yn dos funciones tales que
lımn 7→∞
xn = x y lımn 7→∞
yn = y.
Entonces
(a) lımn 7→∞
(xn + yn) = x+ y, (b) λ ∈ R, lımn 7→∞
λxn = λx
(c) lımn 7→∞
xnyn = xy, (d) lımn 7→∞
xn
yn
=x
y.
(e) Toda sucesion acotada, creciente o decreciente es convergente.
(f) Toda sucesion no acotada es divergente.
(g) El lımite de una sucesion convergente es unico.
EJEMPLO 12.1. Determinar si la siguiente sucesion es convergente o divergente.
3
2,
4
3,
5
4,
6
5,
7
6, . . .
ξρ∫s email: [email protected] 341 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 342
SOLUCION.- Observando los terminos de la sucesion vemos que el termino n-esimo de lasucesion es
an =n + 2
n + 1.
Calculando el lımite
lımn 7→∞
an = lımn 7→∞
n+ 2
n+ 1= lım
n 7→∞
1 +2
n
1 +1
n
= 1
Por tanto, la sucesion an es convergente y converge a 1.
EJEMPLO 12.2. Determinar la convergencia o divergencia de la sucesion cuyo termino n-esimoes.
(a) an = 2 +1
n2, (b) bn = n sen
(1
n
)
SOLUCION.- Calculando el lımite
lımn 7→∞
an = lımn 7→∞
2 +1
n2= 2 + 0 = 2
Por tanto, la sucesion an es convergente y converge a 2.
De modo similar un calculo simple muestra que
lımn 7→∞
bn = lımn 7→∞
n sen
(1
n
)= lım
n 7→∞
sen
(1
n
)
1
n
= 1
Por tanto, la sucesion bn es convergente y converge a 1.
EJEMPLO 12.3. Determinar la convergencia o divergencia de la sucesion cuyo termino n-esimoes.
(1) an = 3n− 4 (2) an =2
n3
(3) an = (−1)n (4) an =4√n
4√n2 + n
(5) an = n√n (6) an = n
√1
n
(7) an =n3 − 2n
n2 −√n
(8) an =4√n
4√
3n+ 1
ξρ∫s email: [email protected] 342 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 343
SOLUCION.-
(1) lımn 7→∞
an = lımn 7→∞
(3n− 4) = 3∞− 4 = ∞ an converge
(2) lımn 7→∞
an = lımn 7→∞
2
n3=
2
∞3= 0 an converge
(3) lımn 7→∞
an = lımn 7→∞
(−1)n =
1 si n es par
−1 si n es imparan no converge
(4) lımn 7→∞
an = lımn 7→∞
4√n
4√n2 + n
= lımn 7→∞
4√n
4√n2
4√n2 + n4√n2
= lımn 7→∞
4
√n
n2
4
√n2 + n
n2
= lımn 7→∞
4
√1
n
4
√1 +
1
n
=0
1= 0 an converge
(5) lımn 7→∞
an = lımn 7→∞
n√n = lım
n 7→∞n
1n = lım
n 7→∞e
1n
lnn
= lımn 7→∞
eln nn = e0 = 1 an converge
(6) lımn 7→∞
an = lımn 7→∞
n
√1
n= lım
n 7→∞
(1
n
) 1n
= lımn 7→∞
e1n
ln(
1n
)
= lımn 7→∞
eln(n−1)
n = lımn 7→∞
e−ln nn = e−0 = 1 an converge
(7) lımn 7→∞
an = lımn 7→∞
n3 − 2n
n2 −√n
= lımn 7→∞
n3 − 2n
n3
n2 −√n
n3
= lımn 7→∞
1 − 2
n2
1
n− 1
n5/2
=1 − 2
∞2
1
∞ − 1
∞5/2
= ∞ an diverge
(8) lımn 7→∞
an = lımn 7→∞
4√n
4√
3n+ 1= lım
n 7→∞
4√n
4√n
4√
3n+ 14√n
= lımn 7→∞
1
4
√3n+ 1
n
= lımn 7→∞
1
4
√3 +
1
n
=14√
3an converge
ξρ∫s email: [email protected] 343 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 344
EJEMPLO 12.4. Determinar la convergencia o divergencia de la sucesion cuyo termino n-esimoes.
an =√n3 + 2n− n
SOLUCION.- Calculando el lımite
lımn 7→∞
an = lımn 7→∞
(√n2 + 2n− n)
√n2 + 2n + n√n2 + 2n + n
= lımn 7→∞
n2 + 2n− n2
√n2 + 2n+ n
= lımn 7→∞
2n√n2 + 2n+ n
= lımn 7→∞
2√n2 + 2n
n2+ 1
= lımn 7→∞
2√1 +
2
n+ 1
=2√
1 +2
∞ + 1
=2√
1 + 1= 1
Por tanto, la sucesion an es convergente y converge a 1.
12.2. Series
DEFINICION 12.4. Dada la sucesion an, definimos sus sumas parciales por
sn = a1 + a2 + · · ·+ an
Si la sucesion sn converge, entonces el lımite lımn 7→∞
sn se llama serie de la sucesion an y es
denotada por∞∑
n=1
an. Esto es
∞∑
n=1
an = lımn 7→∞
sn = a1 + a2 + · · ·
Algunas series especiales
① La serie geometrica de razon r.
Si |r| < 1, entonces∞∑
n=0
arn =a
1 − r
Si |r| ≥ 1, entonces
∞∑
n=0
arn diverge.
ξρ∫s email: [email protected] 344 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 345
② La serie Armonica
∞∑
n=1
1
ndiverge.
③ La serie Armonica de grado p (serie p de Riemman)
∞∑
n=1
1
npconverge si p > 1 y diverge si
p ≤ 1.
EJEMPLO 12.5. Calcule
∞∑
n=1
[3
(1
8
)n
− 5
(1
3
)n].
SOLUCION.-
∞∑
n=1
[3
(1
8
)n
− 5
(1
3
)n]= 3
∞∑
n=1
(1
8
)n
− 5
∞∑
n=1
(1
3
)n
= 3
1
8
1 − 1
8
− 5
1
3
1 − 1
3
=3
7− 5
2= −29
14
EJEMPLO 12.6. Mediante definicion, demostrar que la serie∞∑
n=2
2n
3nes convergente.
SOLUCION.- Recordemos que, si |r| < 1, entonces
∞∑
n=0
rn =1
1 − r. De aqui podemos concluir
que
1 + r +
∞∑
n=2
rn =1
1 − r
Por lo tanto ∞∑
n=2
2n
3n=
∞∑
n=2
(2
3
)n
=1
1 − 2
3
− 1 − 2
3=
♣
12.2.1. Criterios de Convergencia
Existen algunos criterios que permiten determinar en muchos casos el caracter convergente odivergente de una serie.
Para las series
∞∑
n=1
an de terminos an positivos se tienen los siguientes criterios:
ξρ∫s email: [email protected] 345 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 346
① Criterio de divergencia. Si lımn 7→∞
an 6= 0, entonces la serie
∞∑
n=1
an es divergente.
EJEMPLO 12.7. Determinar la convergencia o divergencia de la serie
∞∑
n=1
2n
SOLUCION.- El termino general de la serie es an = 2n. Ahora bien, como
lımn 7→∞
an = lımn 7→∞
2n = 2∞ = ∞ 6= 0,
entonces la serie dada es divergente.
EJEMPLO 12.8. Determinar la convergencia o divergencia de la serie
∞∑
n=1
2n
SOLUCION.- El termino general de la serie es an =n+ 1
n− 1. Ahora bien, como
lımn 7→∞
an = lımn 7→∞
n+ 1
n− 1= lım
n 7→∞
1 + 1/n
1 − 1/n= 1 6= 0,
entonces la serie dada es divergente.
EJEMPLO 12.9. Determinar la convergencia o divergencia de la serie∞∑
n=1
(1 +
1
n
)n
SOLUCION.- El termino general de la serie es an =
(1 +
1
n
)n
. Ahora bien, como
lımn 7→∞
an = lımn 7→∞
(1 +
1
n
)n
= e 6= 0,
entonces la serie dada es divergente.
EJEMPLO 12.10. Determinar la convergencia o divergencia de la serie
∞∑
n=1
1√n
SOLUCION.- El termino general de la serie es an =1√n
. Ahora bien, como
lımn 7→∞
an = lımn 7→∞
1√n
=1√∞ = 0,
entonces no podemos concluir nada. Sin embargo, a la serie dada es reconocemos como unaserie p de Riemann, pues
∞∑
n=1
1√n
=
∞∑
n=1
1
n1/2con p =
1
2.
Como p = 12< 1, la serie dada diverge.
ξρ∫s email: [email protected] 346 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 347
② Criterio de Comparacion. Si an ≤ bn, entonces
Si
∞∑
n=1
bn converge, entonces
∞∑
n=1
an converge.
Si∞∑
n=1
an no converge, entonces∞∑
n=1
bn no converge.
EJEMPLO 12.11. Aplicando el criterio de Comparacion, determinar la convergencia o
divergencia de la serie
∞∑
n=1
1
n(n + 1)
SOLUCION.- Comparemos la serie dada con la serie p de Riemann∞∑
n=1
1
n2. Como
1
n(n+ 1)≤ 1
n2
y sabiendo que la serie
∞∑
n=1
1
n2es convergente por ser p = 2 > 1, deducimos que la serie dada
tambien es convergente.
EJEMPLO 12.12. Aplicando el criterio de Comparacion, determinar la convergencia o
divergencia de la serie
∞∑
n=1
1
lnn
SOLUCION.- Comparemos la serie dada con la serie Armonica
∞∑
n=1
1
n. Como lnn < n,
entonces1
n≤ 1
lnn
y entonces sabiendo que la serie Armonica∞∑
n=1
1
nes divergente, deducimos que la serie dada
tambien es divergente.
EJEMPLO 12.13. Analizar la convergencia y/o divergencia de la siguiente serie:
∞∑
n=1
n3 + 6n2 + 5n− 2
n 3√
(n3 + 1)4
SOLUCION.-
Puesto que
n3 ≤ n3 + 1
ξρ∫s email: [email protected] 347 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 348
entonces
3√
(n3)4 ≤ 3√
(n3 + 1)4
por tanto
n4 ≤ 3√
(n3 + 1)4
de aquı
n5 ≤ n 3√
(n3 + 1)4
invirtiendo
1
n5≥ 1
n 3√
(n3 + 1)4
ası
n3 + 6n2 + 5n− 2
n5≥ n3 + 6n2 + 5n− 2
n 3√
(n3 + 1)4
por tanto
n3
n5+
6n2
n5+
5n
n5− 2
n5≥ n3 + 6n2 + 5n− 2
n 3√
(n3 + 1)4
de donde se deduce que
1
n2+
6
n3+
5
n4− 2
n5≥ n3 + 6n2 + 5n− 2
n 3√
(n3 + 1)4
Debido a que las series∞∑
n=1
1
n2,
∞∑
n=1
1
n3,
∞∑
n=1
1
n4y
∞∑
n=1
1
n5son series armonicas de grado p con
p > 2, todas son convergentes, por tanto la desigualdad anterior implica que nuestra serietambien es convergente.
③ Criterio de Comparacion por el Cociente. Si lımn 7→∞
an
bn= k, entonces
Si 0 < k <∞, entonces las series
∞∑
n=1
an y
∞∑
n=1
bn ambas convergen o ambas divergen.
ξρ∫s email: [email protected] 348 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 349
Si k = 0 y
∞∑
n=1
bn converge, entonces
∞∑
n=1
an tambien converge.
Si k = ∞ y∞∑
n=1
bn diverge, entonces∞∑
n=1
an tambien diverge.
EJEMPLO 12.14. Determine la convergencia o divergencia de la serie∞∑
n=1
3n− 2
n3 − 2n2 + 11.
SOLUCION.- Sean an =3n− 2
n3 − 2n2 + 11y bn =
3
n2, entonces
lımn 7→∞
an
bn= lım
n 7→∞
3n− 2
n3 − 2n2 + 113
n2
= lımn 7→∞
(3n− 2)n2
3(n3 − 2n2 + 11)
= lımn 7→∞
3n3 − 2n2
3n36 − 2n2 + 33= 1,
Como
∞∑
n=1
1
n2converge, concluimos que la serie
∞∑
n=1
3n− 2
n3 − 2n2 + 11converge.
EJEMPLO 12.15. Determine la convergencia o divergencia de la serie
∞∑
n=1
1√n2 + 19n
.
SOLUCION.- Sean an =1√
n2 + 19ny bn =
1
n, entonces
lımn 7→∞
an
bn= lım
n 7→∞
1√n2 + 19n
1
n
= lımn 7→∞
n√n2 + 19n
= lımn 7→∞
√n2
n2 + 19n= lım
n 7→∞
√√√√1
1 +19
n
= 1.
Como∞∑
n=1
1
ndiverge, concluimos que la serie
∞∑
n=1
1√n2 + 19n
diverge.
EJEMPLO 12.16. Aplicando el criterio de Comparacion por el Cociente, determinar la
convergencia o divergencia de la serie
∞∑
n=1
1
n2 + 4
ξρ∫s email: [email protected] 349 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 350
SOLUCION.- Comparemos la serie dada con la serie p de Riemann convergente
∞∑
n=1
1
n2.
El hecho de que
lımn 7→∞
1
n2 + 41
n2
= lımn 7→∞
n2
n2 + 4= lım
n 7→∞
1
n2 + 4
n2
= lımn 7→∞
1
1 +4
n2
= 1 ∈ (0,∞)
implica que la serie dada es convergente.
EJEMPLO 12.17. Aplicando el criterio de Comparacion por el Cociente, determinar la
convergencia o divergencia de la serie
∞∑
n=1
1√n(2n− 1)
SOLUCION.- Comparemos la serie dada con la serie divergente∞∑
n=1
1√n
. El hecho de que
lımn 7→∞
1√n(2n− 1)
1√n
= lımn 7→∞
√n√
n(2n− 1)= lım
n 7→∞
√n
n(2n− 1)
= lımn 7→∞
√√√√√√
1
n2n2 − n
n2
= lımn 7→∞
√√√√√√
1
n
2 − 1
n
= 0
implica que la serie dada es divergente.
④ Criterio Cauchy o de la Raiz
lımn 7→∞
n√an = k ⇒
Si k < 1, entonces∞∑
n=1
an converge
Si k > 1, entonces∞∑
n=1
an diverge
Si k = 1, entonces el criterio no resuelve
EJEMPLO 12.18. Analizar la convergencia y/o divergencia de la siguiente serie:∞∑
n=1
(cos
πn2
2n2 − 3
)2n
ξρ∫s email: [email protected] 350 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 351
SOLUCION.-
lımn→∞
n
√(cos
πn2
2n2 − 3
)2n
= lımn→∞
(cos
πn2
2n2 − 3
)2
= lımn→∞
cos
π
2 − 3
n2
2
=(cos
π
2
)2
= 0 < 1
Por tanto, la serie es convergente.
⑤ Criterio del Cociente
lımn 7→∞
an+1
an= k ⇒
Si k < 1, entonces∞∑
n=1
an converge
Si k > 1, entonces
∞∑
n=1
an diverge
Si k = 1, entonces el criterio falla
EJEMPLO 12.19. Aplicando el criterio del Cociente, determinar la convergencia o diver-
gencia de la serie
∞∑
n=1
n
3n
SOLUCION.- Aplicando el criterio del Cociente tenemos:
lımn 7→∞
an+1
an
= lımn 7→∞
n+ 1
3n+1
n
3n
= lımn 7→∞
(n+ 1)3n
n3n+1= lım
n 7→∞
(1 +
1
n
)1
3=
1
3< 1,
de donde se deduce que la serie dada es convergente.
EJEMPLO 12.20. Aplicando el criterio del Cociente, determinar la convergencia o diver-
gencia de la serie∞∑
n=1
(n+ 1)(n+ 2)
n!
SOLUCION.- Aplicando el criterio del Cociente tenemos:
lımn 7→∞
an+1
an= lım
n 7→∞
(n+ 2)(n+ 3)
(n+ 1)!
(n+ 1)(n+ 2)
n!
= lımn 7→∞
(n+ 2)(n+ 3)n!
(n + 1)(n+ 2)(n+ 1)!
= lımn 7→∞
n+ 3
(n+ 1)2= 0 < 1,
ξρ∫s email: [email protected] 351 Jasmer LPC
UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 352
de donde se deduce que la serie dada es convergente.
EJEMPLO 12.21. Aplicando el criterio del Cociente, determinar la convergencia o diver-
gencia de la serie∞∑
n=1
n3
(ln 2)n
SOLUCION.- Aplicando el criterio del Cociente tenemos:
lımn 7→∞
an+1
an= lım
n 7→∞
(n+ 1)3
(ln 2)n+1
n3
(ln 2)n
= lımn 7→∞
(n + 1)3(ln 2)n
(ln 2)n+1n3= lım
n 7→∞
(n + 1)3
(ln 2)n3=
1
ln 2> 1,
de donde se deduce que la serie dada es divergente.
EJEMPLO 12.22. Analizar la convergencia y/o divergencia de la siguiente serie:
∞∑
n=1
n 2n
(n+ 1)3n.
SOLUCION.-
lımn→∞
(n + 1) 2n+1
(n + 2)3n+1
n 2n
(n+ 1)3n
= lımn→∞
(n+ 1) 2n+1 (n+ 1)3n
n 2n (n + 2)3n+1
= lımn→∞
(n+ 1) 2n 2 (n+ 1)3n
n 2n (n + 2)3n 3= lım
n→∞
2(n+ 1)2
3n(n + 2)
= lımn→∞
2
(1 +
1
n
)2
3
(1 +
2
n
) =2
3< 1
Por tanto, la serie es convergente.
EJEMPLO 12.23. Verifique la convergencia o divergencia de la serie∞∑
n=1
2n
n!
SOLUCION.- Aplicando el criterio del Cociente tenemos:
lımn 7→∞
an+1
an= lım
n 7→∞
2n+1
(n+ 1)!2n
n!
= lımn 7→∞
2n+1n!
(n+ 1)!2n
= lımn 7→∞
2n2n!
(n+ 1)n!2n= lım
n 7→∞
2
(n+ 1)= 0.
ξρ∫s email: [email protected] 352 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 353
El criterio del cociente nos permite concluir que la serie converge.
EJEMPLO 12.24. Verifique la convergencia o divergencia de la serie∞∑
n=1
2n
n20
SOLUCION.- Aplicando el criterio del Cociente tenemos:
lımn 7→∞
an+1
an= lım
n 7→∞
2n+1
(n + 1)20
2n
n20
= lımn 7→∞
2n+1n20
(n + 1)202n
= lımn 7→∞
2n2
2n
n20
(n + 1)20= lım
n 7→∞2
(n
n + 1
)20
= 2.
El criterio del cociente nos permite concluir que la serie diverge.
EJEMPLO 12.25. Verifique la convergencia o divergencia de la serie∞∑
n=1
n!
nn
SOLUCION.- Aplicando el criterio del Cociente tenemos:
lımn 7→∞
an+1
an= lım
n 7→∞
(n+ 1)!
(n+ 1)n+1
n!
nn
= lımn 7→∞
(n + 1)!nn
(n+ 1)n+1 n!
= lımn 7→∞
(n+ 1)n!nn
(n+ 1)n (n + 1)n!= lım
n 7→∞
(n
n + 1
)n
= lımn 7→∞
1(n+ 1
n
)n = lımn 7→∞
1(1 +
1
n
)n =1
e< 1
El criterio del cociente nos permite concluir que la serie converge.
EJEMPLO 12.26. Utilizando un criterio, determinar la convergencia o divergencia de la
serie∞∑
n=1
lnn
2n
SOLUCION.- Como lnn < n, entonces
lnn
2n<
n
2n
ξρ∫s email: [email protected] 353 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 354
Aplicando el criterio del Cociente tenemos:
lımn 7→∞
an+1
an= lım
n 7→∞
n+ 1
2n+1
n
2n
= lımn 7→∞
(n+ 1)2n
n2n+1= lım
n 7→∞
(1 +
1
n
)1
2=
1
2< 1,
de donde se deduce que la serie∞∑
n=1
n
2ndada es convergente. Por lo tanto, la serie
∞∑
n=1
lnn
2n
es convergente. ♣
ξρ∫s email: [email protected] 354 Jasmer LPC
CAPITULO 13
Funciones Gamma y Beta
13.1. Funcion Gamma
Definamos la funcion Gamma, Γ, como
Γ : (0,∞) → (0,∞)
p 7→ Γ(p) =
∫ ∞
0
tp−1e−tdt
TEOREMA 13.1. 1. Γ(1) = 1.
2. Γ(p) = (p− 1)Γ(p− 1) para todo p > 1.
3. Γ(n) = (n− 1)! para todo n ∈ N.
4. Γ
(1
2
)=
√π.
Demostracion. Probamos la validez de cada una de las propiedades de la funcion Gamma, em-pecemos:
Γ(1) =
∫ ∞
0
t1−1e−tdt = lımx→∞
∫ x
0
e−tdt = lımx→∞
[e0 − e−x
]= 1
Sea p > 1,
355

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 356
Γ(p) =
∫ ∞
0
tp−1e−tdt = lımx→∞
∫ x
0
tp−1e−tdt
= lımx→∞
[−tp−1e−t|x0 −
∫ x
0
(−e−t)(p− 1)tp−1dt
]u = tp−1, dv = e−tdt
du = (p− 1)tp−1dt, v = −e−t
= lımx→∞
[−xp−1e−x + (p− 1)
∫ x
0
tp−1e−tdt
]= (p− 1)Γ(p− 1)
Sea n ∈ N, entonces
Γ(n) = (n− 1)Γ(n− 1) = (n− 1)(n− 2)Γ(n− 2) = · · · = (n− 1)!
Para finalizar
Γ
(1
2
)=
∫ ∞
0
t12−1e−tdt =
∫ ∞
0
t−12e−tdt
=
∫ ∞
0
(u2)− 1
2e−u2
2udut = u2
dt = 2udu
= 2
∫ ∞
0
e−u2
du = 2
(√π
2
)=
√π
EJEMPLO 13.1. Calcular:
Γ(2) = 1! = 1
Γ(6) = 5! = 120
Γ(5)
Γ(3)=
4!
2!= 12
Γ
(9
2
)=
7
2Γ
(7
2
)=
7
2
5
2Γ
(5
2
)=
7
2
5
2
3
2Γ
(3
2
)=
7
2
5
2
3
2
1
2Γ
(1
2
)=
105
16
√π
EJEMPLO 13.2. Calcular la integral
∫ ∞
0
x6e−2xdx.
SOLUCION.-
2x = y x =y
2dx =
dy
2
∫ ∞
0
x6e−2xdx
|↓=
∫ ∞
0
(y2
)6
e−y dy
2=
1
27
∫ ∞
0
y6e−y dy =Γ(7)
27=
6!
27=
45
8
ξρ∫s email: [email protected] 356 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 357
♣
EJEMPLO 13.3. Calcular la integral
∫ ∞
0
√y e−y3
dy.
SOLUCION.-
y3 = x, y = x1/3, dy =1
3x−2/3dx
∫ ∞
0
√y e−y3
dy
|↓=
∫ ∞
0
√x1/3e−x 1
3x−2/3dx =
1
3
∫ ∞
0
x1/6−2/3e−x dx
por tanto
∫ ∞
0
√ye−y3
dy =1
3
∫ ∞
0
x−1/2e−x dx =1
3
∫ ∞
0
x1/2−1e−x dx =1
3Γ
(1
2
)=
1
3
√π.
♣
EJEMPLO 13.4. Calcular la integral
∫ ∞
0
e−x2 x3 dx.
SOLUCION.- Recordemos la definicion de la funcion gamma
Γ(p) =
∫ ∞
0
xp−1 e−x dx
∫e−
x2 x3dx
u = x2,
x = 2u,
dx = 2du
=
∫e−u (2u)3 2 du
= 24
∫u3 e−u du
= 24
∫u4−1 e−u du
= 24Γ(4) = 24 3! = 96
♣
EJEMPLO 13.5. Calcular la integral
∫ ∞
0
e−2x x4 dx.
ξρ∫s email: [email protected] 357 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 358
SOLUCION.-
∫e−2x x4dx
u = 2x,
x = u2,
dx = 12du
=
∫e−u
(u2
)4 1
2du
=1
25
∫u4 e−u du
=1
25
∫u5−1 e−u du
=1
25Γ(5) =
1
254! =
3
4.
♣
EJEMPLO 13.6. Calcular la integral
∫ ∞
0
x3 e−x2 dx.
SOLUCION.- Recordemos la definicion de la funcion gamma
Γ(p) =
∫ ∞
0
xp−1 e−x dx
∫x3 e−
x2 dx
u = x2,
x = 2u,
dx = 2du
=
∫(2u)3 e−u 2 du
= 24
∫u3 e−u du
= 24
∫u4−1 e−u du
= 24Γ(4) = 24 3! = 96
♣
EJEMPLO 13.7. Calcular la integral
∫ ∞
0
x4 e−4x dx.
SOLUCION.- ♣
Calcule las siguientes integrales:
ξρ∫s email: [email protected] 358 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 359
(1)
∫ ∞
0
x4e−4x dx (2)
∫ ∞
0
x4e−2x dx
(3)
∫ ∞
0
x2e−3x dx (4)
∫ ∞
0
x4e−3x dx
(5)
∫ ∞
0
x1/2e−x dx (6)
∫ ∞
0
x3/2e−x dx
(7)
∫ ∞
0
x2e−√
x dx (8)
∫ ∞
0
√x5e−x dx
13.2. Funcion Beta
Definamos la funcion Beta, β, como
β : (0,∞) × (0,∞) → (0,∞)
(p, q) 7→ β(p, q) =
∫ 1
0
xp−1(1 − x)q−1dx
TEOREMA 13.2. 1. β(p, q) = β(q, p).
2. β(p, q) = 2
∫ π2
0
sen2p−1 t cos2q−1 tdt.
3. β(p, q) =
∫ ∞
0
sp−1
(1 + s)p+qds.
4. β(p, q) =Γ(p) Γ(q)
Γ(p+ q).
Demostracion. Hagamos el cambio de variables y = 1 − x, entonces dx = −dy. Por tanto
β(p, q) =
∫ 1
0
xp−1(1 − x)q−1dx = −∫ 0
1
(1 − y)p−1yq−1dy
=
∫ 1
0
yq−1(1 − y)p−1dy = β(q, p)
Para probar la segunda ecuacion, en la definicion de β(p, q) reemplazamos x por sen2(t). Entonces,cuando x = 0, se tiene que sen2(t) = 0, de aquı t = 0. Del mismo modo, cuando x = 1, se tieneque sen2(t) = 1, ası t = π
2. Ademas dx = 2 sen(t) cos(t)dt.
ξρ∫s email: [email protected] 359 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 360
β(p, q) =
∫ 1
0
xp−1(1 − x)q−1dx
=
∫ π2
0
sen2(p−1)(t) (1 − sen2(t))q−12 sen(t) cos(t)dt
= 2
∫ π2
0
sen2p−1(t) cos2q−1(t)dt
Para obtener la tercera ecuacion para β(p, q). Hagamos s =x
1 − x. Cuando x = 0, se tiene que
s = 0 y si x→ 1−, se tiene que s→ ∞. Ahora como, x =s
1 + sse sigue que dx =
(1 + s) − s
(1 + s)2ds =
1
(1 + s)2ds. Por tanto,
β(p, q) =
∫ 1
0
xp−1(1 − x)q−1dx
=
∫ ∞
0
(s
1 + s
)p−1(1 − s
1 + s
)q−11
(1 + s)2ds
=
∫ ∞
0
sp−1
(1 + s)p−1
1
(1 + s)q−1
1
(1 + s)2ds
=
∫ ∞
0
sp−1
(1 + s)p+qds.
Para probar la ultima formula, usamos la definicion de la funcion Gamma, en efecto,
Γ(p) Γ(q) =
∫ ∞
0
tp−1e−tdt
∫ ∞
0
sq−1e−sds
=
∫ ∞
0
(∫ ∞
0
tp−1e−tdt
)sq−1e−sds
=
∫ ∞
0
∫ ∞
0
tp−1e−tsq−1e−sds dt
=
∫ ∞
0
∫ ∞
0
tp−1sq−1e−(t+s)ds dt
Realizando el cambio de variables s = tx se tiene que ds = tdx.
ξρ∫s email: [email protected] 360 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 361
∫ ∞
0
∫ ∞
0
tp−1sq−1e−(t+s)ds dt =
∫ ∞
0
∫ ∞
0
tp−1(tx)q−1e−(t+tx) tdx dt
=
∫ ∞
0
∫ ∞
0
tp−1tq−1xq−1e−t(1+x) tdx dt
=
∫ ∞
0
∫ ∞
0
tp+q−1xq−1e−t(1+x) dt dx
Hagamos s = t(1 + x), luego t =s
1 + x. De aquı dt =
1
1 + xds. Por tanto,
∫ ∞
0
∫ ∞
0
tp+q−1xq−1e−t(1+x) dt dx =
∫ ∞
0
∫ ∞
0
(s
1 + x
)p+q−1
xq−1e−s 1
1 + xds dx
=
∫ ∞
0
∫ ∞
0
sp+q−1
(1 + x)p+q−1xq−1 e−s 1
1 + xds dx
=
∫ ∞
0
∫ ∞
0
xq−1
(1 + x)p+qsp+q−1 e−s ds dx
=
∫ ∞
0
xq−1
(1 + x)p+q
∫ ∞
0
sp+q−1 e−s ds dx
=
∫ ∞
0
xq−1
(1 + x)p+qdx
∫ ∞
0
sp+q−1 e−s ds
= β(p, q) Γ(p+ q).
EJEMPLO 13.8. Calcular la siguiente integral
∫ 1
0
x4(1 − x)2dx.
SOLUCION.-∫ 1
0
x4(1 − x)2dx =
∫ 1
0
x5−1(1 − x)3−1dx = β(5, 3) =Γ(5) Γ(3)
Γ(5 + 3)=
4! 3!
8!=
1
180
♣
EJEMPLO 13.9. Calcular la siguiente integral
∫ 1
0
x2
√2 − x
dx.
SOLUCION.- Apliquemos la tecnica de sustitucion. Si hacemos x = 2y, entonces dx = 2dy. Portanto
ξρ∫s email: [email protected] 361 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 362
∫ 1
0
x2
√2 − x
dx =
∫ 1
0
(2y)2
√2 − 2y
2 dyx = 2y
dx = 2dy
=
∫ 1
0
8y2
√2√
1 − ydy =
∫ 1
0
8√
2y2
√2√
2√
1 − ydy
=
∫ 1
0
4√
2y2
√1 − y
dy = 4√
2
∫ 1
0
y2(1 − y)1/2 dy
Resolviendo el sistema de ecuacionesp− 1 = 2
q − 1 = 1/2
p = 3
q = 3/2
por lo tanto
∫ 1
0
x2
√2 − x
dx = 4√
2
∫ 1
0
y2(1 − y)1/2 dy
= 4√
2 β(3, 1
2
)= 4
√2
Γ(3) Γ(
12
)
Γ(3 + 1
2
) = 4√
2Γ(3) Γ
(12
)
Γ(
72
)
= 4√
2Γ(3) Γ
(12
)
5
2
3
2
1
2Γ
(1
2
) = 4√
23!15
8
=64√
2
15
♣
EJEMPLO 13.10. Calcule las siguientes integrales:
(1)
∫ 2
0
x2√
4 − x2dx (2)
∫ 1
0
x2
√2 − x
dx
(3)
∫ 1
0
x4√
1 − x dx (4)
∫ 1
0
x3(1 − x)4 dx
(5)
∫ 1
0
√x (1 − x)4 dx (6)
∫ 1
0
x2(1 − x)5 dx
(7)
∫ 1
0
√x(1 − x)3dx (8)
∫ 3
0
x4√
9 − x2dx
(9)
∫ 2
0
x2√
4 − x2dx (10)
∫ a
0
x4√a2 − x2dx
ξρ∫s email: [email protected] 362 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 363
EJEMPLO 13.11. Analice la verdad o falsedad de la siguiente afirmacion.
∫ π
0
sen(t) cos4(t)dt =1
2
Γ(
52
)
Γ(
72
) .
SOLUCION.- Recordemos que si a es impar y b par, se tiene que
∫ π
0
senq t cosb t dt =1
2
∫ π2
0
senq t cosb t dt
Aplicando esta ecuacion a nuestro caso obtenemos
∫ π
0
sen(t) cos4(t)dt =1
2
∫ π2
0
sen(t) cos4(t) dt
Entonces para encontrar nuestra integral, debemos resolver el siguiente sistema de ecuaciones
2p− 1 = 1
2q − 1 = 4
p = 2
2= 1
q = 52
por lo tanto
∫ π2
0
sen4(t) cos5(t)dt =1
2
Γ(1) Γ(
52
)
Γ(1 + 5
2
) =1
2
Γ(1) Γ(
52
)
Γ(
72
) =1
2
Γ(
52
)
Γ(
72
)
Por tanto la afirmacion es verdadera.
♣
EJEMPLO 13.12. Calcular la siguiente integral
∫ π2
0
sen4(t) cos5(t)dt.
SOLUCION.- Recordemos que
2
∫ π2
0
sen2p−1 t cos2q−1 tdt = β(p, q) =Γ(p) Γ(q)
Γ(p+ q)
de donde
∫ π2
0
sen2p−1 t cos2q−1 tdt =1
2β(p, q) =
1
2
Γ(p) Γ(q)
Γ(p+ q)(13.1)
ξρ∫s email: [email protected] 363 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 364
Entonces para encontrar nuestra integral, debemos resolver el siguiente sistema de ecuaciones
2p− 1 = 4
2q − 1 = 5
p = 5
2
q = 3
por lo tanto
∫ π2
0
sen4(t) cos5(t)dt =1
2
Γ(
52
)Γ(3)
Γ(
52
+ 3) =
1
2
Γ(
52
)Γ(3)
Γ(
112
) =1
2
Γ(
52
)Γ(3)
Γ(
112
)
Por otra parte calculemos
Γ
(11
2
)=
9
2Γ
(9
2
)=
9
2
7
2Γ
(7
2
)=
9
2
7
2
5
2Γ
(5
2
)=
315
8Γ
(5
2
)
esto implica que
∫ π2
0
sen4(t) cos5(t)dt =1
2
Γ(
52
)2!
315
8Γ
(5
2
) =1
2
(2)(8)
315=
8
315
♣
EJEMPLO 13.13. Calcular la siguiente integral
∫ π2
0
sen6(t) dt.
SOLUCION.- Usemos las ecuaciones en (13.1). Resolvemos el siguiente sistema de ecuaciones:
2p− 1 = 6
2q − 1 = 0
p = 7
2
q = 12
por lo tanto
∫ π2
0
sen6(t) dt =1
2
Γ(
72
)Γ(
12
)
Γ(
72
+ 12
) =1
2
5
2
3
2
1
2Γ
(1
2
) √π
Γ(4)=
5π
32.
♣
EJEMPLO 13.14. Calcular la siguiente integral
∫ π2
0
cos4(t) dt.
ξρ∫s email: [email protected] 364 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 365
SOLUCION.- Usemos las ecuaciones en (13.1). Resolvemos el siguiente sistema de ecuaciones:
2p− 1 = 0
2q − 1 = 4
p = 1
2
q = 52
por lo tanto
∫ π2
0
cos4(t) dt =1
2
Γ(
12
)Γ(
52
)
Γ(
12
+ 52
) =1
2
√π
3
2
1
2Γ
(1
2
)
Γ(3)=
3π
16.
♣
EJEMPLO 13.15. Calcular la integral
∫ π2
0
sen3 θ cos4 θdθ.
SOLUCION.- Recordemos una de las propiedades de la funcion beta
β(p, q) = 2
∫ π2
0
sen2p−1 θ cos2q−1 θdθ
de donde
∫ π2
0
senu θ cosv θdθ =1
2β(u+ 1
2,v + 1
2
)
Aplicando esta ultima formula tenemos∫ π
2
0
sen3 θ cos4 θdθ =1
2β(3 + 1
2,4 + 1
2
)=
1
2β(2,
5
2
)
Recordemos ademas que
β(p, q) =Γ(p) Γ(q)
Γ(p+ q)
aplicando esto obtenemos
β(2,
5
2
)=
Γ(2) Γ(5
2
)
Γ(2 +
5
2
) =1! Γ(5
2
)
Γ(9
2
) =Γ(5
2
)
7
2Γ(7
2
) =Γ(5
2
)
7
2· 5
2Γ(5
2
) =4
35.
Por lo tanto, finalmente tenemos∫ π
2
0
sen3 θ cos4 θdθ =1
2
4
35=
2
35.
♣
ξρ∫s email: [email protected] 365 Jasmer LPC

UMSA mατιo ετo∫ζℏαυεz ⊛ 74076882 366
EJEMPLO 13.16. Calcule las siguientes integrales:
(1)
∫ π2
0
sen4(t) cos5(t)dt (2)
∫ π2
0
sen6(t) dt
(3)
∫ π2
0
sen3 θ cos4 θdθ (4)
∫ π2
0
cos4(t) dt
(5)
∫ π2
0
sen2 θ cos3 θdθ (6)
∫ π
0
sen4 θ dθ
(7)
∫ π2
0
sen3 θ cos2 θdθ (8)
∫ π
0
cos6 θ dθ
ξρ∫s email: [email protected] 366 Jasmer LPC