boom & s.o.s
DESCRIPTION
BOOM & S.O.S. (Rilevatore di caduta). Progettato e realizzato da : Fiore Simone e Timotin Andrei A.S. 2010/2011 Classe 5°A Elettronica e Telecomunicazioni. Descrizione Generale INTRODUZIONE FUNZIONAMENTO CATENA DI ACQUISIZIONE DATI TRASMISSIONE SERIALE ASINCRONA - PowerPoint PPT PresentationTRANSCRIPT

BOOM & S.O.S(Rilevatore di caduta)
Progettato e realizzato da :
Fiore Simone e Timotin Andrei A.S. 2010/2011
Classe 5°A Elettronica e Telecomunicazioni
Descrizione Generaleo INTRODUZIONE o FUNZIONAMENTOo CATENA DI ACQUISIZIONE DATIo TRASMISSIONE SERIALE ASINCR
ONAo TRASMISSIONE/RICEZIONE WIRE
LESS E MODULAZIONEo SVILUPPI FUTURI
Designo STRUTTURA INTERNA TX / RXo SCHEMA ELETTRICO TX / RXo MASTER DEL CIRCUITO TX / RX
Hardwareo PIC16F876Ao ACCELEROMETRO MMA7260QTo GIROSCOPIO LPY510ALo AMPLIFICATORE OPERAZIONALE L
M324o MODULO TRASMETTITORE AUREL
OOK TX-4M10HAo MODULO RICEVITORE AUREL RX-4
M50RR30SF
Softwareo DIAGRAMMA A BLOCCHI TX / RXo PROGRAMMA LINGUAGGIO
ASSEMBLER TX / RX
INDICE
Introduzione
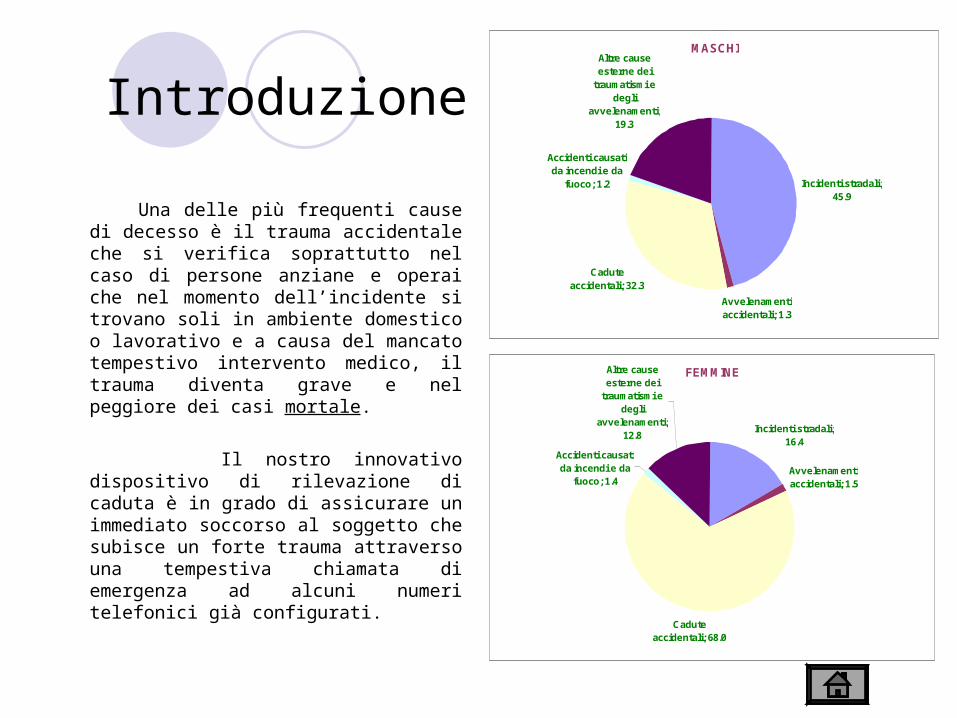
Una delle più frequenti cause di decesso è il trauma accidentale che si verifica soprattutto nel caso di persone anziane e operai che nel momento dell’incidente si trovano soli in ambiente domestico o lavorativo e a causa del mancato tempestivo intervento medico, il trauma diventa grave e nel peggiore dei casi mortale.
Il nostro innovativo dispositivo di rilevazione di caduta è in grado di assicurare un immediato soccorso al soggetto che subisce un forte trauma attraverso una tempestiva chiamata di emergenza ad alcuni numeri telefonici già configurati.
MASCHI
Incidenti stradali; 45.9
Avvelenamenti accidentali; 1.3
Cadute accidentali; 32.3
Accidenti causati da incendi e da
fuoco; 1.2
Altre cause esterne dei
traumatismi e degli
avvelenamenti; 19.3
FEMMINE
Incidenti stradali; 16.4
Avvelenamenti accidentali; 1.5
Cadute accidentali; 68.0
Accidenti causati da incendi e da
fuoco; 1.4
Altre cause esterne dei
traumatismi e degli
avvelenamenti; 12.8
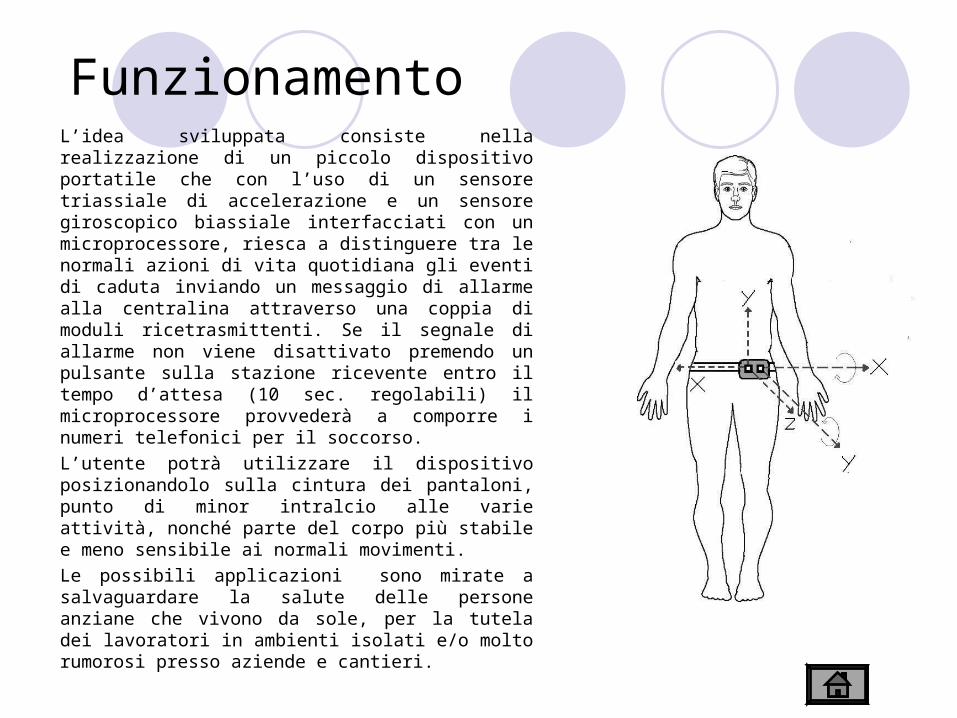
Funzionamento • L’idea sviluppata consiste nella realizzazione di un
piccolo dispositivo portatile che con l’uso di un sensore triassiale di accelerazione e un sensore giroscopico biassiale interfacciati con un microprocessore, riesca a distinguere tra le normali azioni di vita quotidiana gli eventi di caduta inviando un messaggio di allarme alla centralina attraverso una coppia di moduli ricetrasmittenti. Se il segnale di allarme non viene disattivato premendo un pulsante sulla stazione ricevente entro il tempo d’attesa (10 sec. regolabili) il microprocessore provvederà a comporre i numeri telefonici per il soccorso.
• L’utente potrà utilizzare il dispositivo posizionandolo sulla cintura dei pantaloni, punto di minor intralcio alle varie attività, nonché parte del corpo più stabile e meno sensibile ai normali movimenti.
• Le possibili applicazioni sono mirate a salvaguardare la salute delle persone anziane che vivono da sole, per la tutela dei lavoratori in ambienti isolati e/o molto rumorosi presso aziende e cantieri.
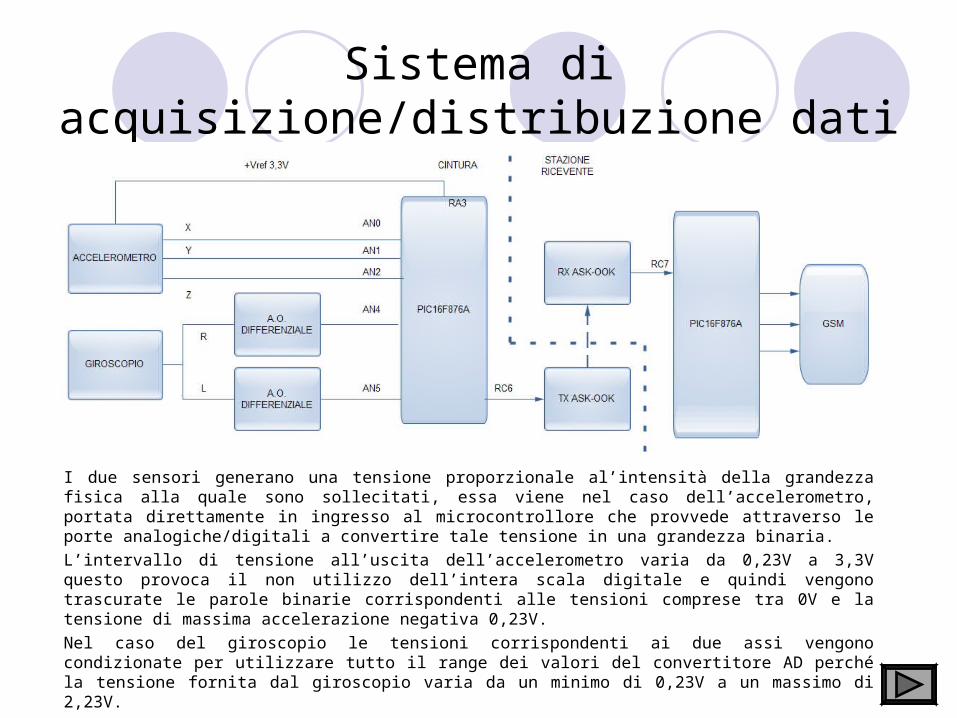
Sistema di acquisizione/distribuzione dati
I due sensori generano una tensione proporzionale al’intensità della grandezza fisica alla quale sono sollecitati, essa viene nel caso dell’accelerometro, portata direttamente in ingresso al microcontrollore che provvede attraverso le porte analogiche/digitali a convertire tale tensione in una grandezza binaria.
L’intervallo di tensione all’uscita dell’accelerometro varia da 0,23V a 3,3V questo provoca il non utilizzo dell’intera scala digitale e quindi vengono trascurate le parole binarie corrispondenti alle tensioni comprese tra 0V e la tensione di massima accelerazione negativa 0,23V.
Nel caso del giroscopio le tensioni corrispondenti ai due assi vengono condizionate per utilizzare tutto il range dei valori del convertitore AD perché la tensione fornita dal giroscopio varia da un minimo di 0,23V a un massimo di 2,23V.

Conversione A/D Il convertitore AD integrato nel microcontrollore
PIC16F876A ha una risoluzione massima di 10 bit, per semplificare il software, abbiamo sfruttato solamente gli 8 bit più significativi in considerazione del fatto che non è richiesta una elevatissima precisione.
La tensione di fondo scala 3,3V è stata scelta perché nessuno dei due dispositivi raggiunge una tensione superiore e quindi per evitare di condizionare la tensione in uscita dall’accelerometro alla tensione standard del PIC contenendo lo spazio.
Il tempo totale di conversione è dato dalla somma del tempo di acquisizione del condensatore di sample & hold più il tempo di conversione dell’ADC per 10 bit ad approssimazioni successive.
Tconv = Tacq + 11*Tad
= 24u + 11*0,7u = 31,7us
Q = VFs/2^nb = 3,3V/2^8 = 12,89mV
FMcamp = 1/ ( 3(Tconv + 12us + 1us) + 5us) = 7,2KHz
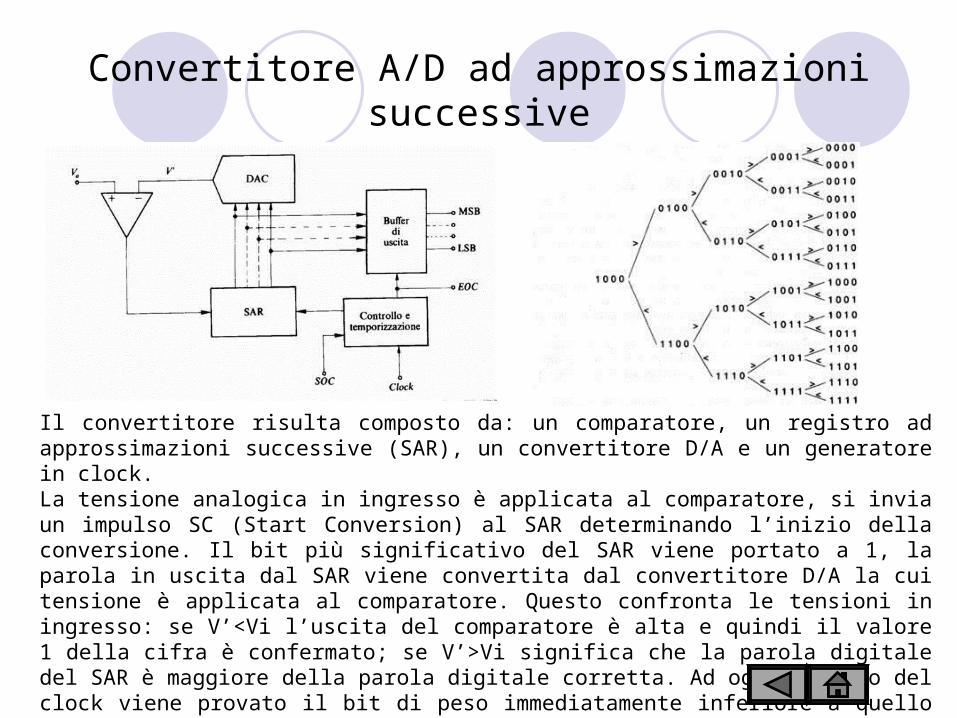
Convertitore A/D ad approssimazioni successive
Il convertitore risulta composto da: un comparatore, un registro ad approssimazioni successive (SAR), un convertitore D/A e un generatore in clock.La tensione analogica in ingresso è applicata al comparatore, si invia un impulso SC (Start Conversion) al SAR determinando l’inizio della conversione. Il bit più significativo del SAR viene portato a 1, la parola in uscita dal SAR viene convertita dal convertitore D/A la cui tensione è applicata al comparatore. Questo confronta le tensioni in ingresso: se V’<Vi l’uscita del comparatore è alta e quindi il valore 1 della cifra è confermato; se V’>Vi significa che la parola digitale del SAR è maggiore della parola digitale corretta. Ad ogni impulso del clock viene provato il bit di peso immediatamente inferiore a quello precedente. Il procedimento si conclude quando è stato testato anche il bit meno significativo. I bit di uscita del SAR sono gli stessi che si portano all’uscita.•La conversione dura sempre n+1 con n = numero di bit.
Protocollo di Trasmissione seriale
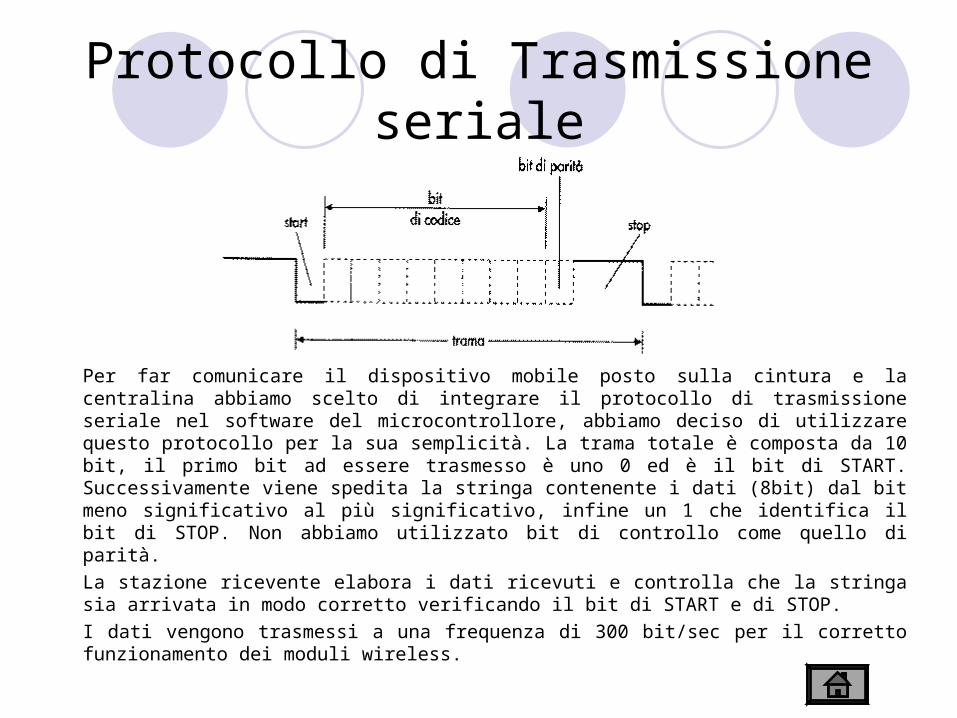
Per far comunicare il dispositivo mobile posto sulla cintura e la centralina abbiamo scelto di integrare il protocollo di trasmissione seriale nel software del microcontrollore, abbiamo deciso di utilizzare questo protocollo per la sua semplicità. La trama totale è composta da 10 bit, il primo bit ad essere trasmesso è uno 0 ed è il bit di START. Successivamente viene spedita la stringa contenente i dati (8bit) dal bit meno significativo al più significativo, infine un 1 che identifica il bit di STOP. Non abbiamo utilizzato bit di controllo come quello di parità.
La stazione ricevente elabora i dati ricevuti e controlla che la stringa sia arrivata in modo corretto verificando il bit di START e di STOP.
I dati vengono trasmessi a una frequenza di 300 bit/sec per il corretto funzionamento dei moduli wireless.
La modulazione
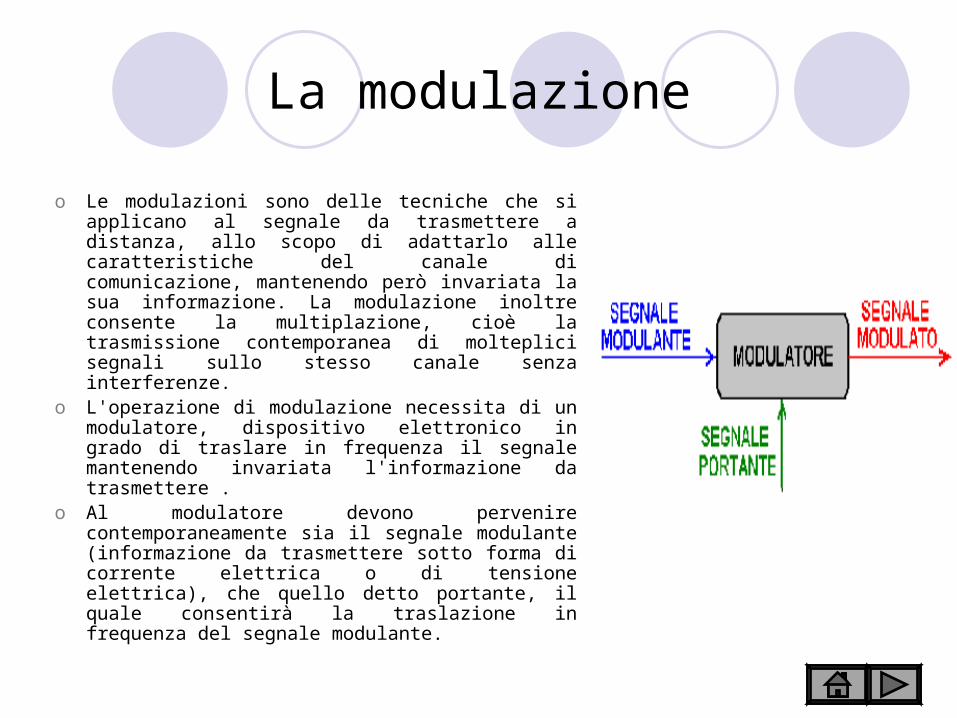
o Le modulazioni sono delle tecniche che si applicano al segnale da trasmettere a distanza, allo scopo di adattarlo alle caratteristiche del canale di comunicazione, mantenendo però invariata la sua informazione. La modulazione inoltre consente la multiplazione, cioè la trasmissione contemporanea di molteplici segnali sullo stesso canale senza interferenze.
o L'operazione di modulazione necessita di un modulatore, dispositivo elettronico in grado di traslare in frequenza il segnale mantenendo invariata l'informazione da trasmettere .
o Al modulatore devono pervenire contemporaneamente sia il segnale modulante (informazione da trasmettere sotto forma di corrente elettrica o di tensione elettrica), che quello detto portante, il quale consentirà la traslazione in frequenza del segnale modulante.
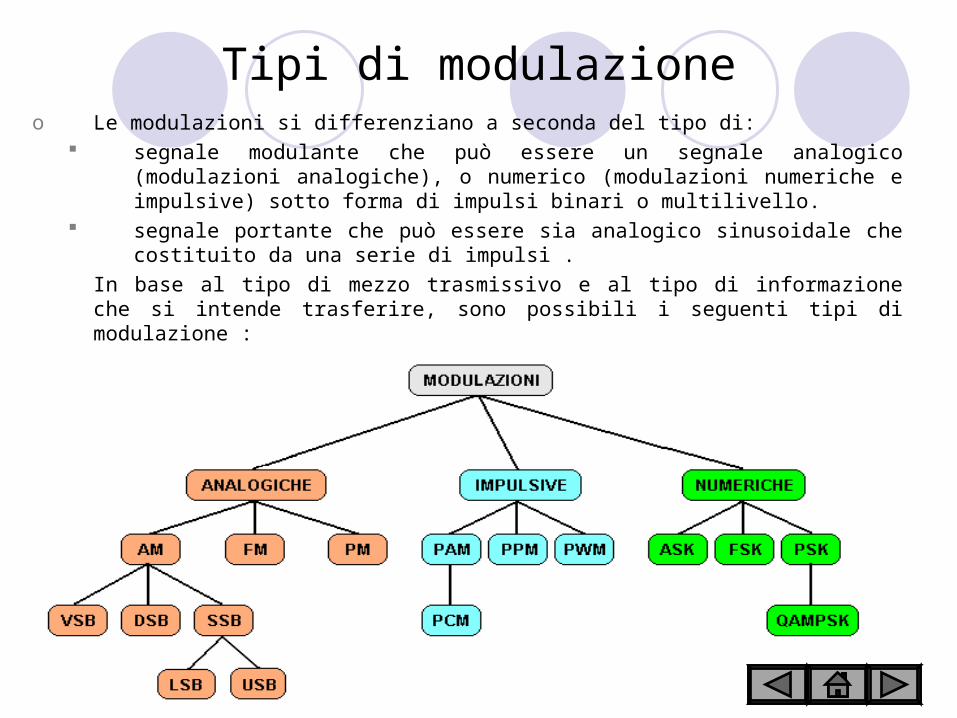
Tipi di modulazioneo Le modulazioni si differenziano a seconda del tipo di:
segnale modulante che può essere un segnale analogico (modulazioni analogiche), o numerico (modulazioni numeriche e impulsive) sotto forma di impulsi binari o multilivello.
segnale portante che può essere sia analogico sinusoidale che costituito da una serie di impulsi .
In base al tipo di mezzo trasmissivo e al tipo di informazione che si intende trasferire, sono possibili i seguenti tipi di modulazione :
I motivi della modulazione Il processo di modulazione è eseguito per i seguenti motivi :o Traslazione della banda del segnale informativo nella banda passante del canale di comunicazione;o Se i segnali devono essere trasmessi mediante onde radio (comunicazione wireless) si verifica che
l'antenna (in trasmissione come in ricezione) ha una lunghezza proporzionale alla lunghezza d'onda, per esempio, ad un segnale audio in banda base occorrerebbe una antenna della lunghezza di alcuni chilometri:
pertanto improponibile perché la potenza necessaria ad alimentare un'antenna di queste dimensioni sarebbe enorme e il trasmettitore risulterebbe pesante e troppo voluminoso;
o Modulando un segnale a frequenze diverse, è possibile far transitare sullo stesso mezzo trasmissivo più segnali contemporaneamente, come ad esempio il comune sistema telefonico che permette l’uso contemporaneo della stessa linea telefonica a più utenti. (FDM - multiplazione a divisione di frequenza);
o Il segnale modulato può essere codificato così da ridurre gli effetti del rumore; la natura del segnale stesso è tale da concentrare il suo spettro nelle frequenze più basse, mentre i mezzi trasmissivi hanno un miglior rendimento ovvero miglior risposta in frequenza a frequenze più elevate o comunque diverse dalla banda base del segnale originario;
o Si ha infine una semplificazione dei circuiti adottati per la trasmissione e la ricezione dei segnali.
Moduli Tx/Rx Wireless
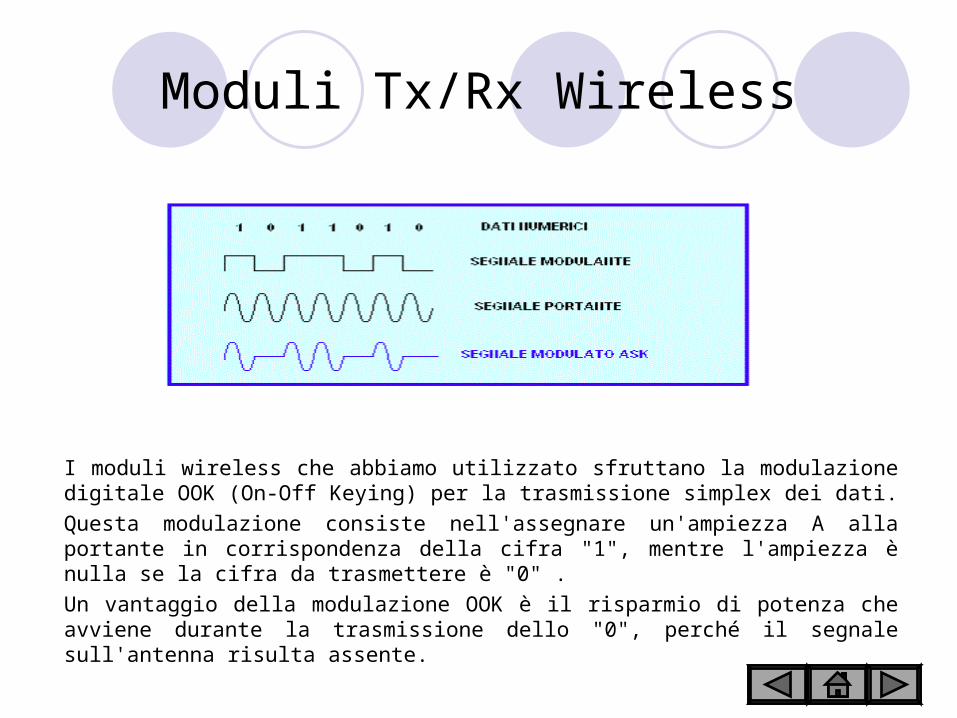
I moduli wireless che abbiamo utilizzato sfruttano la modulazione digitale OOK (On-Off Keying) per la trasmissione simplex dei dati.
Questa modulazione consiste nell'assegnare un'ampiezza A alla portante in corrispondenza della cifra "1", mentre l'ampiezza è nulla se la cifra da trasmettere è "0" .
Un vantaggio della modulazione OOK è il risparmio di potenza che avviene durante la trasmissione dello "0", perché il segnale sull'antenna risulta assente.
Codifica Manchester
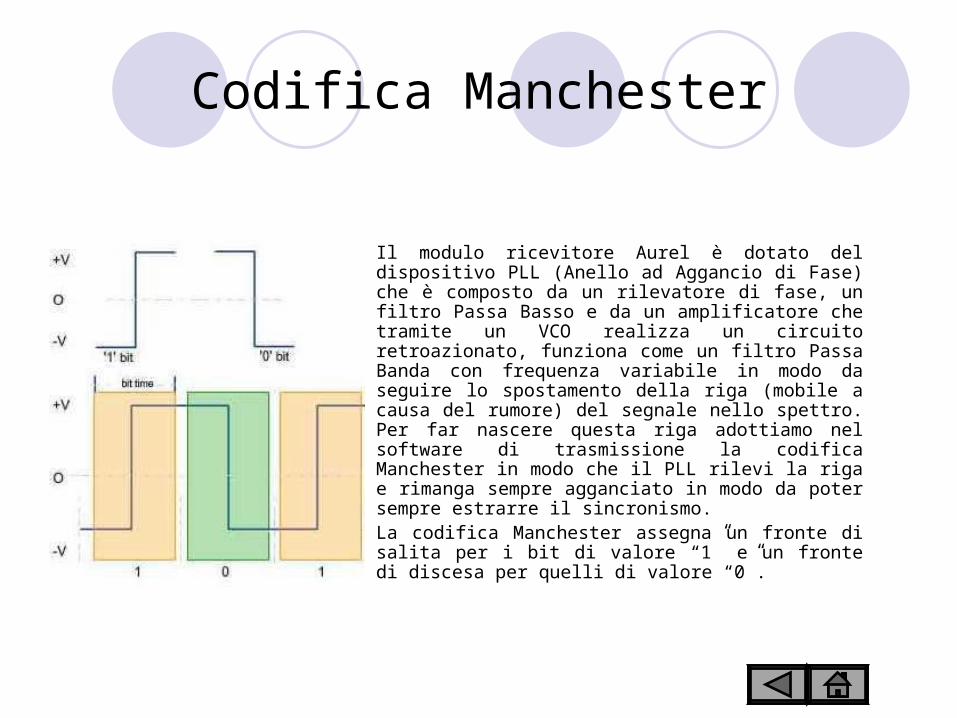
Il modulo ricevitore Aurel è dotato del dispositivo PLL (Anello ad Aggancio di Fase) che è composto da un rilevatore di fase, un filtro Passa Basso e da un amplificatore che tramite un VCO realizza un circuito retroazionato, funziona come un filtro Passa Banda con frequenza variabile in modo da seguire lo spostamento della riga (mobile a causa del rumore) del segnale nello spettro. Per far nascere questa riga adottiamo nel software di trasmissione la codifica Manchester in modo che il PLL rilevi la riga e rimanga sempre agganciato in modo da poter sempre estrarre il sincronismo.
La codifica Manchester assegna un fronte di salita per i bit di valore “1” e un fronte di discesa per quelli di valore “0”.
Sviluppi futuri
• Essendo un prototipo le dimensioni dei circuiti non sono particolarmente contenute. In futuro sarà possibile una ulteriore miniaturizzazione della struttura hardware. Inoltre sarà possibile utilizzare un modulo GSM integrato per contenere le dimensioni della stazione ricevente fissa. L’algoritmo software può essere ulteriormente ottimizzato con l’aggiunta di un controllo, in tempo reale, della posizione in cui si trova l’utente, per cui oltre alla rilevazione della caduta sarà possibile anche una individuazione del luogo dove è avvenuta la caduta.
• L’hardware è stato predisposto anche per l’utilizzo del microcontrollore PIC18F2550 che permette una maggiore velocità software fino a 48MHz e il perfetto interfacciamento con il sensore giroscopico.
PIC16F876A
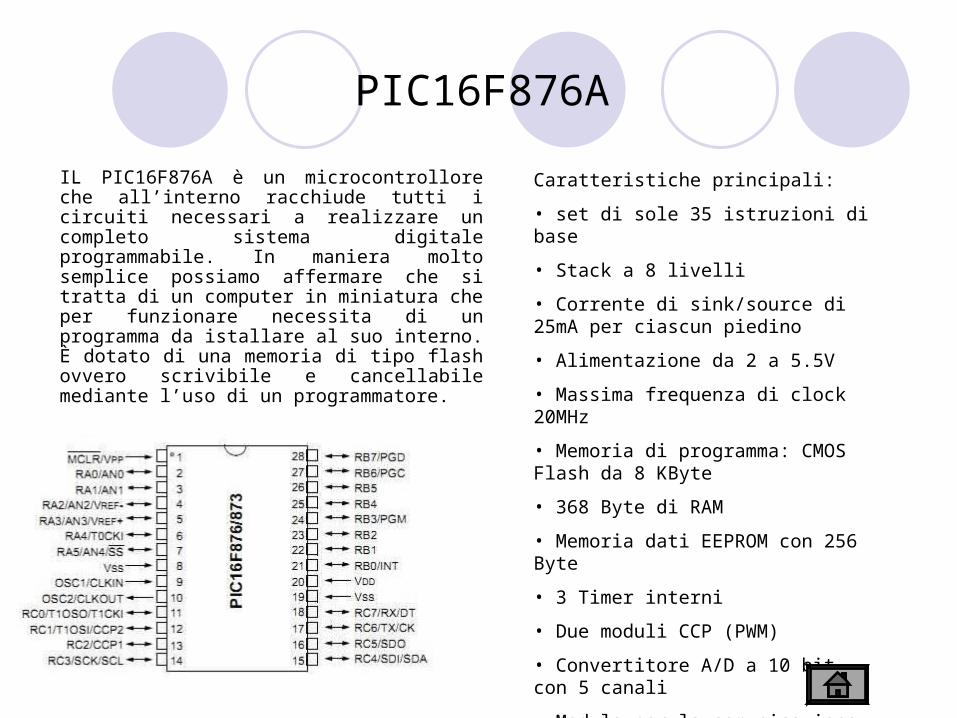
IL PIC16F876A è un microcontrollore che all’interno racchiude tutti i circuiti necessari a realizzare un completo sistema digitale programmabile. In maniera molto semplice possiamo affermare che si tratta di un computer in miniatura che per funzionare necessita di un programma da istallare al suo interno. È dotato di una memoria di tipo flash ovvero scrivibile e cancellabile mediante l’uso di un programmatore.
Caratteristiche principali:
• set di sole 35 istruzioni di base
• Stack a 8 livelli
• Corrente di sink/source di 25mA per ciascun piedino
• Alimentazione da 2 a 5.5V
• Massima frequenza di clock 20MHz
• Memoria di programma: CMOS Flash da 8 KByte
• 368 Byte di RAM
• Memoria dati EEPROM con 256 Byte
• 3 Timer interni
• Due moduli CCP (PWM)
• Convertitore A/D a 10 bit con 5 canali
• Modulo per la comunicazione seriale asincrona (USART)
•Compatibile con I2C Bus

ACCELEROMETRO MMA7260QT
L’accelerometro è un circuito integrato in grado di fornire una tensione proporzionale all’intensità dell’accelerazione cui è sottoposto. L’MMA7260QT può essere alimentato attraverso il pin 3,3V con una tensione nel range tra 2,2V a 3,6V, in alternativa la scheda può essere alimentata con tensioni superiori, fino a 16V usando in pin VIN che è collegato al regolatore low-dropout da 3,3V. In questa configurazione il pin Vcc a 3,3V può essere usato come uscita per riferimento o per alimentare altri dispositivi a bassa potenza, nel nostro caso questa tensione è stata utilizzata come tensione di riferimento superiore per ADC integrato nel PIC.
I pin per la selezione della sensibilità GS1 e GS2 possono essere configurati in modo da avere una sensibilità: 1,5g, 2g, 4g, 6g. Dopo diverse prove pratiche abbiamo optato per la configurazione a 4g.
•Dimensioni: 20x14x3 mm
•Tensione di alimentazione: 3,3-16V
•Corrente assorbita: 1,35mA
•Range della tensione d’uscita: 0,23-3,3V
•Range di sensibilità: +/- 1,5g, 2g, 4g, 6g
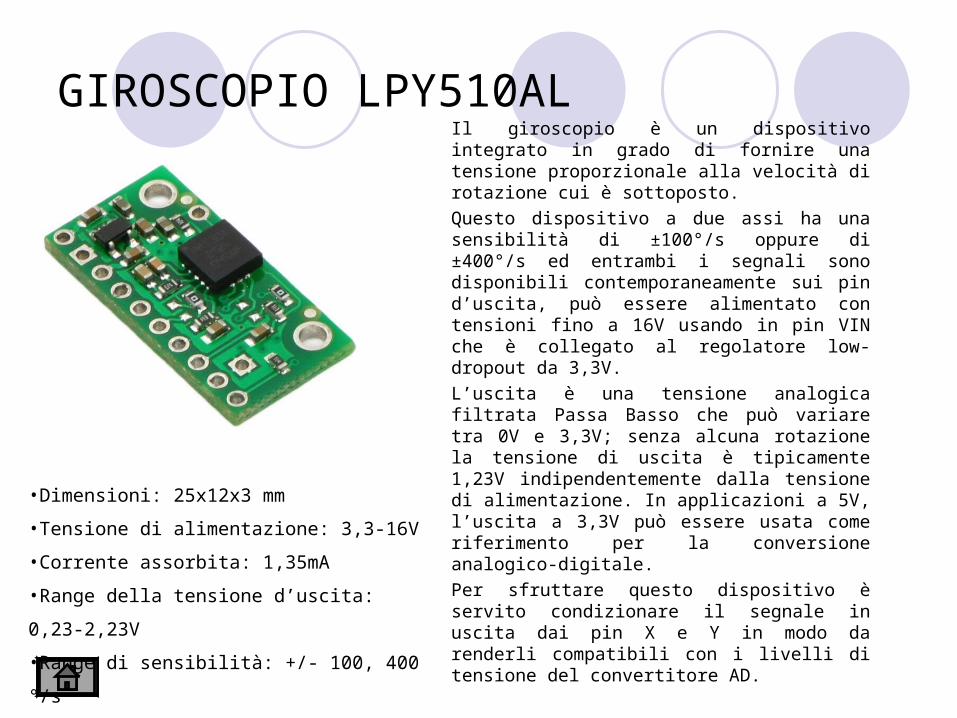
GIROSCOPIO LPY510AL Il giroscopio è un dispositivo integrato in
grado di fornire una tensione proporzionale alla velocità di rotazione cui è sottoposto.
Questo dispositivo a due assi ha una sensibilità di ±100°/s oppure di ±400°/s ed entrambi i segnali sono disponibili contemporaneamente sui pin d’uscita, può essere alimentato con tensioni fino a 16V usando in pin VIN che è collegato al regolatore low-dropout da 3,3V.
L’uscita è una tensione analogica filtrata Passa Basso che può variare tra 0V e 3,3V; senza alcuna rotazione la tensione di uscita è tipicamente 1,23V indipendentemente dalla tensione di alimentazione. In applicazioni a 5V, l’uscita a 3,3V può essere usata come riferimento per la conversione analogico-digitale.
Per sfruttare questo dispositivo è servito condizionare il segnale in uscita dai pin X e Y in modo da renderli compatibili con i livelli di tensione del convertitore AD.
•Dimensioni: 25x12x3 mm
•Tensione di alimentazione: 3,3-16V
•Corrente assorbita: 1,35mA
•Range della tensione d’uscita: 0,23-2,23V
•Range di sensibilità: +/- 100, 400 °/s
AMPLIFICATORE OPERAZIONALE LM324
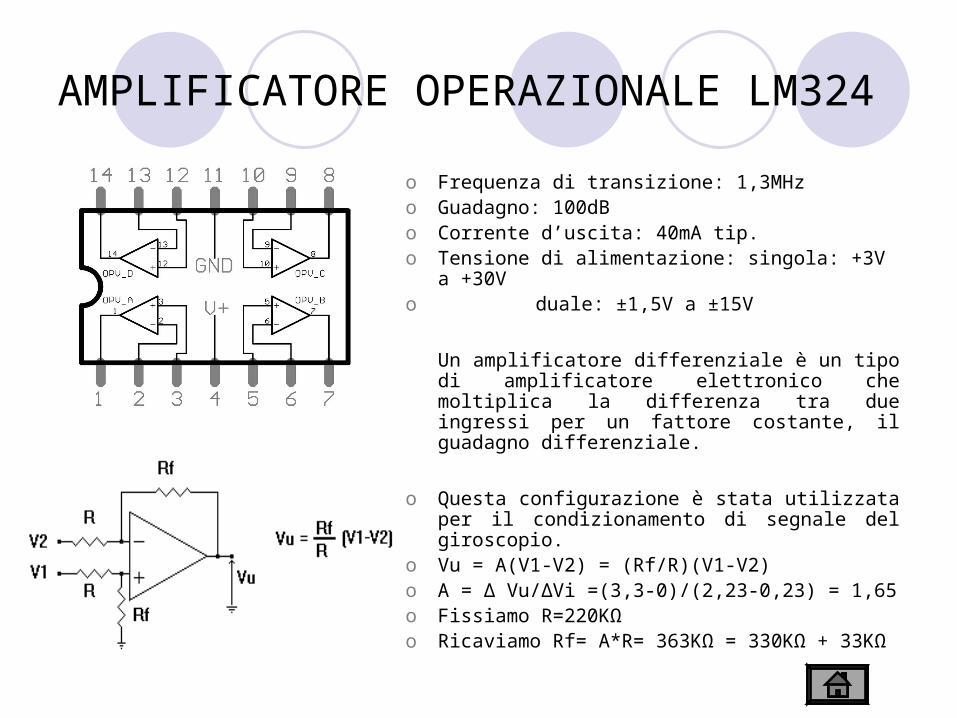
o Frequenza di transizione: 1,3MHzo Guadagno: 100dBo Corrente d’uscita: 40mA tip.o Tensione di alimentazione: singola: +3V a +30Vo duale: ±1,5V a
±15V
Un amplificatore differenziale è un tipo di amplificatore elettronico che moltiplica la differenza tra due ingressi per un fattore costante, il guadagno differenziale.
o Questa configurazione è stata utilizzata per il condizionamento di segnale del giroscopio.
o Vu = A(V1-V2) = (Rf/R)(V1-V2)o A = Δ Vu/ΔVi =(3,3-0)/(2,23-0,23) = 1,65o Fissiamo R=220KΩ o Ricaviamo Rf= A*R= 363KΩ = 330KΩ + 33KΩ

AUREL OOK TX-4M10HA
o Questo dispositivo è un trasmettitore wireless con portante a RF che lavora in modulazione digitale ON-OFF Keying con antenna elicoidale integrata
o Per un corretto funzionamento richiede un condensatore di filtro dell’ordine del centinaio di nanofarad.
o Per interfacciarlo con il microcontrollore abbiamo utilizzato un transistor BC237 in configurazione ad emettitore comune come adattatore di impedenza.
• Tensione di alimentazione: 3V
• Corrente assorbita: 25mA
• Frequenza della portante: 433,92MHz
• Potenza di uscita: 10mW
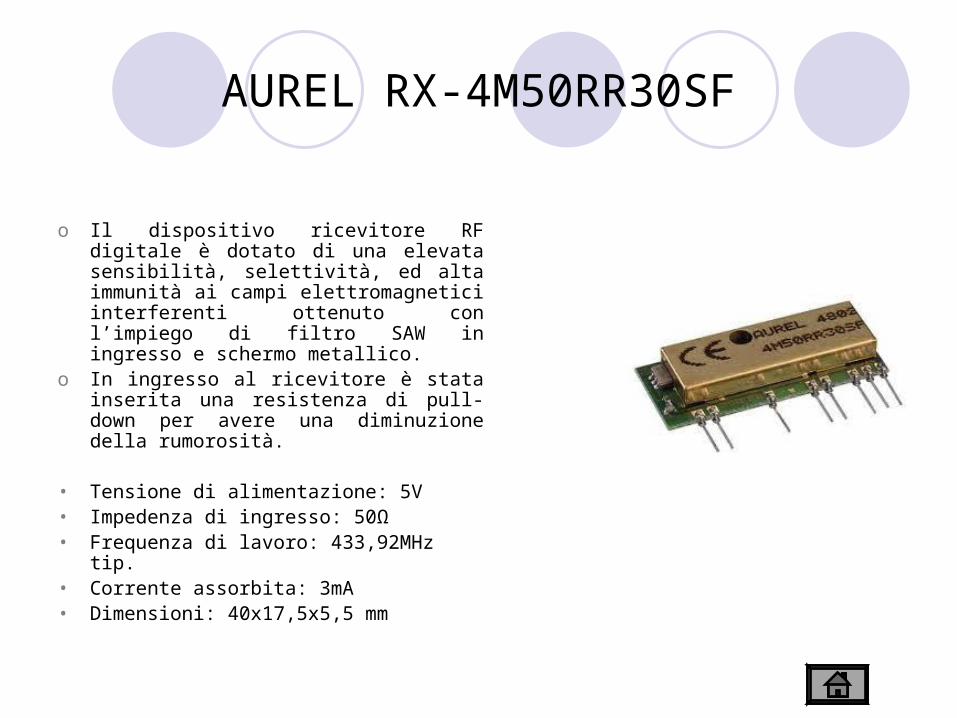
AUREL RX-4M50RR30SF
o Il dispositivo ricevitore RF digitale è dotato di una elevata sensibilità, selettività, ed alta immunità ai campi elettromagnetici interferenti ottenuto con l’impiego di filtro SAW in ingresso e schermo metallico.
o In ingresso al ricevitore è stata inserita una resistenza di pull-down per avere una diminuzione della rumorosità.
• Tensione di alimentazione: 5V• Impedenza di ingresso: 50Ω• Frequenza di lavoro: 433,92MHz tip.• Corrente assorbita: 3mA• Dimensioni: 40x17,5x5,5 mm

Struttura interna del rilevatore1. Microcontrollore PIC16F876A (M)
2. Accelerometro MMA7260QT
3. Giroscopio LPY510AL
4. Amplificatore Operazionale LM324N
5. Regolatore di tensione 78L05
6. Trasmettitore Aurel OOK TX-4M10HA
7. Relè SIP-1A05
8. Batteria ricaricabile 9V

Struttura interna della stazione1. Microcontrollore PIC16F876A (M)
2. Regolatore di tensione 78L05
3. Ricevitore Aurel OOK RX-4M50RR30SF
4. Relè SIP-1A05
5. Trasformatore 230V/24V
6. Trasformatore 230V/3,7V
7. Raddrizzatore a ponte di Graetz