bidirectional search routing protocol for mobile ad hoc networks
DESCRIPTION
TRANSCRIPT
International Journal of Computer Engineering and Technology (IJCET), ISSN 0976-
6367(Print), ISSN 0976 – 6375(Online) Volume 4, Issue 1, January- February (2013), © IAEME
229
BIDIRECTIONAL SEARCH ROUTING PROTOCOL FOR MOBILE AD
HOC NETWORKS
M. Ahmed, S. Yousef, and Sattar J Aboud
Telecommunications Engineering Research Group (TERG)
Faculty of Science and Technology
Anglia Ruskin University, UK
ABSTRACT
Ad hoc Network is self-configurable, infrastructure-less multi-hop wireless networks,
characterized by their frequent topology changes and the need for dynamic routing protocols
capable of coping with these characteristics. A new reactive ad hoc routing protocol is
proposed in this paper, which relies on the Artificial Intelligence Bidirectional Search
Algorithm in discovering routes from source to destination of communication process in a
balanced and mutual search mechanism. This allows both source and destination to
simultaneously discover the routes to each other reducing the discovery time of reactive
routing strategy up to 53% in small and medium scale networks, while this value starts to
decrease by increasing the size of the network. The new Bidirectional Search Routing
protocol then is compared to both Dynamic Source Routing and Ad-hoc On-Demand
Distance Vector Routing in terms of performance metrics of reactive routing strategy such
route discovery time and average delay showing promising results.
Keywords: Routing, Communication system routing, Protocols, MANET.
I. INTRODUCTION
Unlike infrastructure-oriented wireless networks, wherein the wireless devices
internetwork through relying on fixed network infrastructure to bypass, process or route data
packets across the wireless network. Mobile Ad hoc Networks (MANETs) are multi-hop and
self-organized infrastructure-less wireless networks. This means that each network node
should act as both host and router at the same time traversing data packets across the
network. One of the major challenges facing the designers of MANETs is the routing
dilemma. Recently, developing a dynamic routing protocol that can cope with the dynamic
nature of MANETs and simplifies the finding of feasible routes between the communicating
INTERNATIONAL JOURNAL OF COMPUTER ENGINEERING
& TECHNOLOGY (IJCET) ISSN 0976 – 6367(Print) ISSN 0976 – 6375(Online) Volume 4, Issue 1, January- February (2013), pp. 229-243 © IAEME: www.iaeme.com/ijcet.asp Journal Impact Factor (2012): 3.9580 (Calculated by GISI) www.jifactor.com
IJCET
© I A E M E

International Journal of Computer Engineering and Technology (IJCET), ISSN 0976-
6367(Print), ISSN 0976 – 6375(Online) Volume 4, Issue 1, January- February (2013), © IAEME
230
nodes is the goal behind the extensive research in this field. Such protocol should be able to
handle the shifting characteristics of MANET such as scalability and mobility. Many routing
protocols have been designed and categorized into different categories mainly according to
their working mechanisms [1]. Each of these categories provides partial solutions to one or
more MANET problems. For instance, reactive routing protocols [2] help in minimizing the
bandwidth consumption through their idle behavior until a data packet is needed to be
transmitted over the network, and then the protocol starts its route discovery process on-
demand to find a route to the data packet’s destination. This process which can cause delay
before starting data transmission is solved in proactive routing strategy [3] where the network
nodes keep up to date view of the network topology through exchanging routing information
periodically, which is mostly considered as bandwidth consumer. Most of the enhancements
on routing strategies are carried out as either expansions of the existing mechanisms or
changing of the protocol’s parameters to adapt in new working environments. The goal of
this article is to propose a core-level improvement on the reactive routing strategy, in
particular on the DSR [4]. The Bidirectional Search Routing protocol (BSR) is introduced in
this article. Namely, it relies on using the bidirectional search algorithm in discovering routes
through initiating two simultaneous route discovery processes from both source and
destination nodes that meet in most cases somewhere in the middle of the distance between
these nodes. The bidirectional search’s computational complexity is low compared to
unidirectional search algorithm [5] which makes the former the best candidate to be a partial
solution to the initialization delay in reactive routing strategy. In order to utilize this search
mechanism in MANET routing process, a new approach is proposed to trigger the destination
and inform it to start the backward discovery at the same time of initiating the forward one.
This approach theoretically guarantees big reduction in route discovery time compared to
other reactive routing protocols which decreases an end-to-end delay. The theoretical model
and working mechanism of BSR are introduced. Then the protocol is compared to both DSR
and AODV [6] in terms of performance metrics of reactive routing strategy such as route
discovery time and average delay, while it is compared to the Optimizer Link-State Routing
(OLSR) as a proactive protocol, in addition to the DSR and Zone Routing Protocol (ZRP) as
a hybrid routing protocol in terms of throughput utilization. The rest of the article is
organized as follows. In the following section, the time and space (Scalability of the
algorithm) computational complexity of bidirectional search algorithm is briefly discussed,
followed by implicit delay factors in DSR. The BSR algorithm is described, and results of
performance comparisons to both DSR and AODV are shown. Finally, conclusions are drawn
pinpointing the new features of BSR protocol and its ability to outperform other routing
protocols from the same routing strategy.
II. TIME AND SPACE COMPUTATIONAL COMPLEXITY OF BIDIRECTIONAL
SEARCH ALGORITHM
The main idea behind bidirectional search is to simultaneously search both forward
from the initial state (i.e. Source) towards goal and backward from the goal (i.e. Destination)
towards initial state and stop when the two searches meet in – or close to - the middle. For
problems where the branching factor (which is the number of children of each node) is b in
both directions, bidirectional search can make a big difference. Assuming that there is a
solution of depth d, and then the solution will be found in )()2( 2/2/ ddbObO = steps, because
International Journal of Computer Engineering and Technology (IJCET), ISSN 0976-
6367(Print), ISSN 0976 – 6375(Online) Volume 4, Issue 1, January- February (2013), © IAEME
231
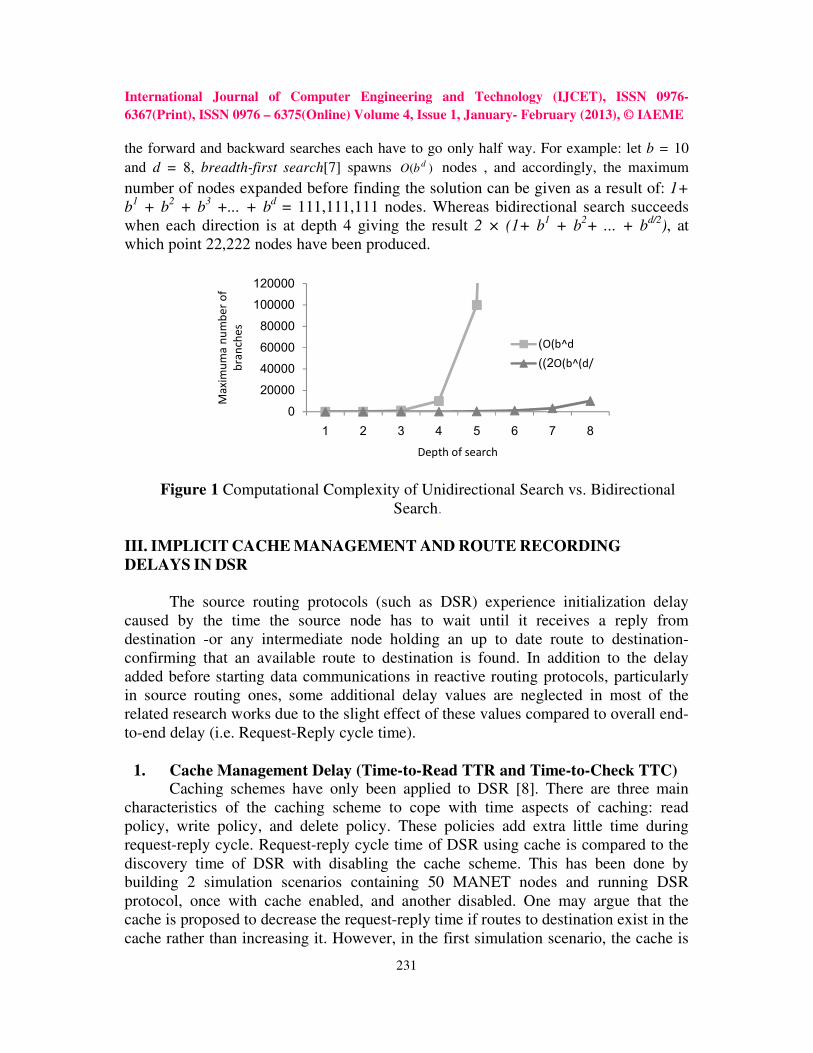
the forward and backward searches each have to go only half way. For example: let b = 10
and d = 8, breadth-first search[7] spawns )( dbO nodes , and accordingly, the maximum
number of nodes expanded before finding the solution can be given as a result of: 1+
b1 + b
2 + b
3 +... + b
d = 111,111,111 nodes. Whereas bidirectional search succeeds
when each direction is at depth 4 giving the result 2 × (1+ b1 + b
2+ ... + b
d/2), at
which point 22,222 nodes have been produced.
Figure 1 Computational Complexity of Unidirectional Search vs. Bidirectional
Search.
III. IMPLICIT CACHE MANAGEMENT AND ROUTE RECORDING
DELAYS IN DSR
The source routing protocols (such as DSR) experience initialization delay
caused by the time the source node has to wait until it receives a reply from
destination -or any intermediate node holding an up to date route to destination-
confirming that an available route to destination is found. In addition to the delay
added before starting data communications in reactive routing protocols, particularly
in source routing ones, some additional delay values are neglected in most of the
related research works due to the slight effect of these values compared to overall end-
to-end delay (i.e. Request-Reply cycle time).
1. Cache Management Delay (Time-to-Read TTR and Time-to-Check TTC) Caching schemes have only been applied to DSR [8]. There are three main
characteristics of the caching scheme to cope with time aspects of caching: read
policy, write policy, and delete policy. These policies add extra little time during
request-reply cycle. Request-reply cycle time of DSR using cache is compared to the
discovery time of DSR with disabling the cache scheme. This has been done by
building 2 simulation scenarios containing 50 MANET nodes and running DSR
protocol, once with cache enabled, and another disabled. One may argue that the
cache is proposed to decrease the request-reply time if routes to destination exist in the
cache rather than increasing it. However, in the first simulation scenario, the cache is
0
20000
40000
60000
80000
100000
120000
1 2 3 4 5 6 7 8
Ma
xim
um
a n
um
be
r o
f
bra
nch
es
Depth of search
O(b^d(
O(b^(d/2((
International Journal of Computer Engineering and Technology (IJCET), ISSN 0976-
6367(Print), ISSN 0976 – 6375(Online) Volume 4, Issue 1, January- February (2013), © IAEME
232
partially enabled, i.e. reading entries and checking for cached routes are enabled,
while using cached routes to initiate Route Replies (RREP) is disabled. As a result,
time reduction through using cache is put out of action. A timer is set to 0 when a
node starts destination’s discovery and stopped when the node receives a reply from
destination. While in the second scenario, route caching is disabled and the requests
are propagated directly towards the destination without any cache management
processes.
2. Route Recording Delay (Time-to-Record TTR)
In DSR, when the destination node receives a Route Request (RREQ), it
initiates a RREP back to the source node the intermediate nodes will record route
information included in the traversed packet overhead. Simulation has been performed
in order to validate this theory by building two network scenarios. First scenario is a
50 MANET nodes network running DSR protocol, and with cache enabled for all
nodes. Conversely, similar to time calculation of round-trip, the second scenario is a
simple Flood-Reply network in which the source node broadcast beacons to all
network nodes requesting a reply from a certain node (a same destination in a first
scenario). Any intermediate node role is only to check if it is the desired destination or
not by comparing its IP address with the one indexing the destination tag of the
traversed packet. Neither route recording, nor cache management are involved in the
Flood-Reply mechanism.
IV. THEORETICAL MODEL OF BSR
1. Originating and Processing Propagating Triggers Similar to DSR, when a MANET node originates an application packet to be
sent over the network to a destination, the former have to check its own cache for
available routes to destination and it will use them if there are any. Otherwise it will
broadcast the Propagating Triggers (PT). The PTs are simple beacons that contain
only addresses of source, final target, and broadcast address (255.255.255.255) in
addition to Time-To-live (TTL) value to prevent the PTs from travelling infinitely
across the network. That is, In order to engage the destination of communication
process into the route discovery formula for a balanced bidirectional search, the
destination must be informed in one way or another to start searching backwards.
Specifically, on the way to achieve a mutual search mechanism, the source and
destination nodes have to find a route over which they have to meet and start
communication.
Therefore, if no route to destination is found in the route cache, the source must
broadcast PTs to all over the network. These PT packets are propagated across the
network hop-by-hop checking the intermediate node’s address if it is equal to the
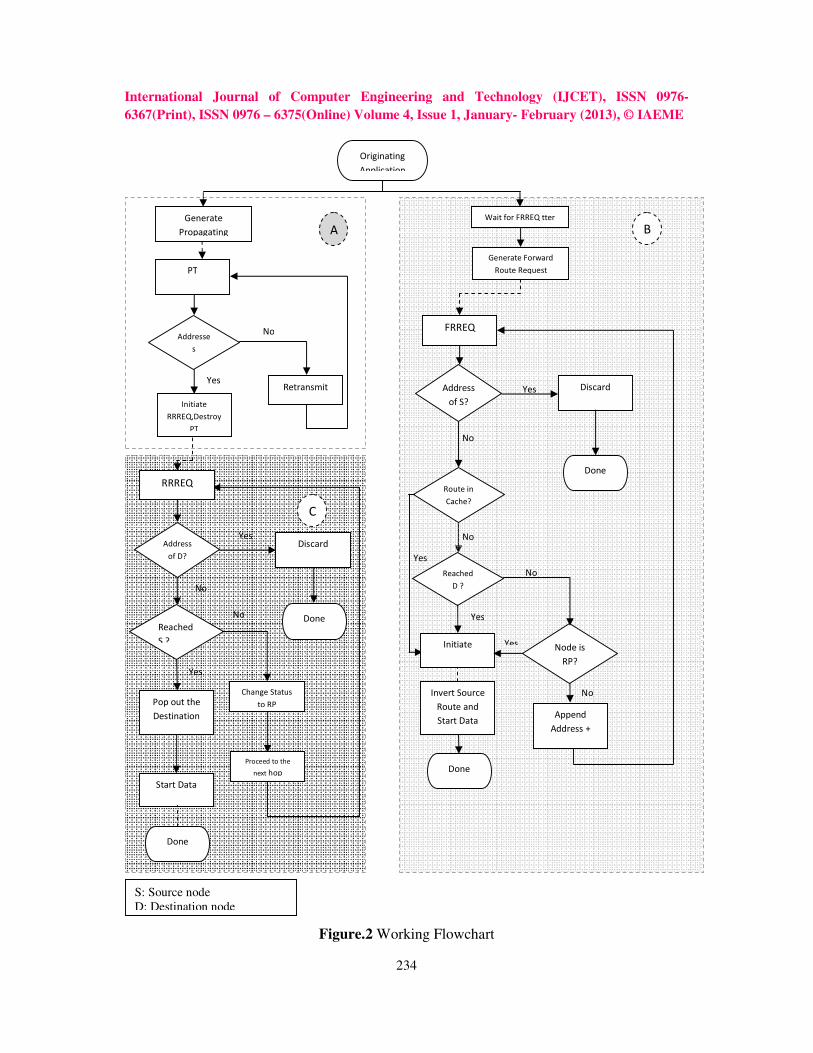
Destination Address value stored in the header of the PT packet, as a result Figure (2)
shows the possible procedures processing the PT afterwards. The PTs have some
characteristics to prevent flooding and to ensure fast network coverage, such as:
International Journal of Computer Engineering and Technology (IJCET), ISSN 0976-
6367(Print), ISSN 0976 – 6375(Online) Volume 4, Issue 1, January- February (2013), © IAEME
233
1) The PTs packet option has 4 fields to be filled prior to broadcast, Source Node
Address, Final Destination Address, Broadcast Address (255.255.255.255), and
TTL.
2) The PTs do not record route, nor do they modify or get modified while travelling
across the network except the fact that their TTL decreases by propagating through
the network. As a result, no implicit factors can delay the PTs other than the time
required to check a traversed nodes on a Boolean manner.
3) TTL is statically set for PTs as a constant value, this is vital since the absence of
TTL for PTs might cause the PT packets to travel infinitely across the network.
The same node that initiated the PT should wait certain amount of time known as
Forward Route Request (FRREQ) Jitter before starting the forward route discovery
process, this delay value is optimally chosen according to the network size,
mobility and in a way that assures the BSR in its worst performance to show as no
more delay than in the case of DSR (section V explains the way the jitter is
optimally set).
2. Originating and Processing FRREQ After sending the PT packets by the source node to trigger the destination’s
RRREQ, the former has to wait for FRREQ Jitter which – at most - should be less
than half the time needed for average source-destination discovery time - before
broadcasting FRREQ en route for the destination. The choice of this waiting time
value ensures that even if it was exactly equal to half of the average source-destination
discovery time, the overall discovery time of BSR is guaranteed to be equal to the
discovery time of DSR. The optimal value of FRREQ Jitter according to MANET size
is described later in this paper. FRREQ has some characteristics that can distinguish it
from both PTs and Reverse Route Requests (RRREQ):
1) In the BSR protocol the non-propagating requests which are used in DSR are not
employed, although sometimes this could be inexpensive way to get routes to
destination IF the destination is within the direct neighbors of the source, however
this cannot always be guaranteed in dynamic networks like MANETs. Therefore,
the BSR uses only propagating FRREQ for any kind of destination (direct
neighbors or not), and builds-up the source route in the FRREQ while traversing
across the MANET. Thus it is one-step process for the FRREQ.
2) The FRREQ traverse is delayed each time it passes through an intermediate node
due to the explicit and implicit delay factors mentioned earlier. This will help us
to differentiate between the time needed for FRREQ and PT to travel across the
network between a certain source and destination. Thus it will help in validating
the BSR theory.
3) The BSR’s FRREQ option is encoded in Type-Length- Value (TLV) format.
4) A timer is associated with the transmission process of the propagating FRREQ
after which the source node has to retransmit a FRREQ if it did not receive a
RREP from either the destination node or any other BSR’s supportive node in a
mechanism that will be discussed later in this article.
International Journal of Computer Engineering and Technology (IJCET), ISSN 0976-
6367(Print), ISSN 0976 – 6375(Online) Volume 4, Issue 1, January- February (2013), © IAEME
234
Figure.2 Working Flowchart
Generate
Propagating
PT
Addresse
s
No
Yes Retransmit
Initiate
RRREQ,Destroy
PT
Start Data
Address
of D?
No
Discard Yes
Done
Change Status
to RP
RRREQ
Reached
S ?
No
Yes
Pop out the
Destination
Proceed to the
next hop
Done
Generate Forward
Route Request
Wait for FRREQ tter
Yes
Route in
Cache?
No
Address
of S?
No
Discard Yes
Done
FRREQ
Reached
D ?
No
Yes
Initiate Node is
RP?
No
Yes
Append
Address +
Originating
Application
Invert Source
Route and
Start Data
Comm.
Done
S: Source node
D: Destination node
A B
C
International Journal of Computer Engineering and Technology (IJCET), ISSN 0976-
6367(Print), ISSN 0976 – 6375(Online) Volume 4, Issue 1, January- February (2013), © IAEME
235
3. Originating and Processing RRREQ As described earlier, in the case of matching the addresses of the receiving node with
the target node in the PT header, the receiving node will instantly use the PT originator’s
address as a target address, and its address as a source address to start backward route
discovery towards the original source of communication.
The main task of RRREQ is not only to search for the source node, but also to create
meeting points (Named as Rendezvous Points or RP) where at the FRREQ and the RRREQ
may connect. Explicitly, when a node receives a PT informing it to start reverse discovery,
the node proceeds as follows:
1) It first checks the addresses field in the PT header and copy the addresses to be:
--The Target Address in the received PT becomes Source Address.
--The Source Address in the received PT becomes Target Address.
--The destination address stays as it is, i.e. the broadcast address (255.255.255.255)
2) After processing the addresses field, it instantaneously originates reverse discovery
packets with RRREQ option, this option is identical to the one used for FRREQ except
that in the RRREQ, the Target Address is the Source Address in the FRREQ, while the
Source Address in the RRREQ is the Target Address in the RREQ.
3) The RRREQ packets start traversing across the MANET searching for its target (The
source of the RREQ and PT). On their way:
They build up the Destination Route (Similar to Source Route in the FRREQ). In other
words, the traversed nodes starting from the initiator of the RRREQ until the current node are
being added to the destination route in order to be used whenever both the FRREQ and the
RRREQ meet. The addition mechanism is important for RRREQ as the destination route
should be built up using a stack, the reason behind using stacks is the push and pop order.
That is, instead of reversing the destination route when the FRREQ meets the RRREQ, the
destination route gets popped out so that the last traversed node using RRREQ (the last
pushed entry) becomes the first in the route to destination just after the Rendezvous Point.
As a result, this mechanism will omit the time needed for inversion of the route in
case if First-In-First-Out (FIFO) is used like the case of source route. Change the status of
each traversed node from Normal node to RP. Any intermediate node that receives a RRREQ
changes its own attribute to become a RP which expands the destination territory towards the
source. More details about the characteristics of the RP will be discussed in the next sub-
section. If the RRREQ found the source node while the FRREQ still searching, the source
node will use the destination route contained within the RRREQ header to start data
communication.
Finally, the destination node in this case will be ready to originate RREP even though it
has initiated RRREQ. The reason behind this is to guarantee as exact as DSR’s discovery
time in cases where the coverage of the RP took place on another direction rather than the
source’s direction.
Apart from the similarities between processing a packet containing a FRREQ option and
another containing RRREQ option, the latter generally differs in the way it processes the
receiving node since the receiving node’s attributes get modified the moment it receives a
RRREQ packet, although the checking mechanism for the target node (The source of the
FRREQ) is identical.
International Journal of Computer Engineering and Technology (IJCET), ISSN 0976-
6367(Print), ISSN 0976 – 6375(Online) Volume 4, Issue 1, January- February (2013), © IAEME
236
Therefore,
1) If the address of the receiving node is listed in the RRREQ route then discard the packet to
prevent infinite loops. Processing a packet with self address means that the receiving node
has processed this packet previously.
2) If the address of the receiving node matches the address of the source node (The Target
according to the RRREQ) contained in the routing header, this means that the RRREQ
has reached the source node directly providing a destination route which – by popping out
if the stack – can be used by the source node to send application packets through.
3) Otherwise, the status of receiving node will be changed to be a RP and holding the –to the
point – destination route to be ready whenever it gets contacted by a FRREQ. After that
the RRREQ proceeds to the next hop repeating the same procedure.
4. Rendezvous Points
The RP is a normal intermediate MANET node which has been passed trough by a
packet containing RRREQ option. Namely, if a RRREQ passes through a MANET node on
its way towards destination it checks the status of the intermediate node, if it is a RP node, it
will leave it unchanged, and otherwise it will change the status to RP. Accordingly, during its
TTL, if the RP was found by the FRREQ the RP will initiate a RREP back to the source node
carrying the inverted destination route. This is considered as the core of time reduction
mechanism of BSR. Instead of reaching the destination itself to initiate a RREP, it could be
half the distance when reaching an intermediate RP, thus approximately half the time.
On the other hand, the other possibility is to initiate a RREP is from any RP that
contains the route to the Final Target. In this case, the addresses from the RP to the Source
node in addition to the Addresses from the RP to the Destination form the whole route from
source to destination. That is,
(Address [Target], Address [Target-1]... Address [RP]) + (Address [RP-1], Address [RP-
2]... Address [Source])
V. OPTIMAL FRREQ JITTER
There are different situations wherein the timing of initiating the FRREQ after
broadcasting the PTs plays an effective role in reducing discovery time between a source and
its destination and also in the scalability of MANETs. Although these delay values –in small
to medium scale network with 5 m/s mobility speed for example – may vary between 0.01
and 0.3 milliseconds respectively, therefore, choosing the right delay value for a certain
network size and mobility model is an important issue that guarantees the best performance
of the BSR. In addition to that, the wrong choice of the delay value will show how the
protocol would collapse to the DSR if the delay value was set around 0.01 or 0.3 milliseconds
in the same example. In order to investigate the way through which the delay should be set,
simulations have been performed on the 3 possibilities below through choosing 3 time
intervals for the FRREQ Jitter statically: in the first case (the immediate FRREQ initiating),
the delay is set to uniform distribution between 0 and 0.01 milliseconds. The second case
where the bounds of the uniform distribution are between 3-4 milliseconds is considered the
late FRREQ originating. Lastly, according to that, the bounds of the distribution are set to be
between 0.01 and 3 milliseconds for optimal delay value for medium size networks as a case
study of the investigation.
International Journal of Computer Engineering and Technology (IJCET), ISSN 0976-
6367(Print), ISSN 0976 – 6375(Online) Volume 4, Issue 1, January- February (2013), © IAEME
237
1. Immediate FRREQ Initiating The smallest the FRREQ Jitter, the closer to destination the connecting RP will be.
That is, if the delay values between initiating the PT and the FRREQ are statically set as
small as 0-0.01 milliseconds in a medium size MANET (200 nodes) with a 5 m/s speed of
mobile nodes, the FRREQ will be directly following the PT towards the destination
shortening the path the RRREQ should use to create a balanced bidirectional search. In this
case, the delay times are very similar to the case of source routing because in most cases, the
RRREQ does not spread enough to form a bidirectional search while the FRREQ is the
dominator in the search process, the result is that the BSR will collapse to DSR in its working
mechanism.
2. Late FRREQ Initiating In this case, the source node waits more time before originating the FRREQ which
causes the PT to arrive to the destination and initiates the RRREQ before the FRREQ leaves
the source node. This makes the rendezvous points to spread further than the previous case,
and since the RRREQ does not use route cache as in the case of FRREQ, the destination node
has to do route discovery towards the source which takes more time than FRREQ cycle due
to the time added for the PT to arrive to destination, and thus more delay than in the previous
case. In this case, the BSR will collapse to DSR with more delay added for the process of
initiating the RRREQ.
3. Optimal FRREQ Jitter Considering the scale of the network and the mobility of its nodes as key factors in
determining the delay value that must be set as waiting time between originating the PTs and
then the FRREQ, the effect of this waiting time has been investigated. The simulation runs
show that the bidirectional mechanism is optimized when the value of the FRREQ Jitter is
between 0.01 and 3 milliseconds for a medium size network with a 5 m/s speed of network
nodes, therefore, this attribute’s default value for BSR is set to uniform distribution of lower
bound of value 0.01 milliseconds, and upper of value 3 milliseconds.
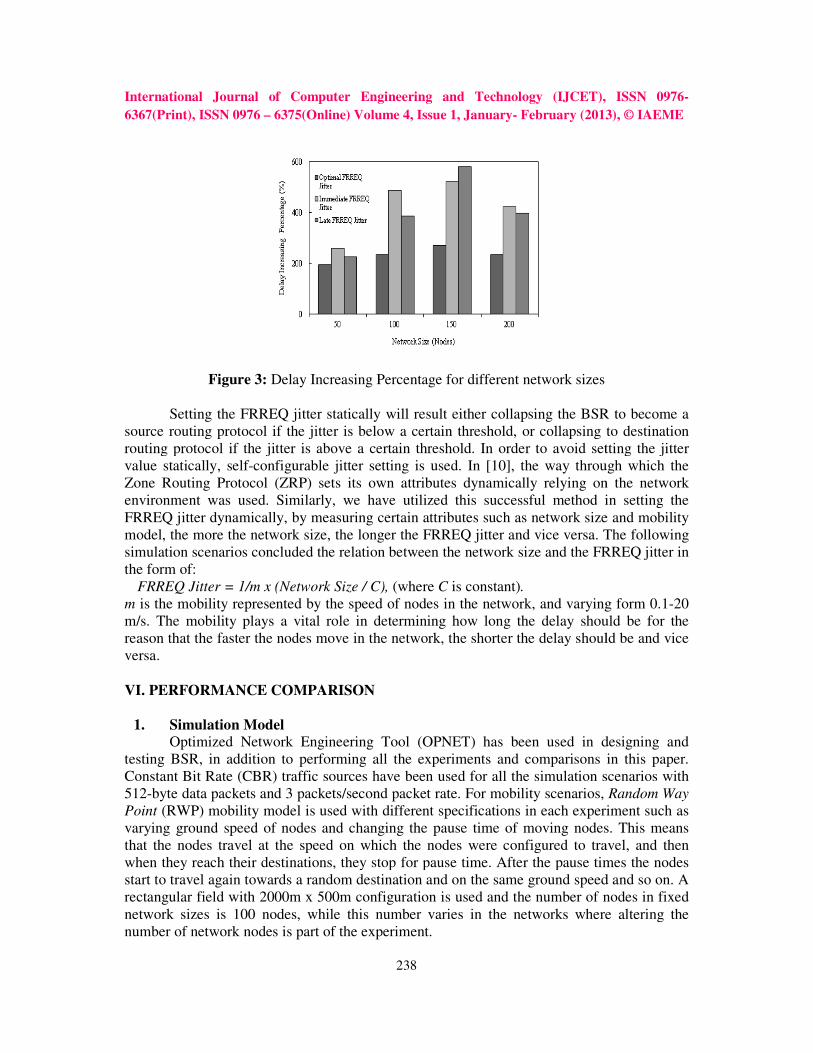
Figure 3: Shows the effect of FRREQ Jitter on the scalability of MANETs through the
relation between the FRREQ Jitter and the average End-to-End Delay while varying the
network density, increasing the mobile nodes’ pause time, and using relatively fixed number
of traffic sources for each scenario. The number of traffic sources started as 5 sources per 50
nodes in the first scenario, then 10 in the second, 15 for the third and finally 20 traffic sources
per 200 MANET nodes in the forth scenario. The percentage will be always 10% of the
network size to keep a relatively fixed number of sources for all scenarios. It is obvious from
the example that increasing the number of nodes within a medium scale MANET is less
effective when the FRREQ Jitter is 0.01-3 milliseconds as the increasing percentage of the
average value of all the end-to-end delay values from the 50 nodes MANET case to the 200
nodes case is 272.8%, while it is 523.3% for the immediate FRREQ initiating, and 579.8%
for the late FRREQ initiating. This makes the uniform distribution of 0.01-3 milliseconds the
optimal value of the FRREQ Jitter for BSR in in the above example.
International Journal of Computer Engineering and Technology (IJCET), ISSN 0976
6367(Print), ISSN 0976 – 6375(Online) Volume 4, Issue 1, January
Figure 3: Delay Increasing Percentage for different network sizes
Setting the FRREQ jitter statically will result either collapsing the BSR to become a
source routing protocol if the jitter is below a certain threshold, or collapsing to destination
routing protocol if the jitter is above a certain
value statically, self-configurable jitter setting is used. In [10], the way through which the
Zone Routing Protocol (ZRP) sets its own attributes dynamically relying on the network
environment was used. Similarly, we have utilized
FRREQ jitter dynamically, by measuring certain attributes such as network size and mobility
model, the more the network size, the longer the FRREQ jitter and vice versa. The following
simulation scenarios concluded th
the form of:
FRREQ Jitter = 1/m x (Network Size / C),
m is the mobility represented by the speed of nodes in the
m/s. The mobility plays a vital role in determining how long the delay should be for the
reason that the faster the nodes move in the network, the shorter the delay should be and vice
versa.
VI. PERFORMANCE COMPARISON
1. Simulation Model
Optimized Network Engineering Tool (OPNET
testing BSR, in addition to performing all the experiments and comparisons in this paper.
Constant Bit Rate (CBR) traffic sources have been used for all the simulation scenarios with
512-byte data packets and 3 packets/second packet rate.
Point (RWP) mobility model is used with different specifications in each experiment such as
varying ground speed of nodes and changing the pause time of moving nodes. This means
that the nodes travel at the speed on which the nodes were configured to travel, and then
when they reach their destinations, they stop for pause time. After the pause times the nodes
start to travel again towards a random destination and on the same ground s
rectangular field with 2000m x 500m configuration is used and the number of nodes in fixed
network sizes is 100 nodes, while this number varies in the networks where altering the
number of network nodes is part of the experiment.
International Journal of Computer Engineering and Technology (IJCET), ISSN 0976
6375(Online) Volume 4, Issue 1, January- February (2013), © IAEME
238
Delay Increasing Percentage for different network sizes
Setting the FRREQ jitter statically will result either collapsing the BSR to become a
source routing protocol if the jitter is below a certain threshold, or collapsing to destination
routing protocol if the jitter is above a certain threshold. In order to avoid setting the jitter
configurable jitter setting is used. In [10], the way through which the
Zone Routing Protocol (ZRP) sets its own attributes dynamically relying on the network
was used. Similarly, we have utilized this successful method in setting the
, by measuring certain attributes such as network size and mobility
model, the more the network size, the longer the FRREQ jitter and vice versa. The following
concluded the relation between the network size and the FRREQ jitter in
FRREQ Jitter = 1/m x (Network Size / C), (where C is constant).
is the mobility represented by the speed of nodes in the network, and varying form 0.1
The mobility plays a vital role in determining how long the delay should be for the
reason that the faster the nodes move in the network, the shorter the delay should be and vice
PERFORMANCE COMPARISON
Engineering Tool (OPNET) has been used in designing and
testing BSR, in addition to performing all the experiments and comparisons in this paper.
Constant Bit Rate (CBR) traffic sources have been used for all the simulation scenarios with
ckets and 3 packets/second packet rate. For mobility scenarios,
(RWP) mobility model is used with different specifications in each experiment such as
varying ground speed of nodes and changing the pause time of moving nodes. This means
t the nodes travel at the speed on which the nodes were configured to travel, and then
when they reach their destinations, they stop for pause time. After the pause times the nodes
start to travel again towards a random destination and on the same ground speed and so on. A
rectangular field with 2000m x 500m configuration is used and the number of nodes in fixed
network sizes is 100 nodes, while this number varies in the networks where altering the
number of network nodes is part of the experiment.
International Journal of Computer Engineering and Technology (IJCET), ISSN 0976-
ary (2013), © IAEME
Setting the FRREQ jitter statically will result either collapsing the BSR to become a
source routing protocol if the jitter is below a certain threshold, or collapsing to destination
avoid setting the jitter
configurable jitter setting is used. In [10], the way through which the
Zone Routing Protocol (ZRP) sets its own attributes dynamically relying on the network
this successful method in setting the
, by measuring certain attributes such as network size and mobility
model, the more the network size, the longer the FRREQ jitter and vice versa. The following
e relation between the network size and the FRREQ jitter in
, and varying form 0.1-20
The mobility plays a vital role in determining how long the delay should be for the
reason that the faster the nodes move in the network, the shorter the delay should be and vice
) has been used in designing and
testing BSR, in addition to performing all the experiments and comparisons in this paper.
Constant Bit Rate (CBR) traffic sources have been used for all the simulation scenarios with
For mobility scenarios, Random Way
(RWP) mobility model is used with different specifications in each experiment such as
varying ground speed of nodes and changing the pause time of moving nodes. This means
t the nodes travel at the speed on which the nodes were configured to travel, and then
when they reach their destinations, they stop for pause time. After the pause times the nodes
peed and so on. A
rectangular field with 2000m x 500m configuration is used and the number of nodes in fixed
network sizes is 100 nodes, while this number varies in the networks where altering the
International Journal of Computer Engineering and Technology (IJCET), ISSN 0976-
6367(Print), ISSN 0976 – 6375(Online) Volume 4, Issue 1, January- February (2013), © IAEME
239
2. Observations Key performance metrics of BSR protocol are examined through a set of simulation runs
in different scenarios and different MANET environments. Some of the performance metrics
which have been evaluated are scalability, adaptability to mobility and traffic intensity, and
comparability to other routing protocols.
2.1 Discovery Time for Different Size Networks
Generally, the time to discover a route to a specific destination is the time when a route
request was sent out to discover a route to that destination until the time a RREP is received with
a route to that destination. This term is only used by reactive routing protocols as they should
discover the available routes to destinations on demand. Theoretically, the BSR aims to reduce
the discovery time in reactive routing strategies up to 50%-60% of the time consumed in other
protocols such as DSR and AODV. This can be achieved by distributing the route discovery load
on the source and destination simultaneously instead of relying on the source only to find its route
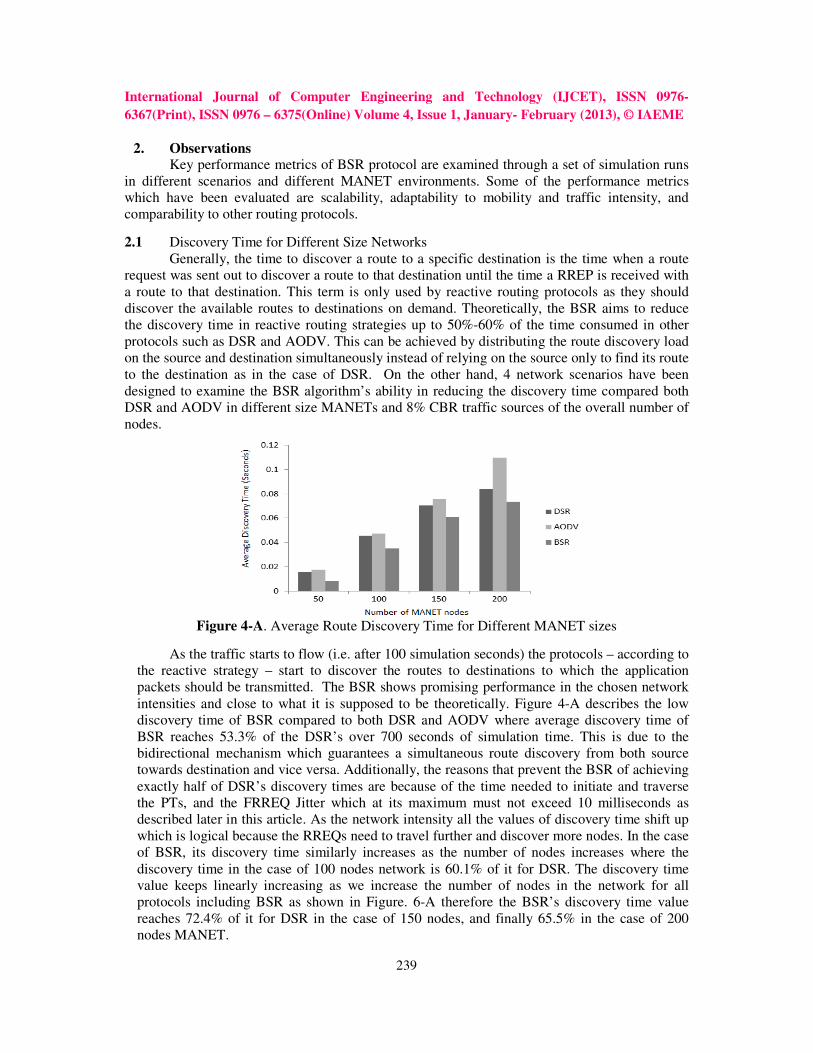
to the destination as in the case of DSR. On the other hand, 4 network scenarios have been
designed to examine the BSR algorithm’s ability in reducing the discovery time compared both
DSR and AODV in different size MANETs and 8% CBR traffic sources of the overall number of
nodes.
Figure 4-A. Average Route Discovery Time for Different MANET sizes
As the traffic starts to flow (i.e. after 100 simulation seconds) the protocols – according to
the reactive strategy – start to discover the routes to destinations to which the application
packets should be transmitted. The BSR shows promising performance in the chosen network
intensities and close to what it is supposed to be theoretically. Figure 4-A describes the low
discovery time of BSR compared to both DSR and AODV where average discovery time of
BSR reaches 53.3% of the DSR’s over 700 seconds of simulation time. This is due to the
bidirectional mechanism which guarantees a simultaneous route discovery from both source
towards destination and vice versa. Additionally, the reasons that prevent the BSR of achieving
exactly half of DSR’s discovery times are because of the time needed to initiate and traverse
the PTs, and the FRREQ Jitter which at its maximum must not exceed 10 milliseconds as
described later in this article. As the network intensity all the values of discovery time shift up
which is logical because the RREQs need to travel further and discover more nodes. In the case
of BSR, its discovery time similarly increases as the number of nodes increases where the
discovery time in the case of 100 nodes network is 60.1% of it for DSR. The discovery time
value keeps linearly increasing as we increase the number of nodes in the network for all
protocols including BSR as shown in Figure. 6-A therefore the BSR’s discovery time value
reaches 72.4% of it for DSR in the case of 150 nodes, and finally 65.5% in the case of 200
nodes MANET.
International Journal of Computer Engineering and Technology (IJCET), ISSN 0976-
6367(Print), ISSN 0976 – 6375(Online) Volume 4, Issue 1, January- February (2013), © IAEME
240
2.2 Average End-to-End Delay for Different Mobility Patterns
The MANETs are known by their dynamic and stochastic nature that is caused by
the mobility of nodes under unexpected conditions and to uncertain destinations in
addition to their limited wireless coverage. These factors affect the overall performance
of MANET in a way that makes it difficult for routing protocols – the reactive ones in
particular - to handle the basic control overhead needed for reactive routing management
in addition to the overhead needed to maintain the routes in high mobility scenarios. This
experiment is to examine the stability of BSR in different mobility scenarios, compared to
DSR only as the AODV reacts to link breakage by initiating new RREQ since it
originally has at most one route per destination in its routing table, therefore it is affected
by mobility more than DSR which tends to check its cache for routes in case of link
breakage instead of initiating RREQs which makes DSR more stable than AODV in most
of the mobility scenarios. In this experiment two factors are used to determine the
stability of the protocols which are the speed of moving nodes and the pause times. These
factors can take different values to control the mobility of nodes as the more the pause
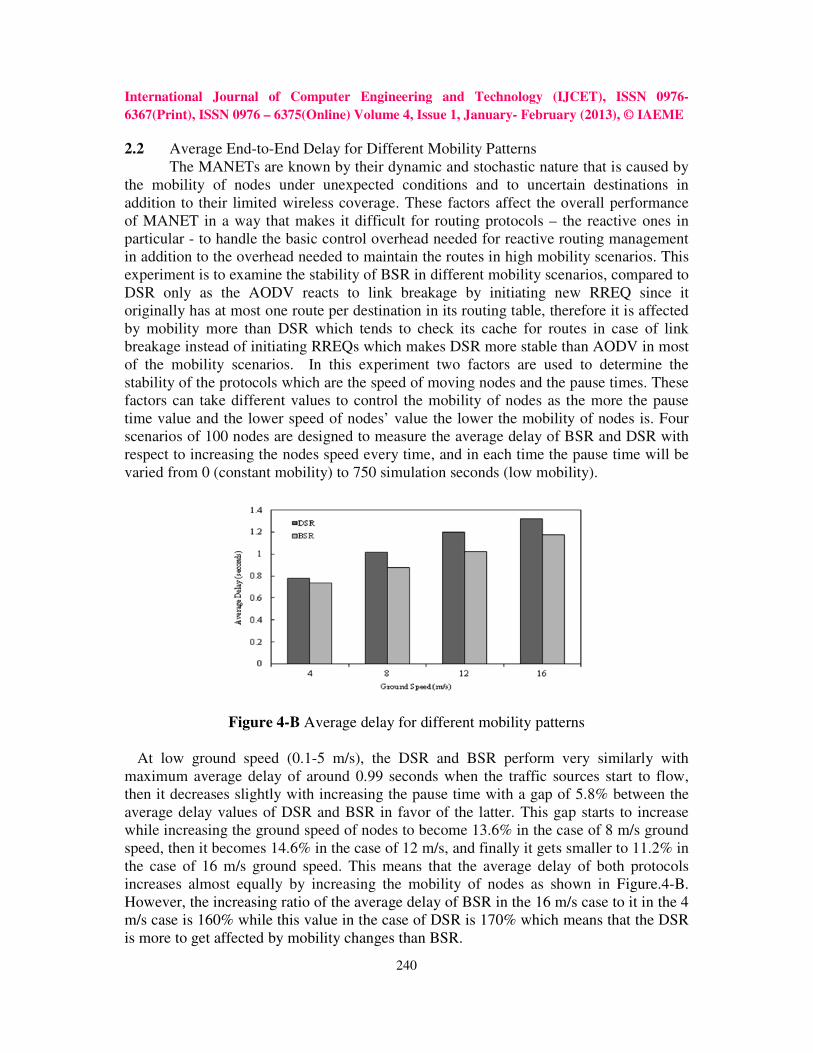
time value and the lower speed of nodes’ value the lower the mobility of nodes is. Four
scenarios of 100 nodes are designed to measure the average delay of BSR and DSR with
respect to increasing the nodes speed every time, and in each time the pause time will be
varied from 0 (constant mobility) to 750 simulation seconds (low mobility).
Figure 4-B Average delay for different mobility patterns
At low ground speed (0.1-5 m/s), the DSR and BSR perform very similarly with
maximum average delay of around 0.99 seconds when the traffic sources start to flow,
then it decreases slightly with increasing the pause time with a gap of 5.8% between the
average delay values of DSR and BSR in favor of the latter. This gap starts to increase
while increasing the ground speed of nodes to become 13.6% in the case of 8 m/s ground
speed, then it becomes 14.6% in the case of 12 m/s, and finally it gets smaller to 11.2% in
the case of 16 m/s ground speed. This means that the average delay of both protocols
increases almost equally by increasing the mobility of nodes as shown in Figure.4-B.
However, the increasing ratio of the average delay of BSR in the 16 m/s case to it in the 4
m/s case is 160% while this value in the case of DSR is 170% which means that the DSR
is more to get affected by mobility changes than BSR.

International Journal of Computer Engineering and Technology (IJCET), ISSN 0976-
6367(Print), ISSN 0976 – 6375(Online) Volume 4, Issue 1, January- February (2013), © IAEME
241
VII. CONCLUSION
Motivated by the accelerated research and development of MANET routing
protocols and inspired by DSR. A new reactive MANET protocol has been proposed
which utilizes the AI’s bidirectional search algorithm to reduce the route discovery
time and therefore reduce the end-to-end delay in MANETs. BSR uses a new
approach in order to inform the destination of communication process to start its
backward search (RRREQ) towards the source at the same time of the forward search
towards the destination through broadcasting small packets called Propagating
Triggers which travel across the network check for destination only. After a small
jitter called FRREQ jitter, the source has to start its normal forward discovery process
(FRRREQ) searching either the destination itself or any Rendezvous Point created by
the RRREQ. This work shows that there are some implicit delay values in DSR that
have been neglected due to their slightness compared to the overall route discovery
time. These values have been shown to explain the way in which the PTs travel faster
than normal route requests across the network. By guaranteeing the faster network
coverage by the PTs followed by the FRREQs, both FRREQ and RRREQ should meet
at around the middle of the distance between the source and the destination.
The BSR is compared to both DSR and AODV in different simulation
scenarios by varying traffic sources, mobility patterns, and network intensity. BSR
shows promising performance compared to other reactive routing protocols such as
DSR and AODV in terms of route discovery time, average end-to-end delay and other
performance metrics which will be presented in future work such as packet delivery
fraction, routing load, and others. The BSR shows up to 47% reduction in discovery
time compared to DSR in small to medium scale networks. This is due to the
bidirectional mechanism which guarantees a simultaneous route discovery from both
source towards destination and vice versa. Additionally, the reasons that prevent the
BSR of achieving exactly half of DSR’s discovery times are because of the time
needed to initiate and traverse the PTs, and the FRREQ Jitter which at its maximum
must not exceed 10 milliseconds. The BSR then shows less reaction to changing the
mobility patterns through changing the ground speed and pause time of moving nodes
than DSR. Both protocols show similar average delay on low node speeds with a gap
of 5.8% between the average delay values of DSR and BSR in favor of the latter. This
gap starts to increase slightly as we increase the ground speed of nodes to reach 11.2%
in favor of BSR.
REFERENCES
[1] Elizabeth M. Royer and Chai-Keong Toh “A Review of Current Routing
Protocols for Ad Hoc Mobile Wireless Networks,” IEEE Personal
Communications, pp. 46-55, April 1999.

International Journal of Computer Engineering and Technology (IJCET), ISSN 0976-
6367(Print), ISSN 0976 – 6375(Online) Volume 4, Issue 1, January- February (2013), © IAEME
242
[2] D. Maltz et al., “The Effects of On-demand Behavior in Routing Protocols for
Multihop Wireless Ad Hoc Networks,” IEEE JSAC, vol. 17, no. 8, Aug. 1999.
[3] S.-J. Lee, M. Gerla, and C.-K. Toh, “A Simulation Study of Table driven and
On-Demand Routing Protocols for Mobile Ad Hoc Networks,” IEEE Network,
vol. 13, no. 4, pp. 48-54, July-Aug. 1999.
[4] D. B. Johnson and D. A. Maltz, "Dynamic Source Routing in Ad-Hoc Wireless
Networks," Mobile Computing, T. lmielinski and H. Korth, Eds., Kluwer, 1996,
pp. 153-81.
[5] Stuart J. Russell and Peter Norvig,” Artificial Intelligence - A Modern
Approach,” 2nd
edition, 2012, p. 80-82
[6] C. E. Perkins and E. M. Royer, "Ad-hoc On-Demand Distance Vector Routing,"
Proc. 2nd IEEE Workshop for Mobile Comp. Sys., and Apps. , pp. 9C100, Feb.
1999
[7] Thomas H. Cormen, Charles E. Leiserson, Ronald L. Rivest, and Clifford Stein,
“Introduction to Algorithms,” 2nd
edition, p.531, 2001
[8] Roberto Beraldi and Roberto Baldoni, “A Caching Scheme for Routing in
Mobile Ad Hoc Networks and its Application to ZRP,” IEEE Transactions on
Computers, VOL.52, NO.8 August 2003
[9] Network Routing: Algorithms, Protocols, and Architectures, by Deepanker
Medhe and Karthikeyan Ramasamy. P.26. 2007
[10] Maamoun Ahmed and Sufian Yousef, “Self-Configurable Zone Routing Protocol
Attributes”, 978-1-4244-1666-0/08/ procc. P. 2119. Cambridge '2008 IEEE
[11] Sunita Kushwaha, Bhavna Narain, Deepti Verma and Sanjay kumar, “Effect Of
Scenario Environment On The Performance of Manets Routing Protocol:
AODV” International journal of Computer Engineering & Technology (IJCET),
Volume 2, Issue 1, 2011, pp. 33 - 38, Published by IAEME.
[12] V.Ramesh and Dr.P.Subbaiah, “Energy Efficient Preemptive Dynamic Source
Routing Protocol For Manet” International journal of Computer Engineering &
Technology (IJCET), Volume 3, Issue 1, 2012, pp. 213 - 222, Published by
IAEME.
[13] S.Sridhar and P.Chandrasekar, “A Survey On Trust Based Routing In Manet”
International journal of Computer Engineering & Technology (IJCET), Volume
3, Issue 3, 2012, pp. 213 - 222, Published by IAEME.
[14] S. Kanimozhi Suguna and Dr.S.Uma Maheswari, “Comparative Analysis Of
Bee-Ant Colony Optimized Routing (Bacor) With Existing Routing Protocols
For Scalable Mobile Ad Hoc Networks (Manets)” International journal of
Computer Engineering & Technology (IJCET), Volume 3, Issue 1, 2012, pp. 232
- 240, Published by IAEME.
[15] M. Pushpalatha, T. Ramarao, Revathi Venkataraman and Sorna Lakshmi,
“Mobility Aware Data Replication Using Minimum Dominating Set In Mobile
Ad Hoc Networks” International journal of Computer Engineering &
Technology (IJCET), Volume 3, Issue 2, 2012, pp. 645 - 658, Published by
IAEME.

International Journal of Computer Engineering and Technology (IJCET), ISSN 0976-
6367(Print), ISSN 0976 – 6375(Online) Volume 4, Issue 1, January- February (2013), © IAEME
243
AUTHORS’ INFORMATION
M. AHMED (M’08) Assistant professor at the Middle East University (MEU) Maamoun
received his BSc in Computer Engineering from Mu’tah University, Jordan in 2004; he
started his career right after that and worked for the Jordan’s e-Government as a core system
administrator assistant for a year. In 2005 he has joined the TERG at Anglia Ruskin
University in UK and in 2009 he received his PhD degree in computer engineering. His
research interests are in designing routing protocols for Ad-hoc networks, modeling and
simulation, and Artificial Intelligence applications. Ahmed is a member of IEEE and the
British Computer Society (BCS) since early 2008.
S. YOUSEF Graduated in 1978 as Electrical Engineer. Worked for 18 Years in the
Telecommunication Corporation of Jordan as Operation & Maintenance engineer, and then as
head of Transmission. He moved to Anglia Ruskin University (ARU) in 1993 to gain his
MSc in Telecommunication Systems Management. In 1994 he was Offered studentship from
EPSRC to complete his PhD at ARU on ATM modeling and queuing which has been
achieved in 1998. He worked as a research fellow at ARU from 1998 until 2002 and then
promoted to a senior lecturer. He established and headed the Telecommunication
Engineering Research Group (TERG) since year 2003 which currently hoists 28 MPhil/PhD
students. His main theme of expertise is telecommunication networks in their wired and
wireless status. Most of the research is performed recently on mobile communications at
different generations through considering quality of service, security, physical layer
measurements of fading, modulation techniques, noise cancellation, coding theory, Ad Hoc
mobile networks, knowledge transfer management, 4th
generation mobile networks issues and
all electronic engineering relevant designs. Dr. Yousef has published around 80 papers
covering all the aforementioned fields and he is a member of editorial committees of many
journals, keynote speaker and chair in many conferences around the globe and external
examiner to PhD students and postgraduate degrees in many universities. TERG has to
become a research centre of excellence in Mobile and security research. TERG has wide
international links through the European consortium for bidding to FP7 fund and to Tempus
Fund.
SATTAR J ABOUD is currently a visitor professor in Telecommunications Engineering
Research Group at Anglia Ruskin University in Britain. He received his education (PhD and
Master) in 1982 and 1988 respectively from Britain. He worked in various academic places
and research centres cross the continents. During this long period he has gathered wide and
very rich experiences in both teaching, researching fields and in quality assurance in
university education areas. Thus, he awarded the Quality Assurance Certificate of
Philadelphia University, Faculty of Information Technology in 2002, and also the Iraqi
Council of Representatives medal, for organizing the first International Conference for Iraqi
Expatriates Scientists & Qualifiers, Baghdad-Iraq in 2008. His research interests include the
areas of both symmetric and asymmetric cryptography, area of verification and validation, and
performance evaluation.